Embed Size (px)
Citation preview
DiseDiseñño de Controladores PIDo de Controladores PID
Control 2Control 2Prof. Mariela CERRADAProf. Mariela CERRADA
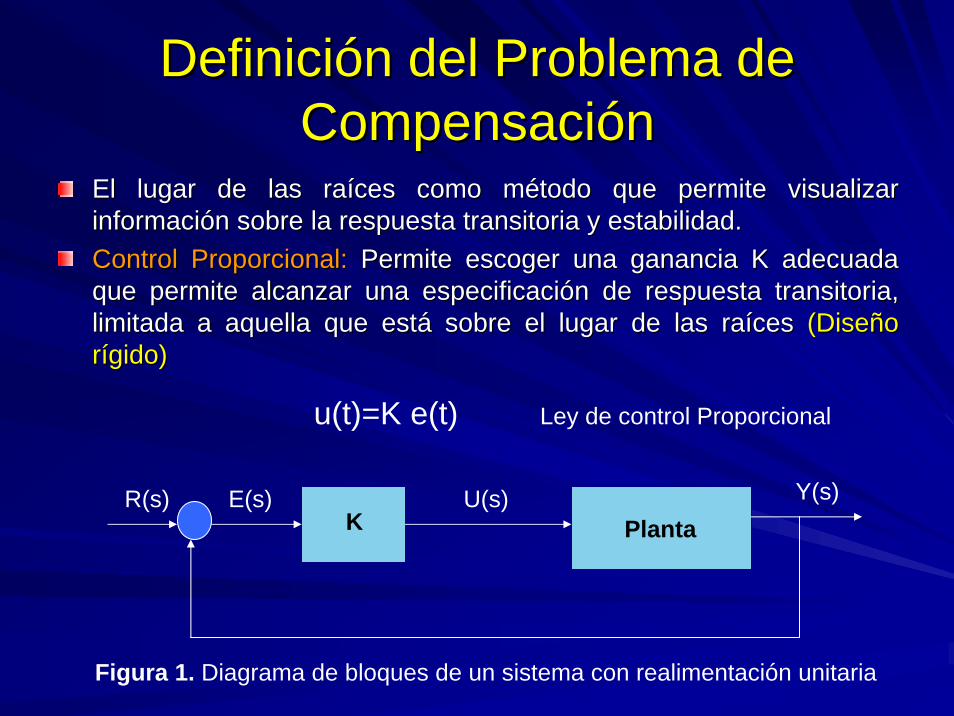
DefiniciDefinicióón del Problema de n del Problema de CompensaciCompensacióónn
El lugar de las raEl lugar de las raííces como mces como méétodo que permite visualizar todo que permite visualizar informaciinformacióón sobre la respuesta transitoria y estabilidad.n sobre la respuesta transitoria y estabilidad.Control Proporcional:Control Proporcional: Permite escoger una ganancia K adecuada Permite escoger una ganancia K adecuada que permite alcanzar una especificacique permite alcanzar una especificacióón de respuesta transitoria, n de respuesta transitoria, limitada a aquella que estlimitada a aquella que estáá sobre el lugar de las rasobre el lugar de las raííces ces (Dise(Diseñño o rríígido) gido)
K PlantaR(s) E(s) U(s) Y(s)
u(t)=K e(t) Ley de control Proporcional
Figura 1. Diagrama de bloques de un sistema con realimentación unitaria
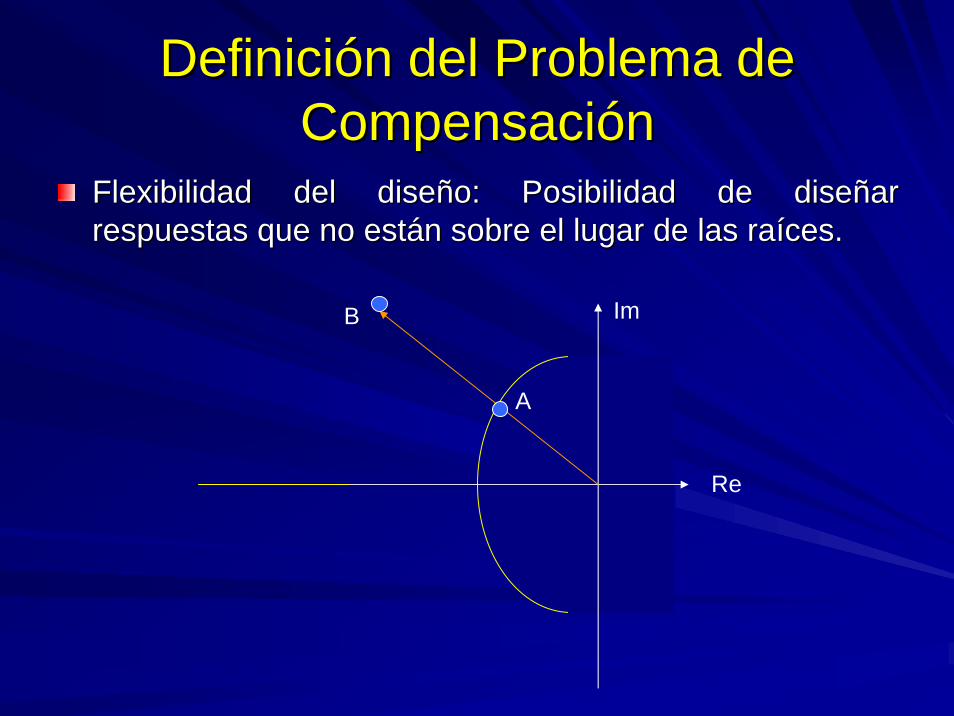
DefiniciDefinicióón del Problema de n del Problema de CompensaciCompensacióónn
Flexibilidad del diseFlexibilidad del diseñño: Posibilidad de diseo: Posibilidad de diseññar ar respuestas que no estrespuestas que no estáán sobre el lugar de las ran sobre el lugar de las raííces.ces.
A
B
Re
Im
DefiniciDefinicióón del Problema de n del Problema de CompensaciCompensacióónn
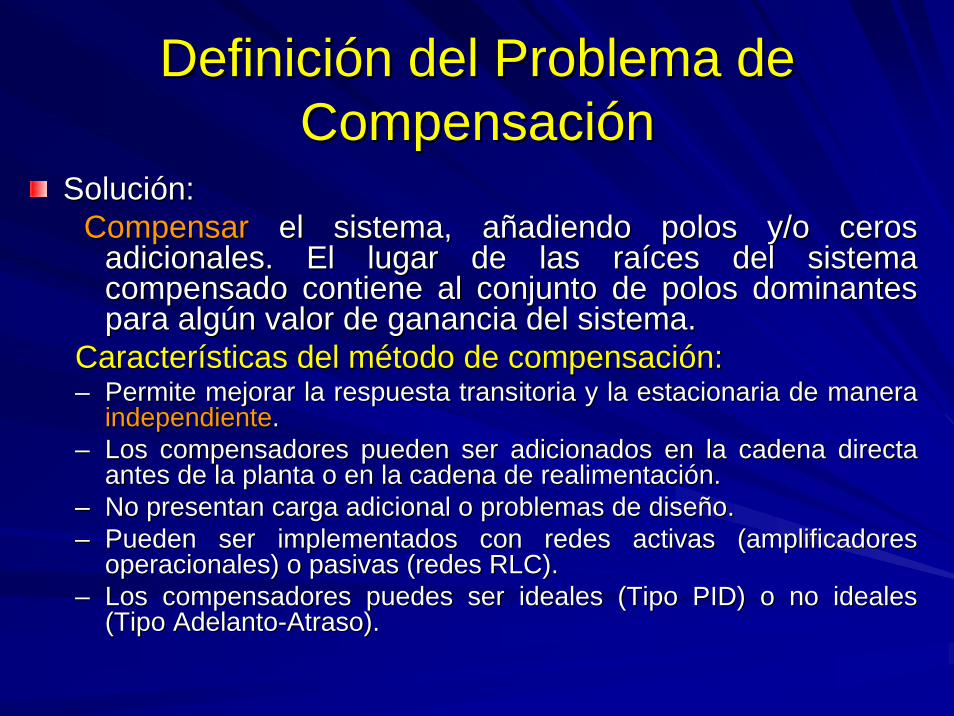
SoluciSolucióón:n:CompensarCompensar el sistema, ael sistema, aññadiendo polos y/o ceros adiendo polos y/o ceros
adicionales. El lugar de las raadicionales. El lugar de las raííces del sistema ces del sistema compensado contiene al conjunto de polos dominantes compensado contiene al conjunto de polos dominantes para algpara algúún valor de ganancia del sistema.n valor de ganancia del sistema.
CaracterCaracteríísticas del msticas del méétodo de compensacitodo de compensacióón:n:–– Permite mejorar la respuesta transitoria y la estacionaria de maPermite mejorar la respuesta transitoria y la estacionaria de manera nera
independienteindependiente..–– Los compensadores pueden ser adicionados en la cadena directa Los compensadores pueden ser adicionados en la cadena directa
antes de la planta o en la cadena de realimentaciantes de la planta o en la cadena de realimentacióón.n.–– No presentan carga adicional o problemas de diseNo presentan carga adicional o problemas de diseñño.o.–– Pueden ser implementados con redes activas (amplificadores Pueden ser implementados con redes activas (amplificadores
operacionales) o pasivas (redes RLC).operacionales) o pasivas (redes RLC).–– Los compensadores puedes ser ideales (Tipo PID) o no ideales Los compensadores puedes ser ideales (Tipo PID) o no ideales
(Tipo Adelanto(Tipo Adelanto--Atraso).Atraso).
