-
Diagonalização de Matrizes 2× 2 eSistemas de Equações
Diferenciais Lineares
Reginaldo J. SantosDepartamento de Matemática-ICExUniversidade
Federal de Minas Geraishttp://www.mat.ufmg.br/~regi
30 de setembro de 2002
1 Diagonalização de Matrizes 2× 21.1 Motivação
Vamos considerar o problema de encontrar as funções que dão a
evolução das po-pulações de duas espécies, S1 e S2, convivendo
em um mesmo ecossistema no tempot > 0. Vamos denotar as
populações das espécies S1 e S2 em um instante t por x1(t)
ex2(t), respectivamente.
Inicialmente vamos supor que a taxa de crescimento da
população de uma espécie nãodepende do que ocorre com a outra
espécie e que esta taxa é proporcional a sua populaçãoexistente
(ou equivalentemente que a taxa de crescimento relativa é
constante). Ou seja,vamos supor que
x′1(t) = ax1(t)
x′2(t) = dx2(t)
em que a, d ∈ R. Temos aqui um sistema de equações
diferenciais, ou seja, um sistemade equações que envolvem
derivadas das funções que são incógnitas. Neste caso as
duasequações são desacopladas, isto é, podem ser resolvidas
independentemente. A soluçãodo sistema é
x1(t) = c1eat e x2(t) = c2e
dt.
1
http://www.mat.ufmg.br/~regi
-
2 1 DIAGONALIZAÇÃO DE MATRIZES 2× 2
Vamos supor, agora, que as duas populações interagem de forma
que a taxa de cresci-mento da população de uma espécie depende
de forma linear não somente da sua populaçãoexistente, mas
também da população existente da outra espécie. Ou seja, vamos
suporque
x′1(t) = ax1(t) + bx2(t)
x′2(t) = cx1(t) + dx2(t)
Por exemplo, se os indiv́ıduos de uma espécie competem com os
da outra por alimento(a, d > 0 e b, c < 0), ou os indiv́ıduos
da espécie S1 são predadores dos da outra (a, b, d > 0e c <
0). Neste caso a solução de uma equação depende da outra.
Podemos escrever estesistema na forma de uma equação diferencial
matricial
X ′(t) = AX(t), (1)
em que
X ′(t) =
[
x′1(t)x′2(t)
]
, A =
[
a bc d
]
e X(t) =
[
x1(t)x2(t)
]
.
Vamos supor que existam matrizes P e D tais que
A = PDP−1, (2)
em que D =
[
λ1 00 λ2
]
. Substituindo-se (2) em (1) obtemos
X ′(t) = PDP−1X(t).
Multiplicando-se à esquerda por P−1, obtemos
P−1X ′(t) = DP−1X(t). (3)
Fazendo a mudança de variável
Y (t) = P−1X(t), (4)
a equação (3) pode ser escrita como
Y ′(t) = DY (t),
que pode ser escrita na forma de um sistema de equações
desacopladas
y′1(t) = λ1y1(t)
y′2(t) = λ2y2(t)
Diagonalização de Matrizes e Sistemas de Equações
Diferenciais 30 de setembro de 2002
-
1.1 Motivação 3
que tem solução dada por
y1(t) = c1eλ1t e y2(t) = c2e
λ2t.
Assim, da mudança de variáveis (4), a solução da equação
(1) é
X(t) = PY (t) = P
[
c1eλ1t
c2eλ2t
]
.
Se P =
[
v1 w1v2 w2
]
, ou seja, se as colunas da matriz P são os vetores V =
[
v1v2
]
e
W =
[
w1w2
]
, então a solução do sistema pode ser escrita como
[
x1(t)x2(t)
]
= c1 eλ1t
[
v1v2
]
+ c2 eλ2t
[
w1w2
]
oux1(t) = c1v1e
λ1t + c2w1eλ2t e x2(t) = c1v2e
λ1t + c2w2eλ2t
Vamos descobrir como podemos determinar matrizes P e D, quando
elas existem, taisque A = PDP−1, ou multiplicando à esquerda por
P−1 e à direita por P , D = P−1AP ,com D sendo uma matriz
diagonal. Chamamos diagonalização ao processo de encontraras
matrizes P e D.
Definição 1. Dizemos que uma matriz A, é diagonalizável, se
existem matrizes P eD tais que D = P−1AP , ou equivalentemente, A =
PDP−1, em que D é uma matrizdiagonal.
Exemplo 1. Toda matriz diagonal
A =
[
λ1 00 λ2
]
é diagonalizável, poisA = (I2)
−1AI2,
em que I2 =
[
1 00 1
]
é a matriz identidade 2× 2.
30 de setembro de 2002 Reginaldo J. Santos
-
4 1 DIAGONALIZAÇÃO DE MATRIZES 2× 2
1.2 Autovalores e Autovetores
Vamos supor inicialmente que a matriz A seja diagonalizável.
Então existe uma matrizP tal que
P−1AP = D , (5)
em que D é uma matriz diagonal.Vamos procurar tirar conclusões
sobre as matrizes P e D. Multiplicando à esquerda
por P ambos os membros da equação anterior, obtemos
AP = PD . (6)
Sejam
D =
[
λ1 00 λ2
]
e P =
[
v1 w1v2 w2
]
=[
V W]
,
em que V =
[
v1v2
]
e W =
[
w1w2
]
são as colunas de P . Por um lado
AP = A [ V W ] = [ AV AW ]
e por outro lado
PD =
[
v1 w1v2 w2
] [
λ1 00 λ2
]
= [ λ1V λ2W ]
Assim, (6) pode ser reescrita como[
AV AW]
=[
λ1V λ2W]
.
Logo,AV = λ1V e AW = λ2W.
Ou seja, as colunas de P , V e W , e os elementos da diagonal de
D, λ1 e λ2, satisfazem aequação
AX = λX,
em que λ e X são incógnitas. Isto motiva a seguinte
definição.
Definição 2. Um número real λ é chamado autovalor de uma
matriz A, se existe um
vetor não nulo X =
[
xy
]
tal que
AX = λX . (7)
Um vetor não nulo que satisfaça (7), é chamado de autovetor
de A.
Diagonalização de Matrizes e Sistemas de Equações
Diferenciais 30 de setembro de 2002
-
1.2 Autovalores e Autovetores 5
©©©©©©*
©©©*
O
AX = λXX
q
λ > 1
©©©©©©*
©©©*
O
XAX = λX
q
0 < λ < 1
©©©©©©*
©©©¼
O
X
AX = λXq
λ < 0
Observe que a equação (7) pode ser escrita como
AX = λI2X
ou(A− λI2)X = 0̄ . (8)
Como os autovetores são vetores não nulos, os autovalores são
os valores de λ, para osquais o sistema (A − λI2)X = 0̄ tem
solução não trivial. Mas, este sistema homogêneotem solução
não trivial se, e somente se, det(A−λI2) = 0. Assim temos um
método paraencontrar os autovalores e os autovetores de uma matriz
A.
