Embed Size (px)
Citation preview
273
MARC THOMMEN/SOPHIE MATJAZ
Die Fahrlässigkeit im Zeitalter autonomer Fahrzeuge
Inhaltsübersicht
I. Einleitung ....................................................................................................... 273
II. Autonome Fahrzeuge – was, wie und warum? .............................................. 276
1. Begriff ................................................................................................. 276
2. Funktionsweise ........................................................................................ 277
3. Zwecke ................................................................................................. 278
III. Fahrlässigkeit im Strassenverkehr ................................................................. 279
1. Der Fahrzeugführer .................................................................................. 280
2. Der Sorgfaltsmassstab .............................................................................. 280
IV. Fahrlässigkeit im autonomen Strassenverkehr ............................................... 286
1. Die Gegenwart: Zunehmende Automatisierung ....................................... 286
2. Die ferne Zukunft: Vollautomatisierte Fahrzeuge .................................... 288
3. Die unmittelbare Zukunft: Teilautonome Fahrzeuge ............................... 289
3.1 Sicherheit oder Freiheit? .................................................................... 290 3.2 Sicherheit und Freiheit ....................................................................... 293
V. Fazit ............................................................................................................... 295
I. Einleitung
Es ist sicher keine Übertreibung, ANDREAS DONATSCH als den führenden Fahrlässig-
keitsdogmatiker der Schweiz zu bezeichnen. Mit seiner Habilitationsschrift zu Sorg-
faltsbemessung und Erfolg beim Fahrlässigkeitsdelikt1 sowie mit späteren Publikatio-
nen zur Mittäterschaft oder Garantenstellung beim fahrlässigen Erfolgsdelikt hat er
Massstäbe gesetzt.2 Insbesondere seine Ausführungen zur Ermittlung des Sorgfaltsin-
halts sind von unvergleichbarer Tiefe.3 Dies möchten wir zum Anlass nehmen, seine
–––––––––––––– 1 A. DONATSCH, Sorgfaltsbemessung und Erfolg beim Fahrlässigkeitsdelikt, Zürich 1987. 2 Vgl. aus dem umfassenden Oeuvre DONATSCHS: Mittäterschaft oder Teilnahme am fahrlässigen
Erfolgsdelikt?, SJZ 1989, 109 ff.; Garantenstellung und Sorgfaltsbemessung beim fahrlässigen
Erfolgsdelikt – Urteilsanmerkung Strafrecht – BGE 110 IV 68 ff., recht 1988, 128 ff.; u.v.m. 3 Vgl. dazu insb. DONATSCH (Fn. 1), 100 ff.
MARC THOMMEN/SOPHIE MATJAZ
274
Theorien zur Sorgfaltsbemessung auf ein aktuelles Rechtsproblem anzuwenden: Die
strafrechtliche Fahrlässigkeitshaftung bei Unfällen mit (teil-)autonomen Fahrzeugen.
Als Ausgangspunkt dient uns dabei ein Wert, den ANDREAS DONATSCH in seinem
Oeuvre durchwegs hochhält. Es ist dies die Handlungsfreiheit des Einzelnen. In den
Worten des Jubilars handelt es sich hierbei nicht nur um ein «ausserordentlich gewich-
tiges Interesse»4, er erinnert auch daran, «dass die Bewahrung eines möglichst grossen
Bereichs an Handlungsfreiheiten für jeden Einzelnen im unbedingten Interesse der
Gemeinschaft liegt»5 und betont, dass «jedem Rechtsadressaten ein möglichst grosses
Mass an Handlungsfreiheit einzuräumen ist»6.
Diese Zitate aus seiner 1987 erschienenen Habilitationsschrift weisen ANDREAS DO-
NATSCH als überzeugten Verfechter der Handlungsfreiheit aus. Heute – fast 30 Jahre
später – ist unsere Gesellschaft geprägt durch die rasante Entwicklung und Vermark-
tung immer neuer technologischer Innovationen. Während manche davon getrost in die
Kategorie sinnloser Erfindungen eingeordnet werden können – wer braucht schon ei-
nen Spaghetti-Ventilator7 – weisen andere das Potential auf, ihren Nutzern einen be-
trächtlichen Gewinn an Handlungsfreiheit zu verschaffen. Häufig bergen diese Inno-
vationen aber auch Gefahren für die Rechtsgüter der Nutzer oder anderer Personen. Bei
der Festlegung von rechtlichen Rahmenbedingungen für die Verwendung neuer Tech-
nologien müssen daher sowohl deren Vorteile, als auch potentielle Gefahren berück-
sichtigt und in Balance gebracht werden. Der von ANDREAS DONATSCH betonte Wert
der individuellen Handlungsfreiheit spielt dabei – wie wir noch zeigen werden – eine
zentrale Rolle.
Eine aus diversen Science-Fiction-Szenarien bekannte Innovation, die das Potential
hat, dem Einzelnen und der Gesellschaft als Ganzes erheblichen Nutzen zu bringen, ist
das autonome Fahrzeug. Dieses war zu der Zeit als ANDREAS DONATSCH seine Habili-
tationsschrift verfasste noch eher Fiction als Science. Wir erinnern uns mit Schmunzeln
an K.I.T.T., das selbstfahrende Auto von Michael Knight, aus der in den frühen Acht-
zigerjahren produzierten US-amerikanischen Fernsehserie «Knight Rider». Heute sind
autonome Fahrzeuge mehr als blosse Zukunftsmusik. Mittlerweile arbeiten alle grossen
Fahrzeughersteller sowie Google und Apple an der Entwicklung von für autonomes
Fahren benötigten Technologien.8 Im Mai 2015 fuhr erstmals ein autonomes Auto
–––––––––––––– 4 DONATSCH (Fn. 1), 181. 5 DONATSCH (Fn. 1), 183. 6 DONATSCH (Fn. 1), 215. 7 Der Spaghetti-Ventilator ist eine Innovation aus Japan. An einem Stäbchen befestigt, kühlt er
jeden Bissen Spaghetti, bevor dieser in den Mund gelangt. <https://kurier.at/buzz/kuriose-erfindu
ngen/1.069.849/slideshow>. 8 Vgl. bspw. I. FRIED, Ford CEO Mark Fields Says Fully Autonomous Cars Could Hit Roads in
Four Years, Recode (18.11.2015), <http://www.recode.net/2015/11/18/ford-ceo-mark-fields-is-try
Die Fahrlässigkeit im Zeitalter autonomer Fahrzeuge
275
selbstständig durch Zürich.9 Die Markteinführung von hochgradig automatisierten
Fahrzeugen ist bereits ab 2020 geplant.10 Befürworter erhoffen sich davon eine Reihe
positiver Effekte wie beispielsweise eine signifikante Reduktion von Unfällen, die
Erhöhung der Verkehrseffizienz sowie gewichtige Produktivitäts- und Mobilitätsge-
winne.
Doch bevor sie uns das Leben erleichtert, wirft die zunehmende Fahrzeugautomatisie-
rung eine Reihe juristischer Fragen auf.11 Aus strafrechtlicher Perspektive interessiert
besonders die Verantwortlichkeit bei Unfällen mit autonomen Fahrzeugen. Ein solcher
ereignete sich etwa im Februar 2016 in San Francisco, als ein Google Car aufgrund
eines Systemfehlers mit einem Bus kollidierte.12 Doch man muss den Blick gar nicht so
weit in die Ferne schweifen lassen: Im Mai 2016 prallte der Fahrer eines Tesla, der auf
der Autobahn bei Winterthur mit Autopilot unterwegs war, in einen stehenden Van,
weil die Assistenzsysteme versagten.13 Beide Vorfälle zogen keine strafgerichtlichen
Konsequenzen nach sich. Im Google-Fall war kein Schaden entstanden, da das Auto
lediglich mit einer Geschwindigkeit von drei Stundenkilometern unterwegs war. Im
Tesla-Fall hingegen nahm der Fahrer die Verantwortung auf sich, mit der Begründung,
er hätte früher reagieren können, um die Kollision abzuwenden.
Beide Beispiele zeigen: Die Frage nach der Verantwortlichkeit bei Unfällen mit auto-
nomen Fahrzeugen ist schon heute keine bloss theoretische und wird in Zukunft an
Bedeutung gewinnen. Während in einem solchen Fall in zweiter Linie als potentielle
–––––––––––––– ing-to-keep-one-foot-in-today-one-in-tomorrow/>; heute öffnet die 2015 International CES ihre
Tore, Business Wire (21.12.2015), <http://www.businesswire.com/news/home/20150107005
292/de/>. 9 Medienmitteilung der Swisscom vom 12.5.2015: Swisscom zeigt das erste selbstfahrende Auto
auf Schweizer Strassen, <http://www.swisscom.ch/de/about/medien/press-releases/2015/05/20150
512-MM-selbstfahrendes-Auto.html>. Die Testfahrt war aufgrund einer Sonderbewilligung des
Eidgenössischen Departements für Umwelt, Verkehr, Energie und Kommunikation (UVEK) mög-
lich. 10 Vgl. L.S. LUTZ, Anforderungen an Fahrerassistenzsysteme nach überstaatlichem Recht, in: E. Hil-
gendorf/S. Hötitzsch (Hrsg.), Das Recht vor den Herausforderungen der modernen Technik, Ba-
den-Baden 2015, 171. 11 Vgl. etwa zum Zulassungsrecht M. F. LOHMANN, Erste Barriere für selbstfahrende Fahrzeuge
überwunden – Entwicklungen im Zulassungsrecht, sui-generis 2015, 135 ff.; zum Versicherungs-
und Haftpflichtrecht M. F. LOHMANN/A. RUSCH, Fahrassistenzsysteme und selbstfahrende Fahr-
zeuge im Lichte von Haftpflicht und Versicherung, HAVE 2015, 349 ff.; zum Datenschutzrecht
M. HOCHSTRASSER, Auto ohne Fahrer, AJP 2015, 691 ff. 12 C. ZIEGLER, A Google self-driving car caused a crash for the first time, The Verge (29.2.2016),
<http://www.theverge.com/2016/2/29/11134344/google-self-driving-car-crash-report>. 13 Teslafahrer knallt bei Winterthur in einen Van – das Assistenzsystem versagte, watson
(31.05.2016), <http://www.watson.ch/Schweiz/Region%20Z%C3%BCrich/133375308-Teslafahr
er-knallt-bei-Winterthur-in-einen-Van-%E2%80%93-das-Assistenzsystem-versagte>.
