Embed Size (px)
Citation preview
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 1. Einführung / 1Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische SystemeElektromechanische SystemeTeil A (Prof. Binder):Teil A (Prof. Binder):Mathematische Analyse von Wandlern & Mathematische Analyse von Wandlern & AktorenAktoren
1. Einf1. Einfüührung hrung
1. Einführung2. Grundlagen3. Formale Behandlung elektromechanischer diskreter Systeme4. Methode der Lagrange-Gleichungen5. Elektromechanische Grundsysteme6. Dynamische Untersuchung des Wandlerverhaltens7. Analyse ausgewählter elektromechanischer Wandler
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 1. Einführung / 2Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme1. Einführung
Vorlesungsziele der Abschnitte von Prof. Binder:- Physikalisches Verständnis der elektromechanischen Wandlungsprinzipien- Methoden zur Analyse und mathematischen Beschreibung elektromech.
Wandler- Untersuchung ausgewählter Wandler-Grundanordnungen
Für einen Überblick über unterschiedliche Wandlertypen und deren Einsatzgebieten wird Literatur empfohlen:
1a) R. G. Ballas; G. Pfeifer; R. Werthschützky: Elektromechanische Systeme der Mikrotechnik und Mechatronik: Dynamischer Entwurf - Grundlagen und Anwendungen, Springer, Heidelberg, 2009
1b) A. Lenk; R. G. Ballas; K. Mayer; R. Werthschützky; G. Pfeifer: ElectromechanicalSystems in Microtechnology and Mechatronics: Electrical, Mechanical and Acoustic Networks, their Interactions and Applications, Springer, Heidelberg, 2011
2) U. Marschner; R. Werthschützky: Aufgaben und Lösungen zur Schaltungsdarstellung und Simulation elektromechanischer Systeme: In Mikrotechnik und Mechatronik, Springer, Heidelberg 2015
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 1. Einführung / 3Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme1. Einführung
Ergänzende Literatur zu den Vorlesungsabschnitten von Prof. Binder:1) H. H. Woodson; J. R. Melcher: Electromechanical Dynamics, Part 1: Discrete
Systems, Wiley, New York, 1968 2) J. Meisel: Principles Of Electromechanical Energy Conversion, McGraw-Hill, New
York, 19663) H.-J. Dirschmid: Mathematische Grundlagen der Elektrotechnik (+ Begleitband:
Lösungen u. Hinweise), 4. Aufl.; Vieweg, Wiesbaden, 19964) T. Arens et al.: Mathematik: 3. Aufl.; Spektrum Akad. Verlag & Springer,
Heidelberg, 20155) K. Küpfmüller; K. Mathis; A. Reibiger: Theoretische Elektrotechnik, 19. Aufl.,
Springer, Heidelberg, 2013
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 1. Einführung / 4Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme1. Einführung
Lehrunterlagen von Prof. Binder:a) Auf Moodle-Plattform, b) Auf Homepage des Instituts für Elektrische Energiewandlung,
1) Kompletter Foliensatz (pdf)2) Aufgabensammlung mit Musterlösungen und Theoriefragen (pdf)3) Übungsunterlagen werden der Aufgabensammlung entnommen
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 1. Einführung / 5Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Vorlesung
M. Sc. Sascha NeusüsInstitut für Elektrische Energiewandlung
TU Darmstadt 64283, Landgraf-Georg-Strasse 4, Darmstadt
tel.: +49-6151-16-24192fax.:+49-6151-16-24183
e-mail: [email protected]
Übungen
Prof. Dr.-Ing. habil. Dr. h.c. Andreas BinderInstitut für Elektrische Energiewandlung
TU Darmstadt 64283, Landgraf-Georg-Strasse 4, Darmstadt
tel.: +49-6151-16-24181 o. 24182fax.:+49-6151-16-24183
e-mail: [email protected]
Elektromechanische Systeme1. Einführung
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 1. Einführung / 6Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Prüfung
Schriftlich
2 Stunden
3 Berechnungsaufgaben
Verständnisfragen zur Theorie
2 Prüfungstermine pro Jahr
Liste der Verständnisfragen in der Aufgabensammlung
Elektromechanische Systeme1. Einführung
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 1. Einführung / 7Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
• Verwendete Formelzeichen: siehe Aufgabensammlung
• Das griechische Alphabet:
Alpha Beta Gamma Delta
Epsilon Zeta Eta Theta
Jota Kappa Lambda My (mue)
Ny (nue) Xi Omikron Pi
Rho Sigma Tau Ypsilon
Phi Chi Psi Omega
Elektromechanische Systeme1. Einführung
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 1Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme Elektromechanische Systeme
2. Grundlagen2. Grundlagen
• Dynamische Grundgesetze der Mechanik und Elektromagnetik• Materialgesetze• Kraftgesetze• Energiebegriffe• Einführendes Beispiel:
Kopplung eines mechanischen mit einem el.-magn. System
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 2Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme2. Grundlagen
Dynamische Grundgesetze der Mechanik und Elektromagnetik Materialgesetze Kraftgesetze Energiebegriffe Einführendes Beispiel:
Kopplung eines mechanischen mit einem el.-magn. System
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 3Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Dynamische Grundgesetze der Mechanik und ElektromagnetikMechanische Grundgleichungen
• Die mechanischen Grundgleichungen geben Bewegungen von massebehafteten Körpern durch Kräfte und Drehmomente bezüglich eines Beobachters B (der das Bezugssystem darstellt) wieder
• Wenn die Geschwindigkeiten v der Bewegung bezüglich B KLEIN gegenüber der Vakuumlichtgeschwindigkeit c0 3.108 m/s ist, gelten die drei NEWTON´schen Gesetze
• Bei hohen Geschwindigkeiten v müssen mit den Gesetzen der speziellen Relativitätstheorie diese NEWTON´schen Gesetze korrigiert werden Die Umrechnung der NEWTON-Gesetze von bewegtem System zum ruhenden Bezugssystem B erfolgt mit derLORENTZ-Transformation, wobei sich die „Formeln“ ändern Bewegte Körper erscheinen von B aus verkürzt,
die Zeit im bewegten System vergeht langsamer. Der Formelapparat für das bewegte System ändert sich bezüglich B
• Elektromechanische Wandler: Kleine Geschwindigkeiten v Statt LORENTZ- kann näherungsweise GALILEI-Transformation (=Geschwindigkeitsaddition) verwendet werden Abmessungen bewegter Körper bleiben bzgl. B erhalten, Einheitliche Zeit bzgl. B in allen Systemen Einheitlicher Formelapparat für ruhenden und bewegte Systeme
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 4Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Dynamische Grundgesetze der Mechanik und ElektromagnetikNichtrelativistische mechanische Grundgleichungen
• Die mechanischen Grundgleichungen („Bewegungsgleichungen“) können auf zwei Artenformuliert werden:
• a) Mit Verwendung der NEWTON´schen Axiome:1. Ein kräftefreier Körper bleibt in Ruhe oder bewegt sich geradlinig
mit konstanter Geschwindigkeit.2. Kraft ist gleich Masse mal Beschleunigung.3. Eine Kraft von Körper A auf Körper B verursacht immer eine gleich große,
aber entgegen gerichtete Kraft von Körper B auf Körper A
• b) Mit Verwendung des LAGRANGE-Formalismus:1. Die Dynamik eines Systems wird durch eine einzige skalare (LAGRANGE)-Funktion
beschrieben.2. Aus der LAGRANGE-Funktion werden die Bewegungsgleichungen mit den EULER-
LAGRANGE-Gleichungen der Variationsrechnung aus dem Prinzip der kleinsten Wirkung bestimmt.
• Vorteil von b) gegenüber a): Bei Systemen mit vielen unterschiedlich bewegten Körpern (Mehrkörpersystemen) können die Bewegungsgleichungen leichter angegeben werden das Freischneiden der einzelnen Körper mit dem Aufstellen des Kräftegleichgewichts je Körper (mit Einführung von Zwangskräften zwischen den Körpern) entfällt.
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 5Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
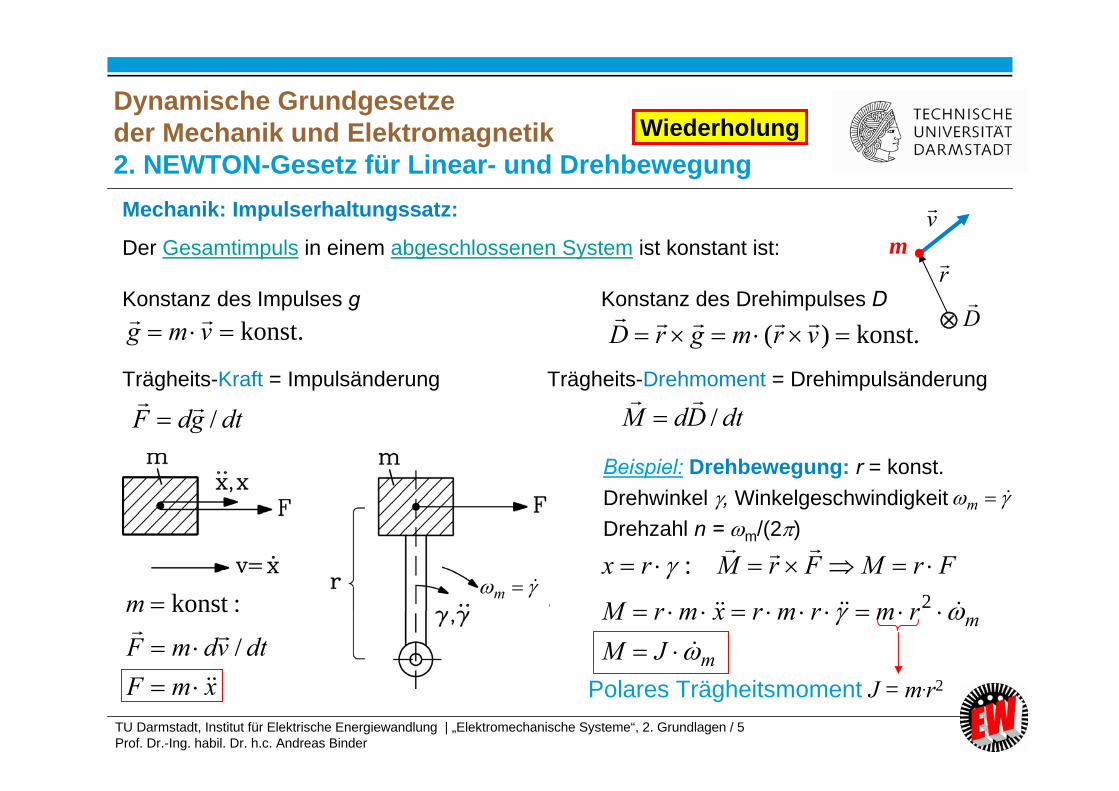
Polares Trägheitsmoment J = m.r2
Dynamische Grundgesetze der Mechanik und Elektromagnetik2. NEWTON-Gesetz für Linear- und DrehbewegungMechanik: Impulserhaltungssatz:
Der Gesamtimpuls in einem abgeschlossenen System ist konstant ist:
Konstanz des Impulses g Konstanz des Drehimpulses Dkonst. vmg
konst.)( vrmgrD
Trägheits-Kraft = Impulsänderung Trägheits-Drehmoment = Drehimpulsänderung
dtgdF / dtDdM /
xmFdtvdmF
m
/
:konst
Beispiel: Drehbewegung: r = konst.Drehwinkel , Winkelgeschwindigkeit Drehzahl n = m/(2)
m
m
JMrmrmrxmrM
FrMFrMrx
2
:
m
r
v
m
D
m
Wiederholung
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 6Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Dynamische Grundgesetze der Mechanik und ElektromagnetikElektromagnetische Grundgleichungen
• Die elektromagnetischen Grundgleichungen geben die gekoppelt elektrischen und magnetischen Vorgänge im Vakuum, in elektrisch geladenen, in stromdurchflossenen, in polarisierbaren / magnetisierbaren Körpern bezüglich eines Beobachters B (der das Bezugssystem darstellt) wieder
• Unabhängig, ob die Geschwindigkeiten v der Bewegung bezüglich B KLEIN gegenüber der Vakuumlichtgeschwindigkeit c0 3.108 m/s sind oder nicht, gelten die vier MAXWELL´schenGesetze
• Bei der Umrechnung der MAXWELL-Gesetze vom bewegtem System zum ruhenden Bezugssystem B mit der LORENTZ-Transformation ändern sich die Gesetze nicht
• Allerdings ändern sich dabei die elektromagnetischen Größen D, E, B, H ! Z. B.: Ein bewegtes magnetisches System (B, H) hat aus der Sicht vom ruhenden B nun
geänderte Werte B´, H´ und zusätzliche elektrische Größen D´, E´(Dies gilt auch umgekehrt: z. B: RÖNTGEN- und ROWLAND-Effekt)
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 7Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Dynamische Grundgesetze der Mechanik und ElektromagnetikBewegungsinduktion
• Elektromechanische Wandler: Kleine Geschwindigkeiten v Zwar ändern sich die elektromagnetischen Größen D, E, B, H in D´, E´, B´, H´,aber 1. Diese Größenänderungen und die zusätzlich auftretenden magnetischen
Größen sind vernachlässigbar klein.2. ABER:
Die zusätzliche Größe E´ - E muss berücksichtigt werden („Bewegungsinduktion“)Für v << c0 gilt:
BvEBvEE b
´
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 8Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Dynamische Grundgesetze der Mechanik und ElektromagnetikElektromagnetische Grundgesetze (ohne Relativbewegung v)
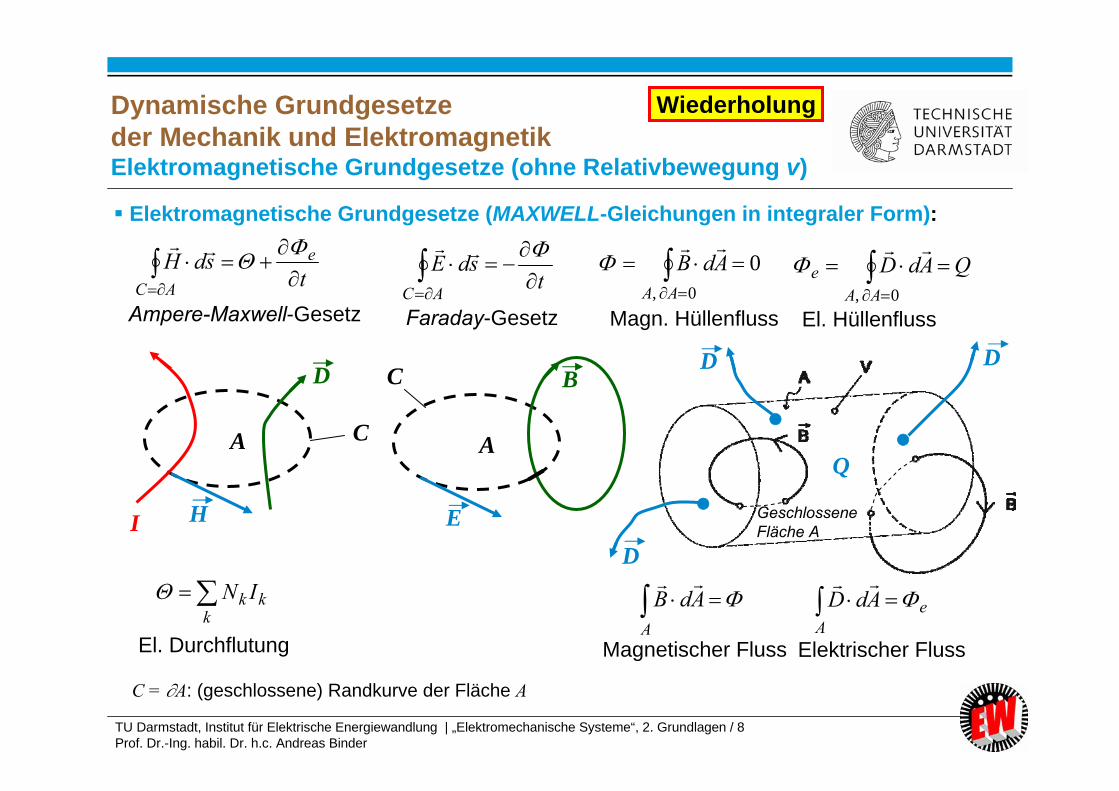
Elektromagnetische Grundgesetze (MAXWELL-Gleichungen in integraler Form):
tsdH e
AC
0
0,
AA
AdB
QAdDAA
e 0,
Ampere-Maxwell-Gesetz Faraday-Gesetz Magn. Hüllenfluss
k
kk INe
AAdD
El. Durchflutung Magnetischer Fluss Elektrischer Fluss
El. Hüllenfluss
tsdE
AC
A
AdB
I
D
H
CA
B
E
C
A
Geschlossene Fläche A
Q
D
D
D
C = A: (geschlossene) Randkurve der Fläche A
Wiederholung
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 9Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
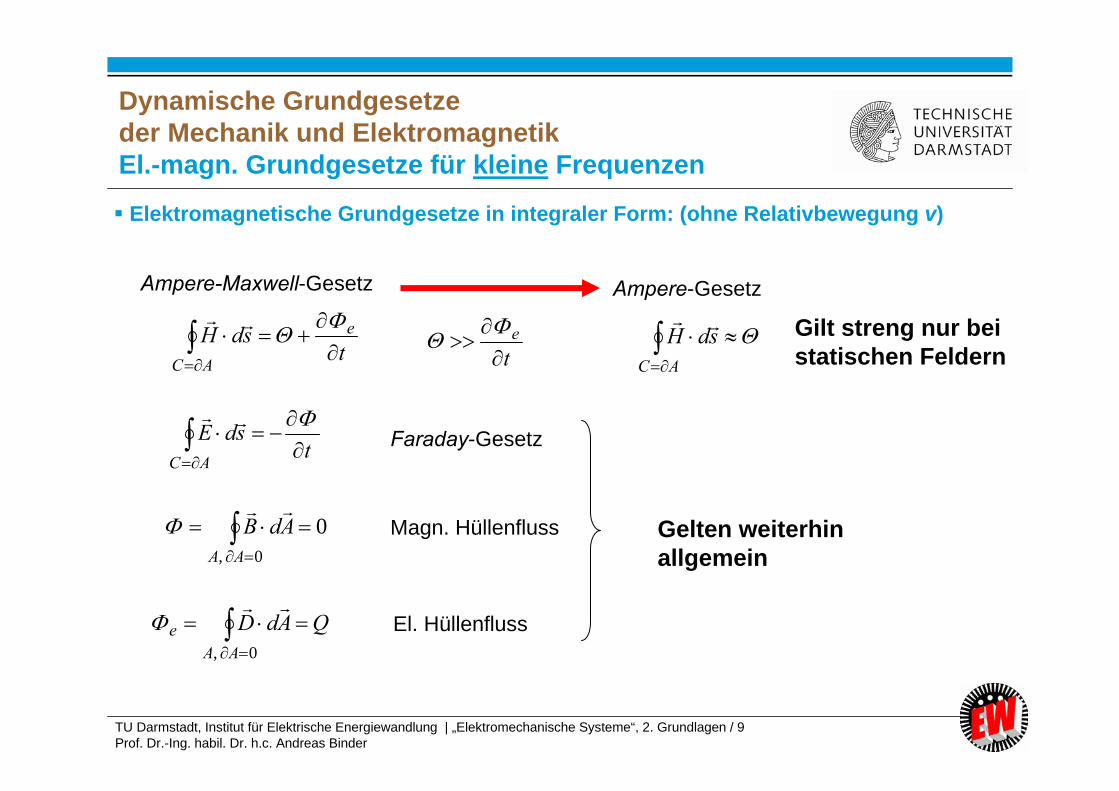
Dynamische Grundgesetze der Mechanik und ElektromagnetikEl.-magn. Grundgesetze für kleine Frequenzen
tsdH e
AC
00,
AA
AdB
QAdDAA
e 0,
Ampere-Maxwell-Gesetz
Faraday-Gesetz
Magn. Hüllenfluss
El. Hüllenfluss
tsdE
AC
Ampere-Gesetz
te
AC
sdH
Gelten weiterhin allgemein
Gilt streng nur bei statischen Feldern
Elektromagnetische Grundgesetze in integraler Form: (ohne Relativbewegung v)
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 10Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
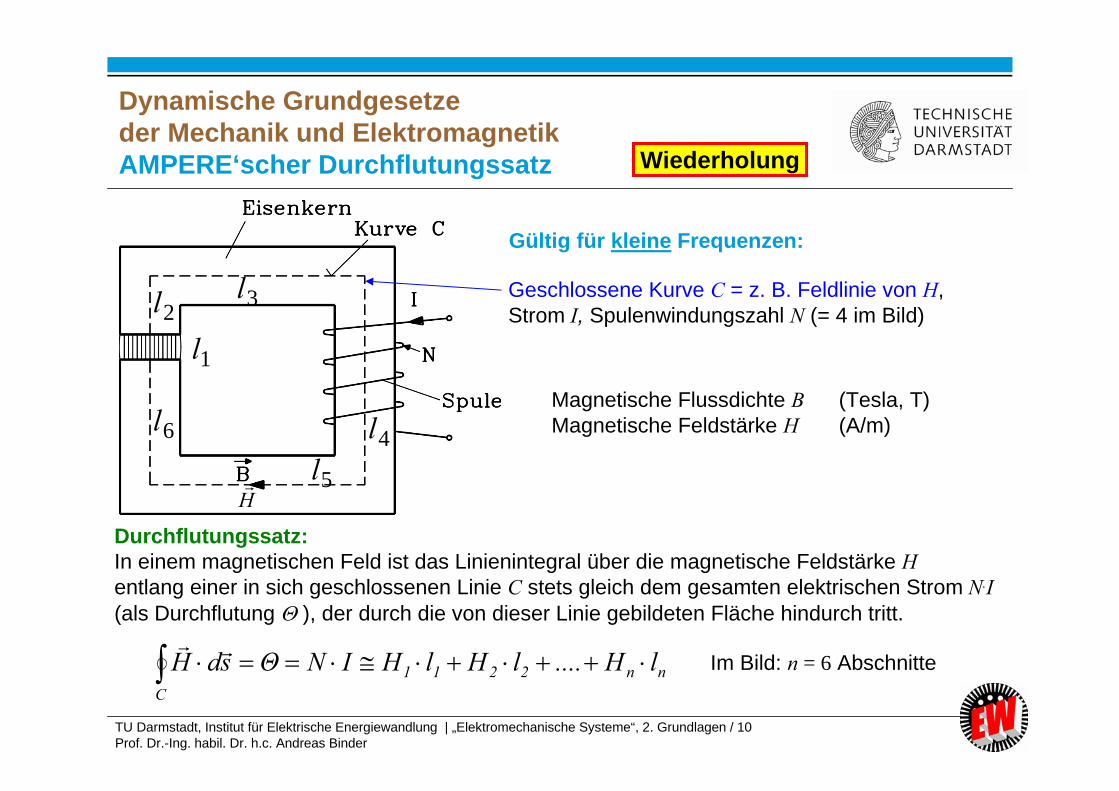
Dynamische Grundgesetze der Mechanik und ElektromagnetikAMPERE‘scher Durchflutungssatz
1l2l 3l
4l5l
6l
H
Geschlossene Kurve C = z. B. Feldlinie von H, Strom I, Spulenwindungszahl N (= 4 im Bild)
Magnetische Flussdichte B (Tesla, T)Magnetische Feldstärke H (A/m)
Durchflutungssatz:In einem magnetischen Feld ist das Linienintegral über die magnetische Feldstärke Hentlang einer in sich geschlossenen Linie C stets gleich dem gesamten elektrischen Strom N.I(als Durchflutung ), der durch die von dieser Linie gebildeten Fläche hindurch tritt.
nn22C
11 lH....lHlHINΘsdH
Im Bild: n = 6 Abschnitte
Wiederholung
Gültig für kleine Frequenzen:
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 11Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
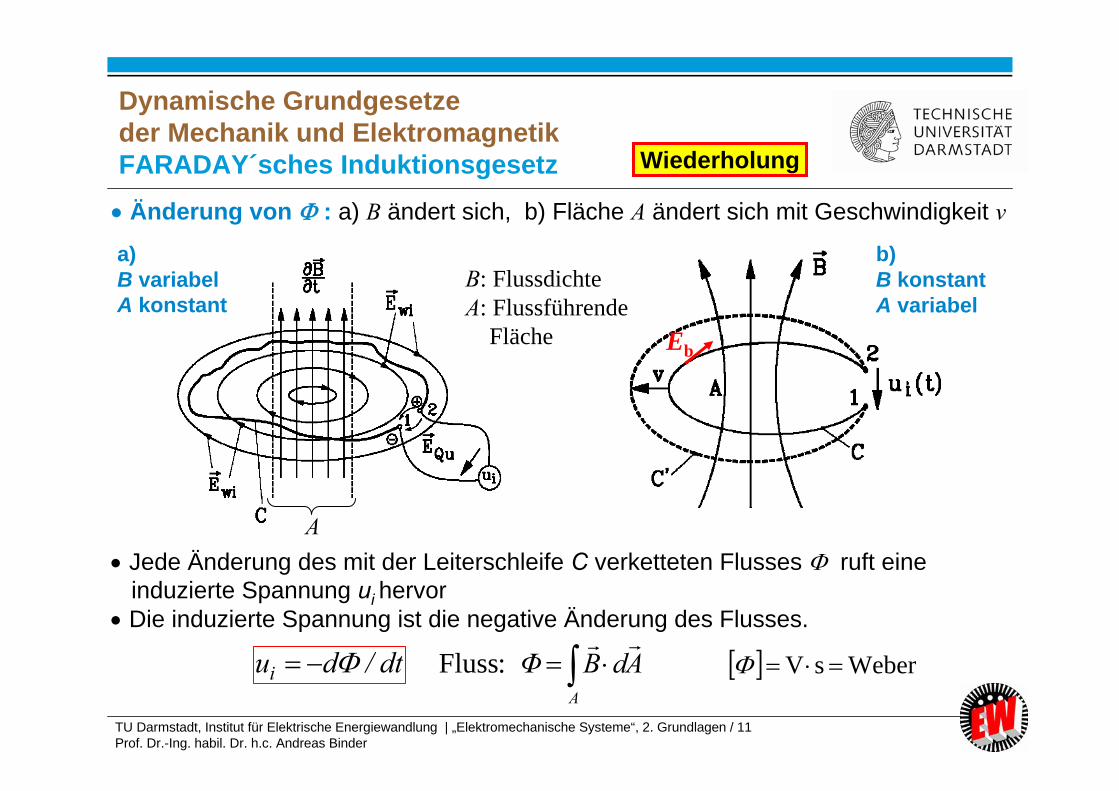
Jede Änderung des mit der Leiterschleife C verketteten Flusses ruft eine induzierte Spannung ui hervor
Die induzierte Spannung ist die negative Änderung des Flusses.
dt/dui A
AdBΦ
:Fluss WebersV
a)B variabelA konstant
A
B: FlussdichteA: Flussführende
Fläche
b)B konstantA variabel
Eb
Änderung von : a) B ändert sich, b) Fläche A ändert sich mit Geschwindigkeit v
Dynamische Grundgesetze der Mechanik und ElektromagnetikFARADAY´sches Induktionsgesetz Wiederholung
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 12Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
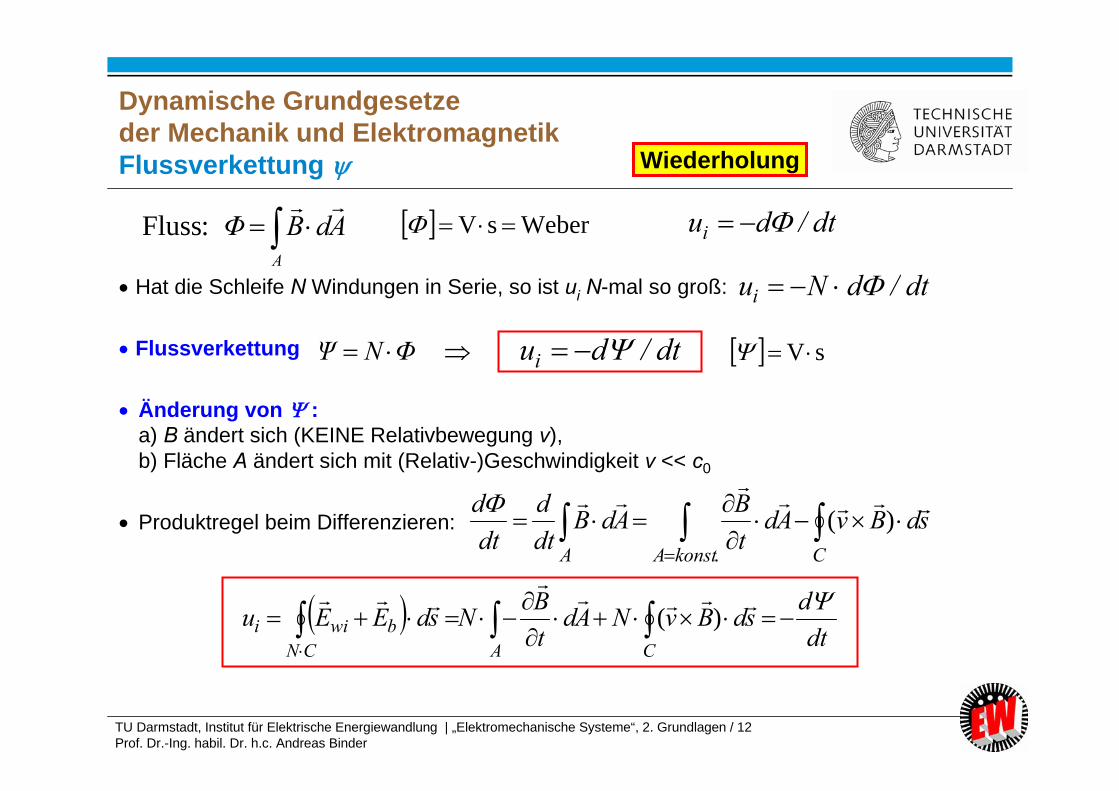
Dynamische Grundgesetze der Mechanik und ElektromagnetikFlussverkettung
Hat die Schleife N Windungen in Serie, so ist ui N-mal so groß:
Flussverkettung
Änderung von : a) B ändert sich (KEINE Relativbewegung v), b) Fläche A ändert sich mit (Relativ-)Geschwindigkeit v << c0
Produktregel beim Differenzieren:
ΦNΨ dt/dui
dt/dNui
dt/dui A
AdBΦ
:Fluss WebersV
sV
)(.
CkonstAA
sdBvAdtBAdB
dtd
dtd
dt
dsdBvNAdtBNsdEEu
CACNbwii
)(
Wiederholung
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 13Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
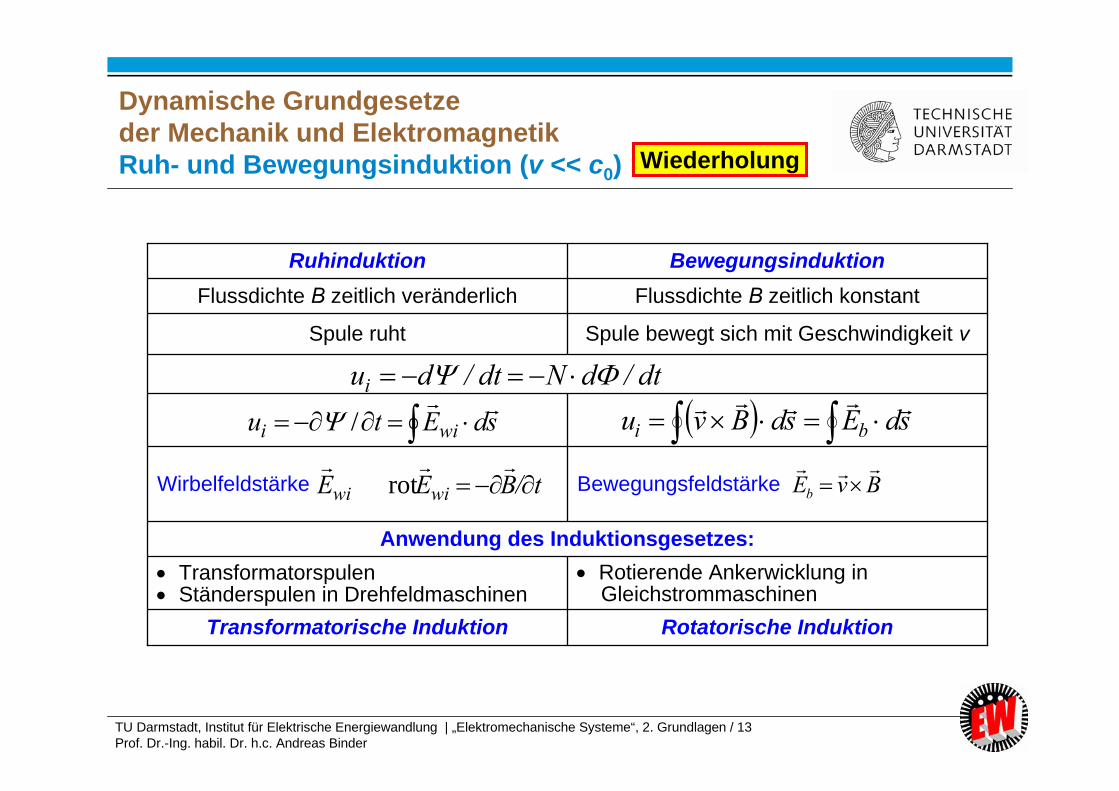
Rotierende Ankerwicklung inGleichstrommaschinen
Transformatorspulen Ständerspulen in Drehfeldmaschinen
Rotatorische InduktionTransformatorische Induktion
Anwendung des Induktionsgesetzes:
BewegungsfeldstärkeWirbelfeldstärke
Spule bewegt sich mit Geschwindigkeit vSpule ruht
Flussdichte B zeitlich konstantFlussdichte B zeitlich veränderlichBewegungsinduktionRuhinduktion
t/BEE wiwi
rot BvEb
dt/dNdt/dui
sdEtu wii
/ sdEsdBvu bi
Dynamische Grundgesetze der Mechanik und ElektromagnetikRuh- und Bewegungsinduktion (v << c0) Wiederholung
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 14Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
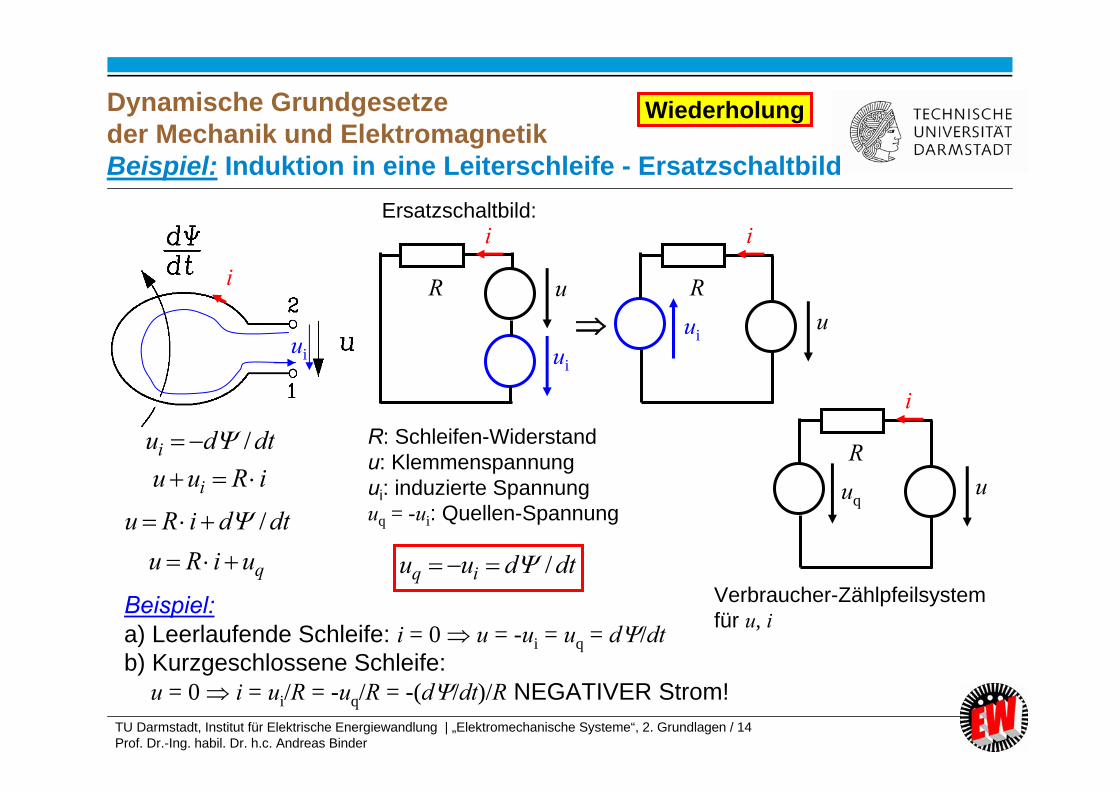
ui
i
dtdui /iRuu i
i
ui
uR
Ersatzschaltbild:
R: Schleifen-Widerstandu: Klemmenspannungui: induzierte Spannunguq = -ui: Quellen-Spannung
ui
i
uR
uq
i
uR
dtdiRu /
Verbraucher-Zählpfeilsystem für u, i
quiRu dtduu iq /
Beispiel:a) Leerlaufende Schleife: i = 0 u = -ui = uq = d/dtb) Kurzgeschlossene Schleife:
u = 0 i = ui/R = -uq/R = -(d/dt)/R NEGATIVER Strom!
Dynamische Grundgesetze der Mechanik und ElektromagnetikBeispiel: Induktion in eine Leiterschleife - Ersatzschaltbild
Wiederholung
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 15Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
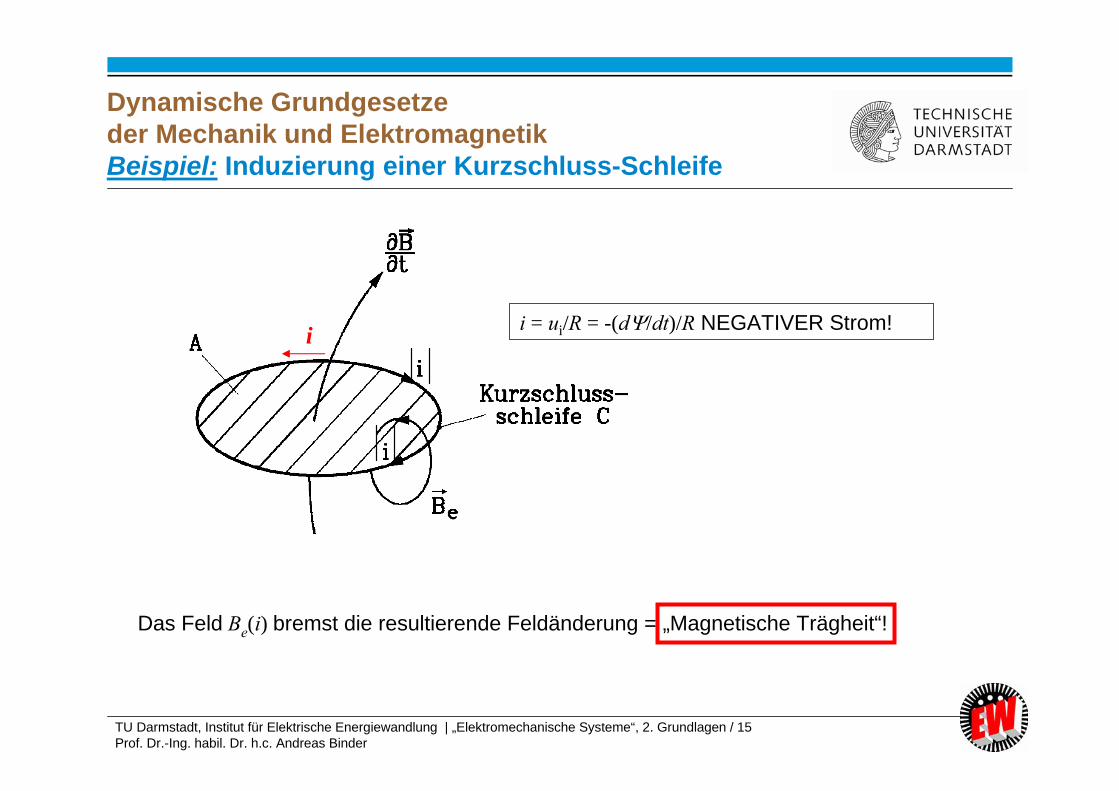
Das Feld Be(i) bremst die resultierende Feldänderung = „Magnetische Trägheit“!
i = ui/R = -(d/dt)/R NEGATIVER Strom!
Dynamische Grundgesetze der Mechanik und ElektromagnetikBeispiel: Induzierung einer Kurzschluss-Schleife
i
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 16Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
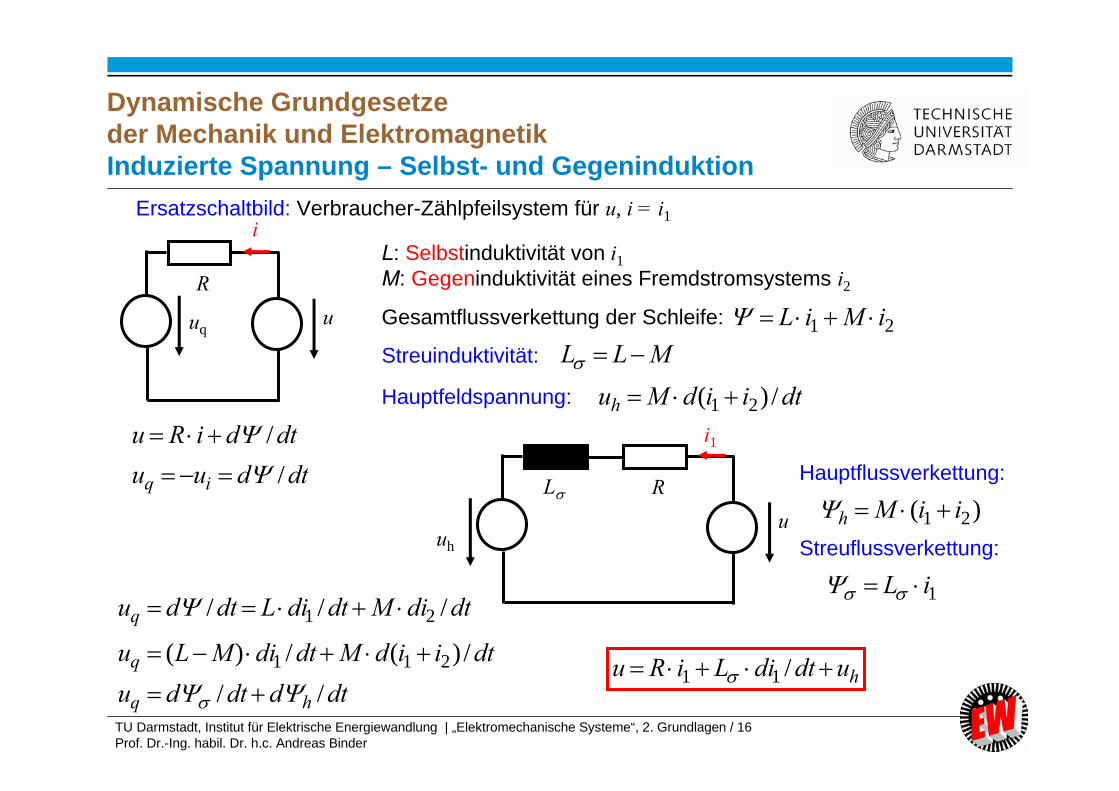
uhu
RL
i1
Ersatzschaltbild: Verbraucher-Zählpfeilsystem für u, i = i1
L: Selbstinduktivität von i1M: Gegeninduktivität eines Fremdstromsystems i2
Gesamtflussverkettung der Schleife:
Streuinduktivität:
i
uqu
R
dtdiRu /
dtiidMdtdiMLuq /)(/)( 211
dtduu iq /
21 iMiL MLL
hudtdiLiRu /11
Hauptfeldspannung: dtiidMuh /)( 21
Hauptflussverkettung:
)( 21 iiMh Streuflussverkettung:
1iL
dtddtdu hq //
dtdiMdtdiLdtduq /// 21
Dynamische Grundgesetze der Mechanik und ElektromagnetikInduzierte Spannung – Selbst- und Gegeninduktion
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 17Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Dynamische Grundgesetze der Mechanik und ElektromagnetikElektromagnetische Grundgleichungen
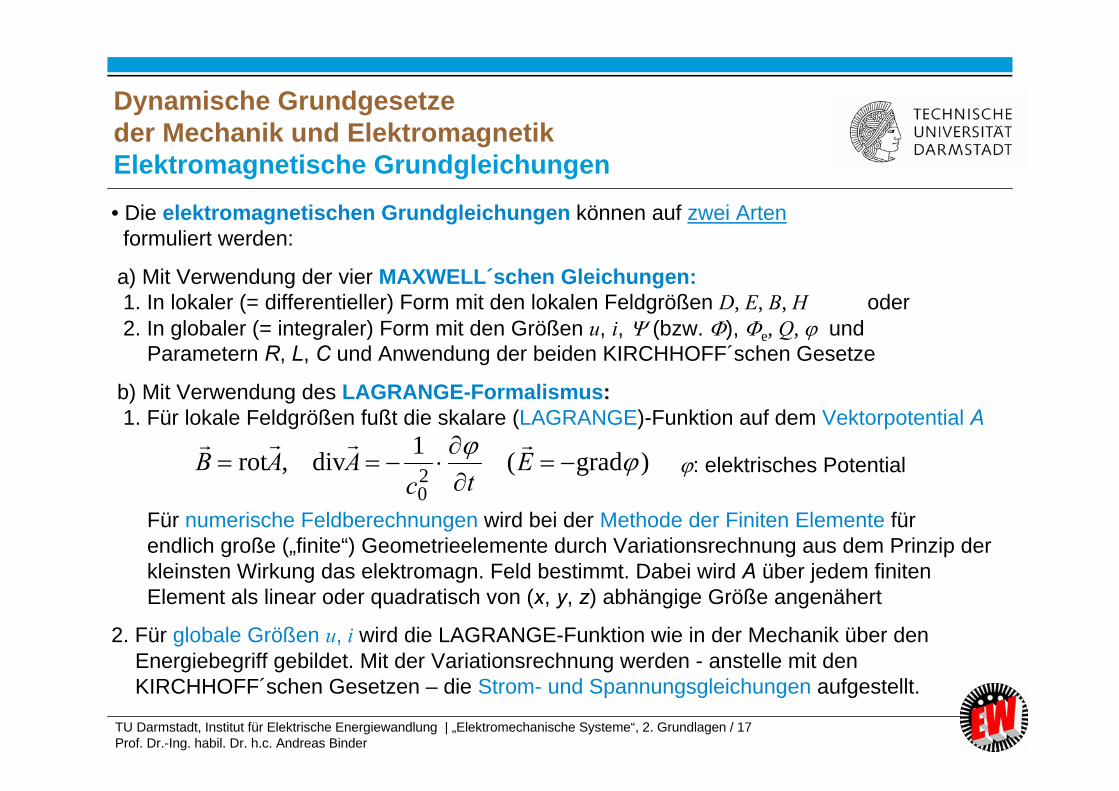
• Die elektromagnetischen Grundgleichungen können auf zwei Artenformuliert werden:
a) Mit Verwendung der vier MAXWELL´schen Gleichungen:1. In lokaler (= differentieller) Form mit den lokalen Feldgrößen D, E, B, H oder2. In globaler (= integraler) Form mit den Größen u, i, (bzw. ), e, Q, und
Parametern R, L, C und Anwendung der beiden KIRCHHOFF´schen Gesetze
b) Mit Verwendung des LAGRANGE-Formalismus:1. Für lokale Feldgrößen fußt die skalare (LAGRANGE)-Funktion auf dem Vektorpotential A
Für numerische Feldberechnungen wird bei der Methode der Finiten Elemente für endlich große („finite“) Geometrieelemente durch Variationsrechnung aus dem Prinzip derkleinsten Wirkung das elektromagn. Feld bestimmt. Dabei wird A über jedem finiten Element als linear oder quadratisch von (x, y, z) abhängige Größe angenähert
2. Für globale Größen u, i wird die LAGRANGE-Funktion wie in der Mechanik über den Energiebegriff gebildet. Mit der Variationsrechnung werden - anstelle mit den KIRCHHOFF´schen Gesetzen – die Strom- und Spannungsgleichungen aufgestellt.
)grad(1div,rot 20
E
tcAAB
: elektrisches Potential
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 18Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme2. Grundlagen
Dynamische Grundgesetze der Mechanik und Elektromagnetik Materialgesetze Kraftgesetze Energiebegriffe Einführendes Beispiel:
Kopplung eines mechanischen mit einem el.-magn. System
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 19Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
MaterialgesetzeElastisch verformbare Materie
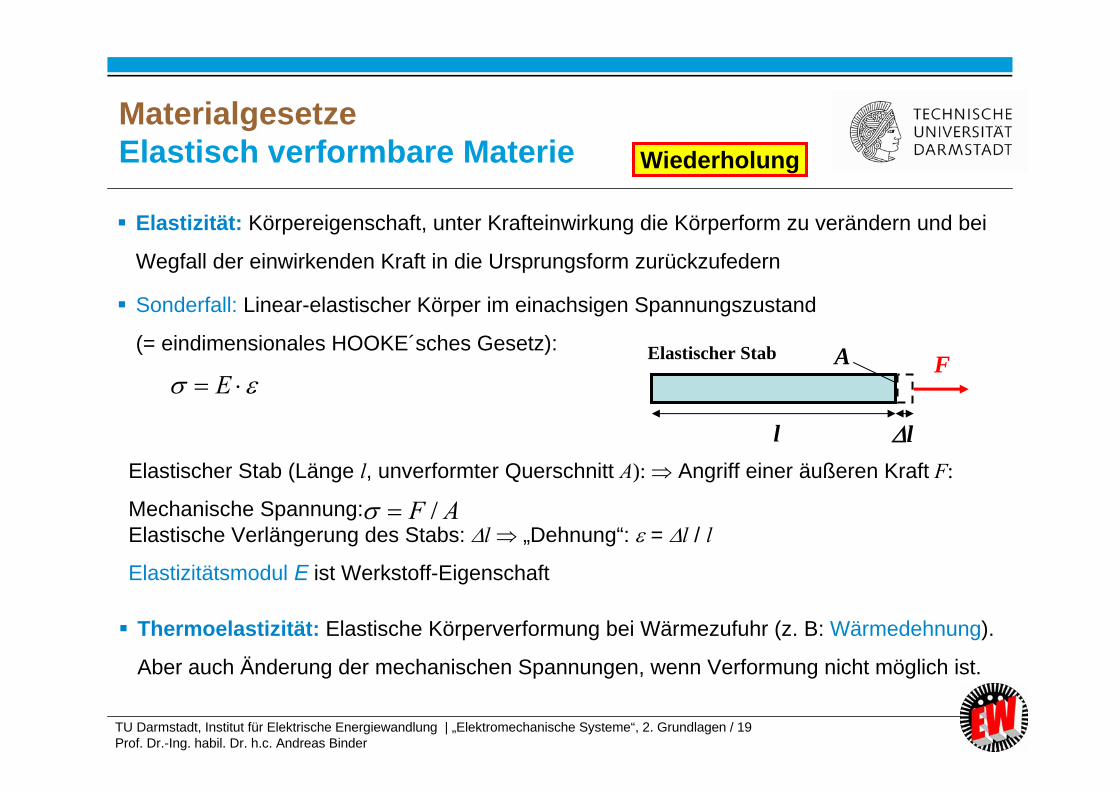
Elastizität: Körpereigenschaft, unter Krafteinwirkung die Körperform zu verändern und bei
Wegfall der einwirkenden Kraft in die Ursprungsform zurückzufedern
Sonderfall: Linear-elastischer Körper im einachsigen Spannungszustand
(= eindimensionales HOOKE´sches Gesetz):
EFA
l l
Elastischer Stab
Elastischer Stab (Länge l, unverformter Querschnitt A): Angriff einer äußeren Kraft F:
Mechanische Spannung: Elastische Verlängerung des Stabs: l „Dehnung“: = l / l
Elastizitätsmodul E ist Werkstoff-Eigenschaft
AF /
Wiederholung
Thermoelastizität: Elastische Körperverformung bei Wärmezufuhr (z. B: Wärmedehnung).
Aber auch Änderung der mechanischen Spannungen, wenn Verformung nicht möglich ist.
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 20Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
MaterialgesetzeElektrisch polarisierbare Materie
Dielektrika: I. A. elektrisch nicht oder schwach leitfähige Stoffe, deren Moleküle versuchen,
sich im äußeren elektrischen Feld E in oder gegen die Feldrichtung E auszurichten
(„polarisieren“). Dadurch erregen sie ein zusätzliches elektrisch wirksames Feld, die
elektrische Polarisation P Das resultierend wirksame elektrische Feld ist die dielektrische Verschiebung
(el. Flussdichte) D: PED
0
Isotrope Dielektria: Die Wirkung der Polarisierung ist unabhängig von der Raumrichtung
Lineare Polarisierbarkeit:
r = konstant
Nichtlineare Polarisierbarkeit: r(E)
EEPEDEP r
00~
r 1: relative Permittivität
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 21Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
MaterialgesetzeMagnetisierbare Materie
Magnetisierbare Werkstoffe:
Ferromagnetika, Anti-Ferromagnetika, Ferri-Magnetika, Diamagnetika, Paramagnetika
I. A. elektrisch leitfähige Stoffe, deren Moleküle versuchen, sich im äußeren magnetischen
Feld H in oder gegen die Feldrichtung H auszurichten. Dadurch erregen sie ein zusätzliches
magnetisch wirksames Feld (= magnet. Polarisation JM bzw. Magnetisierung M = JM/0).
Oberhalb der CURIE-Temperatur Tc verschwindet der Ferro-/Anti-Ferromagnetismus!
Fe: 768°C, Ni: 350°C, Co: 1150°C, Ba- u. Sr-Ferrite: 100 … 460°C je nach Typ
Das resultierend wirksame magnetische Feld ist die magnetische Induktion
(mag. Flussdichte) B: MHJHB M
000
Isotrope Magnetika: Die Magnetisierungswirkung ist unabhängig von der Raumrichtung:
a) Linear: r = konstant:
b) Nichtlinear: r(H)
HHJHBHJ rMM
00~r 1: relative Permeabilität
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 22Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
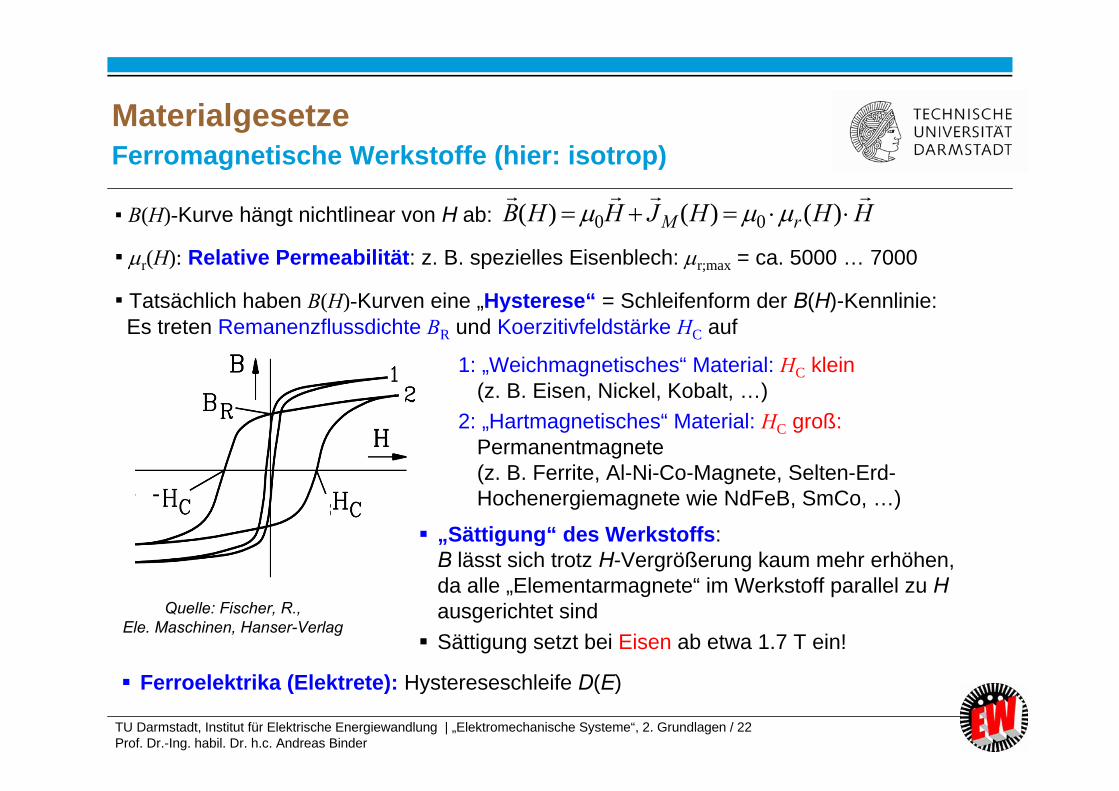
1: „Weichmagnetisches“ Material: HC klein(z. B. Eisen, Nickel, Kobalt, …)
2: „Hartmagnetisches“ Material: HC groß:Permanentmagnete (z. B. Ferrite, Al-Ni-Co-Magnete, Selten-Erd-Hochenergiemagnete wie NdFeB, SmCo, …)
Quelle: Fischer, R., Ele. Maschinen, Hanser-Verlag
▪ B(H)-Kurve hängt nichtlinear von H ab:
▪ r(H): Relative Permeabilität: z. B. spezielles Eisenblech: r;max = ca. 5000 … 7000
▪ Tatsächlich haben B(H)-Kurven eine „Hysterese“ = Schleifenform der B(H)-Kennlinie:Es treten Remanenzflussdichte BR und Koerzitivfeldstärke HC auf
HHHJHHB rM
)()()( 00
- „Sättigung“ des Werkstoffs:
B lässt sich trotz H-Vergrößerung kaum mehr erhöhen, da alle „Elementarmagnete“ im Werkstoff parallel zu Hausgerichtet sind Sättigung setzt bei Eisen ab etwa 1.7 T ein!
MaterialgesetzeFerromagnetische Werkstoffe (hier: isotrop)
Ferroelektrika (Elektrete): Hystereseschleife D(E)
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 23Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
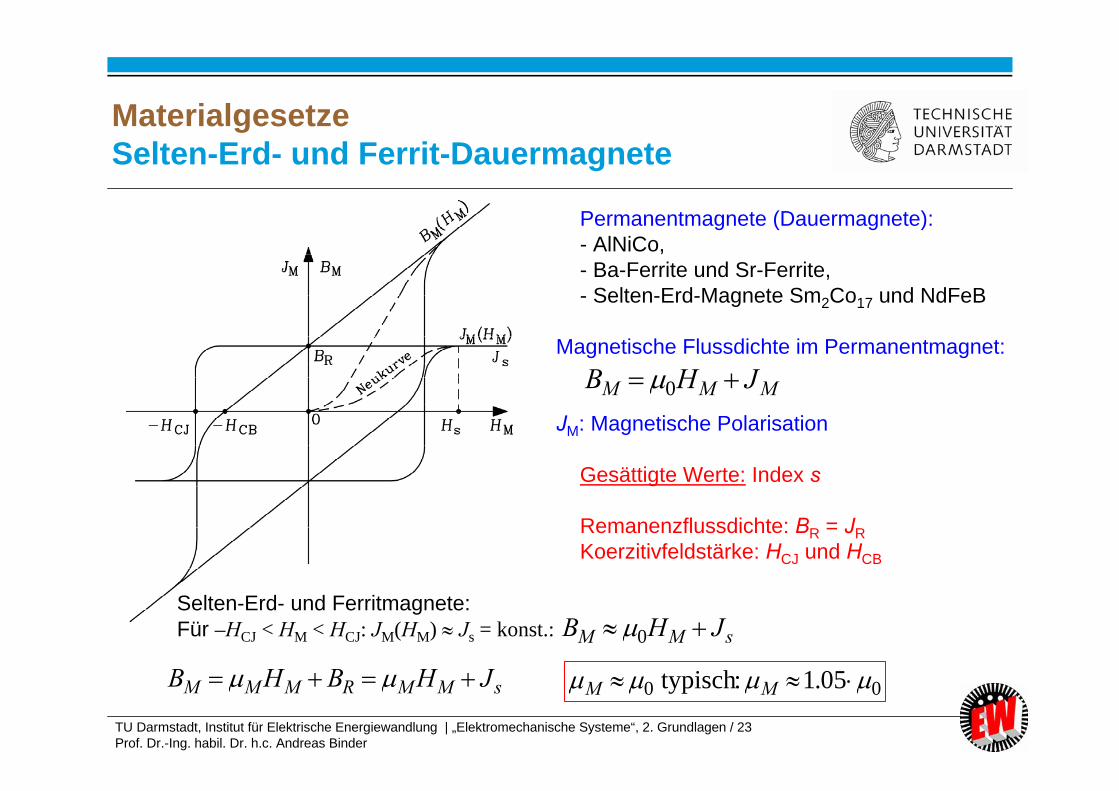
Permanentmagnete (Dauermagnete):- AlNiCo,- Ba-Ferrite und Sr-Ferrite,- Selten-Erd-Magnete Sm2Co17 und NdFeB
Magnetische Flussdichte im Permanentmagnet:
JM: Magnetische Polarisation
Gesättigte Werte: Index s
Remanenzflussdichte: BR = JRKoerzitivfeldstärke: HCJ und HCB
MMM JHB 0
Selten-Erd- und Ferritmagnete: Für –HCJ < HM < HCJ: JM(HM) Js = konst.: sMM JHB 0
sMMRMMM JHBHB 00 05.1:typisch MM
MaterialgesetzeSelten-Erd- und Ferrit-Dauermagnete
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 24Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
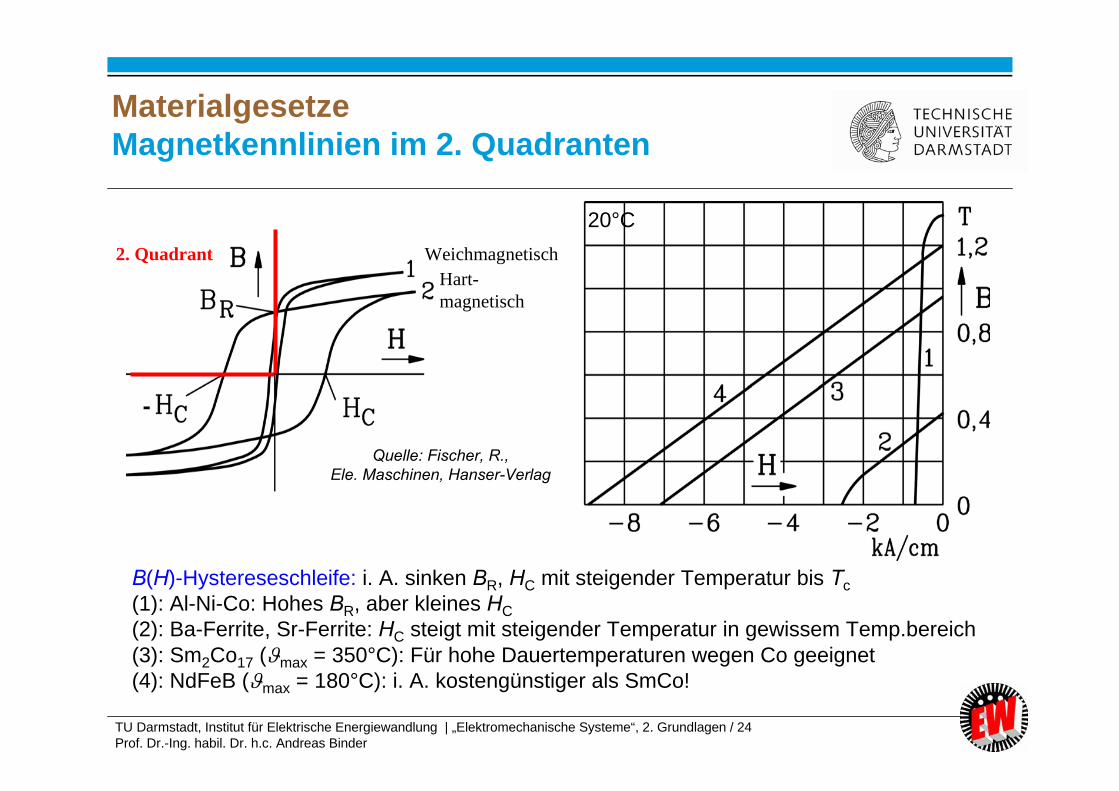
B(H)-Hystereseschleife: i. A. sinken BR, HC mit steigender Temperatur bis Tc(1): Al-Ni-Co: Hohes BR, aber kleines HC(2): Ba-Ferrite, Sr-Ferrite: HC steigt mit steigender Temperatur in gewissem Temp.bereich(3): Sm2Co17 (max = 350°C): Für hohe Dauertemperaturen wegen Co geeignet (4): NdFeB (max = 180°C): i. A. kostengünstiger als SmCo!
MaterialgesetzeMagnetkennlinien im 2. Quadranten
20°C
Quelle: Fischer, R., Ele. Maschinen, Hanser-Verlag
-
Hart-magnetisch
2. Quadrant Weichmagnetisch
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 25Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
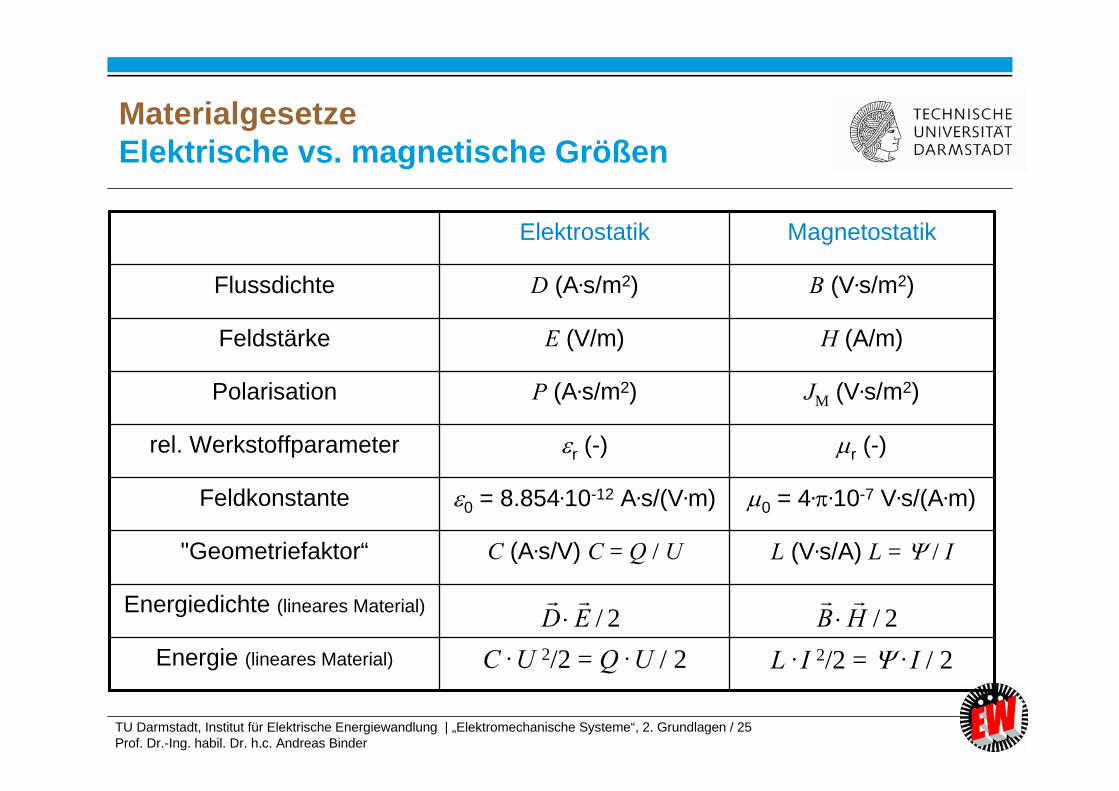
MaterialgesetzeElektrische vs. magnetische Größen
Energiedichte (lineares Material)
L . I 2/2 = . I / 2 C . U 2/2 = Q . U / 2Energie (lineares Material)
L (V.s/A) L = / IC (A.s/V) C = Q / U"Geometriefaktor“
0 = 4..10-7 V.s/(A.m)0 = 8.854.10-12 A.s/(V.m)Feldkonstante
r (-)r (-)rel. Werkstoffparameter
JM (V.s/m2)P (A.s/m2)Polarisation
H (A/m)E (V/m)Feldstärke
B (V.s/m2)D (A.s/m2)Flussdichte
MagnetostatikElektrostatik
2/HB
2/ED
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 26Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
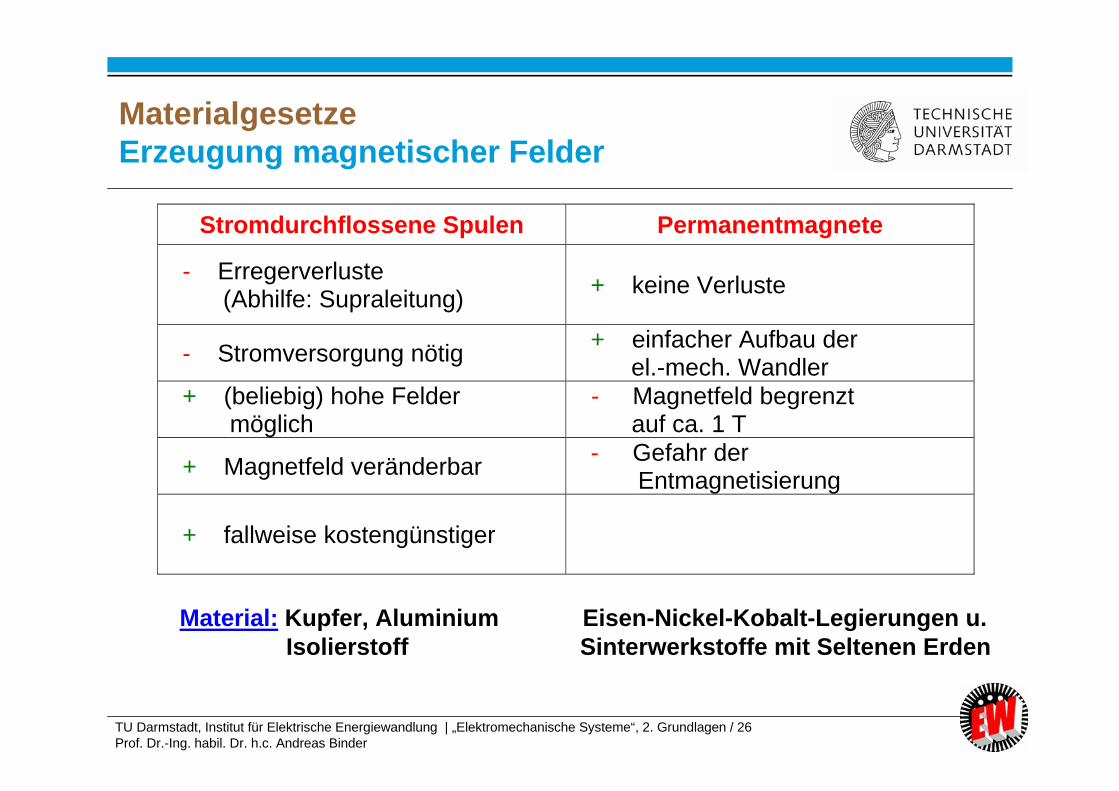
MaterialgesetzeErzeugung magnetischer Felder
Stromdurchflossene Spulen Permanentmagnete
- Erregerverluste (Abhilfe: Supraleitung) + keine Verluste
- Stromversorgung nötig + einfacher Aufbau der el.-mech. Wandler
+ (beliebig) hohe Felder möglich
- Magnetfeld begrenzt auf ca. 1 T
+ Magnetfeld veränderbar - Gefahr der Entmagnetisierung
+ fallweise kostengünstiger
Material: Kupfer, Aluminium Eisen-Nickel-Kobalt-Legierungen u. Isolierstoff Sinterwerkstoffe mit Seltenen Erden
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 27Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
MaterialgesetzeElektromagnetisch-mechanisch wechselwirkendeMaterie
Neben elastischen Materialien, Dielektrika und Magnetika gibt es zahlreiche weitere Materialtypen, die für die Anwendung in elektromechanischen Systemen interessant sind,z. B.: Piezoelektrizität: Änderung der elektrischen Polarisation P an Festkörpern, wenn
sie elastisch verformt werden (Druck- oder Zugspannung), und umgekehrt („Elektrostriktion“). Piezoresistiver Effekt: Änderung des elektrischen Widerstands R eines Materials
durch Druck- oder Zugspannung. Piezomagnetismus: Änderung der magnetischen Polarisation J an magnetischen
Festkörpern, wenn sie elastisch verformt werden (über Druck- oder Zugspannung), und umgekehrt (Magnetostriktion z.B.: „Trafo-Brummen“).
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 28Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
MaterialgesetzeElektromagnetisch-thermisch wechselwirkende Materie
Thermoelektrische Stoffe:Gegenseitige Beeinflussung von Temperatur und Elektrizität Seebeck-Effekt: In einem Stromkreis aus zwei verschiedenen elektrischen
Leitermaterialien entsteht bei einer Temperaturdifferenz zwischen den Kontaktstellen dort eine elektrische Spannung Peltier-Effekt: „Reziproker“ Effekt zum Seebeck-Effekts
Ein elektrischer Stromfluss durch eine Kontaktstelle aus zwei verschiedenen elektrischen Leitern bewirkt eine Änderung der Kontakttemperatur (Erhöhung oder Absenkung) = Wärmeerzeugung oder Kühlung. Thomson-Effekt: Jeder stromdurchflossene Leiter mit einer Temperaturdifferenz
zwischen zwei Punkten wird entweder mehr oder weniger Wärme transportieren, als dies ohne Stromfluss aufgrund der Wärmeleitfähigkeit und Temperaturdifferenz der Fall wäre.
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 29Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme2. Grundlagen
Dynamische Grundgesetze der Mechanik und Elektromagnetik Materialgesetze Kraftgesetze Energiebegriffe Einführendes Beispiel:
Kopplung eines mechanischen mit einem el.-magn. System
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 30Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
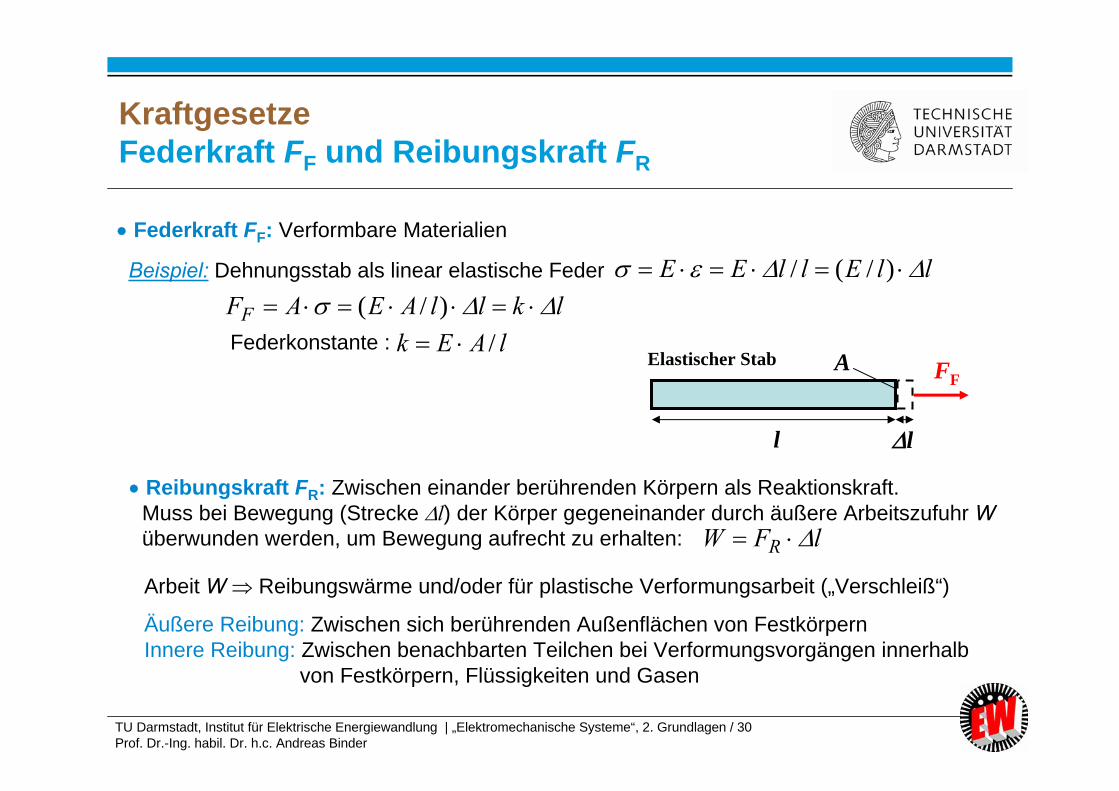
Beispiel: Dehnungsstab als linear elastische Feder
KraftgesetzeFederkraft FF und Reibungskraft FR
llEllEE )/(/
FFA
l l
Elastischer Stab
lkllAEAFF )/(Federkonstante : lAEk /
Federkraft FF: Verformbare Materialien
Arbeit W Reibungswärme und/oder für plastische Verformungsarbeit („Verschleiß“)
Äußere Reibung: Zwischen sich berührenden Außenflächen von FestkörpernInnere Reibung: Zwischen benachbarten Teilchen bei Verformungsvorgängen innerhalb
von Festkörpern, Flüssigkeiten und Gasen
Reibungskraft FR: Zwischen einander berührenden Körpern als Reaktionskraft. Muss bei Bewegung (Strecke l) der Körper gegeneinander durch äußere Arbeitszufuhr Wüberwunden werden, um Bewegung aufrecht zu erhalten: lFW R
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 31Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
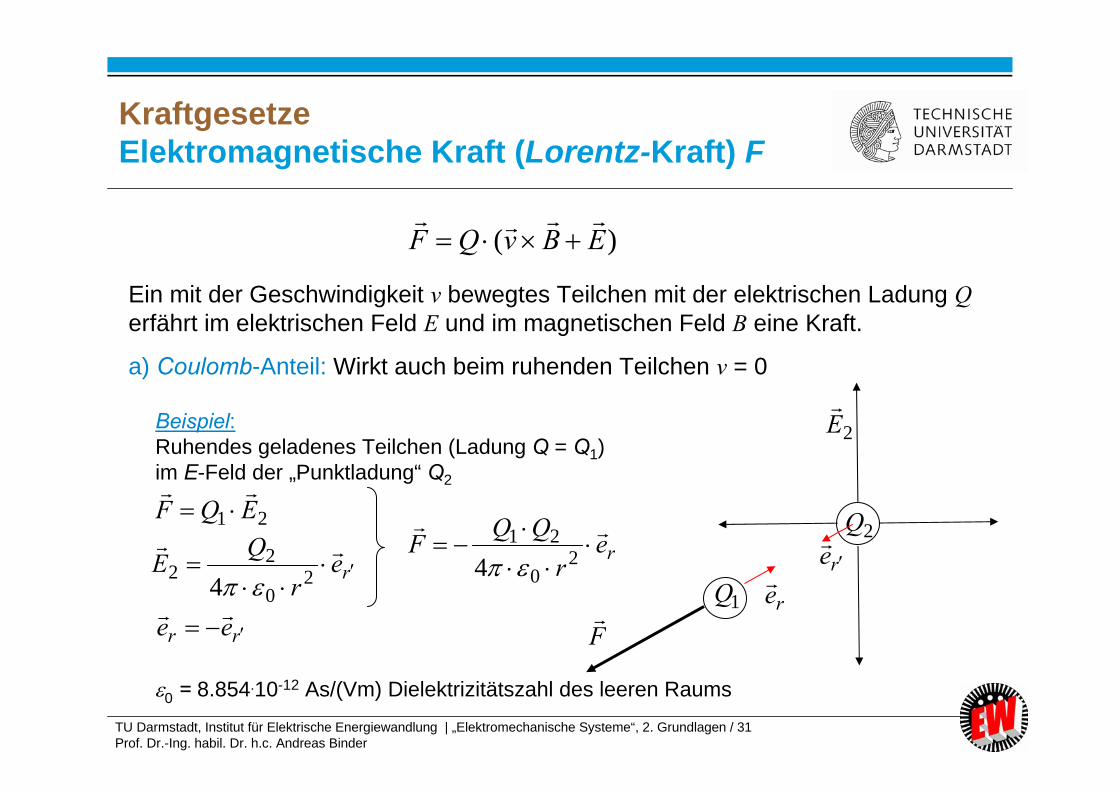
KraftgesetzeElektromagnetische Kraft (Lorentz-Kraft) F
)( EBvQF
Ein mit der Geschwindigkeit v bewegtes Teilchen mit der elektrischen Ladung Qerfährt im elektrischen Feld E und im magnetischen Feld B eine Kraft.
a) Coulomb-Anteil: Wirkt auch beim ruhenden Teilchen v = 0
Beispiel:Ruhendes geladenes Teilchen (Ladung Q = Q1) im E-Feld der „Punktladung“ Q2
21 EQF
rer
QE
20
22 4
rer
QQF
20
21
4
0 = 8.854.10-12 As/(Vm) Dielektrizitätszahl des leeren Raums
rr ee 1Q
2Q
2E
re
F re
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 32Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
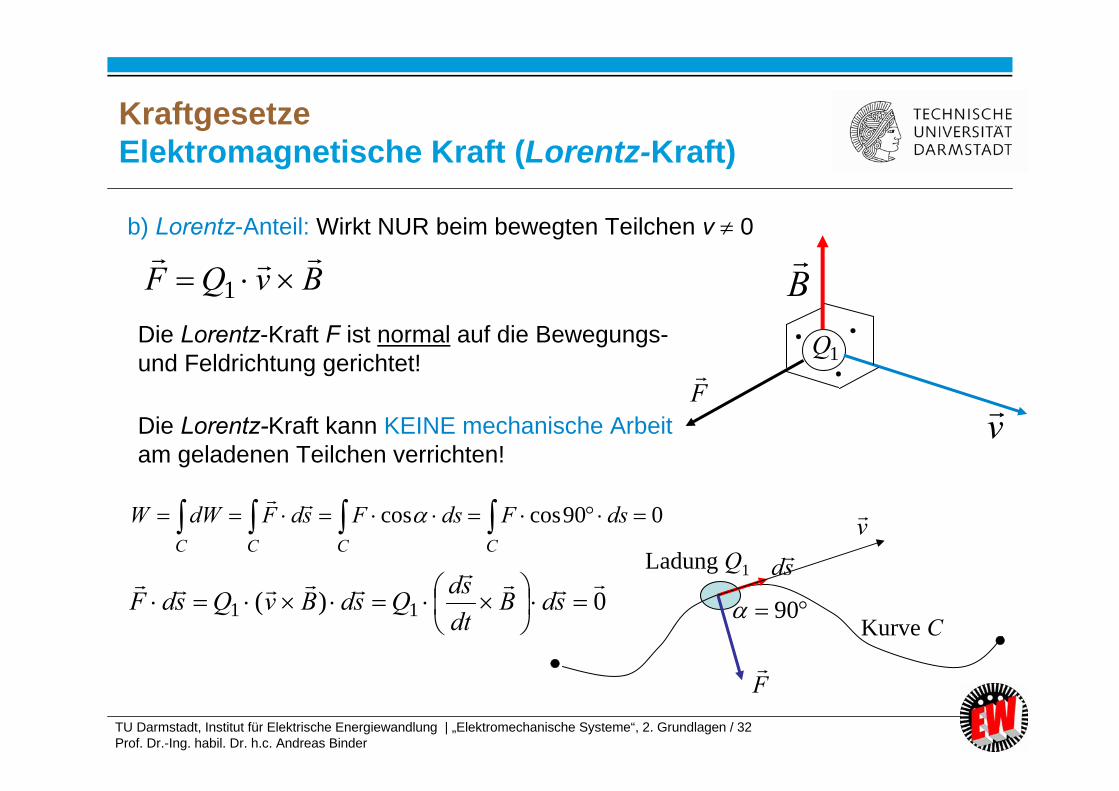
KraftgesetzeElektromagnetische Kraft (Lorentz-Kraft)
BvQF
1
b) Lorentz-Anteil: Wirkt NUR beim bewegten Teilchen v 0
Die Lorentz-Kraft F ist normal auf die Bewegungs-und Feldrichtung gerichtet!
Die Lorentz-Kraft kann KEINE mechanische Arbeitam geladenen Teilchen verrichten!
F
sd
90Kurve C
Ladung Q1
v090coscos CCCC
dsFdsFsdFdWW
0)( 11
sdB
dtsdQsdBvQsdF
1Q
F
B
v
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 33Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
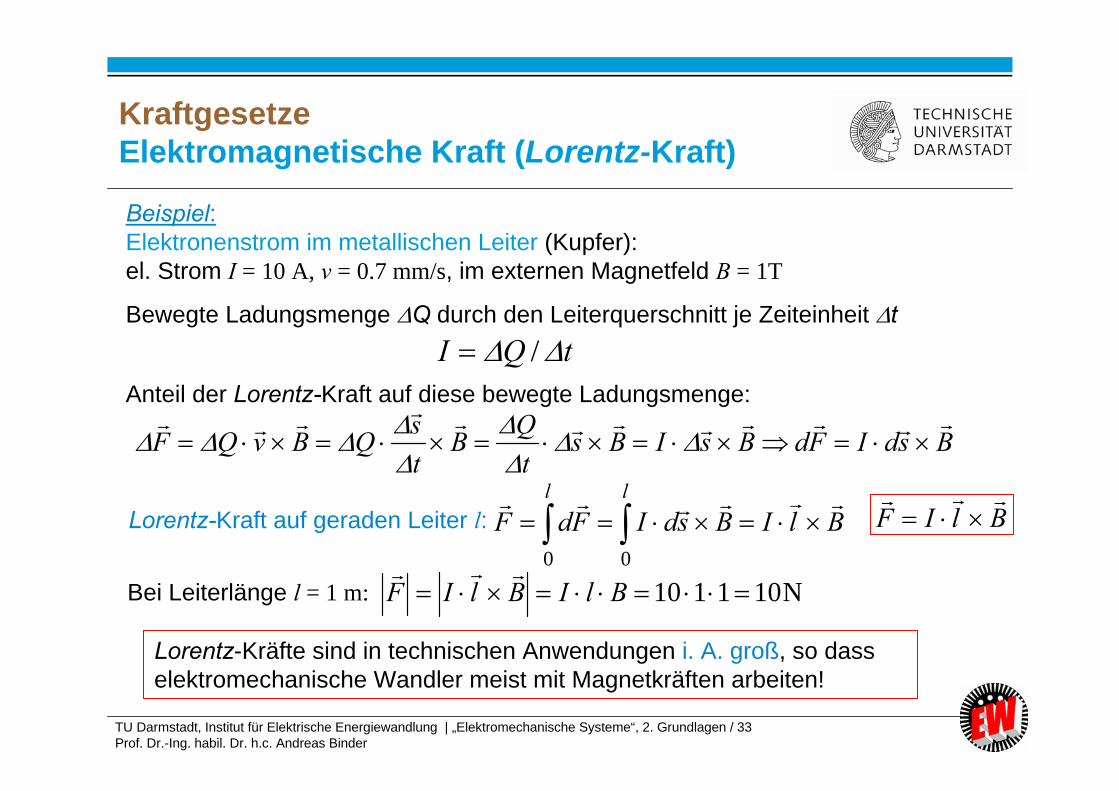
KraftgesetzeElektromagnetische Kraft (Lorentz-Kraft)
Beispiel:Elektronenstrom im metallischen Leiter (Kupfer): el. Strom I = 10 A, v = 0.7 mm/s, im externen Magnetfeld B = 1T
Bewegte Ladungsmenge Q durch den Leiterquerschnitt je Zeiteinheit t
BsdIFdBsIBstQB
tsQBvQF
tQI /Anteil der Lorentz-Kraft auf diese bewegte Ladungsmenge:
Bei Leiterlänge l = 1 m:
BlIBsdIFdFll
00
BlIF
N101110 BlIBlIF
Lorentz-Kraft auf geraden Leiter l:
Lorentz-Kräfte sind in technischen Anwendungen i. A. groß, so dass elektromechanische Wandler meist mit Magnetkräften arbeiten!
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 34Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KraftgesetzeElektromagnetische Kraftdichte f
EVQlABlIEVQVBlIVFf
)/()/()()/(/)(/
JeJedAdAJdllddAAdJdldAldI llA
/)()/(/)()/(
dVdQ /
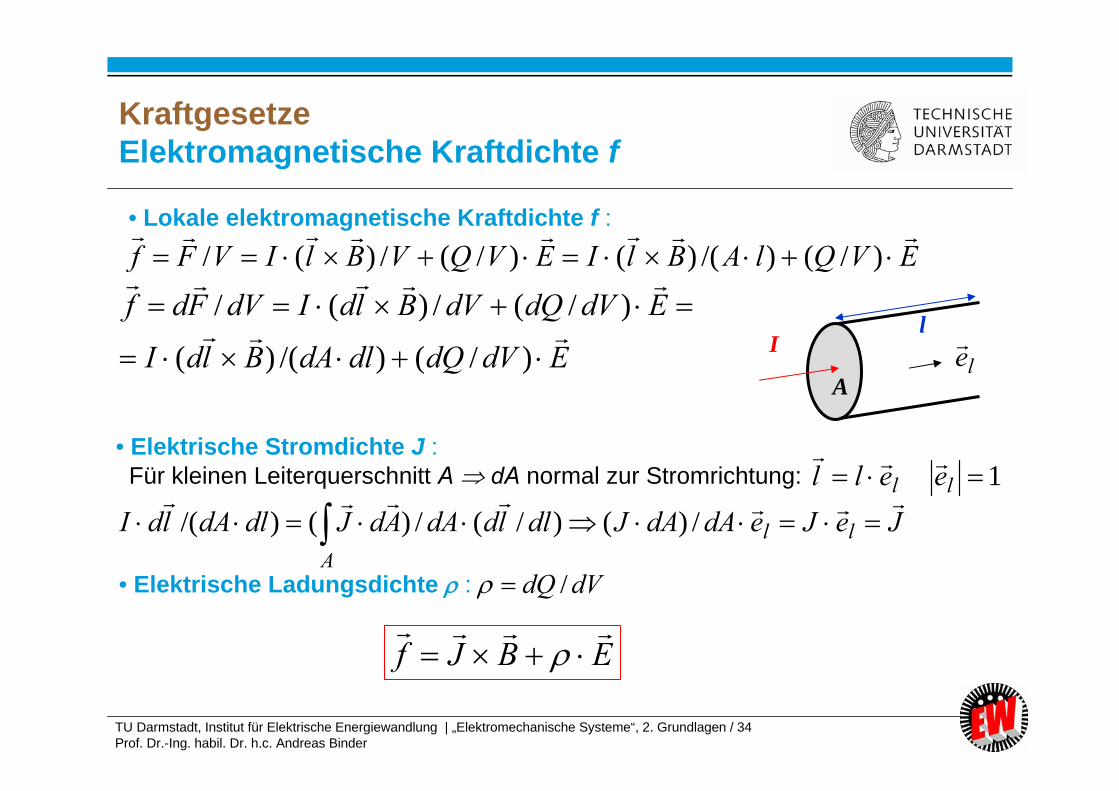
EBJf
• Lokale elektromagnetische Kraftdichte f :
• Elektrische Stromdichte J : Für kleinen Leiterquerschnitt A dA normal zur Stromrichtung:
• Elektrische Ladungsdichte :
EdVdQdldABldI
EdVdQdVBldIdVFdf
)/()/()(
)/(/)(/
1 ll eell
I
A
l
le
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 35Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KraftgesetzeKraft auf polarisierte u. magnetisierte Körper
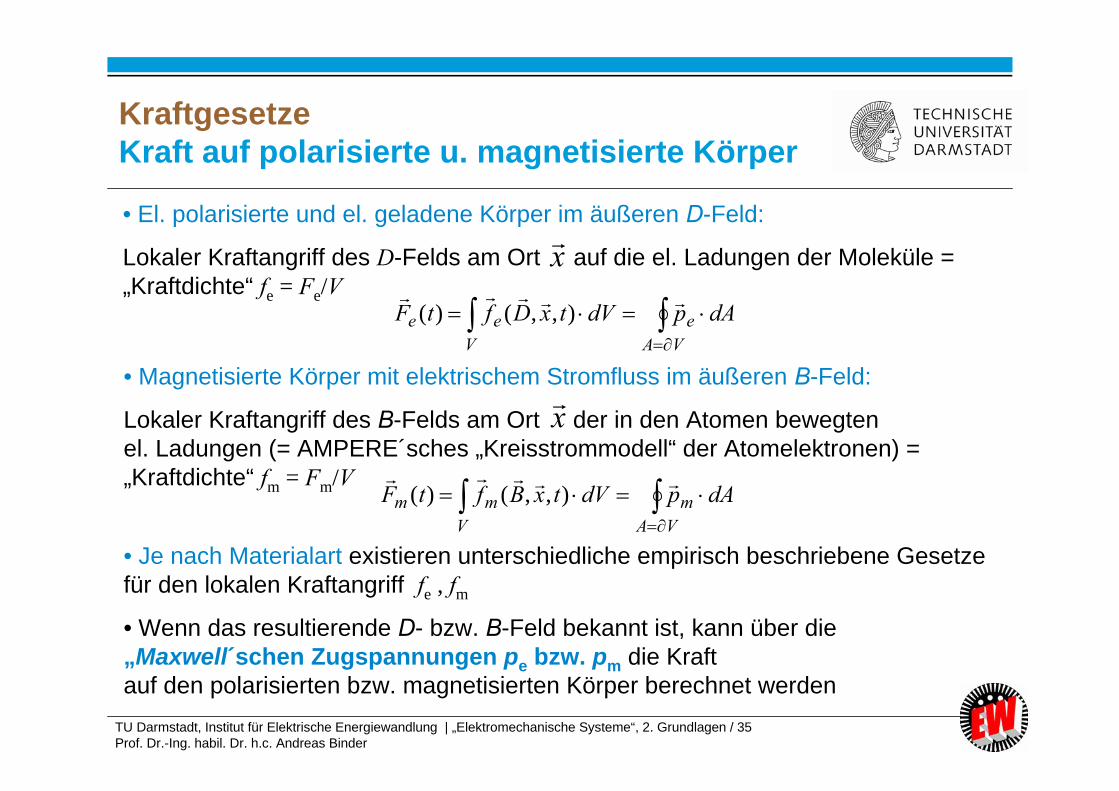
• El. polarisierte und el. geladene Körper im äußeren D-Feld:
Lokaler Kraftangriff des D-Felds am Ort auf die el. Ladungen der Moleküle = „Kraftdichte“ fe = Fe/V
VA
eV
ee dApdVtxDftF ),,()(
x
• Magnetisierte Körper mit elektrischem Stromfluss im äußeren B-Feld:
Lokaler Kraftangriff des B-Felds am Ort der in den Atomen bewegten el. Ladungen (= AMPERE´sches „Kreisstrommodell“ der Atomelektronen) = „Kraftdichte“ fm = Fm/V
VA
mV
mm dApdVtxBftF ),,()(
x
• Je nach Materialart existieren unterschiedliche empirisch beschriebene Gesetze für den lokalen Kraftangriff fe , fm
• Wenn das resultierende D- bzw. B-Feld bekannt ist, kann über die „Maxwell´schen Zugspannungen pe bzw. pm die Kraft auf den polarisierten bzw. magnetisierten Körper berechnet werden
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 36Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KraftgesetzeKraft Fe auf el. polarisierten, el. geladenen Körper
Vj
jPji
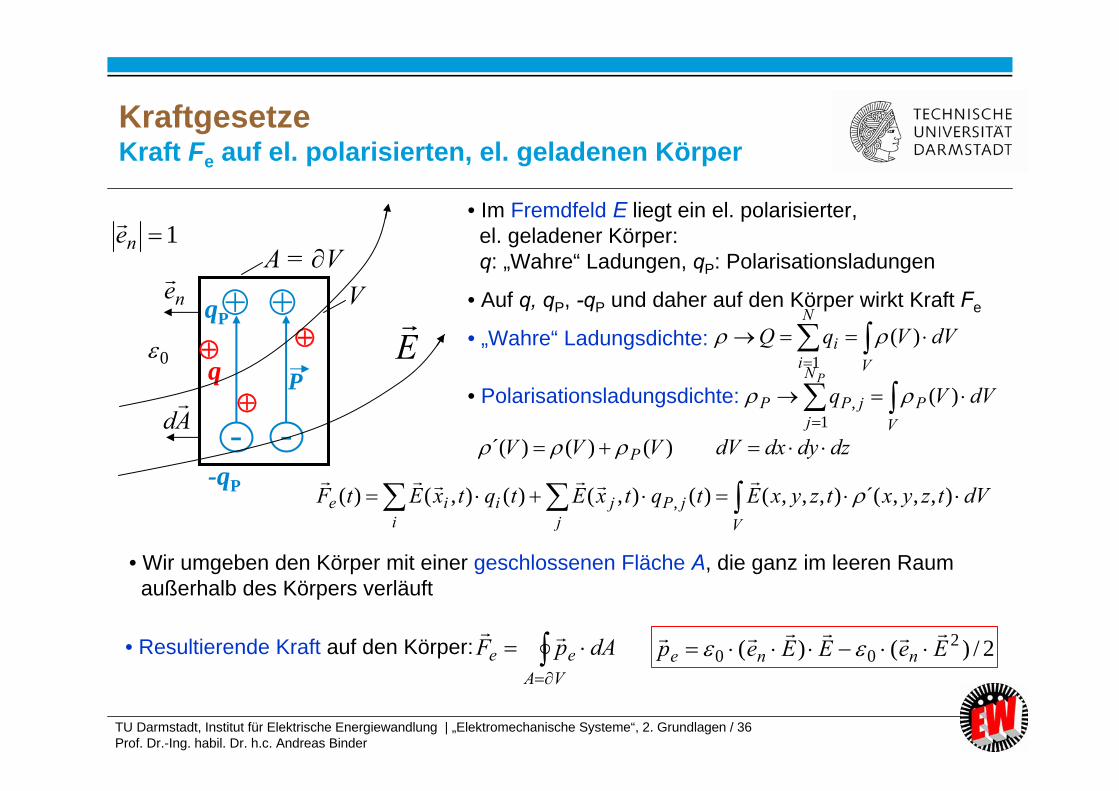
iie dVtzyxtzyxEtqtxEtqtxEtF ),,,´(),,,()(),()(),()( ,
• Im Fremdfeld E liegt ein el. polarisierter, el. geladener Körper:q: „Wahre“ Ladungen, qP: Polarisationsladungen
• Auf q, qP, -qP und daher auf den Körper wirkt Kraft Fe
• „Wahre“ Ladungsdichte:
• Polarisationsladungsdichte:
• Wir umgeben den Körper mit einer geschlossenen Fläche A, die ganz im leeren Raum außerhalb des Körpers verläuft
• Resultierende Kraft auf den Körper:
VA
ee dApF 2/)()( 2
00 EeEEep nne
V
N
ii dVVqQ )(
1
V
P
N
jjPP dVVq
P)(
1,
dzdydxdVVVV P )()()´(
- -
Pq
VA = V
E
ne
Ad
1ne
qP
-qP
0
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 37Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KraftgesetzeHerleitung: Kraft auf el. geladene, el. polarisierte Körper (1)
VVV
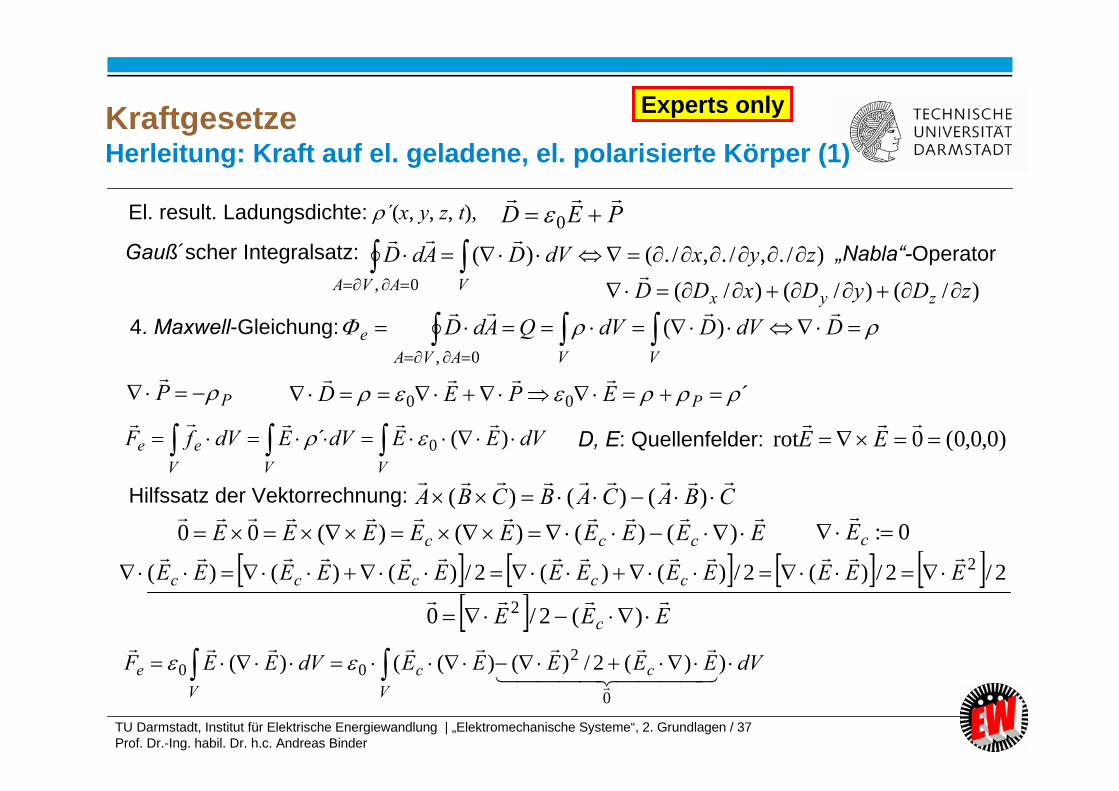
ee dVEEdVEdVfF )(´ 0
El. result. Ladungsdichte: ´(x, y, z, t), PED
0
DdVDdVQAdDVVAVA
e
)(0,
4. Maxwell-Gleichung:
Gauß´scher Integralsatz: )/.,/.,/.()(0,
zyxdVDAdDVAVA
„Nabla“-Operator
Experts only
D, E: Quellenfelder: )0,0,0(0rot
EE
Hilfssatz der Vektorrechnung: CBACABCBA
)()()(EEEEEEEEE ccc
)()()()(00 0: cE
2/2/)(2/)()(2/)()()( 2EEEEEEEEEEEEE ccccc
EEE c
)(2/0 2
V
ccV
e dVEEEEEdVEEF ))(2/)()(()(0
200
)/()/()/( zDyDxDD zyx
´00 PEPED
PP
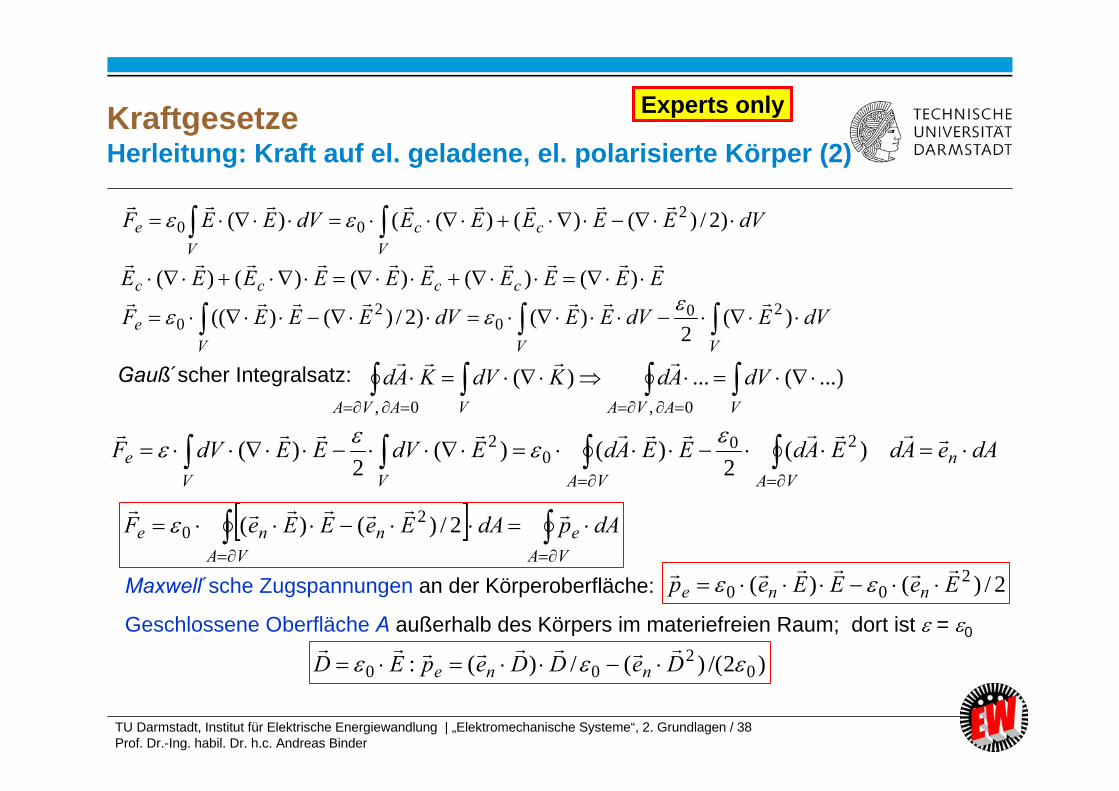
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 38Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KraftgesetzeHerleitung: Kraft auf el. geladene, el. polarisierte Körper (2)
Experts only
EEEEEEEEEE cccc
)()()()()(
V
ccV
e dVEEEEEdVEEF )2/)()()(()( 200
VVV
e dVEdVEEdVEEEF )(2
)()2/)()(( 200
20
Gauß´scher Integralsatz: VAVAVAVA
dVAdKdVKAd ...)(...)(0,0,
dAeAdEAdEEAdEdVEEdVF nVAVAVV
e
)(
2)()(
2)( 20
02
VA
eVA
nne dApdAEeEEeF 2/)()( 2
0
Maxwell´sche Zugspannungen an der Körperoberfläche:
Geschlossene Oberfläche A außerhalb des Körpers im materiefreien Raum; dort ist = 0
2/)()( 200 EeEEep nne
)2/()(/)(: 02
00 DeDDepED nne
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 39Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
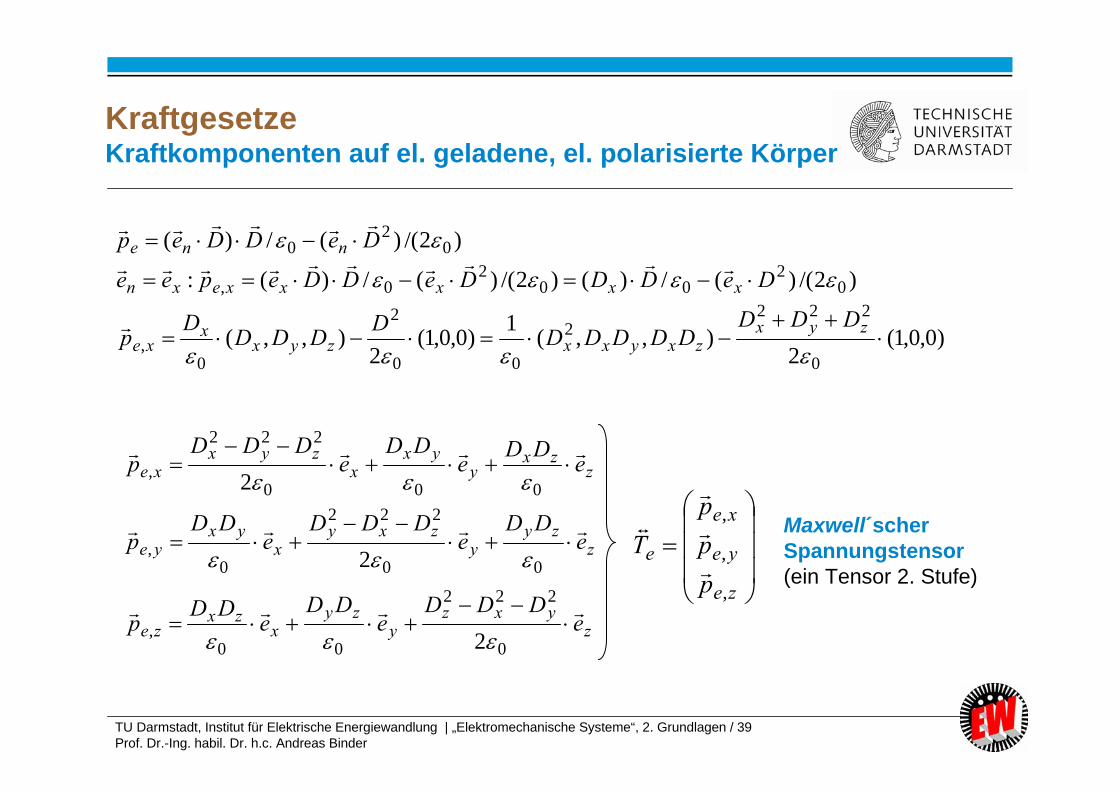
KraftgesetzeKraftkomponenten auf el. geladene, el. polarisierte Körper
)2/()(/)()2/()(/)(: 02
002
0, DeDDDeDDepee xxxxxexn
)2/()(/)( 02
0 DeDDep nne
)0,0,1(2
),,(1)0,0,1(2
),,(0
2222
00
2
0,
zyx
zxyxxzyxx
xeDDD
DDDDDDDDDDp
zzx
yyx
xzyx
xe eDDeDD
eDDD
p
000
222
, 2
zzy
yzxy
xyx
ye eDD
eDDD
eDD
p
00
222
0, 2
zyxz
yzy
xzx
ze eDDD
eDD
eDDp
0
222
00, 2
ze
ye
xe
e
ppp
T
,
,
,
Maxwell´scherSpannungstensor(ein Tensor 2. Stufe)
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 40Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
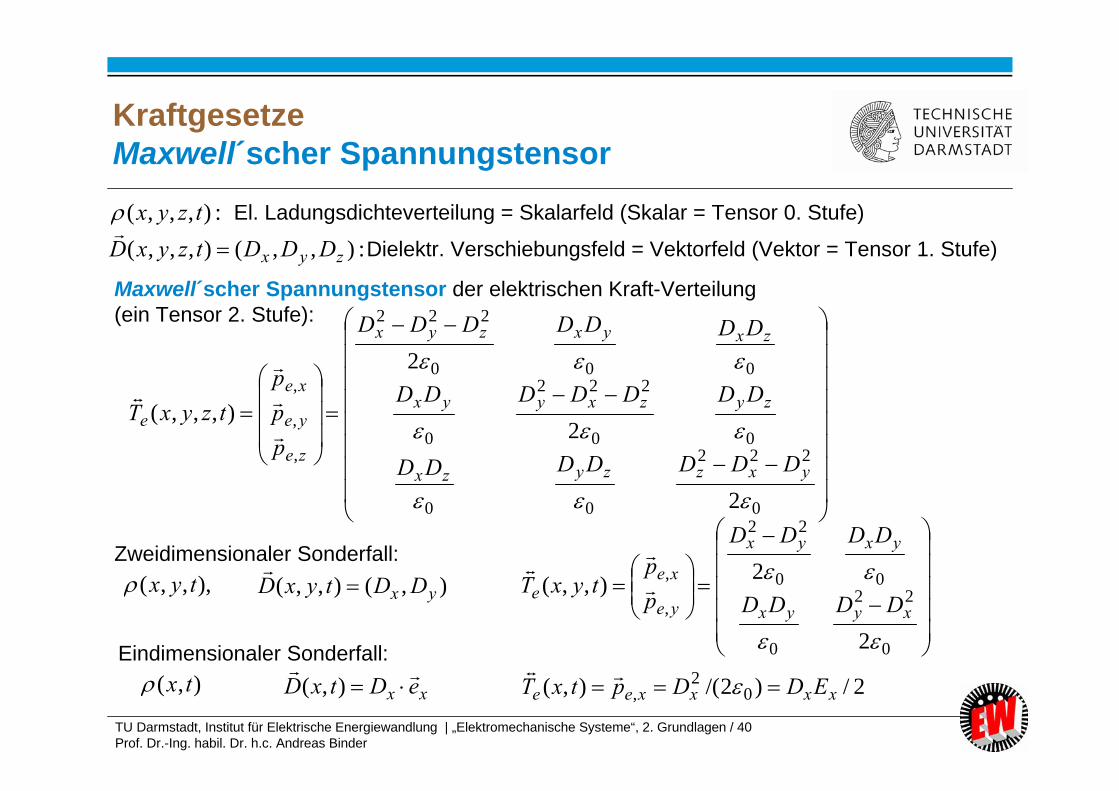
KraftgesetzeMaxwell´scher Spannungstensor
:),,(),,,( zyx DDDtzyxD
:),,,( tzyx
0
222
00
00
222
0
000
222
,
,
,
2
2
2
),,,(
yxzzyzx
zyzxyyx
zxyxzyx
ze
ye
xe
e
DDDDDDD
DDDDDDD
DDDDDDD
ppp
tzyxT
Maxwell´scher Spannungstensor der elektrischen Kraft-Verteilung(ein Tensor 2. Stufe):
El. Ladungsdichteverteilung = Skalarfeld (Skalar = Tensor 0. Stufe)
Dielektr. Verschiebungsfeld = Vektorfeld (Vektor = Tensor 1. Stufe)
Zweidimensionaler Sonderfall:),(),,( yx DDtyxD
),,,( tyx
0
22
0
00
22
,
,
2
2),,(
xyyx
yxyx
ye
xee DDDD
DDDD
pp
tyxT
Eindimensionaler Sonderfall:
xx eDtxD ),(),( tx 2/)2/(),( 0
2, xxxxee EDDptxT
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 41Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
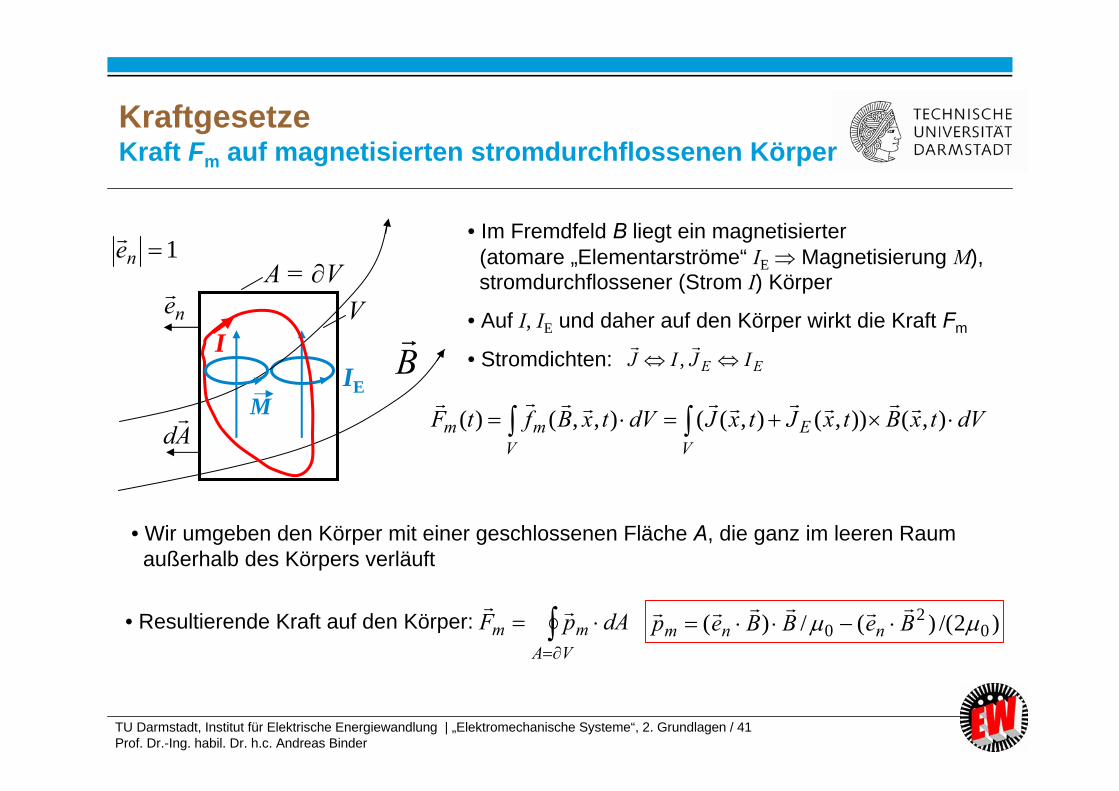
KraftgesetzeKraft Fm auf magnetisierten stromdurchflossenen Körper
• Im Fremdfeld B liegt ein magnetisierter (atomare „Elementarströme“ IE Magnetisierung M), stromdurchflossener (Strom I) Körper
• Auf I, IE und daher auf den Körper wirkt die Kraft Fm
• Stromdichten:
• Resultierende Kraft auf den Körper:
VA
mm dApF )2/()(/)( 0
20 BeBBep nnm
V
EV
mm dVtxBtxJtxJdVtxBftF ),()),(),((),,()( M
IV
A = V
B
ne
Ad
1ne
IEEE IJIJ
,
• Wir umgeben den Körper mit einer geschlossenen Fläche A, die ganz im leeren Raum außerhalb des Körpers verläuft
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 42Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KraftgesetzeHerleitung: Kraft auf magnetisierten stromdurchflossenen Körper (1)
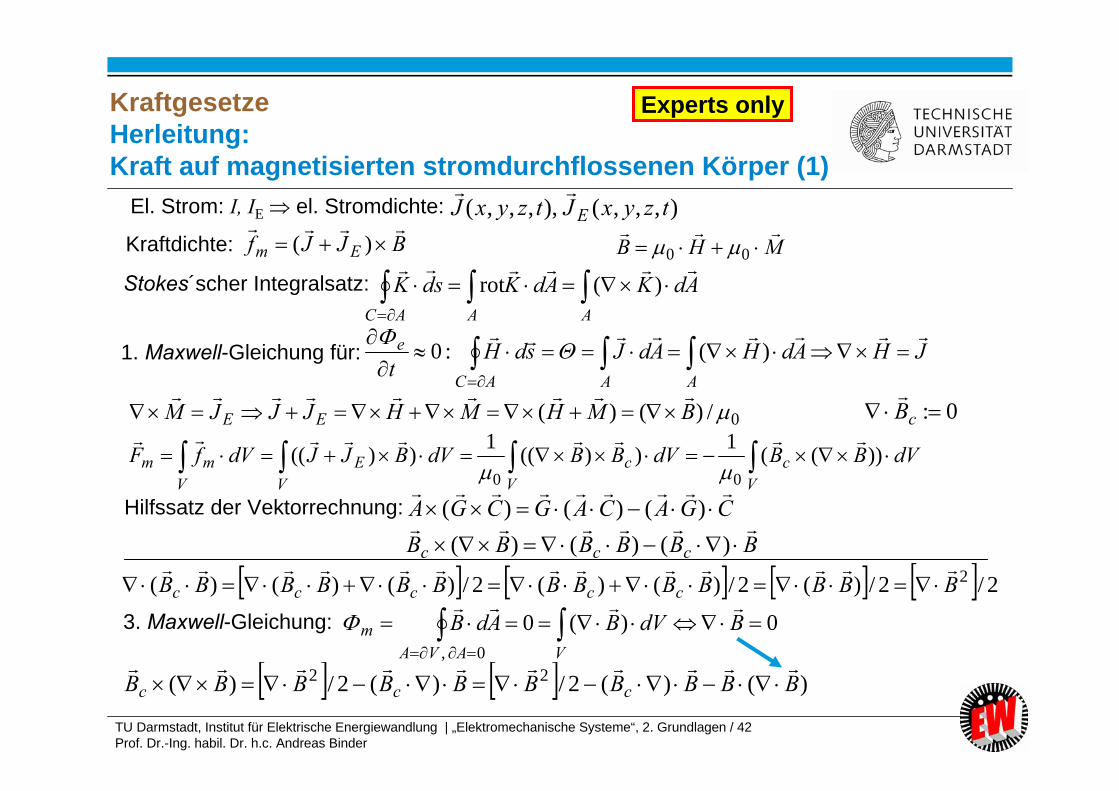
El. Strom: I, IE el. Stromdichte:
1. Maxwell-Gleichung für:
Experts only
),,,(),,,,( tzyxJtzyxJ E
Kraftdichte: BJJf Em
)(
JHAdHAdJsdHt AAAC
e
)(:0
0)(00,
BdVBAdBVAVA
m
3. Maxwell-Gleichung:
Stokes´scher Integralsatz: AAAC
AdKAdKsdK
)(rot
V
cV
cV
EV
mm dVBBdVBBdVBJJdVfF ))((1))((1))((00
Hilfssatz der Vektorrechnung: CGACAGCGA
)()()(BBBBBB ccc
)()()(
0: cB
2/2/)(2/)()(2/)()()( 2BBBBBBBBBBBBB ccccc
)()(2/)(2/)( 22 BBBBBBBBBB ccc
MHB
00
0/)()( BMHMHJJJM EE
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 43Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Experts only
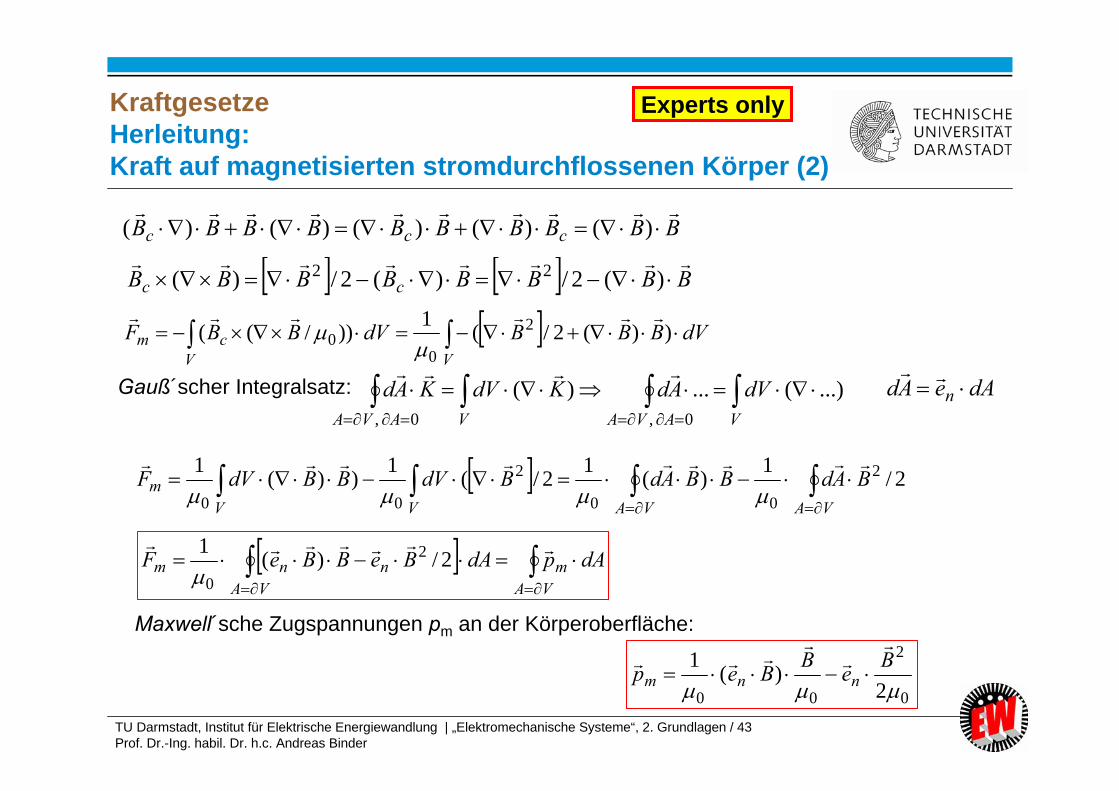
Gauß´scher Integralsatz: VAVAVAVA
dVAdKdVKAd ...)(...)(0,0,
dAeAd n
Maxwell´sche Zugspannungen pm an der Körperoberfläche:
BBBBBBBB cc
)(2/)(2/)( 22
VV
cm dVBBBdVBBF ))(2/(1))/(( 2
00
VAVAVV
m BAdBBAdBdVBBdVF 2/1)(12/(1))(1 2
00
2
00
VA
mVA
nnm dApdABeBBeF 2/)(1 2
0
0
2
00 2)(1
BeBBep nnm
BBBBBBBBBB ccc
)()()()()(
KraftgesetzeHerleitung: Kraft auf magnetisierten stromdurchflossenen Körper (2)
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 44Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KraftgesetzeKraft auf magnetisierte und stromdurchflossene Körper
0
222
00
00
222
0
000
222
,
,
,
2
2
2
),,,(
yxzzyzx
zyzxyyx
zxyxzyx
zm
ym
xm
m
BBBBBBB
BBBBBBB
BBBBBBB
ppp
tzyxT
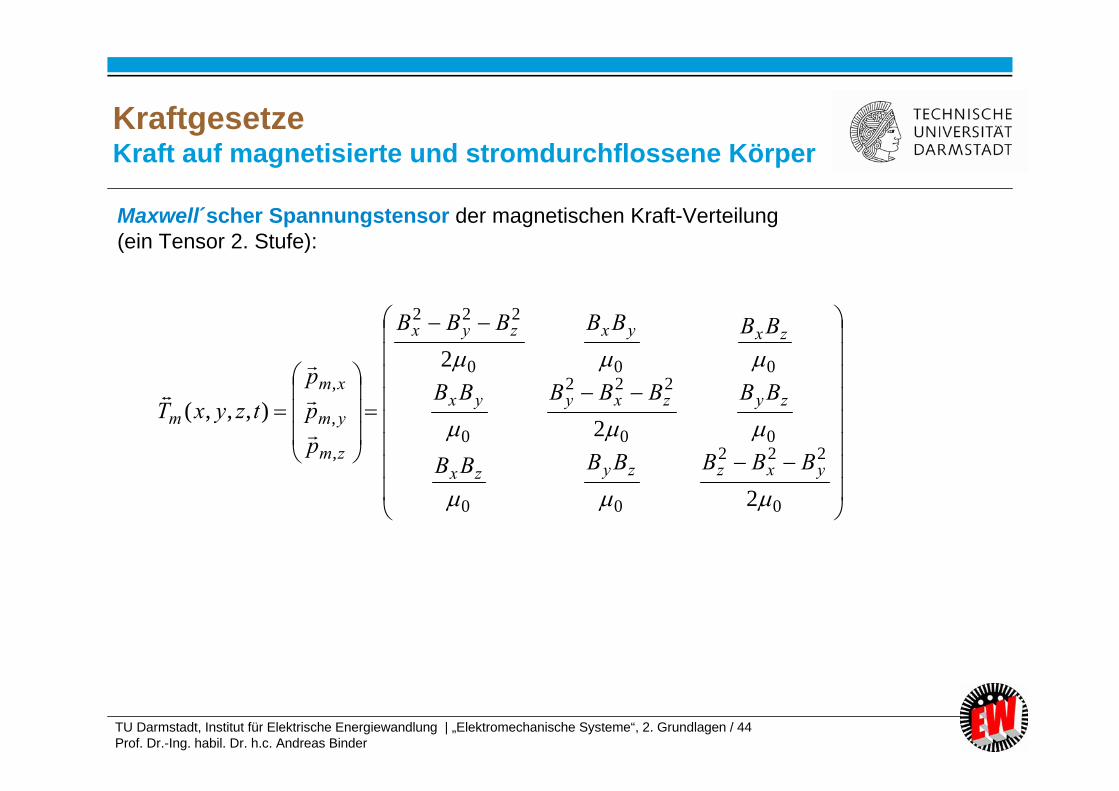
Maxwell´scher Spannungstensor der magnetischen Kraft-Verteilung(ein Tensor 2. Stufe):
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 45Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
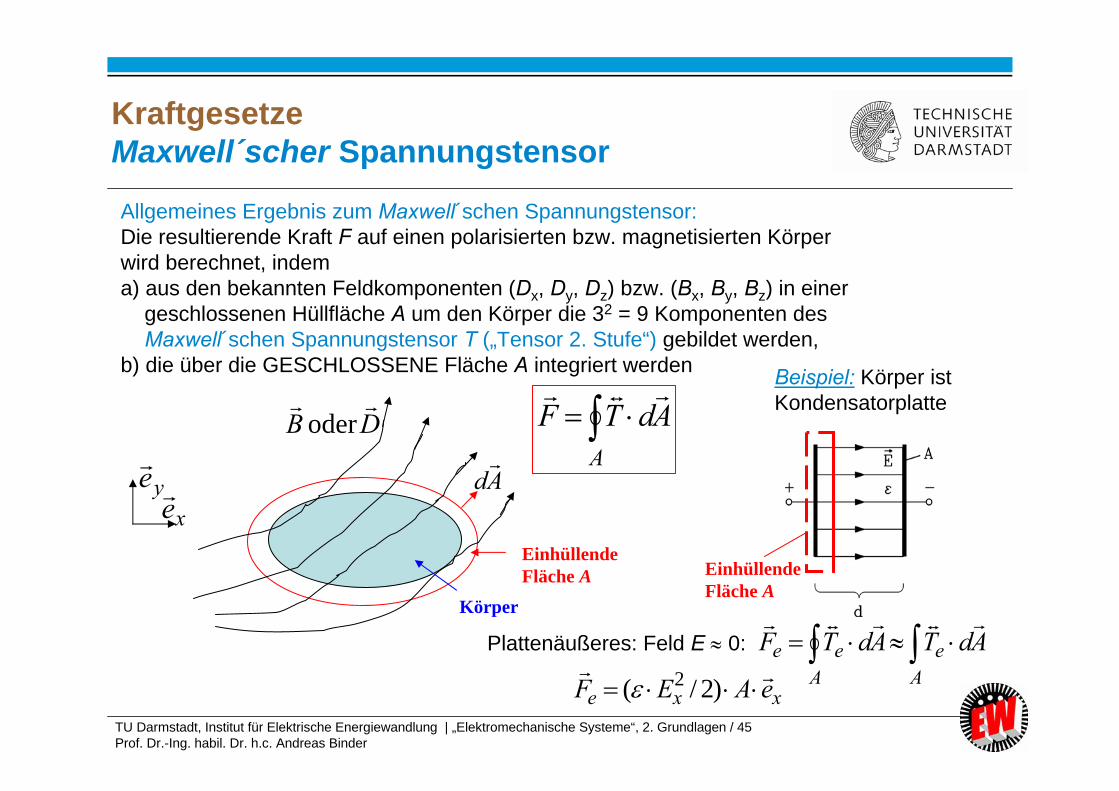
Allgemeines Ergebnis zum Maxwell´schen Spannungstensor:Die resultierende Kraft F auf einen polarisierten bzw. magnetisierten Körper wird berechnet, indem a) aus den bekannten Feldkomponenten (Dx, Dy, Dz) bzw. (Bx, By, Bz) in einer
geschlossenen Hüllfläche A um den Körper die 32 = 9 Komponenten des Maxwell´schen Spannungstensor T („Tensor 2. Stufe“) gebildet werden,
b) die über die GESCHLOSSENE Fläche A integriert werden
KraftgesetzeMaxwell´scher Spannungstensor
A
AdTF Beispiel: Körper ist
Kondensatorplatte
Plattenäußeres: Feld E 0: A
eA
ee AdTAdTF
Einhüllende Fläche A
Körper
DB
oder
Einhüllende Fläche A
xeye Ad
xxe eAEF )2/( 2
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 46Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
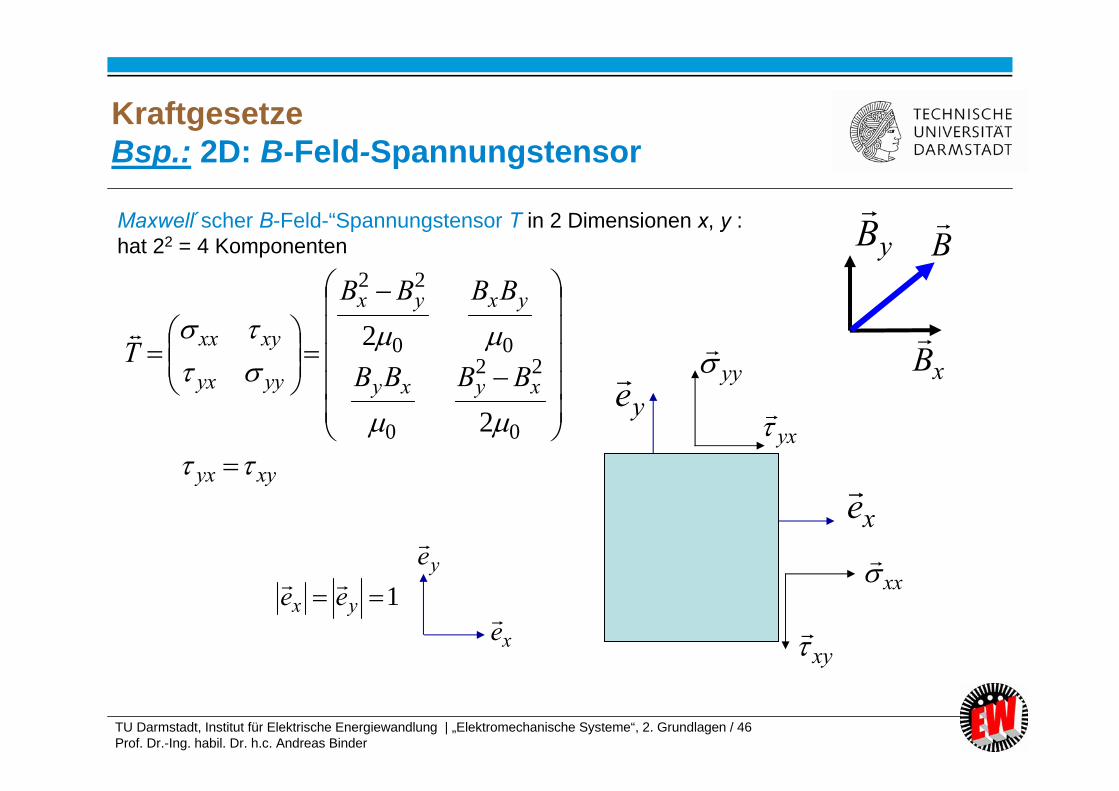
Maxwell´scher B-Feld-“Spannungstensor T in 2 Dimensionen x, y :hat 22 = 4 Komponenten
0
22
0
00
22
2
2
xyxy
yxyx
yyyx
xyxx
BBBB
BBBB
T
yeyy
yx
xe
xx
xy
xB
yB
B
KraftgesetzeBsp.: 2D: B-Feld-Spannungstensor
xyyx
ye
1 yx ee
xe
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 47Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
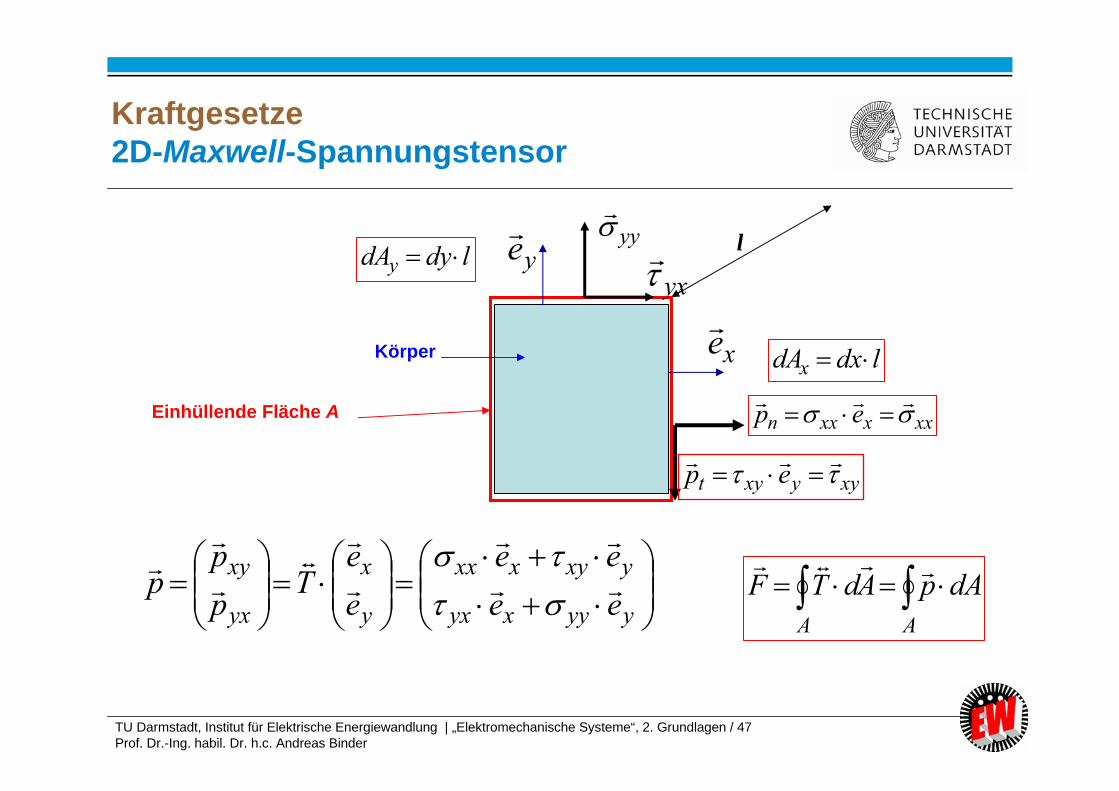
yyyxyx
yxyxxx
y
x
yx
xy
eeee
ee
Tpp
p
AA
dApAdTF
Kraftgesetze2D-Maxwell-Spannungstensor
Körper
Einhüllende Fläche A
ye yy
yx
xe
xxxxxn ep
xyyxyt ep
ldxdAx
ldydAy l
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 48Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
B
B
B
p
p
pn
n
t t
ntn pBB
0
22
2
ttn pBB
0
tn ppp
A
dApF
Quelle: Reichert, K., VDE-Kurs El. Maschinen, 2009
n
tBB
tan
222
tantan
122tan
tn
tn
n
t
BBBB
pp
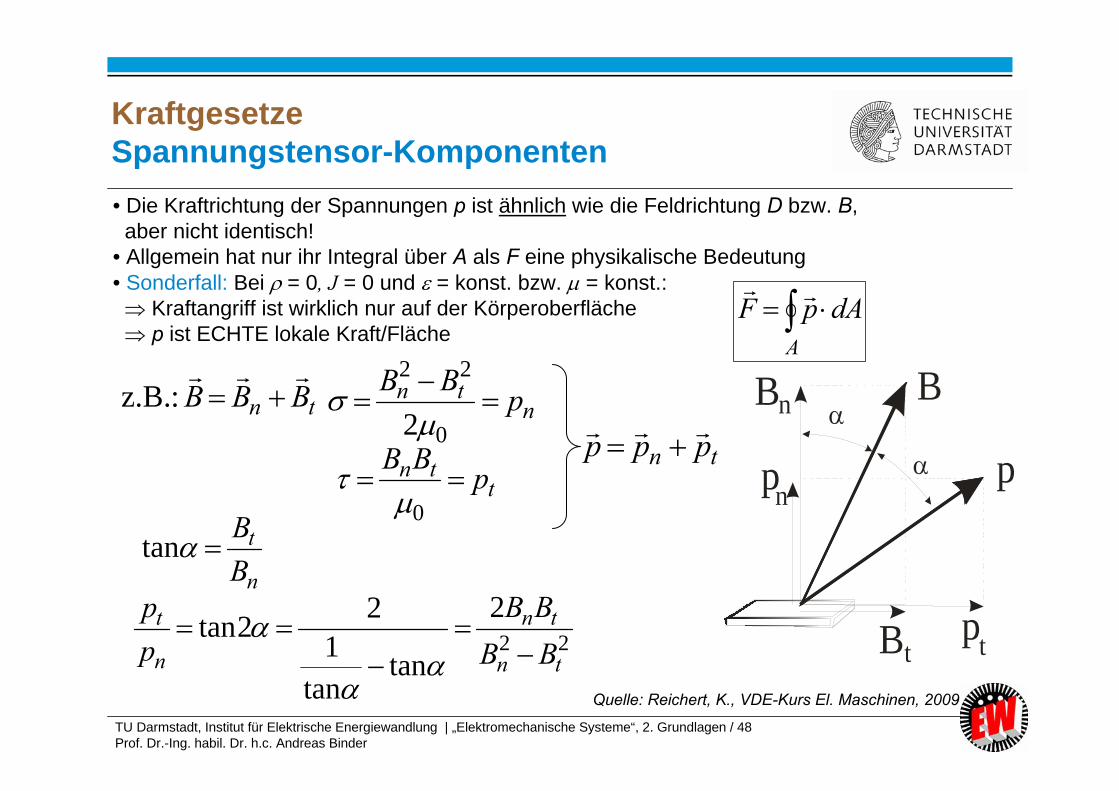
KraftgesetzeSpannungstensor-Komponenten• Die Kraftrichtung der Spannungen p ist ähnlich wie die Feldrichtung D bzw. B,
aber nicht identisch!• Allgemein hat nur ihr Integral über A als F eine physikalische Bedeutung• Sonderfall: Bei = 0, J = 0 und = konst. bzw. = konst.: Kraftangriff ist wirklich nur auf der Körperoberfläche p ist ECHTE lokale Kraft/Fläche
tn BBB
:z.B.
