Embed Size (px)
Citation preview

Commande Robuste
Ecole Nationale Supérieure de Physique de Strasbourg
Option ISAV
Master ISTI, spécialité PARI, parcours AV
Professeur Michel de Mathelin
Cours intégré : 15 h+10 h

Programme du cours de commande robuste (1)
• Chapitre I: Introduction
– Objectifs
– Différentes approches
• Chapitre II: Robustesse et performance
– Fonctions de sensibilité
– Critères de robustesse
– Critères de performance
– Gabarits fréquentiels
• Chapitre III: Synthèse H∞ standard
– Algorithme de Glover-Doyle
– Synthèse H∞– Correcteurs à deux degrés de liberté
– Modelage de la boucle ouverte
• Chapitre IV: Mise en oeuvre
– Réduction de modèle
– Discrétisation

Programme du cours de commande robuste (2)
• Chapitre V: µ-analyse et µ-synthèse
– µ-analyse
– µ-synthèse
• Chapitre VI: Etude de cas

• J. Bernussou, coordinateur, Commande robuste: développements et
applications.
Hermès, Paris, 1996.
• G. Duc et S. Font, Commande H∞ et µ-analyse.
Hermès, Paris, 1999.
• A. Oustaloup, coordinateur, La robustesse: analyse et synthèse de
commandes robustes.
Hermès, Paris, 1994.
• A. Oustaloup, La commande CRONE.
Hermès, Paris, 1991.
Bibliographie – ouvrages en français
• S. Bhattacharyya, H. Chapellat, & L. Keel, Robust control : the parametricapproach.
Prentice Hall, Upper Saddle River, 1995.
• S. Boyd, L. El Ghaoui, E. Feron, & V. Balakrishnan, Linear matriuxinequalities in system and control theory.
SIAM Studies in Applied Mathematics, vol. 15, SIAM, Philadelphie, 1994.
• M. Green and D. J. Limebeer, Linear robust control.
Prentice Hall, Englewood Cliffs, 1995.
• I. Horowitz, Quantitative feedback design.
QFT Publications, Boulder, 1993.
• J. M. Maciejowski, Multivariable feedback control.
Addison Wesley, Wokingham, 1989.
• D. C. McFarlane and K. Glover, Robust controller design.
Lecture Notes in control and information sciences, Springer, Berlin, 1989.
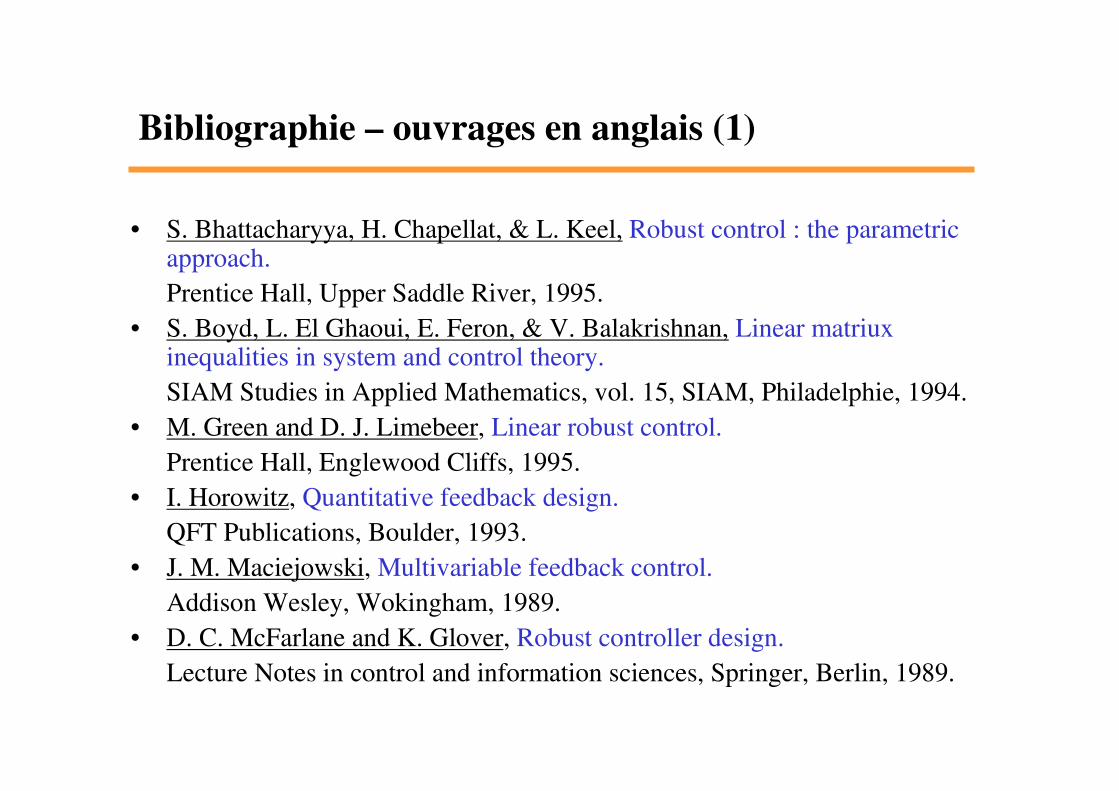
Bibliographie – ouvrages en anglais (1)

• M. Morari and E. Zafiriou, Robust process control.
Prentice Hall, Englewood Cliffs, 1989.
• S. Skogestad and I. Postlethwaite, Multivariable feedback control.
Wiley, Chichester, 1996.
• K. Zhou, J. C. Doyle, & K. Glover, Robust and optimal control.
Prentice Hall, Upper Saddle River, 1996.
• K. Zhou with J. C. Doyle, Essentials of robust control.
Prentice Hall, Upper Saddle River, 1998.
Bibliographie – ouvrages en anglais (2)

