Embed Size (px)
Citation preview
產情趨勢
創新研發
驗證技術
精選論文
影音推薦
43
如何設計能符合適用於不同電動車輛應用之整車控制器,是目前鑽研電動化車輛
開發之產、學、研等單位,積極投入研究的一大課題,車輛中心 (ARTC) 投入電動車
輛整車控制器發展已有多年,並累積相當多的開發經驗,茲介紹如下:
///////////////////////////////////////////
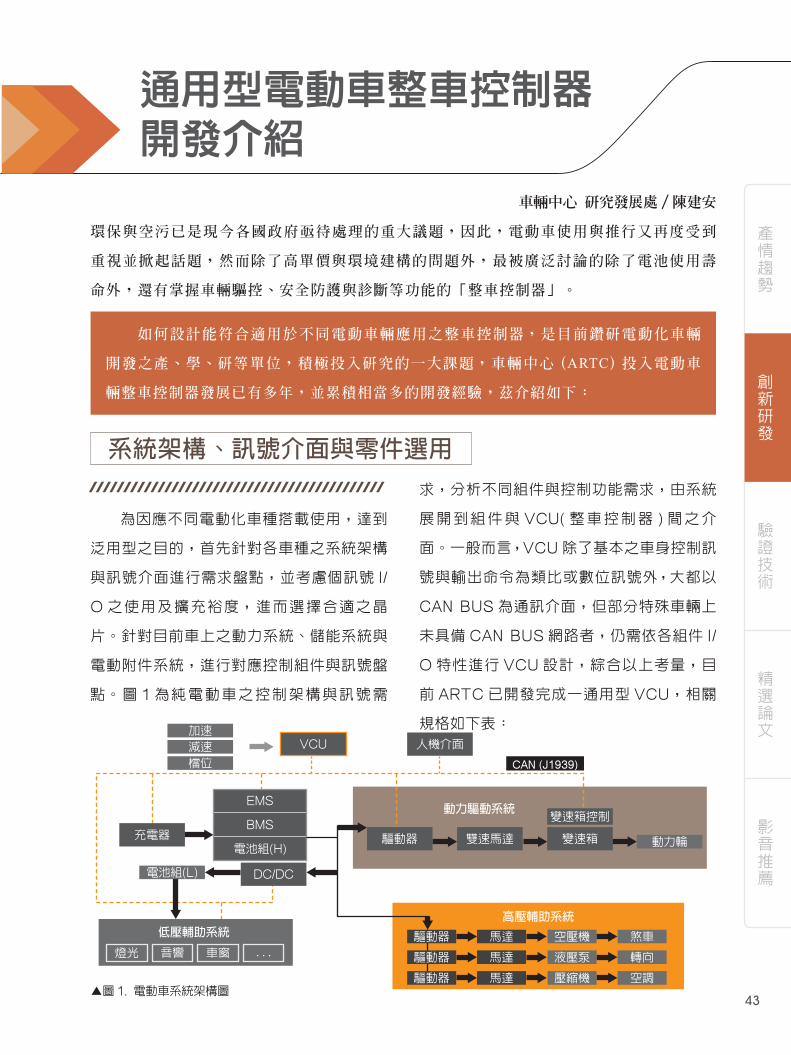
為因應不同電動化車種搭載使用,達到
泛用型之目的,首先針對各車種之系統架構
與訊號介面進行需求盤點,並考慮個訊號 I/
O 之使用及擴充裕度,進而選擇合適之晶
片。針對目前車上之動力系統、儲能系統與
電動附件系統,進行對應控制組件與訊號盤
點。圖 1 為純電動車之控制架構與訊號需
環保與空污已是現今各國政府亟待處理的重大議題,因此,電動車使用與推行又再度受到
重視並掀起話題,然而除了高單價與環境建構的問題外,最被廣泛討論的除了電池使用壽
命外,還有掌握車輛驅控、安全防護與診斷等功能的「整車控制器」。
車輛中心 研究發展處 /陳建安
加速VCU 人機介面
驅動器 雙速馬達 變速箱
變速箱控制
充電器
DC/DC
EMS
BMS
電池組(H)
電池組(L)
動力輪
空壓機
液壓泵
壓縮機
馬達
馬達
馬達
驅動器
驅動器
驅動器
煞車
轉向
空調
低壓輔助系統
高壓輔助系統
動力驅動系統
燈光 音響 車窗 ...
