Embed Size (px)
Citation preview

Dogru Akım Motorları
Doğru Akım Motorları
Yrd. Doç. Dr. Aytaç Gören
08.05.2012

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren
İçerik
Doğru Akım Elektrik Motorları
Doğru Akım Motorlarının Kısımları ve Özellikleri
Güç Hesabı
Adım (Step) Motorlar
Servo Motorlar
2 25.11.2011
Lineer Servo Motorlar

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren 3
Doğru Akım Motorları
Gramme Halkası – İlk DC Motor olarak kabul edilir.

Dogru Akım Motorları 4
Doğru Akım Elektrik Motorları
Elektrik Motorları
Alternatif Akım (AC) Motorları
Doğru Akım (DC) Motorları
Senkron İndüksiyon (Asenkron)
Üç Fazlı Tek Fazlı
Kendinden Uyarmalı
Dışarıdan Uyarmalı
Seri Şönt Bileşik

Dogru Akım Motorları 5
Doğru Akım Elektrik Motorları
Doğru Akım (DC) Motorları
Kendinden Uyarmalı
Dışarıdan Uyarmalı
Seri Şönt Bileşik

Dogru Akım Motorları 6
• Alan Kutupları • Basit bir DA motorunda kuzey ve güney
kutuplarını oluşturan bir çift mıknatıs vardır
• Manyetik alan oluşturmak için elektriği kullanır.
• Armatür • Kutuplar arasındaki silindire benzer kısımdır
• Akım geçerken elektromıknatıs olur
• Motor çıkış miline bağlıdır
• Komütator • Armatürdeki akım yönünü değiştirir
Doğru Akım Elektrik Motorlarının Kısımları

Dogru Akım Motorları 7
• Hız kontrolü
• Armatür gerilimi değiştirilerek
• Alan akımı değiştirilerek yapılabilir.
• Sınırlı kullanım
• Yavaş ve orta hız uygulamalarında kullanılır
• Temiz, güvenli koşullarda kullanılırlar.
• AA Motorlara göre pahalıdır
Doğru Akım Elektrik Motorlarının Özellikleri

Dogru Akım Motorları 8 © UNEP 2006
Hız, mayetik akı ve armatür gerilimi arasındaki ilişki
E : Armatür terminalindeki elektromanyetik kuvvet [V] : Alan akısı (Alan akımıyla orantılıdır) n : Hız [dev/dak] T : Elektro manyetik tork Ia : Armatür akımı [A] K : Denklem sabiti
Doğru Akım Elektrik Motorlarının Özellikleri
Zıt EMK: E = K n Tork: T = K Ia

Dogru Akım Motorları 9
• Ayrık Uyartım Akımlı Doğru Akım Motoru: • Alan akımı dış bir kaynaktan sağlanır.
• Şönt Motor: • Uyartım akımı motorun kendisi tarafından sağlanır.
Alan sargıları armatür sargılarıyla paraleldir.
Toplam Akım = Alan Akımı + Armatür Akımı
Belirli tork değerine kadar hız sabiti yükten
bağımsızdır
Hız Kontrolü: armatüre direnç
bağlanır ya da alan akımıyla sağlanır
Doğru Akım Elektrik Motorlarının Çeşitleri

Dogru Akım Motorları 10
Doğru Akım Elektrik Motorlarının Özellikleri
Dışarıdan Uyartımlı DA Motoru

Dogru Akım Motorları 11
Kendinden Uyartımlı Seri Motor
Alan sargısı ile armatür sargısı birbirine seri
bağlıdır. Alan akımı=Armatür akımı
Hız 5000 dev/dak’ya sınırlıdır.
• Yüksüz çalıştırmaktan kaçınınız: Hız
kontrolsüzdür.
Yüksek başlangıç torku gereken yerlere
uygundur: Örn. yük asansörü veya vinç gibi
Doğru Akım Elektrik Motorlarının Çeşitleri

