Embed Size (px)
Citation preview

Antennes actives
Dimensionnement
par François GAUTIERIngénieur de l’institut polytechnique de GrenobleLicencié ès sciences physiquesAncien directeur technique adjoint de Thales Airborne Systems
1. Surface. Diagramme. Gain..................................................................... E 3 295 - 2
2. PIRE .............................................................................................................. — 3
3. Maille ........................................................................................................... — 3
4. Nombre optimum de modules .............................................................. — 5
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Électronique E 3 295 − 1
près avoir présenté le schéma synoptique d’une antenne active et avoirexposé l’intérêt de ce type d’antenne, les avantages qu’il procure à un sys-
tème, ainsi qu’une description détaillée de la constitution, des fonctions et desmodes de réalisation des sous-ensembles dans l’article consacré aux principesde conception [E 3 294], nous exposons ici les méthodes de calcul de base per-mettant, d’une part, de spécifier un certain nombre de sous-ensembles clés et,d’autre part, de prédire et de caractériser les performances d’une antenne active.
5. Choix du nombre de bits ........................................................................ — 55.1 Plage de variation ........................................................................................ — 55.2 Plus petit pas ................................................................................................ — 5
5.2.1 Cas d’une loi linéaire .......................................................................... — 55.2.2 Cas des lois non linéaires................................................................... — 6
6. Effet des pannes ....................................................................................... — 66.1 Pannes d’amplitude faible........................................................................... — 76.2 Pannes de forte amplitude .......................................................................... — 7
7. Globalisation des effets des erreurs ................................................... — 7
8. Écartométrie .............................................................................................. — 8
9. Granularité ................................................................................................. — 9
10. Température équivalente de bruit ....................................................... — 10
11. Bande passante en fréquence ............................................................... — 1111.1 Limitation générale ...................................................................................... — 1111.2 Limitations dues aux déphaseurs............................................................... — 1111.3 Cas des commandes par retards ................................................................ — 11
12. Formation de faisceaux .......................................................................... — 12
13. Linéarité ...................................................................................................... — 13
14. Bruit de phase et d’amplitude .............................................................. — 13
15. Conclusion.................................................................................................. — 13
Références bibliographiques.......................................................................... — 14
Pour en savoir plus ........................................................................................... Doc. E 3 296
A

ANTENNES ACTIVES ____________________________________________________________________________________________________________________
Cet article constitue le second volet d’une série consacrée aux antennes actives :— E 3 294 - Antennes actives - Principes de conception ;— E 3 295 - Antennes actives - Dimensionnement ;— Doc E 3 296 - Antennes actives - Pour en savoir plus.Le lecteur pourra également consulter les articles suivants, du traité Électronique, pour plus
de détails sur la théorie des antennes et celle des antennes-réseaux en particulier :— E 3 280 - Antennes - Bases et principes ;— E 3 282 - Antennes - Différents types ;— E 3 284 - Antennes - Techniques ;— E 3 288 - Antennes - Éléments connexes ;
ainsi que les références [1] [2] [3] [4] [5] et [6].
1. Surface. Diagramme. Gain
■ Dans une antenne active, la surface est à déterminer en fonction :— du diagramme de rayonnement, à l’émission et à la réception ;
D’une façon plus précise, le gain est :
(1)G� an
n∑ gn �
2
an2∑
------------------------------------=
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.E 3 295 − 2 © Techniques de l’Ingénieur, traité Électronique
— du gain en réception.
Le gain à l’émission n’est pas à lui seul déterminant dans le calculde la surface, car dans tous les Systèmes, c’est le produit (Gain àl’émission × Puissance émise qui caractérise le mieux la fonctionémission ; c’est ce qu’on appelle la PIRE (ou puissance isotroperayonnée équivalente) (cf. § 2).
Le diagramme de rayonnement (largeur à 3 dB, décroissance deslobes secondaires) ainsi que le gain en réception dépendent parcontre très directement de la surface d’antenne.
■ Des formules approchées sont utiles comme point de départ ducalcul des caractéristiques de l’antenne.
● Largeur à 3 dB du faisceau
θ3dB ≈ (51 + A) λ /L dans le cas d’un réseau linéaire
ou θ3dB = (57 + A) λ /φ si le réseau a un contour circulaire
avec θ3dB largeur du faisceau en degrés, L dimension du réseau, s’il est linéaire, ou dimension
suivant laquelle est calculée θ3dB s’il a un contour rec-tangulaire,
φ diamètre du réseau s’il a un contour circulaire, λ longueur d’onde, A pondération sur les bords de l’antenne lorsque les
signaux des modules actifs sont sommés avec despoids décroissants du centre vers les bords del’antenne. Cette pondération fait baisser le niveau deslobes secondaires. Dans la formule, A est la valeurabsolue en dB de la pondération.
● Gain de l’antenne
Le gain de l’antenne réseau (G) se calcule classiquement par :
avec S surface du réseau, η rendement de l’antenne.
Cette formule est vraie pour un réseau plein.
avec an amplitude du signal reçu ou rayonné par l’élément rayon-nant n,
gn gain de l’élément n.
Cette formule (1) s’applique, au premier ordre, aux réseaux pleinsou lacunaires, composés d’éléments identiques ou non.
Dans le cas où tous les éléments sont identiques, le gains’exprime par :
G (θ, ϕ) = η N g (θ, ϕ) (2)
avec N nombre total d’éléments rayonnants, η rendement de l’antenne, g (θ, ϕ) gain de l’élément rayonnant (figure 1).
Il est donc recommandé de définir le gain de l’élément g (θ, ϕ) etle rendement de la façon suivante :
• g (θ, ϕ) est le gain de l’élément rayonnant tel que l’on peut lecalculer ou le mesurer lorsque l’élément rayonnant est inséré dansle réseau, tous les autres éléments rayonnants étant chargés parleur impédance d’adaptation. Ce gain est défini au point deconnexion entre l’élément rayonnant et le module actif et il prenden compte toutes les pertes entre ce point de connexion et l’élémentrayonnant ainsi que les pertes propres de l’élément rayonnant ;
• η est le rendement dit rendement de rayonnement ou d’illumi-nation défini par :
Il vaut 1 pour une répartition uniforme des amplitudes an(à l’émission par exemple) et de 0,8 à 0,7 (soit –1 à –1,5 dB) pourles sommations les plus couramment utilisées en réception.
Comme on le verra dans les paragraphes suivants, le gain peutaussi être réduit par d’autres causes.
Le gain de l’antenne ainsi défini est maximum dans la direction(θ0 , ϕ0) du lobe principal.
Exemple : une pondération de 10 dB indique que les signaux desmodules du bord de l’antenne sont sommés par le distributeur/somma-teur avec une contribution égale à 10 % de leur puissance, et que leniveau des lobes secondaires est réduit d’environ 10 dB.
�3dB
G 4π Sλ2--------η=
Rappelons que, pour être cohérent, le gain d’antenne doit êtredéfini au point d’entrée de la chaîne de réception, là où estdéfinie la température équivalente de bruit du récepteur(point M de la figure 5).
n
ηill
� ann∑ �
2
N an2
n∑
-----------------------=
___________________________________________________________________________________________________________________ ANTENNES ACTIVES
À la différence d’une antenne mécanique où le faisceau est indé-formable, le gain d’une antenne à balayage électronique varie avecl’angle de pointage (θ0 , ϕ0). C’est ce qu’exprime la formule (2).
2. PIRE
La PIRE (puissance isotrope rayonnée équivalente) d’une antenneréseau s’exprime par :
PIRE = G × P
avec G gain du réseau, P puissance totale émise.
Puisque
où pn est la puissance générée par un module n :
(3)
On voit ainsi que, du point de vue de la PIRE, un arbitrage entrele nombre N de modules et la puissance par module p est possible.
G ηill N g= et P pnn∑=
PIRE ηillNg pnn∑=
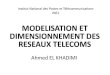
Figure 1 – Coordonnées et positions des éléments rayonnants
z
y
x
M θ
ϕ
r0
d2d1
w
u
v O
Composantes du vecteur direction r0 : u = sin θ · cos ϕv = sin θ · cos ϕw = cos θ
Positions des éléments rayonnants : ρmn = m · d1 � n · d2
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Électronique E 3 295 − 3
Pour obtenir la PIRE maximale, on a intérêt à choisir une ampli-fication uniforme dans tous les modules actifs, auquel cas, ηill = 1
et ; alors :
Nota : si l’on veut réduire le nombre N d’éléments, la puissance unitaire croît comme et réciproquement.
3. Maille
■ La maille du réseau d’éléments rayonnants est soumise à deuxcontraintes :
— elle doit être, a priori, la plus grande possible pour minimiserle nombre N d’éléments ;
— elle doit être telle que l’effet de périodicité n’entraîne pasl’apparition de lobes de réseau.
En effet, tout réseau périodique a un facteur de réseau (cf. § 3.3de l’article [E 3 294]) périodique, provoquant, si l’on n’y prendgarde, l’apparition de lobes indésirables, appelés lobes de réseau.
