Embed Size (px)
Citation preview

INSTITUTO POLITECNICO NACIONAL
Escuela Superior de Ingeniería Mecánica y Eléctrica
Unidad Profesional Adolfo López Mateos
Diseño, Construcción, Instrumentación y Control
de un Vehículo Aéreo No Tripulado (UAV)
Tesis que presenta
ESCAMILLA NÚÑEZ RAFAEL
para Obtener el Grado de
Ingeniero en Control y Automatización
Directores de tesis :
Dr. Sergio Salazar
M. en C. Francisco Villanueva
México D.F. Noviembre 2010


Pregúntate si lo que estas haciendo hoyte acerca al lugar en el que quieres estar mañana.
J. Brown
i

AGRADECIMIENTOS
A mis padres:
Yolanda Patricia Núñez Perez Tejada y Rafael Escamilla Rodríguez por todo elamor, respeto, apoyo, dedicación y paciencia que me han brindado a lo largo de todami vida; ya que, sin sus enseñanzas y consejos no habría sido posible cumplir misobjetivos y llegar a ser la persona que hoy soy.
A mi hermano:
Héctor Escamilla Núñez por su amistad, cariño y apoyo ofrecido en todo momen-to y de manera incondicional.
A mi novia:
Mitzi Mabel Salina Luna por su comprensión, amor y compañía a lo largo deestos últimos años.
A mis amigos:
A mis amigos, investigadores del CINVESTAV y seres queridos no presentes, conlo cuales he compartido grandes momentos de mi vida y a su vez, me han permitidoaprender de su experiencia.
Por último, agradezco al Dr. Rogelio Lozano por darme la oportunidad de parti-cipar en este proyecto, el cual me insitó a adentrarme aún más en el camino de lainvestigación.
GRACIAS.
ii

INTRODUCCIÓN
El proyecto que aquí se presenta es de carácter teórico-práctico y fue desarrolladoen el Laboratorio Franco-Mexicano de Informática y Automatización (LAFMIA) yen el Departamento de Control Automático del Centro de Investigaciones y EstudiosAvanzados del Instituto Politécnico Nacional (CINVESTAV). Está enfocado al ám-bito de la investigación y experimentación para el desarrollo de nuevas tecnologíascorrespondientes al campo de los vehículos aéreos no tripulados (UAV) por sus siglasen inglés Unmanned Aerial Vehicles.
Los prototipos que se mencionan en esta tesis se realizaron físicamente, ya quefueron diseñados, construidos, instrumentados electrónicamente y controlados parala realización de las pruebas de vuelo correspondientes. Los resultados experimen-tales que se obtuvieron se organizaron a fin de presentarse en este documento.
La pretensión del proyecto motivo de este documento fue controlar la orientacióndel UAV para la realización de vuelos automáticos en línea recta; lo que implicóconocer de los principales conceptos aerodinámicos para entender los movimientospropios de la aeronave durante el vuelo y a su vez poder efectuar el control de lamisma. Partiendo de estos conceptos se logró diseñar el ala y posteriormente el fuse-laje del vehículo; ya construido el prototipo, se procedió a la incorporación de laelectrónica correspondiente para efectuar las pruebas de vuelo de forma manual afin de corroborar que el diseño propuesto cumplía con los fines requeridos.
Después se diseñó una tarjeta electrónica basada en amplificadores operacionales,cuya función es acondicionar la señal proveniente de los sensores (acelerómetros,girómetros y magnetómetro) para poder ser leída por el microcontrolador. En esteúltimo dispositivo se realizó la programación del algoritmo de control para ser capa-ces de gobernar las superficies que controlan los movimientos de la aeronave medianteel uso de servomotores. Para tales fines se requirió implementar un circuito que ais-lara físicamente el microcontrolador de los motores simplemente por protección delmicrocontrolador. Una vez finalizada la parte de instrumentación electrónica y pro-gramación, se incorporá ésta al vehículo para realizar las pruebas de vuelo de formaautomática y así obtener las gráficas correspondientes al control de la orientaciónmediante el uso del software MatLab.
iii

OBJETIVOS DEL PROYECTO A DESARROLLAR
Objetivo General
Diseñar, construir, instrumentar y controlar la orientación de un VehículoAéreo No Tripulado (UAV) para la realización de vuelos automáticos.
Objetivos Específicos
Diseñar y construir un vehículo aéreo no tripulado (UAV) considerando lasprincipales fuerzas aerodinámicas y empleando materiales de fácil reparación,reemplazo y bajo costo.
Instrumentar electrónicamente el UAV a través de una central inercial basadaen Amplificadores Operacionales.
Programar un microcontrolador Rabbit (programación en lenguaje C).
Emplear el software MatLab para la visualización en forma gráfica de los datosobtenidos durante los vuelos realizados.
iv

Justificación
La vida cotidiana pone a las personas ante problemáticas diversas: la posiblepérdida de vidas humanas en la realización de tareas de alto riesgo; los peligros quese derivan de los desastres naturales o consecuencia de errores humanos. Ante estassituaciones, el hombre se esmera por asegurar su vida, así como sus bienes, al igualque las empresas o instituciones.
A su vez, existen muchos casos en los cuales es casi imposible que un ser vivopueda ingresar a determinadas aéreas por cuestiones de seguridad; por lo cual, esconveniente emplear vehículos no tripulados para la realización de esta clase de tareasy así salvaguardar la integridad física del ser humano. En este tipo de situacionesun UAV es de gran ayuda ya que se pueden realizar misiones de reconocimiento,vigilancia, búsqueda y rescate; apoyo en desastres, estudios de investigación, etc. Locual es posible gracias a que día con día la tecnología avanza de manera impresio-nante ofreciéndonos más y mejores alternativas mediante la aplicación de métodossencillos y eficaces, disminuyendo así los posibles riesgos.
Planteamiento del problema
Diseñar un vehículo con una configuración lo suficientemente estable durante elvuelo, para poder emplear éstos como modelo a seguir en la construcción de aeron-aves, empleando materiales más resistentes como fibra de carbono.
A su vez, en la actualidad se requieren vehículos que sean capaces de desem-peñar tareas cada vez más complejas, lo cual se puede llevar a cabo, al incorporarcámaras y distintas clases de sensores a los prototipos para llevar a cabo misionesde reconocimiento y vigilancia, etc.
v

CONTENIDO
En el primer capítulo de esta tesis se define lo que es un vehículo aéreo no tripu-lado, sus principales aplicaciones tanto en el ámbito militar y civil, así como suclasificación de acuerdo a su altitud y alcance. Enseguida, en el apartado segundose da una breve explicación de los principales conceptos aerodinámicos empleadospara llevar a cabo el diseño de una aeronave, así como de los sistemas embebidospresentes en la Aeronáutica.
En el tercer capítulo se desarrollan los principales cálculos para llevar a caboel diseño de la aeronave, así como los motivos por los cuales se emplearon ciertosmateriales para la construcción del prototipo. Posteriormente, en el capítulo cuatrose describe el funcionamiento de los componentes electrónicos empleados para lainstrumentación del UAV. También se mencionan las ventajas de usar un microcon-trolador para llevar a cabo la acción de control del prototipo.
El apartado correspondiente al quinto capítulo, se muestra el modelo matemáticolongitudinal de una aeronave, así como la acción de control implementada y su re-spectivo diagrama de flujo del algoritmo de control empleado para llevar a cabo elcontrol de la orientación del vehículo. Ya en el sexto capítulo se muestran las gráficasobtenidas durante los vuelos realizados con control de la orientación del UAV.
Finalmente, en el capítulo siete, se da a conocer de manera general si el prototipocumplió con los objetivos planteados en un inicio del proyecto y se consideran losposibles trabajos posteriores que pueden realizarse en el área correspondiente a losvehículos aéreos no tripulados.
vi

Índice general
Índice de Figuras ix
1. Antecedentes 11.1. Historia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2. Aplicaciones de los UAV . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.1. Aplicaciones Militares . . . . . . . . . . . . . . . . . . . . . . 31.2.2. Aplicaciones Civiles . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3. Clasificación de los UAV . . . . . . . . . . . . . . . . . . . . . . . . . 4
2. Marco Teórico 72.1. Principales conceptos aerodinámicos . . . . . . . . . . . . . . . . . . . 7
2.1.1. Geometría y configuración del ala . . . . . . . . . . . . . . . . 82.1.1.1. Perfil aerodinámico . . . . . . . . . . . . . . . . . . . 8
2.1.2. Fuselaje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.1.3. Principales fuerzas que actúan sobre un avión . . . . . . . . . 11
2.1.3.1. Levantamiento . . . . . . . . . . . . . . . . . . . . . 112.1.3.2. Peso . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.1.3.3. Arrastre . . . . . . . . . . . . . . . . . . . . . . . . . 112.1.3.4. Empuje . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1.4. Centro de gravedad . . . . . . . . . . . . . . . . . . . . . . . . 122.1.5. Centro de presión . . . . . . . . . . . . . . . . . . . . . . . . . 122.1.6. Centro aerodinámico . . . . . . . . . . . . . . . . . . . . . . . 132.1.7. Ángulo de ataque . . . . . . . . . . . . . . . . . . . . . . . . . 132.1.8. Diedros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.1.9. Ejes de translación y rotación de la aeronave . . . . . . . . . . 142.1.10. Principales superficies de control . . . . . . . . . . . . . . . . 14
2.1.10.1. Alerones . . . . . . . . . . . . . . . . . . . . . . . . . 152.1.10.2. Elevador . . . . . . . . . . . . . . . . . . . . . . . . . 152.1.10.3. Timon . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.1.11. Softwares para el diseño de perfiles aerodinámicos . . . . . . . 162.2. Sistemas embebidos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
vii

ÍNDICE GENERAL
2.2.1. Aplicaciones de los sistemas embebidos en la aeronáutica . . . 172.2.2. Características de los sistemas embebidos . . . . . . . . . . . . 172.2.3. Periféricos de los sistemas embebidos . . . . . . . . . . . . . . 18
2.3. Aviónica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3. Diseño y construcción del prototipo 213.1. Prototipos experimentales . . . . . . . . . . . . . . . . . . . . . . . . 213.2. Diseño del perfil aerodinámico, ala y fuselaje del prototipo . . . . . . 22
3.2.1. Prototipo Etknian . . . . . . . . . . . . . . . . . . . . . . . . 233.2.1.1. Características y elementos del prototipo Etknian . . 243.2.1.2. Parámetros aerodinámicos del prototipo Etknian . . 26
3.2.2. Prototipo RafKinga . . . . . . . . . . . . . . . . . . . . . . . . 293.2.2.1. Características y elementos del prototipo RafKinga . 293.2.2.2. Parámetros aerodinámicos del prototipo RafKinga . 31
4. Instrumentación del Prototipo 354.1. Hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.2. Microcontrolador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5. Control del Prototipo 515.1. Modelo matemático longitudinal de 3 grados de libertad de un ve-
hículo aéreo no tripulado . . . . . . . . . . . . . . . . . . . . . . . . . 515.2. Acción de control aplicada al prototipo . . . . . . . . . . . . . . . . . 52
5.2.1. Controlador Proporcional-Derivativo (PD) . . . . . . . . . . . 535.3. Control de la orientación . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.3.1. Control del ángulo pitch, roll y yaw del prototipo . . . . . . . 555.4. Diagrama de flujo del algoritmo de control . . . . . . . . . . . . . . . 58
6. Resultados Experimentales 63
7. Conclusiones y Trabajos Futuros 67
A. Glosario 69
Bibliografía 72
viii

Índice de figuras
1.1. Vehículo aéreo no tripulado UAV . . . . . . . . . . . . . . . . . . . . 3
2.1. Partes de un perfil aerodinámico . . . . . . . . . . . . . . . . . . . . . 92.2. Perfil simétrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.3. Perfil asimétrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.4. Fuerzas que actuan sobre un avión referencia en [14] . . . . . . . . . . 122.5. Ejes de posición y rotación de la aeronave referencia en [14] . . . . . . 152.6. Principales superficies de control de una aeronave . . . . . . . . . . . 16
3.1. Perfil aerodinámico creado con el software JavaFoil . . . . . . . . . . 233.2. Perfil aerodinámico creado con el software Xfoil . . . . . . . . . . . . 233.3. Perfil Aerodinámico y Ala del prototipo Etknian . . . . . . . . . . . . 253.4. Fuselaje del prototipo Etknian . . . . . . . . . . . . . . . . . . . . . . 253.5. Ala diseñada en el software Xfoil para el prototipo Etknian . . . . . . 283.6. Prototipo final obtenido con el software Xfoil . . . . . . . . . . . . . . 283.7. Prototipo Final llamado Etknian . . . . . . . . . . . . . . . . . . . . 283.8. Perfil Aerodinámico y Ala del prototipo RafKinga . . . . . . . . . . . 303.9. Fuselaje del prototipo RafKinga . . . . . . . . . . . . . . . . . . . . . 313.10. Ala diseñada en el software Xfoil para el prototipo RafKinga . . . . . 333.11. Prototipo previo al prototipo final . . . . . . . . . . . . . . . . . . . . 333.12. Prototipo final llamado RafKinga . . . . . . . . . . . . . . . . . . . . 34
4.1. Receptor Futaba . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.2. Radio Control Futaba . . . . . . . . . . . . . . . . . . . . . . . . . . 364.3. Servomotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.4. Motor Brushless con su base . . . . . . . . . . . . . . . . . . . . . . . 384.5. Diagrama del Controlador de Velocidad . . . . . . . . . . . . . . . . . 394.6. Variador de Velocidad . . . . . . . . . . . . . . . . . . . . . . . . . . 394.7. Central Inercial (IMU) para 3 gyros y 3 acelerómetros . . . . . . . . . 404.8. Amplificadores Operacionales en configuraciones de seguidor e inte-
grador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414.9. Central Inercial (IMU) para 3 gyros . . . . . . . . . . . . . . . . . . . 42
ix

