Embed Size (px)
Citation preview

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
1
Skriftlig prøve, den 14. december 2010. Kursus navn: Billedanalyse, vision og computer grafik. Tilladte hjælpemidler: Alle hjælpemidler er tilladt. Varighed: 4 timer Vægtning: Alle opgaver vægtes ligeligt. NAVN : . . . . Lærerne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Underskrift : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Bord nr. : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ogave 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Svar
2 3 2 5 1 eller 3
3 5 5 2 1 3 2 4 3 2
Svarmulighederne for hvert spørgsmål er nummereret fra 1 til 6. For hvert spørgsmål skal nummeret på den valgte svarmulighed indføres i skemaet ovenfor. Indføres et forkert nummer i skemaet kan dette rettes ved at "sværte" det forkerte nummer over og anføre det rigtige nummer nedenunder. Er der tvivl om meningen med en rettelse, betragtes spørgsmålet som ubesvaret. KUN FORSIDEN SKAL AFLEVERES. Afleveres blankt eller forlades eksamen i utide, skal forsiden alligevel afleveres. Kladde, mellemregninger og bemærkninger tillægges ingen betydning, kun tallene indført ovenfor registreres. Det gives 5 points for et korrekt svar og -1 for et ukorrekt svar. Ubesvarede spørgsmål eller et 6 -tal (svarende til "ved ikke" ) giver 0 points. Det antal points, der kræves for, at et sæt anses for tilfredsstillende besvaret, afgøres endeligt ved censureringen af sættene. Husk at forsyne opgaveteksten med navn, underskrift og bord nummer.
Opgave
16 17 18 19 20 21 22 23 24 25
Svar
(1) udgår
1 4 5 5 2 5 1 4 4