Proposição 1. Seja A uma matriz 2× 2.(a) Os autovalores de A
são as ráızes do polinômio
p(t) = det(A− t I2) (9)
(b) Para cada autovalor λ, os autovetores associados a λ são os
vetores não nulos dasolução do sistema
(A− λI2)X = 0̄ . (10)
Definição 3. Seja A uma matriz 2× 2. O polinômio
p(t) = det(A− t I2) (11)
é chamado polinômio caracteŕıstico de A.
Assim, para determinarmos os autovalores de uma matriz A
precisamos determinar asráızes do seu polinômio caracteŕıstico,
que tem a forma p(t) = t2 + at+ b.
30 de setembro de 2002 Reginaldo J. Santos
-
6 1 DIAGONALIZAÇÃO DE MATRIZES 2× 2
Exemplo 2. Vamos determinar os autovalores e autovetores da
matriz
A =
[
1 −1−4 1
]
Para esta matriz o polinômio caracteŕıstico é
p(t) = det(A− tI2) = det[
1− t −1−4 1− t
]
= (1− t)2 − 4 = t2 − 2t− 3 .
Como os autovalores de A são as ráızes de p(t), temos que os
autovalores de A são λ1 = 3e λ2 = −1.
Agora, vamos determinar os autovetores associados aos
autovalores λ1 = 3 e λ2 = −1.Para isto vamos resolver os sistemas
(A− λ1I2)X = 0̄ e (A− λ2I2)X = 0̄. Como
A− λ1I2 =[
−2 −1−4 −2
]
,
então
(A− λ1I2)X = 0̄é
[
−2 −1−4 −2
] [
xy
]
=
[
00
]
ou{
−2x − y = 0−4x − 2y = 0
cuja solução geral é
W1 = {(α,−2α) | α ∈ R}.que é o conjunto de todos os autovetores
associados a λ1 = 3 acrescentado o vetor nulo.Agora,
(A− λ2I2)X = 0̄é
[
2 −1−4 2
] [
xy
]
=
[
00
]
cuja solução geral é
W2 = {(α, 2α) | α ∈ R},que é o conjunto de todos os autovetores
associados a λ2 = −1 acrescentado o vetor nulo.
Diagonalização de Matrizes e Sistemas de Equações
Diferenciais 30 de setembro de 2002
-
1.3 Diagonalização 7
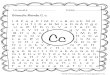
−6 −4 −2 0 2 4 6−6
−4
−2
0
2
4
6
x
y
W2
W1
−6 −4 −2 0 2 4 6−6
−4
−2
0
2
4
6
x
y
AW
AV
V = (1,−2)
W = (1, 2)
Figura 1: Autovetores associados a λ1 = 3 e a λ2 = −1 da matriz
do Exemplo 2
Um resultado interessante e que iremos usar mais adiante é o
seguinte.
Proposição 2. Sejam V e W autovetores de uma matriz A
associados a λ1 e λ2, respec-tivamente. Se V = αW , para algum
escalar α, então λ1 = λ2.
Demonstração. Se V = αW , então multiplicando-se à esquerda
por A e usando o fatode que AV = λ1V e AW = λ2W , temos que
λ1V = A(αW ) = αAW = αλ2W = λ2αW = λ2V.
Isto implica que(λ1 − λ2)V = 0̄.
Como V é um vetor não nulo, então λ1 = λ2.
1.3 Diagonalização
Vamos enunciar e demonstrar o resultado principal. Já vimos que
se uma matriz A édiagonalizável, então as colunas da matriz P ,
que faz a diagonalização, são autovetoresassociados a
autovalores, que por sua vez são elementos da matriz diagonal D.
Como amatriz P é invert́ıvel, estes 2 autovetores são L.I. (um
vetor não é múltiplo escalar dooutro).
30 de setembro de 2002 Reginaldo J. Santos
-
8 1 DIAGONALIZAÇÃO DE MATRIZES 2× 2
Teorema 3. Seja A uma matriz 2×2 que tem 2 autovalores λ1 6= λ2.
Sejam V = (v1, v2)e W = (w1, w2) autovetores associados a λ1 e λ2,
respectivamente. Então, as matrizes
P = [ V W ] =
[
v1 w1v2 w2
]
e D =
[
λ1 00 λ2
]
são tais que
D = P−1AP,
ou seja, a matriz A é diagonalizável.
Demonstração. Pela Proposição 2, V = (v1, v2) e W = (w1, w2)
são L.I. são 2 autove-tores L.I. (um não é múltiplo escalar do
outro). Vamos definir as matrizes
P =
[
v1 w1v2 w2
]
= [ V W ] e D =
[
λ1 00 λ2
]
.
Como AV = λ1V e AW = λ2W , então
AP = A [ V W ] = [ AV AW ] = [ λ1V λ2W ] =
[
v1 w1v2 w2
] [
λ1 00 λ2
]
= PD . (12)
Como V e W são L.I., a matriz P é invert́ıvel. Assim,
multiplicando por P −1 à esquerdaem (12) obtemos
D = P−1AP.
Ou seja, A matriz A é diagonalizável.
Assim, se uma matriz A é diagonalizável e D = P−1AP , então
os autovalores de Aformam a diagonal de D e os 2 autovetores
linearmente independentes associados aosautovalores formam as
colunas de P .
Exemplo 3. Considere a matriz
A =
[
1 14 1
]
Já vimos no Exemplo 2 na página 6 que o seu polinômio
caracteŕıstico é p(t) =det(A − t I2) = t2 − 2t − 3, que os seus
autovalores são λ1 = 3 e λ2 = −1 e que osautoespaços
correspondentes são W1 = {(α, 2α) | α ∈ R} e W2 = {(α,−2α) | α ∈
R},respectivamante.
Diagonalização de Matrizes e Sistemas de Equações
Diferenciais 30 de setembro de 2002
-
1.3 Diagonalização 9
Para λ1 = 3, temos que V = (1, 2) é um autovetor de A associado
a λ1. De formaanáloga para λ2 = −1, W = (1,−2) é um autovetor
associado a λ2. Como um vetor nãoé múltiplo escalar do outro, a
matriz A é diagonalizável e as matrizes
P = [ V W ] =
[
1 12 −2
]
e D =
[
λ1 00 λ2
]
=
[
3 00 −1
]
são tais que
D = P−1AP.
Exemplo 4. Considere a matriz
A =
[
0 10 0
]
O seu polinômio caracteŕıstico é p(t) = det(A − tI2) = t2,
assim A possui um únicoautovalor: λ1 = 0. Agora, vamos determinar
os autovetores associados ao autovalorλ1 = 0. Para isto vamos
resolver o sistema (A− λ1I2)X = 0̄. Como
A− λ1I2 = A =[
0 10 0
]
,
então
(A− λ1I2)X = 0̄
é[
0 10 0
] [
xy
]
=
[
00
]
ou{
y = 00 = 0
cuja solução geral é
W1 = {(α, 0) | α ∈ R} .
que é o conjunto de todos os autovetores associados a λ1 = 0
acrescentado o vetor nulo.Portanto, não podemos ter 2 autovetores
L.I. associados a λ1 = 0 e como só temos umautovalor não podemos
ter mais autovetores L.I. Portanto, pelo Teorema 3 na página 8,
amatriz A não é diagonalizável, ou seja, não existem matrizes P
e D tais que D = P −1AP .