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 49Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KraftgesetzeBetrag der MAXWELL-Zugspannung
sincos
1
2/)()(
2/)()( 200
EEn
EEpn
nn
nne
eee
eeee
EDeEDe
EeEEep
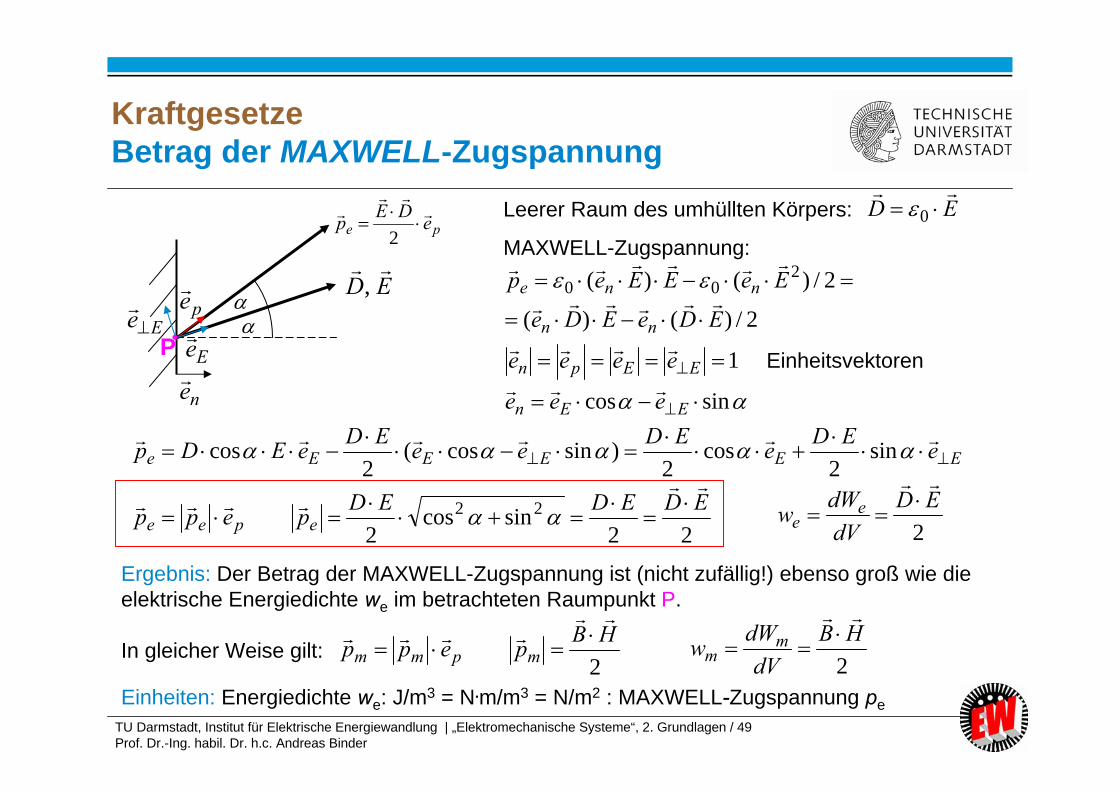
Leerer Raum des umhüllten Körpers:
MAXWELL-Zugspannung:
ED
0
Einheitsvektoren
22sincos
2
sin2
cos2
)sincos(2
cos
22 EDEDEDpepp
eEDeEDeeEDeEDp
epee
EEEEEe
Ergebnis: Der Betrag der MAXWELL-Zugspannung ist (nicht zufällig!) ebenso groß wie die elektrische Energiedichte we im betrachteten Raumpunkt P.
In gleicher Weise gilt:
ne
ED
,
pe eDEp
2
pe
EeEe
P
2ED
dVdWw e
e
2HBpepp mpmm
2HB
dVdWw m
m
Einheiten: Energiedichte we: J/m3 = N.m/m3 = N/m2 : MAXWELL-Zugspannung pe
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 50Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
A
dApF
- Integration von T erfolgt über geschlossene Fläche A des eingehüllten Körpers- Lokale Werte p.dA haben für sich i. A. KEINE physikalische Bedeutung
- Die Kraftdichte fe bzw. fm ist im Körper je nach Verteilung (x,y,z) bzw. (x,y,z)i. A. ungleichmäßig verteilt.
- Daher hat diese physikalisch wirksame Verteilung i. A. NICHTS mit der (äquivalenten) lokalen Verteilung der MAXWELL-Spannungstensor-Komponenten zu tun
- Sonderfall: Ungeladene bzw. stromlose Körper: (x,y,z) = 0, bzw. :Körper homogen isotrop polarisierbar (x,y,z) = konst. bzw. magnetisierbar (x,y,z) = konst.:Die lokale Kraftdichte tritt an der Körperoberfläche auf (im Inneren: f = 0), ist aber i. A. NICHT identisch mit den MAXWELL-Spannungstensor-Komponenten
- Sonder-Sonderfall: (x,y,z) konst. bzw. (x,y,z) :Die lokale Kraftdichte tritt an der Körperoberfläche auf UND ist identisch mit den MAXWELL-Spannungstensor-Komponenten
),,(/),,(:, zyxpdAzyxFd
KraftgesetzeMaxwell-Spannungstensor: Eigenschaften
0
J
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 51Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
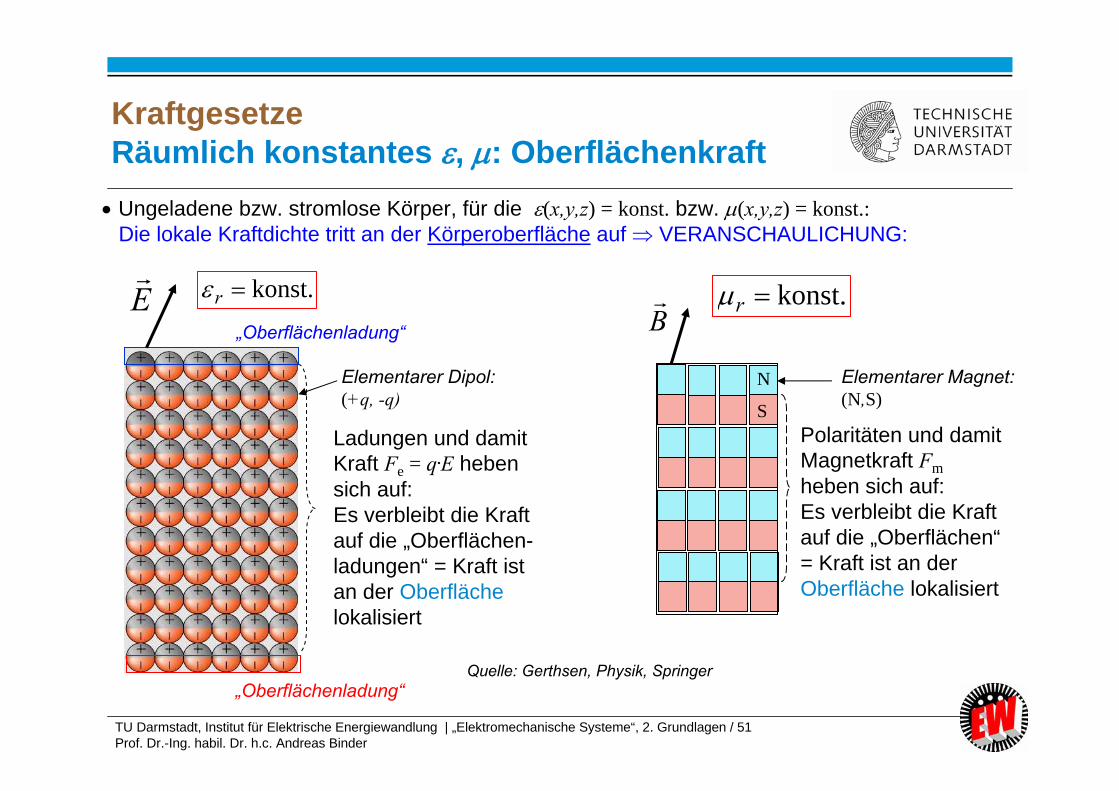
KraftgesetzeRäumlich konstantes , : Oberflächenkraft Ungeladene bzw. stromlose Körper, für die (x,y,z) = konst. bzw. (x,y,z) = konst.:
Die lokale Kraftdichte tritt an der Körperoberfläche auf VERANSCHAULICHUNG:
Ladungen und damit Kraft Fe = q.E heben sich auf:Es verbleibt die Kraft auf die „Oberflächen-ladungen“ = Kraft ist an der Oberflächelokalisiert
„Oberflächenladung“
„Oberflächenladung“
Elementarer Dipol:(+q, -q)
E konst.r
Elementarer Magnet:(N,S)
N
SPolaritäten und damit Magnetkraft Fmheben sich auf:Es verbleibt die Kraft auf die „Oberflächen“= Kraft ist an der Oberfläche lokalisiert
B konst.r
Quelle: Gerthsen, Physik, Springer
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 52Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
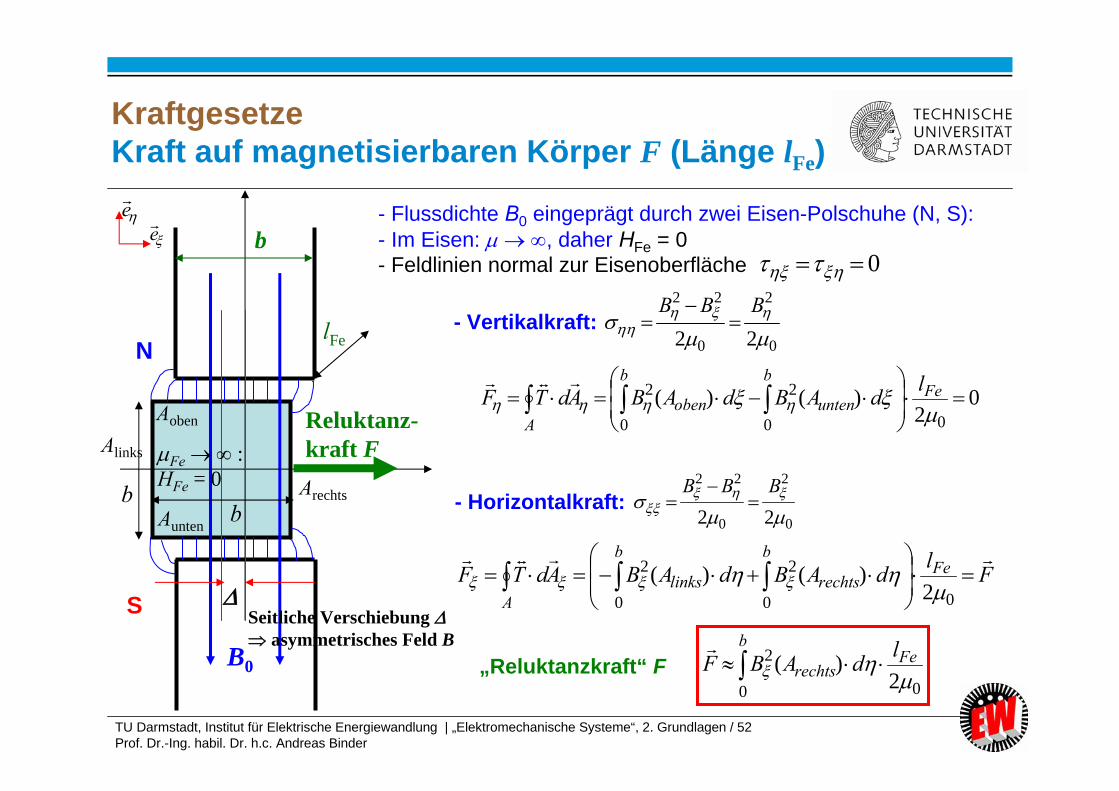
- Flussdichte B0 eingeprägt durch zwei Eisen-Polschuhe (N, S):- Im Eisen: , daher HFe = 0- Feldlinien normal zur Eisenoberfläche 0
- Vertikalkraft:0
2
0
22
22
BBB
02
)()(00
2
0
2
Feb
unten
b
obenA
ldABdABAdTF
0
2
0
22
22
BBB
FldABdABAdTF Feb
rechts
b
linksA
00
2
0
22
)()(
„Reluktanzkraft“ F
- Horizontalkraft:
KraftgesetzeKraft auf magnetisierbaren Körper F (Länge lFe)
Reluktanz-kraft F
B0
b
Seitliche Verschiebung asymmetrisches Feld B
Fe : HFe = 0
N
S
ee
lFe
Aoben
Aunten
Alinks
Arechtsb
b
00
22
)(
Fe
b
rechtsldABF
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 53Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KraftgesetzeKraft auf stromdurchflossenen Leiter im B-Feld
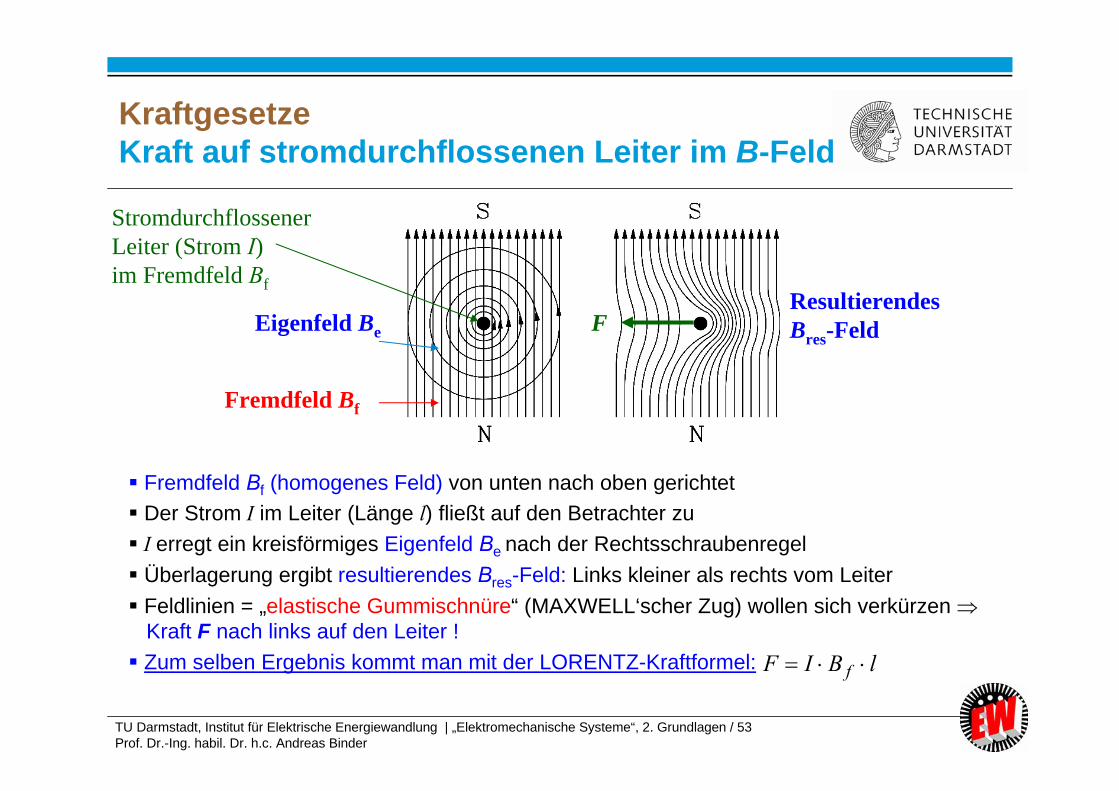
Fremdfeld Bf (homogenes Feld) von unten nach oben gerichtet Der Strom I im Leiter (Länge l) fließt auf den Betrachter zu I erregt ein kreisförmiges Eigenfeld Be nach der Rechtsschraubenregel Überlagerung ergibt resultierendes Bres-Feld: Links kleiner als rechts vom Leiter Feldlinien = „elastische Gummischnüre“ (MAXWELL‘scher Zug) wollen sich verkürzen
Kraft F nach links auf den Leiter ! Zum selben Ergebnis kommt man mit der LORENTZ-Kraftformel:
Stromdurchflossener Leiter (Strom I) im Fremdfeld Bf
Fremdfeld Bf
Eigenfeld Be
Resultierendes Bres-FeldF
lBIF f
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 54Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme2. Grundlagen
Dynamische Grundgesetze der Mechanik und Elektromagnetik Materialgesetze Kraftgesetze Energiebegriffe Einführendes Beispiel:
Kopplung eines mechanischen mit einem el.-magn. System
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 55Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
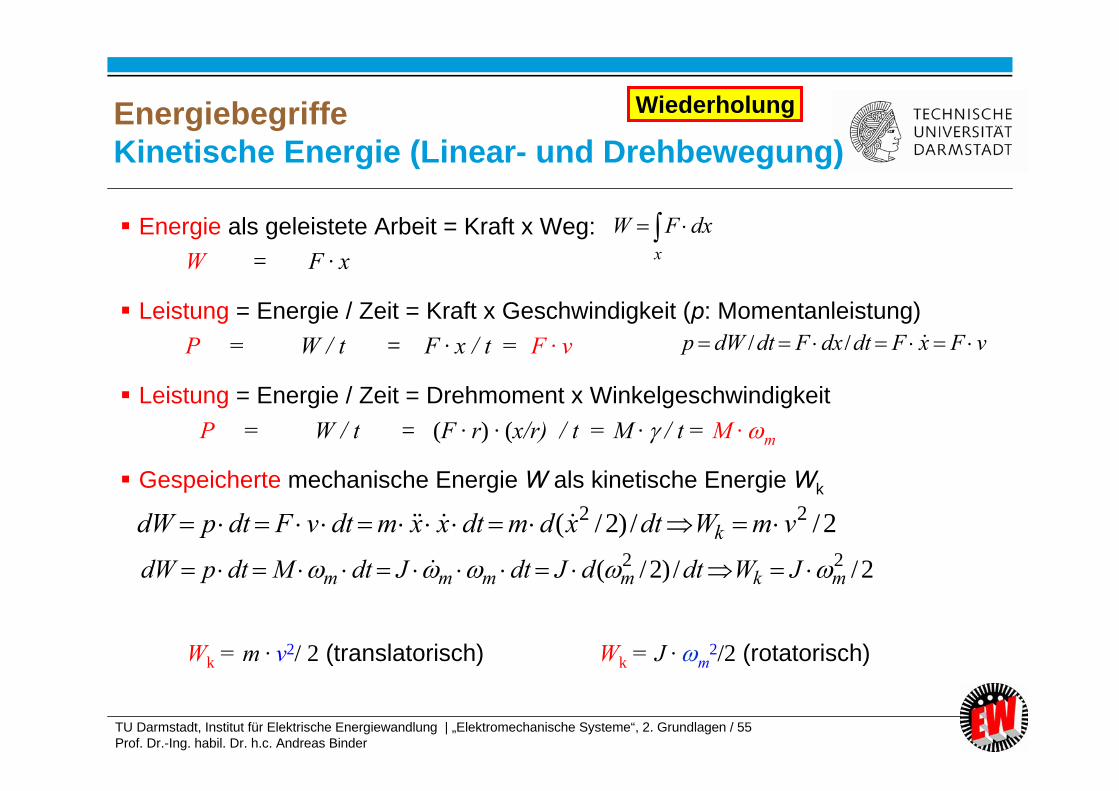
Energie als geleistete Arbeit = Kraft x Weg: W = F . x
Leistung = Energie / Zeit = Kraft x Geschwindigkeit (p: Momentanleistung)P = W / t = F . x / t = F . v
Leistung = Energie / Zeit = Drehmoment x WinkelgeschwindigkeitP = W / t = (F . r) . (x/r) / t = M . / t = M . m
Gespeicherte mechanische Energie W als kinetische Energie Wk
Wk = m . v2/ 2 (translatorisch) Wk = J . m2/2 (rotatorisch)
x
dxFW
vFxFdtdxFdtdWp //
2//)2/( 22 vmWdtxdmdtxxmdtvFdtpdW k
EnergiebegriffeKinetische Energie (Linear- und Drehbewegung)
2//)2/( 22mkmmmm JWdtdJdtJdtMdtpdW
Wiederholung
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 56Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
EnergiebegriffePotentielle Energie
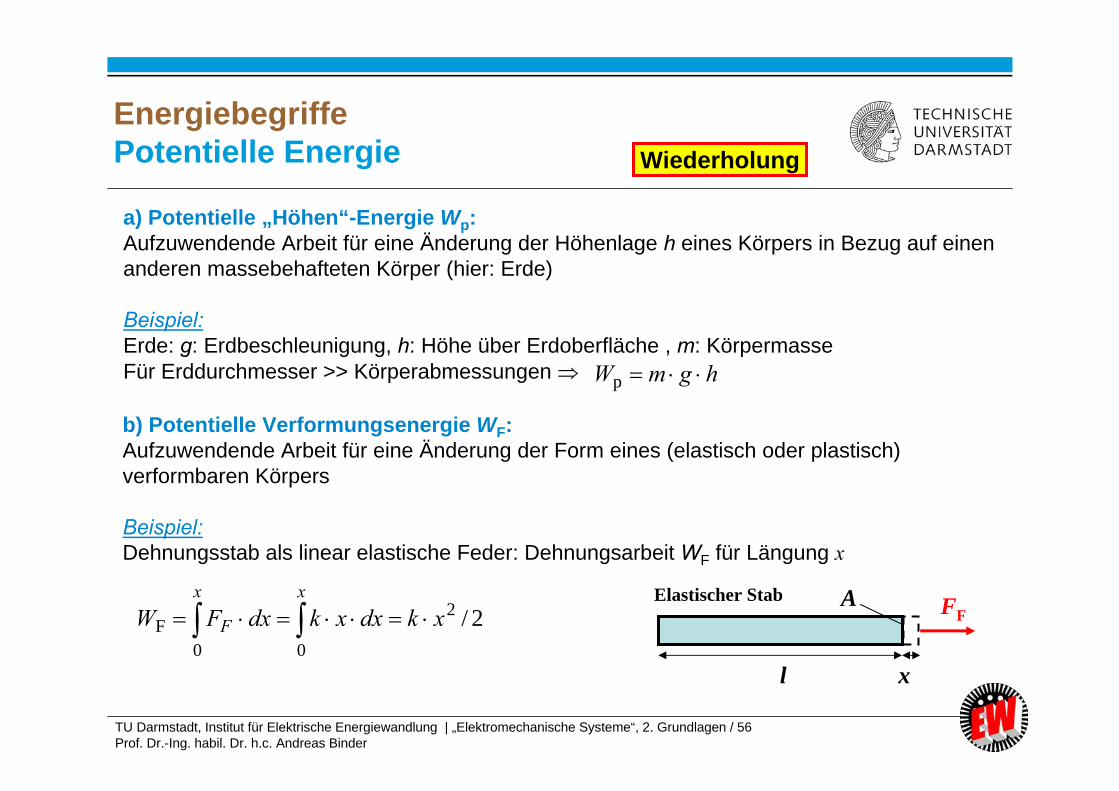
a) Potentielle „Höhen“-Energie Wp:Aufzuwendende Arbeit für eine Änderung der Höhenlage h eines Körpers in Bezug auf einen anderen massebehafteten Körper (hier: Erde)
Beispiel:Erde: g: Erdbeschleunigung, h: Höhe über Erdoberfläche , m: KörpermasseFür Erddurchmesser >> Körperabmessungen hgmW p
b) Potentielle Verformungsenergie WF:Aufzuwendende Arbeit für eine Änderung der Form eines (elastisch oder plastisch) verformbaren Körpers
Beispiel:Dehnungsstab als linear elastische Feder: Dehnungsarbeit WF für Längung x
2/2
00F xkdxxkdxFW
xx
F FFA
l x
Elastischer Stab
Wiederholung
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 57Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
EnergiebegriffeElektrische Energiedichte we (nichtlinear)
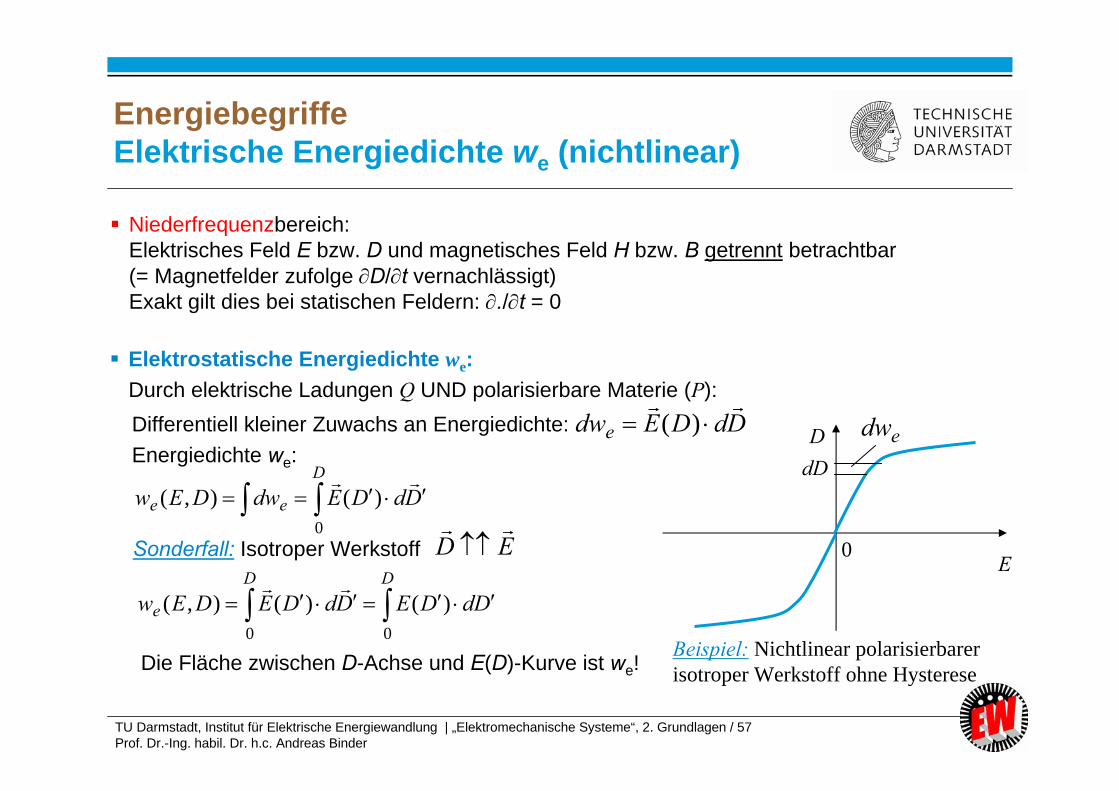
Niederfrequenzbereich: Elektrisches Feld E bzw. D und magnetisches Feld H bzw. B getrennt betrachtbar(= Magnetfelder zufolge D/t vernachlässigt)Exakt gilt dies bei statischen Feldern: ./t = 0
Elektrostatische Energiedichte we:Durch elektrische Ladungen Q UND polarisierbare Materie (P):
DdDEdwe
)(Differentiell kleiner Zuwachs an Energiedichte:Energiedichte we:
E
D
0
dDedw
D
ee DdDEdwDEw0
)(),(
Beispiel: Nichtlinear polarisierbarer isotroper Werkstoff ohne Hysterese
Sonderfall: Isotroper Werkstoff ED
DD
e DdDEDdDEDEw00
)()(),(
Die Fläche zwischen D-Achse und E(D)-Kurve ist we!
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 58Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
EnergiebegriffeElektrische Energiedichte we (linear)
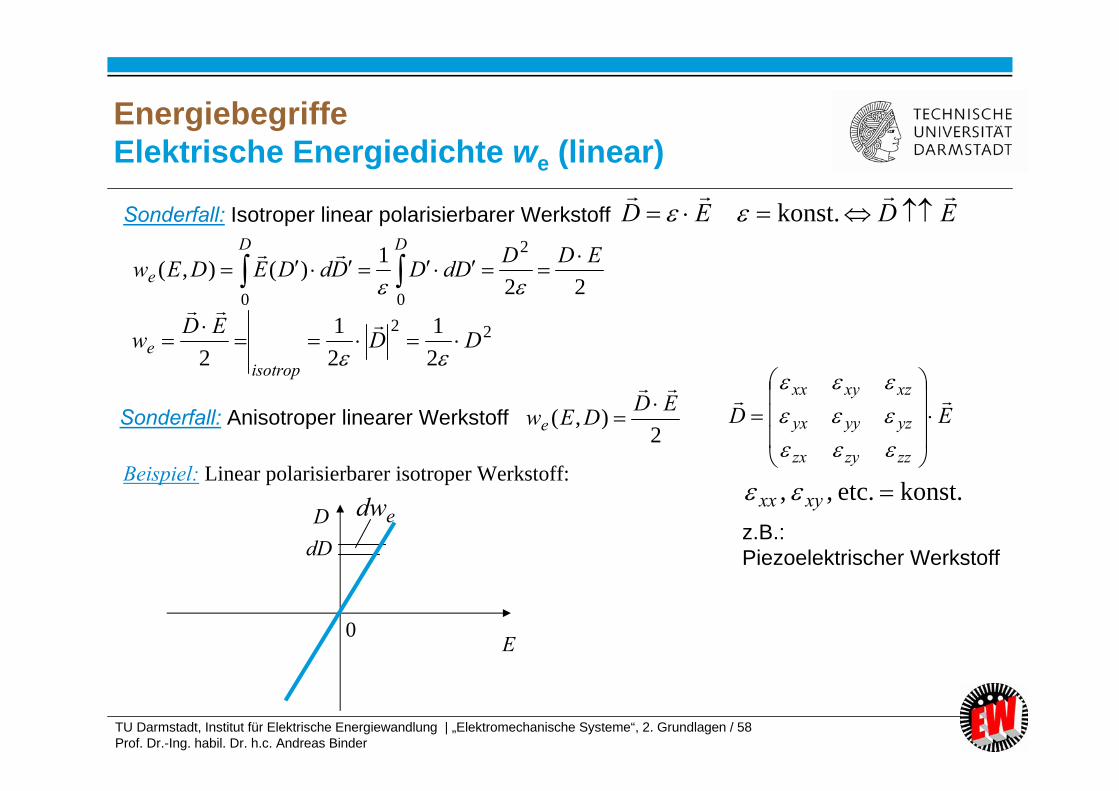
Beispiel: Linear polarisierbarer isotroper Werkstoff:
Sonderfall: Isotroper linear polarisierbarer Werkstoff
221)(),(
2
00
EDDDdDDdDEDEwDD
e
EDED
konst.
Sonderfall: Anisotroper linearer Werkstoff2
),( EDDEwe
E
D
0
dDedw
ED
zzzyzx
yzyyyx
xzxyxx
konst.etc.,, xyxx
22
21
21
2DDEDw
isotrope
z.B.: Piezoelektrischer Werkstoff
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 59Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
AA
D
A
D
le
A l
D
V
D
e
QduAdDduAdDdDuAdDdsdDEW
sdAdDdDEDdDEW
0000
00
)()(
)()(
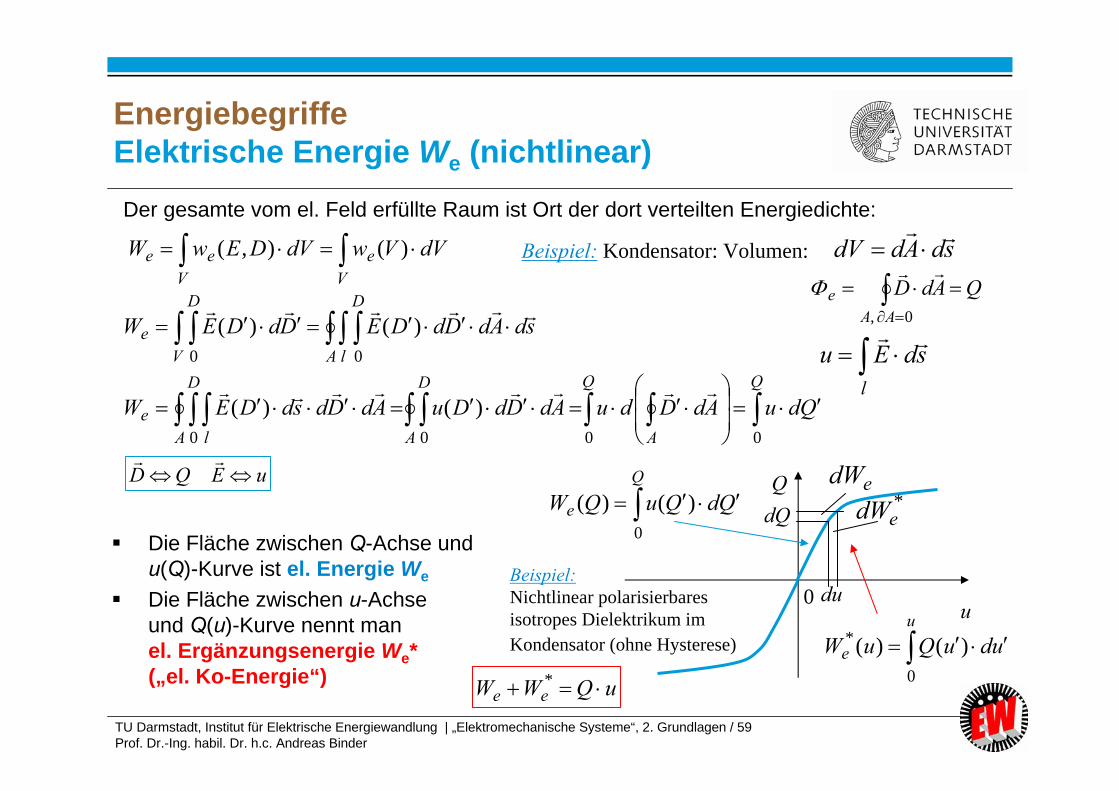
EnergiebegriffeElektrische Energie We (nichtlinear)Der gesamte vom el. Feld erfüllte Raum ist Ort der dort verteilten Energiedichte:
V
eV
ee dVVwdVDEwW )(),( Beispiel: Kondensator: Volumen:
uEQD
QAdDAA
e 0,
l
sdEu
sdAddV
Die Fläche zwischen Q-Achse und u(Q)-Kurve ist el. Energie We
Die Fläche zwischen u-Achseund Q(u)-Kurve nennt man el. Ergänzungsenergie We*(„el. Ko-Energie“)
u
Q
0
dQedW
Beispiel:Nichtlinear polarisierbares isotropes Dielektrikum im Kondensator (ohne Hysterese)
Q
e QdQuQW0
)()(
u
e uduQuW0
* )()(
uQWW ee *
du
*edW
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 60Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
EnergiebegriffeElektrische Energie We (linear)
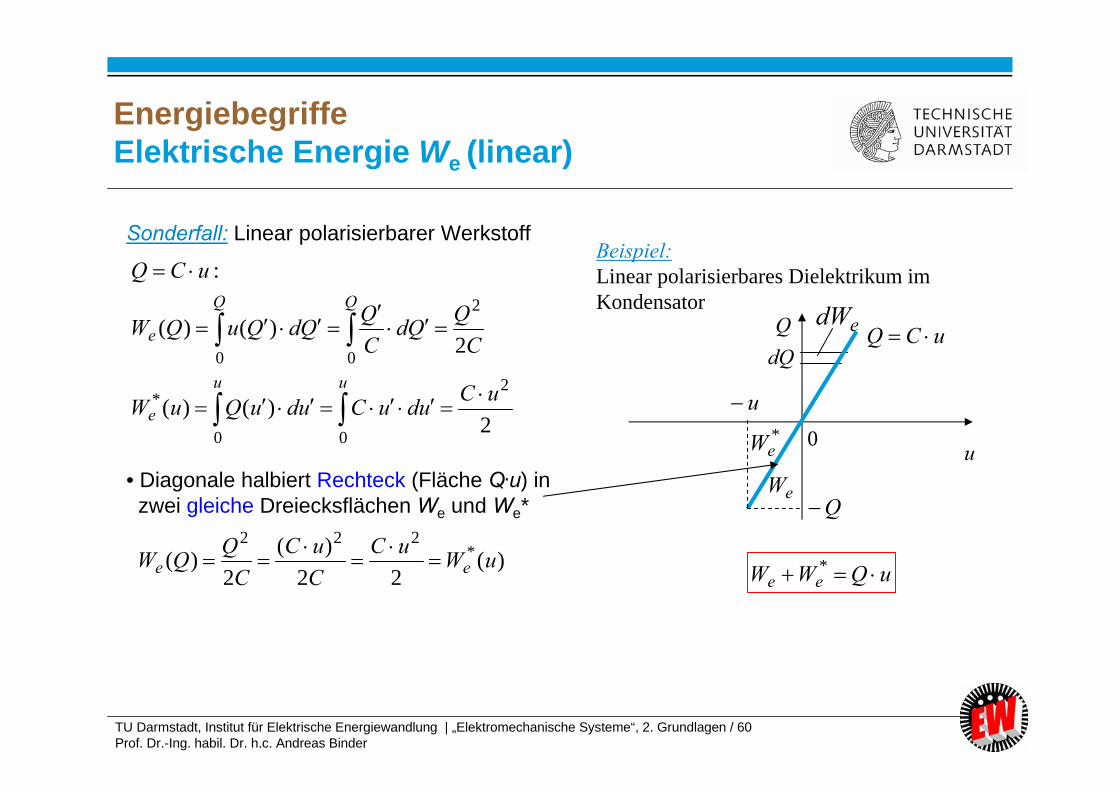
Beispiel:Linear polarisierbares Dielektrikum im Kondensator
Sonderfall: Linear polarisierbarer Werkstoff
2)()(
2)()(
:
2
00
*
2
00
uCuduCuduQuW
CQQd
CQQdQuQW
uCQ
uu
e
e
• Diagonale halbiert Rechteck (Fläche Q.u) in zwei gleiche Dreiecksflächen We und We*
)(22
)(2
)( *222
uWuCCuC
CQQW ee
u
Q
0
dQedW
*eW
eW
uQWW ee *
Q
u
uCQ
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 61Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
EnergiebegriffeElektrische Energie We im Kondensator
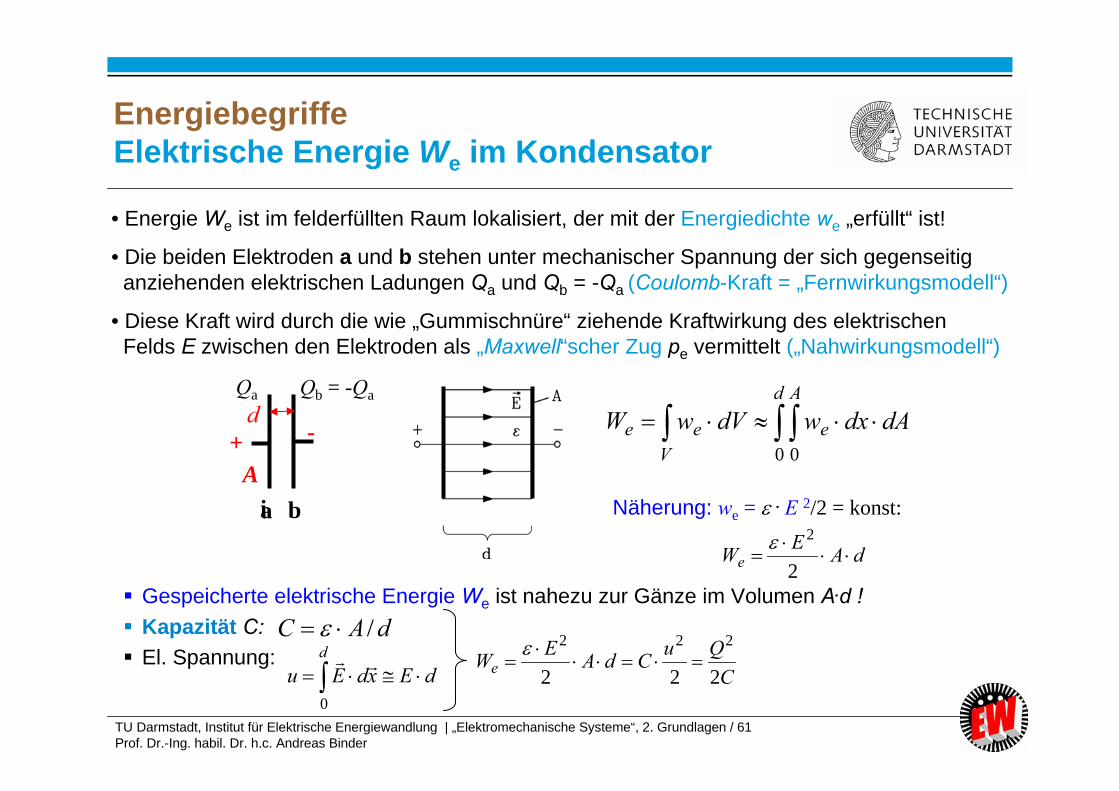
• Energie We ist im felderfüllten Raum lokalisiert, der mit der Energiedichte we „erfüllt“ ist!
• Die beiden Elektroden a und b stehen unter mechanischer Spannung der sich gegenseitig anziehenden elektrischen Ladungen Qa und Qb = -Qa (Coulomb-Kraft = „Fernwirkungsmodell“)
• Diese Kraft wird durch die wie „Gummischnüre“ ziehende Kraftwirkung des elektrischen Felds E zwischen den Elektroden als „Maxwell“scher Zug pe vermittelt („Nahwirkungsmodell“)
Gespeicherte elektrische Energie We ist nahezu zur Gänze im Volumen A.d ! Kapazität C: El. Spannung:
d+ -
ia b
Qa Qb = -Qa
A
d A
eV
ee dAdxwdVwW0 0
Näherung: we = . E 2/2 = konst:
dAEWe
2
2
dAC /
dExdEud
0
C
QuCdAEWe 222
222
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 62Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
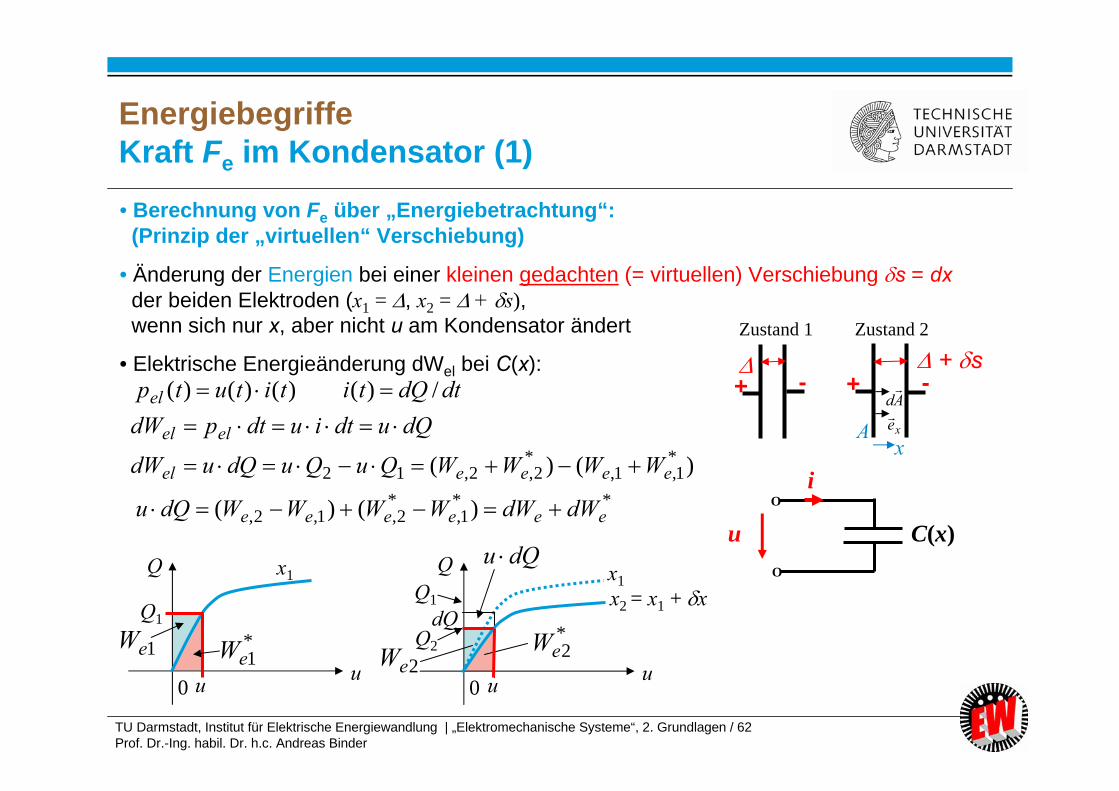
Energiebegriffe Kraft Fe im Kondensator (1)• Berechnung von Fe über „Energiebetrachtung“:
(Prinzip der „virtuellen“ Verschiebung)
• Änderung der Energien bei einer kleinen gedachten (= virtuellen) Verschiebung s = dxder beiden Elektroden (x1 = , x2 = + s), wenn sich nur x, aber nicht u am Kondensator ändert
• Elektrische Energieänderung dWel bei C(x):
)()( *1,1,
*2,2,12 eeeeel WWWWQuQudQudW
**1,
*2,1,2, )()( eeeeee dWdWWWWWdQu
- + s+ +-
xA xe
Ad
Zustand 1 Zustand 2
O
O
C(x)
i
u
dtdQtititutpel /)()()()( dQudtiudtpdW elel
u
Q
0
Q1
u u
Q
0
dQ
2eWu
*2eW1eW *
1eW
Q1
Q2
x1 x1x2 = x1 + x
dQu
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 63Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
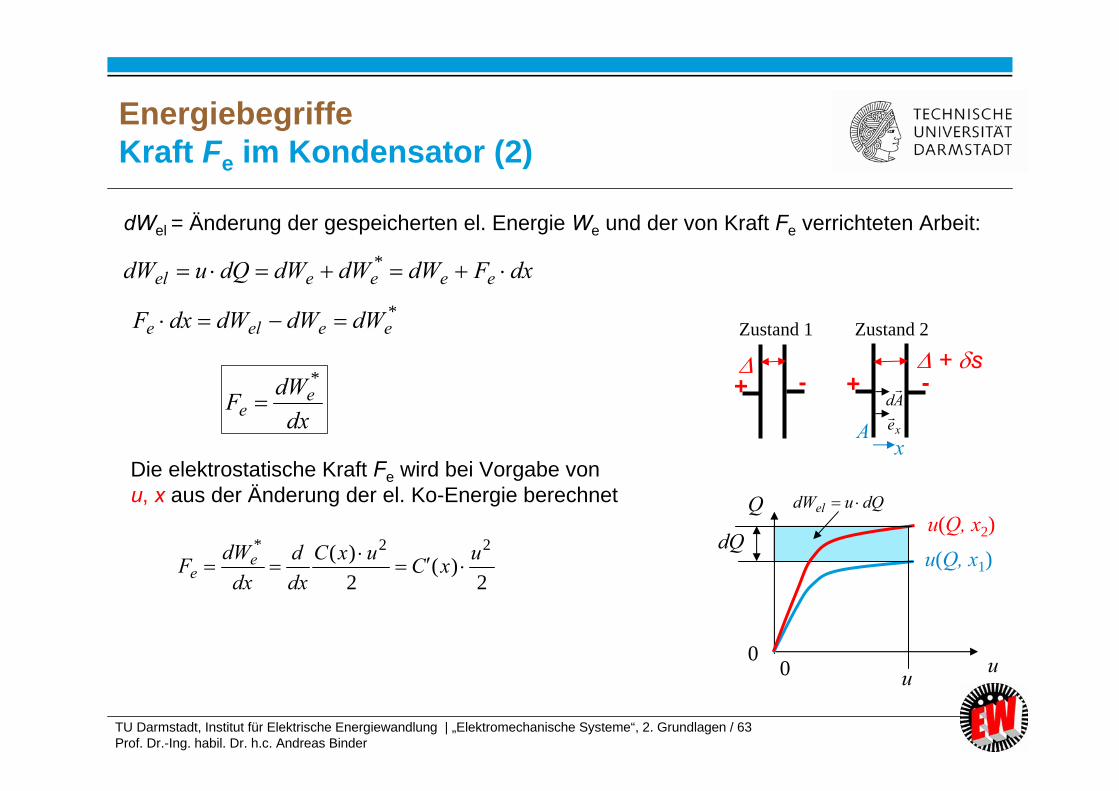
Energiebegriffe Kraft Fe im Kondensator (2)
dxFdWdWdWdQudW eeeeel *
dxdWF e
e
*
dWel = Änderung der gespeicherten el. Energie We und der von Kraft Fe verrichteten Arbeit:
*eeele dWdWdWdxF
u
Q
0
dQ
u
u(Q, x1)u(Q, x2)
dQudWel
0
Die elektrostatische Kraft Fe wird bei Vorgabe von u, x aus der Änderung der el. Ko-Energie berechnet
2)(
2)( 22* uxCuxC
dxd
dxdWF e
e
- + s+ +-
xA xe
Ad
Zustand 1 Zustand 2
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 64Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Energiebegriffe Kraft Fe in Abhängigkeit von (Q, x) bzw. (u, x)
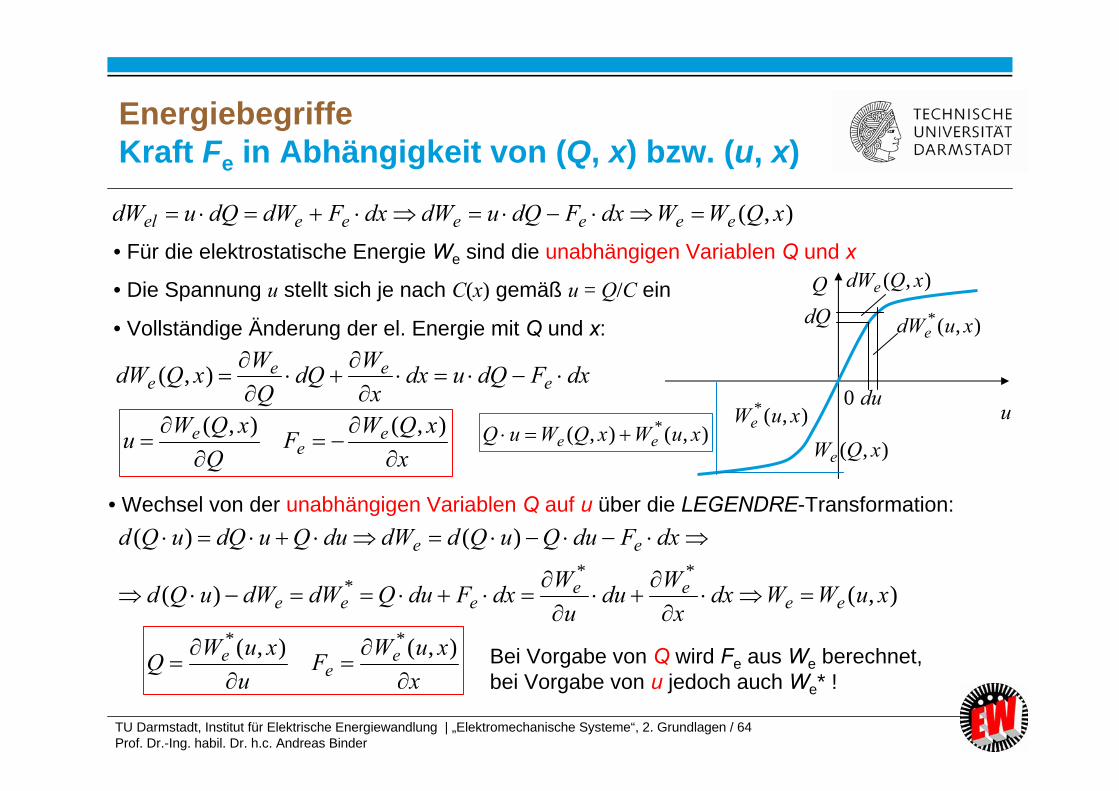
),( xQWWdxFdQudWdxFdWdQudW eeeeeeel
• Für die elektrostatische Energie We sind die unabhängigen Variablen Q und x
• Die Spannung u stellt sich je nach C(x) gemäß u = Q/C ein
• Vollständige Änderung der el. Energie mit Q und x:
dxFdQudxx
WdQQ
WxQdW eee
e
),(
xxQWF
QxQWu e
ee
),(),(
• Wechsel von der unabhängigen Variablen Q auf u über die LEGENDRE-Transformation:
),()(
)()(**
* xuWWdxx
Wduu
WdxFduQdWdWuQd
dxFduQuQddWduQudQuQd
eeee
eee
ee
),(),( * xuWxQWuQ ee u
Q
0
dQ
),( xQdWe
du
),(* xudWe
),(* xuWe
),( xQWe
xxuWF
uxuWQ e
ee
),(),( **Bei Vorgabe von Q wird Fe aus We berechnet,bei Vorgabe von u jedoch auch We* !
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 65Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
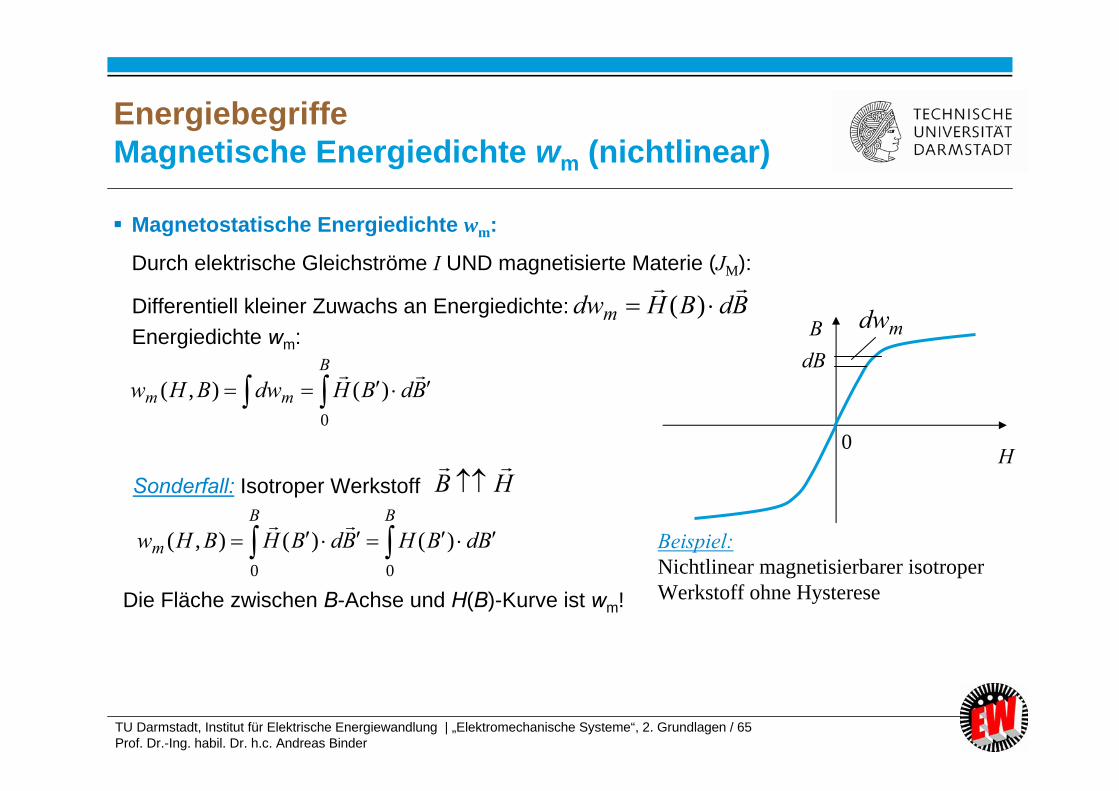
EnergiebegriffeMagnetische Energiedichte wm (nichtlinear)
Magnetostatische Energiedichte wm:
Durch elektrische Gleichströme I UND magnetisierte Materie (JM):
BdBHdwm
)(Differentiell kleiner Zuwachs an Energiedichte:Energiedichte wm:
H
B
0
dBmdw
B
mm BdBHdwBHw0
)(),(
Beispiel:Nichtlinear magnetisierbarer isotroperWerkstoff ohne Hysterese
Sonderfall: Isotroper Werkstoff HB
BB
m BdBHBdBHBHw00
)()(),(
Die Fläche zwischen B-Achse und H(B)-Kurve ist wm!
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 66Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
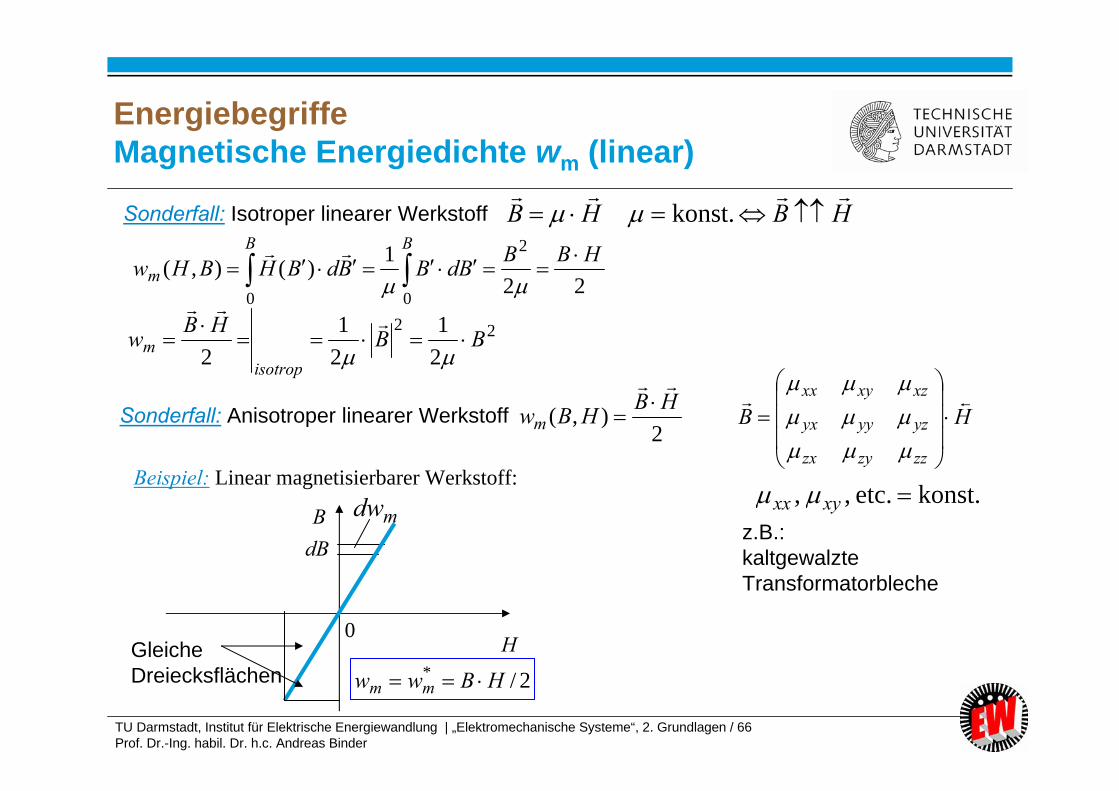
EnergiebegriffeMagnetische Energiedichte wm (linear)
Beispiel: Linear magnetisierbarer Werkstoff:
Sonderfall: Isotroper linearer Werkstoff
221)(),(
2
00
HBBBdBBdBHBHwBB
m
HBHB
konst.
Sonderfall: Anisotroper linearer Werkstoff HB
zzzyzx
yzyyyx
xzxyxx
konst.etc.,, xyxx
22
21
21
2BBHBw
isotropm
2),( HBHBwm
z.B.: kaltgewalzteTransformatorbleche
H
B
0
dBmdw
Gleiche Dreiecksflächen 2/* HBww mm
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 67Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
0000
00
)(
)()(
diAdBNdiAdBdiNAdBdsdBHW
sdAdBdBHBdBHW
AA
B
A
B
Cm
C A
B
V
B
m
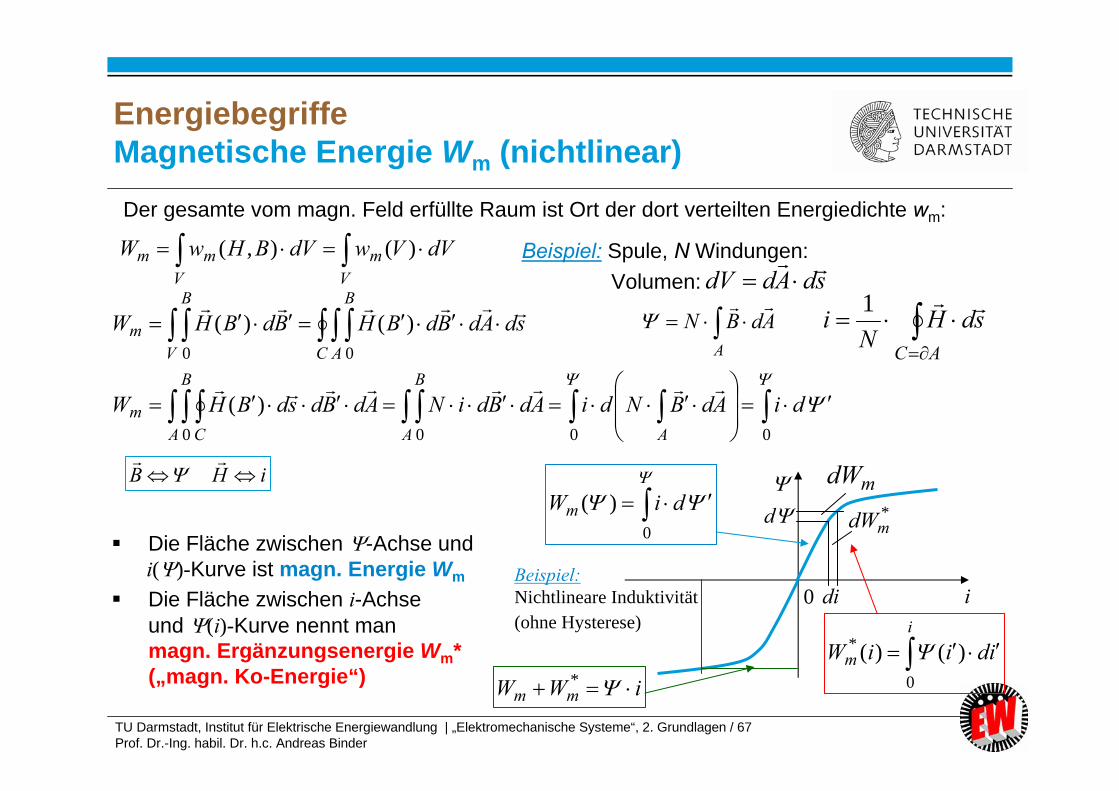
EnergiebegriffeMagnetische Energie Wm (nichtlinear)Der gesamte vom magn. Feld erfüllte Raum ist Ort der dort verteilten Energiedichte wm:
V
mV
mm dVVwdVBHwW )(),( Beispiel: Spule, N Windungen:Volumen:
iHB
A
AdBN
AC
sdHN
i 1sdAddV
Die Fläche zwischen -Achse und i()-Kurve ist magn. Energie Wm
Die Fläche zwischen i-Achseund (i)-Kurve nennt man magn. Ergänzungsenergie Wm*(„magn. Ko-Energie“)
i
0
dmdW
Beispiel:Nichtlineare Induktivität(ohne Hysterese)
i
m idiiW0
* )()( iWW mm *
0
)( diWm
di
*mdW
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 68Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
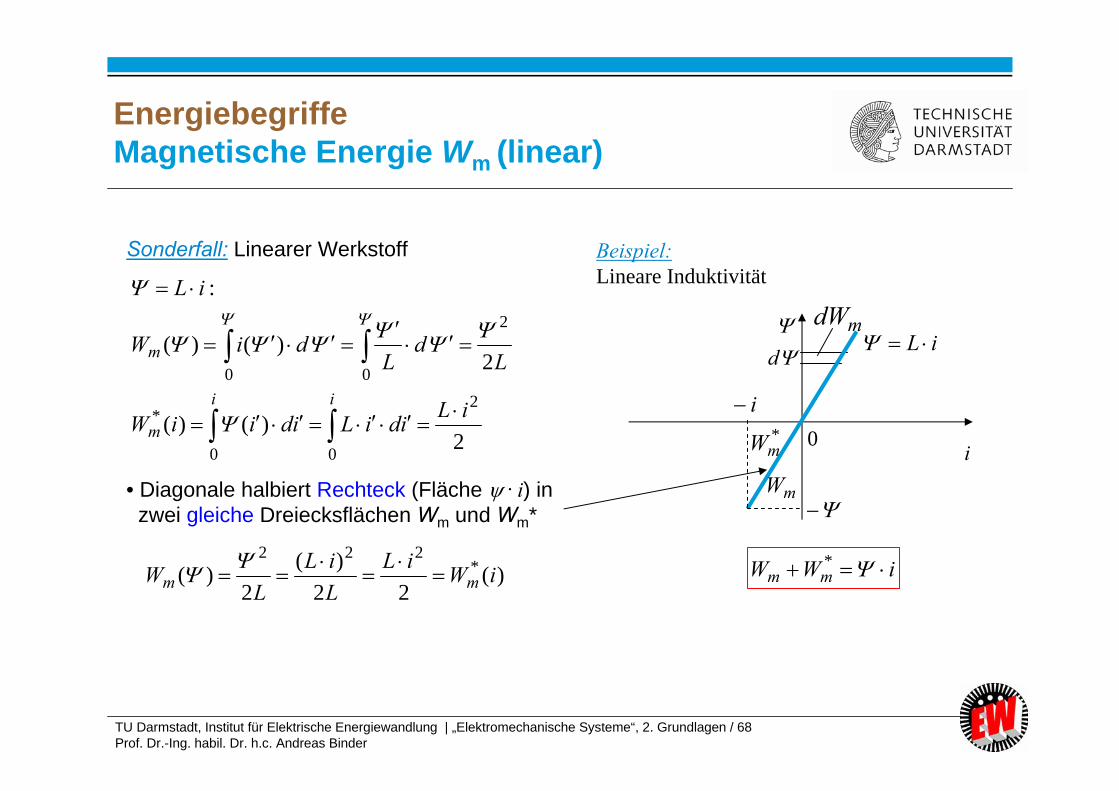
EnergiebegriffeMagnetische Energie Wm (linear)
Beispiel:Lineare Induktivität
Sonderfall: Linearer Werkstoff
2)()(
2)()(
:
2
00
*
2
00
iLidiLidiiW
Ld
LdiW
iL
ii
m
m
)(22
)(2
)( *222
iWiLLiL
LW mm
• Diagonale halbiert Rechteck (Fläche . i) in zwei gleiche Dreiecksflächen Wm und Wm*
i
0
dmdW
*mW
mW
i
iWW mm *
iL
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 69Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
EnergiebegriffeMagnetische Energie Wm zwischen Polen
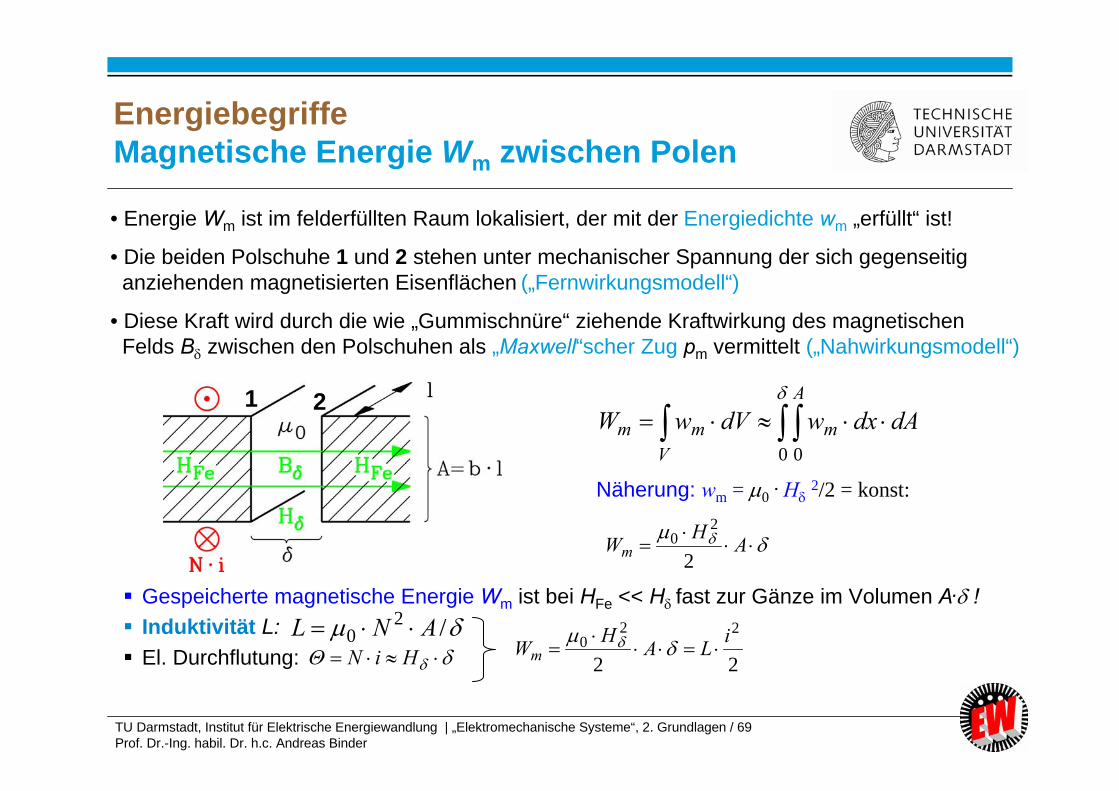
• Energie Wm ist im felderfüllten Raum lokalisiert, der mit der Energiedichte wm „erfüllt“ ist!
• Die beiden Polschuhe 1 und 2 stehen unter mechanischer Spannung der sich gegenseitig anziehenden magnetisierten Eisenflächen („Fernwirkungsmodell“)
• Diese Kraft wird durch die wie „Gummischnüre“ ziehende Kraftwirkung des magnetischen Felds B zwischen den Polschuhen als „Maxwell“scher Zug pm vermittelt („Nahwirkungsmodell“)
Gespeicherte magnetische Energie Wm ist bei HFe << H fast zur Gänze im Volumen A. ! Induktivität L: El. Durchflutung:
0 0
A
mV
mm dAdxwdVwW
Näherung: wm = 0. H
2/2 = konst:
22
220 iLAHWm
/2
0 ANL HiN
1 2
AHWm 2
20
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 70Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
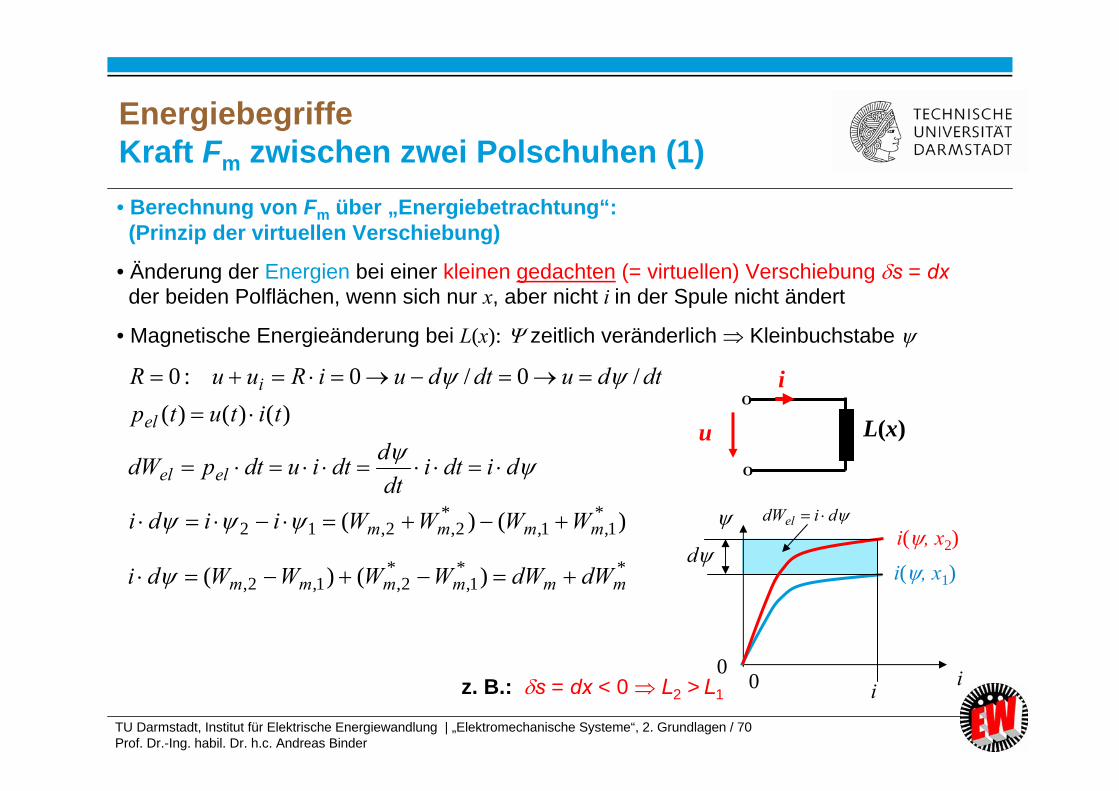
Energiebegriffe Kraft Fm zwischen zwei Polschuhen (1)• Berechnung von Fm über „Energiebetrachtung“:
(Prinzip der virtuellen Verschiebung)
• Änderung der Energien bei einer kleinen gedachten (= virtuellen) Verschiebung s = dxder beiden Polflächen, wenn sich nur x, aber nicht i in der Spule nicht ändert
• Magnetische Energieänderung bei L(x): zeitlich veränderlich Kleinbuchstabe
didtidt
ddtiudtpdW elel
i
0
d
i
i(, x1)i(, x2)
didWel
0
)()( *1,1,
*2,2,12 mmmm WWWWiidi
**1,
*2,1,2, )()( mmmmmm dWdWWWWWdi
O
O
L(x)
i
u
dtdudtduiRuuR i /0/0:0
)()()( titutpel
z. B.: s = dx < 0 L2 > L1
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 71Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
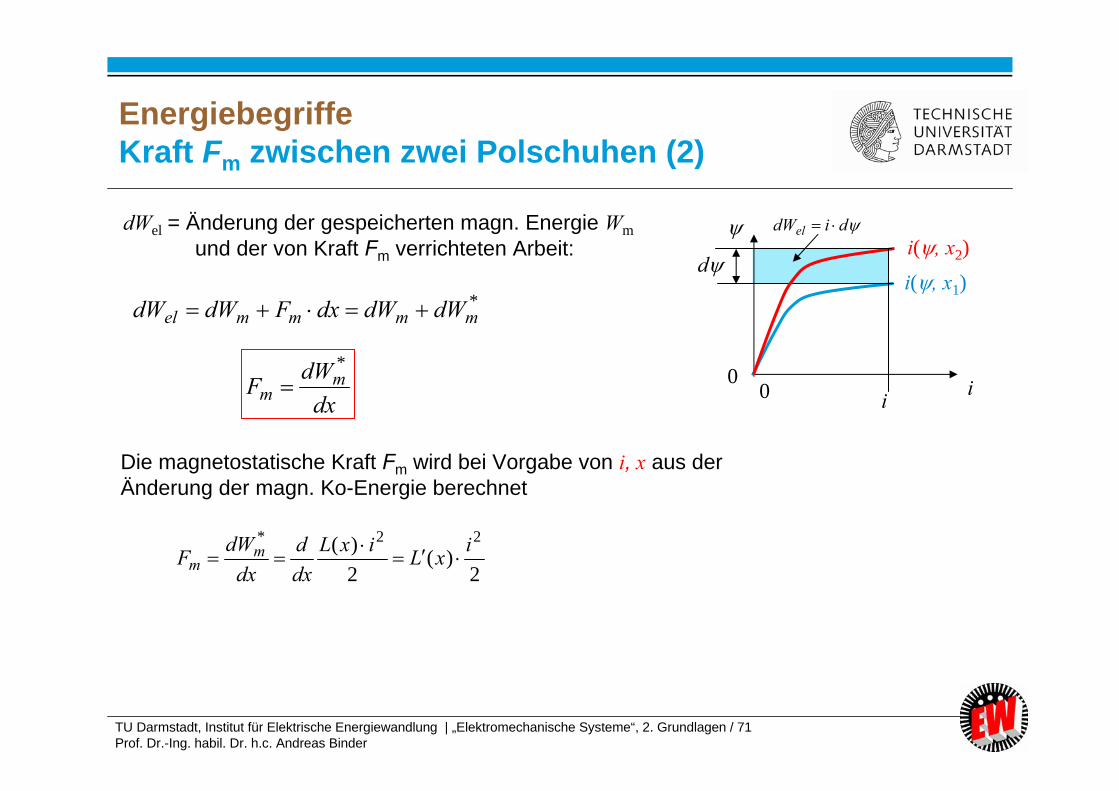
Energiebegriffe Kraft Fm zwischen zwei Polschuhen (2)
*mmmmel dWdWdxFdWdW
dxdWF m
m
*
dWel = Änderung der gespeicherten magn. Energie Wmund der von Kraft Fm verrichteten Arbeit:
i
0
d
i
i(, x1)i(, x2)
didWel
0
Die magnetostatische Kraft Fm wird bei Vorgabe von i, x aus der Änderung der magn. Ko-Energie berechnet
2)(
2)( 22* ixLixL
dxd
dxdWF m
m
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 72Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
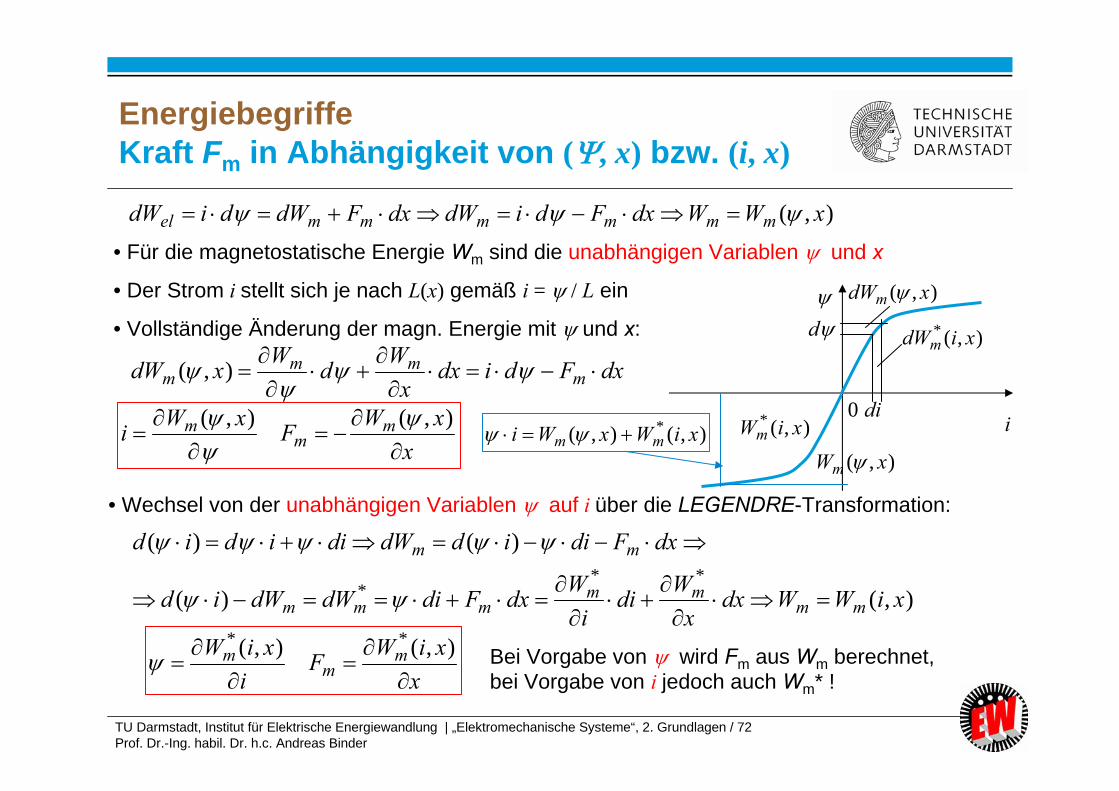
Energiebegriffe Kraft Fm in Abhängigkeit von (, x) bzw. (i, x)
),( xWWdxFdidWdxFdWdidW mmmmmmel
• Für die magnetostatische Energie Wm sind die unabhängigen Variablen und x
• Der Strom i stellt sich je nach L(x) gemäß i = / L ein
• Vollständige Änderung der magn. Energie mit und x:
dxFdidxx
WdWxdW mmm
m
),(
xxWFxWi m
mm
),(),(
• Wechsel von der unabhängigen Variablen auf i über die LEGENDRE-Transformation:
),()(
)()(**
* xiWWdxx
Wdii
WdxFdidWdWid
dxFdiiddWdiidid
mmmm
mmm
mm
),(),( * xiWxWi mm i
0
d
),( xdWm
di
),(* xidWm
),(* xiWm
),( xWm
xxiWF
ixiW m
mm
),(),( ** Bei Vorgabe von wird Fm aus Wm berechnet,
bei Vorgabe von i jedoch auch Wm* !
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 73Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
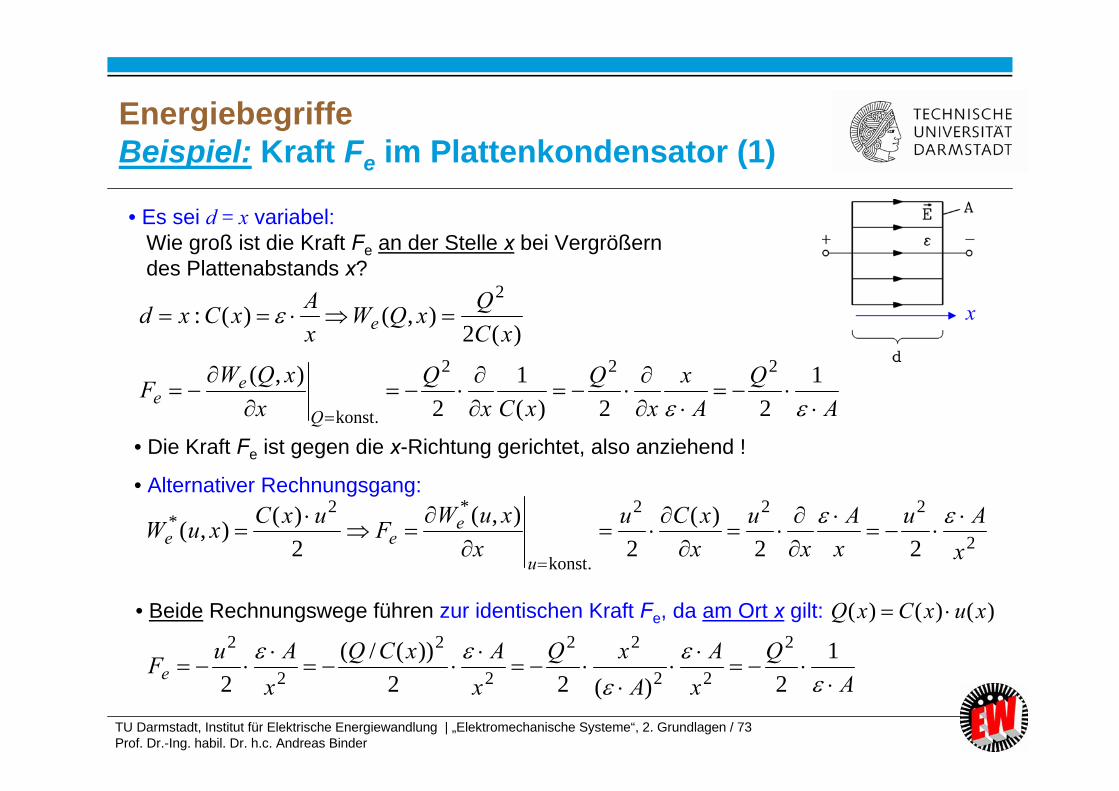
Energiebegriffe Beispiel: Kraft Fe im Plattenkondensator (1)
AQ
Ax
xQ
xCxQ
xxQWF
xCQxQW
xAxCxd
Q
ee
e
122)(
12
),(
)(2),()(:
222
.konst
2
• Es sei d = x variabel: Wie groß ist die Kraft Fe an der Stelle x bei Vergrößerndes Plattenabstands x?
x
• Die Kraft Fe ist gegen die x-Richtung gerichtet, also anziehend !
• Alternativer Rechnungsgang:
2
222
.konst
*2*
22)(
2),(
2)(),(
xAu
xA
xu
xxCu
xxuWFuxCxuW
u
eee
• Beide Rechnungswege führen zur identischen Kraft Fe, da am Ort x gilt:
AQ
xA
AxQ
xAxCQ
xAuFe
12)(22
))(/(2
2
22
22
2
2
2
2
)()()( xuxCxQ
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 74Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Energiebegriffe Beispiel: Kraft Fe im Plattenkondensator (2)
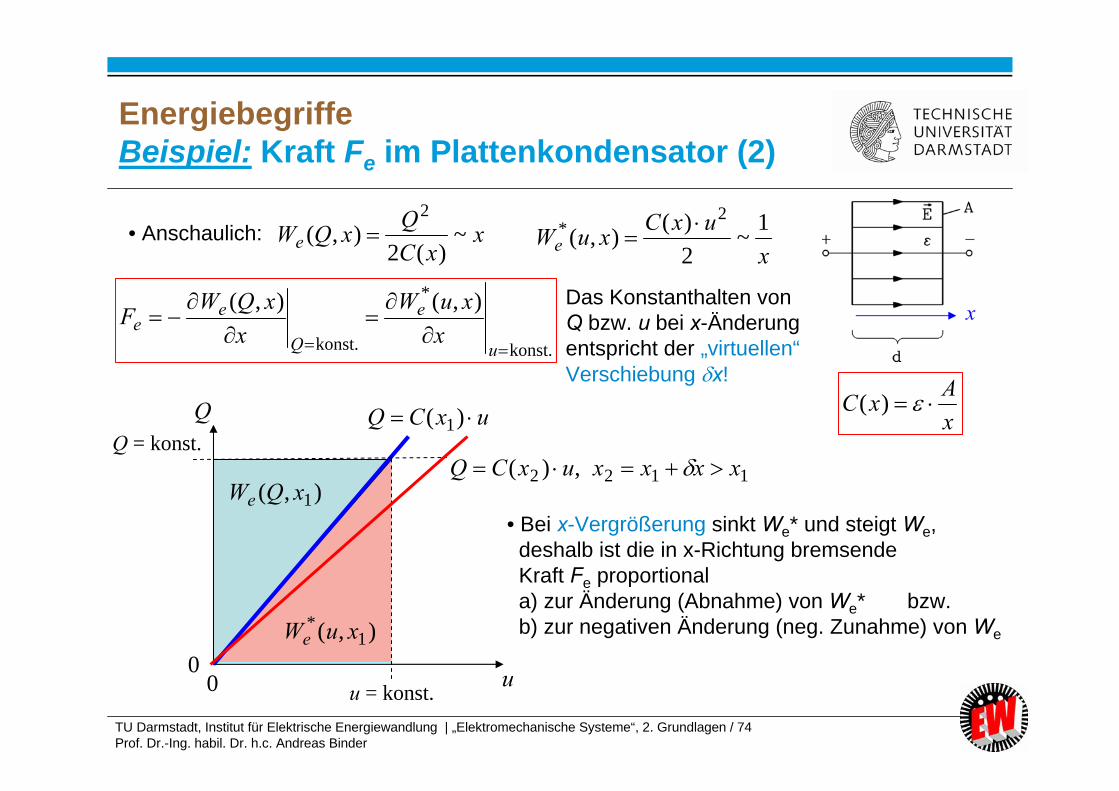
• Anschaulich:
x
xuxCxuWe
1~2)(),(
2*
xxC
QxQWe ~)(2
),(2
xAxC )(
1122 ,)( xxxxuxCQ
• Bei x-Vergrößerung sinkt We* und steigt We, deshalb ist die in x-Richtung bremsende Kraft Fe proportionala) zur Änderung (Abnahme) von We* bzw.b) zur negativen Änderung (neg. Zunahme) von We
konst.
*
konst.
),(),(
u
e
Q
ee x
xuWx
xQWF
Q
00 u
uxCQ )( 1
),( 1xQWe
),( 1* xuWe
u = konst.
Q = konst.
Das Konstanthalten von Q bzw. u bei x-Änderung entspricht der „virtuellen“Verschiebung x!
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 75Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Energiebegriffe Beispiel: Kraft Fe im Plattenkondensator (3)
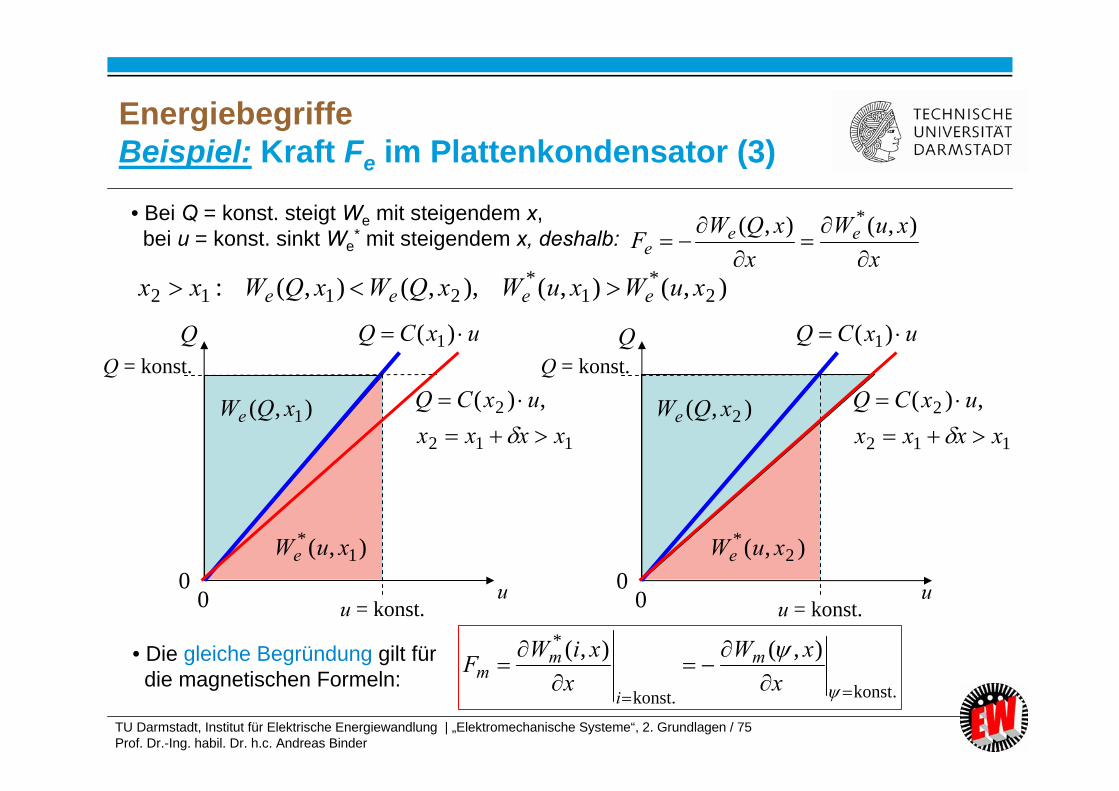
• Bei Q = konst. steigt We mit steigendem x, bei u = konst. sinkt We
* mit steigendem x, deshalb: x
xuWx
xQWF eee
),(),( *
),(),(),,(),(: 2*
1*
2112 xuWxuWxQWxQWxx eeee
112
2 ,)(xxxx
uxCQ
Q
00
uxCQ )( 1
),( 1xQWe
),( 1* xuWe
u = konst.
Q = konst.
112
2 ,)(xxxx
uxCQ
Q
00
uxCQ )( 1
),( 2xQWe
),( 2* xuWe
u = konst.
Q = konst.
u u
• Die gleiche Begründung gilt für die magnetischen Formeln: .konstkonst.
* ),(),(
x
xWx
xiWF m
i
mm
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 76Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Energiebegriffe Beispiel: Kraft Fe im Plattenkondensator (4)
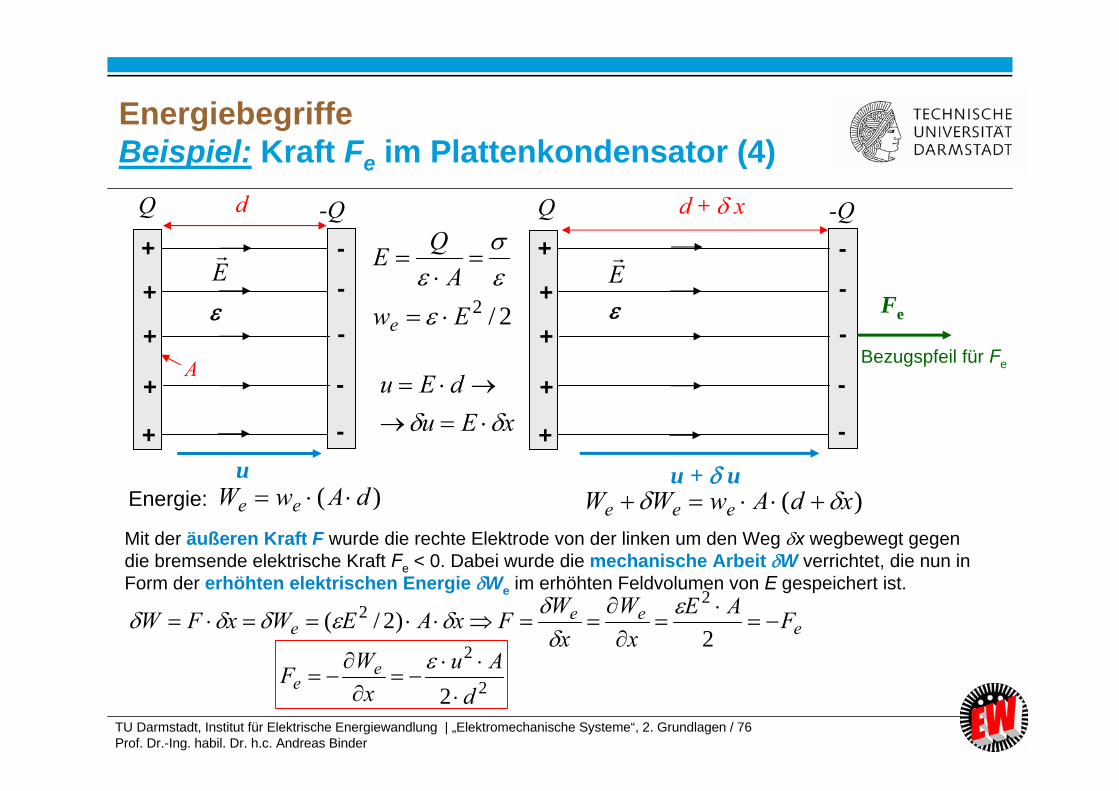
Energie: )( dAwW ee )( xdAwWW eee Mit der äußeren Kraft F wurde die rechte Elektrode von der linken um den Weg x wegbewegt gegen die bremsende elektrische Kraft Fe < 0. Dabei wurde die mechanische Arbeit W verrichtet, die nun in Form der erhöhten elektrischen Energie We im erhöhten Feldvolumen von E gespeichert ist.
eee
e FAEx
Wx
WFxAEWxFW
2
)2/(2
2
2
2
2 dAu
xWF e
e
xEudEu
+
+
+
+
+
--
-
-
-
+
+
+
+
+
--
-
-
-
Q -Q Q -Q
E
E
d d + x
u u + u
Fe
A
2/2EwA
QE
e
Bezugspfeil für Fe
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 77Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
EnergiebegriffeEinachsiges Magnetfeld zwischen zwei Polschuhen
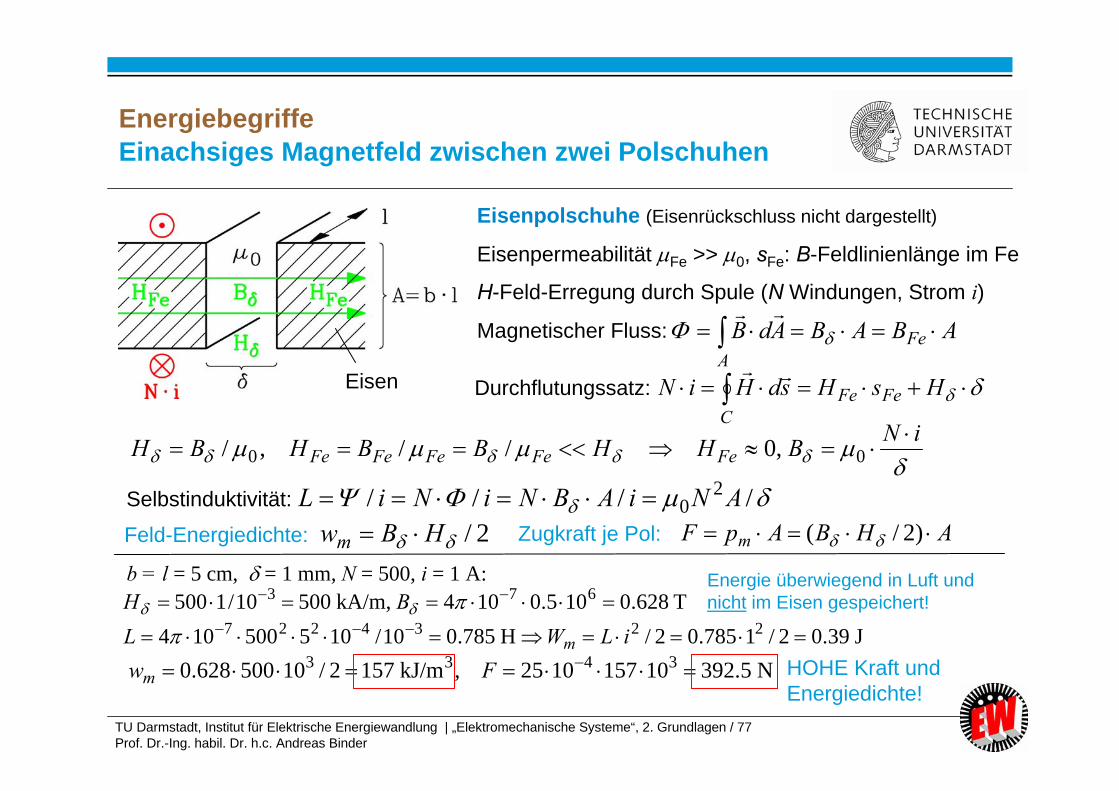
Eisen
Eisenpolschuhe (Eisenrückschluss nicht dargestellt)
Eisenpermeabilität Fe >> 0, sFe: B-Feldlinienlänge im Fe
H-Feld-Erregung durch Spule (N Windungen, Strom i)
Magnetischer Fluss: ABABAdB FeA
HsHsdHiN FeFeC
Durchflutungssatz:
iNBHHBBHBH FeFeFeFeFe
00 ,0//,/
Selbstinduktivität: //// 20 ANiABNiNiL
Feld-Energiedichte: 2/ HBwm Zugkraft je Pol: AHBApF m )2/(
b = l = 5 cm, = 1 mm, N = 500, i = 1 A:
J39.02/1785.02/H785.010/105500104 2234227 iLWL mT628.0105.0104kA/m,50010/1500 673 BH
N5.392101571025,kJ/m1572/10500628.0 3433 Fwm
Energie überwiegend in Luft undnicht im Eisen gespeichert!
HOHE Kraft und Energiedichte!
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 78Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Energiebegriffe Kraftberechnung mit numerischen Programmen
1) Methode der Finiten Differenzen:Die Geometrie wird mit einem regelmäßigen Netz diskretisiertAus den Maxwell-Differential-Gleichungen werden Differenzengleichungen für z. B. B, Hgebildet und für entsprechende Vorgabe der Quellen (Ladungen, Ströme) gelöst
2) Methode der Finiten Elemente:Die Geometrie wird mit einem UNregelmäßigen Netz diskretisiert, so dass die reale Geometrie BESSER approximiert wirdAnstelle der Maxwell-Differential-Gleichungen wird über den Lagrange-Formalismus das zugehörige Variationsproblem der „minimalen Wirkung“ formuliertDamit wird z. B. das Vektorpotential A und daraus mit das Feld B näherungsweise (abhängig von der Diskretisierung) berechnet.
• Kraftberechnung: Für 1) und 2):a) Mit der „virtuellen“ Verschiebung werden zwei um z. B. eine Netzelementbreite
räumlich gegeneinander verschobene Netze berechnet. Aus beiden Feldlösungen wird über die Feldenergie-Differenz die Kraft auf einen Körper berechnet
b) Aus den Feldwerten werden die 4 od. 9 Komponenten des Maxwell´schenSpannungstensors auf einer vorgegebenen (geschlossenen) Oberfläche berechnet unddaraus die resultierende Kraft auf den eingeschlossenen Körper
AAB
rot
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 79Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
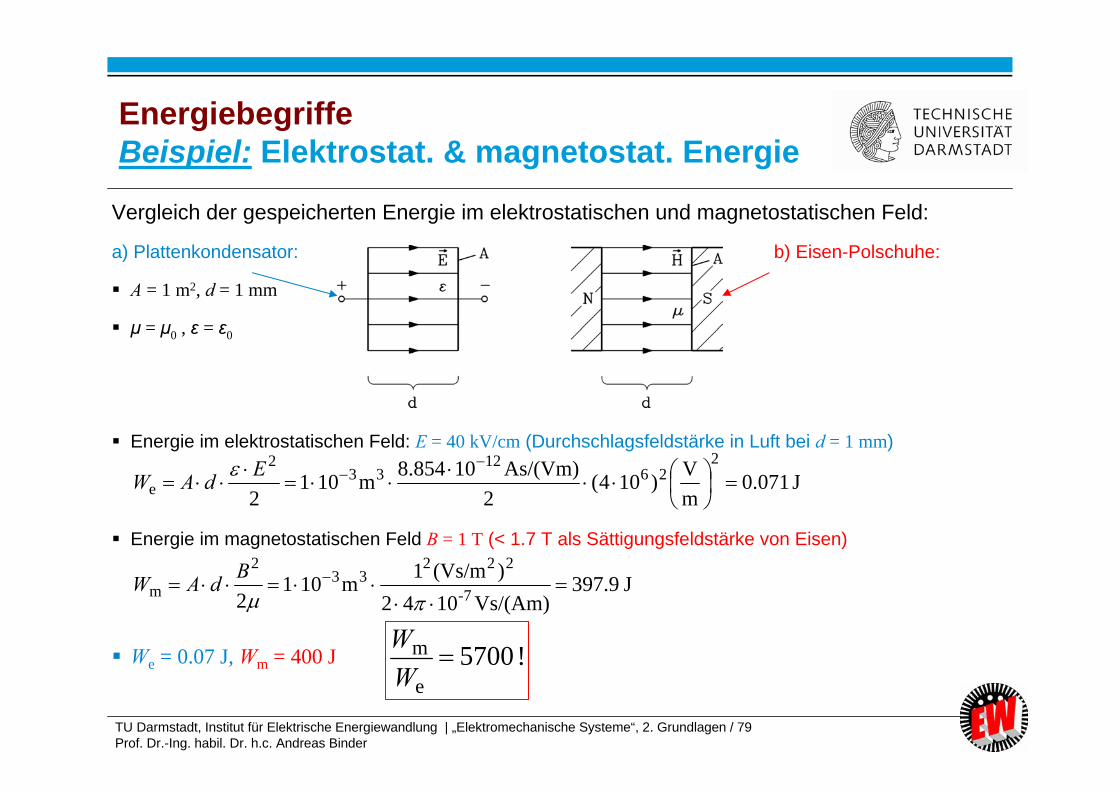
EnergiebegriffeBeispiel: Elektrostat. & magnetostat. Energie
Vergleich der gespeicherten Energie im elektrostatischen und magnetostatischen Feld:
a) Plattenkondensator: b) Eisen-Polschuhe:
A = 1 m2, d = 1 mm
μ = μ0 , ε = ε0
Energie im elektrostatischen Feld: E = 40 kV/cm (Durchschlagsfeldstärke in Luft bei d = 1 mm)
Energie im magnetostatischen Feld B = 1 T (< 1.7 T als Sättigungsfeldstärke von Eisen)
We = 0.07 J, Wm = 400 J
J071.0mV)104(
2As/(Vm)10854.8m101
2
226
1233
2
e
EdAW
!5700e
m WW
J9.397Vs/(Am)1042
)(Vs/m1m1012 7-
22233
2
m
BdAW
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 80Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
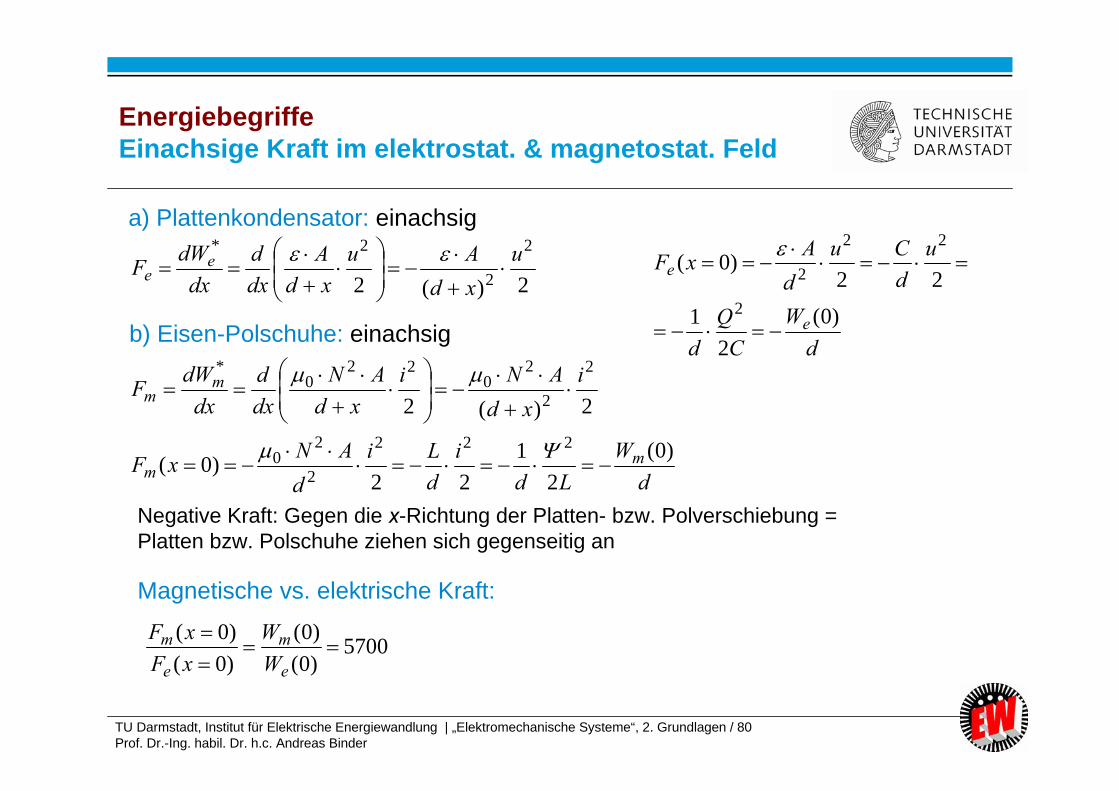
EnergiebegriffeEinachsige Kraft im elektrostat. & magnetostat. Feld
a) Plattenkondensator: einachsig
2)(2
2
2
2* uxdAu
xdA
dxd
dxdWF e
e
b) Eisen-Polschuhe: einachsig
dW
Ldi
dLi
dANxF
ixd
ANixd
ANdxd
dxdWF
mm
mm
)0(2
122
)0(
2)(2222
2
20
2
2
20
220
*
Magnetische vs. elektrische Kraft:
5700)0()0(
)0()0(
e
m
e
mWW
xFxF
Negative Kraft: Gegen die x-Richtung der Platten- bzw. Polverschiebung = Platten bzw. Polschuhe ziehen sich gegenseitig an
dW
CQ
d
udCu
dAxF
e
e
)0(2
1
22)0(
2
22
2
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 81Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiel:Gleiches Luft-Volumen: Fläche A = 1m2, Abstand d = 1mmWm / We = 400/0.07 = 5700 (!)
