Embed Size (px)
Citation preview

DISEÑO, IMPLEMENTACIÓN Y ANALISIS DE CAUDALIMETRO
DIEGO ARMANDO HERNÁNDEZ RUBIO
UNIVERSIDAD DE LOS ANDES FACULTAD DE INGENIERÍA
DEPARTAMENTO DE MECÁNICA BOGOTÁ D.C.
2008

DISEÑO, IMPLEMENTACIÓN Y ANALISIS DE CAUDALIMETRO
DIEGO ARMANDO HERNÁNDEZ RUBIO
Tesis de grado para optar por el titulo de
Ingeniero Mecánico
Asesor
JAIME LOBOGUERRERO USCATEQUI
UNIVERSIDAD DE LOS ANDES FACULTAD DE INGENIERÍA
DEPARTAMENTO DE MECÁNICA BOGOTÁ D.C.
2008

Bogotá, D.C. Junio 2008 Ingeniero Luís Mario Mateus Sandoval Director Departamento de Ingeniería Mecánica Universidad de los Andes Ciudad Por medio de la presente someto a su consideración el Proyecto de Grado “DISEÑO, IMPLEMENTACIÓN Y ANALISIS DE CAUDALIMETRO” elaborado por Diego Armando Hernández Rubio como requisito para optar el titulo de Ingeniero Mecánico. Cordialmente, Jaime Loboguerrero Uscatequi Profesor Asesor

Bogotá, D.C. Junio 2008 Ingeniero Luís Mario Mateus Sandoval Director Departamento de Ingeniería Mecánica Universidad de los Andes Ciudad Por medio de la presente someto a su consideración el Proyecto de Grado “DISEÑO, IMPLEMENTACIÓN Y ANALISIS DE CAUDALIMETRO” elaborado por Diego Armando Hernández Rubio como requisito para optar el titulo de Ingeniero Mecánico. Cordialmente, Diego A. Hernández Rubio Código: 200223012

TABLA DE CONTENIDO
1. INTRODUCCION………………………………………..……………..….………9
2. OBJETIVOS..……………………………………………..……………...………11
3. DISEÑO FINAL……………………………………………………………….….12
3.1 Celda de carga………………………………………….…………….……..13
3.2 Señal de celda de carga………………………..………………………….15
3.3 Circuito Amplificador……………………………..…………………………15
3.4 Adquisición de datos………………………………………………………..18
3.5 Estructura…………………………………………………………………….19
3.6 Admisión de agua al sistema………………………………..…………….22
3.7 Conversión de señales…………..………………………………………….25
3.7.1. Análisis de unidades………………………………………….28
4. EXPERIMENTACIÓN Y RESULTADOS………..……………..…………….29
4.1 Calibración de celda de carga…………………..…………..…………….29
4.2 Calibración del sistema…………………………..…………..…………….32
4.3 Muestra……………………………………………..…………..……………34
5. CONCLUCIONES Y RECOMENDACIONES………………….……………37
5.1 Diseño y construcción………………………………..…….………………37
5.2 Instrumentación……………………………………………………………..37
5.3 Análisis de datos………………………………………….……..….………38
6. BIBLIOGRAFIA………………………………………………...……………….41
7. ANEXOS……………………………………………………….…………………42

LISTADO DE FIGURAS
Figura 1. Celda de carga Omega LC105 para 1000 lb. ………….…………….14 Figura 2. Puente de Wheatstone y Galga extensiométrica…………………….14 Figura 3. Composición de amplificador de instrumentación INA128………….16
Figura 4. Comparación de señal con y sin filtro……………….………………..17 Figura 5. Esquema de circuito amplificador…….………………………………..18 Figura 6. Sistema de pivotaje para celda de carga…………………..………….20 Figura 7. Estructura de canales en “U”……………………………………….…..20 Figura 8. Sistema de pilotaje para celda de carga…………………………….…21 Figura 9. Sistema de válvula………….………………………………….………..22 Figura 10. Estructura y concepto final…..………………………………………..24
Figura 11. Diagrama de bloques……………………...…………………………..24 Figura 12. Vista de adquisición de datos……….…………….…………………..33
LISTADO DE TABLAS Tabla 1. Calibración celda de carga ………………………..………………….…30 Tabla 2. Copilado de calibraciones………………………………………………..31
Tabla 3. Calibración de todo el sistema……………………………………...….. 32

LISTADO DE GRAFICOS
Grafica 1. Comportamiento de la celda de carga en calibración……………...…..30 Grafica 2. Calibración, Fuerza vs. Voltaje amplificado…….…………………….....31 Grafica 3. Calibración, Fuerza vs. Voltaje no amplificado..………….…………..…31 Grafica 4. Calibración, Cantidad de agua en tanque vs. Voltaje……………..…....32 Grafica 5. Cantidad de agua en tanque vs. Tiempo………………………..……….34 Grafica 6. Caudal analizado cada 5 segundos…………………………..………….34 Grafica 7. Calibración celda de carga (errónea)……………………………..….…..38 Grafica 8. Caudal para periodo de 1 segundo…………………………….………….38 Grafica 9. Caudal para periodo de 5 segundos………………………………………39
LISTADO DE FOTOGRAFIAS
Fotografía 1. Caja Fuente – Amplificador – Filtro…………..………………………..18 Fotografía 2. Instalación sistema adquisición de datos……………………………..18 Fotografía 3. Instrumento completo……………………………………………………19 Fotografía 4. Sistema de pilotaje de estructura………………………...…………….21 Fotografía 5. Instalación de ruedas…………………………………..……………….21 Fotografía 6. Sistema de protección contra bordes…………………………………21 Fotografía 7. Sistema de pilotaje…………………………………………..………….21 Fotografía 8. Sistema de válvula…………………………………….………………..23 . Fotografía 9. Sistema de amortiguación de agua …………..……………………….23

LISTA DE SÍMBOLOS
2R Bondad de ajuste
GR Resistencia de ajuste en ganancia
G Ganancia del amplificador
ρ Densidad
P Fuerza aplicada a celda de carga
M Masa de agua dentro del tanque
W Peso de agua dentro del tanque
3,2,1C Constantes de conversión de unidades
t Tiempo
R Resistencia
4,3,2,1R Resistencias en puente Wheatstone
1V Voltaje de salida en celda de carga (sin amplificar)
2V Voltaje de salida en celda de carga (amplificado)
Q Promedio de caudal
QS Desviación estándar de caudal
n Numero de muestras
z Variable de distribución normal
u Media

9
1. INTRODUCCIÓN
El objetivo general del proyecto es conferir un aporte al departamento de Ingeniería Mecánica con el desarrollo de un caudalímetro que esté en capacidad de medir el caudal obtenido por el circuito de agua del laboratorio de Fluidos en el Edificio Mario La Serna de La Universidad de los Andes. Se tratará de lograr el mayor número de cifras significativas para caudales hasta unos 30 litros por segundo. Contextualizando un poco el escenario, se cuenta con un tanque de 1000 Litros de capacidad, el cual será el encargado de almacenar el fluido para ser medido. Los métodos favorecidos de medición serán de orden primario midiendo volumen ó peso almacenado en el tiempo. De allí surge la necesidad de un estudio comparativo entre posibles soluciones para este problema. Los elementos electromecánicos de instrumentación como sensores de todo tipo se han convertido en “los ojos del ingeniero” para el análisis y entendimiento en sus diferentes estudios experimentales. En este orden de ideas, la exactitud de instrumentos de medición para diferentes variables ha sido muy apetecida en la industria ya que esto implica optimización en sus diseños, procesos, funcionalidad etcétera. En el proyecto escrito a continuación se encuentran las memorias detalladas del trabajo que se llevo a cabo para el desarrollo de un caudalímetro. Por medio de un estudio comparativo entre varios modelos se realizó el diseño, implementación y análisis de un instrumento capaz medir un caudal de agua optimizando la exactitud del sistema, adicionalmente, usando la instrumentación como herramienta primordial para el análisis, se estudiaran los resultados experimentales para concluir y corregir sobre los resultados. Para expandir el panorama de posibles diseños, fue ineludible una revisión sobre literatura en el campo de distintos sistemas medidores de caudal, para obtener como resultado algunos diseños de sistemas viables para nuestro caso en particular. De allí, un análisis entre los distintos modelos fue realizado con el objetivo de optimizar factores como precio y exactitud en el diseño final. Al hablar de un tanque de 1000 Litros estamos hablando de un peso de una Tonelada, lo cual es un peso considerable, es por esto que el diseño de la estructura que soportará el tanque siguió un especial cuidado, y su uso particular adhirió exigencias al sistema. El uso de componentes electrónicos fue imperioso teniendo en cuenta que la idea es facilitar la adquisición, es por esto que se implemento un circuito como ayuda para obtener una señal eléctrica “clara” que nos permitiera adquirir resultados de fácil lectura. Una parte importante del desarrollo del sistema es el registro automático de los datos, es por esto que es necesario que los datos entregados

10
por el sistema sean registrados de forma digital, de allí surge la necesidad de ayudas computacionales (en este caso DAQ Factory Express) en donde análisis de consecutivas pruebas nos muestra la forma correcta de adquisición de datos. Como parte final del proyecto, se desarrolló un manual instructivo sobre uso del caudalímetro. Este manual será consignado y archivado en el laboratorio con el objetivo de que futuros estudiantes puedan hacer uso de él y comprender la instrumentación del sistema, midiendo todas las variables involucradas.

11
2. OBJETIVOS
El objetivo general y principal de esta tesis es diseñar, implementar y analizar un instrumento que permita medir el caudal de agua que sale por el circuito del laboratorio de fluidos. El objetivo de este documento es consignar de forma escrita todos aquellos elementos determinantes que aportaron a las decisiones en el diseño final del sistema. Uno de los objetivos importantes de este trabajo fue realizar un aporte al laboratorio de fluidos para que estudiantes de materias como instrumentación o ingeniería experimental puedan realizar prácticas y/o laboratorios con un sistema de medición real, percatándose del funcionamiento todos sus elementos. Es por esto que se adjuntara un manual de operación de uso en donde se explicara en detalle el funcionamiento del equipo. Un importante objetivo de este trabajo es el compromiso investigativo de toda aquella literatura sobre instrumentación para caudales, y adicionalmente fusionar estos conceptos con los conocimientos aprendidos a lo largo de la carrera. Más allá de construir un caudalímetro se busco el diseño óptimo para:
• Maximizar la exactitud del sistema • Simplificar su proceso de construcción • Tener funcionamiento práctico y utilizable por otros estudiantes y profesores • Aprovechar al máximo los recursos tanto físicos como económicos de la
universidad • Maximizar la vida de sus componentes ya que muchos de ellos tendrán
contacto constante con agua y estarán sujetos a determinadas cargas. • Desarrollar un cierto nivel de estética y en donde el funcionamiento de sus
componentes sea palpable (medible y/o visible).

12
3. DISEÑO FINAL En la búsqueda de un diseño optimo para nuestro equipo, fue necesaria una previa investigación de las distintas posibilidades a nuestro alcance, es decir, en este momento la tecnología nos permitiría recrear sistemas de gran exactitud, seguramente mayor de la que vamos a obtener con nuestro diseño final, sin embargo, tenemos que contextualizar nuestro diseño a nuestras condiciones, por ejemplo, se quiere un sistema de medición de caudal con un porcentaje de error lo mas bajo posible, sin embargo, las posibilidades económicas son limitantes, adicionalmente la salida del sistema debe tener la mayor exactitud posible pero también debemos estar en la capacidad de leerla con los recursos otorgados; es por esto que hubo que tener en cuenta muchas limitantes para el diseño del equipo. Como se menciona en los objetivos, la idea es desarrollar un diseño con ciertas características y propiedades particulares, la consecuencia de esto incurrió a muchas iteraciones y conceptos previos del diseño final; en este documento no se consignaran todas ellas pues seria irrelevante, sin embargo, serán tratados aquellos elemento sobresalientes en el diseño final. A continuación la descripción de los pasos tomados que nos llevaron a tomar las distintas decisiones sobre el funcionamiento del sistema. Cuando hablamos de exactitud y porcentaje de error en nuestro sistema, estamos hablando de que tan cercano esta nuestro resultado de la realidad, afortunadamente en este momento, la industria nos ofrece herramientas electrónicas que traducen una señal ya sea: nivel de agua, peso, presión etcétera, en una señal electrónica que resulta en una salida dinámica, mas exacta, fácil de leer y adquirir para su posterior análisis. Es por esto que nuestro sistema contará con un transductor electrónico para la toma de datos. Ahora bien, es importante como primera medida contextualizar un poco nuestra situación y precisar los órdenes de magnitud que manejara el sistema. En nuestro caso utilizaremos un tanque de 1000 litros para medir el caudal que sale por el circuito de agua del laboratorio de fluidos, acá se almacenará la cantidad de agua a medir. Dicho esto, ya se tiene una idea de los instrumentos que se pueden utilizar sabiendo que se alojara un peso de una tonelada aproximadamente. Esto implica una estructura con ciertas características para que pueda soportar este peso.

