Embed Size (px)
Citation preview

Dalla meccanica del continuo alleEquazioni di Lagrange per i solidi elasticiq g g p
Franco Mastroddihttp://www.diaa.uniroma1.it/docenti/f.mastroddi
dal corso di
Dinamica delle Strutture AerospazialiAnno Accademico 2008-2009
SOMMARIO
Ri hi i di i d i ti i ( lidi+fl idi)• Richiami di meccanica dei continui (solidi+fluidi)
Le equazioni di Lagrange per i solidi elastici lineari• Le equazioni di Lagrange per i solidi elastici lineari
• ENFASI SU:
– La scelta delle funzioni di base per le Equazioni di Lagrange FEM v.s. variabili modaliq g g
ANNO ACCADEMICO 2008-2009corso di
Dinamica delle Strutture Aerospaziali Pagina 2
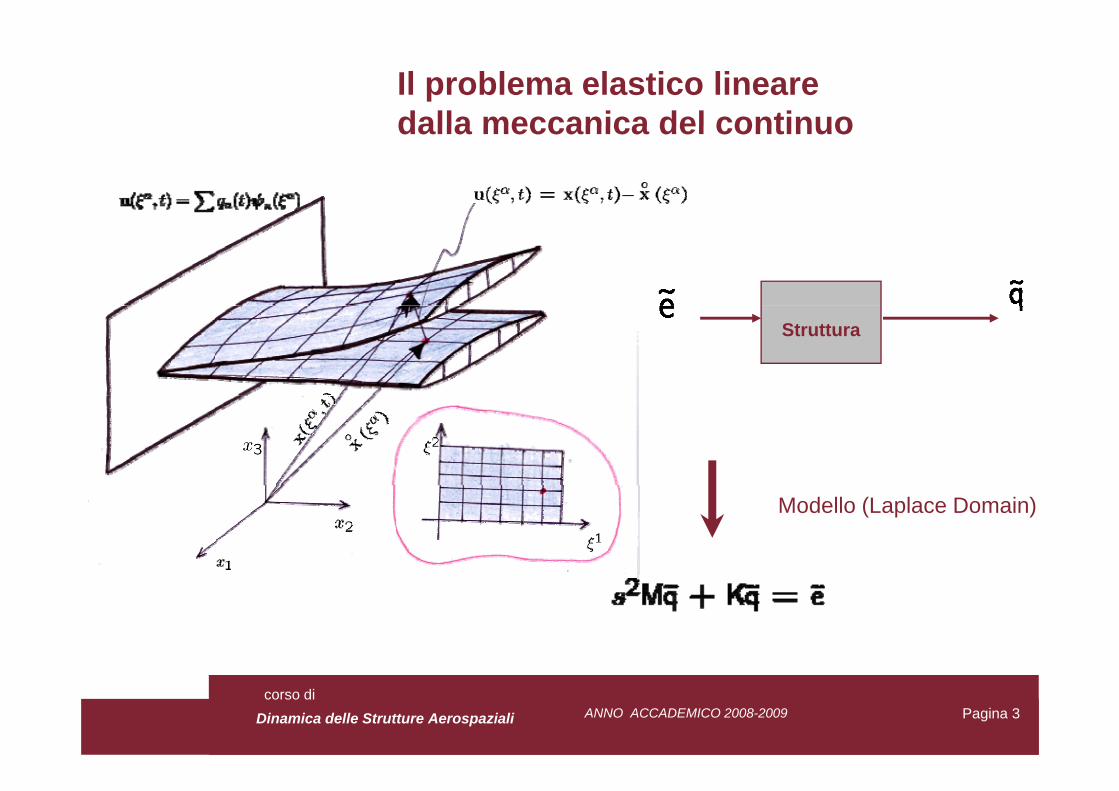
Il problema elastico linearedalla meccanica del continuodalla meccanica del continuo
Struttura
Modello (Laplace Domain)
ANNO ACCADEMICO 2008-2009corso di
Dinamica delle Strutture Aerospaziali Pagina 3
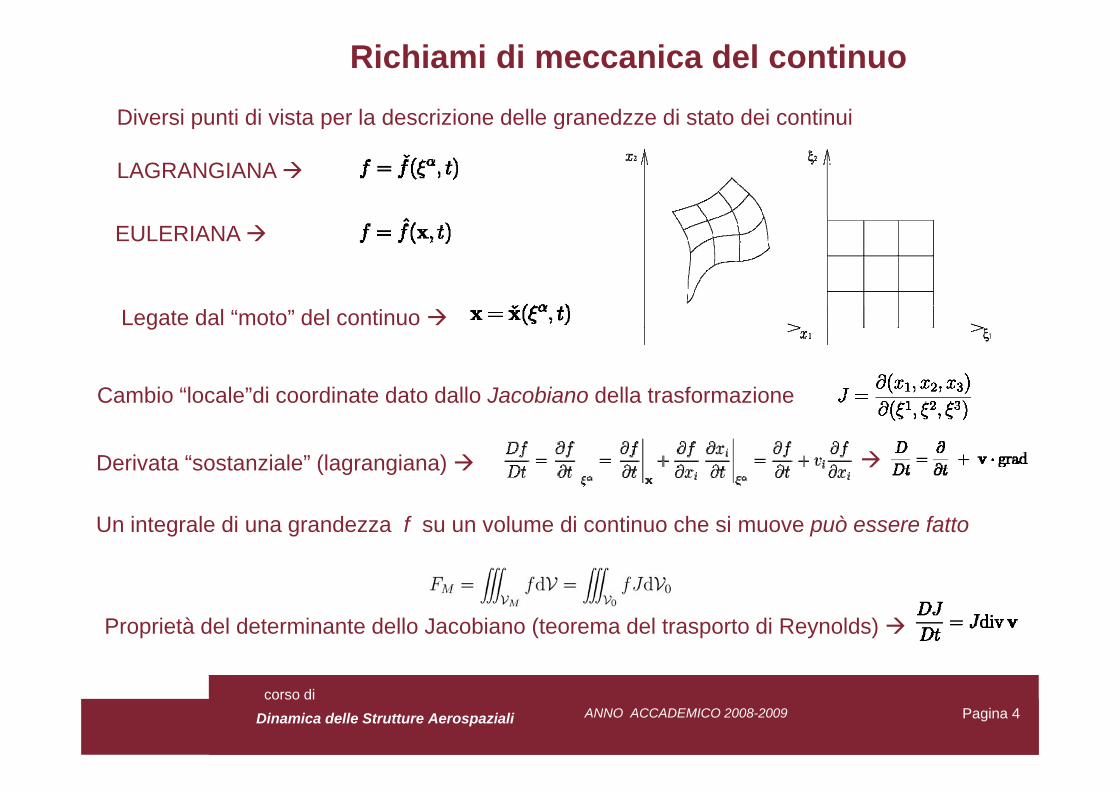
Richiami di meccanica del continuoDiversi punti di vista per la descrizione delle granedzze di stato dei continuip p g
