-
いすゾ自動車株式会社
1 IESC (Isuzu Electronic Stability Control)
通称名
フォワード
1 概要(図 Iー 1)
車 両 型 式
TKG-F**90 TKG-F**34
適用時期
2014年11月~
出典資料
総合修理!書 No. D03-019
これまで大型車の安全性を高めるために GIGAに採用してきたIESC(Isuzu Electronic Stability
Control)シ
ステムを中型車に展開するものである,基本制御は大型車と同様である。
IESCシステムは従来のABS/ASRシステムに加え追加されたセンサからの情報を得て,車両姿勢が不安定
になり始める状況をより 早 く察知しエンジン及びブレーキ・システムへの制御を精密化することで,車両姿
勢を早期に安定状態に戻すことと 万が一の危険回避貢献を目的に したシステムである。
当システムの制御は下記2つの制御に分別される。
-曲がり 方の補正制御
(アンダ・ステア/オーバ・ステア)
.横転制御
7
三三ゴ臨器室調
寸アンダ・ステア
E盟謹オーバ・ステア
図 1-1 作動概要因
-
-E・E・E温・・
2 構造 ・機能
1 ) 構成部品の配置
(1) 主要構成部品(図 1-2)
1 2
10 9 8 7 6
図 1-2 主要構成部品配置図
1.操舵角センサ
2 エア・プレッシャ・センサNO.3
3.前右車輪速センサ
4.後右車輪速センサ
5.後左車輪速センサ
6. ECM (6HK1-TCエンジン搭載フル ・キ ャブ仕様)
7. ECM (6HK1-TCエンジン搭載ショート・キヤブ仕様)
8. 前左車輪速センサ
9 ヨー・レート・センサ
10. ECM (4HK1-TCエンジン搭載仕様)
(2) 工ア・タンク周りの構成部品(図 1-3)
3
1. プロポーショナル ・バルブNO.1
2 エア・プレッシャ ・セ ンサNO.1
3. ダブル・チェック・バルブ(プライマリ似1])
4. サーボ・ユニット(プライマリ側)
5. サーボ・ユニット(セカンダリ側)
図1-3 工ア・タンク周りの構成部品
6.エア・プレッシャ・センサNO.2
7 ダブル・チェック・バルブ(セカンダリ側)
8 プロポーショナル・バルブNO.2
9. EHCU
。。
-
-E唖温5・E温・・
主要システム構成図
主要システム構成図(図 1-4)
2)
(1)
L
国国出品缶百
7
ぽ
/
巴16 ・;1
17 , .
15
'l''at--Et--'E『J
E-
-
-
-
-
R
R
-
・岡
、
、
--
d、
•• -----
MR
E
a
-----
酋
開--a
-
a
-
エア配管
電気配線
油圧配管
9
フロント・ホイール・ブレーキ
車輪速センサ
エア・プレッシャ・センサ
ブレーキ・バルブ
エア ・タンク
プロポーショナル・バルブ
ダブル・チェック・ノすルブ
サーボ・ユニット
ハリ1i
ヮ“
q
u
A吐r
D
p
h
U
勾
i
li--
-i1i1i1i
141i
10
1. ECM
2. IESC OFFスイッチ
3. 警告灯
4 操舵角センサ
5 ヨー・レート・センサ
6. ブレーキ・スイッチ
7. DLC
8. リヤ・ホイール・ブレーキ
9. EHCU
主要システム構成図
9
図 1-4
-
-E・E・E・-
(2) ブレーキ配管主体のシステム構成図(図 Iー5)
エア圧
圃圃圃圃ーーー 液圧
電気信号
各車輪ブレーキ
|ソレ川リレー|
|モータ リレー|
CAN通信
(車輪速センサ }
rン }ベHSA/B日 CU ) ベメータ,他ECU }
十一一サ}ベ操舵角センサ }
図Iー5 ブレーキ配管主体のシステム構成図
3) 構成部品の構造・機能
(1) ダブル・チェック・バルブ(図 1-6)
ダブル・チェック・バルブは入力ポートを 2つ有してお
りいずれかのボートのエア圧の高い方を出力ポートに供
給する機能を有している部品である。
※ネジ、仕様はすべて 3/8-19
当システムではダブル・チェック・バルブを 2個使用し
ており,接続回路は入力側がブレーキ・バルブからのエ
ア圧とプロポーショナル・バルブに,出力側がサーボ・
ユニットに接続されており,通常のブレーキ作用時と
IESCシステムからのブレーキ作用時のエア圧の高い方
を指示圧として選択する。
- 10 一
1く> 0 2
4
図1-6 ダブル・チェック・バルブ
1. プロポーショナル・バルブより
2 ブレーキ ・バルブより
3 サーボ・ユニットへ
-
