Embed Size (px)
Citation preview
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Domínio, Contradomínio e Imagem
Definição (domínio, contradomínio e imagem de função)
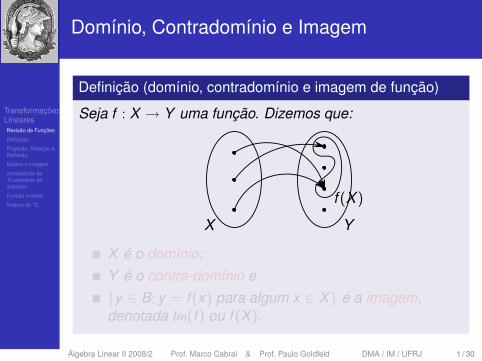
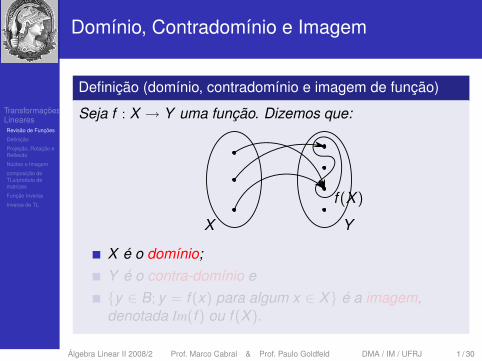
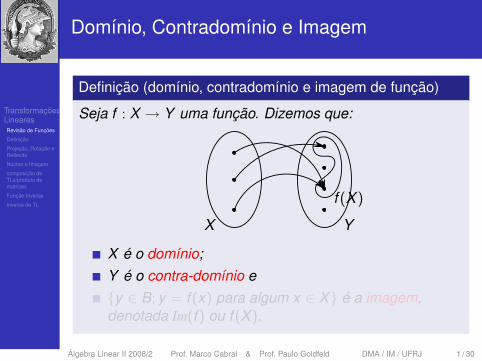
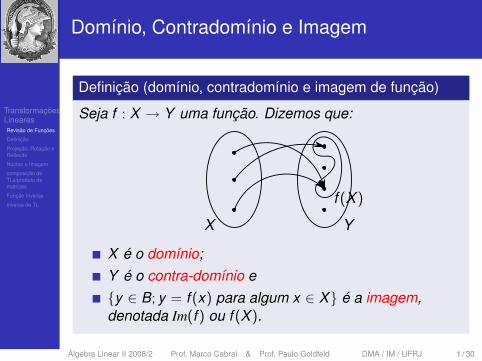
Seja f : X → Y uma função. Dizemos que:
YX
f (X )
X é o domínio;Y é o contra-domínio e{y ∈ B; y = f (x) para algum x ∈ X} é a imagem,denotada Im(f ) ou f (X ).
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 1 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Domínio, Contradomínio e Imagem
Definição (domínio, contradomínio e imagem de função)
Seja f : X → Y uma função. Dizemos que:
YX
f (X )
X é o domínio;Y é o contra-domínio e{y ∈ B; y = f (x) para algum x ∈ X} é a imagem,denotada Im(f ) ou f (X ).
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 1 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Domínio, Contradomínio e Imagem
Definição (domínio, contradomínio e imagem de função)
Seja f : X → Y uma função. Dizemos que:
YX
f (X )
X é o domínio;Y é o contra-domínio e{y ∈ B; y = f (x) para algum x ∈ X} é a imagem,denotada Im(f ) ou f (X ).
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 1 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Domínio, Contradomínio e Imagem
Definição (domínio, contradomínio e imagem de função)
Seja f : X → Y uma função. Dizemos que:
YX
f (X )
X é o domínio;Y é o contra-domínio e{y ∈ B; y = f (x) para algum x ∈ X} é a imagem,denotada Im(f ) ou f (X ).
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 1 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções Injetiva, Sobrejetiva e Bijetiva
Definição (função injetiva, sobrejetiva e bijetiva)
Seja f : A → B uma função. Dizemos que f é:injetiva se f (u) = f (v) implica que u = v. No diagrama,cada elemento do contra-domínio é atingido nomáximo uma vez.sobrejetiva se f (A) = B. No diagrama, cada elementodo contra-domínio é atingido pelo menos uma vez.bijetiva se é injetiva e sobrejetiva. No diagrama, cadaelemento do contra-domínio é atingido exatamenteuma vez.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 2 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções Injetiva, Sobrejetiva e Bijetiva
Definição (função injetiva, sobrejetiva e bijetiva)
Seja f : A → B uma função. Dizemos que f é:injetiva se f (u) = f (v) implica que u = v. No diagrama,cada elemento do contra-domínio é atingido nomáximo uma vez.sobrejetiva se f (A) = B. No diagrama, cada elementodo contra-domínio é atingido pelo menos uma vez.bijetiva se é injetiva e sobrejetiva. No diagrama, cadaelemento do contra-domínio é atingido exatamenteuma vez.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 2 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções Injetiva, Sobrejetiva e Bijetiva
Definição (função injetiva, sobrejetiva e bijetiva)
Seja f : A → B uma função. Dizemos que f é:injetiva se f (u) = f (v) implica que u = v. No diagrama,cada elemento do contra-domínio é atingido nomáximo uma vez.sobrejetiva se f (A) = B. No diagrama, cada elementodo contra-domínio é atingido pelo menos uma vez.bijetiva se é injetiva e sobrejetiva. No diagrama, cadaelemento do contra-domínio é atingido exatamenteuma vez.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 2 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções Injetiva, Sobrejetiva e Bijetiva
Definição (função injetiva, sobrejetiva e bijetiva)
Seja f : A → B uma função. Dizemos que f é:injetiva se f (u) = f (v) implica que u = v. No diagrama,cada elemento do contra-domínio é atingido nomáximo uma vez.sobrejetiva se f (A) = B. No diagrama, cada elementodo contra-domínio é atingido pelo menos uma vez.bijetiva se é injetiva e sobrejetiva. No diagrama, cadaelemento do contra-domínio é atingido exatamenteuma vez.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 2 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções Injetiva, Sobrejetiva e Bijetiva
Definição (função injetiva, sobrejetiva e bijetiva)
Seja f : A → B uma função. Dizemos que f é:injetiva se f (u) = f (v) implica que u = v. No diagrama,cada elemento do contra-domínio é atingido nomáximo uma vez.sobrejetiva se f (A) = B. No diagrama, cada elementodo contra-domínio é atingido pelo menos uma vez.bijetiva se é injetiva e sobrejetiva. No diagrama, cadaelemento do contra-domínio é atingido exatamenteuma vez.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 2 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções Injetiva, Sobrejetiva e Bijetiva
Definição (função injetiva, sobrejetiva e bijetiva)
Seja f : A → B uma função. Dizemos que f é:injetiva se f (u) = f (v) implica que u = v. No diagrama,cada elemento do contra-domínio é atingido nomáximo uma vez.sobrejetiva se f (A) = B. No diagrama, cada elementodo contra-domínio é atingido pelo menos uma vez.bijetiva se é injetiva e sobrejetiva. No diagrama, cadaelemento do contra-domínio é atingido exatamenteuma vez.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 2 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções Injetiva, Sobrejetiva e Bijetiva
Definição (função injetiva, sobrejetiva e bijetiva)
Seja f : A → B uma função. Dizemos que f é:injetiva se f (u) = f (v) implica que u = v. No diagrama,cada elemento do contra-domínio é atingido nomáximo uma vez.sobrejetiva se f (A) = B. No diagrama, cada elementodo contra-domínio é atingido pelo menos uma vez.bijetiva se é injetiva e sobrejetiva. No diagrama, cadaelemento do contra-domínio é atingido exatamenteuma vez.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 2 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções – Exemplo 1
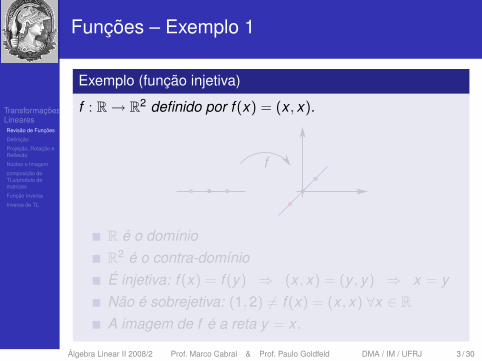
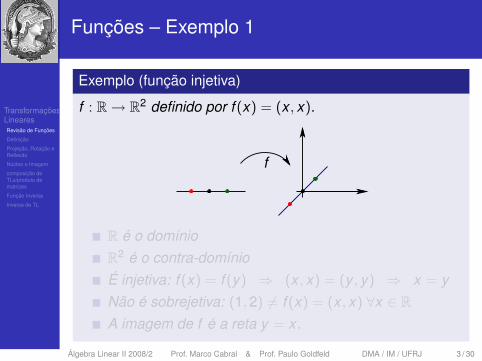
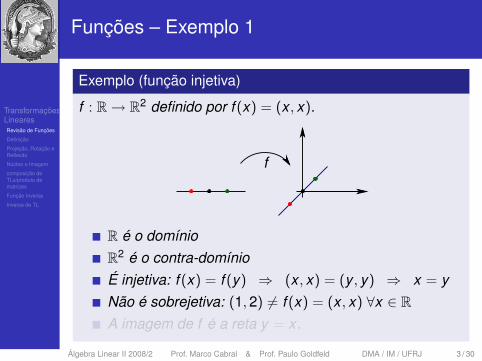
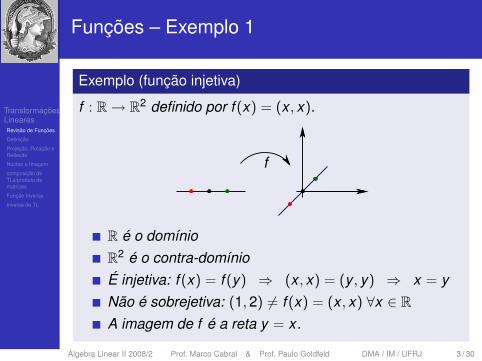
Exemplo (função injetiva)
f : R → R2 definido por f (x) = (x , x).
