Embed Size (px)
Citation preview

MONT
ÁŽNÍ
NÁV
OD(C
ONTR
OL)
Typová čísla 52 261 - 52 266
Typová čísla 52 442, 52 443.xxxxN5
Typová čísla 52 030 - 52 036.xxxxN5
Elektrické servomotory
2/16

OBSAH
1.1. Všeobecně. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2. Elektronickévybavení . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.2.1. Spínánímotoru 1.2.2. Dynamickábrzda 1.2.3. Místníovládání 1.2.4. Zpětnovazebnívysílačpolohy 1.2.5. RegulátorZP2.RE5 a) Popis b) Technicképarametry1.3. Připojeníregulátoru. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 1.3.1. Síťovépřipojení 1.3.2. Nízkonapěťovépřipojení1.4. Nastaveníregulátoru. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 1.4.1. Nastavitelnéparametry 1.4.2. FunkcetlačítekSW1aSW2 1.4.3. ParametryP1–P4 1.4.4. P5-Autokalibrace1.5. Režimregulace. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 1.5.1. Provozníachybováhlášení 1.5.2. ReléOK1.6. Pomocnéfunkce. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 1.6.1. FunkceTest 1.6.2. Reset 1.6.3. Nastavenízáložníchparametrů 1.6.4. ParametryZÁLOHA1.7. ServisníprogramZP2RE5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Schémataelektrickéhozapojení
ProtechnickéúdajeservomotorůMODACT MON, MOP, MONJ, MPS, MTN, MTP ControlvtomtoDodatkune-uvedené,platíustanoveníuvedenávMontážnímnávoduMODACT MON, MOP, MONJ, MPS, MTN, MTP.
Servomotor Motor Ovládání RegulátorPřipojení
svorkovnice konektor
MONJ 1-fázový
- - P0913-E P0941-E
BMO - P0914-E P0942-E
MON,MOP - - P0947 P0953
MTN,MTP3-fázový
BMO - P0948 P0954
MPS - ZP2RE5 P0949 P0955
52261-52266 BMO ZP2RE5 P0950 P0956


3
1.1. VŠEOBECNĚElektrickéservomotoryMODACT MON, MTN, MPSvprovedeníControl,majíoprotiklasickýmservomotorůmnavíczabu-
doványovládacíobvody,kterénenínutnoinstalovatdorozváděčůaexterněpropojovat.Jejichvzájemnépropojeníjesoučástíservomotoru.Takmůžebýtjednímtřífázovýmrozvodemnapájenaceláskupinaservomotorů.
ServomotorvprovedeníControlvždyobsahujeprvekspínánímotoru (stykače,SSR)avolitelněmůžebýt ještěvybavenregulátoremZP2RE5,elektrodynamickoubrzdou,blokemmístníhoovládáníBMOavysílačempolohy.
Konstrukčnějsoutytoprvkyzabudoványvesvorkovnicovéskříniservomotoru.Vřídícískřínizůstávajístandardníprvkymecha-nickédesky,tj.spínačemomentové,polohovéasignalizační,blokacemomentuavysílačpolohy.
Silovévodiče3x400Vasignálovévodičeodnadřízenéhosystému,sekesvorkovniciservomotorupřivádějívolitelněkabelo-výmiprůchodkaminebokonektorem.
1.2. ELEKTRONICKÉ VYBAVENÍ1.2.1. Spínání elektromotoru
Servomotory ve variantách Control, mají vestavěné reverzační stykačové kombinace. Jsou sestaveny ze dvoustykačů a nadproudového relé. Součástí kombinace je také mechanické blokování, které zabraňuje současnémusepnutíoboustykačů.Ktomubymohlodojít,např.přichybnémzapojenipropojeknasvorkovnici.Blokacenenídimen-zovánaprodlouhodobépůsobení.Nadproudovéreléchráníelektromotorpředpřetíženíma jedimenzovánopodle jehovýkonu.
Podle provedení servomotoru, jsou stykače ovládány regulátorem, přepínačem místního ovládání, nebo externímvstupem. Ovládací napětí je standardně 230 V/50 Hz a přivádí se přes kontakty polohových a/nebo momentovýchmikrospínačů.Tytomikrospínačetedynenínutnovyvádětzeservomotoru.
1.2.2. Dynamická brzda
Brzda je volitelným příslušenstvím servomotorů MON Control. Po rozpojení stykače, vyvolává v elektromotoru podobuněkolikadesetinsekundydynamickýbrzdnýmoment.Významnězkracujedobudoběhu,čímžzpřesňujeregulaci.Vdoběkliduservomotoru,sežádnýbrzdnýmomentnevyvíjí.
UservomotorůbezregulátorusepoužíváautonomníbrzdaBAM-002.Prosvojifunkcipotřebujepřídavnépomocnékontaktystykačůapřídavnýkontaktnadproudovéhorelé.Jedimenzovánaproelektromotory3x230/400V,svýkonemdo550W.
Uservomotorů s regulátoremZP2RE5sepoužívají jednodušší, řízenébrzdyBR2. Jsoupropojeny s regulátorem,kterýjimdáváimpulskpůsobení.
Dlevýkonuelektromotorusevolíodpovídajícívarianta: BR2 550 dovýkonu550W BR 2,2 dovýkonu2,2kWPřipožadavkubrzditvětšívýkonynež2,2kW,jenutnopoužítelektromotoryvezvláštnímprovedeni,selektromag-
netickoubrzdou.
1.2.3. Místní ovládání
Blokmístníhoovládáníjevolitelnýmpříslušenstvím.Skládázedvoupřepínačů,znichžjeden(Místní/0/Dálkové)odpojíovládacífáziodregulátoruapřepnejidodruhéhopřepínače(Otvírá/0/Zavírá),kterýpřesmomentovéa/nebopolohovéspínačeovládáspínacíprvekmotoruatedyotáčenívýstupníhohřídeleservomotoru.
1.2.4. Zpětnovazební vysílač polohy
Vysílačepolohyjsouvolitelnýmpříslušenstvímservomotorů.Uservomotorůbezregulátorujemožnozvolitvysílačodporový(2x100ohmů),proudovýpasivní4–20mA(CPT1Az)nebo
proudovýaktivní4–20mA(DCPT+DCPZ).UservomotorůsregulátoremZP2RE5můžebýtpoužitvysílač0/4–20mA,vyvedenýzkonektroruregulátoruJ3.Vysílačje
galvanickyoddělenýodostatníchobvodůregulátoruajenapájenzezdrojeDCPZ.
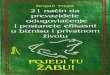
1.2.5. Regulátor ZP2.RE5
a) PopisZákladní částí regulátoru ZP2.RE5 je mikropočítač s řídicím programem, naprogramovaným v jeho vnitřní paměti.
Součástí mikropočítače jsou A/D převodníky pro zpracování řídícího a zpětnovazebního signálu. Regulátor umožňujeautomatickénastavenívýstupníhohřídeleservomotoruvzávislostinahodnotěproudového řídícíhosignálu.Regulátor