30 de setembro de 2002 Reginaldo J. Santos
-
10 1 DIAGONALIZAÇÃO DE MATRIZES 2× 2
1.4 Autovalores complexos
Tudo que fizemos até agora é válido para matrizes com
entradas que são números reaisou complexos e para autovalores
reais ou complexos.
Um vetor de C2 pode ser escrito como
Z = (z1, z2) = (v1 + iw1, v2 + iw2) = (v1, v2) + i(w1, w2) = V +
iW,
em que V e W são vetores de R2.O próximo resultado é válido
exclusivamente para matrizes com entradas que são
números reais.
Proposição 4. Seja A uma matriz 2 × 2 com entradas que são
números reais. Se umvetor Z = V + iW ∈ C2 é um autovetor de A
associado ao autovalor λ = α + iβ, entãoZ = V − iW também é um
autovetor de A, mas associado a λ = α− iβ. Além disso, seβ 6= 0
então Z e Z são L.I.
Demonstração. Substituindo-se Z = V + iW e λ = α + iβ em AZ =
λZ obtemos que
AV + iAW = α(V + iW ) + iβ(V + iW ) = (αV − βW ) + i(αW + βV
).
Isto implica queAV = αV − βW e AW = αW + βV.
Agora, usando os valores de AV e AW obtidos temos que
AZ = A(V − iW ) = AV − iAW = αV − βW − i(αW + βV )= (α− iβ)V −
(β + iα)W = (α− iβ)V − i(α− iβ)W= (α− iβ)(V − iW ) = λZ.
Se β 6= 0, então λ e λ são diferentes. Logo, pela Proposição
2 na página 7, Z e Z sãoL.I.
Assim, se uma matriz A, 2× 2, com entradas reais tem autovalores
complexos, entãoela é diagonalizável.
Exemplo 5. Considere a matriz
A =
[
−3 2−4 1
]
Diagonalização de Matrizes e Sistemas de Equações
Diferenciais 30 de setembro de 2002
-
1.5 Se a matriz A não é diagonalizável 11
O seu polinômio caracteŕıstico é p(t) = det(A− t I2) = (−3−
t)(1− t)2 + 8 = t2 + 2t+ 5cujas ráızes são λ1 = −1+2i e λ2 = λ1 =
−1−2i. Agora, vamos determinar os autovetoresassociados ao
autovalor λ1 = −1+2i. Para isto vamos resolver o sistema (A−λ1I2)X
= 0̄.Como
A− λ1I2 =[
−2− 2i 2−4 2− 2i
]
,
então(A− λ1I2)X = 0̄
é[
−2− 2i 2−4 2− 2i
] [
xy
]
=
[
00
]
ou{
(−2− 2i)x + 2y = 0−4x + (2− 2i)y = 0
cuja solução geral éW1 = {(α, (1 + i)α) | α ∈ C} .
que é o conjunto de todos os autovetores associados a λ1 = −1 +
2i acrescentado o vetornulo. Assim, Z = (1, 1 + i) é um autovetor
associado a λ1 = −1 + 2i. Pela Proposição 4,Z = (1, 1− i) é um
autovetor associado a λ2 = λ1 = −1− 2i e além disso Z e Z são
L.I.Assim, a matriz A é diagonalizável e as matrizes
P = [ Z Z ] =
[
1 11 + i 1− i
]
e D =
[
λ1 0
0 λ1
]
=
[
−1 + 2i 00 −1− 2i
]
são tais queD = P−1AP.
1.5 Se a matriz A não é diagonalizável
Se uma matriz A com entradas que são números reais, 2 × 2,
não é diagonalizávelé por que ela tem somente um autovalor real
λ. Neste caso apesar de não podermosdiagonalizá-la é válido o
seguinte resultado.
30 de setembro de 2002 Reginaldo J. Santos
-
12 1 DIAGONALIZAÇÃO DE MATRIZES 2× 2
Teorema 5. Seja A uma matriz não diagonal 2× 2 com entradas que
são números reaise que possui um único autovalor λ. Sejam W =
(w1, w2) um vetor que não é autovetorde A (AW 6= λW ) (Por
exemplo, E1 = (1, 0) ou E2 = (0, 1) satisfaz esta condição)e V
=
[
v1v2
]
= (A − λI2)W . Então, as matrizes P = [ V W ] =[
v1 w1v2 w2
]
e
J =
[
λ 10 λ
]
são tais que
J = P−1AP.
Demonstração. Vamos escrever A =
[
a bc d
]
. Neste caso, o polinômio caracteŕıstico
de A é p(t) = det(A− t I2) = (a− t)(d− t)− bc = t2− (a+d)t+(ad−
bc). Como estamossupondo que A tem somente um autovalor, então
∆ = (a+ d)2 − 4(ad− bc) = a2 − 2ad+ d2 + 4bc = 0 (13)
e o autovalor de A que é a única raiz de p(t) é
λ =a+ d
2.
Assim, para este valor λ e usando (13) obtemos que
(A−λI2)2 = A2− 2λA+λ2I2 =[
a2 + bc− 2λa+ λ2 ab+ bd− 2λbac+ dc− 2λc bc+ d2 − 2λd+ λ2
]
=
[
0 00 0
]
.
Seja W = (w1, w2) um vetor que não é autovetor de A. Portanto,
ele não pertence aoespaço solução de (A− λI2)X = 0̄. Seja V =
(v1, v2) = (A− λI2)W . Então
(A− λI2)V = (A− λI2)2W = 0̄
Logo, V é um autovetor de A, ou seja,
AV = λV.
Da definição de V segue que
AW = V + λW.
Diagonalização de Matrizes e Sistemas de Equações
Diferenciais 30 de setembro de 2002
-
1.6 Resumo 13
Assim P = [ V W ] =
[
v1 w1v2 w2
]
e J =
[
λ 10 λ
]
são tais que
AP = A[ V W ] = [ AV AW ] = [ λV V + λW ] =
[
λv1 v1 + λw1λv2 v2 + λw2
]
= PJ. (14)
Como V é autovetor de A, se W fosse um múltiplo escalar de V ,
então W também seriaum autovetor de A. Mas isto não ocorre pela
definição do vetor W . Assim a matriz P éinvert́ıvel e
multiplicando-se a equação (14) à esquerda por P−1 obtemos o
resultado.