Pour une maille régulière définie par les vecteurs et (figure 1), le facteur de réseau a une périodicité définie par les
vecteurs et . Pour les deux types de maille régulière utilisés,rectangulaire et triangulaire, on a les relations définies dans letableau 1.
Le réseau linéaire est un cas particulier du réseau rectangulaire,
défini seulement par .
● Pour choisir la maille, il faut considérer :— le domaine angulaire dans lequel le faisceau principal sera
dépointé ;— le domaine angulaire dans lequel on ne veut pas voir appa-
raître de lobes de réseaux.
Pour un certain nombre de cas canoniques, la détermination estaisée (figure 2). Les valeurs définissant la maille sont rassembléesdans le tableau 2.
La maille triangulaire est la plus favorable lorsque le domaine depointage et le domaine sans lobe de réseau sont tous les deuxconiques. (0)
pnn∑ Np=
PIREmax N 2 g p=
1N2-------
dans le réseau
d1 d 2
r1 r2
d1
Tableau 1 – Relations entre maille et lobes de réseau
Maille Composantes de d1 et d2 Surface de la maille Composantes de et
Rectangulaire a · b
Triangulaire a · b
r1 r2
d1
a
0
d2
0
b
r1
λ a⁄
0r2
0
λ b⁄
d1
a
0
d2
a 2⁄
br1
λ a⁄
λ 2b⁄r2
0
λ b⁄
ANTENNES ACTIVES ____________________________________________________________________________________________________________________
(0)
Tableau 2 – Valeurs définissant la maille pour les cas canoniques de la figure 2
Réseau Domaine de pointage Domaine sans lobe de réseau Dimensions de la maille
Linéaire ± θ max
+ θ1
Rectangulaire± u max
± v max
± u 1± v 1
u 2 + v 2 < 1 (tout l’espace visible)
a λθ1sin θmaxsin+
------------------------------------------------�
±π2----- a λ
1 θmaxsin+----------------------------------�
a λu1 umax+---------------------------<
b λu1 vmax+---------------------------<
a λ1 umax+------------------------<
b λ1 vmax+------------------------<
2 2 2 a 2b 3=
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.E 3 295 − 4 © Techniques de l’Ingénieur, traité Électronique
En effet, pour un domaine d’ouverture 2θmax :— la maille rectangulaire, qui devient alors carrée, a une surface
S de :
— la maille triangulaire, qui devient équilatérale, a une surfaceS de :
La surface de la maille triangulaire représente donc , soit
environ 1,15, fois celle de la maille rectangulaire et le nombre demodules est réduit de 13 %.
■ Remarques
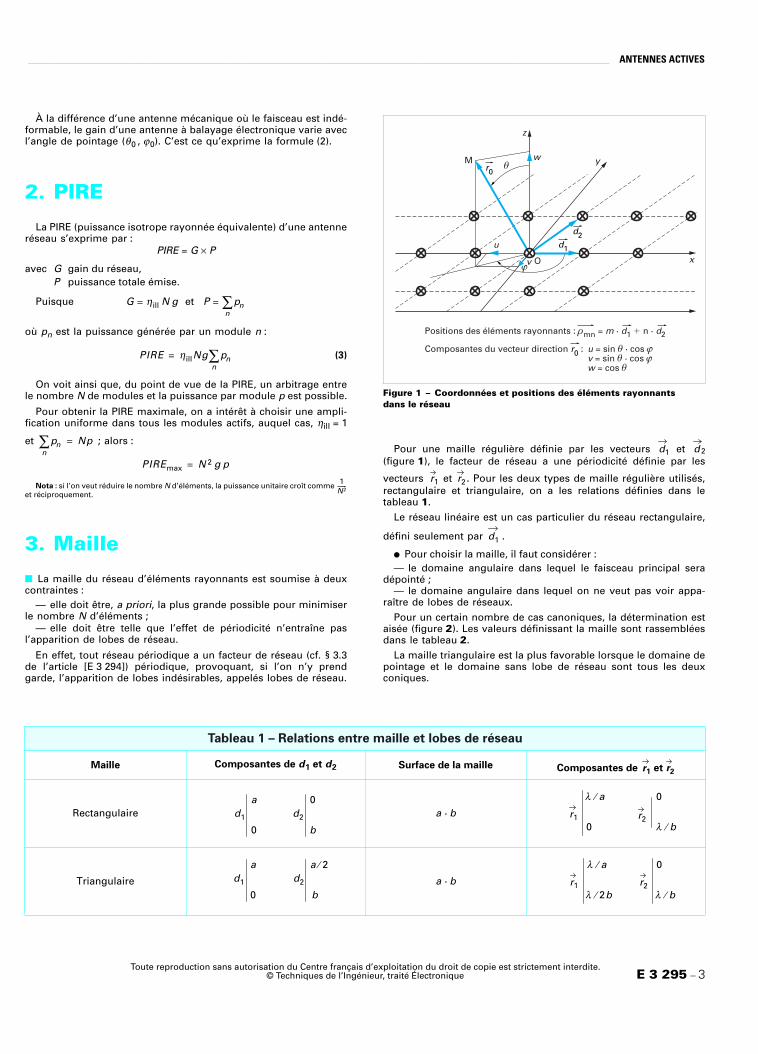
● Le gain des lobes de réseau subit lui aussi la loi du gain del’élément rayonnant (2). Idéalement celui-ci doit être le plus grand etle plus constant possible dans le domaine de pointage et le plusfaible possible en dehors de ce domaine. Il contribue ainsinotablement à l’affaiblissement des lobes de réseaux.
● La limite à choisir pour θ1 doit tenir compte de la largeur dulobe de réseau. Pour éliminer entièrement les lobes de réseau dansun cône d’ouverture 2θ1 , il faut choisir, au lieu de θ1 , une valeur telle que :
où ∆umax est la demi-largeur à – x dB, calculée en , du lobeprincipal c’est-à-dire que c’est le pied (à – x dB) du lobe de réseauqui s’approche de la limite θ1 (figure 2).
Triangulairecône d’ouverture 2θ max
cône d’ouverture 2θ 1
u 2 + v 2 < 1 (tout l’espace visible)
u 2 v 2+ θ2maxsin<
u v+ θ1sin<b λ
θ1sin θmaxsin+-----------------------------------------------<
a 2b3
---------=
b λ1 θmaxsin+----------------------------------<
Figure 2 – Domaine de pointage et de non-apparitiondes lobes de réseau (cas linéaire)
0 +umax–umax–u1–u'
– 1 +u1 +1 sin θ
Lobe de réseau Lobe principal
Domaine depointage
Domaine de non-apparitionde lobes de réseau
Diagramme del'élément rayonnant
u01
S λ2
θ1sin θmaxsin+( )2-----------------------------------------------------=
S 2λ2
3 θ1sin θmaxsin+( )2--------------------------------------------------------------=
Exemple : pour une antenne de satellite dont le faisceau balaye lasurface de la terre, soit un domaine de balayage conique d’ouverture17o pour un satellite géostationnaire, on se soucie peu des lobes deréseau dirigés vers le reste de l’espace. Dans ce cas, θ1 = θmax = 8,5o.
On s’efforcera de définir les éléments rayonnants ayant le maximumde gain dans le cône de 17o, les lobes de réseau au-delà de ± 8,5o étantalors en fait atténués par la chute du gain de l’élément rayonnant endehors de ce cône.
Exemple : la valeur approchée de ∆u– 20dB est 1,5 λ /φ pour uneantenne de diamètre φ.
23
----------
θ ′1
θ ′1sin θ1sin ∆umax+�
(soit u ′1 b u1 ∆umax)+
u 2 v 2+
___________________________________________________________________________________________________________________ ANTENNES ACTIVES
● On peut essayer d’échapper à la contrainte de dimension de lamaille, liée à la périodicité, en choisissant une maille irrégulière,voire aléatoire. Dans ce type de réseau, la surface effective del’élément rayonnant, celle qui définit son gain, reste celle quiconduit à un gain g (θ, ϕ ) maximum dans tout le domaine de poin-tage désiré. Elle est donc, a priori, la même pour tous les élémentsrayonnants et égale à la plus petite des mailles.
Ceci conduit à un réseau lacunaire. Cette solution a quelquesattraits :
— une surface S donnée peut être remplie avec un nombre bienplus faible d’éléments qu’avec une maille régulière. Récipro-quement, on peut répartir un nombre d’éléments donné sur unesurface bien plus grande ;
— on casse le lien rigide existant entre nombre d’éléments etlargeur du faisceau ;
— au premier ordre, le gain reste bien :
G (θ, ϕ ) = η N g (θ, ϕ )
où N est le nombre réel d’éléments (modules) utilisés, supposésidentiques.
Mais dans cette solution, il faut savoir accepter la dilution d’unepartie de l’énergie dans une répartition aléatoire de lobes secon-daires. En effet, l’antenne a bien le gain de N éléments rayonnants
la plus grande valeur atteinte étant ∆ :
Nota : pour la loi d’amplitude ∆ et p sont généralement définis en dB.
5.1 Plage de variation
■ Pour la phase, toujours définie à 2π près, la plage de variation estde 0 à 2π – p.
