Embed Size (px)
Citation preview

T.C.
ANKARA ÜNİVERSİTESİ
BİLİMSEL ARAŞTIRMA PROJESİ KESİN RAPORU
Proje Başlığı
Sürekli karıştırmalı polimerizasyon reaktörüne çok girdili / çok çıktılı modele dayalı kontrol algoritmasının uygulanması
Proje Yürütücüsünün İsmi Doç. Dr. Gülay Özkan
Proje Numarası 2002-0745009
Başlama Tarihi 13/11/2002 Bitiş Tarihi 13.5.2005
Rapor Tarihi 13.6.2005
Ankara Üniversitesi Bilimsel Araştırma Projeleri Ankara - " 2005 "
EK-8

SÜREKLİ, KARIŞTIRMALI POLİMERİZASYON REAKTÖRÜNE
ÇOK GİRDİLİ/ ÇOK ÇIKTILI MODELE DAYALI KONTROL
ALGORİTMASININ UYGULANMASI
Özet: Yapılan çalışmada stirenin serbest radikalik çözelti polimerizasyonu, soğutma ceketli
sürekli, karıştırmalı tank reaktör (CSTR) de dinamiği ve kontrolü deneysel ve teorik olarak iki
kısımda incelenmiştir.
Teorik çalışmalarda sürekli, karıştırmalı tank reaktörün matematiksel modellemesi yapılmış,
bu matematiksel modelden yola çıkılarak sistemin yatışkın hal işletim koşulları MATLAB
ortamında belirlenmiştir. Buna göre yatışkın halde Reaktör sıcaklığı (Tr)=327.9038 K, Ceket
sıcaklığı (Tc)=317.4907 K, Benzoil peroksit derişimi (CI)=0.01mol/l, stiren derişimi (CM)= 2.3188
mol /l olarak bulunmuştur. Sistemin dinamik davranışını gözlemek amacıyla girdi değişkenlerine
basamak etki verilerek çıktı değişkenlerindeki değişim gözlenmiştir. Daha sonra sıcaklık ve
dönüşüm kontrolü için en uygun ayar değişkenleri, prosesin yatışkın hal kazancını kullanan bağıl
kazanç oranı metoduyla (RGA) belirlenmiştir. RGA sonuçlarına göre Tr(Reaktör Sıcaklığı) için en
uygun ayar değişkeni Tf (Besleme sıcaklığı ); CM(Monomer derişimi) için en uygun ayar değişkeni
QM(Monomer akış hızı) olarak bulunmuştur. Çok girdili/çok çıktılı sistemlerin kontrolünde önemli
yeri olan ayırma kontrol yöntemi sürekli, karıştırmalı polimer reaktörüne uygulanmış, döngü
etkileşimlerini en aza indirecek denkleyici(kompansötör) tasarlanmıştır. Basitleştirilmiş ayırması
gerçekleştirilen sistemin monomer derişimi ve sıcaklığının değişik set noktaları altında kontrolü; bu
denkleyici ile PID kontrol algoritması kullanılarak yapılmıştır. İkinci bir kontrol algoritması
Dinamik matris kontrol MATAB ortamında polimer reaktörünün monomer derişimini ve reaktör
sıcaklığını kontrol etmek için denenmiştir. Son olarak modele dayalı kontrol algoritmalarından olan
jenerik model kontrol algoritması reaktör içi sıcaklık kontrolü için denenmiştir. Her üç kontrol
algoritmasıda başarıyla polimer reaktörüne uygulanmıştır.
Deneysel çalışmalar iki kısma ayrılmış olup birinci kısımda sistemin dinamik davranışı
incelenmiştir. İkinci kısımda ise reaktör sıcaklığı ve dönüşüm kontrolünün gerçekleştiği deneyler
bulunmaktadır. Kontrol deneylerinde sıcaklık kontrolü için modele dayalı kontrol tekniklerinden
biri olan Jenerik model kontrol edicisi (GMC ), dönüşüm kontrolü için ise PID kontrol edicisi
kullanılmıştır. Deneylerde iyi kontrolün sağlanması seçtiğimiz ayar değişkenlerinin doğruluğunu da
kanıtlamıştır.
Anahtar Kelimeler: Karıştırmalı Sürekli Polimer Reaktör, Bağıl Kazanç Oranı (RGA), Ayırma Kontrol, Jeneric Model Kontrol

APPLICATION OF MULTI INPUT/MULTI OUTPUT MODEL BASED CONTROL
ALGORITHM TO CONTINUOUS STIRRED POLYMERIZATION REACTOR.
Abstract:
In the present work, the dynamics and the control of the free radical solution polimerization
of styrene in a cooling jacketed batch reactor were investigated experimentally and theoretically. In
the theoretical works, mathematical model of continuous stirred tank reactors was determined, and
by using this mathematical model steady state values were determined in matlab program. And so at
steady state, Reactor temperature (Tr) = 327.9038 K, Jacket temperature (Tc) =317.4907K, BPO
concentration (CI) = 0.01mol/l, Styrene concentration (CM) = 2.3188 mol/l were found. To observe
dynamic behavior of reactors, by giving step effect input variables, changing of output variables
were observed. And then best suitable manipulated variables for temperature control and
conversation control were found by relative gain array (RGA) method. According to RGA method,
best manipulated variables for reactor temperature is feed temperature, best manipulated variables
for monomer concentration is monomer flow rate. Decoupling control, that important for MIMO
systems (multiple input multiple output), were applied continuous stirred tank reactor, and
compensatory projected to minimize loop interactions. In the simplified decoupled system,
monomer concentration control and temperature control for different set point observed with this
compensatory by PID controller. Secant control algorithm which is dynamic matrix control is
applied to control monomer concentration of polymer reactor using MATLAB software. Finally, we
applied generic model control, which is model-based control to reactor temperature. Three control
algorithm are applied successfully polymer reactor.
Experimental works were carried out in two parts. In the first works dynamic behavior of
system were determined. Second works includes reactor temperature control and conversation
control. In the experimental works generic model controller (GMC) for temperature and PID
controller for conversation were used. Experimental works obtained well control, this proved
manipulated variables which we choose are true.
Key words: Continuous Stirred Tank Reactor, Relative Gain Array, Decoupling Control,
Generic model control.

