Embed Size (px)
Citation preview
지능형 로봇 및 로봇 제어 개론
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
2
과정소개
[지능형 로봇 제어를 위한 MSRDS활용하기] 과정에 참여하신 여러분 반갑습니다. 본 교육에서는 지능형 로봇 제어를 위한 최신 개발 툴인 MSRDS의 개념을 이해하고 이를 이용하여 로봇 응용 프로그램을 작성하는 방법을 습득하고, 시뮬레이션 환경 및 비주얼 프로그램 언어 (VPL)를 통한 로봇제어기법 학습한 후 실제 로봇에 적용하는 것을 배우게 됩니다. 다양한 MSRDS 예제 및 응용을 통해 여러 지능형 로봇들을 제어해 본 후 이를 활용하여 다양한 로봇 들에서 여러분이 필요로 하는 로봇 어플리케이션을 개발하는 실무능력을 기르는 있는 계기가 되길 바랍니다.
과정소개
지능형 로봇 제어를 위한 MSRDS활용하기 강좌에서는 다음과 같은 내용을 학습하게 됩니다.
-지능형 로봇 및 로봇 제어 개론
-지능형 로봇 제어를 위한 최신 개발 툴인 MSRDS의 개념 이해
-시뮬레이션 환경 및 비주얼 프로그램 언어 (VPL)를 통한 로봇 제어기법 학습
-MSRDS예제를 통한 다양한 지능형 로봇 제어 실습 및 응용 어플리케이션 개발
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
3
과정소개
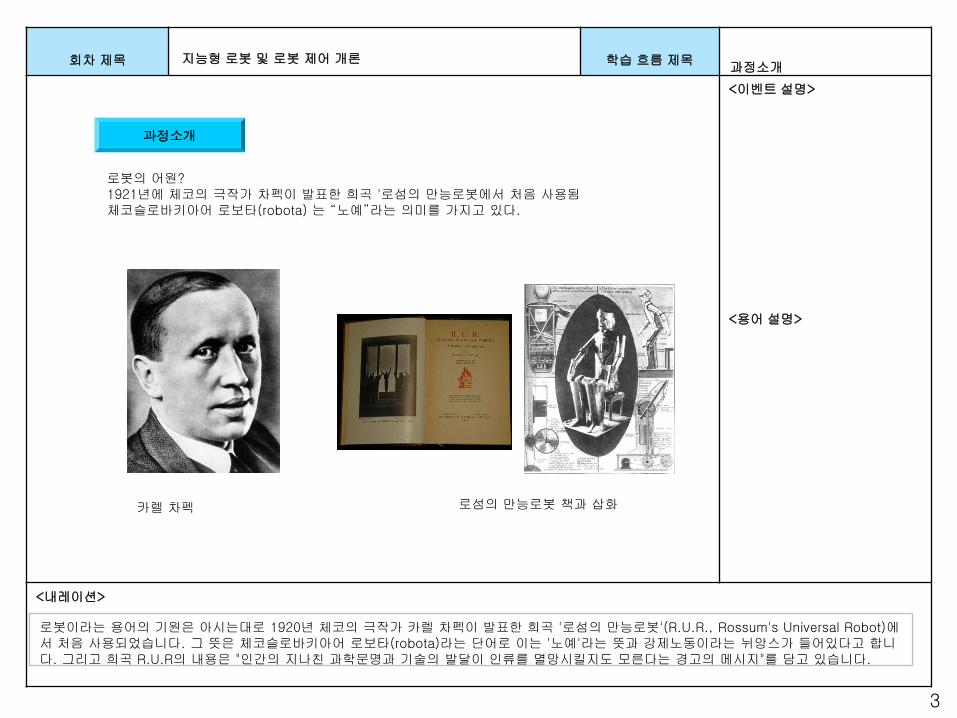
로봇이라는 용어의 기원은 아시는대로 1920년 체코의 극작가 카렐 차펙이 발표한 희곡 '로섬의 만능로봇'(R.U.R., Rossum's Universal Robot)에서 처음 사용되었습니다. 그 뜻은 체코슬로바키아어 로보타(robota)라는 단어로 이는 '노예'라는 뜻과 강제노동이라는 뉘앙스가 들어있다고 합니다. 그리고 희곡 R.U.R의 내용은 "인간의 지나친 과학문명과 기술의 발달이 인류를 멸망시킬지도 모른다는 경고의 메시지"를 담고 있습니다.
과정소개
로봇의 어원? 1921년에 체코의 극작가 차펙이 발표한 희곡 '로섬의 만능로봇에서 처음 사용됨 체코슬로바키아어 로보타(robota) 는 “노예”라는 의미를 가지고 있다.
카렐 차펙 로섬의 만능로봇 책과 삽화
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
4
과정소개
만약, 현실세계에서 아톰과 같은 정도의 지능형 로봇이 나타나게 된다면, 이는 매우 충격적이고 놀라운 일이 될 것입니다. 여기서 아톰이 의미하는 바는, 사람보다 강한 육체와, 명석한 두뇌회전이 있고, 또한 인간과 유사한 감정을 나타내는 로봇이란 의미입니다.하지만, 현재의 기술적인 수준으로만 본다면, 일본의 혼다에서 제작한 아시모가 이와 가장 유사한 형태이지만, 사람보다 매우 약하며, 지능적으로도 매우 떨어지고 나아가 감정을 가지고 있지 않은 매우 초보적인 형태의 움직임만 모방한 로봇의 형태라고 할 수 있습니다.
과정소개
지능형 로봇의 미래와 현실
VS
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
5
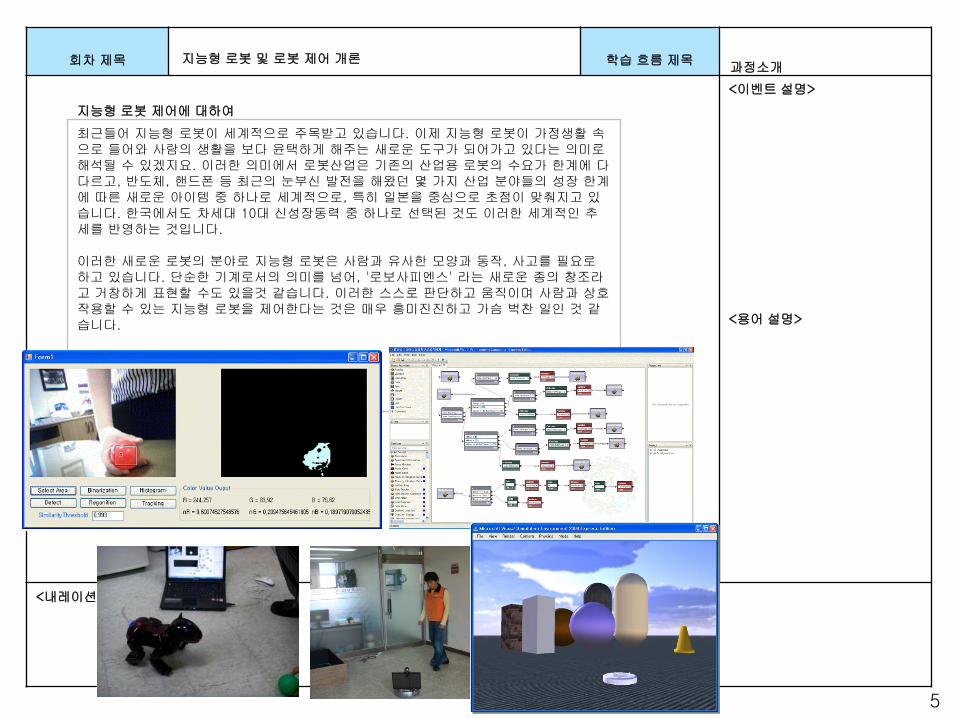
최근들어 지능형 로봇이 세계적으로 주목받고 있습니다. 이제 지능형 로봇이 가정생활 속으로 들어와 사람의 생활을 보다 윤택하게 해주는 새로운 도구가 되어가고 있다는 의미로 해석될 수 있겠지요. 이러한 의미에서 로봇산업은 기존의 산업용 로봇의 수요가 한계에 다다르고, 반도체, 핸드폰 등 최근의 눈부신 발전을 해왔던 몇 가지 산업 분야들의 성장 한계에 따른 새로운 아이템 중 하나로 세계적으로, 특히 일본을 중심으로 초점이 맞춰지고 있습니다. 한국에서도 차세대 10대 신성장동력 중 하나로 선택된 것도 이러한 세계적인 추세를 반영하는 것입니다. 이러한 새로운 로봇의 분야로 지능형 로봇은 사람과 유사한 모양과 동작, 사고를 필요로 하고 있습니다. 단순한 기계로서의 의미를 넘어, '로보사피엔스' 라는 새로운 종의 창조라고 거창하게 표현할 수도 있을것 같습니다. 이러한 스스로 판단하고 움직이며 사람과 상호작용할 수 있는 지능형 로봇을 제어한다는 것은 매우 흥미진진하고 가슴 벅찬 일인 것 같습니다.
지능형 로봇 제어에 대하여
과정소개
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
6
동기유발
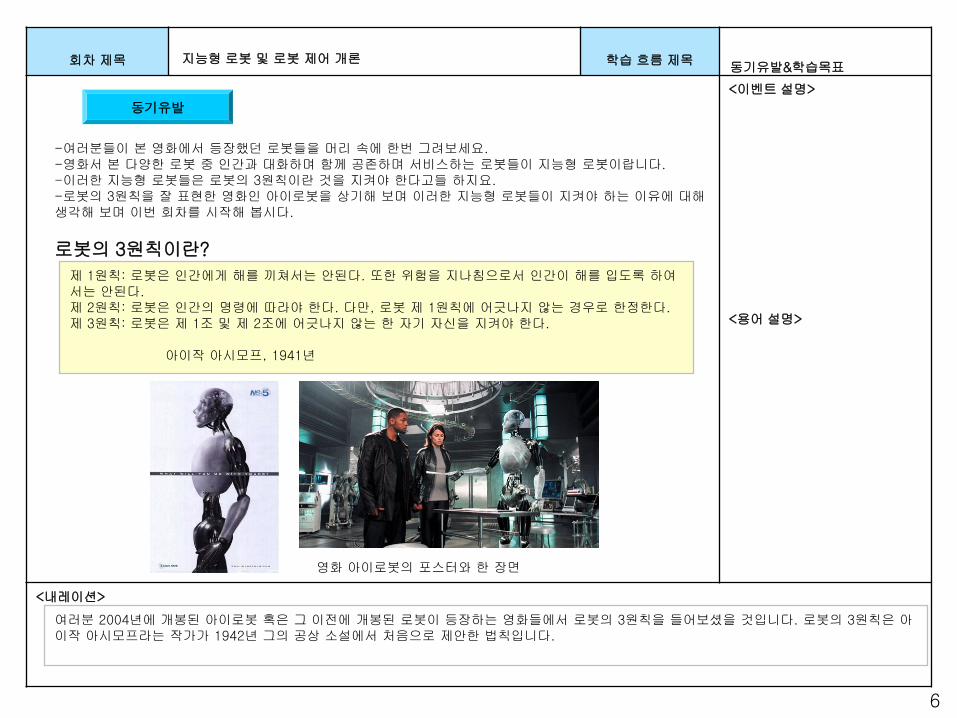
로봇의 3원칙이란?
제 1원칙: 로봇은 인간에게 해를 끼쳐서는 안된다. 또한 위험을 지나침으로서 인간이 해를 입도록 하여서는 안된다. 제 2원칙: 로봇은 인간의 명령에 따라야 한다. 다만, 로봇 제 1원칙에 어긋나지 않는 경우로 한정한다. 제 3원칙: 로봇은 제 1조 및 제 2조에 어긋나지 않는 한 자기 자신을 지켜야 한다. 아이작 아시모프, 1941년
동기유발&학습목표
여러분 2004년에 개봉된 아이로봇 혹은 그 이전에 개봉된 로봇이 등장하는 영화들에서 로봇의 3원칙을 들어보셨을 것입니다. 로봇의 3원칙은 아이작 아시모프라는 작가가 1942년 그의 공상 소설에서 처음으로 제안한 법칙입니다.
-여러분들이 본 영화에서 등장했던 로봇들을 머리 속에 한번 그려보세요. -영화서 본 다양한 로봇 중 인간과 대화하며 함께 공존하며 서비스하는 로봇들이 지능형 로봇이랍니다. -이러한 지능형 로봇들은 로봇의 3원칙이란 것을 지켜야 한다고들 하지요. -로봇의 3원칙을 잘 표현한 영화인 아이로봇을 상기해 보며 이러한 지능형 로봇들이 지켜야 하는 이유에 대해 생각해 보며 이번 회차를 시작해 봅시다.
