Dynamic Characteristics of Triaxial Active Control Magnetic
Bearing with Asymmetric Structure
Atsushi Nakajima, Katsuhiro Hirata, Noboru Niguchi, and Masayuki
KatoOsaka University
Bibliography[1] Gerhard Schweitzer, Eric H. Maslen, “Magnetic
Bearings -Theory, Design, and
Application to Rotating Machinery,” Springer, 2009.[2] Kouhei
Tsuchida, Masatsugu Takemoto, Satoshi Ogasawara, “A Novel Structure
of
a 3-axisActive Control Type Magnetic Bearing With a Cylindrical
Rotor”,International Conference on Electrical Machines and Systems,
2010
Proposed Magnetic BearingThe structure and operating principle
of proposed magnetic bearing areshown in Fig. 2 and Fig. 3.
Computed Result by 3-D FEM・Suspension force in each axis is
shown in Table I.・The current density of the coil is are 12
A/mm2.・The rotor is fixed in an initial position.・the suspension
force in the positive direction of Z-axis is significantly
higher than the other forces due to the asymmetric
structure.
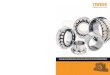
Active ControlThe controllability of the proposed 3-axis AMB
under position control in the following four conditions- Operation
from no load condition- X-axis disturbance control in steady state-
Z-axis disturbance control in steady state- X- and Z- axes
disturbances control in steady state⇨In all cases, control is
possible within allowable current density and
within allowable displacement..
Conclusion• We proposed a novel magnetic bearing with asymmetric
structure. The feature of the proposed structure is to have
non-magnetic material parts for control the magnetic path.
• Its basic characteristics were verified by 3-D FEA. Due to
asymmetric our magnetic bearing can generate high thrust force to
practical use.
• we verified the controllability of the proposed AMB by
conducting a control simulation using a PID control.
Table I
Excitation coilSuspension force
Direction of force Force [ N ]
Radial coil + x 179
Thrust coil (+z) + z 830
Thrust coil (−z) − z 131
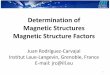
Structure
Air gap length : 0.55 mmz
130 mm
68.7 mm 24.8 mm 13.9 mm 11.5 mm
RotorShaft
Thrust stator & coil z1
Thrust stator & coil z1
Radial stator & coil
Thrust stator & coil z3
Non-magneticmaterial
49.1 mm
・Axially asymmetric.・Have a radial stator (8 coils), three
thrust stators and a rotor.・The rotor consists of a magnetic
material and 2 non-magnetic parts.・Maximum current density : 12
A/mm2
・Allowable displacement : X-axis 0.1mm, Z-axis 0.15mm
Fig. 2. Basic structure of proposed magnetic bearing.
: Magnetic flux
y1
y2
x1x2
fz
z1
z2
z3
xz
y
xy
z
Operating principle
・2 adjacent radial coils are connected in series.- the radial
coils consist of 4 circuits: (x1, x2) and (y1, y2)
・The thrust coils z1 and z2 are connected in series.・A negative
Z-axis thrust force is generated by the magnetic flux
due to the thrust coil z3.
Fig. 3. Operating principle.
0
50
100
150
200
250
300
350
400
450
500
-2.0E-05
-1.5E-05
-1.0E-05
-5.0E-06
0.0E+00
5.0E-06
1.0E-05
0 1 2 3 4
Exte
rnal
forc
e [
N]
dis
pla
cem
ent x [
mm
]
time [s]
x
External force
0
100
200
300
400
500
600
700
800
900
-5.0E-04
-3.0E-04
-1.0E-04
1.0E-04
3.0E-04
5.0E-04
7.0E-04
9.0E-04
0 1 2 3 4 Exte
rnal
forc
e [N
]
dis
pla
cem
ent z
[mm
]
time [s]
z
External force
Fig. 5. Controllability when external forces are applied in the
X and Z axes.
(a) X-axis displacement. (b) Z-axis displacement.
0
100
200
300
400
500
600
700
-0.05
0
0.05
0.1
0.15
0.2
0 0.2 0.4 0.6 0.8 1
Exte
rnal
forc
e [N
]
Dis
pla
cem
ent
z [m
m]
time [s]
disp. z
disp. x
force
Fig. 4. Simulation result of Z-axis position control.
Introduction
Shaft
Motor
Thrust magnetic
bearingRadial magnetic
bearing
・Need motor and 3 bearings(4 units)-increasing size of the
system-reduction in the critical speed
・Have a flat disk in thrust rotor-pore assemblability-reduction
of the speed limit
Fig. 1. Five-axis active control magnetic levitation system.
To solve these problem, triaxial active control magnetic
bearings without flat disk have been proposed.
However, supporting force of triaxial magnetic bearings are not
high enough.