Embed Size (px)
Citation preview

Rece�ved / Gel�ş: 20.02.2020 · Accepted / Kabul: 04.06.2020 · Publ�shed / Yayın Tar�h�: 10.11.2020
Correspondence / Yazışma: Uğur Ödek · Nevşeh�r Hacı Bektaş Vel� Ün�vers�tes�, Beden Eğ�t�m� ve Spor Bölümü, Nevşeh�r, Turkey · ugurodek@gma�l.com
C�te th�s art�cle as: Odek U. Assessing agreement between angular data obtained by inertial measurement sensors and video recordings in two-dimensional gait analysis.Turk J Sports Med. 2021;56(1):13-19.; http://dx.doi.org/10.47447/tjsm.0434
© 2020 Turk�sh Sports Med�c�ne Assoc�at�on. All r�ghts reserved.
Spor Hek�ml�ğ� Derg�s� 56(1):13-19; 2021 Turk�sh Journal of Sports Med�c�ne
Turk J Sports Med. DOI: 10.47447/tjsm.0434
Research Ar t �c le / Araşt ırma Makales�
Assess�ng agreement between angular data obta�ned by �nert�al measurement sensors andv�deo record�ngs �n two-d�mens�onal ga�t analys�s
İk� boyutlu yürüme anal�z�nde eylems�zl�k ölçüm sensörler� ve v�deo görüntüler�nden eldeed�len açısal değerler�n uyumunun �ncelenmes�
Uğur ÖdekPhys�cal Educat�on and Sports Department, Nevşeh�r Hacı Bektaş Vel� Un�vers�ty, Nevşeh�r, Turkey
ABSTRACT
Object�ve: Inertial measurement sensors have recently been used to support video-based motion analysis and, have become a standalone measure‐ment tool in time. These devices, which are not affected by the disadvantages of the camera such as the angle of view and lens-induced image dis‐tortions, can easily present the data that video-based motion analysis can hardly present when correct analysis techniques are used. The purpose ofthis study is to examine the agreement of angular values calculated from the data obtained from camera images and inertial measurement sensors foruse in gait analysis.Mater�als and Method: In the study, 3 male (age: 21±1.57years, height: 178±3.86cm), and 3 female (age: 20±0.46years, height: 161±2.26cm) partici‐pants were asked to walk straight through on an 8-meter predetermined walking way 3 times. Six passive markers were placed on the left lower ext‐remity to calculate angular values from video recordings and 3 inertial measurement units were placed on the same extremity to calculate angular va‐lues using units. Thigh, calf and foot angles were calculated using the data obtained from two different measurement methods. Complementary filte‐ring method was used to calculate angular values from the sensor data. To assess the agreement between data, Bland-Altman graphs and OneSample Tests were used.Results: Following examination of the Bland-Altman graphics, it was determined that 54 data set pairs were in agreement with 95% confidence inter‐val. The results of the One Sample T-Tests revealed that the differences of the angular values of the body parts obtained using two different measure‐ment methods did not differ statistically from 0 (p>.05).Conclus�on: These results show that inertial measurement sensors can be used as an alternative to image capture systems in kinematic analysis,where angular values are examined.
Keywords: Kinematics, gait analysis, video-based analysis, inertial measurement sensors
ÖZ
Amaç: Yakın zamanda eylemsizlik ölçüm sensörleri görüntü tabanlı hareket analizine destek amacıyla kullanılmaya başlanmış, süreç içerisinde başlı ba‐şına bir ölçüm aracı haline gelmiştir. Görüş açısı ve lens kaynaklı görüntü bozulmaları gibi kameraya ait dezavantajlardan etkilenmeyen bu cihazlar, doğ‐ru analiz teknikleri kullanıldığı durumlarda görüntü tabanlı hareket analizinin güçlükle sunabildiği verileri kolaylıkla sağlayabilmektedir. Bu çalışmanınamacı yürüme analizinde kullanılmak üzere kamera görüntülerinden ve eylemsizlik ölçüm sensörlerinden elde edilen verilerden hesaplanan açısal de‐ğerlerin uyumunun incelenmesidir.Gereçler ve Yöntem: Çalışmaya 3 erkek (yaş: 21±1.57yıl, boy: 178±3.86cm), 3 kadın (yaş: 20±0.46yıl, boy: 161±2.26cm) katılımcı alınmıştır. Görüntü‐lerden açısal hesaplamaların yapılabilmesi için 6 adet pasif işaretleyici, eylemsizlik ölçüm sensörlerinden açısal hesaplamaların yapılabilmesi için 3 adetsensör katılımcıların sol alt ekstremitesi üzerine yerleştirilmiştir. Önceden belirlenen 8 metrelik bir yürüyüş yolunda düz bir şekilde 3 kez yürümeleri isten‐miştir. İki farklı veri toplama yönteminden elde edilen veriler kullanılarak uyluk, baldır ve ayağa ait açısal değerler hesaplanmıştır. Sensörlerden elde edi‐len verilerden açısal değerlerin hesaplanmasında tamamlayıcı filtreleme (eylemsizlik ölçüm verileri) kullanılmıştır. Değerlerin uyumunun incelenmesindeise Bland-Altman grafikleri ve Tek Örneklem T-testleri kullanılmıştır.Bulgular: Bland-Altman grafiklerinin incelenmesi sonucunda 54 veri seti çiftinin %95 güven aralığında birbiriyle uyumlu olduğu belirlenmiştir. Tek Örnek‐lem T-testlerinin sonuçları ise iki farklı ölçüm yöntemi kullanılarak elde edilen vücut bölümlerine ait açısal değerlerin 0 değerine göre istatistiksel anlamlıbir farklılığı olmadığını ortaya koymuştur (p>0.05).Sonuç: Elde edilen sonuçlar eylemsizlik ölçüm sensörlerinin açısal değerlerin incelendiği kinematik analizlerde görüntü yakalama sistemlerine alternatifolarak kullanılabileceğini göstermektedir.Anahtar Sözcükler: Kinematik, yürüme analizi, görüntü tabanlı analiz, eylemsizlik ölçüm sensörü
Turk J Sports Med U. Ödek
14
GİRİŞ
K�nemat�k anal�zler araştırmacılara gözlem yoluyla eldeedeb�lecekler� �zlen�mlerden daha fazlasını sunarak, hare-ket� b�yomekan�ğ�n şems�yes� altında yer alan f�z�k, mate-mat�k ve k�nes�yoloj� g�b� b�l�m dalları çerçeves�nde anal�zedeb�lmey� mümkün kılar. Hareket� oluşturan öğeler�n sayı-sallaştırıldığı bu anal�z yöntem�nde gerekl� ver�y� toplamak�ç�n çeş�tl� yöntem ve ver� toplama araçları kullanılmaktadır(1-3). Hareket�n görüntülenmes� ve kayıt altına alınması buyöntemlerden b�r�s�d�r. Görüntü tabanlı hareket anal�z�n�n(GTHA) ver� toplama aşamasını oluşturan bu yöntem (4) �n-san ve hayvanlara a�t lokomotor becer�ler� açıklamaya yö-nel�k sıralı fotoğra�ardan oluşan çalışmalardan sonra po-pülerl�k kazanmış ve günümüzde en çok kullanılan yön-temler arasında yer�n� almıştır.