영화 아이로봇의 포스터와 한 장면
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
7
학습목표
<학습 목표>
1. 지능형 로봇의 정의, 구성요소, 종류별 특징을 설명할 수 있다.
2. 지능형 로봇의 분야별 기술 및 로봇 제어 방법들을 이해한다.
이번 시간은 지능형 로봇 및 로봇 제어 방법에 대하여 학습하고자 합니다.
동기유발&학습목표
이번 시간은 지능형 로봇 및 로봇 제어방법에 대하여 학습하고자 합니다. 따라서 이번시간의 지능형 로봇의 정의, 구성요소, 종류별 특징을 이해
하고, 지능형 로봇의 분야별 기술 및 다양한 로봇제어 방법들을 알아보고 이해하는 것이 목표입니다.
<주요 학습 내용>
1. 지능형 로봇 소개
2. 지능형 로봇 제어 방법 소개
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
8
1. 지능형 로봇은 인간과 같은 생활 환경에서 사용이 가능하다. 2. 소니에서 개발한 애완로봇 아이보는 지능형 로봇에 속한다. 3. 산업용 로봇이 지능형 로봇보다 늦게 개발되었다.
간단한 퀴즈
학습에 앞서 여러분의 사전지식이 어느 정도인지 알아보는 OX퀴즈입니다.
가벼운 마음으로 아래의 내용을 읽고, OX로 답해보기 바랍니다.
확인
O / X
학습에 앞서 간단한 퀴즈를 풀어보겠습니다.
다음 OX문제에 대해 답해보고 여러분의 지능형 로봇에 대한 사전지식을 알아보겠습니다.
자 그럼 이번 회차를 통해, 지능형 로봇의 전체적인 개념과 기존의 산업용 로봇과 지능형 로봇의 차이점과 그 제어 방법들에 대해 학습하도록 하겠습니다.
사전지식 점검
O / X
O / X
1번 정답: O
2번 정답 : O
3번 정답 : X
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
9
Lesson. 지능형 로봇 소개
지능형 로봇의 이동부, 팔, 및 센서를 이용한 로봇제어 방법을 소개한다. 지능형 로봇 제어를 배우기 위해서는 먼저 지능형 로봇의 정의, 구성요소 및 종류별 특징 알아야 합니다.
1. 지능형 로봇이란? 2. 지능형 로봇의 구성요소 3. 지능형 로봇의 종류
레슨소개
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
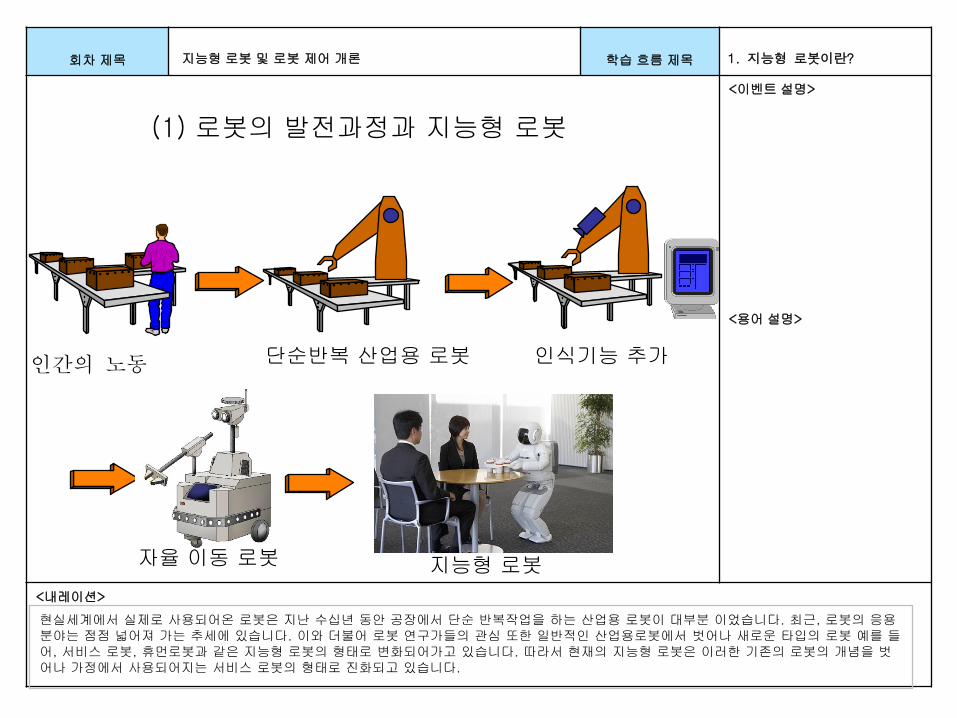
(1) 로봇의 발전과정과 지능형 로봇
인간의 노동 단순반복 산업용 로봇 인식기능 추가
자율 이동 로봇 지능형 로봇
현실세계에서 실제로 사용되어온 로봇은 지난 수십년 동안 공장에서 단순 반복작업을 하는 산업용 로봇이 대부분 이었습니다. 최근, 로봇의 응용분야는 점점 넓어져 가는 추세에 있습니다. 이와 더불어 로봇 연구가들의 관심 또한 일반적인 산업용로봇에서 벗어나 새로운 타입의 로봇 예를 들어, 서비스 로봇, 휴먼로봇과 같은 지능형 로봇의 형태로 변화되어가고 있습니다. 따라서 현재의 지능형 로봇은 이러한 기존의 로봇의 개념을 벗어나 가정에서 사용되어지는 서비스 로봇의 형태로 진화되고 있습니다.
1. 지능형 로봇이란?

회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
11
(2) 지능형 로봇의 정의? -스스로 주변의 상황을 인지하여 행동하는 능력을 가진 로봇 -지능형 로봇이란 사람처럼 시각, 청각, 등 감각을 통해 외부 정보를 입력 받아 스스로 판단해 적절한 행동을 하는 로봇
1. 지능형 로봇이란?
지능형 로봇이란 스스로 주변의 상황을 인지하여 행동하는 능력을 가진 로봇으로 사람처럼 시각, 청각, 등 감각을 통해 외부 정보를 입력 받아 스스로 판단해 적절한 행동을 하는 로봇을 일컫습니다. 나아가 지능형 로봇은 스스로 생각하고 느끼며 판단하고 행동하는 공상 과학영화 등에 등장하는 인간과 유사한 로봇을 의미합니다. 이러한 지능형 로봇은 전기, 전자, 기계, 자동화, 전산, 등의 일반 산업부문의 첨단기술이 총망라된 복합체이지만 특히 지능형 로봇은 인공지능과 , 생체공학, 신경회로, 퍼지이론, 음성화 화상인식 기술, 마이크로프로세서와 모터 제어, 센서사용 등 이제까지 개발된 모든 기술이 총동원되는 첨단 기술의 볼합체라고 말할 수 있습니다. 영화 '바이센테니얼 맨' 이나,'AI', '스타워즈' 에서 보여지는 것처럼 새로운 가정부 내지는 언어번역 및 비서, 교육 로봇, 전문가 보조 로봇, 노약자 및 장애인 보조 로봇 등 다양한 서비스 로봇과 현재 시중에서 쉽게 접할 수 있는 여러 엔터테인먼트용 완구로봇들의 형태로 나열될 수 있습니다. 기존에는 산업용 로봇을 포함하다 최근엔 기술의 발달로 지능의 레벨이 상당히 높은 로봇만을 지칭합니다.
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
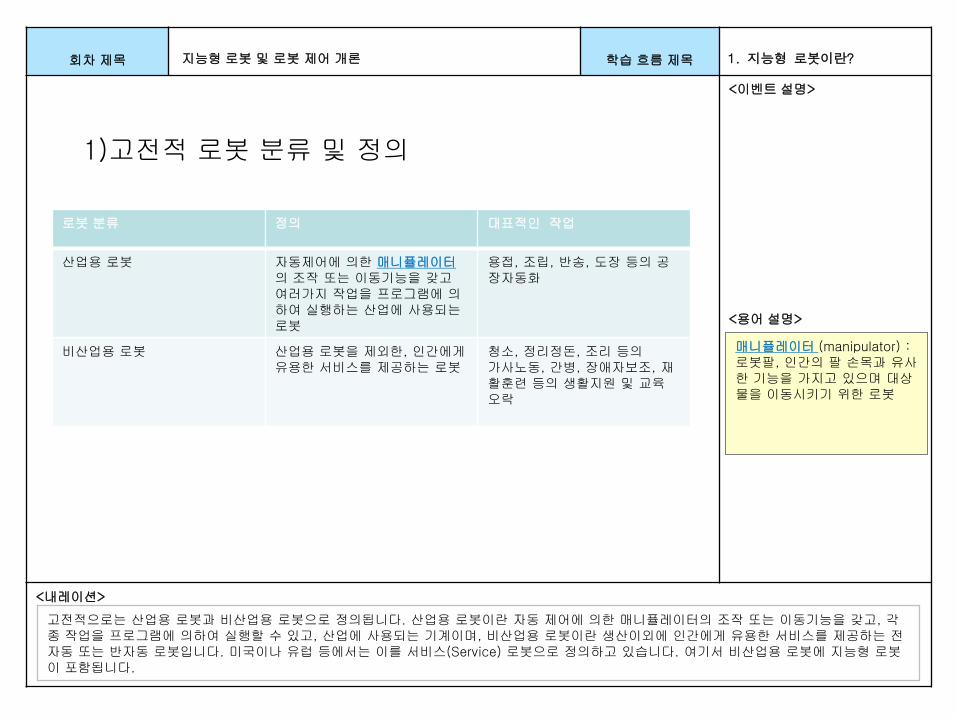
1)고전적 로봇 분류 및 정의
고전적으로는 산업용 로봇과 비산업용 로봇으로 정의됩니다. 산업용 로봇이란 자동 제어에 의한 매니퓰레이터의 조작 또는 이동기능을 갖고, 각종 작업을 프로그램에 의하여 실행할 수 있고, 산업에 사용되는 기계이며, 비산업용 로봇이란 생산이외에 인간에게 유용한 서비스를 제공하는 전자동 또는 반자동 로봇입니다. 미국이나 유럽 등에서는 이를 서비스(Service) 로봇으로 정의하고 있습니다. 여기서 비산업용 로봇에 지능형 로봇이 포함됩니다.
1. 지능형 로봇이란?
로봇 분류 정의 대표적인 작업
산업용 로봇
자동제어에 의한 매니퓰레이터의 조작 또는 이동기능을 갖고 여러가지 작업을 프로그램에 의하여 실행하는 산업에 사용되는 로봇
용접, 조립, 반송, 도장 등의 공장자동화
비산업용 로봇 산업용 로봇을 제외한, 인간에게 유용한 서비스를 제공하는 로봇
청소, 정리정돈, 조리 등의 가사노동, 간병, 장애자보조, 재활훈련 등의 생활지원 및 교육 오락
매니퓰레이터 (manipulator) : 로봇팔, 인간의 팔 손목과 유사한 기능을 가지고 있으며 대상물을 이동시키기 위한 로봇
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
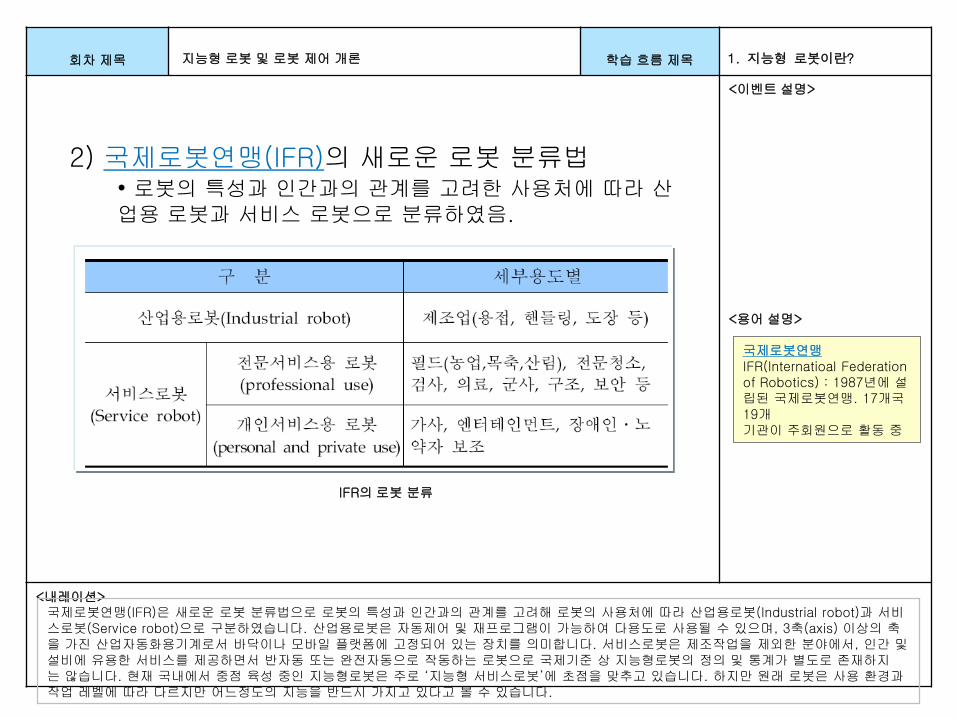
국제로봇연맹(IFR)은 새로운 로봇 분류법으로 로봇의 특성과 인간과의 관계를 고려해 로봇의 사용처에 따라 산업용로봇(Industrial robot)과 서비스로봇(Service robot)으로 구분하였습니다. 산업용로봇은 자동제어 및 재프로그램이 가능하여 다용도로 사용될 수 있으며, 3축(axis) 이상의 축을 가진 산업자동화용기계로서 바닥이나 모바일 플랫폼에 고정되어 있는 장치를 의미합니다. 서비스로봇은 제조작업을 제외한 분야에서, 인간 및 설비에 유용한 서비스를 제공하면서 반자동 또는 완전자동으로 작동하는 로봇으로 국제기준 상 지능형로봇의 정의 및 통계가 별도로 존재하지 는 않습니다. 현재 국내에서 중점 육성 중인 지능형로봇은 주로 ‘지능형 서비스로봇’에 초점을 맞추고 있습니다. 하지만 원래 로봇은 사용 환경과 작업 레벨에 따라 다르지만 어느정도의 지능을 반드시 가지고 있다고 볼 수 있습니다.