13
3.1 .CELDA DE CARGA Uno de los principales objetivos de este trabajo consiste en la lectura de una propiedad física ya sea presión, peso, nivel de agua etcétera como función del tiempo que nos conduzca al conocimiento de un caudal. Después de investigar entre los diferentes sensores dinámicos ofrecidos por el mercado se llego a la conclusión que los más apropiados para nuestra situación podrían ser: Sensores de nivel en donde el nivel de agua del tanque nos indicaría el volumen de agua como función del tiempo y por ende la masa alojada por unidad de tiempo. Celdas de carga las cuales actúan como balanza pesando la cantidad de agua alojada por el tanque como función del tiempo. Transductores de presión que nos indicarían la presión del agua en el fondo del tanque y de esta forma conoceríamos el nivel del agua, el volumen y la masa en el tanque en cada instante de tiempo. Después de un estudio comparativo entre estas tres opciones y analizando el funcionamiento de cada una de ellas, se llego a la conclusión de que la celda de carga era la mas conveniente para nuestro caso, principalmente por las siguientes razones. - De seleccionar un sensor de nivel para nuestro propósito con exactitudes del
orden del 0.2% (catalogo omegadyne.com), habría una distorsión en la medición por la dificultad en reducir el oleaje.
- Sensor de presión muy caro del orden de USD 390. - Al calcular por medio de calibración del tanque para tener valores de masa
en función de la presión al fondo del tanque el porcentaje de error se incrementa considerablemente
- El precio de las celdas de carga para nuestro propósito oscila entre los USD
350 (catalogo omegadyne.com). - La exactitud de las celdas de carga es de 0.025%. - La respuesta esperada de esta celda es excelente para las variaciones de la
frecuencia de carga esperadas (hasta de unos 50Hz)

14
Es por estas principales razones que se optó por usar una celda de carga para medir la cantidad de agua entrando al tanque por medio de su peso. Asumiendo el peso que debía medir la celda de carga se contó con la buena suerte que el laboratorio de ingeniería mecánica de la universidad tenía justamente la que necesitábamos. La celda de carga a utilizar será la Omega LC105 para 1000 lb. cuya ficha técnica esta adjunta la final del trabajo.
Figura 1. Celda de carga Omega LC105 para 1000 lb.
Para tener la capacidad de leer la señal de salida de la celda de carga es relevante la siguiente breve explicación de su funcionamiento. La celda de carga Omega referencia LC105, tiene una forma de “S” como lo muestra la figura, en su interior se encuentra alojado un circuito llamado “Puente de Wheatstone” cuyo objetivo es determinar el valor de una resistencia desconocida mediante el equilibrio de los brazos del puente mostrado en la figura.1
Figura 2. a) Puente de Wheatstone, b) Galga extensiométrica
1 Imágenes sacadas de: http://weblogs.madrimasd.org/medida_informacion_escepticismo/archive/2007/06/02/66924.aspx http://nees.buffalo.edu/docs/labmanual/HTML/Chapter%203_files/image047.png

15
Ahora, una de estas resistencias es una galga extensiométrica, que simplemente es una resistencia eléctrica variable, y esta variabilidad está sujeta a la deformación que sufre la galga. Dicho esto, a medida que la celda soporta alguna carga, el material de la misma sufre una deformación, esta deformación conlleva una variación en el valor de la resistencia de la galga, que por medio del Puente de Wheatstone, puede ser medida con una señal proporcional a la deformación y por ende a la carga. 3.2. SEÑAL DE CELDA DE CARGA Una de las características mas importantes a tener en cuenta en la celda de carga son aquellas relacionadas a las señales tanto de alimentación (Excitation) como de salida o sensibilidad (Output), esta ultima indica el cambio de la señal de salida por unidad de valor medido, para nuestra celda estos valores son: Excitation : 10Vdc, 15Vdcmax Output: 3mV/V ± 0.0075mV/V Esto indica que la señal de entrada de la celda debe estar en un rango de 10 a 15 Voltios de corriente continua, y que por cada Voltio de en la señal de entrada, la señal de salida tendrá 3mV/V ± 0.0075mV/V. Como nuestra celda de carga esta diseñada para un peso de 1000 lb., la señal de salida, para esta condición y alimentada a 10V deberá ser de 30mV± 0.075mV/V. Esto lo podemos verificar en la tabla de calibración entregada por el fabricante, (Tabla adjunta en ANEXOS) en donde para un peso de 1000 lb. tenemos una señal de salida de 30mV alimentada a 10Vdc. 3.3. CIRCUITO AMPLIFICADOR Como se menciona anteriormente, tenemos una señal de salida que oscila entre 0 y 30mV para un peso de 0 a 1kip. Esta señal puede ser medida por una variedad de instrumentos tan simples como un multímetro, sin embargo nuestro objetivo es adquirir esos datos de forma digital y dinámica para su posterior análisis. El laboratorio de ingeniería mecánica cuenta a su disposición con un sistema de adquisición de datos el cual no podría ser más apropiado para nuestro objetivo. Este sistema se conforma de un software llamado “DAQ Factory Express”, una tarjeta de adquisición de datos LABJACK referencia U12 y su respectivo cable USB. En un primer experimento de adquisición de datos el software presento problemas para leer esta señal, esto se debe a que la magnitud de esta señal es tan pequeña

16
que el sistema la lee como ruido, de acá sale la necesidad de un amplificador que permita agrandar la señal lo suficiente para ser leída. Para la amplificación de esta señal se intento usar un amplificador operacional LM324 sin mayores resultados debido a que este amplificador no posee ningún mecanismo para separar una señal tan pequeña del ruido. Finalmente tras consultar manuales de instrumentación se decidió usar un amplificador de instrumentación cuya principal característica es la eliminación de ruido por medio de dos amplificadores que, restan entre si el ruido que entra que en teoría es el mismo, y de esta manera tener una mejor señal, en este caso elegimos el amplificador de instrumentación marca Burr-Brown referencia INA128 (especificaciones adjuntas a ANEXOS) este tipo de amplificadores es comúnmente usado para adquisición de datos de sensores y su composición es la siguiente:
Figura 3. Composición de amplificador de instrumentación INA128
En esta figura vemos como el valor de G (ganancia del amplificador) puede tomar diferentes valores según la resistencia GR elegida. Dentro de las condiciones para la adquisición de toma de datos en nuestro sistema, se tiene un tope de 10 Voltios como señal de entrada, esto quiere decir que nuestra señal de salida de la celda de carga una vez amplificada será del orden de 6 Voltios (esto debido a que el sistema de amplificación se alimentara 10V por lo que hay que dejar un rango de voltaje para que el sistema no se sature). Dicho esto necesitaríamos una ganancia de:
200306
=mVV
(1)
Para esta ganancia según la figura 3 necesitaría una resistencia GR igual a:

17
GRk
GΩ
+=50
1 (2)
Ω= 250GR
Este sería el valor de nuestra resistencia GR para obtener la ganancia mencionada, sin embargo para efectos prácticos se adquirió un “TRIMER” elemento que funciona como una resistencia variable, la cual se ajustará para que la señal de la salida tenga un rango de 0 a 6V. Finalmente para que nuestra señal de salida del circuito sea lo más limpia posible se implemento al circuito un amplificador operacional como seguidor para darle robustez a la señal, y un filtro pasa baja para frecuencias menores de 30 Hz.
Figura 4. Comparación de señal con y sin filtro
Esta figura muestra la efectividad del filtro pasa baja, en donde la señal de color rojo cuenta con el filtro implementado pero la señal de color blanco no. El esquema final del circuito con los elementos anteriormente descritos es de la siguiente manera:

18
Figura 5. Esquema de circuito amplificador
Todo el circuito amplificador fue instalado un una caja para su mejor uso
3.4. Fotografía 1. Caja Fuente – Amplificador - Filtro
3.4. ADQUISICIÓN DE DATOS
Fotografía 2. Instalación sistema adquisición de datos

19
Como se menciono anteriormente fue necesaria la implementación de un circuito amplificador para una correcta adquisición de datos, sin embargo se necesita una transformación de señal análoga a digital para su posterior almacenamiento y análisis. Para lograr esto se crea un archivo en “DAQ Factory Express”, especificando las condiciones de nuestra toma de datos, en este caso configuramos aquel canal que se usara (Procedimiento explicado en el manual de uso) para proceder a tomar los datos del sistema. De esta manera sin mayores complicaciones podemos leer la señal de salida del amplificador hasta cada 0.02 segundos y adicionalmente almacenarla en un archivo xls para ser analizada en otro programa. En la fotografía 2 se muestra todo el sistema de adquisición de datos instalado. 3.5. ESTRUCTURA
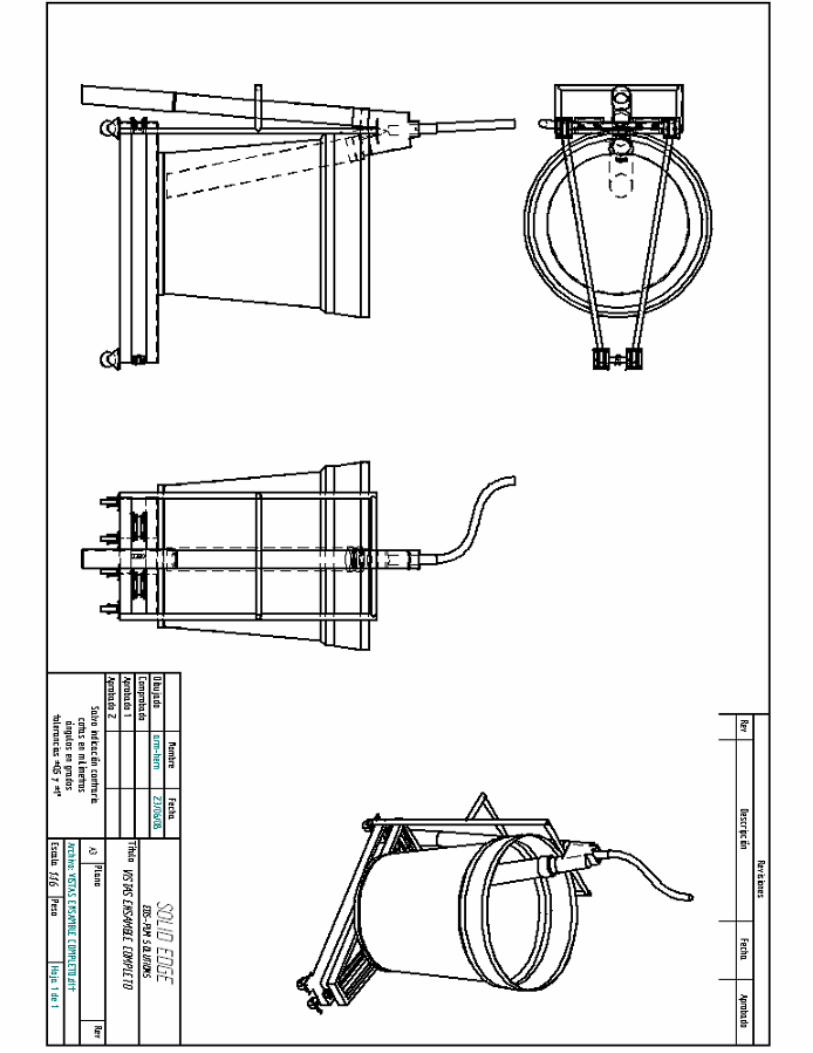
Fotografía 3. Instrumento completo
Para el instrumento a construir fue muy importante el diseño de la estructura que lo soportará, siendo un tanque de 1000 L estamos hablando de peso considerable, magnitud que hay que tener en cuenta para el diseño de la misma.