f
R é o domínioR2 é o contra-domínioÉ injetiva: f (x) = f (y) ⇒ (x , x) = (y , y) ⇒ x = yNão é sobrejetiva: (1, 2) 6= f (x) = (x , x) ∀x ∈ RA imagem de f é a reta y = x.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 3 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções – Exemplo 1
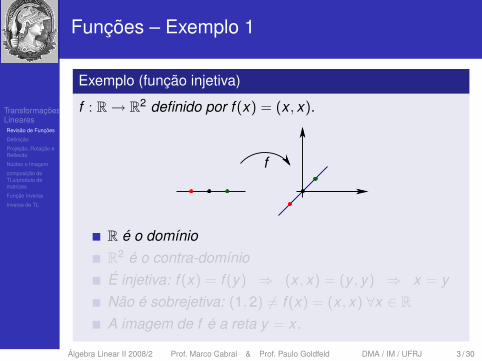
Exemplo (função injetiva)
f : R → R2 definido por f (x) = (x , x).
f
R é o domínioR2 é o contra-domínioÉ injetiva: f (x) = f (y) ⇒ (x , x) = (y , y) ⇒ x = yNão é sobrejetiva: (1, 2) 6= f (x) = (x , x) ∀x ∈ RA imagem de f é a reta y = x.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 3 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções – Exemplo 1
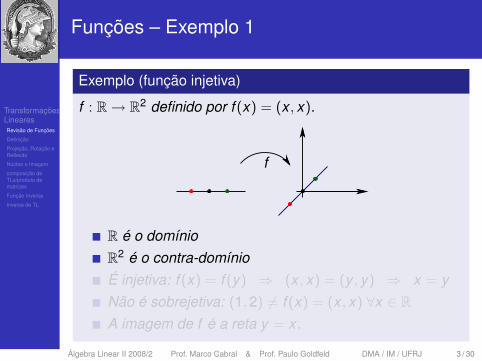
Exemplo (função injetiva)
f : R → R2 definido por f (x) = (x , x).
f
R é o domínioR2 é o contra-domínioÉ injetiva: f (x) = f (y) ⇒ (x , x) = (y , y) ⇒ x = yNão é sobrejetiva: (1, 2) 6= f (x) = (x , x) ∀x ∈ RA imagem de f é a reta y = x.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 3 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções – Exemplo 1
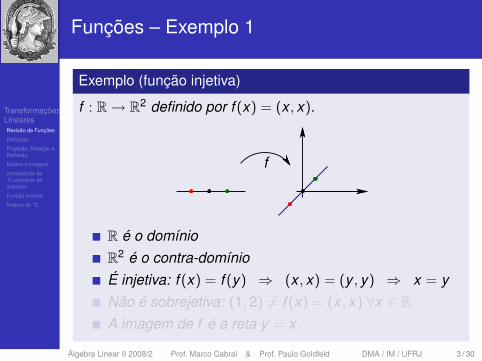
Exemplo (função injetiva)
f : R → R2 definido por f (x) = (x , x).
f
R é o domínioR2 é o contra-domínioÉ injetiva: f (x) = f (y) ⇒ (x , x) = (y , y) ⇒ x = yNão é sobrejetiva: (1, 2) 6= f (x) = (x , x) ∀x ∈ RA imagem de f é a reta y = x.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 3 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções – Exemplo 1
Exemplo (função injetiva)
f : R → R2 definido por f (x) = (x , x).
f
R é o domínioR2 é o contra-domínioÉ injetiva: f (x) = f (y) ⇒ (x , x) = (y , y) ⇒ x = yNão é sobrejetiva: (1, 2) 6= f (x) = (x , x) ∀x ∈ RA imagem de f é a reta y = x.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 3 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções – Exemplo 1
Exemplo (função injetiva)
f : R → R2 definido por f (x) = (x , x).
f
R é o domínioR2 é o contra-domínioÉ injetiva: f (x) = f (y) ⇒ (x , x) = (y , y) ⇒ x = yNão é sobrejetiva: (1, 2) 6= f (x) = (x , x) ∀x ∈ RA imagem de f é a reta y = x.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 3 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções – Exemplo 1
Exemplo (função injetiva)
f : R → R2 definido por f (x) = (x , x).
f
R é o domínioR2 é o contra-domínioÉ injetiva: f (x) = f (y) ⇒ (x , x) = (y , y) ⇒ x = yNão é sobrejetiva: (1, 2) 6= f (x) = (x , x) ∀x ∈ RA imagem de f é a reta y = x.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 3 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções – Exemplo 2
Exemplo (função sobrejetiva)
f : R2 → R definido por f (x , y) = x + y.R2 é o domínioR é o contra-domínioNão é injetiva: f (1, 0) = f (0, 1)
É sobrejetiva: dado y ∈ R (elemento docontra-domínio), existe x ∈ R2 (por exemplo, x = (y , 0))tal que f (x) = f (y , 0) = yA imagem de f é R
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 4 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções – Exemplo 2
Exemplo (função sobrejetiva)
f : R2 → R definido por f (x , y) = x + y.R2 é o domínioR é o contra-domínioNão é injetiva: f (1, 0) = f (0, 1)
É sobrejetiva: dado y ∈ R (elemento docontra-domínio), existe x ∈ R2 (por exemplo, x = (y , 0))tal que f (x) = f (y , 0) = yA imagem de f é R
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 4 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções – Exemplo 2
Exemplo (função sobrejetiva)
f : R2 → R definido por f (x , y) = x + y.R2 é o domínioR é o contra-domínioNão é injetiva: f (1, 0) = f (0, 1)
É sobrejetiva: dado y ∈ R (elemento docontra-domínio), existe x ∈ R2 (por exemplo, x = (y , 0))tal que f (x) = f (y , 0) = yA imagem de f é R
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 4 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções – Exemplo 2
Exemplo (função sobrejetiva)
f : R2 → R definido por f (x , y) = x + y.R2 é o domínioR é o contra-domínioNão é injetiva: f (1, 0) = f (0, 1)
É sobrejetiva: dado y ∈ R (elemento docontra-domínio), existe x ∈ R2 (por exemplo, x = (y , 0))tal que f (x) = f (y , 0) = yA imagem de f é R
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 4 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções – Exemplo 2
Exemplo (função sobrejetiva)
f : R2 → R definido por f (x , y) = x + y.R2 é o domínioR é o contra-domínioNão é injetiva: f (1, 0) = f (0, 1)
É sobrejetiva: dado y ∈ R (elemento docontra-domínio), existe x ∈ R2 (por exemplo, x = (y , 0))tal que f (x) = f (y , 0) = yA imagem de f é R
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 4 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Funções – Exemplo 2
Exemplo (função sobrejetiva)
f : R2 → R definido por f (x , y) = x + y.R2 é o domínioR é o contra-domínioNão é injetiva: f (1, 0) = f (0, 1)
É sobrejetiva: dado y ∈ R (elemento docontra-domínio), existe x ∈ R2 (por exemplo, x = (y , 0))tal que f (x) = f (y , 0) = yA imagem de f é R
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 4 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Definição de Transformação Linear
Definição (transformação linear)
T : V → W é dita linear se preserva combinações lineares:
T (α~u + ~v) = αT (~u) + T (~v2).
para todo ~u, ~v ∈ V e α ∈ R.
Observação
Uma função é linear se e só se preserva soma vetoriale multiplicação por escalar.Se T é linear,
T (0) = T (−0 + 0) = − T (0) + T (0) = 0
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 5 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Definição de Transformação Linear
Definição (transformação linear)
T : V → W é dita linear se preserva combinações lineares:
T (α~u + ~v) = αT (~u) + T (~v2).
para todo ~u, ~v ∈ V e α ∈ R.
Observação
Uma função é linear se e só se preserva soma vetoriale multiplicação por escalar.Se T é linear,
T (0) = T (−0 + 0) = − T (0) + T (0) = 0
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 5 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Definição de Transformação Linear
Definição (transformação linear)
T : V → W é dita linear se preserva combinações lineares:
T (α~u + ~v) = αT (~u) + T (~v2).
para todo ~u, ~v ∈ V e α ∈ R.
Observação
Uma função é linear se e só se preserva soma vetoriale multiplicação por escalar.Se T é linear,
T (0) = T (−0 + 0) = − T (0) + T (0) = 0
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 5 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Definição de Transformação Linear
Definição (transformação linear)
T : V → W é dita linear se preserva combinações lineares:
T (α~u + ~v) = αT (~u) + T (~v2).
para todo ~u, ~v ∈ V e α ∈ R.
Observação
Uma função é linear se e só se preserva soma vetoriale multiplicação por escalar.Se T é linear,
T (0) = T (−0 + 0) = − T (0) + T (0) = 0
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 5 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Definição de Transformação Linear
Definição (transformação linear)
T : V → W é dita linear se preserva combinações lineares:
T (α~u + ~v) = αT (~u) + T (~v2).
para todo ~u, ~v ∈ V e α ∈ R.
Observação
Uma função é linear se e só se preserva soma vetoriale multiplicação por escalar.Se T é linear,
T (0) = T (−0 + 0) = − T (0) + T (0) = 0
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 5 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Definição de Transformação Linear
Definição (transformação linear)
T : V → W é dita linear se preserva combinações lineares:
T (α~u + ~v) = αT (~u) + T (~v2).
para todo ~u, ~v ∈ V e α ∈ R.