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
2
OPGAVE 10.1 En 2D linje er i homogene koordinater givet ved l=[2 0 -10], og et 2D homogent punkt er givet ved q=[12 6 2]. Hvad er afstanden fra punktet til linjen?
1. 0
2. 1
3. 2
4. 3
5. 4
6. Ved ikke
DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
3
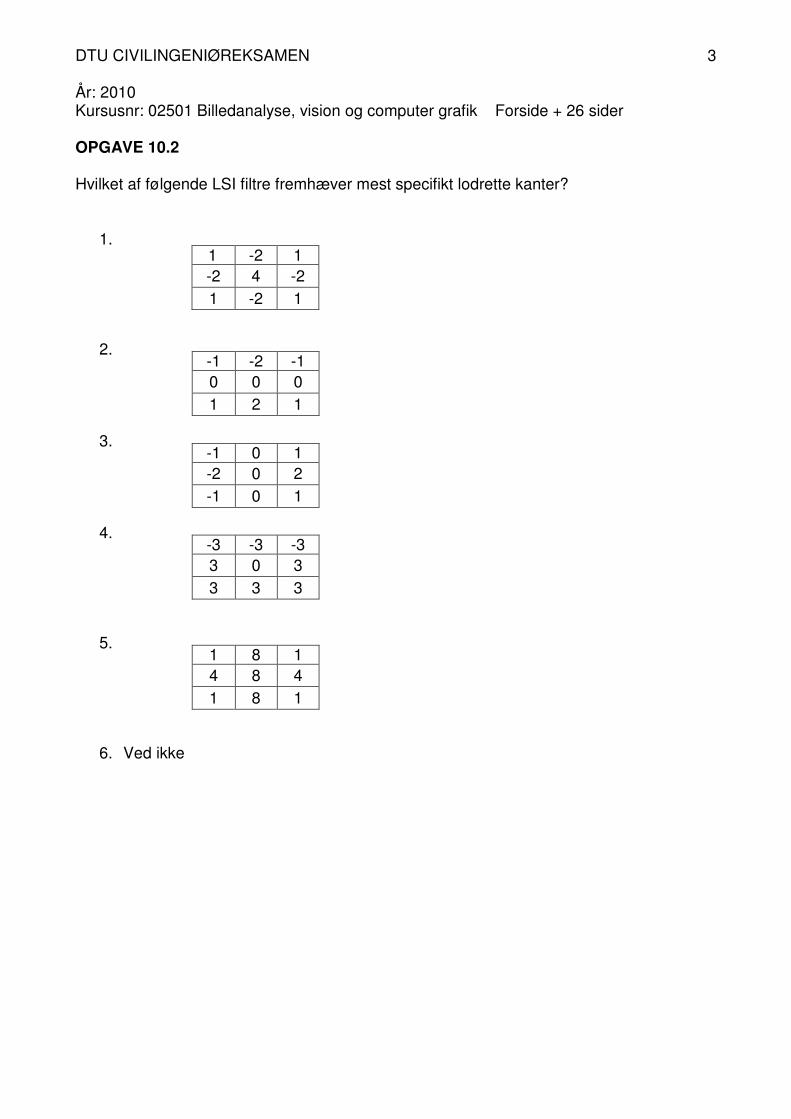
OPGAVE 10.2 Hvilket af følgende LSI filtre fremhæver mest specifikt lodrette kanter?
1.
2. 3. 4. 5. 6. Ved ikke
1 -2 1 -2 4 -2 1 -2 1
-1 -2 -1 0 0 0 1 2 1
-1 0 1 -2 0 2 -1 0 1
-3 -3 -3 3 0 3 3 3 3
1 8 1 4 8 4 1 8 1
DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
4
OPGAVE 10.3 Det følgende spørgsmål omhandler effektiv rendering i computergrafik.
a) Display lists er en måde at tegne indexed primitives. b) I immediate mode tegnes trekanter sendt til grafikkortet ikke umiddelbart. c) Display lists, vertex arrays i buffere på grafikkortet og instancing er alle tre
teknikker til effektiv rendering på grafikkort. d) Display lists er en måde at optage grafikkomandoer (så man ikke umiddelbart
tegner men gemmer kommandoen) til senere afspilning. e) Instancing giver mulighed for at tegne samme objekt med forskellige attributter
(såsom materialer, position, etc.). f) Triangle strips giver mulighed for at sende trekanter til grafikkortet med blot to og
ikke tre vertices per trekant. Hvilke af ovenstående udsagn om effektiv rendering er sande? 1. Alle udsagnene
2. c,d,e 3. c,d,e,f 4. a,b, 5. d,e,f 6. Ved ikke
DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
5
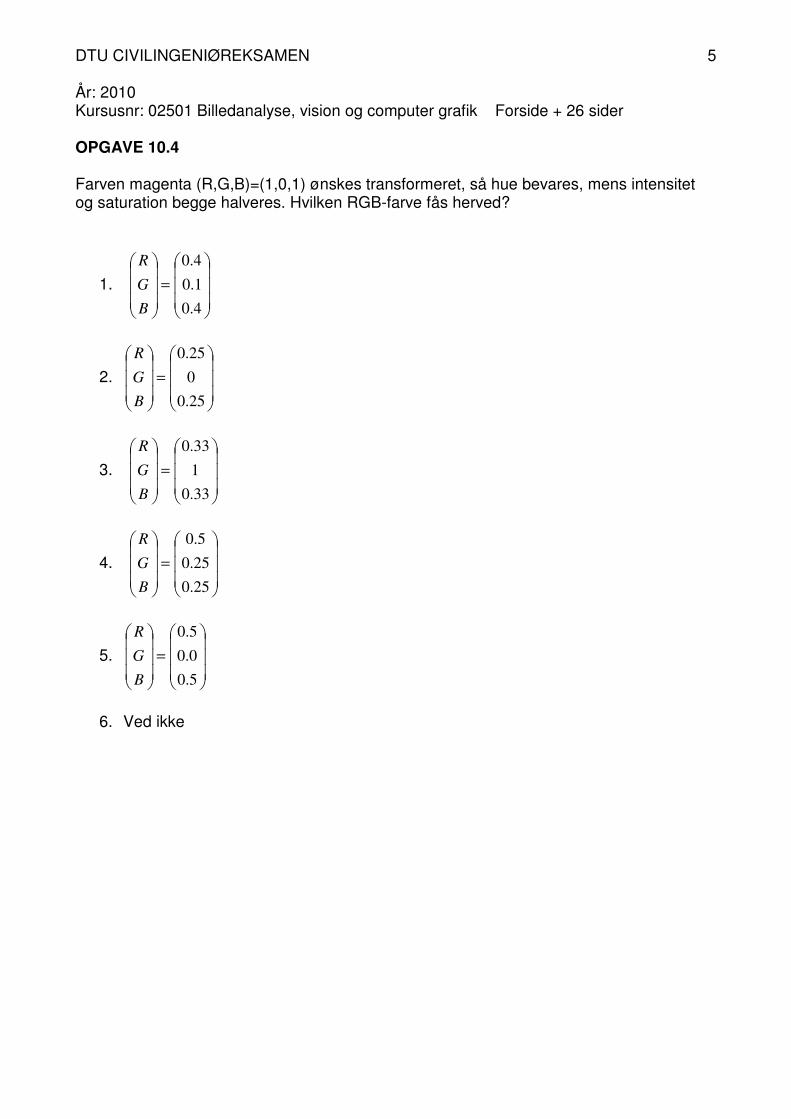
OPGAVE 10.4 Farven magenta (R,G,B)=(1,0,1) ønskes transformeret, så hue bevares, mens intensitet og saturation begge halveres. Hvilken RGB-farve fås herved?
1.
=
4.0
1.0
4.0
B
G
R
2.
=
25.0
0
25.0
B
G
R
3.
=
33.0
1
33.0
B
G
R
4.
=
25.0
25.0
5.0
B
G
R
5.
=
5.0
0.0
5.0
B
G
R
6. Ved ikke