ÍNDICE DE FIGURAS
4.10. Central Inercial (IMU) para 3 acelerómetros . . . . . . . . . . . . . . 424.11. Magnetómetro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 444.12. Etapa de Potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 464.13. Bateria LiPo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 464.14. Tarjeta electrónica del microprocesador . . . . . . . . . . . . . . . . . 474.15. Microcontrolador Rabbit RCM3400 . . . . . . . . . . . . . . . . . . . 484.16. Hardware empleado en la instrumentación de los prototipos . . . . . . 49
5.1. Modelo Longitudinal de la aeronave . . . . . . . . . . . . . . . . . . . 525.2. Diagrama a bloques del Control de la Orientación Prototipo . . . . . 535.3. Velocidad θ = 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 575.4. Control del ángulo pitch θ . . . . . . . . . . . . . . . . . . . . . . . . 57
6.1. Control del ángulo roll . . . . . . . . . . . . . . . . . . . . . . . . . . 646.2. Control del ángulo pitch . . . . . . . . . . . . . . . . . . . . . . . . . 656.3. Control del ángulo yaw . . . . . . . . . . . . . . . . . . . . . . . . . . 66
x

Capítulo 1
Antecedentes
Los vehículos aéreos no tripulados (UAV) por sus siglas en inglés UnmannedAerial Vehicles, han sido una área de investigación muy activa durante los últimosaños. Son aeronaves capaces de volar sin necesidad de un piloto humano abordoque las controle. Pueden ser remotamente controlados o volar de forma autónomabasada en planes de vuelo pre programados mediante el uso de sistemas de controlcomplejos. La autonomía se relaciona con los algoritmos de control que poseen estosvehículos para responder de manera satisfactoria al encontrarse en eventos inespera-dos o aleatorios, durante sus misiones de vuelo referencia en [6]. En la actualidad losUAV son utilizados en el ámbito militar, por ejemplo en misiones de reconocimientoy ataque a blancos militares. También se utilizan, aunque en menor grado, en aplica-ciones civiles tales como la inspección de incendios, monitoreo de eventos políticos yreconocimiento de desastres naturales; también son empleados en misiones aburridasu hostiles para ser comandadas por un piloto.
En la actualidad la tecnología para la fabricación de UAV totalmente autónomosse encuentra en pleno desarrollo; ésta recae en las siguientes catergorías:
Fusión de Sensores: Combinar información desde diversos dispositivos, paraser utilizados en el control del vehículo.
Comunicaciones: Realizar la coordinación entre multiples agentes en la presen-cia de información que sea imprecisa e incompleta.
Planeamiento de Vuelos: Determinar el camino óptimo que deberá seguirel vehículo, a la vez de que cumple con ciertas restricciones impuestas por losobjetivos y la misión, tales como obstáculos o consumo de combustible.
Generación de Trayectorias: Determinar la maniobra óptima para llegar oseguir a un objetivo determinado.
1

1.1. Historia
Regulación de Trayectorias: Las estrategias de control específicas requeri-das para cumplir con las restricciones.
Programación y asignación de tareas: Determinar la distribución óptimade tareas entre un grupo de agentes, satisfaciendo las restricciones en tiempoy equipo.
Tácticas cooperativas: Formular una secuencia óptima y una distribuciónespecial de actividades entre los diferentes agentes, con el fin de maximizar lasprobabilidades de éxito de alguna misión dada.
1.1. Historia
El alto número de pilotos que han perecido durante misiones del tipo de rastreode enemigos en la segunda guerra mundial ha alentado la idea de utilizar vehículosno tripulados. Algunos países han invertido grandes presupuestos en la investigaciónde UAV, principalmente Estados Unidos, Israel, algunos países de la Unión Europeay recientemente Japón referencia en [6].
Durante la guerra de Vietnam referencia en [6], el ejercito estadounidense utilizóUAV, para localizar plataformas de lanzamiento de misiles sobiéticos. Con el desa-rrollo y miniaturización de las tecnologías, el interés en estos vehículos dentro dela armada estadounidense creció de manera considerable. Así, comenzaron a versecomo dispositivos baratos que ayudarían en combate, sin el riesgo de pérdidas huma-nas.
Las primeras generaciones de UAV fueron hechas inicialmente para la supervisióny vigilancia referencia en [6], aunque algunos fueron equipados con armamento (comoel MQ-1 Predator, el cual utilizaba misiles aire-tierra). A los UAV armados, se lesconoce como vehículos de combate aereo no tripulados,(UCAV por sus siglas eningles: Unmanned Combat Aerial Vehicles). Para ilustrar lo anterior, se puede citarla guerra del golfo (1991), donde la armada estadounidense utilizó uno de estospara tareas de vigilancia tanto a la luz del día como por la noche; este vehículo seencargaba de recabar información de objetivos hostiles. Más recientemente, en 2002,la misma armada utilizó uno de ellos en Afganistán.
1.2. Aplicaciones de los UAV
Los UAV usualmente se ubican en dos grandes categorías de aplicación: la military la civil.
2

1. Antecedentes
Figura 1.1: Vehículo aéreo no tripulado UAV
1.2.1. Aplicaciones Militares
La cualidad más importante de los UAV es el vuelo no tripulado. Esta carac-terística esencial permite evitar cualquier posible riesgo para el piloto, notablementeen el dominio militar como en misiones en áreas hostiles, así como en misiones enlas que se demande una importante carga y daño psicológico para el piloto: accesoa altas altitudes o vigilancia repetitiva.
Los avances tecnológicos ayudan para ampliar el rango de aplicaciones de lossistemas autónomos: en acciones militares, de vigilancia y seguimiento de posicionesenemigas, creando enlaces de comunicación entre estaciones terrestres para el inter-cambio de información. Las aplicaciones de los UAV militares pueden dividirse entres categorías principales:
Patrullaje y reconocimiento
Apoyo al combate
Combate
1.2.2. Aplicaciones Civiles
Comparados con los UAV militares, los UAV civiles no tienen el mismo desarrolloque han tenido sus similares militares. No obstante, poseen un buen potencial, debidoa su versatilidad y flexibilidad de operación. Existe un amplio rango de aplicacionespotenciales para los vehículos no tripulados civiles, especialmente en misiones concaracterísticas peligrosas o rutinarias.
3

1.3. Clasificación de los UAV
De la misma manera que en el dominio militar, los ejemplos de aplicación sepueden clasificar en diferentes categorías:
Investigación científica
• Estudio de la atmósfera, la tierra y el océano
• Estudio del agua
• Cartografía
Apoyo a desastres
• Detección de fuego en incendios
• Volcanos y tornados
• Búsqueda y rescate
Vigilancia civil
• Supervisión marítima (puertos, tráfico de drogas, inmigración ilegal, misio-nes de rescate)
• Vigilancia urbana
1.3. Clasificación de los UAV
Uno de los criterios mediante los cuales se puede clasificar a los UAV es de acuer-do a su altitud/rango como se muestra a continuación:
Altitud/Rango
Handheld: 600m de altitud en un rango de 2Km
Close: 1500m de altitud en un rango superior a los 10Km
Nato: 3000m de altitud en un rango superior a los 50Km
Tactical: 5500m de altitud en un rango de hasta 160Km
Male: 9000m de altitud en un rango de hasta 200Km
Hale: 99Km de altitud con un rango indefinido
Hypersonic: supersónico (Mach 1-5) o hipersónico (Mach 5+) con 15200mde altitud o altitud suborbital con un rango superior a los 200Km
4

1. Antecedentes
Orbital: en orbitas bajas terrestres (Mach 25+)
CIS Lunar: viaja entre la Luna y la Tierra.
El UAV desarrollado en esta tesis puede ubicarse en la categoría Hanheld siel cuerpo y ala del vehículo se construyeran de fibra de carbono para contar conuna estructura de mayor rigidez y así poder alcanzar una mayor altitud, lo cual sepretende hacer en un futuro próximo una vez que se haya encontrado la configuraciónadecuada del cuerpo y ala del vehículo.
El prototipo tiene un rango de hasta 3Km que es la máxima distancia en la quepuede existir una comunicaciónen entre el receptor que se encuentra en el avión yel radio control con el cual se manipulará el mismo. Por otro lado, el vehículo estaenfocado hacia aplicaciones civiles con fines de investigación científica.
5

1.3. Clasificación de los UAV
6

Capítulo 2
Marco Teórico
La aerodinámica estudia el comportamineto de los cuerpos sólidos cuando existeun movimiento relativo entre éstos y un fluido en contacto, siendo éste último el aireen nuestro caso.
Para llevar a cabo el desarrollo de éste proyecto es indispensable conocer losprincipales conceptos aerodinámicos bajo los cuales se rige el comportamiento delvehículo en estudio, ya que de lo contrario el diseño del mismo resultaría muy com-plicado y al realizar las pruebas de vuelo, esté no sería capaz de volar de la maneradeseada. Por lo tanto, a continuación se mencionan los principales conceptos aero-dinámicos cosiderados para la realización del prototipo.
2.1. Principales conceptos aerodinámicos
Al pensar en el diseño de aeronaves ya sea a tamaño real o escala, se debenconsiderar diferentes conceptos y parámetros aerodinámicos, los cuales varían deacuerdo a la aplicación, tamaño, forma, peso, velocidad, etc. del vehículo.
Los conceptos considerados para el desarrollo de este prototipo son los siguientes:
Geometría y configuración del ala
Fuselaje
Principales fuerzas que actúan sobre un avión
Centro de gravedad
Centro de presión
Centro aerodinámico
Ángulo de ataque
7

2.1. Principales conceptos aerodinámicos
Diedros
Ejes de translación y rotación de la aeronave
Principales superficies de control de un avión
Softwares para el diseño de perfiles aerodinámicos
Una vez conocidos cuales son los parámetros aerodinámicos a considerar en eldiseño del vehículo, se procede a dar una breve explicación de cómo influye cadauno de ellos en el control, estabilidad y vuelo de una aeronave.
2.1.1. Geometría y configuración del ala
Existen diversas configuraciones y tamaños de ala, donde el diseño de está de-pende de la aplicación a realizar por el UAV. Para vuelos a bajas velocidades, lasalas rectangulares son adecuadas ya que oponen una mayor resistencia al flujo deaire. De lo contrario, por ejemplo, un ala con geometría triangular o delta es másconveniente para vuelos rápidos. Independientemente de la configuración empleada,un factor importante a considerar es el área de la superficie del ala ya que de estodependerá la sustentación del avión.
Ala
En aeronáutica se denomina ala a un cuerpo aerodinámico compuesto de perfilesaerodinámicos capaz de generar una diferencia de presiones al desplazarse por elaire. Como consecuencia de esta diferencia de presiones se produce la sustentaciónreferencia en [13], la cual permite que la aeronave vuele.
2.1.1.1. Perfil aerodinámico
Un perfil aerodinámico es una superficie de forma plana que al desplazarse através del aire es capaz de crear a su alrededor una distribución de presiones quegeneren una sustentación referencia en [17]. Los parámetros que influyen en un perfilaerodinámico (figura 2.1) son los siguientes:
1 Línea de cuerda. Es la línea recta que une el borde de ataque ó bordedelantero del ala y el borde de fuga ó borde de salida del perfil.
• Borde de Ataque. Es el borde delantero del ala. Es la parte del ala queprimero entra en contacto con el flujo de aire.
• Borde de Fuga ó Borde de Salida. Es la parte posterior del ala por dondesale el flujo de aire.
8

2. Marco Teórico
2 Cuerda. Es la longitud de la línea de cuerda. Todas las dimensiones de losperfiles se miden en términos de la cuerda.
3 Línea de curvatura media. Es la línea media entre la superficie superiortambién conocida como extradós y la superficie inferior también conocida comointradós.
4 Curvatura máxima. Es la distancia máxima entre la línea de curvaturamedia y la línea de cuerda.
5 Espesor máximo. Es la distancia máxima entre la superficie superior einferior (extradós e intradós).
Figura 2.1: Partes de un perfil aerodinámico
Los perfiles aerodinámicos se pueden dividir en dos grandes grupos:
Perfiles Simétricos. Son aquellos en los cuales su superficie superior es iguala la inferior. Una ventaja de este tipo de perfiles es que su construcción essencilla (figura 2.2).
Figura 2.2: Perfil simétrico
Perfiles Asimétricos. Son aquellos en los cuales sus superficies son distintasya que cuentan con una curvatura (figura 2.3). Este tipo de perfiles cuentancon una mayor sustentación en comparación con los perfiles simétricos.
9

2.1. Principales conceptos aerodinámicos
Figura 2.3: Perfil asimétrico
Todos los perfiles aerodinámicos cuentan con un número de serie llamado NACA,mediante el cuale se pueden conocer los principales parámetros aerodinámicos bajolos cuales fue diseñado el perfil aerodinámico.
El perfil aerodinámico empleado para la construcción del ala de los prototipos esel NACA 6412 de la serie de 4-dígitos, cuyo perfil es asimétrico ya que nos brindauna sustentación mayor.
NACA 4-dígitos de la serie
La NACA (National Advisory Committee for Aeronautics: Comité ConsejeroNacional para la Aeronáutica) fue una agencia federal de Estados Unidos fundadael 3 de marzo de 1915 para emprender, fomentar, e institutionalizar las investiga-ciones aeronáuticas. La NACA desarrolló la serie de cuatro dígitos, siendo así laprimer familia de superficies de sustentación. El primer dígito especifica la incli-nación máxima m en porcentaje de la cuerda (longitud aerodinámica), el segundoindica la posición de la curvatura máxima p en décimas de cuerda, y los dos últimosnúmeros nos proporcionan el máximo espesor t de la superficie de sustentación entérminos de porcentaje. Por ejemplo, el perfil aerodinámico NACA empleado es el6412, el cual tiene una inclinación máxima del 6 %, con una curvatura máxima de4mm y un espesor máximo de 12 %.
Hoy en día, el diseño aerodinámio se realiza con los recursos computacionalesdisponibles ya que permiten al diseñador, diseñar y optimizar rápidamente un perfilaerodinámico de acuerdo a la aplicación requerida, en lugar de hacer una selecciónde una familia existente.
2.1.2. Fuselaje
El fuselaje o cuerpo del avión. Su función principal es servir de soporteprincipal al resto de los componentes del aeroplano. La forma del fuselaje se deter-mina normalmente por la misión de la aeronave. Los fuselajes que ofrecen una menorresistencia aerodinámica son los de sección circular, elíptica u oval, y de formaalargada.
10

