Embed Size (px)
DESCRIPTION
Edição do Boletim Em Órbita para o mês de Agosto de 2011. Neste número: os lançamentos orbitais realizados em Julho de 2011 e as habituais secções do boletim.
Citation preview

1
AAA ppprrriiimmmeeeiiirrraaa pppuuubbbllliiicccaaaçççãããooo eeellleeeccctttrrróóónnniiicccaaa sssooobbbrrreee AAAssstttrrrooonnnáááuuutttiiicccaaa eee aaa CCCooonnnqqquuuiiissstttaaa dddooo EEEssspppaaaçççooo eeemmm pppooorrrtttuuuggguuuêêêsss
EEEmmm ÓÓÓrrrbbbiiitttaaa VVVooolll... 111111 --- NNN...ººº 111111444 ––– AAAgggooossstttooo dddeee 222000111111
(((eeedddiiiçççãããooo mmmeeennnsssaaalll)))

1
Em Órbita
Em Órbita n.º 114 (Vol. 11) – Agosto de 2011
a Capa: O foguetão Zenit-2SB80/Fregat-SB que colocaria em órbita o observatório Spektr-R.
O boletim Em Órbita, dedicado à Astronáutica e à Conquista do Espaço, é da autoria de Rui C. Barbosa e tem uma edição electrónica mensal. Versão web (http://www.zenite.nu/orbita/ - www.zenite.nu): Estrutura: José Roberto Costa; Edição: Rui C. Barbosa
este número colaboraram José Roberto Costa e Manuel Montes.
Qualquer parte deste boletim não deverá ser reproduzida sem a autorização prévia do autor.
Rui C. Barbosa BRAGA
PORTUGAL
00 351 93 845 03 05 [email protected]
Índice Lançamentos orbitais em Julho de 2011 3 Misterioso Shi Jian 11-03 4 TianLian-1B, preparando o lançamento do TianGong 16 Seis novos satélites Globalstar 34 Índia lança GSAT-12 46 Missão dupla do Proton-M 51 Segundo GPS-IIF colocado em órbita 60 Spektr-R, um laboratório espacial para estudar o Universo 76 China lança Compass-I4 90 Misterioso Shi Jian 11-02 107 Quadro de lançamentos recentes 110 Outros objectos catalogados 111 Regressos / Reentradas 112 Lançamentos orbitais previstos para Setembro e Outubro de 2011 113 Próximos lançamentos tripulados 114 Futuras Expedições na ISS 115 Lançamentos Suborbitais 117 Cronologia Astronáutica (LXIX) 120 Estatísticas do Voo Espacial tripulado 122 Explicação dos termos técnicos 125
O Em Órbita está no Twitter
Visite-nos no Twitter em
http://twitter.com/zenite_nu

Em Órbita
Em Órbita – Vol.11 - .º 114 / Agosto de 2011 2
Campanha da AIMAL Contra as Touradas em Portugal
Tourada, ão! Abolição!
Conheça o Horror e a Perversão das Touradas em www.Animal.org.pt.
Seja parte da Mudança. Junte-se à AIMAL!
Torne-se sócia/o da AIMAL e apoie a organização na defesa dos direitos dos animais. Inscreva-se através de [email protected].
Junte-se ao Grupo de Activismo da ANIMAL. Inscreva-se enviando um e-mail em branco para [email protected].
Para mais informações, por favor contacte a AIMAL através do e-mail [email protected] ou visite o site www.animal.org.pt.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 3
Lançamentos orbitais em Julho de 2011
Em Julho de 2011 foram levados a cabo 10 lançamentos orbitais dos quais um foi tripulado. No total colocaram-se em órbita 17 satélites. Desde 1957 e tendo em conta que até ao final de Julho de 2011 foram realizados 4793 lançamentos orbitais, 395 lançamentos foram realizados neste mês o que corresponde a 8,2% do total e a uma média de 7,6 lançamentos por ano neste mês. É no mês de Dezembro onde se verificam mais lançamentos orbitais (476 lançamentos que correspondem a 9,9% com uma média de 9,2 lançamentos) e é no mês de Janeiro onde se verificam menos lançamentos orbitais (286 lançamentos que correspondem a 6,0% com uma média de 5,5 lançamentos).
Lançamentos orbitais em Julho desde 1957
010 0
3
5 5
910
12
989
5
8
10
6
1011
17
15
6
9
12
89
12
78 8
1010109
7
14
6
9
7 7
56 6
8
54
2
43434
7
3
10
0
24
68
10
12
14
16
18
1957
1960
1963
1966
1969
1972
1975
1978
1981
1984
1987
1990
1993
1996
1999
2002
2005
2008
2011
Ano
Lan
çamen
tos
Total de lançamentos orbitais 1957 / 2011 (Julho)
28
1419
35
7255
8711
2 11812
7119
110 114 120
106 109
106
125 128
124
124
106
105
123
121 12
712
912
110
3 110 11
610
111
688
95
7989
75 7386
77
7382
5862
6153 52
63 65 67
7570
38
0
20
40
60
80
100
120
140
1957
1960
1963
1966
1969
1972
1975
1978
1981
1984
1987
1990
1993
1996
1999
2002
2005
2008
Ano
Lan
çamen
tos

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 4
Misterioso Shi Jian 11-03 Às 0428:03,993UTC do dia 6 de Julho de 2011 a China levava a cabo o lançamento do satélite SJ-11 Shi Jian 11-03 desde o Centro de Lançamento de Satélites de Jiuquan. O lançamento foi levado a cabo por um foguetão CZ-2C Chang Zheng-2C (Y25) desde a Plataforma de Lançamento 603 (ou SLS-2).
As autoridades chinesas designaram este satélite como um veículo experimental, mas o lançamento de um satélite semelhante no final do mês adensaria as suspeitas sobre o verdadeiro objectivo destes satélites.
Os satélites SJ-11 Shi Jian-11 (实践十一号实践十一号实践十一号实践十一号)
A 5 de Julho de 2011, a China anunciava1,2 que estavam a decorrer no Centro de Lançamento de Satélites de Jiuquan, os preparativos para o lançamento do satélite experimental SJ-11 Shi Jian 11-03 referindo que esses preparativos estavam a decorrer normalmente sem dar mais detalhes.
O primeiro satélite desta série, o SJ-11 Shi Jian 11-01, foi colocado em órbita a 12 de Novembro de 20093. Na altura, o analista espacial russo Igor Lissov, notou que os parâmetros orbitais deste satélite eram iguais ao do satélite SW-2 Shiyan Weixing-2 colocado em órbita a 18 de Novembro de 20044. O objectivo da missão do SW-2 foi o teste de sensores de infravermelhos o que levou à conclusão de que o satélite SJ-11-01 possa ter sido o primeiro de uma constelação de satélites de
aviso antecipado. Esta constelação seria semelhante ao sistema STSS (Space Tracking and Surveillance System)5 dos Estados Unidos.
De facto, ao se observar as imagens divulgadas dos satélites Shi Jian-11 nota-se a possível existência de quatro sensores na parte inferior dos satélites. Nas imagens ao lado podemos ver (imagem superior) a representação do satélite Shi Jian 11-03 e na imagem inferior a representação do satélite Shiyan Weixing-2.
Segundo as autoridades chinesas, os satélites desta série são desenvolvidos pela China Spacesat Co. Ltd da Corporação
Aeroespacial de Ciência e Tecnologia da China.
A 29 de Julho a China colocaria em órbita o satélite SJ-11 Shi Jian 11-02 cujo lançamento seguiu o mesmo azimute utilizado pelo Shi Jian 11-03.
Lançamento Veículo lançador
Data de Lançamento
Hora (UTC) Local de
Lançamento Satélites
2009-061 Y21 12-ov-09 2:45:04 Jiuquan, 603 Shi Jian 11-01 (36088 2009-061A)
2011-030 Y25 6-Jul-11 04:28:03,993 Jiuquan, 603 Shi Jian 11-03 (37730 2011-030A)
2011-039 Y24 29-Jul-11 7:42:03,570 Jiuquan, 603 Shi Jian 11-02 (37765 2011-039A)
1 “China to launch an experimental satellite in coming days”, http://news.xinhuanet.com/english2010/china/2011-07/05/c_13967439.htm (em Inglês). 2 http://www.chinanwes.com/gn/2011/07-05/3158417.shtml (em Chinês). 3 O lançamento do SJ-11 Shi Jian 11-01 (36088 2009-061A) teve lugar às 0245:04UTC do dia 12 de Novembro de 2009, tendo sido realizado por um foguetão CZ-2C Chang Zheng-2C ( Y21) a partir da Plataforma de Lançamento 603 (SLS-2) do Centro de Lançamento de Satélites de Jiuquan. 4 O lançamento do satélite SW-2 Shiyan Weixing-2 (28479 2004-046A) teve lugar às 1045UTC do dia 18 de Novembro de 2004 e foi levado a cabo por um foguetão CZ-2C Chang Zheng-2C (Y15) desde a Plataforma de Lançamento LC1 do Centro de Lançamento de satélites de Xi Chang. 5 Os dois satélites experimentais deste sistema foram lançados às 1220:00,223UTC do dia 24 de Setembro de 2009 por um foguetão Delta-2 7920-10 (D344) desde o Complexo de Lançamento SLC-17B do Cabo Canaveral AFS. Os dois satélites são USA-208 'STSS Demo-1’ (35937 2009-052A) e o USA-209 'STSS Demo-2’ (35938 2009-052B).

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 5
O foguetão CZ-2C Chang Zheng-2C
O desaire com o foguetão lançador Chang Zheng-2A levou a uma intervenção política de alto nível por parte das autoridades chinesas em meados dos anos 70. Em resultado, deu-se total prioridade ao controlo de qualidade no desenvolvimento dos componentes dos lançadores. Todos os sistemas eléctricos foram reforçados e realizou-se uma nova campanha de testes de vibração de componentes chave do veículo no solo que teve uma duração de dez meses. As alterações ao foguetão foram tão importantes que o novo veículo recebeu uma nova designação, o CZ-2C Chang Zheng-2C.
Este veículo é o lançador chinês por excelência para missões para a órbita terrestre baixa, sendo o foguetão mais utilizado pela China. Para responder às necessidades dos clientes internacionais, a Academia Chinesa de Tecnologia de Foguetões Lançadores desenvolveu um novo estágio superior, o SD (Smart Dispenser), que começou a ser utilizado comercialmente em finais de 1990 e que levou a cabo sete missões bem sucedidas para colocar em órbita satélites da rede Iridium. O foguetão CZ-2C Chang Zheng-2C está disponível em três versões:
• A versão básica: lançador CZ-2C a dois estágios para missões em órbitas baixas, inferiores a 500 km de altitude, e com uma capacidade de carga de 3.366 kg (altitude de 200 km, inclinação orbital de 63º em relação ao equador terrestre);
• A versão de três estágios: lançador CZ-2C/SD, CZ-2C/SM e o veículo CZ-2C utilizado em Abril de 2004. De acordo com recentes observações, estas versões parecem compartilhar o primeiro e segundo estágio. Comparado com a versão original, o segundo estágio é mais alongado com o primeiro estágio a permanecer com o mesmo comprimento. Pode haver no entanto, melhorias nos motores utilizados nestes lançadores. As diferenças nestes veículos situam-se ao nível da utilização ou não de diferentes estágios superiores e que estágios superiores são utilizados. Uma designação alternativa para a versão de três estágios do CZ-2C é “CZ-2C Modelo 2”, denominando “CZ-2C/2” a versão de dois estágios. Estes lançadores são utilizados para colocar satélites em órbitas baixas ou órbitas sincronizadas com o Sol (polares) superiores a 500 km de altitude com uma capacidade de carga de 1.456 kg (altitude de 900 km, polar e sincronizada com o Sol).
• CZ-2C Modelo 3 ou simplesmente “CZ-2C/3A", pela primeira vez utilizada a 29 de Agosto de 20046. Comparada com versões anteriores apresenta um primeiro estágio mais alongado e quatro estabilizadores aerodinâmicos colocados no fundo do primeiro estágio. O seu comprimento total é de 42 metros.
O lançador CZ-2C proporciona interfaces mecânicas e eléctricos flexíveis e uma ogiva capaz de ser ajustada no seu comprimento consoante o comprimento do satélite a ser lançado. O ambiente a que o satélite é submetido no lançamento (vibrações, choque, pressão, acústica, aceleração e ambiente térmico), atinge os requisitos comuns no mercado do lançamento comercial de satélites.
Descrição técnica
Sem ter em conta a versão do CZ-2C Cheng Zheng-2C lançada a 29 de Agosto de 2004, as duas configurações deste lançador partilham o primeiro estágio, segundo estágio e carenagem de protecção. O comprimento total do lançador é de 42 metros com um diâmetro de 3,35 metros. Consome tetróxido de azoto e UDMH, desenvolvendo uma força de 2.962 kN no lançamento e tendo uma massa de 233.000 kg. A seguinte tabela mostra as principais características do CZ-2C Chang Zheng-2C:
Estágio Primeiro estágio
L-140
Segundo estágio
L-35 CTS
Propolente UDMH / N2O4 UDMH / N2O4 UDMH / Hidrazina
Massa do propolente (kg) 162.706 54.667 125 / 50
Motor YF-217 YF-228 (principal)
YF-24 (4 vernier) Motor sólido / SCR
Força (k) 2.961,6 741,4 / 11,8 70,78 (motor sólido)
Impulso específico (s/kg) 2.556,5 (no solo) 2.922,37 (principal)
2.831,11 (vernier no vácuo) 2.804 (motor sólido)
Tempo de queima (s) 122 130
Diâmetro (m) 3,35 3,35 2,7
Comprimento (m) 25,720 7,757 1,5
6 Este lançador foi utilizado para colocar em órbita o satélite FSW-19 (28402 2004-033A). 7 Conjunto de quatro YF-20. 8 Uma modificação do motor YF-20.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 6
O sistema do CZ-2C é composto pela estrutura do foguetão lançador, sistema de propulsão, sistema de controlo, sistema de telemetria, sistema de rastreio e segurança, sistema de controlo de atitude, sistema de separação, etc.
A estrutura do foguetão actua de forma a suportar as várias cargas internas e externas no lançador durante o transporte, elevação (colocação na plataforma de lançamento) e voo. A estrutura do foguetão também combina todos os subsistemas em conjunto. A estrutura do foguetão é composta pelo primeiro estágio, segundo estágio e carenagem de protecção. O primeiro estágio inclui a secção inter-estágio, tanque de oxidante, secção inter-tanque, tanque de combustível, secção de trânsito posterior, secção posterior, sistema de alimentação de propolente, etc. O segundo estágio inclui o adaptador do veículo lançador, secção de equipamento, tanque de oxidante, secção inter-tanque, tanque de combustível, sistema de alimentação de combustível, etc. o adaptador do veículo lançador liga a carga com o segundo estágio do lançador e deriva as cargas entre eles. Para o CZ-2C são fornecidos os adaptadores internacionais 937B e 1194A. A carenagem de protecção, com duas metades, é composta por uma secção abobadada, pela secção cónica frontal e secção cilíndrica. A figura na página seguinte mostra a configuração do foguetão CZ-2C Chang Zheng-2C/CTS.
O sistema de propulsão, incluindo motores e sistema de fornecimento / pressurização, gera a força dianteira e de controlo necessária para o voo. O primeiro estágio e o segundo estágio, utilizam propolentes armazenáveis, isto é tetróxido de azoto (N2O4) e dimetil hidrazina assimétrica (UDMH). Os tanques de propolente são pressurizados pelos sistemas de propulsão regenerativos. Existem quatro motores em paralelo no primeiro estágio. Os motores podem ser orientados em direcções tangenciais. A força de cada motor é de 740,4 kN e a força total desenvolvida é de 2.961,6 kN. Existe um motor principal e quatro motores vernier no segundo estágio,
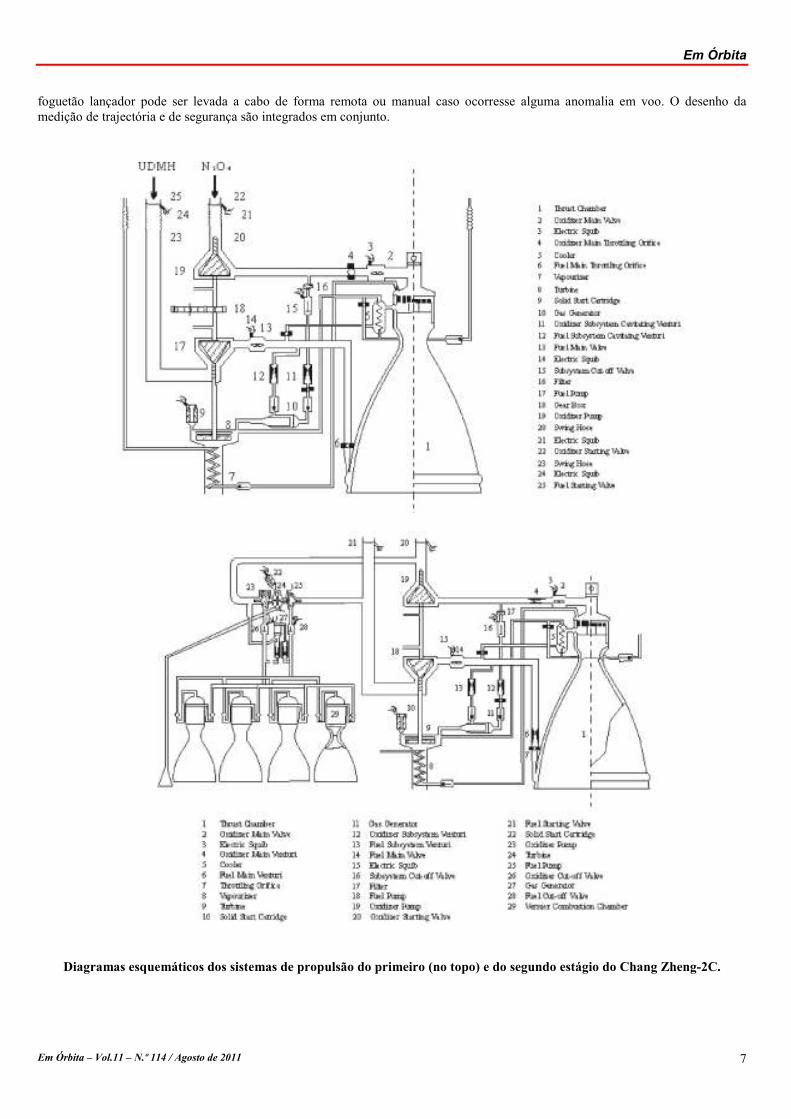
desenvolvendo uma força total de 798,1 kN. O CTS utiliza um motor de combustível sólido como motor principal e um sistema de controlo de reacção para ajustamentos de atitude. Nas páginas seguintes são mostrados os diagramas esquemáticos dos sistemas de propulsão do primeiro e do segundo estágio.
O sistema de controlo é utilizado para manter a estabilidade do voo do lançador e para levar a cabo a navegação e / ou orientação segundo o programa de voo pré-estabelecido. O sistema de controlo consiste de uma unidade de orientação, sistema de controlo de atitude, sequenciador, distribuição de energia, etc.
A unidade de orientação fornece dados de movimento e de atitude do lançador e controla o voo tendo em conta a trajectória predeterminada. O sistema de controlo de atitude controla a atitude de voo para garantir a estabilização e a atitude de injecção ao satélite a colocar em órbita. Para a configuração de dois estágios do Chang Zheng-2C, o sistema de controlo reorienta o CZ-2C após o final da queima dos motores vernier do segundo estágio. O lançador pode induzir uma rotação no satélite de acordo com os requerimentos do utilizador. A rotação pode atingir as 10 rpm. O sequenciador e o distribuidor de energia fornecem a energia eléctrica ao sistema de controlo, sendo também utilizada para iniciar os sistemas pirotécnicos e para gerar os sinais temporais para determinados eventos.
O sistema de telemetria funciona para medir e transmitir alguns parâmetros dos sistemas do lançador. O sistema de telemetria consiste de dois segmentos: sistemas de bordo e sistemas no solo. Os sistemas de bordo incluem sensores / conversores, dispositivos intermédios, bateria, distribuidores de energia, transmissores, sinalizador de rádio, etc. O sistema no solo está equipado com antenas, modem, gravador e processador de dados. O sistema de telemetria fornece os dados iniciais de injecção e gravação em tempo real aos dados de telemetria. No total, cerca de 300 parâmetros estão disponíveis para o CZ-2C. O CTS tem o seu próprio sistema de telemetria.
O sistema de rastreio e de segurança trabalha em conjunto com as estações terrestres para medir a trajectória e os parâmetros de injecção orbital finais. O sistema também fornece informação para meios de segurança. A auto-destruição do
1 – Carenagem de protecção da carga; 2 – Carga; 3 – CTS (topo do estágio para o CZ-2C); 4 – Adaptador de carga; 5 – Tanque de oxidante do segundo estágio; 6 – Secção inter-tanque do segundo estágio; 7 – tanque de combustível do segundo estágio; 8 – Motores vernier; 9 – Motor principal; 10 – Estrutura da secção inter-estágio; 11 – Tanque de oxidante do primeiro estágio; 12 – Secção inter-tanque do primeiro estágio; 13 – Tanque de combustível do primeiro estágio; 14 – secção de transição posterior; 15 – Secção posterior; 16 – Motores principais do primeiro estágio.
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 7
foguetão lançador pode ser levada a cabo de forma remota ou manual caso ocorresse alguma anomalia em voo. O desenho da medição de trajectória e de segurança são integrados em conjunto.
Diagramas esquemáticos dos sistemas de propulsão do primeiro (no topo) e do segundo estágio do Chang Zheng-2C.
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 8
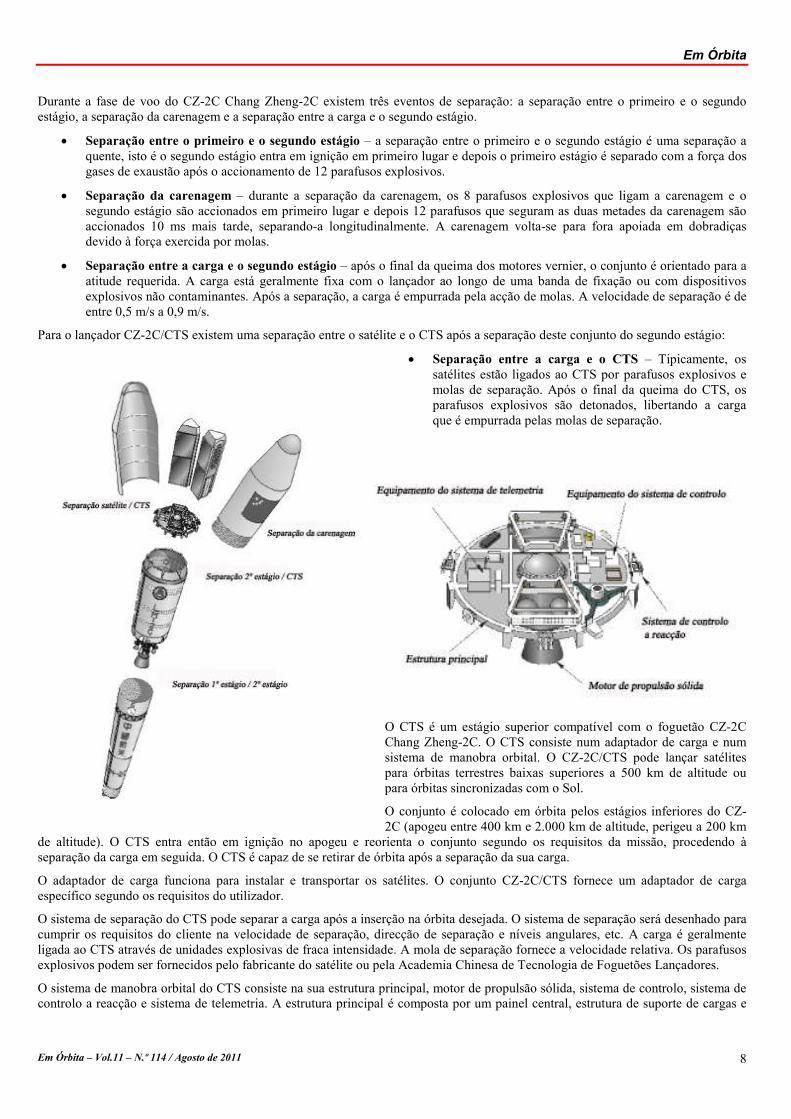
Durante a fase de voo do CZ-2C Chang Zheng-2C existem três eventos de separação: a separação entre o primeiro e o segundo estágio, a separação da carenagem e a separação entre a carga e o segundo estágio.
• Separação entre o primeiro e o segundo estágio – a separação entre o primeiro e o segundo estágio é uma separação a quente, isto é o segundo estágio entra em ignição em primeiro lugar e depois o primeiro estágio é separado com a força dos gases de exaustão após o accionamento de 12 parafusos explosivos.
• Separação da carenagem – durante a separação da carenagem, os 8 parafusos explosivos que ligam a carenagem e o segundo estágio são accionados em primeiro lugar e depois 12 parafusos que seguram as duas metades da carenagem são accionados 10 ms mais tarde, separando-a longitudinalmente. A carenagem volta-se para fora apoiada em dobradiças devido à força exercida por molas.
• Separação entre a carga e o segundo estágio – após o final da queima dos motores vernier, o conjunto é orientado para a atitude requerida. A carga está geralmente fixa com o lançador ao longo de uma banda de fixação ou com dispositivos explosivos não contaminantes. Após a separação, a carga é empurrada pela acção de molas. A velocidade de separação é de entre 0,5 m/s a 0,9 m/s.
Para o lançador CZ-2C/CTS existem uma separação entre o satélite e o CTS após a separação deste conjunto do segundo estágio:
• Separação entre a carga e o CTS – Tipicamente, os satélites estão ligados ao CTS por parafusos explosivos e molas de separação. Após o final da queima do CTS, os parafusos explosivos são detonados, libertando a carga que é empurrada pelas molas de separação.
O CTS é um estágio superior compatível com o foguetão CZ-2C Chang Zheng-2C. O CTS consiste num adaptador de carga e num sistema de manobra orbital. O CZ-2C/CTS pode lançar satélites para órbitas terrestres baixas superiores a 500 km de altitude ou para órbitas sincronizadas com o Sol.
O conjunto é colocado em órbita pelos estágios inferiores do CZ-2C (apogeu entre 400 km e 2.000 km de altitude, perigeu a 200 km
de altitude). O CTS entra então em ignição no apogeu e reorienta o conjunto segundo os requisitos da missão, procedendo à separação da carga em seguida. O CTS é capaz de se retirar de órbita após a separação da sua carga.
O adaptador de carga funciona para instalar e transportar os satélites. O conjunto CZ-2C/CTS fornece um adaptador de carga específico segundo os requisitos do utilizador.
O sistema de separação do CTS pode separar a carga após a inserção na órbita desejada. O sistema de separação será desenhado para cumprir os requisitos do cliente na velocidade de separação, direcção de separação e níveis angulares, etc. A carga é geralmente ligada ao CTS através de unidades explosivas de fraca intensidade. A mola de separação fornece a velocidade relativa. Os parafusos explosivos podem ser fornecidos pelo fabricante do satélite ou pela Academia Chinesa de Tecnologia de Foguetões Lançadores.
O sistema de manobra orbital do CTS consiste na sua estrutura principal, motor de propulsão sólida, sistema de controlo, sistema de controlo a reacção e sistema de telemetria. A estrutura principal é composta por um painel central, estrutura de suporte de cargas e

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 9
longarina. A parte inferior do painel está ligada ao motor de propulsão sólida e a parte superior está ligada com o suporte de cargas, formando um painel de apoio para os sistemas aviónicos. O cilindro tem uma forma estrutural de semi-monocoque. O motor de propulsão sólida fornece a força para as manobras do CTS. O impulso total do motor vai depender dos requerimentos específicos de cada missão. As características típicas são:
Diâmetro (m) 0,54
Comprimento total (m) <0,9
Massa total (kg) <160
Massa do propolente (kg) 121,7
Impulso específico (m/s) 2.804
Impulso total (ks) 341,3
Tempo de queima (s) 35
O CTS está equipado com um sistema de controlo independente que tem as seguintes funções: manter a estabilização do voo durante a fase de deriva e proporciona a orientação do conjunto para a atitude de queima do motor de propulsão sólida; activar o motor de propulsão sólida e controlar a atitude durante a queima; levar a cabo a correcção de velocidade terminal segundo os requisitos da missão; reorientar o conjunto e separar os veículos; e ajustar a orientação do CTS e iniciar a remoção de órbita. O sistema independente de telemetria funciona para medir e transmitir alguns parâmetros ambientais do CTS no solo e durante o voo. A telemetria também fornece alguns dados orbitais na separação da carga. O sistema de controlo de reacção executa os comandos do sistema de controlo. Os motores utilizam hidrazina pressurizada controlada por válvulas solenóides. Existem quatro tanques, dois tanques de gás e 16 motores.
O sistema de coordenadas do foguetão lançador (OXYZ) tem origem no centro de massa instantâneo do veículo, isto é no centro de massa integrado da combinação carga / veículo lançador, incluindo o adaptador, propolentes e carenagem, etc., caso seja aplicável.
Lançamento do foguetão CZ-2C Chang Zheng-2C (Y25) no dia 6 de Julho de 2011 transportando o satélite SJ-11 Shi Jian 11-03 desde a Plataforma de Lançamento 603 (SLS-2) do Centro de Lançamento de Satélites de Jiuquan.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 10
O eixo OX coincide com o eixo longitudinal do foguetão. O eixo OY é perpendicular ao eixo OX e está no interior do plano de lançamento oposto ao azimute de lançamento. Os eixos OX, OY e OZ formam um sistema ortogonal que segue a regra da mão direita.
A atitude de voo do eixo do veículo lançador está definida na figura ao lado. O fabricante do satélite define o sistema de coordenadas do satélite. A relação ou orientação entre o veículo lançador e os sistemas do satélite serão determinados ao longo da coordenação técnica para projectos específicos.
Missões que podem ser realizadas pelo CZ-2C
O foguetão CZ-2C Chang Zheng-2C é um veículo capaz de colocar cargas em órbitas terrestres baixas com uma capacidade de lançamento de 3.366 kg (para uma órbita a uma altitude de 200 km e uma inclinação de 63º). Adaptado com estágios superiores distintos, o CZ-2C pode levar a cabo várias missões.
• Injectar cargas em órbitas terrestres baixas, que é a principal missão do CZ-2C de dois estágios;
• Colocar cargas em órbitas terrestres baixas ou sincronizadas com o Sol, caso esteja equipado com o CTS.
A tabela seguinte mostra as especificações típicas para várias missões que podem ser levadas a cabo pelo foguetão CZ-2C Chang Zheng-2C
Versão Requisitos orbitais Capacidade de lançamento
Local de Lançamento
Órbita terrestre baixa CZ-2C Apogeu=185~2.000 km
Perigeu=185~400 km 3.366 kg (200 km/63º) Jiuquan
Órbita terrestre baixa CZ-2C/CTS Apogeu=400~2.000 km
Perigeu=400~2.000 km 2.800 kg (500 km/50º) Jiuquan
Órbita sincronizada com o Sol CZ-2C/CTS 400~2.000 km 1.456 kg (900 km) Jiuquan

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 11
Performance do CZ-2C Chang Zheng-2C9
No total já foram levadas a cabo 32 lançamentos do CZ-2C em todas as suas versões, tendo uma taxa de sucesso de 100%. A seguinte tabela mostra os últimos dez lançamentos levados a cabo pelo CZ-2C10.
Lançamento Veículo lançador
Data de Lançamento
Hora (UTC) Local de
Lançamento Satélites
2004-033 Y12 29-Ago-04 7:50:05 Jiuquan, 603 FSW-4 (1) (28402 2004-033A)
2004-046 Y15 18-ov-04 10:45:00 Xi Chang, LC1 Shiyan Weixing-2 (28479 2001-046A)
2005-027 Y13 2-Ago-05 7:30:02 Jiuquan, 603 FSW-4 (2) (28776 2005-027A)
2006-035 Y16 9-Set-06 7:00:04 Jiuquan, 603 Shi Jian-8 (29385 2006-035A)
2007-010 Y18 11-Abr-07 3:27:15 Taiyuan, LC1 Hai Yang-1B (31113 2007-010A)
2008-041 6-Set-08 3:25:03 Taiyuan, LC1 Huan Jing-1A (33320 2008-041A) Huan Jing-1B (33321 2008-041B)
2009-021 Y19 22-Abr-09 02:55:04,562 Taiyuan, LC1 YaoGan Weixing-6 (34839 2009-021A)
2009-061 Y21 12-ov-09 2:45:04 Jiuquan, 603 Shi Jian 11-01 (36088 2009-061A)
2011-030 Y25 6-Jul-11 04:28:03,993 Jiuquan, 603 Shi Jian 11-03 (37730 2011-030A)
2011-039 Y24 29-Jul-11 07:42:03,570 Jiuquan, 603 Shi Jian 11-02 (37765 2011-039A)
O foguetão CZ-2C Chang Zheng-2C de dois estágios é principalmente utilizado para levar a cabo missões destinadas à órbita terrestre baixa (altitude inferior a 500 km) e o CZ-2C Chang Zheng-2C/CTS é utilizado para colocar cargas em órbitas circulares em altitudes iguais ou superiores a 500 km, ou para missões em órbitas sincronizadas com o Sol.
O CZ-2C pode ser lançado desde o Centro de Lançamento de Satélites de Jiuquan (base principal), podendo também ser lançado desde o Centro de Lançamento de Satélites de Xi Chang e do Centro de Lançamento de Satélites de Taiyuan.
O quadro seguinte mostra a sequência de voo típica para o CZ-2C Chang Zheng-2C (também para a versão CTS).
Evento Chang Zheng-2C Tempo de Voo (s)
Chang Zheng-2C/CTS Tempo de Voo (s)
Lançamento 0,000 0,000 Manobra de arfagem 10,000 10,000 Final da queima 1º estágio 120,270 120,270 Separação entre 1 / 2º estágio 121,770 121,70 Separação da carenagem 231,670 231,670 Final da queima do motor principal 2º estágio 350,770 301,184 Final da queima dos motores vernier 2º estágio 566,234 613,333 Separação entre 2º estágio / CTS / 616,333 Ignição do CTS / 2.888,347 Início do ajustamento de velocidade terminal / 2.928,347 Separação da carga 569,234 3.013,347 Saída de órbita do CTS / 3.213,347
9 A performance de lançamento descrita tem em conta as assumpções de existem limitações no que diz respeito à segurança dos dispositivos de seguimento do lançador e limitações impostas pelas estações de seguimento; a massa do adaptador de carga e do sistema de separação estão incluídas na massa do lançador; é utilizada uma carenagem de protecção standard com um diâmetro de 3,35 metros e um comprimento de 8,368 metros; na separação da carenagem o calor aerodinâmico é inferior a 1.135 W/m2; o impulso total do motor de propulsão sólida do CTS pode ser ajustado tendo em conta os diferentes requisitos para a missão; e os valores orbitais são dados tendo em conta um raio equatorial médio de 6.378,10 km. 10 Para uma listagem completa dos lançamentos do CZ-2C Chang Zheng-2C ver o n.º 105 do Boletim Em Órbita de Dezembro de 2009.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 12
Evento Velocidade relativa (m/s)
Altitude de Voo (km)
Distância ao Solo (km)
Projecção Latitude Satélite
(º)
Projecção Longitude Satélite
(º) Lançamento 0,2 1,452 0,000 38,661 111,608 Final da queima 1º estágio 2.035,853 47,052 61,755 38,106 111,633 Separação entre 1 / 2º estágio 2.043,777 48,257 64,549 38,081 111,635 Separação da carenagem 3.698,167 117,618 352,768 35,490 111,729 Final da queima do motor principal 2º estágio 6.379,424 146,895 679,624 32,551 111,813 Final da queima dos motores vernier 2º estágio 7.917,684 181,142 2.825,723 13,252 112,076 Separação entre 2º estágio / CTS 7.918,657 181,104 2.848,800 13,045 112,077 Ignição do CTS 7.402,700 637,804 18.860,013 -44,220 -80,123 Início do ajustamento de velocidade terminal 7.512,356 639,455 18.971,228 -41,280 -80,001 Separação da carga 7.520,725 637,611 18,983,402 -36,557 -79,808
1 – Lançamento; 2- manobra de arfagem; 3 – Final da queima do primeiro estágio; 4 – Separação entre o primeiro e o segundo estágio; 5 – Separação da carenagem; 6 – Final da queima do motor principal do segundo estágio; 7 – Final da queima dos motores vernier do segundo estágio; 8 – Separação entre o segundo estágio e o CTS; 9 – Ignição do motor de propulsão sólida do CTS; 10 – Início do ajustamento de velocidade terminal; 11 – Separação do satélite; 12 – Saída de órbita do CTS.
Parâmetros característicos da trajectória de voo típica do foguetão CZ-2C. Tabela: Rui C. Barbosa.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 13
As carenagens do CZ-2C
A carga está protegida por uma carenagem que a isola de várias interferências da atmosfera, que inclui correntes de ar de alta velocidade, cargas aerodinâmicas, aquecimento aerodinâmico e ruídos acústicos, etc., enquanto que o lançador ascende através da atmosfera. A carenagem proporciona assim à carga um bom meio ambiente.
O aquecimento aerodinâmico é absorvido ou isolado pela carenagem. A temperatura no interior da carenagem é controlada dentro dos limites estabelecidos. Os ruídos acústicos gerados por correntes de ar e pelos motores do lançador são reduzidos para níveis permitidos para a respectiva carga.
A carenagem é separado e ejectada quando o foguetão lançador voa fora da atmosfera. A altura exacta da separação da carenagem é determinada pelo requisito de que o fluxo de calor aerodinâmico na separação da carenagem seja inferior a 1.135 W/m2.
Vários testes foram levados a cabo no desenvolvimento da carenagem do CZ-2C, incluindo testes em túneis de voo, testes térmicos, testes acústicos, testes de separação, testes de análise de modelos, testes de resistência, etc. Uma carenagem de protecção típica utilizada neste lançador tem um diâmetro de 3,35 metros e um comprimento de 8,368 metros. O comprimento da carenagem pode ser ajustado tendo em conta os requisitos da missão.
O volume estático da carenagem é a limitação física das dimensões máximas da configuração da carga a transportar. O volume estático é determinado pela consideração das deformações estimadas a nível dinâmico e estático do conjunto carenagem / carga por uma variedade de interferências durante o voo. Os volumes variam com diferentes tipos de carenagem e adaptadores de carga. Pode-se permitir que algumas saliências na carga possam exceder o volume estático máximo
(Φ3000) da secção cilíndrica da carenagem.
A estrutura da carenagem consiste numa abóbada, secção cónica frontal e secção cilíndrica. A secção cilíndrica consiste em duas partes: uma secção cilíndrica em favos de mel (superior) e uma secção cilíndrica química (inferior). A abóbada é um corpo semi-esférico com um raio de 1 metro, uma altura de 0,740 metros e um diâmetro de base de 1,930 metros. Consiste numa concha abobadada, um anel de base, um anel de encapsulamento e reforços.
A concha abobadada é uma estrutura em fibra de vidro com uma espessura de 8 mm. O anel de base, anel de encapsulamento e reforço são fabricados em ligas de alumínio de alta resistência. Uma cintura à base de borracha de sílica cobre o exterior da linha de divisão e um cinturão de borracha está comprimido entre as duas metades. Os cinturões de isolamento exterior e interior impedem a corrente de ar de entrar na carenagem durante o voo.
Volume estático da carenagem para o foguetão CZ-2C Chang Zheng-2C de dois estágios (em cima: interface 937B e interface 1194A) e para a versão CTS (ao lado, interface com parafusos explosivos).

