Tento studijn materil vznikl za finann podpory Evropskho
socilnho fondu (ESF) a rozpotu esk republiky v rmci een projektu:
CZ.1.07/2.2.00/15.0463, MODERNIZACE VUKOVCH MATERIL A DIDAKTICKCH
METOD
VYSOK KOLA BSK TECHNICK UNIVERZITA OSTRAVA FAKULTA STROJN
DYNAMIKA
Dynamika bodu
Ing. Mgr. Roman Sikora, Ph.D.
Ostrava 2013
Ing. Mgr. Roman Sikora, Ph.D.
Vysok kola bsk Technick univerzita Ostrava
ISBN 978-80-248-3039-1
MODERNIZACE VUKOVCH MATERIL A DIDAKTICKCH METOD
CZ.1.07/2.2.00/15.0463
2
OBSAH
1 DYNAMIKA BODU
.........................................................................................................
3
1.1 Trocha historie
.........................................................................................................
4
1.2 Newtonovy zkony
...................................................................................................
5
1.2.1 een pohybu bodu pomoc zkona sly.
...............................................................
5
1.2.2 Obecn postup pi een loh, kter je pedveden na jednoduchm
pkladu. . 7
1.3 Dal vektorov pstupy.
........................................................................................
8
1.4 Energetick pstupy
...............................................................................................
9
1.4.1 Pklady potencilnch energi
...............................................................................
10
1.4.2 Vta o zmn kinetick energie
..............................................................................
11
1.4.3 Vta o zachovn mechanick energie
...................................................................
11
1.4.4 Pklad een pohybovou rovnic i energeticky
.................................................. 12
1.4.5 Energetick pstup
.................................................................................................
12
1.5 Pklady k procvien
............................................................................................
13
1.5.1 Pklad 1
...................................................................................................................
13
1.5.2 Pklad 2
...................................................................................................................
13
1.5.3 Pklad 3
...................................................................................................................
13
1.5.4 Pklad 4
...................................................................................................................
13
1.5.5 Pklad 5
...................................................................................................................
14
1.5.6 Pklad 6
...................................................................................................................
14
1.5.7 Pklad 7
...................................................................................................................
14
1.5.8 Pklad 8
...................................................................................................................
15
1.5.9 Pklad 9
...................................................................................................................
15
1.5.10 Pklad 10
.................................................................................................................
16
1.5.11 Pklad 11
.................................................................................................................
16
2 POUIT LITERATURA
.............................................................................................
17
MODERNIZACE VUKOVCH MATERIL A DIDAKTICKCH METOD
CZ.1.07/2.2.00/15.0463
3 Dynamika bodu
1 DYNAMIKA BODU
STRUN OBSAH PEDNKY:
Dynamika bodu. Trocha historie. Newtonovy zkony. Dal vektorov
pstupy. Energetick pstupy. Pklady k procvien.
MOTIVACE:
Zatm jsme se zajmali jen o to, jak se nco hbe. Existuje vce
monost jak zskat rovnice, ktermi se d pohyb. Porozumn tmto rovnicm
pro bod vede k porozumn i pro sloitj ppady. Pohybovmi rovnicemi se
d veker pohyb ve vesmru od galaxi pes stroje k sticm.
CL:
Pohybov rovnice hmotnho bodu.
D'Alambertv princip, vty o zmn hybnosti a momentu hybnosti.
Prce, vkon, energie, zkon zachovn mechanick energie.
MODERNIZACE VUKOVCH MATERIL A DIDAKTICKCH METOD
CZ.1.07/2.2.00/15.0463
4 Dynamika bodu
1.1 TROCHA HISTORIE
Zatm jsme popsali, jak se bod hbe, to znamen kde je, jakou m
rychlost, zrychlen a ppadn ryv, ale nezajmali jsme se co je pinou
toho, e se hbe. O piny pohybu se zajmali lid uveden v nsledujcch
odstavcch.
Aristoteles Pokud je tleso na svm pirozenm mst a nepsob na nj dn
dal vlivy, setrvv tam v klidu. Pokud tleso nen na svm pirozenm mst,
sna se na n dostat (co plat zejmna o svislm pohybu). Bez inku sly
se tleso nepohybuje jinak ne svm pirozenm pohybem. Odpov na otzku,
pro let hozen kmen, i vystelen p je, e pi hodu kamene i vstelu pu
jim pedme hybnou slu, tzv. impetus. Ty si ji chvli s sebou nesou a
postupn ji spotebovvaj. Toto vak nevysvtluje nap. pohyb kyvadla. V
11. stolet zavd Avicenna impetus, kter se sm o sob nevyerpv. Jedn
se o hybnou slu vtitnou do tlesa zdrojem pohybu. Ta v pohybujcm se
tlese zstv a dle psob jeho pohyb. Impetus se zmenuje pouze skrze
jin sly, typicky odporem prosted.