減速
檔位 CAN (J1939)
▲圖 1. 電動車系統架構圖
系統架構、訊號介面與零件選用
求,分析不同組件與控制功能需求,由系統
展開到組件與 VCU( 整車控制器 ) 間之介
面。一般而言,VCU 除了基本之車身控制訊
號與輸出命令為類比或數位訊號外,大都以
CAN BUS 為通訊介面,但部分特殊車輛上
未具備 CAN BUS 網路者,仍需依各組件 I/
O 特性進行 VCU 設計,綜合以上考量,目
前 ARTC 已開發完成一通用型 VCU,相關
規格如下表:
通用型電動車整車控制器開發介紹
產情趨勢
創新研發
驗證技術
精選論文
影音推薦
44
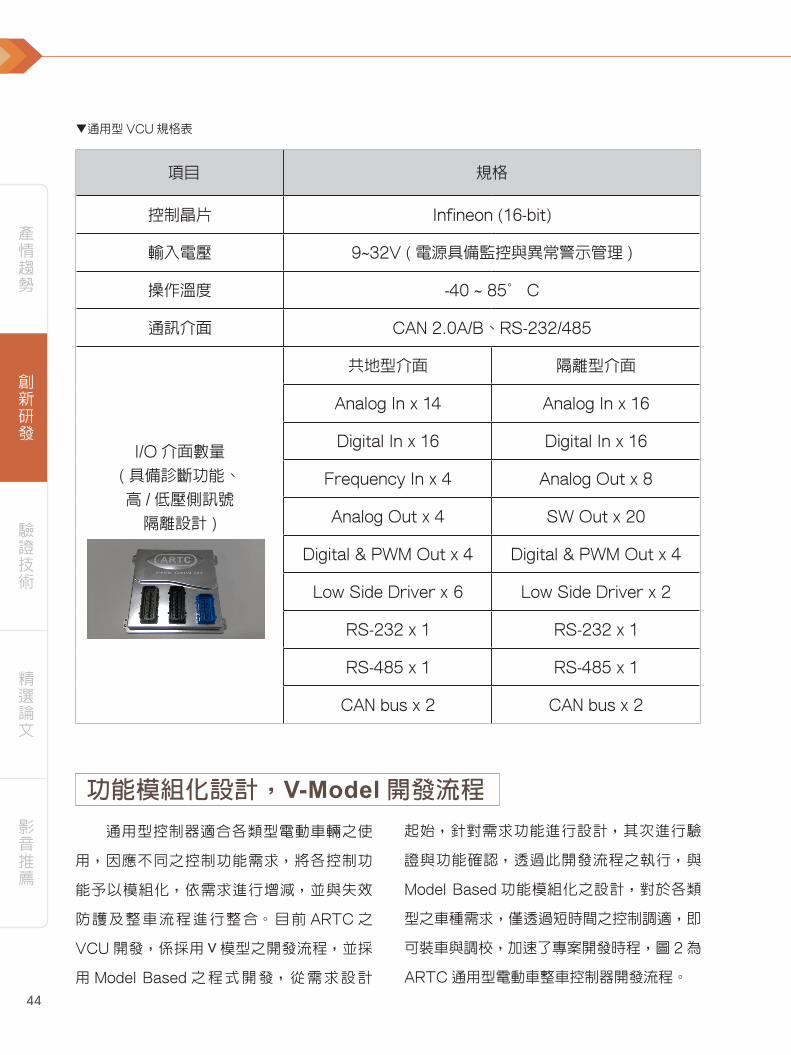
通用型控制器適合各類型電動車輛之使
用,因應不同之控制功能需求,將各控制功
能予以模組化,依需求進行增減,並與失效
防護及整車流程進行整合。目前 ARTC 之
VCU 開發,係採用V模型之開發流程,並採
用 Model Based 之程式開發,從需求設計
起始,針對需求功能進行設計,其次進行驗
證與功能確認,透過此開發流程之執行,與
Model Based 功能模組化之設計,對於各類
型之車種需求,僅透過短時間之控制調適,即
可裝車與調校,加速了專案開發時程,圖 2 為
ARTC 通用型電動車整車控制器開發流程。
▼通用型 VCU 規格表
項目 規格
控制晶片 Infineon (16-bit)
輸入電壓 9~32V ( 電源具備監控與異常警示管理 )
操作溫度 -40 ~ 85° C
通訊介面 CAN 2.0A/B、RS-232/485
I/O 介面數量
( 具備診斷功能、
高 / 低壓側訊號
隔離設計 )
共地型介面 隔離型介面
Analog In x 14 Analog In x 16
Digital In x 16 Digital In x 16
Frequency In x 4 Analog Out x 8
Analog Out x 4 SW Out x 20