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 14
A parte superior da secção bicónica é um cone de 15º com uma altura de 2,647 metros. O diâmetro do anel superior e do anel base é de 1,930 metros. A secção tem uma constituição em favos de mel de alumínio.
A secção cilíndrica é composta por duas partes. A parte inferior é fabricada em alumínio alterado quimicamente e tem uma altura de 1,581 metros. A parte superior é fabricada numa estrutura de alumínio em favos de mel e tem uma altura de 3,400 metros. Quase todas as portas de acessos estão localizadas na parte inferior. Existem 12 válvulas de ventilação na parte inferior com uma área total de 350 cm2. O comprimento da secção cilíndrica pode ser ajustado de acordo com os requisitos da missão.
O mecanismo de separação e ejecção da carenagem consiste em mecanismos de abertura laterais, mecanismo de abertura longitudinal e mecanismo de separação, accionados por molas e ganchos.
O anel base da carenagem está ligado com o segundo estágio por oito parafusos explosivos não contaminantes. O plano de separação longitudinal da carenagem está localizado no quadrante II-IV. O mecanismo de abertura longitudinal consiste em doze explosivos não contaminantes.
O mecanismo de separação da carenagem é composto por dois pares de dobradiças e doze molas. Cada metade da carenagem é suportada por duas dobradiças que se localizam no quadrante I e III. Existem seis molas de separação colocadas em cada metade da carenagem; o máximo de força exercida por cada mola é de 4 kN. Após a abertura da carenagem, cada metade roda em torno de uma dobradiça. Quando a taxe de rotação da metade da carenagem é superior a 15º/s, a carenagem é ejectada. O processo cinemático é exemplificado ao lado. Podem ser incorporadas na secção bicónica da carenagem e na secção cilíndrica janelas
transparentes às radiofrequências RF para fornecer ao satélite a capacidade de transmissão através da carenagem de acordo com as necessidades do utilizador. As janelas transparentes RF são fabricadas em fibra de vidro na qual a taxa de transparência é maior do que 85%. Podem ser proporcionadas portas de acesso à secção cilíndrica para permitir um acesso limitado ao satélite após a

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 15
colocação da carenagem. Algumas áreas da carenagem não podem ser seleccionadas para a localização das janelas de radiofrequência RF.
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 16
Tian Lian-1B, preparando o lançamento do TianGong O ano de 2011 é um ano extremamente importante para as ambições espaciais da China. Dando passos seguros no desenvolvimento dos seus veículos tripulados Shenzhou e conseguindo levar a cabo a sua primeira actividade extraveícular em 2008, a China prepara-se agora para levar a cabo o lançamento do módulo orbital TG-1 TianGong-1 que deverá acoplar com a SZ-8 Shenzhou-8, não tripulada, no último trimestre de 2011.
A realização da primeira acoplagem em órbita é um passo importante para o lançamento em 2012 das SZ-9 Shenzhou-9 e SZ-10 Shenzhou-10 que deverão transportar as primeiras tripulações para habitar o TianGong-1.
Antecipando o lançamento do TianGong-1, a China levou a cabo o lançamento do satélite de retransmissão de dados TL-1B TianLian-1B.
Os satélites TL-1 TianLian-1 (天链一号天链一号天链一号天链一号)
O sistema TianLian (Ligação no Céu) foi desenvolvido pela Academia Chinesa de Tecnologia Espacial (CAST) e é similar ao sistema Tracking and Data Relay Satellite System (TDRSS) dos Estados Unidos. A sua carga foi desenvolvida pela Corporação de
Tecnologia Estrela Espacial, uma companhia baseada em Pequim e pertencente ao CAST.
O sistema foi desenvolvido para satisfazer os requisitos de uma cobertura de longa duração e de alta cobertura na transmissão de dados e de comunicações.
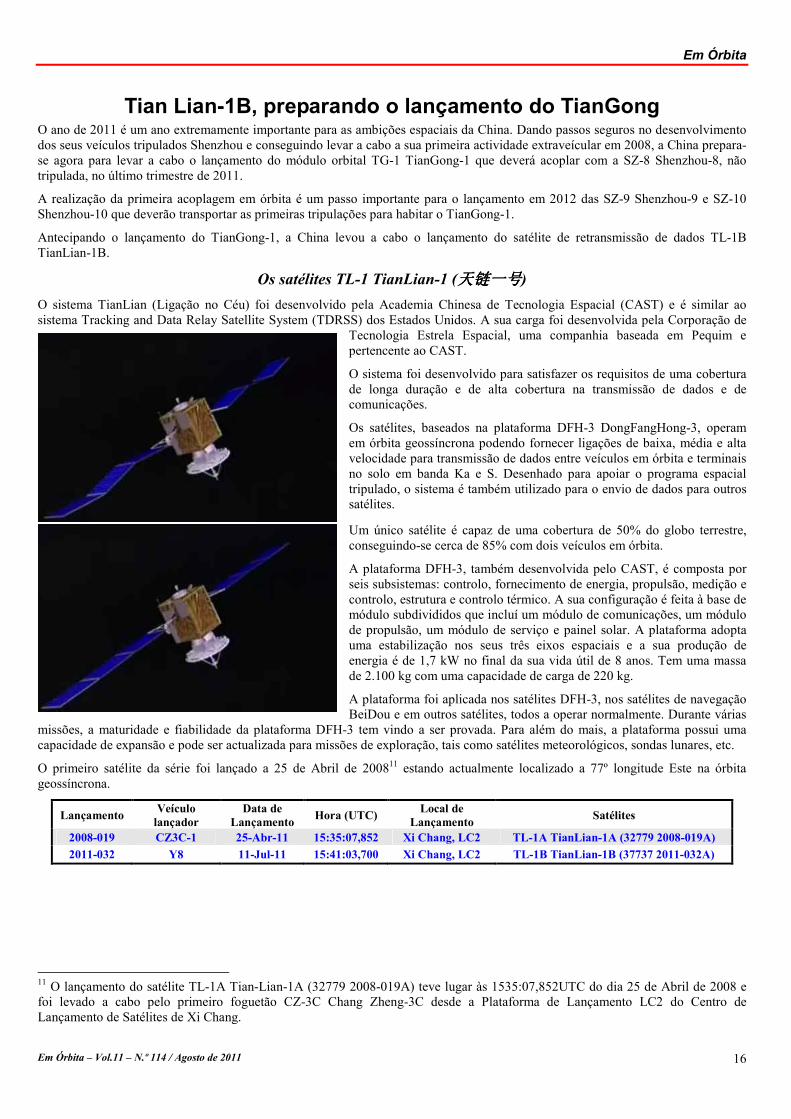
Os satélites, baseados na plataforma DFH-3 DongFangHong-3, operam em órbita geossíncrona podendo fornecer ligações de baixa, média e alta velocidade para transmissão de dados entre veículos em órbita e terminais no solo em banda Ka e S. Desenhado para apoiar o programa espacial tripulado, o sistema é também utilizado para o envio de dados para outros satélites.
Um único satélite é capaz de uma cobertura de 50% do globo terrestre, conseguindo-se cerca de 85% com dois veículos em órbita.
A plataforma DFH-3, também desenvolvida pelo CAST, é composta por seis subsistemas: controlo, fornecimento de energia, propulsão, medição e controlo, estrutura e controlo térmico. A sua configuração é feita à base de módulo subdivididos que incluí um módulo de comunicações, um módulo de propulsão, um módulo de serviço e painel solar. A plataforma adopta uma estabilização nos seus três eixos espaciais e a sua produção de energia é de 1,7 kW no final da sua vida útil de 8 anos. Tem uma massa de 2.100 kg com uma capacidade de carga de 220 kg.
A plataforma foi aplicada nos satélites DFH-3, nos satélites de navegação BeiDou e em outros satélites, todos a operar normalmente. Durante várias
missões, a maturidade e fiabilidade da plataforma DFH-3 tem vindo a ser provada. Para além do mais, a plataforma possui uma capacidade de expansão e pode ser actualizada para missões de exploração, tais como satélites meteorológicos, sondas lunares, etc.
O primeiro satélite da série foi lançado a 25 de Abril de 200811 estando actualmente localizado a 77º longitude Este na órbita geossíncrona.
Lançamento Veículo lançador
Data de Lançamento
Hora (UTC) Local de
Lançamento Satélites
2008-019 CZ3C-1 25-Abr-11 15:35:07,852 Xi Chang, LC2 TL-1A TianLian-1A (32779 2008-019A)
2011-032 Y8 11-Jul-11 15:41:03,700 Xi Chang, LC2 TL-1B TianLian-1B (37737 2011-032A)
11 O lançamento do satélite TL-1A Tian-Lian-1A (32779 2008-019A) teve lugar às 1535:07,852UTC do dia 25 de Abril de 2008 e foi levado a cabo pelo primeiro foguetão CZ-3C Chang Zheng-3C desde a Plataforma de Lançamento LC2 do Centro de Lançamento de Satélites de Xi Chang.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 17
Lançamento do TL-1B TianLian-1B
O lançamento do TL-1B TianLian-1B era já aguardado há vários meses e estava originalmente previsto para ter lugar a 12 de Julho de 2011, sendo no entanto antecipado em 24 horas devido às previsões de mau tempo para esse dia. A comunicação social oficial chinesa anunciou os preparativos para o lançamento a 10 de Julho, indicando que os preparativos do satélite e do seu foguetão estavam a decorrer normalmente.
O lançamento teria lugar às 1541:03,700UTC do dia 11 de Julho e todas as suas fases decorreram como previsto. O final da queima dos dois propulsores laterais de combustível líquido teve lugar às 1543:07UTC, separando-se às 1543:09UTC. Os dois propulsores cairiam nos condados de Jinsha e Renhui, província de Guizhou. O final da queima do primeiro estágio teve lugar às 1542:29UTC, separando-se do segundo estágio às 1542:31UTC. A ignição do segundo estágio tinha lugar nesta altura. Os restos do primeiro estágio cairiam perto da vila de Shuangba localizada pêro da cidade de Dadi, condado de Zhenyuan e província de Ghizhou.
A carenagem de protecção ter-se-á separado às 1545:23UTC e terão caído perto da vila de Qingcao, província de Jiangxi na região de Sichuan. O final da queima do motor principal do 2º estágio ocorria às 1546:32UTC e o final da queima dos motores vernier tinha lugar às 1546:37UTC. A separação entre o 2º e o 3º estágio ocorria às 1546:38UTC, com o 3º estágio a entrar em ignição pela primeira vez neste momento. Esta queima terminaria às 1551:55UTC, iniciando-se uma fase não propulsiva do lançamento 4 segundos mais tarde. A segunda ignição do 3º estágio teria início pelas 1603:07UTC, terminando às 1605:12UTC. Nesta fase iniciava-se uma manobra de ajustamento de velocidade que terminaria pelas 1605:59UTC. A separação entre o satélite TL-1B TianLian-1B e o 3º estágio do foguetão lançador CZ-3C Chang Zheng-3C (Y8) ocorria pelas 1607:19UTC.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 18

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 19

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 20
As imagens em baixam mostram as equipas de populares a recuperar algumas partes do foguetão lançador CZ-3C Chang Zheng-3C que colocou em órbita o satélite TL-1B TianLian-1B.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 21
O CZ-3C Chang Zheng-3C (长征三号丙火箭长征三号丙火箭长征三号丙火箭长征三号丙火箭)
O foguetão lançador CZ-3C Chang Zheng-3C é um veículo a três estágios de propulsão líquida que combina os estágios do foguetão CZ-3B Chang Zheng-3B com dois propulsores laterais de combustível líquido do foguetão CZ-2E Chang Zheng-2E.
O desenvolvimento do CZ-3C Chang Zheng-3C teve início em 1995 mas aparentemente o seu programa foi suspenso entre 1996 e 2000 devido ao acidente registado com o foguetão CZ-3B Chang Zheng-3B em 1996. O seu desenvolvimento é iniciado ao mesmo tempo do desenvolvimento do foguetão CZ-3B e tendo por base o foguetão CZ-3A Chang Zheng-3A.
O foguetão tem um comprimento total de 54,838 metros, podendo atingir os 55,638 metros dependendo da carenagem de protecção a utilizar, podendo ser equipado com uma carenagem com um comprimento de 9,56 metros (diâmetro de 4,00 metros) ou de 9,777 metros (diâmetro de 4,20 metros). A sua massa no
lançamento é de 345.000 kg e é capaz de colocar uma carga de 3.800 kg numa órbita de transferência para a órbita geossíncrona.
Estágio Propulsores laterais Primeiro estágio
L-180
Segundo estágio
L-35
Terceiro estágio
H-18
Massa no lançamento (kg) 345.000
Propolente N2O4/UDMH LOX/LH2
Massa do Propolente (kg) 37.746 (x2) 171.775 49.605 18.193
Massa do estágio (kg) 41.000 (x2) 179.000 55.000 21.000
Motor YF-25 YF-21C
YF-24E
YF-22E (principal)
YF-23C (vernier)
YF-75
Força (k) 740,4 (x2) 2.961,6 742 (principal)
11,8 x 4 (vernier) 4.312
Impulso específico (s) 291 189 297 440
Imp. esp. nível do mar (s) 261 259 260 -
Tempo de queima (s) 128 155 110 470
Diâmetro (m) 2,25 3,35 3,35 3,0
Comprimento (m) 15,326 23,272 9,943 12,375
Comprimento carenagem (m) 9,56 (9,777)
Diâmetro carenagem (m) 4,0 (4,2)
Comprimento total (m) 54,838 (55,638)
A capacidade do CZ-3C para a órbita de transferência para a órbita geossíncrona atinge os 3.800 kg ao utilizar quatro propulsores laterais e um segundo estágio mais alongado. O CZ-3C proporciona dois tipos de carenagens de protecção, dois tipos de processos de montagem da carenagem e quatro tipos distintos de interfaces de carga que proporcionam assim aos utilizadores mais flexibilidade.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 22
O sistema do CZ-3C é composto pela estrutura do foguetão lançador, sistema de propulsão, sistema de controlo, sistema de telemetria, sistema de rastreio e segurança, sistema de controlo de atitude e de gestão de propolente na fase orbital não propulsiva, sistema de utilização de propolente criogénico, sistema de separação e sistema auxiliar.
A estrutura do foguetão actua de forma a suportar as várias cargas internas e externas no lançador durante o transporte, elevação (colocação na plataforma de lançamento) e voo. A estrutura do foguetão também combina todos os subsistemas em conjunto. A estrutura do foguetão é composta pelos propulsores, primeiro estágio, segundo estágio, terceiro estágio e carenagem de protecção. A figura na página seguinte mostra a configuração do foguetão CZ-3C Chang Zheng-3C.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 23

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 24
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 25
Cada propulsor lateral é composto pela zona frontal, tanque de oxidante, zona inter-tanque, tanque de combustível, secção posterior, secção de cauda, estabilizador, válvulas e condutas, etc.
O primeiro estágio é composto pela secção inter-estágio, tanque de oxidante, inter-tanque, tanque de combustível, secção posterior, secção de cauda, válvulas e condutas, etc.
O segundo estágio é composto pelo tanque de oxidante, inter-tanque, tanque de combustível, válvulas e condutas, etc.
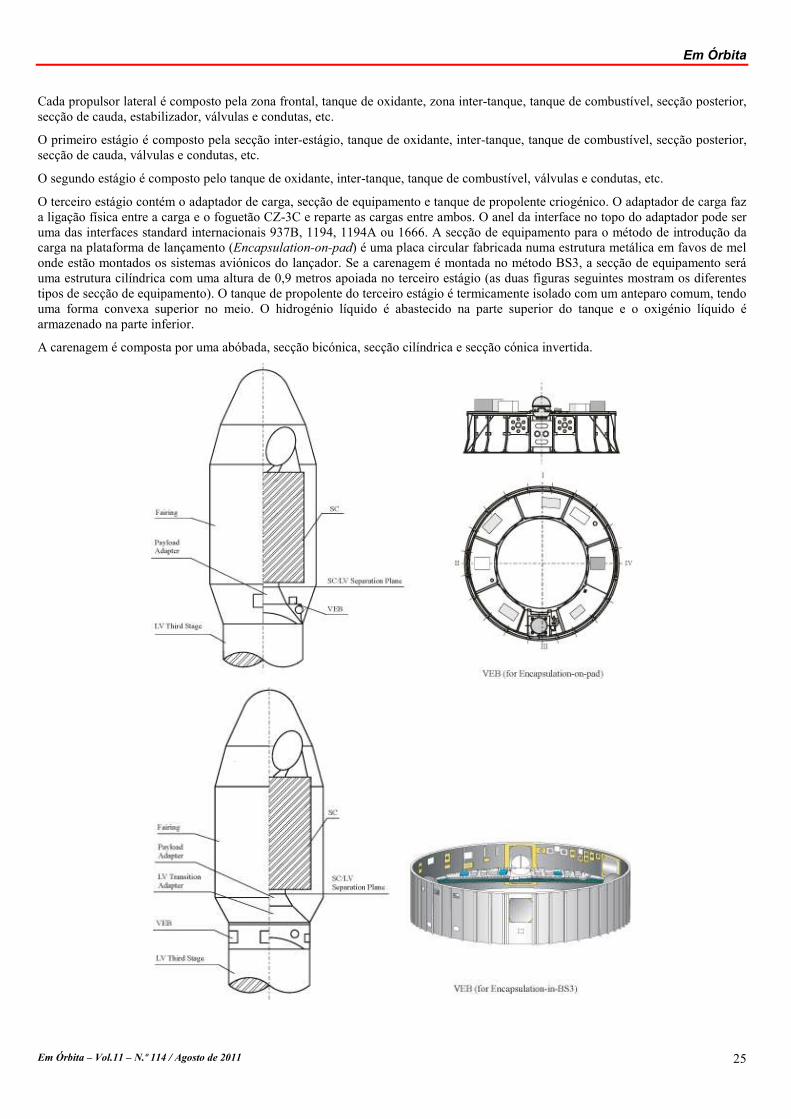
O terceiro estágio contém o adaptador de carga, secção de equipamento e tanque de propolente criogénico. O adaptador de carga faz a ligação física entre a carga e o foguetão CZ-3C e reparte as cargas entre ambos. O anel da interface no topo do adaptador pode ser uma das interfaces standard internacionais 937B, 1194, 1194A ou 1666. A secção de equipamento para o método de introdução da carga na plataforma de lançamento (Encapsulation-on-pad) é uma placa circular fabricada numa estrutura metálica em favos de mel onde estão montados os sistemas aviónicos do lançador. Se a carenagem é montada no método BS3, a secção de equipamento será uma estrutura cilíndrica com uma altura de 0,9 metros apoiada no terceiro estágio (as duas figuras seguintes mostram os diferentes tipos de secção de equipamento). O tanque de propolente do terceiro estágio é termicamente isolado com um anteparo comum, tendo uma forma convexa superior no meio. O hidrogénio líquido é abastecido na parte superior do tanque e o oxigénio líquido é armazenado na parte inferior.
A carenagem é composta por uma abóbada, secção bicónica, secção cilíndrica e secção cónica invertida.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 26
O sistema de propulsão, incluindo motores e sistema de fornecimento / pressurização, gera a força dianteira e de controlo necessária para o voo. O terceiro estágio, propulsores laterais e segundo estágio, utilizam propolentes armazenáveis, ist é tetróxido de azoto (N2O4) e dimetil hidrazina assimétrica (UDMH). Os tanques de propolente são pressurizados pelos sistemas de propulsão regenerativos. Existem quatro motores em paralelo no primeiro estágio. Os motores podem ser orientados em direcções tangenciais. A força de cada motor é de 740,4 kN. Os quatro sistemas de propulsão utilizam os mesmos motores. Existe um motor principal e quatro motores vernier no segundo estágio. A força total é de 789,1 kN.
O terceiro estágio utiliza propolentes criogénicos, isto é hidrogénio líquido (LH2) e oxigénio líquido (LOX). Dois motores universais em suspensões cardan proporcionam uma força total de 157 kN. O rácio de expansão dos motores é de 80:1 e o impulso específico é de 4.312 Ns/kg. O tanque de LH2 é pressurizado por hélio e por um sistema regenerador, e o tanque de LOX é pressurizado por hélio aquecido e por um sistema regenerador.
O sistema de controlo é utilizado para manter a estabilidade do voo do lançador e para levar a cabo a navegação e / ou orientação segundo o programa de voo pré-estabelecido. O sistema de controlo consiste de uma unidade de orientação, sistema de controlo de atitude, sequenciador, distribuição de energia, etc. o sistema de controlo adopta uma plataforma inercial de quatro eixos, computador de bordo e dispositivos digitais de controlo de atitude. Algumas tecnologias avançadas são aplicadas no sistema de controlo, tais como sequenciadores electrónicos programáveis, decoplagem de três canais, controlo de duplo parâmetro e compensação em tempo real para erros de medição. Estas tecnologias tornam o lançador muito flexível para várias missões.
O sistema de telemetria funciona para medir e transmitir alguns parâmetros dos sistemas do lançador. Alguns dados medidos podem ser processados em tempo real. O sistema de telemetria recebe energia tendo em conta a distribuição dos sensores e codificação dos dados. As medições dos sinais de comando são digitalizadas. O fornecimento de energia e os testes são levados a cabo de forma automática. Os conversores digitais a bordo são inteligentes e cerca de 700 parâmetros são medidos.
O sistema de rastreio e de segurança mede os dados da trajectória e parâmetros de injecção orbital finais. O sistema também fornece informação para meios de segurança. A auto-destruição do foguetão lançador seria levada a cabo de forma remota caso ocorresse alguma anomalia em voo. O desenho da medição de trajectória e de segurança são integrados em conjunto.
O sistema de controlo de atitude e de gestão de propolente na fase de voo não propulsionada leva a cabo o controlo de atitude e gestão de propolente em órbita e reorienta o lançador antes da separação da carga. Um motor alimentado por hidrazina em pressão trabalha de forma intermitente neste sistema que pode ser accionado repetidamente segundo os comandos recebidos.
O sistema de utilização dos propolentes criogénicos mede em tempo real o nível de propolentes no interior dos tanques do terceiro estágio e ajusta o nível de consumo de oxigénio líquido para tornar os propolentes residuais numa proporção óptima. O ajustamento é utilizado para compensar o desvio da performance do motor, estrutura da massa, carga de propolente, etc., para o propósito de se obter uma maior capacidade de lançamento. O sistema contém um processador, sensores de nível de propolente e válvulas de ajustamento.
Os seguintes esquemas representam a estrutura dos sistemas de propulsão do primeiro, segundo e terceiro estágios.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 27
Durante a fase de voo do CZ-3C Chang Zheng-3C existem cinco eventos de separação: a separação dos dois propulsores laterais, a separação entre o segundo e o primeiro estágio, a separação entre o segundo e o terceiro estágio, a separação da carenagem e a separação entre a carga e o terceiro estágio.
• Separação dos propulsores – os propulsores laterais estão acoplados ao primeiro estágio por três piro-mecanismos localizados na secção frontal e por mecanismos de separação na secção posterior. Quatro pequenos foguetões geram forças de separação para o exterior após a abertura simultânea dos mecanismos de separação.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 28
• Separação entre o primeiro e o segundo estágio – a separação entre o primeiro e o segundo estágio é uma separação a quente, isto é o segundo estágio entra em ignição em primeiro lugar e depois o primeiro estágio é separado com a força dos gases de exaustão após o accionamento de 14 parafusos explosivos.
• Separação entre o segundo e o terceiro estágio – a separação entre o segundo e o terceiro estágio é uma separação a frio. Os parafusos explosivos são accionados em primeiro lugar e depois pequenos retro foguetões no segundo estágio são accionados para gerar a força de separação.
• Separação da carenagem – durante a separação da carenagem, os parafusos explosivos que ligam a carenagem e o terceiro estágio são accionados em primeiro lugar e depois todos os dispositivos pirotécnicos que ligam as duas metades da carenagem são accionados, com a carenagem a ser separada longitudinalmente. A carenagem volta-se para fora apoiada em dobradiças devido à força exercida por molas.
• Separação entre a carga e o terceiro estágio – a carga está fixa com o lançador ao longo de uma banda de fixação. Após a separação, a carga é empurrada pela acção de molas.
O sistema auxiliar funciona antes do lançamento e inclui unidades de monitorização e de medição no solo tais como verificação do nível de abastecimento de propolente e temperatura, medição da estanquicidade, fornecimento de ar condicionado para a carenagem de protecção, etc.
O sistema de coordenadas do foguetão lançador (OXYZ) tem origem no centro de massa instantâneo do veículo, isto é no centro de massa integrado da combinação carga / veículo lançador, incluindo o adaptador, propolentes e carenagem, etc., caso seja aplicável. O eixo OX coincide com o eixo longitudinal do foguetão. O eixo OY é perpendicular ao eixo OX e estão no interior do plano de lançamento 180º para lá do azimute de lançamento. Os eixos OX, OY e OZ formam um sistema ortogonal que segue a regra da mão
direita.
A atitude de voo do eixo do veículo lançador está definida na figura ao lado. O fabricante do satélite define o sistema de coordenadas do satélite. A relação ou orientação entre o veículo lançador e os sistemas do satélite serão determinados ao longo da coordenação técnica para projectos específicos.
Missões que podem ser realizadas pelo CZ-3C
O foguetão CZ-3C Chang Zheng-3C é um veículo potente e versátil que é capaz de levar a cabo as seguintes missões:
• Transportar cargas para órbitas de transferência para a órbita geossíncrona (GTO). Esta será a função primária do CZ-3C e o objectivo da sua concepção. Após a separação do CZ-3C, o satélite irá transferir-se da órbita GTO para a órbita geossíncrona GEO). Esta é a órbita operacional na qual o período orbital do satélite coincide com o período de rotação da Terra, 24 horas, e o plano orbital coincide com o plano do equador (ver figura em baixo);
• Injectar cargas numa órbita terrestre baixa (LEO) localizada abaixo de uma altitude média de 2.000 km;
• Injectar cargas em órbitas sincronizadas com o Sol (SSO). O plano destas órbitas encontra-se ao longo da direcção de rotação do eixo de rotação da Terra ou aponta para a rotação da Terra em torno do Sol. A velocidade angular do satélite é igual à velocidade angular média da Terra em torno do Sol.
• Lançar sondas espaciais para lá do campo gravitacional da Terra.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 29
Performance do CZ-3C Chang Zheng-3C
No total já foram levadas a cabo 6 lançamentos do CZ-3C, tendo uma taxa de sucesso de 100%. O primeiro lançamento do CZ-3C teve lugar a 25 de Abril de 2008, colocando em órbita o satélite de comunicações e transmissão de dados TL-1 Tian Lian-1. A seguinte tabela mostra os lançamentos levados a cabo pelo CZ-3C:
Lançamento Veículo lançador Data de
Lançamento Hora (UTC) Satélites
2008-019 CZ3C-1 25-Abr-08 15:35:07,852 TL-1A Tian Lian-1A (32779 2008-019A) 2009-018 Y3 14-Abr-09 16:16:03 BeiDou-2 'Compass-G2' (34779 2009-018A) 2010-001 Y2 16-Jan-10 16:12:04,391 BeiDou-2 'Compass-G1' (36287 2010-001A) 2010-024 Y4 2-Jun-10 13:53:04,524 BeiDou-2 'Compass-G3' (36590 2010-024A) 2010-050 Y7 1-Out-10 10:59:57,345 Cheng'e-2 (37174 2010-050A) 2010-057 Y5 31-Out-10 16:26:09,956 BeiDou-2 ‘Compass-G4’ (37210 2010057A) 2011-032 Y8 11-Jul-11 15:41:03,700 TL-1B Tian Lian-1B (37737 2011-032A)
Descrição da missão do CZ-3C12
O CZ-3C é principalmente utilizado para missões para a órbita GTO, sendo a GTO standard recomendada ao utilizador do veículo. O CZ-3C coloca a carga numa GTO standard com os seguintes parâmetros a partir de Xi Chang: altitude do perigeu – 200 km; altitude do apogeu – 35.959 km, inclinação 28,5º; argumento do perigeu – 178º (estes parâmetros representam a órbita instantânea a quando da separação do satélite do terceiro estágio; A altitude do perigeu é equivalente a uma altitude real de 35.786 km na passagem do primeiro perigeu devido a perturbações causadas pela forma oblatada da Terra).
12 A performance do foguetão CZ-3C Chang Zheng-3C aqui discutida é baseada na assumpção de que o veículo é lançado desde o Centro de Lançamento de Satélites de Xi Chang tendo em conta as limitações relevantes no que diz respeito à segurança e requerimentos de rastreio a partir do solo; tem-se em conta que o azimute de lançamento é de 97,5º; a massa do adaptador de carga e do sistema de separação não estão incluídas na massa da carga; o terceiro estágio do CZ-3C transporta a quantidade suficiente de propolente para atingir a órbita pretendida com uma probabilidade superior a 99,73%; por altura da separação da carenagem de protecção o fluxo aerodinâmico é inferior a 1.135 W/m2; e os valores das altitudes orbitais são determinados em relação a uma Terra esférica com um raio de 6.378 km.
Esta tabela mostra os lançamentos orbitais levados a cabo pelo foguetão CZ-3C Chang Zheng-3C. Todos os lançamentos são levados a cabo desde o Centro de Lançamentos de Satélites de Xi Chang. Tabela: Rui C. Barbosa.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 30
Os quadros seguintes mostram a sequência de voo típica do CZ-3C Chang Zheng-3C.
Evento Tempo de Voo (s) Lançamento 0,000 Manobra de arfagem 10,000 Final da queima dos propulsores 127,491 Separação dos propulsores 128,991 Final da queima 1º estágio 145,159 Separação entre 1 / 2º estágio 146,659 Separação da carenagem 258,659 Final da queima do motor principal 2º estágio 328,000 Final da queima dos motores vernier 2º estágio 333,000 Separação entre 2º / 3º estágio; Primeira ignição 3º estágio 334,000 Final da primeira queima 3º estágio 650,605 Início da fase não propulsiva 654,105 Fim da fase não propulsiva / Segunda ignição 3º estágio 1323,242 Final da segunda queima 3º estágio / Início do ajustamento de velocidade 1447,866 Fim do ajustamento de velocidade 1494,866
Separação da carga 1574,866
Evento Altitude de Voo (km)
Distância ao Solo (km)
Projecção Latitude Satélite
(º)
Projecção Longitude Satélite
(º) Lançamento 1,825 0,000 28,246 102,027 Final da queima dos propulsores 48,695 50,554 28,184 102,537 Separação dos propulsores 49,987 52,901 28,181 102,560 Final da queima 1º estágio 64,658 82,016 28,144 102,854 Separação entre 1 / 2º estágio 66,083 85,079 28,140 102,885 Separação da carenagem 147,940 374,700 27,723 105,790 Final da queima do motor principal 2º estágio 181,940 640,597 27,275 108,433 Final da queima dos motores vernier 2º estágio 184,323 663,670 27,233 108,659 Separação entre 2º / 3º estágio; Primeira ignição 3º estágio 184,786 667,927 27,225 108,704 Final da primeira queima 3º estágio 208,710 2464,996 22,775 125,847 Início da fase não propulsiva 208,570 2490,003 22,699 126,076 Segunda ignição 3º estágio 194,809 7295,242 3,232 165,880 Final da segunda queima 3º estágio 215,792 8541,619 -2,454 175,552 Fim do ajustamento de velocidade terminal 226,394 8730,789 -3,301 177,030 Separação da carga 295,051 9478,806 -6,626 182,908
Sequência de voo típica do foguetão CZ-3C Chang Zheng-3C Tabela: Rui C. Barbosa.
Parâmetros característicos da trajectória de voo típica do foguetão CZ-3C Chang Zheng-3C Tabela: Rui C. Barbosa.
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 31
As carenagens do CZ-3C
A carga está protegida por uma carenagem que a isola de várias interferências da atmosfera, que inclui correntes de ar de alta velocidade, cargas aerodinâmicas, aquecimento aerodinâmico e ruídos acústicos, etc., enquanto que o lançador ascende através da atmosfera. A carenagem proporciona assim à carga um bom meio ambiente.
O aquecimento aerodinâmico é absorvido ou isolado pela carenagem. A temperatura no interior da carenagem é controlada dentro dos limites estabelecidos. Os ruídos acústicos gerados por correntes de ar e pelos motores do lançador são reduzidos para níveis permitidos para a respectiva carga.
A carenagem é separado e ejectada quando o foguetão lançador voa fora da atmosfera. A altura exacta da separação da carenagem é determinada pelo requisito de que o fluxo de calor aerodinâmico na separação da carenagem seja inferior a 1.135 W/m2.
Vinte e dois tipos de testes foram levados a cabo no desenvolvimento da carenagem do CZ-3B, incluindo testes em túneis de voo, testes térmicos, testes acústicos, testes de separação, testes de análise de modelos, testes de resistência, etc.
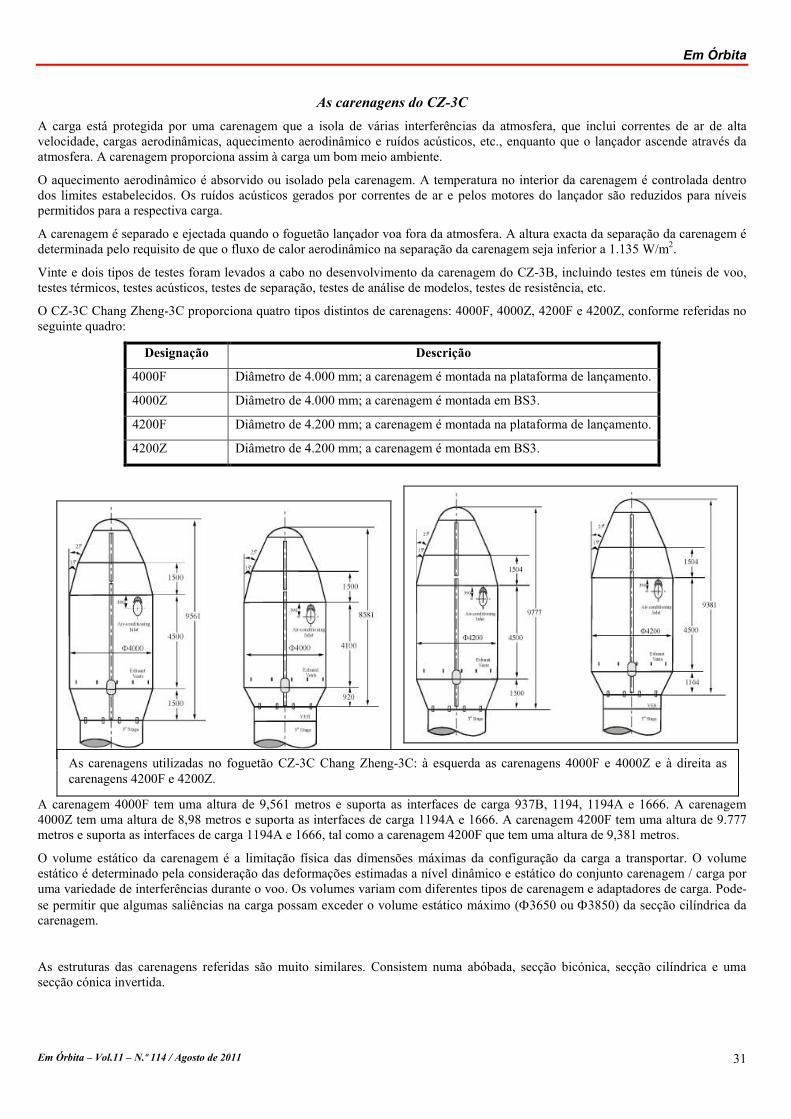
O CZ-3C Chang Zheng-3C proporciona quatro tipos distintos de carenagens: 4000F, 4000Z, 4200F e 4200Z, conforme referidas no seguinte quadro:
Designação Descrição
4000F Diâmetro de 4.000 mm; a carenagem é montada na plataforma de lançamento.
4000Z Diâmetro de 4.000 mm; a carenagem é montada em BS3.
4200F Diâmetro de 4.200 mm; a carenagem é montada na plataforma de lançamento.
4200Z Diâmetro de 4.200 mm; a carenagem é montada em BS3.
A carenagem 4000F tem uma altura de 9,561 metros e suporta as interfaces de carga 937B, 1194, 1194A e 1666. A carenagem 4000Z tem uma altura de 8,98 metros e suporta as interfaces de carga 1194A e 1666. A carenagem 4200F tem uma altura de 9.777 metros e suporta as interfaces de carga 1194A e 1666, tal como a carenagem 4200F que tem uma altura de 9,381 metros.
O volume estático da carenagem é a limitação física das dimensões máximas da configuração da carga a transportar. O volume estático é determinado pela consideração das deformações estimadas a nível dinâmico e estático do conjunto carenagem / carga por uma variedade de interferências durante o voo. Os volumes variam com diferentes tipos de carenagem e adaptadores de carga. Pode-se permitir que algumas saliências na carga possam exceder o volume estático máximo (Φ3650 ou Φ3850) da secção cilíndrica da carenagem.
As estruturas das carenagens referidas são muito similares. Consistem numa abóbada, secção bicónica, secção cilíndrica e uma secção cónica invertida.
As carenagens utilizadas no foguetão CZ-3C Chang Zheng-3C: à esquerda as carenagens 4000F e 4000Z e à direita as carenagens 4200F e 4200Z.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 32
A abóbada é um corpo semi-esférico com um raio de 1 metros, uma altura de 0,661 metros e um diâmetro de base de 1,890 metros. Consiste numa concha abobadada, um anel de base, um anel em encapsulamento e reforços.
A concha abobadada é uma estrutura em fibra de vidro com uma espessura de 8 mm. O anel de base, anel de encapsulamento e reforço são fabricados em ligas de alumínio de alta resistência. Uma cintura à base de borracha de sílica cobre o exterior da linha de divisão e um cinturão de borracha está comprimido entre as duas
metades. Os cinturões de isolamento exterior e interior impedem a corrente de ar de entrar na carenagem durante o voo.
A parte superior da secção bicónica é um cone de 25º com uma altura de 1,400 metros e a parte inferior é um cone de 15º com uma altura de 1,500 metros. A parte superior e a parte inferior estão interligadas. O diâmetro do anel superior é de 1,890 metros e o diâmetro do anel inferior é de 4,000 metros.
A estrutura da secção cilíndrica é idêntica à da secção bicónica, isto é tem uma constituição em favos de mel de alumínio. Existem duas entradas de ar condicionado na parte superior da secção cilíndrica e 10 saídas de exaustão com uma área total de 191 cm2 na parte inferior.
A secção cónica invertida é uma estrutura reforçada monocoque. É composta por um anel superior, um anel intermédio, reforços inferiores longitudinais e cobertura com tratamento químico. Para as carenagens 4000F e 4200F, estão disponíveis portas de acesso nesta secção. Para as carenagens 4000Z e 4200Z não existem portas de acesso.
A superfície exterior da carenagem, especialmente a superfície da abóbada e da secção bicónica, sofre um aquecimento devido à corrente de ar a alta velocidade durante o lançamento. Deste modo, são adoptadas medidas que evitam o aquecimento para garantir que a temperatura na superfície interior seja inferior a 80ºC.
A superfície exterior da secção bicónica e da secção cilíndrica são cobertas por um painel de cortiça especial. O painel na secção bicónica tem uma espessura de 1,2 mm e na secção cilíndrica tem uma espessura de 1,0 mm.
O mecanismo de separação e ejecção da carenagem consiste em mecanismos de abertura laterais, mecanismo de abertura longitudinal e mecanismo de separação. Para as carenagens 4000F e 4200F o anel na base da carenagem está ligado com a secção curta dianteira do tanque criogénico do terceiro estágio por doze parafusos explosivos não contaminantes. Para as carenagens 4000Z e 4200Z a base do anel na carenagem está ligado com o topo da secção de equipamento por parafusos explosivos não contaminantes. A fiabilidade de um parafuso explosivo é de 0,9999.
O plane de separação longitudinal da carenagem é o quadrante II-IV (XOZ). O mecanismo de abertura longitudinal consiste em parafusos entalhados, mangueiras, mangueiras com cordas explosivas e detonadores, suportes dos detonadores e dois parafusos explosivos. Duas mangueiras de aço percorrem a linha de separação da carenagem. Dois detonadores não sensíveis estão fixados a cada extremidade das cordas explosivas. A quando da separação, os dois parafusos não contaminantes são detonados e cortados. Os detonadores fazem as cordas explosivas entrar em ignição, gerando-se gás a alta pressão o que leva à expansão das mangueiras de aço e à quebra dos parafusos entalhados. Nesta sequência, a carenagem separa-se em duas metades. O gás gerado fica selado nas mangueiras de aço, não havendo assim contaminação da carga.
Uma das duas cordas explosivas pode ser detonada apenas se um dos quatro detonadores é accionado. Se uma das cordas explosivas é accionada, todos os parafusos entalhados podem ser quebrados, isto é a carenagem pode separar-se. Assim, a fiabilidade da separação longitudinal é muito elevada.
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 33
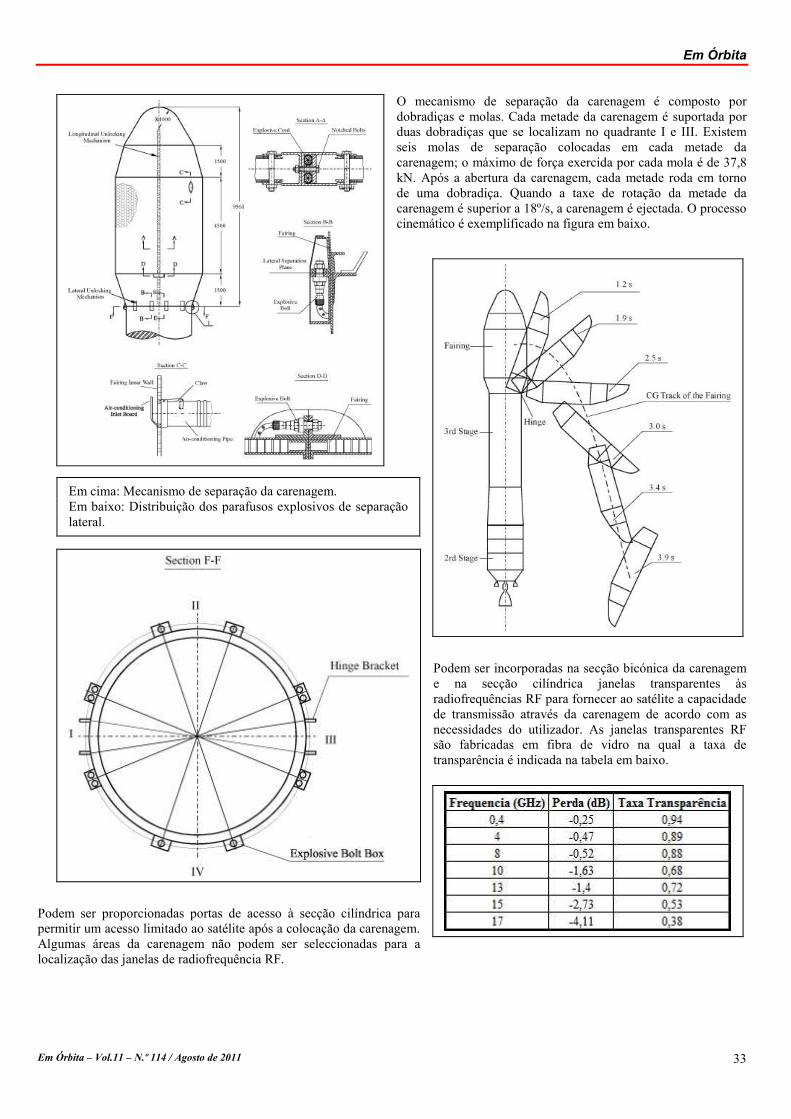
O mecanismo de separação da carenagem é composto por dobradiças e molas. Cada metade da carenagem é suportada por duas dobradiças que se localizam no quadrante I e III. Existem seis molas de separação colocadas em cada metade da carenagem; o máximo de força exercida por cada mola é de 37,8 kN. Após a abertura da carenagem, cada metade roda em torno de uma dobradiça. Quando a taxe de rotação da metade da carenagem é superior a 18º/s, a carenagem é ejectada. O processo cinemático é exemplificado na figura em baixo.
Podem ser incorporadas na secção bicónica da carenagem e na secção cilíndrica janelas transparentes às radiofrequências RF para fornecer ao satélite a capacidade de transmissão através da carenagem de acordo com as necessidades do utilizador. As janelas transparentes RF são fabricadas em fibra de vidro na qual a taxa de transparência é indicada na tabela em baixo.
Podem ser proporcionadas portas de acesso à secção cilíndrica para permitir um acesso limitado ao satélite após a colocação da carenagem. Algumas áreas da carenagem não podem ser seleccionadas para a localização das janelas de radiofrequência RF.
Em cima: Mecanismo de separação da carenagem. Em baixo: Distribuição dos parafusos explosivos de separação lateral.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 34
Seis novos satélites Globalstar Continuando a renovar a sua frota de satélites de comunicações móveis, a Globalstar contratou a Starsem, uma subsidiária da Arianespace, para colocar em órbita seis novos satélites tal como já tinha acontecido em Outubro de 2010.
14A14 Soyuz-2, evolução
O foguetão 14A14 Soyuz-2 representa a mais recente evolução do épico míssil balístico intercontinental R-7 desenvolvido por Sergei Korolev nos anos 50 do século passado. O novo lançador apresenta motores melhorados, modernos sistemas aviónicos digitais e uma reduzida participação de componentes de fabrico não russo.
O lançador é também conhecido pela designação Soyuz-ST e foi especialmente desenhado para uma utilização comercial aumentando a sua performance geral apesar de o desenho básico do veículo permanecer o mesmo. As alterações foram realizadas ao nível de uma melhoria da performance dos motores do primeiro e do segundo estágio com novos injectores e alteração da mistura dos propolentes; aumento na performance do terceiro estágio; introdução de um novo sistema de controlo permitindo uma alteração do plano orbital já durante o voo13; introdução de um novo sistema de telemetria digital para a monitorização do lançador e a introdução de uma nova ogiva de protecção de carga com um diâmetro de 3,6 metros.
O foguetão 14A14 Soyuz-2 pode ser equipado com um quarto estágio, nomeadamente o estágio Fregat, utilizando as carenagens de protecção do tipo ST e SF.
Este lançador é capaz de colocar uma carga de 7.800 kg numa órbita terrestre a 240 km de altitude com uma inclinação de 51,80º. No lançamento desenvolve uma força de 4.144.700 kN. A sua massa total é de 310.000 kg, o seu diâmetro no estágio principal é de 2,95 metros e o seu comprimento total é de 43,40 metros.
O primeiro estágio do 14A14 Soyuz-2 é composto pelos quatro propulsores laterais (Blok B, V, G e D) com uma massa bruta de 44.400 kg, tendo uma massa de 3.810 kg sem combustível. Cada propulsor tem um motor RD-107A (14D22) que desenvolve uma
13 Todas as versões anteriores dos lançadores derivados do R-7 eram lançadas com uma trajectória fixa na qual a mesa da plataforma de lançamento rodava, sendo colocada no azimute de voo pretendido.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 35
força de 1.021.097 kN (vácuo), com um Ies 310 s e um Tq de 120 s. Têm um comprimento de 19,60 metros, um diâmetro de 2,69 metros e consomem LOX e querosene.
O segundo estágio (Blok-A) tem um comprimento de 27,80 metros, um diâmetro de 2,95 metros, um peso bruto de 105400 kg e um peso sem combustível de 6.975 kg. Está equipado com um motor RD-108A que no lançamento desenvolve 999.601 kgf (vácuo), com um Ies de 311 s e um Tq de 286 s. Consome LOX e querosene.
Lançamento Data Hora UTC Versão .º Série Local Lançamento Plat. Lanç. Carga
- 8-ov-04 18:30:00 1A Ф15000-001 GIK-1 Plesetsk LC43/4 17F116ML Oblik
2006-044 19-Out-06 16:28:13.169 1A/Fregat Ж15000-003/1011 GIK-5 Baikonur LC31 PU-6 MetOp-A
(29499 2006-044A)
2006-061 24-Dez-06 8:34:44.402 1A/Fregat 76033135/1012 GIK-1 Plesetsk LC43/4 Meridian
(29668 2006-061A)
2006-063 27-Dez-06 14:23:38.929 1B/Fregat П15000-001/1013 GIK-5 Baikonur LC31 PU-6 CoRoT
(29678 2006-063A)
2008-037 26-Jul-08 18:31:35.911 1B 77057143 GIK-1 Plesetsk LC43/4 Cosmos 2441
(33272 2008-037A)
2009-029 21-Mai-09 21:53:33.331 1B/Fregat 162/1018 GIK-1 Plesetsk LC43/4 Meridian-2
(35008 2009-029A)
2009-049 17-Set-09 15:55:07.679 1B/Fregat 002/1014 Baikonur LC31 PU-6
Meteor-M (35865 2009-049A)
Sterkh-2 (35866 2009-049B)
IRIS (35867 2009-049C) Universitetskiy-
Tatyana-2 (35868 2009-049D)
UGATUSAT (35869 2009-049E)
Sumbandila 35870 2009-049F)
BLITS (35871 2009-049G)
2010-053 19-Out-10 17:10:59 1A/Fregat Б15000-009/1023 Baikonur LC31 PU-6
Globalstar-73 (37188 2010-053A)
Globalstar-74 (37189 2010-053B)
Globalstar-75 (37190 2010-053C)
Globalstar-76 (37191 2010-053D)
Globalstar-77 (37192 2010-053E)
Globalstar-79 (37193 2010-053F)
2010-058 2-ov-10 00:58:39 1A/Fregat 167/1022 GIK-1 Plesetsk LC43/4 Meridian-3
(37212 2010-058A)
2011-018 4-Mai.11 17:41:33 1A/Fregat 230/1028 GIK-1 Plesetsk LC43/4 Meridian-4
(37398 2011-018A)
2011-033 13-Jul-11 2:27:04 1A/Fregat 008/1024 Baikonur LC31 PU-6
Globalstar-M082 (37739 2011-033A) Globalstar-M088 (37740 2011-033B) Globalstar-M091 (37741 2011-033C) Globalstar-M085 (37742 2011-033D) Globalstar-M081 (37743 2011-033E) Globalstar-M089 (37744 2011-033F)
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 36
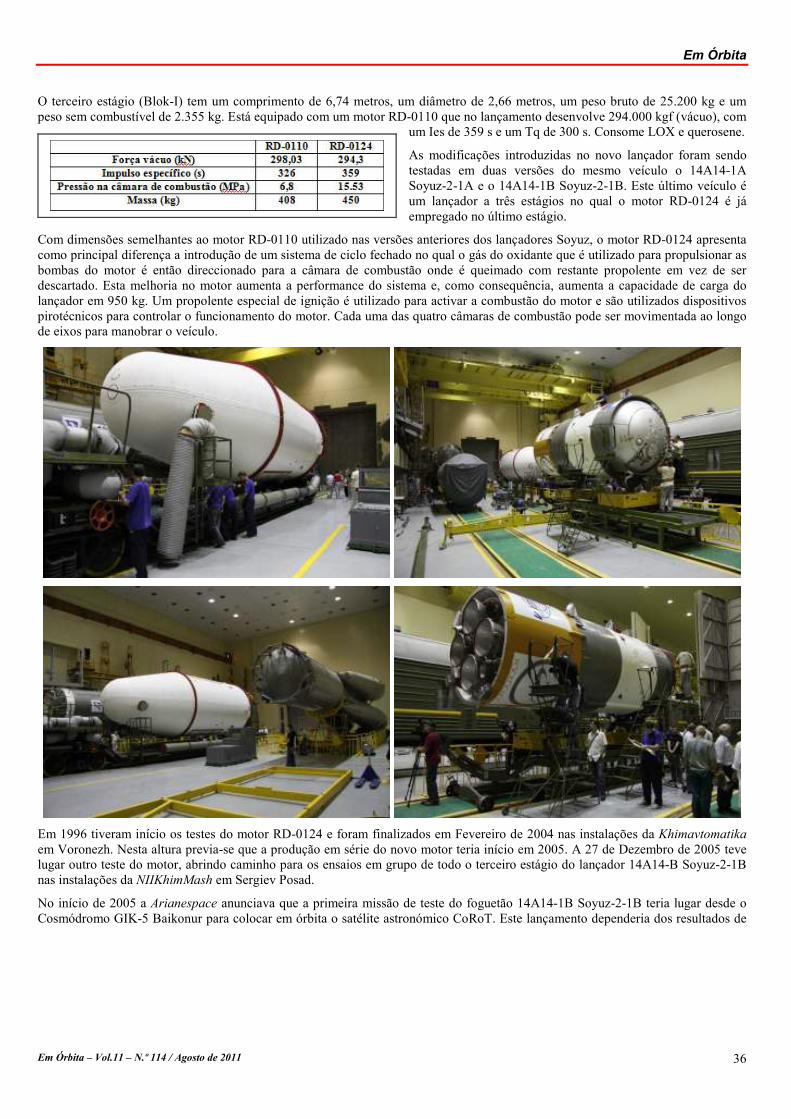
O terceiro estágio (Blok-I) tem um comprimento de 6,74 metros, um diâmetro de 2,66 metros, um peso bruto de 25.200 kg e um peso sem combustível de 2.355 kg. Está equipado com um motor RD-0110 que no lançamento desenvolve 294.000 kgf (vácuo), com
um Ies de 359 s e um Tq de 300 s. Consome LOX e querosene.
As modificações introduzidas no novo lançador foram sendo testadas em duas versões do mesmo veículo o 14A14-1A Soyuz-2-1A e o 14A14-1B Soyuz-2-1B. Este último veículo é um lançador a três estágios no qual o motor RD-0124 é já empregado no último estágio.
Com dimensões semelhantes ao motor RD-0110 utilizado nas versões anteriores dos lançadores Soyuz, o motor RD-0124 apresenta como principal diferença a introdução de um sistema de ciclo fechado no qual o gás do oxidante que é utilizado para propulsionar as bombas do motor é então direccionado para a câmara de combustão onde é queimado com restante propolente em vez de ser descartado. Esta melhoria no motor aumenta a performance do sistema e, como consequência, aumenta a capacidade de carga do lançador em 950 kg. Um propolente especial de ignição é utilizado para activar a combustão do motor e são utilizados dispositivos pirotécnicos para controlar o funcionamento do motor. Cada uma das quatro câmaras de combustão pode ser movimentada ao longo de eixos para manobrar o veículo.
Em 1996 tiveram início os testes do motor RD-0124 e foram finalizados em Fevereiro de 2004 nas instalações da Khimavtomatika em Voronezh. Nesta altura previa-se que a produção em série do novo motor teria início em 2005. A 27 de Dezembro de 2005 teve lugar outro teste do motor, abrindo caminho para os ensaios em grupo de todo o terceiro estágio do lançador 14A14-B Soyuz-2-1B nas instalações da !IIKhimMash em Sergiev Posad.
No início de 2005 a Arianespace anunciava que a primeira missão de teste do foguetão 14A14-1B Soyuz-2-1B teria lugar desde o Cosmódromo GIK-5 Baikonur para colocar em órbita o satélite astronómico CoRoT. Este lançamento dependeria dos resultados de