Galileo Galileo objevil, e prodn jevy lze popsat matematicky a
pokld to za odraz "pravho zkona prody. Galileo vak pitom jet nevytv
dynamiku v dnenm smyslu, tedy nehled pinu pohyb. Bav ho popisovat
pozemsk pohyby se stejnou pesnost a exaktnost, jak to dlali
astronomov (Kepler) s pohyby nebeskmi, napklad kvadratickou
zvislost drhy pi volnm pdu na ase. Sv vahy odvozuje jen z
experiment, pesto vznamn ovlivn dynamiku principem setrvanosti.
Isaac Newton Pedpoklady pro pesnj formulace dynamickch zkon dnes
v rmci dostaten pesnosti pouvan shrnul sir Isaac Newton v
Principich (Philosophi naturalis principia mathematica) vydanch r.
1687.
Newton pouv Euklidovsk geometrick prostor a nezvisle bc absolutn
as, co umouje mit vzdlenosti a tvary tles a popisovat polohu tlesa
vzhledem ke zvolen souadn soustav. Absolutn as ukazuje na existenci
jist speciln mry v men asu. Newton tak zavd pojem absolutnho
prostoru, kter oznauje jako zkladn prostor, jeho body jsou neustle
na svch mstech a lze vi nim urovat absolutn polohu tles, zejmna
meme mluvit o pohybu vi absolutnmu prostoru. Newton neznal pojem
zrychlen a piadil kadmu tlesu mru jeho pohybovho stavu hybnost
souin rychlosti a hmotnosti. U tles v klidu i rovnomrnm pohybu po
pmce, se tato mra pohybu nemn. Jako pinu zmny pohybovho stavu zavd
slu. A formuluje i zkon akce a reakce o psoben sil mezi dvma tlesy,
kter je dsledkem zkona zachovn hybnosti.
Po dal dv stolet souhlasily vechny experimenty s jeho teori a a
dky Maxwelovm objevm v oboru elektromagnetismu, a snahm o vysvtlen
Morley-Michelsonova pokusu pi hledn rychlosti Zem vi aetheru 1887
se dosplo ke vcelku jednoduch prav zkon mechaniky, kterou lze
pochopit pi prmrnch znalostech stedokolsk matematiky, zvanou
Einsteinova speciln teorie relativity (trochu podobn Kolumbovu
vejci). Je spe podivn, e s touto teori nepiel Hendrick Lorentz i
George Fitzegerald o mnoho let dve. Pi vysvtlen Michelson-Morley
experimentu, Lorentz navrhl, e dochz ke zkracovn dlek pohybujcch se
tles (kontrakci dlky) ve smru pohybu. K tomuto zvru doel ji v roce
1889 George FitzGerald. Lorentz zavedl termn mstn as, kter
vyjadoval vztah mezi souasnost nepohyblivho tlesa a pohybujcho se
tlesa. Speciln teorie relativity je platn jen pro velmi omezen
rozsah souadnch soustav (inerciln) a proto vyadovala zobecnn.
http://cs.wikipedia.org/w/index.php?title=Kontrakce_d%C3%A9lky&action=edit&redlink=1http://cs.wikipedia.org/w/index.php?title=George_Francis_FitzGerald&action=edit&redlink=1
MODERNIZACE VUKOVCH MATERIL A DIDAKTICKCH METOD
CZ.1.07/2.2.00/15.0463
5 Dynamika bodu
Obecn teorie relativity, kter uvauje i se zakivenm prostoroasu
je ji opravdu pomrn sloitou teori.
Pro stice pak tvo pohybovou rovnici Schrdingerova rovnice, kter
uruje pouze pravdpodobnost toho, kde se stice nachz (kvantov
mechanika).
V na dynamice budeme pouvat Newtonovy vztahy, kter jsou v rmci
rychlost, a velikost se ktermi budeme pracovat dostaten pesn.
Pipomeme si Newtonovy zkony, kter jsou zkladem cel klasick
mechaniky.
1.2 NEWTONOVY ZKONY
1. Zkon setrvanosti: Tleso setrvv v klidu nebo v rovnomrnm
pmoarm pohybu, jestlie na nj nepsob jin tlesa silou nebo sly psobc
na tleso jsou v rovnovze.
konstvF == 0
2. Zkon sly: Sla je pinou zmny pohybovho stavu. Kde sla je pinou
zmny hybnosti p, kter je souinem hmotnosti a rychlosti p=m.v.
dtpdF
=
3. Zkon akce a reakce: Psob-li jedno tleso na druh silou, psob i
druh tleso na prvn stejn velkou silou stejnho smru opan
orientace.
Audio 1.1 Newtonovy zkony.