LAGRANGIANA
EULERIANA
Legate dal “moto” del continuo
Cambio “locale”di coordinate dato dallo Jacobiano della trasformazioneCambio locale di coordinate dato dallo Jacobiano della trasformazione
Derivata “sostanziale” (lagrangiana)
Un integrale di una grandezza f su un volume di continuo che si muove può essere fatto
Proprietà del determinante dello Jacobiano (teorema del trasporto di Reynolds)
ANNO ACCADEMICO 2008-2009corso di
Dinamica delle Strutture Aerospaziali Pagina 4
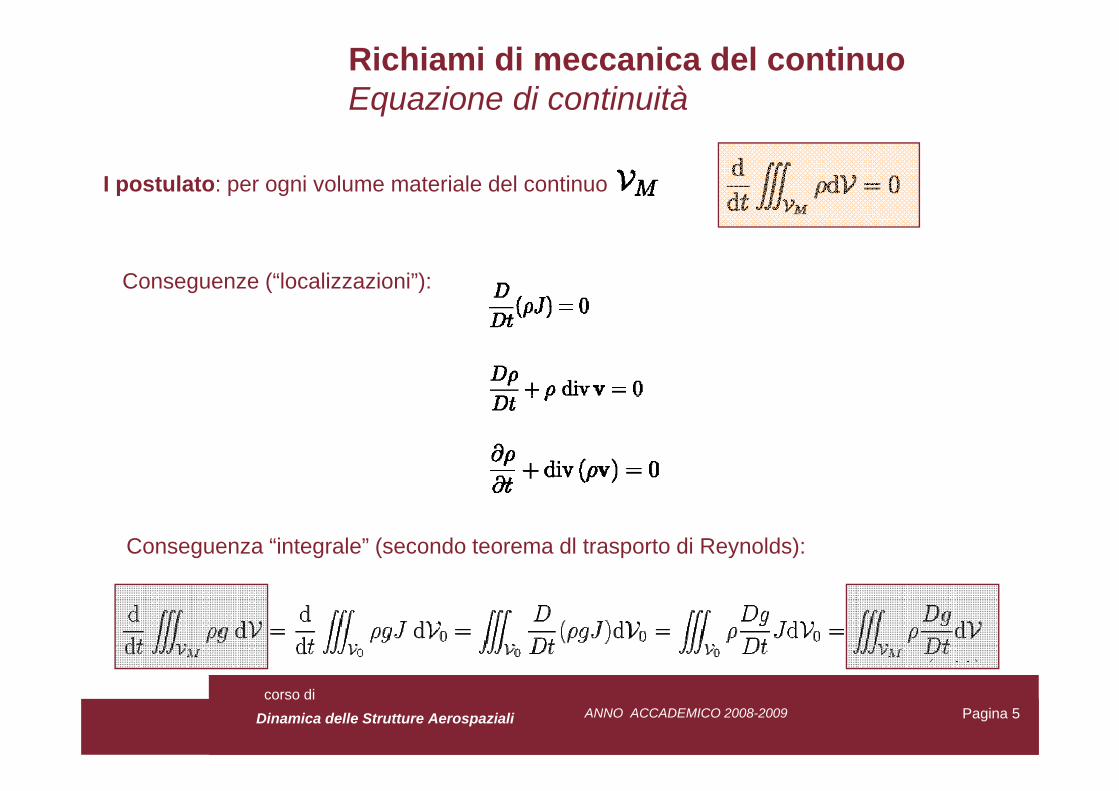
Richiami di meccanica del continuoEquazione di continuità
I postulato: per ogni volume materiale del continuo
Conseguenze (“localizzazioni”):
Conseguenza “integrale” (secondo teorema dl trasporto di Reynolds):
ANNO ACCADEMICO 2008-2009corso di
Dinamica delle Strutture Aerospaziali Pagina 5
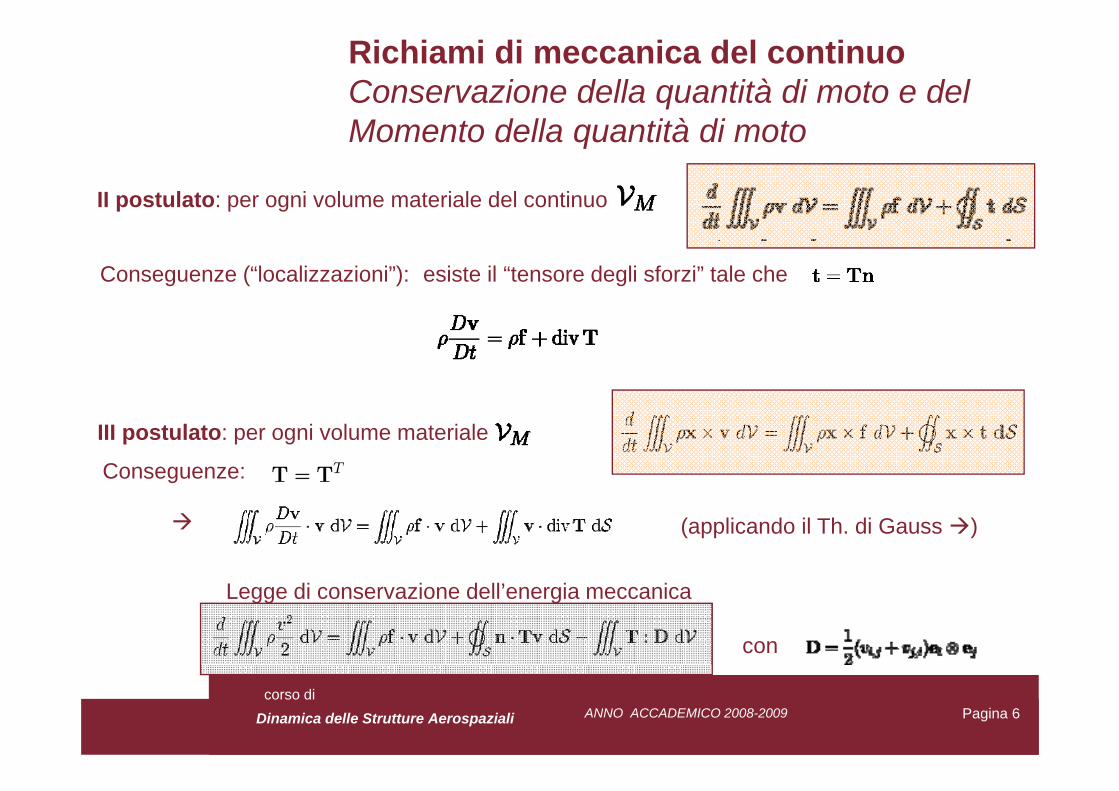
Richiami di meccanica del continuoConservazione della quantità di moto e delMomento della quantità di motoMomento della quantità di moto
II postulato: per ogni volume materiale del continuo