Observação
Uma função é linear se e só se preserva soma vetoriale multiplicação por escalar.Se T é linear,
T (0) = T (−0 + 0) = − T (0) + T (0) = 0
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 5 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Notação
Notação
Denotamos por L(U; V ) o conjunto de todas astransformações lineares de U em V .
Observação
Veremos que L(U; V ), munido de operações adequadas, éespaço vetorial.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 6 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Notação
Notação
Denotamos por L(U; V ) o conjunto de todas astransformações lineares de U em V .
Observação
Veremos que L(U; V ), munido de operações adequadas, éespaço vetorial.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 6 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 1
T : R3 → R2
(x1, x2, x3) 7→ (x3, −x1)é linear?
T (αx + y) = T (αx1 + y1, αx2 + y2, αx3 + y3)
= (αx3 + y3, −(αx1 + y1))
= α(x3, −x1) + (y3, −y1)
= αT (x) + T (y)
Sim.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 7 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 1
T : R3 → R2
(x1, x2, x3) 7→ (x3, −x1)é linear?
T (αx + y) = T (αx1 + y1, αx2 + y2, αx3 + y3)
= (αx3 + y3, −(αx1 + y1))
= α(x3, −x1) + (y3, −y1)
= αT (x) + T (y)
Sim.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 7 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 1
T : R3 → R2
(x1, x2, x3) 7→ (x3, −x1)é linear?
T (αx + y) = T (αx1 + y1, αx2 + y2, αx3 + y3)
= (αx3 + y3, −(αx1 + y1))
= α(x3, −x1) + (y3, −y1)
= αT (x) + T (y)
Sim.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 7 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 1
T : R3 → R2
(x1, x2, x3) 7→ (x3, −x1)é linear?
T (αx + y) = T (αx1 + y1, αx2 + y2, αx3 + y3)
= (αx3 + y3, −(αx1 + y1))
= α(x3, −x1) + (y3, −y1)
= αT (x) + T (y)
Sim.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 7 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 1
T : R3 → R2
(x1, x2, x3) 7→ (x3, −x1)é linear?
T (αx + y) = T (αx1 + y1, αx2 + y2, αx3 + y3)
= (αx3 + y3, −(αx1 + y1))
= α(x3, −x1) + (y3, −y1)
= αT (x) + T (y)
Sim.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 7 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 1
T : R3 → R2
(x1, x2, x3) 7→ (x3, −x1)é linear?
T (αx + y) = T (αx1 + y1, αx2 + y2, αx3 + y3)
= (αx3 + y3, −(αx1 + y1))
= α(x3, −x1) + (y3, −y1)
= αT (x) + T (y)
Sim.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 7 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 1
T : R3 → R2
(x1, x2, x3) 7→ (x3, −x1)é linear?
T (αx + y) = T (αx1 + y1, αx2 + y2, αx3 + y3)
= (αx3 + y3, −(αx1 + y1))
= α(x3, −x1) + (y3, −y1)
= αT (x) + T (y)
Sim.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 7 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 2
T : Rn → Rm
x 7→ Am×nxé linear?
T (αx + y) = A(αx + y)
= αAx + Ay
= αT (x) + T (y)
Sim.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 8 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 2
T : Rn → Rm
x 7→ Am×nxé linear?
T (αx + y) = A(αx + y)
= αAx + Ay
= αT (x) + T (y)
Sim.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 8 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 2
T : Rn → Rm
x 7→ Am×nxé linear?
T (αx + y) = A(αx + y)
= αAx + Ay
= αT (x) + T (y)
Sim.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 8 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 2
T : Rn → Rm
x 7→ Am×nxé linear?
T (αx + y) = A(αx + y)
= αAx + Ay
= αT (x) + T (y)
Sim.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 8 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 2
T : Rn → Rm
x 7→ Am×nxé linear?
T (αx + y) = A(αx + y)
= αAx + Ay
= αT (x) + T (y)
Sim.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 8 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 2
T : Rn → Rm
x 7→ Am×nxé linear?
T (αx + y) = A(αx + y)
= αAx + Ay
= αT (x) + T (y)
Sim.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 8 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 3
T : R3 → R2
(x1, x2, x3) 7→ (x3, x1x2)é linear?
T (1, 1, 1) = (1, 1)
T (2, 2, 2) = (2, 4) 6= 2T (1, 1, 1)
Não.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 9 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 3
T : R3 → R2
(x1, x2, x3) 7→ (x3, x1x2)é linear?
T (1, 1, 1) = (1, 1)
T (2, 2, 2) = (2, 4) 6= 2T (1, 1, 1)
Não.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 9 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 3
T : R3 → R2
(x1, x2, x3) 7→ (x3, x1x2)é linear?
T (1, 1, 1) = (1, 1)
T (2, 2, 2) = (2, 4) 6= 2T (1, 1, 1)
Não.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 9 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 3
T : R3 → R2
(x1, x2, x3) 7→ (x3, x1x2)é linear?
T (1, 1, 1) = (1, 1)
T (2, 2, 2) = (2, 4) 6= 2T (1, 1, 1)
Não.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 9 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 3
T : R3 → R2
(x1, x2, x3) 7→ (x3, x1x2)é linear?
T (1, 1, 1) = (1, 1)
T (2, 2, 2) = (2, 4) 6= 2T (1, 1, 1)
Não.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 9 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 4
Seja C1(R; R) o espaço das funções continuamentediferenciáveis e C(R; R) o conjunto das funções contínuas.A transformação derivada
D : C1(R; R) → C(R; R)f 7→ D(f ) = f ′.
é linear?
D(αf + g) = (αf + g)′ = αf′ + g′ = αD(f) + D(g)
Sim.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 10 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 4
Seja C1(R; R) o espaço das funções continuamentediferenciáveis e C(R; R) o conjunto das funções contínuas.A transformação derivada
D : C1(R; R) → C(R; R)f 7→ D(f ) = f ′.
é linear?
D(αf + g) = (αf + g)′ = αf′ + g′ = αD(f) + D(g)
Sim.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 10 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 4
Seja C1(R; R) o espaço das funções continuamentediferenciáveis e C(R; R) o conjunto das funções contínuas.A transformação derivada
D : C1(R; R) → C(R; R)f 7→ D(f ) = f ′.
é linear?
D(αf + g) = (αf + g)′ = αf′ + g′ = αD(f) + D(g)
Sim.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 10 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 4
Seja C1(R; R) o espaço das funções continuamentediferenciáveis e C(R; R) o conjunto das funções contínuas.A transformação derivada
D : C1(R; R) → C(R; R)f 7→ D(f ) = f ′.
é linear?
D(αf + g) = (αf + g)′ = αf′ + g′ = αD(f) + D(g)
Sim.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 10 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 4
Seja C1(R; R) o espaço das funções continuamentediferenciáveis e C(R; R) o conjunto das funções contínuas.A transformação derivada
D : C1(R; R) → C(R; R)f 7→ D(f ) = f ′.
é linear?
D(αf + g) = (αf + g)′ = αf′ + g′ = αD(f) + D(g)
Sim.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 10 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
TL – Exemplo 4
Seja C1(R; R) o espaço das funções continuamentediferenciáveis e C(R; R) o conjunto das funções contínuas.A transformação derivada
D : C1(R; R) → C(R; R)f 7→ D(f ) = f ′.
é linear?
D(αf + g) = (αf + g)′ = αf′ + g′ = αD(f) + D(g)
Sim.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 10 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Teorema
Teorema
Sejam T : U → V transformação linear e {u1, u2, . . . , un}base de U. Se conhecemos T (ui) para i = 1, . . . , n, entãoT (u) está bem determinado para qualquer u ∈ U.
u =∑n
i=1 αiui
T (u) = T(∑n
i=1 αiui)
=∑n
i=1 αiT (ui)
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 11 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Teorema
Teorema
Sejam T : U → V transformação linear e {u1, u2, . . . , un}base de U. Se conhecemos T (ui) para i = 1, . . . , n, entãoT (u) está bem determinado para qualquer u ∈ U.
u =∑n
i=1 αiui
T (u) = T(∑n
i=1 αiui)
=∑n
i=1 αiT (ui)
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 11 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Teorema
Teorema
Sejam T : U → V transformação linear e {u1, u2, . . . , un}base de U. Se conhecemos T (ui) para i = 1, . . . , n, entãoT (u) está bem determinado para qualquer u ∈ U.
u =∑n
i=1 αiui
T (u) = T(∑n
i=1 αiui)
=∑n
i=1 αiT (ui)
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 11 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Teorema
Teorema
Sejam T : U → V transformação linear e {u1, u2, . . . , un}base de U. Se conhecemos T (ui) para i = 1, . . . , n, entãoT (u) está bem determinado para qualquer u ∈ U.
u =∑n
i=1 αiui
T (u) = T(∑n
i=1 αiui)
=∑n
i=1 αiT (ui)
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 11 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo
Exemplo
Seja T : R2 → R TL tal que T (1, 1) = 2 e T (0, 1) = 3.Determine T(x,y).
(x , y) = (x , x) + (0, y − x) = x(1, 1) + (y − x)(0, 1)
T (x , y) = xT (1, 1)+(y −x)T (0, 1) = 2x +3(y −x) = 3y −x
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 12 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo
Exemplo
Seja T : R2 → R TL tal que T (1, 1) = 2 e T (0, 1) = 3.Determine T(x,y).
(x , y) = (x , x) + (0, y − x) = x(1, 1) + (y − x)(0, 1)
T (x , y) = xT (1, 1)+(y −x)T (0, 1) = 2x +3(y −x) = 3y −x
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 12 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo
Exemplo
Seja T : R2 → R TL tal que T (1, 1) = 2 e T (0, 1) = 3.Determine T(x,y).