MARC THOMMEN/SOPHIE MATJAZ
276
Haftungssubjekte der Fahrzeughalter, der Produzent, der Programmierer des Algorith-
mus und das automatisierte Fahrzeug als Haftungssubjekt sui generis14 in Betracht
kommen, widmet sich dieser Beitrag der potentiellen Verantwortlichkeit des Fahrers.
Ganz im Sinne des Wirkens unseres Jubilars steht dabei die Fahrlässigkeitsstrafbarkeit
im Vordergrund.15
Wir gehen also im Folgenden der Frage nach, ob die zunehmende Fahrzeugautomati-
sierung eine Anpassung des herkömmlichen Sorgfaltsmassstabes für den Fahrer im
Strassenverkehr rechtfertigt oder gar notwendig macht. Zuerst gehen wir auf den Be-
griff, die Funktionsweise und die Zwecke autonomer Fahrzeuge ein (II). Im Anschluss
wird der heutige Sorgfaltsmassstab im Strassenverkehr dargestellt (III). Es folgen Ge-
danken zum passenden Haftungskonzept für voll- und teilautonome Fahrzeuge (IV)
und abschliessende Überlegungen zum autonomen Fahren (V).
II. Autonome Fahrzeuge – was, wie und warum?
1. Begriff
Ein einheitlicher Begriff oder eine Legaldefinition für autonome Fahrzeuge fehlt. Ge-
meinhin wird zwischen mehreren Automatisierungsstufen16 unterschieden, wobei sich
folgende Kriterien zur Abgrenzung anbieten:17 Erstens das Ausmass, in dem Kontroll-
funktionen von einem System übernommen werden können. Zweitens die Fähigkeit
eines Systems, während der Fahrt selbstständig Prozesse zu erfassen und darauf zu
reagieren. Drittens – und besonders relevant für die Frage nach der Verantwortlichkeit
des Fahrers – die Intensität der Eingriffsmöglichkeiten und -pflichten des Fahrzeugin-
sassen.
Vor diesem Hintergrund können wir folgende Begrifflichkeiten festlegen: Ausgangs-
punkt ist das nichtautomatisierte Fahrzeug, bei dem der menschliche Fahrer alle Fahr-
–––––––––––––– 14 Zu den potentiellen Haftungssubjekten siehe W. WOHLERS, Individualverkehr im 21. Jahrhundert:
das Strafrecht vor neuen Herausforderungen, BJM 2016, 123 ff. Vgl. zur Haftung bei Schädigun-
gen durch automatisierte Technologien im Allgemeinen S. GLESS/T. WEIGEND, Intelligente Agen-
ten und das Strafrecht, ZStW 2014, 561 ff. 15 Siehe Fn. 2. 16 Die Society of Automotive Engineers (SAE), eine gemeinnützige Organisation für Technik und
Wissenschaft, unterscheidet bspw. sechs Automatisierungsgrade: (0.) No automation, (1.) Driver
assistance, (2.) Partial automation, (3.) Conditional Automation, (4.) High automation, (5.) Full
automation, SAE International Standard J3016, <http://www.sae.org/misc/pdfs/automated
_driving.pdf>. 17 Vgl. European Technology Platform on Smart Systems Integration, European Roadmap Smart
Systems for Automated Driving, Berlin 2015, 2 f., <http://www.smart-systems-integration.org/pu
blic/documents/publications/EPoSS%20Roadmap_Smart%20Systems%20for%20Automated%20
Driving_V2_April%202015.pdf>.
Die Fahrlässigkeit im Zeitalter autonomer Fahrzeuge
277
aufgaben selbst wahrnehmen muss. Die Bezeichnung autonomes Fahrzeug dient uns
sodann als Überbegriff für sämtliche Systeme, die den Fahrer in mehr oder minder
grossem Umfang von seinen Fahraufgaben entlasten.
Von teilautonomen Fahrzeugen sprechen wir, wenn der Fahrer zwar von Fahr-
Assistenz-Systemen unterstützt,18 allerdings nicht gänzlich von Kontroll- oder Ein-
griffspflichten befreit wird. Entscheidend ist hier, dass der Fahrzeugführer die Kontrol-
le über das Fahrzeug an sich nehmen kann, also eine Übersteuerungsmöglichkeit gege-
ben ist. Erfasst ist damit ein breites Spektrum von Systemen, wie zum Beispiel die
bereits heute gängigen Einparkhilfen oder sogenannte Autobahnassistenten, die auto-
matisches Fahren auf einer Autobahn bis zu einer oberen Geschwindigkeitsgrenze
ermöglichen. Auch hochgradig automatisierte Systeme, die weitgehend selbstständig
Fahraufgaben wahrnehmen, den Fahrer aber in einzelnen Spezialfällen zum Eingreifen
auffordern, fallen nach dieser Definition in die Kategorie teilautonomer Fahrzeuge.
Im Gegensatz dazu sprechen wir von vollautonomen Fahrzeugen, wenn Assistenz-
Systeme den menschlichen Fahrer nicht nur unterstützen, sondern ihn gänzlich erset-
zen. Eingriffspflichten der Insassen gibt es in solchen Autos jedenfalls nicht mehr. Sie
verkehren demnach vollkommen fahrerlos mit der Konsequenz, dass in dieser Konstel-
lation dereinst sogar die blosse Möglichkeit des Eingreifens durch einen menschlichen
Passagier eliminiert werden wird.
2. Funktionsweise
Das autonome Fahrzeug von Google – das sogenannte «Google Car» – ist ein anschau-
liches Beispiel für die technische Ausstattung autonomer Fahrzeuge.19
Im Folgenden
wird daher die Funktionsweise des Google Cars stark vereinfacht dargestellt. Statt ein
völlig neues Modell zu entwickeln, verbindet Google herkömmliche Fahrzeuge mit für
autonomes Fahren benötigter Technologie: Dazu gehören Radar- und Laserabstands-
messer – Lidar20
genannt –, Kameras und Ultraschallsensoren, die ständig ein detail-
liertes Bild der Umgebung aufzeichnen. Ein GPS-Modul ermittelt den jeweiligen
Standort des Fahrzeugs. Der Bordcomputer gleicht sodann die einlaufenden Daten mit
seinem Weltmodell ab.21
Bilderkennungsalgorithmen lesen aus der Momentaufnahme
–––––––––––––– 18 Vgl. B.D. KUPFERSCHMIED, Autonome Fahrzeuge – Die Haftung im Strassenverkehr der Zukunft,
HAVE 2015, 356 ff.; W. VOGT, Fahrassistenzsysteme: Neue Technik – Neue Rechtsfragen?, NZV
2003, 153 ff. 19 H. FOUNTAIN, Yes, Driverless Cars Know the Way to San Jose, NY Times (28.10.2012), <https://
www.nytimes.com/2012/10/28/automobiles/yes-driverless-cars-know-the-way-to-san-jose.html?p
agewanted=all&_r=0>. 20 Abkürzung für Light detection and ranging. 21 Dieses ist die innere Landkarte des Wagens, allerdings sehr viel detaillierter als Karten in Naviga-
tionssystemen. H. FOUNTAIN, NY Times (28.10.2012).
MARC THOMMEN/SOPHIE MATJAZ
278
heraus, ob ein vorausfahrendes Auto bremst, ein Fussgänger die Strasse überquert oder
eine Ampel umschaltet.22 Über die Vehicle-to-Vehicle-Communication, eine Art Inter-
net für Fahrzeuge, kann das Auto zudem etwa Informationen über einen Stau beziehen
oder anderen Wagen mitteilen, dass es gleich abbiegen wird.23 Die gesammelten In-
formationen werden an Datenzentren übermittelt und dazu benutzt, die Landkarten, die
Google an alle seine Fahrzeuge übermittelt, laufend zu aktualisieren.24
Im Inneren des Fahrzeugs befindet sich ein Bildschirm, mit dessen Hilfe der Fahrer das
autonome System beobachten und kontrollieren kann. Indem er etwa das Lenkrad be-
wegt oder das Brems- oder Gaspedal berührt, kann er die Kontrolle wieder an sich
bringen. Zusätzlich existiert ein Schalter, mit dem der Selbstfahr-Modus an- und abge-
stellt werden kann.25 Wenn die Technologie in einer Situation nicht weiss, was zu tun
ist, lässt eine Stimme den Fahrer wissen, dass ihm die Kontrolle überantwortet wird.
Nach unserer Definition (siehe oben II.1., 3. Abschnitt) handelt es sich daher um ein
teilautonomes Fahrzeug. Es sei darauf hingewiesen, dass diese Ausgestaltung, die dem
Fahrer relativ weitreichende Eingriffsmöglichkeiten gewährt, eher eine Folge derzeiti-
ger rechtlicher Rahmenbedingungen denn begrenzter technischer Möglichkeiten ist.26
3. Zwecke
Mit der Einführung autonomer Fahrzeuge werden drei Hauptzwecke verfolgt:
Zunächst erhofft man sich ein Mehr an Sicherheit im Strassenverkehr. Da die bei wei-
tem meisten Verkehrsunfälle auf unmittelbares menschliches Fehlverhalten zurückzu-
–––––––––––––– 22 N. BOEING, Der Richter und sein Lenker, Zeit Wissen 6 (2015). 23 N. BOEING, Zeit Wissen 6 (2015). 24 T. VANDERBILT, Let the Robot Drive: The Autonomous Car of the Future Is Here, Wired (20.1.
2012), <https://www.wired.com/magazine/2012/01/ff_autonomouscars/all/>. 25 P. VALDES-DAPENA, Thrilled and Bummed by Google’s Self-Driving Car, CNN Money (18.5.
2012), <http://money.cnn.com/2012/05/17/autos/google-driverless-car>. 26 Die kalifornische Kraftfahrzeugbehörde DMV (California Department of Motor Vehicles) hat im
Dezember 2015 bestimmt, dass autonome Fahrzeuge in Kalifornien mit Lenkrad und Pedalen
ausgestattet sein müssen. Der Fahrer muss eine Fahrerlaubnis besitzen und fahrtüchtig sein, so-
dass er jederzeit das Steuer übernehmen und in die Fahrt eingreifen kann. Google zeigte sich über
diese Entscheidung ‚sehr enttäuscht‘, weil sie die technischen Möglichkeiten der Fahrzeuge ver-
kenne und den Markt für selbstfahrende Autos behindere. Außerdem werde so die Mobilität von
Menschen, die kein Auto lenken können, beschränkt. Siehe dazu A. WILKENS, Kalifornien: Neue
Regeln für autonome Autos – und Google ist ‚sehr enttäuscht‘, heise online (17.12.2015),
<http://www.heise.de/newsticker/meldung/Kalifornien-Neue-Regeln-fuer-autonome-Autos-und-
Google-ist-sehr-enttaeuscht-3045857.html>.