20
Sabiendo que la celda de carga esta diseñada para un peso de 1000 lb. (454 Kg.) se optó por construir una estructura pivotada para que el peso de una tonelada del tanque se viera reducido a la capacidad de la celda de carga como lo muestra el siguiente esquema.
Figura 6. Sistema de pilotaje para celda de carga
En las especificaciones del fabricante del tanque advierten de la necesidad que toda la superficie del tanque debe estar apoyada en una base sólida una vez el tanque este lleno es por esto que el tanque será soportado en circulo de madera y este a su vez estará apoyado por dos “canales U” en forma de A como se ve a continuación.
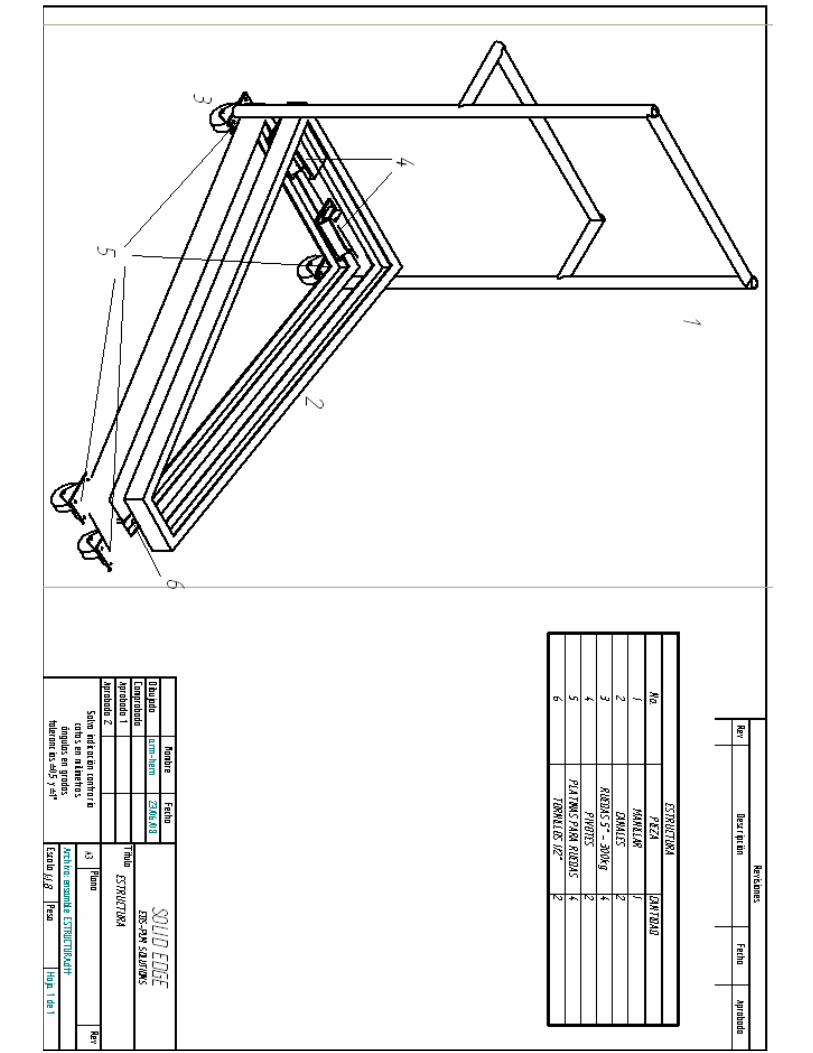
Figura 7. Estructura de canales en “U” [Plano 6. Estructura]
Como la estructura será corrediza, llevara ruedas, esto requiere otro soporte en “A” que lleve la misma carga (fotografía 5 y 7). Para la construcción de esta estructura fueron necesarios 8mt de canal en U de tres pulgadas ASTM-36, cuyas secciones fueron cortadas y soldadas para obtener las estructuras mostradas a continuación.

21
Fotografía 4. Sistema de pilotaje de estructura
Fotografía 5. Instalación de ruedas Fotografía 6. Sistema de protección contra bordes
Fotografía 7. Sistema de pilotaje En estas fotos vemos partes de la estructura el sistema de pivote que se uso y el recubrimiento de PVC redondeado que se instalo sobre las ruedas para proteger de los bordes filosos Para obtener las dimensiones de la estructura se utilizo el siguiente procedimiento:
Figura 8. Sistema de pilotaje para celda de carga
El tanque es de 1000L pero para efectos prácticos se llena con 925L aprox. Sabiendo esto podemos predecir que la fuerza que ejerce el tanque lleno será de 9KN pero la celda de carga esta diseñada para trabajar hasta 4.5KN, es por esto que el tanque fue ubicado en la posición mostrada por la figura 8 en donde si el
22
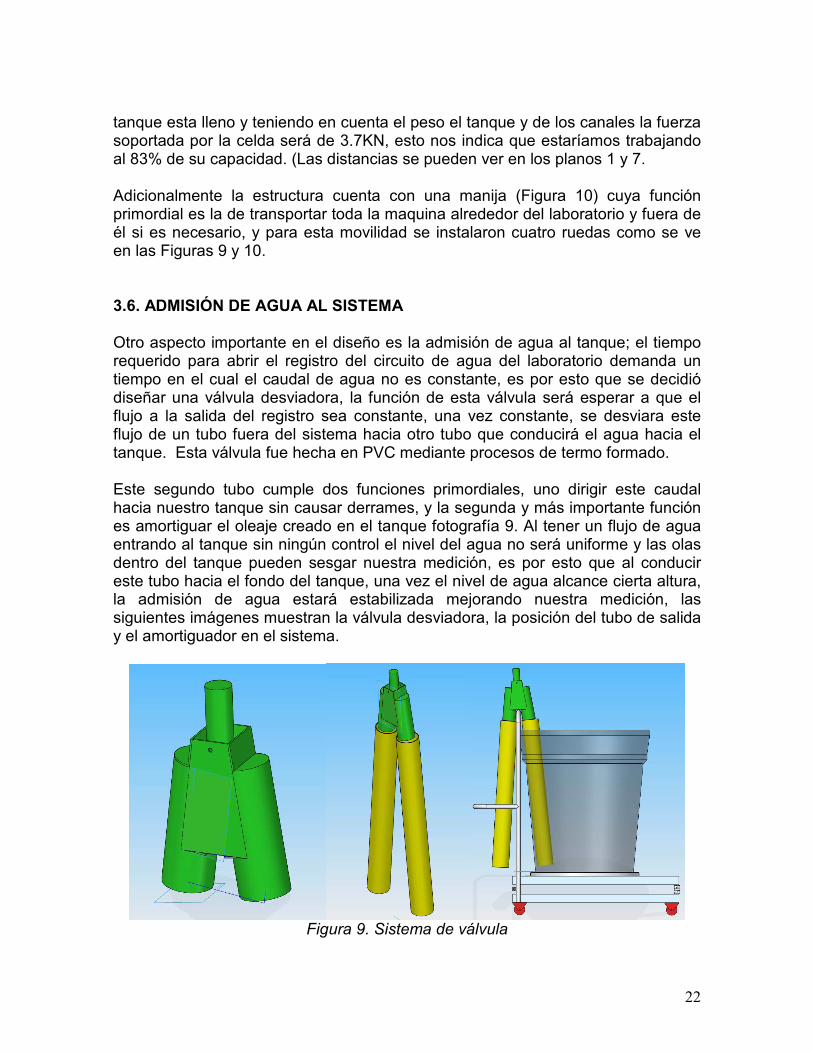
tanque esta lleno y teniendo en cuenta el peso el tanque y de los canales la fuerza soportada por la celda será de 3.7KN, esto nos indica que estaríamos trabajando al 83% de su capacidad. (Las distancias se pueden ver en los planos 1 y 7. Adicionalmente la estructura cuenta con una manija (Figura 10) cuya función primordial es la de transportar toda la maquina alrededor del laboratorio y fuera de él si es necesario, y para esta movilidad se instalaron cuatro ruedas como se ve en las Figuras 9 y 10. 3.6. ADMISIÓN DE AGUA AL SISTEMA Otro aspecto importante en el diseño es la admisión de agua al tanque; el tiempo requerido para abrir el registro del circuito de agua del laboratorio demanda un tiempo en el cual el caudal de agua no es constante, es por esto que se decidió diseñar una válvula desviadora, la función de esta válvula será esperar a que el flujo a la salida del registro sea constante, una vez constante, se desviara este flujo de un tubo fuera del sistema hacia otro tubo que conducirá el agua hacia el tanque. Esta válvula fue hecha en PVC mediante procesos de termo formado. Este segundo tubo cumple dos funciones primordiales, uno dirigir este caudal hacia nuestro tanque sin causar derrames, y la segunda y más importante función es amortiguar el oleaje creado en el tanque fotografía 9. Al tener un flujo de agua entrando al tanque sin ningún control el nivel del agua no será uniforme y las olas dentro del tanque pueden sesgar nuestra medición, es por esto que al conducir este tubo hacia el fondo del tanque, una vez el nivel de agua alcance cierta altura, la admisión de agua estará estabilizada mejorando nuestra medición, las siguientes imágenes muestran la válvula desviadora, la posición del tubo de salida y el amortiguador en el sistema.
Figura 9. Sistema de válvula

23
Fotografía 8. Sistema de válvula
Fotografía 9. Sistema de amortiguación de agua
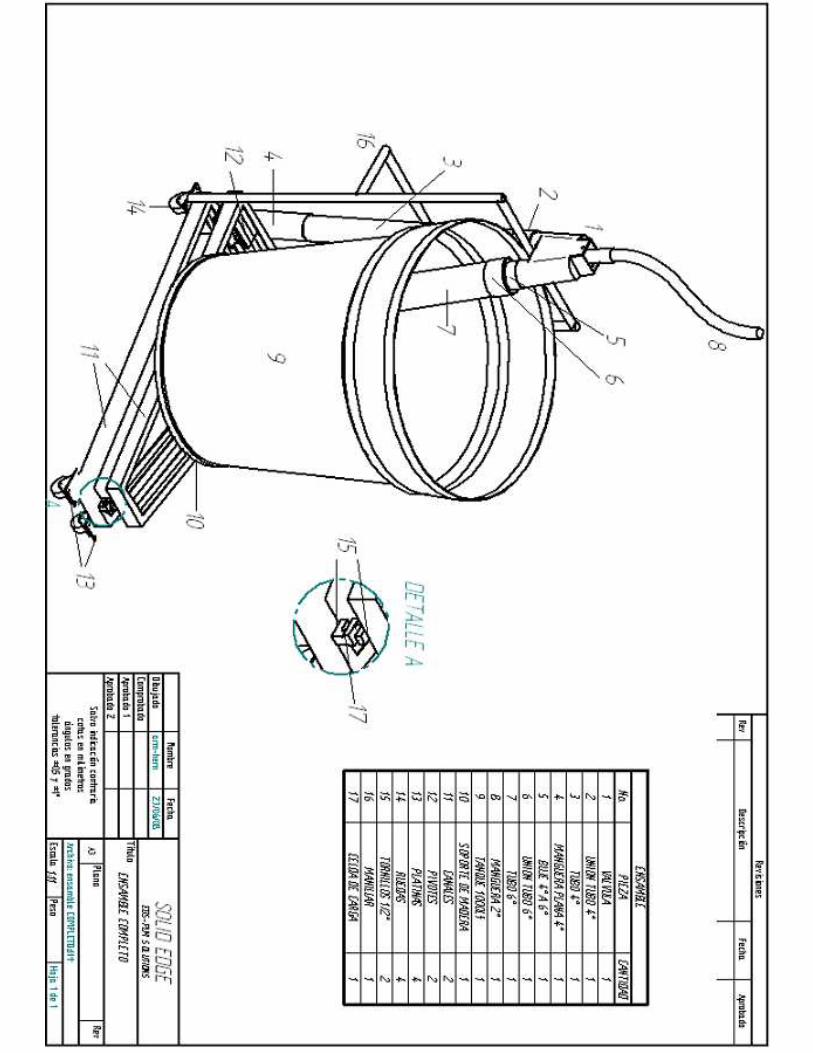
En este paso del diseño se tuvo en cuenta la manera de transportar el sistema completo y soportar la válvula, es por ello que se diseñó el elemento mostrado en la siguiente figura y una vez concebido todo el sistema electrónico y estructural el diseño final luce así:

24
Figura10. Estructura y concepto final
Finalmente a manera de resumen, un diagrama de bloques de la señal de nuestro sistema.
Figura 11. Diagrama de bloques

25
3.7. CONVERSÓN DE SEÑALES De esta forma vemos que la señal se obtiene de la siguiente manera: Sabemos que la cantidad de agua que se almacena en el tanque va de 0 a 925Kg de agua (esto a las condiciones específicas de nuestro tanque), de ahí pasa por una cierta cantidad de conversiones de señal para obtener nuestra señal de salida tal y como lo muestra la figura 11 y estos 4 pasos son:
1. Cantidad de Agua en el Tanque – Fuerza sobre la celda de carga En este paso contamos con la masa de agua dentro del tanque, que como ya se advirtió va de 0 Kg. a 925 Kg. Esto esta pivotado en nuestra estructura de modo que este peso va a ejercer una fuerza en la celda de carga. Sin embargo cuando el tanque esta vació la celda de carga esta midiendo el peso de la estructura más el peso del tanque como tal, dicho esto podemos ver obtener un modelo matemático teórico muy simple que modela esta conversión de señal: Por sumatoria de momentos (Ver figura 8):
WmtPmt *55.0*425.1 = (3) Donde P= Fuerza de Celda de Carga en Kilonewtons W= Peso de agua en tanque en Kilonewtons Ahora, si sumamos el peso del tanque vacío y la estructura soportada en la celda de carga tenemos una fuerza de 0.19 KN (Ver 4.2 Calibración del sistema), sumando esto a nuestra formula tenemos:
mt
smMmt
KNP425.1
1000/81.9*
55.0
19.0
2
+= (4)
Donde M es la masa en Kg. de agua dentro del tanque. A manera de prueba: Si miramos el escenario en donde el tanque esta con 925Kg y usamos este modelo, P debería ser de 3.69KN, y al hacer una muestra experimental (Ver 4.2 Calibración del sistema) el resultado es de 3.72KN lo cual esta muy acertado debido a la simplicidad del modelo que se propone (error de 0.8%). Dicho esto, el rango de operación de la celda de carga varia entre 0.19KN a 3.72KN.