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 37
novos ensaios do motor RD-0124 que tiveram lugar em Março e Abril de 2006. Um último teste teve lugar a 20 de Outubro de 2006 e o satélite CoRoT acabaria por ser lançado a 21 de Dezembro desse ano14.
O estágio Fregat foi qualificado para voo no ano 2000 e representa um estágio superior flexível e autónomo que foi desenhado para operar como um veículo orbital. O Fregat prolonga as capacidades dos estágios inferiores dos foguetões Soyuz para proporcionar um acesso total a um variado leque de órbitas. Para fornecer ao Fregat uma fiabilidade inicial elevada e acelerar o seu processo de desenvolvimento, vários subsistemas já utilizados em voo e outros componentes de outros veículos e lançadores foram incorporados neste estágio superior.
14 O satélite CoRoT (29678 2006-063A) foi colocado em órbita ás 1423:38,292UTC do dia 27 de Dezembro de 2006 desde o a Plataforma de Lançamento PU-6 do Complexo de Lançamento LC36 (17P32-6) do Cosmódromo GIK-5 Baikonur por um foguetão 14A14 Soyuz-2.1b/Fregat (001/1013).

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 38
O estágio consiste em seis tanques esféricos (quatro tanques de propolentes e dois tanques de sistemas aviónicos) colocados em círculo, com longarinas atravessando ao longo dos tanques para fornecer apoio estrutural. O estágio é independente dos estágios inferiores do lançador, possuindo o seu próprio sistema de orientação, navegação, controlo, detecção e telemetria.
O Fregat utiliza um motor S9.98M que consome propolentes hipergólicos (UDMH e NTO) e pode ser reactivado até 20 vezes em voo, permitindo assim levar a cabo perfis de missões complexas. Pode fornecer uma estabilização nos três eixos espaciais à carga a colocar em órbita ou colocá-la nua situação de estabilização por rotação.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 39
O Fregat pode ser utilizado como estágio superior dos foguetões 11A511U Soyuz-U, 11A511U-FG Soyuz-FG, 14A14-1A Soyuz-2-1A, 14A14-1B Soyuz-2-1B e 11K77 Zenit-3F
A rede Globalstar
A rede Globalstar fornece serviços de voz e de dados em todo o globo terrestre utilizando uma frota orbital de satélites. No entanto, para melhor compreender porque razão a tecnologia fornece à Globalstar uma vantagem sobre outros serviços, é necessário compreender os conceitos de ‘portas de passagem’, ‘fluxos de chamadas’, ‘Diversidade de caminhos’ e ‘tecnologia sem fios’.
Os satélites Globalstar
Existem dois tipos distintos de satélites utilizados para fornecer serviços de voz e dados: LEO (Low Earth-Orbit) e GEO (Geostationary Orbit). A Globalstar construiu a sua rede utilizando satélites LEO devido à sua capacidade de fornecer uma melhor qualidade de voz.
Os satélites Globalstar orbitam a uma altitude média de 1.414 km acima da superfície terrestre, e demoram menos de duas horas a completar uma órbita. A sua proximidade relativa permite aos sinais de voz e de dados viajarem rapidamente, resultando em comunicações fiáveis e claras. Mesmo os clientes que utilizem dispositivos de recepção de sinal de satélite de baixa potência, tais como telefones portáteis, podem esperar uma qualidade de voz digital que é comparável à qualidade de voz nos telemóveis normais. Dada a sua velocidade e a quantidade de satélites em órbita, as falhas na cobertura são mínimas e são corrigidas em poucos minutos. Os satélites em
órbitas baixas comunicam facilmente com os dispositivos Globalstar utilizando antenas omnidireccionais dado que somente necessitam de um campo de visão desimpedido para o céu para funcionarem, e não uma calibração específica.
Em comparação, os satélites em órbita geostacionária orbitam a cerca de 36.000 km de altitude e movem-se com a Terra, nunca alterando a sua localização. Podem assim ocorrer atrasos de voz perceptíveis ou ecos devido às distâncias significativas que envolvem as transferências de sinais. Os dispositivos de satélites GEO são relativamente mais caros e utilizam antenas direccionais que têm de ser apontadas para o satélite para funcionar.
Portas de passagem
Estas instalações permitem a transferência de dados e voz entre a rede sem fios da Globalstar e a rede pública normal de telefones. A Globalstar utiliza muitas portas de passagem estrategicamente localizadas em todo o globo para lidar de forma eficiente com estas transferências, optimizando assim a qualidade de transmissão de voz e dados. Podem ser levadas a cabo melhorias rápidas no sistema de redes nestas instalações, permitindo assim à Globalstar colocar rapidamente à disposição dos seus clientes as melhorias efectuadas nos seus serviços.
Fluxos de chamadas
Os fluxos de chamadas da Globalstar foram desenhados para atingir um objectivo – proporcionar uma soberba qualidade de serviços de voz. Para atingir este resultado, a emissão de chamadas dos telefones da Globalstar são ligadas directamente para o mínimo de um e até três satélites em órbita de uma só vez, e depois entregue à porta de passagem regional mais próxima para a finalização da chamada através da rede fixa. A recepção de chamadas pode seguir o mesmo caminho, mas em sentido contrário. Em comparação, alguns fornecedores de serviços com satélites em órbitas terrestres baixas transferem as chamadas entre satélites até se encontrarem em linha de visão com a sua única porta de passagem. Este fluxo de chamadas pode resultar num alto nível de degradação da qualidade de voz dependendo do número de passagens entre satélites necessárias para atingir este única porta de passagem.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 40
Cobertura e Diversidade de caminhos
A Globalstar utiliza um método patenteado de recepção de sinal, denominado ‘Diversidade de caminhos’ (Path Diversity™), para ligar uma única chamada a três satélites de uma só vez, para assim reduzir de forma significativa o atraso de voz e melhorar a sua qualidade. A ‘Diversidade de caminhos’ (Path Diversity™) permite a um receptor digital combinar múltiplos sinais relevantes de várias potências num único sinal sem estática. À medida que os satélites se movem para dentro e fora do campo de visão, eles são
adicionados e removidos do processo de chamada, reduzindo assim o risco de ocorrência de interrupções. Isto permite à Globalstar fornecer uma grande cobertura com menos potencial de bloqueio de sinal por edifícios, massas de terreno ou outras características naturais.
O funcionamento em conjunto de múltiplos satélites Globalstar garante que se um satélite tem uma falha temporária, um outro pode responder a esse falha rapidamente e a cobertura global não fica assim impedida de forma significativa. Em comparação, um único satélite na órbita
geossíncrona fornece uma larga cobertura, o que resulta em distúrbios nos serviços globais caso ocorra algum problema, mesmo de forma temporária. Os serviços da Globalstar estão disponíveis desde os 70º de latitude Norte até aos 70º de latitude Sul, o que representa mais de 75% da superfície do planeta. A rede foi desenhada para fornecer serviços às zonas temperadas do globo onde a maior parte dos clientes da Globalstar necessitam de cobertura; porém, a cobertura também se estende para as zonas mais quentes do planeta, perto do equador. Uma equipa da Globalstar monitoriza de forma regular a rede para garantir que as operações são óptimas a todo o tempo.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 41
Tecnologia sem fios
A Globalstar utiliza uma versão da tecnologia Code Division Multiple Access (CDMA) baseada no standard IS-95 CDMA. A tecnologia CDMA forma os fundamentos dos serviços 3G sem fios de terceira geração, que são utilizados por mais de 128 milhões de pessoas em todo o mundo. Esta tecnologia de transmissão digital permite a um grande número de clientes sem fios acederem de forma simultânea a um único canal de frequência de rádio. O resultado é menos interferência e um aumento da capacidade quando comparável a sistemas análogos tais como os sistemas Frequency Division Multiple Access (FDMA). A tecnologia avançada da
Globalstar já deu resultados provados e foi desenhada para levar os seus clientes para o futuro da tecnologia das comunicações sem fios.
Os satélites Globalstar são construídos pela Alcatel Alenia Space e têm uma massa de 700 kg, tendo uma forma trapezoidal. Estão equipados com 16 repetidores de banda C a banda S e 16 receptores de banda L a banda C.
Uma vez totalmente em órbita, a segunda geração de satélites Globalstar vai permitir serviços melhorados com velocidades de transmissão de dados de 256 kbps numa configuração muito mais flexível. Entre os produtos suportados estão a multi-transmissão, sistema de mensagens avançado (multimédia ou MMS), vídeo móvel, serviços de geo-localização, dispositivos de multi-banda e de multi-modo, e serviços de dados com integração de GPS.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 42
Preparação e lançamento dos novos satélites Globalstar
O foguetão 14A14-1A Soyuz-2-1A que seria utilizado para este lançamento, foi transportado para o Cosmódromo de Baikonur a 27 de Setembro de 2009. Entretanto, e segundo o fórum de discussão da revista de cosmonáutica russa Novosti Kosmonavtiki, o lançamento da missão ST-23 estava originalmente previsto para ter lugar a 18 de Maio de 2011, sendo antecipado para o dia 14 de Maio. Os seis satélites chegavam ao Cosmódromo de Baikonur a 15 de Março a bordo de um avião de carga Antonov An-124 ‘Ruslan’ que transportou também o equipamento de suporte. A campanha para o lançamento teria início a 22 de Março.
Após chegarem a Baikonur os seis satélites foram transportados para as instalações de processamento onde foram submetidos a testes eléctricos e de verificação dos sistemas de propulsão. De seguida, procedeu-se à sua pressurização, abastecimento e determinação da sua massa, estando assim prontos para serem integrados no adaptador cónico que posteriormente seria colocado no foguetão lançador.
Durante os preparativos para o lançamento levados a cabo em finais de Março e princípios de Abril, foi determinado que quatro dos satélites entregues a 15 de Março teriam de ser transportados de volta para o fabricante Thales Alenia Space. A empresa determinara
que seria necessário levar a cabo mais testes para garantir a qualidade do processo e o seu sucesso. Isto implicou o adiamento do lançamento que estava previsto para as 0334UTC do dia 14 de Maio. Nesta altura o lançamento era então adiado para finais de Junho.
Três novos satélites foram transportados para Baikonur a 31 de Maio e o lançamento era agendado para o dia 11 de Julho às 0258:57UTC. A 28 e 29 de Junho, os seis satélites eram integrados no adaptador cónico sendo posteriormente colocados no interior da carenagem de protecção de carga a 1 de Julho. A carenagem utilizada é do tipo ST, tendo 4,1 metros de diâmetro e 11,4 metros de comprimento. Contendo o estágio superior Fregat (1024), o adaptador cónico com os seis satélites e a carenagem de protecção, este módulo orbital estava assim pronto para ser integrado no 3º estágio do foguetão lançador 14A14-1A Soyuz-2-1A (008). Esta integração

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 43
teria lugar a 6 de Julho. No mesmo dia este conjunto era acoplado aos estágios inferiores do lançador. O transporte do foguetão 14A14-1A Soyuz-2-1A/Fregat (008/1024/ST23) para a Plataforma de Lançamento PU-6 do Complexo de Lançamento LC31 (17P32-6) teve lugar na madrugada do dia 8 de Julho.
A contagem decrescente para o lançamento decorreu sem problemas até entrar nos últimos dez segundos altura em que surgiu um problema com o equipamento na plataforma de lançamento que obrigou ao seu adiamento por 24 horas. O problema registou-se a T-2,5 s quando o braço umbilical inferior de serviço da plataforma não se afastou como era esperado. Após o adiamento, os especialistas demoraram cerca de uma hora a colocar o lançador num modo seguro e durante este tempo os satélites utilizaram as suas baterias internas para o fornecimento de energia. O lançamento seria então agendado para o dia 12 de Julho às 0243UTC, mas seria novamente adiado por 24 horas devido ao atraso em se reconfigurar o lançador e prepará-lo para uma nova tentativa de lançamento. O lançamento seria então agendado para as 0227UTC do dia 13 de Julho.
Desta vez a contagem decrescente decorreu sem problemas e o lançamento teve lugar às 0227:04UTC.
O esquema seguinte mostra as diferentes fases do lançamento até à separação do módulo contendo os seis satélites Globalstar. A separação dos seis satélites ocorreu a T+1h 38m após o lançamento.
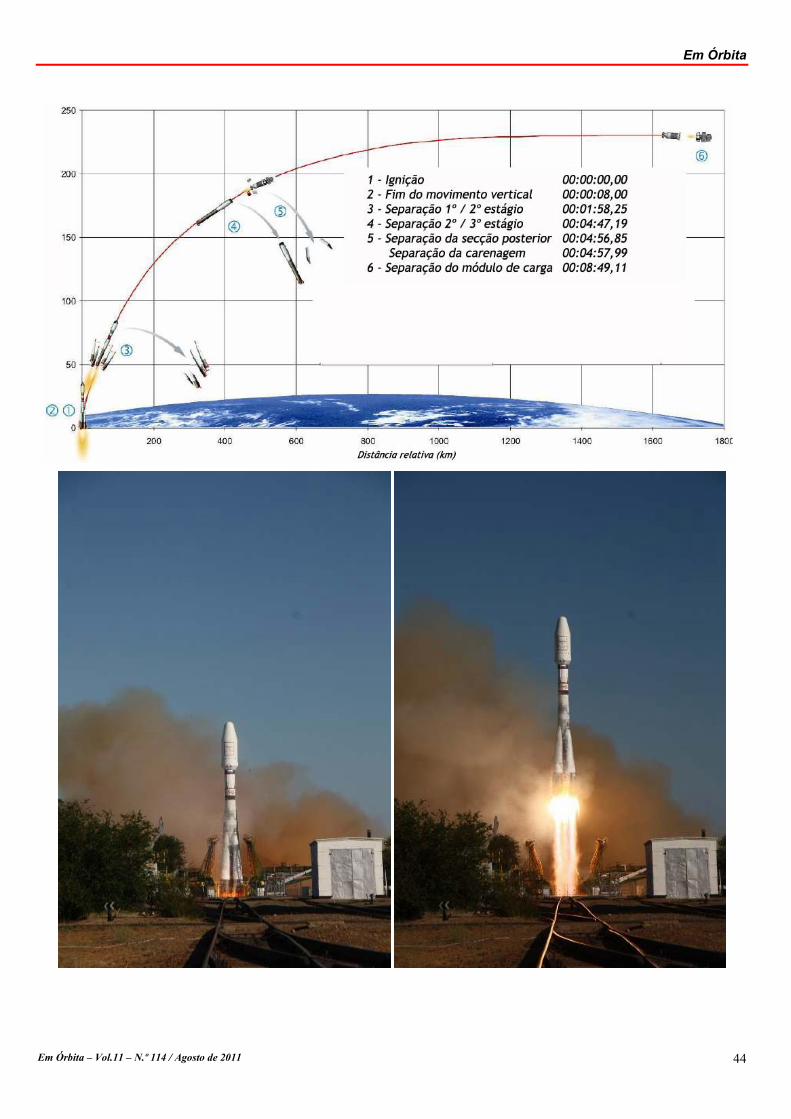
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 44

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 45
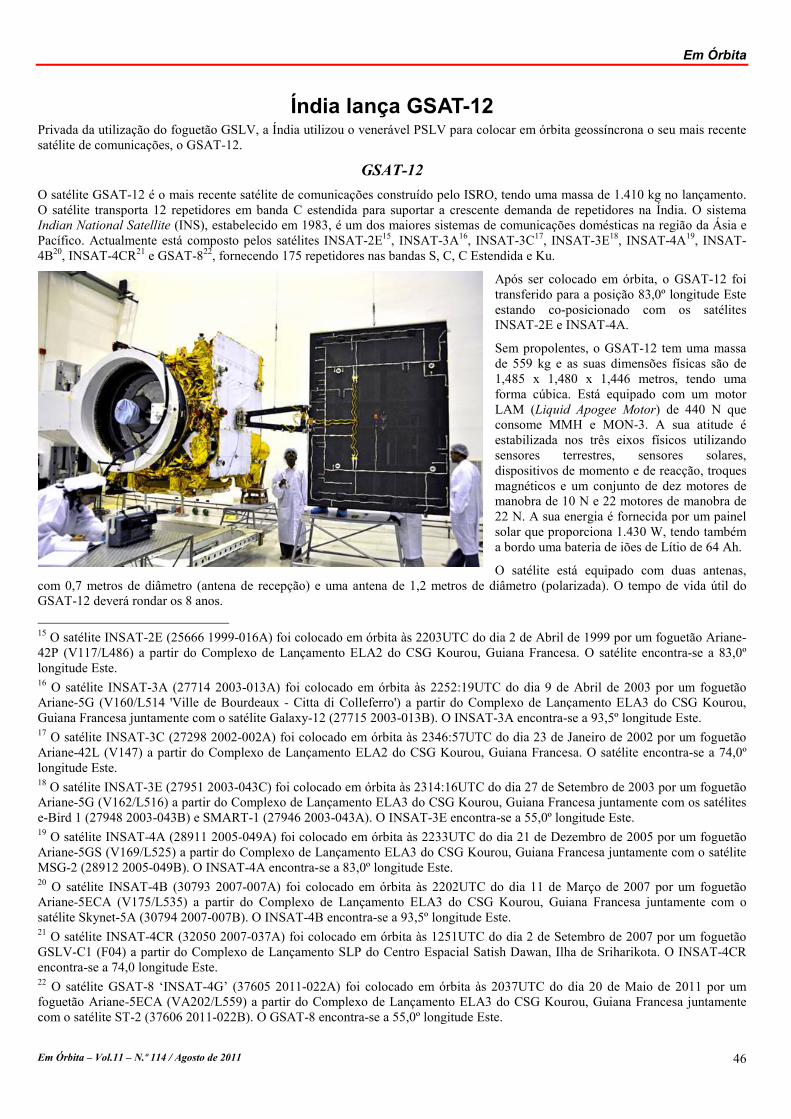
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 46
Índia lança GSAT-12 Privada da utilização do foguetão GSLV, a Índia utilizou o venerável PSLV para colocar em órbita geossíncrona o seu mais recente satélite de comunicações, o GSAT-12.
GSAT-12
O satélite GSAT-12 é o mais recente satélite de comunicações construído pelo ISRO, tendo uma massa de 1.410 kg no lançamento. O satélite transporta 12 repetidores em banda C estendida para suportar a crescente demanda de repetidores na Índia. O sistema Indian !ational Satellite (INS), estabelecido em 1983, é um dos maiores sistemas de comunicações domésticas na região da Ásia e Pacífico. Actualmente está composto pelos satélites INSAT-2E15, INSAT-3A16, INSAT-3C17, INSAT-3E18, INSAT-4A19, INSAT-4B20, INSAT-4CR21 e GSAT-822, fornecendo 175 repetidores nas bandas S, C, C Estendida e Ku.
Após ser colocado em órbita, o GSAT-12 foi transferido para a posição 83,0º longitude Este estando co-posicionado com os satélites INSAT-2E e INSAT-4A.
Sem propolentes, o GSAT-12 tem uma massa de 559 kg e as suas dimensões físicas são de 1,485 x 1,480 x 1,446 metros, tendo uma forma cúbica. Está equipado com um motor LAM (Liquid Apogee Motor) de 440 N que consome MMH e MON-3. A sua atitude é estabilizada nos três eixos físicos utilizando sensores terrestres, sensores solares, dispositivos de momento e de reacção, troques magnéticos e um conjunto de dez motores de manobra de 10 N e 22 motores de manobra de 22 N. A sua energia é fornecida por um painel solar que proporciona 1.430 W, tendo também a bordo uma bateria de iões de Lítio de 64 Ah.
O satélite está equipado com duas antenas, com 0,7 metros de diâmetro (antena de recepção) e uma antena de 1,2 metros de diâmetro (polarizada). O tempo de vida útil do GSAT-12 deverá rondar os 8 anos.
15 O satélite INSAT-2E (25666 1999-016A) foi colocado em órbita às 2203UTC do dia 2 de Abril de 1999 por um foguetão Ariane-42P (V117/L486) a partir do Complexo de Lançamento ELA2 do CSG Kourou, Guiana Francesa. O satélite encontra-se a 83,0º longitude Este. 16 O satélite INSAT-3A (27714 2003-013A) foi colocado em órbita às 2252:19UTC do dia 9 de Abril de 2003 por um foguetão Ariane-5G (V160/L514 'Ville de Bourdeaux - Citta di Colleferro') a partir do Complexo de Lançamento ELA3 do CSG Kourou, Guiana Francesa juntamente com o satélite Galaxy-12 (27715 2003-013B). O INSAT-3A encontra-se a 93,5º longitude Este. 17 O satélite INSAT-3C (27298 2002-002A) foi colocado em órbita às 2346:57UTC do dia 23 de Janeiro de 2002 por um foguetão Ariane-42L (V147) a partir do Complexo de Lançamento ELA2 do CSG Kourou, Guiana Francesa. O satélite encontra-se a 74,0º longitude Este. 18 O satélite INSAT-3E (27951 2003-043C) foi colocado em órbita às 2314:16UTC do dia 27 de Setembro de 2003 por um foguetão Ariane-5G (V162/L516) a partir do Complexo de Lançamento ELA3 do CSG Kourou, Guiana Francesa juntamente com os satélites e-Bird 1 (27948 2003-043B) e SMART-1 (27946 2003-043A). O INSAT-3E encontra-se a 55,0º longitude Este. 19 O satélite INSAT-4A (28911 2005-049A) foi colocado em órbita às 2233UTC do dia 21 de Dezembro de 2005 por um foguetão Ariane-5GS (V169/L525) a partir do Complexo de Lançamento ELA3 do CSG Kourou, Guiana Francesa juntamente com o satélite MSG-2 (28912 2005-049B). O INSAT-4A encontra-se a 83,0º longitude Este. 20 O satélite INSAT-4B (30793 2007-007A) foi colocado em órbita às 2202UTC do dia 11 de Março de 2007 por um foguetão Ariane-5ECA (V175/L535) a partir do Complexo de Lançamento ELA3 do CSG Kourou, Guiana Francesa juntamente com o satélite Skynet-5A (30794 2007-007B). O INSAT-4B encontra-se a 93,5º longitude Este. 21 O satélite INSAT-4CR (32050 2007-037A) foi colocado em órbita às 1251UTC do dia 2 de Setembro de 2007 por um foguetão GSLV-C1 (F04) a partir do Complexo de Lançamento SLP do Centro Espacial Satish Dawan, Ilha de Sriharikota. O INSAT-4CR encontra-se a 74,0 longitude Este. 22 O satélite GSAT-8 ‘INSAT-4G’ (37605 2011-022A) foi colocado em órbita às 2037UTC do dia 20 de Maio de 2011 por um foguetão Ariane-5ECA (VA202/L559) a partir do Complexo de Lançamento ELA3 do CSG Kourou, Guiana Francesa juntamente com o satélite ST-2 (37606 2011-022B). O GSAT-8 encontra-se a 55,0º longitude Este.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 47
Polar Satellite Launch Vehicle
O foguetão PSLV foi desenhado e desenvolvido pelo ISRO para colocar em órbita polar sincronizada com o Sol, satélites com um peso máximo de 1.000 kg da classe IRS. Segundo dados fornecidos pelo ISRO, desde o seu primeiro voo em Outubro de 1994 a capacidade do PSLV foi aumentada de 850 kg para os actuais 1.400 kg para uma órbita sincronizada com o Sol a 820 km de altitude. O lançador demonstrou também uma capacidade múltipla no lançamento de diferentes satélites.
O PSLV foi desenvolvido no Centro Espacial Vikram Sarabhai, Thiruvananthapuram. O sistema de inércia foi desenvolvido pela unidade IISU (ISRO Inertial Systems Unit), localizado também em Thiruvananthapuram. O Centro de Sistemas de Propulsão Líquida desenvolveu os estágios de propulsão líquida bem como os sistemas de controlo de reacção. O Centro Espacial Satish Dawan, SHAR, processa os motores de combustível sólido e leva a cabo as operações do lançamento.
A melhoria das capacidades do PSLV foi conseguida através de vários meios: aumento da capacidade de carga de propolente no primeiro, segundo e quarto; melhoria na performance do motor do terceiro estágio ao se optimizar o motor e a carga de combustível; e introdução de um adaptador de carga de material compósito carbónico. A sequência de ignição dos propulsores laterais foi também alterada. Anteriormente dois dos propulsores entravam em ignição na plataforma de lançamento e os restantes quatro entravam em ignição com o veículo á em voo. Esta sequência foi alterada, entrando em ignição no solo quatro propulsores e os restantes dois entram em ignição com o veículo já em voo.
O PSLV tem uma altura de 44,4 metros, um diâmetro base de 2,8 metros e um peso de 294.000 kg. O PSLV é um lançador a quatro estágios, sendo o segundo e o quarto estágios a combustível líquido e os restantes a combustível sólido. O PSLV é capaz de colocar 3.700 kg numa órbita terrestre baixa a 200 km de altitude com uma inclinação de 49,5º em relação ao equador terrestre ou então 800 kg numa órbita de transferência para a órbita geossíncrona.
O primeiro estágio PS-1 é um dos maiores estágios a combustível sólido actualmente existente, transportando 138.000 kg de HTPB (Hydroxyl Terminated Poly Butadiene). Tem um peso bruto de 210.000 kg (138.000 kg referentes ao corpo central juntamente com 72.000 kg referentes a seis propulsores laterais PSOM-XL com uma massa de 12.000 kg cada um) e desenvolve uma força de 495.590 kgf no lançamento, tendo um Ies de 269 s (Ies-nm de 237 s) e um Tq de 98 s (os propulsores laterais de combustível sólido tem um Tq de 49 s). O seu comprimento total é de 20,3 metros e o seu diâmetro é de 2,8 metros, com os propulsores laterais a terem um diâmetro de 1,0 metros e um comprimento de 12,4 metros. Em torno do primeiro estágio estão colocados seis propulsores de combustível sólido. Destes seis propulsores, quatro entram em ignição no momento T=0, aumentando a força inicial do primeiro estágio.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 48
O segundo estágio PS-2 emprega o motor Vikas, desenvolvido pela Índia, e transporta 40.000 kg de UDMH e N2O4. Tem um comprimento de 11,9 metros, um diâmetro de 2,8 metros e é capaz de desenvolver 73.931 kgf no lançamento, tendo um Ies de 293 s e um Tq de 147 s. Este segundo estágio tem um peso bruto de 45.800 kg e um peso de 5.300 kg sem combustível.
O terceiro estágio PS-3 utiliza combustível sólido. Tem um comprimento de 3,6 metros e um diâmetro de 2,0 metros, sendo capaz de desenvolver 33.519 kgf no lançamento, tendo um Ies de 294 s e um Tq de 109 s. Tem um peso bruto de 8.400 kg, pesando 1.100 kg sem combustível. O compartimento do motor é fabricado à base de fibra de poliaramida.
O quarto estágio PS-4 utiliza dois motores de combustível líquido que consomem MMH (Mono Metil Hidrazina) e MON (Mixed Oxides of !itrogen). Tem um comprimento de 2,9 metros e um diâmetro de 2,8 metros, atingindo uma envergadura de 2,0 metros e sendo capaz de desenvolver 1.428 kgf no lançamento (Ies de 308 s; Tq de 515 s). Tem um peso bruto de 2.920 kg, pesando 920 kg sem combustível.
A carenagem de protecção dos satélites tem um diâmetro base de 3,2 metros.
O primeiro lançamento do PSLV (PSLV-D1) teve lugar a 20 de Setembro de 1993 (0512UTC) e acabou num fracasso (1993-F03), falhando a colocação em órbita do satélite IRS-1E. A primeira missão com sucesso teve lugar a 15 de Outubro de 1994 (0505UTC) quando o foguetão PSLV-D2 colocou em órbita o satélite IRS-P2 (23323 1994-068A).
A ogiva de protecção da carga tem um diâmetro de 3,2 metros.
O PSLV utiliza um grande número de sistemas auxiliares para a separação dos estágios, separação da ogiva de protecção, etc. Estes sistemas estão divididos pelos diferentes estágios:
• 1º Estágio: sistema SITVC (Secondary Injection Thrust Vector Control) para controlo de translação, e motores de reacção para controlo da rotação;
• 2º Estágio: movimentação do motor para controlo de translação e motor de controlo da rotação;
• 3º Estágio: escape (tubeira) flexível para controlo de translação e sistema de controlo de reacção PS-4 para controlo da rotação;
• 4º Estágio: movimentação do motor para controlo de translação e sistema de controlo de reacção reactivável para controlo de atitude.
O sistema de navegação inercial localizado no compartimento de equipamento no topo do quarto estágio guia o lançador desde o seu lançamento até à injecção do satélite em órbita. O veículo possui
instrumentação para monitorizar a sua performance durante o voo. O sistema de detecção fornece informação em tempo real sobre o desempenho do veículo permitindo uma segurança do voo e permite a determinação da órbita preliminar na qual o satélite é colocado.
A versão PSLV-CA (CA – Core Alone) é uma versão desenvolvida a partir da versão standard do lançador PSLV-C e é seleccionada tendo em conta o peso das cargas a ser colocadas em órbita. Esta versão tem uma massa de 230.000 kg no lançamento

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 49
A tabela seguinte mostra os últimos dez lançamentos levados a cabo pelo foguetão PSLV em todas as suas versões.
Lançamento Veículo lançador
Modelo PSLV
Data de Lançamento
Hora Plataforma Lançamento
Satélites
2007-001 C7 C 10-Jan-07 03:53:00 FLP
CartoSat-2 (29709 2007-001A) SER-1 (29710 2007-001B)
Lapan-Tubsat (29711 2007-001C) Pehuensat-1 (29712 2007-001D)
2007-013 C8 CA 23-Abr-07 10:00:00 SLP Agile (31135 2007-013A) AAM (31136 2007-013B)
2008-002 C10 CA 21-Jan-08 03:45:00 FLP Polaris 'TecSAR' (32476 2008-002A)
2008-021 C9 C 28-Abr-08 03:53:51 SLP
CartoSat-2A (32783 2008-021A) IMS-1 (32786 2008-021D) CanX-2 (32790 2008-021H)
Cute-1.7+APD-2 (32785 2008-021C) DELFI-C3 (32789 2008-021G) AAUSat-2 (32788 2008-021F)
COMPASS-1 (32787 2008-021E) Seeds-2 (32791 2008-021J)
SL-5 'CanX-6' (32784 2008-021B) Rubin-8-AIM (32792 2008-021K)
2008-052 C11 XL 22-Out-08 00:52:11 SLP Chandrayaan-1 (33405 2008-052A);
IMP
2009-019 C12 CA 20-Abr-09 01:15:00 SLP RISAT-2 (34807 2009-019A) AUSAT (34808 2009-019B)
2009-051 C14 CA 23-Set-09 06:21:00 FLP
Oceansat-2 (35931 2009-051A) BeeSat (35932 2009-051B) UWE-2 (35933 2009-051C)
ITU-pSAT 1 (35964 2009-051D) SwissCube-1 (35935 2009-051E)
Rubin-9.1 / Rubin-9.2 (35936 2009-051F)
2010-035 C15 CA 12-Jul-10 03:53:00 FLP
CartoSat-2B (36795 2010-035A) STUDSAT (36796 2010-035B) AISSat-1 (36797 2010-035C) AlSat-2A (36798 2010-035D) TISat-1 (36799 2010-035E)
2011-015 C16 C 20-Abr-11 04:42:00 FLP ResourceSat-2 (37387 2011-015A)
YouthSat/IMS-1A (37388 2011-015B) X-Sat (37389 2011-015C)
2011-034 C17 XL 15-Jul-11 11:18:00 SLP GSAT-12 ‘ISAT-4G’ (37746 2011-034A)
Lançamento do PSLC-C17
O lançamento do PSLV-C17 teve lugar às 1118UTC do dia 15 de Julho de 2011 a partir do Complexo de Lançamento SLP (Second Launch Pad) do Centro Espacial Satish Dawan, Ilha de Sriharikota.
O processo de lançamento inicia-se com a ignição do primeiro estágio e dos propulsores laterais de combustível sólido PSOM-XL 0,46 segundos mais tarde. Esta é a fase de ignição do primeiro estágio. A T+25 s dá-se a ignição dos restantes propulsores laterais de combustível sólido com os primeiros propulsores a terminarem a sua queima e a separarem-se do lançador a T+1m 10s. os propulsores laterais de combustível sólido que entraram em ignição já em voo, terminam a sua queima a T+1m 32s e separam-se do primeiro estágio. Este, por sua vez, termina a sua queima a T+1m 52,5s, com o segundo estágio a entrar em ignição quase de imediato a T+1m 52,7s. Esta é a fase de transição entre o primeiro e o segundo estágio. A separação da carenagem de protecção da carga ocorre a T+3m 21,6s. Nesta altura o lançador encontra-se a 114 km de altitude e a viajar a uma velocidade de 3,64 km/s. Esta é a fase de ignição do segundo estágio que termina a T+4m 23,3s,
Esta tabela indica os últimos dez lançamentos levados a cabo utilizando o foguetão PSLV nas suas diferentes versões. Todos os lançamentos são levados a cabo a partir do Centro Espacial Satish Dawan SHAR na Ilha de Sriharikota. Tabela: Rui C. Barbosa