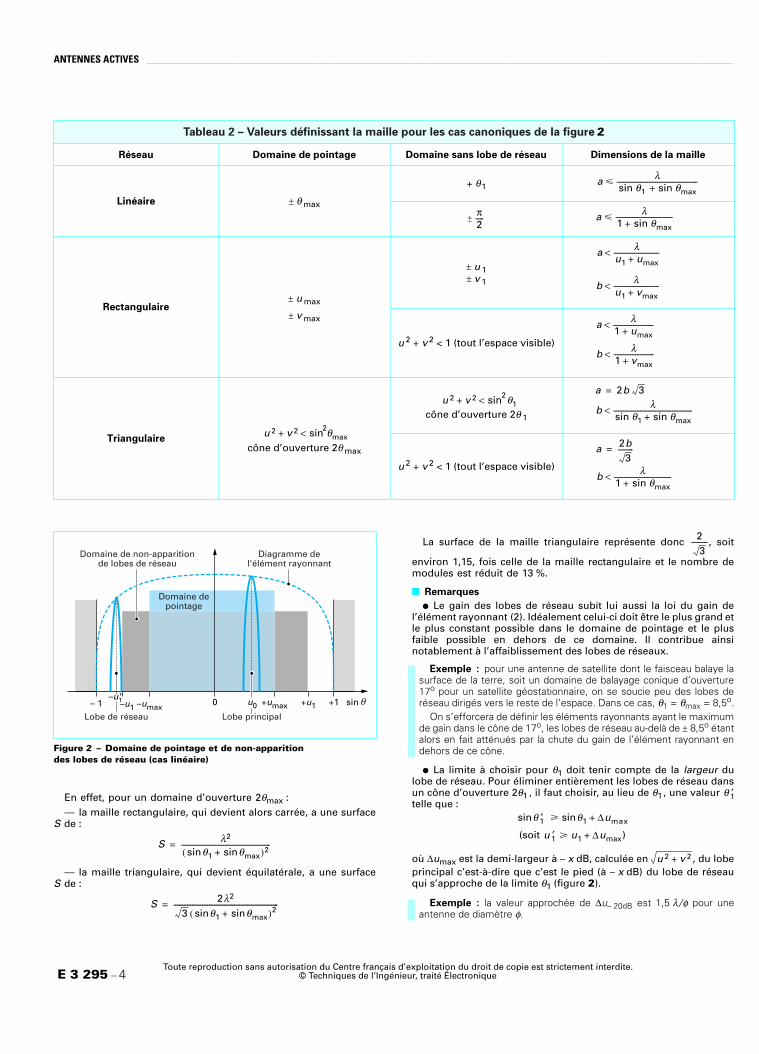
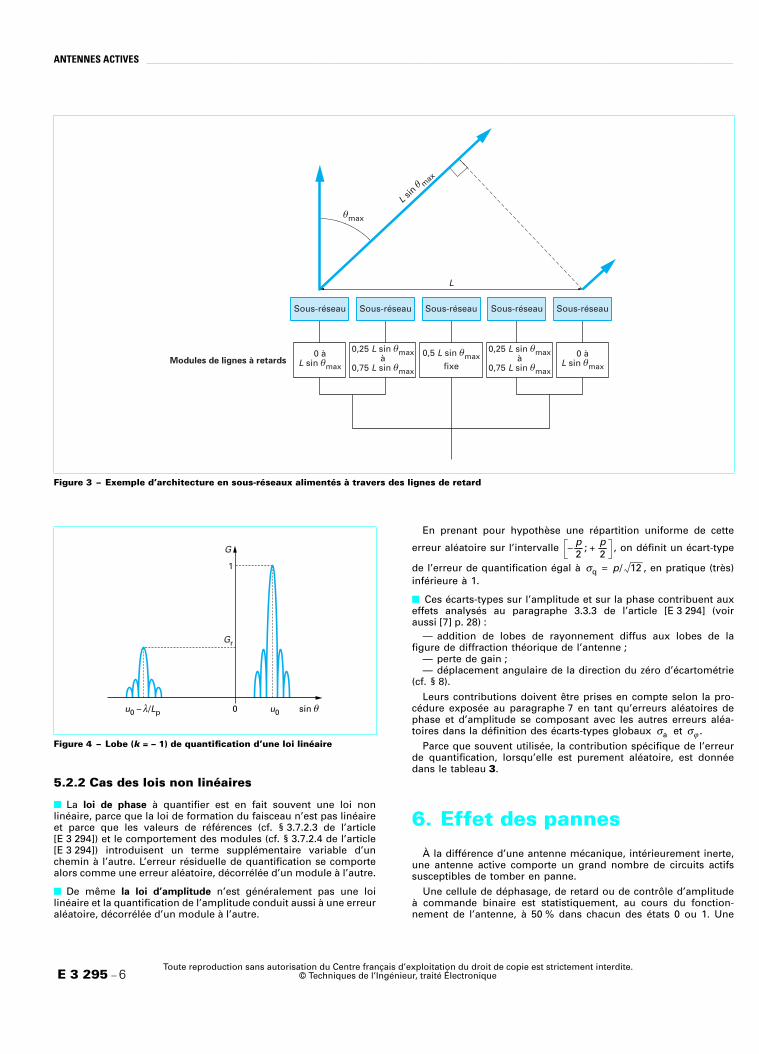
■ Pour des retards vrais, la plage de variation est définie par la plusgrande distance Lmax entre modules, ou entre sous-réseaux s’ils’agit de commandes appliquées aux sous-réseaux, et l’anglemaximum de pointage θmax dans le plan concernant cette distance.Le retard maximum à compenser correspond à la différence dechemin à parcourir entre les éléments extrêmes du réseau pour unrayonnement dans la direction définie par θmax (figure 3). Expriméen longueur, ce retard vaut :
∆L = Lmax sin θmax
■ Pour définir la plage de variation de l’amplitude, il faut prendreen compte :
∆ p 2i 1–
i 1=
b
∑ p 2b 1–( )= =
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Électronique E 3 295 − 5
mais une largeur du faisceau plus faible, correspondant à lasurface S bien plus grande que la surface occupée par ces N élé-ments.
En première approximation, le niveau statistique moyen de lobessecondaires est g (θ, ϕ ) soit (η N ) fois plus faible que le gainmaximum (seulement).
4. Nombre optimumde modules
Le nombre de modules peut découler directement du choix de lasurface d’antenne, du domaine de pointage du faisceau et dudomaine de non-apparition de lobes de réseau.
Le choix de la maille ainsi que le contrôle du gain g (θ, ϕ ) del’élément rayonnant pour favoriser le gain du lobe principal audétriment du gain de lobes de réseau permettent, dans certains cas,de gagner quelques dizaines de pour cent sur le nombre demodules.
Pour une antenne fonctionnant seulement en émission, on a aussià considérer l’obtention de la PIRE recherchée, au moindre coût etavec le minimum de consommation d’énergie. Avec le modèle deconsommation utilisée au paragraphe 3.8 de l’article [E 3 294] et unmodèle de coût établi de façon analogue, on peut aussi rechercherune optimisation (minimisation en général) du nombre de modulesactifs.
5. Choix du nombre de bits
Le contrôle de phase et d’amplitude s’opère généralement aumoyen de cellules à commandes binaires. Pour chaque commande,le nombre b de bits est défini par la plage de variation totale ∆ etle plus petit pas p :
— la dispersion des réponses des modules et du distributeur,dont la va leur maximum est fourn ie par les modè lescomportementaux (cf. § 3.2.2 de l’article [E 3 294]) ;
— l’amplitude des lois de pondération qui seront appliquées surle réseau.
On obtient ainsi fréquemment une valeur de plage de variationd’amplitude entre 20 et 30 dB.
5.2 Plus petit pas
Le plus petit pas p définit une erreur résiduelle de la commande,appelée communément erreur de quantification.
5.2.1 Cas d’une loi linéaire
Lorsque l’on quantifie une loi linéaire, ce qui peut être le cas pourla loi de phase ou de retard, l’erreur de quantification a un caractèrepseudo-périodique sur le réseau et il en résulte des lobes secon-daires, dits lobes de quantification, assez élevés et bien marqués.
La période Lp de l’erreur dépend de la pente de la loi linéaire àquantifier, donc du pointage du faisceau. L’amplitude de l’erreurreste par contre toujours celle d’une loi linéaire entre – p /2 et + p /2.