Die Fahrlässigkeit im Zeitalter autonomer Fahrzeuge
279
führen sind,27 werden durch die Einführung autonomer Fahrzeuge eine erhebliche Er-
höhung der Verkehrssicherheit und eine signifikante Reduktion von Unfällen erwar-
tet.28
Zweitens wird angestrebt, derzeit nicht fahrtüchtigen Personen einen Mobilitätsgewinn
zu verschaffen. Viele Menschen sind durch die konventionellen führergesteuerten
Fahrzeuge benachteiligt, etwa weil sie blind, zu jung, zu alt oder aus anderen Gründen
nicht in fahrtauglichem Zustand sind. Autonome Fahrzeuge sollen diesen Personen
eine Teilnahme am Strassenverkehr ermöglichen.29
Drittens wird durch die Umstellung auf autonomes Fahren eine erhebliche Steigerung
des Komforts und der Produktivität der Fahrer erwartet.30 So profitieren auch Men-
schen, die heute bereits herkömmliche Fahrzeuge steuern, von der Entwicklung. Sie
werden von monotonen Fahraufgaben entlastet und können sich künftig während der
Zeit, die sie heute noch mit dem Steuern des Autos verbringen, anderen Tätigkeiten
widmen.
III. Fahrlässigkeit im Strassenverkehr
Fehlverhalten im Strassenverkehr ist allgegenwärtig. Entsprechend umfangreich sind
die Regelwerke, welche das korrekte Verhalten im Strassenverkehr normieren. Nach-
folgend interessieren jedoch nicht die unmittelbaren strafrechtlichen Konsequenzen
von Verkehrsregelverletzungen, sondern die kernstrafrechtlichen Fahrlässigkeitsdelikte
(Art. 117, 125 Strafgesetzbuch [StGB])31, die durch Verletzungen von Sorgfaltspflich-
ten im Strassenverkehr verwirklicht werden. Ein klassisches Beispiel ist der Autofah-
rer, der nicht rechtzeitig abbremst und einen die Strasse querenden Fussgänger ver-
letzt.32 Hierbei stellt sich zunächst die Frage, wer Haftungssubjekt ist (III.1) und
sodann, ob der Fahrer pflichtwidrig unvorsichtig und damit fahrlässig gehandelt hat
(III. 2).
–––––––––––––– 27 Vgl. bspw: Menschliches Fehlverhalten ist häufigste Ursache für Verkehrsunfälle, GDV
(10.7.2013), <http://www.gdv.de/2013/07/menschliches-fehlverhalten-ist-haeufigste-ursache-fu
er-verkehrsunfaelle>. 28 S. DEUTSCHLE, Wer fährt? – Der Fahrer oder das System?, SVR 2005, 249. 29 L. S. LUTZ, Autonome Fahrzeuge als rechtliche Herausforderung, NJW 2015, 119; VOGT (Fn. 18),
153. 30 DEUTSCHLE (Fn. 28), 249. 31 Schweizerisches Strafgesetzbuch vom 21. Dezember 1937 (SR 311.0). 32 Vgl. etwa BGer vom 11.6.2007, 6S.107/2007.
MARC THOMMEN/SOPHIE MATJAZ
280
1. Der Fahrzeugführer
Heute beruht das Strassenverkehrsrecht auf der Annahme, dass die Verkehrsteilnahme
menschliches Verhalten voraussetzt und nur natürliche Personen Verhaltensvorschrif-
ten entsprechen oder dagegen verstossen können.33 Ein Computersystem kann nach
heutigem Stand in der Schweiz nicht Adressat strafrechtlicher Schuldvorwürfe sein.34
«Fahrzeugführer» gemäss dem Strassenverkehrsgesetz (SVG)35 ist ein Mensch, der die
ihm obliegende Fahraufgabe wahrnimmt und dabei seinen Verhaltenspflichten nachzu-
kommen hat.36 Nach der hier verwendeten Definition teilautonomer Fahrzeuge (siehe
oben II.1) kann bei diesen von einem Fahrzeugführer gesprochen werden,37 denn wo
Eingriffsmöglichkeiten bestehen, liegen eine Fahraufgabe und damit einhergehend
Verhaltenspflichten vor. Eine Verhaltenspflicht könnte bspw. darin bestehen, ein Sys-
tem nicht sorgfaltswidrig zu übersteuern. Bei vollautonomen Fahrzeugen ohne Ein-
griffsmöglichkeit des menschlichen Passagiers lässt sich hingegen nicht länger von
einem Fahrzeugführer sprechen (dazu unten IV.2).
2. Der Sorgfaltsmassstab
Wir wollen hier die Ermittlung des Sorgfaltsmassstabs, der in einem konkreten Le-
benssachverhalt für einen bestimmten Normadressaten gilt, anhand der von ANDREAS
DONATSCH beschriebenen Methode vornehmen: Ausgangspunkt ist dabei eine zunächst
allgemeine Verhaltensrichtlinie, die an die gegebenen Umstände sowie die persönli-
chen Verhältnisse des potentiellen Täters anzupassen ist (Art. 12 Abs. 3 StGB).38 Bei
den fahrlässigen Erfolgsdelikten lautet diese Verhaltensrichtlinie, jeder habe sein Tun
und Unterlassen so zu gestalten, dass dadurch keine Gefahr einer Verletzung oder Ge-
fährdung tatbestandsmässig umschriebener Erfolge geschaffen wird.39 Eine solche
reine Erfolgsverhinderungspflicht stellt aber für sich noch keine Sorgfaltspflicht dar.40
–––––––––––––– 33 Vgl. F. SCHMID/R. MATTI, Assistenzsysteme, in: R. Schaffhauser (Hrsg.), Jahrbuch zum Strassen-
verkehrsrecht, Bern 2012, 570. 34 Vgl. GLESS/WEIGEND (Fn. 14), 570 ff. 35 Strassenverkehrsgesetz (SVG) vom 19. Dezember 1958 (SR. 741.01). 36 Art. 1 Abs. 2 SVG («Die Verkehrsregeln (Art. 26-57a) gelten für die Führer von Motorfahrzeu-
gen und die Radfahrer auf allen dem öffentlichen Verkehr dienenden Strassen…»); LOHMANN
(Fn. 11), 141. 37 Siehe zum Begriff des Fahrzeugführers im Kontext autonomer Fahrzeuge auch C. RIEDO/S. MAE-
DER, Die Benutzung automatisierter Motorfahrzeuge aus strafrechtlicher Sicht, in: T. Probst/
F. Werro, Strassenverkehrsrechtstagung 21.-22. Juni 2016, Bern 2016, 91. 38 DONATSCH (Fn. 1), 114. 39 DONATSCH (Fn. 1), 117. 40 Vgl. etwa G. STRATENWERTH, Schweizerisches Strafrecht, Allgemeiner Teil I: Die Straftat, 4.
Aufl., Bern 2011, § 16 N 9: «Sorgfaltspflichten können im Übrigen nicht gebieten, den Eintritt
Die Fahrlässigkeit im Zeitalter autonomer Fahrzeuge
281
Die Verhaltensrichtlinie ist bildlich gesprochen lediglich das Rohmaterial, aus dem in
Anwendung von Art. 12 Abs. 3 StGB die tatsächliche Sorgfaltspflicht herauszu-
kristallisieren ist.
Unter dem Aspekt der gegebenen Umstände ist zunächst zu bestimmen, welches das
für die zu beurteilende Verhaltensweise höchstzulässige Risiko darstellt.41 Zuerst ist
dazu der generelle rechtlich überhaupt – unabhängig von den konkreten Umständen –
denkbare Risikobereich festzulegen, der durch das menschliche Können in zweifacher
Hinsicht begrenzt ist:42 Einerseits kann niemand zur Einhaltung eines Gefährdungs-
masses verpflichtet werden, welches sich trotz Einsatz aller menschenmöglichen Mass-
nahmen zur Risikoverminderung nicht eliminieren lässt («ultra posse nemo tenetur»).43
Es kann niemandem ein Fahrlässigkeitsvorwurf gemacht werden, der Menschenun-
mögliches nicht leistet.44 Platzt beispielsweise bei voller Fahrt aus vom Fahrer nicht zu
vertretenden Gründen ein Autoreifen und lässt sich dadurch ein Zusammenstoss nicht
mehr abwenden, kann dem Fahrer auch keine Sorgfaltspflichtverletzung zur Last gelegt
werden, weil er diesen nicht verhindert.45 Das trotz Einhaltung des höchstzulässigen
Risikos verbleibende Gefährdungsmass wird in Kauf genommen, da die Alternative ein
Verbot des Autofahrens schlechthin und damit eine empfindliche Einschränkung der
individuellen Handlungsfreiheit wäre.46 Die zweite Begrenzung des überhaupt mög-
lichen Risikobereichs, der durch Einhaltung einer Sorgfaltspflicht gewährleistet werden
soll, ergibt sich aus der sogenannten minimalen Risikoverminderungskapazität des
Menschen.47 Es sind dies die Fähigkeiten, wie sie jedem schuldfähigen, psychisch und
physisch normal ausgebildeten Rechtsadressaten eigen sind.48 Damit ist der generell
denkbare Risikobereich, in dem das höchstzulässige Risiko liegt, umschrieben: Min-
–––––––––––––– bestimmter Erfolge als solchen, sondern nur, die zu ihnen führenden Geschehensabläufe zu ver-
hindern.» 41 DONATSCH (Fn. 1), 128; A. DONATSCH/B. TAG, Strafrecht I, Verbrechenslehre, 9. Aufl., Zürich
2013, 343; STRATENWERTH (Fn. 40), § 9 N 34, § 16 N 11; M.A. NIGGLI/ST. MAEDER, in: M.A.
Niggli/H. Wiprächtiger (Hrsg.), Basler Kommentar, Strafrecht I, 3. Aufl., Basel 2013, Art. 12 N
98; BGE 90 IV 11, 116 IV 308, 117 IV 61, 118 IV 133, 121 IV 14, 122 IV 19 f., 133, 147, 126 IV
16 f., 127 IV 38, 65, 129 IV 121, 130 IV 10; zum erlaubten Risiko im Kontext autonomer Fahr-
zeuge siehe auch N. Zurkinden, Strafrecht und selbstfahrende Autos – ein Beitrag zum erlaubten
Risiko, recht 2016, 144 ff. 42 DONATSCH (Fn. 1), 156. 43 DONATSCH (Fn. 1), 144; DONATSCH/TAG (Fn. 41), 343; NIGGLI/MAEDER, in: BSK StGB I (Fn.