I.1 Objectifs (1)
• Méthodes classiques
Objectifs:
– Suivre les variations de la consigne
– Rejeter les perturbations et le bruit
Méthode:
– Synthèse à partir d’un modèle nominal du système
sur base de critères de stabilité et de performance
– Analyse a posteriori de la robustesse
I. INTRODUCTION

I.1 Objectifs (2)
• Méthodes de commande robuste
Objectifs:
– Suivre les variations de la consigne
– Rejeter les perturbations et le bruit
– Garantir des marges de robustesse
Méthode:
– Synthèse à partir d’un modèle nominal du système sur base de critères de stabilité et de performance
– Prise en compte dans la synthèse de critères explicites de robustesse vis à vis des incertitudes
I. INTRODUCTION

I.2 Différentes approches
• Commande avec modèle interne
• Commande LQG/LTR (Linéaire Quadratique Gaussienne avec
Recouvrement de transfert de boucle)
• Commande prédictive (GPC, MPC)
• Approche QFT (Quantitative Feedback Theory)
• Placement de pôle robuste
• Approche paramétrique (Théorème de Kharitonov)
• Commande CRONE (Commande Robuste d’Ordre Non Entier)
• Commande H∞
• µ-analyse et µ-synthèse
• Approches basées sur des LMI (Inégalités Linéaires Matricielles)
Les 3 dernières approches sont multivariables et font l’objet de ce cours
I. INTRODUCTION
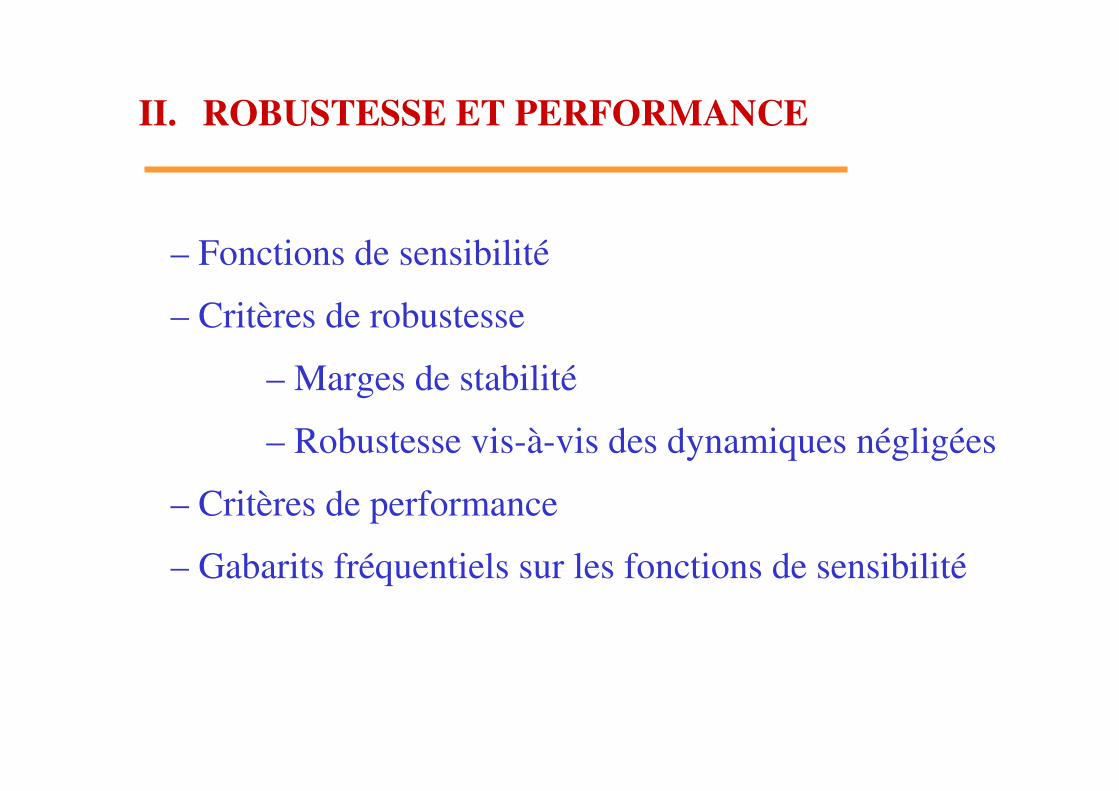
II. ROBUSTESSE ET PERFORMANCE
– Fonctions de sensibilité
– Critères de robustesse
– Marges de stabilité
– Robustesse vis-à-vis des dynamiques négligées
– Critères de performance
– Gabarits fréquentiels sur les fonctions de sensibilité
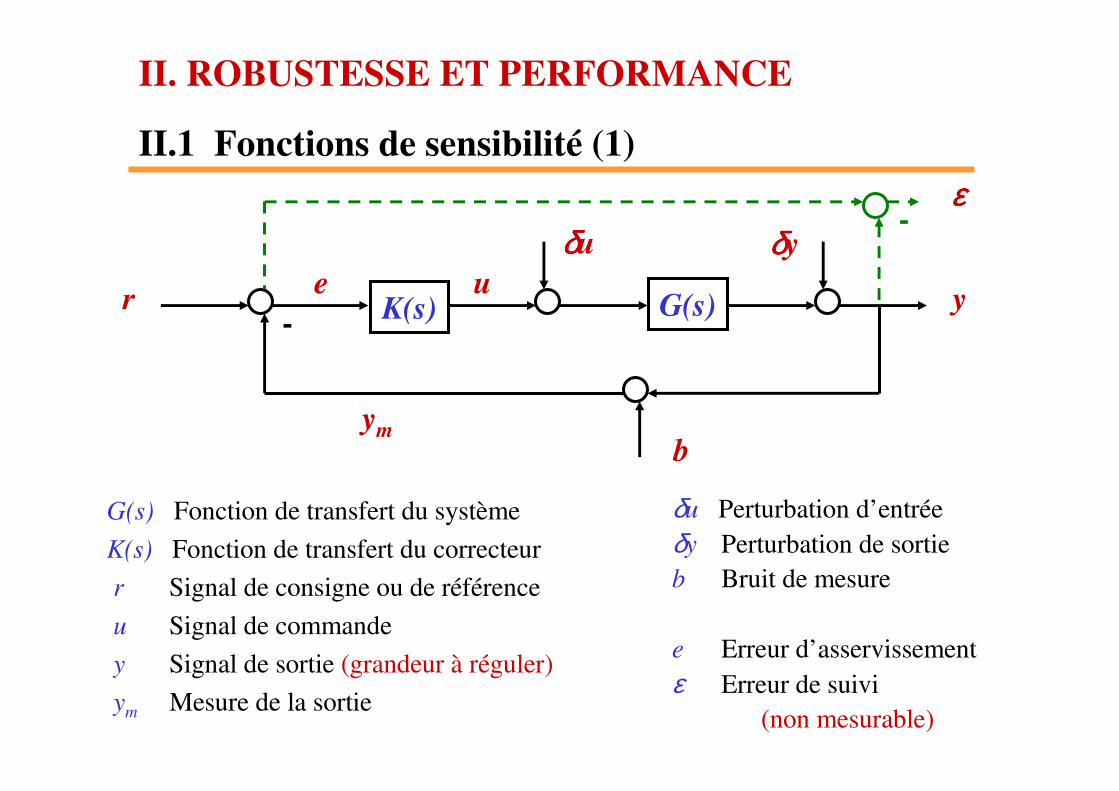
II.1 Fonctions de sensibilité (1)
G(s) Fonction de transfert du système
K(s) Fonction de transfert du correcteur
r Signal de consigne ou de référence
u Signal de commande
y Signal de sortie (grandeur à réguler)
ym Mesure de la sortie
II. ROBUSTESSE ET PERFORMANCE
δu Perturbation d’entrée
δy Perturbation de sortie
b Bruit de mesure
e Erreur d’asservissement
ε Erreur de suivi
(non mesurable)
K(s) G(s)r
b
e uy
ym
δδδδu δδδδy
εεεε
-
-