-.U!盟国国
(2) プロポーショナル ・バルブ(図 1-7)
プロポーショナル・パルフ守は電磁弁によりエア通路を開閉する構造となっている。
当システムではプロポーショ ナル・バルブを 2個使用しており,接続回路は入力側がエア・タンク,出力側
がダブル・チェック・バルブに接続されており,通常はエア・タンクからのエア圧を遮断しているが,
IESCシステムからのブレーキ要求があった場合にEHCU(Electronic Hydraulic Control
Unit)からの指示信
号(電流値により制御)を受け,エア・タンクからのエア圧を適切な制動用エア圧に調圧しダブル・チェ ック ・
バルブへ出力する。
4
図Iー7 プ口ポーショナル ・バルブ概略図
l コネクタ
2 排気ポート
3. ダブル・チェック・バルブへ
4.エア・ タンク より
r------・圃・・・・・・・・・・・・・・圃圃・・・・・・・
・・・・・・・・・・・・・圃圃恒国圃圃圃圃圃圃圃・・・・・・・圃 -----I [バルブ特性目安]
コネクタに約600mA指示時
i コエア/1¥カ 8bar相当
[バルブ点検方法]
コネクタ端子関抵抗
コ 18-25Q
(各端子~パルプ・ボデー ∞)
L _ーーーーーーーーーーーーーーーーーーーーーーーーーー同ーーーーーーーーーーーー」
(3) 車輪速センサ (図 1-8)
IESCシステムでは従来のABSシステムに利用していた車速センサをそのまま流用しており,各車輪速度の
データは直接EHCUに入力され, CAN通信にて他コントロール・ユニットと情報共有を行っている。
図1-8 車輪速センサ概略図
唱
EA
咽
EA
1.センサ
2 エキサイタ・リ ング
I [センサ点検方法]
コネクタ端子問抵抗
l コ 1-3kQ
: (各端子~ボデー :∞)a岡田四国ーーーーーーーーーー-~
-
-E帽直2・E温・・
(4) 工ア・プレッシャ・センサ(図 1-9)
IESCシステムでは,ドライパの意思に無関係にブレーキ・システムへの介入があるため,ダブル・チェック・
バルブの上流と下流にエア・プレッシャ・センサを装着している。
前軸,後軸のブレーキ・エア配管に2個づっ装着され,車両l台あたり 4個が取り付けられている。
ただし 4つのセンサの信号のうち 3個のセンサ値はEHCUに出力されるが,ダブル・チェック・バルブの
上流側にある後軸側配管に装着されているセンサ信号だけは,車両制御ユニットに出力される。
※図 1-5 ブレーキ配管主体のシステム構成図 参照
本センサからの出力信号はブレーキ通常制御時には利用しておらず, IESCシステムが作動中に起こり得
るEHCUからの指示とドライパからの指示が異なる場合に,双方の意思を確認するために利用される。
[EHCUからの指示とドライパからの指示が異なる場合の具体例]
EHCUにて制動指示の最中に, ドライパがブレーキ・バルブを踏んだ,または踏み増しした。
(5) 操舵角センサ(図 1-10)
r -ーーーーーーーーーーーーー、
; [セ ンサ出力特性目安]
l 圧力ゼロコ O.5V相当
l 08MPa コ 3.1V相当ー-ーーーーーーーーーーー・・ 4
※センサの特性は4個すべて同じである。
図1-9 エア・プレッシャ・センサ概観図
操舵角センサはステアリング・コラム部に組み込まれており,操舵角度と操舵方向を検出しEHCUにCAN
データを送信する。
車速と本センサからの信号を基本情報にして, ドライパが車両をどの方向に動かそうと考えているのかを推
察する。[コネクタ・ピ ン情報]
1 : GND 2 : CAN -L
3: CAN-H 4: IGN(24V)
※CANは250kbps仕様
2 3 4
図1-10 操舵角センサ概観図
- 12 -
-
-E・E・.:・・
(6) ヨー・ レー ト・センサ(図 I-11)
IESCシステムではヨー ・レー トを監視し車速やステア リング操作等の状態からコン トロール ・ユニッ ト
内に記憶しているヨ ー・レー トと,ヨ ー・レー ト・センサから出力されるヨ ー ・レー トを比較 し 車両が安
定状態であるかを把握する。
ヨー ・レー ト・ センサはキャブ内のセンタ・コンソール助手席側面に取り 付け られ, CAN通信を介 して
EHCUに情報を共有する。
本センサは, 図 1-11のとおり,衝撃に対して敏感な部品であるため,取り 付け時には注意が必要であり,
低い位置からの地面落下でも使用不可である。