Digital & PWM Out x 4 Digital & PWM Out x 4
Low Side Driver x 6 Low Side Driver x 2
RS-232 x 1 RS-232 x 1
RS-485 x 1 RS-485 x 1
CAN bus x 2 CAN bus x 2
功能模組化設計,V-Model 開發流程

產情趨勢
創新研發
驗證技術
精選論文
影音推薦
45
功能邏輯流程設計
模塊C code轉檔
功能邏輯與
流程設計
功能需求展開
控制架構
與關聯設計
系統
整合設計
單元測試
軟硬體
整合測試
實車測試
Model-baseddesign platform
確認與驗證
需求清單
單元測試
功能展開
功能邏輯流程開發
與模型建立
整車整合流程設計
與功能模塊
Dave I/O設定 &
Tasking 程式整合
▲圖 2. 通用型電動車整車控制器開發流程
產情趨勢
創新研發
驗證技術
精選論文
影音推薦
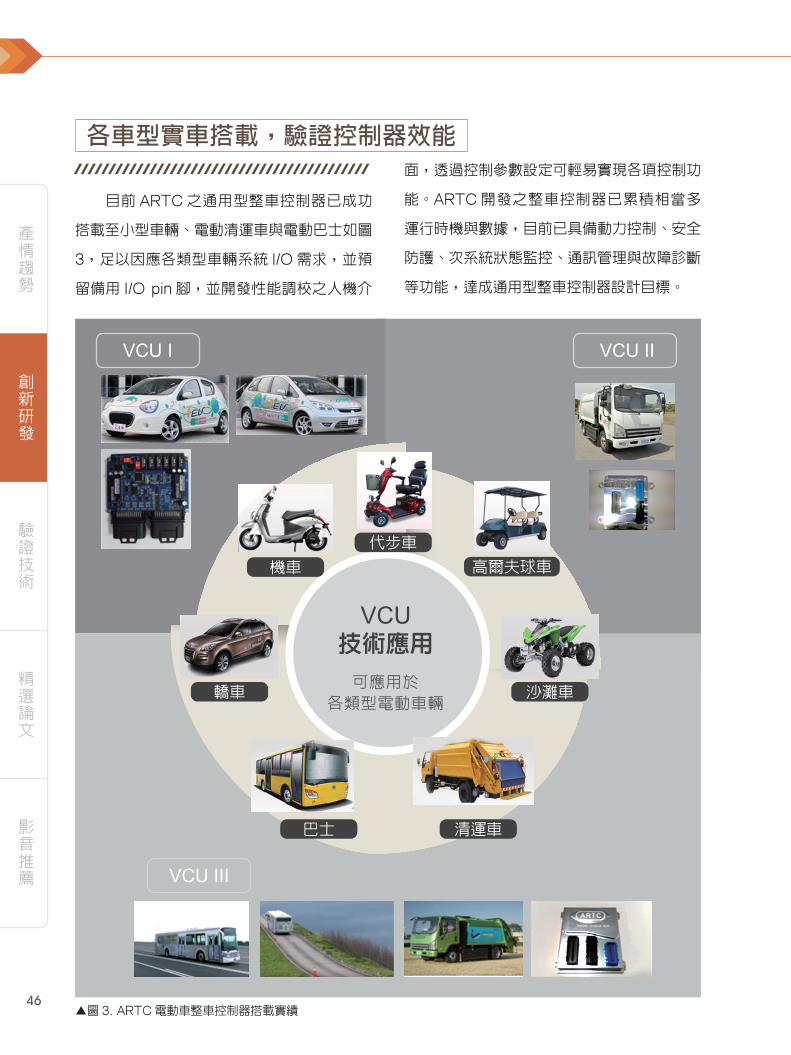
46▲圖 3. ARTC 電動車整車控制器搭載實績
目前 ARTC 之通用型整車控制器已成功
搭載至小型車輛、電動清運車與電動巴士如圖
3,足以因應各類型車輛系統 I/O 需求,並預
留備用 I/O pin 腳,並開發性能調校之人機介
面,透過控制參數設定可輕易實現各項控制功
能。ARTC 開發之整車控制器已累積相當多
運行時機與數據,目前已具備動力控制、安全
防護、次系統狀態監控、通訊管理與故障診斷
等功能,達成通用型整車控制器設計目標。
VCU I
VCU技術應用
代步車
機車
轎車 沙灘車
巴士 清運車
可應用於
各類型電動車輛
高爾夫球車
VCU II
VCU III
///////////////////////////////////////////
各車型實車搭載,驗證控制器效能
產情趨勢
創新研發
驗證技術
精選論文
影音推薦
47
目前 ARTC 所完成通用型整車控制器如
圖 5,除適用大範圍電源操作外,並具備動力