Exemplo 6. Considere a matriz
A =
[
−1 1−1 −3
]
O seu polinômio caracteŕıstico é p(t) = det(A− t I2) = (−1−
t)(−3− t) + 1 = t2 +4t+4cujas ráızes são λ1 = λ2 = λ = −2. O
vetor E1 = (1, 0) é tal que
(A− λI2)E1 =[
1 1−1 −1
] [
10
]
=
[
1−1
]
6= 0̄
Sejam W = E1 = (1, 0) e V = (A− λI2)W = (1,−1). Pelo Teorema 5,
as matrizes
P = [ V W ] =
[
1 1−1 0
]
e J =
[
λ 10 λ
]
=
[
−2 10 −2
]
são tais queJ = P−1AP.
1.6 Resumo
Para diagonalizar uma matriz 2× 2 não diagonal siga os
seguintes passos:(a) Determine o polinômio caracteŕıstico p(t) =
det(A− t I2).
(b) Se p(t) tem duas ráızes reais (distintas) λ1 6= λ2, então
determine um autovetorV = (v1, v2) associado a λ1, isto é, uma
solução não trivial de (A − λ1I2)X = 0̄e um autovetor W = (w1,
w2) associado a λ2, isto é, uma solução não trivial de(A−
λ2I2)X = 0̄. Então
P = [ V W ] =
[
v1 w1v2 w2
]
e D =
[
λ1 00 λ2
]
são tais que A = PDP−1.
30 de setembro de 2002 Reginaldo J. Santos
-
14 1 DIAGONALIZAÇÃO DE MATRIZES 2× 2
(c) Se p(t) tem duas ráızes complexas λ1 = α + iβ e λ2 = λ̄1 =
α − iβ. Encontre umautovetor complexo V + iW = (v1 + iw1, v2 +
iw2), isto é, uma solução não trivialde (A− (α + iβ)I2)X = 0̄.
Então
P = [ V + iW V − iW ] =[
v1 + iw1 v1 − iw1v2 + iw2 v2 − iw2
]
e D =
[
α + iβ 00 α− iβ
]
são tais que A = PDP−1.
(d) Se p(t) tem somente uma raiz real λ. Seja W = (w1, w2) um
vetor não nulo que nãoseja autovetor de A (AW 6= λW ). Por
exemplo, W = E1 = (1, 0) ou W = E2 =(0, 1). Seja V =
[
v1v2
]
= (A− λI2)W . Então
P = [ V W ] =
[
v1 w1v2 w2
]
e J =
[
λ 10 λ
]
são tais que A = PJP−1.
1.7 Exerćıcios (respostas na página 28)
Ache para cada matriz A, se posśıvel, uma matriz não-singular
P tal que P−1AP seja
diagonal. Se não for posśıvel, ache uma matriz P tal que P−1AP
=
[
λ 10 λ
]
, para λ ∈ R.
1.1.
[
1 11 1
]
1.2.
[
1 −12 4
]
1.3.
[
3 −41 −1
]
1.4.
[
1 −15 3
]
1.5.
[
4 −28 −4
]
1.6.
[
−1 −41 −1
]
1.7.
[
a 2−2 0
]
1.8.
[
0 a−2 −2
]
1.9.
[
2a 11 4a
]
1.10.
[
1 1a 1
]
Diagonalização de Matrizes e Sistemas de Equações
Diferenciais 30 de setembro de 2002
-
15
2 Sistemas de Equações Diferenciais Lineares
Considere o sistema de equações diferenciais lineares.
{
x′1(t) = ax1(t)x′2(t) = dx2(t)
em que a, d ∈ R. Temos aqui um sistema de equações
diferenciais, ou seja, um sistemade equações que envolvem
derivadas das funções que são incógnitas. Neste caso as
duasequações são desacopladas, isto é, podem ser resolvidas
independentemente. A soluçãodo sistema é
x1(t) = c1eat
x2(t) = c2edt.
Considere, agora, o sistema de equações diferenciais
lineares
{
x′1(t) = ax1(t) + bx2(t)x′2(t) = cx1(t) + dx2(t)
em que a, b, c, d ∈ R com b ou c não nulos. Neste caso a
solução de uma equação dependeda outra. Podemos escrever este
sistema na forma de uma equação diferencial matricial
X ′(t) = AX(t), (15)
em que X ′(t) =
[
x′1(t)x′2(t)
]
, A =
[
a bc d
]
e X(t) =
[
x1(t)x2(t)
]
.
2.1 A Matriz A é diagonalizável em R
Vamos supor que existam matrizes P =
[
v1 w1v2 w2
]
e D =
[
λ1 00 λ2
]
, com λ1, λ2 ∈ R,tais que
A = PDP−1. (16)
Substituindo-se (16) em (15) obtemos
X ′(t) = PDP−1X(t).
Multiplicando-se à esquerda por P−1, obtemos
P−1X ′(t) = DP−1X(t). (17)
30 de setembro de 2002 Reginaldo J. Santos
-
16 2 SISTEMAS DE EQUAÇÕES DIFERENCIAIS LINEARES
Fazendo a mudança de variável
Y (t) = P−1X(t), (18)
a equação (17) pode ser escrita como
Y ′(t) = DY (t),
que pode ser escrita na forma de um sistema de equações
desacopladas
y′1(t) = λ1y1(t)
y′2(t) = λ2y2(t)
que tem solução dada por
y1(t) = c1eλ1t e y2(t) = c2e
λ2t.
Assim, da mudança de variáveis (18), a solução da equação
(15) é
X(t) = PY (t) = P
[
c1eλ1t
c2eλ2t
]
.
Como P =
[
v1 w1v2 w2
]
, então as colunas da matriz P são os vetores V =
[
v1v2
]
e
W =
[
w1w2
]
, assim a solução do sistema pode ser escrita como
[
x1(t)x2(t)
]
= c1 eλ1t
[
v1v2
]
+ c2 eλ2t
[
w1w2
]
.
Se são dadas as condições iniciais x1(0) = x(0)1 e x2(0) =
x
(0)2 , então para determinarmos
c1 e c2 substituimos t = 0 na solução, ou seja,
[
x1(0)x2(0)
]
= c1
[
v1v2
]
+ c2
[
w1w2
]
=
[
x(0)1
x(0)2
]
.
que é equivalente ao sistema linear{
v1c1 + w1c2 = x(0)1
v2c1 + w2c2 = x(0)2
Exemplo 7. Considere o sistema{
x′1(t) = x1(t) − x2(t)x′2(t) = −4x1(t) + x2(t)
Diagonalização de Matrizes e Sistemas de Equações
Diferenciais 30 de setembro de 2002
-
2.1 A Matriz A é diagonalizável em R 17
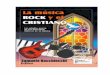
−4 −3 −2 −1 0 1 2 3 4−4
−3
−2
−1
0
1
2
3
4
x
y
Figura 2: Trajetórias do sistema do Exemplo 7
Já vimos no Exemplo 3 na página 6 que a matriz
A =
[
1 −1−4 1
]
é diagonalizável e as matrizes
P = [ V W ] =
[
1 1−2 2
]
e D =
[
λ1 00 λ2
]
=
[
3 00 −1
]
são tais queD = P−1AP.