(x , y) = (x , x) + (0, y − x) = x(1, 1) + (y − x)(0, 1)
T (x , y) = xT (1, 1)+(y −x)T (0, 1) = 2x +3(y −x) = 3y −x
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 12 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo
Exemplo
Seja T : R2 → R TL tal que T (1, 1) = 2 e T (0, 1) = 3.Determine T(x,y).
(x , y) = (x , x) + (0, y − x) = x(1, 1) + (y − x)(0, 1)
T (x , y) = xT (1, 1)+(y −x)T (0, 1) = 2x +3(y −x) = 3y −x
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 12 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo
Exemplo
Seja T : R2 → R TL tal que T (1, 1) = 2 e T (0, 1) = 3.Determine T(x,y).
(x , y) = (x , x) + (0, y − x) = x(1, 1) + (y − x)(0, 1)
T (x , y) = xT (1, 1)+(y −x)T (0, 1) = 2x +3(y −x) = 3y −x
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 12 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo: Rotação
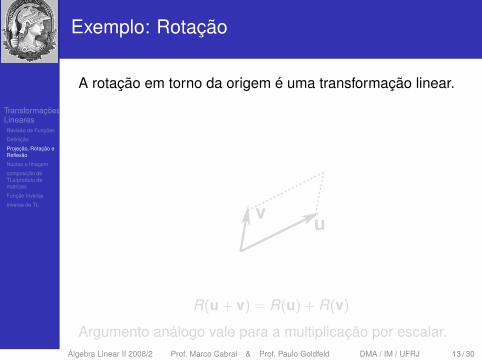
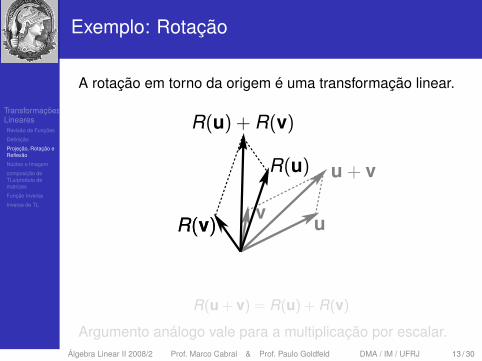
A rotação em torno da origem é uma transformação linear.
uv
R(u + v) = R(u) + R(v)
Argumento análogo vale para a multiplicação por escalar.Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 13 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo: Rotação
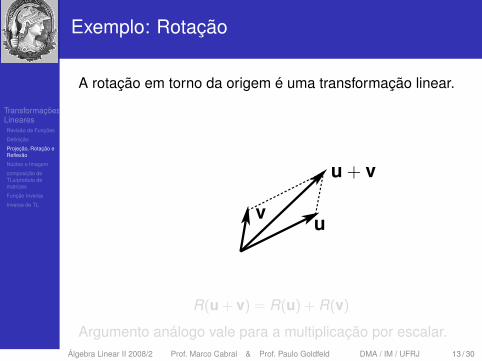
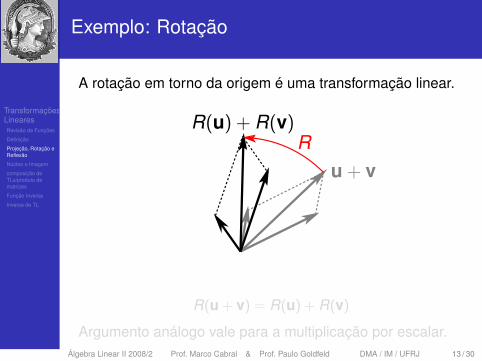
A rotação em torno da origem é uma transformação linear.
u + v
uv
R(u + v) = R(u) + R(v)
Argumento análogo vale para a multiplicação por escalar.Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 13 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo: Rotação
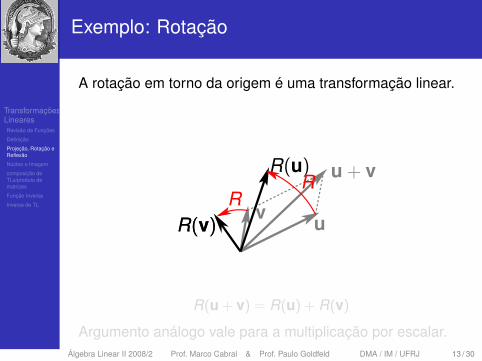
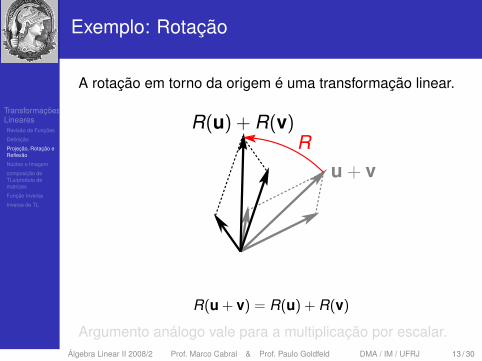
A rotação em torno da origem é uma transformação linear.
R(v)
R(u)
R(v)
RR
v u
u + v
R(u + v) = R(u) + R(v)
Argumento análogo vale para a multiplicação por escalar.Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 13 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo: Rotação
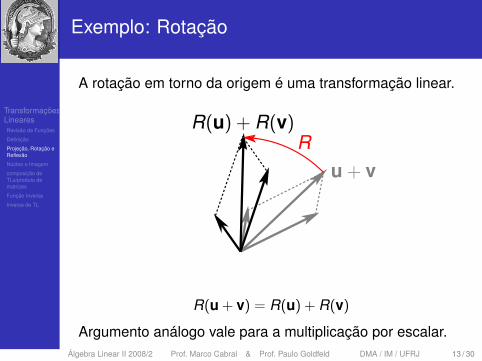
A rotação em torno da origem é uma transformação linear.
R(v)
R(u)
R(v)
R(u) + R(v)
v u
u + v
R(u + v) = R(u) + R(v)
Argumento análogo vale para a multiplicação por escalar.Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 13 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo: Rotação
A rotação em torno da origem é uma transformação linear.
R(u) + R(v)R
u + v
R(u + v) = R(u) + R(v)
Argumento análogo vale para a multiplicação por escalar.Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 13 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo: Rotação
A rotação em torno da origem é uma transformação linear.
R(u) + R(v)R
u + v
R(u + v) = R(u) + R(v)
Argumento análogo vale para a multiplicação por escalar.Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 13 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo: Rotação
A rotação em torno da origem é uma transformação linear.
R(u) + R(v)R
u + v
R(u + v) = R(u) + R(v)
Argumento análogo vale para a multiplicação por escalar.Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 13 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo: Matriz de Rotação
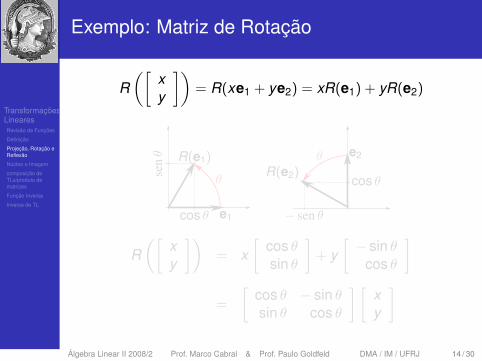
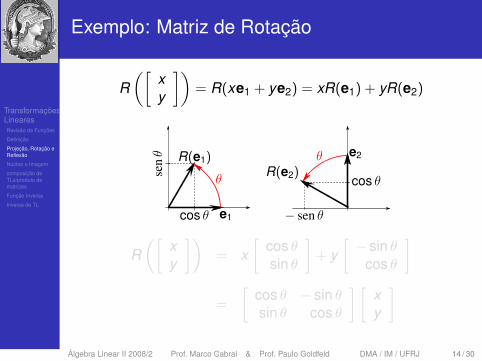
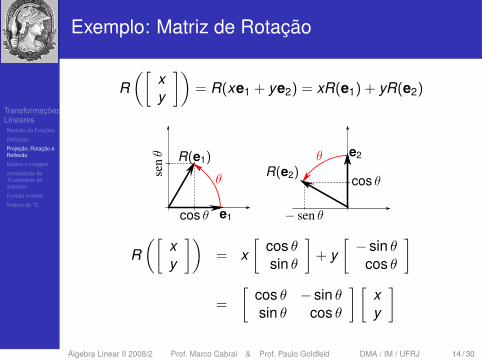
R([
xy
])= R(xe1 + ye2) = xR(e1) + yR(e2)
cos θ
senθ
θ
e1
R(e1)
− sen θ
cos θ
e2
R(e2)θ
R([
xy
])= x
[cos θsin θ
]+ y
[− sin θ
cos θ
]
=
[cos θ − sin θsin θ cos θ
] [xy
]
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 14 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo: Matriz de Rotação
R([
xy
])= R(xe1 + ye2) = xR(e1) + yR(e2)
cos θ
senθ
θ
e1
R(e1)
− sen θ
cos θ
e2
R(e2)θ
R([
xy
])= x
[cos θsin θ
]+ y
[− sin θ
cos θ
]
=
[cos θ − sin θsin θ cos θ
] [xy
]
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 14 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo: Matriz de Rotação
R([
xy
])= R(xe1 + ye2) = xR(e1) + yR(e2)
cos θ
senθ
θ
e1
R(e1)
− sen θ
cos θ
e2
R(e2)θ
R([
xy
])= x
[cos θsin θ
]+ y
[− sin θ
cos θ
]
=
[cos θ − sin θsin θ cos θ
] [xy
]
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 14 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Núcleo e Imagem
Definição (núcleo, imagem)
O núcleo de uma transformação linear T é o conjunto dosvetores do domínio cuja imagem por T é o vetor nulo.
Nuc(T ) = {u ∈ U | T (u) = 0}
A imagem de uma transformação linear T é o conjunto dosvetores do contra-domínio que são imagem por T de algumvetor do domínio.