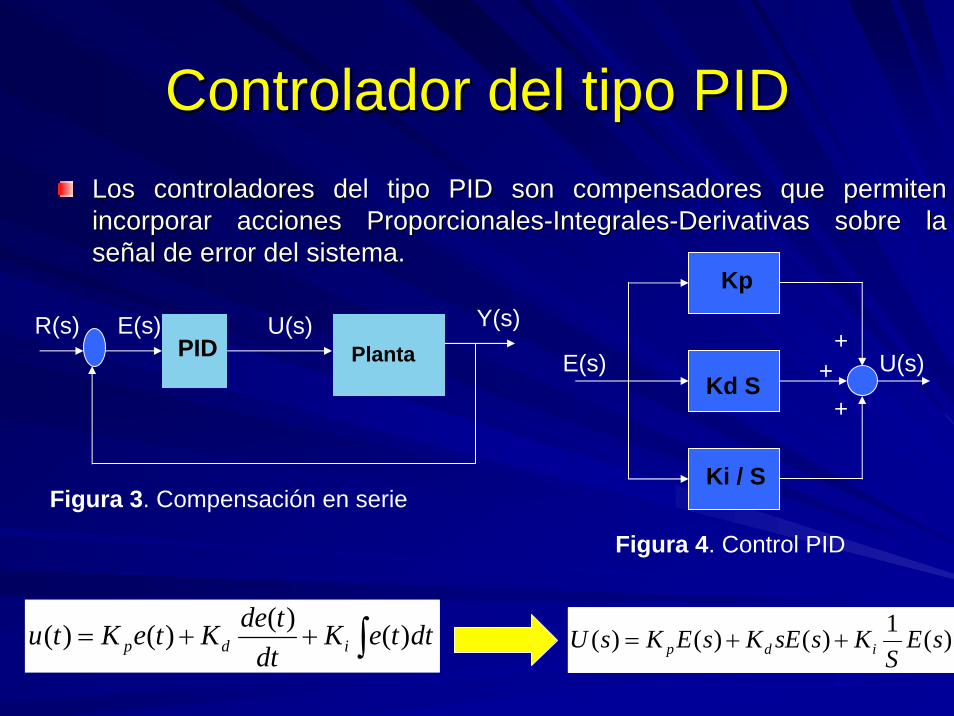
Controlador del tipo PIDControlador del tipo PIDLos controladores del tipo PID son compensadores que permiten Los controladores del tipo PID son compensadores que permiten incorporar acciones Proporcionalesincorporar acciones Proporcionales--IntegralesIntegrales--Derivativas sobre la Derivativas sobre la seseññal de error del sistema.al de error del sistema.
)(1)()()( sES
KssEKsEKsU idp ++=
PID PlantaR(s) E(s) U(s) Y(s)
∫++= dtteKdt
tdeKteKtu idp )()()()(
U(s)E(s)
Kp
Kd S
Ki / S
++
+
Figura 3. Compensación en serie
Figura 4. Control PID
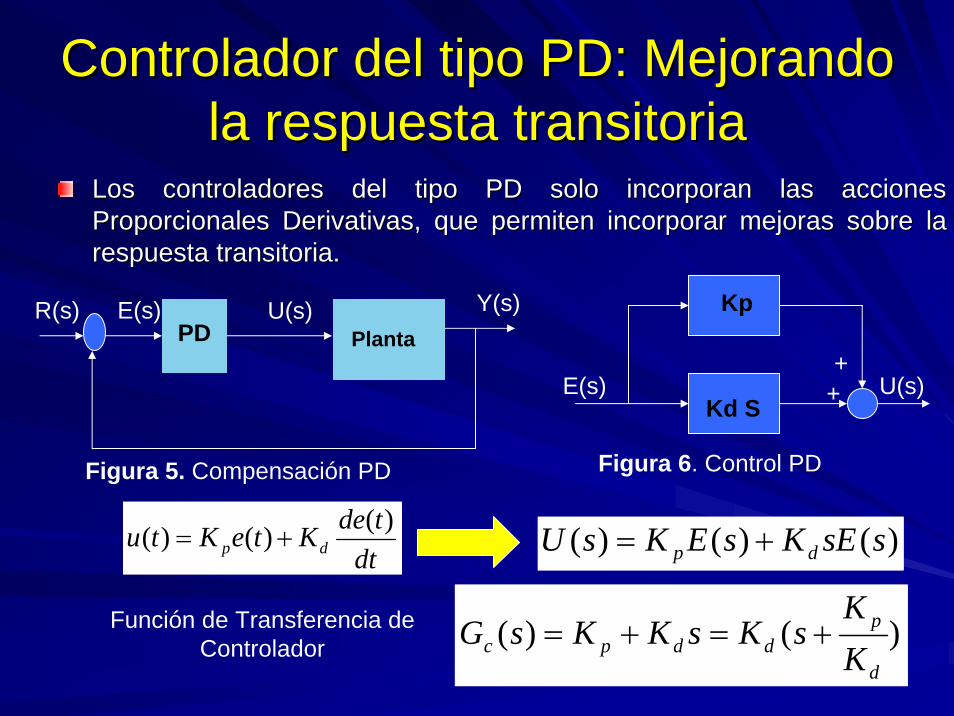
Controlador del tipo PD: Mejorando Controlador del tipo PD: Mejorando la respuesta transitoriala respuesta transitoria
Los controladores del tipo PD solo incorporan las acciones Los controladores del tipo PD solo incorporan las acciones Proporcionales Derivativas, que permiten incorporar mejoras sobrProporcionales Derivativas, que permiten incorporar mejoras sobre la e la respuesta transitoria.respuesta transitoria.
)()()( ssEKsEKsU dp +=
PD PlantaR(s) E(s) U(s) Y(s)
dttdeKteKtu dp)()()( +=
U(s)E(s)
Kp
Kd S
++
)()(d
pddpc K
KsKsKKsG +=+=Función de Transferencia de
Controlador
Figura 5. Compensación PD Figura 6. Control PD
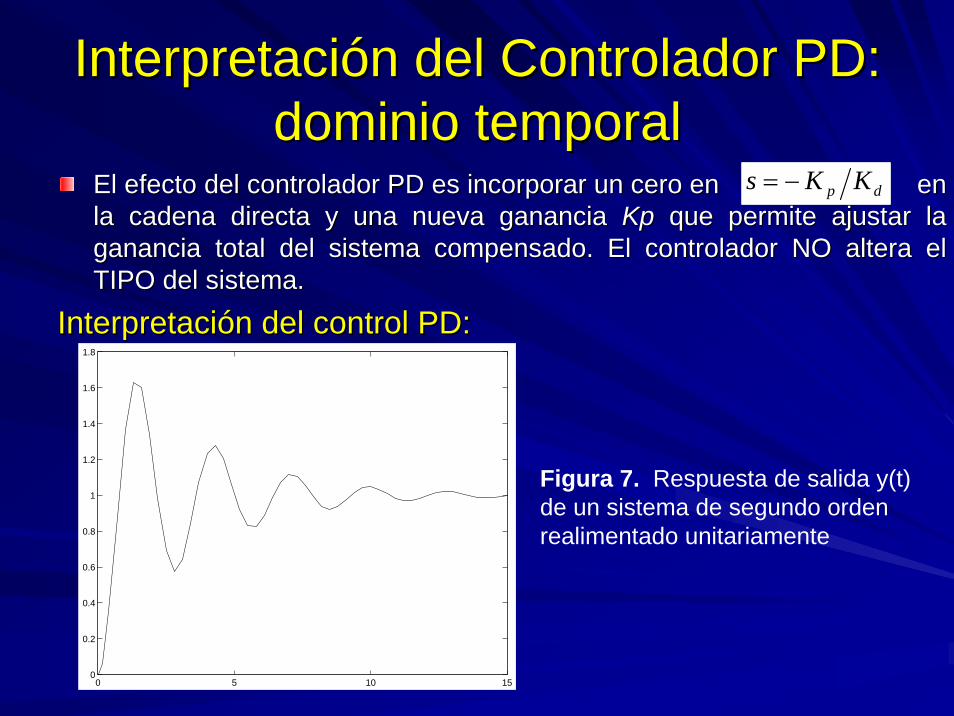
InterpretaciInterpretacióón del Controlador PD: n del Controlador PD: dominio temporaldominio temporal
El efecto del controlador PD es incorporar un cero en El efecto del controlador PD es incorporar un cero en enenla cadena directa y una nueva ganancia la cadena directa y una nueva ganancia KpKp que permite ajustar la que permite ajustar la ganancia total del sistema compensado. El controlador NO altera ganancia total del sistema compensado. El controlador NO altera el el TIPO del sistema.TIPO del sistema.