26
2. Fuerza en la Celda de Carga – Señal Eléctrica de Celda de Carga
Esta conversión de señal esta encargada a nuestro transductor el cual como ya fue explicado en las secciones 3.1 y 3.2 funciona con un puente de Wheatstone, la salida de este instrumento según su ficha técnica (Ver anexos) es de: Output: 3 mV/V ±.0075 mV/V. En la tabla de calibración entregada por el fabricante se puede ver lo siguiente, para una alimentación de 10Vdc.
Lb mV 0 0500 151000 30
Sin embargo para nuestro caso estamos alimentando la celda con un voltaje de 11.54V fue por eso que se hizo una nueva calibración (Ver tabla1 y 2, grafica 3) y de esta última podemos sacar el modelo que nos dice:
2860.0*75.71 += PV (5) Donde P= Fuerza en Kilonewtons V1= Voltaje de Salida de la celda en Milivoltios. Finalmente nuestro rango de voltaje que manejara la señal de la celda de carga será de 1.7 a 29.1 Milivoltios.
3. Señal de Celda de Carga – Señal amplificada Este paso se encuentra explicado en detalle en la sección 3.3 pero el modelo que lo representa es una simple ganancia de 200 (teórico) pero para efectos prácticos medidos tenemos una ganancia de 196.8. Esto es:
8.196*12 VV = (6) Donde V2= Señal amplificada en Voltios A manera de prueba: Si tomamos la tabla 2 en donde se mide el voltaje antes y después de su amplificación vemos que la ganancia es de 196.8 consecutivamente.

27
Finalmente nuestro rango de voltaje que manejara la señal amplificada de la celda de carga será de 0.33 a 5.76 Voltios. Después de recopilar todas las ecuaciones tenemos una entrada de Voltaje para tener una salida de masa de agua dentro del tanque, esto se resume es la siguiente ecuación:
MASA DENTRO DEL TANQUE [Kg.] 54.63][*61.173 −= VVOLTAJE (7)
4. Señal Análoga – Señal Digital En la adquisición de datos como ya se menciono en la sección 3.4 se realiza la conversión de una señal análoga a una señal digital, que a su vez esta siendo guardada por el computador para posteriormente ser analizada. Vale la pena aclarar a esta altura que la tasa de adquisición de datos puede variar según las especificaciones de la tarjeta de adquisición. Para nuestro caso usando el programa DAQ Factory Express, se debe colocar en “Timing” (a la hora de crear el canal) la tasa a la cual se quiere adquirir (el programa recomienda adquirir datos con un período de 0.02 segundos debido a las condiciones de la tarjeta).
Sensibilidad: Finalmente podemos calcular la sensibilidad del instrumento: Sensibilidad = (salida máxima – salida mínima)/(entrada máxima-entrada mínima) Sensibilidad = 5.86mV/Kg. A continuación una tabla resumiendo los rangos de valores en las diferentes señales:
M De 0 a 925 KgW De 0 a 9,07 KNP De 0,19 a 3,72 KNmV De 1,7 a 29,1 mVV De 0,33 a 5,76 V

28
3.7.1. ANÁLISIS DE UNIDADES Acá se hará el análisis de las unidades usadas en la sección anterior para simplificar las operaciones:
mt
smMmt
KNP425.1
1000/81.9*
55.0
19.0
2
+=
2860.0*75.71 += PV
8.196*12 VV =
Al meter esto en una ecuación
8.196*2860.0425.1
1000/81.9*
55.0
19.0*75.72
2
+
+=mt
smMmt
KNV
Remplazando por constantes y organizando:
+
+
⋅⋅
⋅=mVV
CmVKNmV
CKNNsKNmt
CMV 3221 286.019.02
Donde:
=
=
⋅⋅
×= −
mVV
C
KNmV
C
NsKNmt
C
1968.0
75.7
1078.3
3
2
23
1
Si convertimos todo esto en una ecuación (7) y la comparamos con la obtenida experimentalmente en la calibración ecuación (8) obtenemos una gran similitud de los resultados, veamos:
M 54.63*61.173 −= V (7)
M 205.60*4.170 −= V (8)

29
4. EXPERIMENTACIÓN Y RESULTADOS
CALIBRACIÓN Una vez ajustado el tanque a su base, y con todos los componentes instalados, el paso a seguir es la calibración del sistema. El principal objetivo del caudalímetro es medir la cantidad de agua almacenada en el tanque en función del tiempo usando la cantidad de fuerza realizada por la celda de carga en cada instante de tiempo, dicho esto la idea es estar en la capacidad de conocer estas dos variable por medio del voltaje amplificado de la celda de carga. 4.1 CALIBRACIÓN DE CELDA DE CARGA
Cada celda de carga viene con una tabla de calibración realizada por el fabricante, sin embargo, en la calibración del fabricante la celda es alimentada con un voltaje de 10Vdc, pero en nuestro caso contamos con una fuente de 11,54Vdc, es por ello que fue necesaria una nueva calibración para nuestro nuevo voltaje. Esta nueva calibración fue realizada en el “CIPEM” (Centro de Investigación en Propiedades Mecánica y Estructura de Materiales) con la máquina universal de ensayos INSTRON 5586.
Para un mayor conocimiento de nuestro sistema, la calibración fue realizada de dos formas:
1. Con nuestro sistema de amplificación de señal, el cual incluye: el filtro pasa baja, el seguidor y el amplificador de instrumentación. La manera como se realizo la calibración fue ajustando la celda de carga a la maquina universal de ensayos y para cada fuerza aplicada a la celda se toma el valor de la señal ya amplificada de esta manera se construye la tabla 1.
2. Sin amplificación, tomando los datos directamente de la celda de carga con un multímetro. Mas en detalle, se tomo la celda de carga y se alimento con el mismo voltaje con la que será alimentada para nuestras mediciones esto es, 11.54V, por otro lado fue necesario medir la señal de salida con un multímetro ya que la tarjeta de adquisición de datos lee esta señal como ruido debido a que es muy bajita.
La manera como se calibro la celda fue aplicando diferentes magnitudes de fuerza a la celda y mirando su señal de salida, para cada tipo de calibración se realizaron dos mediciones. El comportamiento de la celda de carga fue de la siguiente forma:

30
COMPORTAMIENTO DE CELDA DE CARGA EN CALIBRACIÓN
0
1
2
3
4
5
6
7
8
0 20 40 60 80 100No. DATOS
SEÑAL DE SALIDA [v]
Grafica 1. Comportamiento de Celada de carga en calibración
Los resultados fueron los siguientes: Tabla 1. Calibración celda de carga 1ra medición 2da medición 1ra medición 2da medición
FUERZA (KN)
VOLTAJE AMPLIFICADO(V)
VOLTAJE AMPLIFICADO(V)
VOLTAJE NO AMPLIFICADO
(mV)
VOLTAJE NO AMPLIFICADO
(mV)
0 0,09765 0,09765 0,2 0,2 0,5 0,7763 0,7634 4,1 4,2 1 1,5869 1,5869 8,1 8,1 1,5 2,3291 2,3291 12 12 2 3,0908 3,1591 15,8 15,7 2,5 3,8671 3,8818 19,7 19,8 3 4,5996 4,6191 23,5 23,5 3,5 5,4052 5,4492 27,4 27,4 4 6,1621 6,2011 31,4 31,2 4,5 6,997 6,9726 35,1 35,2
Paso a seguir se sacó un promedio entre las dos mediciones para cada tipo de calibración para obtener los resultados finales que se muestran a continuación.

31
FUERZA vs VOLTAJE APLIFICADOy = 0,6513x - 0,0285
R2 = 0,9998
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
5
0 1 2 3 4 5 6 7 8VOLTIOS
KILONEWTO
NS
FUERZA vs VOLTAJE NO APLIFICADO y = 0,129x - 0,0369
R2 = 1
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
5
0 5 10 15 20 25 30 35 40miliVoltios
KILONEWTO
NS
Tabla 2. Copilado de Calibraciones
FUERZA (KN)
VOLTAJE AMPLIFICADO(V)
VOLTAJE NO AMPLIFICADO
(mV) 0 0,09765 0,2 0,5 0,76985 4,15 1 1,5869 8,1 1,5 2,3291 12 2 3,12495 15,75 2,5 3,87445 19,75 3 4,60935 23,5 3,5 5,4272 27,4 4 6,1816 31,3 4,5 6,9848 35,15
Grafica 2. Calibración Grafica 3. Calibración En los resultados graficados vemos las ecuaciones con sus respectivas varianzas, que para el primer caso es de 0.9998 y para el segundo caso es de 1 esto nos indica una excelente toma de datos, adicionalmente la primera ecuación es la que determinará la fuerza y el peso que sentirá la celda en nuestro sistema.
0285.0][6513.0][ −×= VVOLTAJEKNFUERZA

32
CANTIDAD DE AGUA DENTRO DEL TANQUEy = 170,4x - 60,205
R2 = 1
-200
0
200
400
600
800
1000
0 1 2 3 4 5 6 7
VOLTIOS
KILOGRAMOS
AGUA DENTRO DEL TANQUE [Kg]
SEÑAL AMPLIFICADA
[V]
925 5,76895 5,60865 5,42835 5,24805 5,07775 4,90745 4,72715 4,55685 4,37655 4,20625 4,02595 3,86565 3,68535 3,50505 3,32475 3,14445 2,98415 2,80385 2,63355 2,45325 2,28295 2,09265 1,92235 1,74205 1,56175 1,38145 1,21115 1,0385 0,8455 0,6625 0,4819 0,450 0,34
4.2 CALIBRACIÓN DEL SISTEMA Como segundo paso en nuestra calibración, el objetivo es saber la cantidad de masa de agua almacenada en el tanque, es por ello que la calibración consistió en tener diferentes cantidades de agua dentro del tanque para mirar el comportamiento de la señal de la celda de carga ya amplificada. La calibración consistió en pesar en un balde 2.5Kg. de agua con la balanza del laboratorio y pasar esta cantidad 6 veces en un recipiente mas grande para obtener medidas de 15 Kg. de agua, este balde se marco se fue llenando cada 15Kg. para ser trasladados al tanque de 1000L para tomar su correspondiente respuesta eléctrica de nuestro circuito. Para esta tabla los valores fueron medidos directamente de la tarjeta de adquisición de datos cuyas especificaciones se encuentran en su ficha técnica (ver anexos) su exactitud es de +/- 0.2%, dicho esto podemos contar con 2 cifras con una confiabilidad del 95% significativas como se muestra en la tabla
Los resultados fueron los siguientes:
Grafica 4. Calibración Tabla 3. Calibración del sistema

33
Como vemos en la grafica la varianza es de 1 lo cual es otra excelente medida y la ecuación con la que podremos saber la cantidad de masa dentro del tanque es:
MASA DENTRO DEL TANQUE [Kg.] 205.60][*4.170 −= VVOLTAJE (8) Finalmente se configuro el programa de la tarjeta de adquisición de datos para que permitiera ver las tres variables simultáneamente de la siguiente manera:
Figura 12. Vista de adquisición de datos

34
4.3 MUESTRA Finalmente después de configurado todo el sistema los resultados de una medición son de la siguiente forma:
CANTIDAD DE AGUA EN TANQUE
0
100
200
300
400
500
600
700
800
900
1000
0 50 100 150 200 250
Segundos
KILOGRAMOS
Grafica 5. Cantidad de agua vs. Tiempo
Ahora, si miramos la derivada para cada 5 segundos de la grafica obtendríamos algo de este estilo:
CAUDAL
0
1
2
3
4
5
6
7
8
0 50 100 150 200
Segundos
Litros*Segundo
Grafica 6. Caudal para cada 5 segundos
Para el cálculo de este caudal se tomo una muestra de datos de 10 segundos de duración, con los primeros 5 datos espaciados cada 1 segundo, se halló el promedio aritmético de estos cinco valores del voltaje correspondiente al valor promedio de los primeros 5 segundos; se repitió esta misma operación para el siguiente período de los siguientes 5 segundos. Se multiplicaron estos datos por la sensibilidad del instrumento para conocer el valor de masa dentro del tanque para estos periodos, a continuación se restaron estos dos datos y se dividió por 5 segundos para conocer el caudal en este lapso de 10 segundos y se repitió este