1. PROJENIN AMACI
Ekzotermik reaksiyonların gerçekleştiği prosesler güvenlik problemleri, birden fazla yatışkın
hal şartlarını sağlamaları v.b. problemler nedeniyle üzerinde çalışılması gereklidir. Endüstride bu
tip davranış gösteren proseslerden biride polimerizasyon reaksiyonlarıdır. Polimerizasyon
reaksiyonlarının ekzotermik, polimerlerin ısıl iletkenliğinin düşük ve aşırı viskoz olmaları gibi
sebeplerden ısı transferi ve sıcaklık kontrolü son derece zordur. Aynı zamanda polimerizasyon
reaksiyonlarında ürün kalitesini etkileyen pek çok parametre vardır. Bunlardan biride molekül
ağırlığıdır. Molekül ağırlığının on-line ölçümü zor ve zaman gecikimi söz konusudur. Kontrol
çalışmalarında molekül ağırlığı gibi sistem değişkenlerini tahmin yöntemleri kullanılarak tespit
edilebilinir. Bu durumda, son derece kompleks ve zor bir proses özelliği gösteren polimerleşme,
ancak iyi bir kontrol sistemi ile kontrol edildiğinde istenilen özelliklere sahip ürün vermektedir. Bu
açıdan proses kontrolün önemi ortaya çıkmaktadır.
Bu proje kapsamındaki araştırmada, 2 L soğutma ceketli sürekli bir reaktörde yatışkın hal
işletim parametreleri belirlenecek tir. Belirlenen işletim şartlarında reaktör sıcaklığı ve dönüşümün
çok girdili/çok çıktılı modele dayalı kontrolü gerçekleştirilecektir. Bu amaçla, proje çerçevesinde:
- Sürekli karıştırmalı tepkime kabının yatişkın hal işletim şartlarını belirlenecek,
- Prosesin dinamik özellikleri belirlenecek, proses modeli ortaya konulacak ve model parametreleri
belirlenecek,
- Sistemde istenmeyen yük etkilerini ortadan kaldıran çok girdili/çok çıktılı modele dayalı kontrol
algoritması geliştirip, hem deneysel hem de teorik olarak uygulanacaktır.
II. MATERYAL VE YÖNTEM
İncelemeler deneysel ve teorik çalışmalar olmak üzere iki aşamada gerçekleştirilmiştir. Teorik
olarak proses modellemesi yapılmış, yatışkın hal değerleri matlab programıyla belirlenmiş ve
proses aktarım fonksiyonları bulunmuştur. Daha sonra kontrol aşaması için önce ayırıcı tasarlanmış
bu ayırıcı bloklar kullanılarak yeni aktarım fonksiyonları bulunmuş, reaktör sıcaklığı ve dönüşüm
kontrolü teorik olarak tamamlanmıştır.
Deneysel çalışmalarda ise önce prosesin dinamik davranışı gözlenmiş sonra GMC ile
sıcaklık kontrolü, PID ile Monomer derişimi (Dönüşüm) kontrolü gözlenmiştir. Deneysel çalışma
aşamaları ve deney yöntemi aşağıda anlatılmıştır.

Deney düzeneği
Stirenin serbest radikalik polimerizasyonu sürekli bir tepkime kabında gerçekleştirilmiştir.
Reaktör dökme camdan yapılmış, soğutma ceketli, musluklu bir karıştırma kabıdır. Reaktör kapağı
beş rodajlı olup ortadaki ağızdan karıştırıcı, diğerlerinde ise dalgıç ısıtıcı , termoçift, döner
vizkozimetre yerleştirilmiştir. Son rodaj ise besleme akımının girişi için kullanılmıştır. Besleme
pompasıyla reaktöre sürekli giriş sağlanmıştır. Sürekli çıkış için ise reaktördeki musluk
kullanılmıştır. Reaktörün kullanılabilen iç hacmi yani musluğa kadar olan hacmi 1200ml, ceket
hacmi ise 455ml dir.
Reaktörün iç sıcaklığı, soğutma suyunun çıkış sıcaklığı ve beslemenin giriş sıcaklıkları
termoçiftlerle okunmakta ve bilgisayara A/D çeviricileri yardımıyla aktarılmaktadır. Bunun yanında
reaktör içindeki döner vizkozimetre ile vizkozite değişimleri başka bir A/D yardımıyla bilgisayara
gönderilmektedir. Reaktör içindeki ısıtıcı bir triyak modülü ve D/A çeviricisi ile bilgisayara
bağlanmıştır. Soğutma suyu akış hızını ve besleme akış hızını ayarlamak için kullanılan peristaltik
pompaların hem elle hem de bilgisayarla devir hızı ayarlanabilmektedir. Tüm deney düzeneği şekil
1 ile verilmiştir.
Polimerizasyonda kullanılan stiren vakumla damıtılarak, stirenin içinde bulunan
inhibitörlerden arındırılır. Başlatıcı olarak kullanılan benzoilperoksit ise kloroform-metanol
karışımında kristallendirilerek saflaştırılır.
Deney yöntemi
Çalışmalar dinamik deneyler ve GMC -PID deneyleri olmak üzere iki gruptan oluşmaktadır.
Dinamik çalışmalarda reaktör içerisindeki karışımı istenilen sıcaklığa getirmek için ısıtıcı
çalıştırılır. Stiren touen ve benzoilperoksitten oluşan besleme akımı sürekli olarak sisteme
gönderilir. Bu koşullarda reaktör içindeki karışımın sıcaklığının sabit kalması ve sistemin yatışkın
duruma gelmesi için varyak elle ayarlanır. Sistem yatışkın duruma gelince besleme derişmine
basamak etki verilerek dönüşüm ve reaktör sıcaklığındaki değişim gözlenir. Sıcaklık değişimi
sayısal bilgisayarda takip edilmiş, dönüşüm ise deney boyunca belirli aralıklarla numune alınıp
metanolde çöktürülerek hesaplanmıştır.
Sistemin dinamik davranışı belirlendikten sonra kontrol çalışmalarına geçilir. Bu aşamada
reaktör içi sıcaklığın GMC kontrolü, dönüşümün ise PID kontrolü gerçekleştirilmiştir. Sıcaklık

kontrolünde ayarlama termoçiftlerden gelen sinyallere göre ısıtıcı yardımıyla, dönüşüm kontrolünde
ise vizkozimetreden gelen sinyallere göre besleme pompasıyla yapılmıştır. Teorik sonuçlara
bakılarak bir ayar değişkenindeki değişimin diğer kontrol değişkeni üzerinde etkisinin fazla
olmadığına kanaat getirilmiştir.
Şekil 2.1. Deney Düzeneği Deneysel çalışmalar için gerekli hazırlama birimleri Stirenin saflaştırılması
Stiren petkim yarımca kompleksinden temin edilmiştir. Depolama sırasında kendiliğinden
polimerleşmeyi önlemek amacıyla polimerizasyon ortamına katılan katkı maddeleri monomerlerin
polimerleşmesi yavaşlatılır veya durdurulur. Bu tür maddeler zincir başlatıcı radikallerle veya
büyümekte olan zincir radikallerle tepkime vererek bunları radikal olmayan moleküllere veya
etkinliği düşük radikallere dönüştürür. Polimerizasyon hızını sıfıra düşüren maddelere önleyici,
polimerizasyonu tamamen önlemeyen fakat reaksiyon hızını azaltan maddelere geciktirici denir.
İçerisinde bir çok safsızlık ve önleyici maddeler bulunan bu ham stirenin deneylerde
kullanılabilmesi için saflaştırılması gerekmektedir. Bu sebeple deneylerden kısa süre önce stiren 10
–15 mmHg vakum altında damıtılır. Vakumda damıtılmasının sebebi; yüksek kaynama noktası
nedeniyle stireni polimerleşmeden damıtabilmektir. Şekil 2.2 de stiren saflaştırma ünitesi
gösterilmiştir.

Su banyosu sıcaklığı 25°C – 30°C sıcaklığa ısıtılır. Stiren dolu balon su banyosuna
yerleştirilir. Soğutma suyu musluğu açılır ve vakum pompası çalıştırılır. Sistem üzerindeki üç yollu
muslukla ayarlama yapılırken manometreden basınç değeri takip edilir basınç 10 mmHg olduğunda
musluk ayarı tamamlanmış olur ve damıtma başlar.
Stiren saflaştırma ünitesinde kullanılan birimler;
1. Su banyolu ısıtıcı
3. Vigros kolon
2. Destile edilecek stiren
4. Destile stireni toplama balonu
5.Termometre
6. Soğutma suyu çıkışı
7. Soğutma suyu girişi
8. Üç yollu musluk
9. Tuzak
10. Devar kabı
11. Manomerte
12. Vakum pompası
Şekil 2.2 Stiren saflaştırma ünitesi.