Das magnetische Feld erlaubt wesentlich größere Energiedichten/Kräfte Daher werden bei größeren Leistungen/Kräften bevorzugt
elektro-magnetische Wandler eingesetzt! Bei Mikro-Wandlern werden aber
a) Elektrostatische Kräfte, b) Piezoeffekt-Kräfteverwendet (= elektrische Wandler), da sich 1) Ladungsanordnungen wesentlich besser miniaturisieren lassen als elektrisch
isolierte Draht-Spulen-Körper,2) bei kleinen Abständen (Sub-m-Bereich) die Durchschlagsfeldstärke ED
deutlich erhöht ist. Die Kräfte in elektrischen Wandlern sind aber i. A. sehr klein
Änderung der Ko-Energie bei kleinen Wegänderungen = Kraft: F = dW*/dx
EnergiebegriffeMagnetische vs. elektrische Wandler
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 82Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme2. Grundlagen
Dynamische Grundgesetze der Mechanik und Elektromagnetik Materialgesetze Kraftgesetze Energiebegriffe Einführendes Beispiel:
Kopplung eines mechanischen mit einem el.-magn. System
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 83Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
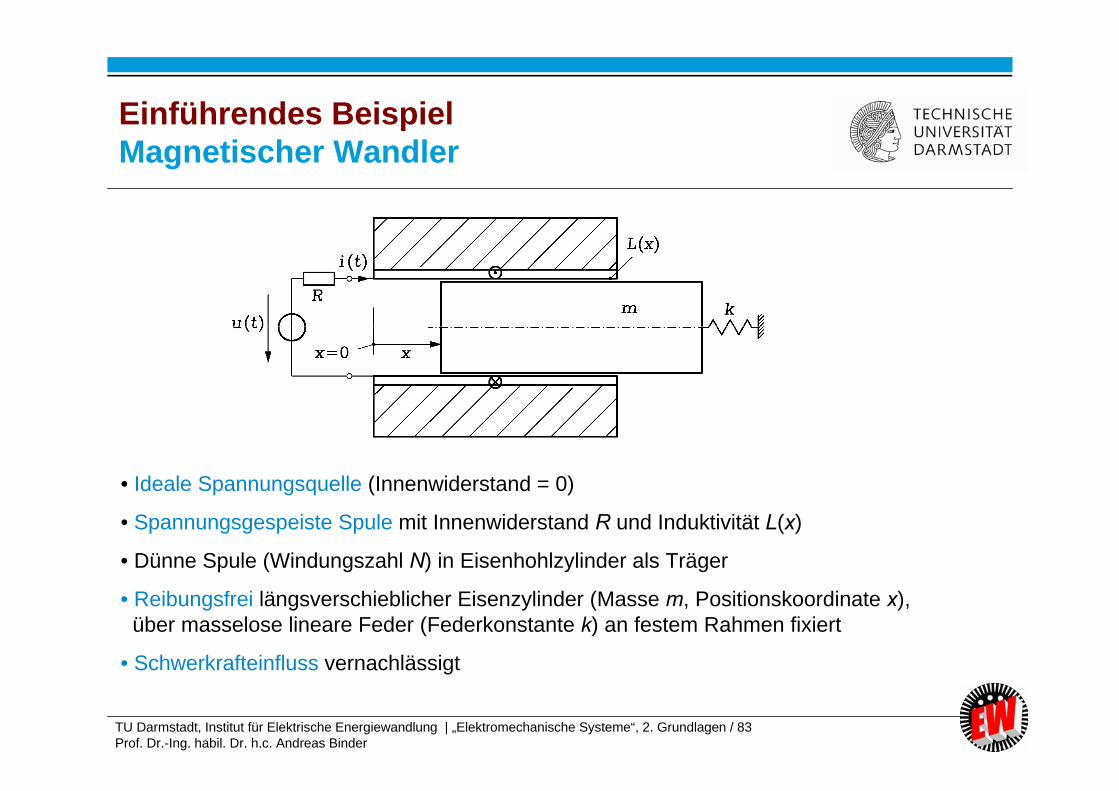
Einführendes BeispielMagnetischer Wandler
• Ideale Spannungsquelle (Innenwiderstand = 0)
• Spannungsgespeiste Spule mit Innenwiderstand R und Induktivität L(x)
• Dünne Spule (Windungszahl N) in Eisenhohlzylinder als Träger
• Reibungsfrei längsverschieblicher Eisenzylinder (Masse m, Positionskoordinate x), über masselose lineare Feder (Federkonstante k) an festem Rahmen fixiert
• Schwerkrafteinfluss vernachlässigt
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 84Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
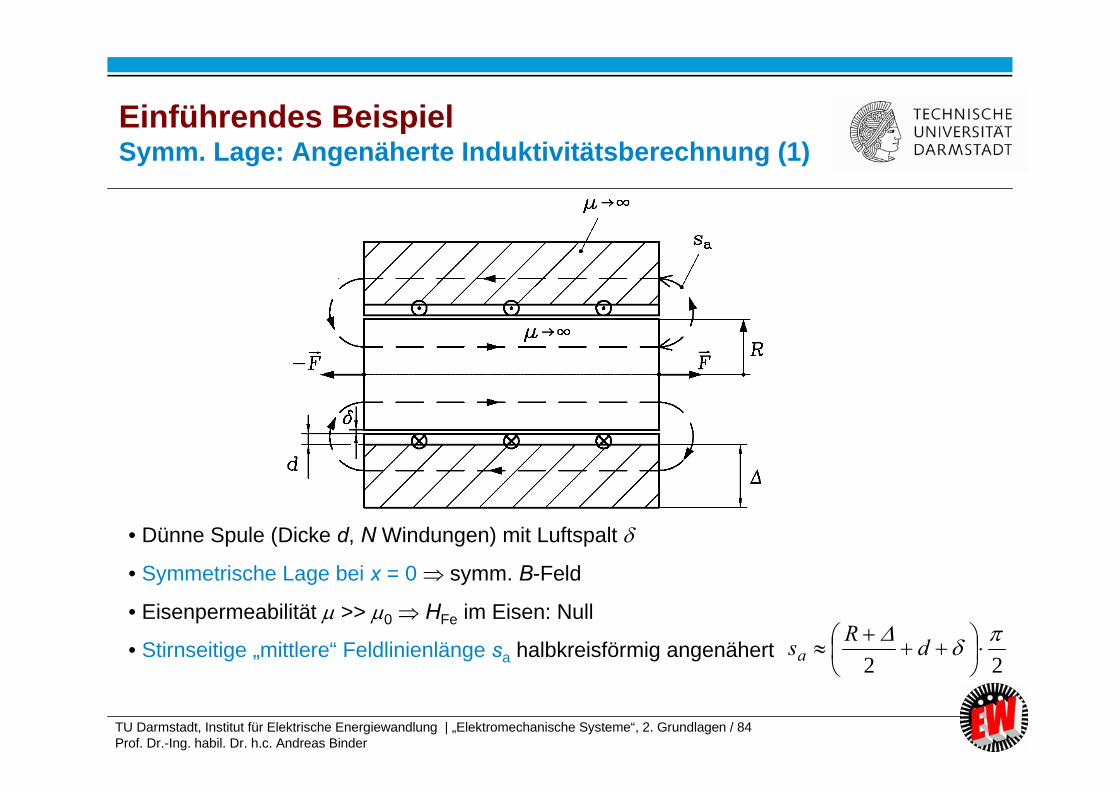
Einführendes BeispielSymm. Lage: Angenäherte Induktivitätsberechnung (1)
• Dünne Spule (Dicke d, N Windungen) mit Luftspalt
• Symmetrische Lage bei x = 0 symm. B-Feld
• Eisenpermeabilität >> 0 HFe im Eisen: Null
• Stirnseitige „mittlere“ Feldlinienlänge sa halbkreisförmig angenähert 22
dRsa
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 85Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
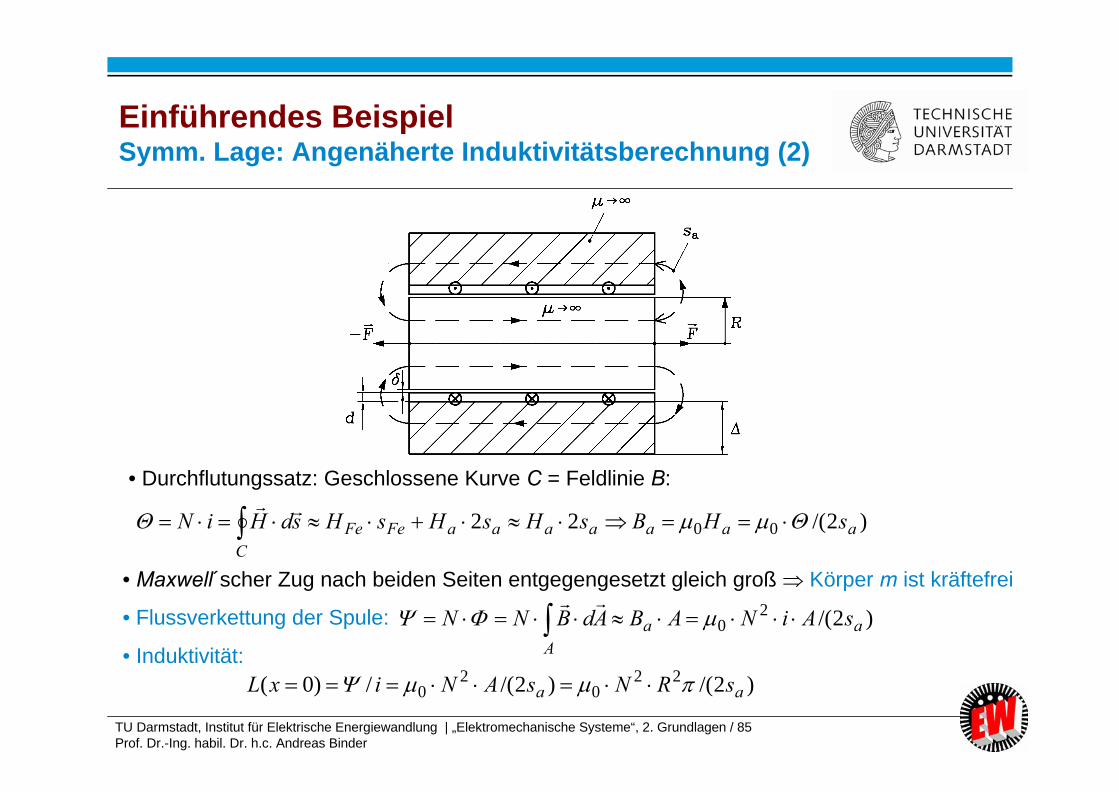
Einführendes BeispielSymm. Lage: Angenäherte Induktivitätsberechnung (2)
• Durchflutungssatz: Geschlossene Kurve C = Feldlinie B:
)2/(22 00 aaaaaaaFeFeC
sHBsHsHsHsdHiN
• Maxwell´scher Zug nach beiden Seiten entgegengesetzt gleich groß Körper m ist kräftefrei
• Flussverkettung der Spule:
• Induktivität:
)2/(20 aa
A
sAiNABAdBNN
)2/()2/(/)0( 220
20 aa sRNsANixL
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 86Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Einführendes BeispielAsymm. Lage: Angenäherte Kraftberechnung
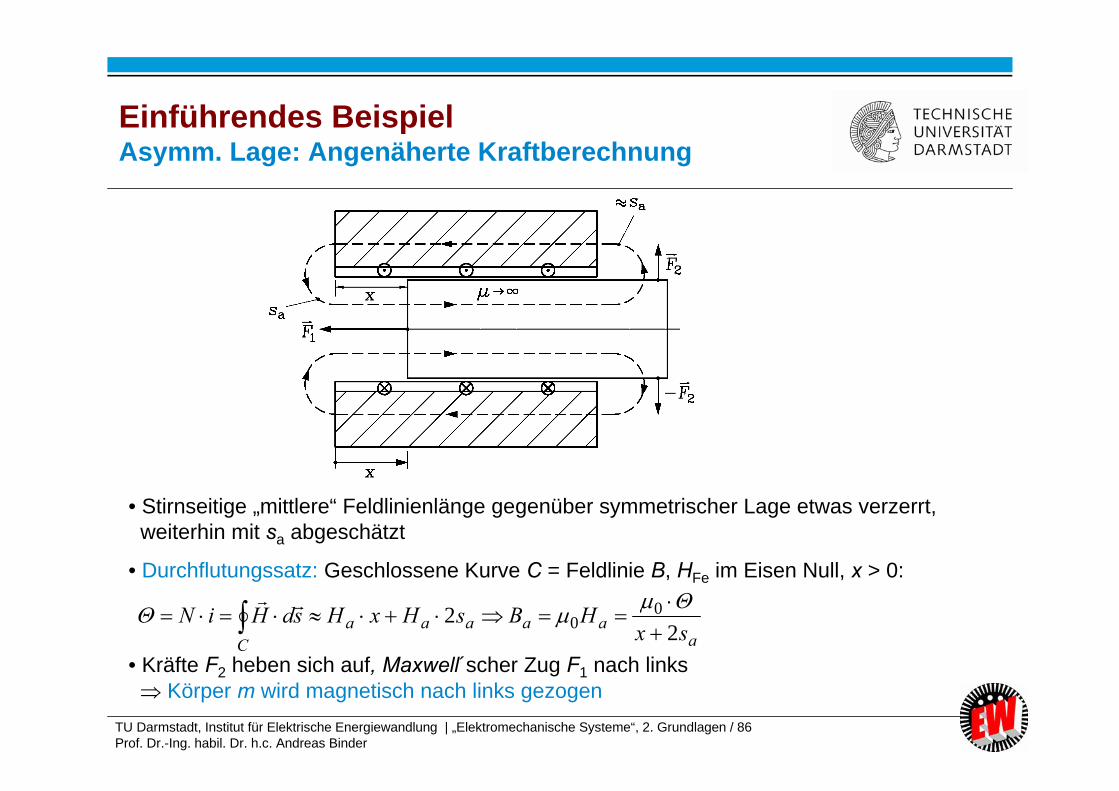
• Stirnseitige „mittlere“ Feldlinienlänge gegenüber symmetrischer Lage etwas verzerrt, weiterhin mit sa abgeschätzt
• Durchflutungssatz: Geschlossene Kurve C = Feldlinie B, HFe im Eisen Null, x > 0:
aaaaaa
C sxHBsHxHsdHiN
22 0
0
• Kräfte F2 heben sich auf, Maxwell´scher Zug F1 nach links Körper m wird magnetisch nach links gezogen
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 87Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Einführendes BeispielAsymm. Lage: Angenäherte Induktivitätsberechnung
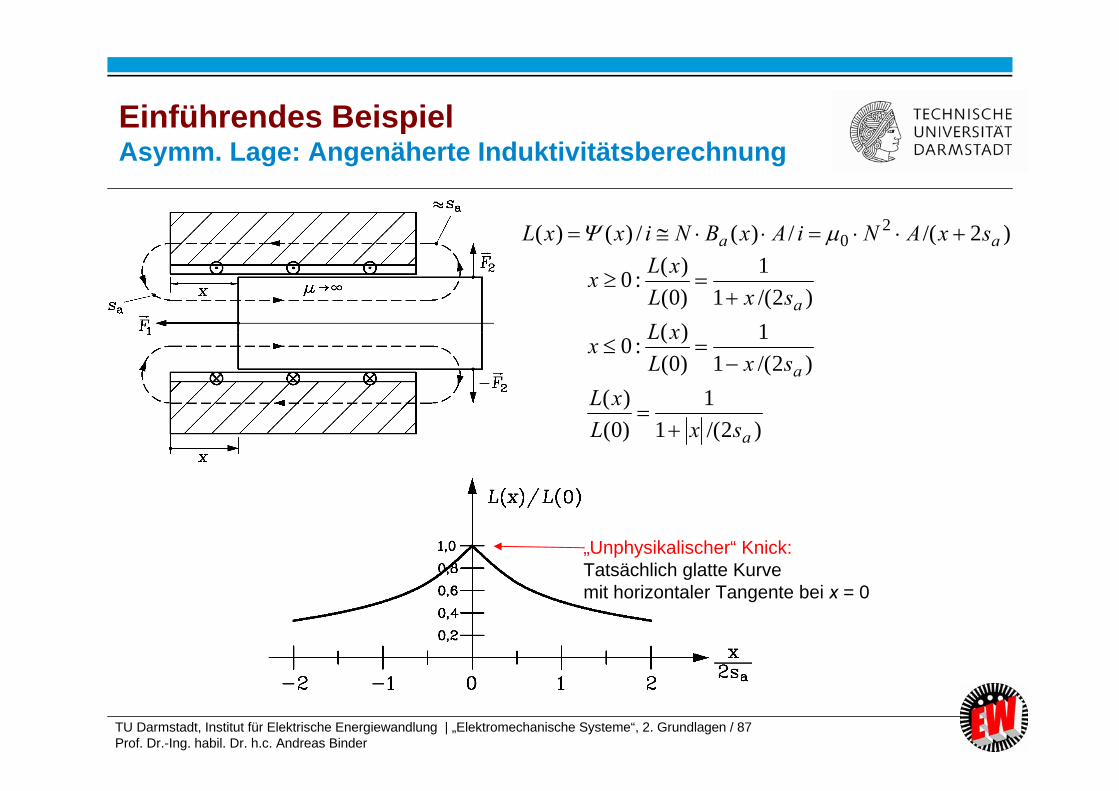
)2/(/)(/)()( 20 aa sxANiAxBNixxL
)2/(11
)0()(
)2/(11
)0()(:0
)2/(11
)0()(:0
a
a
a
sxLxL
sxLxLx
sxLxLx
„Unphysikalischer“ Knick: Tatsächlich glatte Kurve mit horizontaler Tangente bei x = 0
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 88Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Einführendes BeispielAsymm. Lage: Kraftberechnung F1
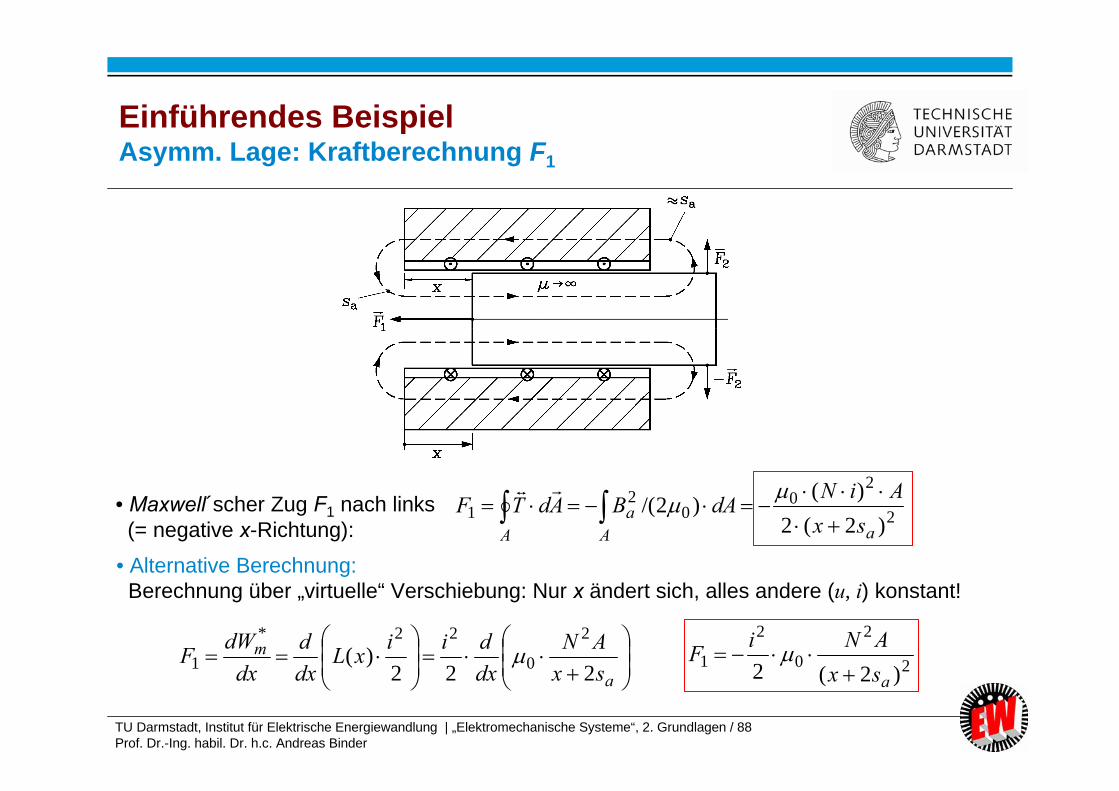
• Maxwell´scher Zug F1 nach links (= negative x-Richtung):
2
20
02
1 )2(2)()2/(
aAa
A sxAiNdABAdTF
• Alternative Berechnung:Berechnung über „virtuelle“ Verschiebung: Nur x ändert sich, alles andere (u, i) konstant!
a
msxAN
dxdiixL
dxd
dxdWF
222)(
2
0
22*
1 2
2
0
2
1 )2(2 asxANiF
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 89Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Einführendes BeispielAsymm. Lage: Resultierende Kraft auf den Körper
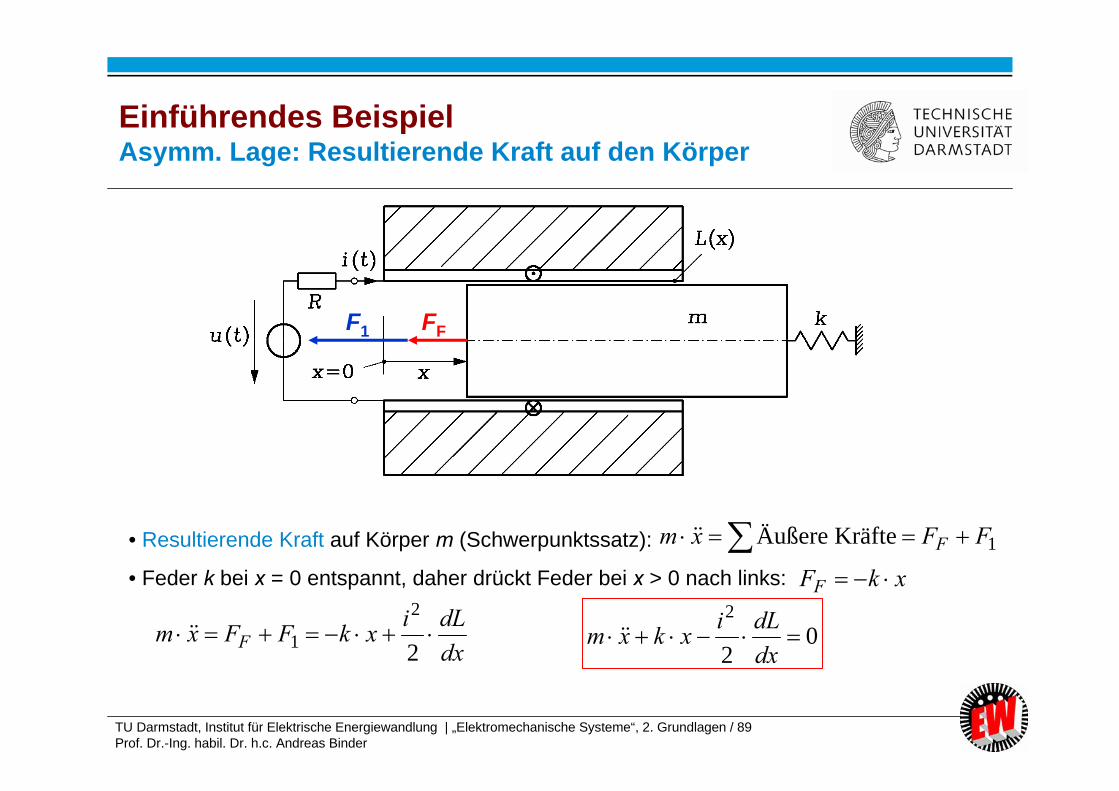
• Resultierende Kraft auf Körper m (Schwerpunktssatz):
• Feder k bei x = 0 entspannt, daher drückt Feder bei x > 0 nach links: xkFF
dxdLixkFFxm F
2
2
1 02
2
dxdLixkxm
1KräfteÄußere FFxm F
FFF1
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 90Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
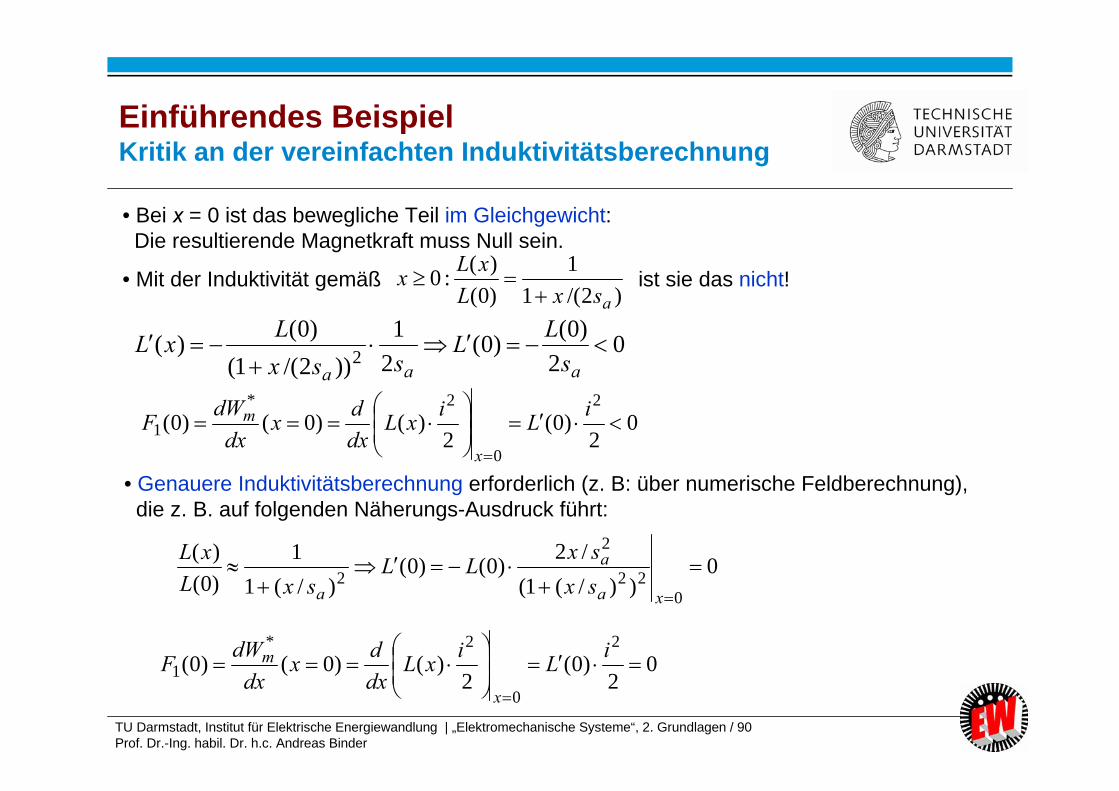
Einführendes BeispielKritik an der vereinfachten Induktivitätsberechnung
• Bei x = 0 ist das bewegliche Teil im Gleichgewicht: Die resultierende Magnetkraft muss Null sein.
• Mit der Induktivität gemäß ist sie das nicht!
02
)0()0(21
))2/(1()0()( 2
aaa sLL
ssxLxL
)2/(11
)0()(:0
asxLxLx
02
)0(2
)()0()0(2
0
2*
1
iLixLdxdx
dxdWF
x
m
• Genauere Induktivitätsberechnung erforderlich (z. B: über numerische Feldberechnung), die z. B. auf folgenden Näherungs-Ausdruck führt:
0))/(1(
/2)0()0()/(1
1)0()(
022
2
2
xa
a
a sxsxLL
sxLxL
02
)0(2
)()0()0(2
0
2*
1
iLixLdxdx
dxdWF
x
m
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 91Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
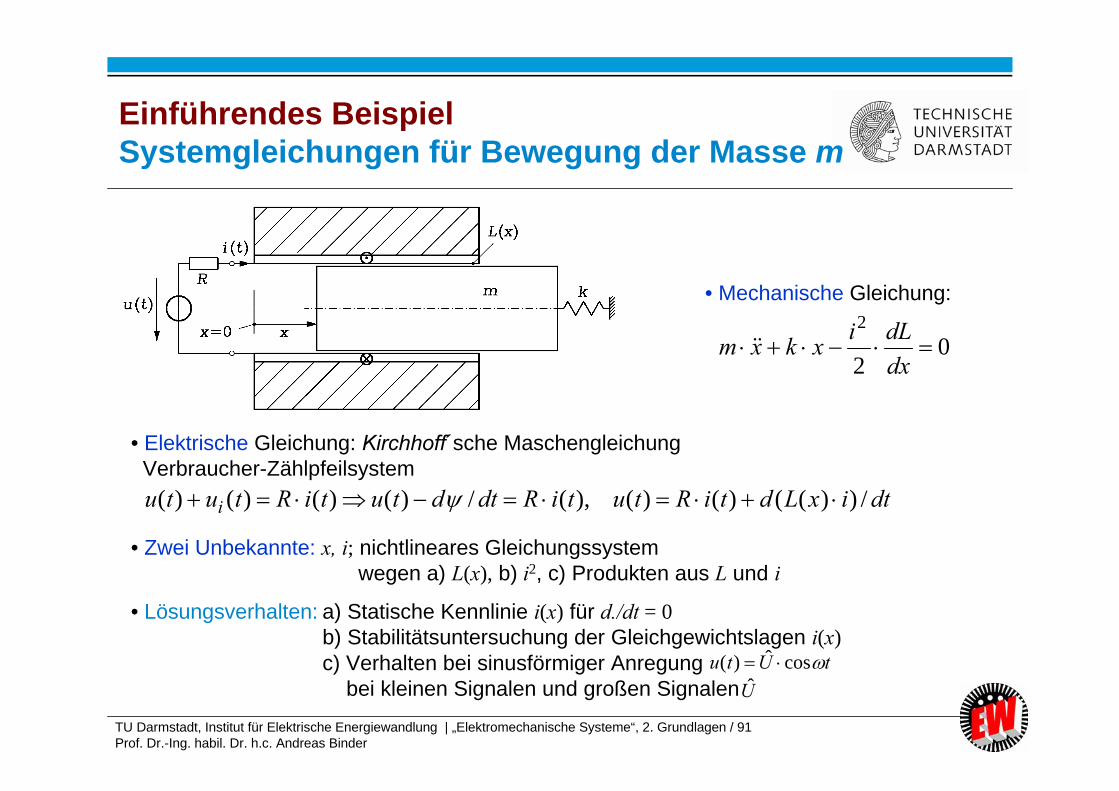
Einführendes BeispielSystemgleichungen für Bewegung der Masse m
• Mechanische Gleichung:
02
2
dxdLixkxm
• Elektrische Gleichung: Kirchhoff´sche MaschengleichungVerbraucher-Zählpfeilsystem
dtixLdtiRtutiRdtdtutiRtutu i /))(()()(),(/)()()()(
• Zwei Unbekannte: x, i; nichtlineares Gleichungssystem wegen a) L(x), b) i2, c) Produkten aus L und i
• Lösungsverhalten: a) Statische Kennlinie i(x) für d./dt = 0b) Stabilitätsuntersuchung der Gleichgewichtslagen i(x)c) Verhalten bei sinusförmiger Anregung
bei kleinen Signalen und großen Signalen tUtu cosˆ)(
U
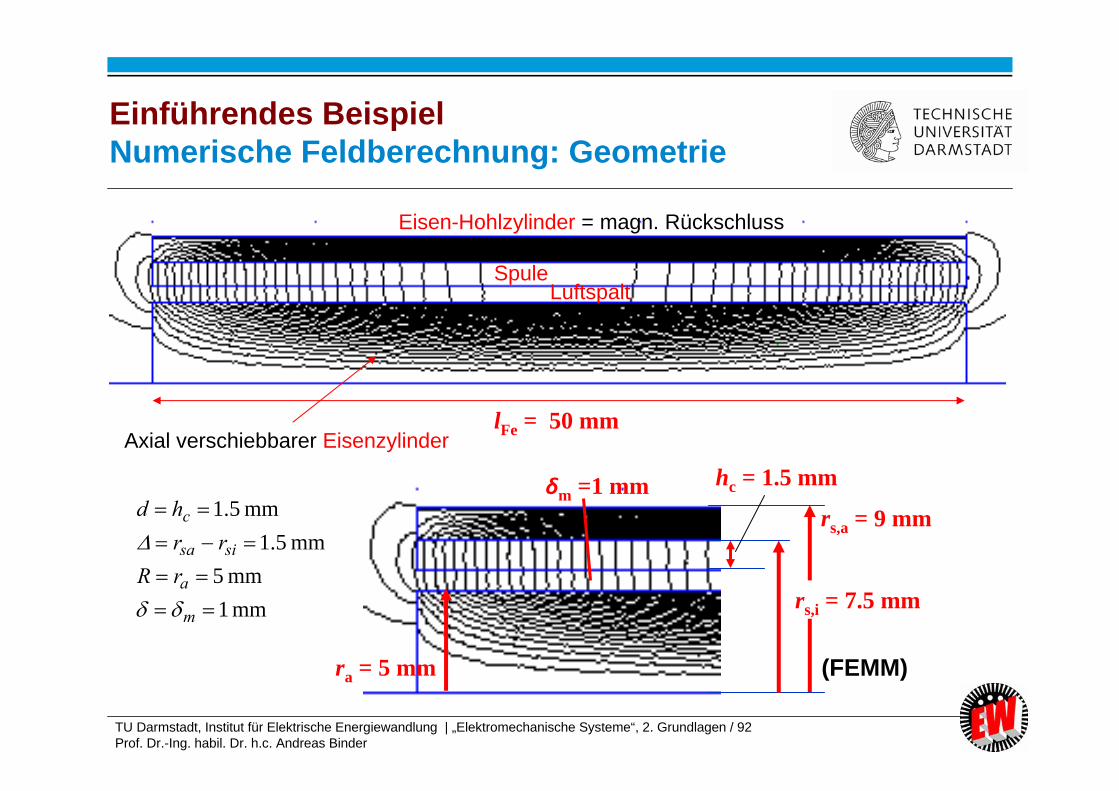
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 92Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Einführendes BeispielNumerische Feldberechnung: Geometrie
(FEMM)ra = 5 mm
rs,a = 9 mm
rs,i = 7.5 mm
hc = 1.5 mmδm =1 mm
lFe = 50 mm
SpuleLuftspalt
Eisen-Hohlzylinder = magn. Rückschluss
Axial verschiebbarer Eisenzylinder
mm1mm5
mm5.1mm5.1
m
a
sisa
c
rRrr
hd
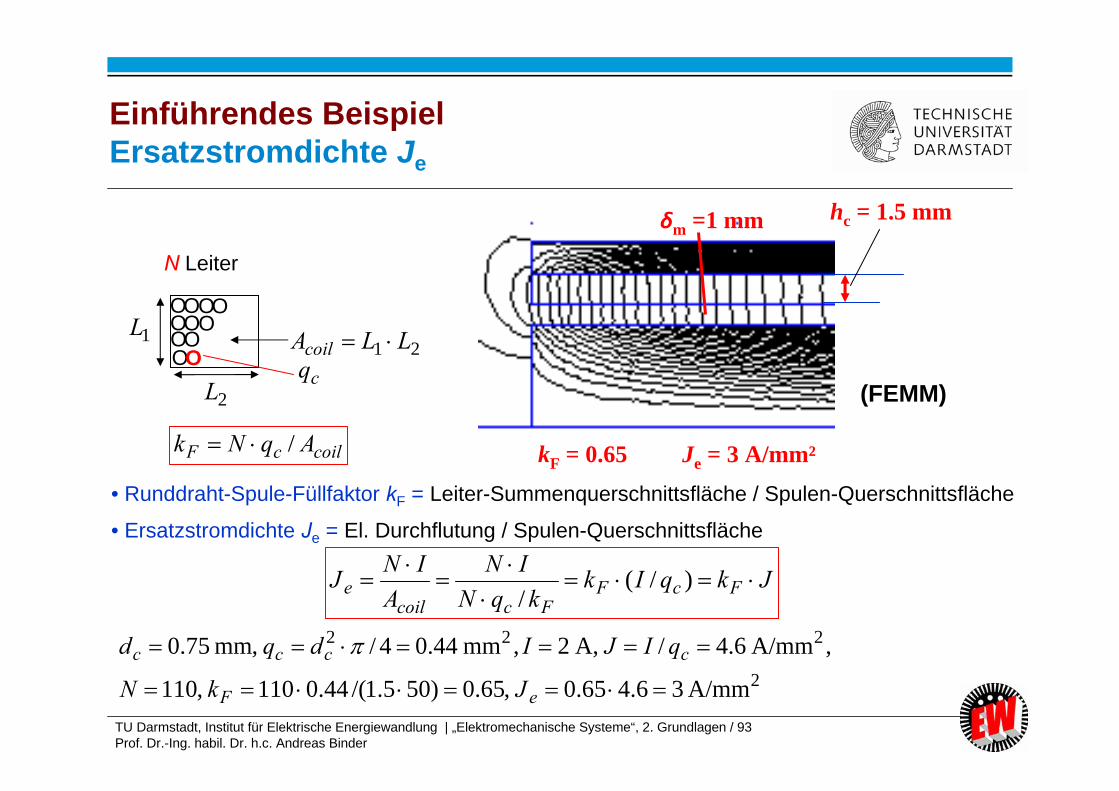
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 93Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Einführendes BeispielErsatzstromdichte Je
(FEMM)
hc = 1.5 mmδm =1 mm
• Runddraht-Spule-Füllfaktor kF = Leiter-Summenquerschnittsfläche / Spulen-Querschnittsfläche
• Ersatzstromdichte Je = El. Durchflutung / Spulen-Querschnittsfläche
JkqIkkqN
INA
INJ FcFFccoil
e
)/(/
kF = 0.65coilcF AqNk /
OOOOOOOOOOO 21 LLAcoil
cq1L
2L
N Leiter
Je = 3 A/mm²
2
222
A/mm36.465.0,65.0)505.1/(44.0110,110
,A/mm6.4/A,2,mm44.04/,mm75.0
eF
cccc
JkN
qIJIdqd
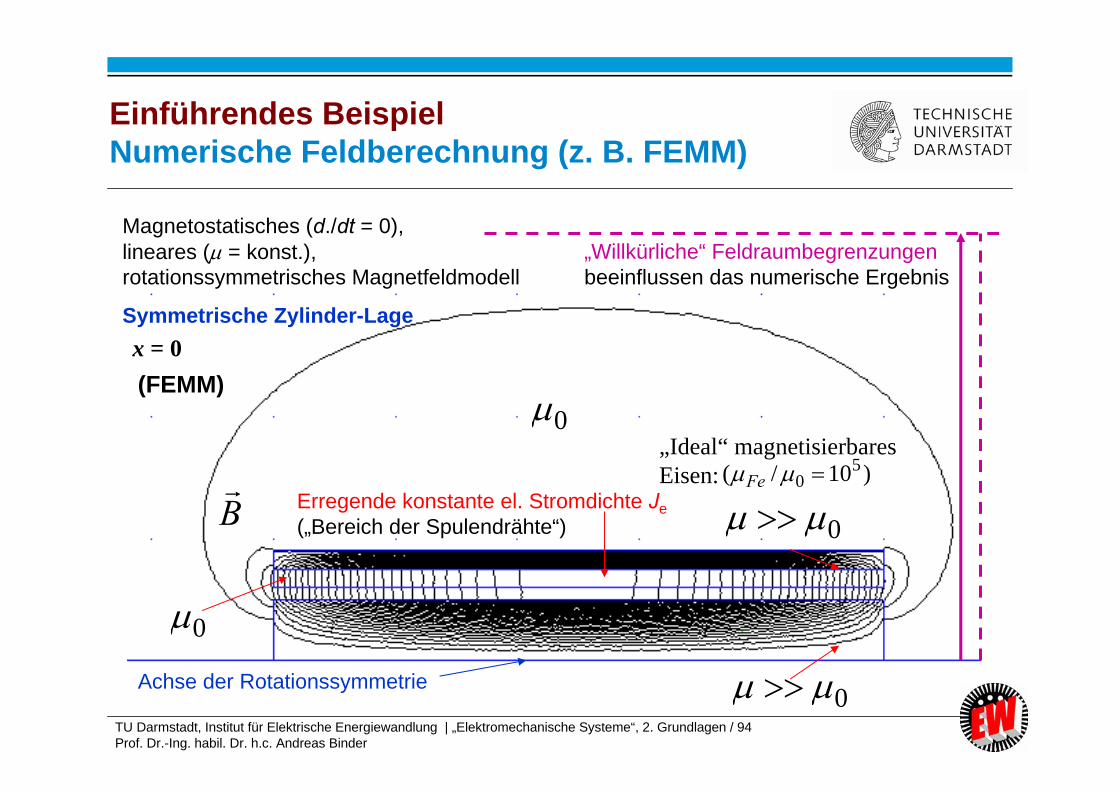
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 94Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Einführendes BeispielNumerische Feldberechnung (z. B. FEMM)
B
0
0
0
0
Magnetostatisches (d./dt = 0), lineares ( = konst.), rotationssymmetrisches Magnetfeldmodell
Symmetrische Zylinder-Lage
Erregende konstante el. Stromdichte Je(„Bereich der Spulendrähte“)
Achse der Rotationssymmetrie
„Willkürliche“ Feldraumbegrenzungenbeeinflussen das numerische Ergebnis
(FEMM)
)10/( 50 Fe
x = 0
„Ideal“ magnetisierbares Eisen:
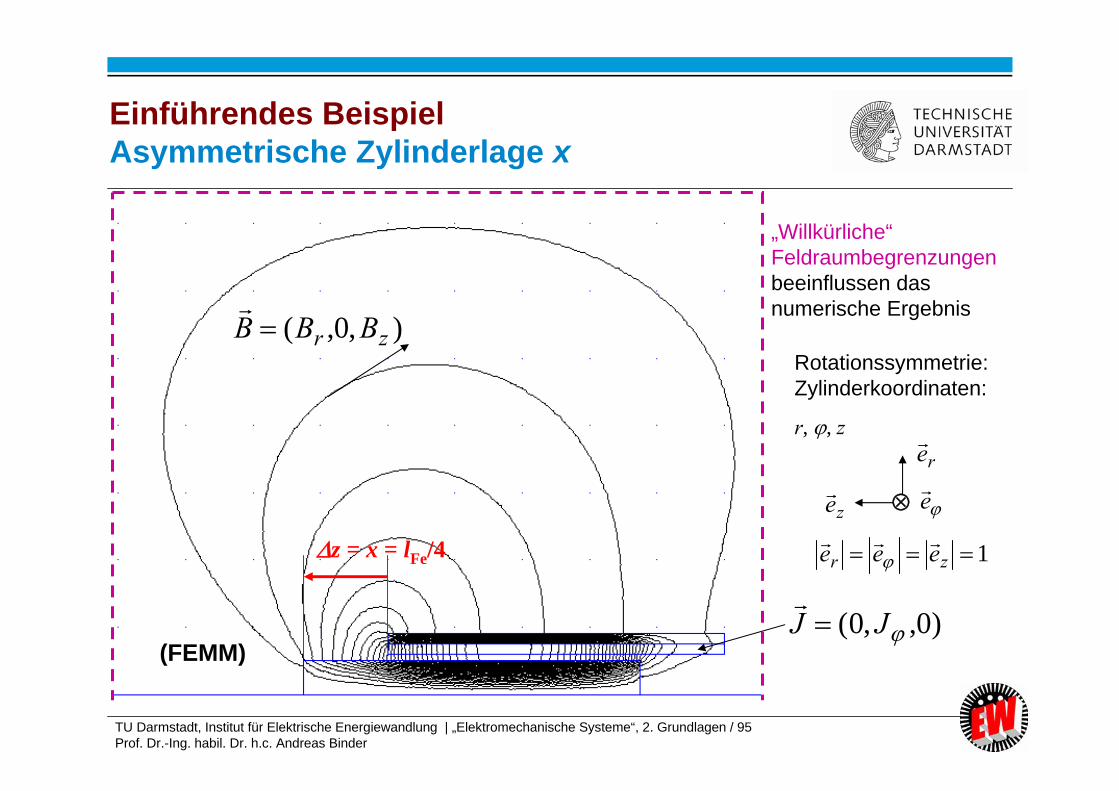
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 95Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Einführendes BeispielAsymmetrische Zylinderlage x
„Willkürliche“Feldraumbegrenzungenbeeinflussen das numerische Ergebnis
z = x = lFe/4
),0,( zr BBB
)0,,0( JJ
Rotationssymmetrie:Zylinderkoordinaten:
r, , z
re
e
ze
1 zr eee
(FEMM)
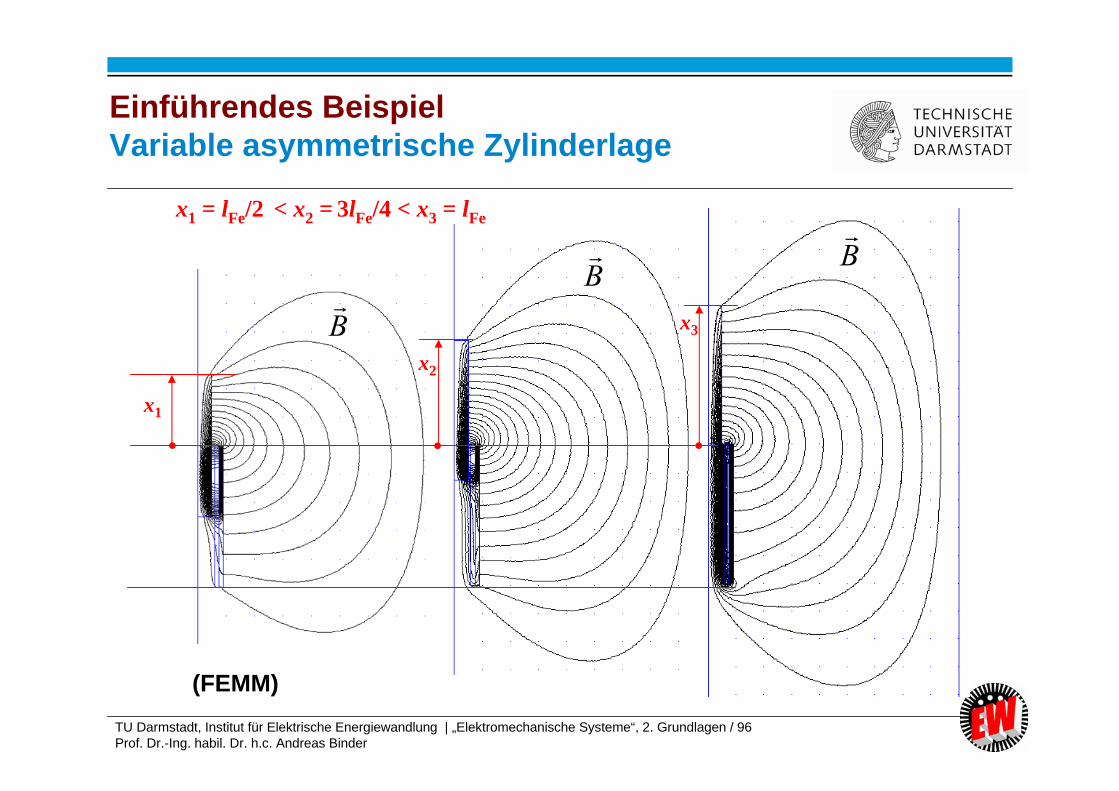
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 96Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Einführendes BeispielVariable asymmetrische Zylinderlage
x1
x2
x3
x1 = lFe/2 < x2 = 3lFe/4 < x3 = lFe
(FEMM)
B
B
B
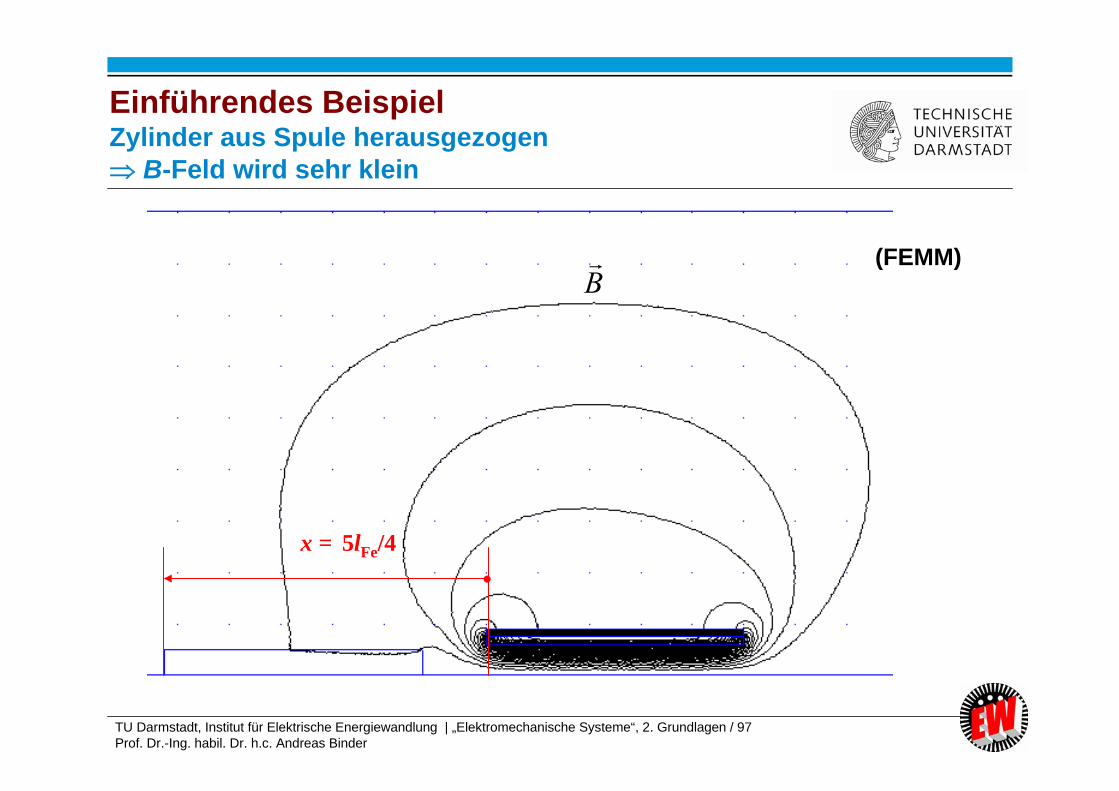
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 97Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Einführendes BeispielZylinder aus Spule herausgezogen B-Feld wird sehr klein
(FEMM)
x = 5lFe/4
B
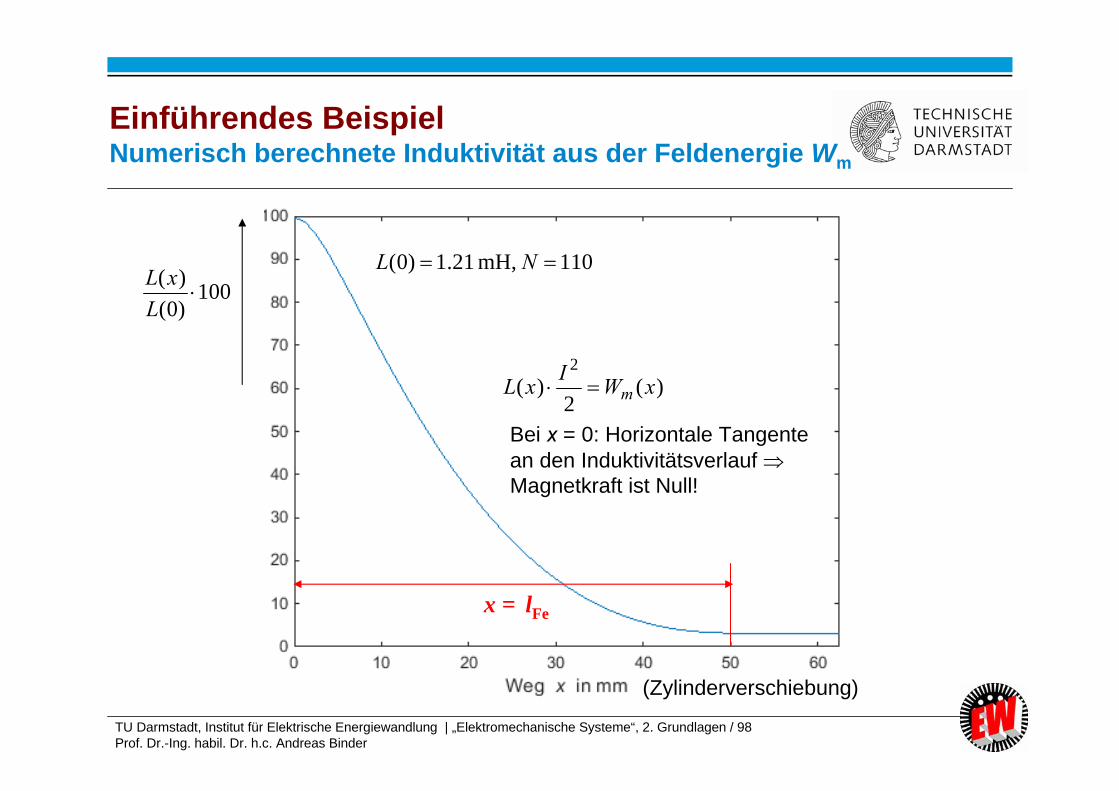
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 98Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Einführendes BeispielNumerisch berechnete Induktivität aus der Feldenergie Wm
100)0()(
LxL
110mH,21.1)0( NL
(Zylinderverschiebung)
x = lFe
)(2
)(2
xWIxL m
Bei x = 0: Horizontale Tangente an den Induktivitätsverlauf Magnetkraft ist Null!
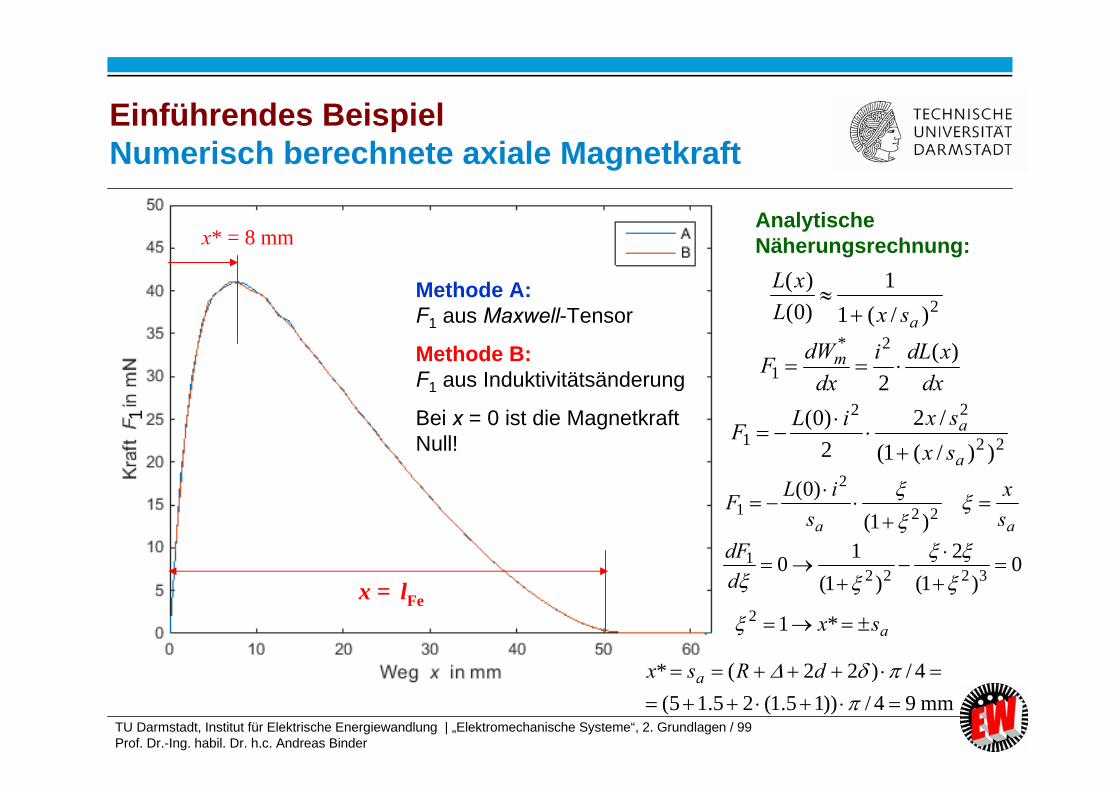
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 99Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Einführendes BeispielNumerisch berechnete axiale Magnetkraft
(Zylinderverschiebung)
x = lFe
Methode A:F1 aus Maxwell-Tensor
Methode B:F1 aus Induktivitätsänderung
Bei x = 0 ist die Magnetkraft Null!
2)/(11
)0()(
asxLxL
Analytische Näherungsrechnung:
dxxdLi
dxdWF m )(
2
2*
1
22
22
1 ))/(1(/2
2)0(
a
a
sxsxiLF
aa sx
siLF
22
2
1 )1()0(
1
0)1(
2)1(
10 32221
ddF
asx *12
mm94/))15.1(25.15(4/)22(*
dRsx a
x* = 8 mm
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 2. Grundlagen / 100Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme2. Grundlagen
Zusammenfassung:
- Mechanische und elektromagnetische Kräfte- Mechanische und elektromagnetische Energien- Kopplung der mechanischen und elektrischen Systemgleichungen- Nichtlineare Differentialgleichungen mit mehreren Unbekannten
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 1Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme Elektromechanische Systeme
3. Formale Behandlung 3. Formale Behandlung elektromechanischer diskreter Systemeelektromechanischer diskreter Systeme
• Bezugspfeile, Leistungsfluss, Energiefluss• Potentielle Energiespeicher• Beispiel:
Beweglicher Plattenkondensator• Kinetische Energiespeicher• Beispiel:
Bewegliche gekoppelte Spulen• Energiedissipation• Elektrische Ersatzelemente
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 2Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme3. Formale Behandlung
elektromechanischer diskreter Systeme
Bezugspfeile, Leistungsfluss, Energiefluss Potentielle Energiespeicher Beispiel:
Beweglicher Plattenkondensator Kinetische Energiespeicher Beispiel:
Bewegliche gekoppelte Spulen Energiedissipation Elektrische Ersatzelemente
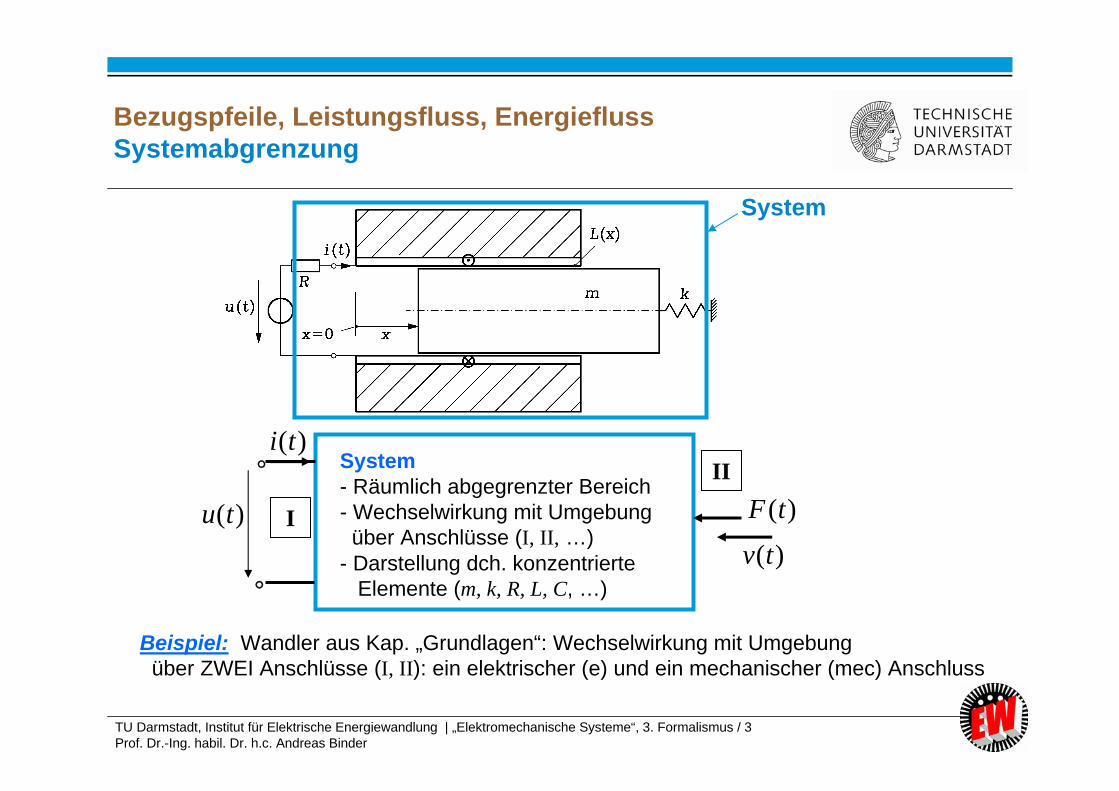
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 3Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Bezugspfeile, Leistungsfluss, EnergieflussSystemabgrenzung
System
System- Räumlich abgegrenzter Bereich- Wechselwirkung mit Umgebung
über Anschlüsse (I, II, …)- Darstellung dch. konzentrierte
Elemente (m, k, R, L, C, …)
I
II)(ti
)(tu )(tF
)(tv
Beispiel: Wandler aus Kap. „Grundlagen“: Wechselwirkung mit Umgebungüber ZWEI Anschlüsse (I, II): ein elektrischer (e) und ein mechanischer (mec) Anschluss
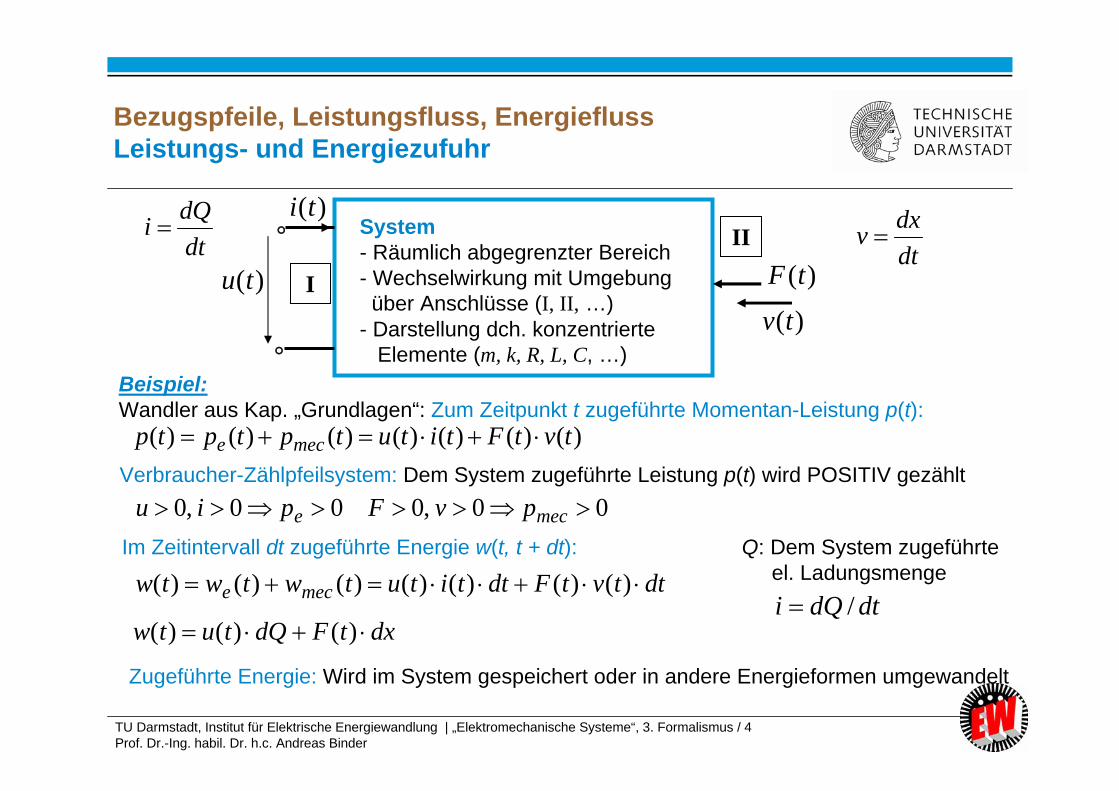
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 4Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Bezugspfeile, Leistungsfluss, EnergieflussLeistungs- und Energiezufuhr
System- Räumlich abgegrenzter Bereich- Wechselwirkung mit Umgebung
über Anschlüsse (I, II, …)- Darstellung dch. konzentrierte
Elemente (m, k, R, L, C, …)
I
II)(ti
)(tu )(tF
)(tv
Beispiel:Wandler aus Kap. „Grundlagen“: Zum Zeitpunkt t zugeführte Momentan-Leistung p(t):
)()()()()()()( tvtFtitutptptp mece Verbraucher-Zählpfeilsystem: Dem System zugeführte Leistung p(t) wird POSITIV gezählt
00,000,0 mece pvFpiuIm Zeitintervall dt zugeführte Energie w(t, t + dt):
dttvtFdttitutwtwtw mece )()()()()()()(Q: Dem System zugeführte
el. LadungsmengedtdQi /
dxtFdQtutw )()()(
dtdQi
dtdxv
Zugeführte Energie: Wird im System gespeichert oder in andere Energieformen umgewandelt
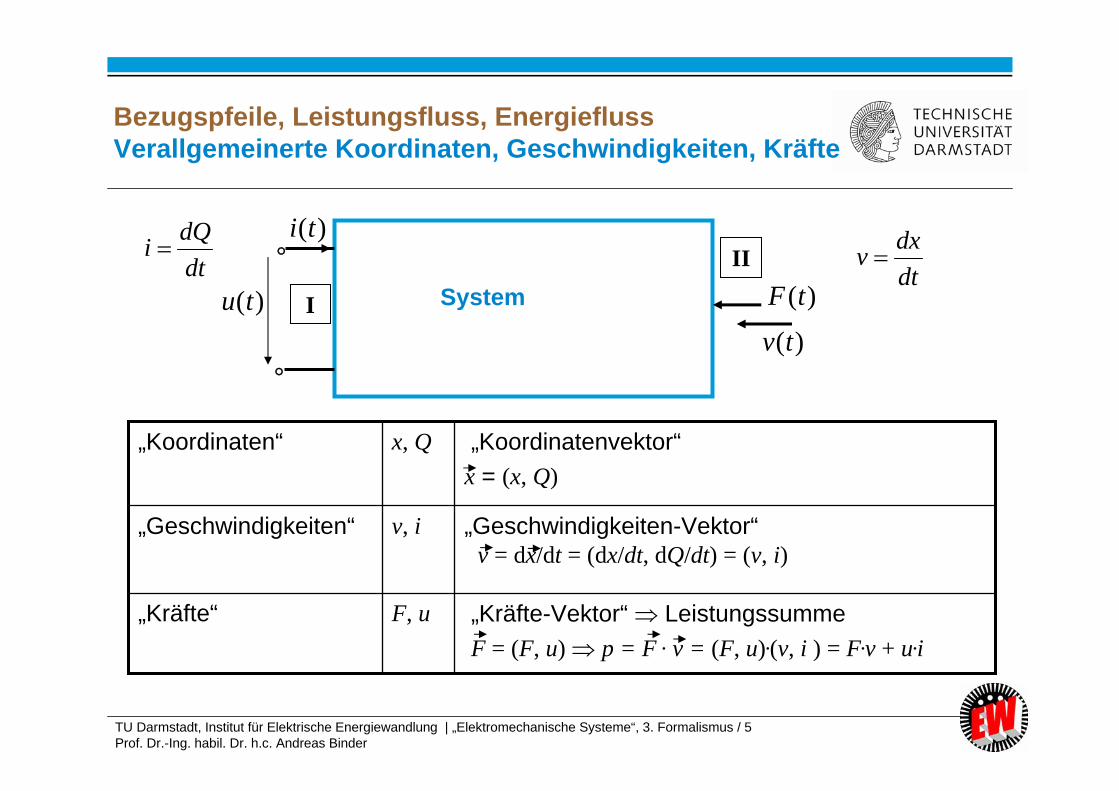
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 5Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Bezugspfeile, Leistungsfluss, EnergieflussVerallgemeinerte Koordinaten, Geschwindigkeiten, Kräfte
„Kräfte-Vektor“ LeistungssummeF = (F, u) p = F . v = (F, u).(v, i ) = F.v + u.i
F, u„Kräfte“
„Geschwindigkeiten-Vektor“v = dx/dt = (dx/dt, dQ/dt) = (v, i)
v, i„Geschwindigkeiten“
„Koordinatenvektor“x = (x, Q)
x, Q„Koordinaten“
I
II)(ti
)(tu )(tF
)(tv
dtdQi
dtdxv
System
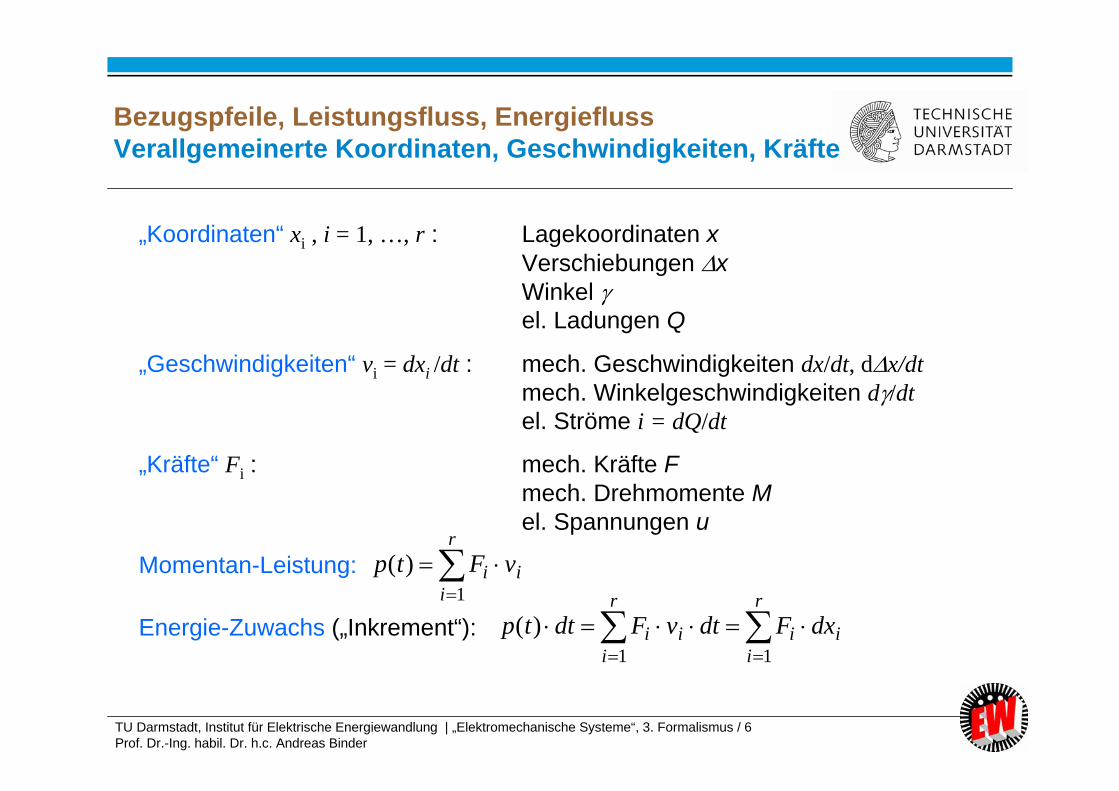
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 6Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Bezugspfeile, Leistungsfluss, EnergieflussVerallgemeinerte Koordinaten, Geschwindigkeiten, Kräfte
„Koordinaten“ xi , i = 1, …, r : Lagekoordinaten xVerschiebungen xWinkel el. Ladungen Q
„Geschwindigkeiten“ vi = dxi /dt : mech. Geschwindigkeiten dx/dt, dx/dtmech. Winkelgeschwindigkeiten d/dtel. Ströme i = dQ/dt
„Kräfte“ Fi : mech. Kräfte Fmech. Drehmomente Mel. Spannungen u
Momentan-Leistung:
Energie-Zuwachs („Inkrement“):
r
iii vFtp
1)(
r
iii
r
iii dxFdtvFdttp
11)(
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 7Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme3. Formale Behandlung
elektromechanischer diskreter Systeme
Bezugspfeile, Leistungsfluss, Energiefluss Potentielle Energiespeicher Beispiel:
Beweglicher Plattenkondensator Kinetische Energiespeicher Beispiel:
Bewegliche gekoppelte Spulen Energiedissipation Elektrische Ersatzelemente
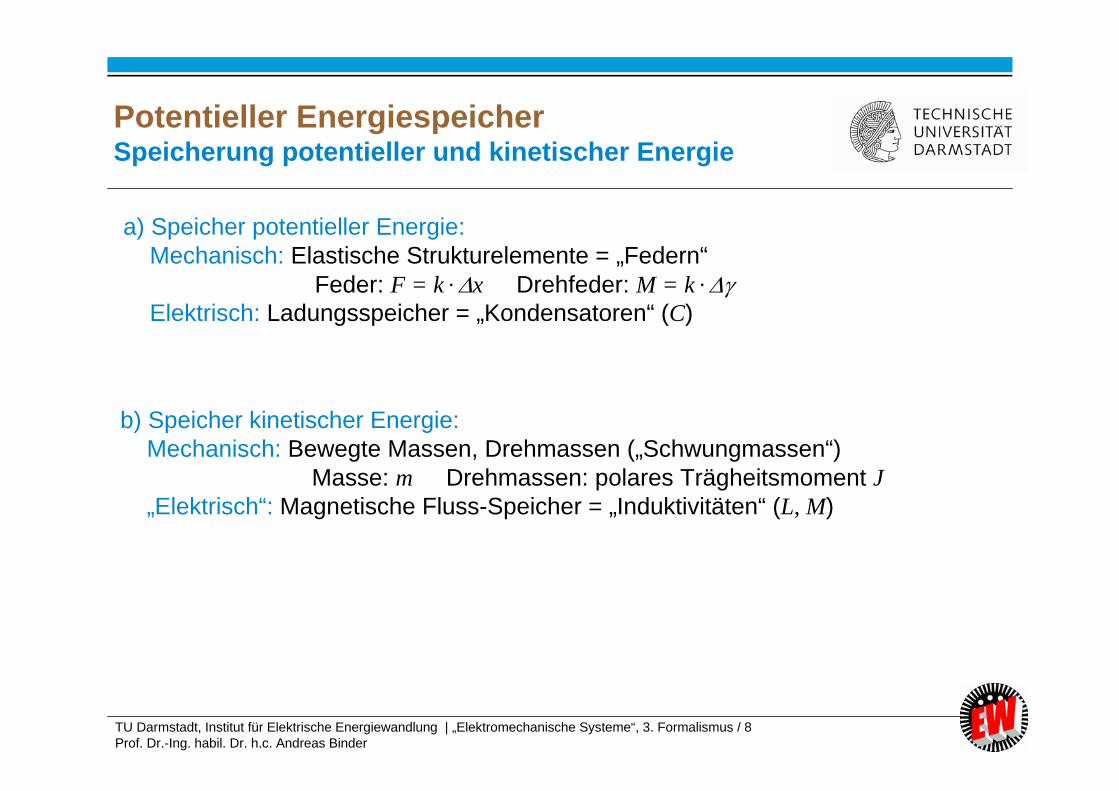
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 8Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Potentieller EnergiespeicherSpeicherung potentieller und kinetischer Energie
a) Speicher potentieller Energie:Mechanisch: Elastische Strukturelemente = „Federn“
Feder: F = k . x Drehfeder: M = k . Elektrisch: Ladungsspeicher = „Kondensatoren“ (C)
b) Speicher kinetischer Energie:Mechanisch: Bewegte Massen, Drehmassen („Schwungmassen“)
Masse: m Drehmassen: polares Trägheitsmoment J„Elektrisch“: Magnetische Fluss-Speicher = „Induktivitäten“ (L, M)
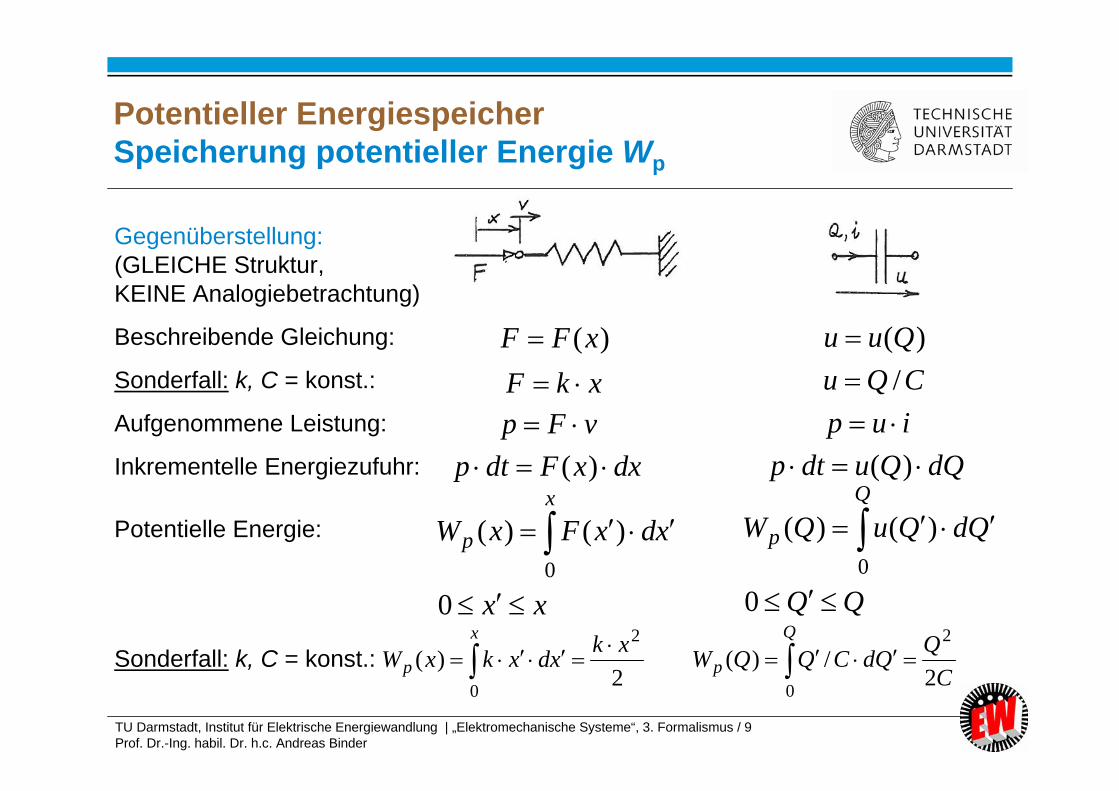
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 9Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Potentieller EnergiespeicherSpeicherung potentieller Energie Wp
Gegenüberstellung:(GLEICHE Struktur, KEINE Analogiebetrachtung)
Beschreibende Gleichung:
Sonderfall: k, C = konst.:
Aufgenommene Leistung:
Inkrementelle Energiezufuhr:
Potentielle Energie:
Sonderfall: k, C = konst.:
)(xFF )(Quu xkF CQu /vFp iup
dxxFdtp )( dQQudtp )(
xx
xdxFxWx
p
0
)()(0
QdQuQWQ
p
0
)()(0
2)(
2
0
xkxdxkxWx
p
CQQdCQQW
Q
p 2/)(
2
0
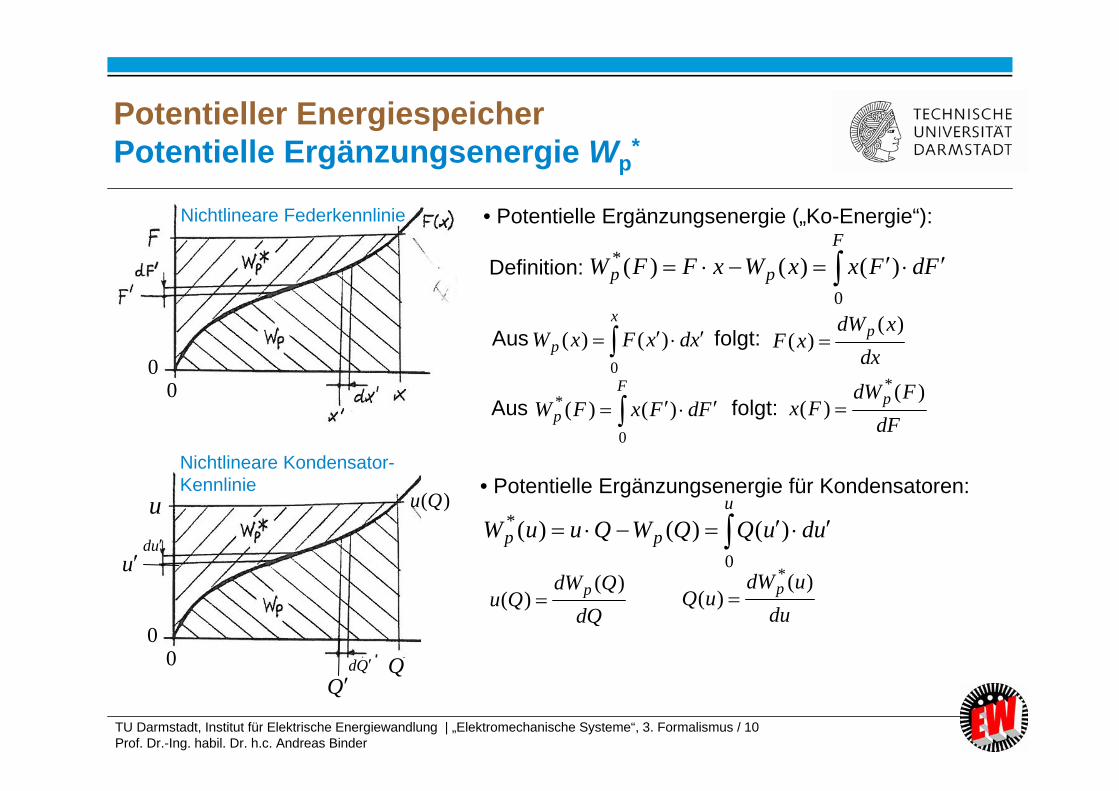
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 10Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Potentieller EnergiespeicherPotentielle Ergänzungsenergie Wp
*
F
pp FdFxxWxFFW0
* )()()(
• Potentielle Ergänzungsenergie („Ko-Energie“):
Definition:
x
p xdxFxW0
)()(0
0
Nichtlineare Federkennlinie
Aus folgt:dx
xdWxF p )()(
F
p FdFxFW0
* )()(Aus folgt:dF
FdWFx p )(
)(*
00
Nichtlineare Kondensator-Kennlinie
u )(Qu
uud
QQd Q
u
pp uduQQWQuuW0
* )()()(
dQQdW
Qu p )()(
duudW
uQ p )()(
*
• Potentielle Ergänzungsenergie für Kondensatoren:
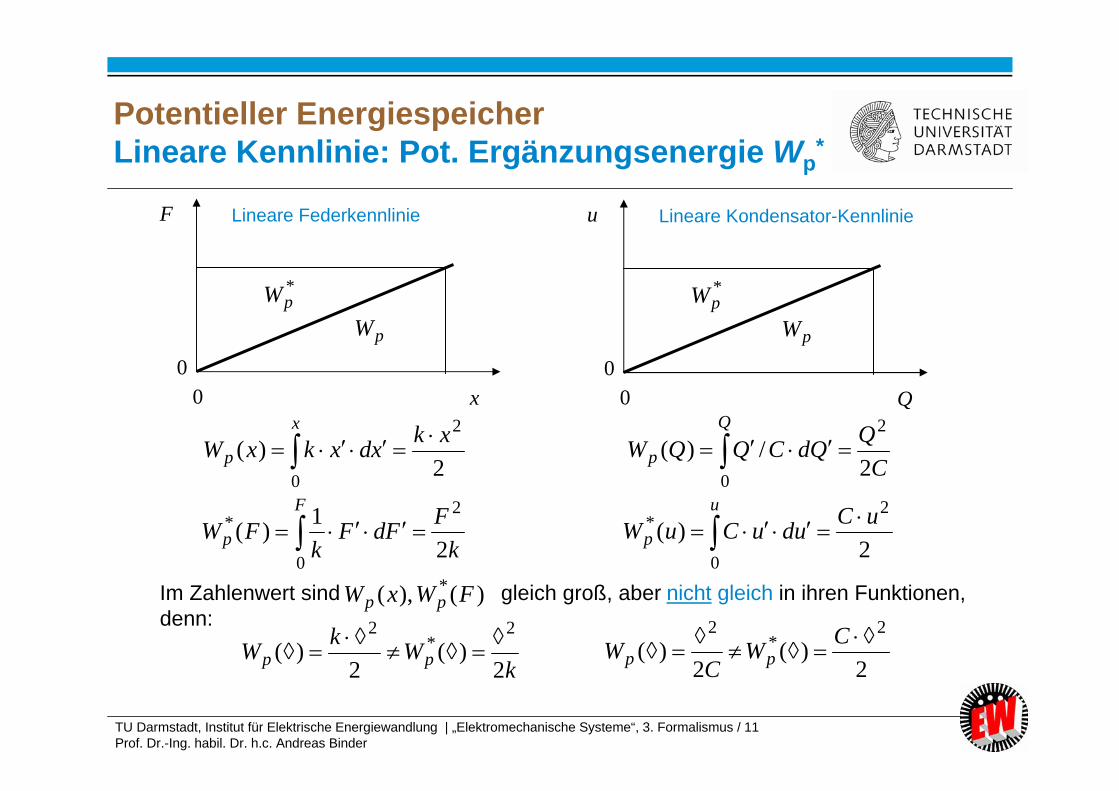
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 11Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Potentieller EnergiespeicherLineare Kennlinie: Pot. Ergänzungsenergie Wp
*
00
Lineare Federkennlinie
x
F
pW
*pW
00
Lineare Kondensator-Kennlinie
Q
u
pW
*pW
2)(
2
0
xkxdxkxWx
p
CQQdCQQW
Q
p 2/)(
2
0
kFFdF
kFW
F
p 21)(
2
0
* 2)(
2
0
* uCuduCuWu
p
Im Zahlenwert sind gleich groß, aber nicht gleich in ihren Funktionen, denn:
)(),( * FWxW pp
kWkW pp 2
)(2
)(2
*2
2
)(2
)(2
*2
CW
CW pp
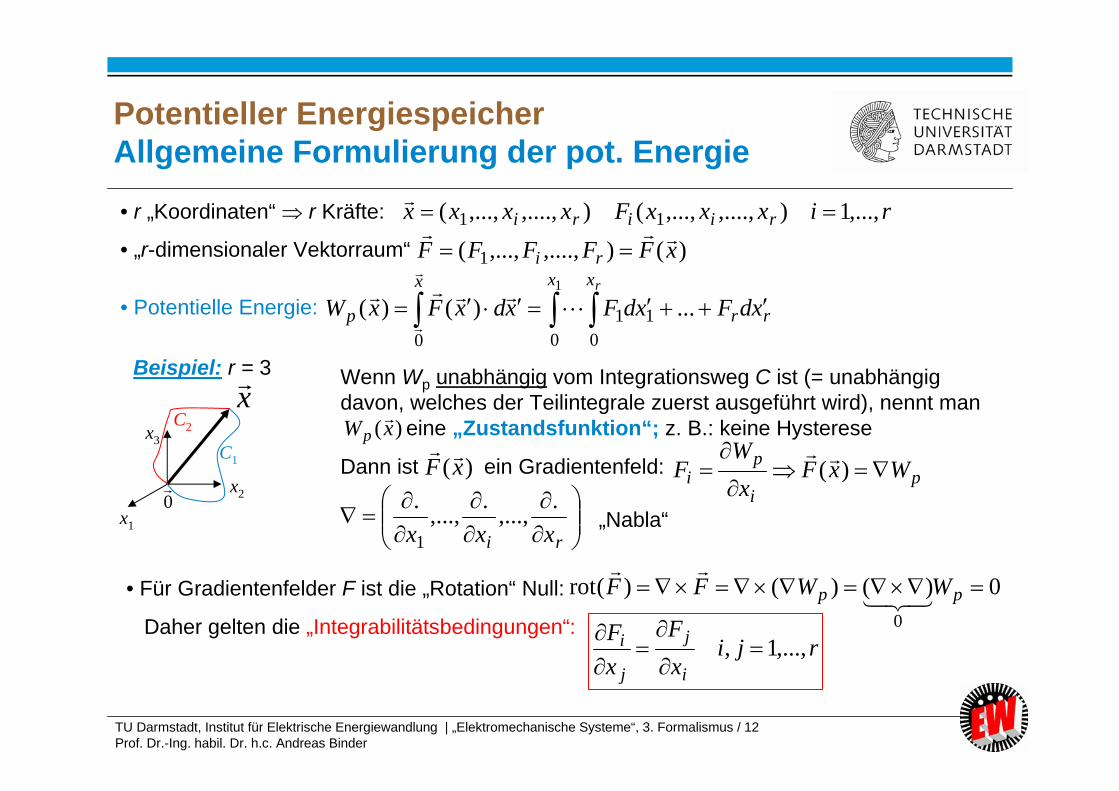
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 12Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Potentieller EnergiespeicherAllgemeine Formulierung der pot. Energie
• r „Koordinaten“ r Kräfte:
• „r-dimensionaler Vektorraum“
• Potentielle Energie:
rixxxFxxxx riiri ,...,1),....,,...,(),....,,...,( 11
)(),....,,...,( 1 xFFFFF ri
1
0 011
0
...)()(x x
rr
x
p
r
xdFxdFxdxFxW
Beispiel: r = 3 Wenn Wp unabhängig vom Integrationsweg C ist (= unabhängig davon, welches der Teilintegrale zuerst ausgeführt wird), nennt man
eine „Zustandsfunktion“; z. B.: keine Hysterese
Dann ist ein Gradientenfeld:
)(xWp
)(xF p
i
pi WxF
xW
F
)(
ri xxx.,...,.,...,.
1
• Für Gradientenfelder F ist die „Rotation“ Null:
Daher gelten die „Integrabilitätsbedingungen“:
0)()()(rot0
pp WWFF
rjixF
xF
i
j
j
i ,...,1,
x2
x3C1
C2
x
0
x1 „Nabla“
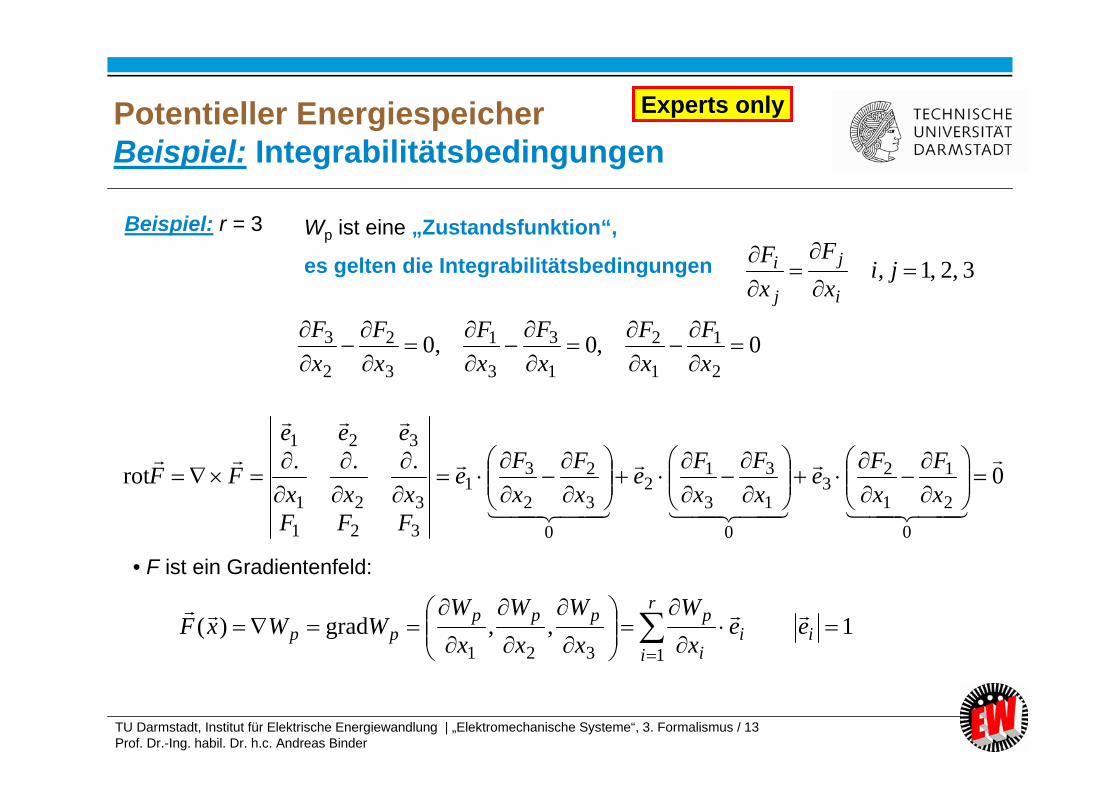
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 13Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Potentieller EnergiespeicherBeispiel: Integrabilitätsbedingungen
Beispiel: r = 3 Wp ist eine „Zustandsfunktion“,
es gelten die Integrabilitätsbedingungen
0...rot
0
2
1
1
23
0
1
3
3
12
0
3
2
2
31
321321
321
xF
xFe
xF
xFe
xF
xFe
FFFxxx
eee
FF
3,2,1,
ji
xF
xF
i
j
j
i
0,00,2
1
1
2
1
3
3
1
3
2
2
3
xF
xF
xF
xF
xF
xF
• F ist ein Gradientenfeld:
1,,grad)(1321
r
iii
i
pppppp ee
xW
xW
xW
xW
WWxF
Experts only
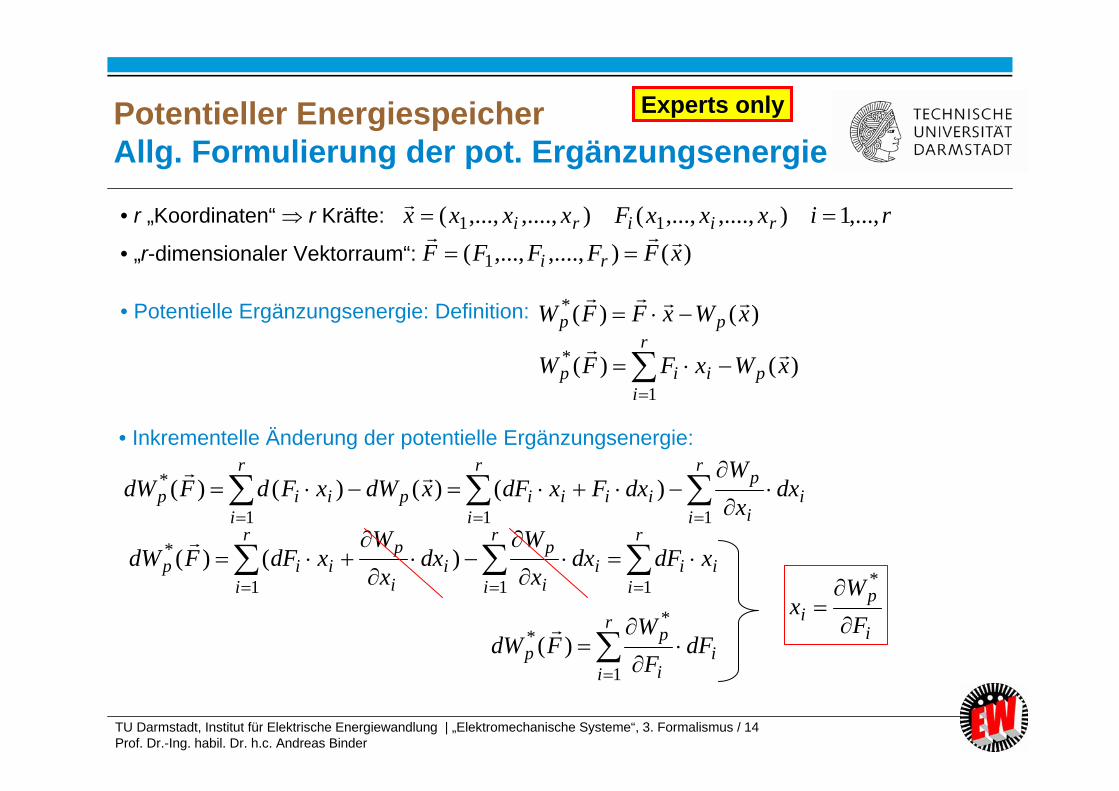
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 14Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Potentieller EnergiespeicherAllg. Formulierung der pot. Ergänzungsenergie
• r „Koordinaten“ r Kräfte:
• „r-dimensionaler Vektorraum“:
• Potentielle Ergänzungsenergie: Definition:
rixxxFxxxx riiri ,...,1),....,,...,(),....,,...,( 11
)(),....,,...,( 1 xFFFFF ri
)()(* xWxFFW pp
)()(1
* xWxFFW p
r
iiip
• Inkrementelle Änderung der potentielle Ergänzungsenergie:
r
ii
i
pr
iiiiip
r
iiip dx
xW
dxFxdFxdWxFdFdW111
* )()()()(
r
iii
r
ii
i
pr
ii
i
piip xdFdx
xW
dxx
WxdFFdW
111
* )()(
r
ii
i
pp dF
FW
FdW1
** )( i
pi F
Wx
*
Experts only
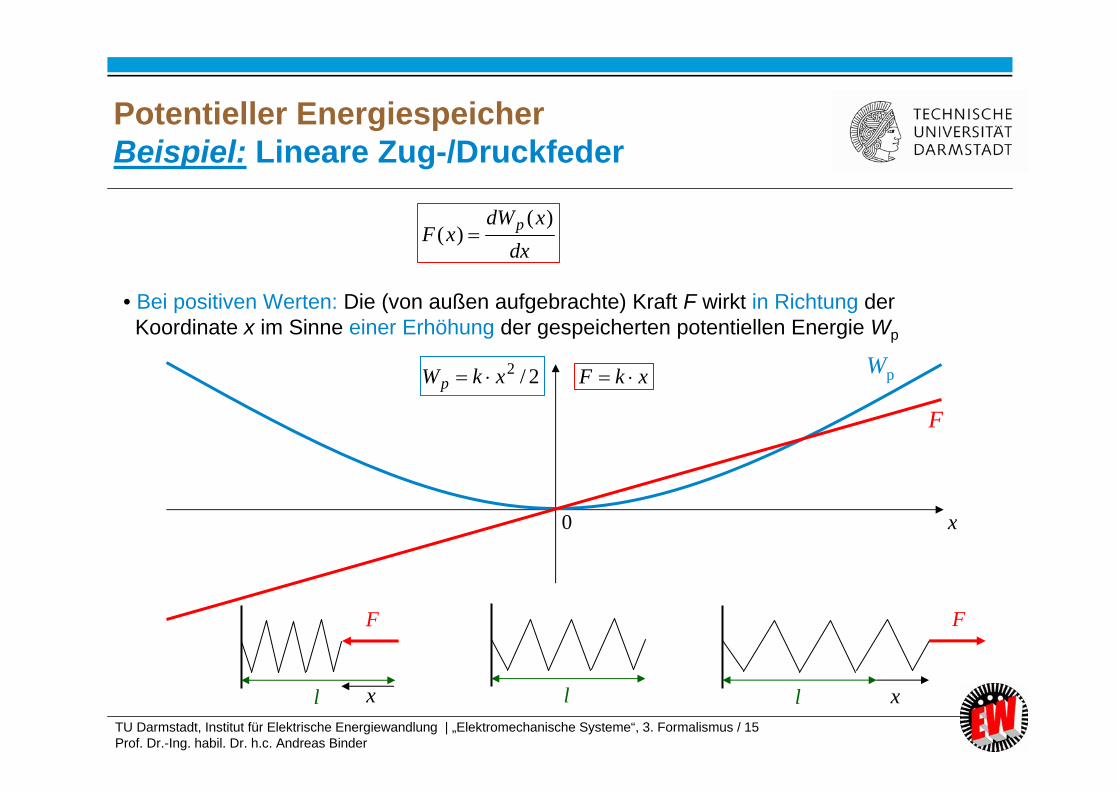
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 15Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Potentieller EnergiespeicherBeispiel: Lineare Zug-/Druckfeder
dxxdW
xF p )()(
• Bei positiven Werten: Die (von außen aufgebrachte) Kraft F wirkt in Richtung der Koordinate x im Sinne einer Erhöhung der gespeicherten potentiellen Energie Wp
0 x
F
Wp2/2xkWp xkF
l l x
F
l x
F
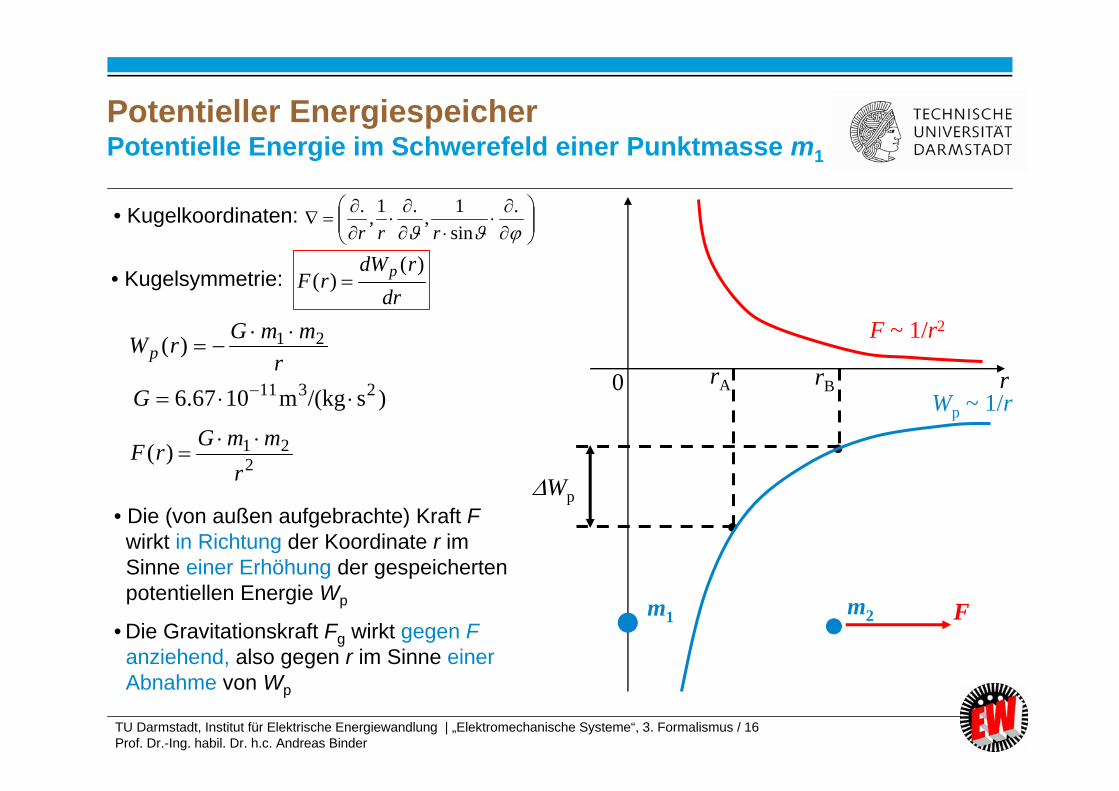
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 16Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Potentieller EnergiespeicherPotentielle Energie im Schwerefeld einer Punktmasse m1
rmmGrWp
21)(
drrdW
rF p )()(
• Kugelkoordinaten:
.
sin1,.1,.
rrr
• Kugelsymmetrie:
)s/(kgm1067.6 2311 G
221)(
rmmGrF
• Die (von außen aufgebrachte) Kraft Fwirkt in Richtung der Koordinate r im Sinne einer Erhöhung der gespeicherten potentiellen Energie Wp
• Die Gravitationskraft Fg wirkt gegen Fanziehend, also gegen r im Sinne einer Abnahme von Wp
0 rrA rBWp ~ 1/r
Wp
m1 m2 F
F ~ 1/r2
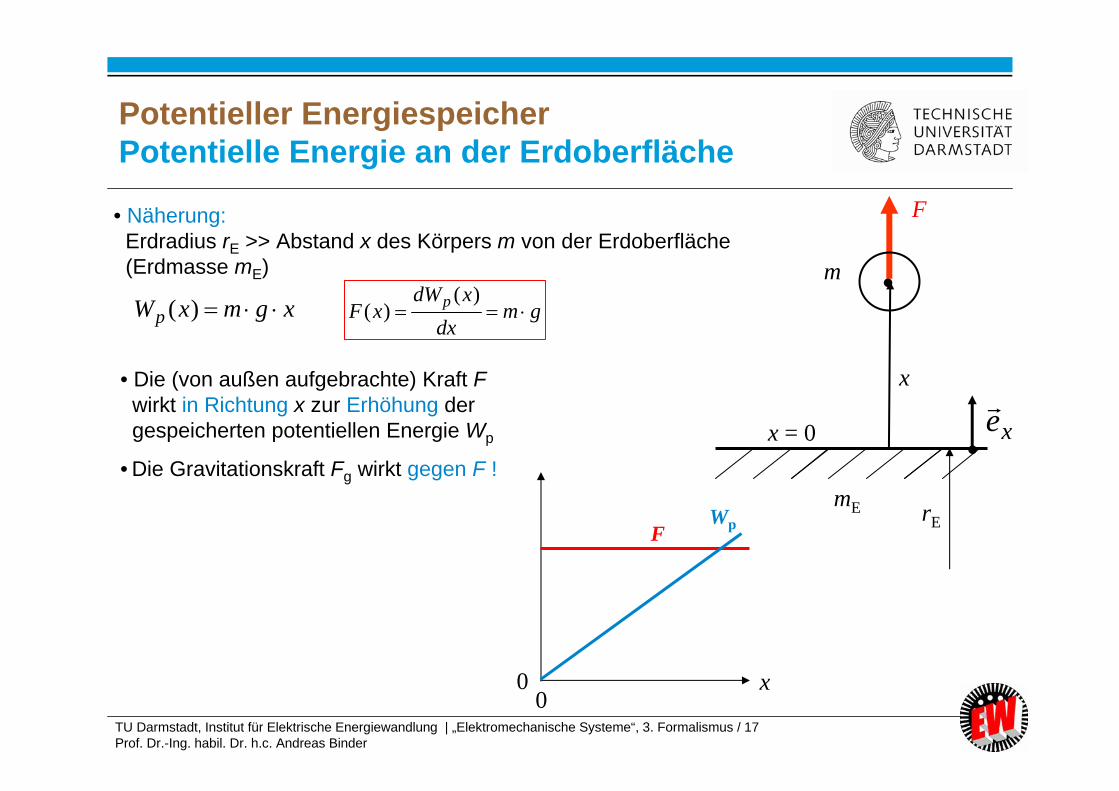
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 17Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Potentieller EnergiespeicherPotentielle Energie an der Erdoberfläche
xgmxWp )(
• Näherung:Erdradius rE >> Abstand x des Körpers m von der Erdoberfläche (Erdmasse mE)
mE rE
m
x
xex = 0
F
gmdx
xdWxF p
)()(
• Die (von außen aufgebrachte) Kraft Fwirkt in Richtung x zur Erhöhung der gespeicherten potentiellen Energie Wp
• Die Gravitationskraft Fg wirkt gegen F !
x00
FWp
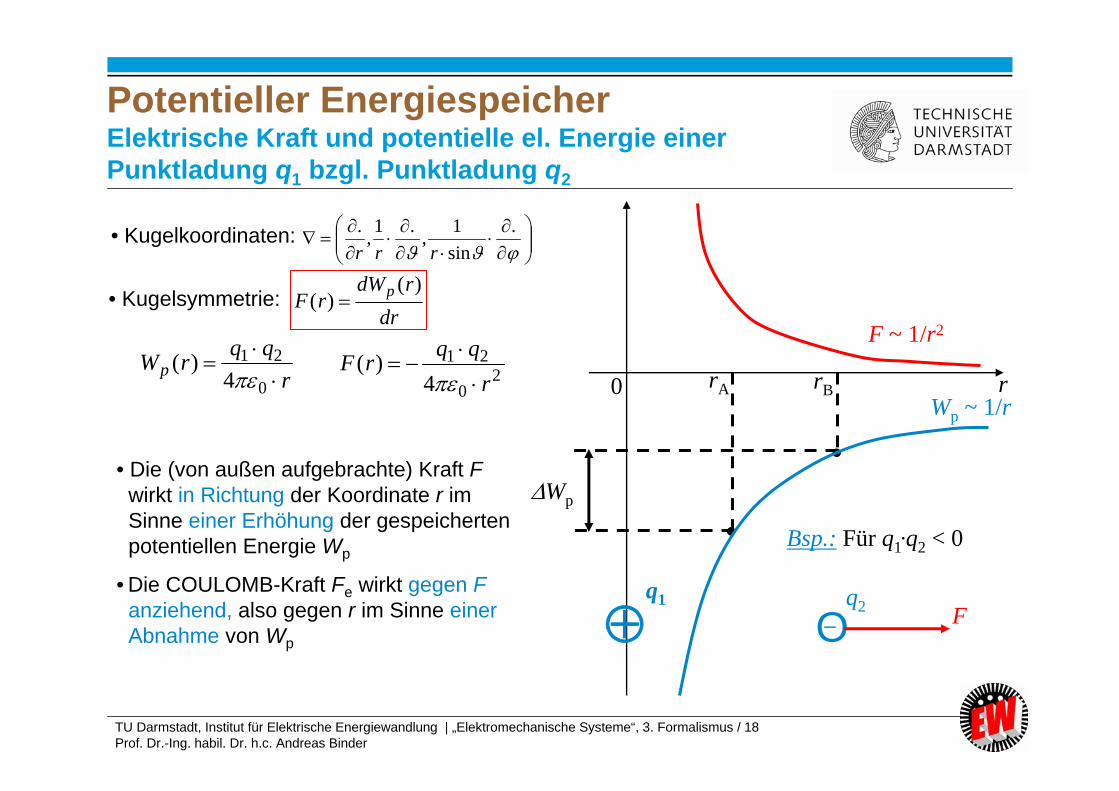
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 18Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Potentieller EnergiespeicherElektrische Kraft und potentielle el. Energie einer Punktladung q1 bzgl. Punktladung q2
rqqrWp
0
214
)(
drrdW
rF p )()(
• Kugelkoordinaten:
.
sin1,.1,.
rrr
• Kugelsymmetrie:
20
21
4)(
rqqrF
• Die (von außen aufgebrachte) Kraft Fwirkt in Richtung der Koordinate r im Sinne einer Erhöhung der gespeicherten potentiellen Energie Wp
• Die COULOMB-Kraft Fe wirkt gegen Fanziehend, also gegen r im Sinne einer Abnahme von Wp
0 rrA rBWp ~ 1/r
Wp
Oq1 q2 F
F ~ 1/r2
Bsp.: Für q1.q2 < 0
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 19Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme3. Formale Behandlung
elektromechanischer diskreter Systeme
Bezugspfeile, Leistungsfluss, Energiefluss Potentielle Energiespeicher Beispiel:
Beweglicher Plattenkondensator Kinetische Energiespeicher Beispiel:
Bewegliche gekoppelte Spulen Energiedissipation Elektrische Ersatzelemente
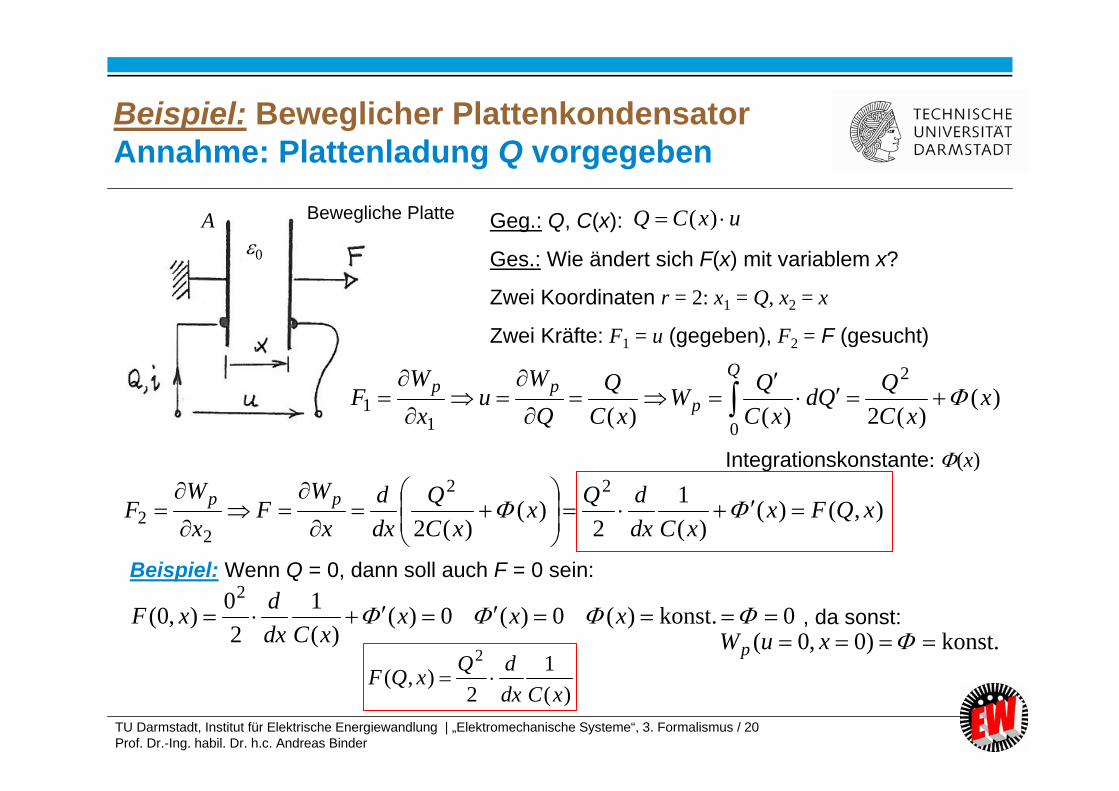
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 20Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiel: Beweglicher PlattenkondensatorAnnahme: Plattenladung Q vorgegeben
Bewegliche PlatteA0
Geg.: Q, C(x):
Ges.: Wie ändert sich F(x) mit variablem x?
Zwei Koordinaten r = 2: x1 = Q, x2 = x
Zwei Kräfte: F1 = u (gegeben), F2 = F (gesucht)
uxCQ )(
)()(2)()(
2
011 x
xCQQd
xCQW
xCQ
QW
ux
WF
Q
ppp
Integrationskonstante: (x)
),()()(
12
)()(2
22
22 xQFx
xCdxdQx
xCQ
dxd
xW
FxW
F pp
Beispiel: Wenn Q = 0, dann soll auch F = 0 sein:
0konst.)(0)(0)()(
12
0),0(2
xxxxCdx
dxF
)(1
2),(
2
xCdxdQxQF
, da sonst:konst.)0,0( xuWp
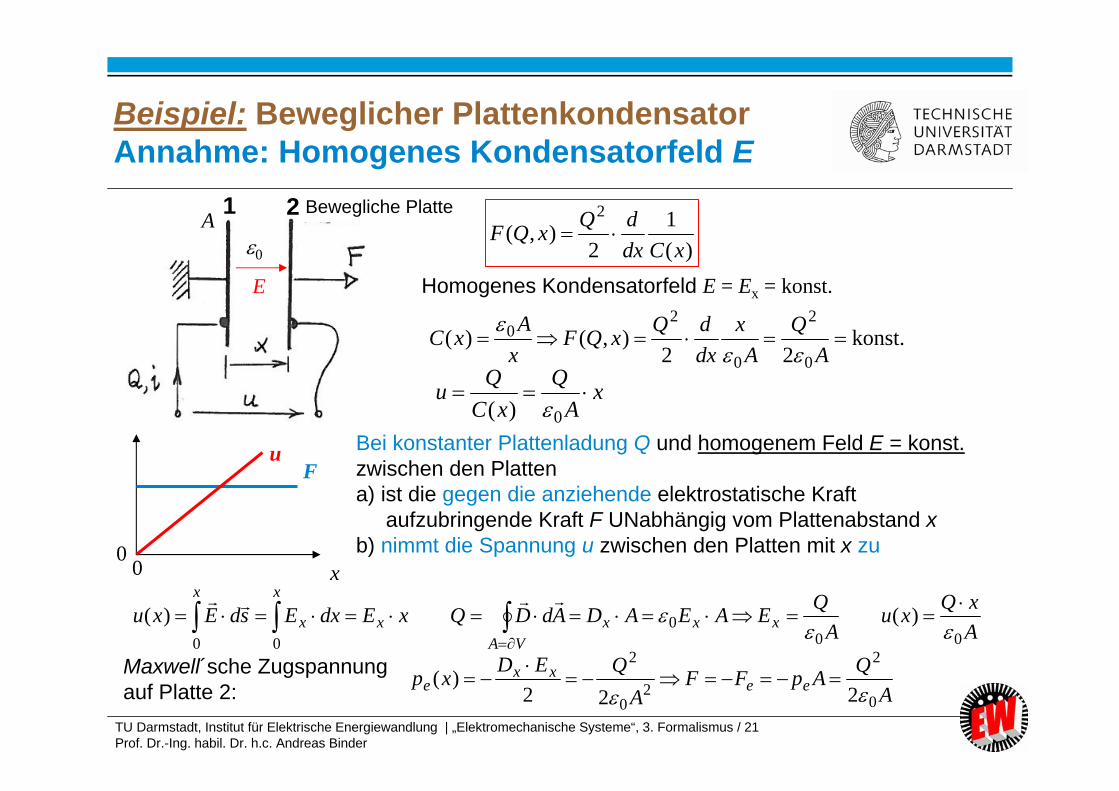
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 21Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Bewegliche PlatteA
0
E
1 2
Beispiel: Beweglicher PlattenkondensatorAnnahme: Homogenes Kondensatorfeld E
)(1
2),(
2
xCdxdQxQF
Homogenes Kondensatorfeld E = Ex = konst.
konst.22
),()(0
2
0
20
AQ
Ax
dxdQxQF
xAxC
xA
QxC
Qu 0)(
x
Fu
00
Bei konstanter Plattenladung Q und homogenem Feld E = konst.zwischen den Platten a) ist die gegen die anziehende elektrostatische Kraft
aufzubringende Kraft F UNabhängig vom Plattenabstand xb) nimmt die Spannung u zwischen den Platten mit x zu
AxQxu
AQEAEADAdDQxEdxEsdExu xxx
VAx
x
x
x
000
00
)()(
Maxwell´sche Zugspannung auf Platte 2: A
QApFFA
QEDxp eexx
e0
2
20
2
222)(
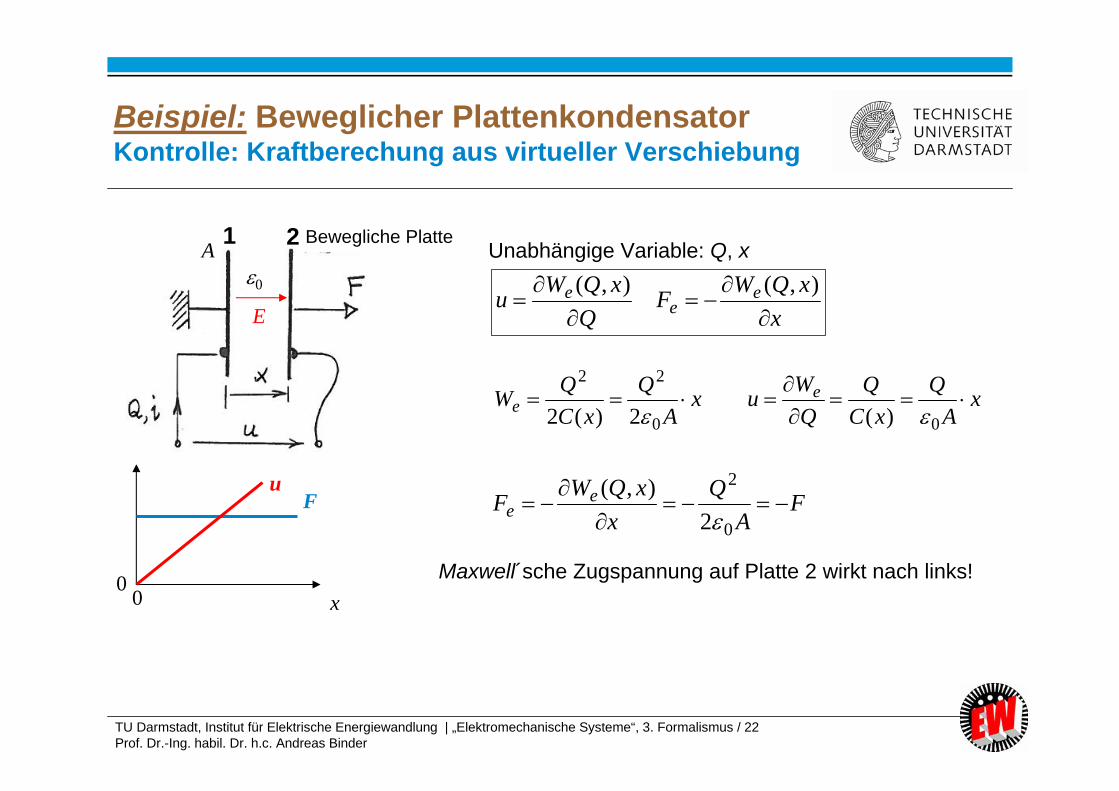
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 22Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiel: Beweglicher PlattenkondensatorKontrolle: Kraftberechung aus virtueller Verschiebung
Unabhängige Variable: Q, x
x
Fu
00
Maxwell´sche Zugspannung auf Platte 2 wirkt nach links!
Bewegliche PlatteA
0
E
1 2
xxQWF
QxQWu e
ee
),(),(
xA
QxC
QWe 0
22
2)(2 x
AQ
xCQ
QWu e
0)(
FA
Qx
xQWF ee
0
2
2),(
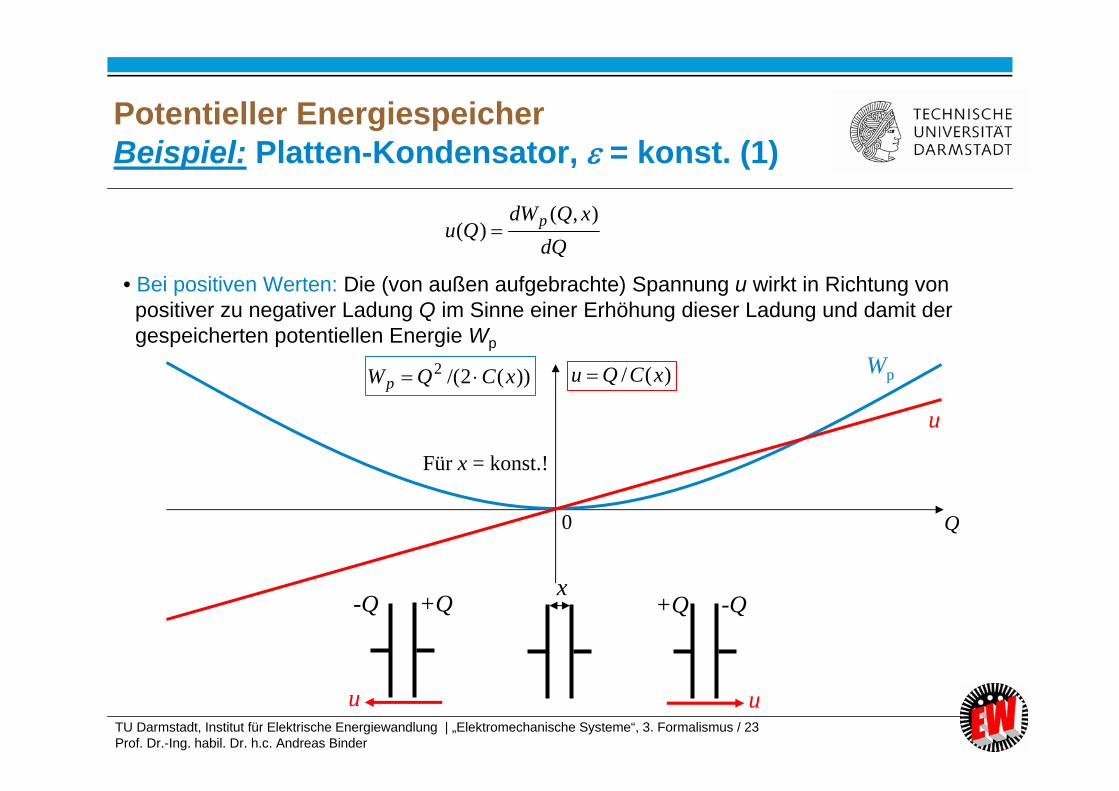
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 23Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Potentieller EnergiespeicherBeispiel: Platten-Kondensator, = konst. (1)
• Bei positiven Werten: Die (von außen aufgebrachte) Spannung u wirkt in Richtung von positiver zu negativer Ladung Q im Sinne einer Erhöhung dieser Ladung und damit der gespeicherten potentiellen Energie Wp
dQxQdW
Qu p ),()(
0 Q
u
Wp))(2/(2 xCQWp )(/ xCQu
Für x = konst.!
x+Q -Q
u
-Q +Q
u
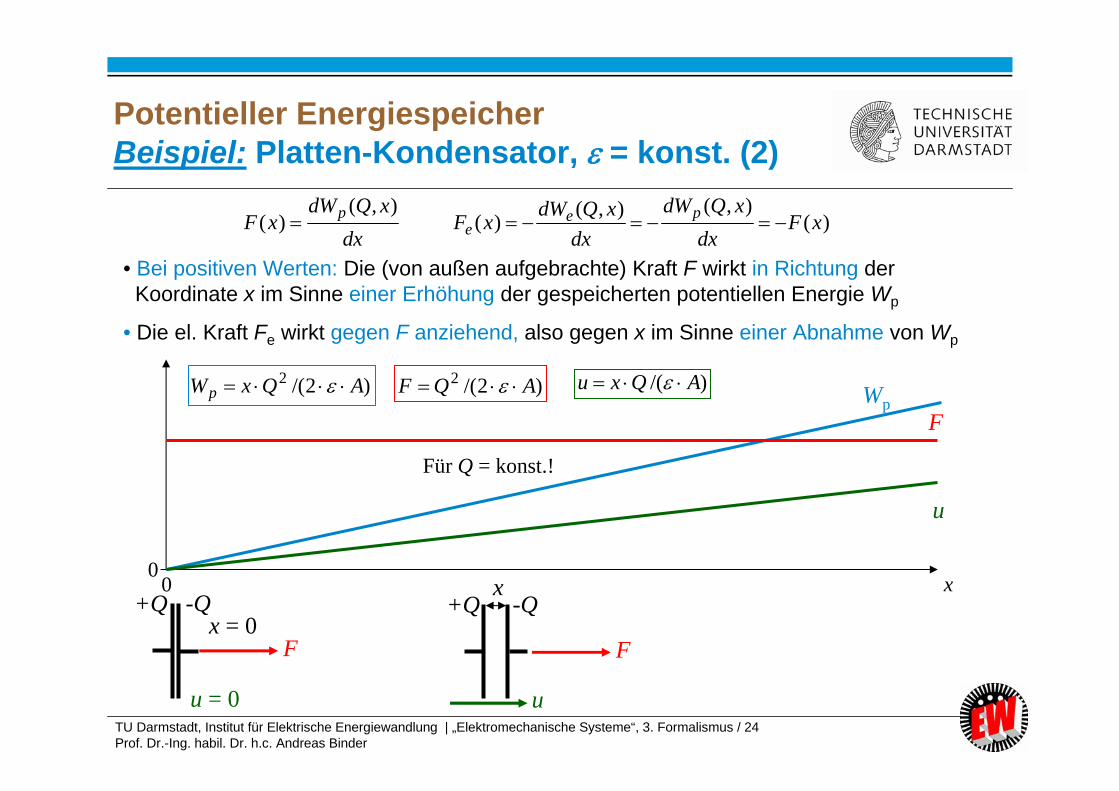
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 24Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Potentieller EnergiespeicherBeispiel: Platten-Kondensator, = konst. (2)
dxxQdW
xF p ),()(
• Bei positiven Werten: Die (von außen aufgebrachte) Kraft F wirkt in Richtung der Koordinate x im Sinne einer Erhöhung der gespeicherten potentiellen Energie Wp
• Die el. Kraft Fe wirkt gegen F anziehend, also gegen x im Sinne einer Abnahme von Wp
0x
FWp
)2/(2 AQxWp )2/(2 AQF
Für Q = konst.!
)/( AQxu
0
u
+Q -Q
u = 0
x = 0F
x+Q -Q
u
F
)(),(),()( xF
dxxQdW
dxxQdWxF pe
e
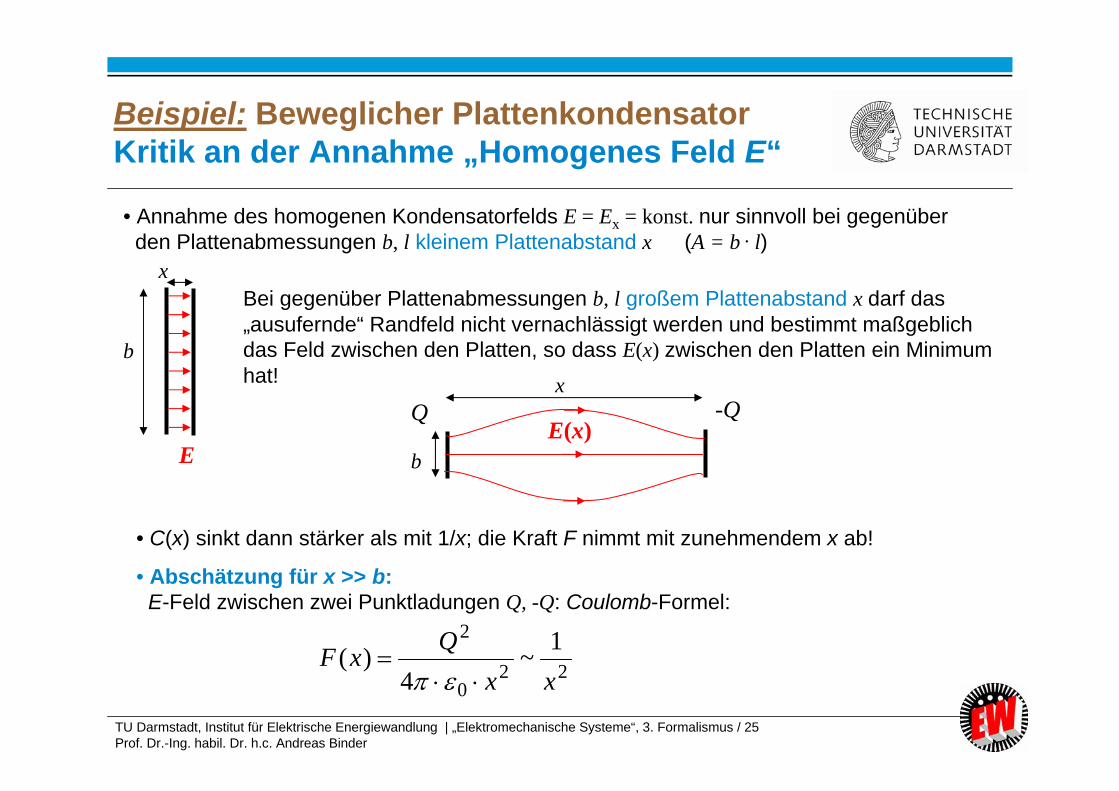
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 25Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiel: Beweglicher PlattenkondensatorKritik an der Annahme „Homogenes Feld E“
• Annahme des homogenen Kondensatorfelds E = Ex = konst. nur sinnvoll bei gegenüber den Plattenabmessungen b, l kleinem Plattenabstand x (A = b . l)
b
E
xBei gegenüber Plattenabmessungen b, l großem Plattenabstand x darf das „ausufernde“ Randfeld nicht vernachlässigt werden und bestimmt maßgeblich das Feld zwischen den Platten, so dass E(x) zwischen den Platten ein Minimum hat!
• C(x) sinkt dann stärker als mit 1/x; die Kraft F nimmt mit zunehmendem x ab!
• Abschätzung für x >> b: E-Feld zwischen zwei Punktladungen Q, -Q: Coulomb-Formel:
220
2 1~4
)(xx
QxF
bE(x)
xQ -Q
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 26Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme3. Formale Behandlung
elektromechanischer diskreter Systeme
Bezugspfeile, Leistungsfluss, Energiefluss Potentielle Energiespeicher Beispiel:
Beweglicher Plattenkondensator Kinetische Energiespeicher Beispiel:
Bewegliche gekoppelte Spulen Energiedissipation Elektrische Ersatzelemente
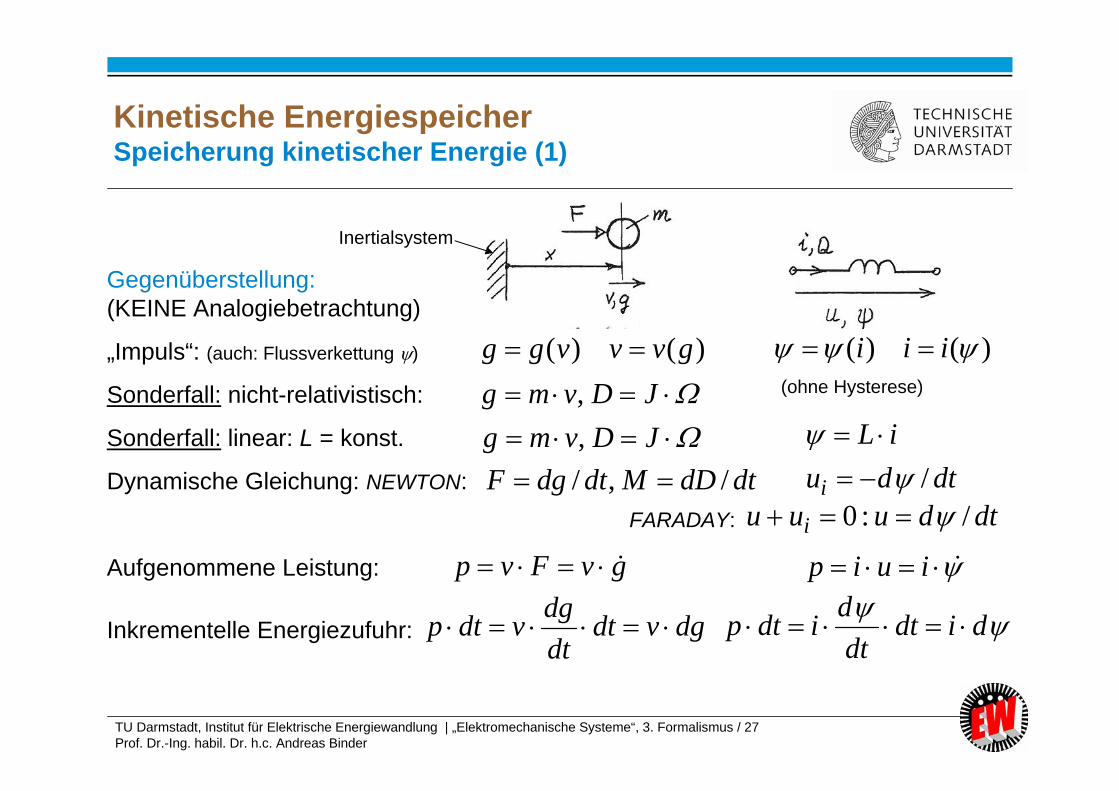
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 27Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Kinetische EnergiespeicherSpeicherung kinetischer Energie (1)
Gegenüberstellung:(KEINE Analogiebetrachtung)
„Impuls“: (auch: Flussverkettung )
Sonderfall: nicht-relativistisch:
Sonderfall: linear: L = konst.