35
procedimiento para cada periodo de 10 segundo cuyos resultados nos muestra la grafica. Vale la pena aclarar que la irregularidad de estos datos es completamente normal dadas las condiciones que estamos estudiando (varianza 0.1), acá lo importante es conocer la derivada general de la grafica de “CANTIDAD DE AGUA EN EL TANQUE” ya que esta en su esencia, es una curva cuya pendiente es constante a la largo de la grafica. Para ello se hace un análisis de intervalo de confianza: Como se analiza el caudal para 36 intervalos se saca un promedio aritmético de todos ellos y su respectiva desviación estándar:
LpsS
LpsQ
Q 35.0
97.4
=
=
n
SzQu
n
SzQ Q
cQQ
c 2/2/ +<<− (9)
Para un intervalo de confianza de 95% tomamos 2/cz = 475.0z =1.96 para tener
Qu = 4.973635.0
96.1±
Finalmente Qu = 4.97 11.0± Lps
Análisis de incertidumbre En el siguiente análisis se estudiaran los componentes así como la exactitud esperada del sistema. Este análisis tuvo como bases los conceptos presentados en el libro Mechanical Measurementes del capitulo 3.11 “Examples of Uncertainty Analysis” en donde diferentes sistemas con distintas exactitudes asociadas son analizados. De allí es tomado el siguiente procedimiento tomado a continuación Para nuestro caso en particular es imperioso el análisis de los componentes que hacen parte de nuestro sistema, estos son: Celda de carga Amplificador de instrumentación Tarjeta de adquisición de datos

36
Dicho esto, empezamos nuestro análisis con nuestra celda de carga, cuya función primordial es la medir el peso W de agua dentro del tanque, ahora, cual es la confiabilidad de esta medición, para ello nos referimos a su ficha técnica (ver anexos) en donde nos especifican su exactitud de +/- 0.03% en la practica según el texto este tipo de datos se pueden asociar a una confiabilidad del 95% (esta misma confiabilidad será asociada a las exactitudes de los demás instrumentos). Nuestro próximo instrumento en su orden pertinente es el amplificador de instrumentación INA128 de la misma manera en su ficha técnica podemos ver su exactitud con un +/-0.05%. Después de definir los anteriores valores es importante también incluir nuestro sistema de adquisición de datos a nuestro estudio analizando la incertidumbre relacionada a nuestro sistema de adquisición de datos, una vez mas mirando las especificaciones de nuestra tarjeta en el archivo “Labjack U12 user´s guide” encontrado en el CD de instalación de la misma tarjeta, en la parte de “Especificaciones” hacen alusión a su exactitud de la tarjeta con +/- 0.2 Otro parámetro importante para nuestro análisis es la densidad del agua, según este mismo capitulo (3.11.2 expected uncertainty for flowmeter calibration Pág. 80 2do renglón) se afirma que entre 0º C y 38º C la densidad del agua decrece un 0.7%, entonces si la desviación estándar de la temperatura es +/-0.1º C entonces la variación de su densidad ( ρ ) es de 0.002% Reorganizando los resultados tenemos (dado el análisis sobre los instrumentos del ejemplo 3.15 del libro se tomaron los valores de sus desviaciones estándares):
Variable Incertidumbre (95%) Desviacion estandarPeso 0,03% 0,100%
Densidad 0,02% 0,002%Adquisición de datos 0,20% 1,000%Amplificacion de señal 0,05% 0,000%
Como se mostró anteriormente si tenemos un caudal de:
Qu = 4.97 11.0± Lps (9)
Podemos afirmar que este rango de valores esta asociado a la exactitud del instrumento, esto es, entre mas pequeño sean estos limites mas exactitud tendrá el sistema en nuestro caso en particular este rango esta definido por el 2.21% de la media que, viene siendo la exactitud de nuestro instrumento.

37
5. CONCLUSIONES Y RECOMENDACIONES
Después del diseño, implementación y análisis del caudalímetro presento las siguientes conclusiones sobre diferentes aspectos del proyecto: 5.1 Diseño y construcción La planeación para el proceso de construcción es una de las partes mas dispendiosas, demoradas e importantes de todo el proyecto, es por esto que fue de mucha importancia la ayuda computacional para el diseño del aparato, en este caso SOLID EDGE ya que simulando el diseño se percato de muchos posible errores que su hubieran podido cometer como la intersección de piezas y el sobredimensionamiento de elementos. Cabe resaltar en este punto que programas de esta naturaleza permiten recrear cualquier figura que se pueda imaginar, sin embargo es de mucha importancia resolver primero el problema de la manufactura de la pieza, y los elementos que posee la universidad para su realización. Otro punto vital en el diseño es contar siempre con la variedad de elemento que ofrece el mercado, ya que en nuestro caso se tuvo que cambiar partes del diseño varias veces debido a que se desconocían los estándares de tubería, vigas, canales, etcétera. Una buena recomendación para este punto es siempre consultar con el profesor asesor del proyecto, con los técnicos del laboratorio o dado el caso llamar a tiendas y preguntar la disponibilidad de los elementos. Para nuestro caso y de muchos otros diseños, se cuentan con muchas posibilidades, es por esto que fue de gran ayuda e importancia realizar una tabla comparativa entre las distintas opciones teniendo en cuenta, precio exactitud o cualesquiera que sean los principales objetivos, para tomar un el mejor camino. 5.2 Instrumentación Para nuestro caso especifico y muchos otros transductores, el uso de una celda de carga requiere de un proceso especial para adquirir una señal deseada, para lograr esto es necesaria la iteración de prueba y error hasta lograr los objetivos, de esto se concluye: Los amplificadores operacionales son una muy mala opción para amplificar una señal tan pequeña del orden de 30mV, ya que esta señal es confundida con ruido y el resultado de esta amplificaron no tiene sentido alguno, lo mejor para estos casos es usar un amplificador de instrumentación que nos permite obtener grandes ganancias y además cuenta con un sistema que separa el ruido de la señal. Es muy importante tener en cuenta la relación que existe entre la alimentación de todo el circuito amplificador y la señal de salida del mismo, un error que se

38
cometió fue adaptar la ganancia para que la señal de salida fuera de 10Vdc mientras que estábamos alimentando el circuito con 11,75Vdc, el resultado fue el siguiente:
CALIBRACIÓN CELDA DE CARGA
0
1
2
3
4
5
6
7
8
9
0 1 2 3 4 5
FUERZA (KILONEWTONS)
SEÑAL DE SALIDA (V)
Grafica 7. Calibración celda de carga (errónea)
Lo que sucedió fue que cuando se calibro por primera vez la celda de carga, la señal se saturaba en un punto y no tenia mas voltaje para suplir a la señal de salida, esto afortunadamente tuvo un sencillo arreglo que fue disminuir el valor de la ganancia para obtener ordenes de magnitud en la señal de salida de 0V a 6V. Esto se debe a que todos aquellos componentes en el circuito consumen energía y no se puede esperar una salida de 10V si se esta alimentando el amplificador con 11V. 5.3 Análisis de datos Los resultados finales de nuestro sistema deben ser vistos con mucho análisis, dado que estamos midiendo con un instrumento dinámico de exactitud: 2.21% y el caudal tiene características turbulentas causadas por la caída del agua desde la boquilla hasta la superficie de agua almacenada dentro del tanque, las variaciones en la señal lograda se pueden apreciar en esta grafica.
Grafica 8. Caudal para periodo de 1 segundo
39
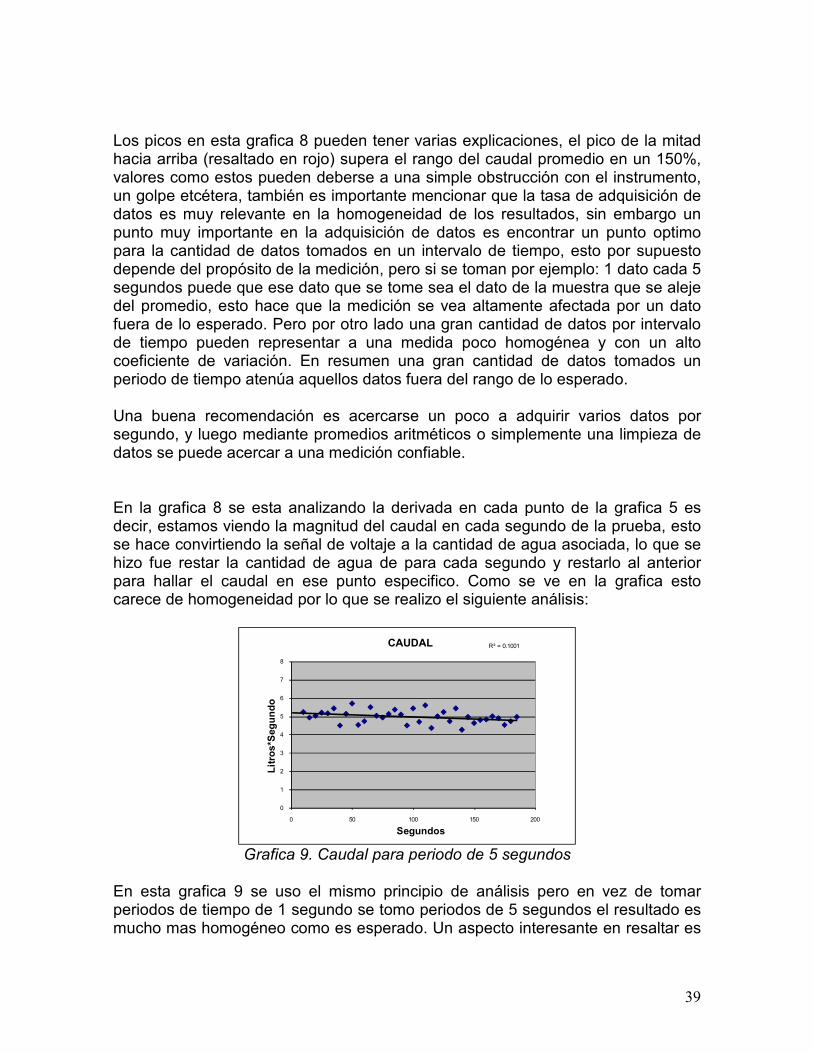
Los picos en esta grafica 8 pueden tener varias explicaciones, el pico de la mitad hacia arriba (resaltado en rojo) supera el rango del caudal promedio en un 150%, valores como estos pueden deberse a una simple obstrucción con el instrumento, un golpe etcétera, también es importante mencionar que la tasa de adquisición de datos es muy relevante en la homogeneidad de los resultados, sin embargo un punto muy importante en la adquisición de datos es encontrar un punto optimo para la cantidad de datos tomados en un intervalo de tiempo, esto por supuesto depende del propósito de la medición, pero si se toman por ejemplo: 1 dato cada 5 segundos puede que ese dato que se tome sea el dato de la muestra que se aleje del promedio, esto hace que la medición se vea altamente afectada por un dato fuera de lo esperado. Pero por otro lado una gran cantidad de datos por intervalo de tiempo pueden representar a una medida poco homogénea y con un alto coeficiente de variación. En resumen una gran cantidad de datos tomados un periodo de tiempo atenúa aquellos datos fuera del rango de lo esperado. Una buena recomendación es acercarse un poco a adquirir varios datos por segundo, y luego mediante promedios aritméticos o simplemente una limpieza de datos se puede acercar a una medición confiable. En la grafica 8 se esta analizando la derivada en cada punto de la grafica 5 es decir, estamos viendo la magnitud del caudal en cada segundo de la prueba, esto se hace convirtiendo la señal de voltaje a la cantidad de agua asociada, lo que se hizo fue restar la cantidad de agua de para cada segundo y restarlo al anterior para hallar el caudal en ese punto especifico. Como se ve en la grafica esto carece de homogeneidad por lo que se realizo el siguiente análisis:
R² = 0.1001
0
1
2
3
4
5
6
7
8
0 50 100 150 200
Litros*Segundo
Segundos
CAUDAL
Grafica 9. Caudal para periodo de 5 segundos
En esta grafica 9 se uso el mismo principio de análisis pero en vez de tomar periodos de tiempo de 1 segundo se tomo periodos de 5 segundos el resultado es mucho mas homogéneo como es esperado. Un aspecto interesante en resaltar es

40
la pendiente que disminuye a medida que el tiempo aumenta esto se debe a que nuestro tanque es llenado desde otro tanque mas grande, a medida que el tanque grande pierde agua la presión de salida del mismo decrece y de la misma forma decrece su caudal como se observa en la línea de tendencia. La irregularidad de los datos se debe básicamente a: La turbulencia del agua dentro del tanque que puede ser reducida con amortiguación (por ejemplo se introduce una esponja delgada que flote sobre la superficie, o con un tuvo que llegue hasta el fondo del tanque como en nuestro caso. El sistema de adquisición de datos captura datos con un período fijo y el valor registrado debe ser tratado como el de una muestra digital de una señal de ruido continua en la cual es necesario eliminar el ruido extraordinario prolongando el período de medición para lograr confiabilidad en la lectura.