Benzoilperoksidin kristallendirilmesi
Stiren radikalik polimerizasyon reaksiyonunda başlatıcı olarak benzoilperoksit
kullanılmıştır. Benzoilperoksit içerisindeki safsızlıkların ve nemin uzaklaştırılması için
kristallendirme işlemine tabi tutulur.
Kristallendirme için 50g benzoilperoksit 200ml kloroform içinde çözülür. çözünmenin tam
olarak gerçekleşebilmesi için karışım bir miktar ısıtılır, ardından süzgeç kağıdından süzülür ve 500
ml metanol içine dökülerek buzlu ortamda soğutularak krisatllenmeye bırakılır. Kristaller süzgeç
kağıdıyla süzülür, kurutulur. Metanolün uzaklaşmasıyla % 99–99.5 saflıkta benzoilperoksit elde
edilir.
III. ANALİZ VE BULGULAR
Reaksiyon sırasında stirenin polistirene dönüşen yüzdesini hesaplamak üzere reaksiyon boyunca
çeşitli zaman aralıklarında numuneler alınmıştır. Alınan numuneler önce metanolde çöktürülür,
ardından goach krozede süzülerek kurutulur ve tartılarak polimer kütlesi bulunur.
% dönüşüm değeri aşağıdaki denklemden faydalanarak bulunabilir.
Pw*Vt % Dönüşüm 100 5*Vs*ρs burada;
Vt: toplam karışım (stiren + toluen) hacmi (1100ml).
Vs: stiren hacmi (586ml).
ρs: stiren yoğunluğu (0.87g/cm3).
Pw: boş ve dolu kroze arasındaki fark.
Çizelgede verilen işletim şartlarında yapılan deneyler için oluşan polimer kütlesi ve % monomer
dönüşümü için örnek hesaplama verilmiştir.

Çizelge 2.1 t(s) 2100 3237 Pw (g) 0.4317 0.4116 % dön 18.62 17.76
V. SONUÇ VE ÖNERİLER
V 1. Soğutma Ceketli, Sürekli ve Karıştırmalı Polimer Reaktörünün Matematiksel Modeli
İçin Yapılan Varsayımlar:
1. Reaktör içinde tam karışma olup, her bölgesinde sıcaklık ve derişim aynı değerdedir.
2. Yoğunluk değişimi ihmal edilerek, tepkime boyunca reaktör içerisinde her bölgede yoğunluğun
sabit kaldığı kabul edilmiştir.
3. Viskozite değişiminin deney koşulları içerisinde tepkime kinetiği üzerine etkisi yoktur .
4. Reaktör içindeki karışımın ortalama ısı kapasitesi sıcaklık ve derişimine bağlı değildir.
5. Monomer değişim hızı polimer üretim hızına eşit alınmıştır.
6. Polimerizasyonun başlama, sonlanma basamaklarındaki ısı, çoğalma basamağının yanında
ihmal edilmiştir.
Soğutma Ceketli, Sürekli ve Karıştırmalı Polimer Reaktörü İçin Enerji ve Kütle korunum
denklikleri:
Reaktör içi Enerji Korunum denkliği
Soğutma suyu çıkış sıcaklığı için kütle korunum denkliği:
Monomer için kütle denkliği:
V*C*ρ
)TA(T*U
C*ρ
r*)∆Η(
V
)T(T*Q
dt
dT
p
cr
p
mrrftr −−
−+
−=
cpcc
cr
c
ccfcj
V*C*ρ
)T(T*A*U
V
)T(T*Q
dt
dT
−+
−=
mr
V
*QM*Q
dt
dM tfm +−
=M
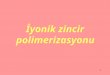
Başlatıcı için kütle denkliği:
Reaksiyon Hız İfadesi
rM = - kp *(M) *(2f * kd * I/kt)0.5
rM = kp *(kd * I/kt)
0.5 * M
rI = -kd * I
V.II Teorik olarak yatışkın hal işletim koşullarını belirlenmesi:
Bunun için MATLAB paket programı içinde bir program yazılmıştır. Bu programda kütle ve
enerji denklemleri eş zamanlı olarak fsolve komutu kullanılarak çözdürülmüştür. Programda
kullanılan kinetik ve fiziksel sabitler Çizelge 4.1 de verilmiştir. Elde edilen yatışkın hal işletim
koşulları literatürde yapılanlarla karşılaştırmalı olarak Çizelge 4.2’de verilmiştir.
Çizelge 2.1 Monomer (stiren) ve Başlatıcı (BPO) için kullanılan kinetik sabitler ve sistemin
fiziksel sabitleri
Sabit Değeri Birimi AP 1.06*107 L/mol s AT 1.25*109 L/mol s AI 5.95*1013 L/mol s EP 3557 cal/mol K ET 843 cal/mol K EI 14897 cal/mol K DELH 16500 cal/mol
ıtfı r
V
*QI*Q
dt
dI+
−=
I

Çizelge 2.2 Yatışkın Hal İşletim Koşulları:
VIII. Kontrol Çalışmalarında Kullanılmak Üzere Hal Uzay Modeli Oluşturulması: Fiziksel sistemlerin dinamiğini göstermenin başka bir yoludur. x = f(x,u) Dinamik Model x = Ax + Bu Hal Uzay Modeli y = Cx + Du x : Hal Değişkenlerinin Vektörü u : Ayar Değişkenlerinin Vektörü y : Ölçülen Değerlerin Vektörü A, B ve C katsayı matrislerini gösterir.
x=[Tr ,Tc , M , I ]
u=[Qm, Qc ,Tcf, Tf]
y=[Tr ,Tc , M , I ]
Sistem
Özellikleri
Yapılan Çalışma
Choi
Brooks Duerkensen
Bresilow
Mf mol/L
8.6981
8.67
8.67
4.81
8.6981
If mol/L
0.588
0.5
1.4e-4
0.01
0.5888
Tf , K
330
330
300
- 330
Tcf , K
295
300
343
- 295
V , L
3000
3000
2000
2000
3000
Qt , L/s
0.26
0.28
0.02
0.2
0.26
Tr,K
325.88
- 350
337
354.8
XA
0.62
- - - 0.74

Yukarıda verilen kütle ve enerji denklikleri kullanılarak sistemin yatışkın hal değerleri aşağıdaki
gibi bulunmuştur. Sistem koşulları ve matlab bilgisayar programı ek3 de ayrıca verilmiştir.
Tr (Reaktör sıcaklığı): 327.9038
Tc (Ceket sıcaklığı):317.4907
CA (stiren derişimi): 2.3188
CI (Bpo derişimi):0.01
Hal uzay modeli ile gösterim
Bulunan yatışkın hal değerleri kullanılarak kütle ve enerji denkliklerinin dinamik
çözümünden aşağıda ki A ve B matrisleri elde edilir. A ve B matrislerinin çözümü için kullanılan
bilgisayar programı ek ‘de verilmiştir.
A ve B matrisleri bulunurken prosesin dört girdisi (QM, QC, Tjf, Tf) ve dört çıktısı (Tr, Tj,
CM, CI ) kullanılmıştır. Buna göre matrisler 4*4 boyutunda bulunmuştur. Bu haliyle sadece RGA
hesabında kullanılmış olup bizim kontrol etmek istediğimiz iki değişken (Tr ve CM) olduğundan
transfer fonksiyonlarının bulunmasında 2*2 boyutu kullanılmıştır.
-0.0014 0.0006 0.0001 0.0118 A= 0.0006 -0.0008 0 0 -0.0000 0 -0.0008 -0.0003 -0.0000 0 0 -0.0008 15.5960 0 0 0.0008 B= 0 -60.4191 0.0002 0 1.9427 0 0 0 -0.0083 0 0 0
A matrisinin eigen değerlerine bakılarak köklerin hepsinin negatif yani prosesin kararlı olduğu görülmüştür. -0.0018 Eig(A)= -0.0004 -0.0008 -0.0008
QM
QC
Tjf
Tf
Proses Tr
Tj
CM
CI