Assim, a solução do sistema é dada por[
x1(t)x2(t)
]
= c1 e3t
[
1−2
]
+ c2 e−t[
12
]
.
Os gráficos de diversas soluções aparecem na Figura 2. A
disposição das trajetórias ét́ıpica de um sistema linear X ′ =
AX, em que os autovalores de A são reais não nuloscom sinais
contrários. Neste caso, dizemos que a origem é um ponto de
sela.
Exemplo 8. Considere o sistema{
x′1(t) = 3x1(t) − x2(t)x′2(t) = −2x1(t) + 2x2(t)
30 de setembro de 2002 Reginaldo J. Santos
-
18 2 SISTEMAS DE EQUAÇÕES DIFERENCIAIS LINEARES
−4 −3 −2 −1 0 1 2 3 4−4
−3
−2
−1
0
1
2
3
4
x
y
Figura 3: Trajetórias do sistema do Exemplo 8
Vamos determinar os autovalores e autovetores da matriz
A =
[
3 −1−2 2
]
Para esta matriz o polinômio caracteŕıstico é
p(t) = det(A− t I2) = det[
3− t −1−2 2− t
]
= (3− t)(2− t)− 2 = t2 − 5t+ 4 .
Como os autovalores de A são as ráızes de p(t), temos que os
autovalores de A são λ1 = 1e λ2 = 4.
Agora, vamos determinar os autovetores associados aos
autovalores λ1 = 1 e λ2 = 4.Para isto vamos resolver os sistemas
(A− λ1I2)X = 0̄ e (A− λ2I2)X = 0̄. Como
A− λ1I2 =[
2 −1−2 1
]
,
então(A− λ1I2)X = 0̄
é[
2 −1−2 1
] [
xy
]
=
[
00
]
ou{
2x − y = 0−2x + y = 0
Diagonalização de Matrizes e Sistemas de Equações
Diferenciais 30 de setembro de 2002
-
2.2 A Matriz A é diagonalizável em C 19
cuja solução geral é
W1 = {(α, 2α) | α ∈ R} = {α(1, 2) | α ∈ R} = {αV | α ∈ R}, em
que V = (1, 2).
Este é o conjunto de todos os autovetores associados a λ1 = 1
acrescentado o vetor nulo.Agora,
(A− λ2I2)X = 0̄é
[
−1 −1−2 −2
] [
xy
]
=
[
00
]
cuja solução geral é
W2 = {(−α, α) | α ∈ R} = {α(−1, 1) | α ∈ R} = {αW | α ∈ R}, em
que W = (−1, 1).
Este é o conjunto de todos os autovetores associados a λ2 = 4
acrescentado o vetor nulo.Assim, a matriz A é diagonalizável e as
matrizes
P = [ V W ] =
[
1 −12 1
]
e D =
[
λ1 00 λ2
]
=
[
1 00 4
]
são tais queD = P−1AP.
Assim, a solução do sistema é dada por
[
x1(t)x2(t)
]
= c1 et
[
12
]
+ c2 e4t
[
−11
]
.
Os gráficos de diversas soluções aparecem na Figura 3. A
disposição das trajetórias é t́ıpicade um sistema linear X ′ =
AX, em que os autovalores de A são reais e positivos. Nestecaso,
dizemos que a origem é um nó instável ou fonte. No caso em que
os autovaloresde A reais e negativos as trajetórias são
semelhantes, mas percorridas no sentido contrárioàs da Figura 3.
Neste caso, dizemos que a origem é um nó atrator ou
sumidouro.
2.2 A Matriz A é diagonalizável em C
Vamos supor que existam matrizes P =
[
v1 + iw1 v1 − iw1v2 + iw2 v2 − iw2
]
e D =
[
λ 0
0 λ
]
, com
λ1, λ2 ∈ C, tais queA = PDP−1. (19)
30 de setembro de 2002 Reginaldo J. Santos
-
20 2 SISTEMAS DE EQUAÇÕES DIFERENCIAIS LINEARES
Substituindo-se (19) em (15) obtemos
X ′(t) = PDP−1X(t).
Multiplicando-se à esquerda por P−1, obtemos
P−1X ′(t) = DP−1X(t).
Fazendo novamente a mudança de variável Y (t) = P−1X(t),
obtemos
Y ′(t) = DY (t),
que pode ser escrito na forma
y′1(t) = λ y1(t)
y′2(t) = λ y2(t)
Estas equações estão desacopladas e têm soluções dadas
por
y1(t) = C1 eλt
y2(t) = C2 eλt.
Assim a solução da equação (15) é
X(t) = PY (t) = P
[
C1 eλt
C2 eλt
]
.
Como P =
[
v1 + iw1 v1 − iw1v2 + iw2 v2 − iw2
]
, então as colunas da matriz P são os vetores V + iW =[
v1 + iw1v2 + iw2
]
e V − iW =[
v1 − iw1v2 − iw2
]
. Assim a solução geral nos complexos é dada por
X(t) = C1 eλt
[
v1 + iw1v2 + iw2
]
+ C2 eλt
[
v1 − iw1v2 − iw2
]
(20)
As constantes C1 e C2 são complexas. Estamos interessados em
uma solução real. Paraisso, fazendo C2 = C1, a segunda parcela em
(20) se torna o conjugado da primeira eassim obtemos.
X(t) = 2Re
{
C1 eλt
[
v1 + iw1v2 + iw2
]}
Diagonalização de Matrizes e Sistemas de Equações
Diferenciais 30 de setembro de 2002
-
2.2 A Matriz A é diagonalizável em C 21
Escrevendo a constante complexa em termos de constantes reais na
forma C1 =c12− ic2
2e escrevendo λ = α + iβ, obtemos
[
x1(t)x2(t)
]
= Re(C1) Re
{
e(α+iβ)t[
v1 + iw1v2 + iw2
]}
− Im(C1) Im{
e(α+iβ)t[
v1 + iw1v2 + iw2
]}
= c1 Re
{
e(α+iβ)t[
v1 + iw1v2 + iw2
]}
+ c2 Im
{
e(α+iβ)t[
v1 + iw1v2 + iw2
]}
= c1 eαt
(
cos βt
[
v1v2
]
− sen βt[
w1w2
])
+ c2 eαt
(
cos βt
[
w1w2
]
+ sen βt
[
v1v2
])
Se são dadas as condições iniciais x1(0) = x(0)1 e x2(0) =
x
(0)2 , então para determinarmos
c1 e c2 substituimos t = 0 na solução, ou seja,
[
x1(0)x2(0)
]
= c1
[
v1v2
]
+ c2
[
w1w2
]
=
[
x(0)1
x(0)2
]
.
que é equivalente ao sistema linear
{
v1c1 + w1c2 = x(0)1
v2c1 + w2c2 = x(0)2
−3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
x
y
Figura 4: Trajetórias do sistema do Exemplo 9
30 de setembro de 2002 Reginaldo J. Santos
-
22 2 SISTEMAS DE EQUAÇÕES DIFERENCIAIS LINEARES
Exemplo 9. Considere o sistema
{
x′1(t) = −3x1(t) + 2x2(t)x′2(t) = −4x1(t) + x2(t)
Já vimos no Exemplo 5 na página 10 que a matriz
A =
[
−3 2−4 1
]
é diagonalizável e as matrizes
P = [ Z Z ] =
[
1 11 + i 1− i
]
e D =
[
λ1 0
0 λ1
]
=
[
−1 + 2i 00 −1− 2i
]
são tais que
D = P−1AP.