Dynamische Gleichung: NEWTON:
Aufgenommene Leistung:
Inkrementelle Energiezufuhr:
)()( gvvvgg )()( iii
JDvmg ,iL
iuip
dgvdtdtdgvdtp didt
dtdidtp
Inertialsystem
JDvmg ,
(ohne Hysterese)
gvFvp
dtdDMdtdgF /,/ FARADAY:
dtdui /dtduuu i /:0
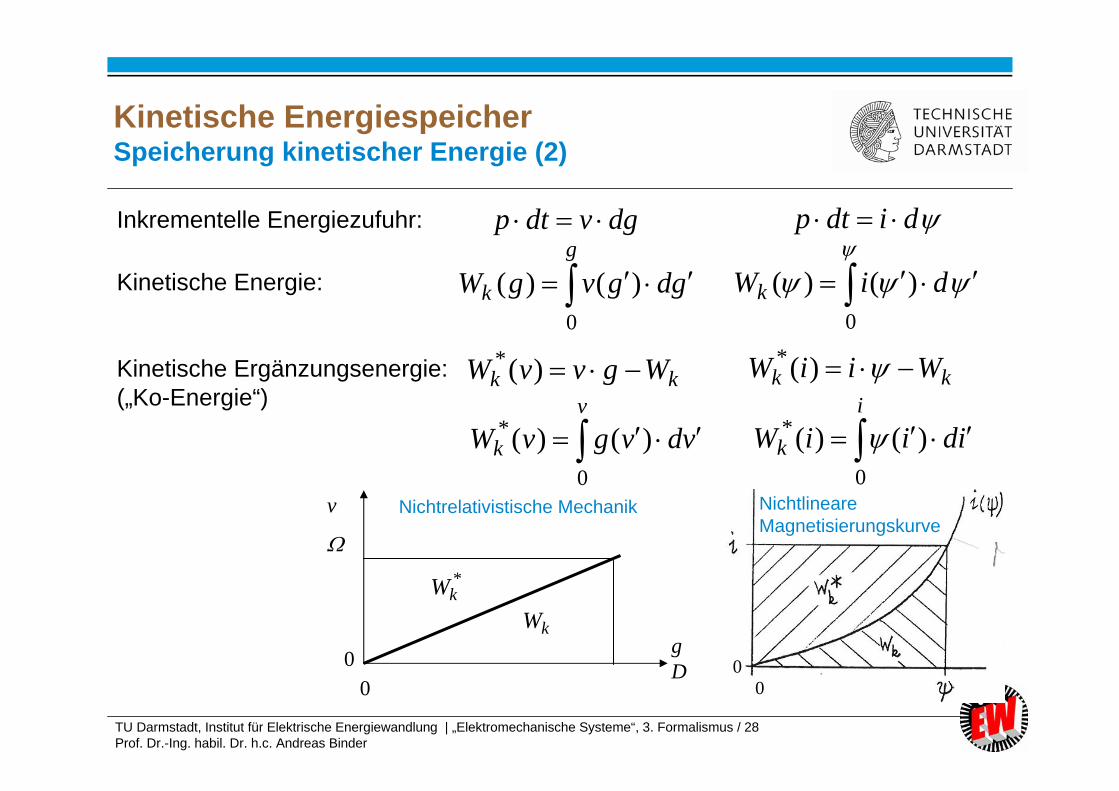
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 28Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Kinetische EnergiespeicherSpeicherung kinetischer Energie (2)
Inkrementelle Energiezufuhr:
Kinetische Energie:
Kinetische Ergänzungsenergie:(„Ko-Energie“)
dgvdtp didtp
g
k gdgvgW0
)()(
0
)()( diWk
kk WgvvW )(*
v
k vdvgvW0
* )()(
kk WiiW )(*
i
k idiiW0
* )()(
Nichtlineare Magnetisierungskurve
00
00
Nichtrelativistische Mechanik
g D
v
kW
*kW
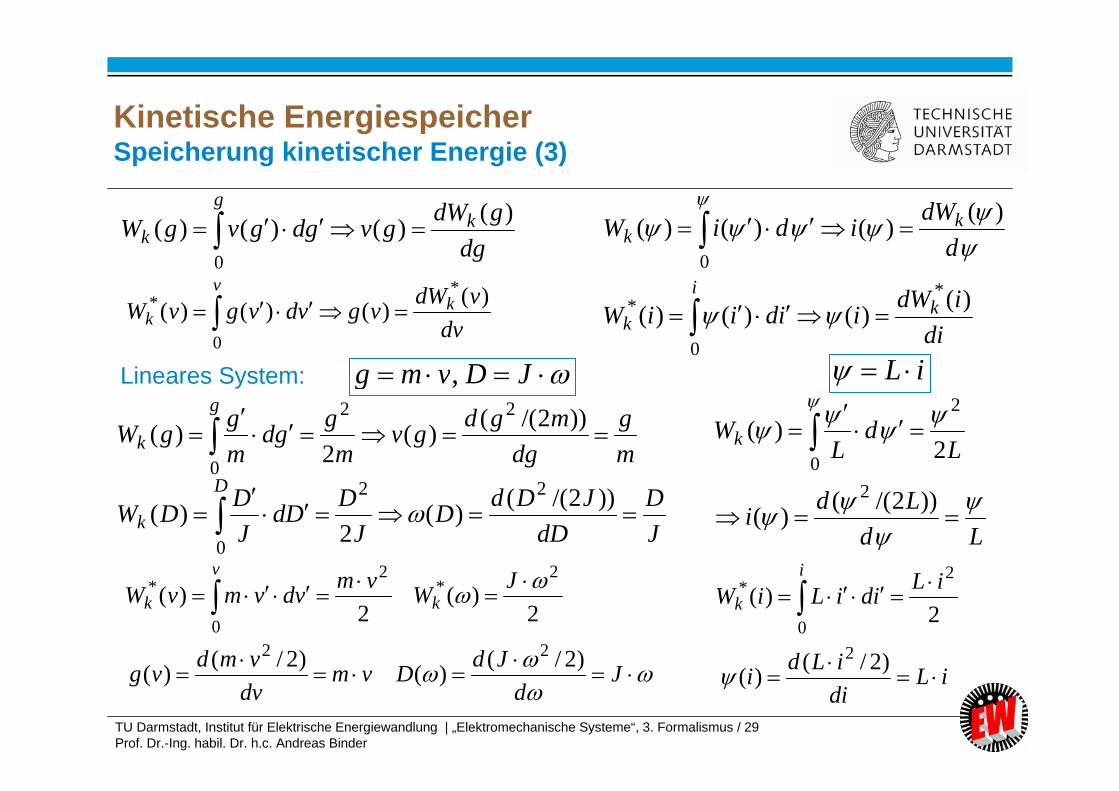
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 29Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Kinetische EnergiespeicherSpeicherung kinetischer Energie (3)
dggdWgvgdgvgW k
g
k)()()()(
0
dvvdWvgvdvgvW k
v
k)()()()(
*
0
* diidWiidiiW k
i
k)()()()(
*
0
*
ddWidiW k
k)()()()(
0
Lineares System: iL JDvmg ,
mg
dgmgdgv
mggd
mggW
g
k
))2/(()(
2)(
22
0
JD
dDJDdD
JDDd
JDDW
D
k
))2/(()(
2)(
22
0
Ld
Ldi
Ld
LWk
))2/(()(
2)(
2
2
0
2)(
2)(
2*
2
0
*
JWvmvdvmvW k
v
k 2)(
2
0
* iLidiLiWi
k
iLdiiLdi
)2/()(
2
Jd
JdDvmdvvmdvg )2/()()2/()(
22
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 30Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Kinetische EnergiespeicherÄußere Kräfte F u. innere Kräfte F(in)
Auf das System wirken
a) von außen aufgeprägte äußere Kräfte F (z. B. Schwerkraft, el. Spannung) und
b) zwischen einzelnen Teilen des Systems (z. B. Feder-Masse-Anordnung) innere Kräfte F(in)
Die inneren Kräfte hängen von der Lage (Koordinaten xi) der i = 1, …, r einzelnen Systemteile ab (z. B. Spule 1 bewegt sich von Spule 2 weg: x ändert magn. Energie)
Koordinaten der einzelnen r Systemteile (z. B. Lage, el. Ladung) als Vektor:
Impulse der einzelnen Systemteile als Vektor:
),,( 1 rxxx
),,( 1 rggg
Das System ist als räumlich abgegrenzter Bereich über äußere Kräfte über Anschlüsse (I, II, …) in Wechselwirkung mit seiner Umgebung.
Die einzelnen Systemteile sind dch. konzentrierte Elemente (allgemein: m, k, R, L, C, …hier: „kinetisch“: m, L) gegeben
)(),,( )(1
)( xFxxF inir
ini
Über die „inneren“ Kräfte F(in) wird Energie mit den kinetischen Speichern des Systems ausgetauscht!
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 31Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Kinetische EnergiespeicherDynamisches Kraftgesetz für allgemeines System
Dynamisches Kraftgesetz (für mech. Systemteile: NEWTON´sches Gesetz):Die Summe aus äußerer und innerer Kraft je Systemteil ergibt dessen Impulsänderung,so dass sich die gesamte Impulsänderung des Systems als Vektorgleichung ergibt.
dtgdxFF in
)()( ),,(),,( )()(
1)(
1in
rinin
r FFFFFF
Kraftgesetz hier für den Sonderfall OHNE dissipative Kräfte und ohne potentielle Energiespeicher
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 32Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Kinetische EnergiespeicherKinetische Energie für allgemeines System
Von außen durch die äußeren Kräfte dem System zugeführte Momentanleistung p(t):
vxFdtgdvFvFtp in
r
iii
)()( )(
1
Zugehörige inkrementelle Energiezufuhr == Impulsänderungsarbeit – Arbeit der inneren Kräfte
)1()()()( )()()( xdxFgdvdtdtxdxFdt
dtgdvdtvF
dtgdvdttpdW inini
Energiezufuhr bedingt Erhöhung der gespeicherten kinetischen Energie:
Wegen hängt Wk nicht nur von , sondern auch von ab. kdWdW
)()( xF in g x
)2(),,,,,(),(11
11
r
ii
i
kr
ii
i
kkrrkkk dx
xWdg
gWdWxxggWxgWW
Koeffizientenvergleich (1) mit (2):
i
kini
i
ki
r
ii
ini
r
iii
ink x
WFgWvdxFdgvxdxFgdvdW
)(
1
)(
1
)( )(:)1(
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 33Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Kinetische EnergiespeicherKinetische Ergänzungsenergie für allgemeines System
Kinetische Ergänzungsenergie (Definition):
Deren Änderung ist:
),(),(* xgWvgxvW kk
r
ii
i
ki
i
kr
iiikk dx
xWdg
gWvgddWvgddW
11
* )()()(
r
ii
i
ki
vi
kiiiik dx
xWdg
gWdvgvdgdW
i
1
* )(
r
ii
i
ki
i
kk dx
xWdv
vWxvdW
1
*** )(),(
i
k
i
kini
i
ki
xW
xWF
vWg
*)(
*
xdxvFvdxvgdxFdvgxvdW inr
ii
iniiik
),(),()(),( )(
1
)(*
Inkrement der kinetische Ergänzungsenergie:
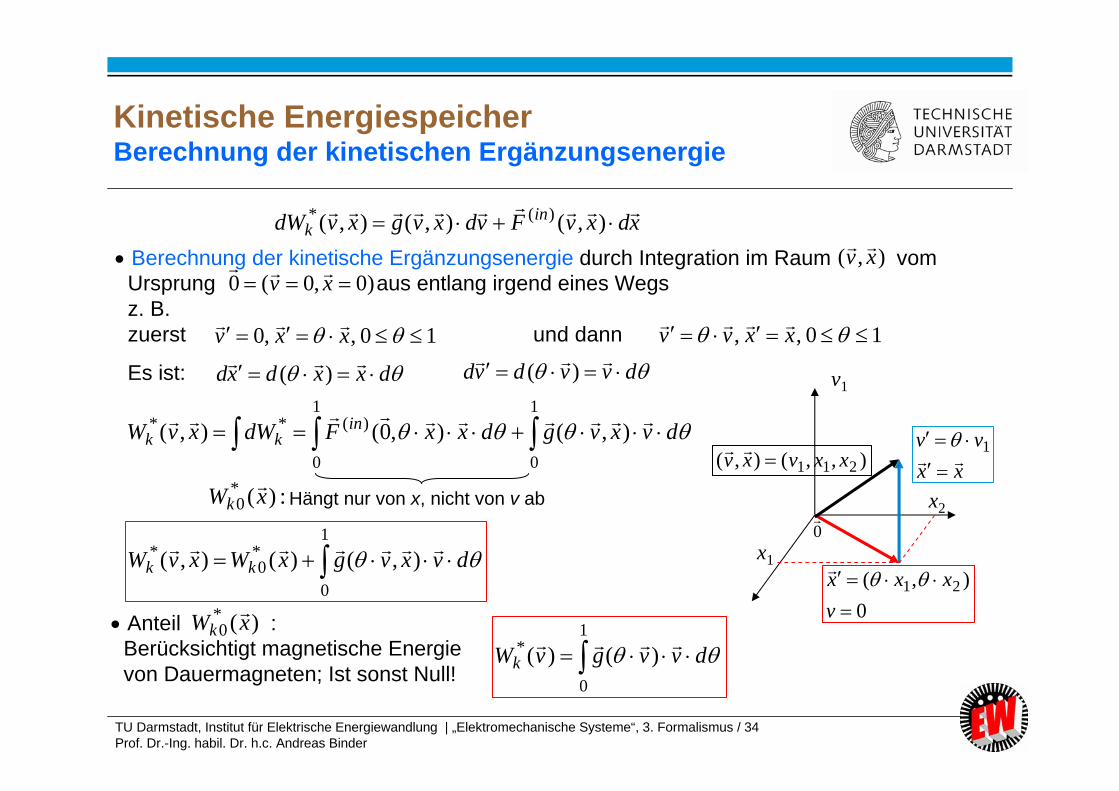
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 34Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Kinetische EnergiespeicherBerechnung der kinetischen Ergänzungsenergie
xdxvFvdxvgxvdW ink
),(),(),( )(*
Berechnung der kinetische Ergänzungsenergie durch Integration im Raum vom Ursprung aus entlang irgend eines Wegsz. B. zuerst und dann
Es ist:
),( xv
)0,0(0 xv
10,,0 xxv 10,, xxvv
1
0
1
0
)(** ),(),0(),( dvxvgdxxFdWxvW inkk
dxxdxd )( dvvdvd
)(
Hängt nur von x, nicht von v ab
1
0
*0
* ),()(),( dvxvgxWxvW kk
:)(*0 xWk
x1
x2
v1
0
0),( 21
vxxx
xxvv
1),,(),( 211 xxvxv
Anteil : Berücksichtigt magnetische Energie von Dauermagneten; Ist sonst Null!
)(*0 xWk
1
0
* )()( dvvgvWk
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 35Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme3. Formale Behandlung
elektromechanischer diskreter Systeme
Bezugspfeile, Leistungsfluss, Energiefluss Potentielle Energiespeicher Beispiel:
Beweglicher Plattenkondensator Kinetische Energiespeicher Beispiel:
Bewegliche gekoppelte Spulen Energiedissipation Elektrische Ersatzelemente
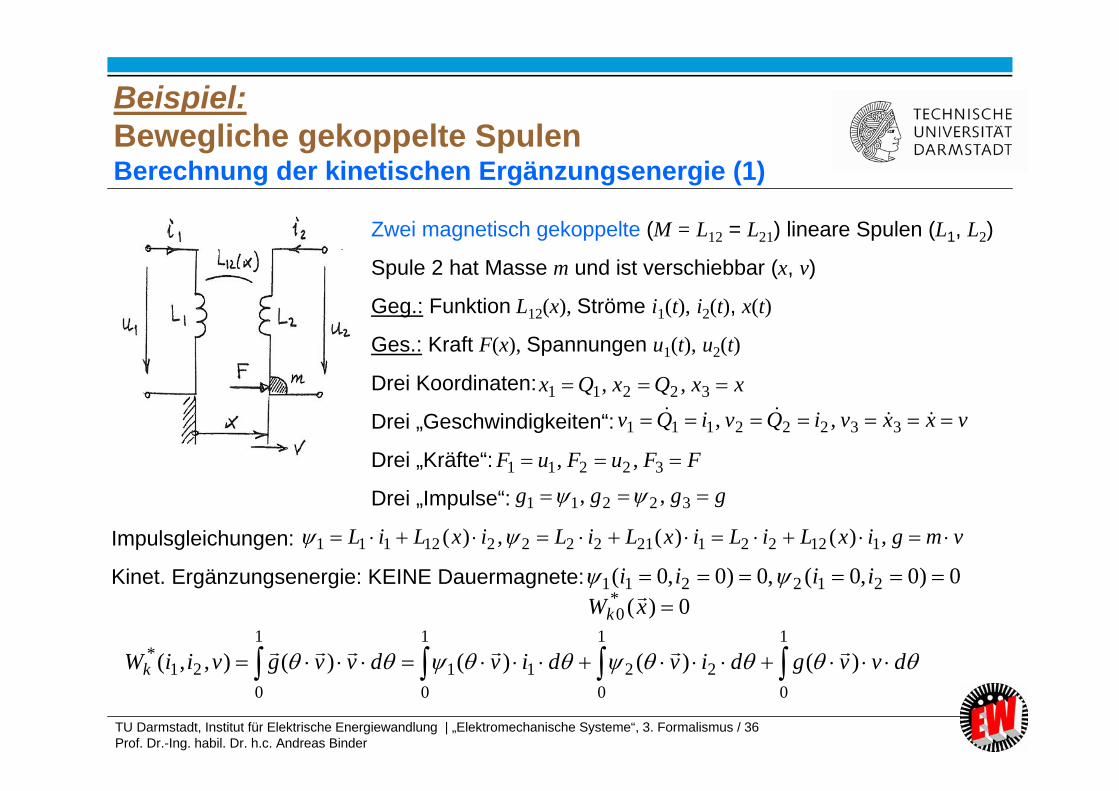
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 36Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiel:Bewegliche gekoppelte SpulenBerechnung der kinetischen Ergänzungsenergie (1)
Zwei magnetisch gekoppelte (M = L12 = L21) lineare Spulen (L1, L2)
Spule 2 hat Masse m und ist verschiebbar (x, v)
Geg.: Funktion L12(x), Ströme i1(t), i2(t), x(t)
Ges.: Kraft F(x), Spannungen u1(t), u2(t)
Drei Koordinaten:
Drei „Geschwindigkeiten“:
Drei „Kräfte“:
Drei „Impulse“:
xxQxQx 32211 ,,vxxviQviQv
33222111 ,,
FFuFuF 32211 ,,gggg 32211 ,,
Impulsgleichungen:
Kinet. Ergänzungsenergie: KEINE Dauermagnete:
vmgixLiLixLiLixLiL ,)()(,)( 11222121222212111
1
0
1
022
1
011
1
021
* )()()()(),,( dvvgdivdivdvvgviiWk
0)0,0(,0)0,0( 212211 iiii 0)(*
0 xWk
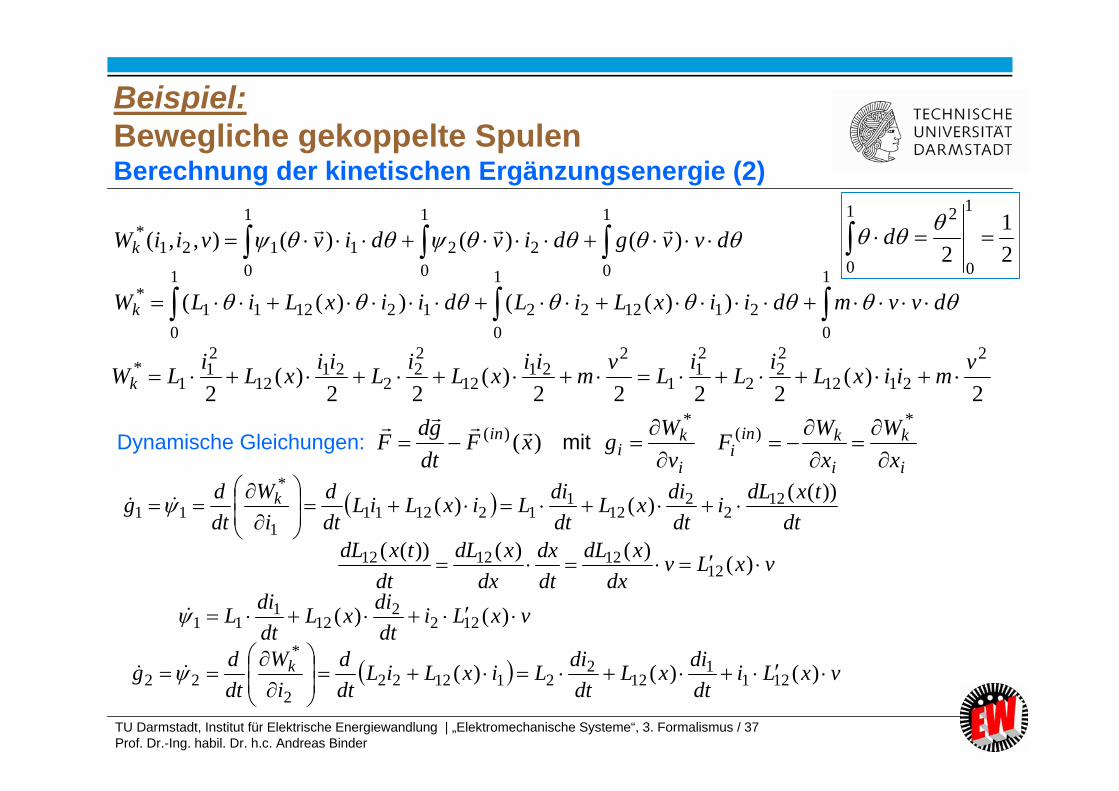
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 37Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiel:Bewegliche gekoppelte SpulenBerechnung der kinetischen Ergänzungsenergie (2)
1
0
1
022
1
01121
* )()()(),,( dvvgdivdivviiWk
1
0
1
0211222
1
0121211
* ))(())(( dvvmdiixLiLdiixLiLWk
2)(
2222)(
22)(
2
2
2112
22
2
21
1
221
12
22
221
12
21
1* vmiixLiLiLvmiixLiLiixLiLWk
21
2
1
0
21
0
d
Dynamische Gleichungen: mit)()( xFdtgdF in
i
k
i
kini
i
ki x
Wx
WFv
Wg
*
)(*
dt
txdLidtdixL
dtdiLixLiL
dtd
iW
dtdg k ))(()()( 12
22
121
1212111
*
11
vxLvdx
xdLdtdx
dxxdL
dttxdL
)()()())((12
121212
vxLidtdixL
dtdiL )()( 122
212
111
vxLidtdixL
dtdiLixLiL
dtd
iW
dtdg k
)()()( 1211
122
2112222
*
22
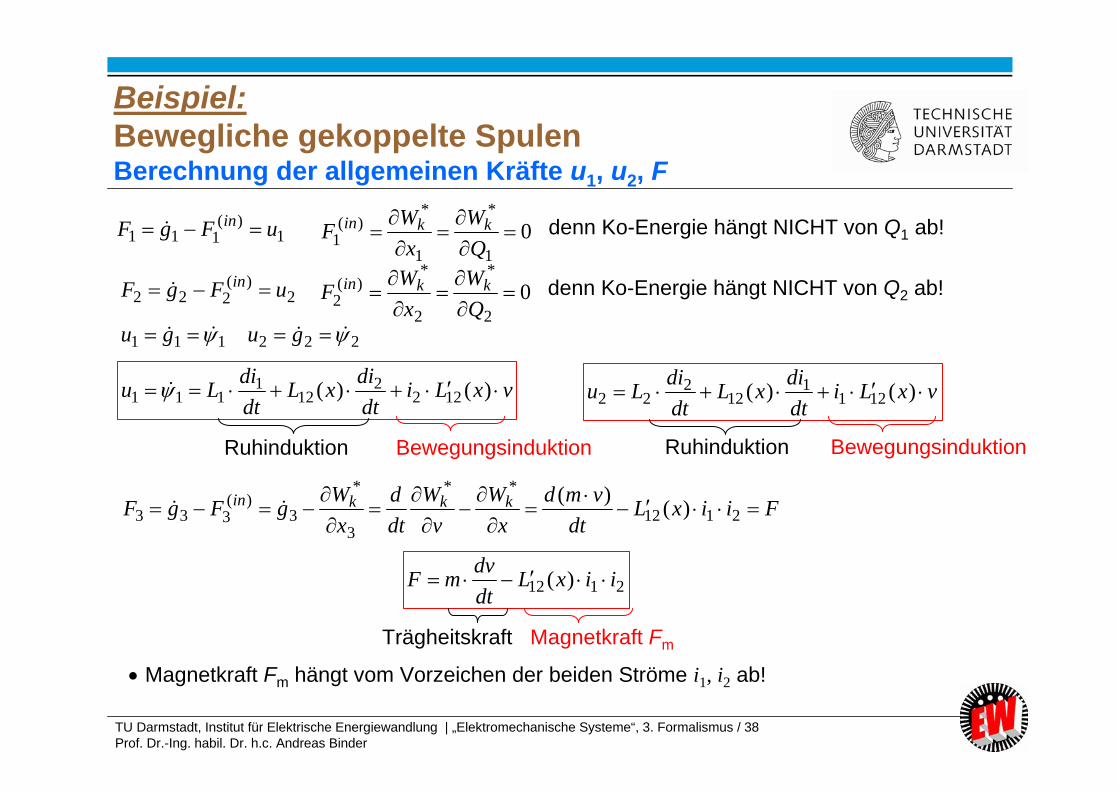
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 38Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiel:Bewegliche gekoppelte SpulenBerechnung der allgemeinen Kräfte u1, u2, F
vxLidtdixL
dtdiLu )()( 122
212
1111 vxLi
dtdixL
dtdiLu )()( 121
112
222
Ruhinduktion Bewegungsinduktion Ruhinduktion Bewegungsinduktion
FiixLdt
vmdx
Wv
Wdtd
xWgFgF kkkin
2112
**
3
*
3)(
333 )()(
1)(
111 uFgF in 01
*
1
*)(
1
QW
xWF kkin denn Ko-Energie hängt NICHT von Q1 ab!
2)(
222 uFgF in 02
*
2
*)(
2
QW
xWF kkin denn Ko-Energie hängt NICHT von Q2 ab!
222111 gugu
2112 )( iixLdtdvmF
Trägheitskraft Magnetkraft Fm
Magnetkraft Fm hängt vom Vorzeichen der beiden Ströme i1, i2 ab!
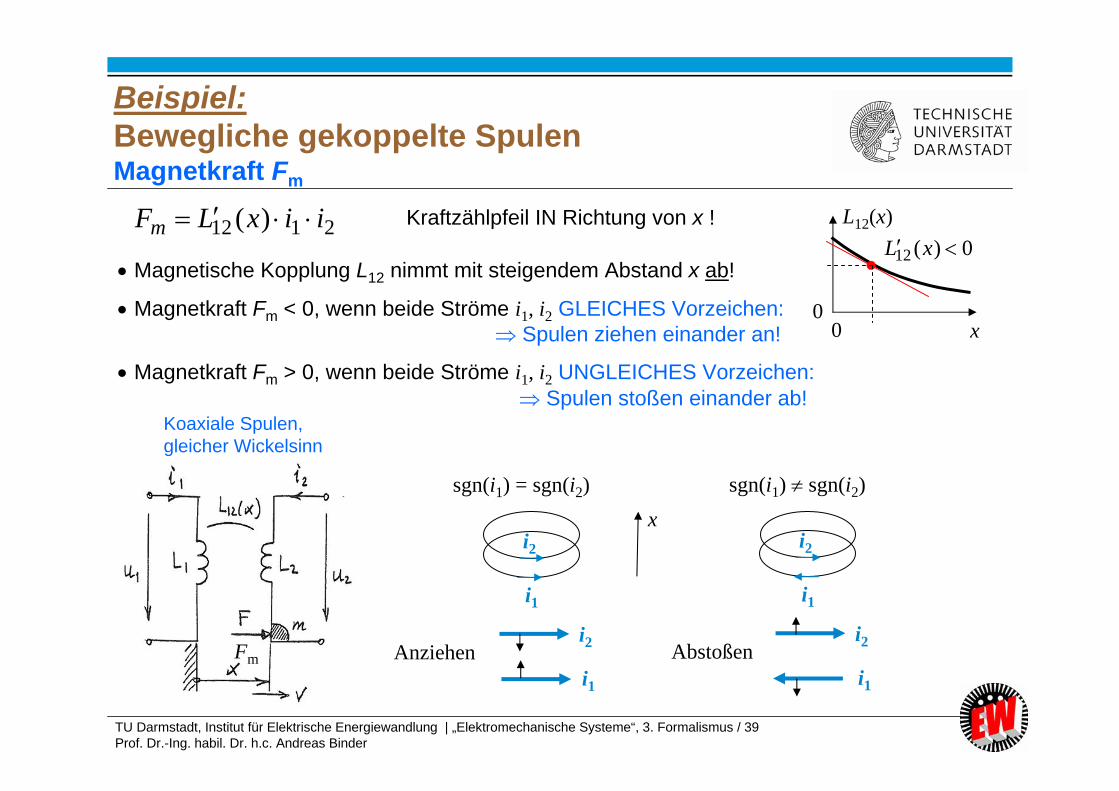
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 39Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiel:Bewegliche gekoppelte SpulenMagnetkraft Fm
2112 )( iixLFm L12(x)
x0
0
0)(12 xL
Magnetische Kopplung L12 nimmt mit steigendem Abstand x ab!
Magnetkraft Fm < 0, wenn beide Ströme i1, i2 GLEICHES Vorzeichen: Spulen ziehen einander an!
Magnetkraft Fm > 0, wenn beide Ströme i1, i2 UNGLEICHES Vorzeichen: Spulen stoßen einander ab!
Kraftzählpfeil IN Richtung von x !
Fm
Koaxiale Spulen, gleicher Wickelsinn
i1
sgn(i1) = sgn(i2)
Anziehen
i2
i2
i1
i1
sgn(i1) sgn(i2)
Abstoßen
i2
i2
i1
x
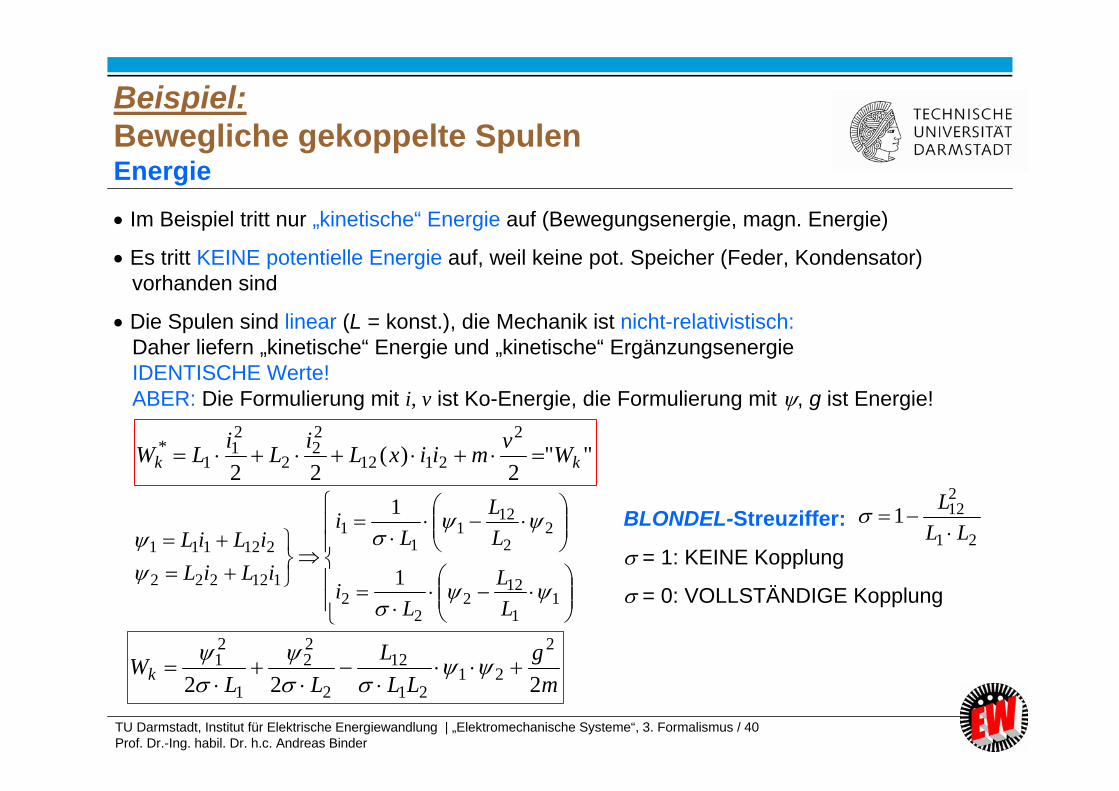
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 40Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
BLONDEL-Streuziffer:
= 1: KEINE Kopplung
= 0: VOLLSTÄNDIGE Kopplung
Beispiel:Bewegliche gekoppelte SpulenEnergie
Im Beispiel tritt nur „kinetische“ Energie auf (Bewegungsenergie, magn. Energie)
Es tritt KEINE potentielle Energie auf, weil keine pot. Speicher (Feder, Kondensator) vorhanden sind
Die Spulen sind linear (L = konst.), die Mechanik ist nicht-relativistisch:Daher liefern „kinetische“ Energie und „kinetische“ Ergänzungsenergie IDENTISCHE Werte!ABER: Die Formulierung mit i, v ist Ko-Energie, die Formulierung mit , g ist Energie!
""2
)(22
2
2112
22
2
21
1*
kk WvmiixLiLiLW
11
122
22
22
121
11
112222
212111
1
1
LL
Li
LL
Li
iLiLiLiL 21
2121LL
L
mg
LLL
LLWk 222
2
2121
12
2
22
1
21
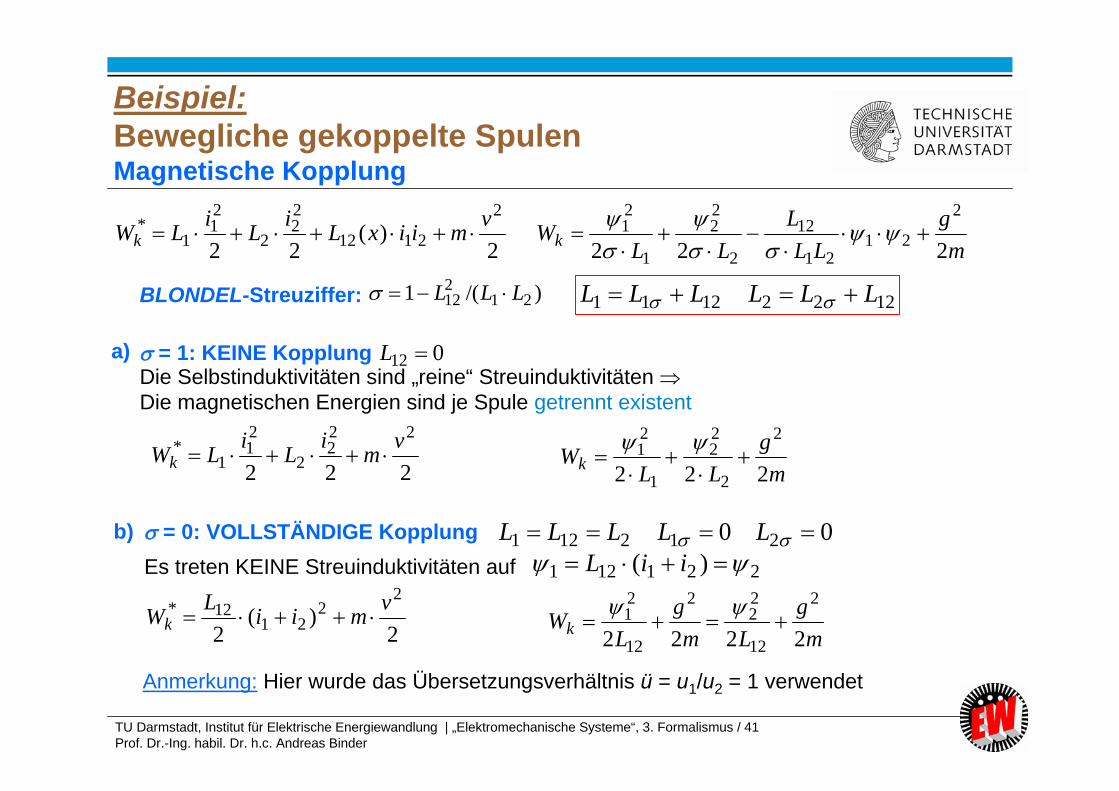
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 41Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiel:Bewegliche gekoppelte SpulenMagnetische Kopplung
2)(
22
2
2112
22
2
21
1* vmiixLiLiLWk
)/(1 21212 LLL BLONDEL-Streuziffer:
= 1: KEINE Kopplung
mg
LLL
LLWk 222
2
2121
12
2
22
1
21
mg
LLWk 222
2
2
22
1
21
012 L
222
222
2
21
1* vmiLiLWk
= 0: VOLLSTÄNDIGE Kopplung
12221211 LLLLLL
Die Selbstinduktivitäten sind „reine“ Streuinduktivitäten Die magnetischen Energien sind je Spule getrennt existent
00 212121 LLLLLEs treten KEINE Streuinduktivitäten auf
2)(
2
22
2112* vmiiLWk
221121 )( iiL
mg
Lmg
LWk 2222
2
12
22
2
12
21
Anmerkung: Hier wurde das Übersetzungsverhältnis ü = u1/u2 = 1 verwendet
a)
b)
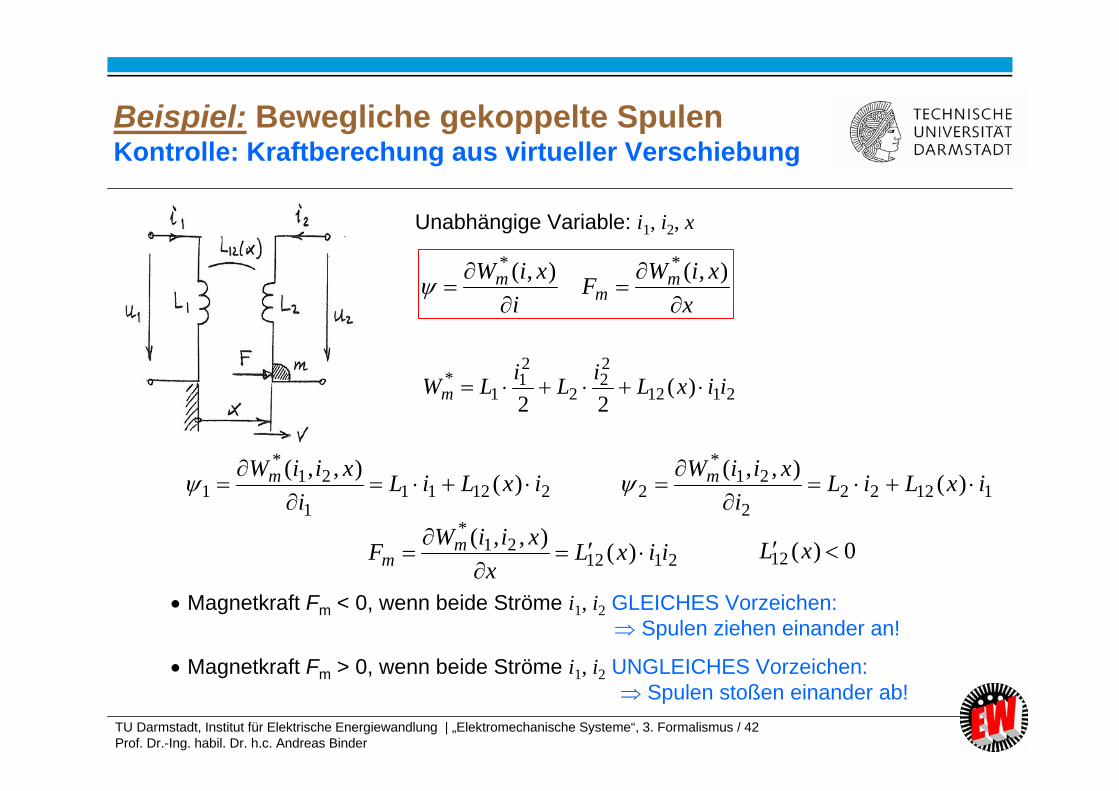
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 42Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiel: Bewegliche gekoppelte SpulenKontrolle: Kraftberechung aus virtueller Verschiebung
Unabhängige Variable: i1, i2, x
211221
*)(),,( iixL
xxiiWF m
m
xxiWF
ixiW m
mm
),(),( **
2112
22
2
21
1* )(
22iixLiLiLWm
212111
21*
1 )(),,( ixLiLi
xiiWm
11222
2
21*
2 )(),,( ixLiLi
xiiWm
Magnetkraft Fm < 0, wenn beide Ströme i1, i2 GLEICHES Vorzeichen: Spulen ziehen einander an!
Magnetkraft Fm > 0, wenn beide Ströme i1, i2 UNGLEICHES Vorzeichen: Spulen stoßen einander ab!
0)(12 xL
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 43Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme3. Formale Behandlung
elektromechanischer diskreter Systeme
Bezugspfeile, Leistungsfluss, Energiefluss Potentielle Energiespeicher Beispiel:
Beweglicher Plattenkondensator Kinetische Energiespeicher Beispiel:
Bewegliche gekoppelte Spulen Energiedissipation Elektrische Ersatzelemente
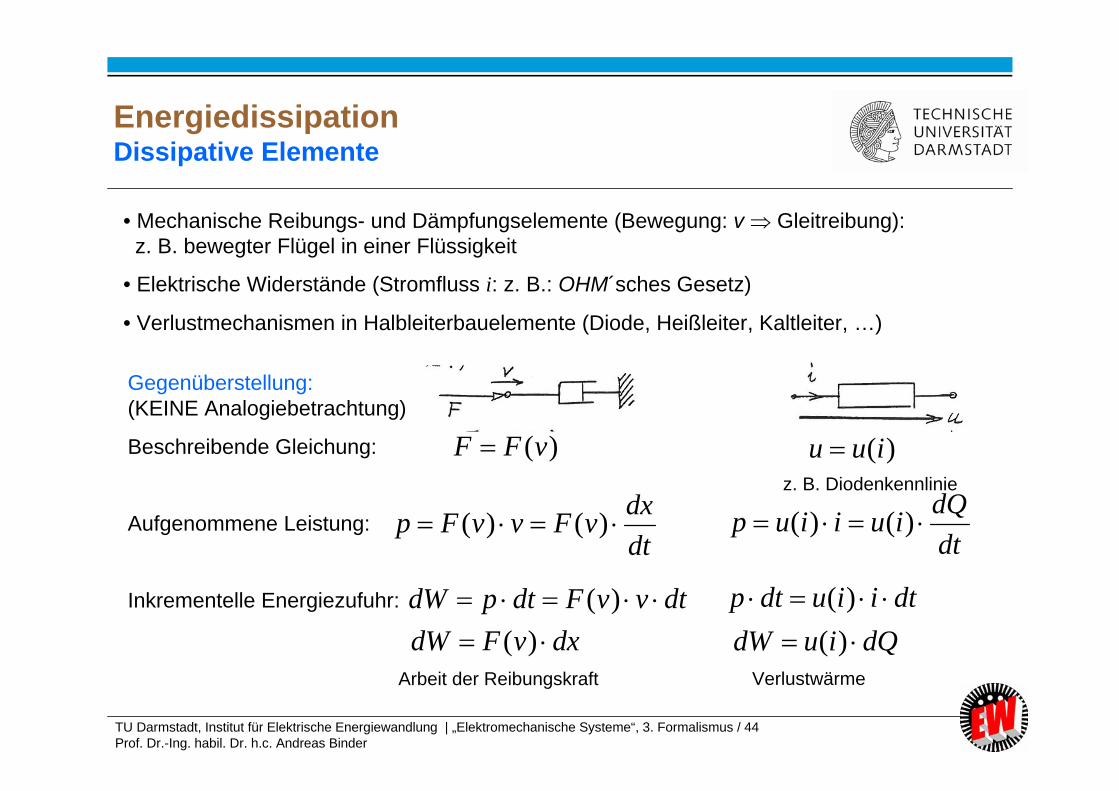
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 44Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
EnergiedissipationDissipative Elemente
• Mechanische Reibungs- und Dämpfungselemente (Bewegung: v Gleitreibung): z. B. bewegter Flügel in einer Flüssigkeit
• Elektrische Widerstände (Stromfluss i: z. B.: OHM´sches Gesetz)
• Verlustmechanismen in Halbleiterbauelemente (Diode, Heißleiter, Kaltleiter, …)
Gegenüberstellung:(KEINE Analogiebetrachtung)
Beschreibende Gleichung:
Aufgenommene Leistung:
Inkrementelle Energiezufuhr:
)(vFF )(iuu z. B. Diodenkennlinie
dtdxvFvvFp )()(
dtdQiuiiup )()(
dtvvFdtpdW )(dxvFdW )(
dtiiudtp )(dQiudW )(
Arbeit der Reibungskraft Verlustwärme
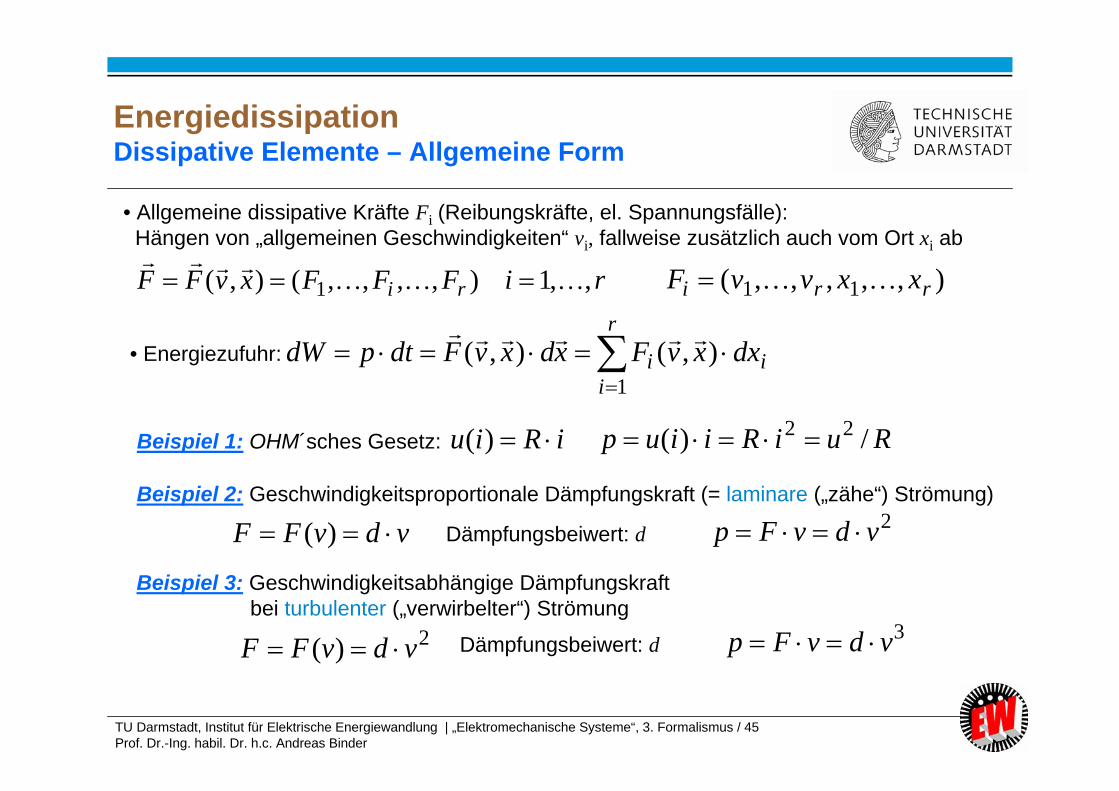
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 45Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
EnergiedissipationDissipative Elemente – Allgemeine Form
• Allgemeine dissipative Kräfte Fi (Reibungskräfte, el. Spannungsfälle):Hängen von „allgemeinen Geschwindigkeiten“ vi, fallweise zusätzlich auch vom Ort xi ab
• Energiezufuhr:
riFFFxvFF ri ,,1),,,,(),( 1
RuiRiiup /)( 22
r
iii dxxvFxdxvFdtpdW
1),(),(
),,,,,( 11 rri xxvvF
Beispiel 1: OHM´sches Gesetz: iRiu )(
vdvFF )(Beispiel 2: Geschwindigkeitsproportionale Dämpfungskraft (= laminare („zähe“) Strömung)
Dämpfungsbeiwert: d 2vdvFp
2)( vdvFF
Beispiel 3: Geschwindigkeitsabhängige Dämpfungskraft bei turbulenter („verwirbelter“) Strömung
Dämpfungsbeiwert: d 3vdvFp
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 46Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme3. Formale Behandlung
elektromechanischer diskreter Systeme
Bezugspfeile, Leistungsfluss, Energiefluss Potentielle Energiespeicher Beispiel:
Beweglicher Plattenkondensator Kinetische Energiespeicher Beispiel:
Bewegliche gekoppelte Spulen Energiedissipation Elektrische Ersatzelemente
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 47Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrische ErsatzelementeElektrische Ersatzelemente für das mechanische System
• Vor dem Einsatz leistungsfähiger Digitalrechner wurden in den 1960-1980-er Jahre elektronische Analogrechner eingesetzt, um Differentialgleichungen zu integrieren.
• Für mechanische Ausgleichsvorgänge wurden äquivalente elektrische Ersatzsystemeverwendet, die das gleiche dynamische Verhalten haben.
• Daraus abgeleitet haben sich elektrische Ersatzelemente für die Beschreibung mechanischer Systeme fallweise erhalten.
• Bei elektromechanischen Systemen werden so die ohnehin vorhandenen elektrischen Gleichungen (auf Basis der KIRCHHOFF-Gesetze) um weitere, mit ihnen gekoppelte elektrische Gleichungen (für das gekoppelte mechanische System) erweitert.
• Die Beschreibung des dynamischen Kleinsignal-Verhaltens des (linearisierten) Wandlers in einem Arbeitspunkt erfolgt dann ausschließlich über die Lösung elektrischer Netzwerke.
• Es gibt zwei elektrische Äquivalenzsysteme zum mechanischen System:a) Kraft-Spannungs-System, b) Kraft-Strom-System
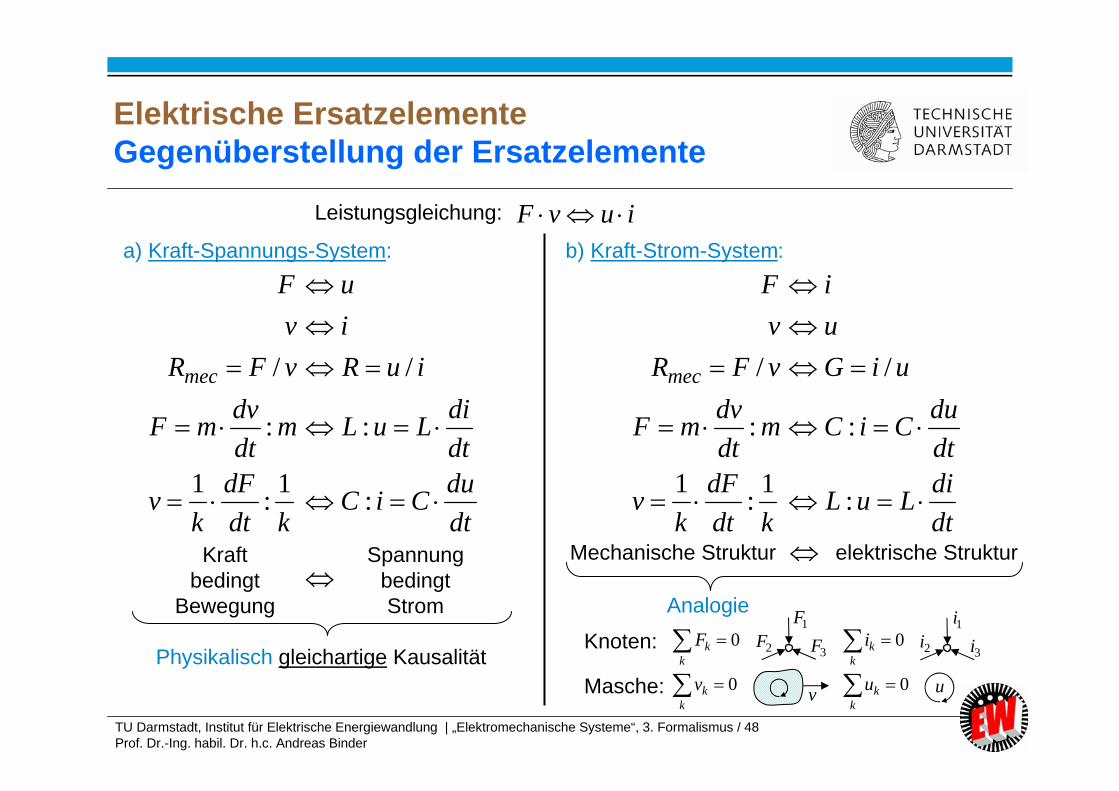
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 48Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrische Ersatzelemente Gegenüberstellung der Ersatzelemente
dtduCiC
kdtdF
kv
dtdiLuLm
dtdvmF
iuRvFRivuF
mec
:1:1
::
//
Leistungsgleichung:
a) Kraft-Spannungs-System: b) Kraft-Strom-System:
dtdiLuL
kdtdF
kv
dtduCiCm
dtdvmF
uiGvFRuviF
mec
:1:1
::
//
iuvF
Kraft bedingt
Bewegung
Spannung bedingt Strom
Physikalisch gleichartige Kausalität
Mechanische Struktur elektrische Struktur
Analogie
Knoten:
Masche: 0
0
kk
kk
v
F
0
0
kk
kk
u
i1F
2F3F
1i
3i2i
v u
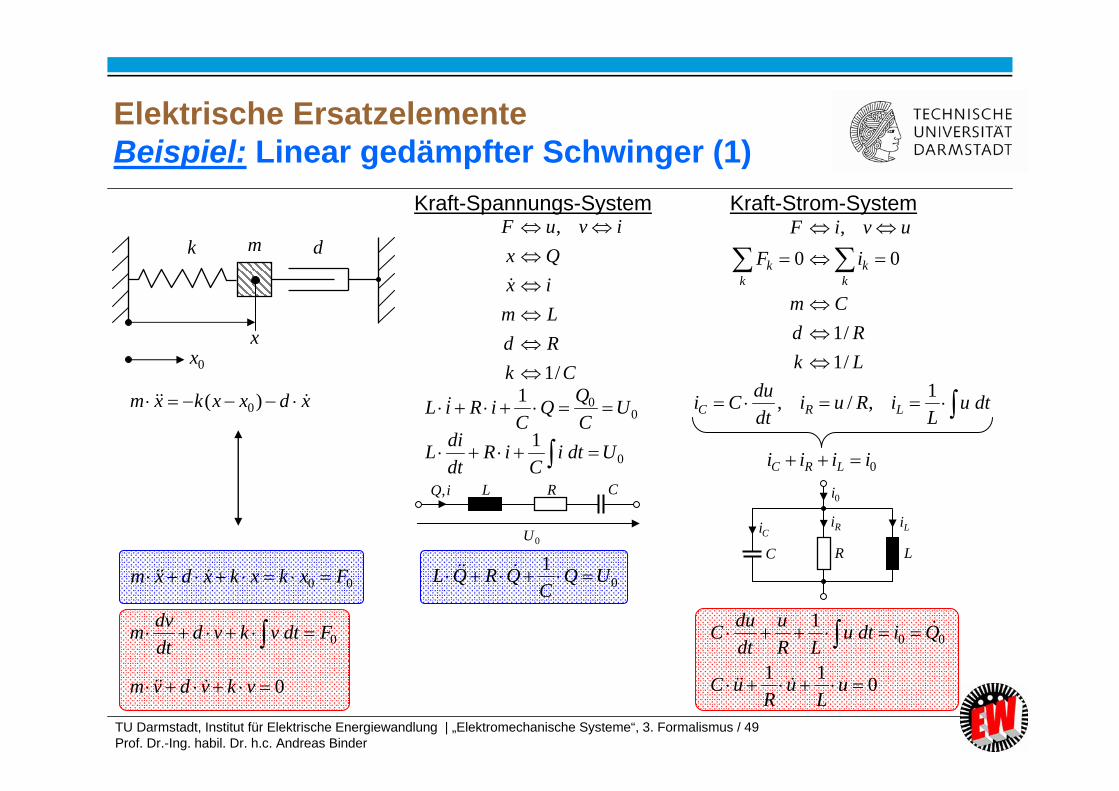
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 49Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrische Ersatzelemente Beispiel: Linear gedämpfter Schwinger (1)
CkRdLmixQx
ivuF
/1
,
Kraft-Spannungs-System
LkRd
Cm
iFuviF
kk
kk
/1/1
00,
xdxxkxm )( 0
0Fdtvkvddtdvm
00 Fxkxkxdxm
001 U
CQQ
CiRiL
01 UQC
QRQL
011
100
uL
uR
uC
QidtuLR
udtduC
dtuL
iRuidtduCi LRC
1,/,
0iiii LRC
Kraft-Strom-System
0 vkvdvm
01 UdtiC
iRdtdiL iQ, L R C
0U Ci
LRC
LiRi
0i
k m d
x0x
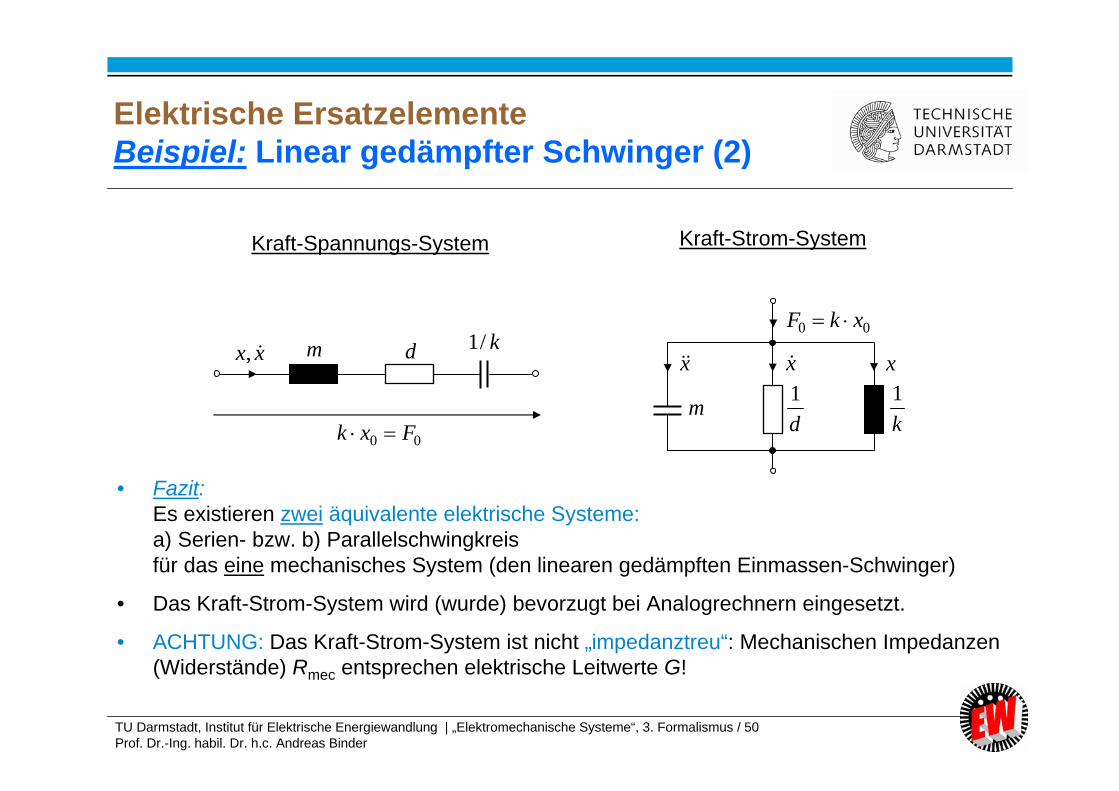
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 50Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrische Ersatzelemente Beispiel: Linear gedämpfter Schwinger (2)
Kraft-Spannungs-System Kraft-Strom-System
xx , m d k/1
00 Fxk
x
k1
d1m
xx
00 xkF
• Fazit:Es existieren zwei äquivalente elektrische Systeme:a) Serien- bzw. b) Parallelschwingkreisfür das eine mechanisches System (den linearen gedämpften Einmassen-Schwinger)
• Das Kraft-Strom-System wird (wurde) bevorzugt bei Analogrechnern eingesetzt.
• ACHTUNG: Das Kraft-Strom-System ist nicht „impedanztreu“: Mechanischen Impedanzen (Widerstände) Rmec entsprechen elektrische Leitwerte G!
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 51Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrische Ersatzelemente Verwendung der Ersatzsysteme
Verwendung des Kraft-Strom-Systems:In den Vorlesungsunterlagen von Prof. Werthschützky und in den Lehrbüchern von Ballas / Pfeifer / Werthschützky
In dieser Lehrveranstaltung und in den Lehrbüchern von Woodson / Melcher / Meisel wird KEIN Ersatzsystem verwendet, sondern direkt die physikalisch bedingten Gleichungen.
Die dabei auftretenden Entsprechungen für die unterschiedlichen Energieformen passen zum Kraft-Spannungs-System!
ACHTUNG:In den Lehrunterlagen und Klausuren bis SS 2018 (Prof. Werthschützky) ist das Kraft-Strom-System in Verwendung gewesen!
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 3. Formalismus / 52Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme3. Formale Behandlung
elektromechanischer diskreter Systeme
Zusammenfassung:
- Allgemeine Koordinaten (Lage, el. Ladungen)- Allgemeine Geschwindigkeiten (Bewegung, el. Ströme)- Allgemeine Kräfte (mech. Kräfte, el. Spannungen)- Allgemeine potentielle Energie (Lageenergie, el.-stat. Energie)- Allgemeine kinetische Energie (Bewegungsenergie, magn.-stat.
Energie)- Berechnung der Kräfte aus den Ko-Energien- r-dimensionaler Raum der allgemeinen Koordinaten
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 1Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme Elektromechanische Systeme
4. Methode der 4. Methode der LagrangeLagrange--GleichungenGleichungen
• Verallgemeinerte unabhängige Koordinaten• Virtuelle Verschiebungen• Variationsrechnung anstelle der klassischen dynamischen Grundgesetze:
Lagrange-Gleichungen• Beispiele zum mechanischen System• Beispiele zum elektrischen Netzwerk
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 2Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme4. Methode der Lagrange-Gleichungen
Verallgemeinerte unabhängige Koordinaten Virtuelle Verschiebungen Variationsrechnung anstelle der klassischen dynamischen
Grundgesetze: Lagrange-Gleichungen Beispiele zum mechanischen System Beispiele zum elektrischen Netzwerk
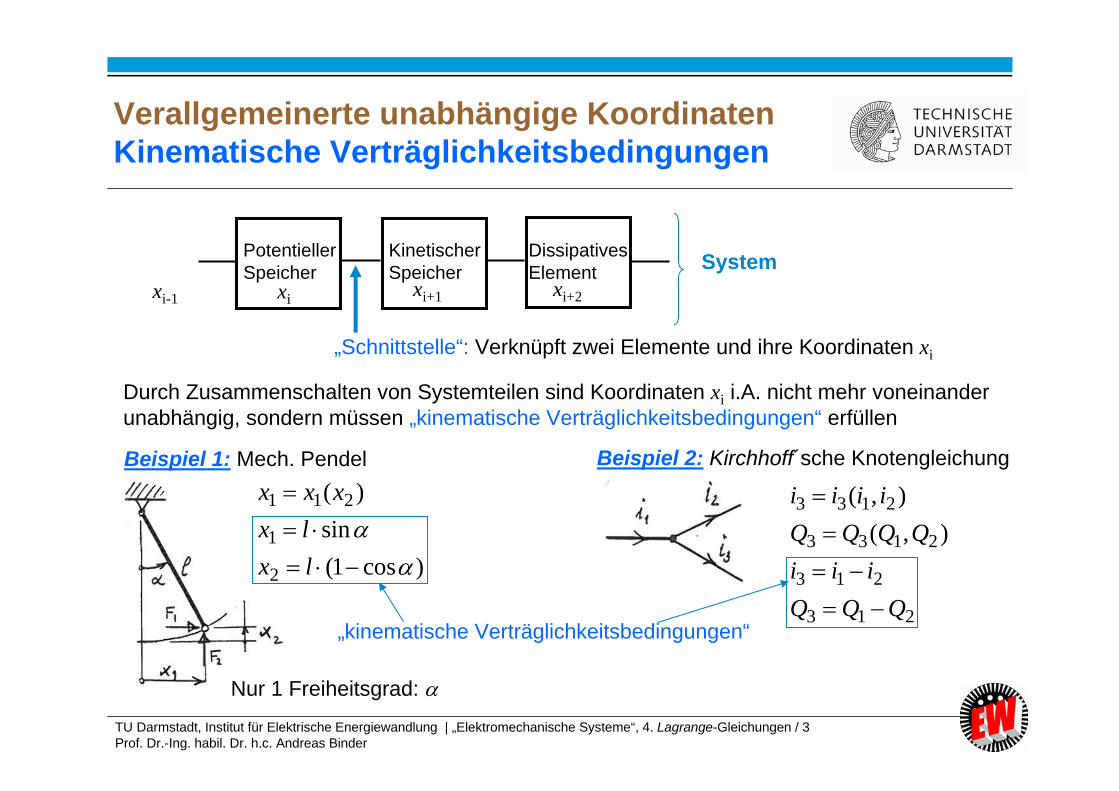
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 3Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Verallgemeinerte unabhängige KoordinatenKinematische Verträglichkeitsbedingungen
„Schnittstelle“: Verknüpft zwei Elemente und ihre Koordinaten xi
Durch Zusammenschalten von Systemteilen sind Koordinaten xi i.A. nicht mehr voneinander unabhängig, sondern müssen „kinematische Verträglichkeitsbedingungen“ erfüllen
Beispiel 1: Mech. Pendel Beispiel 2: Kirchhoff´sche Knotengleichung
Potentieller Speicher
Kinetischer Speicher
Dissipatives Element System
xi xi+1 xi+2xi-1
)cos1(sin
)(
2
1
211
lxlx
xxx
Nur 1 Freiheitsgrad:
213
213
2133
2133
),(),(
QQQiii
QQQQiiii
„kinematische Verträglichkeitsbedingungen“
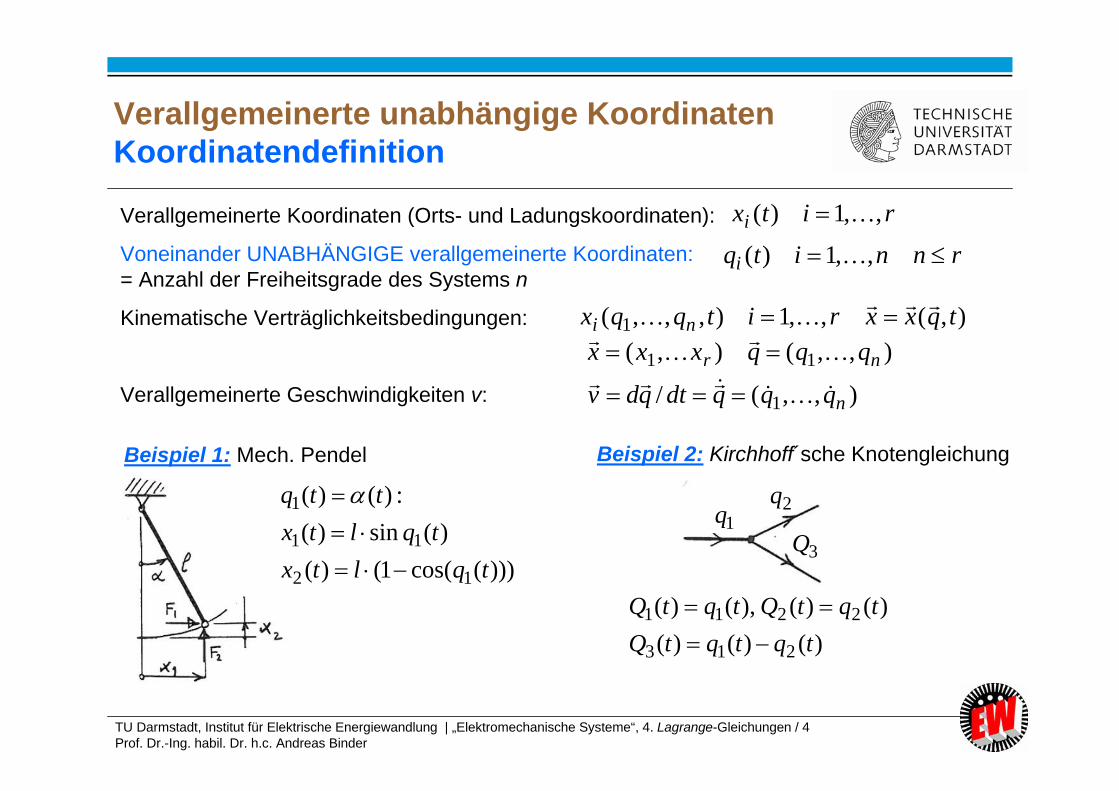
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 4Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Verallgemeinerte unabhängige KoordinatenKoordinatendefinition
Verallgemeinerte Koordinaten (Orts- und Ladungskoordinaten):
Voneinander UNABHÄNGIGE verallgemeinerte Koordinaten: = Anzahl der Freiheitsgrade des Systems n
Kinematische Verträglichkeitsbedingungen:
Verallgemeinerte Geschwindigkeiten v:
Beispiel 1: Mech. Pendel Beispiel 2: Kirchhoff´sche Knotengleichung
)))(cos(1()()(sin)(
:)()(
12
11
1
tqltxtqltx
ttq
)()()()()(),()(
213
2211
tqtqtQtqtQtqtQ
ritxi ,,1)(
rnnitqi ,,1)(
),(,,1),,,( 1 tqxxritqqx ni
),,(),( 11 nr qqqxxx
),,(/ 1 nqqqdtqdv
1q 2q
3Q
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 5Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme4. Methode der Lagrange-Gleichungen
Verallgemeinerte unabhängige Koordinaten Virtuelle Verschiebungen Variationsrechnung anstelle der klassischen dynamischen
Grundgesetze: Lagrange-Gleichungen Beispiele zum mechanischen System Beispiele zum elektrischen Netzwerk
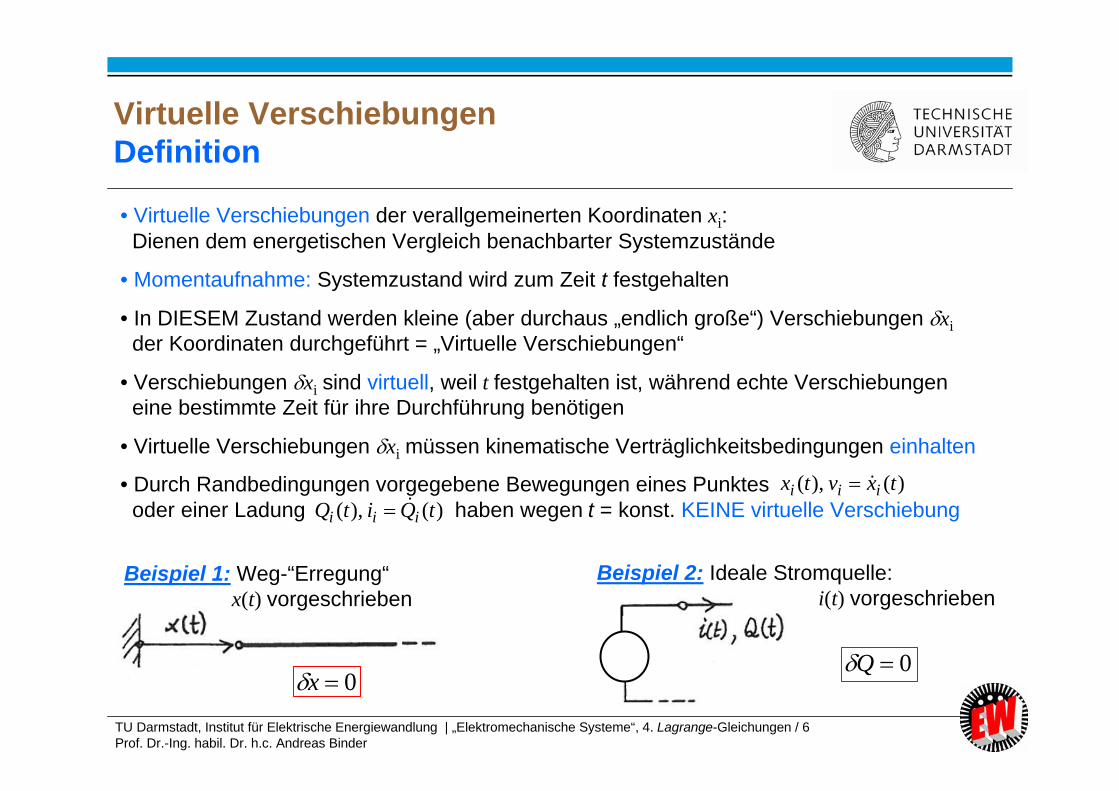
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 6Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Virtuelle VerschiebungenDefinition
• Virtuelle Verschiebungen der verallgemeinerten Koordinaten xi:Dienen dem energetischen Vergleich benachbarter Systemzustände
• Momentaufnahme: Systemzustand wird zum Zeit t festgehalten
• In DIESEM Zustand werden kleine (aber durchaus „endlich große“) Verschiebungen xider Koordinaten durchgeführt = „Virtuelle Verschiebungen“
• Verschiebungen xi sind virtuell, weil t festgehalten ist, während echte Verschiebungen eine bestimmte Zeit für ihre Durchführung benötigen
• Virtuelle Verschiebungen xi müssen kinematische Verträglichkeitsbedingungen einhalten
• Durch Randbedingungen vorgegebene Bewegungen eines Punktesoder einer Ladung haben wegen t = konst. KEINE virtuelle Verschiebung
)(),( txvtx iii )(),( tQitQ iii
Beispiel 1: Weg-“Erregung“x(t) vorgeschrieben
Beispiel 2: Ideale Stromquelle: i(t) vorgeschrieben
0x0Q
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 7Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme4. Methode der Lagrange-Gleichungen
Verallgemeinerte unabhängige Koordinaten Virtuelle Verschiebungen Variationsrechnung anstelle der klassischen dynamischen
Grundgesetze: Lagrange-Gleichungen Beispiele zum mechanischen System Beispiele zum elektrischen Netzwerk
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 8Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Variationsrechnung anstelle der klassischen dynamischen Grundgesetze: Lagrange-GleichungenGrundsatz-Überlegungen für konservative Systeme
• Konservatives System (= Energie-erhaltendes System):Keine Energieaustausch des Systems mit der Umgebung Keine Energiedissipation (= keine Verlustwärme). Es wird nur Energie zwischen den pot. & kin. Speichern des Systems ausgetauscht
• Nichtkonservatives System:Energieaustausch des Systems mit der Umgebung durch äußere Kräfte FEnergiedissipation = bremsende (Reibungs-)Kräfte F(d)
Es wird auch Energie zwischen den pot. & kin. Speichern des Systems ausgetauscht:Pot. Speicherkäfte F(p) und „innere“ Kräfte F(in) der kin. Speicher
• Diese Kräfte werden in Abhängigkeit der voneinander UNABHÄNGIGEN verallgemeinerten Koordinaten beschrieben
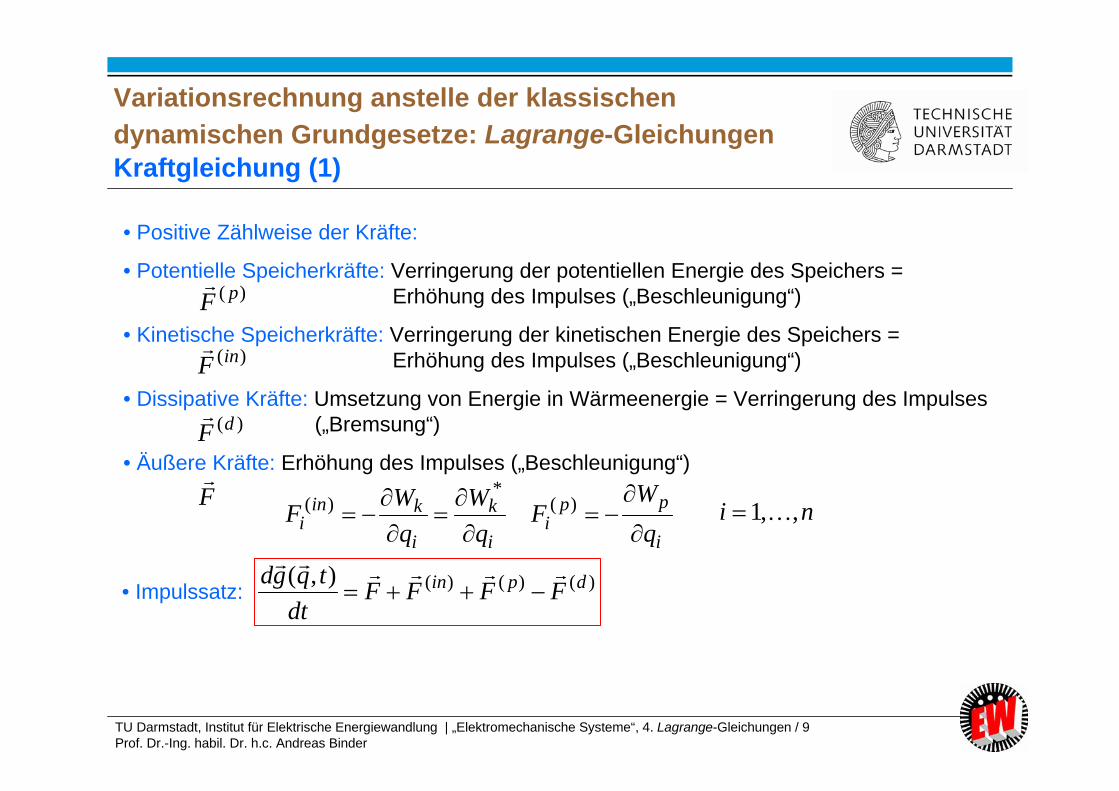
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 9Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Variationsrechnung anstelle der klassischen dynamischen Grundgesetze: Lagrange-GleichungenKraftgleichung (1)
• Impulssatz: )()()(),( dpin FFFFdt
tqgd
• Positive Zählweise der Kräfte:
• Potentielle Speicherkräfte: Verringerung der potentiellen Energie des Speichers =Erhöhung des Impulses („Beschleunigung“)
• Kinetische Speicherkräfte: Verringerung der kinetischen Energie des Speichers =Erhöhung des Impulses („Beschleunigung“)
• Dissipative Kräfte: Umsetzung von Energie in Wärmeenergie = Verringerung des Impulses(„Bremsung“)
• Äußere Kräfte: Erhöhung des Impulses („Beschleunigung“)
i
ppi
i
k
i
kini q
WF
qW
qWF
)(*
)( ni ,,1F
)(inF
)( pF
)(dF
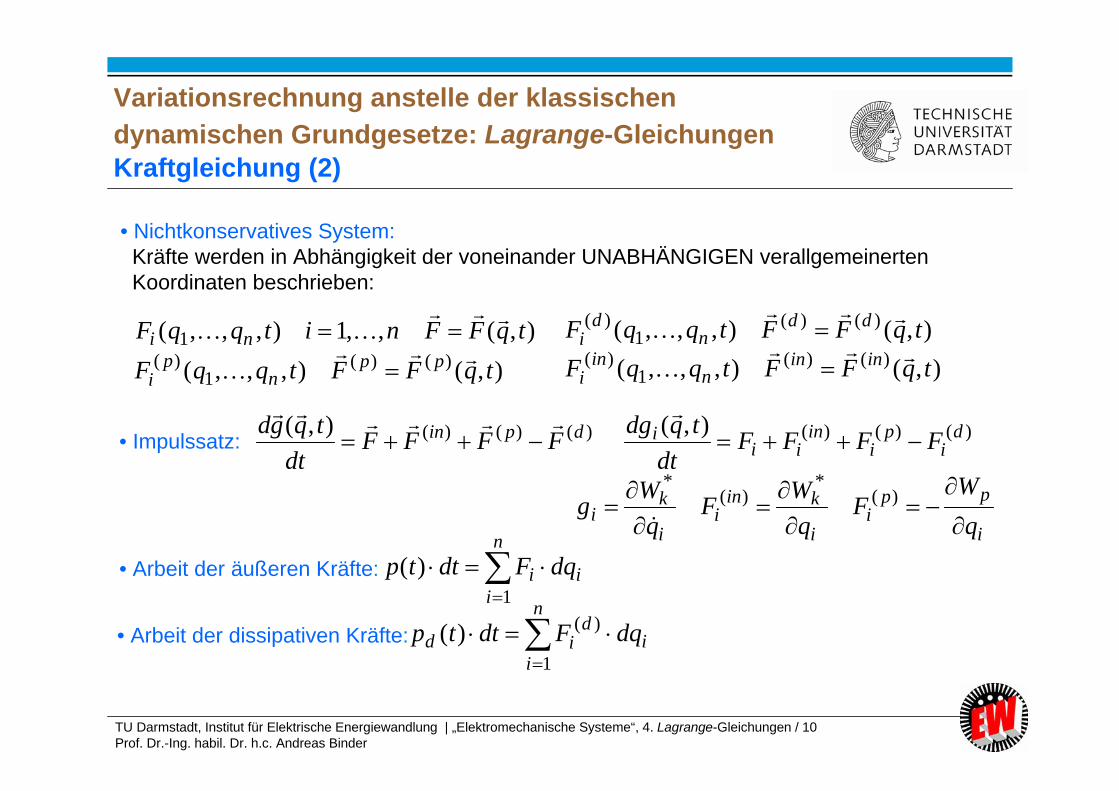
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 10Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Variationsrechnung anstelle der klassischen dynamischen Grundgesetze: Lagrange-GleichungenKraftgleichung (2)
• Nichtkonservatives System:Kräfte werden in Abhängigkeit der voneinander UNABHÄNGIGEN verallgemeinerten Koordinaten beschrieben:
),(,,1),,,( 1 tqFFnitqqF ni
• Impulssatz:
),(),,,( )()(1
)( tqFFtqqF ddn
di
),(),,,( )()(1
)( tqFFtqqF ppn
pi
),(),,,( )()(
1)( tqFFtqqF inin
nin
i
)()()(),( dpin FFFFdt
tqgd
)()()(),( di
pi
inii
i FFFFdt
tqdg
i
ppi
i
kini
i
ki q
WF
qWF
qWg
)(*
)(*
• Arbeit der äußeren Kräfte:
n
iii dqFdttp
1)(
• Arbeit der dissipativen Kräfte:
n
ii
did dqFdttp
1
)()(
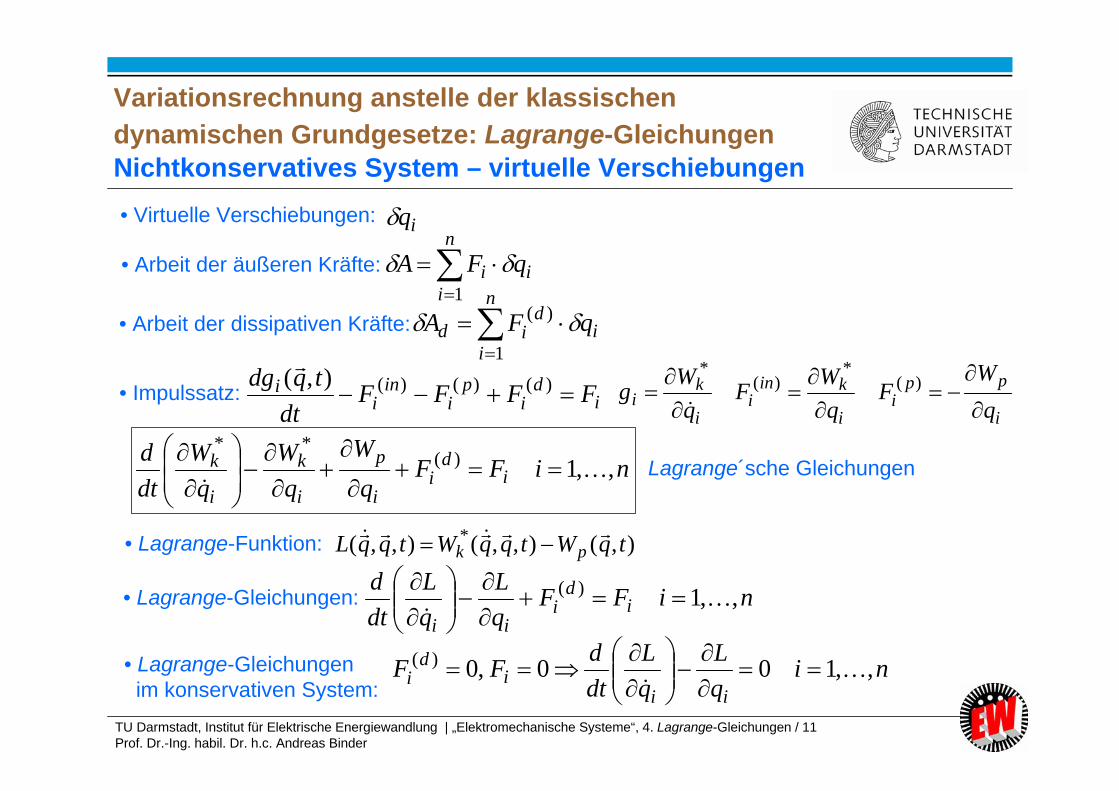
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 11Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Variationsrechnung anstelle der klassischen dynamischen Grundgesetze: Lagrange-GleichungenNichtkonservatives System – virtuelle Verschiebungen• Virtuelle Verschiebungen:
• Impulssatz: id
ip
iin
ii FFFFdt
tqdg )()()(),(
i
ppi
i
kini
i
ki q
WF
qWF
qWg
)(*
)(*
• Arbeit der äußeren Kräfte:
n
iii qFA
1
• Arbeit der dissipativen Kräfte:
n
ii
did qFA
1
)(
iq
niFFq
Wq
Wq
Wdtd
id
ii
p
i
k
i
k ,,1)(**
Lagrange´sche Gleichungen
• Lagrange-Funktion: ),(),,(),,( * tqWtqqWtqqL pk
niFFqL
qL
dtd
id
iii
,,1)(
• Lagrange-Gleichungen:
niqL
qL
dtdFF
iii
di ,,100,0)(
• Lagrange-Gleichungenim konservativen System:
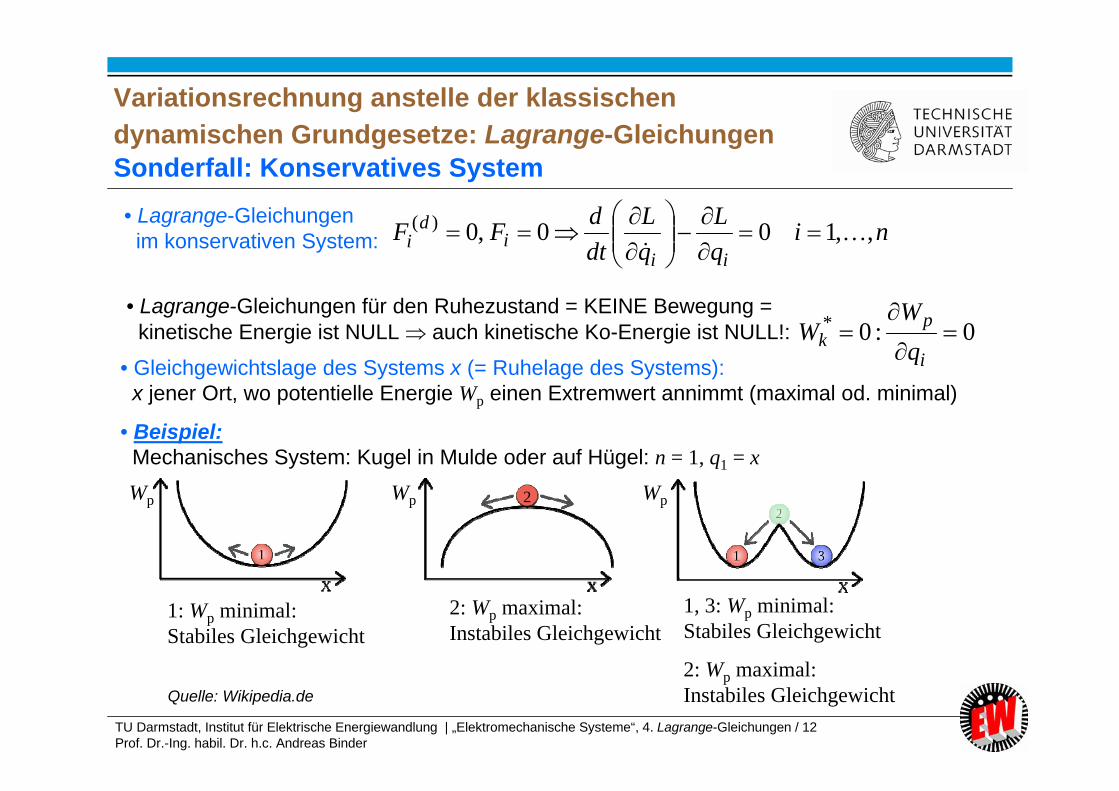
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 12Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Variationsrechnung anstelle der klassischen dynamischen Grundgesetze: Lagrange-GleichungenSonderfall: Konservatives System
niqL
qL
dtdFF
iii
di ,,100,0)(
• Lagrange-Gleichungen
im konservativen System:
• Lagrange-Gleichungen für den Ruhezustand = KEINE Bewegung =kinetische Energie ist NULL auch kinetische Ko-Energie ist NULL!: 0:0*
i
pk q
WW
• Gleichgewichtslage des Systems x (= Ruhelage des Systems): x jener Ort, wo potentielle Energie Wp einen Extremwert annimmt (maximal od. minimal)
• Beispiel:Mechanisches System: Kugel in Mulde oder auf Hügel: n = 1, q1 = x
2Wp Wp Wp
1: Wp minimal: Stabiles Gleichgewicht
2: Wp maximal: Instabiles Gleichgewicht
1, 3: Wp minimal: Stabiles Gleichgewicht
2: Wp maximal: Instabiles GleichgewichtQuelle: Wikipedia.de
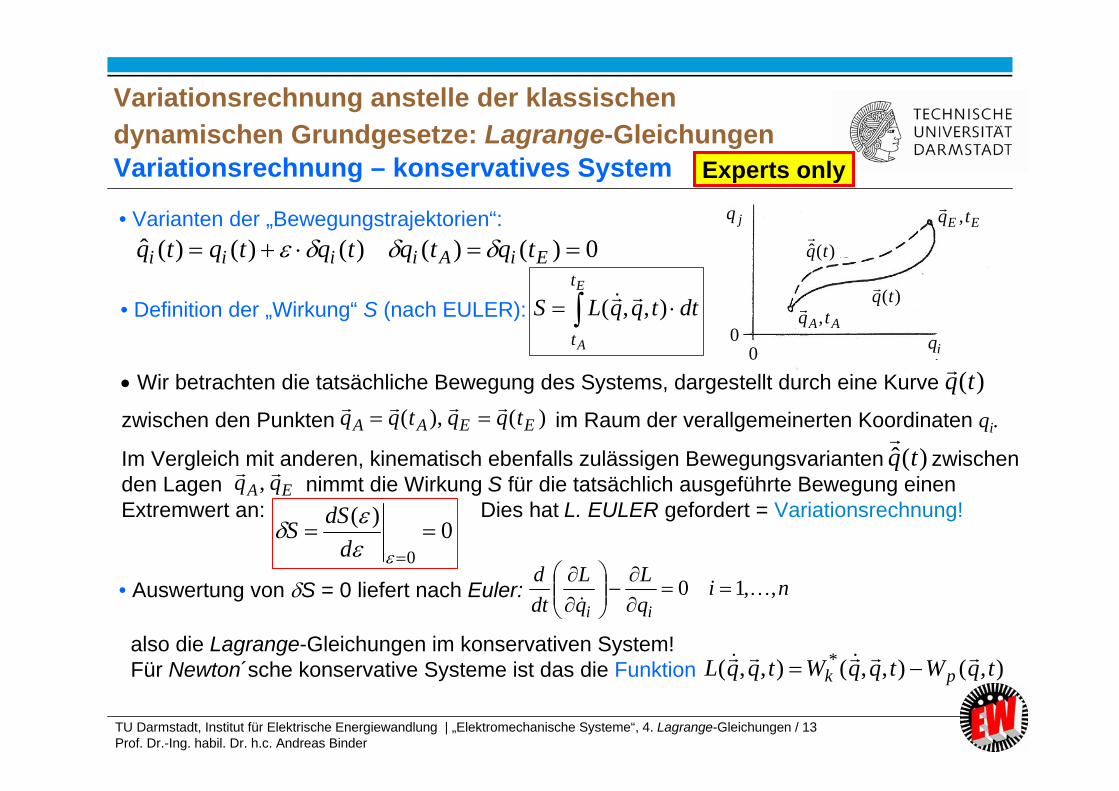
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 13Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Variationsrechnung anstelle der klassischen dynamischen Grundgesetze: Lagrange-GleichungenVariationsrechnung – konservatives System
• Varianten der „Bewegungstrajektorien“:0)()()()()(ˆ EiAiiii tqtqtqtqtq
niqL
qL
dtd
ii,,10
• Auswertung von S = 0 liefert nach Euler:
also die Lagrange-Gleichungen im konservativen System!Für Newton´sche konservative Systeme ist das die Funktion
Experts only
• Definition der „Wirkung“ S (nach EULER): E
A
t
t
dttqqLS ),,(
),(),,(),,( * tqWtqqWtqqL pk
Wir betrachten die tatsächliche Bewegung des Systems, dargestellt durch eine Kurve
zwischen den Punkten im Raum der verallgemeinerten Koordinaten qi.
Im Vergleich mit anderen, kinematisch ebenfalls zulässigen Bewegungsvarianten zwischen den Lagen nimmt die Wirkung S für die tatsächlich ausgeführte Bewegung einen Extremwert an: Dies hat L. EULER gefordert = Variationsrechnung!
)(tq
)(),( EEAA tqqtqq
EA qq ,
0)(
0
ddSS
)(ˆ tq
)(ˆ tq
)(tq
AA tq ,
EE tq ,
00 iq
jq
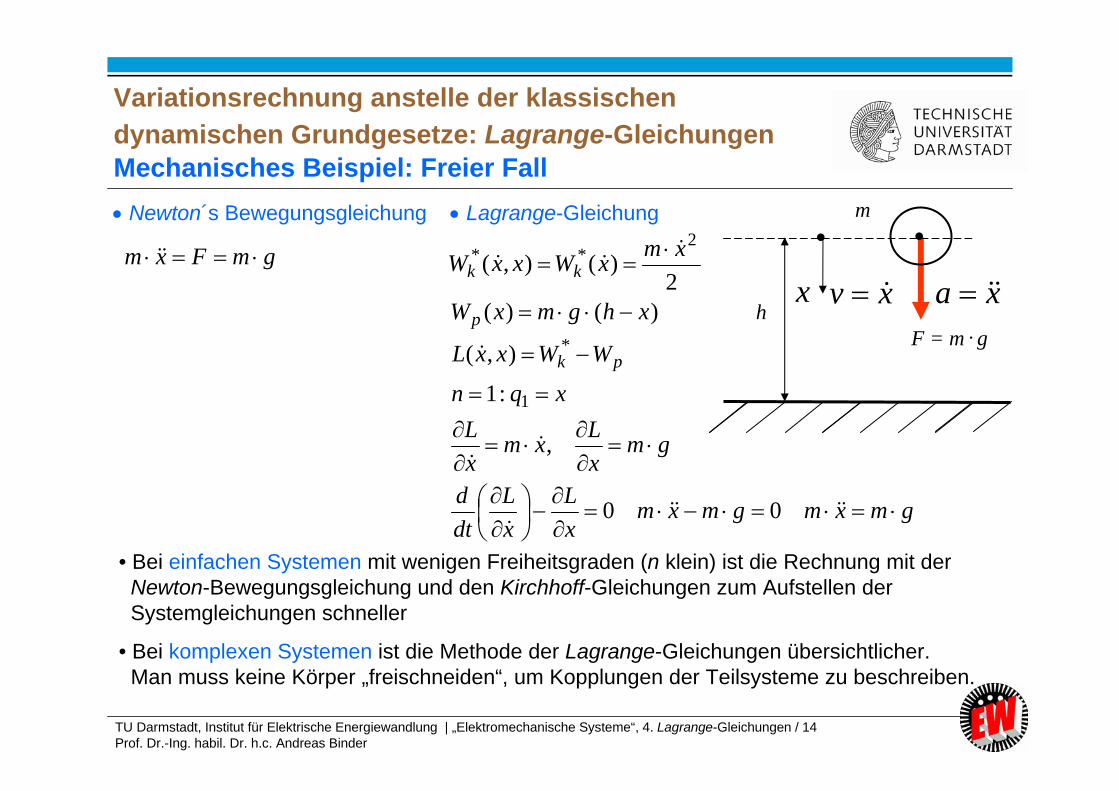
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 14Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Variationsrechnung anstelle der klassischen dynamischen Grundgesetze: Lagrange-GleichungenMechanisches Beispiel: Freier Fall Newton´s Bewegungsgleichung Lagrange-Gleichung
h
m
xa xv
F = m . g
xgmFxm
2)(),(
2** xmxWxxW kk
)()( xhgmxWp
gmxmgmxmxL
xL
dtd
gmxLxm
xL
xqn
WWxxL pk
00
,
:1
),(
1
*
• Bei einfachen Systemen mit wenigen Freiheitsgraden (n klein) ist die Rechnung mit der Newton-Bewegungsgleichung und den Kirchhoff-Gleichungen zum Aufstellen der Systemgleichungen schneller
• Bei komplexen Systemen ist die Methode der Lagrange-Gleichungen übersichtlicher.Man muss keine Körper „freischneiden“, um Kopplungen der Teilsysteme zu beschreiben.
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 15Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Variationsrechnung anstelle der klassischen dynamischen Grundgesetze: Lagrange-GleichungenVorgehensweise zum Aufstellen der Systemgleichungen
a) Feststellen der Anzahl n der Freiheitsgrade
• Wahl der verallgemeinerten Koordinaten qi, i = 1, …, n
• Verallgem. Koordinaten qi sind UNabhängige Verschiebungen x, Winkel , Ladungen Q
• Eingeprägte Koordinatenvorgaben (Wegerregung, Stromquelle) haben vorgeschriebeneZeitfunktionen und zählen daher NICHT zu den UNabhängigen verallg. Koordinaten
• Geometrische Bedingungen und Kirchhoff-Knotengleichungen müssen erfüllt sein
b) Anschreiben der kinet. Ergänzungsenergie W *k als Funktion der verallg. Geschwindigkeiten dqi/dt und Koordinaten qi und der pot. Energie Wp als Funktion von qi
c) Bestimmen der verallg. dissipativen Kräfte Fi(d) u. äußeren Kräfte Fi als Koeffizienten der
Änderungen Ad, A bei den virtuellen Verschiebungen qi
d) Einsetzen von W *k , Wp in die Lagrange-Gleichungen und Ausführen der Differentiationen liefert einen Satz von n unabhängigen Systemgleichungen
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 16Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme4. Methode der Lagrange-Gleichungen
Verallgemeinerte unabhängige Koordinaten Virtuelle Verschiebungen Variationsrechnung anstelle der klassischen dynamischen
Grundgesetze: Lagrange-Gleichungen Beispiele zum mechanischen System (5 Beispiele) Beispiele zum elektrischen Netzwerk
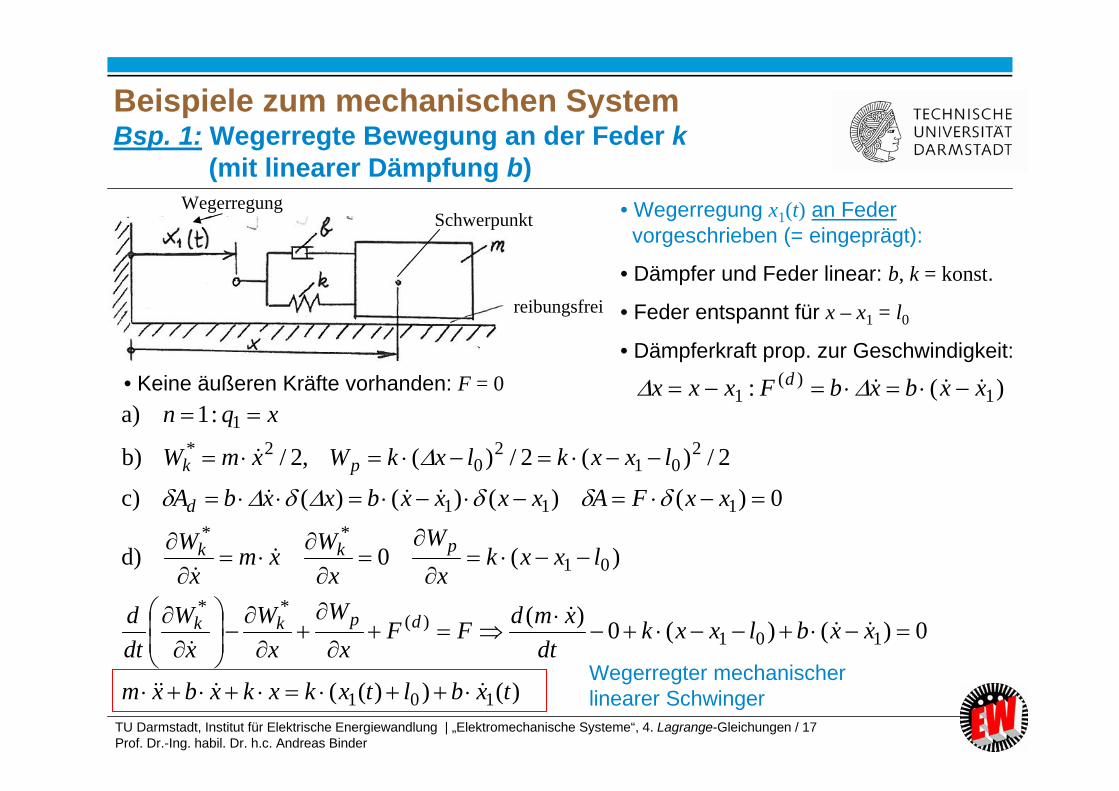
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 17Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum mechanischen SystemBsp. 1: Wegerregte Bewegung an der Feder k
(mit linearer Dämpfung b)
Schwerpunkt
reibungsfrei
Wegerregung • Wegerregung x1(t) an Federvorgeschrieben (= eingeprägt):
• Dämpfer und Feder linear: b, k = konst.
• Feder entspannt für x – x1 = l0
• Dämpferkraft prop. zur Geschwindigkeit:
)())((
0)()(0)(
)(0d)
0)()()()(c)
2/)(2/)(,2/b)
:1a)
101
101)(
**
01
**111
201
20
2*1
txbltxkxkxbxm
xxblxxkdt
xmdFFx
Wx
Wx
Wdtd
lxxkx
Wx
Wxmx
W
xxFAxxxxbxxbA
lxxklxkWxmW
xqn
dpkk
pkk
d
pk
)(: 1)(
1 xxbxbFxxx d • Keine äußeren Kräfte vorhanden: F = 0
Wegerregter mechanischerlinearer Schwinger
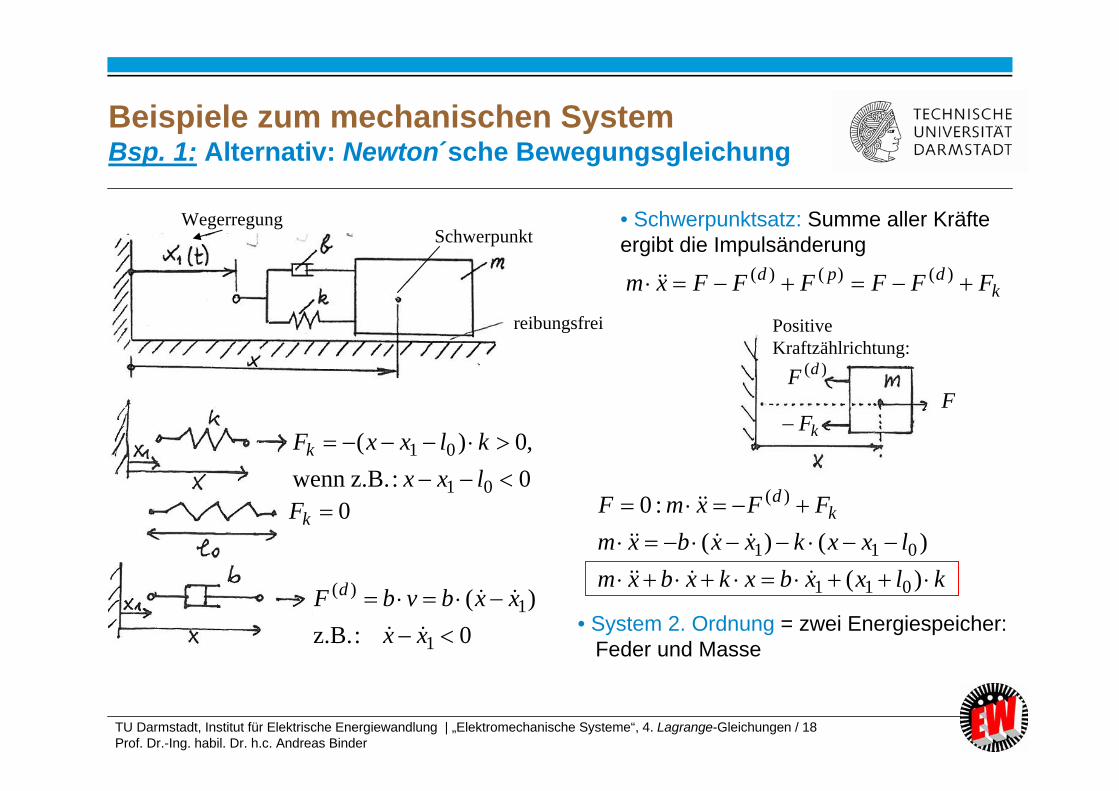
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 18Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum mechanischen SystemBsp. 1: Alternativ: Newton´sche Bewegungsgleichung
Schwerpunkt
reibungsfrei
Wegerregung • Schwerpunktsatz: Summe aller Kräfte ergibt die Impulsänderung
kdpd FFFFFFxm )()()(
)(dF
kF
0:z.B.wenn ,0)(
01
01
lxxklxxFk
0kF
klxxbxkxbxmlxxkxxbxm
FFxmF kd
)()()(
:0
011
011
)(
• System 2. Ordnung = zwei Energiespeicher: Feder und Masse
Positive Kraftzählrichtung:
0:z.B.)(
1
1)(
xxxxbvbF d
F
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 19Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum mechanischen SystemBsp. 1: Gleichgewicht bei Weg-erregter Bewegung
Wegerregung (Feder-seitig):
Gleichgewicht d./dt = 0
klxxbxkxbxm )( 011
1111 .konst0,0 Xxxxxx
Xkklxxk )( 01 01 lXX
Abweichung aus der Gleichgewichtslage: )()( txXtx )()( 111 txXtx
klxXxbxXkxbxm )()( 0111
kxxbxkxbxm 11
Sinusförmige Abweichung aus der Gleichgewichtslage:
)cos(ˆ)()( tXXtxXtx)cos(ˆ)()( 11111 tXXtxXtx
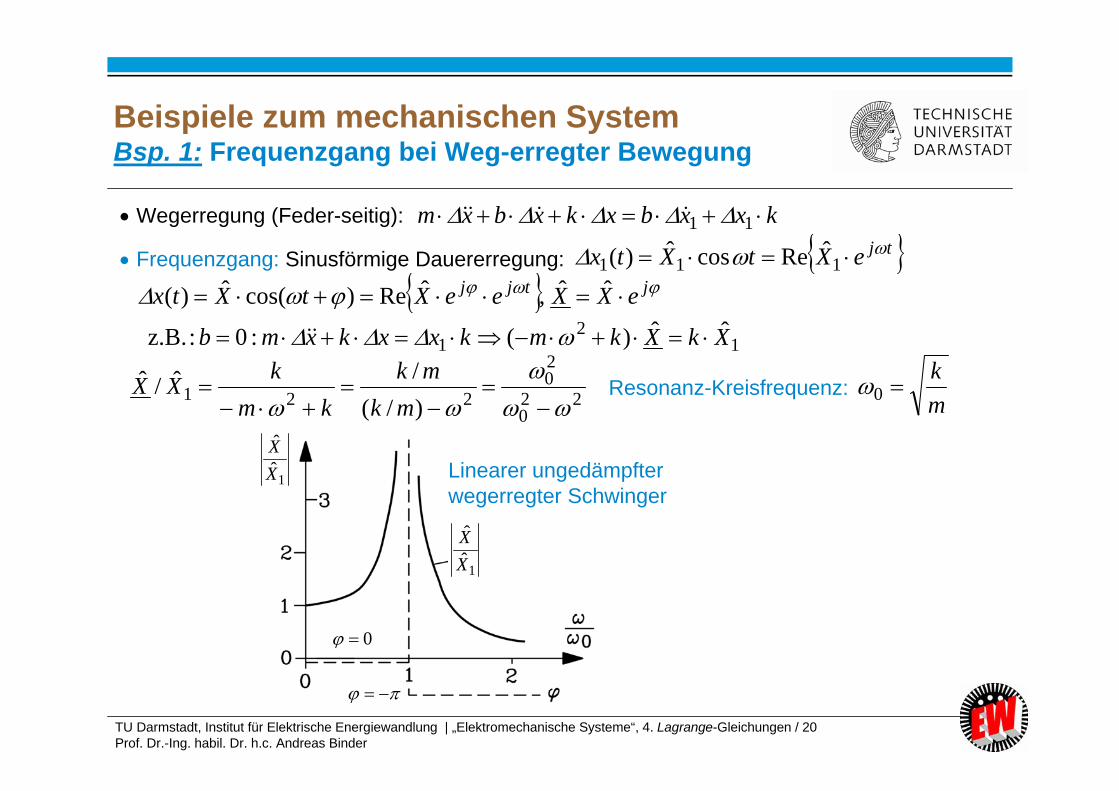
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 20Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum mechanischen SystemBsp. 1: Frequenzgang bei Weg-erregter Bewegung
Resonanz-Kreisfrequenz:
Frequenzgang: Sinusförmige Dauererregung:
Wegerregung (Feder-seitig):
tjeXtXtx 111ˆRecosˆ)(
12
1ˆˆ)(:0:z.B. XkXkmkxxkxmb
jtjj eXXeeXtXtx ˆˆ,ˆRe)cos(ˆ)(
220
20
221 )/(/ˆ/ˆ
mkmk
kmkXX
mk
0
Linearer ungedämpfter wegerregter Schwinger
kxxbxkxbxm 11
1ˆˆ
XX
0
1ˆˆ
XX
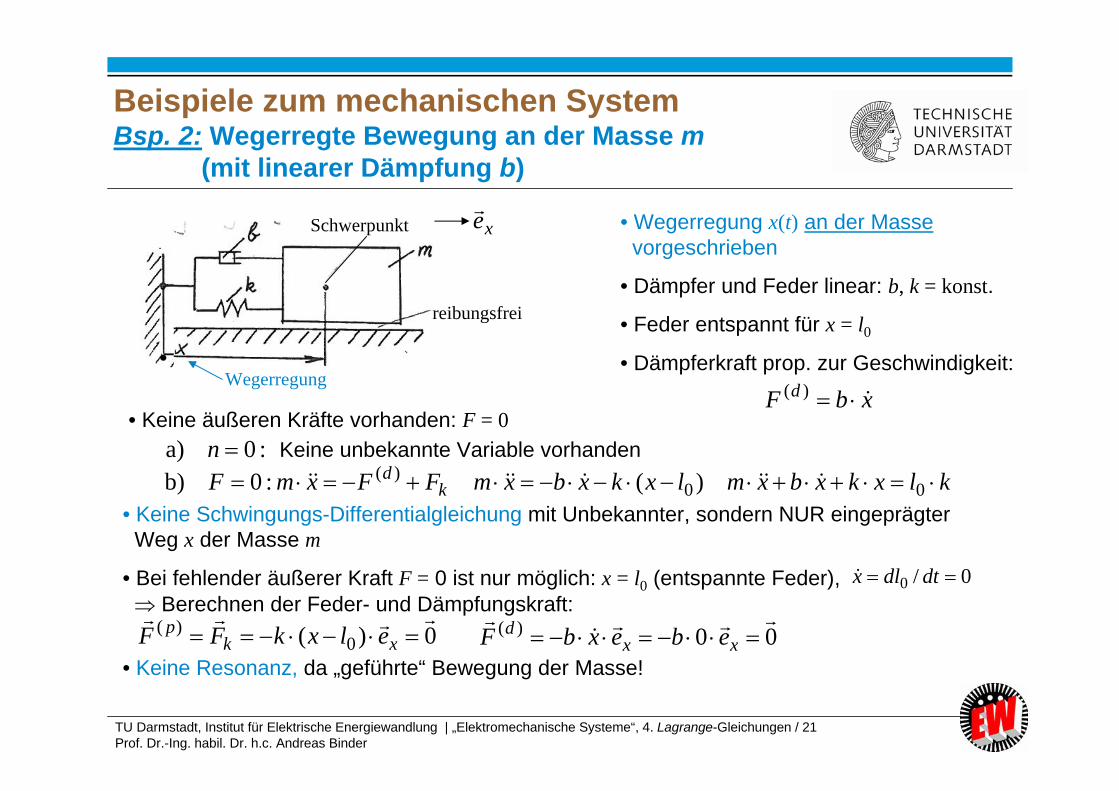
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 21Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum mechanischen SystemBsp. 2: Wegerregte Bewegung an der Masse m
(mit linearer Dämpfung b)
• Wegerregung x(t) an der Massevorgeschrieben
• Dämpfer und Feder linear: b, k = konst.
• Feder entspannt für x = l0
• Dämpferkraft prop. zur Geschwindigkeit:
:0a) n
xbF d )(
• Keine äußeren Kräfte vorhanden: F = 0
• Keine Schwingungs-Differentialgleichung mit Unbekannter, sondern NUR eingeprägter Weg x der Masse m
• Bei fehlender äußerer Kraft F = 0 ist nur möglich: x = l0 (entspannte Feder), Berechnen der Feder- und Dämpfungskraft:
• Keine Resonanz, da „geführte“ Bewegung der Masse!
Keine unbekannte Variable vorhanden
0)( 0)(
xkp elxkFF 00)(
xxd ebexbF
Schwerpunkt
reibungsfrei
Wegerregung
xe
klxkxbxmlxkxbxmFFxmF kd 00
)( )(:0b)
0/0 dtdlx
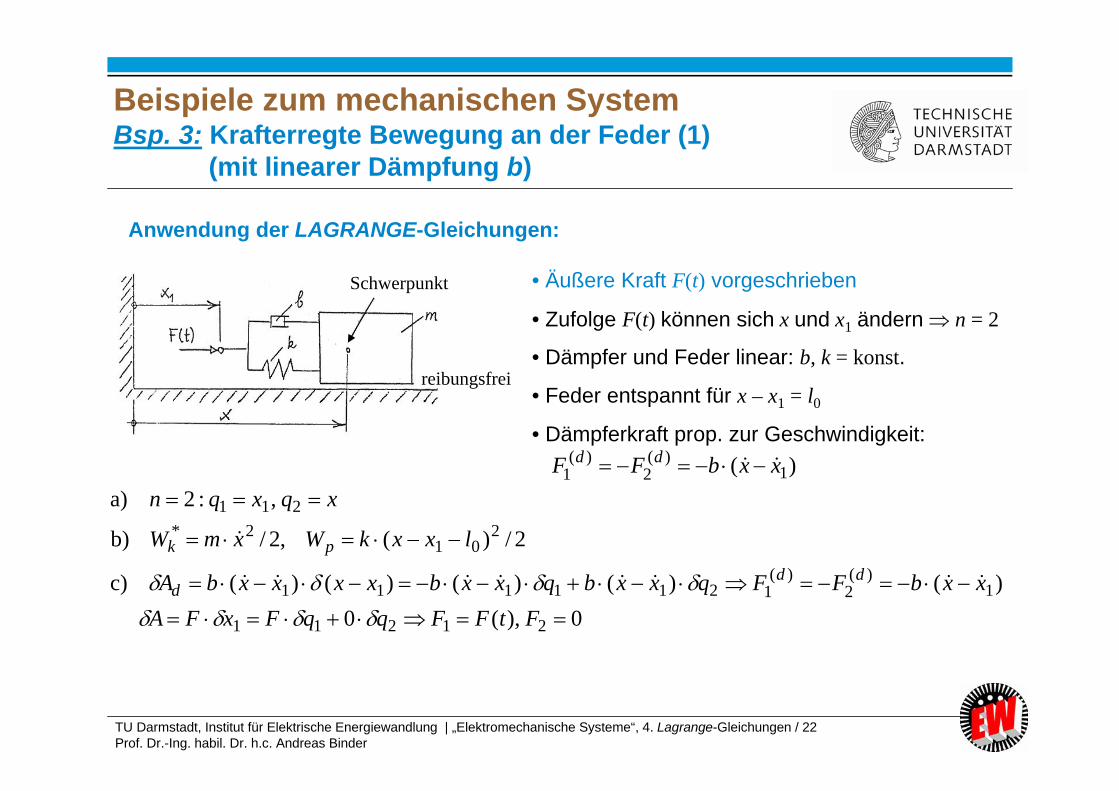
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 22Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum mechanischen SystemBsp. 3: Krafterregte Bewegung an der Feder (1)
(mit linearer Dämpfung b)
• Äußere Kraft F(t) vorgeschrieben
• Zufolge F(t) können sich x und x1 ändern n = 2
• Dämpfer und Feder linear: b, k = konst.
• Feder entspannt für x – x1 = l0
• Dämpferkraft prop. zur Geschwindigkeit:
0),(0)()()()()(c)
2/)(,2/b)
,:2a)
21211
1)(
2)(
1211111
201
2*211
FtFFqqFxFAxxbFFqxxbqxxbxxxxbA
lxxkWxmW
xqxqn
ddd
pk
Schwerpunkt
reibungsfrei
)( 1)(
2)(
1 xxbFF dd
Anwendung der LAGRANGE-Gleichungen:
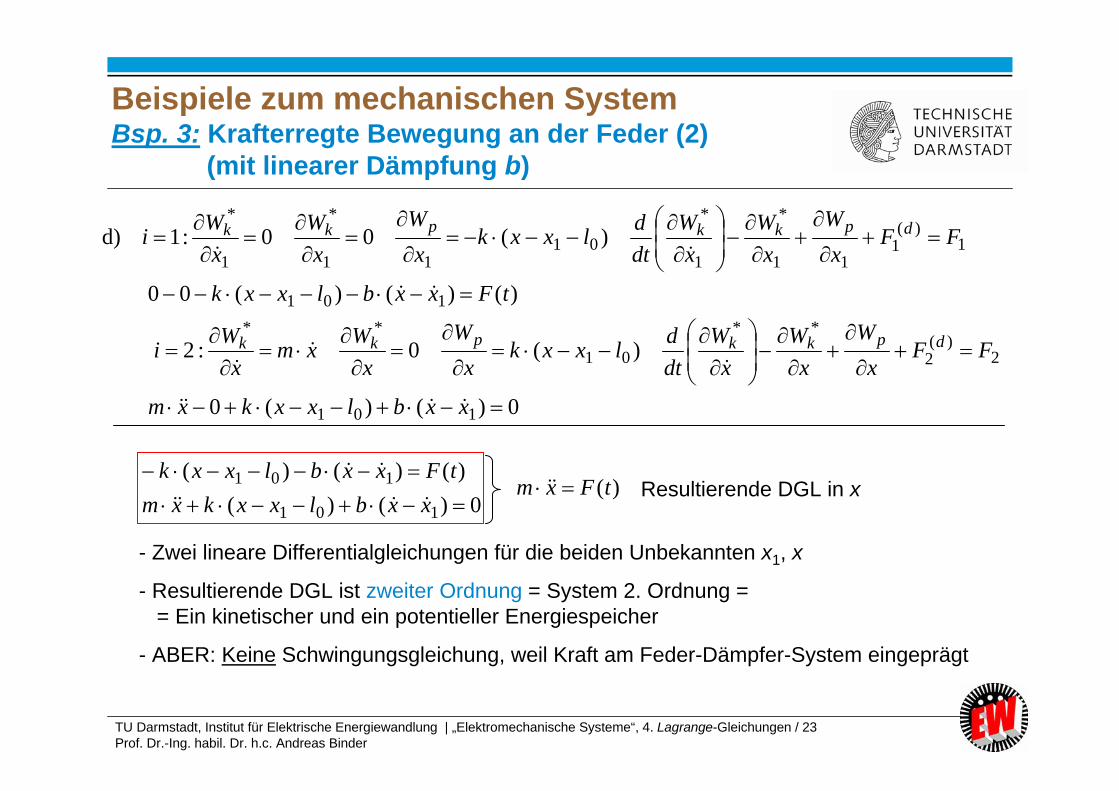
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 23Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum mechanischen System Bsp. 3: Krafterregte Bewegung an der Feder (2)
(mit linearer Dämpfung b)
0)()(0
)(0:2
)()()(00
)(00:1d)
101
2)(
2
**
01
**101
1)(
111
*
1
*
0111
*
1
*
xxblxxkxm
FFx
Wx
Wx
Wdtdlxxk
xW
xWxm
xWi
tFxxblxxk
FFx
Wx
Wx
Wdtdlxxk
xW
xW
xWi
dpkkpkk
dpkkpkk
- Zwei lineare Differentialgleichungen für die beiden Unbekannten x1, x
- Resultierende DGL ist zweiter Ordnung = System 2. Ordnung = = Ein kinetischer und ein potentieller Energiespeicher
- ABER: Keine Schwingungsgleichung, weil Kraft am Feder-Dämpfer-System eingeprägt
0)()()()()(
101
101
xxblxxkxmtFxxblxxk
)(tFxm Resultierende DGL in x
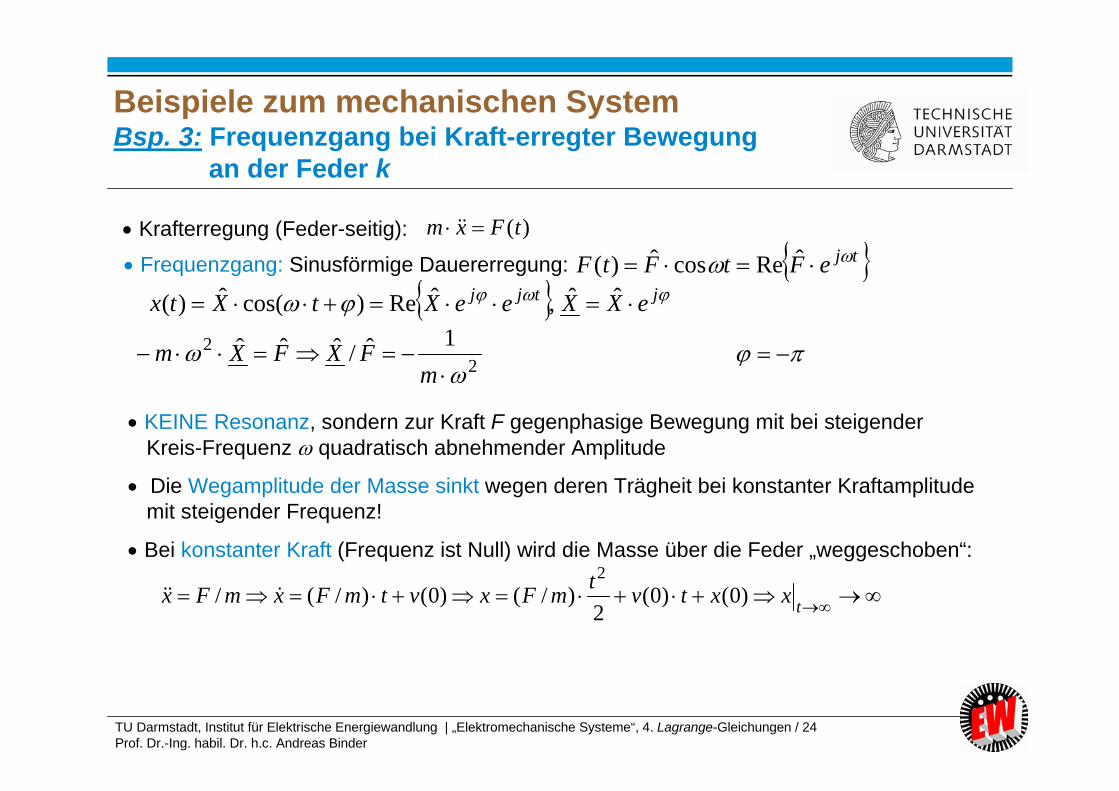
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 24Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum mechanischen SystemBsp. 3: Frequenzgang bei Kraft-erregter Bewegung
an der Feder k
KEINE Resonanz, sondern zur Kraft F gegenphasige Bewegung mit bei steigender Kreis-Frequenz quadratisch abnehmender Amplitude
Die Wegamplitude der Masse sinkt wegen deren Trägheit bei konstanter Kraftamplitude mit steigender Frequenz!
Bei konstanter Kraft (Frequenz ist Null) wird die Masse über die Feder „weggeschoben“:
)(tFxm
Frequenzgang: Sinusförmige Dauererregung:
Krafterregung (Feder-seitig):
tjeFtFtF ˆRecosˆ)(
22 1ˆ/ˆˆˆ
mFXFXm
jtjj eXXeeXtXtx ˆˆ,ˆRe)cos(ˆ)(
txxtvtmFxvtmFxmFx )0()0(2
)/()0()/(/2
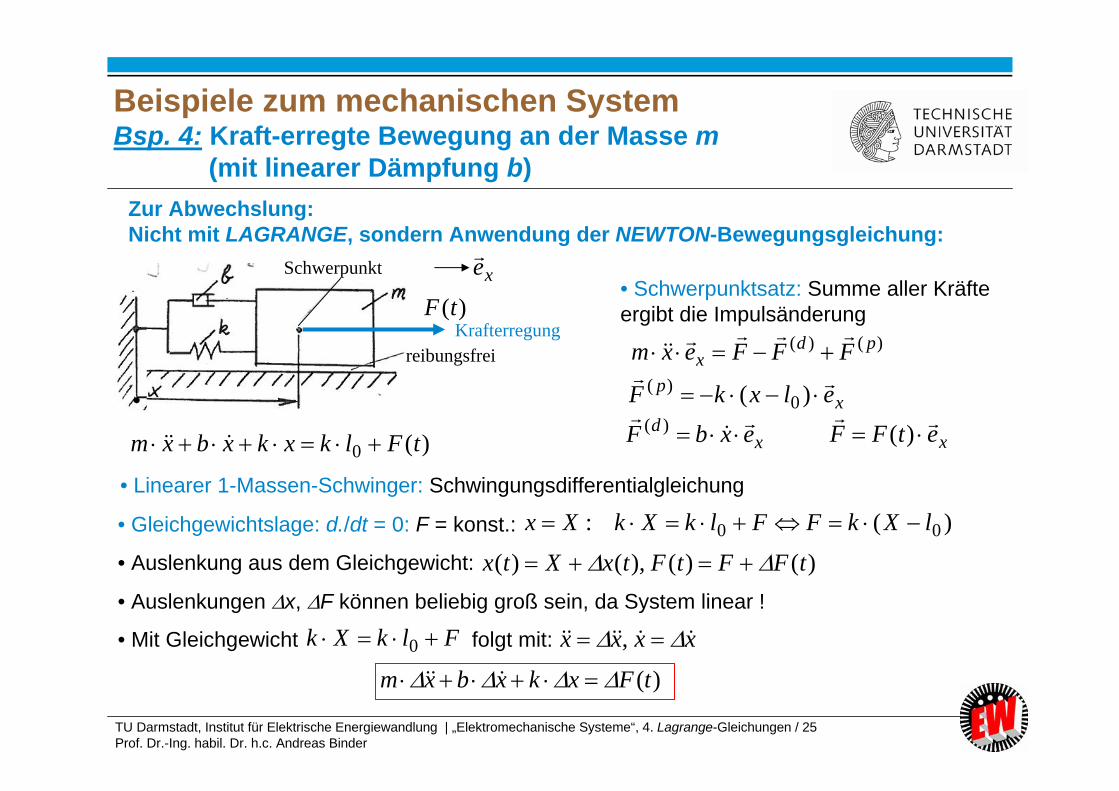
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 25Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum mechanischen SystemBsp. 4: Kraft-erregte Bewegung an der Masse m
(mit linearer Dämpfung b)
• Schwerpunktsatz: Summe aller Kräfte ergibt die Impulsänderung
)()( pdx FFFexm
Schwerpunkt
reibungsfreiKrafterregung
)(tFxe
xp elxkF
)( 0)(
xd exbF
)()(0 tFlkxkxbxm xetFF
)(
• Gleichgewichtslage: d./dt = 0: F = konst.:
• Auslenkung aus dem Gleichgewicht:
• Auslenkungen x, F können beliebig groß sein, da System linear !
