Embed Size (px)
DESCRIPTION
Ingeniería
Citation preview
Universidad Nacional Autónoma de
México
Facultad de Ingeniería
Actividad 02. Diseño de Controlador PID
Sistemas de Control
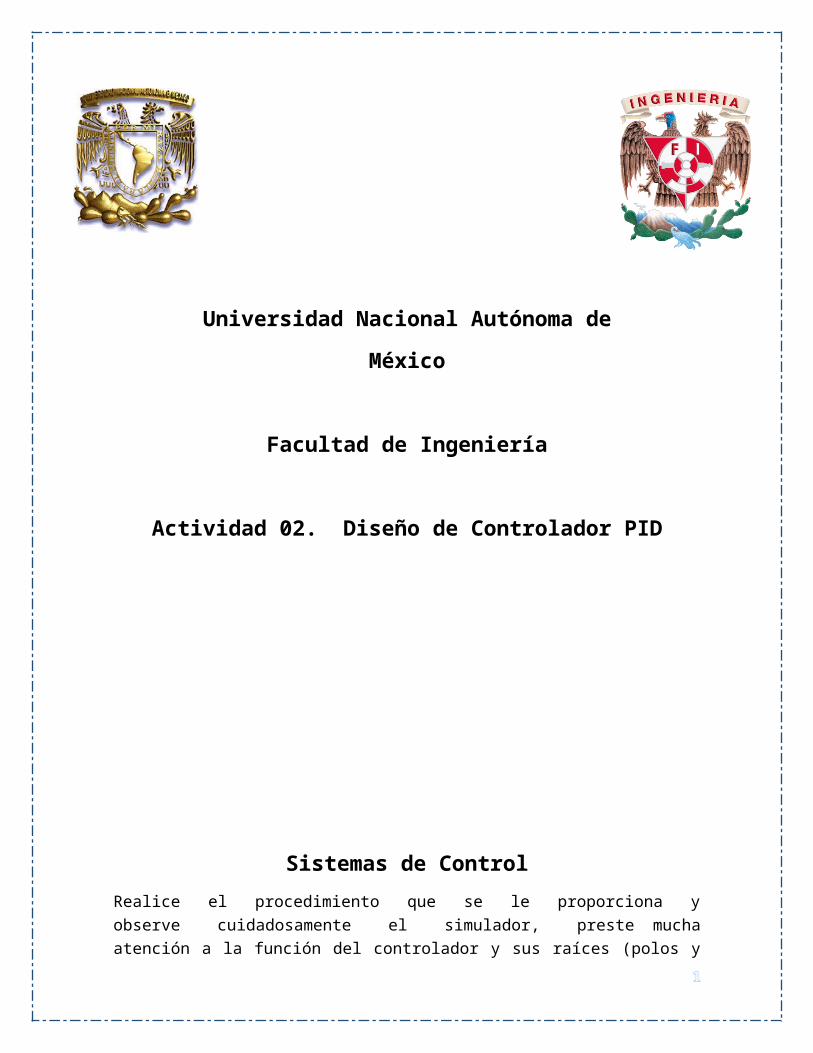
Realice el procedimiento que se le proporciona y observe cuidadosamente el simulador, preste mucha atención a la función del controlador y sus raíces (polos y ceros) en el plano complejo para reconocer los efectos de las acciones de control sobre un proceso de primero y segundo orden.
Complete la tabla que se le muestra después, de acuerdo con sus mediciones y observaciones en los incisos correspondientes.
1
Procedimiento:
a. Seleccionar la planta de un polo real igual a -1 (tau=1 seg).