41), Art. 12 N 99; STRATENWERTH (Fn. 40), § 16 N 10; BGE 127 IV 44, 130 IV 14. 44 NIGGLI/MAEDER, in: BSK StGB I (Fn. 41), Art. 12 N 99. 45 NIGGLI/MAEDER, in: BSK StGB I (Fn. 41), Art. 12 N 99; vgl. auch STRATENWERTH (Fn. 40), § 16
N 10. 46 Vgl. dazu DONATSCH/TAG (Fn. 41), 343 und DONATSCH (Fn. 1), 181 ff. 47 DONATSCH (Fn. 1), 130 ff., 146; NIGGLI/MAEDER, in: BSK StGB I (Fn. 41), Art. 12 N 110; DO-
NATSCH/TAG (Fn. 41), 345. 48 DONATSCH (Fn. 1), 154.
MARC THOMMEN/SOPHIE MATJAZ
282
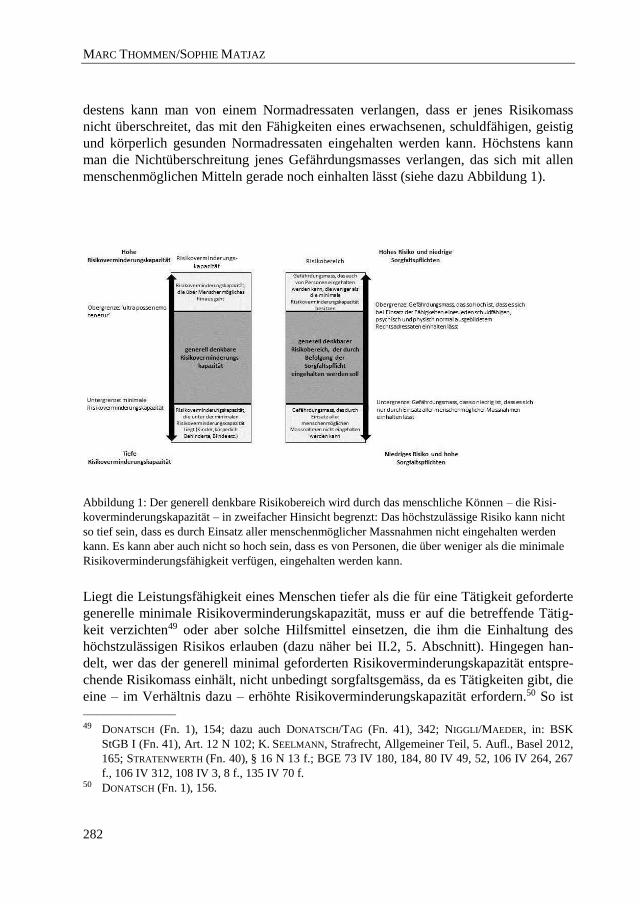
destens kann man von einem Normadressaten verlangen, dass er jenes Risikomass
nicht überschreitet, das mit den Fähigkeiten eines erwachsenen, schuldfähigen, geistig
und körperlich gesunden Normadressaten eingehalten werden kann. Höchstens kann
man die Nichtüberschreitung jenes Gefährdungsmasses verlangen, das sich mit allen
menschenmöglichen Mitteln gerade noch einhalten lässt (siehe dazu Abbildung 1).
Abbildung 1: Der generell denkbare Risikobereich wird durch das menschliche Können – die Risi-
koverminderungskapazität – in zweifacher Hinsicht begrenzt: Das höchstzulässige Risiko kann nicht
so tief sein, dass es durch Einsatz aller menschenmöglicher Massnahmen nicht eingehalten werden
kann. Es kann aber auch nicht so hoch sein, dass es von Personen, die über weniger als die minimale
Risikoverminderungsfähigkeit verfügen, eingehalten werden kann.
Liegt die Leistungsfähigkeit eines Menschen tiefer als die für eine Tätigkeit geforderte
generelle minimale Risikoverminderungskapazität, muss er auf die betreffende Tätig-
keit verzichten49 oder aber solche Hilfsmittel einsetzen, die ihm die Einhaltung des
höchstzulässigen Risikos erlauben (dazu näher bei II.2, 5. Abschnitt). Hingegen han-
delt, wer das der generell minimal geforderten Risikoverminderungskapazität entspre-
chende Risikomass einhält, nicht unbedingt sorgfaltsgemäss, da es Tätigkeiten gibt, die
eine – im Verhältnis dazu – erhöhte Risikoverminderungskapazität erfordern.50 So ist
–––––––––––––– 49 DONATSCH (Fn. 1), 154; dazu auch DONATSCH/TAG (Fn. 41), 342; NIGGLI/MAEDER, in: BSK
StGB I (Fn. 41), Art. 12 N 102; K. SEELMANN, Strafrecht, Allgemeiner Teil, 5. Aufl., Basel 2012,
165; STRATENWERTH (Fn. 40), § 16 N 13 f.; BGE 73 IV 180, 184, 80 IV 49, 52, 106 IV 264, 267
f., 106 IV 312, 108 IV 3, 8 f., 135 IV 70 f. 50 DONATSCH (Fn. 1), 156.
Die Fahrlässigkeit im Zeitalter autonomer Fahrzeuge
283
es nicht jedem voll schuldfähigen, psychisch und physisch normal ausgebildeten Er-
wachsenen erlaubt, Auto zu fahren. Vielmehr sind weitere Voraussetzungen zu erfül-
len, namentlich der Besitz der für das Bestehen einer Fahrprüfung und Einhaltung der
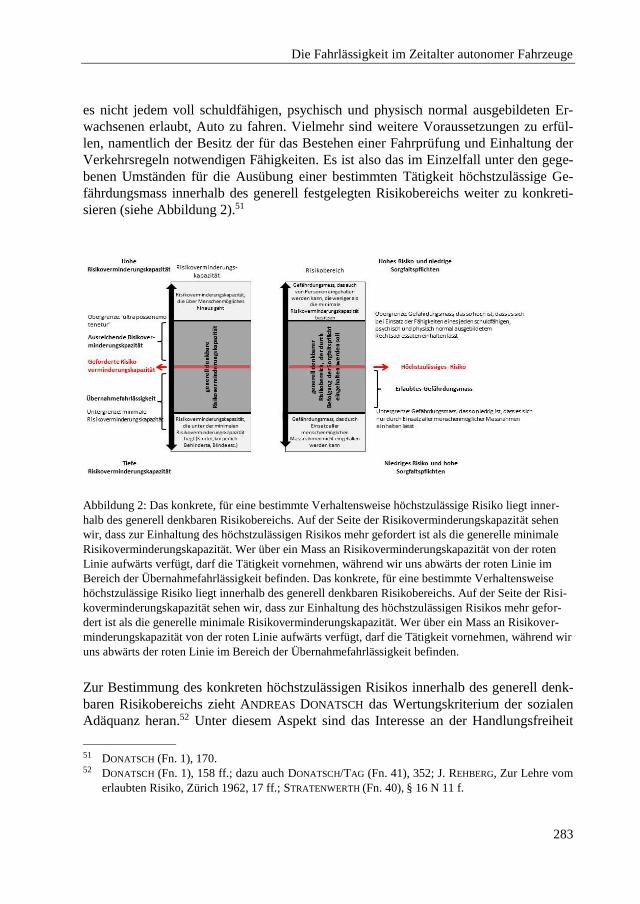
Verkehrsregeln notwendigen Fähigkeiten. Es ist also das im Einzelfall unter den gege-
benen Umständen für die Ausübung einer bestimmten Tätigkeit höchstzulässige Ge-
fährdungsmass innerhalb des generell festgelegten Risikobereichs weiter zu konkreti-
sieren (siehe Abbildung 2).51
Abbildung 2: Das konkrete, für eine bestimmte Verhaltensweise höchstzulässige Risiko liegt inner-
halb des generell denkbaren Risikobereichs. Auf der Seite der Risikoverminderungskapazität sehen
wir, dass zur Einhaltung des höchstzulässigen Risikos mehr gefordert ist als die generelle minimale
Risikoverminderungskapazität. Wer über ein Mass an Risikoverminderungskapazität von der roten
Linie aufwärts verfügt, darf die Tätigkeit vornehmen, während wir uns abwärts der roten Linie im
Bereich der Übernahmefahrlässigkeit befinden. Das konkrete, für eine bestimmte Verhaltensweise
höchstzulässige Risiko liegt innerhalb des generell denkbaren Risikobereichs. Auf der Seite der Risi-
koverminderungskapazität sehen wir, dass zur Einhaltung des höchstzulässigen Risikos mehr gefor-
dert ist als die generelle minimale Risikoverminderungskapazität. Wer über ein Mass an Risikover-
minderungskapazität von der roten Linie aufwärts verfügt, darf die Tätigkeit vornehmen, während wir
uns abwärts der roten Linie im Bereich der Übernahmefahrlässigkeit befinden.
Zur Bestimmung des konkreten höchstzulässigen Risikos innerhalb des generell denk-
baren Risikobereichs zieht ANDREAS DONATSCH das Wertungskriterium der sozialen
Adäquanz heran.52 Unter diesem Aspekt sind das Interesse an der Handlungsfreiheit
–––––––––––––– 51 DONATSCH (Fn. 1), 170. 52 DONATSCH (Fn. 1), 158 ff.; dazu auch DONATSCH/TAG (Fn. 41), 352; J. REHBERG, Zur Lehre vom
erlaubten Risiko, Zürich 1962, 17 ff.; STRATENWERTH (Fn. 40), § 16 N 11 f.
MARC THOMMEN/SOPHIE MATJAZ
284
des potentiellen Täters sowie das Interesse am Verzicht auf Verhaltensweisen, die zu
einer Gefährdung oder Verletzung von strafrechtlich geschützten Rechtsgütern führen
können, abzuwägen, wobei insbesondere das Kriterium der Sozialnützlichkeit bzw.