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
6
OPGAVE 10.5 Hvilet af følgende udsagn er forkert?
1. Lys med bølgelængde 1460 nm er I det nærinfrarøde (NIR).
2. Når der vælges 4-konnektivitet for baggrund, antages der automatisk 8-konnektivitet for forgrund.
3. En Gauss pyramide kan dannes ved skridtvis højpasfiltrering og subsampling.
4. Fourier transformationen er lineær.
5. Hvis man placerer et spejl i en retning vinkelret på et kameras optiske akse under
en bright field belysning, da vil man i kamerabilledet se spejlbilledet af lyskilden.
6. Ved ikke

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
7
OPGAVE 10.6
1 2 2 2 3 3
1 1 1 2 3 3
2 3 3 3 3 2
3 4 4 5 5 4
4 5 5 6 6 6
7 8 9 8 7 6
Hvilken værdi fås i den markerede pixel efter filtrering af ovenstående billede med det nedenstående 5x5 LSI filter?
-2 -2 -2 -2 -2
-1 -1 -1 -1 -1 0 0 0 0 0
1 1 1 1 1 2 2 2 2 2
1. 40 2. 42
3. 44
4. 46
5. 50
6. Ved ikke

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
8
OPGAVE 10.7 Et Pinhole kamera, P=A[R t], er defineret ved (iflg. notationen i pensum):
• R er lig enheds matricen.
• t=
3
0
0
• Focal længden, f=1200. • Den optiske akse skærer billedplanet i (x,y)=(300,200) • Derudover oplyses det at pixels i kameraet er retvinklede og kvadratiske, dvs. at
α=1 og β=0. Hvortil projiceres 3D punktet Q=[0 0 4]?
1. 1200,3
2. 2100, 1400
3. 0,0
4. 1200,800
5. 300,200
6. Ved ikke

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
9
OPGAVE 10.8
2 2 1 1 2 3
3 3 2 3 4 4
5 4 3 2 3 4
5 3 2 1 2 3
5 5 4 2 3 2
4 3 4 3 2 1
I ovenstående billede ønskes ved bilineær resampling værdien i pixelposition (x,y) = (3.4 , 3.6). Værdien er
1. 1.7
2. 1.8
3. 1.85
4. 1.9
5. 2.0
6. Ved ikke
0
y
0 x

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
10
OPGAVE 10.9 Lad der være givet en trekant i 3D med hjørnerne p0 = [-1, 0, -1,1], p1 = [1, 0, -1,1], p2 = [0,1,-2,1] i homogene 3D koordinater. Vi har et punkt p = (p0+p1+p2)/3 og en projektionsmatrix M givet ved
Vi husker, at man projicerer et punkt ved at gange på projektionsmatricen og dernæst dividere med w koordinaten. Efter projektion er vi kun interesserede i x og y koordinaterne. Hvis vi projicerer både p og trekantens hjørner p0, p1 og p2 hvad er da de barycentriske koordinater for p projiceret i forhold til den projicerede trekant? 1. [0.25,0.5,0.25]
2. [0.25,0.25,0.5]
3. [0.25,0.25,0.25]
4. [0.34,0.35,0.31]
5. [-0.1,-0.1,-0.1]
6. Ved ikke