4
porovnáváhodnotuřídícíhosignálushodnotouzpětnovazebníhosignáluzvysílačepolohy.Je-lizjištěnaregulačníodchyl-ka,regulátoraktivujevýstupnísignályFOneboFZ,kteréřídíchodservomotoru,dokudsevýstupníhřídelnepřestavídopolohy,kteráodpovídáhodnotěřídícíhosignálu.
Pozn.:Regulátor nastavuje polohu, avšak neovlivňuje rychlost přestavení. Ta je dána typem a provedením servomotoru
Regulátortakésledujeněkteréprovoznístavyasignalizujevznikléporuchy.Nastavení parametrů regulátoru je možné tlačítky SW1 a SW2 nebo počítačem se servisním programem. Počítač
se připojuje přes komunikační modul ke konektoru J7. Nastavené parametry jsou uloženy v paměti typu EEPROM,takževypnutímnapájecíhonapětíneníobsahpamětinarušen.
b) Technické parametry
Napájecí napětí: 230V+10%-15%,50–60HzLinearita regulátoru: 0,5%Necitlivost regulátoru: 1–10%(nastavitelná)
Vstupní signály dvouhodnotové (N / 230 V):UPOHON OvládacífázeprovýstupyFO,FZ,jištěnopojistkouF1,6ATEST1,2 AktivacerežimuTESTMO,MZ StavykoncovýchspínačůservomotoruTP Stavtepelnéochranymotoru
Vstupní signály analogové:Řídicísignál: 0/4–20mAZpětnovazebnísignál: Proudovývysílač4–20mA(např.DICONTCPT1Az)
Výstupní signály dvouhodnotové:FO,FZ Ovládacífáze,spínanákontaktyrelé5A/230VReléOK Signalizaceporuchy,přepínacíkontakt5A/230VBRZDA Ovládacísignálbrzdy
TlačítkaSW2SW1
Konektorprovývojové
účelyJ6
LEDdiodyD2-RUD1-ORD3-ZE
KomunikačníkonektorJ7
SignálprobrzduJ5
KonektorTESTJ4
Konektorzpětnovazebníhosignálu(PWM)J3
LEDdiodaD4otvíráZelenázavíráRudá
Konektorprořídícísignál
J1
KonektorprokapacitníaodporovývysílačJ2
Napájecíaovládací
konektorJ8
Obr.1- ZP2.RE5 - celkový pohled

5
Výstupní signál analogový:
Signalizacepolohy Galvanickyoddělenýpasivnívysílač0/4–20mA.,vnějšínapájení15–30V,
impedancezátěžemax500ohmů
Signalizace:
D1(žlutá) nastavování/hlášeníporuch
D2(rudá) nastavování/hlášeníporuch
D3(zelená) napájení
D4(zelená) pohonotevírá
D4(rudá) pohonzavírá
Chybová hlášení: RežimTEST
Chybířídicísignál(pouzepřipoužitísignálu4–20mA)
Servomotorbylvypnutkoncovýmspínačemjindenežvkoncovépoloze
Chybasnímačepolohy
ZapůsobilatepelnáochranamotoruTP
Servomotorjevmístnímovládání
Reakce na poruchu:
RežimTEST Chybovéhlášení+servomotordopolohydlenastaveníP2
Chybířídicísignál Chybovéhlášení+servomotordopolohydlenastaveníP2
Chybasnímačepolohy Chybovéhlášení+servomotorstop
Poruchatepelnéochrany Chybovéhlášení+servomotorstop
Nastavovací prvky: komunikačníkonektor(propřipojeníPC)
2xtlačítkopronastaveníparametrůbezpočítače
Rozsah pracovních teplot: -25°C–+75°C
Rozměry: 75x81x25mm
1.3. PŘIPOJENÍ REGULÁTORUServomotory MODACT Control s regulátorem polohy ZP2.RE5 jsou ve výrobním závodě zapojeny a vyzkou-
šeny se zpětnou polohovou vazbou, takže se chovají stabilně. Je-li servomotor v rovnovážné poloze a je z tétopolohy vnějším vlivem (například ručním kolem) vychýlen, působením regulátoru se do této polohy samočinněvrací.
Vpřípaděpřipojeníservomotorunaopačnýsledfází,nežpřikterémbylnastavenavyzkoušen,sezačnecho-vatnestabilně.Výstupníhřídelsepřestavujedojednézkrajníchpolohapřijejímdosaženíseservomotornevypne,protože koncovýmikrospínač v tomtopřípaděpůsobí na spínačmotorupropohyb vopačnémsměru.Tímto jearmaturanamáhánamaximálnímmomentem,kterýjeelektromotorschopenvyvinout.Namáhánítrvádotédoby,než nadproudové relé motor odpojí. Působící moment je vyšší než nastavený moment jmenovitý a může dojítkpoškozeníarmaturyneboservomotoru.
Po připojení servomotoru k napájecímu napětí je vždy potřeba překontrolovat, zda se chová stabilně a reguluje v požadovaném smyslu a zda příslušné koncové mikrospínače správně vypínají pohon.
Nechová-li se servomotor stabilně, je nutné jej okamžitě zastavit. Např. přepnutím bloku místního ovládáníBMO„Místní“/„0“/„Dálkové“,dopolohy„0“.Nemá-liservomotorBMO,lzezastavitmotorstisknutímčervenéhotla-čítkaO/Inanadproudovémrelé.Uněkterýchtypůochransemotorzastavípouzenadobu,pokteroujetlačítkostisknuto.Pouvolnění,seopětrozeběhne.
POZOR! Obvody servomotoru jsou i po tomto zastavení pod napětím. Před další prací na servomotoru je po-třeba vypnout napájecí napětí!!
Kezměněsledufází,kterázapříčinínestabilníchování,můžetakédojítipřiopraváchaúpraváchvrozvodutřífázové-honapětípronapájeníservomotorů!