V.IV. RGA Hesaplamaları
Bağıl kazanç matrisi aşağıdaki gibi bulunmuştur.
=
f
Jf
C
M
f
I
Jf
I
C
I
M
I
f
M
Jf
M
C
M
M
M
fJfCM
fJfCM
I
M
T
T
Q
Q
.
T
C
T
C
Q
C
Q
CT
C
T
C
Q
C
Q
CT
Tj
T
Tj
Q
Tj
Q
TjT
Tr
T
Tr
Q
Tr
Q
Tr
C
C
Tj
Tr
0. 004168 7.7923*10^8 -7.7923 *10^8 1.436263 λ = 0 1.021492 0.419731 -0.440419 0. 990934 -4.5634*10^8 4.5634*10^8 0.004176 0. 004898 -3.2289 3.2289*10^8 -0.000019
RGA sonuçlarına göre Tr (Reaktör Sıcaklığı ) için en uygun ayar değişkeni Tf (Besleme
sıcaklığı ); CM (Monomer derişimi) için en uygun ayar değişkeni QM (Monomer akış hızı )
bulunmuştur.
Yaptığımız deneylerde besleme sıcaklığını ayar değişkeni olarak kullanmak amacıyla
besleme tankına ısıtıcı yerleştirmenin enerji kaybına sebep olduğu sonucuna vardık. Besleme
akımının sıcaklığını artırmak - azaltmak yerine enerji kayıplarını en aza indirmek için reaktör içine
bir dalgıç ısıtıcı yerleştirerek ayarlamayı bu ısıtıcı yardımıyla sağladık. Böylece besleme tankından
reaktöre kadar olan yol boyunca ısı kaybı en aza indirilmiş oldu.
Proses Aktarım Fonksiyonlarının bulunması
Bu bölüme kadar dört girdi ve dört çıktı değişkeni kullanarak işlem yapılmıştı, proses
aktarım fonksiyonları bulunurken sadece kontrol etmek istediğimiz iki kontrol değişkeni olan
reaktör sıcaklığı (Tr) ve monomer derişimini (CM) kullanılacaktır. Ayar değişkenleri ise rga
sonucuna göre bulunan besleme sıcaklığı (Tf) ve monomer akış hızı (QM) dir. Buna göre A ve B
matrisleri 2*2 boyutunda aşağıda verildiği gibidir.
num1 num2 num3 num4

- 0.0014 0.0001 15.5960 0.0008 A = B = -0.0000 -0.0008 1.9427 0
Buradan prosesin aktarım fonksiyonlarına geçilebilir. Aktarım fonksiyonları matlab da ss2tf komutu
ile oluşturulmuştur.
Sistemin basitleştirilmiş ayırması
I. Birden fazla kontrol ve ayar değişkeni olan sistemlere çok girişli çok çıkışlı kontrol
sistemleri denir. N tane kontrol değişkeni N tane ayar değişkeni olan bir proses için N! değişik
kontrol döngüsü oluşturmak mümkündür. Bu döngüleri oluştururken “hangi giriş değişkeni hangi
çıkış değişkenini en iyi kontrol eder, bir giriş değişkeni birden fazla çıkış değişkenini etkiler mi”
sorularının cevaplanması gerekmektedir. Bu sorular çok değişkenli proseslerin tipik problemi olan
etkileşimdir. Bağımsız çalışabilen bireysel kontrol döngüleri ayırma teknikleri ile oluşturularak bu
sorunlar giderilebilir.
İdeal durumda (tüm kontrol döngüleri birbirinden bağımsızsa ) kontrol edici ayarlamasında, çok
sayıda ayarlama yapmak yerine daha az ayarlamayla etkileşmeyen kontrol edici yapmak ayırıcının
görevidir. Bunun en büyük yararı, tek değişkenli sistemlerin (SİSO) kontrol edici tasarım
=
MM
M
fM QC
QTr
TC
TfTrGp
/
/
/
/
06e17.1s002236.0s
002713.0s943.1Q/C
2MM −+++
=
06e17.1s002236.0s
07e963.6s0008333.0Tf/Tr
2 −++−+
=
06e17.1s002236.0s
010e22.4Tf/C
2M −++−−
06e17.1s002236.0s
01323.0s6.15Q/Tr
2M −+++
=

tekniklerinin kullanılır olmasıdır. Ayırıcı tasarım problemi denkleyici (compensatör) elemanı Gi’
nin seçimidir.
Şekil 5.1 Etkileşim denkleyiciyi içeren çok değişkenli ayırma kontrol sistemi
Şekil 5.2 Denkleyici eklenmiş 2*2 lik çok değişkenli proses
Kontrol performansını arttırmak amacıyla döngü etkileşimlerinin etkisini en aza indiren bir teknik
geliştirmek gerekmektedir. Bunun için ideal ayırıcı tasarım teknikleri geliştirilmiştir.
i. Basitleştirilmiş ayırma
ii. Genelleştirilmiş ayırma.
Basitleştirilmiş ayırma
Basitleştirilmiş ayırma sonuçu yeni aktarım fonksiyonları aşağıda gösterildiği gibi bulunmuştur.
Yd +
Gc G Gi v u
y
Ayırma kontrol edicisi

y1=(g11-(g12*g21/g22))*v1 0.0014)(s
0.00083333 g21/g22)*(g12-g11
+=
y2=(g22-(g12*g21/g11))*v2 0.0008356)(s
1.9427 g21/g11)*(g12-g22
+=
Şekil 5.3 denkleyici eklenmiş2*2likçokdeğişkenliproses
Şekil 5.4. 2*2 lik çok değişkenli prosesin basitleştirilmiş ayrılma sonucu (Tr/Tf)

Şekil 5.3 2*2 lik çok değişkenli prosesin basitleştirilmiş ayrılma sonucu (CM/QM)
V.V. POLİMER REAKTÖRÜNÜN DİNAMİK DAVRANIŞI.
Bu bölümde girdi değişkenlerine basamak etki verildiğinde çıktı değişkenlerinin değişimi
incelenmiştir. Teorik olarak besleme sıcaklığına, monomer akış hızına pozitif basamak etki verilip
reaktör sıcaklığının ve monomer derişiminin değişimi gözlenmiştir. Deneysel olarak besleme
monomer derişimine (CM0 ) ve besleme sıcaklığına (Tf) pozitif basamak etki verilip reaktör
sıcaklığının (Tr) ve reaktördeki monomer dönüşümünün değişimi gözlenmiştir. Deneylerde %30
toluen % 70 stiren karışımı kullanılmıştır