2. Marco Teórico
2.1.3. Principales fuerzas que actúan sobre un avión
Una fuerza puede ser pensada como un empujón o un tirón en una direcciónespecífica. Una fuerza es una magnitud vectorial, por lo que la fuerza tiene unamagnitud, una dirección y un sentido. Las cuatro principales fuerzas que actúansobre un avión durante su vuelo (figura 2.4) son las siguientes:
2.1.3.1. Levantamiento
El Levantamiento (Lift) es una fuerza aerodinámica generada por un obje-to sólido que se mueve a través de un fluido, en este caso el aire; es decir, es lafuerza que sostiene al avión en el aire y es generado por cada parte del mismo peroprincipalmente por el ala y es perpendicular a la dirección del flujo. La magnituddel vector de levantamiento depende de varios factores como la forma, tamaño yvelocidad del avión.
2.1.3.2. Peso
El Peso (Weigth) es la fuerza causada por la atracción gravitacional de la tierrasobre el avión y su dirección siempre apunta hacia el centro de la tierra. Sin embargo,a menudo el peso actúa sobre un único punto llamado centro de gravedad. Envuelo, el avión gira alrededor del centro de gravedad. La magnitud del vector de pesodepende de la masa de todas las partes del avión que se encuentran distribuidas enel mismo.
2.1.3.3. Arrastre
El Arrastre (Drag) es la fuerza aerodinámica generada por la resistencia queopone el aire al movimiento del avión. El arrastre es opuesto a la dirección devuelo. Al igual que en la fuerza de sustentación, hay varios factores que afectan lamagnitud de la fuerza de arrastre incluyendo la viscosidad del aire, la velocidad yla configuración o forma del avión. La fuerza de arrastre actúa hacia un punto delavión llamado centro de presión.
2.1.3.4. Empuje
El Empuje(Trust) es la fuerza mecánica generada por el motor y la hélice paramover el avión a través del aire. La dirección de la fuerza de empuje depende dela posición de los motores en la aeronave y su magnitud depende del sistema depropulsión empleado, en nuestro caso, depende de la del motor.
El movimiento del avión a través del aire depende de la dirección de las cuatrofuerzas. Si las fuerzas se encuentran en equilibrio, el avión volará a una velocidad
11

2.1. Principales conceptos aerodinámicos
constante, de lo contrario si las fuerzas no están equilibradas, el avión acelerará enla dirección donde se encuentre la fuerza de mayor magnitud.
Para mantener en equilibrio al UAV referencia en [14] es necesario cumplir lassiguientes condiciones:
Fuerza de elevación = Peso (Lift = Weigth)Fuerza de empuje = Fuerza de Arrastre (Trust = Drag)
Figura 2.4: Fuerzas que actuan sobre un avión referencia en [14]
2.1.4. Centro de gravedad
El avión durante su vuelo puede realizar maniobras usando las superficies decontrol (elevador, timón y alerones), las cuales modifican la posición del vehículo.Al ocurrir esto, el avión rota alrededor de un punto llamado centro de gravedaddenotado por las siglas CG. En este punto se encuentra el promedio del peso totaldel avión que por lo general se encuentra a un tercio del borde principal del ala. Unaspecto que se debe tener presente es que el centro de gravedad afecta considerable-mente el equilibrio del avión por lo cual debe estar correctamente ubicado.
2.1.5. Centro de presión
El Centro de Presión denotado por las siglas CP es el punto resultante gene-rado por la suma total de todas las presiones que se producen sobre la superficiedel ala. Cuando un objeto se mueve a través de un fluido, la velocidad del fluido
12

2. Marco Teórico
varía alrededor de la superficie del objeto. La variación de la velocidad produce unavariación de la presión en la superficie del objeto.
Si se cuenta con un perfil asimétrico como es el caso, el centro de presión semueve a lo largo de una línea imaginaria en el ala dependiendo de la variación delángulo de ataque. Si el ángulo de ataque se incrementa, el centro de presión se muevehacia adelante y si el ángulo de ataque disminuye el centro de presión se mueve haciaatrás.
2.1.6. Centro aerodinámico
Se ha encontrado experimentalmente y teóricamente que, si la fuerza aerodinámicase ubica a 1/4 del borde principal de el ala en los aviones de baja velocidad, la mag-nitud del momento aerodinámico permanece casi constante con el ángulo de ataque,por lo tanto el Centro Aerodinámico denotado por las siglas AC, es el puntodonde el momento aerodinámico permanece constante. Para perfiles simétricos, elcentro aerodinámico es cero independientemente del cambio del ángulo de ataque.Para perfiles con curvatura el AC es diferente de cero y constante para perfiles del-gados. En el caso de alas rectangulares el centro del ala es es el mismo que su centroaerodinámico. Pero para alas con diferentes configuraciones (triangular, trapezoidal,etc.) es necesario obtener un promedio de toda el ala para encontrar su AC.
2.1.7. Ángulo de ataque
Cuando el avión se mueve a través del aire, esté se posiciona con cierto ánguloen dirección al vuelo. El ángulo entre la línea de cuerda y la dirección del vuelo esllamado ángulo de ataque y tiene un amplio efecto sobre el levantamiento generadopor el ala.
Para fuselajes delgados, la fuerza de levantamiento (Lift) es directamente pro-porcional al ángulo de ataque para ángulos pequeños comprendidos entre +/ − 10grados.
2.1.8. Diedros
Los diedros tiene como principal función mejorar la estabilidad de las aero-naves durante el vuelo; es decir, cuando la aeronave se encuentra en desplazamiento,las corrientes de aire chocan contra sus alas modificando la posición original de laaeronave. En estas situaciones, los diedros proporcionan una mayor estabilidad ala aeronave para tratar de mantenerla en su posición original. Los diedros se en-cuentran ubicados en cada extremo del ala con cierta inclinación, la cual forma unángulo respecto a la horizontal. El ángulo formado entre el diedro y la horizontal sele conoce como ángulo de diedro.
13

2.1. Principales conceptos aerodinámicos
2.1.9. Ejes de translación y rotación de la aeronave
Se puede definir como un sistema de coordenadas tridimensionales a través delcentro de gravedad con cada eje de este sistema de coordenadas perpendiculares alos otros dos ejes. Por lo tanto, se puede definir la orientación de la aeronave por lacantidad de rotación de las partes de ésta a lo largo de sus ejes principales (figura2.5).
Eje X
El eje X o Roll axis. Se encuentra a lo largo de la línea central del avión. Almovimiento de rotación que realiza la aeronave sobre el eje X se le llama Roll. Éstees un movimiento ascendente y descendente de las alas del avión causado por el cam-bio de posición de los alerones. Los alerones son superficies de control localizadas enla parte trasera de cada ala, las cuales permiten que la aeronave gire.
Eje Y
El eje Y o Pitch axis. Es perpendicular a la línea central del avión y se en-cuentra en el plano de las alas. Al movimiento de rotación que realiza la aeronavesobre el eje Y se le llama Pitch. El Pitch es causado por el cambio de posicióndel elevador, localizado en la parte trasera del estabilizador horizontal, ocasionan-do de esta forma el movimiento hacia arriba y hacia abajo de la nariz de la aeronave.
Eje Z
El eje Z o Yaw axis. Es perpendicular al ala y se encuentra en el plano de lalínea central del avión. Al movimiento de rotación que realiza la aeronave sobre eleje Z se le llama Yaw. El Yaw se visualiza como un movimiento de lado a lado dela nariz de la aeronave, el cual es causado por el cambio de posición de la superficiede control localizadas en la parte trasera del estabilizador vertical llamado timón.
En la figura 2.5 se pueden distinguir los dos tipos de desplazamiento realiza-dos por la aeronave. El desplazamiento traslacional el cual indica la posición de laaeronave denotado por las líneas de color azul y el desplazamiento rotacional el cualindica la orientación de la aeronave denotado por las líneas de color rojo.
2.1.10. Principales superficies de control
Las superficies de control son las partes móviles de un avión la cuales sirven paraajustar y controlar la trayectoria de vuelo del mismo (Figura 2.6). Las superficiesde control más utilizadas y comúnes son las siguientes:
14

2. Marco Teórico
Figura 2.5: Ejes de posición y rotación de la aeronave referencia en [14]
Alerones (Ailerons) ubicados sobre el eje X (Roll Control).
Elevador (Elevator) ubicados sobre el eje Y (Pitch Control]).
Timón (Rudder) ubicados sobre el eje Z (Yaw Control).
2.1.10.1. Alerones
Los alerones (ailerons) son superficies de control las cuales se localizan en elborde exterior de cada ala. Los alerones siempre se mueven en sentido opuesto; esdecir, si el aleron izquierdo baja, el aleron derecho sube para crear fuerzas de igualmagnitud pero de sentidos opuestos (Tercera Ley de Newton); al ocurrir esto, elavión cambiará su trayectoria de vuelo girando sobre su eje X (eje Roll) hacia laderecha o izquierda dependiendo de la posición de los alerones.
2.1.10.2. Elevador
El elevador (elevator) es la superficie de control localizada en la parte posteriordel estabilizador horizontal, la cual ayuda a la estabilización horizontal del avión. Lafunción del elevador es crear una fuerza en eje Y (eje Pitch) para afectar el ángulode ataque del avión provocando que este suba o baje dependiendo de la posicióndel elevador. Al subir éste, el aire ejerce una fuerza hacia abajo ocasionando que lanariz del avión ascienda y viceversa al descender el elevador el aire ejerce una fuerzahacia arriba provocando que la nariz del avión descienda.
15

2.1. Principales conceptos aerodinámicos
2.1.10.3. Timon
El timón (rudder) es la superficie de control ubicada en la parte trasera delestabilizador vertical, la cual ayuda a la estabilización vertical del avión. La funcióndel timón es generar un movimiento sobre el eje Z (eje Yaw) sin alterar el ángulo deataque y la altitud del avión.
Figura 2.6: Principales superficies de control de una aeronave
Con el uso de estas tres superficies de control es posible controlar la estabilidad yla trayectoria de vuelo de la aeronave. Al cambiar la posición de cualquier superficiede control, se modifica el ángulo formado respectivamente, entre la horizontal overtical y la superficie de control, provocando la rotación de la aeronave en cualquierade sus tres ejes.
2.1.11. Softwares para el diseño de perfiles aerodinámicos
En la actualidad existe una gran variedad de softwares para diseñar perfilesaerodinámicos, alas, fuselajes, superficies de control, etc. En la mayoría de los soft-wares utilizados para el diseño de aeronaves, se pueden introducir diversos pará-metros para emular las condiciones de vuelo y así poder crear la aeronave de acuerdoa las necesidades requeridas. Algunos parámetros introducidos para la creación deun perfil aerodinámico son los siguientes:
Velocidad de desplazamiento de la aeronave.
Densidad del aire dependiendo de las condiciones ambientales del país o región.
Presión Atmosférica
Ángulo de Ataque deseado, etc.
Una vez que se introducen los parámetros establecidos por cada software, este nosgenera el perfil aerodinámico, el ala, el fuselaje, etc. Algunos softwares comerciales
16

2. Marco Teórico
empleados para el diseño son: Foilsim creado por la NASA (National Aeronauticsand Space Administration), XFLR5, Xfoil, Javafoil, Plotfoil, Nacafoil, etc.
2.2. Sistemas embebidos
Se puede decir que un sistema embebido es una computadora de propósito espe-cial, diseñada para realizar una o varias funciones, usualmente con restricciones entiempo real dadas por el mismo sistema de computadora.
Generalmente el sistema embebido forma parte de un sistema que contiene tan-to hardware como partes mecánicas. En constraste, un sistema de computadora depropósito general, como lo es una computadora personal, puede realizar una varie-dad de tareas, dependiendo de la programación.
En la actualidad los sistemas embebidos son tan importantes como su algoritmode control, y son utilizados en muchos dispositivos que se utilizan en la vida diariaya sean reproductores MP3, relojes digitales, etc, hasta emplearse en instalacionesestacionarias como luces de tráfico o controladores industriales. Su complejidad varíadesde un solo chip de microcontrolador hasta múltiples unidades, periféricos y re-des montadas dentro de un chasis.
Debido a que los sistemas embebidos son diseñados para realizar tareas especí-ficas, los ingenieros de diseño puede optimizar dicho sistema, reduciendo el tamañoy costo del producto o incrementando la confiabilidad y funcionamiento.
2.2.1. Aplicaciones de los sistemas embebidos en la aeronáu-tica
Los sistemas de transportación que van desde automóviles hasta aeronaves, uti-lizan sistemas embebidos. Los aeroplanos de nueva generación, poseen dispositivosavanzados como son los sistemas inerciales de guía y receptores GPS. Algunosmotores eléctricos (motores de corriente directa y motores de corriente di-recta sin escobillas) utilizan controladores electrónicos. Actualmente los auto-móviles, vehículos eléctricos y vehículos híbridos se fabrican cada vez más conmúltiples sistemas embebidos que permitan maximizar la eficiencia y reducir loscontaminantes producidos por el vehículo referencia en [5].
2.2.2. Características de los sistemas embebidos
Los sistemas embebidos son diseñados para realizar alguna tarea específica,a diferencia de las computadoras de propósito general que estan hechas para
17

2.3. Aviónica
realizar diferentes tareas.
Los sistemas embebidos no siempre son dispositivos individuales. Es comúnque estos sistemas sean construidos como parte del dispositivo a controlar.
El software para manejar el sistema embebido se le conoce como firmware, yes guardado en la memoria de solo lectura o en la memoria flash, en vez deguardarse en un disco duro. Comunmente este software trabaja en conjunto concomponentes de hardware limitados, tales como teclado, pantalla o memoriareducida.
2.2.3. Periféricos de los sistemas embebidos
Algunos de los aparatos o dispositivos auxiliares e independientes conectados ala unidad central de procesamiento de una computadora son los siguientes:
Microcontrolador. Es el encargado de realizar las operaciones de cálculo princi-pales del sistema. Ejecuta código para realizar una determinada tarea y dirigeel funcionamiento de los demás elementos que le rodean.
Interfaces de comunicación serial tales como: RS-232, RS-422, RS-485.
Interfaces de comunicación serial síncrona, como: I2C, SPI, etc.
Bus universal serial (USB)
Redes como: Ethernet, Controller Area Network (CAN. Protocolo de comuni-cacion basado en topologia bus para la transmisión de datos), etc.
Entradas y salidas digitales como las GPIO (Entradas y salidas de propósitogeneral)
Convertidores analógico/digital y digital/analógico ADC/DAC.
2.3. Aviónica
La aviónica conforma, en esencia, a todos los sistemas electrónicos diseñadospara el uso en un aeronave. En un nivel básico, conforma las comunicaciones, lanavegación, el tablero de monitoreo y el manejo de los múltiples sistemas de laaeronave referencia en [5]. Literalmente conforma cientos de sistemas que indivi-dualmente realizan tareas específicas sobre la aeronave. La aviónica también se refierea la electrónica en los satélites artificiales y en las naves espaciales. Las categoríasprincipales de la aviónica son:
18