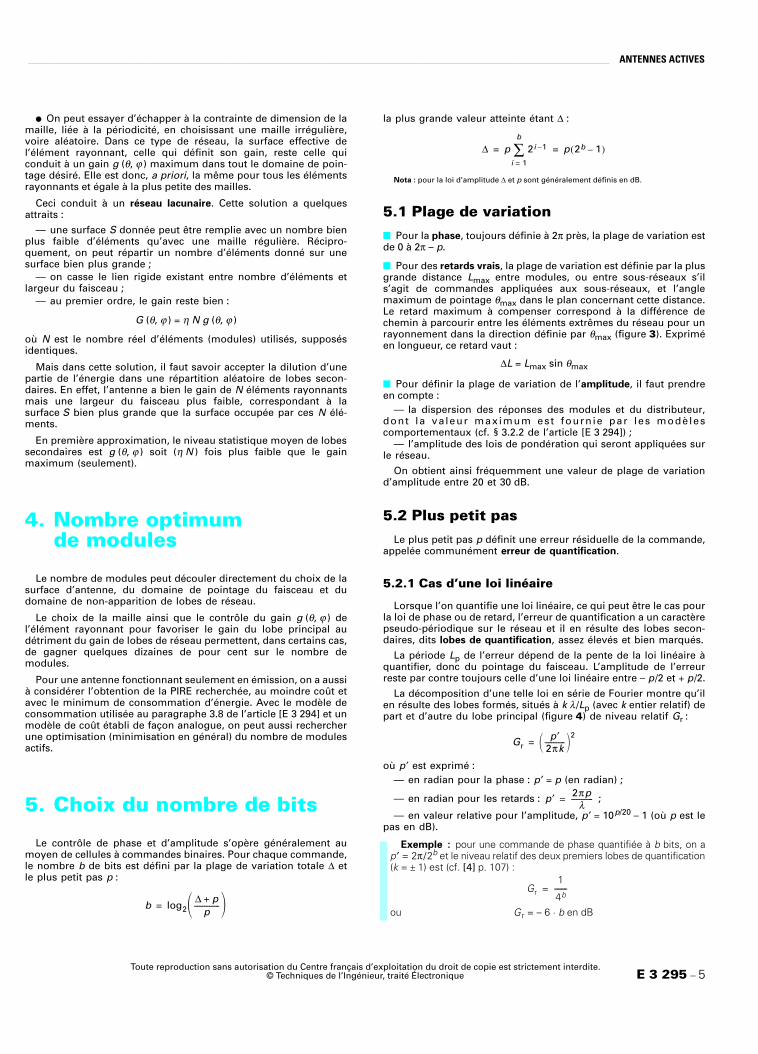
La décomposition d’une telle loi en série de Fourier montre qu’ilen résulte des lobes formés, situés à k λ /Lp (avec k entier relatif) depart et d’autre du lobe principal (figure 4) de niveau relatif Gr :
où p ′ est exprimé :— en radian pour la phase : p ′ = p (en radian) ;
— en radian pour les retards : ;
— en valeur relative pour l’amplitude, p ′ = 10p/20 – 1 (où p est lepas en dB).
b log2� ∆ p+p
---------------�=
Exemple : pour une commande de phase quantifiée à b bits, on ap ′ = 2π /2b et le niveau relatif des deux premiers lobes de quantification(k = ± 1) est (cf. [4] p. 107) :
ou G r = – 6 · b en dB
Gr � p ′2πk------------�2
=
p ′ 2πpλ
-------------=
Gr
1
4b---------=
ANTENNES ACTIVES ____________________________________________________________________________________________________________________
L
θmax
L sin
θ max
Sous-réseau Sous-réseau Sous-réseau Sous-réseau Sous-réseau
0 àL sin θmax
0 àL sin θmax
0,25 L sin θmaxà
0,75 L sin θmax
0,25 L sin θmaxà
0,75 L sin θmax
0,5 L sin θmaxfixe
Modules de lignes à retards
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.E 3 295 − 6 © Techniques de l’Ingénieur, traité Électronique
5.2.2 Cas des lois non linéaires
■ La loi de phase à quantifier est en fait souvent une loi nonlinéaire, parce que la loi de formation du faisceau n’est pas linéaireet parce que les valeurs de références (cf. § 3.7.2.3 de l’article[E 3 294]) et le comportement des modules (cf. § 3.7.2.4 de l’article[E 3 294]) introduisent un terme supplémentaire variable d’unchemin à l’autre. L’erreur résiduelle de quantification se comportealors comme une erreur aléatoire, décorrélée d’un module à l’autre.
■ De même la loi d’amplitude n’est généralement pas une loilinéaire et la quantification de l’amplitude conduit aussi à une erreuraléatoire, décorrélée d’un module à l’autre.
En prenant pour hypothèse une répartition uniforme de cette
erreur aléatoire sur l’intervalle , on définit un écart-type
de l’erreur de quantification égal à , en pratique (très)inférieure à 1.
■ Ces écarts-types sur l’amplitude et sur la phase contribuent auxeffets analysés au paragraphe 3.3.3 de l’article [E 3 294] (voiraussi [7] p. 28) :
— addition de lobes de rayonnement diffus aux lobes de lafigure de diffraction théorique de l’antenne ;
— perte de gain ;— déplacement angulaire de la direction du zéro d’écartométrie
(cf. § 8).
Leurs contributions doivent être prises en compte selon la pro-cédure exposée au paragraphe 7 en tant qu’erreurs aléatoires dephase et d’amplitude se composant avec les autres erreurs aléa-toires dans la définition des écarts-types globaux et .
Parce que souvent utilisée, la contribution spécifique de l’erreurde quantification, lorsqu’elle est purement aléatoire, est donnéedans le tableau 3.
6. Effet des pannesÀ la différence d’une antenne mécanique, intérieurement inerte,
une antenne active comporte un grand nombre de circuits actifssusceptibles de tomber en panne.
Une cellule de déphasage, de retard ou de contrôle d’amplitudeà commande binaire est statistiquement, au cours du fonction-nement de l’antenne, à 50 % dans chacun des états 0 ou 1. Une
Figure 3 – Exemple d’architecture en sous-réseaux alimentés à travers des lignes de retard
Figure 4 – Lobe (k = – 1) de quantification d’une loi linéaire
0 sin θu0 – λ/Lp u0
1
Gr
G – p2----- ; + p
2-----
σq p/ 12=
σa σϕ

___________________________________________________________________________________________________________________ ANTENNES ACTIVES
panne sur une telle cellule conduisant à la permanence d’un état 0ou 1 quelle que soit la commande peut donc être décrite commeune erreur nulle pour 50 % des valeurs à obtenir et une erreur égaleà la valeur pe du pas en panne pour les autres 50 % des valeurs.
Une panne complète sur une chaîne d’amplification peut êtredécrite comme une erreur sur an égale à – an .
6.1 Pannes d’amplitude faible
En première approximation, les pannes d’amplitude faible, cor-respondant à pe faible ( ou erreur d’amplitude faibledevant 1) pourront être décrites par un écart-type d’erreur :
avec pn valeurs des cellules en panne, N nombre total de modules.
Les formules du tableau 3 s’appliquent.
d’où la valeur relative moyenne des lobes secondaires :
■ De même pour une panne totale de module où l’erreur est – an :
et
La PIRE devient alors :
pe << 2π
σe1N------
pn∑2
--------------=
Grp1
M p2
θ,ϕ( )
� an∑ �2---------------------------
2τp1
ηillN--------------= =
ηp2
� anN∑ an
Np 2
∑– �2
N a n2
N Np 2–∑
-----------------------------------------------=
ηp2ηill �1 τp2�–=
Grp2
τp2
ηillN--------------=
ηill N Np2–( )2gp PIREinitiale 1 τp–( )2× PIREinitiale 1 2τp2
–( )≈=
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Électronique E 3 295 − 7
6.2 Pannes de forte amplitude
Pour les pannes de forte amplitude, il faut distinguer les pannessur les cellules de déphasage ou de retard et les pannes d’amplitudeseule.
■ Par exemple, la panne d’une cellule de valeur est décrite par :— erreur nulle dans 50 % des cas ;— erreur égale à – 2an dans les autres 50 %.
Le rendement d’illumination correspondant est :
où la somme porte sur les seuls modules en panne ; d’oùstatistiquement :
où est le taux de modules en panne : .
Le niveau des lobes secondaires correspondant se déduit ducalcul du facteur de réseau des seuls modules en panne, l’erreurétant nulle dans 50 % des cas et égale à – 2an dans les autres cas.D’où :
où ψn est le terme de phase et le vecteur
position du module en panne.
En valeur quadratique moyenne sur toutes les directions, les
positions des modules en panne étant distribuées aléatoirement :
7. Globalisation des effets des erreurs
Tout au long des descriptions du paragraphe 3 de l’article[E 3 294], on a mis en évidence d’autres causes d’erreur que la quan-tification et les pannes qui viennent d’être caractérisées. Ce sonttoutes les autres valeurs résiduelles d’écart entre les valeursfournies par les modèles et les valeurs réelles produites par lescircuits.
Sans prétendre clore la recherche d’erreurs, on mentionnera aumoins une cause d’erreur supplémentaire : celle due au couplageexterne entre éléments rayonnants. Dans la mesure où le moduleserait toujours (quelle que soit la fréquence en particulier) adaptéà l’élément rayonnant et dans la mesure où le comportement dumodule serait insensible à l’énergie couplée entre éléments rayon-nants, il n’y aurait pas de cause d’erreur supplémentaire. Oncomprend bien qu’il s’agit là d’un comportement idéal : en pratique,une partie de l’énergie couplée est réfléchie et re-rayonnée ; par deseffets de « load-pull », l’amplificateur d’émission est sensible àl’énergie couplée qui se présente comme un coefficient deréflexion ; le facteur de bruit en réception est lui aussi sensible àl’adaptation du module à l’élément rayonnant. On minimisera et onrendra peut être négligeables ces phénomènes au moyen d’unebonne adaptation du module à l’élément rayonnant ainsi que parl’isolation des amplificateurs d’émission et de réception vis-à-vis del’élément rayonnant.