41
6. BIBLIOGRAFIA Para la realización del anterior proyecto se contó con el apoyo del siguiente material: [1] James J. Lindquist, (1965). Volumetric Flow meter Calibration. United States Patent office, No.3,177,699. [2] Frank W. Kenik, (1983). Liquid Flow meter. United States Patent office, No. 4,538,445 [3] Wright, J. D., (1998) NIST Calibration Services for gas Flor Meters: Piston Provers and Bell Prover Facilities. Gaithersburg, National Institute of standars and Technology, Special Publication. [4] Jarret, F. H. (1954) Standpipes simplify flowmeter calibration. Control Eng. 1:37, December [5] Lance Alan Wolf. (2001). Baffle for suppressing slosh in a tank and a tank for incorporating same. United States Patent office, No. 6,220,287. [6] White, F.M. (2003). Fluid Mechanics. (Fifth Ed). New York, USA: McGraw Hill [7] Thomas G. Beckwith (2007). Mechanical Measurements. (Sixth Ed). USA: Pearson, Prentice Hall. [8] Catalogo Virtual Omegadyne. http://www.omegadyne.com/

42
7. ANEXOS -Guía de usuario -Ficha técnica celda de carga -Ficha técnica de amplificador -Ficha técnica de Labjack U12 -Planos del sistema










©1995 Burr-Brown Corporation PDS-1296C Printed in U.S.A. October, 1996
A1
A2
A3
40kΩ40kΩ
40kΩ40kΩ
VIN
2
1
8
3
6
5
VIN
RG
V+
V–
INA128, INA129
Ref
VO
INA128:
G = 1 + 50kΩRG
INA129:
G = 1 + 49.4kΩRG
–
+
Over-VoltageProtection
25kΩ(1)
25kΩ(1)
Over-VoltageProtection
4
7
NOTE: (1) INA129: 24.7kΩ
FEATURES LOW OFFSET VOLTAGE: 50µV max
LOW DRIFT: 0.5µV/°C max
LOW INPUT BIAS CURRENT: 5nA max
HIGH CMR: 120dB min
INPUTS PROTECTED TO ±40V
WIDE SUPPLY RANGE: ±2.25 to ±18V
LOW QUIESCENT CURRENT: 700µA
8-PIN PLASTIC DIP, SO-8
DESCRIPTIONThe INA128 and INA129 are low power, generalpurpose instrumentation amplifiers offering excellentaccuracy. Their versatile 3-op amp design and smallsize make them ideal for a wide range of applications.Current-feedback input circuitry provides wide band-width even at high gain (200kHz at G = 100).
A single external resistor sets any gain from 1 to10,000. INA128 provides an industry standard gainequation; INA129’s gain equation is compatible withthe AD620.
The INA128/INA129 is laser trimmed for very lowoffset voltage (50µV), drift (0.5µV/°C) and high com-mon-mode rejection (120dB at G ≥ 100). It operateswith power supplies as low as ±2.25V, and quiescentcurrent is only 700µA—ideal for battery operatedsystems. Internal input protection can withstand up to±40V without damage.
The INA128/INA129 is available in 8-pin plasticDIP, and SO-8 surface-mount packages, specified forthe –40°C to +85°C temperature range. The INA128is also available in dual configuration, the INA2128.
Precision, Low PowerINSTRUMENTATION AMPLIFIERS
® INA128INA129
APPLICATIONS BRIDGE AMPLIFIER
THERMOCOUPLE AMPLIFIER
RTD SENSOR AMPLIFIER
MEDICAL INSTRUMENTATION
DATA ACQUISITION
INA128
INA128
INA129
INA129
International Airport Industrial Park • Mailing Address: PO Box 11400, Tucson, AZ 85734 • Street Address: 6730 S. Tucson Blvd., Tucson, AZ 85706 • Tel: (520) 746-1111 • Twx: 910-952-1111Internet: http://www.burr-brown.com/ • FAXLine: (800) 548-6133 (US/Canada Only) • Cable: BBRCORP • Telex: 066-6491 • FAX: (520) 889-1510 • Immediate Product Info: (800) 548-6132

SPECIFICATIONSAt TA = +25°C, VS = ±15V, RL = 10kΩ, unless otherwise noted.
INA128P, U INA128PA, UAINA129P, U INA129PA, UA
PARAMETER CONDITIONS MIN TYP MAX MIN TYP MAX UNITS
Specification same as INA128P, U or INA129P, U.NOTE: (1) Input common-mode range varies with output voltage—see typical curves. (2) Guaranteed by wafer test. (3) Temperature coefficient of the 50kΩ (or 49.4kΩ)term in the gain equation. (4) Nonlinearity measurements in G = 1000 are dominated by noise. Typical nonlinearity is ±0.001%.
INPUTOffset Voltage, RTI
Initial TA = +25°C ±10 ±100/G ±50 ±500/G ±25 ±100/G ±125 ±1000/G µVvs Temperature TA = TMIN to TMAX ±0.2 ± 2/G ±0.5 ± 20/G ±0.2 ± 5/G ±1 ± 20/G µV/°Cvs Power Supply VS = ±2.25V to ±18V ±0.2 ±20/G ±1 ±100/G ±2 ±200/G µV/V
Long-Term Stability ±0.1 ±3/G µV/moImpedance, Differential 1010 || 2 Ω || pF
Common-Mode 1011 || 9 Ω || pFCommon-Mode Voltage Range(1) VO = 0V (V+) – 2 (V+) – 1.4 V
(V–) + 2 (V–) + 1.7 VSafe Input Voltage ±40 VCommon-Mode Rejection VCM = ±13V, ∆RS = 1kΩ
G=1 80 86 73 dBG=10 100 106 93 dB
G=100 120 125 110 dBG=1000 120 130 110 dB
BIAS CURRENT ±2 ±5 ±10 nAvs Temperature ±30 pA/°C
Offset Current ±1 ±5 ±10 nAvs Temperature ±30 pA/°C
NOISE VOLTAGE, RTI G = 1000, RS = 0Ωf = 10Hz 10 nV/√Hzf = 100Hz 8 nV/√Hzf = 1kHz 8 nV/√HzfB = 0.1Hz to 10Hz 0.2 µVp-p
Noise Currentf=10Hz 0.9 pA/√Hzf=1kHz 0.3 pA/√HzfB = 0.1Hz to 10Hz 30 pAp-p
GAINGain Equation, INA128 1 + (50kΩ/RG) V/V
INA129 1 + (49.4kΩ/RG) V/VRange of Gain 1 10000 V/VGain Error G=1 ±0.01 ±0.024 ±0.1 %
G=10 ±0.02 ±0.4 ±0.5 %G=100 ±0.05 ±0.5 ±0.7 %
G=1000 ±0.5 ±1 ±2 %Gain vs Temperature(2) G=1 ±1 ±10 ppm/°C
50kΩ (or 49.4kΩ) Resistance(2, 3) ±25 ±100 ppm/°CNonlinearity VO = ±13.6V, G=1 ±0.0001 ±0.001 ±0.002 % of FSR
G=10 ±0.0003 ±0.002 ±0.004 % of FSRG=100 ±0.0005 ±0.002 ±0.004 % of FSR
G=1000 ±0.001 (Note 4) % of FSR
OUTPUTVoltage: Positive RL = 10kΩ (V+) – 1.4 (V+) – 0.9 V
Negative RL = 10kΩ (V–) + 1.4 (V–) + 0.8 VLoad Capacitance Stability 1000 pFShort-Circuit Current +6/–15 mA
FREQUENCY RESPONSE
Bandwidth, –3dB G=1 1.3 MHzG=10 700 kHz
G=100 200 kHzG=1000 20 kHz
Slew Rate VO = ±10V, G=10 4 V/µsSettling Time, 0.01% G=1 7 µs
G=10 7 µsG=100 9 µs
G=1000 80 µsOverload Recovery 50% Overdrive 4 µs
POWER SUPPLYVoltage Range ±2.25 ±15 ±18 VCurrent, Total VIN = 0V ±700 ±750 µA
TEMPERATURE RANGESpecification –40 85 °COperating –40 125 °CθJA 8-Pin Dip 80 °C/W
SO-8 SOIC 150 °C/W

The information provided herein is believed to be reliable; however, BURR-BROWN assumes no responsibility for inaccuracies or omissions. BURR-BROWN assumes no responsibilityfor the use of this information, and all use of such information shall be entirely at the user’s own risk. Prices and specifications are subject to change without notice. No patent rights orlicenses to any of the circuits described herein are implied or granted to any third party. BURR-BROWN does not authorize or warrant any BURR-BROWN product for use in life supportdevices and/or systems.
ELECTROSTATICDISCHARGE SENSITIVITY
This integrated circuit can be damaged by ESD. Burr-Brownrecommends that all integrated circuits be handled with ap-propriate precautions. Failure to observe proper handling andinstallation procedures can cause damage.
ESD damage can range from subtle performance degradationto complete device failure. Precision integrated circuits maybe more susceptible to damage because very small parametricchanges could cause the device not to meet its publishedspecifications.
ORDERING INFORMATION
PACKAGEDRAWING TEMPERATURE
PRODUCT PACKAGE NUMBER(1) RANGE
INA128PA 8-Pin Plastic DIP 006 –40°C to +85°CINA128P 8-Pin Plastic DIP 006 –40°C to +85°CINA128UA SO-8 Surface-Mount 182 –40°C to +85°CINA128U SO-8 Surface-Mount 182 –40°C to +85°C
INA129PA 8-Pin Plastic DIP 006 –40°C to +85°CINA129P 8-Pin Plastic DIP 006 –40°C to +85°CINA129UA SO-8 Surface-Mount 182 –40°C to +85°CINA129U SO-8 Surface-Mount 182 –40°C to +85°C
NOTE: (1) For detailed drawing and dimension table, please see end of datasheet, or Appendix C of Burr-Brown IC Data Book.
PIN CONFIGURATION
8-Pin DIP and SO-8
RG
V–IN
V+IN
V–
RG
V+
VO
Ref
1
2
3
4
8
7
6
5
Top View
Supply Voltage .................................................................................. ±18VAnalog Input Voltage Range ............................................................. ±40VOutput Short-Circuit (to ground) .............................................. ContinuousOperating Temperature ................................................. –40°C to +125°CStorage Temperature ..................................................... –40°C to +125°CJunction Temperature .................................................................... +150°CLead Temperature (soldering, 10s) ............................................... +300°C
ABSOLUTE MAXIMUM RATINGS

TYPICAL PERFORMANCE CURVESAt TA = +25°C, VS = ±15V, unless otherwise noted.
COMMON-MODE REJECTION vs FREQUENCY
Frequency (Hz)C
omm
on-M
ode
Rej
ectio
n (d
B)
10 100 10k 1M1k
140
120
100
80
60
40
20
0100k
G = 1V/V
G = 10V/V
G = 100V/VG = 1000V/V
POSITIVE POWER SUPPLY REJECTIONvs FREQUENCY
Frequency (Hz)
Pow
er S
uppl
y R
ejec
tion
(dB
)
140
120
100
80
60
40
20
010 100 1k 10k 100k 1M
G = 100V/V
G = 1000V/V
G = 1V/V
G = 10V/V
INPUT COMMON-MODE RANGEvs OUTPUT VOLTAGE, VS = ±5, ±2.5V
Output Voltage (V)
Com
mon
-Mod
e V
olta
ge (
V)
–5
5
4
3
2
1
0
–1
–2
–3
–4
–5–4 –3 –2 –1 0 1 2 3 4 5
VS = ±5VVS = ±2.5V
G = 1 G = 1
G ≥ 10 G ≥ 10
G ≥ 10
G = 1
NEGATIVE POWER SUPPLY REJECTIONvs FREQUENCY
Frequency (Hz)
Pow
er S
uppl
y R
ejec
tion
(dB
)
140
120
100
80
60
40
20
010 100 1k 10k 100k 1M
G = 100V/V
G = 1000V/V
G = 1V/V
G = 10V/V
INPUT COMMON-MODE RANGEvs OUTPUT VOLTAGE, VS = ±15V
Output Voltage (V)
Com
mon
-Mod
e V
olta
ge (
V)
–15 –10 0 5 15–5
15
10
5
0
–5
–10
–1510
G = 1 G = 1
G ≥ 10 G ≥ 10
VD/2–
+–
+
VCM
VO
VD/2 Ref
–15V
+15V
+
GAIN vs FREQUENCY60
50
40
30
20
10
0
–10
–20
Gai
n (d
B)
Frequency (Hz)
1k 10k 100k 1M 10M
G = 100V/V
G = 10V/V
G = 1V/V
G = 1000V/V