2. Marco Teórico
Aviónica en Aeronaves: Son los sistemas que permiten que la aeronavesvuelen con seguridad y que se tenga el control de la dirección sobre la aeron-ave, y estos son controlados por el piloto. Estos sistemas son críticos para laseguridad de vuelo y a todos los elementos que la conforman se les conocecomo aviónica de la aeronave.
Comunicaciones: Es la capacidad de intercambiar información entre la aero-nave y tierra. Las telecomunicaciones han hecho posible esto gracias al bastoequipo de sistemas de comunicación con los que cuenta el vehículo para realizarlos vuelos de forma segura.
Navegación: Se refiere a determinar la posición y dirección de la aeronave,ya sea sobre tierra o en pleno vuelo. Una de las formas más importantes en lascuales la navegación a avanzado en los últimos años, es gracias al desarrollode sistemas GPS.
Gracias al conocimiento de los prinicipales conceptos aerodinámicos, a la elecciónadecuada de los materiales y componentes con los cuales se construirá e instru-mentará el UAV, nos conducirán a un excelente diseño y control del vehículo duranteel vuelo.
19

2.3. Aviónica
20

Capítulo 3
Diseño y construcción del prototipo
En la actualidad existen diversos softwares que pueden ser utilizados para eldiseño de aeronaves a escala; pero antes de emplear algún software para realizaresto, es necesario hacer un estimado de la masa total que va a soportar el vehículo,incluyendo la estructura del mismo y la velocidad deseada de vuelo; para que deacuerdo a estas especificaciones, iniciar el diseño del perfil aerodinámico y fuselajedel prototipo.
3.1. Prototipos experimentales
A lo largo de este proyecto se realizaron dos prototipos diferentes. El Etkni-an que tenía el sistema de propulsión en la parte forntal lo que ocasionaba que serompiera la hélice y en ocasiones el motor, sobre todo cuando no se realizaba unaterrizaje cuidadoso. Por lo anterior, se diseño otro vehículo que protegiera al sis-tema de propulsión para evitar reparaciones continuas y pérdidas materiales. A éstese le denominó RafKinga. Otro aspecto importante que se mejoró en el segundoprototipo fue la robustez del ala, un mayor levantamiento generado por la mismay la disminución del peso total del vehículo. El perfil aerodinámico empleado enambos prototipos fue el NACA 6412.
El prototipo llamado Etknian tiene una masa aproximada de 975g incluyendo elvehículo y todos los componentes necesarios para efectuar vuelos de forma autóno-ma y el prototipo llamado RafKinga tiene una masa aproximada de 950g con lasmismas especificaciones que el anterior. La diferencia de masas entre estos vehículosradica en la configuración del cuerpo y la longitud del ala empleada; pero el materialcon el cual fueron construidos es el mismo en ambos prototipos, aunque en diferentesproporciones.
La velocidad de vuelo deseada para ambos vehículos se encuentra entre los 7m/sy 8m/s, que es la velocidad comunmente empleada en los aviones de aeromodelismo.
21

3.2. Diseño del perfil aerodinámico, ala y fuselaje del prototipo
El cuerpo de los prototipos fue realizado con un material llamado dépron el cualestá compuesto por espuma de poliestireno comprimido de aproximadamente 6mmde grosor; este material es empleado en aeromodelismo ya que es muy liviano, es fácilde manipular y a su vez tiene la rigidez necesaria para hacer el cuerpo del vehículoy soportar impactos menores.
En lo que respecta al ala de los vehículos está fabricada de poliestireno expandido,mejor conocido como unicel. Se eligío el unicel para construirla debido a la longitud ygrosor de la misma, añadiendo que el unicel es un material muy liviano y resistentehasta cierto punto, por lo que se necesita reforzar el ala para evitar constantesreparaciones. El ala de los vehículos tiene una configuración rectangular pero condiferentes dimensiones para cada uno los prototipos.
3.2. Diseño del perfil aerodinámico, ala y fuselaje
del prototipo
Para diseñar el perfil aerodinámico y así posteriormente construir el ala, se utili-zarón diversas ecuaciones para calcular los parámetros aerodinamicos presentes enla dinámica de los vehículos aéreos como son el levantamiento L, superficie alar S,etc. La ecuación del levantamiento (lift) L es la siguiente.
L = ClqS = W (3.1)
donde Cl es el coeficiente adimensional de levantamiento, mientras q es la presióndinámica dada por
q = [1
2ρV 2] (3.2)
donde ρ es la densidad del aire y V es la velocidad del vehículo. Considerandoque nos encontramos en la Ciudad de México a una altitud de 2250m sobre el niveldel mar a una presión atmosférica de 585mmHg; por lo tanto, la densidad del airees de 1,2210kg/m3 de acuerdo a la ISA (International Standard Atmosphere) y Srepresenta la superficie del ala dada por
S = c l (3.3)
donde l es la longuitud del ala y c es la cuerda del perfil aerodinámico dado por
c =W
qCl
(3.4)
22

3. Diseño y construcción del prototipo
Emplando las ecuaciones anteriores se diseña el perfil aerodinámico usando lossoftwares JavaFoil (figura3.1) y Xfoil (figura3.2), respectivamente.
Figura 3.1: Perfil aerodinámico creado con el software JavaFoil
Figura 3.2: Perfil aerodinámico creado con el software Xfoil
3.2.1. Prototipo Etknian
El prototipo que se va a describir a continuación fue realizado con la ayuda delsoftware Xfoil, el cual se empleó para el diseño del ala y cuerpo del UAV de acuerdoa las necesidades: que el UAV realice vuelos a una velocidad aproximada de 7,5m/sy que el vehículo sea capaz de soportar un peso de 1kg.
Otra ventaja se tiene al emplear el software de diseño es que éste nos proporcionadatos como el valor del Cl, los cuales dependen del perfil aerodinámico empleado,del ángulo de ataque α y del número de Reynolds (Re), éste es un número adimen-sional utilizado en mecánica de fluidos para conocer el movimiento de un fluido. Enaeronáutica se considera flujo laminar a un fluido con Re ≤ 500000, etc.
23

3.2. Diseño del perfil aerodinámico, ala y fuselaje del prototipo
3.2.1.1. Características y elementos del prototipo Etknian
El prototipo tiene una masa de 715g que engloba la estructura del avión, cuatroservomotores, tubos de fibra de carbono de un diámetro de 5mm y 3mm para darrigedez al cuerpo y ala; el receptor, el motor, la base de soporte para el motor ypor último la hélice. A estos 715g se le debe adicionar la parte electrónica para larealización de vuelos automáticos y la batería para la alimentación del motor y loscircuitos electrónicos; cuya masa es de 260g; dando así la masa total del prototipode aproximadamente 975g.
La masa individual de los elementos que conforman al vehículo son los siguientes:
Elemento MasaAla 355gFuselaje 130gMotor Brushless 65gServomotor 11gVariador de Velocidad 30gTarjetas Electrónicas 145gReceptor 9gBatería 115gBase del Motor 10gHélice 7gCables y conectores 20gExtras 45gTolal 975g
Por otro lado el prototipo cuenta con una embergadura de 1,5m dividida en tressecciones (figura 3.3). La primera sección corresponde a una superficie rectangular de80cm de largo por una cuerda de 25cm de ancho por 2,5cm de alto. Las dos seccionesrestantes corresponden a dos superficies rectangulares llamadas diedros, donde lasdimensiones de cada uno de ellos es de 35cm de largo por una cuerda de 25cm deancho y 2,5cm de alto; estas superficies se colocan en cada uno de los extremos del alacon una inclinación de 25 grados respecto a la horizontal, esta inclinación tambiénes conocida como ángulo diedro. Los diedros sirven para aumentar la estabilidad delavión.
El fuselaje o cuerpo del UAV (figura 3.4) tiene una longitud de 85cm de largopor 10cm de ancho en la parte frontal y va disminuyendo hasta llegar a los 5cm en laparte trasera; a vez, a esté lo conforman el estabilizador horizontal y el estabilizadorvertical, cada uno de ellos con su respectivo servomotor.
24

3. Diseño y construcción del prototipo
Figura 3.3: Perfil Aerodinámico y Ala del prototipo Etknian
Figura 3.4: Fuselaje del prototipo Etknian
25

3.2. Diseño del perfil aerodinámico, ala y fuselaje del prototipo
3.2.1.2. Parámetros aerodinámicos del prototipo Etknian
El perfil aerodinámico empleado fue el NACA 6412 diseñado en el softwareJavaFoil (figura 3.1) y también fue realizado en el software Xfoil (figura 3.2).Dondelos parámetros aerodinámicos reales del ala son los siguientes:
Variable ValorPerfil NACA 6412Cuerda (C) 0.25mEmbergadura (b) 1.50mEspesor (Tck) 12.83 %Camber (Cmb) 6.61 %
Gracias a los parámetros propuestos y a los obtenidos mediante el software sepueden calcular las ecuaciones anteriores. Donde el coeficiente de lift Cl = 0,76, ladensidad del aire ρ = 1,2210kg/m3 de acuerdo a la ISA (International StandardAtmosphere), la cuerda c = 0,25m, la velocidad V = 7,5m/s, la longitud del alal = 1,5m y el ángulo de ataque α = 5. Por lo tanto:
De la ecuación 3.2 obtenemos la Presión dinámica q y de la ecuación 3.3 laSuperficie alar S.
q = (1
2)(1,2210kg/m3)(7,5m/s2)
q = 34,3406Pa (3.5)
S = (0,25m)(1,5m)
S = 0,3750m2 (3.6)
A su vez, de la ecuación 3.1 calculamos el Levantamiento (Lift) L y por últimode la ecuación 3.4 se calcula el valor de la Cuerda c.
L = (0,76)(34,3406Pa)(0,3750m)
L = 9,9986N (3.7)
26

3. Diseño y construcción del prototipo
c =9,9986N
(34,3406Pa)(0,76)
c = 0,25m (3.8)
Una forma de comprobar que el ala del UAV es capaz de soportar la masadel vehículo es emplear La Segunda Ley de Newton que dice que la fuerza F esdirectamente proporcional a la masa m por la aceleración a y está representada enla siguiente ecuación
F = ma (3.9)
Empleando el resultado de la ecuación 3.7 y el valor de la aceleración gravi-tacional a = 9,8m/s2, despejamos la masa m de la ecuación 3.9 dandonos comoresultado la masa del UAV
m =F
a(3.10)
m =9,9986N
9,8m/s2
m = 1,02kg ≈ 1kg (3.11)
De esta forma se puede apreciar que el Levantamiento (Lift) generado por el alaes el necesario para soportar la masa del avión que es de 975g, teniendo la posibili-dad de agregar más componentes con una masa menor a 25g, y aun así el UAV serácapaz de realizar vuelos sin dificultades.
A continuación se muestra la imágen del ala diseñada mediante software Xfoil(figura 3.5) para el prototipo Etkanian.
Como resultado se obtienen, mediante el uso de los softwares de diseño los proto-tipos finales (figuras 3.6 y 3.7).
27

3.2. Diseño del perfil aerodinámico, ala y fuselaje del prototipo
Figura 3.5: Ala diseñada en el software Xfoil para el prototipo Etknian
Figura 3.6: Prototipo final obtenido con el software Xfoil
Figura 3.7: Prototipo Final llamado Etknian
28

3. Diseño y construcción del prototipo
3.2.2. Prototipo RafKinga
La realización del prototipo denominado RafKinga se diseñó con la finalidad deproteger la hélice y el motor ya que constantemente se dañaban. A su vez, se trató dedisminuir la masa del vehículo respecto al primer prototipo, incrementar la robustezdel ala y aumentar la fuerza del levantamiento generada por el ala. La velocidaddeseada de vuelo y la masa a soportar por el vehículo continua siendo la misma quela del prototipo anterior que es de 7,5m/s y 1kg, respectivamente.
3.2.2.1. Características y elementos del prototipo RafKinga
Hay que señalar que para este segundo prototipo se utilizó el mismo perfil aero-dinámico previamente diseñado y usado en el primer prototipo. Sin embargo, al alase le hicieron modificaciones en lo que respecta a su longitud para incrementar susuperficie alar y por lo tanto, tener una mayor sustentación.
El prototipo RafKinga tiene una masa de 645g que engobla la estructura delavión, cuatro servomotores, tubos de fibra de carbono de un diámetro de 5mm y3mm para dar rigedez al cuerpo y ala; el receptor, el motor, la base de soporte parael motor y por último la hélice. A estos 645g se le debe adicionar la parte electrónicapara la realización de vuelos automáticos y la batería para la alimentación del mo-tor, además de los circuitos electrónicos; cuya masa es de 260g; dando así la masatotal del prototipo de aproximadamente 950g.
La masa individual de los elementos que conforman al vehículo son los siguientes:
Elemento MasaAla 310gFuselaje 150gMotor Brushless 65gServomotor 11gVariador de Velocidad 30gTarjetas Electrónicas 145gReceptor 9gBatería 115gBase del Motor 10gHélice 7gCables y conectores 20gExtras 45gTolal 950g
29