6
1.4. NASTAVENÍ REGULÁTORUProbezchybnoufunkciregulátorumusímítservomotornejdřívenastavenyadoovládacíhoobvoduzapojenykoncové
spínačeaseřízensnímačpolohy.Pokudjsoujakokoncovéspínačepoužityspínačemomentové,musíbýtprověřeno,žeservomotorjeschopenpotřebnývypínacímomentvyvinout.
TeprvepotomlzenastavovatregulátoraprovéstAutokalibraci.JevhodnéprovéstAutokalibraciservomotorunaarma-tuře,kterájevpotrubísjižnapuštěnýmpracovnímmédiem.Povpuštěnípracovníhomédiadopotrubíbysemohlyzměnitvlastnostisoustavynatolik,žebybylonutnoAutokalibraciopakovat.
1.4.1. Nastavitelné parametry
Parametryregulátorujemožnonastavittlačítkynebopočítačem.Přitlačítkovémnastaveníjemožnonastavovatparametry(obr.2-Grafickéznázorněnítlačítkovéhoovládání):–Proudovýřídícísignál(P1)–OdezvanasignálTESTaztrátuřídícíhosignálu(P2)–Necitlivostregulátoru(P3)–Způsobregulace(P4)
Přinastavovánípočítačemlzenavícnastavit:–ReakcereléOK–Výstupníproudovýsignálpolohy(vzestupně,sestupně).–RozšířenívolbyP2(OdezvanasignálTEST...)omožnostnajetínanastavenoupolohu–RozšířenívolbyP4(Způsobregulace)omožnostnajetínanastavenoupolohu(Opn,Zpn)Počítačemlzetakémonitorovatčinnostregulátoru.Servisníprogramjepopsánvodstavci1.7.
Obr.2- Grafické znázornění tlačítkového ovládání
Režim nastavení ZP2.RE5

7
Po nastavení parametrů tlačítky nebo počítačem je možno ještě spustit P5 Autokalibraci. Autokalibrace jeautomatickýproces,běhemněhožregulátorzjistídalšípotřebnéparametryapřibezchybnémprůběhu jeuložídopaměti:
–Zkontrolujevysílačpolohyasmyslotáčenívýstupníhohřídele–PřestavíhřídeldokrajníchpolohOtevřenoaZavřenoazaznamenázdehodnotyzvysílačepolohy–Změřísetrvačnosthřídeleproobasměryotáčení–ZjistíazaznamenáaktivníúrovněsignálůTESTatepelnéochrany.
Autokalibracijetřebaspustitvždy,kdyžsezměnípodmínky,kteréovlivňujíčinnostregulátoru-např.změnase-řízeníkoncovýchspínačůservomotorunebozměnamechanickýchvlastnostíarmatury(dotaženíucpávky,výměnaarmatury,apod.).
1.4.2. Funkce tlačítek SW1a SW2
Tlačítky SW1 a SW2 je možno provádět veškerá provozní nastavení regulátoru.Tlačítkem SW1 se procházíjednotlivéparametryatlačítkemSW2sevybíráznabídkyhodnotaparametru.DlouhýmstiskemtlačítkaSW2sevy-branáhodnotaparametruzapíšedopaměti.DlouhýmstiskemtlačítkaSW1seměnírežimyRegulaceaNastavení.PostupjepatrnýzGrafickéhoznázornění;popisparametrůjevtabulcevodstavci1.4.3.a1.4.4.
Použité zkratky:Krátkýstisktlačítka:SW1 CyklickévybíráníparametrůP1 – P5SW2 Cyklicképrocházeníhodnotvybranéhoparametru
DlouhýstisktlačítkadokudsenerozsvítíoběkontrolkyD1iD2(cca2s):SW1(L) PřecházenímezirežimyNastaveníaRegulace.SW2(L) ZápiszvolenýchhodnotparametrůP1 – P4dopaměti. VP5,máfunkcispuštěníAutokalibrace.
1.4.3. Parametry P1 – P4
ParametrD1
(žlutá)D2
(rudá)Hodnota parametru Poznámka
P1Řídící signál
1x
1x 4–20mA2x 0–20mA3x 20–4mA
4x 20–0mA
P2Odezva na
signál TEST a při poruše
2x
1x otevřepolohunelzenastavittlačítky,alepouzepočítačem
2x zavře3x stoppohonu4x najedenapolohu
P3Necitlivostregulátoru
3x
1x 1%2x 2%... …
10x 10%
P4Způsob regulace
4x
1x OPK,ZPK OxxotevřenoZxxzavřeno---------------xPKpolohakoncováxMmonentxPn poloha nastavená(lzenastavitpouzepočítačem)
2x OM,ZPK3x OM,ZM4x OPK,ZM5x OPn, Zpn6x OM, Zpn7x OPn, ZM
PoznámkykparametruP4.:OPKaZPK - Regulace„napolohu“;servomotorzastavípřishoděřídícíhoazpětnovazebníhosignáluOMaZM -Regulace„namoment“;poblížkrajníchhodnot(prořídícísignál4–20mAtojsouhodnotymenšínež
4,2mAavětšínež19,8mA).Servomotornezastavípřishoděřídícíhoazpětnovazebníhosignálu,alepokračujevpohybuaždozapůsobenípříslušnéhokoncovéhospínače.Tímjearmaturatěsněuzavřena.
OPnaZpn -Polohynastavené;zvolenépolohy,dokterýchseservomotorpřestavívpřípaděpožadavkuúplnéhoote-vřenínebozavření.Tytopolohylzezadávatpouzepočítačem.