Conseguenze (“localizzazioni”): esiste il “tensore degli sforzi” tale che
III postulato: per ogni volume materiale
Conseguenze:
(applicando il Th. di Gauss )
con
Legge di conservazione dell’energia meccanica
ANNO ACCADEMICO 2008-2009corso di
Dinamica delle Strutture Aerospaziali Pagina 6
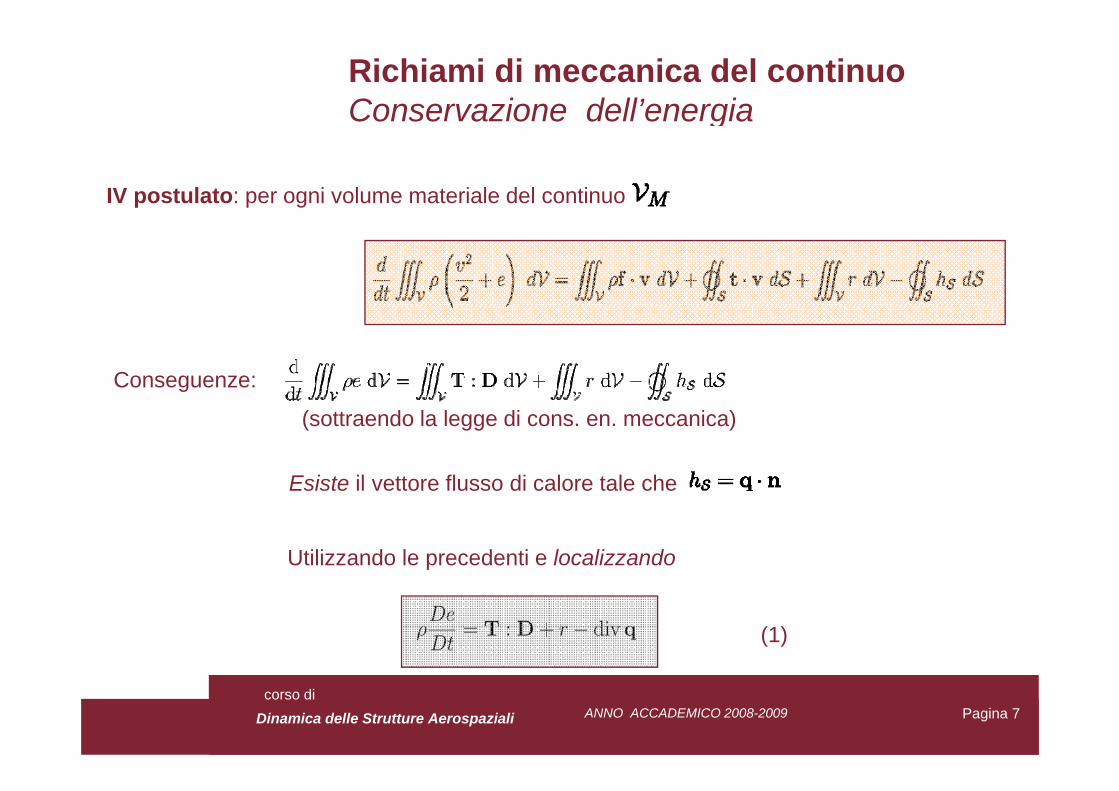
Richiami di meccanica del continuoConservazione dell’energia
IV postulato: per ogni volume materiale del continuo
Conseguenze:
(sottraendo la legge di cons. en. meccanica)
Esiste il vettore flusso di calore tale cheEsiste il vettore flusso di calore tale che
Utilizzando le precedenti e localizzando
(1)
ANNO ACCADEMICO 2008-2009corso di
Dinamica delle Strutture Aerospaziali Pagina 7
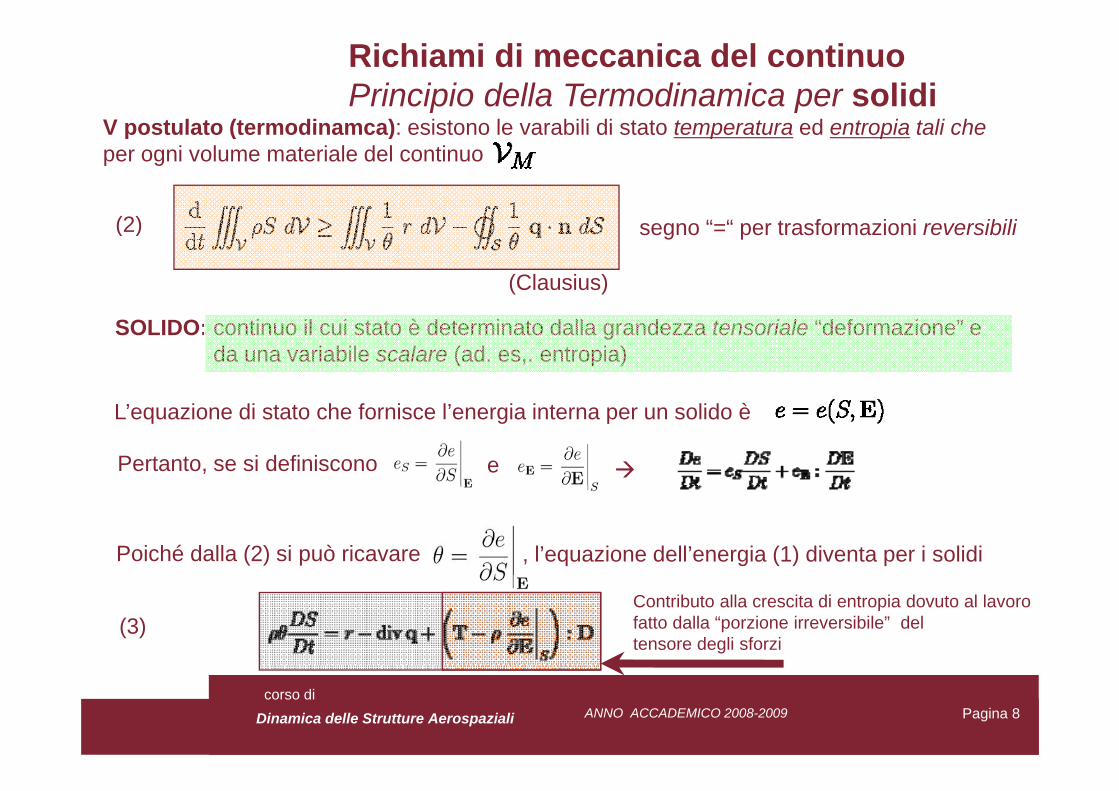
Richiami di meccanica del continuoPrincipio della Termodinamica per solidi
V postulato (termodinamca): esistono le varabili di stato temperatura ed entropia tali cheV postulato (termodinamca): esistono le varabili di stato temperatura ed entropia tali che per ogni volume materiale del continuo
(2)
(Clausius)
segno “=“ per trasformazioni reversibili(2)