位1F 1. Gセンサ2. ヨー・レート・センサ3 ヨー・レート ・センサASM
※作動電圧は12V仕機※CANの終端抵抗内蔵品である
図1-11 操舵角センサ概観図
直望日 ョー ・レートとは
ヨー ・レートとは,車両重心を通る鉛直中,11
廻りの回転角速度で,右イラス トを参照。
(7) IESC OFFスイッチ(図 I-12)
IESCシステムには,モーメンタ リ・ プッシュ式のOFF
スイッチが設定されており, ドライバ操作(1秒押 し)に
より容易にシステムを作動禁止状態にすることができる。
このスイッチを作動させると, IESCとともにASRシス
テムも作動禁止状態となる。
また,モーメンタ リ式のため,作動禁止操作後にドライ
パがエンジンを停止させ再始動 した場合には,システム
作動待機状態から始まる。
図1-12 IESC OFFスイッチ概観図
勺
J、,i
-
-E竃E・圃E温・
(8) IESC作動表示灯及び警告灯(図 1-13)
IESCシステムの作動及び異常を認知すると警告灯で知らせる。
また, IESC OFFスイッチ操作により IESCが作動禁止状態であることを認知するとメータ 内にIESCOFF
表示灯が点灯する。
IESC作動時 ・・・・警告灯の点滅 + ブザー音
IESC異常時 -・警告灯の点灯
※警告灯はエンジン始動後に点灯し, 3秒後に消灯すれば正常
IESC OFF 時 -・・・ OFF表示灯の点灯
図 1-13 IESC表示 ・警告灯
(9) EHCU (図 1-14, 15)
EHCUはElectronicHydraulic Control Unitの111告称で,その名のとおり,ハイドロ リック
・ユニッ ト部と,
コン トロール・ユニッ ト部により構成されている。
従来より採用されていた EHCUに対 しIESC機能を追加するにあたりコン トロール ・ユニッ ト部に変更を
行った。
l エレクトロニック・コントロール ・ユニッ ト部
2. ハイドロ リック ・ユニット部
※端子番号に対応する回路については
図 1-15の結線図を参照のこと
図 1-14 EHCU概観図
- 14 -
-
-E・E・-温・
[結線図]
J274 イグニッション電源.
一一 ~34
バルブ電原Iz
モータ電源14
ストップ ・ランプ ・リ レー
24
バッテリ
プロポーショナル・ノ~)~フ" No.1
30
29
28
31 EHCU プロポーショナル ・
I~)l〆フ"No. 2
IESC OFFスイッチ
23
エー勾巴h2立型斗1
図 1-15 結線図
ヨーレート・センサ
16 26
32
27
21
11
12
別院院一エア ・フ.レッシャ・
センサNO.1
14民 エア・フ.レッシャ・センサNO.2
18
17
車輪速センサ
ーー午 1後右
7 8
後左
9
10 前右
20 19
前左
4) 制御内容
(1) 曲がり方(オーバ・ステア/アンダ・ステア)の補正制御(図 1-16, 17)
車速やステアリング・センサ等からの信号を受け コントロール・ユニ ット内に記憶されているヨー・レー
ト値よりも大きければ,車両の後方がスリ ップしていると判断し, ヨー・レート値が小さければ車両の前方
がスリ ップしていると判断し,それぞれの状態から正常な状態に復帰させようとする制御である。
この制御は, 車両の状態によりどこの輸にどのような順番で制動を掛けるのかが重要となる。
オーバ・ステアを検知
EZ函・『亨
-魁耕咽・縫国外向きのモーメントを発生
オーバ・ステア抑制
...... 機滑りを防止
アンダ・ステアを検知
E/ÿ/tfttJ~tQJlþIJ
可v
.塵圏彊・旋回方向にモーメン卜を発生
アンダ・ステア抑制可V
機滑りを防止
15
図 1-16 曲がり方補正制御時の制御内容
-
-.Ul_温・
[EHCU内での制御内容]
IESC作動時はプロポー ショナル・バルブを介してサーボ ・ユニ ットにエアが供給される。
EHCUはソレノイド ・バルブを制御し, 制動カτ必要な車輪のホイール・シ リンダにブレーキ ・フルードを
圧送していく 。以下の図は左旋回時にアン ダ ・ステアを検出した場合のEHCU作動を示す。
パルフ守作動状態 ~ 1= ffjIJ絢JJ侍IESC作動時
前輪外側 前輪内側 後輪外側 後輪内flllJ
保持用ソレノイド・ バルブ |苅 rm 閉 日目 日目i威圧用ソレノイド ・パルブ |羽 閉 閉 閑 閉
エア・タンク
t
n
u
c
u
a
r
AU
VJ
UH
「,J
・
.