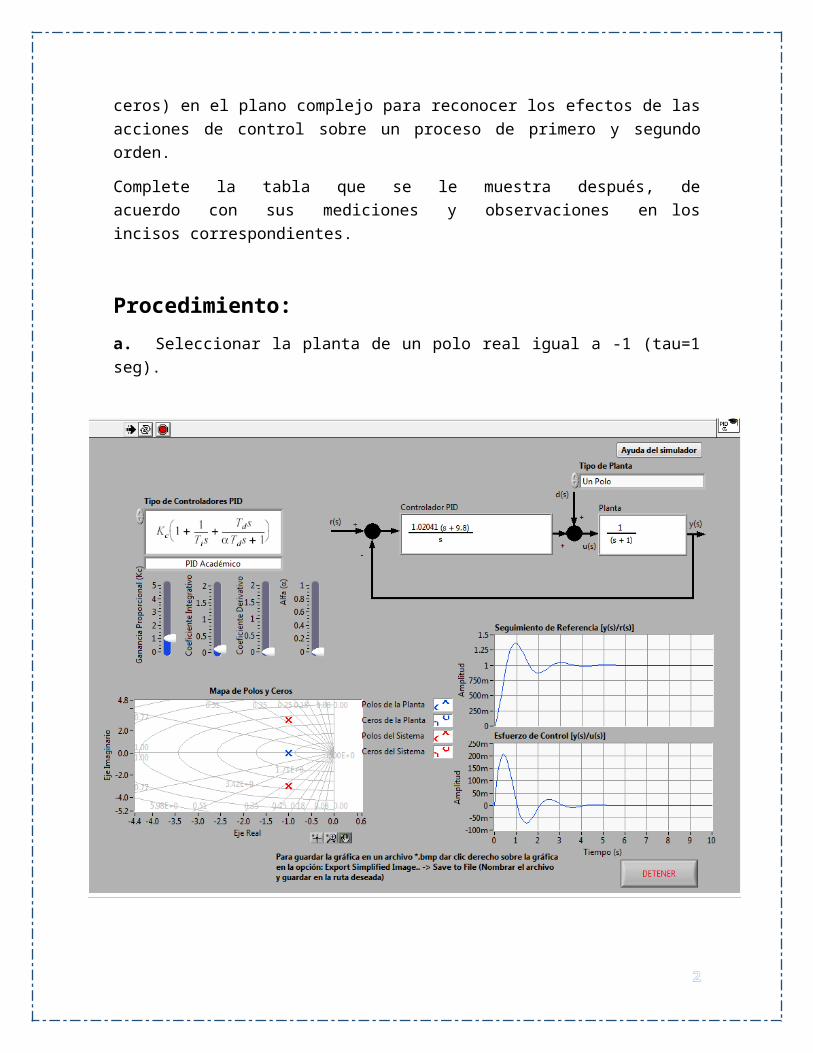
b. Ajustar la ganancia Kc=2 y el resto de los parámetros del controlador son inhabilitados (coeficiente integral cero, coeficiente derivativo cero y alfa cero).
2
c. Ejecutar la simulación y medir el offset (error de estado estable), en la gráfica de la salida y contra el tiempo, así como la diferencia del valor estable de la salida con respecto a 1 (1000m).
d. Observar el mapa de polos y ceros, y anotar las coordenadas de los polos azul y rojo.
3
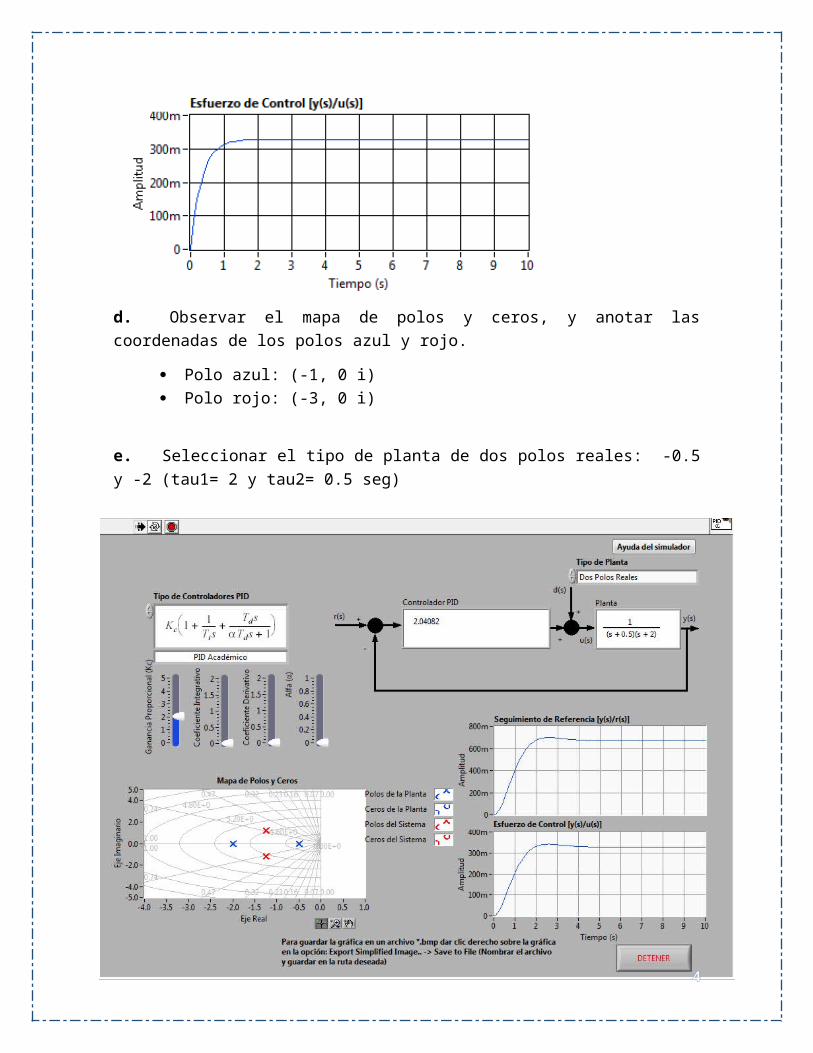