II.1 Fonctions de sensibilité (2)
II. ROBUSTESSE ET PERFORMANCE
2.11 Cas monovariable (SISO)
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]bruyy
byruyeuyy
byryre m
−++=⇒
−−++=++=+−=−=
TGSS
KGGKGG
)(
δδ
δδδδ
)(S1)KG(1
)KG()T(
)KG(1
1)S(
ss
ss
ss
−=+
=
+= Fonction de sensibilité
Fonction de sensibilité complémentaire
(1)

II.1 Fonctions de sensibilité (3)
II. ROBUSTESSE ET PERFORMANCE
2.11 Cas monovariable (suite)
[ ] [ ] [ ] [ ]
[ ] [ ]
[ ] [ ] [ ] [ ]ubyryr
byruu
ubyr
byryre m
δδε
δδ
δδ
GSTSS
KST
GSSSS
)(
−+−=−=
−−+−=⇒
−−−=+−=−=
(2)
(3)
(4)

II.1 Fonctions de sensibilité (4)
II. ROBUSTESSE ET PERFORMANCE
2.12 Cas multivariable (MIMO)
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]bruyy
byruyeuyy
byryre m
−++=⇒
−−++=++=+−=−=
sss TGSS
GKGGKG
δδ
δδδδ)(
s
1
s
1
s
SIGKGK)(IT
GK)(IS
−=+=
+=
−
−
)(
)(
s
s Fonction de sensibilité en sortie
Fonction de sensibilité
complémentaire en sortie
(5)

II.1 Fonctions de sensibilité (5)
II. ROBUSTESSE ET PERFORMANCE
2.12 Cas multivariable (suite)
[ ] [ ][ ] [ ]
[ ] [ ] [ ]
[ ] [ ] [ ][ ] [ ]byruu
uubyru
ubyryr
ubyr
eubyrbyre
−−+−=⇒
−−−−=
−+−=−=−−−=
−−−−=+−=
δδδδ
δδεδδ
δδ
KST
KGKGK
GSTS
GSS
GKG
ee
sss
ss
)(
(6)
(7)
(8)
e
1
e
1
e
SIKGKG)(I(s)T
KG)(I(s)S
−=+=
+=−
− Fonction de sensibilité en entrée
Fonction de sensibilité
complémentaire en entrée

II.1 Fonctions de sensibilité (6)
II. ROBUSTESSE ET PERFORMANCE
2.12 Cas multivariable (suite)
s
1
e
1
s
1
e
1
s
TKGKG)(ITGGK)K(IGKS
KKG)(IKSGKIKKS
≠+==+=
+==+=
−−
−−)(

II.2 Critères de robustesse (1)
2.21 Marges de stabilité (cas monovariable)
•
•
KG(jω)
1-1•
cωϕ
δg
1−
g ′−1
•
Diagramme de Nyquist (monovariable)
II. ROBUSTESSE ET PERFORMANCE
Critère de Nyquist:
Le système asservi (en boucle fermée) est stable ssi KG(jω)encercle le point -1 dans le sens anti-horlogique un nombre
de fois égal au nombre de pôles instables de la boucle ouverte