• Mit Gleichgewicht folgt mit:
)(: 00 lXkFFlkXkXx
)()(),()( tFFtFtxXtx
• Linearer 1-Massen-Schwinger: Schwingungsdifferentialgleichung
xxxx ,FlkXk 0
Zur Abwechslung: Nicht mit LAGRANGE, sondern Anwendung der NEWTON-Bewegungsgleichung:
)(tFxkxbxm
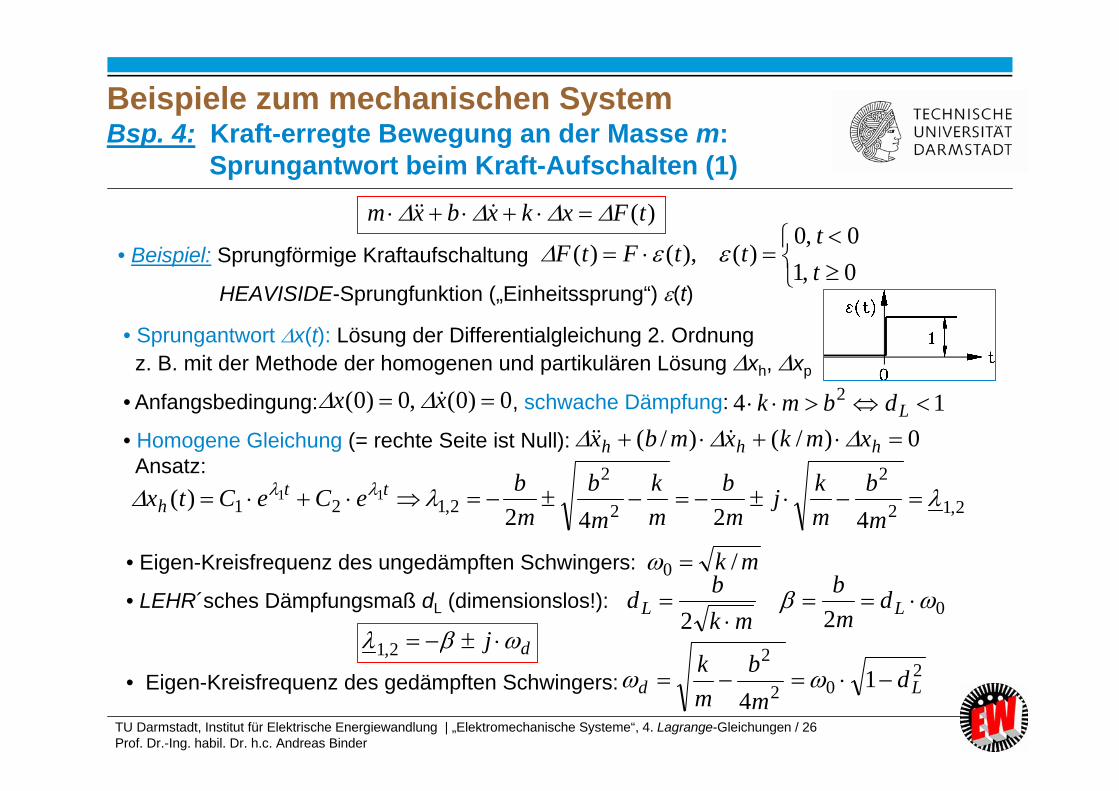
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 26Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum mechanischen SystemBsp. 4: Kraft-erregte Bewegung an der Masse m:
Sprungantwort beim Kraft-Aufschalten (1)
• Beispiel: Sprungförmige Kraftaufschaltung
HEAVISIDE-Sprungfunktion („Einheitssprung“) (t)
• Sprungantwort x(t): Lösung der Differentialgleichung 2. Ordnung z. B. mit der Methode der homogenen und partikulären Lösung xh, xp
• Anfangsbedingung: , schwache Dämpfung:
• Homogene Gleichung (= rechte Seite ist Null):Ansatz:
0,10,0
)(),()(tt
ttFtF
0)/()/( hhh xmkxmbx
)(tFxkxbxm
0)0(,0)0( xx 14 2 Ldbmk
2,12
2
2
2
2,121 4242)( 11
mb
mkj
mb
mk
mb
mbeCeCtx tt
h
mk /0
202
21
4 Ld dmb
mk
• Eigen-Kreisfrequenz des ungedämpften Schwingers:
• LEHR´sches Dämpfungsmaß dL (dimensionslos!):
• Eigen-Kreisfrequenz des gedämpften Schwingers:
022
LL d
mb
mkbd
dj 2,1
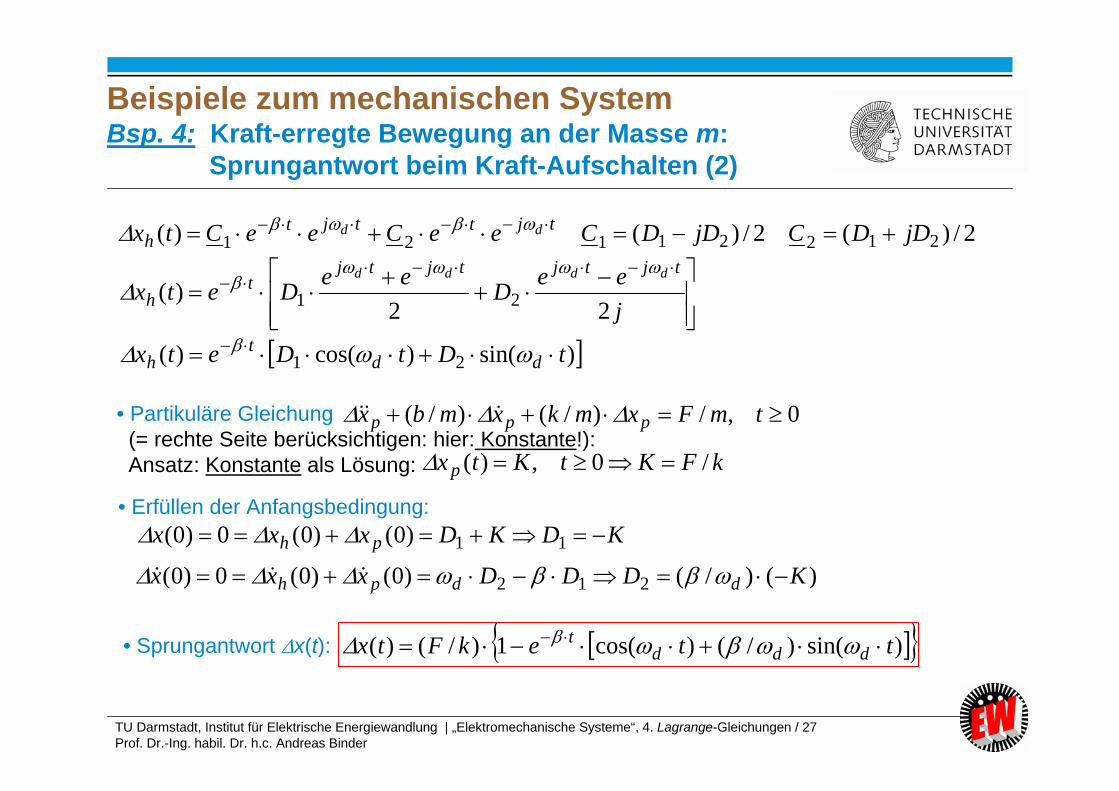
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 27Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
2/)(2/)()( 21221121 jDDCjDDCeeCeeCtx tjttjth
dd
jeeDeeDetx
tjtjtjtjt
hdddd
22)( 21
)sin()cos()( 21 tDtDetx ddt
h
• Partikuläre Gleichung (= rechte Seite berücksichtigen: hier: Konstante!):Ansatz: Konstante als Lösung:
0,/)/()/( tmFxmkxmbx ppp
kFKtKtx p /0,)(
• Erfüllen der Anfangsbedingung:KDKDxxx ph 11)0()0(0)0(
)()/()0()0(0)0( 212 KDDDxxx ddph
• Sprungantwort x(t): )sin()/()cos(1)/()( ttekFtx dddt
Beispiele zum mechanischen SystemBsp. 4: Kraft-erregte Bewegung an der Masse m:
Sprungantwort beim Kraft-Aufschalten (2)
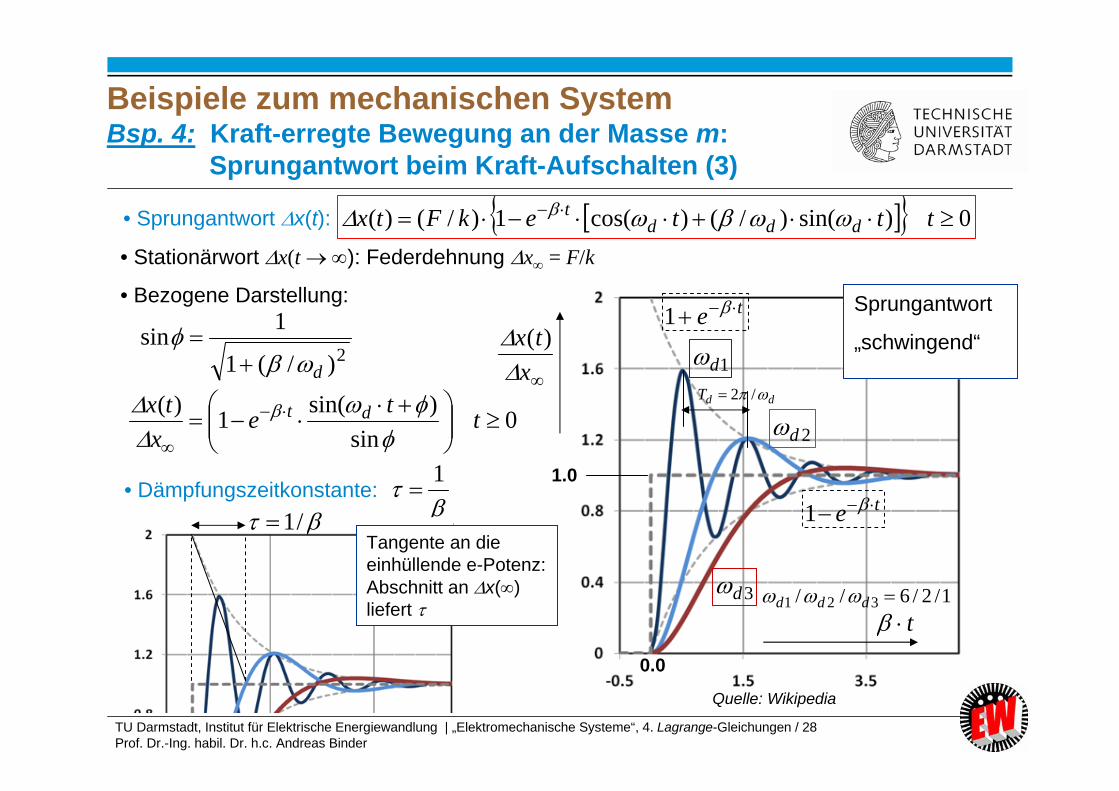
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 28Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
• Sprungantwort x(t): 0)sin()/()cos(1)/()( tttekFtx dddt
• Stationärwort x(t ): Federdehnung x = F/k
• Bezogene Darstellung:
0sin
)sin(1)(
tte
xtx dt
2)/(1
1sind
1• Dämpfungszeitkonstante:
/1Tangente an die einhüllende e-Potenz:Abschnitt an x() liefert t
Sprungantwort
„schwingend“
3d
2d
1d
1.0
xtx
)(
0.0
ddT /2
te 1
Quelle: Wikipedia
1/2/6// 321 ddd
te 1
Beispiele zum mechanischen SystemBsp. 4: Kraft-erregte Bewegung an der Masse m:
Sprungantwort beim Kraft-Aufschalten (3)
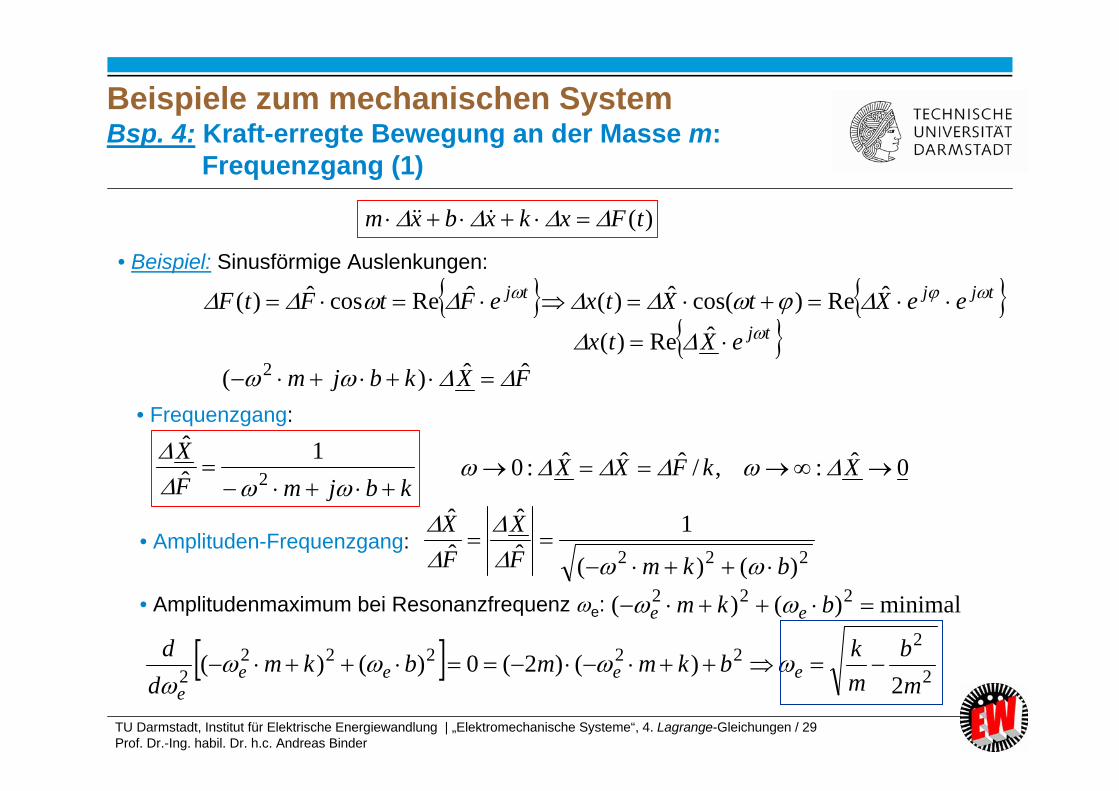
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 29Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
• Beispiel: Sinusförmige Auslenkungen:
)(tFxkxbxm
tjjtj eeXtXtxeFtFtF ˆRe)cos(ˆ)(ˆRecosˆ)(
tjeXtx ˆRe)(FXkbjm ˆˆ)( 2
• Frequenzgang:
kbjmFX
21
ˆˆ
0ˆ:,/ˆˆˆ:0 XkFXX
• Amplituden-Frequenzgang:222 )()(
1ˆˆ
ˆˆ
bkmFX
FX
• Amplitudenmaximum bei Resonanzfrequenz e: minimal)()( 222 bkm ee
2
222222
2 2)()2(0)()(
mb
mkbkmmbkm
dd
eeeee
Beispiele zum mechanischen SystemBsp. 4: Kraft-erregte Bewegung an der Masse m:
Frequenzgang (1)
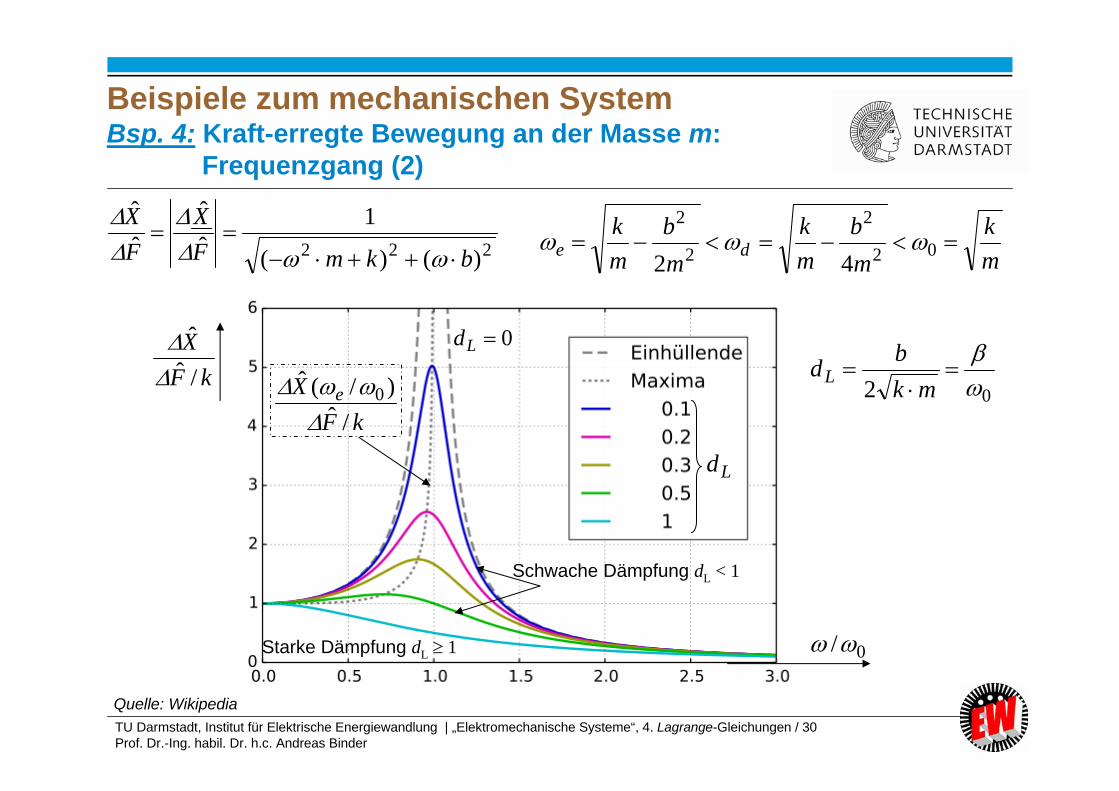
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 30Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
222 )()(
1ˆˆ
ˆˆ
bkmFX
FX
mk
mb
mk
mb
mk
de 02
2
2
2
42
0/
kFX/ˆˆ
Quelle: Wikipedia
Ld
kFX e
/ˆ)/(ˆ
0
0Ld
02
mk
bdL
Beispiele zum mechanischen SystemBsp. 4: Kraft-erregte Bewegung an der Masse m:
Frequenzgang (2)
Starke Dämpfung dL 1
Schwache Dämpfung dL < 1
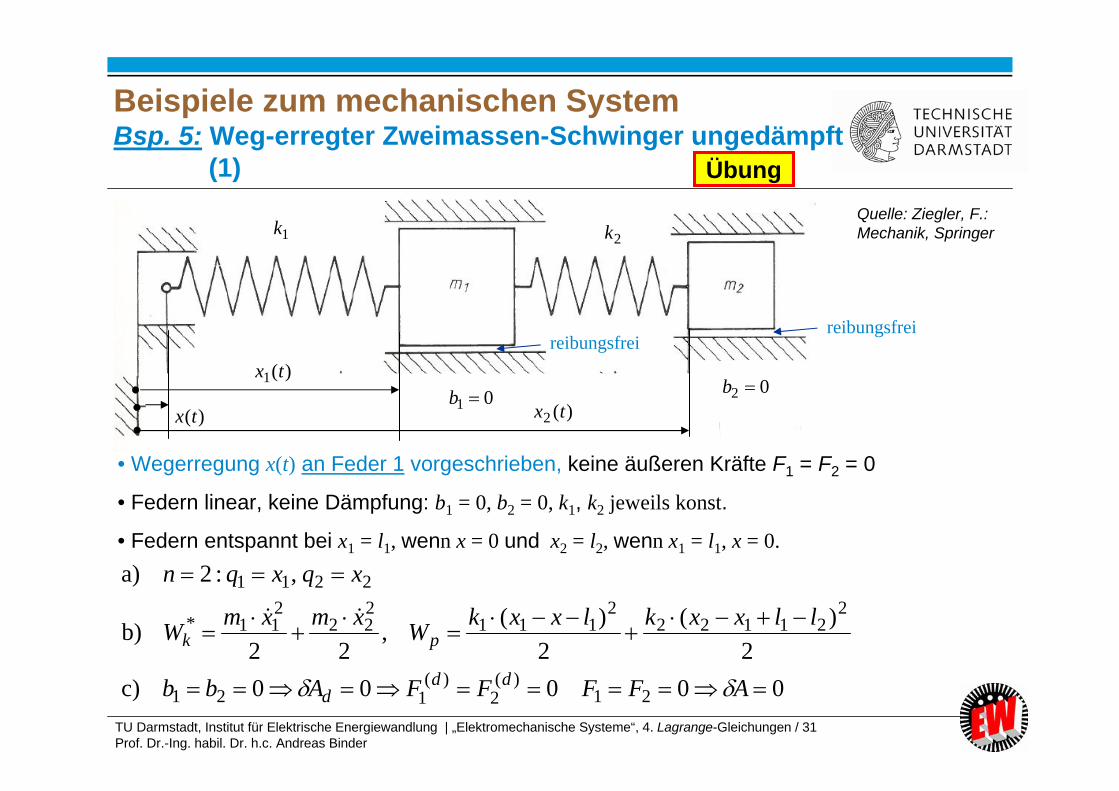
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 31Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum mechanischen SystemBsp. 5: Weg-erregter Zweimassen-Schwinger ungedämpft
(1)Quelle: Ziegler, F.: Mechanik, Springer
reibungsfrei
1k 2k
01 b 02 b)(tx
)(1 tx
)(2 tx
reibungsfrei
• Wegerregung x(t) an Feder 1 vorgeschrieben, keine äußeren Kräfte F1 = F2 = 0
• Federn linear, keine Dämpfung: b1 = 0, b2 = 0, k1, k2 jeweils konst.
• Federn entspannt bei x1 = l1, wenn x = 0 und x2 = l2, wenn x1 = l1, x = 0.
00000c)2
)(2
)(,22
b)
,:2a)
21)(
2)(
121
221122
2111
222
211*
2211
AFFFFAbb
llxxklxxkWxmxmW
xqxqn
ddd
pk
Übung
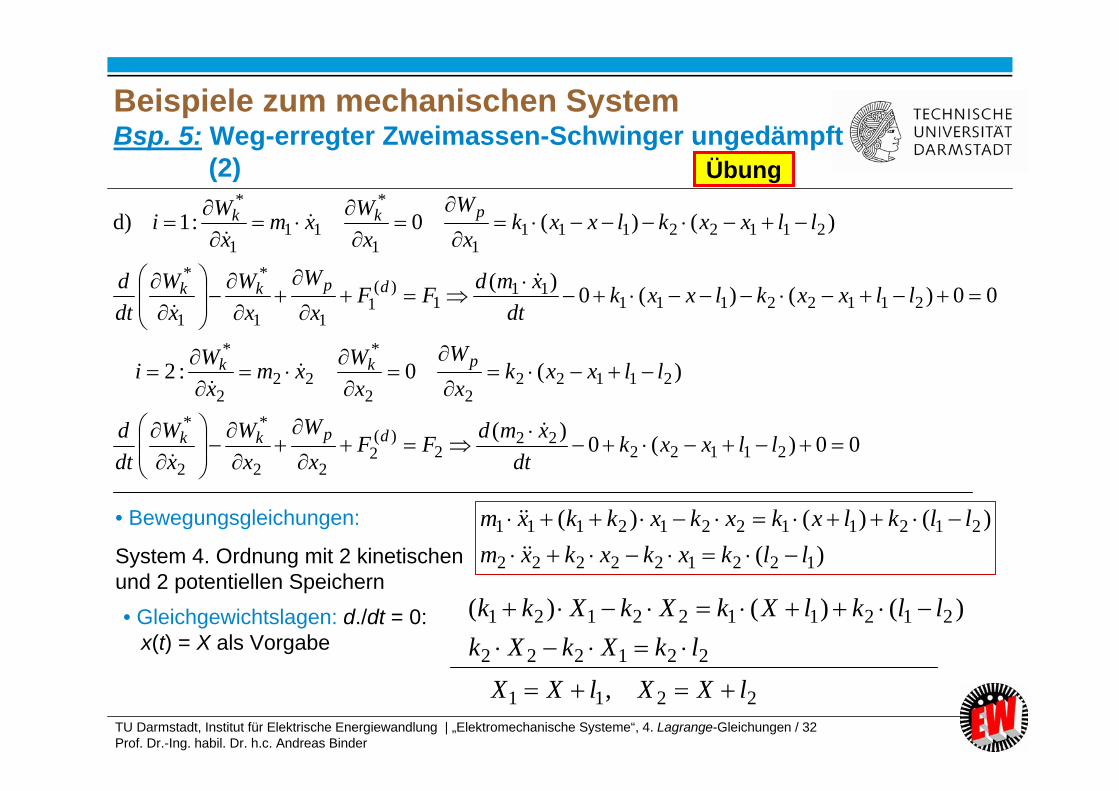
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 32Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum mechanischen SystemBsp. 5: Weg-erregter Zweimassen-Schwinger ungedämpft
(2)
00)(0)(
)(0:2
00)()(0)(
)()(0:1d)
2112222
2)(
222
*
2
*
2112222
*
222
*
2112211111
1)(
111
*
1
*
2112211111
*
111
*
llxxkdt
xmdFFxW
xW
xW
dtd
llxxkxW
xWxm
xWi
llxxklxxkdt
xmdFFx
Wx
Wx
Wdtd
llxxklxxkx
Wx
Wxmx
Wi
dpkk
pkk
dpkk
pkk
)()()()(
122122222
212112212111
llkxkxkxmllklxkxkxkkxm
• Bewegungsgleichungen:
System 4. Ordnung mit 2 kinetischen und 2 potentiellen Speichern• Gleichgewichtslagen: d./dt = 0:
x(t) = X als Vorgabe 221222
2121122121 )()()(lkXkXk
llklXkXkXkk
2211 , lXXlXX
Übung
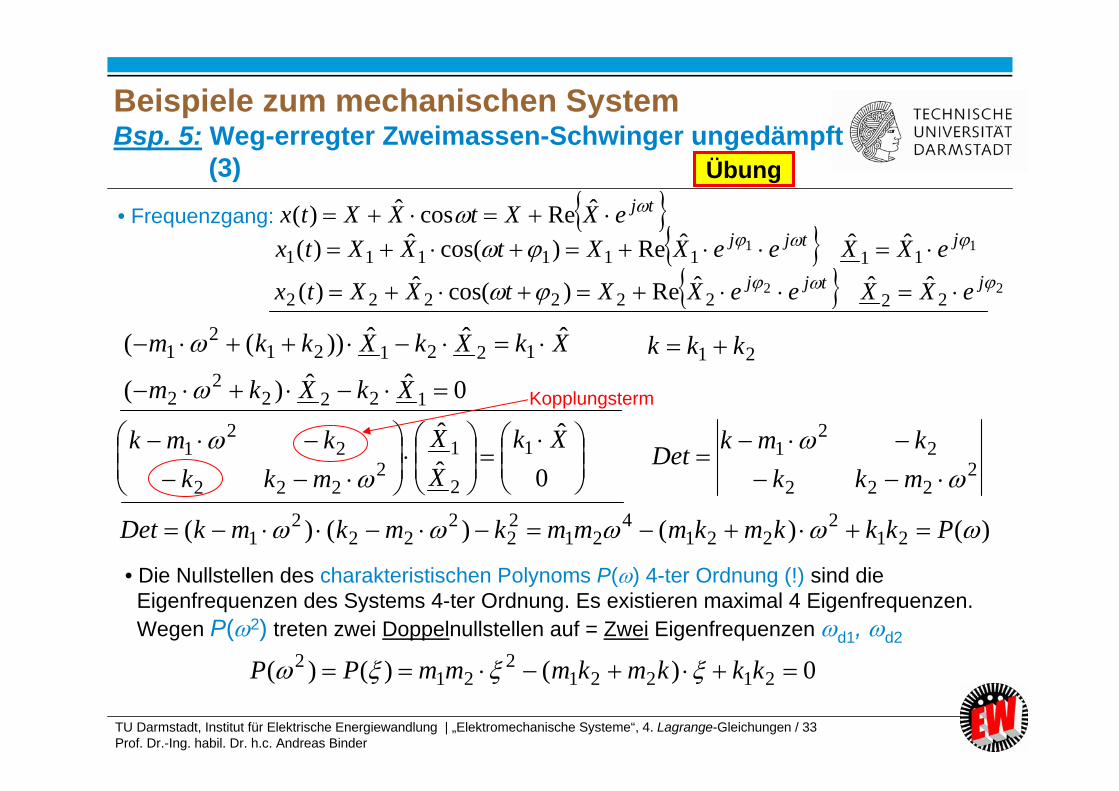
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 33Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum mechanischen SystemBsp. 5: Weg-erregter Zweimassen-Schwinger ungedämpft
(3)
• Frequenzgang: tjeXXtXXtx ˆRecosˆ)( 11
11111111ˆˆˆRe)cos(ˆ)( jtjj eXXeeXXtXXtx
2222222222
ˆˆˆRe)cos(ˆ)( jtjj eXXeeXXtXXtx
0ˆˆ)(
ˆˆˆ))((
12222
2
1221212
1
XkXkm
XkXkXkkm
0
ˆˆˆ
1
2
12
222
22
1 XkXX
mkkkmk
21 kkk
2222
22
1
mkkkmkDet
)()()()( 212
2214
2122
222
21 PkkkmkmmmkmkmkDet
• Die Nullstellen des charakteristischen Polynoms P() 4-ter Ordnung (!) sind die Eigenfrequenzen des Systems 4-ter Ordnung. Es existieren maximal 4 Eigenfrequenzen. Wegen P(2) treten zwei Doppelnullstellen auf = Zwei Eigenfrequenzen d1, d2
0)()()( 212212
212 kkkmkmmmPP
Kopplungsterm
Übung
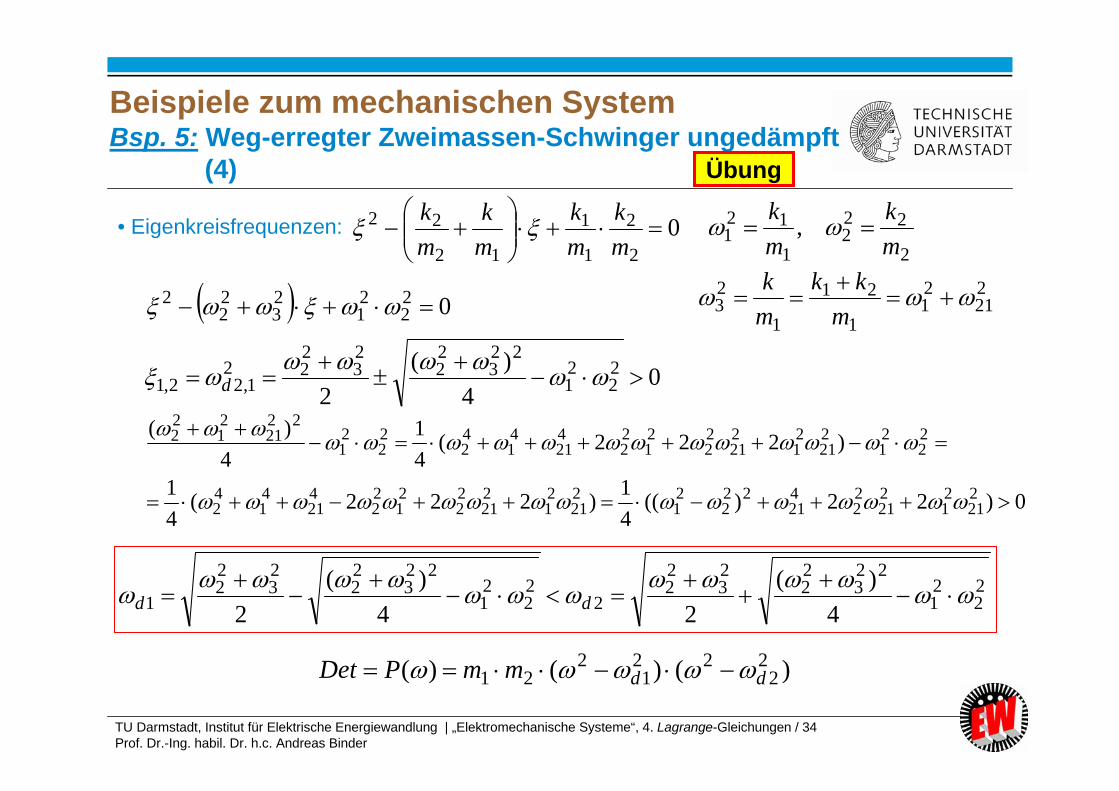
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 34Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum mechanischen SystemBsp. 5: Weg-erregter Zweimassen-Schwinger ungedämpft
(4)
• Eigenkreisfrequenzen: 02
2
1
1
12
22
mk
mk
mk
mk
2
222
1
121 ,
mk
mk
221
21
1
21
1
23
mkk
mk 02
221
23
22
2
04
)(2
22
21
223
22
23
222
1,22,1
d
0)22)((41)222(
41
)222(41
4)(
221
21
221
22
421
222
21
221
21
221
22
21
22
421
41
42
22
21
221
21
221
22
21
22
421
41
42
22
21
2221
21
22
22
21
223
22
23
22
222
21
223
22
23
22
1 4)(
24)(
2
dd
)()()( 22
221
221 ddmmPDet
Übung
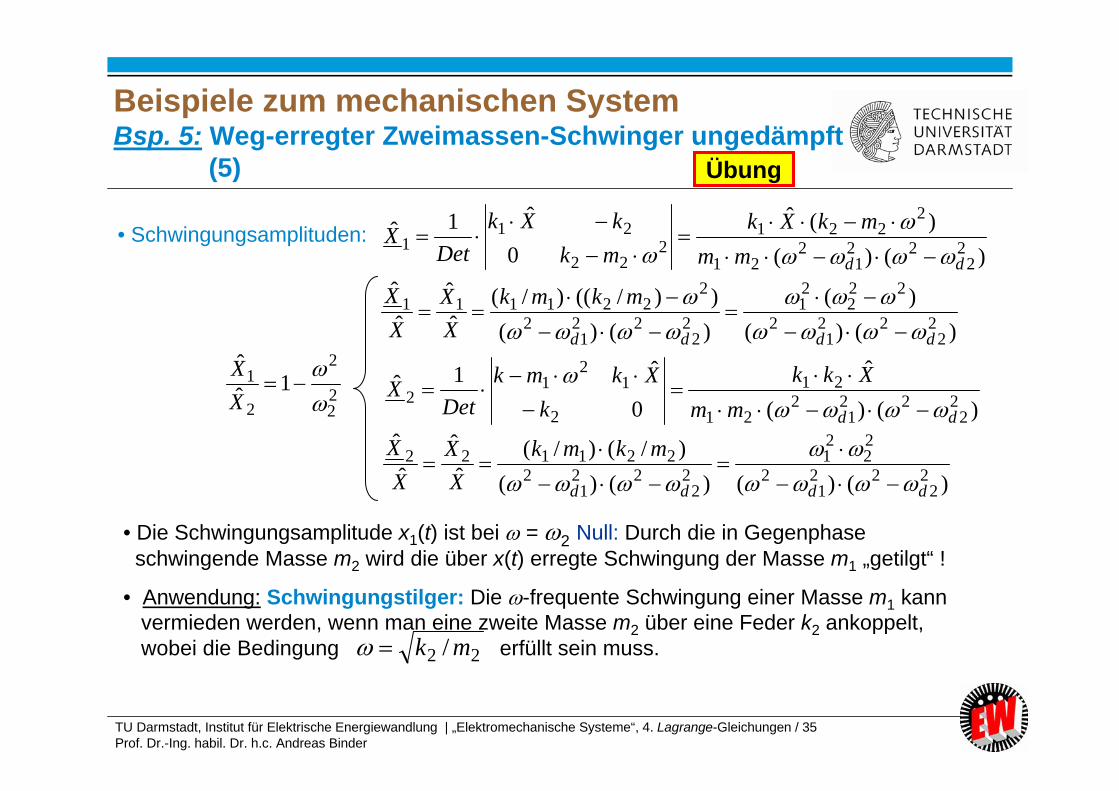
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 35Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum mechanischen SystemBsp. 5: Weg-erregter Zweimassen-Schwinger ungedämpft
(5)
• Schwingungsamplituden:)()(
)(ˆ
0
ˆ1ˆ2
222
12
21
2221
222
211
ddmmmkXk
mkkXk
DetX
)()()(
)()())/(()/(
ˆˆ
ˆˆ
22
221
2
222
21
22
221
2
2221111
dddd
mkmkXX
XX
)()(
ˆ
0
ˆ1ˆ2
222
12
21
21
2
12
12
ddmmXkk
kXkmk
DetX
)()()()()/()/(
ˆˆ
ˆˆ
22
221
2
22
21
22
221
2221122
dddd
mkmkXX
XX
• Die Schwingungsamplitude x1(t) ist bei = 2 Null: Durch die in Gegenphase schwingende Masse m2 wird die über x(t) erregte Schwingung der Masse m1 „getilgt“ !
• Anwendung: Schwingungstilger: Die -frequente Schwingung einer Masse m1 kann vermieden werden, wenn man eine zweite Masse m2 über eine Feder k2 ankoppelt, wobei die Bedingung erfüllt sein muss. 22 / mk
22
2
2
1 1ˆˆ
XX
Übung
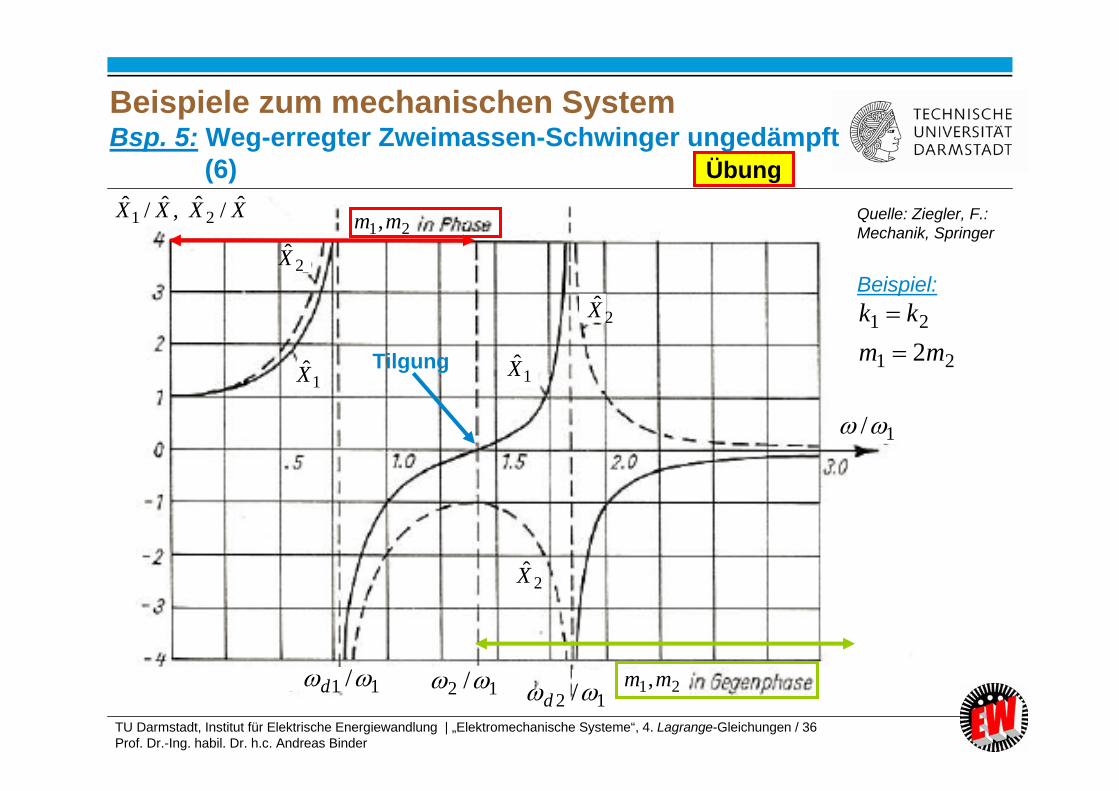
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 36Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum mechanischen SystemBsp. 5: Weg-erregter Zweimassen-Schwinger ungedämpft
(6)Quelle: Ziegler, F.: Mechanik, Springer
Beispiel:
21
21
2mmkk
1/
11 /d 12 /
,ˆ/ˆ1 XX XX ˆ/ˆ
2
1X 1X
2X
2X
2X
21,mm
21,mm12 /d
Tilgung
Übung
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 37Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme4. Methode der Lagrange-Gleichungen
Verallgemeinerte unabhängige Koordinaten Virtuelle Verschiebungen Variationsrechnung anstelle der klassischen dynamischen
Grundgesetze: Lagrange-Gleichungen Beispiele zum mechanischen System Beispiele zum elektrischen Netzwerk (7 Beispiele)
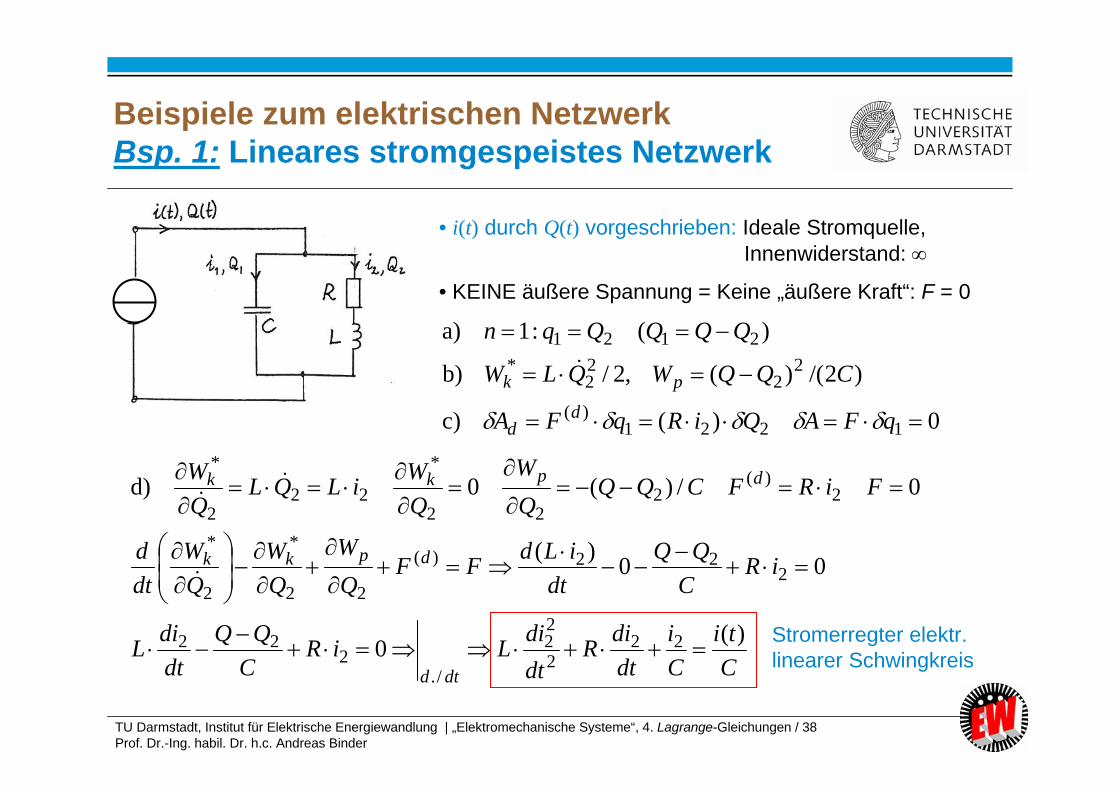
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 38Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum elektrischen NetzwerkBsp. 1: Lineares stromgespeistes Netzwerk
• i(t) durch Q(t) vorgeschrieben: Ideale Stromquelle, Innenwiderstand:
• KEINE äußere Spannung = Keine „äußere Kraft“: F = 0
Cti
Ci
dtdiR
dtdiLiR
CQQ
dtdiL
iRC
QQdt
iLdFFQW
QW
QW
dtd
FiRFCQQQW
QWiLQL
QW
dtd
dpkk
dpkk
)(0
00)(
0/)(0d)
222
22
/.2
22
222)(
22
*
2
*
2)(
222
*
222
*
0)(c)
)2/()(,2/b)
)(:1a)
1221)(
22
22
*2121
qFAQiRqFA
CQQWQLW
QQQQqn
dd
pk
Stromerregter elektr.linearer Schwingkreis
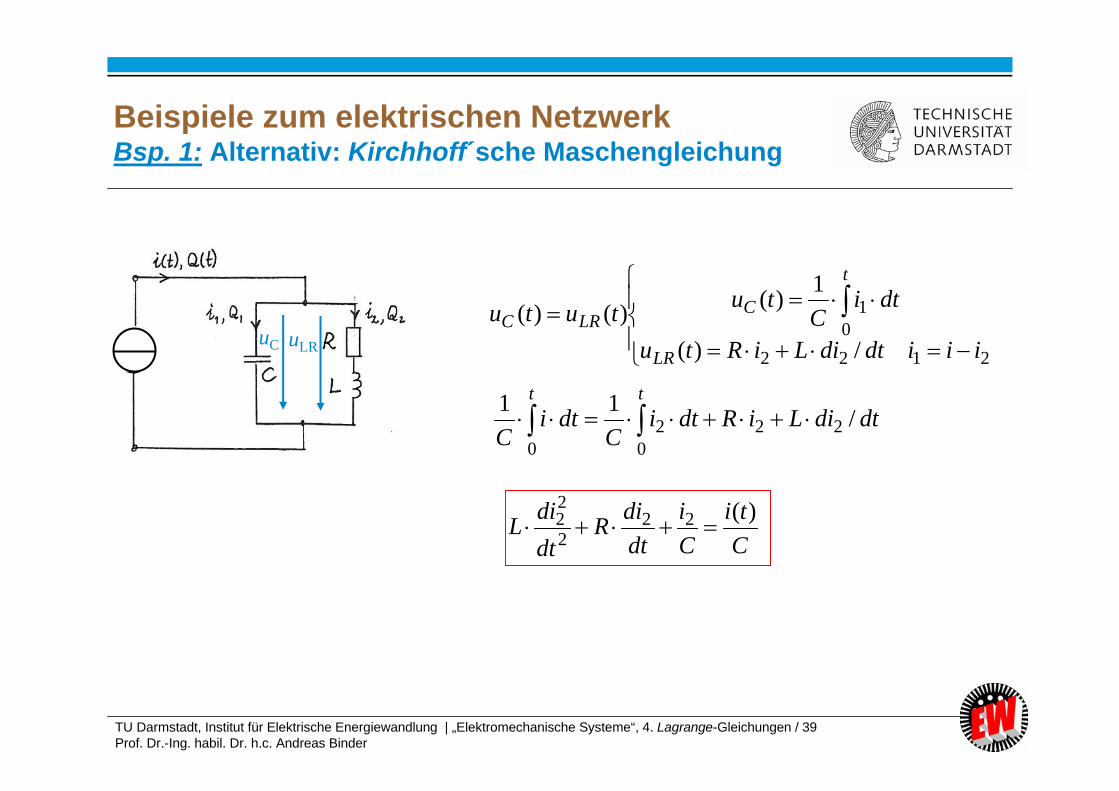
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 39Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum elektrischen NetzwerkBsp. 1: Alternativ: Kirchhoff´sche Maschengleichung
21220
1
/)(
1)()()(iiidtdiLiRtu
dtiC
tututu
LR
t
CLRC
dtdiLiRdtiC
dtiC
tt/11
220
20
Cti
Ci
dtdiR
dtdiL )(22
2
22
uC uLR
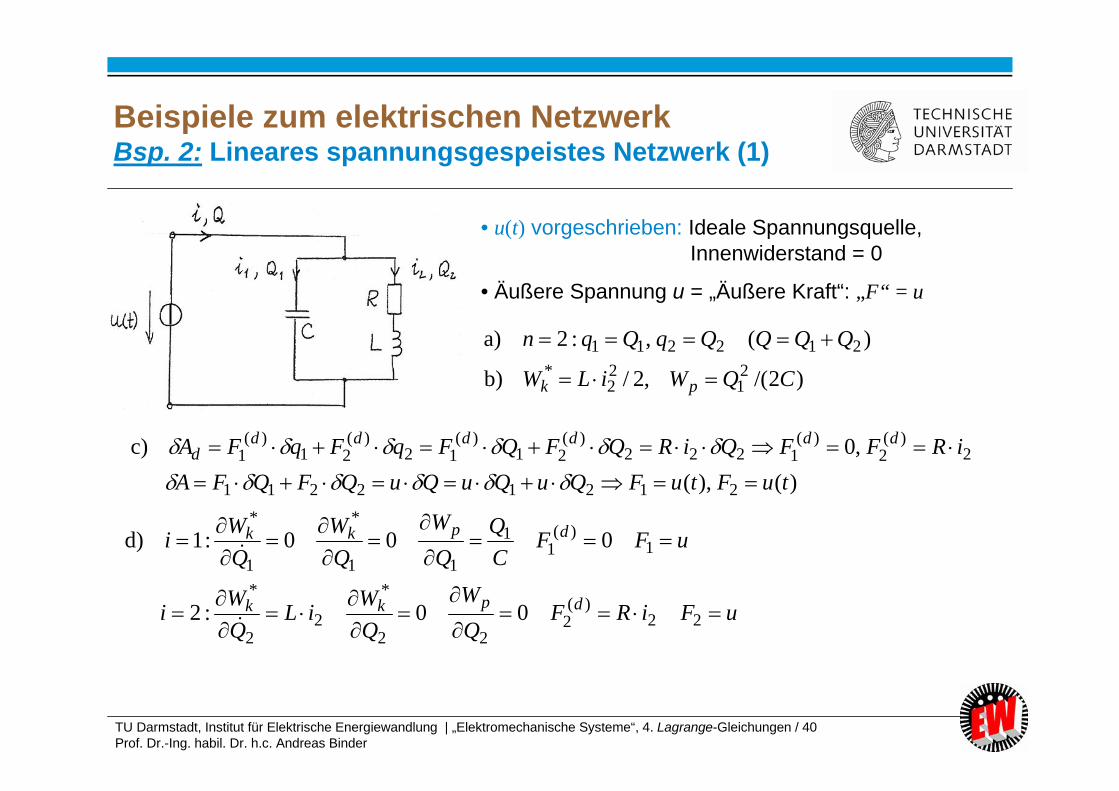
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 40Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum elektrischen NetzwerkBsp. 2: Lineares spannungsgespeistes Netzwerk (1)
• u(t) vorgeschrieben: Ideale Spannungsquelle, Innenwiderstand = 0
• Äußere Spannung u = „Äußere Kraft“: „F“ = u
)2/(,2/b)
)(,:2a)21
22
*212211
CQWiLW
QQQQqQqn
pk
)(),(,0c)
21212211
2)(
2)(
1222)(
21)(
12)(
21)(
1
tuFtuFQuQuQuQFQFAiRFFQiRQFQFqFqFA dddddd
d
uFiRFQW
QWiL
QWi
uFFCQ
QW
QW
QWi
dpkk
dpkk
22)(
222
*
22
*
1)(
11
11
*
1
*
00:2
000:1d)
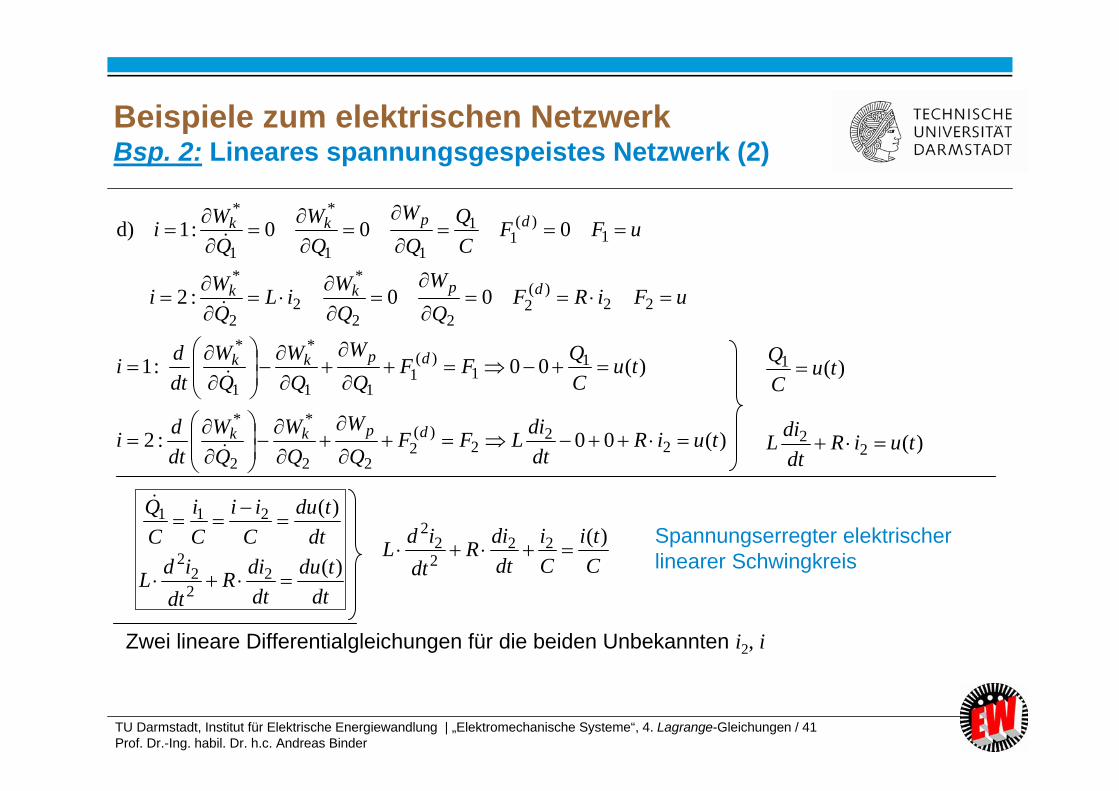
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 41Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum elektrischen NetzwerkBsp. 2: Lineares spannungsgespeistes Netzwerk (2)
)(00:2
)(00:1
00:2
000:1d)
22
2)(
222
*
2
*
11
)(1
11
*
1
*
22)(
222
*
22
*
1)(
11
11
*
1
*
tuiRdtdiLFF
QW
QW
QW
dtdi
tuCQFF
QW
QW
QW
dtdi
uFiRFQW
QWiL
QWi
uFFCQ
QW
QW
QWi
dpkk
dpkk
dpkk
dpkk
)(22 tuiR
dtdiL
)(1 tuCQ
dttdu
Cii
Ci
CQ )(211
dttdu
dtdiR
dtidL )(222
2
Cti
Ci
dtdiR
dtidL )(2222
2
Zwei lineare Differentialgleichungen für die beiden Unbekannten i2, i
Spannungserregter elektrischerlinearer Schwingkreis
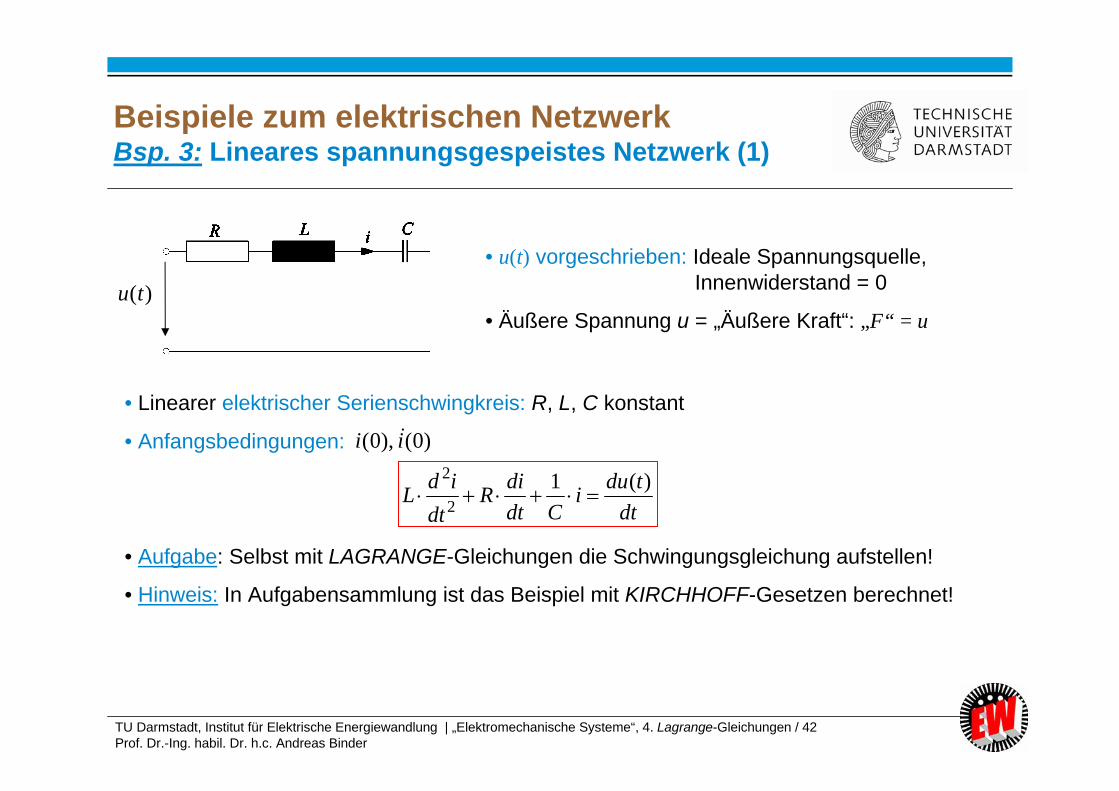
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 42Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum elektrischen NetzwerkBsp. 3: Lineares spannungsgespeistes Netzwerk (1)
• u(t) vorgeschrieben: Ideale Spannungsquelle, Innenwiderstand = 0
• Äußere Spannung u = „Äußere Kraft“: „F“ = u)(tu
• Linearer elektrischer Serienschwingkreis: R, L, C konstant
• Anfangsbedingungen:
• Aufgabe: Selbst mit LAGRANGE-Gleichungen die Schwingungsgleichung aufstellen!
• Hinweis: In Aufgabensammlung ist das Beispiel mit KIRCHHOFF-Gesetzen berechnet!
dttdui
CdtdiR
dtidL )(12
2
)0(),0( ii
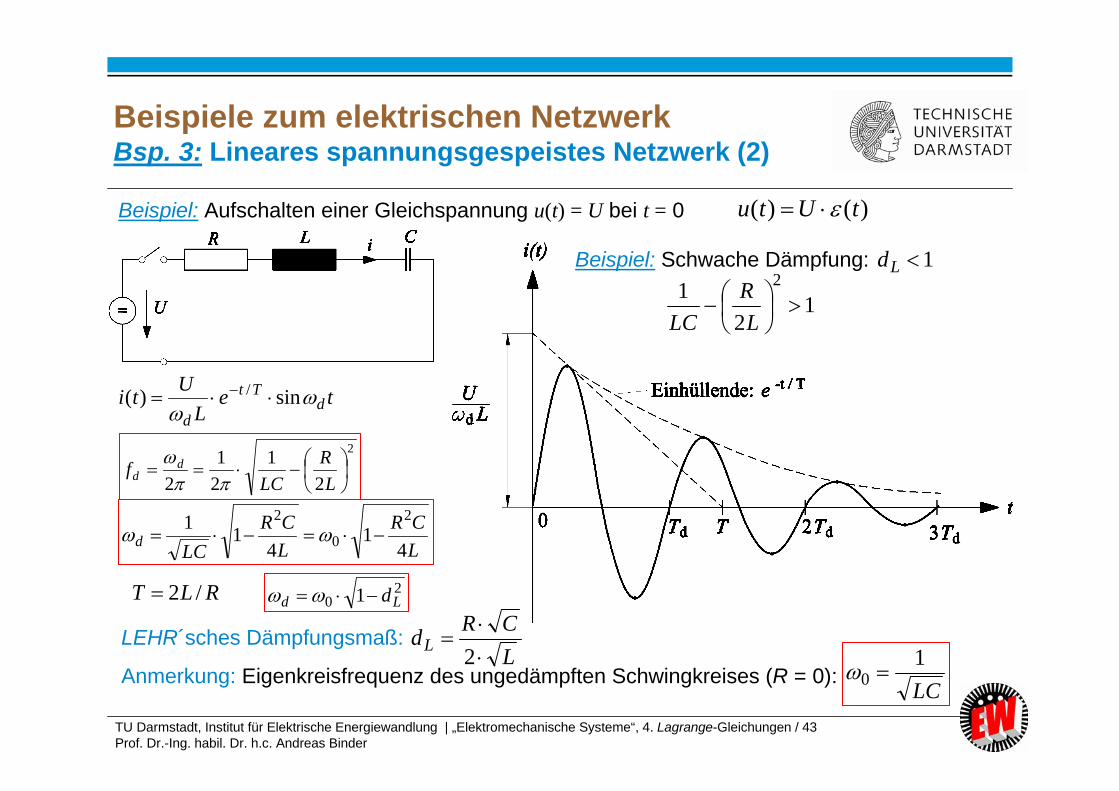
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 43Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum elektrischen NetzwerkBsp. 3: Lineares spannungsgespeistes Netzwerk (2)
Beispiel: Aufschalten einer Gleichspannung u(t) = U bei t = 0 )()( tUtu
teL
Uti dTt
d
sin)( /
2
21
21
2
LR
LCf d
d
RLT /2
12
1 2
LR
LC
Beispiel: Schwache Dämpfung:
LCR
LCR
LCd 41
411 2
0
2
LEHR´sches Dämpfungsmaß:
Anmerkung: Eigenkreisfrequenz des ungedämpften Schwingkreises (R = 0): LC1
0 LCRdL
2
20 1 Ld d
1Ld
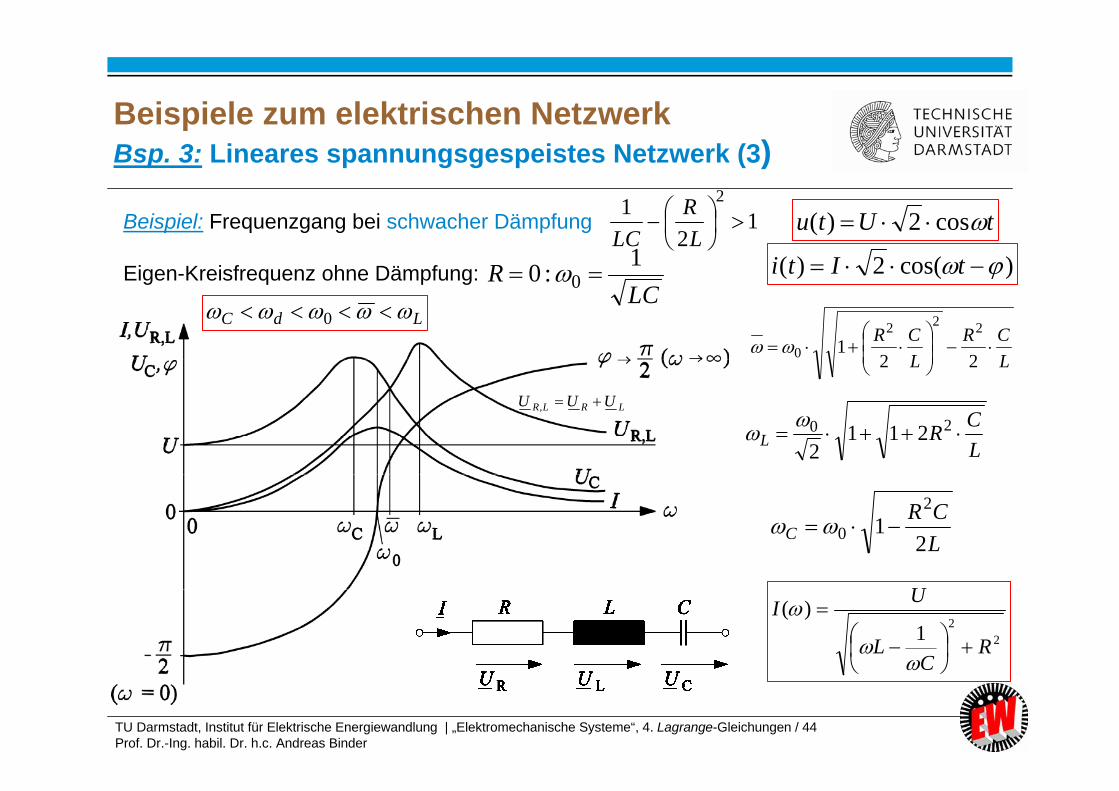
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 44Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum elektrischen NetzwerkBsp. 3: Lineares spannungsgespeistes Netzwerk (3)
Beispiel: Frequenzgang bei schwacher Dämpfung 12
1 2
LR
LCtUtu cos2)(
LCR 1:0 0 Eigen-Kreisfrequenz ohne Dämpfung:
LCR
LCR
221
222
0
LCRL 20 211
2
LCR
C 21
2
0
221
)(
RC
L
UI
)cos(2)( tIti
LdC 0
LRLR UUU ,
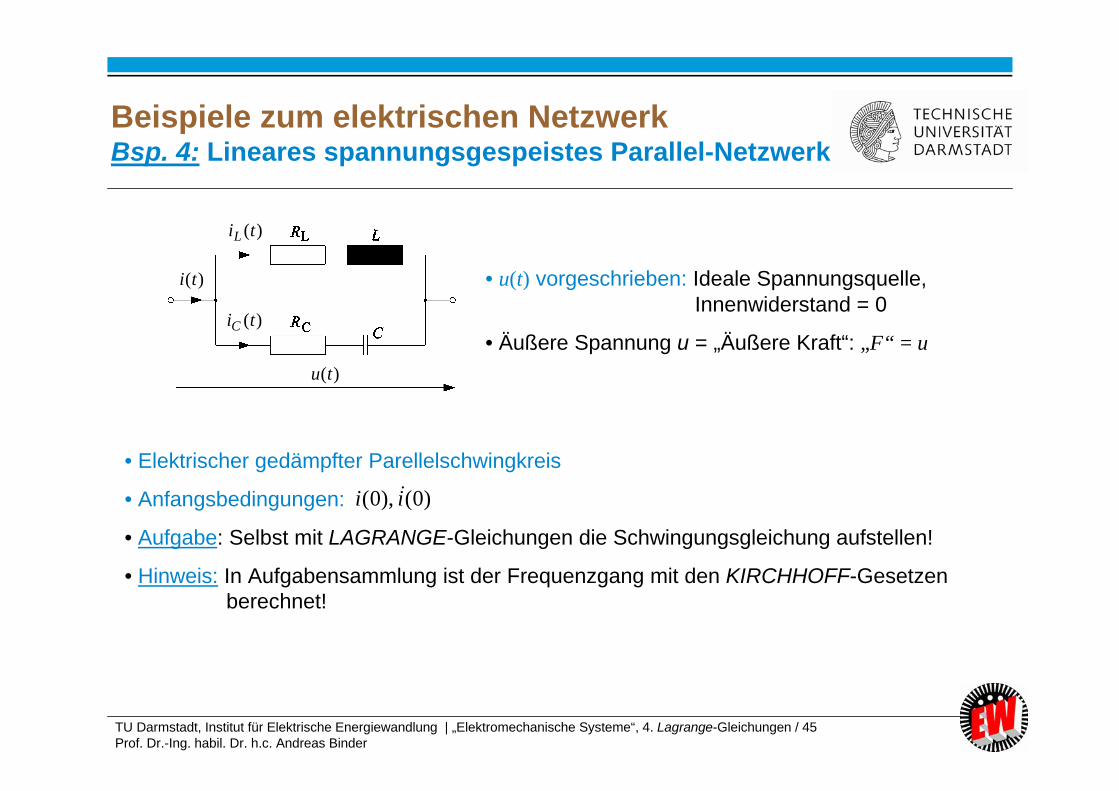
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 45Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum elektrischen NetzwerkBsp. 4: Lineares spannungsgespeistes Parallel-Netzwerk
• u(t) vorgeschrieben: Ideale Spannungsquelle, Innenwiderstand = 0
• Äußere Spannung u = „Äußere Kraft“: „F“ = u
• Elektrischer gedämpfter Parellelschwingkreis
• Anfangsbedingungen:
• Aufgabe: Selbst mit LAGRANGE-Gleichungen die Schwingungsgleichung aufstellen!
• Hinweis: In Aufgabensammlung ist der Frequenzgang mit den KIRCHHOFF-Gesetzenberechnet!
)0(),0( ii
)(ti
)(tiL
)(tiC
)(tu
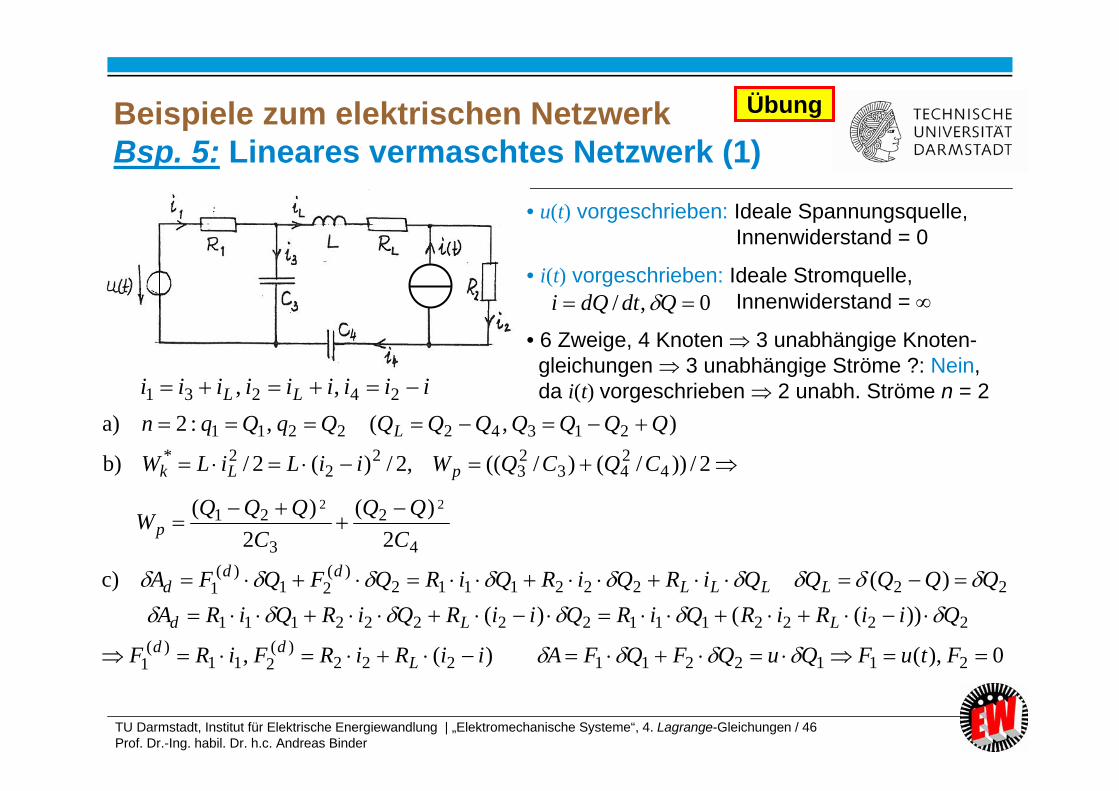
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 46Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum elektrischen NetzwerkBsp. 5: Lineares vermaschtes Netzwerk (1)
iiiiiiiii LL 24231 ,,
4
2
3
21
4243
23
22
2*213422211
2)(
2)(
2/))/()/((,2/)(2/b)
),(,:2a)
22
CQQ
CQQQW
CQCQWiiLiLW
QQQQQQQQqQqn
p
pLk
L
• u(t) vorgeschrieben: Ideale Spannungsquelle, Innenwiderstand = 0
• i(t) vorgeschrieben: Ideale Stromquelle, Innenwiderstand =
• 6 Zweige, 4 Knoten 3 unabhängige Knoten-gleichungen 3 unabhängige Ströme ?: Nein, da i(t) vorgeschrieben 2 unabh. Ströme n = 2
0),()(,
))(()()(c)
2112211222)(
211)(
1
222211122222111
222221112)(
21)(
1
FtuFQuQFQFAiiRiRFiRF
QiiRiRQiRQiiRQiRQiRAQQQQQiRQiRQiRQFQFA
Ldd
LLd
LLLLdd
d
0,/ QdtdQi
Übung
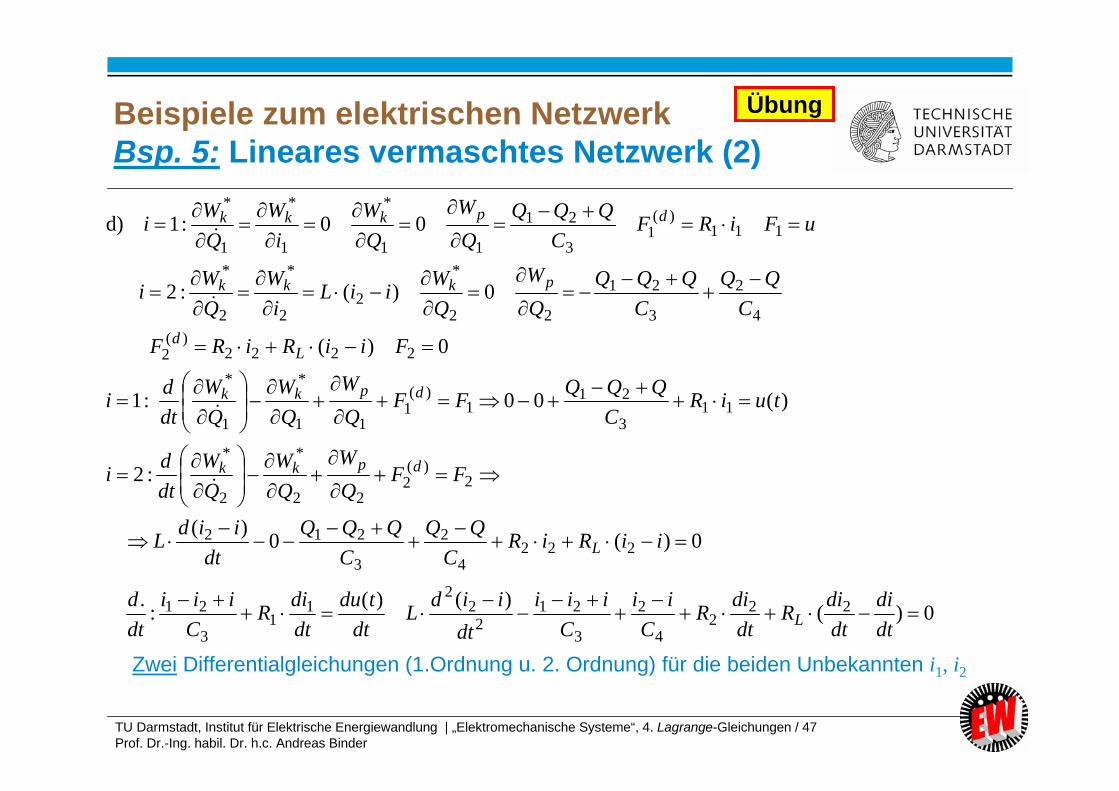
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 47Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum elektrischen NetzwerkBsp. 5: Lineares vermaschtes Netzwerk (2)
0)(0)(
:2
)(00:1
0)(
0)(:2
00:1d)
2224
2
3
212
2)(
222
*
2
*
113
211
)(1
11
*
1
*2222
)(2
4
2
3
21
22
*
22
*
2
*
111)(
13
21
11
*
1
*
1
*
iiRiRC
QQC
QQQdt
iidL
FFQW
QW
QW
dtdi
tuiRC
QQQFFQW
QW
QW
dtdi
FiiRiRF
CQQ
CQQQ
QW
QWiiL
iW
QWi
uFiRFC
QQQQW
QW
iW
QWi
L
dpkk
dpkk
Ld
pkkk
dpkkk
0)()()(:. 222
4
2
3
212
22
11
3
21
dtdi
dtdiR
dtdiR
Cii
Ciii
dtiidL
dttdu
dtdiR
Ciii
dtd
L
Zwei Differentialgleichungen (1.Ordnung u. 2. Ordnung) für die beiden Unbekannten i1, i2
Übung
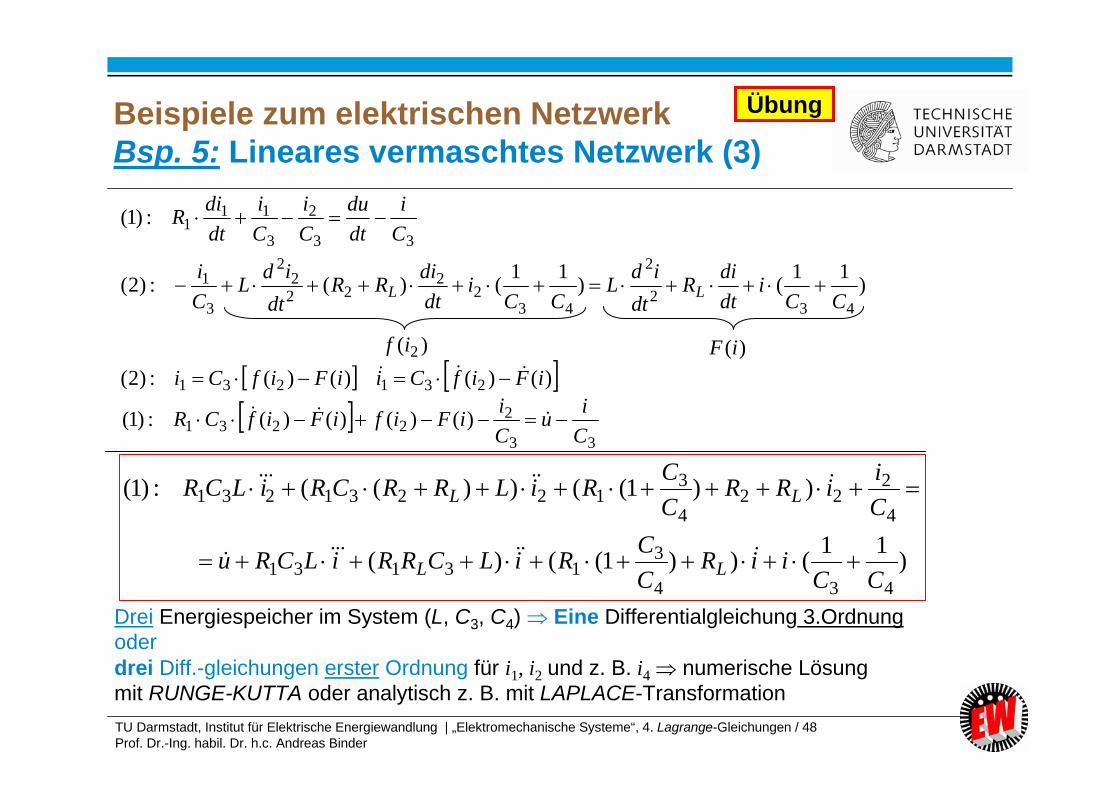
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 48Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum elektrischen NetzwerkBsp. 5: Lineares vermaschtes Netzwerk (3)
)11()11()(:)2(
:)1(
432
2
432
222
22
3
1
33
2
3
111
CCi
dtdiR
dtidL
CCi
dtdiRR
dtidL
Ci
Ci
dtdu
Ci
Ci
dtdiR
LL
)( 2if )(iF )()()()(:)2( 231231 iFifCiiFifCi
33
22231 )()()()(:)1(
Ciu
CiiFifiFifCR
)11())1(()(
))1(())((:)1(
434
313131
4
222
4
312231231
CCiiR
CCRiLCRRiLCRu
CiiRR
CCRiLRRCRiLCR
LL
LL
Drei Energiespeicher im System (L, C3, C4) Eine Differentialgleichung 3.Ordnung oderdrei Diff.-gleichungen erster Ordnung für i1, i2 und z. B. i4 numerische Lösung mit RUNGE-KUTTA oder analytisch z. B. mit LAPLACE-Transformation
Übung
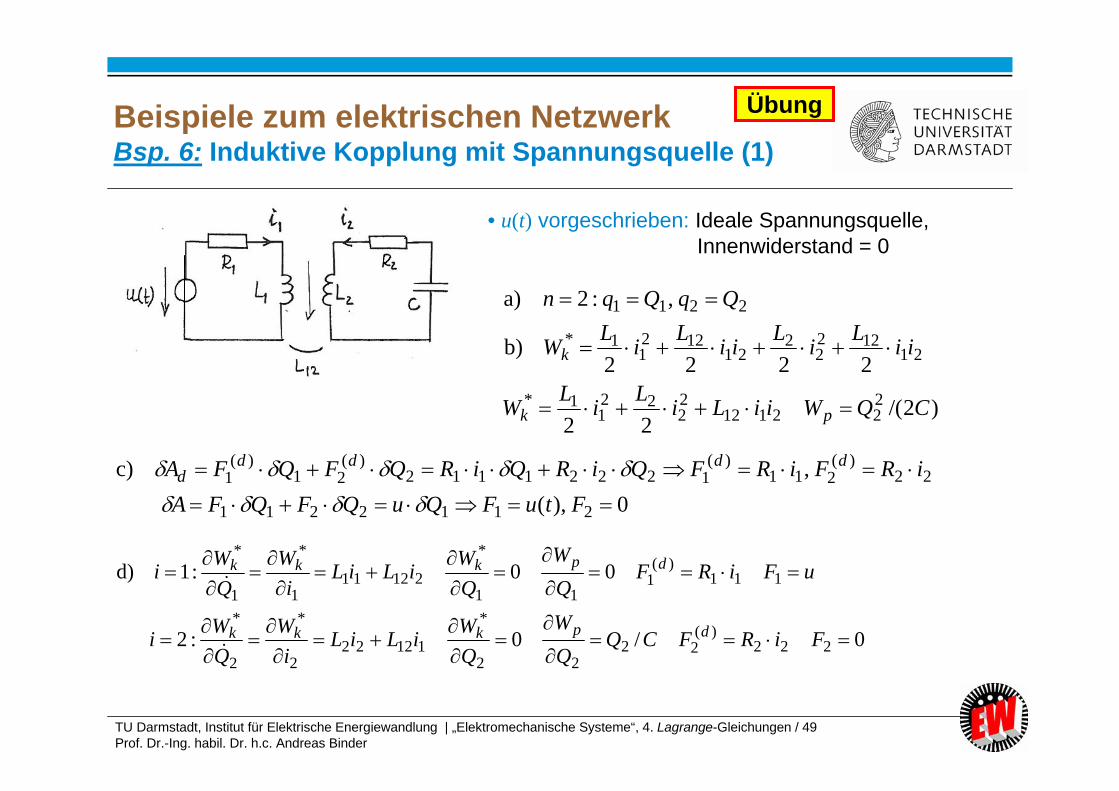
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 49Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum elektrischen NetzwerkBsp. 6: Induktive Kopplung mit Spannungsquelle (1)
• u(t) vorgeschrieben: Ideale Spannungsquelle, Innenwiderstand = 0
)2/(22
2222b)
,:2a)
222112
22
221
1*
21122
22
21122
11*
2211
CQWiiLiLiLW
iiLiLiiLiLW
QqQqn
pk
k
0),(,c)
2112211
22)(
211)(
12221112)(
21)(
1
FtuFQuQFQFAiRFiRFQiRQiRQFQFA dddd
d
0/0:2
00:1d)
222)(
2222
*
112222
*
2
*
111)(
111
*
212111
*
1
*
FiRFCQQW
QWiLiL
iW
QWi
uFiRFQW
QWiLiL
iW
QWi
dpkkk
dpkkk
Übung
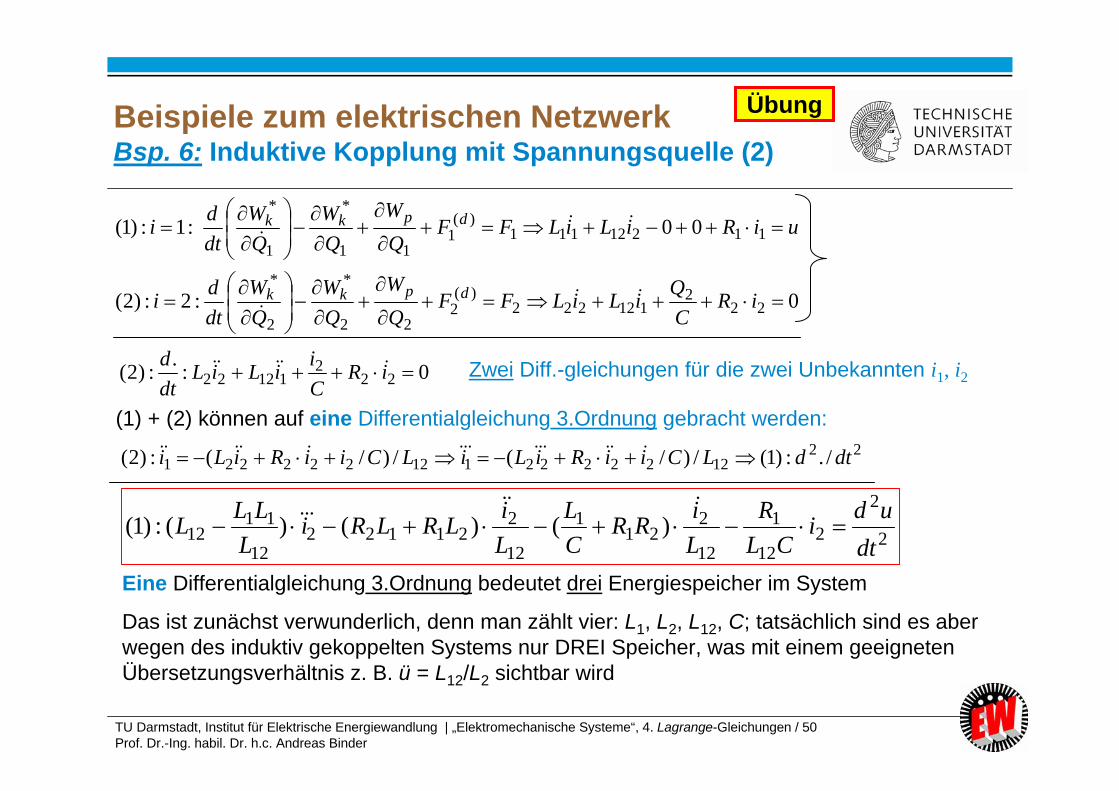
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 50Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum elektrischen NetzwerkBsp. 6: Induktive Kopplung mit Spannungsquelle (2)
0:2:)2(
00:1:)1(
222
112222)(
222
*
2
*
11212111)(
111
*
1
*
iRCQiLiLFF
QW
QW
QW
dtdi
uiRiLiLFFQW
QW
QW
dtdi
dpkk
dpkk
0:.:)2( 222
11222 iRCiiLiL
dtd Zwei Diff.-gleichungen für die zwei Unbekannten i1, i2
(1) + (2) können auf eine Differentialgleichung 3.Ordnung gebracht werden:22
1222222112222221 /.:)1(/)/(/)/(:)2( dtdLCiiRiLiLCiiRiLi
2
2
212
1
12
221
1
12
221122
12
1112 )()()(:)1(
dtudi
CLR
LiRR
CL
LiLRLRi
LLLL
Eine Differentialgleichung 3.Ordnung bedeutet drei Energiespeicher im System
Das ist zunächst verwunderlich, denn man zählt vier: L1, L2, L12, C; tatsächlich sind es aber wegen des induktiv gekoppelten Systems nur DREI Speicher, was mit einem geeigneten Übersetzungsverhältnis z. B. ü = L12/L2 sichtbar wird
Übung
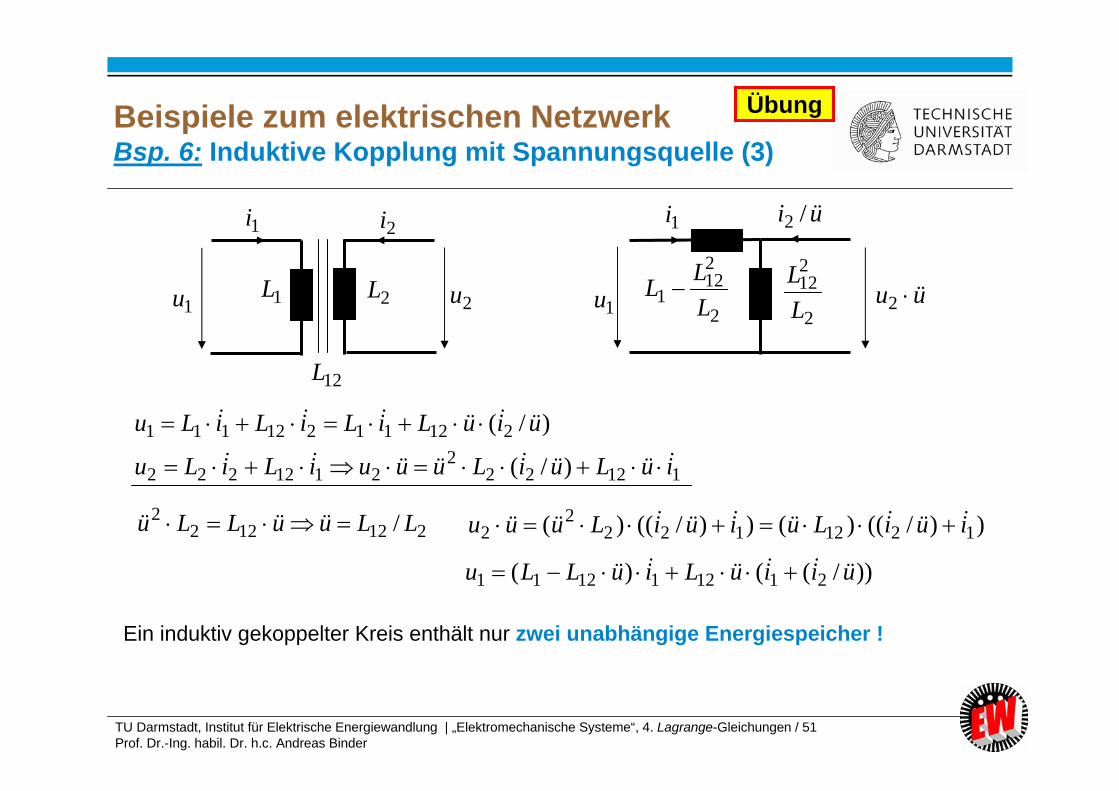
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 51Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum elektrischen NetzwerkBsp. 6: Induktive Kopplung mit Spannungsquelle (3)
1u 2u
1i 2i
1L 2L
12L
1u üu 2
üi /21i
2
212
1 LLL
2
212
LL
112222
2112222
21211212111
)/(
)/(
iüLüiLüüuiLiLu
üiüLiLiLiLu
2121222 / LLüüLLü ))/(()())/(()( 1212122
22 iüiLüiüiLüüu
))/(()( 211211211 üiiüLiüLLu
Ein induktiv gekoppelter Kreis enthält nur zwei unabhängige Energiespeicher !
Übung
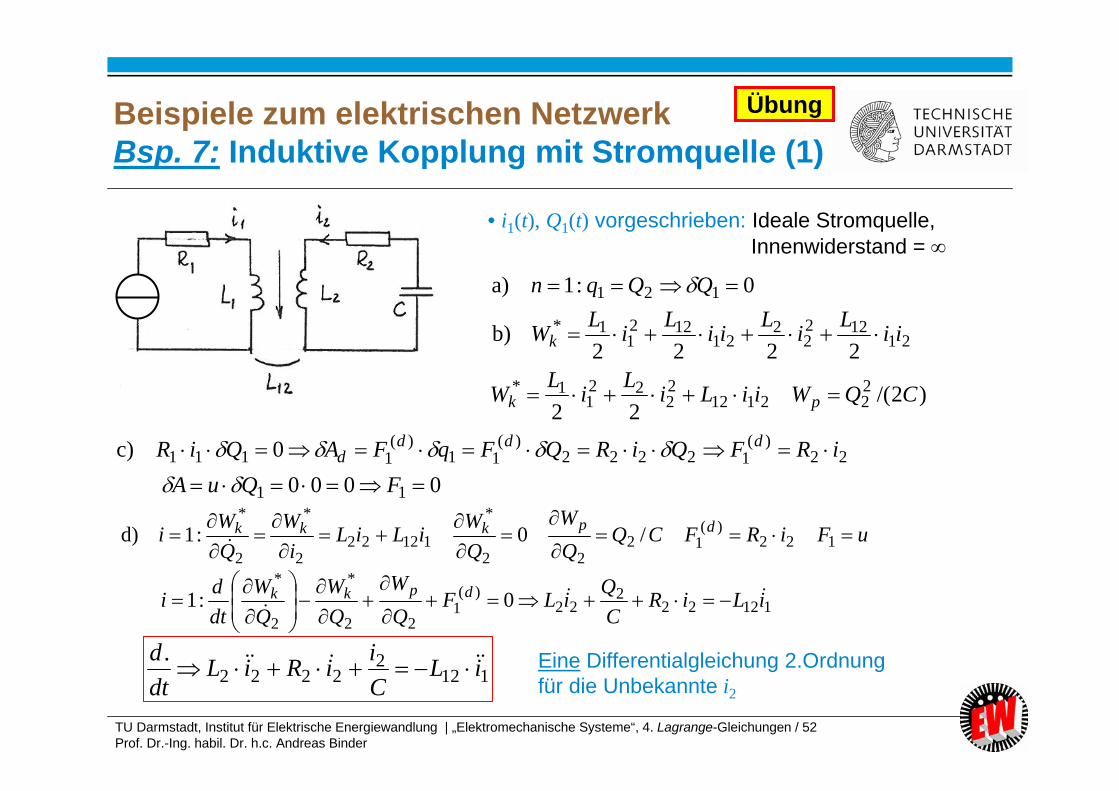
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 52Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum elektrischen NetzwerkBsp. 7: Induktive Kopplung mit Stromquelle (1)
• i1(t), Q1(t) vorgeschrieben: Ideale Stromquelle, Innenwiderstand =
)2/(22
2222b)
0:1a)
222112
22
221
1*
21122
22
21122
11*
121
CQWiiLiLiLW
iiLiLiiLiLW
QQqn
pk
k
00000c)
11
22)(
12222)(
11)(
1111
FQuAiRFQiRQFqFAQiR ddd
d
uFiRFCQQW
QWiLiL
iW
QWi dpkkk
122)(
1222
*
112222
*
2
*/0:1d)
112222
22)(
122
*
2
*0:1 iLiR
CQiLF
QW
QW
QW
dtdi dpkk
1122
2222. iL
CiiRiL
dtd Eine Differentialgleichung 2.Ordnung
für die Unbekannte i2
Übung
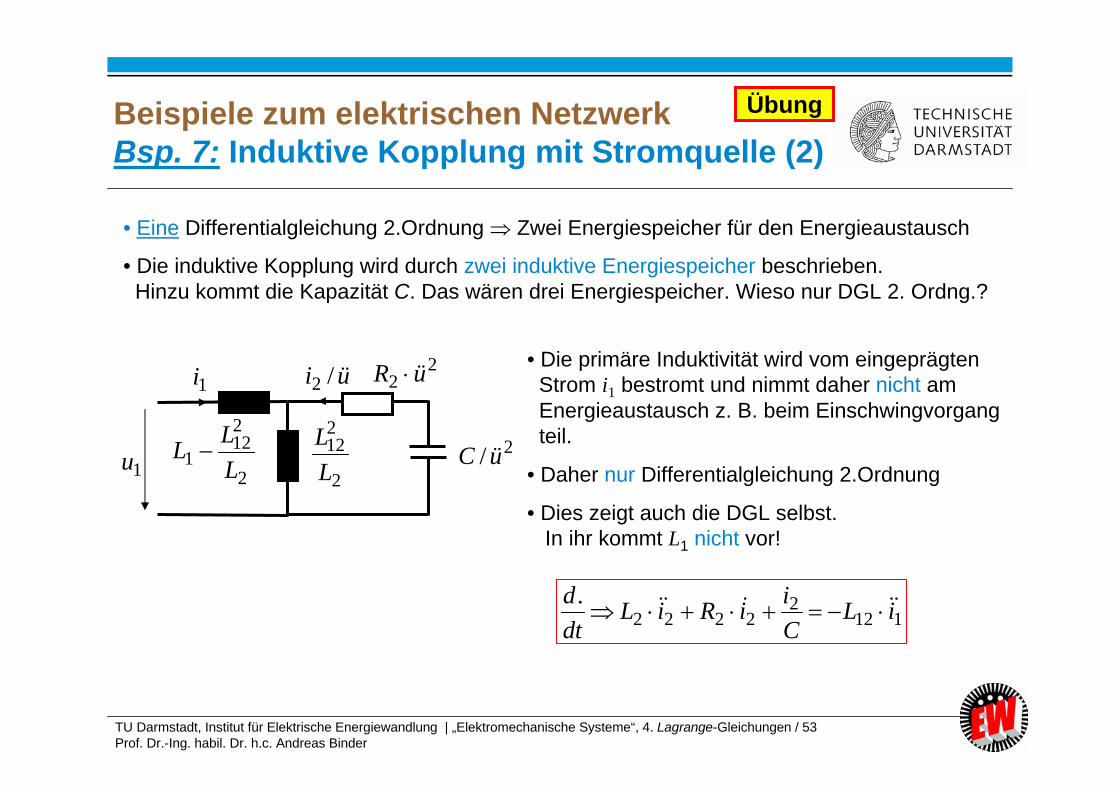
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 53Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Beispiele zum elektrischen NetzwerkBsp. 7: Induktive Kopplung mit Stromquelle (2)
1122
2222. iL
CiiRiL
dtd
• Eine Differentialgleichung 2.Ordnung Zwei Energiespeicher für den Energieaustausch
• Die induktive Kopplung wird durch zwei induktive Energiespeicher beschrieben. Hinzu kommt die Kapazität C. Das wären drei Energiespeicher. Wieso nur DGL 2. Ordng.?
1u
22 üR üi /21i
2
212
1 LLL
2
212
LL 2/ üC
• Die primäre Induktivität wird vom eingeprägten Strom i1 bestromt und nimmt daher nicht am Energieaustausch z. B. beim Einschwingvorgang teil.
• Daher nur Differentialgleichung 2.Ordnung
• Dies zeigt auch die DGL selbst. In ihr kommt L1 nicht vor!
Übung
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 4. Lagrange-Gleichungen / 54Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme4. Methode der Lagrange-Gleichungen
Zusammenfassung:- Allgemeine UNABHÄNGIGE Koordinaten (Lage, el. Ladungen) bilden
n-dimensionalen Raum n r- Über virtuelle Verschiebungen werden benachbarte Systemzustände energetisch
betrachtet (= die Systemkoordinaten werden „variiert“)- Die EULER´sche Variationsrechnung führt auf die EULER´schen Variations-
gleichungen, wenn bei Änderung der System-Lage von A nach B eine bestimmte „Wirkung“ S des Systems minimal ist (z. B. die dabei verstrichene Zeit T)
- Für die Wandlersystemgleichungen ist S das ist Wegintegral der Lagrange-Funktion L, die die Differenz aus kin. Ergänzungsenergie und pot. Energie des Systems ist
- Mit diesem L heißen die n EULER´schen Variationsgleichungendie Lagrange-Gleichungen
- Bei komplexen Systemen verwendet man anstelle der klassischen dynamischen Grundgesetze diese Lagrange-Gleichungen
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 1Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme Elektromechanische Systeme
5. Elektromechanische Grundsysteme5. Elektromechanische Grundsysteme
• Magnetisches GrundsystemStationäres Verhalten: Beispiele
• Elektrisches GrundsystemStationäres Verhalten: Beispiele
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 2Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme5. Elektromechanische Grundsysteme
• Magnetisches GrundsystemStationäres Verhalten: Beispiele
• Elektrisches GrundsystemStationäres Verhalten: Beispiele
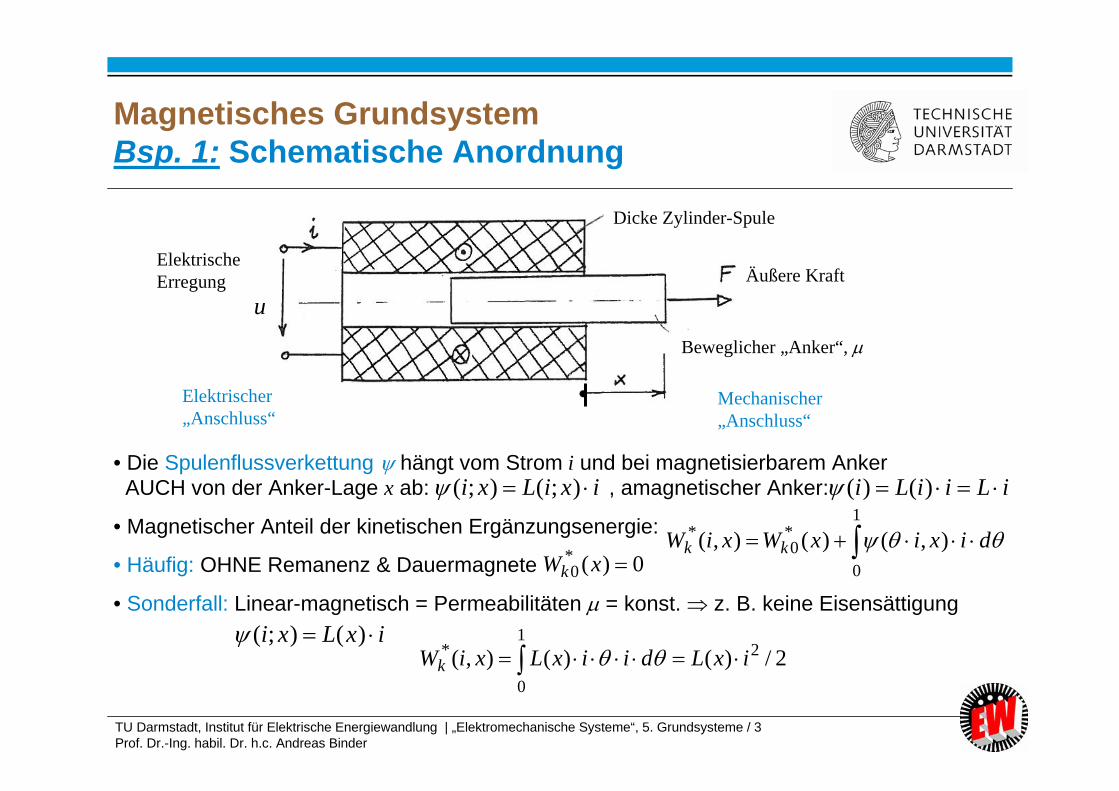
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 3Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetisches GrundsystemBsp. 1: Schematische Anordnung
• Die Spulenflussverkettung hängt vom Strom i und bei magnetisierbarem Anker AUCH von der Anker-Lage x ab: , amagnetischer Anker:
• Magnetischer Anteil der kinetischen Ergänzungsenergie:
• Häufig: OHNE Remanenz & Dauermagnete
• Sonderfall: Linear-magnetisch = Permeabilitäten = konst. z. B. keine Eisensättigung
ixiLxi );();(
1
0
*0
* ),()(),( dixixWxiW kk
iLiiLi )()(
0)(*0 xWk
ixLxi )();(2/)()(),( 2
1
0
* ixLdiixLxiWk
Dicke Zylinder-Spule
Beweglicher „Anker“,
Äußere KraftElektrische Erregung
u
Elektrischer „Anschluss“
Mechanischer „Anschluss“
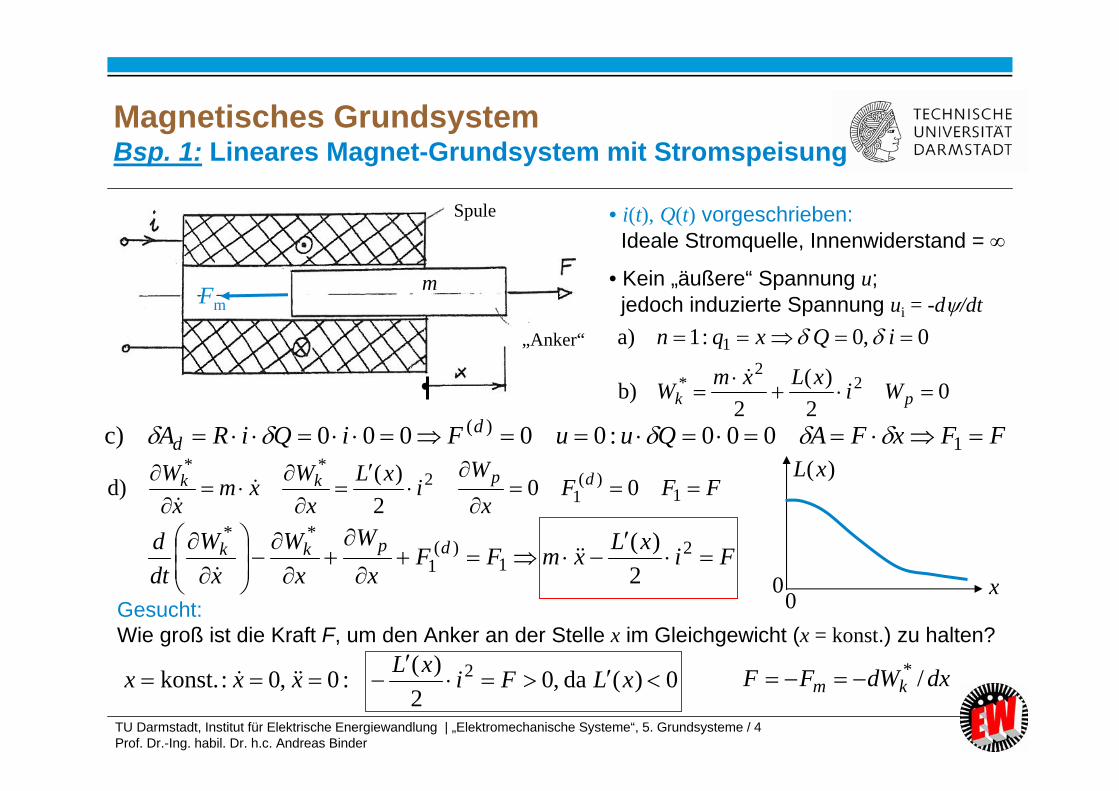
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 4Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetisches GrundsystemBsp. 1: Lineares Magnet-Grundsystem mit Stromspeisung
Gesucht: Wie groß ist die Kraft F, um den Anker an der Stelle x im Gleichgewicht (x = konst.) zu halten?
02
)(2
b)
0,0:1a)
22
*
1
pk WixLxmW
iQxqn
FFxFAQuuFiQiRA dd 1
)( 000:00000c)
FFFx
WixL
xWxm
xW dpkk
1)(
12
**00
2)(d)
FixLxmFFx
Wx
Wx
Wdtd dpkk
2
1)(
1
**
2)(
• i(t), Q(t) vorgeschrieben: Ideale Stromquelle, Innenwiderstand =
• Kein „äußere“ Spannung u; jedoch induzierte Spannung ui = -d/dt
0)(da,02
)(:0,0:konst. 2
xLFixLxxx dxdWFF km /*
Spule
„Anker“
Fm
m
)(xL
x00
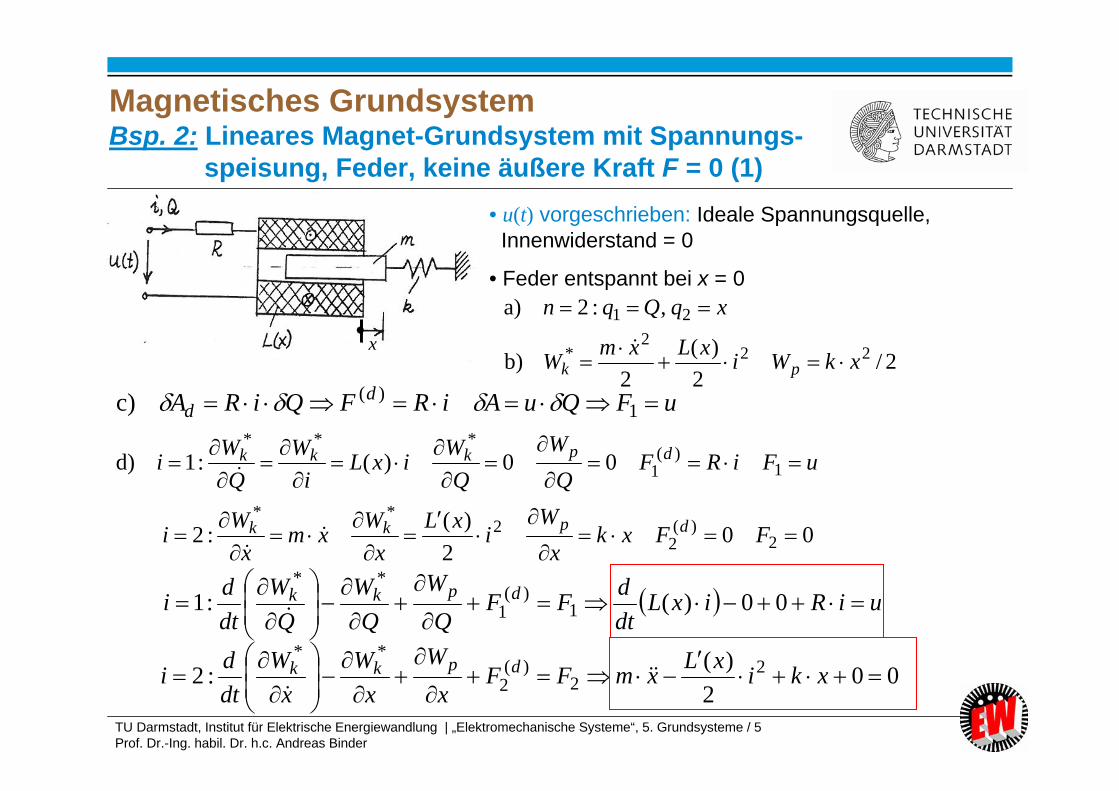
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 5Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetisches GrundsystemBsp. 2: Lineares Magnet-Grundsystem mit Spannungs-
speisung, Feder, keine äußere Kraft F = 0 (1)• u(t) vorgeschrieben: Ideale Spannungsquelle,
Innenwiderstand = 0
• Feder entspannt bei x = 0
2/2
)(2
b)
,:2a)
222
*
21
xkWixLxmW
xqQqn
pk
x
uFQuAiRFQiRA dd 1
)(c)
002
)(:2
00)(:1d)
2)(
22
**
1)(
1
***
FFxkx
WixL
xWxm
xWi
uFiRFQ
WQ
WixLi
WQ
Wi
dpkk
dpkkk
002
)(:2 22
)(2
**
xkixLxmFFx
Wx
Wx
Wdtdi dpkk
uiRixLdtdFF
QW
QW
QW
dtdi dpkk
00)(:1 1)(
1
**
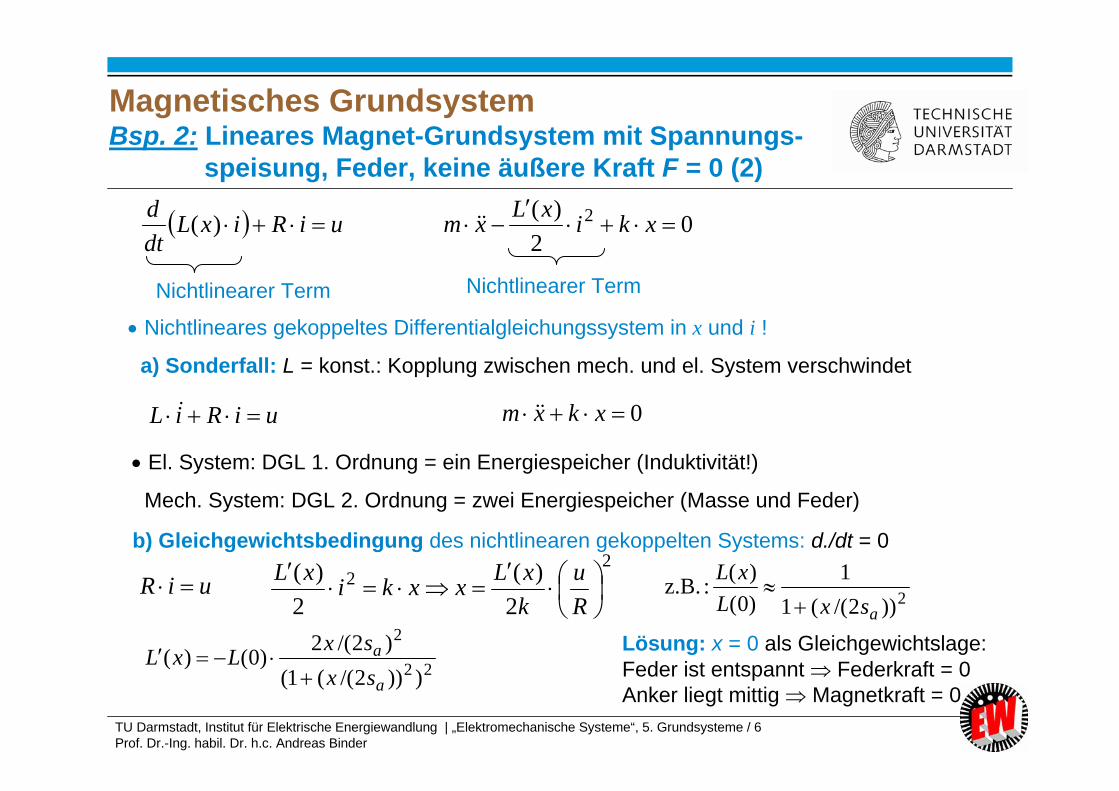
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 6Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
02
)( 2
xkixLxm uiRixLdtd
)(
Nichtlinearer Term Nichtlinearer Term
Nichtlineares gekoppeltes Differentialgleichungssystem in x und i !
a) Sonderfall: L = konst.: Kopplung zwischen mech. und el. System verschwindet
0 xkxm uiRiL
El. System: DGL 1. Ordnung = ein Energiespeicher (Induktivität!)
Mech. System: DGL 2. Ordnung = zwei Energiespeicher (Masse und Feder)
b) Gleichgewichtsbedingung des nichtlinearen gekoppelten Systems: d./dt = 0 2
2
2)(
2)(
Ru
kxLxxkixLuiR 2))2/((1
1)0()(:z.B.
asxLxL
22
2
)))2/((1()2/(2)0()(
a
a
sxsxLxL
Lösung: x = 0 als Gleichgewichtslage:
Feder ist entspannt Federkraft = 0Anker liegt mittig Magnetkraft = 0
Magnetisches GrundsystemBsp. 2: Lineares Magnet-Grundsystem mit Spannungs-
speisung, Feder, keine äußere Kraft F = 0 (2)
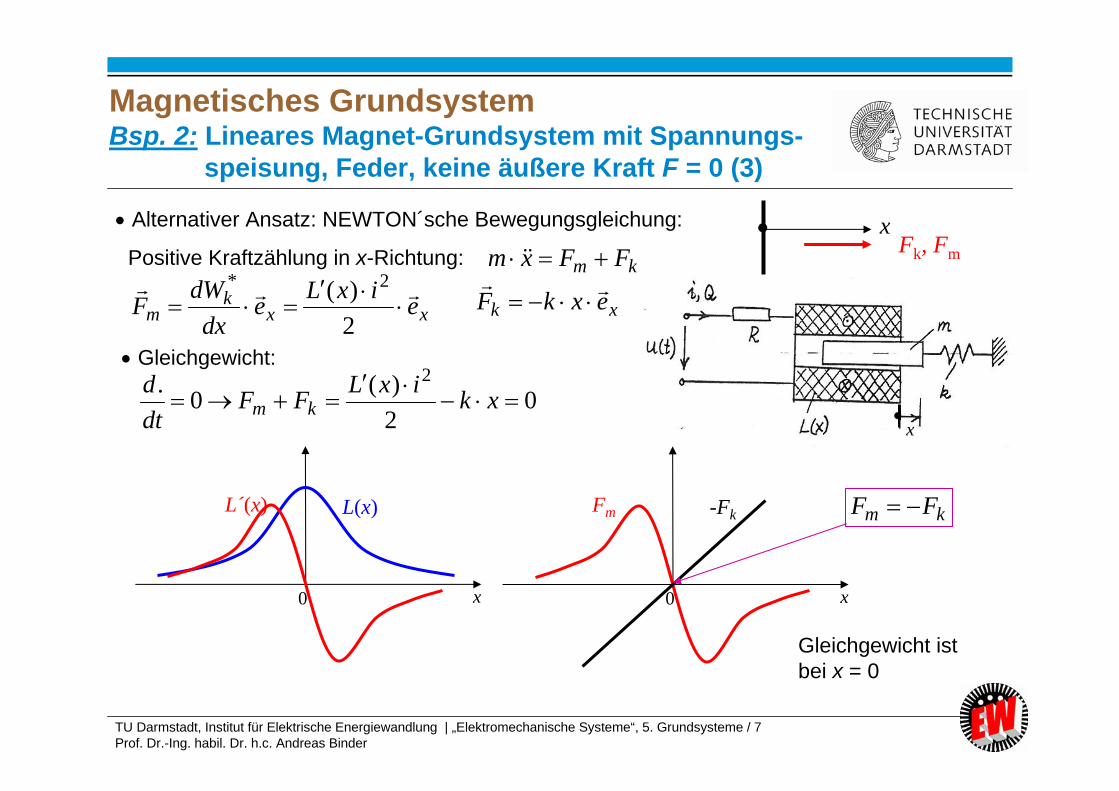
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 7Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetisches GrundsystemBsp. 2: Lineares Magnet-Grundsystem mit Spannungs-
speisung, Feder, keine äußere Kraft F = 0 (3)
Alternativer Ansatz: NEWTON´sche Bewegungsgleichung:
Positive Kraftzählung in x-Richtung: x
Fk, Fm
x
xk exkF xx
km eixLe
dxdWF
2)( 2*
km FFxm
02)(0. 2
xkixLFFdtd
km
Gleichgewicht:
L(x)L´(x)
0 x
-FkFm
0 x
km FF
Gleichgewicht ist bei x = 0
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 8Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme5. Elektromechanische Grundsysteme
• Magnetisches GrundsystemStationäres Verhalten: Beispiele
• Elektrisches GrundsystemStationäres Verhalten: Beispiele
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 9Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrisches GrundsystemKeine kinetische Ergänzungsenergie & kein F(d)
bei elektrostatische Anordnungen
• Elektrostatische Energie ist potentielle Energie Wp
• Statisch = Geschwindigkeit v = 0 keine kinetische mechanische Ergänzungsenergie Wk*
• Elektrostatik: d./dt = 0 kein Stromfluss: i = dQ/dt = 0 kein Magnetfeld
• Magnetische Energie ist Null keine kinetische magnetische Ergänzungsenergie Wk*
0* kW• v = 0 keine Reibungskraft, i = 0 keine Stromwärmeverluste:
Dissipative verallgemeinerte Kräfte sind Null! F(d) = 0
• Lagrange-Gleichungen vereinfachen sich:
)(grad)/,,,/,/()(
,,1
21
)(**
ppnppp
ii
pi
di
i
p
i
k
i
k
WWqWqWqWqF
Fq
WniFF
qW
qW
qW
dtd
• Dieses Ergebnis wurde bereits in Kapitel 3 hergeleitet!
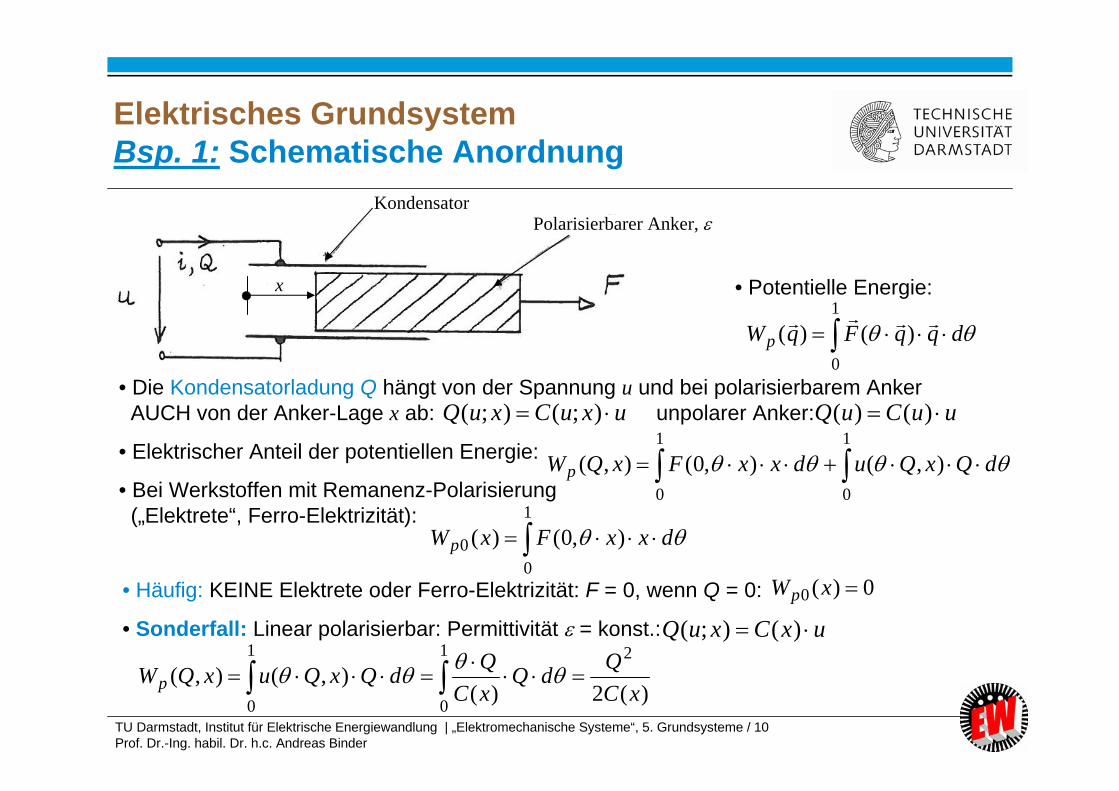
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 10Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
• Häufig: KEINE Elektrete oder Ferro-Elektrizität: F = 0, wenn Q = 0:
• Sonderfall: Linear polarisierbar: Permittivität = konst.:
Elektrisches GrundsystemBsp. 1: Schematische Anordnung
• Die Kondensatorladung Q hängt von der Spannung u und bei polarisierbarem Anker AUCH von der Anker-Lage x ab: unpolarer Anker:
• Elektrischer Anteil der potentiellen Energie:
• Bei Werkstoffen mit Remanenz-Polarisierung („Elektrete“, Ferro-Elektrizität):
uxuCxuQ );();(
1
0
)()( dqqFqWp
uxCxuQ )();(
KondensatorPolarisierbarer Anker,
x
uuCuQ )()(
• Potentielle Energie:
1
0
1
0
),(),0(),( dQxQudxxFxQWp
)(2)(),(),(
21
0
1
0 xCQdQ
xCQdQxQuxQWp
1
00 ),0()( dxxFxWp
0)(0 xWp
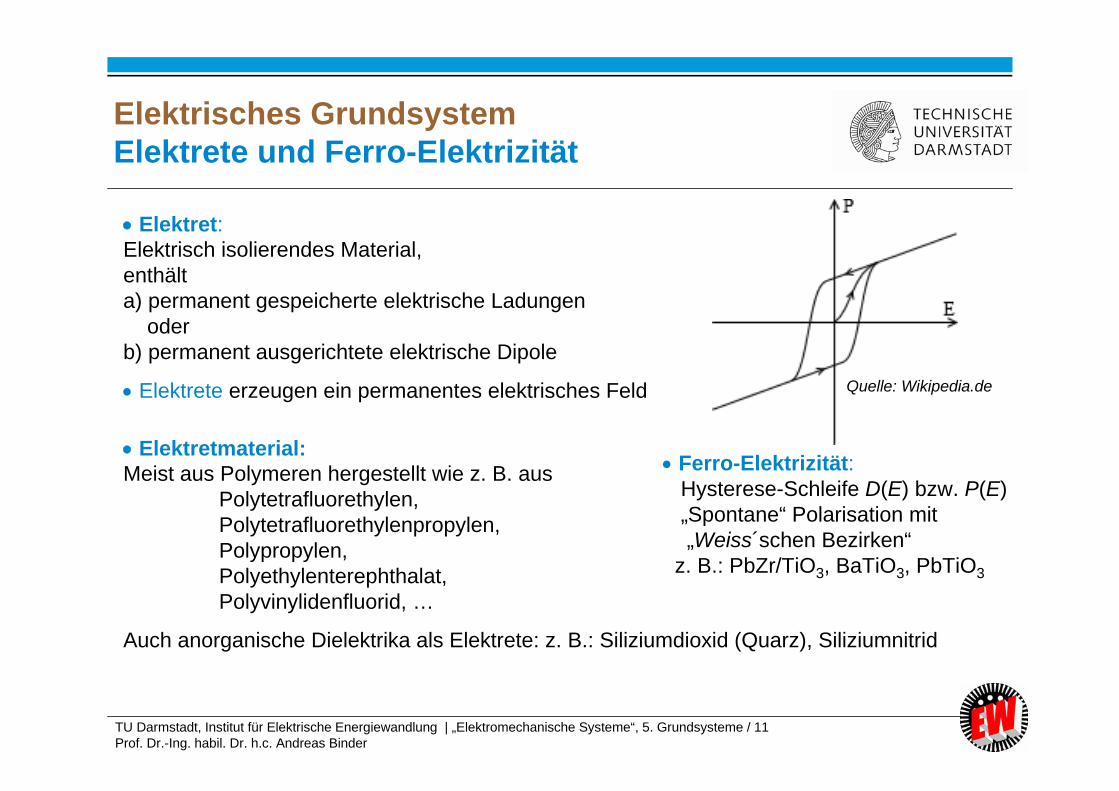
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 11Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrisches GrundsystemElektrete und Ferro-Elektrizität
Elektret: Elektrisch isolierendes Material,enthält a) permanent gespeicherte elektrische Ladungen
oder b) permanent ausgerichtete elektrische Dipole
Elektrete erzeugen ein permanentes elektrisches Feld
Elektretmaterial: Meist aus Polymeren hergestellt wie z. B. aus
Polytetrafluorethylen,Polytetrafluorethylenpropylen,Polypropylen,Polyethylenterephthalat, Polyvinylidenfluorid, …
Auch anorganische Dielektrika als Elektrete: z. B.: Siliziumdioxid (Quarz), Siliziumnitrid
Quelle: Wikipedia.de
Ferro-Elektrizität: Hysterese-Schleife D(E) bzw. P(E)„Spontane“ Polarisation mit „Weiss´schen Bezirken“
z. B.: PbZr/TiO3, BaTiO3, PbTiO3
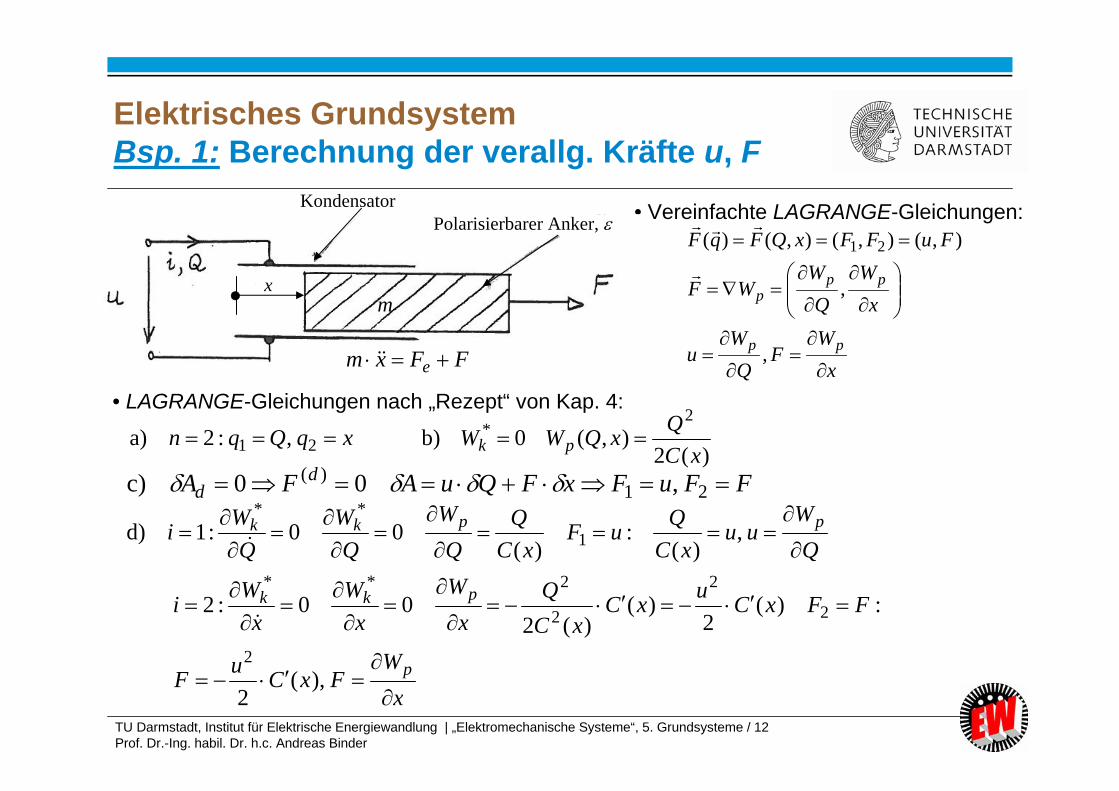
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 12Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrisches GrundsystemBsp. 1: Berechnung der verallg. Kräfte u, F
)(2),(0b),:2a)
2*
21 xCQxQWWxqQqn pk
FFuFxFQuAFA dd 21
)( ,00c)
xW
FxCuF
FFxCuxCxC
Qx
Wx
Wx
Wi
QW
uuxC
QuFxC
WQ
WQ
Wi
p
pkk
ppkk
),(2
:)(2
)()(2
00:2
,)(
:)(
00:1d)
2
2
2
2
2**
1
**
• Vereinfachte LAGRANGE-Gleichungen:Kondensator
x
FFxm e
m
Polarisierbarer Anker,
• LAGRANGE-Gleichungen nach „Rezept“ von Kap. 4:x
WF
QW
u
xW
QW
WF
FuFFxQFqF
pp
ppp
,
,
),(),(),()( 21
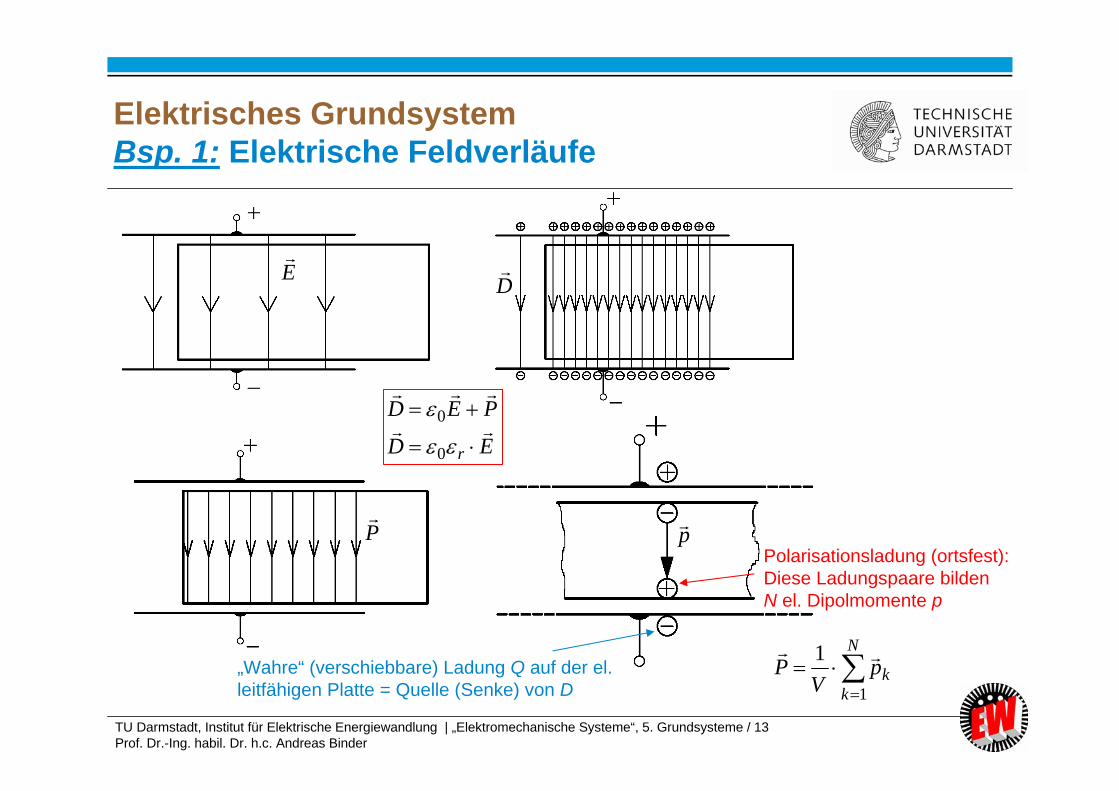
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 13Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrisches GrundsystemBsp. 1: Elektrische Feldverläufe
E
D
P
p
ED
PED
r
0
0
N
kkp
VP
1
1 „Wahre“ (verschiebbare) Ladung Q auf der el. leitfähigen Platte = Quelle (Senke) von D
Polarisationsladung (ortsfest): Diese Ladungspaare bilden N el. Dipolmomente p
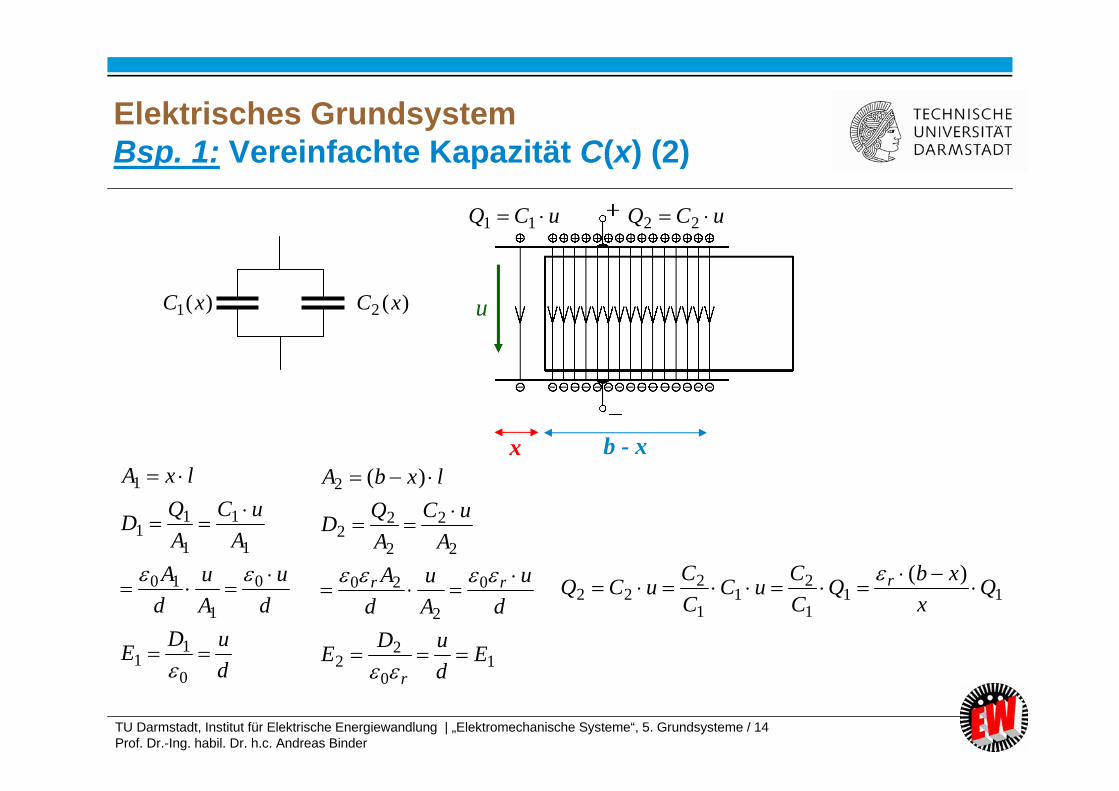
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 14Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrisches GrundsystemBsp. 1: Vereinfachte Kapazität C(x) (2)
duDE
du
Au
dA
AuC
AQD
lxA
0
11
0
1
10
1
1
1
11
1
10
22
0
2
20
2
2
2
22
2 )(
EduDE
du
Au
dA
AuC
AQD
lxbA
r
rr
11
1
21
1
222
)( Qx
xbQCCuC
CCuCQ r
)(1 xC )(2 xC u
uCQ 11 uCQ 22
x b - x
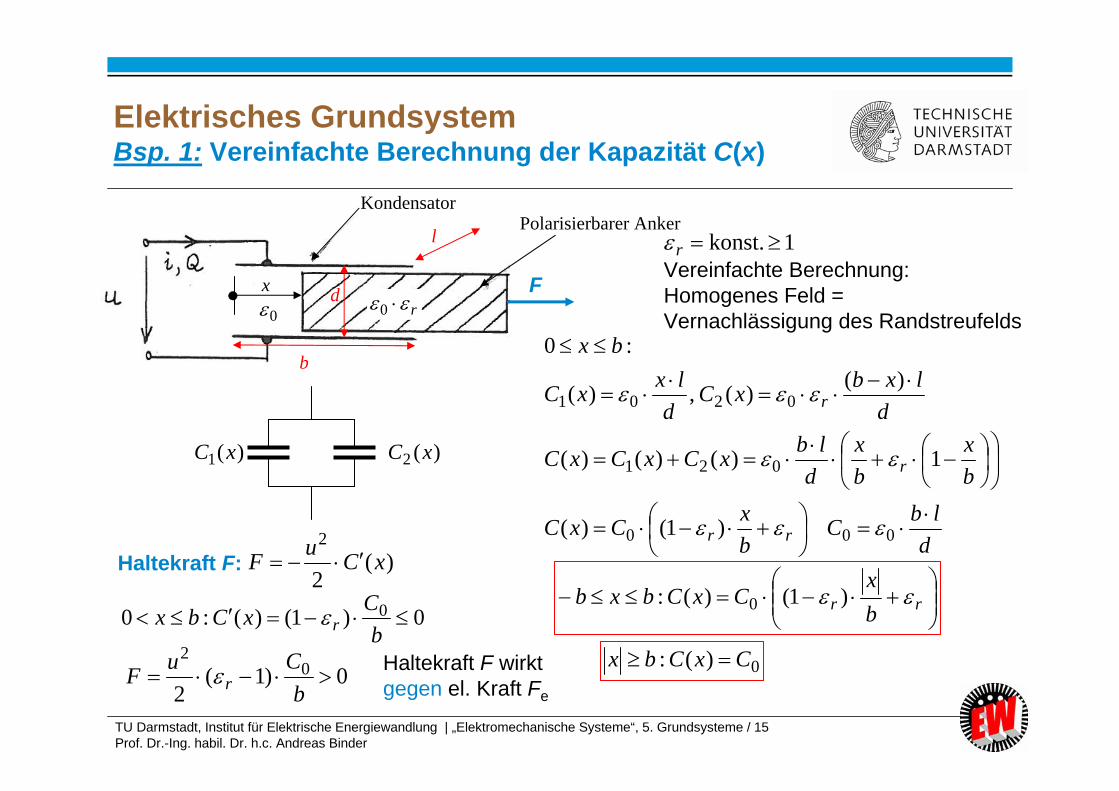
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 15Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrisches GrundsystemBsp. 1: Vereinfachte Berechnung der Kapazität C(x)
Vereinfachte Berechnung:Homogenes Feld = Vernachlässigung des Randstreufelds
dlbC
bxCxC
bx
bx
dlbxCxCxC
dlxbxC
dlxxC
bx
rr
r
r
000
021
0201
)1()(
1)()()(
)()(,)(
:0
rr b
xCxCbxb )1()(: 0
0)(: CxCbx
)(2
2xCuF
0)1()(:0 0 b
CxCbx r
0)1(2
02
b
CuF r
Haltekraft F:
KondensatorPolarisierbarer Anker
x0 r 0
d
b
l
)(1 xC )(2 xC
F
1konst.r
Haltekraft F wirkt gegen el. Kraft Fe
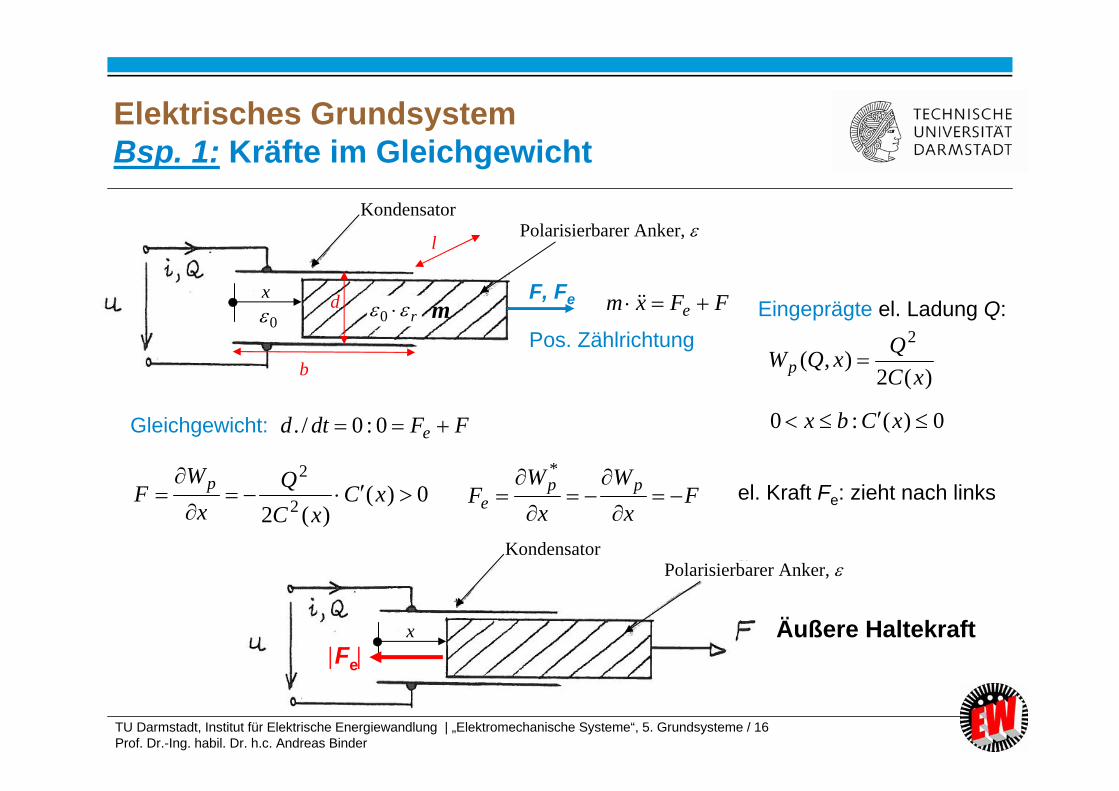
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 16Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrisches GrundsystemBsp. 1: Kräfte im Gleichgewicht
el. Kraft Fe: zieht nach linksFx
Wx
WF pp
e
*
)(2),(
2
xCQxQWp
Eingeprägte el. Ladung Q:
0)(:0 xCbxGleichgewicht: FFdtd e 0:0/.