1. 지능형 로봇이란?
2) 국제로봇연맹(IFR)의 새로운 로봇 분류법 • 로봇의 특성과 인간과의 관계를 고려한 사용처에 따라 산업용 로봇과 서비스 로봇으로 분류하였음.
국제로봇연맹 IFR(Internatioal Federation of Robotics) : 1987년에 설립된 국제로봇연맹. 17개국 19개 기관이 주회원으로 활동 중
IFR의 로봇 분류
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
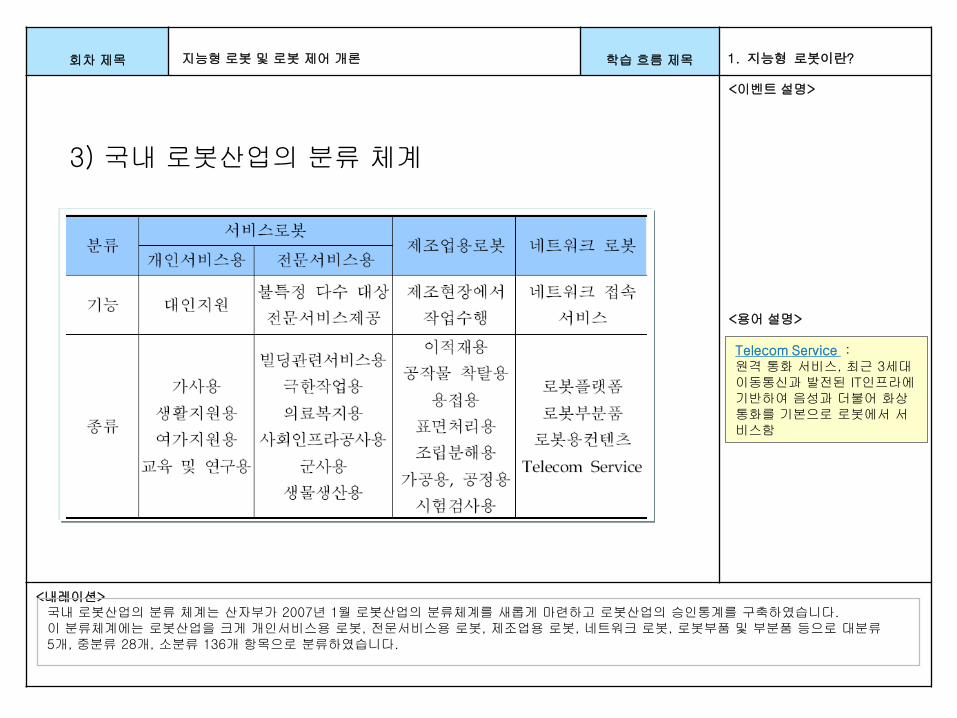
국내 로봇산업의 분류 체계는 산자부가 2007년 1월 로봇산업의 분류체계를 새롭게 마련하고 로봇산업의 승인통계를 구축하였습니다. 이 분류체계에는 로봇산업을 크게 개인서비스용 로봇, 전문서비스용 로봇, 제조업용 로봇, 네트워크 로봇, 로봇부품 및 부분품 등으로 대분류 5개, 중분류 28개, 소분류 136개 항목으로 분류하였습니다.
1. 지능형 로봇이란?
3) 국내 로봇산업의 분류 체계
Telecom Service : 원격 통화 서비스, 최근 3세대 이동통신과 발전된 IT인프라에 기반하여 음성과 더불어 화상 통화를 기본으로 로봇에서 서비스함
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
4) 산업용 로봇과 지능형 로봇의 차이점
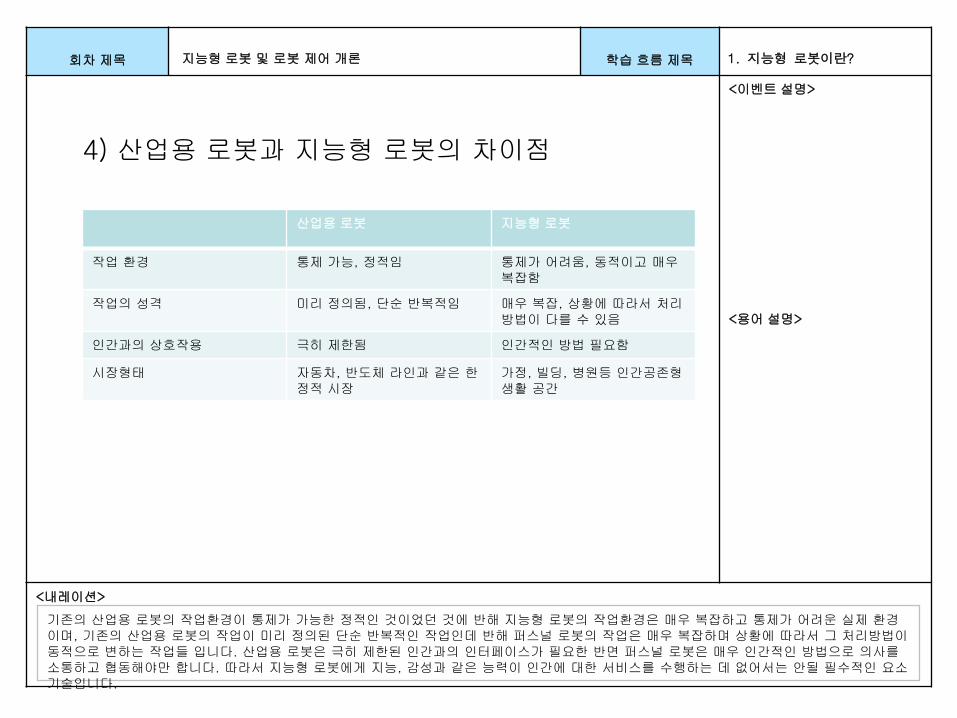
기존의 산업용 로봇의 작업환경이 통제가 가능한 정적인 것이었던 것에 반해 지능형 로봇의 작업환경은 매우 복잡하고 통제가 어려운 실제 환경 이며, 기존의 산업용 로봇의 작업이 미리 정의된 단순 반복적인 작업인데 반해 퍼스널 로봇의 작업은 매우 복잡하며 상황에 따라서 그 처리방법이 동적으로 변하는 작업들 입니다. 산업용 로봇은 극히 제한된 인간과의 인터페이스가 필요한 반면 퍼스널 로봇은 매우 인간적인 방법으로 의사를 소통하고 협동해야만 합니다. 따라서 지능형 로봇에게 지능, 감성과 같은 능력이 인간에 대한 서비스를 수행하는 데 없어서는 안될 필수적인 요소기술입니다.
1. 지능형 로봇이란?
산업용 로봇 지능형 로봇
작업 환경 통제 가능, 정적임 통제가 어려움, 동적이고 매우 복잡함
작업의 성격 미리 정의됨, 단순 반복적임 매우 복잡, 상황에 따라서 처리방법이 다를 수 있음
인간과의 상호작용 극히 제한됨 인간적인 방법 필요함
시장형태 자동차, 반도체 라인과 같은 한정적 시장
가정, 빌딩, 병원등 인간공존형 생활 공간
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
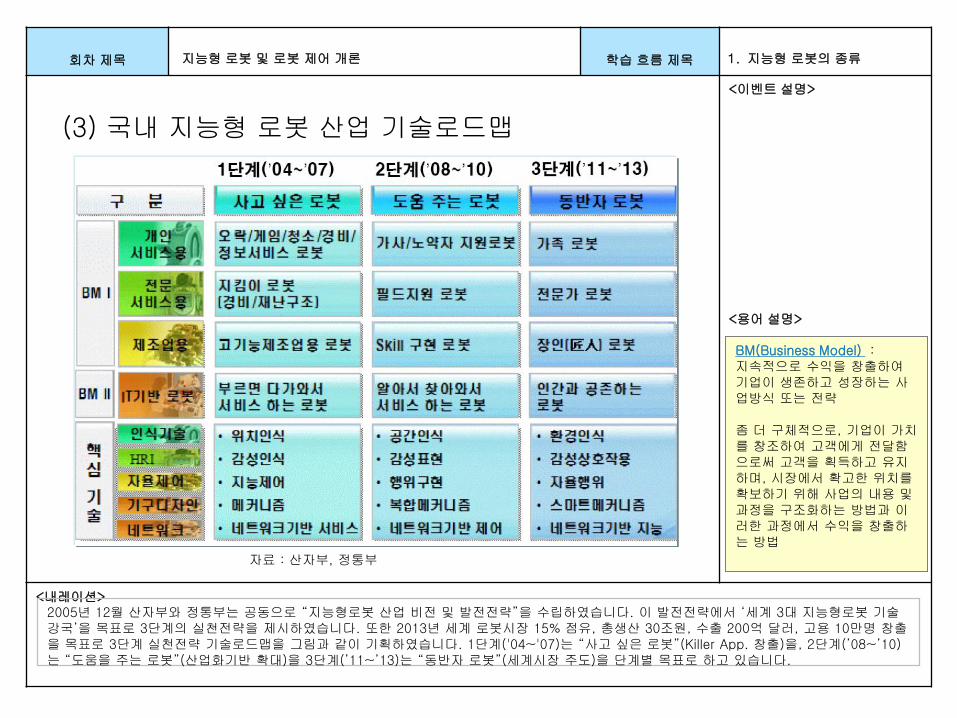
2005년 12월 산자부와 정통부는 공동으로 “지능형로봇 산업 비전 및 발전전략”을 수립하였습니다. 이 발전전략에서 ‘세계 3대 지능형로봇 기술강국’을 목표로 3단계의 실천전략을 제시하였습니다. 또한 2013년 세계 로봇시장 15% 점유, 총생산 30조원, 수출 200억 달러, 고용 10만명 창출을 목표로 3단계 실천전략 기술로드맵을 그림과 같이 기획하였습니다. 1단계('04~'07)는 “사고 싶은 로봇”(Killer App. 창출)을, 2단계(’08~’10) 는 “도움을 주는 로봇”(산업화기반 확대)을 3단계(’11~’13)는 “동반자 로봇”(세계시장 주도)을 단계별 목표로 하고 있습니다.