•• ・
.・.,,‘
r--------------------
FL FR RL RR
図1-17 EHCU内での制御内容
CO
1i
-
-E・E・Eヨ・・
(2) 横転制御(図 1-18)
ブラインド・コーナをコーナ・リング中に道路に落下物を発見した等のケースでは,予想以上にステアリン
グを操舵することが容易に想像でき,このような状況下では車両内側タイヤが地面から離れ車体が横転して
しまう可能性が大きくなるため, タイヤ総輸を正常に路面と接触を維持できるようにするための制御が横転
制御である。
この制御は,コーナの車体内側のタイヤを地面から浮かす力である遠心力をいかに少なくするかということ
が重要視される コ 遠心力を落とすという事は,すなわち車体速度を落とすという事を意味する。
具体的には車両が保有するありとあらゆる制動システムを使用して,車体速度を安全圏内に落とす制御であ
り,エンジン・ブレーキ(燃料無噴射による減速).補助ブレーキによる減速,主制動装置(ホイール・ブレー
キ)による減速がこれにあたる。
機G・傾斜角大を検知
司' 可'E-SHutlU困 -・・ ~7-(/'¥1:ヨョ・・E、.... ・E盃~
可V
l恒ESC警告灯
園齢即一………灯m吋……の吋叩一点服叩滅配とザザf一の吹鳴により
|正ESCが作動中であ
ることをドライバに
通知
『司~機転を防止
-臨詩画園
図1-18 横転制御時の制御内容
(3) IESCシステムの留意点
1. IESCはドライパの安全運転を支援するシステムであり,車両の限界を超えた走行を可能にするものでは
ない。
2. ぬかるみや新雪から脱出しようとするときに アクセル・ペダルを踏み込んで、も IESC/ASR機能が作動
してエンジン出力があがらなくなり 脱出しにくくなることカtある。
このような場合. IESC OFFスイッチを使用して IESCの機能を停止し対応。
3. IESCの機能を停止させると. ASRとしての機能も解除される。
4. IESCが作動すると,エアの消費量が通常よりも増加する。空気圧が低下し空気圧警告灯およびエア低
圧警報“ピ一一一"が作動した場合はただちに安全な場所に停車させて,所定の空気圧に回復してから走行
する。
5. IESCを装備していても,アクセル,クラッチ,ハンドルの急な操作は避ける。特に滑りやすい路面での
発進は.IESCを装備していない場合と同様に安全運転を心がける。
6. 以下の症状は異常で、はないので注意。
・エンジン始動後に車両右広報よりモータ音または パルフ守の作動音が聞こえることがある
こ今 ABS/ ASR/IESCの機能をチェックしているときの音
-低速でIESCが作動しない
コ IESCは発進後の車速15km/hを越えてから作動
7. ホイール・ベースの延長/短縮改造を行った場合にはIESCが正常に作動しなくなる。
ヴ
t唱
ai
-
-E・~.温・
3 点検 ・整備のポイン卜
本システムの点検 ・整備には,専用のスキャン ・ツールが必要となる。
1 ) 学習操作が必要な作業
(1) EHCU交換時には,タイヤ径及び,車型,車体番号情報の入力が必要となる。
【タイヤ径の書き込み手)@i]
(イ) スキャン ・ツールを車両に接続する
(ロ) スタータ ・スイッチを ONにする
かす スキャン・ツールの項目を選択していく
シャシコABS/ESCコプログラミングコタイ ヤ径書き込み
(ニ) プログラミング完了後,スタータ・スイ ッチOFF
[車型,車番の書き込み手)11買]
(イ) スキャン・ツールを車両に接続する
(ロ) スタータ・スイッチを ONにする
かす スキャン ・ツールの項目を選択していく
シャシコABS/ESCコプログラミングコ車台番号プログラミング
(ニ) プログラミング完了後 スタータ・スイ ッチOFF
(2) 操舵角センサ交換時または学習値クリア操作後には,中心位置学習が必要となる。
ステア リング・シャフ ト,ステアリング ・ホイールなどのステア リング関連部品を取り外した場合は, 車両
走行による操舵角センサの中心位置再学習による中心位置学習を行う。
なお, 学習値ク リア後は,中心位置学習が修了するまでIESC警告灯が点灯する。
[中心位置学習手)11買]
(イ) スキャン・ツールを車両に接続する
(ロ) スタータ・スイ ッチを ONにする
かす スキャン・ツールの項目を選択していく
シャシコABS/ESCコスペシャル・ファンクションコ操舵角中点学習初期化
(斗 画面の指示に従い学習値をク リア
(刻平坦路にて車速35km/h以上で5秒以上直進走行 し.IESC警告灯が消灯すれば完了
※警告灯が消灯しない場合はDTCが入力されていないか確認し クリアしておく 。
OD
'EA
-
-E・E・.:・・
ヨ~ DTC表