Im(T ) = {v ∈ V | v = T (u) para algum u ∈ U}
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 15 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Núcleo e Imagem
Definição (núcleo, imagem)
O núcleo de uma transformação linear T é o conjunto dosvetores do domínio cuja imagem por T é o vetor nulo.
Nuc(T ) = {u ∈ U | T (u) = 0}
A imagem de uma transformação linear T é o conjunto dosvetores do contra-domínio que são imagem por T de algumvetor do domínio.
Im(T ) = {v ∈ V | v = T (u) para algum u ∈ U}
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 15 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Núcleo e Imagem
Observação
Nuc(T ) é subespaço vetorial de U.
Im(T ) é subespaço vetorial de V .
Definição (nulidade, posto)
A nulidade de uma transformação linear T é a dimensão doseu núcleo
ν(T ) = dim(Nuc(T ))
O posto de uma transformação linear T é a dimensão dasua imagem
dim Im(T ) = dim(Im(T ))
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 16 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Núcleo e Imagem
Observação
Nuc(T ) é subespaço vetorial de U.
Im(T ) é subespaço vetorial de V .
Definição (nulidade, posto)
A nulidade de uma transformação linear T é a dimensão doseu núcleo
ν(T ) = dim(Nuc(T ))
O posto de uma transformação linear T é a dimensão dasua imagem
dim Im(T ) = dim(Im(T ))
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 16 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Núcleo e Imagem
Observação
Nuc(T ) é subespaço vetorial de U.
Im(T ) é subespaço vetorial de V .
Definição (nulidade, posto)
A nulidade de uma transformação linear T é a dimensão doseu núcleo
ν(T ) = dim(Nuc(T ))
O posto de uma transformação linear T é a dimensão dasua imagem
dim Im(T ) = dim(Im(T ))
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 16 / 30

TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Núcleo e Imagem
Exemplo
T : R2 → R3, T (x , y) = (x + y , −2(x + y), 0)
T (x , y) = (0, 0, 0) ⇔ x + y = 0Nuc(T ) = 〈(1,−1)〉
Im(T ) = 〈(1,−2, 0)〉
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 17 / 30

TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Núcleo e Imagem
Exemplo
T : R2 → R3, T (x , y) = (x + y , −2(x + y), 0)
T (x , y) = (0, 0, 0) ⇔ x + y = 0Nuc(T ) = 〈(1,−1)〉
Im(T ) = 〈(1,−2, 0)〉
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 17 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Núcleo e Imagem
Exemplo
T : R2 → R3, T (x , y) = (x + y , −2(x + y), 0)
T (x , y) = (0, 0, 0) ⇔ x + y = 0Nuc(T ) = 〈(1,−1)〉
Im(T ) = 〈(1,−2, 0)〉
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 17 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Núcleo e Imagem
Exemplo
T : R2 → R3, T (x , y) = (x + y , −2(x + y), 0)
T (x , y) = (0, 0, 0) ⇔ x + y = 0Nuc(T ) = 〈(1,−1)〉
Im(T ) = 〈(1,−2, 0)〉
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 17 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Núcleo e Imagem
Lema
Seja T : U → V uma TL. Então:T é injetiva ⇔ Nuc(T ) = {0}T é sobrejetiva ⇔ dim(Im(T )) = dim(V )
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 18 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Núcleo e Imagem
Lema
Seja T : U → V uma TL. Então:T é injetiva ⇔ Nuc(T ) = {0}T é sobrejetiva ⇔ dim(Im(T )) = dim(V )
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 18 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Núcleo e Imagem
Lema
Seja T : U → V uma TL. Então:T é injetiva ⇔ Nuc(T ) = {0}T é sobrejetiva ⇔ dim(Im(T )) = dim(V )
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 18 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Núcleo e Imagem
Teorema (do Núcleo e Imagem)
Seja T : U → V uma TL. Então
dim(Nuc(T )) + dim(Im(T )) = dim(U).
Prova
Seja {u1, . . . , uν} base de Nuc(T ) esejam v1, . . . , vr tais que {u1, . . . , uν , v1, . . . , vr}seja base de U. Basta verificar que{T (v1), . . . , T (vr )} é base de Im(T ).
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 19 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Núcleo e Imagem
Teorema (do Núcleo e Imagem)
Seja T : U → V uma TL. Então
dim(Nuc(T )) + dim(Im(T )) = dim(U).
Prova
Seja {u1, . . . , uν} base de Nuc(T ) esejam v1, . . . , vr tais que {u1, . . . , uν , v1, . . . , vr}seja base de U. Basta verificar que{T (v1), . . . , T (vr )} é base de Im(T ).
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 19 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Núcleo e Imagem
Teorema (do Núcleo e Imagem)
Seja T : U → V uma TL. Então
dim(Nuc(T )) + dim(Im(T )) = dim(U).
Prova
Seja {u1, . . . , uν} base de Nuc(T ) esejam v1, . . . , vr tais que {u1, . . . , uν , v1, . . . , vr}seja base de U. Basta verificar que{T (v1), . . . , T (vr )} é base de Im(T ).
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 19 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Núcleo e Imagem
Teorema (do Núcleo e Imagem)
Seja T : U → V uma TL. Então
dim(Nuc(T )) + dim(Im(T )) = dim(U).
Prova
Seja {u1, . . . , uν} base de Nuc(T ) esejam v1, . . . , vr tais que {u1, . . . , uν , v1, . . . , vr}seja base de U. Basta verificar que{T (v1), . . . , T (vr )} é base de Im(T ).
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 19 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Espaço Vetorial das TLs
Definição (operações entre TLs)
Dados T , S ∈ L(U; V ) e α ∈ R definimos a soma de TLs e asua multiplicação por escalar como:
T + S : U → Vu 7→ T (u) + S(u)
eαT : U → V
u 7→ αT (u).
Lema (espaço vetorial das TLs)
L(U; V ) com as operações acima é um espaço vetorial.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 20 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Espaço Vetorial das TLs
Definição (operações entre TLs)
Dados T , S ∈ L(U; V ) e α ∈ R definimos a soma de TLs e asua multiplicação por escalar como:
T + S : U → Vu 7→ T (u) + S(u)
eαT : U → V
u 7→ αT (u).
Lema (espaço vetorial das TLs)
L(U; V ) com as operações acima é um espaço vetorial.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 20 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Composição de Funções
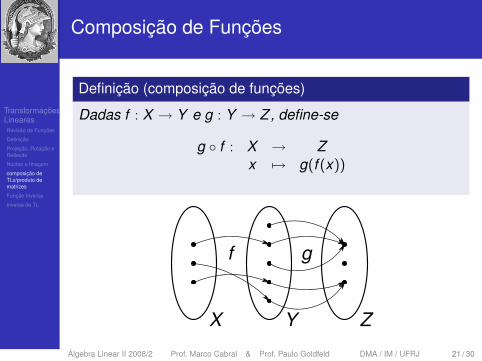
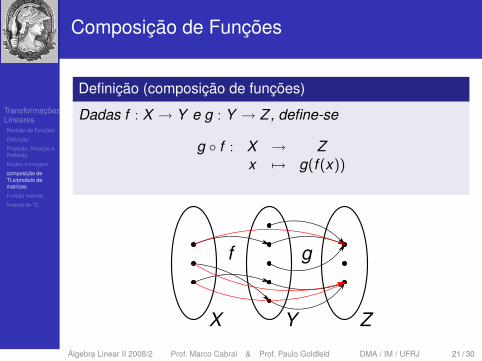
Definição (composição de funções)
Dadas f : X → Y e g : Y → Z, define-se
g ◦ f : X → Zx 7→ g(f (x))
f g
X Y Z
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 21 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Composição de Funções
Definição (composição de funções)
Dadas f : X → Y e g : Y → Z, define-se
g ◦ f : X → Zx 7→ g(f (x))
f g
X Y Z
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 21 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Composição de Funções
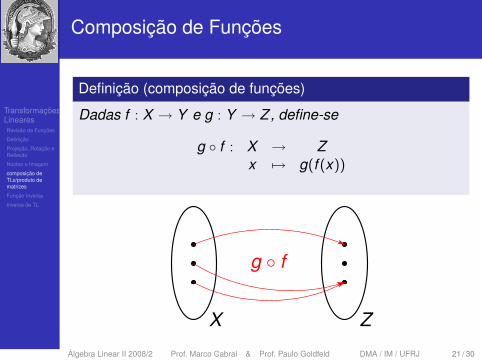
Definição (composição de funções)
Dadas f : X → Y e g : Y → Z, define-se
g ◦ f : X → Zx 7→ g(f (x))
X Z
g ◦ f
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 21 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Composição de Funções
Propriedades da Composição
Associatividade: (f ◦ g) ◦ h = f ◦ (g ◦ h) = f ◦ g ◦ hNão-comutatividade:em geral, dadas f : X → Y e g : Y → Z ,g ◦ f está bem definido, mas f ◦ g não está.Mesmo quando Z = X , caso em que ambas estãodefinidas, g ◦ f e f ◦ g podem diferir.Exemplo em breve.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 22 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Composição de Funções
Propriedades da Composição
Associatividade: (f ◦ g) ◦ h = f ◦ (g ◦ h) = f ◦ g ◦ hNão-comutatividade:em geral, dadas f : X → Y e g : Y → Z ,g ◦ f está bem definido, mas f ◦ g não está.Mesmo quando Z = X , caso em que ambas estãodefinidas, g ◦ f e f ◦ g podem diferir.Exemplo em breve.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 22 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Composição de Funções
Propriedades da Composição
Associatividade: (f ◦ g) ◦ h = f ◦ (g ◦ h) = f ◦ g ◦ hNão-comutatividade:em geral, dadas f : X → Y e g : Y → Z ,g ◦ f está bem definido, mas f ◦ g não está.Mesmo quando Z = X , caso em que ambas estãodefinidas, g ◦ f e f ◦ g podem diferir.Exemplo em breve.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 22 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Composição de Funções
Propriedades da Composição
Associatividade: (f ◦ g) ◦ h = f ◦ (g ◦ h) = f ◦ g ◦ hNão-comutatividade:em geral, dadas f : X → Y e g : Y → Z ,g ◦ f está bem definido, mas f ◦ g não está.Mesmo quando Z = X , caso em que ambas estãodefinidas, g ◦ f e f ◦ g podem diferir.Exemplo em breve.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 22 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Composição de Funções
Propriedades da Composição
Associatividade: (f ◦ g) ◦ h = f ◦ (g ◦ h) = f ◦ g ◦ hNão-comutatividade:em geral, dadas f : X → Y e g : Y → Z ,g ◦ f está bem definido, mas f ◦ g não está.Mesmo quando Z = X , caso em que ambas estãodefinidas, g ◦ f e f ◦ g podem diferir.Exemplo em breve.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 22 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Composição de TLs
Propriedades da Composição de TLs
No caso particular em que as funções são TLs, temosalgumas propriedades adicionais:
A composição de TLs é uma TL.