GTHA'de çeş�tl� görüntü toplama araçları (standart v�deokamera, kızılötes�/morötes� v�deo kamera, X ışını kamerasıvb.) �le elde ed�len görüntüler üzer�nde bel�rlenen noktala-rın zaman �çer�s�ndek� yer değ�şt�rmeler� tak�p ed�l�r ve yerdeğ�şt�rme m�ktarı göz önünde bulundurularak �k� ya da üçboyutlu k�nemat�k anal�zler gerçekleşt�r�l�r. Bu anal�zler�nyapılab�lmes� �ç�n farklı donanım (örneğ�n; akt�f/pas�f �şa-retley�c�ler) ve yazılımlar (örneğ�n; V�con NEXUS®, Qualy-s�s Track Manager®) gel�şt�r�lm�ş ve bu araçlarla elde ed�-len ver�ler�n güven�l�rl�ğ�ne çeş�tl� çalışmalarda (5) yer ver�l-m�şt�r. Ölçüm sonuçlarının güven�rl�l�ğ� dışında GTHA'nınsıklıkla kullanılmasının nedenler� arasında, yöntem�n esk�-ye uzanan tar�h�ne bağlı kazanılan deney�mler ve günümüzteknoloj�s�n�n bu yönteme olan katkıları (yüksek hızlı ka-meralar, akt�f �şaretley�c�ler, otomat�k sayısallaştırma vb.)yer almaktadır.
Özell�kle son dönemde hız kazanan teknoloj�k gel�ş�m�nolumlu etk�ler� d�ğer ver� toplama araçları üzer�nde de ken-d�n� h�ssett�rerek, bu araçların hareket anal�z�nde kullanıl-masına olanak tanımaktadır. İvmeölçer, j�roskop ve manye-tometre g�b� farklı t�p ver�ler� ölçeb�len sensörler�n b�r ya dadaha fazlasının b�r arada bulunduğu c�hazlar olan eylem-s�zl�k ölçüm sensörler� bahsed�len ver� toplama araçların-dan b�r�d�r. Son dönem çalışmalarında eylems�zl�k ölçümsensörler�n�n tek başlarına ya da d�ğer ver� toplama araçla-rıyla b�rl�kte, robot�k, kl�n�k ya da sport�f performansı gel�ş-t�rmeye yönel�k amaçlar doğrultusunda kullanıldığını gör-mek mümkündür (6-8).