Dogru Akım Motorları 12
Bileşik DA Motoru
Alan sargısı, armatür sargısına hem seri
hem paraleldir.
Tork üretme karakteristiği iyi ve
stabil bir hız karakteristiği vardır.
Seri yüzdesi fazla ise, başlangıçta
yüksek tork üretebilir.
Bileşik DA motorunun seri kısmının yüzdesi fazla ise
yüksek başlangıç torku üretir. Krenler, yük
asansörleri gibi uygulamalarda
kullanılabilir.
Doğru Akım Elektrik Motorlarının Çeşitleri

Dogru Akım Motorları 13
Doğru Akım Elektrik Motorları
Doğru Akım (DC) Motorları
Fırçasız Fırçalı
AA Asenkron Motorların yapısına dikkat edin

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren 14
Doğru Akım Motorları Güç Hesabı
Temelde kullanılan öncelikli iki denklem Faraday Yasası ve Lorenz Kuvveti’dir. Kayıpların olmadığı kabulü ile yandaki denklemler kullanılabilir.
E=B l v F=Bil
Tmil = Im kT Em=kE ωm
kT = kE = 2 N 2p Bg lm rm
P = Em Im = kE ωm(Tmil / kT ) = ωm Tmil
Parametre Gösterim Parametre Gösterim
Motordan geçen akım [A] Im EMK [volt] E
Motor indüklenmiş gerilim sbt. [ ] kE İletkenin hızı [m/s] v
Motor tork sbt. [ ] kT İletkenden geçen akım [A] i
Açısal hız [rad/s] ωm İletkenin boyu [m] l
Mildeki tork [Nm] Tmil motor stator boyu [m] lm
Slot başına iletken sayısı [ ] N Manyetik akı yoğunluğu [Wb/m2] B
Kutup çifti sayısı [ ] P Kuvvet [N] F
Hava aralığı akı yoğunluğu [Wb/m2] Bg Güç [W] P
Motorun hava aralığı yarıçapı [m] rm İndüklenmiş motor gerilimi [V] Em

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren 15
Doğru Akım Motorları Manyetik Devre
Φ =
Bfm=
2 Qf =VFe+2VL
Qf =Wf If
B=H μ
Parametre Gösterim
Rotor çapı D
Kutup sayısı 2p
Oluk sayısı Na
Kutup aralığı TP
Oluk aralığı TA
Endüvi boyu (derinlemesine) l
Bir bobinin oluşturduğu
magnete motor kuvvet
Qf
Uyarma akımı If
Her bir bobinin sarım sayısı Wf

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren 16
Doğru Akım Motorları Rotorda İndüklenen Gerilim, Manyetik Motor Dönme Momenti
Parametre Gösterim
Bobin eni d
Çift kutup sayısı p
Rotorun çevresinin uzunluğu x
Hız
Zamana bağlı indüklenen gerilim
İki fırça arasındaki bobinin sarım
sayısı
2 1
x
bobinin ortası
v
x zamana göre değişir. Bu durumda indüklenen gerilim;

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren 17
Doğru Akım Motorları Rotorda İndüklenen Gerilim, Manyetik Motor Dönme Momenti
Parametre Gösterim
Bobin eni d
Çift kutup sayısı p
Rotorun çevresinin uzunluğu x
Hız
Zamana bağlı indüklenen gerilim
İki fırça arasındaki bobinin sarım
sayısı
2 1
x
bobinin ortası
v
Elektrik motorlarında indüklenen akım, alternatif akımdır. Kollektörlerden fırçalara geçerken doğru akım olur.
Devir sayısı, elektrik motorlarında genelde doğrusal hıza göre daha fazla kullanılan bir parametredir.

