Upload
karlg
View
223
Download
0
Embed Size (px)
Citation preview
8/10/2019 doktorat Lewandowski
1/254
WARSAW UNIVERSITY
OF TECHNOLOGY
Faculty of Electronics and InformationSystems
Ph.D. Thesis
Arkadiusz Lewandowski
Multi-frequency approach to vector-network-analyzer
scattering-parameter measurements
Supervisor
Professor Janusz Dobrowolski, Ph.D., D.Sc.
Warsaw, 2010
8/10/2019 doktorat Lewandowski
2/254
8/10/2019 doktorat Lewandowski
3/254
Abstract
Vector network analyzer (VNA) is the basic measurement instrument used in the char-
acterization of microwave and millimeter-wave electronic circuits and systems. Much effort
has been put throughout the past three decades in improving the designs of VNA instru-
mentation and in establishing the principles of VNA calibration and uncertainty analysis
of VNA measurements. Modern VNAs are a culmination of this long standing research,
and are sophisticated, mature and reliable measurement instruments, commonly employed
in the industry and laboratories.
Recently, however, several new trends in the vector network-analysis started to emerge.
These new trends result from an increased interest in the application of millimeter- and
sub-millimeter-wave signals (frequencies up to 1 THz), rapid development of the nanotech-
nology, requiring characterization of structures with very large impedances (on the order of
100 k), and an increased demand for large-signal characterization of microwave circuits.
These new trends result, on one hand, in new concepts in the design of the VNA instrumen-
tation, such as special VNA extension units, allowing the conventional VNAs to operate
up to 500 GHz, microwave scanning microscopes, or nonlinear vector network analyzers
(NVNA). On the other hand, these trends lead to new challenging demands regarding themeasurement accuracy and its reliable and complete evaluation.
The multi-frequency approach introduced in this work addresses this last issue. The
principle of this approach is to account for the relationships between scattering parameter
measurements at different frequencies. We show that this new approach allows to reduce by
several times the impact of errors in the description of calibration standards, resulting thus
in a significant improvement of the VNA measurement accuracy. We further demonstrate
that the multi-frequency approach to the description of VNA instrumentation errors yields
better understanding of their physical origins, leading to their compact description based
on the stochastic modeling. We finally show that the multi-frequency representation of
the uncertainty in VNA scattering-parameter measurements is essential when using these
measurements in the calibration of time-domain measurement systems, such as high-speed
sampling oscilloscopes, or nonlinear vector network analyzers.
iii
8/10/2019 doktorat Lewandowski
4/254
8/10/2019 doktorat Lewandowski
5/254
Streszczenie
Wektorowy analizator obwodw (ang. Vector Network Analyzer - VNA) jest podsta-wowym urzdzeniem wykorzystywanym do charakteryzowania ukadw i systemw elek-
tronicznych wielkiej czstotliwoci (w. cz). Konstrukcja wspczesnych analizatorw, jak
i metody wykorzystywane w ich kalibracji oraz analizie niepewnoci pomiaru, s owocem
wieloletnich prac badawczych oraz intensywnego rozwoju technologicznego. W konsekwen-
cji nowoczesne wektorowe analizatory obwodw odznaczaj si niezwykle zaawansowanymi
i dojrzaymi rozwizaniami technicznymi oraz s z powodzeniem wykorzystywane w co-
dziennej praktyce zarwno laboratoriw pomiarowych jak i przemysu ukadw w. cz.
W wektorowej analizie obwodw pojawiy si w ostatnim czasie nowe kierunki roz-
woju, wynikajce z rosncego zainteresowania wykorzystaniem sygnaw w zakresie fal
milimetrowych i submilimetrowych (czstotliwoci blisko 1 THz), rozszerzania si zakresu
impedancji mierzonych struktur w. cz. (impedancje rzdu 100 k), zwizanego z intensyw-
nym rozwojem nanotechnologii, oraz z zapotrzebowania na charakteryzowanie wielkosy-
gnaowych wasnoci ukadw w. cz. Te nowe zastosowania wektorowej analizy obwodw
prowadz, z jednej strony, do nowych rozwiza konstrukcyjnych, jak na przykad gowice
powielajco-mieszajce rozszerzajce zakres pracy typowych analizatorw do czstotliwoci
rzdu 500 GHz, mikrofalowe mikroskopy skaningowe, czy te wielkosygnaowe wektorowe
analizatory obwodw (ang. Nonlinear Vector Network Analyzer-NVNA). Z drugiej strony,stawiaj one zupenie nowe wyzwania, jeeli chodzi o dokadno pomiaru, oraz jej wiary-
godne oszacowanie.
Przedstawione w niniejszej pracy nowatorskie wieloczstotliwociowe podejcie do po-
miaru parametrw rozproszenia za pomoca wektorowego analizatora obwodw jest prb
odpowiedzi na te nowe wyzwania. Jego istot jest uwzgldnienie relacji midzy pomiarami
parametrw rozproszenia na rnych czstotliwociach. W pracy wykazano, e to nowe
ujcie pozwala kilkukrotnie zmniejszy wpyw bdw wynikajcych z niedokadnego opisu
wzorcw kalibracyjnych, a tym samym znaczco zwikszy dokadno pomiaru. Pokazanorwnie, e wieloczstotliwociowy opisu bdw losowych w pomiarach analizatorem wek-
torowym pozwala lepiej wyjani ich fizyczne przyczyny, prowadzc do prostego i spjnego
opisu tych bdw opartego na modelowaniu stochastyczym. W kocu, w pracy wykazano,
e uoglniony wieloczstotliwociowy opis niepewnoci pomiaru parametrw rozproszenia
jest niezbdny, gdy wykorzystuje si te pomiary w kalibracji urzdze dziaajcych w dzie-
dzinie czasu, takich jak szybkie oscyloskopy prbkujce, albo wielkosygnaowe wektorowe
analizatory obwodw.
v
8/10/2019 doktorat Lewandowski
6/254
8/10/2019 doktorat Lewandowski
7/254
Wenn [meine] Arbeit einen Wert
hat, so besteht er [...] darin, dass in
ihr Gedanken ausgedrckt sind,
und dieser Wert wird umso grer
sein, je besser die Gedanken
ausgedrckt sind.
Ludwig Wittgenstein
Meine Resultate kenne ich lngst,
ich wei nur noch nicht,
wie ich zu ihnen gelangen soll.
Carl Friedrich Gauss
vii
8/10/2019 doktorat Lewandowski
8/254
8/10/2019 doktorat Lewandowski
9/254
Acknowledgment
This research project would not have been possible without the support of many peo-
ple and institutions. First of all, I would like to thank to my advisor Dr. Dylan Williams
from the National Institute of Standards and Technology (NIST), Boulder, USA, for manyfruitful discussions and his continuous support during my five years long stay at NIST. I
wish also to express gratitude to my supervisor at the Warsaw University of Technology,
Prof. Janusz Dobrowolski for his constant help and patience during the long period in which
this work was written. My gratitude is also due to Dr. Wojciech Wiatr for his encourage-
ment and many invaluable advices without which this work have not been accomplished.
I would like also to acknowledge Denis LeGolvan of NIST, Boulder, USA, for introduc-
ing me into the world of coaxial connectors, and for his enormous help with the measure-
ments. I would also like to convey thanks to Grzegorz Kdzierski and Karol Korsze of
the National Institue of Telecommunications, Warsaw, Poland, for performing the Type-N
measurements described in this work.
Special thanks is also due to all of my colleges in the Electromagnetics Division, NIST,
Boulder, and at the Institute of Electronic Systems, Warsaw, Poland, for their constant
support throughout the entire time in which this project was carried out.
My deepest gratitude is also due to my family for their love, patience, and understanding
without which finishing this work would not have been possible.