Şekil 5.4. Momomer başlangıç derişimine (CmO) %30 luk artış yapıldığında teorik olarak reaktör
sıcaklığının (Tr) zamanla değişimi
Şekil 5.5 Momomer başlangıç derişimine (CmO) %30 luk artış yapıldığında deneysel olarak reaktör
sıcaklığının (Tr) zamanla değişimi
Zaman (S)
5000 5500 6000 6500 7000 7500 8000
Sıcaklık ('C)
54
55
56
57
58
59
60

Şekil 5.6. Besleme sıcaklığına %30 luk artış yapıldığında deneysel olarak reaktör sıcaklığının
(Tr) zamanla değişimi
Şekil 5.7. Besleme sıcaklığına %40 luk artış yapıldığında deneysel olarak reaktör sıcaklığının
(Tr) zamanla değişimi
Zaman
3000 4000 5000 6000 7000 8000
sıcaklık('C)
54
56
58
60
62
64
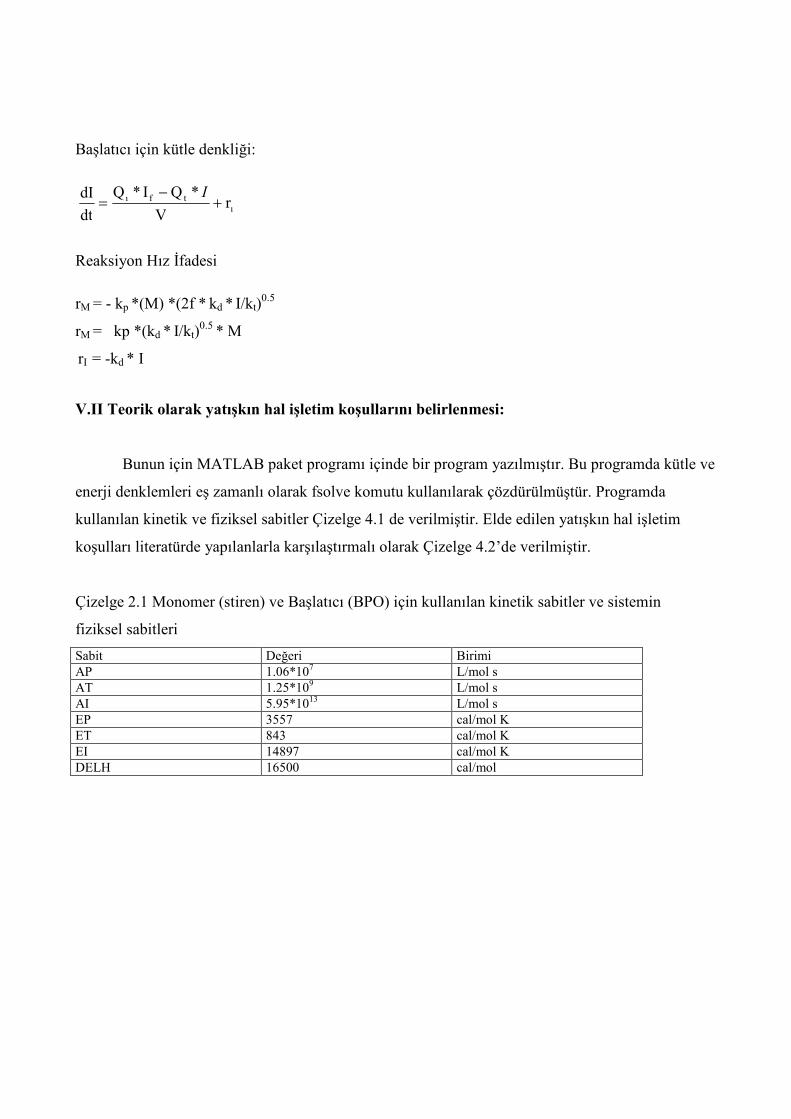
Şekil 5.4 ,5.5 ,5.6 ve 5.7 de görüldüğü gibi hem deneysel bulgular hem de teorik bulgular besleme
monomer derişimi ve besleme sıcaklığının artmasıyla reaktör sıcaklığının arttığını göstermiştir.
Şekil 5.8 Momomer akış hızına %30 luk artış yapıldığında teorik olarak dönüşümün zamanla
değişimi
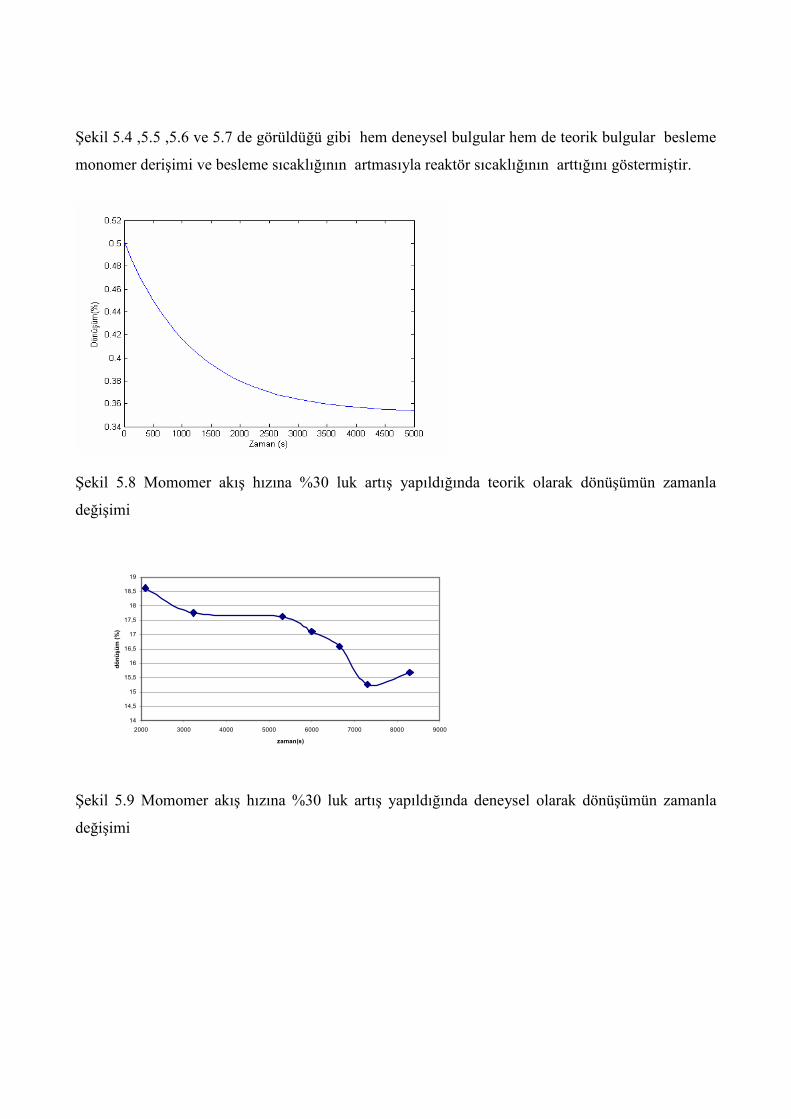
Şekil 5.9 Momomer akış hızına %30 luk artış yapıldığında deneysel olarak dönüşümün zamanla
değişimi
14
14,5
15
15,5
16
16,5
17
17,5
18
18,5
19
2000 3000 4000 5000 6000 7000 8000 9000
zaman(s)
dönüşüm (%)

Şekil 5.10 Besleme sıcaklığına %40 luk artış yapıldığında deneysel olarak dönüşümün
zamanla değişimi
Şekil 5.11 Besleme sıcaklığına %40 luk artış yapıldığında deneysel olarak dönüşümün
zamanla değişimi
0
5
10
15
20
25
0 2000 4000 6000 8000 10000 12000
zaman(s)
dönüşüm (%)

