Embed Size (px)
Citation preview
ENTWURF UND REALISIERUNG EINES
ERGONOMIE-MOCK-UPS UNTER
VERWENDUNG VON METHODEN DER
VIRTUELLEN REALITÄT
Vom Fachbereich für Mathematik und Informatik
der Technischen Universität Braunschweig
genehmigte Dissertation
zur Erlangung des Grades eines
Doktor-Ingenieurs (Dr.-Ing.)
von
Dipl.-Inform. Kai Schrader
Eingereicht am 27. Mai 2003
1. Referent: Prof. Dr. Dipl.-Ing. D.P. Pretschner
2.Referent: Prof. Dr. T. Ertl
Mündliche Prüfung am 11. September 2003
i
Erklärung
Hiermit erkläre ich, dass die vorliegende Arbeit selbstständig nur unter Ver-wendung der aufgeführten Hilfsmittel von mir erstellt wurde.
Teilaspekte der Arbeit wurden in [Schr99] und [SRM02] veröffentlicht. Diese Dissertation oder ein Teil davon wurde noch nicht als Prüfungsarbeit für eine staatliche oder andere wissenschaftliche Prüfung eingereicht.
Gifhorn, 5. November 2003 Unterschrift

ii
Danksagung
Mein Dank gilt Herrn Professor Dr. med. Dipl.-Ing. Dietrich Peter Pretschner, der durch seine Betreuung und durch seinen fachlichen Rat diese Arbeit erst ermöglicht hat. Ohne Zögern erklärte er sich zu dieser Unterstüt-zung bereit, als ich diesbezüglich an ihn herantrat. Herrn Professor Dr. Thomas Ertl sei an dieser Stelle ebenfalls für seine Zusage zur Übernahme des Zweitgutachtens sowie für sein Interesse an meiner Arbeit gedankt.
Die vorliegende Arbeit entstand während, bzw. nach meiner Tätigkeit im Virtual Reality Labor (VRLab) der VOLKSAGEN AG in Wolfsburg. Ich möchte an dieser Stelle allen Kolleginnen und Kollegen danken, die mich dort bei meiner Arbeit unterstützt und die mir hilfreich zur Seite gestanden haben. Mein besonderer Dank gilt Herrn Dipl.-Ing. Peter Zimmermann, dem Leiter des VRLab.
Die Herren Dipl.-Ing. Frank Bullmann und Dipl.-Ing. in spe Jens Steffens lieferten im Rahmen von Diplomarbeiten wichtige Beiträge zu dieser Ar-beit. Dafür möchte ich mich bei ihnen bedanken.
Die ursprüngliche Idee zur Bearbeitung des Themas dieser Arbeit entstand in der Abteilung ET-1 der AUDI AG in Ingolstadt. Allen Mitarbeitern dort möchte ich für die Initiierung dieser Arbeit und für ihre Unterstützung dan-ken.
Bedanken möchte ich mich auch bei den Mitarbeitern der Abteilung NE-P der VOLKSWAGEN AG Nutzfahrzeugentwicklung. Es erfreut mich, dass dort die Ergebnisse meiner Arbeit heute erfolgreich zur Anwendung kom-men. Herrn Prof. Dr. H. Oehlschlaeger, dem Leiter dieser Abteilung, möchte ich für sein Engagement diesbezüglich danken. Seinen Mitarbeitern, den Herren Dipl.-Ing. Matthias Meier und Wi.-Ing. Jens Krebs, gilt mein besonderer Dank.
Last but not least möchte ich mich bei meiner Familie bedanken, die ihren Teil zur Entstehung dieser Arbeit beigetragen hat.
iii
Zusammenfassung Nach [Zimm00] liegt eine der größten Herausforderungen der Automobil-hersteller heute in der Integration neuer Methoden und rechnergestützter Tools in den Prozess der Produktentwicklung – dazu gehört auch Virtual Reality (VR).
In dieser Arbeit werden Möglichkeiten der Verwendung von VR-Methoden zu Zwecken der ergonomischen Fahrzeuggestaltung untersucht. Es wird exemplarisch ein Ergonomie-Mock-Up1 aufgebaut, das einen ähnlich voll-ständigen Innenraumeindruck eines Automobils ermöglicht, wie dieses bis-her nur durch aufwendige physikalische Aufbauten erreichbar war. Speziell Ergonomieanalysen mit subjektiver Bewertung von Sichtbedingungen, Bedieninteraktionen, Tätigkeitsabläufen bis hin zu einfachen Fahrszenarien werden mit dieser neuen Form des Virtual Ergonomic Prototypings in einer VR-Umgebung durchführbar.
Virtual Reality ist heute für eindrucksvolle computergraphische Simulatio-nen bekannt. Oft werden ausschließlich visuelle Informationen dargestellt. Für hoch-immersive2 Szenarien – Ziel dieser Arbeit ist die Erzeugung eines solchen Szenarios – ist aber auch die Berücksichtigung anderer Wahrneh-mungskanäle der Benutzer erforderlich. Dadurch entstehen erhöhte Anfor-derungen an die Simulation, insbesondere auch an deren Echtzeitverhalten. Daneben erschweren Defizite einzelner Hard- und Softwarekomponenten die Realisierung überzeugender, immersiver Applikationen.
Für das Ergonomie-Mock-Up gilt es zunächst geeignete Komponenten zu wählen: Haptische Wahrnehmung wird über eine sog. Sitzkiste ermöglicht. Diese gibt vereinfacht den Innenraum des darzustellenden Automobils wie-der und kann verschiedene Bedienelemente (z.B. Lenkrad, Pedalerie, Schalter, usw.) aufnehmen. Ein Head-Mounted Display dient der Grafik- und Audiowiedergabe. Es blockiert die Sicht auf die reale Versuchsumge-bung. Durch die Verwendung eines 3D-Menschmodells kann der Benutzer während der VR-Simulation trotzdem seine Körperhaltung sehen. Zur Nach-führung des Menschmodells kommt ein optisches Trackingsystem zum Einsatz. Es erfasst auch Parameter, die der Berechnung der Benutzersicht dienen. Diese Sicht wird in Bezug auf eine Szene dargestellt, die durch ein Geometriemodell gegeben ist. Die Kopplung von Sensorikkomponenten der Sitzkiste mit einer Fahrdynamik-Software ermöglicht schließlich die Durch-führung einer Fahrsimulation.
1 Der Begriff “Mock-Up” (engl.: Attrappe, Modell) ist ein in der Fahrzeugentwicklung synonym verwendeter Begriff für eine prototypische Sitzkiste oder ein maßstabgetreues Fahrzeugkonzept-Modell [Braun99]. 2 Jung bezeichnet Immersion als „The state of being absorbed or deeply involved” [W3Jung].
iv
Der Autor strukturiert den Systementwurf, d.h. die Kopplung aller Einzel-komponenten zum Ergonomie-Mock-Up, in drei Ebenen: Der Kommunika-tionsentwurf erlaubt eine systemnahe Kopplung. Geometrie-, Sound- und Haptikentwurf definieren Modelle einer virtuellen Szene bezüglich der entsprechenden Wahrnehmungsformen. Der Interaktionsentwurf verknüpft die Komponenten auf logischer Ebene miteinander. Der Systementwurf wird für alle drei Ebenen exemplarisch durchgeführt.
Schließlich testet der Autor in Versuchen die Echtzeit- und Einsatzfähigkeit des entstandenen Ergonomie-Mock-Ups. Obwohl das Echtzeitverhalten zukünftig noch verbessert werden muss, ist durch einen Probandenversuch die prinzipielle Einsetzbarkeit im angestrebten Benutzungskontext nachge-wiesen worden.

v
Abstract According to [Zimm00] one of the biggest challenges the automotive industry is facing today is the integration of new methods and computer-aided tools in the process of product development. This also includes virtual reality (VR).
This work inspects existing VR-methods for their use in the field of ergonomic car design. For this reason an ergonomic mock-up1 is built up. The mock-up enables the sort of impression of the automobile’s interior which had previously only been possible through very elaborate physical models. In particular ergonomic investigations which subjectively evaluate visual conditions, user interaction and operation procedures and simple driving scenarios can be carried out in a VR environment using this new form of virtual ergonomic prototyping.
Today, VR is known for its impressive computer-graphic simulations. Often, exclusively visual information is presented. However, for highly immersive2 scenarios – the goal of this work is the development of such a scenario – it is also necessary to take the user’s other perception channels into consideration. Heightened demands are thereby placed on the simulation, and also particularly on its real-time performance. In addition to that, deficiencies of current hard- and software components make it more difficult to realise convincing, immersive applications.
To realise the ergonomic mock-up, suitable components had to be selected: Haptic perception is made possible via a so-called seat box which provides a simplified version of the interior of the vehicle and which can contain various control elements (steering-wheel, pedals, switches, etc.). A head-mounted display provides graphics and audio rendering. It blocks off the view of the actual test environment. By using a 3D human model, the user can, during the VR simulation, still perceive his body as a “graphical echo”. An optical tracking system is used to record his movements. It also records parameters which approximate the user’s view. The view is calculated in reference to a scene which is given through a geometric model. The coupling of sensory components from the seat box with a driving dynamics software finally enables a driving simulation to be carried out.
The system design, which means the coupling of all components of the ergonomic mock-up, has been structured in three layers: The communication design allows connecting the components at system level.
1 The term „mock-up“is used in the automotive industry as a synonym for a true-to-scale representation of a vehicle [Braun99]. 2 According to Jung immersion is „The state of being absorbed or deeply involved” [W3Jung].

vi
The geometry, sound and haptic design define models of the virtual environment according to the corresponding perception channels. The interaction design connects the components at a logical level. All three layers are presented in this work.
Finally the author tests the real-time performance and usability of the developed ergonomic mock-up. Although there are deficiencies in the real-time performance, which have to be eliminated in the future, it could be shown by a user experiment that the principal usability is already given.
vii
Inhaltsverzeichnis
1 Einleitung ........................................................................................... 1 1.1 Motivation und Hintergrund........................................................ 1 1.2 Ergonomie des Fahrzeuginnenraumes ......................................... 4 1.3 Problemdefinition und Aufgabenstellung .................................... 7 1.4 Bisherige Ansätze ....................................................................... 8
1.4.1 Verstellbare Sitzkiste der Fachhochschule Hamburg............ 9 1.4.2 Entwicklung eines variablen Ergonomie-Prüfstandes mit
CAD-Anbindung und Validierung einer Arbeitsmethodik.... 9 1.4.3 Virtual Reality in Automotive Design and Manufacturing . 10 1.4.4 Realization and Evaluation of Virtual Cockpit Simulation and
Virtual Flight Simulation ................................................... 11 1.5 Struktur der Arbeit .................................................................... 13
2 Material und Methode....................................................................... 14 2.1 Virtual Reality .......................................................................... 14
2.1.1 Immersion ......................................................................... 16 2.1.2 Multisensorische Reize...................................................... 17 2.1.3 Echtzeitfähigkeit ............................................................... 26
2.2 Perzeptuelle Integration I .......................................................... 27 2.3 Komponenten eines VR-Systems .............................................. 29 2.4 Grafikdisplays........................................................................... 32
2.4.1 Head-Mounted Displays .................................................... 33 2.4.2 Projektionswände, Caves & Cubes .................................... 35 2.4.3 Immersive Desktopsysteme und Vision Domes ................. 37
2.5 Audiodisplays ........................................................................... 38 2.6 Haptische Displays.................................................................... 40 2.7 Tracking ................................................................................... 42
2.7.1 Mechanisches Tracking ..................................................... 44 2.7.2 Akustisches Tracking ........................................................ 45 2.7.3 Elektromagnetisches Tracking........................................... 46 2.7.4 Optisches Tracking............................................................ 48 2.7.5 Inertiales Tracking ............................................................ 50 2.7.6 Hybrides Tracking............................................................. 51
2.8 Datenhandschuhe ...................................................................... 52 2.9 3D-Menschmodelle................................................................... 53 2.10 Virtuelle Fahrsimulationen........................................................ 54 2.11 Perzeptuelle Integration II ......................................................... 56
2.11.1 Fehlerquellen .................................................................... 56 2.11.2 Sensor Fusion und Prediction ............................................ 57
2.12 VR-Anwendungen in der Automobilindustrie ........................... 58 2.12.1 Visualisierung von Datenkontrollmodellen........................ 58 2.12.2 Postprocessing von FEM-Berechnungen ........................... 58
viii
2.12.3 Virtuelle Produkt Klinik .................................................... 59
3 Entwurf und Realisierung ................................................................. 60 3.1 Komponentenauswahl ............................................................... 61
3.1.1 Haptisches Display (Sitzkiste) ........................................... 61 3.1.2 Grafik- und Audiodisplay .................................................. 63 3.1.3 3D-Menschmodell............................................................. 64 3.1.4 Tracking............................................................................ 69 3.1.5 Fahrsimulation .................................................................. 77
3.2 Kommunikationsentwurf........................................................... 85 3.3 Geometrie-, Sound- und Haptikentwurf..................................... 90 3.4 Interaktionsentwurf ................................................................... 93
4 Ergebnisvalidierung.......................................................................... 96 4.1 Validierung der Echtzeitfähigkeit.............................................. 96
4.1.1 Latenzmessung.................................................................. 97 4.2 Validierung der Einsatzfähigkeit ............................................. 101
5 Diskussion...................................................................................... 106 5.1 Haptisches Display (Sitzkiste)................................................. 107 5.2 Grafik- und Audiodisplay........................................................ 109 5.3 Tracking ................................................................................. 110 5.4 3D-Menschmodell .................................................................. 112 5.5 Fahrsimulation ........................................................................ 113 5.6 Geometrie-, Audio- und Haptikentwurf................................... 115
6 Zusammenfassung und Ausblick..................................................... 118 6.1 Zusammenfassung .................................................................. 118 6.2 Nutzungskontexte ................................................................... 121
6.2.1 Variabler Ergonomieprüfstand......................................... 121 6.2.2 Direkte Kopplung mit CAD-Systemen ............................ 122 6.2.3 Aufbau von Ergonomiebewertungsteams......................... 123 6.2.4 Global Virtual Ergonomic Prototyping ............................ 125
Literaturverzeichnis................................................................................ 127
Informationen aus dem World Wide Web............................................... 144
Lebenslauf.............................................................................................. 149
Anhang................................................................................................... 150
ix
Abbildungsverzeichnis Abbildung 1: Prinzipieller Ablauf einer Automobilentwicklung in Europa
nach [Spies94] .................................................................................... 1 Abbildung 2: Verkürzter Zielprozess durch Einsatz von Virtual Prototyping
nach [DKT00] .................................................................................... 2 Abbildung 3: Ergonomieschablone............................................................. 5 Abbildung 4: Ergonomie-Menschmodell, hier RAMSIS der tecmath AG
[W3Tec] ............................................................................................. 5 Abbildung 5: Ergonomieprüfstand.............................................................. 6 Abbildung 6: Verstellbare Sitzkiste der FH Hamburg [W3HH97]............... 9 Abbildung 7: Virtual Prototyping von Autocockpits [Bei94] Links:
Physikalischer Aufbau Rechts: Sicht des Benutzers im Display ........ 10 Abbildung 8: Mixed Reality nach [MDG95]............................................. 17 Abbildung 9: Das menschliche Auge nach [Gol97]................................... 18 Abbildung 10: Das menschliche Ohr nach [W3IGH] ................................ 21 Abbildung 11: Hörfläche des Menschen nach [W3Krem] ......................... 21 Abbildung 12: Räumliches Hören [W3Krem]........................................... 22 Abbildung 13: Gleichgewichtsorgan und Schnecke nach [W3ND] ........... 23 Abbildung 14: Mechanorezeptoren der unbehaarten Haut......................... 24 Abbildung 15: VR-Simulation durch Wechsel von Detektion und
Darstellung ....................................................................................... 26 Abbildung 16: Bedeutung des Nervensystems für VR .............................. 28 Abbildung 17: Spacemouse [W3DLR] ..................................................... 30 Abbildung 18: Grafikrechner ONYX [W3SGI] ........................................ 30 Abbildung 19: Head-Mounted Displays Links: Lite EyeTM von Kaiser
Electronics [W3KE] Rechts: Datavisor 80 von n-Vision [W3NVI] ... 33 Abbildung 20: Projektoren, Projektionswand und VR-CubeTM der Firma
TAN Projektionstechnologie [W3TAN]............................................ 35 Abbildung 21: CrstalEyes der Firma StereoGraphics [W3SG] ................ 35 Abbildung 22: Responsive Workbench [W3ABFH] und Vision DomeTM
[JTAP00].......................................................................................... 37 Abbildung 23: PHANToM der Firma SensAble [W3Sens] ....................... 40 Abbildung 24: CyberForceTM der Firma Immersion Corp. [W3IC] ........... 41 Abbildung 25: BOOM (Binocular Omni-Orientation Monitor) der Firma
Fakespace Inc. [W3Fak] ................................................................... 44 Abbildung 26: 3D Mouse und Headtracker der Firma Logitech [W3Log]. 45 Abbildung 27: 3D-BirdTM von Ascension [W3Asc] .................................. 46 Abbildung 28: Kamera der Firma Vicon [W3Vic] und ein zur Ganganalyse
eingesetztes optisches System der Firma Motion Analysis Corporation [W3MAC] ........................................................................................ 48
Abbildung 29: Personentracking mit Markern. Oben links: Aktivmarker. Unten links: Passive 3D-Marker. ...................................................... 49
x
Abbildung 30: Augentracker von SensoMotoric Instruments [W3SMI] .... 50 Abbildung 31: Inertiale Tracker IS-300 und InterTrax der Firma Intersense
[W3Int]............................................................................................. 50 Abbildung 32: IS600 Mark2 der Firma Intersense [W3Int] ....................... 51 Abbildung 33: CyberGlove® und CyberGraspTM der Firma Immersion
Corporation [W3IC].......................................................................... 52 Abbildung 34: Virtuelle Menschen [Tha96].............................................. 53 Abbildung 35: Bewegungsplattformen Links: Bewegungsplattform
FUNRIDE der Firma simtec [W3Sim] Rechts: Bewegliche Simulatorkabine der Firma STN Atlas Elektronik GmbH [W3STN] . 54
Abbildung 36: Sensor Fusion, Prediction nach [AHNS99]........................ 57 Abbildung 37: Visualisierung einer FEM-Brechnung ............................... 58 Abbildung 38: Grobkonzept des Systementwurfs ..................................... 60 Abbildung 39: Sitzkisten und Sitzkistenmodelle Links: Modell einer
einfachen (Holz-)Sitzkiste, die zu Testzwecken verwendet wurde. Mitte: Sitzkiste für den VOLKSWAGEN Passat. Rechts: Sitzkiste für den VOLKSWAGEN Transporter..................................................... 62
Abbildung 40: Datavisor 10Xi der Firma n-Vision [W3NVI] ................... 63 Abbildung 41: Typische Grafikdisplay-Konfiguration des Ergonomie-
Mock-Ups während einer Versuchsdurchführung.............................. 64 Abbildung 42: Manikin-Erzeugung mit RAMSIS/Contour ....................... 66 Abbildung 43: 3D-Menschmodell RAMSIS integriert in Sitzkiste ............ 68 Abbildung 44: Ausführungsperformanz „Greifaufgabe“ mit und ohne
Verwendung eines Menschmodells ................................................... 69 Abbildung 45: Optisches Meßsystem der Firma Qualisys [W3Qua], bzw.