INPUT OVER-VOLTAGE V/I CHARACTERISTICS5
4
3
2
1
0
–1
–2
–3
–4
–5
Inpu
t Cur
rent
(m
A)
Input Voltage (V)
–50 –40 –30 –20 –10 10 20 30 400 50
G = 1V/V
G = 1V/V
G = 1000V/V
G = 1000V/V VINIIN –15V
+15V
Flat region representsnormal linear operation.
TYPICAL PERFORMANCE CURVES (CONT)At TA = +25°C, VS = ±15V, unless otherwise noted.
INPUT- REFERRED NOISE vs FREQUENCY
Frequency (Hz)
Inpu
t-R
efer
red
Vol
tage
Noi
se (
nV/√
Hz)
1 10 1k100
1k
100
10
110k
G = 1V/V
G = 10V/V
100
10
1
0.1
Inpu
t Bia
s C
urre
nt N
oise
(pA
/√ H
z)
Current Noise
G = 100, 1000V/V
SETTLING TIME vs GAIN
Gain (V/V)
Set
tling
Tim
e (µ
s)
100
10
11 10 100 1000
0.01%
0.1%
INPUT OFFSET VOLTAGE WARM-UP10
8
6
4
2
0
–2
–4
–6
–8
–100 100 200 300 400 500
Time (µs)
Offs
et V
olta
ge C
hang
e (µ
V)
INPUT BIAS CURRENT vs TEMPERATURE2
1
0
–1
–2
–75 –50 –25 0 25 50 75 100 125
Temperature (°C)
Inpu
t Bia
s C
urre
nt (
nA)
IOS
IB
Typical IB and IOSRange ±2nA at 25°C
QUIESCENT CURRENT and SLEW RATEvs TEMPERATURE
Temperature (°C)
Qui
esce
nt C
urre
nt (
µA)
0.85
0.8
0.75
0.7
0.65
0.6
6
5
4
3
2
1–75 –50 –25 0 25 50 75 100 125
Sle
w R
ate
(V/µ
s)
IQ
Slew Rate

TYPICAL PERFORMANCE CURVES (CONT)At TA = +25°C, VS = ±15V, unless otherwise noted.
OUTPUT VOLTAGE SWINGvs OUTPUT CURRENT
(V+)
(V+)–0.4
(V+)–0.8
(V+)–1.2
(V+)+1.2
(V–)+0.8
(V–)+0.4
V–0 1 2 3 4
Output Current (mA)
Out
put V
olta
ge (
V)
OUTPUT VOLTAGE SWINGvs POWER SUPPLY VOLTAGE
V+
(V+)–0.4
(V+)–0.8
(V+)–1.2
(V–)+1.2
(V–)+0.8
(V–)+0.4
V–0 5 10 15 20
Power Supply Voltage (V)O
utpu
t Vol
tage
Sw
ing
(V) +25°C +85°C
–40°C
+25°C–40°C
+85°C
RL = 10kΩ
+85°C–40°C
SHORT-CIRCUIT OUTPUT CURRENTvs TEMPERATURE
18
16
14
12
10
8
6
4
2
0–75 –50 –25 0 25 50 75 100 125
Temperature (°C)
Sho
rt C
ircui
t Cur
rent
(m
A)
–ISC
+ISC
MAXIMUM OUTPUT VOLTAGE vs FREQUENCY
Frequency (Hz)
Pea
k-to
-Pea
k O
utpu
t Vol
tage
(V
pp)
30
25
20
15
10
5
01k 10k 100k 1M
G = 1
G = 10, 100
G = 1000
TOTAL HARMONIC DISTORTION + NOISEvs FREQUENCY
Frequency (Hz)
TH
D +
N (
%)
100 1k 10k
1
0.1
0.01
0.001100k
VO = 1Vrms G = 1RL = 10kΩ
G = 10V/VRL = 100kΩ
G = 100, RL = 100kΩ
G = 1, RL = 100kΩ
500kHz MeasurementBandwidth
Dashed Portionis noise limited.

TYPICAL PERFORMANCE CURVES (CONT)At TA = +25°C, VS = ±15V, unless otherwise noted.
LARGE-SIGNAL(G = 1, 10)
SMALL-SIGNAL(G = 100, 1000)
SMALL-SIGNAL(G = 1, 10)
LARGE-SIGNAL(G = 100, 1000)
VOLTAGE NOISE 0.1 to 10HzINPUT-REFERRED, G ≥ 100
20µs/div5µs/div
20µs/div5µs/div
1s/div
0.1µV/div
5V/div
G = 1
G = 10
5V/div
G = 100
G = 1000
20mV/div
G = 1
G = 10
20mV/div
G = 100
G = 1000

A1
A2
A36
40kΩ40kΩ
40kΩ40kΩ
7
4
3
8
1
2VIN
VIN
RG
V+
V–
INA128, INA129–
+5
Over-VoltageProtection
25kΩ(1)
25kΩ(1)
Over-VoltageProtection
Load
VO = G • (VIN – VIN)+ –
0.1µF
0.1µF
+
–
VO
RG
Also drawn in simplified form:
INA128
Ref
VO
VIN–
VIN+
Ref
NOTE: (1) INA129: 24.7kΩ
APPLICATION INFORMATIONFigure 1 shows the basic connections required for operationof the INA128/INA129. Applications with noisy or highimpedance power supplies may require decoupling capaci-tors close to the device pins as shown.
The output is referred to the output reference (Ref) terminalwhich is normally grounded. This must be a low-impedanceconnection to assure good common-mode rejection. A resis-tance of 8Ω in series with the Ref pin will cause a typicaldevice to degrade to approximately 80dB CMR (G = 1).
SETTING THE GAIN
Gain is set by connecting a single external resistor, RG,connected between pins 1 and 8:
INA129: (2)
Commonly used gains and resistor values are shown inFigure 1.
The 50kΩ term in Equation 1 (49.4kΩ in Equation 2) comesfrom the sum of the two internal feedback resistors of A1 andA2. These on-chip metal film resistors are laser trimmed to
INA128: (1)G = 1 +
50kΩRG
FIGURE 1. Basic Connections.
accurate absolute values. The accuracy and temperaturecoefficient of these internal resistors are included in the gainaccuracy and drift specifications of the INA128/INA129.
The stability and temperature drift of the external gainsetting resistor, RG, also affects gain. RG’s contribution togain accuracy and drift can be directly inferred from the gainequation (1). Low resistor values required for high gain canmake wiring resistance important. Sockets add to the wiringresistance which will contribute additional gain error (possi-bly an unstable gain error) in gains of approximately 100 orgreater.
DYNAMIC PERFORMANCE
The typical performance curve “Gain vs Frequency” showsthat, despite its low quiescent current, the INA128/INA129achieves wide bandwidth, even at high gain. This is due tothe current-feedback topology of the input stage circuitry.Settling time also remains excellent at high gain.
NOISE PERFORMANCE
The INA128/INA129 provides very low noise in most appli-cations. Low frequency noise is approximately 0.2µVp-pmeasured from 0.1 to 10Hz (G ≥ 100). This providesdramatically improved noise when compared to state-of-the-art chopper-stabilized amplifiers.
G = 1 +49.4kΩ
RG
DESIRED RG NEAREST RG NEARESTGAIN (V/V) (Ω) 1% RG (Ω) (Ω) 1% RG (Ω)
1 NC NC NC NC2 50.00k 49.9k 49.4k 49.9k5 12.50k 12.4k 12.35k 12.4k10 5.556k 5.62k 5489 5.49k20 2.632k 2.61k 2600 2.61k50 1.02k 1.02k 1008 1k
100 505.1 511 499 499200 251.3 249 248 249500 100.2 100 99 100
1000 50.05 49.9 49.5 49.92000 25.01 24.9 24.7 24.95000 10.00 10 9.88 9.76
10000 5.001 4.99 4.94 4.87
NC: No Connection.
INA128 INA129
50kΩ
RG
INA128:
G = 1 +
INA129:
G = 1 +49.4kΩ
RG

OFFSET TRIMMING
The INA128/INA129 is laser trimmed for low offset voltageand offset voltage drift. Most applications require no exter-nal offset adjustment. Figure 2 shows an optional circuit fortrimming the output offset voltage. The voltage applied toRef terminal is summed with the output. The op amp bufferprovides low impedance at the Ref terminal to preserve goodcommon-mode rejection.
INPUT BIAS CURRENT RETURN PATH
The input impedance of the INA128/INA129 is extremelyhigh—approximately 1010Ω. However, a path must be pro-vided for the input bias current of both inputs. This inputbias current is approximately ±2nA. High input impedancemeans that this input bias current changes very little withvarying input voltage.
Input circuitry must provide a path for this input bias currentfor proper operation. Figure 3 shows various provisions foran input bias current path. Without a bias current path, theinputs will float to a potential which exceeds the common-mode range, and the input amplifiers will saturate.
If the differential source resistance is low, the bias currentreturn path can be connected to one input (see the thermo-couple example in Figure 3). With higher source impedance,using two equal resistors provides a balanced input withpossible advantages of lower input offset voltage due to biascurrent and better high-frequency common-mode rejection.
INPUT COMMON-MODE RANGE
The linear input voltage range of the input circuitry of theINA128/INA129 is from approximately 1.4V below thepositive supply voltage to 1.7V above the negative supply.As a differential input voltage causes the output voltageincrease, however, the linear input range will be limited bythe output voltage swing of amplifiers A1 and A2. So the
FIGURE 2. Optional Trimming of Output Offset Voltage.
10kΩOPA177±10mV
Adjustment Range
100Ω
100Ω
100µA1/2 REF200
100µA1/2 REF200
V+
V–
RG INA128
Ref
VO
VIN–
VIN+
FIGURE 3. Providing an Input Common-Mode Current Path.
47kΩ47kΩ
10kΩ
Microphone,Hydrophone
etc.
Thermocouple
Center-tap providesbias current return.
INA128
INA128
INA128
linear common-mode input range is related to the outputvoltage of the complete amplifier. This behavior also de-pends on supply voltage—see performance curves “InputCommon-Mode Range vs Output Voltage”.
Input-overload can produce an output voltage that appearsnormal. For example, if an input overload condition drivesboth input amplifiers to their positive output swing limit, thedifference voltage measured by the output amplifier will benear zero. The output of A3 will be near 0V even though bothinputs are overloaded.
LOW VOLTAGE OPERATION
The INA128/INA129 can be operated on power supplies aslow as ±2.25V. Performance remains excellent with powersupplies ranging from ±2.25V to ±18V. Most parametersvary only slightly throughout this supply voltage range—seetypical performance curves. Operation at very low supplyvoltage requires careful attention to assure that the inputvoltages remain within their linear range. Voltage swingrequirements of internal nodes limit the input common-mode range with low power supply voltage. Typical perfor-mance curves, “Input Common-Mode Range vs OutputVoltage” show the range of linear operation for ±15V, ±5V,and ±2.5V supplies.

INA128RG
VO
C10.1µF
OPA130
Ref R11MΩ
f–3dB = 12πR1C1
= 1.59Hz
VIN
+
–
FIGURE 4. ECG Amplifier With Right-Leg Drive.
FIGURE 8. Differential Voltage to Current Converter.
A1 IB Error
OPA177 ±1.5nAOPA131 ±50pAOPA602 ±1pAOPA128 ±75fA
SEEBECKISA COEFFICIENTTYPE MATERIAL (µV/°C) R1, R2
E + Chromel 58.5 66.5kΩ– Constantan
J + Iron 50.2 76.8kΩ– Constantan
K + Chromel 39.4 97.6kΩ– Alumel
T + Copper 38.0 102kΩ– Constantan
FIGURE 7. Thermocouple Amplifier With RTD Cold-Junction Compensation.
FIGURE 5. Bridge Amplifier.
FIGURE 6. AC-Coupled Instrumentation Amplifier.
REF102
R2R1
R3
Pt100
Cu
Cu
V+
K
610.0V
4
2
INA128VO
Ref
100Ω = Pt100 at 0°C
RG
INA128RG
IB
R1
VIN
–
+
A1 IO
Load
IO = • GVINR1
Ref
INA128RG/2
RG = 5.6kΩ
VOLA
RL
RA
10kΩ
Ref
NOTE: Due to the INA128’s current-feedbacktopology, VG is approximately 0.7V less thanthe common-mode input voltage. This DC offsetin this guard potential is satisfactory for manyguarding applications.
G = 10
2.8kΩ
VGVG
2.8kΩ
1/2OPA2131
390kΩ
390kΩ
1/2OPA2131
300Ω
+5V
2.5V – ∆V
2.5V + ∆V
RG INA128 VO
Ref

