Embed Size (px)
Citation preview

AN1279dsPIC® SC を使った
オフライン UPS リファレンス デザイン
注意 : この日本語版文書は参考資料としてご利用ください。 新情報は必ずオリジナルの英語版をご参照願います。
UPS の概要
UPS ( 無停電電源 ) は、電子機器の主電源が停電した際に、代替電源を供給するための電子装置です。
補助電源とは異なり、UPS は接続先の装置に瞬時に電源を供給できるため、繊細な電子装置を適切にシャットダウンする事により、それらの装置を重大な物理的損傷から保護できます。しかし、UPS が電力を供給できる時間は限られています ( 通常 15 ~ 20 分 )。UPSは、事実上どのようなアプリケーションにでも適用できますが、近年では特にコンピュータや電気通信機器を重大なハードウェアの損傷とデータの損失から保護するための措置として、ますます普及しています。
UPS システムのアプリケーション分野
UPS システムは、各種産業分野の数多くのアプリケーションに使われています。一般的なアプリケーションとしては、低電力定格のパソコン システム、中電力定格の医療施設、生命維持システム、データストレージ、エネルギ機器、高電力定格の電気通信、産業用プロセス、オンライン マネジメント システム等が挙げられます。アプリケーションごとに考慮すべき内容は異なります。例えば、エネルギシステムおよび照明用 UPSは、システムに 90 ~ 120 分間電力を供給できます。これに対しコンピュータのバックアップ電源等は、一般的に 15 ~ 20 分間システムに電力を供給します。この時間内に電源が回復しない場合、システムは安全にシャットダウンします。
バックアップ時間を延長するには、より大きなバッテリ容量が必要です。プロセス機器および高電力アプリケーションでは、ディーゼル発電機等の補助電源を起動するために十分な時間を提供する事を目的に UPSシステムを設計する場合があります。
UPS システムの種類
コンピュータ用の標準的な UPS は、基本的な 4 つの保護的役割 ( 電源のサージ、電圧の低下、完全な停電、電流周波数の大幅な変動への対処 ) を持ちます。UPSシステムは、電気エネルギの貯蔵方法と接続された機器へのエネルギ中継方法に応じて、下記の 3 種類に分類されます。
• オフライン UPS ( 別名 : スタンバイ UPS)• ライン インタラクティブ UPS ( 別名 : 連続式 UPS)• オンライン UPS ( 別名 : 二重変換式電源 )
オフライン UPSオフライン UPS システム ( 図 1 参照 ) の場合、通常時は AC 入力からの電気エネルギを直接負荷へ供給し、ユーティリティ電源に問題を検出した時にだけ、バッテリからの電力供給に切り換えます。この切り換え動作において、電源インバータが電気エネルギをバッテリから負荷へ供給し始めるまでに、通常数 ms を要します。
図 1: オフライン UPS のブロック図
Authors: Sagar KhareMohammad KamilMicrochip Technology Inc.
Load
Inverter
Battery
Charger
AC Input
© 2012 Microchip Technology Inc. DS01279A_JP - p. 1

AN1279
ライン対話型 UPSライン対話型 UPS ( 図 2 参照 ) は、常にバッテリを介して負荷に電気エネルギを中継します。AC 主電源が供給されている時は、バッテリを常時充電します。同時に UPS は AC 出力電圧をレギュレートするため、インバータの接続に関連する遅延はほとんどゼロです。停電が発生した時、切り換えスイッチが開き、電気エネルギはバッテリから負荷へ流れます ( 貯蔵エネルギモード )。このような特性により、一般的に連続式 UPSシステムはオフライン UPS よりもコストがやや増加する傾向にあります。
図 2: ライン対話型 UPS のブロック図
オンライン UPSオンライン UPS ( 図 3 参照 ) は、上記の 2 種類の UPSモデルの基本トポロジを組み合わせたものであり、整流器およびインバータ システムは常時動作します。ライン対話型 UPS と同様に、停電時の電源の切り換えを瞬時に行います。この際、整流器は単純に停止しますが、インバータはバッテリから電力を供給し続けます。ユーティリティ電源が回復した時、インバータは接続先の装置に電力を供給し続ける一方、整流器が動作を再開してバッテリを充電します。このタイプのUPS では、故障時または過負荷時に電力をバイパスするためのスイッチを回路に追加する場合があります。
図 3: オンライン UPS
システム仕様
本アプリケーション ノートでは、スイッチング モード電源 (SMPS) 用 dsPIC® デジタルシグナル コントローラ (DSC)を使ったオフライン無停電電源 (UPS)のリファレンス デザインについて解説します。
オフライン UPS リファレンス デザインは、下記の 3 つの主要 UPS トポロジブロックにより構成されます。
• プッシュプル コンバータ (DC バッテリ電圧を一定の高 DC 電圧へ昇圧 )
• フルブリッジ インバータ (DC電圧を正弦波AC出力へ変換 )
• フライバック スイッチング モード充電器(電流源として機能し、バッテリを一定電流で充電 )
入力と出力の仕様を表 1 に示します。
表 1: I/O 仕様
Load
Static Switch
AC Input
Inverter
Battery
Normal modeStored-energy mode
Legend:
220 V 用 UPS の仕様
AC 入力 AC220 V ±10%、50 Hz ±3 HzDC 入力 3 x DC12 V ( 鉛蓄電池 )UPS 出力 AC220 V、50 Hz ±1 Hz
正弦波
定格 1000 W/1000 VA (1300 VA - 2 sec)
入力フィルタ EMI/RFI フィルタ
110 V 用 UPS の仕様
AC 入力 AC110 V ±10%、60 Hz ±3 HzDC 入力 3 x DC12 V ( 鉛蓄電池 )UPS 出力 AC110 V、60 Hz ±1 Hz
正弦波
定格 1000 W/1000 VA (1300 VA - 2 sec)
入力フィルタ EMI/RFI フィルタ
Load
Static Switch
AC Input
Inverter
Battery
Rectifier/
(Static Bypass)
Charger
DS01279A_JP - p. 2 © 2012 Microchip Technology Inc.

AN1279
1 kVA オフライン UPS リファレンス デザイン
図 4 に示すオフライン UPS システムは、スタンバイモードと UPS モードで動作します。AC 電源電圧が供給されている場合、システムはスタンバイモードで動作します。スタンバイモード中にバッテリを充電し、完全に充電した後はその状態を維持します。バッテリ充電時に、インバータは IGBT の逆並列ダイオードを介して整流器として動作します。フライバック スイッチング モード充電器は電流ジェネレータとして動作し、バッテリに一定の充電電流を供給します。
電源障害が発生すると、システムは UPS モードに切り換わります。この状態では、電力が AC ラインへ供給される事を防ぐために、DPDT リレーを OFF にします。プッシュプル コンバータは、バッテリ電圧をDC380 V に昇圧します。昇圧した DC 電圧をフルブリッジ インバータで変換し、LC フィルタを通す事により、負荷に供給する低歪みの正弦波出力 (AC220/110 V) を生成します。この電源切り換えシーケンスは10 ms 以内で実行されます。
図 4: オフライン UPS リファレンス デザイン
EMI Filter
Battery
DPDTRelay
LC Filter
Full-BridgeInverter/Rectifier
Push-PullDC/DC
Converter
Flyback SwitchMode Charger
Constant Current
220 VAC,50 Hz
Load
220 VAC
380 VDC3 X 12 VDC
© 2012 Microchip Technology Inc. DS01279A_JP - p. 3

AN1279
各ブロックの I/O 信号のタイプと予測信号レベル
プッシュプル コンバータ
図 5 に示すように、制御アルゴリズムを実装するにはDC 出力電圧 (UDCM) を計測する必要があります。EPP信号によりドライバを有効にし、温度センサでヒート
シンク温度を計測し、一次側電流計測 (IP) によりトランス磁束不均衡時にコンバータを保護します。出力電圧を制御するために、dsPIC DSC は PWM 出力でパルスを生成します。
図 5: プッシュプル コンバータ リソースのブロック図
表 2 に、プッシュプル コンバータ用に使う dsPIC DSCのリソースを示します。
表 2: デジタル プッシュプル コンバータに必要なリソース
UDCM+
UDCM-
UBAT
PGND
DRIVER
dsPIC33FJ16GS504
PW
M
PW
M
TemperatureSensor
AD
C
AD
C
AD
C
IPM
EPP
I/O
T
AD
C
UCDM
UB
IP
信号名 信号のタイプdsPIC® DSC のリソース
予測信号レベル
UDCM アナログ AN3 2.99 VIP アナログ AN2 0 ~ 1.65 VT ( オプション、ソフトウェアには未実装 )
アナログ AN8 0 ~ 3.3 V
UB アナログ AN5 1.5 ~ 1.98 VEPP ドライバ イネーブル信号
デジタル
RB6 —
プッシュプル ゲート駆動 デジタル PWM3H、PWM3L —
DS01279A_JP - p. 4 © 2012 Microchip Technology Inc.

AN1279
フルブリッジ インバータ
図 6 のブロック図に示すように、制御アルゴリズムを実装するには、AC 出力電圧 (ACO) を計測する必要があります。出力電流 (I) を計測する事により、電流を制限してコンバータの過負荷を防ぐ事ができます。電圧(ACI) を計測する事により、AC 主電源電圧が供給されているかどうかを検出します。AC 主電源電圧が検出されない場合、信号 A2 でリレー K2 を OFF にする事により、UPS の動作中に電力が電源ラインへ流れる事を防ぎます。信号 A1 はリレー K1 を制御します。DCリンク電圧が低下した場合、K1 を OFF にする事により、AC 主電源電圧が整流器に印加された時に DC リ
ンクコンデンサでの突入電流を防ぎます。これは UPSの動作中にバッテリを使い果たし時に発生します。この場合、UPS は停止するか、あるいは初期のシステム接続状態 (AC 主電源への接続 ) に戻ります。FLT_CLR信号は、異常を検出した時にドライバをリセットするために使います。FAULT/SD と SYS_FLT は、ドライバまたはドライバの異常検出の有効化 / 無効化に使います。これらの信号の詳細は、ドライバ (IR2214) のデータシートに記載されています。各インバータレッグ IGBT のスイッチングは、dsPIC DSC の PWM モジュールが生成するパルスS3/S4とS5/S6により制御します。
図 6: デジタル フルブリッジ インバータ リソースのブロック図
表 3 に、フルブリッジ インバータ用に使う dsPIC DSCのリソースを示します。
表 3: デジタル フルブリッジ インバータに必要なリソース
RL C
ACI2M
ACI1M
UDC+
PGND
FLT_
CLR
FAU
LT/S
DS
YS
_FLT
FLT_
CLR
FAU
LT/S
DS
YS_
FLT
dsPIC33FJ16GS504
PWM
PWM
AD
C
I/O ADCI/OI/OI/OPW
MPW
M
ACO1M ACO2M
A1 (Inverter Series Relay)
A2 (Mains Relay)
I/O
ADC
DRIVER
DRIVER
S3
S4
S5
S6
I
Load
Power Grid
ACO
ACI
KF(1)
KG(1)
Note 1: KF と KG はフィードバック ゲイン回路です。
詳細は補遺 D:「回路図と基板レイアウト」を参照してください。
信号名 信号のタイプdsPIC® DSC のリソース
予測信号レベル
ACO アナログ AN1 0.27 ~ 3.3 VACI アナログ AN11 0.15 ~ 3.16 VI アナログ AN0 2.5 V ( 公称値 )A1 デジタル出力 RC10 —A2 デジタル出力 RC0 —FLT_CLR デジタル出力 RB7 —FAULT/SD デジタル入力 ( 外部割り込み ) RC13 (INT1) —SYS_FLT デジタル入力 RC8 —
S3、S4 ( ゲート駆動 ) PWM 出力 PWM1H、PWM1L —
S5、S6 ( ゲート駆動 ) PWM 出力 PWM2H、PWM2L —
© 2012 Microchip Technology Inc. DS01279A_JP - p. 5

AN1279
フライバック スイッチング モード充電器
図 7 のブロック図では、バッテリの充電用にアナログ電流コントローラを使っています。4 つの信号 (EFB 信号 : TOP スイッチの有効化、IB: バッテリ充電電流の計測、UB: バッテリ電圧の計測、IREF: PWM4L 出力による参照設定 ) が必要です。
図 7: デジタル フライバック スイッチング モード充電器リソースのブロック図
表 4 に、フライバック スイッチング モード充電器用に使う dsPIC DSC のリソースを示します。
表 4: デジタル フライバック スイッチング モード充電器に必要なリソース
UDC+
PGND
TOPSWITCH
PI
UBAT
PGND
ENABLE
+15V
IFEEDBACKIERROR-
IREF
Analog Controller
Shunt
dsPIC33FJ16GS504
PWMADC
I/O
IB
EFB
Flyback transformer
ADC
PI45V
UFEEDBACK
UB
K3(1)
K4(1)
Note 1: K1 と K2 はフィードバック ゲイン回路です。
詳細は補遺 D:「回路図と基板レイアウト」を参照してください。
信号名 信号のタイプdsPIC® DSC のリソース
予測信号レベル
IBATM アナログ AN4 0 ~ 1.67 VUBAT アナログ AN5 1.5 ~ 2 VEFB デジタル出力 RC7 —IREF PWM 出力 PWM4L —
DS01279A_JP - p. 6 © 2012 Microchip Technology Inc.

AN1279
DC/DC コンバータ
ほとんどの UPS 回路は、トランス型の DC/DC コンバータを使います。トランスにより、コンバータの入出力間が絶縁されます。トランスの巻き数比を変更する事により、電圧レベルを変更できます。あるいは、複数の二次側巻き線を使って複数の電圧レベルを提供する事もできます。
トランス型 DC/DC コンバータは、下記の 5 種類の基本的トポロジに分類できます。
• フォワード コンバータ
• プッシュプル コンバータ
• ハーフブリッジ コンバータ
• フルブリッジ コンバータ
• フライバック コンバータ
フライバック トポロジの動作は、エネルギを磁性体に蓄えて開放するという点で、他のトポロジとは少し異なります。他のトポロジは、エネルギを直接入力から出力へ常時伝達します。これとは別に、トランスコアの使用方法によってトポロジを分類する事もできます。
• 単方向コア励磁 – B-H 曲線の第 1 象限だけを使用( フライバックおよびフォワード コンバータ )
• 双方向コア励磁 – B-H 曲線の第 1 象限と第 3 象限を交互に使用( プッシュプル、ハーフブリッジ、フルブリッジ コンバータ )
トポロジを選択する際に、コンバータの設計仕様、コスト、サイズ要件を慎重に分析する必要があります。
上記の各トポロジの動作について、後続のセクションで説明します。その後のセクションで、トポロジの選択とハードウェア設計の詳細について説明します。
フォワード コンバータ
フォワード コンバータを図 8 に示します。これは降圧用にも昇圧用にも使えます。トランジスタ Q が ON の時、VIN が一次側に印加されて、式 1 に示す出力電圧が発生します。
二次側のダイオード D1 により、出力回路には正の電圧だけが印加されます。また、ダイオード D2 は、トランス電圧がゼロまたは負極性である時にインダクタ電流の循環経路を提供します。フォワード コンバータのトランスは、第 3 の巻き線 (「リセット巻き線」とも呼ぶ ) を備えます。この巻き線により、スイッチの導通開始時にトランスコアの磁化がゼロにリセットされます。この巻き線はトランスの飽和を防ぎます。
図 8: フォワード コンバータ
式 1:
VIN
D1
D2
+
-+
-
D3
T L
VOUT
Q
++
+
2
1out in
NV V dN
= ⋅ ⋅
d: トランジスタ Q のデューティサイクル
© 2012 Microchip Technology Inc. DS01279A_JP - p. 7

AN1279
プッシュプル コンバータ
プッシュプル コンバータを図 9 に示します。Q1 が ONに切り換わると、電流は T1 トランスの一次側のハイサイドに流れ、T1 内の磁場が拡張します。T1 内の磁場の拡張によりT1の二次側に電圧が誘導されます。この電圧の極性により、D2 は順バイアス、D1 は逆バイアスとなります。D2 は導通し、L1 を介して出力コンデンサ C2 を充電します。L1 と C2 は LC フィルタ回路を形成します。Q1 が OFF になると T1 内の磁場は崩壊し、PWM 駆動信号のデューティサイクルによっ
て決まるデッドタイム後に、Q2 が導通します。これにより電流が T1 の一次側のローサイドに流れて、T1内の磁場が拡張します。この時の磁束の方向は、Q1 が導通した時とは逆になります。拡張した磁場により T1の二次側に電圧が誘導されます。この電圧の極性により、D1 は順バイアス、D2 は逆バイアスとなります。D1 が導通し、L1 を介して出力コンデンサ C2 を充電します。デッドタイム後に Q1 が導通し、上記のサイクルを繰り返します。
図 9: プッシュプル コンバータ
プッシュプル コンバータでは、下記の 2 点を考慮する事が重要です。
• 両方のトランジスタが同時に導通すると、電源が事実上短絡されるため、これを回避する必要があります。つまり、各トランジスタの 1 サイクル中の導通時間は、1/2 周期を超えてはならないという事です(d < 0.5)。これを超えると、両トランジスタの導通期間がオーバーラップします。
• 回路のハイサイドとローサイドの磁気的挙動は均等である事が必要です。そうでない場合、トランスが飽和して Q1 と Q2 を破損する可能性があります。このため、Q1 と Q2 の導通時間が厳密に同じであり、かつ、センタータップトランスの一次側の両方の巻き線の磁気特性が等しい必要があります。
制御および駆動回路とトランスは、これらの基準を満たす必要があります。出力電圧は式 2 により求まります。
式 2:
VIN
Q1
D1
+
D2
Q2
C2
VOUTL1
+
0V
C1+
0V
+ +
++
T1 +
2
1
2out inNV V dN
= ⋅ ⋅ ⋅
(0 < d < 0.5)d: トランジスタのデューティサイクル
N2/N1: トランスの二次側 / 一次側巻き数比
DS01279A_JP - p. 8 © 2012 Microchip Technology Inc.

AN1279
ハーフブリッジ コンバータ
ハーフブリッジ コンバータ ( 図 10 参照 ) はプッシュプル コンバータに似ていますが、一次側のセンタータップは不要です。一次側巻き線電流の方向を反転する事により、磁場を反転します。この場合、DC 入力の中点を形成するために、2個のコンデンサ (C1とC2)が必要です。トランジスタ Q1 と Q2 を交互に ON にする事により、電源の短絡を回避します。従ってデューティサイクル d は 0.5 未満である事が必要です。
ハーフブリッジ コンバータの出力電圧 VOUT は、式 3により求まります。
図 10: ハーフブリッジ コンバータ
式 3:
D1
+
D2
Q1
Q2
L1
C1
C2
+VOUT
0V
+
+VIN
0V
T1
C3+
+
++
2
1out in
NV V dN
= ⋅ ⋅
(0 < d < 0.5)d: トランジスタのデューティサイクル
N2/N1: トランスの二次側 / 一次側巻き数比
© 2012 Microchip Technology Inc. DS01279A_JP - p. 9

AN1279
フルブリッジ コンバータ
フルブリッジ コンバータのトポロジを図 11 に示します。これは基本的にハーフブリッジコンバータと同じですが、4 個のトランジスタを使います。
対角に位置するトランジスタ同士で構成するトランジスタ ペア (Q1-Q4、Q2-Q3) を交互に導通する事により、トランス一次側の電流を反転します。出力電圧は式 4 により求まります。
図 11: フルブリッジ コンバータ
式 4: フライバック コンバータ
図 12 に、フライバック コンバータ回路を示します。トランジスタ Q1 が ON の時、巻き線の極性により、ダイオード D1 は逆バイアスとなります。従って、トランスコアの磁束は直線的に増加します。トランジスタ Q1 が OFF になると、コアに蓄えられたエネルギによって二次側巻き線からダイオード D1 を通して電流が流れ、磁束は直線的に減少します。出力電圧は式 5により求まります。
図 12: フライバック コンバータ
式 5:
D1
D2
Q3
Q4
L1
C1
+VOUT
0V+
+VIN
0V
T1
C2+
+
++
Q1
Q2
2
1
2out inNV V dN
= ⋅ ⋅ ⋅
(0 < d < 0.5)d: トランジスタのデューティサイクル
N2/N1: トランスの二次側 / 一次側巻き数比
+VIN
Q1
D1
+0V
+VOUT
C2
C1
+
0V
+
+
T1
2
1 1out inN dV VN d
= ⋅ ⋅−
DS01279A_JP - p. 10 © 2012 Microchip Technology Inc.

AN1279
電圧源インバータ (VSI)単相電圧源インバータ (VSI) は、ハーフブリッジまたはフルブリッジ トポロジとして定義できます。どちらのトポロジも、電源および単相 UPS システムで幅広く使われています。
ハーフブリッジ VSI図 13 に、ハーフブリッジ VSI のトポロジを示します。この場合、中点 N を提供するために 2 個の大容量コンデンサが必要です。各コンデンサは電圧 vi ÷ 2 を維持します。インバータの動作によって生じる電流高調波は低次の高調波であるため、2 個の大容量コンデンサ(C+ と C-) が必要です。スイッチのデューティサイクルを使って出力電圧を変調します。DC バスの短絡を回避するために、スイッチの駆動信号にはデッドタイムが必要です。
図 13: 単相ハーフブリッジ VSI
フルブリッジ VSI図 14 に、フルブリッジ VSI のトポロジを示します。このインバータはハーフブリッジ インバータに似ていますが、第 2 レッグから負荷に中点を提供するという点で異なります。DC リンク電圧源 vi の短絡を回避するために、スイッチ S1+ と S1- ( または S2+ と S2-)を同時にONにする事はできません。 DCバスの短絡と不確定な AC 出力電圧条件を回避するために、変調方式は各レッグで常にハイサイドまたはローサイドのどちらか一方のスイッチだけを ON にする必要があります。AC 出力電圧の 大値は DC リンク値 vi です。これは、ハーフブリッジ VSI トポロジで得られる電圧の2 倍です。フルブリッジ VSI に適用可能な各種の変調方式が開発されています。それらの中で もよく知られているのは、双極式および単極式 PWM 方式です。
図 14: 単相フルブリッジ VSI
D+S+
D-S-
VI
VI÷2
VI÷2
C+
C-
aVO
+
-
io
+
-
+
-
ii
N
+-
D1+S1+ D2+S2+
D2-S2-D1-S1-
VI VI C+
a
bVO
+
-
io+
-
ii
+-
© 2012 Microchip Technology Inc. DS01279A_JP - p. 11

AN1279
バッテリ充電器
オフライン UPS は、AC 主電源電圧が供給されている時にバッテリを充電します。このためバッテリ充電器回路を実装しています。
ほとんどのバッテリ充電器は、下記の 4 種類の基本回路形式またはトポロジに分類できます。
• リニア充電器
• スイッチング モード充電器
• 鉄共振型充電器
• SCR 充電器
リニア充電器
リニア充電器は、AC 電源を低電圧の DC 電源に変換する電源部と、バッテリに流れ込む電流を制限するリニア レギュレータ要素により構成されます。電源部は一般的に AC 電源 (220/110 V) をバッテリ電圧に近い
AC 電圧まで降圧するためのトランスと、正弦波 AC 信号を一定の DC 信号に平滑化するための整流器により構成されます。リニア レギュレート要素には、抵抗等の受動素子または参照信号によって制御されるトランジスタ等の能動素子を使えます。図 15 に、抵抗を電流レギュレート要素として使うリニア電源を備えたリニア充電器の概略回路図を示します。
スイッチング モード充電器
スイッチング モード充電器では、AC 電圧を整流した後に、DC/DC コンバータを介して、より低い DC 電圧に変換します。このタイプの充電器では、バッテリへの電流を調整するために、充電制御回路を追加します。充電制御回路は、電源スイッチを ON/OFF する事により電流を調整します。これを行うために、回路、専用の集積チップ、ある種のソフトウェア制御のいずれかを使います。図 16 に、一体型スイッチング モード充電器の概略回路図を示します。
図 15: リニア充電器
図 16: スイッチング モード充電器
Power SupplyChargeControl
DC Output
BatteryCurrentRegulatingElement
R1
RectifierTransformer
AC Input
DC Output
Battery
AC Input
Current ControlLogic
Power Supply
OutputFilterTransformerPower
SwitchRectifier
DS01279A_JP - p. 12 © 2012 Microchip Technology Inc.