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 50
separando-se do terceiro estágio que entra em ignição a T+4m 24,5s. Esta é a fase de transição entre o segundo e o terceiro estágio.
O final da ignição do terceiro estágio ocorre a T+8m 40,4s, separando-se nesta altura. O lançador continua a ganhar altitude ao longo de uma trajectória balística até à ignição do quarto estágio a T+11m 5s. Esta queima termina a T+19m 38,2s.
A separação do GSAT-12 ocorreu a T+20m 25s (1138UTC).
O GSAT-12 ficou colocado numa órbita preliminar com um apogeu a 21.348 km de altitude, perigeu a 278 km de altitude, inclinação orbital de 17,82º e período orbital de 373,87 minutos. No dia 27 de Julho, e após a realização de várias manobras, o satélite já se encontrava numa órbita com um apogeu a 35.717 km de altitude, perigeu a 35.686 km de altitude, inclinação orbital de 0,17º e período orbital de 1431,75 minutos.
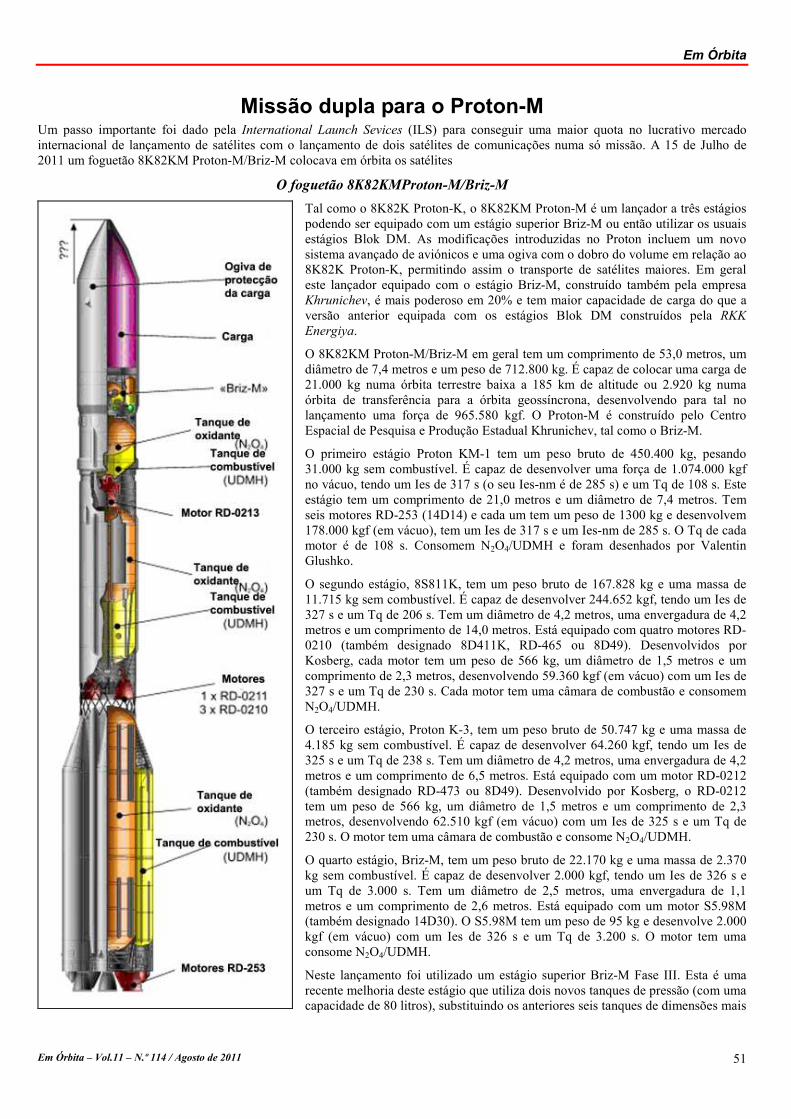
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 51
Missão dupla para o Proton-M Um passo importante foi dado pela International Launch Sevices (ILS) para conseguir uma maior quota no lucrativo mercado internacional de lançamento de satélites com o lançamento de dois satélites de comunicações numa só missão. A 15 de Julho de 2011 um foguetão 8K82KM Proton-M/Briz-M colocava em órbita os satélites
O foguetão 8K82KMProton-M/Briz-M
Tal como o 8K82K Proton-K, o 8K82KM Proton-M é um lançador a três estágios podendo ser equipado com um estágio superior Briz-M ou então utilizar os usuais estágios Blok DM. As modificações introduzidas no Proton incluem um novo sistema avançado de aviónicos e uma ogiva com o dobro do volume em relação ao 8K82K Proton-K, permitindo assim o transporte de satélites maiores. Em geral este lançador equipado com o estágio Briz-M, construído também pela empresa Khrunichev, é mais poderoso em 20% e tem maior capacidade de carga do que a versão anterior equipada com os estágios Blok DM construídos pela RKK Energiya.
O 8K82KM Proton-M/Briz-M em geral tem um comprimento de 53,0 metros, um diâmetro de 7,4 metros e um peso de 712.800 kg. É capaz de colocar uma carga de 21.000 kg numa órbita terrestre baixa a 185 km de altitude ou 2.920 kg numa órbita de transferência para a órbita geossíncrona, desenvolvendo para tal no lançamento uma força de 965.580 kgf. O Proton-M é construído pelo Centro Espacial de Pesquisa e Produção Estadual Khrunichev, tal como o Briz-M.
O primeiro estágio Proton KM-1 tem um peso bruto de 450.400 kg, pesando 31.000 kg sem combustível. É capaz de desenvolver uma força de 1.074.000 kgf no vácuo, tendo um Ies de 317 s (o seu Ies-nm é de 285 s) e um Tq de 108 s. Este estágio tem um comprimento de 21,0 metros e um diâmetro de 7,4 metros. Tem seis motores RD-253 (14D14) e cada um tem um peso de 1300 kg e desenvolvem 178.000 kgf (em vácuo), tem um Ies de 317 s e um Ies-nm de 285 s. O Tq de cada motor é de 108 s. Consomem N2O4/UDMH e foram desenhados por Valentin Glushko.
O segundo estágio, 8S811K, tem um peso bruto de 167.828 kg e uma massa de 11.715 kg sem combustível. É capaz de desenvolver 244.652 kgf, tendo um Ies de 327 s e um Tq de 206 s. Tem um diâmetro de 4,2 metros, uma envergadura de 4,2 metros e um comprimento de 14,0 metros. Está equipado com quatro motores RD-0210 (também designado 8D411K, RD-465 ou 8D49). Desenvolvidos por Kosberg, cada motor tem um peso de 566 kg, um diâmetro de 1,5 metros e um comprimento de 2,3 metros, desenvolvendo 59.360 kgf (em vácuo) com um Ies de 327 s e um Tq de 230 s. Cada motor tem uma câmara de combustão e consomem N2O4/UDMH.
O terceiro estágio, Proton K-3, tem um peso bruto de 50.747 kg e uma massa de 4.185 kg sem combustível. É capaz de desenvolver 64.260 kgf, tendo um Ies de 325 s e um Tq de 238 s. Tem um diâmetro de 4,2 metros, uma envergadura de 4,2 metros e um comprimento de 6,5 metros. Está equipado com um motor RD-0212 (também designado RD-473 ou 8D49). Desenvolvido por Kosberg, o RD-0212 tem um peso de 566 kg, um diâmetro de 1,5 metros e um comprimento de 2,3 metros, desenvolvendo 62.510 kgf (em vácuo) com um Ies de 325 s e um Tq de 230 s. O motor tem uma câmara de combustão e consome N2O4/UDMH.
O quarto estágio, Briz-M, tem um peso bruto de 22.170 kg e uma massa de 2.370 kg sem combustível. É capaz de desenvolver 2.000 kgf, tendo um Ies de 326 s e um Tq de 3.000 s. Tem um diâmetro de 2,5 metros, uma envergadura de 1,1 metros e um comprimento de 2,6 metros. Está equipado com um motor S5.98M (também designado 14D30). O S5.98M tem um peso de 95 kg e desenvolve 2.000 kgf (em vácuo) com um Ies de 326 s e um Tq de 3.200 s. O motor tem uma consome N2O4/UDMH.
Neste lançamento foi utilizado um estágio superior Briz-M Fase III. Esta é uma recente melhoria deste estágio que utiliza dois novos tanques de pressão (com uma capacidade de 80 litros), substituindo os anteriores seis tanques de dimensões mais

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 52
pequenas. Procedeu-se ainda a uma recolocação dos instrumentos de comando para a zona central do tanque para assim mitigar as cargas de choque que o tanque de propolente adicional é ejectado.
Lançamento Data Hora (UTC) º Série Plataforma Satélites 2010-006 12-Fev-10 00:39:40.013 53532 / 99511 LC200 PU-39 Intelsat-16 (36397 2010-006A 2010-010 20-Mar-10 18:26:56.965 93514 / 99514 LC200 PU-39 EchoStar-XIV (36499 2010-010A) 2010-016 24-Abr-10 11:18:59.984 93511 / 99512 LC200 PU-39 SES-1 (36516 2010-016A) 2010-025 3-Jun-10 22:00:07.997 93512 / 99513 LC200 PU-39 Badr-5 'Arabsat-5B' (36592 2010-025A) 2010-034 10-Jul-10 18:40:35.599 93515 / 99515 LC200 PU-39 EchoStar-15 (36792 2010-034A) 2010-053 14-Out-10 18:53:20.986 93516 / 99517 LC81 PU-24 Sirius XM-5 (37185 2010-053A) 2010-061 14-ov-10 17:29:19,979 93513 / 99516 LC200 PU-39 SkyTerra-1 (37218 2010-061A) 2010-069 26-Dez-10 21:50:59,972 93517 / 99518 LC200 PU-39 KA-SAT (37258 2010-069A) 2011-021 20-Mai-11 19:15:18,960 93519 / 99520 LC200 PU-39 Telstar-14R/Estrela do Sul-2 (37602 2011-021A)
2011-035 15-Jul-11 23:16:09,940 93518 / 99519 LC200 PU-39 SES-3 ‘OS-2’ (37748 2011-035A) KazSat-2 (37749 2011-035B)
O primeiro lançamento do foguetão 8K82KM Proton-M/Briz-M teve lugar a 7 de Abril de 2001 (0347:00,525UTC) quando o veículo 535-01 utilizando o estágio Briz-M (88503) colocou em órbita o satélite de comunicações Ekran-M 18 (26736 2001-014A) com uma massa de 1970 kg a partir do Cosmódromo GIK-5 Baikonur (LC81 PU-24).
Os satélites SES-3 e KazSat-2
O satélite de comunicações SES-3 (imagem ao lado) é o 45º satélite da frota da SES, sendo parte de uma frota global com mais de 40 satélites. O SES-3 irá substituir o satélite AMC-1 na posição 103º de longitude Oeste em meados de 2012, fornecendo assim a continuidade dos serviços para os sectores governamentais e comerciais na América do Norte sendo utilizado para a retransmissão de canais educacionais, internacionais e de alta definição. O satélite será também utilizado para comunicações móveis, redes privadas e milhares de terminais VSAT para a comunidade empresarial. O SES-3 é assim o terceiro satélite na nova geração SES WORLD SKIES, juntando-se a linha de satélites da AMC sobre a América do Norte e à constelação NSS que cobre o resto do globo.
O satélite foi construído pela Orbital Sciences Corporation (OSC) e é baseado na plataforma Star—2.4E, tendo uma massa de 3.112 kg no lançamento. Está equipado com 24 repetidores em banda C, 24 repetidores em banda Ku e 1 repetidor de 500 MHz em banda Ka. O satélite deverá estar operacional durante 15 anos.
O KazSat-2 (ao lado) é propriedade do governo do Cazaquistão e foi construído pela russa GK!PTs Khrunichev baseado no modelo Yahkta. Tinha uma massa de 1.330 kg no lançamento e deverá ficar operacional durante 12 anos. O satélite está equipado com 20 repetidores em banda Ku fornecidos pela empresa europeia Thales Alenia Space. Será utilizado para a retransmissão de canais de televisão para o território cazaque a partir da sua posição de 86,5º longitude Este na órbita geossíncrona.
Esta tabela indica os últimos dez lançamentos levados a cabo utilizando o foguetão 8K82KM Proton-M/Briz-M. Todos os lançamentos são levados a cabo a partir do Cosmódromo de Baikonur, Cazaquistão. Tabela: Rui C. Barbosa

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 53
Lançamento do SES-3 e do KazSat-2
O estágio Briz-M (99519) chegou23,24 ao Cosmódromo de Baikonur no dia 28 de Abril de 2011 a bordo de um avião de carga Antonov An-124-100 ‘Ruslan’. Por seu lado, e com o lançamento já adiado por várias vezes devido a atrasos na preparação dos dois satélites, o satélite KazSat-2 chegava25 a Baikonur no dia 30 de Maio, sendo retirado do seu contentor de transporte no dia seguinte e colocado na plataforma de trabalho na qual iria ser submetido a diversos testes e depois preparado para o lançamento. A 2 de Junho o estágio Briz-M era transferido para a estação de abastecimento 11G12 localizada na Área 31. O abastecimento26 teria lugar nos dias 3 e 4 de Junho. No dia 16 de Junho o lançamento era adiado para o dia 14 de Julho, sendo adiado para 15 de Julho no dia 24 de Junho.
Os atrasos na preparação do KazSat-2 estiveram relacionados com o facto de alguns dos seus componentes não passarem nos testes e se encontrarem abaixo dos requisitos necessários para a sua utilização.
23 На космодром Байконур доставлен разгонный блок “Бриз-М», http://www.khrunichev.ru/main.php?id=1&nid=2038. 24 На Байконур доставлен космический разгонный блок «Бриз-М», http://www.aex.ru/news/2011/4/28/84686/. 25 «КазСат-2» доставлен на космодром Байконур, http://www.roscosmos.ru/main.php?id=2&nid=17208. 26 Разгонный блок для спутника «КазСат-2» перевозят на заправочную станцию, http://www.roscosmos.ru/main.php?id=2&nid=17234.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 54
O satélite KazSat-2 foi acoplado com o estágio superior Briz-M a 27 de Junho27. Os trabalhos de integração do Módulo Orbital (que contém o estágio superior Briz-M e os dois satélites) foram finalizados a 8 de Julho. No dia seguinte o foguetão lançador 8K82KM Proton-M/Briz-M (93518/99519) foi transportado para a estação de abastecimento e no dia 12 de Julho foi transportado para a Plataforma de Lançamento PU-39 do Complexo de Lançamento LC200.
A contagem decrescente decorreu sem qualquer problema, bem como o abastecimento dos diferentes estágios do foguetão lançador. A activação da giro-plataforma teve lugar a T-5s (2316:04UTC) do dia 15 de Julho e os seis motores RD-276 do primeiro estágio do Proton-M entravam em ignição a T-1,756s (2316:08,187UTC) até atingirem 50% da força nominal. A força aumenta até 100% a T-0s (2316:09,940UTC) e a confirmação para o lançamento surge de imediato. A sequência de ignição verifica se todos os motores estão a funcionar de forma nominal antes de se permitir o lançamento.
O foguetão ascende verticalmente durante cerca de 10 segundos. O controlo de arfagem, da ignição e fim de queima dos motores, o tempo de separação da ogiva de protecção e o controlo de atitude, são todos calculados para que os estágios extintos caíam nas zonas pré-determinadas.
27 «КазСат-2» стыкуют с разгонным блоком «Бриз-М», http://www.roscosmos.ru/main.php?id=2&nid=17439.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 55

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 56

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 57

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 58
A ignição do segundo estágio ocorreu a T+1m 54,950s (2318:04,430UTC) e a separação entre o primeiro e o segundo estágio ocorreu a T+2m 0,750s (2318:10,690UTC). A ignição dos motores vernier do terceiro estágio ocorreu a T+5m 22,863s (2321:32,803UTC) com os quatro motores RD-0210 do segundo estágio a terminarem as suas queimas a T+5m 25,583s (2321:35,523UTC). A separação entre o segundo e o terceiro estágio ocorre às 2321:36,244UTC (T+5m 36,244s) e a ignição do motor RD-0212 do terceiro estágio ocorre às 2321:38,669UTC (T+5m 28,729s).
Ás 2321:59,116UTC (T+5m 49,176s) inicia-se o processo de separação da ogiva de protecção do satélite. Grampos longitudinais e juntas de fixação transversais são abertas com as duas metades da ogiva de protecção a serem afastadas por meio de molas. As duas metades da ogiva acabaram por cair na zona de impacto do segundo estágio. A indicação da separação da ogiva surge às 2321:59,214UTC (T+5m 49,274s).
O comando preliminar para o final da queima do terceiro estágio é enviado às 2334:14,139UTC (T+9m 24,199s) e o comando principal é enviado às 2345:45,018UTC (T+9m 35,078s). A separação da Unidade Orbital (estágio Briz-M juntamente com o satélite os dois satélites) ocorre às 2325:45,379UTC (T+9m 35,439s). O processo de separação entre o terceiro estágio e o estágio Briz-M é iniciado com o final da queima dos motores vernier, seguido da quebra das ligações mecânicas entre os dois estágios e da ignição dos retro-foguetões de combustível sólido para afastar o terceiro estágio do Briz-M.
Imediatamente após a separação entre o terceiro estágio e o estágio Briz-M, são accionados os motores de estabilização do estágio superior para eliminar a velocidade angular resultante da separação e proporcionar ao Briz-M a orientação e estabilidade ao longo da trajectória suborbital onde se encontra antes da sua primeira ignição.
A primeira ignição do Briz-M inicia-se às 2327:45,506UTC (T+11m 35,566s) com a ignição dos motores de correcção de impulso seguindo-se às 2327:59,597UTC (T+11m 49,657s) a ignição do motor S5.98M. O final da queima dos motores de correcção de impulso ocorre às 2328:01,432UTC (T+11m 51,492s) e o final da primeira queima do Briz-M ocorre às 2332:27,573UTC (T+16m 17,633s).
A segunda queima do Briz-M é executava no primeiro nodo de ascensão da órbita de suporte e após esta queima a Unidade de Ascensão atinge uma órbita intermédia. Esta manobra inicia-se às 0022:08,347UTC (T+1h 5m 58,407s) do dia 16 de Julho, com a ignição dos motores de correcção de impulso seguindo-se às 0022:14,309UTC (T+1h 6m 08,369s) a ignição do motor S5.98M. O final da queima dos motores de correcção de impulso ocorre às 0032:20,144UTC (T+1h 6m 20,144s) e o final da primeira queima do Briz-M ocorre às 0039:24,340UTC (T+1h 23m 14,400s).

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 59
A terceira e quarta queima irão ter lugar após a Unidade de Ascensão executar uma órbita em torno do planeta e têm lugar no perigeu, formando uma órbita de transferência com um apogeu próximo do que será conseguido na órbita final.
Antes da separação dos dois satélites, o estágio Briz-M executaria ainda mais três manobras. O satélite SES-2 separava-se o Briz-M às 0400:46,7UTC, enquanto que o satélite KazSat-2 separava-se às 0740:10,234UTC.
Após a separação do satélite KazSat-2 procedeu-se à medição dos seus parâmetros orbitais e o estágio Briz-M é colocado numa órbita mais afastada do satélite com o estágio a levar a cabo mais duas manobras orbitais procedendo à ignição do seu motor. A pressão dos tanques de propolentes do Briz-M é reduzida para evitar qualquer tipo de fuga de propolente que possa levar à destruição do veículo e á consequente criação de detritos orbitais.
As tabelas seguintes mostram os parâmetros orbitais do SES-3 e do KazSat-2 a caminho da órbita geossíncrona28.
Data Perigeu (km) Apogeu (km) Inclinação Orbital (º) Período Orbital (m)
16 Julho 402 35.252 45,55 624,63
16 Julho 3.655 35.757 24,72 698,76
16 Julho 3.683 35.734 24,67 698,86
16 Julho 3.683 35.728 24,67 698,73
18 Julho 8.447 35.753 14,76 797,14
18 Julho 19.325 35.759 5,33 1036,21
20 Julho 26.907 35.758 2,20 1214,66
Data Perigeu (km) Apogeu (km) Inclinação Orbital (º) Período Orbital (m)
16 Julho 402 35.252 45,55 624,63
16 Julho 3.694 35.745 24,68 699,30
16 Julho 3.691 35.729 24,68 698,91
16 Julho 3.694 35.745 24,68 699,30
28 Dados cedidos por Antonin Vitek http://www.lib.cas.cz/space.40/INDEX1.HTM.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 60
Segundo GPS-IIF colocado em órbita A ULA (United Launch Alliance) levou a cabo o lançamento do segundo de uma nova série de satélites de posicionamento global, o GPS-IIF-2, a partir do Complexo de Lançamento SLC-37B do Cabo Canaveral. O lançamento teve lugar às 0641UTC e foi levado a cabo por um foguetão Delta-IV M+(4,2) (D355).
Os novos satélites Block-IIF irão proporcionar uma maior precisão, relógios internos melhorados, uma vida útil mais longa e estão dotados de processadores reprogramáveis a bordo.
Os satélites GPS-IIF
O sistema GPS (Global Positioning System) é um sistema de navegação espacial de cobertura mundial que fornece aos seus utilizadores informação altamente precisa e tridimensional sobre a sua posição, velocidade e tempo, 24 horas por dias e em qualquer condição meteorológica. A Boeing é a empresa responsável pelo desenvolvimento e construção de quatro programas GPS desde 1974, estando também responsável pela construção de doze satélites GPS Block-IIF da próxima geração.
Características gerais do sistema
Criado pelo Departamento de Defesa dos Estados Unidos para aumentar a capacidade de combate dos militares norte-americanos, o GPS está disponível para utilização gratuita para todos aqueles que tenham um receptor de sinal GPS. As forças militares dos Estados Unidos e dos seus aliados utilizam o sistema GPS em virtualmente todos os sistemas para melhorar as suas capacidades e efectividade enquanto reduz o risco associado às suas forças e não combatentes. Desde as finanças até à agricultura, passando pela localização de encomendas, a utilização pela comunidade civil continua a aumentar de forma rápida e novas aplicações comerciais estão continuamente a ser desenvolvidas.
O aumento da utilização civil e comercial do sistema GPS, juntamente com as lições aprendidas ao longo de vários anos de operações militares e de experiências específicas durante a Operação Tempestade do Deserto, a Guerra do Kosovo, a Operação Escudo do Deserto e da Operação Liberdade do Iraque, levaram a um desejo de modernização do sistema e de aumentar as suas capacidades, mantendo a actual missão do sistema. Em resposta a uma nova demanda civil e às doutrinas emergentes da navegação em combate, a Força Aérea dos Estados Unidos foi encarregada em direccionar e procurar melhorias para a constelação GPS. A Boeing foi seleccionada para apoiar a Força Aérea dos Estados Unidos na arquitectura do futuro do GPS, orientando a introdução de novas capacidades e tecnologias nos satélites Block-IIF para criar um satélite modernizado.
O sistema GPS-IIF trás uma performance de próxima geração à constelação. Os satélites GPS-IIF são elementos críticos para a segurança nacional dos Estados Unidos e para sustentar a disponibilidade da navegação por GPS para as aplicações civis, comerciais e de defesa a nível global. Para além de sustentar a constelação GPS, os satélites IIF possuem mais capacidade e uma performance de missão melhorada.
Cada satélite GPS-IIF proporciona uma maior precisão de navegação através de melhorias na tecnologia dos relógios atómicos; um novo sinal civil (L5) para auxiliar a aviação comercial e as operações de busca e salvamento; melhoria no sinal militar e potência variável para melhor resistência às interferências em ambientes hostis; um tempo de vida útil de 12 anos fornecendo um serviço de longo prazo e custos de operação reduzidos; um processador reprogramável que pode receber actualizações de software para a melhora da operacionalidade do sistema.
O primeiro satélite GPS-IIF foi lançado desde o Cabo Canaveral a 27 de Maio de 2010 e entrou ao serviço para a Força Aérea dos Estados Unidos a 26 de Agosto de 2010, após a finalização dos testes em órbita.
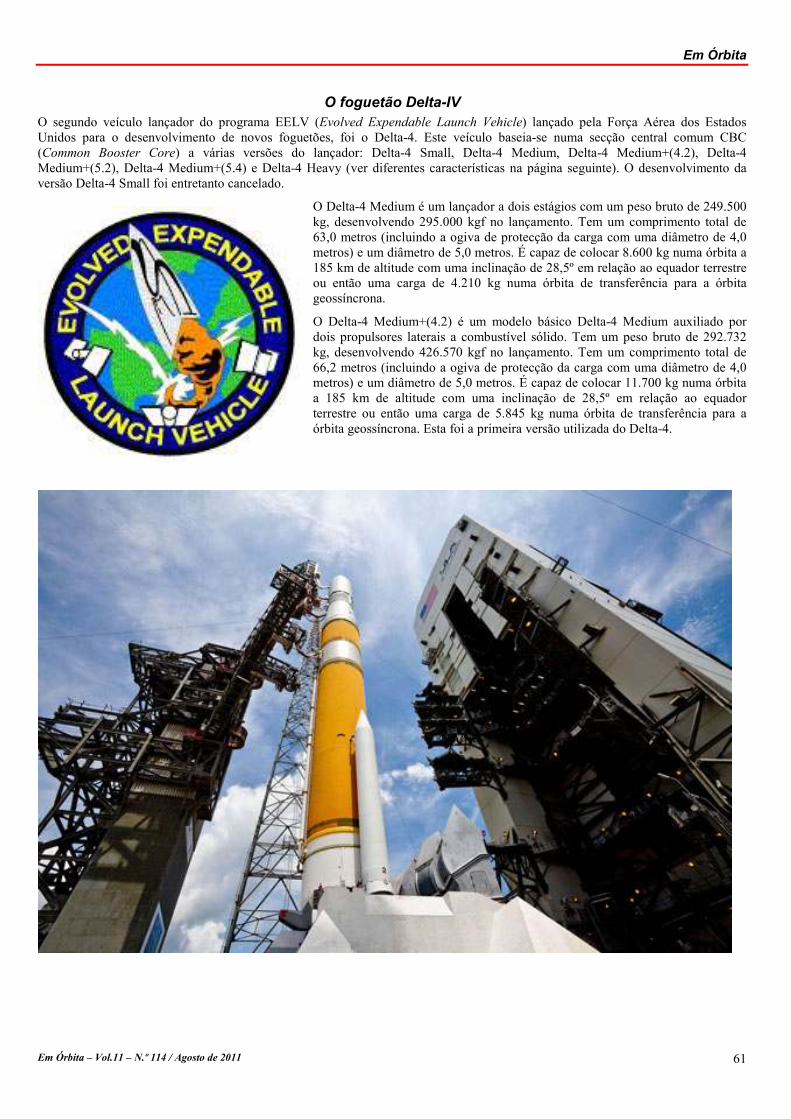
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 61
O foguetão Delta-IV O segundo veículo lançador do programa EELV (Evolved Expendable Launch Vehicle) lançado pela Força Aérea dos Estados Unidos para o desenvolvimento de novos foguetões, foi o Delta-4. Este veículo baseia-se numa secção central comum CBC (Common Booster Core) a várias versões do lançador: Delta-4 Small, Delta-4 Medium, Delta-4 Medium+(4.2), Delta-4 Medium+(5.2), Delta-4 Medium+(5.4) e Delta-4 Heavy (ver diferentes características na página seguinte). O desenvolvimento da versão Delta-4 Small foi entretanto cancelado.
O Delta-4 Medium é um lançador a dois estágios com um peso bruto de 249.500 kg, desenvolvendo 295.000 kgf no lançamento. Tem um comprimento total de 63,0 metros (incluindo a ogiva de protecção da carga com uma diâmetro de 4,0 metros) e um diâmetro de 5,0 metros. É capaz de colocar 8.600 kg numa órbita a 185 km de altitude com uma inclinação de 28,5º em relação ao equador terrestre ou então uma carga de 4.210 kg numa órbita de transferência para a órbita geossíncrona.
O Delta-4 Medium+(4.2) é um modelo básico Delta-4 Medium auxiliado por dois propulsores laterais a combustível sólido. Tem um peso bruto de 292.732 kg, desenvolvendo 426.570 kgf no lançamento. Tem um comprimento total de 66,2 metros (incluindo a ogiva de protecção da carga com uma diâmetro de 4,0 metros) e um diâmetro de 5,0 metros. É capaz de colocar 11.700 kg numa órbita a 185 km de altitude com uma inclinação de 28,5º em relação ao equador terrestre ou então uma carga de 5.845 kg numa órbita de transferência para a órbita geossíncrona. Esta foi a primeira versão utilizada do Delta-4.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 62
Medium Medium+ (4.2) Medium+ (5.2) Medium+ (5.4) Heavy
Propulsores
laterais GEM 60 GEM 60 GEM 60 Delta RS-68 Peso bruto (kg) - 33.798,00 33.798,00 33.798,00 226.400,00 Peso sem combustível
(kg) - 3.849,00 3.849,00 3.849,00 26.760,00
Força vácuo (kgf) - 88.452,00 88.452,00 88.452,00 337.807,00 Diâmetro (m) - 1,52 1,52 1,52 5,1 Envergadura (m) - 1,5 1,5 1,5 5,1 Comprimento (m) - 13,0 13,0 13,0 40,8 Iesp (s) - 275 275 275 420 Inm (s) - 243 243 243 365 Tq (s) - 90 90 90 249 Propolentes - Sólido Sólido Sólido LOX/LH2
N.º motores - 1 (GEM 60) 1 (GEM 60) 1 (GEM 60) 1 (RS-28)
Primeiro estágio Delta RS-68 Delta RS-68 Delta RS-68 Delta RS-68 Delta RS-68 CBC Peso bruto (kg) 226.400,00 226.400,00 226.400,00 226.400,00 226.400,00
Peso sem combustível (kg)
24.494,40 24.494,40 24.494,40 24.494,40 24.494,40
Força vácuo (kgf) 337.807,00 337.807,00 337.807,00 337.807,00 337.807,00 Diâmetro (m) 5,1 5,1 5,1 5,1 5,1 Envergadura (m) 5,1 5,1 5,1 5,1 5,1 Comprimento (m) 38,0 38,0 38,0 38,0 38,0 Iesp (s) 420 420 420 420 420 Inm (s) 365 365 365 365 365 Tq (s) 249 249 249 249 249 Propolentes LOX/LH2 LOX/LH2 LOX/LH2 LOX/LH2 LOX/LH2
N.º motores 1 (RS-6829) 1 (RS-68) 1 (RS-68) 1 (RS-68) 1 (RS-68)
Segundo estágio Delta 4-2 Delta 4-2 Delta 4-2 Delta 4-2 Delta 4H-2
Peso bruto (kg) 24.170,00 24.170,00 24.170,00 24.170,00 30.710,00 Peso sem combustível
(kg) 2.850,00 2.850,00 2.850,00 2.850,00 3.490,00
Força vácuo (kgf) 11.222,00 11.222,00 11.222,00 11.222,00 11.222,00 Diâmetro (m) 2,4 2,4 2,4 2,4 2,4 Envergadura (m) 4,0 4,0 4,0 4,0 5,0 Comprimento (m) 12,0 12,0 12,0 12,0 12,0 Iesp (s) 462 462 462 462 462 Inm (s) - - - - - Tq (s) 850 850 850 850 1.125 Propolentes LOX/LH2 LOX/LH2 LOX/LH2 LOX/LH2 LOX/LH2
N.º motores 1 (RL-10B-230) 1 (RL-10B-2) 1 (RL-10B-2) 1 (RL-10B-2) 1 (RL-10B-2)
29 O motor RL-68 é um motor criogénico desenvolvido pela Rocketdyne Propulsion & Power da Boeing Company. É capaz de desenvolver 337.807 kgf (vácuo) no lançamento e tem um Ies de 420 s, durante um Tq de 249s. Tem um peso de 6.597 kg e uma câmara de combustão. (Ver texto). 30 O motor RL-10B-2 é um motor criogénico desenvolvido pela Pratt & Whitney e já utilizado no Delta-3. É capaz de desenvolver 11.226,60 kgf (vácuo) no lançamento e tem um Ies de 465,5 s, durante um Tq de 700s. Tem um diâmetro de 2,1 metros e uma câmara de combustão.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 63

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 64
O Delta-4 Medium+ (5.2) é um modelo básico Delta-4 Medium auxiliado por dois propulsores laterais a combustível sólido, mas possuindo uma ogiva de protecção de carga com 5,0 metros de diâmetro. Tem um peso bruto de 292.732 kg, desenvolvendo 426.570 kgf no lançamento. Tem um comprimento total de 68,0 metros (incluindo a ogiva de protecção da carga) e um diâmetro de 5,0 metros. É capaz de colocar 10.300 kg numa órbita a 185 km de altitude com uma inclinação de 28,5º em relação ao equador terrestre ou então uma carga de 4.640 kg numa órbita de transferência para a órbita geossíncrona.
O Delta-4 Medium+ (5.4) é um modelo semelhante Delta-4 Medium+ (5.2), mas auxiliado por quatro propulsores laterais a combustível sólido. Tem um peso bruto de 404.600 kg, desenvolvendo 598.000 kgf no lançamento. Tem um comprimento total de 68,0 metros (incluindo a ogiva de protecção da carga com 5,0 metros de diâmetro) e um diâmetro de 5,0 metros. É capaz de colocar 13.600 kg numa órbita a 185 km de altitude com uma inclinação de 28,5º em relação ao equador terrestre ou então uma carga de 6.565 kg numa órbita de transferência para a órbita geossíncrona.
Finalmente, o Delta-4 Heavy tem um peso bruto de 733.400 kg, desenvolvendo 884.000 kgf no lançamento. Tem um comprimento total de 70,7 metros (incluindo a ogiva de protecção da carga com 5,0 metros de diâmetro) e um diâmetro de 5,0 metros. É capaz de colocar 25.800 kg numa órbita a 185 km de altitude com uma inclinação de 28,5º em relação ao equador terrestre ou então uma carga de 13.130 kg numa órbita de transferência para a órbita geossíncrona.
O CBC é comum a todas as versões do Delta-4. Na base deste estágio encontra-se a secção do motor RS-68 seguido pelo tanque de hidrogénio líquido que ocupa dois terços do CBC e que é identificável desde o exterior devido à protecção térmica exercida por uma cobertura de espuma cor de laranja. Entre o tanque de hidrogénio líquido e o tanque de oxigénio líquido encontra-se o corpo central do primeiro estágio e identificável por uma banda branca logo acima da protecção do tanque de hidrogénio. O tanque de oxigénio líquido encontra-se na parte superior do primeiro estágio e é também identificável por uma cobertura em espuma cor de laranja. Como curiosidade é de referir que a Boeing tentou pintar a cobertura de espuma cor de laranja com a cor azul (“Delta Blue”) normalmente associada à herança dos lançadores Delta. Porém, os resultados não foram muito satisfatórios e decidiu-se não se gastar muito tempo nesta pequena questão. No entanto no futuro a Boeing irá se debruçar sobre esta questão tentando dar aos Delta-4 a cor que caracteriza os seus antecessores.
De forma a obter um impulso adicional durante a fase inicial do voo, os modelos Delta-4 Medium+ utilizam combinações de dois ou quatro propulsores laterais de combustível sólido. Acoplados ao primeiro estágio, estes motores são apresentados pela Alliant Techsystems como sendo de terceira geração, os seus motores são fabricados em epóxi-grafite e representam um avanço em relação aos propulsores utilizados nos Delta-2 e Delta-3. Estes motores são denominados GEM-60 pois têm 60 polegadas de diâmetro (1,52 metros). Estes propulsores têm a particularidade de possuir tubeiras que podem ser fixas ou então ser capazes de serem orientadas aumentando assim a sua eficiência.
A parte superior do Delta-4 pode variar consoante as versões. Para o delta-4 Medium e Delta-4 Medium+ (4.2), um adaptador inter-estágio é utilizado para ligar fisicamente o primeiro estágio e o segundo estágio do lançador. As restantes duas versões do Delta-4 Medium+ e o Delta-4 Heavy utilizam um inter-estágio semelhante a um cilindro.
O segundo estágio do Delta-4 foi utilizado por três vezes no Delta-3, no entanto no seu primeiro voo em 27 de Agosto de 199831 o veículo explodiu antes da ignição do último estágio. Na segunda missão do Delta-3 em 5 de Maio de 199932 o segundo estágio não executou uma segunda ignição como estava programado deixando numa órbita inútil o satélite de comunicações Orion-3 (25727 1999-024A). No terceiro lançamento do Delta-3 a 23 de Agosto de 200033, o estágio superior funcionou sem qualquer problema.
31 O Delta-3 8930-13.1C (D259) foi lançado às 0117UTC a partir da LC-17B do Cabo Canaveral e transportava o satélite de comunicações Galaxy-X (1998-F02). 32 O Delta-3 8930-13.1C (D269) foi lançado às 0100UTC a partir da LC-17B do Cabo Canaveral. 33 O Delta-3 8930 (D280) foi lançado às 1105UTC a partir da LC-17B do Cabo Canaveral e transportava o satélite DM-F3 (26475 2000-048A).