A.R.T. [W3Art] Links: Kamera, Rechts: 6D-Targets ........................ 71 Abbildung 46: Einsatz von Kameras zur Erfassung des Messvolumens
„Sitzkiste“ (links) und Messprinzip nach [Qua98] (rechts) ................ 73 Abbildung 47: Fahrzeug- und Trackingkoordinatensystem ....................... 74 Abbildung 48: Definition und Darstellung von Targets Links: Definition
von 6D-Targets nach [W3Art] Rechts: Darstellung von Targets in virtueller Szene................................................................................. 75
Abbildung 49: Datenerfassung und –auswertung von Interaktionselementen einer Sitzkiste ................................................................................... 78
Abbildung 50: Rotation um Drehachse I................................................... 80 Abbildung 51: Rotation um Drehachse II.................................................. 81 Abbildung 52: Definition der modellierten Szene (links )und Schema des
Platzierungsalgorithmus (rechts) ....................................................... 82 Abbildung 53: Szenenplatzierung ............................................................. 83 Abbildung 54: Berechnung von Nick- und Rollwinkel.............................. 84 Abbildung 55: API VR-System ................................................................ 86 Abbildung 56: Schema des Kommunikationsentwurfs .............................. 87 Abbildung 57: Produzenten und Konsumenten des Ergonomie-Mock-Ups 89 Abbildung 58: Ansichten der modellierten Szene ..................................... 91

xi
Abbildung 59: Einbettung der Prozesskette VR in die CAx-Umgebung bei VOLKSWAGEN nach [Zimm00] ..................................................... 92
Abbildung 60: VOLKSWAGEN Sharan bestehend aus ca. 60.000 Polygonen für Innen- und Außenmodell, integriert in Straßenszene .. 93
Abbildung 61: Schichtmodell „Ergonomie-Mock-Up“ ............................. 93 Abbildung 62: Kopplung der Komponenten Tracking und Menschmodell 94 Abbildung 63: Justierung von Targets zur Laufzeit................................... 94 Abbildung 64: Schematischer Versuchsaufbau zur Messung von
Latenzzeiten ..................................................................................... 97 Abbildung 65: Ergebniswerte Latenzmessung ........................................ 100 Abbildung 66: Probandin im Ergonomie-Mock-Up ................................ 101 Abbildung 67: Momentaufnahmen der Versuchsdurchführung ............... 103 Abbildung 68: RetinaDisplay von microvision [W3MVIS]..................... 109 Abbildung 69: Programmable Vehicle Model [W3Pre01]....................... 122 Abbildung 70: Der 3D-Bodyscanner vitus [W3Vit] Links: Person während
der Vermessung Rechts: Ergebnis mit und ohne Farbmapping ........ 124 Abbildung 71: Vision „Global Virtual Ergonomic Prototyping“ ............. 125 Abbildung 72: Schaltplan für Meßinstument zur Latenzbestimmung ...... 150
xii
Tabellenverzeichnis Tabelle 1: Leistungsmerkmale taktiler Mechanorezeptoren, nach [IDA96] 24 Tabelle 2: Typische Frequenzbereiche menschlicher Bewegung [DM95] . 26 Tabelle 3: Wahrnehmung von Latenz, nach [Wlo95] ................................ 27 Tabelle 4: Übersicht Head-Mounted Displays........................................... 34 Tabelle 5: Übersicht Projektionswände, Caves & Cubes........................... 36 Tabelle 6: Übersicht mechanisches Tracking ............................................ 45 Tabelle 7: Übersicht Akustisches Tracking............................................... 46 Tabelle 8: Übersicht elektromagnetisches Tracking .................................. 47 Tabelle 9: Übersicht optisches Tracking ................................................... 50 Tabelle 10: Übersicht inertiales Tracking ................................................. 51 Tabelle 11: Übersicht hybrides Tracking .................................................. 52 Tabelle 12: Fehlerquellen und -größen nach [Hol95a] und [Hol95b]......... 56 Tabelle 13: Referenzpunkte und Markertypen des 3D-Menschmodells
RAMSIS........................................................................................... 67 Tabelle 14: Zuordnung von Targets zu Referenzpunkten des
Menschmodells................................................................................. 76 Tabelle 15: Spezifikation von Bedien- und Anzeigeelementen der
Simulatorbox SchniSi ....................................................................... 77 Tabelle 16: Variablen der Fahrdynamik (Auswahl)................................... 79 Tabelle 17: Geometriekomplexität der Landschaft.................................... 91 Tabelle 18: Ergebniswerte Latenzmessung ............................................. 100 Tabelle 19: Vergleichskriterien virtuelles / reales Interieur ..................... 102 Tabelle 20: Ergebnis Probandenversuch ................................................. 104 Tabelle 21: Körpermaße eines Mannes, 50. Perzentil (Beispiel).............. 123
1
1 Einleitung
Kapitel 1
Einleitung
Dieses Kapitel präsentiert den Rahmen dieser Arbeit. Es erläutert die Auf-gabenstellung und gibt einen Überblick zur Bearbeitung verwandter The-men. Schließlich folgt ein kurzer Ausblick auf die übrigen Kapitel der Ar-beit. VOLKSWAGEN und Audi haben diese Arbeit initiiert.
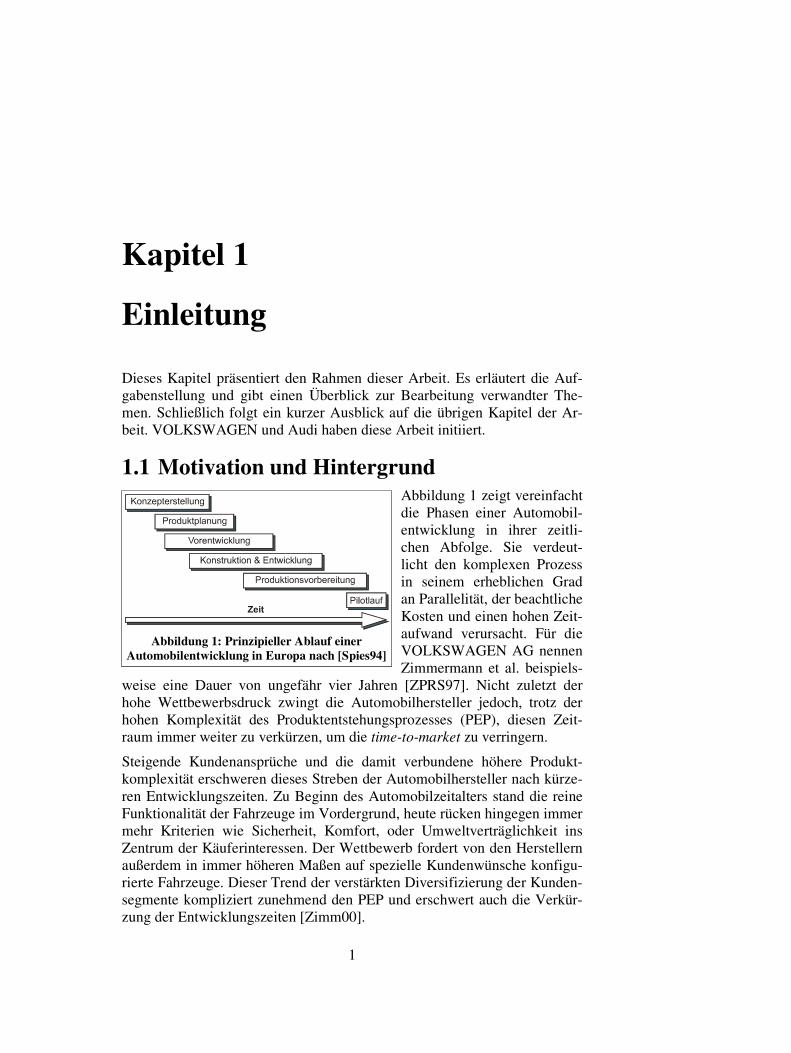
1.1 Motivation und Hintergrund Abbildung 1 zeigt vereinfacht die Phasen einer Automobil-entwicklung in ihrer zeitli-chen Abfolge. Sie verdeut-licht den komplexen Prozess in seinem erheblichen Grad an Parallelität, der beachtliche Kosten und einen hohen Zeit-aufwand verursacht. Für die VOLKSWAGEN AG nennen Zimmermann et al. beispiels-
weise eine Dauer von ungefähr vier Jahren [ZPRS97]. Nicht zuletzt der hohe Wettbewerbsdruck zwingt die Automobilhersteller jedoch, trotz der hohen Komplexität des Produktentstehungsprozesses (PEP), diesen Zeit-raum immer weiter zu verkürzen, um die time-to-market zu verringern.
Steigende Kundenansprüche und die damit verbundene höhere Produkt-komplexität erschweren dieses Streben der Automobilhersteller nach kürze-ren Entwicklungszeiten. Zu Beginn des Automobilzeitalters stand die reine Funktionalität der Fahrzeuge im Vordergrund, heute rücken hingegen immer mehr Kriterien wie Sicherheit, Komfort, oder Umweltverträglichkeit ins Zentrum der Käuferinteressen. Der Wettbewerb fordert von den Herstellern außerdem in immer höheren Maßen auf spezielle Kundenwünsche konfigu-rierte Fahrzeuge. Dieser Trend der verstärkten Diversifizierung der Kunden-segmente kompliziert zunehmend den PEP und erschwert auch die Verkür-zung der Entwicklungszeiten [Zimm00].
Abbildung 1: Prinzipieller Ablauf einer Automobilentwicklung in Europa nach [Spies94]

Einleitung 2
Qualitätssicherung begleitet den gesamten Prozess der Produktentwicklung. Je später Änderungen durchgeführt werden müssen, desto höher sind die Kosten, die durch die Beseitigung der Mängel verursacht werden. Ein Mittel zur Überprüfung der Produktkonsistenz besteht im Aufbau sogenannter Datenkontrollmodelle. Sie wechseln in regelmäßigen Zeitintervallen und sollen den aktuellen Stand der Entwicklung wiederspiegeln und ggfs. auf Schwachstellen hinweisen. Bisher werden dazu hauptsächlich physikalische Modelle (Physical Mock-Up, PMU) verwendet, die z.B. aus Ton gefertigt sein können. Die Herstellung von einem PMU ist zeit- und kostenintensiv. Es kann passieren, dass nach der Fertigstellung eines Modells dieses bereits veraltetet ist. Außerdem besitzen sie keine große Flexibilität, so lassen sich verschiedene Produktvarianten oft nur über mehrere Modelle realisieren.
Die Herausforderung der Auto-mobilfirmen liegt heute u.a. in der Integration neuer rechner-gestützter Methoden und Tools wie z.B. Virtual Reality (VR), Digital Mock-Up (DMU) und Rapid Prototyping in den PEP [HBS98, DKT00, Zimm00]. Der Einsatz dieser Techniken des Virtual Prototypings ermöglicht die Umsetzung verkürzter und sicherer Prozesse bei gleichzei-
tig höherer Produktvarianz. Der verstärkte Einsatz virtueller Prototypen, insbesondere zu Beginn eines neuen Projektes (siehe Abbildung 2), redu-ziert die Anzahl physikalischer Modelle, die dann nur noch in der Endphase der Entwicklung zur Absicherung der Produktqualität verwendet werden brauchen. Die Erzeugung virtueller Prototypen erfolgt typischerweise in wesentlich kürzerer Zeit als ein entsprechender realer Aufbau. Erste Ergeb-nisse, beispielsweise aus Kollisionsüberprüfungen, Montageversuchen oder Crashberechnungen, stehen so früher als bisher für Produktoptimierungen zur Verfügung. Der Austausch von Entwurfsvarianten ist auch in einem virtuellen Modell meist problemlos realisierbar. Zusammenfassend lässt sich feststellen, dass durch Virtual Prototyping Potentiale zur Kosten- und Zeiteinsparung entstehen und gleichzeitig die Produktqualität gesteigert werden kann. Der Einsatz der Technik kann daher wesentlich zu einer Op-timierung der Produktentstehung beitragen. Zimmermann resümiert in die-sem Zusammenhang [Zimm00]: „Langfristig werden nur die Automobilher-steller am Markt bestehen können, die neben der Produktinnovation auch die Innovation der Produktentstehungsprozesse beherrschen“.