InterpretaciInterpretacióón del control PD:n del control PD:
dp KKs −=
0 5 10 150
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Figura 7. Respuesta de salida y(t) de un sistema de segundo orden realimentado unitariamente
InterpretaciInterpretacióón del Controlador PD: n del Controlador PD: dominio temporaldominio temporal
0 5 10 15−2
−1.5
−1
−0.5
0
0.5
1
1.5
0 5 10 15−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
salida
error
der error
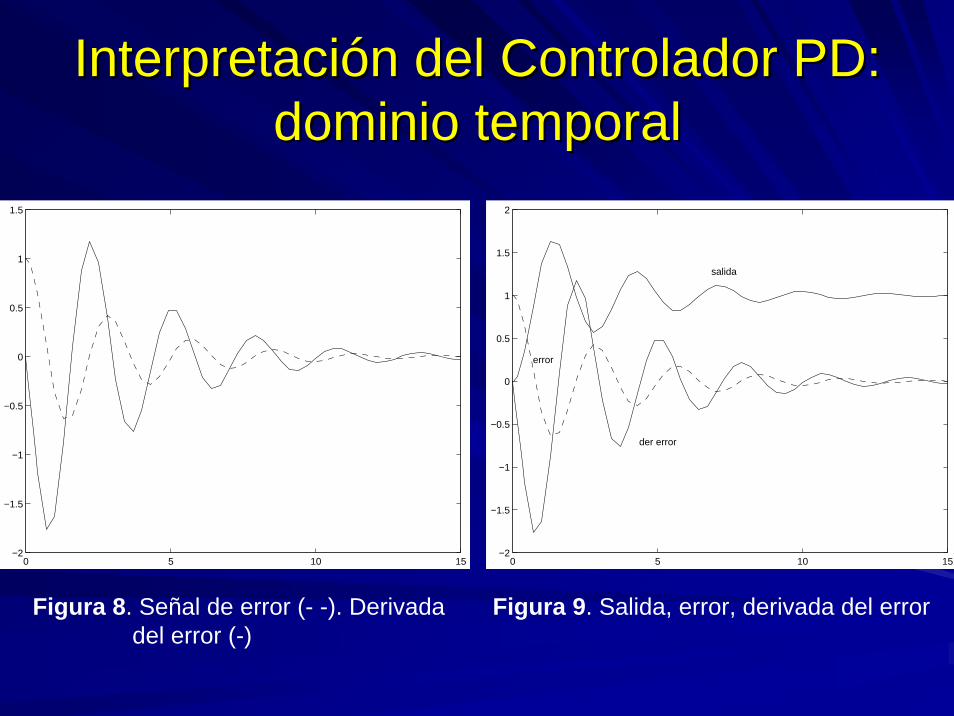
Figura 8. Señal de error (- -). Derivadadel error (-)
Figura 9. Salida, error, derivada del error
InterpretaciInterpretacióón del Controlador PD: n del Controlador PD: dominio temporaldominio temporal
El control Proporcional tiende a producir grandes El control Proporcional tiende a producir grandes sobrepasossobrepasos y y oscilaciones debido a la magnitud del error, que genera accionesoscilaciones debido a la magnitud del error, que genera acciones de de control positivas muy elevadas y sucesivas acciones de control ncontrol positivas muy elevadas y sucesivas acciones de control negativas egativas poco adecuadas en relacipoco adecuadas en relacióón al sobrepaso que se estn al sobrepaso que se estáá generandogenerando
La incorporaciLa incorporacióón de la accin de la accióón derivativa n derivativa compensa compensa el efecto del control el efecto del control proporcional disminuyendo la magnitud de la acciproporcional disminuyendo la magnitud de la accióón de control positiva y n de control positiva y aumentando negativamente las acciones de control negativas cuandaumentando negativamente las acciones de control negativas cuando es o es necesario a fin de reducir los necesario a fin de reducir los sobrepasossobrepasos..
Efectos Efectos Reducir los Reducir los sobrepasossobrepasos negativos y positivosnegativos y positivos
InterpretaciInterpretacióón del Controlador PD: n del Controlador PD: dominio dominio frecuencialfrecuencial
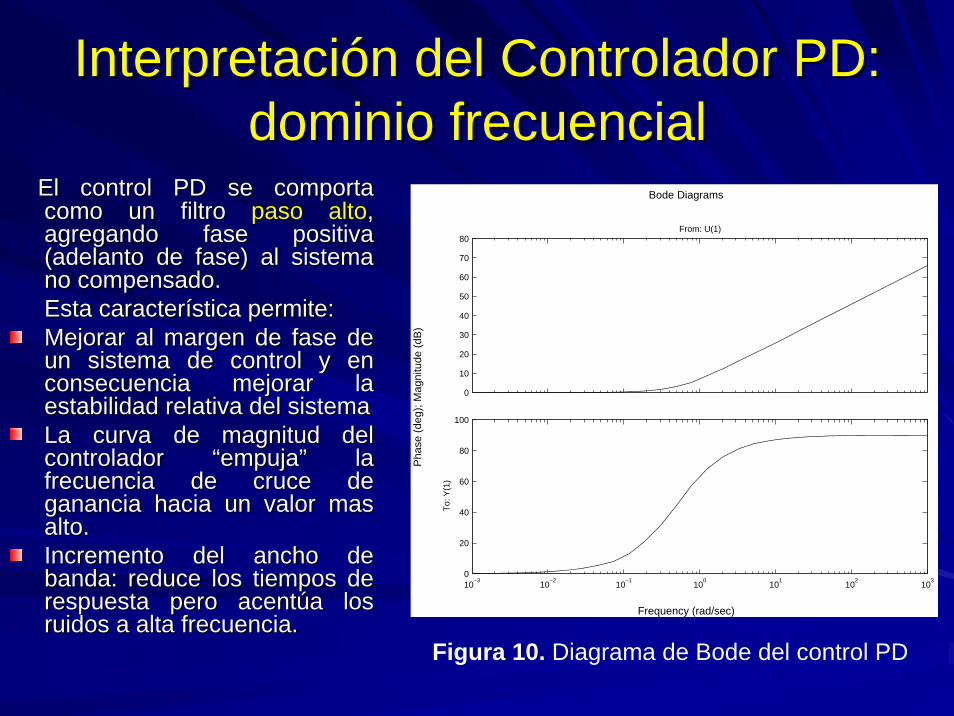
El control PD se comporta El control PD se comporta como un filtro como un filtro paso altopaso alto, , agregando fase positiva agregando fase positiva (adelanto de fase) al sistema (adelanto de fase) al sistema no compensado. no compensado. Esta caracterEsta caracteríística permite:stica permite:Mejorar al margen de fase de Mejorar al margen de fase de un sistema de control y en un sistema de control y en consecuencia mejorar la consecuencia mejorar la estabilidad relativa del sistema estabilidad relativa del sistema La curva de magnitud del La curva de magnitud del controlador controlador ““empujaempuja”” la la frecuencia de cruce de frecuencia de cruce de ganancia hacia un valor mas ganancia hacia un valor mas alto.alto.Incremento del ancho de Incremento del ancho de banda: reduce los tiempos de banda: reduce los tiempos de respuesta pero acentrespuesta pero acentúúa los a los ruidos a alta frecuencia.ruidos a alta frecuencia.
Frequency (rad/sec)
Pha
se (
deg)
; Mag
nitu
de (
dB)
Bode Diagrams
0
10
20
30
40
50
60
70
80From: U(1)
10−3
10−2
10−1
100
101
102
103
0
20
40
60
80
100
To:
Y(1
)
Figura 10. Diagrama de Bode del control PD
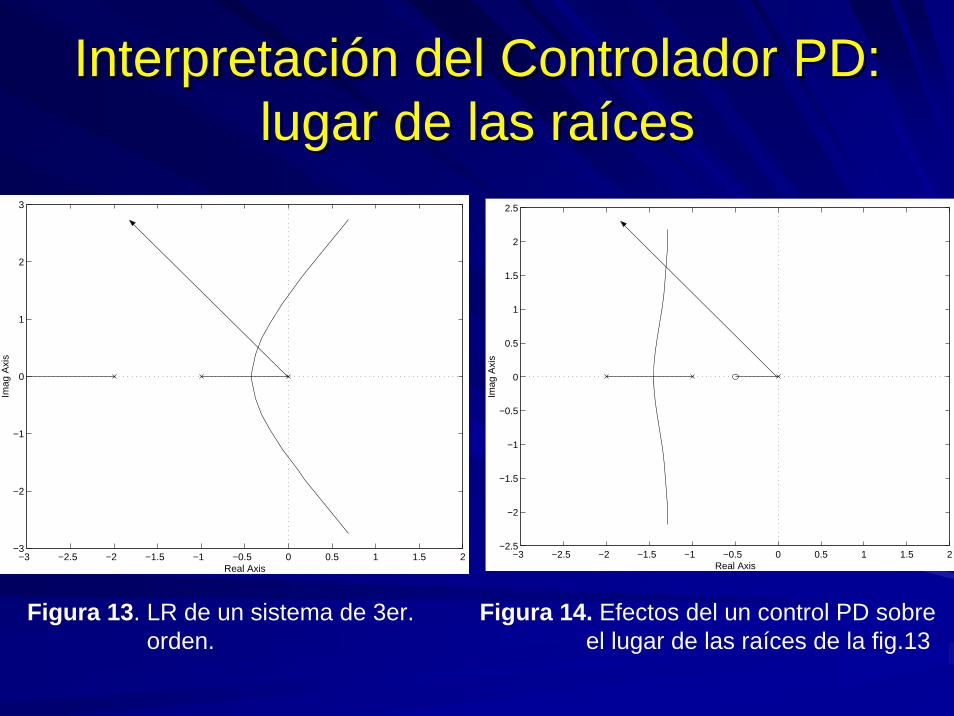
InterpretaciInterpretacióón del Controlador PD: n del Controlador PD: lugar de las ralugar de las raíícesces
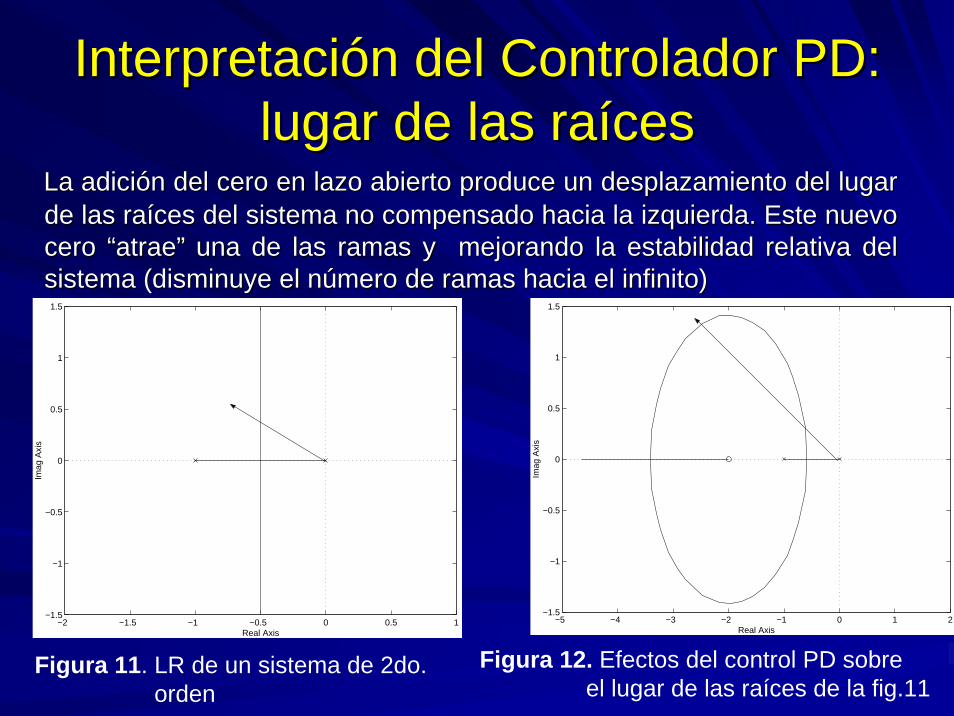
La adiciLa adicióón del cero en lazo abierto produce un desplazamiento del lugar n del cero en lazo abierto produce un desplazamiento del lugar de las rade las raííces del sistema no compensado hacia la izquierda. Este nuevo ces del sistema no compensado hacia la izquierda. Este nuevo cero cero ““atraeatrae”” una de las ramas y mejorando la estabilidad relativa del una de las ramas y mejorando la estabilidad relativa del sistema (disminuye el nsistema (disminuye el núúmero de ramas hacia el infinito)mero de ramas hacia el infinito)
−2 −1.5 −1 −0.5 0 0.5 1−1.5
−1
−0.5
0
0.5
1
1.5
Real Axis
Imag
Axi
s
−5 −4 −3 −2 −1 0 1 2−1.5
−1
−0.5
0
0.5
1
1.5
Real Axis
Imag
Axi
s
Figura 11. LR de un sistema de 2do. orden
Figura 12. Efectos del control PD sobreel lugar de las raíces de la fig.11
InterpretaciInterpretacióón del Controlador PD: n del Controlador PD: lugar de las ralugar de las raíícesces
−3 −2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2−3
−2
−1
0
1
2
3
Real Axis
Imag
Axi
s
−3 −2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
Real Axis
Imag
Axi
s
Figura 13. LR de un sistema de 3er. orden.