SOLIDO: continuo il cui stato è determinato dalla grandezza tensoriale “deformazione” e da una variabile scalare (ad. es,. entropia)
L’equazione di stato che fornisce l’energia interna per un solido è
Pertanto, se si definiscono e
Poiché dalla (2) si può ricavare , l’equazione dell’energia (1) diventa per i solidi
Contributo alla crescita di entropia dovuto al lavoro fatto dalla “porzione irreversibile” del tensore degli sforzi
(3)
ANNO ACCADEMICO 2008-2009corso di
Dinamica delle Strutture Aerospaziali Pagina 8
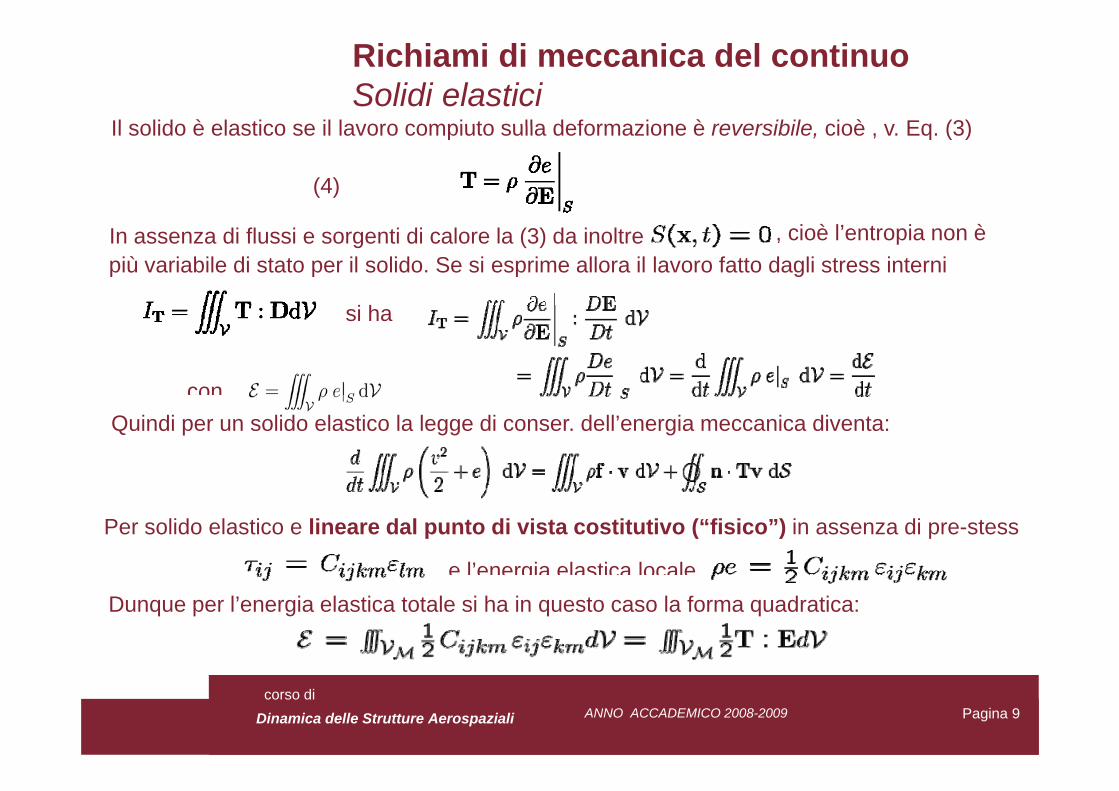
Richiami di meccanica del continuoSolidi elastici
Il solido è elastico se il lavoro compiuto sulla deformazione è reversibile cioè v Eq (3)Il solido è elastico se il lavoro compiuto sulla deformazione è reversibile, cioè , v. Eq. (3)
(4)
In assenza di flussi e sorgenti di calore la (3) da inoltre , cioè l’entropia non è più variabile di stato per il solido. Se si esprime allora il lavoro fatto dagli stress interni
i hsi ha
conQuindi per un solido elastico la legge di conser. dell’energia meccanica diventa:
Per solido elastico e lineare dal punto di vista costitutivo (“fisico”) in assenza di pre-stess
e l’energia elastica localeDunque per l’energia elastica totale si ha in questo caso la forma quadratica:
ANNO ACCADEMICO 2008-2009corso di
Dinamica delle Strutture Aerospaziali Pagina 9
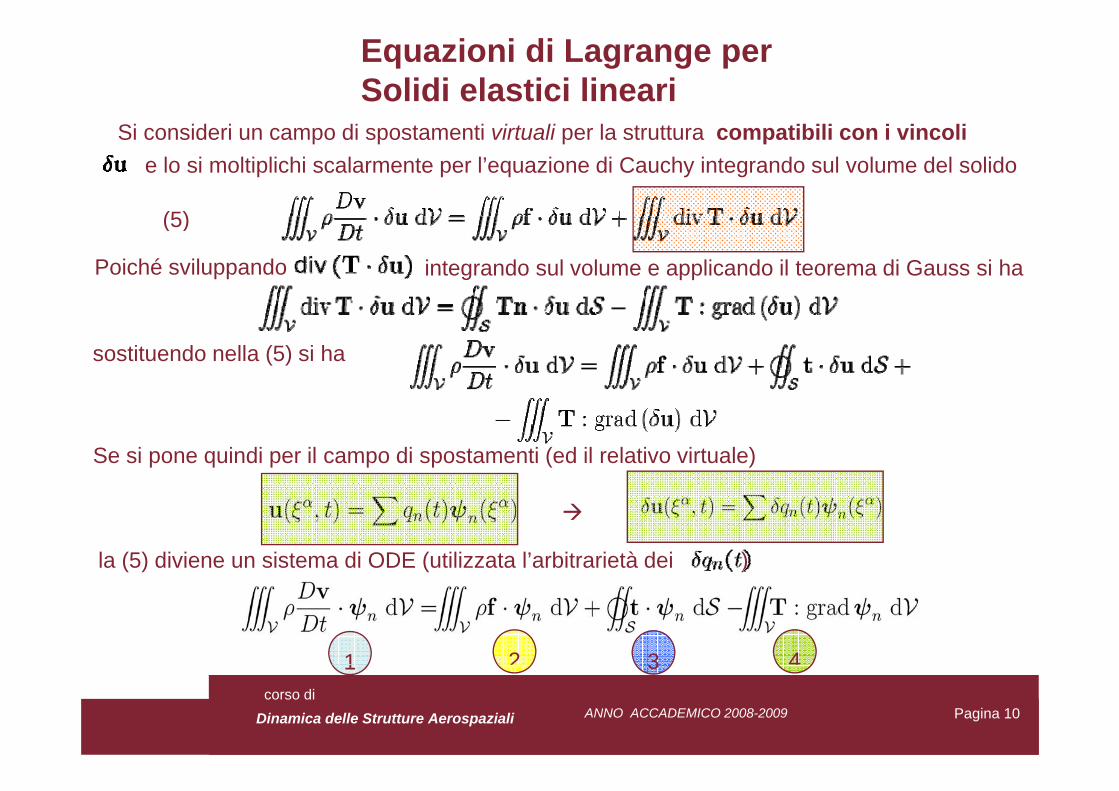
Equazioni di Lagrange per Solidi elastici lineari
Si id i di t ti i t li l t tt tibili i i liSi consideri un campo di spostamenti virtuali per la struttura compatibili con i vincolie lo si moltiplichi scalarmente per l’equazione di Cauchy integrando sul volume del solido
(5)
Poiché sviluppando integrando sul volume e applicando il teorema di Gauss si ha
(5)
sostituendo nella (5) si ha
Se si pone quindi per il campo di spostamenti (ed il relativo virtuale)
la (5) diviene un sistema di ODE (utilizzata l’arbitrarietà dei )
1 2 43
ANNO ACCADEMICO 2008-2009corso di
Dinamica delle Strutture Aerospaziali Pagina 10
1 3
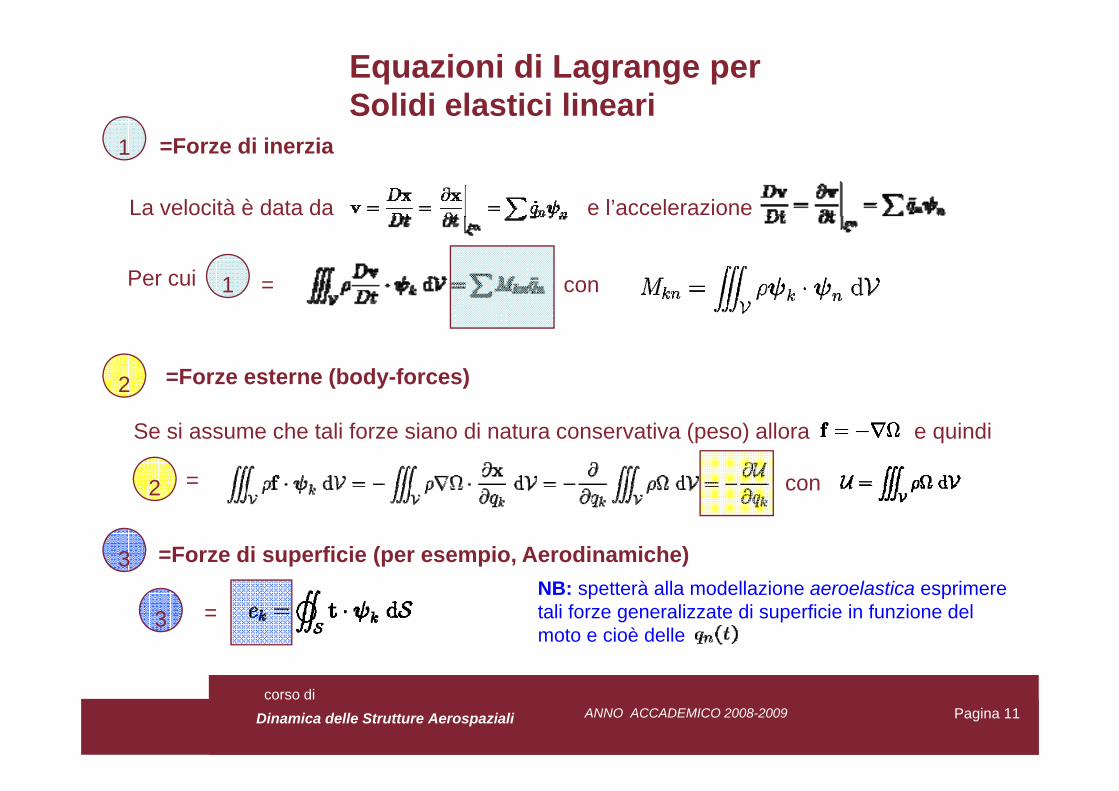
Equazioni di Lagrange per Solidi elastici lineari