GTHA detaylı ve hassas sonuçlar vermekle b�rl�kte görüntü�şleme ve anal�z sırasında hareket�n görünür olmasını dasağlayarak (kızılötes� s�stemler har�ç) araştırmacılara sayı-sal ver�ler �le hareket� bağdaştırma şansı vermekted�r. Tümbu avantajlarına rağmen, görüntü yakalama araçları �leelde ed�len görüntüler�n kullanılab�l�rl�ğ� çözünürlük, net-l�k, görüntü açısı, ışık, görüntü yakalama hızı g�b� değ�ş-kenlerden etk�lenmekted�r (9, 10). Ölçüm kal�tes�n� etk�le-
yen değ�şkenler�n kontrol altında tutulab�lmes� �ç�n �y� b�rdonanım ve yazılımla b�rl�kte genell�kle kapalı alan labora-tuvar ortamına da �ht�yaç duyulur (11-13). Donanım ve yazı-lım mal�yetler� �le b�rl�kte laboratuvar gereks�n�m� bu anal�zyöntem�n�n her araştırmacı tarafından kullanılab�l�r olma-sını sınırlamaktadır. Eylems�zl�k ölçüm sensörler� tek başla-rına kullanıldığında k�ş�n�n hareket� görüntülememes�nekarşın, görüntü yakalama araçları �le kıyaslandığında çokdaha düşük mal�yet gerekt�rmekle b�rl�kte, günümüzde üre-t�len b�rçok sensör kend� güç ün�tes�n� kullandığı �ç�n kablobağlantısı yoktur ve bu nedenle ölçümü yapılacak hareketmekân sınırlaması olmaksızın gerçekleşt�r�leb�l�r (14, 15).Aynı zamanda kablosuz ver� �let�m� protokoller� kullanansensörler aracılığı �le ver�n�n b�lg�sayara eşzamanlı aktarımıda olanaklı hale gelm�şt�r. Eylems�zl�k ölçüm sensörler�n-den elde ed�len ver�ler�n doğru yorumlanab�lmes� �ç�n kul-lanılacak ver� f�ltreleme yöntem�n�n seç�m� halen güncell�-ğ�n� korumakta olan b�r konudur. Özell�kle sensörlerdenelde ed�len ham ver�de görülen ve j�roskop sapması adı ve-r�len durumumun etk�s�n� m�n�m�ze edeb�lmek amacıylaelde ed�len ver�n�n n�tel�ğ�ne göre en doğru f�ltreleme yön-tem� seç�lmel�d�r. Kalman (16), Mahony ve Madgw�ck (17)f�ltreleme yöntemler�n�n �nsan hareketler�n�n �ncelend�ğ�k�nemat�k anal�zlerde kullanıldığı görülmekted�r. Ancak buf�ltreleme yöntemler� oldukça karmaşıktır ve çoklu hesapla-malarda oldukça fazla �şlemc� gücüne �ht�yaç duyar. Dahaçok hava araçlarının oryantasyon b�lg�s�n� elde etmede (18,19) kullanılan ve tamamlayıcı f�ltreleme (complementaryf�lter�ng) olarak adlandırılan f�ltreleme yöntem� son yıllar-da �nsan çalışmalarında kullanılmaya başlanmıştır. Yapılankarşılaştırmalarda, görecel� olarak daha bas�t olan bu f�ltre-leme yöntem�yle �nsan hareketler�ne a�t ver�ler�n yüksekdoğrulukla �şleneb�ld�ğ� görülmekted�r (20, 21).
Hareket�n doğru b�r şek�lde sayısallaştırılması anal�zlerdeyer alan matemat�ksel hesaplamalar açısından büyük önemtaşır (22). Bu nedenle anal�zlerde kullanılacak yen� yöntem-le elde ed�len sonuçların daha önceden güven�rl�ğ� kabuled�lm�ş b�r yöntemle elde ed�len sonuçlarla uyumunun �n-celenmes� yöntem�n güven�l�rl�ğ� konusunda araştırmacıla-ra b�lg� ver�r. Bununla b�rl�kte ver�ler�n uyumu �ncelen�rkendoğru �stat�st�ksel yöntem�n seç�lmes� de oldukça öneml�d�r(23). Sant'Anna, W�ckström (24) ve Henkel'�n (25) çalışmala-rında görüldüğü g�b�, �k� ver� ser�s� arasındak� �l�şk� �ncele-n�rken korelasyon hesaplamaları kullanılmakla beraber, buyöntem elde ed�len değerler�n b�rl�kte nasıl hareket ett�kler�(azalma-artma) hakkında b�lg� ver�r; değerler arasındak�farklar hakkındak� b�lg�ye ulaşmak bu yöntemle oldukçazordur. İk� farklı ver� toplama yöntem� �le elde ed�len ver�le-r�n b�rb�r�ne yakınlığı, b�r başka dey�şle uyumunun tested�lmes�nde Bland-Altman yöntem� özell�kle kl�n�k çalış-malarda sıklıkla kullanılmaktadır.

Turk J Sports Med Yürüme Anal�z�nde Açısal Değerler�n Uyumu
15
Eylems�zl�k ölçüm sensörler�n�n hareket anal�z�nde kullanı-mı gün geçt�kçe yaygınlaşmaktadır. Bununla b�rl�kte aynıyöntem�n farklı hareket prof�ller�nde hata oranın değ�şeb�l-d�ğ�n� gösteren çalışmalar (10, 26) bulunmaktadır. Bu ne-denle, çeş�tl� hareketlerde sensörlerden güven�l�r ver�n�nhang� yöntemler kullanıldığında elde ed�leb�leceğ�n�n bel�r-lenmes� büyük önem taşır. Bu doğrultuda çalışmanın ama-cı; kamera görüntüler�nden elde ed�len ver�lerle hesapla-nan vücut bölümler�ne (uyluk, baldır ve ayak) a�t açısal de-ğerler �le sensörlerden elde ed�len ver�lerden hesaplananvücut bölümler�ne a�t açısal değerler�n uyumunun �ncelen-mes� olarak bel�rlenm�ş ve araştırmanın �stat�st�ksel h�pote-z� "�k� farklı ölçüm yöntem�yle elde ed�len açısal değerlerarasında fark yoktur" olarak bel�rlenm�şt�r.
GEREÇ ve YÖNTEMLER
Araştırma Grubu
Araştırmanın katılımcı grubunu 3 erkek (yaş: 21.3±1.57, boy:178.6±3.86) ve 3 kadın (yaş: 20.4± 0.46, boy: 161±2.26) top-lam 6 k�ş� oluşturmaktadır. Katılımcılar son 1 yıl �çer�s�ndeyürüyüşler�n� etk�leyeb�lecek b�r alt ekstrem�te yaralanması�le karşılaşmamışlardır. Araştırmaya katılım gönüllülükesasına dayalı olup, tüm katılımcıların araştırma önces�ndeonam formları �le araştırma hakkında b�lg�lend�r�lmeler�sağlanmıştır. Çalışmaya Nevşeh�r Hacı Bektaş Vel� Ün�vers�-tes� Et�k Kurulu Başkanlığınca 13.05.2019 tar�h ve2019.07.69. sayılı karar �le onay ver�lm�ş ve çalışma Hels�nk�B�ld�rges�ne uygun şek�lde sürdürülmüştür.