8
1.4.4. P5 - Autokalibrace
Autokalibrace začíná přestavováním polohy ve směru Otevřeno. Aby nevznikla chyba, doporučuje se předemnastavit servomotor do mezipolohy (servomotor není vypnut žádným z koncových spínačů) dostatečně vzdálenéodpolohyOtevřeno.
Parametr D1(žlutá)
D2(rudá)
Hodnota parametru Poznámka
P5Autokalibrace
5x ne
Názvemkoncový spínač jezdeoznačentenspínač,kterýbylnastavenParametrem P4.
SW2(L)
svítí svítí A.probíhábezchybně
5x
3xA.začalanakoncovém spínači, porucha koncového spínače
4x chybnězapojenýkoncový spínač
5xchybnězapojenýnebovadnýproudovýsnímačpolohyCPT
7xšpatnýsměrotáčení,opačnězapojenýRsnímačpolohy
Je-lizvolenP5,kontrolkaD1bliká5x,D2nesvítí(viz1.řádektabulky).StiskemSW2(L)jemožnospustitAutokali-braci(viz2.řádektab.).BěhemautokalibraceD1iD2trvalesvítí(viz3.řádektab.),dokudneníprocesukončen.Není-liautokalibraceúspěšná,D2informujepočtemblikáníozjištěnéchybě(vizzbývajícířádkytab.).
Poúspěšnémdokončení jsouhodnotyzměřenýchparametrůuloženydopaměti regulátoru.ÚspěšnáAutokalibracemádvamožnéprůběhy: •Předspuštěnímbylnastavenparametr„Autokalibraceneprovedena“(novýservomotorzvýrobynebopozapsá-nízáložních/defaultparametrů);poukončeníkontrolkaD1bliká5xaD2zhasne.DorežimuRegulacesepřejdestiskemSW1(L).
•Předspuštěnímbylnastavenparametr „Autokalibraceprovedena“;poukončeníkontrolkyD1 iD2 zhasnouaregulátorpřejdedorežimuRegulaceautomaticky.
1.5. REŽIM REGULACEServomotorreagujenazměnyřídícíhosignálu.PřibezchybnémprovozunesvítíD1aniD2.Vznikléchybysignalizuje
regulátorkontrolkouD2(viztabulka)ačinnostíreléOK.
1.5.1. Provozní a chybová hlášení
HlášeníD1
(žlutá)D2
(rudá)Stav nebo druh závady Poznámka
Provozní ne ne Bezchybný provoz
Chybová ne
1x RežimTEST
Poodstraněníchybyskončíireakcenachybu(nastavenávP2)aservomotorpřejdedorežimuRegulace
2x Řídícíproud4–20mA<3mA
4xZapůsobilkoncový spínač*)vmezipoloze(10-90%)
5x Chybasnímačepolohy
6x ZpůsobilaTP
8–10x Chybnáprovoznídata
*) Koncový spínač - polohový a/nebo momentový spínač, který je zapojen tak, aby zastavil pohyb servomotoru v daném směru. Během provozu je sledován stav koncového spínače, který je přiřazen zvolenému smyslu otáčení. Pokud tento spínač vypne servomotor v jiné poloze než v koncové (která byla zjištěna při autokalibraci), regulátor to vyhodnotí jako chybu. Tato chyba může vzniknout například tehdy, když je jako koncový spínač zapojen momentový spínač a během provozu se armatura zadře nebo zasekne v mezipoloze.