Ayant procédé à l’inventaire exhaustif des erreurs intervenantentre valeur théorique idéale et valeur réelle obtenue de l’amplitudecomplexe an , on pourra globaliser les erreurs de la façon suivante :
— calcul d’un écart-type d’erreur global équivalent de toutes leserreurs de phase identifiées au paragraphe 3 de l’article [E 3 294],calculé en référence à la relation (12) de l’article [E 3 294] :
et
�
ηp 1
� anN∑ 1
2----- 2an
Np1
∑– �2
N an2
n∑
--------------------------------------------------------=
Np1
ηp 1ηill 1 τp 1
–( )2 ηill 1 2τp 1–( )≈=
τp 1τp1
Np1/N=
Mp θ,ϕ( ) 12----- 2an ejψn
Np1
∑=
2 πλ
--------- �k ρn⋅ ϕn�+ ρn
ρn
M p2
θ,ϕ( ) 12----- 4an
2
Np1
∑ 2τp1an
2
Np1
∑= =
σ ϕ2 σ ϕ i
2
i∑ 4π
λ2---------�u 2 σ x
2 v 2 σ y2 w 2 σ z
2+ + �+=
σ ϕ 0
2 σ ϕ i
2
i∑ 4π
λ2---------�u 0
2 σ x2 v 0
2 σ y2 w 0
2 σ z2
+ + �+=

ANTENNES ACTIVES ____________________________________________________________________________________________________________________
(0)
— calcul d’un écart type équivalent à toutes les erreurs d’ampli-tudes :
En fonction de θ et θ0 , et pour θ ≈ θ0 , les parties réelles
ont des variations du type
Ex = Γx0 · (u – u0) et Ey = Γv0
· (v – v0) où Γ est appelé pente d’écar-
tométrie.
Tableau 3 – Valeurs moyennes de la perte de gain et des lobes diffus due aux erreurs
Type d’erreurPerte de gain
(dB)Niveau de gain relatif des lobes diffus
(dB, dans l’axe)
Erreur d’amplitude définie par σa en dB 0 (1)
Erreur de phase définie par σϕ en radian
Erreur de phase définie par b nombre de bits – 14,3/4b – 10 lg N – 6(b – 1)
avec η – 1 dB
(1) La valeur 75 apparaissant dans la formule est la quantité , qui s’introduit en raison de l’utilisation de σa en dB.
10 lg �σ a2/ 75ηN( )�
– 4,34 σ ϕ2
10 lg �σ ϕ2 /ηN�
�
20 lg e( )2 – 20ln 10---------------
2
8,68( )2 75≈ ≈=
σ a2 σ ai dB
2
75----------------
i∑=
Re �–j∆x Σ
Σ 2------------------� et Re�
–j∆y ΣΣ 2
------------------�
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.E 3 295 − 8 © Techniques de l’Ingénieur, traité Électronique
On en déduit :— une perte de gain en dB, fonction de et des taux de pannes et (cf. § 6.2) :
— une perte de PIRE en dB fonction de et des taux de pannes et (cf. § 6.2) :
— un niveau relatif statistique moyen des lobes diffus fonctionde σϕ , σa et des taux de pannes et .
En référence au gain du faisceau à θ = 0, ce niveau relatif deslobes diffus dans la direction θ, ϕ vaut :
Nota : on se rappellera que σϕ contient des termes fonction de la direction (θ, ϕ) parl’intermédiaire de u, v, w.
Le tableau 3 fournit des relations utiles d’évaluation des pertur-bations sur le gain et les lobes diffus en fonction des écarts-typesglobaux d’erreurs aléatoires de phase et d’amplitude.
8. Écartométrie
On ne traitera ici que du procédé dit monopulse consistant à éla-borer, à partir des quatre quadrants d’antenne supposés symé-triques par rapport à deux axes orthogonaux, les signaux dits :
Σ = A + B + C + D
∆x = A + B – C – D
∆y = A – B + C – D
(cf. figure 13 de l’article [E 3 294]).
On notera que, comme pour toutes les fonctions spatiales uti-lisées en balayage électronique, les fonctions Ex et Ey sontinvariantes en (u – u0) et (v – v0) mais pas en θ et ϕ.
Les erreurs et pannes que l’on a décrites précédemment (cf. § 3de l’article [E 3 294]) entraînent :
— une variation de pentes Γx et Γy ;— un passage à 0 pour des valeurs différentes de u0 et v0 , c’est
ce qu’on appelle la déviation d’axe.
Comme pour la perte de gain et les lobes secondaires, il est trèsintéressant de caractériser simplement l’effet des erreurs et pannessur la déviation d’axe (au premier ordre, il n’y a pas d’effet sur lespentes Γ ).
En reprenant les définitions des facteurs de réseau et en l’appli-quant aux signaux Σ et ∆x , on a :
avec δan , δϕn erreurs d’amplitude et de phase respectivement.
Opérons le développement limité au premier ordre au voisinagede u = u0 et v = v0 :
et, il vient :
En ne retenant que les termes du premier ordre et en notant que
et que , la fonction
est bien une fonction linéaire en (u – u0) :
L’écartométrie est le procédé par lequel on mesure précisé-ment la direction d’arrivée d’un signal au moyen de l’antenne.
σϕ 0τp1τp2
∆GdB – 4,34 �σ ϕ 0
2 2τp1τp2
+ + �=
σϕ 0τp1τp2
∆PIREdB – 4,34 �σ ϕ 0
2 2τp12τp2
+ + �=
τp1τp2
Gr 10 lg �σ ϕ2 σ a
2 2τp1τp2
+ + + � 10 lg � g θ,ϕ( )g 0,0( )---------------------� – 10 lg ηN( )+=
Σ fr an 1 δan+( ) e j ψn δψn+( )
A+B+C+D∑=
∆x fr an 1 δan+( ) e j ψn δψn+( )
A+B–C–D∑=
ψn2πλ
--------- k ρn⋅ ϕn+( ) 2πλ
--------- � u u0–( ) xn v v0–( ) yn+ �= =
Σ fr an 1 δan+( ) 1 j+( ) 2πλ
--------- � u u0–( ) xn v v0–( ) yn+ �A+B+C+D
∑ δϕn+=
∆x fr an 1 δan+( ) 1 j+( ) 2πλ
--------- � u u0–( ) xn v v0–( ) yn+ �A+B–C–D
∑ δϕn+=
anA+B–C–D
∑ 0= an ynA+B–C–D
∑ 0= Re � – j∆x ΣΣ 2
-------------------�
Re � – j∆x ΣΣ 2
-------------------�an· � 2π
λ-------- u u0–( ) xnan
A+B–C–D∑ anδϕn
A+B–C–D∑+ �
A+B+C+D∑
an( )2
A+B+C+D∑
---------------------------------------------------------------------------------------------------------------------------------------=

___________________________________________________________________________________________________________________ ANTENNES ACTIVES
Sa pente vaut :
Elle passe par 0 pour
c’est-à-dire pour :
(4)
de même :
(5)
Ce résultat est doublement utile :— si les erreurs δϕn sont connues, ce qui est a priori le cas pour
les erreurs de quantification, ce qui peut être aussi le cas pour cer-taines erreurs connues que l’on n’a pas voulu ou pu corriger, alors
La largeur à 3 dB est exactement 0,89 en radians pour une
répartition uniforme et généralement inférieure à 1,1 pour une
répartition pondérée.
De même η ill vaut 1 pour une répartition uniforme et reste géné-ralement supérieur à 0,85 pour une répartition pondérée :
— ainsi, pour une répartition uniforme :
— et pour une répartition pondérée :
Compte tenu des approximations effectuées, on retiendra :
Γx2πλ
---------
xn anA+B∑
anA+B∑
--------------------------⋅=
2πλ
--------- u u0–( ) xn anA+B–C–D
∑ an δϕnA+B–C–D
∑–=
∆u u u0–– λ2π---------
an δϕnA+B–C–D
∑an xn
A+B–C–D∑
------------------------------------------= =
∆v v v0–– λ2π---------
an δϕnA–B+C–D
∑an yn
A–B+C–D∑
------------------------------------------= =
λL-----
λL-----
σuλσϕ
2π 0,25L⋅----------------------------- 1
N-----------⋅ λ
2π 0,25⋅-------------------------
∆u3dB
0,89 λ------------------
σϕ
N-----------= =
σu 0,715σϕ
N----------- ∆u3dB⋅=
σuλ
2π 0,17L⋅-----------------------------
σϕ
0,8N--------------------⋅ λ
2π 0,17⋅-------------------------
∆u3dB
1,1 λ----------------
σϕ
0,8N--------------------=≈
σu 0,92σϕ
N----------- ∆u3dB⋅≈
σ σ
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Électronique E 3 295 − 9
la fonction d’écartométrie est déterminée sans erreur en calculant∆u et ∆v selon les formules (4) et (5) et en la modélisant par :
Ex = Γx (u – u0 – ∆u)
et Ey = Γy (v – v0 – ∆v)
— on en déduit l’incertitude sur la déviation d’axe due auxerreurs inconnues ; en reprenant le modèle des erreurs aléatoiresdéfinies par σϕ on a :
(6)
On peut remarquer que où XG est l’abscisse
du centre de gravité de la moitié d’antenne A + B alors :
(7)
et de même (8)
où YG est l’ordonnée du centre de gravité de la moitié d’antenneA + C.
