Embed Size (px)
Citation preview
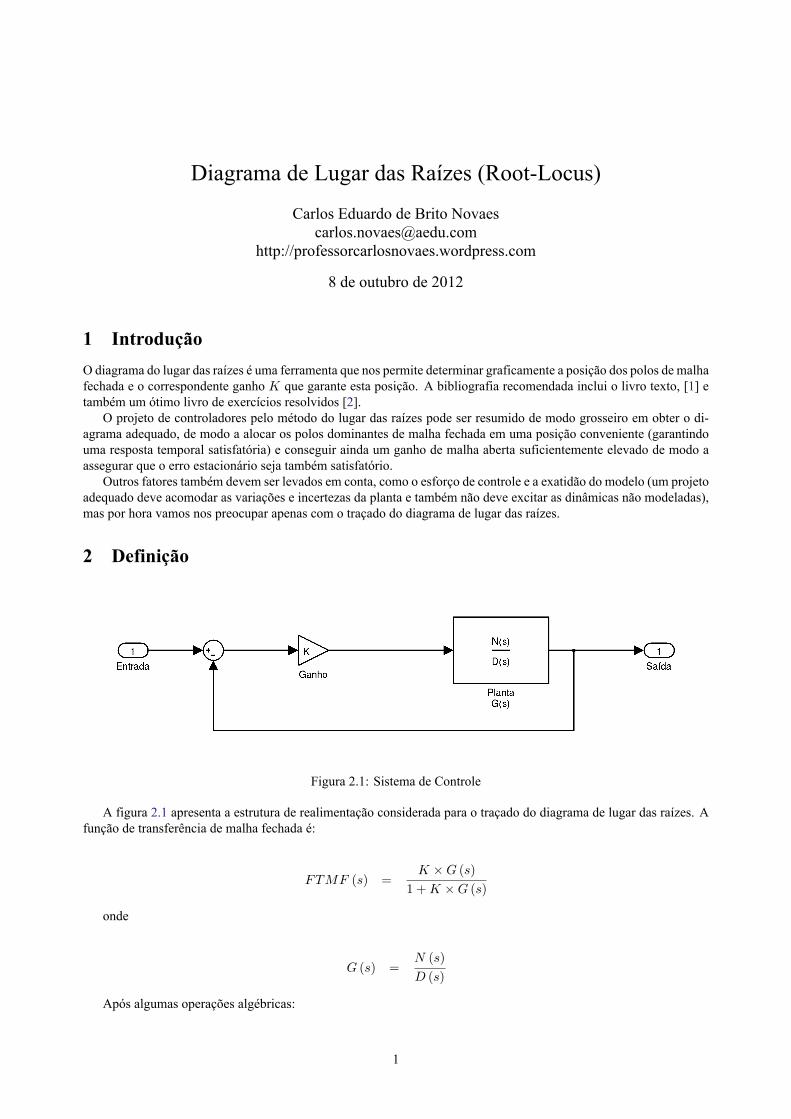
Diagrama de Lugar das Raízes (Root-Locus)
Carlos Eduardo de Brito [email protected]
http://professorcarlosnovaes.wordpress.com
8 de outubro de 2012
1 IntroduçãoO diagrama do lugar das raízes é uma ferramenta que nos permite determinar graficamente a posição dos polos de malhafechada e o correspondente ganho K que garante esta posição. A bibliografia recomendada inclui o livro texto, [1] etambém um ótimo livro de exercícios resolvidos [2].
O projeto de controladores pelo método do lugar das raízes pode ser resumido de modo grosseiro em obter o di-agrama adequado, de modo a alocar os polos dominantes de malha fechada em uma posição conveniente (garantindouma resposta temporal satisfatória) e conseguir ainda um ganho de malha aberta suficientemente elevado de modo aassegurar que o erro estacionário seja também satisfatório.
Outros fatores também devem ser levados em conta, como o esforço de controle e a exatidão do modelo (um projetoadequado deve acomodar as variações e incertezas da planta e também não deve excitar as dinâmicas não modeladas),mas por hora vamos nos preocupar apenas com o traçado do diagrama de lugar das raízes.
2 Definição
Figura 2.1: Sistema de Controle
A figura 2.1 apresenta a estrutura de realimentação considerada para o traçado do diagrama de lugar das raízes. Afunção de transferência de malha fechada é:
FTMF (s) =K ×G (s)
1 +K ×G (s)
onde
G (s) =N (s)
D (s)
Após algumas operações algébricas:
1
2.1 Exemplos visuais 2 DEFINIÇÃO
FTMF (s) =
K ×N (s)
D (s)
1 +K ×N (s)
D (s)
=
K ×N (s)
D (s)
D (s)
D (s)+
K ×N (s)
D (s)
=
K ×N (s)
D (s)
D (s) +K ×N (s)
D (s)
=K ×N (s)
D (s) +K ×N (s)
fica então claro que pelo ajuste do ganho K, é possível alterar os polos de malha fechada. Mais ainda, podemosverificar que se o ganho K tende a zero, o denominador de malha fechada tende ao denominador de malha abertae consequentemente, os polos de malha fechada tendem aos polos de malha aberta. Por outro lado, se forçarmosvalores muito elevados deK, o denominador de malha fechada tende a um múltiploK do numerador de malha aberta1,observamos então que paraK elevado, a posição dos polos de malha fechada tende para os zeros de malha aberta.
De fato, ao variar o ganhoK desde zero até infinito, os polos de malha fechada vão se deslocando por caminhos quecomeçam em um polo de malha aberta e terminam ou em um zero de malha aberta ou em pontos infinitamente distantesda origem (chamados de zeros infinitos ou zeros no infinito). Esses zeros localizados no infinito surgem quando aplanta tem um número de zeros inferior ao número de polos. Desta forma, “faltam” zeros de malha aberta para “fechar”os caminhos do lugar das raízes (que sempre começam em um polo de malha aberta e terminam em um zero de malhaaberta ou um zero no infinito).
Para ilustrar essas ideias, vamos demonstrar alguns traçados obtidos pelo software Matlab.
2.1 Exemplos visuais2.1.1 Para traçar o diagrama de lugar das raízes de uma planta com função de transferência
G (s) =1
s+ 2
digitamos na janela de comando do Matlab:
rlocus([1], [1 2])
onde rlocus é o comando para o traçado do diagrama de lugar das raízes. Este comando recebe dois parâmetros que sãoo numerador e o denominador da função de transferência, para indicar o numerador e o denominador o Matlab utilizauma nomenclatura onde um vetor representa os coeficientes de um polinômio, assim, o numerador é representado como[1], e o denominador é representado como [1 2] (equivalente a 1s+ 2). A figura 2.2 ilustra o resultado.
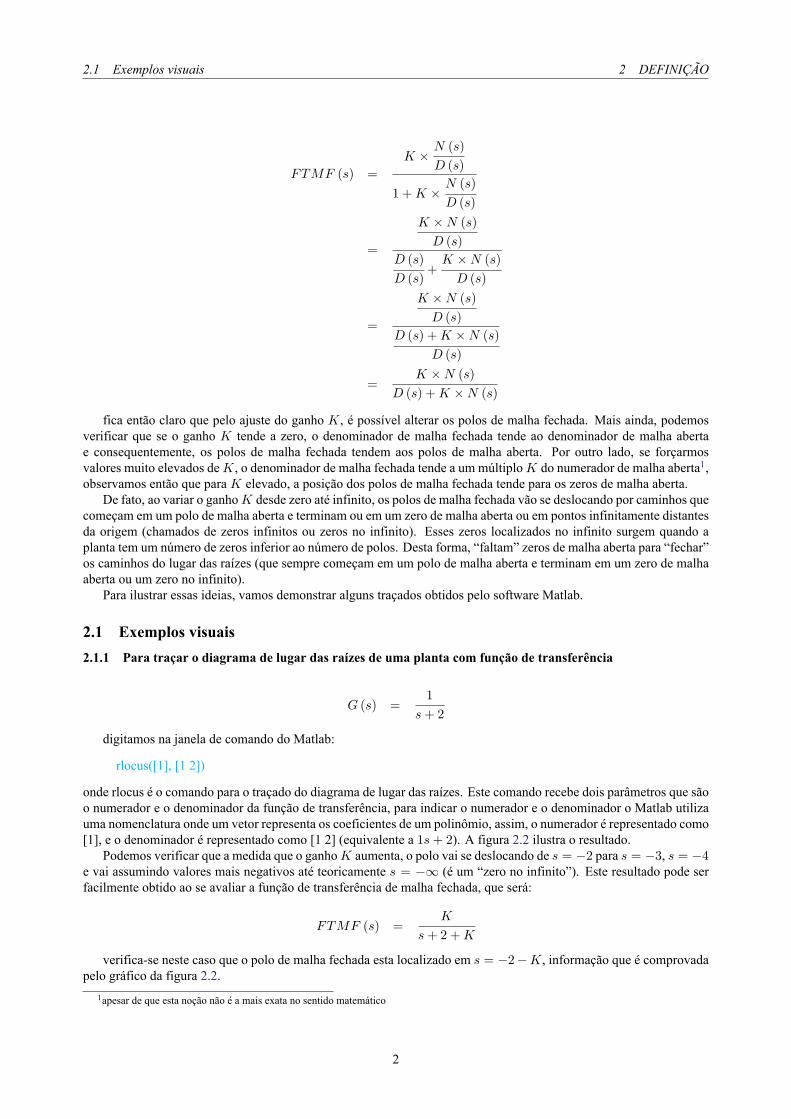
Podemos verificar que a medida que o ganhoK aumenta, o polo vai se deslocando de s = −2 para s = −3, s = −4e vai assumindo valores mais negativos até teoricamente s = −∞ (é um “zero no infinito”). Este resultado pode serfacilmente obtido ao se avaliar a função de transferência de malha fechada, que será:
FTMF (s) =K
s+ 2 +K
verifica-se neste caso que o polo de malha fechada esta localizado em s = −2−K, informação que é comprovadapelo gráfico da figura 2.2.
1apesar de que esta noção não é a mais exata no sentido matemático
2
2.1 Exemplos visuais 2 DEFINIÇÃO
Figura 2.2: Diagrama do lugar das raízes de G (s) =1
s+ 2, traçado pelo Matlab.
2.1.2 Para traçar o diagrama de lugar das raízes de uma planta com função de transferência
G (s) =s+ 5
s+ 2
digitamos na janela de comando do Matlab:
rlocus([1 5], [1 2])
Para indicar o numerador e o denominador o Matlab utiliza uma nomenclatura onde um vetor representa os coeficientesde um polinômio, assim, o numerador é representado como [1 5] (equivalente a 1s+5), e o denominador é representadocomo [1 2] (equivalente a 1s+ 2). A figura 2.3 ilustra o resultado.
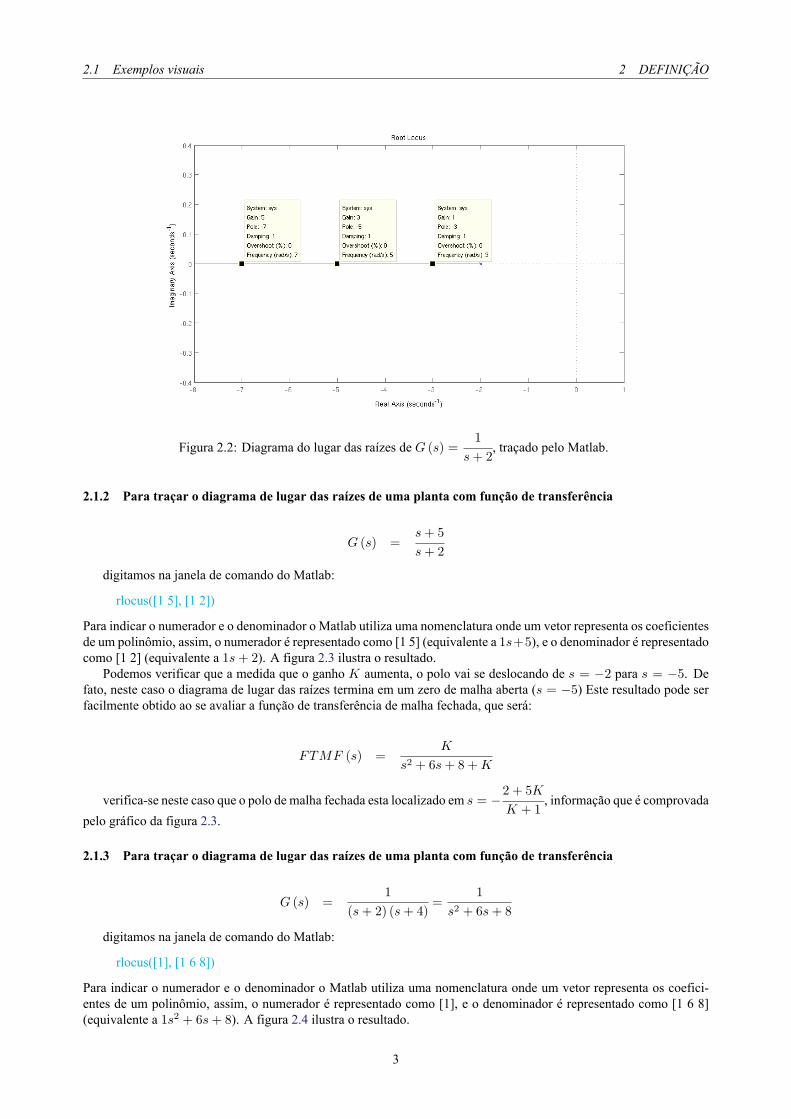
Podemos verificar que a medida que o ganho K aumenta, o polo vai se deslocando de s = −2 para s = −5. Defato, neste caso o diagrama de lugar das raízes termina em um zero de malha aberta (s = −5) Este resultado pode serfacilmente obtido ao se avaliar a função de transferência de malha fechada, que será:
FTMF (s) =K
s2 + 6s+ 8 +K
verifica-se neste caso que o polo de malha fechada esta localizado em s = −2 + 5K
K + 1, informação que é comprovada
pelo gráfico da figura 2.3.