Sozialüblichkeit zu beachten ist.53 Das Interesse an der menschlichen Handlungsfrei-
heit kann grundsätzlich das Interesse am Verzicht auf rechtsgutgefährdende Verhal-
tensweisen überwiegen. Je grösser die mit der antizipierten Tätigkeit verbundene Ge-
fahr für Rechtsgüter eingestuft wird, desto mehr muss andererseits das höchstzulässige
Risiko herabgesetzt werden, damit das der Handlungsfreiheit beizumessende Gewicht
überwiegt.54
Wir wollen nun diese theoretischen Erwägungen auf unsere Thematik anwenden. Das
höchstzulässige Risiko für die Verhaltensweise Autofahren wird heute so bemessen,
dass es nur von einem Rechtsadressaten mit speziellen Kenntnissen und Fähigkeiten,
mithin nur von einem Fahrer erbracht werden kann, der über das Können verfügt, das
Voraussetzung für das Bestehen der Führerprüfung bildet.55 Zusätzlich sind die im
Strassenverkehrsgesetz und in den strassenverkehrsrechtlichen Verordnungen56 gesetz-
lich festgeschriebenen Verkehrsregeln Ausdruck einer vorweggenommen Interessens-
abwägung. Tritt infolge deren Missachtung ein tatbestandsmässiger Erfolg ein und
wird die Vermeidung derartiger Erfolge vom Schutzzweck erfasst, folgt aus der Verlet-
zung einer solchen Norm grundsätzlich, dass das höchstzulässige Risiko überschritten
wurde.57 Aus Sicht der Normadressaten bedeutet das, dass nur derjenige pflichtgemäss
handeln kann, der das Autofahren unterlässt, wenn ihm die für das Bestehen einer Füh-
rerprüfung und für die Einhaltung der Verkehrsregeln erforderliche Risikoverminde-
rungskapazität fehlt oder aber der die entsprechende erforderliche und zugleich
vorhandene Risikoverminderungskapazität auch tatsächlich einsetzt.58 Wer trotz man-
gelnder Fähigkeiten ein Fahrzeug in Betrieb nimmt und wegen dieses Mangels etwa
einen Fussgänger verletzt, macht sich der Übernahmefahrlässigkeit schuldig:59 «So ist
m.E. das Verhalten eines körperlich schwer behinderten Radfahrers, der infolge Inva-
lidität nicht in der Lage ist, vor einem Fussgängerstreifen anzuhalten und deshalb
einen Passanten anfährt sowie verletzt, als pflichtwidrig zu qualifizieren, weil ein der-
artiger Erfolgseintritt bei der umschriebenen körperlichen Konstitution voraussehbar
–––––––––––––– 53 DONATSCH (Fn. 1), 214. 54 DONATSCH (Fn. 1), 217. 55 DONATSCH (Fn. 1), 217 f.; REHBERG (Fn. 52), 214 f.; BGE 73 IV 184. 56 Insb. der Verkehrsregelverordnung (VRV), Verkehrsregelverordnung vom 13. November 1962
(SR. 741.11). 57 DONATSCH (Fn. 1), 221. Ausnahmen sind in Rechtfertigungssituationen, im Falle der Anwendung
des Vertrauensprinzips oder bei mangelnder praktischer Steuerbarkeit des Kausalverlaufs denk-
bar. 58 DONATSCH (Fn. 1), 144. 59 DONATSCH (Fn. 1), 148; siehe auch Fn. 49.
Die Fahrlässigkeit im Zeitalter autonomer Fahrzeuge
285
erscheint.»60 Wie ANDREAS DONATSCH jedoch bereits vor bald dreissig Jahren festge-
halten hat, können Verkehrsteilnehmer auch Hilfsmittel einsetzen, die ihnen das Ein-
halten des höchstzulässigen Risikos ermöglichen: «Der Behinderte kann jedoch sein
Fahrzeug auf eine Weise umbauen (lassen), dass ihm dessen Beherrschung möglich ist,
d.h. seine Realisierungsfähigkeit durch technische Massnahmen im geforderten Um-
fang verbessern.»61
Zu berücksichtigen ist schliesslich, dass nicht jeder, der die für das Autofahren erfor-
derliche Risikoverminderungskapazität besitzt und auch einsetzt, unbedingt sorgfalts-
gemäss handelt: Unter dem Kriterium der persönlichen Umstände ist weiter zu prüfen,
ob der Täter im Falle einer überdurchschnittlichen Leistungsfähigkeit bei Einsatz seiner
besonderen Fähigkeiten in der Lage wäre, das grundsätzlich erlaubte Risiko zu vermin-
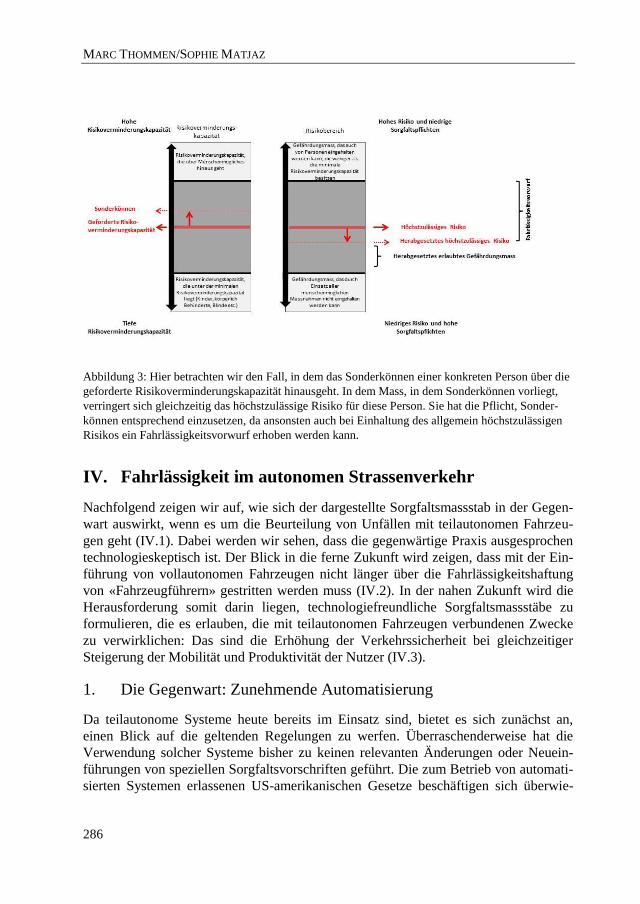
dern (siehe Abbildung 3).62 So genügt es nicht, wenn ein professioneller Rennfahrer,
der besondere Fähigkeiten im Umgang mit Kraftfahrzeugen besitzt, lediglich die für
die Einhaltung des höchstzulässigen Risikos erforderlichen Fähigkeiten aufwendet, um
eine drohende Gefahr abzuwenden. Hätte er sie nämlich mithilfe seines Sonderkönnens
verhindern können, handelt er sorgfaltswidrig, wenn er dieses nicht einsetzt.
–––––––––––––– 60 DONATSCH (Fn. 1), 154 f. 61 DONATSCH (Fn. 1), 155. 62 DONATSCH (Fn. 1), 124; DONATSCH/TAG (Fn. 41), 348; NIGGLI/MAEDER, in: BSK StGB I (Fn.
41), Art. 12 N 100; SEELMANN (Fn. 49), 158 f.; STRATENWERTH (Fn. 40), § 16 N 10; BGE 97 IV
169, 172, 98 IV 168, 177 ff., 99 IV 65, 100 IV 210, 213, 103 IV 289, 292 f., 104 IV 19, 106 IV
81, 118 IV 130, 134, 120 IV 309, 121 IV 14 f., 122 IV 135, 147 ff., 227, 126 IV 16, 130 IV 10.
MARC THOMMEN/SOPHIE MATJAZ
286
Abbildung 3: Hier betrachten wir den Fall, in dem das Sonderkönnen einer konkreten Person über die
geforderte Risikoverminderungskapazität hinausgeht. In dem Mass, in dem Sonderkönnen vorliegt,
verringert sich gleichzeitig das höchstzulässige Risiko für diese Person. Sie hat die Pflicht, Sonder-
können entsprechend einzusetzen, da ansonsten auch bei Einhaltung des allgemein höchstzulässigen
Risikos ein Fahrlässigkeitsvorwurf erhoben werden kann.
IV. Fahrlässigkeit im autonomen Strassenverkehr
Nachfolgend zeigen wir auf, wie sich der dargestellte Sorgfaltsmassstab in der Gegen-
wart auswirkt, wenn es um die Beurteilung von Unfällen mit teilautonomen Fahrzeu-
gen geht (IV.1). Dabei werden wir sehen, dass die gegenwärtige Praxis ausgesprochen
technologieskeptisch ist. Der Blick in die ferne Zukunft wird zeigen, dass mit der Ein-
führung von vollautonomen Fahrzeugen nicht länger über die Fahrlässigkeitshaftung
von «Fahrzeugführern» gestritten werden muss (IV.2). In der nahen Zukunft wird die
Herausforderung somit darin liegen, technologiefreundliche Sorgfaltsmassstäbe zu
formulieren, die es erlauben, die mit teilautonomen Fahrzeugen verbundenen Zwecke
zu verwirklichen: Das sind die Erhöhung der Verkehrssicherheit bei gleichzeitiger
Steigerung der Mobilität und Produktivität der Nutzer (IV.3).
1. Die Gegenwart: Zunehmende Automatisierung
Da teilautonome Systeme heute bereits im Einsatz sind, bietet es sich zunächst an,
einen Blick auf die geltenden Regelungen zu werfen. Überraschenderweise hat die
Verwendung solcher Systeme bisher zu keinen relevanten Änderungen oder Neuein-
führungen von speziellen Sorgfaltsvorschriften geführt. Die zum Betrieb von automati-
sierten Systemen erlassenen US-amerikanischen Gesetze beschäftigen sich überwie-
Die Fahrlässigkeit im Zeitalter autonomer Fahrzeuge
287
gend mit Zulassungsvoraussetzungen und bestimmen ausserdem, dass ein fahrtüchtiger
und jederzeit eingriffsbereiter Fahrer im Auto sitzen muss, für den wiederum keine
speziellen Sorgfaltsnomen normiert werden.63 Im Bereich der zivilen Luftfahrt besteht
die Regelung, dass trotz des Einsatzes von automatisierten Systemen ein Pilot und ein
Co-Pilot an Bord sein müssen, die jeder für sich jederzeit die Kontrolle über das Flug-
zeug übernehmen können und letztlich auch die Verantwortung tragen.64 Ein spezieller
Sorgfaltsmassstab für den Umgang mit dem automatisierten System besteht dabei
nicht.