Polo azul: (-1, 0 i) Polo rojo: (-3, 0 i)
e. Seleccionar el tipo de planta de dos polos reales: -0.5 y -2 (tau1= 2 y tau2= 0.5 seg)
f. Ajustar la ganancia Kc=1.5 y el resto de los parámetros del controlados son inhabilitados (coeficiente integral cero, coeficiente derivativo cero y alfa cero).
4
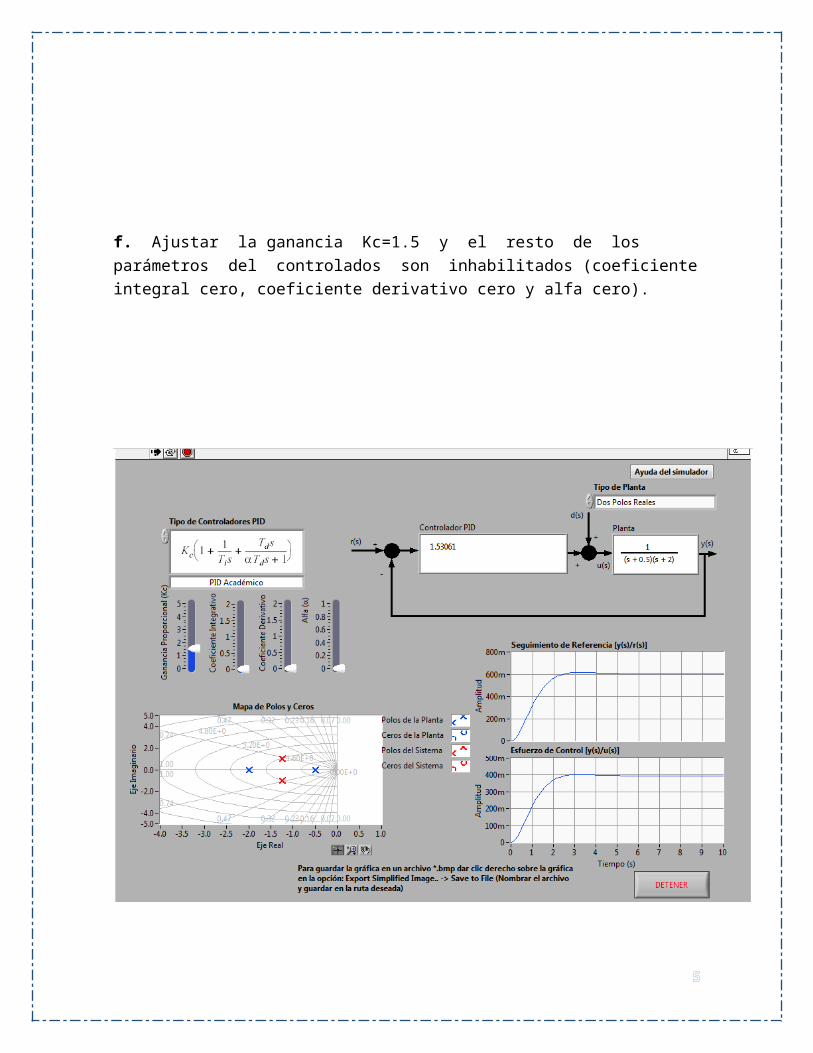
g. Correr la simulación y medir el offset (error de estado estable), en la gráfica de la salida ycontra el tiempo, como la diferencia del valor estable de la salida con respecto a 1 (1000m).