Last, but not least, I would like to acknowledge the Polish Ministry of Science and
Higher Education for the grant N N517 4394 33 from which this work was partially funded.
ix
8/10/2019 doktorat Lewandowski
10/254
8/10/2019 doktorat Lewandowski
11/254
Contents
Abstract iii
Streszczenie v
Acknowledgment ix
Nomenclature xx
1 Introduction 1
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Previous research . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3 Objective and scope of this work . . . . . . . . . . . . . . . . . . . . . . . 5
2 Principles of VNA S-parameter measurements 7
2.1 Definition ofS-parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1.1 Waveguide voltage, current and characteristic impedance . . . . . . 9
2.1.2 Wave amplitudes and scattering parameters . . . . . . . . . . . . . 11
2.1.3 Practical implications . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2 VNAS-parameter measurement . . . . . . . . . . . . . . . . . . . . . . . 17
2.3 Two-port VNA mathematical models . . . . . . . . . . . . . . . . . . . . . 20
2.3.1 Linear time-invariant two-port VNA . . . . . . . . . . . . . . . . . 20
2.3.2 Modeling VNA nonstationarity . . . . . . . . . . . . . . . . . . . . 28
2.4 Two-port VNA calibration techniques . . . . . . . . . . . . . . . . . . . . . 30
2.4.1 Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.4.2 Standards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.4.3 Solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
xi
8/10/2019 doktorat Lewandowski
12/254
CONTENTS
3 Overview of uncertainty analysis for VNA S-parameter measurements 43
3.1 Sources of error in corrected VNAS-parameter measurements . . . . . . . 44
3.2 Statistical description ofS-parameter measurement errors . . . . . . . . . . 453.2.1 Statistical model for S-parameter measurement . . . . . . . . . . . 45
3.2.2 Error description for a singleS-parameter . . . . . . . . . . . . . . 46
3.2.3 Error description for a matrix ofS-parameters . . . . . . . . . . . . 49
3.3 Statistical models for errors in corrected VNAS-parameter measurements 50
3.3.1 Systematic errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.3.2 Random errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.4 Representation of errors in corrected VNAS-parameter measurements . . . 53
3.4.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 533.4.2 Errors in VNA calibration coefficients . . . . . . . . . . . . . . . . . 54
3.4.3 Errors in VNA raw measurements . . . . . . . . . . . . . . . . . . . 58
3.5 Approximate uncertainty evaluation . . . . . . . . . . . . . . . . . . . . . . 61
3.5.1 Ripple analysis techniques . . . . . . . . . . . . . . . . . . . . . . . 62
3.5.2 Calibration comparison method . . . . . . . . . . . . . . . . . . . . 62
3.5.3 Statistical residual analysis . . . . . . . . . . . . . . . . . . . . . . . 63
3.6 Complete uncertainty evaluation . . . . . . . . . . . . . . . . . . . . . . . . 64
3.6.1 Linear error propagation . . . . . . . . . . . . . . . . . . . . . . . . 65
3.6.2 Monte-Carlo simulation . . . . . . . . . . . . . . . . . . . . . . . . 65
4 Multi-frequency description ofS-parameter measurement errors 67
4.1 Statistical model for the multi-frequencyS-parameter measurement . . . . 68
4.2 The notion of a physical error mechanism . . . . . . . . . . . . . . . . . . . 68
4.3 Statistical properties of the multi-frequency measurement error . . . . . . . 71
4.3.1 Probability distribution function . . . . . . . . . . . . . . . . . . . . 71
4.3.2 Uncertainty reporting . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.3.3 Multi-frequency covariance-matrix structure . . . . . . . . . . . . . 754.4 Physical error mechanisms in VNAS-parameter measurements . . . . . . . 75
4.4.1 Calibration standard errors . . . . . . . . . . . . . . . . . . . . . . 75
4.4.2 VNA instrumentation errors . . . . . . . . . . . . . . . . . . . . . . 76
4.5 Practical implications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.5.1 Time-domain waveform correction . . . . . . . . . . . . . . . . . . . 78
4.5.2 Device modeling based on S-parameter measurements . . . . . . . . 83
4.5.3 Error-mechanism-based VNA calibration . . . . . . . . . . . . . . . 84
xii
8/10/2019 doktorat Lewandowski
13/254
CONTENTS
4.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
5 Generalized multi-frequency VNA calibration 895.1 Formulation of the VNA calibration problem . . . . . . . . . . . . . . . . . 90
5.2 Coaxial multi-line VNA calibration . . . . . . . . . . . . . . . . . . . . . . 92
5.2.1 Classical multi-line VNA calibration . . . . . . . . . . . . . . . . . 93
5.2.2 Coaxial air-dielectric line as a calibration standard . . . . . . . . . 93
5.2.3 Computational aspects . . . . . . . . . . . . . . . . . . . . . . . . . 94
5.3 Errors in the coaxial multi-line VNA calibration . . . . . . . . . . . . . . . 95
5.3.1 Variation of connector-interface electrical parameters . . . . . . . . 95
5.3.2 Variation of lines characteristic impedance and propagation constant 100
5.3.3 Line length error . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
5.3.4 Reflect asymmetry . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
5.4 Calibration standard models . . . . . . . . . . . . . . . . . . . . . . . . . . 106
5.4.1 Lines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
5.4.2 Reflect . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
5.4.3 Thru . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
5.5 Solution uniqueness . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
5.5.1 Mathematical framework . . . . . . . . . . . . . . . . . . . . . . . . 111
5.5.2 Relationships between estimated parameters . . . . . . . . . . . . . 112
5.5.3 Optimal constraint choice . . . . . . . . . . . . . . . . . . . . . . . 114
5.6 Numerical solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
5.7 Residual analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
5.8 Experimental results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
5.8.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
5.8.2 Type-N coaxial connector . . . . . . . . . . . . . . . . . . . . . . . 119
5.8.3 1.85 mm coaxial connector . . . . . . . . . . . . . . . . . . . . . . . 126
5.9 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
6 Multi-frequency stochastic modeling of VNA nonstationarity errors 137
6.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
6.2 Generic physical model for the VNA nonstationarity . . . . . . . . . . . . . 139
6.3 Stochastic model for connector nonrepeatability and cable instability . . . 144
6.3.1 Statistical properties of circuit parameters . . . . . . . . . . . . . . 144
6.3.2 Estimation of the covariance matrix of circuit parameters . . . . . . 145
xiii
8/10/2019 doktorat Lewandowski
14/254
CONTENTS
6.3.3 Experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
6.4 Stochastic model for VNA test-set drift . . . . . . . . . . . . . . . . . . . . 157
6.4.1 Drift as the multidimensional random walk . . . . . . . . . . . . . . 1576.4.2 Estimation of the process covariance matrix . . . . . . . . . . . . . 159
6.4.3 Experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
6.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
7 Conclusions 167
A Real-valued representation of complex vectors and matrices 173
B Maximum likelihood approach to system identification 175B.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
B.2 Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
B.2.1 Errors in system responses . . . . . . . . . . . . . . . . . . . . . . . 177
B.2.2 Errors in system responses and excitations . . . . . . . . . . . . . . 182
B.3 Covariance matrix of the estimates . . . . . . . . . . . . . . . . . . . . . . 186
B.3.1 Errors in system responses . . . . . . . . . . . . . . . . . . . . . . . 186
B.3.2 Errors in system responses and excitations . . . . . . . . . . . . . . 188
B.4 Numerical solution techniques . . . . . . . . . . . . . . . . . . . . . . . . . 189
B.4.1 Errors in system responses . . . . . . . . . . . . . . . . . . . . . . . 189
B.4.2 Errors in system responses and excitations . . . . . . . . . . . . . . 191
B.5 Solution uniqueness . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
B.6 Systems with complex-valued inputs and outputs . . . . . . . . . . . . . . 191
C Air-dielectric coaxial transmission line 195
C.1 Infinite metal conductivity . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
C.2 Finite metal conductivity . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
D Center-conductor gap impedance 199
D.1 Infinite metal conductivity . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
D.2 Finite metal conductivity . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201
D.3 Finger effect . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
E Slightly nonuniform coaxial transmission line 205
F Small changes of two-ports scattering parameters 209
xiv
8/10/2019 doktorat Lewandowski
15/254
CONTENTS
G Estimation of VNA nonstationarity model parameters 213
H Vector stochastic Wiener process 217
Bibliography 221
xv
8/10/2019 doktorat Lewandowski
16/254
CONTENTS
xvi
8/10/2019 doktorat Lewandowski
17/254
Nomenclature
a, b, c vectors
A,B
,C
matrices{ai}Ni=1 set of vectors a1, . . . , aNAT transpose of the matrix A
AH conjugate transpose (Hermitian transpose) of the matrix A
A B Kronecker product of the matrices Aand Bvec(A) vector representation [a11, a21, a31, . . . , a12, a22, a32, . . .]
T of the matrix A
Re x real part ofx
Im x imaginary part ofx
a real-valued representation [Re a1, Im a1, Re a2, Im a2, . . .]T of the complex-valued
vector a
x estimate ofx
x true value ofx
x measurement ofx
x error in the measurement ofx
E(x) expectation value ofx
Var(x) variance of x
Cov(x, y) covariance ofxand y
attenuation constant,i.e., Re phase constant,i.e., Im
sought parameters of the VNA and calibration standards
0 free-space phase constant
c vector of calibration-standard unknown parameters
C capacitance
c speed of light in vacuum
c0 vector of calibration-standard known parameters
xvii
8/10/2019 doktorat Lewandowski
18/254
CONTENTS
C normalized capacitance
D diameter of the outer conductor in the coaxial transmission line
d diameter of the inner conductor in the coaxial transmission linedp center-conductor-pin diameter in the coaxial transmission line
DUT device under test
e eccentricity of the inner conductor in the coaxial transmission line
EDF forward directivity
EDF reverse directivity
EDF forward tracking
EDF reverse tracking
EDF forward source matchEDF reverse source match
0 dielectric permittivity of vacuum
r relative dielectric permittivity
physical error mechanism
f frequency; probability density function
g center-conductor-gap width in the coaxial transmission line
complex propagation constant
reflection coefficient
In identity matrix of sizen nJ Jacobian matrix
K number of frequencies
k frequency index
L inductance
L normalized inductance
Lg normalized gap inductance per-unit-length
l transmission line length
li inner conductor length
lo outer conductor length
l misalignment of outer and inner conductor symmetry axes
l loss correction factor
M number of mechanisms
0 magnetic permeability of vacuum
N number of calibration standards
xviii
8/10/2019 doktorat Lewandowski
19/254
CONTENTS
n calibration standard index
angular frequency
p vector of VNA calibration coefficientsPDF probability density function
r vector of residuals
R resistance
R normalized resistance
0 characteristic-impedance correction factor
rDF effective forward directivity
rDF effective reverse directivity
rDF effective forward trackingrDF effective reverse tracking
rDF effective forward source match
rDF effective reverse source match
S scattering matrix
s vector representation vec(s) of the scattering matrix S; vector of calibration-
standard S-parameter-definitions
sm vector of raw measurements of calibration standards
covariance matrix
conductivity, standard deviation
SOLT short open load through
SOLT Singular Value Decomposition
T transmission matrix
TRL through reflect line
v phase velocity
VNA vector network analyzer
V weight matrix in the VNA calibration
w width of the in-cut between the connector socket fingers
Y admittance
Z impedance
Z0 characteristic impedance for the TEM mode in a lossy coaxial transmission line
Z00 characteristic impedance for the TEM mode in a lossless coaxial transmission
line
Y normalized admittance
xix
8/10/2019 doktorat Lewandowski
20/254
NOMENCLATURE
Z normalized impedance
Zref reference impedance
xx
8/10/2019 doktorat Lewandowski
21/254
Chapter 1
Introduction
One day when Pooh Bear had nothing else to
do, he thought he would do something [...].