9
1.5.2. Relé OK
Relémůžepracovatvjednomzedvourežimů:•sdruženáchyba-sepnekontakty(svorky36,37)přilibovolnéchybě•kodchyby-spínákontakty(svorky36,37)vždy,kdyžsvítíD2(rudá)–blikákódchybyRežimylzezměnitpouzepočítačem.Zvýrobyjenastavenrežim„sdruženáchyba“.VbezchybnémstavujecívkareléOKpřipojenaajsousepnutykontakty,vyvedenénakonektorJ8.3 – J8.2(svorky
35,36).Kdyžregulátorreagujenaporuchu,jecívkareléOKodpojenaneboodpojovánaajsousepnutynebospínajíkon-takty,vyvedenénakonektorJ8.3 – J8.4(svorky36,37).
1.6. POMOCNÉ FUNKCE1.6.1. Funkce Test
Připojením24V–230Vnasvorky30a31seservomotorpřestavídopředemdefinovanéhostavu,kterýjedánnastavenímparametruP2.Servomotorsepřestavídostavu,danéhoparametremP2,taképřiztrátěřídícíhosignálu.
1.6.2. Reset
Použije se při podezření na chybu softwaru a k uvolnění regulátoru při chybovém průběhu Autokalibrace. Resetspočívá v krátkodobém vypnutí napájení regulátoru (cca 20 s než se vybijí filtrační kondenzátory v napájecím zdroji)aopětovnémzapnutí.
1.6.3. Nastavení záložních parametrů
Pokudse regulátordostanedostavu, který chcemezru-šit(např.popřepsánívětšíhomnožstvíparametrů),jemožnoprovéstnávratkzákladnímutovárnímunastavení:
•Vypnoutnapájeníregulátoru•StisknoutSW1iSW2• Zapnout napájení regulátoru a držet tlačítka stisknutá,
nežserozsvítíkontrolkyD1iD2(cca2s).Uvolnittlačítkaaregulátorpřejdedostavu,kdyD1(žlutá)
blikánepřetržitěa D2(rudá)jezhasnuta.StiskemtlačítkaSW1(L)dokudsenerozsvítíD1iD2(cca
2s)regulátorpřepíšesvénastaveníuloženýmiparametryZÁLO-HAapouvolněnítlačítkapřejdedorežimuNastavení.
Stiskem tlačítka SW2(L) dokud se nerozsvítí D1 i D2(cca 2 s) regulátor přepíše své nastavení uloženými pa-rametry DEFAULT, doporučenými výrobcem elektronikyapouvolněnítlačítkapřejdedorežimuNastavení.
1.6.4. Parametry ZÁLOHA
P1Řídícísignál 4–20mAP2OdezvanaTEST stopP3Necitlivost 2%P4Typregulace OPK,ZPKFunkcereléOK sdružená
(!!změnitelnépouzepočítačem!!)Úroveňsign.TEST aktivní0
(!!změnitelnépouzepočítačem!!)ÚroveňsignáluTP aktivní1
(!!změnitelnépouzepočítačem!!)Signalizacepolohy vzestupně
Poznámka *).: S novými parametry se do paměti také zapíše parametr „Autokalibrace neprovedena“. To má za následek, že nelze
opustit režim Nastavení, dokud nebude provedena Autokalibrace (obr. 2 - Grafické znázornění tlačítkového ovládání). Je třeba zvolit menu P5 a stisknout SW2(L). Po ukončení Autokalibrace již lze přejít do režimu Regulace stiskem SW1(L).
vypnoutnapájení
zapnoutnapájení
svítíD1iD2
stisknoutSW1(L)iSW2(L)
uvolnitSW1(L)iSW2(L)
D1(žlutá)bliká
SW1(L) SW2(L)
režim*)Nastavení
do paměti regulátorusezapíšouparametryZÁLOHA(ZPA)
do paměti regulátorusezapíšouparametryDEFAULT(EHL)

10
1.7. SERVISNÍ PROGRAM ZP2RE5Hlavní okno programuMonitorování –zobrazeníprovozníchúdajůpohonu
sregulátoremParametry –zobrazeníparametrůregulátoru,zápisde-
faultnebozáložníchparametrůaspouštěníautokalibrace
Spodní stavová řádka– stavkomunikacesregulátoremanastavenýsériovýport– verzefirmwareregulátoru– výrobníčíslopohonuadatummontážeregulátoru
napohon– výrobníčísloadatumvýrobyregulátoru– servisnímódprogramu
Menu programuSoubor –prácesparametryOtevřít –načteníparametrůzesouboru
ajejichzobrazenívokněServisUložit –vyčteníaktuálníchparametrů
zregulátoruajejichuloženídosouboru
Tisk –vyčteníaktuálníchparametrůzregulátoruajejichtisk
Konec –ukončeníprogramuMotor –ovládánímotorupohonuServis –přehledparametrůregulátoru
(jejichzměnaazápisvservisnímmódu).Významparametrůjeuvedenvnápověděprogramu.
Nastavení –parametryprogramu(jazyk,sériovýport,adresaregulátoru)
Nápověda –vyvoláníkontextověsenzitivnínápovědyainformacíoprogramu.
Podrobnějšíinformacekekaždémuúdajiaovládacímkom-ponentámvoknechprogramulzezískat:– stisknutímShift+F1– vybránípoložky„Cotoje?“vmenunápověda– stisknutím pravého tlačítka myši nad vybranou kompo-
nentou– stisknutímotazníkuvhorní lištěokenanáslednýmklik-
nutím levým tlačítkem myši s kurzorem (otazníkem) navybranýúdaj.

11
J1 – řídící signálJ1.1 PE přizemněníJ1.2 -IN -řídícíhosignáluJ1.3 +IN +řídícíhosignálu
J2 – snímač polohyJ2.1 +UR odporovýJ2.2 RIN „J2.3 -UR „J2.4 +24V proudovýJ2.5 IIN „
J3 – vysílač polohy J3.1 +UJ3.2 IOUTJ3.3 -UJ3.4 nevyužito
J4 – vstup TEST (24 V – 230 V) J4.1 TEST1J4.2 TEST2
J5 – výstup brzda J5.1 brzda1J5.2 brzda2
J6 – vývoj J7 – komunikace
J8 – silový konektorJ8.1 FO ovládacívýstup„otvírá“J8.2 OK kontaktreléOK(NO)J8.3 OK kontaktreléOK(COM)J8.4 OK kontaktreléOK(NC)J8.5 MZ kontrolnívstup„zavírá“J8.6 N nevyužitoJ8.7 UOVL fáze230Vproovládací výstupyFO,FZJ8.8 FZ ovládacívýstup„zavírá“J8.9 N napájeníregulátoru230V(nula)J8.10 MO kontrolnívstup„otvírá“J8.11 TP kontrolnívstup„tepelnérelé“J8.12 UREG napájeníregulátoru230V(fáze)
SeznamsignálůnakonektorechregulátoruZP2.RE5

12
Umístěníarozměrysvorkovnicovéskříně(MODACT MON Control)
Typové číslo A B C D E F
52030 500 325 255 307 90 200
52031,52032 630 382 255 316 120 355
Rozměry jsou uvedeny v milimetrech. Uvedené rozměry jsou maximální.
Poznámka:*) - Servomotory Control v krytí IP 55 (MON, MONJ, MPS, MTN) se dodávájí bez kabelových
vývodek – vývodky lze dodat na požadavek (závity se ve svorkovnicové skříni: 3 x M20 x 1,5; 1 x M25 x 1,5).
- Servomotory Control v krytí IP 67 (MOP, MTP) se vždy dodávají s kabelovými vývodkami (3 x M20 x 1,5; 1 x M25 x 1,5).
místníovládání
vnějšíochrannásvorka
vývodkynebozávity*)propojeníelektromotoru
48
150
25
DF
E
A
B C