5
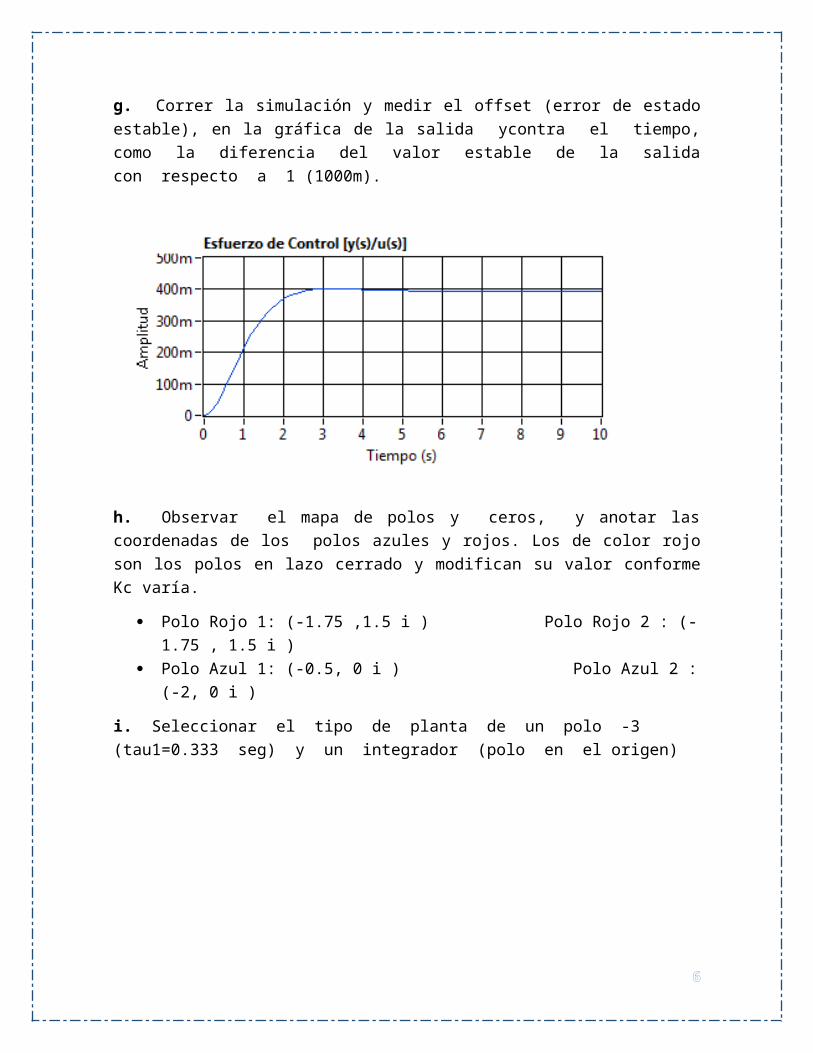
h. Observar el mapa de polos y ceros, y anotar las coordenadas de los polos azules y rojos. Los de color rojo son los polos en lazo cerrado y modifican su valor conforme Kc varía.