Figura 14. Efectos del un control PD sobreel lugar de las raíces de la fig.13
InterpretaciInterpretacióón del Controlador PD: n del Controlador PD: lugar de las ralugar de las raíícesces
−3 −2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2−3
−2
−1
0
1
2
3
Real Axis
Imag
Axi
s
−3 −2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
Real Axis
Imag
Axi
s
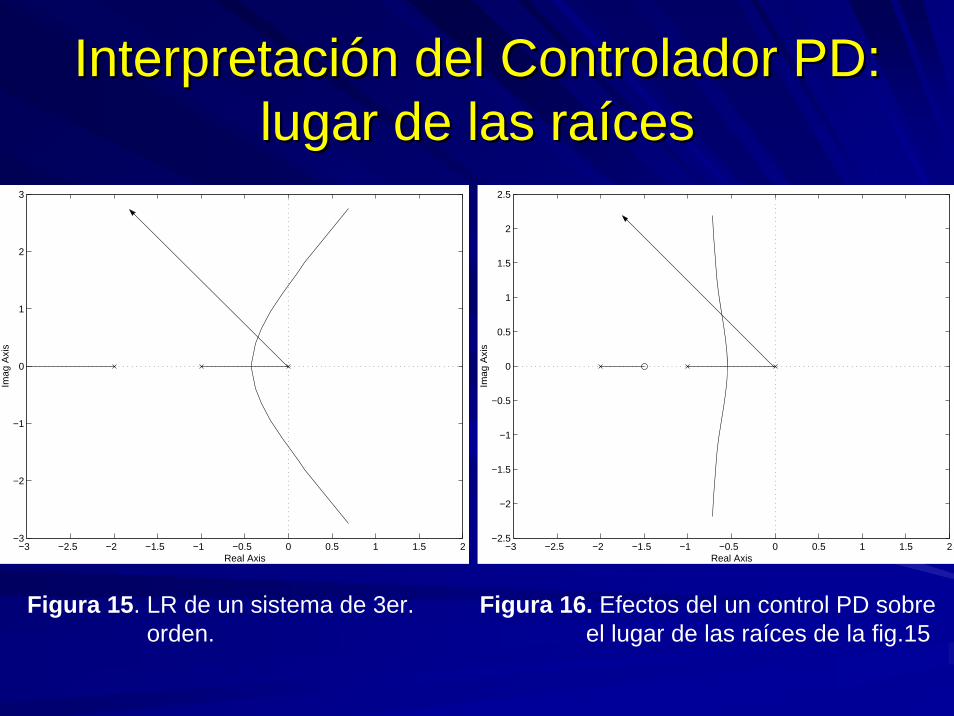
Figura 15. LR de un sistema de 3er. orden.
Figura 16. Efectos del un control PD sobreel lugar de las raíces de la fig.15
InterpretaciInterpretacióón del Controlador PD: n del Controlador PD: lugar de las ralugar de las raíícesces
−3 −2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2−3
−2
−1
0
1
2
3
Real Axis
Imag
Axi
s
−3 −2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2−3
−2
−1
0
1
2
3
Real Axis
Imag
Axi
s
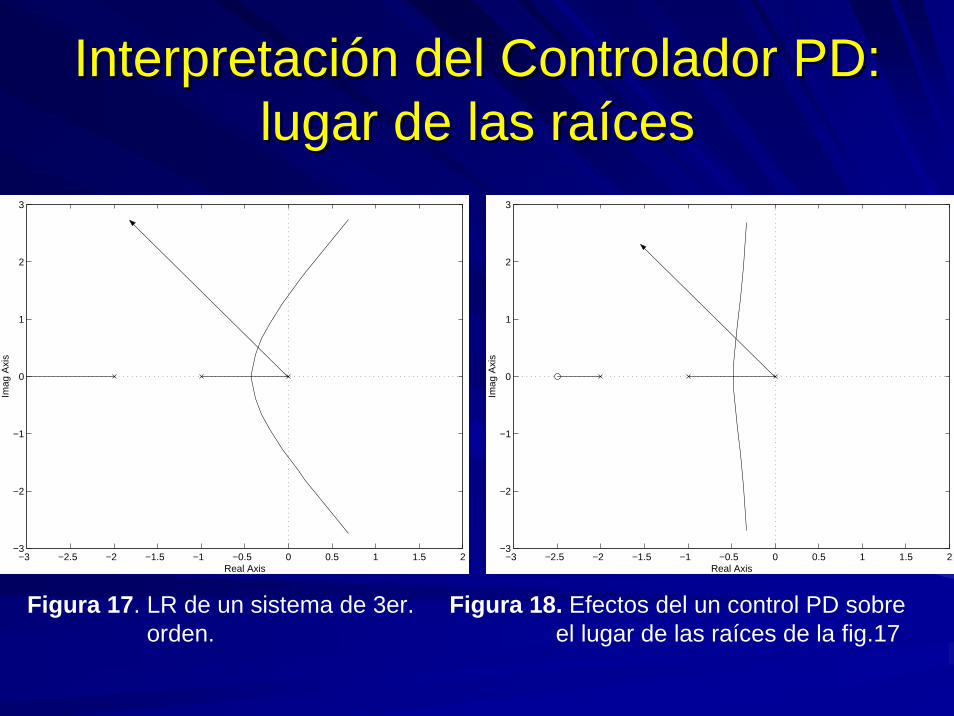
Figura 17. LR de un sistema de 3er. orden.
Figura 18. Efectos del un control PD sobreel lugar de las raíces de la fig.17
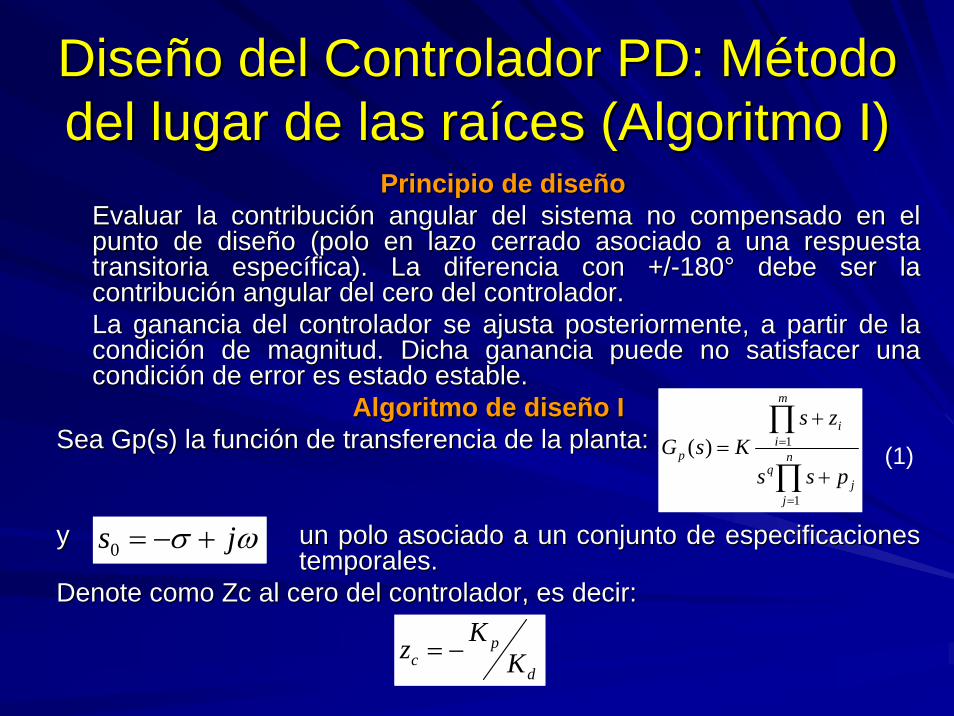
DiseDiseñño del Controlador PD: Mo del Controlador PD: Méétodo todo del lugar de las radel lugar de las raííces (Algoritmo I)ces (Algoritmo I)
Principio de disePrincipio de diseññooEvaluar la contribuciEvaluar la contribucióón angular del sistema no compensado en el n angular del sistema no compensado en el punto de disepunto de diseñño (polo en lazo cerrado asociado a una respuesta o (polo en lazo cerrado asociado a una respuesta transitoria espectransitoria especíífica). La diferencia con +/fica). La diferencia con +/--180180°° debe ser la debe ser la contribucicontribucióón angular del cero del controlador. n angular del cero del controlador. La ganancia del controlador se ajusta posteriormente, a partir dLa ganancia del controlador se ajusta posteriormente, a partir de la e la condicicondicióón de magnitud. Dicha ganancia puede no satisfacer una n de magnitud. Dicha ganancia puede no satisfacer una condicicondicióón de error es estado estable.n de error es estado estable.