Physische Erprobung
Projektstart Start derSerienfertigung
Heutiger Produktentstehungsprozeß
Erprobung anhanddigitaler Produktdaten
Angestebter Produktentstehungsprozeß durch Einsatz von Virtual Prototyping
Erprobung anhanddigitaler Produktdaten
PhysischeErprobung
Zeit
Gewinn
Abbildung 2: Verkürzter Zielprozess durch Einsatz von Virtual Prototyping nach [DKT00]
Einleitung 3
Die vorliegende Arbeit steht genau in dem eben vorgestellten Kontext. Sie entwirft und realisiert ein Ergonomie-Mock-Up (auch Ergonomieprüfstand genannt). Unter der ergonomischen Gestaltung eines technischen Produktes wird allgemein die Anpassung von Größe, Gewicht, Bedienelementen, etc. an die anthropometrischen Eigenschaften des Menschen verstanden1. Methoden der virtuellen Realität realisieren das Mock-Up. Ein neuer Fahr-zeugentwurf soll nicht, wie beim Einsatz von PMU-Methoden, real aufge-baut, sondern in einer virtuellen Umgebung dargestellt und für ergonomi-sche Fragestellungen beurteilbar und erlebbar gemacht werden.
Der Grundgedanke von Virtual Reality besteht darin, einen Benutzer voll-ständig in eine computergenerierte, künstliche Datenwelt zu integrieren. Alle seine Sinne sollen so stimuliert werden, dass er die virtuelle Umgebung als nahezu real empfinden kann. Es ist daher zunächst folgendes Szenario vorstellbar, das bewusst übertrieben dargestellt ist:
Szenario: Kurze Zeit nachdem die Daten eines neuen Fahrzeugentwurfs zusammengetragen und aufbereitet wurden, steht das „virtuelle Auto“ für Ergonomieanalysen zur Verfügung. Ein Proband betritt den Versuchsraum, steigt in das Fahrzeug und nimmt dabei dessen Geruch wahr. Er schaut sich im Innenraum um und stellt alle Bedienkomponenten seinen Bedürfnissen entsprechend ein. Er erfasst das Lenkrad und spürt dabei dessen Oberflä-chenbeschaffenheit. Der Versuchsleiter fordert ihn nun auf verschiedene Elemente zu betätigen, Bewertungen zum Bedienkomfort abzugeben. Danach fährt er mit dem Auto zu einem bestimmten Ort. Während der Fahrt nimmt der Proband den Fahrtwind und das Motorengeräusch wahr. Bei der Einfahrt auf eine Kreuzung stellt er fest, dass er nur mühevoll die dortigen Ampeln einsehen kann. Er teilt dieses dem Versuchsleiter mit, der daraufhin solange Parameter des Fahrzeugentwurfs ändert (z.B. Dachhöhe, Position A-Säule), bis die Ampeln bequem einsehbar sind. Nach Erreichen des Ziel-orts und der Durchführung einiger weiterer Tests steigt der Proband aus dem Fahrzeug. Der Versuchsleiter stoppt die Simulation – der Proband erblickt einen leeren Raum.
Das Szenario zeigt die prinzipiellen Möglichkeiten auf, die der Einsatz vir-tueller Methoden verspricht. Zu bedenken ist allerdings, dass heute Anwen-dungen aus dem VR-Bereich nur sehr selten – und wenn nur für äußerst einfache Simulationen – eine derartige „Simulationsqualität“ erreichen. Die Stimulierung einzelner Sinnesorgane erfordert zum großen Teil einen er-heblichen Hard- und Softwareaufwand. Dieses geht auf Kosten intuitiver Benutzbarkeit und die erzielbaren Resultate sind trotzdem nicht immer zu-friedenstellend. Es ist absehbar, dass durch den Fortschritt der Entwicklung Defizite einzelner Systemkomponenten zukünftig an Bedeutung verlieren.
1 Das Wort Ergonomie ist eine Kombination der beiden griechischen Wortstämme ergon (Arbeit) und nomos (Regel, Gesetz).

Einleitung 4
Wesentlich gravierender schätzt Bryson hingegen das Fehlen allgemeiner Entwurfsmethodiken ein, die zur Realisierung überzeugender VR-Applika-tionen einsetzbar sind [Bry94b]. Die Applikationen lassen sich i.a. nicht, wie in vielen anderen Bereichen der Informationstechnologie, nach dem „Baukastenprinzip“ zusammenfügen, das auf der Verwendung von Stan-dardkomponenten beruht. Es sind oft Speziallösungen erforderlich, um die durch die Anwendungen definierten Leistungsmerkmale zu erreichen.
Bei der Realisierung von VR-Applikationen, die mehr als nur die visuelle Wahrnehmung ansprechen sollen, kommt der konsistenten, ganzheitlichen Berücksichtigung mehrerer Wahrnehmungskanäle der Benutzer eine zen-trale Bedeutung zu. Bullinger et al. resümieren in diesem Zusammenhang [BBB97, S. 1734]: Es sind die Faktoren (human factors) zur Erzeugung von Immersion heute (1997) nur teilweise bekannt. Eine der größten Herausfor-derungen im VR-Bereich liegt im Verständnis dieser Faktoren, die der Ge-nerierung von immersiven, computererzeugten Umgebungen dienen, die der Benutzer als real empfinden kann.
VOLKSWAGEN und Audi haben ein Forschungsprojekt initiiert, das die Verwendbarkeit von Methoden der virtuellen Realität prüft, um den Prozess der ergonomischen Fahrzeuggestaltung zu verbessern. Ein Teil des oben skizzierten Szenarios soll darin in die Tat umgesetzt werden.
1.2 Ergonomie des Fahrzeuginnenraumes Bei der Entwicklung neuer Automobile spielen heute immer mehr Aspekte, wie optimale Bedien- und Handhabbarkeit durch die späteren Benutzer eine wichtige Rolle. Beim Lenken eines Fahrzeugs sind Bedienelemente wie Lenkrad, Pedalerie und Gangschaltung permanent zu benützen, daher sind deren Positionierung und Verstellbarkeit so zu gestalten, dass dies auch unter komfortablen Gesichtspunkten und ermüdungsfrei möglich wird. Außerdem darf die geometrische Anordnung von Elementen im Fahrzeu-ginnenraum keine Gefahren implizieren, beispielsweise muss die freie und ausreichende Sicht auf den Straßenverlauf und die Anzeigeelemente mög-lich sein. Bei der Gestaltung von Fahrerarbeitsplätzen sowie der Auslegung möglicher Verstellbereiche sollen die Körperabmessungen, Körperhaltun-gen und Empfindungen des Menschen als Grundlage und Referenz gelten. Für ergonomische Analysen werden daher die Erreichbarkeit, die Sichtbar-keit und die Belastung der durch die Umgebung erzwungenen Körperhal-tung geprüft und aufgezeichnet.
Als Hilfsmittel zur Beantwortung ergonomischer Fragestellungen sind in der Vergangenheit zuerst anthropometrische Normwerttabellen zum Einsatz gekommen, die heute weltweit zur Verfügung stehen [Sei94, S.1] und regel-mäßig aktualisiert werden. In ihnen sind statistische Daten für Größt-, Mit-

Einleitung 5
tel- und Kleinstmaße unterschiedlichster Bevölkerungsgruppen festgehalten. Die Automobilentwickler haben mit Hilfe der Werte aus den Tabellenwer-ken menschliche Abmessungen in ihre Konstruktionspläne einbezogen.
Die Tabellen haben später auch als Grund-lage für die Fertigung von Somatographie-schablonen in unterschiedlichen Maßstä-ben gedient (z.B. DIN-Schablone DIN 33 408 „Kieler Puppe“ oder SAE-Schablone SAE J 826). Durch den Einsatz dieser zweidimensionalen, teilweise beweglichen Schablonen (siehe Abbildung 3) ist der Prozess der ergonomischen Fahrzeugaus-legung wesentlich vereinfacht und an-schaulicher gestaltet worden. Sie kommen heute noch, insbesondere in frühen Pro-jektphasen, zum Einsatz. Schwierigkeiten entstehen dadurch, dass gestalterische Aufgaben im dreidimensionalen Raum mit Hilfe zweidimensionaler Schablonen ge-
löst werden müssen [Sei94, S.2].
Je mehr die Konstruktion vom Reißbrett hin zu rechnergestützten Methoden wechselt und CAD1-Systeme verstärkt zum Einsatz kommen [Dan97], desto größer wird der Wunsch der Fahrzeugentwickler nach Ergonomie-Werk-zeugen, die sich direkt in der CAD-Umgebung einsetzen lassen. Dies führt zur Entwicklung verschiedener digitaler, hauptsächlich dreidimensionaler Ergonomie-Menschmodelle, wie z.B. SAMMIE (1970), ANTHROPOS (1991) oder RAMSIS (1992). Eine ausführliche Übersicht zur Entwicklung dieser Menschmodelle ist z.B. zu finden in [Sei94] oder [Geu94].
Durch die Verwendung digitaler Menschmodelle können Frage-stellungen der Ergonomie einfa-cher, aber vor allem schneller und daher auch mit einer größeren Va-riationstiefe als vorher berücksich-tigt werden. Außerdem sind durch ihren Einsatz viele neue Möglich-keiten entstanden. So ist z.B. die Berücksichtigung von Akzeleration
und verschiedener Körperbautypen vereinfacht. Sichtkegel und Erreichbar-keits-Hüllflächen können online erzeugt und kontrolliert werden (siehe Abbildung 4). Die Ergebnisse, die durch den Einsatz der Menschmodelle
1 CAD: Computer Aided Design
Abbildung 3: Ergonomieschablone
Abbildung 4: Ergonomie-Menschmodell, hier RAMSIS der tecmath AG [W3Tec]
Einleitung 6
gewonnen werden, besitzen jedoch einen entscheidenden Nachteil: Sie beruhen auf der Simulation von Menschen (dies gilt auch für die oben ge-nannten Ergonomieschablonen). Bestimmte Maße, wie z.B. die optimale Höhe der „Gürtellinie eines Fahrzeugs“, lassen sich aber nicht nach derartigen objektiven Verfahren messen [Braun99], da sie stark von den subjektiven Empfindungen der Benutzer abhängig sind. Praktische Tests mit realen Benutzern sind daher unerlässlich [BO99].
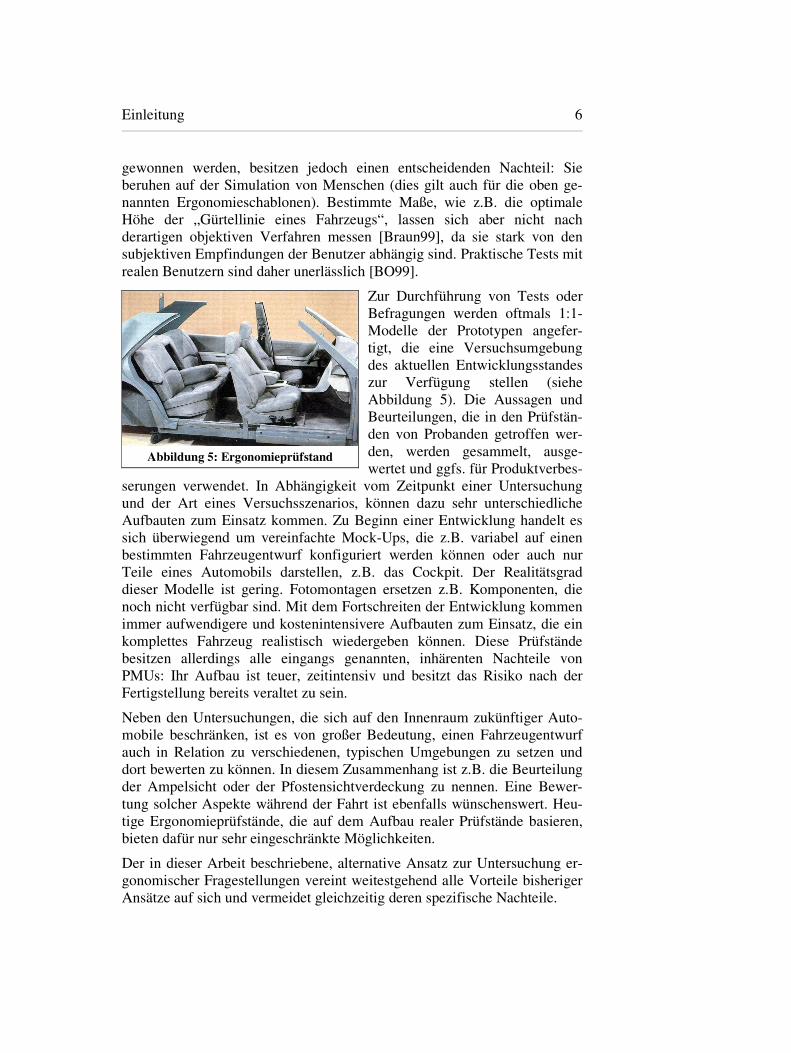
Zur Durchführung von Tests oder Befragungen werden oftmals 1:1-Modelle der Prototypen angefer-tigt, die eine Versuchsumgebung des aktuellen Entwicklungsstandes zur Verfügung stellen (siehe Abbildung 5). Die Aussagen und Beurteilungen, die in den Prüfstän-den von Probanden getroffen wer-den, werden gesammelt, ausge-wertet und ggfs. für Produktverbes-
serungen verwendet. In Abhängigkeit vom Zeitpunkt einer Untersuchung und der Art eines Versuchsszenarios, können dazu sehr unterschiedliche Aufbauten zum Einsatz kommen. Zu Beginn einer Entwicklung handelt es sich überwiegend um vereinfachte Mock-Ups, die z.B. variabel auf einen bestimmten Fahrzeugentwurf konfiguriert werden können oder auch nur Teile eines Automobils darstellen, z.B. das Cockpit. Der Realitätsgrad dieser Modelle ist gering. Fotomontagen ersetzen z.B. Komponenten, die noch nicht verfügbar sind. Mit dem Fortschreiten der Entwicklung kommen immer aufwendigere und kostenintensivere Aufbauten zum Einsatz, die ein komplettes Fahrzeug realistisch wiedergeben können. Diese Prüfstände besitzen allerdings alle eingangs genannten, inhärenten Nachteile von PMUs: Ihr Aufbau ist teuer, zeitintensiv und besitzt das Risiko nach der Fertigstellung bereits veraltet zu sein.
Neben den Untersuchungen, die sich auf den Innenraum zukünftiger Auto-mobile beschränken, ist es von großer Bedeutung, einen Fahrzeugentwurf auch in Relation zu verschiedenen, typischen Umgebungen zu setzen und dort bewerten zu können. In diesem Zusammenhang ist z.B. die Beurteilung der Ampelsicht oder der Pfostensichtverdeckung zu nennen. Eine Bewer-tung solcher Aspekte während der Fahrt ist ebenfalls wünschenswert. Heu-tige Ergonomieprüfstände, die auf dem Aufbau realer Prüfstände basieren, bieten dafür nur sehr eingeschränkte Möglichkeiten.
Der in dieser Arbeit beschriebene, alternative Ansatz zur Untersuchung er-gonomischer Fragestellungen vereint weitestgehend alle Vorteile bisheriger Ansätze auf sich und vermeidet gleichzeitig deren spezifische Nachteile.
Abbildung 5: Ergonomieprüfstand
Einleitung 7
1.3 Problemdefinition und Aufgabenstellung Die Automobilhersteller sehen sich heute mit Forderungen konfrontiert, neue, leistungsfähigere Produkte in immer kürzerer Zeit auf den Markt zu bringen. Als eine spezielle Forderung ist in diesem Zusammenhang die Fahrzeugergonomie zu nennen. Um hier den steigenden Ansprüchen der Konsumenten gerecht zu werden, müssen sinnvolle ergonomische Verfah-ren zur Verifizierung arbeitswissenschaftlicher Fragestellungen immer frü-her in den Entwicklungsprozess von Automobilen integriert werden. Bis heute kommen zu diesem Zweck Methoden und Werkzeuge zum Einsatz, die alle eine partielle Aufgabe erfüllen, aber mit spezifischen Mängeln behaftet sind. Es fehlt ein ganzheitlicher Ansatz, der früher als bisher in den Produktentstehungsprozess integriert werden kann.
