Embed Size (px)
Citation preview

저 시-비 리- 경 지 2.0 한민
는 아래 조건 르는 경 에 한하여 게
l 저 물 복제, 포, 전송, 전시, 공연 송할 수 습니다.
다 과 같 조건 라야 합니다:
l 하는, 저 물 나 포 경 , 저 물에 적 된 허락조건 명확하게 나타내어야 합니다.
l 저 터 허가를 면 러한 조건들 적 되지 않습니다.
저 에 른 리는 내 에 하여 향 지 않습니다.
것 허락규약(Legal Code) 해하 쉽게 약한 것 니다.
Disclaimer
저 시. 하는 원저 를 시하여야 합니다.
비 리. 하는 저 물 리 목적 할 수 없습니다.
경 지. 하는 저 물 개 , 형 또는 가공할 수 없습니다.

공학박사학위논문공학박사학위논문공학박사학위논문공학박사학위논문
Effective Optimization of Power Management for Fuel Cell Hybrid
Vehicles Based on Pontryagin’s Minimum Principle
폰트리아진 최적 원리 기반의 연료전지 하이브리드
차량의 효과적인 동력관리 최적화
2012201220122012년년년년 8888월월월월
서울대학교서울대학교서울대학교서울대학교 대학원대학원대학원대학원
기계항공공학부기계항공공학부기계항공공학부기계항공공학부
Chunhua Zheng

Effective Optimization of Power Management for
Fuel Cell Hybrid Vehicles Based on Pontryagin’s
Minimum Principle
A DISSERTATION SUBMITTED TO THE SCHOOL OF
MECHANICAL AND AEROSPACE ENGINEERING OF
SEOUL NATIONAL UNIVERSITY IN PARTIAL
FULFILLMENT OF THE REQUIREMENTS FOR THE
DEGREE OF DOCTOR OF PHILOSOPHY
By
Chunhua Zheng
August 2012

i
Abstract
Effective Optimization of Power Management for
Fuel Cell Hybrid Vehicles Based on Pontryagin’s
Minimum Principle
Chunhua Zheng
School of Mechanical and Aerospace Engineering
The Graduate School
Seoul National University
A considerable amount of research on power management strategies of
hybrid vehicles has been conducted during last few decades in order to
improve fuel economy and performance of hybrid vehicles. This dissertation
introduces a Pontryagin’s Minimum Principle (PMP)-based power
management strategy for fuel cell hybrid vehicles (FCHVs) and extends this
strategy mathematically for considering three important factors in FCHVs.
These factors include limitations on the battery state of charge (SOC) usage,
the fuel cell system (FCS) lifetime, and the effects of battery thermal
management on the fuel economy. The PMP-based power management
strategy is implemented in a computer simulation for each case.

ii
The limitation problem on the battery SOC usage is solved by introducing
a new cost function other than the fuel consumption rate to the PMP-based
optimal control problem. The limitation requirements on the battery SOC are
satisfied while minimizing the fuel consumption by this solution. In order to
take into account the lifetime of an FCS while considering its fuel
consumption minimization, a second cost function is defined and added to
the PMP-based optimal control problem. The second cost function is related
to the power changing rate of the FCS. Simulation results show that the
lifetime of the FCS can be prolonged by the reformulation of the PMP-based
optimal control problem. However, there is a tradeoff between the FCS
lifetime and the fuel consumption because of the added cost function. The
effect of battery thermal management on the total fuel consumption is
considered by designating the battery temperature as an extra state variable
other than the battery SOC in the PMP-based optimal control problem. The
relationship among the final battery SOC, the final battery temperature, and
the total fuel consumption is illustrated by simulation results. This
relationship can be expressed by a surface, which is composed of two
intersecting half-planes with similar gradients. This surface is defined as an
optimal surface in this dissertation, which indicates the optimal solutions, as
it is derived from the PMP-based power management strategy. Fuel economy
potential gains attributed to the battery thermal management are determined
using the optimal surface. The battery thermal management can improve the

iii
fuel economy of an FCHV up to 4.77% depending on the driving cycle. A
discussion on the combined case is carried out to consider the three factors
together.
For the three extended cases, global optimality of the PMP-based power
management strategies is discussed. Simulation results of the PMP-based
strategy are also compared to those of Dynamic Programming (DP) approach
for the three cases. The PMP-based power management strategy saves much
time compared to DP approach while it guarantees global optimality under
battery assumptions. The time-saving effect of the PMP-based strategy is
outstanding especially when there are more than two state variables.
Key words: Fuel cell hybrid vehicle, Pontryagin’s Minimum Principle,
Power management strategy, Mathematical extension, Time-
saving effect
Student Number: 2007-31059

iv
Contents
Abstract ....................................................................................................................... i
Contents .................................................................................................................... iv
List of Figures ......................................................................................................... vi
List of Tables ......................................................................................................... xv
Chapter 1 Introduction .......................................................................................... 1
1.1 Background ................................................................................... 1
1.2 Contributions ................................................................................ 6
1.3 Outline of this dissertation ............................................................ 9
Chapter 2 Vehicle Model ................................................................................... 11
2.1 Configuration of an FCHV ......................................................... 11
2.2 FCS model .................................................................................. 13
2.2.1 Fuel cell stack model ......................................................................................... 13
2.2.2 Compressor model .............................................................................................. 15
2.2.3 Air cooler and humidifier models ............................................................ 18
2.2.4 FCS characteristics ............................................................................................. 18
2.3 Battery model .............................................................................. 23
2.3.1 Battery internal resistance model ............................................................. 23
2.3.2 Battery thermal model ...................................................................................... 24
2.4 Components sizing ...................................................................... 25
2.4.1 Traction motor power design ...................................................................... 25
2.4.2 FCS power design ............................................................................................... 27
2.4.3 Battery power design and energy capacity design ....................... 29
Chapter 3 PMP-based power management strategy for FCHVs ............. 31
3.1 Theoretical study ......................................................................... 32

v
3.2 Optimal lines ............................................................................... 36
3.3 Fuel economy evaluation based on optimal lines ....................... 44
3.4 Comparison between PMP-based power management strategy
and DP approach ............................................................................... 48
Chapter 4 Extended PMP-based power management strategy for
FCHVs ..................................................................................................................... 52
4.1 PMP-based power management strategy considering battery
SOC constraint .................................................................................. 52
4.2 PMP-based power management strategy considering FCS
lifetime .............................................................................................. 60
4.3 PMP-based power management strategy considering battery
thermal management ......................................................................... 69
4.3.1 PMP-based power management strategy without considering
battery thermal management ..................................................................................... 71
4.3.2 PMP-based power management strategy considering battery
thermal management ....................................................................................................... 72
4.3.3 Global optimality of the two-state variable PMP-based
power management strategy ...................................................................................... 81
4.3.4 Control parameters of the PMP-based power management
strategy ..................................................................................................................................... 88
4.4 Discussions on the combined case .............................................. 93
Chapter 5 Concluding remarks ......................................................................... 95
5.1 Conclusion .................................................................................. 95
5.2 Future work ................................................................................. 98
References ............................................................................................................. 100
Abstract (korean) ................................................................................................ 107
Acknowledgement (korean) ............................................................................ 110

vi
List of Figures
Fig. 1.1 Improvement of the distribution pattern of the FCS operating points
by hybridization: (a) fuel cell vehicle and (b) fuel cell hybrid vehicle
Fig. 2.1 Configuration and energy flows of an FCHV
Fig. 2.2 Configuration of an FCS
Fig. 2.3 Simulation results derived from the compressor model
Fig. 2.4 OCV, activation loss, ohmic loss, concentration loss, and fuel cell
voltage of one single cell versus the stack current for the FCS used in this
dissertation
Fig. 2.5 Stack-provided power, auxiliary power, and FCS net power of the
FCS used in this dissertation
Fig. 2.6 Relationship between the FCS net power and the fuel consumption
rate of the FCS used in this dissertation
Fig. 2.7 FCS efficiency versus the FCS net power for the FCS used in this
dissertation
Fig. 2.8 Electrical schematic of the battery internal resistance model
Fig. 2.9 Relationship between the acceleration time and the required motor
power when the vehicle fully accelerates
Fig. 2.10 Relationship between the vehicle speed and the required FCS net
power when the vehicle drives on a flat road at a constant speed and it is
powered only by the FCS

vii
Fig. 2.11 Relationship between the vehicle speed and the required FCS net
power when the vehicle drives on a 5% grade road at a constant speed and it
is powered only by the FCS
Fig. 2.12 Relationship between the FCS net power and the battery power
when the selected motor power and FCS net power are 75 kW and 62 kW,
and the average motor efficiency is 85 %
Fig. 3.1 OCV and internal resistance of the battery used in this dissertation:
(a) OCV, (b) internal resistance
Fig. 3.2 Fuel consumption rate 2hm
•
, time derivative of the battery SOC
SOC•
, and Hamiltonian H for the whole range of the FCS net power
Fig. 3.3 Simulation results comparison between a constant costate and a
variable costate on the FTP75 urban driving cycle
Fig. 3.4 Simulation results comparison between a constant costate and a
variable costate on the NEDC 2000
Fig. 3.5 Simulation results comparison between a constant costate and a
variable costate on the Japan 1015 driving cycle
Fig. 3.6 Simulation results of the final battery SOC and the total fuel
consumption while changing both constant costates and variable costates on
the FTP75 urban driving cycle
Fig. 3.7 Simulation results of the final battery SOC and the total fuel
consumption while changing both constant costates and variable costates on
the NEDC 2000

viii
Fig. 3.8 Simulation results of the final battery SOC and the total fuel
consumption while changing both constant costates and variable costates on
the Japan 1015 driving cycle
Fig. 3.9 Optimal lines for the FTP75 urban driving cycle
Fig. 3.10 Optimal lines for the NEDC 2000
Fig. 3.11 Optimal lines for the Japan 1015 driving cycle
Fig. 3.12 A rule-based power management strategy
Fig. 3.13 Fuel economy evaluation of the rule-based strategy on the FTP75
urban driving cycle
Fig. 3.14 Fuel economy evaluation of the rule-based strategy on the NEDC
2000
Fig. 3.15 Fuel economy evaluation of the rule-based strategy on the Japan
1015 driving cycle
Fig. 3.16 Distribution patterns of the FCS operating points: (a) Rule-based
power management strategy, (b) PMP-based power management strategy
Fig. 3.17 Simulation results comparison between PMP-based power
management strategy and DP approach on the FTP75 urban driving cycle: (a)
FCS net power trajectories, (b) battery power trajectories, (c) SOC
trajectories
Fig. 3.18 Simulation results comparison between PMP-based power
management strategy and DP approach on the NEDC 2000: (a) FCS net
power trajectories, (b) battery power trajectories, (c) SOC trajectories

ix
Fig. 3.19 Simulation results comparison between PMP-based power
management strategy and DP approach on the Japan 1015 driving cycle: (a)
FCS net power trajectories, (b) battery power trajectories, (c) SOC
trajectories
Fig. 4.1 Comparison of the optimal battery SOC trajectories for the case
without battery SOC boundary and the case with battery SOC boundary
when the cost function C is used
Fig. 4.2 Comparison of the optimal costate trajectories for the case without
battery SOC boundary and the case with battery SOC boundary when the
cost function C is used
Fig. 4.3 Comparison of the optimal power trajectories for the case without
battery SOC boundary and the case with battery SOC boundary when the
cost function C is used
Fig. 4.4 Comparison of the optimal battery SOC trajectories for the case
without battery SOC boundary and the case with battery SOC boundary
when the cost function S is used
Fig. 4.5 Comparison of the optimal costate trajectories for the case without
battery SOC boundary and the case with battery SOC boundary when the
cost function S is used
Fig. 4.6 Comparison of the optimal power trajectories for the case without
battery SOC boundary and the case with battery SOC boundary when the
cost function S is used

x
Fig. 4.7 Comparison between DP approach and PMP-based power
management strategy when the battery SOC constraint is considered: (a) FCS
net power trajectories, (b) battery power trajectories, (c) SOC trajectories
Fig. 4.8 Optimal trajectories for the cases when the FCS lifetime is
considered and is not considered on the FTP75 urban driving cycle
Fig. 4.9 Optimal trajectories for the cases when the FCS lifetime is
considered and is not considered on the NEDC 2000
Fig. 4.10 Optimal trajectories for the cases when the FCS lifetime is
considered and is not considered on the Japan 1015 driving cycle
Fig. 4.11 Optimal lines for the cases when the FCS lifetime is considered and
is not considered on the FTP75 urban driving cycle
Fig. 4.12 Optimal lines for the cases when the FCS lifetime is considered and
is not considered on the NEDC 2000
Fig. 4.13 Optimal lines for the cases when the FCS lifetime is considered and
is not considered on the Japan 1015 driving cycle
Fig. 4.14 Comparison between DP approach and PMP-based power
management strategy when the FCS lifetime is considered: (a) FCS net
power trajectories, (b) battery power trajectories, (c) SOC trajectories
Fig. 4.15 Battery characteristics: (a) OCV, (b) charging resistance, (c)
discharging resistance
Fig. 4.16 Optimal surface on the FTP75 urban driving cycle for the case
when the initial battery SOC is 0.6 and the initial battery temperature is

xi
25 °C
Fig. 4.17 Optimal surface on the NEDC 2000 for the case when the initial
battery SOC is 0.6 and the initial battery temperature is 25 °C
Fig. 4.18 Optimal surface on the Japan 1015 driving cycle for the case when
the initial battery SOC is 0.6 and the initial battery temperature is 25 °C
Fig. 4.19 Optimal surface on the FTP75 urban driving cycle for the case
when the initial battery SOC is 0.6 and the initial battery temperature is 5 °C
Fig. 4.20 Optimal trajectories for different initial battery temperature
conditions: (a) battery SOC trajectories, (b) battery temperature trajectories,
(c) battery power trajectories, (d) FCS net power trajectories
Fig. 4.21 Effects of battery thermal management on the optimal trajectories
on the FTP75 urban driving cycle: (a) battery SOC, (b) battery temperature,
(c) battery power, (d) FCS net power
Fig. 4.22 Effects of battery thermal management on the optimal trajectories
on the NEDC 2000: (a) battery SOC, (b) battery temperature, (c) battery
power, (d) FCS net power
Fig. 4.23 Effects of battery thermal management on the optimal trajectories
on the Japan1015 driving cycle: (a) battery SOC, (b) battery temperature, (c)
battery power, (d) FCS net power
Fig. 4.24 The effect of the battery thermal management on the fuel economy
over the FTP75 urban driving cycle
Fig. 4.25 The effect of the battery thermal management on the fuel economy

xii
over the NEDC 2000
Fig. 4.26 The effect of the battery thermal management on the fuel economy
over the Japan 1015 driving cycle
Fig. 4.27 Concavity and convexity of the state equations based on the
characteristics of the battery used in this dissertation: (a) state equation F
versus battery SOC and battery temperature for different battery power, (b)
state equation F versus battery temperature and battery power for different
battery SOC, (c) state equation F versus battery SOC and battery power
for different battery temperature, (d) state equation f versus battery
temperature and battery SOC for different battery power, (e) state equation
f versus battery temperature and battery power for different battery SOC,
(f) state equation f versus battery SOC and battery power for different
battery temperature
Fig. 4.28 Simulation results derived from DP approach for the two-state
variable case (driving cycle 1): (a) simulation results of the two-state variable,
(b) simulation result of the battery SOC, and (c) simulation result of the
battery temperature
Fig. 4.29 Driving cycle 1 used in comparison between PMP-based strategy
and DP approach
Fig. 4.30 Comparison between DP approach and PMP-based power
management strategy when the effect of battery thermal management is
considered (driving cycle 1): (a) battery SOC, (b) battery temperature, (c)

xiii
battery power, and (d) FCS net power
Fig. 4.31 Simulation results derived from DP approach for the two-state
variable case (driving cycle 2): (a) simulation results of the two-state variable,
(b) simulation result of the battery SOC, and (c) simulation result of the
battery temperature
Fig. 4.32 Driving cycle 2 used in comparison between PMP-based strategy
and DP approach
Fig. 4.33 Comparison between DP approach and PMP-based power
management strategy when the effect of battery thermal management is
considered (driving cycle 2): (a) battery SOC, (b) battery temperature, (c)
battery power, and (d) FCS net power
Fig. 4.34 Fuel consumption rate 2hm
•
, time derivative of the battery SOC
SOC•
, time derivative of the battery temperature T•
, and Hamiltonian H
for the whole range of the FCS net power
Fig. 4.35 Simulation results of two costates for different initial values of
them over the FTP75 urban driving cycle
Fig. 4.36 Relationship between initial value of 1p and final battery SOC
and relationship between initial value of 2p and final battery temperature
over three typical driving cycles: (a) final battery SOC versus initial value of
1p on the FTP75 urban driving cycle, (b) final battery SOC versus initial
value of 1p on the NEDC 2000, (c) final battery SOC versus initial value of
1p on the Japan 1015 driving cycle, (d) final battery temperature versus

xiv
initial vale of 2p on the FTP75 urban driving cycle, (e) final battery
temperature versus initial vale of 2p on the NEDC 2000, (f) final battery
temperature versus initial vale of 2p on the Japan 1015 driving cycle

xv
List of Tables
Table 2.1 Parameters of the vehicle
Table 2.2 Parameters used to the fuel cell voltage calculation
Table 2.3 Parameters related to the FCS used in this dissertation
Table 2.4 Driving performance requirements on the FCHV
Table 2.5 Selected power source components
Table 3.1 Fuel economy evaluation results of the rule-based power
management strategy on three driving cycles
Table 3.2 Fuel economy comparison between the PMP-based power
management strategy and DP approach on three driving cycles
Table 4.1 Fuel consumption comparison of three PMP-based power
management strategies on the FTP75 urban driving cycle
Table 4.2 Comparison of the PMP-based power management strategies for
the cases when the FCS lifetime is considered and is not considered on three
driving cycles
Table 4.3 Influence of the tuning parameter
Table 4.4 Effects of the battery thermal management on the total fuel
consumption on three driving cycles

1
Chapter 1 Introduction
1.1 Background
Hybrid vehicles use two or more than two kinds of power sources, and they
have become a major area of interest in academia and in the automotive
industry recently owing to the energy supply problem and environmental
problems. The power management strategy of hybrid vehicles is one of the
most important and popular research topics in this area, as it determines the
power split between power sources and because it is related to the fuel
economy of the vehicles. Several types of power management strategies for
hybrid vehicles have been developed during last few decades. These power
management strategies can be divided into two major groups: those based on
the heuristic concept and those based on the optimal control theory. The
former mainly includes rule-based algorithms and fuzzy logic algorithms [1-3].
Earlier in the development of hybrid vehicles, power management strategies
were dominated by these types of strategies owing to their simplicity when
actually realizing them. These types of strategies, however, cannot guarantee
the optimal power distribution and the optimal fuel economy as well. In
addition, the rules and fuzzy logic need expert knowledge. To remedy this
problem, the optimal control theory was introduced as part of the power
management strategy of hybrid vehicles, including both Dynamic