Illustrativ ist die einen automatisierten Parkassistenten betreffende Entscheidung des
Amtsgerichts München aus dem Jahr 2007:65 Ein Mann hatte einen Wagen gemietet.
Als er diesen zurückgeben und auf dem Parkplatz der Vermietung abstellen wollte,
musste er rückwärts einparken. Obwohl das Auto über eine Einparkhilfe, ein sogenann-
tes Park-Distance-Control-System, verfügte, fuhr der Fahrer gegen eine rückwärtige
Begrenzung des Parkplatzes, wobei die Heckklappe beschädigt wurde. Die Einparkhil-
fe hatte kein akustisches Signal abgegeben, da sich in Höhe des Abtaststrahls ein Hohl-
raum befand. Anschliessend klagte die Vermieterin auf Schadenersatz. Das Gericht gab
ihr Recht. Eine Einparkhilfe entbinde den Fahrer eines Fahrzeugs nicht von seiner be-
sonderen Sorgfaltspflicht beim Rückwärtsfahren. Er dürfe sich nicht allein auf die
Technik verlassen, sondern müsse durch eigene Beobachtung sicherstellen, dass kein
Hindernis den Weg verstelle.66
Überträgt man den Münchner Fall auf die hier interessierende Frage nach der straf-
rechtlichen Fahrlässigkeitshaftung,67 müsste man eigentlich meinen, dass sich der Fah-
rer auf die Technologie hätte verlassen dürfen. Gerade weil viele Autofahrer mit Ein-
parken Mühe bekunden, sind Fahrzeuge mit Einparkhilfen sehr gefragt. Die Tech-
nologie hätte den Unfall in casu eigentlich verhindert, ist aber aus vom Fahrer nicht zu
vertretenen Gründen ausgefallen. Das Münchner Gericht hat ihm trotzdem Fahrlässig-
keit vorgeworfen, weil er sich auf die Technologie verlassen hat und deshalb nicht voll
aufmerksam war.
–––––––––––––– 63 Vgl. G. WEINER/B. WALKER SMITH, Automated Driving: Legislative and Regulatory Action,
<http://cyberlaw.stanford.edu/wiki/index.php/Automated_Driving:_Legislative_and_Regulatory_
Action>. 64 Vgl. bspw. Federal Aviation Administration, General Operating and Flight Rules § 91.3: «The
pilot in command of an aircraft is directly responsible for, and is the final authority as to, the op-
eration of that aircraft». 65 AG München vom 19.07.2007, 275 C 15658/07. 66 AG München 275 C 15658/07, 3. 67 Weil die fahrlässige Sachbeschädigung nicht strafbar ist (Art. 12 Abs. 1 i.V.m. Art. 144 StGB)
müsste hier unterstellt werden, dass auch eine im Fahrzeug sitzende oder hinter dem parkenden
Wagen passierende Person versehentlich verletzt wurde (Art. 125 StGB).
MARC THOMMEN/SOPHIE MATJAZ
288
Die Begründung des Gerichts, dass eine Einparkhilfe nicht von den Sorgfaltspflichten
beim Rückwärtsfahren entbinde, ist nur auf ersten Blick selbstverständlich. Die damit
zwangsläufig verbundene Pflicht, in kritischen Situationen einzugreifen und das Sys-
tem zu übersteuern, ist ihrerseits nicht frei von Gefahren. Kommt es nämlich zu einem
Unfall, den die Technologie – hätte der Fahrer sie nicht übersteuert – verhindert hätte,
haftet er auch. In dieser Situation wäre der Fahrlässigkeitsvorwurf, dass er eingegriffen
– und sich gerade nicht auf die Technik verlassen – hat.
So zeichnet sich nach der Fahrlässigkeitspraxis der Gegenwart ein perplexes Bild ab:
Der Führer eines autonomen Autos kann eigentlich nur verlieren. Verlässt er sich auf
die Technik so haftet er; verlässt er sich nicht auf die Technik und nimmt das Gesche-
hen selbst in die Hand, haftet er auch. Richtigerweise wäre der entscheidende Punkt in
diesen Fällen, ob für den Fahrer erkennbar ist, dass die Technik im Begriff ist zu ver-
sagen und deshalb eine Eingriffsnotwendigkeit besteht. Fehlt es an dieser Erkenn-
barkeit, darf er sich unseres Erachtens auf die Technik verlassen. In solchen Fällen
haften dann primär die Fahrzeughersteller oder die Wartungsverantwortlichen.
Die Frage, ob die Verantwortlichkeit der Fahrzeugführer modifiziert werden sollte,
stellt sich vor allem auch deshalb, weil sich Fahrzeughersteller ansonsten durch einen
simplen Trick auch bei eigentlich vollautonomen Fahrzeugen von der primären Verant-
wortlichkeit ausnehmen können: Hierzu müssten sie lediglich weiterhin die Möglich-
keit vorsehen, in das Fahrgeschehen einzugreifen. Damit wäre – nach der erläuterten
Sichtweise im Münchner Urteil – immer noch der ,Fahrer‘ in der primären Verantwor-
tung. In diesem Konzept wird die haftungsbegründende Interventionspflicht aus der
zunehmend überflüssigen Interventionsmöglichkeit abgeleitet. Zugespitzt gefragt: Sol-
len wir es wirklich den Fahrzeugherstellern überlassen, über den Einbau von Lenkrä-
dern auch die Fahrlässigkeitshaftung fernzusteuern? Um es vorweg zu nehmen, diese
Frage ist unseres Erachtens nur schon deshalb eher mit Nein zu beantworten, weil Ein-
griffe von Fahrern je länger desto weniger erwünscht sind. Menschliches Fehlverhalten
ist wie erläutert die Hauptursache von Unfällen im Strassenverkehr. Gerade auch die
Pflicht zum Übersteuern stellt daher eine enorme Fehlerquelle dar.
2. Die ferne Zukunft: Vollautomatisierte Fahrzeuge
Unter vollautonom verstehen wir wie oben (II.1, 4. Abschnitt) beschrieben ein Fahr-
zeug, das gänzlich ohne Fahrer auskommt und sogar ohne Insassen auf den Strassen
unterwegs sein kann. Auch wenn dieses Szenario derzeit noch befremdlich klingen
mag, ist es das erklärte Endziel der Entwickler und wird als ultimativer Garant für Ver-
kehrssicherheit angepriesen.68
–––––––––––––– 68 Vgl. Google Self-Driving Car Project: <https://www.google.com/selfdrivingcar/>.

Die Fahrlässigkeit im Zeitalter autonomer Fahrzeuge
289
Uns dient das vollautonome Fahrzeug als Veranschaulichung dessen, was die zuneh-
mende Automatisierung letztendlich mit den Sorgfaltspflichten des Fahrers machen
wird: Sie werden völlig obsolet werden. Es ist naheliegend, dass es in solchen Fahr-
zeugen nicht einmal mehr eine Eingriffsmöglichkeit geben wird, womit schon die Be-
zeichnung eines Insassen als «Fahrer» oder «Fahrzeugführer» befremdlich ist – der
Mensch wird zum blossen Passagier. Selbst wenn in solchen Fahrzeugen noch eine
Eingriffsmöglichkeit bestehen bleiben würde, ist völlig unklar, wen von mehreren In-
sassen die Eingriffspflicht treffen soll: Die Person, die vorne links sitzt? Den Halter?
Den ältesten Insassen? Was ist, wenn ein Auto losgeschickt wird, um Kinder aus der
Schule abzuholen, und dann auf dem Rückweg ein Unfall passiert? Sicher ist einzig,
dass unser heutiges Konzept des sorgfaltspflichtbelasteten Fahrzeugführers dannzumal
nicht länger brauchbar sein wird.
In Bezug auf die Fahrlässigkeitshaftung spannender ist die Zeit bis zur Einführung von
vollautonomen Fahrzeugen: Wir haben gesehen, dass die Verwendung teilautonomer
Fahrsysteme bisher zu keiner Anpassung der Sorgfaltspflichten geführt hat: Der Fahr-
zeugführer muss trotz Assistenzsystemen immer noch 100 Prozent seiner Aufmerk-
samkeit dem Verkehrsgeschehen widmen. Andererseits steht aber auch fest, dass die
Aufmerksamkeitspflichten des «Fahrzeugführers» mit der Einführung vollautonomer
Fahrsysteme auf null absinken werden. Damit verbunden ist nun die – heutzutage wohl
noch etwas utopisch anmutende – Frage, ob der Sorgfaltsmassstab des Fahrzeugführers
mit zunehmender Automatisierung nicht allmählich gesenkt werden könnte:69 Wollen
wir an unserem heutigen Verständnis von Sorgfaltspflichten des Fahrzeugführers im
Strassenverkehr festhalten und dieses erst mit Tag X – dem Tag der Einführung vollau-
tonomer Fahrzeuge – als Ganzes verwerfen oder wollen wir es einer allmählichen Wei-
terentwicklung und Neuausrichtung unterziehen?
3. Die unmittelbare Zukunft: Teilautonome Fahrzeuge
Unter teilautonom verstehen wir wie oben (II.1, 3. Abschnitt) beschrieben Fahrzeuge,
deren automatisierte Technologie zwar einzelne oder sämtliche Fahraufgaben über-
nimmt, dabei die Eingriffsmöglichkeit des menschlichen Fahrers aber nicht aus-
schliesst. Der für die Fahrer solcher Autos geltende Sorgfaltsmassstab wird darüber
entscheiden, wie diese neue Technologie genutzt werden kann und ob deren potentielle
Vorteile ausgeschöpft werden können.
–––––––––––––– 69 Als diese Überlegungen im Februar 2017 bei einem Vortrag beim Zürcherischen Juristenverein
präsentiert wurden, war auch ANDREAS DONATSCH selbst anwesend und wies zu Recht auf einen
Aspekt hin, der für sich zu einem allmählichen Absinken der Sorgfaltspflichten führt: Wenn die
Hersteller gewisse Eigenschaften von autonomen Fahrzeugen zusichern, beginnt das Vertrauens-
prinzip zugunsten des Lenkers zu wirken und der Bereich, in welchem er sich mangels gegenteili-
ger Anzeichen auf das System verlassen kann, wird grösser.