Dem starken Wettbewerbsdruck begegnen die Hersteller mit dem Einsatz neuer, moderner, rechnergestützter Techniken und Tools zur Produktgestal-tung, die Potentiale zur Zeit- und Kosteneinsparung bieten und gleichzeitig zu einer höheren Produktqualität beitragen können. Dazu gehört auch Vir-tual Reality.
Die zentrale Aufgabe dieser Arbeit besteht darin, die Einsetzbarkeit von VR-Methoden im Nutzungskontext der Fahrzeugergonomie zu überprüfen. Durch den Einsatz von Methoden der virtuellen Realität soll dem Benutzer ein ähnlich vollständiger Innenraumeindruck ermöglicht werden, wie dies bisher nur in sehr aufwendigen physikalischen Prüfständen möglich war. Dazu soll exemplarisch eine spezielle Art eines Ergonomieprüfstands, ein sog. Ergonomie-Mock-Up, entworfen, realisiert und auf Einsetzbarkeit ge-testet werden. Besonders Ergonomieuntersuchungen mit subjektiver Be-wertung von Sichtbedingungen, Bedieninteraktionen, Tätigkeitsabläufen bis hin zu einfachen Fahrszenarien sollen mit dieser neuen Form des Virtual Ergonomic Prototypings in einer VR-Umgebung durchführbar werden.
Der Einsatz von VR-Methoden erfordert eine intensive Überprüfung der jeweils aktuell erhältlichen Komponenten. Ständig kommen neue Hard- und Softwaresysteme auf den Markt, die mehr Leistungsfähigkeit und Benutzer-freundlichkeit versprechen, ohne den Wunsch der Nutzer nach universeller Einsetzbarkeit zu erfüllen. Die überwiegende Mehrheit an Komponenten weist heute spezifische Mängel auf. Aus diesem Grund sind VR-Kompo-nenten stets in Abhängigkeit zu einer gegebenen Aufgabe zu wählen. Nur so ist für eine Anwendung im Rahmen der aktuellen Möglichkeiten ein gutes Leistungsverhalten erreichbar.
Die Untersuchung der Verwendbarkeit von Methoden der virtuellen Realität zum Zweck der ergonomischen Fahrzeuggestaltung ist also gerechtfertigt. Kann die Verwendbarkeit anhand des entwickelten Ergonomie-Mock-Ups nachgewiesen werden, so gestattet es dieser neue Ansatz des Virtual Ergo-

Einleitung 8
nomic Prototypings, ergonomische Fragestellungen mit einer wesentlich größeren Bandbreite als bisher zu untersuchen und dadurch die Qualität zu-künftiger Automobile zu verbessern. Gleichzeitig entstehen Potentiale zur Zeit- und Kosteneinsparung.
1.4 Bisherige Ansätze Die Ansätze, die eine ähnliche thematische Richtung aufweisen, wie die hier vorliegende Arbeit, lassen sich grob in zwei Kategorien einteilen. Eine Klasse von Arbeiten beschäftigt sich mit der Verbesserung jetziger Formen der Ergonomieanalyse. Der Einsatz digitaler Menschmodelle ist in diesem Zusammenhang ein Thema, das z.B. in [Kri93, Sei94, Geu94, RL97, SPB99] behandelt wird. Ebenfalls in diese Kategorie gehören Arbeiten, die dem Zweck der Weiterentwicklung von (Ergonomie-)Mock-Ups dienen. So werden z.B. Prototypen gebaut und evaluiert, die eine große Variabilität besitzen und daher auf ein breites Fahrzeugspektrum angepasst werden kön-nen1. Auch die einfache und schnelle Konfigurierbarkeit der Mock-Ups wird beispielsweise in [Braun99] beschrieben. Sie sollen in Abhängigkeit von Fahrzeugentwürfen, die in einem CAD-System vorliegen, sich weitest-gehend automatisch konfigurieren. Mittlerweile gibt es sogar Firmen (siehe [W3Pre01]), deren Hauptbetätigungsfeld in der Entwicklung variabler Sitz-kisten liegt, die über einen Computer konfiguriert und gesteuert werden können.
In die andere Kategorie fallen hingegen Arbeiten, die sich mit dem Einsatz virtueller Methoden befassen und einen engen Bezug zu Fragestellungen dieser Arbeit besitzen. Zunächst ist in diesem Zusammenhang das Thema der Bewegungserfassung von Personen oder allgemeiner von Objekten zu nennen (Tracking, siehe Kapitel 2.7). Der große Bedarf an Weiterentwick-lungen auf diesem Gebiet spiegelt sich in einer enorm hohen Anzahl an Veröffentlichungen wieder: [Fur89, App91, MAB92, Bha93, Azu93, Mul94, DMZ95, Azu95, FZMC96, MG96, WB96, SHCG96, Wel96, FJS97, Koch97, YNA99, Auer00]. Die Überlagerung realer und virtueller Szenen-komponenten (Szenenkalibrierung), eine Problematik die insbesondere aus dem Themenbereich der Augmented Reality bekannt ist, spielt ebenfalls eine wichtige Rolle. Ergebnisse dazu sind z.B. in [JMC93, AB94, UK95, WCBTR95, Azu97, Baj97] zu finden. Mögliche Probleme, die speziell beim Einsatz von Datenhelmen zur Visualisierung auftreten können (Head-Mounted Displays, siehe Kapitel 2.4.1), werden in [Min93, MJ94, BDR96, BR98, Art00] untersucht. Weitere typische Fehlerquellen bei der Realisie-rung von VR-Anwendungen, sowie Ansätze zu deren Vermeidung werden in [OCMB95, Hol95a, Hol95b, JLS97] behandelt. Schließlich sind hier auch
1 In [W3HH97] oder [Braun99] sind Beispiele dafür zu finden.

Einleitung 9
Ergebnisse zur Implementierung von Fahr- und Flugsimulatoren zu nennen. Diese Simulatoren gehören mit zu den ältesten Anwendungen, zu deren Re-alisierung virtuelle Methoden erfolgreich zum Einsatz kommen. In diesem Zusammenhang sind z.B. die Arbeiten [LM95, KEPRW95, Ols95, SKDO99, Kem99] zu nennen.
Es existieren hingegen kaum Arbeiten, die ausführlich auf die Kombination dieser beiden thematischen Richtungen eingehen. Nachfolgend werden die Arbeiten näher vorgestellt, die nach Meinung des Autors die meisten Über-einstimmungen zum Thema dieser Arbeit aufweisen.
1.4.1 Verstellbare Sitzkiste der Fachhochschule Hamburg Das Konzept eines Ergonomieprüfstands wird in [W3HH97] beschrieben (siehe Abbildung 6). Durch Einstellmöglichkei-ten seiner Bedienteile soll eine Darstellung aller denkbaren Fahrerarbeitsplätze, vom LKW bis zum Sportwagen ermöglicht werden. Es ist geplant, den Prüfstand so-wohl real als auch als CAD-Modell zu realisieren. Für theoretische Ergonomie-untersuchungen in der CAD-Umgebung ist die Verwendung des digitalen Mensch-
modells ANTHROPOS [W3Tec] beabsichtigt. Die Ergebnisse aus den Un-tersuchungen sollen dann am realen Prüfstand verifiziert werden.
Bewertung: Es handelt sich derzeit lediglich um ein Konzept, das im Rahmen einer Diplomarbeit entwickelt wurde. Der Aufbau des Prüfstands soll innerhalb weiterer Diplomarbeiten folgen. Der Einsatz von Methoden der virtuellen Realität ist als Option für die Zukunft angedacht, wird aber nicht im Detail erläutert.
1.4.2 Entwicklung eines variablen Ergonomie-Prüfstandes mit CAD-Anbindung und Validierung einer Arbeitsmethodik
In der Arbeit [Braun99] wird eine in ihren Abmessungen elektromotorisch verstellbare Sitzkiste konzipiert, aufgebaut und die Einsetzbarkeit als Ergo-nomieprüfstand validiert. Zusätzlich wird eine bidirektionale Schnittstelle mit einem CAD-System implementiert. Die Schnittstelle kann einerseits zur einfachen Konfiguration der Sitzkiste genutzt werden. Die Konfiguration kann in Abhängigkeit eines Fahrzeugkonzeptes erfolgen, das im CAD-System vorliegt. Andererseits können Ergebnisse aus den Ergonomie-untersuchungen über die Schnittstelle wieder an das CAD-System zurückge-geben werden, die dann wiederum zur Änderung des Fahrzeugkonzeptes verwendet werden können.
Abbildung 6: Verstellbare Sitzkiste
der FH Hamburg [W3HH97]
Einleitung 10
Ein großer Teil der Arbeit besteht aus einer Validierungsstudie. Als Resultat konnte ein hoher linearer Zusammenhang zwischen subjektiven Beurtei-lungen im Ergonomieprüfstand und den Aussagen von Versuchspersonen im korrespondierenden Serienfahrzeug herausgefunden werden.
Bewertung: Der Einsatz von Methoden der virtuellen Realität ist kein Thema der Arbeit. Zum Aufbau des Mock-Ups werden charakteristische, reale Fahrzeugteile verwendet. Ein Einsatz in sehr frühen Phasen der Entwicklung, in denen diese Teile noch nicht existieren, ist daher pro-blematisch. Auch die kurzfristige Darstellung mehrerer Entwurfsvarianten gestaltet sich aufgrund des erforderlichen Prüfstandsumbaus als schwierig.
1.4.3 Virtual Reality in Automotive Design and Manufacturing
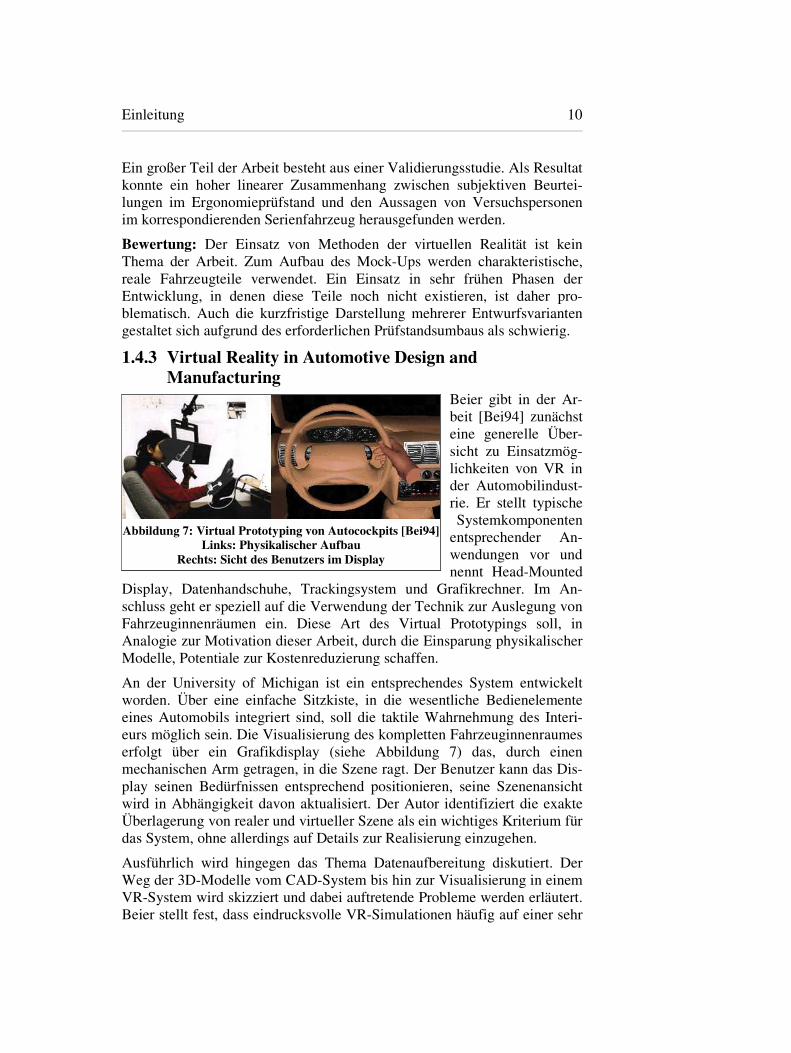
Beier gibt in der Ar-beit [Bei94] zunächst eine generelle Über-sicht zu Einsatzmög-lichkeiten von VR in der Automobilindust-rie. Er stellt typische Systemkomponenten
entsprechender An-wendungen vor und nennt Head-Mounted
Display, Datenhandschuhe, Trackingsystem und Grafikrechner. Im An-schluss geht er speziell auf die Verwendung der Technik zur Auslegung von Fahrzeuginnenräumen ein. Diese Art des Virtual Prototypings soll, in Analogie zur Motivation dieser Arbeit, durch die Einsparung physikalischer Modelle, Potentiale zur Kostenreduzierung schaffen.
An der University of Michigan ist ein entsprechendes System entwickelt worden. Über eine einfache Sitzkiste, in die wesentliche Bedienelemente eines Automobils integriert sind, soll die taktile Wahrnehmung des Interi-eurs möglich sein. Die Visualisierung des kompletten Fahrzeuginnenraumes erfolgt über ein Grafikdisplay (siehe Abbildung 7) das, durch einen mechanischen Arm getragen, in die Szene ragt. Der Benutzer kann das Dis-play seinen Bedürfnissen entsprechend positionieren, seine Szenenansicht wird in Abhängigkeit davon aktualisiert. Der Autor identifiziert die exakte Überlagerung von realer und virtueller Szene als ein wichtiges Kriterium für das System, ohne allerdings auf Details zur Realisierung einzugehen.
Ausführlich wird hingegen das Thema Datenaufbereitung diskutiert. Der Weg der 3D-Modelle vom CAD-System bis hin zur Visualisierung in einem VR-System wird skizziert und dabei auftretende Probleme werden erläutert. Beier stellt fest, dass eindrucksvolle VR-Simulationen häufig auf einer sehr
Abbildung 7: Virtual Prototyping von Autocockpits [Bei94] Links: Physikalischer Aufbau
Rechts: Sicht des Benutzers im Display

Einleitung 11
arbeits- und zeitintensiven Datenaufbereitung beruhen und dass der dazu nötige Aufwand oft unterschätzt wird.
Bewertung: Trotz vieler Gemeinsamkeiten zur hier vorliegenden Arbeit, besitzt der eben beschriebene Ansatz wesentliche Unterscheidungsmerk-male, Nachteile und Unvollkommenheiten, von denen nachfolgend die wichtigsten genannt werden. Zur Veränderung der Szenensicht muss der Benutzer mindestens eine Hand an den Displayapparat nehmen und diesen neu positionieren. Damit werden Ergonomieuntersuchungen problematisch, die ein möglichst natürliches Seh- und Bedienverhalten erfordern. Die Inte-gration des Benutzers in die virtuelle Umgebung findet nur in Ansätzen statt. Sein aktuelles Sehfeld wird berücksichtigt. Daneben werden seine Hände erfasst und grafisch dargestellt (siehe Abbildung 7, rechts). Ansons-ten kann er seinen eigenen Körper nicht visuell wahrnehmen. Das Thema Fahrsimulation, zu dem auch die Erzeugung einer geeigneten Versuchs-landschaft gehört, wird in der Arbeit nicht behandelt. Das Schwerpunkt-thema der Arbeit „Datenaufbereitung“ ist sicherlich auch heute noch von großer Bedeutung. Durch die kontinuierliche Weiterentwicklung entsprech-ender Software-Werkzeuge ist es inzwischen aber sehr viel besser be-herrschbar geworden (vgl. Abschnitt 3.3 ab Seite 90).