Algoritmo de diseAlgoritmo de diseñño Io ISea Sea Gp(sGp(s) la funci) la funcióón de transferencia de la planta:n de transferencia de la planta:
y un polo asociado a un conjunto de espey un polo asociado a un conjunto de especificaciones cificaciones temporales.temporales.
Denote como Denote como ZcZc al cero del controlador, es decir:al cero del controlador, es decir:
ωσ js +−=0
∏
∏
=
=
+
+= n
jj
q
m
ii
p
pss
zsKsG
1
1)(
d
pc K
Kz −=
(1)
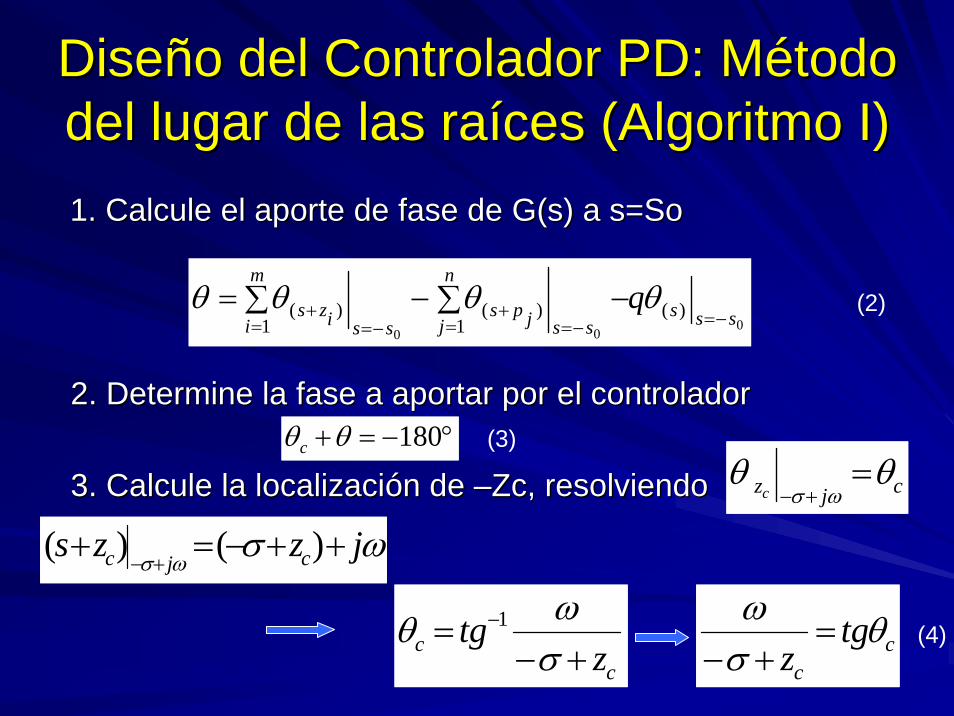
DiseDiseñño del Controlador PD: Mo del Controlador PD: Méétodo todo del lugar de las radel lugar de las raííces (Algoritmo I)ces (Algoritmo I)1. Calcule el aporte de fase de 1. Calcule el aporte de fase de G(sG(s) a s=So) a s=So
2. Determine la fase a aportar por el controlador2. Determine la fase a aportar por el controlador
3. Calcule la localizaci3. Calcule la localizacióón de n de ––Zc, resolviendoZc, resolviendo
000
)(1
)(1
)( sss
n
j ssjpsss
m
i izs q−== −=
+−==
+ ∑ −−∑= θθθθ
°−=+ 180θθc
cc
tgz
θσω
=+−
ωσωσ
jzzs cjc ++−=++−
)()(
cjzcθθ
ωσ=
+−
cc z
tg+−
= −
σωθ 1
(2)
(3)
(4)
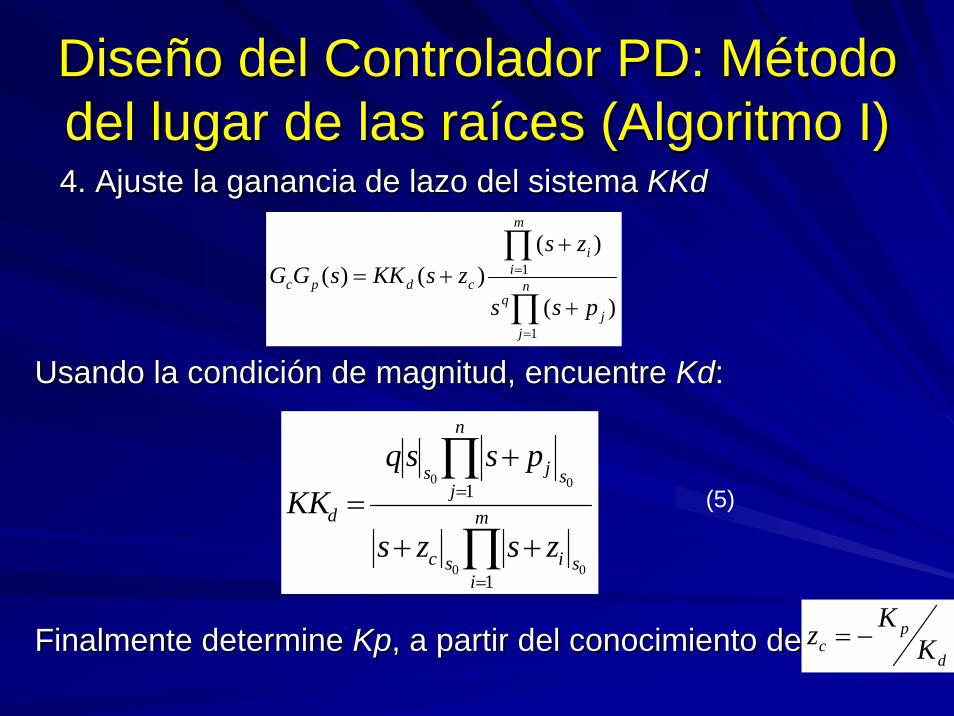
DiseDiseñño del Controlador PD: Mo del Controlador PD: Méétodo todo del lugar de las radel lugar de las raííces (Algoritmo I) ces (Algoritmo I) 4. Ajuste la ganancia de lazo del sistema 4. Ajuste la ganancia de lazo del sistema KKdKKd
Usando la condiciUsando la condicióón de magnitud, encuentre n de magnitud, encuentre KdKd::
Finalmente determine Finalmente determine KpKp, a partir del conocimiento de, a partir del conocimiento de
∏
∏
=
=
+
++= n
jj
q
m
ii
cdpc
pss
zszsKKsGG
1
1
)(
)()()(
∏
∏
=
=
++
+= m
isisc
n
jsjs
d
zszs
pssqKK
1
1
00
00
(5)
d
pc K
Kz −=
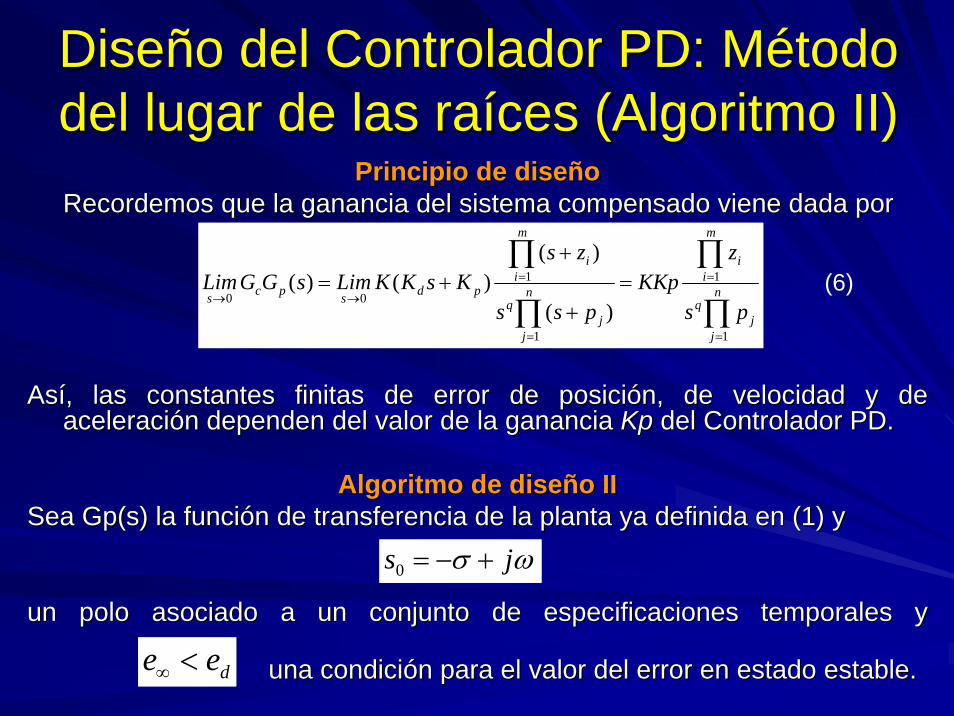
DiseDiseñño del Controlador PD: Mo del Controlador PD: Méétodo todo del lugar de las radel lugar de las raííces (Algoritmo II)ces (Algoritmo II)
Principio de disePrincipio de diseññooRecordemos que la ganancia del sistema compensado viene dada porRecordemos que la ganancia del sistema compensado viene dada por
AsAsíí, las constantes finitas de error de posici, las constantes finitas de error de posicióón, de velocidad y de n, de velocidad y de aceleraciaceleracióón dependen del valor de la ganancia n dependen del valor de la ganancia KpKp del Controlador PD.del Controlador PD.