13
Svorkovnicováskříň(variantasregulátoremZP2.RE5abrzdouBR2)
Pozn.: Osazení svorkovnicové skříně a počet označení svorek na svorkovnici se liší podle konkrétního provedení servomotoru
(1) KO –stykačprosměr„otvírá“
(2) KZ –stykačprosměr„zavírá“
(3) F –tepelnérelé
(4) I/0 –testovacítlačítko
(5) ZP2.RE5–elektronickýregulátorpolohy
(6) GS –zdrojgalvanickyoddělenéhovýstupníhosignálu
(7) FT –síťovýfiltr
(8) BR2 –dynamickábrzdařízená
(9) BMO –blokmístníhoovládání
(10)M/D –přepínač„Místní/“0“/“Dálkové“
(11)OTV/ZAV–přepínač„Otvírá“/“0“/“Zavírá“
7
5
10
6
11
8
4
2
1
3
9
OFFAUSVYPNUTO
REMOTE LOCAL
ORT
MÍSTNÍDÁLK.
FERN
STOP
Legenda

14
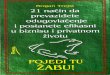
Legenda ke schématům MODACT Control:
SQ1(MO)–momentovývypínačprosměr„otvírá“
SQ2(MZ) –momentovývypínačprosměr„zavírá“
SQ3(PO) –polohovývypínačprosměr„otvírá“
SQ4(PZ) –polohovývypínačprosměr„zavírá“
SQ5(SO) –signalizačnívypínačprosměr„otvírá“
SQ6(SZ) –signalizačnívypínačprosměr„zavírá“
KO –stykačprosměr„otvírá“
KZ –stykačprosměr„zavírá“
F –tepelnérelé
BAM-002 –dynamickábrzdaneřízená
BR2 –dynamickábrzdařízená
BMO –blokmístníhoovládání
SA1(M/D) –přepínačMístně/0/Dálkově
SA2(OTV/ZAV) –přepínačOtvítat/0/Zavírat
BQ1,BQ2(V1,V2) –odporovývysílačpolohy
CPT1Az –proudovývysílačpolohyanalagově
nastavitelný
DCPT –proudovývysílačpolohydigitálně
nastavitelný
DCPZ –napájecízdrojvysílačepolohy
EH –topnýodpor
Volitelné příslušenství:
BlokmístníhoovládáníBMO
Vysílačpolohy –odporovýV1,V2
–proudovýpasivníCPT1Az
–proudovýaktivníDCPT+DCPZ
–bezvysílače
SignalizačníspínačeSO,SZ
Použité elektromotory:
U servomotorů MODACT MONJ 52 030 – 52 032Control jsou použity jednofázové elektromotory, kteréjsouspínányvestavěnýmistykači.
Servomotory MODAT MON, MOP 52 030 – 52 036, MTN, MTP 52 442 – 52 443 a MPS 52 261 – 52 266 Controlmajítřífázovéelektromotoryspínanévestavěnýmistykači,případněještěovládanéregulátoremZP2RE5.

15
P0913-E
výstupnípoloha
ovládacífáze
DCPT DCPZ
CPT1Az
ZapojeníelektrickýchservomotorůMODACT MONJ Control–sestykači
P0914-E
ZapojeníelektrickýchservomotorůMODACT MONJ Control–sestykačiaBMO
výstupnípoloha
DCPT DCPZ
CPT1Az
BMO
1fmotoryMONJ
1fmotoryMONJ
– se svorkovnicí
– se svorkovnicí

16
P0941-E
ZapojeníelektrickýchservomotorůMODACT MONJ Control–sestykači
A1A1KO KZ
A2 A2
15
33 34
36351312 15 16 17 18 19 20 21 22 23 24 25 26 27 2833 34 32 33 34 38 39 40
+
bílá
rudá
2 214141 221 14 21 2 4
PEN L1
SQ1(MO)
SQ2(MZ)
SQ3(PO)
SQ4(PZ)
SQ5(SO)
SQ6(SZ)
Polohavýstup
(V1) (V2)BQ2BQ1
-+
CPT1
P0941-E
L- L + - U + U U-U+
DCPZDCPT
kzko1 3 5
642
1 3 5
2 4 6
U1 Z2 U2
Z1 C C
+
ZAVOTV
LN
ovládací fáze
1f motor
EH
MONJ
MONJ
mA
mA
P0942-E
ZapojeníelektrickýchservomotorůMODACT MONJ Control–sestykačiaBMO
A1A1KO KZ
A2 A2
1542
33 34
36351312 15 16 17 18 19 20 21 22 23 24 25 26 27 2833 34 32 33 34 38 39 40
+mA
bílá
rudá
2 214141 221 14 21 2 4
PEN L1
SQ1(MO)
SQ2(MZ)
SQ3(PO)
SQ4(PZ)
SQ5(SO)
SQ6(SZ)
Polohavýstup
(V1) (V2)BQ2BQ1
-+
CPT1
P0942-E
L- L + - U + U U-U+
DCPZDCPT
M/DOTV/ZAV
BMO
42
1 3 4
3 1
2
kzko1 3 5
642
1 3 5
2 4 6
U1 Z2 U2
Z1 C C
+
ZAVOTV
LN
1f motor
EH
MONJ
mA
MONJ
– s konektorem
– s konektorem
CPT1Az
CPT1Az