Şekil 5.8 ve 5.9 da monomer akış hızına pozitif etki verildiğinde deneysel ve teorik olarak
dönüşümün azaldığı görülmüştür. Aynı şekilde Şekil 5.10 ve 5.11 de ise besleme sıcaklığına positif
etki verildiğinde hem deneysel hem teorik dönüşümün artığı gözlemleniştir. Deneysel dönüşüm
teorik dönüşüme oranla az bulunmuştur. Bunun nedeni teorik çalışmalarda polistiren reaktörünü
modellerken yapılan varsayımlar neticesinde olayı ideale yaklaştırmamızdan kaynaklanmıştır.
Teorik çalışmalar matlab bilgisayar programı ile yapılmıştır.
V.IV. POLİMER REAKTÖRÜNÜN KONTROLÜ Kontrol çalışmaları deneysel ve teorik olmak üzere iki kısımda incelenmiştir. Teorik çalışmalarda
üç farklı kontrol algoritması denenmiştir. Bunlar sırasıyla çok girdili/çok çıktılı proseslerde sıkça
kullanılan ayırmalı (decoupling) kontrol algoritması, Model öngörmeli kontrol algoritmalarından
olan dinamik matrix kontrol ve jenerik model kontrol algoritmalarıdır. Teorik çalışmalarda
öncelikle prosesin basitleştirilmiş ayırması yapılmış, matlab programıyla PID kontrol edicisi
kullanılarak reaktör sıcaklığı (Tr) ve monomer derişimi (CM) ayrı ayrı kontrol edilmiştir. Ayırmalı
PID kontrolünün simulink programı ile yapılmıştır. Şekil 5.12 da monomer konsantrasyonuna birim
basamak etki verildiğide , Monomer konsantrasyonunun zamanla değişimi ayırmalı PID kontrol ile
verilmiştir. Şekil 5.13 de ise set noktasına 3 birimlik step etki verildiğinde Ayırmalı PID kontrolü
ile reaktör sıcaklığının zamanla değişimi verilmiştir. Şekil 5.12 ve 5.13 de görüldüğü gibi ayırmalı
PID ile reaktör sıcaklığı ve monomer konsantrasyonu iyi bir şekilde kontrol edilmiştir.

Şekil 5.12 Set noktasına 1 birimlik step etki verildiğinde Ayırmalı PID kontrolü ile monomer
konsantrasyonunun zamanla değişimi
Şekil 5.13 Set noktasına 3 birimlik step etki verildiğinde Ayırmalı PID kontrolü ile reaktör sıcaklığının zamanla değişimi
V.V MODEL ÖNGÖRMELİ KONTROL:
MOCCA,DMC,MAC ve IMC gibi MPC tasarımında parametreli bir modelden ziyade
basamak ya da impulse yanıtım verileri kullanılarak prosesin gelecekteki çıktıları tahmin edilir.
Kontrol edici gerekli kontrol eylemini tahmini çıktı ve kullanıcı tarafından belirlenen (set
noktası) farkın minimum olacak şekilde hesaplar.
Kontrol hesaplaması çoğu zaman doğrusal - doğrusal olmayan bir optimizasyon
problemi olarak ifade edilir. MPC endüstri ve eğitimde çok günceldir.
1.Göreceli olarak elde edilmesi daha kolay olan basamak yanıtımını kullanır.
2.Çok değişkenlidir.
3.Zaman gecikmelerini ve eğrisellikleri ele alır.
4. Bir ufuk üzerinden optimize eder.
5.Zor cebirsel işlemleri ele alır.
6.Son on yılda endüstriyel uygulamalarla etkinliği kanıtlanmıştır.
KONTROL ALGORİTMASI
Basamak yanıtım verileri kullanılarak gelecekteki proses çıktıları tahmin edilir.
Kesikli birim basamak yanıtımı
y(k+ik) = ai i = 1,2,.......,N (3.1) = ass i > N
y ve u sapma değişkenleri N y(kk ) = Σ aj∆ u(k-j) + assu(k-N-1) (3.2) j=1
Gelecekteki çıktıların ufku N ym(k+ik+i ) = Σ aj∆ u(k+i-j) + assu(k+i-N-1) j=1
i = 1,2.....,P (3.3) ∆ u(k-i),i=0,1,.......,M-1
Gelecekteki girdilerin tahmin ufkuna etkisi
ym(k+1k+1 ) y
*m(k+1k ) ∆ u(k)
ym(k+2k+2 ) y*m(k+2k ) ∆ u(k+1)
. = . + A2 . . . . ym(k+Pk+P ) y
*m(k+Pk ) ∆ u(k+M-1)
(3.4) Ym = A2 ∆ Uf + Y
*m (3. 4a)
A2 matrisi a1 0 0 . . 0 a2 a1 0 . . 0 A2 = . . . . . 0 aM aM-1 . . . 0 . . . . . 0 aP aP-1 . . . 0 P*M
Geçmişteki girdi değişimlerinin tahmin ufkuna etkisi y*m(k+1k ) y
*m(k-N ) ∆ u(k-N+1)
y*m(k+2k ) y*m(k-N+1 ) ∆ u(k-N+2)
. = ass . +A1 . . . . y*m(k+Pk ) y
*m(k-N+P-1) ∆ u(k-1)
(3. 5)
Y*
m = A1 ∆ Up + ass ∆ Up (3. 5a)
A1 matrisi ; aN aN-1 0 . . a2 0 aN aN-1 . . a3 A1 = . . . . . . . . . . 0 0 . aN . aP+1 P*(N-1)
Kontrol eylemini hesaplamak için belirlenmiş yörünge Yd(k) ve tahmin edilmiş yörünge Ym(k)
arasındaki farkın karesini minimuma indiren bir kontrol stratejisi uygulanır. Bu amaçla J
performans indeksi için en küçük kareler yöntemi kullanılır.
J = ½*{[ Yd(k)-Ym(k)]
T*Γ(k)*[ Yd(k)-Ym(k)] + [∆UF(k)]T*Γm (k)*[ ∆UF(k)]}