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
11
OPGAVE 10.10 I et klassifikationsproblem med 2 populationer måles en todimensional feature vektor. Fordelingerne er givet ved
1. N
53
32,
3
2
2. N
− 53
32,
1
4
Vink: den inverse matrix til
53
32 er
−
−
23
35.
Tabsfunktionen er symmetrisk og a priori sandsynlighederne er givet ved, at observationen
0
5.2 ligger lige på Bayes classifier skillelinjen mellem de to populationer.
Hvad er a priori sandsynligheden for population 1? 1. 0.95 2. 0.87 3. 0.62 4. 0.44 5. 0.33 6. Ved ikke

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
12
OPGAVE 10.11 Et pinhole kamera har en fokal længde på 1000 pixels og en chip størrelse på 640 gange 480 kvadratiske pixels. Hvad er field of view for dette kamera målt diagonalt fra hjørne til hjørne? Vinkelangivelsen er i grader, og afrundet til 2 decimaler.
1. 35.49
2. 0.76
3. 43.60
4. 26.99
5. 50
6. Ved ikke

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
13
OPGAVE 10.12 Til kodning af billedesekvenser fra den internationale rumstation ønskes en simpel kompression for mere effektiv transmission af billederne til jorden. Kompressionen skal være tabsfri, af hensyn til de efterfølgende beregninger på billederne. Der vælges en differentiel kodning (DPCM). Vi betragter nu DPCM kodning af et billede med 8 bits per pixel. For hver pixel prædikteres en værdi, f’(i,j), baseret på de forudgående værdier. Differencen efter prædiktion er givet ved d(i,j) = f(i,j) - f’(i,j). Lad d betegne d(i,j) for en given pixel i position i,j. For |d| > 2 kodes en escape karakter. Sandsynlighedsfordelingen varierer med den lokale aktivitet i billedet, der kan deles i et roligt område og et tekstur område. Sandsynlighederne i tekstur området er P(-2) = P(-1) = P(2) = P(escape) =1/8, P(0) = P(1) = 1/4. Sandsynlighederne i det rolige område er P(-2) = 1/32, P(-1) = 1/8, P(0) =1/2, P(1) = 1/4, P(2) = 1/16, og P(escape) = 1/32. Der skal vælges en optimal binær kode til kodning af d for hvert af de to områder. Der er tre koder at vælge imellem.
d Kode 1 Kode 2 Kode 3 -2 110 11110 110 -1 101 110 101 0 000 0 00 1 001 10 01 2 010 1110 100
escape 111 11111 111 For hvert af de to områder vælges den kode, der giver den mindste gennemsnitlige kode længde, samtidig med at koden giver entydig dekodning. Det optimale valg er: (Hint: De optimale koder er Huffman koder.) 1. Kode 1 i begge områder 2. Kode 2 i det rolige område og Kode 3 i tekstur området 3. Kode 1 i det rolige område og Kode 2 i tekstur området 4. Kode 3 i det rolige område og Kode 1 i tekstur området 5. Kode 3 i begge områder 6. Ved ikke