1. 지능형 로봇의 종류
(3) 국내 지능형 로봇 산업 기술로드맵
자료 : 산자부, 정통부
BM(Business Model) : 지속적으로 수익을 창출하여 기업이 생존하고 성장하는 사업방식 또는 전략 좀 더 구체적으로, 기업이 가치를 창조하여 고객에게 전달함으로써 고객을 획득하고 유지하며, 시장에서 확고한 위치를 확보하기 위해 사업의 내용 및 과정을 구조화하는 방법과 이러한 과정에서 수익을 창출하는 방법
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
2. 지능형 로봇의 구성요소
– 센서
– 구동부
– 제어 소프트웨어
레이져 거리계
이륜 구동형 바퀴 구조
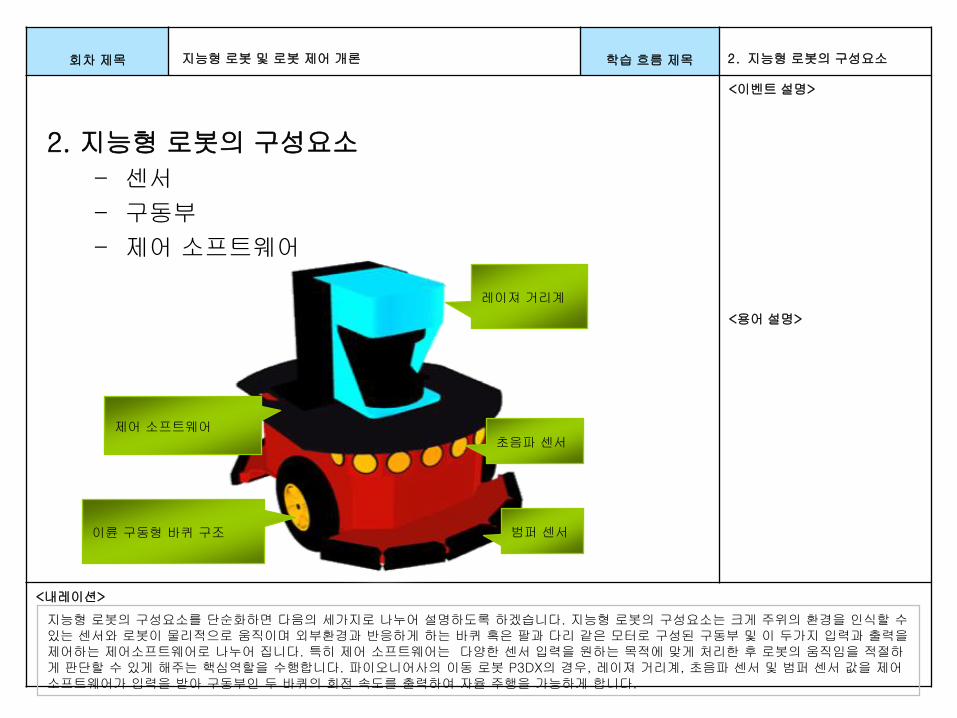
지능형 로봇의 구성요소를 단순화하면 다음의 세가지로 나누어 설명하도록 하겠습니다. 지능형 로봇의 구성요소는 크게 주위의 환경을 인식할 수 있는 센서와 로봇이 물리적으로 움직이며 외부환경과 반응하게 하는 바퀴 혹은 팔과 다리 같은 모터로 구성된 구동부 및 이 두가지 입력과 출력을 제어하는 제어소프트웨어로 나누어 집니다. 특히 제어 소프트웨어는 다양한 센서 입력을 원하는 목적에 맞게 처리한 후 로봇의 움직임을 적절하게 판단할 수 있게 해주는 핵심역할을 수행합니다. 파이오니어사의 이동 로봇 P3DX의 경우, 레이져 거리계, 초음파 센서 및 범퍼 센서 값을 제어소프트웨어가 입력을 받아 구동부인 두 바퀴의 회전 속도를 출력하여 자율 주행을 가능하게 합니다.
제어 소프트웨어
2. 지능형 로봇의 구성요소
범퍼 센서
초음파 센서
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
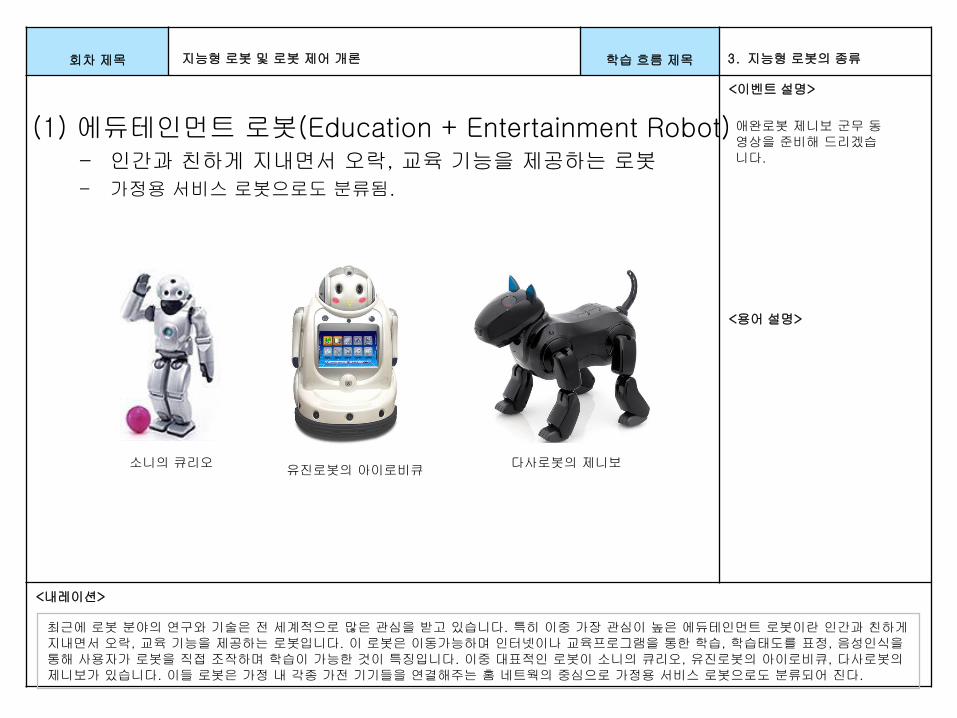
최근에 로봇 분야의 연구와 기술은 전 세계적으로 많은 관심을 받고 있습니다. 특히 이중 가장 관심이 높은 에듀테인먼트 로봇이란 인간과 친하게 지내면서 오락, 교육 기능을 제공하는 로봇입니다. 이 로봇은 이동가능하며 인터넷이나 교육프로그램을 통한 학습, 학습태도를 표정, 음성인식을 통해 사용자가 로봇을 직접 조작하며 학습이 가능한 것이 특징입니다. 이중 대표적인 로봇이 소니의 큐리오, 유진로봇의 아이로비큐, 다사로봇의 제니보가 있습니다. 이들 로봇은 가정 내 각종 가전 기기들을 연결해주는 홈 네트웍의 중심으로 가정용 서비스 로봇으로도 분류되어 진다.
(1) 에듀테인먼트 로봇(Education + Entertainment Robot) – 인간과 친하게 지내면서 오락, 교육 기능을 제공하는 로봇
– 가정용 서비스 로봇으로도 분류됨.
애완로봇 제니보 군무 동영상을 준비해 드리겠습니다.
유진로봇의 아이로비큐 다사로봇의 제니보 소니의 큐리오
3. 지능형 로봇의 종류

회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
(2) 청소로봇
가정용 로봇 분야의 시초이자 대표적인 로봇으로 청소로봇을 들 수 있습니다. 미국의 iRobot사의 Roomba가 대표적이며 최근 국내의 삼성, LG전자와 유진로봇 등에서 다양한 청소로봇이 출시되고 있습니다.
LG전자 로보킹
3. 지능형 로봇의 종류
유진로봇의 아이클레보
iRobot사의 Roomba
삼성전자 하우젠 로봇청소기
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
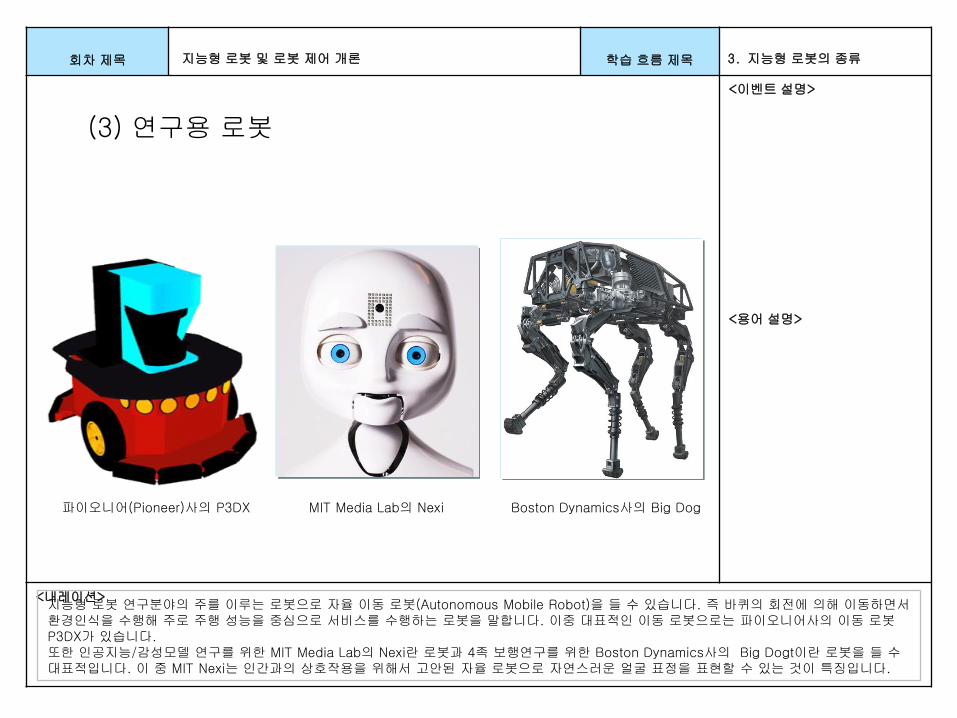
(3) 연구용 로봇
지능형 로봇 연구분야의 주를 이루는 로봇으로 자율 이동 로봇(Autonomous Mobile Robot)을 들 수 있습니다. 즉 바퀴의 회전에 의해 이동하면서 환경인식을 수행해 주로 주행 성능을 중심으로 서비스를 수행하는 로봇을 말합니다. 이중 대표적인 이동 로봇으로는 파이오니어사의 이동 로봇 P3DX가 있습니다. 또한 인공지능/감성모델 연구를 위한 MIT Media Lab의 Nexi란 로봇과 4족 보행연구를 위한 Boston Dynamics사의 Big Dogt이란 로봇을 들 수 대표적입니다. 이 중 MIT Nexi는 인간과의 상호작용을 위해서 고안된 자율 로봇으로 자연스러운 얼굴 표정을 표현할 수 있는 것이 특징입니다.
파이오니어(Pioneer)사의 P3DX
3. 지능형 로봇의 종류
MIT Media Lab의 Nexi Boston Dynamics사의 Big Dog
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
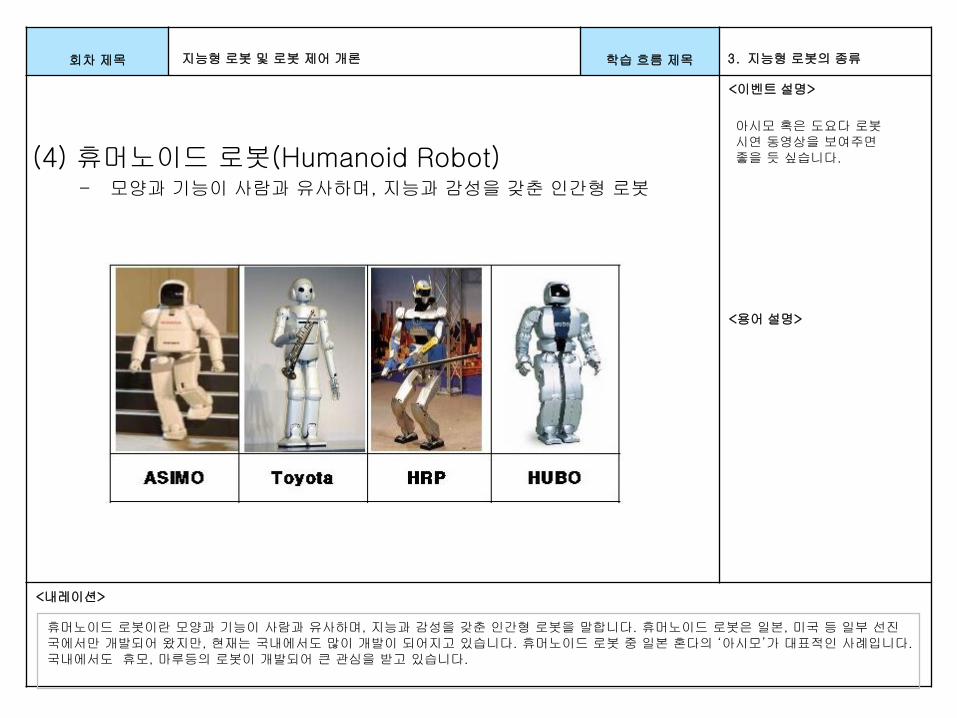
휴머노이드 로봇이란 모양과 기능이 사람과 유사하며, 지능과 감성을 갖춘 인간형 로봇을 말합니다. 휴머노이드 로봇은 일본, 미국 등 일부 선진국에서만 개발되어 왔지만, 현재는 국내에서도 많이 개발이 되어지고 있습니다. 휴머노이드 로봇 중 일본 혼다의 ‘아시모’가 대표적인 사례입니다. 국내에서도 휴모, 마루등의 로봇이 개발되어 큰 관심을 받고 있습니다.