MARC THOMMEN/SOPHIE MATJAZ
290
Es wurde bereits gezeigt (IV.1), dass die gegenwärtige Praxis, wonach die Automati-
sierung zu keinerlei Modifizierung des Sorgfaltsmasstabs führt, erstens nicht technolo-
giefreundlich ist, da der Fahrer eines autonomen Fahrzeugs sowohl beim Eingreifen als
auch beim Nichteingreifen potentiell sorgfaltswidrig handelt. Zweitens hängt die Haf-
tung zunehmend von dem in der Willkür der Hersteller stehenden Faktor ab, ob noch
eine Eingriffsmöglichkeit besteht oder nicht.
Ideal wäre die Schaffung eines rechtlichen Rahmens, in dem autonome Fahrzeuge so
verwendet werden können, dass sie ihren Nutzern den beabsichtigten Gewinn an Hand-
lungsfreiheit bringen und gleichzeitig eine möglichst geringe Gefahr für die Rechtsgü-
ter der anderer begründen.
3.1 Sicherheit oder Freiheit?
Will man durch autonome Fahrzeuge zu einer Erhöhung der Verkehrssicherheit beitra-
gen, scheint es zunächst einmal sinnvoll, die neuen technologischen Möglichkeiten wie
ein Sonderkönnen – also eine Erhöhung der Risikoverminderungskapazität des Einzel-
nen – zu behandeln. Dahinter steckt die Annahme, dass die automatisierte Technologie
einem voll aufmerksamen Fahrer die Möglichkeit bietet, Risiken, die er bisher nicht
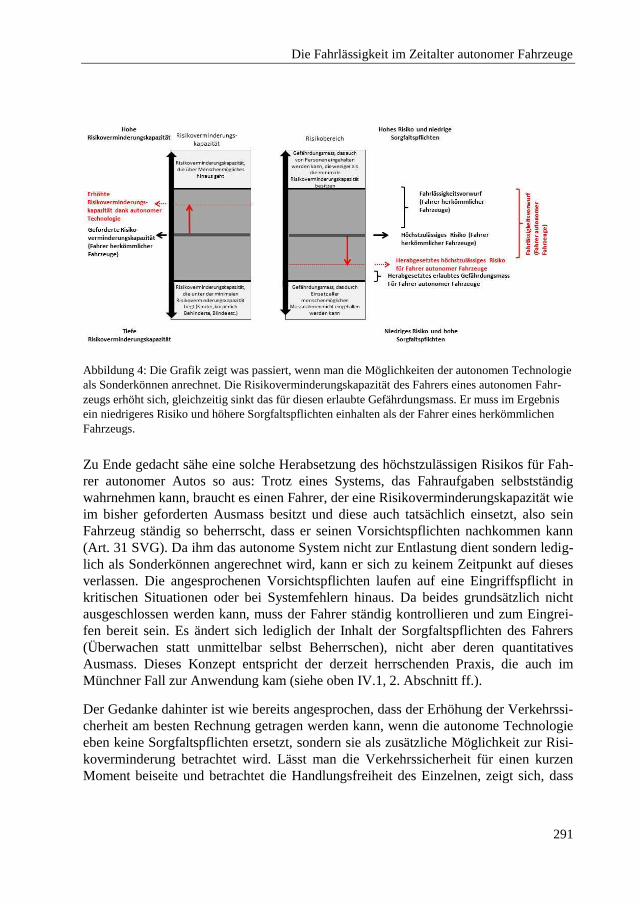
vermeiden konnte, künftig zu verhindern oder einzuschränken. Wie erläutert bedeutet
erhöhte Risikoverminderungskapazität aufgrund von Sonderkönnen, dass auch das
höchstzulässige Gefährdungsmass, das der Fahrer einzuhalten hat, herabzusetzen ist
(siehe Abbildung 4). Folglich wären das vom Fahrzeugführer einzuhaltende Risiko
geringer, damit einhergehend die ihn treffenden Sorgfaltspflichten strenger und die
Strassen vermeintlich sicherer. Es wäre sogar denkbar, nicht bloss die Risikoverminde-
rungskapazität des einzelnen Fahrers zu erhöhen, sondern die Obergrenze der generell
denkbaren Risikoverminderungskapazität anzuheben (Abbildung 5). Für die Festset-
zung der Risikoverminderungskapazität, die überhaupt erbracht werden kann, ist näm-
lich nicht auf die obere Grenze der menschlichen Leistungsfähigkeit schlechthin abzu-
stellen, sondern es sind als entscheidende Faktoren insbesondere der Stand der
Wissenschaft und Technik mitzuberücksichtigen, soweit dadurch eine relevante Be-
grenzung von Gefahren tatsächlich möglich ist.70
–––––––––––––– 70 DONATSCH (Fn. 1), 145.
Die Fahrlässigkeit im Zeitalter autonomer Fahrzeuge
291
Abbildung 4: Die Grafik zeigt was passiert, wenn man die Möglichkeiten der autonomen Technologie
als Sonderkönnen anrechnet. Die Risikoverminderungskapazität des Fahrers eines autonomen Fahr-
zeugs erhöht sich, gleichzeitig sinkt das für diesen erlaubte Gefährdungsmass. Er muss im Ergebnis
ein niedrigeres Risiko und höhere Sorgfaltspflichten einhalten als der Fahrer eines herkömmlichen
Fahrzeugs.
Zu Ende gedacht sähe eine solche Herabsetzung des höchstzulässigen Risikos für Fah-
rer autonomer Autos so aus: Trotz eines Systems, das Fahraufgaben selbstständig
wahrnehmen kann, braucht es einen Fahrer, der eine Risikoverminderungskapazität wie
im bisher geforderten Ausmass besitzt und diese auch tatsächlich einsetzt, also sein
Fahrzeug ständig so beherrscht, dass er seinen Vorsichtspflichten nachkommen kann
(Art. 31 SVG). Da ihm das autonome System nicht zur Entlastung dient sondern ledig-
lich als Sonderkönnen angerechnet wird, kann er sich zu keinem Zeitpunkt auf dieses
verlassen. Die angesprochenen Vorsichtspflichten laufen auf eine Eingriffspflicht in
kritischen Situationen oder bei Systemfehlern hinaus. Da beides grundsätzlich nicht
ausgeschlossen werden kann, muss der Fahrer ständig kontrollieren und zum Eingrei-
fen bereit sein. Es ändert sich lediglich der Inhalt der Sorgfaltspflichten des Fahrers
(Überwachen statt unmittelbar selbst Beherrschen), nicht aber deren quantitatives
Ausmass. Dieses Konzept entspricht der derzeit herrschenden Praxis, die auch im
Münchner Fall zur Anwendung kam (siehe oben IV.1, 2. Abschnitt ff.).
Der Gedanke dahinter ist wie bereits angesprochen, dass der Erhöhung der Verkehrssi-
cherheit am besten Rechnung getragen werden kann, wenn die autonome Technologie
eben keine Sorgfaltspflichten ersetzt, sondern sie als zusätzliche Möglichkeit zur Risi-
koverminderung betrachtet wird. Lässt man die Verkehrssicherheit für einen kurzen
Moment beiseite und betrachtet die Handlungsfreiheit des Einzelnen, zeigt sich, dass
MARC THOMMEN/SOPHIE MATJAZ
292
diese zugunsten eines umfassenden Rechtsgüterschutzes in dreifacher Hinsicht emp-
findlich eingeschränkt wird:
Erstens ist ein Hauptzweck autonomer Fahrzeuge, Personen, die etwa aufgrund einer
schweren Sehbehinderung oder aufgrund verminderter Reaktionsfähigkeit infolge ihres
Alters heute als nicht fahrtüchtig gelten, einen Mobilitätsgewinn zu bringen. Wird aber
trotz autonomer Technologie auf die Risikoverminderungskapazität eines gesunden
Fahrers abgestellt,71 machen sich diese Personen weiterhin der Übernahmefahrlässig-
keit strafbar, wenn sie ein autonomes Fahrzeug in Betrieb nehmen und bleiben daher de
facto von dessen Nutzung ausgeschlossen.
Zweitens bleibt es allen übrigen Nutzern vorbehalten, von der eigentlich bezweckten
Komfort- und Produktivitätssteigerung autonomer Fahrzeuge zu profitieren. Müssen
Fahrer nämlich nach wie vor die gleiche Sorgfalt erbringen, als würden sie hinter dem
Steuer eines nichtautomatisierten Fahrzeugs sitzen, werden sie weder von monotonen
Fahraufgaben entlastet, noch können sie die Zeit während der Fahrt für andere Tätig-
keiten nutzen.
Drittens wird, wenn das höchstzulässige Risiko schliesslich soweit gesenkt wird, dass
es nur noch unter Verwendung von dem neuesten Stand der Technik entsprechender
autonomer Technologie eingehalten werden kann, die Benutzung von nicht automati-
sierten Fahrzeugen per se sorgfaltswidrig, was einer faktischen Enteignung von Haltern
nicht autonomer Fahrzeuge gleichkommt.
Der Einwand, dass diese Bedenken allesamt in den Hintergrund treten, wenn die hohen
Sorgfaltsmassstäbe tatsächlich zu einer signifikanten Erhöhung der Verkehrssicherheit
führen, ist berechtigt. Dass mehr Sorgfaltspflichten auch zu mehr Sicherheit führen, ist
keineswegs zwingend. Insbesondere wegen der Gefahr fehlerhafter Übersteuerung ist
es alles andere als gewiss, dass gerade die Pflicht, sich zum jederzeitigen Eingreifen
bereit zu halten, die Verkehrssicherheit wirklich erhöht (dazu gleich IV.3.2).
Als Zwischenergebnis halten wir fest, dass die Begrenzung des höchstzulässigen Risi-
kos im Dienst einer (vermeintlichen) Erhöhung der Verkehrssicherheit teuer erkauft
wird, indem zwei Hauptzwecke autonomer Fahrzeuge (Mobilitäts- und Produktivitäts-
steigerung) torpediert und die Handlungsfreiheiten insbesondere von alten und behin-
derten Menschen empfindlich eingeschränkt werden.
–––––––––––––– 71 Siehe dazu auch STRATENWERTH (Fn. 40), § 16 N 10, 14: «Von einem Automobilisten, der aus
Altersgründen ausserstande ist, rechtzeitig zu reagieren, raschere Reaktionen zu verlangen, wäre
sinnlos; verlangt werden kann nur, dass er nicht mehr Auto fährt».