Kinematik Analizler
Ver�ler�n toplanması
Katılımcılardan 8 m uzunluğunda ve 40 cm gen�şl�ğ�nde b�ryürüyüş alanında alışmış oldukları günlük adım frekansı veadım uzunluğunu kullanarak kamera bakış açısına göresağdan sola doğru 3'er defa yürüyüş yapmaları �stenm�şt�r.Bununla b�rl�kte, sol bacağın üst kısmında bulunan �şaret-ley�c�n�n görünümünün engellenmemes� �ç�n katılımcılar-dan kollarını göğüs h�zasında b�rleşt�rmeler� �stenm�şt�r.
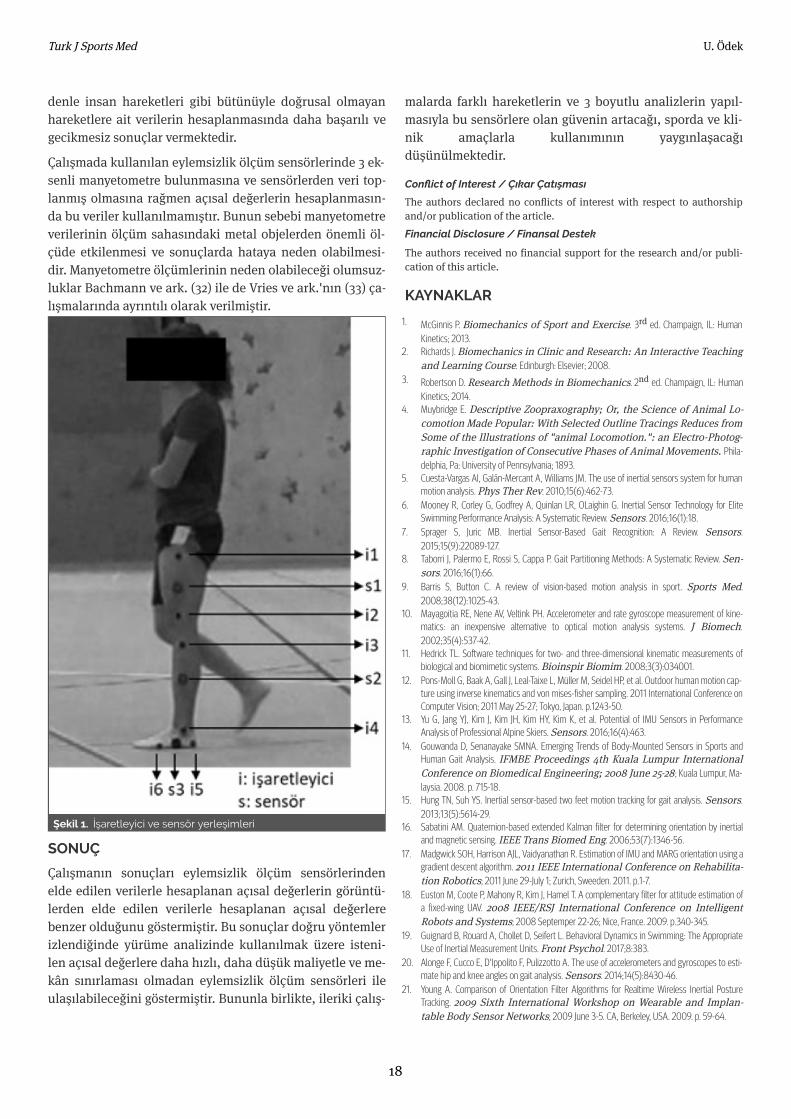
İk� boyutlu görüntü anal�z�nde kullanılmak üzere katılımcı-ların sol bacaklarına 6 adet s�yah renkl�, 2 cm çapında da-�resel pas�f �şaretley�c� yerleşt�r�lm�şt�r. Uyluk bölges�n� ta-nımlamak �ç�n 2 adet �şaretley�c� büyük trokanter�n 5 cm �n-fer�oruna ve lateral kond�l�n 3 cm süper�oruna; baldır böl-ges�n� tanımlamak �ç�n 2 adet �şaretley�c� f�bulanın proks�-mal başınının 3 cm �nfer�oruna ve lateral malleolün 2 cmsüper�oruna yerleşt�r�lm�şt�r. Ayağı tanımlamak üzere �se 2adet �şaretley�c� ayağın lateral yüzey�ne yerleşt�r�lm�şt�r. Bubölgedek� �şaretley�c�ler�n �lk� kalkaneusun poster�or çıkın-tısının 2 cm anter�oruna , �k�nc�s� �se 5. metatarsofalangealeklem�n h�zasına yerleşt�r�lm�şt�r (Şek�l 1). Tüm yürüyüşler
1/100 san�ye hızında ve 1080 p�ksel çözünürlükte yüksekhızlı görüntü kaydı yapab�len kamera kullanılarak (Sony,FDR-X1000V, Japonya) kayıt altına alınmıştır.
Uyluk, baldır ve ayağa a�t 2 eksende (x, y) �vmelenme veaçısal hız ver�s� 3 adet eylems�zl�k sensörü (Act�Graph,GT9X-L�nk, USA) �le 100Hz frekansında toplanmıştır. Sen-sörler �şaretlenen noktalar arasındak� uzunlukların yarısı-na denk gelen mesafeye, vücut bölümler�n�n stat�k durum-dak� anatom�k eksenler� göz önünde bulundurularakyerleşt�r�lm�şt�r.