1.2.1 een pohybu bodu pomoc zkona sly. Zkladn rovnic cel
dynamiky je prv druh Newtonv zkon. Tato rovnice se asto nazv
pohybovou rovnic hmotnho bodu. Vimnte si, e hybnost i sla jsou
vektorov veliiny, kter jsou dny velikost, psobitm, smrem a
orientac. Velikost, orientace a smr lze vyjdit pomoc sloek (v E3 se
jedn o ti sloky, E2 o dv, E1 jednu). Smry sloek se vol tak, aby
byly na sebe vzjemn kolm (ortogonln) nejastji v souadnch soustavch
jako u kinematickch veliin (polohovho vektoru, rychlosti,
zrychlen). V ppad, e uvaujeme hmotn bod, pak je psobit sil dno tmto
bodem.
Audio 1.2 Pohyb bodu.
Pro konstantn hmotnost lze pohybovou rovnici zjednoduit pomoc
zrychlen.
MODERNIZACE VUKOVCH MATERIL A DIDAKTICKCH METOD
CZ.1.07/2.2.00/15.0463
6 Dynamika bodu
rdvdvmrmvmam
dtvmF
====
=
Pozor zmna hmotnosti nemus bt nutn zpsobena relativistickmi
jevy. Pedstavte si baln, kde st lana le na zemi a postupn se odvj a
hmotnost balnu, vetn lana se zvyuje, nebo raketu, jej hmotnost se
sniuje s tm, jak j ubv paliva.
Pohybovou rovnici pak lze rozepsat ve slokovm tvaru pro rzn
souadn systmy:
Kartzsk souadn systm
Vlcov souadn systm
Pirozen souadn systm
Pozor i v ppad, e se bod pohybuje po pmce i v rovin je nutno
uvit, jestli na nj nepsob sly v jinch smrech, kter mohou souviset s
pasivnmi odpory psobcmi v dan pmce i rovin. Pi een loh je dobr si
uvdomit, e obecn je pohybov rovnice diferenciln rovnic druhho du,
kter me bt nelinern a asto nemus mt een v uzavenm tvaru. Obecn
existuj dva typy loh:
loha 1. druhu (kinetostatick). Je to takov loha, u kter znme
veliiny popisujc pohyb a hledme sly, kter jsou pinou tohoto pohybu.
V tomto ppad se pohybov rovnice rozpadne na soustavu linernch
rovnic a een lohy nebv obtn.
loha 2. druhu (dynamick). Je to takov loha, u kter znme psobc
sly a vyetujeme pohyb. V tomto ppad je pohybov rovnice obecn
nelinern diferenciln rovnic druhho du a o tom, jestli existuje een
v uzavenm tvaru, rozhoduj dal okolnosti.
yy amF =xx amF = zz amF =
amF = amF = zz amF =
tt amF =nn amF = 0=bF
MODERNIZACE VUKOVCH MATERIL A DIDAKTICKCH METOD
CZ.1.07/2.2.00/15.0463
7 Dynamika bodu
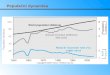
1.2.2 Obecn postup pi een loh, kter je pedveden na jednoduchm
pkladu. Pklad
Na bemeno hmotnosti m=0,3 kg. Psob dv sly o velikostech F1=4.5 N
a F2=0,9 N. Sla F1 svr se svislm smrem hel =45o. Urete zrychlen
tlesa, je-li na potku v klidu. Urete tato zrychlen, pohybuje-li se
tleso na zatku pohybu ve smru a proti smru pohybu sly F1 rychlost
v= 10 m.s-1. Koeficient ten mezi tlesem a podlokou je f=0,2.
00) Ovme poet stup volnosti (u bodu v E3 nejmn 1 maximln 3 stupn
volnosti). M-li bod 0 stup volnosti, lze lohu eit pomoc statickch
rovnic rovnovhy, pi zpornm potu stup volnosti je pak nutno statick
rovnice rovnovhy doplnit rovnicemi prunosti a pevnosti. ad 00)
Tleso se pohybuje jen po pmce ve vodorovnm smru a m tedy jeden
stupe volnosti.
0) Pokusme se odhadnout rozmez, ve kterm se bude vsledek
pohybovat. ad 0)Tleso m hmotnost m=0,3 kg; nejvt psobc sla je
F1=4.5 N zrychlen bude urit men ne a=150 m.s-2, ale bemeno se taky
nemus pohybovat vbec a=0 m.s-2. Ke zpesnn odhadu lze pout vahu:
Sloka sly F1 ve vodorovnm smru je cca 0,7 F1 proti n psob F2 a sla
zpsoben tenm, maximln zrychlen me bt a=70 m.s-2, ale spe bude
mnohem men v dsledku smykovho ten. Tato vaha by mla trvat nkolik
sekund.