2.1.3 Para traçar o diagrama de lugar das raízes de uma planta com função de transferência
G (s) =1
(s+ 2) (s+ 4)=
1
s2 + 6s+ 8
digitamos na janela de comando do Matlab:
rlocus([1], [1 6 8])
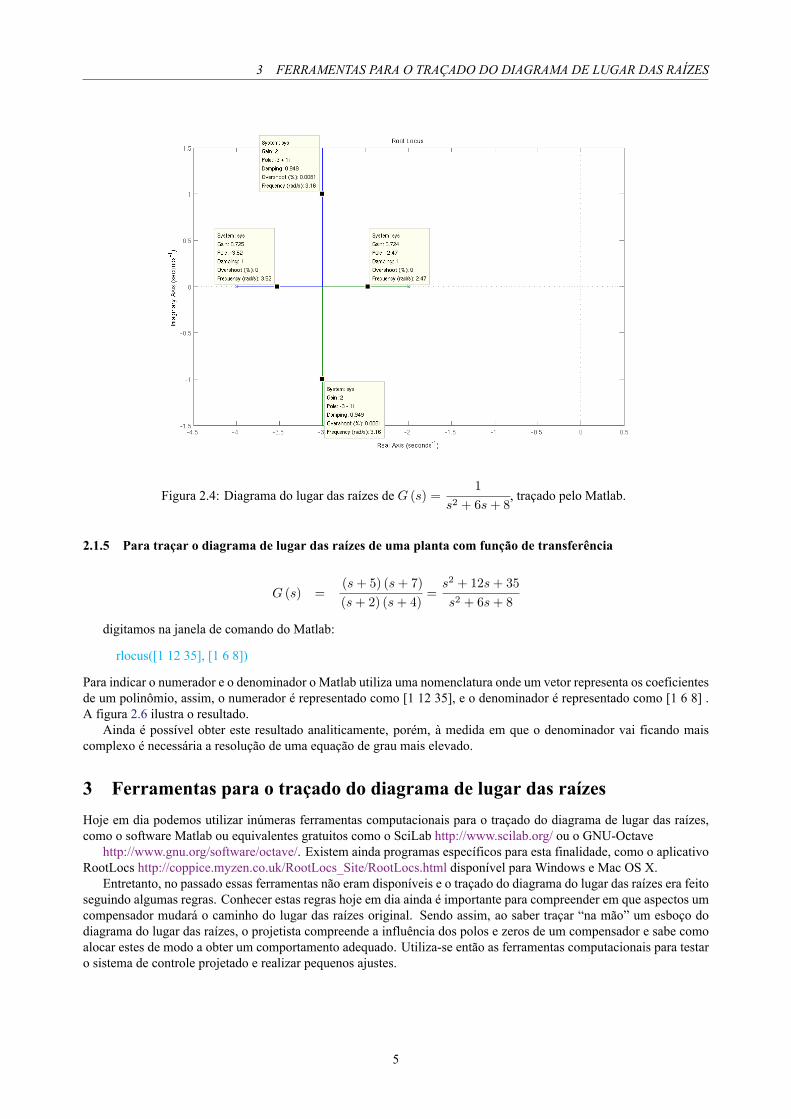
Para indicar o numerador e o denominador o Matlab utiliza uma nomenclatura onde um vetor representa os coefici-entes de um polinômio, assim, o numerador é representado como [1], e o denominador é representado como [1 6 8](equivalente a 1s2 + 6s+ 8). A figura 2.4 ilustra o resultado.
3
2.1 Exemplos visuais 2 DEFINIÇÃO
Figura 2.3: Diagrama do lugar das raízes de G (s) =s+ 5
s+ 2, traçado pelo Matlab.
Podemos verificar que a medida que o ganho K aumenta, os polo se deslocam de s = −2 para s = −∞j e des = −4 para s = ∞j. Este resultado ainda pode ser obtido ao se avaliar a função de transferência de malha fechada,que será:
FTMF (s) =Ks+ 5K
(K + 1) s+ 2 + 5K
resolvendo a equação de segundo grau, verifica-se neste caso que os polos de malha fechada estão localizados ems = −3±
√1−K, informação que é comprovada pelo gráfico da figura 2.4.
2.1.4 Para traçar o diagrama de lugar das raízes de uma planta com função de transferência
G (s) =s+ 5
(s+ 2) (s+ 4)=
s+ 5
s2 + 6s+ 8
digitamos na janela de comando do Matlab:
rlocus([1 5], [1 6 8])
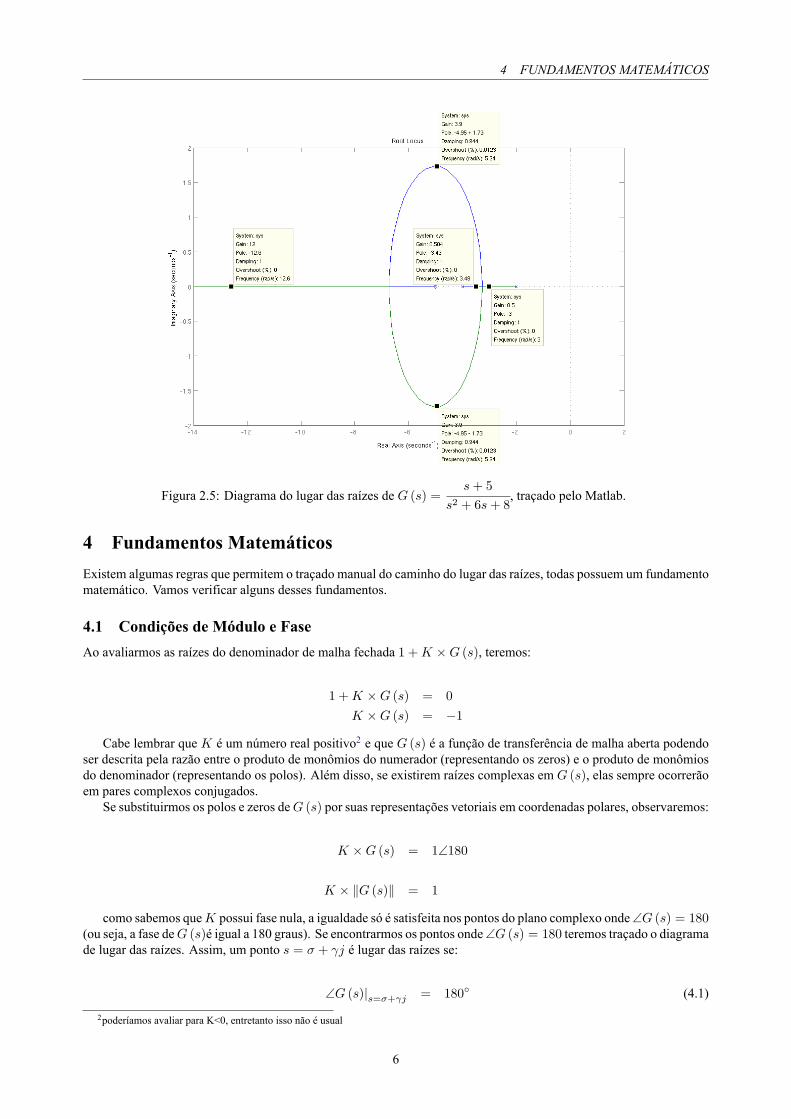
Para indicar o numerador e o denominador o Matlab utiliza uma nomenclatura onde um vetor representa os coeficientesde um polinômio, assim, o numerador é representado como [1 5], e o denominador é representado como [1 6 8] . Afigura 2.5 ilustra o resultado.
Podemos verificar que a medida que o ganho K aumenta, os polo se deslocam de s = −2 para s = −3 − ∞j ede s = −4 para s = −3 +∞j. Este resultado ainda pode ser obtido ao se avaliar a função de transferência de malhafechada, que será:
FTMF (s) =Ks+ 5K
s2 + (6 +K) s+ 8 + 5K
resolvendo a equação de segundo grau, verifica-se neste caso que os polos de malha fechada estão localizados em
s = −6 +K ±
√K2 − 8K + 4
2, informação que é comprovada pelo gráfico da figura 2.5.
4
3 FERRAMENTAS PARA O TRAÇADO DO DIAGRAMA DE LUGAR DAS RAÍZES
Figura 2.4: Diagrama do lugar das raízes de G (s) =1
s2 + 6s+ 8, traçado pelo Matlab.
2.1.5 Para traçar o diagrama de lugar das raízes de uma planta com função de transferência
G (s) =(s+ 5) (s+ 7)
(s+ 2) (s+ 4)=
s2 + 12s+ 35
s2 + 6s+ 8
digitamos na janela de comando do Matlab:
rlocus([1 12 35], [1 6 8])
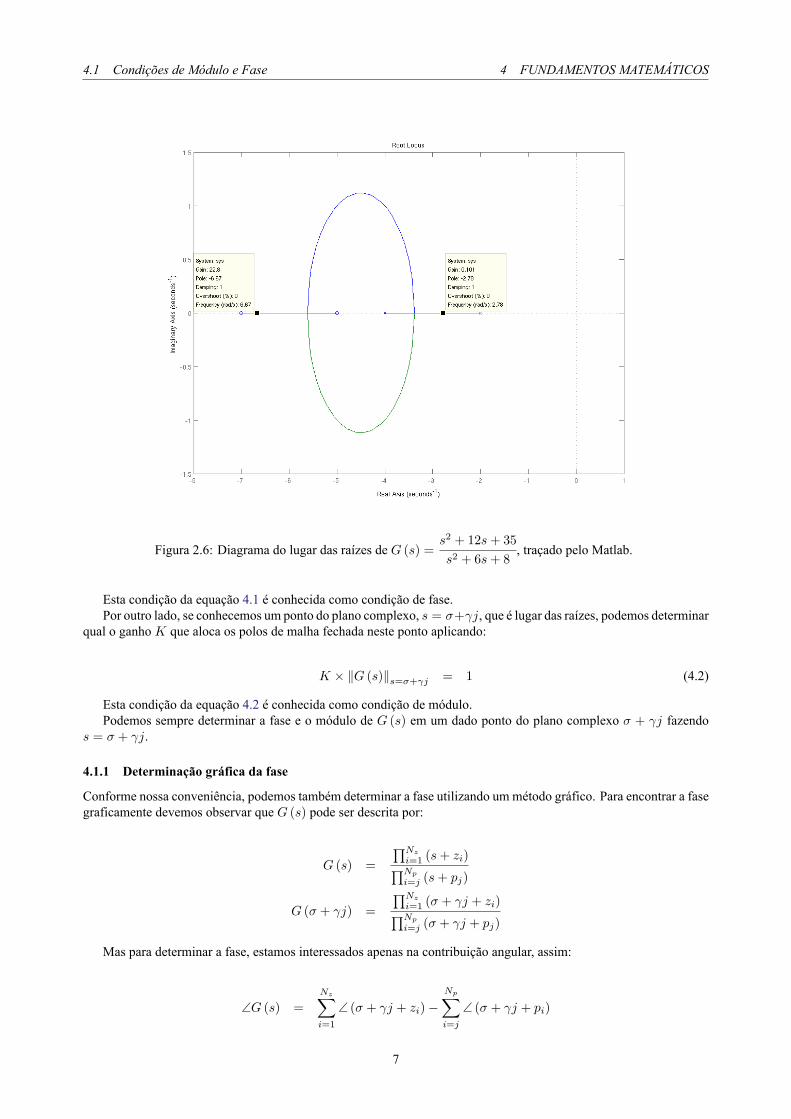
Para indicar o numerador e o denominador o Matlab utiliza uma nomenclatura onde um vetor representa os coeficientesde um polinômio, assim, o numerador é representado como [1 12 35], e o denominador é representado como [1 6 8] .A figura 2.6 ilustra o resultado.