Polo Rojo 1: (-1.75 ,1.5 i ) Polo Rojo 2 : (-1.75 , 1.5 i ) Polo Azul 1: (-0.5, 0 i ) Polo Azul 2 : (-2, 0 i )
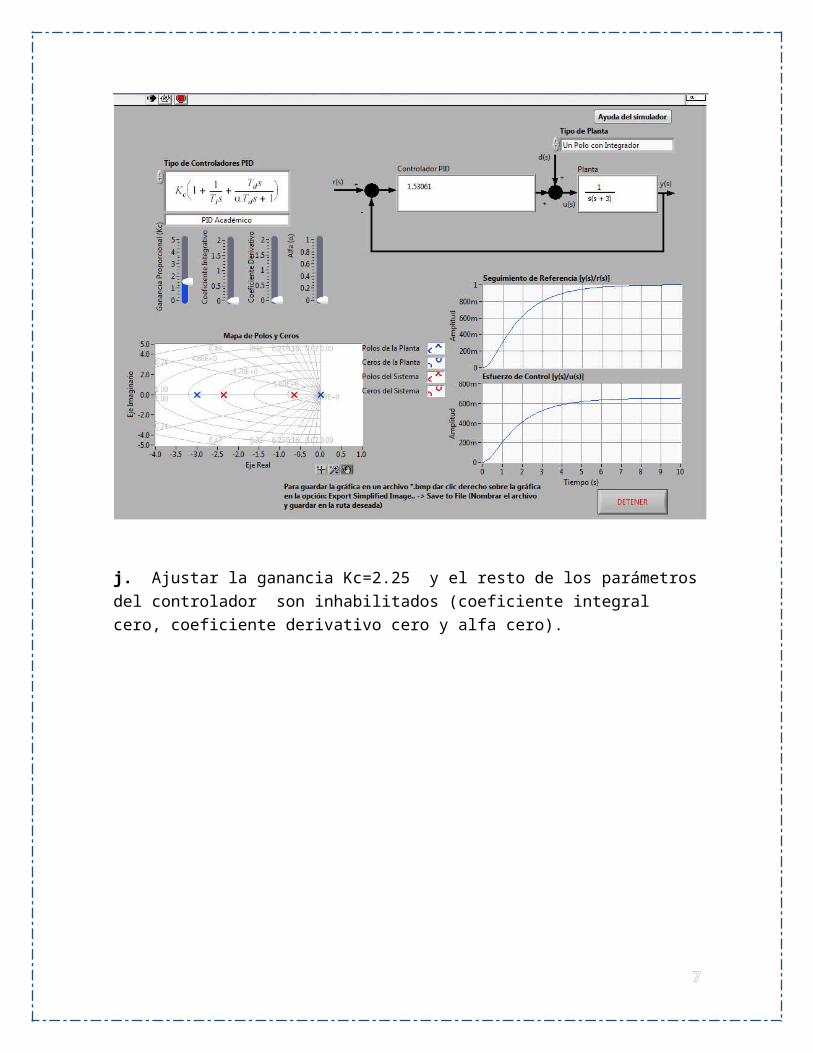
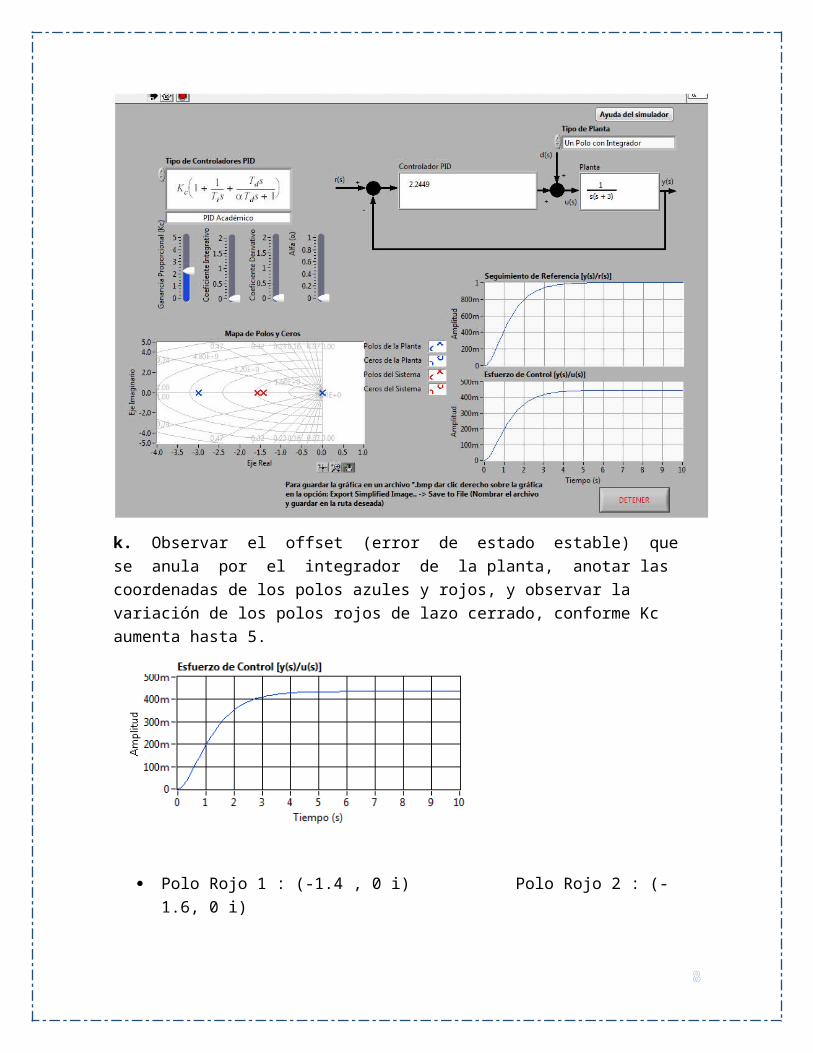
i. Seleccionar el tipo de planta de un polo -3 (tau1=0.333 seg) y un integrador (polo en el origen)
j. Ajustar la ganancia Kc=2.25 y el resto de los parámetros del controlador son inhabilitados (coeficiente integral cero, coeficiente derivativo cero y alfa cero).