II.2 Critères de robustesse (2)
2.21 Marges de stabilité (cas monovariable)
2° Marge de retard ττττ
= retard qui entraîne l’instabilité
{ } ( )( )
ci
i
i
cii
cici
jKG
jKG
ωϕτ
ωπϕωω
min
argsoit
1que tellespulsations lessoit
=⇒
−==
II. ROBUSTESSE ET PERFORMANCE
1° Marge de phase ϕϕϕϕ
= déphasage qui entraîne l’instabilité (retard de phase)

II.2 Critères de robustesse (3)
2.21 Marges de stabilité (cas monovariable)
4° Marge de module δδδδ
= distance minimale entre KG(jω) et -1
{ }∞
∈
∈=⇒
+
=+=S
jKG
jKG1
)(1
1sup
1)(1inf δ
ω
ωδ
ω
ω
R
R
∞∞∞= LH ou norme
II. ROBUSTESSE ET PERFORMANCE
3° Marges de gain g et g’ < 1
= gain qui entraîne l’instabilité

II.2 Critères de robustesse (4)
2.21 Marges de stabilité (cas monovariable)
)(sup
: à égaleest de norme la ), transfertdefonction uneSoit
ωjGG
G(s)LG(sω R∈∞
∞
=*
Remarque : La norme d’une fonction de transfert correspond
à son amplitude maximale dans un diagramme de Bode∞H
II. ROBUSTESSE ET PERFORMANCE
Définition 2.1
Définition 2.2
)(sup
: à égaleest de norme la ), stable transfertdefonction uneSoit
ωjGG
G(s)HG(sω R∈∞
∞
=*
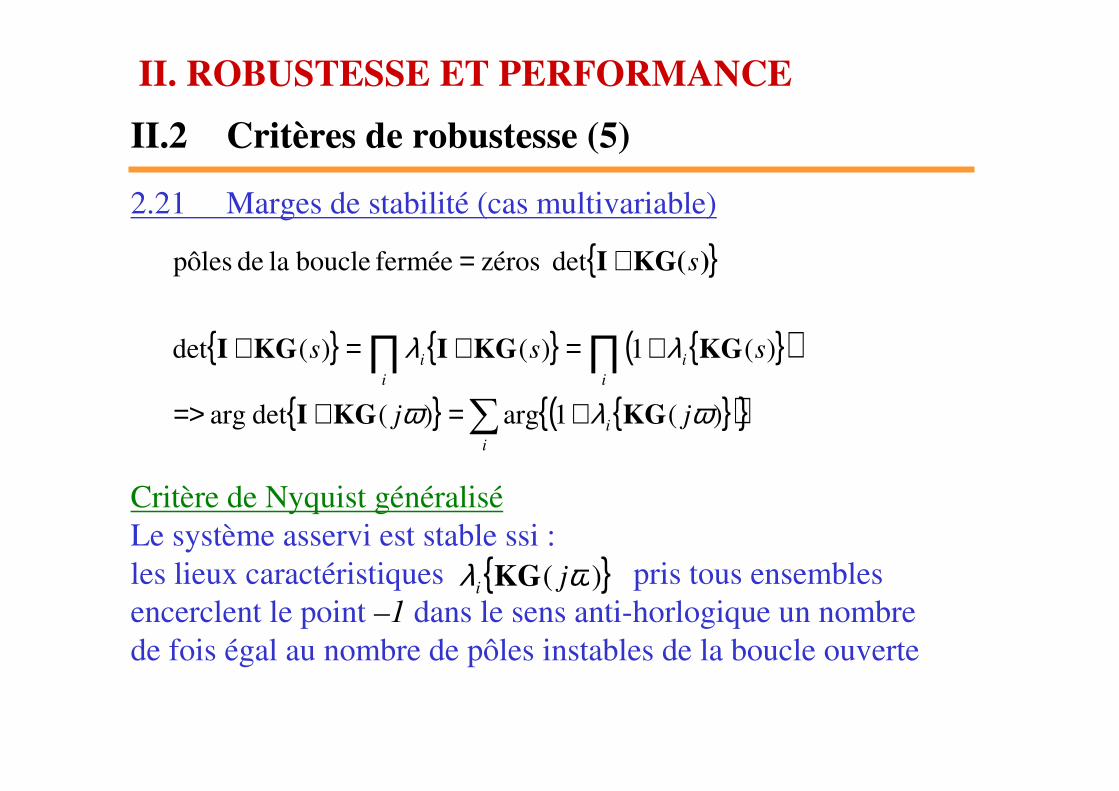
II.2 Critères de robustesse (5)
2.21 Marges de stabilité (cas multivariable)
{ }
{ } { } { }( )
{ } { }( ){ }∑
∏∏+=+=>
+=+=+
+=
i
i
i
i
i
i
jj
sss
s
)(1arg)(detarg
)(1)()(det
det zérosfermée boucle la de pôles
ωλω
λλ
KGKGI
KGKGIKGI
)KG(I
Critère de Nyquist généralisé
Le système asservi est stable ssi :
les lieux caractéristiques pris tous ensembles
encerclent le point –1 dans le sens anti-horlogique un nombre
de fois égal au nombre de pôles instables de la boucle ouverte
{ })( ωλ ji KG
II. ROBUSTESSE ET PERFORMANCE

II.2 Critères de robustesse (6)
2.21 Marges de stabilité (cas multivariable)
2° Marge de retard ττττ= retard appliqué identiquement sur chaque sortie qui entraîne
l’instabilité de la boucle
II. ROBUSTESSE ET PERFORMANCE
1° Marge de phase ϕϕϕϕ= déphasage appliqué identiquement sur chaque sortie qui entraîne
l’instabilité de la boucle
= déphasage minimum entraînant l’instabilité d’un des lieux
caractéristiques
3° Marges de gain g et g’ < 1
= gain appliqué identiquement sur chaque sortie qui entraîne
l’instabilité de la boucle

