Embed Size (px)
DESCRIPTION
Determining Optical Flow. はじめに. オプティカルフローとは画像内の明るさのパターンの動きの見かけの速さの分布 オプティカルフローは物体の動きのよって変化するため、オプティカルフローより速度に関する情報を得ることができる. オプティカルフローの計算における問題点. それぞれの点における速度場は二つの要素を持つ( 2 次元 ) それぞれの点における明るさの変化は 1 次元 明るさだけでは求めることができない その他の拘束の導入が必要. 物体の動きとオプティカルフローの関係. - PowerPoint PPT Presentation
Citation preview

Determining Optical Flow

はじめに
• オプティカルフローとは画像内の明るさのパターンの動きの見かけの速さの分布
• オプティカルフローは物体の動きのよって変化するため、オプティカルフローより速度に関する情報を得ることができる

オプティカルフローの計算における問題点
• それぞれの点における速度場は二つの要素を持つ( 2次元)
• それぞれの点における明るさの変化は1次元– 明るさだけでは求めることができない–その他の拘束の導入が必要

物体の動きとオプティカルフローの関係
• オプティカルフローから 3次元世界における物体の速度との対応は必ずしも明らかではない– 回転する球
• 明るさの濃淡が変化しない– 鏡面反射体
• それ自身ではなく映っている物の速度を表す
• ここでは見かけの速度を表面の動きと同一視する

検討する問題領域
• 物体の表面は平坦• ある点の明るさは反射率に比例• 反射率は連続的に変化
– 明るさが微分可能
明るさの分布の変化は対応する点の変化によってのみ決まる

拘束( constraints)
• 微少時間で明るさは変化しない
E(x,y,t):点(x,y)、時間tにおける明るさ
0dt
dE

t
Et
y
Ey
x
ExtyxE
ttyyxxEtyxE
),,(
),,(),,(
)0tlimit (0
0)(
t
E
t
y
y
E
t
x
x
E
tOt
E
y
E
t
y
x
E
t
x
•ここでE(x,y,t)を差分で表す
•δtで割る

0 tyx EvEuE
tyx EvuEE ),(),(
t
EE
y
EE
x
EE
dt
dyv
dt
dxu
tyx
,,
,
•最終的に明るさに関する拘束より以下の式を得る

Constraint Line
u
v
(Ex,Ey)
constraint line速度空間

Smoothness Constraint
• 近くの点は似たような速度を持つ
• ほとんどの場所において明るさの分布の速度は連続的に変化する

拘束を表現する方法
• 速度の傾きの自乗和(下式)を最小化
• ラプラシアンの自乗の和(下式)の最小化
–ここでは上の式を用いる
2222 and yv
xv
yu
xu
222222 and yv
xv
yu
xu vu

偏導関数の推定
• 次のような立方体の中心におけるEx,Ey,Etを考える。
x
yt
明るさ空間

偏導関数の推定
j+1
i
i+1
j
k+1k }
{
}
{
}
{
,1,11,1,1,1,1,1,
,,11,,1,,1,,41
1,1,1,1,11,,1,,1
,1,,1,1,,,,141
1,,11,1,11,,1,1,
,,1,1,1,,,1,41
kjikjikjikji
kjikjikjikjit
kjikjikjikji
kjikjikjikjiy
kjikjikjikji
kjikjikjikjix
EEEE
EEEEE
EEEE
EEEEE
EEEE
EEEEE
xyt

速度のラプラシアン• 速度についてのラプラシアン(∇ 2u, ∇2v)は次の近似式より求める
• 速度の平均値 ui,j,k,vi,j,kは隣接点の速度に下の重みをかけた総和
)(and)( ,,,,2
,,,,2
kjikjikjikji vvvuuu
1/12 1/6 1/12
1/6 -1 1/6
1/12 1/6 1/12
i+1
i
i-1
j+1 j-1j

誤差の最小化
• 明るさの変化に関する拘束
• Smoothness Constraint
• この二つを最小化するεbと εc
2の相対的な重みはどうするか?
tyxb EvEuE
22222yv
xv
yu
xu
c

誤差の最小化
• 最小化するべき誤差 ε2を次式で定義
この値を最小化するような速度 u,vを求める
dxdycb )( 2222

誤差の最小化
• 変分法とラプラシアンの近似を用いる
][))((
][))((222
222
tyxyyx
tyxxyx
EvEuEEvvEE
EvEuEEuuEE

誤差の最小化
u
v
(Ex,Ey)
constraint line (u,v)
(u,v)

反復計算
• 方程式をそのまま解くとコストが非常に大きくなる– 導関数( Ex,Ey,Et)と平均値( u,v)から下の式を用いた反復計算により求める
)/(][
)/(][
2221
2221
yxt
n
y
n
xy
nn
yxt
n
y
n
xx
nn
EEEvEuEEvv
EEEvEuEEuu

一様(明るさが同じ)な領域の充填
• 明るさの傾き( Ex,Ey)が 0のとき、速度( un+1,vn+1)は平均値( un ,vn)と等しくなる
– 一様な領域の速度 u,vは反復計算によって領域の境界から順に充填されていく
– 反復回数は充填される領域の幅(ピクセル数)よりも多くなければならない

Iterative Scheme
• 1 time stepに 1回の繰り返し計算を行う– 単位時間に処理できる画像数が増える– 誤差が相殺される(傾向にある)
– 1 time stepの間に安定した値が得られるまで繰り返す方法に比べより正確で、また収束も早い

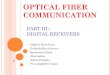
結果1
回転( 2.8度 /time step) 収縮( 5% /time step)
•すべての点における速度のラプラシアンが 0(画像全体が回転 or収縮している)である物体の移動についてのオプティカルフローの計算結果( 32time step後)
•ほぼ正確な値が計算できる

結果2
回転(角速度は距離に反比例) 収縮(収縮率は距離に反比例)
•特異点(回転 or収縮の中心)において速度のラプラシアンが 0でない移動についてのオプティカルフローの計算結果( 32time step後)
•特異点付近で大きなエラーが起きる

結果3
回転する球
( 5度 /time step, 反復計算にて計算)
•境界において速度のラプラシアンが 0でない移動についてのオプティカルフローの計算結果( 32time step後)
•境界付近で大きなエラーが起きる
回転する球
( 5度 /time step, 正確なフロー)

まとめ
• 明るさが一つの拘束しか与えないためその他の拘束を導入し、二つの成分を持つオプティカルフローを計算する
• ノイズや量子化によって誤差が生じやすい







![[Date: xx/xx/xxxx] [Dept. Name] Foundations. 11/22/10 Determining equipment, technology, supplies Determining equipment, technology, supplies](https://img.pdfslide.tips/doc/110x75/56649f055503460f94c19b70/date-xxxxxxxx-dept-name-foundations-112210-determining-equipment.jpg)