A. A. Milne, House at the Pooh corner
1.1 Motivation
Vector network analyzer (VNA) is the basic measurement instrument for characteriza-
tion of microwave and millimeter-wave electronic circuits. The VNA measures scattering
parameters (S-parameters) which constitute a complete description of small-signal deter-
ministic properties of an electronic circuit [1]. This measurement is typically performed in
a broad frequency range, starting from tens of kHz and reaching even hundreds of GHz [2
5]. The VNA measured S-parameters, along with noise parameters, are then traditionally
used in the design and testing of both single components and complex systems working at
microwave and millimeter-wave frequencies.Much effort has been put throughout the past 30 years in establishing the principles of
vector-network analysis and improving the VNA instrumentation. A good review of this
research can be found in [68]. Modern VNAs, such as [35], are a culmination of this long
standing research and are very mature and reliable measurement instruments, commonly
employed in the industry and laboratories.
Recently, however, several new trends in the vector network-analysis started to emerge.
These trends push the boundaries of the conventional VNAs with respect to the maxi-
1
8/10/2019 doktorat Lewandowski
22/254
1. INTRODUCTION
mum measurement frequency, impedance level of the device under test (DUT), and the
assumption of the DUT linearity.
The trend to extend the frequency range of modern VNAs results from an increased
interest in the use of signals with frequencies in the millimeter- and sub-millimeter-wave
range. Examples are high-capacity data transmission systems [9], millimeter-wave radar
system [10, 11], radiotelescopes [12, 13], or the broad range of terahertz applications [14].
Efforts to extend the maximum VNA measurement frequency have recently brought about
special VNA extension units, allowing the conventional VNAs to operate up to 500 GHz
with rectangular waveguide connectors [2]. Extension up to 1 THz is likely to happen in
the nearest future [15, 16].
Accurate VNA S-parameter measurement at millimeter- and sub-millimeter-wave fre-
quencies, however, is very challenging due to some specific error sources negligible at lower
frequencies. Due to small wavelength, these measurements require the use of waveguides
with aperture size below 1 mm in order to avoid overmoding. While it is possible to man-
ufacture such waveguides with quite a high precision, some irregularities, such as rounding
of the waveguide corners or erosion of the leading edges of the waveguide apertures, are
unavoidable and may lead to significant systematic errors in the VNA calibration [17].
Furthermore, the connection of two waveguide flanges with such small apertures requires
very precise alignment. Although some special alignment solutions, involving the use ofmultiple alignment pins, have been devised, the random errors due to flange misalignment
can still significantly deteriorate the measurement accuracy [18]. Finally, the noise fluctu-
ations of the VNA test-signals are another important source of errors in VNA S-parameter
measurement at sub-millimeter-wave frequencies. These fluctuations, caused by the ther-
mal and phase noise originating in the frequency multiplication and sub-harmonic mixing
circuitry of the VNA extension units, significantly reduce the dynamic range and increase
the short-term instability (also referred to as the trace jitter [19]), as compared with
VNAs operating at lower frequencies.While the VNA calibration techniques used at lower frequencies can be adapted to
work with millimeter and sub-millimeter-wave VNAs, due to those specific errors, their
accuracy is often not satisfactory [18, 20]. Thus, new more accurate calibration techniques,
less sensitive to those specific error sources, need to be devised.
Similar challenges regarding the measurement accuracy are encountered in VNAS-pa-
rameter measurements of devices whose impedance differs significantly from the typical
VNA impedance level of 50 . Examples of such devices are nanotubes, nanowires or
2
8/10/2019 doktorat Lewandowski
23/254
1.1. MOTIVATION
metamaterials, which may exhibit impedances in the range of tens and hundreds of ks,
or fractions of an [21]. Since the VNA test-ports are typically built based on 50 -
transmission-line components, the energy coupling to devices with impedance level closeto 50 is very good. Thus, such devices are measured with the highest accuracy. However,
when the DUT impedance is much smaller or much larger than this value, only a little
signal is coupled and most of the signal is reflected back to the VNA. While some special
VNA architectures (e.g. [22]), aiming at increasing the VNA receiver resolution, may help
to improve the measurement accuracy in such cases, new VNA calibration techniques, less
sensitive to the VNA measurement errors (e.g., [23]), are needed.
The last trend in the modern vector-network-analysis results from an increased demand
for the characterization of active high-frequency circuits in the large-signal regime. Accu-rate large-signal characterization of such circuits is essential in the design and testing of
various applications. Examples are portable data transmission systems where the high
power efficiency (hence, long battery life) needs to be combined with a minimal nonlin-
ear distortion to the transmitted signal, or active high-frequency circuits such as signal
generators, mixers or frequency multipliers, that are by nature operating in the nonlinear
regime.
Characterization of large-signal properties of high-frequency circuits poses multiple dif-
ficult problems. It requires specialized instrumentation, such as nonlinear vector-network-analyzer (NVNA), also referred to as large-signal network analyzer (LSNA) [24, 25]. The
NVNA characterizes the nonlinear DUT properties in terms of either voltages and currents,
or wave quantities, such as X-parameters [26, 27] or S-functions [25, 28]. The character-
ization is performed at the principal frequency and its harmonics. The measurement is
then either directly used, for example, in the circuit simulator, or converted into the time
domain in order to analyze the shape of the voltage or current waveforms.
Accurate NVNA measurements require a specialized calibration procedure. This pro-
cedure, apart from the traditional linear VNA calibration, involves also power and phasecalibration. The power calibration is required so as to enable the measurement of absolute
quantities (voltages, currents or wave quantities). The phase calibration is necessary be-
cause in the NVNA measurement one is not only interested in magnitudes and phases of
voltages and currents (or wave quantities) at each frequency, but also in the phase relation-
ships between those quantities. These relationships are essential, for example, when recon-
structing the time-domain voltage and current waveforms from the NVNA measurements.
As a result, the accuracy assessment of NVNA measurements requires new uncertainty
3
8/10/2019 doktorat Lewandowski
24/254
1. INTRODUCTION
analysis approaches that account not only for uncertainties at a single frequency, but also
for the statistical correlations between uncertainties at different frequencies.
Consequently, the new trends in the vector network analysis discussed above, while
stimulating the development of new hardware solutions, lead also to new, more stringent
demands as to the measurement accuracy and its reliable and complete evaluation. The
multi-frequency approach presented in this work addresses this issue.
1.2 Previous research
Enhancement of VNA measurement accuracy and its more reliable and complete eval-
uation have always been stimulating the development of VNA measurement techniques. A
detailed review of this development can be found in [68, 19]. Here we shall indicate the
most important turning points in this development, which will allow us to better under-
stand the origins of the multi-frequency approach proposed in this work.
The first turning point was the invention of the self-calibration methods. The idea
of self-calibration in the two-port VNA calibration problem had first been employed in
Engens TRL method [29] and was then generalized by Eul and Schiek [30]. The concept
of self-calibration in one-port VNA calibration methods appears also in papers by Wiatr
[3133] and Bianco [34]. The principle of self-calibration is to use calibration standards
that are only partially known and to determine their complete S-parameter description
along with the VNA calibration coefficients. For example, in the TRL method, the trans-
mission line is used with known length and unknown propagation constant. Consequently,
the contribution of systematic errors in calibration standard definition can be reduced,
since instead of the specific numerical values of calibration standard parameters, which are
inevitably subject to measurement errors, the information as to the relationships between
these parameters is used.