Dogru Akım Motorları
Elektrik motorundaki moment denklemi jeneratörlerde indüklenen gerilim denklemi ise
http://people.deu.edu.tr/aytac.goren 18
Doğru Akım Motorları Rotorda İndüklenen Gerilim, Manyetik Motor Dönme Momenti
Parametre Gösterim
Bobin eni d
Çift kutup sayısı p
Rotorun çevresinin uzunluğu x
Hız
Zamana bağlı indüklenen gerilim
İki fırça arasındaki bobinin sarım
sayısı
2 1
x
bobinin ortası
v

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren 19
Doğru Akım Motorları Eşdeğer Devre
Elektrik motorlarının gösteriminde ve modellenmesinde kolaylık sağlanması açısından eşdeğer devreleri ile gösterilebilirler. Aşağıdaki şekilde statoru sabit mıknatıs ve rotoru sargı olan bir doğru akım motoru ve bu motora ait eşdeğer devresi görülebilir.

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren 20
Doğru Akım Motorları Eşdeğer Devre
Parametre Gösterim
Armatür (rotor) direnci Ra
Armatür endüktansı La
Armatür akımı Ia
Uygulanan giriş gerilimi Va
Zıt elektromotor gerilimi Vb
Hava aralığı akısı
Moment sabiti Ki
Zıt elektromotor sabiti Kb
Yük momenti TL
Motor momenti Tm
Rotor açısal hızı m
Rotorun açısal konumu m
Viskoz sürtünme katsayısı Bm
Motor eylemsizliği Jm

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren 21
Doğru Akım Motorları Güç
Doğru akım bir elektrik motorunun nominal gücü aşağıdaki denklemdeki gibi ifade edilebilir. Bu denklemde, UDC [V] motora verilen gerilimi ve IDC [A] ise motorun çektiği akımdır. Aşağıdaki denklemlerde, Pgiriş [W] motorun adlandırılmasında kullanılan gücü veya elektriksel gücü, Pçıkış mekanik gücü [W, HP] ya da çıkış gücünü veya anma gücünü (nominal gücü), ωm motor milinin dönüş hızını [devir/dakika, RPM], Tm ise motor milinden elde edilen torku [Nm] ifade eder. Pkayıp ölçülen kayıp gücü [W], η ise motor verimidir [%].
Pgiriş =UDC IDC
Pçıkış = ωm Tm ( 2π / 60 )
Pkayıp = Pgiriş − Pçıkış
η=( Pçıkış / Pgiriş )x100

Dogru Akım Motorları
Pgiriş
Pçıkış Pks PkFe
Pka
http://people.deu.edu.tr/aytac.goren 22
Doğru Akım Motorları Kayıplar
Kayıplar Gösterim
Mekanik sürtünme kayıpları Pks
Demir kayıpları (histerezis ve
girdap akımları kayıpları) PkFe
Endüvi ohmik güç kaybı Pka

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren 23
Fırçalı Doğru Akım Motorları
Demir nüveli bir bobinden elektrik akımı geçirildiğinde, rotorun bir kutbu statorun N kutbu tarafından itilirken, diğer kutbu ise S kutbu tarafından çekilecektir. Fleming’in sol el kuralına göre, bu durum rotorda bir dönme etkisi yapar. Bu dönüşün yönünü sabit tutmak ve hızın devamlılığı için motor komütatörleri akım yönünü iki kutuplu bir doğru akım motorunda her yarım dönüşte ters çevirir.

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren 24
Fırçasız Doğru Akım Motorları
Bu motorda rotor kısmı sabit mıknatıslardan oluşmakta, dolayısıyla da fırçalar bulunmamakta, sürtünme ve arklar olmadığı için verimi oldukça yükselmektedir. Rotorun direkt olarak dönmesi istenilen yere bağlanması neticesinde aktarmadan oluşan kayıplar da engellenmektedir. İçte bulunan stator kısmının üzerine dönebilecek şekilde rotor kısmı bağlanmaktadır. Stator oluk sayısı rotorun mıknatıs sayısı ile belirli sayıda tutularak belirlenmektedir.

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren 25
Fırçasız Doğru Akım Motorları
Rotor Stator
Hall etkisi konum
algılayıcıları
Hız kontrol algoritması
hız bilgisi
120 derece, 6 durumlu DGM anahtarlama
DC V
+
_
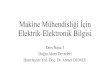
Üç fazlı doğru akım motoru ve sürülmesi.