1.4.4 Realization and Evaluation of Virtual Cockpit Simulation and Virtual Flight Simulation
Das Ziel von Schiefele ist in der Arbeit [Schi00] mit Methoden der virtuel-len Realität eine Cockpit- und Flugsimulation exemplarisch zu entwickeln und aufzubauen. Danach wird die so entstandene Mensch-Maschine-Schnittstelle auf ihre Nutzbarkeit und Beschränkungen hin untersucht. Bei-spielhaft wird mittels CAD-Daten ein virtuelles Cockpit eines Airbus A340 aufgebaut. Das Simulationssystem ist in eine konventionelle Flugsimulation eingebunden. Es enthält eine Geländedatenbank und eine Geräuschsimula-tion. Um das Problem der fehlenden Kraftrückkopplung zu reduzieren, wird das in der virtuellen Umgebung dargestellte Cockpit um eine Luftfahrt-Sitzkiste ergänzt. Neben rein virtuellen Bedienelementen, werden über die Sitzkiste einige Bedienelemente auch taktil fühlbar und real bedienbar ge-macht. Es ist festgestellt worden, dass die Sitzkiste wesentlich zur Erhöhung des realen Eindrucks der Simulation beiträgt. Hingegen verursachen rein virtuelle Bedienelemente enorme Probleme bei den Benutzern. Durch die dort stattfindende Verlagerung der Interaktion ausschließlich auf den visu-ellen Sinn beginnen viele Benutzer neue, „unnatürliche“ Formen der Inter-aktion zu entwickeln. Bei manchen, insbesondere im Umgang mit VR uner-fahrenen Benutzern führt dies sogar zu einer allgemeinen Ablehnung der Simulation.
Ein Datenhelm wird zur Visualisierung des Cockpits benutzt. In Versuchen ist ermittelt worden, dass ein minimales Sehfeld von 80° vorliegen müsse.
Einleitung 12
Bei einer Auflösung von 10241280 × Bildpunkten des Displays sind alle Cockpitanzeigen lesbar. Daneben ist eine Bildwiederholrate von mindestens 30 Hz erforderlich, um sich in virtuellen Cockpits zu orientieren und be-wegte Objekte verfolgen zu können.
Neben der reinen, statischen Simulation des Cockpits wird auch die virtuelle Flugsimulation überprüft und mit der eines konventionellen Flugsimulators verglichen. Airline Piloten fliegen dabei im Durchschnitt mit einer ca. 10% höheren Fehlerrate in VR. Schiefele zieht daraus die Folgerung, dass das entwickelte System derzeit nicht als vollwertiger Ersatz für konventionelle Flugsimulatoren eingesetzt werden kann. Es ist hingegen mehr dazu geeignet, Piloten die Gelegenheit zu geben, sich mit den Gegebenheiten in unbekannten Cockpits vertraut zu machen. Auf diese Weise kann z.B. die Anzahl teurer Simulatorstunden reduziert werden.
Die folgenden Systemparameter konnten zusammenfassend als kritisch identifiziert werden und müssen daher bei der Realisierung verwandter Systeme besonders berücksichtigt werden:
• Kraftrückkopplung • Darstellbares Sehfeld • Auflösung des Grafikdisplays • Bildwiederholrate • Szenenkomplexität • Latenzzeiten • Sound
Bewertung: Die Motivation der eben vorgestellten Arbeit liegt darin, heu-tige, konventionelle Flugsimulatoren zu ergänzen (ggfs. zu ersetzen), um dadurch die Anzahl teurer Simulatorstunden zu reduzieren. Spezielle Erfor-dernisse der (ergonomischen) Fahrzeug- bzw. Cockpitauslegung, wie z.B. einfache und schnelle Austauschbarkeit verschiedener Entwurfsvarianten, spielen nur eine untergeordnete Rolle. Es findet keine vollständige Integra-tion des Benutzers in die virtuelle Umgebung statt. Lediglich sein aktuelles Sehfeld und seine Hände werden diesbezüglich berücksichtigt. Daneben bestehen viele prinzipielle Unterschiede zwischen Fahr- und Flugsimulatio-nen. Ansonsten lässt sich feststellen, dass viele Gemeinsamkeiten zur hier vorliegenden Arbeit existieren. Auf viele Ergebnisse kann daher direkt zurückgegriffen werden.

Einleitung 13
1.5 Struktur der Arbeit Das folgende Kapitel 2 „Material und Methode“ gibt zunächst einen Über-blick zu Virtual Reality. Wesentliche Grundbegriffe und Eigenschaften werden erläutert. Der Schwerpunkt des Kapitels liegt dann auf der Vorstel-lung derzeitiger Systeme und Komponenten aus diesem Gebiet, die bei der Realisierung der gegebenen Aufgabe berücksichtigt werden müssen. Am Ende des Kapitels gibt der Autor eine kurze Übersicht zu anderen Einsatz-möglichkeiten von Virtual Reality in der Automobilindustrie.
Auf der Grundlage der in Kapitel 2 gegebenen Übersicht wird im 3. Kapitel „Entwurf und Realisierung“ zunächst eine Komponentenauswahl getroffen. Im Anschluss daran wird der Systementwurf beschrieben. Er lässt sich in die drei Schichten Kommunikation, Modellierung und Interaktion gliedern.
Anhand einer ersten Realisierung werden im 4. Kapitel „Ergebnisvalidie-rung“ kritische Systemparameter überprüft und die Ergebnisse dazu vorge-stellt. Ein erstes Experiment zur Einsatzfähigkeit des entwickelten Ergono-mieprüfstands schließt das 4. Kapitel ab.
Kapitel 5 behandelt die Diskussion der Ergebnisse dieser Arbeit. Es werden Vor- und Nachteile, sowie derzeitige Schwächen der gewählten Realisie-rung genannt. Außerdem vergleicht der Autor die erzielten Ergebnisse mit den Ergebnissen anderer Arbeiten.
Kapitel 6 „Zusammenfassung und Ausblick“ fasst die Ergebnisse dieser Arbeit zusammen. Abschließend folgt ein Ausblick auf naheliegende An-sätze, die den Benutzungskontext des Ergonomie-Mock-Ups erweitern.
14
2 Material und Methode
Kapitel 2
Material und Methode
Nach einer allgemeinen Einführung in das Thema Virtual Reality liegt der Schwerpunkt dieses Kapitels auf der Vorstellung aktueller Komponenten, die auf diesem Gebiet derzeit eingesetzt werden und die bei der Lösung der gegebenen Aufgabe zu berücksichtigen sind. Damit wird die Grundlage für eine spätere Komponentenauswahl und den Systementwurf geschaffen. Am Ende des Kapitels wird eine kurze Übersicht zu anderen Einsatzmöglich-keiten von Virtual Reality in der Automobilindustrie gegeben.
An einigen Stellen werden spezielle Komponenten anhand kommerzieller Produkte in Bild und Text vorgestellt. Der Autor betont, dass die Darstel-lung der Produkte der Veranschaulichung dient und nicht in irgendeiner Form als Bewertung zu verstehen ist.
2.1 Virtual Reality Bemerkung: Die Zusammenfassung von zwei Gegensätzen zur Begriffs-kombination Virtual Reality, kurz VR, ist nicht unumstritten. In der Literatur sind oft Alternativbegriffe wie Virtual Environment (VE), Virtual Presence, Artificial Reality, Virtual Worlds oder Cyberspace anzutreffen. In dieser Arbeit soll nicht weiter auf diese Begriffsvielfalt eingegangen werden. Der Autor spricht überwiegend von Virtual Reality. Auch wenn diesem Begriff das äußerste Maß an wissenschaftlicher Präzision fehlt, besitzt er heute si-cherlich die größte Popularität und Verbreitung.
In den letzten Jahrzehnten sind auf dem Sektor der 3D-Computergrafik im Hard- und Softwarebereich enorme Leistungssteigerungen erzielt worden. Der Einsatz von Methoden aus diesem Bereich ist heute vielerorts nicht mehr wegzudenken. So haben sich z.B. in vielen Branchen 3D-CAD- CAE- und CAM-Programme etabliert1. Auch die Computerspielindustrie trägt wesentlich zur Verbreitung und Weiterentwicklung dieser Technologie bei.
1 Computer Aided Design (CAD), Computer Aided Engineering (CAE), Computer Aided Manufacturing (CAM). Diese Bereiche lassen sich zu CAx zusammenfassen.
Material und Methode 15
Wird hingegen die Art und Weise betrachtet, mit der Benutzer mit diesen 3D-Systemen interagieren, so ist oft kaum ein Unterschied zur Benutzung herkömmlicher 2D-Computersysteme festzustellen. Hilfsmittel wie Com-putermaus, Tastatur oder Grafiktablett kommen zum Einsatz. Die visuellen Informationen werden meist über einen gewöhnlichen 2D-Monitor dargebo-ten. Die modellierten 3D-Objekte „existieren“ in ihrer eigenen, syntheti-schen Welt, getrennt vom Benutzer.
Ein Grundgedanke von Virtual Reality besteht darin, den Benutzer in die computergenerierte 3D-Welt – oder umgekehrt die computergenerierten 3D-Objekte in die Welt des Benutzers – zu integrieren. Der Mensch soll dabei in die Lage versetzt werden mit der Maschine (den synthetischen Objekten der Computersimulation) zu interagieren und zwar auf für ihn natürliche Art, z.B. durch Sprechen, Zeigen, Ergreifen oder Bewegen von Objekten. In diesem Sinne wird VR daher oft als eine Mensch-Maschine-Schnittstelle (Man-Machine-Interface, MMI) bezeichnet.
Nach [W3Zwis98] ist das Ziel der Entwicklung von Mensch-Maschine-Schnittstellen, von den Eigenschaften der menschlichen Kommunikations-kanäle und Fertigkeiten auszugehen und dann Geräte, Interaktionstechniken und Schnittstellen zu entwickeln, die eine effektive wechselseitige Kommu-nikation mittels dieser Kanäle zulassen. Durch den Einsatz bereits vorhan-dener Fertigkeiten wird die kognitive Belastung während der Interaktion mit dem Computer reduziert. Dadurch erhöht sich die Bandbreite der Kommuni-kation zwischen Mensch und Computer, und sie wird zudem natürlicher.
Bei den „traditionellen“ Formen der Mensch-Computer-Interaktion erfolgt die Steuerung der Maschine kommandoorientiert. Bei der in VR möglichen Direktmanipulation müssen dagegen keine spezifischen Kommandos einge-setzt werden: Der Computer „beobachtet“ den Benutzer passiv und reagiert aufgrund seiner Aktionen, wie Augen-, Kopf- oder Handbewegungen an-gemessen.
In dem nun folgenden Zitat, das von einem der Pioniere auf diesem Gebiet stammt, und in der anschließenden Definition sind wesentliche Aspekte von Virtual Reality zusammengefasst, auf die danach ausführlich im einzelnen eingegangen wird.
The Ultimate Display (I. E. Sutherland, [Sut65]): “The ultimate display would, of course, be a room within which the compu-ter can control the existence of matter. A chair displayed in such a room would be good enough to sit in. Handcuffs displayed in such a room would be confining, and a bullet in such a room would be fatal. With appropriate programming such a display could be the Wonderland into which Alice walked.”

Material und Methode 16
Definition: Virtual Reality [Boh99] „Virtual Reality ist eine mit Hilfe der Computertechnologie generierte und fiktive Welt, die sich dadurch auszeichnet, dass sie über bestimmte Schnitt-stellen vielfältige Reize an möglichst alle Sinne des VR-Nutzers vermittelt, die dieser registriert und durch bestimmte Reaktionen beantwortet, welche wiederum von der VR registriert werden und sie zu entsprechenden Gegen-reaktionen veranlassen. Um die Illusion einer neuen Wirklichkeit zu ver-vollständigen, dürfen nur die Reize der VR und nicht die Reize der realen Welt zu dem VR-Nutzer gelangen, so dass er sich vollständig in VR einge-bunden fühlt und die wahre Welt vergisst bzw. zumindest zeitweilig ver-drängt. Ferner muss die VR schnell und folgerichtig (gemäß den in der VR festgelegten Gesetzmäßigkeiten) auf die Aktionen des Nutzers reagieren.“
2.1.1 Immersion Sowohl im Zitat als auch in der Definition wird von der „Einbindung“ des Nutzers in VR gesprochen, die in diesem Zusammenhang als Immersion bezeichnet wird und deren Erzeugung ein Hauptziel von VR-Applikationen ist. Beim Benutzer soll der Eindruck entstehen, sich tatsächlich in der com-putergenerierten Szene zu befinden und mit ihr zu interagieren, wobei gleichzeitig seine reale Umgebung für die Dauer der Simulation „ausge-blendet“ werden soll.
Nach [BZSS95] sind für die Erzeugung von Immersion erstens hinreichende sensorische Informationen, zweitens die Möglichkeit der Kontrolle über diese Informationen (z.B. durch Verändern der Perspektive) und drittens die Möglichkeit zur Modifizierung der Umgebung erforderlich. In [W3Zwis98] werden zwei Kategorien von Einflussfaktoren auf den Grad der Immersion unterschieden:
Zu externalen Faktoren gehören z.B. Auflösung der Präsentation, senso-rische Merkmale und aktive Interaktionsmöglichkeiten. Der virtuelle Körper sollte dem realen Körper des Benutzers ähnlich sein, und die Kopplung zwi-schen den Aktionen des Benutzers und deren Auswirkungen sollte einfach und klar erkennbar sein. Verhaltensstereotype (individuell oder kulturell bestimmte Erwartungen und Erfahrungen) verstärken das Gefühl der Im-mersion. Die Existenz weiterer animierter Objekte, ein klares Handlungs-ziel, freie Auswahlmöglichkeiten des Benutzers und sofortiges sensorisches Feedback sind ebenfalls hilfreich. Fotorealistische Simulationen sind dage-gen nicht zwingend erforderlich.
Internale Faktoren hängen stark von der subjektiven Erfahrung ab. Bereits beim Entwurf von VR-Systemen müssen die kognitiven Prozesse der Be-nutzer berücksichtigt werden (welche Aspekte der realen Welt sollen simu-liert werden, wie orientieren sich Menschen in der realen Welt). Optimal ist

Material und Methode 17
eine Integration mehrerer sensorischer Kanäle zu einem konsistenten Gan-zen, mit dem in Echtzeit interagiert werden kann.
An dieser Stelle ist anzumerken, dass nicht alle VR-Applikatio-nen gleichartig
hohe Anforderungen an Immersion stellen, wie dies in der Definition durch die „vollständige Einbindung“ des Nutzers gefordert ist. Zum Beispiel sind in [JTAP00] die drei Klassen voll-, semi- und nicht-immersive Anwen-dungen unterschieden. Eine ähnliche Klassifizierung gemäß Abbildung 8 bietet [MDG95]: Hier werden Virtual Reality und verwandte Gebiete unter dem Oberbegriff Mixed Reality angeordnet. Je weiter links dabei ein Gebiet zu finden ist, desto mehr kann ein Nutzer seine reale Umgebung wahrneh-men und desto weniger spielt Immersion eine Rolle. Virtual Reality ist äu-ßerst rechts angeordnet, besitzt somit den höchsten Immersionsanspruch. Bei Anwendungen aus dem Gebiet der Augmented Reality (AR) nimmt ein Benutzer primär seine reale Umgebung wahr. Über ein Computersystem können ihm zusätzliche, unterstützende Informationen geliefert werden. Augmented Virtuality (AV) ist eine Mischform aus VR und AR.
In der Praxis verwischen oft die Grenzen zwischen den einzelnen Gebieten, und viele Anwendungen werden einfach der „populären“ VR zugeordnet, obwohl z.B. reale Komponenten in ihnen vorkommen. Dies gilt auch für die hier vorliegende Arbeit. Bei genauer Betrachtung ist sie dem Gebiet AV zuzuordnen. Die Begründung erfolgt als Vorwegnahme: Um den Fahrzeug-innenraum taktil wahrnehmbar zu machen, kommt in dieser Arbeit eine reale Ergonomiesitzkiste zum Einsatz. Rein virtuelle Methoden bieten der-zeit nicht die Möglichkeit, eine so komplexe Umgebung wie das Interieur eines Automobils in allen Einzelheiten taktil darzustellen.