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 65

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 66
A versão do segundo estágio utilizado no Delta-4 é quase idêntica á versão utilizada no Delta-3. O motor RL-10B-2, o seu módulo de equipamento e o tanque de oxigénio líquido estão colocados na zona inter-estágio durante o lançamento e fica exposta após a separação do primeiro estágio, Enquanto que o Delta-4 permanece na plataforma de lançamento, a zona que alberga o tanque de hidrogénio líquido do segundo estágio é identificável através da presença de uma banda cor de laranja. No total o estágio transporta 20.412,00 kg de propolente que permite um funcionamento de aproximadamente 14 minutos através de duas ignições caso se trate de uma missão para colocar um satélite em órbita geossíncrona.
O último estágio pode ver o seu diâmetro aumentado para 5 metros caso se trate das versões Medium+ (5.2), Medium+ (5.4) ou Heavy. Este aumento de diâmetro tem como objectivo aumentar a capacidade de transporte de propolente. O tanque de oxigénio é aumentado em meio metro no seu comprimento e o tanque de hidrogénio passa dos normais 4,0 metros de diâmetro para 5,0 metros de diâmetro. O total de combustível é aumentado para 27.216 kg, permitindo assim um aumento de aproximadamente 5 minutos no tempo de queima.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 67
O motor RL-10B-2 utilizado no último estágio dos Delta-4, tem a maior tubeira em carbono-carbono extensível. Esta tubeira coloca-se em posição após a separação do primeiro estágio. Este motor tem uma vida útil de 3.500 s e pode ser accionado até 15 vezes, incluindo os testes no solo.
Por fim, no topo do foguetão, situa-se a ogiva de protecção e o dispositivo de fixação da carga. As ogivas são fabricadas em materiais compósitos e podem ter 4,0 ou 5,0 metros de diâmetro. Pode ainda ser utilizada uma ogiva fabricada em alumínio e já utilizada nos foguetões Titan-4.
Os foguetões Delta-4 são fabricados nas instalações da Boeing em Decatur, Alabama.
O motor RS-68 representa uma evolução em sistemas de propulsão dos Estados Unidos e é o primeiro motor de combustível líquido totalmente desenvolvido neste país desde os SSME que propulsionam os vaivéns espaciais e que foi desenvolvido na década de 70.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 68
Desenvolvido entre 1997 e 2002, o RS-68 é o maior motor de hidrogénio líquido disponível em todo o mundo, no entanto o seu desenho é extremamente simples e os custos de produção são relativamente baixos.
Em comparação com os SSME, o tempo de desenvolvimento do RS-68 foi diminuído em metade, o número de peças reduzido em 80%, o trabalho manual reduzido em 92% e os custos reduzidos num factor de 5. A construção do motor é feita na sua maior parte por maquinaria automática. Em vez de se possuir um motor constituído por um grande número de peças, o motor é feito a partir de uma peça de metal sólida aumentando assim a sua fiabilidade.
O motor tem onze componentes principais, incluindo a câmara de combustão, turbo-bombas individuais de oxigénio e hidrogénio líquido, suporte de suspensão do motor, mecanismo de injecção, gerador de gás, dissipador de calor e condutas de exaustão e combustível. O motor possui uma câmara de combustão arrefecida por regeneração que faz com que o motor funciona num ciclo onde uma pequena câmara de combustão faz accionar as turbinas, utilizando de forma eficiente os gases provenientes da turbo-bomba de hidrogénio líquido.
As designações dos foguetões Delta-4
As diferentes configurações da família de foguetões Delta-4 são definidas utilizando um sistema de códigos que utiliza quatro dígitos e uma letra opcional após o quarto dígito. O primeiro dígito designa a configuração básica do veículo, isto é ‘4’ que significa o núcleo do lançador composto pelo Delta-4 LOX/LH2. O número de propulsores laterais de combustível sólido GEM-60 é designado pelo segundo dígito que pode ter os valores de ‘0’, ‘2’ ou ‘4’. O terceiro dígito pode ter os valores de ‘4’, que representa um segundo estágio criogénico com um diâmetro de 4,0 metros, ou ‘5’, que representa um segundo estágio criogénico com um diâmetro de 5,0 metros. Finalmente, o quarto dígito representa o terceiro estágio e que pode ter os números ‘0’, que indica que o foguetão não tem terceiro estágio, ‘3’, que indica a presença de um motor Star-37D / TE-364-3 de propolente sólido, ‘4’, que indica a presença de um motor Star-37D / TE-364-4 de propolente sólido, ‘5’, que indica a presença de um motor Star-48D / PAM-D de propolente sólido34, e ‘6’, que indica a presença de um motor Star-37FM de propolente sólido.
Após o quarto dígito podemos ter a letra opcional ‘H’ que indica a configuração ‘Heavy’ na qual dois CBC laterais suplementam o CBC central.
Ainda podemos ter mais um número no código que é indicativo da carenagem que está a ser utilizada. Para os foguetões Delta-2 este número indica o diâmetro da carenagem em pés. Para os foguetões Delta-3 e Delta-4 este número indica o comprimento da carenagem em metros.
A tabela seguinte mostra os lançamentos do foguetão Delta-4 levados a cabo até à presente missão (os lançamentos desde a Base Aérea de Vandenberg são executados desde o Complexo de Lançamento SLC-6 enquanto que os lançamentos levados a cabo desde o Cabo Canaveral AFS são executados desde o Complexo de Lançamento SLC-37B).
Lançamento Data Modelo /
Configuração Veículo Lançador
Local Lançamento Satélite
2004-050 21-Dez-04 Heavy / 4050H D310 C.C.A.F.S. DemoSat
(28500 2004-050)
2006-018 24-Mai-06 M+(4,2) / 4240 D313 C.C.A.F.S. GOES-13 'GOES-' (29155 2006-018A)
2006-027 25-Jun-06 M+(4,2) / 4240 D317 Vandenberg AFB USA-184 'ROL-22' (29249 2006-027A)
2006-050 4-ov-06 Medium / 4040 D320 Vandenberg AFB USA-191 'DMSP-5D3-F17'
(26522 2006-050A)
2007-054 11-ov-07 Heavy / 4050H D329 C.C.A.F.S. USA-197 'DSP-23' (32287 2007-054A)
2009-001 18-Jan-09 Heavy / 4050H D337 C.C.A.F.S. USA-202 'ROL-26' (33490 2009-001A)
2009-033 27-Jun-09 M+(4,2) / 4240 D342 C.C.A.F.S. GOES-14 'GOES-O' (35491 2009-033A)
2010-008 4-Mar-10 M+(4,2) / 4240 D348 C.C.A.F.S. GOES-15 'GOES-P' (36411 2010-088A)
2010-022 28-Mai-10 M+(4,2) / 4240 D349 C.C.A.F.S. USA-213 'avstar-65 GPS-IIF-1'
(36585 2010-022A)
2010-063 21-ov-10 Heavy / 4050H D351 C.C.A.F.S. USA-223 'ROL-32' (37232 2010-063A)
34 Muitas vezes esta configuração é referida como estágio superior ‘0’ com um motor PAM-D devido à natureza modular da configuração PAM.
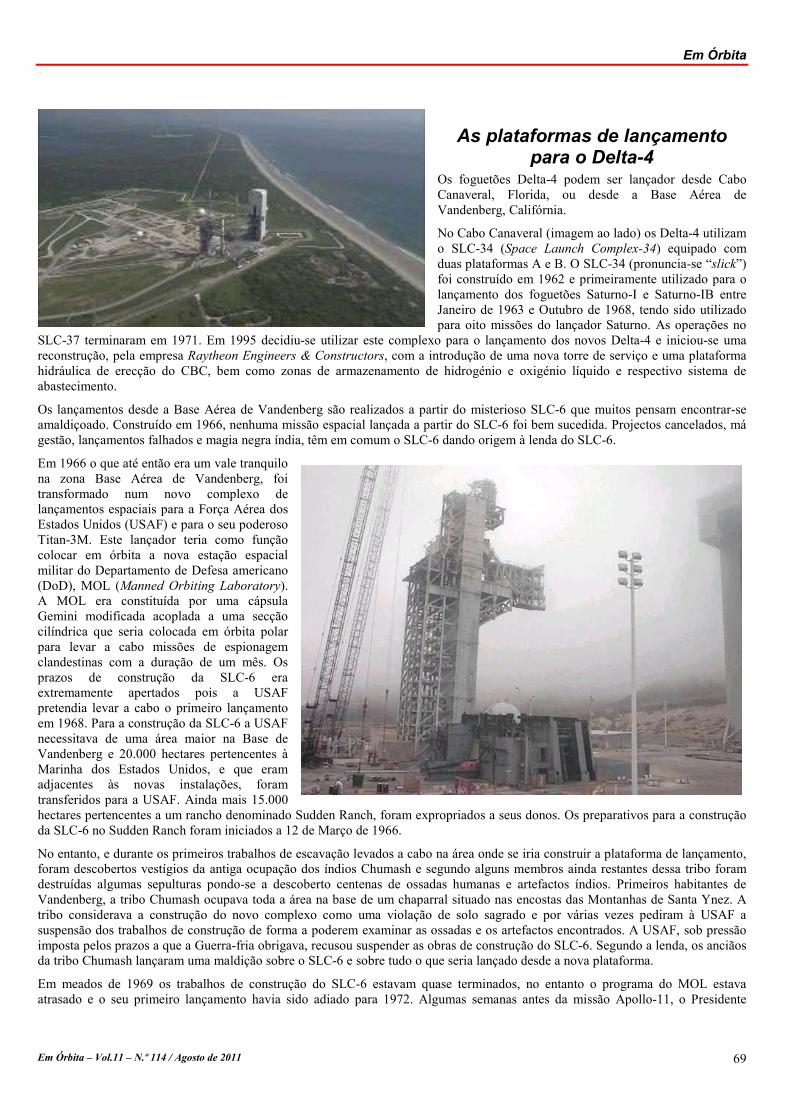
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 69
As plataformas de lançamento para o Delta-4
Os foguetões Delta-4 podem ser lançador desde Cabo Canaveral, Florida, ou desde a Base Aérea de Vandenberg, Califórnia.
No Cabo Canaveral (imagem ao lado) os Delta-4 utilizam o SLC-34 (Space Launch Complex-34) equipado com duas plataformas A e B. O SLC-34 (pronuncia-se “slick”) foi construído em 1962 e primeiramente utilizado para o lançamento dos foguetões Saturno-I e Saturno-IB entre Janeiro de 1963 e Outubro de 1968, tendo sido utilizado para oito missões do lançador Saturno. As operações no
SLC-37 terminaram em 1971. Em 1995 decidiu-se utilizar este complexo para o lançamento dos novos Delta-4 e iniciou-se uma reconstrução, pela empresa Raytheon Engineers & Constructors, com a introdução de uma nova torre de serviço e uma plataforma hidráulica de erecção do CBC, bem como zonas de armazenamento de hidrogénio e oxigénio líquido e respectivo sistema de abastecimento.
Os lançamentos desde a Base Aérea de Vandenberg são realizados a partir do misterioso SLC-6 que muitos pensam encontrar-se amaldiçoado. Construído em 1966, nenhuma missão espacial lançada a partir do SLC-6 foi bem sucedida. Projectos cancelados, má gestão, lançamentos falhados e magia negra índia, têm em comum o SLC-6 dando origem à lenda do SLC-6.
Em 1966 o que até então era um vale tranquilo na zona Base Aérea de Vandenberg, foi transformado num novo complexo de lançamentos espaciais para a Força Aérea dos Estados Unidos (USAF) e para o seu poderoso Titan-3M. Este lançador teria como função colocar em órbita a nova estação espacial militar do Departamento de Defesa americano (DoD), MOL (Manned Orbiting Laboratory). A MOL era constituída por uma cápsula Gemini modificada acoplada a uma secção cilíndrica que seria colocada em órbita polar para levar a cabo missões de espionagem clandestinas com a duração de um mês. Os prazos de construção da SLC-6 era extremamente apertados pois a USAF pretendia levar a cabo o primeiro lançamento em 1968. Para a construção da SLC-6 a USAF necessitava de uma área maior na Base de Vandenberg e 20.000 hectares pertencentes à Marinha dos Estados Unidos, e que eram adjacentes às novas instalações, foram transferidos para a USAF. Ainda mais 15.000 hectares pertencentes a um rancho denominado Sudden Ranch, foram expropriados a seus donos. Os preparativos para a construção da SLC-6 no Sudden Ranch foram iniciados a 12 de Março de 1966.
No entanto, e durante os primeiros trabalhos de escavação levados a cabo na área onde se iria construir a plataforma de lançamento, foram descobertos vestígios da antiga ocupação dos índios Chumash e segundo alguns membros ainda restantes dessa tribo foram destruídas algumas sepulturas pondo-se a descoberto centenas de ossadas humanas e artefactos índios. Primeiros habitantes de Vandenberg, a tribo Chumash ocupava toda a área na base de um chaparral situado nas encostas das Montanhas de Santa Ynez. A tribo considerava a construção do novo complexo como uma violação de solo sagrado e por várias vezes pediram à USAF a suspensão dos trabalhos de construção de forma a poderem examinar as ossadas e os artefactos encontrados. A USAF, sob pressão imposta pelos prazos a que a Guerra-fria obrigava, recusou suspender as obras de construção do SLC-6. Segundo a lenda, os anciãos da tribo Chumash lançaram uma maldição sobre o SLC-6 e sobre tudo o que seria lançado desde a nova plataforma.
Em meados de 1969 os trabalhos de construção do SLC-6 estavam quase terminados, no entanto o programa do MOL estava atrasado e o seu primeiro lançamento havia sido adiado para 1972. Algumas semanas antes da missão Apollo-11, o Presidente

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 70
Richard Nixon acabaria por cancelar todo o programa baseado nos seus custos elevados e numerosos adiamentos. Por outro lado, o desenvolvimento de satélites espiões não tripulados havia já atingido muitos dos objectivos a que o MOL se propunha.
Não havia missão para o SLC-6 que havia custado biliões de dólares e que incluía uma torre de serviço com 32 andares de altura, a MST (Mobile Service Tower). O complexo acabaria por ser abandonado.
No entanto em 1984, o SLC-6 parecia ganhar uma nova vida e de novo para um programa tripulado do DoD. As equipas de construção trabalhavam a todo o vapor para preparar o SLC-6 para as missões militares do vaivém espacial. A USAF havia decidido reactivar e modificar o SLC-6 de forma a poupar 100 milhões de dólares num programa de modificação da estrutura. Devido à sua localização geográfica, rodeado de montanhas e com o Oceano Pacífico mesmo em frente, o SLC-6 era o local ideal para lançar o vaivém espacial em missões militares em órbitas polares.
Os planos da USAF previam que o vaivém espacial fosse montado ao tanque exterior de combustível líquido e aos dois propulsores laterais de combustível sólido, no exterior sem qualquer protecção contra os elementos apesar dos protestos da NASA que indicava que as medidas de tolerância para tais actividades não seriam respeitadas devido às condições atmosféricas do local. A USAF pretendia modificar a MST construída para o MOL enquanto levava a cabo a construção da nova PPF (Payload Processing Facility). A PPF seria composta pelo PPR (Payload Preparation Room) e pela PCR (Payload Changeout Room). Guindastes instalados em ambas as estruturas levantariam os diferentes componentes do vaivém espacial, que seriam montados numa plataforma móvel. De salientar que os primeiros vaivéns montados no interior do VAB (Vehicle Assembly Building) no KSC mostraram que a preocupação da NASA acerca dos limites de tolerância para estas operações, tinha razão de ser. As especificações impostas pela USAF nem se aproximavam dos valores precisos que eram necessários para estas operações, e o pior era que a USAF planeava montar os diferentes componentes do vaivém ao ar livre e sem qualquer protecção contra o imprevisível tempo de Vandenberg.
Em última análise a USAF foi obrigada a concordar com os limites impostos pela NASA e então decidiu-se pela construção do SAB (Shuttle Assembly Building) orçamentado em 40 milhões de dólares. Um abrigo móvel foi adicionado aos planos de reconstrução do SLC-6 e o preço original acabou por duplicar para 79,5 milhões de dólares.
Infelizmente esta era a ponta do iceberg dos problemas que afligiam o SLC-6. A zona onde o complexo está localizado é uma das áreas onde a probabilidade de ocorrência de nevoeiro é a mais elevada nos Estados Unidos. A previsão de formação de gelo no tanque exterior de combustível líquido é muito mais elevada do que nos piores meses de inverno na Florida e em consequência disso a USAF decidiu construir duas estruturas de cimento contendo condutas de ar quente dirigidas para o tanque de combustível e que os engenheiros esperavam evitar a formação de gelo no tanque. Após terem sido gastos mais de 13 milhões de dólares em todo o sistema para evitar a formação de gelo sobre o tanque de combustível, a USAF admitiu que não teria a certeza que o sistema iria impedir a formação de gelo.
A data de lançamento da primeira missão militar desde a SLC-6 foi adiada de 1984 para 1985 e posteriormente para 1986. O complexo estava coberto de problemas, uns não muito graves, mas outros tão sérios que a hipótese de o vaivém espacial explodir no lançamento e destruir todas as instalações era real. Testemunhos posteriores no Congresso dos Estados Unidos vieram a revelar que mais de oito mil soldagens na plataforma de
lançamento se encontravam de tal forma deficientes que não aguentariam o lançamento do vaivém, tendo sido encontradas tubagens quebradas e deliberadamente cortadas, e válvulas críticas encontravam-se entupidas com desperdícios. Investigações levadas a cabo pela USAF mostraram que as soldagens defeituosas haviam passado despercebidas por mais de um ano e que não existia qualquer controlo de qualidade sobre o trabalho realizado. Muitos previam que só se iria assistir a um lançamento do vaivém desde

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 71
Vandenberg, porque a plataforma iria colapsar durante o lançamento. Uma reportagem levada a cabo em 1984 pela NBC, previa que existia uma hipótese em cinco de que o vaivém espacial iria explodir durante um lançamento desde a Base Aérea de Vandenberg. Fora ainda determinado que o hidrogénio gasoso ficaria aprisionado nas condutas destinadas a afastar os produtos da combustão dos motores principais do vaivém durante o lançamento no caso de uma abortagem na plataforma. As condutas eram as mesmas utilizadas para o Titan-3M e estendiam-se até ao sopé das montanhas adjacentes. Porém, os construtores do novo SLC-6 não tiveram em conta que o Titan-3M não utilizava o hidrogénio como combustível. Assim, a detonação acidental do hidrogénio após a abortagem na plataforma poderia destruir tanto o vaivém espacial como a própria plataforma. Além do mais, a plataforma de apoio do vaivém espacial foi considerada muito rígida e não o suficiente flexível. Em resultado as forças resultantes dos motores principais do vaivém poderiam danificar gravemente as asas do veículo.
Apesar de todas estas questões e sérios problemas, a USAF decidiu seguir em frente com a utilização do SLC-6 e em princípios de 1985 era anunciado que os trabalhos de construção do complexo haviam terminado com a colocação do equipamento de suporte no solo e com as verificações finais às instalações. A 15 de Outubro de 1985 o Presidente Ronald Reagan anunciava mais um passo importante no tão bem sucedido programa do vaivém espacial, o VSSLLC (Vandenberg Space Shuttle Launch and Landing Complex) encontrava-se pronto a ser utilizado.
A missão STS-62A, prevista para 20 de Março de 1986 e depois adiada para Julho de 1986, seria a primeira a ser lançada desde Vandenberg. O vaivém espacial Discovery seria tripulado por Robert Laurel Crippen (Comandante), Guy Spence Gardner, Jr. (Piloto), Richard Michael Mullane (Especialista de Voo 1), Jerry Lynn Ross (Especialista de Voo 2), Dale Alan Gardner (Especialista de Voo 3), Edward ‘Pete’ Aldridge (Especialista de Carga) e John Brett Watterson (Especialista de Carga). Curiosamente Robert Crippen foi pela primeira vez seleccionado para astronauta enquanto membro do corpo de astronautas da USAF escolhidos para tripular o MOL.
Os trabalhos de preparação do SLC-6 continuavam e os vaivéns iam completando as suas missões com sucesso até 28 de Janeiro de 1986 dia em que o Challenger é destruído nos céus da Florida e os voos espaciais são suspensos por quase três anos. Em vez de levar a cabo as reparações necessárias no SLC-6, e que atingiam biliões de dólares, a USAF desiste mais uma vez do voo espacial tripulado e sobre o véu da segurança as operações do vaivém espacial a partir de Vandenberg são abandonadas.
A 26 de Dezembro de 1989, o Secretário da Força Aérea dos Estados Unidos, Edward ‘Pete’ Aldridge (em tempos membro da primeira missão do vaivém a ser lançada desde a SLC-6), dá a machadada final no programa de lançamento do vaivém a partir de Vandenberg. Até então o SLC-6 havia custado mais de 8 biliões de dólares sem nunca ver um lançamento espacial.
Em princípios dos anos 90 a USAF concedeu um novo contrato para modificar o SLC-6 de forma a ser utilizado por um novo lançador, o potente Titan-4/Centaur, que era visto como um substituto do vaivém para as cargas militares secretas. Foram então atribuídos mais de 300 milhões de dólares para a reconversão do SLC-6 para que fosse utilizado para o lançamento dos maiores e mais dispendiosos satélites espiões dos Estados Unidos. Porém, a 22 de Março de 1991, a USAF mudava de ideias e terminava os planos de reconversão do SLC-6 dizendo que não havia suficientes requerimentos para lançar o Titan-4/Centaur desde a Base de Vandenberg e justificar a reconversão do complexo. O SLC-6 era novamente abandonado.
Em 1994 uma nova oportunidade surgia para o complexo. A USAF decidia ceder as suas instalações à Lockheed Martin como local de lançamento da nova família de foguetões LLV (Lockheed Launch Vehicles) Athena. Investindo milhões na recuperação do complexo, vítima de uma década de abandono, a Lockheed Martin conseguiria algo que a USAF nunca conseguira, lançar um foguetão desde o SLC-6. O lançamento dava-se às 2230UTC do dia 15 de Agosto de 1995 e o LLV-1 levava a bordo o satélite Gemstar-1/Vitasat-1, tendo como destino a órbita polar. Os festejos iniciais do lançamento depressa se transformaram numa situação de emergência quando aos três minutos de voo o LLV-1 começou a ficar descontrolado e inverteu a sua direcção dirigindo-se para o SLC-6. Os controladores do voo acabariam por accionar o mecanismo de destruição do veículo poucos segundos depois.
As causas do acidente foram determinadas e o veículo teve de ser redesenhado antes de se permitir o lançamento do próximo satélite que pertencia a NASA. O satélite Lewis (24909 1997-044A) acabaria por ser o primeiro satélite a ser colocado em órbita desde o complexo SLC-6 no dia 23 de Agosto de 1997 (0651:01UTC) por um foguetão LMLV-1 (Lockheed Martin Lauch Vehicle-1).
A maldição do SLC-6 parecia ter terminado, pelo menos até ao dia em que o satélite Lewis ficou descontrolado em órbita terrestre (27 de Agosto) e gastando todo o seu combustível de manobra. Após um mês de tentativas para controlar o satélite, o Lewis reentrava na atmosfera terrestre no dia 28 de Setembro de 1997 sobre o Oceano Atlântico e junto da costa da Antárctica.
O próximo lançamento desde o SLC-6 teria lugar a 27 de Abril de 1999. O lançamento deu-se às 1822:01UTC e tudo parecia correr bem com o foguetão Athena-2 (LM-005) até à altura em que as estações de rasteio colocadas na Antárctica e em África não conseguiram captar os sinais do satélite Ikonos-1. O satélite teria sido provavelmente destruído enquanto caia na atmosfera terrestre sobre o Pacífico Sul e nunca tendo atingido a órbita terrestre. A ogiva de protecção do Athena-2 não se separou do último estágio do lançador tendo aumentado o atrito na atmosfera e impedido o veículo de atingir a velocidade suficiente para entrar em órbita.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 72
Lançamento do GPS-IIF-2
O lançamento do satélite de navegação GPS-IIF-2 teve lugar às 0641UTC do dia 16 de Julho de 2011 a partir do Complexo de Lançamento SLC-37B do Cabo Canaveral AFS após uma contagem decrescente sem problemas significativos. Após a ignição dos seus motores, o foguetão Delta-IV Medium+(4,2) (D355) rapidamente abandonava a plataforma de lançamento e levava a cabo uma missão sem problemas. O gráfico e a tabela seguintes mostram as diferentes fases do voo até à separação do satélite que teve lugar às 0714UTC.
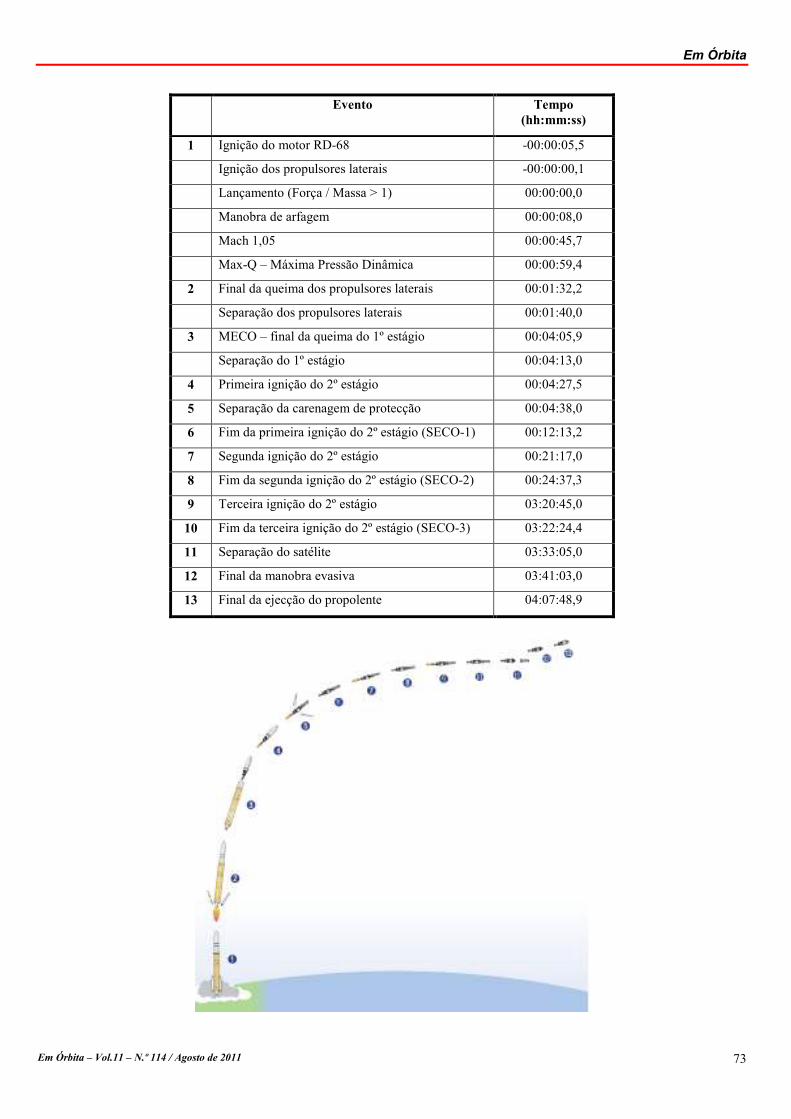
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 73
Evento Tempo (hh:mm:ss)
1 Ignição do motor RD-68 -00:00:05,5
Ignição dos propulsores laterais -00:00:00,1
Lançamento (Força / Massa > 1) 00:00:00,0
Manobra de arfagem 00:00:08,0
Mach 1,05 00:00:45,7
Max-Q – Máxima Pressão Dinâmica 00:00:59,4
2 Final da queima dos propulsores laterais 00:01:32,2
Separação dos propulsores laterais 00:01:40,0
3 MECO – final da queima do 1º estágio 00:04:05,9
Separação do 1º estágio 00:04:13,0
4 Primeira ignição do 2º estágio 00:04:27,5
5 Separação da carenagem de protecção 00:04:38,0
6 Fim da primeira ignição do 2º estágio (SECO-1) 00:12:13,2
7 Segunda ignição do 2º estágio 00:21:17,0
8 Fim da segunda ignição do 2º estágio (SECO-2) 00:24:37,3
9 Terceira ignição do 2º estágio 03:20:45,0
10 Fim da terceira ignição do 2º estágio (SECO-3) 03:22:24,4
11 Separação do satélite 03:33:05,0
12 Final da manobra evasiva 03:41:03,0
13 Final da ejecção do propolente 04:07:48,9

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 74

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 75

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 76
Spektr-R, um laboratório espacial para estudar o Universo A Rússia levou a cabo o lançamento do observatório radioastronómico Spektr-R. O lançamento teve lugar às 0231:18UTC do dia 18 de Julho de 2011 e foi levado a cabo por um foguetão 11K77 Zenit-3SLBF/Fregat-SB (Zenit-2SB80 - SLB80.3/2002) a partir da Plataforma de Lançamento PU-1 do Complexo de Lançamento LC45 do Cosmódromo de Baikonur, Cazaquistão.
O Observatório Espacial RadioAstron (Projecto Spektr-R)
O Observatório Espacial RadioAstron (Projecto Spektr-R) é um projecto internacional para o lançamento de um satélite equipado com uma antena de 10 metros e dedicado à investigação da estrutura de vários objectos no Universo nos comprimentos de onda na ordem dos centímetros e decímetros com uma resolução angular de poucos milionésimos de segundos de arco, isto é milhões de vezes melhor do que a resolução do olho humano. Tal resolução é conseguida para o rádio interferómetro consistindo de um telescópio espacial numa órbita com um apogeu de 350.000 km, em conjunto com grandes radiotelescópios no solo. Medições tendo por base um interferómetro VLBI (Very Long Baseline Interferometer) nesta órbita irão proporcionar informação morfológica e de coordenadas das fontes de rádio galácticas e extragalácticas.
O Projecto Spektr-R, iniciado pelo Centro Astro Espacial do Instituto de Física Lebedev da Academia das Ciências da Rússia em colaboração com outros institutos da academia das ciências e com a Agência Espacial Russa, expandiu-se para uma colaboração internacional: cientistas de mais de vinte países estão a construir os instrumentos, a planear o perfil da missão, e a garantir o apoio de radiotelescópios no solo. A Rússia irá fornecer o satélite, a maior parte do equipamento a bordo e todos os testes. O controlo geral do desenho do telescópio e a construção do radiotelescópio espacial estão a cabo da Associação Lavochkin.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 77
Vários outros países contribuem para os equipamentos científicos a bordo. O receptor de 92 cm está a ser construído pelo Centro Nacional para a Radioastrofísica, Índia, e pela OAO KB ‘Gorizont', em Nizhny Novgorod - Rússia; o receptor de 18 cm na Austrália (CSIRO - Commonwealth Scientific and Industrial Research Organization); o receptor de 6 cm pela Rússia; o receptor de 1,35 cm pela Finlândia (HUT - Helsinki University of Technology) e melhorado nos Estados Unidos (NRAO - !ational Radio Astronomy Observatory) e Rússia (Instituto de Radioengenharia e Electrónica de Moscovo); o sistema de frequência standard de rubídio a bordo foi construído pela ESA no Observatório de Neuchatel, Suíça. O sistema de frequência standard H-maser a bordo foi desenvolvido pela Rússia (ZAO ‘Vremya-CH' em Nizhmy Novgorod). O sistema de gravação russo em sistema HDD e fitas será capaz de aceitar um fluxo de dados digitais a uma velocidade máxima de 128 Mbit/s. O correlador será capaz de processar os dados até cinco estações interferométricas (incluindo o elemento espacial) a uma velocidade máxima de 129 Mbit/s. A ESA participou nos testes da antena do radiotelescópio espacial. Os sistemas operacionais a bordo e os centros de comunicação e comando em Bear Lake e Ussuriysk, e também uma antena de rastreio em Pushchino estão em fase final de preparação.
Devido à grande linha de base perto da distância entre a Terra e a Lua, o interferómetro no solo é capaz de determinar as dimensões das fontes de rádio, as suas estruturas, distâncias e movimentos próprios, bem como actuar como um sistema de observação espectral e de polarização - até dezenas de vezes melhor do que é possível para os interferómetros no solo.
A órbita do RadioAstron, gravitacionalmente perturbada pela Lua, terá os seguintes parâmetros médios: perigeu - 10.000 km, inclinação inicial - 51,6º, apogeu - 350.000 km, período orbital 9,5 dias.
A missão RadioAstron utiliza o satélite Spektr-R (módulo astrofísico). Este módulo será utilizado em várias missões científicas. A massa total da carga científica é de cerca de 2.500 kg, dos quais 1.500 kg correspondem à antena parabólica desdobrável de 10 metros e 900 kg correspondem ao conjunto científico contendo os receptores, fornecimento de energia, sintetizadores, unidades de controlo, standards de frequência e sistema de transmissão de dados. A massa de todo o sistema é de cerca de 5.000 kg (satélite e carga científica). A energia total fornecida pelo sistema de energia é de 3,0 kW dos quais 900 W serão fornecidas à carga científica.
Os subsistemas básicos do satélite são:
• Complexo de controlo por rádio incluindo antenas,
• Sistema de controlo de atitude,
• Sistema de fornecimento de energia,
• Sistema de controlo de atitude do painel solar,
• Motores de correcção dos parâmetros orbitais,
• Sistema de rádio para comunicação de dados com antenas de transmissão,
• Sistema geral de controlo de bordo,
O sistema de controlo do satélite tem as seguintes funções principais:
• Determinar a posição do Sol a partir de uma posição arbitrária do satélite, detecção a manutenção da orientação em relação ao Sol; a plataforma com o sensor estelar deve ser mantida na sombra,
• Estabelecer a base da orientação dos três eixos espaciais,
• Orientação dos eixos do satélite numa determinada posição e estabilização em relação a esta direcção com a precisão de 30 segundos angulares,
• Controlo da operação dos motores de correcção orbital,
• Orientar a antena de alto ganho em direcção à Terra,

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 78
Existem dois tipos de dispositivos de execução de movimentos: sistema de motores e dispositivos inerciais. Os dispositivos inerciais são rodas de reacção e giroscópios. As rodas de reacção serão utilizadas para a estabilização do satélite no modo de orientação preciso. Os giroscópios serão utilizados para reorientar o satélite e para a descargas das rodas de reacção. O sistema de motores é um sistema de propulsão de hidrazina que será utilizado durante a criação do sistema de base para a orientação do satélite, para a descarga dos giroscópios e para correcções orbitais.
Os parâmetros da orientação do satélite são determinados num referencial inercial. A órbita na qual o Spektr-R será colocado proporciona os seguintes quatro tipos de estudos:
• Imagens em bruto das fontes de rádio com uma resolução angular ultra elevada, utilizando todas as linhas de base até ao raio do apogeu, isto é muito maior do que o diâmetro da Terra;
• Medições de alta precisão das coordenadas, movimento próprio e alterações na estrutura das fontes com uma resolução ultra elevada determinada pela maior linha de base;
• Obtenção de imagens de alta qualidade das fontes de rádio, com resolução moderada, ao observar tanto com linhas de base Terra – satélite curtas, isto é próximo do plano orbital, ou perto do perigeu. Em ambos os casos as linhas de base efectivas são somente várias vezes maiores do que o diâmetro da Terra;
• Determinação da órbita com alta precisão.
Para conseguir levar a cabo estes estudos foi seleccionada uma órbita com um apogeu elevado e com um período orbital de cerca de 9,5 dias, que evolui como resultado das fracas perturbações gravitacionais da Lua e do Sol. O raio do perigeu varia entre os 10.000km e os 70.000 km, com o raio do apogeu a variar entre os 310.000 km e os 390.000 km. A principal evolução orbital é a rotação do seu plano em torno do eixo apsides. A normal ao plano orbital descreve uma oval na esfera celeste com o eixo maior a cerca de 150º, e o eixo menor a cerca de 60º, em cerca de três anos. Os parâmetros lineares da órbita variam com o período de cerca de 1,5 anos, e os parâmetros angulares variam com um período de cerca de 3 anos.
Devido à evolução da órbita cerca de 80% das fontes rádio serão localizadas no céu perto da projecção do plano orbital em alguns intervalos de tempo, isto é serão fornecidas possibilidade para as fontes rádio tanto com linhas de base longas como curtas, sendo possível a obtenção de boas imagens com resoluções angulares elevadas e moderadas. Os restantes 20% das fontes rádio podem ser observadas somente com uma resolução angular elevada.
Um cálculo detalhado da órbita pode ser levado a cabo se for conhecida a hora exacta do lançamento. O número de reorientações do telescópio espacial não deverá superar as 10 por dia.
Após vários anos de observações, tendo por base os resultados dos estudos levados a cabo, é possível considerar a transferência do observatório para uma órbita ainda mais elevada (comum apogeu a 3.200.000 km), levando a cabo manobras adicionais utilizando a força gravitacional da Lua, e utilizando antenas com 64 m - 70 m para controlo do veículo, sincronização e recepção de telemetria.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 79
O radiotelescópio espacial
A antena do radiotelescópio consiste num reflector parabólico desdobrável (10 metros de diâmetro) que é composto por 27 pétalas de fibra de carbono e uma porção central sólida (3 metros de diâmetro). O radiotelescópio possui um rácio entre o foco e o diâmetro F/D = 0,43 e uma precisão geral de 0,7 mm. As frequências de observação são 0,324 GHz, 1,66 GHz, 4,83 GHz e 18,4 a 25,1 GHz.
Um arranjo concêntrico no foco principal irá proporcionar a possibilidade de levar a cabo observações em duas frequências ou em duas polarizações circulares de forma simultânea. Todas as frequências LO a bordo serão derivadas a partir de sinais de referência de alta estabilidade transmitidos a partir das estações no solo que estão equipadas com osciladores maser de hidrogénio. O satélite também transporta um oscilador de rubídio e um oscilador maser de hidrogénio para o modo de sincronização independente. O tempo de vida operacional garantido para o módulo do satélite e para a carga científica é de cinco anos com um possível prolongamento até dez anos.
Os amplificadores de baixo ruído nas bandas L, C e K são arrefecidos a 100 K por um sistema de arrefecimento por radiação a bordo. O LNA para a banda P é à temperatura ambiente (cerca de 300 K). em qualquer frequência existem dois receptores para a polarização direita e outro para a polarização esquerda.
No modo espectral a frequência central do receptor de banda K pode ser sintonizado em duas janelas (31.160 - 31.288 e 22.136 - 22.232 MHz em ambas as polarizações), para se poder observar desvios para o vermelho (de -300 a +1.300 km/s e de +12.700 a +14.500 km/s) masers de H2O.
Síntese de multi-frequência em banda K
A Síntese de Multi-Frequência (SMF) permite levar a cabo a obtenção de imagens de boa qualidade das fontes de rádio contínuas num curto espaço de tempo. Alterando entre N valores de frequência é equivalente em algumas assumpções à alteração entre frequências espaciais e assim equivalente à operação simultânea de N telescópios espaciais distribuídos ao longo da linha entre a Terra e o observatório espacial. Se um interferómetro de dois elementos opera simultaneamente em duas frequências, é possível medir as amplitudes e diferenças de fase de duas frequências espaciais.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 80
A missão RadioAstron irá operar um canal em banda K com polarização circular numa frequência fixa a 22,232 GHz. O segundo canal em operação simultânea com polarização circular oposta pode alterar na banda entre 18,392 GHz e 25,112 GHZ com fmax / fmin = 1,37. Assim, é permitida a construção de uma imagem unidimensional no tempo determinado o tempo de integração para canal multiplicado no número de frequências alteradas. É possível a obtenção de uma imagem bidimensional duas vezes por órbita com uma resolução angular máxima e 1 - (fmax / fmin)2 = 46% da área eclíptica no plano UV. É significativo que estes valores são independentes do tamanho e de outros parâmetros da órbita. Em geral um canal de banda K do RadioAstron com uma frequência fixa será inalterado e compatível com todos os radiotelescópios no solo. O canal de banda K sintonizável será compatível com a banda K EVLA.
Algumas vantagens do método SMF:
• Obtenção de imagens unidimensionais das fontes num tempo inferior a uma hora com uma resolução angular extremamente alta e em qualquer parte da órbita;
• Obtenção de imagens bidimensionais em 3 a 5 dias em toda a órbita e num período de 0,5 a 1 dia perto do perigeu;
• A obtenção do espectro de diferentes elementos da imagem;
• A determinação do tamanho angular - dependência da frequência ligada com a dispersão, ou absorção, ou outro processo físico;
• A construção de um mapa da polarização linear e o mapeamento da medida de rotação ou mapeamento da polarização circular, e também a determinação do grau da alteração de polarização com a frequência;
• A determinação das coordenadas diferenciais e dos movimentos próprios com elevada precisão;
• Investigações da estrutura variável das fontes e / ou a sua variação de cintilação no meio interestelar ou no meio de plasma como função da frequência.
Os modos de observação podem ser seleccionados para a realização dos alvos referidos. As frequências dos canais sintonizáveis para SMF são 18.392, 19.352, 20.312, 21.272, 22.232, 23.192, 24.152 e 25.112 GHz. A largura de banda de cada frequência é 32 MHz.
Apoio no solo da missão RadioAstron
O controlo do RadioAstron (transmissão de comandos, telemetria, medições orbitais) será levado a cabo desde as estações de controlo em Yevpatoria e Bear Lake. AS sessões de comunicações estão planeadas para terem lugar em todas as órbitas quando o satélite se encontrar próximo do seu apogeu quando é visto pelas estações de controlo em cada órbita superior a quatro horas. A duração da sessão de comunicação pode durar de duas a quatro horas dependendo do programa a ser levado a cabo durante a órbita seguinte.
Medições grosseiras da órbita serão levadas a cabo a partir das estações de controlo. Cada medição demora dez minutos. Para determinações orbitais mais precisas será medida a ligação de transferência de fase do efeito Doppler por todas as estações de rastreio que recebem dados científicos transmitidos pelo satélite.
As estações de rastreio irão fornecer três funções principais: ligação de transmissão de dados do satélite (15.000 GHz) para recepção de sinais astronómicos digitalizados, ligação para transferência de fase para sincronização de fase (ligação de transmissão a partir das estações em 7.207 GHz, ligação para recepção de dados do satélite 8.400 GHz; a estabilidade da frequência será proporcionada ao se utilizar o standard de frequência do maser de hidrogénio), e medições da velocidade radial do satélite através do desvio Doppler da frequência de envio de dados. Haverá uma estação de rastreio na Rússia (Puschino), e duas estações no estrangeiro: Tidbinbilla (Austrália), fornecida pela NASA, e Green Bank. O satélite deve estar em contacto com uma destas estações quando estiverem a decorrer as observações interferométricas.
As medições levadas a cabo relativas às coordenadas do observatório são processadas no Centro Balístico juntamente com as medições obtidas e todas as estações de rastreio através de sistemas de comunicações de alto fluxo. As medições dos parâmetros orbitais pelas estações de rastreio fornecem somente a componente radial da velocidade do satélite, mas as medições prosseguem continuamente durante as sessões de observação. O erro destas medições é igual a 0,1 m0/s.
A informação relativa à navegação será distribuída entre os centros balísticos e os grupos de controlo incluídos nos processos de reconstrução orbital. A informação é a seguinte:
• Vector de estado do satélite na altura da definição da órbita;
• Escala e velocidade radial medida pela estações de rastreio;
• Informação acerca da posição da antena do radiotelescópio espacial, painéis das baterias solares e antena de alto ganho;
• Informação acerca da operação dos motores e manobras do satélite;