Algoritmo de diseAlgoritmo de diseñño IIo IISea Sea Gp(sGp(s) la funci) la funcióón de transferencia de la planta ya definida en (1) y n de transferencia de la planta ya definida en (1) y
un polo asociado a un conjunto de especificaciones temporales y un polo asociado a un conjunto de especificaciones temporales y
una condiciuna condicióón para el valor del error en estado estable.n para el valor del error en estado estable.
ωσ js +−=0
∏
∏
∏
∏
=
=
=
=
→→=
+
++= n
jj
q
m
ii
n
jj
q
m
ii
pdspcsps
zKKp
pss
zsKsKKLimsGGLim
1
1
1
1
00)(
)()()( (6)
dee <∞
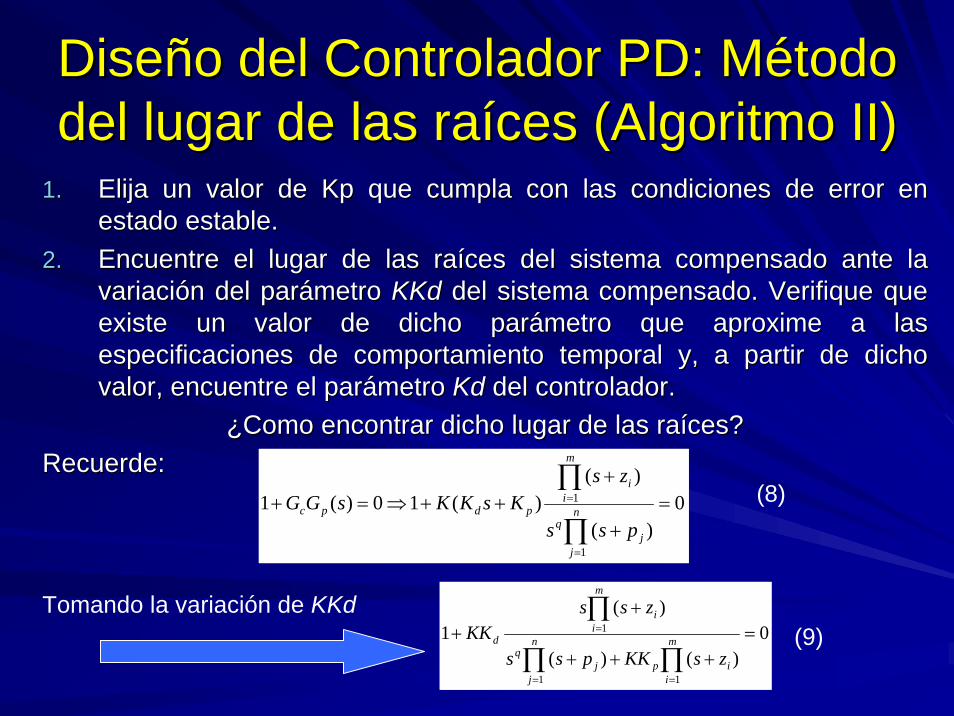
DiseDiseñño del Controlador PD: Mo del Controlador PD: Méétodo todo del lugar de las radel lugar de las raííces (Algoritmo II)ces (Algoritmo II)
1.1. Elija un valor de Elija un valor de KpKp que cumpla con las condiciones de error en que cumpla con las condiciones de error en estado estable.estado estable.
2.2. Encuentre el lugar de las raEncuentre el lugar de las raííces del sistema compensado ante la ces del sistema compensado ante la variacivariacióón del parn del paráámetro metro KKdKKd del sistema compensado. Verifique que del sistema compensado. Verifique que existe un valor de dicho parexiste un valor de dicho paráámetro que aproxime a las metro que aproxime a las especificaciones de comportamiento temporal y, a partir de dichoespecificaciones de comportamiento temporal y, a partir de dichovalor, encuentre el parvalor, encuentre el paráámetro metro KdKd del controlador. del controlador.
¿¿Como encontrar dicho lugar de las raComo encontrar dicho lugar de las raííces?ces?Recuerde:Recuerde:
0)(
)()(10)(1
1
1 =+
+++⇒=+
∏
∏
=
=n
jj
q
m
ii
pdpc
pss
zsKsKKsGG
0)()(
)(1
11
1 =+++
++
∏∏
∏
==
=m
iip
n
jj
q
m
ii
d
zsKKpss
zssKK
Tomando la variación de KKd
(8)
(9)
DiseDiseñño del Controlador PD: Mo del Controlador PD: Méétodo todo AnalAnalíítico Basado en el lugar de las ratico Basado en el lugar de las raíícesces
El mEl méétodo analtodo analíítico parte de las siguientes suposiciones:tico parte de las siguientes suposiciones:Sea un polo, en general complejo, asociadoSea un polo, en general complejo, asociado a una respuesta a una respuesta temporal deseada. Entonces,temporal deseada. Entonces,
Por otro lado:Por otro lado:
y tambiy tambiéén:n:
Sea la fase aportada por el controlador PD, entonces:Sea la fase aportada por el controlador PD, entonces:
ωσ js +−=0
)( ; 122
0
σωβωσ
ωσ β
−=+=
=+−=
tgs
esjs
o
jo
°±≠== 180)(arg ;)()( 000 sGesGsG pj
pp ψψ
cjcc esGsG θ)()( 00 =
cθ
(a)
(b)
(c)
(d)
1y 180 ;)()( 00 =°== αλα λjcp esGsG (ya que So está
Sobre el LR del sistema compensado)
DiseDiseñño del Controlador PD: Mo del Controlador PD: Méétodo todo AnalAnalíítico Basado en el lugar de las ratico Basado en el lugar de las raíícesces
A partir de la ecuación (c), se puede verificar que:
Entonces:
)sin(cos)(
1)sin(cos)(0
000 ccp
dpdpc jsG
jsKKsKKsG θθββ +=++=+=
°==+ 180λθψ c)(1)(
00 sG
sGp
c = (e) (f)
(g)
Igualando las partes imaginarias de (g)β
θsin)(
sin
00 ssGK
p
cd =
Sabiendo de (f) que
ψθ sinsin =c
y usando la identidad trigonométricaψψλθ −°=−= 180c
)sin(sincoscossin bababa −=− obtenemos que
DiseDiseñño del Controlador PD: Mo del Controlador PD: Méétodo todo AnalAnalíítico Basado en el lugar de las ratico Basado en el lugar de las raíícesces
Se tiene finalmente que (h)
(i)
βψ
sin)(sin
00 ssGK
pd =
Usando la igualdad (f) y las siguientes igualdades trigonométricas:ψθ coscos −=c)cos(sinsincoscos bababa −=+ obtenemos que
Igualando las partes reales de (g))(
coscos0
0 sGsKK
p
cdp
θβ =+
Desarrollando (i), y usando (h) se tiene: ββψθβ
sin)(cossincossin
0sGK
p
cp
−= (j)
)sin(sincoscossin bababa +=+ obtenemos que (j) se reescribe como:
ββψ
sin)()sin(
0sGK
pp
+−= (j) Usando (h) y (j) se diseña el controlador PD
DiseDiseñño del Controlador PD: Mo del Controlador PD: Méétodo todo frecuencialfrecuencial (Algoritmo I)(Algoritmo I)
∏
∏
=
=
+
+= n
jj
q
m
ii
p
pss
zsKsG
1
1
)(
)()(
d
pc K
K=ω
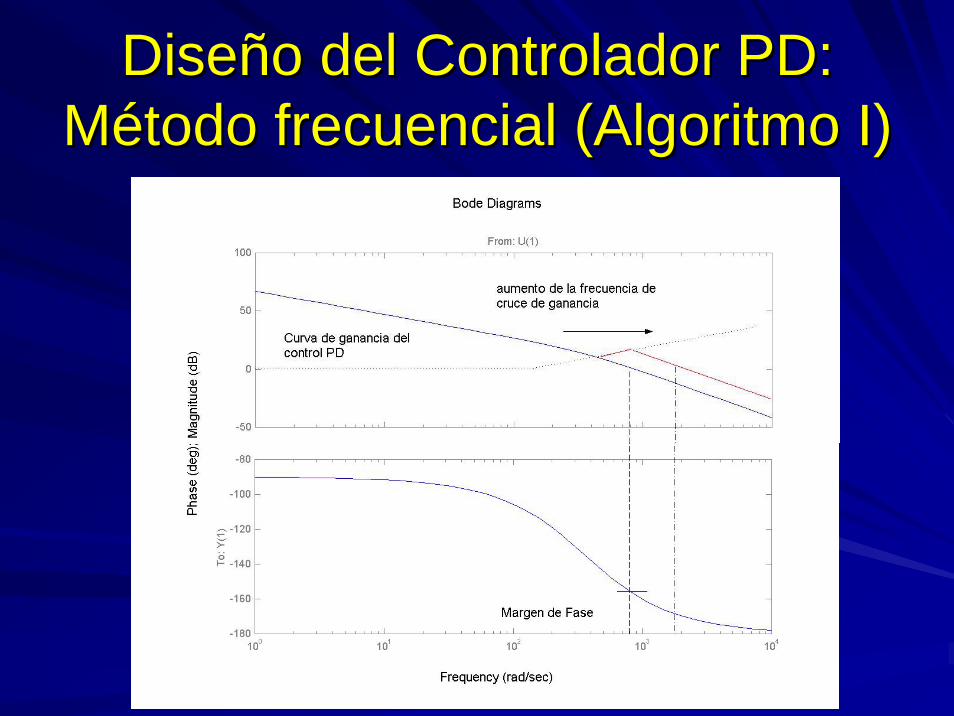
Principio de disePrincipio de diseññooLocalizar la frecuencia de corte del controlador Localizar la frecuencia de corte del controlador para lograr para lograr una mejora en el margen de fase en la nueva frecuencia de cruce una mejora en el margen de fase en la nueva frecuencia de cruce de de ganancia del sistema compensado.ganancia del sistema compensado.