Another turning point was the application of statistical methods in VNA calibrationproblem. This approach was initiated in the case of one-port VNA calibration in [31, 32, 35]
and in the case of two-port VNA calibration methods in [36]. The application of statistical
methods in VNA calibration is based on the use of redundant calibration standards and
statistical processing of the resulting overdetermined set of equations. Consequently, the
contribution of random measurement errors can be significantly reduced.
Another important paradigm change in the development of VNA calibration methods
was initiated in [37] and [38]. In these references, for the first time, the relationships
4
8/10/2019 doktorat Lewandowski
25/254
1.3. OBJECTIVE AND SCOPE OF THIS WORK
between the calibration standard parameters at different frequencies are exploited in the
VNA calibration. The experimental result presented in [37] and [38] indicate that this
improves the accuracy and reliability of the VNA calibration.
The multi-frequency description ofS-parameter measurement errors naturally comple-
ments a VNA calibration approach that accounts for the relationships betweenS-parameter
measurements at different frequencies. Such a description was introduced in [39], and is
based on the covariance-matrix representation which had already been used in the uncer-
tainty analysis of single-frequency S-parameter measurements in dual six-port measure-
ment systems [40, 41], and then recently rediscovered in the context of uncertainty eval-
uation in VNA S-parameter measurements [42, 43]. The generalized covariance-matrix
description proposed in [39] uses additional terms in the covariance matrix in order toaccount for statistical correlations between uncertainties at different frequencies. These
correlations have been shown to be essential when applying the VNA S-parameter mea-
surements in the calibration of time-domain measurement systems [39, 44].
1.3 Objective and scope of this work
As pointed out above, accounting for the relationships between VNAS-parameter mea-
surements at different frequencies can be beneficial in terms of increased measurement ac-
curacy (see [37, 38]) and its more complete evaluation (see [39, 44]). The objective of this
work is to generalize these results by developing a comprehensive multi-frequency approach
to VNA S-parameter measurements.
We shall attain this objective in two step. In the first step, we will develop a mathe-
matical description of the relationships between VNA measurement at different frequencies
which unifies the descriptions used in the calibration approaches of [37, 38] and in the un-
certainty analysis of [39]. With the use of this generalized description, in the second step,
we will investigate the benefits which could be gained by accounting for those relationshipsat various stages of the VNA measurement procedure. A particular emphasis will be put
here on the VNA calibration.
This organization of this work is as follows. In the introductory part (Chapter 2 and
Chapter 3) we review the foundations of VNA S-parameter measurements and uncertainty
analysis. This part serves as the theoretical background for the discussion presented in the
main part of this work.
The main part of this work consists of three chapters. In Chapter 4 we develop a uniform
5
8/10/2019 doktorat Lewandowski
26/254
1. INTRODUCTION
framework for the representation of relationships between VNA S-parameter measurements
at different frequencies. We further review the practical applications for which accounting
for these relationships is important. These applications include the correction of time-domain measurements, measurement-based device modeling and the VNA calibration on
which we focus in the this work. We show that a statistically sound description of the VNA
calibration problem should be done in terms of the error mechanisms underlying the cali-
bration standard and VNA instrumentation errors. As a consequence, the VNA calibration
should be performed jointly at all measurement frequencies so as to account for the simul-
taneous contribution of those error mechanisms to S-parameter measurements at different
frequencies. We refer to this approach as the error-mechanism-based VNA calibration and
in the remainder of this work we develop the necessary tools for the implementation ofsuch a calibration approach. These tools include the generalized multi-frequency VNA
calibration (see Chapter 5) and the framework for error-mechanism-based description of
the VNA nonstationarity errors (see Chapter 6).
In the last part of this work (see Chapter 7) we present conclusions and discuss possible
directions of further research.
6
8/10/2019 doktorat Lewandowski
27/254
Chapter 2
Principles of VNA S-parameter
measurements
All models are wrong, some are useful.
George Box
In this chapter, we review the principles ofS-parameter measurements with the vector
network analyzer (VNA). We begin with a brief review of the S-parameter definition.
Following on that, we discuss the two-port VNA S-parameter measurements, and analyze
the imperfections of a typical two-port VNA measurement setup. The errors caused by
these imperfections are systematic as they are very stable in the course of typical VNA
measurement. Therefore, they can be characterized in a calibrationprocedure and thenremoved from the actual S-parameter measurements in the correction procedure. Both
procedures assume a mathematical model of these VNA. In the calibration procedure, a
set of devices with some known characteristics is measured and the parameters of the
VNA model are determined. Then, in the correction procedure, the model obtained in the
calibration is used to correct for the imperfections of the VNA setup. We discuss different
mathematical VNA models and VNA calibration techniques in the last two sections of this
chapter.
7
8/10/2019 doktorat Lewandowski
28/254
2. PRINCIPLES OF VNA S-PARAMETER MEASUREMENTS
2.1 Definition ofS-parameters
Scattering parameters form a description of an electronic circuit in terms of complex
amplitudes1 of electromagnetic waves interacting with the circuit. This description is
used in the situation when the dimensions of the circuit are become comparable with the
wavelength, which typically takes place at microwave and millimeter-wave frequencies. In
this situation, the physical phenomena occurring in the circuit are of a wave nature, and
the conventional circuit description in terms of terminal voltages and currents looses its
physical correspondence.
Scattering parameter description uses the concept of the circuit port instead of the
circuit terminal. A circuit port is defined as section of a uniform arbitrary waveguidethrough which the electromagnetic wave may enter and exit the electronic circuit. In
order to ensure the uniqueness of the scattering parameter description, we require that
these ports are electromagnetically separated and that a given set of circuit ports (with
waveguide modes propagating through them) encompasses all of the possible means by
which electromagnetic energy can enter and leave the circuit. This means that we need to
account not only for all of the physical ports through which the electromagnetic waves are
interacting with the circuit, but also for all of the waveguide modes propagating through
the circuit ports. In order to simplify the scattering parameter description, we typicallyassume single mode propagation through circuit ports, however, extension to the case of
multiple modes is possible.
Scattering parameters describe the relationships between the amplitudes of the waves
propagating through the circuit ports. These amplitudes are defined with the use of a
simple normalization such that the wave with a unit root-mean-square amplitude, in the
absence of the wave propagating in the opposite direction, carries unit power. Although
the principle of this normalization is very simple, its systematic derivation requires some
consideration. In the following, we briefly review the origins of this normalization (for
more details refer to, e.g., [1, 45]). We first introduce the concepts of waveguide voltage,
current and characteristic impedance. These concepts, although not required for the def-
inition of normalized waves and, consequently, ofS-parameters, allow one the relate the
scattering parameter description to the methods of the transmission line theory. We then
present two different types of normalized waves. The first type, referred to as the traveling
waves, originates in the physics of wave propagation in the waveguide. Thus, properties of
1We assume time-harmonic dependence of the fields.
8
8/10/2019 doktorat Lewandowski
29/254
2.1. DEFINITION OFS-PARAMETERS
traveling waves closely reflect the physical properties of the actual waves propagating in
the waveguide. In some cases, however, these properties lead to results that are surprising
in the context of the transmission line theory. Consequently, another type of normalizedwaves, referred to as pseudo-waves, is introduced, which leads to more intuitive results in
the framework of transmission line theory, at a cost, however, of not as close correspon-
dence to the physics of wave propagation in the waveguide. We conclude with a discussion
of practical implications of the different normalization schemes for scattering parameter
measurements.
2.1.1 Waveguide voltage, current and characteristic impedance
Electromagnetic waves traveling in a waveguide are described in terms ofmodeswhich
are solutions to the Maxwell equations in the waveguide cross-section. For time-harmonic
field dependence, these solutions can be characterized by the normalized transverse electric
and transverse magnetic field distributions, et(x, y) and ht(x, y), respectively, and the
complex-valued propagation constant. In the case of lossless transmission lines, the field
distributions are real-valued, and the propagation constant is imaginary = j. In the
case of transmission lines with losses, the field distributions are in general complex-valued
and the propagation constant has also a real part, that is =+j.
With the use of the normalized field distributions and the propagation constant, we can
write the complex peak amplitudes of the fields at any point in the waveguide (propagation
occurs along the zaxis) in a normalized way as
Et(x,y,z) =C+et(x, y)e
z +Cet(x, y)e+z =V(z)
V0et(x, y), (2.1)
Ht(x,y,z) =C+ht(x, y)e
z +Cht(x, y)e+z =I(z)
I0ht(x, y) (2.2)
where V0 and I0 are normalization constants with the dimension of voltage and current,respectively, C+ and C are unitless constants specifying the amplitude of the forward
and backward propagating wave at z= 0, respectively, and V(z) and I(z) are defined as
waveguide voltageand current.
The unitless constants C+ and C depend on the normalization used for et(x, y) and
ht(x, y). The waveguide voltage and current, however, are independent of this normaliza-
tion due to the use of normalization constants V0 and I0. These constants have units of
voltage and current, respectively, hence in the following we refer to them as the normal-
9
8/10/2019 doktorat Lewandowski
30/254
2. PRINCIPLES OF VNA S-PARAMETER MEASUREMENTS
ization voltage and current, respectively.