2
Programming (DP) as developed by R. E. Bellman [4-6] and Pontryagin’s
Minimum Principle (PMP) [7-10]. The DP approach examines all admissible
control inputs at every state, thus guaranteeing global optimality if the driving
cycle information is given in advance [4-6]. However, the DP approach cannot
be used directly for the real-time control of hybrid vehicles due to the
backward-looking calculation process and the long calculation time. Being
confronted with the drawbacks of the DP, some researchers have proposed
stochastic dynamic programming [11-13] to overcome these problems. The
PMP-based power management strategy optimizes the power distribution
between power sources and minimizes the performance measure by
instantaneously providing the necessary optimality conditions. One of the
major advantages of the PMP-based strategy is that there is only one parameter
to be tuned in this strategy in order to obtain optimal results over a specific
driving cycle [9]. Moreover, the core of this strategy is implementable in a
real-time controller, even if the driving cycle information is not known in
advance [10]. Furthermore, previous research [8] proved from a mathematical
point of view that the PMP-based power management strategy can serve as a
global optimal solution (DP) under the assumption that the open-circuit
voltage (OCV) and the internal resistance of a battery are independent of the
battery state of charge (SOC). This assumption is reasonable for charge-
sustaining types of hybrid vehicles, especially for those which use lithium-ion
batteries. There is also a power management strategy known as the equivalent

3
consumption minimization strategy (ECMS), which is similar to the PMP-
based strategy. The ECMS is originally based on the heuristic concept holding
that the electric energy usage can be transformed to the equivalent fuel
consumption [14-17]. Although the ECMS is based on this heuristic idea, it
also works in conjunction with the optimal concept and can be applied for use
with a real-time control scheme. However, in the PMP-based strategy, control
parameters and their relationship can be explained physically and
mathematically from an optimal control viewpoint, given that this strategy
stems from the optimal control theory. This is notable especially for the case
where there are two state variables and this is the main difference between the
ECMS and the PMP-based strategy.
A fuel cell hybrid vehicle (FCHV) uses a fuel cell system (FCS) as its
primary power source. The FCS converts hydrogen and oxygen into electric
energy with water and heat as the by-products [18]. Therefore, FCHVs are
considered as one of the most promising candidates for future transportation.
As a power source, an FCS has relatively slow power response and cannot
recover the braking energy. Thus, the size and cost of the FCS will be
increased if the FCS is the only power source in a vehicle. The secondary
power source which has relatively fast power response and can recuperate the
braking energy is needed. A battery could be one of the candidates for the
secondary power source. An FCHV can provide sufficient power during its
acceleration and can recuperate the kinetic or potential energy of the vehicle

4
during braking by hybridization of an FCS and a battery. Our research has
shown that the fuel economy can be improved around 20% by hybridization
when the FCHV and the vehicle which is powered only by an FCS (fuel cell
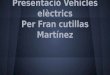
vehicle) have similar mass. Fig. 1.1 illustrates the distribution patterns of the
FCS operating points in the two vehicles. It can be observed that the operating
points of the FCS are shifted to high efficiency region by hybridization in the
FCHV, while the FCS operation does not have an option in the fuel cell
vehicle (FCV), as the FCS is the only power source of the FCV. FCHVs have
many outstanding advantages, such as higher energy efficiency and lower
emissions compared to internal combustion engine vehicles.
(a) (b)
Fig. 1.1 Improvement of the distribution pattern of the FCS operating points by hybridization:
(a) fuel cell vehicle, (b) fuel cell hybrid vehicle
The PMP-based power management strategy is applied to an FCHV in this
dissertation. Some researchers have studied this power management strategy
for engine/battery powered hybrid vehicles and for plug-in hybrid vehicles as
well [18-23]. In the optimal control problem formulation of earlier research,
the performance measure to be minimized is the total fuel consumption, the
state variable of the control system is the battery SOC, and the control variable
0 10 20 30 40 50 60 70 800
10
20
30
40
50
60
FCS net power (kW)
FC
S e
ffici
ency
(%
)
0 10 20 30 40 50 600
10
20
30
40
50
60
FCS net power (kW)
FC
S e
ffici
ency
/Fre
qu
ency
(%
)

5
of the control system is the battery power or the engine power. Some
researchers have extended the basic form of the optimal control problem to
achieve some specific goals [19, 22, 23]. In the research [19], the limitation
problem on the battery SOC usage is considered by defining a cost function
regarding the battery SOC and adding it to the PMP-based optimal control
problem in an engine/battery powered hybrid vehicle. In the research [22],
engine oil temperature is added to the PMP-based control problem as an extra
state variable other than the battery SOC in order to assess the effects of
engine thermal management on the fuel consumption in an engine/battery
powered hybrid vehicle. In the research [23], the battery aging factor is
defined by a parameter, and this parameter is added to the PMP-based control
problem as a second cost function in order to take into account the battery
lifetime together with the total fuel consumption in an engine/battery powered
hybrid vehicle.
In spite of the previous research on the PMP-based power management
strategy, there are still some important factors which are ignored or which
need to be improved when applying this strategy to FCHVs. In this dissertation,
these factors are considered mathematically in the formulation of the PMP-
based optimal control problem. These factors include the battery SOC
constraint, the FCS lifetime, and the effect of battery thermal management on
the fuel economy. These factors are considered by adding a new cost function
or a new state variable to the optimal control problem. In the previous research

6
[8], the global optimality of the PMP-based strategy is proved for the case
where there are one state variable and one cost function. In this dissertation,
global optimality is discussed when the new factors are considered in the
PMP-based strategy, and simulation results of the PMP-based strategy are
compared to those of DP approach which gives global optimal solution. The
comparison result shows that the PMP-based power management strategy still
guarantees global optimality when the new factors are considered. Time-
saving effect of the PMP-based power management strategy is outstanding
considering that the DP approach needs much more time to obtain results,
especially for two-state variable cases. Also, the control parameters and their
relationship in the PMP-based strategy are explained physically and
mathematically in this dissertation.
1.2 Contributions
As introduced in 1.1, a great deal of research on power management
strategies of hybrid vehicles has been conducted during last decades. The
research is still in progress aiming to reduce fuel consumption and improve
vehicle performance. This dissertation introduces a PMP-based power
management strategy for FCHVs, and extends this strategy mathematically in
order to consider some important factors in FCHVs. There are two main
contributions that this dissertation has made compared to the previous research
introduced in 1.1.

7
The first contribution is that the basic formulation of the PMP-based optimal
control problem is extended mathematically in order to take into account some
important factors in FCHVs. In the previous research on the PMP-based power
management strategy, some important factors are ignored in FCHVs. This will
cause some practical problems, such as lifetime shortening of power sources
and increase of fuel consumption. These factors include upper limit and lower
limit of the battery SOC, the FCS lifetime, and the influence of battery thermal
management on the fuel economy. These extensions are achieved by defining
a new state variable or a new cost function and mathematically adding it to the
optimal control problem formulation. Previously, the battery SOC limitation
problem is considered by defining a cost function regarding the battery SOC
and adding it to the PMP-based optimal control problem [19]. This solution,
however, makes the optimal battery SOC trajectory fluctuating. In order to
overcome this drawback, a new cost function regarding the FCS net power is
defined and added to the PMP-based optimal control problem in this
dissertation, and the drawback has been disappeared by this method. In order
to prolong the FCS lifetime, a wavelet transform method is used to decompose
the required power signal into low frequency component and high frequency
component in the literature [3]. In this literature, a fuzzy logic controller is
applied to distribute the low frequency and high frequency components to the
FCS and the battery, respectively. This strategy, however, cannot guarantee
the optimal solution, as the fuzzy logic controller is used. In this dissertation, a

8
new cost function is defined and added to the PMP-based optimal control
problem in order to consider the FCS lifetime. By this extension, the FCS
lifetime is prolonged while the fuel consumption is minimized. Few
researchers have focused on the effect of battery thermal management on the
fuel economy in FCHVs so far. In this dissertation, the battery thermal model
is applied and the effect of battery thermal management on the total fuel
consumption is assessed by designating the battery temperature as a second
state variable in the PMP-based optimal control problem. By this extension,
the effect is assessed and an optimal surface is defined, which expresses the
relationship among the final battery SOC, the final battery temperature, and
the total fuel consumption.
The second contribution of this dissertation is that it provides an effective
method of power management for hybrid vehicles. The PMP-based power
management strategy guarantees global optimality under some reasonable
assumptions while it saves much time compared to the DP approach. The time-
saving effect is outstanding especially for those systems where there are more
than two state variables. Few researchers have provided elapsed time
comparison result of the PMP-based strategy and the DP approach for two-
state variable cases so far. This dissertation compares the simulation time
consumed in the PMP-based strategy and the DP approach for two-state
variable cases so that the effectiveness of the PMP-based power management
strategy is proved.

9
1.3 Outline of this dissertation
There are five chapters in this dissertation. Chapter 1 introduces the research
background on the power management strategies of hybrid vehicles. The
contributions that this dissertation has made compared to the previous research
and outline of this dissertation are also included in the chapter 1. Chapter 2
presents the control-oriented powertrain component models used in this
dissertation. It mainly covers the FCS model and the battery model. The sizing
process of the power source components of an FCHV is also covered in
chapter 2. Chapter 3 mathematically introduces the PMP-based power
management strategy for FCHVs. Formulation of the optimal control problem
here is aimed at a system in which there are one state variable and one cost
function. The PMP-based strategy introduced in chapter 3 is mathematically
extended according to three important factors in chapter 4. These extensions
are achieved by defining a new state variable or a new cost function and
mathematically adding it to the optimal control problem formulation. The
global optimality of the extended PMP-based strategies is discussed and the
simulation results of the extended PMP-based strategy are compared to those
of DP approach. Chapter 4 also compares the elapsed time of the PMP-based
strategy and the DP approach so that the effectiveness of the PMP-based
strategy is emphasized. Chapter 4 is the main part of this dissertation. Chapter

10
5 concludes the whole contents of this dissertation and gives some concluding
remarks and proposes the future work.

11
Chapter 2 Vehicle Model
The complexity of a vehicle model depends on its application. When the
objective is to develop and evaluate a power management strategy or to
estimate the fuel economy, the quasi-static vehicle model is enough. When the
objective is to evaluate the drivability of the vehicle, such as jerks and surges,
the detailed dynamic vehicle model is required. In this dissertation, the
primary objective is to evaluate power management strategies in FCHVs, and
thus a quasi-static vehicle model is used. A quasi-static vehicle model is
sufficient to calculate energy flows in the powertrain and is appropriate for
performance optimization problems [24].
2.1 Configuration of an FCHV
Fig. 2.1 illustrates the configuration of an FCHV and the energy flows in an
FCHV. The architecture of an FCHV is similar to that of a series hybrid
electric vehicle, considering that the electric motor is the only powertrain
component that is directly connected to the wheels. The FCS and the battery
are the power sources and they are connected to the wheels through the
traction motor. The motor receives power from both the FCS and the battery
through the DC-DC converter and the DC-AC inverter. The motor can be
controlled to operate as a generator to convert the kinetic or potential energy
of the vehicle into electrical energy and store it in the battery. The arrows in

12
Fig. 2.1 indicate the energy flow directions. The motor uses a map to express
its efficiency, and the converters are assumed to be ideal converters with a
constant efficiency of 95%. The final drive gear efficiency is considered to be
a constant. The vehicle parameters used in this dissertation are shown in Table
2.1. Parts of these data are sourced from available literature [25].
Fig. 2.1 Configuration and energy flows of an FCHV
Table 2.1 Parameters of the vehicle
Item Value
Vehicle total mass (kg) 1700
Mass factor 1.1
Final drive gear efficiency (%) 95
Tire radius (m) 0.29
Aerodynamic drag coefficient 0.37
Vehicle frontal area (m2) 2.59
Air density (kg/m3) 1.21
Rolling resistance coefficient 0.014

13
2.2 FCS model
The FCS is the primary power source of FCHVs. Fig. 2.2 illustrates the
configuration of an FCS. It also shows the information of gas flows and of
control signals. In this subsection, the components marked in red are
introduced and modeled, which are the fuel cell stack, the compressor, the air
cooler, and the humidifier. We consulted the literature [26-29] for these
models. Here, the fuel cell stack is the main device and others are auxiliary
devices. The characteristics of the FCS used in this dissertation are also
presented in this subsection.
Fig. 2.2 Configuration of an FCS
2.2.1 Fuel cell stack model
A fuel cell stack converts chemical energy of reactants into electrical
energy and provides power to the vehicle and to its auxiliary devices. A fuel

14
cell stack is composed of many single cells connected in series. Here, these
cells are assumed to be identical in performance. The voltage of a single cell
fcv is calculated as follows [26-29]:
fc act ohm concv E v v v= − − −
(2.1)
Here, E is the open circuit voltage (OCV). actv , ohmv , and concv represent
activation loss, ohmic loss, and concentration loss. These losses are
considered by physical and empirical equations here.
The OCV here is calculated from the energy balance between the reactants
and products, and the Faraday Constant [26, 27, 30], as follows:
( ) ( ) ( )( )2 2
4 51.229 8.5 10 298.15 4.3085 10 ln 0.5 lnfc fc h oE T T P P− −= − × − + × ⋅ + (2.2)
Here, fcT represents the fuel cell stack temperature, 2hP and
2oP represent
the reactant partial pressures.
The activation loss, which is caused by the need to move electrons and to
break and form chemical bonds in the anode and cathode, is dominated by the
cathode reaction conditions [27, 31]. This loss can be expressed by the Tafel
equation [26, 27, 32] as follows,
( )10 1 c i
act av v v e− ⋅= + ⋅ − (2.3)
where 0v is the voltage drop at zero current and av depends on the oxygen
partial pressure and the stack temperature. i represents the current density,
and 1c is a constant.

15
The ohmic loss is attributed to the electrical resistance of the electrodes and
the electrolyte, and the voltage drop caused by this loss is proportional to the
current density, as follows:
ohm ohmv i R= ⋅ (2.4)
Here, the internal electrical resistance ohmR depends on the membrane
thickness mt and the membrane conductivity mσ , as follows,
mohm
m
tR
σ= (2.5)
where, the membrane conductivity strongly depends on the membrane water
content and the cell temperature.
The concentration of the reactants in the fuel cell decreases along with the
electrochemical reaction. It results in the fuel cell voltage drop. Especially in
the high current density region, it leads to a rapid voltage drop. This is the
concentration loss, which can be expressed as follows [26, 27, 33]:
3
2max
c
conc
iv i c
i
= ⋅
(2.6)
Here, 2c , 3c , and maxi are constants and depend on the temperature and
reactant partial pressure and can be determined empirically [26].
2.2.2 Compressor model
An air compressor is the main auxiliary device of the fuel cell stack, and it
consumes the greatest amount of auxiliary power from the fuel cell stack. An
air compressor is needed to provide the air to the cathode side with a certain

16
pressure and a certain air flow rate. The performance of the air compressor
affects the overall efficiency of the fuel cell stack, as the reaction rate in the
membrane is influenced by the air pressure. Here, the compressor model is
divided into two parts. The first part is a static compressor map, which is
derived based on the Jensen & Kristensen method [34], and the second part is
the compressor and motor inertia.
The dynamic behavior of the air compressor is expressed by a dynamic
equation, as follows:
cpcp m cp
dJ
dt
ωτ τ= − (2.7)
Here, cpJ represents the total inertia of the compressor and the motor, cpω
represents the compressor speed, mτ is the torque provided by the motor,
and cpτ is the torque required to drive the compressor. Here, mτ is
calculated by a static equation, as follows [27]:
( )tm m m v cp
m
kv k
Rτ η ω= − (2.8)
Here, mη represents the motor mechanical efficiency, and mv represents the
motor input voltage. tk , mR , and vk are motor constants. cpτ is calculated
using a thermodynamic equation, as follows [27, 35]:
1
1p atm smcp cp
cp cp atm
C T PW
P
γγ
τω η
− = −
(2.9)
Here, pC is the constant-pressure specific heat capacity of air, atmT is the
atmospheric temperature, cpη is the compressor efficiency, γ is the ratio of

17
the specific heats of air, and cpW is the air flow rate of the compressor. smP
and atmP represent the air pressure in the supply manifold (compressor output)
and the atmospheric pressure, respectively. The only dynamic state in this
compressor model is the compressor speed. Here, we consulted the literature
[26] for the related data, and obtained our own maps on the relationship
between the stack current and the compressor output pressure, the relationship
between the stack current and the compressor air flow rate, and the
relationship between the stack current and the compressor power consumption.
Fig. 2.3 shows the simulation results derived from the compressor model.
Fig. 2.3 Simulation results derived from the compressor model
0 10 20 30 40 50 600
200
400
Cu
rren
t (A
)
0 10 20 30 40 50 600
100
200300
Mo
tor
inpu
t (V
)
0 10 20 30 40 50 601.5
2
2.5
Pre
ssu
re r
atio
0 10 20 30 40 50 600.5
1
1.5x 10
4
Co
mp
ress
or
spee
d (
rpm
)
0 10 20 30 40 50 600
0.1
0.2
Co
mp
ress
or
flow
(kg
/s)
0 10 20 30 40 50 600
2
4
Oxy
gen
exc
ess
ratio
0 10 20 30 40 50 600
10
20
Co
mp
ress
or
pow
er (
kW)
Time (s)

18
2.2.3 Air cooler and humidifier models
An air cooler is needed for the fuel cell stack to reduce the temperature of
the air entering the stack, considering that the pressurized air leaving the
compressor is at a higher temperature. In the air cooler model, the vapor
saturation map and thermodynamic properties are used to calculate the vapor
pressure, dry air pressure, vapor mass flow, and dry air mass flow. A
humidifier is also needed for the fuel cell stack to prevent dehydration of the
membrane. The humidifier model here calculates the amount of water which
is required to be injected. The water injected is assumed to be in the form of
vapor [26]. In addition, the humidifier model also gives the total flow rate
change and pressure change caused by the added water.
2.2.4 FCS characteristics
Fig. 2.4 illustrates the OCV, the activation loss, the ohmic loss, the
concentration loss, and the fuel cell voltage of one single cell versus the stack
current for the FCS used in this dissertation. The data used here are listed in
Table 2.2.