Ver�ler�n anal�z�
Yerleşt�r�len �şaretley�c�ler�n poz�syonlarının sayısallaştırıl-ması başlangıcın ardından gelen 3. adım sonundak� topuktemasını tak�p eden 3 topuk temasını kapsayan süre (3adım) �ç�n görüntü anal�z� programı (Tracker, V.4.11.1) yar-dımıyla yapılmıştır. Yatay düzlemde yürüyüş yolunun mer-kez�ne yerleşt�r�len 5 m uzunluğundak� şer�t görüntüler�n 2boyutlu kal�brasyonu �ç�n kullanılmıştır. Kamerada kullanı-lan balıkgözü lens neden�yle görüntünün merkezden uzaknoktalarında oluşan bozulmalar görüntü anal�z� yazılımı-nın �çer�s�nde bulunan f�ltreleme eklent�s� �le ortadan kaldı-rılmıştır. Görüntü anal�z� yazılımı kullanılarak �şaretlenennoktalar tanımlandıktan sonra bu noktaların hareket süres�boyunca koord�nat s�stem�ndek� yerler� programın otoma-t�k tak�p özell�ğ� kullanılarak sayısallaştırılmıştır. Sonrasın-da uyluk, baldır ve ayak bölümler� �k� nokta arasına b�rdoğru parçası yerleşt�r�lerek oluşturulmuştur. Bölümlere a�taçısal değerler bu doğru parçalarının yatay eksenle yaptığıaçılardır ve radyan c�ns�nden hesaplanmıştır. Hesaplananaçısal değerler�n yumuşatılmasında S�gmaplot (Ver.13) �sta-t�st�ksel anal�z yazılımı kullanılmıştır. Yumuşatma ver�n�nher 1/100'lük d�l�m� �ç�n negat�f üstsel yöntem kullanılarak4. dereceden pol�nom fonks�yon anal�z� �le yapılmıştır.
Sensörler� üreten f�rmaya (Act�Graph, USA) a�t Act�L�fe (Ver.6.13.3) ver� transfer� ve anal�z� yazılımı �le b�lg�sayar ortamı-na aktarılan �vmelenme ver�s� KST2 (Ver. 2.0.x) görüntüle-me ve graf�k oluşturma yazılımı �le �ncelenm�şt�r. İvmelen-me ver�s�nde yere temas anında meydana gelen p�kler tes-p�t ed�lm�ş ve bu p�kler kullanılarak 3. ve 6. topuk temasınıkapsayan süredek� �vmelenme ve açısal hız ver�ler� anal�zed�lmek üzere ham ver�den kes�lerek ayıklanmıştır. Eldeed�len ver�lerden sensörler�n oryantasyon b�lg�s�ne ulaşa-b�lmek �ç�n tamamlayıcı f�ltreleme yöntem� (Complemen-tary F�lter�ng) yöntem� kullanılmıştır (Eş�tl�k 1). Görüntüler-den elde ed�len oryantasyon b�lg�ler�n�n tab� tutulduğu yu-muşatma yöntem� aynı şek�lde sensörden elde ed�lenlere deuygulanmıştır. Bu yolla yumuşatma yöntem�n�n �çer�ndeyer alan pol�nom�yal eş�tl�k kullanılarak farklı yöntemlerleelde ed�len ver�ler�n gözlem sayısı eş�tlenm�şt�r. Böylece �s‑

Turk J Sports Med U. Ödek
16
Tablo 1. Üç Bölgeye Ait Tek Örneklem T-Testi Sonuçları
Ayak (Sol) Baldır (Sol) Uyluk (Sol)Katılımcı Deneme t p t p t p
11 1.90 0.06 1.91 0.05 1.70 0.092 1.40 0.16 1.81 0.07 1.81 0.073 1.74 0.08 1.59 0.11 1.44 0.15
21 1.55 0.12 1.70 0.09 1.37 0.172 1.25 0.21 1.74 0.08 1.62 0.103 1.71 0.18 1.81 0.07 1.55 0.12
31 1.70 0.09 1.81 0.07 1.90 0.062 1.59 0.11 1.62 0.10 1.62 0.103 1.71 0.18 1.51 0.13 1.74 0.08
41 1.51 0.13 1.49 0.14 1.37 0.172 1.27 0.20 1.90 0.06 1.81 0.073 1.76 0.08 1.74 0.08 1.70 0.09
51 1.37 0.17 1.70 0.09 1.59 0.112 0.99 0.31 1.59 0.11 1.59 0.113 1.49 0.14 1.51 0.13 1.70 0.09
61 1.28 0.20 1.30 0.19 1.76 0.082 1.30 0.19 1.72 0.18 1.59 0.113 1.72 0.18 1.55 0.12 1.81 0.07
TARTIŞMA
tat�st�ksel anal�z �ç�n kullanılacak Bland-Altman yöntem�-n�n gözlem sayısı eş�tl�ğ� önkoşulu yer�ne get�r�lm�şt�r.
Eşitlik 1. Tamamlayıcı Filtre θ = böl ≥ açısı, x = jiroskop verisi, y = ivme ölçer verisi
İstatistiksel Analizler
İstat�st�ksel yaklaşımlar yardımıyla �k� farklı ölçüm yönte-m�nden elde ed�len bölümlere a�t açısal değerler�n uyumuve bu değerler�n farkları �ncelenm�şt�r. İk� yöntemden eldeed�len toplam 54 ver� ç���n�n uyumunun �ncelenmes� �ç�nBland-Altman graf�kler� kullanılmıştır. Alt ve üst uyum sı-nırları bel�rlen�rken ölçüm sonuçlarına a�t farkların stan-dart sapması kullanılmış ve ±1.96 standart sapma uzaklık-ları l�m�t değerler olarak bel�rlenm�şt�r. İstat�st�ksel kararınobjekt�f b�r şek�lde ver�leb�lmes� �ç�n Tek Örneklem T-Test�kullanılmış ve �k� ölçüm arasındak� farkların 0 değer�negöre anlamlı ölçüde farklı olup olmadığı test ed�lm�şt�r.Farkların oluşturduğu ver� setler�ndek� dağılımın normall�-ğ� Kolmogorov-Sm�rnov Test� �le test ed�lm�şt�r. Tüm testler
�ç�n �stat�st�ksel anlamlılık düzey� p<.05 olarakbel�rlenm�şt�r.