Ainda é possível obter este resultado analiticamente, porém, à medida em que o denominador vai ficando maiscomplexo é necessária a resolução de uma equação de grau mais elevado.
3 Ferramentas para o traçado do diagrama de lugar das raízesHoje em dia podemos utilizar inúmeras ferramentas computacionais para o traçado do diagrama de lugar das raízes,como o software Matlab ou equivalentes gratuitos como o SciLab http://www.scilab.org/ ou o GNU-Octave
http://www.gnu.org/software/octave/. Existem ainda programas específicos para esta finalidade, como o aplicativoRootLocs http://coppice.myzen.co.uk/RootLocs_Site/RootLocs.html disponível para Windows e Mac OS X.
Entretanto, no passado essas ferramentas não eram disponíveis e o traçado do diagrama do lugar das raízes era feitoseguindo algumas regras. Conhecer estas regras hoje em dia ainda é importante para compreender em que aspectos umcompensador mudará o caminho do lugar das raízes original. Sendo assim, ao saber traçar “na mão” um esboço dodiagrama do lugar das raízes, o projetista compreende a influência dos polos e zeros de um compensador e sabe comoalocar estes de modo a obter um comportamento adequado. Utiliza-se então as ferramentas computacionais para testaro sistema de controle projetado e realizar pequenos ajustes.
5
4 FUNDAMENTOS MATEMÁTICOS
Figura 2.5: Diagrama do lugar das raízes de G (s) =s+ 5
s2 + 6s+ 8, traçado pelo Matlab.
4 Fundamentos MatemáticosExistem algumas regras que permitem o traçado manual do caminho do lugar das raízes, todas possuem um fundamentomatemático. Vamos verificar alguns desses fundamentos.
4.1 Condições de Módulo e FaseAo avaliarmos as raízes do denominador de malha fechada 1 +K ×G (s), teremos:
1 +K ×G (s) = 0
K ×G (s) = −1
Cabe lembrar que K é um número real positivo2 e que G (s) é a função de transferência de malha aberta podendoser descrita pela razão entre o produto de monômios do numerador (representando os zeros) e o produto de monômiosdo denominador (representando os polos). Além disso, se existirem raízes complexas em G (s), elas sempre ocorrerãoem pares complexos conjugados.
Se substituirmos os polos e zeros deG (s) por suas representações vetoriais em coordenadas polares, observaremos:
K ×G (s) = 1∠180
K × ‖G (s)‖ = 1
como sabemos queK possui fase nula, a igualdade só é satisfeita nos pontos do plano complexo onde∠G (s) = 180(ou seja, a fase deG (s)é igual a 180 graus). Se encontrarmos os pontos onde∠G (s) = 180 teremos traçado o diagramade lugar das raízes. Assim, um ponto s = σ + γj é lugar das raízes se:
∠G (s)|s=σ+γj = 180◦ (4.1)
2poderíamos avaliar para K<0, entretanto isso não é usual
6
4.1 Condições de Módulo e Fase 4 FUNDAMENTOS MATEMÁTICOS
Figura 2.6: Diagrama do lugar das raízes de G (s) =s2 + 12s+ 35
s2 + 6s+ 8, traçado pelo Matlab.
Esta condição da equação 4.1 é conhecida como condição de fase.Por outro lado, se conhecemos um ponto do plano complexo, s = σ+γj, que é lugar das raízes, podemos determinar
qual o ganhoK que aloca os polos de malha fechada neste ponto aplicando:
K × ‖G (s)‖s=σ+γj = 1 (4.2)
Esta condição da equação 4.2 é conhecida como condição de módulo.Podemos sempre determinar a fase e o módulo de G (s) em um dado ponto do plano complexo σ + γj fazendo
s = σ + γj.
4.1.1 Determinação gráfica da fase
Conforme nossa conveniência, podemos também determinar a fase utilizando ummétodo gráfico. Para encontrar a fasegraficamente devemos observar que G (s) pode ser descrita por:
G (s) =
∏Nz
i=1 (s+ zi)∏Np
i=j (s+ pj)
G (σ + γj) =
∏Nz
i=1 (σ + γj + zi)∏Np
i=j (σ + γj + pj)
Mas para determinar a fase, estamos interessados apenas na contribuição angular, assim:
∠G (s) =
Nz∑i=1
∠ (σ + γj + zi)−Np∑i=j
∠ (σ + γj + pi)
7
4.2 Ângulos de partida e chegada 4 FUNDAMENTOS MATEMÁTICOS
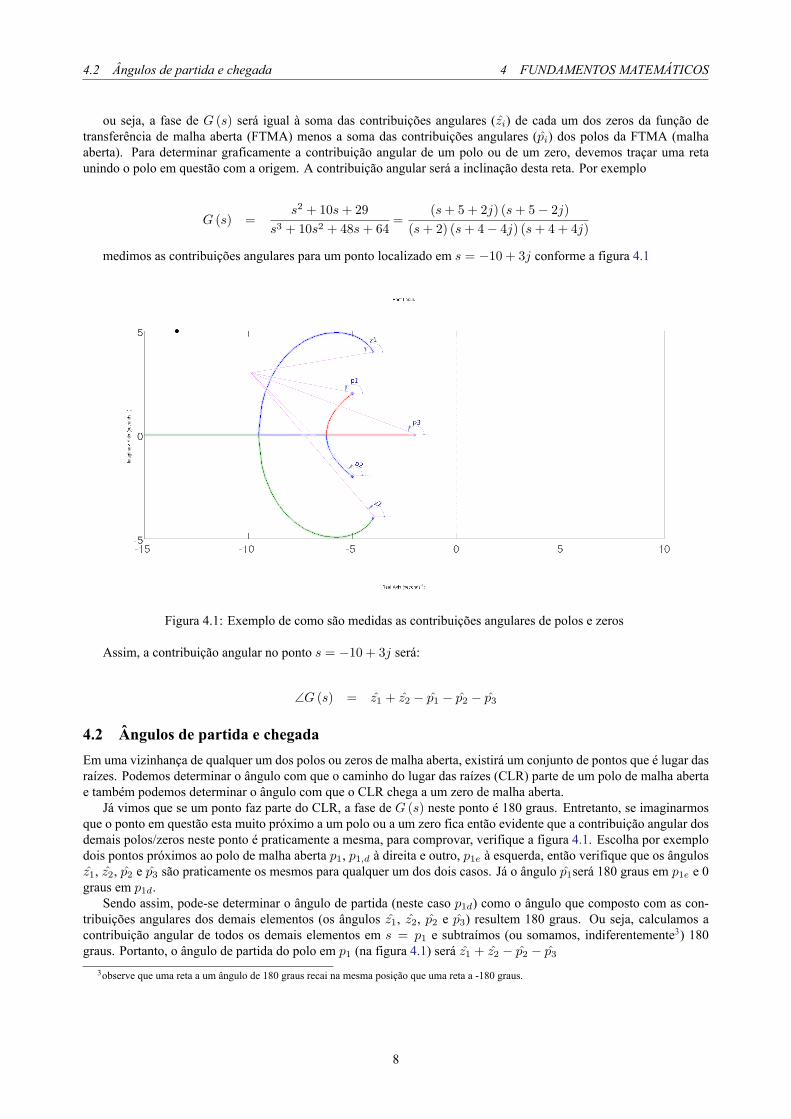
ou seja, a fase de G (s) será igual à soma das contribuições angulares (zi) de cada um dos zeros da função detransferência de malha aberta (FTMA) menos a soma das contribuições angulares (pi) dos polos da FTMA (malhaaberta). Para determinar graficamente a contribuição angular de um polo ou de um zero, devemos traçar uma retaunindo o polo em questão com a origem. A contribuição angular será a inclinação desta reta. Por exemplo
G (s) =s2 + 10s+ 29
s3 + 10s2 + 48s+ 64=
(s+ 5 + 2j) (s+ 5− 2j)
(s+ 2) (s+ 4− 4j) (s+ 4 + 4j)
medimos as contribuições angulares para um ponto localizado em s = −10 + 3j conforme a figura 4.1
Figura 4.1: Exemplo de como são medidas as contribuições angulares de polos e zeros
Assim, a contribuição angular no ponto s = −10 + 3j será:
∠G (s) = z1 + z2 − p1 − p2 − p3
4.2 Ângulos de partida e chegadaEm uma vizinhança de qualquer um dos polos ou zeros de malha aberta, existirá um conjunto de pontos que é lugar dasraízes. Podemos determinar o ângulo com que o caminho do lugar das raízes (CLR) parte de um polo de malha abertae também podemos determinar o ângulo com que o CLR chega a um zero de malha aberta.
Já vimos que se um ponto faz parte do CLR, a fase de G (s) neste ponto é 180 graus. Entretanto, se imaginarmosque o ponto em questão esta muito próximo a um polo ou a um zero fica então evidente que a contribuição angular dosdemais polos/zeros neste ponto é praticamente a mesma, para comprovar, verifique a figura 4.1. Escolha por exemplodois pontos próximos ao polo de malha aberta p1, p1,d à direita e outro, p1e à esquerda, então verifique que os ângulosz1, z2, p2 e p3 são praticamente os mesmos para qualquer um dos dois casos. Já o ângulo p1será 180 graus em p1e e 0graus em p1d.
Sendo assim, pode-se determinar o ângulo de partida (neste caso p1d) como o ângulo que composto com as con-tribuições angulares dos demais elementos (os ângulos z1, z2, p2 e p3) resultem 180 graus. Ou seja, calculamos acontribuição angular de todos os demais elementos em s = p1 e subtraímos (ou somamos, indiferentemente3) 180graus. Portanto, o ângulo de partida do polo em p1 (na figura 4.1) será z1 + z2 − p2 − p3
3observe que uma reta a um ângulo de 180 graus recai na mesma posição que uma reta a -180 graus.
8

5 REGRAS PARA O TRAÇADO MANUAL DO DIAGRAMA DO LUGAR DAS RAÍZES
4.2.1 Ângulos de partida e chegada no eixo real
No eixo real, as contribuições angulares dos polos e zeros complexos conjugados se anula (verifique na figura 4.1, paraqualquer ponto no eixo real), só restando as contribuições angulares dos polos e zeros localizados no próprio eixo real(e que assumirá apenas dois valores, ou 180 ou 0 graus). Desta forma, o traçado do lugar das raízes no eixo real é muitosimplificado e se limita a preencher os locais do eixo real entre dois elementos (polos ou zeros) a partir do elementocom maior parte real (maior considerando o sinal, portanto 1 > −2).
5 Regras para o traçado manual do diagrama do lugar das raízesAs regras que serão apresentadas são justificadas pelos fundamentos matemáticos estudados anteriormente.
1. Escrever a equação característica:
(a) Devemos escrever a equação característica, 1 +K ×G (s) = 0, na seguinte forma
1 +K (s+ z1) (s+ z2) · · · (s+ zr)
(s+ p1) (s+ p2) · · · (s+ pq)= 0
2. Localizar os polos e zeros de malha aberta:
(a) Desenhe no gráfico todos os polos e zeros de malha aberta (usualmente representamos polos por um “x” ezeros por um “o”).
3. Localizar os zeros no infinito, quando houverem:
(a) Os zeros no infinito serão em número de Np −Nz , número de polos de malha aberta menos o número dezeros de malha aberta.
(b) Estarão localizados no final de retas (chamadas assintotas) que se iniciam no ponto σa
σa =
∑polos finitos−
∑zeros finitos
Np −Nz
(c) As assintotas partirão de σa com ângulos de θa (N é um número inteiro) e o resultado será em graus.