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 81
• Efemérides do satélite.
A precisão da previsão da órbita depende do tipo de medições de trajectória que foram utilizadas para a reconstrução da órbita.
Radiotelescópios no solo
Devido à baixa sensibilidade da antena de 10 metros perante a órbita do observatório, somente os grandes radiotelescópios no solo irão permitir a obtenção de dados científicos úteis para a maior parte das observações com o RadioAstron. Porém, as antenas de 25 metros também podem ser úteis em distância intermédias. Os pequenos radiotelescópios podem também ser incluídos no programa de observação. Uma configuração mínima razoável da rede no solo é composta por um grande e um pequeno radiotelescópio. Em algumas observações com o RadioAstron (para as fontes perto do plano da órbita ou em observações perto do perigeu) espera-se que mais de 10 radiotelescópios sejam utilizados para fornecer uma grande escala dinâmica nas imagens resultantes.
Sistemas de gravação
Dois tipos de sistemas de gravação serão utilizados no projecto: o S2 Recording Terminal (S2-RT) canadiano, o NRAO VLBA e discos rígidos russos. Todos os tipos de sistemas de registo serão instalados nas estações de rastreio e nos radiotelescópios na Rússia e nos outros países.
Programa científico
O principal objectivo da missão é investigar a variedade de objectos astronómicos com uma resolução angular sem precedentes.
A resolução que é conseguida com o RadioAstron irá permitir a investigação dos seguintes alvos de grande interesse para a Astrofísica moderna:
• Um estudo do motor central dos Núcleos Galácticos Activos (NGA) próximo do horizonte eventual de buracos negros super-massivos, através da sua estrutura e das regiões dinâmicas emissoras, e também, através do espectro, polarização e variabilidade.
• Parâmetros do modelo cosmológico, matéria negra e energia negra no Universo determinados através da dependência do desvio para o vermelho dos parâmetros dos NGA, e também por efeitos das lentes gravitacionais.
• Estrutura e dinâmica das regiões de formação de estrelas pela linha de emissão maser e megamaser.
• A estrutura das massas dos buracos negros, neutrões e estrelas de quarks na nossa galáxia (em particular, pelo método de ‘interferómetro interestelar'), e determinação dos seus movimentos e paralaxes.
• Estrutura e distribuição da matéria interplanetária e interestelar pela investigação de flutuações da função de visibilidade de pulsares cintilantes.
• Construção de um referencial de coordenadas estelares de alta precisão.
• Desenvolvimento de um modelo de alta precisão do campo gravitacional da Terra, e testes da Teoria Geral da Relatividade através de medições precisas dos desvios para o vermelho.
Observações
O principal objectivo da missão é investigar a variedade de objectos astronómicos com uma resolução angular sem precedentes.
Limitações nas observações
Existem muitas limitações nas observações com o RadioAstron. Estas limitações estão relacionadas com o Sistema de Controlo de Atitude do satélite, com a visibilidade do satélite a partir das estações de rastreio, com os limites das operações autónomas do satélite durante a órbita, e as necessidades para operações auxiliares com o satélite.
O Sol deve estar localizado numa área angular restrita em relação ao satélite. Isto significa que a fonte de observação deve estar localizada no hemisfério oposto à direcção do Sol. A Terra e a Lua também introduzem certos limites.
Todos estes limites são considerados no software de programação de observações. Entre os limites operacionais o mais importante é o número de voltas programadas por órbita, que determina o número máximo de fontes de rádio a ser observadas durante uma órbita. Existem várias operações auxiliares com o satélite, que tipicamente têm de ser levadas a cabo em todas as órbitas:
• Sessão de comunicação: 2 - 4 horas,
• Reorientação: 0,4 horas,
• Ajustamento bruto do sistema óptico: 0,5 horas,
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 82
• Medições orbitais em bruto (duas medições): 0,2 horas cada,
• Transferência para outra estação de rastreio: 0,1 hora,
• Reformulação dos giroscópios: 0,3 horas.
A unidade de tempo médio para o cenário de observação é de uma órbita (9,5 dias). Durante as sessões de comunicação entre o satélite e a estação de controlo, os comandos serão transmitidos para a memória de bordo para fornecer todas as operações do veículo durante a órbita seguinte. As sessões de comunicação têm de ser levadas a cabo quando o satélite está localizado perto do apogeu da sua órbita. Nesta posição da órbita o satélite move-se lentamente e alguma perda de tempo de observação não é muito crítica.
O ajustamento do sistema de observação e as medições em bruto da órbita podem ser feitos durante a sessão de controlo. O cenário principal que se antecipa é a observação de 1 a 3 fontes de rádio ao longo de toda a órbita. tal observação pode ser interrompida por operações auxiliares, que foram referidas anteriormente.
Sensibilidade
A sensibilidade de um interferómetro é expressa em termos de fluxo mínimo correlacionado que pode ser detectado. Durante o tempo de integração, a amplitude da franja observada será diminuída por um factor "f" que reflecte a coerência do sistema VLBI.
Um critério realístico para a detecção da franja numa dada linha de base é que deve estar presente no nível "8-sigma".
Calibração
As seguintes operações de calibração podem ser levadas a cabo no RadioAstron:
• Medições da temperatura do sistema ao se injectar periodicamente um nível determinado de ruído de banda larga no SRT para cada receptor de bordo. Estão disponíveis dois níveis de ruído. Um alto nível de ruído ou um baixo nível de ruído pode ser seleccionado por comandos, transmitidos directamente a partir da estação de controlo durante uma sessão de comunicação, ou por comandos seleccionados a partir da memória de bordo de acordo com um programa pré-determinado.
• Ajustamento bruto do sistema óptico - determinação de pontos da antena SRT através da medição da energia total enquanto se movo o SRT em torno de uma fonte de rádio muito brilhante. Os resultados serão utilizados para correcção de orientação. Todo o procedimento de varrimento pode ser levado a cabo ao se especificar alguns comandos ao sistema de controlo de atitude. O ajustamento bruto do sistema óptico deve ser levado a cabo quando o satélite está em contacto com a estação de controlo.
• Calibração de fase ao se injectar uma sequência periódica de impulsos ultra curto em RF ou IF para 22 GHz. O espectro dos impulsos inclui linhas com 1 MHz de intervalo. O nível do sinal de calibração é umas percentagens em relação à temperatura do sistema de cada receptor. O gerador de impulsos pode ser activado e desactivado através de comandos transmitidos da estação de controlo ou seleccionado a partir da memória de bordo.
• Verificação de franjas - a observação interferométrica de fontes brilhantes seleccionadas e fontes compactas que podem produzir franjas na projecção da linha base espaço - solo seleccionada. A verificação positiva da franja verifica todo o interferómetro, mas o procedimento inclui a correlação de dados, e irá demorar muito tempo. Assim, a verificação de franja será principalmente levada a cabo durante o período de verificação em órbita.
Alvos do RadioAstron
Características observacionais
• Uma previsão balística da evolução da órbita permite a escolha do momento óptimo para as observações de qualquer área específica do céu. Tal previsão pode ser utilizada para preparar as observações científicas com grande antecedência. • Cada fonte seleccionada para as observações é investigada anteriormente com uma resolução angular média (quando o satélite está próximo do perigeu, ou quando a direcção à fonte está próxima do plano da órbita do satélite). Somente após esta investigação preliminar, e se ainda existirem detalhes por resolver na imagem, podem ser levadas a cabo as observações em alta resolução. • O utilizador pode escolher observações numa banda (e obter polarizações esquerda, direita ou circular), ou em qualquer das duas bandas disponíveis – 1,35; 6,2, 18 e 92 cm (mas somente obter uma de duas polarizações circulares). • Em caso de síntese de multifrequência (SMF) na banda de 1,35 cm, a frequência do receptor por ser ciclicamente alterada entre valores standard (18,39; 19,35, 20,31; 22,23; 23,19; 24,15 e 25,11 GHz). Para observações espectrais das fontes de desvio para o vermelho (megamasers) nas frequências 22,136; 22,168; 22,200 GHz, a frequência do receptor pode ser sintonizada até 1.500 km/s.
A sincronização e recepção dos dados científicos serão levadas a cabo por estações de rastreio localizadas na Rússia, Europa, Estados Unidos e Austrália. As estações de controlo estão localizadas em Bear Lake, Moscovo, e Ussuriysk, no Oriente da Rússia.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 83
O foguetão 11K77 Zenit-3F O observatório Spektr-R foi lançado desde Baikonur pelo segundo foguetão 11K77 Zenit-3F/Fregat-SB (Зеніт-3SLБФ/Фрегат-СБ), também designado Zenit-3SLBF/Fregat-SB. Este é um lançador a três estágios nos quais os dois primeiros são designados Zenit-2SB80 (Зеніт-2SБ80) e o terceiro estágio é um Fregat-SB (Фрегат-СБ - сбрасываемые баки, isto é tanques ejectáveis). O Zenit-2SB80 é fabricado pela empresa ucraniana Yuzhnoye enquanto que o estágio Fregat-SB é fabricado pela russa NPO Lavochkin.
A tabela ao lado mostra as principais características do foguetão. O 11K77 Zenit-3F/Fregat-SB tem 58,65 m de comprimento, 466.200 kg de massa total no lançamento (do quais 425.000 kg correspondem aos propolentes) e é capaz de colocar uma carga de 3.750 kg numa órbita de transferência para a órbita geossíncrona. A sua carenagem de protecção tem 4,1 m de diâmetro e 10,4 m de comprimento.
Em baixo vemos os esquemas do foguetão Zenit-3F/Fregat-SB, do estágio Fregat-SB e da carenagem de protecção de carga.
1º Estágio 2º Estágio Fregat-SB
RD-174 RD-120 / RD-8 S5.92
Peso bruto (kg) 352.700 89.900 8.150 Peso sem combustível (kg) 33.900 9.300 1.050
Força vácuo (kN) 7.908 834 / 78 19,6 Força ao nível do mar (kN) 7.259 - -
Diâmetro (m) 3,9 3,9 3,7 Comprimento (m) 32,90 11,50 2,4
Iesp (s) 337 349 327 Tq (s) 150 190 >877
Propolentes RP-1/LOX RP-1/LOX N2O4/UDMH

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 84
Preparação e lançamento do Spektr-R O foguetão lançador Zenit-2SB80 (1-2007) que seria utilizado inicialmente utilizado para o lançamento do observatório Spektr-R chegou ao Cosmódromo de Baikonur a 16 de Janeiro de 2009, sendo colocado em armazenamento após a realização de vários testes. Nesta altura o lançamento estava previsto para finais de 2009. Este foguetão seria depois utilizado para o lançamento do satélite Elektro-L
A 17 de Junho chegava a Baikonur um modelo do Spektr-R que serviu para testar e ensaiar os procedimentos de abastecimento, além dos procedimentos de integração. O modelo seria também utilizado para testes dimensionais.
O lançamento seria sucessivamente adiado com a agência espacial russa a aguardar pelo desempenho do satélite Elektro-L (baseado na mesma plataforma que o Spektr-R) que seria lançado a 20 de Janeiro de 2011. Em finais de 2010 o lançamento estava agendado para Maio de 2011, sendo posteriormente adiado para o dia 10 e depois para o dia 20 de Junho.
Em meados de Março, e após a sua integração nas instalações do fabricante Lavochkin, o Spektr-R era submetido a testes eléctricos nas instalações da empresa NITs RKP situada em Peresvet.
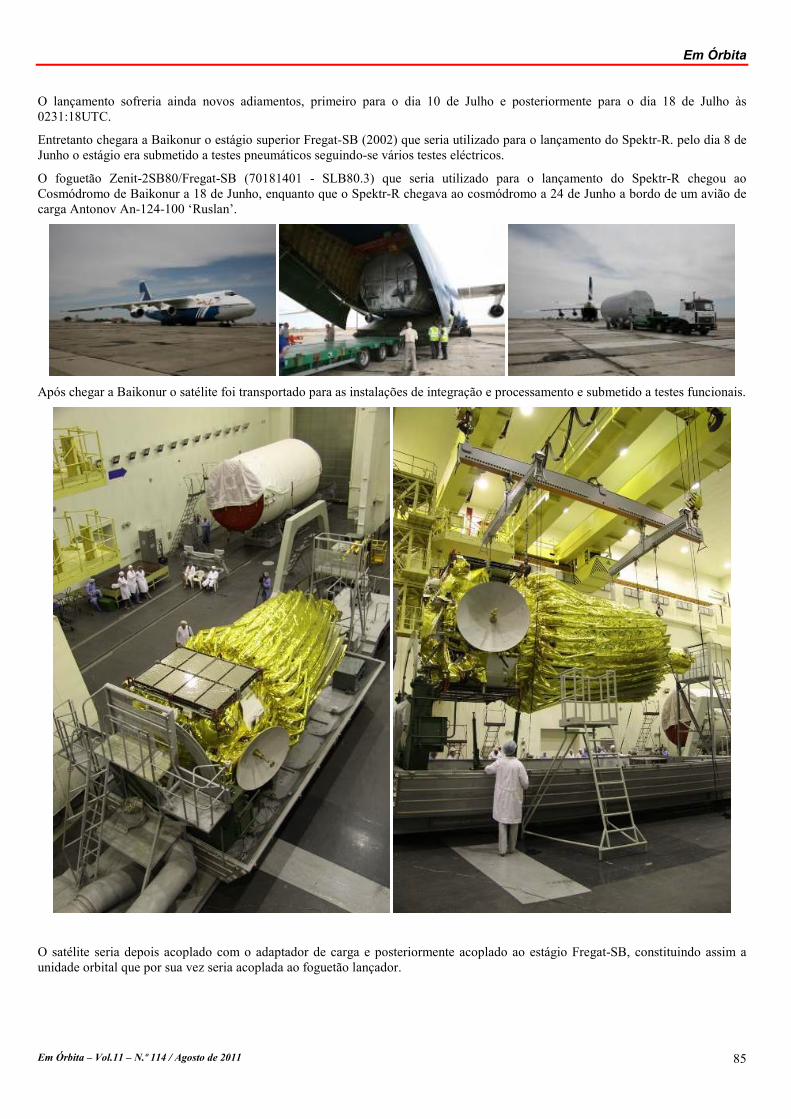
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 85
O lançamento sofreria ainda novos adiamentos, primeiro para o dia 10 de Julho e posteriormente para o dia 18 de Julho às 0231:18UTC.
Entretanto chegara a Baikonur o estágio superior Fregat-SB (2002) que seria utilizado para o lançamento do Spektr-R. pelo dia 8 de Junho o estágio era submetido a testes pneumáticos seguindo-se vários testes eléctricos.
O foguetão Zenit-2SB80/Fregat-SB (70181401 - SLB80.3) que seria utilizado para o lançamento do Spektr-R chegou ao Cosmódromo de Baikonur a 18 de Junho, enquanto que o Spektr-R chegava ao cosmódromo a 24 de Junho a bordo de um avião de carga Antonov An-124-100 ‘Ruslan’.
Após chegar a Baikonur o satélite foi transportado para as instalações de integração e processamento e submetido a testes funcionais.
O satélite seria depois acoplado com o adaptador de carga e posteriormente acoplado ao estágio Fregat-SB, constituindo assim a unidade orbital que por sua vez seria acoplada ao foguetão lançador.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 86

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 87
Às primeiras horas do dia 16 de Julho o foguetão Zenit-2SB80/Fregat-SB (70181401 - SLB80.3/2002) era transportado para a Plataforma de Lançamento PU-1 do Complexo de Lançamento LC45.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 88
Com uma contagem decrescente a decorrer sem qualquer problema, a ignição dos motores do primeiro estágio do foguetão lançador teve lugar às 0231:14,258UTC com o veículo a abandonar a plataforma de lançamento PU-1 às 0231:18UTC.
Após a entrada em órbita o satélite procedeu à abertura das suas baterias solares e no dia 22 de Julho deu-se a abertura da grande antena do satélite. Apesar de ter sido colocada na sua posição operacional, a abertura da antena ainda provocou alguns calafrios nos controladores ao não se fixar inicialmente como estava previsto. A antena seria fixada no dia seguinte.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 89
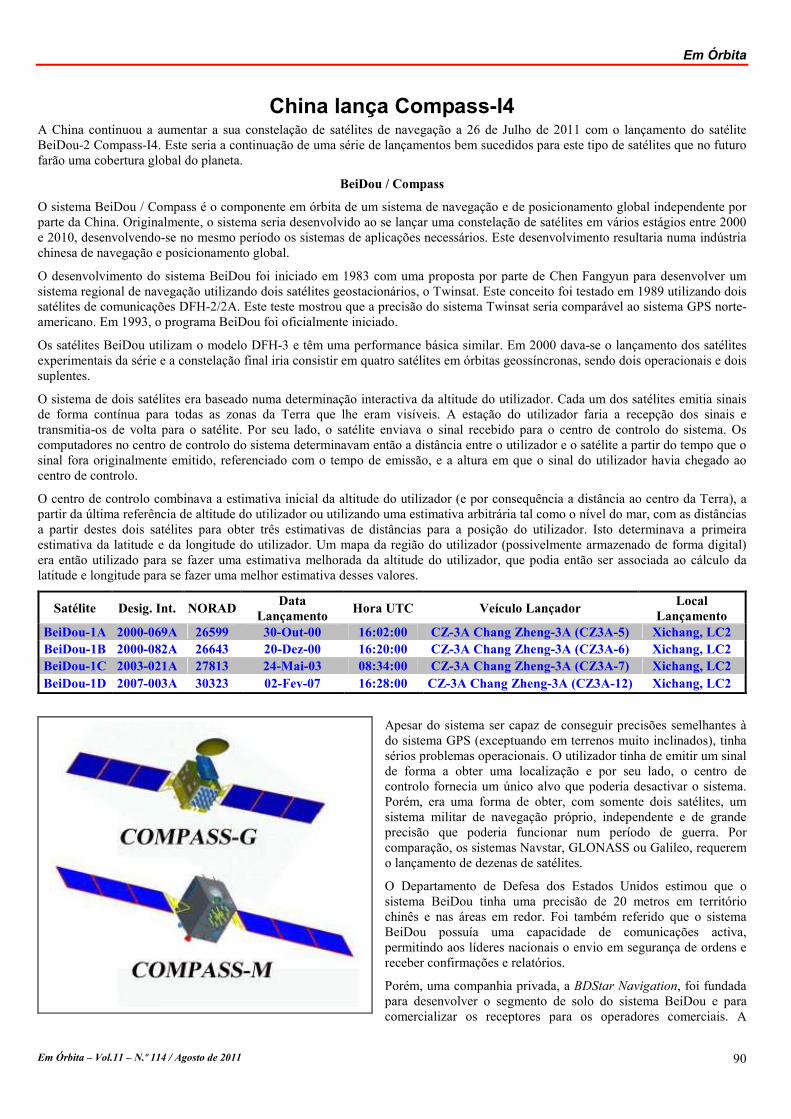
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 90
China lança Compass-I4 A China continuou a aumentar a sua constelação de satélites de navegação a 26 de Julho de 2011 com o lançamento do satélite BeiDou-2 Compass-I4. Este seria a continuação de uma série de lançamentos bem sucedidos para este tipo de satélites que no futuro farão uma cobertura global do planeta.
BeiDou / Compass
O sistema BeiDou / Compass é o componente em órbita de um sistema de navegação e de posicionamento global independente por parte da China. Originalmente, o sistema seria desenvolvido ao se lançar uma constelação de satélites em vários estágios entre 2000 e 2010, desenvolvendo-se no mesmo período os sistemas de aplicações necessários. Este desenvolvimento resultaria numa indústria chinesa de navegação e posicionamento global.
O desenvolvimento do sistema BeiDou foi iniciado em 1983 com uma proposta por parte de Chen Fangyun para desenvolver um sistema regional de navegação utilizando dois satélites geostacionários, o Twinsat. Este conceito foi testado em 1989 utilizando dois satélites de comunicações DFH-2/2A. Este teste mostrou que a precisão do sistema Twinsat seria comparável ao sistema GPS norte-americano. Em 1993, o programa BeiDou foi oficialmente iniciado.
Os satélites BeiDou utilizam o modelo DFH-3 e têm uma performance básica similar. Em 2000 dava-se o lançamento dos satélites experimentais da série e a constelação final iria consistir em quatro satélites em órbitas geossíncronas, sendo dois operacionais e dois suplentes.
O sistema de dois satélites era baseado numa determinação interactiva da altitude do utilizador. Cada um dos satélites emitia sinais de forma contínua para todas as zonas da Terra que lhe eram visíveis. A estação do utilizador faria a recepção dos sinais e transmitia-os de volta para o satélite. Por seu lado, o satélite enviava o sinal recebido para o centro de controlo do sistema. Os computadores no centro de controlo do sistema determinavam então a distância entre o utilizador e o satélite a partir do tempo que o sinal fora originalmente emitido, referenciado com o tempo de emissão, e a altura em que o sinal do utilizador havia chegado ao centro de controlo.
O centro de controlo combinava a estimativa inicial da altitude do utilizador (e por consequência a distância ao centro da Terra), a partir da última referência de altitude do utilizador ou utilizando uma estimativa arbitrária tal como o nível do mar, com as distâncias a partir destes dois satélites para obter três estimativas de distâncias para a posição do utilizador. Isto determinava a primeira estimativa da latitude e da longitude do utilizador. Um mapa da região do utilizador (possivelmente armazenado de forma digital) era então utilizado para se fazer uma estimativa melhorada da altitude do utilizador, que podia então ser associada ao cálculo da latitude e longitude para se fazer uma melhor estimativa desses valores.
Satélite Desig. Int. ORAD Data
Lançamento Hora UTC Veículo Lançador
Local Lançamento
BeiDou-1A 2000-069A 26599 30-Out-00 16:02:00 CZ-3A Chang Zheng-3A (CZ3A-5) Xichang, LC2 BeiDou-1B 2000-082A 26643 20-Dez-00 16:20:00 CZ-3A Chang Zheng-3A (CZ3A-6) Xichang, LC2 BeiDou-1C 2003-021A 27813 24-Mai-03 08:34:00 CZ-3A Chang Zheng-3A (CZ3A-7) Xichang, LC2 BeiDou-1D 2007-003A 30323 02-Fev-07 16:28:00 CZ-3A Chang Zheng-3A (CZ3A-12) Xichang, LC2
Apesar do sistema ser capaz de conseguir precisões semelhantes à do sistema GPS (exceptuando em terrenos muito inclinados), tinha sérios problemas operacionais. O utilizador tinha de emitir um sinal de forma a obter uma localização e por seu lado, o centro de controlo fornecia um único alvo que poderia desactivar o sistema. Porém, era uma forma de obter, com somente dois satélites, um sistema militar de navegação próprio, independente e de grande precisão que poderia funcionar num período de guerra. Por comparação, os sistemas Navstar, GLONASS ou Galileo, requerem o lançamento de dezenas de satélites.
O Departamento de Defesa dos Estados Unidos estimou que o sistema BeiDou tinha uma precisão de 20 metros em território chinês e nas áreas em redor. Foi também referido que o sistema BeiDou possuía uma capacidade de comunicações activa, permitindo aos líderes nacionais o envio em segurança de ordens e receber confirmações e relatórios.
Porém, uma companhia privada, a BDStar !avigation, foi fundada para desenvolver o segmento de solo do sistema BeiDou e para comercializar os receptores para os operadores comerciais. A

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 91
companhia surgiu como um consórcio com a Canada !ovatel em Outubro de 2000 para desenvolver e comercializar os receptores GPS. Um ano mais tarde foi finalizado um projecto para o Sistema de Serviço de Informações BeiDou-1, que proporcionava a base para aplicações abertas do sistema de navegação BeiDou. Um comité industrial conjunto aprovou o plano final em Janeiro de 2003.
O financiamento por parte do Ministério da Ciência e Tecnologia da China levou ao início dos trabalhos no Serviço Integrado de Aplicações de Informação de Satélite BeiDou como parte do Plano de Desenvolvimento Nacional Chinês 863. O sistema passou nos testes de aceitação em Dezembro de 2005, levando a potenciais aplicações dos receptores BeiDou para os navios de pesca oceânica chineses. Em Junho de 2006 foi iniciado o projecto de demonstração comercial para um Serviço de Informação de Transacções e de Produção Segura de Pesca Oceânica.
No entanto, os projectos mais lucrativos da BDStar ainda utilizavam os sinais GPS da Navstar para aplicações tais como a gestão de portos de contentores. Dado as restrições operacionais do sistema BeiDou geostacionário, foi sem surpresa que a China anunciou uma constelação suplementar colocada em órbitas médias em 2006. O sistema operacional BeiDou-2 era então definido como uma constelação de 35 satélites dois quais cinco operavam em órbita geossíncrona e trinta em órbitas médias (a 21.000 km de altitude e período orbital de 12 horas). Os satélites nas órbitas médias utilizariam o mesmo princípio de navegação que os sistemas Navstar, GLONASS e Galileo, com relógios internos de alta precisão e um sistema orbital de informação a enviar a posição precisa do satélite para os receptores passivos dos utilizadores. A combinação de sinais de múltiplos satélites permite ao utilizador o cálculo da sua posição na Terra com alta precisão.
A designação COMPASS aplica-se aos satélites BeiDou-2 sendo estes diferenciados entre os satélites em órbita geossíncrona (COMPASS-G), em órbitas geossíncronas inclinadas (COMPASS-I) e em órbitas médias (COMPASS-M).
Os satélites irão transmitir sinais nas frequências 1195,14 - 1219,14 MHz, 1256,52 - 1280,52 MHz, 1559,05 - 1563,15 MHz e 1587,69 - 1591,79 MHz. É interessante referir que alguns dos sinais se sobrepõem aos sinais da rede Galileu e do código GPS. Segundo Dan Levin em "Chinese Square Off With Europe in Space" (The !ew York Times, 23 de Março de 2009), "segundo a política da ITU (International Telecommunications Union), o primeiro país a utilizar uma frequência específica tem prioridade
sobre a mesma, e os fornecedores de serviços a transmitir na mesma frequência devem garantir que as suas transmissões não
interferem com o sinal autorizado previamente."
Satélite Desig. Int. ORAD Data
Lançamento Hora UTC
Veículo Lançador Local
Lançamento Compass-M1 2007-011A 31115 13-Abr-07 20:11:00 CZ-3A Chang Zheng-3A (Y13) Xi Chang, LC2 Compass-G2 2009-018A 34779 14-Abr-09 16:16:03 CZ-3C Chang Zheng-3C (Y3) Xi Chang, LC2 Compass-G1 2010-001A 36287 16-Jan-10 16:12:04 CZ-3C Chang Zheng-3C (Y2) Xi Chang, LC2 Compass-G3 2010-024A 36590 2-Jun-10 15:53:04 CZ-3C Chang Zheng-3C (Y4) Xi Chang, LC2 Compass-I1 2010-036A 36828 31-Jul-10 21:30:04 CZ-3A Chang Zheng-3A (Y16) Xi Chang, LC3 Compass-G4 2010-057A 37210 31-Out-10 16:26:04 CZ-3C Chang Zheng-3C (Y5) Xi Chang, LC2 Compass-I2 2010-068A 37256 17-Dez-10 20:20:04 CZ-3A Chang Zheng-3A (Y18) Xi Chang, LC3 Compass-I3 2011-013A 37384 10-Abr-11 20:47:05 CZ-3A Chang Zheng-3A (Y19) Xi Chang, LC3 Compass-I4 2011-038A 37763 26-Jul-11 21:44:28 CZ-3A Chang Zheng-3A Xi Chang, LC3
O Sistema de Satélites de Navegação Compass (SSNC) é o sistema de navegação por satélite de segunda geração da China capaz de proporcionar um sinal contínuo de geoposicionamento tridimensional global, além de medição de velocidade. O sistema será inicialmente utilizado para fornecer serviços de posicionamento de alta precisão para os utilizadores na China e nas regiões vizinhas, cobrindo uma área de cerca de 120 graus de latitude no Hemisfério Norte. O objectivo a longo termo é o de desenvolver uma rede de navegação por satélite similar ao GPS norte-americano e ao GLONASS russo.
Dois níveis de serviço são fornecidos pelo sistema BeiDou. O serviço público para utilização civil é grátis para os utilizadores chineses e tem uma precisão de 10 metros no posicionamento do utilizador, proporcionando sinais de sincronização de tempo com uma precisão de 50 ns e medição de velocidade com uma precisão de 0,2 m/s. O serviço militar é mais preciso, fornecendo informação de estado e uma capacidade de comunicação militar.
Os satélites têm uma massa média de 2.200 kg, sendo 1.100 kg a massa correspondente ao propolente. Os satélites são estabilizados nos seus três eixos espaciais. Os satélites BeiDou são desenvolvidos pelo Instituto de Pesquisa de Tecnologia Espacial do Grupo de Ciência e Tecnologia Espacial da China.
Em Janeiro de 2009 a China anunciava que o seu sistema independente de posicionamento e navegação deverá estar completo em 2015 com um total de trinta satélites, dez dos quais deveriam ser lançados entre 2009 e 2010. No entanto estes planos tiveram de ser alterados devido a problemas

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 92
técnicos registados no satélite Compass-G2 bem como devido ao problemas com o foguetão lançador CZ-3B Chang Zheng-3B que a 31 de Agosto de 2009 registava um problema a quando do lançamento do satélite de comunicações indonésio Palapa-D. De salientar que existem inúmeros sistemas comuns entre o CZ-3B e o CZ-3C Chang Zheng-3C.
O primeiro satélite do sistema foi lançado a 30 de Outubro de 2000. O BeiDou-1A foi colocado em órbita por um foguetão CZ-3A Chang Zheng-3A a partir do Complexo de Lançamento LC2 do Centro de Lançamento de Satélites Xi Chang. O satélite foi colocado numa órbita inicial de transferência para a órbita geossíncrona com um apogeu a 41.889 km, perigeu a 195 km e inclinação orbital de 25,0º, antes de ficar colocado na sua órbita definitiva a 6 de Novembro, ficando estacionado a 140º longitude Este.
O BeiDou-1B era lançado a 20 de Dezembro de 2000 por um foguetão CZ-3A Chang Zheng-3A a partir do Complexo de Lançamento LC2 do Centro de Lançamento de Satélites Xi Chang. O satélite foi colocado numa órbita inicial de transferência para a órbita geossíncrona com um apogeu a 41.870 km, perigeu a 190 km e inclinação orbital de 25,0º. O lançamento deste satélite completou o sistema protótipo de dois satélites que deveria fornecer a informação de posicionamento para os serviços de transporte de caminho-de-ferro, auto-estradas e de navegação marítima. O satélite foi posteriormente posicionado na órbita geossíncrona a 80º longitude Este.
O primeiro satélite suplente, o BeiDou-1C, foi lançado a 24 de Maio de 2003 por um foguetão CZ-3A Chang Zheng-3A a partir do Complexo de Lançamento LC2 do Centro de Lançamento de Satélites Xi Chang. O BeiDou-1C foi colocado na órbita geossíncrona a 110º longitude Este. A 2 de Fevereiro de 2007 era lançado o BeiDou-1D por um foguetão CZ-3A Chang Zheng-3A a partir do Complexo de Lançamento LC2 do Centro de Lançamento de Satélites Xi Chang. Este satélite não atingiu a órbita geossíncrona até Abril do mesmo ano devido a problemas na abertura dos seus painéis solares. Fontes militares norte-americanas referiram também a existência de uma nuvem de detritos na altura em que o satélite deveria operar o seu motor de impulso para o apogeu.
CZ-3A Chang Zheng-3A (长征三号甲火箭长征三号甲火箭长征三号甲火箭长征三号甲火箭)
O foguetão lançador CZ-3A Chang Zheng-3A é um veículo a três estágios de propulsão líquida cujo projecto foi iniciado em meados dos anos 80 pela Academia Chinesa de Tecnologia de Foguetões Lançadores. O seu terceiro estágio consome propulsores criogénicos.
O foguetão tem um comprimento total de 55,81 metros e sua massa no lançamento é de 241.000 kg, sendo capaz de colocar 2.600 kg numa órbita de transferência para a órbita geossíncrona.
Estágio Primeiro estágio
L-180
Segundo estágio
L-35
Terceiro estágio
H-18
Massa no lançamento (kg) 241.000
Propolente N2O4/UDMH LOX/LH2
Massa do Propolente (kg) 171.775 30.752 18.193
Massa do estágio sem propolente (kg)
9.000 4.000 2.800
Motor 4 x YF-21C
YF-24E
YF-22E (principal)
YF-23C (vernier)
YF-75
Força (k) 2.961,6 742 (principal)
11,8 x 4 (vernier) 4.312
Impulso específico (s) 189 297 440
Imp. esp. nível do mar (s) 259 260 -
Tempo de queima (s) 155 110 470
Diâmetro (m) 3,35 3,35 3,0
Comprimento (m) 23,272 11,276 12,375
Comprimento carenagem (m) 8,887
Diâmetro carenagem (m) 3,35
Comprimento total (m) 55,81

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 93
Em comparação com o CZ-3 Chang Zheng-3, o CZ-3A melhora de forma considerável a sua performance e é capaz de duplicar a capacidade de carga na órbita geossíncrona, possuindo um primeiro e segundo estágio melhorado e um terceiro estágio de maiores dimensões. Este foi totalmente redesenhado para ser equipado com o motor YF-75. Em relação ao CZ-3, possui um novo sistema digital avançado.
O desenvolvimento do motor YF-75 demorou cinco anos e foi levado a cabo numa fábrica aberta que não impedia a entrada do ar gelado no Inverno e do calor tórrido do Verão.
O sistema do CZ-3A é composto pela estrutura do foguetão lançador, sistema de propulsão, sistema de controlo, sistema de telemetria, sistema de rastreio e segurança, sistema de controlo de atitude e de gestão de propolente na fase orbital não propulsiva, sistema de utilização de propolente criogénico, sistema de separação e sistema auxiliar.
A estrutura do foguetão actua de forma a suportar as várias cargas internas e externas no lançador durante o transporte, elevação (colocação na plataforma de lançamento) e voo. A estrutura do foguetão também combina todos os subsistemas em conjunto. A estrutura do foguetão é composta pelo primeiro estágio, segundo estágio, terceiro estágio e carenagem de protecção. A figura na página seguinte mostra a configuração do foguetão CZ-3A Chang Zheng-3A.
O primeiro estágio é composto pela secção inter-estágio, tanque de oxidante, inter-tanque, tanque de combustível, secção posterior, secção de cauda, válvulas e condutas, etc.
O segundo estágio é composto pelo tanque de oxidante, inter-tanque, tanque de combustível, válvulas e condutas, etc.
O terceiro estágio contém o adaptador de carga, secção de equipamento e tanques de propolente criogénico. O adaptador de carga faz a ligação física entre a carga e o foguetão CZ-3A e reparte as cargas entre ambos. O anel da interface no topo do adaptador pode ser uma das interfaces standard internacionais 937B, 1194, 1194A ou 1666. A secção de equipamento é uma placa circular metálica fabricada pelo método de favos de colmeia e com estruturas de reforço. Aqui encontram-se os sistemas aviónicos do lançador. O tanque de propolente do terceiro estágio é termicamente isolado com um anteparo comum, tendo uma forma convexa superior no meio. O anteparo comum possui uma dupla camada térmica isoladora em vácuo. O hidrogénio líquido é abastecido na parte superior do tanque e o oxigénio líquido é armazenado na parte inferior.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 94