DTC フラッシュ ・コード DTC名称
C0213 13 車両データ値異常
C0214 14 ECU内部異常
C0215 15 ECU電源系異常
C0216 16 CAN通信異常
C0217 17 CAN通信異常(Local)
C0222 22 エア・ プレッ シャ ・センサ電源電圧異常/信号電圧異常
C0224 24 エア・ プレッシャ・センサ電源電圧異常/信号電圧異常
C0225 25 ストップSW断線異常/ON固着
C0226 26 ECM通信異常
C0233 33 モータ断線短絡検出
C0234 34 モータ不回転異常検出
C0235 35 エンジン・コントローラ異常
C0241 41 ソレノイド・リレー断線 短絡検出
C0242 42 エア・ソレノイド・リレー異常
C0245 45 ソレノイド・バルブ異常
C0247 47 エア・タンク圧信号異常
C0248 48 エア圧信号通信異常
C0249 49 HSA通信異常
C0251 51 FL車輪速センサ断線短絡検出
C0252 52 FR車輪速センサ断線短絡検出
C0253 53 RL車輪速センサ断線 短絡検出
C0254 54 RR車輪速センサ断線短絡検出
C0261 61 FL車輪速センサ信号異常
C0262 62 FR車輪速センサ信号異常
C0263 63 RL車輪速センサ信号異常
C0264 64 RR車輪速センサ信号異常
C0265 65 奥径タ イヤ異常検出
C027A 71 ヨー /Gセンサ 出力異常
C027B 71 ヨー /Gセンサ 固着/クランプ異常
C027C 71 ヨー /Gセンサ無効異常
C027D 71 ヨー /Gセンサ停車時出力異常
C027E 71 ヨー /Gセンサ 大カント異常
C0285 85 ヨー /Gセンサ 電源電圧異常
C0286 86 ヨー /Gセンサ通信異常
C028A 81 ヨー /Gセンサ ヨー・レート出力異常
C028C 81 ヨー /Gセンサ ヨー・レート無効異常
C028D 81 ヨー /Gセンサ ヨー ・レート O点異常
C028F 81 ヨー /Gセンサ ヨー・レート発振異常
C0296 96 操舵タjセンサ通信異常
C029B 91 操舵角セ ンサ固着異常
C029C 91 操舵角センサ内部異常
C029D 99 操舵角セ ンサ中点異常
- 19 -
-
-E・E・E温・
II LDWS (Lane Departure Warning System :車線逸脱警報)
通 称 名
フォワード
1 概要
車両型式
TKG-F**90 TKG-F料 34
適用時期 出典資料
2014年11月~ 総合修理書 No. D03-019
いすず自動車では安全性向上のため, 14.5型発売の中型 トラ ック(フォワード)に LDWS(車線逸脱装置)シ
ステムを採用 した。
1 ) 作動概要(図n-1)
LDWSは車両が車線から逸脱すると判断した場合にドライバへ注意喚起をするシステムでドライパにはフ
ロント・ドアに装着のスピーカからの警報音と,メータ内に警告の表示を行う。
図ll-1 作動概要因
このシステムの基本作動条件は車速60km/h以上 かつ道路曲率が250m以上となっている。
この機能は VAT(ビュー・ アシスタン ト・テクノ ロジ)コン トロール・ニ ットに制御が追加されたもので,
車線を認識するためキャブ室内に車線認識用のカメラも新規に追加装着される。
" (L
Ni出目立州-ー-1.勺ザミ車線逸脱空手告_1111天寸わ!Jlンレグ略立:をl喚起羽目:I訟1主主ひょ111ミムヰヒ:ム..
手V週,
なお, LDWSシステムは[わき見運転や居眠り運転の抑制]や, [ドライパが車幅感覚などのズレを自己認識]
できることで,衝突事故の抑制や,新人ドライパの運転スキル向上,乗りなれていない車両へのスムーズな
順応を促進する等のメ リットがあるが,あくまでも車線内の走行を支援するものであり ,前方不注意への補
助や,手放し運転を行うための装置では無い。
- 20 -
-
2 構造・機能
1 ) 構成部品の配置
(1) キャブ室内(図n-2)
-.'IJ(!.ヨ・・
1. LDWSスイッチ
2.操舵角センサ
3. ISS&HSAコントロール・ユニ ット
4. VATコントロール・ユニット
2
1. 車線認識カメラ(標準キャブ車) 2. 車線認識カメラ(ワイド・キャブ車)
l 左フロン ト・ドア・スピーカ
2
2.右フロント・ドア・スピーカ
図11-2 キャブ室内配置図
寸4A
内
4
-
-E・E・.:・・
(2) フレーム(図1I-3,4)
(イ) ECM (4HK1エンジン搭載車) (口1) ECM (6HK1エンジン搭載車)
(ハ,) EHCU
2) システム構成図(図1I-5)
車線認識用カメラ
LDWSスイッチ
(モーメ ンタリ・スイッチ)
操舵角センサ