AN1279
鉄共振型充電器
鉄共振型充電器 (Ferro charger とも呼ばれる ) は、鉄共振型トランスと呼ばれる特殊な部品を使って動作します。鉄共振型トランスは、AC 電圧を低いレギュレート電圧レベルまで降圧すると同時に、充電電流を制御します。その後、整流器で AC 電源をバッテリに適した DC 電源へ変換します。図 17 に、鉄共振型充電器のブロック図を示します。
SCR 充電器
SCR 充電器は、シリコン制御整流器 (SCR) として知られる特殊な部品を使ってバッテリへの電流を制御します。SCR は、1 秒間に複数回の ON/OFF が可能な制御式スイッチです。トランスでユーティリティ電圧をバッテリ電圧近くまで降圧した後にダイオードで電流を整流しますが、SCR によって制御信号に従った充電電流を流す事ができます。図 18 に、SCR 充電器のブロック図を示します。
図 17: 鉄共振型充電器
図 18: SCR 充電器
DC Output
Battery
AC Input
FerroresonantTransformer Rectifier
Power Supply
ChargeControl
DC Output
Battery
AC Input
CurrentLimiterSCRDiode
RectifierTransformer
Power Supply Charge Control
© 2012 Microchip Technology Inc. DS01279A_JP - p. 13

AN1279
ソフトウェア設計
図 19 のシステムブロック図に示すように、オフラインUPSリファレンス デザインは 1個の dsPIC DSCにより制御されます。
図 19: オフライン UPS のブロック図
dsPIC DSC はオフライン UPS の中核として、システムの全ての重要動作と状態監視動作を制御します。dsPIC DSC の機能は、大まかに下記のカテゴリに分類できます。
• 全ての電力変換アルゴリズム
• 各種動作モード用の UPS ステートマシン • 補助タスク ( 真の RMS 計算、ソフトスタート ルー
チン、ユーザインターフェイス ルーチンを含む )dsPIC DSC は、電力変換アプリケーション専用に設計された「インテリジェント電源周辺モジュール」を提供します。これらのインテリジェント電源周辺モジュールは、高速 PWM、高速 10 ビット ADC、高速アナログ コンパレータ モジュールを含みます。
これらの周辺モジュールは高分解能 PWM、柔軟なADC トリガリング、コンパレータ障害処理を使うスイッチング モード電源を容易に制御するための各種機能を備えています。 インテリジェント電源周辺モジュールに加えて、dsPIC DSC は、電源管理と状態監視機能に使用可能なI2C™、SPI、UART を含むデジタル通信用周辺モジュールも提供します。
User Interface Block
Power Conversion Block
dsPIC® DSC
Push-Pull Converter
Full Bridge Voltage-Source
Inverter
3x12V Batteries
Flyback Battery Charger
Relay Logic
Auxiliary Power Supply
LCD ControllerPIC18F2420
USB Controller
PIC18F2450
LCD Module USB Port
Computer
UPSOutput
Load
AC Mains Input Rectified by Inverter Body Diodes
凡例 :
信号フロー
電力フロー
Note: デバイスの詳細は、dsPIC33F「GS」シリーズのデバイス データシート参照してください。周辺モジュールの詳細は、「dsPIC33Fファミリ リファレンス マニュアル」の対応する SMPS セクションを参照してください。
DS01279A_JP - p. 14 © 2012 Microchip Technology Inc.

AN1279
オフライン UPS ソフトウェア構造の概略図を図 20 に示します。図に示すように、ソフトウェアは大まかに下記の 2 つの部分に分割されます。• UPS ステートマシン ( 電力変換ルーチンを含む )• ユーザインターフェイス ソフトウェア
これらの部分について、後続のセクションで詳細に説明します。
図 20: オフライン UPS ソフトウェアの概略構造
UPS ステートマシン
オフライン UPS ソフトウェアは、システムの動作モードを決定するステートマシンを実装します。このステートマシンは、タイマ割り込みサービスルーチン(ISR) 内で 100 µs 毎に実行されます。ステートマシンは、適切な電力変換アルゴリズムを実行するために内蔵周辺モジュールを設定します。
オフライン UPS の正常動作時に、ステートマシンは、システムステートによって決まる適切な電力変換アルゴリズムを実行するために、システム周辺モジュールを設定します。
電源障害が発生した時、UPS ステートマシンはバッテリ充電器モードからインバータモードへの切り換えを実行します。AC 主電源の回復を検出した時、ステートマシンはインバータモードからバッテリ充電器モードへの切り換えを実行します。これらの切り換え機能は、負荷に中断なく電力を供給するために、可能な限り短時間で実行する必要があります。
バッテリ充電器モードとインバータモードは、オフライン UPS の標準動作モードですが、これ以外に 2 つの動作モード ( システム起動モードとシステムエラーモード ) が存在します。オフライン UPS の各動作モードについて以降のセクションで説明します。図 21 にオフライン UPS のステート図を示します。
UPS State Machine(Interrupt Based)
Priority:MediumExecution Rate:Medium
User Interface Software
Priority:LowExecution Rate:Low
Power Conversion Algorithms(Interrupt Based)
Priority:HighExecution Rate:High
Offline UPS Software
© 2012 Microchip Technology Inc. DS01279A_JP - p. 15

AN1279
図 21: オフライン USP のステート図
システムの起動
オフライン UPS を ON にした時のシステムの状態は不確定です。従って、ステートマシンは、まず全てのシステム変数を確認して UPS の起動状態を特定します。
この際にステートマシンは異常条件を監視し、全てのシステム変数が仕様レンジ内に入って UPS が通常動作へ移行可能な状態であるかどうかも確認します。
System Startup
System Error
Inverter ModeBattery Charger
Mode
MAI
NS_
NO
T_O
K
MA
INS
_OK
&
DC
_LIN
K_U
ND
ER
VO
LTA
GE
MA
INS
_OK
& D
C_L
INK
_OV
ER
VOLT
AGE
BAT
TER
Y_O
VER
VOLT
AGE
MAINS_OK &
DC_LINK_OK &
BATTERY_LOW
MAI
NS
_NO
T_O
K &
DC
_LIN
K_O
K &
BAT
TER
Y_O
K
MA
INS
_OK &
DC
_LINK
_OK
&(B
ATTERY
_OK
|| BATTE
RY
_LOW
)MAINS_OK &
DC_LINK_OK &
BATTERY_LOW
DC_LINK_UNDERVOLTAGE
DC_LINK_OVERVOLTAGE
MAINS_OK &
DC_LINK_OK &
BATTERY_OK
MAINS_OK &
DC_LINK_OK &
BATTERY_OK
MAINS_NOT_OK &
BATTERY_UNDERVOLTAGE
BATTERY_OVERVOLTAGE
DC_LINK_UNDERVOLTAGE
DC_LINK_OVERVOLTAGE
BATTERY_OVERVOLTAGE
MAINS_NOT_OK &
BATTERY_UNDERVOLTAGE
BATTERY_U
ND
ERVO
LTAGE
DC
_LINK_U
ND
ERVO
LTAGE
DC_LINK_OVERVOLTAGE
BATTERY
_OVE
RV
OLTA
GE
MAINS_NOT_OK &DC_LINK_OK &BATTERY _OK
DS01279A_JP - p. 16 © 2012 Microchip Technology Inc.

AN1279
バッテリ充電器モード
AC 主電源電圧が供給されている事を検出した時、オフライン UPS はバッテリ充電器モードに切り換わります。dsPIC DSC は、可変デューティサイクル PWM信号により参照電流レベルを提供します。
バッテリの状態を確認するために、バッテリ電圧を計測します。バッテリの状態に応じて充電電流を調整する事により、 短時間で充電するとともに、バッテリの寿命を延ばします。
バッテリ充電のプロファイルは、密封型鉛蓄電池(SLA) 用に設定しています。その概要を図 22 に示します。
バッテリ充電器の制御機能の一部はハードウェアで実装し、一部はソフトウェアで実装します。整流後の AC主電源電圧から一定電流源を得るために、フライバック コンバータを使います。dsPIC DSC は、フライバック コンバータの出力電流用に参照信号を提供します。
この電流参照信号は、dsPIC DSC からの PWM 出力をフィルタ処理する事により生成します。充電電流は、電流参照 PWM 信号のデューティサイクルを変更する事により制御します。
バッテリ充電器モードの開始時に、dsPIC DSC は充電電流を 小値に設定します。その後、バッテリ電圧とバッテリ電流を高速 10ビット ADCモジュールで計測します。計測したバッテリ電圧から充電状態を特定し、これに基づいてソフトウェア コードは図 22 に示すバッテリ充電プロファイルから適正な充電電流を指定します。
必要に応じてシーケンスを切り換えるために、ステートマシンは全てのシステム変数を監視します。AC 主電源の電源障害を検出した場合、ステートマシンはUPS 動作をインバータモードへ切り換えます。異常を検出した場合、システムステートはシステムエラー状態へ切り換わります。
図 22: オフライン UPS のバッテリ充電プロファイル
Charging Current
Battery Voltage35.7V 40.5V 43.2V 45V
2.25A
0.1A
TrickleCharging
State
BulkCharging
State
OverCharging
State
FloatCharging
State
ChargingOff
30V
Note: 縮尺は不定です
ChargingOff
© 2012 Microchip Technology Inc. DS01279A_JP - p. 17

AN1279
バッテリ充電器の初期化ルーチン
オフライン UPS をバッテリ充電器モードへ切り換え時に、ソフトウェア コードは以前のモードを OFF にする必要があります。ハードウェア部品のストレスを軽減するために、出力が 0 V に達した時にフルブリッジ インバータを OFF にします。バッテリ充電器モードのフローチャートを図 23 に示します。
インバータを OFF にした後に、出力リレーをリリースして、AC 主電源を UPS 出力へ接続します。UPS 出力での電力供給が途切れないようにするために、出力リレーを可能な限り短時間でリリースする必要があります。一般的に、動作モードの切り換え時間は、リレーの切り換え時間によって制限されます。
図 23: バッテリ充電器モードの初期化フローチャート
UPS State Machine
Battery Charger InitializationPriority:Medium
Battery Charger
Mode
Inverter Mode
System Startup
Set Relay flag = NOT_READY_TO_SWITCH
Is relay ready to switch?(Relay flag cleared in ADC ISR)
Initiate relay release
Call 4 ms delay to allow inverter output to become 0V
Turn OFF inverter PWM signals
Bypass DC link charging resistor
Call 12 ms delay to allow complete release of relay
Reset charging state to UNKNOWN and set minimum charging
Enable charging current reference signal (PWM4L)
Enable Battery Charger Flyback Converter
Push-Pull Control Loop(ADC Interrupt)
Priority:High
Inverter Control Loop(ADC Interrupt)
Priority:High
Battery Voltage and Current Measurement
(ADC Interrupt)
Priority:Medium
AC Mains Detection(ADC Interrupt)
Priority:Medium
Yes
No
current reference
DS01279A_JP - p. 18 © 2012 Microchip Technology Inc.

AN1279
dsPIC DSC は、切り換え時間を可能な限り短縮するために、予測的技法を使います。この技法は、リレーの切り換え時間を予測し、インバータ出力を OFF にするよりも前にリレーをリリースします。インバータからAC 主電源への切り換え動作については、本書の後続セクションで説明します。バッテリ充電器制御方式
バッテリ充電器制御ループは、ステートマシン内に実装されます。
計測した充電電流が参照電流より低い場合、デューティサイクルを一定ステップで増やします。逆に充電電流が参照電流よりも高い場合、デューティサイクルを一定ステップで減らします。この処理は、電流誤差が無視可能な値に減少するまで続きます。
バッテリ充電電流の制御方式を図 24に示します。バッテリ充電器制御ルーチンは、バッテリ充電モード時にステートマシン内部で呼び出されます。従って、バッテリ充電器制御ループは、ステートマシンと同じレート (100 µs 毎に 1 回 ) で実行され、ステートマシンと同じ優先度を持ちます。バッテリの電流と電圧の計測は、dsPIC DSC の PWM トリガ機能を使ってトリガします。
計測データはスケーリングされてデータメモリに変数として保存されます。これは制御ループの実行とは非同期に行われます。制御ループが呼び出されると、データは単純にデータメモリから読み出されて、制御ループの計算に使われます。バッテリ充電器制御ループのフローチャートを図 25 に示します。
図 24: バッテリ充電器の制御方式
Quantizer
z-1
Measured Charging Current
Charging Current Reference
Duty Cycle+K
-K
0
© 2012 Microchip Technology Inc. DS01279A_JP - p. 19

AN1279
図 25: バッテリ充電器モードのフローチャート
UPS State Machine
Battery Charger Control LoopPriority:Medium
Battery Charger Mode
Battery Charger Mode
Push-pull control loop(ADC Interrupt)
Priority:High
Inverter control loop(ADC Interrupt)
Priority:High
Battery Voltage and Current Measurement
(ADC Interrupt)
Priority:Medium
AC Mains Detection(ADC Interrupt)
Priority:Medium
Is battery voltage < BATTERY_TRICKLE_VOLTAGE?
Is battery voltage < BATTERY_BULK_VOLTAGE?
Is battery voltage < BATTERY_FLOAT_VOLTAGE?
Is battery voltage < BATTERY_VOLTAGE_MAX?
Set Minimum Charging Current
Set Maximum Charging Current
Yes
No
No
No
No
Yes
Yes
Yes
Calculate and set Charging Current
Turn Charger OFF
DS01279A_JP - p. 20 © 2012 Microchip Technology Inc.

AN1279
バッテリ充電器のリソース割り当て
図 26: バッテリ充電器に割り当てる dsPIC® DSC のリソース
バッテリ充電器用に使う dsPIC DSC のリソースの概要を表 5 に示します。
表 5: バッテリ充電器に割り当てる dsPIC® DSC のリソース
インバータモード
AC 主電源電圧が検出されない場合、バッテリ充電器は無効化され、オフライン UPS はインバータモードに切り換わります。インバータモードでは、システムはバッテリ電源で動作して、UPS 出力で低歪みの正弦波電圧を生成します。これにより、重要な電子機器は中断する事なく動作を継続できます。正弦波出力を生成するために、データメモリ内の正弦波ルックアップテーブルを使います。このルックアップ テーブルは、インバータ制御ループに正弦波参照電圧を提供します。
インバータモードの開始時に、ソフトスタート ルーチンを使って、プッシュプル コンバータ電圧を定格 DCリンク電圧まで安全に立ち上げます。ソフトスタートルーチンは、システム部品のストレスを軽減するとともに、AC 主電源またはバッテリからの電圧および電流サージを防ぎます。
インバータモードで正常に動作している場合、プッシュプル コンバータとフルブリッジ インバータは、割り込みによる電力変換アルゴリズムまたは制御ループにより制御されます。性能を 大限高めるために、制御ループは高レートで実行されます。インバータモード電力変換アルゴリズムは dsPIC DSC にとって も重要なルーチンであるため、これらのルーチンには
ADC ADC PWM
dsPIC33FJ16GS504
+
kB(2)kA
(2)
VBAT
GND
AC Input
Note 1
Note 1: AC 主電源入力を IGBT のボディ ダイオードで整流してバッテリ充電器へ DC 電圧を供給します。
2: KA と KB はフィードバック ゲイン回路です。詳細は補遺 D:「回路図と基板レイアウト」を参照してください。
信号名 内容 信号のタイプdsPIC® DSC の
リソース実行レート / 周波数
IREF 参照充電電流 PWM 出力 PWM4L (ピン 35へ割り当て変更 )
25 kHz
IB 充電電流フィードバック アナログ入力 AN4 6.25 kHzUB バッテリ電圧フィードバック アナログ入力 AN5 6.25 kHzEFB フィードバック コンバータの
有効化デジタル出力 RC7 UPS をバッテリ充電器モード
へ切り換える時にのみ有効化
© 2012 Microchip Technology Inc. DS01279A_JP - p. 21

AN1279
高のユーザ優先度が割り当てられます。ステートマシンも割り込みに基づきますが、制御ループよりも低い優先度を持ちます。結果として、ステートマシンとユーザインターフェイス コードの実行は、高優先度の制御ループによって極めて頻繁に割り込まれます。dsPIC DSC は割り込みのネスティングを許容するため、このような動作が可能です。割り込みネスティング機能により、制御ループはステートマシンの実行に割り込む事ができます。ステートマシンの実行は、制御ループに比べて低速です。dsPIC DSC は、優先度と実行レートの異なる複数の割り込みを使って、電力変換ルーチンと UPS ステートマシン間のシームレスな遷移を可能にします。
インバータモードで動作している時、ステートマシンは全てのシステム変数を監視します。AC 主電源電圧を検出すると、即座に切り換えシーケンスを呼び出して、システムステートをバッテリ充電器モードへ切り換えます。いずれかのシステム変数にエラーが発生した場合、システムステートはシステムエラー状態へ切り換わります。
プッシュプル コンバータの初期化
システムがインバータモードへ切り変わる時、それ以前の動作モードを 初に無効にする必要があります。従って、フライバック コンバータを OFF にし、さらにバッテリ参照電流用の PWM 出力を無効にする事によって、バッテリ充電器をまず無効にします。AC 主電源入力を UPS 出力から切り離すために出力リレーを作動させるとともに、バイパスリレーを ON にしてインバータの直列抵抗をバイパスします。次に、プッシュプル コンバータ制御ループを再初期化し、全ての制御履歴をクリアします。
AC 主電源入力の動作電圧レンジは広いため、主電源が停電した時の DC リンク電圧値は予測不能です。このため、プッシュプル コンバータを ON にする前に、直前に計測した DC リンク電圧をプッシュプル コンバータの初期参照電圧として使います。ソフトスタート ルーチンにより、DC リンク電圧を制御された変化率で立ち上げる事ができるため、電流スパイクによる回路部品への無用なストレスを回避できます。
図 27: プッシュプル コンバータ初期化のフローチャート
UPS State Machine
Push-pull Converter InitializationPriority:Medium
Inverter Mode
Battery Charger Mode
System Startup
Disable Battery Charger Flyback Converter
Switch output relay to disconnect Mains from UPS output
Bypass DC link charging resistor
Push-pull control loop(ADC Interrupt)
Priority:High
Inverter control loop(ADC Interrupt)
Priority:High
Battery Voltage and Current Measurement
(ADC Interrupt)
Priority:Medium
AC Mains Detection(ADC Interrupt)
Priority:Medium
Turn OFF PWM signal for battery current reference
Re-initialize push-pull control loop to purge history
Set minimum duty cycle before turning ON PWM outputs
Enable PWM outputs for push-pull converter (PWM3H and PWM3L)
DS01279A_JP - p. 22 © 2012 Microchip Technology Inc.

AN1279
ソフトスタート ルーチン
ソフトスタート ルーチンは、プッシュプル コンバータの有効化直後に呼び出されます。ソフトスタートルーチンは、ソフトウェアでプッシュプル コンバータの参照電圧を一定のステップで増加させます。参照電圧が定格 DC リンク電圧に達すると、インバータ再初期化ルーチンを呼び出してインバータを起動し、UPS出力で正弦波電圧を生成します。
DCリンク電圧のランプレートは固定されていますが、ソフトスタート ルーチンの開始電圧は変化するため、ソフトスタートに要する時間も変化します。
このため、主電源からインバータへの切り換え時間は不確定となります。ソフトスタート ルーチンのランプレートは、出力リレーが ON に切り換わるのに要する時間内で完了するように設定されます。これにより、切り換え時間を設計仕様値である10 ms以内に収めます。 しかし、ソフトスタートがこれより短い時間で完了する状況も考慮する必要があります。この場合、インバータ出力は、リレーの切り換えに十分な時間が与えられる前に ON となります。従って、正弦波サイクルの途中で、インバータ出力が UPS 出力で ON となります。ソフトスタートが完了した後にリレーが ON になるのでは、切り換えタイミングが遅すぎます。
dsPIC DSC は、ソフトスタート ルーチン開始時に遅延カウンタを初期化する事によって、これらの両方の問題を回避します。ソフトスタート ルーチンが DC リンク電圧をランプ状に立ち上げるにつれて、カウンタがインクリメントしてソフトウェア スタート期間 (ms) を示します。ソフトスタートがリレーのターンオンに必要な 小要求時間よりも前に完了した場合、コードは 小要求時間が経過するまで待機します。そして、この要求時間が経過した時点でフルブリッジインバータを有効にします。この方法により、UPS 出力で常時中断なく電源を供給します。
© 2012 Microchip Technology Inc. DS01279A_JP - p. 23

AN1279
図 28: ソフトスタート ルーチンのフローチャート
UPS State Machine
Push-pull Converter InitializationPriority:Medium
Inverter Mode
Start
Initialize delay counter
Push-pull control loop(ADC Interrupt)
Priority:High
Inverter control loop(ADC Interrupt)
Priority:High
Battery Voltage and Current Measurement
(ADC Interrupt)
Priority:Medium
AC Mains Detection(ADC Interrupt)
Priority:Medium
Set soft-start flag to allow higher peak currents during startup
Clear soft-start flag
Is Push-pull converter reference = final setpoint?
Yes
No
Increment push-pull reference
Increment delay counter
Does delay count represent duration greater than relay
switching time?
Increment delay counter
Yes
No
Push-PullSoft-Start
DS01279A_JP - p. 24 © 2012 Microchip Technology Inc.