The choice of normalization voltage V0 and current I0 is not arbitrary and we require
that
P0 =1
2V0I
0 =
1
2
S
et htdS (2.3)
where the superscript indicates the complex conjugate, and Sdenotes the cross-sectionof the waveguide. From (2.3) it follows that the net power flow in the waveguide is
P(z) =1
2
S
Et(x,y,z) Ht (x,y,z)dS=1
2V(z)I(z)
Set htdS
V0I0=
1
2V(z)I(z). (2.4)
Consequently, by imposing the condition (2.3), we require that the net power flowing
through the cross-section of the waveguide can be determined applying conventional circuit-
theory definition to the waveguide voltage and current. Note that the magnitude of P0
depends on the normalizations used for et(x, y) and ht(x, y), however, its phase is inde-
pendent of this normalizations and is an inherent property of the mode.
Due to the power constraint (2.3), only one of the constantsV0and I0can be arbitrarily
chosen. For example, for the voltage V0, we may choose to use the path integral along
some arbitrarily chosen path Pin the cross-section of the waveguide
V0= P et(x, y)dl, (2.5)with an obvious constraint V0= 0, and then determine I0 from (2.3) (voltage-powernormalization). Alternatively, we can also fix the currentI0based the loop integral around
a closed loop L in the cross-section of the waveguide
I0 =L
ht(x, y)dl, (2.6)
with a similar constraintI0= 0 and then determineV0 from the constraint (2.3) (current-power normalization). Other normalizations are also possible, e.g., [1] or [46].
Based on the definition of the normalization voltage V0 and current I0, we define the
characteristic impedanceof the mode
Z0=V0
I0. (2.7)
The magnitude of Z0 depends, in general, on the field normalizations and the chosen
strategy for setting the constants V0 and I0. The phase ofZ0 can be easily determined in
10
8/10/2019 doktorat Lewandowski
31/254
2.1. DEFINITION OFS-PARAMETERS
terms of the mode power P0. Indeed, after some simple transformations, we obtain
ImZ0ReZ0 =
ImP0ReP0 (2.8)
Phase ofZ0 is therefore the inherent property of the mode and does not depend on the
field normalizations and the constants V0 and I0.
For TEM modes, the integral (2.5) depends only on the end points of the path and it is
natural to choose these point to lie on different conductors. Definition (2.7) becomes then
the conventional definition of the characteristic impedance for TEM modes.
The above definition of the waveguide voltage, current and characteristic impedance
are the fundamental concepts of the transmission line theory. This theory extends theconventional circuit theory by allowing voltages and currents to depend also on the location.
The main tool of this theory is a set of differential equations, referred to as Telegraphic
equations, which describe the wave propagation in terms time- and location-dependent
voltages and currents. For details refer to, e.g., [1] or [47].
2.1.2 Wave amplitudes and scattering parameters
So far, we have presented two different means of representing fields in the waveguide.The voltage-current description is independent of the field normalizations used in et(x, y)
and ht(x, y) and allows us to use the methods of the transmission line theory. However,
this description does not represent well the underlying physics of wave propagation phe-
nomenon which is best both analyzed and experimentally observed in terms of forward and
backward propagating waves rather than voltages and currents. The other description we
discussed, resulting directly from the solution of Maxwell equations, uses unitless constants
C+ andC. These constants have straightforward physical interpretation and describe the
amplitudes of the forward and backward propagating wave. However, they are difficult to
both interpret and measure sue to the dependence on the normalization of the mode fields
et(x, y) and ht(x, y).
Solution to that problems is the description in terms oftraveling-wave amplitudes. This
description arises from the following normalization of the constants C+ and C
a0(z) =
2ReP0C+ez , and b0(z) =
2ReP0C
e+z . (2.9)
By use of this normalization, we readily obtain the fields in the waveguide as
11
8/10/2019 doktorat Lewandowski
32/254
8/10/2019 doktorat Lewandowski
33/254
2.1. DEFINITION OFS-PARAMETERS
shift between the electric and magnetic fields, that is, when arg P0= 0. This phase shift isa consequence of power loss in the waveguide, which is commonly encountered in practice
due to finite conductivity of real conductors and losses in dielectrics.When the waveguide is lossy, the forward and backward propagating modes are not
orthogonal. Therefore, the real power flowing through a given cross section is not equal
to the sum of powers carried by the modes, which is usually assumed in the classical
transmission line theory [48, 49]. This result can easily be confirmed by writing the real
power flowing through the waveguide cross-section with the use of the traveling wave
amplitudes
ReP(z) =1
2|a0|2 1
2|b0|2 + Im(a0b0) Imp0Rep0 =
1
2|a0|2 1
2|b0|2 + Im(a0b0) ImZ0ReZ0 . (2.16)
Indeed, for arg P0= 0 we obtain an additional term related to the phase ofP0. Note that,according to (2.8), this phase is a property of the mode and does not depend on the choice
of field normalizations. It is related to the characteristic impedance of the mode through
(2.8), hence arg P0= 0 implies that characteristic impedance Z0 is complex.Another property, surprising in the context of transmission line theory, that results from
the loss in the waveguide, is that the ratio of real powers incident at and reflected from
an discontinuity in the waveguide is not equal to||2 where is the reflection coefficient = b0/a0 [48]. Therefore, in some cases, magnitude of may exceed one which is also
unusual for the classical transmission-line theory. This result can also be easily obtained
with the use of traveling wave amplitudes [45].
Therefore, for practical reasons, it is sometimes desirable to have an alternative normal-
ization which would lead to more intuitive results in the context of the transmission-line
theory. Also, when characteristic impedance Z0 exhibits a significant frequency depen-
dence, it is more convenient to have a fixed relationship between the wave amplitudes and
waveguide voltages and currents that be independent of the frequency dependence ofZ0.A normalization that has these properties is proposed in [45] and has form
a(z) =|V0|
V0
ReZref
2|Zref| [V(z) +I(z)Zref] , (2.17)
b(z) =|V0|
V0
ReZref
2|Zref| [V(z) I(z)Zref] , (2.18)
13
8/10/2019 doktorat Lewandowski
34/254
2. PRINCIPLES OF VNA S-PARAMETER MEASUREMENTS
where Zrefis an arbitrary parameter with ReZref 0, and a(z) and b(z) are referred toas the pseudo-wave amplitudes. This normalization has the property that the real power
flow in the waveguide is described by the expression as (2.16), however withZ0replaced byZref. Consequently, for a realZref, the additional term in expression (2.16) vanishes and
we obtain a description that is more intuitive in the context of transmission line theory.
It can be also shown that for Zref = Z0, the pseudo-wave amplitudes (2.17) and (2.18)
become traveling-wave amplitudes (2.12) and (2.13).
It is important to note that the pseudo-wave amplitudes do not directly correspond
to the traveling wave amplitudes. Indeed, we can readily show that a(z) and b(z) are
linear combinations ofa0(z) and b0(z). Therefore pseudo wave amplitudes are more of amathematical artifact than a physical representation of wave propagation in the waveguide.
This results in a well know property that for an infinite waveguide stimulated by a traveling
wave with|a0(z)| = 0 we have|b0(z)| = 0, however, after conversion to the pseudo-waveamplitudes, we obtain |b(z)| = 0 [45]. This again confirms that the pseudo-wave amplitudesdo not reflect the physics of wave propagation in the waveguide.
It is sometimes desirable to convert from on set of pseudo-wave amplitudes, a(z) and
b(z), with a reference impedance Zref to another set, a(z) and b(z) with a different
reference impedanceZref. The relationship between the two sets can be easily determined
from (2.17) and (2.18) as [45]
a(z)
b(z)
= N
a(z)
b(z)
, (2.19)
where
N=
1 jImZref/ReZref1 jImZref/ReZref
11
2
1
1
, (2.20)
and
=Zref ZrefZref+Zref
. (2.21)
It can be shown that for real reference impedances Zref and Zref, matrix (2.20) becomes
the transmission matrix of an ideal impedance transformer [1].
Having discussed different definitions of wave amplitudes, we finally introduce the scat-
tering parameters. For a circuit withNports, we group the wave amplitudes (traveling-
14
8/10/2019 doktorat Lewandowski
35/254
2.1. DEFINITION OFS-PARAMETERS
wave amplitudes of pseudo-wave amplitudes) at the circuit ports into two vectors
a=
a1...
aN
, b=
b1...
bN
, (2.22)
and define a linear relationship between the two vectors with a matrix S
b= Sa. (2.23)
When matrix (2.23) is defined in terms of traveling-wave amplitudes, we refer to its elements
as scattering parameters. In the case of pseudo-wave amplitude, we refer to the elementsofS aspseudo-scattering parameters. However, since the pseudo-wave amplitudes become
traveling wave amplitudes forZref=Z0, we often talk briefly about scattering parameters
defined with reference to a certain impedance Zref.