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
14
OPGAVE 10.13 Om to kameraer oplyses det, at den fundamentale matrix er givet ved
I forbindelse med billedtracking skal korrespondancen til 2D punktet q1=[127 540] i billede 1 findes i billede 2. Hvilke af følgende er mulige kandidater?
1. 540,127 2. 540,345
3. 540,-127
4. 127,439
5. -127,540
6. Ved ikke
DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
15
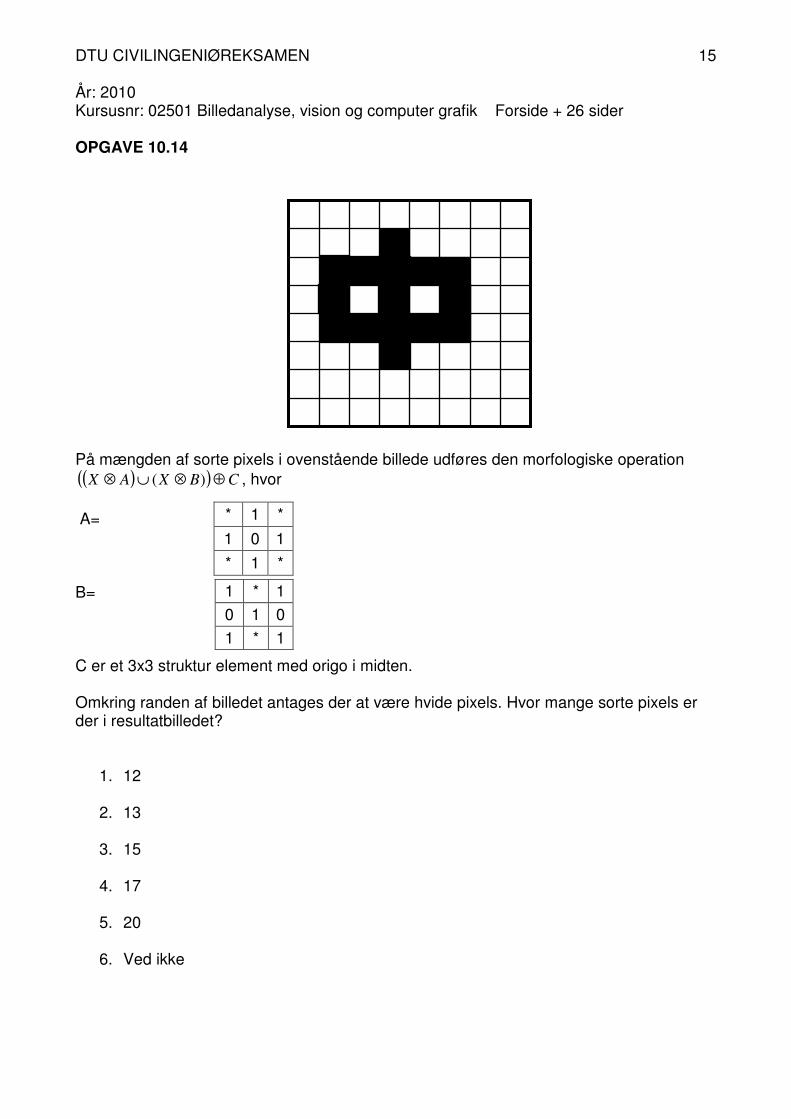
OPGAVE 10.14 På mængden af sorte pixels i ovenstående billede udføres den morfologiske operation ( )( ) CBXAX ⊕⊗∪⊗ )( , hvor
A= B= C er et 3x3 struktur element med origo i midten. Omkring randen af billedet antages der at være hvide pixels. Hvor mange sorte pixels er der i resultatbilledet?
1. 12 2. 13
3. 15
4. 17
5. 20
6. Ved ikke
* 1 *
1 0 1
* 1 *
1 * 1
0 1 0
1 * 1

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
16
OPGAVE 10.15
To kameraer, P1 og P2, kan beskrives ved følgende pinhole kamera model (Bemærk at den eneste forskel mellem matricerne er fortegnet på 3000):
Et 3D punkt, Q, er observeret i (400, 250) i billede 1 og i (400, 550) i billede 2. Hvad er koordinaterne af 3D punktet Q?
1. (0 0 10) 2. (2 0 20)
3. (2 0 10)
4. (0 23 0)
5. (0 1 6)
6. Ved ikke

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
17
OPGAVE 10.16
Et givet billede består af én kant. Den til billedet hørende Hough transformation ser ud som vist i figuren, og har maksimum i r=100 og θ=45 grader.
Hvad er linjen i billedet svarende til dette maksimum i Hough transformationen? Linjen er givet i homogene koordinater.
1. [sqrt(2) sqrt(2) -100] 2. [100 100 45]
3. [0.7854 45 -100 ]
4. [0.7854 0.7854 45]
5. [sqrt(2) sqrt(2) 45]
6. Ved ikke