Assim a solução do sistema é dada por
[
x1(t)x2(t)
]
= c1 Re
{
e(−1+2i)t[
11 + i
]}
+ c2 Im
{
e(−1+2i)t[
11 + i
]}
= c1 e−t(
cos 2t
[
11
]
− sen 2t[
01
])
+ c2 e−t(
cos 2t
[
01
]
+ sen 2t
[
11
])
Os gráficos de diversas soluções aparecem na Figura 4. A
disposição das trajetórias ét́ıpica de um sistema linear X ′ =
AX, em que os autovalores de A são complexos com aparte real
negativa. Neste caso, dizemos que a origem é um foco atrator ou
sumidoroespiral. No caso em que os autovalores de A são complexos
com a parte real positiva astrajetórias são semelhantes, mas
percorridas no sentido contrário às da Figura 4. Nestecaso,
dizemos que a origem é um foco instável ou fonte espiral.
Exemplo 10. Considere o sistema
{
x′1(t) = −x1(t) + 2x2(t)x′2(t) = −x1(t) + x2(t)
Este sistema pode ser escrito na forma X ′(t) = AX(t), em
que
A =
[
−1 2−1 1
]
Diagonalização de Matrizes e Sistemas de Equações
Diferenciais 30 de setembro de 2002
-
2.2 A Matriz A é diagonalizável em C 23
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
x
y
Figura 5: Trajetórias do sistema do Exemplo 10
O polinômio caracteŕıstico da matriz A é p(t) = det(A−t I2) =
(−1−t)(1−t)2+2 = t2+1cujas ráızes são λ1 = i e λ2 = λ1 = −i.
Agora, vamos determinar os autovetores associadosao autovalor λ1 =
i. Para isto vamos resolver o sistema (A− λ1I2)X = 0̄. Como
A− λ1I2 =[
−1− i 2−1 1− i
]
,
então(A− λ1I2)X = 0̄
é[
−1− i 2−1 1− i
] [
xy
]
=
[
00
]
ou{
(−1− i)x + 2y = 0−x + (1− i)y = 0
cuja solução geral é
W1 = {((1− i)α, α) | α ∈ C} = {α(1− i, 1) | α ∈ C}.Este é o
conjunto de todos os autovetores associados a λ1 = i acrescentado o
vetor nulo.Assim, Z = (1 − i, 1) é um autovetor associado a λ1 =
i. Pela Proposição 4 na página10, Z = (1 + i, 1) é um autovetor
associado a λ2 = λ1 = −i e além disso Z e Z são L.I.Assim, a
matriz
A =
[
−1 2−1 1
]
30 de setembro de 2002 Reginaldo J. Santos
-
24 2 SISTEMAS DE EQUAÇÕES DIFERENCIAIS LINEARES
é diagonalizável e as matrizes
P = [ Z Z ] =
[
1− i 1 + i1 1
]
e D =
[
λ1 0
0 λ1
]
=
[
i 00 −i
]
são tais queD = P−1AP.
Assim a solução do sistema é dada por
[
x1(t)x2(t)
]
= c1 Re
{
eit[
1− i1
]}
+ c2 Im
{
eit[
1− i1
]}
= c1
(
cos t
[
11
]
− sen t[
−10
])
+ c2
(
cos t
[
−10
]
+ sen t
[
11
])
Os gráficos de diversas soluções aparecem na Figura 5. A
disposição das trajetórias ét́ıpica de um sistema linear X ′ =
AX, em que os autovalores de A são complexos com aparte real igual
a zero. Neste caso, dizemos que a origem é um centro.
2.3 A Matriz A não é diagonalizável em C
Sejam P =
[
v1 w1v2 w2
]
e J =
[
λ 10 λ
]
matrizes tais que
A = PJP−1. (21)
Substituindo-se (16) em (1) obtemos
X ′(t) = PJP−1X(t).
Multiplicando-se à esquerda por P−1, obtemos
P−1X ′(t) = JP−1X(t).
Fazendo a mudança de variável Y (t) = P−1X(t), obtemos
Y ′(t) = JY (t),
que pode ser escrito na forma
y′1(t) = λ y1(t) + y2(t)
y′2(t) = λ y2(t)
Diagonalização de Matrizes e Sistemas de Equações
Diferenciais 30 de setembro de 2002
-
2.3 A Matriz A não é diagonalizável em C 25
A segunda equação tem soluçãoy2(t) = c2e
λt.
Substituindo y2(t) na primeira equação obtemos a equação
y′1(t) = λ y1(t) + c2 eλt
que tem soluçãoy1(t) = (c1 + c2 t)e
λt.
Assim a solução da equação (1) é
X(t) = PY (t) = P
[
(c1 + c2 t)eλt
c2 eλt
]
.
Se P =
[
v1 w1v2 w2
]
, ou seja, se as colunas da matriz P são os vetores V =
[
v1v2
]
e
W =
[
w1w2
]
, então
[
x1(t)x2(t)
]
= (c1 + c2 t)eλt
[
v1v2
]
+ c2 eλt
[
w1w2
]
.
Se são dadas as condições iniciais x1(0) = x(0)1 e x2(0) =
x
(0)2 , então para determinarmos
c1 e c2 substituimos t = 0 na solução, ou seja,
[
x1(0)x2(0)
]
= c1
[
v1v2
]
+ c2
[
w1w2
]
=
[
x(0)1
x(0)2
]
.
que é equivalente ao sistema linear{
v1c1 + w1c2 = x(0)1
v2c1 + w2c2 = x(0)2
Exemplo 11. Considere o sistema{
x′1(t) = −x1(t) + x2(t)x′2(t) = −x1(t) − 3x2(t)
Vimos no Exemplo 6 na página 13 que a matriz
A =
[
−1 1−1 −3
]
30 de setembro de 2002 Reginaldo J. Santos
-
26 2 SISTEMAS DE EQUAÇÕES DIFERENCIAIS LINEARES
não é diagonalizável, mas que as matrizes
P = [ V W ] =
[
1 1−1 0
]
e J =
[
λ 10 λ
]
=
[
−2 10 −2
]
são tais queJ = P−1AP.