1) Bod uvolnme. To znamen, urme vechny sly, kter na nj psob
velmi vhodn je nakreslit obrzek. ad 1) Krom sil F1 a F2 psob na
tleso jeho vlastn tha G, reakce podloky N a sla T zpsoben tenm,
kter psob proti smru pohybu. Zatm nevme, kterm smrem se tleso
pohybuje, proto je vhodn nakreslit oba ppady. Pro zadan smr
rychlosti je smr tec sly dan. Tec sla je vdy orientovna proti smru
pohybu. V nsledujcch rovnicch je kladn vodorovn smr volen ve smru
kladn orientace rychlosti.
2) Napeme pohybovou rovnici a rozepeme ji do vhodnch sloek. ad
2) Pro oba ppady.
amNTGFF
=++++ 21
( ) 121sin1 amFTF = ( ) 222sin1 amFTF =+
MODERNIZACE VUKOVCH MATERIL A DIDAKTICKCH METOD
CZ.1.07/2.2.00/15.0463
8 Dynamika bodu
3) Rovnice doplnme o vztahy z kinematiky, statiky, geometrie a
tak dle. ad 3) V tomto ppad doplnme o vztah pro smykov ten.
fNT =
4) Vzniklou soustavu rovnic vyeme. (lze-li analyticky jinak
numericky) ad 4) V tomto ppad se jedn o soustavu linernch rovnic a
lze ji eit napklad dosazovnm. Vsledkem bude a1=3,524 m.s-2;
a2=-11,689 m.s-2. Zporn hodnota znamen, e je-li na potku tleso v
klidu pak se bu nerozjede, nebo rozjede s opanou orientac, ale
zrychlen bude jin a je nutno jej vypost pro opanou orientaci tec
sly. Pokud se ale tleso pohybuje a kladn orientace je stejn jako u
rychlosti pak zporn zrychlen znamen, e tleso zpomaluje.
5) Ovme sprvnost een. (napklad dosazenm do pvodnch rovnic i
experimentem).
1.3 DAL VEKTOROV PSTUPY.
DAlambertv princip. Hlavn mylenkou je pipojit slu, kter
vykompenzuje zrychlen a pak se loha dynamick pevede na lohu
statickou. Tato sla se nazv DAlambertova nebo setrvan sla. Je to
zdnliv sla, kterou ctte napklad pi prudkm brzdn v aut, nebo pi
prjezdu zatkou.
Audio 1.3 DAlembertv princip.
DAlambertova sla
amD
=
Rovnice pseudorovnovhy m tvar:
0
=+ DF
Toto een je velmi vhodn zejmna u loh 1. druhu i pro tlesa.
Dynamiku bodu lze eit tak pomoc vty o zmn hybnosti a impulzu.
Tento vztah lze odvodit z pohybov rovnice pro hmotn bod s konstantn
hmotnost.
0
=+ DF
dtdvmdtF =
0
)(
0
)(0
vmtvmvdmdtFtv
v
t ==
Pokud ozname impuls sly I a hybnost p
IdtF
=
( ) 0cos1 = FGN ( ) 0cos1 = FGN
MODERNIZACE VUKOVCH MATERIL A DIDAKTICKCH METOD
CZ.1.07/2.2.00/15.0463
9 Dynamika bodu
vmp =
pak dospjeme k nsledujcmu vztahu: ( ) )()( 00 tptptI
=
Vta o zmn hybnosti: Prstek hybnosti v danm asovm intervalu se
rovn impulzu zrychlujc sly v tme asovm intervalu. Impuls sly i
hybnost jsou vektorov a lze je rozepsat do sloek.
een dynamiky bodu pomoc vty o zmn momentu hybnosti a impulzu pro
hmotn bod s konstantn hmotnost.
Podobn jak se vypote moment sly k bodu, lze vypost i vypost i
moment hybnosti L.
prL
=
Po derivovn
Frvmvamrvmvdtvdmrvm
dtrd
dtpdrp
dtrd
dtL
+=+=+=+=
Protoe vektorov souin dvou rovnobnch vektor je roven nule a druh
st je moment sly plat nsledujc vztah.
0
= vmv MFr
=
Meme napsat velmi podobnou vtu o zmn momentu hybnosti.
=)(
0 0
tL
L
t
LddtM
( ) 0LtLIM =
Vta o zmn momentu hybnosti: Prstek momentu hybnosti k danmu bodu
v uritm asovm intervalu je roven impulzu momentu IM sly k tmu bodu
a v tme asovm intervalu.
1.4 ENERGETICK PSTUPY
Pedchoz pstupy lze oznait jako vektorov, ale v dynamice existuje
jet dal pstup, kdy se dynamick lohy e pomoc energi. Dv formy
mechanick energie se nazvaj kinetick a potenciln. S energiemi pak
souvis mechanick prce. Energie i prce jsou skalrnmi veliinami, to
znamen, e jsou pln ureny jen svou velikost.