AN1279
フルブリッジ インバータの初期化
プッシュプル ソフトスタート ルーチンは、DC リンク電圧を定格値まで確実に立ち上げ、出力リレーに切り換えイベントを確実に完了させます。ソフトスタートルーチンが完了した後に、フルブリッジ インバータを有効にして、UPS 出力で正弦波電圧を生成する必要があります。
インバータ制御ループを再初期化して全ての制御履歴をクリアします。その後、0 V 出力を生成するようにデューティサイクルを設定し、正弦波ルックアップテーブル ポインタを開始位置へリセットします。この時点で、正弦波出力電圧を生成するために、PWM 出力を有効にします。
図 29: インバータ初期化のフローチャート
UPS State Machine
Inverter InitializationPriority:Medium
Inverter Mode
Inverter Mode
Re-initialize inverter control loop to purge all control history
Set duty cycle to produce 0V output
Reset sine wave lookup table to the start
Enable PWM outputs to turn ON inverter (PWM1H, PWM1L,
PWM2H and PWM2L)
Push-pull control loop(ADC Interrupt)
Priority:High
Inverter control loop(ADC Interrupt)
Priority:High
Battery Voltage and Current Measurement
(ADC Interrupt)
Priority:Medium
AC Mains Detection(ADC Interrupt)
Priority:Medium
© 2012 Microchip Technology Inc. DS01279A_JP - p. 25

AN1279
プッシュプル制御ループ
プッシュプル コンバータの制御には、電圧モード制御方式を使います。dsPIC DSC の PWM モジュールは、独立タイムベースを使うプッシュプル モード用に設定します。DC リンク電圧を ADC で計測してデジタル値に変換します。ソフトウェアでこの値を参照電圧から減算する事により、電圧誤差を求めます。
この電圧誤差を制御アルゴリズムに入力します。制御アルゴリズムは現在の電圧誤差、前回の誤差、制御履歴に基づいてデューティサイクル値を生成します。
ハードウェアを保護するために、制御アルゴリズムの出力を 小および 大デューティサイクル値にクランプします。
良の過渡応答を達成するために、電圧モード制御アルゴリズムを高レートで実行する必要があります。従って制御アルゴリズムは、UPS コード内で 高優先度を割り当てられた ADC 割り込みサービス ルーチン内で実行されます。
プッシュプル コンバータ制御方式のブロック図を図 30に示します。
図 30: プッシュプル コンバータ制御方式
X PIDVREF
+-PWM
S&H
1001010111
ADCVoltage Feedback
VOUT
1:16
+
+Vin
VoltageError
ControlOutput
DutyCycle
DS01279A_JP - p. 26 © 2012 Microchip Technology Inc.

AN1279
インバータ制御ループ
正弦波ルックアップ テーブルを使って参照電圧を変化させる事により、インバータ出力を生成します。出力電圧の計測値を現在の参照値から減算する事により、電圧誤差を求めます。この電圧誤差を、ADC 割り込みサービスルーチン内で電圧誤差補償アルゴリズムに入力します。電圧誤差補償器の出力は電流参照値を生成します。この電流参照値から出力電流の計測値を減算する事により、電流誤差を求めます。電流誤差を電流誤差補償アルゴリズムへの入力として使って、PWM モジュールへのコマンド信号を生成します。
オフライン UPS では、フルブリッジ インバータ用に3 水準制御を実装します。このため、dsPIC DSC のPWM モジュールを、ゼロ出力電圧に対応する固定デューティサイクルを使ってセットアップします。フルブリッジ インバータの各レッグは、デッドタイムを持つ相補的センターアライン モードで動作します。フルブリッジ インバータの片方のレッグでは、公称デューティサイクルに制御ループの結果を加算し、他方のレッグでは公称デューティサイクルから制御ループの結果を減算します。
フルブリッジ インバータ制御システムのブロック図を図 31 に示します。
図 31: フルブリッジ インバータの制御方式
X PI X PPWM
Sinusoidal ReferenceCurrent
Reference
S&H
S&H
1001010111
ADC
1011010011
Output Filter
AC Out
Voltage Feedback
+ - + -
VoltageError
CurrentError
ControlOutput
DutyCycle
CurrentFeedback
© 2012 Microchip Technology Inc. DS01279A_JP - p. 27

AN1279
プッシュプル コンバータのハードウェアおよびソフトウェア リソース割り当て
図 32: プッシュプル コンバータ用の dsPIC® DSC リソースの割り当て
プッシュプル コンバータ用に使う dsPIC DSC のリソースの概要を表 6 に示します。
表 6: プッシュプル コンバータ用の dsPIC® DSC リソースの割り当て
ADC
ADC
ADC PWM
dsPIC33FJ16GS504
PWM
FET Driver
FET Driver kD kC
VBAT
GND
+
Push-Pull ConverterVDC
GND
kE
orAnalog Comparator
信号名 内容 信号のタイプdsPIC® DSC の
リソース サンプリング レート /周波数
S1 プッシュプル駆動信号 PWM 出力 PWM3L 100 kHzS2 プッシュプル駆動信号 PWM 出力 PWM3H 100 kHzIP プッシュプル一次側
電流フィードバックアナログ入力 AN2 25 kHz
UDCM DC リンク電圧 フィードバック
アナログ入力 AN3 25 kHz
DS01279A_JP - p. 28 © 2012 Microchip Technology Inc.

AN1279
図 33: フルブリッジ インバータ用の dsPIC® DSC リソースの割り当て
フルブリッジ コンバータ用に使う dsPIC DSC のリソースの概要を表 7 に示します。
表 7: フルブリッジ コンバータ用の dsPIC® DSC リソースの割り当て
ADC
ADC
PWMPWM
dsPIC33FJ16GS504
PWM PWM
IGBT Driver
IGBT Driver
IGBT Driver
IGBT Driver kF kG
VOUT+
VOUT-
Full-Bridge InverterVDC
GND
信号名 内容 信号のタイプdsPIC® DSC の
リソース サンプリング レート /周波数
S3 インバータ駆動信号 PWM 出力 PWM1L 50 kHzS4 インバータ駆動信号 PWM 出力 PWM1H 50 kHzS5 インバータ駆動信号 PWM 出力 PWM2L 50 kHzS6 インバータ駆動信号 PWM 出力 PWM2H 50 kHzI インバータ出力電流
フィードバックアナログ入力 AN0 25 kHz
ACO インバータ出力電圧フィードバック
アナログ入力 AN1 25 kHz
ACI AC 主電源電圧 フィードバック
アナログ入力 AN11 25 kHz
A1 抵抗バイパスリレー駆動信号
デジタル出力 RC10 起動時にのみ有効化(DC リンク電圧を 小値よりも高く充電するため )
A2 出力リレー駆動信号 デジタル出力 RC0 UPS がインバータモードに切り換わる時にのみ有効化
© 2012 Microchip Technology Inc. DS01279A_JP - p. 29

AN1279
インバータから主電源への切り換えルーチン
電源障害が発生した時、オフライン UPS はインバータモードに切り換わり、主電源電圧を検出するまで、このモードで動作します。負荷へ電力を中断なく供給するために、システムはモードの切り換えを可能な限り短時間で実行する必要があります。
バッテリ充電器モードへ切り換える前に、ソフトウェアは主電源電圧が仕様レベル内である事を確実に検出する必要があります。ソフトウェアは、主電源の波形が適正である事 ( 歪みが十分に微小である事 ) を確認する必要もあります。
主電源検出ルーチンは下記のステップに分割されます。
1. 主電源の高電圧検出 : インバータモードでは、UPS ソフトウェアは 初に主電源で高電圧が供給されているかどうかを確認します。5 ms 間継続して高電圧を検出した場合、主電源検出ルーチンは次のステップへ進みます。
2. ゼロ交差検出 : 高電圧を検出した後に、ソフトウェアは主電源電圧のゼロ交差を検出するまでポーリングを続けます。計測した電圧の極性が前回は負極性で今回は正極性であり、かつ、前回と今回の電圧計測値の差が 小値を超えている場合にのみ、有効なゼロ交差が検出されます。これにより、ノイズに起因するゼロ交差の誤認を防ぎます。
3. 主電源データの収集 : ゼロ交差を検出すると、UPS ソフトウェアは主電源データ収集ステップを開始します。このステップでは、計測した主電源電圧の各サンプルを配列に保存します。正確な参照データを得るために、収集したデータの各サンプルの 4 正弦波サイクルの平均値を求めます。この配列は、後で主電源の障害を検出するための主電源参照電圧として使います。
4. 主電源の同期 : 主電源電圧データを収集した後に、主電源検出ルーチンは、計測した電圧と主電源参照データを比較します。誤差が 8 ms 間続けて ±20 V 以内であれば、ソフトウェアは主電源が供給されていると判断し、AC 主電源の現在の状態をステートマシンに伝えます。
次に、ステートマシンはインバータモードからバッテリ充電器モードへの切り換え処理を開始します。この切り換えは、インバータと主電源の両方がゼロ交差した時に実行します。これは、 も円滑なモード切り換えを提供し、瞬間的に発生します。
AC 主電源が回復した時に、インバータと主電源の位相が一致しない可能性があります。AC 主電源とインバータの周波数がほとんど同じである場合、両方の波形のゼロ交差タイミングはいつまでたっても一致しない可能性があります。従って、UPS ソフトウェアは、
初に両方の周波が非常に近いかどうかを確認します。周波数が大きく異なる場合、両波形のゼロ交差タイミングは 終的に一致し、この時に UPS は切り換えを実行します。
両波形がほぼ同じ周波数である場合、ルックアップテーブルからの一部のサンプルを間引く事によって、インバータ周波数を少し変化させます。この結果、正弦波の数サイクル後に、両波形のゼロ公差タイミングは一致します。これにより、UPS ステートマシンは、ほとんど遅延なくインバータモードからバッテリ充電器モードへ切り換える事ができます。インバータから主電源への切り換えシーケンスを図 34 に示します。
また、重要な注意点として、リレー切り換え時間に関する情報を使ってゼロ交差の一致を予測する必要があります。リレー切り換えの遅延に対処するために、実際のゼロ公差よりも数ms前にリレーを切り換えます。
DS01279A_JP - p. 30 © 2012 Microchip Technology Inc.

AN1279
図 34: インバータから主電源への切り換えルーチン
High Voltage Detected Zero-crossing Detected Mains Data Collection Complete
AC Mains
Inverter
Inverter Frequency Modified
Zero-crossing Aligned
Inverter turned OFF
Start Mains DataCollection
© 2012 Microchip Technology Inc. DS01279A_JP - p. 31

AN1279
主電源からインバータへの切り換えルーチン
主電源が供給されている場合、UPS ソフトウェアは、計測した主電源電圧を主電源参照配列内の対応するデータと比較し続けます。象限情報も変数に保存されます。サンプル毎に、期待電圧と実際の電圧間の誤差を計算します。
この誤差が ±20 V を超える場合、カウントをインクリメントします。誤差が約 1 ms 間続けて制限を超えた場合、オフライン UPS は主電源障害が発生したと判断します。この場合、システムステートをインバータモードへ切り換え、リレーを即座に切り換えて UPS 出力から主電源を切断します。次に、プッシュプル コン
バータを有効にし、ソフトスタート ルーチンを実行します。ソフトスタート ルーチンが完了した後に、主電源電圧を再度計測します。
バイナリサーチ アルゴリズムを使って、正弦波ルックアップ テーブルから適切なサンプル番号 ( 適切な象限内にあり、かつ、主電源電圧に も近い値を持つサンプルの番号 ) を選択します。UPS 出力で急激な電圧の変化が発生しないようにするために、このサンプル番号を開始位置としてインバータを有効にします。主電源からインバータへの切り換えシーケンスを図 35 に示します。
図 35: 主電源からインバータへの切り換えルーチン
Mains Failure Occurred
Mains Failure detected
Battery Charger
Mode (AC Mains
Present)
UPS
Output
DC
Link
Voltage
Push-pull Soft-startRoutine Completed
Inverter Mode
Inverter turned ON at the last measuredmains voltage
DS01279A_JP - p. 32 © 2012 Microchip Technology Inc.

AN1279
システムエラー
システム変数の組み合わせが異常な状態である事を検出した場合、UPS はシステムエラー状態に移行します。図 21 のステート図には、システムエラーが検出される全ての条件が示されています。
dsPIC DSC は、ソフトウェア オーバーヘッドなしで電力コンバータの自動シャットダウンを可能にするフォルトおよび電流制限機能を内蔵しています。この機能は、電力変換アプリケーションにおいて非常に重要であり、ユーザ、システム ハードウェア、下流の電子回路の保護に役立ちます。
システムエラー モードは、各電源段が無効化された後の全ての異常に対処するよう設計されています。システムがエラーモードに移行した時、LCD モジュールに異常のタイプを表示します。UPS がシステムエラーモードに移行した場合、正常動作に復帰するには、システムを再起動する必要があります。
補助タスク
オフライン UPS の補助的な機能は、全て補助タスクとして分類されます。これらのタスクの実行は比較的低速であるため、オフライン UPS ソフトウェア内で低の実行優先度が割り当てられます。
補助タスクは、コードのメインループ内で実行されます。これらのタスクは、電力変換制御ループや UPS ステートマシン等の高優先度タスクがアクティブでない場合にのみ、実行されます。言い換えれば、補助タスクは電力変換ルーチンとステートマシンの「アイドル」時間中に実行されます。結果として、メインループも「アイドルループ」として見なされます。補助タスクは、制御ループやステートマシン等の高優先度タスクによって頻繁に割り込まれます。以降のセクションで各補助タスクについて簡単に説明します。
出力電圧 / 電流 RMS 値の計算
RMS 計算ルーチンは、出力電圧および電流情報を、LCD と出力過電流および出力過電圧 / 低電圧保護機能に提供します。
計測した電流と電圧は、それぞれ 256 点の配列としてデータメモリに保存されます。RM 計算ルーチンが呼び出されると、各配列が RMS 値計算機能へ渡されます。この機能は、パラメータの真の RMS 値を出力します。
RMS 計算ルーチンを効率的に実行するために、dsPICDSC の DSP 命令を使います。Q15 ライブラリは、二乗和と二乗根を計算する関数を含んでいます。これらの演算は両方とも Q15 ライブラリで利用可能であり、オフライン UPS リファレンス デザインでは、これらを使って RMS 計算を実装します。
RMS 計算は、AC 主電源サイクルに対して実行されるため、アイドルループ内で呼び出されます。従って、この計算は比較的低い実行レートしか要求しません。電圧値 (V) または電流値 (A) を生成するために、計算結果を適切にスケーリングします。
LCD に結果を表示するために、RMS 計算結果の十進数の各桁の値を文字変数として保存します。LCD モジュールでデータを表示するために、これらの文字変数を連結して文字列とします。
LCDdsPIC DSC 用の LCD 制御コードは、LCD モジュールへの書き込み内容 ( ピクセル、バイト、ワード、文字列 ) ごとに別々の機能として実装されています。これらの LCD 表示ルーチンは、メインループ内で呼び出します。
オフライン UPS リファレンス デザインでは、専用MCU(PIC18F2420) で制御する 20 桁 x4 行の LCD モジュールを使います。dsPIC DSC は、シリアル ペリフェラル インターフェイス (SPI) を介して LCD コントローラと通信します。
dsPIC DSC を SPI マスタデバイスとして設定し、全ての LCD コマンドを LCD コントローラへ送信します。LCD コントローラは、dsPIC DSC からのシリアルコマンドをパラレルデータに変換するとともに、LCD モジュールのタイミング制御を管理します。
LCD コントローラは 5 V 電源で動作し、dsPIC DSC は3.3 V 電源で動作します。しかし、dsPIC DSC のデジタル専用ピンは 5 V を許容するため、dsPIC DSC とLCDコントローラを直接接続する事ができます。また、dsPIC DSC のデジタル出力はオープンドレイン コンフィグレーションで動作可能であり、プルアップ抵抗だけを使って5 VのLCDコントローラ向けに論理HIGHを生成できます。
LCD コントローラ用のリソース割り当ての概要を表 8に示します。
表 8: LCD 用の dsPIC® DSC リソースの割り当て
Note: 本書では、LCD コントローラの動作について説明しません。LCD 設計ソリューションについては、www.microchip.com/lcd をご覧ください。
信号名 内容 信号のタイプdsPIC® DSC の
リソースサンプリング レート / 周波数
SDO SPI データ出力 デジタル出力 RP22 アクティブ時に 156.25 kHzSDI SPI データ入力 デジタル入力 RP19 アクティブ時に 156.25 kHzSCK SPI クロック出力 デジタル出力 RP21 アクティブ時に 156.25 kHzSS SPI スレーブ選択出力 デジタル出力 RP20 LCD コントローラへのデータ
送信時にのみアサート
© 2012 Microchip Technology Inc. DS01279A_JP - p. 33

AN1279
USB 通信
オフライン UPS は USB 通信インターフェイスも備えており、UPS に接続したコンピュータまたはサーバの電源管理を行えます。USB 通信の実行には、専用のUSB コントローラ MCU (PIC18F2450) を使います。USB コントローラは、光絶縁 UART インターフェイスを介して dsPIC DSC と通信します。
USB 通信インターフェイス用のリソース割り当ての概要を表 9 に示します。
表 9: USB 通信インターフェイス用の dsPIC® DSC リソースの割り当て
信号名 内容 信号のタイプdsPIC® DSC の
リソースサンプリング レート / 周波数
Tx UART 送信 デジタル出力 RP27 9600 bpsRX UART 受信 デジタル入力 RP28 9600 bps
DS01279A_JP - p. 34 © 2012 Microchip Technology Inc.

AN1279
フォルト状態と保護スキーム
システムに全ての出力を停止させてシステムエラーモードへ移行させる事ができる各種のフォルト源が存在します。これら全てのシステム異常は、オフラインUPS のシステムエラー モードへの移行をトリガできます。これには下記が含まれます。
• プッシュプル一次側過電流
• DC リンク低電圧
• DC リンク過電圧
• バッテリ低電圧
• バッテリ過電圧
• 出力過電流
• 過熱
単独の異常または複数の異常の組み合わせにより、システムはその時の動作モードに応じてシステムエラーモードに移行します。例えば、ソフトスタート ルーチンがアクティブである場合、DC リンク低電圧条件が発生しても、システムはシステムエラー モードに移行しません。同様に、過渡負荷によってプッシュプル一次側電流が短時間だけ制限値を超過しただけでは、システムエラー モードに移行しません。過電流条件が一定時間以上持続した場合にのみプッシュプル過電流異常が生成されます。
急激に作用してシステムと負荷装置を破損する恐れのある全ての異常は、高優先度の制御ループ内で処理されます。プッシュプル過電流異常は、可能な限り迅速に検出する必要のある非常に高速な信号の一例です。結果としてこの異常は、プッシュプル制御ループと同時に検出されます。その他のバッテリ電圧等の信号は比較的低速な信号であるため、それらの異常は UPS ステートマシン内で処理されます。
異常条件が発生すると、システムはシステムエラーモードに移行し、異常のタイプが LCD モジュールで表示されます。
整流器負荷での動作
コンピュータおよびサーバ用の無停電電源は、オフライン UPS の も重要なアプリケーションの 1 つです。ほとんどのコンピュータとサーバは、力率改善 (PFC)を備えたスイッチング モード AC-DC 電源を実装しています。通常このような負荷は、フロントエンド ブリッジ整流器を備えるため、整流器負荷として分類されます。
PFC を実装していない場合、負荷は顕著な容量性負荷挙動を示し、結果として高いピーク電流が発生するとともに、力率が低下します。このようなコンフィグレーションの接続ブロック図を図 36 に示します。
このような電源の代表的コンフィグレーションは、図37に示すようにPFC昇圧型コンバータを備えます。昇圧型コンバータは、通常、大容量の出力コンデンサを使います。回路図からわかるように、AC 入力と出力コンデンサの間に低インピーダンス経路が存在します。結果として、負荷を始めて UPS 出力に接続した時に、出力コンデンサは大きな突入電流を引き込みます。
図 36: オフライン UPS の代表的な整流器負荷
Computer/Server Power Supply
EMI FilterPFC BoostConverter
DC-DCConverter
AC UPSOutput Input
AC Offline UPS
© 2012 Microchip Technology Inc. DS01279A_JP - p. 35

AN1279
図 37: PFC 昇圧型コンバータ
PFC を実装していない場合、負荷は高いピークをともなって非常に不連続的に電流を引き込みます。このため、負荷は顕著な容量性挙動を示します ( 図 38 参照 )。
図 38: 整流器負荷の入力電流波形 (PFC なし )
Load
AC
DiodeON
DiodeON
DiodeON
DiodeONDiode
OFFDiodeOFF
DiodeOFF
Input Voltage
Output Voltage
Input Current
DS01279A_JP - p. 36 © 2012 Microchip Technology Inc.