6
k. Observar el offset (error de estado estable) que se anula por el integrador de la planta, anotar las coordenadas de los polos azules y rojos, y observar la variación de los polos rojos de lazo cerrado, conforme Kc aumenta hasta 5.
Polo Rojo 1 : (-1.4 , 0 i) Polo Rojo 2 : (-1.6, 0 i) Polo Azul 1: ( 0, 0 i) Polo Azul 2 : (-3, 0 i)
Variación del polo rojo de lazo cerrado en Kc = 5.
Polo Rojo 1: (-1.5 , 1.9 i ) Polo Rojo 2 : (-1.5, 1.9 i)
7
Polo Azul 1: ( 0, 0 i) Polo Azul 2 : (-3, 0 i)
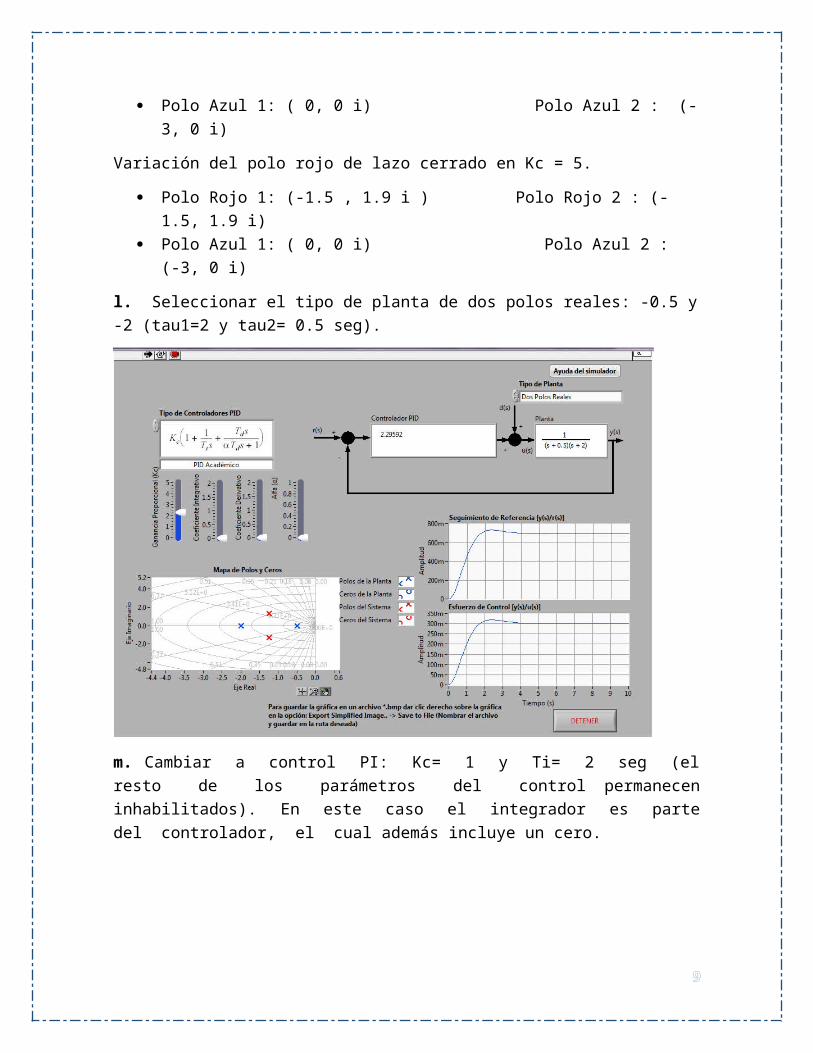
l. Seleccionar el tipo de planta de dos polos reales: -0.5 y -2 (tau1=2 y tau2= 0.5 seg).
