Embed Size (px)
Citation preview

Distributed and Efficient Classifiers for Distributed and Efficient Classifiers for Wireless Audio-Sensor NetworksWireless Audio-Sensor Networks
Baljeet MalhotraBaljeet MalhotraIoanis NikolaidisIoanis Nikolaidis
Mario A. NascimentoMario A. Nascimento
University of AlbertaUniversity of AlbertaCanadaCanada
To be presented at:INSS, June 17-19, 2008, Kanazawa, Japan
Supported By:
Outline Of The TalkOutline Of The Talk
Introduction
MotivationMotivation
Classification of Acoustic Targets– Classification Framework– Classification Methods: KNN & ML
Features Extraction– Independent Features Selection– Global Features Selection
Simulation Study– Dataset and Setup– Methodology– Results and DiscussionsResults and Discussions
Conclusion and Future Directions
2 min2 min
5 min5 min
6 min6 min
2 min2 min
5 min5 min
IntroductionIntroduction
Vehicle classification is an important problem in Vehicle classification is an important problem in WSNWSN
– TrackingTracking– LocalizationLocalization
Tracking can be facilitated by:Tracking can be facilitated by:– Video/Image based sensors Video/Image based sensors – RFID tagsRFID tags– Limitations:Limitations:
Video/Image requires higher processing capabilitiesVideo/Image requires higher processing capabilities RFID tags may not be feasibleRFID tags may not be feasible
Acoustic target tracking Acoustic target tracking – Lesser processing requirementsLesser processing requirements
Vehicle ClassificationVehicle Classification
Vehicle classification is crucial to trackingVehicle classification is crucial to tracking
Only vehicles of interest are reportedOnly vehicles of interest are reported
Problem becomes much challenging if there are Problem becomes much challenging if there are more vehicles of the same class more vehicles of the same class – Identification problem Identification problem
This paper deals with the problem of vehicle This paper deals with the problem of vehicle classification only and NOT identificationclassification only and NOT identification
Disclaimer: Images used above are collected through Google’s search engine
Class A Class B Class A

A Framework for ClassificationA Framework for Classification
Nodes organize themselves into neighborhoods Nodes organize themselves into neighborhoods “clusters” as a vehicles crosses through an area “clusters” as a vehicles crosses through an area monitored by sensorsmonitored by sensors
A master node is selected based on the signal A master node is selected based on the signal strength. strength.
A cluster can perform classification independently.A cluster can perform classification independently.
Multiple clusters may be formed and collaborate for:Multiple clusters may be formed and collaborate for:– Better accuracyBetter accuracy– Sharing the costsSharing the costs– But not attempted in this paper (future work)But not attempted in this paper (future work)
Sensor deployment along a straight path Formation of a cluster

Classification TechniquesClassification Techniques
k-NN is one of the simplest, yet accurate methods.– Given a set of samples known samples, U– Fetch k (≥ 1) closest known samples from U – Classifies the unknown sample as the majority class of
the drawn k samples.
Maximum Likelihood (ML)
Real time computation is proportional to: – d × l × c (for KNN)– d2 (for ML)
– d : size of feature vectors, l : class size, c : number of classes
Conclusion: Features vector size is important

Feature ExtractionFeature Extraction
Hundreds of features to choose from acoustic signatures
Two demands that compete with each other
– Low dimensional features that are yet effective
Acoustic features– Power spectral densityPower spectral density
Power is concentrated in the lower range of frequencies
Assault Amphibian Vehicles
Dragon Wagon

Feature Extraction SchemesFeature Extraction Schemes
Pruning Step 1: Select the frequencies that have the maximum power as reported by training samples:
– where
Pruning Step 2: Ranking and selecting only a % of them:
– (< )
Independent Feature Selection – a
Global Feature Selection– s
Experimental StudyExperimental Study
DAPRA/IXO SenseIT dataset– Two types of vehicles (AAV and DW)– Total 389 samples (180 AAV, and 209 DW)
Simulated a network of (3 ~ 40) sensors– In order to create a local copy of unknown (testing)
sample for a sensor, a signal is attenuated based on its distance from the moving vehicle, and white noise is added
Performance Metrics– Classification accuracy– Communication (energy) expenditure