AN1279
PFC昇圧型コンバータの出力には大容量のコンデンサが存在するため、整流器負荷の負荷ステップと起動条件に対処するために、オフライン UPS には特殊なアルゴリズムを実装する必要があります。整流器負荷の起動時に引き込まれる電流は、 大定格電流の 20 倍に達する場合があります。このように高い電流サージに対応するために、ハードウェアに十分な余裕を持たせて設計するのも 1 つの方法です。しかし、このような方法では対費用効果が低く、性能または効率も低下する可能性があります。dsPIC DSC は、この問題に対処するための各種の柔軟な機能を提供します。PWM 電流制限機能を使うと、サイクル毎に電流を制限できます。この機能とソフトウェアの組み合わせにより、突入電流を制限するよう制御しながら出力コンデンサを充電する事ができます。
オフライン UPS リファレンス デザインでは、過電流条件発生時に外部割り込みを生成します。これにより、PWMモジュールは自動的にシャットダウンします。割り込みサービスルーチン内で、PWM は非常に小さなデューティサイクルに設定された後に再有効化されます。デューティサイクルが小さいため、1 回の PWMスイッチング サイクル中に引き込まれる電流は自動的に制限されます。制御された状態で出力コンデンサを充電するために、デューティサイクルを小さなステップで段階的に増加させます。電流制限異常処理ルーチンの実行中にインバータ制御ループはオーバーライドされます。インバータの正弦波参照電圧と実際のインバータ出力電圧が等しくなった時に、インバータ制御ループが動作を再開します。
インバータ出力の短絡状態によって 初の電流制限異常が発生した場合、2 回目の発生に対して即座に電流制限フォルトがトリガされます。これにより、過電流エラーによるシステムのシャットダウンが発生します。このエラー状態は LCD モジュールに表示され、システムを一度OFFにしてから再度ONにしない限りリセットされません。
ピーク電流制限機能
整流器負荷の力率が低すぎる場合、インバータ電流の波高因子が増加します。オフライン UPS リファレンス デザインは、 大波高因子 3:1 を定格条件として設計しています。負荷の波高因子がこの値を超えても、電流が 大ピーク電流定格を超えていなければ、UPSは何も対応しません。しかし、波高因子警告が LCD モジュールに表示されます。
負荷が要求するピーク電流が 15 A を超える場合、電流制限機能はインバータ制御ループをオーバーライドします。この機能は、デューティサイクルを 大値でクランプする事によって、出力での 大電流を制限します。
DC オフセットの除去
波高因子が高い状態で動作する場合、その影響として、引き込まれる電流が非対称になる可能性があります。これは、インバータ出力電圧に微小な DC オフセットが含まれるためです。DC オフセットは、フィードバック回路部品の許容誤差によって生じます。
標準的なアナログ実装の場合、DC オフセットを除去するためにトリマ抵抗が必要です。この場合、製造時に各 UPS システムのトリマ調整が必要であるため、コストと時間がかかります。部品の長期的劣化に対処するために、定期的なサービスによる再調整も必要かもしれません。dsPIC DSC で DC オフセット除去アルゴリズムを使う事により、これらの問題を解消できます。
オフライン UPS リファレンス デザインは、計測した出力電圧の正と負のピークを比較する事により、オフセット除去ルーチンを実行します。正または負いずれかの方向の片よりを検出した場合、出力電圧に補正係数を適用する事により、DC オフセットをキャンセルします。これらのピーク値は、複数の正弦波サイクルにわたって記録された 小および 大電圧を平均化する事により求めます。このような方法により、出力での負荷ステップの影響を無視できます。
© 2012 Microchip Technology Inc. DS01279A_JP - p. 37

AN1279
ハードウェア設計
プッシュプル昇圧型コンバータ
設計仕様
プッシュプル昇圧型コンバータは、広いレンジのバッテリリンク入力電圧を安定した高電圧 DC リンクへ変換する必要があります。オフライン UPS リファレンス デザインには下記の仕様を適用します。
• 入力電圧レンジ : DC30 ~ -45 V • 出力電圧 : DC380 V• 連続電力 : 1 kVA• 2 秒間のピーク電力 : 1.3 kVA• スイッチング周波数 : 100 kHz
検討したトポロジと選択理由
図 39 と図 40 に、使用可能な全てのプッシュプル昇圧型回路を示します。この中から、 も対費用効果の高いプッシュプル インバータ (図39(C))とフルブリッジ整流器 ( 図 40(B)) の組み合わせを選択しました。インバータにはローサイド駆動回路のみが必要であるため、単純な PWM 信号 ( 図 41 参照 ) でインバータを駆動できます。
図 39: 一次側駆動回路
(A) フルブリッジ インバータ
(B) ハーフブリッジ インバータ
(C) プッシュプル インバータ
Q1
Q3 Q4
Q2
Q1
Q3
Q Q
T1
T1C1
UB
UB
UB
T1
+
+
+
C2
C1
DS01279A_JP - p. 38 © 2012 Microchip Technology Inc.

AN1279
図 40: 整流器回路
図 41: プッシュプル インバータの制御信号
二次側には、下記の理由により、フルブリッジ整流器を選択しました。
• トランスの二次側で 1 つの巻き線だけを使う事により、漏れインダクタンスを低減できる
• トランスのコストを低減できる
• 逆方向降伏電圧の定格値が低い整流器ダイオードを使える ( そのようなダイオードは順方向特性とスイッチング特性に優れる )
• 高電圧 / 低電流動作であるため同期整流は不要
出力電圧は式 6 により求まります。ここで、N2 ÷ N1はトランスの巻き数比、d は PWM 信号のデューティサイクルです。デューティサイクルは、一定の範囲に制限する必要があります。実際のアプリケーションでは、デューティサイクルを 0.1 < d < 0.42 に制限する必要があります。この制限は、MOSFET とトランスのスイッチング挙動のためです。システム内で許容する変動と損失を考慮する必要があるため、式 6 を使った計算は正確ではありません。プッシュプル昇圧段が無負荷状態である時、コントローラはバーストモードに切り換える必要があります。また、大きな負荷がかかった時、各種損失を補償するためにデューティサイクルを増やす必要があります。
式 6:
(A) ハーフブリッジ整流器
(B) フルブリッジ整流器
T1 L1
R1C1D2D1
T1D3
D1 D2
D4
L1
C1 R1
UDC UBATN2N1------ 2d⋅ ⋅=
(0 < d < 0.5)d: トランジスタのデューティサイクル
N2/N1: トランスの二次側 / 一次側巻き数比
© 2012 Microchip Technology Inc. DS01279A_JP - p. 39

AN1279
電力変換回路部品の設計
プッシュプルトランスは、フェライト磁気コアを使って設計しました。このトランスは、エリアプロダクト(WaAc) アプローチを使って、下記の条件を満たすように設計しています。
• 小入力電圧 : Vimin = 30 V• 大 DC リンク電圧 : Vo = 380 V• 大出力電力 : Pomax = 2000 W• 一次側 RMS 電流 : IPrms = 30.5 A• 大デューティサイクル : Dmax = 0.42• スイッチング周波数 : f = 100 kHzアプリケーションに適したコア材を選択するために、製造者のデータシートを参考にします。それらのコア材の周波数、コア損失、 大磁束密度を考慮する必要があります。データを検討した結果、FERROXCUBE
社製の 3C90 材を選択しました。コア損失から、式 7を使って 大磁束密度を計算できます。この式で使う係数は表 10 から求めます。
式 7:
コア損失密度には、通常 150 mW/cm3 前後の値を選択します。計算した 大磁束密度は、飽和時の B の 1/2未満に制限する必要があります。このような B のレベルを選択する理由は、磁束密度が飽和に近付いた時に、この周波数におけるトランスコアの温度が高くなりすぎるためです。以上により、 大磁束密度は式 8 のように求まります。
表 10: 式 7 ( コア損失計算 ) で使う係数
式 8:
Pl a f c Bmaxd⋅ ⋅=
コア材 周波数 a c d
R, 35G, N87, 3C90 f < 100 kHz 0.074 1.43 2.85100 kHz ≤ f < 500 kHz 0.036 1.64 2.68
f ≥ 500 kHz 0.014 1.84 2.28P, 45G, N72, 3C85 f < 100 kHz 0.158 1.36 2.86
100 kHz ≤ f < 500 kHz 0.0434 1.63 2.62f ≥ 500 kHz 7.36e-7 3.47 2.54
F, 25G, N41, 3C81 f < 10 kHz 0.790 1.06 2.8510 kHz ≤ f < 100 kHz 0.0717 1.72 2.66100 kHz ≤ f < 500 kHz 0.0573 1.66 2.68
f ≥ 500 kHz 0.0126 1.88 2.29
BmaxPl
a f1000------------⎝ ⎠⎛ ⎞ c⋅
---------------------------
⎝ ⎠⎜ ⎟⎜ ⎟⎜ ⎟⎛ ⎞
1000d
------------
150
0.036 1000001000
------------------⎝ ⎠⎛ ⎞ 1.64⋅
-------------------------------------------------
⎝ ⎠⎜ ⎟⎜ ⎟⎜ ⎟⎛ ⎞
10002.68------------
1339G= = =
DS01279A_JP - p. 40 © 2012 Microchip Technology Inc.

AN1279
適切なサイズのコアを選択するために、コアのエリアプロダクトを式 9 を使って計算する必要があります。この式は、磁束鎖交数の式 (ψ = N * Φ) から導かれ、コアの電力処理能力を表します。従って、各コアは、コアのウィンドウ面積 Wa とコアの断面積 Ac の積として求まる特性値を持ちます。式 9:
図 42 に示すコアの双極性励起により、式 9 の ΔB は2Bmax と等しくなります。巻き線の電流密度は500 A/cm2 と予測され、 大出力電力 Pomax は 2000 Wです。従って、エリアプロダクトは式 10 のように求まります。
式 10:
図 42: 磁気コアのヒステリシスループ
計算値よりも大きなエリアプロダクトを持つコアを選択 す る 必 要 が あ り ま す。形 状 と サ イ ズ か らWaAc = 12.6 cm2 の値を持つ ETD54 コアを選択しました。一次側および二次側巻き線をコアの巻き線用エリアに収めるために、大きめのサイズを選択しました。
一次側巻き数は式 11 のように求まります。巻き数は整数値に丸める必要があるため、この場合、一次側の片方の巻き数を 4 とします。
式 11:
WaAc108 Pomax⋅Kt ΔB f J⋅ ⋅ ⋅-------------------------------=
WaAc108 2000⋅
0.254 2678 100000 500⋅ ⋅ ⋅------------------------------------------------------------------ 5.9cm4= =
ΔB
B
H
B
B
BSAT
BSAT
BMAX
BMAX
NP
108 Vimin2f---⎝ ⎠⎛ ⎞ Dmax⋅ ⋅ ⋅
ΔB AC⋅---------------------------------------------------------
108 30 2100000------------------⎝ ⎠⎛ ⎞ 0.42⋅ ⋅ ⋅
2678 2.8⋅-------------------------------------------------------------- 3.4===
© 2012 Microchip Technology Inc. DS01279A_JP - p. 41

AN1279
二次側巻き数は式 12 のように求まります。この結果を整数化して二次側巻き数を 60 とします。式 12:
一次側および二次側巻き線の断面積は式13のように求まります。一次側の片側の巻き線の長さが二次側に比べて非常に短い事から、巻き線をトランスのボビンに収めるために一次側と二次側で異なる電流密度を使います (JP = 8A/mm2、JS = 5A/mm2)。この場合、一次側巻き線は短いために温度はそれほど上昇しない事か
ら、一次側の電流密度を高くする事ができます。 一次側 RMS 電流は IPrms = 30.5 A です。二次側 RMS 電流は、Isrms = IPrms * Np ÷ Ns = 2.03 A として求まります。
式 13:
スイッチング周波数が高い (f = 100 kHz) ため、巻き線損失 ( 表皮効果と近接効果による損失 ) を低減するためにリッツ線を選択する必要があります。リッツ線もスイッチング周波数を考慮して設計する必要があります。
図 43 に、トランス巻き線の回路図と構造図を示します。
図 43: トランスの電気的および機械的構造
Ns
Vo2Dmax----------------
Vimin---------------- Np
3802 0.42⋅------------------
30------------------ 4 60.3=⋅=⋅= AcuP
IPrmsJP
------------- 3.81mm2= =
AcuSISrms
JS------------ 0.41mm2= =
NS
NP NP
NP NP
NS
COREBobbin Insulation and Shield
NP
NP
NS
DS01279A_JP - p. 42 © 2012 Microchip Technology Inc.

AN1279
プッシュプル MOSFETMOSFET を選択する際に下記を考慮する必要があります。
• 大降伏電圧
• 連続電流
• ピーク電流
• パッケージの熱特性
大降伏電圧
選択したコンフィグレーションにおいて、MOSFET はバッテリ電圧の 2 倍以上の電圧を保持する必要があります ( 式 14 参照 )。この計算では、30% の安全マージンを選択しました。従って、ドレイン - ソース間降伏電圧が 117 V よりも高いデバイスを選択する必要があります。
式 14:
連続電流
デバイスの電流定格を計算するには、ピーク電流と平均電流を予測する必要があります。ピークおよび平均電流は、電力定格と入力電圧から予測できます。平均電流は式 15 を使って計算します。ここで、PC は連続電力、UBAT はバッテリ電圧です。
式 15:
バッテリ電圧が 低の時に も高い電流が流れるため、連続電流は I = 1000W ÷ 30V = 33.34 A と求まります。レッグあたりの連続引き込み電流は、この値の1/2 です ( 従って ID = 16.67 A)。
ピーク電流
ピーク電流は、 大出力条件での電流波形を考慮して計算する必要があります。電流波形を、デューティサイクル (d)を持つのこぎり波であると仮定した場合、そのピーク電流は式 16 を使って計算できます。デューティサイクル (d) の計算には式 17 を使います。
式 16:
式 17:
巻き数比 16 のトランスを使う場合、ピーク電流は式 18 のように求まります。
式 18:
以上から、連続引き込み電流 16.67 A とピーク引き込み電流 160.3 A に対して MOSFET を設計する必要があります。波形は厳密なのこぎり波ではないため、これらの計算は予測に過ぎません。安全側に見積もるために、これらの電流値を 1.3 倍します。
パッケージの熱特性
熱特性を設計するために、RMS 電流値を計算する必要があります。波形とピーク電流が既知である場合、RMS 電流値は式 19 を使って計算できます。
式 19:
結果として、RMS 電流は式 20 のように求まります。
式 20:
22 45 1.3 117
BRDSS BATV VV V>
⋅ ⋅ =
/a c batI P U=
maxpm
bat
PIU d
=⋅
2
12DC
bat
U NdU N
⋅=
⋅ ⋅
2000 160.330 0.416pm
WI AV
= =⋅
3rms pcdI I=
280.15 .416 42.133rmsI A= ⋅ ⋅ =
© 2012 Microchip Technology Inc. DS01279A_JP - p. 43

AN1279
レッグあたりの電流は、この電流の 1/2 です ( 従ってIDRMS = 21.07 A)。これは 悪条件を想定した設計検討です。従って、50% の余裕を持たせて、IDRMS = 21.07A* 1.5 = 31.5 A と見積もります。電流が流れる全てのトレースとトランスも、この電流に対して設計する必要があります。MOSFET の伝導損失の計算には式 21 を使います。
式 21:
プッシュプル コンフィグレーションもスイッチングするため、スイッチング周波数 100 kHz での損失を考慮する必要があります。電流波形がのこぎり波に近ければ、ターンオン損失を無視できます。ターンオフ損失は、ピーク電流と漏れインダクタンスによって決まります。電圧スパイクを抑制するために、ターンオフ電圧クランプ回路を使います。この回路により、MOSFET は RC スナバなしで動作できます。スナバは、トランスの漏れインダクタンスに蓄えられたエネルギを消散するために使うのではなく、高周波発振を抑制するためだけに使います。従って、全てのエネルギは MOSFET で消費されます。式 22 を使ってターンオフ時の電力損失を予測できます。
式 22:
式22のWLはターンオフ時の漏れインダクタンスの貯蔵エネルギであり、式 23 を使って計算できます。
式 23:
このレンジの標準的なトランスの漏れインダクタンスは L = 0.5 μH を超えません。従って、ターンオフ電力は式 24 のように見積もれます。
式 24:
MOSFET の総電力損失 (Ptot = Poff + PC) は、レッグあたり 55 W と予測されます。
以上の検討により、MOSFET を選択できます。本リファレンス デザインでは、MOSFET に TO-220 パッケージを使います。絶縁シリコンパッドを使う場合、これらのデバイスの標準的な接合部 - ヒートシンク間熱抵抗は、RΘt = 2.5 /W です。
本デザインでは、接合部の連続温度として110 (ヒートシンク温度で 60 ) を許容します。この条件と電力損失から、必要な熱抵抗を計算でき、その結果から使うパラレル MOSFET の個数が決まります。
デバイスの必要個数は、n = RΘt ÷ RΘJH = 2.7 として求まります。式 25 の計算に従い、Fairchild Semiconductor社製のパラレルFDP2532デバイス (3個 )を選択しました。
式 25:
2Drmsc DSonP I R= ⋅
4L
off SWWP f=
2
2Li LW =
33 1.6100 40
4offeP e W−
= =
50 0.91 /55JH
tot
R C WPΘΔΘ
= = = °
DS01279A_JP - p. 44 © 2012 Microchip Technology Inc.

AN1279
全波整流器
図 44: 整流器と電流の流れ
ダイオードを選択する際に、下記を考慮する必要があります。
• ダイオード降伏電圧
• 平均順方向電流
• ピーク順方向電流
• スイッチング特性
• パッケージの熱特性
ダイオード降伏電圧
トランスの二次側電圧は、VS = VBAT * N2 ÷ N1 として計算します。バッテリ電圧が 大時の 大二次側電圧は、VS = 45 * 16 = 720 V です。トランスの漏れインダクタンス、ダイオードの内部インダクタンス、DC リンクインダクタのインダクタンスの影響により、スイッチング時にダイオードで電圧スパイクが発生します。このため、計算した降伏電圧を 1.3 倍します。従ってダイオードの降伏電圧は 936 V を超える必要があります。
平均順方向電流
レッグあたりの平均順方向電流は、目標とする DC リンク電圧と連続出力電力から式 26 を使って容易に求まります。
式 26:
ピーク順方向電流
ピーク電流は、トランス電流比と、先に式 9 で求めたピーク MOSFET 電流を使って計算します。
式 27:
(A) D3 and D2 Conduct
(B) D1 and D4 ConductT1
D3
D1 D2
D4
L1
C1 R1
T1D3
D1 D2
D4
L1
C1 R1
1000 2.6380
cavg
DC
PI AV
= = =
1
2
160.3 0.625 10pD PNI I AN
= ⋅ = ⋅ =
© 2012 Microchip Technology Inc. DS01279A_JP - p. 45

AN1279
スイッチング特性
ダイオードのスイッチング特性は、順方向回復時間と逆方向回復時間によって決まります。
図 45: ダイオードのスイッチング特性
ダイオードのスイッチング損失は式 28 を使って予測できます。
式 28:
パッケージの熱特性
ダイオードには、絶縁 TO-220-2 パッケージを使います。連続動作時の接合部温度は、ヒートシンク温度が60 の時に 130 を超えない事が必要です。接合部絶縁TO-220-2パッケージの標準的な接合部 -ヒートシンク間熱抵抗は RΘt = 3.5 /W です。従って、部品あたりの 大許容電力損失はPMAX = 70 ÷ 3.5 = 20 Wです。
STMicroelectronics 社製の STTH1210D は電圧および電流要件を満たします。次に、ダイオードのデータシートに基づいて電力損失を計算できます。
総電力損失は、伝導損失とスイッチング損失の合計として、式 29 のように予測されます。
式 29:
この予測結果は、電力損失が設定した基準内である事を示しています。
出力インダクタ
このインダクタの使用は必須ではありません。使うかどうかは、トランスの構造、DC リンク電圧の制御、使う必要のあるインダクタ値によって決まります。以下では、50 µH 出力インダクタの設計について説明します。
出力インダクタの設計にはエリアプロダクト アプローチを使い、下記の条件を適用します。
• インダクタンス : L = 50 μH• ピーク DC 電流 : Ip = 13 A• 動作磁束密度 : Bm = 300 mT• 電流密度 : J = 500A/cm2
• ウィンドウ利用率 : Ku = 0.4まず、式 30 により、エネルギ処理能力を計算する必要があります。
t[s]t3t2t1
t i
PDoffPDon
i[A]u[V]
tfr
u
π
swD c DC SWP Q V f= ⋅ ⋅ 10tot swD fDP P P W= + =
DS01279A_JP - p. 46 © 2012 Microchip Technology Inc.