Kinetick energie hmotnho bodu Ek. Pro rychlosti a pesnosti, se
ktermi se bn setkvme je mono kinetickou energii hmotnho bodu
definovat jako polovina souinu hmotnosti m a druh mocniny velikosti
rychlosti.
Audio 1.4 Kinetick energie bodu.
MODERNIZACE VUKOVCH MATERIL A DIDAKTICKCH METOD
CZ.1.07/2.2.00/15.0463
10 Dynamika bodu
2
21 vmEk =
Potenciln energie Ep je energie bodu (tlesa) v potencilovm
silovm poli. Pozor nemus se jednat jen o gravitan energii v
blzkosti povrchu Zem, ale napklad o energii pruiny,
elektrostatickho silovho pole, gravitanho pole jinch tles atd. Lze
ji definovat podobn jako prci jen s opanm znamnkem. Sla pole je pak
funkc polohy. U potenciln energie je definovn jen rozdl energie
mezi dvma msty a je jedno jakou hladinu (ekvipotenciln plochu) si
vyberete jako mnoinu bod s nulovou potenciln energi. Pokud potme s
absolutn hodnotou Ep pak je nutno si stanovit hladinu s nulovou
potenciln energi.
Audio 1.5 Potenciln energie.
( ) =r
r
rdrrFrEprEp
0
00 )()(
Taky lze ct, e sla pole je gradientem potenciln energie.
1.4.1 Pklady potencilnch energi 1) Potenciln energie bodu o
hmotnosti m v thovm poli Zem v blzkosti povrchu
s thovm zrychlenm g a ve vce h nad povrchem, kde nulov hladina
je zvolena na povrchu Zem.
hgmEp =
2) Potenciln energie bodu o hmotnosti m v thovm poli Zem ve vce
y nad povrchem, kde nulov hladina je zvolena na povrchu Zem. Mz je
hmotnost Zem; Rz je polomr Zem a je Newtonova gravitan konstanta.
(M vznam pro velk vky).
RzmRg
yRmRg
RmM
yRmMEp z
z
z
z
z
z
z ++
=
++
=22
3) Potenciln energie linern pruiny s tuhost k pi deformaci o
dlky y, kde nulov hladina odpovd nezaten a tedy nedeformovan
pruin.
2
21 ykEp =
Mechanick prce W je dal skalrn veliinou a jej velikost (skalrn
veliiny maj pouze velikost) se vypote stejn jako u prce jen s
kladnm znamnkem.
=r
r
rdFrrW
0
)( 0
Vkon: Je veliina charakterizujc, jak rychle byla prce vykonna.
Okamit vkon je definovn jako:
( )dt
dWtP =
MODERNIZACE VUKOVCH MATERIL A DIDAKTICKCH METOD
CZ.1.07/2.2.00/15.0463
11 Dynamika bodu
1.4.2 Vta o zmn kinetick energie Z pohybov rovnice lze odvodit
vztah mezi dodanou prac a kinetickou energi, kter k, e prstek
kinetick energiemi mezi dvma polohami je roven prci psobcch sil
mezi tmito polohami.
rdvdvmamF
==
vdvmrdF
=
=v
v
r
r
vdvmrdF00
( ) 2020 21
21 vmvmrrW =
( ) 00 EkEkrrW = 1.4.3 Vta o zachovn mechanick energie V
konzervativnm silovm poli plat, e se mechanick energie zachovv.
Konzervativn (potencilov) silov pole znamen, e prce, kter je
vykonna silou pole po njak kivce zvis jen na poten a koncov poloze
a nezvis na tvaru kivky mezi polohami. Kdy chcete zvednout idli a
dt ji na stl pak v tomto typu pole je jedno dte-li ji nahoru pmo
nebo jestli s n nejdve obejdete mstnost. Jin definice je, e integrl
po uzaven kivce je roven nule. U idle to znamen, e skon-li na konci
tam, kde pvodn byla, pak se obejitm mstnosti se idl nevykonala dn
prce. Podobn, lze ci, e rotace pole je rovna nule.
Pkladem takovho pole me bt gravitan i elektrick pole, kdy
zanedbme pasivn odpory. V tomto typu pole se energie nepemuje na
jin formy energie jako teplo i energii plastick deformace.
Souet kinetick a potenciln energie je v konzervativnm silovm
poli konstantn.
Audio 1.6 Dal zjednoduujc pedpoklady
Ek+Ep=konst.
i v jinm tvaru: Ek0+Ep0=Ek1+Ep1
V ppad, e se nejedn o konzervativn pole a je dodna prce W navc,
kter nesouvis se silovm polem a pemn se cele na mechanickou
energii, lze pout i dal vztah, kter ovem nen mono nazvat zkonem
zachovn mechanick energie.