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
18
OPGAVE 10.17 Herunder er vist et billede der er fremkommet som grafisk output fra TOGL. Bemærk at den lille kugle ligger i (0,0,0) i world koordinater og at world koordinatsystemets Y akse peger direkte op i billedet.
Herunder er gengivet tre programmer: Program 1: Perspective 50 1 1 100 LookAt 30 20 0 0 0 0 0 1 0 { Rotate 45 1 0 0 Translate 0 10 0 Scale 3 3 3 Box } Scale 0.3 0.3 0.3 Sphere
Program 2: Perspective 50 1 1 100 LookAt 30 20 0 0 0 0 0 1 0 { Translate 0 10 0 Rotate 45 1 0 0 Scale 3 3 3 Box } Scale 0.3 0.3 0.3 Sphere
(Opgaven fortsættes næste side)

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
19
Program 3: Perspective 50 1 1 100 LookAt 30 20 0 0 0 0 0 1 0 Translate 0 10 0 Rotate 45 1 0 0 Scale 3 3 3 Box Scale 0.3 0.3 0.3 Sphere Spørgsmålet er nu hvilket eller hvilke (om nogen) af programmerne, der har genereret billedet. 1. Program 1.
2. Program 2.
3. Program 3.
4. Ingen af programmerne.
5. De genererer alle samme billede.
6. Ved ikke
DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
20
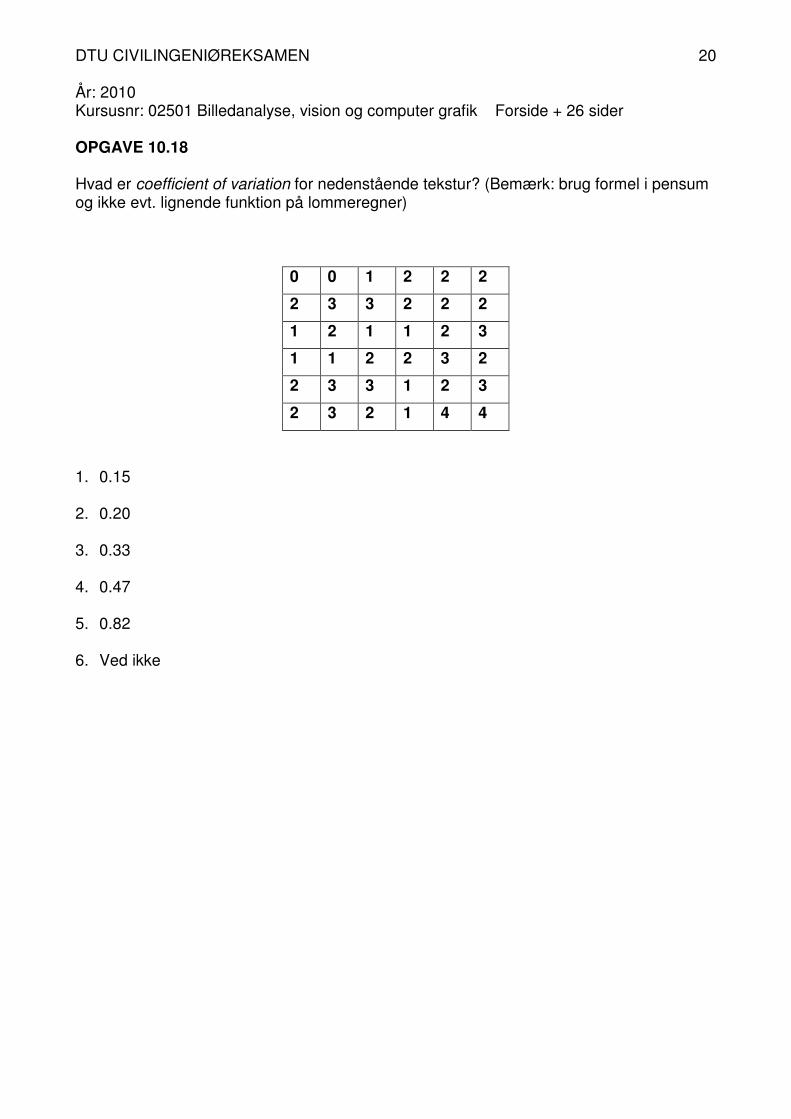
OPGAVE 10.18 Hvad er coefficient of variation for nedenstående tekstur? (Bemærk: brug formel i pensum og ikke evt. lignende funktion på lommeregner)
0 0 1 2 2 2
2 3 3 2 2 2
1 2 1 1 2 3
1 1 2 2 3 2
2 3 3 1 2 3
2 3 2 1 4 4
1. 0.15
2. 0.20
3. 0.33
4. 0.47
5. 0.82 6. Ved ikke