1 =Forze di inerzia
La velocità è data da e l’accelerazione
Per cui 1 = con
2 =Forze esterne (body-forces)
Se si assume che tali forze siano di natura conservativa (peso) allora e quindi
2 = con2 con
3 =Forze di superficie (per esempio, Aerodinamiche)
3 =NB: spetterà alla modellazione aeroelastica esprimeretali forze generalizzate di superficie in funzione del moto e cioè delle
ANNO ACCADEMICO 2008-2009corso di
Dinamica delle Strutture Aerospaziali Pagina 11
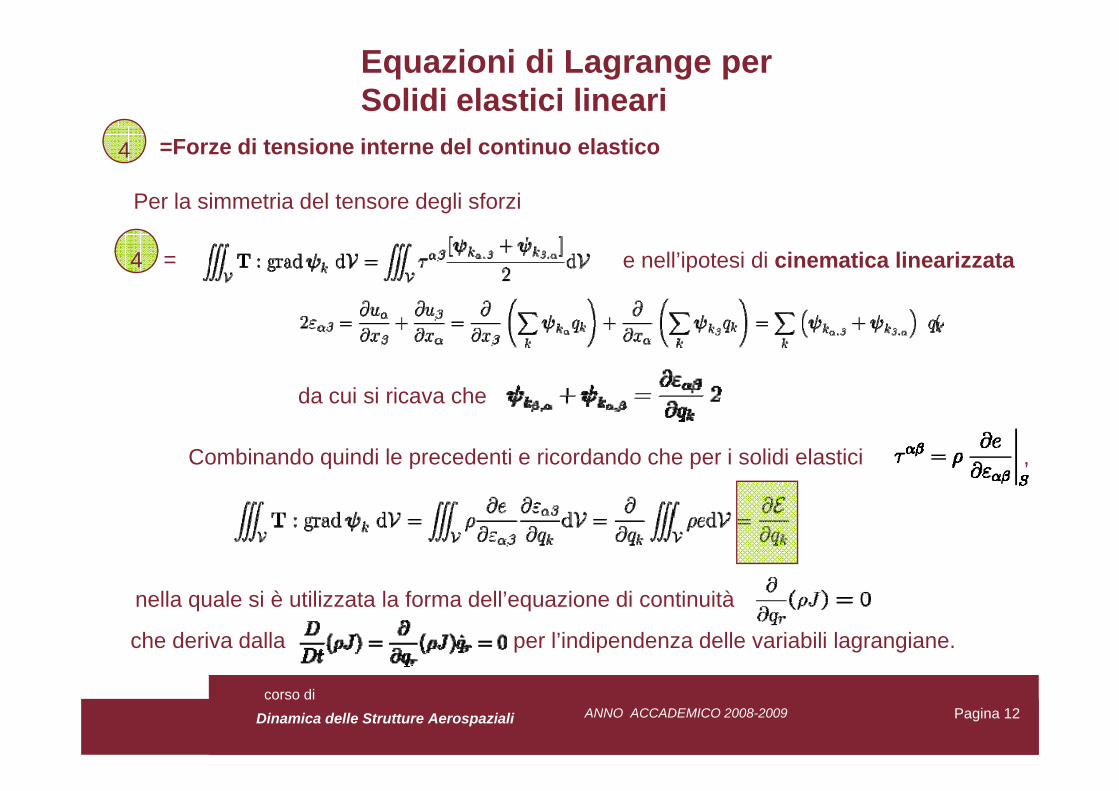
Equazioni di Lagrange per Solidi elastici lineari
=Forze di tensione interne del continuo elastico4
Per la simmetria del tensore degli sforzi
4 = e nell’ipotesi di cinematica linearizzata
da cui si ricava cheda cui si ricava che
Combinando quindi le precedenti e ricordando che per i solidi elastici ,
nella quale si è utilizzata la forma dell’equazione di continuità
che deriva dalla per l’indipendenza delle variabili lagrangiane.
ANNO ACCADEMICO 2008-2009corso di
Dinamica delle Strutture Aerospaziali Pagina 12
Equazioni di Lagrange per Solidi elastici lineari