BULGULAR
Bland-Altman graf�kler� tüm zaman ser�s� ç��ler� �ç�n �k� öl-çüm yöntem�nden elde ed�len sonuçların farklarının alt veüst l�m�tler �çer�s�nde kaldığını gösterm�şt�r. B�r�nc� katılım-cının 3. denemes�n�n vücut bölümler�ne a�t açısal değerler�ve Bland-Altman graf�kler� örnek olarak sunulmuştur (Gra-f�k 1-6). Kolmogorov-Sm�rnov testler� sonucunda farklarınoluşturduğu tüm ver� setler�n�n normal dağılım gösterd�ğ�bulunmuştur (p>.05). Bununla b�rl�kte Tek örneklem T-Test�sonuçları (Tablo 1) tüm ver� ç��ler�nde �k� ölçüm yöntem�n-den elde ed�len sonuçların farklarının �stat�st�ksel olarak0'dan anlamlı ölçüde farklı olmadığını gösterm�şt�r (p>.05).Elde ed�len sonuçlar doğrultusunda �k� ölçüm yöntem� �leelde ed�len ver�ler�n %95 güven aralığı sınırları �çer�s�ndeuyumlu olduğu bel�rlenm�ş ve �k� farklı ölçüm yöntem� �leelde ed�len sonuçlar arasında fark yoktur h�potez� kabuled�lm�şt�r.
Bu çalışmada yürümen�n k�nemat�k anal�z�nde kullanılmaküzere v�deo kamera görüntüler� ve eylems�zl�k ölçüm sen-sörler�nden elde ed�len ver�lerle hesaplanan açısal değerle-r�n uyumu �ncelenm�şt�r. Sol uyluk, baldır ve ayağa a�t açı-sal değerler farklı yöntemler kullanılarak hesaplanan de-ğerler olmasına rağmen ölçüm sonuçları arasındak� farkın�stat�st�ksel olarak 0'dan farklı olmadığı ve ver� setler�n�n%95 güven aralığı �çer�s�nde uyum gösterd�ğ� bulunmuştur.
Zhang, Novak (27), Q�ngguo ve Jun-T�an (28) tarafından ya-pılan çalışmalarda eylems�zl�k ölçüm sensörler�n�n (Xsens,
MVN, Hollanda) yürüme anal�z�nde kamera desteğ� �le yada tek başına kullanılab�leceğ� bel�rt�lm�şt�r. L�u, Inoue veSh�bata (29) �se kend� gel�şt�rd�kler� g�y�leb�l�r s�stem ve gö-rüntülerden elde ett�kler� ver�ler� karşılaştırdıkları çalışma-larında uyluk, baldır ve ayak açılarının benzer olduğunubulmuşlardır. İşaretley�c�ler� ve sensörler� farklı noktalarayerleşt�rm�ş olmalarına ve farkları ortaya koymada "Kök Or-talama Kare Hatası"nı kullanmalarına rağmen çalışmanınsonuçları bu çalışmayla örtüşmekted�r. B�r başka çalışmadaSeel, Ra�sch ve Schauer (30) ampute b�reylerde hem sağlıklıbacak hem de protez bacak �ç�n d�z ve b�lek açılarının ölçü
θ = 0.98 ⋅ (θk − 1 + x ⋅ Δt) + (0.02 ⋅ y)

Turk J Sports Med Yürüme Anal�z�nde Açısal Değerler�n Uyumu
17
münde eylems�zl�k sensörler�nden elde ed�len ver�ler�n gö-rüntülerden elde ed�lenlere oldukça yakın sonuçlar verd�ğ�-n� bel�rtm�şt�r. Benzer araştırmaların sonuçlarından yolaçıkarak farklı ölçüm ve anal�z yöntemler� kullanıldığındadah� eylems�zl�k ölçüm sensörler�nden elde ed�len ver�ler�ngörüntülerden elde ed�lenler �le anlamlı farklılıklar göster-med�ğ� söyleneb�l�r.
Grafik 1. Ayağa ait açısal değerlerin uyumu
Grafik 2. Baldıra ait açısal değerlerin uyumu
Grafik 3. Uyluğa ait açısal değerlerin uyumu
Grafik 4. Ayağa ait açısal değerler
Grafik 5. Baldıra ait açısal değerler
Grafik 6. Uyluğa ait açısal değerler
Araştırmacıların kolaylıkla kullanab�leceğ� bas�t ve ucuzyöntemler�n gel�şt�r�lmes�n�n alanda yapılacak çalışma sa-yısını artıracağı düşünülmekted�r. Bu çalışmada kullanılantamamlayıcı f�ltreleme eş�tl�ğ� daha öncek� araştırmalardakullanılan f�ltreleme eş�tl�kler� �le kıyaslandığında oldukçabas�t olmasına rağmen sonuçlarda herhang� b�r j�roskopsapmasına rastlanmamıştır. İvmelenme ve açısal hız değer-ler�ne sah�p olan araştırmacılar çeş�tl� of�s yazılımları (MSExcel, L�breo��ce Calc vb.) yardımıyla tamamlayıcı f�ltrekullanarak eklem ve bölüm açılarını kolaylıkla hesaplamaolanağı bulab�l�rler. Bununla b�rl�kte H�gg�ns'�n (31) çalış-masında bel�rt�ld�ğ� g�b� tamamlayıcı f�ltreleme yöntem�çok daha az hesaplama gerekt�r�r. Yüksek hızlı ver� toplamaaraçlarının kullanıldığı ve b�nlerce ver�n�n m�l�san�yeler�çer�s�nde �şlenmes� gerekt�ğ� durumlarda bu katkı oldukçaöneml�d�r. Ayrıca tamamlayıcı f�ltreleme yöntem� modelle-me hesaplamaları �çermez ya da sonuca ulaşmak �ç�n Kal-man f�ltreler� g�b� b�r sonrak� ver�ye �ht�yaç duymaz. Bu ne‑
Turk J Sports Med U. Ödek
18
denle �nsan hareketler� g�b� bütünüyle doğrusal olmayanhareketlere a�t ver�ler�n hesaplanmasında daha başarılı vegec�kmes�z sonuçlar vermekted�r.