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 95
A carenagem é composta por uma abóbada, secção bicónica, secção cilíndrica e secção cónica invertida.
O sistema de propulsão, incluindo motores e sistema de fornecimento / pressurização, gera a força dianteira e de controlo necessária para o voo. O primeiro estágio e o segundo estágio, utilizam propolentes armazenáveis, isto é tetróxido de azoto (N2O4) e dimetil hidrazina assimétrica (UDMH). Os tanques de propolente são pressurizados pelos sistemas de propulsão regenerativos. Existem quatro motores em paralelo no primeiro estágio. Os motores podem ser orientados em direcções
tangenciais. A força de cada motor é de 740,4 kN. Os quatro sistemas de propulsão utilizam os mesmos motores. Existe um motor principal e quatro motores vernier no segundo estágio. A força total é de 789,1 kN.
O terceiro estágio utiliza propolentes criogénicos, isto é hidrogénio líquido (LH2) e oxigénio líquido (LOX). Dois motores universais em suspensões cardan proporcionam uma força total de 157 kN. O rácio de expansão dos motores é de 80:1 e o impulso específico é de 4.312 Ns/kg. O tanque de LH2 é pressurizado por hélio e por um sistema regenerador, e o tanque de LOX é pressurizado por hélio aquecido e por um sistema regenerador.
O sistema de controlo é utilizado para manter a estabilidade do voo do lançador e para levar a cabo a
navegação e / ou orientação segundo o programa de voo pré-estabelecido. O sistema de controlo consiste de uma unidade de orientação, sistema de controlo de atitude, sequenciador, distribuição de energia, etc. O sistema de controlo adopta uma plataforma inercial de quatro eixos, computador de bordo e dispositivos digitais de controlo de atitude. Algumas tecnologias avançadas são aplicadas no sistema de controlo, tais como sequenciadores electrónicos programáveis, decoplagem de três canais, controlo de duplo parâmetro e compensação em tempo real para erros de medição. Estas tecnologias tornam o lançador muito flexível para várias missões.
O sistema de telemetria funciona para medir e transmitir alguns parâmetros dos sistemas do lançador. Alguns dados medidos podem ser processados em tempo real. O sistema de telemetria recebe energia tendo em conta a distribuição dos sensores e codificação dos dados. As medições dos sinais de comando são digitalizadas. O fornecimento de energia e os testes são levados a cabo de forma automática. Os conversores digitais a bordo são inteligentes e cerca de 700 parâmetros são medidos.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 96
O sistema de rastreio e de segurança mede os dados da trajectória e parâmetros de injecção orbital finais. O sistema também fornece informação para meios de segurança. A auto-destruição do foguetão lançador seria levada a cabo de forma remota caso ocorresse alguma anomalia em voo. O desenho da medição de trajectória e de segurança são integrados em conjunto.
O sistema de controlo de atitude e de gestão de propolente na fase de voo não propulsionada leva a cabo o controlo de atitude e gestão de propolente em órbita e reorienta o lançador antes da separação da carga. Um motor alimentado por hidrazina em pressão trabalha de forma intermitente neste sistema que pode ser accionado repetidamente segundo os comandos recebidos.
O sistema de utilização dos propolentes criogénicos mede em tempo real o nível de propolentes no interior dos tanques do terceiro estágio e ajusta o nível de consumo de oxigénio líquido para tornar os propolentes residuais numa proporção óptima. O ajustamento é utilizado para compensar o desvio da performance do motor, estrutura da massa, carga de propolente, etc., para o propósito de se obter uma maior capacidade de lançamento. O sistema contém um processador, sensores de nível de propolente e válvulas de ajustamento.
Os seguintes esquemas representam a estrutura dos sistemas de propulsão do primeiro, segundo e terceiro estágios.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 97
Durante a fase de voo do CZ-3A Chang Zheng-3A existem quatro eventos de separação: a separação entre o primeiro e o segundo estágio, a separação entre o segundo e o terceiro estágio, a separação da carenagem e a separação entre a carga e o terceiro estágio.
• Separação entre o primeiro e o segundo estágio – a separação entre o primeiro e o segundo estágio é uma separação a quente, isto é o segundo estágio entra em ignição em primeiro lugar e depois o primeiro estágio é separado com a força dos gases de exaustão após o accionamento de 14 parafusos explosivos.
• Separação entre o segundo e o terceiro estágio – a separação entre o segundo e o terceiro estágio é uma separação a frio. Os parafusos explosivos são accionados em primeiro lugar e depois pequenos retro-foguetões no segundo estágio são accionados para gerar a força de separação.
• Separação da carenagem – durante a separação da carenagem, os parafusos explosivos que ligam a carenagem e o terceiro estágio são accionados em primeiro lugar e depois todos os dispositivos pirotécnicos que ligam as duas metades da carenagem são accionados, com a carenagem a ser separada longitudinalmente. A carenagem volta-se para fora apoiada em dobradiças devido à força exercida por molas.
• Separação entre a carga e o terceiro estágio – a carga está fixa com o lançador ao longo de uma banda de fixação. Após a separação, a carga é empurrada pela acção de molas.
O sistema auxiliar funciona antes do lançamento e inclui unidades de monitorização e de medição no solo tais como verificação do nível de abastecimento de propolente e temperatura, medição da estanquicidade, fornecimento de ar condicionado para a carenagem de protecção, etc.
O sistema de coordenadas do foguetão lançador (OXYZ) tem origem no centro de massa instantâneo do veículo, isto é no centro de massa integrado da combinação carga / veículo lançador, incluindo o
adaptador, propolentes e carenagem, etc., caso seja aplicável. O eixo OX coincide com o eixo longitudinal do foguetão. O eixo OY é perpendicular ao eixo OX e estão no interior do plano de lançamento 180º para lá do azimute de lançamento. Os eixos OX, OY e OZ formam um sistema ortogonal que segue a regra da mão direita.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 98
A atitude de voo do eixo do veículo lançador está definida na figura ao lado. O fabricante do satélite define o sistema de coordenadas do satélite. A relação ou orientação entre o veículo lançador e os sistemas do satélite serão determinados ao longo da coordenação técnica para projectos específicos.
Missões que podem ser realizadas pelo CZ-3A
O foguetão CZ-3A Chang Zheng-3A é um veículo potente e versátil que é capaz de levar a cabo as seguintes missões:
• Transportar cargas para órbitas de transferência para a órbita geossíncrona (GTO). Esta será a função primária do CZ-3A e o objectivo da sua concepção. Após a separação do CZ-3A, o satélite irá transferir-se da órbita GTO para a órbita geossíncrona GEO). Esta é a órbita operacional na qual o período orbital do satélite coincide com o período de rotação da Terra, 24 horas, e o plano orbital coincide com o plano do equador (ver figura em baixo);
• Injectar cargas numa órbita terrestre baixa (LEO) localizada abaixo de uma altitude média de 2.000 km;
• Injectar cargas em órbitas sincronizadas com o Sol (SSO). O plano destas órbitas encontra-se ao longo da direcção de rotação do eixo de rotação da Terra ou aponta para a rotação da Terra em torno do Sol. A velocidade angular do satélite é igual à velocidade angular média da Terra em torno do Sol.
• Lançar sondas espaciais para lá do campo gravitacional da Terra.
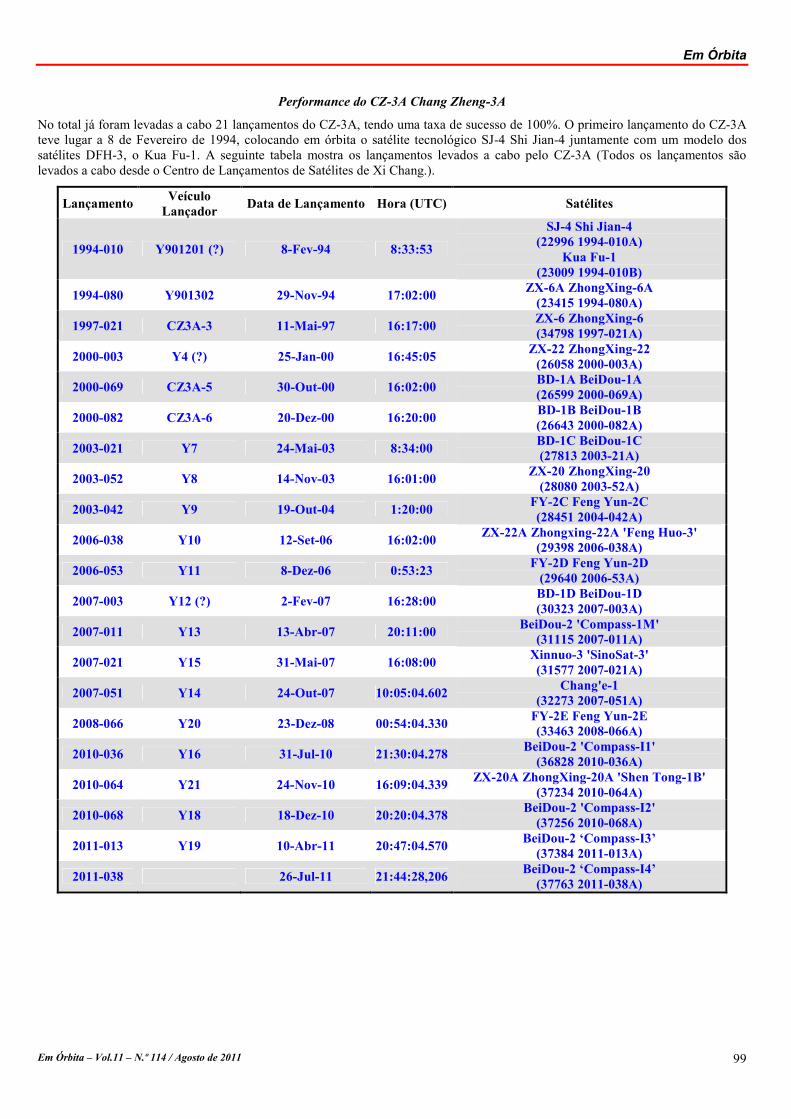
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 99
Performance do CZ-3A Chang Zheng-3A
No total já foram levadas a cabo 21 lançamentos do CZ-3A, tendo uma taxa de sucesso de 100%. O primeiro lançamento do CZ-3A teve lugar a 8 de Fevereiro de 1994, colocando em órbita o satélite tecnológico SJ-4 Shi Jian-4 juntamente com um modelo dos satélites DFH-3, o Kua Fu-1. A seguinte tabela mostra os lançamentos levados a cabo pelo CZ-3A (Todos os lançamentos são levados a cabo desde o Centro de Lançamentos de Satélites de Xi Chang.).
Lançamento Veículo Lançador
Data de Lançamento Hora (UTC) Satélites
1994-010 Y901201 (?) 8-Fev-94 8:33:53
SJ-4 Shi Jian-4 (22996 1994-010A)
Kua Fu-1 (23009 1994-010B)
1994-080 Y901302 29-ov-94 17:02:00 ZX-6A ZhongXing-6A (23415 1994-080A)
1997-021 CZ3A-3 11-Mai-97 16:17:00 ZX-6 ZhongXing-6 (34798 1997-021A)
2000-003 Y4 (?) 25-Jan-00 16:45:05 ZX-22 ZhongXing-22 (26058 2000-003A)
2000-069 CZ3A-5 30-Out-00 16:02:00 BD-1A BeiDou-1A (26599 2000-069A)
2000-082 CZ3A-6 20-Dez-00 16:20:00 BD-1B BeiDou-1B (26643 2000-082A)
2003-021 Y7 24-Mai-03 8:34:00 BD-1C BeiDou-1C (27813 2003-21A)
2003-052 Y8 14-ov-03 16:01:00 ZX-20 ZhongXing-20 (28080 2003-52A)
2003-042 Y9 19-Out-04 1:20:00 FY-2C Feng Yun-2C (28451 2004-042A)
2006-038 Y10 12-Set-06 16:02:00 ZX-22A Zhongxing-22A 'Feng Huo-3'
(29398 2006-038A)
2006-053 Y11 8-Dez-06 0:53:23 FY-2D Feng Yun-2D (29640 2006-53A)
2007-003 Y12 (?) 2-Fev-07 16:28:00 BD-1D BeiDou-1D (30323 2007-003A)
2007-011 Y13 13-Abr-07 20:11:00 BeiDou-2 'Compass-1M'
(31115 2007-011A)
2007-021 Y15 31-Mai-07 16:08:00 Xinnuo-3 'SinoSat-3' (31577 2007-021A)
2007-051 Y14 24-Out-07 10:05:04.602 Chang'e-1
(32273 2007-051A)
2008-066 Y20 23-Dez-08 00:54:04.330 FY-2E Feng Yun-2E (33463 2008-066A)
2010-036 Y16 31-Jul-10 21:30:04.278 BeiDou-2 'Compass-I1' (36828 2010-036A)
2010-064 Y21 24-ov-10 16:09:04.339 ZX-20A ZhongXing-20A 'Shen Tong-1B'
(37234 2010-064A)
2010-068 Y18 18-Dez-10 20:20:04.378 BeiDou-2 'Compass-I2' (37256 2010-068A)
2011-013 Y19 10-Abr-11 20:47:04.570 BeiDou-2 ‘Compass-I3’
(37384 2011-013A)
2011-038 26-Jul-11 21:44:28,206 BeiDou-2 ‘Compass-I4’
(37763 2011-038A)
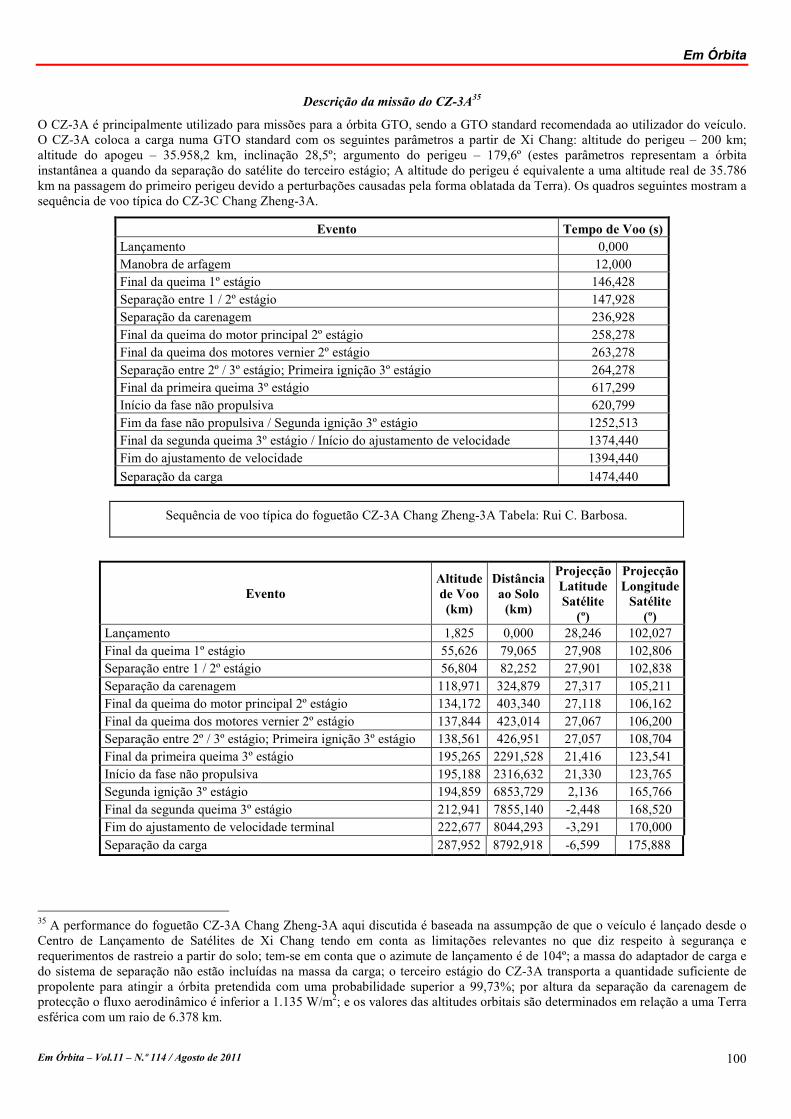
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 100
Descrição da missão do CZ-3A35
O CZ-3A é principalmente utilizado para missões para a órbita GTO, sendo a GTO standard recomendada ao utilizador do veículo. O CZ-3A coloca a carga numa GTO standard com os seguintes parâmetros a partir de Xi Chang: altitude do perigeu – 200 km; altitude do apogeu – 35.958,2 km, inclinação 28,5º; argumento do perigeu – 179,6º (estes parâmetros representam a órbita instantânea a quando da separação do satélite do terceiro estágio; A altitude do perigeu é equivalente a uma altitude real de 35.786 km na passagem do primeiro perigeu devido a perturbações causadas pela forma oblatada da Terra). Os quadros seguintes mostram a sequência de voo típica do CZ-3C Chang Zheng-3A.
Evento Tempo de Voo (s) Lançamento 0,000 Manobra de arfagem 12,000 Final da queima 1º estágio 146,428 Separação entre 1 / 2º estágio 147,928 Separação da carenagem 236,928 Final da queima do motor principal 2º estágio 258,278 Final da queima dos motores vernier 2º estágio 263,278 Separação entre 2º / 3º estágio; Primeira ignição 3º estágio 264,278 Final da primeira queima 3º estágio 617,299 Início da fase não propulsiva 620,799 Fim da fase não propulsiva / Segunda ignição 3º estágio 1252,513 Final da segunda queima 3º estágio / Início do ajustamento de velocidade 1374,440 Fim do ajustamento de velocidade 1394,440
Separação da carga 1474,440
Evento Altitude de Voo (km)
Distância ao Solo (km)
Projecção Latitude Satélite
(º)
Projecção Longitude Satélite
(º) Lançamento 1,825 0,000 28,246 102,027 Final da queima 1º estágio 55,626 79,065 27,908 102,806 Separação entre 1 / 2º estágio 56,804 82,252 27,901 102,838 Separação da carenagem 118,971 324,879 27,317 105,211 Final da queima do motor principal 2º estágio 134,172 403,340 27,118 106,162 Final da queima dos motores vernier 2º estágio 137,844 423,014 27,067 106,200 Separação entre 2º / 3º estágio; Primeira ignição 3º estágio 138,561 426,951 27,057 108,704 Final da primeira queima 3º estágio 195,265 2291,528 21,416 123,541 Início da fase não propulsiva 195,188 2316,632 21,330 123,765 Segunda ignição 3º estágio 194,859 6853,729 2,136 165,766 Final da segunda queima 3º estágio 212,941 7855,140 -2,448 168,520 Fim do ajustamento de velocidade terminal 222,677 8044,293 -3,291 170,000 Separação da carga 287,952 8792,918 -6,599 175,888
35 A performance do foguetão CZ-3A Chang Zheng-3A aqui discutida é baseada na assumpção de que o veículo é lançado desde o
Centro de Lançamento de Satélites de Xi Chang tendo em conta as limitações relevantes no que diz respeito à segurança e requerimentos de rastreio a partir do solo; tem-se em conta que o azimute de lançamento é de 104º; a massa do adaptador de carga e do sistema de separação não estão incluídas na massa da carga; o terceiro estágio do CZ-3A transporta a quantidade suficiente de propolente para atingir a órbita pretendida com uma probabilidade superior a 99,73%; por altura da separação da carenagem de protecção o fluxo aerodinâmico é inferior a 1.135 W/m2; e os valores das altitudes orbitais são determinados em relação a uma Terra esférica com um raio de 6.378 km.
Sequência de voo típica do foguetão CZ-3A Chang Zheng-3A Tabela: Rui C. Barbosa.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 101
As carenagens do CZ-3A
A carga está protegida por uma carenagem que a isola de várias interferências da atmosfera, que inclui correntes de ar de alta velocidade, cargas aerodinâmicas, aquecimento aerodinâmico e ruídos acústicos, etc., enquanto que o lançador ascende através da atmosfera. A carenagem proporciona assim à carga um bom meio ambiente.
O aquecimento aerodinâmico é absorvido ou isolado pela carenagem. A temperatura no interior da carenagem é controlada dentro dos limites estabelecidos. Os ruídos acústicos gerados por correntes de ar e pelos motores do lançador são reduzidos para níveis permitidos para a respectiva carga.
A carenagem é separada e ejectada quando o foguetão lançador voa fora da atmosfera. A altura exacta da separação da carenagem é determinada pelo requisito de que o fluxo de calor aerodinâmico na separação da carenagem seja inferior a 1.135 W/m2.
Vinte e dois tipos de testes foram levados a cabo no desenvolvimento da carenagem do CZ-3A, incluindo testes em túneis de voo, testes térmicos, testes acústicos, testes de separação, testes de análise de modelos, testes de resistência, etc.
O volume estático da carenagem é a limitação física das dimensões máximas da configuração da carga a transportar. O volume estático é determinado pela consideração das deformações estimadas a nível dinâmico e estático do conjunto carenagem / carga por uma variedade de interferências durante o voo. Os volumes variam com diferentes tipos de carenagem e adaptadores de carga. Pode-se permitir que algumas
saliências na carga possam exceder o volume estático máximo (3000) da secção cilíndrica da carenagem.
A estrutura da carenagem consiste numa abóbada, secção bicónica, secção cilíndrica e uma secção cónica invertida. A abóbada é um corpo semi-esférico com um raio de 1 metros, uma altura de 0,740 metros e um diâmetro de base de 1,930 metros. Consiste numa concha abobadada, um anel de base, um anel em encapsulamento e reforços.
A concha abobadada é uma estrutura em fibra de vidro com uma espessura de 8 mm. O anel de base, anel de encapsulamento e reforço são fabricados em ligas de alumínio de alta resistência. Uma cintura à base de borracha de sílica cobre o exterior da linha de divisão e um cinturão de borracha está comprimido entre as duas metades. Os cinturões de isolamento exterior e interior impedem a corrente de ar de entrar na carenagem durante o voo.
A parte superior da secção bicónica é um cone de 15º com uma altura de 2,647 metros e a parte inferior é um cone de 15º com uma altura de 1,500 metros. A parte superior e a parte inferior estão interligadas. O diâmetro do anel superior é

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 102
de 1,930 metros e o diâmetro do anel inferior é de 3,350 metros. A estrutura da secção cilíndrica é idêntica à da secção bicónica, isto é tem uma constituição em favos de mel de alumínio.
A secção cónica invertida é uma estrutura reforçada monocoque. É composta por um anel superior, um anel intermédio, reforços inferiores longitudinais e cobertura com tratamento químico. Estão disponíveis várias portas de acesso nesta secção.
A superfície exterior da carenagem, especialmente a superfície da abóbada e da secção bicónica, sofre um aquecimento devido à corrente de ar a alta velocidade durante o lançamento. Deste modo, são adoptadas medidas que evitam o aquecimento para garantir que a temperatura na superfície interior seja inferior a 80ºC.
A superfície exterior da secção bicónica e da secção cilíndrica são cobertas por um painel de cortiça especial. O painel na secção bicónica tem uma espessura de 1,2 mm e na secção cilíndrica tem uma espessura de 1,0 mm.
O mecanismo de separação e ejecção da carenagem consiste em mecanismos de abertura laterais, mecanismo de abertura longitudinal e mecanismo de separação, accionados por molas e ganchos.
Cada metade da carenagem é suportada por dois ganchos que estão localizados nos quadrantes I e III. Existem quatro molas de separação em cada metade da carenagem, actuando com um máximo de força de 37,8 kN. Após a separação, cada metade roda sobre uma dobradiça.
Quando o ângulo de rotação é superior a 18º/s, dá-se a separação da metade da carenagem.
O mecanismo de separação da carenagem é composto por dobradiças e molas. Cada metade da carenagem é suportada por duas dobradiças que se localizam no quadrante I e III. Existem seis molas de separação colocadas em cada metade da carenagem; o máximo de força exercida por cada mola é de 37,8 kN. Após a abertura da carenagem, cada metade roda em torno de uma dobradiça. Quando a taxe de rotação da metade da carenagem é superior a 18º/s, a carenagem é ejectada. O processo cinemático é exemplificado a seguir.
Podem ser incorporadas na secção bicónica da carenagem e na secção cilíndrica janelas transparentes às radiofrequências RF para fornecer ao satélite a capacidade de transmissão através da carenagem de acordo com as necessidades do utilizador. As janelas transparentes RF são fabricadas em fibra de vidro na qual a taxa de transparência é indicada na tabela ao lado.
Podem ser proporcionadas portas de acesso à secção cilíndrica para permitir um acesso limitado ao satélite após a colocação da carenagem. Algumas áreas da carenagem não podem ser seleccionadas para a localização das janelas de radiofrequência RF.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 103
O Complexo de Lançamento
O complexo de lançamento para o foguetão Chang Zheng-3C no Centro de Lançamento de Satélites em Xi Chang, inclui as plataformas de lançamento, torres de serviço, torres umbilical, centro de controlo de lançamento, sistemas de abastecimento, sistemas de fornecimento de gás, sistemas de fornecimento de energia, torres de protecção contra relâmpagos, etc.
As torres de serviço são compostas pelas torres do guindaste, equipamento movível, plataformas, elevadores, sistema de distribuição e fornecimento de energia, condutas de abastecimento para armazenamento do propolente, detectores de incêndio e extintores.
As torres têm uma altura de 90,60 metros. No topo das torres existem dois guindastes. A altura de levantamento efectiva é de 85 metros. A capacidade de carga é de 20.000 kg (guincho principal) e 10.000 kg (guincho suplente). Existem dois elevadores (com uma capacidade de 2.000 kg) para a elevação de pessoal e equipamentos. As torres têm plataformas para operações de verificação e operações de teste do foguetão lançador e da sua carga.
A parte superior das torres é uma área limpa com ambiente controlado. O nível de limpeza é de Classe 100.000 e as temperaturas na área de operação do satélite encontram-se entre os 15 ºC e os 25 ºC. A acoplagem entre a carga e o veículo lançador, teste do satélite, encapsulamento da carenagem e outras actividades são levadas a cabo nesta área. Um guindaste superior telescópico está equipado para levar a cabo estas operações. Este guindaste pode rodar num ângulo de 180º e a sua capacidade é de 8.000 kg.
Nas torres de serviço, a Sala 812 é exclusivamente preparada para a carga. No seu interior é fornecida uma corrente eléctrica de 60Hz UPS (Fase 120V, 5kW). A resistência é menos de 1. A área desta sala é de 8 m2.
Para além de um sistema de hidratação, as torres de serviço estão também equipadas com pó extintor e extintores 1211.
As torres umbilicais servem para fornecer ligações eléctricas, condutas de gás, condutas líquidas, bem como as ligações para o satélite e para o foguetão lançador. As torres têm um sistema de braço amovível, plataformas e condutas de
abastecimento criogénico. O abastecimento do lançador é levado a cabo através das condutas criogénicas. As torres umbilicais também estão equipadas com sistemas de ar condicionado para a carga e carenagem, um sistema RF, sistemas de comunicações, plataformas rotativas, sistemas de extinção de incêndios, etc. Os cabos de fornecimento de energia são conectados ao satélite e ao lançador através destas torres umbilicais. As condutas do ar condicionado são ligadas à carenagem também através desta torre para fornecer ar limpo. A limpeza do ar condicionado é de Classe 100.000 e a temperatura encontra-se entre os 15ºC e os 25ºC, com uma humidade entre 35% e 55%.
A Sala 722 das torres umbilicais é exclusivamente preparada para a carga. A sua área é de 8m2 e no seu interior é fornecida uma corrente eléctrica de 60Hz/50Hz UPS (Fase 120V/220V/15A). A resistência é menos de 1.
Centro de Controlo de Lançamento
O Centro de Controlo de Lançamento (CCL) é uma estrutura em fortim capaz de resistir a uma explosão violenta. As operações levadas a cabo na torre (tais como testes antes do lançamento, abastecimento, operações de lançamento) do foguetão lançador são controladas desde o CCL. O controlo de lançamento do satélite também pode ser levado a cabo no CCL. A sua área de construção é de 1.000 m2.
Em cima o processo dinâmico de separação da carenagem de protecção no foguetão CZ-3A Chang Zheng-3A.
Esquema do Complexo de Lançamento LC2 do Centro de Lançamento de satélites de Xi Chang.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 104
O CCL inclui as salas de teste do veículo lançador, salas de teste dos satélites, sala de controlo de abastecimento, sala de controlo de lançamento, sala de informação para o director de missão, sistema de ar condicionado, passagens de evacuação, etc. Todo o CCL recebe ar condicionado.
Existem duas salas para o teste dos satélites e cada uma tem uma área de 48,6 m2. A temperatura no interior das salas é de 20ºC com variação máxima e mínima de 5ºC. A humidade relativa é de 75%. Em cada sala existem painéis de distribuição de energia 380V/220V, 50Hz e 120V/220V, 60Hz. A resistência é menos de 1. O satélite é conectado com o equipamento de controlo no interior da sala de teste através de cabos umbilicais.
Estão disponíveis no interior das salas sistemas de telefone e de monitorização, bem como na torre e nos restantes locais.
Centro de Controlo e Comando da Missão
O Centro de Controlo e Comando da Missão (CCCM) está localizado a 7 km do local de lançamento. Todo o edifício inclui duas partes: uma é a zona de comando e controlo e a outra é a zona de computação. A zona de comando e controlo consiste em duas áreas: a área de comando e a área de segurança. Em torno da primeira zona encontram-se salas de operação e escritórios. Existem uma sala de visitas no segundo andar e os visitantes podem observar o lançamento em ecrãs de televisão. Existem sistemas de televisão por cabo parta os visitantes.
O CCCM tem como funções comandar todas as operações das estações de rastreio e monitorizar a performance e estado do equipamento, levar a cabo o controlo de segurança após o lançamento, obter informações sobre os parâmetros de localização do
lançador a partir de estações e processar estes dados em tempo real, fornecer a aquisição e e obter dados para as estações de rastreio e para o Centro de Controlo de Satélites em Xi’an, fornecer informações à equipa de controlo e levar a cabo o processamento de dados após a missão.
O CCCM possui um sistema de computadores a funcionar em tempo real; um sistema de comando e controlo; levar a cabo a monitorização e fornecimento de controlo, computadores sistemas de conversão D/A e A/D, sistemas de televisão, sistemas de gravação de dados e sistemas de telecomando; sistemas de comunicação, sistemas de temporização e transmissão de dados, e equipamento de impressão e revelação de filme.
Centro de Controlo, Telemetria e Detecção
O Centro de Controlo, Telemetria e Detecção (CCTD) do Centro de Lançamento de Satélites de Xi Chang e o CCTD do Centro de Controlo de Satélites de Xi’an, formam uma rede de Controlo, Telemetria e Detecção para cada missão. O CCTD do Centro de Lançamento de Satélites de Xi Chang consiste na estação de rastreio de Xi Chang, na estação de rastreio de Yibin e na estação de rastreio de Guiyang. O CCTD do Centro de Controlo de Satélites de Xi’an consiste na estação de rastreio de Weinan, na estação de rastreio de Xiamen e nos navios de instrumentação.
O Centro de rastreio de Xi Chang inclui equipamentos ópticos, radar, telemetria e telecomando. É responsável pela medição e processamento dos dados de voo do foguetão lançador e também pelo controlo da zona de segurança. Os dados recebidos e gravados pelo sistema do CCTD são utilizados para o processamento e análise após a missão.
As principais funções do CCTD são o registo dos dados iniciais de voo em tempo real, medição da trajectória do veículo lançador; recepção, gravação, transmissão e processamento dos dados e telemetria do foguetão lançador e do satélite; tomar decisões relativas à segurança; e computar o estado de separação entre o satélite e o lançador e respectivos parâmetros de injecção.
Após o lançamento o foguetão é imediatamente seguido pelo equipamento óptico, de telemetria e por radares em torno do local de lançamento. Os dados recebidos são enviado para CCCM. Estes dados serão inicialmente processados e enviados para as estações respectivas. Os computadores das estações recebem estes dados e levam a cabo a conversão de coordenadas, utilizando esses dados como dados para orientar o sistema do CCTD para obter e seguir o alvo.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 105
Após a detecção do alvo, os dados medidos são enviados para os computadores na estação e para o CCCM para serem processados. Estes dados processados são utilizados para o controlo da segurança do voo. Os resultados das computações são enviados para o Centro de Lançamento de Satélites de Xi Chang e para o Centro de Controlo de Satélites de Xi’an em tempo real através de linhas de transmissão de dados.
Em caso de falha durante as fases de voo do primeiro ou segundo estágio, o oficial de segurança tomará uma decisão tendo por base os critérios de segurança.
A injecção orbital da carga é detectada pelos navios de rastreio e enviada para o Centro de Controlo de Satélites de Xi’an. Os resultados são enviados para o CCCM de Xi Chang para processamento e monitorização.
Lançamento do BeiDou-2 IGSO-4 'Compass-I4’
Os observadores internacionais aguardavam o lançamento do satélite de comunicações tácticas ZX-22B ZhongXing-22B (o segundo satélite FH-1 FengHuo-1) em finais de Julho de 2011, mas a 25 de Julho as autoridades chinesas anunciavam que seria colocado em órbita um novo satélite de navegação Compass-I
Referindo que os preparativos decorriam ser qualquer problema, o lançamento acabou por ter lugar às 2144:28,206UTC do dia 26 de Julho de 2011 (a janela de lançamento decorria das 2133:00UTC até às 2143:00UTC). O lançamento foi adiado por alguns minutos devido às más condições atmosféricas com a ocorrência de chuva forte e trovoadas.
Doze segundos após abandonar a Plataforma de Lançamento LC3 do Centro de Lançamento de Satélites de Xi Chang, o foguetão CZ-3A Chang Zheng-3A iniciava uma manobra de arfagem colocando-se no azimute desejado para cumprir a sua missão para colocar o satélite numa órbita com uma inclinação de 55º.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 106

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 107
Misterioso Shi Jian 11-02 O quarto lançamento da China em menos de um mês tinha lugar às 0742:03,570UTC do dia 29 de Julho de 2011 com a colocação em órbita do satélite SJ-11 Shi Jian 11-04 desde o Centro de Lançamento de Satélites de Jiuquan. O lançamento foi levado a cabo por um foguetão CZ-2C Chang Zheng-2C (Y24) desde a Plataforma de Lançamento 603 (ou SLS-2).
Tal como nos satélites anteriores desta série, as autoridades chinesas designaram este satélite como um veículo experimental. O seu lançamento foi anunciado pela primeira vez a 28 de Julho.
O satélite separava-se do último estágio do foguetão lançador às 0752UTC, sendo colocado numa órbita inicial com um apogeu a 718 km de altitude, perigeu a 636 km de altitude, inclinação orbital de 98,13º e período orbital de 98,34 minutos.
Logo após o lançamento do SJ-11 ShiJian 11-02 começaram a surgir rumores que a China preparava-se para colocar em órbita em Agosto o satélite SJ-11 ShiJian 11-04. O lançamento deste satélite iria ter lugar a 18 de Agosto, mas infelizmente terminaria no primeiro desaire com um foguetão CZ-2C Chang Zheng-2C.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 108

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 109

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 110
Quadro de Lançamentos Recentes A seguinte tabela lista os lançamentos orbitais levados a cabo entre nos meses de Junho e Julho de 2011. Por debaixo de cada lançamento está referida uma sequência de quatro números que indica respectivamente o apogeu orbital (km), perigeu orbital (km), a inclinação orbital em relação ao equador terrestre (º) e o período orbital (minutos). Estes dados foram fornecidos pelo Space Track. Estes são os dados mais recentes para cada veículo à altura da edição deste número do Boletim Em Órbita.
Data UTC Des. Int. ORAD Designação Lançador Local Peso (kg)
07 Jun. 2012:45 2011-023A 37633 Soyuz TMA-02M (702 ISS-27S) 11A511U-FG Soyuz-FG (И15000-037) Baikonur, LC1 PU-5 (395 / 378 / 51,64 / 92,28) 10 Jun. 1420:13 2011-024A 37673 SAC-D/Aquarius Delta-2 7320-10 (D354) Vandenberg AFB, SLC-3W (655 / 653 / 98,01 / 97,81) 15 Jun. 0914 2011-025A 37675 Rasad-1 Safir-B (UIS.0001) Semnam 15,3 (153 / 149 / 55,66 / 87,51) – Reentrou na atmosfera terrestre a 6 de Julho de 2011 20 Jun. 1613:04 2011-026A 37677 ZX-10 ZhongXing-10 CZ-3B Chang Zheng-3B/E (Y20) Xi Chang, LC2 5.210 (35799 / 35773 / 0,07 / 1436,07) 21 Jun. 1438:15 2011-027A 37679 Progress M-11M (411 / ISS-43P) 11A511U Soyuz-U (И15000-128) Baikonur, LC1 PU-5 (395 / 378 / 51,64 / 92,28) 27 Jun. 1610 2011-028A 37727 Cosmos 2472 11A511U Soyuz-U (222) GIK-1 Plesetsk, LC16/2 (152 / 136 / 81,38 / 87,37) 30 Jun. 0309 2011-029A 37728 USA-231 ‘ORS-1’ Minotaur-I Wallops Island (MARS), LP-0B (407 / 397 / 40 / 92,6) 06 Jul. 0428:04 2011-030A 37730 SJ-11 Shi Jian 11-03 CZ-2C Chang Zheng-2C (Y25) Jiuquan, SLS-2 (603) (704 / 690 / 98,23 / 98,71) 08 Jul. 1529:04 2011-031A 37736 STS-135 / ISS ULF-7 OV-104 Atlantis Centro Espacial Kennedy, LC-39A/MLP-3 (385 / 371 / 51,64 / 92,11) – Regressou à Terra a 21 de Julho de 2011 MPLM Raffaello 2011-031B 37752 Pico-Satellite Solar Cell (PSSC 2) (377 / 360 / 51,64 / 91,92) 11 Jul. 1541:04 2011-032A 37737 TL-1B Tian Lian-1B CZ-3C Chang Zheng-3C (Y8) Xi Chang, LC2 (35791 / 35779 / 1,01 / 1436,03) 13 Jul. 0227:04 2011-033A 37739 Globalstar-M083 14A14-1A Soyuz-2-1A/Fregat (008/1024/ST23) Baikonur, LC31 PU-6 (933 / 919 / 51,99 / 103,54) 2011-033B 37740 Globalstar-M088 (1414 / 1413 / 51,97 / 114,08) 2011-033C 37741 Globalstar-M091 (933 / 918 / 51,99 / 103,53) 2011-033D 37742 Globalstar-M085 (932 / 916 / 51,99 / 103,5) 2011-033E 37743 Globalstar-M081 (932 / 917 / 51,99 / 103,51)

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 111
2011-033F 37744 Globalstar-M089 (932 / 916 / 51,99 / 103,5) 15 Jul. 1118 2011-034A 37746 GSAT-12 PSLV-C17 Satis Dawan, Ilha de Sriharikota, SLP (35815 / 35758 / 0,12 / 1436,09) 15 Jul. 2316:10 2011-035A 37748 SES-3 ‘OS-2’ 8K82KM Proton-M/Briz-M (93518/99519) Baikonur, LC200 PU-39 (35792 / 35782 / 0,05 / 1436,1) 2011-035B 37749 KazSat-2 (35822 / 35749 / 0,04 / 1436,05) 16 Jul. 0641 2011-036A 37753 USA-232 (GPS IIF-2 Navstar-66) Delta-IV Medium+(4,2) (D355) Cabo Canaveral AFS, SLC-37B (20464 / 20452 / 55,03 / 729,19) 18 Jul. 0231:18 2011-037A 37755 Spektr-R Zenit-2SB80/Fregat-SB (70181401 - SLB80.3/2002) Baikonur, LC45 PU-1 (335973 / 4740 / 56,83 / 12323,8) 26 Jul. 2144:28 2011-038A 37763 BeiDou-2 IGSO-4 Compass-I4 CZ-3A Chang Zheng-3A Xi Chang, LC3 (35872 / 35699 / 55,2 / 1436,03) 29 Jul. 0742:04 2011-039A 37765 SJ-11 Shi Jian 11-02 CZ-2C Chang Zheng-2C-III (Y24) Jiuquan, SLS-2 (603) (706 / 688 / 98,11 / 98,71)
Outros Objectos Catalogados Data Lançamento Des. Int. ORAD Designação Veículo Lançador Local de Lançamento
06 Julho 2011-030B 37731 H-18 (CZ2C Y25) CZ-2C Chang Zheng-2C (Y25) Jiuquan, 603 (SLS-2) 06 Julho 2011-030C 37732 (Destroço) CZ-2C Chang Zheng-2C (Y25) Jiuquan, 603 (SLS-2) 06 Julho 2011-030D 37733 (Destroço) CZ-2C Chang Zheng-2C (Y25) Jiuquan, 603 (SLS-2) 06 Julho 2011-030E 37734 (Destroço) CZ-2C Chang Zheng-2C (Y25) Jiuquan, 603 (SLS-2) 06 Julho 2011-030F 37735 (Destroço) CZ-2C Chang Zheng-2C (Y25) Jiuquan, 603 (SLS-2) 11 Julho 2011-032B 37737 H-18 (CZ3C Y8) CZ-3C Chang Zheng-3C (Y8) Xi Chang, LC2 13 Julho 2011-033G 37745 Fregat (1024) 14A14-1A Soyuz-2-1A/Fregat (008/1024/ST23) Baikonur, LC31 PU-6 15 Julho 2011-034B 37747 PS-4 (C-17) PSLV-C17 (PSLV-XL) Satish Dawan, Ilha de Sriharikota, SLP 15 Julho 2011-035C 37750 Tanque Briz-M (99519) 8K82KM Proton-M/Briz-M (93518/99519) Baikonur, LC200 PU-39 15 Julho 2011-035D 37751 Briz-M (99519) 8K82KM Proton-M/Briz-M (93518/99519) Baikonur, LC200 PU-39 16 Julho 2011-036B 37754 Delta 4-2 (D355) Delta-IV Medium+(4,2) (D355) Cabo Canaveral AFS, SLC-37B 18 Julho 2011-037B 37756 (Destroço) Zenit-2SB80/Fregat-SB (70181401 - SLB80.3/2002) Baikonur, LC45 PU-1 18 Julho 2011-037C 37757 (Destroço) Zenit-2SB80/Fregat-SB (70181401 - SLB80.3/2002) Baikonur, LC45 PU-1 18 Julho 2011-037D 37758 Fregat-SB (2002) Zenit-2SB80/Fregat-SB (70181401 - SLB80.3/2002) Baikonur, LC45 PU-1 18 Julho 2011-037E 37759 (Destroço) Zenit-2SB80/Fregat-SB (70181401 - SLB80.3/2002) Baikonur, LC45 PU-1 18 Julho 2011-037F 37760 (Destroço) Zenit-2SB80/Fregat-SB (70181401 - SLB80.3/2002) Baikonur, LC45 PU-1 18 Julho 2011-037G 37761 (Destroço) Zenit-2SB80/Fregat-SB (70181401 - SLB80.3/2002) Baikonur, LC45 PU-1 26 Janeiro 1978-012E 37762 (Destroço) Delta-2914 (628/D138) Cabo Canaveral AFS, LC-17A 26 Julho 2011-038B 37764 H-18 (CZ3A) CZ-3A Chang Zheng-3A Xi Chang, LC3 29 Julho 2011-039B 37766 H-18 (CZ2C Y24) CZ-2C Chang Zheng-2C (Y24) Jiuquan, 603 (SLS-2) 29 Julho 2011-039C 37767 (Destroço) CZ-2C Chang Zheng-2C (Y24) Jiuquan, 603 (SLS-2)

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 112
29 Julho 2011-039D 37768 (Destroço) CZ-2C Chang Zheng-2C (Y24) Jiuquan, 603 (SLS-2) 29 Julho 2011-039E 37769 (Destroço) CZ-2C Chang Zheng-2C (Y24) Jiuquan, 603 (SLS-2) 29 Julho 2011-039F 37770 (Destroço) CZ-2C Chang Zheng-2C (Y24) Jiuquan, 603 (SLS-2)
Regressos / Reentradas A tabela indica os satélites que reentraram na atmosfera ou regressaram no mês de Julho de 2011. Estas informações são cedidas pelo Space Track. Ree: reentrou na atmosfera terrestre; Reg: regressou após a missão.
Data Status Des. Int. ORAD Designação Lançador Data Lançamento Local Lançamento D. Órbita 01 Jul. Ree. 2004-007B 28185 Centaur (AC-202) Atlas-3A (AC-202) 13 Março Cabo Canaveral AFS, SLC-36B 2666 01 Jul. Ree. 2011-025B 37676 Último estágio Safir-B Safir-B (UIS.0001) 15 Junho Semnam 16 01 Jul. Ree. 2011-028B 37727 Blok-I 11A511U Soyuz-U (222) 27 Junho GIK-1 Plesetsk, LC16/2 4 02 Jul. Ree. 1968-014A 03138 OGO-5 SLV-3A Agena-D (5602/6503 AA26) 04 Março Cabo Canaveral AFS, LC13 15825 02 Jul. Ree. 1999-025CNN 31961 (Destroço) Feng Yun-1C CZ-4B Chang Zeng-4B (Y2) 10 Maio Taiyuan, LC1 4436 04 Jul. Ree. 1977-047M 32964 (Destroço) Cosmos 917 8K78M Molniya-M/L 16 Junho NIIP-53 Plesetsk, LC43/4 12436 04 Jul. Ree. 1997-051SG 35798 (Destroço) Iridium-33 8K82K Proton-K/DM2 (39101/2L) 14 Setembro GIK-5 Baikonur, LC81 PU-23 5041 06 Jul. Ree. 2011-025A 37675 Rasad-1 Safir-B (UIS.0001) 15 Junho Semnam 21 08 Jul. Ree. 1999-025AEM 30422 (Destroço) Feng Yun-1C CZ-4B Chang Zeng-4B (Y2) 10 Maio Taiyuan, LC1 4442 13 Jul. Ree. 2011-033G 37745 (Destroço) 14A14-1A Soyuz-2-1A/Fregat (008/1024/ST23) 13 Julho Baikonur, LC31 PU-6 0 14 Jul. Ree. 1987-053H 36856 (Destroço) DMSP-5D2-F8 Atlas-E (59E) / Star-37S-ISS 20 Junho Vandenberg AFB, SLC-3W 8790 15 Jul. Ree. 1997-051WU 36565 (Destroço) Iridium-33 8K82K Proton-K/DM2 (39101/2L) 14 Setembro GIK-5 Baikonur, LC81 PU-23 5052 16 Jul. Ree. 1975-052LK 37628 (Destroço) Delta-2910 (595/D111) 12 Junho Vandenberg AFB, SLC-2W 13183 18 Jul. Ree. 1993-036AMN 35595 (Destroço) Cosmos 2251 11K65M Kosmos-3M (47135-601) 16 Junho GIK-1 Plesetsk, LC132/1 6606 21 Jul. Ree. 1999-025NX 30046 (Destroço) Feng Yun-1C CZ-4B Chang Zeng-4B (Y2) 10 Maio Taiyuan, LC1 4455 21 Jul. Ree. 1993-036CY 33895 (Destroço) Cosmos 2251 11K65M Kosmos-3M (47135-601) 16 Junho GIK-1 Plesetsk, LC132/1 6609 21 Jul. Reg. 2011-031A 37736 STS-135 OV-104 Atlantis 08 Julho Centro Espacial Kennedy, LC-39A/MLP-3 13 22 Jul. Ree. 2001-049CF 27135 (Destroço) PSLV-C3 22 Outubro Satish Dawan, Sriharikota, PSLV 3560 22 Jul. Ree. 1999-025XV 30260 (Destroço) Feng Yun-1C CZ-4B Chang Zeng-4B (Y2) 10 Maio Taiyuan, LC1 4456 29 Jul. Ree. 1993-035D 22674 Blok-L 8K78M Molniya-M/L (77044660) 26 Maio GNIIP Plesetsk, LC43/4 6638 30 Jul. Ree. 2011-024B 37674 Delta-K Delta-2 7320-10C (D354) 10 Junho Vandenberg AFB, SLC-2W 50