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
21
OPGAVE 10.19 Et pinhole kameras interne parametre kan beskrives ved
Og har følgende eksterne parametre
Det observere et 2D billede punkt, som vides at være genereret af et laser plan der kan beskrives via ligningen
Hvad er koordinaterne af det 3D punkt, der genererer dette 2D billede punkt, når det oplyses at 2D billedpunktets koordinater er givet ved (300,300) ?
1. (10,5,0) 2. (-7,3,10)
3. (1,1,1)
4. (10,-5,0)
5. (7, -3, 1)
6. Ved ikke
DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
22
OPGAVE 10.20 Der er placeret to kameraer på to målestationer placeret i henholdsvis (0,0,0) og (2,0,0). Hvis alt andet er lige, hvilket af følgende punkter kan du så måle mest nøjagtigt, vha. af disse kameraer? (Det antages at kameraerne stilles således at punkterne er i field of view.)
1. (60,10,0) 2. (5,0,0)
3. (1,20,0)
4. (10,5,0)
5. (1,2,0)
6. Ved ikke
DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
23
OPGAVE 10.21 Hvilet af følgende udsagn er forkert?
1. CCD og CMOS er de mest almindelige sensorteknologier til kameraer.
2. Morfologisk opening er homotopibevarende.
3. Ud fra spatial dispersion matrix kan man beregne retningen af et objekt f.eks. hvis man skal gribe det på et transportbånd.
4. I Fourier domænet er det hensigtsmæssigt at analysere periodiske strukturer.
5. Et line scan kamera er ofte velegnet til kontrol af roterende cylindriske emner.
6. Ved ikke

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
24
OPGAVE 10.22
Herunder er vist tre billeder af en kugle. De er alle genereret med TOGL, og der er et ambient, spekulært og diffust bidrag i alle tre billeder.
A. Det venstre billede har et mindre skarpt højlys sammelignet med det midterste fordi shininess er lavere.
B. Højlyset har en mærkelig form til højre, fordi der er brugt færre trekanter, og fordi man med per vertex belysning kun beregner højlyset i hjørnerne og interpolerer det til resten af trekanten.
C. Hvis der var brugt per pixel lighting i billedet til højre (d.v.s. hvor normalen interpoleres og farven beregnes per pixel i stedet for per vertex) ville man have undgået de artefacts som man ser i billedet.
D. Højlyset i billedet til venstre er større end i det midterste billede fordi AmbientColor er sat til større værdier.
Hvilke af ovenstående udsagn (om nogen) er sande 1. A
2. B, C 3. C 4. ingen 5. A,B og C 6. Ved ikke

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
25
OPGAVE 10.23 Hvad er den spatielle dispersionsmatrix for ovenstående sorte objekt?
1.
−
−
1214
1420
2.
−
−
85
512
3.
93
36
4.
123
312
5.
−
−
1010
1016
6. Ved ikke

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
26
OPGAVE 10.24
Et kamera har følgende data: CCD-chip Opløsning: 640 pixels horisontalt * 480 pixels vertikalt Pixelstørrelse: 3 µm * 3 µm Pixelplacering: 3.45 µm (center til center) Kameraet er monteret med en arbejdsafstand på 40 cm i forhold til et plant objekt, der skal afbildes, og linsen har en brændvidde (eng. focal length) på 25 mm. Hvad er pixelstørrelsen i billedplanet (altså på objektet)?
1. 2 mm
2. 0.750 mm
3. 0.125 mm
4. 0.048 mm
5. 0.003 mm
6. Ved ikke

DTU CIVILINGENIØREKSAMEN År: 2010 Kursusnr: 02501 Billedanalyse, vision og computer grafik Forside + 26 sider
27
OPGAVE 10.25 Hvilket af følgende udsagn er forkert?
1. SIFT features er invariante over for rotation. 2. Der bruges non maximum supression i forbindelse med Canny edge detectoren.
3. Et laplace filter kan tilnærmes vel af Difference of Gaussion (DOG) .
4. Billedgeometri har ingen anvendelse i feature tracking.
5. Correlation bruges ofte til billedregistrerig/matching.
6. Ved ikke





