Çalışmada kullanılan eylems�zl�k ölçüm sensörler�nde 3 ek-senl� manyetometre bulunmasına ve sensörlerden ver� top-lanmış olmasına rağmen açısal değerler�n hesaplanmasın-da bu ver�ler kullanılmamıştır. Bunun sebeb� manyetometrever�ler�n�n ölçüm sahasındak� metal objelerden öneml� öl-çüde etk�lenmes� ve sonuçlarda hataya neden olab�lmes�-d�r. Manyetometre ölçümler�n�n neden olab�leceğ� olumsuz-luklar Bachmann ve ark. (32) �le de Vr�es ve ark.'nın (33) ça-lışmalarında ayrıntılı olarak ver�lm�şt�r.
Şekil 1. İşaretleyici ve sensör yerleşimleri
SONUÇ
Çalışmanın sonuçları eylems�zl�k ölçüm sensörler�ndenelde ed�len ver�lerle hesaplanan açısal değerler�n görüntü-lerden elde ed�len ver�lerle hesaplanan açısal değerlerebenzer olduğunu gösterm�şt�r. Bu sonuçlar doğru yöntemler�zlend�ğ�nde yürüme anal�z�nde kullanılmak üzere �sten�-len açısal değerlere daha hızlı, daha düşük mal�yetle ve me-kân sınırlaması olmadan eylems�zl�k ölçüm sensörler� �leulaşılab�leceğ�n� gösterm�şt�r. Bununla b�rl�kte, �ler�k� çalış-
malarda farklı hareketler�n ve 3 boyutlu anal�zler�n yapıl-masıyla bu sensörlere olan güven�n artacağı, sporda ve kl�-n�k amaçlarla kullanımının yaygınlaşacağıdüşünülmekted�r.
Conflict of Interest / Çıkar Çatışması
The authors declared no con��cts of �nterest w�th respect to authorsh�pand/or publ�cat�on of the art�cle.
Financial Disclosure / Finansal Destek
The authors rece�ved no f�nanc�al support for the research and/or publ�-cat�on of th�s art�cle.
KAYNAKLAR
McG�nn�s P. B�omechan�cs of Sport and Exerc�se. 3rd ed. Champa�gn, IL: HumanK�net�cs; 2013.R�chards J. B�omechan�cs �n Cl�n�c and Research: An Interact�ve Teach�ngand Learn�ng Course. Ed�nburgh: Elsev�er; 2008.
Robertson D. Research Methods �n B�omechan�cs. 2nd ed. Champa�gn, IL: HumanK�net�cs; 2014.Muybr�dge E. Descr�pt�ve Zoopraxography; Or, the Sc�ence of An�mal Lo-comot�on Made Popular: W�th Selected Outl�ne Trac�ngs Reduces fromSome of the Illustrat�ons of "an�mal Locomot�on.": an Electro-Photog-raph�c Invest�gat�on of Consecut�ve Phases of An�mal Movements. Ph�la-delph�a, Pa: Un�vers�ty of Pennsylvan�a; 1893.Cuesta-Vargas AI, Galán-Mercant A, W�ll�ams JM. The use of �nert�al sensors system for humanmot�on analys�s. Phys Ther Rev. 2010;15(6):462-73.Mooney R, Corley G, Godfrey A, Qu�nlan LR, OLa�gh�n G. Inert�al Sensor Technology for El�teSw�mm�ng Performance Analys�s: A Systemat�c Rev�ew. Sensors. 2016;16(1):18.Sprager S, Jur�c MB. Inert�al Sensor-Based Ga�t Recogn�t�on: A Rev�ew. Sensors.2015;15(9):22089-127.Taborr� J, Palermo E, Ross� S, Cappa P. Ga�t Part�t�on�ng Methods: A Systemat�c Rev�ew. Sen-sors. 2016;16(1):66.Barr�s S, Button C. A rev�ew of v�s�on-based mot�on analys�s �n sport. Sports Med.2008;38(12):1025-43.Mayago�t�a RE, Nene AV, Velt�nk PH. Accelerometer and rate gyroscope measurement of k�ne-mat�cs: an �nexpens�ve alternat�ve to opt�cal mot�on analys�s systems. J B�omech.2002;35(4):537-42.Hedr�ck TL. So�ware techn�ques for two- and three-d�mens�onal k�nemat�c measurements ofb�olog�cal and b�om�met�c systems. B�o�nsp�r B�om�m. 2008;3(3):034001.Pons-Moll G, Baak A, Gall J, Leal-Ta�xe L, Müller M, Se�del HP, et al. Outdoor human mot�on cap-ture us�ng �nverse k�nemat�cs and von m�ses-f�sher sampl�ng. 2011 Internat�onal Conference onComputer V�s�on; 2011 May 25-27; Tokyo, Japan. p.1243-50.Yu G, Jang YJ, K�m J, K�m JH, K�m HY, K�m K, et al. Potent�al of IMU Sensors �n PerformanceAnalys�s of Profess�onal Alp�ne Sk�ers. Sensors. 