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 113
Lançamentos orbitais previstos para Setembro e Outubro de 2011 Dia Lançador Carga Local
Setembro 8 (1235:52UTC) Delta-2 7920H (D356) GRAIL C. Canaveral AFS, SLC-17B 9 Ariane-5ECA (VA204) Arabsat-5C CSG Kourou SES-2 14 (?) 8K82KM Proton-M/Briz-M (93522/99524) QuetzSat-1 Baikonur, LC81 PU-24 22 11A511U-FG Soyuz-FG (И15000-039) Soyuz TMA-22 (232 / ISS-28S) Baikonur, LC1 PU-5 22 11K77 Zenit-3SL/DM-SL Atlantic Bird-7 Oc. Pacífico, Odyssey 25 PSLV-C18 Megha-Tropiques Satish Dawan SHAR AIS-Sat 1 27 Minotaur-IV TacSat-4 Kodiak, LP-1 29 11A511U-FG Soyuz-FG/Fregat (Б15000-033/1019) Kanopus-V n.º 1; BKA Baikonur, LC31 PU-6 MKA-FKI No. 1 (Zond-PP) ADS-1B; TET-1 30 (?) 8K82KM Proton-M/Briz-M (93522/99524) ViaSat-1 Baikonur, LC200 PU-39 ?? 14A18 Dnepr-1 KOMPSat Dombarovskiy, LC13 ?? CZ-3B/E Chang Zheng-3B/E Eutelsat-W3C Xi Chang, LC3 ?? CZ-2D Chang Zheng-2D SW-4 Shiyan WEixing-4 Jiuquan, 603 (SLS-2) CX-3 Chuang Xin-3 ?? CZ-3B Chang Zheng-3B ZX-22B ZhongXing-22B Xi Chang LC2 Outubro 3 11K77 Zenit-2SB/DM-SLB Intelsat-18 Baikonur, LC45 PU-1 8 14A14 Soyuz-2-1A/Fregat (007/1027) Globalstar (x6) Baikonur, LC31 PU-6 16 ( ?) 8K82KM Proton-M/Briz-M SES-4 Baikonur, LC200 PU-39 20 (1034 :00UTC) Soyuz ST-B (2-1b)/Fregat-MT (8/7/VS1) Galileo-IOV 3 CSG Kourou, ZLS Galileo-IOV 4 25 (0948 :01UTC) Delta-2 7920 NPP-Bridge Vandenberg AFB, SLC-3W LightSail-1 26 11A511U Soyuz-U (127) Progress M-13M (ISS-45P) Baikonur, LC1 PU-5 Chibis-M 30 (?) 8K82KM Proton-M/Briz-M (99523/53539) Uragan-M (x3) Baikonur, LC81 PU-40 ?? Semnam Fajr-1 Safir-B ?? CZ-3C Chang Zheng-3C BaiDou-2 ‘Compass-G5’ Xi Chang, LC3 ?? CZ-2F/H Chang Zheng-2F/H SZ-8 Shenzhou-8 Jiuquan, 921 (SLS-1)
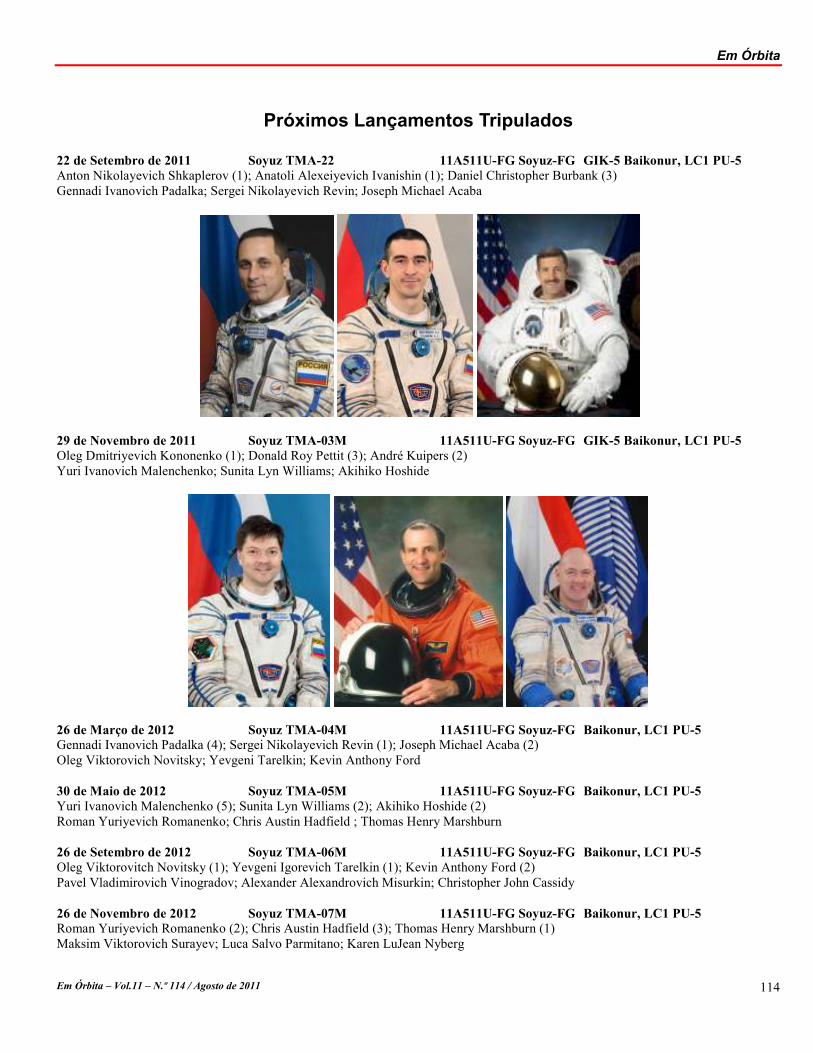
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 114
Próximos Lançamentos Tripulados
22 de Setembro de 2011 Soyuz TMA-22 11A511U-FG Soyuz-FG GIK-5 Baikonur, LC1 PU-5 Anton Nikolayevich Shkaplerov (1); Anatoli Alexeiyevich Ivanishin (1); Daniel Christopher Burbank (3) Gennadi Ivanovich Padalka; Sergei Nikolayevich Revin; Joseph Michael Acaba
29 de ovembro de 2011 Soyuz TMA-03M 11A511U-FG Soyuz-FG GIK-5 Baikonur, LC1 PU-5 Oleg Dmitriyevich Kononenko (1); Donald Roy Pettit (3); André Kuipers (2) Yuri Ivanovich Malenchenko; Sunita Lyn Williams; Akihiko Hoshide
26 de Março de 2012 Soyuz TMA-04M 11A511U-FG Soyuz-FG Baikonur, LC1 PU-5 Gennadi Ivanovich Padalka (4); Sergei Nikolayevich Revin (1); Joseph Michael Acaba (2) Oleg Viktorovich Novitsky; Yevgeni Tarelkin; Kevin Anthony Ford 30 de Maio de 2012 Soyuz TMA-05M 11A511U-FG Soyuz-FG Baikonur, LC1 PU-5 Yuri Ivanovich Malenchenko (5); Sunita Lyn Williams (2); Akihiko Hoshide (2) Roman Yuriyevich Romanenko; Chris Austin Hadfield ; Thomas Henry Marshburn 26 de Setembro de 2012 Soyuz TMA-06M 11A511U-FG Soyuz-FG Baikonur, LC1 PU-5 Oleg Viktorovitch Novitsky (1); Yevgeni Igorevich Tarelkin (1); Kevin Anthony Ford (2) Pavel Vladimirovich Vinogradov; Alexander Alexandrovich Misurkin; Christopher John Cassidy 26 de ovembro de 2012 Soyuz TMA-07M 11A511U-FG Soyuz-FG Baikonur, LC1 PU-5 Roman Yuriyevich Romanenko (2); Chris Austin Hadfield (3); Thomas Henry Marshburn (1) Maksim Viktorovich Surayev; Luca Salvo Parmitano; Karen LuJean Nyberg
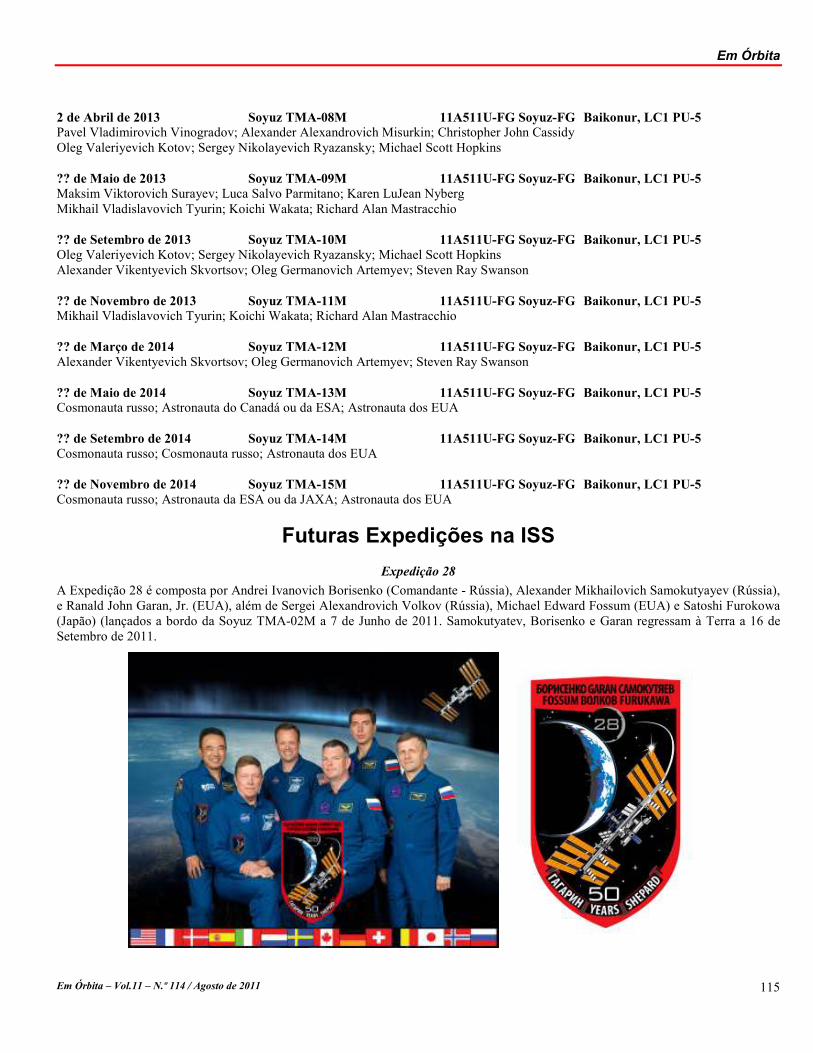
Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 115
2 de Abril de 2013 Soyuz TMA-08M 11A511U-FG Soyuz-FG Baikonur, LC1 PU-5 Pavel Vladimirovich Vinogradov; Alexander Alexandrovich Misurkin; Christopher John Cassidy Oleg Valeriyevich Kotov; Sergey Nikolayevich Ryazansky; Michael Scott Hopkins ?? de Maio de 2013 Soyuz TMA-09M 11A511U-FG Soyuz-FG Baikonur, LC1 PU-5 Maksim Viktorovich Surayev; Luca Salvo Parmitano; Karen LuJean Nyberg Mikhail Vladislavovich Tyurin; Koichi Wakata; Richard Alan Mastracchio ?? de Setembro de 2013 Soyuz TMA-10M 11A511U-FG Soyuz-FG Baikonur, LC1 PU-5 Oleg Valeriyevich Kotov; Sergey Nikolayevich Ryazansky; Michael Scott Hopkins Alexander Vikentyevich Skvortsov; Oleg Germanovich Artemyev; Steven Ray Swanson ?? de ovembro de 2013 Soyuz TMA-11M 11A511U-FG Soyuz-FG Baikonur, LC1 PU-5 Mikhail Vladislavovich Tyurin; Koichi Wakata; Richard Alan Mastracchio ?? de Março de 2014 Soyuz TMA-12M 11A511U-FG Soyuz-FG Baikonur, LC1 PU-5 Alexander Vikentyevich Skvortsov; Oleg Germanovich Artemyev; Steven Ray Swanson ?? de Maio de 2014 Soyuz TMA-13M 11A511U-FG Soyuz-FG Baikonur, LC1 PU-5 Cosmonauta russo; Astronauta do Canadá ou da ESA; Astronauta dos EUA ?? de Setembro de 2014 Soyuz TMA-14M 11A511U-FG Soyuz-FG Baikonur, LC1 PU-5 Cosmonauta russo; Cosmonauta russo; Astronauta dos EUA ?? de ovembro de 2014 Soyuz TMA-15M 11A511U-FG Soyuz-FG Baikonur, LC1 PU-5 Cosmonauta russo; Astronauta da ESA ou da JAXA; Astronauta dos EUA
Futuras Expedições na ISS
Expedição 28
A Expedição 28 é composta por Andrei Ivanovich Borisenko (Comandante - Rússia), Alexander Mikhailovich Samokutyayev (Rússia), e Ranald John Garan, Jr. (EUA), além de Sergei Alexandrovich Volkov (Rússia), Michael Edward Fossum (EUA) e Satoshi Furokowa (Japão) (lançados a bordo da Soyuz TMA-02M a 7 de Junho de 2011. Samokutyatev, Borisenko e Garan regressam à Terra a 16 de Setembro de 2011.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 116
A Expedição 29 será composta por Michael Edward Fossum (Comandante - EUA), Sergei Alexandrovich Volkov (Rússia), Satoshi Furokowa (Japão), Anton Nikolayevich Shkaplerov (Rússia), Anatoli Alexeievich Ivanishin (Rússia) e Daniel Christopher Burbank (EUA), estes últimos lançados a 30 de Setembro de 2011 a bordo da Soyuz TMA-22. S. Volkov, Fossum e Furokawa regressam à Terra a 16 de Novembro de 2011.
A Expedição 30 será composta por Daniel Burbank (Comandante – EUA), Anton Shkaplerov (Rússia), Anatoli Ivanishin (Rússia), Oleg Kononenko (Rússia), Donald Pettit (EUA) e André Kuipers (Holanda), sendo estes últimos lançados a bordo da Soyuz TMA-03M a 30 de Novembro de 2011. Ainda não está decidida a data de regresso de Shkaplerov, Ivanishin e Burbank.
A Expedição 31 será composta por Oleg Kononenko (Comandante – Rússia), Donald Pettit (EUA), André Kuipers (Holanda), Gennadi Padalka (Rússia), Konstantin Valkov (Rússia) e Joseph Acaba (EUA), sendo estes três últimos lançados a 26 de Março de 2012 a bordo da Soyuz TMA-04M.
A Expedição 32 será composta por Gennadi Padalka (Comandante – Rússia), Konstantin Valkov (Rússia), Joseph Acaba (EUA), Yuri Malenchenko (Rússia), Sunita Williams (EUA) e Akihiko Hoshide (Japão), sendo estes três últimos lançados a 29 de Maio de 2012 a bordo da Soyuz TMA-05M.
A Expedição 33 será composta por Sunita Williams (Comandante – EUA), Yuri Malenchenko (Rússia), Akihiko Hoshide (Japão), Oleg Novitsky (Rússia), Yevgeni Tarelkin (Rússia) e Kevin Ford (EUA), sendo estes três últimos lançados a 23 de Setembro de 2012 a bordo da Soyuz TMA-06M.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 117
A Expedição 34 será composta por Kevin Ford (Comandante – EUA), Oleg Novitsky (Rússia), Yevgeni Tarelkin (Rússia), Roman Romanenko (Rússia), Chris Hadfield Canadá) e Thomas Marshburn (EUA), sendo estes três últimos lançados a 20 de Novembro de 2012 a bordo da Soyuz TMA-07M.
A Expedição 35 será composta por Chris Hadfield (Comandante – Canadá), Roman Romanenko (Rússia), Thomas Marshburn (EUA) e três novos membros ainda não designados.
Lançamentos Suborbitais A seguinte tabela tenta fazer uma listagem de todos os lançamentos suborbitais realizados. Entre os lançamentos que se pretende listar estarão os lançamentos de mísseis balísticos intercontinentais ou de outros veículos com capacidade de atingir a órbita terrestre mas que são utilizados em lançamentos suborbitais. A listagem é baseada em informação recolhida na rede informática mundial, através de pesquisa quase diária por parte do autor, e de múltipla informação recebida de várias fontes entre as quais se encontram as várias agências espaciais.
Esta lista estará sempre incompleta pois será quase impossível obter a informação de todos os lançamentos suborbitais realizados (por exemplo, muitos testes de mísseis balísticos podem ser secretos e a informação recebida poderá, quase de certeza, ser muito escassa).
Muitas vezes são realizados lançamentos suborbitais por foguetões sonda mas que não atingem altitudes orbitais. Estes lançamentos que não superam os 100 km de altitude, limite inferior do Espaço internacionalmente reconhecido, serão assinalados.
Data Hora ome Lançador Local Altitude (km)
09 Jun 0335 Prithvi-II ITR, Chandipur 10 Jun NASA 41.096GT ‘SubTEC IV’ Terrier Improved Orion Wallops Island MARS 188 13 Jun 1017 NASA 41.095UO ‘RockOn’ Terrier Improved Orion Wallops Island MARS 22 Jun 1335 GT204 Minuteman-III Vandenberg AFB, LF10 28 Jun Ghadr ‘Shaab-1’ Semnan 28 Jun Ghadr ‘Shaab-2’ Semnan 28 Jun Ghadr ‘Shaab-3’ Semnan 28 Jun 1155 R-29RM Bulava Yuriy Dolgorukiy, Mar Branco 09 Jul 0304 FTX-17 C-17 / SRALT Point Mugu 10 Jul. 1400 NASA 21.140GE Black Brant V Wallops Island MARS 10 Jul. 1400 NASA 41.090GE Terrier Improved Orion Wallops Island MARS 11 Jul. 1535 Gradicom-II Base Aérea de Chamical, La Rioja ~100 21 Jul 0750 Prahaar ITR Chandipur, Orissa 35 21 Jul 1358 NASA 41.092 GO / Rosanova Terrier Improved Orion Wallops Island MARS 27 Jul Minuteman-III Vandenberg AFB 27 Jul RSM-54 Sineva Ekaterinburg, Mar de Barents
9 de Julho – FTX-17 / SRALT A agência MDA (Missile Defense Agency) levou a cabo com sucesso um teste em voo que envolveu o lançamento de um míssil alvo Short Range Air Launched Target (SRALT) a partir do Centro de Guerra Aeronaval localizado no Weapons Division-Point Mugu Sea Range, Califórnia. Este teste de voo, designado FTX-17, demonstrou com sucesso um sistema de lançamento aéreo e de remoção umbilical que foi redesenhado para corrigir problemas identificados em testes anteriores.
O lançamento ocorreu às 0304UTC do dia 9 de Julho a partir de um avião de transporte C-17 da Força Aérea dos Estados Unidos sobre o Oceano Pacífico a Oeste da costa californiana. O míssil alvo foi extraído da parte posterior do C-17 por um pára-quedas, com o motor do veículo a entrar em ignição pouco depois e enviando o míssil numa trajectória sobre o Pacífico.
O míssil foi seguido com sucesso por vários sensores de defesa na Califórnia, incluindo um radar de defesa táctico AN/TPS-59 situado no Campo Base de Marines em Pendleton, um radar de banda X AN/TPY-2 na Base Aérea de Vandenberg, e pelo Upgraded Early Warning Radar na Base Aérea de Beale.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 118
10 de Julho – NASA 21.140GE & NASA41.080GE A NASA levou a cabo dois lançamentos suborbitais a partir de Wallops Island a 10 de Julho de 2011. Um foguetão sonda Black Brant
V transportando a missão NASA 21.140GE foi lançado 1400UTC e um segundo foguetão-sonda, um Terrier Improved Orion, foi lançado 15 segundos mais tarde.
Uma das missões obteve dados sobre o gás ionizado bem como sobre os gases neutros através dos quais viajou. A outra missão criou uma longa coluna de lítio gasoso para determinar os movimentos dos ventos.
Ambos os lançamentos foram adiados desde 5 de Julho devido às más condições científicas e atmosféricas.
11 de Julho – Gradicom-II A Argentina levou a cabo com sucesso o lançamento de um foguetão-sonda às 1535UTC do dia 11 de Julho de 2011. O lançamento teve lugar desde A Base Aérea de Chamical, província de La Rioja, e surgiu após várias tentativas falhadas.
O foguetão de propolentes sólidos (em baixo) teve como objectivo levar a cabo testes de um protótipo de um
foguetão de dois estágios para realizar um voo de 120 segundos no espaço, levando a cabo experiências nos seus sistemas e subsistemas a bordo.
O foguetão-somda tinha um comprimento de 7, 686 metros e uma massa de 933 kg, sendo completamente desenvolvido por especialistas argentinos. Esta missão atingiu um apogeu de cerca de 100 km e uma distância de 120 km.
O Gradicom-II foi lançado para implementar um novo programa de lançadores para utilização civil e militar.
21 de Julho – Prahaar Um novo míssil terra-terra foi testado pelas forças armadas da Índia a 21 de Julho de 2011. O lançamento ocorreu às 0750UTC a partir de uma plataforma móvel situada na zona de testes Integrated Teste Range em Chandipur, Orissa.
O míssil percorreu 150 km em 250 segundos antes de impactar numa zona alvo na Baía de Bengala com uma precisão de alguns metros
21 de Julho – NASA 41.092 / Terrier Improved Orion Um foguetão-sonda Terrier-Improved Orion da NASA foi lançado às 1358UTC do dia 21 de Julho transportando a missão NASA 41.082 GO/Rosanova.
A missão transportou uma carga de experiências (denominada RocsatX) desenvolvidas por estudantes universitários e também levou a cabo o teste de um novo sistema de recuperação de carga.
O projecto, apoiado pelo Colorado Space Grant Consortium, contou com a participação da Universidade do Porto Rico, Universidade do Wyoming, Universidade Norte do Colorado e da Universidade do Colorado em Boulder.
Após atingir uma altitude de cerca de 120 km, a carga foi recuperada.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 119
27 de Julho – GT204 / Minuteman-III Um míssil operacional Minuteman-III foi destruído às 1106UTC após ter sido lançado a partir do Complexo de Lançamento LF04 da Base Aérea de Vandenberg, Califórnia, no dia 27 de Julho de 2011.
Os controladores da Força Aérea dos Estados Unidos detectaram uma anomalia e finalizaram o voo devido a questões de segurança. Na altura da sua destruição o míssil estava sobre o Oceano Pacífico a Nordeste de Roi-Namur.
O voo era um teste operacional para determinar a fiabilidade desde sistema e a sua precisão.
27 de Julho – RSM-54 Sineva A Rússia levou a cabo um novo ensaio com o míssil balístico intercontinental RSM-54 (R-29RM) Sineva no dia 27 de Julho de 2011. O lançamento foi levado a cabo pelo submarino Ekaterinburg, do Projecto 667BDRM, no Mar de Barents.
A Marinha da Federação Russa anunciou que todas as ogivas transportadas atingiram os respectivos alvos no local de testes situado em Kura, Península de Kamchatka.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 120
Cronologia Astronáutica (LXIX) Por Manuel Montes
-1948: Os ensaios das V-2 alemãs capturadas pelos soviéticos, em Kapustin Yar, são detectados pelos norte-americanos. O polígono, que foi identificado pela primeira vez na primavera de 1947, começa a ser vigiado pelos serviços de inteligência, sobretudo pela SIS britânica e pela CIA americana. Um grupo de especialistas britânicos, fazendo-se passar por arqueólogos, visita o Irão para controlar desde à distância as actividades realizadas no cosmódromo.
-1948: Apesar de que Tikhonravov deixou o programa, a proposta de um foguetão tripulado (VR-190) continuou durante os últimos meses noutras mãos, nos centros NII-1 e NII-4. É finalmente apresentado um plano preliminar, e este é aprovado,
mas decide-se abandonar a presença de humanos a bordo, os quais serão substituídos por cães. No ano seguinte, o VR-190 perderá força quando Korolev decida usar o seu R-1 para tarefas semelhantes.
-Janeiro de 1948: Depois da explosão de Novembro, os técnicos preparam de novo o protótipo do míssil MX-774 e conseguem a sua ignição estática dos sues motores durante 30 segundos. Este tipo de testes prolongar-se-á até Maio.
-15 de Janeiro de 1948: A direcção da Air Force americana declara oficialmente que o corpo possui a responsabilidade lógica de ocupar-se de qualquer projecto de satélite que se deseje levar a cabo. No dia seguinte, a !avy inicia os passos para separar-se deste assunto, evitando uma desnecessária duplicidade de esforços.
-22 de Janeiro de 1948: Despega desde White Sands a V-2 número 34. Alcança os 159 km de altitude, realizando medições de pressão atmosférica e análises dos raios cósmicos. Falha a separação de uma ogiva simulada.
-Inverno/Primavera de 1948: O grupo de engenheiros alemães que está a trabalhar em Moscovo (NII 88) é unido ao grupo de Gorodomlya. Entre outras coisas, efectuarão estudos sobre o míssil R-12, uma substancial melhoria da V-2, capaz de lançar uma
tonelada de explosivos a 2.413 km de distância.
-Fevereiro de 1948: A US Air Force encarrega ao Projecto RAND um relatório detalhado sobre as características que deveria ter um satélite em função dos conhecimentos actuais. O RAND procurará ajuda em universidades, empresas e indivíduos de especialidades diversas. Este relatório tardará dois anos a levar-se a cabo.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 121
-4 de Fevereiro de 1948: Efectua-se o primeiro voo de um avião-foguete D-558 (D-558-II-1). É pilotado por John Martin, que o faz despegar desde uma pista.
-6 de Fevereiro de 1948: É lançada com êxito desde White Sands a V-2 número 36. Repete a missão de sua antecessora, conseguindo esta vez expulsar a ogiva simulada. Também utiliza um sistema electrónico de orientação não estandardizado. Alcança 111 km de altitude.
-5 de Março de 1948: O segundo foguetão-sonda Aerobee (RTV-N-8/A-5) alcança 107 km de altitude após partir desde White Sands. Transporta instrumentos para analisar os raios cósmicos.
-19 de Março de 1948: A terceira carga Blossom (a pesar de não lhe ser atribuída qualquer número) fracassa quando o seu míssil V-2 (número 39) fica sem peróxido de hidrogénio devido a uma falha de um regulador. Só alcança 6 km de altitude sobre White Sands. Devia analisar o campo magnético.
ota sobre o autor: Nascido em 1965, Manuel Montes Palacio, é um escritor freelancer e divulgador científico desde 1989, especializando-se em temas relacionados com a Astronáutica e Astronomia. Pertence a diversas associações espanholas e internacionais, tais como a Sociedad Astronómica de España y América e a British Interplanetary Society, tendo colaborado com centenas de artigos para um grande número de publicações, entre elas a britânica Spaceflight e as espanholas Muy Interessante, Quo, On-Off, Tecnología Militar, Universo e Historia y Vida. Actualmente elabora semanalmente o boletim gratuito “!oticias del Espacio”, distribuído exclusivamente através da Internet, e os boletins “!oticias de la Ciencia y la Tecnologia” e “!C&T Plus”, participando também na realização dos conteúdos do canal científico da página “Terra”.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 122
Estatísticas do Voo Espacial tripulado Esta secção do Em Órbita será dedicada a estabelecer as estatísticas relacionadas com o programa espacial tripulado em geral.
Os 10 mais experientes
Sergei Konstantinovich Krikalev (Soyuz TM-7; Soyuz TM-12; STS-60; STS-80; Soyuz TM-31; Soyuz TMA-6) Tempo total de voo: 803d 09h 33m 29s
Alexander Yurievich Kaleri (Soyuz TM-14; Soyuz TM-24; Soyuz TM-30; Soyuz TMA-3; Soyuz TMA-01M) Tempo total de voo: 769d 06h 35m 02s
Sergei Vasilyevich Avdeyev (Soyuz TM-15; Soyuz TM-22; Soyuz TM-28) Tempo total de voo: 747d 14h 14m 11s – 14 de Fevereiro de 2003
Valeri Vladimirovich Polyakov (Soyuz TM-6; Soyuz TM-18) Tempo Total de voo: 678d 16h 33m 36s – 1 de Junho de 1995
Anatoli Yakovlevich Solovyov (Soyuz TM-5; Soyuz TM-9; Soyuz TM-15; STS-71; Soyuz TM-26) Tempo total de voo: 651d 00h 02m 00s – 2 de Fevereiro de 1999
Gennadi Ivanovich Padalka (Soyuz TM-28, TMA-4, TMA-14) Tempo total de voo: 585d 06h 29m 54s
Victor Mikhailovich Afanasyev (Soyuz TM-11; Soyuz TM-18; Soyuz TM-29; Soyuz TM-33) Tempo total de voo: 555d 18h 28m 48s – 17 de Abril de 2006
Yuri Vladimirovich Usachyov (Soyuz TM-18; Soyuz TM-23; STS-101; STS-102) Tempo total de voo: 552d 22h 19m 12S – 5 de Abril de 2004
Musa Khiramanovich Manarov (Soyuz TM-4; Soyuz TM-11) Tempo total de voo: 541d 00h 28m 48s – 23 de Julho de 1992
Yuri Ivanovich Malenchenko (Soyuz TM-19; STS-106; Soyuz TMA-2; Soyuz TMA-11) Tempo total de voo: 512d 23h 58m 10s
As datas após o ‘Tempo total de voo’ indicam a altura em que deixou o activo.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 123
Os 10 voos mais longos Valeri Vladimirovich Polyakov 437d 17h 58m 32s Soyuz TM-18 (Mir EO-15/16/17) De 8 de Janeiro de 1994 (Soyuz TM-18) a 22 de Março de 1995 (Soyuz TM-20) Sergei Vasilyevich Avdeyev 379d 14h 51m 10s Soyuz TM-28 (Mir EO-26/27) De 13 de Agosto de 1998 (Soyuz TM-28) a 28 de Agosto de 1999 (Soyuz TM-29) Musa Khiramanovich Manarov 365d 22h 38m 58s Soyuz TM-4 (Mir EO-3) De 21 de Dezembro de 1987 (Soyuz TM-4) a 21 de Dezembro de 1988 (Soyuz TM-6) Vladimir Georgievich Titov 365d 22h 38m 58s Soyuz TM-4 (Mir EO-3) De 21 de Dezembro de 1987 (Soyuz TM-4) a 21 de Dezembro de 1988 (Soyuz TM-6) Yuri Viktorovich Romanenko 326d 11h 37m 59s Soyuz TM-2 (Mir EO-2/3) De 5 de Fevereiro de 1987 (Soyuz TM-2 )a 29 de Dezembro de 1987 (Soyuz TM-3) Sergei Konstantinovich Krikalev 311d 20h 00m 54s Soyuz TM-12 (Mir EO-9/10) De 18 de Maio de 1991 (Soyuz TM-12) a 25 de Março de 1992 (Soyuz TM-13) Valeri Vladimirovich Polyakov 240d 22h 34m 47s Soyuz TM-6 (Mir EO-3/4) De 29 de Agosto de 1988 (Soyuz TM-6) a 27 de Abril de 1989 (Soyuz TM-7) Leonid Denisovich Kizim 236d 22h 49m 04s Soyuz T-10 (Salyut-7 EO-3) De 8 de Fevereiro de 1984 (Soyuz T-10) a 2 de Outubro de 1984 (Soyuz T-11) Vladimir Alexeievich Solovyov 236d 22h 49m 04s Soyuz T-10 (Salyut-7 EO-3) De 8 de Fevereiro de 1984 (Soyuz T-10) a 2 de Outubro de 1984 (Soyuz T-11) Oleg Yurievich Atkov 236d 22h 49m 04s Soyuz T-10 (Salyut-7 EO-3) De 8 de Fevereiro de 1984 (Soyuz T-10) a 2 de Outubro de 1984 (Soyuz T-11)
Os 10 menos experientes Gherman Stepanovich Titov 1d 01h 18m 00s Vostok-2 Boris Borisovich Yegorov 1d 00h 17m 03s Voskhod-2 Konstantin Petrovich Feoktistov 1d 00h 17m 03s Voskhod-2 Yang Liwei 0d 21h 21m 36s Shenzhou-5 Virgil Ivan 'Gus' Grissom 0d 05h 08m 37s MR-4 Literty Bell-7 Malcom Scott Carpenter 0d 04h 56m 05s MA-7 Aurora-7 Yuri Alexeievich Gagarin 0d 01h 48m 00s Vostok-1 Sharon Christa McAuliffe 0d 00h 01m 13s STS-51L Challenger Gregory Bruce Jarvis 0d 00h 01m 13s STS-51L Challenger Michael John Smith 0d 00h 01m 13s STS-51L Challenger
Os 10 mais experientes em AEV Anatoli Yakovlevich Solovyov 69h 42m – 14 Michael Eladio Lopez-Alegria 67h 40m – 10 Jerry Lynn Ross 58h 32m – 9 John Mace Grunsfeld 58h 30m – 8 Steven Lee Smith 49h 48m – 7 Scott Eduard Parazynski 47h 05m – 7 Joseph Richard Tanner 46h 29m – 7 Robert Lee Curbeam 45h 34m – 7 ikolai Mikhailovich Budarin 44h 25m – 9 Douglas harry Wheelock 43h 30m – 6 James Hansen ewman 43h 01m – 6
Cosmonautas e Astronautas Segundo a FAI 520 Segundo a USAF 526 Cosmonautas e Astronautas em órbita 517

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 124
úmero de cosmonautas e astronautas por país em órbita (segundo a Federação Astronáutica Internacional)
Rússia 110 Canadá 9 Espanha 1
Estados Unidos 331 Arábia Saudita 1 Eslováquia 1
Checoslováquia 1 Holanda 2 África do Sul 1
Polónia 1 México 1 Israel 1
Alemanha 10 Síria 1 China 6
Bulgária 2 Afeganistão 1 Brasil 1
Hungria 1 Japão 9 Suécia 1
Vietname 1 Reino Unido 1 Malásia 1
Cuba 1 Áustria 1 Coreia do Sul 1
Mongólia 1 Bélgica 2
Roménia 1 Suíça 1 TOTAL – 520
França 9 Itália 5
Índia 1 Ucrânia 1

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 125
Explicação dos Termos Técnicos Impulso específico (Ies) – Parâmetro que mede as potencialidades do combustível (propulsor) de um motor. Expressa-se em segundos e equivale ao tempo durante o qual 1kg desse combustível consegue gerar um impulso de 10N (Newton). É medido dividindo a velocidade de ejecção dos gases de escape pela aceleração da gravidade. Quando maior é o impulso específico maior será o rendimento do propulsante e, consequentemente, do motor. O impulso específico (em vácuo) define a força em kgf gerada pelo motor por kg de combustível consumido por tempo (em segundos) de funcionamento:
(kgf/(kg/s)) = s Quanto maior é o valor do impulso específico, mais eficiente é o motor.
Tempo de queima (Tq) – Tempo total durante o qual o motor funciona. No caso de motores a combustível sólido representa o valor do tempo que decorre desde a ignição até ao consumo total do combustível (de salientar que os propulsores a combustível sólido não podem ser desactivados após a entrada em ignição). No caso dos motores a combustível líquido é o tempo médio de operação para uma única ignição. Este valor é usualmente superior ao tempo de propulsão quando o motor é utilizado num determinado estágio. É necessário ter em conta que o tempo de queima de um motor que pode ser reactivado múltiplas vezes, é bastante superior ao tempo de queima numa dada utilização (voo).
Impulso específico ao nível do mar (Ies-nm) – Impulso específico medido ao nível do mar.
Órbita de transferência – É uma órbita temporária para um determinado satélite entre a sua órbita inicial e a sua órbita final. Após o lançamento e a sua colocação numa órbita de transferência, o satélite é gradualmente manobrado e colocado a sua órbita final.
Órbita de deriva – É o último passo antes da órbita geostacionária, uma órbita circular cuja altitude é de aproximadamente 36000 km.
Fracção de deriva – É a velocidade de um satélite movendo-se numa direcção longitudinal quando observado a partir da Terra.
Órbita terrestre baixa – São órbitas em torno da Terra com altitude que variam entre os 160 km e os 2000 km acima da superfície terrestre.
Órbita terrestre média – São órbitas em torno da Terra com altitudes que variam entre os 2000 km e os 35786 km (órbita geostacionária). São também designadas órbitas circulares intermédias.
Órbita geostacionária – São órbitas acima do equador terrestre e com excentricidade 0 (zero). Visto do solo, um objecto colocado numa destas órbitas parece estacionário no céu. A posição do satélite irá unicamente ser diferenciada pela sai longitude, pois a latitude é sempre 0º (zero graus).
Órbita polar – São órbitas nas quais os satélites passam sobre o perto dos pólos de um corpo celeste. As suas inclinações orbitais são de (ou aproximadas a) 90º em relação ao equador terrestre.
Delta-v – Em astrodinânica o delta-v é um escalar com unidades de velocidade que mede a quantidade de «esforço» necessário para levar a cabo uma manobra orbital. É definido como
Onde T é a força instantânea e m é a massa instantânea. Na ausência de forças exteriores, e quando a força é aplicada numa direcção constante, a expressão em cima simplifica para
, que é simplesmente a magnitude da mudança de velocidade.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 126
Parâmetros orbitais Apogeu: ponto de altitude máxima da órbita.
Perigeu: ponto de altitude mínima da órbita.
odos ascendente e descendente da órbita: são os pontos de intersecção da órbita com o plano equatorial. Nodo ascendente é aquele que o satélite atravessa no Equador quando se dirige do Sul para o Norte. Nodo descendente é aquele que o satélite atravessa no Equador quando se dirige do Norte para o Sul. A “linha dos nodos” é aquela que liga os nodos ascendente e descendente, passando pelo centro da Terra.
Inclinação (I): ângulo entre o plano orbital do satélite e o plano equatorial da Terra. Inclinações próximas a 0º correspondem às chamadas órbitas equatoriais. Inclinações próximas a 90º correspondem às chamadas órbitas polares pois cobrem os dois pólos. Órbitas com inclinação entre 0º e 90º rodam no mesmo sentido que a Terra (Oeste - Este) e por isso são denominadas de "progressivas". Órbitas com inclinação maior que 90º rodam no sentido contrário à Terra (Este - Oeste) e por isso são chamadas de "retrógradas". Inclinações maiores que 50º e menores que 130º correspondem a órbitas "polares" pois atingem latitudes altas. Inclinações menores que 40º correspondem a órbitas próximas ao Equador.
Ascensão recta do nodo ascendente (Right Ascension of Ascending ode - RAA -Ω ): ângulo entre o primeiro ponto de Aires e o nodo ascendente. Segundo valor que alinha a elipse orbital no espaço, considerando que a inclinação é o primeiro.
Argumento do perigeu (Argument of perigee -ϖ ): é o ângulo medido no plano orbital, na direcção do movimento, do nodo ascendente ao perigeu. É o ângulo entre o eixo maior da elipse (linha entre o perigeu e o apogeu) e a linha dos nodos, medido no plano da órbita. Varia entre 0° e 360°, sendo igual a 0º quando o perigeu está no nodo ascendente, e 180º quando o satélite está mais longe da Terra (apogeu) cruzando o Equador em movimento ascendente. Determina a posição da elipse orbital no plano orbital, visto que a inclinação I e a ascensão recta Ω determinam a posição do plano orbital no espaço.
Excentricidade: determina a forma da elipse orbital. Círculo: Excentricidade = 0; Elipse longa e estreita: Excentricidade = 1.
Movimentação média (Mean motion - n): velocidade angular média do satélite (em revoluções por dia) em uma órbita elíptica: n = 2.π /T onde T é o período orbital. Parâmetro relacionado com o tamanho da órbita (distância do satélite à Terra).
Anomalia média (Mean anomaly - M): especificação da posição do satélite na órbita numa dada época. Ângulo medido a partir do perigeu na direcção do movimento do satélite, que um satélite teria se se movesse em velocidade angular constante.
Anomalia verdadeira: ângulo no plano orbital do satélite entre o perigeu e a posição do satélite medido na direcção do movimento do satélite.
Elementos keplerianos: descrevem a forma e orientação de uma órbita elíptica em torno da Terra, bem como a posição de um satélite naquela órbita em uma dada época (data e hora de referência): argumento do perigeu, ascensão recta do nodo ascendente, anomalia média, semi-eixo maior, inclinação e excentricidade.
Perturbações: existem os seguintes tipos de perturbações: Geopotencial - devido ao achatamento terrestre, ou seja, ao desvio principal da Terra em relação à forma esférica; altera a orientação do plano orbital no espaço sem alterar a inclinação; altera a orientação da elipse no plano orbital; Atracão lunissolar - devido às acções atractivas do Sol e da Lua; afecta todos os elementos orbitais, diminuindo a altura do perigeu e, consequentemente, afectando o tempo de vida do satélite; Arrasto (atrito) atmosférico - devido ao atrito com a atmosfera; diminuição do semi-eixo maior, da excentricidade e do período de revolução.

Em Órbita
Em Órbita – Vol.11 – .º 114 / Agosto de 2011 127
Combustíveis e Oxidantes 2O4 – Tetróxido de itrogénio (Peróxido de Azoto); De uma forma simples pode-se dizer que o oxidante N2O4 consiste no tetróxido em equilíbrio com uma pequena quantidade de dióxido de nitrogénio. No seu estado puro o N2O4 contém menos de 0,1% de água. O N2O4 tem uma coloração vermelho acastanhada tanto nas suas fases líquida como gasosa, sendo incolor na fase sólida. Este oxidante é muito reactivo e tóxico, tendo um cheiro ácido muito desagradável. Não é inflamável com o ar, no entanto inflamará materiais combustíveis. Surpreendentemente não é sensível ao choque mecânico, calor ou qualquer tipo de detonação. O N2O4 é fabricado através da oxidação catalítica da amónia, onde o vapor é utilizado como diluente para reduzir a temperatura de combustão. Grande parte da água condensada é expelida e os gases ainda mais arrefecidos, sendo o óxido nítrico oxidado em dióxido de nitrogénio. A água restante é removida em forma de ácido nítrico. O gás resultante é essencialmente tetróxido de nitrogénio puro. Tem uma densidade de 1,45 g/c3, sendo o seu ponto de congelação a -11,0ºC e o seu ponto de ebulição a 21,0ºC.
UDMH ( (CH3)2H2 ) – Unsymmetrical Dimethylhydrazine (Hidrazina Dimetil Assimétrica); O UDMH é um líquido altamente tóxico e volátil que absorve oxigénio e dióxido de carbono. O seu odor é ligeiramente amoniacal. É completamente miscível com a água, com combustíveis provenientes do petróleo e com o etanol. É extremamente sensível aos choques e os seus vapores são altamente inflamáveis ao contacto com o ar em concentrações de 2,5% a 95,0%. Tem uma densidade de 0,79g/cm3, sendo o seu ponto de congelação a -57,0ºC e o seu ponto de ebulição a 63,0ºC.
LOX – Oxigénio Líquido; O LOX é um líquido altamente puro (99,5%) e tem uma cor ligeiramente azulada, é transparente e não tem cheiro característico. Não é combustível, mas dar vigor a qualquer combustão. Apesar de ser estável, isto é resistente ao choque, a mistura do LOX com outros combustíveis torna-os altamente instáveis e sensíveis aos choques. O oxigénio gasoso pode formar misturas com os vapores provenientes dos combustíveis, misturas essas que podem explodir em contacto com a electricidade estática, chamas, descargas eléctricas ou outras fontes de ignição. O LOX é obtido a partir do ar como produto de destilação. Tem uma densidade de 1,14 g/c3, sendo o seu ponto de congelação a -219,0ºC e o seu ponto de ebulição a -183,0ºC.
LH2 – Hidrogénio Líquido; O LH2 é um líquido em equilíbrio cuja composição é de 99,79% de para-hidrogénio e 0,21 orto-hidrogénio. O LH2 é transparente e som odor característico, sendo incolor na fase gasosa. Não sendo tóxico, é um líquido altamente inflamável. O LH2 é um bi-produto da refinação do petróleo e oxidação parcial do fuelóleo daí resultante. O hidrogénio gasoso é purificado em 99,999% e posteriormente liquidificado na presença de óxidos metálicos paramagnéticos. Os óxidos metálicos catalisam a transformação orto-para do hidrogénio (o hidrogénio recém catalisado consiste numa mistura orto-para de 3:1 e não pode ser armazenada devido ao calor exotérmico da conversão). Tem uma densidade de 0,07 g/cm3, sendo o seu ponto de congelação a -259,0ºC e o seu ponto de ebulição a -253,0ºC.
H4ClO4 – Perclorato de Amónia; O NH4ClO4 é um sal sólido branco do ácido perclorato e tal como outros percloratos, é um potente oxidante. A sua produção é feita a partir da reacção entre a amónia e ácido perclorato ou por composição entre o sal de amónia e o perclorato de sódio. Cristaliza em romboedros incolores com uma densidade relativa de 1,95. É o menos solúvel de todos os sais de amónia. Decompõe-se antes da fusão. Quando ingerido pode causar irritação gastrointestinal e a sua inalação causa irritação do tracto respiratório ou edemas pulmonares. Quando em contacto com a pele ou com os olhos pode causar irritação.





