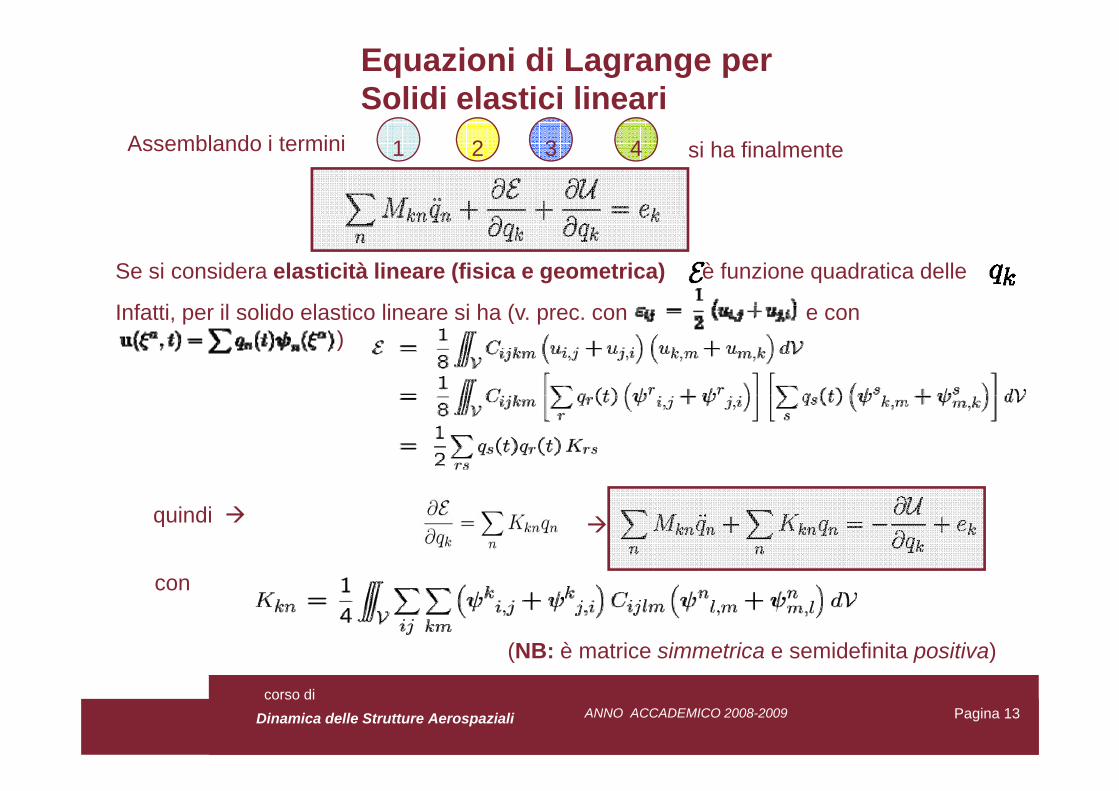
1 2 43Assemblando i termini si ha finalmente
Se si considera elasticità lineare (fisica e geometrica) è funzione quadratica delle
I f tti il lid l ti li i h (Infatti, per il solido elastico lineare si ha (v. prec. con e con)
quindi
con
(NB: è matrice simmetrica e semidefinita positiva)
ANNO ACCADEMICO 2008-2009corso di
Dinamica delle Strutture Aerospaziali Pagina 13
Equazioni di Lagrange per Solidi elastici lineari
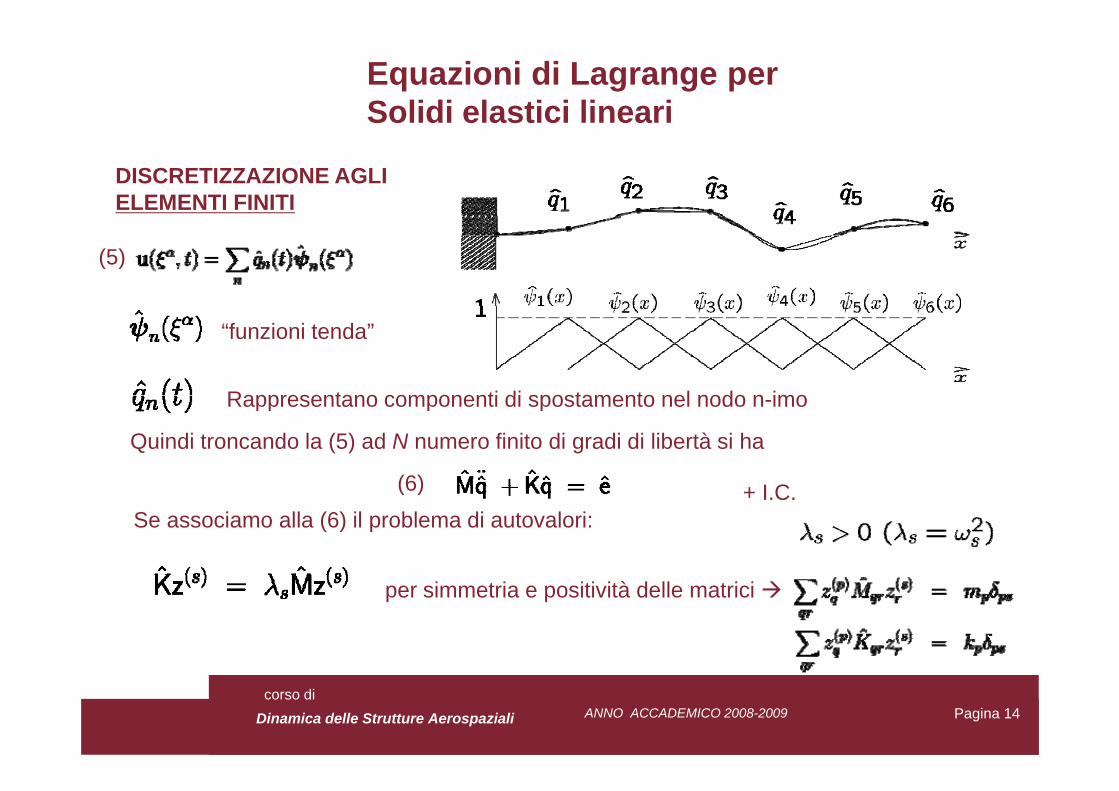
DISCRETIZZAZIONE AGLI ELEMENTI FINITI
(5)
“funzioni tenda”
Rappresentano componenti di spostamento nel nodo n imoRappresentano componenti di spostamento nel nodo n-imo
Quindi troncando la (5) ad N numero finito di gradi di libertà si ha
I C(6) + I.C.Se associamo alla (6) il problema di autovalori:
(6)
per simmetria e positività delle matrici
ANNO ACCADEMICO 2008-2009corso di
Dinamica delle Strutture Aerospaziali Pagina 14
Equazioni di Lagrange per Solidi elastici lineari
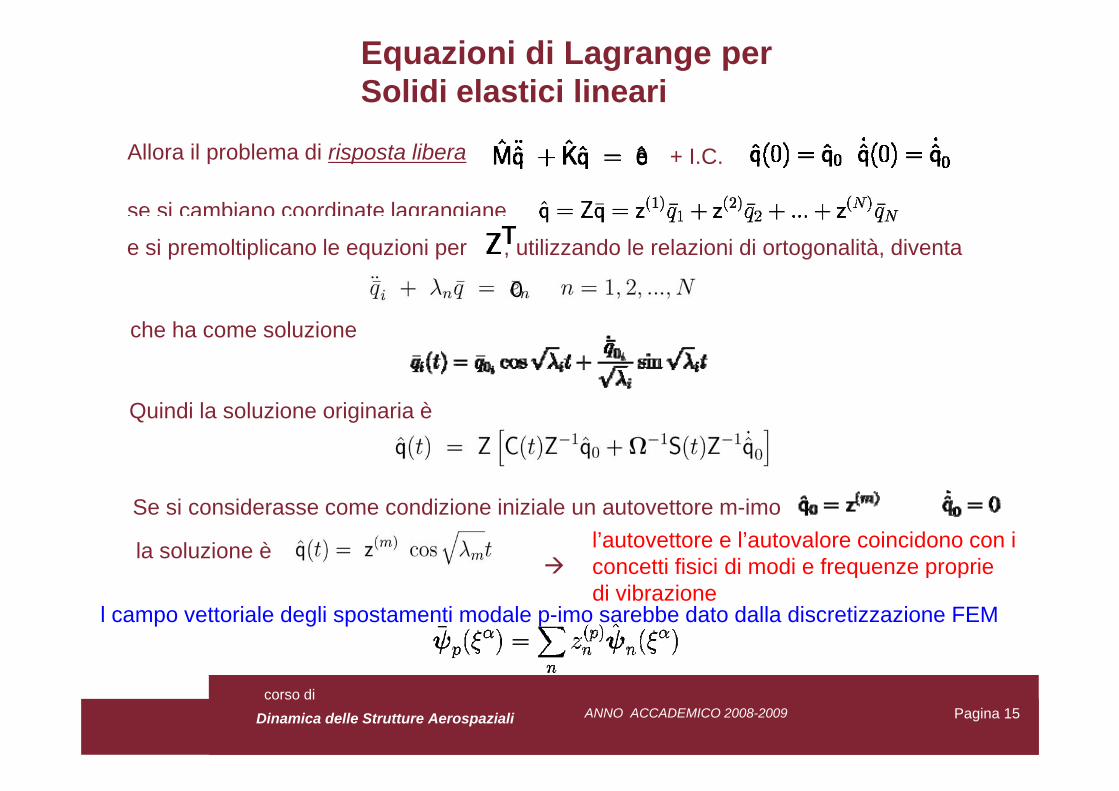
Allora il problema di risposta libera 0 + I.C.