ISS & HSA
コントロール・ユニット
ECM
EHCU
文は
ABSコントロール・ユニット
ワイパ・スイッチ(High/Low)
1. ECM
図II-3 ECM配置図
1. EHCU
図II-4 EHCU配置図
LOCAL CAN
映像信号
ON/OFF信号
J1939 CAN
操舵角信号
ターンシグナル信号 . JAT コンロ-)レ・
ユニット
J1939 CAN
車速信号
J1939 CAN
車速信号
High/Low信号
ISO CAN
フ。口ク'ラミング-
データ表示。TC表示
警告音信号
警告音信号
J1939 CAN
マルチ ・ディスプレイ望書告
LDWS警告灯
DTC表示
| J1939 CAN | みまもり情報
(4HKlエンジン搭載車)
J1939 CAN
みまもり情報1 (6HKlエンジン搭載車)
図ll-5 システム構成図
22
スキャン・ツール
フロント・ドア ・
スピーカ(左)
フロント ・ドア・
スピーカ(右)
メータ
BCM
みまもりコントロール ・ユニッ ト
-
-E・E・E温・
3) 構成部品の構造 ・機能
(1) VATコントロール ・ユニット(図 II-6, 7)
VATコントロール・ ユニットは,運転席側のインス ト
ルメン ト・ パネルに取り 付けられ. LDWSを作動させ
るためにCAN回路を利用して,車線認識用カメラから
の情報やミ リ波レーダ等の情報を送受信している。
また,車線認識用カメラやミ リ波レーダへの電源供給の
役目も担っている。〈カメラ用電源は 12V出力〉
亡二コ
l.L一一一ー_1r
※端子番号に対応する回路については
図II-7の結線図を参照
2
1 2
j i i i i i i i
-5
i f i i
-i j i l l
--9
i
-止却f f
u引」
喝wi i ! i
引戸
hi i f
心持! i
e「ゆi
引43
州市i
剖」31
止叫! 1
図H-6 VATコントロール・ユニット
[結線図]
ハッテリ電源
A
U
7
t
'l
qu
原一源一
電一電一
リ一ン-
テ一ヨ一
ツ一、y一
t一
y-:
:
ク一イ一 :;陸出 他ECU円削(OFF~20
LDWSスイッチ
;
+-
一一:
力一力
一
ピ一ピ
一
ス一ス一
唱,
n,』
η'ι フロン卜・ ドア・スピーカ(右)
ti告書;;去Jレ惜フロン卜・ドア・
スピーカ(左)
車線認識用
カメラ
:
H一
L-; : ;
イ一イ一
ワ一ワ一
必“『
phu
内
4
qL
ワイパ・スイッチ
SIG口ND7ト一一一一一
定出!: POWER GND 28
図H-7 結線図
ηぺuつ臼
-
-E・E・E温・
(2) LDWSスイッチ(図 II-8, 9)
LDWSスイッチは,スイッチを押すごとに以下の3つの
パターンに順次繰り返し切り替わる。
【警報タイミング標準]コ[警報タイミング早い]
ニコ[警報解除]
図II-8 LDWSスイッチ配置
当システムでは上記警報タイミングをキー OFFでも記憶しているが, LDWSスイッチにより {警報解除]を
選択している状態からエンジンを再始動した場合は, [警報タイ ミング標準]となりシステムが起動する。
【警報タイミング標準]または[警報タイミング早い]を選択している状態からエンジンを再始動した場合は,
いずれの状態であって も[警報タイミング標準]でシステムが起動する。
[作動の目安}
タイミング標準・・・・・タイヤが車線を越えたとき
タイミング早い ・・・・・ タイヤが車線を踏んだとき
3-4
通一り一し
導一あ一な
スイッチ操作
ON
OFF
iJ!iJ定笹i所
一
1一
5
一
一
2一
6
一
一〆
一?t
一
=/一B一
一
3一
/
-
一
4-/
一
図II-9 LDWSスイッチ・ピン配置
(3) LDWS警告表示(マルチ・インフォメーション表示含む)(図 II-10, 11, 12, 13, 14)
スタータ・スイッチ ONでLDWS警告灯を表示する。
警告灯は,スタータ・スイッチ ON後, 3秒後に消灯す
ればシステム正常で、あることを示す。
図II-10 LDWS警告灯
なお, LDWSスイッチ操作により作動解除の指示を行った表示も含め,マルチ・インフォメーション表示
は図n-11のよ うに変化する。
ボタン押目、--~.盟・
LDWSスイッチを
押して選択
図Eー11 マルチ・インフォメーション表示
- 24 -
-
-E・E・E画面画
標準タイミングと早いのタイミングは右イラストのよう
に見分ける。 -E 寝里・・
=争間隔が広い
=争間隔が狭い
図1I-12 LDWS警告タイミングの遣い
ドライパへの警告は下記のような状態となる。(警報タイミング早い選択時の表示)
画面
表示
警報音
(車両スピーカ)
図Eー13 LDWS警告方法
[LDWS装置に異常が発生している場合の表示]