(4) 휴머노이드 로봇(Humanoid Robot) – 모양과 기능이 사람과 유사하며, 지능과 감성을 갖춘 인간형 로봇
아시모 혹은 도요다 로봇 시연 동영상을 보여주면 좋을 듯 싶습니다.
3. 지능형 로봇의 종류
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
22
문제 : 다음 중 지능형 로봇에 해당하지 않는 로봇은? ① 인간형 로봇 ② 홈 서비스 로봇 ③ 애완 로봇 ④ 용접 로봇
정답: 4 번
해설: 용접 로봇은 산업용 로봇에 해당합니다.
정답 확인
돌발! 퀴즈~
돌발퀴즈
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
23
Lesson.
지능형 로봇의 분야별 기술, 지능형 로봇 센서의 종류와 다양한 로봇제어 방법들 대해 알아 봅니다.
1. 지능형 로봇의 분야별 기술 2. 지능형 로봇 센서의 종류 3. 다양한 로봇 제어 방법들
레슨소개
지능형 로봇 제어 방법 소개
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
1. 지능형 로봇의 핵심기술
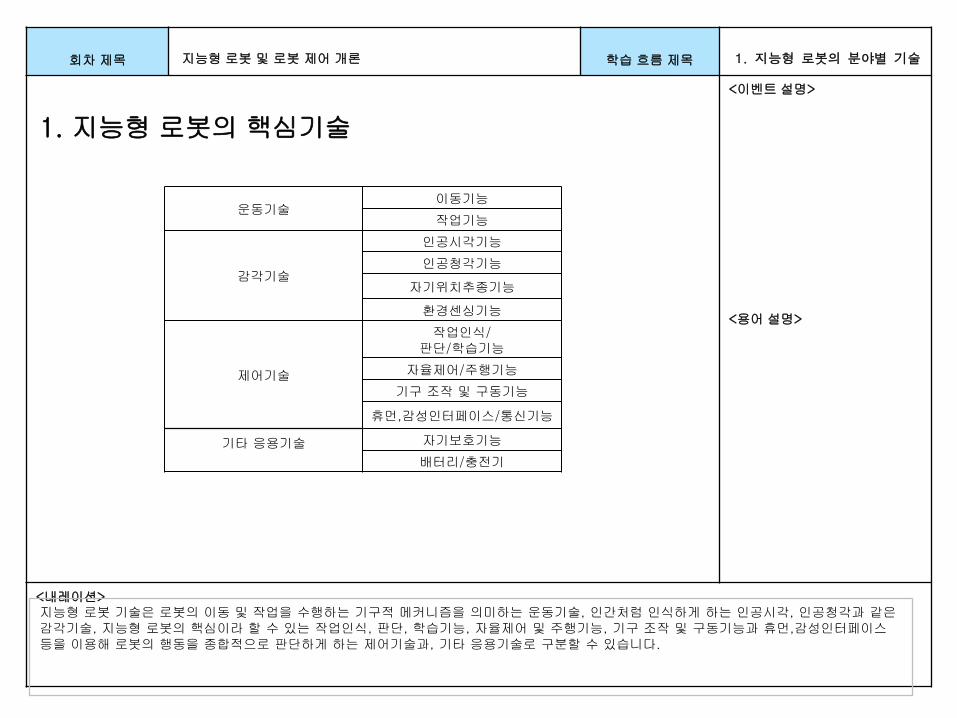
지능형 로봇 기술은 로봇의 이동 및 작업을 수행하는 기구적 메커니즘을 의미하는 운동기술, 인간처럼 인식하게 하는 인공시각, 인공청각과 같은 감각기술, 지능형 로봇의 핵심이라 할 수 있는 작업인식, 판단, 학습기능, 자율제어 및 주행기능, 기구 조작 및 구동기능과 휴먼,감성인터페이스 등을 이용해 로봇의 행동을 종합적으로 판단하게 하는 제어기술과, 기타 응용기술로 구분할 수 있습니다.
1. 지능형 로봇의 분야별 기술
운동기술 이동기능
작업기능
감각기술
인공시각기능
인공청각기능
자기위치추종기능
환경센싱기능
제어기술
작업인식/ 판단/학습기능
자율제어/주행기능
기구 조작 및 구동기능
휴먼,감성인터페이스/통신기능
기타 응용기술
자기보호기능
배터리/충전기
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
2. 지능형 로봇 센서의 종류
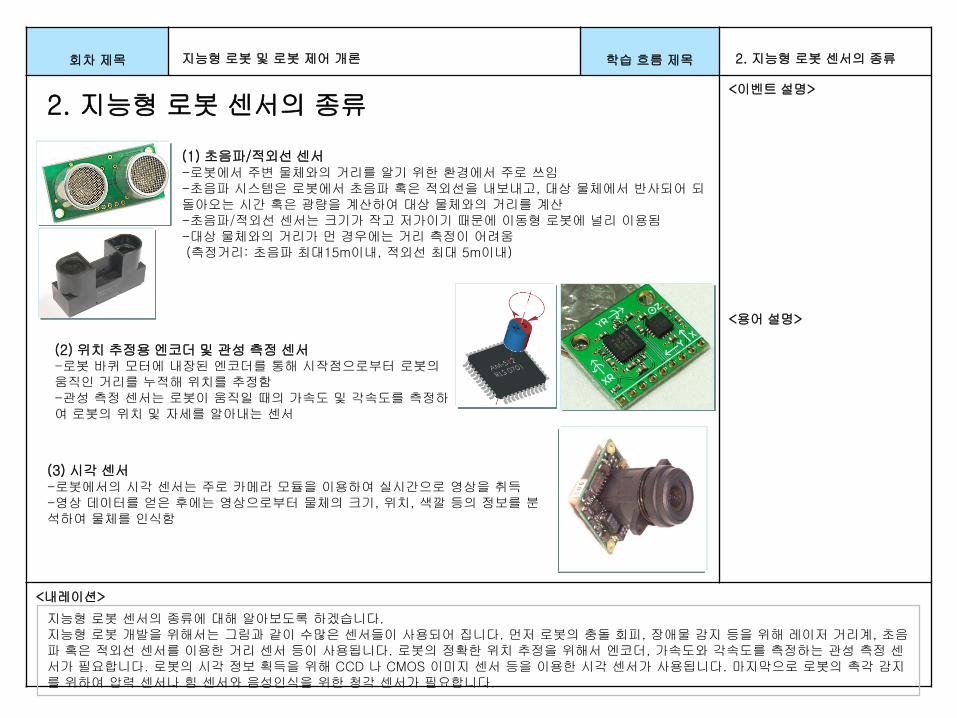
지능형 로봇 센서의 종류에 대해 알아보도록 하겠습니다. 지능형 로봇 개발을 위해서는 그림과 같이 수많은 센서들이 사용되어 집니다. 먼저 로봇의 충돌 회피, 장애물 감지 등을 위해 레이저 거리계, 초음파 혹은 적외선 센서를 이용한 거리 센서 등이 사용됩니다. 로봇의 정확한 위치 추정을 위해서 엔코더, 가속도와 각속도를 측정하는 관성 측정 센서가 필요합니다. 로봇의 시각 정보 획득을 위해 CCD 나 CMOS 이미지 센서 등을 이용한 시각 센서가 사용됩니다. 마지막으로 로봇의 촉각 감지를 위하여 압력 센서나 힘 센서와 음성인식을 위한 청각 센서가 필요합니다.
2. 지능형 로봇 센서의 종류
(1) 초음파/적외선 센서 -로봇에서 주변 물체와의 거리를 알기 위한 환경에서 주로 쓰임 -초음파 시스템은 로봇에서 초음파 혹은 적외선을 내보내고, 대상 물체에서 반사되어 되돌아오는 시간 혹은 광량을 계산하여 대상 물체와의 거리를 계산 -초음파/적외선 센서는 크기가 작고 저가이기 때문에 이동형 로봇에 널리 이용됨 -대상 물체와의 거리가 먼 경우에는 거리 측정이 어려움 (측정거리: 초음파 최대15m이내, 적외선 최대 5m이내)
(3) 시각 센서 -로봇에서의 시각 센서는 주로 카메라 모듈을 이용하여 실시간으로 영상을 취득 -영상 데이터를 얻은 후에는 영상으로부터 물체의 크기, 위치, 색깔 등의 정보를 분석하여 물체를 인식함
(2) 위치 추정용 엔코더 및 관성 측정 센서 -로봇 바퀴 모터에 내장된 엔코더를 통해 시작점으로부터 로봇의 움직인 거리를 누적해 위치를 추정함 -관성 측정 센서는 로봇이 움직일 때의 가속도 및 각속도를 측정하여 로봇의 위치 및 자세를 알아내는 센서
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
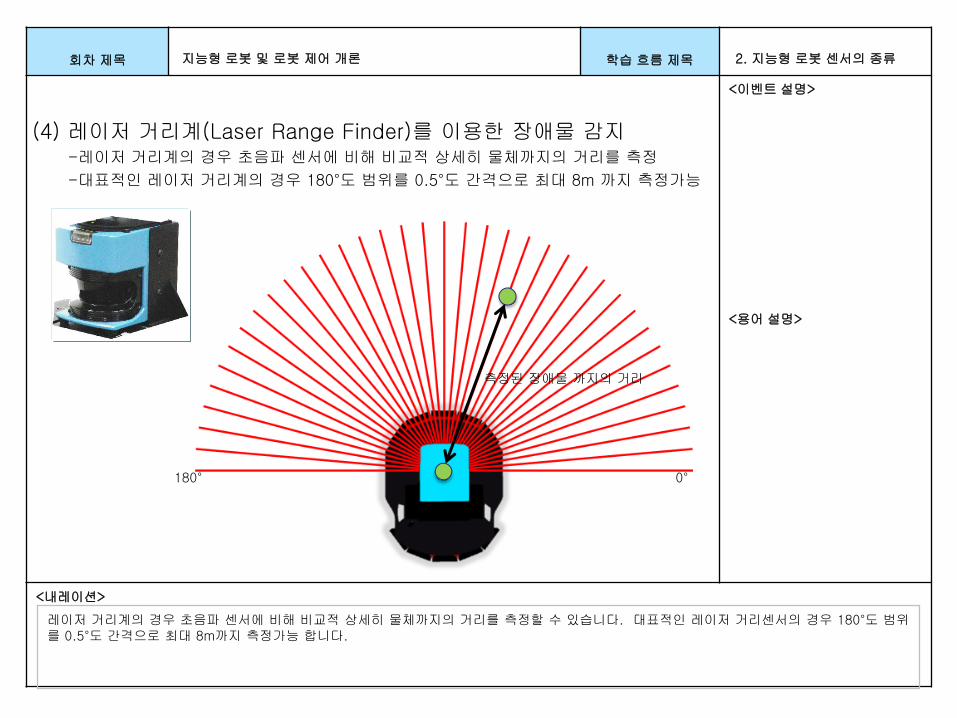
(4) 레이저 거리계(Laser Range Finder)를 이용한 장애물 감지 -레이저 거리계의 경우 초음파 센서에 비해 비교적 상세히 물체까지의 거리를 측정
-대표적인 레이저 거리계의 경우 180°도 범위를 0.5°도 간격으로 최대 8m 까지 측정가능
레이저 거리계의 경우 초음파 센서에 비해 비교적 상세히 물체까지의 거리를 측정할 수 있습니다. 대표적인 레이저 거리센서의 경우 180°도 범위를 0.5°도 간격으로 최대 8m까지 측정가능 합니다.