控制、安全防護、具電路保護與自我診斷功
能,已實車搭載於小客車、電動垃圾清運車
與電動巴士等電動化車輛,完成各項功能整
合驗證,相關經驗成果可提供國內業者參考
與技術服務。
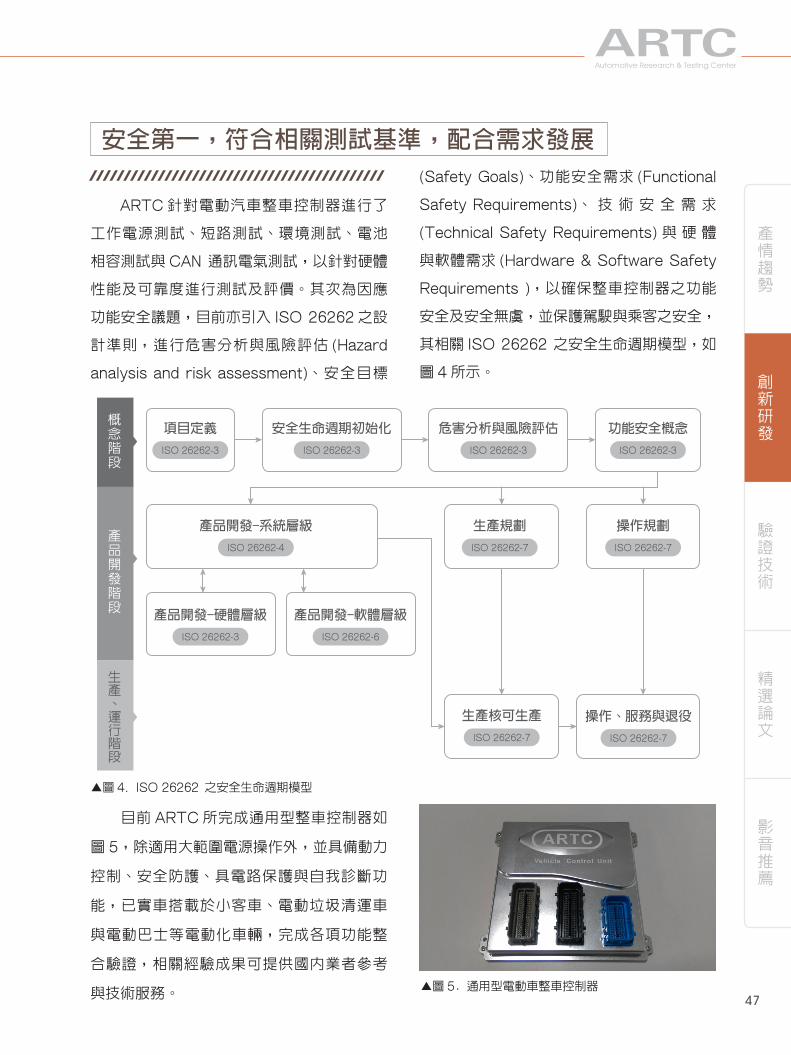
概念階段
產品開發階段
生產、運行階段
項目定義 安全生命週期初始化
ISO 26262-3
生產規劃
ISO 26262-7
操作規劃
ISO 26262-7
ISO 26262-3
產品開發-硬體層級
ISO 26262-3
產品開發-軟體層級
ISO 26262-6
產品開發-系統層級
ISO 26262-4
危害分析與風險評估
ISO 26262-3
操作、服務與退役
ISO 26262-7
功能安全概念
ISO 26262-3
生產核可生產
ISO 26262-7
▲圖 4. ISO 26262 之安全生命週期模型
ARTC 針對電動汽車整車控制器進行了
工作電源測試、短路測試、環境測試、電池
相容測試與 CAN 通訊電氣測試,以針對硬體
性能及可靠度進行測試及評價。其次為因應
功能安全議題,目前亦引入 ISO 26262 之設
計準則,進行危害分析與風險評估 (Hazard
analysis and risk assessment)、安全目標
/////////////////////////////////////////// (Safety Goals)、功能安全需求 (Functional
Safety Requirements)、 技 術 安 全 需 求
(Technical Safety Requirements) 與 硬 體
與軟體需求 (Hardware & Software Safety
Requirements ),以確保整車控制器之功能
安全及安全無虞,並保護駕駛與乘客之安全,
其相關 ISO 26262 之安全生命週期模型,如
圖 4 所示。
▲圖 5. 通用型電動車整車控制器
安全第一,符合相關測試基準,配合需求發展