Algoritmo de diseAlgoritmo de diseñño Io ISea Sea Gp(sGp(s) la funci) la funcióón de transferencia de la planta:n de transferencia de la planta:
Para propPara propóósitos de disesitos de diseñño en el dominio o en el dominio frecuencialfrecuencial, representemos a la , representemos a la funcifuncióón del transferencia del controlador de la siguiente manera:n del transferencia del controlador de la siguiente manera:
)11()1( sKsKKKsKKG
cp
p
dpdpc ω
+=+=+=
(10)
(11)
DiseDiseñño del Controlador PD: Mo del Controlador PD: Méétodo todo frecuencialfrecuencial (Algoritmo I)(Algoritmo I)
mωω =mθ
)(1
cc tg
ωωθ −=
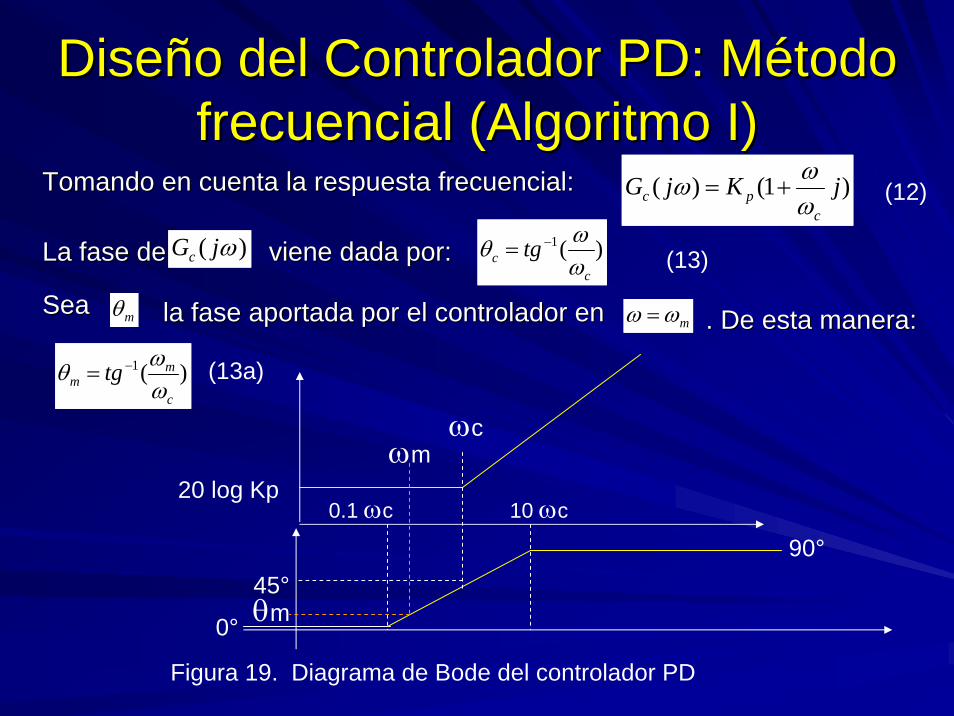
Tomando en cuenta la respuesta Tomando en cuenta la respuesta frecuencialfrecuencial::
La fase de viene dada por:La fase de viene dada por:
Sea Sea la fase aportada por el controlador en la fase aportada por el controlador en
)( ωjGc
)1()( jKjGc
pc ωωω +=
. De esta manera:. De esta manera:
)(1
c
mm tg
ωωθ −=
(12)
(13)
Figura 19. Diagrama de Bode del controlador PD
ωc
20 log Kp
90°45°
0°
ωm
θm
0.1 ωc 10 ωc
(13a)
DiseDiseñño del Controlador PD: Mo del Controlador PD: Méétodo todo frecuencialfrecuencial (Algoritmo I)(Algoritmo I)
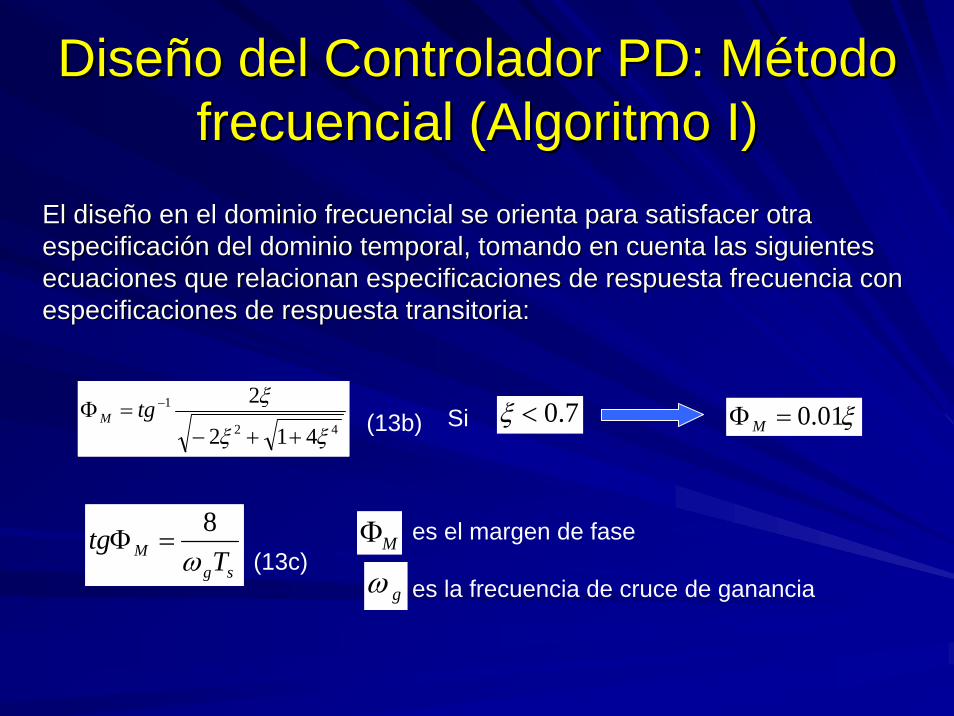
sgM T
tgω
8=Φ MΦ
gω
El diseEl diseñño en el dominio o en el dominio frecuencialfrecuencial se orienta para satisfacer otra se orienta para satisfacer otra especificaciespecificacióón del dominio temporal, tomando en cuenta las siguientes n del dominio temporal, tomando en cuenta las siguientes ecuaciones que relacionan especificaciones de respuesta frecuencecuaciones que relacionan especificaciones de respuesta frecuencia con ia con especificaciones de respuesta transitoria:especificaciones de respuesta transitoria:
es el margen de fase
es la frecuencia de cruce de ganancia(13c)
42
1
412
2
ξξ
ξ
++−=Φ −tgM Si 7.0<ξ ξ01.0=ΦM(13b)
DiseDiseñño del Controlador PD: Mo del Controlador PD: Méétodo todo frecuencialfrecuencial (Algoritmo I)(Algoritmo I)
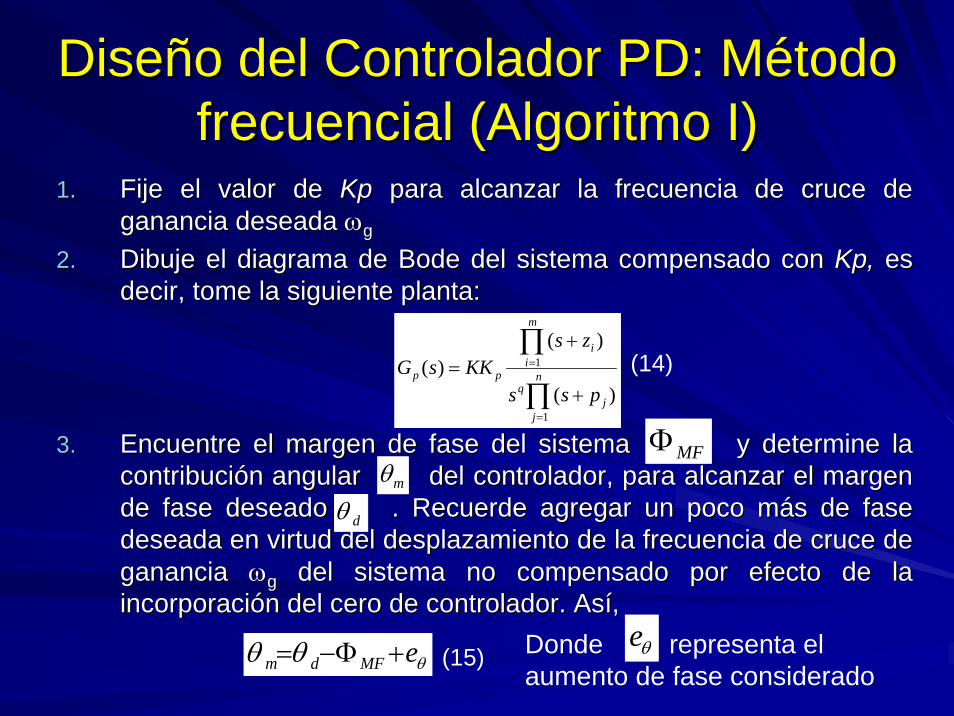
1.1. Fije el valor de Fije el valor de KpKp para alcanzar la frecuencia de cruce de para alcanzar la frecuencia de cruce de ganancia deseada ganancia deseada ωωgg
2.2. Dibuje el diagrama de Bode del sistema compensado con Dibuje el diagrama de Bode del sistema compensado con KpKp, , es es decir, tome la siguiente planta:decir, tome la siguiente planta:
3.3. Encuentre el margen de fase del sistema y determine la Encuentre el margen de fase del sistema y determine la contribucicontribucióón angular del controlador, para alcanzar el margen n angular del controlador, para alcanzar el margen de fase deseado . Recuerde agregar un poco mde fase deseado . Recuerde agregar un poco máás de fase s de fase deseada en virtud del desplazamiento de la frecuencia de cruce ddeseada en virtud del desplazamiento de la frecuencia de cruce de e ganancia ganancia ωωgg del sistema no compensado por efecto de la del sistema no compensado por efecto de la incorporaciincorporacióón del cero de controlador. Asn del cero de controlador. Asíí,,
∏
∏
=
=
+
+= n
jj
q
m
ii
pp
pss
zsKKsG
1
1
)(
)()(
θθθ eMFdm +Φ−=
mθMFΦ
dθ
(14)
(15) Donde representa el aumento de fase considerado
θe
DiseDiseñño del Controlador PD: Mo del Controlador PD: Méétodo todo frecuencialfrecuencial (Algoritmo I)(Algoritmo I)
4. Elija a la izquierda de la frecuencia de cruce de ganan4. Elija a la izquierda de la frecuencia de cruce de ganancia si cia si óó a la derecha si . Puede obtenerse un estimado a la derecha si . Puede obtenerse un estimado
solucionado la ecuacisolucionado la ecuacióón (13a) para n (13a) para ωωmm= = ωωgg..