θa =(2N + 1)× 180
Np −Nz
4. Traçar a parte do caminho do lugar das raízes (CLR) que esta sobre o eixo real:
(a) Sobre o eixo real, as contribuições de polos e zeros complexos conjugados se anula, restando apenas acontribuição dos polos e zeros que também estão sobre o eixo real. Uma forma simples de realizar estetraçado é localizar no eixo real os polo e zeros.i. Começando pelo elemento maior (o mais positivo), trace uma reta no sentido negativo (diminuindo)
até encontrar outro elemento (seja polo ou zero).ii. Continue em sentido negativo, mas sem traçar reta alguma, até encontrar o próximo elemento.iii. Continue em sentido negativo, traçando novamente uma reta.iv. Repita alternando o traçado a cada vez que um novo elemento for encontrado, até que todos os elemen-
tos sobre o eixo real tenham sido alcançados. Observe que pode haver um zero em s = −∞, nestecaso é conveniente traçar um pouco mais adiante (mas não precisa chegar no infinito).
5. Determine o ângulo de partida dos polos e zeros complexos conjugados:
(a) Localize o polo ou zero complexo em questão(b) Calcule a contribuição angular neste ponto, ignorando o elemento que ai se localiza e somando 180 graus.
Por exemplo, se houver um polo em s = −4 + 4j, haverá obviamente o seu conjugado em s = −4− 4j evamos supor que exista mais um em s = −6. A contribuição angular no ponto s = −4− 4j será calculadaconsiderando apenas os elementos em s = −4+4j e em s = −6. O ângulo de partida será esta contribuiçãoangular somada a 180 graus (ou subtraída, se for mais conveniente).
9

5.1 Exemplos 5 REGRAS PARA O TRAÇADO MANUAL DO DIAGRAMA DO LUGAR DAS RAÍZES
(c) desenhe um vetor indicando este ângulo de partida sobre o elemento calculado.
6. Trace um primeiro esboço do CLR.
(a) Lembre-se que cada ramo do CLR começa em um polo e termina em um zero.(b) O CLR é simétrico em relação ao eixo real.(c) Poderão existir pontos de separação, podendo ser de chegada ou saída, sobre o eixo real (normalmente
ocorrem entre dois polos ou entre dois zeros). Para localizar aproximadamente estes pontos, cabe a seguinteobservação.
i. Polos tem o efeito de “afastar” o lugar das raízes em suas imediações.ii. Zeros tem o efeito de “atrair” o lugar das raízes em suas imediações.iii. Polos e zeros, quando estão distantes, exercem pouca influência em uma região do CLR.
7. Determine a posição dos pontos de separação:
(a) Um ponto de separação σb pode ser determinado fazendo
Np∑i=1
1
σb − pi=
Nz∑i=1
1
σb − zi
(b) A resolução da equação anterior pode levar a um polinômio de grau elevado e de difícil solução. Entretanto,um procedimento de tentativa e erro permite obter a posição de modo preciso partindo de uma estimativainicial. Para isto, basta observar que o ponto de separação possui dois elementos mais próximos e que sãomais influentes que os demais.
i. Então, para todos os elementos mais afastados do ponto de separação σb, substituímos σb por umaestimativa. Isso leva a uma equação de segundo grau que se resolvida nos da uma nova estimativa paraσb.
ii. Repete-se o processo com a nova estimativa no lugar da anterior.iii. Em geral, partindo-de de uma boa estimativa inicial nos leva a um resultado bastante preciso em apenas
uma computação.
5.1 Exemplos5.1.1 Determine o esboço do lugar das raízes de:
G (s) =(s+ 1)
(s+ 2) (s+ 3) (s+ 4)
1. A equação característica, 1 +K ×G (s) = 0, será 1 +K (s+ 1)
(s+ 2) (s+ 3) (s+ 4)= 0
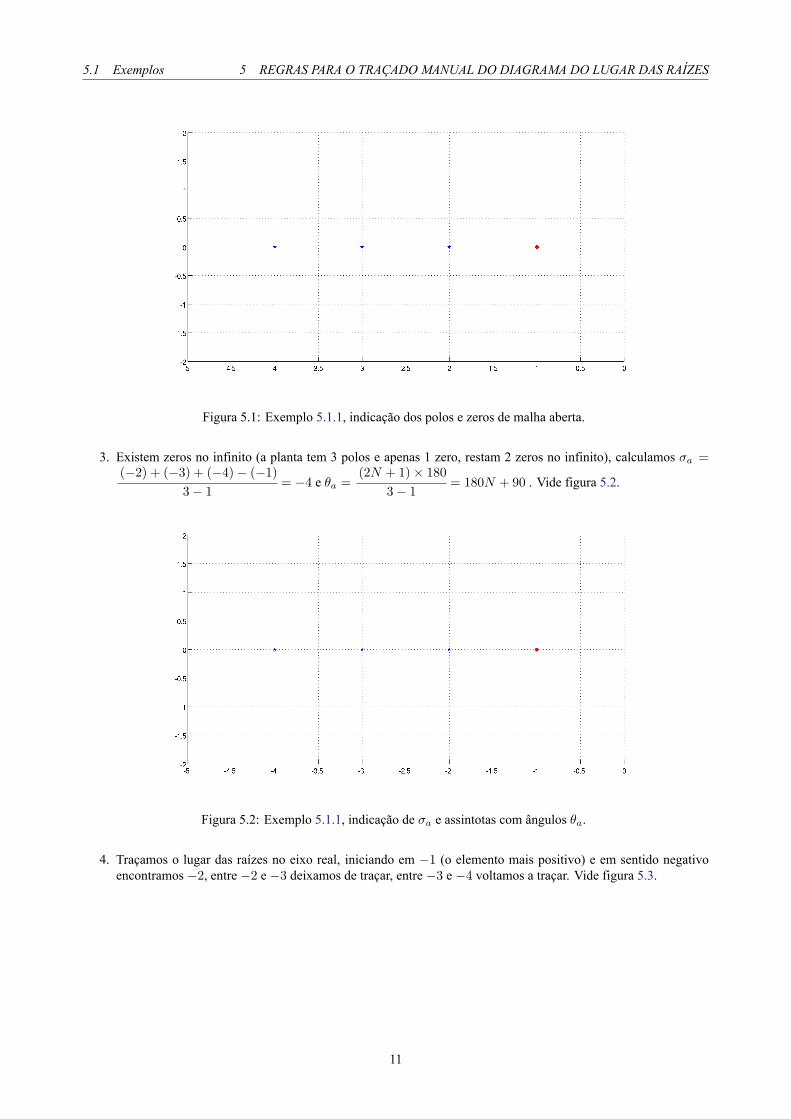
2. Os polos de malha aberta estão localizados em s = −2, s = −3 e s = −4. O único zero de malha aberta estalocalizado em s = −1. Vide figura 5.1.
10
5.1 Exemplos 5 REGRAS PARA O TRAÇADO MANUAL DO DIAGRAMA DO LUGAR DAS RAÍZES
Figura 5.1: Exemplo 5.1.1, indicação dos polos e zeros de malha aberta.
3. Existem zeros no infinito (a planta tem 3 polos e apenas 1 zero, restam 2 zeros no infinito), calculamos σa =(−2) + (−3) + (−4)− (−1)
3− 1= −4 e θa =
(2N + 1)× 180
3− 1= 180N + 90 . Vide figura 5.2.
Figura 5.2: Exemplo 5.1.1, indicação de σa e assintotas com ângulos θa.
4. Traçamos o lugar das raízes no eixo real, iniciando em −1 (o elemento mais positivo) e em sentido negativoencontramos −2, entre −2 e −3 deixamos de traçar, entre −3 e −4 voltamos a traçar. Vide figura 5.3.
11
5.1 Exemplos 5 REGRAS PARA O TRAÇADO MANUAL DO DIAGRAMA DO LUGAR DAS RAÍZES
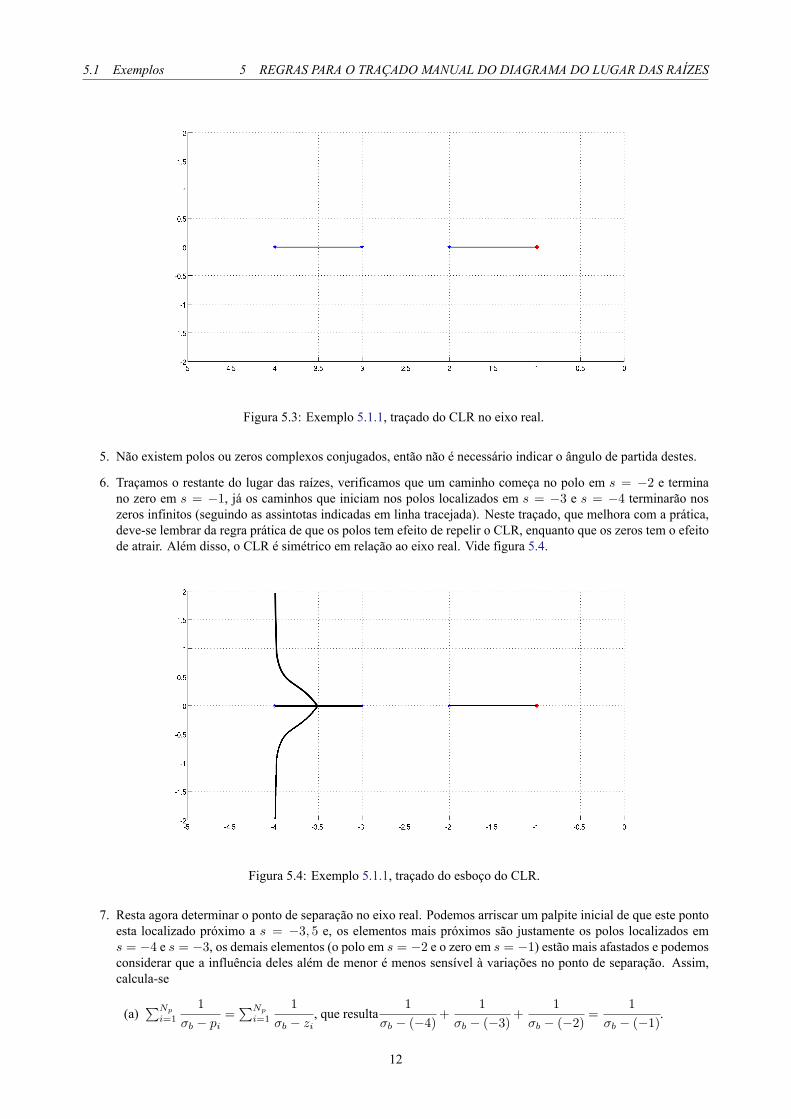
Figura 5.3: Exemplo 5.1.1, traçado do CLR no eixo real.
5. Não existem polos ou zeros complexos conjugados, então não é necessário indicar o ângulo de partida destes.
6. Traçamos o restante do lugar das raízes, verificamos que um caminho começa no polo em s = −2 e terminano zero em s = −1, já os caminhos que iniciam nos polos localizados em s = −3 e s = −4 terminarão noszeros infinitos (seguindo as assintotas indicadas em linha tracejada). Neste traçado, que melhora com a prática,deve-se lembrar da regra prática de que os polos tem efeito de repelir o CLR, enquanto que os zeros tem o efeitode atrair. Além disso, o CLR é simétrico em relação ao eixo real. Vide figura 5.4.
Figura 5.4: Exemplo 5.1.1, traçado do esboço do CLR.
7. Resta agora determinar o ponto de separação no eixo real. Podemos arriscar um palpite inicial de que este pontoesta localizado próximo a s = −3, 5 e, os elementos mais próximos são justamente os polos localizados ems = −4 e s = −3, os demais elementos (o polo em s = −2 e o zero em s = −1) estão mais afastados e podemosconsiderar que a influência deles além de menor é menos sensível à variações no ponto de separação. Assim,calcula-se
(a)∑Np
i=1
1
σb − pi=
∑Np
i=1
1
σb − zi, que resulta
1
σb − (−4)+
1
σb − (−3)+
1
σb − (−2)=
1
σb − (−1).