0° 180°
측정된 장애물 까지의 거리
2. 지능형 로봇 센서의 종류
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
(5) 제니보에 장착된 센서 구조
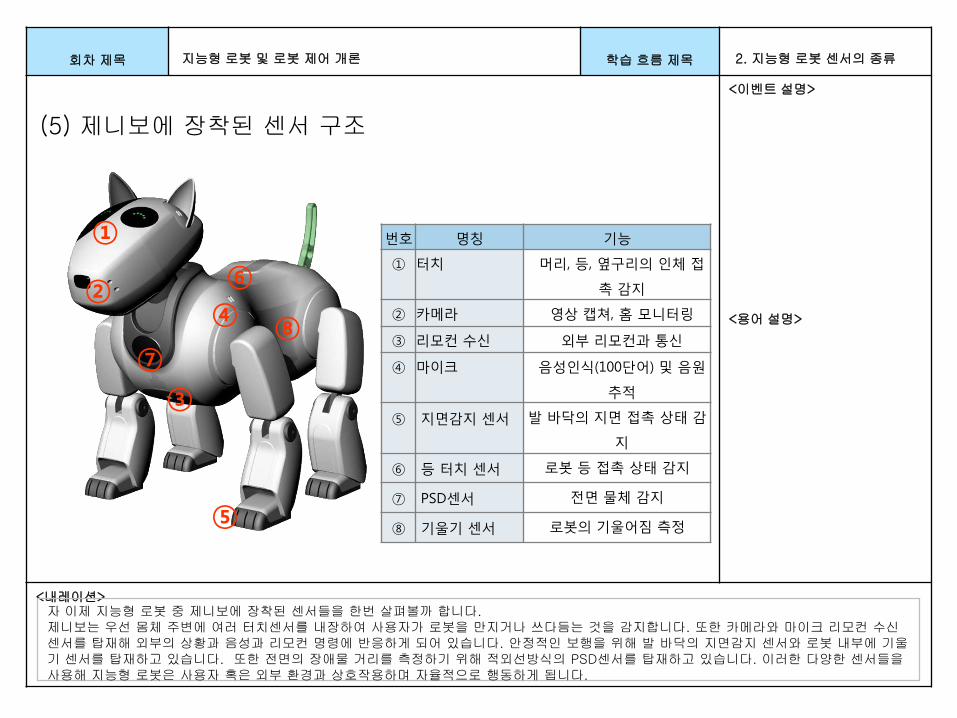
자 이제 지능형 로봇 중 제니보에 장착된 센서들을 한번 살펴볼까 합니다. 제니보는 우선 몸체 주변에 여러 터치센서를 내장하여 사용자가 로봇을 만지거나 쓰다듬는 것을 감지합니다. 또한 카메라와 마이크 리모컨 수신 센서를 탑재해 외부의 상황과 음성과 리모컨 명령에 반응하게 되어 있습니다. 안정적인 보행을 위해 발 바닥의 지면감지 센서와 로봇 내부에 기울기 센서를 탑재하고 있습니다. 또한 전면의 장애물 거리를 측정하기 위해 적외선방식의 PSD센서를 탑재하고 있습니다. 이러한 다양한 센서들을 사용해 지능형 로봇은 사용자 혹은 외부 환경과 상호작용하며 자율적으로 행동하게 됩니다.
번호 명칭 기능
① 터치 머리, 등, 옆구리의 인체 접
촉 감지
② 카메라 영상 캡쳐, 홈 모니터링
③ 리모컨 수신 외부 리모컨과 통신
④ 마이크 음성인식(100단어) 및 음원
추적
⑤ 지면감지 센서 발 바닥의 지면 접촉 상태 감
지
⑥ 등 터치 센서 로봇 등 접촉 상태 감지
⑦ PSD센서 전면 물체 감지
⑧ 기울기 센서 로봇의 기울어짐 측정
①
②
③
④
⑤
⑥
⑧ ⑦
2. 지능형 로봇 센서의 종류
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
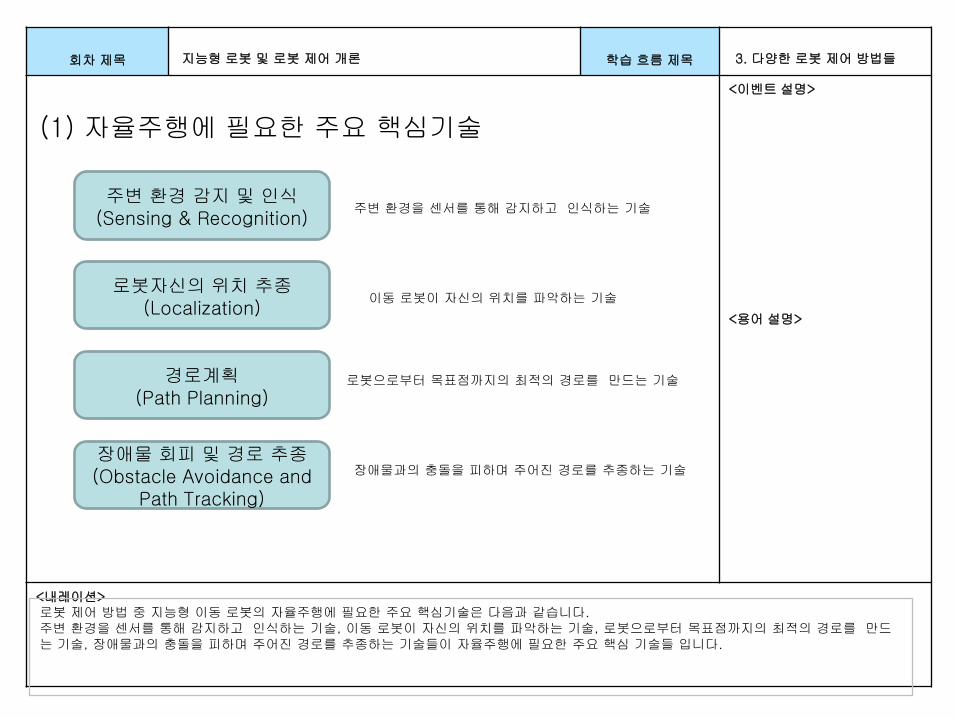
로봇 제어 방법 중 지능형 이동 로봇의 자율주행에 필요한 주요 핵심기술은 다음과 같습니다. 주변 환경을 센서를 통해 감지하고 인식하는 기술, 이동 로봇이 자신의 위치를 파악하는 기술, 로봇으로부터 목표점까지의 최적의 경로를 만드는 기술, 장애물과의 충돌을 피하며 주어진 경로를 추종하는 기술들이 자율주행에 필요한 주요 핵심 기술들 입니다.
3. 다양한 로봇 제어 방법들
(1) 자율주행에 필요한 주요 핵심기술
주변 환경 감지 및 인식 (Sensing & Recognition)
로봇자신의 위치 추종 (Localization)
경로계획 (Path Planning)
장애물 회피 및 경로 추종 (Obstacle Avoidance and
Path Tracking)
주변 환경을 센서를 통해 감지하고 인식하는 기술
이동 로봇이 자신의 위치를 파악하는 기술
로봇으로부터 목표점까지의 최적의 경로를 만드는 기술
장애물과의 충돌을 피하며 주어진 경로를 추종하는 기술
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
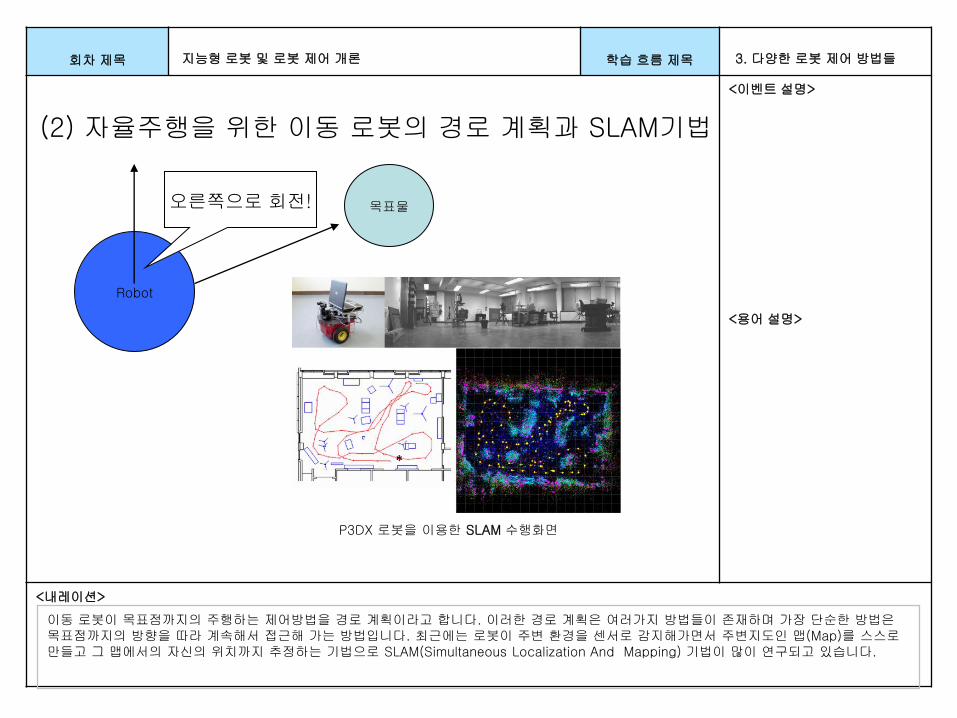
(2) 자율주행을 위한 이동 로봇의 경로 계획과 SLAM기법
이동 로봇이 목표점까지의 주행하는 제어방법을 경로 계획이라고 합니다. 이러한 경로 계획은 여러가지 방법들이 존재하며 가장 단순한 방법은 목표점까지의 방향을 따라 계속해서 접근해 가는 방법입니다. 최근에는 로봇이 주변 환경을 센서로 감지해가면서 주변지도인 맵(Map)를 스스로 만들고 그 맵에서의 자신의 위치까지 추정하는 기법으로 SLAM(Simultaneous Localization And Mapping) 기법이 많이 연구되고 있습니다.
3. 다양한 로봇 제어 방법들
목표물
Robot
오른쪽으로 회전!
P3DX 로봇을 이용한 SLAM 수행화면
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
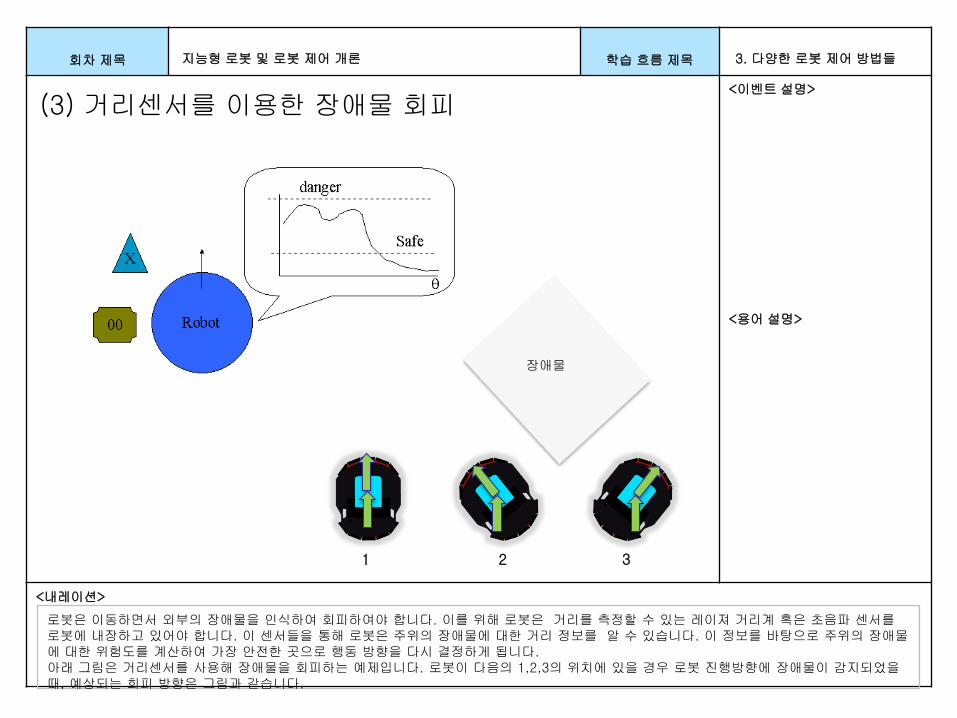
(3) 거리센서를 이용한 장애물 회피
로봇은 이동하면서 외부의 장애물을 인식하여 회피하여야 합니다. 이를 위해 로봇은 거리를 측정할 수 있는 레이져 거리계 혹은 초음파 센서를 로봇에 내장하고 있어야 합니다. 이 센서들을 통해 로봇은 주위의 장애물에 대한 거리 정보를 알 수 있습니다. 이 정보를 바탕으로 주위의 장애물에 대한 위험도를 계산하여 가장 안전한 곳으로 행동 방향을 다시 결정하게 됩니다. 아래 그림은 거리센서를 사용해 장애물을 회피하는 예제입니다. 로봇이 다음의 1,2,3의 위치에 있을 경우 로봇 진행방향에 장애물이 감지되었을 때, 예상되는 회피 방향은 그림과 같습니다.