(T ◦ S)(αu + v) = T (S(αu + v)) = T (αS(u) + S(v))= αT (S(u)) + T (S(v))= α(T ◦ S)(u) + (T ◦ S)(v)
(S + T ) ◦ U = S ◦ U + T ◦ U (distributividade);S ◦ (T + U) = S ◦ T + S ◦ U (distributividade);S ◦ (αT ) = α(S ◦ T ) = (αS) ◦ T ;
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 23 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Composição de TLs
Propriedades da Composição de TLs
No caso particular em que as funções são TLs, temosalgumas propriedades adicionais:
A composição de TLs é uma TL.
(T ◦ S)(αu + v) = T (S(αu + v)) = T (αS(u) + S(v))= αT (S(u)) + T (S(v))= α(T ◦ S)(u) + (T ◦ S)(v)
(S + T ) ◦ U = S ◦ U + T ◦ U (distributividade);S ◦ (T + U) = S ◦ T + S ◦ U (distributividade);S ◦ (αT ) = α(S ◦ T ) = (αS) ◦ T ;
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 23 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Composição de TLs
Propriedades da Composição de TLs
No caso particular em que as funções são TLs, temosalgumas propriedades adicionais:
A composição de TLs é uma TL.
(T ◦ S)(αu + v) = T (S(αu + v)) = T (αS(u) + S(v))= αT (S(u)) + T (S(v))= α(T ◦ S)(u) + (T ◦ S)(v)
(S + T ) ◦ U = S ◦ U + T ◦ U (distributividade);S ◦ (T + U) = S ◦ T + S ◦ U (distributividade);S ◦ (αT ) = α(S ◦ T ) = (αS) ◦ T ;
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 23 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Composição de TLs
Propriedades da Composição de TLs
No caso particular em que as funções são TLs, temosalgumas propriedades adicionais:
A composição de TLs é uma TL.
(T ◦ S)(αu + v) = T (S(αu + v)) = T (αS(u) + S(v))= αT (S(u)) + T (S(v))= α(T ◦ S)(u) + (T ◦ S)(v)
(S + T ) ◦ U = S ◦ U + T ◦ U (distributividade);S ◦ (T + U) = S ◦ T + S ◦ U (distributividade);S ◦ (αT ) = α(S ◦ T ) = (αS) ◦ T ;
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 23 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Composição de TLs
Propriedades da Composição de TLs
No caso particular em que as funções são TLs, temosalgumas propriedades adicionais:
A composição de TLs é uma TL.
(T ◦ S)(αu + v) = T (S(αu + v)) = T (αS(u) + S(v))= αT (S(u)) + T (S(v))= α(T ◦ S)(u) + (T ◦ S)(v)
(S + T ) ◦ U = S ◦ U + T ◦ U (distributividade);S ◦ (T + U) = S ◦ T + S ◦ U (distributividade);S ◦ (αT ) = α(S ◦ T ) = (αS) ◦ T ;
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 23 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo de Composição de TLs
Exemplo
Considere TLs definidas em R2:P projeção no eixo x: P(a, b) = (a, 0);R reflexão na reta y = x: R(a, b) = (b, a);S reflexão no eixo y: S(a, b) = (−a, b).
PS(x , y) = P(−x , y) = (−x , 0)SP(x , y) = S(x , 0) = (−x , 0). Logo PS = SP.PR(x , y) = P(y , x) = (y , 0)RP(x , y) = R(x , 0) = (0, x). Logo PR 6= RP
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 24 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo de Composição de TLs
Exemplo
Considere TLs definidas em R2:P projeção no eixo x: P(a, b) = (a, 0);R reflexão na reta y = x: R(a, b) = (b, a);S reflexão no eixo y: S(a, b) = (−a, b).
PS(x , y) = P(−x , y) = (−x , 0)SP(x , y) = S(x , 0) = (−x , 0). Logo PS = SP.PR(x , y) = P(y , x) = (y , 0)RP(x , y) = R(x , 0) = (0, x). Logo PR 6= RP
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 24 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo de Composição de TLs
Exemplo
Considere TLs definidas em R2:P projeção no eixo x: P(a, b) = (a, 0);R reflexão na reta y = x: R(a, b) = (b, a);S reflexão no eixo y: S(a, b) = (−a, b).
PS(x , y) = P(−x , y) = (−x , 0)SP(x , y) = S(x , 0) = (−x , 0). Logo PS = SP.PR(x , y) = P(y , x) = (y , 0)RP(x , y) = R(x , 0) = (0, x). Logo PR 6= RP
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 24 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo de Composição de TLs
Exemplo
Considere TLs definidas em R2:P projeção no eixo x: P(a, b) = (a, 0);R reflexão na reta y = x: R(a, b) = (b, a);S reflexão no eixo y: S(a, b) = (−a, b).
PS(x , y) = P(−x , y) = (−x , 0)SP(x , y) = S(x , 0) = (−x , 0). Logo PS = SP.PR(x , y) = P(y , x) = (y , 0)RP(x , y) = R(x , 0) = (0, x). Logo PR 6= RP
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 24 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo de Composição de TLs
Exemplo
Considere TLs definidas em R2:P projeção no eixo x: P(a, b) = (a, 0);R reflexão na reta y = x: R(a, b) = (b, a);S reflexão no eixo y: S(a, b) = (−a, b).
PS(x , y) = P(−x , y) = (−x , 0)SP(x , y) = S(x , 0) = (−x , 0). Logo PS = SP.PR(x , y) = P(y , x) = (y , 0)RP(x , y) = R(x , 0) = (0, x). Logo PR 6= RP
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 24 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo de Composição de TLs
Exemplo
Considere TLs definidas em R2:P projeção no eixo x: P(a, b) = (a, 0);R reflexão na reta y = x: R(a, b) = (b, a);S reflexão no eixo y: S(a, b) = (−a, b).
PS(x , y) = P(−x , y) = (−x , 0)SP(x , y) = S(x , 0) = (−x , 0). Logo PS = SP.PR(x , y) = P(y , x) = (y , 0)RP(x , y) = R(x , 0) = (0, x). Logo PR 6= RP
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 24 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo de Composição de TLs
Exemplo
Considere TLs definidas em R2:P projeção no eixo x: P(a, b) = (a, 0);R reflexão na reta y = x: R(a, b) = (b, a);S reflexão no eixo y: S(a, b) = (−a, b).
PS(x , y) = P(−x , y) = (−x , 0)SP(x , y) = S(x , 0) = (−x , 0). Logo PS = SP.PR(x , y) = P(y , x) = (y , 0)RP(x , y) = R(x , 0) = (0, x). Logo PR 6= RP
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 24 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo de Composição de TLs
Exemplo
Considere TLs definidas em R2:P projeção no eixo x: P(a, b) = (a, 0);R reflexão na reta y = x: R(a, b) = (b, a);S reflexão no eixo y: S(a, b) = (−a, b).
PS(x , y) = P(−x , y) = (−x , 0)SP(x , y) = S(x , 0) = (−x , 0). Logo PS = SP.PR(x , y) = P(y , x) = (y , 0)RP(x , y) = R(x , 0) = (0, x). Logo PR 6= RP
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 24 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo de Composição de TLs
Exemplo
Considere TLs definidas em R2:P projeção no eixo x: P(a, b) = (a, 0);R reflexão na reta y = x: R(a, b) = (b, a);S reflexão no eixo y: S(a, b) = (−a, b).
PS(x , y) = P(−x , y) = (−x , 0)SP(x , y) = S(x , 0) = (−x , 0). Logo PS = SP.PR(x , y) = P(y , x) = (y , 0)RP(x , y) = R(x , 0) = (0, x). Logo PR 6= RP
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 24 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo de Composição de TLs
Exemplo
Considere TLs definidas em R2:P projeção no eixo x: P(a, b) = (a, 0);R reflexão na reta y = x: R(a, b) = (b, a);S reflexão no eixo y: S(a, b) = (−a, b).
PS(x , y) = P(−x , y) = (−x , 0)SP(x , y) = S(x , 0) = (−x , 0). Logo PS = SP.PR(x , y) = P(y , x) = (y , 0)RP(x , y) = R(x , 0) = (0, x). Logo PR 6= RP
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 24 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo de Composição de TLs
Exemplo
Considere TLs definidas em R2:P projeção no eixo x: P(a, b) = (a, 0);R reflexão na reta y = x: R(a, b) = (b, a);S reflexão no eixo y: S(a, b) = (−a, b).