II.2 Critères de robustesse (7)
2.21 Marges de stabilité (cas multivariable)
4° Marge de module δδδδ= distance minimale entre les lieux caractéristiques
et le point -1
{ }
{ }{ }
( ){ } ( ){ }
∞
−
∈
−−
∈
∈
∈
∈
=⇒
+=+=
+=
+=
+=
S
KGIKGI
KGI
KGI
KG
R
R
R
R
R
1
)(sup
1)(inf
)(inf
)(inf
)(1mininf
1
11
max
min
min
δ
ωσωσ
ωσ
ωλ
ωλδ
ω
ω
ω
ω
ω
jj
j
j
jii
II. ROBUSTESSE ET PERFORMANCE
{ })( ωλ ji KG

II.2 Critères de robustesse (8)
2.21 Marges de stabilité (cas multivariable)
II. ROBUSTESSE ET PERFORMANCE
{ })(sup
: à égaleest de norme la ), transfertde matrice uneSoit
ωσ j
(s)L(sω GG
GG
R∈∞
∞
=*
Définition 2.3
{ })(sup
: à égaleest de norme laet
RH)( ), stable transfertde matrice uneSoit
ωσ j
(s)H
s(s
ω GG
G
GG
R∈∞
∞
∞
=
∈*
Définition 2.4

II.2 Critères de robustesse (9)
2.22 Robustesse vis à vis des dynamiques négligées
2.221 Erreur de modèle multiplicative
)()()()(
)()()()(
)()(
)1(
1
1
ωωωωωωωω
ωωω
jWjKGjKGjKG
jjKGjKGjKG
jWj
GG
M
M
M
M
<−⇒
∆+=⇒
∈∀<∆∃⇒
∆∆+=
∆
∆
∆
R
Cas monovariable (SISO)
II. ROBUSTESSE ET PERFORMANCE
où est une fonction de transfert inconnue
une fonction de transfert stable telle que:1W

II.2 Critères de robustesse (10)
2.221 Erreur de modèle multiplicative
1
1)(1
)()()()()(1
1
1
1
GGTW
jKG
jWjKGjWjKGjKG
∆∞<⇔
∀<+
⇔∀>+ ωω
ωωωωωω
Cas monovariable (SISO)
Condition de stabilité
•
•-1
1+KG(jω)
KG(jω))()( 1 ωω jWjKG
•
•
••
••
II. ROBUSTESSE ET PERFORMANCE
si et ont le même nombre de pôles à partie réelle < 0

II.2 Critères de robustesse (11)
2.22 Robustesse vis à vis des dynamiques négligées
2.222 Erreur de modèle additive
)()()()(
)()()()(
)()(
2
2
ωωωωωωωω
ωωω
jWjKjKGjKG
jjKjKGjKG
jWj
GG
A
A
A
A
<−⇒
∆+=⇒
∈∀<∆∃⇒
∆∆+=
∆
∆
∆
R
Cas monovariable (SISO)
II. ROBUSTESSE ET PERFORMANCE
où est une fonction de transfert inconnue
une fonction de transfert stable telle que:2W

II.2 Critères de robustesse (12)
2.222 Erreur de modèle additive
1
1)(1
)()()()()(1
2
2
2
GGKSW
jKG
jWjKjWjKjKG
∆∞<⇔
∀<+
⇔∀>+ ωω
ωωωωωω
Cas monovariable (SISO)
Condition de stabilité
•
•-1
1+KG(jω)
KG(jω))()( 2 ωω jWjK
•
•
••
••
II. ROBUSTESSE ET PERFORMANCE
+ et ont le même nombre de pôles à partie réelle < 0

II.2 Critères de robustesse (13)
2.223 Schéma standard
Exemple
-K
∆
+ +G
2We u
z w
−−=
GI
I0P
2W
Le système nominal + dynamiques
négligées est mis sous une forme standard
∆
z
eu
wP(s)
K(s)
P = système augmenté
=
=
2221
1211
euew
zuzw
PP
PP
PP
PPP
II. ROBUSTESSE ET PERFORMANCE
2.22 Robustesse vis à vis des dynamiques négligées

II.2 Critères de robustesse (14)
La fonction de transfert w → z
∆
zw
= transformation linéaire
fractionnaire inférieure
( )( ) 21
1
221211 PKPIKPP
KPT
−−+=
= ,lwz F
( )KP,lF
La fonction de transfert u → e
= transformation linéaire
fractionnaire supérieure( )
( ) 12
1
112122 P∆PI∆PP
∆PT
−−+=
= ,uue F
II. ROBUSTESSE ET PERFORMANCE
2.223 Schéma standard
eu
K
( )∆P,uF