In the case of two-port devices2, it is sometimes more convenient to represent the
relationship between the wave amplitudes with the use oftransmission matrixdefined as
b1
a1= T
a2
b2 . (2.24)
This description has the useful property that the transmission matrix of the cascade con-
nection of two-port networks described with transmission matrices Ti, for i= 1, . . . , N , is
given by a product
T=Ni=1
Ti. (2.25)
In the common case of a two-port device, we give the relationship between the two
representations explicitly as they are used very often throughout this work. For a two-port
network with the scattering parameters given by
S=
S11 S12
S21 S22
, (2.26)
2The transmission matrix representation can easily be extend to the case of multiport devices with aneven number of ports, see [47].
15
8/10/2019 doktorat Lewandowski
36/254
2. PRINCIPLES OF VNA S-PARAMETER MEASUREMENTS
and the transmission parameters
T= T11 T12
T21 T22
, (2.27)
the relationships between the elements of (2.26) and (2.27) is [1]
T= 1
S21
S12S21 S11S22 S11
S22 1
, (2.28)
and
S=
1
T22 T12 T11T22
T12T21
1 T21
. (2.29)
2.1.3 Practical implications
In practice, the general definition ofS-parameters presented in the previous section,
can often be simplified. In most practical cases, the normalization voltage V0 is real3,
hence we have|V0|/V0= 1. We obtain then the following relations between the waveguidevoltages and currents, and the traveling-wave amplitudes
a0(z) =
ReZ0
2|Z0| [V(z) +I(z)Z0] , (2.30)
b0(z) =
ReZ0
2|Z0| [V(z) I(z)Z0] , (2.31)
while for the pseudo-wave amplitudes we have
a(z) =
ReZref
2|Zref| [V(z) +I(z)Zref] , (2.32)
b(z) =
ReZref
2|Zref| [V(z) I(z)Zref] , (2.33)
3Voltage V0 becomes complex if the plane of a constant phase velocity it not perpendicular to thedirection of propagation. This occurs in waveguides with dielectrics that are anisotropic or inhomogeneousin the waveguide cross-section.
16
8/10/2019 doktorat Lewandowski
37/254
2.2. VNAS-PARAMETER MEASUREMENT
and thus
V(z) = 1ReZref |Zref| [a0(z) +b0(z)] , (2.34)
I(z) = 1ReZref
|Zref|Zref
[a0(z) b0(z)] . (2.35)
For a real reference impedance, we further obtain the familiar expression known from the
circuit theory [5052]
a(z) = 1
2
Zref [V(z) +I(z)Zref] , (2.36)
b(z) = 1
2
Zref[V(z) I(z)Zref] , (2.37)
and
V(z) =
Zref[a0(z) +b0(z)] , (2.38)
I(z) = 1
Zref
[a0(z)
b0(z)] . (2.39)
In the context of the VNA S-parameter measurements, it is important to note that the
VNA measures S-parameters with respect to some unknown reference impedance. Hence
an important aspect of the VNA calibration is the determination of this impedance. This
will be discussed in more detail in Paragraph 2.4.2-C.
2.2 VNA S-parameter measurement
In the previous section, we demonstrated that the scattering parameters, as captured in
S-matrix defined by (2.23), describe relationships between normalized guided electromag-
netic waves incident at and reflected from the ports of an electronic circuit. This suggests
an intuitive method for their measurement, namely through an observation of these waves
in some controlled conditions, such as when only one of the device ports is excited at a
time. This observation should disturb the waves as little as possible (this is analogous to
the condition in low-frequency oscilloscope measurements that the probe has high input
17
8/10/2019 doktorat Lewandowski
38/254
2. PRINCIPLES OF VNA S-PARAMETER MEASUREMENTS
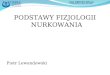
Fig. 2.1: VNA block diagram (switch is shown in the forward position).
impedance such that it does not disturb voltages and currents in the circuit), and in orderto avoid any interferences, waves emerging from the device-under-test (DUT) should be
absorbed at some place far enough from the DUT (this is analogous to the measurement
of impedance or admittance parameters when we require, respectively, low impedance or
high impedance termination of the circuit terminals).
This simple idea is the operational principle of the vector network analyzer (VNA).
A simplified diagram of a typical VNA, dedicated to the measurement of devices with
two or less ports (in short, a two-port VNA), is shown in Fig. 2.1. On either side of the
DUT, there is a set of two directional couplers with detectors. We refer to each set asa reflectometer. The function of the reflectometer is to measure the complex amplitudes
of the wave incident at and reflected from the DUT. This process is realized by coupling
part of each wave out the detection circuit and converting it to a lower frequency at which
the analog to digital (A/D) converters can be used. We show the detection circuit as a
single mixer excited by the local oscillator (LO), however, in the reality the signal may
undergo multiple frequency conversions. The A/D conversion may take place either at
some intermediate frequency (IF) or in the baseband.
18
8/10/2019 doktorat Lewandowski
39/254
2.2. VNAS-PARAMETER MEASUREMENT
In the forward position of the switch (this is the position shown in Fig. 2.1), signal
from the RF source is sent to the first port of the device under test while the other port
is terminated with a matched termination. The function of this termination is to absorbthe wave emerging from the non-excited port of the DUT. Complex voltages a1m and
b1m, which are approximately proportional to the amplitudes of the waves incident at and
reflected from port one,a1 andb1, respectively, are then measured in the left reflectometer.
Similarly, signal b2m, approximately proportional to the wave b2 transmitted through the
DUT, is measured in the right reflectometer. From these measurements, we approximate
scattering parametersS11 and S22 of the DUT as
S11m=
b1m
a1m , and S21m=
b2m
a1m , (2.40)
respectively. A similar description holds for the reverse position of the switch and we
obtain the following approximations ofS22 and S12
S22m= b2ma2m
, and S12m= b1ma2m
. (2.41)
We refer these approximations as raw, measured or uncorrected S-parameters.
The practical implementation of the VNA is far more complicated then the diagram
in Fig. 2.1. For detailed discussion of different architectures see for example [53]. The
main objective of the VNA construction is to provide wideband operation (for example
from 70 kHz up to 70 GHz [4]) while maintaining the error of approximations (2.40) and
(2.41) reasonably small. This objective is very hard to attain in practice, therefore the
errors of approximations are (2.40) and (2.41) usually not acceptable, even for approximate
assessment of the DUT S-parameters.
These errors result from various imperfections of the VNA construction. The most
important ones are the finite directivity of directional couplers, impedance mismatches in
the VNA (such as between the generator and the adjacent coupler, or between the other
coupler and the matched termination), discontinuities in the transmission lines guiding the
measured signals, phase shift and attenuation introduced by these lines, parasitic coupling
between the VNA ports (e.g. through the LO circuitry), and differences between the load
impedance in the forward and reverse position of the switch.
19
8/10/2019 doktorat Lewandowski
40/254
2. PRINCIPLES OF VNA S-PARAMETER MEASUREMENTS
2.3 Two-port VNA mathematical models
In this section, we discuss mathematical models for two-port VNA measurements.
These models describe the relationship between the measured and actual S-parameters
of a DUT as a function of a set of model parameters describing the systematic errors
introduced by the VNA. These models form the foundation for the correction of VNA
measurements and the development of VNA calibration algorithms.
The basic premise in the formulation of VNA models is that the relationships between
the measured and actual wave amplitudes are linear and time-invariant, thus the VNA
is assumed to be a linear time-invariant (LTI) system. We begin our discussion with the
description of VNA models based on this premise. Then we discuss situations when thetime-invariance assumption is violated. We do not discuss the case when the VNA becomes
non-linear as it is beyond the scope of this work.
2.3.1 Linear time-invariant two-port VNA
Fig. 2.2: 16-term model of a two-
port VNA.
A. 16-term model. The most general model of a
linear time-invariant two-port VNA is the 16-term
model [6, 5456]. This model, shown schematically
in Fig. 2.2, results directly from the VNA diagram
in Fig. 2.1. In the 16-term model model, the linear
relationship between the measured and actual waves
as a four-port liner network, denoted with EFig. 2.2,
and defined as
b1m
b2ma1
a2
=Se
a1m
a2mb1
b2
, where Se=
S11e S12eS21e S22e
=
e11 e12 e13 e14
e21 e22 e23 e24e31 e32 e33 e34
e41 e42 e43 e44
. (2.42)
Model parameters contained in the matrix Se encompass all possible transmission and
reflection paths in the VNA. Referring to Fig. 2.2 and Fig. 2.1, we note that
the diagonal terms of S11e, S12e, S21e, and S22e describe the systematic error intro-duced by the VNA reflectometers themselves;
20
8/10/2019 doktorat Lewandowski
41/254
2.3. TWO-PORT VNA MATHEMATICAL MODELS
anti-diagonal terms of S11e (that is e12 and e21) correspond to the internal cross-talkbetween the VNA reflectometers; this cross-talk results from the finite isolation
between different ports of the switch;
the anti-diagonal terms ofSe (that ise14,e23,e32 ande41) correspond to the couplingbetween VNA reflectometers, for example, through the IF circuitry; in modern VNAs
this coupling is negligible, therefore one typically assumes e14 = e23=e32=e41 = 0;
the anti-diagonal terms ofS22e (that ise34 ande43) correspond to the external cross-talkbetween the VNA reflectometers, that is, to the direct cross-talk between the
VNA measurement ports; when measuring open-waveguide structures (e.g., mis-
crostrip lines or coplanar waveguides), this cross-talk can be significant, however,
in the case of enclosed waveguides (e.g., coaxial lines or rectangular waveguides) this
cross-talk does not occur.