Assim a solução do sistema é dada por
[
x1(t)x2(t)
]
= (c1 + c2 t)e−2t[
1−1
]
+ c2 e−2t[
10
]
.
Os gráficos de diversas soluções aparecem na Figura 6. A
disposição das trajetóriasé t́ıpica de um sistema linear X ′ =
AX, em que a matriz A não é diagonalizável em Ce o único
autovalor é negativo. Neste caso, dizemos que a origem é um nó
impróprio.No caso em que o único autovalor de A é positivo as
trajetórias são semelhantes, maspercorridas no sentido contrário
às da Figura 6. Neste caso, dizemos também que aorigem é um nó
impróprio.
−4 −3 −2 −1 0 1 2 3 4
−4
−3
−2
−1
0
1
2
3
4
x
y
Figura 6: Trajetórias do sistema do Exemplo 11
Diagonalização de Matrizes e Sistemas de Equações
Diferenciais 30 de setembro de 2002
-
2.4 Exerćıcios (respostas na página 31) 27
2.4 Exerćıcios (respostas na página 31)
Ache a solução geral do sistema de equações dado.
2.1.
{
x′(t) = x(t) + y(t)y′(t) = x(t) + y(t)
2.2.
{
x′(t) = x(t) − y(t)y′(t) = 2x(t) + 4y(t)
2.3.
{
x′(t) = 3x(t) − 4y(t)y′(t) = x(t) − y(t) 2.4.
{
x′(t) = x(t) − y(t)y′(t) = 5x(t) + 3y(t)
2.5.
{
x′(t) = 4x(t) − 2y(t)y′(t) = 8x(t) − 4y(t) 2.6.
{
x′(t) = −x(t) − 4y(t)y′(t) = x(t) − y(t)
2.7.
{
x′(t) = ax(t) + 2y(t)y′(t) = −2x(t) 2.8.
{
x′(t) = ay(t)y′(t) = −2x(t) − 2y(t)
2.9.
{
x′(t) = 2ax(t) + y(t)y′(t) = x(t) + 4ay(t)
2.10.
{
x′(t) = x(t) + y(t)y′(t) = ax(t) + y(t)
Faça um esboço das soluções de X ′(t) = AX(t) e diga se a
origem define uma sela,um nó instável, um nó atrator, um foco
instável, um foco atrator, um centro ou umnó impróprio.
2.11. A =
[
2 13 4
]
2.12. A =
[
−1 81 1
]
2.13. A =
[
1 1−3 −2
]
2.14. A =
[
5 3−3 1
]
2.15. A =
[
3 −41 −1
]
2.16. A =
[
0 2−2 0
]
2.17. A =
[
2 −31 −2
]
2.18. A =
[
−1 −20 −2
]
Comandos do MATLAB:
>>[P,D]=eig(sym(A)) determina simbólicamente, se
posśıvel, matrizes P e D tais queD = P−1AP , sendo D uma matriz
diagonal.>>[P,J]=jordan(sym(A)) determina simbólicamente, se
posśıvel, matrizes P e J tais que
J = P−1AP , sendo J =
[
λ 10 λ
]
.
Comando do pacote GAAL:
>>fluxlin(A) desenha algumas trajetórias que são
soluções do sistema de equações dife-renciais X ′(t) =
AX(t).
30 de setembro de 2002 Reginaldo J. Santos
-
28 3 RESPOSTAS DOS EXERCÍCIOS
3 Respostas dos Exerćıcios
1. Diagonalização de Matrizes 2× 2(página 14)1.1. À
A=sym([1,1;1,1]);
À [P,D]=eig(A)
P =[ 1, -1]
[ 1, 1]
D =[ 2, 0]
[ 0, 0]
1.2. À A=sym([1,-1;2,4]);À [P,D]=eig(A)
P =[ -1, 1]
[ 1, -2]
D =[ 2, 0]
[ 0, 3]
1.3. À A=sym([3,-4;1,-1]);À [P,J]=jordan(A)
P =[ 2, 1]
[ 1, 0]
J =[ 1, 1]
[ 0, 1]
1.4. À A=sym([1,-1;5,3]);À [P,D]=eig(A)
P =[ -1/5+2/5*i, -1/5-2/5*i]
[ 1, 1]
D =[ 2+2*i, 0]
[ 0, 2-2*i]
1.5. À A=sym([4,-2;8,-4]);À [P,J]=jordan(A)
P =[ 4, 1]
[ 8, 0]
J =[ 0, 1]
[ 0, 0]
1.6. À A=sym([-1,-4;1,-1]);À [P,D]=eig(A)
Diagonalização de Matrizes e Sistemas de Equações
Diferenciais 30 de setembro de 2002
-
29
P =[ 2*i, -2*i]
[ 1, 1]
D =[ -1+2*i, 0]
[ 0, -1-2*i]
1.7. Se |a| > 4:
À [P,D]=eig(A)
P =
[
4 4
−a+√a2 − 16 −a−
√a2 − 16
]
D =
[
a+√a2−162
0
0 a−√a2−162
]
Se |a| < 4:P =
[
4 4
−a+ i√16− a2 −a− i
√16− a2
]
D =
[
a+i√
16−a22
0
0 a−i√
16−a22
]
Se a = 4:
À [P,J]=jordan(subs(A,a,4))
P =[ 2, 1]
[ -2, 0]
J =[ 2, 1]
[ 0, 2]
Se a = −4:
À [P,J]=jordan(subs(A,a,-4))
P =[ -2, 1]
[ -2, 0]
J =[ -2, 1]
[ 0, -2]
1.8. Se a < 1/2:
À [P,D]=eig(A)
30 de setembro de 2002 Reginaldo J. Santos
-
30 3 RESPOSTAS DOS EXERCÍCIOS
P =
[
−1 +√1− 2a −1−
√1− 2a
2 2
]
D =
[
−1 +√1− 2a 0
0 −1−√1− 2a
]
Se a > 1/2:
P =
[
−1 + i√2a− 1 −1− i
√2a− 1
2 2
]
D =
[
−1 + i√2a− 1 0
0 −1− i√2a− 1
]
Se a = 1/2:
À [P,J]=jordan(subs(A,a,1/2))
P =[ 1, 1]
[ -2, 0]
J =[ -1, 1]
[ 0, -1]
1.9. À [P,D]=eig(A)
P =
[
−a+√a2 + 1 −a−
√a2 + 1
1 1
]
D =
[
3 a+√a2 + 1 0
0 3 a−√a2 + 1
]
1.10. Se a > 0:
À [P,D]=eig(A)
P =
[ 1√a− 1√
a
1 1
]
D =
[
1 +√a 0
0 1−√a
]
Se a < 0:
P =
[ − i√−ai√−a
1 1
]
D =
[
1 + i√−a 0
0 1− i√−a
]
Se a = 0:
Diagonalização de Matrizes e Sistemas de Equações
Diferenciais 30 de setembro de 2002
-
31
À A=subs(A,a,0)À [P,J]=jordan(A)
P =[ 1, 0]
[ 0, 1]
J =[ 1, 1]
[ 0, 1]
2. Sistemas de Equações Diferenciais Lineares (página 27)
2.1.