■ Il est aussi intéressant de rapporter ces valeurs σu et σv à la lar-geur à 3 dB du lobe principal. Pour cela, nous distinguerons les troiscas :
— réseau linéaire ;— réseau à contour rectangulaire ;— réseau à contour circulaire.
● Réseau linéaire de longueur L
Suivant les répartitions an utilisées, XG varie généralement entreL /6 et L /4. Il vaut exactement L /4 pour une répartition uniforme.Il est inférieur à L /4 pour les répartitions pondérées vers les extré-mités.
(9)
● Réseau rectangulaire
En procédant de façon analogue pour chacune des dimensions eten sachant que η est généralement égal au carré du rendement d’unréseau linéaire, on obtient :
(10)
● Réseau circulaire
De la même façon, mais avec :• XG ou YG compris entre 0,25 et 0,42 φ /2 ;
• largeur à 3 dB comprise entre et ;
• rendement compris entre 1 et 0,8,
on obtient :
(11)
On retiendra le point important suivant.
9. GranularitéContrairement à un balayage mécanique et en raison de la quan-
tification des commandes, le faisceau d’une antenne à balayageélectronique ne se déplace pas de façon continue mais avance parsauts, si l’on commande une variation continue.
Pour une commande de position dans une direction donnée, lefaisceau se pointe dans cette direction avec une erreur d’écart-typeσu et σv (cf. § 8).
Lors d’une variation continue, l’erreur de position n’est pasaléatoire d’une position à une autre quel que soit l’écart entre ces
Il est important de noter que les erreurs d’amplitude, ainsi queles pannes de la cellule O/π, n’affectent pas la déviation d’axe.
σuλ
2π--------- σϕ
a n2∑
2 xn anA+B∑
-----------------------------=
xn anA+B∑ XG Σan=
σuλ
2πXG-----------------
σϕ
ηN---------------=
σvλ
2πYG-----------------
σϕ
ηN---------------=
L’écart-type de déviation d’axe, rapporté à la largeur à 3 dB,
varie toujours en et est toujours proportionnel àl’écart-type des erreurs de phase.
u
σu3dB
-------------- 0,8 ϕ
N----------- à ± 15 % ( ) ≈
σu ou v
∆u3dB ou ∆v3dB---------------------------------------------- 0,85
σϕ
N----------- à ± 15 % ( ) ≈
λφ----- 1,2 λ
φ-----
σu
∆u3dB------------------
σϕ
N----------- à ± 20 % ( ) ≈
1 N

ANTENNES ACTIVES ____________________________________________________________________________________________________________________
positions. En étudiant le comportement du facteur de réseau, onmontre que l’erreur de position est corrélée sur un certain intervalleet que l’intervalle de corrélation est :
∆uc ≈ ∆u3dB 2–b
avec b nombre de bits de phase ou de retards sur 2π.
On conçoit aussi que, dans cet intervalle de corrélation, lefaisceau bouge par sauts lorsque l’on modifie la commande defaçon continue. Le plus petit saut se produit lorsque au moins unecellule de déphasage commute quelque part sur le réseau. Statis-tiquement cela se produit pour une variation de la commande deposition :
∆up ≈ 3,33 ∆u3dB 2–b/N
soit 0,3N fois sur l’intervalle de décorrélation.
Comme l’on vient de le dire, l’erreur se décorrèle progres-sivement lorsque les 0,3N positions de l’intervalle ∆u3dB 2–b sontsuccessivement balayées.
On notera que le saut minimum est en 1/N et que l’écart-type de
l’erreur de position est en , c’est-à-dire bien plus grand.
La température de bruit de l’antenne est prise égale à T0 , tem-pérature de référence.
La température additionnelle de bruit de l’atténuateur est
.
Le calcul fait ici correspond à un sommateur équiamplitude,c’est-à-dire que tous les paramètres de transfert sn sont égaux à
où N est le nombre d’entrées et L0 représente l’ensemble despertes (ohmiques, diélectriques) du sommateur pour chacune desvoies.
La température additionnelle de bruit due aux pertes L0 est
.
■ On calculera successivement le signal et la température de bruiten sortie de sommateur puis la température équivalente de bruit àl’entrée de l’antenne.
● Signal en sortie
Pour des éléments rayonnants ayant tous le même gain, lessignaux reçus ont la même amplitude s0 .
Le signal en sortie (S ) est calculé dans l’hypothèse où le gain est
1N
-----------
Ta T0� 1
an2
-------- 1– �=
L0/N
TL T0� 1L0------- 1– �=
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
E 3 295
−
10
© Techniques de l’Ingénieur, traité Électronique
10. Température équivalente de bruit
■ Le principe de la méthode de calcul est exposé à partir du schémasynoptique de la figure 5 dans laquelle :
— l’ensemble est supposé être à la température de référenceT0 ≈ 300 K ;
— le module est schématisé par un amplificateur de gain GA etun atténuateur contrôlant l’amplitude an (normalisés à 1).
Nota : on trouvera des calculs plus extensifs en référence [8].
Lorsque an = 1, la température additionnelle équivalente de bruitdu module, à l’entrée du module, au point M où est défini le gaing (θ, ϕ ) de l’élément rayonnant (cf. § 1), est Tm .
maximum dans la direction d’arrivée de ces signaux, c’est-à-direque les signaux sont exactement mis en phase dans l’ensemblemodules/sommateur, alors :
(12)
● Température de bruit en sortie
Toutes les sources de bruit étant supposées décorrélées, l’addi-tion des bruits se fait selon leur puissance, c’est-à-dire que les tem-pératures de bruit s’additionnent.
On a donc en sortie du sommateur la température de bruit Ts :
(13)
● Température équivalente de bruit à l’entrée de l’antenne.
Pour définir la température équivalente de bruit à l’entrée del’antenne, on ramène le schéma équivalent de la figure 5 à celui dela figure 6 constitué d’une antenne de gain G égal au gain définiau paragraphe 2.1 soit G = ηNg, et d’un amplificateur équivalent degain Geq et de température additionnelle de bruit à l’entrée Teq .
Figure 5 – Schéma pour le calcul de la température de bruit
Sommateur
sn = L0 /NSTs
an
Ta
TL
GA
Tm s0T0
Modules
M
Figure 6 – Antenne et amplificateur équivalents pour le calculde la température de bruit
S2 � s0n∑ GA an L0/N �
2=
S2 s02 GAL0� an
n∑ �
2/N s0
2 GAL0η an2
n∑= =
Ts � T0 Tm+( )GA T0�1
an2
-------- 1– �+ �an2 T0� 1
L0------ 1– �+
n∑
L0
N-------=
Ts � T0 Tm+( )GA T0– �L0
N------- �an
2 �n∑ T0+=
S'Ts
S0Geq
Teq
T0
Antennede gainG = ηNg

___________________________________________________________________________________________________________________ ANTENNES ACTIVES
Le signal S0 présent à l’entrée de l’amplificateur équivalent estproportionnel en puissance au gain G = ηNg alors que le signal s0était proportionnel en puissance à g.
d’où
En sortie, on a
En égalant S et S ′, il vient, d’après (12) :
d’où (14)
Dans le cas général, et Geq < GA .
La température équivalente de bruit ramenée à l’entrée est donc[d’après (13) et (14)] :
Il apparaît là une première limitation sur la bande instantanée del’antenne : elle correspond à la largeur de bande sur laquelle l’erreurentre valeur réelle et valeur commandée de la phase ou de l’ampli-tude est décrite par le modèle avec la précision recherchée.
La bande instantanée dépend donc de l’amplitude des variationscomportementales avec la fréquence, de leur rapidité et de la pré-cision recherchée.
Ceci est également vrai pour les lois de formation de faisceau.
11.2 Limitations dues aux déphaseurs
En plus de la limitation qui vient d’être exposée, une deuxièmelimitation apparaît dans le cas d’une commande de pointage par lesphases seulement.
Rappelons que la loi de phase de pointage, à la fréquence f0 , pourla direction (u 0 , v 0), est :
Lorsque la fréquence change, pour une loi de pointage donnée,le faisceau se déplace. La position de faisceau (u1 , v1) à la fré-quence f (soit la longueur d’onde λ ) est en effet :
S02 ηNs0
2=
S ′2 S 02Geq=
ηNs 02Geq s 0
2GAL0η an2∑=
GeqGAL0 an
2∑N
------------------------------=
L0 1,< an2∑ N<
T0 Teq+TS
Geq------------
T0 Tm+( )GA T0–
GA------------------------------------------------
T0N
GAL0 an2∑
------------------------------+= =
T
ϕ x, y( ) 2πλ0--------- u0 x v0 y+( )=
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Électronique E 3 295 − 11
d’où
ou encore (15)
Dans une antenne active où le sommateur serait sans perte(L0 = 1) et s’il n’y avait pas de pondération, on aurait Geq = GA et latempérature additionnelle équivalente de bruit serait celle dumodule lui-même.