3.2. Diseño del perfil aerodinámico, ala y fuselaje del prototipo
Por otro lado el prototipo cuenta con una embergadura de 2,10m dividida en tressecciones (figura 3.8). La primera sección corresponde a una superficie rectangular de1,40m de largo por una cuerda de 25cm de ancho y 2,5cm de alto. Las dos seccionesrestantes corresponden a dos superficies rectangulares llamadas diedros, donde lasdimensiones de cada una de ellos es de 30cm de largo por una cuerda de 25cm deancho y 2,5cm de alto; estas superficies se colocan en cada uno de los extremos del alacon una inclinación de 25 grados respecto a la horizontal, esta inclinación tambiénes conocida como ángulo diedro. Los diedros sirven para aumentar la estabilidad delavión.
Figura 3.8: Perfil Aerodinámico y Ala del prototipo RafKinga
El fuselaje o cuerpo del prototipo (figura 3.9) tiene una longitud de 85cm delargo por 10cm de ancho en la parte frontal y en la parte trasera se reduce a 3cm yaque el estabilizador vertical y horizontal estan soportados por una placa y un tubode fibra de carbono. Un punto importante en el cual se debe hacer hincapié, es que apesar de que las dimensiones del ala del segundo prototipo son mayores comparadascon las del primero, la masa total del segundo vehículo es menor.
30

3. Diseño y construcción del prototipo
Figura 3.9: Fuselaje del prototipo RafKinga
3.2.2.2. Parámetros aerodinámicos del prototipo RafKinga
El perfil aerodinámico empleado fue el NACA 6412 diseñado en el softwareJavaFoil y Xfoil. Donde los parámetros aerodinámicos reales del ala son los siguien-tes:
Variable ValorPerfil NACA 6412Cuerda (C) 0.25mEmbergadura (b) 2.10mEspesor (Tck) 12.83 %Camber (Cmb) 6.61 %
Los resultados para el segundo prototipo se obtienen a partir de las ecuaciones3.1 y 3.3. Cabe aclarar que los valores del coeficiente de lift Cl = 0,76, la densidaddel aire ρ = 1,2210kg/m3, la cuerda c = 0,25m, la velocidad V = 7,5m/s y el ángulode ataque α = 5 no cambian respecto al primer prototipo; donde si existe un cambioes en la longitud del ala que ahora es de l = 2,10m y como consecuencia también semodifica la superficie alar S y el levantamiento (Lift) L.
Por lo tanto, de la ecuación 3.3 podemos calcular la Superficie alar S para elnuevo prototipo, así como se obtuvo la Presión dinámica q = 34,3406Pa (ecuación3.5) y el valor de la superficie alar S = 0,5250 (ecuación 3.12).
S = (0,25m)(2,10m)
S = 0,5250m2 (3.12)
Teniendo de esta forma, los datos necesarios para resolver la ecuación 3.1 y asíconocer el Levantamiento (Lift) L para el nuevo prototipo dado por la ecuación 3.13.
31

3.2. Diseño del perfil aerodinámico, ala y fuselaje del prototipo
L = (0,76)(34,3406Pa)(0,5250m)
L = 13,7018N (3.13)
Para comprobar que el ala del UAV es capaz de soportar la masa del vehículose emplea La Segunda Ley de Newton ecuación 3.9. Para poder hacer el cálculose requere el resultado de la fuerza de levantamiento ecuación 3.13 y el valor de laaceleración gravitacional a = 9,8m/s2, despejando la masa m de la ecuación 3.10 seobtiene la masa del UAV dada por
m =13,7018N
9,8m/s2
m = 1,3981kg ≈ 1,4kg (3.14)
Como se puede observar, el levantamiento (Lift) generado por el ala es el sufi-ciente para soportar la masa del avión que es de 950g y además existe la posibilidadde añadirle más componentes al UAV con una masa menor a 450g. Por ejemplo sele podría añadir otra tarjeta electrónica, un GPS, etc, para que sea capaz de desem-peñar una mayor cantidad de tareas.
En la figura 3.10 se muestra la imágen del ala diseñada mediante software Xfoil(figura 3.10) para el prototipo RafKinga.
Como resultado final del uso de los softwares de diseño, de los conceptos yparámetros aerodinámicos se obtiene el prototipo final (figuras 3.11 y 3.12).
El prototipo mostrado en la figura 3.11, es el previo al vehículo definitivo, el cualno fue utilizado por dos principales razones:
1. El ala se encontraba sujetada por dos soportes, en la parte inferior era el cuerpodel aeroplano y en la parte superior una estructura en forma de media luna,la cual no contaba con la rigidez suficiente para resistir los impactos ocurridosen el ala.
2. La estructura en forma de media luna, se podía reforzar poniendo placasde fibra de carbono alrededor, pero el peso del vehículo se incrementabaconsiderablemente; optando por diseñar una configuración distinta para so-portar el ala.
32

3. Diseño y construcción del prototipo
Figura 3.10: Ala diseñada en el software Xfoil para el prototipo RafKinga
Figura 3.11: Prototipo previo al prototipo final
33

3.2. Diseño del perfil aerodinámico, ala y fuselaje del prototipo
Como nuevo resultado, se pusieron cuatro soportes triangulares en el fuselajepara tener un adecuado soporte del ala (figura 3.9); de esta forma se alcanzó elobjetivo de hacer un UAV robusto (figura 3.12).
Figura 3.12: Prototipo final llamado RafKinga
34

Capítulo 4
Instrumentación del Prototipo
Una vez que los prototipos se han construido, se procede a instrumentarlos.Primeramente se colocan los componentes electrónicos indispensables para realizarvuelos de forma manual y así comprobar sí el vehículo es capaz de volar; una vezque se realizaron las pruebas de vuelo correspondientes, se incorpora al vehículo lastarjetas electrónicas necesarias para llevar a cabo las pruebas de vuelo de formaautomática.
A pesar de que se realizarón dos prototipos con distintas configuraciones, la partereferente a la instrumentación y al control, es la misma para ambos. Debido a quelas superficies de control, es decir, las superficies donde recae la acción de éste, novarían de un vehículo a otro. Por lo tanto, en este capítulo se explicará un soloprototipo (prototipo RafKinga), tomando en cuenta que esto puede ser aplicado acualquiera de los dos prototipos.
4.1. Hardware
La aviónica es la etapa basada en un sistema embebido de vuelo, el cual puede serdividido en dos elementos, los elementos hardware y el propio microcontroladorreferencia en [5]. Ambos vehículos cuentan con el mismo hardaware y microcontro-lador, tanto para realizar vuelos en forma manual como en forma automática.
El hardaware mediante el cual está conformado el prototipo para la realizaciónde vuelos de forma automática es el siguiente:
Receptor
El Receptor es el dispositivo que recibe las señales emitidas por el radio controlal realizar las maniobras para manipular las superficies de control del vehículo. Elreceptor Futaba, cuenta con 7 canales los cuales proporcionan una modulación por
35

4.1. Hardware
ancho de pulso (PWM) para controlar los servomotores, que a su vez controlaron laposición de las superficies de control en donde estos se encuentren (figura 4.1).
Figura 4.1: Receptor Futaba
Radio Control
El Radio Control es el dispositivo que permite gobernar el vehículo a distanciay de manera inalámbrica. El radio control Futaba mostrado en la figura 4.2 cuentacon 6 canales de los cuales 4 de ellos se utilizan para el control de forma manualdel UAV; ya que en forma automática solo se utiliza el canal correspondiente a lapotencia del motor y un interruptor, el cual también es considerado como canal, pararealizar el cambio de forma manual a automática y visceversa. Cabe señalar que aúnestando el vehículo en modo automático, se tiene la capacidad de manipular el radiopara controlar el vehículo en caso de ser necesario, debido a algún imprevisto.
Figura 4.2: Radio Control Futaba
Servomotor
Los Servomotores son dispositivos que constan de un motor, su tren de engra-nes, un mecanismo de retroalimentación de posición y su electrónica de control. Laposición angular del servomotor está determinada por la duración del pulso aplicadoa su circuito de control del servomotor. A esta acción se le conoce como modulacióncodificada de pulso. El servomotor espera recibir un pulso cada 20ms. El largo delpulso determinará que tanto deberá girar el motor del servo. Por ejemplo, a 1,5ms,el motor dará una vuelta de 90 grados. Si el pulso es menor que 1,5ms, el motor
36

4. Instrumentación del Prototipo
dará una vuelta a su eje de 0 grados. Si el pulso es mayor que 1,5ms, entonces el ejedel servo girará aproximadamente 180 grados.
A su vez los servomotores cuentan con tres cables de conexión externa, dondecada uno de ellos es de un color distinto.
Cable de color negro o café. Es la conexión a tierra (GND).
Cable de color rojo. Es el cable de alimentación (Vcc +5volts).
Cable de color blanco o amarillo. Es la línea de control por la que se le en-vía la señal codificada para indicarle al servomotor el ángulo en que se debeposicionar.
El servomotor MX-52MG que se utilizó (figura 4.3) proporciona un par de 3kgcma +5volts.
Figura 4.3: Servomotor
Motor Brushless sin escobillas
En la construcción del prototipo se utilizó un motor de corriente directa sin esco-billas mejor conocidos como Motores Brushless. este tipo de motores tienen unaeficiencia mayor que los de corriente directa, debido a la carencia de escobillas; yaque sin éstas el desgaste en la máquina es menor.
Se empleo el motor brushless Tower pro (figura 4.4), ya que tiene la potencianecesaria para proporcionar un empuje (es el par generado por el motor y la hélice)de 511g, el cual es suficiente para desplazar el vehículo a través del aire. Además, seeligió este motor porque en ocasiones anteriores ya se había trabajado con él.
37

4.1. Hardware
Figura 4.4: Motor Brushless con su base
Las principales características del motor brushless Tower pro son las siguientes:
Peso (g) 65Voltaje (V) 10Max RPM (r/min) 10500Max Eficiencia ( %) 78Max Potencia (W/60s) 160Max eficiencia de corriente (A) 17.6
Variador de Velocidad
Los motores eléctricos generalmente operan a velocidad constante o casi-constante,y con valores que dependen de la alimentación y de las características propias delmotor, los cuales no se pueden modificar fácilmente. Para regular la velocidad de losmotores de corriente continua, se emplea un controlador eléctrico-electrónicoque recibe el nombre de variador de velocidad. Un variador de velocidad puedeconsistir en la combinación de un motor eléctrico y el controlador que se empleapara regular la velocidad del mismo; sin embargo, es común emplear el término devariador de velocidad únicamente al controlador eléctrico-electrónico.
El controlador eléctrico-electrónico a usar depende de las características del mo-tor que se tenga, ya que si el controlador no proporciona la corriente demandadapor el motor, éste no funcionará de manera correcta. El controlador utilizado es dela marca High Tech cuyas especificaciones son las siguientes:
38

4. Instrumentación del Prototipo
Tower pro MAG 8 25APeso (g) 30Rango de Voltaje (V) 6-12Operación 30A máx 10 min / 25A continuaNúmero de pilas 3celdas LIPO ó NiMH / NiCd 12.05Funciones de protección Detener la temperatura de trabajo 110řC
El controlador eléctrico-electrónico Tower pro (figura 4.6) cuenta con tres cables:positivo, negativo y neutro; los cuales van conectados al motor brushless (figura4.5). Se pueden conectar los cables de manera diferente, pero posteriormente sedebe checar el sentido de giro del motor, en caso de ser opuesto al deseado, sólo sedeben de intercambiar dos de los tres cables independientemente de cuales se elijan.A su vez, el controlador en su otro extremo cuenta con un cable de alimentación elcual se conecta a las terminales de Vcc y GND de la batería LiPo. Por último, elcontrolador cuenta con un cable de conexión que se conectará al canal 3 del receptormostrado en la figura 4.1 para obtener el tren de pulsos corresponidente a la potenciadel motor.
Figura 4.5: Diagrama del Controlador de Velocidad
Figura 4.6: Variador de Velocidad
39

4.1. Hardware
Central Inercial (IMU)
Se denomina Central Inercial (IMU) al conjunto de sensores que propor-cionan la medición de la posición angular del vehículo (φ, θ, ψ), así como su veloci-dad angular (φ, θ, ψ), todo esto es posible gracias a los acelerómetros y girómetros,respectivamente, que conforman a la central inercial (IMU).
Los acelerómetros, son sensores que miden la aceleración lineal en una, dos otres dimensiones, esto es, en tres direcciones del espacio ortonormal, es decir, en tresdirecciones perpendiculares entre sí. Esta característica permite medir la inclinaciónde un cuerpo, puesto que es posible determinar con el acelerómetro la componentede la aceleración provocada por la gravedad que actúa sobre el cuerpo.
Un acelerómetro también es usado para determinar la posición angular de uncuerpo, a partir de la medición de su aceleración. Por otro lado, el girómetro, esun dispositivo formado esencialmente por un cuerpo con simetría de rotación quegira alrededor de su eje de simetría. Cuando se somete el giroscopio a un momentode fuerza que tiende a cambiar la orientación del eje de rotación. Su eje de rotación,en lugar de cambiar de dirección como lo haría un cuerpo que no girase, cambia deorientación en una dirección perpendicular a la dirección intuitiva. Con los gyroso girómetros podemos medir la rapidez con la que cambia un objeto y poder así,conocer la velocidad angular del objeto.
La central inercial (figura 4.7), consta de 3 acelerómetros en los ejes x, y, z y 3gyros en los ejes x, y, z. El objetivo de desarrollar este sistema es obtener las señalesde los gyros y acelerómetros en tiempo real, a las entradas de los convertidoresanalógicos/digitales del microcontrolador. Para realizar esto, se emplearon los sen-sores IMU 5 DOF IDG500/ADXL335, el cual cuenta con 3 acelerómetros en x, y, zy 2 gyros en x, y, y el sensor LPY530AL giro dual 300/s, conformado por 2 gyrosen y, z.
Figura 4.7: Central Inercial (IMU) para 3 gyros y 3 acelerómetros
40