II.2 Critères de robustesse (15)
Théorème des petits gains
( ) ( )( )
( ) γε
ε
=<
<∆∈∀
∞
∞∞
1ssi
que telstabilise alors
stable)est que tel(cad, 0,tstabilisansoit
KP,
HR∆∆P,K
KP,PK
l
u
lu
F
F
FF
∆
zw ( )KP,lF
∞RH
est l’espace des fonctions
de transfert réelles stables
où
II. ROBUSTESSE ET PERFORMANCE
2.223 Schéma standard
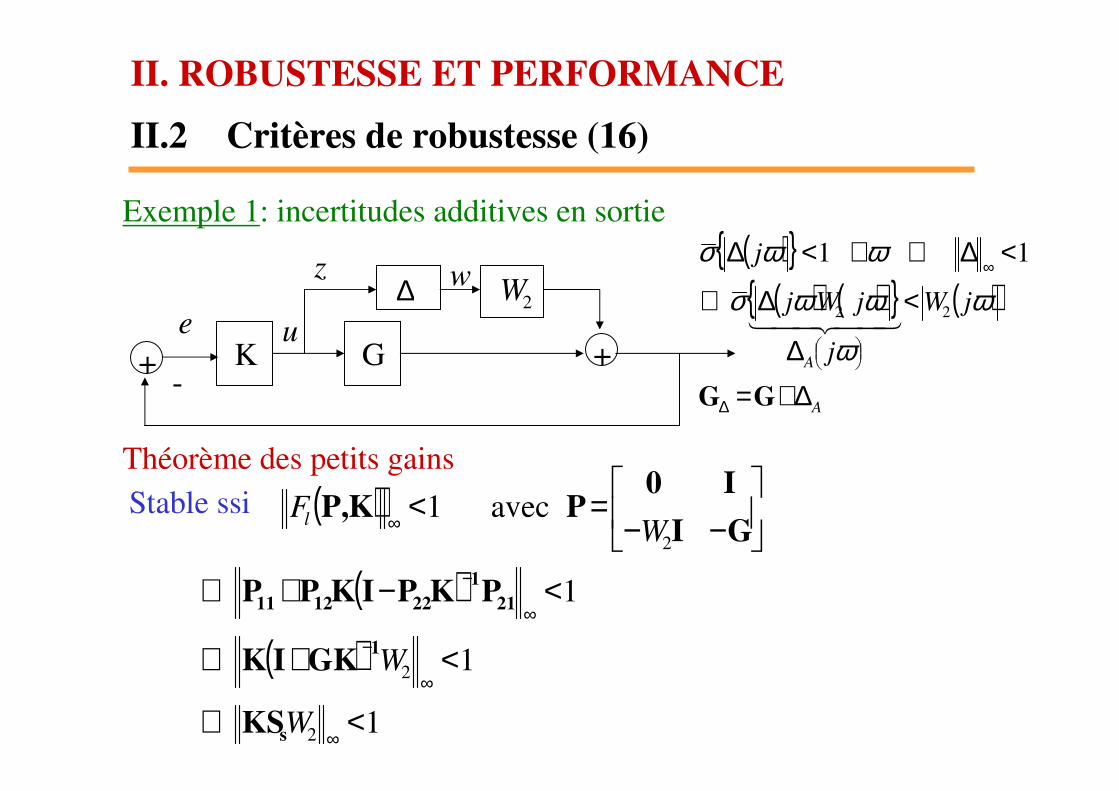
II.2 Critères de robustesse (16)
Théorème des petits gains
( )
( )( )
1
1
1
avec1
2
2
2
<⇔
<+⇔
<−+⇔
−−=<
∞
∞
−
∞
−
∞
W
W
WFl
s
1
21
1
221211
KS
GKIK
PKPIKPP
GI
I0PKP,
Exemple 1: incertitudes additives en sortie
( ){ }( ) ( ){ } ( )
A
A
jW
j
jWj
j
∆+=
<
∆
∆⇔
<∆⇔∀<∆
∆
∞
GG
ω
ω
ωωσ
ωωσ
22
11
44 344 21
Stable ssi
-K
∆
+ +G
2We u
z w
II. ROBUSTESSE ET PERFORMANCE

II.2 Critères de robustesse (17)
11 <∞
WsT
Condition de stabilité
-K(s) G(s)
∆
+ +
( )( )( ) ( ) 1 avec11 ≤∆∆=∆⇔∈∀<∆
+=
∞WjWj MM
M
R
G∆IG∆
ωωωσ
II. ROBUSTESSE ET PERFORMANCE
Exemple 2: incertitudes multiplicatives en sortie
e u
z1W
w
1
1
1
)( WFW
l
−+−=⇒
−−=⇒ GK)GK(IKP,
GI
G0P
11 WW s
1 TGKGK)(I −=+−= −
(théorème des petits gains)

II.3 Critères de performance (1)
•Suivi de consigne
•Rejet de perturbation
•Atténuation du bruit de mesure
•Modération de la commande
∃ des critères contradictoires => compromis nécessaires
Synthèse => transformation en critères fréquentiels∞H
II. ROBUSTESSE ET PERFORMANCE
[ ] [ ] [ ][ ] [ ][ ] [ ] [ ]
[ ] [ ]byruu
ubyr
ubyre
ubryy
−−+−=−+−=
−−−=+−+=
δδδδε
δδδδ
KST
GSTS
GSS
GSTS
ee
sss
ss
sss(5)
(6)
(7)
(8)

II.3 Critères de performance (2)
2.31 Suivi de consigne
2.311 Précision statique [ ]rsS=ε1° erreur de position
( ) ( ) psst
p essstUtrte ===⇔==→→∞→
)0()(limlim)()(oùlim00
ss SSI εε
{ }{ })(
0)0(
ωσσ
js
s
S
S
⇒
=⇔erreur de position = 0
a une pente 20dB/décade à l’origine
II. ROBUSTESSE ET PERFORMANCE
≥
•Précision statique
•Temps de réponse
•Dépassement ou facteur d’amortissement

II.3 Critères de performance (3)
2.31 Suivi de consigne
2.311 Précision statique
{ })(
0)(1
lim0
ωσ
ωω
σω
j
jj
s
s
S
S
⇒
=
⇔→
erreur de vitesse = 0
a une pente 40dB/décade à l’origine
2° erreur de vitesse
( ) vst
v ess
ttUtrte =⇔==→∞→
)(1
lim)()(oùlim0
sSIε
3° erreur d’accélération
( ) ast
a ess
tUt
trte =⇔==→∞→
)(1
lim)(2
)(oùlim20
2
sSIε
II. ROBUSTESSE ET PERFORMANCE
≥