PS(x , y) = P(−x , y) = (−x , 0)SP(x , y) = S(x , 0) = (−x , 0). Logo PS = SP.PR(x , y) = P(y , x) = (y , 0)RP(x , y) = R(x , 0) = (0, x). Logo PR 6= RP
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 24 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo de Composição de TLs
Exemplo
Considere TLs definidas em R2:P projeção no eixo x: P(a, b) = (a, 0);R reflexão na reta y = x: R(a, b) = (b, a);S reflexão no eixo y: S(a, b) = (−a, b).
PS(x , y) = P(−x , y) = (−x , 0)SP(x , y) = S(x , 0) = (−x , 0). Logo PS = SP.PR(x , y) = P(y , x) = (y , 0)RP(x , y) = R(x , 0) = (0, x). Logo PR 6= RP
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 24 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo de Composição de TLs
Exemplo
Considere TLs definidas em R2:P projeção no eixo x: P(a, b) = (a, 0);R reflexão na reta y = x: R(a, b) = (b, a);S reflexão no eixo y: S(a, b) = (−a, b).
PS(x , y) = P(−x , y) = (−x , 0)SP(x , y) = S(x , 0) = (−x , 0). Logo PS = SP.PR(x , y) = P(y , x) = (y , 0)RP(x , y) = R(x , 0) = (0, x). Logo PR 6= RP
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 24 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo de Composição de TLs
Exemplo
Considere TLs definidas em R2:P projeção no eixo x: P(a, b) = (a, 0);R reflexão na reta y = x: R(a, b) = (b, a);S reflexão no eixo y: S(a, b) = (−a, b).
PS(x , y) = P(−x , y) = (−x , 0)SP(x , y) = S(x , 0) = (−x , 0). Logo PS = SP.PR(x , y) = P(y , x) = (y , 0)RP(x , y) = R(x , 0) = (0, x). Logo PR 6= RP
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 24 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo de Composição de TLs
Exemplo
Considere TLs definidas em R2:P projeção no eixo x: P(a, b) = (a, 0);R reflexão na reta y = x: R(a, b) = (b, a);S reflexão no eixo y: S(a, b) = (−a, b).
PS(x , y) = P(−x , y) = (−x , 0)SP(x , y) = S(x , 0) = (−x , 0). Logo PS = SP.PR(x , y) = P(y , x) = (y , 0)RP(x , y) = R(x , 0) = (0, x). Logo PR 6= RP
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 24 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo de Composição de TLs
Exemplo
Considere TLs definidas em R2:P projeção no eixo x: P(a, b) = (a, 0);R reflexão na reta y = x: R(a, b) = (b, a);S reflexão no eixo y: S(a, b) = (−a, b).
PS(x , y) = P(−x , y) = (−x , 0)SP(x , y) = S(x , 0) = (−x , 0). Logo PS = SP.PR(x , y) = P(y , x) = (y , 0)RP(x , y) = R(x , 0) = (0, x). Logo PR 6= RP
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 24 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplo de Composição de TLs
Exemplo
Considere TLs definidas em R2:P projeção no eixo x: P(a, b) = (a, 0);R reflexão na reta y = x: R(a, b) = (b, a);S reflexão no eixo y: S(a, b) = (−a, b).
PS(x , y) = P(−x , y) = (−x , 0)SP(x , y) = S(x , 0) = (−x , 0). Logo PS = SP.PR(x , y) = P(y , x) = (y , 0)RP(x , y) = R(x , 0) = (0, x). Logo PR 6= RP
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 24 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Função Inversa
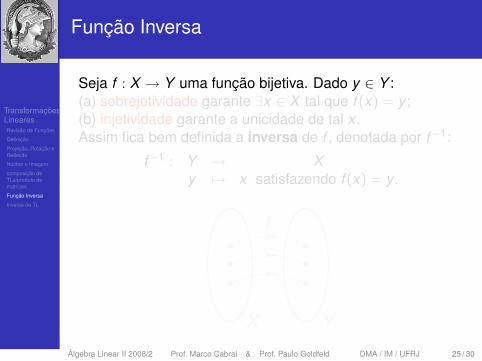
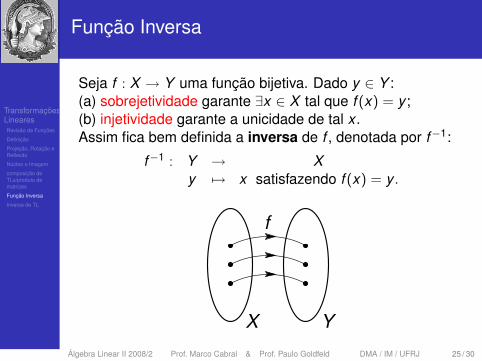
Seja f : X → Y uma função bijetiva. Dado y ∈ Y :(a) sobrejetividade garante ∃x ∈ X tal que f (x) = y ;(b) injetividade garante a unicidade de tal x .Assim fica bem definida a inversa de f , denotada por f−1:
f−1 : Y → Xy 7→ x satisfazendo f (x) = y .
f
X YÁlgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 25 / 30

TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Função Inversa
Seja f : X → Y uma função bijetiva. Dado y ∈ Y :(a) sobrejetividade garante ∃x ∈ X tal que f (x) = y ;(b) injetividade garante a unicidade de tal x .Assim fica bem definida a inversa de f , denotada por f−1:
f−1 : Y → Xy 7→ x satisfazendo f (x) = y .
f
X YÁlgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 25 / 30

TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Função Inversa
Seja f : X → Y uma função bijetiva. Dado y ∈ Y :(a) sobrejetividade garante ∃x ∈ X tal que f (x) = y ;(b) injetividade garante a unicidade de tal x .Assim fica bem definida a inversa de f , denotada por f−1:
f−1 : Y → Xy 7→ x satisfazendo f (x) = y .
f
X YÁlgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 25 / 30

TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Função Inversa
Seja f : X → Y uma função bijetiva. Dado y ∈ Y :(a) sobrejetividade garante ∃x ∈ X tal que f (x) = y ;(b) injetividade garante a unicidade de tal x .Assim fica bem definida a inversa de f , denotada por f−1:
f−1 : Y → Xy 7→ x satisfazendo f (x) = y .
f
X YÁlgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 25 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Função Inversa
Seja f : X → Y uma função bijetiva. Dado y ∈ Y :(a) sobrejetividade garante ∃x ∈ X tal que f (x) = y ;(b) injetividade garante a unicidade de tal x .Assim fica bem definida a inversa de f , denotada por f−1:
f−1 : Y → Xy 7→ x satisfazendo f (x) = y .
f
X YÁlgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 25 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Função Inversa
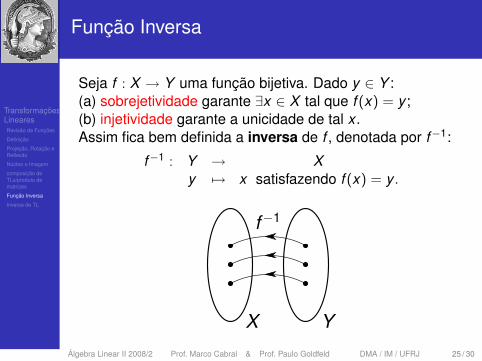
Seja f : X → Y uma função bijetiva. Dado y ∈ Y :(a) sobrejetividade garante ∃x ∈ X tal que f (x) = y ;(b) injetividade garante a unicidade de tal x .Assim fica bem definida a inversa de f , denotada por f−1:
f−1 : Y → Xy 7→ x satisfazendo f (x) = y .
f−1
X YÁlgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 25 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Propriedades da Inversa
A inversa possui as seguintes propriedades:
f (f−1(y)) = y ∀y ∈ Y , isto é, f ◦ f−1 = IY ef−1(f (x)) = x ∀x ∈ X , isto é, f−1 ◦ f = IX .
De fato, estas duas propriedades caracterizam a inversa,conforme veremos mais adiante.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 26 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Propriedades da Inversa
A inversa possui as seguintes propriedades:
f (f−1(y)) = y ∀y ∈ Y , isto é, f ◦ f−1 = IY ef−1(f (x)) = x ∀x ∈ X , isto é, f−1 ◦ f = IX .
De fato, estas duas propriedades caracterizam a inversa,conforme veremos mais adiante.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 26 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Propriedades da Inversa
A inversa possui as seguintes propriedades:
f (f−1(y)) = y ∀y ∈ Y , isto é, f ◦ f−1 = IY ef−1(f (x)) = x ∀x ∈ X , isto é, f−1 ◦ f = IX .
De fato, estas duas propriedades caracterizam a inversa,conforme veremos mais adiante.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 26 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplos de Função Inversa
Exemplo
A inversa de f (x) = x3 é f−1(x) = 3√
x pois ( 3√
y)3 = y e3√
x3 = x. A inversa NÃO é g(x) = 1/x3.
Exemplo
A inversa de f (x) = cos(x) é f−1(x) = arccos(x) poiscos(arccos(y)) = y e arccos(cos(x)) = x. A inversa NÃO ég(x) = 1/ cos(x).
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 27 / 30

TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplos de Função Inversa
Exemplo
A inversa de f (x) = x3 é f−1(x) = 3√
x pois ( 3√
y)3 = y e3√
x3 = x. A inversa NÃO é g(x) = 1/x3.
Exemplo
A inversa de f (x) = cos(x) é f−1(x) = arccos(x) poiscos(arccos(y)) = y e arccos(cos(x)) = x. A inversa NÃO ég(x) = 1/ cos(x).
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 27 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplos de Função Inversa
Exemplo
A inversa de f (x) = x3 é f−1(x) = 3√
x pois ( 3√
y)3 = y e3√
x3 = x. A inversa NÃO é g(x) = 1/x3.
Exemplo
A inversa de f (x) = cos(x) é f−1(x) = arccos(x) poiscos(arccos(y)) = y e arccos(cos(x)) = x. A inversa NÃO ég(x) = 1/ cos(x).