Ek0+Ep0+(W)=Ek1+Ep1
Vsledn mechanick energie je rovna soutu pvodn mechanick energie
a dodan prce. K een dynamickch loh vede tedy vce cest. Je mono je
eit vektorovm pstupem pomoc pohybov rovnice, D'Alambertova
principu, hybnosti a impulsu sly, momentu hybnosti a impulsu
silovho momentu nebo pomoc energi. Vtinou je nkter zpsob een pro
danou lohu vhodnj ve srovnn s ostatnmi, ale vbr zpsobu een me bt
i
MODERNIZACE VUKOVCH MATERIL A DIDAKTICKCH METOD
CZ.1.07/2.2.00/15.0463
12 Dynamika bodu
vc obliby. Je nutno pipomenout, e krom rovnic dynamiky je tak
nutn znalost kinematiky, statiky, geometrie atd. Existuj jet dal
zpsoby een loh nap. pomoc Lagrangeovch rovnic, i Hamiltonovch
rovnic, ale v tomto materil se s nimi setkvat nebudeme.
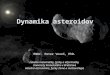
1.4.4 Pklad een pohybovou rovnic i energeticky
Hmotn bod je zaven na lanku zanedbateln hmotnosti a pohybuje se
po kruhov drze v gravitanm poli Zem. V poten poloze lanko vodorovn.
Ve vyetovan poloze svr se svislm smrem hel . Poten rychlost je
nulov. Urete rychlost bodu ve vyetovan poloze. Hmotnost bodu je
mB=0,1 kg; dlka lanka r=35 cm; =35o.
een Na bod psob jeho tha G a sla v lanku S. Zakreslme si bod v
obecn poloze dan hlem . Pohybovou rovnici rozepeme do tenho a
normlovho smru.
( ) tamG = cos
amSG
=+ ( ) namSG =+ sin
Je-li ten zanedbateln, pak ns bude zajmat jen rovnice v tenm
smru. Pouijeme-li kinematick vztahy pro zrychlen a zskme
diferenciln rovnici, kterou vyeme pro konenou hlovou rychlost k a
vynsobenm dlkou lanka zskme rychlost bodu.
= rat
dd
=
rv
=
( )
ddrmG =cos
( ) =+ k
drmdG
0
090
0
cos
rv kk = (v=2,371 m/s)
1.4.5 Energetick pstup Nulovou hladinu potenciln energie zvolme
napklad v mst zvsu. Jedn se o bod v thovm poli Zem blzko povrchu a
potenciln energie zvis na tze a vce. Kinetick energie je dna
hmotnost a rychlost.
MODERNIZACE VUKOVCH MATERIL A DIDAKTICKCH METOD
CZ.1.07/2.2.00/15.0463
13 Dynamika bodu
1100 EkEpEkEp +=+
Poten potenciln i kinetick energie jsou rovny nule.
( ) 221cos00 kvmrgm +=+
Z danho vztahu lze okamit urit rychlost bodu vk ve vyetovan
poloze. Vsledek mus vyjt v obou ppadech shodn. (v=2,371 m/s).
1.5 PKLADY K PROCVIEN
1.5.1 Pklad 1 Kabina vtahu vetn nkladu m hmotnost m=380 kg,
jakou silou je namhno lano, kdy kabina:
a) Stoj. (F=3727 N) b) Pohybuje se vzhru konstantn rychlost
v=3,2 m.s-1. (F=3727 N). c) Pohybuje se vzhru s konstantnm
zrychlenm a=3,2 m.s-2. (F=4943 N). d) Jede s tmto zrychlenm dol.
(F=2511 N).
Vsledky jsou uvedeny v zvorkch.
1.5.2 Pklad 2 Urete hmotnost hmotnho bodu, kter se vlivem inku
zrychlujc sly F=230 N rozjede za as T= 42 s na rychlost v=31
km.h-1.
Vsledek mb=1122 kg.
1.5.3 Pklad 3 Nboj o hmotnosti m=28 g opustil hlave puky
rychlost v=720 m.s-1. Hlavn se pohyboval nboj po dobu t=0,00065 s.
Urete, jak prmrn tlak psobil v hlavni, jestlie vnitn prmr hlavn je
d=8,3 mm. Urete hybnost H nboje po oputn hlavn.
Vsledky p=573,2 MPa; H=20,16 kg.m.s-1.
1.5.4 Pklad 4 Urete, jakou silou mus bt vytahovno lanem bemeno o
hmotnosti m=100 kg po naklonn rovin se sklonem =20o smrem vzhru se
zrychlenm a=2 m.s-2. Lano svr s naklonnou rovinou hel =30o.