AN1279
式 30:次に、フェライトコアの適切なサイズを選択するために、式 31 に示すエリアプロダクトの計算が必要です。
式 31:
周囲の部品への干渉を軽減できる小型のサイズと形状を持つ事から、FERROXCUBE 社製の P36/22 ポットコアを選択しました。 製造者のデータシート内のデータから、このコアのエリアプロダクトは 1.46 cm4 と計算できます。
コイルの目標インダクタンスを得るために必要な巻き数は、式 32 のように求まります。製造者のデータシートから、コアの断面積は Ac = 172 mm2 です。
式 32:
巻き数は、計算値に も近い整数値である 13 とします。
目標インダクタンスを得るために、エアギャップを持つ 3C81 材を選択して磁束密度を調整しました。エアギャップがコアの磁気経路に分散されている場合、コア材の実効透磁率が変化します ( インダクタンス係数AL)。AL の値と巻き数から、インダクタンスは式 33 のように求まります。AL の値は、コア材のデータシートから得られ、その値は 0.97 mm のエアギャップで315 nH です。
式 33:
新たに求めた動作磁束密度を式 34 により検証します。この値は選択したコア材の飽和点よりも低い事が必要です。
式 34:
3C81 材の飽和点は 320 mT (100 ) です。
条件を満たせない場合、コア材、エアギャップ、巻き数を変更するか、あるいはより大きなコアを選択する必要があります。
巻き線の断面積は式 35 のように求まります。ここで、インダクタの RMS 電流は、プッシュプル トランスの一次側 RMS 電流と巻き数比から求まります。スイッチング周期の半周期で一次側巻き線の片方だけが導通し、次の半周期でもう片方の一次側巻き線が導通するため、一次側 RMS 電流は 2 倍する必要があります。
式 35:
計算値は巻き線の 小断面積です(100 kHzリッツ線を使う必要があります )。
次に、式 36 でフィルファクタを計算する必要があります。これにより、巻き線がボビンに収まるかどうかを予測します。フィルファクタは 0.4 以下である事が必要です。
Wb はボビンの巻き線領域の面積です。この値はコアのデータシートから 72.4 mm2 です。
式 36:
出力コンデンサ
DC リンクコンデンサを選択する際に下記を考慮する必要があります。
• 電圧定格
• リップル電流
電圧定格
電圧定格は DC リンク電圧 VDC = 380 V と定義されます。従って、これよりも高い電圧定格を持つコンデンサを選択する必要があります。
2 6 250 10 13 0.00432 2
pL IE Ws
−⋅ ⋅ ⋅= = =
442 10 1.43a c
m u
EW A cmB J K⋅ ⋅
= =⋅ ⋅
12.6p
c m
L IN
A B⋅
= =⋅
2 53LL N A Hμ= ⋅ =
308pnew
c
L IB mT
N A⋅
= =⋅
2
20.82
PPrms
rms Scu
NII NA mmJ J
⋅ ⋅= = =
0.15cuu
b
N AKW⋅
= =
© 2012 Microchip Technology Inc. DS01279A_JP - p. 47

AN1279
リップル電流
DC リンク電圧コントローラが期待通りに動作している場合、インバータによって発生する低周波リップル電流は無視可能です。従って、コンデンサは無効負荷電流だけを補償する必要があります。この電流は、デバイスの仕様 (S = 1300 VA、P = 1000 W) によって決まります。
式 37:
式 38:
スナバ
スナバは、高周波発振を抑制してダイオードのリンギング損失を低減するために使います。一次側スナバは一次側巻き線全体に対して配置します。このスナバは、MOSFET ターンオフ時の電圧スパイクへの対処には使わず、リンギングとトランス突入電流を低減するためだけに使います。
一次側スナバを設計するには、MOSFET の静電容量とトランスの漏れインダクタンスを知る必要があります。どちらのパラメータも計測可能ですが、MOSFETの静電容量は電圧によって変化するため、1 つの予測値だけを使えます。本リファレンス デザインで使う 3個のパラレル MOSFET の静電容量は概ね CDS = 7 nFであり、トランスの漏れインダクタンスは LS = 500 nHと予測されます。簡略化した高周波回路を図 46 に示します。
図 46: 高周波回路
共振周波数は式 39 のように求まります。
式 39:
一次側巻き線抵抗 (RS) とバッテリリンク コンデンサの直列抵抗 (RC) は mΩ レベルしかないため、システムのダンピングは非常に低くなります。この高周波リンギングを低減するために、直列 RC スナバを一次側巻き線の全体に対して追加しました。静電容量はMOSFET 静電容量の 1 ~ 3 倍必要です。直列抵抗値は、ダンピングを与えかつ電力損失が抵抗の定格以内に収まるように選択する必要があります。システムの効率を高く維持するために、一次側スナバで許容する電力損失を定格電力の 1% 未満とします。実験で評価したRCスナバの 終値はC = 10 nF、R = 12 Ωです。抵抗の電力定格は 4 W です。
整流器ダイオード用スナバを設計するには、整流器ダイオードの静電容量を知る必要があります。簡略化した高周波回路を図 47 に示します。
図 47: 高周波回路
この場合、コンデンサにはダイオード静電容量の 2 ~5 倍の容量が必要です。ダイオード静電容量は、ダイオードのデータシートに記載されています。選択したダイオードの静電容量は概ね CD = 70 pF です。従って、スナバ静電容量値の初期値としては、C = 150 pFが妥当です。ここでも、コンバータの効率を可能な限り高く維持するために、スナバでの消費電力をコンバータ定格電力の 1% 以下に制限します。この場合も抵抗の電力定格は 4 W です。抵抗値は、メインスイッチング電圧信号によって抵抗で消費される電力を可能な限り低く抑えるように選択する必要があります。消費電力はRC 回路の周波数特性によって決まります。抵抗または静電容量を小さくすると、RC回路の特性周波数は高くなり、その結果 100 kHz のスイッチング電圧によってスナバで消費される電力は減少します。しかし、スナバのダンピングも減少します。抵抗の初期値としては R = 1 kΩが妥当です。
2 2 830.7Q S P Var= − =
830.7 3.6230r
AC
QI AV
= = =
RS
RC LS.5 µH
CDS6.6 nF
1 2.72 DS S
f MHzC Lπ
= =⋅ ⋅ ⋅
CD1
CD3
L1LSS
DS01279A_JP - p. 48 © 2012 Microchip Technology Inc.

AN1279
スナバ回路の計算は非常に複雑であり、計算しても期待通りの結果を得られません。従って、実験でパラメータを評価する必要があります。スナバを設計する際に下記を考慮する必要があります。• 総合的なシステム効率
• 信号クオリティ
• デバイスの電力定格
• デバイスの電圧定格
駆動回路の設計
MOSFET を駆動するには、dsPIC DSC からの信号を増幅するドライバを使って MOSFET のゲートを駆動する必要があります。MOSFET のゲートはコンデンサのような挙動を示します。MOSFET のドレイン - ソース間抵抗 RDS は、ゲート - ソース間電圧 VGS によって変化します。ゲート - ソース間電圧が高いほど、ドレイン - ソース間抵抗は低下します。選択した MOSFETの特性は下記の通りです。
• VGS = ±20 V• VGS(TH) = 2 ~ 4 V• CG(TOT) = 10.7 nF
ON 状態での抵抗を低く抑えるために、ゲートを 12 V信号で駆動します。図 48 に示す駆動回路は、ドライバ (S1)、スロープ制御要素、均等化抵抗 (R1、R2、R3)、R4、R5、C1、ターンオフ電圧クランプ回路 D1、D2、Q4、R6 により構成されます。
R5 と C1 は必須ではありません。R5 は、MOSFET が勝手にターンオンする事を防ぐために使います。C1は、ミラー静電容量の補償と EMI の抑制に使います。抵抗 R1、R2、R3 は、MOSFET のゲートしきい値電圧を均等化してパラレルターンオンを確保するために使います。R4 との組み合わせにより、ターンオン スロープも制御します。さらにターンオフ スロープも、ドレイン - ソース間電圧 (VDS) が電圧クランプ回路のしきい値に達するまで制御します。電圧クランプ回路がアクティブになる時、VDS は一定値を保ち、ターンオフ スロープは減少します。これにより、漏れインダクタンスに蓄えられたエネルギの一部を二次側へ伝達し、残りのエネルギを MOSFET で制御しながら消散する事ができます。また、電流スロープの低減により、システム全体の発振も減少します。しかし、MOSFETのターンオン時間が増加する事、および 大デューティサイクルを低減する必要がある事に注意が必要です。
ドライバの連続供給電流は式 40のように求まります。式中の n は、パラレル MOSFET の個数です。
図 48: MOSFET 駆動回路
式 40:
Q1 Q2 Q3R3R2R1D2
R5C1
D1 ZenerT
R6
R4S1
V112V
Q4
+
9 3( )2 2 3 10.7 10 15 100 10 96.3Gc G tot DRV SWI n C V f mA−= ⋅ ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ =
© 2012 Microchip Technology Inc. DS01279A_JP - p. 49

AN1279
ピーク電流の予測値の計算には式 41 を使います。式 41:
ドライバの電力損失の計算については、「MCP14E3/MCP14E4/MCPE5 イネーブル機能を備えた 4.0A デュアル高速パワー MOSFET ドライバ 」 (DS22062) データシートを参照してください。総電力損失 (Ptot) は概算で約 1 W となります。
電圧および電流フィードバック回路の設計
プッシュプル段では、バッテリリンク電圧と DC リンク電圧を計測する必要があります。どちらもMCP6022レールツーレール オペアンプを使って差動計測します。高電圧差動計測を行う場合、入力抵抗が高い事と、抵抗の電圧および電力定格を超えない事が必要です。このため、本リファレンス デザインでは、入力分圧器で 1206 個の抵抗を使います。S/N 比を高めるために、差動増幅器の出力信号は 5 V とします。これを 3.3 Vの 10 ビット A/D コンバータへ接続するために、dsPICDSC の近くで抵抗分圧器を使います。加えて、S&Hコンデンサを高速に充電するために、コンデンサをdsPIC DSC の近くに配置します。計測には、許容誤差1% の抵抗を使います。これは、差動増幅器の検出回路の抵抗を均等にしてコモンモード ノイズを除去するために、特に重要です。
MOSFET のドレイン電流とヒートシンク温度も計測します。電流計測は、ドレイン - ソース間抵抗 RDSONでの電圧降下計測に基づきます。この種の計測は温度に影響されるため、MOSFET の RDSON にほぼ等しい温度依存性を持つ半導体温度センサを使います。電流フィードバック信号は、トランスの飽和を防ぐために使います。
プリント基板のレイアウトに関する注意点
プッシュプル段に関しては、一次側電流が流れるトレースに特別な配慮が必要です。高周波電流と高電流ピークにより大量のノイズが発生する可能性があります。また、プリント基板で損失が生じる可能性もあります。従ってトレースを可能な限り短くし、トレースに鋭いエッジを設けない事が必要です。一次側巻き線の接続にトランスの巻き線に使っているリッツ線 ( フライリード ) を使うのも良い方法です。
電源部品と信号部品をグランドプレーンにカップリングしないよう配慮が必要です。
熱的設計
MOSFET とダイオードで発生する熱は、ヒートシンクを使って周囲に放熱する必要があります。既に予測した総電力損失は下記の通りです。 • MOSFET: PMOS = 110 W• ダイオード : PDIODE = 40 W、放熱に強制空冷を使用
フルブリッジ インバータ
インバータの設計仕様
UPS 出力電圧を生成するためにインバータを使います。その仕様は下記の通りです。
• 入力電圧 : DC380 V• 出力電圧 : AC230 Vrms• 連続電力 : 1 KW• 連続出力電流 : 5.6 Arms • 2 秒間のピーク電力 : 1300 VA• 大出力電流 : 10 Arms• スイッチング周波数 : 50 kHz• 短絡保護
インバータ 電力変換回路の設計
IGBT の選択
スイッチング周波数が高いため、低スイッチング損失の IGBT を選択する必要があります。IGBT には 600 V以上の連続電圧定格と、14 A 以上の連続電流定格が必要です。上記要件の全てを満たす STMicroelectronics社製の STGP14NC60KD を選択しました。
損失は、データシートに記載されているデータを使って、P = 17 W と予測できます。シリコンパッドを使った場合の接合部 - ヒートシンク間熱抵抗の予測値は、RΘt = 3 /W です。これらの予測値から、接合部温度はヒートシンク温度よりも 50 高くなると予測されます。
IGBT インバータは、AC 主電源からバッテリに充電している時に全波整流器としても動作します。
出力コモンモード チョーク
コモンモード インダクタは、1 つのコアに 2 つの巻き線を備えています。これは、コモンモード干渉とインバータで発生する出力へのスイッチング ノイズをブロックするため、コモンモード インダクタと呼びます。図 49 に、このインダクタのブロック図を示します。巻き線上の黒丸は巻き始めを示しています。負荷を出力に接続した時、コアの磁束が合計される必要があります。そうでない場合、インダクタが正しく接続されていません。
( )1 1 1 14 ( 1 2 3 )
DRV GS THGp
V VI
R R R R− − − −
−=
+ + +
DS01279A_JP - p. 50 © 2012 Microchip Technology Inc.

AN1279
図 49: コモンモード インダクタの概略図
出力コモンモード チョークの設計は下記の条件に基づきます。設計方法は DC インダクタと同様です。
• インダクタンス : L = 250 μH• ピーク AC 電流 : Ip = 17A• 動作磁束密度 : Bm = 380 mT• 電流密度 : J = 500A/cm2
• ウィンドウ利用率 : Ku = 0.4• 出力電力 : Po = 1000 Wまず、式 42 のようにエネルギ処理能力を計算する必要があります。
式 42:
次に、コアの適切なサイズを選択するために、式 43 に示すエリアプロダクトの計算が必要です。
式 43:
本リファレンス デザインでは、Epcos 社製の ETD54フェライトコアを選択しました。製造者のデータシート内の寸法データに基づく計算により、このコアのエリアプロダクトは 11.5 cm4 です。
コイルの目標インダクタンスを得るために必要な巻き数は、式 44 のように求まります。製造者のデータシートから、コアの断面積は Ac = 172 mm2 です。
式 44:
計算した巻き数は、両方の巻き線を含む巻き数です。この巻き数を整数に丸めて 40 とし、両方の巻き線の巻き数は同じであるため、各巻き線の巻き数を 20 とします。
目標とするインダクタンスを得るために、AL の値を式 45 のように求めます。
式 45:
次に、コア製造者のデータシートから、適正なエアギャップを選択できます。Epcos 社製 N87 材のギャップ長は式 46 のように求まります。
式 46:
これに基づき、データシートからエアギャップとして3.5 mm を選択しました。このエアギャップ値を使って、AL の値を式 47 のように再計算します。
式 47:
新たなインダクタンス値を式 48 に示します。
式 48:
新たな動作磁束密度を式 49 により検証します。この値は選択した素材の飽和点よりも低い事が必要です。
I1 O1
Input Output
I2 O2
2 6 2250 10 17 0.0362 2
pL IE Ws
−⋅ ⋅ ⋅= = =
442 10 10.3a c
m u
EW A cmB J K⋅ ⋅
= =⋅ ⋅
39.9p
c m
L IN
A B⋅
= =⋅
2 156LLA nH
N= =
2
1
1
3.3k
LAs mmk
⎛ ⎞= =⎜ ⎟⎝ ⎠
21 148K
LA K s nH= ⋅ =
2 237LL N A Hμ= ⋅ =
© 2012 Microchip Technology Inc. DS01279A_JP - p. 51

AN1279
式 49:N27 材の飽和点は 410 mT (100 ) です。
巻き線の断面積は式 50 のように求まります。ここで、インダクタにおける RMS 電流は、出力電力と出力電圧の RMS 値から計算します。
式 50:
この計算値は、巻き線の 小断面積です (100 kHz リッツ線を使う必要があります )。
次に、式 51 のようにフィルファクタを求める必要があります。これにより、巻き線がボビンに収まるかどうかを予測します。フィルファクタは 0.4 以下である事が必要です。Wb はボビンの巻き線面積であり、その値は 315.6 mm2 です。このデータはコアのデータシートに記載されています。
式 51:
出力コンデンサの選択
インバータのスイッチング トランジスタは、50 Hz または 60 Hz を基本周波数とする正弦パルス幅変調電圧波形を生成します。ローパスフィルタは出力インダクタと出力コンデンサで構成され、正弦パルス幅変調電圧波形の低周波数成分 (50 Hz または 60 Hz) のみを通過させます。これにより、低周波数の正弦波出力電圧を生成します。
出力コンデンサの値は、基本周波数を通過させるために十分に大きくする必要がありますが、高い無効電流を必要とするため、大きくしすぎない事が必要です。約 100 Hz のカットオフ周波数を得るために、出力コンデンサの値を 4.7 µF とします。出力コンデンサは、高いインダクタ リップル電流を取り込むとともに、スイッチング ノイズを抑制できる必要があります。Epcos社製のB32924C3475M MKPシリーズ フィルムコンデンサは、上記の要件を全て満たします。
出力リレー
本システムでは 2 個のリレーを使います。リレー K1は、AC 主電源からの DC リンク コンデンサの充電を制御するために使います。このリレーは動作中常にONです。リレーK2 は、AC 主電源で電源障害が発しした時の切り換え用に使います。このリレーは高速に切り換える必要があるため、切り換え時間を短縮するために部品を追加します。R68 と C43 の R||C の組み合わせを使う事により、ターンオン時の高電流を許容し、その後の ON 状態中の電流を低減して高速なターンオフを可能とします。抵抗 R72 は、ターンオフを高速化するために、リレーコイルに蓄えられたエネルギを消散するために使います。トランジスタ Q11 のスイッチング速度は、R-C||R の組み合わせを使う事により向上します。これにより、ターンオン時のより高いベース電流と、ターンオフ時のベース電流での負の電圧を許容します。
ゲート駆動回路の設計
設計仕様を満たすために、フォルト保護と短絡保護を備えたハーフブリッジドライバを使う必要があります。選択した IGBT は、10 μs 間の短絡に耐えます。ドライバは、短絡を検出した時に、IGBT のソフト ターンオフを実行します。加えて、ハイサイド IGBT を駆動するために、600 V のフローティング チャンネルを備えたブートストラップが必要です。EMI 要件を満たすために、ゲート抵抗を使ってターンオンおよびターンオフ スロープを調整できる必要があります。International Rectifier 社製の IR2214 は、上記の要件を全て満たします。IGBT のデータシートによると、許容ゲート電圧 VGMAX = ±20 V、ゲートしきい値電圧VG(TH) = 4.5 ~ 6.5 V です。IGBT のターンオンを確実に行うために、ドライバには VCC = 12 V を供給します。VCE が急な傾きで上がった時に、内部 IGBT ミラー静電容量によって IGBT がターンオンする事を防ぐために、ゲート - コレクタ間コンデンサを使います。
電圧および電流フィードバック回路の設計
電圧フィードバックには、MCP6022 オペアンプで構成した差動増幅器を使います。AC 主電源電圧と出力電圧を計測するために、双極性計測が必要です。差動増幅器による双極性信号電圧の計測を可能にするために、オフセット Voff = 2.5 V を正の参照電圧点として使います。従って、差動計測した電圧がゼロである場合、オペアンプは 2.5 V を出力します。差動計測した電圧の極性が負である場合、出力は 0 V へ向かって変化し、極性が正である場合、出力は 5 V へ向かって変化します。
360pnew
c
L IB mT
N A⋅
= =⋅
2230 0.88o
rmscu
PI VA mmJ J
= = =
0.11cuu
b
N AKW⋅
= =
DS01279A_JP - p. 52 © 2012 Microchip Technology Inc.

AN1279
差動入力電圧が高いため、デバイスの電圧および電力定格内に収めるために、1206 個の直列抵抗を使います。正確な計測を保証し、コモンモード ノイズを除去するために、全て許容誤差 1% の抵抗を使いました。電流計測には、LEM 社製のホール効果センサを使います。このセンサは双極性であり、信号出力は 5 V です。電流がゼロの時の出力は 2.5 V です。
全ての 5 V 信号は、dsPIC DSC の近くに追加した抵抗分圧器を使って、3.3 V の 10 ビット A/D コンバータに接続します。さらに、SH コンデンサを高速に充電するために、dsPIC DSC の近くに 1 個のコンデンサを追加しました。
プリント基板のレイアウトに関する注意点
出力電流が流れるトレースは、可能な限り短くする必要があります。高電圧がかかるため、特別な注意が必要です。IGBT ドライバの周囲では、論理レベル部品とゲート駆動部品を分離し、それらの部品をグランドプレーンにカップリングしないように配慮が必要です。
熱的設計
IGBT は放熱するためにヒートシンクに取り付ける必要があります。 総電力損失は PIGBT = 68 W と予測されます。デバイスは、熱伝導性電気絶縁材を介してヒートシンクに取り付ける必要があります。
バッテリ充電器の設計
バッテリ充電器の設計仕様
バッテリ充電器は、AC 主電源からバッテリを充電するために使います。本システムでは、直列に接続した3 個の鉛蓄電池を使います。充電器の設計仕様は下記の通りです。
• 入力電圧 : AC95 ~ 260 V• 出力電圧 : 30 ~ 45 V• 出力電流 : 0 ~ -2.5 A• 電流制御
• 電圧制限
電力変換回路部品の設計
フライバック コンバータの一次側駆動段を実装するために、Power Integrations 社製の一体型ソリューション TOP250Y を選択しました。 大出力電力は、PCH = UBmax * IBmax - 112.5 W として求まります。フライバックは、スイッチング周波数 f = 132 kHz で動作します。従って、高速な整流器と一次側クランプ ダイオードを使う必要があります。トランスの巻き数比は N2 ÷ N1 = 28 ÷ 52 です。この巻き数比と 大入力電圧に基づき、整流器の逆電圧定格は式 66 の結果より高い事が必要です。式中の VF(IGBTD) は、AC 主電源電圧の整流に使う IGBT 逆並列ダイオードでの電圧降下です。
クランピング要素の設計には、TOP250Y の製造者が提供する設計ツールを使いました。
フライバック トランス
フライバック トランスは、電流源動作を可能にするために、目標とする出力電力と出力電流リップルに基づいて設計します。フライバック コンバータには、エアギャップを持つトランスが必要です。このトランスは下記の条件に基づいて設計します。
• 小 DC リンク電圧 : Vimin = 130.6 V• 大 DC リンク電圧 : Vimax = 364 V• 公称 DC リンク電圧 : Vinom = 247.4 V• 公称デューティサイクル : dn = 0.24• 出力電流 : Io1max = 2.5 A• 公称出力電圧 : Vo = 40 V• 二次側電流リップル : ∆Is[%] < 25 %• スイッチング周波数 : f = 132 kHz二次側に対する一次側の巻き数比は式 52 のように求まります。
式 52:
電流リップルを制限するために、一次側および二次側巻き線のインダクタンスを式 53 のように求めます。
式 53:
以上から、一次側電流は式 54 のように求まります。二次側電流は、トランスの効率を 90% と予測して、式 55 のように求まります。
( ) 1.91
inom DSon nPS
O Df n
V V dNV V d
−= ⋅ =
+ −
max
2
( ) ( )196
684
o Df ONS
P S PS
V V T TL H
IsL L N H
μ
μ
+ ⋅ −= =
Δ= ⋅ =
© 2012 Microchip Technology Inc. DS01279A_JP - p. 53

AN1279
式 54:式 55:
これにより、一次側および二次側で要求される巻き線を選択できます。本リファレンス デザインでは、フライバックトランスを電流密度 J = 4 A/mm2 で動作するように設計します。従って、一次側および二次側に必要な銅線の断面積は式 56 のように求まります(132 kHz 用のリッツ線を使う必要があります )。
式 56:
トランスの巻き線係数として K = 0.2 を選択し、 コアには N87 材を選択します。コアの 大磁束密度をB = 130 mT に設定します。コアを選択するために、エリアプロダクトを式 57 のように求めます。
式 57:
選択したコアのエリアプロダクトは、この計算値よりも高い事が必要です。磁気的には ETD34 以上で十分ですが、巻き線を収めるために十分なスペースが必要です。これを検討するために、巻き数と、それに対応するウィンドウ利用率およびフィルファクタを、各種コアで計算してみる必要があります。ウィンドウ利用率が 90% を超える場合、またはフィルファクタが 0.4を超える場合、巻き線を収める事はできません。トランス巻き線の回路図と機械的構造図を図 50 に示します。
[ ]max
max
2max
( ) ( ) % 1
4(1 )
4.52
1(1 )( ( ) ( ( )) 3.22 3 2
O onS O S
S
OSc
SSpeek Sc
S SS rms Speek Sc Speek Sc
V T TI I I AL
II Ad
II I A
I II d I I I I A
⋅ −Δ = = ⋅Δ =
= =−
Δ= + =
Δ Δ= − − + − − =
min max
min max
2max
( ) 0.55
2.4( ) 0.9
2.72
1( ( ) ( ( )) 1.52 3 2
i onP
P
O OPc
i
PPpeek Pc
P PPrms Ppeek Pc Ppeek Pc
V TI AL
V II AV d
II I A
I II d I I I I A
⋅Δ = =
⋅= =
⋅ ⋅Δ
= + =
Δ Δ= − + − − =
2
2
0.375
0.8
PrmsCuP
SrmsCuS
IA mmJ
IA mmJ
= =
= =
4max100 0.652
Oa c
t
PW A cmK B f J
⋅= =
⋅ ⋅ ⋅
DS01279A_JP - p. 54 © 2012 Microchip Technology Inc.