We determine the relationship between the raw and actual S-parameters in the 16-term
model by applying their definitions
b1m
b2m
= Sm
a1m
a2m
, and
b1
b2
= S
a1
a2
, (2.43)
respectively, to (2.42) and solving the resulting set of linear equations. This yields
Sm = S11e+ S12eS (I S22eS)1 S21e=S11e+ S12e
S1 S22e1
S21e, (2.44)
and
S=
S21e(Sm S11e)1 S12e+ S22e1
. (2.45)
By exploiting the structure of (2.44) and (2.45), we note that, although the model (2.2)
has 16 terms, only 15 terms need to be known to solve (2.44) and (2.45). Indeed, if wemultiply all elements ofS21e by an arbitrary constant and divide all elements S12e by the
same constant, relationships (2.44) and (2.45) do not change. Therefore one of the elements
in S12e or S21e can be arbitrarily chosen, for example fixed to one.
We further observe that relationships between the actual and measured S-parameters,
S and Sm, respectively, given by (2.44) and (2.45), are nonlinear functions of the model
parameters contained in the matrix Se, defined in (2.42). Therefore, the 16-term model is
often expressed in an alternative form which uses a different set of parameters for which
21
8/10/2019 doktorat Lewandowski
42/254
2. PRINCIPLES OF VNA S-PARAMETER MEASUREMENTS
the relationships between S and Sm become linear. This alternative form is defined by
[6, 55, 56]
b1m
b2m
a1m
a2m
=Te
b1
b2
a1
a2
, where Te=
T11e T12e
T21e T22e
=
t11 t12 t13 t14
t21 t22 t23 t24
t31 t32 t33 t34
t41 t42 t43 t44
. (2.46)
After applying (2.43) to (2.46) and solving the resulting set of linear equations we obtain
T11eS + T12e SmT21eS SmT22e= 0, (2.47)
where the model parameters contained in the submatrices ofTe can be expressed in terms
of the original parameters of the 16-term model as
T11e= S12e S11eS121eS22e, (2.48)T12e= S11eS
121e, (2.49)
T21e= S121eS22e, (2.50)T22e= S21e. (2.51)
The relationship (2.47) can further be brought to a very convenient form with the use of
matrix vectorization operator [57]. For a matrix X represented as X=[x1, . . . , xN], where
x1, . . . , xNare the columns ofX, the vectorization operator is defined as [57]
vec(X) =
x1...
xN
. (2.52)
Consequently, the vector (2.52) consists of stacked columns of matrix X. Applying thisoperator to (2.47) and with the use of the identity vec (ABC) =
CT A
vec (B), where
is the Kronecker product (see [57]), we obtain
ST I22
t11e+ t12e
ST Sm
t21e (I22 Sm) t22e= 0, (2.53)
22
8/10/2019 doktorat Lewandowski
43/254
2.3. TWO-PORT VNA MATHEMATICAL MODELS
where tije =vec (Tije), for i, j= 1, 2. This can be further transformed to
ST I2 I4 ST Sm I2 Sm
t11et12e
t21e
t22e
= 0, (2.54)
where I2 and I4 are identify matrices of size 2 2 and 4 4, respectively. Equation (2.54)forms a foundation for the 16-term VNA model identification [55, 56].
B. 8-term model. For modern VNAs, the internal cross-talk and coupling are usuallyvery small. Also, when performing VNA measurements with closed waveguides, such as
coaxial transmission line or rectangular waveguide, the external cross-talk is negligible4. In this case, the VNA reflectometers are electrically separated and the model (2.42)
simplifies to the 8-term model [6, 29], referred to also aserror-box model(see Fig. 2.3). In
the 8-term model, the VNA reflectometers are represented as two linear two-port networks
A and B, referred to as the error boxes. We shall first formulate definitions of these
networks, following a similar convention to that used in model (2.46), and then show
another formulation which stems from the basic form (2.42) of the 16-term model.
As the networks A and B are electrically separated, we can rewrite (2.46) as two sets
of independent equations
b1m
a1m
= TA
b1
a1
, and
a2
b2
= TB
a2m
b2m
, (2.55)
and represent the measured and actual S-parameters, Sm and S, as the transmission
parameters, Tm and T, respectively, defined by
b1
a1
= T
a2
bb
, and
a1m
b1m
= Tm
a2m
b2m
, (2.56)
which immediately yields
Tm=TATTB, (2.57)
4In the case of VNA measurements involving open waveguides, such as in the case of on-wafer mea-surements or measurements employing fixtures with microstrip lines, the external cross-talk may becomesignificant.
23
8/10/2019 doktorat Lewandowski
44/254
2. PRINCIPLES OF VNA S-PARAMETER MEASUREMENTS
Fig. 2.3: 8-term model of a two-port VNA.
and consequently
T= T1A TmT1B . (2.58)
Equations (2.57) and (2.58) constitute probably the most commonly used formulation
of the 8-term model. Following a similar reasoning as in the case of the 16-term model, we
can show that out of total 8 complex terms in TA andTB, only 7 are necessary to describe
the relationship between Tm and T. Therefore one of the terms in the 8-term model can
be arbitrarily chosen, for example fixed to one.
Parameters of the eight term model can be chosen in different ways. A simple choice
is to directly use the coefficient of matrices TA and TB. Another choice is to relate the
parameters of the eight term model to the actual sources if systematic error in the VNA
measurement. This can be done with the use of the flow graph in Fig. 2.4 [58]. The
terms in the graph correspond to the different sources of systematic errors in the VNA
reflectometers. The second letter in the subscript, F or R, denotes position of the
switch, forward or reverse, respectively, in which the signal source is connected to thereflectometer. The individual terms correspond to the systematic errors resulting from
finite directivity of the reflectometers (EDF and EDR),
mismatch at the reflectometer input (ESF and ESR),
reflection tracking of the reflectometers (ERF and ERR).
The additional terms and describe the asymmetry in the parameters of both reflec-tometers. However, since the 8-term model has 7 independent terms, only the ratio /
appears in the equations (2.57) and (2.58). Therefore the flow graph for the 8-term model
can also be represented in an alternative form, by lumping the non-reciprocity of both error
boxes into oneof them. In Fig. 2.5, we show such an alternative representation where the
non-reciprocity is lumped into the error box representing port two of the VNA. Similar
graph can also be obtained by lumping the nonreciprocity into error box representing port
one of the VNA.
24
8/10/2019 doktorat Lewandowski
45/254
2.3. TWO-PORT VNA MATHEMATICAL MODELS
Fig. 2.4: Flow graph for the 8-term VNA model.
Fig. 2.5: Alternative form of the flow graph for the 8-term VNA model.
With the use of the terms shown in Fig. 2.4, we can rewrite (2.57) as
Tm= 1
EtEATEB, (2.59)
where the transmission matrices Tm and T can be derived from the measured and actual
DUTS-parameters with the use of (2.28) , while
EA=
ERF EDFESF EDF
ESF 1
, EB=
ERR EDRESR ESR
EDR 1
, (2.60)
and
Et =
ERR. (2.61)
The appealing simplicity of (2.57) and (2.58) allows to describe the VNA calibration
problem in a very concise and elegant way which has lead to numerous interesting results(see for example [30, 36]). However, formulation (2.57) and (2.58), has also an important
disadvantage. After examining (2.28), we note that transmission matrix T cannot be
defined for a DUT that does not have a forward transmission, that is, when S21 = 0.
Indeed, in such a case, pairs of variablesa1, b1and a2, b2are unrelated and the transmission
matrix T does not exist. Hence, matrix formulation (2.57) and (2.58) cannot provide a
uniform description for the VNA measurements of both two-port and one-port devices.
In order to describe the measurement of a one-port device with the use of matrices TA
25
8/10/2019 doktorat Lewandowski
46/254
2. PRINCIPLES OF VNA S-PARAMETER MEASUREMENTS
and TB, we apply the definitions of reflection coefficient measurement on port Aand B
mA = b1ma1m , and
mB = b2ma2m (2.62)
to obtain
mA=EDF+ ERFA1 ESFA , and mB =EDR+
ERRB1 ESRB , (2.63)
where A and B are the reflection coefficients of the one-port device connected to the
VNA port A and B, respectively. Equations (2.63) can be easily inverted to obtain the
correction formulas.