〈マルチ ・インフォメ ーション表示〉 + (LDWS警告灯〉
胸 囲障面臨 回[車線認識ができない場合の表示]
右図の様に、車線部分を点線で表示
図Eー14 LDWS故障・車線認識不可の表示方法
(4) 車線認識用カメラ(図 Eー15,16)
車線を認識するためのカメラでキャ
ブ室内上部にブラケットを介して装
着さ れる。
カメラの CANラインと作動用電源
(12V)は VATコン トロール ・ユ
ニットと接続されている。
図1I-15 カメラ配置
「
DqL
2
-
-E・E・E温・
また,システムの特性上,カメラ映像範囲内に障害物(車検ステッカなど)や,ダッシュ・ボードなどに置か
れた物などの影響で正常な画像を得られなくなる恐れがある。
上記理由から取り付け位置の変更はできないことに加え,下図のフロント・ガラス範囲内には障害物が無い
ようにしなくてはならない。
標準キャブとワイド・キャブでカメラ装着位置が異なるため注意が必要である。
{標準キャブ〉 〈ワイド・キャフ〉
図Eー16 カメラ周辺 映像遮断物禁止帯
(5) スピーカ(図 II-17)
ドライパへの警告を出すため特殊なスピーカを使用し,車線を踏んだ,または超えた方向のスピーカのみが
作動する。
通常の音源を伝える回路と, LDWS警告用の2組の入力端子を有したスピーカのため,指定外のスピーカ以
外は使用不可。
1. 2系統入力端子(8Q)
; 取り付けたスピーカにより, LDWS警告灯(糧) :
( が点灯する原因にもなる
図II-17 スピーカ(裏面)
4) 制御内容
室内に装着された車線認識カメラにより車線が認識でき,かつ車速が60km/hを超えると, システムが作動
する。
システムの基本的な制御内容は車線(白線)の延長線に対して自車位置の認識を行い,ステアリング・センサ
からステアリングの現在位置,操舵速度,操舵角度を入手し, ECMからの車速情報と総合的に処理し車体
の移動量を推測,警告の有無を判断することである。
システムへの付加情報として下記の信号入力から制御内容に修正も加える。
[ターン・シグナル信号] コ ISS &HSAコントロール・ユニットより共有
※信号入力により システムを一時的に解除する
※ヘッド ・ランプ作動情報により画像処理を変更
[ワイパ信号] ニコ ワイパ・スイッチより共有
※信号入力により 警告タ イミングを補正
LDWSシステムを一時的に解除する条件
-ターン・シグナル・スイッチを操作したとき
-車線変更に相当する操舵力でハンドルを操作したとき
.急カーブを走行するとき
po
nノμ
-
-E・JIl・E・-
-車速が60km/h以下になったとき
-走行中,車線が認識できなくなったとき
. LDWSの警報が作動したとき
LDWSシステムの留意点
以下のような場合,車線を正確に認識できないため,システムが正常に作動しない事がある 0
.車線がかすれたり汚れたりして見えにくいとき
-雨,雪,霧,逆光などで車線が見えにくいとき
-路面補修の消し残り線,影,残雪,雨のi留ま ったわだちなど,車線と紛らわ しい線が光っているとき
.二重白線路を走行 しているとき
-車線の111面が狭いときや広いとき
-分岐路やインタ出入り口,急、なカーブ路を走行するとき
-工事による車線規制により車線をまたいで走行するときや仮設の車線を走行するとき
.うねった道路や荒れた道路を走行するとき
-高速道路などの本線(走行車線,追い越し車線)以外の車線を走行するとき
・ヘッド・ライトのレンズ汚れなどにより照射が弱いときや光軸がずれているとき
.急激な明るさの変化が連続するとき
-荷物が片寄って積載された状態のときや,タイヤ空気圧の調整不足により車両が著しく傾いているとき
3 点検・整備のポイント(図 Eー 18,19, 20, 21, 22)
本システムの点検・整備には専用のスキャン・ツールが必要となる。
1 ) 学習操作が必要な作業
車線認識用カメラの脱着及び車両姿勢に変化(タイヤ・サイズ変更,サスペンション調整・交換等)があった
場合には以下のカメラ学習を行う 。
[車線認識用カメラ学習]
カメラは下記のような手順で学習操作を行う必要があり,学習には専用の学習用ターゲットと,スキャン・
ツールが必要となる。
[学習前の注意事項]
-カメラと学習ターゲット聞に映像遮断物がない
.学習は空車状態で実施
(エア・サスの場合は車高調整が適正なことも確認)
.タイヤ空気圧が適正
.フロント・タイヤが直進状態
-車両前方に最低7m以上に障害物が無い平坦な場所
(車両前方10mに何も無いのが理想的)
-学習用ターゲットを張れるスタンドなど
ワー内/臼
図Eー18 学習時のセット要領
-
-.u;・Eヨ・・
【学習用ターゲツ卜の作成]
白い紙に塗 りつぶ して作成すればよいので,図 II-19のす法を厳守する。