19
Fig. 2.4 OCV, activation loss, ohmic loss, concentration loss, and fuel cell voltage of one single
cell versus the stack current for the FCS used in this dissertation
Table 2.2 Parameters used to the fuel cell voltage calculation
Item Value
Maximum stack current (A) 400
Anode pressure (Hydrogen) (atm) 2
Cathode pressure (air) (atm) 1-1.5
Stack temperature (°C) 80
Active area (cm2/cell) 280
Membrane thickness (cm) 0.01275
0 50 100 150 200 250 300 350 4001.175
1.18
1.185
1.19
Ope
n c
ircu
it vo
ltage
(V
)
0 50 100 150 200 250 300 350 4000.2
0.3
0.4
Act
ive
loss
(V
)
0 50 100 150 200 250 300 350 4000
0.2
0.4
Ohm
ic lo
ss (
V)
0 50 100 150 200 250 300 350 4000
0.02
0.04
0.06
Co
ncen
tra
tion
loss
(V
)
0 50 100 150 200 250 300 350 4000.4
0.6
0.8
1
Cel
l vol
tag
e (V
)
Time (s)

20
The stack-provided power stackP is related to the stack current stackI and
cell voltage fcv as follows:
stack cell fc stackP N v I= ⋅ ⋅ (2.10)
Here, cellN represents the cell number of the stack. The stack-provided power
is partially used to maintain the auxiliary devices of the FCS, such as the air
compressor. The part of power used to propel the vehicle is called FCS net
power. The relationship between the FCS net power fcsP and the stack-
provided power stackP is as follows:
fcs stack auxP P P= − (2.11)
Here, auxP represents the power consumption of the auxiliary components.
Fig. 2.5 illustrates the stack-provided power, auxiliary power, and FCS net
power of the FCS used in this dissertation. The parameters related to the FCS
are listed in Table 2.3.
Fig. 2.5 Stack-provided power, auxiliary power, and FCS net power of the FCS used in this
dissertation
0 50 100 150 200 250 300 350 4000
10
20
30
40
50
60
70
80
Stack current (A)
Po
wer
(kW
)
Stack powerFCS net powerCompressor powerOther auxiliary power

21
Table 2.3 Parameters regarding the FCS
Item Value
Maximum stack power (kW) 77
Maximum net power (kW) 62
Cell number 350
Compressor efficiency (%) 80
For a fuel cell stack, the fuel consumption rate 2hm
• is related to the stack
current according to the following equation:
2
2
cell hh stack
N Mm I
n Fλ
• ⋅= ⋅ ⋅
⋅ (2.12)
In equation (2.12) [19, 36, 37], 2hM represents the molar mass of hydrogen,
n represents the number of electrons acting in the reaction, F is the
Faraday constant, and λ is the hydrogen excess ratio.
The FCS net power and the fuel consumption rate have a specific
relationship, as both of them are related to the fuel cell stack current according
to Fig. 2.5 and equation (2.12). Fig. 2.6 illustrates the relationship between the
FCS net power and the fuel consumption rate of the FCS used in this
dissertation.

22
Fig. 2.6 Relationship between the FCS net power and the fuel consumption rate of the FCS
used in this dissertation
In an FCS, its efficiency is defined as
2
fcsfcs
h
P
m LHVη •=
⋅ (2.13)
In equation (2.13) [38], LHV=120000 kJ/kg is the lower heating value of
hydrogen. Fig. 2.7 illustrates the FCS efficiency versus the FCS net power for
the FCS used in this dissertation.
Fig. 2.7 FCS efficiency versus the FCS net power for the FCS used in this dissertation
0 10 20 30 40 50 600
0.5
1
1.5
2
FCS net power (kW)
Hyd
rog
en c
on
sum
ptio
n r
ate
(g/s
)
0 10 20 30 40 50 600
10
20
30
40
50
60
FCS net power (kW)
FC
S e
ffici
ency
(%
)

23
2.3 Battery model
2.3.1 Battery internal resistance model
An internal resistance battery model [39] is used in this dissertation. This
battery model consists of a voltage source (OCV) and an internal resistance
component [40-42]. The effects of the battery temperature on both the internal
resistance R and the OCV, V , were typically neglected in previous
research [43-46]. In this dissertation, the effects are taken into account and the
parameters of the battery model are related according to the following
equation:
2( , ) ( , ) 4 ( , )
2 ( , )
bat
bat
ISOC
Q
V SOC T V SOC T R SOC T PI
R SOC T
•= −
− − ⋅=
(2.14)
Here, batQ is the battery charge capacity, I is the battery current, T is the
battery temperature, and batP is the battery power at the battery terminals. Fig.
2.8 illustrates the electrical schematic of the battery internal resistance model.
Fig. 2.8 Electrical schematic of the battery internal resistance model

24
2.3.2 Battery thermal model
In this dissertation, a lumped capacitance thermal model [47] is used to
estimate the battery temperature changes. The temperature change in the
battery is calculated in accordance with the energy balance between the
battery heat generation and heat lost, the thermal mass of the battery, and the
duration of the battery use, as follows [47]:
_ _
,
bat gen bat case
bat p bat
Q QT
m C
−=
⋅ɺ (2.15)
Here, _bat genQ represents the battery heat generation caused by
electrochemical reactions and resistive heating, _bat caseQ represents heat loss
from the battery, batm is the battery mass, and ,p batC is the battery heat
capacity.
In this battery thermal model, the parallel airflow approach is used to cool
the battery. Thus, _bat caseQ is a combination of conduction and convection
loss from the battery to the surrounding air; it can be expressed as follows:
_
1
,
,
air
eff
bat caseamb
eff
T TT a
RQ
T TT a
R
− ≥= − <
(2.16)
In this equation, airT represents the temperature of the air surrounding the
battery, ambT represents the ambient temperature. a is a set point of the
battery temperature, which is the starting point of the air cooling. effR is the
effective thermal resistance for the case when the battery temperature is above

25
a and the air cooling system operates, and 1effR is that for the case when the
battery temperature is below a and the air cooling system does not operate.
The exit air temperature airT can be expressed as follows [47]:
_
,
0.5 bat caseair amb
air p air
QT T
m C= +
⋅ɺ (2.17)
Here, airmɺ is the airflow rate, and ,p airC is the heat capacity of the air. In this
thermal model, it is assumed that 50% of the battery heat loss is used to warm
the air.
2.4 Components sizing
Before the power management strategy, the sizing process on power source
components of an FCHV needs to be done in order to meet the driving
performance requirements, which are bounds or constraints on the component
sizing. The components sizing process of an FCHV includes the power design
of the traction motor, the FCS power design, the battery power design, and the
energy capacity design of the battery. The driving performance requirements
include acceleration requirement and maximum speed requirement.
2.4.1 Traction motor power design
As stated in subsection 2.1, the configuration of an FCHV is similar to that
of a series type of hybrid vehicle, considering that the traction motor is the
only powertrain component that is directly connected to the wheel side. The
motor transforms the electrical energy of the power sources into the

26
mechanical energy to propel the vehicle. Therefore, the traction motor power
is required to meet the acceleration demand, the maximum speed demand, and
the gradeability demand of the vehicle. Out of these demands, the acceleration
demand requires the greatest amount of power, and thus the power of a
traction motor is usually determined by this factor. The acceleration ability of
a vehicle is usually evaluated by its acceleration time for accelerating it from
zero to a certain high speed. The total traction power p for accelerating the
vehicle from zero to a certain speed fV in the time t can be expressed as
follows [48]:
2 2 32 1( )
2 3 5f b r f a D f f
Mp V V Mgf V C A V
t
δ ρ= + + + (2.18)
Here, δ is the mass factor that equivalently converts rotational inertias of
rotating components into translational mass [49], M is the total mass of the
vehicle, bV is the vehicle base speed which is dependent on the motor base
speed, g is the gravity acceleration, rf is the rolling resistance coefficient,
aρ is the air density, DC is the aerodynamic drag coefficient, and fA is the
vehicle frontal area. The values of these parameters are listed in Table 2.1. In
this dissertation, the maximum rotational speed of the motor is 5000 rpm, and
the speed ratio of the motor, which is defined as the ratio of maximum speed
to base speed of the motor [48], is 4. The final gear ratio is 4, and fV is 100
km/h. Under this condition, the relationship between the acceleration time and
the required motor power is illustrated in Fig. 2.9. It can be observed that if

27
the vehicle is required to accelerate itself from 0 to 100 km/h in 13 s, the
required motor power is around 75 kW.
Fig. 2.9 Relationship between the acceleration time and the required motor power
2.4.2 FCS power design
An FCS is the primary power source in an FCHV, and thus it is required to
provide enough power to the vehicle when the vehicle drives at a high constant
speed on a flat road or a grade road without help of the secondary power
source. When the vehicle drives at a constant speed V , the required traction
power is as follow [48]:
31cos sin
2r a D fP Mgf V C A V MgVα ρ α= + + (2.19)
Here, α represents the gradient of the road. Fig. 2.10 illustrates the
relationship between the vehicle speed and the required FCS net power when
the vehicle drives on a flat road at a constant speed and it is powered only by
the FCS.
10 11 12 13 14 15 1660
65
70
75
80
85
90
95
Acceleration time (s)
Req
uire
d m
oto
r p
ow
er (
kW)

28
Fig. 2.10 Relationship between the vehicle speed and the required FCS net power when the
vehicle drives on a flat road at a constant speed and it is powered only by the FCS
Fig. 2.11 shows the same relationship for the case where the gradient of the
road is 5 %. The average motor efficiency is assumed to be 85 % here. It can
be observed that if the FCS net power is 62 kW, the maximum constant speed
is around 148 km/h on a flat road and 111 km/h on a 5 % grade road.
Fig. 2.11 Relationship between the vehicle speed and the required FCS net power when the
vehicle drives on a 5% grade road at a constant speed and it is powered only by the FCS
110 120 130 140 150 160 17020
30
40
50
60
70
80
90
Vehicle speed (km/h)
Req
uire
d F
CS
net
po
wer
(kW
)
80 85 90 95 100 105 110 115 12035
40
45
50
55
60
65
70
75
Vehicle speed (km/h)
Req
uire
d F
CS
net
po
wer
(kW
)

29
2.4.3 Battery power design and energy capacity design
The battery power is decided based on the motor power and the FCS net
power, which are determined by the preceding process, and the average motor
efficiency. Fig. 2.12 illustrates the relationship between the FCS net power and
the battery power when the selected motor power and FCS net power are 75
kW and 62 kW, and the average motor efficiency is 85 %. It can be seen that
the minimum battery power is about 26 kW in this case.
Fig. 2.12 Relationship between the FCS net power and the battery power when the selected
motor power and FCS net power are 75 kW and 62 kW, and the average motor efficiency is 85 %
As a second power source, the battery provides power to the vehicle and
also recovers energy from the vehicle or from the FCS. The energy change
changeE in the battery during driving can be expressed as follows:
traction recoveringchange out inE P dt P dt= −∫ ∫ (2.20)
Here, outP is the battery power corresponding to the case when the battery
provides power to the vehicle, inP is the battery power corresponding to the
case when the battery recovers energy from the regenerative braking or from
45 50 55 60 65 70 75 80 850
5
10
15
20
25
30
35
40
FCS net power (kW)
Bat
tery
po
wer
(kW
) Admissible area

30
the FCS. Considering the available battery SOC usage, the battery energy
capacity can be determined by
changeb
EE
K= (2.21)
where, K is the allowed percentage of the battery SOC usage. changeE
strongly depends on the power management strategy and the driving cycle [48].
Thus, the battery energy capacity is also dependent on specific conditions.
The driving performance requirements on the FCHV in this dissertation are
listed in Table 2.4, and the powertrain components of the FCHV are selected
based on these requirements which are listed in Table 2.5. Here, two types of
batteries are selected for chapter 3 and chapter 4, respectively.
Table 2.4 Driving performance requirements on the FCHV
Requirement Value
Acceleration time from 0 to 100 km/h (s) 13
Maximum speed (flat road) (km/h) 148
Maximum speed (5% grade road) (km/h) 111
Table 2.5 Selected power source components
Component Value
Motor power (kW) 75
FCS net power (kW) 62
Battery capacity (kWh) 1.5
Battery capacity (kWh) 1.9 at 25°C

31
Chapter 3 PMP-based power management strategy
for FCHVs
PMP stems from the optimal control theory; it is a general case of the
fundamental theorem of the Calculus of Variations [7]. PMP instantaneously
provides the necessary conditions to optimal control problems to let them find
optimal control laws. In this chapter, the basic formulation of the PMP-based
optimal control problem, in which there are one state variable and one cost
function, is presented. The optimal lines are defined based on the simulation
results of the PMP-based power management strategy, and they are used to
the fuel economy evaluation of a rule-based power management strategy. The
simulation results of the PMP-based power management strategy are also
compared to those of DP approach (global optimal solution). The powertrain
components listed in Table 2.5 are used in this chapter. Here, the first battery
is used. Fig. 3.1 illustrates the characteristics of the first battery. The
characteristics of the FCS were described in subsection 2.2.
(a) (b)
Fig. 3.1 OCV and internal resistance of the battery: (a) OCV, (b) internal resistance
0 0.2 0.4 0.6 0.8 1270
280
290
300
310
320
330
Battery SOC
OC
V (
V)
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
Battery SOC
Inte
rnal
res
ista
nce
(O
hm
)
dischargingcharging

32
3.1 Theoretical study
The motor power comes from both the FCS and the battery in an FCHV, as
shown in Fig. 2.1. Thus, the fuel economy of an FCHV depends on how the
power required for the vehicle is distributed between the FCS and the battery.
The objective of the optimal control problem of an FCHV is to find an
optimal power split trajectory which minimizes the fuel consumption when
the vehicle is being driven. We solve this problem by finding the optimal
trajectory of the FCS net power, which is the control variable of the optimal
control problem. The battery SOC is the state variable of the optimal control
problem. In this chapter, the battery temperature is not taken into account in
the fuel consumption minimization.
The state equation of the system, which describes the dynamics of the state
variable, is given in (2.14). Considering that the battery temperature is not
taken into account here, and the internal resistance and OCV of the battery are
functions of the battery SOC, equation (2.14) can be simplified using a
function f as follows:
( )( ), ( )( ) batSOC f SOC t P tt•
= (3.1)
The power required for the motor reqP , the FCS net power fcsP , and the
battery power batP have the following relationship:
( ) ( ) ( )bat req fcsP t P t P t= − (3.2)

33
As the power required for the motor can be derived when selecting a driving
cycle, we can transform the state equation (3.1) into
( ) ( )( ), ( )fcsSOC t F SOC t P t•
= (3.3)
using a different function F .
The performance measure to be minimized here is the total fuel
consumption when the FCHV drives over a specified driving cycle from time
0t to time ft . Given that the FCS net power and the fuel consumption rate
are related to each other as shown in Fig. 2.6, the performance measure J is
expressed as follows:
( ) ( )2
0
( ) ( )ft
fcs h fcstJ P t m P t dt
•= ∫ (3.4)
Considering the state equation (3.3), which is a constraint of the optimal
control problem, together with the cost function, the performance measure is
to be
( ) ( ) ( ) ( ) ( )2
0
( ) ( ) ( ), ( )ft
fcs h fcs fcstJ P t m P t p t F SOC t P t SOC t dt
• • = + ⋅ −
∫ (3.5)
where, p is the Lagrange multiplier, which is also called the costate in the
PMP-based control.
The objective of the optimal control problem here is to minimize the total
fuel consumption while the dynamic state equation (3.3) is satisfied. Thus, the
necessary conditions of the optimal control problem are given when the
variation of the performance measure Jδ from equation (3.5) is zero [7, 8].
If we introduce a Hamiltonian H [7, 8], which is defined as

34
( ) ( )( ) ( ) ( ) ( )2
, ( ), ( ) ( ), ( )fcs h fcs fcsH SOC t P t p t m P t p t F SOC t P t•
= + ⋅ (3.6)
then the necessary conditions that derive the optimal trajectories are as
follows:
0fcs
HSOC
p
Hp
SOCH
P
•
•
∂ =∂∂ = −
∂∂ =
∂
(3.7)
The necessary conditions in (3.7) should be satisfied all the time in order to
obtain the optimal results. In the definition of the Hamiltonian (3.6), the first
term is about the fuel usage and the second term can be considered as the
electric usage. The costate p can also be considered as an equivalent
parameter between the fuel usage and the electric usage [8, 43, 44]. The first
necessary condition in (3.7) is actually the state equation (3.3), which is a
constraint of the optimal control problem. The second necessary condition is
called the costate equation that determines the optimal trajectory of the costate
p when the initial value of the costate is given. The third necessary condition
determines the optimal trajectory of the control variable fcsP by minimizing
the Hamiltonian H .
PMP is a general case of the Euler-Lagrange equation of the Calculus of
Variation [8], in which the third necessary condition in (3.7) is expressed as
follows:
( ) ( ) ( )( ) ( ) ( ) ( )( )* * * * *, ,, ,fcs fcsH SOC t P t p t H SOC t P t p t≤ (3.8)

35
The advantage of form (3.8) is that it can be applied to a non-linear, non-
differentiable, or a non-convex function [8]. In the computer calculation of the
PMP-based optimal control, the optimal fcsP is obtained at every calculation
time step by finding out the fcsP among all admissible FCS net power values,
which minimizes the Hamiltonian H . Now, the necessary conditions of the
PMP-based optimal control can be written in a specific form, as follows:
( ) ( ) ( ) ( )( ) ( ) ( )( )
( ) ( ) ( ) ( )( ) ( ) ( ) ( )( )( ) ( ) ( )( ) ( ) ( ) ( )( )
* * * * * *
* * * * * * *
* * * * *
, , ,
, , ,
, , , ,
fcs fcs
fcs fcs
fcs fcs
HSOC t SOC t P t p t F SOC t P t
p
H Fp t SOC t P t p t p t SOC t P t
SOC SOC
SOC t P t p t SOC t P t p tH H
•
•
∂= =∂∂ ∂= − = − ⋅
∂ ∂≤
(3.9)
Boundary conditions also need to be satisfied other than the necessary
conditions, which are as follows [7]:
( ) ( ) ( ) ( )( )* * * *, , 0T
f f f fcs f f fp t SOC H SOC t P t p t tδ δ − + = (3.10)
Here, ft represents the final time.
Fig. 3.2 illustrates the fuel consumption rate 2hm
•
, the time derivative of the
battery SOC SOC•
, and the Hamiltonian H for the whole range of the
FCS net power when the power required for the motor reqP is 30 kW, the
battery SOC is 0.6, and the costate p is set to -90. The convexity of the
Hamiltonian indicates that the optimal fcsP , which minimizes the Hamiltonian,
can be determined for this calculation time step. In this example, the FCS net
power ranges from 0 to 62 kW. Admissible FCS net power range for each
calculation time step is decided by considering the maximum and minimum