5. Dibuje el nuevo Diagrama de Bode compensado y ajuste el 5. Dibuje el nuevo Diagrama de Bode compensado y ajuste el controlador si es necesario.controlador si es necesario.
cω
°> 45cθ °< 45cθ
DiseDiseñño del Controlador PD: o del Controlador PD: MMéétodo todo frecuencialfrecuencial (Algoritmo I)(Algoritmo I)
DiseDiseñño del Controlador PD: Mo del Controlador PD: Méétodo todo frecuencialfrecuencial (Algoritmo II)(Algoritmo II)
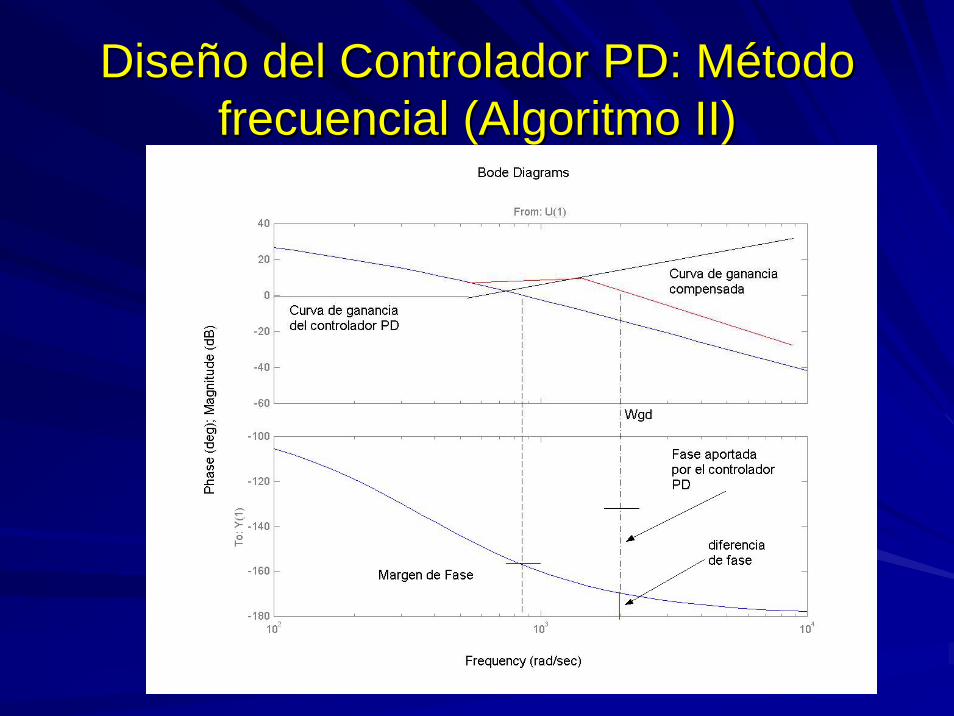
Principio de disePrincipio de diseññooSeleccionar la frecuencia de corte del controlador para lograr Seleccionar la frecuencia de corte del controlador para lograr el margen de el margen de
fase deseado en dicha frecuencia, satisfaciendo requerimientos dfase deseado en dicha frecuencia, satisfaciendo requerimientos de e error en estado estable.error en estado estable.
Algoritmo de diseAlgoritmo de diseñño IIo II1.1. Dado un margen de fase deseado y un tiempo de respuesta Dado un margen de fase deseado y un tiempo de respuesta
deseado deseado TsTs,, encuentre la frecuencia de cruce de ganancia encuentre la frecuencia de cruce de ganancia deseada usando la ecuacideseada usando la ecuacióón (16).n (16).
2.2. Elija un valor de Elija un valor de KpKp que satisfaga requerimientos de error en estado que satisfaga requerimientos de error en estado estableestable
3.3. Dibuje el diagrama de Bode del sistema dado en la ecuaciDibuje el diagrama de Bode del sistema dado en la ecuacióón (14).n (14).4.4. Ubique la frecuencia y compare respecto a la frecuencia dUbique la frecuencia y compare respecto a la frecuencia de cruce e cruce
de ganancia actual. Si es posible alcanzar , entonces de ganancia actual. Si es posible alcanzar , entonces escogaescoga la la frecuencia de corte del controlador para lograr el margen de fasfrecuencia de corte del controlador para lograr el margen de fase e deseado, segdeseado, segúún el algoritmo anterior.n el algoritmo anterior.
gdω
dθgdω
gdω
DiseDiseñño del Controlador PD: Mo del Controlador PD: Méétodo todo frecuencialfrecuencial (Algoritmo II)(Algoritmo II)
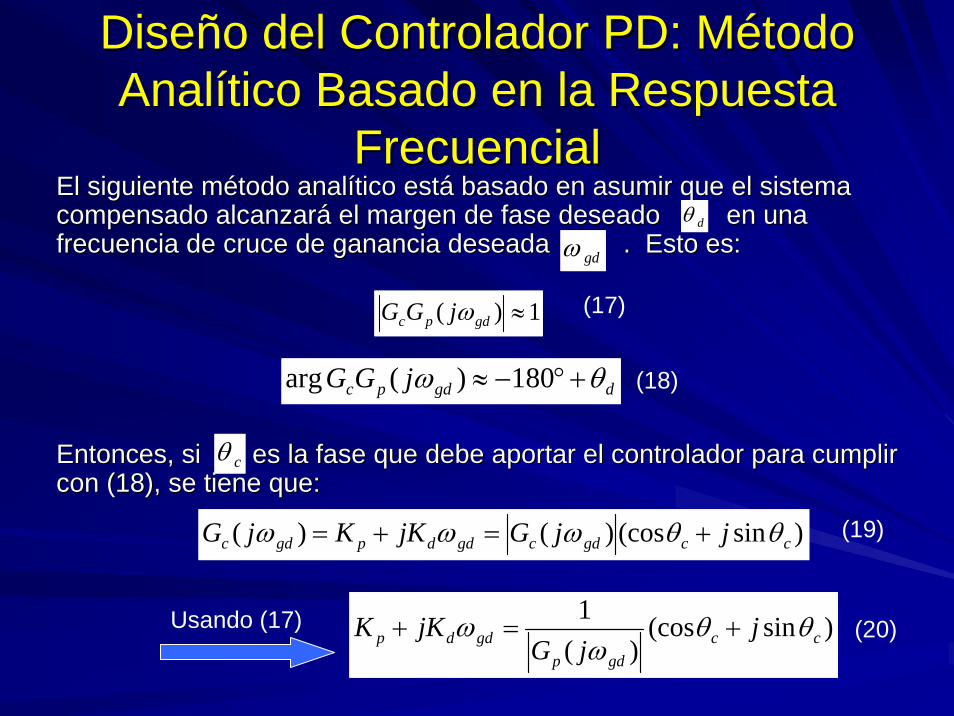
DiseDiseñño del Controlador PD: Mo del Controlador PD: Méétodo todo AnalAnalíítico Basado en la Respuesta tico Basado en la Respuesta
FrecuencialFrecuencialEl siguiente mEl siguiente méétodo analtodo analíítico esttico estáá basado en asumir que el sistema basado en asumir que el sistema compensado alcanzarcompensado alcanzaráá el margen de fase deseado en una el margen de fase deseado en una frecuencia de cruce de ganancia deseada . Esto es:frecuencia de cruce de ganancia deseada . Esto es:
Entonces, si es la fase que debe aportar el controlador paEntonces, si es la fase que debe aportar el controlador para cumplir ra cumplir con (18), se tiene que:con (18), se tiene que:
gdω
1)( ≈gdpc jGG ω
dθ
dgdpc jGG θω +°−≈ 180)(arg
(17)
(18)
cθ
)sin(cos)()( ccgdcgddpgdc jjGjKKjG θθωωω +=+=
)sin(cos)(
1cc
gdpgddp j
jGjKK θθ
ωω +=+
(19)
Usando (17) (20)
DiseDiseñño del Controlador PD: Mo del Controlador PD: Méétodo todo AnalAnalíítico Basado en la Respuesta tico Basado en la Respuesta
FrecuencialFrecuencialAlgoritmo de diseAlgoritmo de diseññoo
Siguiendo el principio de diseSiguiendo el principio de diseñño del algoritmo II basado usando o del algoritmo II basado usando respuesta respuesta frecuencialfrecuencial, sea la frecuencia de cruce de ganancia , sea la frecuencia de cruce de ganancia deseada para el sistema compensado y la fase que debe aportdeseada para el sistema compensado y la fase que debe aportar el ar el controlador PD para alcanzar el margen de fase deseadocontrolador PD para alcanzar el margen de fase deseadoEntonces, igualando las partes reales e imaginarias de ambos ladEntonces, igualando las partes reales e imaginarias de ambos lados de os de la ecuacila ecuacióón (20), se tiene:n (20), se tiene:
gdω
cθ
dθ
gdjsp
cp
sGK
ω
θ
=
=)(
cos
gdjspgd
cd
sGsenK
ωω
θ
=
=)((21) (22)
Observe que de (18), se tiene que: )(arg180)(arg gdpdgdcc jGjG ωθωθ −+°−== (23)
Y esto no es más que lo expresado en la ecuación (15) pero con relación a la frecuencia de cruce de ganancia deseado como se plantea en el algoritmo IUsando el método frecuencial !!!.
gdω