II.3 Critères de performance (4)
2.31 Suivi de consigne
2.312 Temps de réponse
1° système du premier ordresτ+1
1
2° système du deuxième ordre
Le temps de réponse est corrélé à la bande passante en B.F. : ( )ωjsT
Pulsation de coupureτ
ω 1=C
Temps de montée τ2,2%90%10 == −ttm
22
2
2 nn
n
ss ωζωω
++Pulsation naturelle
nω = pulsation de coupure diagramme de Bode asymptotique
Temps premier maximum )1(1 2
1 <−
= ζζω
π
n
t
Temps d’établissement (temps de réponse) à x % )1(100
1ln
12
% <
−−= ζζζω
xt
n
x
II. ROBUSTESSE ET PERFORMANCE

II.3 Critères de performance (5)
2.31 Suivi de consigne
Bande passante ⇔fréquences où le gain de la boucle fermée ≥ -3dB
( ){ }( ){ } C
C
j
j
ωωωσωωωσ
≤∀≤⇐≤∀≥⇒
293,0
707,0
s
s
S
T
II. ROBUSTESSE ET PERFORMANCE
2.312 Temps de réponse
Temps de montée )1(8,1 <≈ ζ
ωn
mt
2° système du deuxième ordre (suite)
⇒le temps de réponse est inversement proportionnel
à la bande passante en boucle fermée
Si est la pulsation de coupure :cω

II.3 Critères de performance (6)
2.31 Suivi de consigne
2.313 Facteur d’amortissement
Système du deuxième ordre
∞
−−
=
=
S
eD
1 à liéest
10021/
%
δζ
ζπζ
∞S
0,3
0,5
0,7
0,9
2 (6dB)
1,5
1,3 (3dB)
1,2
=> L’amortissement peut être spécifié par
( ){ } dB 4ou 3sup ≤=∞
ωσω
jss SS
II. ROBUSTESSE ET PERFORMANCE
Typiquement:
ζ
∞S
II.3 Critères de performance (7)
2.32 Rejet de perturbations
Supposons que soit une perturbation basse-fréquence
⇒ Il faut proche de zéro dans les basses fréquences
⇒ Définir une fonction de transfert telle que
le rejet de perturbation est correctement effectué si
2.321 Rejet de la perturbation de sortie ][ yy δsS=
yδ)( ωjsS
Par exemple
( ) γωγω ≤⇔∀≤∞ss SS 11 WjW
1W
)(1 ωjW = fonction de
pondération
fréquentielle
{ } 0)0(
11
=⇒
=
sSσωj
wW
⇒ rejet de perturbation constante
II. ROBUSTESSE ET PERFORMANCE

II.3 Critères de performance (8)
2.32 Rejet de perturbations
⇒Il faut proche de zéro dans les fréquences où
la perturbation est significative
⇒ Définir une fonction de transfert telle que
le rejet de perturbation est correctement effectué si
2.321 Rejet de la perturbation d’entrée ][ uy δGSs=
uδ)( ωjGSs
( ) γωγω ≤⇔∀≤∞
GSGS ss 33 WjW
3W
)(3 ωjW = fonction de pondération fréquentielle proportionnelle
à la perturbation
II. ROBUSTESSE ET PERFORMANCE

II.3 Critères de performance (9)
2.33 Atténuation du bruit de mesure
A. ⇔ dans la plage de fréquence du bruit
⇔ Définir tel que l’effet du bruit est atténué
sur la sortie si
( ){ } 0≈ωσ jsT
2W
γ≤∞sT2W
B. ⇔ Définir tel que l’effet du bruit est atténué
sur la commande si4W
γ≤∞
KSe4W
Exemple ( ) ωγω
ω ∀≤⇒= 2
2
2
wj
w
sW sT
II. ROBUSTESSE ET PERFORMANCE
][by sT−= et ][bu KSe−=
roll-off de –20dB/décade
II.3 Critères de performance (10)
2.34 Modération de la commande
⇒ Limiter dans la bande passante
⇒
( ){ }ωσ jKSe
[ ]ru KSe=
( ){ } bas-passe filtre2
constante1
<°
<°∞
ωσ jKS
KS
e
e
II. ROBUSTESSE ET PERFORMANCE
⇔ Définir tel que4W γ≤∞
KSe4W

II.4 Gabarits fréquentiels (1)
2.41 Gabarit sur
γ<∞1WsS
sS
•
( )ωγjW1
( ){ }ωσ jsS
ω1
1K=
δ
pE
sω
( )ωjW1grand dans les basses-fréquences => précision statique
( borne supérieure de l’erreur de position)pE
sω ≅ bande passante minimalecs ωω >
1
1
−= Kδ = limite supérieure de la marge de module
S = transfert consigne → erreur
= transfert perturbation de sortie → sortie
Exemple : γωωδ
Sp
S
Es
ssW
++=)(1
II. ROBUSTESSE ET PERFORMANCE