36
power of the battery. It can be seen from Fig. 3.2 that the costate p should
be a negative value all the time in the PMP-based optimal control problem.
Otherwise zero will be always selected for the FCS net power and there is no
the concept of the optimization.
Fig. 3.2 Fuel consumption rate 2hm
•, time derivative of the battery SOC SOC
•, and
Hamiltonian H for the whole range of the FCS net power
3.2 Optimal lines
Previous research proved from a mathematical point of view that the PMP-
based power management strategy can work as a global optimal solution (DP)
under the assumption that the internal resistance and OCV of a battery do not
depend on the battery SOC [8]. This assumption is reasonable for FCHVs,
0 10 20 30 40 50 600
1
2
Fuel c
onsu
mptio
n rate
(g/s
)
0 10 20 30 40 50 60-0.01
0
0.01
Tim
e d
eriv
ativ
e o
f S
OC
(1/s
)
0 10 20 30 40 50 600.5
1
1.5
Ham
iltonia
n (g/s
)
FCS net power (kW)

37
considering that FCHVs are charge-sustaining types of hybrid vehicles. This
assumption can lead to the following equation because the function F does
not depend on the battery SOC.
( ) ( ) ( )( )* * * 0fcs
Fp t p t P t
SOC
• ∂= − ⋅ =∂
(3.11)
Equation (3.11) indicates that the costate is a constant value. From equation
(3.11), previous research [8] proved that the PMP-based power management
strategy can work as a global optimal solution (DP).
A variable costate, derived from the second necessary condition in (3.7),
can be replaced with a constant costate when the above assumption is satisfied
[43]. In order to validate this fact, a simulation comparison is carried out here.
Fig. 3.3 illustrates the comparison results for the FTP75 urban driving cycle.
This figure shows that the optimal trajectories of the fuel consumption for
both a constant costate and a variable costate are very similar to each other.
The optimal trajectories of the battery SOC for both cases are also very
similar to each other. Fig. 3.4 and Fig. 3.5 illustrate the comparison results of
the NEDC 2000 and the Japan 1015 driving cycle, respectively. The two
figures also validate the same fact that a variable costate, derived from the
necessary condition of the PMP, can be replaced with a constant costate. The
second result in each figure pertains to the costate information. For each
driving cycle, the constant costate selected is close to the average value of the
variable costate. In fact, the optimal trajectories of the fuel consumption for
both a constant costate and a variable costate can be identical by adjusting the

38
value of the constant costate and the initial value of the variable costate. The
optimal trajectories of the battery SOC can also be the same by adjusting the
value of the costates.
Fig. 3.3 Simulation results comparison between a constant costate and a variable costate on the
FTP75 urban driving cycle
0 200 400 600 800 1000 1200 14000
50
100
Veh
icle
spe
ed (
km/s
)
0 200 400 600 800 1000 1200 1400-87
-86.5
-86
Cos
tate
(g
)
Variable costateConstant costate
0 200 400 600 800 1000 1200 14000.4
0.6
0.8
Bat
tery
SO
C
Variable costateConstant costate
0 200 400 600 800 1000 1200 14000
50
100
150
Time (s)
Fu
el c
ons
umpt
ion
(g
)
Variable costateConstant costate

39
Fig. 3.4 Simulation results comparison between a constant costate and a variable costate on the
NEDC 2000
Fig. 3.5 Simulation results comparison between a constant costate and a variable costate on the
Japan 1015 driving cycle
0 200 400 600 800 1000 12000
50
100
150
Veh
icle
sp
eed
(km
/h)
0 200 400 600 800 1000 1200-89
-88
-87C
ost
ate
(g)
Variable costateConstant costate
0 200 400 600 800 1000 12000.4
0.6
0.8
Bat
tery
SO
C
Variable costateConstant costate
0 200 400 600 800 1000 12000
50
100
150
Time (s)
Fu
el c
on
sum
ptio
n (
g)
Variable costateConstant costate
0 100 200 300 400 500 600 7000
50
100
Veh
icle
sp
eed
(km
/h)
0 100 200 300 400 500 600 700-86
-85.5
-85
Cos
tate
(g
)
Variable costateConstant costate
0 100 200 300 400 500 600 7000.55
0.6
0.65
Bat
tery
SO
C
Variable costateConstant costate
0 100 200 300 400 500 600 7000
20
40
60
Fu
le c
onsu
mpt
ion
(g)
Time (s)
Variable costateConstant costate

40
The trajectories of the battery SOC and the fuel consumption depend on the
costate value. Thus, the final battery SOC and the total fuel consumption will
change if a different costate is used in the simulation. We assessed the
simulation results of the final battery SOC and the total fuel consumption
while changing both constant costates and variable costates. Fig. 3.6, Fig. 3.7,
and Fig. 3.8 illustrate the assessed simulation results for the FTP75 urban
driving cycle, the NEDC 2000, and the Japan 1015 driving cycle, respectively.
Asterisks correspond to constant costates and circles correspond to variable
costates. The initial battery SOC is set to 0.6 here. The three figures show the
strong similarity in the relationship between the final battery SOC and the
total fuel consumption when using both constant costates and variable costates.
Fig. 3.6 Simulation results of the final battery SOC and the total fuel consumption while
changing both constant costates and variable costates on the FTP75 urban driving cycle
0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.8120
130
140
150
160
170
Final battery SOC
Fu
el c
on
sum
ptio
n (
g)
Variable costatesConstant costates

41
Fig. 3.7 Simulation results of the final battery SOC and the total fuel consumption while
changing both constant costates and variable costates on the NEDC 2000
Fig. 3.8 Simulation results of the final battery SOC and the total fuel consumption while
changing both constant costates and variable costates on the Japan 1015 driving cycle
Fig. 3.9 shows the simulation results of the relationship between the final
battery SOC and the total fuel consumption for the FTP75 urban driving cycle
when the vehicle mass is increasing. Here, only constant costates are used. It
can be observed that the simulation results form an approximately straight line
for each vehicle mass. These lines are defined as optimal lines, as it is proved
that the PMP-based power management strategy can serve as a global optimal
0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.8120
130
140
150
160
170
Fu
el c
on
sum
ptio
n (
g)
Final battery SOC
Variable costatesConstant costates
0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.830
40
50
60
70
80
Final battery SOC
Fu
el c
on
sum
ptio
n (
g)
Variable costatesConstant costates

42
solution [8]. The initial battery SOC is set to 0.6 here. It is clear that the
gradient of the optimal lines is the same when the vehicle mass is increasing
and the optimal line moves up along with increasing the vehicle mass. Also,
the distance between nearby optimal lines is the same. Fig. 3.10 and Fig. 3.11
illustrate the cases of the NEDC 2000 and the Japan 1015 driving cycle,
respectively. It can be seen from the three figures that the distance between
nearby optimal lines is different for each driving cycle.
Fig. 3.9 Optimal lines for the FTP75 urban driving cycle
Fig. 3.10 Optimal lines for the NEDC 2000
0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.8120
130
140
150
160
170
180
190
Final battery SOC
Fu
el c
on
sum
ptio
n (
g)
Vehicle mass=1700 kgVehicle mass=1900 kgVehicle mass=2100 kg
0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.8120
130
140
150
160
170
180
190
Final battery SOC
Fu
el c
on
sum
ptio
n (
g)
Vehicle mass=1700 kgVehicle mass=1900 kgVehicle mass=2100 kg

43
Fig. 3.11 Optimal lines for the Japan 1015 driving cycle
In an optimal line, each simulation result point corresponds to a different
costate value. A lower final battery SOC value and a lower total fuel
consumption value correspond to a higher costate value, and a higher final
battery SOC value and a higher total fuel consumption value correspond to a
lower costate value. As stated before, the costate can be considered as an
equivalent parameter between the fuel usage and the electric usage. The
physical meaning of the costate here can be explained as the amount of fuel
that can replace the battery electrical energy usage. Thus the unit of the
costate is g . A higher costate value indicates that more fuel is needed to
replace the same amount of battery electrical energy and that the fuel is more
valuable. Thus, the PMP-based power management strategy attempts to use
the electrical energy more during the power distribution. On the contrary, a
lower costate value implies that less fuel is needed to replace the same amount
of battery electrical energy and the electrical energy is more valuable.
Therefore, the strategy tries to use the fuel more during power distribution.
0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.830
40
50
60
70
80
90
Final battery SOC
Fu
el c
on
sum
ptio
n (
g)
Vehicle mass=1700 kgVehicle mass=1900 kgVehicle mass=2100 kg

44
The costate is the only control parameter in the PMP-based power
management strategy introduced in this chapter. The physical meaning of the
costae helps us to predict it based on the future driving information in the
realization of the PMP-based strategy.
3.3 Fuel economy evaluation based on optimal lines
As the optimal lines are derived from the PMP-based power management
strategy, they can be used to evaluate other power management strategies.
Any other simulation result points derived from other power management
strategies will always locate above optimal lines. In this subsection, a rule-
based power management strategy for the FCHV is introduced and its fuel
economy is evaluated based on the optimal lines. Fig. 3.12 illustrates the rule-
based power management strategy which is based on the efficiency
characteristics of the FCS. For the FCS used in this dissertation, it is clear that
the FCS efficiency is very low when the FCS net power is less than 7 kW;
hence, the battery mode is used in this region as much as possible. On the
other hand, the FCS efficiency is high when the FCS net power is greater than
7 kW and less than 25 kW; therefore, the FCS mode is used in this region.
When the required power is greater than 25 kW, the hybrid mode or battery
charging mode is used. The FCS provides constant power in this region. The
battery charging mode is selected if the constant power is greater than the

45
required power, and the hybrid mode is used if the constant power is less than
the required power.
Fig. 3.12 A rule-based power management strategy
In Fig. 3.13, Fig. 3.14, and Fig. 3.15, the solid lines are optimal lines
derived on the FTP75 urban driving cycle, the NEDC 2000, and the Japan
1015 driving cycle, respectively. The process of a fuel economy evaluation
based on the optimal line is as follows: (1) Obtain the simulation results of the
final battery SOC and fuel consumption when the rule-based power
management strategy illustrated in Fig. 3.12 is applied to the FCHV and the
initial battery SOC is set to 0.6 for the three driving cycles. (2) Plot the point,
which corresponds to the simulation results of each driving cycle, to each
figure to compare with each optimal line. (3) Add a straight line parallel to the
optimal line that intersects the point in each figure. (4) Check the fuel
consumption value which corresponds to the final battery SOC of 0.6 on the
line from step (3) in each figure. In Fig. 3.13, Fig. 3.14, and Fig. 3.15, the
asterisks are derived from step (2) and the dashed lines are obtained from step
0 10 20 30 40 50 600
10
20
30
40
50
60
FCS net power (kW)
FC
S e
ffici
ency
(%
)
0.4<SOC<0.8
Hybrid modePfcs=28 kW
FCS mode
Battery mode

46
(3). In this subsection, the fixed-step size (sample time) is 0.1 s for both the
PMP-based strategy and rule-based strategy, while it is 1 s in other sections.
Fig. 3.13 Fuel economy evaluation of the rule-based strategy on the FTP75 urban driving cycle
Fig. 3.14 Fuel economy evaluation of the rule-based strategy on the NEDC 2000
Fig. 3.15 Fuel economy evaluation of the rule-based strategy on the Japan 1015 driving cycle
0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.8
120
130
140
150
160
170
Final battery SOC
Fu
el c
on
sum
ptio
n (
g)
0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.8
120
130
140
150
160
170
Final battery SOC
Fu
el c
on
sum
ptio
n (
g)
0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.825
30
35
40
45
50
55
60
65
70
Final battery SOC
Fu
el c
on
sum
ptio
n (
g)

47
Table 3.1 shows the fuel economy evaluation result of the rule-based power
management strategy on the three driving cycles. The discrepancy between
the rule-based strategy and the PMP-based strategy is 3.46%, 4.44%, and 4.23%
on the three driving cycles.
Table 3.1 Fuel economy evaluation result of the rule-based power management strategy on
three driving cycles
Driving cycle
Fuel consumption (kg/100 km)
Discrepancy (%) PMP-based power
management strategy
Rule-base power
management strategy
FTP75 urban 1.127 1.166 3.46
NEDC 2000 1.269 1.325 4.44
Japan 1015 1.119 1.166 4.23
Fig. 3.16 illustrates the distribution patterns of the FCS operating points for
the rule-based power management strategy and the PMP-based strategy. The
FTP75 urban driving cycle is used here, and the final battery SOC is lower
than the initial battery SOC for the rule-based strategy while they are the same
for the PMP-based strategy. It can be observed that more FCS operating
points are located in the high efficiency region for the PMP-based power
management strategy.

48
(a) (b)
Fig. 3.16 Distribution patterns of the FCS operating points for the rule-based power
management strategy and the PMP-based strategy: (a) rule-based strategy, (b) PMP-based
strategy
3.4 Comparison between PMP-based power management
strategy and DP approach
Previous research [7, 50] theoretically investigated the relationship between
the Hamilton-Jacobi-Bellman (HJB) equation, which is the recurrence relation
of the DP, and the PMP, and concluded that the PMP can be derived from the
HJB equation under certain conditions. Previous research [8] also proved from
a mathematical point of view that the PMP-based power management strategy
can be a global optimal solution (DP) under the assumption that the internal
resistance and OCV of a battery do not depend on the battery SOC. In this
subsection, simulation results of the two power management strategies are
compared to each other. Here, the control variable is the FCS net power when
the PMP is applied to the power management strategy of the FCHV while the
control variable is the battery power when the DP approach is applied.
0 10 20 30 40 50 600
10
20
30
40
50
60
FCS net power (kW)
FC
S e
ffici
ency
/Fre
qu
ency
(%
)
0 10 20 30 40 50 600
10
20
30
40
50
60
FCS net power (kW)
FC
S e
ffici
ency
/Fre
qu
ency
(%
)

49
Fig. 3.17 illustrates the optimal trajectories solved by the PMP and DP on
the FTP75 urban driving cycle. The results include the FCS net power, the
battery power, and the battery SOC. Here, the optimal battery power
trajectory of the PMP is obtained by considering the optimal FCS net power
trajectory and the power required for the vehicle, which is given when
selecting a driving cycle. As we can see, the two trajectories of each term
nearly overlap each other most of the time. Fig. 3.18 and Fig. 3.19 are for the
cases of the NEDC 2000 and the Japan 1015 driving cycle.
(a)
(b) (c)
Fig. 3.17 Comparisons of PMP and DP on the FTP75 urban driving cycle: (a) FCS net power
trajectories, (b) battery power trajectories, (c) SOC trajectories
0 200 400 600 800 1000 1200 14000
5
10
15
20
25
30
35
Time (s)
FC
S n
et p
ow
er (kW
)
DPPMP
0 200 400 600 800 1000 1200 1400-25
-20
-15
-10
-5
0
5
10
15
Time (s)
Bat
tery
pow
er (kW
)
DPPMP
0 200 400 600 800 1000 1200 14000.48
0.5
0.52
0.54
0.56
0.58
0.6
0.62
Time (s)
Batte
ry S
OC
DPPMP

50
(a)
(b) (c)
Fig. 3.18 Comparisons of PMP and DP on the NEDC 2000: (a) FCS net power trajectories, (b)
battery power trajectories, (c) SOC trajectories
(a)
(b) (c)
Fig. 3.19 Comparisons of PMP and DP on the Japan 1015 driving cycle: (a) FCS net power
trajectories, (b) battery power trajectories, (c) SOC trajectories
0 200 400 600 800 1000 12000
5
10
15
20
25
30
35
40
Time (s)
FC
S n
et p
ow
er (k
W)
DPPMP
0 200 400 600 800 1000 1200-30
-20
-10
0
10
20
Time (s)
Bat
tery
pow
er (k
W)
DPPMP
0 200 400 600 800 1000 12000.5
0.55
0.6
0.65
0.7
0.75
Time (s)
Bat
tery
SO
C
DPPMP
0 100 200 300 400 500 600 7000
5
10
15
20
25
Time (s)
FC
S n
et p
ow
er (kW
)
DPPMP
0 100 200 300 400 500 600 700-10
-5
0
5
10
Time (s)
Bat
tery
pow
er (k
W)
DPPMP
0 100 200 300 400 500 600 700
0.58
0.59
0.6
0.61
0.62
0.63
0.64
0.65
Time (s)
Bat
tery
SO
C
DPPMP

51
Table 3.2 shows the discrepancy of the two strategies on the fuel economy.
It can be seen that the discrepancy over the three driving cycles is within
plus/minus 0.4%. However, the elapsed time discrepancy between the two
strategies is very large. The PMP-based power management strategy can save
much time compared to the DP approach while it guarantees the global
optimality. This is one of the strong advantages of the PMP-based strategy.
Table 3.2 Fuel economy comparison between the PMP-based power management strategy and
DP approach
Driving cycle Fuel consumption (kg/100 km)
Discrepancy (%) PMP-based strategy DP approach
FTP75 urban 1.154 1.149 0.44
NEDC 2000 1.282 1.279 0.23
Japan 1015 1.137 1.133 0.35

52
Chapter 4 Extended PMP-based power management
strategy for FCHVs
The basic formulation of the PMP-based optimal control problem of
FCHVs is carried out in chapter 3, in which there are only one state variable
and one cost function and the state variable is not constrained. In this chapter,
the basic formulation is mathematically extended based on three important
factors which are limitations on the battery SOC usage, the FCS lifetime, and
the effect of the battery thermal management on the fuel economy.
4.1 PMP-based power management strategy considering
battery SOC constraint
In chapter 3, we assumed that the state variable is not bounded. But in fact,
most batteries operate in a certain SOC range in the charge-sustaining types of
hybrid vehicles. Thus the battery SOC should be constrained in the optimal
control problem. In this subsection, the constraints on the battery SOC usage
are considered by defining a new cost function and adding the cost function to
the PMP-based optimal control problem. The first battery in Table 2.5 is used
in this subsection. The objective of the optimization problem here is to
minimize the fuel consumption while the battery SOC usage boundary is
satisfied. The formulation of the optimal control problem is introduced below.