12
5.1 Exemplos 5 REGRAS PARA O TRAÇADO MANUAL DO DIAGRAMA DO LUGAR DAS RAÍZES
(b) substituímos σb pelo palpite inicial nos elementos mais afastados, então:
i.1
σb − (−4)+
1
σb − (−3)+
1
−3, 5− (−2)=
1
−3, 5− (−1)
ii.(σb + 3) + (σb + 4)
(σb + 4) (σb + 3)=
1
−2, 5−
1
−1, 5
iii.2σb + 7
σ2b + 7σb + 12
= 0, 2667
iv. 2σb + 7 = 0, 2667σ2b + 1, 8667σb + 3, 2
v. 0, 0404σ2b − 0, 1333σb − 3, 8 = 0 resultando em σb = −3, 5332 ou σb = 4, 0333. Obviamente o
resultado que procuramos é −3, 5332
(c) repetindo o processo para o novo palpite σb = −3, 5332 encontraremos calculamos o novo σb = −3, 5321.Os novos valores não se alteram significativamente, indicando que encontramos o valor procurado.
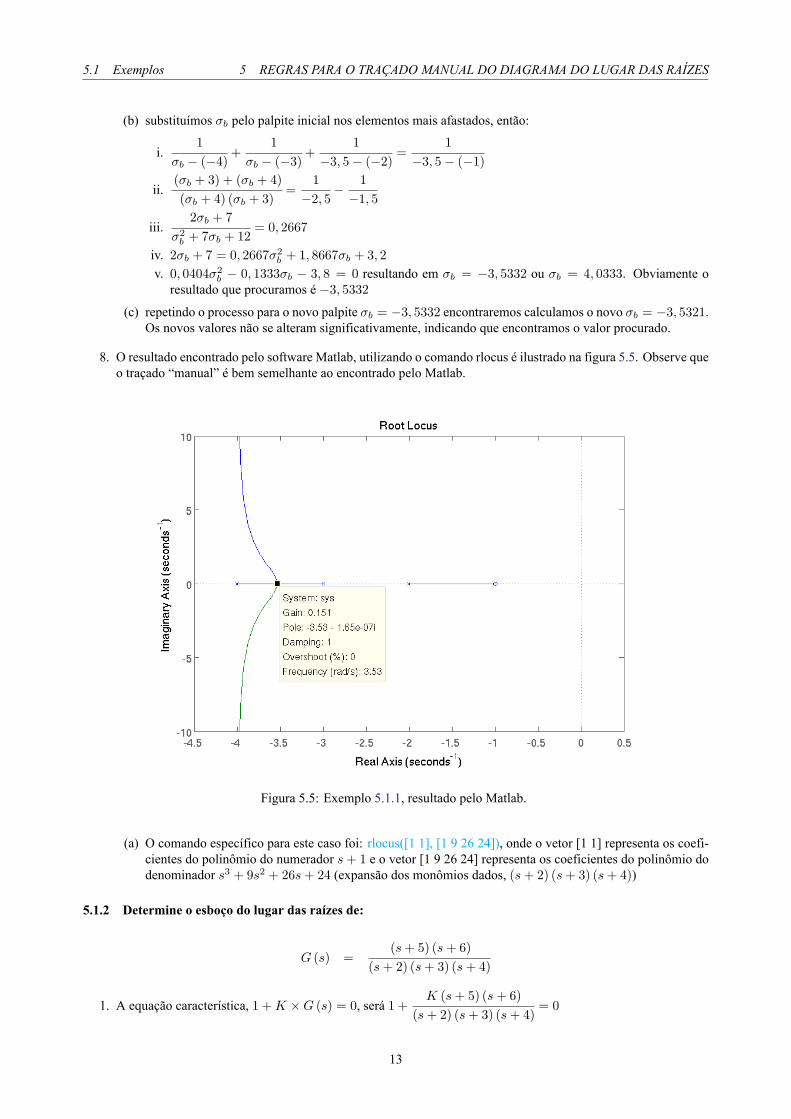
8. O resultado encontrado pelo software Matlab, utilizando o comando rlocus é ilustrado na figura 5.5. Observe queo traçado “manual” é bem semelhante ao encontrado pelo Matlab.
Figura 5.5: Exemplo 5.1.1, resultado pelo Matlab.
(a) O comando específico para este caso foi: rlocus([1 1], [1 9 26 24]), onde o vetor [1 1] representa os coefi-cientes do polinômio do numerador s+ 1 e o vetor [1 9 26 24] representa os coeficientes do polinômio dodenominador s3 + 9s2 + 26s+ 24 (expansão dos monômios dados, (s+ 2) (s+ 3) (s+ 4))
5.1.2 Determine o esboço do lugar das raízes de:
G (s) =(s+ 5) (s+ 6)
(s+ 2) (s+ 3) (s+ 4)
1. A equação característica, 1 +K ×G (s) = 0, será 1 +K (s+ 5) (s+ 6)
(s+ 2) (s+ 3) (s+ 4)= 0
13
5.1 Exemplos 5 REGRAS PARA O TRAÇADO MANUAL DO DIAGRAMA DO LUGAR DAS RAÍZES
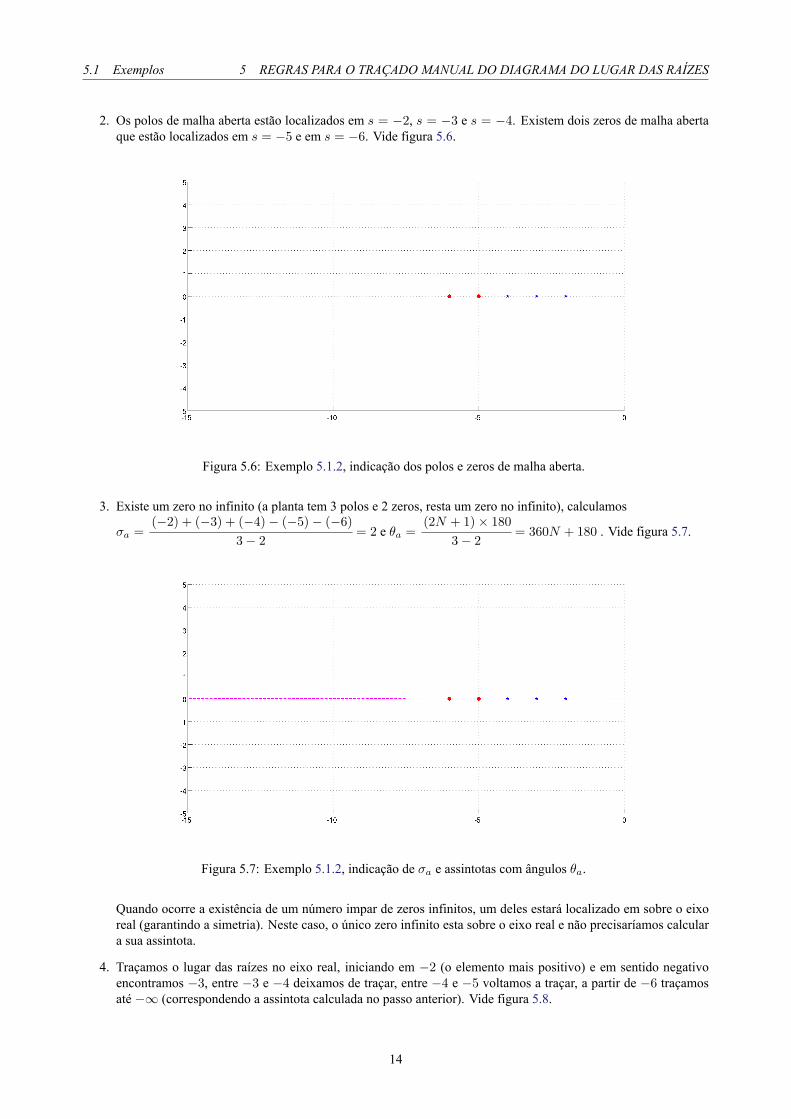
2. Os polos de malha aberta estão localizados em s = −2, s = −3 e s = −4. Existem dois zeros de malha abertaque estão localizados em s = −5 e em s = −6. Vide figura 5.6.
Figura 5.6: Exemplo 5.1.2, indicação dos polos e zeros de malha aberta.
3. Existe um zero no infinito (a planta tem 3 polos e 2 zeros, resta um zero no infinito), calculamos
σa =(−2) + (−3) + (−4)− (−5)− (−6)
3− 2= 2 e θa =
(2N + 1)× 180
3− 2= 360N + 180 . Vide figura 5.7.
Figura 5.7: Exemplo 5.1.2, indicação de σa e assintotas com ângulos θa.
Quando ocorre a existência de um número impar de zeros infinitos, um deles estará localizado em sobre o eixoreal (garantindo a simetria). Neste caso, o único zero infinito esta sobre o eixo real e não precisaríamos calculara sua assintota.
4. Traçamos o lugar das raízes no eixo real, iniciando em −2 (o elemento mais positivo) e em sentido negativoencontramos −3, entre −3 e −4 deixamos de traçar, entre −4 e −5 voltamos a traçar, a partir de −6 traçamosaté −∞ (correspondendo a assintota calculada no passo anterior). Vide figura 5.8.
14
5.1 Exemplos 5 REGRAS PARA O TRAÇADO MANUAL DO DIAGRAMA DO LUGAR DAS RAÍZES
Figura 5.8: Exemplo 5.1.2, traçado do CLR no eixo real.
5. Não existem polos ou zeros complexos conjugados, então não é necessário indicar o ângulo de partida destes.
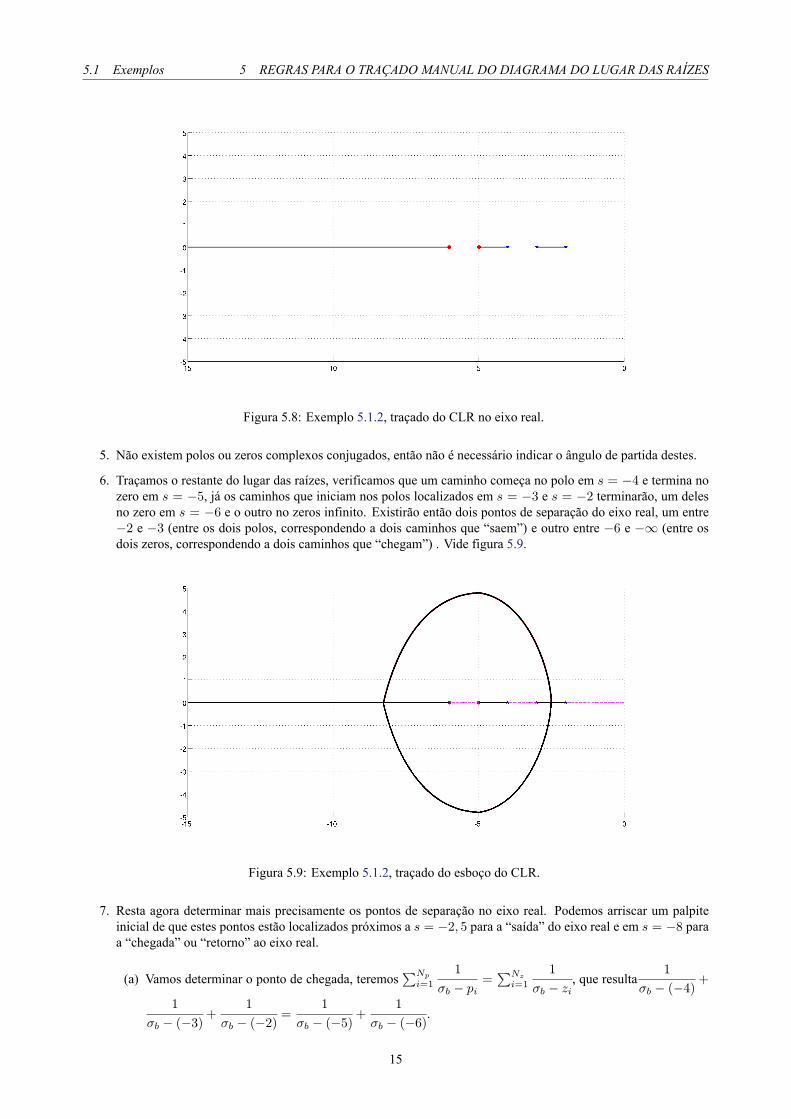
6. Traçamos o restante do lugar das raízes, verificamos que um caminho começa no polo em s = −4 e termina nozero em s = −5, já os caminhos que iniciam nos polos localizados em s = −3 e s = −2 terminarão, um delesno zero em s = −6 e o outro no zeros infinito. Existirão então dois pontos de separação do eixo real, um entre−2 e −3 (entre os dois polos, correspondendo a dois caminhos que “saem”) e outro entre −6 e −∞ (entre osdois zeros, correspondendo a dois caminhos que “chegam”) . Vide figura 5.9.
Figura 5.9: Exemplo 5.1.2, traçado do esboço do CLR.