1 : 1870mm 2: 95mm
2 2
図II-19 学習用ターゲット作成要領
手順
①平坦な場所にて,車両前後の中心位置を割 り出す。
.c:.$ミ---8
図ll-20 学習用A・B点設定要領
②①で導き 出したA.B点より ,延長線上に線を伸ばしC点を設定する。
〉ト一世 ACJ帆J
1 :フロ ント・ タイヤ中心線
2: C点までの距離 6927mm
※距離の誤差は40mm以内のこと2
図II-21 学習用 C点設定要領
③学習用 ターゲット を設定する。
2
1 :学習用ターゲ、ッ ト
2:学習用ターゲット中心高さ
3:中心高さ 1530mm
4:フロント・タイヤ中心線
5:ターゲッ トまでの水平距離 6927mm 3
4 5
図II-22 学習用ターゲット設定要領
28
-
-E唖E・圃E温・
④スキャン・ツールにて設定する。
スキャン ・ツールは,ボデー コ VAT コスペシャル ・ファンクションコ カメラ学習
画面の指示通りに学習を実行する。
2) DTC確認作業(図 Eー 23)
LDWSシステムの DTC確認方法は以下のとおりである。
(1)スタータ・スイッチを ONにする。
(2)DLCコネクタのNo.12とNO.4または5を短絡させる。
(3)マルチ・ディスプレイ内に DTCが表示される。
表示されるコードはフラッシュ・コードである。
一
-JH1UR
一
Y八VHA凸
工ハ門
TI
一旦
QU-AH
;
一札ー」一回一
図n-23 DLCコネクタ詳細及び故障表示
ヨ~ DTC表
DTC フラッシュ・コード DTC名称
BlO11[44J 22 VAT ECU内音防次障(RAM)
BlO11[45J 21 VAT ECU内部故障(ROM)
B1011[46J 18 VAT ECU内部故障(EEPROM)
B1011 [47J 23 VAT ECU内部故障(WD)
B1011 [49J 20 VAT ECU内部故障(CPU)
BlO11 [55J 19 プログラ ミング未実施
BlO11 [54J 37 カメラ未学習状態
BlO11 [78J 34 カメラ学習値不一致
BlO11 [96J 31 カメラ内部故障
BlO11 [97J 32 カメラ遮蔽検知
BlO11 [98J 33 カメラ高温検知
B1EOO[49J 5 電源線断線/FUSE故障
B1EOl[16J 2 KEYSW故障/VATECU入力回路故障(IG)
B1EOl[17J 3 VAT ECU入力端子過電圧印加
B1E01[49J 4 VAT ECU入力回路故障
BIE02[16J 6 センサ電源電圧短絡/VATECU内部回路故障(電圧低下)
B1E02[17J 7 センサ電源、電圧短絡/VATECU内部回路故障(電圧上昇)
BIE03[49J 8 VAT ECU内部回路故障(音声IC)
B1E04[13J 10 スピーカ故障/VATECU内部回路故障(スピーカ出力)
B1E04[49J 9 VAT ECU内部回路故障(アンプIC)
- 29 -
-
-E帽置・圃E温・・
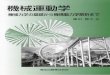
重宝己各種安全技術の投入により減少を続けてきた事業用自動車の重大事故件数が平成22年より横ばいの傾向に
傾向変化が生じている形となり,更なる安全技術のへの要望が高まってきていることが伺える。
ー
1
1
1
仲
す
時
す
砕
す
{
{
{
n
υ
n
u
n
u
n
u
n
U
《
U
R
u
n
u
k
u
q
o
q
以
内
ζ
トラックの重大事故発生状況の推移
2000件
。
5001'牛
01'ヰH5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
参照:[自動車運送事業用自動車事故統計年報]
(自動車交通の輸送の安全にかかわる情報(平成24年)
国土交通省自動車局 平成26年2月
このような状況に対しトラックに更なる安全装備の追加が求められるようになり,今後の販売車両には安全
装置の装着義務化が本格化されることとなった。
今後の安全装置に関する導入動向は以下のとおりである。
EVSC (Electric Vehicle Stability
Control)
衝突被害軽減ブレーキ
AEBS (Advanced Em巴rg官ncy
Brake System)
車線逸脱警報装置
LDWS (Lane Departure Warning
System)
いす f 自動車では, 14.5型発売の中型 トラ ック(フォワー ド)に EVSCに対応する IESC(Isuzu
Electronic
Stability Control)とLDWSシステムを義務化に先駆けて採用した。
以下に IESC装置についての解説を進める。
nu 。。