F-43
WEIGHTCAPACITY (lb) A B C D E kg (lb)
250 to 1000 1⁄2-20 32 (1.25) 25 (1.0) 51 (2.0) 76 (3.0) 0.5 (1.1)
U FM Intrinsically SafeU Aluminum—for Light
Weight and DurabilityU 5-Point Calibration
Provided (in Tension)SPECIFICATIONSExcitation: 10 Vdc, 15 Vdc maxOutput: 3 mV/V ±.0075 mV/VLinearity: ±0.03% FSOHysteresis: ±0.02% FSORepeatability: ±0.01% FSOZero Balance: ±1% FSOAgency Approval: FM IntrinsicallySafe IS/I.II.III/1/CDEFG (standard)Operating Temp Range: -40 to 93°C (-40 to 200°F)Compensated Temp Range: 17 to 71°C (60 to 160°F)Thermal Effects:
Zero: 0.002% FSO/°CSpan: 0.002% rdg/°C
Safe Overload: 150% of capacityUltimate Overload: 300% of capacityBridge Resistance: 350 ± 5 Full Scale Deflection: 0.25 to 0.50 mm(0.010 to 0.020")Construction: AluminumElectrical (4-Conductor Shielded Cable):!200 lb: 9.1 m (30') 24 AWG"250 lb: 9.1 m (30') 20 AWG
LC115 Mating Connector:PT06F10-6S, $26.50 (not included)Protection Class: IP65
LC105/LC115 SeriesLC105 (Cable Style)LC115 (Connector Style)Tension/CompressionCalibrated in Tension0-25 lb to 0-1000 lb 0-11 kg to 0-455 kg
Comes with 5-point NIST-traceable calibration.* See section D for compatible meters. DPiS meter suitable for one direction measurement only.Connector style available from 250 lb and up; specify model LC115-(capacity). No extra charge.Ordering Examples: LC105-200, ±200 lb capacity load cell, $295. LC115-1K, ±1000 lbcapacity connector-style load cell, $295. REC-012M, matching rod end, $45 ea.PT06F10-6S, mating connector (sold separately), $26.50 ea.
Dimensions: mm (in)
LC105-500, $295,shown smaller than actual size.
LC105-25, $295,shown smallerthan actual size.
ALUMINUM “S” BEAM LOAD CELLSHIGH ACCURACY, ECONOMICAL PRICE
To Order (Specify Model Number)LOAD BUTTON ROD END
CAPACITY CABLE MODEL MODELlb kg MODEL NO. PRICE COMPATIBLE METERS* NO. PRICE NO. PRICE
25 11 LC105-25 $295 DPiS, DP41-S, DP25B-S — — — —
50 23 LC105-50 295 DPiS, DP41-S, DP25B-S — — — —
100 45 LC105-100 295 DPiS, DP41-S, DP25B-S — — — —
200 91 LC105-200 295 DPiS, DP41-S, DP25B-S — — — —
250 114 LC105-250 295 DPiS, DP41-S, DP25B-S LBC-012 $40 REC-012M $45
500 227 LC105-500 295 DPiS, DP41-S, DP25B-S LBC-012 40 REC-012M 45
1000 455 LC105-1K 295 DPiS, DP41-S, DP25B-S LBC-012 40 REC-012M 45
DCL
A(THREAD)
9 m (30')4-CONDUCTORSHIELDEDCABLE
CABLESEALINGGLAND
E
B
C
C
Wiring CodeWiring Pin ConnectionGN A +OutputWT B –OutputBK C, E –InputRED D, F +Input
RANGES >200 LB
1/4-20 UNC, Both Ends
9 m (30’) 4-ConductorShielded PVC Cable
(1.5)DIA.
64(2.5)
38
RANGES !200 LB
REC-012M, rodend, $45, soldseparately.
MOST POPULAR MODELS HIGHLIGHTED!
All Models
$295F M
APPROVED
MODEL NO. PRICE DESCRIPTIONME-1758 $95 Reference
Book: Strengthof Materials andStructures
ACCESSORY
Dimensions:mm (in)

One Omega Drive | Stamford, CT 06907 | 1-888-TC-OMEGA (1-888-826-6342) | [email protected]
www.omega.com
More than 100,000 Products Available!
CANADAwww.omega.caLaval(Quebec)
1-800-TC-OMEGA
UNITED KINGDOMwww. omega.co.uk
Manchester, England0800-488-488
GERMANYwww.omega.de
Deckenpfronn, Germany0800-8266342
FRANCEwww.omega.fr
Guyancourt, France088-466-342
BENELUXwww.omega.nl
Amstelveen, NL0800-099-33-44
UNITED STATESwww.omega.com
1-800-TC-OMEGAStamford, CT.
CZECH REPUBLICwww.omegaeng.cz
Karviná, Czech Republic596-311-899
TemperatureCalibrators, Connectors, General Test and Measurement Instruments, Glass Bulb Thermometers, Handheld Instruments for Temperature Measurement, Ice Point References, Indicating Labels, Crayons, Cements and Lacquers, Infrared Temperature Measurement Instruments, Recorders Relative Humidity Measurement Instruments, RTD Probes, Elements and Assemblies, Temperature & Process Meters, Timers and Counters, Temperature and Process Controllers and Power Switching Devices, Thermistor Elements, Probes and Assemblies,Thermocouples Thermowells and Head and Well Assemblies, Transmitters, Wire
Pressure, Strain and ForceDisplacement Transducers, Dynamic MeasurementForce Sensors, Instrumentation for Pressure and Strain Measurements, Load Cells, Pressure Gauges, Pressure Reference Section, Pressure Switches, Pressure Transducers, Proximity Transducers, Regulators, Strain Gages, Torque Transducers, Valves
pH and ConductivityConductivity Instrumentation, Dissolved Oxygen Instrumentation, Environmental Instrumentation, pH Electrodes and Instruments, Water and Soil Analysis Instrumentation
HeatersBand Heaters, Cartridge Heaters, Circulation Heaters, Comfort Heaters, Controllers, Meters and Switching Devices, Flexible Heaters, General Test and Measurement Instruments, Heater Hook-up Wire, Heating Cable Systems, Immersion Heaters, Process Air and Duct, Heaters, Radiant Heaters, Strip Heaters, Tubular Heaters
Flow and LevelAir Velocity Indicators, Doppler Flowmeters, Level Measurement, Magnetic Flowmeters, Mass Flowmeters,Pitot Tubes, Pumps, Rotameters, Turbine and Paddle Wheel Flowmeters, Ultrasonic Flowmeters, Valves, Variable Area Flowmeters, Vortex Shedding Flowmeters
Data AcquisitionAuto-Dialers and Alarm Monitoring Systems, Communication Products and Converters, Data Acquisition and Analysis Software, Data LoggersPlug-in Cards, Signal Conditioners, USB, RS232, RS485 and Parallel Port Data Acquisition Systems, Wireless Transmitters and Receivers
click here to go to the omega.com home pageEPG05

ESPECIFICACIONES TARJETA LABJACK U12


Diego A. Hernández Rubio -20022302 TESIS: DISEÑO, IMPLEMENTACIÓN Y ANÁLISIS DE CAUDALIMETRO
MANUAL DE USO
El siguiente documento es un manual de uso del instrumento desarrollado para la tesis: Diseño, Implementación y Análisis de caudalimetro, en el se explicara paso a paso los procedimientos para su uso.
Figura 1.
El caudalimetro se compone basicamente de: 1. Tanque de 1000L 2. Estructura soporte 3. Sistema de admision de agua 4. Celda de carga 5. Circuito Amplificador de Señal 6. Sistema de adquisicion de datos
Como primera medida tenemos el sistema de admision de agua, este se compone de una valvula desviadora que dirigue el chorro de agua dentro o fuera del tanque mediante una palanca como lo muestra la figura 2.
.
Figura 2.

Si el flujo es dirigido hacia el tanque pasa por un tubo que llega hasta el fondo del tanque para amortiguar el golpe del agua y reducir el oleaje.
La manguera azul (figura 1) conecta la válvula a un registro del circuito de agua del laboratorio de fluidos.
El primer paso es acomodar todo el instrumento de manera que el tubo de salida apunte al sifón del piso, luego se debe desatornillar el sifón e introducir la manguera inferior en el desagüe como lo muestra la figura 3.
Figura 3.
El siguiente paso es conectar todo el sistema de amplificación y adquisición de datos, en la figura 4 se muestra la ceda de carga instalada a la estructura, la figura 5 muestra una caja en cuyo interior se encuentra: el sistema de alimentación de la celda de carga un circuito amplificador y un filtro pasa-baja la figura 6 muestra la tarjeta de adquisición de datos LabjackU12
Figuras 4, 5 y 6
De la celda de carga sale un cable, este y la tarjeta de adquisición van conectados a la fuente, y la tarjeta va conectada al computador por el puerto USB como se muestra en la figura 7

Figura 7
Una vez montado todo el instrumento el paso a seguir es de configurar el sistema de adquisición de datos. Lo primero es instalar el programa que viene con la tarjeta “LabJack Software”. Hecho esto, se debe abrir el programa “DAQ Factory Express” y crear un canal, este procedimiento es muy sencillo y esta explicado en un corto tutorial que se encuentra bajo el nombre de “DAQ Factory Express – U12 Tutorial” metiéndose por: Inicio> >Programas> >LabJack U12 Legacy> >DAQ Factory Express – U12 Tutorial. o se puede bajar con el link: http://www.egmont.com.pl/labjack/instrukcje/DAQFactory_U12_Tutorial.pdf pero de cualquier manera es necesaria la instalación del software que viene con la tarjeta, es muy importante que al momento de crear el canal en el programa, coincida con el canal que tiene conectado a la fuente. En este corto manual se muestra como hacer una conversión como almacenar los datos, como controlar una señal de salida etcétera. Una vez conectada la tarjeta y configurado el programa el computador debería mostrar el voltaje medido, otro aspecto importante es asegurarse que la fuente este conectada a la toma de corriente y que su switch este en ON. Se recomienda precaución al momento de ubicar estos instrumentos cerca de un lugar donde les pueda caer agua.
En este punto está pasando lo siguiente, la celda de carga está siendo alimentada por la fuente y adicionalmente está generando una señal eléctrica proporcional a la fuerza que se le está aplicando, esta señal a su vez está siendo amplificada y filtrada (filtro pasa-baja para 30Hz) por la caja a la que se conecta, los cables negro (-) y rojo (+) están sacando esta señal amplificada a la tarjeta de adquisición de datos para convertirla en una señal digital.
Una vez configurado el programa el sistema está listo para la admisión de agua.

Para la toma de datos los pasos que hay que seguir son los siguientes:
1. Asegurarse de que la válvula desviadora este apuntando al tuvo que sale del tanque
2. Asegurarse de que la manguera del tubo de salida este bien insertada en el sifón
3. Empezar la adquisición de datos para grabar el experimento
4. Abrir el registro de agua despacio hasta su totalidad y dejarlo un par de segundos para esperar que el caudal se estabilice.
5. Una vez estabilizado el caudal se halla la palanca en un movimiento rápido pero sutil para desviar el flujo hacia dentro del tanque.
6. Esperar a que el tanque se llene esto toma 3 minutos aproximadamente
7. Cuando el agua este en el nivel deseado otra vez se desvía el flujo de agua hacia afuera del tanque mediante la palanca (es importante la rapidez de este movimiento puesto que al hacerlo despacio la medición del caudal se vería comprometida).
8. Una vez el agua este saliendo por el tubo de salida se debe cerrar el registro
9. A continuación detener la medición.
10. Finalmente vaciar el tanque, el tanque pesara cerca de una tonelada cuando se encuentre lleno y será imposible moverlo es por esto que se debe usar la válvula de salida del tanque, al sacar la manguera azul nos da espacio para girar el tubo de la válvula de salida para desocupar el tanque como lo muestra la figura 8
Figura 8.

ANALISIS DE DATOS
Una vez guardados los datos como lo especifica el tutorial (con un archivo .csv) se podrán abrir desde Excel para su análisis, en el momento en que se guardan los datos el tiempo y el voltaje quedan almacenados en una sola celda de la siguiente manera
Es por esto que hay que separar los dígitos de la derecha para obtener los valores de voltaje que son los que nos interesan, para ello se utiliza la formula =+DERECHA(A74;8) donde A74 es la celda que almacena la información y 9 es el numero de dígitos que se quieren copiar así:
De esta forma los datos están listos para su análisis
Este instrumento esta previamente calibrado, para ver las tablas de calibración remitirse a la tesis, estas tablas de calibración permiten asociar el voltaje que el sistema está leyendo a la cantidad de agua dentro del tanque y a la fuerza que está soportando la celda de carga.
Adicionalmente se pueden implementar estas graficas de calibración al “SCOPE” que tiene el programa para poder ver en tiempo real la cantidad de agua (Kg.) dentro del tanque y la fuerza de la celda de esta manera:

Figura 9.
Un análisis de los datos es mostrado en la tesis en donde se asocia un valor de exactitud al sistema así como su sensibilidad.
NOTA:
Este es un simple manual de uso, las especificaciones del sistema asi como su calibración y funcionamiento en detalle están desarrollados en el documento.





