m. Cambiar a control PI: Kc= 1 y Ti= 2 seg (el resto de los parámetros del control permanecen inhabilitados). En este caso el integrador es parte del controlador, el cual además incluye un cero.
8
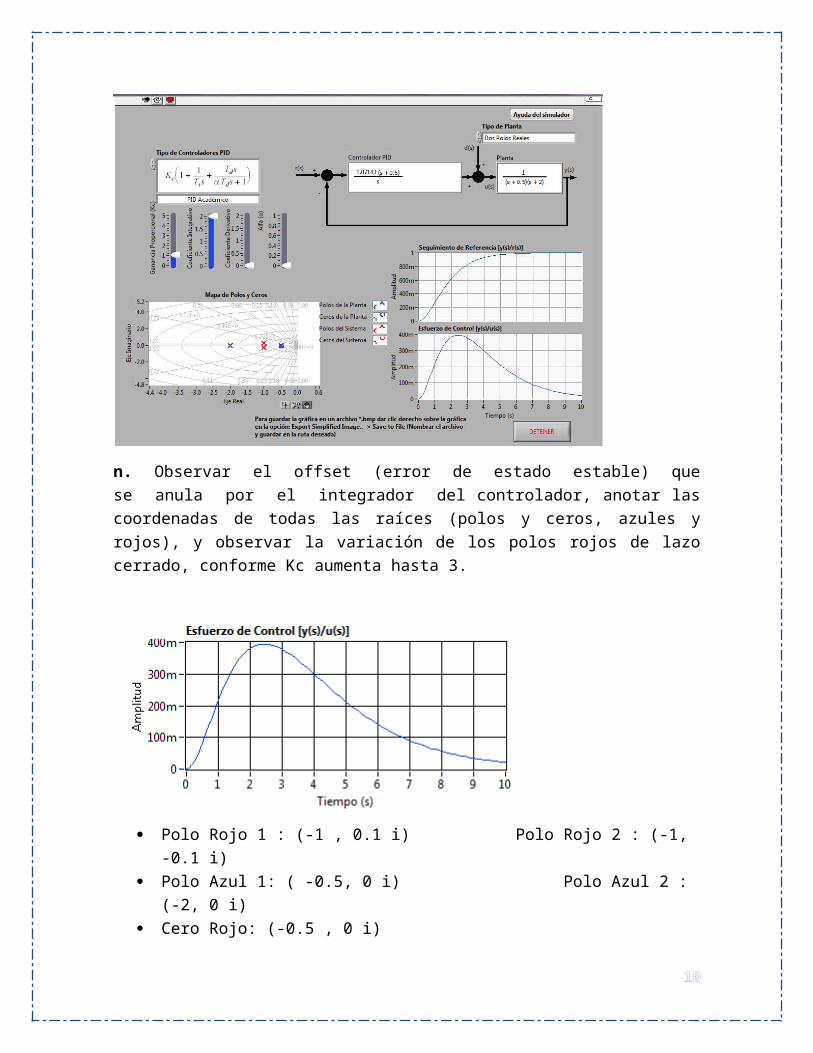
n. Observar el offset (error de estado estable) que se anula por el integrador del controlador, anotar las coordenadas de todas las raíces (polos y ceros, azules y rojos), y observar la variación de los polos rojos de lazo cerrado, conforme Kc aumenta hasta 3.
Polo Rojo 1 : (-1 , 0.1 i) Polo Rojo 2 : (-1, -0.1 i) Polo Azul 1: ( -0.5, 0 i) Polo Azul 2 : (-2, 0 i) Cero Rojo: (-0.5 , 0 i)
Polos Rojos de lazo cerrado en Kc =3.