Γ,Γm:Ayar değişkenini zorlayan ağırlık matrisleri
Ym :Geçmişteki girdilere ve gelecekteki kontrol eylemine bağlı terim
Kontrol eylemi:
∆ UF =A* E(k)
A* = [A2T Γ A 2 + Γm ]
-1 A2T
Gelecekteki hataların tahmin edilen matrisidir
E(k) = [ Yd(k) - Ym(k)]
�M tane kontrol eylemi hesaplandığında sadece ilk ∆u(k) tamamlanmış olur.
�Bir sonraki örnekleme aralığında ölçülen çıktının yeni değerleri elde edilir.
Kontrol ufku ileriye doğru bir adım değişir ve aynı hesaplamalar yinelenir
DİNAMİK MATRİS KONTROLÜN POLİMER REAKTÖRÜNE UYGULANMASI VE
SONUÇLAR
Tr = 361.5 K Tc = 339.9 K M = 2935.9 mol/m3 I = 1.9 mol/m3 QM= 0.0008 L/s QI = 0.00001 L/s Qs = 0.0002 L/s Qc = 0.007L/s Tco = Tf=335 K V = 2 L M0 =8 mol/L I0 = 0.05 mol/L
Yukarıdaki yatışkın hal değerleri kullanılarak MATLAB paket programına hal uzay modeli
yüklenmiş ve aşağıdaki DMC algoritması ile kontrol sonuçları elde Proses yatışkın halde iken
reaktördeki monomer derişiminin (servo) set noktası değişiminde kontrolü: Şekil 5.15 de
verilmiştir. Reaktör sıcaklığı ve monomer derişimi kontrol edilen değişkenlerdir. Ağırlıklar
eşittir.
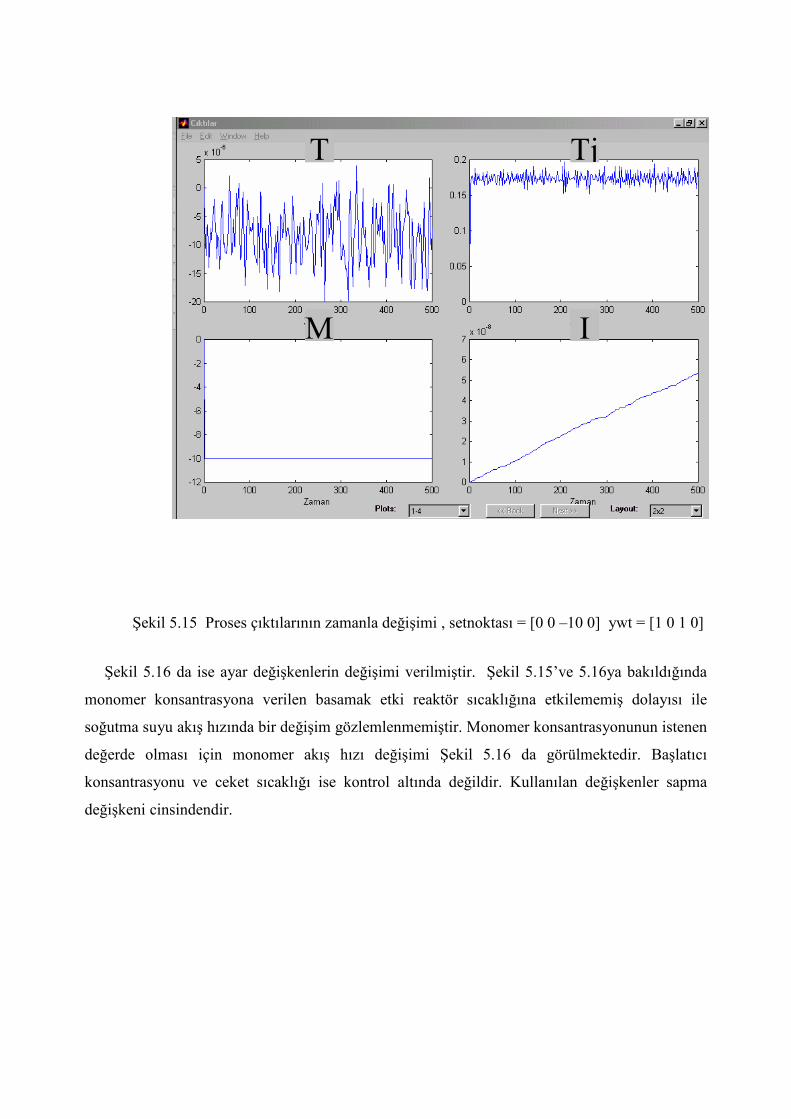
Şekil 5.15 Proses çıktılarının zamanla değişimi , setnoktası = [0 0 –10 0] ywt = [1 0 1 0] Şekil 5.16 da ise ayar değişkenlerin değişimi verilmiştir. Şekil 5.15’ve 5.16ya bakıldığında
monomer konsantrasyona verilen basamak etki reaktör sıcaklığına etkilememiş dolayısı ile
soğutma suyu akış hızında bir değişim gözlemlenmemiştir. Monomer konsantrasyonunun istenen
değerde olması için monomer akış hızı değişimi Şekil 5.16 da görülmektedir. Başlatıcı
konsantrasyonu ve ceket sıcaklığı ise kontrol altında değildir. Kullanılan değişkenler sapma
değişkeni cinsindendir.
T
M
Tj
I

Şekil 5.16 Ayar değişkenlerinin zamanla değişimi, setnoktası = [0 0 –10 0] ywt = [1 0 1 0]
Şekil 5.15 ve 5.16 danda anlaşıldığı gibi modele dayalı kontrol algoritmalarından olan DMC
başarıyla polimer reaktörünü kontrol etmekdedir.
V.VI. MODEL KONTROL ALGORİTMALARINDAN OLAN JENERİK MODEL
KONTROLÜN SÜREKLİ REAKTÖRE UYGULANMASI
Kesikli reaktörün genel enerji denkliğini jenerik modelin genel eşitliği ile birleştirerek
Jenerik model kontrol kanunu uygulanır.
Q
Q
F ( T , Q ,TJ ) - K1 ( Tset – Tr )- K2 ∫ ( Tset – Tr ) dt = 0
Q+−
−−
+−
==V*C*ρ
)TA(T*U
C*ρ
r*)∆Η(
V
)T(T*Q
dt
dTTj)Q,F(T,
p
cr
p
mrrftr

Yukarıdaki iki eşitlik yardımıyla ayar değişkenin alacağı değer aşağıdaki eşitlik gereğince
hesaplanır.
Şekil 4.12’de jenerik model kontrolün teorik olarak polimer reaktörüne uygulanması
gösterilmiştir.
Şekil 5.17. Reaktör sıcaklığına 3 birimlik step etki verildiğinde jenerik model kontrolü ile
reaktör sıcaklığının zamanla değişimi
Şekil 5.17’de jenerik model kontrol sabitleri Lee ve Sullivandan yola çıkarak hesaplanmıştır.
K1=1/ τ2
K2 = 2ξ / τ
∑ ISE değerleri = ∑=
−t
i
setnoktasıyty1
2))((
Jenerik model katsayılarının hesabı için proses zaman sabiti baz alınıp farklı ξ
değerlerinde elde edilen K1 ve K2 değerleri hesaplanmıştır. Benzetim programı bu sabitler
kullanılarak çalıştırılmış ve ISE değerleri hesaplatılmıştır. Minimum ISE değerini veren
K1=0.196 ve K2 =0.00107 olarak hesaplanmıştır. Şekil 5.17’de jenerik model kontrol başarıyla
polimer reaktörünü kontrol etmektedir.
∆−−−+−+∆Η−−
−−= ∑
=
tiTiTKTTKCVTTUAVRQk
i
rsetrsetpcm
121
rft ))()(()()()(V
)T(T*Qρ
Zaman (s)
0 2000 4000 6000 8000 10000 12000 14000
Sıcaklık ('C)
50
60
70
80
90
100

V.VII. DENEYSEL KONTROL SONUÇLARI:
Deneysel çalışmalarda sıcaklık kontrolü dalgıç ısıtıcı yardımıyla, dönüşüm kontrolü ise
vizkozimetre sinyaline göre besleme pompası ile sağlanmıştır. Kontrol algoritması olarak jenerik
model kontrol algoritması ile ayırmalı PID kontrol algoritması kullanılmıştır.
Şekil 5.18 Ayırmalı PID kontrol algoritması ile reaktör sıcaklığına 3 birimlik etki altında iken
reaktör sıcaklığının deneysel olarak kontrolü.
Şekil 5.19. Reaktör sıcaklığına +3 birimlik etki verildiğinde viskozitenin deneysel olarak kontrolü.
Zam an(s )
0 1000 2000 3000
Sıcaklık('C)
50
52
54
56
58
60
Zaman(s)
0 500 1000 1500 2000 2500 3000
Vizkozite
-10
-5
0
5
10