17
P0947
ZapojeníelektrickýchservomotorůMODACT MON, MOP, MTN, MTP, MPS 52 261-6 Control–sestykači
výstupnípoloha
ovládacífáze
brzda
DCPT DCPZ
3fmotor
CPT1Az
PM0948
ZapojeníelektrickýchservomotorůMODACT MON, MOP, MTN, MTP, MPS 52 261-6 Control–sestykačiaBMO
výstupnípoloha
ovládacífáze
brzda
DCPT DCPZ
CPT1Az
BMO
– se svorkovnicí
– se svorkovnicí

18
U1 V1 W1
A2
95
+ TEST(230Vac)
PEL1 L3L2N
Poloha
-IN+IN
mA
výstup
35 36 51 52
421 24 1
171612 13 14 15
1 2
10 11
řídíc
í sig
nál
0/4-
20m
A,
31
4 1 2
302423 25 6132 33 34 6021
21 4 1
1918 20
2
22
(PZ)SQ4
(PO)(MZ)SQ2 SQ3
(MO)SQ1
J3.2
+IN -IN
J1.2
J1.1
J3.3
PE FZ
J8.8
J8.1
0
J8.1
J8.5
TP MO MZ FO
J3.1
J8.1
1
J1.3
(SZ)SQ6
TEST
J4.2
J4.1
(SO)SQ5
OK
J8.3
J8.2
J8.4
4
1
2
21
22
53
6
1
642
53
22
21
J3
ZP2.RE5
J8
J5.2
J5.1
J4
J5
BR
ZDA
3f motor
EH
mod
ráhn
ědá
37
A2A2
KZKOA1 A1
F
U V WN
42 6
mod
ráhn
ědá
J1
J2
DCPT
+U
-UJ2.4
J2.3
INJ2.5
vložit propojkudo svorek "t1,t2"
Po nastavení,
t1 t2
L- L + - U + U+
U
2 31
brzda4
BR2
ko
kz
DCPZU-U+
FT
ž/z
LNJ8.1
2J8
.9U
reg
Uov
lJ8
.7
Nre
g
P0949
připojit svodiče přepětí
Na cívky stykačů
– se svorkovnicí
– se svorkovnicí
ZapojeníservomotorůMODACT MON, MOP, MTN, MTP, MPS 52 261-6 Control –sestykačia regulátoremZP2RE5
ZapojeníservomotorůMODACT MON, MOP, MTN, MTP, MPS 52 261-6 Control –sestykači,regulátoremZP2RE5aBMO
BMO
U1 V1 W1
A2
95
(230Vac)TEST
ZP2RE5
62 4
N L2 L3L1 PE
N WVU
FA1A1
KO KZA2 A2
37
EH
3f motorBR
ZDA
J5
J4
J5.1
J5.2
J8
ZP2.RE5
J3
21
22
3 5
2 4 6
1
6
3 5
22
21
2
1
4
J8.4
J8.1
2
J8.9
Ure
g
J8.2
J8.3
OK
(SO)
J4.1
J4.2
TEST
SQ6(SZ)
J1.3
OTV/ZAV
J8.1
1
J3.1
FOMZMOTP
J8.5
J8.1
J8.1
0
J8.8
FZPE
J3.3
J1.1
J1.2
-IN+IN
J3.2
SQ1(MO)
SQ3SQ2(MZ) (PO)
SQ4(PZ)
22
2
2018 19
141 2
21 60343332 612523 24 30
214
31
0/4-
20m
A,říd
ící s
igná
l
1110
21
15141312 16 17
14 21 2 4
+
52513635
výstup
mA
+IN -IN
Poloha
Uov
l
31
2 4
DCPT
J1
J2
+U
-UJ2.4
J2.3
INJ2.5
vložit propojkudo svorek "t1,t2"
Po nastavení,
t1 t2
L- L + - U + U
+U
M/D
13
4 2
BR2
2 31
brzda4
ko
FT
mod
ráhn
ědá
ž/z
mod
ráhn
ědá kz
DCPZU-U+ LN
J8.7
Nre
g
P0950
připojit svodiče přepětí
Na cívky stykačů
P0949
P0950

19
ZapojeníelektrickýchservomotorůMODACT MON, MOP, MTN, MTP, MPS 52 261-6 Control–sestykači
3215
33 34
36351312 15 16 17 18 19 20 21 22 23 24 25 26 27 2833 34 32 33 34 38 39 40
+
+mA
mA
A2
95
bílá
rudá
kokz
62 4
EH
2
1
14
F
BA
M-002
532
1
64
98
97
4 6
3 5
22
21
31
32215
6 22
2 214141 2
331
2 432
1
21 14 21 2 4
U1 V1 W1
L3 PEN L2L1
SQ1(MO)
SQ2(MZ)
SQ3(PO)
SQ4(PZ)
SQ5(SO)
SQ6(SZ)
Polohavýstup
(V1) (V2)BQ2BQ1
-+
CPT1
P0953
L- L + - U + U U-U+
DCPZDCPT
ZAVOTV
LN
ovládací fáze
A1A1KO KZ
A2 A2
3f motor
MON, MTN
P0954
ZapojeníelektrickýchservomotorůMODACT MON, MOP, MTN, MTP, MPS 52 261-6 Control–sestykačiaBMO
321542
33 34
36351312 15 16 17 18 19 20 21 22 23 24 25 26 27 2833 34 32 33 34 38 39 40
+
+mA
mA
A2
95
M/DOTV/ZAV
BMO
bílá
rudá
kokz
62 4
EH
2
1
14
F
BA
M-002
532
1
64
98
97
4 6
3 5
22
21
31
32215
6 22
2 214141 2
331
2 432
1
21 14 21 2 4
U1 V1 W1
L3 PEN L2L1
SQ1(MO)
SQ2(MZ)
SQ3(PO)
SQ4(PZ)
SQ5(SO)
SQ6(SZ)
42
1 3 4
3 1
2
Polohavýstup
(V1) (V2)BQ2BQ1
-+
CPT1
P0954
L- L + - U + U U-U+
DCPZDCPT
ZAVOTV
SA2 SA1LN
A1A1KO KZ
A2 A2
3f motor
MON, MTN
P0953– s konektorem
– s konektorem
CPT1Az
CPT1Az