7. Resta agora determinar mais precisamente os pontos de separação no eixo real. Podemos arriscar um palpiteinicial de que estes pontos estão localizados próximos a s = −2, 5 para a “saída” do eixo real e em s = −8 paraa “chegada” ou “retorno” ao eixo real.
(a) Vamos determinar o ponto de chegada, teremos∑Np
i=1
1
σb − pi=
∑Nz
i=1
1
σb − zi, que resulta
1
σb − (−4)+
1
σb − (−3)+
1
σb − (−2)=
1
σb − (−5)+
1
σb − (−6).
15
5.1 Exemplos 5 REGRAS PARA O TRAÇADO MANUAL DO DIAGRAMA DO LUGAR DAS RAÍZES
(b) substituímos σb pelo palpite inicial nos elementos mais afastados, então:
i.1
−8− (−4)+
1
−8− (−3)+
1
−8− (−2)=
1
σb − (−5)+
1
σb − (−6)
ii.1
−4+
1
−5+
1
−6=
(σb + 5) + (σb + 6)
(σb + 5) (σb + 6)
iii. −0, 6167 =2σb + 11
σ2b + 11σb + 30
iv. −0, 6167σ2b − 6, 7833σb − 18, 5 = 2σb + 11
v. −0, 6167σ2b − 8, 7833σb − 29, 5 = 0 resultando em σb = −8, 8186 ou σb = −5, 4247. Obviamente o
resultado que procuramos é −8, 8186
(c) repetindo o processo para o novo palpite σb = −8, 8186 encontraremos que o novo σb = −9, 3666. Repe-tindo o processo algumas vezes encontramos σb = −9, 7; σb = −9, 3666; σb = −9, 9781; σb = −10, 1418; σb = −10, 2512; σb = −10, 3243 e σb = −10, 3731.... A escolha inicial não foi muito adequada e a con-vergência esta lenta, mas verificamos que o ponto de entrada esta próximo a −10, 5
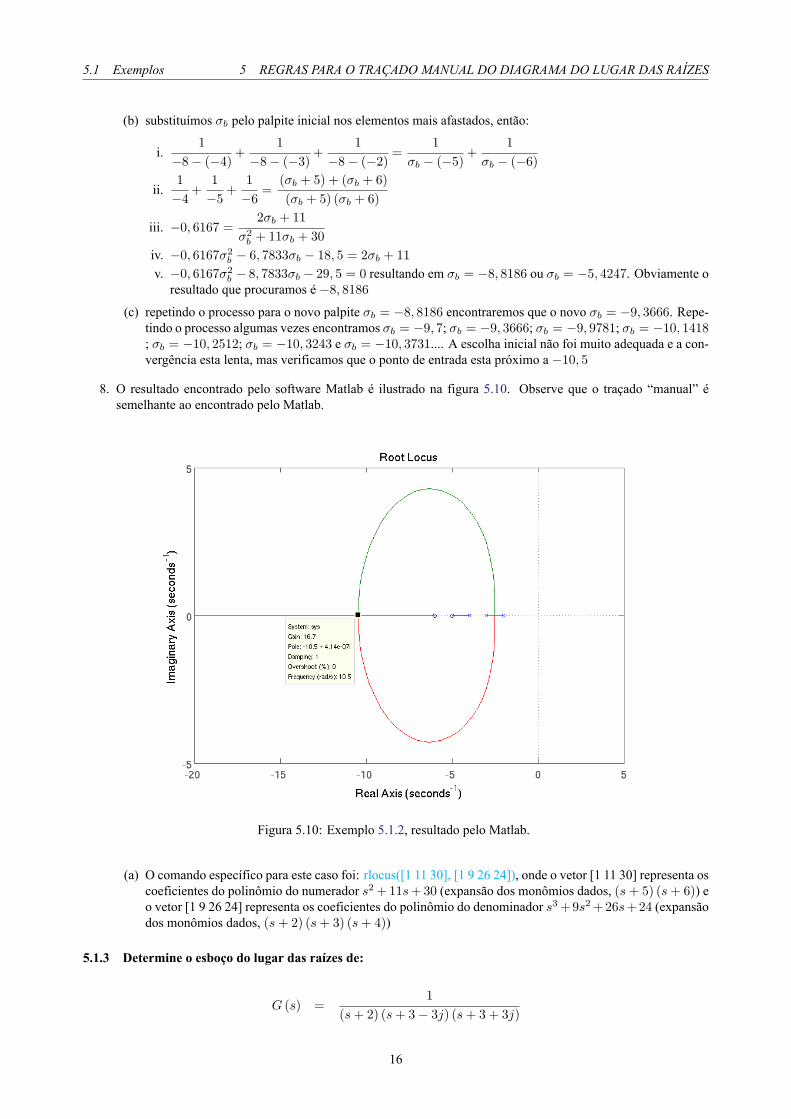
8. O resultado encontrado pelo software Matlab é ilustrado na figura 5.10. Observe que o traçado “manual” ésemelhante ao encontrado pelo Matlab.
Figura 5.10: Exemplo 5.1.2, resultado pelo Matlab.
(a) O comando específico para este caso foi: rlocus([1 11 30], [1 9 26 24]), onde o vetor [1 11 30] representa oscoeficientes do polinômio do numerador s2 +11s+30 (expansão dos monômios dados, (s+ 5) (s+ 6)) eo vetor [1 9 26 24] representa os coeficientes do polinômio do denominador s3+9s2+26s+24 (expansãodos monômios dados, (s+ 2) (s+ 3) (s+ 4))
5.1.3 Determine o esboço do lugar das raízes de:
G (s) =1
(s+ 2) (s+ 3− 3j) (s+ 3 + 3j)
16
5.1 Exemplos 5 REGRAS PARA O TRAÇADO MANUAL DO DIAGRAMA DO LUGAR DAS RAÍZES
1. A equação característica, 1 +K ×G (s) = 0, será 1 +K
(s+ 2) (s+ 3− 3j) (s+ 3 + 3j)= 0
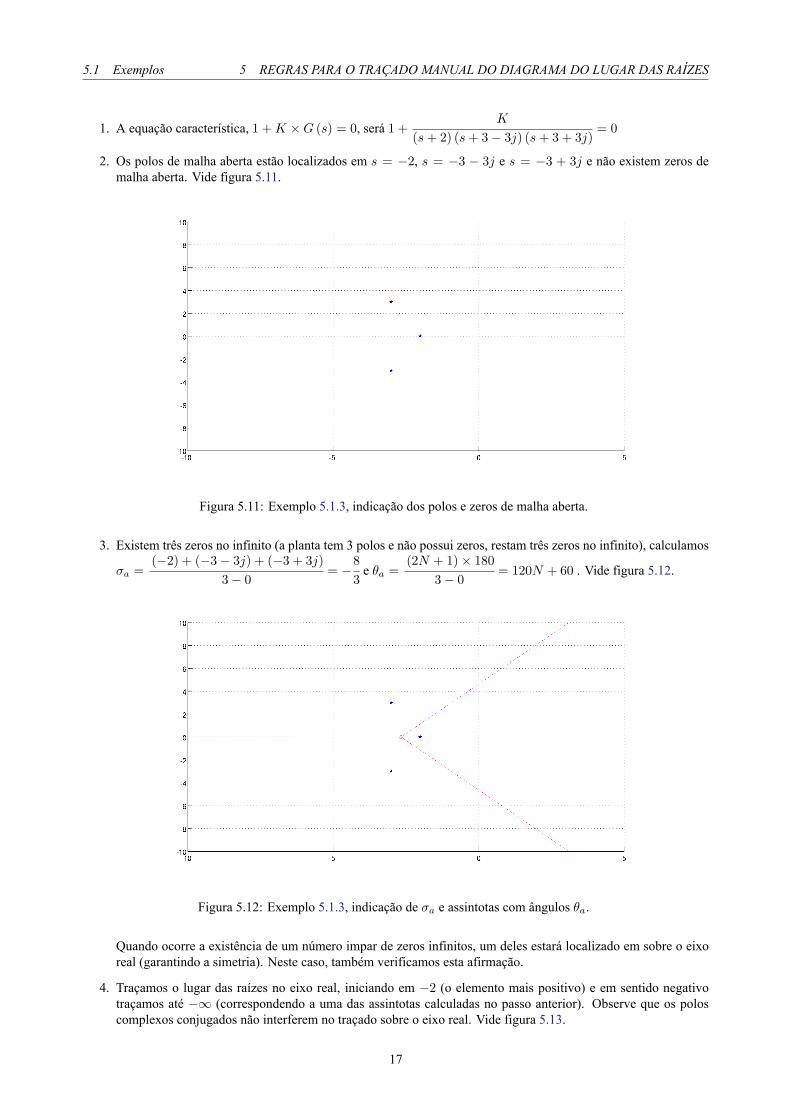
2. Os polos de malha aberta estão localizados em s = −2, s = −3 − 3j e s = −3 + 3j e não existem zeros demalha aberta. Vide figura 5.11.
Figura 5.11: Exemplo 5.1.3, indicação dos polos e zeros de malha aberta.
3. Existem três zeros no infinito (a planta tem 3 polos e não possui zeros, restam três zeros no infinito), calculamos
σa =(−2) + (−3− 3j) + (−3 + 3j)
3− 0= −
8
3e θa =
(2N + 1)× 180
3− 0= 120N + 60 . Vide figura 5.12.
Figura 5.12: Exemplo 5.1.3, indicação de σa e assintotas com ângulos θa.
Quando ocorre a existência de um número impar de zeros infinitos, um deles estará localizado em sobre o eixoreal (garantindo a simetria). Neste caso, também verificamos esta afirmação.
4. Traçamos o lugar das raízes no eixo real, iniciando em −2 (o elemento mais positivo) e em sentido negativotraçamos até −∞ (correspondendo a uma das assintotas calculadas no passo anterior). Observe que os poloscomplexos conjugados não interferem no traçado sobre o eixo real. Vide figura 5.13.
17
5.1 Exemplos 5 REGRAS PARA O TRAÇADO MANUAL DO DIAGRAMA DO LUGAR DAS RAÍZES
Figura 5.13: Exemplo 5.1.3, traçado do CLR no eixo real.
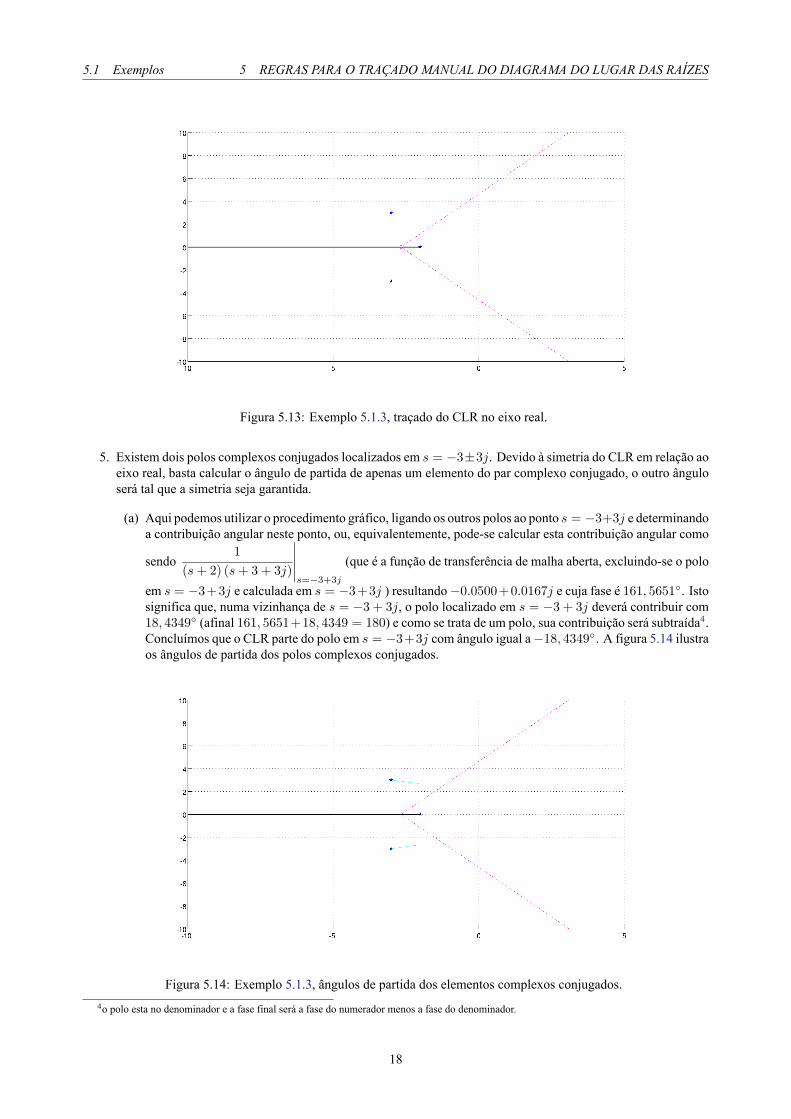
5. Existem dois polos complexos conjugados localizados em s = −3±3j. Devido à simetria do CLR em relação aoeixo real, basta calcular o ângulo de partida de apenas um elemento do par complexo conjugado, o outro ânguloserá tal que a simetria seja garantida.