(orientace nahoru). Koeficient ten mezi naklonnou rovinou a bemenem
je f=0,1.
Vsledek F=685,1 N.
MODERNIZACE VUKOVCH MATERIL A DIDAKTICKCH METOD
CZ.1.07/2.2.00/15.0463
14 Dynamika bodu
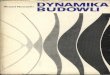
1.5.5 Pklad 5
Jakou silou je zapoteb vytahovat tleso po naklonn rovin s
koeficientem ten f1 a hlem sklonu naklonn roviny , aby na drze s
doshlo rovnomrn zrychlenm pohybem rychlosti v. Poten rychlost je
v0. Lano je vedeno pes pevn kruhov trm s koeficientem ten f2. Sla m
smr svisle dol.
F=?
m
f1
v f2
m=70 kg v0 = 1m/s v=10 km.h-1 f1=0,15 f2 =0,1 =300 s=6 m
Vsledek F=581,5 N.
1.5.6 Pklad 6 Odbrzdn automobil o hmotnosti m=1075 kg se rozjd
ze svahu dlce s= 63 m vlastn thou. Jak je sklon svahu, jestlie
rychlost automobilu po projet svahu je v= 56 km.h-1. Urete rychlost
automobilu v polovin svahu (pasivn odpory zanedbejte).
Vsledky =11,29o; v(s/2)=11 m.s-1.
1.5.7 Pklad 7
Baln o hmotnosti m=540 kg kles svisle dol se stlm zrychlenm
a=1,6 m.s-2.
Urete: 1) Jak vztlakov sla psob na baln. 2) Jakou hmotnost mZ
mus mt zva, kter je teba vyhodit z koe balnu, aby se zaal
pohybovat svisle vzhru se stlm zrychlenm a2=0,82 m.s-2 (vztlakov
sla je stejn). 3) Za jak dlouho zane baln stoupat, je-li pvodn
rychlost v okamiku odhozen
v=10 m.s-1 smrem dol.
a2=0,82 m.s-2
MODERNIZACE VUKOVCH MATERIL A DIDAKTICKCH METOD
CZ.1.07/2.2.00/15.0463
15 Dynamika bodu
m=540 kg a=1,6 m.s-2 v=10 m.s-1
Vsledky: F=4432 N mZ=123,0 kg t= 12,20 s.
1.5.8 Pklad 8 Ze zem vylt raketa po oputn atmosfry poten
rychlost v0= 5 km.s-1 pak vypne motory. Urete, jak maximln vky H
doshne. Na raketu psob pitalivost Zem. Pozor thov zrychlen nen
konstantn a je nutno vyut Newtonova gravitanho zkona.
Newtonv gravitan zkon
( )2yR
mMFZ
Rzg +
=
Mz je Hmotnost Zem; mR je hmotnost rakety; Rz=6380 km je polomr
Zem; je Newtonova gravitan konstanta a y je promnliv vzdlenost
rakety od Zem. Pro uren hodnoty souinu Mz. vyuijte znalosti
zrychlen u povrchu Zem (pro y=0 je a=g).
Vsledek (Hmax=1593 km).
1.5.9 Pklad 9
Na misku pruinovch vah o hmotnosti mM=100 g s pruinou o tuhosti
k=15000 N.m-1 dopadne zva o hmotnosti mZ=50 g. Po nrazu zva zstane
na misce (nraz je dokonale neprun). Urete, o jakou vzdlenost
poklesne pruina. (Zde je nutno zat zkonem zachovn hybnosti).
Vsledek: Pruina poklesne maximln o vzdlenost x=1,502 mm.
MODERNIZACE VUKOVCH MATERIL A DIDAKTICKCH METOD
CZ.1.07/2.2.00/15.0463
16 Dynamika bodu
1.5.10 Pklad 10 Automobil jedouc po vodorovn silnici o hmotnosti
m=1280 kg zvil svou rychlost z v0=7,3 m.s-1 na v1=63 km.h-1 za as
t= 3 s. Jakou zrychlujc slu F musel vyvinout motor a jakou drhu
auto bhem zrychlovn urazilo.
Vsledky F=4352 N, s=37,2 m
1.5.11 Pklad 11 Mal ebenov koule o objemu V=2 litry dopadla na
hladinu moe rychlost v0=50 m.s-1. Odporov sla vody je mrn rychlosti
podle vztahu F=k.v, k= 4.kg.s-1.
Nakreslete sly psobc na kouli pod hladinou vody.
Urete: Jakou rychlost bude mt koule, kdy se nachzet v hloubce
h=20 m.
Urete: as, za kter se koule pono do hloubky h=20 m.
Pozn. hustota ebenu a vody je stejn =1000 kg.m-3 a tedy vztlakov
sla je rovn tze.