Şekil 5.20 PID ile reaktör sıcaklığı +3 birimlik etki altında dönüşüm kontrolü
Şekil 5.18-5.19 ve 5.20 ‘de reaktör sıcaklığı +3 birimlik etki altında iken ayırmalı PID ile
reaktör sıcaklığı kontrol edilmiştir. Şekil 5.19 Viskozite değişim eğrisi verilmiştir. Viskozitenin
değişimi ölçülerek monomer dönüşümünün % 18 de sabit kalması sağlanmaya çalışılmıştır.
Şekil 5.21 Jenerik model kontrol algoritması ile reaktör sıcaklığına -3 birimlik etki verildiğinde
reaktör sıcaklığının deneysel olarak kontrolü.
Zam an(s )
3000 4000 5000 6000
Sıcaklık
50
52
54
56
58
60
Zam an-S ıcak lık
0
5
10
15
20
25
30
0 500 1000 1500 2000 2500 3000 3500 4000
Zaman (s)
Dönüşüm(%)

Şekil 5.22 Reaktör sıcaklığına -3 birimlik etki verildiğinde viskozitenin deneysel olarak kontrolü.
Şekil 5.23 Jenerik model kontrol algoritması ile reaktör sıcaklığına -3 birimlik etki verildiğinde
dönüşümün kontrolü
Şekil 5.21 de reaktör sıcaklığı –3 birimlik negatif etki altında iken sıcaklık kontrolü
jenerik model kontrol algoritması ile gerçekleştirilmiştir. Şekil 5.22’de viskozite değişim eğrisi
verilmiştir. Viskozite kontrol altında iken dönüşüm % 15 de, istenildiği gibi sabit kalmiştır.
Zaman(s)
3000 3500 4000 4500 5000 5500 6000
Vizkozite
-10
-5
0
5
10
0
5
10
15
20
25
30
0 1000 2000 3000 4000 5000 6000 7000
Zaman(s)
Dönüşüm(%)

Yapılan proje kapsamında yukarıda verildiği gibi sürekli karıştırmalı tepkime kabı
modelllenmiş model parametreleri hesaplanmış ve bu model yardımıyla yatışkın hal işletim şartı
karalı durum için belirlenmiştir. Teorik çalışmalarda MATLAB hazır paket programı ve
FORTRAN programlam dili kulllanılarak kontrol algoritmaları hazırlanmıştır. Bu programlar
yardımıyla teorik dinamik ve kontrol gerçekleştirilmiştir. Deneysel kontrol için teorik de yazılan
programlar visul basıc diline dönüştürülmüştür.
Çok girdili/çok çıktılı kontrol çalışmaları neticesinde (jenerik model kontrol, ayırmalı
PID ve DMC kontrol ) proje kapsamı içinde polimer reaktörüne deneysel ve teorik olarak
uygulanmış ve performansları test edilmiştir. Bundan sonraki çalışmalar için viskozite aparatına
ilave bir yoğunluk ölçer ilave edilebilinir.
KAYNAKLAR Brooks B.W., Chem. Eng sci. (1980) ‘Dynamic Behaviour of a Continuous –flow Polymerisation Reactor’ 36 ; 589 Wu W., Ko J., Lee H. (1993) ,’Decoupling Control of a Multivariable System with a Desensitizer’İnd. Eng. Chem. Res. 32; 2937 Mc Avoy T., (1981 ) ‘Connection between relative gain and control loop stability and design’ AIChE Journal., 27 ; 613 Mc Avoy T., Arkun Y., Chen R., Robinson D. (2003 ),’A new approach to defining a dynamic relative gain’ Control eng.Pract., 11 ; 907 Alvarez J., Suarez R., Sanchez A., Chem.eng. Sci.(1990) ‘Nonlinear Decoupling Control of Free-Radical Polymerization Continuous Stirred Tank Reactors’ 45; 3341 Ahn S., Park J., Rhee H., İnd. Eng. Chem. Res. (1999) ‘Extended Kalman Filter –Based Nonlineer Model Predictive Control for a Continuous MMA polymerization Reactor’ 38; 3942 Nakanishi E., Ohtani S., J. Chem. eng.of Japan (1986) ‘Multivariable Control of CSTR with Time-Delays Via a Decoupling Strategy.’ 19 ; 36 Luyben W., (1990) ‘proses Modeling ,Simulation and Control for Chemical Engineers’ Bequette Wayne B. (1998). ‘Process Dynamics Modelling Analysis and Simulation’, Prince Hall Brooks, B. W. (1981). ‘Dynamic Behaviour of a Continuous Flow Polymerisation Reactor’ , Chem. Eng. Sci. 36,589-593
Choi, K. Y. (1986). ‘Analysis of Steady state of Radical Solution Polymerization in a Continuous Stirred Tank Reactor’ , Poly. Eng. Sci. 26:14, 975-981
Lee, PL. , and Sullivan G.R.( 1988 ) ‘Generic Model Control.’ Comput. Chem. Eng.,12;573
Lee, PL., Newell R.B. and Sullivan G.R.( 1989 ) ‘ Generic Model Control: A case Study’ , Can.
J. Chem. Eng., 67; 478
VII. EKLER
a) Mali Bilanço ve Açıklamaları
POLIMER REAKTÖRÜ KONTROL SISTEMI (1 Adet) 19.883 milyon
Top Kağıt (BAP’dan sağlanmıştır) 20 milyon
Kalan para: 96 milyon
Toplam : 20 Milyon
b) Makine ve Teçhizatın Konumu ve İlerideki Kullanımına Dair Açıklamalar (BAP Demirbaş
numaraları dahil)
“POLIMER REAKTÖRÜ KONTROL SISTEMİ “A.Ü.Müh.Fak. Temel işlemler
Labaratuvarında bulunmaktadır.
Demirbaş No:
c) Yayınlar (hakemli bilimsel dergiler) ve tezler
Projeden elde edilen teçhizat yardımıyla aşağıdaki makalleler yayınlanmış ve bir tez
hazırlanmıştır.
1-Özkan G., Ürkmez G., Özkan G., “Application Of Box Wilson’s Optimization Technique To
The Partially Oriented Yarn Properties”, Polymer-Plastics Technology & Eng.42,3,459-
470,2003

2-Alpbaz, M., Hapoğlu, H., Özkan, G., Experimental Aplication of Generalized Predictive
Control at The Temperature in Polystrene Polymerization Reactor. Chemical Engineering
Communication,191,9,1173-1184,2004
Tezler:
3- Polimer Reaktörüne Jenerik Model Kontrolün Uygulanması, Öznur Tekin, Ankara
Üniversitesi,Fen Bilimleri Enstitüsü,Kimya Mühendisliği Anabilim Dalı, Ağustos da jüriye
girecek 2005
Proje konusu kapsamında yapılan tez:
4- Sürekli, Karıştırmalı Polimerizasyon Reaktörüne Çok Girdili/ Çok Çıktılı Modele Dayalı
Kontrol Algoritmasının Uygulanması . İlkay Çalışkan, Ankara Üniversitesi,Fen Bilimleri
Enstitüsü,Kimya Mühendisliği Anabilim Dalı, Ağustos da jüriye girecek 2005