53
The state equation is the same with equation (3.3), as the state variable is
also the battery SOC here. In the literature [19], a new cost function is defined
in order to consider the battery SOC limitation factor in the fuel consumption
optimization problem. Here, we first introduce a similar cost function with the
literature [19]. The cost function C is defined as follows:
( )( )
( ) ( ) ( )
( ) ( ) ( )
2
minmin
max
2
maxmax
max
0
SOC t SOCa SOC t SOC
SOC
SOC t SOCC SOC t SOC t SOC
SOC
Otherwise
b
δδ
δδ
− + ⋅ ≤ +
− − = ≥ −
⋅ (4.1)
Here, minSOC and maxSOC represent the upper limit and the lower limit of
the battery SOC, respectively. a and b are tuning parameters, and δ is a
constant. The performance measure to be minimized is then
( ) ( ) ( )( ) ( ) ( ) ( )2
0
( ) ( ) ( ), ( )ft
fcs h fcs fcstJ P t m P t C SOC t p t F SOC t P t SOC t dt
• • = + + ⋅ −
∫ (4.2)
The necessary conditions of the PMP-based optimal control here are as
follows,
( ) ( ) ( ) ( )( ) ( ) ( )( )
( ) ( ) ( ) ( )( )
( ) ( ) ( )( ) ( )( )( ) ( ) ( )( ) ( ) ( ) ( )( )
* * * * * *
* * * *
* * * *
* * * * *
, , ,
, ,
,
, , , ,
fcs fcs
fcs
fcs
fcs fcs
HSOC t SOC t P t p t F SOC t P t
p
Hp t SOC t P t p t
SOCF dC
p t SOC t P t SOC tSOC dSOC
H SOC t P t p t H SOC t P t p t
•
•
∂= =∂∂= −
∂∂= − ⋅ −
∂≤
(4.3)
when Hamiltonian is defined as
( ) ( )( ) ( ) ( )( ) ( ) ( )2
, ( ), ( ) ( ), ( )fcs h fcs fcsH SOC t P t p t m P t C SOC t p t F SOC t P t•
= + + ⋅ (4.4)

54
It can be observed from (4.3) that there is a new term in the second
necessary condition compared to (3.9). This new term is originated from the
added cost function and affects the optimal trajectory of the costate when the
battery SOC is about to reach its limits. Fig. 4.1, Fig. 4.2, and Fig. 4.3
illustrate comparison results of the PMP-based strategies introduced in
chapter 3 and here. The upper limit and lower limit of the battery SOC are
0.6936 and 0.5073, and the FTP75 urban driving cycle is used here.
Fig. 4.1 Comparison of the optimal battery SOC trajectories for the case without battery SOC
boundary and the case with battery SOC boundary by cost function C
Fig. 4.2 Comparison of the optimal costate trajectories for the case without battery SOC
boundary and the case with battery SOC boundary by cost function C
0 200 400 600 800 1000 1200 14000.45
0.5
0.55
0.6
0.65
0.7
Time (s)
Bat
tery
SO
C
Not constrainedConstrained
0 200 400 600 800 1000 1200 1400-95
-90
-85
-80
-75
Time (s)
Co
stat
e (g
)
Not constrainedConstrained

55
Fig. 4.3 Comparison of the optimal power trajectories for the case without battery SOC
boundary and the case with battery SOC boundary by cost function C
It can be seen that there are fluctuations in the trajectories because of the
changed costate value for the case with the battery SOC boundary, although
the battery SOC is constrained in this case. This is attributed to the
characteristics of the cost function C . The fluctuations of the battery SOC
may shorten the battery lifetime. In order to remedy the drawback of the cost
function (4.1), a cost function S is newly defined regarding the battery SOC
limitation factor. Here, S is a function of the FCS net power, whereas C is
a function of the battery SOC.
The definition of the new cost function S is as follows:
( )( )( ) ( )( ) ( )
min
max
0
fcs
fcs fcs
P t SOC t SOC
S P t P t SOC t SOC
Otherwise
αβ
⋅ ≤= ⋅ ≥
(4.5)
Here, α and β are tuning parameters. The performance measure using S
is then
0 200 400 600 800 1000 1200 14000
10
20
30
40
FC
S n
et pow
er (k
W)
Not constrained
Constrained
0 200 400 600 800 1000 1200 1400-40
-20
0
20
Time (s)
Batte
ry p
ow
er (k
W)
Not constrained
Constrained

56
( ) ( ) ( )( ) ( ) ( ) ( )2
0
( ) ( ) ( ), ( )ft
fcs h fcs fcs fcstJ P t m P t S P t p t F SOC t P t SOC t dt
• • = + + ⋅ −
∫ (4.6)
The necessary conditions of the PMP-based optimal control here are as
follows,
( ) ( ) ( ) ( )( ) ( ) ( )( )
( ) ( ) ( ) ( )( ) ( ) ( ) ( )( )( ) ( ) ( )( ) ( ) ( ) ( )( )
* * * * * *
* * * * * * *
* * * * *
, , ,
, , ,
, , , ,
fcs fcs
fcs fcs
fcs fcs
HSOC t SOC t P t p t F SOC t P t
p
H Fp t SOC t P t p t p t SOC t P t
SOC SOC
H SOC t P t p t H SOC t P t p t
•
•
∂= =∂∂ ∂= − = − ⋅
∂ ∂≤
(4.7)
when Hamiltonian is defined as
( ) ( )( ) ( ) ( )( ) ( ) ( )2
, ( ), ( ) ( ), ( )fcs h fcs fcs fcsH SOC t P t p t m P t S P t p t F SOC t P t•
= + + ⋅ (4.8)
Necessary conditions in (4.7) look the same with those in (3.9), but the
third necessary condition expresses different contents, given that the new cost
function S is added to the Hamiltonian here. The influence of the cost
function S on the optimal trajectories is different from that of C . C
affects the optimal trajectory of the costate when the battery SOC is about to
reach its limits, and this consequently affects other optimal trajectories
including the optimal battery SOC trajectory. On the other hand, S has the
function of shifting the optimal value of the FCS net power when the battery
SOC reaches its boundaries. This accordingly influences the optimal battery
SOC trajectory. S affects the shape of Hamiltonian illustrated in Fig. 3.2, as
S is a function of the FCS net power. A lower value of the FCS net power
will be selected as the optimal solution when the battery SOC reaches its
upper limit, and a greater value of the FCS net power will be chosen as the
optimal solution when the battery SOC reaches its lower limit. Fig. 4.4, Fig.

57
4.5, and Fig. 4.6 show comparison results of the PMP-based power
management strategies introduced in chapter 3 and here using the cost
function S . The upper limit and lower limit of the battery SOC are also
0.6936 and 0.5073, and the FTP75 urban driving cycle is used here. It can be
seen that the tendency of the battery SOC trajectories is similar while the
battery SOC is constrained in the case where the cost function S is used.
The FCS net power trajectories overlap each other most of the time and the
battery power trajectories as well. This is the main advantage of using the cost
function S .
Fig. 4.4 Comparison of the optimal battery SOC trajectories for the case without battery SOC
boundary and the case with battery SOC boundary by cost function S
0 200 400 600 800 1000 1200 14000.48
0.5
0.52
0.54
0.56
0.58
0.6
0.62
Time (s)
Bat
tery
SO
C
Not constrainedConstrained

58
Fig. 4.5 Comparison of the optimal costate trajectories for the case without battery SOC
boundary and the case with battery SOC boundary by cost function S
Fig. 4.6 Comparison of the optimal power trajectories for the case without battery SOC
boundary and the case with battery SOC boundary by cost function S
Table 4.1 shows the fuel consumption comparison of the three power
management strategies introduced in chapter 3 and in this subsection. Here,
the initial battery SOC and the final battery SOC are both 0.6, and the FTP75
urban driving cycle is used. The table indicates that there is a tradeoff between
the limitation requirement of the battery SOC usage and the fuel consumption.
The vehicle consumes slightly more fuel when the battery SOC is constrained,
0 200 400 600 800 1000 1200 1400-87
-86.5
-86
-85.5
Time (s)
Co
stat
e (g
)
Not constrainedConstrained
0 200 400 600 800 1000 1200 14000
20
40
60
FC
S p
ow
er
(kW
)
Not constrained
Constrained
0 200 400 600 800 1000 1200 1400-40
-20
0
20
Time (s)
Ba
ttery
po
we
r (k
W)
Not constrained
Constrained

59
and the fuel economy of the case where the cost function S is used is better
than that of the case where the cost function C is used.
Table 4.1 Fuel consumption comparison of three PMP-based power management strategies on
the FTP75 urban driving cycle
Power management strategy Fuel consumption
(kg/100 km)
PMP-based strategy without battery
SOC boundary 1.154
PMP-based strategy with battery
SOC constraint
(cost function C )
1.166
PMP-based strategy with battery
SOC constraint
(cost function S )
1.159
Equation (3.11) is still true when the new cost function S is added if the
battery OCV and internal resistance are not dependent on the battery SOC.
Because S is only related to fcsP as shown in equation (4.5) and there is no
state variable other than the battery SOC. Thus, the PMP-based power
management strategy with the cost function S can serve as a global optimal
solution. Fig. 4.7 illustrates the comparison result between DP approach and
the PMP-based power management strategy when the battery SOC constraint
is considered. The FTP75 urban driving cycle is used here. The optimal
trajectories overlap each other most of the time and simulation results show

60
that the fuel consumption discrepancy is within 0.5%. It can be concluded that
the PMP-based power management strategy still guarantees the global
optimality when the battery SOC constraint is considered by the cost function
S . Meanwhile, the PMP-based power management strategy can save much
time compared to the DP approach.
(a)
(b) (c)
Fig. 4.7 Comparison between DP approach and PMP-based power management
strategy when the battery SOC constraint is considered: (a) FCS net power
trajectories, (b) battery power trajectories, (c) SOC trajectories
0 200 400 600 800 1000 1200 14000
10
20
30
40
50
Time (s)
FC
S n
et p
ow
er (
kW)
DPPMP
0 200 400 600 800 1000 1200 1400-25
-20
-15
-10
-5
0
5
10
15
Time (s)
Bat
tery
po
wer
(kW
)
DPPMP
0 200 400 600 800 1000 1200 14000.5
0.52
0.54
0.56
0.58
0.6
0.62
Time (s)
Bat
tery
SO
C
DPPMP

61
4.2 PMP-based power management strategy considering FCS
lifetime
In chapter 3, it was assumed that there are no limits on the FCS power
changing rate. However, the power changing rate of an FCS is actually limited
because of the slow dynamic of its air circuit [25, 51]. Besides, frequent and
rapid changes of the dynamic load shorten the FCS lifetime. Hence, these
changes of the load should be avoided in order to improve the FCS durability
and prolong the FCS lifetime. In this subsection, a new cost function is
defined for the FCS lifetime factor and is introduced to the PMP-based
optimal control problem. The first battery in the Table 2.5 is also used in this
subsection. The objective of the optimal control problem here is to minimize
the fuel consumption while considering the FCS lifetime.
The state equation is also the same with equation (3.3) here, as there is also
one state variable in this optimal control problem. The new cost function L
which is related to the objective of prolonging the FCS lifetime is defined as
follows:
( ) ( )2( ) ( ) ( )fcs fcs fcsL P t c P t P t d= ⋅ − − (4.9)
Here, c is a tuning parameter, t represents a time step, and t d−
represents its previous time step. d is the duration of one time step.
Considering the cost functions and the state equation, which is a constraint on
the optimization problem, the performance measure to be minimized is

62
( ) ( ) ( ) ( ) ( ) ( )2
0
( ) ( ) ( ) ( ), ( )ft
fcs h fcs fcs fcstJ P t m P t L P t p t F SOC t P t SOC t dt
• • = + + ⋅ −
∫ (4.10)
The necessary conditions of the PMP-based optimal control here are as
follows:
( ) ( ) ( ) ( )( ) ( ) ( )( )
( ) ( ) ( ) ( )( ) ( ) ( ) ( )( )( ) ( ) ( )( ) ( ) ( ) ( )( )
* * * * * *
* * * * * * *
* * * * *
, , ,
, , ,
, , , ,
fcs fcs
fcs fcs
fcs fcs
HSOC t SOC t P t p t F SOC t P t
p
H Fp t SOC t P t p t p t SOC t P t
SOC SOC
H SOC t P t p t H SOC t P t p t
•
•
∂= =∂∂ ∂= − = − ⋅
∂ ∂≤
(4.11)
It looks the same with (3.9) and (4.7), but the third necessary condition is
different for each case, as Hamiltonian here is defined as,
( ) ( ) ( )( ) ( ) ( ) ( ) ( )2
, , ( ) ( ) ( ), ( )fcs h fcs fcs fcsH SOC t P t p t m P t L P t p t F SOC t P t•
= + ⋅+ (4.12)
where, a new term is added compared to the definition (3.6). This new term
makes the optimal trajectory of the FCS net power smooth in order to prolong
the FCS lifetime.
Fig. 4.8, Fig. 4.9, and Fig. 4.10 illustrate the simulation results on the
FTP75 urban driving cycle, NEDC 2000, and Japan 1015 driving cycle,
respectively. These figures indicate that the optimal trajectory of the FCS net
power becomes smooth through the reformulation of the PMP-based optimal
control problem introduced in this subsection. The power changing rate of the
FCS also becomes smaller for the case of reformulation. The initial battery
SOC and the final SOC are both 0.6 here.

63
Fig. 4.8 Optimal trajectories when the FCS lifetime is considered and is not considered on the
FTP75 urban driving cycle
0 200 400 600 800 1000 1200 14000
50
100
Veh
icle
sp
eed
(km
/h)
0 200 400 600 800 1000 1200 14000
20
40F
CS
net
po
wer
(kW
)
0 200 400 600 800 1000 1200 1400-50
0
50
FC
S p
ow
er c
han
ge
rate
(kW
/s)
0 200 400 600 800 1000 1200 1400-50
0
50
Bat
tery
pow
er (
kW)
0 200 400 600 800 1000 1200 14000.4
0.6
0.8
Time (s)
Bat
tery
SO
C
FCS lifetime is not consideredConsidered
FCS lifetime is not consideredConsidered
FCS lifetime is not consideredConsidered
FCS lifetime is not consideredConsidered

64
Fig. 4.9 Optimal trajectories when the FCS lifetime is considered and is not considered on the
NEDC 2000
0 200 400 600 800 1000 12000
50
100
150
Veh
icle
spe
ed (
km/h
)
0 200 400 600 800 1000 12000
20
40
60F
CS
net
pow
er (
kW)
0 200 400 600 800 1000 1200-40
-20
0
20
FC
S p
ower
cha
nge
rate
(kW
/s)
0 200 400 600 800 1000 1200-50
0
50
Bat
tery
pow
er (
kW)
0 200 400 600 800 1000 12000.4
0.6
0.8
Bat
tery
SO
C
Time (s)
FCS lifetime is not consideredConsidered
FCS lifetime is not consideredConsidered
FCS lifetime is not consideredConsidered
FCS lifetime is not consideredConsidered

65
Fig. 4.10 Optimal trajectories when the FCS lifetime is considered and is not considered on the
Japan 1015 driving cycle
Table 4.2 shows comparisons of the simulation results illustrated in the
three figures. It can be observed that the mean power changing rate of the
FCS is reduced through the reformulation. Thus, the FCS lifetime can be
increased. However, the reformulation increases the fuel consumption instead
of prolonging the FCS lifetime.
0 100 200 300 400 500 600 7000
50
100
Veh
icle
spe
ed (
km/h
)
0 100 200 300 400 500 600 7000
10
20
30F
CS
net
pow
er (
kW)
0 100 200 300 400 500 600 700-20
-10
0
10
FC
S p
ower
cha
nge
rate
(kW
/s)
0 100 200 300 400 500 600 700-20
0
20
Bat
tery
pow
er (
kW)
0 100 200 300 400 500 600 7000.55
0.6
0.65
Time (s)
Bat
tery
SO
C
FCS lifetime is not consideredConsidered
FCS lifetime is not consideredConsidered
FCS lifetime is not consideredConsidered
FCS lifetime is not consideredConsidered

66
Table 4.2 Comparison of the PMP-based power management strategies
Driving cycle
Fuel consumption (kg/100 km) Mean power changing rate of
FCS (kW/s)
Basic PMP-
based strategy
PMP-based
strategy
considering FCS
lifetime
Basic PMP-
based strategy
PMP-based
strategy
considering FCS
lifetime
FTP75 urban 1.154 1.204 2.974 1.009
NEDC 2000 1.282 1.310 2.396 0.696
Japan 1015 1.137 1.170 1.681 0.841
Fig. 4.11 illustrates the optimal lines of the PMP-based power management
strategies introduced in chapter 3 and here over the FTP75 urban driving cycle.
It can be observed that the optimal line moves up for the strategy introduced
here. The gap between the two optimal lines indicates the amount of fuel
usage attributed to the new cost function L . Fig. 4.12 and Fig. 4.13 show the
comparisons of optimal lines for the NEDC 2000 and the Japan 1015 driving
cycle, respectively. Table 4.2, Fig. 4.11, Fig. 4.12, and Fig. 4.13 indicate that
there is a tradeoff between the FCS lifetime and the fuel economy. However,
prolonging the FCS lifetime will be significant from an economic viewpoint
even though there is a fuel consumption loss because the price of the fuel cell
stack is very high currently.