Die Fahrlässigkeit im Zeitalter autonomer Fahrzeuge
293
3.2 Sicherheit und Freiheit
Anzustreben ist – wie ANDREAS DONATSCH betont – jedem Rechtsadressaten ein mög-
lichst grosses Mass an Handlungsfreiheit einzuräumen.72 Weil die Handlungsfreiheit
des Einen jedoch die des Anderen begrenzt, muss für den Kollisionsfall eine Regel
gefunden werden, nach welcher diese Grenze zu ziehen ist.73 Da die Erhaltung der
Handlungsfreiheit des Einzelnen nicht nur in dessen Interesse, sondern auch in demje-
nigen jedes Anderen und damit der Allgemeinheit liegt, besteht ein mögliches Kriteri-
um zur Grenzziehung in der Beantwortung der Frage, ob von der Handlungsfreiheit im
konkreten Fall in gemeinschaftswidriger Weise Gebrauch gemacht worden ist. Umge-
kehrt muss davon ausgegangen werden, ein Missbrauch der Handlungsfreiheit sei aus-
zuschliessen, sofern das zu beurteilende Verhalten als im gemeinschaftlichen Sinne
liegend zu qualifizieren ist.74 Dabei ist nicht nur der konkrete Nutzen für die Gemein-
schaft, sondern auch die Tatsache, dass bestimmte Tätigkeiten im Laufe der Zeit all-
gemein üblich und aus dem heutigen Leben kaum mehr wegzudenken sind, für deren
gesellschaftliche Tolerierung ausschlaggebend.75
Es sind also das Interesse an der zweckentsprechenden Nutzung autonomer Fahrzeuge
und das Interesse am Verzicht auf eine solche Nutzung gegeneinander abzuwägen.
Dabei ist die Handlungsfreiheit unter Einbezug der Aspekte der Sozialüblichkeit bzw.
Sozialnützlichkeit zu berücksichtigen. Welche Tätigkeiten als sozialüblich erachtet
werden, hängt vom Entwicklungsstand der Gesellschaft ab, die den betreffenden Be-
wertungsmassstab hervorbringt.76 Bereits heute wird die Teilnahme am nichtautomati-
sierten Strassenverkehr als für die Gesellschaft nützlich qualifiziert.77 Die Einführung
autonomer Fahrzeuge brächte neben dem Gewinn an individueller Handlungsfreiheit
eine Reihe zusätzlicher positiver Effekte für die Gesellschaft. Zu denken ist insbeson-
dere an Unfall- und Staureduktion und die damit einhergehende Senkung von Kosten
und Reduktion von Umweltverschmutzung.78
Selbst wenn man die Sozialnützlichkeit bzw. Sozialüblichkeit autonomen Fahrens be-
jaht, bleibt zu beachten, dass je grösser die mit der antizipierten Tätigkeit verbundene
Gefahr für Rechtsgüter eingestuft wird, das höchstzulässige Risiko umso mehr herab-
gesetzt werden muss, damit das der Handlungsfreiheit beizumessende Gewicht über-
wiegt. Heute wird nicht umsonst für das Autofahren eine erhöhte Risikoverminde-
rungskapazität verlangt. Die Frage, ob die Gesellschaft bereit ist, zugunsten innovativer
–––––––––––––– 72 DONATSCH (Fn. 1), 215. 73 DONATSCH (Fn. 1), 183. 74 DONATSCH (Fn. 1), 184. 75 DONATSCH (Fn. 1), 184. 76 DONATSCH (Fn. 1), 185. 77 DONATSCH (Fn. 1), 184; REHBERG (Fn. 52), 51. 78 DEUTSCHLE (Fn. 28), 252.
MARC THOMMEN/SOPHIE MATJAZ
294
Nutzung neuer Technologien Sicherheitsrisiken in Kauf zu nehmen, ist berechtigt und
bedarf sorgfältiger Abwägung. Sie ist allerdings auch nicht neu: Auch die Regeln des
geltenden Strassenverkehrsgesetzes stellen das Resultat einer umfassenden Abwägung
dar, einerseits höchstmögliche Sicherheit im Strassenverkehr und andererseits die ma-
ximale Mobilität zu gewährleisten. Daran wird sich auch mit zunehmender Automati-
sierung nichts ändern.
Die Verminderung von Unfällen ist eines der Hauptziele autonomer Fahrzeuge. Aller-
dings muss man sich darüber im Klaren sein, dass davon ausgegangen wird, dass sich
die Verkehrssicherheit gerade durch die Ausschaltung des menschlichen Faktors er-
höht. Computer werden nicht müde, sind weder angetrunken noch bekifft, lassen sich
nicht von schreienden Kindern ablenken und geben nicht Vollgas, um ihren Freunden
etwas zu beweisen. Es wurde bereits angetönt, dass überhöhte Anforderungen an die
menschliche Sorgfalt ohnehin nur vermeintliche Sicherheit bringen. Es ist kontrapro-
duktiv, den Menschen zum ständigen Überwachen und Eingreifen zu verpflichten,
wenn die überwältigende Mehrheit an Verkehrsunfällen gerade auf menschliches Ver-
sagen zurückzuführen ist (siehe oben II.3, 3. Abschnitt). Insbesondere ist hier an Fälle
zu denken, in denen die autonome Technologie einen Unfall verhindert hätte, sie aber
durch den Menschen übersteuert wird und es so erst recht zu einem Unfall kommt. Es
ist absehbar, dass die Fahrer mit zunehmender Automatisierung mangels Übung an
Fahrfähigkeiten einbüssen werden. So ist zumindest ernsthaft in Zweifel zu ziehen,
dass es zur Verkehrssicherheit beiträgt, Menschen, die nur ‚im Notfall‘ Fahraufgaben
wahrnehmen, strafbewehrte Eingriffspflichten aufzuerlegen.
Hinzu kommt schliesslich, dass die Bedeutung der Mobilität im heutigen Sinne mit
zunehmender Fahrzeugautomatisierung eher abnehmen wird. Weil das Fahren heute
eine monotone und aufmerksamkeitsintensive Tätigkeit darstellt, ist es wichtig, mög-
lichst rasch von A nach B zu kommen. Stau ist auch wirtschaftlich ineffizient. Sobald
sich Fahrzeuginsassen jedoch legal anderen Tätigkeiten (Abrufen von Mails, Schlafen,
Essen, Spielen mit den Kindern etc.) widmen können, wird die Dauer der Fahrt zweit-
rangig.
Im Ergebnis spricht unseres Erachtens vieles für die Reduktion der von Fahrern auto-
nomer Fahrzeuge geforderten Risikoverminderungskapazität. Einerseits führt dieser
Weg zu einem enormen Gewinn an Handlungsfreiheit: Insofern sich der Fahrer auf die
autonome Technologie verlassen darf und nicht zur ständigen Überwachung angehalten
ist, kann er sich anderen Tätigkeiten widmen und ist von der Ausübung monotoner
Fahraufgaben befreit, was ihm ein Mehr an Komfort und Produktivität bringt. Unter
derzeitigen Umständen nicht fahrtüchtige Personen dürfen autonome Fahrzeuge in
Betrieb nehmen, wenn und soweit sie durch den Einsatz der Technologie in der Lage
sind, die erforderliche Risikoverminderungskapazität aufzubringen. Das ist übrigens
keineswegs neu: Dass Personen, deren Risikoverminderungskapazität geringer als zur
Einhaltung des höchstzulässigen Risikos notwendig ist, diese durch Hilfsmittel bis zum
Die Fahrlässigkeit im Zeitalter autonomer Fahrzeuge
295
geforderten Ausmass erhöhen können, hat ANDREAS DONATSCH zu Recht bereits vor
dreissig Jahren gefordert.79 Als Hilfsmittel in diesem Sinn gilt sodann die autonome
Technologie, wenn der Normadressat durch ihre Nutzung zur Einhaltung der erforder-
lichen Risikoverminderungskapazität in der Lage ist.
Die positiven Auswirkungen auf die individuelle Handlungsfreiheit gehen einher mit
Vorteilen, die der Gesellschaft als Ganzes nutzen und müssen darüber hinaus voraus-
sichtlich nicht mit Abstrichen bei der Verkehrssicherheit erkauft werden. Kommt es in
der Folge häufiger zu Unfällen, bei denen dem Fahrer mangels Sorgfaltsverstoss kein
Fahrlässigkeitsvorwurf gemacht werden kann, wird man verstärkt die Diskussion über
andere Haftungssubjekte führen müssen (siehe oben I). Insbesondere ist in diesen Fäl-
len an die sogenannte strafrechtliche Produktverantwortlichkeit des Herstellers zu den-
ken.80 Eine solche Haftung des Produzenten schafft den Anreiz für diesen, die Fahr-
zeuge schnell sicherer zu machen – wobei er die Entwicklungskosten über den
Verkaufspreis weitergeben kann – was auch langfristig zur Erhöhung der Verkehrssi-
cherheit beiträgt.
V. Fazit
Zusammenfassend haben wir gesehen, dass nach heutigem Stand auch mit zunehmen-
der Fahrzeugautomatisierung an den bestehenden Sorgfaltsmassstäben festgehalten
wird. Auf den ersten Blick wird damit die Verkehrssicherheit (noch) weiter erhöht. Es
steht jedoch nicht zweifelsfrei fest, dass die Pflicht, auch bei autonomen Fahrzeugen
einzugreifen, die Strassen tatsächlich sicherer macht, zumal die Gefahr steigt, dass
zunehmend ungeübte Fahrer mit fehlerhaften Übersteuerungsmanövern Unfälle ver-
ursachen. Hinzu kommt, dass die (vermeintliche) Erhöhung der Sicherheit auf Kosten
einer Einbusse an Mobilität benachteiligter Personen und allgemeiner Produktivität
teuer erkauft werden muss. Mit anderen Worten hat das jetzige Regime einen hohen
Preis: Eine vermeintliche Erhöhung von Sicherheit bekommt man nur für eine tatsäch-
liche Einschränkung von Freiheit. Wir hoffen indes gezeigt zu haben, dass sich Sicher-
heit und Freiheit im Kontext autonomer Fahrzeuge keineswegs ausschliessen müssen:
So besteht ja gerade das Hauptziel der Entwickler autonomer Fahrzeuge darin, die
Verkehrssicherheit zu erhöhen und zugleich die Mobilität und Produktivität zu steigern.
Dies ist sicherlich auch im Sinne unseres Jubilars, der sowohl (Verkehrs-)Sicherheit als
auch den Eigenwert von Freiheit stets hochgehalten hat.
–––––––––––––– 79 DONATSCH (Fn. 1), 154. 80 Siehe dazu S. GLESS, Strafrechtliche Produkthaftung, recht 2013, 54 ff.