[
x(t)y(t)
]
= c1 e2t
[
11
]
+ c2
[
−11
]
.
2.2.
[
x(t)y(t)
]
= c1 e2t
[
−11
]
+ c2 e3t
[
1−2
]
.
2.3.
[
x(t)y(t)
]
= (c1 + c2 t)et
[
21
]
+ c2 et
[
10
]
2.4.
[
x(t)y(t)
]
= c1 e2t
(
cos 2t
[
−15
]
− sen 2t[
20
])
+
c2 e2t
(
cos 2t
[
20
]
+ sen 2t
[
−15
])
2.5.
[
x(t)y(t)
]
= (c1 + c2 t)
[
48
]
+ c2
[
10
]
2.6.
[
x(t)y(t)
]
= c1 e−t(
cos 2t
[
01
]
− sen 2t[
20
])
+
c2 e−t(
cos 2t
[
20
]
+ sen 2t
[
01
])
2.7. Se |a| > 4:[
x(t)y(t)
]
= c1 e(a+
√a2−16
2)t
[
4
−a+√a2 − 16
]
+
c2 e(a−
√a2−16
2)t
[
4
−a−√a2 − 16
]
.
Se |a| < 4:[
x(t)y(t)
]
= c1 eat
2
(
cos(√
16−a22
t)
[
4−a
]
− sen(√
16−a22
t)
[
0√16− a2
])
+
c2 eat
2
(
cos(√16− a2t)
[
0√16− a2
]
+ sen(√16− a2t)
[
4−a
])
30 de setembro de 2002 Reginaldo J. Santos
-
32 3 RESPOSTAS DOS EXERCÍCIOS
Se a = ±4:[
x(t)y(t)
]
= (c1 + c2 t)e±2t[
±2−2
]
+ c2 e±2t[
10
]
2.8. Se a < 1/2:[
x(t)y(t)
]
= c1 e(−1+
√1−2a)t
[
−1 +√1− 2a
2
]
+
c2 e(−1−
√1−2a)t
[
−1−√1− 2a
2
]
.
Se a > 1/2:[
x(t)y(t)
]
= c1 e−t(
cos(√2a− 1t)
[
−12
]
− sen(√2a− 1t)
[ √2a− 10
])
+
c2 e−t(
cos(√2a− 1t)
[ √2a− 1
0
]
+ sen(√2a− 1t)
[
−12
])
Se a = 1/2:[
x(t)y(t)
]
= (c1 + c2 t)e−t[
1−2
]
+ c2 e−t[
10
]
2.9.
[
x(t)y(t)
]
= c1 e(3a+
√a2+1)t
[
−a+√a2 + 1
1
]
+ c2 e(3a−
√a2+1)t
[
−a−√a2 + 1
1
]
.
2.10. Se a > 0:[
x(t)y(t)
]
= c1 e(1+
√a)t
[ 1√a
1
]
+ c2 e(1−
√a)t
[ − 1√a
1
]
.
Se a < 0:[
x(t)y(t)
]
= c1
(
et cos(√−at)
[
01
]
− et sen(√−at)
[ − 1√−a0
])
+
c2
(
et cos(√−at)
[ − 1√−a0
]
+ et sen(√−at)
[
01
])
.
Se a = 0:[
x(t)y(t)
]
= (c1 + c2 t)et
[
10
]
+ c2 et
[
01
]
Diagonalização de Matrizes e Sistemas de Equações
Diferenciais 30 de setembro de 2002
-
33
2.11. A origem é um nó instável.
−4 −3 −2 −1 0 1 2 3 4
−4
−3
−2
−1
0
1
2
3
4
x
y
2.12. A origem é uma sela.
−4 −3 −2 −1 0 1 2 3 4
−4
−3
−2
−1
0
1
2
3
4
x
y
2.13. A origem é um foco atrator.
−3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
x
y
30 de setembro de 2002 Reginaldo J. Santos
-
34 3 RESPOSTAS DOS EXERCÍCIOS
2.14. A origem é um foco instável.
−3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
x
y
2.15. A origem é um nó impróprio.
−8 −6 −4 −2 0 2 4 6 8
−8
−6
−4
−2
0
2
4
6
8
x
y
2.16. A origem é um centro.
−3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
x
y
Diagonalização de Matrizes e Sistemas de Equações
Diferenciais 30 de setembro de 2002
-
35
2.17. A origem é uma sela.
−4 −3 −2 −1 0 1 2 3 4
−4
−3
−2
−1
0
1
2
3
4
x
y
2.18. A origem é um nó atrator.
−4 −3 −2 −1 0 1 2 3 4
−4
−3
−2
−1
0
1
2
3
4
x
y
30 de setembro de 2002 Reginaldo J. Santos
-
36 REFERÊNCIAS
Referências
[1] Howard Anton and Chris Rorres. Álgebra Linear com
Aplicações. Bookman, SãoPaulo, 8a. edição, 2000.
[2] William E. Boyce and Richard C. DiPrima. Equações
Diferenciais Elementares eProblemas de Valores de Contorno. Livros
Técnicos e Cient́ıficos Editora S.A., Rio deJaneiro, 6a. edição,
1999.
[3] Morris W. Hirsch and Stephen Smale. Differential Equations,
Dynamical Systems andLinear Algebra. Academic Press, Inc., New
York, 1974.
[4] Bernard Kolman. Introdução à Álgebra Linear com
Aplicações. Prentice Hall doBrasil, Rio de Janeiro, 6a. edição,
1998.
[5] Erwin Kreiszig. Matemática Superior. Livros Técnicos e
Cient́ıficos Editora S.A., Riode Janeiro, 2a. edição, 1985.
[6] Steven J. Leon. Álgebra Linear com Aplicações. Livros
Técnicos e Cient́ıficos EditoraS.A., Rio de Janeiro, 5a. edição,
1998.
[7] Reginaldo J. Santos. Um Curso de Geometria Anaĺıtica e
Álgebra Linear. ImprensaUniversitária da UFMG, Belo Horizonte,
2002.
[8] Jorge Sotomayor. Lições de Equações Diferenciais
Ordinárias. IMPA, Rio de Janeiro,1979.
Diagonalização de Matrizes e Sistemas de Equações
Diferenciais 30 de setembro de 2002
Diagonalização de Matrizes 2 x 2MotivaçãoAutovalores e
AutovetoresDiagonalizaçãoAutovalores complexosSe a matriz A não é
diagonalizávelResumoExercícios (respostas na página 28)
Sistemas de Equações Diferenciais LinearesA Matriz A é
diagonalizável em RA Matriz A é diagonalizável em CA Matriz A não é
diagonalizável em CExercícios (respostas na página 31)
Respostas dos Exercícios