3. 다양한 로봇 제어 방법들
1 2 3
장애물
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
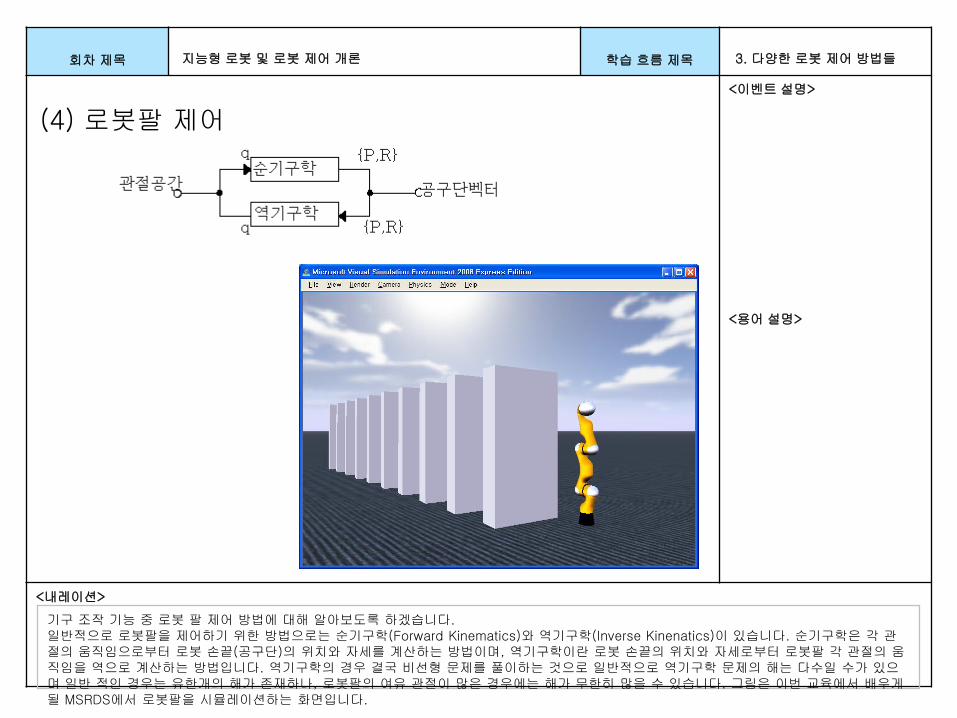
(4) 로봇팔 제어
기구 조작 기능 중 로봇 팔 제어 방법에 대해 알아보도록 하겠습니다. 일반적으로 로봇팔을 제어하기 위한 방법으로는 순기구학(Forward Kinematics)와 역기구학(Inverse Kinenatics)이 있습니다. 순기구학은 각 관절의 움직임으로부터 로봇 손끝(공구단)의 위치와 자세를 계산하는 방법이며, 역기구학이란 로봇 손끝의 위치와 자세로부터 로봇팔 각 관절의 움직임을 역으로 계산하는 방법입니다. 역기구학의 경우 결국 비선형 문제를 풀이하는 것으로 일반적으로 역기구학 문제의 해는 다수일 수가 있으며 일반 적인 경우는 유한개의 해가 존재하나, 로봇팔의 여유 관절이 많은 경우에는 해가 무한히 많을 수 있습니다. 그림은 이번 교육에서 배우게 될 MSRDS에서 로봇팔을 시뮬레이션하는 화면입니다.
3. 다양한 로봇 제어 방법들
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
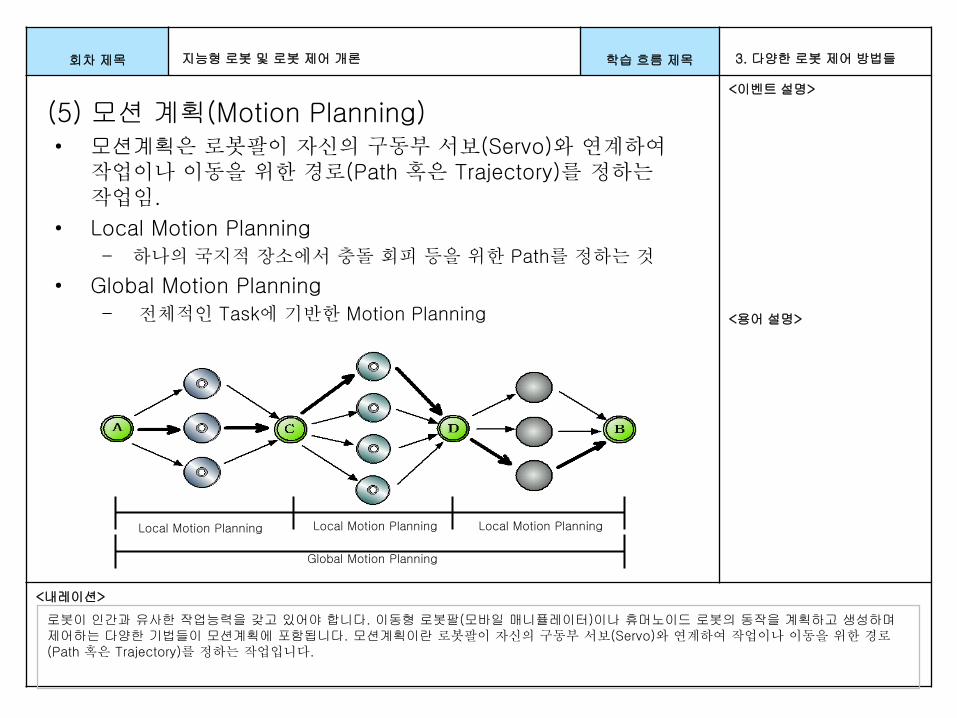
• 모션계획은 로봇팔이 자신의 구동부 서보(Servo)와 연계하여 작업이나 이동을 위한 경로(Path 혹은 Trajectory)를 정하는 작업임.
• Local Motion Planning
– 하나의 국지적 장소에서 충돌 회피 등을 위한 Path를 정하는 것
• Global Motion Planning
– 전체적인 Task에 기반한 Motion Planning
(5) 모션 계획(Motion Planning)
Global Motion Planning
Local Motion Planning Local Motion Planning Local Motion Planning
3. 다양한 로봇 제어 방법들
로봇이 인간과 유사한 작업능력을 갖고 있어야 합니다. 이동형 로봇팔(모바일 매니퓰레이터)이나 휴머노이드 로봇의 동작을 계획하고 생성하며 제어하는 다양한 기법들이 모션계획에 포함됩니다. 모션계획이란 로봇팔이 자신의 구동부 서보(Servo)와 연계하여 작업이나 이동을 위한 경로(Path 혹은 Trajectory)를 정하는 작업입니다.
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
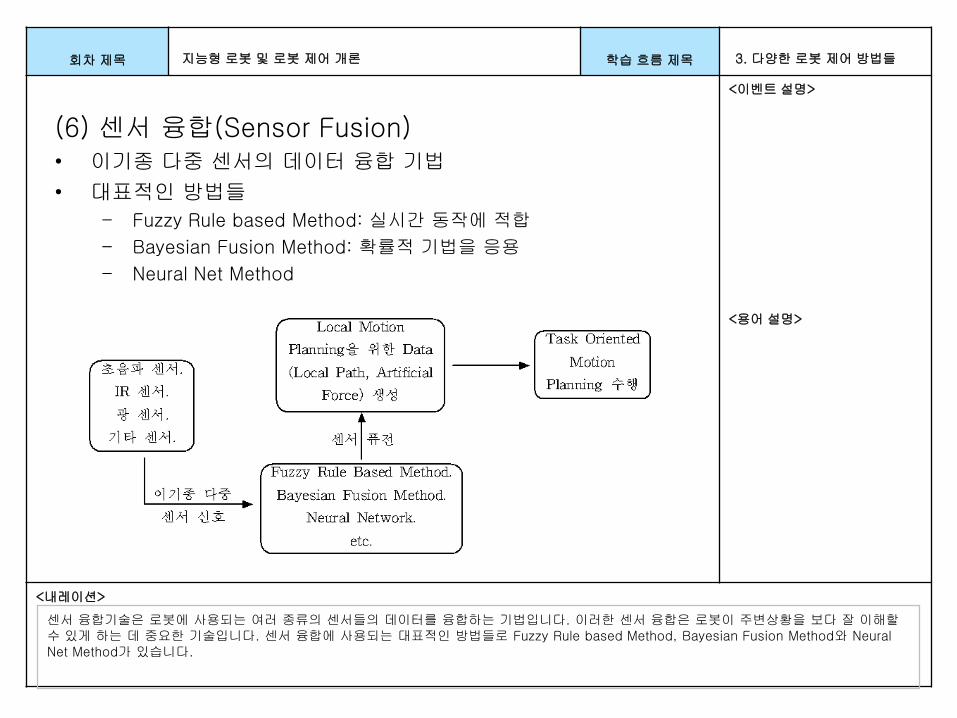
• 이기종 다중 센서의 데이터 융합 기법
• 대표적인 방법들
– Fuzzy Rule based Method: 실시간 동작에 적합
– Bayesian Fusion Method: 확률적 기법을 응용
– Neural Net Method
(6) 센서 융합(Sensor Fusion)
3. 다양한 로봇 제어 방법들
센서 융합기술은 로봇에 사용되는 여러 종류의 센서들의 데이터를 융합하는 기법입니다. 이러한 센서 융합은 로봇이 주변상황을 보다 잘 이해할 수 있게 하는 데 중요한 기술입니다. 센서 융합에 사용되는 대표적인 방법들로 Fuzzy Rule based Method, Bayesian Fusion Method와 Neural Net Method가 있습니다.
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
1) 목표지점까지의 이동
A
B
D
E F
K
J G
C
I
H
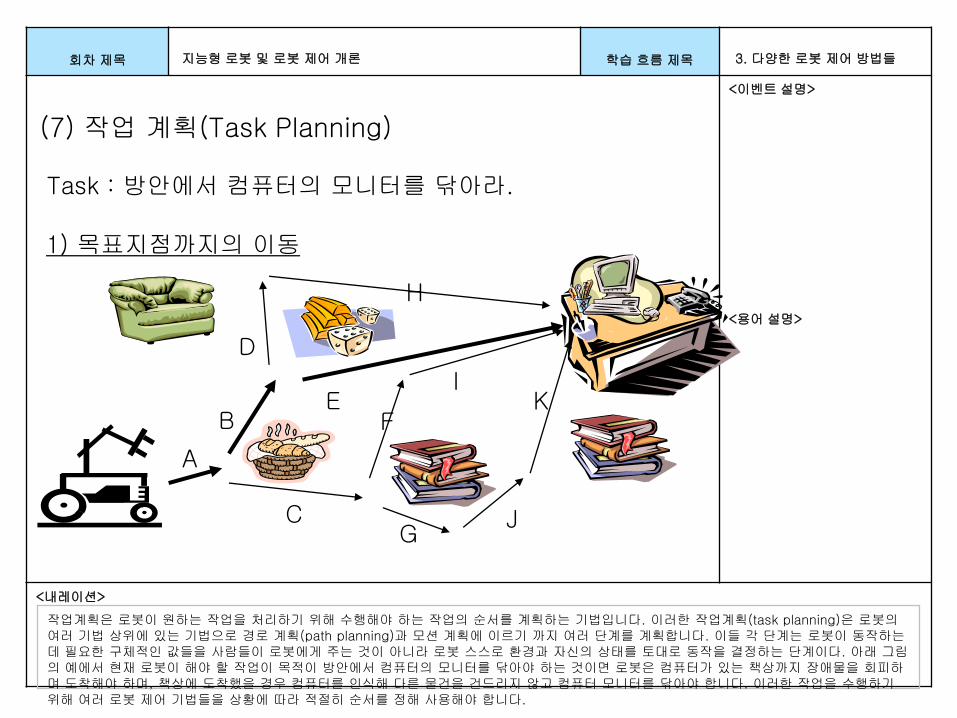
(7) 작업 계획(Task Planning)
Task : 방안에서 컴퓨터의 모니터를 닦아라.
3. 다양한 로봇 제어 방법들
작업계획은 로봇이 원하는 작업을 처리하기 위해 수행해야 하는 작업의 순서를 계획하는 기법입니다. 이러한 작업계획(task planning)은 로봇의 여러 기법 상위에 있는 기법으로 경로 계획(path planning)과 모션 계획에 이르기 까지 여러 단계를 계획합니다. 이들 각 단계는 로봇이 동작하는데 필요한 구체적인 값들을 사람들이 로봇에게 주는 것이 아니라 로봇 스스로 환경과 자신의 상태를 토대로 동작을 결정하는 단계이다. 아래 그림의 예에서 현재 로봇이 해야 할 작업이 목적이 방안에서 컴퓨터의 모니터를 닦아야 하는 것이면 로봇은 컴퓨터가 있는 책상까지 장애물을 회피하며 도착해야 하며, 책상에 도착했을 경우 컴퓨터를 인식해 다른 물건을 건드리지 않고 컴퓨터 모니터를 닦아야 합니다. 이러한 작업을 수행하기 위해 여러 로봇 제어 기법들을 상황에 따라 적절히 순서를 정해 사용해야 합니다.