Polo Rojo 1 : (-1 , 1.8 i) Polo Rojo 2 : (-1, -1.8 i)
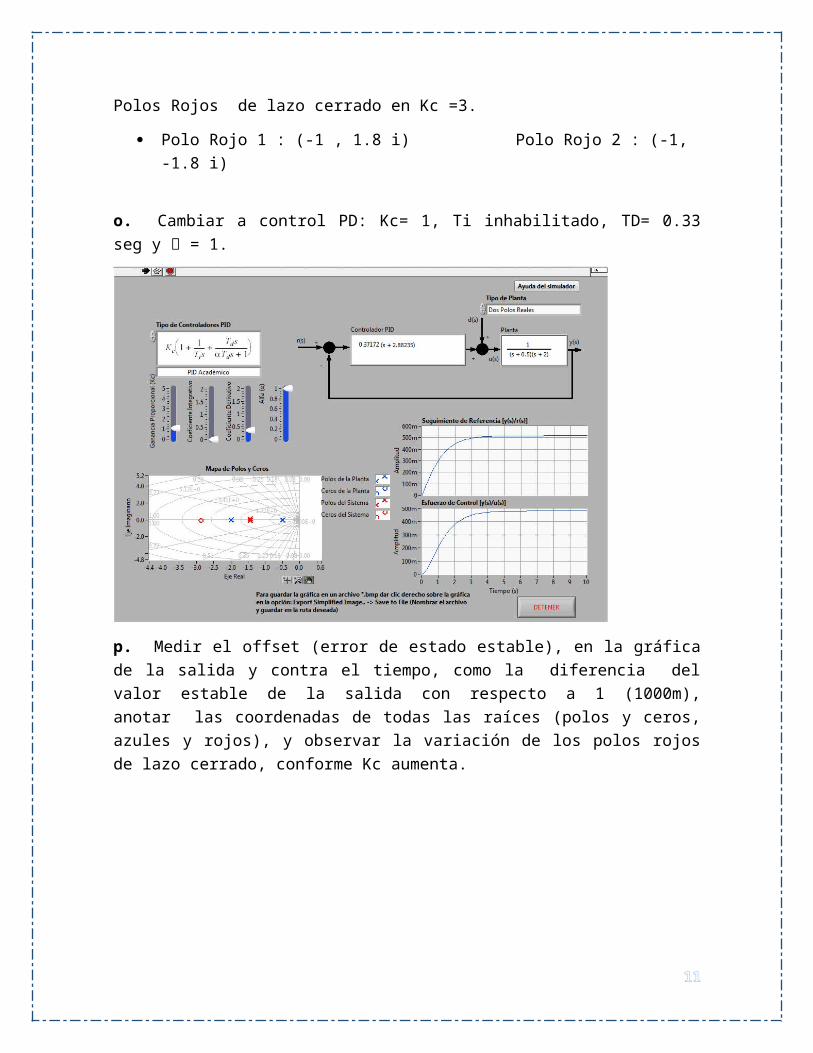
o. Cambiar a control PD: Kc= 1, Ti inhabilitado, TD= 0.33 seg y = 1.
9
p. Medir el offset (error de estado estable), en la gráfica de la salida y contra el tiempo, como la diferencia del valor estable de la salida con respecto a 1 (1000m), anotar las coordenadas de todas las raíces (polos y ceros, azules y rojos), y observar la variación de los polos rojos de lazo cerrado, conforme Kc aumenta.
Polo Rojo 1 : (-1.5 , 0 i) Polo Rojo 2 : (-1.5, 0 i) Polo Azul 1: ( -0.5, 0 i) Polo Azul 2 : (-2, 0 i) Cero Rojo: (-2.8 , 0 i)
Incisos ess
Polosazules
Polos rojos(malla cerrada)
Ceros Observaciones
c y d (-3, 0 i) (-1, 0 i) -
10
g y h (-0.5, 0 i ), (-2, 0i ) (-1.75 ,1.5 i),(-1.75 , 1.5i ) -k ( 0, 0 i) , (-3, 0 i) (-1.4 , 0 i) , (-1.6, 0 i) -n ( -0.5, 0 i) , (-2, 0
i)(-1 , 0.1 i), (-1, -0.1 i) (-0.5 , 0 i)
p ( -0.5, 0 i), (-2, 0 i) (-1.5 , 0 i) , (-1.5, 0 i) (-2.8 , 0 i)
11