20
ZapojeníelektrickýchservomotorůMODACT MON, MOP, MTN, MTP, MPS 52 261-6 Control–sestykačiaregulátoremZP2.RE5
ZapojeníelektrickýchservomotorůMODACT MON, MOP, MTN, MTP, MPS 52 261-6 Control–sestykači,regulátoremZP2.RE5aBMO
– s konektorem
– s konektorem
+
A2A2
KZKOA1 A1
A2
95
U1 V1 W1
TEST(230Vac)
kz
38 321534334039 36354645444241
62 4
N L2 L3L1 PE
F
EH
BR
ZDA
J5
J4
J5.1
J5.2
J8
ZP2.RE5
J3
21
22
3 5
2 4 6
1
6
3 5
22
21
2
1ko
4
J8.4
J8.9
J8.2
J8.3
OK
SQ4(SO)
J4.1
J4.2
TEST
SQ6(SZ)
J1.3
J8.1
1
J3.1
FOMZMOTP
J8.5
J8.1
J8.1
0
J8.8
FZPEJ3
.3
J1.1
J1.2
-IN+IN
J3.2
SQ1(MO)
SQ3SQ2(MZ) (PO)
SQ5(PZ)
2141 2 214
0/4-
20m
A,říd
ící s
igná
l
2 14 22 4
výstup
+IN -INPoloha
1312 15 16 17 18 19 20 21 22 23 24 25 26 27 28
J1
J2
DCPT
+U
-UJ2.4
J2.3
INJ2.5
vložit propojkudo svorek "t1,t2"
Po nastavení,
t1 t2
L- L + - U+U+
U
mod
ráhn
ědá
mod
ráhn
ědá
DCPZU-U+
FT
ž/z
LN
BR2
2 31
brzda4
11
3f motor
J8.1
2U
reg
Uov
lJ8
.7
Nre
g
připojit svodiče přepětí
Na cívky stykačů
mA
P0955
ZP2RE5
+
A2A2
KZKOA1 A1
282726252423222120191817161512 13
42
1 3 3 1
Poloha-IN+IN
výstup
421 24 11 2
řídíc
í sig
nál
0/4-
20m
A,
4 1 221 4 1 2
(PZ)SQ5
(PO)(MZ)SQ2 SQ3
(MO)SQ1
J3.2
+IN -IN
J1.2
J1.1
J3.3
PE FZ
J8.8
J8.1
0
J8.1
J8.5
TP MO MZ FO
J3.1
J8.1
1
OTV/ZAV
J1.3
(SZ)SQ6
TEST
J4.2
J4.1
(SO)SQ4
OK
J8.3
J8.2
J8.9
M/D
J8.4
BMO4
ko1
2
21
22
53
6
1
642
53
22
21
J3
ZP2.RE5
J8
J5.2
J5.1
J4
J5
BR
ZDA
EH
F
PEL1 L3L2N
42 6
41 42 44 45 46 35 3639 40 33 34 5 1 2 338
kz
(230Vac)TEST
U1 V1 W1
95
A2
P0956
J1
J2
+U
-UJ2.4
J2.3
INJ2.5
vložit propojkudo svorek "t1,t2"
Po nastavení,
t1 t2 +U
24
FT
mod
ráhn
ědá
ž/z
mod
ráhn
ědá
DCPZU-U+ LN
BR2
2 31
brzda4
3f motor
J8.1
2U
reg
Uov
lJ8
.7
Nre
g
připojit svodiče přepětí
Na cívky stykačů
mA
DCPTL- L + - U+U
ZP2RE5
P0955
P0956

21
Název Typ Skladové číslo
ZPA Elektronickýregulátor ZP2.RE5 2339610003
ZPA Síťovýfiltr FiltanaFS8211322/V 2339610076
ZPA Napájecízdroj DCPZ 2340510368
ZPA Dynamickábrzdaneřízená BAM002 2334510008
ZPA Brzda BR2550 2339610124
ZPA Brzda BR2,2 2339610142
ZPA Odpor TR34268R 2337110355
GE Stykač MC1A301ATN 2335821060
GE Mechanickéblokovánístykačů MMHO 2335821061
GE Pomocnýkontaktstykačů MACL101AT 2335821062
GE Tepelnérelé0,26–0,43A*) MT03C 2335821066
GE Tepelnérelé0,43–0,65A*) MT03D 2335821067
GE Tepelnérelé0,65–1A*) MT03E 2335821068
GE Tepelnérelé0,85–1,3A*) MT03F 2335821069
GE Tepelnérelé1,1–1,6A*) MT03G 2335821070
GE Tepelnérelé1,35–2A*) MT03H 2335821063
GE Pomocnýkontakttepel.relé MATV10AT 2335821064
Lovato Stykač 11MC9.01 2335821006
Lovato Mechanickéblokovánístykačů 11G321 2335821080
Lovato Pomocnýkontaktstykačů G320-1 2335821079
Lovato Tepelnérelé0,3–0,5A*) 11RF9.05 2335826182
Lovato Tepelnérelé0,45–0,75A*) 11RF9.075 2335826183
Lovato Tepelnérelé0,6–1A*) 11RF9.1 2335826184
Lovato Tepelnérelé0,9–1,5A*) 11RF9.1V5 2335826185
Lovato Tepelnérelé1,4–2,3A*) 11RF9.2V3 2335826188
NáhradnídílyproservomotoryMODACT MON, MOP, MTN, MTP, MPS Control OprotiservomotorůmMODACTMON,MOP,MTN,MTP,MPSmáprovedeníControlnavícnásledujícínáhradnídíly:
*)podlevýkonuelektromotoru


tel.: 321785141-9fax: 321785165 321785167e-mail:[email protected]
ZPAPečky,a.s.tř.5.května16628911PEČKYwww.zpa-pecky.cz