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 27 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplos de Função Inversa
Exemplo
A inversa de f (x) = x3 é f−1(x) = 3√
x pois ( 3√
y)3 = y e3√
x3 = x. A inversa NÃO é g(x) = 1/x3.
Exemplo
A inversa de f (x) = cos(x) é f−1(x) = arccos(x) poiscos(arccos(y)) = y e arccos(cos(x)) = x. A inversa NÃO ég(x) = 1/ cos(x).
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 27 / 30

TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplos de Função Inversa
Exemplo
A inversa de f (x) = x3 é f−1(x) = 3√
x pois ( 3√
y)3 = y e3√
x3 = x. A inversa NÃO é g(x) = 1/x3.
Exemplo
A inversa de f (x) = cos(x) é f−1(x) = arccos(x) poiscos(arccos(y)) = y e arccos(cos(x)) = x. A inversa NÃO ég(x) = 1/ cos(x).
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 27 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplos de Função Inversa
Exemplo
A inversa de f (x) = x3 é f−1(x) = 3√
x pois ( 3√
y)3 = y e3√
x3 = x. A inversa NÃO é g(x) = 1/x3.
Exemplo
A inversa de f (x) = cos(x) é f−1(x) = arccos(x) poiscos(arccos(y)) = y e arccos(cos(x)) = x. A inversa NÃO ég(x) = 1/ cos(x).
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 27 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplos de Função Inversa
Exemplo
A inversa de f (x) = x3 é f−1(x) = 3√
x pois ( 3√
y)3 = y e3√
x3 = x. A inversa NÃO é g(x) = 1/x3.
Exemplo
A inversa de f (x) = cos(x) é f−1(x) = arccos(x) poiscos(arccos(y)) = y e arccos(cos(x)) = x. A inversa NÃO ég(x) = 1/ cos(x).
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 27 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplos de Função Inversa
Exemplo
A inversa de f (x) = x3 é f−1(x) = 3√
x pois ( 3√
y)3 = y e3√
x3 = x. A inversa NÃO é g(x) = 1/x3.
Exemplo
A inversa de f (x) = cos(x) é f−1(x) = arccos(x) poiscos(arccos(y)) = y e arccos(cos(x)) = x. A inversa NÃO ég(x) = 1/ cos(x).
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 27 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Exemplos de Função Inversa
Exemplo
A inversa de f (x) = x3 é f−1(x) = 3√
x pois ( 3√
y)3 = y e3√
x3 = x. A inversa NÃO é g(x) = 1/x3.
Exemplo
A inversa de f (x) = cos(x) é f−1(x) = arccos(x) poiscos(arccos(y)) = y e arccos(cos(x)) = x. A inversa NÃO ég(x) = 1/ cos(x).
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 27 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Caracterização da Inversa
Lema
Seja f : X → Y uma função qualquer. Se existemg, h : Y → X satisfazendo:(a) g ◦ f = IX (identidade em X) e(b) f ◦ h = IY (identidade em Y),então f é bijetiva e g = h = f−1.
Corolário
Se f é bijetiva, então f−1 é bijetiva e (f−1)−1 = f .
Usaremos, indistintamente, os termos bijetiva e invertível.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 28 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Caracterização da Inversa
Lema
Seja f : X → Y uma função qualquer. Se existemg, h : Y → X satisfazendo:(a) g ◦ f = IX (identidade em X) e(b) f ◦ h = IY (identidade em Y),então f é bijetiva e g = h = f−1.
Corolário
Se f é bijetiva, então f−1 é bijetiva e (f−1)−1 = f .
Usaremos, indistintamente, os termos bijetiva e invertível.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 28 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Caracterização da Inversa
Lema
Seja f : X → Y uma função qualquer. Se existemg, h : Y → X satisfazendo:(a) g ◦ f = IX (identidade em X) e(b) f ◦ h = IY (identidade em Y),então f é bijetiva e g = h = f−1.
Corolário
Se f é bijetiva, então f−1 é bijetiva e (f−1)−1 = f .
Usaremos, indistintamente, os termos bijetiva e invertível.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 28 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Caracterização da Inversa
Lema
Seja f : X → Y uma função qualquer. Se existemg, h : Y → X satisfazendo:(a) g ◦ f = IX (identidade em X) e(b) f ◦ h = IY (identidade em Y),então f é bijetiva e g = h = f−1.
Corolário
Se f é bijetiva, então f−1 é bijetiva e (f−1)−1 = f .
Usaremos, indistintamente, os termos bijetiva e invertível.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 28 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Caracterização da Inversa
Lema
Seja f : X → Y uma função qualquer. Se existemg, h : Y → X satisfazendo:(a) g ◦ f = IX (identidade em X) e(b) f ◦ h = IY (identidade em Y),então f é bijetiva e g = h = f−1.
Corolário
Se f é bijetiva, então f−1 é bijetiva e (f−1)−1 = f .
Usaremos, indistintamente, os termos bijetiva e invertível.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 28 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Caracterização da Inversa
Lema
Seja f : X → Y uma função qualquer. Se existemg, h : Y → X satisfazendo:(a) g ◦ f = IX (identidade em X) e(b) f ◦ h = IY (identidade em Y),então f é bijetiva e g = h = f−1.
Corolário
Se f é bijetiva, então f−1 é bijetiva e (f−1)−1 = f .
Usaremos, indistintamente, os termos bijetiva e invertível.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 28 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Inversa da Composta
Lema
Se g : Y → Z e f : X → Y são invertíveis então g ◦ ftambém o é e (g ◦ f )−1 = f−1 ◦ g−1.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 29 / 30
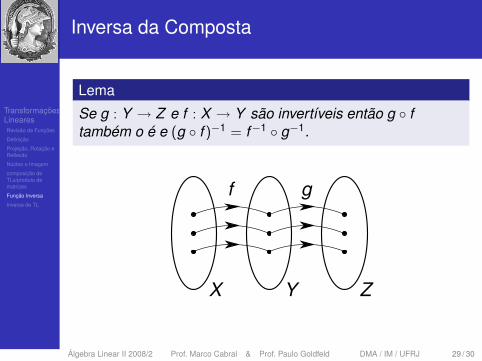
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Inversa da Composta
Lema
Se g : Y → Z e f : X → Y são invertíveis então g ◦ ftambém o é e (g ◦ f )−1 = f−1 ◦ g−1.
f g
X Y Z
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 29 / 30
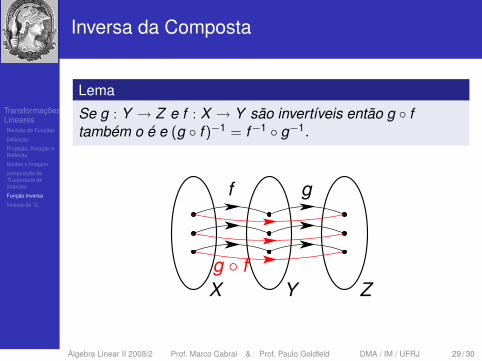
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Inversa da Composta
Lema
Se g : Y → Z e f : X → Y são invertíveis então g ◦ ftambém o é e (g ◦ f )−1 = f−1 ◦ g−1.
f g
X Y Zg ◦ f
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 29 / 30
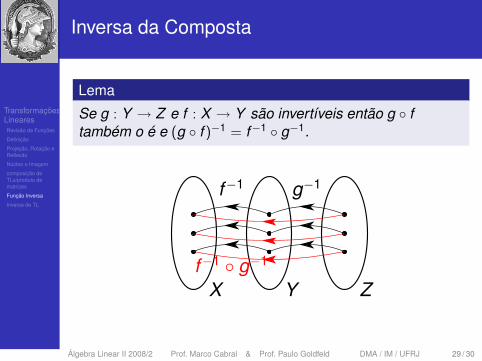
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Inversa da Composta
Lema
Se g : Y → Z e f : X → Y são invertíveis então g ◦ ftambém o é e (g ◦ f )−1 = f−1 ◦ g−1.
f−1 g−1
X Y Zf−1 ◦ g−1
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 29 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Inversa de TL
Uma transformação linear é uma função e, como tal,admite uma função inversa desde que seja bijetiva.Há dois fatos específicos relativos à inversa de umatransformação linear importantes.
Lema (inversa de TL)
Se T : U → V é transformação linear invertível, entãoT−1 também é linear;U e V têm a mesma dimensão.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 30 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Inversa de TL
Uma transformação linear é uma função e, como tal,admite uma função inversa desde que seja bijetiva.Há dois fatos específicos relativos à inversa de umatransformação linear importantes.
Lema (inversa de TL)
Se T : U → V é transformação linear invertível, entãoT−1 também é linear;U e V têm a mesma dimensão.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 30 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Inversa de TL
Uma transformação linear é uma função e, como tal,admite uma função inversa desde que seja bijetiva.Há dois fatos específicos relativos à inversa de umatransformação linear importantes.
Lema (inversa de TL)
Se T : U → V é transformação linear invertível, entãoT−1 também é linear;U e V têm a mesma dimensão.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 30 / 30
TransformaçõesLinearesRevisão de Funções
Definição
Projeção, Rotação eReflexão
Núcleo e Imagem
composição deTLs/produto dematrizes
Função Inversa
Inversa de TL
Inversa de TL
Uma transformação linear é uma função e, como tal,admite uma função inversa desde que seja bijetiva.Há dois fatos específicos relativos à inversa de umatransformação linear importantes.
Lema (inversa de TL)
Se T : U → V é transformação linear invertível, entãoT−1 também é linear;U e V têm a mesma dimensão.
Álgebra Linear II 2008/2 Prof. Marco Cabral & Prof. Paulo Goldfeld DMA / IM / UFRJ 30 / 30





