se si cambiano coordinate lagrangiane
e si premoltiplicano le equzioni per , utilizzando le relazioni di ortogonalità, diventa
0
che ha come soluzione
Quindi la soluzione originaria è
Se si considerasse come condizione iniziale un autovettore m-imo
la soluzione è l’autovettore e l’autovalore coincidono con i concetti fisici di modi e frequenze proprie q p pdi vibrazione
l campo vettoriale degli spostamenti modale p-imo sarebbe dato dalla discretizzazione FEM
ANNO ACCADEMICO 2008-2009corso di
Dinamica delle Strutture Aerospaziali Pagina 15
Equazioni di Lagrange per Solidi elastici lineari
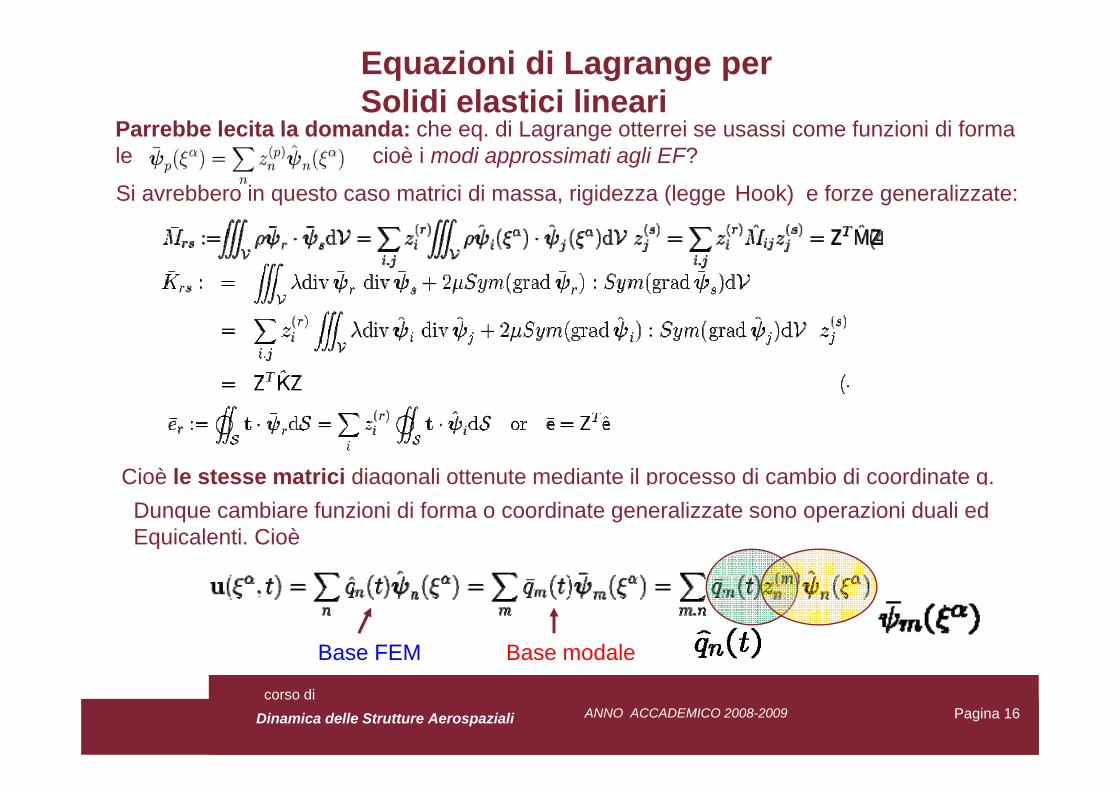
Parrebbe lecita la domanda: che eq di Lagrange otterrei se usassi come funzioni di formaParrebbe lecita la domanda: che eq. di Lagrange otterrei se usassi come funzioni di formale cioè i modi approssimati agli EF?
Si avrebbero in questo caso matrici di massa, rigidezza (legge Hook) e forze generalizzate:
Cioè le stesse matrici diagonali ottenute mediante il processo di cambio di coordinate q.Dunque cambiare funzioni di forma o coordinate generalizzate sono operazioni duali ed Equicalenti. Cioè
Base FEM Base modale
ANNO ACCADEMICO 2008-2009corso di
Dinamica delle Strutture Aerospaziali Pagina 16
Equazioni di Lagrange per Solidi elastici lineari
A parità di accuratezza, la velocità di convergenza globale della base modale (approssimata) alla soluzione esatta è maggiore della base FEM.
Poiché la stabilità e la risposta aeroelastica di una configurazioni sono caratteristiche
AD ESEMPIO:
Altra motivazione: a parità di accuratezza, si debbono calcolare meno forze generalizzateaerodinamiche essendo il calcolo aerodinamico l’onere di calcolo maggiore
globali, la base modale è la tipica base lagrangiana utilizzata in aeroelasticità.
ESEMPIO FILMATI ANALISI MODALEESEMPIO FILMATI ANALISI MODALE
ANNO ACCADEMICO 2007-2008corso di
Dinamica delle Strutture Aerospaziali Pagina 17