(a) Aqui podemos utilizar o procedimento gráfico, ligando os outros polos ao ponto s = −3+3j e determinandoa contribuição angular neste ponto, ou, equivalentemente, pode-se calcular esta contribuição angular como
sendo1
(s+ 2) (s+ 3 + 3j)
∣∣∣∣∣s=−3+3j
(que é a função de transferência de malha aberta, excluindo-se o polo
em s = −3+3j e calculada em s = −3+3j ) resultando−0.0500+0.0167j e cuja fase é 161, 5651◦. Istosignifica que, numa vizinhança de s = −3 + 3j, o polo localizado em s = −3 + 3j deverá contribuir com18, 4349◦ (afinal 161, 5651+18, 4349 = 180) e como se trata de um polo, sua contribuição será subtraída4.Concluímos que o CLR parte do polo em s = −3+3j com ângulo igual a−18, 4349◦. A figura 5.14 ilustraos ângulos de partida dos polos complexos conjugados.
Figura 5.14: Exemplo 5.1.3, ângulos de partida dos elementos complexos conjugados.4o polo esta no denominador e a fase final será a fase do numerador menos a fase do denominador.
18
5.1 Exemplos 5 REGRAS PARA O TRAÇADO MANUAL DO DIAGRAMA DO LUGAR DAS RAÍZES
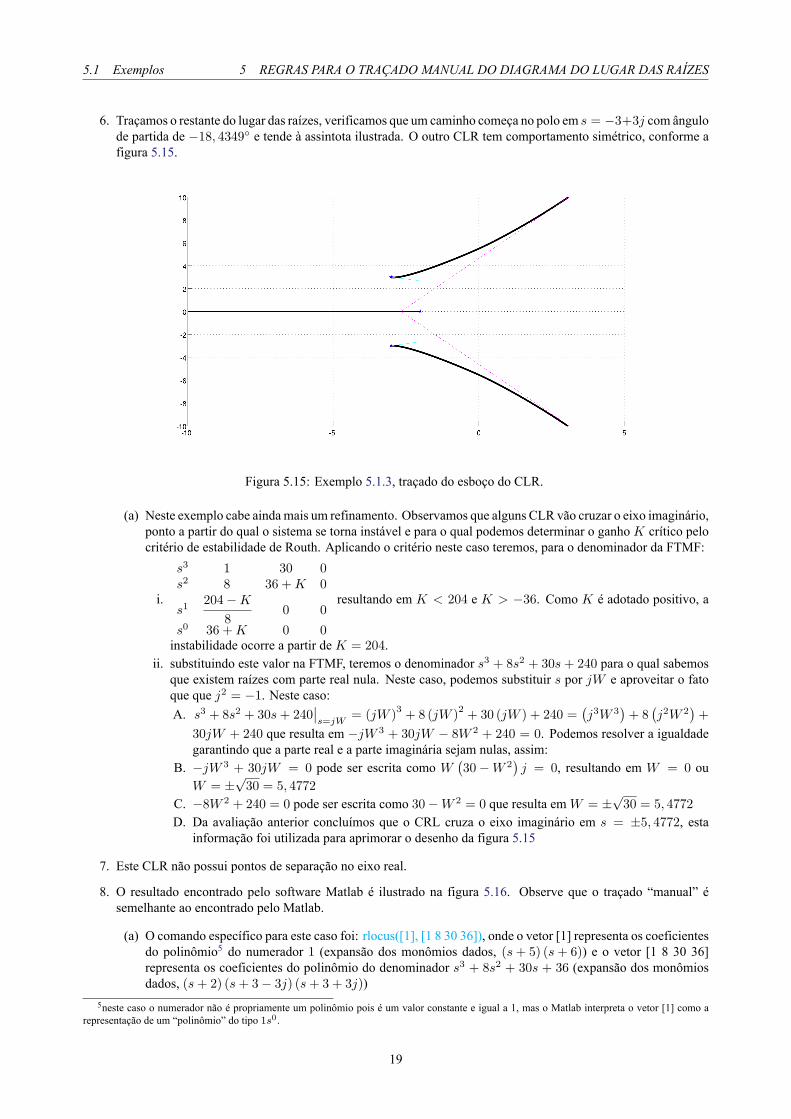
6. Traçamos o restante do lugar das raízes, verificamos que um caminho começa no polo em s = −3+3j com ângulode partida de −18, 4349◦ e tende à assintota ilustrada. O outro CLR tem comportamento simétrico, conforme afigura 5.15.
Figura 5.15: Exemplo 5.1.3, traçado do esboço do CLR.
(a) Neste exemplo cabe aindamais um refinamento. Observamos que alguns CLR vão cruzar o eixo imaginário,ponto a partir do qual o sistema se torna instável e para o qual podemos determinar o ganhoK crítico pelocritério de estabilidade de Routh. Aplicando o critério neste caso teremos, para o denominador da FTMF:
i.
s3 1 30 0s2 8 36 +K 0
s1204−K
80 0
s0 36 +K 0 0
resultando em K < 204 e K > −36. Como K é adotado positivo, a
instabilidade ocorre a partir deK = 204.ii. substituindo este valor na FTMF, teremos o denominador s3 + 8s2 + 30s+ 240 para o qual sabemos
que existem raízes com parte real nula. Neste caso, podemos substituir s por jW e aproveitar o fatoque que j2 = −1. Neste caso:A. s3 + 8s2 + 30s+ 240
∣∣s=jW
= (jW )3+ 8 (jW )
2+ 30 (jW ) + 240 =
(j3W 3
)+ 8
(j2W 2
)+
30jW + 240 que resulta em −jW 3 + 30jW − 8W 2 + 240 = 0. Podemos resolver a igualdadegarantindo que a parte real e a parte imaginária sejam nulas, assim:
B. −jW 3 + 30jW = 0 pode ser escrita como W(30−W 2
)j = 0, resultando em W = 0 ou
W = ±√30 = 5, 4772
C. −8W 2 + 240 = 0 pode ser escrita como 30−W 2 = 0 que resulta emW = ±√30 = 5, 4772
D. Da avaliação anterior concluímos que o CRL cruza o eixo imaginário em s = ±5, 4772, estainformação foi utilizada para aprimorar o desenho da figura 5.15
7. Este CLR não possui pontos de separação no eixo real.
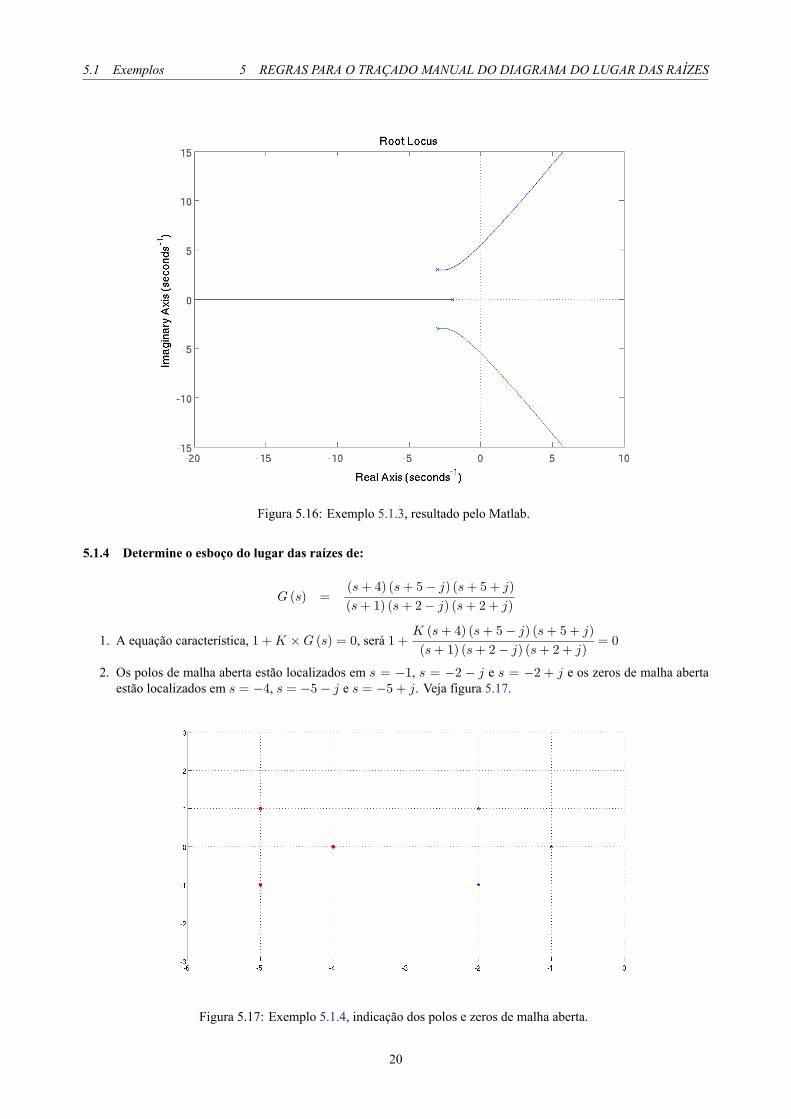
8. O resultado encontrado pelo software Matlab é ilustrado na figura 5.16. Observe que o traçado “manual” ésemelhante ao encontrado pelo Matlab.
(a) O comando específico para este caso foi: rlocus([1], [1 8 30 36]), onde o vetor [1] representa os coeficientesdo polinômio5 do numerador 1 (expansão dos monômios dados, (s+ 5) (s+ 6)) e o vetor [1 8 30 36]representa os coeficientes do polinômio do denominador s3 + 8s2 + 30s + 36 (expansão dos monômiosdados, (s+ 2) (s+ 3− 3j) (s+ 3 + 3j))
5neste caso o numerador não é propriamente um polinômio pois é um valor constante e igual a 1, mas o Matlab interpreta o vetor [1] como arepresentação de um “polinômio” do tipo 1s0.
19
5.1 Exemplos 5 REGRAS PARA O TRAÇADO MANUAL DO DIAGRAMA DO LUGAR DAS RAÍZES
Figura 5.16: Exemplo 5.1.3, resultado pelo Matlab.
5.1.4 Determine o esboço do lugar das raízes de:
G (s) =(s+ 4) (s+ 5− j) (s+ 5 + j)
(s+ 1) (s+ 2− j) (s+ 2 + j)
1. A equação característica, 1 +K ×G (s) = 0, será 1 +K (s+ 4) (s+ 5− j) (s+ 5 + j)
(s+ 1) (s+ 2− j) (s+ 2 + j)= 0
2. Os polos de malha aberta estão localizados em s = −1, s = −2 − j e s = −2 + j e os zeros de malha abertaestão localizados em s = −4, s = −5− j e s = −5 + j. Veja figura 5.17.
Figura 5.17: Exemplo 5.1.4, indicação dos polos e zeros de malha aberta.