AN1279
図 50: トランスの電気的および機械的構造
巻き線にはリッツ線を使って高周波数での銅損を低減します。スイッチング周波数 f = 132 kHz に対し、AWG38 素線によるリッツ線を使って、表皮効果と近接効果を除去します。必要な素線の本数は式 58 のように求まります。
式 58:
本リファレンス デザインでは、一次側および二次側ともに標準リッツ線を選択する必要があります。このため、一次側には 45xAWG38、二次側には 105xAWG38を選択します。選択した巻き線のシルク絶縁被覆を含む直径は、DP = 1 mm、DS = 1.5 mm です。
次に、選択した ETD39 コア ( エアギャップあり ) で必要となる巻き数を、要求される一次側インダクタンス、巻き数比、コアデータから計算できます。
その結果、巻き数は式 59 のように求まります。
式 59:
次に、選択したコアと巻き線に関して、ウィンドウ利用率とフィルファクタを計算します。ボビンのウィンドウは 25x7 mm です。この値から、一次側と二次側の 1 層あたりの巻き数が式 60 のように求まり、必要な層数が式 61 のように求まります。
式 60:
式 61:
ウィンドウ利用率は式 62のように求まり、フィルファクタは式 63 のように求まります。
式 62:
式 63:
この結果から、選択したコアに巻き線を収める事ができます。
必要なエアギャップは、コアのデータシートから計算できます。必要エアギャップを計算するには、コアのAL 値を計算する必要があります。AL の値はエアギャップに依存します。一次側のインダクタンスと巻き数から、必要な AL 値は式 64 のように求まります。
COREBobbin Insulation and Shield
NP
NP
NS
PrimarySecondary
Primary
PrimarySecondary
Primary
47.7
101.8
CuPwP
Cuw
CuPwS
Cuw
AnAAnA
= =
= =
41058.1 58
2
30.5 30
P PpeekP
e
PS
PS
L IN
B ANNN
⋅ ⋅= = →
⋅
= = →
25 25 25
25 16.7 16
tPP
tSS
ND
ND
= = →
= = →
2.32 3
1.875 2
PlP
tP
SlS
tS
NNNNNN
= = →
= =→ →
( ) / 86%u P lP S lS aW D N D N W= + =
( ) / 0.25u CuP P CuS S aK A N A N W= ⋅ + ⋅ =
© 2012 Microchip Technology Inc. DS01279A_JP - p. 55

AN1279
式 64:次に、コア製造者のデータシートから、適正なエアギャップを選択します。選択した EPCOS 社製 ETD39N87 コアの適正エアギャップは、式 65 のように求まります。
式 65:
この値の前後の標準エアギャップは 0.7 mm と 1 mmです。本デザインには計算値に近い1 mmのエアギャップを選択しました。この場合、巻き線を変更する必要はありません。 0.7 mm のエアギャップを選択した場合、巻き数を修正する必要があります。
バッテリの選択
バッテリの選択は、DC 電圧とオフライン UPS システムの要求バックアップ時間によって決まります。オフライン UPS リファレンス デザインでは、入力 DC 電圧を 36 V とし、35AH バッテリを使って 1 時間のバックアップが可能な設計としています。
電圧、電流、温度の検出回路
バッテリ充電器は、バッテリ電圧に関係なく、要求された充電電流をバッテリへ供給する電流源として機能します。電流の計測と制御には、抵抗とハイサイド電流シャントモニタ (Texas Instruments 社製 INA168) を使いました。電流制御用に、TOP250Y のデューティサイクルを制御するディスクリート アナログ PI コントローラを構成しました。加えて、計測した電流を差動増幅器段を介して dsPIC DSC に入力します。バッテリが接続されていない場合に出力電圧を制限するために、電流フィードバック ループに対して並列に電圧フィードバック ループを使います。加えて、プリント基板には、バッテリ温度監視用温度センサを接続するためのヘッダを配置しています。これにより、バッテリ管理ソフトウェアはバッテリの状態を検知できます。
プリント基板のレイアウトに関する注意点
高電圧信号を扱うため注意が必要です。また、スイッチング部品のストレスを軽減するために、一次側クランプ部品をトランスと TOP250Y のできるだけ近くに配置する必要があります。電源、制御、計測部品をグランドプレーンにカップリングしないように注意する事も必要です。
熱的設計
トップスイッチと整流器ダイオードはヒートシンクに取り付ける必要があります。バッテリ充電器の効率を70% と仮定すると、50 W 近くの電力損失が発生します。この損失はクランプ損失、トランス損失、一次側スイッチ (TOP250Y) 損失、整流器損失を含みます。従って、30 W 近くの損失をヒートシンクで放熱する必要があると予測できます。TOP250Y と整流器ダイオードは、熱伝導性電気絶縁材を使ってヒートシンクに取り付ける必要があります。
式 66:
2 203.3LLA nH
N= =
2
1
1
0.95k
LAs mmk
⎛ ⎞= =⎜ ⎟⎝ ⎠
2( ) ( )
1
282 2 260 2 45 2 1.3 240.452BR rect in bat F IGBTD
NV V V V VN
= ⋅ ⋅ + − ⋅ = ⋅ ⋅ + − ⋅ =
DS01279A_JP - p. 56 © 2012 Microchip Technology Inc.

AN1279
補助電源の設計
設計仕様
補助電源は、バッテリリンクから全ての内蔵電子回路へ電源を供給します。設計仕様は下記の通りです。
• 入力電圧 : 30 ~ 45 V• 出力 : 150 mA @ 3.3 V、 300 mA @ 5 V、 500 mA @
12 V
部品の選択
幅広い入力電圧レンジに対応するとともに電力損失を低減するために、バッテリ電圧からの 12 V の生成には降圧型コンバータを採用しました。3.3 V と 5 V の生成には、単純で低コストなリニア レギュレータを使います。全ての電圧レギュレータを直列に接続します。そのため 12 V 降圧型コンバータは 1 A の電流を供給する必要があります。降圧型コンバータには、スイッチング周波数を f = 500 kHz に設定した NationalSemiconductor 社製の LM5575 を採用しました。関連部品は LM5575 のデータシートに従って選択しました。プリント基板レイアウトに適したパッケージを選択するために、リニア電圧レギュレータの電力損失を計算する必要があります。5 V レギュレータの 大電力損失は P5V = (VIN - VOUT) * IOUT = 3.15 mW、3.3 V レギュレータの電力損失は P5V = (VIN - VOUT) * IOUT =255 mW と計算されます。5 V レギュレータには基板搭載用ヒートシンクを使う (KE7805ER) TO-263 パッケージを選択し、3.3 V レギュレータには (TC1262)SOT223 パッケージを選択しました。デジタルおよびアナログ電源電圧を分離するために、アナログ回路にチップインダクタとコンデンサを追加しました。
補助電源は、DC リンク電圧が供給された時またはボタンが押された時に起動します。
プリント基板のレイアウトに関する注意点
降圧型コンバータでは、非常に高周波数の電流が流れるため、出力トレースの設計に注意が必要です。インダクタ、ショットキー ダイオード、低 ESR 出力コンデンサは、IC に可能な限り近付けて配置する必要があります。降圧型コンバータで発生するノイズをブロックするために、入力コンデンサも IC の近くに配置する必要があります。
リニア レギュレータには、デバイスの温度を低く保つために、適切なプリント基板面積および銅箔面積を確保する必要があります。
まとめ
マイクロチップ社の dsPIC DSC は、電力変換アプリケーションに必要な全ての電源周辺モジュールを提供します。dsPIC DSC が提供する非常に柔軟なインテリジェント電源周辺モジュール (IPP)、ADC、コンパレータ、PWM モジュールは、高性能 UPS システムのハードウェア構成を単純化し、部品点数を削減します。内蔵 DSP エンジンと IPP は、制御ループ回路の 適化を助け、整流器負荷と3:1の波高因子という条件であっても、低歪みの正弦波出力 (THD は 3% 未満 ) の生成を可能にします。
MAC 等の 適化された命令セットにより、全ての補助タスク、フォルト保護、状態監視、外部との通信を実行するための十分な処理時間を確保できます。dsPIC33F を使うと、全ての先進機能を備えた電力変換回路を目標価格内で設計できます。
参考資料
•「MCP14E3/MCP14E4/MCPE5 イネーブル機能を備えた 4.0A デュアル高速パワー MOSFET ドライバ 」(DS22062)、マイクロチップ社
•「TC1262 500mA 固定出力 CMOS LDO」(DS21372)、マイクロチップ社
•“Power Electronics Converter, Applications andDesign” by N.Mohan, T.M.Undeland, andW.P.Robbins
•“Control Topology Options for Single-Phase UPSInverter” by M.J Ryan, W.E.Brumsickle, andR.D.Lorenz, IEEE transaction on industryapplication, Vol. 33, No. 2, March/April 1997.
•“A Current Mode Control Technique withInstantaneous Inductor Current Feedback for UPSInverter” by H.Wu, D.Lin, D. Zhang, K. Yao,J.Zhang, IEEE transaction, 1999.
•“A High Performance Sine Wave Inverter Controllerwith Capacitor Current Feedback and Back-EMFcoupling” by M.J Ryan and R.D.Lorenz, IEEEtransaction, 1995.
© 2012 Microchip Technology Inc. DS01279A_JP - p. 57

AN1279
NOTE:DS01279A_JP - p. 58 © 2012 Microchip Technology Inc.

AN1279
補遺 A: ソースコード
本アプリケーション ノートに関連する全てのソフトウェアは、1 つの WinZip ファイルに収められています。このファイルは下記のマイクロチップ社ウェブサイトからダウンロードできます :
www.microchip.com
ソフトウェア ライセンス使用許諾
Microchip Technology Incorporated ( 以下「弊社」) が供給するソフトウェアは、弊社製品との組み合わせでのみ使用われる事を目的として弊社のお客様に提供されます。
ソフトウェアの所有権は弊社および / またはソフトウェアのサプライヤに帰属し、適用著作権法のもとに保護されています。無断複写、複製、転載は禁じられています。上記の制約に違反してソフトウェアを使った場合、使用者はライセンス使用許諾の侵害に対して民事責任を問われ、適用法のもとに罰せられます。
本ソフトウェアは「無条件受け取り」を条件として提供されます。本ソフトウェアの商品性および特定目的に対する適合性の黙示
保証を含む ( ただし必ずしもこれらに限定されない ) 明示、暗示、法的な保証は一切いたしません。弊社は、いかなる場合も、特
殊、偶発的、必然的にかかわらず、いかなる理由があろうとも、一切の賠償責任を負いません。
© 2012 Microchip Technology Inc. DS01279A_JP - p. 59

AN1279
補遺 B: 制御システムの設計
オフライン UPS リファレンス デザインは、プッシュプル コンバータとフルブリッジ インバータの完全デジタル制御を実装します。ハードウェアに基づいて補償器を設計し、ソフトウェアで使う 適な係数を生成するために、MATLAB® を使いました。
MATLAB SIMULINK シミュレーション ファイルは、各種サブシステムのモデルを格納します。メイン図を簡略化するために、一部のサブシステムはネストされたブロックとして表示されます。Simulink® は、時間領域シミュレーション用に数学ブロックを提供します。
各ファイルには一般的に下記の 2 つのモデルが含まれます。
• アナログ実装
• デジタル実装
各 SIM ファイルのアナログ実装は、一般的に下記のセクションを含みます。
• 参照ブロック
• フィードバック システム ブロック
• 電源システムブロック
• 制御システムブロック
• 変調反転ブロック
• 変調ブロック
• 負荷システム ブロック
• 特殊ブロック
Simulink ブロックは、実装するコンバータ トポロジと制御方式 ( 電流モード、電圧モード ) によって異なります。後続のセクションでは、モデル内で使う各ブロックについて説明します。
参照ブロック
このシステムは、制御システムへの入力を提供します。一般的に、DC-DC コンバータには DC 定数のみを提供し、UPS タイプのモデルには正弦波ジェネレータを提供します。制御システムは参照波形に追従する必要があります。このブロックは、実際のモデル内と同様にラベルを付けても付けなくてもかまいません。
フィードバック システム ブロック
一般的にシステムでは各種信号を計測します。これには、制御動作を実行するための電圧と電流が含まれます。
デジタル実装では、ADC による量子化と、一定周波数で信号をサンプリングする際のゼロ次ホールドを考慮するために、追加のブロックが必要となる場合があります。
電源システムブロック
これは実際の物理的システムです。このシステムは、エネルギ状態を表現し、制御対象となる出力を実際に与えます。一般的にこのブロックは L-C 回路で構成されます。L および C のシステム実装は、積分器と飽和
に基づきます。一般的に入力は変調ブロックにより与えられる電圧です ( デューティサイクルを実際の励起電圧へ変換 )。トポロジによって電源システムブロックは異なります。コンデンサ ESR やインダクタ DCR等の寄生成分は、このシステムに含まれます。加えて、システムへの負荷はこのブロックで扱います。
制御システムブロック
このブロックは、電源セクション ブロックを駆動するデューティ比を生成します。このブロックは、フィードバック ブロックからのフィードバック信号を入力とし、デューティサイクル比を表す 0 ~ 1 の値を出力します。
このブロックは、制御方式(電圧モードまたは電流モード ) に基づいて、各種のカスケードされた PID ループで構成できます。デジタル実装では、積分器と微分器を等価なデジタル要素に置き換えます。
変調反転ブロック
このブロックは、PID ループの出力を電圧および電流量からデューティ比量 (0 ~ 1) に変換するため、制御システム ブロックの一部となる場合があります。トポロジによって実装方法は異なります。一般的に、このブロックは電圧量 ( 例 : 降圧型コンバータの入力電圧と昇圧型コンバータの出力電圧 ) による除算を含みます。これは、デューティ比から電圧への変換において物理システムが実行する変調の逆の動作です。
一般的にこれらのモデルでは、除数となる電圧量はほとんど変化しません。ソフトウェアにこれらのルーチンが実装されない場合がありますが、実際のシステムでは量は一定であると仮定され、ゲインは適正にプリスケールされます。
変調ブロック
このブロックは、スイッチング システムの平均モデルを表現します。このブロックは、物理システムに適用されるデューティを電圧量に変換します。このブロックの入力は、電圧量に変換されるデューティサイクル比 / パラメータ (0 ~ 1) です。このブロックは、通常、システム入力電圧とデューティサイクルを入力とし、出力電圧を生成します。
負荷システム ブロック
このブロックは、各種形態の負荷電流を生成するために使います。例えば、DC オフセットによるステップ負荷を生成できます。これはステップ状に負荷を与える場合に便利です。UPS 型システムの場合、試験条件の選択に応じて正弦波負荷の位相 ( 誘導性、抵抗性等)、振幅、周波数を変更できます。
特殊ブロック
インダクタの飽和やデッドタイム等の副次的効果をシステムに対してモデル化します。これらの効果は、UPS のようなシステムで重要となります。これらは、飽和およびデッドタイム ブロックにより示されます。
DS01279A_JP - p. 60 © 2012 Microchip Technology Inc.

AN1279
MATLAB .m ファイル MATLAB モデル (.mdl) で使う係数の生成には、.mファイルを使います。このファイルは、ソフトウェア内で使うスケーリングされた値も生成します。値は小数フォーマットで生成されます。ソフトウェアでは、これらの値を Q15(x) として表現する必要があります (「x」は小数値 )。
一般的に下記のパラメータを使います。
• 入力電圧 • L ( 等価インダクタ値 ) • C ( 等価コンデンサ値 )• ESR ( コンデンサ ESR)• LSR ( トレース、スイッチ、ケーブル等の抵抗をひとつにまとめた直列抵抗 )
使うトポロジに基づいて、これらのパラメータを実際の値から変更できます。例えば、3 個のコンバータを並列で使う場合、シミュレーションは 1 個のコンバータだけに関して実行します(3個のコンデンサではなく1 個のコンデンサの値でモデル化、インダクタ値は変更せず )。
特にトランスが含まれる場合、入力電圧は変化する可能性があります。一般的に、全ての量は一次側または二次側のどちらか都合の良い方を基準とします。どち
らを基準とした場合も、入力電圧は変化します。実装方式によっては、入力電圧を一定と仮定してゲインの一部とひとまとめにできます。
ボード線図は、.m ファイルによって生成されるグラフです。標準的な線図は下記の通りです。
• ループゲイン線図 : (A x β) – 位相およびゲインマージンを特定するために使用
• 閉ループ線図 : (A x β) / (1 + A x β) または Vo / Vo* –システムの閉ループ応答と帯域幅を特定するために使用
• 外乱除去線図 : Io(s) / Vo(s) – システム剛性と負荷がかかった時に予期される電圧リップルの振幅を周波数の関数として特定するために使用
プッシュプル補償器
プッシュプル補償器には、電圧モード制御を使ってPID 制御アルゴリズムを実装しています。これは、出力電圧を計測して参照設定点と比較する事を意味します。その偏差を PID 補償器に通します。PID 制御アルゴリズムは、現在の誤差、以前の誤差、制御履歴に基づいて出力値を決定します。PID の出力は、PWMデューティサイクルのオンタイムを決定します。図 B-1 に、プッシュプル コンバータの制御方式を示します。
図 B-1: プッシュプル制御方式
X PIDVREF
+PWM
S&H
1001010111
ADCVoltage Feedback
VOUT
1:16
+
+VIN
–
VoltageError
ControlOutput
DutyCycle
© 2012 Microchip Technology Inc. DS01279A_JP - p. 61

AN1279
図 B-2 に、MATLAB Simulink のブロック図を示します。各ブロックの詳細については、MATLAB (.mdl)ファイルを参照してください。図 B-2: MATLAB デジタル実装 ( プッシュプル )
以下のボード線図は、MATLAB (.m) ファイルから生成したものです。各線図を使ってシステムの挙動を説明します。外乱除去線図は、I(s) / VO(s) として定義されます。
図 B-3 は、単位電圧のサージを発生させるために必要な負荷電流の振幅を周波数の関数として示しています。この特性値が高いほど、電源出力は強固に安定します。 小値は -4 dB であり、これは、1 A の負荷によって出力で 1.5 V のディップが発生する事を意味します。
図 B-3: 外乱除去線図 ( プッシュプル )
390VO*1
VIN1
DigitalControl System
Inverter Load Generator1
ADC
L_C Circuit1Buck Modulation1
Scope1
Expected InputCurrent1
Product3
VO
VIN D D
VIN1
VIN.DVO*
Out1 In1
VO ILOAD
540
L_C Voltage
VO1
ILiLoad
x
DS01279A_JP - p. 62 © 2012 Microchip Technology Inc.

AN1279
図 B-4 に示すループゲイン電圧線図を使って位相とゲインのマージンを調べます。この線図からは、位相マージン (ゲイン曲線が 0 dBに交差する周波数における位相角と 180° の差 ) は 90° である事がわかります。システムが条件的に不安定になる事を防ぐには、位相が 180° に交差する周波数でゲインが 0 dB を下まわる事が必要です。
青の曲線はアナログ実装、緑の曲線はデジタル実装を示しています。一般的に、パラメータ変動を許容するために、40° 以上の位相マージンを確保する事を推奨します。
ゲインマージンは、位相曲線が 180° に達する周波数におけるゲイン曲線と 0 dB の差です。これに従い、緑の曲線のゲインマージンは -20 dB となります。
図 B-4: ループゲイン電圧線図 ( プッシュプル )
© 2012 Microchip Technology Inc. DS01279A_JP - p. 63

AN1279
図 B-5 に閉ループボード線図を示します。一般的に、ゲインが -3 dB に交差する周波数、または位相が -45°に交差する周波数を帯域幅と呼びます。本システムの電圧ループの帯域幅は約 1250Hz (8000 rad/s) であり、これはボード線図とよく一致しています。図 B-5: 閉ループ ( プッシュプル )
フルブリッジ インバータ補償器
インバータには、2 つの制御アルゴリズム (PI と P) を使って電流モード制御を実装しています。
電流モード制御では、電流だけでなく電圧も計測します。インバータ出力は、正弦波ルックアップ テーブルを使って入力参照電圧を変化させる事により生成します。電圧誤差は電圧誤差補償器 (PI) に入力され、電流
参照値が出力されます。計測した電流値を電流参照値から減算して求めた誤差は、電流誤差補償器 (P) に入力されます。この補償器の出力を使って PWM 出力を制御します。電流モード制御は、出力の過渡応答性と安定性により優れます。しかし、電圧モード制御が1 つのアルゴリズムしか使わないのに対し、電流モード制御は 2 つの制御アルゴリズムを使うため一般的に実装は複雑になります。
図 B-6: フルブリッジ インバータ制御方式
X PI X PPWM
Sinusoidal ReferenceCurrent
Reference
S&H
S&H
1001010111
ADC
1011010011
Output Filter
AC Out
Voltage Feedback
+ - + -
VoltageError
CurrentError
ControlOutput
DutyCycle
CurrentFeedback
DS01279A_JP - p. 64 © 2012 Microchip Technology Inc.

AN1279
図 B-7 に、インバータ用の MATLAB Simulink ブロック図を示します。各ブロックの詳細については、MATLAB (.mdl) ファイルを参照してください。図 B-7: MATLAB デジタル実装 ( インバータ )
プッシュプル補償器の説明で既に述べたように、外乱除去線図は I(s) / VO(s) として定義されます。
インバータの場合、 小値は -30 dB となり、これは負荷電流振幅が 1A @ 1000 Hz (6280 rad/s) の時に出力電圧が 31 V の正弦波変動を示すという事を意味します。
図 B-8: 外乱除去線図 ( インバータ )
Out1
Sine WaveVO*1
Zero-orderHold2
Sine Wave(input variation)
++
390
++
++
Full-BridgeModulation Model1
L_C Circuit1
D.VIN
iLoad
VO
IL
Dtop
VIN
ILZX
VIN(2.D-1)
In1
In2Out2
Out1
DigitalControl System1
Dtop
VO
VIN
IL
VO*
ILoad
Scope2
© 2012 Microchip Technology Inc. DS01279A_JP - p. 65

AN1279
図 B-9 に、インバータのループゲイン ボード線図を示します。この線図からは、位相マージン ( ゲイン曲線が 0 dB に交差する周波数における位相角と 180° の差 ) は 47° である事がわかります。ゲインマージンは、位相曲線が 180° に達する周波数におけるゲイン曲線と 0 dB の差です。これに従い、緑の曲線のゲインマージンは -10 dB となります。
図 B-10 に、インバータの閉ループボード線図を示します。一般的に、ゲイン曲線が -3 dB に交差する周波数、または位相が -45° に交差する周波数を帯域幅と呼びます。本システムの電圧ループの帯域幅は 1250Hz(8000 rad/s) であり、これはボード線図とよく一致しています。
図 B-9: ループゲイン電圧線図 ( インバータ )
図 B-10: 閉ループ ( インバータ )
DS01279A_JP - p. 66 © 2012 Microchip Technology Inc.