0)()(2 2
2
xC
xCQ
xW
F p
KondensatorPolarisierbarer Anker,
x0 r 0
d
b
l
F, Fe FFxm e
Pos. Zählrichtungm
KondensatorPolarisierbarer Anker,
xFe
Äußere Haltekraft
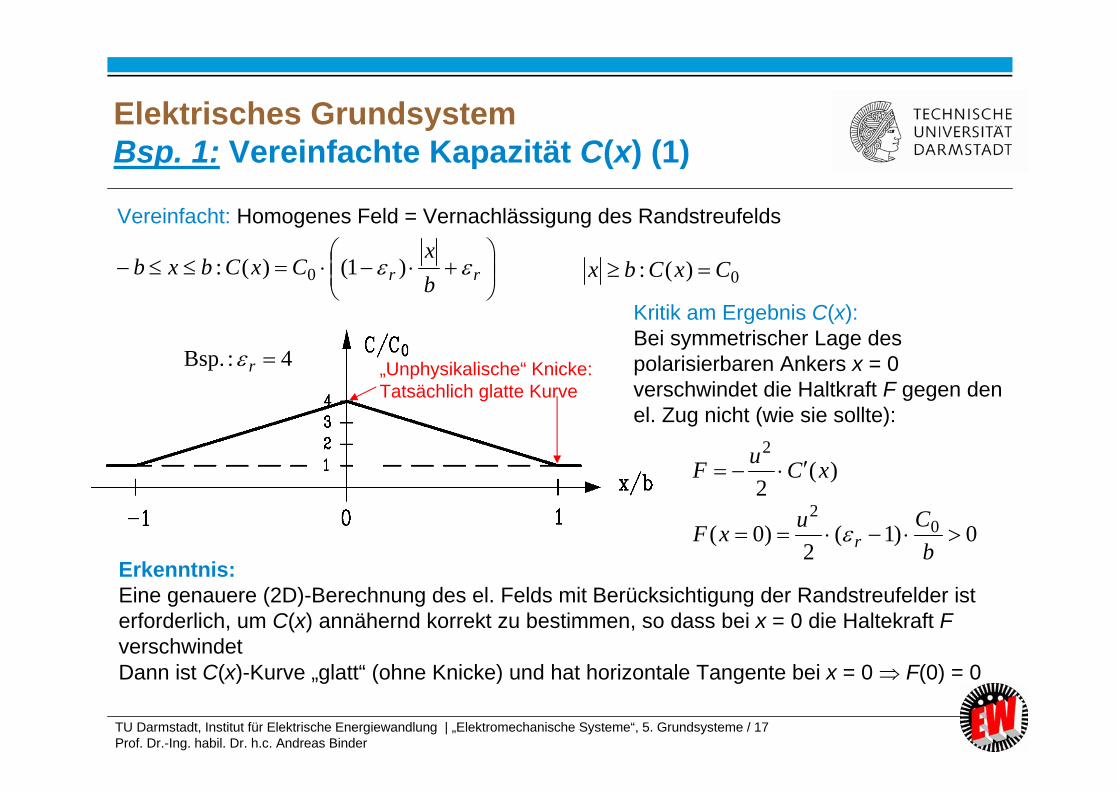
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 17Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrisches GrundsystemBsp. 1: Vereinfachte Kapazität C(x) (1)
Vereinfacht: Homogenes Feld = Vernachlässigung des Randstreufelds
0)(: CxCbx
Kritik am Ergebnis C(x):Bei symmetrischer Lage des polarisierbaren Ankers x = 0 verschwindet die Haltkraft F gegen den el. Zug nicht (wie sie sollte):
)(2
2xCuF
0)1(2
)0( 02
b
CuxF rErkenntnis:Eine genauere (2D)-Berechnung des el. Felds mit Berücksichtigung der Randstreufelder ist erforderlich, um C(x) annähernd korrekt zu bestimmen, so dass bei x = 0 die Haltekraft FverschwindetDann ist C(x)-Kurve „glatt“ (ohne Knicke) und hat horizontale Tangente bei x = 0 F(0) = 0
4:Bsp. r „Unphysikalische“ Knicke: Tatsächlich glatte Kurve
rr b
xCxCbxb )1()(: 0
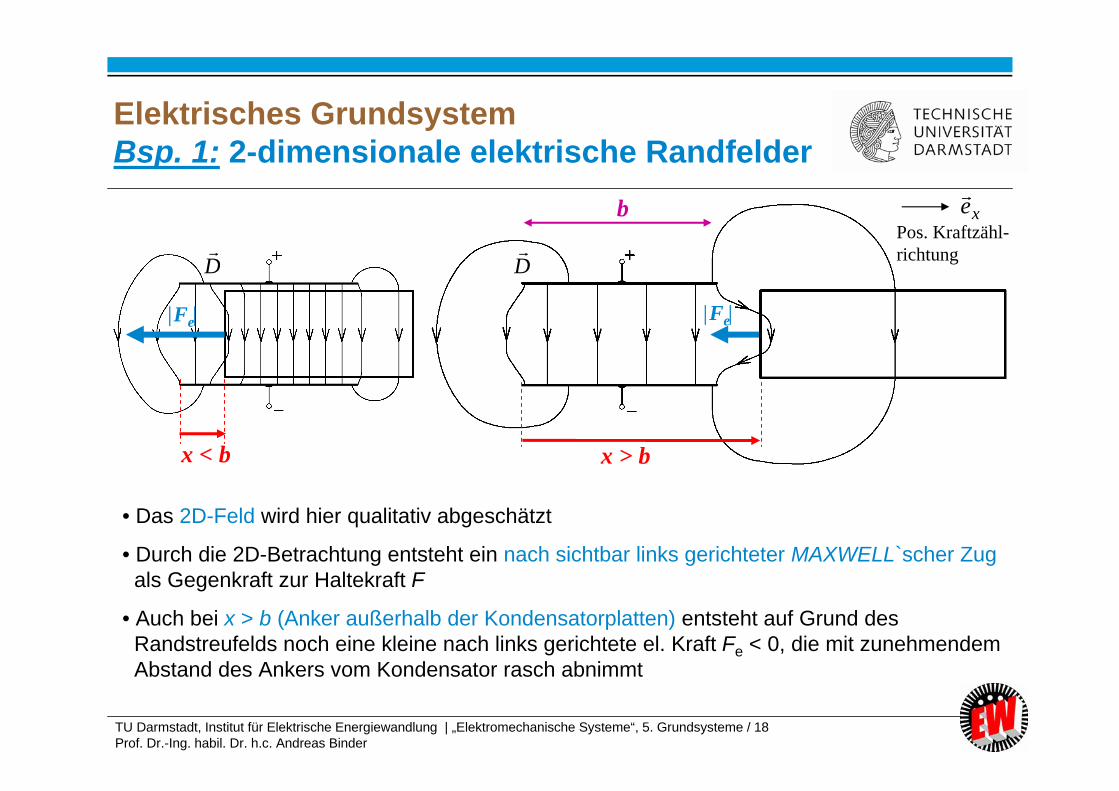
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 18Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrisches GrundsystemBsp. 1: 2-dimensionale elektrische Randfelder
D
• Das 2D-Feld wird hier qualitativ abgeschätzt
• Durch die 2D-Betrachtung entsteht ein nach sichtbar links gerichteter MAXWELL`scher Zugals Gegenkraft zur Haltekraft F
• Auch bei x > b (Anker außerhalb der Kondensatorplatten) entsteht auf Grund des Randstreufelds noch eine kleine nach links gerichtete el. Kraft Fe < 0, die mit zunehmendem Abstand des Ankers vom Kondensator rasch abnimmt
Fe
D
x < b x > b
b
Fe
xe
Pos. Kraftzähl-richtung
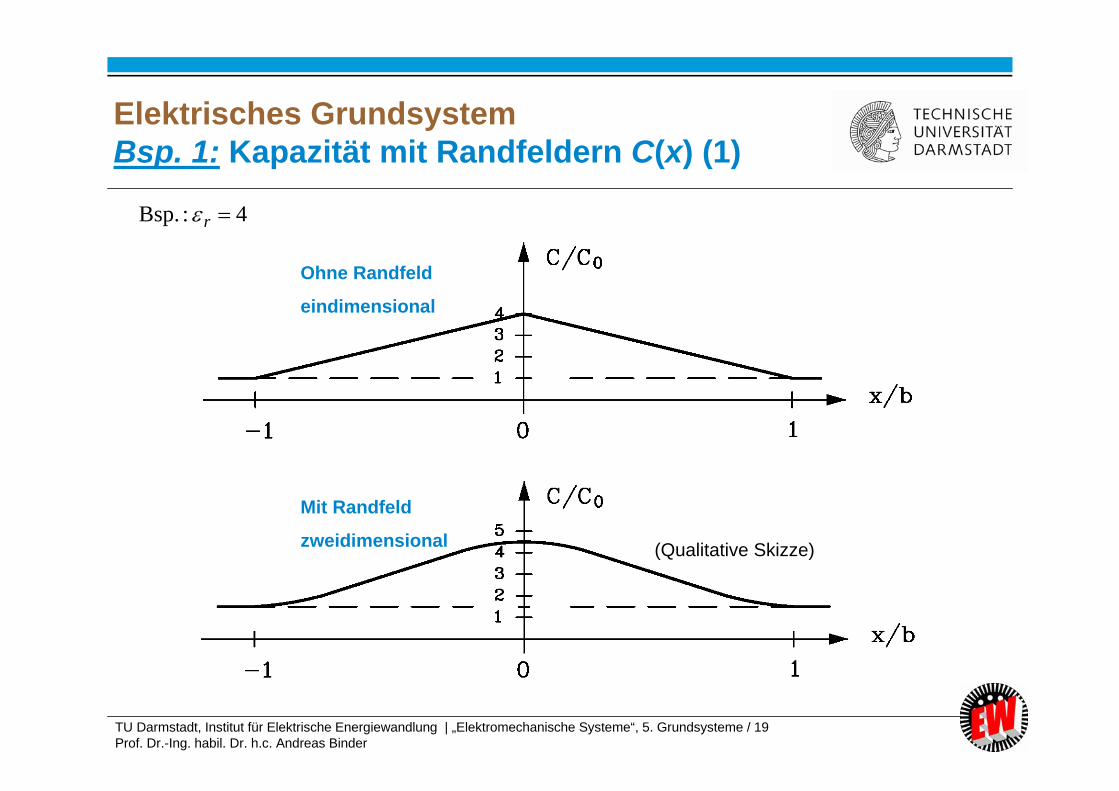
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 19Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrisches GrundsystemBsp. 1: Kapazität mit Randfeldern C(x) (1)
Mit Randfeld
zweidimensional
Ohne Randfeld
eindimensional
(Qualitative Skizze)
4:Bsp. r
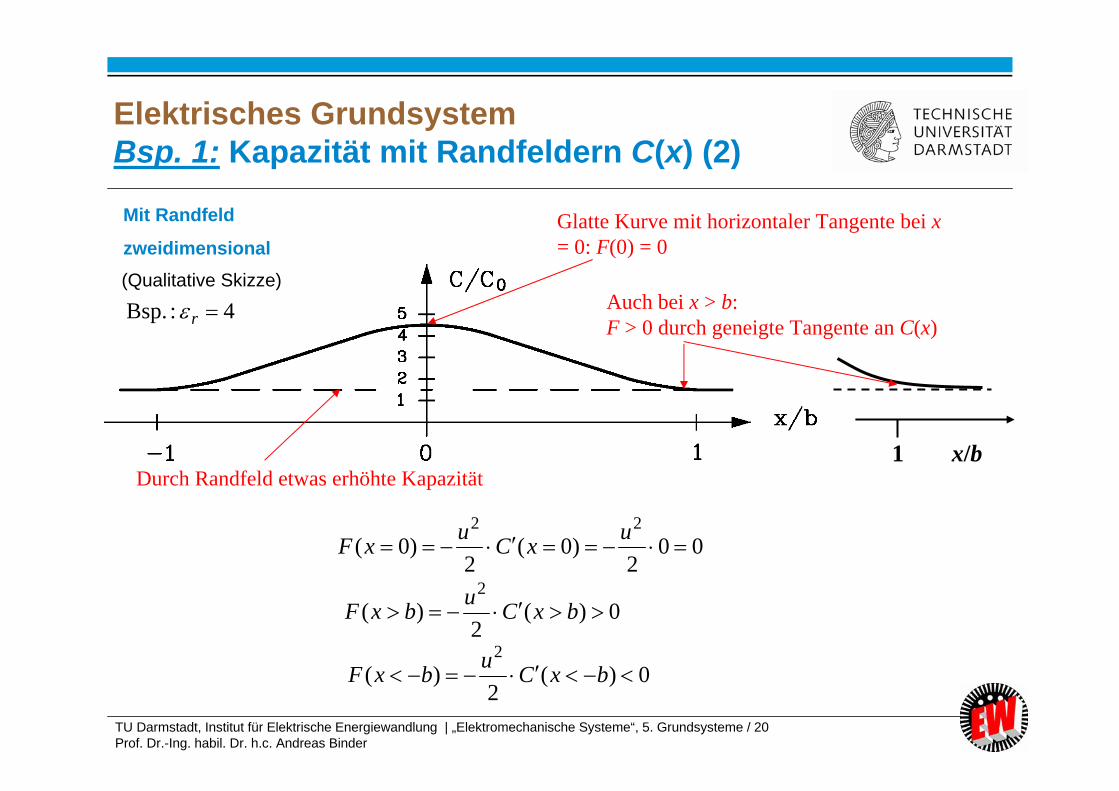
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 20Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrisches GrundsystemBsp. 1: Kapazität mit Randfeldern C(x) (2)
002
)0(2
)0(22
uxCuxF
0)(2
)(2
bxCubxF
0)(2
)(2
bxCubxF
Mit Randfeld
zweidimensional(Qualitative Skizze)
4:Bsp. r
Durch Randfeld etwas erhöhte Kapazität
Glatte Kurve mit horizontaler Tangente bei x= 0: F(0) = 0
Auch bei x > b: F > 0 durch geneigte Tangente an C(x)
1 x/b
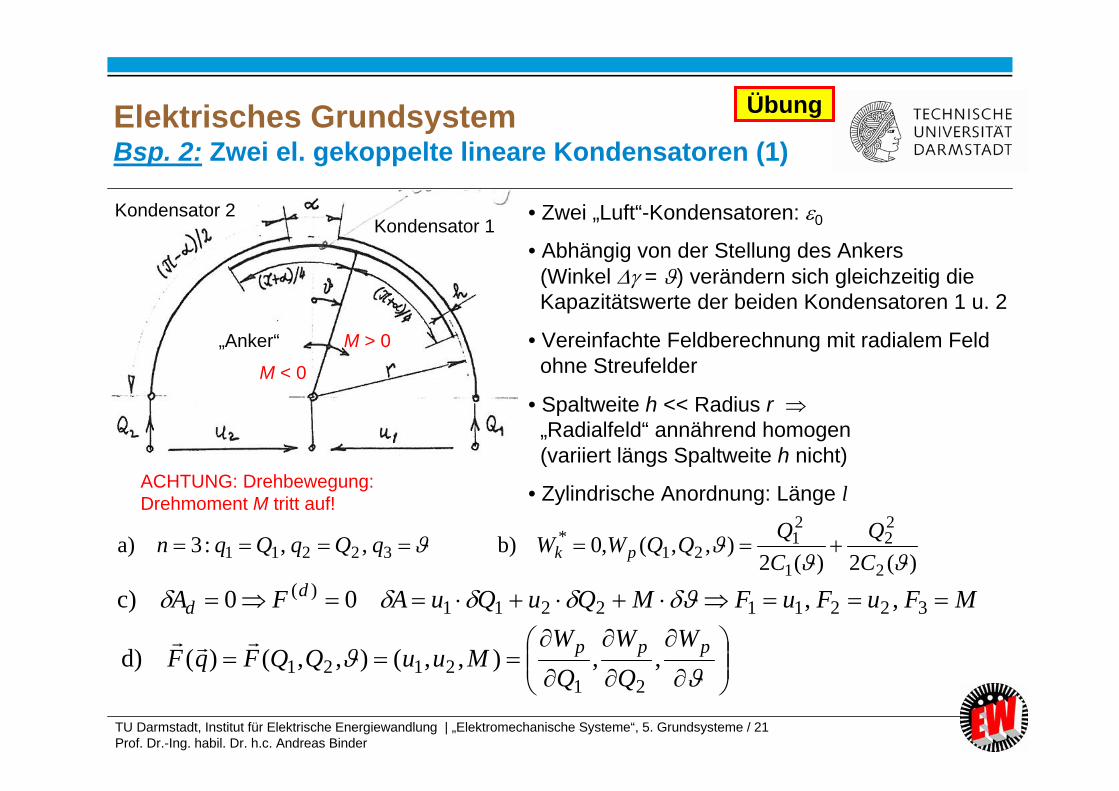
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 21Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrisches GrundsystemBsp. 2: Zwei el. gekoppelte lineare Kondensatoren (1)
• Zwei „Luft“-Kondensatoren: 0
• Abhängig von der Stellung des Ankers (Winkel = ) verändern sich gleichzeitig die Kapazitätswerte der beiden Kondensatoren 1 u. 2
• Vereinfachte Feldberechnung mit radialem Feld ohne Streufelder
• Spaltweite h << Radius r „Radialfeld“ annährend homogen (variiert längs Spaltweite h nicht)
• Zylindrische Anordnung: Länge l
)(2)(2),,(,0b),,:3a)
2
22
1
21
21*
32211
CQ
CQQQWWqQqQqn pk
MFuFuFMQuQuAFA dd 322112211
)( ,,00c)
ppp W
QW
QW
MuuQQFqF ,,),,(),,()(d)21
2121
Kondensator 1Kondensator 2
„Anker“
ACHTUNG: Drehbewegung: Drehmoment M tritt auf!
M > 0
M < 0
Übung
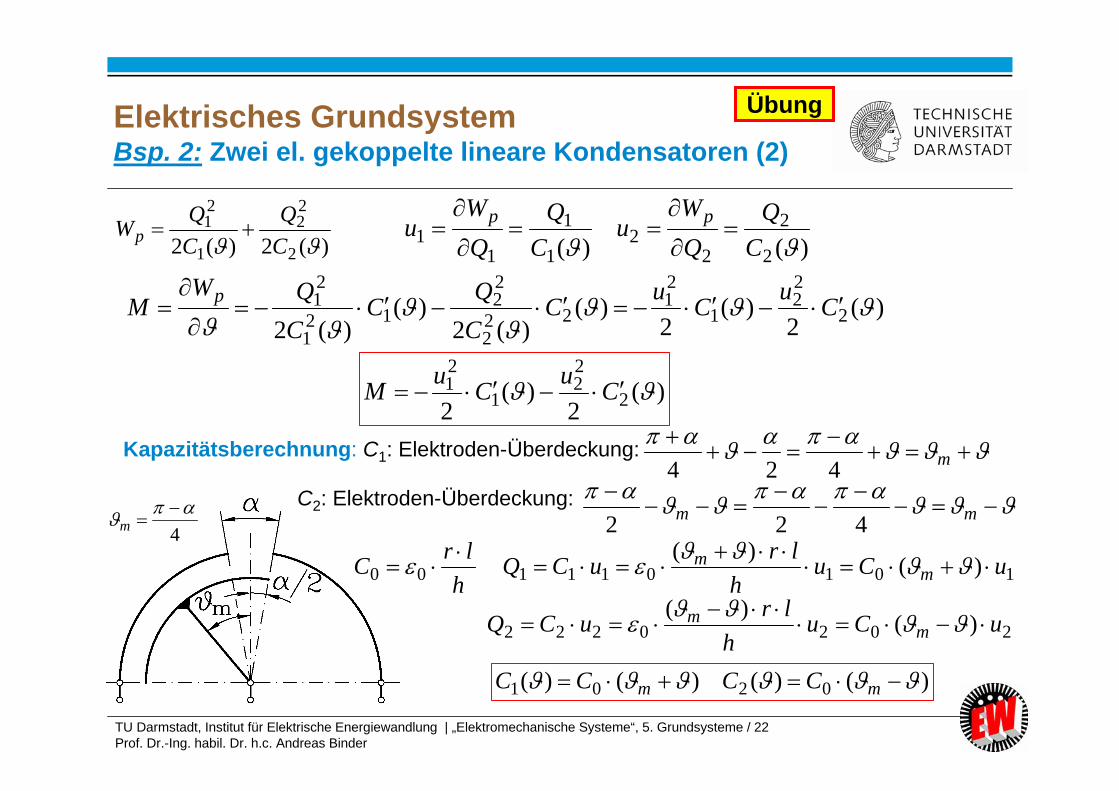
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 22Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrisches GrundsystemBsp. 2: Zwei el. gekoppelte lineare Kondensatoren (2)
)()( 2
2
22
1
1
11 C
QQW
uC
QQW
u pp
)(2)(2 2
22
1
21
CQ
CQWp
)(2
)(2
)()(2
)()(2 2
22
1
21
222
22
121
21
CuCuC
CQC
CQW
M p
)(2
)(2 2
22
1
21 CuCuM
Kapazitätsberechnung: C1: Elektroden-Überdeckung:
m424
C2: Elektroden-Überdeckung:
mm 4224
m
1010111 )()( uCuh
lruCQ mm
hlrC
00
2020222 )()( uCuh
lruCQ mm
)()()()( 0201 mm CCCC
Übung
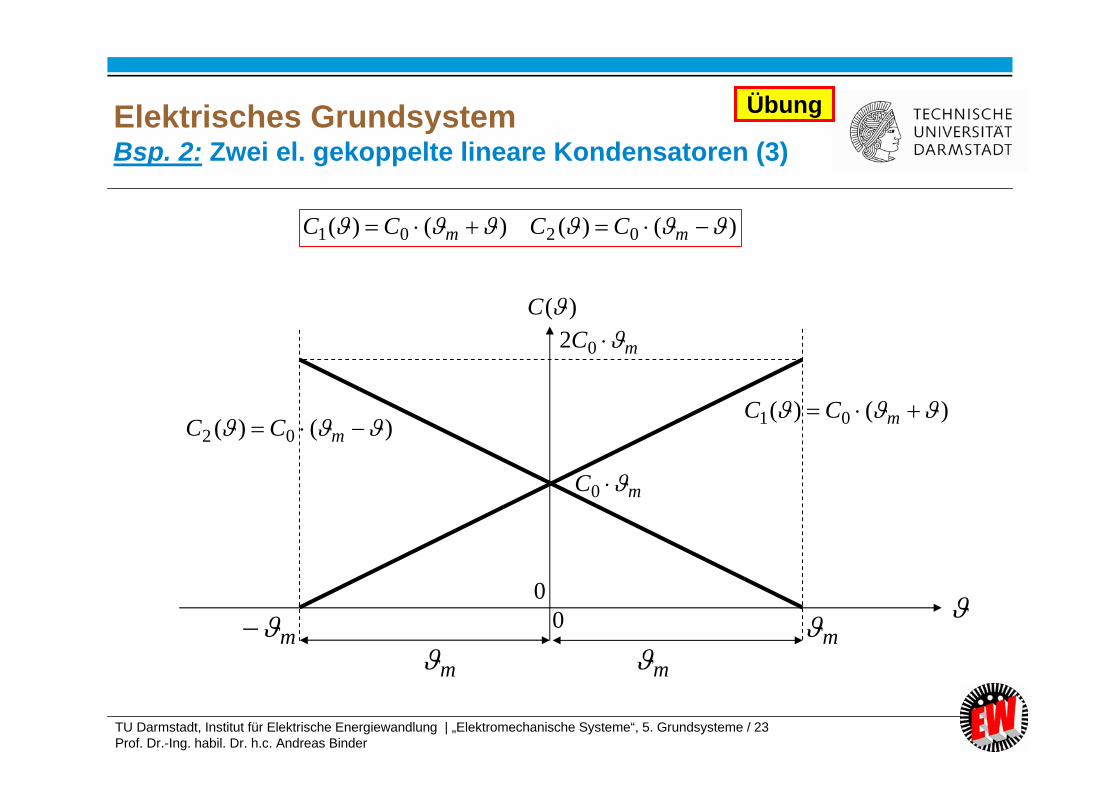
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 23Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrisches GrundsystemBsp. 2: Zwei el. gekoppelte lineare Kondensatoren (3)
)()()()( 0201 mm CCCC
mmmm
)()( 02 mCC)()( 01 mCC
)(C
mC 0
00
mC 02
Übung
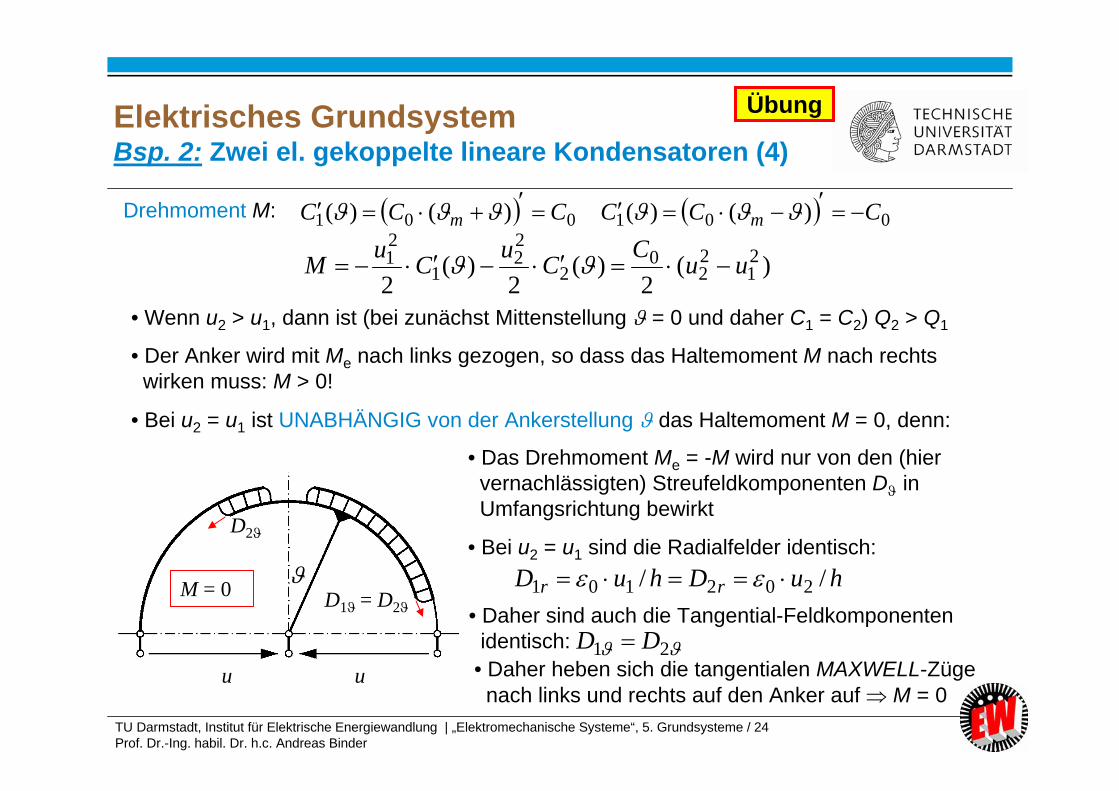
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 24Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrisches GrundsystemBsp. 2: Zwei el. gekoppelte lineare Kondensatoren (4)
Drehmoment M: 001001 )()()()( CCCCCC mm
)(2
)(2
)(2
21
22
02
22
1
21 uuCCuCuM
• Wenn u2 > u1, dann ist (bei zunächst Mittenstellung = 0 und daher C1 = C2) Q2 > Q1
• Der Anker wird mit Me nach links gezogen, so dass das Haltemoment M nach rechts wirken muss: M > 0!
• Bei u2 = u1 ist UNABHÄNGIG von der Ankerstellung das Haltemoment M = 0, denn:
• Das Drehmoment Me = -M wird nur von den (hier vernachlässigten) Streufeldkomponenten D in Umfangsrichtung bewirkt
• Bei u2 = u1 sind die Radialfelder identisch:huDhuD rr // 202101
• Daher sind auch die Tangential-Feldkomponentenidentisch: 21 DD
• Daher heben sich die tangentialen MAXWELL-Zügenach links und rechts auf den Anker auf M = 0
u u
M = 0
D2
D1 = D2
Übung
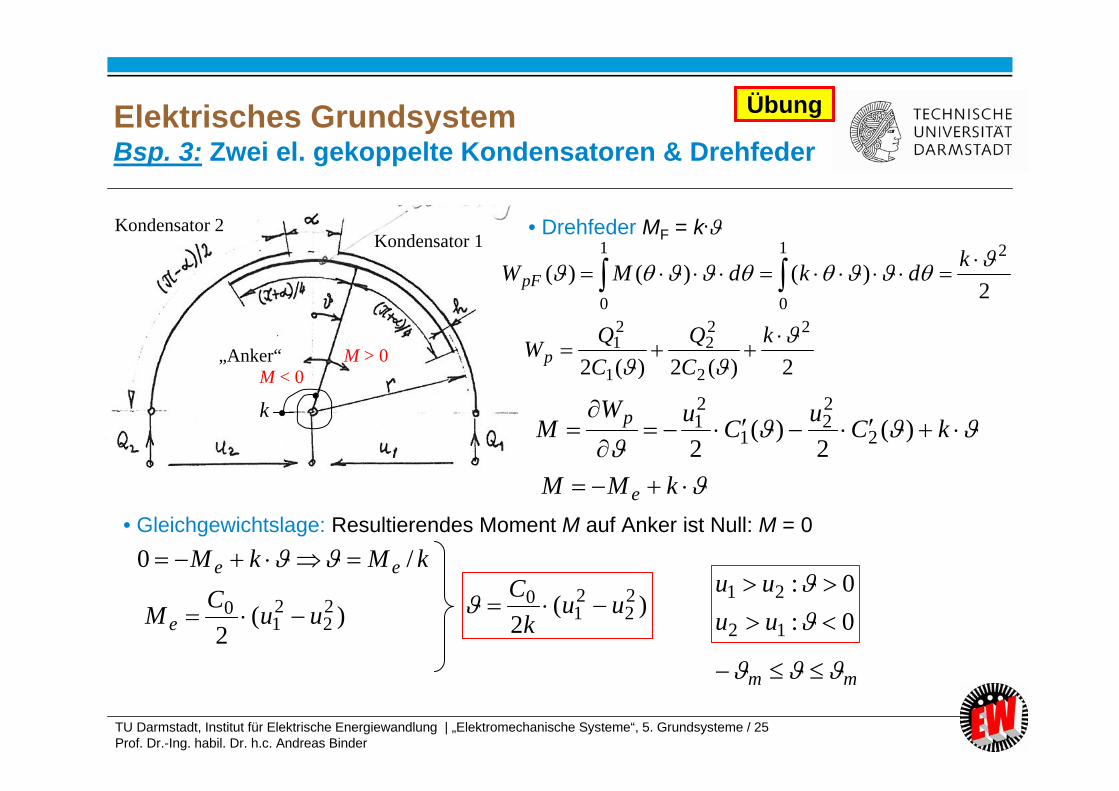
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 25Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektrisches GrundsystemBsp. 3: Zwei el. gekoppelte Kondensatoren & Drehfeder
• Drehfeder MF = k.Kondensator 1
Kondensator 2
„Anker“ M > 0M < 0
k
2)(2)(2
2
2
22
1
21
k
CQ
CQWp
2)()()(
21
0
1
0
kdkdMWpF
kCuCuW
M p )(2
)(2 2
22
1
21
kMM e
• Gleichgewichtslage: Resultierendes Moment M auf Anker ist Null: M = 0kMkM ee /0
)(2
22
21
0 uuCM e )(2
22
21
0 uuk
C
0:0:
12
21
uuuu
mm
Übung
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 5. Grundsysteme / 26Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Zusammenfassung:- Beim magnetischen Grundsystem treten verallgemeinerte kinetische
Energie Wk und mechanische potentielle Energie Wp auf- Es sind daher die Lagrange-Gleichungen für das Aufstellen der
Systemgleichungen nötig - Beim elektrischen Grundsystem tritt nur verallg. potentielle Energie Wp
auf, da keine Bewegungen betrachtet werden (v = 0)- Es werden daher als Sonderfall die verallg. Kräfte als Gradienten der
verallg. pot. Energie bestimmt (= verkürzte Rechnung)
Elektromechanische Systeme5. Elektromechanische Grundsysteme
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 1Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme Elektromechanische Systeme
6. Dynamische Untersuchung des Wandlerverhaltens6. Dynamische Untersuchung des Wandlerverhaltens
• Gleichgewicht• Linearisierung• Kleinsignalverhalten• Statische Instabilität• Dynamische Instabilität• Lineares System mit konstanten Koeffizienten: Beispiel
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 2Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme6. Dynamische Untersuchung des Wandlerverhaltens
• Gleichgewicht• Linearisierung• Kleinsignalverhalten• Statische Stabilität• Dynamische Stabilität• Lineares System mit konstanten Koeffizienten: Beispiel
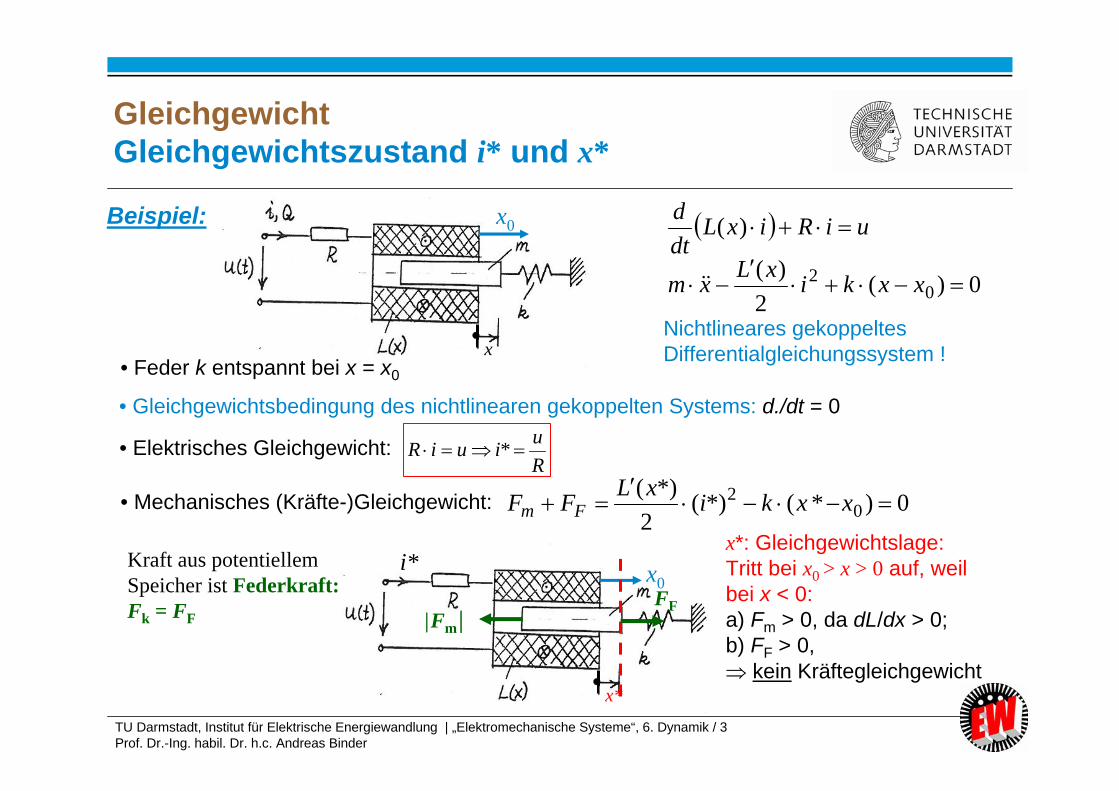
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 3Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
GleichgewichtGleichgewichtszustand i* und x*
Beispiel:
0)(2
)(0
2
xxkixLxm
uiRixLdtd
)(
Nichtlineares gekoppeltes Differentialgleichungssystem !
• Gleichgewichtsbedingung des nichtlinearen gekoppelten Systems: d./dt = 0
RuiuiR *
x
x0
• Feder k entspannt bei x = x0
• Elektrisches Gleichgewicht:
• Mechanisches (Kräfte-)Gleichgewicht: 0)*(*)(2
*)(0
2
xxkixLFF Fm
Kraft aus potentiellem Speicher ist Federkraft:Fk = FF
x*: Gleichgewichtslage:Tritt bei x0 > x > 0 auf, weil bei x < 0:a) Fm > 0, da dL/dx > 0;b) FF > 0, kein Kräftegleichgewicht
x*
x0FF
Fm
i*
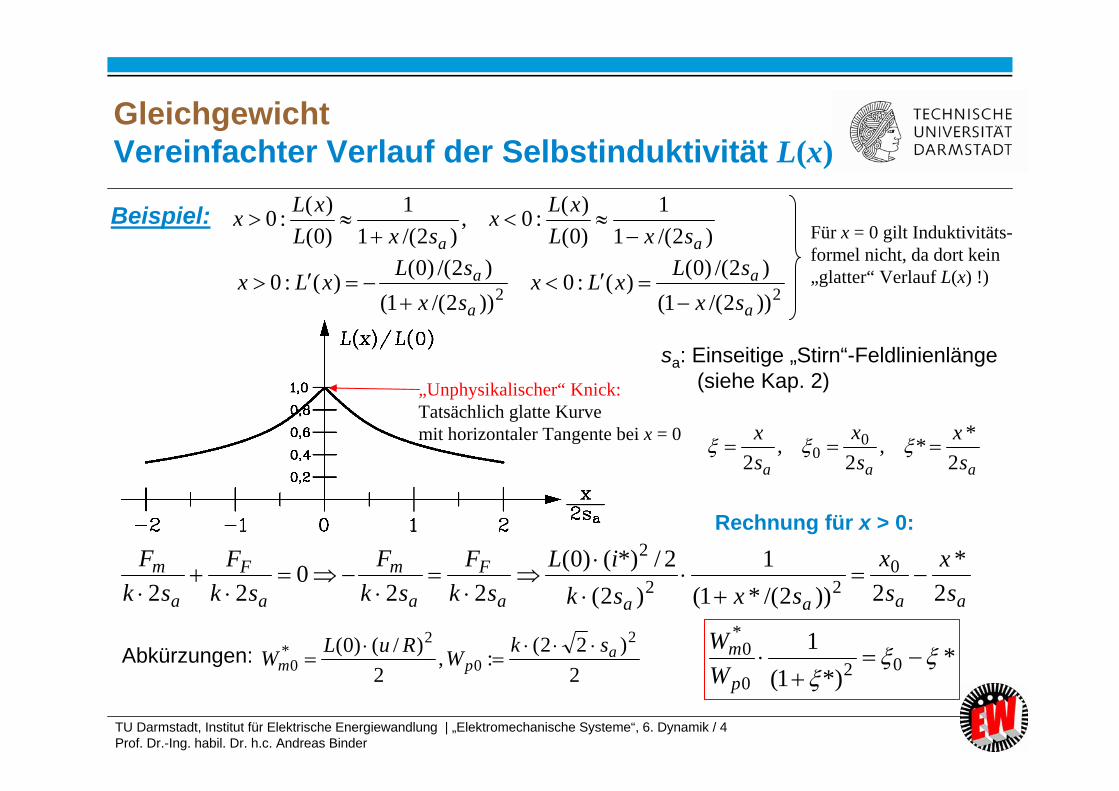
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 4Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
„Unphysikalischer“ Knick: Tatsächlich glatte Kurve mit horizontaler Tangente bei x = 0
Gleichgewicht Vereinfachter Verlauf der Selbstinduktivität L(x)
Beispiel:)2/(1
1)0()(:0,
)2/(11
)0()(:0
aa sxLxLx
sxLxLx
22 ))2/(1()2/()0()(:0
))2/(1()2/()0()(:0
a
a
a
a
sxsLxLx
sxsLxLx
sa: Einseitige „Stirn“-Feldlinienlänge(siehe Kap. 2)
aaa sx
sx
sx
2**,
2,
20
0
2)22(:,
2)/()0( 2
0
2*
0a
pmskWRuLW
aaaaa
F
a
m
a
F
a
ms
xsx
sxskiL
skF
skF
skF
skF
2*
2))2/(*1(1
)2(2/*)()0(
220
220
22
2
**)1(
102
0
*0
p
mWWAbkürzungen:
Rechnung für x > 0:
Für x = 0 gilt Induktivitäts-formel nicht, da dort kein „glatter“ Verlauf L(x) !)
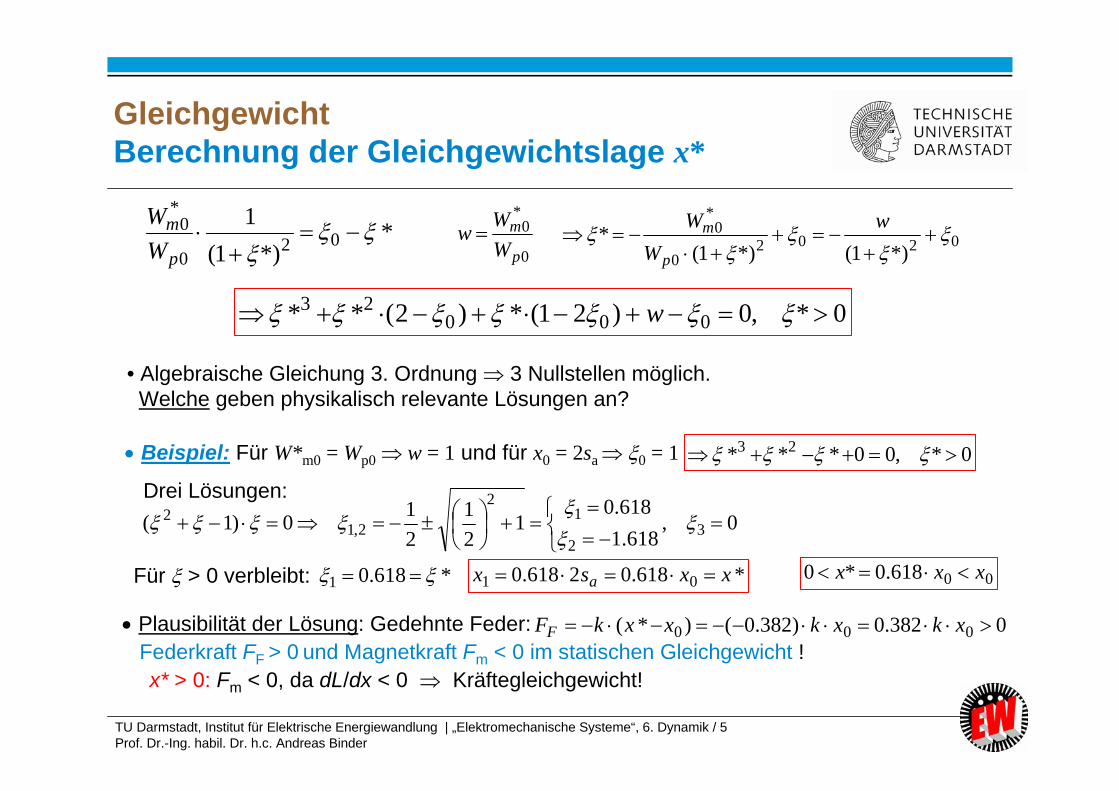
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 5Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Gleichgewicht Berechnung der Gleichgewichtslage x*
02020
*0
*)1(*)1(*
wW
W
p
m
0
*0
p
mWWw
0*,0)21(*)2(** 00023 w
• Algebraische Gleichung 3. Ordnung 3 Nullstellen möglich.Welche geben physikalisch relevante Lösungen an?
**)1(
102
0
*0
p
mWW
Beispiel: Für W*m0 = Wp0 w = 1 und für x0 = 2sa 0 = 1
Drei Lösungen:
0*,00*** 23
0,618.1
618.01
21
210)1( 3
2
12
2,12
Für > 0 verbleibt: *618.01 *618.02618.0 01 xxsx a
Plausibilität der Lösung: Gedehnte Feder: 0382.0)382.0()*( 000 xkxkxxkFFFederkraft FF > 0 und Magnetkraft Fm < 0 im statischen Gleichgewicht !
00618.0*0 xxx
x* > 0: Fm < 0, da dL/dx < 0 Kräftegleichgewicht!
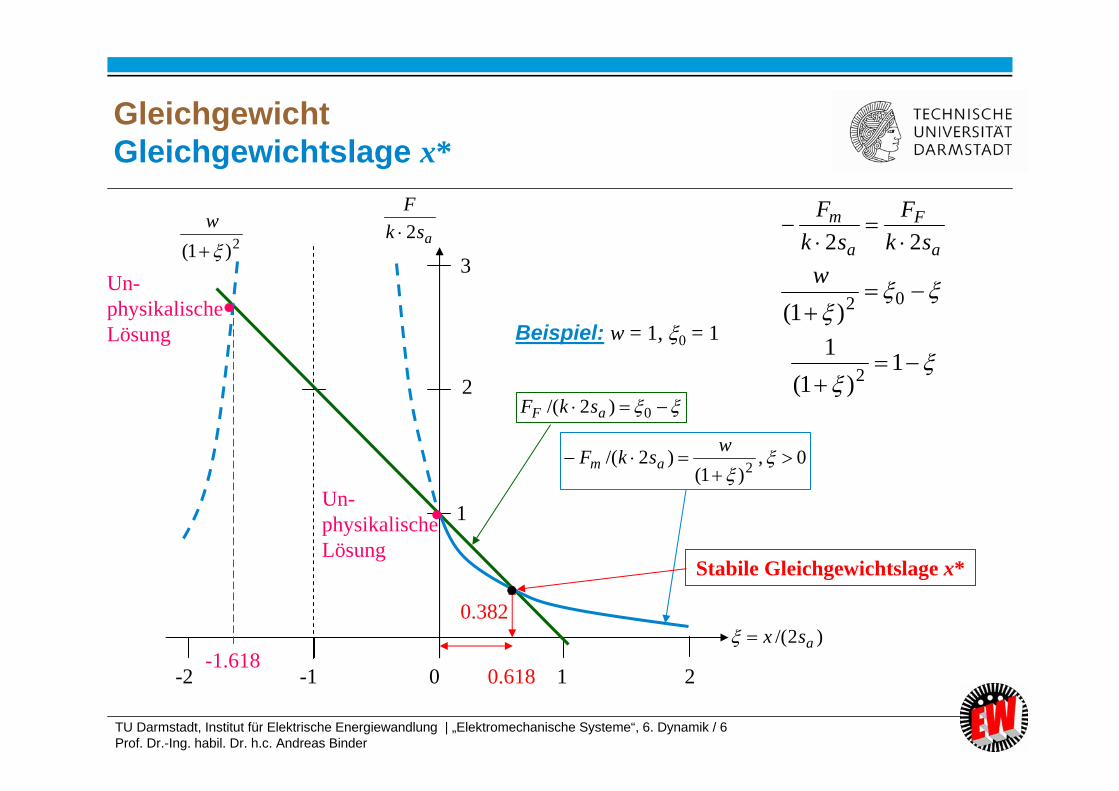
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 6Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Gleichgewicht Gleichgewichtslage x*
02)1(w
1)1(
12
Un-physikalische Lösung
-2 -1 0 0.618 1 2
)2/( asx
0,)1(
)2/( 2
wskF am
0)2/( aF skF
Beispiel: w = 1, 0 = 1
3
2
1
askF2
0.382
2)1( w
-1.618
Un-physikalische Lösung
a
F
a
msk
Fsk
F22
Stabile Gleichgewichtslage x*
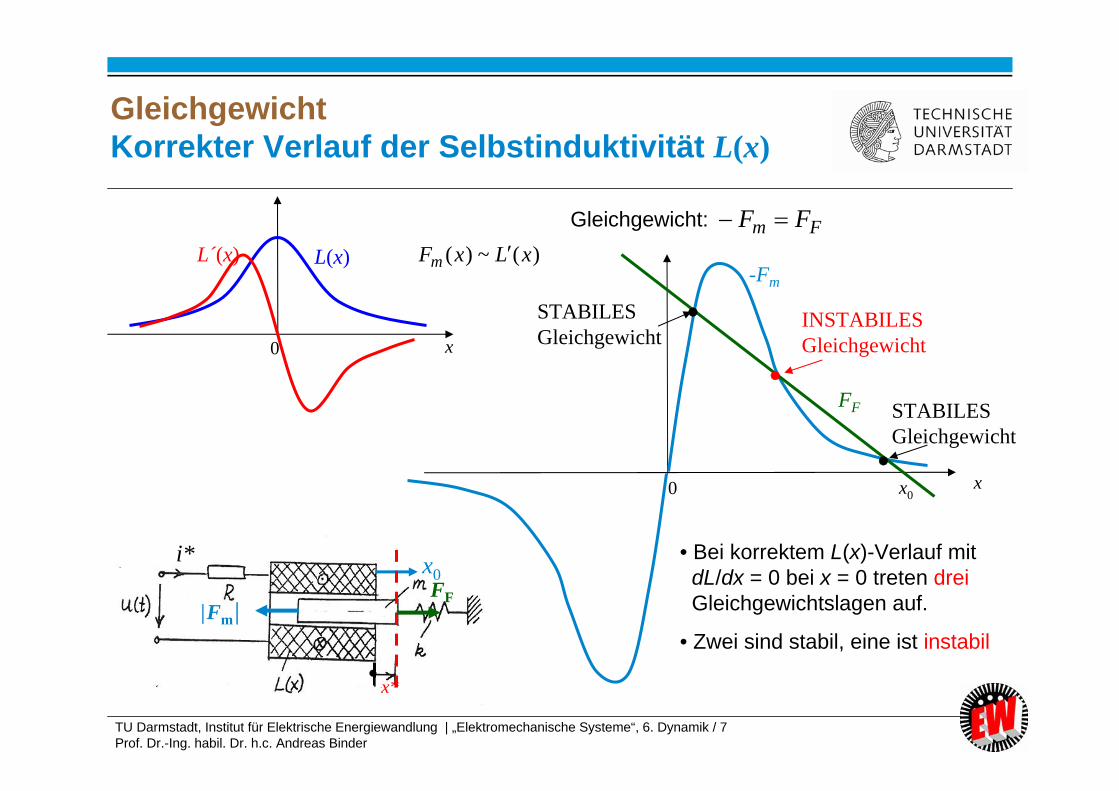
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 7Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
L(x)L´(x)
0 x
Gleichgewicht Korrekter Verlauf der Selbstinduktivität L(x)
FF
-Fm
0 x
Fm FF Gleichgewicht:
x0
STABILES Gleichgewicht
STABILES Gleichgewicht
INSTABILES Gleichgewicht
x*
x0FF
Fm
i* • Bei korrektem L(x)-Verlauf mit dL/dx = 0 bei x = 0 treten dreiGleichgewichtslagen auf.
• Zwei sind stabil, eine ist instabil
)(~)( xLxFm
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 8Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Gleichgewicht Gleichgewichtslage - Berechnung
Bis zur Ordnung n = 4 analytische Lösungsformeln vorhanden
n = 1: Eine reelle Lösungn = 2: VIETA: Zwei reelle od. zwei konj. komplexe Lösungenn = 3: CARDANO (eig. Scipio del Ferro): Eine reelle + 2 konj. kompl. od. drei reelle Lösungenn = 4: FERRARI: 4 konj. kompl. od. zwei reelle + 2 konj. kompl. od. vier reelle Lösungenn > 4: N. H. ABEL: Es existieren KEINE analytische Lösungsformeln
Numerische iterative Nullstellensuchverfahren: Regula falsi, Newton-Raphson, …
Frage: Ist das System in der Gleichgewichtslage x* gegen kleine Störungen dieses Betriebszustands stabil?
Wird das System um den kleinen Wert x/x* << 1 aus x* ausgelenkt, kehrt das System wieder nach x* zurück (STABIL) oder nicht (INSTABIL)?
Allgemeine Lösungsgleichung für Gleichgewichtslagen:Algebraische Gleichung n-ter Ordnung Fundamentalsatz der Algebra: n Lösungen, wovonkomplex-wertige Lösungen unphysikalisch sind und stets als konjugiert komplexe Paare auftreten. Daher: Bei ungeradem n mindestens eine reelle Lösung!
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 9Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme6. Dynamische Untersuchung des Wandlerverhaltens
• Gleichgewicht• Linearisierung• Kleinsignalverhalten• Statische Stabilität• Dynamische Stabilität• Lineares System mit konstanten Koeffizienten: Beispiel
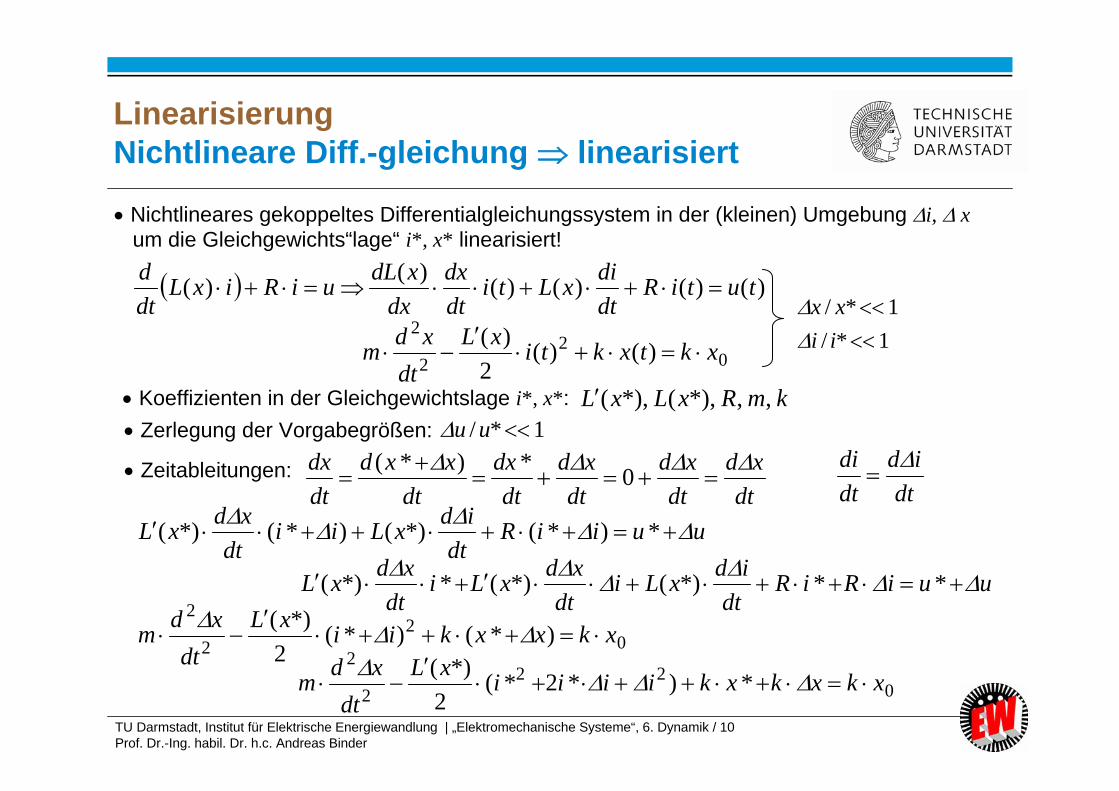
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 10Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
LinearisierungNichtlineare Diff.-gleichung linearisiert
Nichtlineares gekoppeltes Differentialgleichungssystem in der (kleinen) Umgebung i, xum die Gleichgewichts“lage“ i*, x* linearisiert!
)()()()()()( tutiRdtdixLti
dtdx
dxxdLuiRixL
dtd
02
2
2)()(
2)( xktxktixL
dtxdm
Koeffizienten in der Gleichgewichtslage i*, x*: kmRxLxL ,,*),(*),(
1*/1*/
iixx
Zerlegung der Vorgabegrößen: 1*/ uu
uuiiRdt
idxLiidt
xdxL *)*(*)()*(*)(
Zeitableitungen:dt
xddt
xddt
xddt
dxdt
xxddtdx
0*)*(dt
iddtdi
uuiRiRdt
idxLidt
xdxLidt
xdxL ***)(*)(**)(
02
2
2)*()*(
2*)( xkxxkiixL
dtxdm
022
2
2*)*2*(
2*)( xkxkxkiiiixL
dtxdm
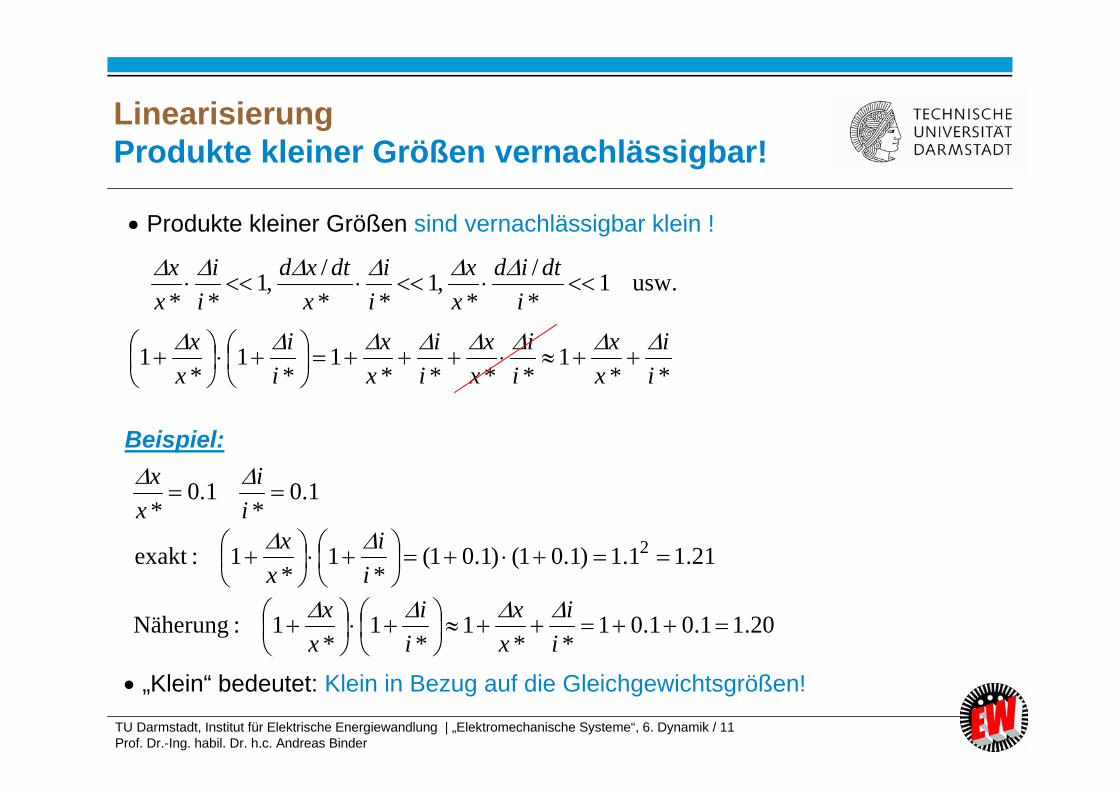
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 11Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
LinearisierungProdukte kleiner Größen vernachlässigbar!
Beispiel:
„Klein“ bedeutet: Klein in Bezug auf die Gleichgewichtsgrößen!
**1
****1
*1
*1
ii
xx
ii
xx
ii
xx
ii
xx
21.11.1)1.01()1.01(*
1*
1:exakt 2
ii
xx
1.0*
1.0*
i
ix
x
20.11.01.01**
1*
1*
1:Näherung
ii
xx
ii
xx
usw.1*/
*,1
**/,1
**
idtid
xx
ii
xdtxd
ii
xx
Produkte kleiner Größen sind vernachlässigbar klein !
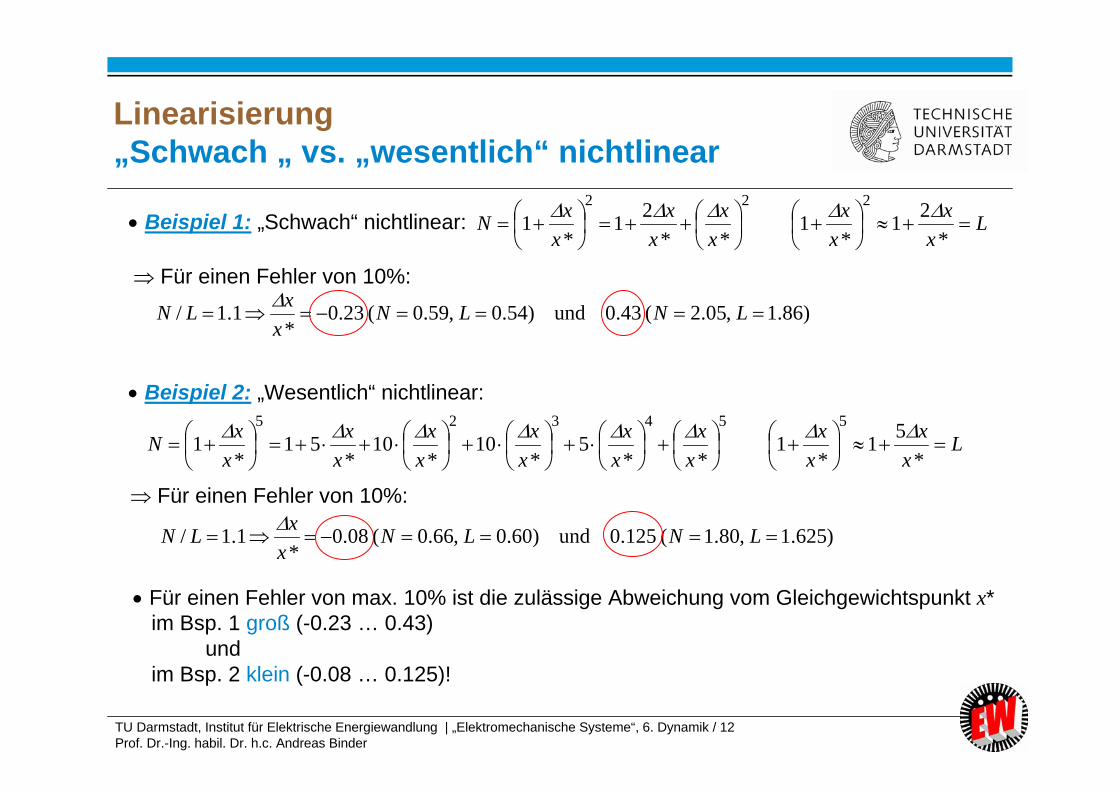
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 12Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Linearisierung„Schwach „ vs. „wesentlich“ nichtlinear
Lx
xx
xx
xx
xx
xN
*21
*1
**21
*1
222 Beispiel 1: „Schwach“ nichtlinear:
Lx
xx
xx
xx
xx
xx
xx
xx
xN
*51
*1
**5
*10
*10
*51
*1
554325
Beispiel 2: „Wesentlich“ nichtlinear:
Für einen Fehler von 10%:
)86.1,05.2(43.0und)54.0,59.0(23.0*
1.1/ LNLNx
xLN
)625.1,80.1(125.0und)60.0,66.0(08.0*
1.1/ LNLNx
xLN Für einen Fehler von 10%:
Für einen Fehler von max. 10% ist die zulässige Abweichung vom Gleichgewichtspunkt x* im Bsp. 1 groß (-0.23 … 0.43)
und im Bsp. 2 klein (-0.08 … 0.125)!
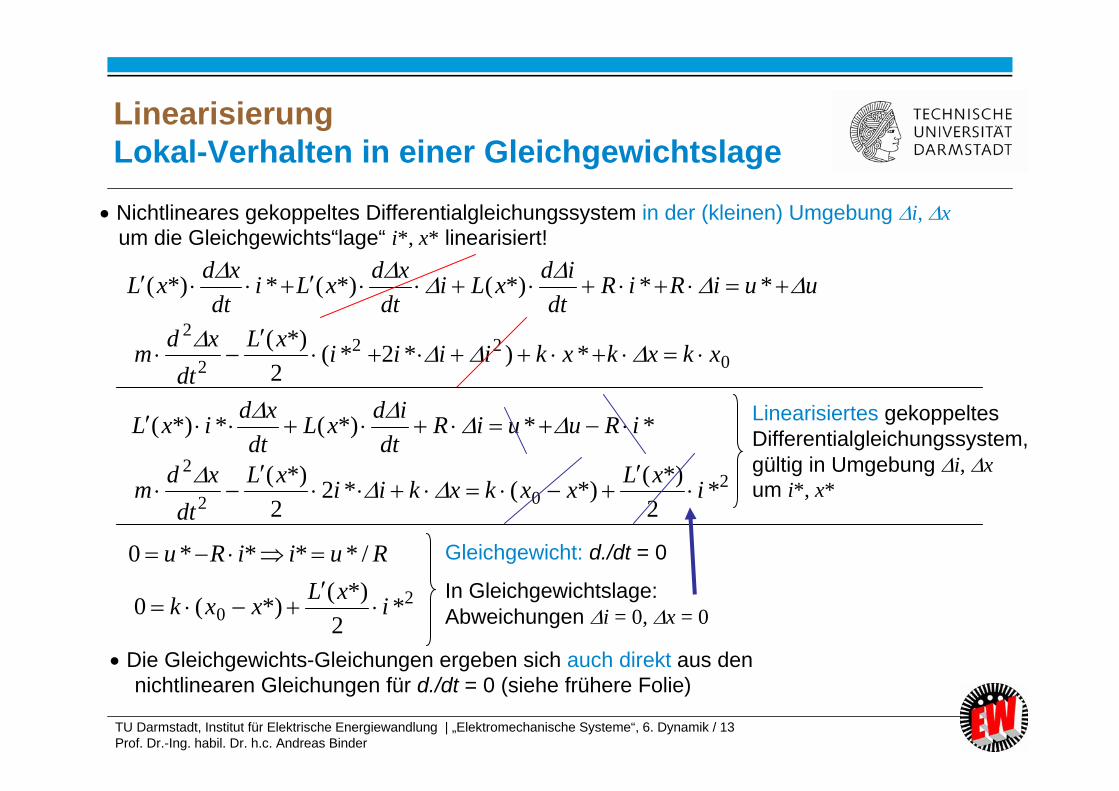
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 13Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Nichtlineares gekoppeltes Differentialgleichungssystem in der (kleinen) Umgebung i, xum die Gleichgewichts“lage“ i*, x* linearisiert!
uuiRiRdt
idxLidt
xdxLidt
xdxL ***)(*)(**)(
022
2
2*)*2*(
2*)( xkxkxkiiiixL
dtxdm
***)(**)( iRuuiRdt
idxLdt
xdixL
202
2*
2*)(*)(*2
2*)( ixLxxkxkiixL
dtxdm
Linearisiertes gekoppeltes Differentialgleichungssystem,gültig in Umgebung i, xum i*, x*
RuiiRu /****0
20 *
2*)(*)(0 ixLxxk
Gleichgewicht: d./dt = 0
In Gleichgewichtslage: Abweichungen i = 0, x = 0
Die Gleichgewichts-Gleichungen ergeben sich auch direkt aus den nichtlinearen Gleichungen für d./dt = 0 (siehe frühere Folie)
LinearisierungLokal-Verhalten in einer Gleichgewichtslage
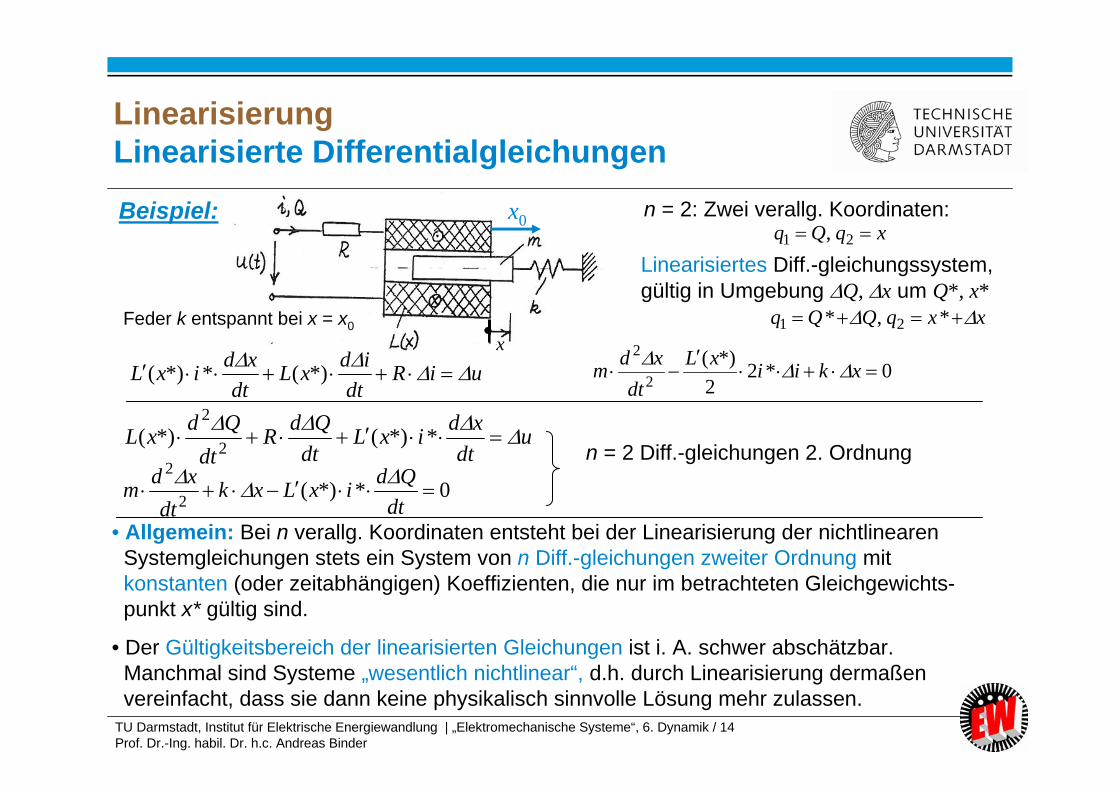
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 14Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
• Allgemein: Bei n verallg. Koordinaten entsteht bei der Linearisierung der nichtlinearen Systemgleichungen stets ein System von n Diff.-gleichungen zweiter Ordnung mit konstanten (oder zeitabhängigen) Koeffizienten, die nur im betrachteten Gleichgewichts-punkt x* gültig sind.
• Der Gültigkeitsbereich der linearisierten Gleichungen ist i. A. schwer abschätzbar. Manchmal sind Systeme „wesentlich nichtlinear“, d.h. durch Linearisierung dermaßen vereinfacht, dass sie dann keine physikalisch sinnvolle Lösung mehr zulassen.
udt
xdixLdt
QdRdt
QdxL **)(*)( 2
2
0**)(2
2
dtQdixLxk
dtxdm
n = 2 Diff.-gleichungen 2. Ordnung
LinearisierungLinearisierte Differentialgleichungen
Beispiel:
x
x0
Feder k entspannt bei x = x0
n = 2: Zwei verallg. Koordinaten:xqQq 21 ,
Linearisiertes Diff.-gleichungssystem,gültig in Umgebung Q, x um Q*, x*
xxqQQq *,* 21
uiRdt
idxLdt
xdixL *)(**)( 0*2
2*)(
2
2
xkiixL
dtxdm
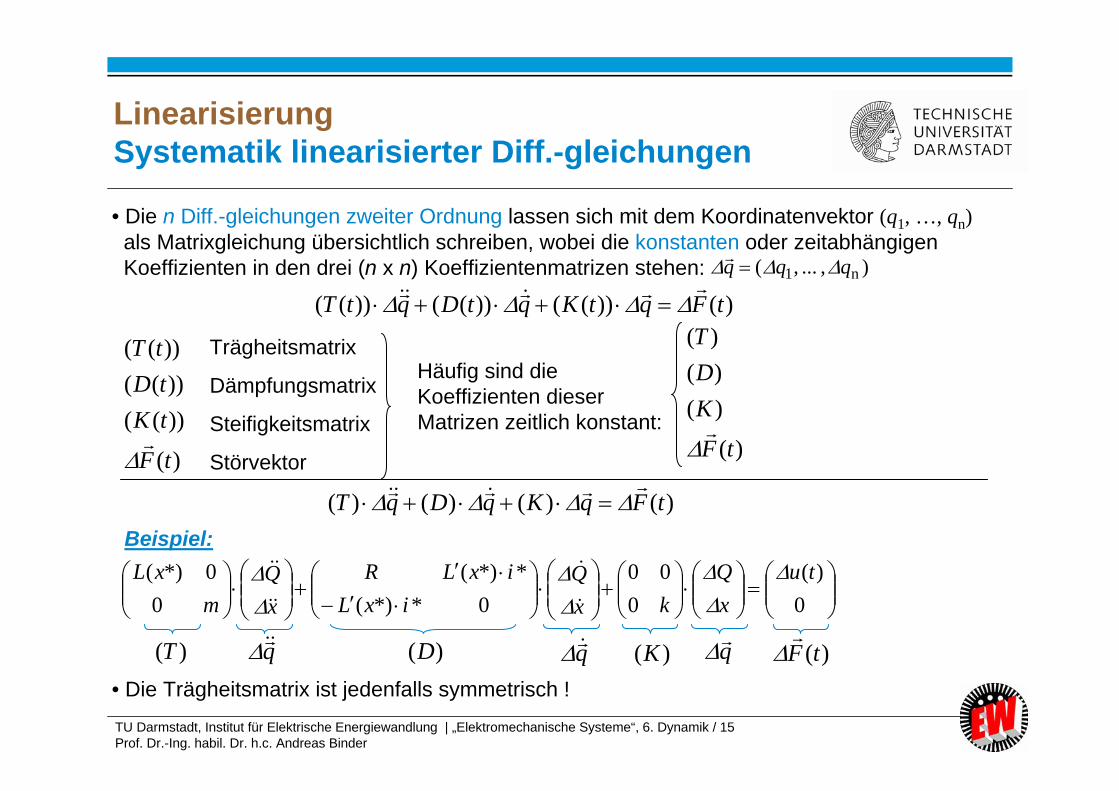
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 15Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
LinearisierungSystematik linearisierter Diff.-gleichungen
• Die n Diff.-gleichungen zweiter Ordnung lassen sich mit dem Koordinatenvektor (q1, …, qn)als Matrixgleichung übersichtlich schreiben, wobei die konstanten oder zeitabhängigen Koeffizienten in den drei (n x n) Koeffizientenmatrizen stehen: ),...,( n1 qqq
)())(())(())(( tFqtKqtDqtT
Trägheitsmatrix
Dämpfungsmatrix
Steifigkeitsmatrix
Störvektor)(
))(())(())((
tF
tKtDtT
Häufig sind die Koeffizienten dieser Matrizen zeitlich konstant:
)(
)()()(
tF
KDT
)()()()( tFqKqDqT
Beispiel:
0
)(0
000**)(
**)(0
0*)( tuxQ
kxQ
ixLixLR
xQ
mxL
)(T q )(D q )(K q )(tF
• Die Trägheitsmatrix ist jedenfalls symmetrisch !
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 16Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme6. Dynamische Untersuchung des Wandlerverhaltens
• Gleichgewicht• Linearisierung• Kleinsignalverhalten• Statische Stabilität• Dynamische Stabilität• Lineares System mit konstanten Koeffizienten: Beispiel
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 17Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KleinsignalverhaltenLokal-Verhalten in einer Gleichgewichtslage
• Elektromechanische Systeme arbeiten häufig im stationären (= eingeschwungenen) Betrieb, speziell also in einer Gleichgewichtslage x*, um die die Systemparameter z. B. mit einer bestimmten Anrege-Frequenz f mit begrenzter Amplitude x / x* <<1 schwingen.
• Wie ist der Frequenzgang des Systems, also das Verhältnis einer interessierenden Ausgangssignal-Amplitude zu einer Anrege- bzw. Eingangs-Signalamplitude (Amplitudengang), oder die zugehörige Phasenverschiebung des Ausgangs- zum Eingangssignal (Phasengang)?
• Wie reagiert das System bei Störungen möglicher stationärer Betriebszustände? Die Methode der Störungsrechnung erlaubt Aussagen in begrenztem Rahmen (= für Störungen mit kleiner Amplitude), da die linearisierten Systemgleichungen verwendet werden.
• Für Systeme mit konstanten Koeffizienten steht eine Reihe von Methoden zur Untersuchung zur Verfügung:
a) Direkter Ansatz mit Homogen- und Partikulärlösung,b) Laplace-Transformationc) Komplexe Rechnung im Frequenzbereich (Amplituden-/ Phasengang)
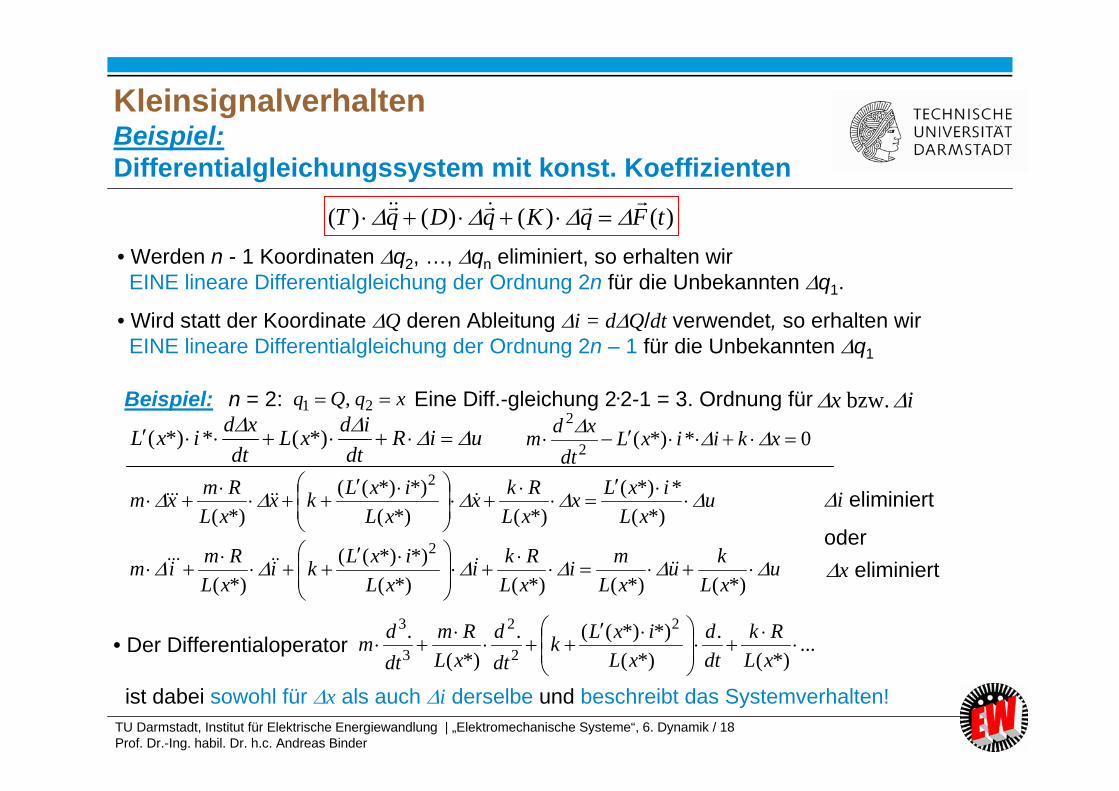
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 18Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KleinsignalverhaltenBeispiel:Differentialgleichungssystem mit konst. Koeffizienten
• Werden n - 1 Koordinaten q2, …, qn eliminiert, so erhalten wir EINE lineare Differentialgleichung der Ordnung 2n für die Unbekannten q1.
• Wird statt der Koordinate Q deren Ableitung i = dQ/dt verwendet, so erhalten wir EINE lineare Differentialgleichung der Ordnung 2n – 1 für die Unbekannten q1
)()()()( tFqKqDqT
Beispiel:
uiRdt
idxLdt
xdixL *)(**)( 0**)(2
2 xkiixL
dtxdm
uxL
ixLxxLRkx
xLixLkx
xLRmxm
*)(**)(
*)(*)(*)*)((
*)(
2
uxLku
xLmi
xLRki
xLixLki
xLRmim
*)(*)(*)(*)(*)*)((
*)(
2
i eliminiert
oderx eliminiert
• Der Differentialoperator
ist dabei sowohl für x als auch i derselbe und beschreibt das Systemverhalten!
n = 2: Eine Diff.-gleichung 2.2-1 = 3. Ordnung für xqQq 21 , ix bzw.
...*)(
.*)(
*)*)((.*)(
. 2
2
2
3
3
xLRk
dtd
xLixLk
dtd
xLRm
dtdm
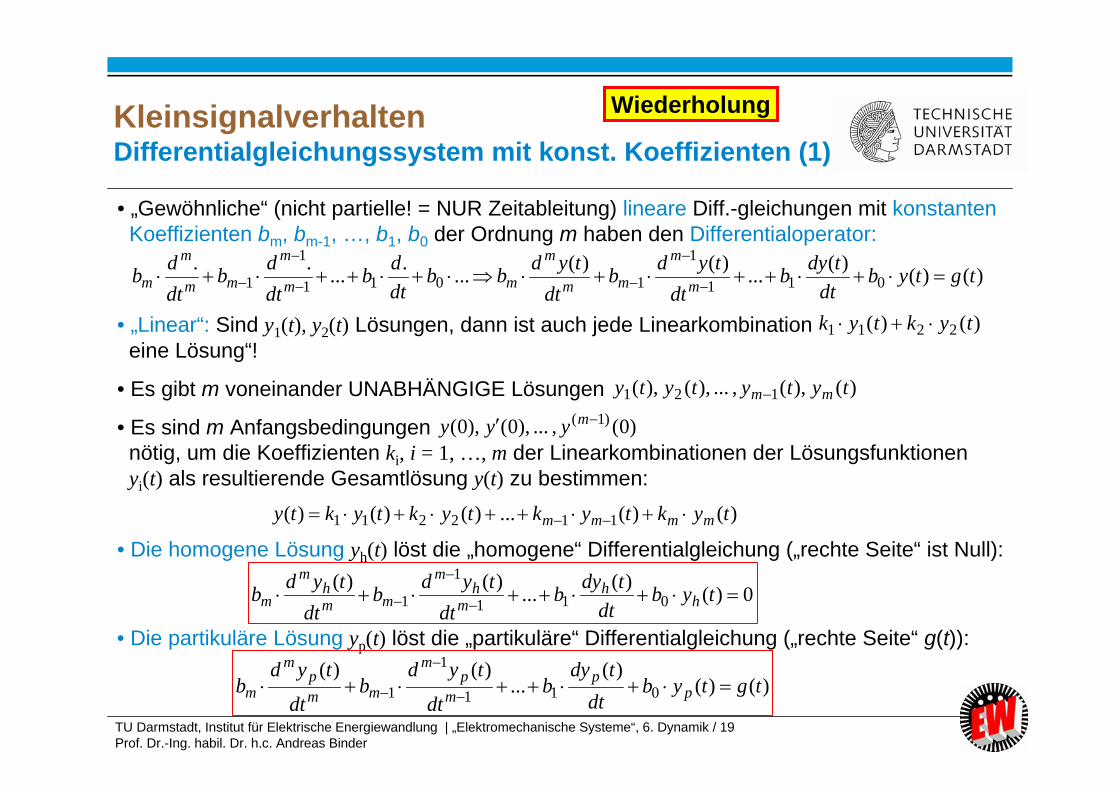
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 19Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KleinsignalverhaltenDifferentialgleichungssystem mit konst. Koeffizienten (1)
• „Gewöhnliche“ (nicht partielle! = NUR Zeitableitung) lineare Diff.-gleichungen mit konstantenKoeffizienten bm, bm-1, …, b1, b0 der Ordnung m haben den Differentialoperator:
)()()(...)()(.........011
1
1011
1
1 tgtybdt
tdybdt
tydbdt
tydbbdtdb
dtdb
dtdb m
m
mm
m
mm
m
mm
m
m
• „Linear“: Sind y1(t), y2(t) Lösungen, dann ist auch jede Linearkombination eine Lösung“!
• Es gibt m voneinander UNABHÄNGIGE Lösungen
• Es sind m Anfangsbedingungen nötig, um die Koeffizienten ki, i = 1, …, m der Linearkombinationen der Lösungsfunktionen yi(t) als resultierende Gesamtlösung y(t) zu bestimmen:
)()( 2211 tyktyk
)(),(,...),(),( 121 tytytyty mm
)0(,...),0(),0( )1( myyy
)()(...)()()( 112211 tyktyktyktykty mmmm
• Die homogene Lösung yh(t) löst die „homogene“ Differentialgleichung („rechte Seite“ ist Null):
0)()(...)()(011
1
1
tybdt
tdybdt
tydbdt
tydb hh
mh
m
mmh
m
m
• Die partikuläre Lösung yp(t) löst die „partikuläre“ Differentialgleichung („rechte Seite“ g(t)):
)()()(
...)()(
011
1
1 tgtybdt
tdyb
dt
tydb
dt
tydb p
pm
pm
mmp
m
m
Wiederholung
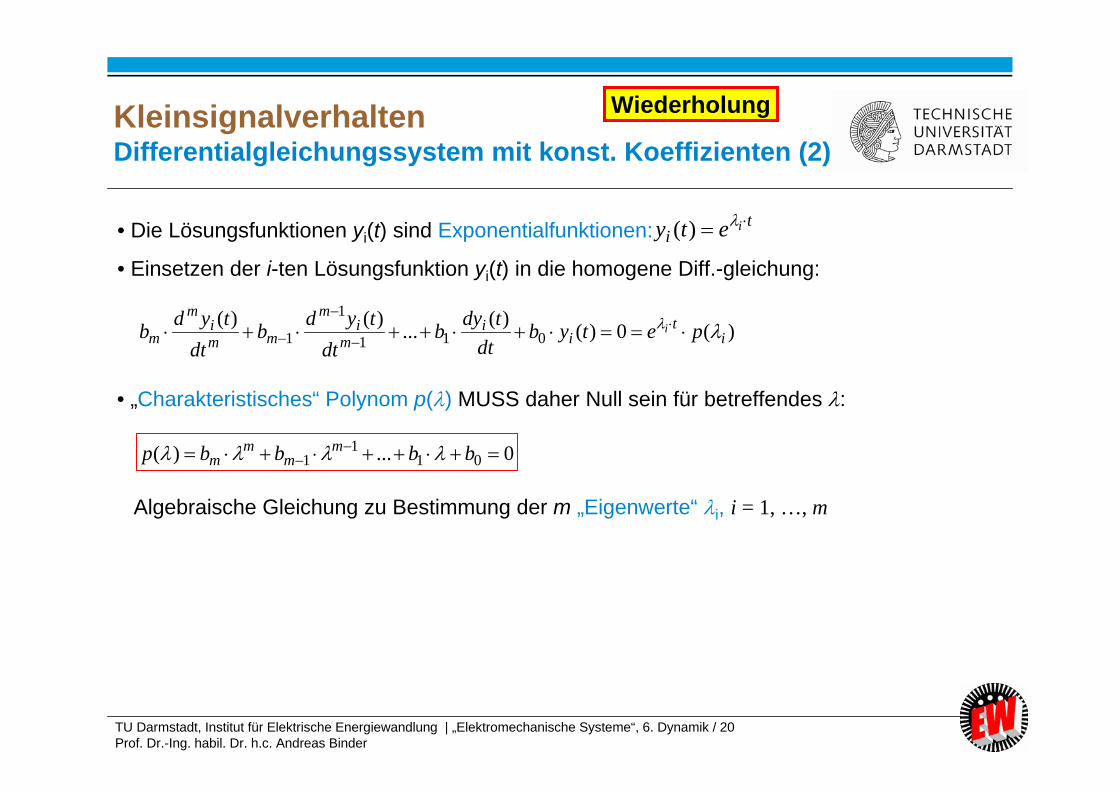
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 20Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KleinsignalverhaltenDifferentialgleichungssystem mit konst. Koeffizienten (2)
• Die Lösungsfunktionen yi(t) sind Exponentialfunktionen:
• Einsetzen der i-ten Lösungsfunktion yi(t) in die homogene Diff.-gleichung:
)(0)()(...)()(011
1
1 it
ii
mi
m
mmi
m
m petybdt
tdybdt
tydbdt
tydb i
ti
iety )(
• „Charakteristisches“ Polynom p() MUSS daher Null sein für betreffendes :
0...)( 011
1 bbbbp m
mm
m
Algebraische Gleichung zu Bestimmung der m „Eigenwerte“ i, i = 1, …, m
Wiederholung
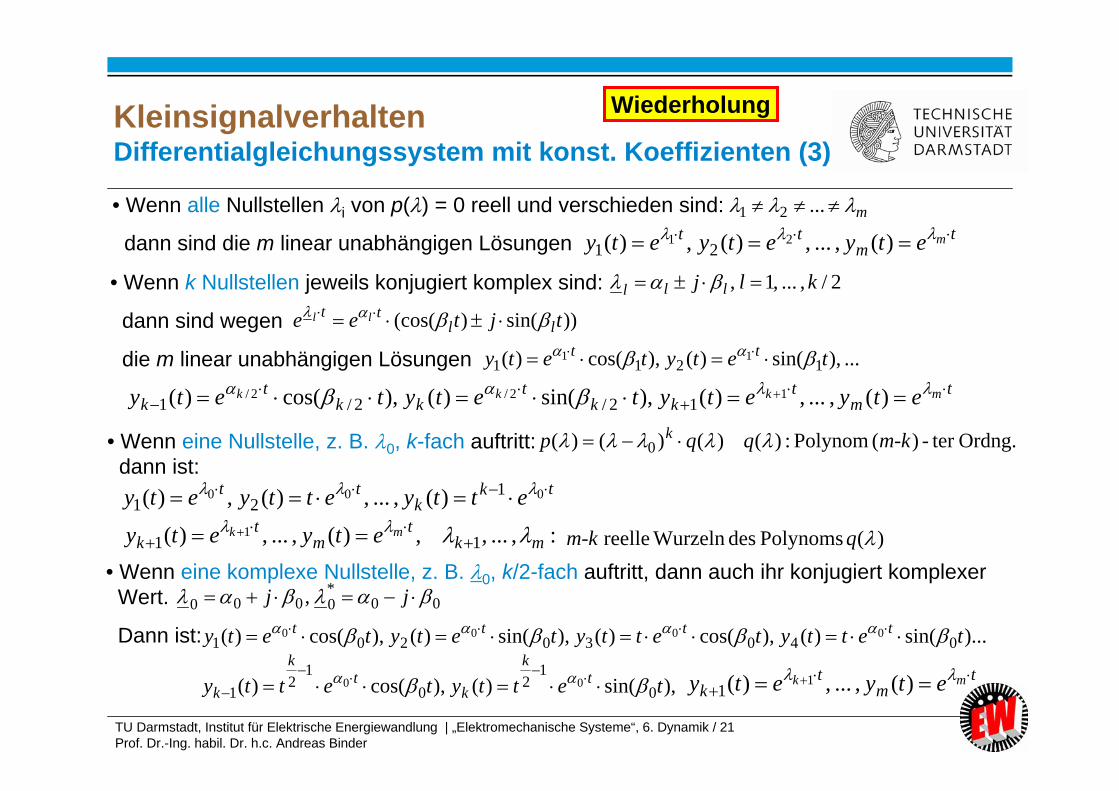
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 21Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KleinsignalverhaltenDifferentialgleichungssystem mit konst. Koeffizienten (3)
• Wenn eine Nullstelle, z. B. 0, k-fach auftritt: dann ist:
Ordng.ter -)( Polynom:)()()()( 0 m-kqqp k
tkk
tt ettyettyety 000 121 )(,...,)(,)(
:,...,,)(,...,)( 111
mkt
mt
kmk etyety
)( Polynoms des Wurzeln reelle qm-k• Wenn eine komplexe Nullstelle, z. B. 0, k/2-fach auftritt, dann auch ihr konjugiert komplexer
Wert.
Dann ist:
tm
tk
mk etyety )(,...,)( 11
)...sin()(),cos()(),sin()(),cos()( 040302010000 tettytettytetytety tttt
00*0000 , jj
),sin()(),cos()( 01
20
12
100 tettytetty t
k
kt
k
k
• Wenn alle Nullstellen i von p() = 0 reell und verschieden sind:
dann sind die m linear unabhängigen Lösungenm ...21
tm
tt metyetyety )(,...,)(,)( 2121
• Wenn k Nullstellen jeweils konjugiert komplex sind:
dann sind wegen
die m linear unabhängigen Lösungen
2/,...,1, klj lll
tm
tkk
tkk
tk
mkkk etyetytetytety
)(,...,)(),sin()(),cos()( 12/2/
12/2/1
))sin()(cos( tjtee lltt ll
...),sin()(),cos()( 121111 tetytety tt
Wiederholung
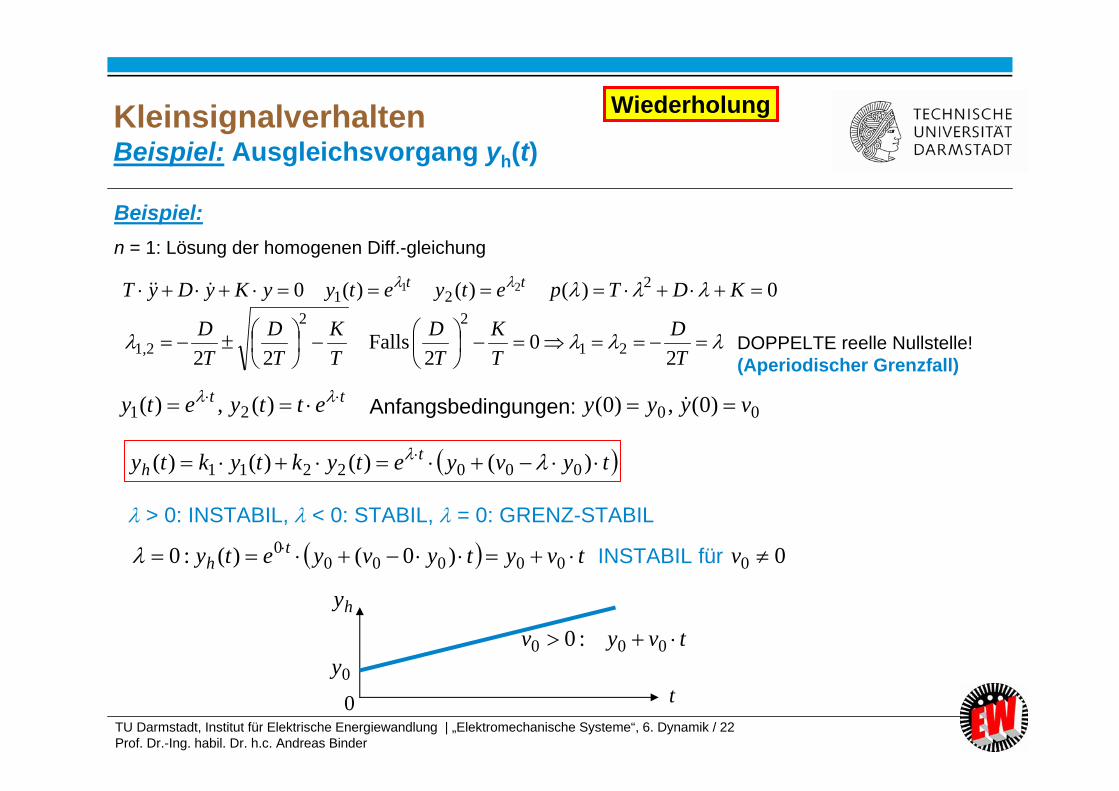
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 22Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KleinsignalverhaltenBeispiel: Ausgleichsvorgang yh(t)
Beispiel:n = 1: Lösung der homogenen Diff.-gleichung
0)()()(0 221
21 KDTpetyetyyKyDyT tt
TD
TK
TD
TK
TD
TD
20
2 Falls
22 21
22
1,2 DOPPELTE reelle Nullstelle!(Aperiodischer Grenzfall)
tt ettyety )(,)( 21 00 )0(,)0( vyyy
tyvyetyktykty th )()()()( 0002211
> 0: INSTABIL, < 0: STABIL, = 0: GRENZ-STABIL
Wiederholung
tvytyvyety th
000000 )0()(:0 INSTABIL für 00 v
Anfangsbedingungen:
t0
hy
0ytvyv 000 :0
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 23Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KleinsignalverhaltenStabilität der Lösungen
• Die homogene Lösung yh(t) der lin. Diff.-gleichung beschreibt den transienten (flüchtigen)Ausgleichsvorgang als Systemantwort auf eine Störung (Anregung) in einem bestimmten Betriebspunkt („Arbeitspunkt“).
• Die partikuläre Lösung yp(t) der lin. Diff.-gleichung beschreibt das stationäre (dauernde)Betriebsverhalten des Systems aufgrund der Störung (Anregung), z. B. eine Veränderung des Arbeitspunkts.
• Wenn die Größe yh(t) mit der Zeit abklingt und verschwindet, ist das System im betreffenden Arbeitspunkt STABIL. Es müssen daher die reellen Eigenwerte k bzw. die Realteile k der komplexen Eigenwerte k sämtlich negativ sein, damit yh(t) abklingt.
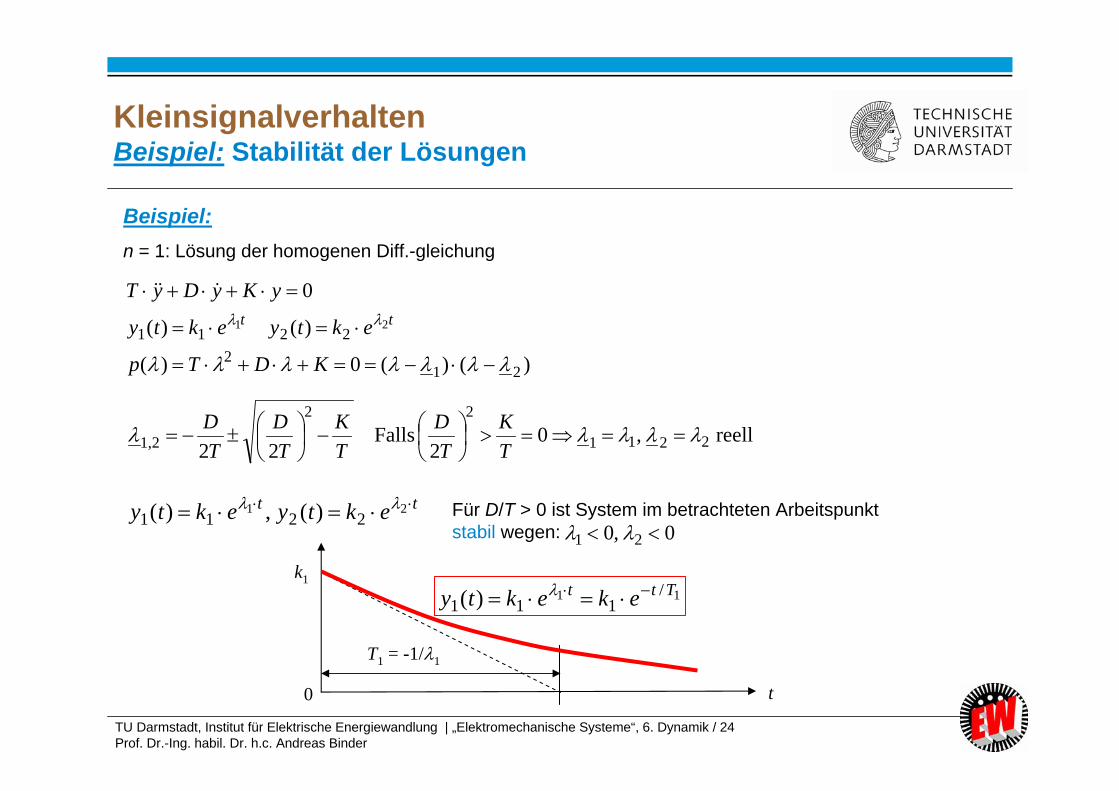
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 24Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KleinsignalverhaltenBeispiel: Stabilität der Lösungen
Beispiel:n = 1: Lösung der homogenen Diff.-gleichung
)()(0)(
)()(
0
212
221121
KDTp
ektyekty
yKyDyTtt
reell,02
Falls22 2211
22
1,2
TK
TD
TK
TD
TD
tt ektyekty 212211 )(,)( Für D/T > 0 ist System im betrachteten Arbeitspunkt
stabil wegen: 0,0 21
0
k1
t
T1 = -1/1
11 /111 )( Ttt ekekty
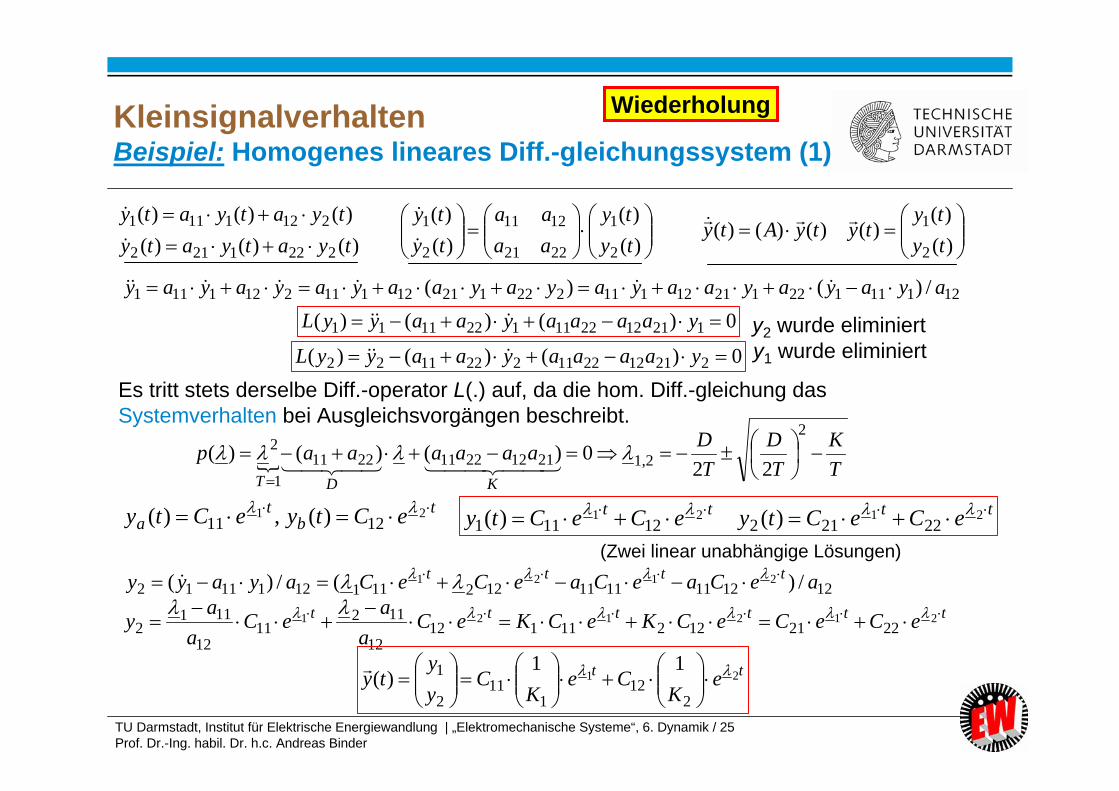
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 25Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KleinsignalverhaltenBeispiel: Homogenes lineares Diff.-gleichungssystem (1)
tb
ta eCtyeCty 21
1211 )(,)(
(Zwei linear unabhängige Lösungen)
)()()()()()(
2221212
2121111
tyatyatytyatyaty
)()(
)()(
2
1
2221
1211
2
1
tyty
aaaa
tyty
)()(
)()()()(2
1
tyty
tytyAty
1211112212112111222121121112121111 /)()( ayayayaayayayaayayayay
0)()()( 1211222111221111 yaaaayaayyL y2 wurde eliminiert0)()()( 2211222112221122 yaaaayaayyL y1 wurde eliminiert
Es tritt stets derselbe Diff.-operator L(.) auf, da die hom. Diff.-gleichung das Systemverhalten bei Ausgleichsvorgängen beschreibt.
TK
TD
TDaaaaaap
KDT
2
1,22112221122111
2
220)()()(
tttt eCeCtyeCeCty 21212221212111 )()(
12121111111221111211112 /)(/)( 2121 aeCaeCaeCeCayayy tttt
tttttt eCeCeCKeCKeCa
aeC
aa
y
212121222112211112
12
11211
12
1112
tt eK
CeK
Cyy
ty 21
212
111
2
1 11)(
Wiederholung
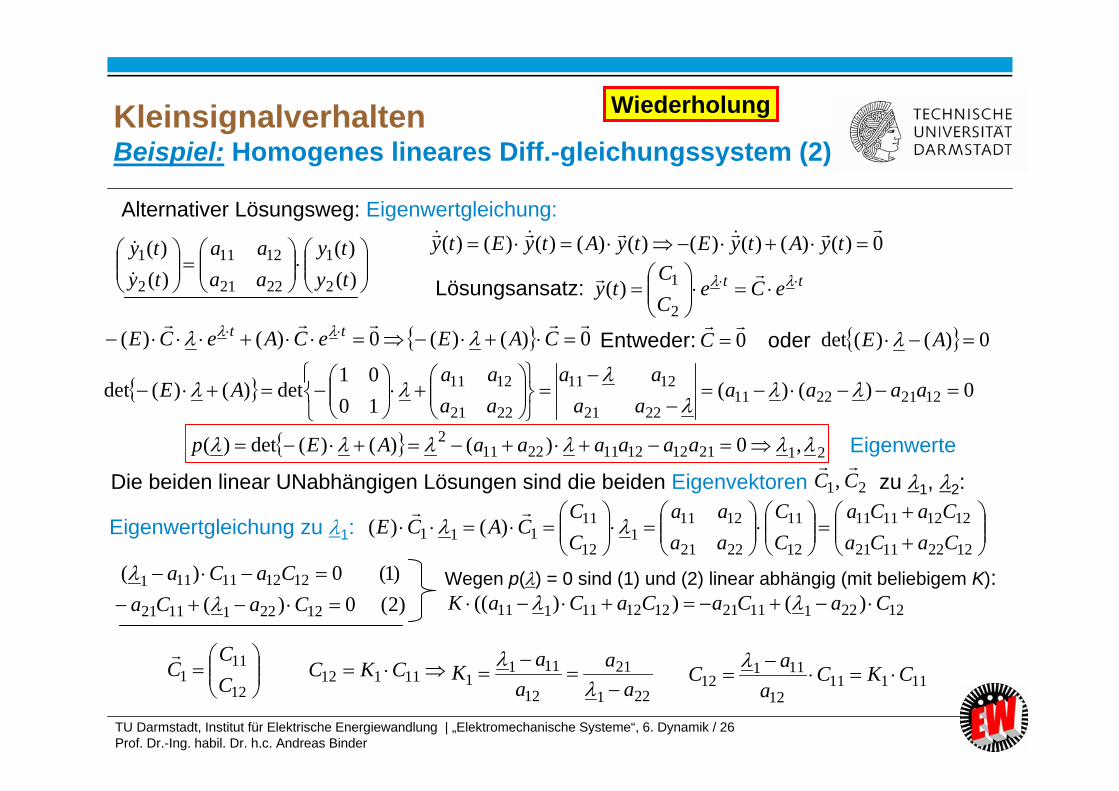
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 26Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KleinsignalverhaltenBeispiel: Homogenes lineares Diff.-gleichungssystem (2)
)()(
)()(
2
1
2221
1211
2
1
tyty
aaaa
tyty
0)()()()()()()()()( tyAtyEtyAtyEty
Lösungsansatz: tt eCeCC
ty
2
1)(
0)()(0)()(
CAEeCAeCE tt Entweder: oder 0
C 0)()(det AE
0)()(1001
det)()(det 122122112221
1211
2221
1211
aaaa
aaaa
aaaa
AE
212112121122112 ,0)()()(det)( aaaaaaAEp Eigenwerte
Die beiden linear UNabhängigen Lösungen sind die beiden Eigenvektoren zu 1, 2:
12221121
12121111
12
11
2221
12111
12
11111 )()(
CaCaCaCa
CC
aaaa
CC
CACE
21, CC
)2(0)()1(0)(
122211121
121211111
CaCa
CaCa
Wegen p() = 0 sind (1) und (2) linear abhängig (mit beliebigem K): 122211121121211111 )())(( CaCaCaCaK
221
21
12
1111 a
aa
aK
1111112
11112 CKC
aa
C
Eigenwertgleichung zu 1:
12
111 C
CC
Alternativer Lösungsweg: Eigenwertgleichung:
Wiederholung
11112 CKC
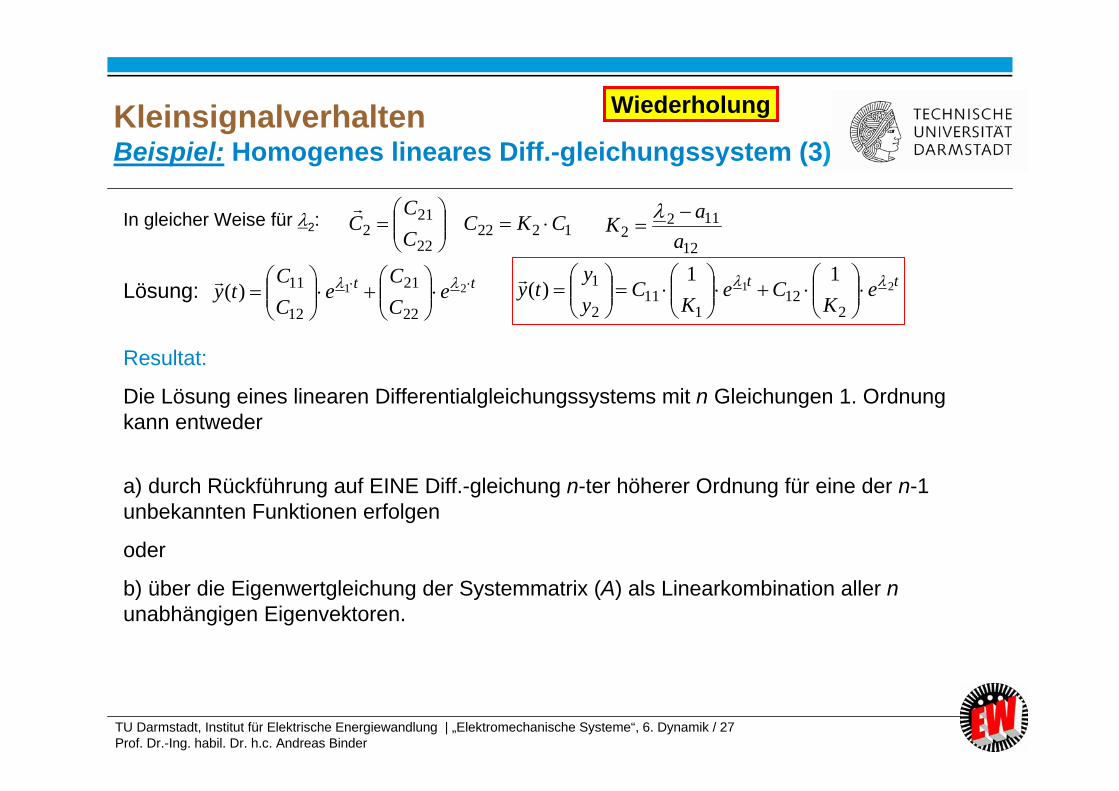
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 27Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KleinsignalverhaltenBeispiel: Homogenes lineares Diff.-gleichungssystem (3)
In gleicher Weise für 2: 122222
212 CKC
CC
C
12
1122 a
aK
Lösung: tt eCC
eCC
ty
21
22
21
12
11)( tt eK
CeK
Cyy
ty 21
212
111
2
1 11)(
Resultat:
Die Lösung eines linearen Differentialgleichungssystems mit n Gleichungen 1. Ordnung kann entweder
a) durch Rückführung auf EINE Diff.-gleichung n-ter höherer Ordnung für eine der n-1 unbekannten Funktionen erfolgen
oder
b) über die Eigenwertgleichung der Systemmatrix (A) als Linearkombination aller nunabhängigen Eigenvektoren.
Wiederholung
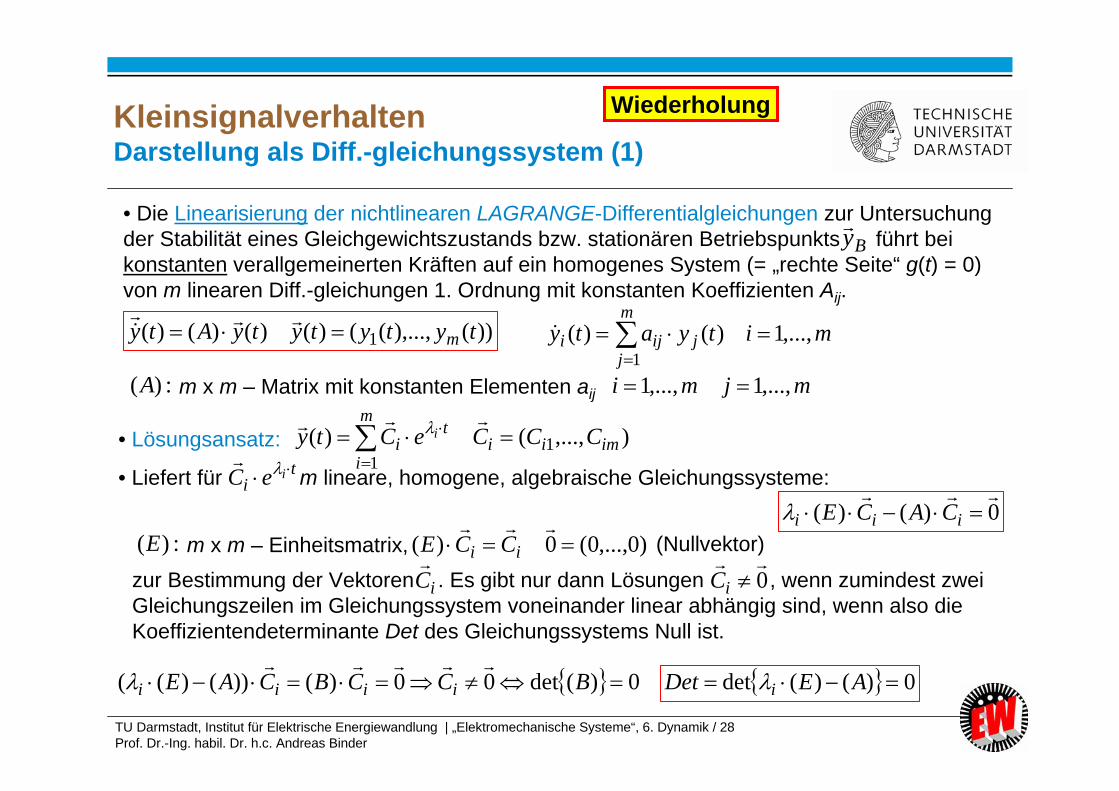
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 28Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KleinsignalverhaltenDarstellung als Diff.-gleichungssystem (1)
• Die Linearisierung der nichtlinearen LAGRANGE-Differentialgleichungen zur Untersuchung der Stabilität eines Gleichgewichtszustands bzw. stationären Betriebspunkts führt bei konstanten verallgemeinerten Kräften auf ein homogenes System (= „rechte Seite“ g(t) = 0) von m linearen Diff.-gleichungen 1. Ordnung mit konstanten Koeffizienten Aij.
By
))(),...,(()()()()( 1 tytytytyAty m
mityatym
jjiji ,...,1)()(
1
:)(A m x m – Matrix mit konstanten Elementen aij mjmi ,...,1,...,1
• Lösungsansatz:
• Liefert für m lineare, homogene, algebraische Gleichungssysteme:
),...,()( 11
imii
m
i
ti CCCeCty i
0)()(
iii CACE:)(E m x m – Einheitsmatrix, )0,...,0(0)(
ii CCE (Nullvektor)
zur Bestimmung der Vektoren . Es gibt nur dann Lösungen , wenn zumindest zwei Gleichungszeilen im Gleichungssystem voneinander linear abhängig sind, wenn also die Koeffizientendeterminante Det des Gleichungssystems Null ist.
0)()(det AEDet i 0)(det00)())()(( BCCBCAE iiii
iC
0
iC
ti
ieC
Wiederholung
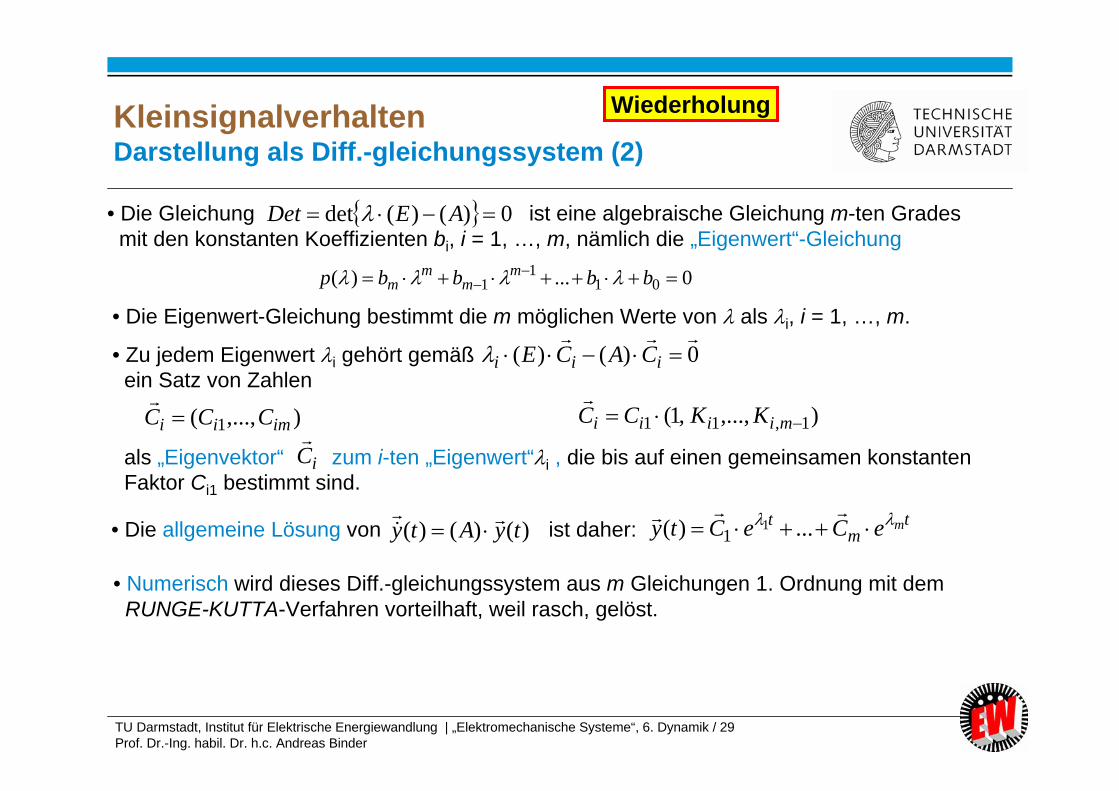
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 29Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
• Die Gleichung ist eine algebraische Gleichung m-ten Grades mit den konstanten Koeffizienten bi, i = 1, …, m, nämlich die „Eigenwert“-Gleichung
• Die Eigenwert-Gleichung bestimmt die m möglichen Werte von als i, i = 1, …, m.
• Zu jedem Eigenwert i gehört gemäßein Satz von Zahlen
als „Eigenvektor“ zum i-ten „Eigenwert“i , die bis auf einen gemeinsamen konstanten Faktor Ci1 bestimmt sind.