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren 26
Fırçasız Doğru Akım Motorları
Bir önceki sayfadaki şekilde de görüldüğü üzere, motor sargıları, yıldız şeklinde bağlıdır. Yüksek verim hedeflenen, bu yapıya sahip bir motorun rotor mıknatıslarının hangi konumda olduğunun bilinmesi motorun doğru sürülebilmesi açısından önemlidir. Bu amaçla stator üzerine rotorun hangi konumda olduğunu belirlemek amacıyla hall etkisi algılayıcıları yerleştirilmiştir. Üç adet algılayıcı ile rotorun mıknatıslarının hangi konumda olduğunun bilgisi sürücü kartına gönderilerek, hız bilgisini almak ve anahtarlama durumunu belirlemek için kullanılır.
Hız Kontrolü
Konuma göre sinyal kontrolü
DC V
+
_

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren 27
Fırçasız Doğru Akım Motorları
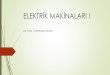
Fırçasız DA motorun fırçalı DA motoruna göre yüksek verimini sağlayan sürtünme ve ark kayıplarının olmaması ile devrede efektif olan sargıların olması, histerezis kayıplarının ince ve farklı malzemeden kullanılan sargı nüve malzemesi ile giderilmesi gibi etkenler sayılabilir. Yandaki şekilde motorun devrede kalan sargıların tespiti için algılayıcıların kullanılma mantığı anlatılmaya çalışılmıştır. Bu mantığa göre, A B ve C fazlarından birisi ya da ikisi rotorun konumuna göre aktif olmakta, böylece mıknatıs ve sargıların birlikte çalışması daha etkin olması sağlanmaktadır.
Faz B Faz C
Faz A
ABC [010]
ABC [110]
ABC [100]
ABC [101]
ABC [001]
ABC [011]
Fırçasız DA motorunda altı adım kontrolde stator akı vektörleri (algılayıcı çıktıları [ABC] olarak
gösterilmiştir.)

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren 28
Fırçasız Doğru Akım Motorları

Dogru Akım Motorları 29
Adım (Step) Motorlar
Adım (Step) motorlar terminallerine voltaj uygulandığında dönen doğru akım motorlarından
farklı çalışırlar. Elektriksel her bir darbe sinyalini ayrı mekanik hareketlere çevirirler. Step motorlarda ortada
mıknatıs veya metalden oluşan rotor ve statoru çevreleyen bobinler vardır. Step motorun rotorunun
etrafını çevreleyen bobinlere sürücü devre tarafından sinyaller gönderilir. Böylece yaratılan elektromanyetik
etki ile step motor küçük bir dönüş yapar. Diğer sinyalde bir sonraki bobine sinyal verilmesiyle
elektromanyetik çekim bu kez de o bobine doğru gerçekleşir ve böylece küçük hareketlerle dönme
işlemi sürdürülür. Bu küçük dönüş hareketlerinin her birine bir adım denir.

Dogru Akım Motorları 30
Adım (Step) Motorlar
• Adım motorlar açık devre kontrol ile hassasiyet gerektiren yerlerde kullanılır. Çünkü step motorların adımlarındaki hata sayısı düşüktür ve bir adımdaki hata bir sonraki adımı etkilemez. • Step motorların dönüş açısı, giriş darbe sinyali sayısı ile orantılıdır. • Step motorlar durmak, yön değiştirmek ve harekete başlamak için gönderilen sinyallere çabuk cevap verirler. • Dijital olarak kontrol edilebildikleri için bilgisayar kontrollü uygulamalarda kullanılmaya da yatkındırlar. • Step motorların hızı giriş sinyalinin frekanslarıyla orantılıdır.
Avantajları:

Dogru Akım Motorları 31
Adım (Step) Motorlar
• Adım motorlarında diğer motorlara göre daha fazla olan titreşim bazı hız değerlerinde tork kayıplarına neden olabilir. Bu titreşimler faz sayısı fazla olan motorlarda faz sayısı az olan motorlara göre daha azdır. • Titreşimlerden doğan tork kaybı sorununu çözmek için step motoru titreşim yaratacak hız aralığında çalıştırmamaya özen gösterilmelidir. • Çok yüksek hızlarda kolaylıkla kontrol edilemezler. • Step motorlar, DA ve Servo motorlara göre daha karmaşık sürücü devrelere ihtiyaç duyabilirler.
Adım Motorların Dezavantajları:

Dogru Akım Motorları 32
Adım (Step) Motorlar
Bu tip adım motorlarda isminden de anlaşılacağı gibi adım motorun rotor kısmında sabit mıknatıslar bulunur. Kuzey ve
güney kutupları rotor şaftına paralel düz çizgiler halindedirler. Sabit mıknatıslı adım motorların stator bobinlerine uygulanan gerilime ve bobinlerden geçen
akımın yönüne bağlı olarak adım motorun dönüşü sağlanır. Bu mıknatıslanan rotor kutupları manyetik akış
yoğunluğunu arttırır. Bu durumdan dolayı sabit mıknatıslı adım motorlar, değişken relüktanslı adım motorlara göre daha gelişmiş tork karakteristiklerine sahiptirler. Statorun
sargılarından geçen akım büyüdükçe, elektromanyetik alan ve buna bağlı olarak da tork artar. Manyetik kutup sayısı ve
stator dişleri ne kadar az ise adım sayısı o kadar azalır ve buna bağlı olarak da adım açısı artar.
Adım Motor Çeşitleri
Sabit Mıknatıslı Step Motorlar (Permanent Magnet Stepper Motors-PM)

Dogru Akım Motorları 33
Adım (Step) Motorlar
Step motorların en basit tipi olan değişken relüktanslı step motorlarda rotor yumuşak demirdendir ve etrafında silindir eksenine paralel dişler vardır. Stator dişlerine DA verildiğinde kutuplar mıknatıslanır ve stator dişlerinin rotor dişlerini çekmesiyle adım hareketi gerçekleşir. Değişken relüktanslı adım motorların rotorları sabit mıknatıslılara göre daha küçük ve hafif olması onları daha hızlı yapar. Değişken relüktanslı adım motorlarda stator dişleri ile rotor dişleri arasındaki boşluk ne kadar az olursa, oluşan manyetik kuvvetin aradaki hava boşluğundan dolayı uğrayacağı kayıp da o kadar düşük olur.
Değişken Relüktanslı Step Motorlar (Variable Reluctance Stepper Motors-VR)

Dogru Akım Motorları 34
Adım (Step) Motorlar
Hibrit adım motorlar adım kararlılığı, tork ve hız bakımından daha iyi bir performansa sahip olduklarından
sabit mıknatıslı adım motorlara göre daha pahalıdırlar. Tipik hibrit adım motorlarının adım açıları 3,60 ile 0,90
aralığındadır. Hibrit adım motorlar, sabit mıknatıslı step motorların ve değişken relüktanslı adım motorların en iyi yanlarını bir araya toplar. Rotor değişken relüktanslılarda olduğu gibi çok dişlidir ve şaftı etrafında eksensel olarak
magnetize olmuş eşmerkezli bir mıknatıs içerir. Rotor etrafındaki dişler, hava boşluğu içinde manyetik akımın
istenilen poziyona gelebilmesi için daha iyi bir yol sağlar. Böylece hibrit adım motorlarda, değişken relüktanslı ve sabit mıknatıslı tiplere tutunma ve dinamik tork daha
yüksek olur.
Hibrit Adım Motorlar (Hybrid Stepper Motors-HB)

Dogru Akım Motorları 35
Adım (Step) Motorlar
İki Fazlı Step Motorlar:
İki fazlı adım motorlarda iki farklı elektromanyetik bobin sarım şekli vardır. Bunlar unipolar ve bipolar sarım şekilleridir.
Unipolar Step Motorlar:
Faz başına iki sargı içeren adım motorlardır. Bu sargılardan biri akım yönü içindir ve bu sayede manyetik kutuplar, akım yönü değiştirilmeksizin terslenebilir. Bu sayede her sarım için komütasyon devresi çok kolay şekilde (bir transistör ile) yapılabilir. Genelde her sarım için bir uç ortaktır, her faz için de 3 uç vardır. İki fazlık bir step motorda 6 uç bulunur. Sıklıkla bu iki fazın ortak uçları içeride birleştirilir, sonuçta 5 kablo ucu olur.