AN1279
スケーリング
MATLAB から計算したゲインは、実際の物理単位 (V、A 等 ) に基づきます。dsPIC DSC は固定小数点プロセッサを備えます。このプロセッサ内の値と対応する物理量の間の関係は線形です。
MATLAB が生成するゲイン値は物理単位を持つため( 物理量を表すため )、これらの値を直接プロセッサに適用する事はできません。従って、計算の一貫性を保つために、これらのゲインをスケーリングする必要があります。後続のセクションでは、適切なスケーリングを行うための一般的考え方について説明します。
加算または減算される値は、互いに同じスケールを持つ必要があるというのがスケーリングの基本的考え方です。
スケーリングはブロック図で示される制御システムの構造には影響しません。スケーリングはソフトウェア内での各種物理量の表現にのみ影響します。
スケーリング フィードバック PID ゲインを正しくスケーリングするには、フィードバック ゲインの計算を理解する事が不可欠です。フィードバックは各種フォーマットで表現できますが、固定小数点フォーマット (Q15) による表現が非常に便利です。
このフォーマットを使うと、ある回路のコードを全く異なる定格を持つ別の回路へ容易に移植できます。この場合、ヘッダファイルで定義されている係数を変更するだけでほとんど済みます。
Q15 フォーマットでは、符号付き演算にプロセッサ内の 16 ビット全てを使えるため、分解能を 大にできます。他のフォーマットも使用可能ですが、処理の分解能が低下します。Q15 により、dsPIC DSC の小数乗算 MAC 演算を効率的に使えます。
フィードバック信号 ( 通常は電圧または電流 ) は、通常 10 ビット ADC から供給されます。フィードバック回路内の分圧器 / 増幅器に基づいて実際の電圧と電流がスケーリングされます。
通常、フィードバック 10 ビット値 (0 -1023) に 32 を乗じて +/-32767 のレンジにスケーリングします。このフォーマットは Q15 フォーマット : Q15(m) とも呼ばれます (-1 < m < 1、(int) (m * 32767) として定義 )。
これらのフォーマットでは、15 ビットの分解能が有限であるために、2^15 = 32768 に対し +/- 32767 しか使えないため、誤差が生じます。しかし、ほとんどのシステムでは、このような誤差は制御精度に重大な影響を及ぼしません。
このフォーマットでは、+32767 が +3.3 V、0 が 0 V に対応します。
フィードバック回路と 5 ビットの左シフト (x32) により、効果的に物理量を取り込み、これをより大きなベース量で除算します。この小数値はソフトウェア内でQ15 フォーマットとして表現されます。目標はより大きなベース量を見つける事です。
例として、100 V を計測する場合を想定します。100 Vの時にアナログピンに1.65 Vを与えるために分圧器を使います。読み取った値は Q15 フォーマットで 16383または Q15(0.5) となり、これは Q15(100 / 200) と等価です。従って、200 がベース電圧となります。
ベース値 ( 正規化に使う分母の値 ) は VN と表記します。言い換えれば、VN は、3.3 V ( アナログ ADC ピンでのフルレンジ電圧 ) を生成する電圧に相当します。
以上により、電圧はソフトウェア内で小数 (V / VN) としてスケーリングされます。
同様に、ADC フィードバックから読み取られる他の物理量も Q15 フォーマットで表現されます。
ゲインのスケーリング
シミュレーションでは、制御ゲインを実際の物理単位に基づいて計算します。例えば、電流モード制御の場合、電圧ループの出力は参照電流 ( 単位は A) です。従って、ゲインの単位は A/V または 1/Ωです : V ゲイン IREF
電流ループをソフトウェアに実装するには、Q15(I/IN)のような適切なフォーマットでIREFの値を得る必要があります。
理論的には、まず Q15 フォーマットの電圧値 V/VN にVN を乗算し、さらにゲイン (G) を乗算し、得られたIREF 値を IN で除算して適切なフォーマットの電流値を求めます。VN と IN は定数であるため、ゲイン G はG * VN / IN としてスケーリングされます。ソフトウェア内でこの値を電圧量に対して使う事により、電流量を算出できます。
入力量は小数フォーマットである事が必要です ( これはコードで対応する必要があります )。そうすれば出力電流量は自動的に正しい小数量となります。これがそもそものスケーリングの目的です。同様の事が全ての制御ブロックにあてはまります。
ソフトウェアで処理する入力と出力の物理単位と各ブロックのスケールを考慮する事により、適切にスケーリングされた値を得る事ができます。
サンプリング時間
離散時間領域で微分項と積分項を計算する場合、TS( サンプリング時間 ) が影響します。通常サンプリング時間は一定であるため、ゲインと一緒にまとめる事ができます。例えば、GS を物理単位を持つ積分ゲインとした場合、スケーリングした値は GS * TS * VN / INとなります。
© 2012 Microchip Technology Inc. DS01279A_JP - p. 67

AN1279
プリスケーラ
ゲインとの乗算を容易にするために、ほとんどの物理量は Q15 フォーマットで表現されるため、ゲインも小数フォーマットで表現する必要があります。ゲインの値 (G * VN/IN) が -1 ~ +1 の範囲であれば、容易に小数フォーマットで表現できます。
乗算は、MAC 等の小数乗算関数を使うか、builtin_mul 関数と適切なシフト値を使って実行できます。例えば、z = (__builtin_mulss(x,y) >> 15) の結果として z=Q15(fx,fy) が得られ、この場合 x、y、zは全て Q15 フォーマットです (fx と fy は x と y によって表現される小数 )。多くの場合、ゲイン項の絶対値は 1 より大きくなります。16 ビット固定小数点に制限されるため、プリスケーラを使ってゲイン項を +/- レンジに収める事ができます。例えば、使う必要のある値が 2.5 である場合、この値を 4 で除算 ( プリスケール ) する事により、±1レンジ内に収めます。
制御ブロック内の P 項にプリスケーラを使う場合、制御ブロック内の I および D 項にも同じプリスケーラを使う必要があります ( これらの項は全て互いに加算されるため )。
値のオーバーフローを避けるために、PID 出力と I 出力は、別々に ±32767 で飽和させる必要があります。PID 出力の飽和限界は、プリスケーラを考慮して±32767 の 1/4 に設定する必要があります。従って、飽和限界を ±8192 に設定します。
終的に飽和した後、出力を 4 でポストスケールして適切なスケールに戻す必要があります。
変調とデューティの生成
飽和後の制御システムの出力は 0~ 32767のレンジに収まります。トポロジに基づき、これは 0 ~ 1 のデューティ比 / 変調インデックスとして解釈できます。これを PWM 周期に乗算する事により、デューティサイクル値へ変換できます。これはトポロジによって異なりますが、スケーリングの考え方は同じです。
再び、次の式を使えます : Duty = ( __builtin_mulss(m, PERIOD) >> 15)、PERIOD は 100% デューティに対応
VIN による除算
MATLAB モデル内のコントローラの出力は、一般的に電圧量です。これをデューティ / 変調量に変換する必要があります。このために、制御出力を入力電圧 VINで除算する必要があります。除算を避けるために、VINを一定と仮定して 1/VIN を一定の乗数として使い、これを前のブロックのゲインと一緒にまとめる事ができます。
DS01279A_JP - p. 68 © 2012 Microchip Technology Inc.

AN1279
補遺 C: 電気的仕様
本補遺には、UPS の電気的仕様の概要と、初期試験結果からのオシロスコープ波形を記載しています。
表 C-1: オフライン UPS リファレンス デザインの電気的仕様
パラメータ 内容 Min Typ Max 単位 注釈
VIN 入力電圧 210 220 242 V
fIN 入力周波数 47 50 53 Hz
VOUT 出力電圧 220 V
fOUT 出力周波数 49 50 51 Hz
VBATTERY バッテリ入力電圧 34 36 45 V
POUT 連続出力電力 — — 1000 VA
OLP 過負荷保護 >100 — 135 % 1350 VA (2 sec)
THD 出力電圧 THD — — 3 % 全負荷 ( 抵抗 )
η バッテリ充電器モード システム効率
— 84 — %
インバータモード システム効率 — — 84 % >50% 負荷 tTRANSFER 主電源からインバータへの
切り換え時間
— — 10 ms
インバータから主電源への切り換え時間
— 0 — ms
ICHARGE バッテリ充電電流 — 2 2.5 A
I_BATTERY バッテリ入力電流 (Note 1) — — 40 A @ 100% 負荷
T 動作温度 — 25 —
CF 波高因子 — — 3:1 —
PF 力率 ( 誘導性負荷 ) .65 — — — .8 PF でのみ試験
力率 ( 整流器負荷 ) .65 — — —
Note 1: UPS の動作時間は、出力負荷電流とバッテリの放電率によって異なります。詳細な放電時間については、バッテリのデータシートを参照してください。
© 2012 Microchip Technology Inc. DS01279A_JP - p. 69

AN1279
図 C-1: 負荷に対する効率の関係
図 C-2: 出力電圧波形 - 無負荷
220V UPS Efficiency Chart
60
65
70
75
80
85
90
10 25 50 60 70 80 90 100
% Load
Perc
enta
ge (%
)
DS01279A_JP - p. 70 © 2012 Microchip Technology Inc.

AN1279
図 C-3: 出力電圧と出力電流 - 全負荷
図 C-4: 出力電圧と出力電流 - 500 VA 無効負荷
© 2012 Microchip Technology Inc. DS01279A_JP - p. 71

AN1279
図 C-5: 主電源からインバータへの切り換え - 400 W 負荷
図 C-6: インバータから主電源への切り換え - 400 W 負荷
DS01279A_JP - p. 72 © 2012 Microchip Technology Inc.

AN1279
図 C-7: 動的負荷応答 – 400 W 負荷停止
図 C-8: 動的負荷応答 – 400 W 負荷ステップ
© 2012 Microchip Technology Inc. DS01279A_JP - p. 73

AN1279
補遺 D: 回路図と基板レイアウト
図 D-1: オフライン UPS リファレンス デザインの基板レイアウト ( 上面 )
DS01279A_JP - p. 74 © 2012 Microchip Technology Inc.

AN1279
図 D-2: オフライン UPS リファレンス デザインの回路図 (1/8)
BYV
26E
D26
D25
STTH
8R06
D
6k8
4W
R97
0.22
uF 6
30V
C82
4.7n
F 10
00V
C83
C84
R98
Uba
t
100n
F 10
0VC88
C1
L2 X 3
S 4
F 5
D7
TOP
250Y
N (T
O22
0-7)
IC4
Q14
BC81
7
EFB
47uF
25V
C89
ETD
39 F
lyba
ck tr
ansf
orme
r N1:
N2
= 52
:28
Lp=7
00uH
T2
100u
F 10
0VC
85 100V
12k
R11
0
6.8e
R10
7
4k7
R11
4
PGN
D
0.33
e 5W
R96
PG
ND
PGN
D
PGN
D
Ibatm-
Ibatm+
Q12
BC81
7
180e
R10
5
3k3
R10
1
12V
PG
ND 10
0nF
25V
C91
12V
1k5
R11
5
24k
R11
1
0.68
uF 1
00V
C86
Udc
+3
-4
1
5 2
U6
INA1
68
12V
GN
D
2k2
R11
2
1uF
C14
7
GN
D
Iref
6.8k
1%
R10
3
1k5 1%
R10
6 GN
D
GN
D
GN
D
Uch
567
B8 4
U7B
LM35
8
2 31
A8 4
U7A
LM35
8
3k3
R10
4
TP13
TP14
W2
PGN
D
390k
R99
1206
390k
R10
012
06
390k
R10
212
06
390k
R10
812
06 390k
R10
9
1206
D27
BAR
43C
100n
F 25
VC
144 GN
D
47nF
C93
2k2
R20
2
GN
D
100n
FC
143
D49
Zene
r 47V
1uF
C92
10k
R11
3
GN
D
P4
Cha
rger
+
P2
Cha
rger
-
Imax
=2.5
AVm
ax=4
8V
DN
P
DN
PD
NP
1SM
B594
1BT3
G
© 2012 Microchip Technology Inc. DS01279A_JP - p. 75

AN1279
図 D-3: オフライン UPS リファレンス デザインの回路図 (2/8)
PW
M2L
11
PW
M2H
10
PW
M3L
9
PW
M3H
8
VD
DC
OR
E7
Vss
6
RP
195
RP
224
RP
213
RP
202
PG
C1
1
RP644
RP543
RP1542
RP841
VDD40
Vss39
RP2438
RP2337
AN936
PWM4L35
PWM4H34
OS
CO
33
OS
CI
32
AN8
31
Vss
30
V DD
29
AN
1028
AN
1127
AN5
26
AN4
25
AN3
24
AN2
23
AN1 22
AN0 21
RP28 20
RP27 19
MCLR 18
AVDD 17
AVSS 16
RP29 15
RP16 14
PWM1L 13
PWM1H 12
U15
dsP
IC33
FJ16
GS5
04
S4
S3
S6
S5
I
ACo
FLT_
CLR
/SYS_FLT
FAULT/SD
S2
S1
IPUdc
m
T
PS
EPP
TX
RX
SC
LK
SD
O
SD
I
SS
12
34
56
P3 ICSP
dsV
pp
dsIC
SPC
dsIC
SPD
3V3
GN
D
Do
not c
onne
ct w
hen
UPS
is c
onne
cted
to A
C L
ine!
No
galv
anic
isol
atio
n!
dsV
pp
10k
R11
8Iref
Ub
Ib
Tb
Q15
100 Ω
R11
6
GN
D
12V
1 2
P_FA
N
FAN
1 2
20M
Hz
Y1
1M D
NP
R11
712pF
C95
GN
D
12pF
C96
GN
D
dsICSPD
dsICSPC
3V3
100n
F
C94
GN
D
100n
F
C14
0 GN
D
100n
F
C97
GN
D
3V3
3V3A
100n
F
C99
AG
ND
3V3
AC
i
A1
A2
EFB
4.7u
H 1
.5A
L10
1uF
25V
C22
e10
D29
ES 1
B10
uF 2
5V
C59
DN
PR
26
D30
DN
PR
15D
NP
R12
7 D33
DN
PR
201
D34
GN
D
10uF
6V
Tan
tC
139
1uFC
141
1uF
C98
1uFC
25
100p
FC
142
GN
D
S2 DN
P
DN
PR
206
3V3
10e
R20
7
AGN
DG
ND
0eBR4
10k
AR
1
DN
PD
NP
DN
P
IRLL
2705
DS01279A_JP - p. 76 © 2012 Microchip Technology Inc.

AN1279
図 D-4: オフライン UPS リファレンス デザインの回路図 (3/8)
MC
LR/V
PP
1
RA
0/A
N0
2
RA
1/A
N1
3
RA
2/A
N2/
V RE
F-4
RA
3/A
N3/
V RE
F+5
RA
4/T0
CK
I6
RA
5/A
N4/
SS/L
VD
IN7
VS
S8
OSC
1/C
LKI
9O
SC
2/C
LKO
/RA
610
RC
0/T1
OS
O/T
1CK
I11
RC
1/T1
OS
I/CC
P2
12
RC
2/C
CP
113
RC
3/S
CK
/SC
L14
RC
4/S
DI/S
DA
15
RC
5/S
DO
16
RC
6/TX
/CK
17
RC
7/R
X/D
T18
VS
S19
VD
D20
RB0
/INT0
21
RB1
/INT1
22
RB2
/INT2
23
RB
3/C
CP
224
RB4
25
RB
5/P
GM
26
RB6
/PG
C27
RB7
/PG
D28
U8
PIC
18F2
420-
E/S
O
GN
D
GN
D
SC
LK
SD
O
SD
I
SS
5V
100n
FC
104
GN
D
12
Y2
7.37
28M
Hz
1MR13
1
33pF
C10
3
GN
D
33pF
C10
2
GN
D
12
34
56
P6 ICS
P
Vpp
ICSP
CIC
SPD
5V
GN
D
VPP10
kR
130
5V
ICSP
CIC
SPD
Do
not c
onne
ct w
hen
UP
S is
con
nect
ed to
AC
Lin
e!N
o ga
lvan
ic is
olat
ion!
E1
DB
0D
B3D
B5D
B7
BTN
LED
2LE
D1
DB
6D
B4
DB1E2A0
5V
100n
FC
100
10k
R12
022
0eR
119
4k7
R12
1
4k7
R12
3
10k
R12
2
2.2n
FC
101
5V GN
D
E2E1A0D
B7D
B6D
B0D
B1
DB
2
DB2
DB3
DB4
DB5
LED
1LE
D2
BTN
5V
4k7
R13
4
D31
0R
R12
9
0R
R13
2
DN
PR
126
DN
PR
125
5V
0R
R13
3
DN
PR
135
GN
D
0R
R12
8
DN
PR
124
12
34
56
78
910
1112
1314
1516
1718
1920
P5
LCD
DN
PR
204
DN
PR
203
10k
R13
6
5V
1 2
P_BZ
© 2012 Microchip Technology Inc. DS01279A_JP - p. 77

AN1279
図 D-5: オフライン UPS リファレンス デザインの回路図 (4/8)
STG
P14
NC
60K
D
Q7
10k
R55
3.3n
F 25
V
C33
STG
P14
NC
60K
D
Q9
10k
R63
3.3n
F 25
V
C37
PGN
D
STG
P14
NC
60K
D
Q8
10k
R56
3.3n
F 25
VC
34
STG
P14
NC
60K
DQ
10
10k
R64
3.3n
F 25
V
C38
L2
ref 12
out 11
gnd 10
Vc 9
11
33
55
77
22
44
66
88
HX
S 2
0-N
P/S
P2
U4
4.7u
F 30
5VC36
47e
R53
12e
R54
1kR
57
47e
R61
12e
R62
1kR
65
D16
EG
P10
J
D17
EG
P10
J
D13
EG
P10
J
D14
EG
P10
J
47e
R45
12e
R48
1kR
51
47e
R58
12e
R59
1kR
60
DSH
2
HO
P2
HO
N2
SD
DH
2
DSH
1
HO
P1
HO
N1
SDD
H1
DS
L2
LOP
2
LON
2
SDD
L2
DS
L1
LOP
1
LON
1
SDD
L1
100n
FC
39
100n
F
C40
5VA
AGN
DAG
ND
Im
K2
Phoe
nix
Con
tact
DP
DT
MR
...21
-21
GN
D
F2
A2
ACo1m
ACo2m
ACi1m
ACi2m
DS
H Vb
N.C
.H
OP
HO
N Vs
SS
DH
N.C
.N
.C.
N.C
.N
.C.
N.C
.D
SL
Vcc
LOP
LON
CO
MS
SDL
Vss
/FA
ULT
/SD
/SY
S_F
LTFL
T_C
LRLI
NH
IN
U3
IR22
14
DS
H Vb
N.C
.H
OP
HO
N Vs
SS
DH
N.C
.N
.C.
N.C
.N
.C.
N.C
.D
SL
Vcc
LOP
LON
CO
MS
SDL
Vss
/FA
ULT
/SD
/SY
S_F
LTFL
T_C
LRLI
NH
IN
U5
IR22
14
D19
EG
P10
J1eR
67
1206
1uF
25V
C41
D18
EG
P10
J1eR
66
1206
1uF
25V
C35
DSH
2
HO
P2H
ON
2
SDD
H2
DS
L2
LOP
2LO
N2
PGN
D
SDD
L2
12V
D20
1N41
48
Q11
BC
817
GN
D
3k3
R70
10k
R71
100e
4W
R40
UD
CPh
oeni
x C
onta
ct D
PD
T M
R...
21-
21K1
A1
12V
D15
1N41
48Q
6B
C81
7
GN
D
3k3
R50
10k
R52
DSH
1
HO
P1H
ON
1
SDD
H1
DS
L1
LOP
1LO
N1
SDD
L1
S6
S5
FLT_
CLR
/SY
S_F
LTFA
ULT
/SD
S4
S3
FLT_
CLR
/SY
S_FL
TFA
ULT
/SD
12V
12V
S6
S5
FLT_
CLR
/SY
S_F
LT
FAU
LT/S
D
PGN
D
GN
D
GN
D
4k7
R43
4k7
R41
GN
D
GN
D
S3
S4
4k7
R44
4k7
R42
GN
D
GN
D
4k7
R46
GN
D4k
7R
494k
7R
47
3V3
3V3
L1L2
L2L1
J5 AC
InN
J6 AC
InL
J3 ACO
utN
J4 AC
Out
L
33e
R68
1206
10uF
25V
C43
12e
R72
470p
FC
42
100e
R69
S1
SW
-DP
ST
Filte
r
LN
LN
PE
1uF
25V
C14
5
1uF
25V
C14
6
PGN
D
PGN
D
4n7C13
2
AGN
D
132PA
Cin
Plu
g A
C M
ale
GN
D
Not
on
PC
B
Not on PCB
Not
on
PC
BN
ot o
n P
CB
250u
H E
TD54
DS01279A_JP - p. 78 © 2012 Microchip Technology Inc.