4. Instrumentación del Prototipo
También se realizó un circuito mediante amplificadores operacionales en confi-guración seguidor e integrador (figura 4.8) para acondiconar la señal producida porlos sensores, y así poder ser leída por el microcontrolador.
Figura 4.8: Amplificadores Operacionales en configuraciones de seguidor e integrador
A continuación se hace una breve explicación de los sensores que conforman lacentral inercial (figura 4.7) empleada para llevar a cabo las medicones de la posicióny velocidad angular del vehículo.
Sensor IMU 5 DOF IDG500/ADXL335. Central inercial conformada por3 acelerómetros y 2 gyros:
Sensor IDG500. Conformado por dos gyros, utilizados para medir la veloci-dad angular en Roll y Pitch; es decir, mide la velocidad de rotación alrededorrespecto al eje X y Y .
El rango de voltaje para su operación se encuentra entre 2,7V y 3,3V ; sinembargo, se trabaja a V ref = 3V .
Sensor ADXL335. Es un sistema completo de medición de la aceleración entres ejes (X,Y, Z). Donde las señales de salida son voltajes análogos propor-cionales a la aceleración.
El rango de voltaje para su operación se encuentra entre 1,8V y 3,6V ; sinembargo, se trabaja a V ref = 3V .
Sensor LPY530AL giro dual 300/s. Conformado por dos gyros, utilizadospara medir la velocidad angular en Pitch y Yaw ; es decir, mide la velocidadde rotación alrededor respecto al eje Y y Z.
El rango de voltaje para su operación se encuentra entre 2,7V y 3,6V ; sinembargo, se trabaja a V ref = 3V .
41

4.1. Hardware
Las tarjetas electrónicas para el acondicionamiento de la señal mostradas en lafigura 4.9 y 4.10, fueron realizadas por el autor. La primera de ellas (figura 4.9),está diseñada unicamente para acondicionar la señal proveniente de los gyros enRoll, Pitch, Yaw y la segunda (figura 4.10) para acondicionar la señal provenientede los acelerómetros en x y y, ya que para efectuar la medición en el eje Z se utilizael magnetómetro y el gyro en Yaw.
Figura 4.9: Central Inercial (IMU) para 3 gyros
Figura 4.10: Central Inercial (IMU) para 3 acelerómetros
Para reducir la masa del prototipo, estas tarjetas fueron reemplazadas por elcircuito impreso mostrado en la figura 4.7, el cual fue diseñado en el software ProtelDXP-2004.
Al diseñar el circuito de acondicionamiento en el software, se incorporaron losamplificadores operacionales en configuraciones de seguidores e integradores (figura4.8) necesarios, para acondicionar la señal proveniente de los gyros y acelerómetros.A su vez, se usaron componentes de montaje superficial disminuyendo considerable-mente el peso y las dimensiones de la tarjeta diseñada.
Para calcular los valores de las resisitencias y la configuración de amplificadoresoperacioneles adecuados para proporcionarle al microcontrolador el rango de voltajenecesario, nos apoyamos del documento llamado Single-Supply Op Amp DesignTechniques referencia en [10], de esta manera aseguramos el correcto funciona-
42

4. Instrumentación del Prototipo
miento de la interface de acoplamiento.
Magnetómetro
El Magnetómetro también conocido como Compás, es una brújula diseñadaespecíficamente para los robots como una ayuda a la navegación referencia en [19].El Magnetómetro utiliza el sensor de campo magnético Philips KMZ51, que es losuficientemente sensible para detectar el campo magnético Terrestre. A su vez, estesensor está orientado hacia el norte magnético, el cual es opuesto al norte geográfico.
El Magnetómetro en nuestro caso, controla la orientación del vehículo sobre el ejeYaw. Para realizar el control en este eje, cuando el vehículo se está desviando de laorientación deseada el gyro detiene el movimiento de la superficie de control llamadaTimón y el magnetómetro vuelve a orientar al vehículo hacia el punto deseado.
El módulo del Magnetómetro (figura 4.11) cuenta con nueve pines los cuales sedescriben a continuación:
Pin 1, +5v. El módulo del magnetómetro requiere una alimentación de 5V a25mA.
Pin 2 y 3 SDA (Serial Data) y SCL (Serial Clock). Son la interfaz I2C (InterIntegrate Circuit Bus) y se puede utilizar para obtener una lectura directa delcompás. Si la interfaz I2C no se utiliza, estos pines deben ser conectados a +5va través de un par de resistencias de alrededor de 47kΩ. Es adecuado, aunquelos valores de las resistencias no son críticos.
Pin 4, Señal PWM (Modulación por ancho de pulsos). El ángulo es repre-sentado por el ancho del pulso positivo, este varía de 1ms; es decir, 0,1gradoshasta 36,99ms, es decir, 359,9grados. La señal para nivel bajo es de 65ms entrepulsos, por lo tanto, el ciclo de trabajo es de 65ms + el ancho de pulso positivo,por lo que el periodo de la señal es de T = 102ms. El pulso es generado en elprocesador por un contador de 16 bits proporcionando una resolución de 1µssin embargo, lo más recomendable es realizar la medición cada 10µs; es decir,cada 0,1grados. Al usar el pin de la señal PWM, los pines 2 y 3 deben seralimentados con 5V directamente.
Pin 5, Es usado para indicar que la calibración esta en proceso.
Pin 6, Es una de las dos formas de calibrar el compás, la otra manera decalibrarlo es escribiendo 255 (0xFF) en el registro de comandos.
Pin 7 y 8, No se usan actualmente por lo que pueden dejarse sin conectar.
43

4.1. Hardware
Pin 9. Alimentación de 0V .
Existen dos formas de obtener las mediciones correspondientes al magnetómetro.La primera es mediante la señal PWM, proporcionada en el pin 4, y la segunda conla interfaz I2C proporcionada en los pines 2 y 3.
En este prototipo se realiza la comunicación entre el magnetómetro y el micro-controlador mediante la interfaz I2C; ya que las cuatro salidas PWM con las quecuenta el microcontrolador son empleadas para el control de los cuatro servomotores.Por lo tanto, sólo se emplean cuatro de los 9 pines del magnetómetro, siendo estoslos siguientes:
Pin 1. Alimentación de 5V a 25mA.
Pin 2 y 3. SDA (Serial Data) y SCL (Serial Clock) para la comunicaciónmediante la interfaz I2C.
Pin 9. Alimentación de 0V .
Figura 4.11: Magnetómetro
Interfaz I2C
La interfaz I2C es un bus serie formado por dos hilos referencia en [2], quepuede conectar varios dispositivos mediante un hardware muy simple. Por esos doshilos se produce una comunicación serie, bit a bit. Se transmiten dos señales, unapor cada línea:
SCL (Serial Clock): Es la señal de reloj que se utiliza para la sincronizaciónde los datos.
SDA (Serial Data): Es la línea para la transferencia serie de los datos.
Los dispositivos conectados al bus I2C mantienen un protocolo de comunicacionesdel tipo maestro/esclavo. Las funciones tipo maestro y esclavo se diferencian en:
44

4. Instrumentación del Prototipo
El circuito maestro inicia y termina la transferencia de información, ademásde controlar la señal de reloj. Normalmente es un microcontrolador.
El esclavo es un circuito direccionado por el maestro.
La línea SDA es bidireccional; es decir, tanto el maestro como los esclavos puedenactuar como transmisores o receptores de datos dependiendo de la función del dispo-sitivo. La generación de señales de reloj (SCL) siempre es responsabilidad del mae-stro.
Cada dispositivo conectado al bus I2C es reconocido por una única dirección quelo diferencia del resto de los circuitos conectados. Los dispositivos compatibles conbus I2C suelen llevar 2 ó 3 pines para poder modificar esta dirección de modo que eldiseñador pueda evitar que en un mismo diseño haya 2 o más esclavos con la mismadirección.
El bus I2C puede ser multi-master, esto significa que puede soportar más de undispositivo capaz de controlar el bus. Los sistemas más comunes están constituidospor un solo microcontrolador maestro, como es el caso en la configuración que seesta usando.
Etapa de Potencia
La función principal de la Etapa de Potencia (figura 4.12) es aislar fisicamenteel circuito de control (microcontrolador) del circuito de potencia (motor y los servo-motores), debido que la demanda de corriente y voltaje es diferente tanto para elmicrocontrolador como para los motores. También otra función de la etapa de po-tencia es la de amplificar el voltaje suministrado por el microcontrolador que es de3,3V , lo incrementa a 5V que es el voltaje de suministro necesario para los servo-motores y etapa de potencia se toman directamente los 12V para alimentar al motor.
Fuente de Alimentación del Motor
La fuente de alimentación empleada para alimentar el motor brushless encargadode propulsar a la aeronave es mediante una Batería LiPo (Polímero de Litio) de 3-celdas 11,1V a 1,3A (figura 4.13). Este tipo de baterías es utilizado debido a sureducido tamaño y poco peso, lo que las hace ideales para equipos que requieranpotencia y duración.
45
4.1. Hardware
Figura 4.12: Etapa de Potencia
Figura 4.13: Bateria LiPo
46
4. Instrumentación del Prototipo
4.2. Microcontrolador
Un Microcontrolador es un circuito integrado o chip que incluye en su inte-rior las tres unidades funcionales de una computadora: unidad central de procesa-miento, memoria y periféricos de E/S (entrada/salida). El microcontrolador procesalas señales provenientes de la central inercial, del magnetómetro y además controlalos servomotores. Es en este dispositivo donde se programan los algoritmos de con-trol para realizar los vuelos.
La etapa de programación para realizar el control del vehículo fue llevada a cabocon el microcontrolador Rabbit RCM3400, para lo cual se elaboró una tarjetaelectrónica (figura 4.14) mediante el software Protel DXP-2004 a fin de realizarla comunicación entre el microcontrolador y las demás tarjetas electrónnicas talescomo: la central inercial, la etapa de potencia y el magnetómetro.
Figura 4.14: Tarjeta electrónica del microprocesador
El módulo RCM3400 (figura 4.15) incorpora un microcontrolador Rabbit 3000referencia en [12], memoria Flash, RAM estática, puertos de E/S digitales, entradasanalógicas y salidas PWM, etc. A continuación se muestran algunas otras caracterís-ticas del módulo RCM3400, tales como:
Microcontrolador: Rabbit 3000 a una frecuencia de operación de 29,4MHz.
Voltaje de alimentación de 3,3V .
Ram estática de 512k.
Memoria Flash de 512k.
8 canales de Convertidores Analógicos-Digitales.
47

4.2. Microcontrolador
Entradas y salidas de propósito general: 47 líneas paralelas de E/S con 5V detolerancia, de las cuales 41 líneas son configurables para E/S, 3 entradas fijasy 3 salidas fijas.
2 líneas de 34 pines cada una de entradas digitales.
2 entradas digitales adicionales y una salida digital adicional.
Combinación de hasta 8 entradas analógicas de una sola terminal ó 4 entradasanalógicas diferenciales.
Entrada externa de reset.
Reloj en tiempo real.
4 salidas PWM.
2 entradas de Input Capture (sirven para la lectura de la señal PWM).
Puerto Serial, etc.
Figura 4.15: Microcontrolador Rabbit RCM3400
Las ventajas de utilizar el módulo RCM3400 son las siguientes:
Bajo costo, comparado con la adquisición de los componentes de forma indi-vidual.
Fácil programación en lenguaje C.
Desarrollo de programas en el software llamado Dynamic C.
Gran capacidad de memoria para desarollar programas de miles de líneas decódigo.
Diseño de referencia que permite el puerto Ethernet integrado para la conec-tividad de red, con derechos de software libre TCP/IP.
48

4. Instrumentación del Prototipo
Concluyendo con la parte correspondiente a la instrumentación, en la figura 4.16se engloba todo la electrónica empleada en el desarrollo de los prototipos, en estafigura se puede observar la lógica secuencial aplicada para llevar a cabo el controldel vehículo, donde se representa a grandes rasgos, la forma en que se transmiten losdatos entre cada dispositivo. Por ejemplo, se muestra cómo las señales provenientesdel magnetómetro, de la central inercial (IMU) y del receptor entran al microcon-trolador para ser procesadas y controladas, obteniendo así la señal controlada paramanipular a cada servomotor el cual a su vez, manipula las superficie de la aeronavelogrando de esta forma un control del vehículo en vuelo.
Por otro lado, se muestra el voltaje con el que necesita ser alimentado cadadispositivo para poder desempeñar su función de una correcta manera. Como sepuede observar el microcontrolador debe ser alimentado con 3.3V, pero tanto lacentral inercial, el magnetómetro, el receptor y los servomotores son alimentadoscon un voltaje de 5V, voltajes proporcionados gracias a la etapa de potencia (figura4.12). En lo que respecta al motor, éste es alimentado con 11.1V mediante la bateríaLiPo.
Figura 4.16: Hardware empleado en la instrumentación de los prototipos
49

4.2. Microcontrolador
50

Capítulo 5
Control del Prototipo
La palabra Control tiene un amplio significado, pero en este apartado se definirácomo la acción ejercida con el fin de mantener una variable dentro de un rango devalores predeterminados. Por lo tanto, para controlar la orientación del vehículo yeste sea capaz de volar en línea recta, es necesario obtener el modelo matemáticolongitudinal del prototipo lo que permitirá conocer su modelo dinámico, que no esmás que su descripción matemática del sistema físico.
5.1. Modelo matemático longitudinal de 3 grados
de libertad de un vehículo aéreo no tripulado
Un modelo dinámico proporciona una descripción matemática de un sistema físi-co o mecánico. En el caso de los vehículos aéreos, el modelo dinámico muestra lasecuaciones que describen las fuerzas y momentos aerodinámicos que actúan sobreestos sistemas referencia en [5]. Gracias al modelado matemático es posible teneruna noción de la orientación y posición de los mismos.
El modelo de la dinámica longitudinal de una aeronave (figura 5.1) consiste enun movimiento plano donde sólo se consideran las velocidades longitudinales y lavertical del avión, así como su giro en torno al eje longitudinal.
Para obtener las ecuaciones representativas de la dinámica longitudinal en modoavión se hacen las siguientes cosideraciones:
Se considera el vehículo como un cuerpo rígido.
No existen variaciones en la masa del vehículo.
Considerando lo anterior, se tienen las ecuaciones (5.1, 5.2 y 5.3) que representanel modelo matemátco longitudinal de la aeronave referencia en [5].
51