Dans le cas réel ( et ), la température de bruit est
donc supérieure à Tm . L’accroissement dépend du rapport GA/Geq .
11. Bande passanteen fréquence
11.1 Limitation générale
La bande passante totale d’une antenne active dépend de cellede ses constituants :
— éléments rayonnants ;— modules ;— distributeur/sommateur.
Généralement on ne rencontre pas de grandes difficultés pourobtenir 10 à 15 % de bande passante totale. Au-delà des désadap-tations des éléments rayonnants et des composants du distributeur,les baisses de rendement et de gain des amplificateurs desmodules, contribuent à une perte de gain de l’antenne par rapportà sa valeur théorique 4πS/λ2 (cf. § 1), à une augmentation de sa tem-pérature de bruit et à une baisse de rendement énergétique.
Malgré cela, et beaucoup mieux que pour les antennes passives,les ressources de conception des constituants de l’antenne per-mettent d’obtenir des performances adaptées à des Systèmes trèslarge bande, de plus de 15 % à plus de 100 % (rapport 3 entre fré-quences maximum et minimum).
Les modèles des constituants doivent évidemment rendrecompte de leur comportement sur une large bande.
1 1
d’où
ou (16)
Le faisceau se rapproche de la normale à l’antenne lorsque la fré-quence augmente.
Bien que ce déplacement soit totalement prédictible, il n’est pasacceptable au-delà d’une certaine valeur si l’on veut garder le maxi-mum de gain dans une direction donnée.
11.3 Cas des commandes par retards
Si au lieu de contrôler la phase au moyen de déphaseurs on lacontrôle avec des cellules de retards purs, on réalise un systèmeinsensible à la fréquence, au moins pour ce qui est du pointage dufaisceau.
Le retard introduit par les cellules de retards (commutation delignes ou de cellules ayant la même dispersion en fréquence qu’unelongueur de ligne) compense en effet exactement le retard de pro-pagation vis-à-vis de la direction de rayonnement.
Il faut cependant préciser qu’en raison des désadaptations descommutateurs et de la dispersion de certains éléments, onn’obtient jamais l’équivalent d’un retard parfait. Là aussi, desmodèles comportementaux peuvent être nécessaires pour rendrecompte précisément de l’effet de la fréquence. Ces écarts de
Teq Tm T0N
GAL0 an2∑
------------------------------ 0
GA----------–+=
Teq Tm T0GA Geq–
GAGeq--------------------------+=
L0 << 1 an2∑ N<
Exemple : avec le critère |u1 – u0| < ∆u3dB/8, ce qui limite la pertede gain à 0,2 dB, il faut :
(17)
où ∆f i est la bande instantanée totale et L la dimension de l’antenneselon la coordonnée u0 .
La relation peut aussi s’écrire :
∆f i · L · u0 < 0,075
où ∆f i est exprimé en GHz et L en mètres.
2πλ1--------- u1 x v1 y+( ) 2π
λ0--------- u0 x v0 y+( )=
u1λ1
λ0-------u0= et v1
λ1
λ0-------v0=
u1f0
f1------u0= et v1
f0
f1------v0=
∆f i
f---------- λ
4Lu0---------------<
ANTENNES ACTIVES ____________________________________________________________________________________________________________________
comportement sont à prendre en compte dans le bilan des erreursrésiduelles (cf. § 7) et peuvent conduire à fractionner la bandetotale en sous-bandes instantanées pour limiter l’amplitude des
Une telle architecture en lignes à retards se définit à partir dela longueur maximum à réaliser (dans le cas d’un réseaulinéaire) (cf. § 4) et du pas minimum. Celui-ci est à déterminer en
Figure 7 – Erreur de phase dans une commande mixte retards/déphasages
Segments conservantla phase calculée pour f0
Loi de phaseidéale à lafréquence f > f0
Loi de phaseà la fréquence f0
Segment(sous-réseau)
Mise en phase exacteMise en phase exacteau centre des sous-réseauxMise en phase exacteau centre des sous-réseaux
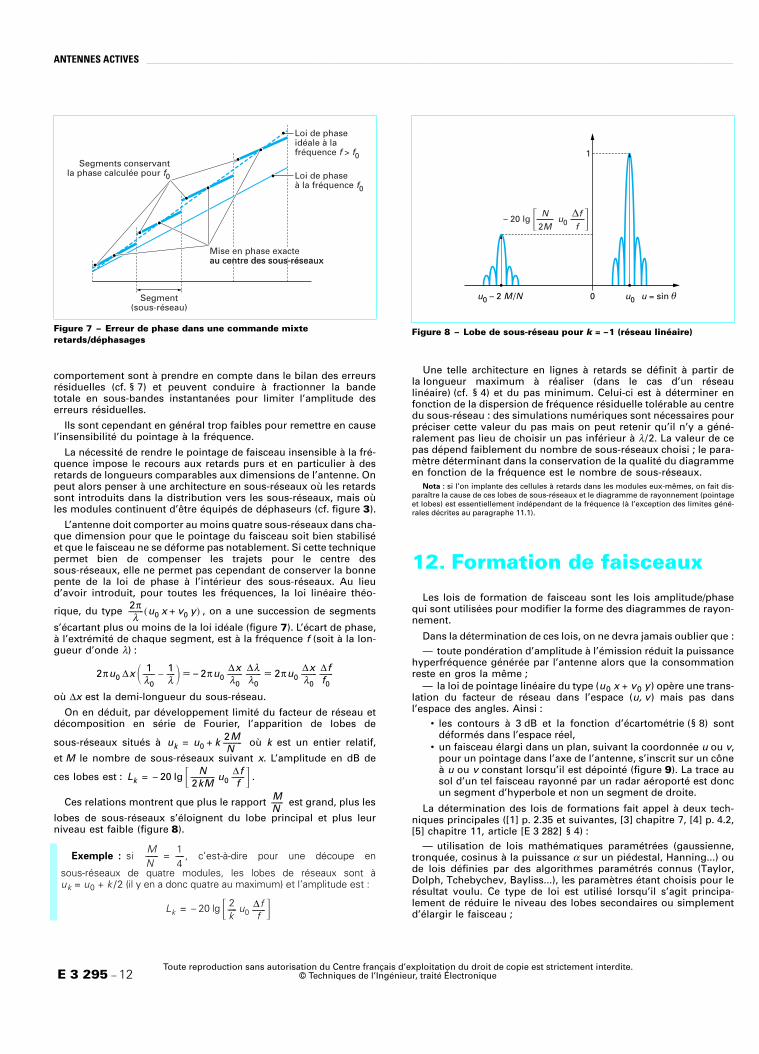
Figure 8 – Lobe de sous-réseau pour k = –1 (réseau linéaire)
0 u = sin θu0 – 2 M/N u0
1
– 20 lg � �u0N
2M∆ff
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.E 3 295 − 12 © Techniques de l’Ingénieur, traité Électronique
erreurs résiduelles.
Ils sont cependant en général trop faibles pour remettre en causel’insensibilité du pointage à la fréquence.
La nécessité de rendre le pointage de faisceau insensible à la fré-quence impose le recours aux retards purs et en particulier à desretards de longueurs comparables aux dimensions de l’antenne. Onpeut alors penser à une architecture en sous-réseaux où les retardssont introduits dans la distribution vers les sous-réseaux, mais oùles modules continuent d’être équipés de déphaseurs (cf. figure 3).
L’antenne doit comporter au moins quatre sous-réseaux dans cha-que dimension pour que le pointage du faisceau soit bien stabiliséet que le faisceau ne se déforme pas notablement. Si cette techniquepermet bien de compenser les trajets pour le centre dessous-réseaux, elle ne permet pas cependant de conserver la bonnepente de la loi de phase à l’intérieur des sous-réseaux. Au lieud’avoir introduit, pour toutes les fréquences, la loi linéaire théo-
rique, du type , on a une succession de segments
s’écartant plus ou moins de la loi idéale (figure 7). L’écart de phase,à l’extrémité de chaque segment, est à la fréquence f (soit à la lon-gueur d’onde λ) :
où ∆x est la demi-longueur du sous-réseau.
On en déduit, par développement limité du facteur de réseau etdécomposition en série de Fourier, l’apparition de lobes de
sous-réseaux situés à où k est un entier relatif,
et M le nombre de sous-réseaux suivant x. L’amplitude en dB de
ces lobes est : .
Ces relations montrent que plus le rapport est grand, plus les
lobes de sous-réseaux s’éloignent du lobe principal et plus leurniveau est faible (figure 8).
fonction de la dispersion de fréquence résiduelle tolérable au centredu sous-réseau : des simulations numériques sont nécessaires pourpréciser cette valeur du pas mais on peut retenir qu’il n’y a géné-ralement pas lieu de choisir un pas inférieur à λ /2. La valeur de cepas dépend faiblement du nombre de sous-réseaux choisi ; le para-mètre déterminant dans la conservation de la qualité du diagrammeen fonction de la fréquence est le nombre de sous-réseaux.