Dogru Akım Motorları 36
Adım (Step) Motorlar
Bipolar Step Motorlar
Faz başına tek sargı içeren step motorlardır. Manyetik kutbu terslemek için sarımdaki akımı ters yöne çevirmek gerektiğinden, bipolar adım motorların sürücü devreleri unipolarlara göre daha karmaşıktır. Sürücü devre olarak genellikle H köprüsü devreleri kullanılır. Bipolar adım motorlarda faz başına iki uç vardır ve ortak uç yoktur. Sarımlar bipolar step motorlarda daha iyi kullanıldığından aynı ağırlığa sahip unipolar ve bipolar step motorlardan bipolar olanın torku daha yüksektir.

Dogru Akım Motorları 37
Adım (Step) Motorlar

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren 38
Servo Motorlar

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren 39
Servo Motorlar
Bknz. Ref. Motor güç mili dışında, rotorun pozisyonunu ya da hızını belirlemek amacıyla bir çıkış mili daha olan ve bu mile bağlı enkoder, potansiyometre v.b. gibi geri besleme alınabilecek bir çıkışı olan motorlara servo motor denilir. Alternatif akım
ya da doğru akımla çalışan farklı tipleri mevcuttur. 0,05 beygir gücünden 1000 BG ‘ne kadar farklı güçlerde
olabilirler. Konum kontrolü ya da hız kontrolü gereken endüstriyel
uygulamalarda, hobi amaçlı modellerde ve robotik uygulamalarda sıklıkla kullanılırlar.
Çalışma prensipleri standart doğru akım motoru veya alternatif akım motoru ile aynı olmasına rağmen
tasarımları, atalet momentlerini minimize edecek şekildedir.Bununla birlikte kompanzasyonları kendi içinde
yapılmıştır.

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren 40
Servo Motorlar
Bknz. Ref.

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren 41
Servo Motorlar
Lineer Servo Motorlar Motor yapısının bir doğru boyunca açıldığı varsayılırsa, bu doğru üzerinde hareket eden rotorun doğrusal bir hareket yapar. Bu sayede, bir aktarıma gerek olmadan rotor direkt olarak hareket çıkış noktası olur. Rotor konum bilgisinin alınması ile istenilen konuma istenilen hızda gitmesi sağlanabilir. Bu tip motorlara doğrusal servo motor denilir. Konum geri beslemesi, doğrusal ölçüm elemanları ile (lineer cetvel, doğrusal potansiyometre v.b.) ya da fırçasız motorlardaki gibi olabilir.

Dogru Akım Motorları http://people.deu.edu.tr/aytac.goren 42
Servo Motorlar
Lineer Servo Motorlar

Dogru Akım Motorları
Referanslar: 1. Güneş Arabaları İçin Yüksek Verimli Fırçasız Doğru Akım Motoru
Tasarımı ve Üretimi, A.Gören, End.& Otomasyon, 2011. 2. http://ocw.mit.edu 3. http://en.wikipedia.org 4. http://www.energyefficiencyasia.org 5. http://www.robotiksistem.com/step_motor_cesitleri.html 6. http://nylander.wordpress.com/category/physics/magnetism/ 7. http://www.newmarksystems.com/linear-stage-eTrack.html 8. http://www.bilgiustam.com/servo-motor-nedir-nasil-calisir/ 9. http://www.seattlerobotics.org 10. http://www.nedirkimdirnasil.com/index.php/servo-motorun-plc-
ile-kontrolu/ 11. http://machinedesign.com/article/linear-actuators-get-a-servo-
look-0124