0)()(det AEDet
),...,( 1 imii CCC
0...)( 011
1 bbbbp m
mm
m
0)()(
iii CACE
iC
• Die allgemeine Lösung von ist daher:)()()( tyAty t
mt meCeCty
...)( 11
KleinsignalverhaltenDarstellung als Diff.-gleichungssystem (2)
• Numerisch wird dieses Diff.-gleichungssystem aus m Gleichungen 1. Ordnung mit dem RUNGE-KUTTA-Verfahren vorteilhaft, weil rasch, gelöst.
),...,,1( 1,11 miiii KKCC
Wiederholung
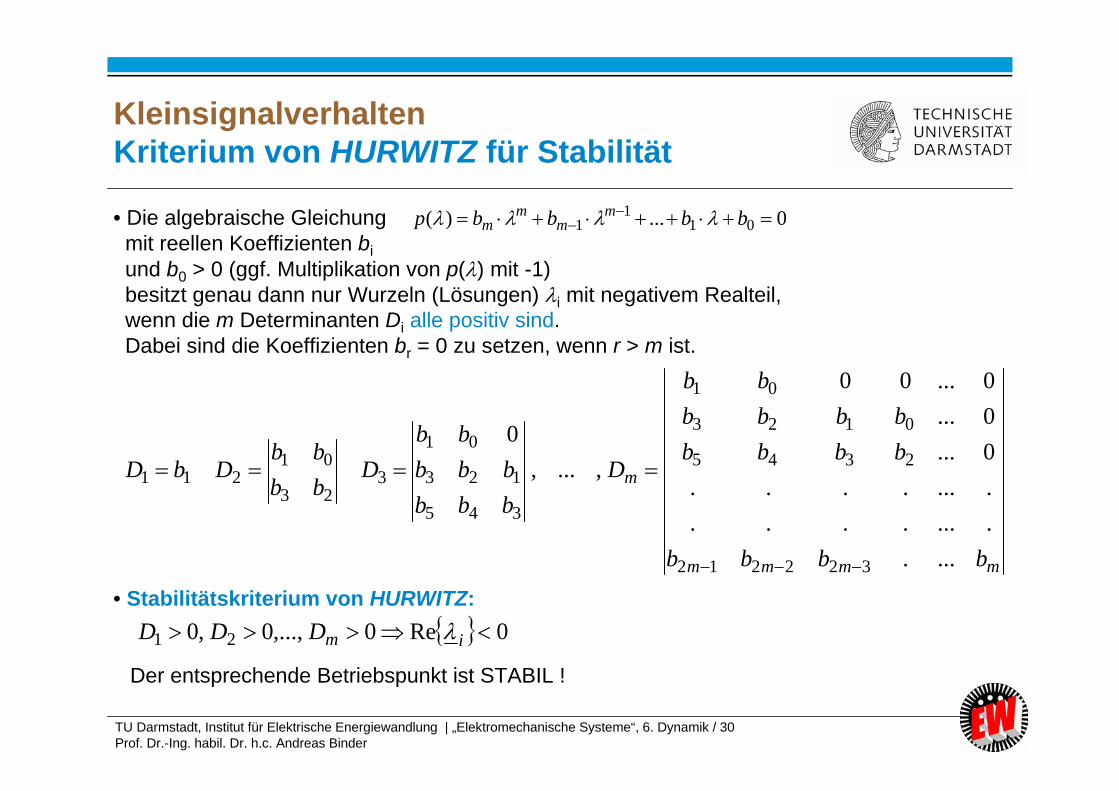
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 30Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KleinsignalverhaltenKriterium von HURWITZ für Stabilität
• Die algebraische Gleichungmit reellen Koeffizienten bi und b0 > 0 (ggf. Multiplikation von p() mit -1)besitzt genau dann nur Wurzeln (Lösungen) i mit negativem Realteil, wenn die m Determinanten Di alle positiv sind. Dabei sind die Koeffizienten br = 0 zu setzen, wenn r > m ist.
0...)( 011
1 bbbbp m
mm
m
mmmm
m
bbbb
bbbbbbbb
bb
Dbbbbbb
bbD
bbbb
DbD
....................0...0...0...00
,...,0
322212
2345
0123
01
345
123
01
323
01211
• Stabilitätskriterium von HURWITZ: 0Re0,...,0,0 21 imDDD
Der entsprechende Betriebspunkt ist STABIL !
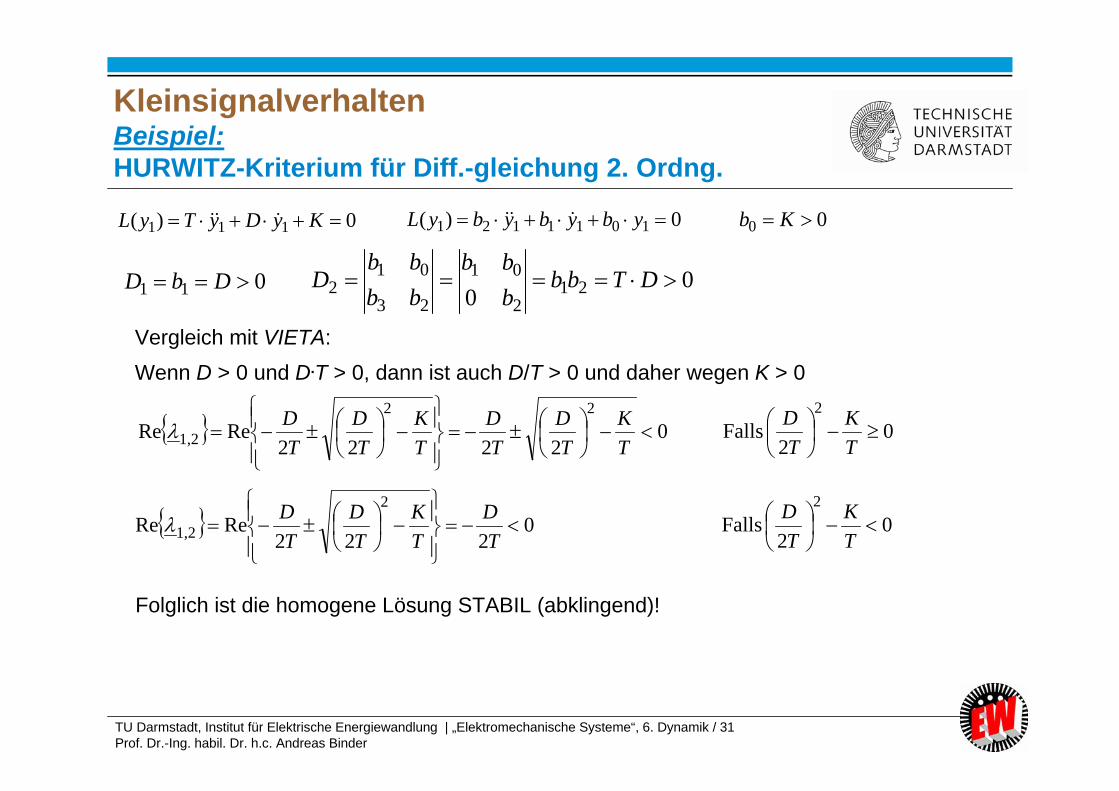
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 31Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KleinsignalverhaltenBeispiel:HURWITZ-Kriterium für Diff.-gleichung 2. Ordng.
0)( 111 KyDyTyL 0)( 1011121 ybybybyL
00 21
2
01
23
012 DTbb
bbb
bbbb
D011 DbD
02222
ReRe22
1,2
TK
TD
TD
TK
TD
TD
Vergleich mit VIETA:Wenn D > 0 und D.T > 0, dann ist auch D/T > 0 und daher wegen K > 0
02
Falls2
TK
TD
0222
ReRe2
1,2
TD
TK
TD
TD 0
2 Falls
2
TK
TD
Folglich ist die homogene Lösung STABIL (abklingend)!
00 Kb
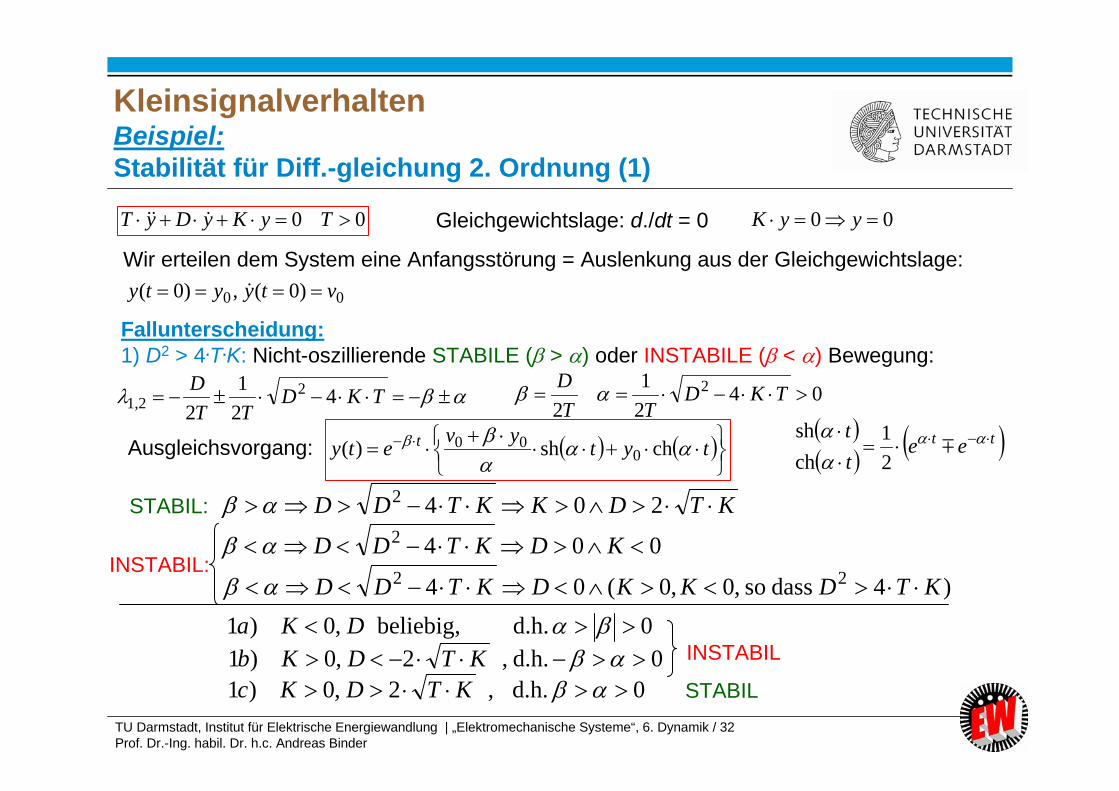
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 32Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KleinsignalverhaltenBeispiel:Stabilität für Diff.-gleichung 2. Ordnung (1)
00 TyKyDyT Gleichgewichtslage: d./dt = 0 00 yyK
Wir erteilen dem System eine Anfangsstörung = Auslenkung aus der Gleichgewichtslage:
00 )0(,)0( vtyyty
Fallunterscheidung:1) D2 > 4.T.K: Nicht-oszillierende STABILE ( > ) oder INSTABILE ( < ) Bewegung:
TKDTT
D 421
22
1,2 0421
22 TKD
TTD
tytyvety t
chsh)( 0
00Ausgleichsvorgang: tt ee
tt
21
chsh
STABIL: KTDKKTDD 2042
INSTABIL:0042 KDKTDD
)4dassso,0,0(04 22 KTDKKDKTDD
0d.h.beliebig,,0)1 DKa0d.h.,2,0)1 KTDKb
0d.h.,2,0)1 KTDKcINSTABIL
STABIL
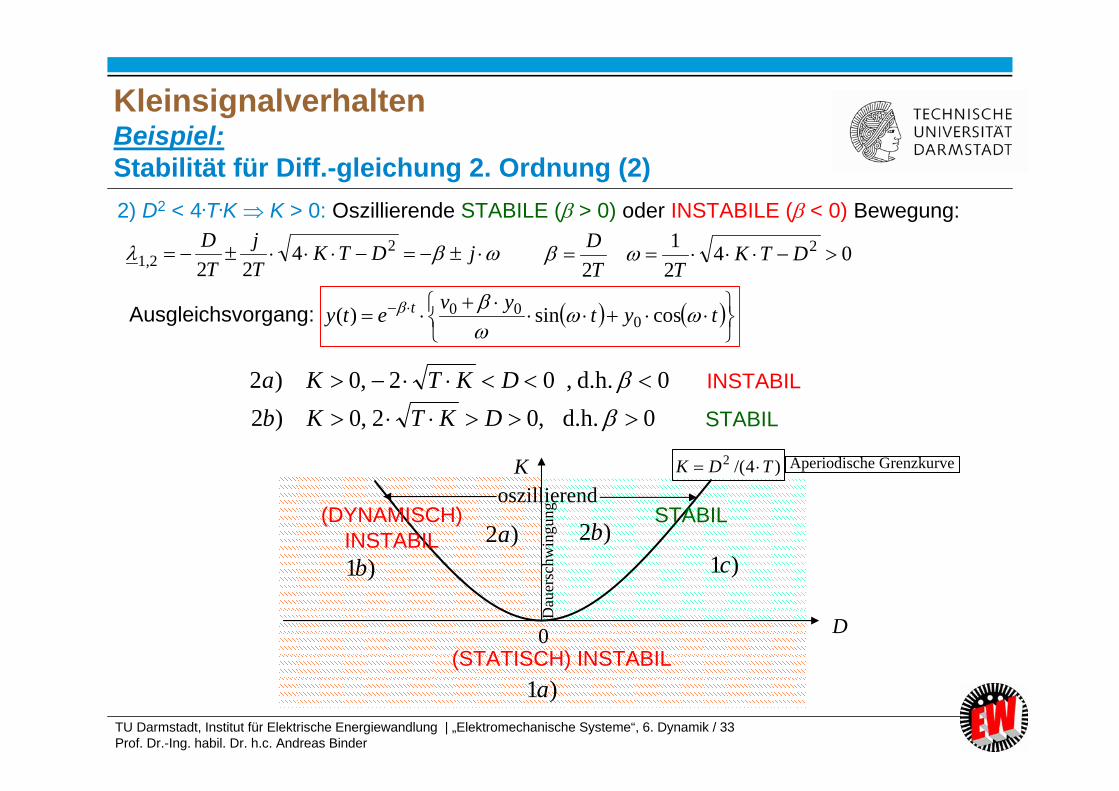
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 33Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
KleinsignalverhaltenBeispiel:Stabilität für Diff.-gleichung 2. Ordnung (2)2) D2 < 4.T.K K > 0: Oszillierende STABILE ( > 0) oder INSTABILE ( < 0) Bewegung:
jDTKTj
TD 2
1,2 422
0421
22 DTK
TTD
tytyvety t
cossin)( 0
00Ausgleichsvorgang:
0d.h.,02,0)2 DKTKa0d.h.,02,0)2 DKTKb
INSTABIL
STABIL
D0
K
)2b)2a)1c)1b
)1a
STABIL
(STATISCH) INSTABIL
(DYNAMISCH)INSTABIL
oszillierend)4/(2 TDK
Dau
ersc
hwin
gung
Aperiodische Grenzkurve
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 34Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme6. Dynamische Untersuchung des Wandlerverhaltens
• Gleichgewicht• Linearisierung• Kleinsignalverhalten• Statische Stabilität• Dynamische Stabilität• Lineares System mit konstanten Koeffizienten: Beispiel
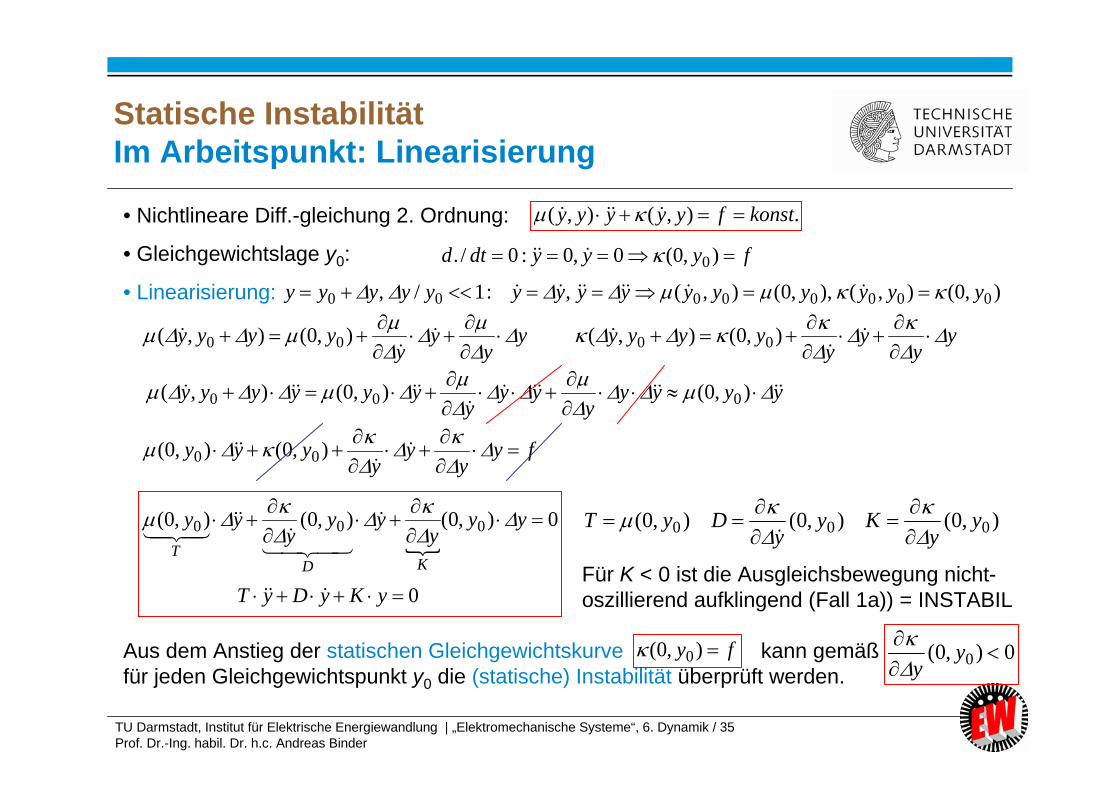
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 35Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Statische InstabilitätIm Arbeitspunkt: Linearisierung
• Nichtlineare Diff.-gleichung 2. Ordnung:
• Gleichgewichtslage y0:
• Linearisierung:
.),(),( konstfyyyyy
fyyydtd ),0(0,0:0/. 0
),0(),(),,0(),(,:1/, 00000000 yyyyyyyyyyyyyyy
yy
yy
yyyy
),0(),( 00 yy
yy
yyyy
),0(),( 00
yyyyy
yyy
yyyyyy
),0(),0(),( 000
fyy
yy
yyy
),0(),0( 00
0 yKyDyT
0),0(),0(),0( 000
yyy
yyy
yy
KDT
),0(),0(),0( 000 y
yKy
yDyT
Für K < 0 ist die Ausgleichsbewegung nicht-oszillierend aufklingend (Fall 1a)) = INSTABIL
Aus dem Anstieg der statischen Gleichgewichtskurve kann gemäßfür jeden Gleichgewichtspunkt y0 die (statische) Instabilität überprüft werden.
fy ),0( 0 0),0( 0 y
y
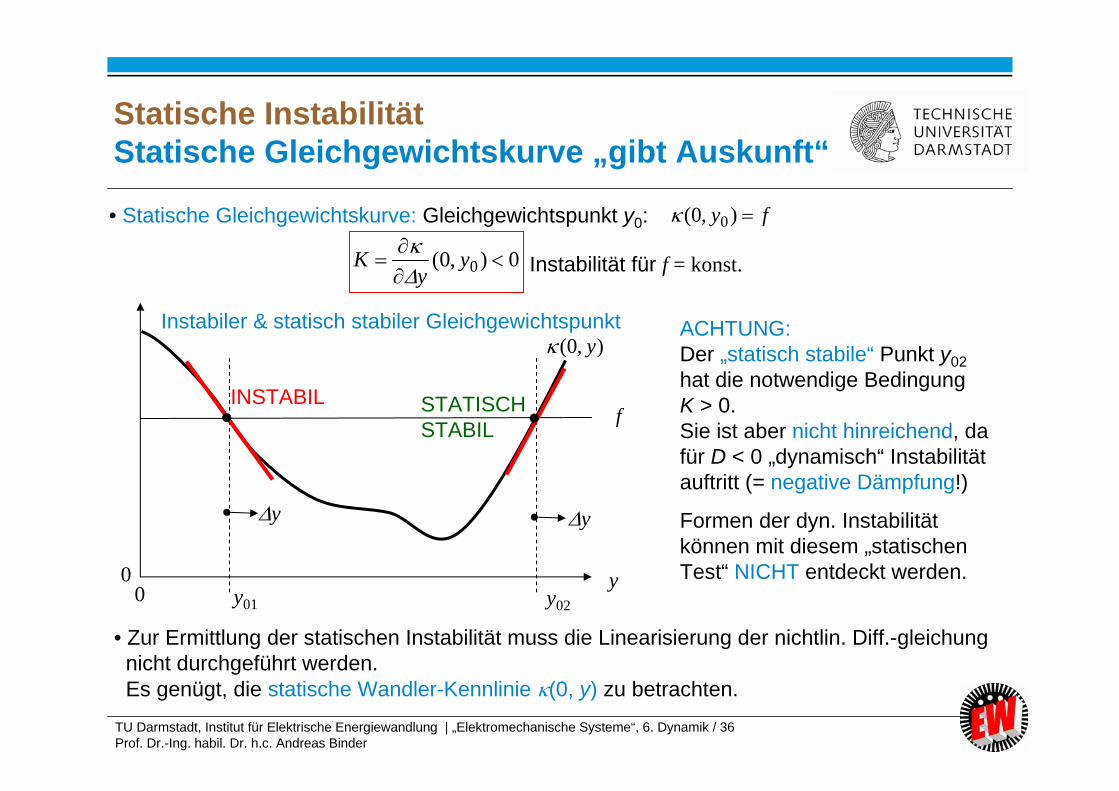
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 36Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Statische InstabilitätStatische Gleichgewichtskurve „gibt Auskunft“
• Statische Gleichgewichtskurve: Gleichgewichtspunkt y0: fy ),0( 0
0),0( 0
yy
K
Instabilität für f = konst.
y
),0( y
f
00 y01 y02
y y
INSTABIL STATISCH STABIL
Instabiler & statisch stabiler Gleichgewichtspunkt
• Zur Ermittlung der statischen Instabilität muss die Linearisierung der nichtlin. Diff.-gleichungnicht durchgeführt werden. Es genügt, die statische Wandler-Kennlinie (0, y) zu betrachten.
ACHTUNG:Der „statisch stabile“ Punkt y02hat die notwendige Bedingung K > 0.Sie ist aber nicht hinreichend, da für D < 0 „dynamisch“ Instabilität auftritt (= negative Dämpfung!)
Formen der dyn. Instabilität können mit diesem „statischen Test“ NICHT entdeckt werden.
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 37Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme6. Dynamische Untersuchung des Wandlerverhaltens
• Gleichgewicht• Linearisierung• Kleinsignalverhalten• Statische Stabilität• Dynamische Stabilität• Lineares System mit konstanten Koeffizienten: Beispiel
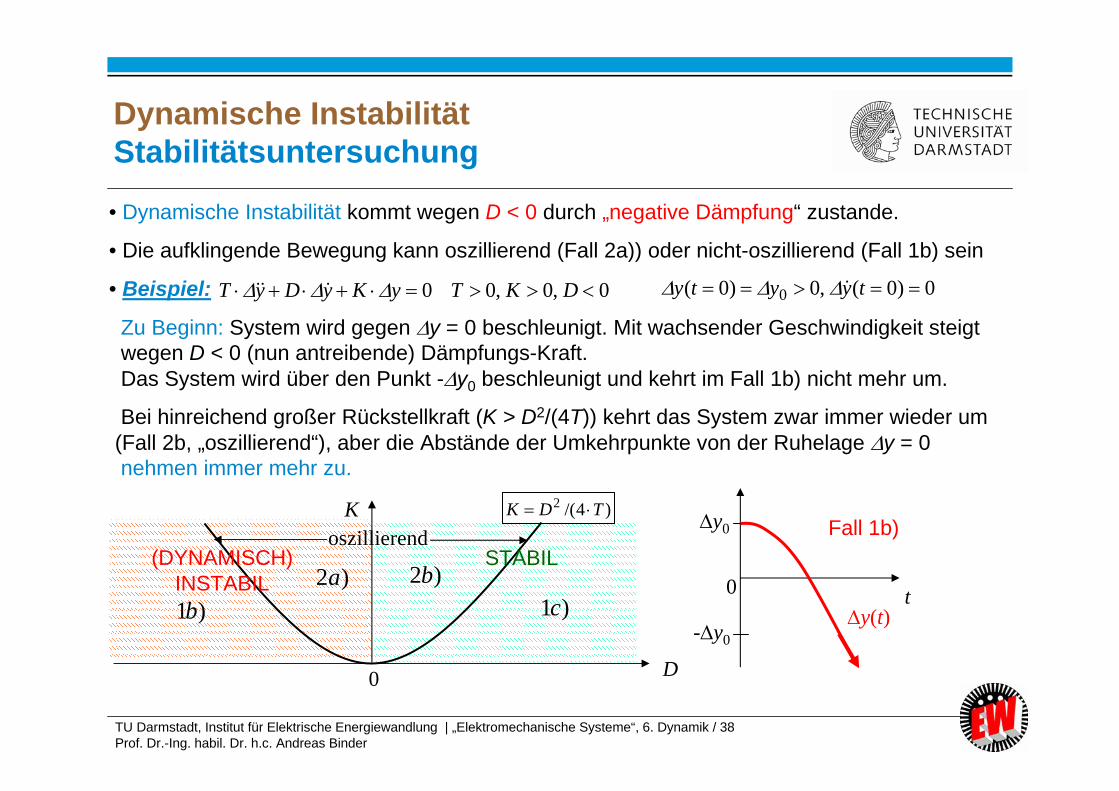
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 38Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Dynamische InstabilitätStabilitätsuntersuchung
• Dynamische Instabilität kommt wegen D < 0 durch „negative Dämpfung“ zustande.
• Die aufklingende Bewegung kann oszillierend (Fall 2a)) oder nicht-oszillierend (Fall 1b) sein
• Beispiel:
Zu Beginn: System wird gegen y = 0 beschleunigt. Mit wachsender Geschwindigkeit steigt wegen D < 0 (nun antreibende) Dämpfungs-Kraft. Das System wird über den Punkt -y0 beschleunigt und kehrt im Fall 1b) nicht mehr um.
Bei hinreichend großer Rückstellkraft (K > D2/(4T)) kehrt das System zwar immer wieder um (Fall 2b, „oszillierend“), aber die Abstände der Umkehrpunkte von der Ruhelage y = 0 nehmen immer mehr zu.
0,0,00 DKTyKyDyT 0)0(,0)0( 0 tyyty
D0
K
)2b)2a)1c)1b
STABIL(DYNAMISCH)INSTABIL
oszillierend)4/(2 TDK
t0
y0
-y0y(t)
Fall 1b)
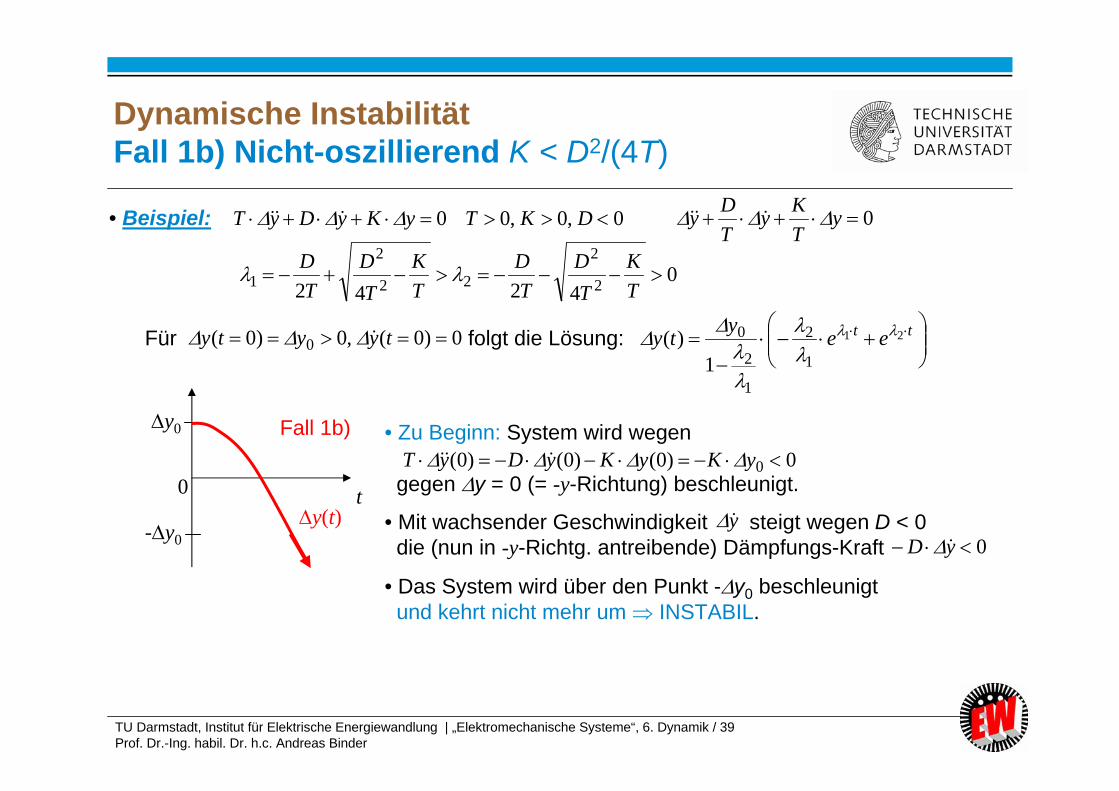
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 39Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Für folgt die Lösung:
Dynamische InstabilitätFall 1b) Nicht-oszillierend K < D2/(4T)
• Beispiel: 0,0,00 DKTyKyDyT
0)0(,0)0( 0 tyyty
t0
y0
-y0y(t)
Fall 1b)
0 yTKy
TDy
04242 2
2
22
2
1 TK
TD
TD
TK
TD
TD
tt eeyty 21
1
2
1
2
0
1)(
• Zu Beginn: System wird wegen
gegen y = 0 (= -y-Richtung) beschleunigt.
• Mit wachsender Geschwindigkeit steigt wegen D < 0 die (nun in -y-Richtg. antreibende) Dämpfungs-Kraft
• Das System wird über den Punkt -y0 beschleunigt und kehrt nicht mehr um INSTABIL.
y0 yD
0)0()0()0( 0 yKyKyDyT
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 40Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme6. Dynamische Untersuchung des Wandlerverhaltens
• Gleichgewicht• Linearisierung• Kleinsignalverhalten• Statische Stabilität• Dynamische Stabilität• Lineares System mit konstanten Koeffizienten: Beispiel
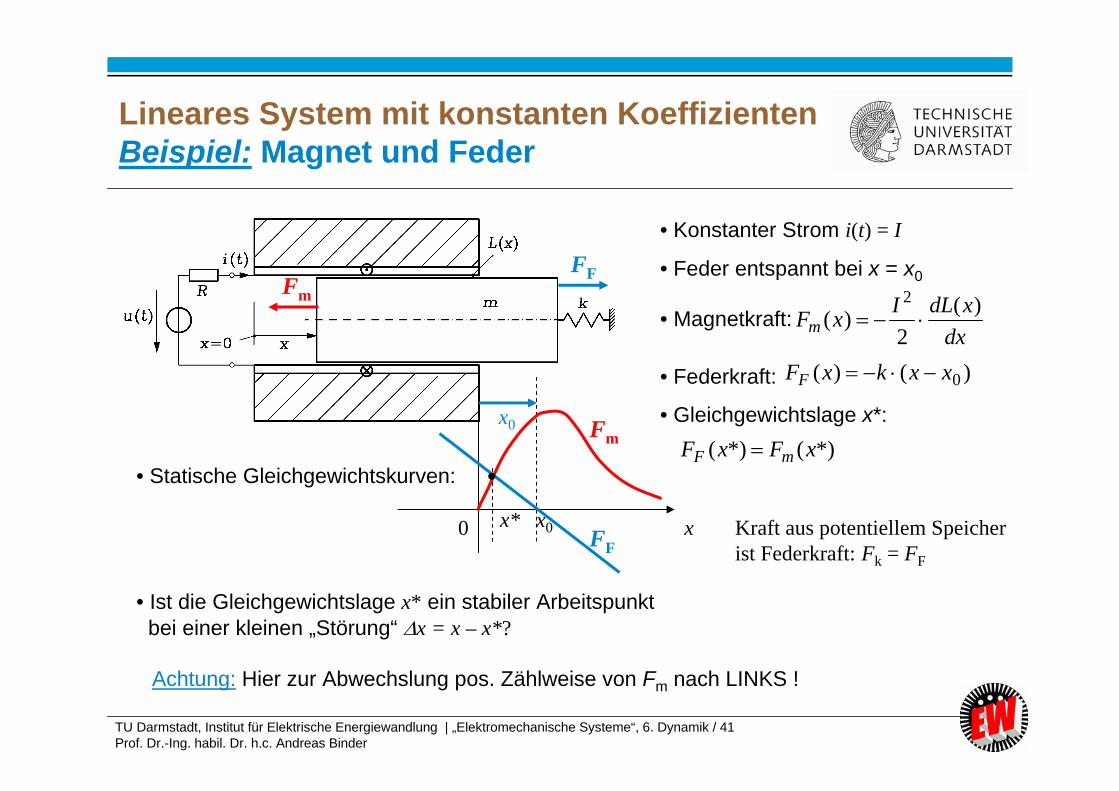
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 41Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Lineares System mit konstanten Koeffizienten Beispiel: Magnet und Feder
• Konstanter Strom i(t) = I
• Feder entspannt bei x = x0
• Magnetkraft:
• Federkraft:
• Gleichgewichtslage x*:
dxxdLIxFm)(
2)(
2
)()( 0xxkxFF
*)(*)( xFxF mF
Fm
x0
x0 FF
FF
Fm
x* x0
• Ist die Gleichgewichtslage x* ein stabiler Arbeitspunkt bei einer kleinen „Störung“ x = x – x*?
• Statische Gleichgewichtskurven:
Kraft aus potentiellem Speicher ist Federkraft: Fk = FF
Achtung: Hier zur Abwechslung pos. Zählweise von Fm nach LINKS !
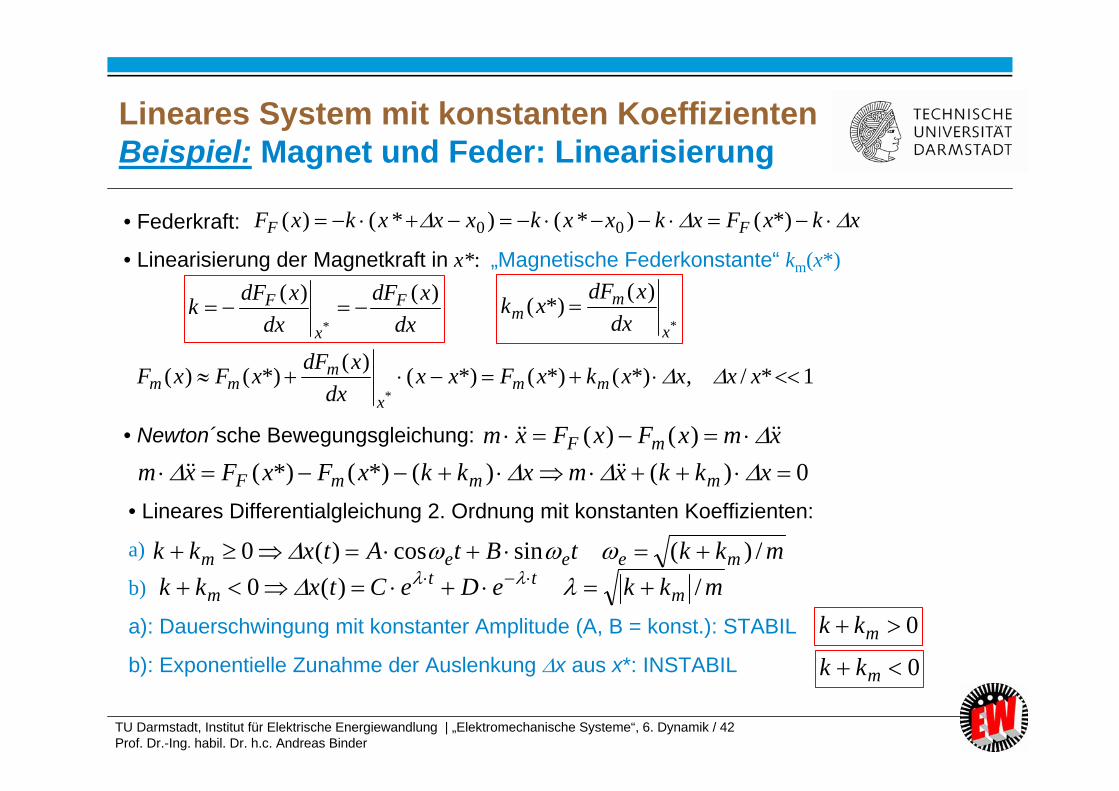
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 42Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Lineares System mit konstanten Koeffizienten Beispiel: Magnet und Feder: Linearisierung
• Federkraft:
• Linearisierung der Magnetkraft in x*: „Magnetische Federkonstante“ km(x*)
1*/,*)(*)(*)()(*)()(*
xxxxkxFxxdx
xdFxFxF mmx
mmm
*
)(*)(x
mm dx
xdFxk
• Newton´sche Bewegungsgleichung: xmxFxFxm mF )()(
xkxFxkxxkxxxkxF FF *)()*()*()( 00
0)()(*)(*)( xkkxmxkkxFxFxm mmmF
• Lineares Differentialgleichung 2. Ordnung mit konstanten Koeffizienten:
a)
b)
a): Dauerschwingung mit konstanter Amplitude (A, B = konst.): STABIL
b): Exponentielle Zunahme der Auslenkung x aus x*: INSTABIL
mkktBtAtxkk meeem /)(sincos)(0 mkkeDeCtxkk m
ttm /)(0
dxxdF
dxxdFk F
x
F )()(*
0 mkk
0 mkk
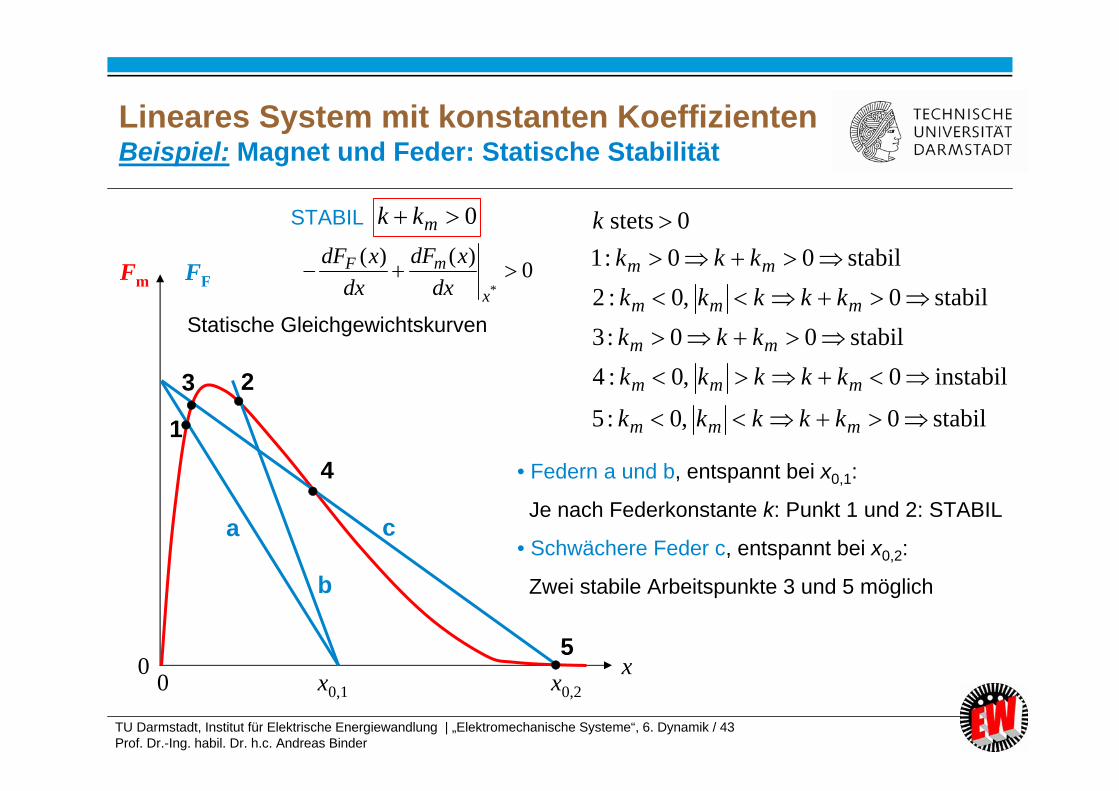
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 43Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Lineares System mit konstanten Koeffizienten Beispiel: Magnet und Feder: Statische Stabilität
stabil0,0:5
instabil0,0:4stabil00:3
stabil0,0:2stabil00:1
0stets
mmm
mmm
mm
mmm
mm
kkkkk
kkkkkkkk
kkkkkkkk
k
• Federn a und b, entspannt bei x0,1:
Je nach Federkonstante k: Punkt 1 und 2: STABIL
• Schwächere Feder c, entspannt bei x0,2:
Zwei stabile Arbeitspunkte 3 und 5 möglich
0 mkkSTABIL
0)()(*
x
mFdx
xdFdx
xdF
Fm FF
0 0
x x0,1 x0,2
2
1
3
4
5
Statische Gleichgewichtskurven
a
b
c
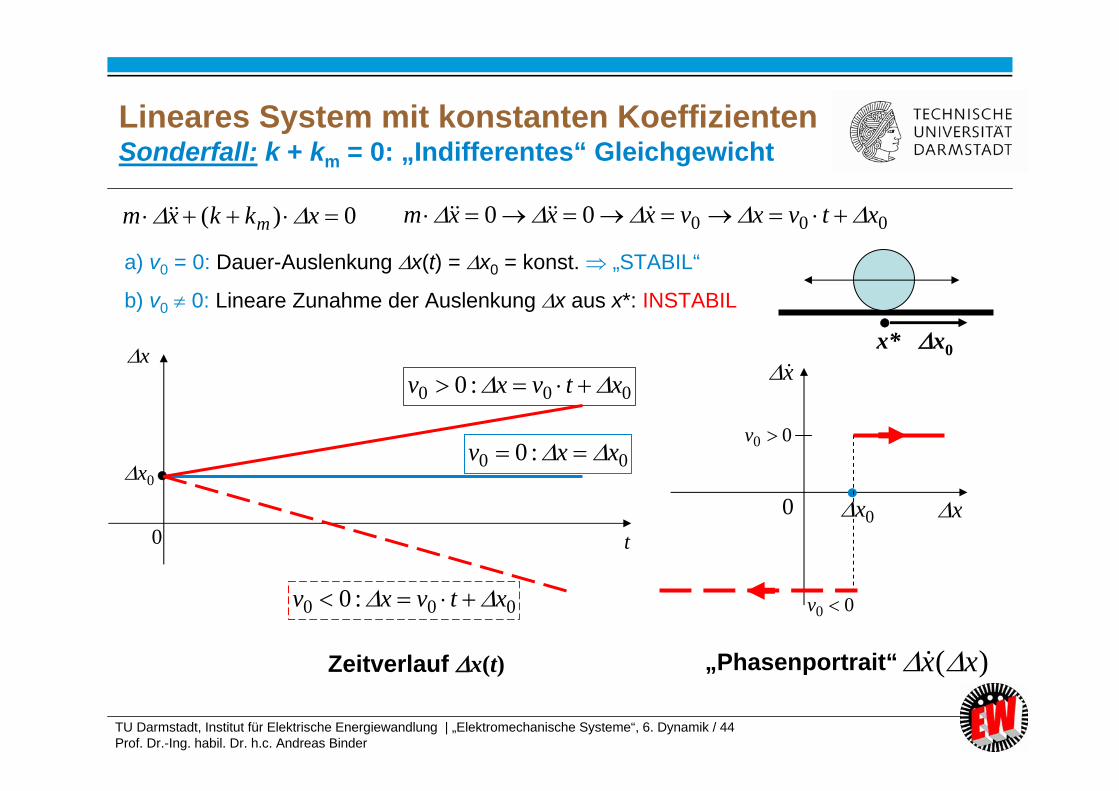
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 44Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Lineares System mit konstanten KoeffizientenSonderfall: k + km = 0: „Indifferentes“ Gleichgewicht
0)( xkkxm m
a) v0 = 0: Dauer-Auslenkung x(t) = x0 = konst. „STABIL“
b) v0 0: Lineare Zunahme der Auslenkung x aus x*: INSTABIL
00000 xtvxvxxxm
0 t
x0
x
00 :0 xxv
000 :0 xtvxv
000 :0 xtvxv
x0
x
0x
00 v
00 v
Zeitverlauf x(t) „Phasenportrait“ )( xx
x* x0
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 6. Dynamik / 45Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Zusammenfassung:- Vereinfachte dynamische Untersuchung durch Linearisierung des i. A.
nichtlinearen Systems in einem Arbeitspunkt- Wegen dieser Vereinfachung bei nichtlin. System nur
Kleinsignalverhalten untersuchbar in der lokalen Umgebung um den Arbeitspunkt
- Statische Stabilitätsuntersuchung eines Systems im Arbeitspunkt anhand statischer Kennlinien bei Vernachlässigung der Dämpfung
- Dynamische Stabilitätsuntersuchung eines linearisierten Systems im Arbeitspunkt bei Berücksichtigung der Dämpfung
- Bei negativer Dämpfung: „Dynamische Instabilität“
Elektromechanische Systeme6. Dynamische Untersuchung des Wandlerverhaltens
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 1Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme Elektromechanische Systeme
7. Analyse ausgew7. Analyse ausgewäählter elektromechanischer Wandlerhlter elektromechanischer Wandler
• Magnetischer Wandler „Typ 1“• Magnetischer Wandler „Typ 2“• Kapazitiver Wandler „Typ 3“
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 2Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme7. Analyse ausgewählter elektromechanischer Wandler
• Magnetischer Wandler „Typ 1“• Magnetischer Wandler „Typ 2“• Kapazitiver Wandler „Typ 3“
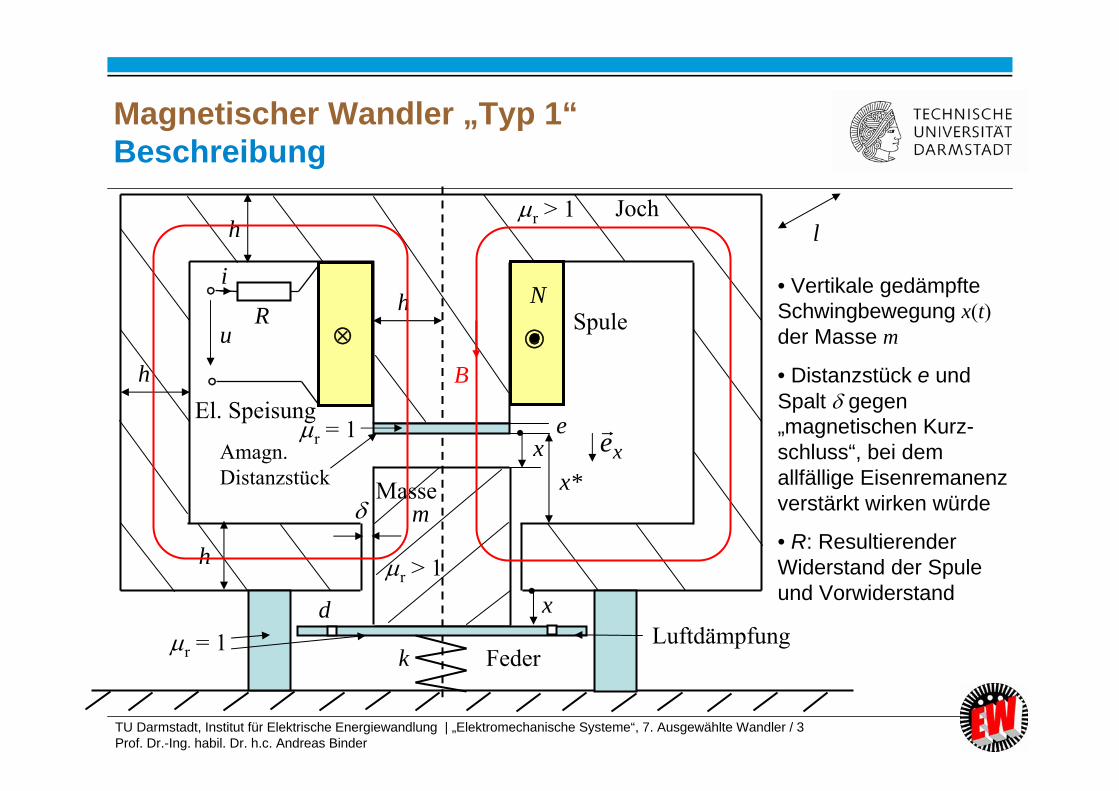
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 3Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Beschreibung
• Vertikale gedämpfte Schwingbewegung x(t)der Masse m
• Distanzstück e und Spalt gegen „magnetischen Kurz-schluss“, bei dem allfällige Eisenremanenz verstärkt wirken würde
• R: Resultierender Widerstand der Spule und Vorwiderstand
lh
h
h
h
k
d
m
ex
uR
iN
r = 1
r = 1
r > 1
r > 1
FederLuftdämpfung
Joch
Masse
Spule
El. Speisung
x
x*
B
Amagn. Distanzstück
xe
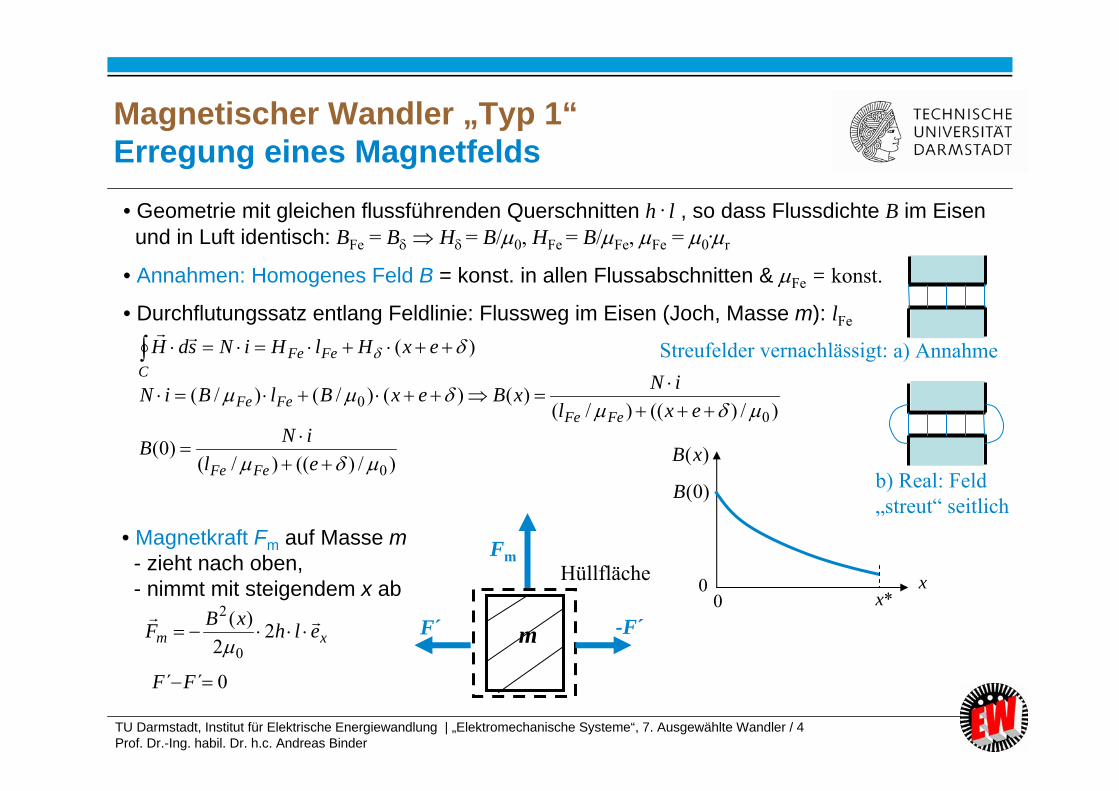
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 4Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Erregung eines Magnetfelds• Geometrie mit gleichen flussführenden Querschnitten h . l , so dass Flussdichte B im Eisen
und in Luft identisch: BFe = B H = B/0, HFe = B/Fe, Fe = 0.r
• Annahmen: Homogenes Feld B = konst. in allen Flussabschnitten & Fe = konst.
• Durchflutungssatz entlang Feldlinie: Flussweg im Eisen (Joch, Masse m): lFe
)( exHlHiNsdH FeFeC
)/)(()/()()()/()/(
00
exliNxBexBlBiN
FeFeFeFe
)/)(()/()0(
0
eliNB
FeFe
• Magnetkraft Fm auf Masse m- zieht nach oben,- nimmt mit steigendem x ab
xm elhxBF 2
2)(
0
2
0´´ FF
x*0
0x
)0(B
)(xB
a) Annahme
b) Real: Feld „streut“ seitlich
Hüllfläche
F´ -F´
Fm
m
Streufelder vernachlässigt:
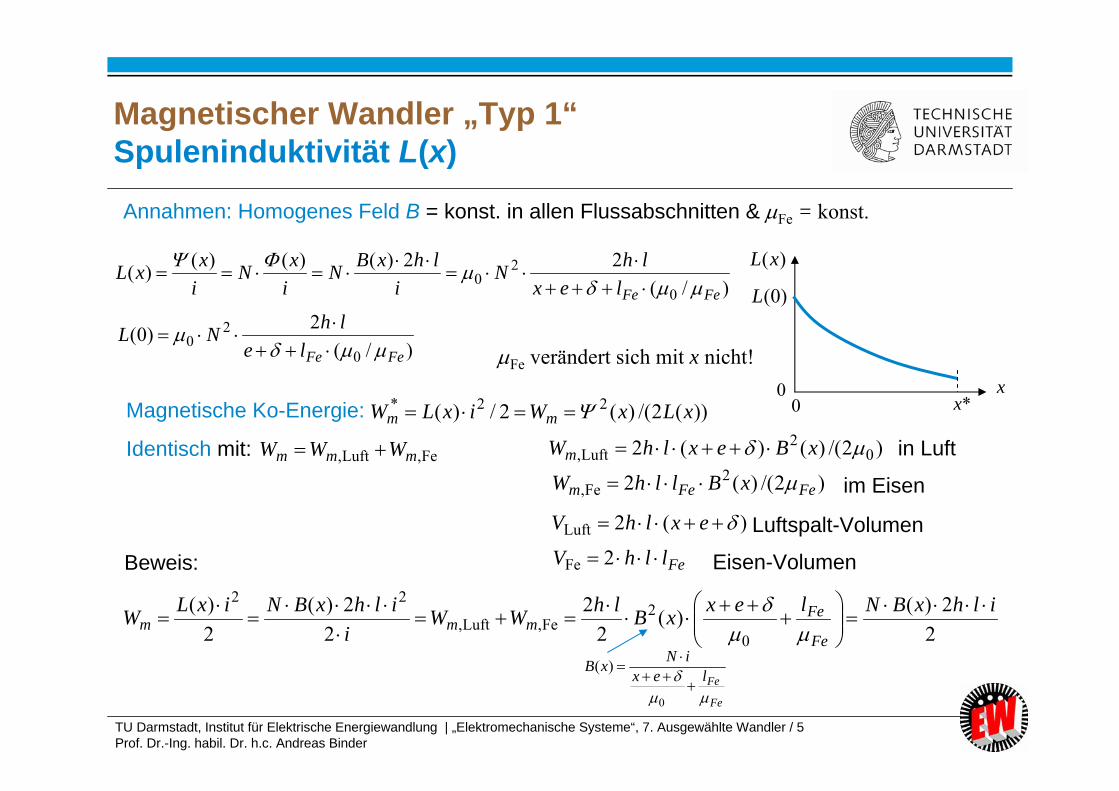
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 5Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Spuleninduktivität L(x)
)/(22)()()()(
0
20
FeFelexlhN
ilhxBN
ixN
ixxL
x*0
0x
)0(L
)(xL
)/(2)0(
0
20
FeFelelhNL
Annahmen: Homogenes Feld B = konst. in allen Flussabschnitten & Fe = konst.
Fe verändert sich mit x nicht!
Magnetische Ko-Energie:
Identisch mit:
))(2/()(2/)( 22* xLxWixLW mm
Fe,Luft, mmm WWW )2/()()(2 02
Luft, xBexlhWm
)2/()(2 2Fe, FeFem xBllhW
)(2Luft exlhV
FellhV 2Fe
in Luft
im Eisen
Luftspalt-Volumen
Eisen-Volumen
22)()(
22
22)(
2)(
0
2Fe,Luft,
22 ilhxBNlexxBlhWWi
ilhxBNixLWFe
Femmm
Fe
FelexiNxB
0
)(
Beweis:
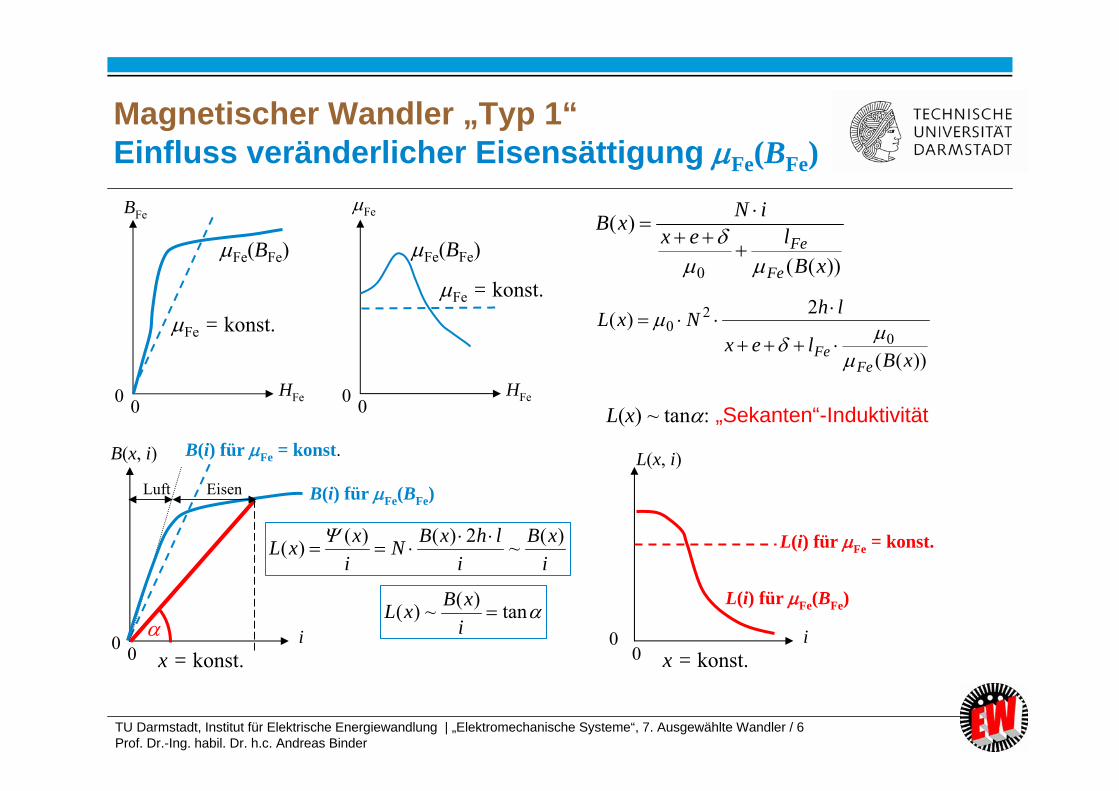
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 6Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Einfluss veränderlicher Eisensättigung Fe(BFe)
))((
)(
0 xBlex
iNxB
Fe
Fe
Fe(BFe)
00 HFe
BFe
Fe = konst.
00 HFe
Fe
Fe = konst.
Fe(BFe)
))((
2)(0
20
xBlex
lhNxL
FeFe
ixB
ilhxBN
ixxL )(~2)()()(
tan)(~)( ixBxL
00 i
B(x, i) B(i) für Fe = konst.
x = konst.
B(i) für Fe(BFe)
Luft Eisen
00 i
L(x, i)
L(i) für Fe = konst.
x = konst.
L(i) für Fe(BFe)
L(x) ~ tan: „Sekanten“-Induktivität
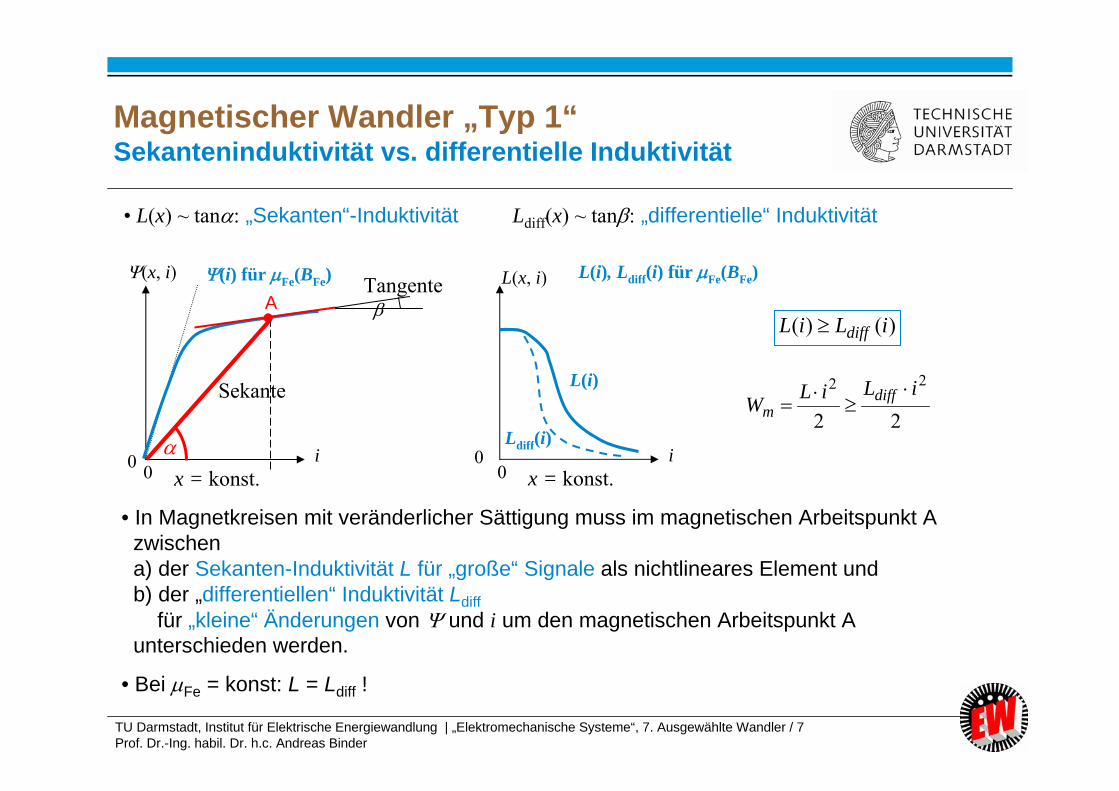
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 7Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Sekanteninduktivität vs. differentielle Induktivität
x = konst.
• L(x) ~ tan: „Sekanten“-Induktivität Ldiff(x) ~ tan: „differentielle“ Induktivität
00 i
L(x, i)
x = konst.
L(i), Ldiff(i) für Fe(BFe)
L(i)
Ldiff(i)
• In Magnetkreisen mit veränderlicher Sättigung muss im magnetischen Arbeitspunkt Azwischen a) der Sekanten-Induktivität L für „große“ Signale als nichtlineares Element undb) der „differentiellen“ Induktivität Ldiff
für „kleine“ Änderungen von und i um den magnetischen Arbeitspunkt Aunterschieden werden.
• Bei Fe = konst: L = Ldiff !
00 i
(x, i) (i) für Fe(BFe)
Tangente
Sekante
A)()( iLiL diff
22
22 iLiLW diffm
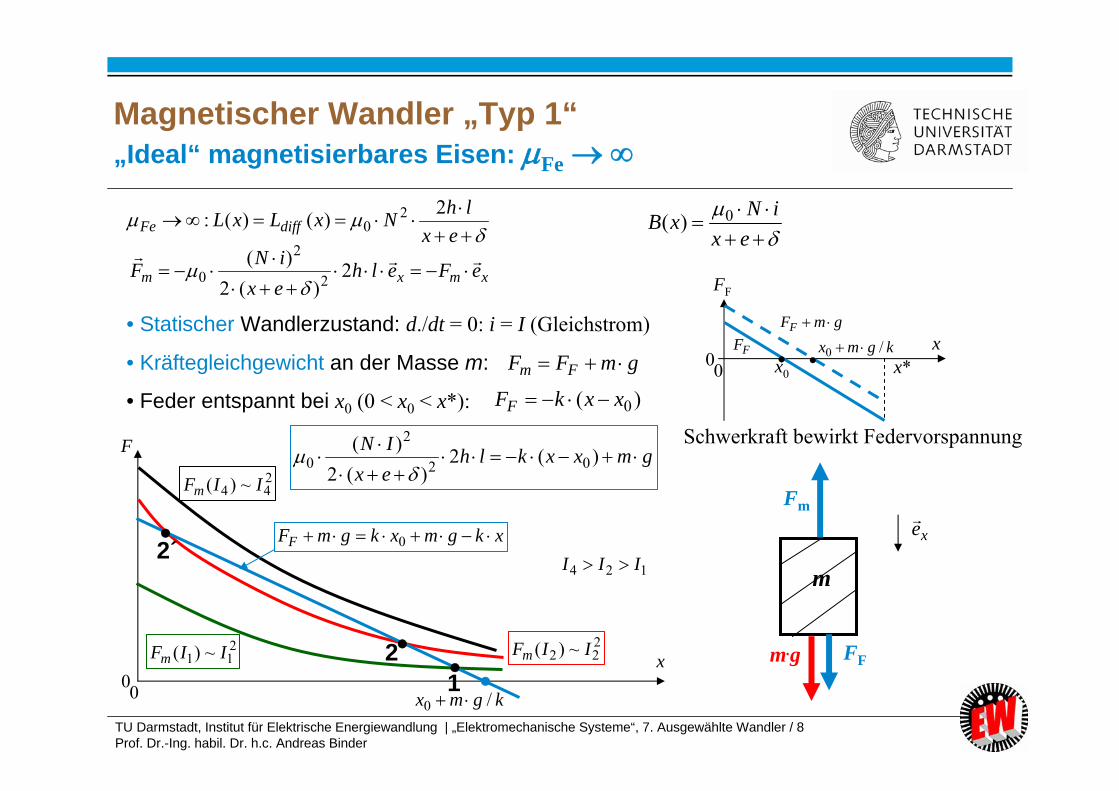
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 8Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“„Ideal“ magnetisierbares Eisen: Fe
ex
lhNxLxL diffFe2)()(: 2
0
ex
iNxB 0)(
xmxm eFelhexiNF
2
)(2)(
2
2
0
• Statischer Wandlerzustand: d./dt = 0: i = I (Gleichstrom)
• Kräftegleichgewicht an der Masse m:
• Feder entspannt bei x0 (0 < x0 < x*):
gmFF Fm
)( 0xxkFF
m.g FF
Fm
m
xe
gmxxklhexIN
)(2
)(2)(
02
2
0
00x
F
124 III
244 ~)( IIFm
222 ~)( IIFm
211 ~)( IIFm
xkgmxkgmFF 0
kgmx /0
2´
21
00
FF
xx0 x*
gmFF
FF kgmx /0
Schwerkraft bewirkt Federvorspannung
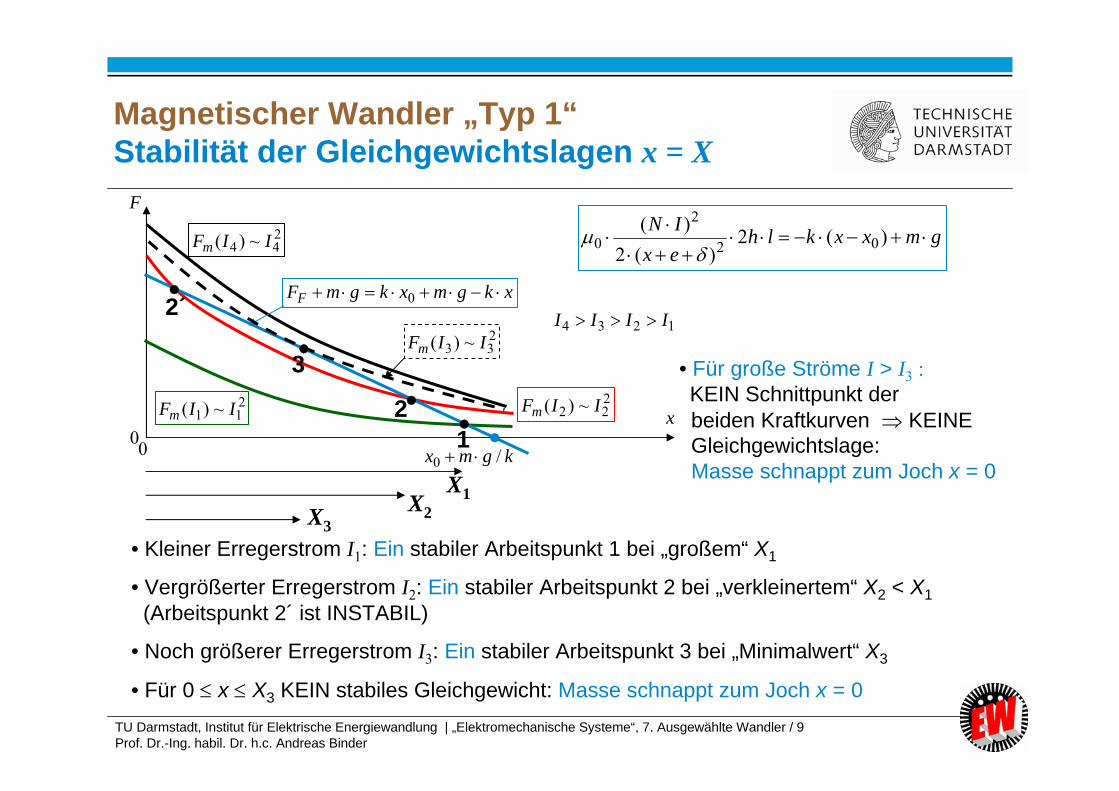
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 9Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Stabilität der Gleichgewichtslagen x = X
• Kleiner Erregerstrom I1: Ein stabiler Arbeitspunkt 1 bei „großem“ X1
• Vergrößerter Erregerstrom I2: Ein stabiler Arbeitspunkt 2 bei „verkleinertem“ X2 < X1(Arbeitspunkt 2´ ist INSTABIL)
• Noch größerer Erregerstrom I3: Ein stabiler Arbeitspunkt 3 bei „Minimalwert“ X3
• Für 0 x X3 KEIN stabiles Gleichgewicht: Masse schnappt zum Joch x = 0
gmxxklhexIN
)(2
)(2)(
02
2
0
00x
F
1234 IIII
244 ~)( IIFm
222 ~)( IIFm
211 ~)( IIFm
xkgmxkgmFF 0
kgmx /0
2´
21
3
233 ~)( IIFm
X1X2X3
• Für große Ströme I > I3 :KEIN Schnittpunkt der beiden Kraftkurven KEINE Gleichgewichtslage: Masse schnappt zum Joch x = 0
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 10Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Statische Stabilität (1)
• Statische Stabilität: Bewegungsgleichung ungedämpft:
• Störung der Gleichgewichtslage X durch kleine Auslenkungen x Linearisierung der nichtlinearen Differentialgleichung
mF FgmFxm
1/ Xx
)()()()( 0 xXFgmxxXkxmxmtxXtx m
))/(21()(
)())/(1()(
)()(
)()(´: 2
20
22
20
2
20 eXx
eXlhIN
eXxeXlhIN
exXlhINxXFee m
2)1(
21)1(
1)(2121
121
1)1(
1:10
3001
222
ddf
ddff
• Gleichgewichtslage X: gmxXkeX
lhIN
)()(
)(02
20
0´)()(2
3
20
xKxTx
eXlhINkxm • Linearisierte Diff.gleichung:
• Stabile Lösungen für 0´)()(2
3
20
eXlhINkK
0),())((
dxIxdF
dxgmxFdK mF
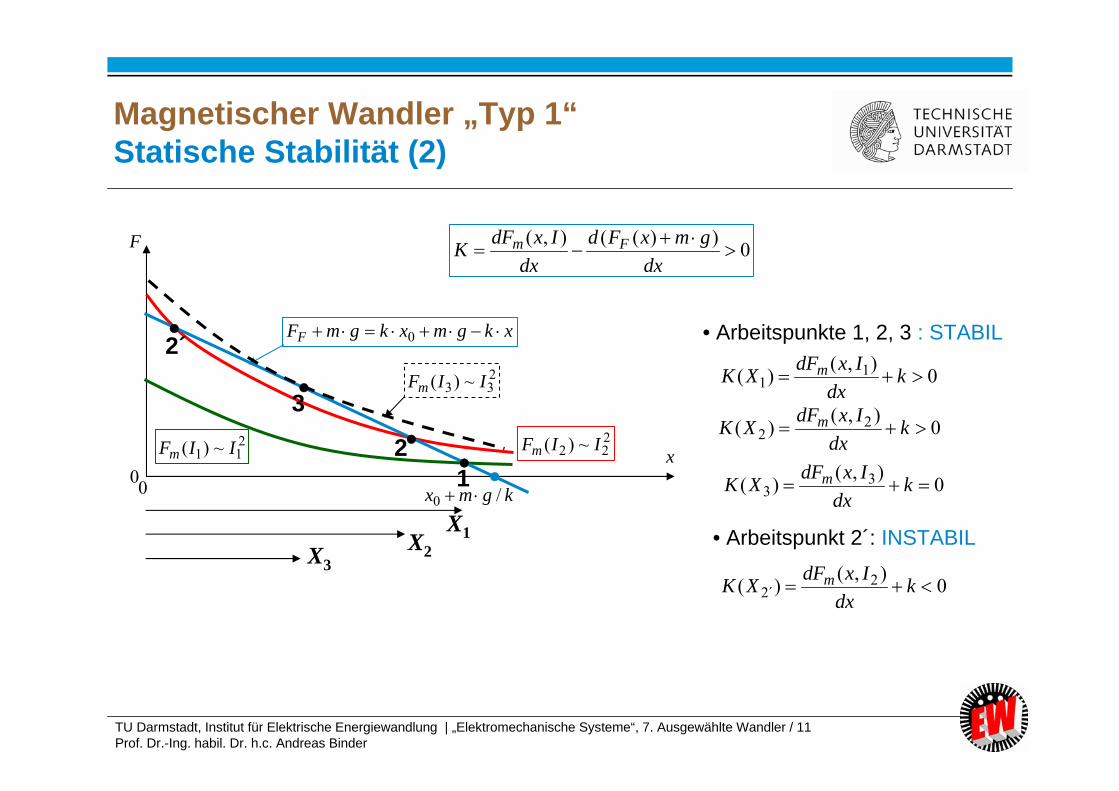
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 11Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Statische Stabilität (2)
00x
F
222 ~)( IIFm
211 ~)( IIFm
xkgmxkgmFF 0
kgmx /0
2´
21
3
233 ~)( IIFm
X1X2X3
0))((),(
dxgmxFd
dxIxdFK Fm
• Arbeitspunkte 1, 2, 3 : STABIL
0),()( 11 k
dxIxdFXK m
• Arbeitspunkt 2´: INSTABIL
0),()( 22 k
dxIxdFXK m
0),()( 33 k
dxIxdFXK m
0),()( 2´2 k
dxIxdFXK m
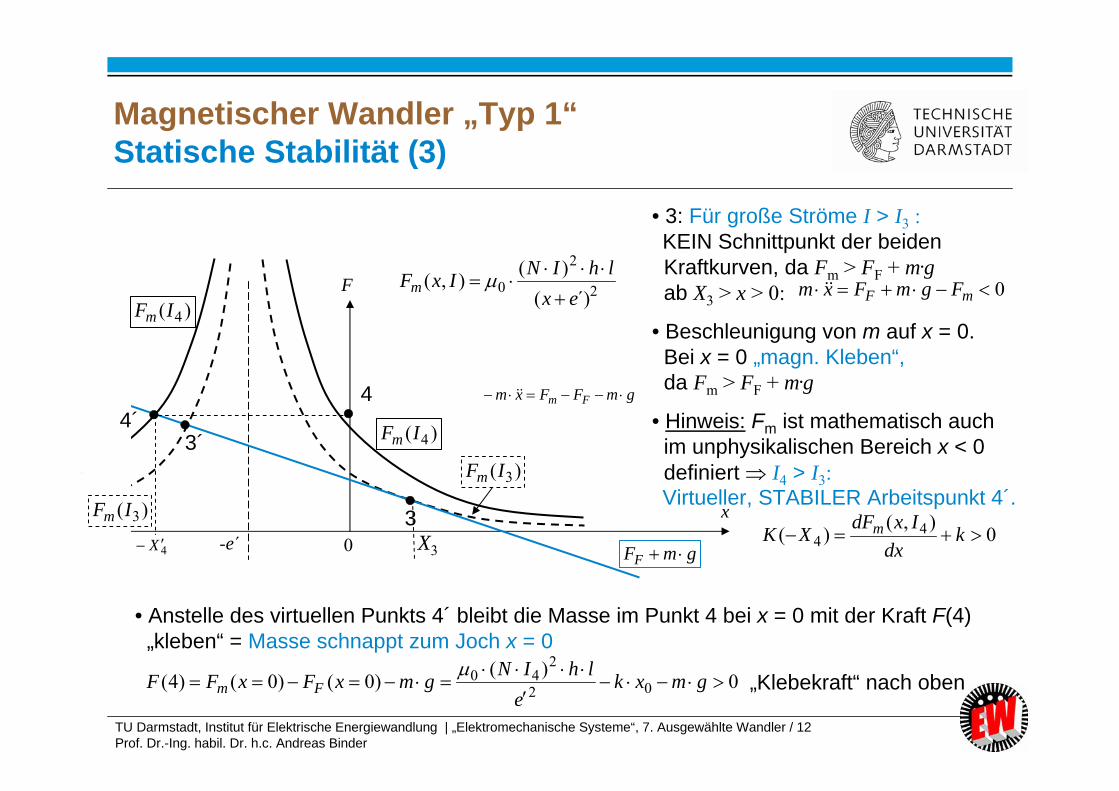
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 12Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Statische Stabilität (3)
• 3: Für große Ströme I > I3 :KEIN Schnittpunkt der beiden Kraftkurven, da Fm > FF + m.gab X3 > x > 0:
• Beschleunigung von m auf x = 0. Bei x = 0 „magn. Kleben“, da Fm > FF + m.g
• Hinweis: Fm ist mathematisch auch im unphysikalischen Bereich x < 0 definiert I4 > I3: Virtueller, STABILER Arbeitspunkt 4´.
• Anstelle des virtuellen Punkts 4´ bleibt die Masse im Punkt 4 bei x = 0 mit der Kraft F(4) „kleben“ = Masse schnappt zum Joch x = 0
0),()( 44 k
dxIxdFXK m
0)()0()0()4( 02
240
gmxk
elhINgmxFxFF Fm
x
F
gmFF
3
2
2
0 ´)()(),(ex
lhINIxFm
0-e´
)( 3IFm
)( 4IFm
)( 4IFm
4
)( 3IFm
4X
4´3´
X3
gmFFxm Fm
0 mF FgmFxm
„Klebekraft“ nach oben
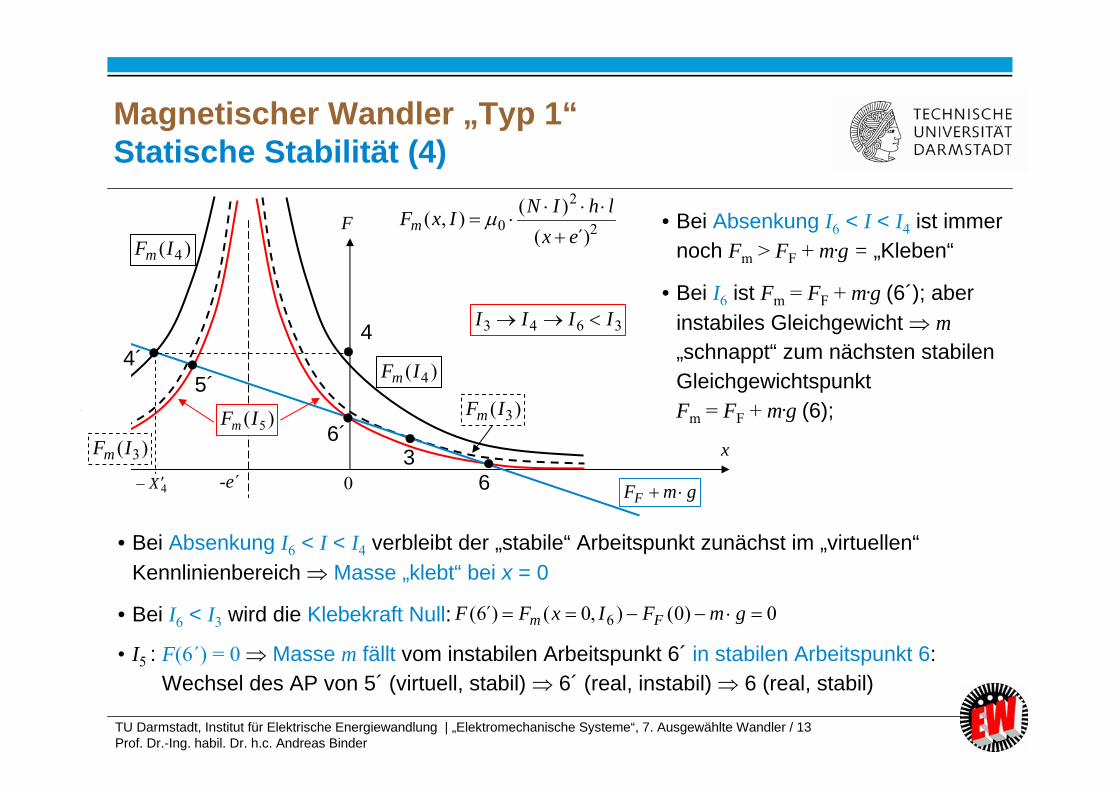
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 13Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
• Bei Absenkung I6 < I < I4 verbleibt der „stabile“ Arbeitspunkt zunächst im „virtuellen“Kennlinienbereich Masse „klebt“ bei x = 0
• Bei I6 < I3 wird die Klebekraft Null:
Magnetischer Wandler „Typ 1“Statische Stabilität (4)
x
F
gmFF
3
2
2
0 ´)()(),(ex
lhINIxFm
0-e´
)( 4IFm
)( 4IFm
4
)( 3IFm
4X
4´3643 IIII
)( 3IFm
6
6´
5´
)( 5IFm
• Bei Absenkung I6 < I < I4 ist immer noch Fm > FF + m.g = „Kleben“
• Bei I6 ist Fm = FF + m.g (6´); aber instabiles Gleichgewicht m„schnappt“ zum nächsten stabilen Gleichgewichtspunkt Fm = FF + m.g (6);
0)0(),0(´)6( 6 gmFIxFF Fm
• I5 : F(6´) = 0 Masse m fällt vom instabilen Arbeitspunkt 6´ in stabilen Arbeitspunkt 6: Wechsel des AP von 5´ (virtuell, stabil) 6´ (real, instabil) 6 (real, stabil)
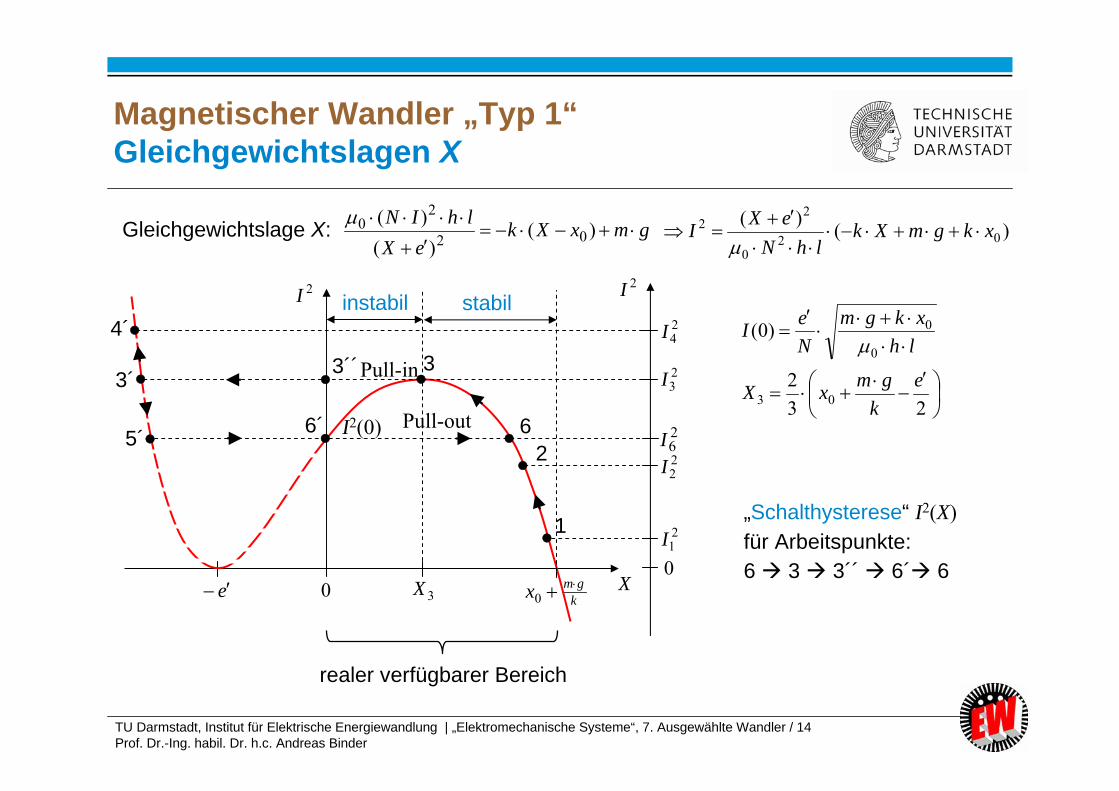
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 14Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Gleichgewichtslagen X
Gleichgewichtslage X: gmxXkeX
lhIN
)()(
)(02
20 )()(
020
22 xkgmXk
lhNeXI
232
)0(
03
0
0
ek
gmxX
lhxkgm
NeI
„Schalthysterese“ I2(X)für Arbeitspunkte: 6 3 3´´ 6´ 6X
24I
23I
26I
21I
22I
03X0 k
gmx 0e
2I2I
4´
realer verfügbarer Bereich
3´
5´ 6´
3
62
1
3´´
stabilinstabil
I2(0)
Pull-in
Pull-out
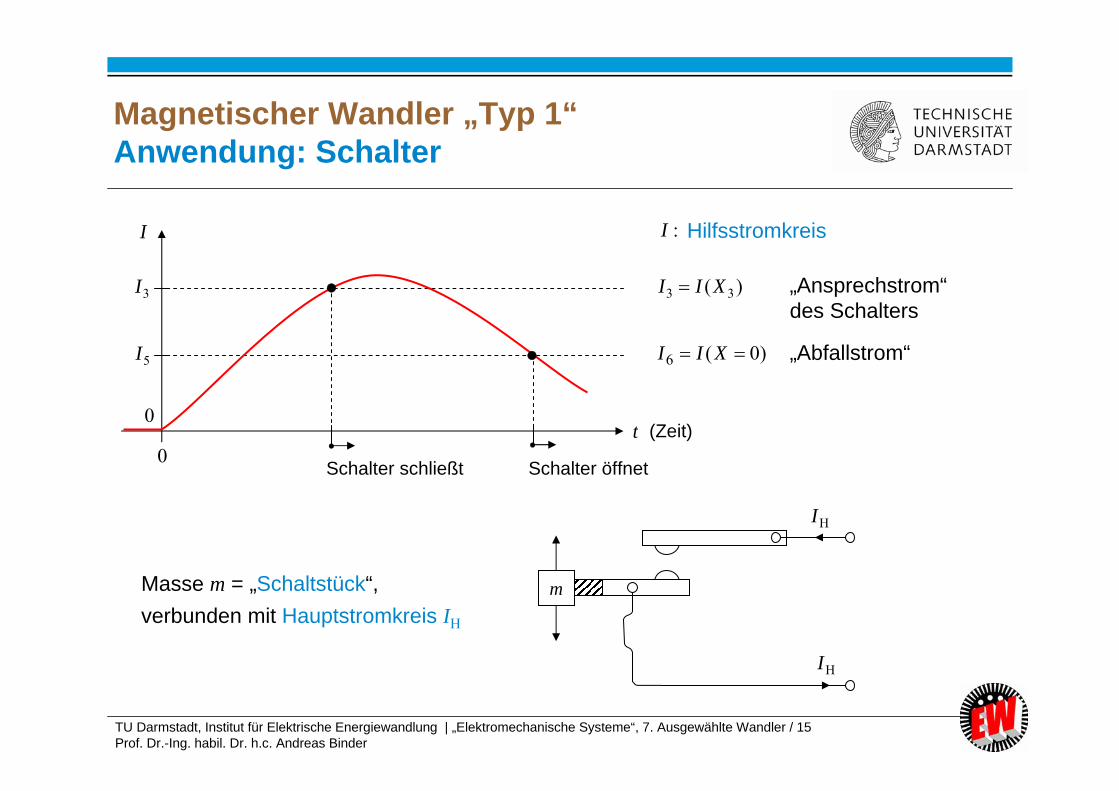
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 15Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Anwendung: Schalter
:I Hilfsstromkreis
)( 33 XII „Ansprechstrom“des Schalters
)0(6 XII „Abfallstrom“
(Zeit)t
I
3I
5I
0
0
Schalter schließt Schalter öffnet
Masse m = „Schaltstück“, verbunden mit Hauptstromkreis IH
m
HI
HI
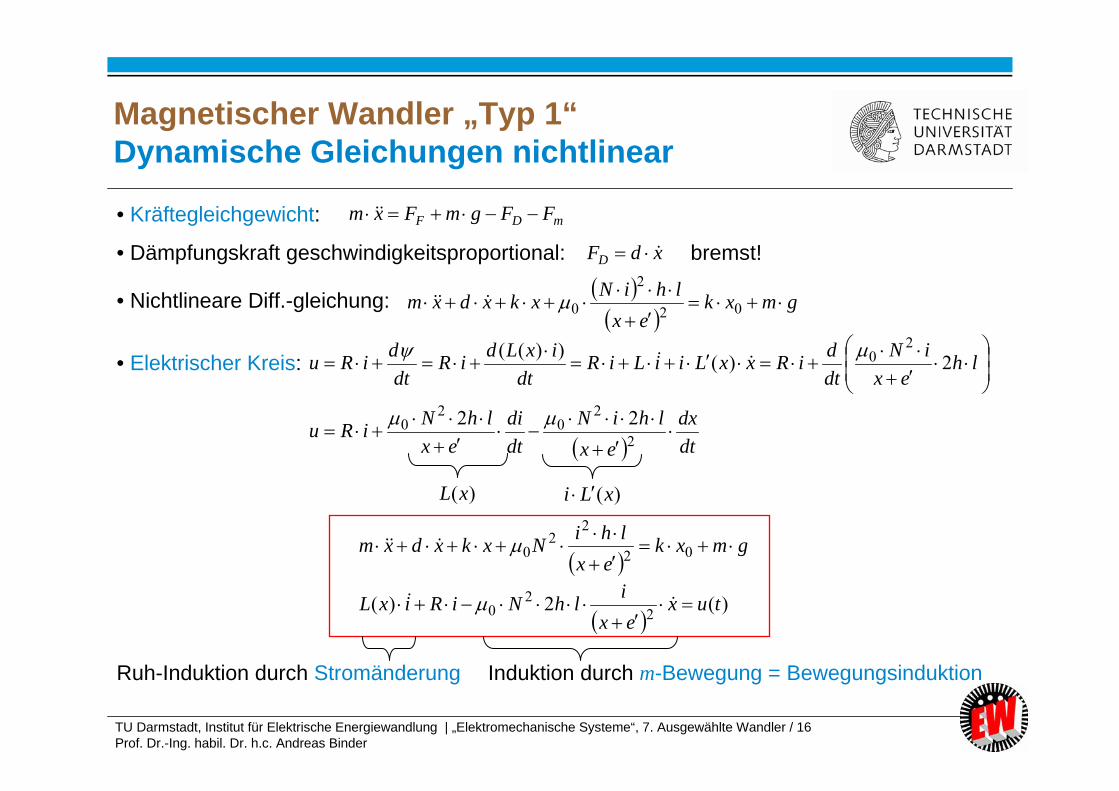
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 16Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
• Kräftegleichgewicht:
• Dämpfungskraft geschwindigkeitsproportional: bremst!
• Nichtlineare Diff.-gleichung:
• Elektrischer Kreis:
Magnetischer Wandler „Typ 1“Dynamische Gleichungen nichtlinear
mDF FFgmFxm
xdFD
gmxkex
lhiNxkxdxm
02
2
0
dtdx
exlhiN
dtdi
exlhNiRu
lhex
iNdtdiRxxLiiLiR
dtixLdiR
dtdiRu
2
20
20
20
22
2)())((
)(xL
gmxk
exlhiNxkxdxm
02
22
0
)(2)( 2
20 tux
exilhNiRixL
Ruh-Induktion durch Stromänderung Induktion durch m-Bewegung = Bewegungsinduktion
)(xLi
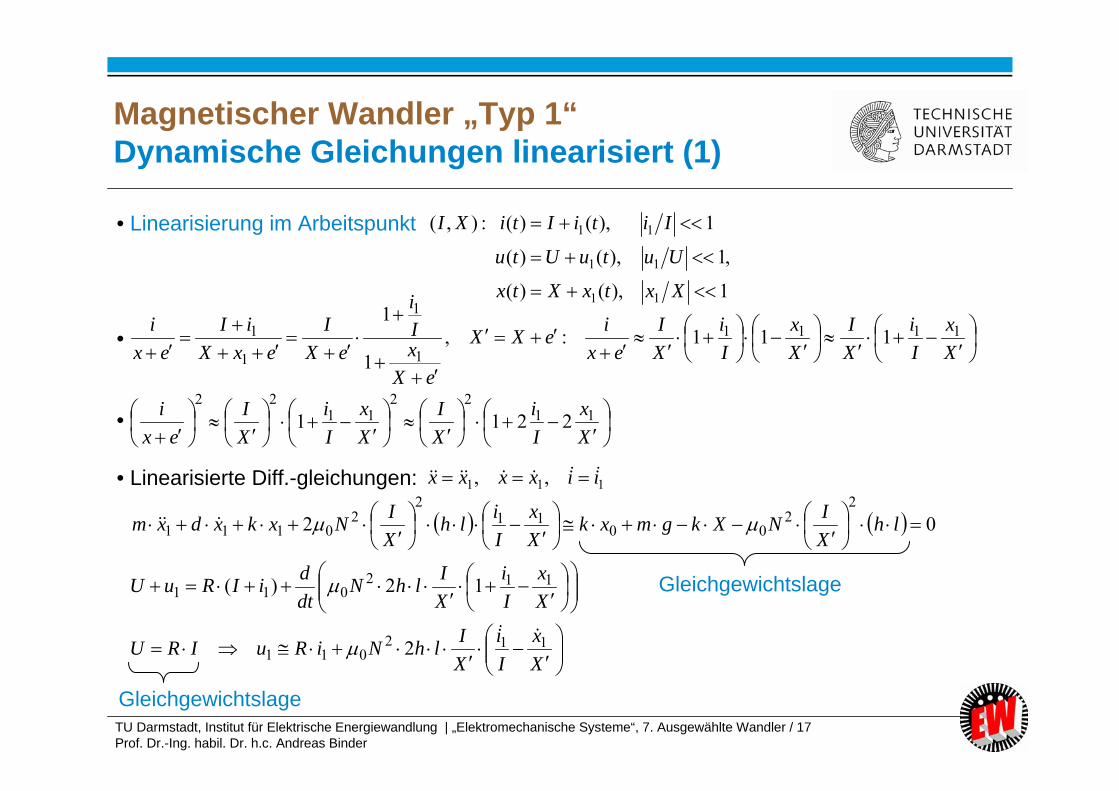
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 17Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Dynamische Gleichungen linearisiert (1)
• Linearisierung im Arbeitspunkt
•
•
• Linearisierte Diff.-gleichungen:
:),( XI
1),()(
,1),()(
1),()(
11
11
11
XxtxXtx
UutuUtu
IitiIti
X
xIi
XI
Xx
Ii
XI
exieXX
eXxIi
eXI
exXiI
exi 1111
1
1
1
1 111:,1
1
Xx
Ii
XI
Xx
Ii
XI
exi 11
2211
222211
111 ,, iixxxx
022
200
112
20111
lh
XINXkgmxk
Xx
Iilh
XINxkxdxm
Gleichgewichtslage
Xx
Ii
XIlhNiRuIRU
Xx
Ii
XIlhN
dtdiIRuU
112011
112011
2
12)(
Gleichgewichtslage
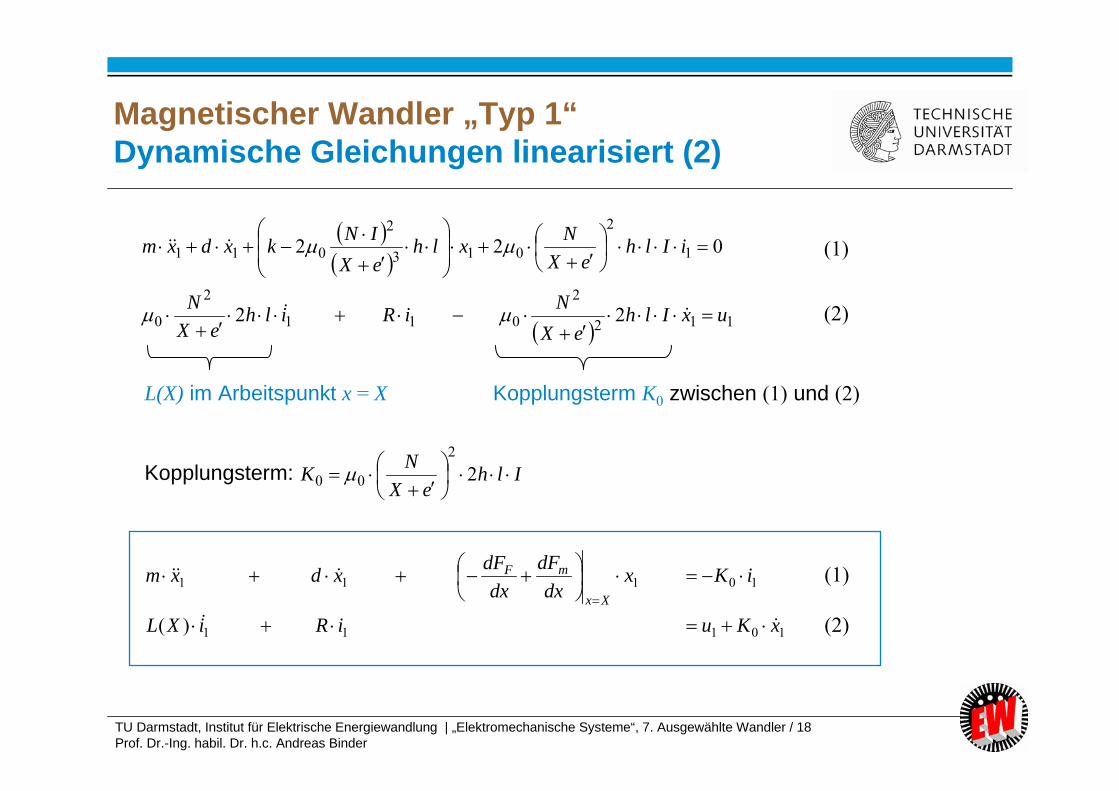
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 18Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Dynamische Gleichungen linearisiert (2)
112
2
011
2
0
1
2
013
2
011
22
022
uxIlheX
NiRilheX
N
iIlheX
NxlheXINkxdxm
(1)
(2)
Kopplungsterm K0 zwischen (1) und (2)L(X) im Arbeitspunkt x = X
Kopplungsterm: IlheX
NK
2
2
00
10111
10111
)( xKuiRiXL
iKxdx
dFdx
dFxdxmXx
mF
(1)
(2)
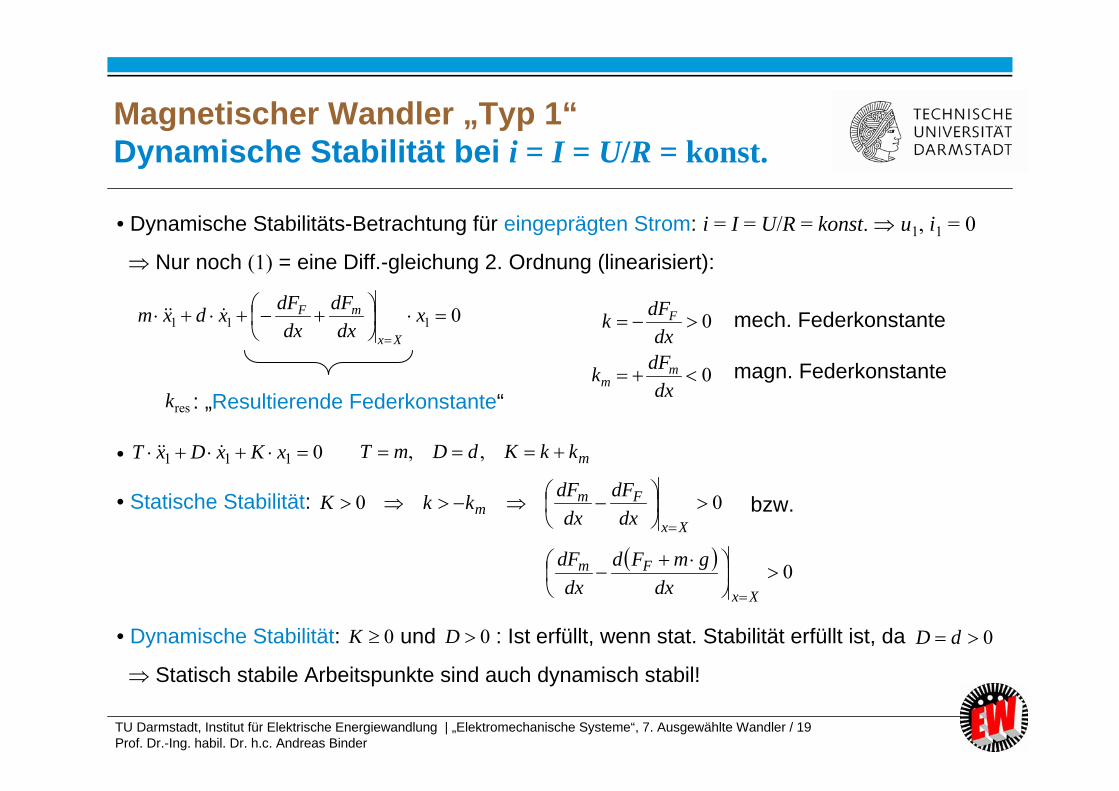
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 19Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Dynamische Stabilität bei i = I = U/R = konst.
• Dynamische Stabilitäts-Betrachtung für eingeprägten Strom: i = I = U/R = konst. u1, i1 = 0
Nur noch (1) = eine Diff.-gleichung 2. Ordnung (linearisiert):
•
• Statische Stabilität:
• Dynamische Stabilität: und : Ist erfüllt, wenn stat. Stabilität erfüllt ist, da
Statisch stabile Arbeitspunkte sind auch dynamisch stabil!
resk
0111
xdx
dFdx
dFxdxmXx
mF
mkkKdDmT ,,
0
0
dxdFk
dxdFk
mm
F
0111 xKxDxT
mech. Federkonstante
magn. Federkonstante: „Resultierende Federkonstante“
00
Xx
Fmm dx
dFdx
dFkkK bzw.
0
Xx
Fmdx
gmFddx
dF
0K 0D 0 dD
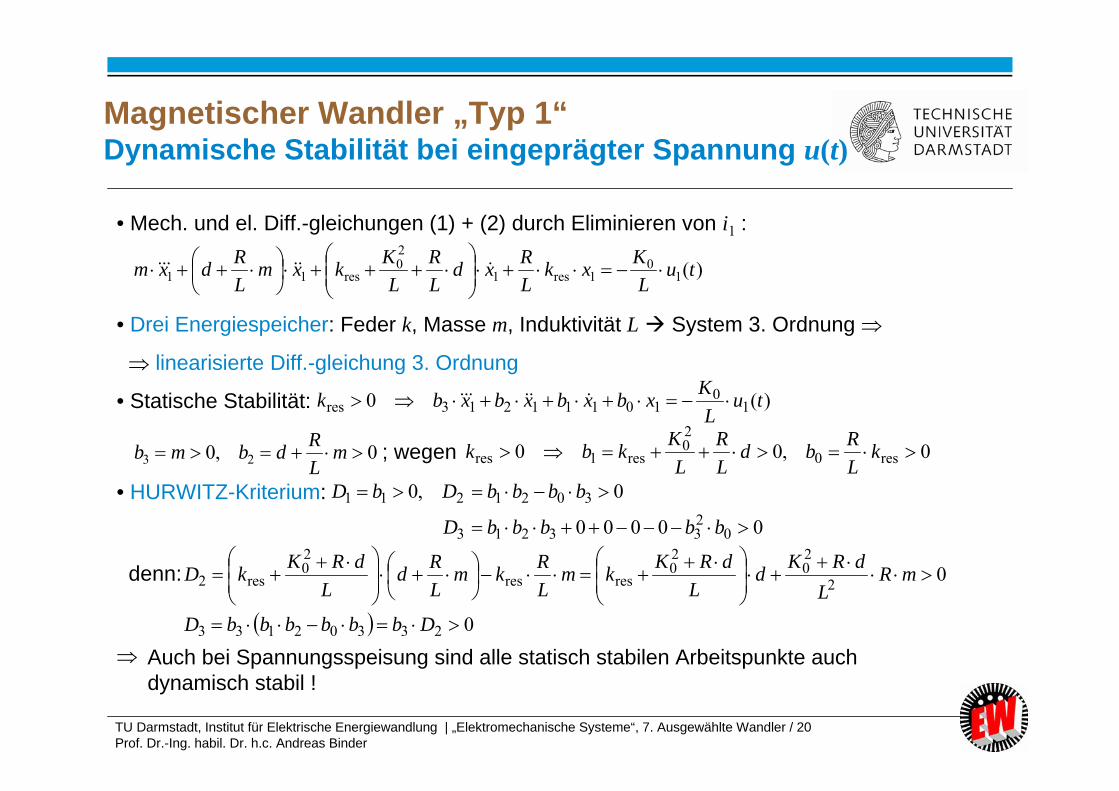
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 20Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Dynamische Stabilität bei eingeprägter Spannung u(t)
• Mech. und el. Diff.-gleichungen (1) + (2) durch Eliminieren von i1 :
• Drei Energiespeicher: Feder k, Masse m, Induktivität L System 3. Ordnung
linearisierte Diff.-gleichung 3. Ordnung
• Statische Stabilität:
; wegen
• HURWITZ-Kriterium:
denn:
0,00 res0
20
res1res kLRbd
LR
LKkbk
)(10
1res1
20
res11 tuL
KxkLRxd
LR
LKkxm
LRdxm
0,0 23 mLRdbmb
)(0 10
10111213res tuL
Kxbxbxbxbk
00000
0,0
0233213
3021211
bbbbbD
bbbbDbD
0
0
23302133
2
20
20
resres
20
res2
DbbbbbbD
mRL
dRKdL
dRKkmLRkm
LRd
LdRKkD
Auch bei Spannungsspeisung sind alle statisch stabilen Arbeitspunkte auch dynamisch stabil !
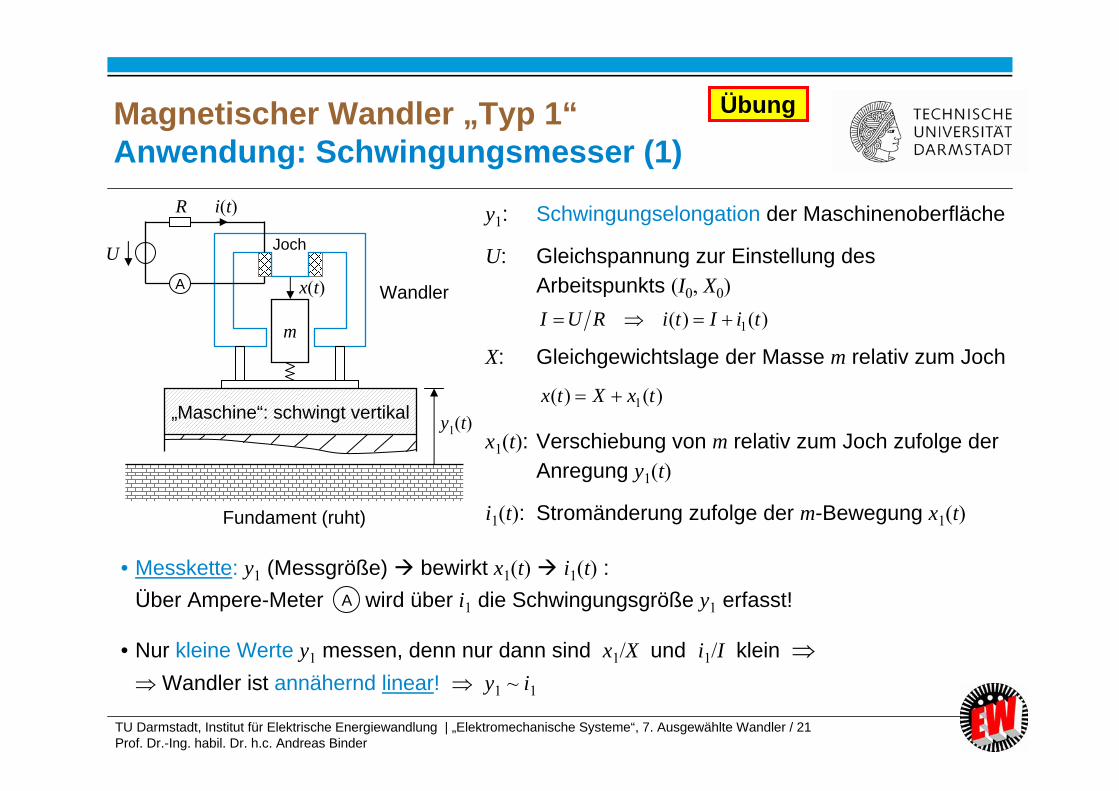
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 21Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Anwendung: Schwingungsmesser (1)
y1: Schwingungselongation der Maschinenoberfläche
U: Gleichspannung zur Einstellung des Arbeitspunkts (I0, X0)
X: Gleichgewichtslage der Masse m relativ zum Joch
x1(t): Verschiebung von m relativ zum Joch zufolge der Anregung y1(t)
i1(t): Stromänderung zufolge der m-Bewegung x1(t)
)()( 1 tiItiRUI
)()( 1 txXtx
• Messkette: y1 (Messgröße) bewirkt x1(t) i1(t) : Über Ampere-Meter wird über i1 die Schwingungsgröße y1 erfasst!
• Nur kleine Werte y1 messen, denn nur dann sind x1/X und i1/I klein Wandler ist annähernd linear! y1 ~ i1
A
Fundament (ruht)
„Maschine“: schwingt vertikal y1(t)
Wandler
m
x(t)A
U
R i(t)
Joch
Übung
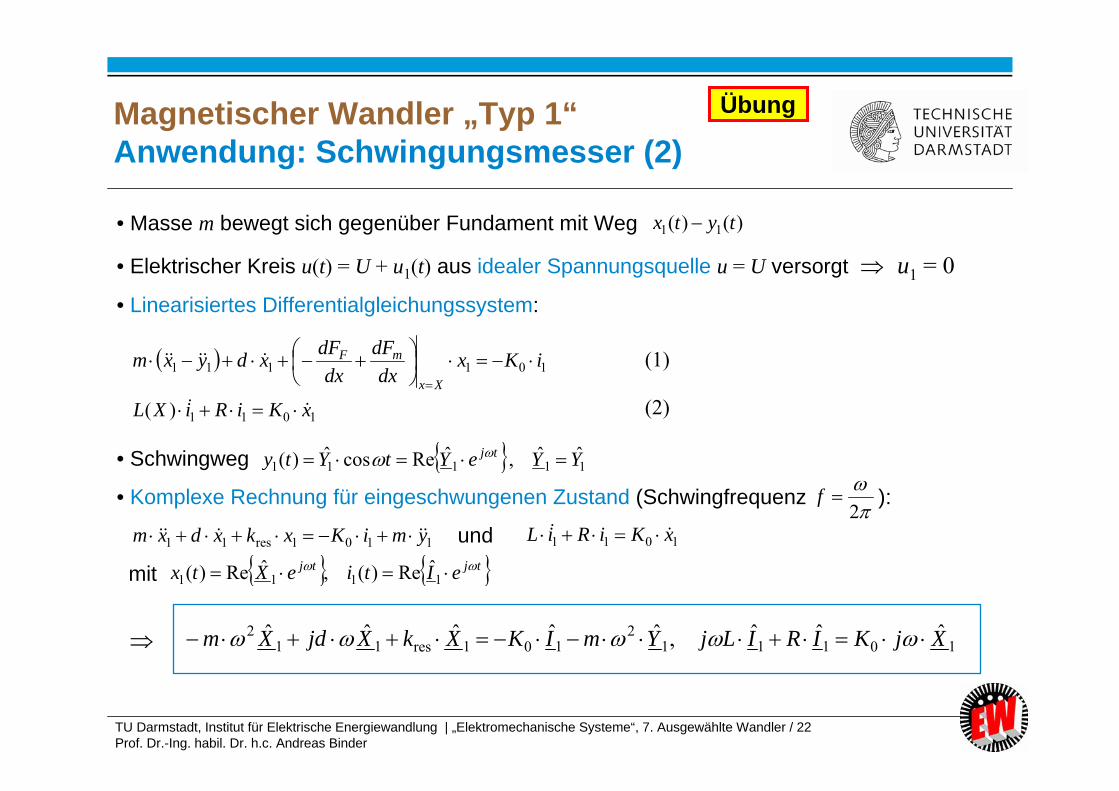
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 22Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Anwendung: Schwingungsmesser (2)
• Masse m bewegt sich gegenüber Fundament mit Weg
• Elektrischer Kreis u(t) = U + u1(t) aus idealer Spannungsquelle u = U versorgt u1 = 0• Linearisiertes Differentialgleichungssystem:
• Schwingweg
• Komplexe Rechnung für eingeschwungenen Zustand (Schwingfrequenz ):
und
mit
)()( 11 tytx
1011
101111
)( xKiRiXL
iKxdx
dFdx
dFxdyxmXx
mF
11111ˆˆ,ˆRecosˆ)( YYeYtYty tj
2
f
1101res11 ymiKxkxdxm 1011 xKiRiL
tjtj eItieXtx 1111ˆRe)(,ˆRe)(
101112
101res112 ˆˆˆ,ˆˆˆˆˆ XjKIRILjYmIKXkXjdXm
(1)
(2)
Übung
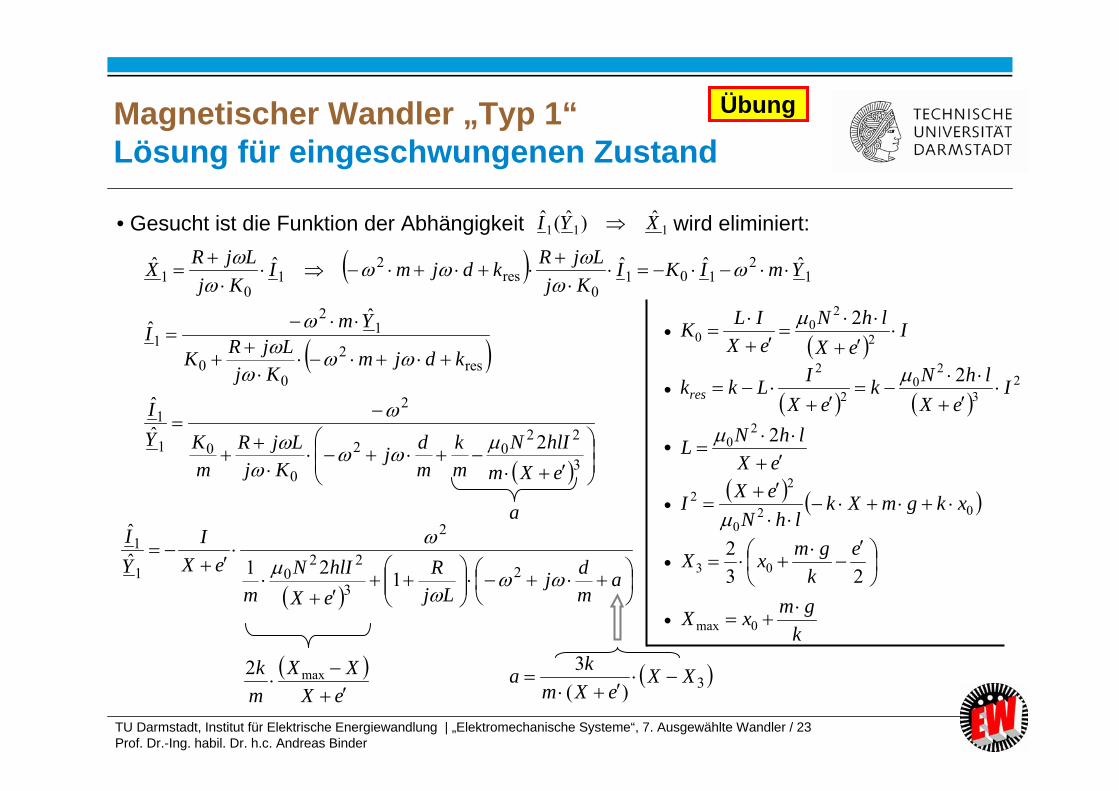
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 23Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Lösung für eingeschwungenen Zustand
• Gesucht ist die Funktion der Abhängigkeit wird eliminiert:111ˆ)ˆ(ˆ XYI
3
2202
0
0
2
1
1
res2
00
12
1
12
1010
res2
10
1
2ˆˆ
ˆˆ
ˆˆˆˆˆ
eXmhlIN
mk
mdj
KjLjR
mKY
I
kdjmKj
LjRK
YmI
YmIKIKj
LjRkdjmIKj
LjRX
a
mdj
LjR
eXhlIN
meX
IYI
23
220
2
1
1
121ˆˆ
a
eX
XXmk
max2 3)(3 XX
eXmka
•
•
•
•
•
•
I
eXlhN
eXILK
2
20
02
2
3
20
2
2 2 IeX
lhNkeX
ILkkres
eXlhNL
22
0
020
22 xkgmXk
lhNeXI
23
203
ek
gmxX
kgmxX
0max
Übung
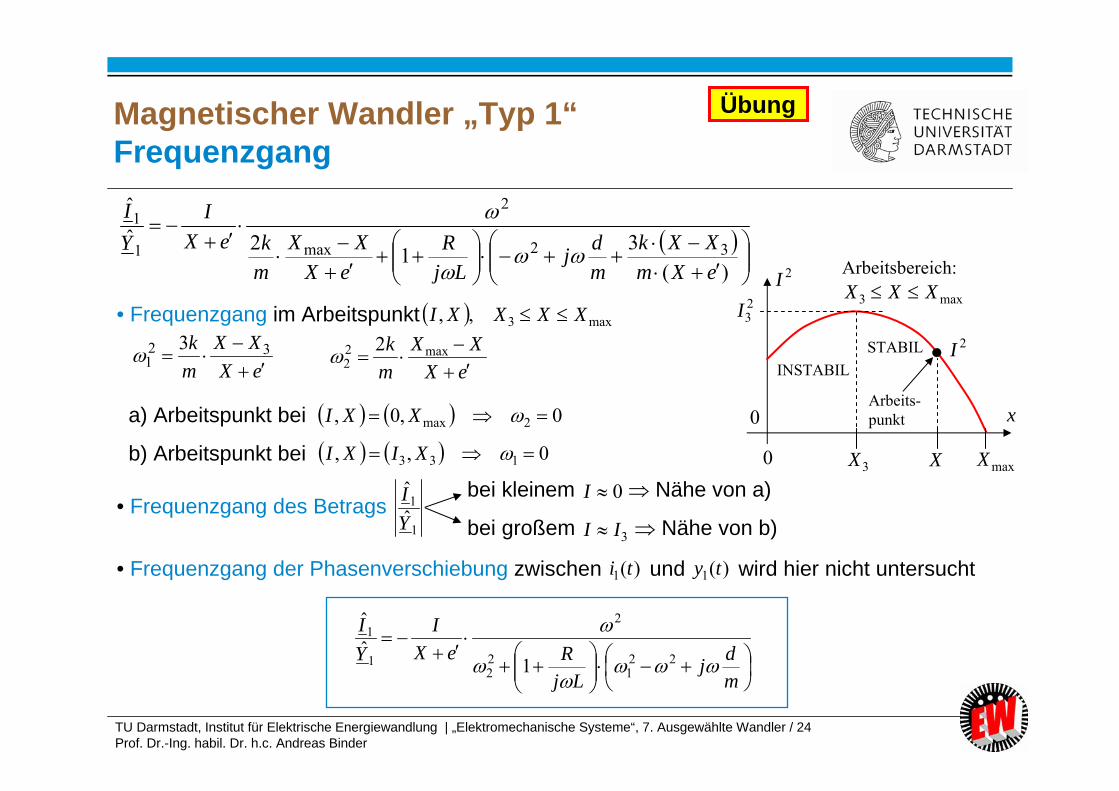
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 24Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
• Frequenzgang im Arbeitspunkt
a) Arbeitspunkt bei
b) Arbeitspunkt bei
• Frequenzgang des Betrags
• Frequenzgang der Phasenverschiebung zwischen und wird hier nicht untersucht
bei kleinem Nähe von a)
bei großem Nähe von b)
Magnetischer Wandler „Typ 1“Frequenzgang
)(312ˆ
ˆ
32max
2
1
1
eXmXXk
mdj
LjR
eXXX
mkeX
IYI
3II
max3,, XXXXI
eXXX
mk
321
3
0,0, 2max XXI
eXXX
mk
max22
2
0,, 133 XIXI
1
1ˆˆ
YI 0I
)(1 ti )(1 ty
mdj
LjReX
IYI
22
122
2
1
1
1ˆˆ
2I
0
0
INSTABIL
3X X maxX
x
STABIL
max3 XXX
2I
Arbeits-punkt
Arbeitsbereich:
23I
Übung
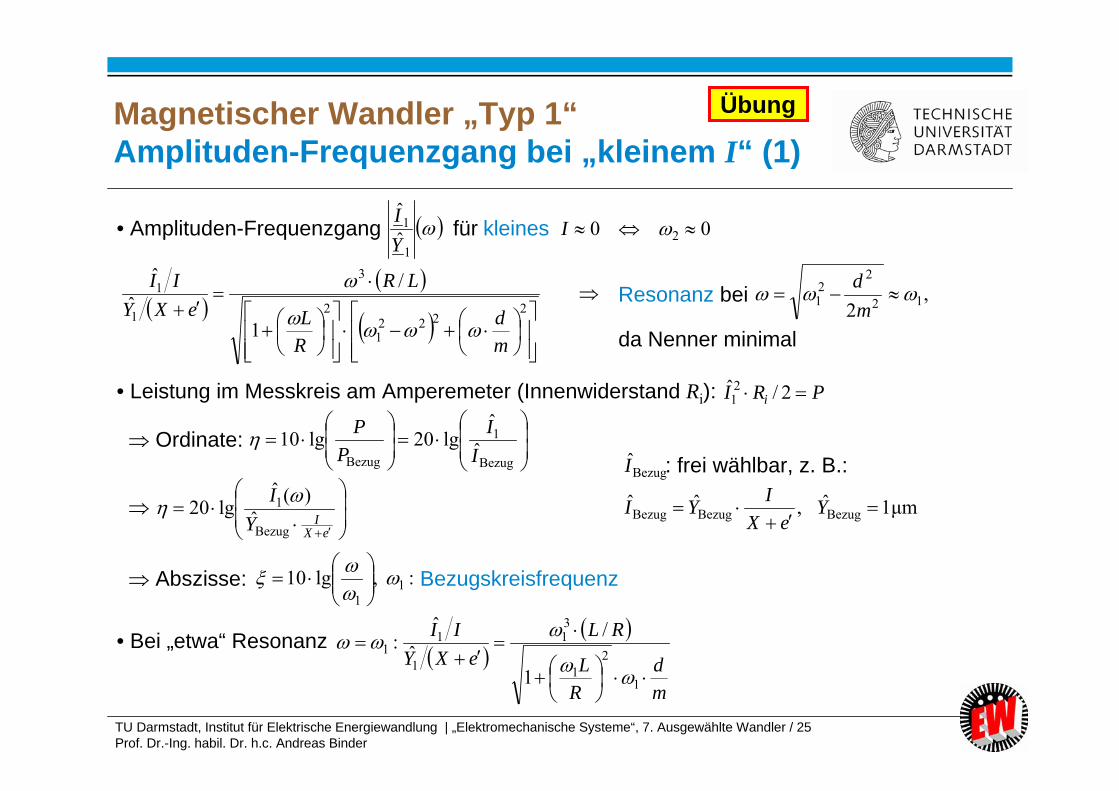
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 25Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Amplituden-Frequenzgang bei „kleinem I“ (1)
• Amplituden-Frequenzgang für kleines
• Leistung im Messkreis am Amperemeter (Innenwiderstand Ri):
Ordinate:
Abszisse: Bezugskreisfrequenz
• Bei „etwa“ Resonanz
00 2 I
2222
1
2
3
1
1
1
/ˆ
ˆ
md
RL
LReXY
II
1
1ˆˆ
YI
Resonanz bei
da Nenner minimal
,2 12
221
md
PRI i 2/ˆ21
Bezug
1
Bezugˆ
ˆlg20lg10
II
PP
eXIY
I
Bezug
1ˆ
)(ˆlg20
:,lg10 11
md
RL
RLeXY
II
1
21
31
1
11
1
/ˆ
ˆ:
BezugI : frei wählbar, z. B.:
μm1ˆ,ˆˆBezugBezugBezug
Y
eXIYI
Übung
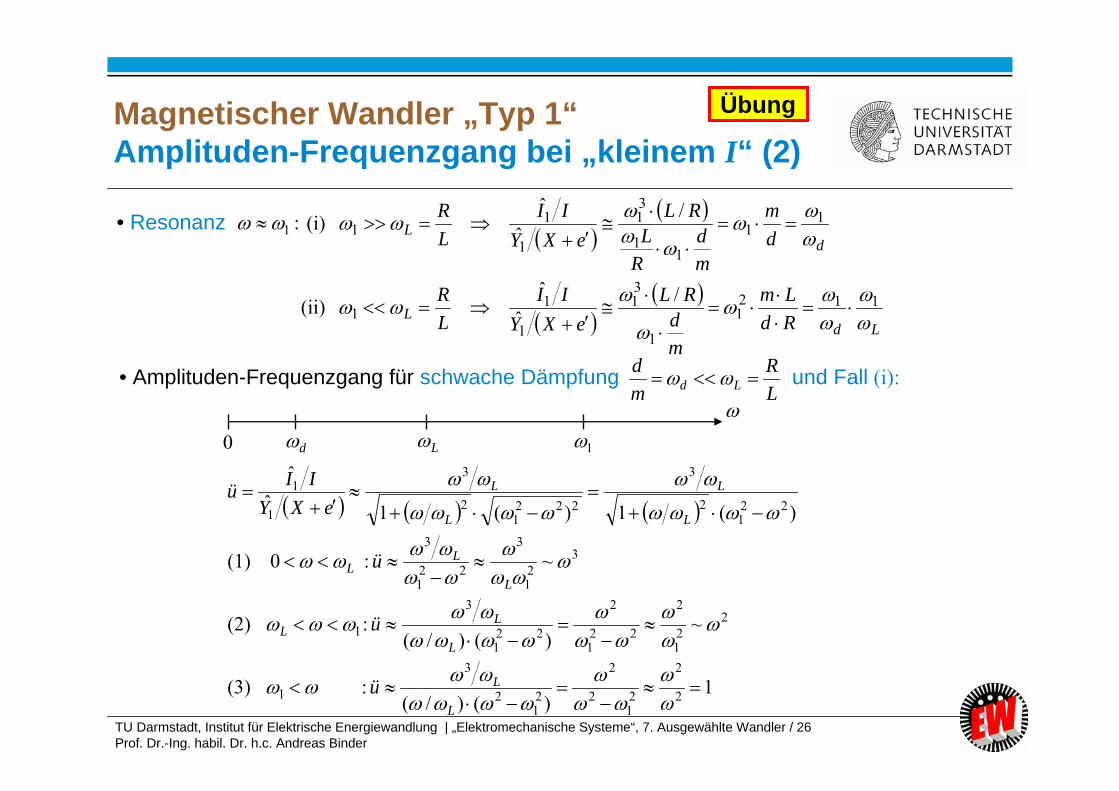
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 26Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Amplituden-Frequenzgang bei „kleinem I“ (2)
• Resonanz :1
LR
md
Ld
1)()/(
:(3)
~)()/(
:(2)
~:0(1)
)(1)(1ˆˆ
2
2
21
2
2
21
2
3
1
221
2
221
2
221
3
1
321
3
221
3
221
2
3
2221
2
3
1
1
L
L
L
LL
L
LL
L
L
L
L
ü
ü
ü
eXYIIü
LdL
dL
RdLm
md
RLeXY
IILR
dm
md
RL
RLeXY
IILR
1121
1
31
1
11
11
11
31
1
11
/ˆ
ˆ(ii)
/ˆ
ˆ(i)
d L 10
• Amplituden-Frequenzgang für schwache Dämpfung und Fall (i):
Übung
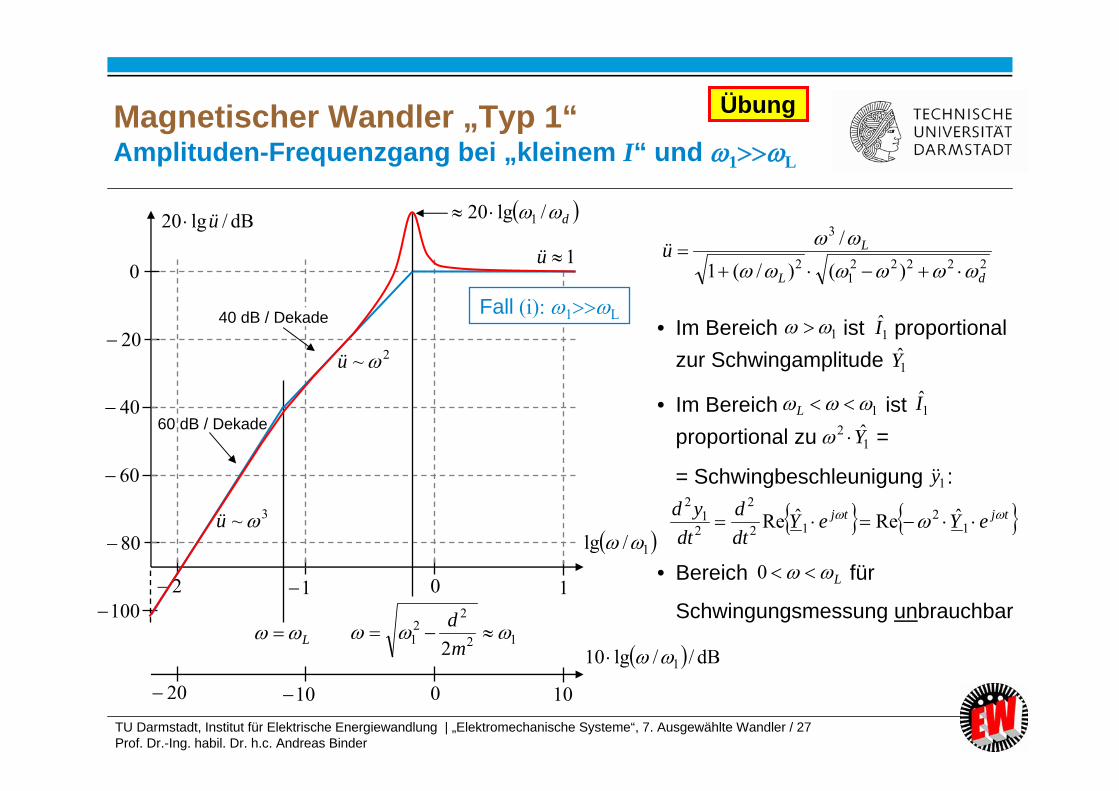
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 27Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Amplituden-Frequenzgang bei „kleinem I“ und 1L
• Im Bereich ist proportional zur Schwingamplitude
• Im Bereich ist proportional zu =
= Schwingbeschleunigung :
• Bereich für
Schwingungsmessung unbrauchbar
222221
2
3
)()/(1/
dL
Lü
1 1I
1Y
1 L 1I
12 Y
1y
tjtj eYeYdtd
dtyd 1
212
2
21
2ˆReˆRe
L 0
60 dB / Dekade
L
0
12
221 2
md
dB/lg20 ü
20
60
40
80
100
1/lg
dB//lg10 1
2 1 0 1
20 10 0 10
1ü
d /lg20 1
2~ü
3~ ü
40 dB / Dekade Fall (i): 1L
Übung
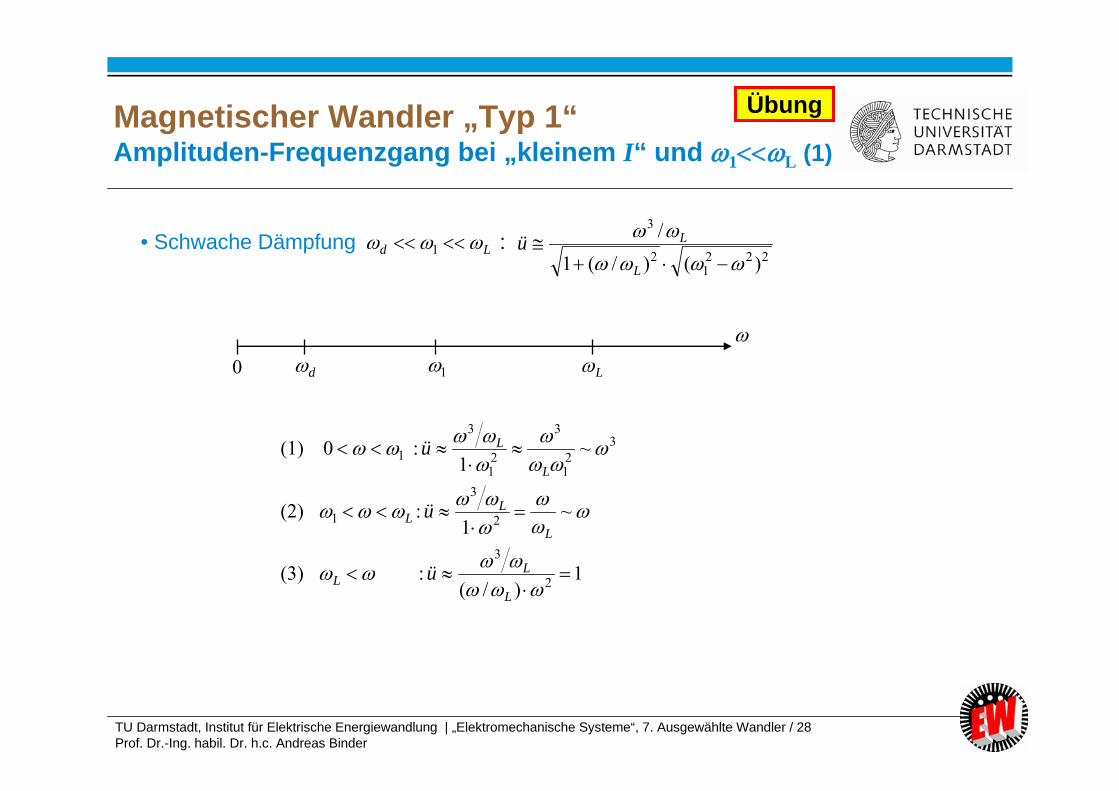
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 28Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Amplituden-Frequenzgang bei „kleinem I“ und 1L (1)
2221
2
3
)()/(1/
L
Lü• Schwache Dämpfung :
1)/(
:(3)
~1
:(2)
~1
:0(1)
2
3
2
3
1
321
3
21
3
1
L
LL
L
LL
L
L
ü
ü
ü
d 1 L0
Ld 1
Übung
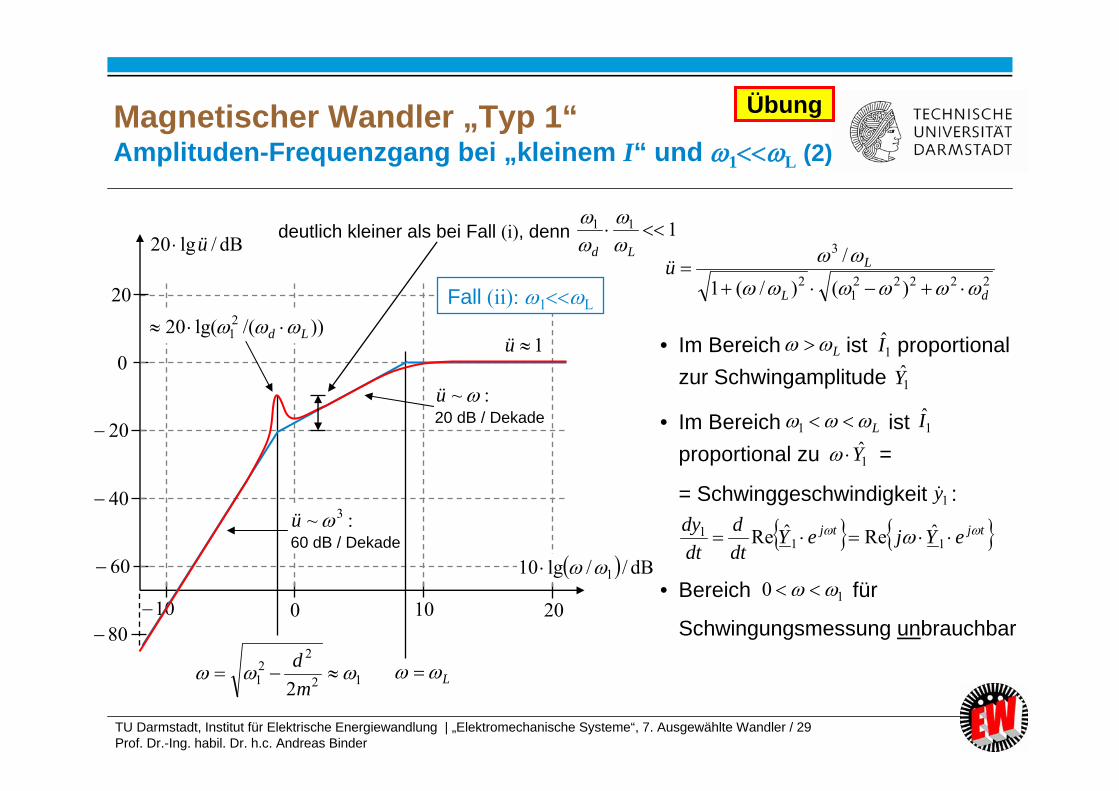
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 29Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Amplituden-Frequenzgang bei „kleinem I“ und 1L (2)
• Im Bereich ist proportional zur Schwingamplitude
• Im Bereich ist proportional zu =
= Schwinggeschwindigkeit :
• Bereich für
Schwingungsmessung unbrauchbar
222221
2
3
)()/(1
/
dL
Lü
L 1I
1Y
L 1 1I
1Y
1y
tjtj eYjeYdtd
dtdy 11
1 ˆReˆRe
10
12
221 2
md
L
20
dB/lg20 ü
0
40
20
60
8010 0 10 20
1ü))/(lg(20 2
1 Ld
:~ü
:~ 3ü
20 dB / Dekade
Fall (ii): 1L
deutlich kleiner als bei Fall (i), denn
60 dB / Dekade dB//lg10 1
111 Ld
Übung
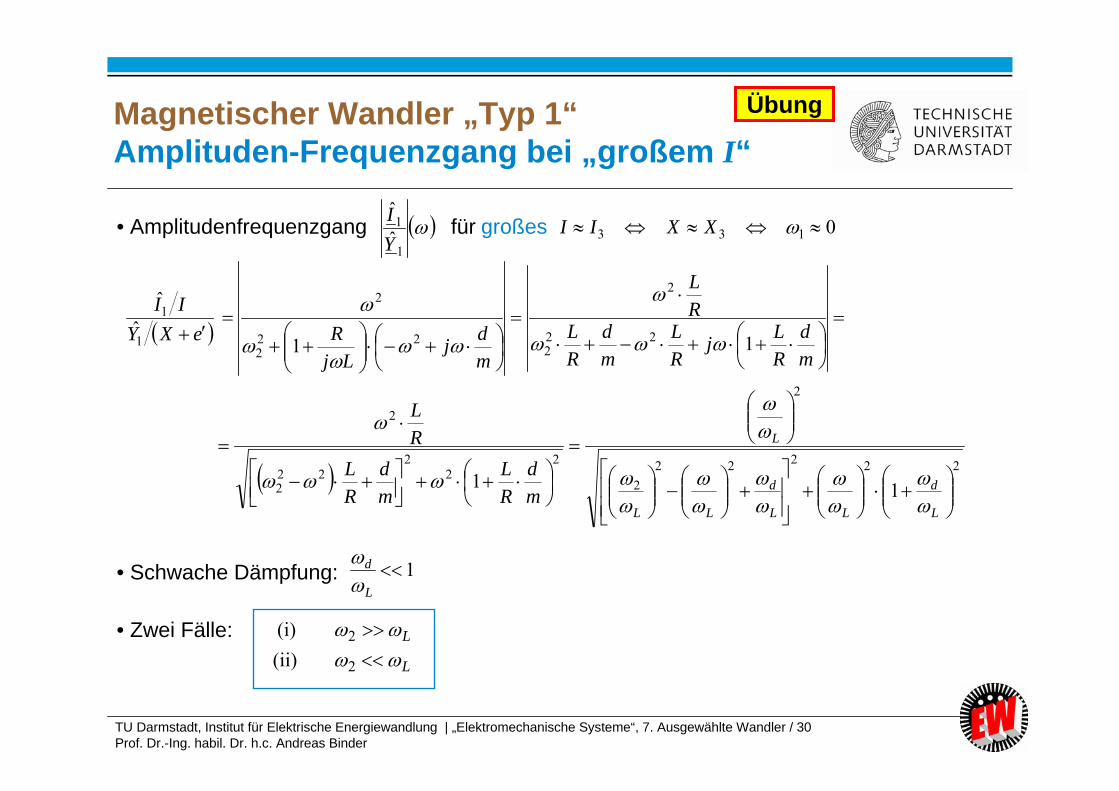
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 30Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Amplituden-Frequenzgang bei „großem I“
• Amplitudenfrequenzgang für großes
• Schwache Dämpfung:
• Zwei Fälle:
0133 XXII 1
1ˆˆ
YI
222222
2
22
222
2
2
222
2
222
2
1
1
11
11ˆ
ˆ
L
d
LL
d
LL
L
md
RL
md
RL
RL
md
RLj
RL
md
RL
RL
mdj
LjReXY
II
1L
d
L
L
2
2
(ii)(i)
Übung
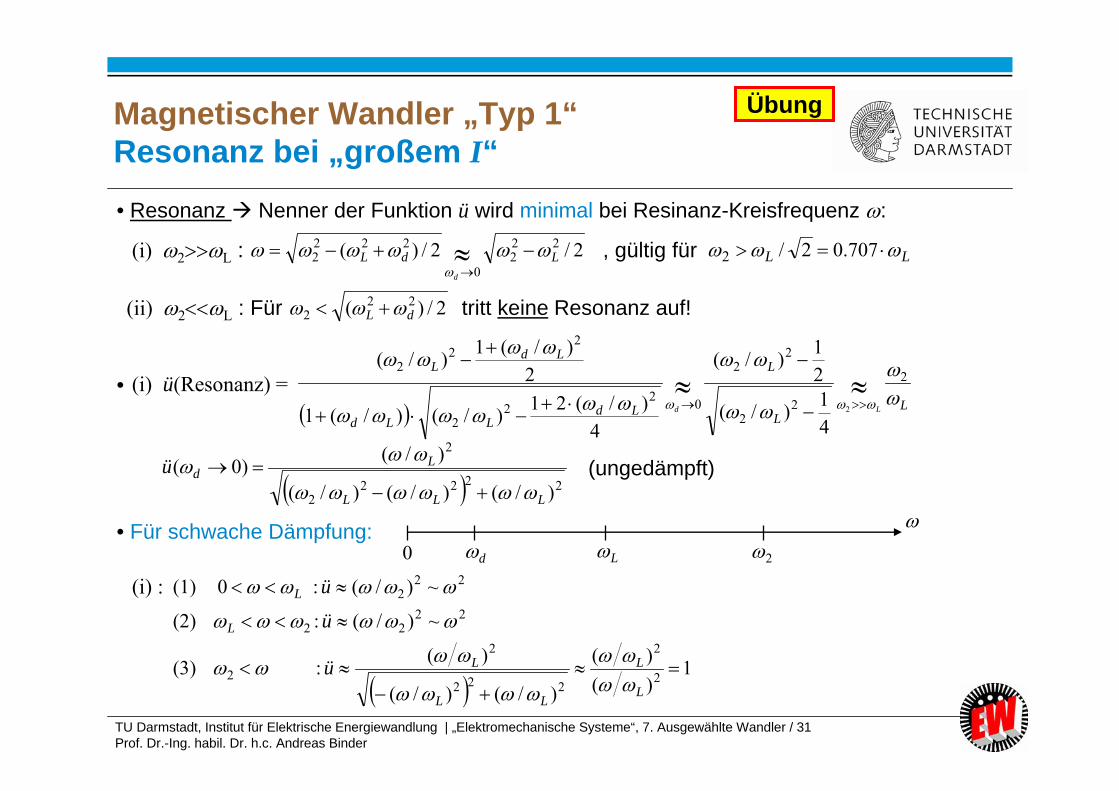
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 31Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
(i) 2L : , gültig für
(ii) 2L : Für tritt keine Resonanz auf!