Nota : si l’on implante des cellules à retards dans les modules eux-mêmes, on fait dis-paraître la cause de ces lobes de sous-réseaux et le diagramme de rayonnement (pointageet lobes) est essentiellement indépendant de la fréquence (à l’exception des limites géné-rales décrites au paragraphe 11.1).
12. Formation de faisceaux
Les lois de formation de faisceau sont les lois amplitude/phasequi sont utilisées pour modifier la forme des diagrammes de rayon-nement.
Dans la détermination de ces lois, on ne devra jamais oublier que :— toute pondération d’amplitude à l’émission réduit la puissance
hyperfréquence générée par l’antenne alors que la consommationreste en gros la même ;
— la loi de pointage linéaire du type (u0 x + v0 y) opère une trans-lation du facteur de réseau dans l’espace (u, v) mais pas dansl’espace des angles. Ainsi :
• les contours à 3 dB et la fonction d’écartométrie (§ 8) sontdéformés dans l’espace réel,
• un faisceau élargi dans un plan, suivant la coordonnée u ou v,pour un pointage dans l’axe de l’antenne, s’inscrit sur un côneà u ou v constant lorsqu’il est dépointé (figure 9). La trace ausol d’un tel faisceau rayonné par un radar aéroporté est doncun segment d’hyperbole et non un segment de droite.
La détermination des lois de formations fait appel à deux tech-niques principales ([1] p. 2.35 et suivantes, [3] chapitre 7, [4] p. 4.2,[5] chapitre 11, article [E 3 282] § 4) :
— utilisation de lois mathématiques paramétrées (gaussienne,tronquée, cosinus à la puissance α sur un piédestal, Hanning...) oude lois définies par des algorithmes paramétrés connus (Taylor,Dolph, Tchebychev, Bayliss...), les paramètres étant choisis pour lerésultat voulu. Ce type de loi est utilisé lorsqu’il s’agit principa-lement de réduire le niveau des lobes secondaires ou simplementd’élargir le faisceau ;
Exemple : si , c’est-à-dire pour une découpe en
sous-réseaux de quatre modules, les lobes de réseaux sont àuk = u0 + k /2 (il y en a donc quatre au maximum) et l’amplitude est :
2πλ
--------- u0 x v0 y+( )
2πu0 ∆x � 1λ0------- 1
λ-----– � – 2πu0
∆xλ0
--------- ∆λλ0
--------- 2πu0∆xλ0
--------- ∆ff0
--------≈ ≈
uk u0 k 2MN
-----------+=
Lk – 20 lg � N2kM-------------- u0
∆ff
--------�=
MN-------
MN---------
14------=
Lk – 20 lg � 2k------ u0
∆ff
--------�=

___________________________________________________________________________________________________________________ ANTENNES ACTIVES
vis-à-vis des signaux incidents dans la mesure où son gain diminueen principe fortement en dehors de la bande passante recherchéepour l’antenne ;
— la détermination de la marge nécessaire entre la puissancemaximum des signaux entrant dans le module et le niveau de satu-ration de la voie de réception.
À partir du niveau de saturation ainsi défini pour la voie de récep-tion, chaque fonction élémentaire de la voie de réception peut êtrespécifiée en niveau de saturation en fonction de sa position dansla voie. Cette spécification aura des conséquences déterminantessur le choix des composants et sur leur consommation.
L’incidence sur la consommation totale de l’antenne n’est géné-ralement pas négligeable.
14. Bruit de phaseet d’amplitudeFigure 9 – Forme des lignes à u et v constants
Arcos v Arcos u
x
y
z
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Électronique E 3 295 − 13
— recours à des algorithmes de synthèse directe ou de synthèseitérative pour faire tendre le diagramme de rayonnement vers ungabarit donné. Ces méthodes sont utilisées lorsque l’on n’a pas laconnaissance, a priori, du type de loi de formation capable de for-mer le faisceau selon le gabarit recherché, par exemple, pour obte-nir un faisceau en forme de cosécante, pour créer des lobes deniveau très bas dans un certain domaine angulaire de rayonnement,pour maintenir un faisceau élargi plan au lieu de le laisser s’inscriresur un cône quand on le déplace.
L’éventail des méthodes proposées dans la littérature est vaste :il inclut entre autres les classiques méthodes des moindres carrés.
Il est probable que la loi de formation ainsi déterminée donne lerésultat recherché dans un domaine de fréquence et de pointagelimité. Il faudra donc multiplier le nombre de lois nécessaires, pourle type de faisceau recherché, par le nombre de domaines d’utili-sation.
13. Linéarité
L’antenne active présente l’inconvénient majeur qu’aucun filtragespatial ne peut être appliqué au signal incident avant son entréedans le module. L’élément rayonnant possède fonctionnellement undiagramme de rayonnement très ouvert (le faisceau n’est forméqu’après passage des signaux dans les modules) et capte lessignaux en provenance de toutes les directions.
La voie de réception dans chaque module doit donc être dimen-sionnée pour la dynamique totale de tous les signaux incidents sanscréer d’intermodulation entre signaux.
L’analyse préalable à la définition de la dynamique linéaire de lavoie de réception implique :
— l’identification de la nature des signaux susceptibles d’êtrecaptés pendant le fonctionnement normal de l’antenne, qu’ils soientles échos du signal émis ou des signaux d’origines extérieuresdiverses. Leur amplitude, leur fréquence ou leur densité spectraledoivent être caractérisées. À ce stade, l’identification doit porter surla totalité du spectre ;
— la caractérisation de la réponse à large bande (le gain) de l’élé-ment rayonnant. Celui-ci constitue en effet un filtre fréquentiel
Le bruit propre des composants actifs à l’état solide des modulesdétermine le facteur de bruit de l’antenne (cf. § 10) en réception. Àl’émission, le bruit additif généré par l’amplificateur se révèle géné-ralement très faible comparé à la pureté spectrale du signal fournià l’antenne.
En fait, des causes extérieures au module peuvent créer dessources de bruits nuisibles au bon fonctionnement du Système. Cesont principalement les raies parasites créées par un filtrage insuf-fisant des tensions d’alimentation du module, les couplages designaux dans le câblage ou le couplage vis-à-vis de l’environnementradioélectrique externe. Ces phénomènes perturbateurs existentdans tous les Systèmes. Ils demandent seulement une attention par-ticulière dans le cas de l’antenne active en raison de la complexitéet de la densité du câblage.
15. Conclusion
On aura compris à la lecture de ces articles que l’antenne activeconstitue une véritable rupture technologique dans le domaine desantennes et des Systèmes. Il s’agit bien encore d’un domainetechnique émergent puisque, si des réalisations ont déjà vu le jouret si les principes ont déjà été analysés en profondeur, de nom-breuses potentialités n’ont pas encore pu être exploitées en raisondes limites technologiques actuelles. Mais de grands chantiers sontouverts :
— technologie de l’état solide en micro-ondes avec recherched’accroissement de puissance et de rendement, d’une plus grandedensité d’intégration et, bien sûr, d’une très forte réduction descoûts ;
— simulations électromagnétiques et fonctionnelles pour unemeilleure maîtrise de conception, en particulier pour les antennesconformes et/ou partagées ;
— traitement de signal adaptatif qui bénéficiera du dévelop-pement continu de l’électronique rapide.
Le domaine est donc un immense champ d’actions pour les cher-cheurs et les ingénieurs, non seulement par sa richesse techniquemais aussi parce qu’il se situe favorablement dans le contexted’évolution des Systèmes.

ANTENNES ACTIVES ____________________________________________________________________________________________________________________
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.E 3 295 − 14 © Techniques de l’Ingénieur, traité Électronique
Références bibliographiques
[1] JONHSON (R.C.) et JASIK (H.). – AntennaEngineering Handbook - 2e édition, MacGrawHill book Company (ISBN 0-07-032291-0)(1984).
[2] KRAUS (J.D.). – Antennas - MacGraw Hillbook Company (ISBN 0-07-035422-7) (1988).
[3] COLLIN (R.) et ZUCKER (F.). – Antenna theory,part . 1 - MacGraw Hill book Company (1969).
[4] RUDGE (A.W.), MILNE (K.), OLVER (A.D.) etKNIGHT (P.). – Handbook of antenna Design -Volume 2, Peter Peregrinus Ltd (ISBN0-906048-47-7) (1983).
[5] LO (Y.T.) et LEE (S.W.). – Antenna Handbook -Van Nostrand Reinhold Company (ISBN0-442-25843-7) (1988).
[6] DRABOWITCH (S.) et ANCONA (C.). – Anten-nes volume 2 Applications - MASSON (ISBN2-225 80626-8), 275 p. (1986).
[7] FARINA (A.). – Antenna based signal proces-sing techniques for radar systems - ArtechHouse (ISBN 0-89006-396-6) (1992).
[8] KRAFT (U.R.). – Gain and G/T of multielementreceive antennas with active beamformingnetwork - IEEE Transactions on Antennas andPropagation, vol. 48, no 12, p. 1818-1829,déc. 2000.