2.1.2 Multisensorische Reize Menschen nehmen die Umgebung über ihre Sinnesorgane wahr. In [Boh99] wird geschätzt, dass pro Sekunde über eine Million Reize an die Sinnes-organe gelangen, von denen nur ein Bruchteil tatsächlich verarbeitet wird. Zur Erzeugung von Immersion muss ein VR-System in der Lage sein, für die Dauer der Simulation die Reize der realen Welt teilweise oder komplett zu unterdrücken und stattdessen die Sinnesorgane eines Nutzers mit jenen Reizen zu versorgen, die der VR-Simulation entstammen. Diese „Täu-schung der Sinne“ ist dabei im Idealfall qualitativ so hochwertig und konsi-stent, dass sie von einem Benutzer nicht bemerkt wird und er sich in der virtuellen Umgebung wie in einer entsprechenden realen Umgebung verhal-ten kann.
Real VirtualMixed Reality
Completely Virtual(Virtual Reality)Augmented VirtualityAugmented RealityCompletely Real
(Reality)
Abbildung 8: Mixed Reality nach [MDG95]
Material und Methode 18
Nachfolgend wird auf die einzelnen Arten der Sinneswahrnehmung (Per-zeption) eingegangen. Dabei werden die verschiedenen Formen der Wahr-nehmung insbesondere auf spezifische Leistungsmerkmale hin untersucht. Idealerweise erfüllen die Komponenten eines VR-Systems genau (bzw. min-destens) diese Leistungsmerkmale. Der Autor zeigt später, dass auch mit Komponenten, die dem heutigen, aktuellen Stand der Technik entsprechen, diese Forderung nur selten zu erfüllen ist.
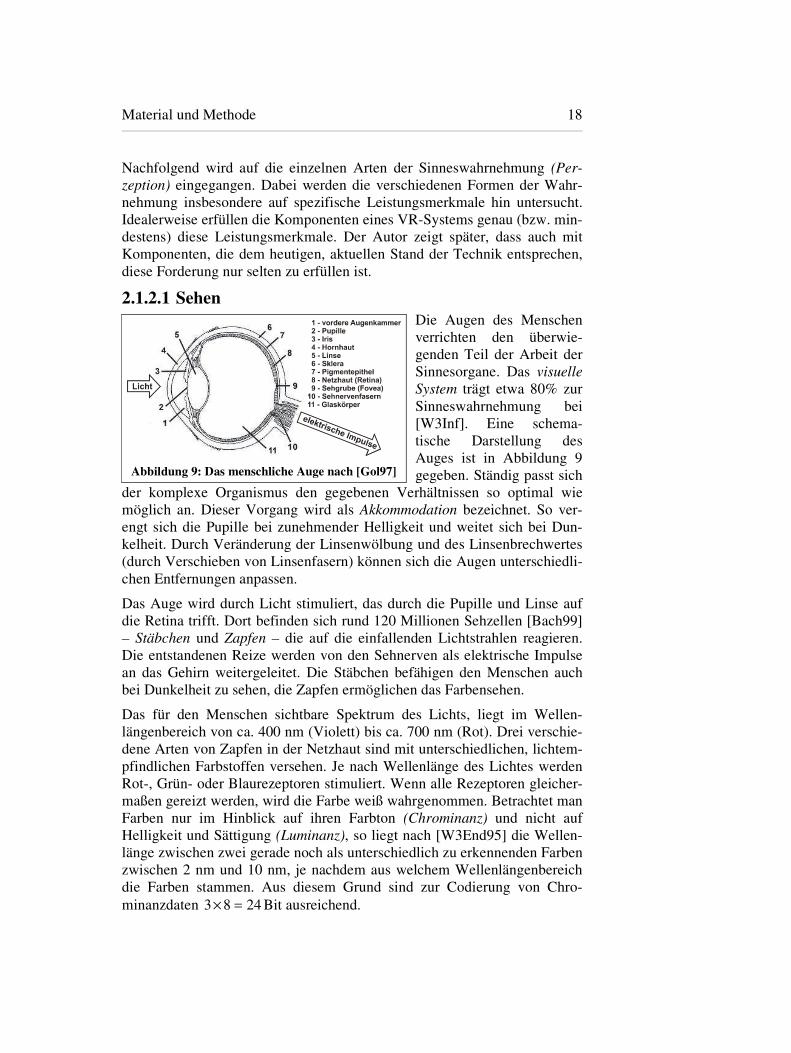
2.1.2.1 Sehen Die Augen des Menschen verrichten den überwie-genden Teil der Arbeit der Sinnesorgane. Das visuelle System trägt etwa 80% zur Sinneswahrnehmung bei [W3Inf]. Eine schema-tische Darstellung des Auges ist in Abbildung 9 gegeben. Ständig passt sich
der komplexe Organismus den gegebenen Verhältnissen so optimal wie möglich an. Dieser Vorgang wird als Akkommodation bezeichnet. So ver-engt sich die Pupille bei zunehmender Helligkeit und weitet sich bei Dun-kelheit. Durch Veränderung der Linsenwölbung und des Linsenbrechwertes (durch Verschieben von Linsenfasern) können sich die Augen unterschiedli-chen Entfernungen anpassen.
Das Auge wird durch Licht stimuliert, das durch die Pupille und Linse auf die Retina trifft. Dort befinden sich rund 120 Millionen Sehzellen [Bach99] – Stäbchen und Zapfen – die auf die einfallenden Lichtstrahlen reagieren. Die entstandenen Reize werden von den Sehnerven als elektrische Impulse an das Gehirn weitergeleitet. Die Stäbchen befähigen den Menschen auch bei Dunkelheit zu sehen, die Zapfen ermöglichen das Farbensehen.
Das für den Menschen sichtbare Spektrum des Lichts, liegt im Wellen-längenbereich von ca. 400 nm (Violett) bis ca. 700 nm (Rot). Drei verschie-dene Arten von Zapfen in der Netzhaut sind mit unterschiedlichen, lichtem-pfindlichen Farbstoffen versehen. Je nach Wellenlänge des Lichtes werden Rot-, Grün- oder Blaurezeptoren stimuliert. Wenn alle Rezeptoren gleicher-maßen gereizt werden, wird die Farbe weiß wahrgenommen. Betrachtet man Farben nur im Hinblick auf ihren Farbton (Chrominanz) und nicht auf Helligkeit und Sättigung (Luminanz), so liegt nach [W3End95] die Wellen-länge zwischen zwei gerade noch als unterschiedlich zu erkennenden Farben zwischen 2 nm und 10 nm, je nachdem aus welchem Wellenlängenbereich die Farben stammen. Aus diesem Grund sind zur Codierung von Chro-minanzdaten 2483 =× Bit ausreichend.
Abbildung 9: Das menschliche Auge nach [Gol97]
Material und Methode 19
Das Auflösungsvermögen der Augen bezieht sich auf die Fähigkeit, zwei Punkte eines Objekts, die einen bestimmten Abstand zueinander haben, ge-rade noch getrennt wahrzunehmen. Die Eigenschaft wird zur Bestimmung der Sehschärfe benutzt. Die Sehschärfe hängt von vielen Einflussfaktoren ab. Zunächst findet nur in einem kleinen Bereich, der sich um die Sehachse erstreckt, zentrales oder scharfes Sehen statt. Für den Betrachtungsabstand von zwei Metern wird in [W3Roc01] dafür ein Sehfeld genannt, das sich durch einen Winkel zur Sehachse aufspannen lässt, der etwa 2 bis 7° be-trägt. Das betrachtete Objekt wird direkt auf die Fovea abgebildet. Im übri-gen Bereich findet peripheres oder unscharfes Sehen statt. Daneben ist die Sehschärfe proportional zur Luminanz der betrachteten Szene. In [Bach99] wird für das menschliche Auge ein Auflösungsvermögen genannt, das etwas besser als eine Bogenminute ist. Es sei kurz erklärt, was dieser Wert für Grafikdisplays bedeutet: Ein Winkel von einem Grad entspricht bei einer Betrachtungsentfernung von 57 cm einer Strecke von einem Zentimeter. Also müssen bei dieser Entfernung auf einem Zentimeter des Displays min-destens 60 Pixel untergebracht werden, was über 150 dpi entspricht. Um dem Shannonschen Abtasttheorem zu genügen, muss der Wert, falls kein Anti-Aliasing eingesetzt wird, sogar doppelt so hoch sein.
Neben dem räumlichen spielt auch das zeitliche Auflösungsvermögen der Augen eine wichtige Rolle. Der große Teil heutiger Grafikdisplays versorgt den Benutzer mit einer Sequenz an Einzelbildern in schneller Abfolge. In diesem Zusammenhang ist es wichtig, diejenige Frequenz zu kennen, die als Flimmerfusionsfrequenz bezeichnet wird, ab der der Sehapparat die Abfolge als kontinuierlich wahrnimmt. Sie ist abhängig von der auftretenden Lumi-nanz. So kann z.B. das 100-Hz-Flackern einer Leuchtstoffröhre als störend registriert werden. Heutige Grafikdisplays besitzen oft Bildwiederholraten zwischen 60 und 70 Hz. Die entsprechenden Darstellungen werden im allge-meinen als flimmerfrei empfunden.
Beim beidäugigen, binokularen Sehen überlappen sich die Sehfelder der Augen. Nur im Überlappungsbereich ist Tiefenwahrnehmung möglich. Der Eindruck der räumlichen Tiefe entsteht dadurch, dass die Bilder beider Au-gen einen Unterschied aufweisen, der in diesem Zusammenhang (Stereo-) Disparität genannt wird. Der Augenabstand (Inter Pupillar Distance, IPD), der beim Menschen im Mittel 63 mm annimmt (siehe DIN 33 402), führt zu (leicht) unterschiedlichen Blickwinkeln auf das zu betrachtende Objekt. Das Gehirn ist in der Lage, aus den Abweichungen beider Bilder die räumliche Information zu gewinnen. Diese Charakteristiken der Stereopsis werden ausgenutzt, um stereoskopische Ansichten künstlich zu erzeugen. Die Stereosehschärfe gehört zu den Übersehschärfen (Hyperacuity). Das Auflö-sungsvermögen liegt nach [Bach99] sogar bei 10 Bogensekunden. Für technische Umsetzungen müssen daher Methoden wie Anti-Aliasing zur Anwendung kommen [Bach99].
Material und Methode 20
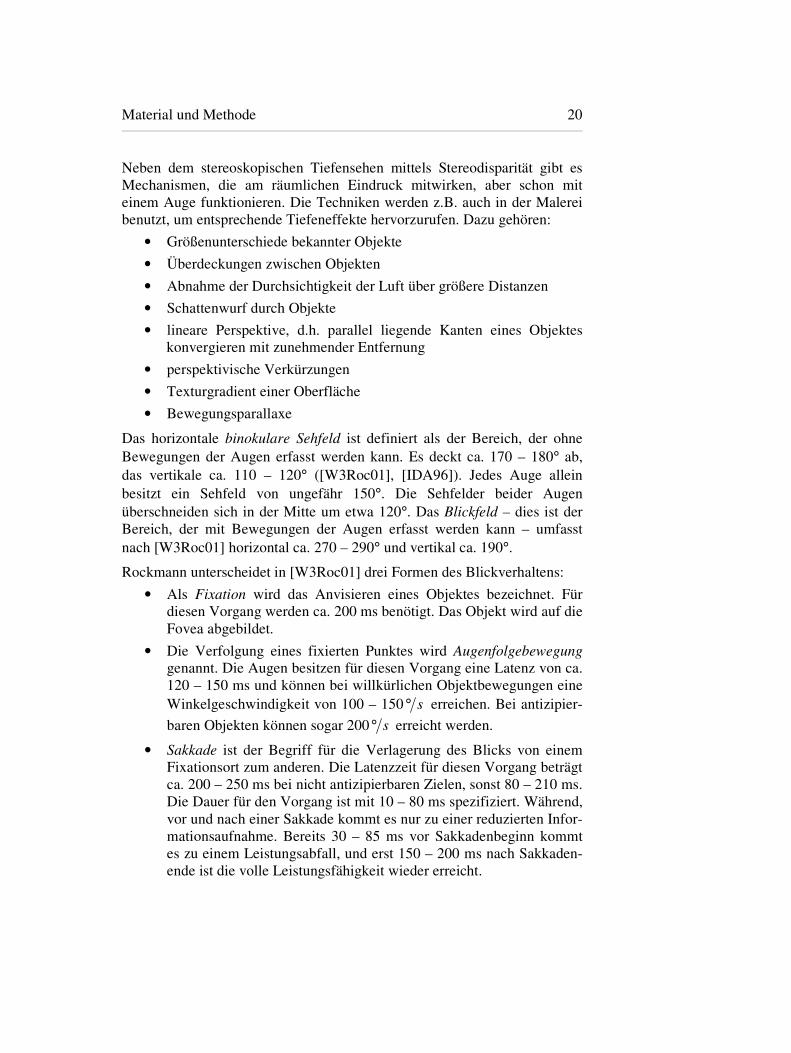
Neben dem stereoskopischen Tiefensehen mittels Stereodisparität gibt es Mechanismen, die am räumlichen Eindruck mitwirken, aber schon mit einem Auge funktionieren. Die Techniken werden z.B. auch in der Malerei benutzt, um entsprechende Tiefeneffekte hervorzurufen. Dazu gehören:
• Größenunterschiede bekannter Objekte • Überdeckungen zwischen Objekten • Abnahme der Durchsichtigkeit der Luft über größere Distanzen • Schattenwurf durch Objekte • lineare Perspektive, d.h. parallel liegende Kanten eines Objektes
konvergieren mit zunehmender Entfernung • perspektivische Verkürzungen • Texturgradient einer Oberfläche • Bewegungsparallaxe
Das horizontale binokulare Sehfeld ist definiert als der Bereich, der ohne Bewegungen der Augen erfasst werden kann. Es deckt ca. 170 – 180° ab, das vertikale ca. 110 – 120° ([W3Roc01], [IDA96]). Jedes Auge allein besitzt ein Sehfeld von ungefähr 150°. Die Sehfelder beider Augen überschneiden sich in der Mitte um etwa 120°. Das Blickfeld – dies ist der Bereich, der mit Bewegungen der Augen erfasst werden kann – umfasst nach [W3Roc01] horizontal ca. 270 – 290° und vertikal ca. 190°.
Rockmann unterscheidet in [W3Roc01] drei Formen des Blickverhaltens: • Als Fixation wird das Anvisieren eines Objektes bezeichnet. Für
diesen Vorgang werden ca. 200 ms benötigt. Das Objekt wird auf die Fovea abgebildet.
• Die Verfolgung eines fixierten Punktes wird Augenfolgebewegung genannt. Die Augen besitzen für diesen Vorgang eine Latenz von ca. 120 – 150 ms und können bei willkürlichen Objektbewegungen eine Winkelgeschwindigkeit von 100 – 150 s° erreichen. Bei antizipier-baren Objekten können sogar 200 s° erreicht werden.
• Sakkade ist der Begriff für die Verlagerung des Blicks von einem Fixationsort zum anderen. Die Latenzzeit für diesen Vorgang beträgt ca. 200 – 250 ms bei nicht antizipierbaren Zielen, sonst 80 – 210 ms. Die Dauer für den Vorgang ist mit 10 – 80 ms spezifiziert. Während, vor und nach einer Sakkade kommt es nur zu einer reduzierten Infor-mationsaufnahme. Bereits 30 – 85 ms vor Sakkadenbeginn kommt es zu einem Leistungsabfall, und erst 150 – 200 ms nach Sakkaden-ende ist die volle Leistungsfähigkeit wieder erreicht.