20
5.1 Exemplos 5 REGRAS PARA O TRAÇADO MANUAL DO DIAGRAMA DO LUGAR DAS RAÍZES
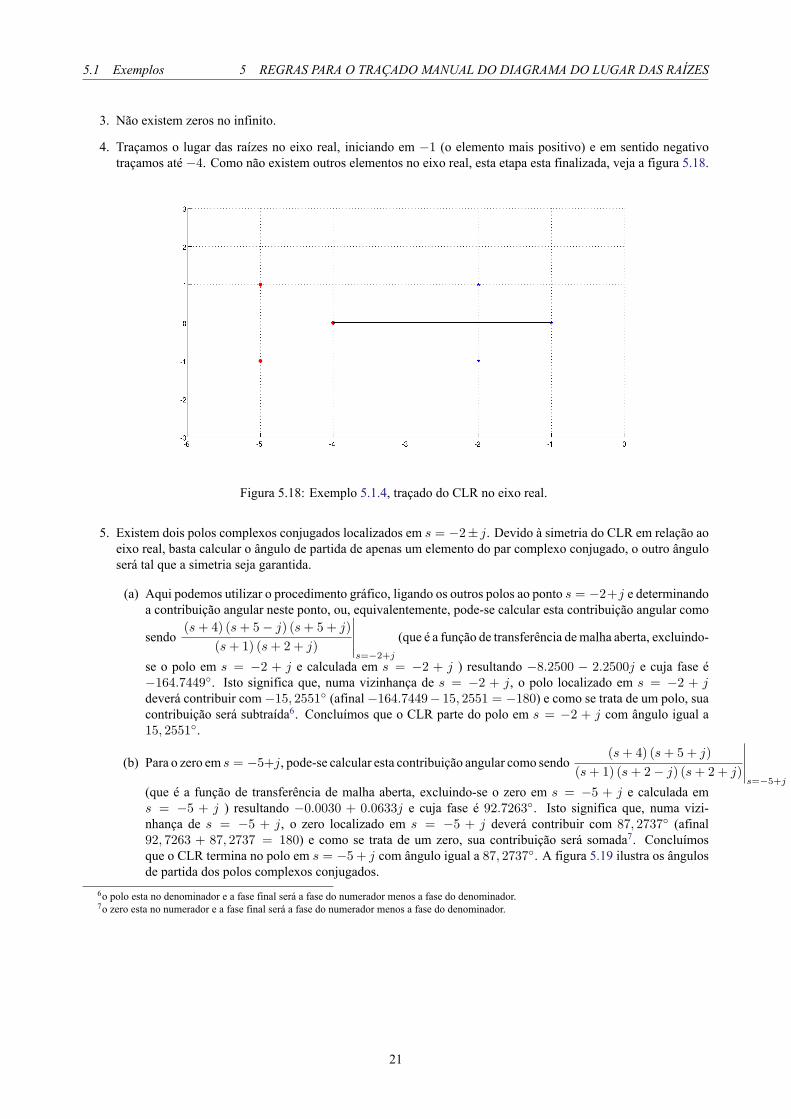
3. Não existem zeros no infinito.
4. Traçamos o lugar das raízes no eixo real, iniciando em −1 (o elemento mais positivo) e em sentido negativotraçamos até −4. Como não existem outros elementos no eixo real, esta etapa esta finalizada, veja a figura 5.18.
Figura 5.18: Exemplo 5.1.4, traçado do CLR no eixo real.
5. Existem dois polos complexos conjugados localizados em s = −2± j. Devido à simetria do CLR em relação aoeixo real, basta calcular o ângulo de partida de apenas um elemento do par complexo conjugado, o outro ânguloserá tal que a simetria seja garantida.
(a) Aqui podemos utilizar o procedimento gráfico, ligando os outros polos ao ponto s = −2+j e determinandoa contribuição angular neste ponto, ou, equivalentemente, pode-se calcular esta contribuição angular como
sendo(s+ 4) (s+ 5− j) (s+ 5 + j)
(s+ 1) (s+ 2 + j)
∣∣∣∣∣s=−2+j
(que é a função de transferência demalha aberta, excluindo-
se o polo em s = −2 + j e calculada em s = −2 + j ) resultando −8.2500 − 2.2500j e cuja fase é−164.7449◦. Isto significa que, numa vizinhança de s = −2 + j, o polo localizado em s = −2 + jdeverá contribuir com−15, 2551◦ (afinal−164.7449− 15, 2551 = −180) e como se trata de um polo, suacontribuição será subtraída6. Concluímos que o CLR parte do polo em s = −2 + j com ângulo igual a15, 2551◦.
(b) Para o zero em s = −5+j, pode-se calcular esta contribuição angular como sendo(s+ 4) (s+ 5 + j)
(s+ 1) (s+ 2− j) (s+ 2 + j)
∣∣∣∣∣s=−5+j
(que é a função de transferência de malha aberta, excluindo-se o zero em s = −5 + j e calculada ems = −5 + j ) resultando −0.0030 + 0.0633j e cuja fase é 92.7263◦. Isto significa que, numa vizi-nhança de s = −5 + j, o zero localizado em s = −5 + j deverá contribuir com 87, 2737◦ (afinal92, 7263 + 87, 2737 = 180) e como se trata de um zero, sua contribuição será somada7. Concluímosque o CLR termina no polo em s = −5 + j com ângulo igual a 87, 2737◦. A figura 5.19 ilustra os ângulosde partida dos polos complexos conjugados.
6o polo esta no denominador e a fase final será a fase do numerador menos a fase do denominador.7o zero esta no numerador e a fase final será a fase do numerador menos a fase do denominador.
21
5.1 Exemplos 5 REGRAS PARA O TRAÇADO MANUAL DO DIAGRAMA DO LUGAR DAS RAÍZES
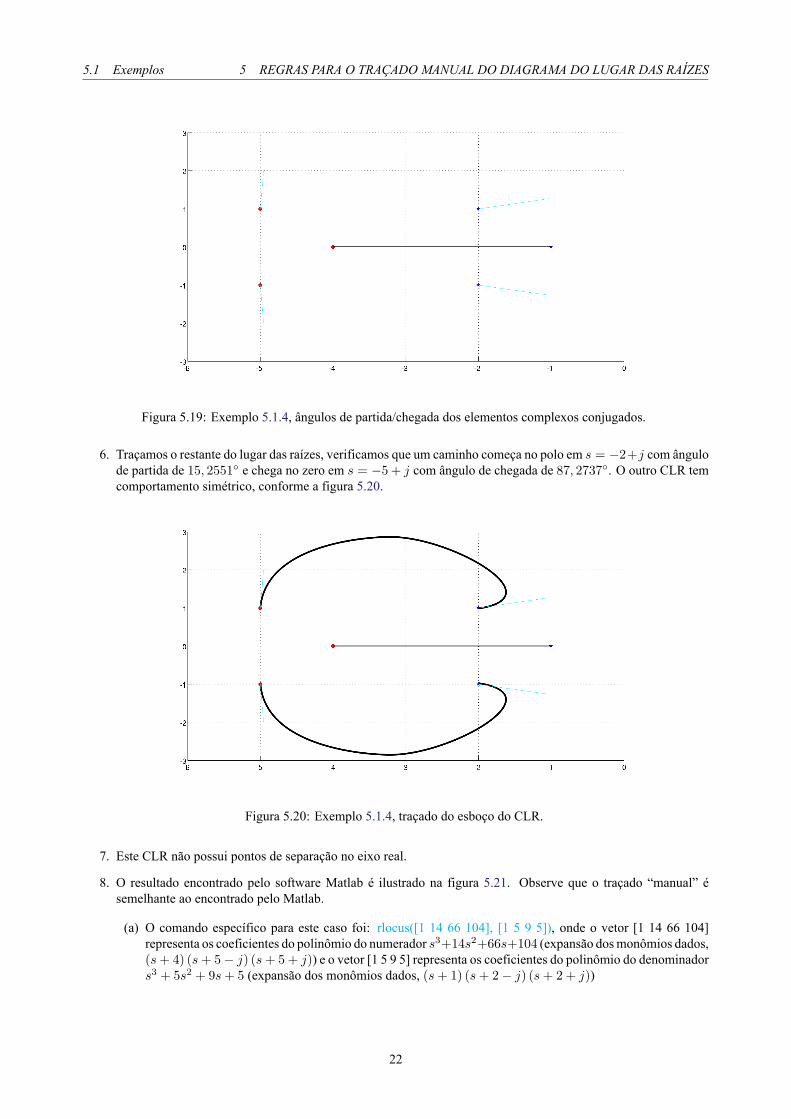
Figura 5.19: Exemplo 5.1.4, ângulos de partida/chegada dos elementos complexos conjugados.
6. Traçamos o restante do lugar das raízes, verificamos que um caminho começa no polo em s = −2+j com ângulode partida de 15, 2551◦ e chega no zero em s = −5 + j com ângulo de chegada de 87, 2737◦. O outro CLR temcomportamento simétrico, conforme a figura 5.20.
Figura 5.20: Exemplo 5.1.4, traçado do esboço do CLR.
7. Este CLR não possui pontos de separação no eixo real.
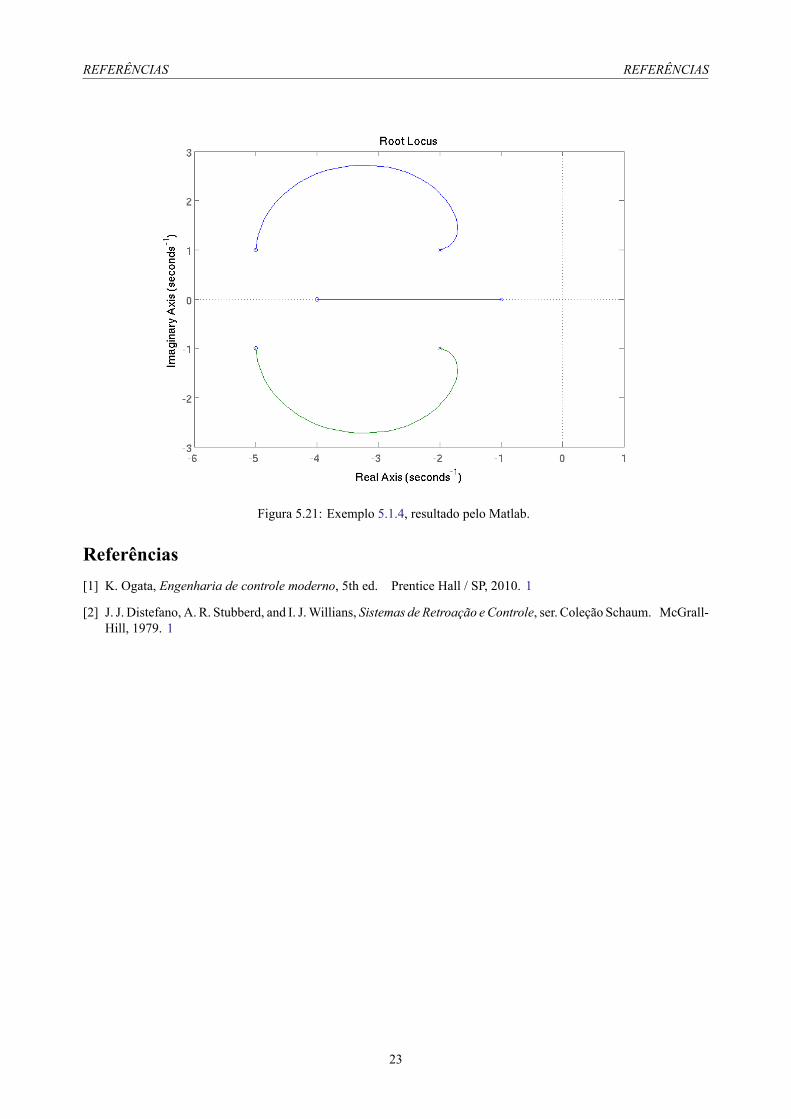
8. O resultado encontrado pelo software Matlab é ilustrado na figura 5.21. Observe que o traçado “manual” ésemelhante ao encontrado pelo Matlab.
(a) O comando específico para este caso foi: rlocus([1 14 66 104], [1 5 9 5]), onde o vetor [1 14 66 104]representa os coeficientes do polinômio do numerador s3+14s2+66s+104 (expansão dosmonômios dados,(s+ 4) (s+ 5− j) (s+ 5 + j)) e o vetor [1 5 9 5] representa os coeficientes do polinômio do denominadors3 + 5s2 + 9s+ 5 (expansão dos monômios dados, (s+ 1) (s+ 2− j) (s+ 2 + j))
22
REFERÊNCIAS REFERÊNCIAS
Figura 5.21: Exemplo 5.1.4, resultado pelo Matlab.
Referências[1] K. Ogata, Engenharia de controle moderno, 5th ed. Prentice Hall / SP, 2010. 1
[2] J. J. Distefano, A. R. Stubberd, and I. J.Willians, Sistemas de Retroação eControle, ser. Coleção Schaum. McGrall-Hill, 1979. 1
23






![Autopilot [Modo de compatibilidad]...SecondSecond aircraft aircraft. . root locus (non-corrected) Control and guidance Slide 18 root locus (non. 1. Longitudinal auto1. Longitudinal](https://img.pdfslide.tips/doc/110x75/5e5cd96ddab13665fb20c153/autopilot-modo-de-compatibilidad-secondsecond-aircraft-aircraft-root-locus.jpg)






