II.4 Gabarits fréquentiels (2)
2.42 Gabarit sur sT
•
( )ωγjW2
ωcω
( )ωjW2grand dans les hautes-fréquences ⇒ atténuation du bruit
-3dB
rω•γ<⇔
∞2WsT
( ){ } cj ωωωσ ≥∀≥ 707,0sT bande passante
Exemple : ( ) cr
r
ssW ωω
ωγ>=2
1! ω∀−= ss SIT
⇒ les 2 gabarits ne sont pas indépendants!
II. ROBUSTESSE ET PERFORMANCE
( ){ }ωσ jsT
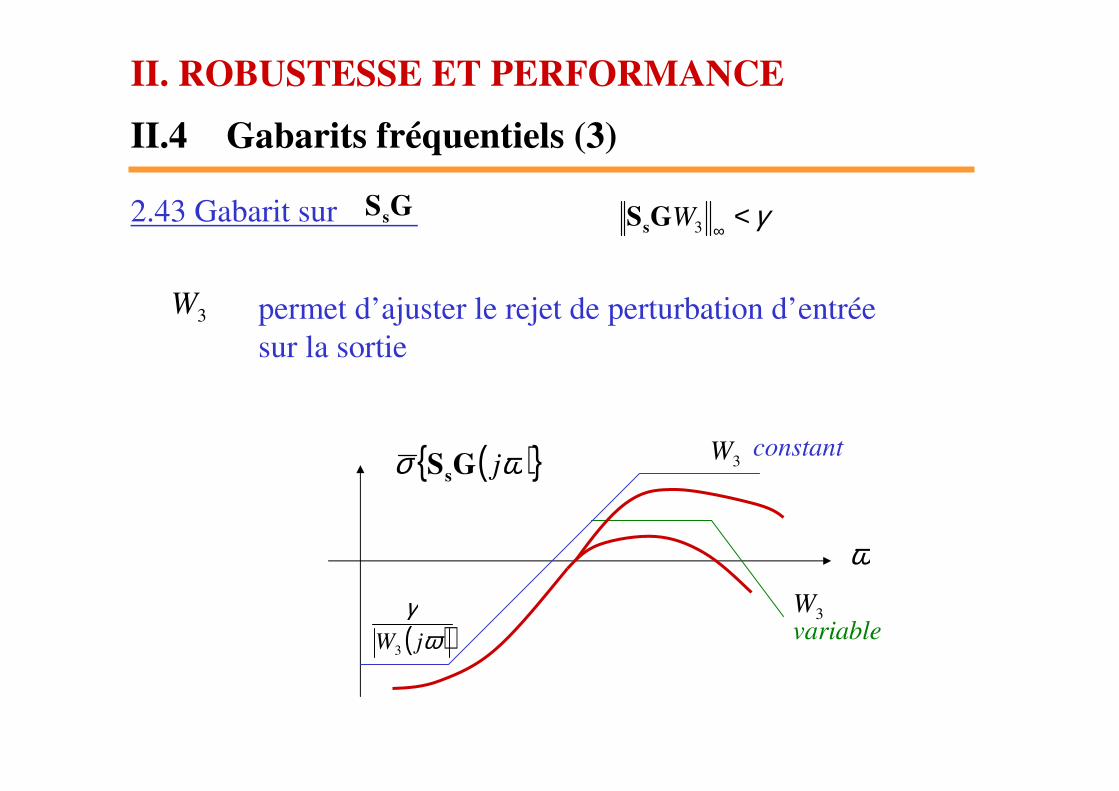
II.4 Gabarits fréquentiels (3)
2.43 Gabarit sur γ<∞3WGSs
GSs
( )ωγjW3
( ){ }ωσ jGSs
ω
3W constant
3Wvariable
3W permet d’ajuster le rejet de perturbation d’entrée
sur la sortie
II. ROBUSTESSE ET PERFORMANCE

II.4 Gabarits fréquentiels (4)
2.45 Gabarit sur ousKS
( )ωγjW4
( ){ }ωσ jsKS
ω
2k
KSe
1k
• •cω uωPermet d’éviter d’exciter
Les commandes au-delà de la
bande passante choisie
⇒ petit2k
4W ≅ bande passante commande
Exemple: cu
u
u
sk
sk
ksW ωω
ωω
γ>
++=
2
1
1
4
1)(
1
ou bien1
4
1)(
1
ksW =
γ
II. ROBUSTESSE ET PERFORMANCE
γ<∞4WsKS

II.4 Gabarits fréquentiels (5)
2.44 Gabarit sur eTGKSs =
( )ωγjW5
( ){ }ωσ jGKSs
ω
4W permet d’ajuster le rejet de perturbation d’entrée sur
la commande mais aussi le « roll-of » et le bruit de
mesure par rapport à la sortie
II. ROBUSTESSE ET PERFORMANCE
γ<∞5WGKSs

II.5 Récapitulatif
Stabilité robuste
Marge de module δIncertitudes additives en sortie
Incertitudes multiplicatives en sortie
Incertitudes multiplicatives en entrée γ
γ
γ
δ
≤
≤
≤
≤
∞
∞
∞
∞
e
s
s
s
T
T
KS
S
W
W
W
1
II. ROBUSTESSE ET PERFORMANCE

II.5 Récapitulatif (suite)
Performance robuste
γ
γ
γ
γ
γ
≤
≤
≤
≤
≤
∞
∞
∞
∞
∞
KS
T
T
GS
S
e
e
s
s
s
W
W
W
W
W
Erreur de position
Erreur de vitesse
Erreur d’accélération
Bande passante
Amortissement
Rejet perturbation de sortie (en sortie)
Rejet perturbation d’entrée (en sortie)
Atténuation du bruit de mesure (en sortie)
Rejet perturbations d’entrée (en entrée)
Modération de la commande
pe
ve
ae
cω7,0>ζ
)(1
lim
)(1
lim
)(lim
20
0
0
ss
e
ss
e
se
sa
sv
sp
s
s
s
S
S
S
→
→
→
=
=
=
( ){ } cj ωωωσ ≤∀< 293,0sS
dB3≤∞sS
II. ROBUSTESSE ET PERFORMANCE