Material und Methode 21
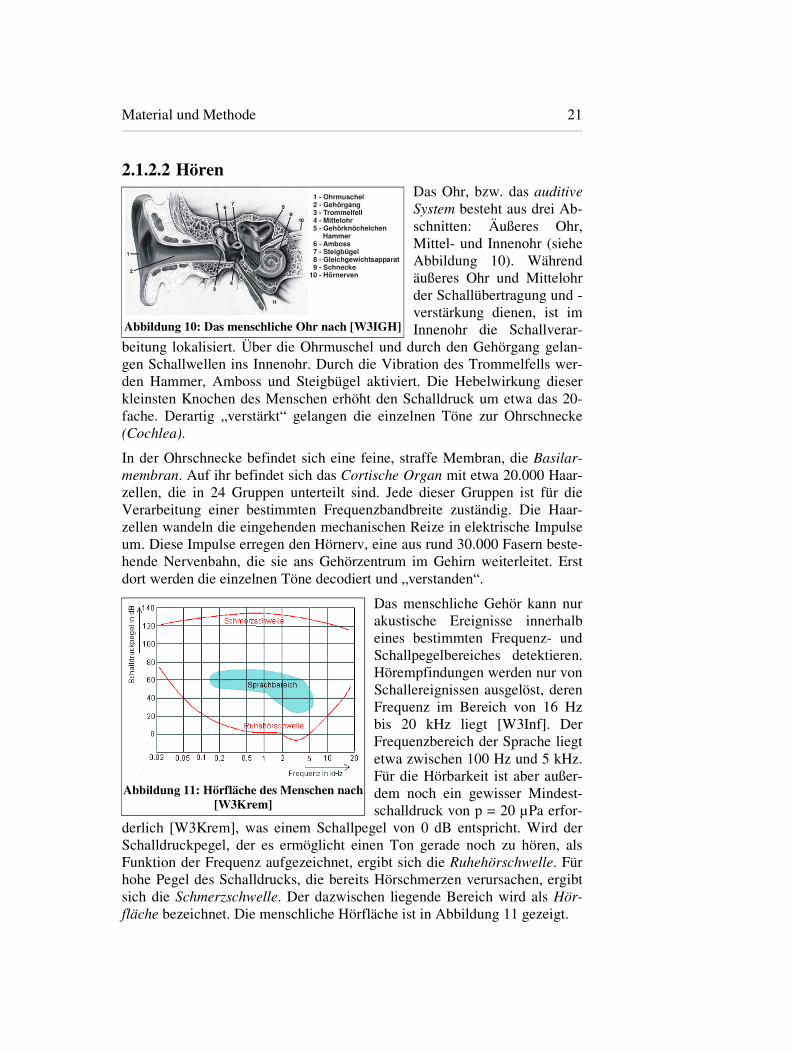
2.1.2.2 Hören Das Ohr, bzw. das auditive System besteht aus drei Ab-schnitten: Äußeres Ohr, Mittel- und Innenohr (siehe Abbildung 10). Während äußeres Ohr und Mittelohr der Schallübertragung und -verstärkung dienen, ist im Innenohr die Schallverar-
beitung lokalisiert. Über die Ohrmuschel und durch den Gehörgang gelan-gen Schallwellen ins Innenohr. Durch die Vibration des Trommelfells wer-den Hammer, Amboss und Steigbügel aktiviert. Die Hebelwirkung dieser kleinsten Knochen des Menschen erhöht den Schalldruck um etwa das 20-fache. Derartig „verstärkt“ gelangen die einzelnen Töne zur Ohrschnecke (Cochlea).
In der Ohrschnecke befindet sich eine feine, straffe Membran, die Basilar-membran. Auf ihr befindet sich das Cortische Organ mit etwa 20.000 Haar-zellen, die in 24 Gruppen unterteilt sind. Jede dieser Gruppen ist für die Verarbeitung einer bestimmten Frequenzbandbreite zuständig. Die Haar-zellen wandeln die eingehenden mechanischen Reize in elektrische Impulse um. Diese Impulse erregen den Hörnerv, eine aus rund 30.000 Fasern beste-hende Nervenbahn, die sie ans Gehörzentrum im Gehirn weiterleitet. Erst dort werden die einzelnen Töne decodiert und „verstanden“.
Das menschliche Gehör kann nur akustische Ereignisse innerhalb eines bestimmten Frequenz- und Schallpegelbereiches detektieren. Hörempfindungen werden nur von Schallereignissen ausgelöst, deren Frequenz im Bereich von 16 Hz bis 20 kHz liegt [W3Inf]. Der Frequenzbereich der Sprache liegt etwa zwischen 100 Hz und 5 kHz. Für die Hörbarkeit ist aber außer-dem noch ein gewisser Mindest-schalldruck von p = 20 µPa erfor-
derlich [W3Krem], was einem Schallpegel von 0 dB entspricht. Wird der Schalldruckpegel, der es ermöglicht einen Ton gerade noch zu hören, als Funktion der Frequenz aufgezeichnet, ergibt sich die Ruhehörschwelle. Für hohe Pegel des Schalldrucks, die bereits Hörschmerzen verursachen, ergibt sich die Schmerzschwelle. Der dazwischen liegende Bereich wird als Hör-fläche bezeichnet. Die menschliche Hörfläche ist in Abbildung 11 gezeigt.
1 - Ohrmuschel 2 - Gehörgang 3 - Trommelfell 4 - Mittelohr 5 - Gehörknöchelchen Hammer 6 - Amboss 7 - Steigbügel 8 - Gleichgewichtsapparat 9 - Schnecke10 - Hörnerven
Abbildung 10: Das menschliche Ohr nach [W3IGH]
Abbildung 11: Hörfläche des Menschen nach [W3Krem]
Material und Methode 22
Aus der Kurve der dargestellten Ruhehörschwelle ist erkennbar, dass das Gehör im Frequenzbereich zwischen 2 und 5 kHz am empfindlichsten ist. Es ist nur ein geringer Schallpegel erforderlich, um eine Hörempfindung hervorzurufen. Für eine subjektiv vergleichbare Lautstärkeempfindung im Frequenzbereich ab 10 kHz muss der Schallpegel entsprechend erhöht wer-den. Gleiches gilt für den Bereich niedriger Frequenzen.
Als Frequenzauflösung wird die Fähigkeit des Gehörs bezeichnet, Tonhö-hen zu differenzieren. Nach [W3Krem] können ungefähr 620 Tonhöhen unterschieden werden. Die wahrnehmbare Frequenzänderung ist dabei abhängig von der Frequenz des Schallereignisses. Unterhalb einer Frequenz von 500 Hz ist ein Frequenzunterschied von 1,8 Hz gerade noch hörbar. Oberhalb von 500 Hz muss die Frequenzänderung nach [W3LOI] mindes-tens 0,3% betragen, damit eine Tonhöhenänderung wahrnehmbar ist. Dies bedeutet beispielsweise, dass das Gehör in der Lage ist einen 1000 Hz-Ton von einem 1003 Hz-Ton zu unterscheiden.
Eine vergleichbare Aussage für das Gehör in bezug auf Lautstärkeempfind-lichkeit, bzw. Wahrnehmung der Schallstärke, ist schwierig. Physikalisch ist die Schallstärke eindeutig über den Schalldruck definiert. Für die Beschrei-bung der subjektiven Hörempfindung Lautheit, reicht die physikalische Schallstärke allein allerdings nicht aus. Es müssen vielmehr auch Einflüsse von Frequenzbereich, Bandbreite und Dauer des Schallsignals berücksich-tigt werden. Auf eine Aussage dazu wird hier verzichtet und auf [W3Krem] verwiesen.
Das zeitliche Auflösungsvermögen des Gehörs ist nach [W3LOI] besser als 30 ms. Es können also Schallereignisse, die im Abstand von 30 ms aufein-anderfolgen deutlich unterschieden werden.
Zur Durchführung der bis hier genannten Hörfunktionen ist prin-zipiell ein Ohr ausreichend. Es handelt sich um sog. monaurales Hören. Durch das Zusammenspiel beider Ohren (binaurales Hören) ist auch räumliches Hören mög-lich. Befindet sich eine Schall-quelle genau vor oder hinter einer
hörenden Person, so liegen an beiden Trommelfellen die gleichen Ohrsig-nale an. Das ändert sich aber, wenn die Position der Schallquelle nicht mehr frontal vor der Person liegt. In diesem Fall tritt an den Trommelfellen ein unterschiedliches Ohrsignal auf, bedingt durch die unterschiedliche geomet-rische Lage der Ohren zur Schallquelle und durch den Kopf, der hierbei ein „Schallhindernis“ darstellt,. Dieses ist in Abbildung 12 dargestellt. Für die Lokalisation von Geräuschquellen werden vom Gehör einerseits Laufzeit-
Abbildung 12: Räumliches Hören [W3Krem]
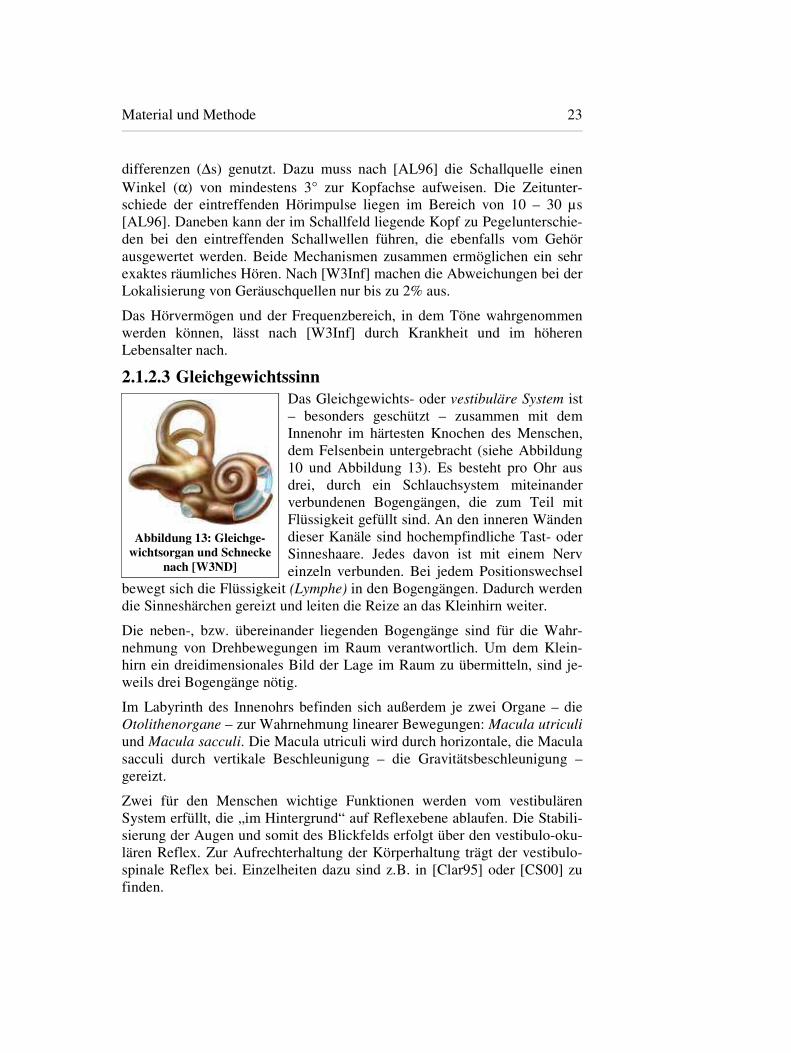
Material und Methode 23
differenzen (∆s) genutzt. Dazu muss nach [AL96] die Schallquelle einen Winkel (α) von mindestens 3° zur Kopfachse aufweisen. Die Zeitunter-schiede der eintreffenden Hörimpulse liegen im Bereich von 10 – 30 µs [AL96]. Daneben kann der im Schallfeld liegende Kopf zu Pegelunterschie-den bei den eintreffenden Schallwellen führen, die ebenfalls vom Gehör ausgewertet werden. Beide Mechanismen zusammen ermöglichen ein sehr exaktes räumliches Hören. Nach [W3Inf] machen die Abweichungen bei der Lokalisierung von Geräuschquellen nur bis zu 2% aus.
Das Hörvermögen und der Frequenzbereich, in dem Töne wahrgenommen werden können, lässt nach [W3Inf] durch Krankheit und im höheren Lebensalter nach.
2.1.2.3 Gleichgewichtssinn Das Gleichgewichts- oder vestibuläre System ist – besonders geschützt – zusammen mit dem Innenohr im härtesten Knochen des Menschen, dem Felsenbein untergebracht (siehe Abbildung 10 und Abbildung 13). Es besteht pro Ohr aus drei, durch ein Schlauchsystem miteinander verbundenen Bogengängen, die zum Teil mit Flüssigkeit gefüllt sind. An den inneren Wänden dieser Kanäle sind hochempfindliche Tast- oder Sinneshaare. Jedes davon ist mit einem Nerv einzeln verbunden. Bei jedem Positionswechsel
bewegt sich die Flüssigkeit (Lymphe) in den Bogengängen. Dadurch werden die Sinneshärchen gereizt und leiten die Reize an das Kleinhirn weiter.
Die neben-, bzw. übereinander liegenden Bogengänge sind für die Wahr-nehmung von Drehbewegungen im Raum verantwortlich. Um dem Klein-hirn ein dreidimensionales Bild der Lage im Raum zu übermitteln, sind je-weils drei Bogengänge nötig.
Im Labyrinth des Innenohrs befinden sich außerdem je zwei Organe – die Otolithenorgane – zur Wahrnehmung linearer Bewegungen: Macula utriculi und Macula sacculi. Die Macula utriculi wird durch horizontale, die Macula sacculi durch vertikale Beschleunigung – die Gravitätsbeschleunigung – gereizt.
Zwei für den Menschen wichtige Funktionen werden vom vestibulären System erfüllt, die „im Hintergrund“ auf Reflexebene ablaufen. Die Stabili-sierung der Augen und somit des Blickfelds erfolgt über den vestibulo-oku-lären Reflex. Zur Aufrechterhaltung der Körperhaltung trägt der vestibulo-spinale Reflex bei. Einzelheiten dazu sind z.B. in [Clar95] oder [CS00] zu finden.
Abbildung 13: Gleichge-wichtsorgan und Schnecke
nach [W3ND]
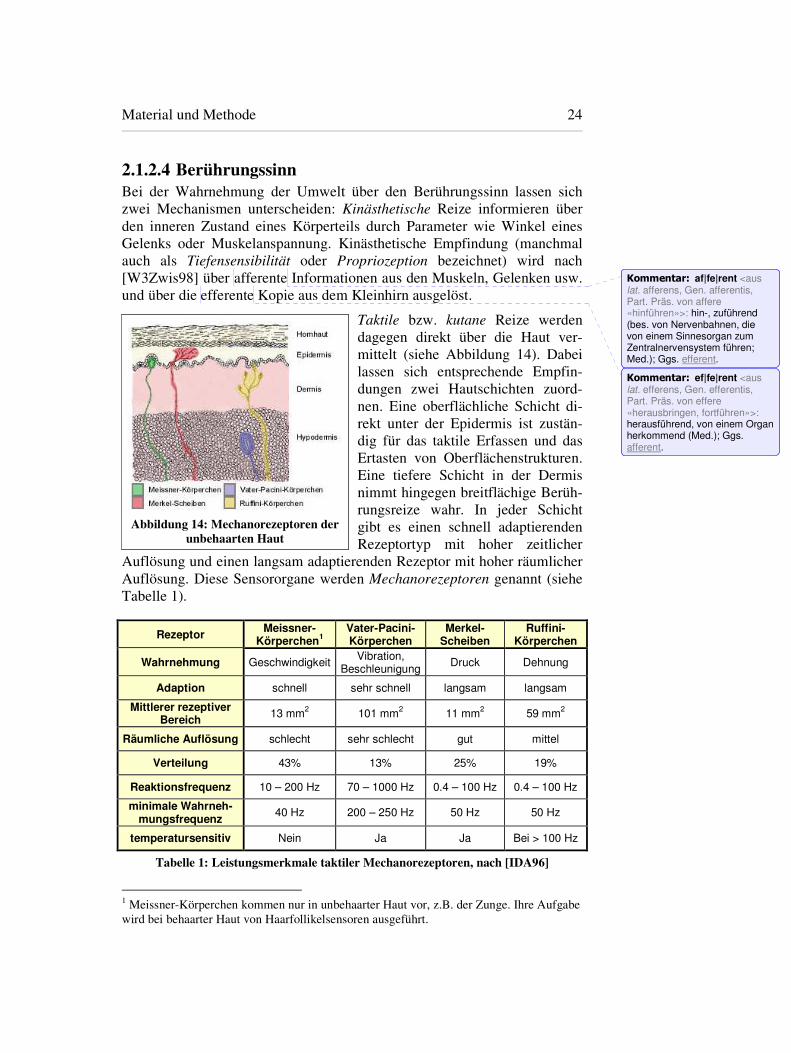
Material und Methode 24
2.1.2.4 Berührungssinn Bei der Wahrnehmung der Umwelt über den Berührungssinn lassen sich zwei Mechanismen unterscheiden: Kinästhetische Reize informieren über den inneren Zustand eines Körperteils durch Parameter wie Winkel eines Gelenks oder Muskelanspannung. Kinästhetische Empfindung (manchmal auch als Tiefensensibilität oder Propriozeption bezeichnet) wird nach [W3Zwis98] über afferente Informationen aus den Muskeln, Gelenken usw. und über die efferente Kopie aus dem Kleinhirn ausgelöst.