(bez vsledku)
MODERNIZACE VUKOVCH MATERIL A DIDAKTICKCH METOD
CZ.1.07/2.2.00/15.0463
17 Pouit Literatura
2 POUIT LITERATURA
[1] JULI, K.,BREPTA, R.: Mechanika II. dl - Dynamika; Technick
prvodce, SNTL Praha, 1987.
[2] Brt V., Rosenberg J., J V.: Kinematika SNTL Praha 1987. [3]
Brousil, J., Slavk, J., Zeman, V.: Dynamika, Praha, SNTL, 1989. [4]
PODEVA, J.: Dynamika v pkladech. Edin stedisko VB-TU Ostrava, 2005,
s. 65.
ISBN 80-7078-678-7. [5] Feynman R. P., Leighton R. B., Sands M.:
Feynmanovy pednky z fyziky s eenmi
pklady 1.dl. Fragment, Havlkv Brod 2000. [6] Halliday D.,
Resnick R., Walker J.: Fyzika st 1 Mechanika. Vysok uen
technick
v Brn- Nakladatelstv VUTIUM a PROMETHEUS Praha, 2000.
Internet Studijn materily:
http://www.337.vsb.cz/studijni-materialy-109.html.
OBSAH1 Dynamika bodu1.1 Trocha historie1.2 Newtonovy zkony1.2.1
een pohybu bodu pomoc zkona sly.1.2.2 Obecn postup pi een loh, kter
je pedveden na jednoduchm pkladu.
1.3 Dal vektorov pstupy.1.4 Energetick pstupy1.4.1 Pklady
potencilnch energi1.4.2 Vta o zmn kinetick energie1.4.3 Vta o
zachovn mechanick energie1.4.4 Pklad een pohybovou rovnic i
energeticky1.4.5 Energetick pstup
1.5 Pklady k procvien1.5.1 Pklad 11.5.2 Pklad 21.5.3 Pklad
31.5.4 Pklad 41.5.5 Pklad 51.5.6 Pklad 61.5.7 Pklad 71.5.8 Pklad
81.5.9 Pklad 91.5.10 Pklad 101.5.11 Pklad 11
STRUN OBSAH PEDNKY:MOTIVACE:CL:2 Pouit Literatura
/ColorImageDict > /JPEG2000ColorACSImageDict >
/JPEG2000ColorImageDict > /AntiAliasGrayImages false
/CropGrayImages true /GrayImageMinResolution 300
/GrayImageMinResolutionPolicy /OK /DownsampleGrayImages true
/GrayImageDownsampleType /Bicubic /GrayImageResolution 300
/GrayImageDepth -1 /GrayImageMinDownsampleDepth 2
/GrayImageDownsampleThreshold 1.50000 /EncodeGrayImages true
/GrayImageFilter /DCTEncode /AutoFilterGrayImages true
/GrayImageAutoFilterStrategy /JPEG /GrayACSImageDict >
/GrayImageDict > /JPEG2000GrayACSImageDict >
/JPEG2000GrayImageDict > /AntiAliasMonoImages false
/CropMonoImages true /MonoImageMinResolution 1200
/MonoImageMinResolutionPolicy /OK /DownsampleMonoImages true
/MonoImageDownsampleType /Bicubic /MonoImageResolution 1200
/MonoImageDepth -1 /MonoImageDownsampleThreshold 1.50000
/EncodeMonoImages true /MonoImageFilter /CCITTFaxEncode
/MonoImageDict > /AllowPSXObjects false /CheckCompliance [ /None
] /PDFX1aCheck false /PDFX3Check false /PDFXCompliantPDFOnly false
/PDFXNoTrimBoxError true /PDFXTrimBoxToMediaBoxOffset [ 0.00000
0.00000 0.00000 0.00000 ] /PDFXSetBleedBoxToMediaBox true
/PDFXBleedBoxToTrimBoxOffset [ 0.00000 0.00000 0.00000 0.00000 ]
/PDFXOutputIntentProfile () /PDFXOutputConditionIdentifier ()
/PDFXOutputCondition () /PDFXRegistryName () /PDFXTrapped
/False
/CreateJDFFile false /Description > /Namespace [ (Adobe)
(Common) (1.0) ] /OtherNamespaces [ > /FormElements false
/GenerateStructure false /IncludeBookmarks false /IncludeHyperlinks
false /IncludeInteractive false /IncludeLayers false
/IncludeProfiles false /MultimediaHandling /UseObjectSettings
/Namespace [ (Adobe) (CreativeSuite) (2.0) ]
/PDFXOutputIntentProfileSelector /DocumentCMYK /PreserveEditing
true /UntaggedCMYKHandling /LeaveUntagged /UntaggedRGBHandling
/UseDocumentProfile /UseDocumentBleed false >> ]>>
setdistillerparams> setpagedevice