(i) ü(Resonanz) =
Magnetischer Wandler „Typ 1“Resonanz bei „großem I“• Resonanz Nenner der Funktion ü wird minimal bei Resinanz-Kreisfrequenz :
2/)( 222 dL
1
)()(
)/()/(
)(:(3)
~)/(:(2)
~)/(:0(1)
2
2
222
2
2
2222
222
L
L
LL
L
L
L
ü
ü
ü
d L 20
2/2/)( 222
0
2222 LdL
d
LL 707.02/2
(i) :
• Für schwache Dämpfung:
LL
L
LdLLd
LdL
Ld
2
22
22
022
2
22
2
2
41)/(
21)/(
4)/(21)/()/(1
2)/(1)/(
•
22222
2
)/()/()/(
)/()0(LLL
Ldü
(ungedämpft)
Übung
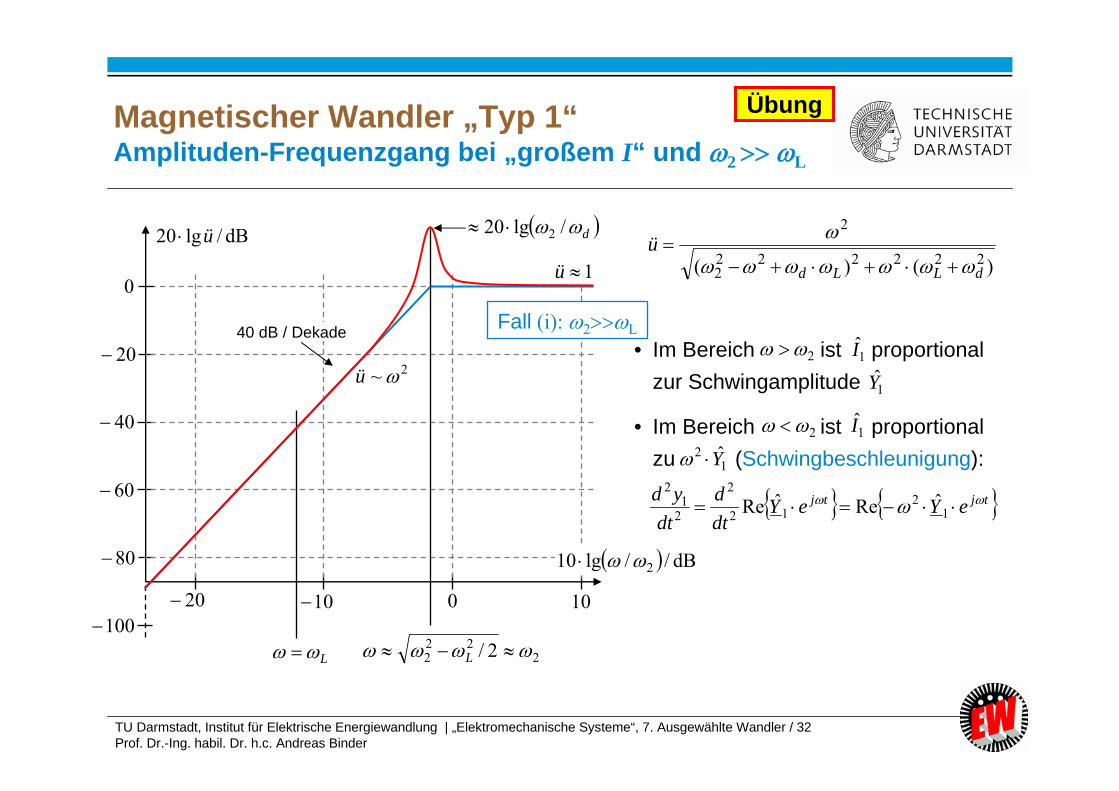
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 32Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Amplituden-Frequenzgang bei „großem I“ und 2 L
)()( 2222222
2
dLLd
ü
• Im Bereich ist proportional zur Schwingamplitude
• Im Bereich ist proportional zu (Schwingbeschleunigung):
2 1I
1Y
2 1I
12 Y
tjtj eYeYdtd
dtyd 1
212
2
21
2ˆReˆRe
L
0
222
2 2/ L
dB/lg20 ü
20
60
40
80
10020 10 0 10
1ü
d /lg20 2
2~ ü
40 dB / Dekade Fall (i): 2L
dB//lg10 2
Übung
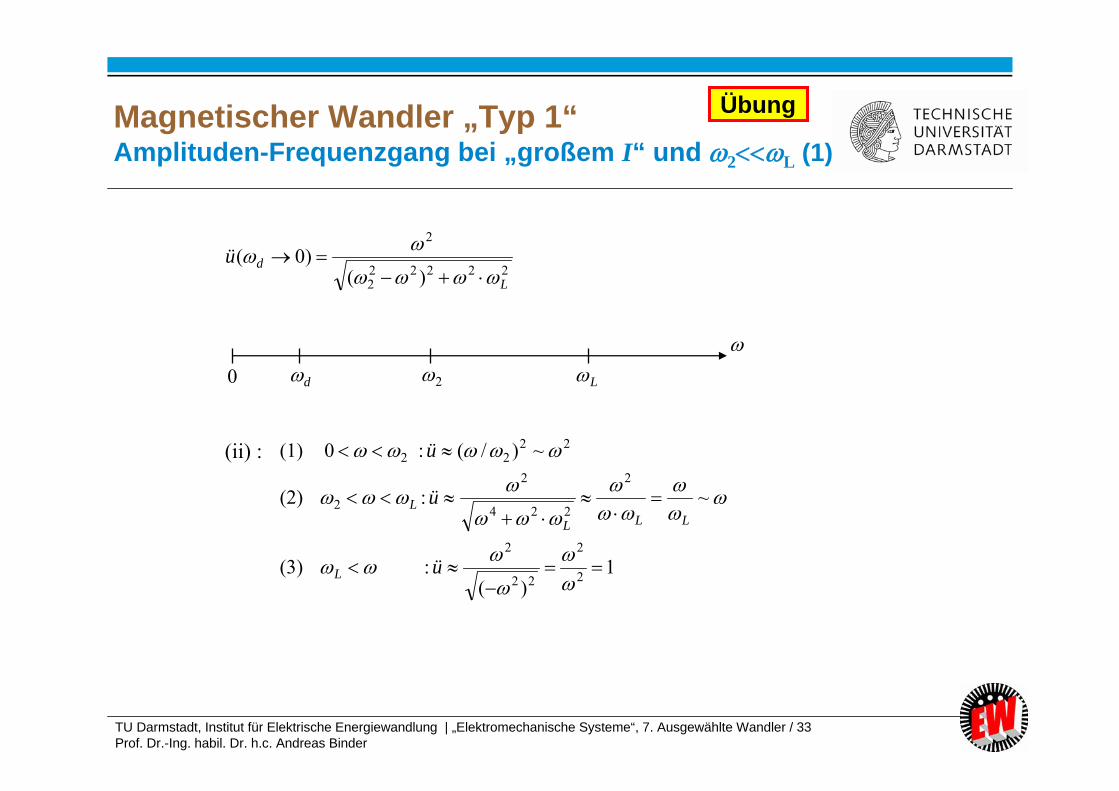
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 33Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Amplituden-Frequenzgang bei „großem I“ und 2L (1)
222222
2
)()0(
Ldü
1)(
:(3)
~:(2)
~)/(:0(1)
2
2
22
2
2
224
2
2
2222
ü
ü
ü
L
LLLL
d 2 L0
(ii) :
Übung
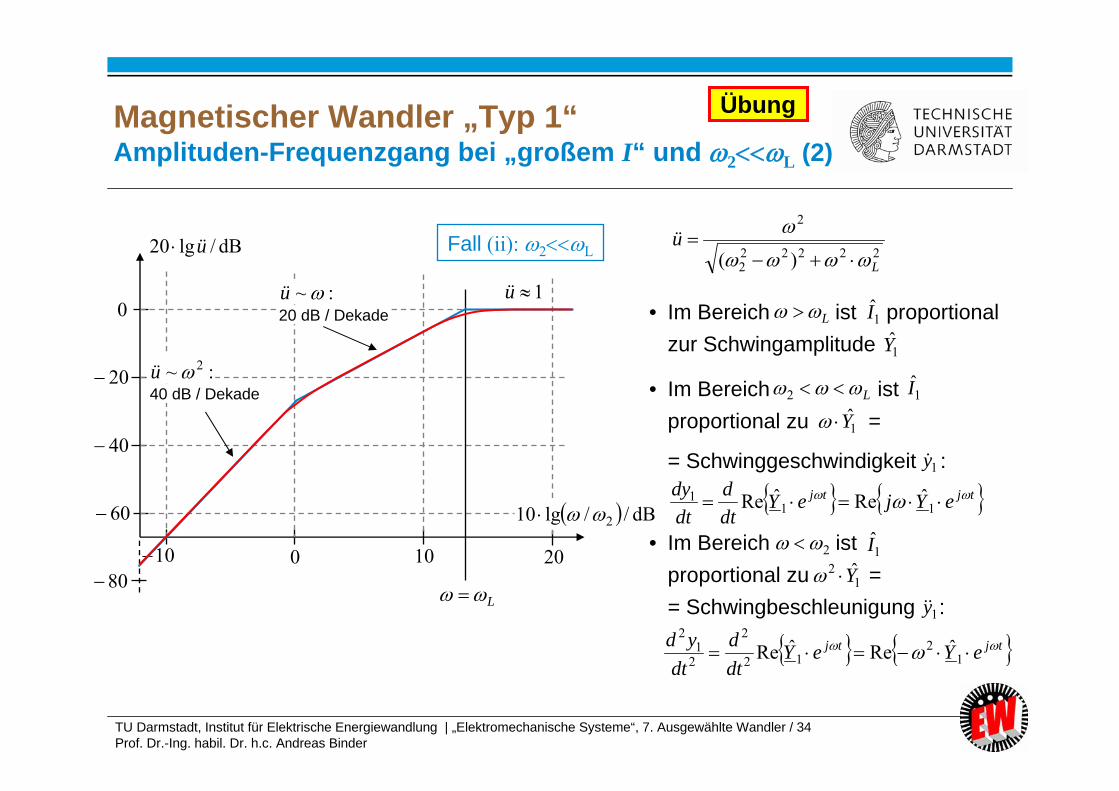
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 34Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 1“Amplituden-Frequenzgang bei „großem I“ und 2L (2)
222222
2
)( L
ü
• Im Bereich ist proportional zur Schwingamplitude
• Im Bereich ist proportional zu =
= Schwinggeschwindigkeit :
• Im Bereich ist proportional zu = = Schwingbeschleunigung :
L 1I
1Y
L 2 1I
1Y
1y
tjtj eYjeYdtd
dtdy 11
1 ˆReˆRe
2
tjtj eYeYdtd
dtyd 1
212
2
21
2ˆReˆRe
1I
12 Y
1yL
dB/lg20 ü
0
40
20
60
8010 0 10 20
1ü:~ü
:~ 2ü
20 dB / Dekade
Fall (ii): 2L
40 dB / Dekade
dB//lg10 2
Übung
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 35Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme7. Analyse ausgewählter elektromechanischer Wandler
• Magnetischer Wandler „Typ 1“• Magnetischer Wandler „Typ 2“• Kapazitiver Wandler „Typ 3“
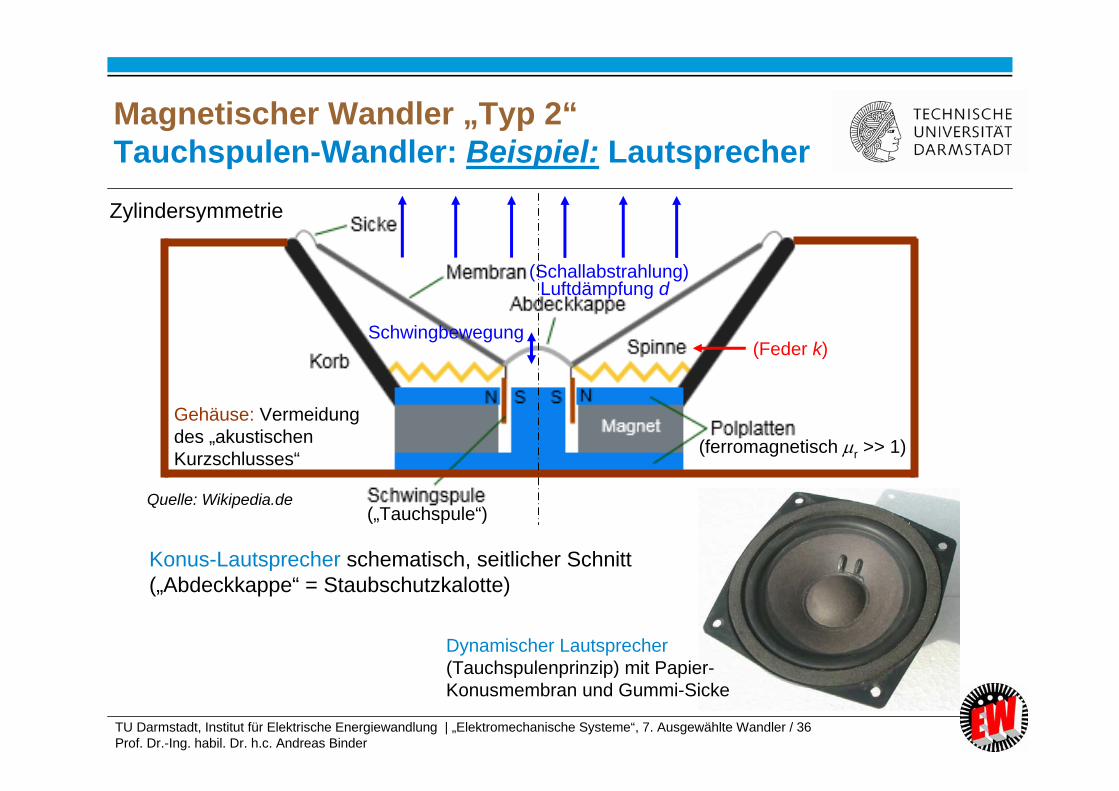
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 36Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“Tauchspulen-Wandler: Beispiel: Lautsprecher
Konus-Lautsprecher schematisch, seitlicher Schnitt („Abdeckkappe“ = Staubschutzkalotte)
(ferromagnetisch r >> 1)
(„Tauchspule“)
(Schallabstrahlung)
Gehäuse: Vermeidung des „akustischen Kurzschlusses“
(Feder k)Schwingbewegung
Luftdämpfung d
Zylindersymmetrie
Quelle: Wikipedia.de
Dynamischer Lautsprecher(Tauchspulenprinzip) mit Papier-Konusmembran und Gummi-Sicke

TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 37Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“Lautsprecherkorb mit entfernter Membran
Lautsprecherkorb mit entfernter MembranQuelle: Wikipedia.dePatrick.Nordmann, CC BY-SA 4.0
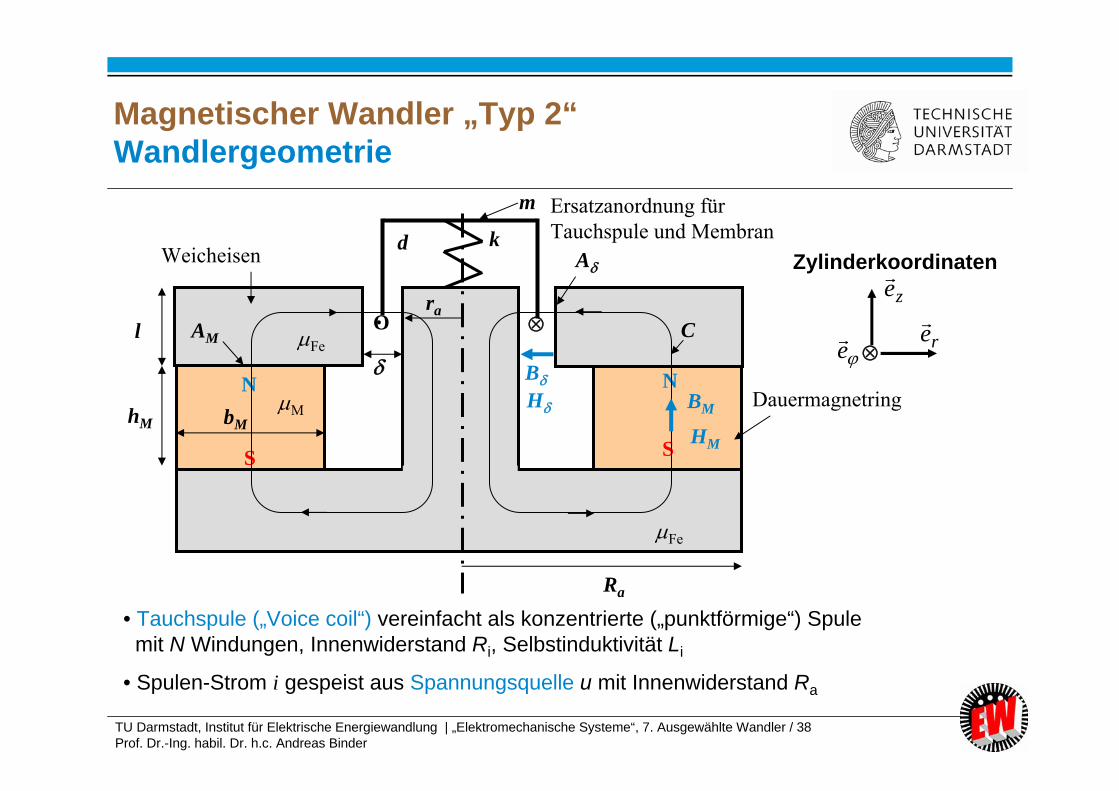
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 38Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“Wandlergeometrie
• Tauchspule („Voice coil“) vereinfacht als konzentrierte („punktförmige“) Spule mit N Windungen, Innenwiderstand Ri, Selbstinduktivität Li
• Spulen-Strom i gespeist aus Spannungsquelle u mit Innenwiderstand Ra
O
d k
m
ra
Ra
hM bM
N N
SS
l AM
A
C
BM
HM
BHM
Fe
Fe
Weicheisen
Dauermagnetring
Ersatzanordnung für Tauchspule und Membran
reze
e
Zylinderkoordinaten
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 39Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“Lautsprecherfunktion
• Spannungsquelle u als „Sprachsignal“ = Überlagerung unterschiedlicher Sinusspannungen unterschiedlicher Amplituden und Frequenzen f
• Spannungsquelle treibt Strom i, der mit Luftspaltfeld B vertikale LORENTZ-Kraft Fm ~ ierzeugt, die die Tauchspule und damit die Lautsprechermembran im Takt des Stromsignals bewegt
• Die Lautsprechermembran verdichtet / verdünnt die Luft = Abstrahlung von Schallwellen(Longitudinalwellen)
• Dämpfung: d = dR + dS, dR: Reibung bei Bewegung,dS: Schallwellen stellen „akustische Dämpfungskraft“ ~ dS(f) dar. Hier vereinfacht: d = konst. (frequenzunabhängig)
• Analyse des Wandlerverhaltens:1. Magnetfeldberechnung2. Dynamische Gleichungen erstellen3. Gleichgewichtspunkte als Arbeitspunkte bestimmen4. Frequenzgang des Verhaltens „Membranbewegung“ z(t)
in Abhängigkeit von u(t) bestimmenErwünscht: z(t) ~ u(t)
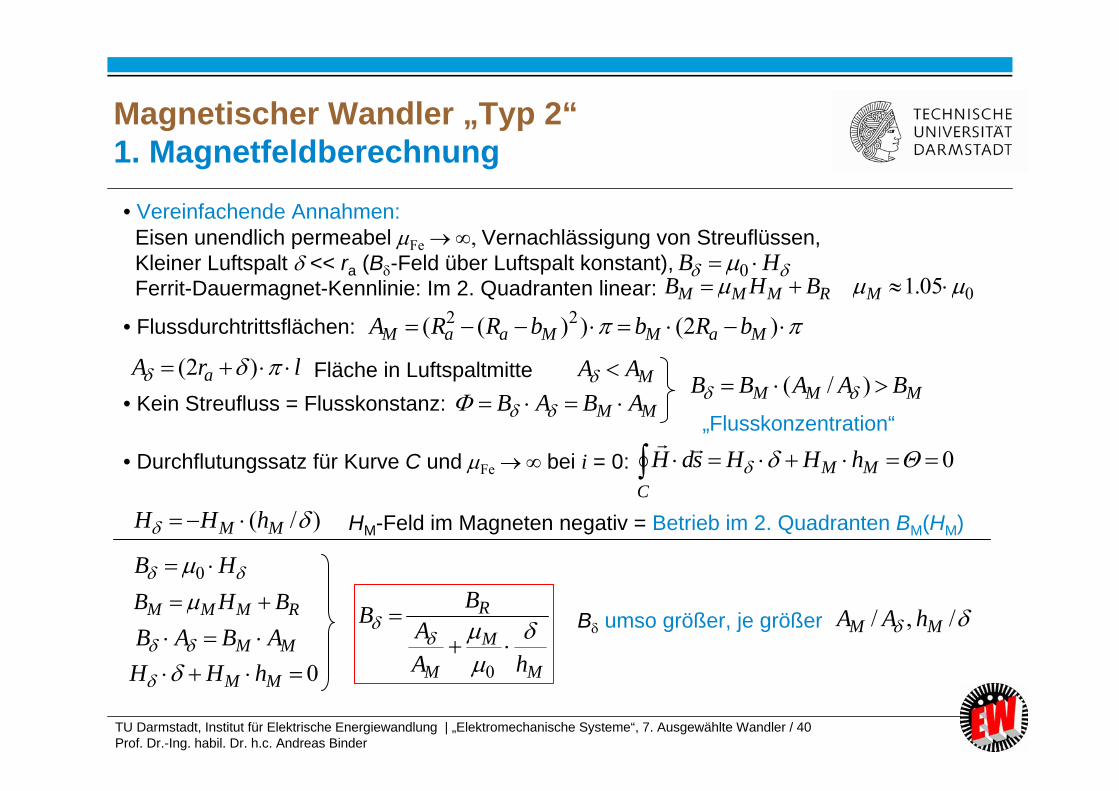
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 40Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“1. Magnetfeldberechnung
• Vereinfachende Annahmen: Eisen unendlich permeabel Fe , Vernachlässigung von Streuflüssen,Kleiner Luftspalt << ra (B-Feld über Luftspalt konstant),Ferrit-Dauermagnet-Kennlinie: Im 2. Quadranten linear:
• Flussdurchtrittsflächen:
• Kein Streufluss = Flusskonstanz:
• Durchflutungssatz für Kurve C und Fe bei i = 0:
005.1 MRMMM BHB
)2())(( 22MaMMaaM bRbbRRA
lrA a )2( Fläche in Luftspaltmitte
MM ABAB
0 MMC
hHHsdH
)/( MM hHH
HB 0
HM-Feld im Magneten negativ = Betrieb im 2. Quadranten BM(HM)
MAA
„Flusskonzentration“MMM BAABB )/(
HB 0
RMMM BHB
MM ABAB
0 MM hHH M
M
M
R
hAA
BB
0
B umso größer, je größer /,/ MM hAA
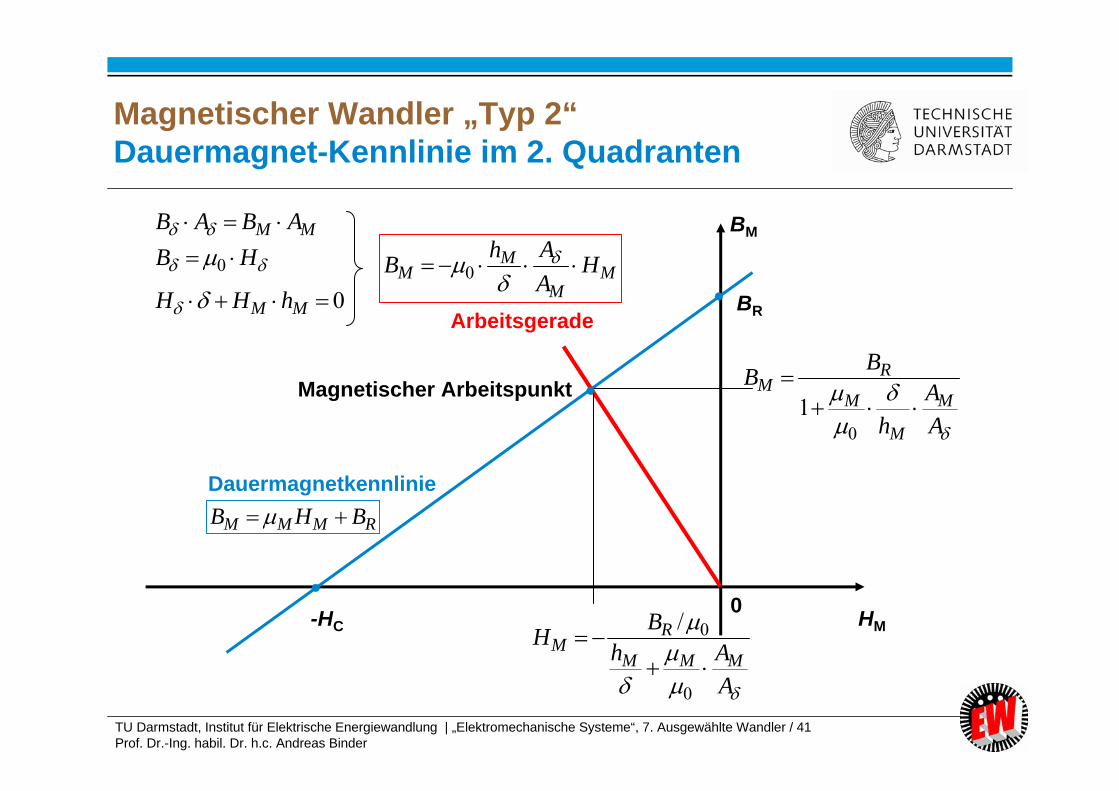
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 41Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“Dauermagnet-Kennlinie im 2. Quadranten
0 HM
BM
-HC
BR
Magnetischer Arbeitspunkt
Dauermagnetkennlinie
Arbeitsgerade
RMMM BHB
MM ABAB
HB 0
0 MM hHH
MM
MM H
AAhB
0
AA
h
BBM
M
M
RM
01
AAh
BHMMM
RM
0
0/
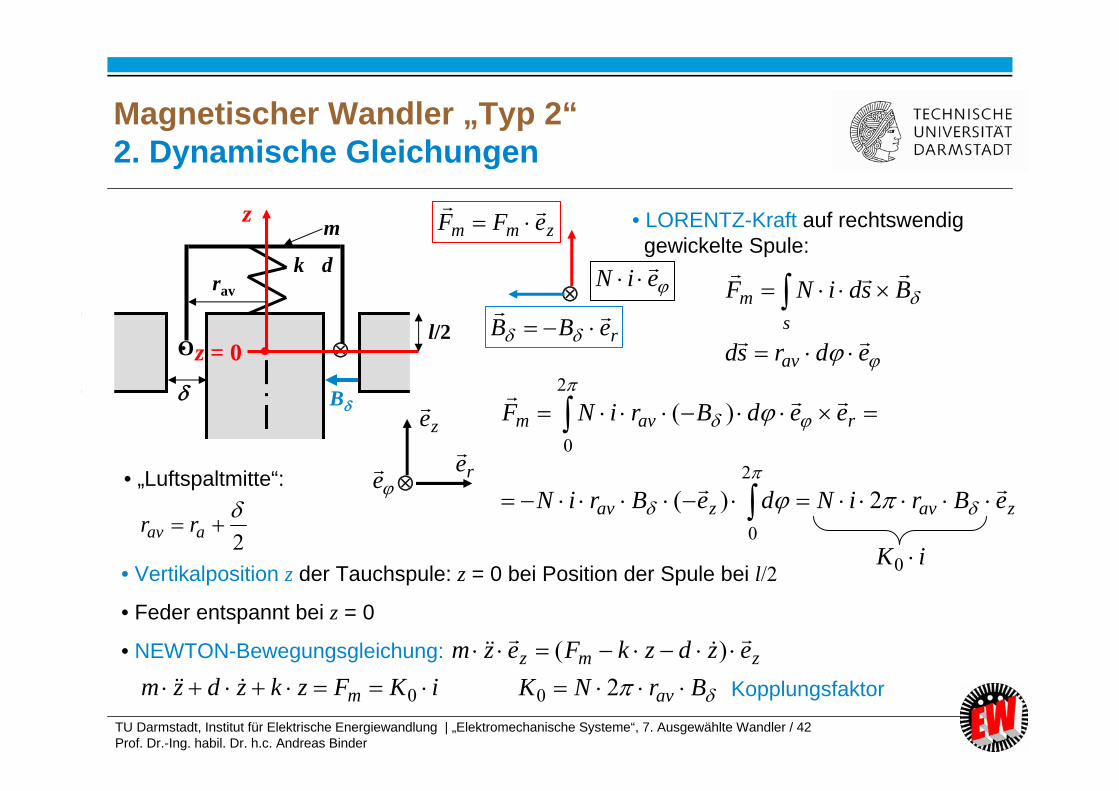
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 42Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“2. Dynamische Gleichungen
• LORENTZ-Kraft auf rechtswendig gewickelte Spule:
edrsd
BsdiNF
av
sm
z
reBB
zmm eFF
O
dk
m
B
l/2z = 0
reze
e
eiN rav
2
aav rr
• „Luftspaltmitte“:zavzav
ravm
eBriNdeBriN
eedBriNF
2)(
)(
2
0
2
0
• Vertikalposition z der Tauchspule: z = 0 bei Position der Spule bei l/2
• Feder entspannt bei z = 0
• NEWTON-Bewegungsgleichung: zmz ezdzkFezm
)(
iKFzkzdzm m 0
iK 0
BrNK av 20 Kopplungsfaktor
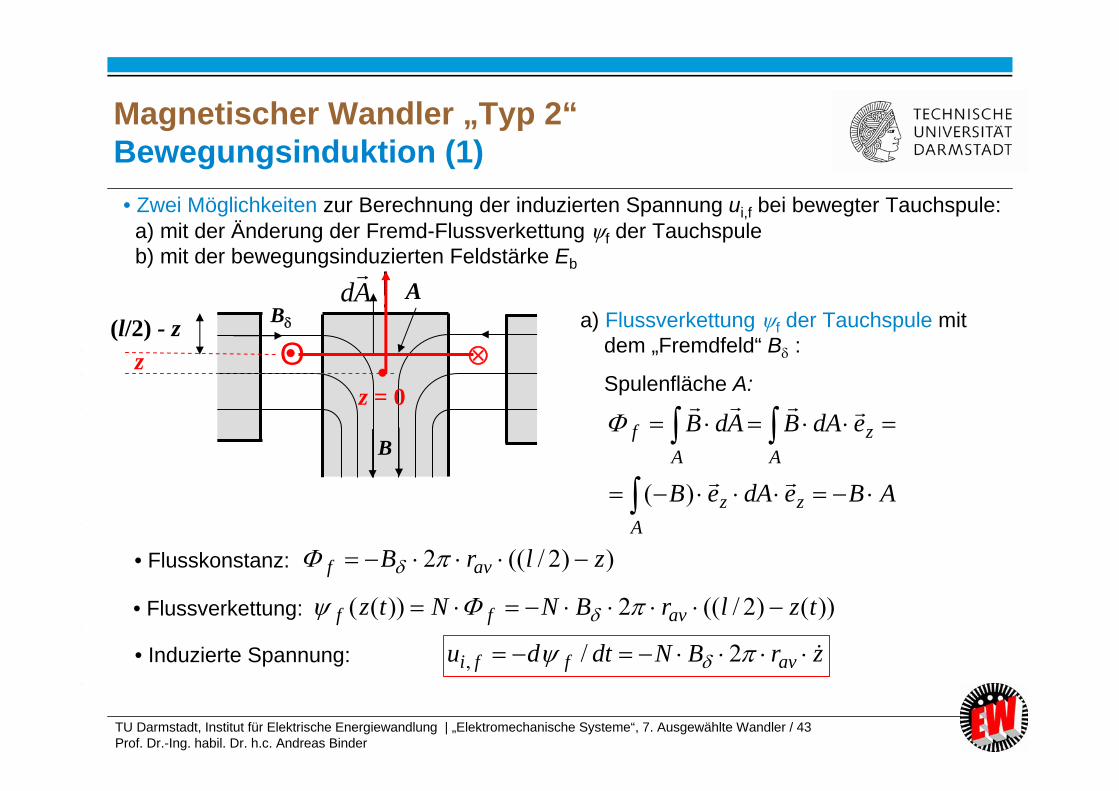
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 43Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“Bewegungsinduktion (1)• Zwei Möglichkeiten zur Berechnung der induzierten Spannung ui,f bei bewegter Tauchspule:
a) mit der Änderung der Fremd-Flussverkettung f der Tauchspuleb) mit der bewegungsinduzierten Feldstärke Eb
Oz
z = 0
(l/2) - zAd
Aa) Flussverkettung f der Tauchspule mit
dem „Fremdfeld“ B :
Spulenfläche A:
ABedAeB
edABAdB
Azz
Az
Af
)(
• Flusskonstanz: ))2/((2 zlrB avf
• Flussverkettung: ))()2/((2))(( tzlrBNNtz avff
B
B
• Induzierte Spannung: zrBNdtdu avffi 2/,
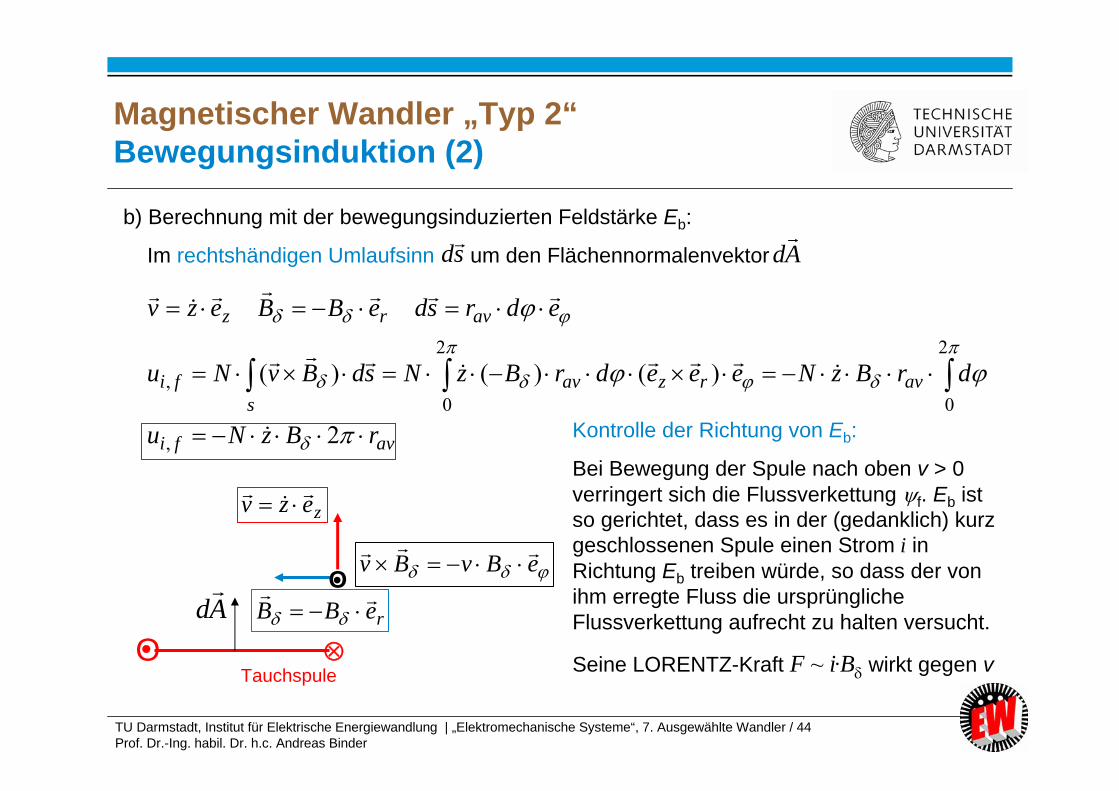
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 44Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“Bewegungsinduktion (2)
b) Berechnung mit der bewegungsinduzierten Feldstärke Eb:
Im rechtshändigen Umlaufsinn um den Flächennormalenvektor
avfi
avrzavs
fi
avrz
rBzNu
drBzNeeedrBzNsdBvNu
edrsdeBBezv
2
)()()(
,
2
0
2
0,
sd Ad
reBB
zezv
eBvBv O
OAd
Tauchspule
Kontrolle der Richtung von Eb:
Bei Bewegung der Spule nach oben v > 0 verringert sich die Flussverkettung f. Eb ist so gerichtet, dass es in der (gedanklich) kurz geschlossenen Spule einen Strom i in Richtung Eb treiben würde, so dass der von ihm erregte Fluss die ursprüngliche Flussverkettung aufrecht zu halten versucht.
Seine LORENTZ-Kraft F ~ i.B wirkt gegen v
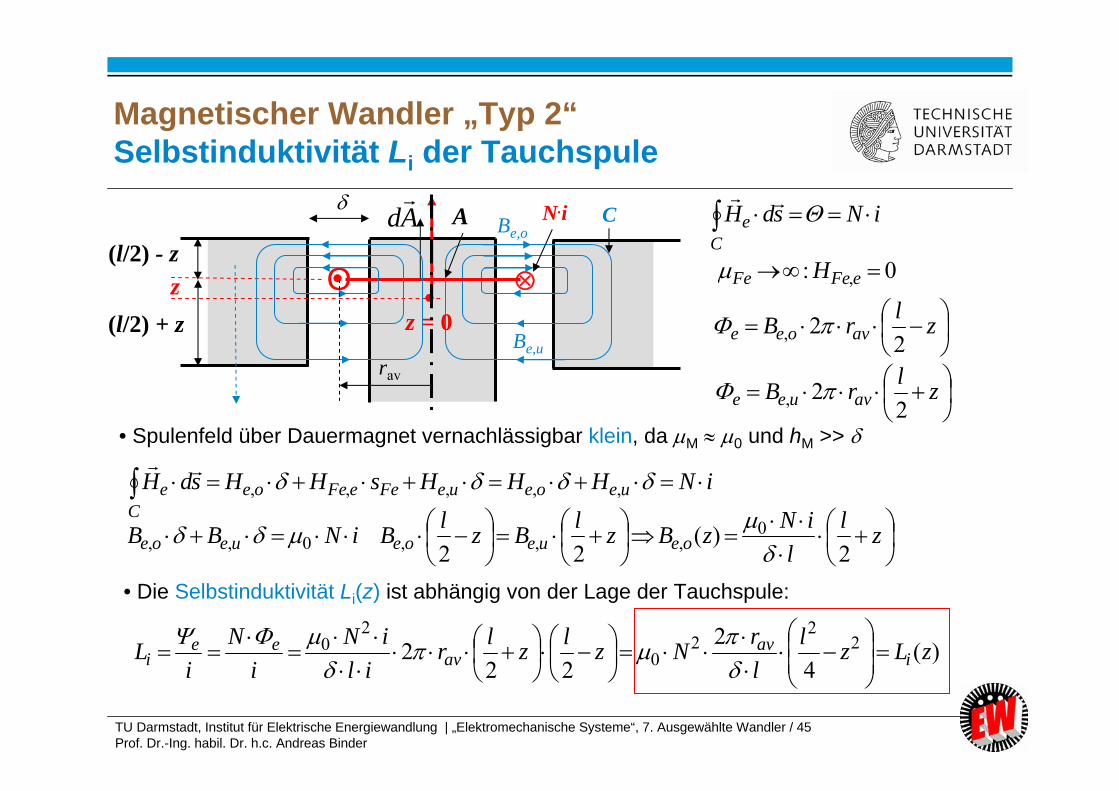
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 45Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“Selbstinduktivität Li der Tauchspule
• Spulenfeld über Dauermagnet vernachlässigbar klein, da M 0 und hM >>
iNHHHsHHsdH ueoeueFeeFeoeC
e ,,,,,
iNsdHC
e
0: , eFeFe H
zlrB avoee 2
2,
Oz
z = 0
(l/2) - zAd
A N.i
Be,u
CBe,o
(l/2) + z
rav
zlrB avuee 2
2,
zl
liNzBzlBzlBiNBB oeueoeueoe 2
)(22
0,,,0,,
• Die Selbstinduktivität Li(z) ist abhängig von der Lage der Tauchspule:
)(4
222
2 22
20
20 zLzl
lrNzlzlr
iliN
iN
iL i
avav
eei
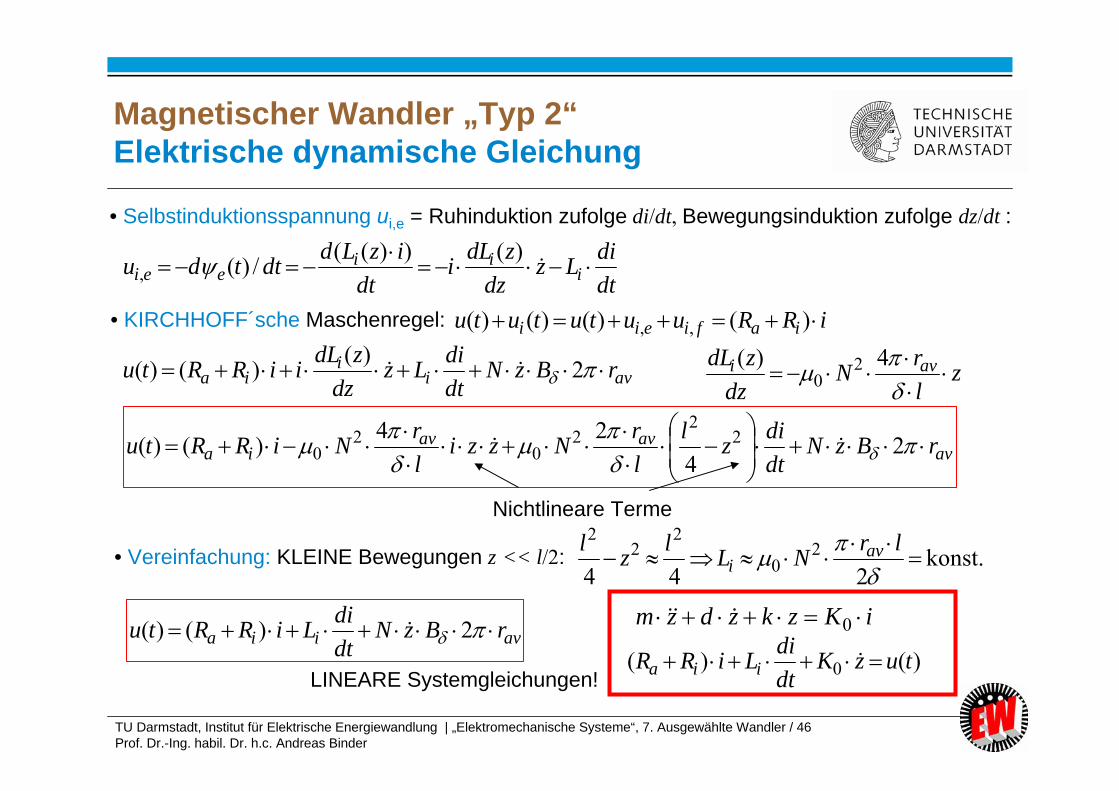
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 46Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“Elektrische dynamische Gleichung
• Selbstinduktionsspannung ui,e = Ruhinduktion zufolge di/dt, Bewegungsinduktion zufolge dz/dt :
dtdiLz
dzzdLi
dtizLddttdu i
iieei
)())((/)(,
• KIRCHHOFF´sche Maschenregel: iRRuutututu iafieii )()()()( ,,
avii
ia rBzNdtdiLz
dzzdLiiRRtu 2)()()( z
lrN
dzzdL avi
4)( 2
0
avavav
ia rBzNdtdizl
lrNzzi
lrNiRRtu
2
424)()( 2
22
02
0
Nichtlineare Terme
• Vereinfachung: KLEINE Bewegungen z << l/2: konst.244
20
22
2
lrNLlzl av
i
aviia rBzNdtdiLiRRtu 2)()(
iKzkzdzm 0
)()( 0 tuzKdtdiLiRR iia
LINEARE Systemgleichungen!
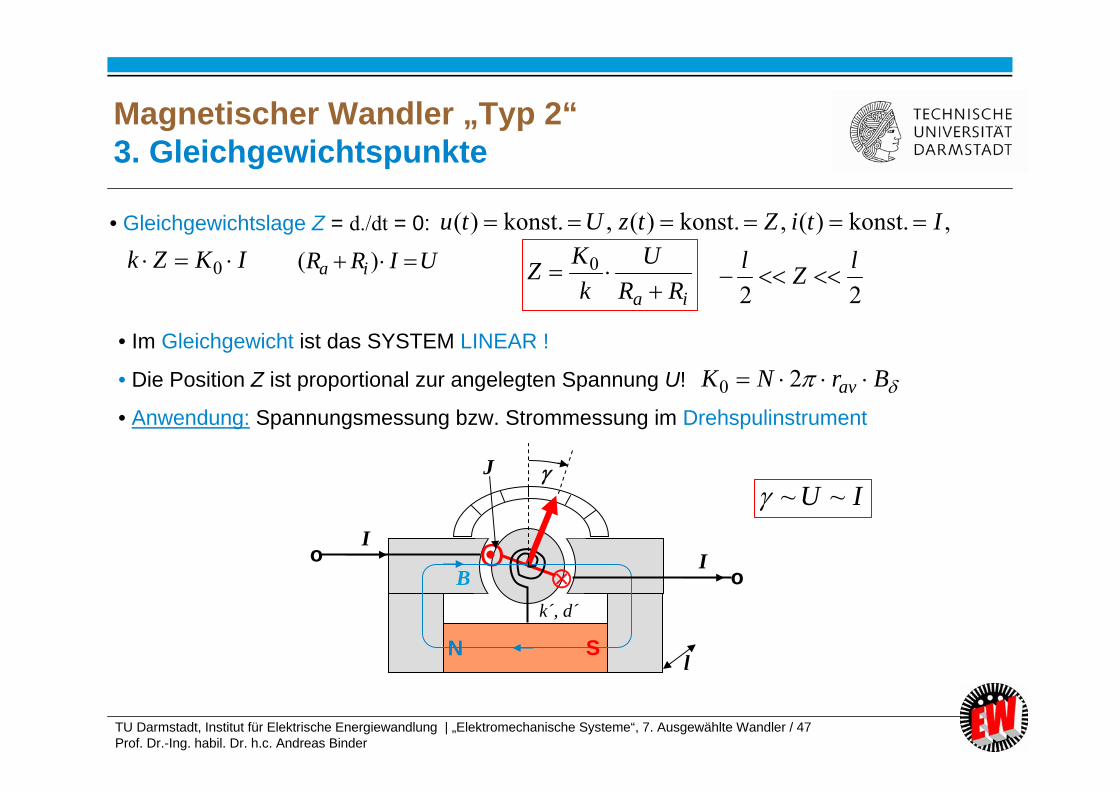
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 47Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“3. Gleichgewichtspunkte
IKZk 0 UIRR ia )(• Gleichgewichtslage Z = d./dt = 0: ,konst.)(,konst.)(,konst.)( ItiZtzUtu
ia RRU
kKZ
0
• Im Gleichgewicht ist das SYSTEM LINEAR !
• Die Position Z ist proportional zur angelegten Spannung U!
• Anwendung: Spannungsmessung bzw. Strommessung im Drehspulinstrument
22lZl
O
N S
oo
II
B
J
k´, d´
l
BrNK av 20
IU ~~
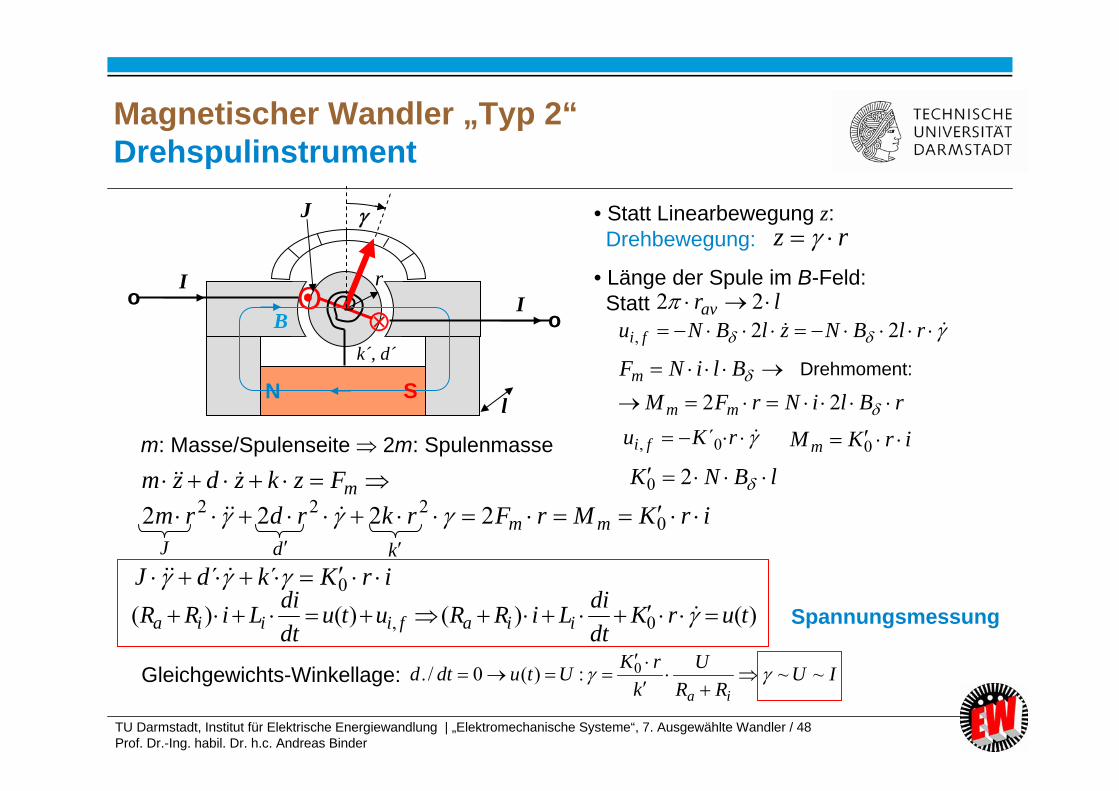
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 48Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“Drehspulinstrument
irKkdJ 0´´
)()()()( 0, turKdtdiLiRRutu
dtdiLiRR iiafiiia
IURR
Uk
rKUtudtdia
~~:)(0/. 0
rz
irKMrFrkrdrm mm 0222 2222
Gleichgewichts-Winkellage:
d k
rlBNzlBNu fi 22,
• Statt Linearbewegung z:Drehbewegung:
• Länge der Spule im B-Feld: Statt
mFzkzdzm
O
N S
oo
II
B
J
k´, d´
l
rlrav 22
rBliNrFMBliNF
mm
m
22 rKu fi 0, ´ irKM m 0
Drehmoment:
m: Masse/Spulenseite 2m: Spulenmasse
J
lBNK 20
Spannungsmessung
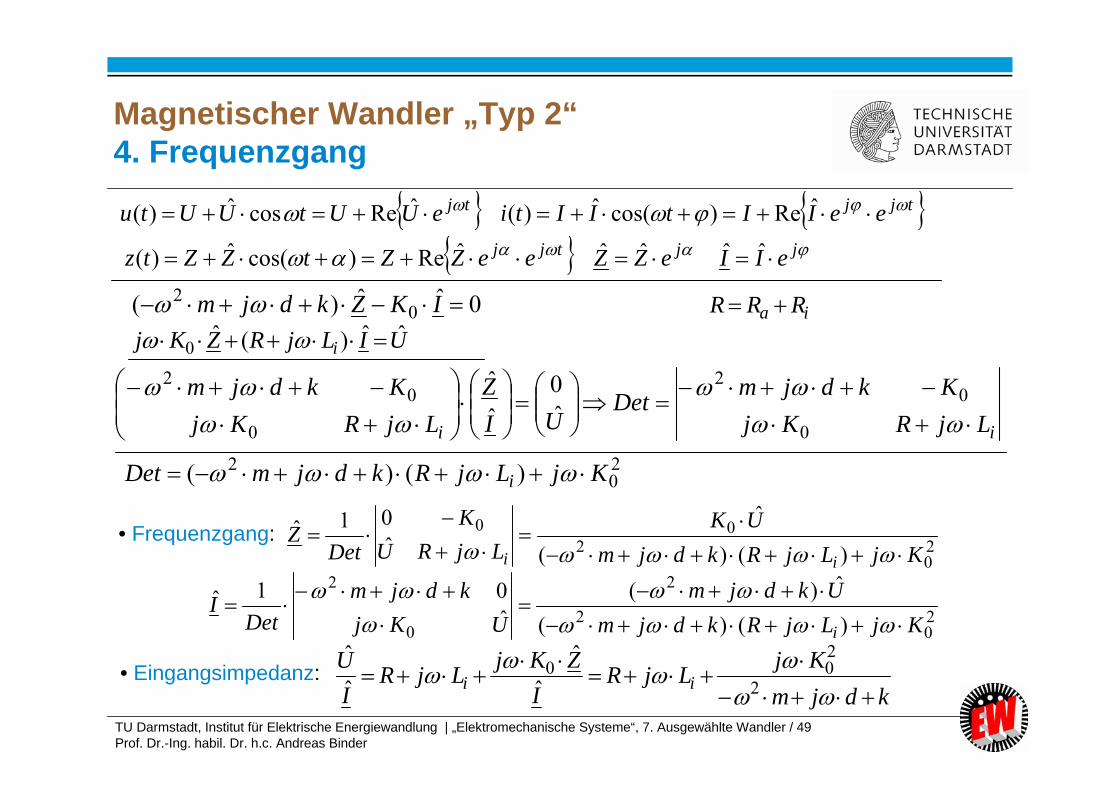
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 49Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“4. Frequenzgang
0ˆˆ)( 02 IKZkdjm
UILjRZKj iˆˆ)(ˆ
0
tjjtj eeIItIItieUUtUUtu ˆRe)cos(ˆ)(ˆRecosˆ)(
jjtjj eIIeZZeeZZtZZtz ˆˆˆˆˆRe)cos(ˆ)(
ia RRR
ii LjRKjKkdjmDet
UIZ
LjRKjKkdjm
0
02
0
02
ˆ0
ˆˆ
20
2 )()( KjLjRkdjmDet i
20
200
)()(
ˆˆ01ˆ
KjLjRkdjmUK
LjRUK
DetZ
ii
kdjmKjLjR
IZKjLjR
IU
ii
2
200
ˆˆ
ˆˆ
• Frequenzgang:
• Eingangsimpedanz:
20
2
2
0
2
)()(
ˆ)(ˆ01ˆ
KjLjRkdjmUkdjm
UKjkdjm
DetI
i
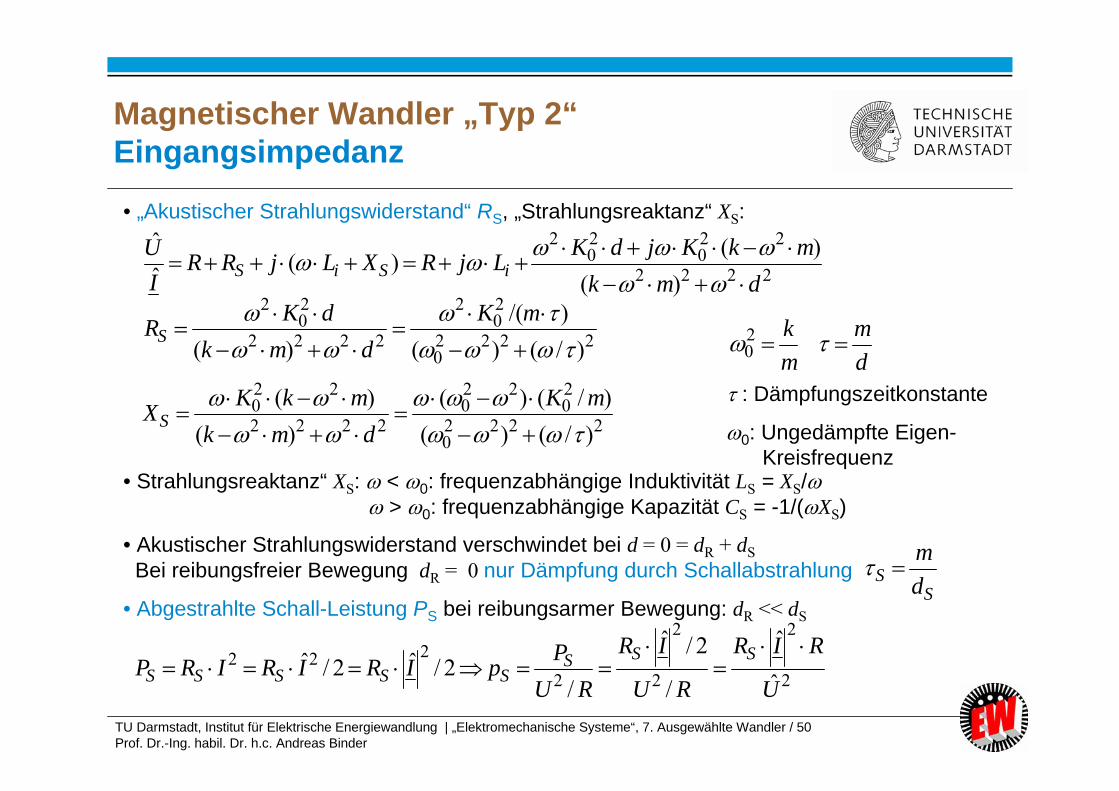
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 50Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“Eingangsimpedanz
2222
220
20
2
)()()(ˆ
ˆ
dmkmkKjdKLjRXLjRR
IU
iSiS
• „Akustischer Strahlungswiderstand“ RS, „Strahlungsreaktanz“ XS:
22220
20
2
2222
20
2
)/()()/(
)(
mKdmk
dKRS
22220
20
220
2222
220
)/()()/()(
)()(
mKdmk
mkKXS
dm
mk
20
: Dämpfungszeitkonstante
0: Ungedämpfte Eigen-Kreisfrequenz
• Strahlungsreaktanz“ XS: < 0: frequenzabhängige Induktivität LS = XS/ > 0: frequenzabhängige Kapazität CS = -1/(XS)
• Akustischer Strahlungswiderstand verschwindet bei d = 0 = dR + dSBei reibungsfreier Bewegung dR = 0 nur Dämpfung durch Schallabstrahlung
• Abgestrahlte Schall-Leistung PS bei reibungsarmer Bewegung: dR << dSS
S dm
2
2
2
2
2222
ˆ
ˆ
/
2/ˆ
/2/ˆ2/ˆ
U
RIR
RU
IR
RUPpIRIRIRP
SSSSSSSS
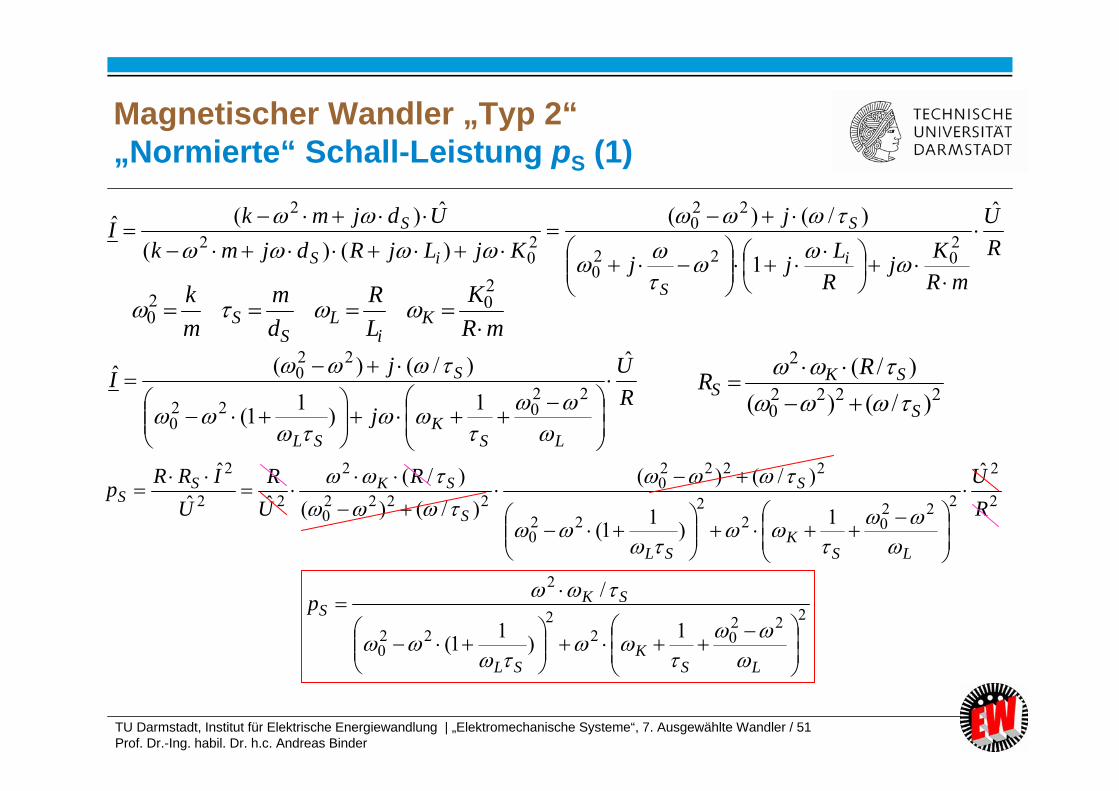
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 51Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“„Normierte“ Schall-Leistung pS (1)
RU
mRKj
RLjj
jKjLjRdjmk
UdjmkIi
S
S
iS
Sˆ
1
)/()()()(
ˆ)(ˆ2022
0
220
20
2
2
mRK
LR
dm
mk
Ki
LS
S
202
0
RU
j
jI
LSK
SL
Sˆ
1)11(
)/()(ˆ22
0220
220
2222
0
2
)/()()/(
S
SKS
RR
2
2
22202
222
0
22220
22220
2
22
2 ˆ
1)11(
)/()()/()(
)/(ˆˆ
ˆ
RUR
UR
UIRRp
LSK
SL
S
S
SKSS
22202
222
0
2
1)11(
/
LSK
SL
SKSp
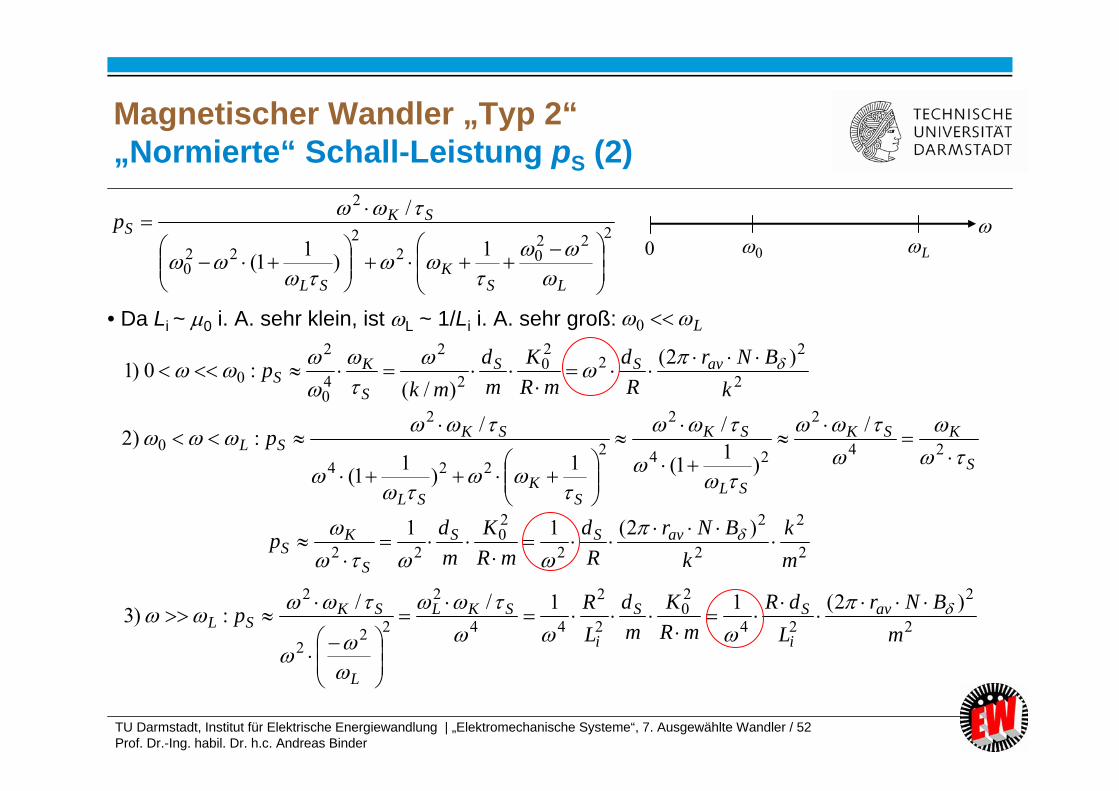
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 52Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“„Normierte“ Schall-Leistung pS (2)
22202
222
0
2
1)11(
/
LSK
SL
SKSp
0 L
0
2
22
20
2
2
40
2
0)2(
)/(:0)1
kBNr
Rd
mRK
md
mkp avSS
S
KS
S
KSK
SL
SK
SK
SL
SKSL p
24
2
24
2
2224
2
0/
)11(
/
1)11(
/:)2
• Da Li ~ 0 i. A. sehr klein, ist L ~ 1/Li i. A. sehr groß: L 0
2
2
2
2
2
20
22)2(11
mk
kBNr
Rd
mRK
mdp avSS
S
KS
2
2
24
20
2
2
44
2
222
2 )2(11//:)3m
BNrLdR
mRK
md
LRp av
i
SS
i
SKL
L
SKSL
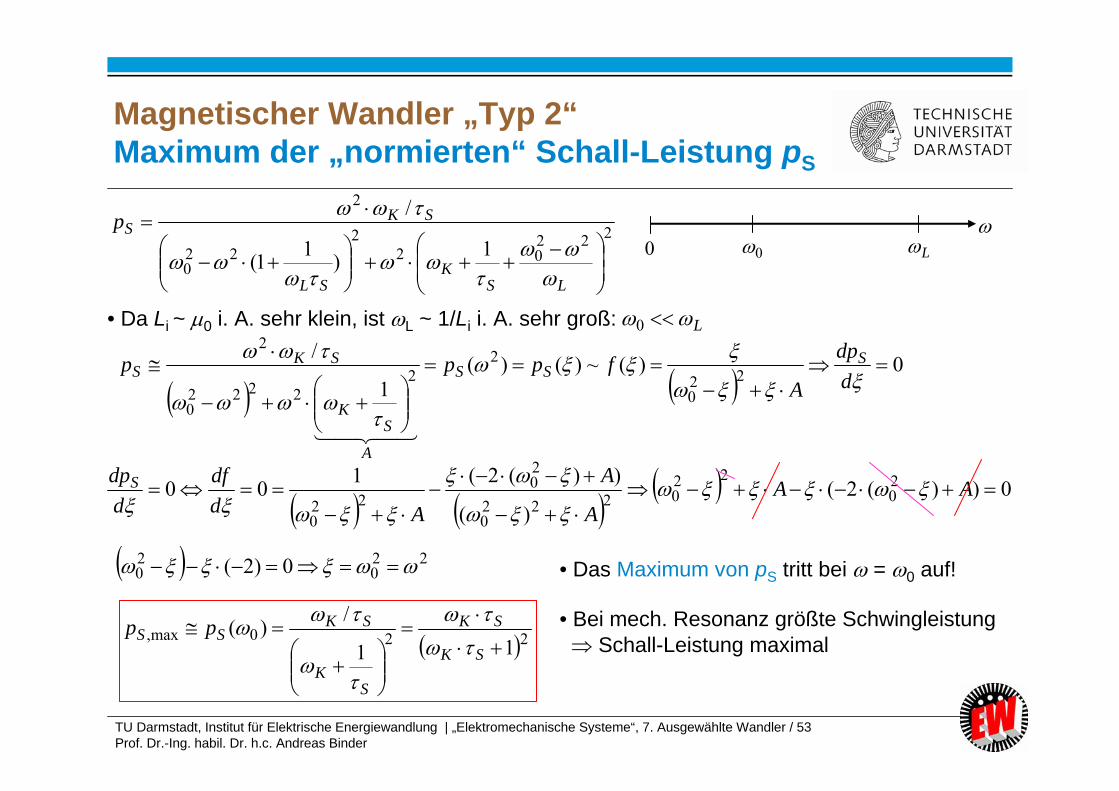
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 53Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“Maximum der „normierten“ Schall-Leistung pS
22202
222
0
2
1)11(
/
LSK
SL
SKSp
0 L
0
• Da Li ~ 0 i. A. sehr klein, ist L ~ 1/Li i. A. sehr groß: L 0
0)(~)()(
1
/22
0
22
22220
2
ddp
Afppp S
SS
A
SK
SKS
0))(2(
)(
))(2(100 20
220222
0
20
220
AA
A
A
Addf
ddpS
220
20 0)2( • Das Maximum von pS tritt bei = 0 auf!
220max,11
/)(
SK
SK
SK
SKSS pp
• Bei mech. Resonanz größte Schwingleistung Schall-Leistung maximal
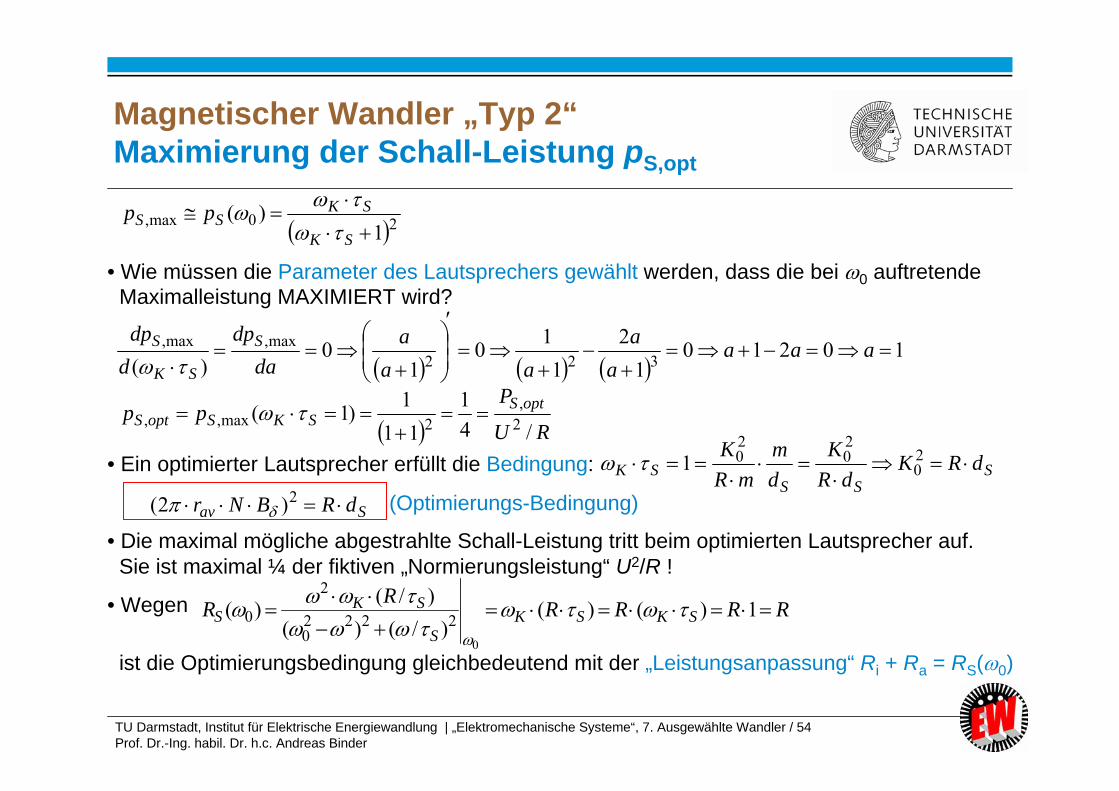
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 54Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“Maximierung der Schall-Leistung pS,opt
20max,1
)(
SK
SKSS pp
• Wie müssen die Parameter des Lautsprechers gewählt werden, dass die bei 0 auftretende Maximalleistung MAXIMIERT wird?
10210
12
110
10
)( 322max,max,
aaa
aa
aaa
dadp
ddp S
SK
S
RU
Ppp optS
SKSoptS /41
111)1( 2
,2max,,
• Ein optimierter Lautsprecher erfüllt die Bedingung:
• Die maximal mögliche abgestrahlte Schall-Leistung tritt beim optimierten Lautsprecher auf.Sie ist maximal ¼ der fiktiven „Normierungsleistung“ U2/R !
• Wegen
ist die Optimierungsbedingung gleichbedeutend mit der „Leistungsanpassung“ Ri + Ra = RS(0)
SSS
SK dRKdR
Kdm
mRK
20
20
201
Sav dRBNr 2)2(
RRRRRR SKSKS
SKS
1)()()/()(
)/()(0
22220
2
0
(Optimierungs-Bedingung)
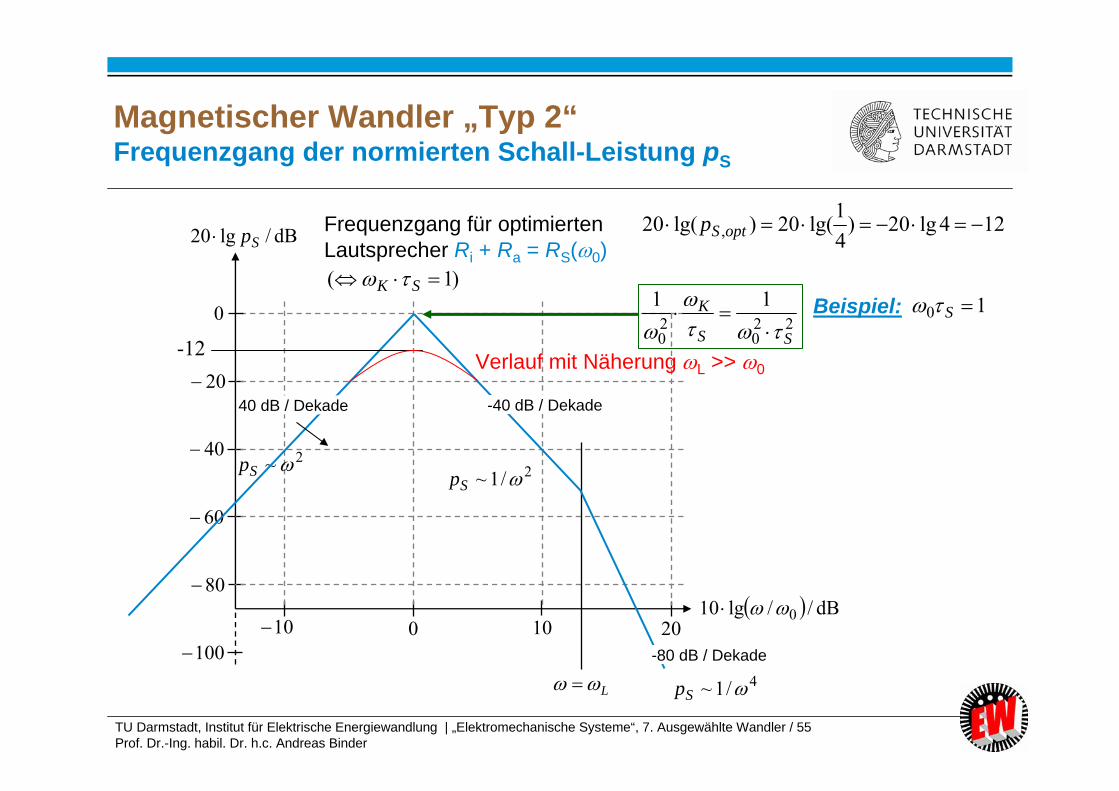
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 55Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“Frequenzgang der normierten Schall-Leistung pS
124lg20)41lg(20)lg(20 , optSpFrequenzgang für optimierten
Lautsprecher Ri + Ra = RS(0)
L
0
dB/lg20 Sp
20
60
40
80
10010 0 10 20
2~Sp
40 dB / Dekade
dB//lg10 0
-40 dB / Dekade
-80 dB / Dekade
2/1~ Sp
4/1~ Sp
-12 Verlauf mit Näherung L >> 0
220
20
11
SS
K
)1( SK Beispiel: 10 S
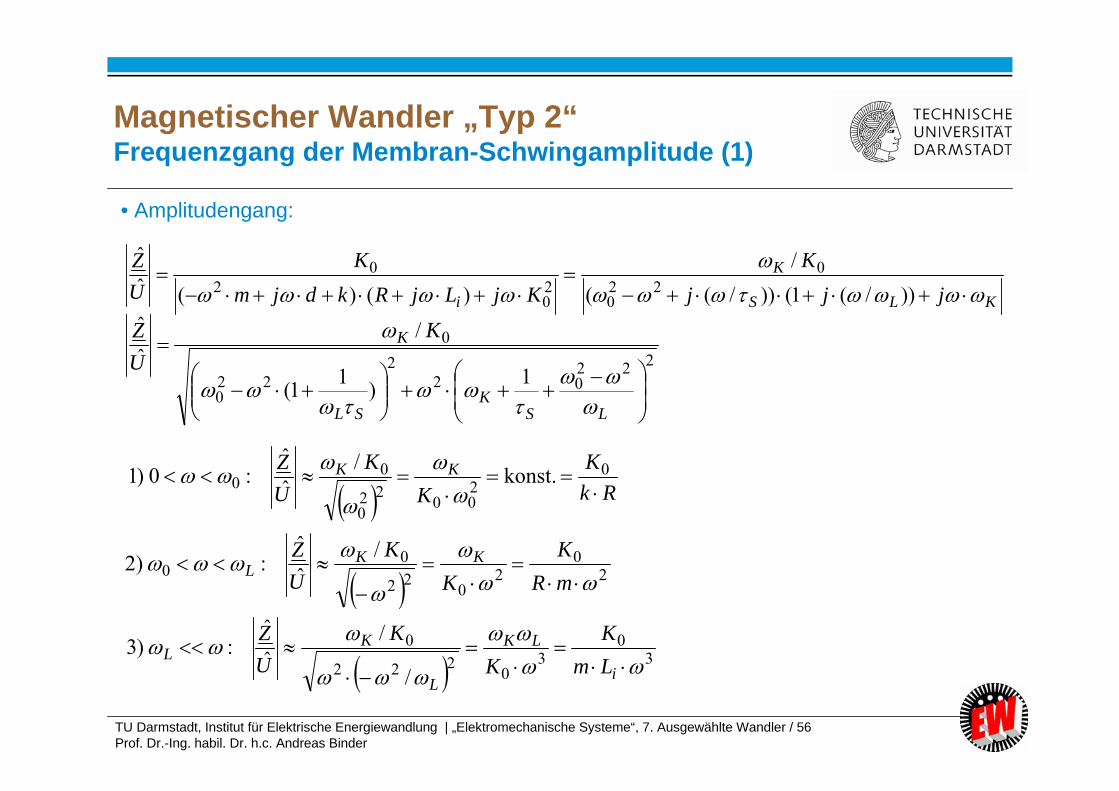
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 56Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“Frequenzgang der Membran-Schwingamplitude (1)
KLS
K
i jjjK
KjLjRkdjmK
UZ
))/(1())/((/
)()(ˆˆ
220
020
20
22202
222
0
0
1)11(
/ˆˆ
LSK
SL
K KUZ
RkK
KK
UZ KK
0
20022
0
00 konst./
ˆˆ
:0)1
20
2022
00
/ˆˆ
:)2
mRK
KK
UZ KK
L
30
30222
0
/
/ˆˆ
:)3
i
LK
L
KL Lm
KK
KUZ
• Amplitudengang:
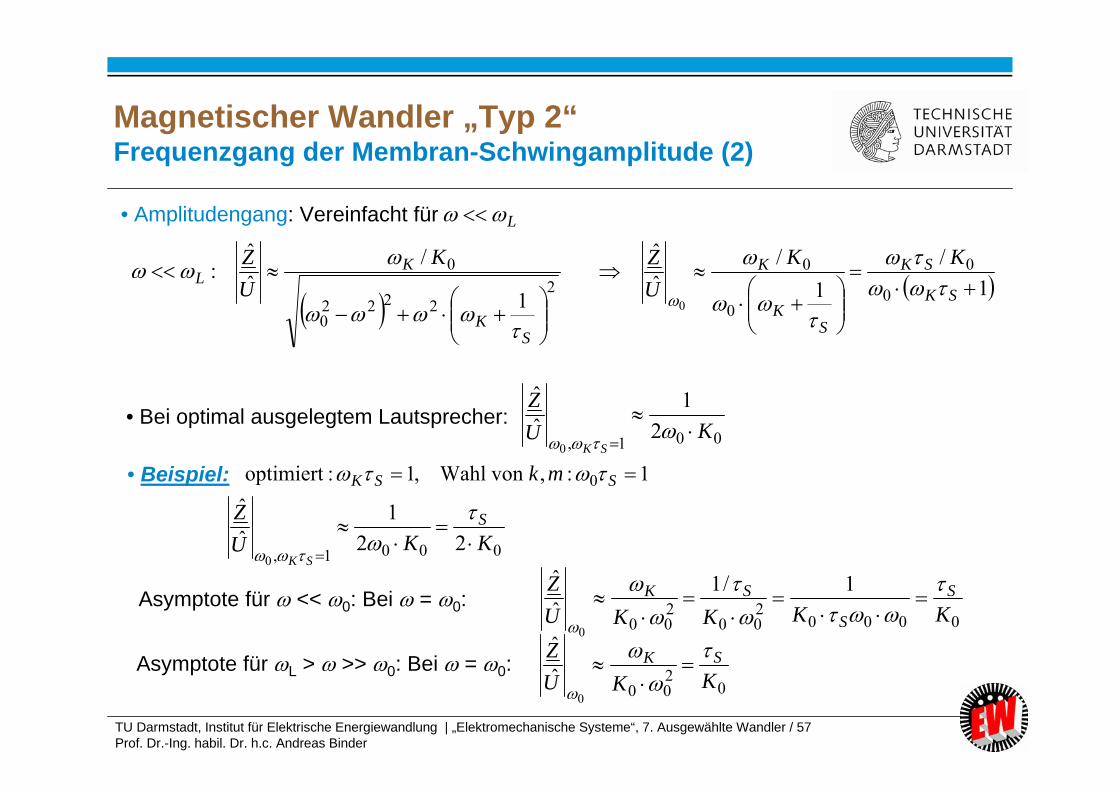
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 57Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“Frequenzgang der Membran-Schwingamplitude (2)
1/
1/
ˆˆ
0
0
0
0
0
SK
SK
SK
K KKUZ
001, 21
ˆˆ
0KU
Z
SK
2
22220
0
1
/ˆˆ
:
SK
KL
KUZ
Asymptote für << 0: Bei = 0:
• Beispiel: 1:,vonWahl,1:optimiert 0 SSK mk
0001, 221
ˆˆ
0KKU
Z S
SK
0000200
200
1/1ˆˆ
0KKKKU
Z S
S
SK
• Bei optimal ausgelegtem Lautsprecher:
• Amplitudengang: Vereinfacht für L
Asymptote für L > >> 0: Bei = 0:0
2000
ˆˆ
KKUZ SK
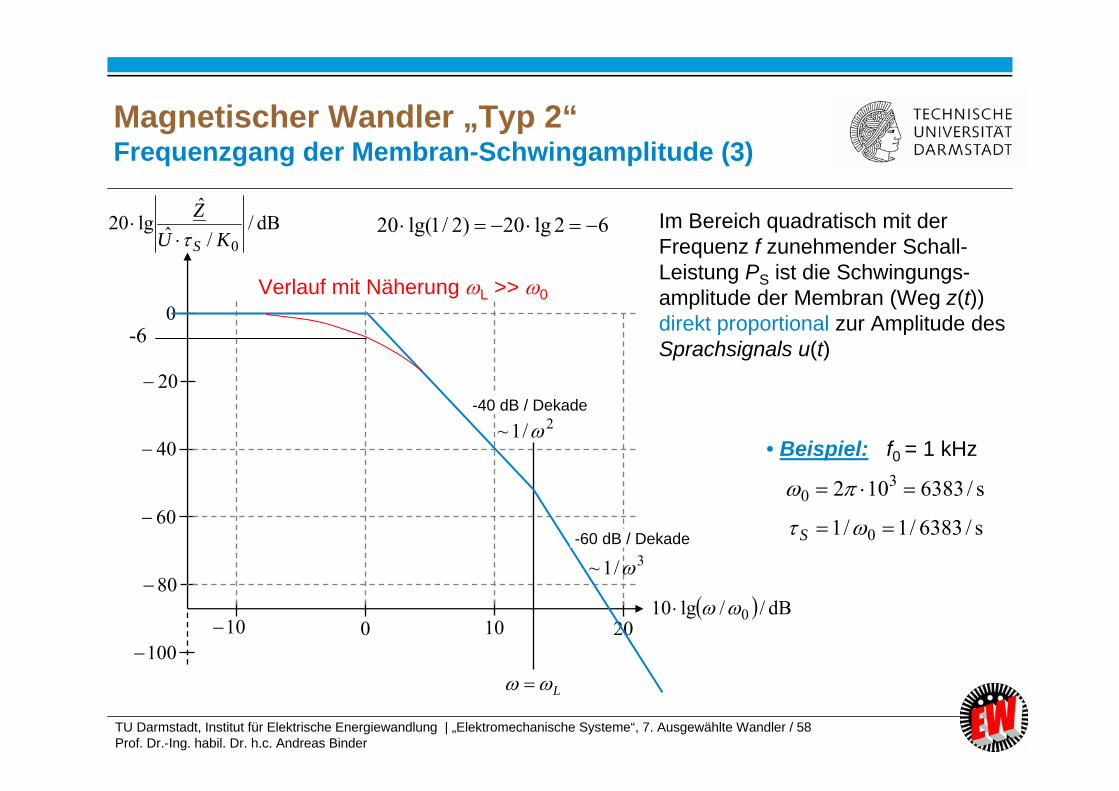
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 58Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“Frequenzgang der Membran-Schwingamplitude (3)
• Beispiel: f0 = 1 kHz
s/6383102 30
s/6383/1/1 0 S
L
0
dB//ˆ
ˆlg20
0KUZ
S
20
60
40
80
10010 0 10 20
dB//lg10 0
-40 dB / Dekade
-60 dB / Dekade
2/1~
3/1~
-6
Verlauf mit Näherung L >> 0
62lg20)2/1lg(20 Im Bereich quadratisch mit der Frequenz f zunehmender Schall-Leistung PS ist die Schwingungs-amplitude der Membran (Weg z(t)) direkt proportional zur Amplitude des Sprachsignals u(t)
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 59Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Magnetischer Wandler „Typ 2“Vergleich zum Wandler Typ 1
• Keine Kraft auf magnetisierbaren Körper maßgebend, sondern LORENTZ-Kraft
• Daher kein instabiles Verhalten kein Schnapp-Mechanismus
• Die Bewegungsgleichungen sind (bei Li = konstant) LINEAR
• Keine Linearisierung und Kleinsignaltheorie erforderlich
• Zwei typische Anwendungen: - Drehspulinstrument
- Lautsprecher
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 60Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Elektromechanische Systeme7. Analyse ausgewählter elektromechanischer Wandler
• Magnetischer Wandler „Typ 1“• Magnetischer Wandler „Typ 2“• Kapazitiver Wandler „Typ 3“
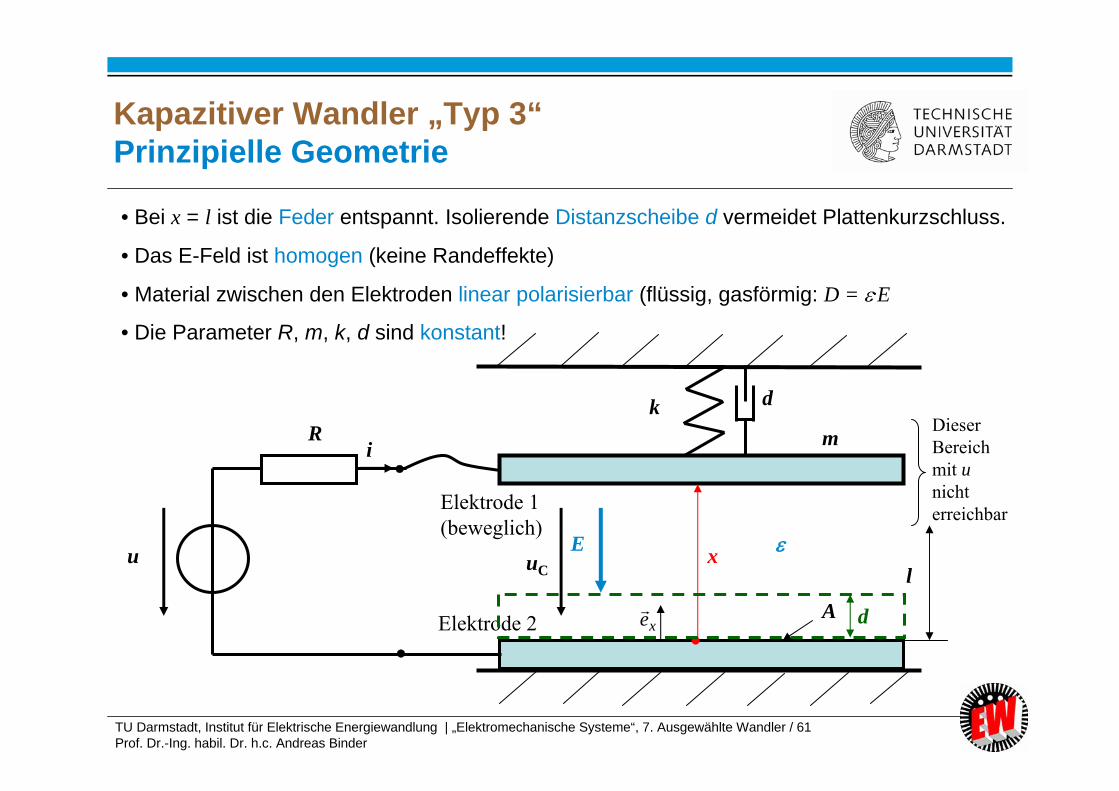
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 61Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Kapazitiver Wandler „Typ 3“Prinzipielle Geometrie
• Bei x = l ist die Feder entspannt. Isolierende Distanzscheibe d vermeidet Plattenkurzschluss.
• Das E-Feld ist homogen (keine Randeffekte)
• Material zwischen den Elektroden linear polarisierbar (flüssig, gasförmig: D = .E
• Die Parameter R, m, k, d sind konstant!
u
iR m
k d
xE
A
Elektrode 1(beweglich)
Elektrode 2 xeluC
d
Dieser Bereich mit unicht erreichbar
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 62Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Kapazitiver Wandler „Typ 3“Elektrostatische Kraft
• MAXWELL´scher Zug auf Elektrode 1:Wirkt anziehend in Richtung zur Elektrode 2
• Elektrisches Feld E: Hüllfläche O um Elektrode 1, wo die Ladung Q ist:
• El. Spannung uC zwischen den beiden Elektroden:
xexxx
xe eAEFeEeEp
222
222
,
xEAEdADAdDQAO
0Bereichim
xEdsEedseEsdEuxx
xx
xs
sC
000)()(
xC
e ex
AuF
2
2
2
• NEWTON´sche Bewegungsgleichung für Elektrode 1:
xC
xxxx ex
Auegmexdekxlexm
2
2
2)(
2
2
2xAugmklxkxdxm C
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 63Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Kapazitiver Wandler „Typ 3“Elektrische dynamische Gleichung
• KIRCHHOFF´sche Maschengleichung:
• Ladung Q auf Elektrode 1:
• Ladungsänderung dQ/dt ist der Ladestrom i:
CuiRu
• Elektrische dynamische Gleichung:
2
2
2)(
xARiugmklxkxdxm
xAxCuCxAuAEQ CC /)(/ dtuCddtdQi C /)(/
dtdu
xAux
xA
dtduxCu
dtdx
dxxdC
dttdutxCtu
dttxdCti C
CC
CC
C
2)()()())(()())(()(
dtdiR
dtdu
xAiRux
xAti )()( 2
dtdu
xAux
xAx
xRAi
dtdi
xRA
22 )1(
dtdu
RRu
xx
xx
RAxi
dtdi
1)(
Nichtlineares Diff.-gleichungssystemdritter Ordnung = drei Energiespeicher
Kinetisch, Federspeicher, elektrostatisch
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 64Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
• Statische Kennlinie:
• Nullstellen:
• Maximum bei:
Kapazitiver Wandler „Typ 3“Gleichgewichtslagen: d./dt = 0
2
2
2
2
22)(
xAUgmklxk
xARiugmklxkxdxm
konst./001)(
QdtdQiRA
xidtdu
RRu
xx
xx
RAxi
dtdi
• Bei u(t) = U konst. fließt KEIN Strom über die Kapazität C Ladung Q auf Elektroden ist konstant.
UxAUxAUxCQUUi CCC )/()/()(,:0
)(2
22
Xk
gmlXk
AU
)/(,0 02,1 kgmlXX
03 )3/2())/(()3/2( XkgmlX
)(274
2)( 2
3k
gmlk
AXU
)(27
8)( 322
3 kgml
AkXUU
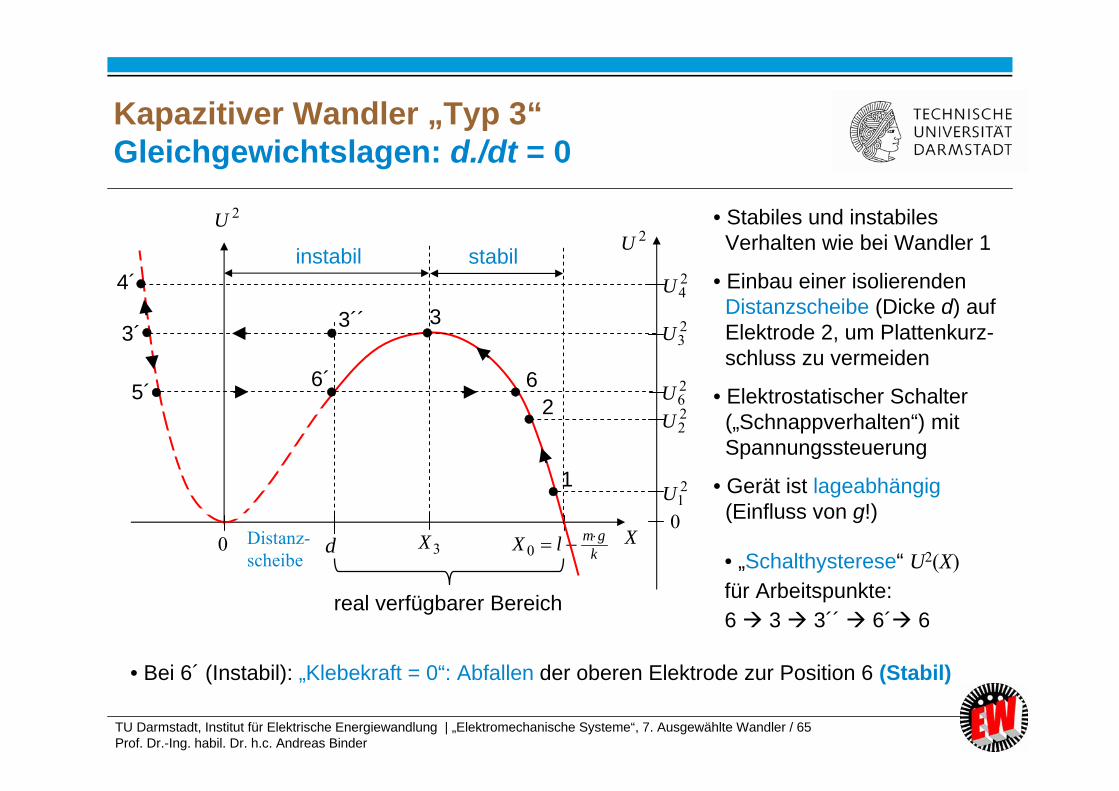
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 65Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Kapazitiver Wandler „Typ 3“Gleichgewichtslagen: d./dt = 0
• Stabiles und instabiles Verhalten wie bei Wandler 1
• Einbau einer isolierenden Distanzscheibe (Dicke d) auf Elektrode 2, um Plattenkurz-schluss zu vermeiden
• Elektrostatischer Schalter („Schnappverhalten“) mit Spannungssteuerung
• Gerät ist lageabhängig(Einfluss von g!)
• Bei 6´ (Instabil): „Klebekraft = 0“: Abfallen der oberen Elektrode zur Position 6 (Stabil)
• „Schalthysterese“ U2(X)für Arbeitspunkte: 6 3 3´´ 6´ 6
X
24U
23U
26U
21U
22U
03X
kgmlX 00
2U2U
4´
real verfügbarer Bereich
3´
5´ 6´
3
62
1
3´´
stabilinstabil
dDistanz-scheibe
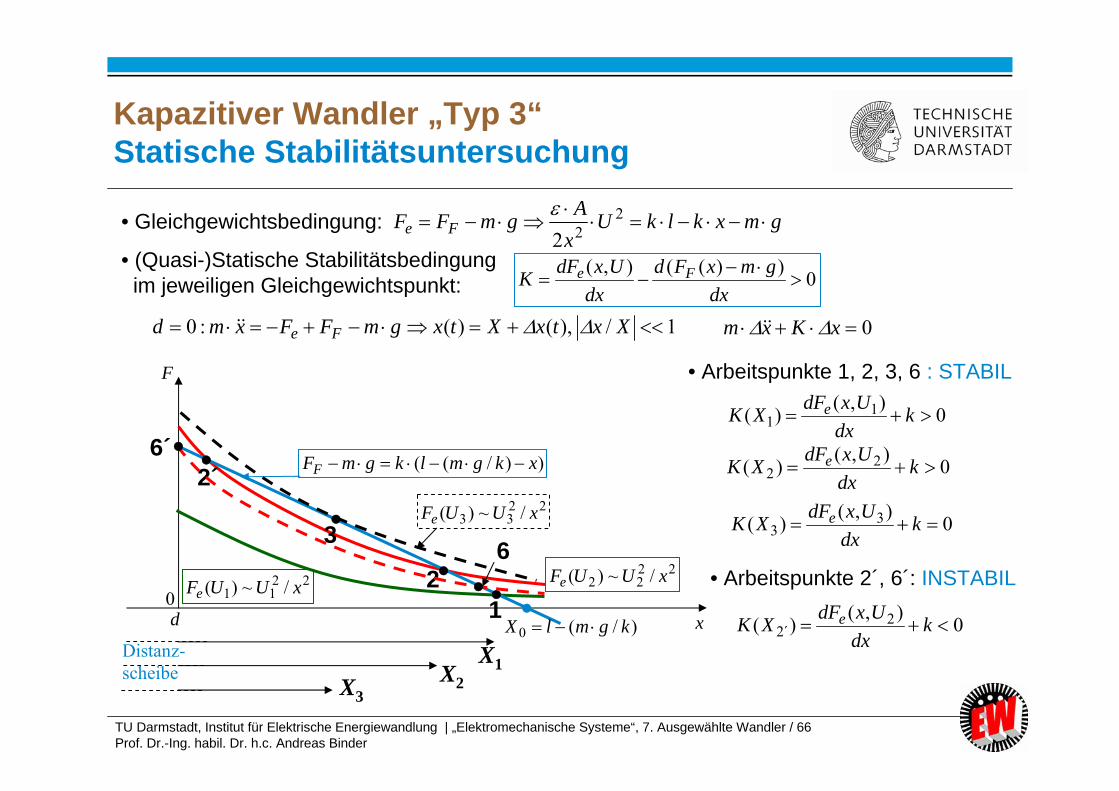
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 66Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Kapazitiver Wandler „Typ 3“Statische Stabilitätsuntersuchung
0))((),(
dxgmxFd
dxUxdFK Fe
• Arbeitspunkte 1, 2, 3, 6 : STABIL
0),()( 11 k
dxUxdFXK e
• Arbeitspunkte 2´, 6´: INSTABIL
0),()( 22 k
dxUxdFXK e
0),()( 33 k
dxUxdFXK e
0),()( 2´2 k
dxUxdFXK e
• Gleichgewichtsbedingung:
• (Quasi-)Statische Stabilitätsbedingung im jeweiligen Gleichgewichtspunkt:
gmxklkUxAgmFF Fe
222
1/),()(:0 XxtxXtxgmFFxmd Fe 0 xKxm
1
X1
d0
x
F
2222 /~)( xUUFe22
11 /~)( xUUFe
))/(( xkgmlkgmFF
)/(0 kgmlX
2´
2
3
2233 /~)( xUUFe
X2X3
6´
6
Distanz-scheibe
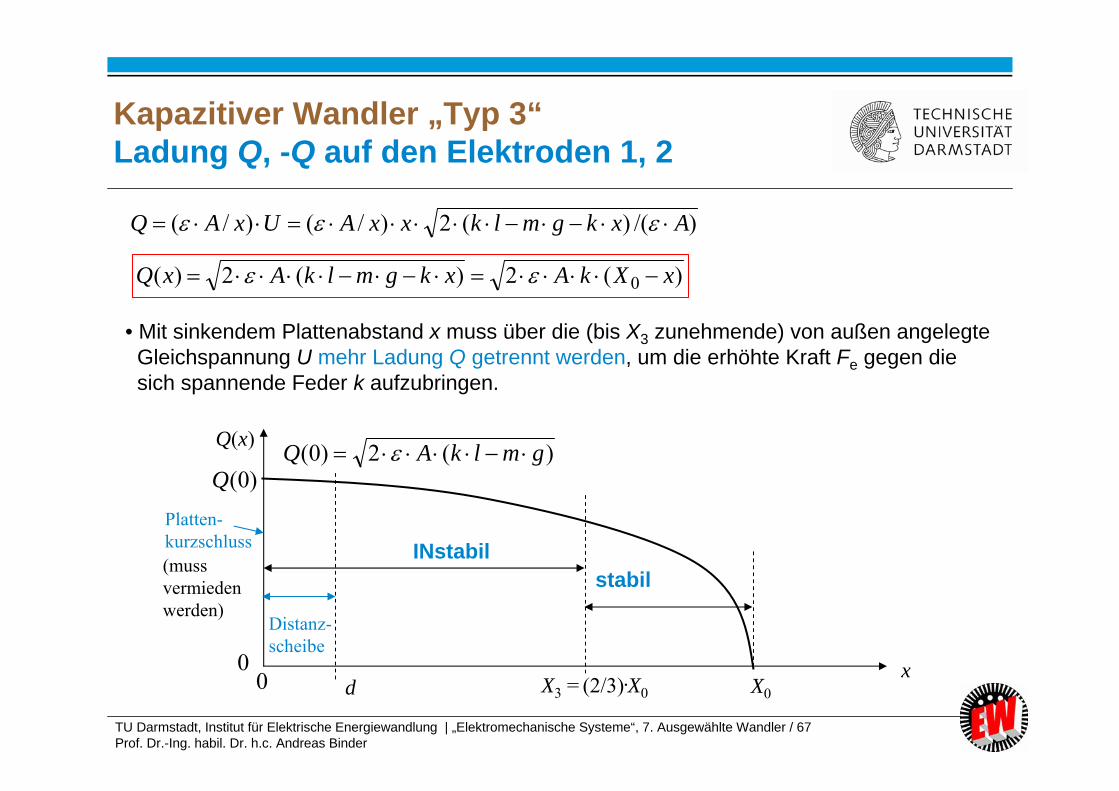
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 67Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Kapazitiver Wandler „Typ 3“Ladung Q, -Q auf den Elektroden 1, 2
)/()(2)/()/( AxkgmlkxxAUxAQ
)(2)(2)( 0 xXkAxkgmlkAxQ
• Mit sinkendem Plattenabstand x muss über die (bis X3 zunehmende) von außen angelegte Gleichspannung U mehr Ladung Q getrennt werden, um die erhöhte Kraft Fe gegen die sich spannende Feder k aufzubringen.
xX0
Q(x) )(2)0( gmlkAQ )0(Q
00 X3 = (2/3).X0
stabilINstabil
d
Distanz-scheibe
Platten-kurzschluss(muss vermieden werden)
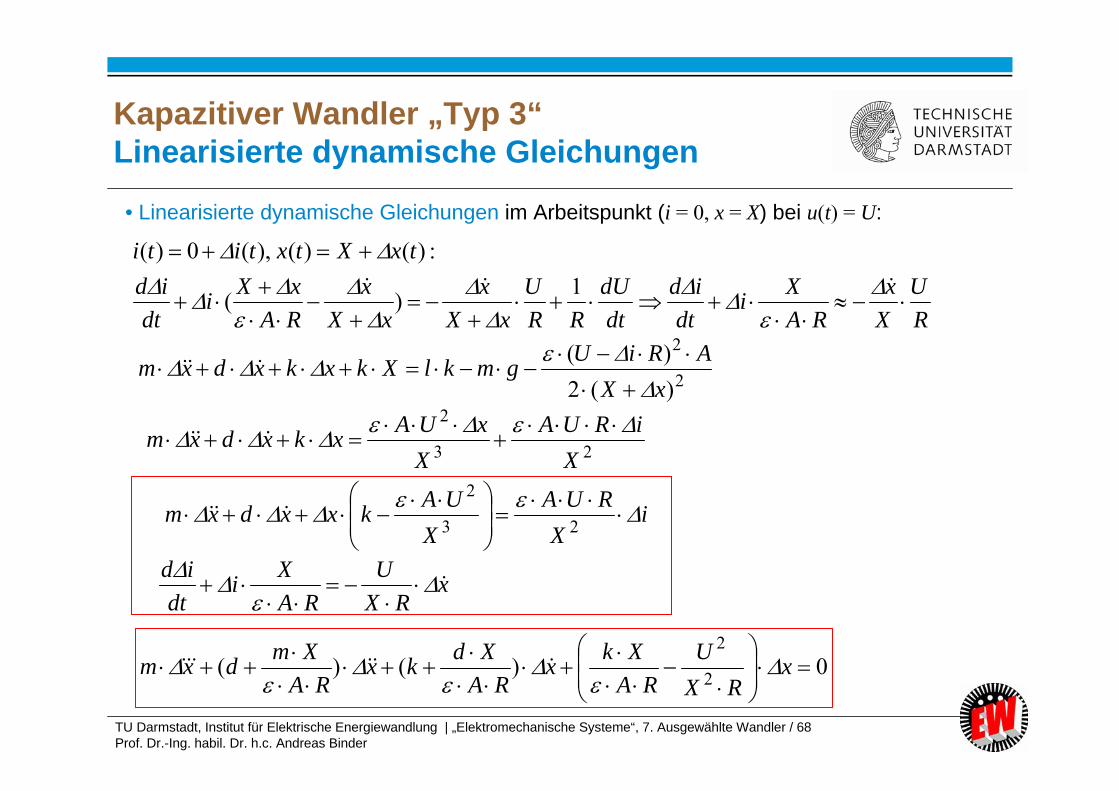
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 68Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Kapazitiver Wandler „Typ 3“Linearisierte dynamische Gleichungen
• Linearisierte dynamische Gleichungen im Arbeitspunkt (i = 0, x = X) bei u(t) = U:
2
2
)(2)(
xXARiUgmklXkxkxdxm
RU
Xx
RAXi
dtid
dtdU
RRU
xXx
xXx
RAxXi
dtid
txXtxtiti
1)(
:)()(),(0)(
23
2
XiRUA
XxUAxkxdxm
iX
RUAX
UAkxxdxm
23
2
xRX
URA
Xidt
id
0)()( 2
2
xRX
URA
XkxRA
XdkxRA
Xmdxm
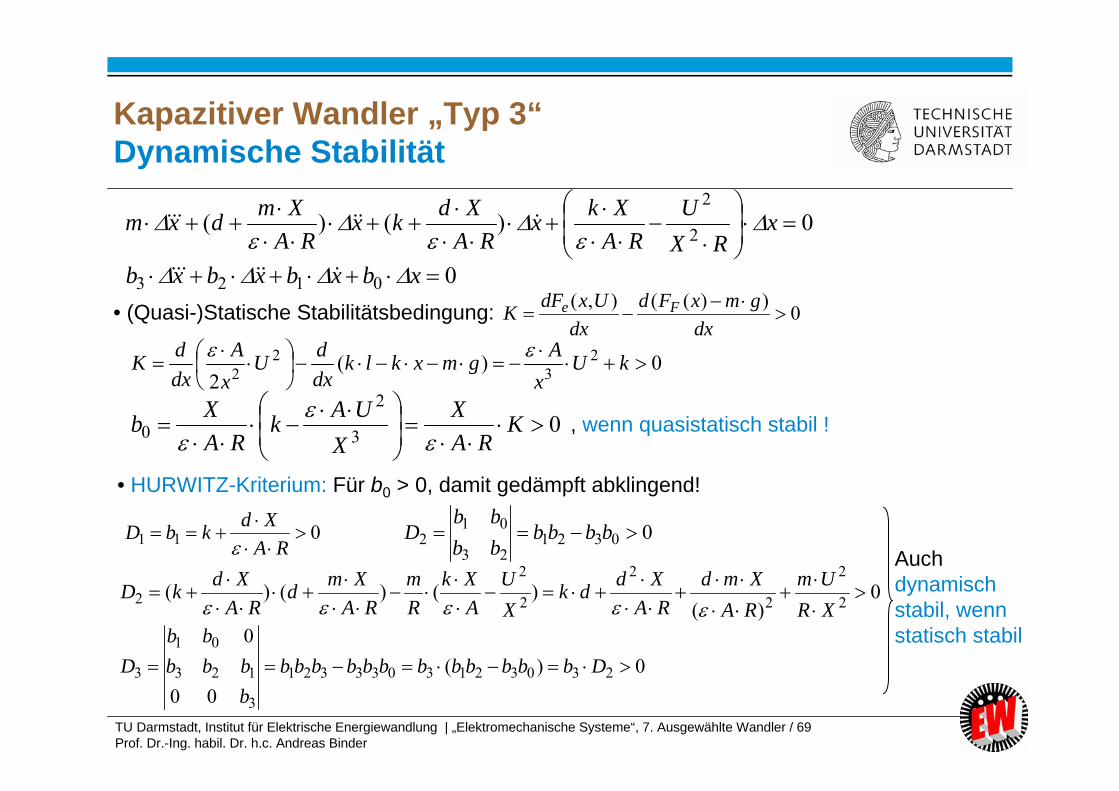
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 69Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Kapazitiver Wandler „Typ 3“Dynamische Stabilität
0)()( 2
2
xRX
URA
XkxRA
XdkxRA
Xmdxm
00123 xbxbxbxb
0)(00
0
2303213033321
3
123
01
3 Dbbbbbbbbbbbbbbbb
bbD
• (Quasi-)Statische Stabilitätsbedingung: 0))((),(
dxgmxFd
dxUxdFK Fe
0)(2
23
22
kU
xAgmxklk
dxdU
xA
dxdK
03
2
0
K
RAX
XUAk
RAXb
Auch dynamisch stabil, wenn statisch stabil
• HURWITZ-Kriterium: Für b0 > 0, damit gedämpft abklingend!
011
RAXdkbD
0)(
)()()( 2
2
2
2
2
2
2
XRUm
RAXmd
RAXddk
XU
AXk
Rm
RAXmd
RAXdkD
0032123
012 bbbb
bbbb
D
, wenn quasistatisch stabil !
TU Darmstadt, Institut für Elektrische Energiewandlung | „Elektromechanische Systeme“, 7. Ausgewählte Wandler / 70Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Zusammenfassung:- (Nichtlineare) Berechnung des magnetischen Arbeitspunkts- Stabile & instabile Arbeitspunkte Anwendung: Schalter- (Linearisiertes) Kleinsignalverhalten im stabilen Arbeitspunkt- Amplituden-Frequenzgang bei erzwungener Schwingung
z.B.: Wandler 1: Schwingungsmessung- Frequenzgangsdarstellung: Doppelt-logarithm. BODE-Diagramm- Je nach Frequenzbereich z. B. Wandler 1: Messung
- des Schwingungswegs,- der Schwinggeschwindigkeit,- der Schwingungsbeschleunigung
Elektromechanische Systeme7. Analyse ausgewählter elektromechanischer Wandler








![dialog p [Pickelhandschlaufe] - bergundsteigen.atdialog).pdf · d i esrK l mt, ac hu ng o Sy - delt und diese nicht zusätzlich hochgehängt werden muss. Die Microtraxion klemmt auch](https://img.pdfslide.tips/doc/110x75/5d0437ce88c993c8248c8241/dialog-p-pickelhandschlaufe-dialogpdf-d-i-esrk-l-mt-ac-hu-ng-o-sy-delt.jpg)




