67
Fig. 4.11 Optimal lines for the basic case and for the case where the FCS lifetime is considered
on the FTP75 urban driving cycle
Fig. 4.12 Optimal lines for the basic case and for the case where the FCS lifetime is considered
on the NEDC 2000
Fig. 4.13 Optimal lines for the basic case and for the case where the FCS lifetime is considered
on the Japan 1015 driving cycle
0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.8120
130
140
150
160
170
Final battery SOC
Fuel
consu
mptio
n (g)
Basic optimal controlFCS lifetime is considered
0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.8120
130
140
150
160
170
Final battery SOC
Fuel
consu
mptio
n (g)
Basic optimal controlFCS lifetime is considered
0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.830
35
40
45
50
55
60
65
70
Final battery SOC
Fuel
consu
mptio
n (g)
Basic optimal controlFCS lifetime is considered

68
Table 4.3 shows the influence of the tuning parameter c on the fuel
consumption and on the mean power changing rate of the FCS. The FTP75
urban driving cycle is used here. It can be seen that a higher value of c
results in higher fuel consumption and lower mean power changing rate of the
FCS.
Table 4.3 Influence of the tuning parameter
Tuning parameter
Fuel consumption
(kg/100 km)
Mean power
changing rate of FCS
(kW/s)
0.001c = 1.187 1.307
0.002c = 1.204 1.009
0.003c = 1.216 0.836
Equation (3.11) is still true in this subsection under the assumption that the
battery OCV and internal resistance are not dependent on the battery SOC, as
the new cost function L is only dependent on the FCS net power and there is
no other state variable except the battery SOC. Thus, the PMP-based power
management strategy introduced here can serve as a global optimal solution
when the FCS lifetime is taken into account. Fig. 4.14 illustrates the
comparison between the DP approach and the PMP-based power management
strategy introduced in this subsection. The NEDC 2000 is used here. The
optimal trajectories nearly overlap each other and the fuel consumption
discrepancy is within 0.6%. It can be concluded that the PMP-based power
management strategy introduced here which considers the FCS lifetime can

69
guarantee the global optimality. In the meantime, the PMP-based power
management strategy can save much time compared to the DP approach.
(a)
(b) (c)
Fig. 4.14 Comparison between DP approach and PMP-based power management strategy when
the FCS lifetime is considered: (a) FCS net power trajectories, (b) battery power trajectories, (c)
SOC trajectories
4.3 PMP-based power management strategy considering
battery thermal management
A proton-exchange-membrane (PEM) fuel cell is usually used in vehicular
applications, and the temperature of the PEM fuel cell is controlled properly
within a certain small range by its thermal management system when it is
operating. However, the battery temperature increases during its operation.
0 200 400 600 800 1000 1200-10
0
10
20
30
40
50
Time (s)
FC
S n
et p
ow
er (
kW)
DPPMP
0 200 400 600 800 1000 1200-40
-30
-20
-10
0
10
20
30
Time (s)
Bat
tery
po
wer
(kW
)
DPPMP
0 200 400 600 800 1000 12000.5
0.55
0.6
0.65
0.7
0.75
Time (s)
Bat
tery
SO
C
DPPMP

70
This affects the total fuel consumption, as the battery temperature is related to
the battery efficiency and is further related to the efficiency of the entire
vehicle system. In chapter 3, the battery temperature is assumed to be the same
all the time. However, the battery temperature changes according to equation
(2.15) during its operation, and a good battery thermal management system is
necessary for better fuel economy. In this subsection, the influence of battery
thermal management on the fuel consumption is considered by designating the
battery temperature as a second-state variable of the optimal control problem.
The second battery in Table 2.5 is used in this subsection. Fig. 4.15 illustrates
the OCV, charging internal resistance, and discharging internal resistance of
the battery used here. These data are sourced from an automotive simulation
program called Autonomie.
(a)
(b) (c)
Fig. 4.15 Battery characteristics: (a) OCV, (b) charging resistance, (c) discharging resistance
0
0.5
1
0
20
40
60220
240
260
280
300
Battery SOCBattery temperature (°C)
OC
V (
V)
0
0.5
1
020
4060
0
0.5
1
1.5
2
Battery SOCBattery temperature (°C)
Ch
arg
ing
re
sist
an
ce (
Oh
m)
0
0.5
1
020
40
60
0
1
2
3
4
5
6
Battery SOCBattery temperature (°C)
Dis
cha
rgin
g r
esi
sta
nce
(O
hm
)

71
4.3.1 PMP-based power management strategy without considering battery thermal management
In subsection 3.1, we introduced the basic formulation of the PMP-based
optimal control problem for FCHVs, where we assumed that the battery
temperature is always the same. This assumption does not apply here. The
battery temperature changes according to equation (2.15). However, battery
thermal management is not taken into account in this subsection in order to
evaluate its effects on the total fuel consumption in the next subsection.
In this optimal control problem, the battery temperature is specified as a
second-state variable. The state equations, which describe the dynamics of the
state variables, are as follows:
( ) ( ) ( ) ( )( )( ) ( ) ( ) ( )( )
, ,
, ,
fcs
fcs
SOC t F SOC t T t P t
T t f SOC t T t P t
=
=
ɺ
ɺ (4.13)
Here, the FCS net power fcsP is the control variable and the battery SOC and
battery temperature are the two state variables. The first state equation is
sourced from equation (2.14), and the second one is sourced from equation
(2.15). The performance measure to be minimized is the total fuel
consumption. Considering the first state equation in (4.13), which is a
constraint on the optimal control problem, the performance measure is as
follows:
( ) ( ) ( )( )2
0
( ) ( ) ( ) ( ), , ( ) ( )ft
fcs h fcs fcstJ P t m P t p t F SOC t T t P t SOC t dt
• • = + ⋅ −
∫ (4.14)

72
The necessary conditions that minimize the performance measure are then as
follows,
( ) ( ) ( ) ( ) ( )( )
( ) ( ) ( ) ( ) ( )( )( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( )
* * * *
* * * *
* * * * *
, , ,
, , ,
, , , , , ,
fcs
fcs
fcs fcs
HSOC t SOC t T t P t p t
p
Hp t SOC t T t P t p t
SOC
H SOC t T t P t p t H SOC t T t P t p t
•
•
∂=∂∂= −
∂≤
(4.15)
when Hamiltonian is defined as follows:
( ) ( ) ( )( ) ( )( ) ( ) ( )( )2, , ( ), ( ), , ( )hfcs fcs fcsH SOC t T t P t p t m P t p t F SOC t T t P t•
= + ⋅ (4.16)
As stated before, the battery temperature is not considered in the fuel
consumption optimization in this formulation. Thus the second state equation
in (4.13) is not included in the performance measure and in the Hamiltonian,
and equation (4.15) does not give a necessary condition with respect to the
battery temperature.
4.3.2 PMP-based power management strategy considering battery thermal management
In subsection 4.3.1, the battery temperature is not related to the
optimization of the fuel consumption. The battery temperature, however,
affects the total fuel consumption, as it influences the battery efficiency and
further influences the overall efficiency of the vehicle system. Thus, a battery
thermal management system is needed. In this subsection, the PMP-based
optimal control problem introduced in 4.3.1 is reformulated in order to
evaluate the influence of battery thermal management on the total fuel
consumption.

73
The two state equations are identical to those in (4.13). Because the two
state variables are all taken into account in the fuel consumption optimization,
two costates are needed. By introducing the two costates 1p and 2p , the
performance measure to be minimized can be expressed as follows:
( ) { ( ) ( ) ( ) ( )( ) ( )( )( ) ( ) ( )( ) ( )( ) }
20
1
2
( ) ( ) ( ) , ,
( ) , ,
ft
fcs h fcs fcst
fcs
J P t m P t p t F SOC t T t P t SOC t
p t f SOC t T t P t T t dt
•
= + ⋅ −
+ ⋅ −
∫ ɺ
ɺ
(4.17)
The necessary conditions that minimize the performance measure are then as
follows,
( ) ( ) ( ) ( ) ( ) ( )( )
( ) ( ) ( ) ( ) ( ) ( )( )
( ) ( ) ( ) ( ) ( ) ( )( )
( ) ( ) ( ) ( ) ( ) ( )( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
* * * * * *1 2
1
* * * * * *1 2
* * * * * *1 1 2
* * * * * *2 1 2
* * * * * * * *1 2 1
, , , ,
, , , ,2
, , , ,
, , , ,
, , , , , , , ,
fcs
fcs
fcs
fcs
fcs fcs
HSOC t SOC t T t P t p t p t
p
HT t SOC t T t P t p t p t
p
Hp t SOC t T t P t p t p t
SOCH
p t SOC t T t P t p t p tT
H SOC t T t P t p t p t H SOC t T t P t p t
•
•
•
•
∂=∂
∂=∂
∂= −∂∂= −∂
≤ ( )( )*2p t
(4.18)
when Hamiltonian H is defined as
( ) ( ) ( ) ( )( ) ( )( ) ( ) ( ) ( )( )( ) ( ) ( )( )
21 2 1
2
, , ( ), , , , ( )
, , ( )
fcs h fcs fcs
fcs
H SOC t T t P t p t p t m P t p t F SOC t T t P t
p t f SOC t T t P t
= + ⋅
+ ⋅
ɺ
(4.19)
Fig. 4.16, Fig. 4.17, and Fig. 4.18 illustrate the simulation results on the
FTP75 urban driving cycle, NEDC 2000, and Japan 1015 driving cycle,
respectively. Here, the initial battery SOC is set to 0.6, and the initial battery
temperature is 25 °C. The result points on each figure are derived from
different values of 1p and 2p . It can be observed that these result points
form a surface in each figure and that each surface can be approximated by

74
two half-planes with similar gradients and which are separated at the battery
SOC of 0.6.
Fig. 4.16 Optimal surface on the FTP75 urban driving cycle when the initial battery SOC is 0.6
and the initial battery temperature is 25 °C
Fig. 4.17 Optimal surface on the NEDC 2000 when the initial battery SOC is 0.6 and the initial
battery temperature is 25 °C
0.4
0.6
0.8
2830
3234
100
120
140
160
180
Final battery SOCFinal battery temperature (°C)
Fu
el c
on
sum
ptio
n (
g)
0.4
0.5
0.6
0.7
0.8
26
28
30
32100
120
140
160
180
Final battery SOCFinal battery temperature (°C)
Fu
el c
on
sum
ptio
n (
g)

75
Fig. 4.18 Optimal surface on the Japan 1015 driving cycle when the initial battery SOC is 0.6
and the initial battery temperature is 25 °C
The three surfaces represent the relationship among the final battery SOC,
the final battery temperature, and the total fuel consumption for the three
driving cycles. Here, the three surfaces are defined as optimal surfaces, as
they are obtained from the extended PMP-based power management strategy.
Any other result points derived from other power management strategies will
always locate above these surfaces on the three driving cycles. It can be seen
that the final battery SOC and final battery temperature simultaneously
influence the total fuel consumption. A higher final battery SOC leads to more
fuel consumption, while a higher final battery temperature results in less fuel
consumption. The shape and location of an optimal surface depend on the
driving cycle and the initial battery conditions as well. Fig. 4.19 illustrates an
optimal surface, which is obtained when the initial battery SOC is 0.6, the
initial battery temperature is 5 °C, and the FTP75 urban driving cycle is
0.4
0.6
0.8
2627
282920
30
40
50
60
70
80
Final battery SOCFinal battery temperature (°C)
Fu
el c
on
sum
ptio
n (
g)

76
selected. It can be seen that the gradients of the optimal surface and its
location on the three axes are different from those in Fig. 4.16.
Fig. 4.19 Optimal surface on the FTP75 urban driving cycle when the initial battery SOC is 0.6
and the initial battery temperature is 5 °C
The optimal trajectories are affected by the battery temperature when the
battery thermal management is taken into account. Fig. 4.20 shows the
optimal trajectories of the battery SOC, the battery temperature, the battery
power, and the FCS net power for different initial battery temperature
conditions when the initial battery SOC and the final battery SOC are both 0.6.
The FTP75 urban driving cycle is used here. This figure shows that the
trajectories of each item are different for each condition. Compared to the
case where the initial battery temperature is 25 °C, the positive battery power
is lower at the beginning and becomes greater along as the battery temperature
increases when the initial battery temperature is 0 °C or 10 °C. In contrast, it
is greater at the beginning and becomes lower gradually due to the increasing
0.4
0.5
0.6
0.7
0.8
141516
1718
19120
130
140
150
160
Final battery SOCFinal battery temperature (°C)
Fuel c
onsu
mptio
n (g)

77
battery temperature when the initial battery temperature is 25 °C compared to
the other cases.
(a) (b)
(c) (d)
Fig. 4.20 Optimal trajectories for different initial battery temperature conditions: (a) battery
SOC trajectories, (b) battery temperature trajectories, (c) battery power trajectories, (d) FCS net
power trajectories
Fig. 4.21 illustrates the simulation results of the battery SOC, the battery
temperature, the battery power, and the FCS net power over the FTP75 urban
driving cycle both with battery thermal management introduced here and
without thermal management. It is evident that the trajectories of each item
are different for each case. The battery discharges more and charges more in
the case without battery thermal management, causing the battery temperature
increase more in this case. Fig. 4.22 and Fig. 4.23 illustrate the simulation
results on the NEDC 2000 and the Japan 1015 driving cycle, respectively.
0 200 400 600 800 1000 1200 14000.5
0.55
0.6
0.65
0.7
Time (s)
Bat
tery
SO
C
T-initial=0°CT-initial=10°CT-initial=25°C
0 200 400 600 800 1000 1200 14000
5
10
15
20
25
30
35
Time (s)
Batte
ry te
mper
ature
(°C
)
T-initial=0°CT-initial=10°CT-initial=25°C
0 200 400 600 800 1000 1200 1400-25
-20
-15
-10
-5
0
5
10
15
Time (s)
Bat
tery
pow
er (k
W)
T-initial=0°CT-initial=10°CT-initial=25°C
0 200 400 600 800 1000 1200 14000
10
20
30
40
50
Time (s)
FC
S n
et p
ow
er (kW
)
T-initial=0°CT-initial=10°CT-initial=25°C

78
(a) (b)
(c) (d)
Fig. 4.21 Effects of battery thermal management on the optimal trajectories on the FTP75 urban
driving cycle: (a) battery SOC, (b) battery temperature, (c) battery power, (d) FCS net power
(a) (b)
(c) (d)
Fig. 4.22 Effects of battery thermal management on the optimal trajectories on the NEDC 2000:
(a) battery SOC, (b) battery temperature, (c) battery power, (d) FCS net power
0 200 400 600 800 1000 1200 14000.5
0.52
0.54
0.56
0.58
0.6
0.62
Time (s)
Bat
tery
SO
C
With thermal managementWithout thermal management
0 200 400 600 800 1000 1200 140024
26
28
30
32
34
Time (s)
Bat
tery
tem
per
atu
re (
°C)
With thermal managementWithout thermal management
0 200 400 600 800 1000 1200 1400-30
-20
-10
0
10
20
Time (s)
Bat
tery
po
wer
(kW
)
With thermal managementWithout thermal management
0 200 400 600 800 1000 1200 14000
5
10
15
20
25
30
35
40
Time (s)
FC
S n
et p
ow
er (
kW)
With thermal managementWithout thermal management
0 200 400 600 800 1000 12000.5
0.55
0.6
0.65
0.7
0.75
Time (s)
Bat
tery
SO
C
with thermal managementwithout thermal management
0 200 400 600 800 1000 120025
26
27
28
29
30
31
32
Time (s)
Bat
tery
tem
per
atu
re (
°C)
with thermal managementwithout thermal management
0 200 400 600 800 1000 1200-30
-20
-10
0
10
20
30
Time (s)
Bat
tery
po
wer
(kW
)
with thermal managementwithout thermal management
0 200 400 600 800 1000 12000
10
20
30
40
50
Time (s)
FC
S p
ow
er (
kW)
with thermal managementwithout thermal management

79
(a) (b)
(c) (d)
Fig. 4.23 Effects of battery thermal management on the optimal trajectories on the Japan1015
driving cycle: (a) battery SOC, (b) battery temperature, (c) battery power, (d) FCS net power
Fig. 4.24 illustrates the relationship between the optimal surface acquired in
this subsection and the simulation results of subsection 4.3.1 over the FTP75
urban driving cycle. The asterisk indicates the simulation results of subsection
4.3.1. As stated earlier, the asterisk is located above the optimal surface. This
shows the improvement of the fuel economy when battery thermal
management is carried out. Fig. 4.25 and Fig. 4.26 denote this for the NEDC
2000 and the Japan 1015 driving cycle, respectively.
0 100 200 300 400 500 600 700
0.58
0.59
0.6
0.61
0.62
0.63
0.64
0.65
Time (s)
Bat
tery
SO
C
with thermal mangementwithout thermal management
0 100 200 300 400 500 600 70025
25.5
26
26.5
27
27.5
Time (s)
Bat
tery
tem
per
atu
re (
°C)
with thermal mangementwithout thermal management
0 100 200 300 400 500 600 700-10
-5
0
5
10
Time (s)
Bat
tery
po
wer
(kW
)
with thermal mangementwithout thermal management
0 100 200 300 400 500 600 7000
5
10
15
20
25
30
Time (s)
FC
S p
ow
er (
kW)
with thermal mangementwithout thermal management

80
Fig. 4.24 The effect of the battery thermal management on the fuel economy over the FTP75
urban driving cycle
Fig. 4.25 The effect of the battery thermal management on the fuel economy over the NEDC
2000
Fig. 4.26 The effect of the battery thermal management on the fuel economy over the Japan
1015 driving cycle
0.4
0.6
0.8
2830
3234
100
120
140
160
180
Final battery SOCFinal battery temperature (°C)
Fu
el c
on
sum
ptio
n (
g)
0.4
0.5
0.6
0.7
0.8
26
28
30
32100
120
140
160
180
Final battery SOCFinal battery temperature (°C)
Fu
el c
on
sum
ptio
n (
g)
0.4
0.6
0.8
2627
282920
30
40
50
60
70
80
Final battery SOCFinal battery temperature (°C)
Fu
el c
on
sum
ptio
n (
g)

81
Table 4.4 lists detailed data on the effects of the battery thermal
management on the total fuel consumption. The table indicates that the fuel
economy of the FCHV is improved by 2.33%, 4.77%, and 3.02% with battery
thermal management on the FTP75 urban driving cycle, the NEDC 2000, and
the Japan 1015 driving cycle, respectively. The difference in the final battery
temperature for the two cases is removed by considering the relationship
between the final battery temperature and the total fuel consumption for the
same final battery SOC, which is demonstrated on the optimal surface.
Table 4.4 The effects of the battery thermal management on the total fuel consumption
Driving cycle
Fuel consumption (kg/100 km)
Discrepancy (%) Without battery
thermal management
With battery thermal
management
FTP75 urban 1.142 1.116 2.33
NEDC 2000 1.273 1.215 4.77
Japan 1015 1.127 1.094 3.02
4.3.3 Global optimality of the two-state variable PMP-based power management strategy
Based on the previous research [8], the PMP-based power management
strategy introduced in subsection 4.3.2 can guarantee the global optimality if
the two state variables are not coupled to each other and the two costates can
be replaced with two constants. The two state variables, however, are related
to each other by the third and the fourth necessary conditions in (4.18). Thus,

82
a new discussion regarding this case is needed. In the research [52], it was
proved mathematically that the necessary conditions produced by PMP are
sufficient for the global optimal solution under two assumptions: 1) the state
equation is concave and 2) the optimal costate is always negative. This
conclusion is obtained for the one-state variable case for the engine/battery
powered hybrid vehicles. However, we can expand this conclusion to our
problem here. Four assumptions that can guarantee the global optimal solution
in the two-state variable PMP-based optimal control problem are as follows: 1)
the state equation F is concave 2) the costate 1p is always negative 3) the
state equation f is convex 4) the costate 2p is always positive. The first
assumption indicates that the state equation F is concave for the battery
SOC, the battery temperature, and the FCS net power at the same time.
Similarly, the third assumption indicates that the state equation f is convex
for the three parameters simultaneously. We assessed the shape of the two
state equations for each two parameters out of the three parameters based on
the battery characteristics illustrated in Fig. 4.15. Fig. 4.27 illustrates the
images of the state equations F and f . We can see that the concavity and
convexity of the state equations basically satisfy.