Evaluation MethodologyEvaluation Methodology
Classification accuracy:
– Based on leave-one-out policy
Energy expenditure model:
– Er = 50nJ/bit and Es = 50+.1×R3 nJ/bit, where Er is the energy required to receive one bit and Es is the energy required to send one bit at R distance.
L1 Distance Metric
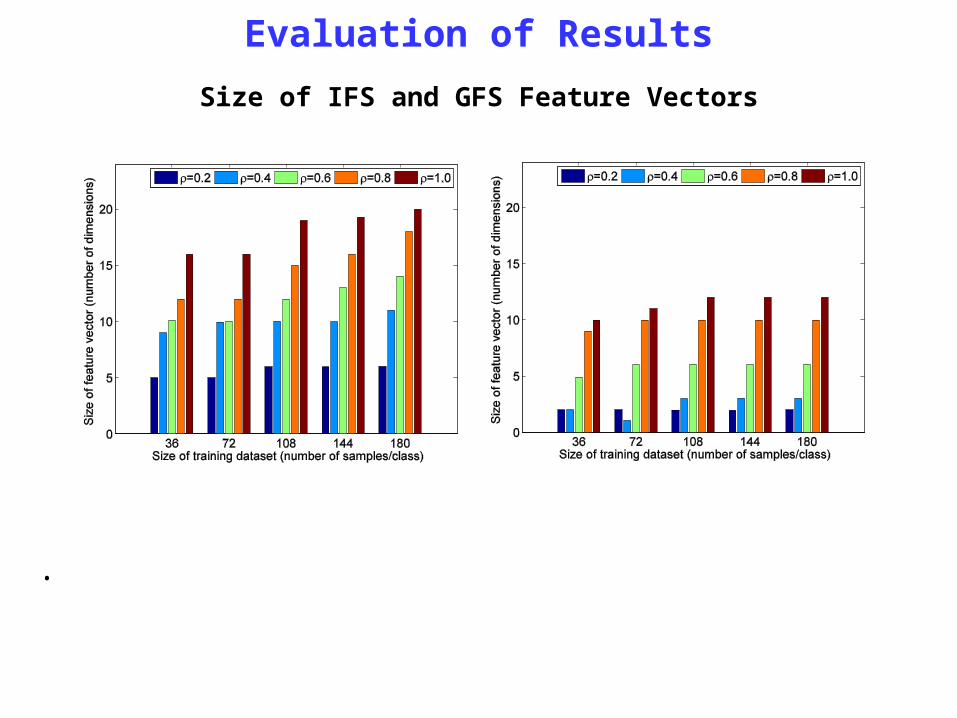
Size of IFS and GFS Feature Vectors
Evaluation of Results
IFS GFS
• Size does not go beyond 20 and 15 in IFS and GFS respectively
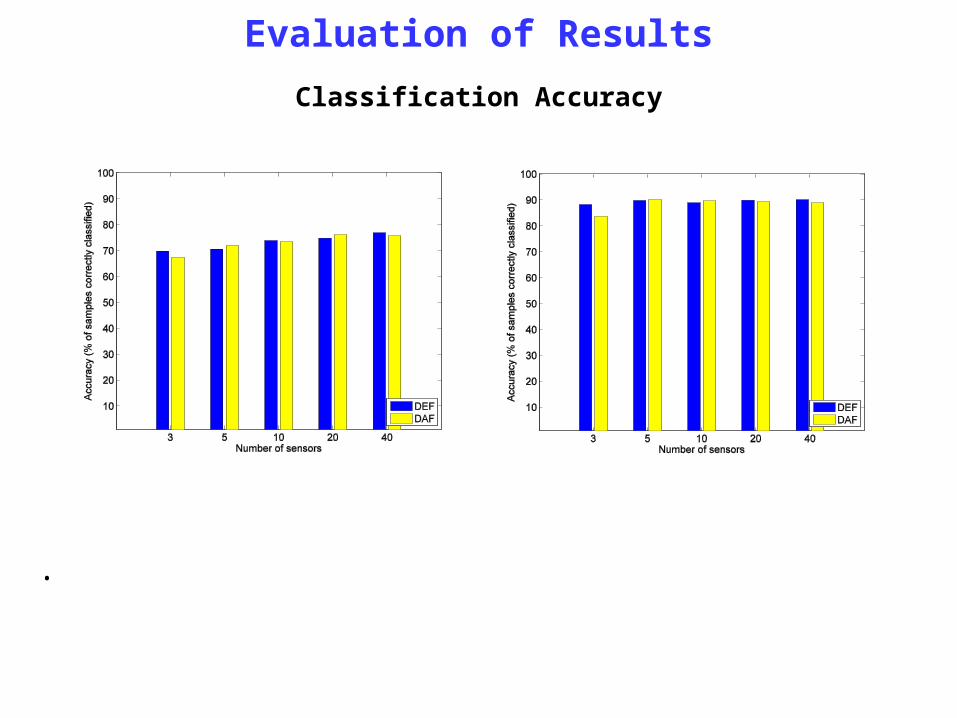
Classification Accuracy
Evaluation of Results
KNN ML
• ML outperforms KNN

Communication Costs
Evaluation of Results
KNN ML
• DEF is less expensive than DAF

Comparison with other studies
Evaluation of Results

Conclusion and Future DirectionConclusion and Future Direction
Classifying ground vehicles is an important problem in wireless sensor networks.
We have two main contributions in this work:– Distributed data/decision fusion framework for
classification– New feature extraction schemes that can produce low
dimensional yet effective features
We conducted a simulation study using real acoustic signals of military vehicles, and our proposed features achieved better classification accuracy
In the future:– Improve the efficiency of our proposed schemes.– Consider more than two classes of ground vehicles

Thank You !Thank You !