5.2. Acción de control aplicada al prototipo
Figura 5.1: Modelo Longitudinal de la aeronave
X =1
m[T sin(θ) − L cos(θ + α) −D sin(θ + α)] (5.1)
Z =1
m[T cos(θ) + L sin(θ + α) −D cos(θ + α)] − g (5.2)
θ =1
Iyy
[−lwL cos(α) +M ] (5.3)
donde X, Z y θ son la aceleración, altitud y ángulo pitch, respectivamente. Lamasa está representada por la letra m, la gravedad de la tierra por la letra g, la matrizde inercia está dada por Iyy y la distancia del motor al centro de gravedad por lw.Las letras T, L,D,M se refieren al empuje generado por el motor, al levantamiento,al arrastre y al momento de pitch en el eje y positivo respectivamente.
5.2. Acción de control aplicada al prototipo
Antes de centrar la atención en el diagrama de flujo empleado para el controldel prototipo se definirán algunos conceptos importantes para entender la acción decontrol aplicada.
Controladores Automáticos. Un controlador automático compara el valorreal de la salida de la planta (sistema físico a controlar) con la entrada dereferencia (el valor deseado) referencia en [1]; posteriormente éste determinala desviación o diferencia entre estas dos variables y produce una señal decontrol para disminuir la diferencia o mejor conocida como error a un valorde cero o a un valor pequeño. La manera en la cual el controlador automáticoproduce la señal de control se denomina acción de control.
52

5. Control del Prototipo
Entrada de Referencia o Set Point. Es el valor que se desea que tenga lavariable controlada.
Variable Controlada. Es la señal que debe mantenerse en un valor deseado.
Actuadores. Es el elemento final de control que modifica directamente a laplanta de acuerdo a la señal enviada por el controlador automático.
Planta. Es todo sistema físico al cual se le aplica una acción de control.
Sensores. Dispositivo en el cual se produce un fenómeno mecánico, eléctricoo similar, relacionado con la variable de salida de la planta.
En el diagrama a bloques del control de la orientación del prototipo mostrado enla figura 5.2 se pueden identificar los conceptos definidos anteriormente. Por ejemplo,la entrada de referencia corresponde al ángulo deseado de Roll, Pitch y Yaw; elcontrolador automático se identifica como el microcontrolador, donde la variablecontrolada es la señal PWM emitida por el mismo microcontrolador, también sepuede identificar a los servomotores como los actuadores, los cuales mediante elcambio de su posición modifican las superficies de control del UAV que son la plantaen este caso, y por último están los sensores, los cuales transmiten el valor real dela señal obtenida a la salida para ser comparada con la entrada de referencia o valordeseado y así reducir el error.
Figura 5.2: Diagrama a bloques del Control de la Orientación Prototipo
5.2.1. Controlador Proporcional-Derivativo (PD)
De acuerdo a la acción de control que desempeña cada controlador, estos puedenser clasificados de la siguiente forma referencia en [1]:
Controlador On-Off.
Controlador Proporcional (P)
53

5.2. Acción de control aplicada al prototipo
Controlador Integral (I)
Controlador Derivativo (D)
Controlador Proporcional-Integral (PI)
Controlador Proporcional-Derivativo (PD)
Controlador Proporcional-Integral-Derivativo (PID)
El tipo de controlador a emplear se elije de acuerdo a la planta y a las condicionesde operación del sistema. Por lo tanto, se eligío un Controlador Proporcional-Derivativo (PD) respecto a los demás controladores.
La elección del Controlador Proporcional-Derivativo (PD) es debido aque los acelerómetros (miden la posición angular del vehículo) representan la parteproporcional y los gyros (miden la velocidad angular del vehículo) representan laparte derivativa, es decir, la Acción Proporcional (P); se considera como unamplificador con ganancia ajustable sin importar cual sea el mecanismo real, peroesta acción siempre debe de ir acompañada por otra acción de control ya que losvalores obtenidos del producto de la ganancia proporcional (Kp) y el error, solofuncionan para un cierto rango de valores del sistema.
En conjunto, con la acción proporcional (P) se uso la Acción Derivativa (D).Su función principal es mantener al mínimo el error corrigiéndolo proporcionalmentea la misma velocidad que se produce, de tal forma que el error no incrementa. En laacción derivativa (D), se deriva el error respecto al tiempo y se multiplica por unaconstante Td para así sumarse a la señal proporcional (P).
Otro aspecto importante a considerar en este tipo de control, es que debemosde adaptar la respuesta de control a los cambios en el sistema ya que una mayorderivativa corresponde a un cambio más rápido y el controlador pueda responderacordemente. En el programa realizado para el control de la orientación se empleala rutina de saturación para adaptar la respuesta respecto a los cambios de posiciónde los servomotores.
Donde para la acción proporcional (P), la relación entre la salida del controladoru(t) y el error e(t) corresponde a la ecuación 5.4 y para la acción derivativa (D) estarepresentada por la ecuación 5.5:
u(t) + kpe(t) (5.4)
54

5. Control del Prototipo
u(t) + kd
de(t)
d(t)(5.5)
donde kp es la ganancia proporcional ajustable y kd es la ganancia derivativa.
Aplicando la transformada de Laplace a las ecuaciones 5.4 y 5.5, se obtienen susfunciones de transferencia (es la relación salida entre la entrada del sistema) respec-tivamente, teniendo de esta forma las ecuaciones 5.6 y 5.7 las cuales se sumaránpara formar el Controlador Proporcional-Derivativo (PD) (ecuación 5.9).
U(s)
E(s)= kp (5.6)
U(s)
E(s)= kds (5.7)
La ecuación 5.8 representa la relación entre la salida del controlador u(t) y elerror e(t) para el controlador proporcional-derivativo (PD)
u(t) = kpe(t) + kpTd
de(t)
d(t)(5.8)
U(s)
E(s)= kp(1 + Tds) (5.9)
donde Td es el tiempo derivativo, el cual se refiere al tiempo de acción derivadaen minutos de anticipo.
La acción Proporcional-Integral (PI) ó Proporcional-Integral-Derivativo (PID)no fueron empleadas para el control del prototipo ya que no se realiza una prome-diación del error en un período determinado para corregirlo.
5.3. Control de la orientación
Para realizar el control de la orientación del vehículo, es necesario controlar lostres movimientos rotativos del vehículo dados por Roll, Pitch y Yaw en los ejes X,Y y Z respectivamente.
5.3.1. Control del ángulo pitch, roll y yaw del prototipo
En modo aeronave, la dinámica de pitch es estable en lazo abierto, debido a queel centro de gravedad está ubicado adelante del centro aerodinámico del ala. Por lo
55

5.3. Control de la orientación
que el avión efectua un movimiento hacia adelante debido al empuje (T), las varia-ciones de la altura son modificadas por θ y T; que a su vez el pitch (θ) es generadopor el cambio de posición de δe. La variación proporcional de estos parámetros afectaal levantamiento (L).
La estrategia de control que estabiliza la dinámica de pitch referencia en [5] es:
δ =γx
lw(5.10)
donde, γx = Kveθ + Kpe
(θ − θd) con Kvey Kpe
> 0 que son las ganancias dela velocidad angular y posición angular respectivamente.
Considerando que el ángulo de ataque α es muy pequeño decimos que cos(α) ≈ 1.
Al aplicar el control Proporcional-Derivativo (PD) la ecuación 5.3 se reduce dela siguiente forma
θ = −[Kveθ +Kpe
(θ − θd)] (5.11)
donde, θ −→ θd cuando t −→ ınf. La θ deseada es representa como θd.la primera parte de la ecuación correspondiente a θ representa la velocidad an-
gular que es la parte de control derivativo (D) y la segunda parte que involucra a(θ− θd) representa la posición angular que es el control proporcional (P). Aplicandola transformada de Laplace e igualando a cero la ecuación 5.11 obtenemos
s2θ(s) +Kvesθ(s) +Kpe
θ(s) = 0 (5.12)
Aplicando el Criterio de Estabilidad de Routh-Hurwitz a la ecuación 5.13 obte-nemos las ganancias del controlador de orientación
Kve> 0
Kpe> 0 (5.13)
Por último se fija la orientación, eligiendo las ganancias del controlador de ori-entación de tal forma que converjan rapidamente a θ = 0 (figura 5.3) en un tiempode aproximadamente 1,4s y θd = π
9− ǫ (figura 5.4), donde ǫ es sumamente pequeño
para evitar que el avión llege a su punto máximo de elevación también conocidocomo stall y después caiga abruptamente referencia en [5]. Esto ocurre con un án-gulo de ataque α ≈ 15 grados dependiendo del perfil aerodinámico utilizado para laconstrucción del ala.
Como podemos ver en la figura 5.4, la gráfica inicia en el valor propuesto paraθ0 ≈ 10 grados e incremente hasta llegar al valor final de θd ≈ 15 grados, que es el
56

5. Control del Prototipo
Figura 5.3: Velocidad θ = 0
Figura 5.4: Control del ángulo pitch θ
57

5.4. Diagrama de flujo del algoritmo de control
punto deseado para que se mantenga el ángulo pitch durante el vuelo del avión.
Para realizar el control del ángulo roll y yaw se partio del mismo esquema decontrol de pitch el cual consiste en la deflexión del elevador para controlar el desplaza-miento del vehículo. El control de roll es mediante la deflexión de los alerones loscuales generan fuerzas de igual magnitud pero en dirección y sentido opuesto. Seemplea el acelerómetro ubicado en el eje Y y el girómetro ubicado en el eje X paramedir la posición angular y la velocidad angular de la aeronave, respectivamente.
En lo que corresponde al control de yaw se emplea el girómetro ubicado en el ejeY y el magenetómetro; donde, las señales enviadas por estos sensores son procesadaspor el microcontrolador modificando la posición del rudder para lograr el control dela orientación en el eje Z.
5.4. Diagrama de flujo del algoritmo de control
Para realizar el control de la orientación del vehículo, primeramente se realizó undiagrama de flujo que sirvió de apoyo para la realización del programa en el softwarellamado Dynamic C.
Una vez que se acabó el programa, se cargo al módulo RCM3400 conectando elcable de programación del Rabbit de la computadora a la tarjeta donde se encuentramontado el microprocesador.
Se debe de tener especial cuidado en mantener el prototipo en posición horizontaly sin movimientos, mientras se carga el programa de la computadora al microcon-trolador y al encender el prototipo para hacer las pruebas de vuelo; ya que se llevaa cabo la promedición de los sensores para eliminar el offset. De lo contrario, lapromediación será respecto a otra posición del prototipo ocasionando que no vueleen línea recta como se pretende.
El diagrama de flujo realizado es el siguiente:
58