83
(a) (b)
(c) (d)
(e) (f)
Fig. 4.27 Concavity and convexity of the state equations based on the characteristics of the
battery used in this dissertation: (a) state equation F versus battery SOC and battery
temperature for different battery power, (b) state equation F versus battery temperature and
battery power for different battery SOC, (c) state equation F versus battery SOC and battery
power for different battery temperature, (d) state equation f versus battery temperature and
battery SOC for different battery power, (e) state equation f versus battery temperature and
battery power for different battery SOC, (f) state equation f versus battery SOC and battery
power for different battery temperature
010
2030
40
0.4
0.5
0.60.7
0.8-5
-4
-3
-2
-1
x 10-3
Battery temperature (°C)Battery SOC
Tim
e d
eriv
ativ
e o
f SO
C (
1/s
)
Pbat=20kW
Pbat=10kW
-40-20
020
40
10
20
30
40-15
-10
-5
0
5
x 10-3
Battery power (kW)Battery temperature (°C)
Tim
e d
iriva
tive
of
SO
C (
1/s
)
SOC=0.8
SOC=0.5
-40-20
020
40
0.4
0.5
0.6
0.7
0.8
-15
-10
-5
0
5
x 10-3
Battery power (kW)Battery SOC
Tim
e d
eriv
ativ
e o
f S
OC
(1
/s)
T=36 °C
T=20 °C
10 15 20 25 30 35 40 45 0.4
0.6
0.8
0
0.5
1
1.5
2
Battery SOC
Battery temperature (°C)
Tim
e d
eriv
ativ
e o
f te
mp
era
ture
(°C
/s)
Pbat=20kW
Pbat=25kW
-40-20
020
40
1020
30400
0.5
1
1.5
2
2.5
3
3.5
Battery power (kW)Battery temperature (°C)
Tim
e d
eriv
ativ
e o
f te
mp
era
ture
(°C
/s)
SOC=0.5
SOC=0.8
-40-20
020
40
0.40.5
0.60.7
0.80
0.5
1
1.5
2
Battery power (kW)Battery SOC
Tim
e d
eriv
ativ
e o
f te
mp
era
ture
(°C
/s)
T=36 °C
T=20 °C

84
Fig. 4.28 illustrates the simulation results derived from DP approach for the
two-state variable case. A short-time driving cycle is used here because of the
long calculation time, which is illustrated in Fig. 4.29.
(a)
(b) (c)
Fig. 4.28 Simulation results derived from DP approach for the two-state variable case
(driving cycle 1): (a) simulation results of the two state variables, (b) simulation result of the
battery SOC, and (c) simulation result of the battery temperature
Fig. 4.29 Driving cycle 1 used in comparison between PMP-based strategy and DP approach
0
50
100
150
0.59
0.592
0.594
0.596
0.598
0.6
27.8
27.9
28
Time (s)Battery SOC
Batte
ry tem
pera
ture
(C
els
ius
degre
e)
0 20 40 60 80 100 120 140 160 1800.59
0.591
0.592
0.593
0.594
0.595
0.596
0.597
0.598
0.599
0.6
Time (s)
Batte
ry S
OC
0 20 40 60 80 100 120 140 160 18027.75
27.8
27.85
27.9
27.95
28
28.05
Time (s)
Batte
ry te
mpera
ture
(C
els
ius
degre
e)
0 50 100 150 2000
5
10
15
20
25
30
35
40
Time (s)
Sp
eed
(km
/h)

85
According to above four assumptions that can guarantee the global optimal
solution in the two-state variable PMP-based optimal control problem, the
battery characteristics illustrated in Fig. 4.27 will make few differences
between the optimal solution derived from the PMP-based strategy introduced
in subsection 4.3.2 and the global optimal solution derived from DP approach.
Fig. 4.30 shows the comparison between DP approach and the PMP-based
power management strategy. We can see that the optimal trajectories overlap
each other most of the time. Simulation result shows that the fuel
consumption discrepancy is within 1.5%. The difference will be disappeared
if a battery, which perfectly satisfies the four assumptions above, is used.
(a) (b)
(c) (d)
Fig. 4.30 Simulation results comparison between PMP-based strategy and DP approach
(driving cycle 1): (a) battery SOC, (b) battery temperature, (c) battery power, and (d) FCS net
power
0 50 100 1500.59
0.595
0.6
0.605
Time (s)
Bat
tery
SO
C
DPPMP
0 50 100 15027.75
27.8
27.85
27.9
27.95
28
28.05
28.1
28.15
Time (s)
Bat
tery
tem
per
atu
re (
Cel
siu
s d
egre
e)
DPPMP
0 20 40 60 80 100 120 140 160 180-6
-4
-2
0
2
4
Time (s)
Bat
tery
po
wer
(kW
)
DPPMP
0 20 40 60 80 100 120 140 160 1800
5
10
15
20
Time (s)
FC
S n
et p
ow
er (
kW)
DPPMP

86
Here, we can conclude that the two-state variable PMP-based power
management strategy introduced in subsection 4.3.2 can guarantee the global
optimality if the battery satisfies the four assumptions above. In the meantime,
the PMP-based strategy can save much time compared to DP approach. The
time saving effect is outstanding in the two-state variable case. For the driving
cycle illustrated in Fig. 4.29, the elapsed time is 13 hours 55 minutes 1 second
for DP approach and is just 36 seconds for the PMP-based strategy. The
battery SOC range and battery temperature range are relatively narrow when
the driving cycle illustrated in Fig. 4.29 is used. Thus, the elapsed time for DP
approach is also relatively short in this case.
Fig. 4.31 shows the simulation results derived from DP approach when the
driving cycle illustrated in Fig. 4.32 is used. Fig. 4.33 shows the comparison
between DP approach and the PMP-based power management strategy for this
driving cycle. The battery SOC rang and battery temperature range are
relatively wide for this driving cycle, thus the time saving effect is more
outstanding in this case compared to the driving cycle illustrated in Fig. 4.29.
The elapsed time is 166 hours 48 minutes 21 seconds for DP approach and is
just 37 seconds for the PMP-based strategy when the driving cycle illustrated
in Fig. 4.32 is used. From the comparisons of the two driving cycles, we can
see that the time saving effect of the PMP-based power management strategy
is more outstanding when the battery SOC range and battery temperature
range, and the driving cycle time increase.

87
(a)
(b) (c)
Fig. 4.31 Simulation results derived from DP approach for the two-state variable case
(driving cycle 2): (a) simulation results of the two state variables, (b) simulation result of the
battery SOC, and (c) simulation result of the battery temperature
Fig. 4.32 Driving cycle 2 used in comparison between PMP-based strategy and DP approach
050
100150
200
0.5750.58
0.5850.59
0.595
27.8
28
28.2
28.4
Time (s)Battery SOC
Ba
ttery
tem
pe
ratu
re (
Ce
lsiu
s d
eg
ree
)
0 50 100 150 2000.575
0.58
0.585
0.59
0.595
0.6
Time (s)
Ba
ttery
SO
C
0 50 100 150 200
27.8
27.9
28
28.1
28.2
28.3
28.4
28.5
Time (s)
Ba
ttery
te
mp
era
ture
(C
els
ius
de
gre
e)
0 50 100 150 200 2500
10
20
30
40
50
60
70
Time (s)
Sp
eed
(km
/h)

88
(a) (b)
(c) (d)
Fig. 4.33 Simulation results comparison between PMP-based strategy and DP approach
(driving cycle 2): (a) battery SOC, (b) battery temperature, (c) battery power, and (d) FCS net
power
4.3.4 Control parameters of the PMP-based power management strategy
Fig. 4.34 illustrates the fuel consumption rate 2hm
•
, time derivative of the
battery SOC SOC•
, time derivative of the battery temperature T•
, and the
Hamiltonian H for the whole range of FCS net power at the calculation
time step when the power required for the motor reqP is 35 kW, the battery
SOC is 0.6, the battery temperature is 30 °C, and the costate 1p and 2p are
set to -90 and 1. The convexity of the Hamiltonian demonstrates that the
0 50 100 150 200
0.58
0.59
0.6
0.61
0.62
Time (s)
Bat
tery
SO
C
DPPMP
0 50 100 150 20027.6
27.8
28
28.2
28.4
28.6
Time (s)
Bat
tery
tem
per
atu
re (
Cel
siu
s d
egre
e)
DPPMP
0 50 100 150 200-10
-8
-6
-4
-2
0
2
4
Time (s)
Bat
tery
po
wer
(kW
)
DPPMP
0 50 100 150 200 2500
5
10
15
20
25
Time (s)
FC
S n
et p
ow
er (
kW)
DPPMP

89
optimal fcsP , which minimizes the Hamiltonian, can be determined for this
calculation time step. The shape of the Hamiltonian depends on the two
costates at each calculation time step, and consequently the optimal fcsP is
also dependent on the two costaes. Therefore, the two costates are called
control parameters.
Fig. 4.34 Fuel consumption rate 2hm
•, time derivative of the battery SOC SOC
•, time
derivative of the battery temperature T•
, and Hamiltonian H for the whole range of the FCS
net power
0 10 20 30 40 50 600
0.5
1
1.5
2
Fue
l co
nsum
ptio
n r
ate
(g/s
)
0 10 20 30 40 50 60-10
-5
0
5x 10
-3
Tim
e d
eriv
ativ
e of
SO
C (
1/s
)
0 10 20 30 40 50 60-0.2
0
0.2
0.4
0.6
Tim
e d
eriv
ativ
e of
tem
pera
ture
(°C
/s)
0 10 20 30 40 50 600.5
1
1.5
Ham
ilto
nian
(g
/s)
FCS net power (kW)

90
Costate 1p reflects the relationship between the battery SOC and the fuel
consumption, whose unit is g , while costate 2p reflects the relationship
between the battery temperature and the fuel consumption, whose unit is
/g C° . The two costates are determined by the third and the fourth necessary
conditions in (4.18) when their initial values are given. This indicates that the
two costates are related to each other as follows:
* ** * *
1 1 2
* ** * *
2 1 2
F fp p p
SOC SOC
F fp p p
T T
•
•
∂ ∂= − ⋅ − ⋅∂ ∂∂ ∂= − ⋅ − ⋅∂ ∂
(4.20)
Fig. 4.35 illustrates the simulation results of 1p and 2p for different initial
values of 1p and 2p over the FTP75 urban driving cycle. Here, the initial
battery SOC and the final SOC are each 0.6. The initial values of 1p and 2p
should be properly selected based on the physical meanings of the costates
and based on the final battery SOC constraint.

91
(a) (b)
(c) (d)
(e) (f)
Fig. 4.35 Simulation results of two costates for different initial values of them over the FTP75
urban driving cycle
From (4.19), it is clear that the two costates simultaneously influence the
Hamiltonian. Thus, the simulation results depend on both costates. In the
previous subsection 3.2, the influences of the costate value on the final value
of the state variable and on the total fuel consumption were discussed for the
basic PMP-based power management strategy. For the extended PMP-based
strategy presented in subsection 4.3.2, the influences of the costates can be
explained similarly. Greater 1p and 2p values cause a lower final battery
SOC value and a lower final battery temperature value, respectively. Fig. 4.36
0 200 400 600 800 1000 1200 1400-110
-105
-100
Time (s)
p1
(g)
0 200 400 600 800 1000 1200 14001
1.01
1.02
p2
(g/°C
)
p1p2
0 200 400 600 800 1000 1200 1400-105
-100
-95
-90
Time (s)
p1
(g)
0 200 400 600 800 1000 1200 14002
2.01
2.02
2.03
p2
(g/°C
)
p1p2
0 200 400 600 800 1000 1200 1400-100
-90
-80
Time (s)
p1
(g)
0 200 400 600 800 1000 1200 14003
3.02
3.04
p2
(g/°C
)
p1p2
0 200 400 600 800 1000 1200 1400-100
-90
-80
-70
-60
Time (s)p
1 (
g)
0 200 400 600 800 1000 1200 14004
4.01
4.02
4.03
4.04
p2
(g/
°C)
p2p1
0 200 400 600 800 1000 1200 1400-90
-80
-70
-60
Time (s)
p1
(g)
0 200 400 600 800 1000 1200 14005
5.02
5.04
5.06
p2
(g/°C
)
p2p1
0 200 400 600 800 1000 1200 1400-100
-90
-80
-70
-60
-50
Time (s)
p1
(g)
0 200 400 600 800 1000 1200 14006
6.01
6.02
6.03
6.04
6.05
p2
(g/°C
)
p2p1

92
illustrates the relationship between the initial value of 1p and the final
battery SOC and the relationship between the initial value of 2p and the
final battery temperature over three typical driving cycles. The initial values
of 2p are identical for each line in (a), (b), and (c), and the initial values of
1p are identical for each line in (d), (e), and (f).
(a) (b)
(c) (d)
(e) (f)
Fig. 4.36 Relationship between initial value of 1p and final battery SOC and relationship
between initial value of 2p and final battery temperature over three typical driving cycles: (a)
final battery SOC versus initial value of 1p on the FTP75 urban driving cycle, (b) final
-110 -100 -90 -80 -70 -600.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
0.8
Initial value of p1 (g)
Fin
al b
atte
ry S
OC
p2 initial=1 g/°Cp2 initial=2 g/°Cp3 initial=3 g/°C
-125 -120 -115 -110 -105 -100 -95 -90 -850.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
0.8
Initial value of p1 (g)
Fin
al b
atte
ry S
OC
p2 initial=1 g/°Cp2 initial=2 g/°Cp3 initial=3 g/°C
-140 -130 -120 -110 -100 -90 -80 -70 -600.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
0.8
Initial value of p1 (g)
Fin
al b
atte
ry S
OC
p2 initial=1 g/°Cp2 initial=2 g/°Cp3 initial=3 g/°C
0 2 4 6 8 10 1229.5
30
30.5
31
31.5
32
32.5
33
Initial value of p2 (g/°C)
Fin
al b
atte
ry t
emp
erat
ure
(°C
)
p1 initial=-70 gp1 initial=-100 g
0 5 10 15 2027.5
28
28.5
29
29.5
Initial value of p2 (g/°C)
Fin
al b
atte
ry t
emp
erat
ure
(°C
)
p1 initial=-70 gp1 initial=-100 g
0 2 4 6 8 1026
26.5
27
27.5
28
28.5
29
Initial value of p2 (g/°C)
Fin
al b
atte
ry t
emp
erat
ure
(°C
)
p1 initial=-70 gp1 initial=-100 gp1 initial=-130 g

93
battery SOC versus initial value of 1p on the NEDC 2000, (c) final battery SOC versus initial
value of 1p on the Japan 1015 driving cycle, (d) final battery temperature versus initial vale
of 2p on the FTP75 urban driving cycle, (e) final battery temperature versus initial vale of
2p on the NEDC 2000, (f) final battery temperature versus initial vale of 2p on the Japan
1015 driving cycle
4.4 Discussions on the combined case
Previously, we introduced the PMP-based power management strategy
considering three important factors which are the battery SOC constraint, the
FCS lifetime, and the effect of the battery thermal management on the fuel
economy. These three factors are separately considered in the previous three
subsections, and now the case in which the three factors are all taken into
account is discussed.
In this case, there are two state variables and three cost functions. Two state
equations are the same with (4.13). The Hamiltonian in this case can be
defined as follows:
( ) ( ) ( )( ) ( ) ( )( ) ( )( ) ( ) ( )( ) ( ) ( ) ( )( )
21 2
1 2
, ( ), ( ), , ( ) ( )
, , ( ) , , ( )
fcs h fcs fcs fcs
fcs fcs
H SOC t T t P t p t p t A m P t B S P t C L P t
p t F SOC t T t P t p t f SOC t T t P t
•= ⋅ + ⋅ + ⋅
+ ⋅ + ⋅(4.21)
Here, coefficients A, B, and C are weighting factors which have the following
relationship:
1A B C+ + = (4.22)

94
The value of each coefficient is determined based on the main goal of the
control. For example, C is greater than A and B if the FCS lifetime is the main
factor to be considered.
The necessary conditions that obtain the optimal solution here are as
follows:
( ) ( ) ( ) ( ) ( ) ( )( )
( ) ( ) ( ) ( ) ( ) ( )( )
( ) ( ) ( ) ( ) ( ) ( )( )
( ) ( ) ( ) ( ) ( ) ( )( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
* * * * * *1 2
1
* * * * * *1 2
* * * * * *1 1 2
* * * * * *2 1 2
* * * * * * * *1 2 1
, , , ,
, , , ,2
, , , ,
, , , ,
, , , , , , , ,
fcs
fcs
fcs
fcs
fcs fcs
HSOC t SOC t T t P t p t p t
p
HT t SOC t T t P t p t p t
p
Hp t SOC t T t P t p t p t
SOCH
p t SOC t T t P t p t p tT
H SOC t T t P t p t p t H SOC t T t P t p t
•
•
•
•
∂=∂
∂=∂
∂= −∂∂= −∂
≤ ( )( )*2p t
(4.23)
This looks identical to (4.18), but the optimal trajectories derived here will be
different from previous three cases because of the added cost functions.

95
Chapter 5 Concluding remarks
5.1 Conclusion
A PMP-based power management strategy for FCHVs is presented and
mathematically extended by considering three important factors which are
limitations on the battery SOC usage, FCS lifetime, and effects of battery
thermal management on the fuel economy. These extensions are useful for
realization of the PMP-based strategy, as these extensions are closer to the
reality. Global optimality is discussed for the three extended cases and
simulation time consumed in the PMP-based strategy and DP approach is
compared for two-state variable cases. The following points are drawn from
this dissertation.
(1) In order to overcome drawbacks of the existing method, which
considers the battery SOC boundary while minimizing the fuel
consumption but makes the battery SOC trajectory fluctuating, we
introduce a new cost function to the basic PMP-based optimal control
problem to consider the battery SOC constraint factor. Simulation
results illustrate that there is no fluctuation in the optimal battery SOC
trajectory after the reformulation and the tendency of the battery SOC
trajectory for the reformulation is similar to that for the case where the
battery SOC constraint is not considered. Simulation results also show

96
that the fuel economy is worse when considering the limitations of the
battery SOC usage in the PMP-based power management strategy.
(2) A second cost function is defined and introduced to the basic PMP-
based optimal control problem in order to take into account the FCS
lifetime while optimizing the fuel economy of the FCHV. Simulation
results illustrate that the optimal trajectory of the FCS net power
becomes smooth through the reformulation. The power changing rate
of the FCS is also smaller for the case of reformulation compared to the
basic PMP-based power management strategy. However, there is a
tradeoff between the FCS lifetime and the fuel economy. The optimal
line moves up when the FCS lifetime is considered and the gap
between the original optimal and the new optimal lines indicates the
amount of fuel usage attributed to the new cost function. Prolonging the
FCS lifetime will be significant because of the high-priced FCS, even
though there is a tradeoff between the FCS lifetime and the fuel
economy.
(3) The effect of battery thermal management on the fuel economy is
evaluated by designating the battery temperature as a second state
variable other than the battery SOC and adding it mathematically to the
PMP-based optimal control problem. An optimal surface is defined for
this reformulation which represents the relationship among the final
battery SOC, the final battery temperature, and the total fuel

97
consumption. For a driving cycle, any other simulation result points
derived from other power management strategies will always locate
above the optimal surface, as the optimal surface is obtained from the
extended PMP-based power management strategy. The optimal surface
indicates that the final battery SOC and final battery temperature
simultaneously influence the total fuel consumption. A higher final
battery SOC causes more fuel consumption, and a higher final battery
temperature results in less fuel consumption. The battery discharges
more and charges more in the case without battery thermal
management. From the relationship between the optimal surface and
the simulation results derived when the battery thermal management is
not taken into account, it could be concluded that the fuel economy of
the FCHV is improved by 2.33%, 4.77%, and 3.02% with the battery
thermal management on the FTP75 urban driving cycle, NEDC 2000,
and Japan 1015 driving cycle, respectively.
(4) The PMP-based power management strategy which considers the
battery SOC constraint guarantees the global optimality under the
assumption that the battery OCV and internal resistance are not
dependent on the battery SOC. The PMP-based power management
strategy which takes into account the FCS lifetime also guarantees the
global optimality under the same assumption. The PMP-based power
management strategy which considers the effect of battery thermal

98
management on the fuel economy guarantees the global optimality
under the assumption that the two state equations satisfy convexity and
concavity respectively, and the two costates are always negative and
always positive respectively. Simulation results derived from the PMP-
based strategy and DP approach show consistency for the three cases.
The elapsed time of the PMP-based power management strategy and
DP approach is compared for the two-state variable case in order to
prove the effectiveness of the PMP-based strategy. The comparison
result shows that the time which the DP approach consumed is way
longer than the PMP-based strategy’s while the two strategies obtain
the same simulation results. The time saving effect of the PMP-based
power management strategy is more outstanding when the battery SOC
range and the battery temperature range, and the driving cycle time
increase.
5.2 Future work
Future work of this dissertation is to realize the presented PMP-based power
management strategy to real FCHVs. In order to achieve this goal, a pre-
process on the presented strategy is needed to make the strategy applicable to
real vehicles and to establish the real-time control concept. This control will be
a map-based control and it mainly deals with the decision of control
parameters. A pre-experiment also needs to be designed and carried out. This

99
is a complicated process from a technological viewpoint and from an
economic viewpoint, as there are lots of issues regarding the real vehicle
control and the test bench cost is high. However, it will be a big success in the
automotive area if the realization of the presented power management strategy
is completed. It can be started from a reduced-scale of an FCHV powertrain. I
believe that the presented power management strategy will be applied to real
vehicles as a powerful solution in the near future.