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
2) 닦는 작업 수행
3. 다양한 로봇 제어 방법들
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
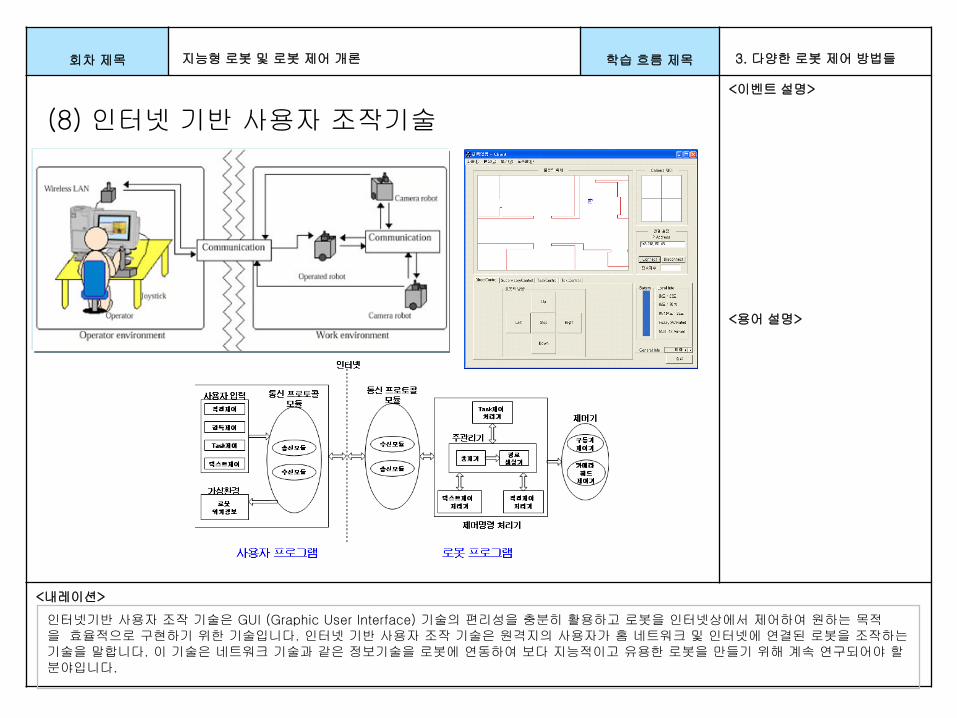
(8) 인터넷 기반 사용자 조작기술
3. 다양한 로봇 제어 방법들
인터넷기반 사용자 조작 기술은 GUI (Graphic User Interface) 기술의 편리성을 충분히 활용하고 로봇을 인터넷상에서 제어하여 원하는 목적을 효율적으로 구현하기 위한 기술입니다. 인터넷 기반 사용자 조작 기술은 원격지의 사용자가 홈 네트워크 및 인터넷에 연결된 로봇을 조작하는 기술을 말합니다. 이 기술은 네트워크 기술과 같은 정보기술을 로봇에 연동하여 보다 지능적이고 유용한 로봇을 만들기 위해 계속 연구되어야 할 분야입니다.
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
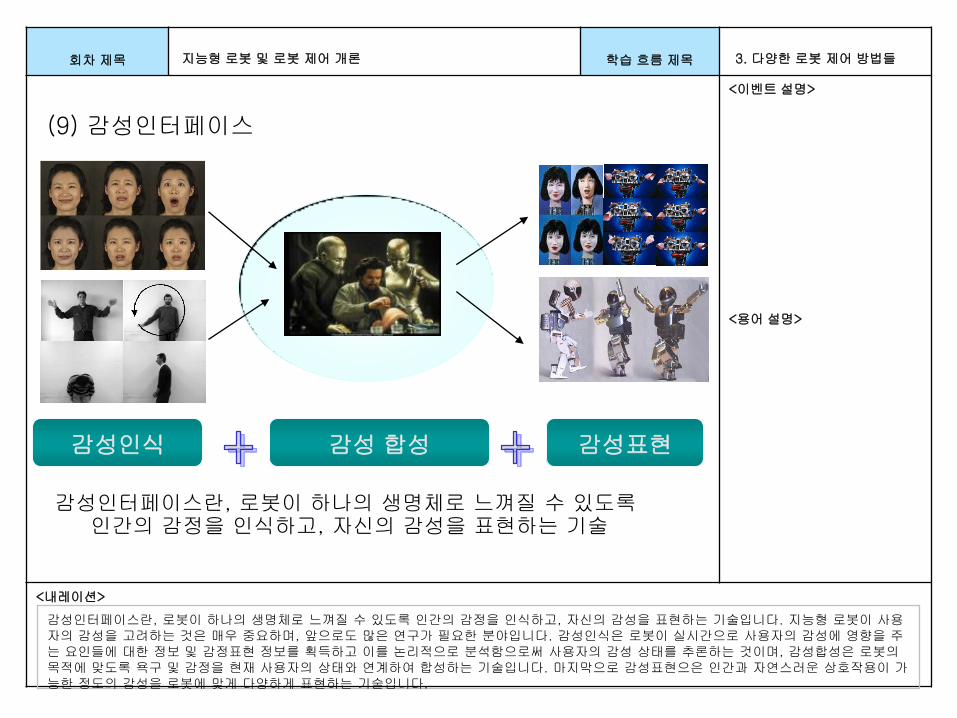
감성인터페이스란, 로봇이 하나의 생명체로 느껴질 수 있도록 인간의 감정을 인식하고, 자신의 감성을 표현하는 기술
감성인식 감성표현 감성 합성
(9) 감성인터페이스
감성인터페이스란, 로봇이 하나의 생명체로 느껴질 수 있도록 인간의 감정을 인식하고, 자신의 감성을 표현하는 기술입니다. 지능형 로봇이 사용자의 감성을 고려하는 것은 매우 중요하며, 앞으로도 많은 연구가 필요한 분야입니다. 감성인식은 로봇이 실시간으로 사용자의 감성에 영향을 주는 요인들에 대한 정보 및 감정표현 정보를 획득하고 이를 논리적으로 분석함으로써 사용자의 감성 상태를 추론하는 것이며, 감성합성은 로봇의 목적에 맞도록 욕구 및 감정을 현재 사용자의 상태와 연계하여 합성하는 기술입니다. 마지막으로 감성표현으은 인간과 자연스러운 상호작용이 가능한 정도의 감성을 로봇에 맞게 다양하게 표현하는 기술입니다.
3. 다양한 로봇 제어 방법들
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
38
문제 : 다음 중 지능형 로봇의 자율주행 제어 방법에 속하지 않는 것은? ① 장애물 회피 ② 휴먼인터페이스 ③ 주변 환경 감지 및 인식 ④ SLAM
정답: 2 번
해설: 휴먼인터페이스는 지능형 로봇 제어방법에는 속하지만
자율주행 제어 방법에는 속하지 않습니다.
정답 확인
돌발! 퀴즈~
돌발퀴즈
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
39
학습 포인트
지능형 로봇이란? -스스로 주변의 상황을 인지하여 행동하는 능력을 가진 로봇 -지능형 로봇이란 사람처럼 시각, 청각, 등 감각을 통해 외부 정보를 입력 받아 스스로 판단해 적절한 행동을 하는 로봇
지능형 로봇 제어기술이란?
지능형 로봇을 구동하는 매우 중요한 기술로 작업인식, 판단, 학습기능, 자율제어 및 주행기능, 기구 조작 및 구동기능과 휴먼,감성인터페이스 등 로봇이 상황을 종합적으로 판단하고 행동하게 하는 기술입니다.
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
40
1. 지능형 로봇이란? -스스로 주변의 상황을 인지하여 행동하는 능력을 가진 로봇 -지능형 로봇이란 사람처럼 시각, 청각, 등 감각을 통해 외부 정보를 입력 받아 스스로 판단해 적절한 행동을 하는 로봇
2.국제로봇연맹(IFR)의 새로운 로봇 분류법
-로봇의 특성과 인간과의 관계를 고려한 사용처에 따라 구분
-산업용 로봇과 서비스 로봇으로 분류됨
3. 지능형 로봇 제어기술
지능형 로봇의 핵심기술로 작업인식, 판단, 학습기능, 자율제어 및 주행기능, 기구 조작 및 구동기능과 휴먼,감성인터페이스 등이 있습니다. 4. 자율주행에 필요한 핵심기술 지능형 이동 로봇의 자율주행에 필요한 주요 핵심기술로는 주변 환경을 센서를 통해 감지하고 인식하는 기술, 이동 로봇이 자신의 위치를 파악하는 기술, 로봇으로부터 목표점까지의 최적의 경로를 만드는 기술, 장애물과의 충돌을 피하며 주어진 경로를 추종하는 기술들이 있습니다.
학습요약 및 정리
출력하기
학습요약 및 정리
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
41
문제 2 : 다음 중 지능형 로봇의 제어 방법에 속하지 않는 것은? ① 경로계획 ② 감성인터페이스 ③ 음성인식 ④ 불량품 검사
학습하시느라 수고하셨습니다. 다음의 문제를 풀어보면서 학습한 내용을 점검해볼까요? 아래의 문제에 답해보세요.
정답: 3 번
해설: 단순 반복 작업을 하는 로봇은 지능형 로봇의 개념과는 먼 산업용 로봇의 특징입니다.
관련학습 보기: 지능형 로봇이란?
평가하기
문제 1 : 다음 중 지능형 로봇과 거리가 먼 설명? ① 인간과 공존하는 로봇 ② 부르면 다가와 서비스 하는 로봇 ③ 단순 반복 작업을 하는 로봇 ④ 알아서 찾아와 서비스 하는 로봇
정답: 4 번
해설: 불량품 검사는 산업용 로봇의 기능으로 지능형 로봇의 제어 방법에는 포함되지 않습니다.
관련학습 보기: 다양한 로봇 제어 방법들
문제 3 : 다음 중 자율주행에 필요한 주요 핵심기술에 해당하는 것은? 속하지 않는 것은? ① 감성인터페이스 ② 장애물 회피 및 경로 추종 ③ 화자인식 ④ 로봇팔 제어
정답: 2 번
해설: 장애물 회피 및 경로 추종이 자율주행에 필요한 핵심기술에 해당합니다.
관련학습 보기: 다양한 로봇 제어 방법들
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
42
관련사이트
지능형로봇사업단
http://www.intelligentrobot.org/
이번 이번 시간에는 지능형 로봇 및 로봇 제어 방법에 대하여 학습하였습니다. 1. 지능형 로봇 소개 2. 지능형 로봇제어 방법 소개
다음 시간에서는 지능형 로봇 제어를 위한 개발 툴 MSRDS 에 대해 학습하도록 하겠습니다. 1. MSRDS의 탄생 및 배경 2. MSRDS 소개 및 특징 설명
참고문헌
훤히 보이는 지능형 로봇 (전자신문사)
학습마무리
회차 제목
학습 흐름 제목
<이벤트 설명>
<용어 설명>
<내레이션>
지능형 로봇 및 로봇 제어 개론
43
쉼터
다음에 제시된 지능형 로봇 관련사이트들을 한번 둘러보며 이번 회차 내용에 대해서 복습해 보는 시간을 가지면 어떨까요?
국내 지능형 로봇분야 연구수준은 세계적으로 매우 인정받고 있습니다.
특히 여러 휴머노이드 로봇 등 매우 자랑할만한 로봇들이 많이 현재도 개발되어지고 있습니다.
그 중 대표적인 로봇 연구소 웹사이트들을 한번씩 찾아보면 좋을 듯 싶습니다.
지능형로봇사업단
http://www.intelligentrobot.org/
인간기능 생활지원 지능로봇 기술개발사업단
http://irobotics.re.kr
KIST 인지로봇연구단
http://humanoid.kist.re.kr
KAIST 휴보랩 과 인공지능미디어랩
http://hubolab.kaist.ac.kr
http://mind.kaist.ac.kr
ETRI u-City로봇연구팀
http://robotask.etri.re.kr/





















![[전문가 발표] DRC참가기 & 로봇 정신 (한재권 박사)](https://img.pdfslide.tips/doc/110x75/55d131eebb61ebc35f8b4700/-drc-.jpg)

![[전문가 발표] 하지 외골격 로봇 (김완수 박사)](https://img.pdfslide.tips/doc/110x75/55d131aebb61ebd75f8b46d0/-55d131aebb61ebd75f8b46d0.jpg)