2016;16(4):463.Gouwanda D, Senanayake SMNA. Emerg�ng Trends of Body-Mounted Sensors �n Sports andHuman Ga�t Analys�s. IFMBE Proceed�ngs 4th Kuala Lumpur Internat�onalConference on B�omed�cal Eng�neer�ng; 2008 June 25-28 ; Kuala Lumpur, Ma-lays�a. 2008. p. 715-18.Hung TN, Suh YS. Inert�al sensor-based two feet mot�on track�ng for ga�t analys�s. Sensors.2013;13(5):5614-29.Sabat�n� AM. Quatern�on-based extended Kalman f�lter for determ�n�ng or�entat�on by �nert�aland magnet�c sens�ng. IEEE Trans B�omed Eng. 2006;53(7):1346-56.Madgw�ck SOH, Harr�son AJL, Va�dyanathan R. Est�mat�on of IMU and MARG or�entat�on us�ng agrad�ent descent algor�thm. 2011 IEEE Internat�onal Conference on Rehab�l�ta-t�on Robot�cs; 2011 June 29-July 1; Zur�ch, Sweeden. 2011. p.1-7.Euston M, Coote P, Mahony R, K�m J, Hamel T. A complementary f�lter for att�tude est�mat�on ofa f�xed-w�ng UAV. 2008 IEEE/RSJ Internat�onal Conference on Intell�gentRobots and Systems; 2008 Septemper 22-26; N�ce, France. 2009. p.340-345.Gu�gnard B, Rouard A, Chollet D, Se�fert L. Behav�oral Dynam�cs �n Sw�mm�ng: The Appropr�ateUse of Inert�al Measurement Un�ts. Front Psychol. 2017;8:383.Alonge F, Cucco E, D'Ippol�to F, Pul�zzotto A. The use of accelerometers and gyroscopes to est�-mate h�p and knee angles on ga�t analys�s. Sensors. 2014;14(5):8430-46.Young A. Compar�son of Or�entat�on F�lter Algor�thms for Realt�me W�reless Inert�al PostureTrack�ng. 2009 S�xth Internat�onal Workshop on Wearable and Implan-table Body Sensor Networks; 2009 June 3-5. CA, Berkeley, USA. 2009. p. 59-64.
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.

Turk J Sports Med Yürüme Anal�z�nde Açısal Değerler�n Uyumu
19
W�ndolf M, Götzen N, Morlock M. Systemat�c accuracy and prec�s�on analys�s of v�deo mot�oncaptur�ng systems-exempl�f�ed on the V�con-460 system. J B�omech. 2008;41(12):2776-80.G�avar�na D. Understand�ng Bland Altman analys�s. B�ochem Med. 2015;25(2):141-51.Anna AS, W�ckström N, Eklund H, Zügner R, Tranberg R. Assessment of Ga�t Symmetry andGa�t Normal�ty Us�ng Inert�al Sensors: In-Lab and In-S�tu Evaluat�on. B�omed�cal Eng�ne-er�ng Systems and Technolog�es Commun�cat�ons �n Computer and In-format�on Sc�ence. 2013;239-54.Henkel M. Implementat�on and Val�dat�on of Inert�al Measurement Un�ts �n marker-based andmarker-less 3D mot�on track�ng [Undergraduate]. TU München; 2016.Watanabe T, Sa�to H, Ko�ke E, N�tta K. A Prel�m�nary Test of Measurement of Jo�nt Angles andStr�de Length w�th W�reless Inert�al Sensors for Wearable Ga�t Evaluat�on System. ComputIntell Neurosc�. 2011;2011: 975193Zhang JT, Novak AC, Brouwer B, L� Q. Concurrent val�dat�on of Xsens MVN measurement oflower l�mb jo�nt angular k�nemat�cs. Phys�ol Meas. 2013;34(8):63-9.
L� Q, Zhang JT. Post-tr�al anatom�cal frame al�gnment procedure for compar�son of 3D jo�nt ang-le measurement from magnet�c/�nert�al measurement un�ts and camera-based systems. Phy-s�ol Meas. 2014;35(11):2255-68.L�u T, Inoue Y, Sh�bata K. Development of a wearable sensor system for quant�tat�ve ga�t analy-s�s. Measurement. 2009; 42(7), 978-988.Seel T, Ra�sch, J, Schauer, T. IMU-based jo�nt angle measurement for ga�t analys�s. Sensors.2014; 14(4), 6891-6909.H�gg�ns W. A Compar�son of Complementary and Kalman F�lter�ng. IEEE Transact�onson Aerospace and Electron�c Systems. 1975;11(3):321-5.Bachmann E, Yun X, Brumf�eld A. L�m�tat�ons of Att�tude Est�mnat�on Algor�thms forInert�al/Magnet�c Sensor Modules. IEEE Robot�cs & Automat�on Magaz�ne.2007;14(3):76-87.de Vr�es WH, Veeger HE, Baten CT, van der Helm FC. Magnet�c d�stort�on �n mot�on labs, �mpl�-cat�ons for val�dat�ng �nert�al magnet�c sensors. Ga�t Posture. 2009;29(4):535-41.
22.
23.24.
25.
26.
27.
28.
29.
30.
31.
32.
33.