5. Control del Prototipo
59

5.4. Diagrama de flujo del algoritmo de control
60
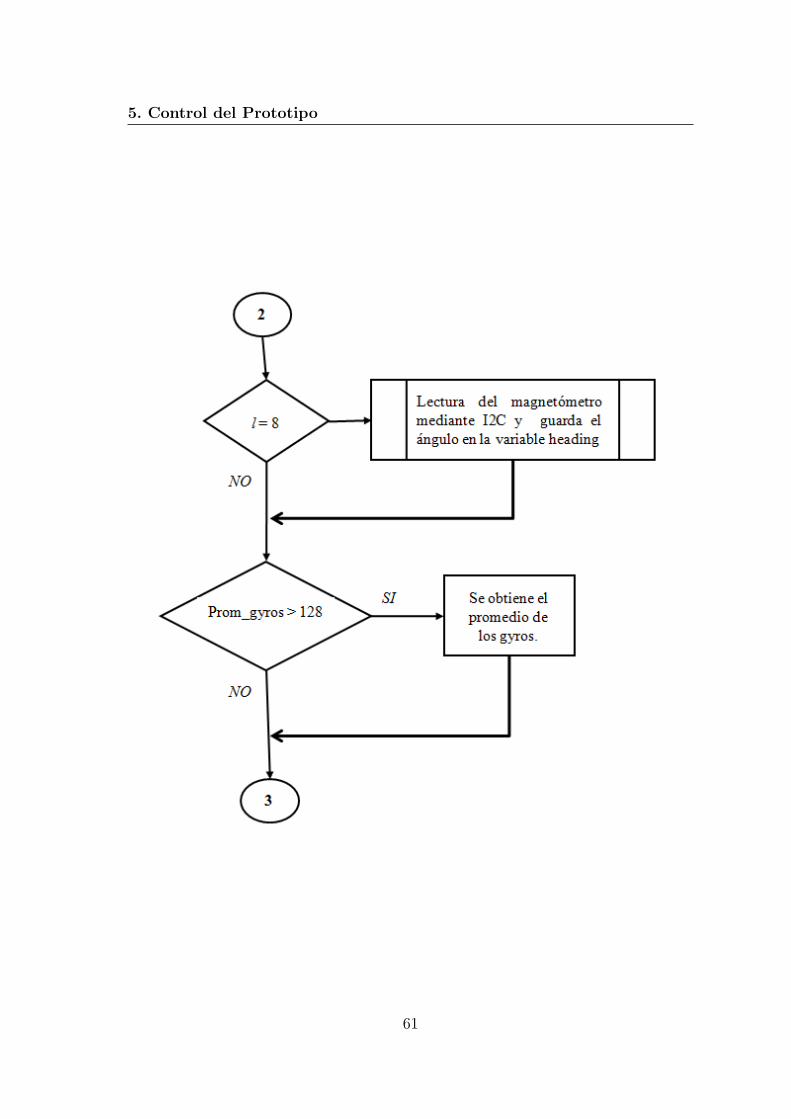
5. Control del Prototipo
61

5.4. Diagrama de flujo del algoritmo de control
62

Capítulo 6
Resultados Experimentales
Después de haber instrumentado el prototipo y programado el microcontrolador,se procedió a realizar las pruebas de vuelo de forma manual como automática paraadquirir las gráficas correspondientes a los vuelos con y sin control de la orientación.
Para poder obtener las gráficas representativas de los movimientos de rotaciónde la aeronave, se debe utilizar un modem para enviar y recibir los datos. El modemutilizado para la adquisición de los datos es el Xbee Pro serie 1. Se cuenta con undispositivo maestro y uno esclavo, donde cada uno es conectado a una computadoraa través del puerto USB de la misma. Mediante el uso de un software, los modemson configurados, uno como transmisor y otro como receptor a la misma velocidadde transmisón/recepción, con la misma cantidad de bits a enviar y recibir, etc.
Una vez finalizada la configuración del modem, es necesario leer el puerto seriedel microcontrolador al cual se conectará el modem. Una vez que se conectó eltransmisor al microcontrolador y el receptor al puerto USB de la computadora, seefectuan los vuelos necesarios para que mediante el uso del software de MatLab sepuedan recibir y procesar los datos de acuerdo a las condiciones establecidas en elprograma elaborado.
Las gráficas obtenidas de los vuelos con control de la orientación son las siguientespara cada uno de los movimientos de rotación de la aeronave.
63
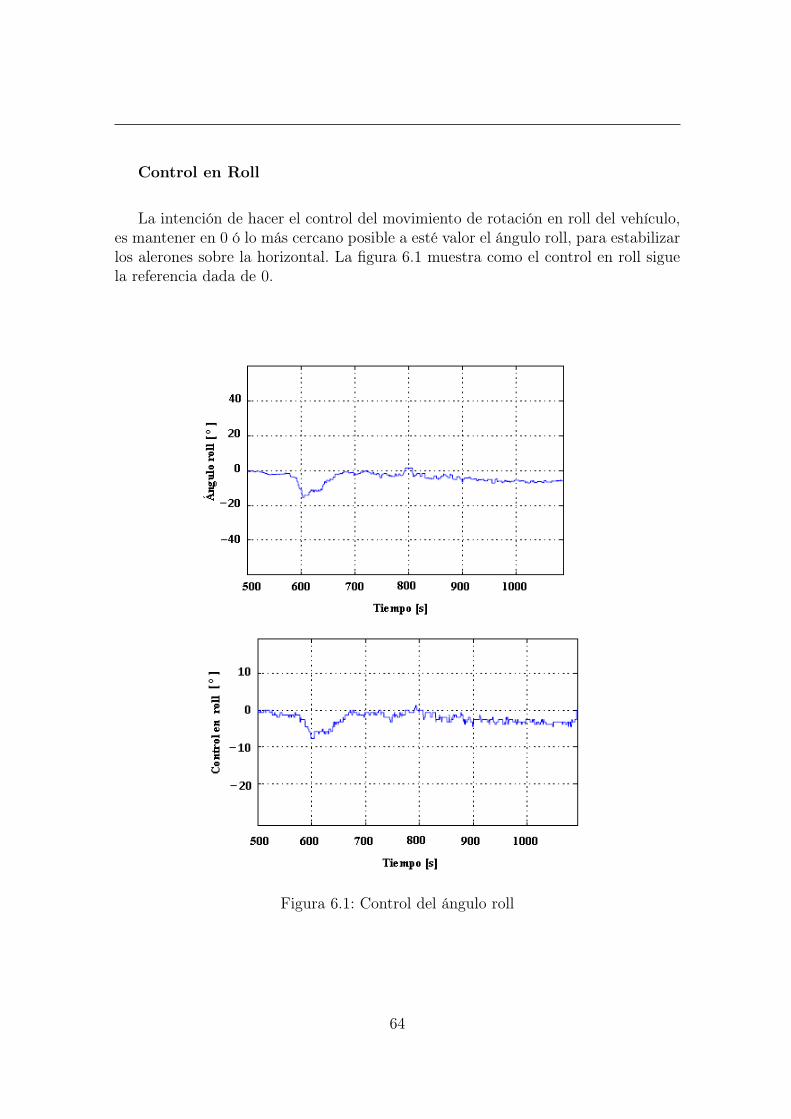
Control en Roll
La intención de hacer el control del movimiento de rotación en roll del vehículo,es mantener en 0 ó lo más cercano posible a esté valor el ángulo roll, para estabilizarlos alerones sobre la horizontal. La figura 6.1 muestra como el control en roll siguela referencia dada de 0.
Figura 6.1: Control del ángulo roll
64

6. Resultados Experimentales
Control en Pitch
La figura 6.2 muestra la comparación entre el ángulo real del vehículo y la medi-ción del ángulo una vez aplicado el control sobre el mismo. En la primer gráfica sepuede ver el comportamiento del ángulo pitch; donde, el parámetro de θ inicial esde 5 y la θ deseada es de 15, como se indica en el apartado referente al control delprototipo. La segunda gráfica muestra el comportamiento de la aeronave una vezaplicado el control en pitch, el cual sigue a la referencia propuesta anteriormente.
Figura 6.2: Control del ángulo pitch
65

Control en Yaw
Por último, al realizar el control de yaw (figura 6.3) se establece la referencia en0, la cual es seguida por el prototipo correctamente.
Figura 6.3: Control del ángulo yaw
66

Capítulo 7
Conclusiones y Trabajos Futuros
La finalidad de construir físicamente el prototipo y realizar las pruebas de vuelocorrespondientes es corroborar que el diseño, la instrumentación y el control utili-zado están funcionando en conjunto para lograr el objetivo principal que es controlarla orientación del UAV para la realización de vuelos automáticos en línea recta.
Durante el desarrollo de este proyecto pude aprender nuevos conocimientos, am-pliar los existentes y generarme aún más preguntas. Por ejemplo, en un principio notenía idea de los factores aerodinámicos que influían para el control de una aeronave,posteriormente me di cuenta que tener un conocimiento de los principales factoresaerodinámicos y de las diferentes estrategias de control existentes, es fundamentalpara poder llegar a controlar un vehículo con características iguales o similares demanera eficaz y eficiente.
Por otra parte, a lo largo de este tiempo se presentaron diferentes contratiempospara llevar a cabo el proyecto, los cuales se fueron solucionando poco a poco conla ayuda de los investigadores que colaboraron conmigo. Lo anterior me permitiórealizar el control de la orientación del vehículo, cumpliendo así con la totalidad delos objetivos planteados en un inicio.
Debido al éxito obtenido en cuanto a que se pudo llevar a cabo el control de laorientación del vehículo, se concluye que podrían añadirse a éste sensores de velo-cidad y un GPS (Sistema de Posicionamiento Global) para lograr un mejor controldel vehículo.
A largo plazo quizá se podría realizar el control de la posición del vehículo ya seaen movimiento o en punto fijo mediante visión; para ello, se tendría que profundizaren la teoría del control, proponer nuevas leyes al respecto, en caso de que no existan,lo suficientemente sólidas para lograr tal fin o también migrar hacía otros tipos de
67

vehículos aéreos.
68

Apéndice A
Glosario
A
Aceleración: Magnitud vectorial que indica el cambio de la velocidad de uncuerpo por unidad de tiempo. En otras palabras la aceleración es la derivadadel vector velocidad respecto al tiempo. Expresada en [m
s2 ].
Aceleración Angular: Es la variación de la velocidad angular (ω) por unidadde tiempo, expresada en [ rad
seg2 ]. Se representa con la letra α y se calcula de lasiguiente forma:
α =dω
dt(A.1)
Acelerómetro: Es cualquier instrumento destinado a medir aceleracioneslíneales.
Alcance: Es la diferencia algebráica entre los valores superior e inferior delcampo de medida del instrumento. Ejemplo, el receptor utilizado para lacomunicación entre el radio control y el avión tiene un alcance de 3km.
Automático: Es todo aquello que se mueve, regula y opera, por sí solo,independientemente del medio que lo rodea.
Automatización: Cosiste en un sistema de control automático, por mediodel cual el sistema verifica su propio funcionamiento, efectuando mediciones ycorrecciones sin la intervención del ser humano.
Autónomo: Sistema que tiene la libertad de gobernarse por sus propias leyesde control.
C
69

Control: Acción ejercida con el fin de poder mantener una variable dentro deun rango de valores predeterminados.
Control Automático: Cosiste en desarrollar la acción de control, sin laparticipación directa de un ser humano (operario).
D
Desplazamiento: (Física). Es la longitud de la trayectoria comprendida entrela posición inicial y la posición final de un objeto.
E
Eje de Rotación: Línea alrededor de la cual se realiza un giro.
F
Frecuencia (f ): Es la inversa del periodo (ecuación A.2), es decir, es el númerode revoluciones o vueltas que da un móvil por unidad de tiempo. Se mide ens−1 o hertz (Hz).
f =1
T=
ω
2π(A.2)
I
Inercia: Es la propiedad de los cuerpos de resistirse al cambio del movimiento,es decir, es la resistencia al efecto de una fuerza que se ejerce sobre ellos.
L
Ley de conservación: Las leyes de conservación se refieren a las leyes físicasque postulan que durante la evolución temporal de un sistema aislado ciertasmagnitudes tienen un valor constante. Puesto que el universo entero constituyeun sistema aislado pueden aplicársele diversas leyes de conservación.
M
Momento Angular: Es una magnitud física importante en todas las teoríasfísicas, ya que está relacionada con las simetrías rotacionales de los sistemasfísicos. Bajo ciertas condiciones de simetría rotacional de los sistemas es unamagnitud que se mantiene constante con el tiempo a medida que el sistemaevoluciona, lo cual da lugar a una Ley de conservación conocida como Ley deconservación del Momento Angular. El momento angular se mide en el SistemaInternacional (SI) en [kg m2
s].
70

A. Glosario
Momento de Fuerza ó Par Motor: Es la fuerza aplicada por la distanciaal eje de rotación.
Momento de Inercia ó Inercia Rotacional: Es una medida de la inerciarotacional de un cuerpo. Expresado mediante el símbolo I.
O
Operación de Control: Conjunto de acciones que buscan mantener unavariable dentro de los rangos de funcionamiento deseados.
Orientación: La orientación de un objeto en el espacio es cada una de lasposibles elecciones para colocarlo sin cambiar un punto fijo de referencia, esdecir, el objeto puede ser rotado alrededor de un punto fijo. Por lo tanto, laorientación puede ser definida por ángulos de rotación sobre un punto fijo.
P
Período (T): Indica el tiempo que tarda un móvil en dar una vuelta a lacircunferencia que recorre. Su ecuación (A.3) es la siguiente:
T =2π
ω(A.3)
Posición: La posición de una partícula física se refiere a la localización enel espacio-tiempo de la misma, normalmente se expresa por un conjunto decoordenadas.
Posición Angular: Es el arco de la circunferencia, medido en radianes, querealiza un movimiento (ecuación A.4). Se representa con la letra ϕ y se calculade la siguiente forma:
e(t) = R ϕ(t) (A.4)
Donde e(t) es el espacio recorrido a lo largo de una circunferencia de radio R.
R
Rango: Son el conjunto de valores comprendidos entre los límites superior einferior de la capacidad de medida o de transmisión del instrumento. Ejemplo,la central inercial (IMU) tiene un rango de operación de 1,96 a 3,0V olts.
71

Rapidez ó Celeridad: Es la relación entre la distancia recorrida y el tiempoempleado en recorrerla. La rapidez es una magnitud escalar la cual se mideen las mismas unidades que la velocidad, pero no es un vector como está. Larapidez representa justamente el módulo de la velocidad.
S
Sistema: Es el conjunto de partes o elementos organizadas y relacionados,que interactúan entre en sí, para llegar a un mismo objetivo.
Sistemas de Automatización: Conjunto de equipos, sistemas de infor-mación, y procedimientos que van a permitir y asegurar un desempeño in-dependiente del proceso, a través de operaciones de control y supervisión.
Supervisión y Monitoreo: Es el proceso de lectura de valores de las diversasvariable del proceso, con el objetivo de identificar el estado en el que se vienedesarrollando el proceso en un tiempo determinado.
T
Trayectoria: Es el lugar geométrico de las sucesivas posiciones que va ocu-pando un cuerpo durante su movimiento.
V
Velocidad: Magnitud física de carácter vectorial que expresa el desplaza-miento de un objeto por unidad de tiempo. En otras palabras la velocidad esla derivada del vector posición con respecto al tiempo. Expresada en [m
s].
Velocidad Angular: Es la variación de la posición angular (ϕ) respecto altiempo (ecuación A.5). Se expresa en [ rad
seg] y se representa con la letra ω y se
calcula de la siguiente forma:
ω =dϕ
dt(A.5)
72

Bibliografía
[1] Ogata, Katsuhiko. Ingeniería de control moderna. 4a.ed. España: Prentice Hall,2002.
[2] Palacios Municio, Enrique. Microcontrolador PIC16F84. 2a.ed. México: Alfa-omega, 2006.
[3] Stengel, R. Flight Dynamics. Princeton University Press, 2004.
[4] Barnes W., McComick. Aerodynamics, Aeronautics and Flight Mechanics.2a.ed. Jonh Wiley and Sons Inc., 1995.
[5] Flores Colunga, Ramón Gerardo. «Modelado, control e implementación de mi-ni vehículos aéreos autónomos convertibles». Tesis de Maestría. CINVESTAV,2010.
[6] Escareño Castro, Juan Antonio. «Localización de un helicóptero miniatura utili-zando visión artificial». Tesis de Doctorado. CINVESTAV, 2008.
[7] González Hernández, Iván. «Control de la orientación y altura de un helicópterominiatura de cuatro hélices». Tesis de Maestría. CINVESTAV, 2009.
[8] Efkhanian, Ludovic. «Création et commande en stabilité d’ un drone avion».Ecoles d’Officier de l’Armée de l’Air, 2010.
[9] Carter, Bruce. «Designing Gain and Offset in Thirty Seconds». S.l. TexasInstruments, 2002.
[10] Mancini, Ron. «Single Supply Op Amp Design Techniques». S.l. Texas Instru-ments, s.f.
[11] User’s Manual. «Dynamic C». Digi International Inc., 2007-2008.
[12] User’s Manual. «Rabbit Core RCM3400». Rabbit Semiconductor Inc., 2002-2007.
[13] Wikipedia, http://es.wikipedia.org
73

BIBLIOGRAFÍA
[14] NASA, http://www.grc.nasa.gov
[15] Manual de vuelo, http://www.manualvuelo.com
[16] Diseño aerodinámico, http://www.aerospaceweb.org
[17] Perfiles alares, http://www.mexicorc.com
[18] Orientación, http://www.worldlingo.com
[19] Magnetómetro, http://www.robot-electronics.co.uk
[20] Central Inercial, http://www.robodacta.com
[21] Presión atmosférica, http://www.cneq.unam.mx
74





