AN1279
図 D-6: オフライン UPS リファレンス デザインの回路図 (5/8)
82k
1%
R14
5
1206
2k2
1%
R13
8
2k2
1%
R15
8
4.7n
FC10
6
4.7n
FC
111
1k69
1%
R14
7
3k3
1%
R15
6
AGN
D
4.7n
FC
112
AGN
D
AC
i1m
AC
i
100n
FC10
85V
A
AGN
D
AGN
D2V
5A
82k
1%
R14
4
1206
82k
1%
R14
3
1206
82k
1%
R14
2
1206
82k
1%
R15
4
1206
82k
1%
R15
3
1206
82k
1%
R15
2
1206
82k
1%
R15
1
1206
82k
1%
R16
7
1206
2k2
1%
R16
2
2k2
1%
R17
8
4.7n
FC11
4
4.7n
FC
118
1k69
1%
R16
9
3k3
1%
R17
6
AGN
D
4.7n
FC
119
AGN
D
AC
o
2V5A
82k
1%
R16
6
1206
82k
1%
R16
5
1206
82k
1%
R16
4
1206
82k
1%
R17
4
1206
82k
1%
R17
3
1206
82k
1%
R17
2
1206
82k
1%
R17
1
1206 2k
2 1%
R18
2
2k2
1%
R18
6
4.7n
FC
123
AGN
D100n
FC12
15V
A
AGN
D
5VA
2V5A
AGN
D
2k 1
%
R13
7
2k 1
%
R15
7
4.7n
FC10
5
4.7n
FC
109
1k69
1%
R14
6
3k3
1%
R15
5
AGN
D
4.7n
FC
110
AGN
D
Udc
m
100n
FC10
75V
A
AGN
D
AGN
D
33k
1%
R16
3
1206
2k2
1%
R16
0
2k2
1%
R17
7
4.7n
FC11
3
4.7n
FC
116
1k69
1%
R16
8
3k3
1%
R17
5
AGN
D
4.7n
F
C11
7
AGN
D
Ub
AGN
D
33k
1%
R17
0
1206
56k
1%
R14
8
1206
56k
1%
R14
9
1206
56k
1%
R15
0
1206
56k
1%
R13
9
1206
56k
1%
R14
0
1206
56k
1%
R14
1
1206
AGN
D
AGN
D
AC
i2m
AC
o1m
AC
o2m
Udc
m+
Udc
m-
Ubm
-
Ubm
+
3k3
1%
R19
3
1k69
1%
R19
6
3k3
1%
R19
8
AGN
D
100n
FC
129
AGN
D
T
AGN
D
Tm+
2k2
1%
R18
0
2k2
1%
R19
1
1k69
1%
R18
7
3k3
1%
R18
9
AGN
D
4.7n
F
C12
6
AGN
D
AGN
D
10k
R19
0
220p
F D
NP
C12
7
IPm
IP
AGN
D100n
FC12
25V
A
AGN
D
Tr
3k3
1%
R19
7
100n
FC
130
2k2
1%
R19
2
AGN
D
33k
1%
R18
1
1206
33k
1%
R18
4
1206
100k
1%
R18
84.
7nF
C12
4
AGN
D
100k
1%
R17
9
4.7n
FC12
0
Ibat
m-
Ibat
m+
Ib1k
69 1
%
R18
3
3k3
1%
R18
5
AGN
D
4.7n
FC
125
AGN
D
I1k
69 1
%
R15
9
3k3
1%
R16
1
AGN
D
4.7n
FC
115
AG
ND
Im
1 2 3
P7 Bat T
emp
5VA
AGN
D10
0k
R19
510
0nF
C12
8
AGN
DAG
ND
Tb
2 31
A
8 4
U10
AM
CP
6022
2 31
A
8 4
U11
AM
CP
6022
2 31
A
8 4
U12
AM
CP
6022
2 31
A
8 4
U9A
MC
P60
22
567
B
8 4
U10
BM
CP
6022
567
B
8 4
U9B
MC
P60
22
567
B
8 4
U11
BM
CP
6022
567
B
8 4
U12
BM
CP
6022
1kR19
4
3V3
AGN
D
D36
BA
R43
S
3V3
AGN
D
D35
BAR
43S
3V3
AGN
D
D38
BA
R43
S
3V3
AGN
D
D39
BAR
43S
3V3
AGN
D
D41
BA
R43
S
3V3
AGN
D
D40
BAR
43S
3V3
AGN
D
D37
BAR
43S
3V3
AGN
D
D12
BA
R43
S
3V3
AGN
D
D42
BA
R43
S
© 2012 Microchip Technology Inc. DS01279A_JP - p. 79

AN1279
図 D-7: オフライン UPS リファレンス デザインの回路図 (6/8)
0.33
uF 1
00V
C44
68k
R78
12K
R85
24k
R88
1k2
R83
3k3
R86
1nF
25V
C56
10e
R81
1206
220n
F 2
5V
C47
470n
F 2
5VC
46
1uF
25V
C53
330p
FC
49D
22E
S3B
1uF
25V
C66
2.2u
F 1
0VC
75
Uba
t
12V
5V
68uF
25V
C64
Low
ESR
VIN
3
/SD
2
SY
NC
4
RA
MP
8
SS
10
RT
7
CO
MP
5
FB6
AGN
D9
PGN
D12
OU
T11
IS13
PR
E15
SW
14
VC
C1
BS
T16
IC1
LM55
75
47uH
2.6
A
L3
0.33
uF 1
00V
C45
1uF
25V
C48
1uF
25V
C54
2.2n
F 25
VC
57
680p
F 2
5VC
55
100k
R77
GN
D
GN
DG
ND
GN
DG
ND
GN
D
GN
D
GN
D
PAG
ND
1
PAG
ND
1
PAG
ND
1
BLM
21PG
221
L8 0805
2.2u
F 1
0VC
72 AGN
D5VA
68uF
25V
C73
Low
ES
R
68uF
25V
C68
Low
ES
R
BLM
21P
G22
1
L6 0805
150k
R73
1206
150k
R76
1206
150k
R79
1206
150k
R80
1206
150k
R84
1206 4k
7R
87
1206
GN
D
Udc
68uF
25V
C50
Low
ES
R68
uF 2
5V
C51
Low
ES
R68
uF 2
5V
C52
Low
ES
R
GN
DPA
GN
D1
EGN
DPG
ND
C81
C78
EGN
D
UD
C
C79
EGN
DEG
ND
GN
D
C80
UB
AT
10kR82
12V
5VA
5V1
23
45
67
8
P1
pow
er
3V3
3V3A
AGN
DG
ND
12V
47k
R75
W1
SM
D07
5F/6
0F1
0eBR
2Q13
BC
856
10k
R74 S3
SW
-PB
GN
D
12
P10
TES
T
D21
BAV
99
3V3
2.2u
F 1
0V
C60
BLM
21PG
221
L5 0805
2.2u
F 1
0VC
61
AGN
D
3V3A
VIN
VOU
T
GN
D
LM29
04S
-5.0
VR
1N
eeds
hea
tsin
k on
PC
B
68uF
25V
C62
Low
ES
R
D45
4k7
R18
D46
2k2
R22
0
D47
1kR22
1
GN
D
GN
D
GN
D
BZX
85C
16
D44
GN
D
VIN
VOU
T
GN
D
TC12
62-3
.3
VR
2
GN
D
GN
D
100p
F 2k
V10
0pF
2kV
100p
F 2k
V10
0pF
2kV
2-po
sitio
n he
ader
exte
rnal
ON
/OFF
sw
itch
(on
encl
osur
e)
DS01279A_JP - p. 80 © 2012 Microchip Technology Inc.

AN1279
図 D-8: オフライン UPS リファレンス デザインの回路図 (7/8)
1uF
100V
C13
e5
T1
ETD
54
12eR22
1206
FDP
2532
Q1C
4.7eR19C
FDP
2532
Q1B
4.7eR19B
12eR19
1206
C12
PGN
D
PGN
DPG
ND
S1
S2
BA
S21
D7
3 21
LM39
3
U1A
5 67
U1Bref1
ref2
68pF
DN
PC
30
GN
D10k
DN
PR
39
3V3
100p
F D
NP
C28
GN
D
2k2
R37
PS
t× KTY
81/1
22
RT1
DN
P
Tr
Cyc
le-b
y-cy
cle
Cur
rent
-Lim
it to
dsP
IC
Vve
rcur
rent
shu
tdow
n to
driv
er
curr
ent s
ense
200μ
H
L1
.1uF
630
V
C2
e15
470u
F 40
0V H
T 10
5×C
C5
PGN
D
C2D
0512
0D1
Udc
m+
Udc
m-
Udc
2.4k
3W
R7
150p
F 1k
VC6
1k / 33e(CT)
R38
1206
GN
D
1kR36
DN
PC29
GN
D
IPm
Cur
rent
sen
se to
dsP
IC
GN
D
5V10
0nF
C27
GN
D
Uba
t
J1 BAT+
J2 BAT-
C7
.1uF
630
V
C3
e15
10R
3W
R16
100V
C23 0.
01uF
1000
uF 1
00V
HT
105×
C
C11
Ubm
-
Ubm
+
PGN
D
ENB_A1 IN_A2 GND3 IN_B4 OUT_B 5
VDD 6
OUT_A 7
ENB_B 8
U2
MC
P14
E4
PGN
DG
ND
12V
1uF
25V
C15
68uF
25V
C16
Low
ESR
EPP
4k7
R3
4k7
R6
DN
PR
2
GN
D3k3
R14
BZX
84C
3V6
D6
Q5
BC
807
12V
10k
R28
Tm+
Tm-
10k
DN
P
R25
DN
P
R29
DN
P
R30
GN
D
DN
PC
26
Tr
10k
DN
P
R8
DN
P
R12
DN
P
R13
GN
D
DN
PC
17
ref1
ref2
TP5
TP7
TP6
TP2
P9A
DC
+
P9B
DC
-
DN
P
R5
BAS
21
D43
BA
S21
D11
C2D
0512
0D2
C2D
0512
0D3
C2D
0512
0D28
2.4k
3W
R1
150p
F 1k
VC1
2.4k
3W
R4
150p
F 1k
VC4
2.4k
3W
R9
150p
F 1k
VC8
FDP
2532
Q1A
10k
R20
4.7eR19A
3.3n
F 25
V
C20
D4
BAS
21
1kR10
12V
D8
100V
FDP
2532
Q3C
4.7eR22C
FDP
2532
Q2B
4.7eR22B
PGN
D
BA
S21
D10
curr
ent s
ense
10R
3W
R17
100V
C24
0.01
uF
FDP2
532
Q2A
10k
R21
4.7eR22A 3.3n
F 25
VC
21
D5
BA
S21
1kR11
12V
D9
100V
1uF
100V
C14
e5T3
DN
P
D48
BAV
99D
32B
AV99
33e(CT)
R38
a D
NP
1206
PGN
D
PGN
D
10k
R23
10k
R24
Q18
BC
817
Q19
BC
817
BAR
43S
D23
BA
R43
SD
24
1 2
P_C
T
0eBR
1
DN
P
DN
P
DN
P
DN
P
2x20
AS
low
Blo
w (o
n en
clos
ure)
DNP
DNP
Fext
1200
uF12
00uF
100V
100V
CT
1:10
00
(opt
iona
l)
© 2012 Microchip Technology Inc. DS01279A_JP - p. 81

AN1279
図 D-9: オフライン UPS リファレンス デザインの回路図 (8/8)
100n
FC
131
3V3
5VU
SB
GN
DU
SBG
ND
VB
US
1
D-
2
D+
3
GN
D4 US
B B
1-1
4701
56-
1
J7B
LM21
PG
221
L90805
1uF
25V
C13
7
5VU
SB
GN
DU
SB
TXRX
12
20M
HzY
3
1MR20
0
12pF
C13
5
GN
DU
SB
12pF
C13
3
GN
DU
SB
GN
DU
SB
1nF
C13
8
GN
DU
SB
100n
FC
134
GN
DU
SB
5VU
SB
10k
R19
9
5VU
SB
12
34
56
P8
ICS
P
UV
pp
UIC
SP
CU
ICS
PD
UV
ppU
ICSP
CU
ICSP
D
5VU
SB
GN
DU
SB
GN
D
100n
FC
136
GN
DU
SBV
cc1
1
Out
A2
In B
3
GN
D 1
4G
ND
25
Out
B6
In A
7V
cc2
8U
13
ISO
7221
EGN
D
MC
LR/V
PP/R
E31
RA0
/AN
02
RA1
/AN
13
RA2
/AN
2/VR
EF-
4
RA3
/AN
3/VR
EF+
5
RA4
/T0C
KI/R
CV
6
RA5
/AN
4/H
LVD
IN7
Vss
8
OSC
1/C
LKI
9
OSC
2/C
LKO
/RA6
10
RC
0/T1
OSO
/T1C
KI11
RC
1/T1
OSI
/UO
E12
RC
2/C
CP1
13
VUS
B14
RC
4/D
-/VM
15R
C5/
D+/
VP
16R
C6/
TX/C
K17
RC
7/R
X/C
K18
VSS
19V
DD
20R
B0/
AN12
/INT0
21R
B1/
AN10
/INT1
22R
B2/
AN
8/IN
T2/V
MO
23R
B3/
AN
9/V
PO
24R
B4/
AN
11/K
BI0
25R
B5/
KB
I1/P
GM
26R
B6/
KB
I2/P
GC
27R
B7/
KB
I3/P
GD
28
U14
PIC
18F2
450
DS01279A_JP - p. 82 © 2012 Microchip Technology Inc.

© 2012 Microchip Technology Inc. DS01279A_JP - p. 83
本書に記載されているデバイス アプリケーション等に関する
情報は、ユーザの便宜のためにのみ提供されているものであ
り、更新によって無効とされる事があります。お客様のアプ
リケーションが仕様を満たす事を保証する責任は、お客様に
あります。マイクロチップ社は、明示的、暗黙的、書面、口
頭、法定のいずれであるかを問わず、本書に記載されている
情報に関して、状態、品質、性能、品性、特定目的への適合
性をはじめとする、いかなる類の表明も保証も行いません。マ
イクロチップ社は、本書の情報およびその使用に起因する一
切の責任を否認します。マイクロチップ社の明示的な書面に
よる承認なしに、生命維持装置あるいは生命安全用途にマイ
クロチップ社の製品を使用する事は全て購入者のリスクと
し、また購入者はこれによって発生したあらゆる損害、クレー
ム、訴訟、費用に関して、マイクロチップ社は擁護され、免
責され、損害うけない事に同意するものとします。暗黙的あ
るいは明示的を問わず、マイクロチップ社が知的財産権を保
有しているライセンスは一切譲渡されません。
商標
マイクロチップ社の名称と Microchip ロゴ、dsPIC、KEELOQ、
KEELOQ ロゴ、MPLAB、PIC、PICmicro、PICSTART、rfPIC、
UNI/O は、米国およびその他の国におけるマイクロチップ・
テクノロジー社の登録商標です。
FilterLab、Hampshire、HI-TECH C、Linear Active Thermistor、MXDEV、MXLAB、SEEVAL、Embedded Control SolutionsCompany は、米国におけるマイクロチップ・テクノロジー
社の登録商標です。
Analog-for-the-Digital Age,Application Maestro、chipKIT、chipKIT logo、CodeGuard、dsPICDEM、dsPICDEM.net、dsPICworks、dsSPEAK、ECAN、ECONOMONITOR、
FanSense、HI-TIDE、In-Circuit Serial Programming、ICSP、Mindi、MiWi、MPASM、MPLAB Certifiedr ロゴ、MPLIB、MPLINK、mTouch、Omniscient Code Generation、PICC、
PICC-18、PICDEM、PICDEM.net、PICkit、PICtail、REAL ICE、rfLAB、Select Mode、Total Endurance、TSHARC、
UniWinDriver、WiperLock、ZENA は、米国およびその他の
国におけるマイクロチップ・テクノロジー社の登録商標です。
SQTP は、米国におけるマイクロチップ・テクノロジー社の
サービスマークです。
その他、本書に記載されている商標は各社に帰属します。
© 2011, Microchip Technology Incorporated, All RightsReserved.
ISBN: 978-1-61341-520-7
マイクロチップ社製デバイスのコード保護機能に関して次の点にご注意ください。
• マイクロチップ社製品は、該当するマイクロチップ社データシートに記載の仕様を満たしています。
• マイクロチップ社では、通常の条件ならびに仕様に従って使用した場合、マイクロチップ社製品のセキュリティ レベルは、現
在市場に流通している同種製品の中でも最も高度であると考えています。
• しかし、コード保護機能を解除するための不正かつ違法な方法が存在する事もまた事実です。弊社の理解ではこうした手法は、
マイクロチップ社データシートにある動作仕様書以外の方法でマイクロチップ社製品を使用する事になります。このような行
為は知的所有権の侵害に該当する可能性が非常に高いと言えます。
• マイクロチップ社は、コードの保全性に懸念を抱くお客様と連携し、対応策に取り組んでいきます。
• マイクロチップ社を含む全ての半導体メーカーで、自社のコードのセキュリティを完全に保証できる企業はありません。コー
ド保護機能とは、マイクロチップ社が製品を「解読不能」として保証するものではありません。
コード保護機能は常に進歩しています。マイクロチップ社では、常に製品のコード保護機能の改善に取り組んでいます。マイクロ
チップ社のコード保護機能の侵害は、デジタル ミレニアム著作権法に違反します。そのような行為によってソフトウェアまたはそ
の他の著作物に不正なアクセスを受けた場合は、デジタル ミレニアム著作権法の定めるところにより損害賠償訴訟を起こす権利が
あります。
マイクロチップ社では、ChandlerおよびTempe (アリゾナ州 )、Gresham( オレゴン州 ) の本部、設計部およびウェハー製造工場そしてカリフォルニア州とイドのデザインセンターが ISO/TS-16949:2009 認証を取得しています。マイクロチップ社の品質システム プロセスおよび手順は、PIC® MCU および dsPIC® DSC、KEELOQ® コード ホッピング デバイス、シリアル EEPROM、マイクロペリフェラル、不揮発性メモリ、アナログ製品に採用されています。さらに、開発システムの設計と製造に関するマイクロチップ社の品質システムは ISO 9001:2000 認証を取得しています。

DS01279A_JP - p. 84 © 2012 Microchip Technology Inc.
北米本社2355 West Chandler Blvd.Chandler, AZ 85224-6199Tel:480-792-7200 Fax:480-792-7277技術サポート : http://www.microchip.com/supportURL: www.microchip.com
アトランタDuluth, GA Tel:678-957-9614 Fax:678-957-1455
ボストンWestborough, MA Tel:774-760-0087 Fax:774-760-0088
シカゴItasca, IL Tel:630-285-0071 Fax:630-285-0075
クリーブランドIndependence, OH Tel:216-447-0464 Fax:216-447-0643
ダラスAddison, TX Tel:972-818-7423 Fax:972-818-2924
デトロイトFarmington Hills, MI Tel:248-538-2250Fax:248-538-2260
インディアナポリスNoblesville, IN Tel:317-773-8323Fax:317-773-5453
ロサンゼルスMission Viejo, CA Tel:949-462-9523 Fax:949-462-9608
サンタクララSanta Clara, CA Tel:408-961-6444Fax:408-961-6445
トロントMississauga, Ontario, CanadaTel:905-673-0699 Fax:905-673-6509
アジア / 太平洋アジア太平洋支社Suites 3707-14, 37th FloorTower 6, The GatewayHarbour City, KowloonHong KongTel:852-2401-1200Fax:852-2401-3431
オーストラリア - シドニーTel:61-2-9868-6733Fax:61-2-9868-6755
中国 - 北京Tel:86-10-8569-7000 Fax:86-10-8528-2104
中国 - 成都Tel:86-28-8665-5511Fax:86-28-8665-7889
中国 - 重慶Tel:86-23-8980-9588Fax:86-23-8980-9500
中国 - 杭州Tel:86-571-2819-3187 Fax:86-571-2819-3189
中国 - 香港 SARTel:852-2401-1200 Fax:852-2401-3431
中国 - 南京Tel:86-25-8473-2460Fax:86-25-8473-2470
中国 - 青島Tel:86-532-8502-7355Fax:86-532-8502-7205
中国 - 上海Tel:86-21-5407-5533 Fax:86-21-5407-5066
中国 - 瀋陽Tel:86-24-2334-2829Fax:86-24-2334-2393
中国 - 深圳Tel:86-755-8203-2660 Fax:86-755-8203-1760
中国 - 武漢Tel:86-27-5980-5300Fax:86-27-5980-5118
中国 - 西安Tel:86-29-8833-7252Fax:86-29-8833-7256
中国 - 厦門Tel:86-592-2388138 Fax:86-592-2388130
中国 - 珠海Tel:86-756-3210040 Fax:86-756-3210049
アジア / 太平洋
インド - バンガロールTel:91-80-3090-4444 Fax:91-80-3090-4123
インド - ニューデリーTel:91-11-4160-8631Fax:91-11-4160-8632
インド - プネTel:91-20-2566-1512Fax:91-20-2566-1513
日本 - 大阪Tel:81-66-152-7160 Fax:81-66-152-9310
日本 - 横浜Tel:81-45-471- 6166 Fax:81-45-471-6122
韓国 - 大邱Tel:82-53-744-4301Fax:82-53-744-4302
韓国 - ソウルTel:82-2-554-7200Fax:82-2-558-5932 または 82-2-558-5934
マレーシア - クアラルンプールTel:60-3-6201-9857Fax:60-3-6201-9859
マレーシア - ペナンTel:60-4-227-8870Fax:60-4-227-4068
フィリピン - マニラTel:63-2-634-9065Fax:63-2-634-9069
シンガポールTel:65-6334-8870Fax:65-6334-8850
台湾 - 新竹Tel:886-3-5778-366Fax:886-3-5770-955
台湾 - 高雄Tel:886-7-536-4818Fax:886-7-330-9305
台湾 - 台北Tel:886-2-2500-6610 Fax:886-2-2508-0102
タイ - バンコクTel:66-2-694-1351Fax:66-2-694-1350
ヨーロッパ
オーストリア - ヴェルスTel:43-7242-2244-39Fax:43-7242-2244-393
デンマーク - コペンハーゲンTel:45-4450-2828 Fax:45-4485-2829
フランス - パリTel:33-1-69-53-63-20 Fax:33-1-69-30-90-79
ドイツ - ミュンヘンTel:49-89-627-144-0 Fax:49-89-627-144-44
イタリア - ミラノ Tel:39-0331-742611 Fax:39-0331-466781
オランダ - ドリューネンTel:31-416-690399 Fax:31-416-690340
スペイン - マドリッドTel:34-91-708-08-90Fax:34-91-708-08-91
イギリス - ウォーキンガムTel:44-118-921-5869Fax:44-118-921-5820
各国の営業所とサービス
11/29/11

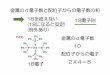






![Implementación en DSPIC de un algoritmo óptimo para … · librería Embedded Target for PIC/dsPIC, de Mat-lab [11]. Con el propósito de realizar ... dor que emula el encoder;](https://img.pdfslide.tips/doc/110x75/5bb9a44209d3f27c3d8c5acf/implementacion-en-dspic-de-un-algoritmo-optimo-para-libreria-embedded-target.jpg)


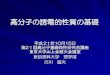
















![Readout No.42 09 アプリケーションでは,実際のバッテリーの出力である,電流,電圧,電力,充放電容量(SOC[6])および電池パックの温度や電池セル](https://img.pdfslide.tips/doc/110x75/5e2da72b74539009676af2ac/readout-no42-09-fffff-ioeeffffffioeeioeeoeioeeioeeeisoc6iefffef.jpg)