100
References
[1] M. Ehsani, Y.M. Gao, A. Emadi. Modern Electric, hybrid electric, and
Fuel Cell Vehicles, CRC press, 2010, pp. 461-463.
[2] D.W. Gao, Z.H. Jin, Q.C. Lu. Energy management strategy based on
fuzzy logic for a fuel cell hybrid bus. J. Power Sources 196 (20) 3280-3289.
[3] O. Erdinc, B. Vural, M. Uzunoglu, Y. Ates. Modeling and analysis of an
FC/UC hybrid vehicular power system using a wavelet-fuzzy logic based
load sharing and control algorithm. Int. J. Hydrogen Energy 34 (2009)
5223-5233.
[4] D.E. Kirk. Optimal Control Theory (An Introduction), Prentice-hall,
1970, pp. 53-95.
[5] C.C. Lin, H. Peng, J.W. Grizzle, J. Kang. Power management strategy
for a parallel hybrid electric truck. IEEE Trans. Control Systems Technol.
11 (2003) 839-849.
[6] C.C. Lin, J. Kang, J.W. Grizzle, H. Peng. Energy management strategy
for a parallel hybrid electric truck. American Control Conf., Alington, USA,
2001, pp. 2878-2883.
[7] D.E. Kirk. Optimal Control Theory (An Introduction), Prentice-hall,
1970, pp. 184-240.

101
[8] N.W. Kim. Energy management strategy for hybrid electric vehicles
based on pontryagin’s minimum principle. PhD dissertation, Seoul National
University, Seoul, Korea, 2009.
[9] L. Serrao, G. Rizzoni. Optimal control of power split for a hybrid
electric refuse vehicle. American Control Conference, Washington, USA,
2008, pp. 4498-4503.
[10] A. Chasse, A. Sciarretta. Supervisory control of hybrid powertrains: an
experimental benchmark of offline optimization and online energy
management. Control Eng. Pract. 19 (2011) 1253-1265.
[11] C.C. Lin, H. Peng, J.W. Grizzle. A stochastic control strategy for
hybrid electric vehicles. American Control Conference, Boston, USA, 2004,
pp. 4710-4715.
[12] M.J. Kim, H. Peng, C.C. Lin, E. Stamos, D. Tran. Testing, modeling,
and control of a fuel cell hybrid vehicle. American Control Conference,
Portland, USA, 2005, pp. 3859-3864.
[13] M.J. Kim, H. Peng. Power management and design optimization of fuel
cell/battery hybrid vehicles. J. Power Sources 165 (2007) 819-832.
[14] L.F. Xu, J.Q. Li, J.F. Hua, X.J. Li, M.G. Ouyang. Optimal vehicle
control strategy of a fuel cell/battery hybrid city bus. Int. J. Hydrogen
Energy 34 (2009) 7323-7333.
[15] A. Sciarretta, M. Back, L. Guzzella. Optimal control of parallel hybrid
electric vehicles. IEEE Trans. Control Syst. Technol. 12 (2004) 352-363.

102
[16] P. Pisu, G. Rizzoni. A comparative study of supervisory control
strategies for hybrid electric vehicles. IEEE Trans. Control Syst. Technol.
15 (2007) 506-518.
[17] Edwin Tazelaar, Bram Veenhuizen, Paul van den Bosch. Analytical
solution of the energy management for fuel cell hybrid propulsion systems.
IEEE Trans. Veh. Technol. 61 (2012) 1-13.
[18] J. Bernard, S. Delprat, T.M. Guerra, F. Buechi. Fuel efficient power
management strategy for fuel cell hybrid powertrains. Control Eng. Pract.
18 (2010) 408-417.
[19] L. Serrao, S. Onori, G. Rizzoni. ECMS as a realization of Pontryagin’s
minimum principle for HEV control. American Control Conference, St.
Louis, USA, 2009, pp. 3964-3969.
[20] G. Rousseau, D. Sinoque, P. Rouchon. Constrained optimization of
energy management for a mild-hybrid vehicle. Oil Gas Sci. Technol. 62
(2007) 623-634.
[21] N.W. Kim, A. Rousseau, D.H. Lee. A jump condition of PMP-based
control for PHEVs. J. Power Sources 196 (2011) 10380-10386.
[22] J. Lescot, A. Sciarretta, Y. Chamaillard, A. Charlet. On the integration
of optimal energy management and thermal management of hybrid electric
vehicles. IEEE Vehicle Power Propulsion Conference, Lille, France, 2010,
pp. 1-6.

103
[23] L. Serrao, S. Onori, A. Sciarretta, Y. Guezennec, G. Rizzoni. Optimal
energy management of hybrid electric vehicles including battery aging.
American Control Conference, San Francisco, USA, 2011, pp. 2125-2130.
[24] X. Wei, Modeling and control of a hybrid electric drivetrain for
optimum fuel economy, performance and driveability, PhD dissertation,
Ohio State University, Columbus, USA, 2004, pp. 1-9.
[25] J. Bernard, S. Delprat, F. Buechi, T.M. Guerra. Fuel-cell hybrid
powertrain: toward minimization of hydrogen consumption. IEEE Trans.
Veh. Technol. 58 (2009) 3168-3176.
[26] J.T. Pukrushpan, H. Peng, A.G. Stefanopoulou. Control-oriented
modeling and analysis for automotive fuel cell systems. J. Dyn. Syst. Meas.
Control 126 (2004) 14-25.
[27] J.T. Pukrushpan, A.G. Stefanopoulou, H. Peng. Control of Fuel Cell
Power Systems (Principles, Modeling, Analysis and Feedback Design),
Springer, 2004, pp. 15-56.
[28] J. Larminie, A. Dicks. Fuel Cell Systems Explained. John Wiley &
Sons Ltd, 2003, pp. 37-59.
[29] R. O'Hayre, S.W. Cha, W. Colella, F.B. Prinz. Fuel Cell Fundamentals.
Wiley, 2006, pp. 169-173.
[30] J. Amphlett, R. Baumert, R. Mann, B. Peppley, P. Roberge.
Performance modeling of the Ballard Mark IV solid polymer electrolyte fuel
cell. J. Electrochem. Soc. 142 (1995) 9-15.

104
[31] J. Lee, T. Lalk, A. Appleby. Modeling electrochemical performance in
large scale proton exchange membrane fuel cell stacks. J. Power Sources 70
(1998) 258-268.
[32] J.T. Pukrushpan, A.G. Stefanopoulou, H. Peng. Modeling and control
for PEM fuel cell stack system. American Control Conference, Anchorage,
USA, 2002, pp. 3117-3122.
[33] J.T. Pukrushpan, H. Peng, A.G. Stefanopoulou. Simulation and analysis
of transient fuel cell system performance based on a dynamic reactant flow
model. International Mechanical Engineering Congress & Exposition, New
Orleans, USA, 2002, pp. 1-12.
[34] P. Moraal, I. Kolmanovsky. Turbocharger modeling for automotive
control applications. SAE paper 1999-01-0908.
[35] J. Gravdahl, O. Egeland. Compressor Surge and Rotating Stall.
Springer, 1999.
[36] V. Paladini, T. Donateo, A. de Risi, D. Laforgia. Super-capacitors fuel-
cell hybrid electric vehicle optimization and control strategy development.
Energy Conv. Manag. 48 (2007) 3001-3008.
[37] J.T. Pukrushpan, A.G. Stefanopoulou, H. Peng. Control of Fuel Cell
Breathing. IEEE Control Systems Magazine, April, 2004, pp. 30-46.
[38] W.S. Lin, C.H. Zheng. Energy management of a fuel cell/
ultracapacitor hybrid power system using an adaptive optimal-control
method. J. Power Sources 196 (2011) 3280-3289.

105
[39] V.H. Johnson. Battery performance models in ADVISOR. J. Power
Sources 110 (2002) 321-329.
[40] N.W. Kim, S.W. Cha, H. Peng. Optimal control of hybrid electric
vehicles based on Pontryagin’s Minimum Principle. IEEE Trans. Control.
Syst. Technol. 19 (2011) 1279-1287.
[41] N.W. Kim, S.W. Cha, H. Peng. Optimal equivalent fuel consumption
for hybrid electric vehicles. IEEE Trans. Control. Syst. Technol. 20 (2012)
817-825.
[42] N.W. Kim, D.H. Lee, S.W. Cha, H. Peng. Optimal control of a plug-in
hybrid electric vehicle (PHEV) based on driving patterns. EVS24
International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium,
Stavanger, Norway, 2009, pp. 1-9.
[43] C.H. Zheng, N.W. Kim, S.W. Cha. Optimal control in the power
management of fuel cell hybrid vehicles. Int. J. Hydrogen Energy 37 (2012)
655-663.
[44] C.H. Zheng, C.E. Oh, Y.I. Park, S.W. Cha. Fuel economy evaluation of
fuel cell hybrid vehicles based on equivalent fuel consumption. Int. J.
Hydrogen Energy 37 (2012) 1790-1796.
[45] C.H. Zheng, Y.I. Park, W.S. Lim, S.W. Cha. Fuel economy evaluation
of fuel cell hybrid vehicles based on optimal control. Int. J. Automot.
Technol. 13 (2012) 517-522.

106
[46] C.H. Zheng, C.W. Shin, H.W. Seo, Y.I. Park, S.W. Cha. Strategies and
evaluation of fuel economy in fuel cell hybrid vehicles. IEEE Vehicle Power
Propulsion Conference, Chicago, USA, 2011, pp. 1-5.
[47] A.A. Pesaran. Battery thermal models for hybrid vehicle simulations. J.
Power Sources 110 (2002) 377-382.
[48] M. Ehsani, Y.M. Gao, A. Emadi. Modern Electric, hybrid electric, and
Fuel Cell Vehicles, CRC press, 2010, pp. 105-122.
[49] M. Ehsani, Y.M. Gao, A. Emadi. Modern Electric, hybrid electric, and
Fuel Cell Vehicles, CRC press, 2010, pp. 19-46.
[50] H.A. Borhan, C. Zhang, A. Vahidi, A.M. Phillips, M.L. Kuang, S.D.
Cairano. Nonlinear model predictive control for power-split hybrid electric
vehicles. 49th IEEE Conference on Decision and Control, Atlanta, USA,
2010, 4890-4895.
[51] Y. Guezennec, T.Y. Choi, G. Paganelli, G. Rizzoni. Supervisory
control of fuel cell vehicles and its link to overall system efficiency and
low-level control requirements. American Control Conference, Denver,
USA, 2003, pp. 2055-2061.
[52] N.W. Kim, A. Rousseau. Sufficient conditions of optimal control based
on Pontryagin’s minimum principle for use in hybrid electric vehicles. Proc.
Inst. Mech. Eng. Part D-J. Automob. Eng. Available online 2012.4.

107
국문초록
하이브리드 차량의 연비와 성능 향상을 위하여 지난 몇 십년
동안 많은 연구가 활발히 진행되었다. 본 논문에서는 연료전지
하이브리드 차량을 대상으로 폰트리아진의 최적 원리 기반의
동력관리 전략을 제기하였다. 또한 연료전지 하이브리드 차량의 세
가지 중요한 요소를 고려하기 위하여 이 전략을 수학적으로
확장하였다. 이 세 가지 요소들은 각각 배터리 SOC의 사용범위에
대한 구속, 연료전지 시스템의 수명, 배터리의 열관리가 연비에
미치는 영향이다. 제기된 전략은 각 상황에 대하여 컴퓨터
시뮬레이션으로 구현되었다.
배터리 SOC에 대한 구속 문제는 연료소모율과 별도로 새로운
cost function을 폰트리아진의 최적 원리 기반의 최적 제어 문제에
도입하는 것으로 해결하였다. 이 해결책으로 인해 연료소모를
최소화하는 동시에 배터리 SOC에 대한 구속 요구를 만족시킬 수
있다. 연료전지 시스템의 수명을 연료소모 최소화 문제와 함께
고려하기 위하여 새로운 cost function을 정의하여 폰트리아진의
최적 원리 기반의 최적 제어 문제에 추가하였는데 이 새로운 cost
function은 연료전지 시스템의 파워 변화율과 연관되어 있다.
전략의 새로운 변형을 통하여 연료전지 시스템의 수명이 연장될 수
있음을 시뮬레이션 결과에서 확인할 수 있다. 또한 연료전지
시스템의 수명을 고려함으로 인해 연비 면에서는 손실을 본다는

108
것도 확인할 수 있다. 배터리의 열관리가 연비에 미치는 영향은
폰트리아진의 최적 원리 기반의 최적 제어 문제에서 배터리 온도를
배터리 SOC와 별도로 두 번째 상태변수로 지정하는 것을 통하여
고려하였다. 이 상황에서 시뮬레이션을 통하여 배터리 최종 SOC,
배터리 최종 온도, 그리고 전체 연료소모량 사이의 관계를
나타냈는데 이 관계는 하나의 면으로 표현될 수 있으며 이 면은
기울기가 비슷한 두 개의 서로 교차되는 반 평면으로 구성되었음을
확인할 수 있다. 본 논문에서는 이 면을 최적 면이라고 정의하는데
이는 이 면이 폰트리아진의 최적 원리 기반의 동력관리 전략에서
도출되었기 때문이다. 배터리의 열관리로 인한 연비 향상 가능성은
시뮬레이션을 통하여 보여주었는데 연료전지 하이브리드 차량의
연비는 주행싸이클에 따라 최대로 4.77%까지 향상될 수 있다. 본
논문에서는 또한 위에서 제기된 세 가지 요소들을 동시에 고려한
경우에 대하여 토론하였다.
위의 세 가지 확장된 상황에 대하여 본 논문에서는 폰트리아진의
최적 원리 기반의 동력관리 전략의 global optimality에 대해
토론하였다. 또한 이 세 가지 상황에서 폰트리아진의 최적 원리
기반의 동력관리 전략에서 도출된 결과를 다이나믹 프로그래밍에서
도출된 결과와 비교하였다. 폰트리아진의 최적 원리 기반의
동력관리 전략은 배터리의 일정한 가정하에 global optimality를
보장하면서 또한 다이나믹 프로그래밍에 비해 많은 시간을 절약할
수 있는데 그 시간 절약 효과는 특히 상태변수가 두 개인

109
시스템에서 더 뛰어나다.
주요어주요어주요어주요어:::: 연료전지 하이브리드 차량, 폰트리아진의 최적화 원리,
동력관리 전략, 수학적 확장, 시간 절약 효과
학번학번학번학번:::: 2007-31059

110
감사의 글
한국에 온지도 벌써 5 년이란 시간이 흘렀습니다. 처음에는 이
5 년이 언제 다 지날까 싶었는데 막상 졸업하려니 시원섭섭합니다.
졸업을 하며 그 동안 저의 연구와 생활에 도움과 조언을 아끼지
않으셨던 모든 분들께 진심으로 감사를 드립니다. 우선, 5 년 전
낯선 한국 서울대에 와서 연구실을 찾아 방황하고 있는 저를 흔쾌히
받아주셨던 저의 지도교수 차석원 교수님께 깊은 감사의 뜻을
전하고 싶습니다. 그때 재생에너지변환연구실에 들어왔기에 오늘의
제가 있을 수 있지 않았나 싶습니다. 차석원 교수님의 가르침은
저의 인생에 있어 값진 경험이 될 것 같습니다. 그리고 프로젝트를
지도해 주시면서 소중한 가르침을 주셨던 서울산업대학교
박영일교수님과 임원식교수님께도 진심으로 감사를 드립니다. 또한
저의 박사학위논문을 심사해 주시면서 조언을 아끼지 않으셨던
서울대학교 안성훈교수님과 윤병동교수님께도 감사를 드립니다.
논문을 준비하면서 연구실 졸업 선배이신 김남욱 박사님한테서
조언을 많이 구했습니다. 미국에 계심에도 불구하고 매번 이메일로
저의 의문점에 답해주시느라 수고 많으셨습니다. 연구실 저의
하이브리드 팀의 팀원인 대흥이 오빠, 창우 오빠, 호원이, 종렬이,
현섭이, 형균이, 종대에게도 고맙다는 말을 전하고 싶습니다. 매 번
학회도 같이 다니고 하면서 재미있는 일도 많았는데 좋은 추억들로
남아있을 것입니다. 그리고 또 다른 한 팀인 연료전지 팀의

111
팀원들에게도 감사를 드립니다. 무엇보다 저의 부모님한테 감사의
마음을 전하고 싶습니다. 중국 어느 시골 동네에서 저를 낳아
서울대 박사로 키워주시느라 지금까지 참 수고가 많으셨습니다.
앞으로 더 잘 클 것이니 기대하십시오. 그리고 오랜 시간 동안
저한테 정신적 힘을 주신 분들에게도 감사를 드립니다. 모두들
수고하셨습니다.
끝으로 지금까지 저한테 도움을 주신 모든 분들의 행복을 기원하며
이 논문을 저의 부모님께 바칩니다.