An alternative formulation of the eight-term model that provides a uniform description
of both one-port and two-port measurements, can be derived from the basic form (2.42)
of the 16-term model. Taking into account that the VNA reflectometers are electrically
separated and including the definitions in Fig. 2.4, we can write submatrices ofSe as
Se=
S11e S12e
S21e S22e
=
EDF
ERF
EDR ERR
ESF
1 ESR
. (2.64)
Applying then (2.64) to formulas (2.44) and (2.45), we obtain a uniform description of
both one-port and two-port measurements
S11m=EDF+S11ERF
D ERFESRS
D , (2.65)
S22m= EDR+S22ERR
D ERRESFS
D , (2.66)
S21m= S21
ERRD
, (2.67)
S12m=S12
ERFD
, (2.68)
where
S=S11S22 S21S12, (2.69)
and
D= 1 ESFS11 ESRS22+ESFESRS. (2.70)
26
8/10/2019 doktorat Lewandowski
47/254
2.3. TWO-PORT VNA MATHEMATICAL MODELS
C. Model parametrization choice. We showed in the previous section that the 16-term
and the 8-term model can be represented in terms of different sets of parameters. Although
this different parametrizations are equivalent, special attention needs to be paid to theirproperties in the context of their application in VNA calibration algorithms. Important
property in this context is theuniquenessof the parametrization. Parametrizations having
this property allow one to avoid the so called root choice problem in analytical VNA cali-
bration methods, and improves the robustness of the iterative VNA calibration techniques.
We shall discuss this issue in more detail for the 8-term model.
The primary parametrization we use for the 8-term model, which we refer to as the
base parametrization, results directly from (2.64). In this parametrization, we write the
vector of VNA-model parameters as
p=
EDF, ESF, ERF, EDR, ESR, ERR,
T. (2.71)
By expanding equations (2.44) and (2.45) in terms of parameters in p, we can easily show
that these parameters describe a unique solution to (2.44) and (2.45). In other words, if
some p solves equations (2.44) and (2.45), there is no other p= p that also solves theseequations.
Parametrization (2.71), however, is not the common one encountered in the literature.
Two other parametrizations that are often used are thereciprocal parametrization(see [36,
59]) and thetransmission parametrization(see [29, 30]). In the reciprocal parametrization,
write the vector of VNA parameters is written as
pR=
EDF, ESF,
ERF, EDR, ESR,
ERR,
ERRERF
T=
= [EDF, ESF, etF, EDR, ESR, etR, k]T . (2.72)
This parametrization has a very convenient property that the joint effect of the nonreciproc-
ity of both VNA error boxes is lumped into a single non-reciprocity factor k =
ERRERF
.
Thus the VNA error boxes A and B are represented as reciprocal two-port linear networks
with S21A = S12A = etF and S21B = S12B = etR, respectively. For reciprocal error boxes
(that is when = ERF/ and = ERR/), we have k = 1, otherwise|k| = 1. Conse-quently, adding a reciprocal linear network between the VNA error box and the DUT does
not change k. This is not the case of the base parametrization, for which adding such a
27
8/10/2019 doktorat Lewandowski
48/254
2. PRINCIPLES OF VNA S-PARAMETER MEASUREMENTS
linear network affects, in general, all of the parameters contained in (2.71).
Parametrization (2.72) is, however, not unique. We can demonstrate that by investi-
gating the conversion of the base parametrization (2.71) into (2.72). To this end, we write
etF and etR as
etF =sRF
ERF+
, and etR=sRR
ERR+
, (2.73)
where
x+
indicates one of the square roots of the complex numberx(e.g., with the positive
real part), and sRF = 1 and sRR= 1. Based on that, we rewrite (2.72) as
pR(sRF, sRR) =
EDF, ESF, sRF
ERF
+
, EDR, ESR, sRR
ERR+
,sRRsRF
ERR
+
ERF
+
T
. (2.74)
Consequently, we see that there are four different vectors pR(sRF, sRR) which lead to the
same vector p, depending on which square root we choose.
The transmission parametrization is based on the transmission matrix representation
(2.59) of the 8-term model. In this parametrization, the vector of VNA parameters is
written as
pT =
EDF, ESF, EDFESF ERF, EDR, ESR, EDRESR ERR,
ERR
T=
= [EDF, ESF, F, EDR, ESR, R, r]T . (2.75)
We can easily show that (2.75) can be uniquely derived from the base parametrization
(2.71).
2.3.2 Modeling VNA nonstationarity
The 16-term and eight term model presented in the previous section capture the pri-
mary systematic errors introduced in the VNA measurements. These models assume thatthe VNA does not change with time, which is essential for reliable identification of and
correction for VNA systematic errors.
In practice, however, this assumption is not met. The primary reason for the VNA
nonstationarity is the very manner in which the VNA operates, that is, by repeatedly
switching the source generator and the matched termination between the two reflectometers
(see Fig. 2.1). Due to the asymmetry of the switch, the VNA reflectometers see a slightly
different impedance of the source generator and of the matched termination in each position
28
8/10/2019 doktorat Lewandowski
49/254
2.3. TWO-PORT VNA MATHEMATICAL MODELS
(a) (b)
Fig. 2.6: Modeling changes of the matched termination impedance: (a) forward measure-ment, (b) reverse measurement.
of the switch. The difference between the source generator impedance in the two different
positions of the switch does not lead to an error since the reflectometer parameters, as
captured in the 16-term or eight term model, do not depend on this impedance [60].
However, the change of the matched termination impedance leads to systematic errors
[6, 58].
Other sources of the VNA nonstationarity are the nonrepeatability of the switch, the
test-set drift, imperfect connector repeatability and errors due to cable flexure. Apart from
the test-set drift which is strongly dependent on the temperature and humidity changes,these errors are of a random nature and without any further knowledge about their char-
acter they cannot be corrected for. We discuss those sources of VNA nonstationarity in
more detail in Subsection 3.3.2.
As to the changes of the matched-termination impedance, there exist two common
approaches for modeling their impact of VNA-model parameters. In either approach, a
different models is used for the VNA operating in the forward and reverse direction. In
the 12-term model [6], additional terms are used to described the effect of the matched-
termination variation whose values, however, are not directly related to the value of thematched-termination impedance seen through the switch. Another approach, which is
illustrated in Fig. 2.6, extends the VNA models presented in the previous section by adding
some additional terms related directly to the impedance of the matched termination. In
the forward and reverse positions of the switch, the matched termination presents different
reflection coefficient, Fand R, respectively. This reflection coefficients are referred to as
the switch terms. Consequently, the measured parameters can be expressed as a function
of the time-invariant VNA measurement Smand the switch terms. In particular, when the
29
8/10/2019 doktorat Lewandowski
50/254
2. PRINCIPLES OF VNA S-PARAMETER MEASUREMENTS
switch is in the forward direction, the VNA measures
SF11m= b1Fma1Fm andS
F21m= b2Fma1Fm , (2.76)
and when the switch is in the reverse direction, the VNA measures
SR22m= b2Rma2Rm
andSR12m= b1Rma2Rm
. (2.77)
With the use of these measurements, one can solve the linear equations resulting from the
flow graphs in Fig. 2.6 to obtain [58]
Sm= 1
1 SR12mSF21mRF
SF11m SR12mSF21mF SR12m SF11mSR12mR
SF21m SR22mSF21mF SR22m SR12mSF21mR
. (2.78)
Matrix Smobtained in that way is then used with the time-invariant VNA models presented
in Section 2.3.1.
The reflection coefficients F and R are typically measured in a separate step [58].
The VNA ports are then directly connected so that the matched termination is excited
from the opposite port. This impedance is typically very stable [58], therefore repeated
measurement of the reflection coefficients Fand R are not necessary.
2.4 Two-port VNA calibration techniques
VNA calibration procedures have been extensively studied in the literature and there
exists several good and detailed reviews, such as [6], or more recently [8]. Based on those
reviews, one concludes that these procedures differ from each other in many aspects, such
as the number and the type of calibration standards used, model of the VNA systematicerrors, mathematical formulation of the calibration problem, or the numerical method
used to solve it. Thus, VNA calibration procedures seem to form an inhomogeneous realm
with the only commonality being the high complexity of the mathematical description.
Therefore, in this overview, instead of going deep into mathematical details, we shall take
a higher-level look at the VNA calibration procedures and try to draw some similarities
between them.
The VNA can be thought of as a system whose input and output are the actual scatter-
30
8/10/2019 doktorat Lewandowski
51/254
2.4. TWO-PORT VNA CALIBRATION TECHNIQUES
ing parameters of a device and their raw measurement, respectively (see Fig. 2.7). Denoting
the vector representation of the measurement and the actual S-parameters of the device
under test (DUT) with the vectors sm and s, respectively, and the VNA model parameters(calibration coefficients) with the vector p, we may model the VNA operation at a given
frequency as a vector function
sm =f(s, p) , (2.79)
where the particular form of this function depends on the VNA mathematical model and
the parametrization choice (see Section 2.3).
Fig. 2.7: Representation of the
VNA operation.
The objective of the VNA calibration procedure is
now to determine the parameters p of the VNA based on
the measurement of a number of devicesreferred to as
calibration standardswith some known characteristics.
The VNA calibration problem falls therefore into the gen-
eral class of system identification problems [61, 62], also
referred to as inverse problems [63] or nonlinear regression problems[64, 65].
Fig. 2.8: VNA measurement of a calibration stan-
dard.
In order to formulate this problem
in a more precise way, consider Fig. 2.8.
Letsmn andsndenote the measurement
and the actual parameters of the n-th
calibration standard, forn = 1, . . . , N ,
where N is the number of calibration
st