Taktile bzw. kutane Reize werden dagegen direkt über die Haut ver-mittelt (siehe Abbildung 14). Dabei lassen sich entsprechende Empfin-dungen zwei Hautschichten zuord-nen. Eine oberflächliche Schicht di-rekt unter der Epidermis ist zustän-dig für das taktile Erfassen und das Ertasten von Oberflächenstrukturen. Eine tiefere Schicht in der Dermis nimmt hingegen breitflächige Berüh-rungsreize wahr. In jeder Schicht gibt es einen schnell adaptierenden Rezeptortyp mit hoher zeitlicher
Auflösung und einen langsam adaptierenden Rezeptor mit hoher räumlicher Auflösung. Diese Sensororgane werden Mechanorezeptoren genannt (siehe Tabelle 1).
Rezeptor Meissner-Körperchen1
Vater-Pacini-Körperchen
Merkel-Scheiben
Ruffini-Körperchen
Wahrnehmung Geschwindigkeit Vibration, Beschleunigung Druck Dehnung
Adaption schnell sehr schnell langsam langsam
Mittlerer rezeptiver Bereich 13 mm2 101 mm2 11 mm2 59 mm2
Räumliche Auflösung schlecht sehr schlecht gut mittel
Verteilung 43% 13% 25% 19%
Reaktionsfrequenz 10 – 200 Hz 70 – 1000 Hz 0.4 – 100 Hz 0.4 – 100 Hz
minimale Wahrneh-mungsfrequenz 40 Hz 200 – 250 Hz 50 Hz 50 Hz
temperatursensitiv Nein Ja Ja Bei > 100 Hz
Tabelle 1: Leistungsmerkmale taktiler Mechanorezeptoren, nach [IDA96]
1 Meissner-Körperchen kommen nur in unbehaarter Haut vor, z.B. der Zunge. Ihre Aufgabe wird bei behaarter Haut von Haarfollikelsensoren ausgeführt.
Abbildung 14: Mechanorezeptoren der unbehaarten Haut
��������� af|fe|rent <aus lat. afferens, Gen. afferentis, Part. Präs. von affere «hinführen»>: hin-, zuführend (bes. von Nervenbahnen, die von einem Sinnesorgan zum Zentralnervensystem führen; Med.); Ggs. efferent.
��������� ef|fe|rent <aus lat. efferens, Gen. efferentis, Part. Präs. von effere «herausbringen, fortführen»>: herausführend, von einem Organ herkommend (Med.); Ggs. afferent.
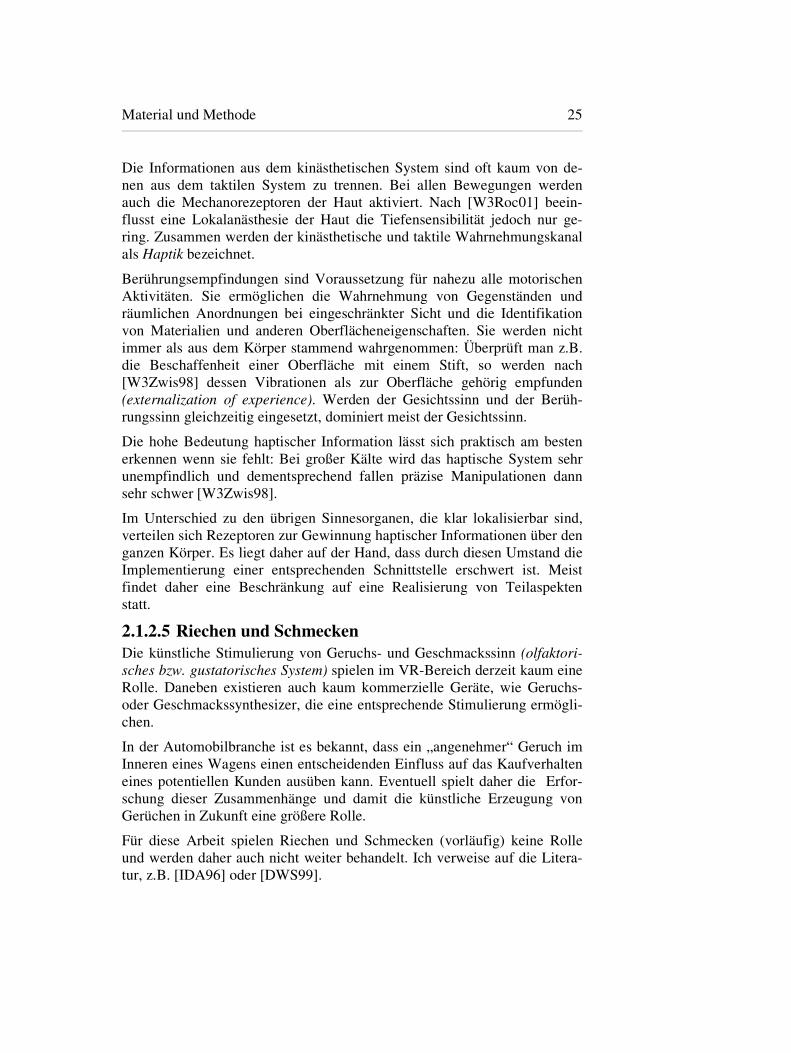
Material und Methode 25
Die Informationen aus dem kinästhetischen System sind oft kaum von de-nen aus dem taktilen System zu trennen. Bei allen Bewegungen werden auch die Mechanorezeptoren der Haut aktiviert. Nach [W3Roc01] beein-flusst eine Lokalanästhesie der Haut die Tiefensensibilität jedoch nur ge-ring. Zusammen werden der kinästhetische und taktile Wahrnehmungskanal als Haptik bezeichnet.
Berührungsempfindungen sind Voraussetzung für nahezu alle motorischen Aktivitäten. Sie ermöglichen die Wahrnehmung von Gegenständen und räumlichen Anordnungen bei eingeschränkter Sicht und die Identifikation von Materialien und anderen Oberflächeneigenschaften. Sie werden nicht immer als aus dem Körper stammend wahrgenommen: Überprüft man z.B. die Beschaffenheit einer Oberfläche mit einem Stift, so werden nach [W3Zwis98] dessen Vibrationen als zur Oberfläche gehörig empfunden (externalization of experience). Werden der Gesichtssinn und der Berüh-rungssinn gleichzeitig eingesetzt, dominiert meist der Gesichtssinn.
Die hohe Bedeutung haptischer Information lässt sich praktisch am besten erkennen wenn sie fehlt: Bei großer Kälte wird das haptische System sehr unempfindlich und dementsprechend fallen präzise Manipulationen dann sehr schwer [W3Zwis98].
Im Unterschied zu den übrigen Sinnesorganen, die klar lokalisierbar sind, verteilen sich Rezeptoren zur Gewinnung haptischer Informationen über den ganzen Körper. Es liegt daher auf der Hand, dass durch diesen Umstand die Implementierung einer entsprechenden Schnittstelle erschwert ist. Meist findet daher eine Beschränkung auf eine Realisierung von Teilaspekten statt.
2.1.2.5 Riechen und Schmecken Die künstliche Stimulierung von Geruchs- und Geschmackssinn (olfaktori-sches bzw. gustatorisches System) spielen im VR-Bereich derzeit kaum eine Rolle. Daneben existieren auch kaum kommerzielle Geräte, wie Geruchs- oder Geschmackssynthesizer, die eine entsprechende Stimulierung ermögli-chen.
In der Automobilbranche ist es bekannt, dass ein „angenehmer“ Geruch im Inneren eines Wagens einen entscheidenden Einfluss auf das Kaufverhalten eines potentiellen Kunden ausüben kann. Eventuell spielt daher die Erfor-schung dieser Zusammenhänge und damit die künstliche Erzeugung von Gerüchen in Zukunft eine größere Rolle.
Für diese Arbeit spielen Riechen und Schmecken (vorläufig) keine Rolle und werden daher auch nicht weiter behandelt. Ich verweise auf die Litera-tur, z.B. [IDA96] oder [DWS99].
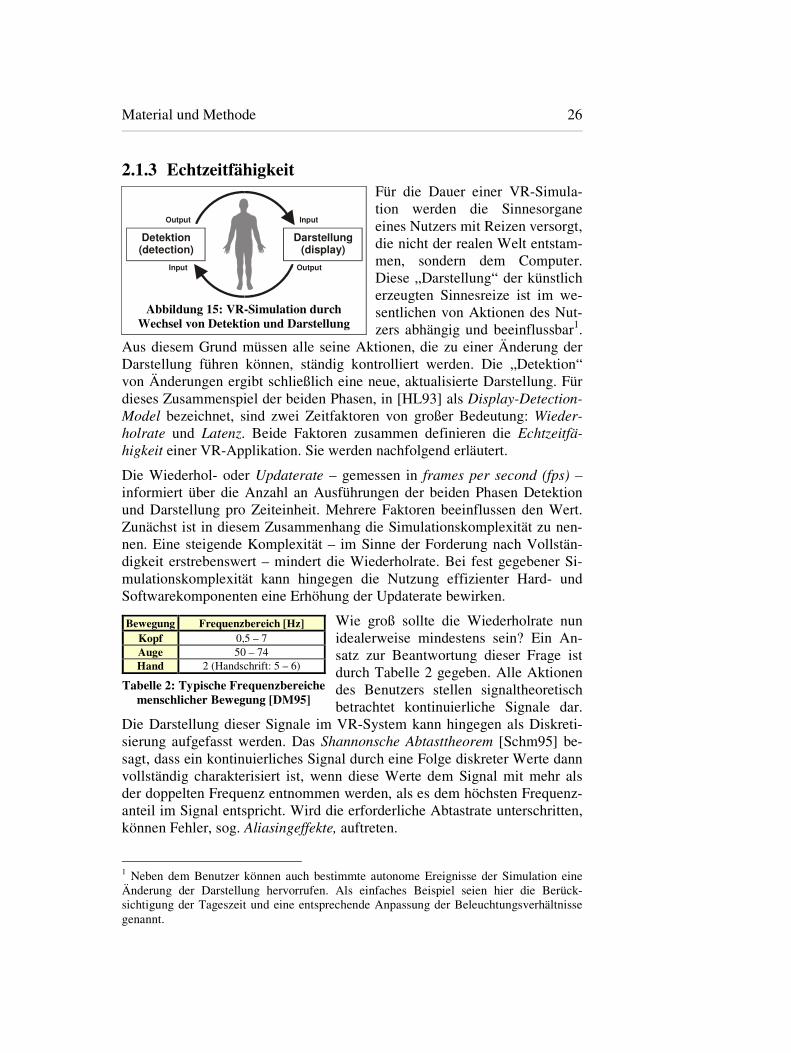
Material und Methode 26
2.1.3 Echtzeitfähigkeit Für die Dauer einer VR-Simula-tion werden die Sinnesorgane eines Nutzers mit Reizen versorgt, die nicht der realen Welt entstam-men, sondern dem Computer. Diese „Darstellung“ der künstlich erzeugten Sinnesreize ist im we-sentlichen von Aktionen des Nut-zers abhängig und beeinflussbar1.
Aus diesem Grund müssen alle seine Aktionen, die zu einer Änderung der Darstellung führen können, ständig kontrolliert werden. Die „Detektion“ von Änderungen ergibt schließlich eine neue, aktualisierte Darstellung. Für dieses Zusammenspiel der beiden Phasen, in [HL93] als Display-Detection-Model bezeichnet, sind zwei Zeitfaktoren von großer Bedeutung: Wieder-holrate und Latenz. Beide Faktoren zusammen definieren die Echtzeitfä-higkeit einer VR-Applikation. Sie werden nachfolgend erläutert.
Die Wiederhol- oder Updaterate – gemessen in frames per second (fps) – informiert über die Anzahl an Ausführungen der beiden Phasen Detektion und Darstellung pro Zeiteinheit. Mehrere Faktoren beeinflussen den Wert. Zunächst ist in diesem Zusammenhang die Simulationskomplexität zu nen-nen. Eine steigende Komplexität – im Sinne der Forderung nach Vollstän-digkeit erstrebenswert – mindert die Wiederholrate. Bei fest gegebener Si-mulationskomplexität kann hingegen die Nutzung effizienter Hard- und Softwarekomponenten eine Erhöhung der Updaterate bewirken.
Wie groß sollte die Wiederholrate nun idealerweise mindestens sein? Ein An-satz zur Beantwortung dieser Frage ist durch Tabelle 2 gegeben. Alle Aktionen des Benutzers stellen signaltheoretisch betrachtet kontinuierliche Signale dar.
Die Darstellung dieser Signale im VR-System kann hingegen als Diskreti-sierung aufgefasst werden. Das Shannonsche Abtasttheorem [Schm95] be-sagt, dass ein kontinuierliches Signal durch eine Folge diskreter Werte dann vollständig charakterisiert ist, wenn diese Werte dem Signal mit mehr als der doppelten Frequenz entnommen werden, als es dem höchsten Frequenz-anteil im Signal entspricht. Wird die erforderliche Abtastrate unterschritten, können Fehler, sog. Aliasingeffekte, auftreten.
1 Neben dem Benutzer können auch bestimmte autonome Ereignisse der Simulation eine Änderung der Darstellung hervorrufen. Als einfaches Beispiel seien hier die Berück-sichtigung der Tageszeit und eine entsprechende Anpassung der Beleuchtungsverhältnisse genannt.
Detektion(detection)
Darstellung(display)
Input
Input
Output
Output
Abbildung 15: VR-Simulation durch Wechsel von Detektion und Darstellung
Bewegung Frequenzbereich [Hz] Kopf 0,5 – 7 Auge 50 – 74 Hand 2 (Handschrift: 5 – 6)
Tabelle 2: Typische Frequenzbereiche menschlicher Bewegung [DM95]

Material und Methode 27
Das eben Gesagte gilt für den Fall, dass eine VR-Simulation dem Benutzer einen hohen Grad an Interaktivität und Immersion bietet. Ist diese Voraus-setzung nicht gegeben, handelt es sich z.B. um eine Simulation, die über-wiegend der Darstellung dient, so kann eine geringere Wiederholrate, zu-gunsten einer hohen Szenenkomplexität akzeptabel sein. Bei Erfüllung der Voraussetzung machen sich niedrige Wiederholraten durch o.g. Aliasingef-fekte bemerkbar. Die Simulation wird vom Benutzer als nicht kontinuier-lich, sondern als Folge diskreter Darstellungen wahrgenommen. Speziell die Interaktion in derartigen Umgebungen gestaltet sich schwierig.
Der zweite Zeitfaktor, der eine wichtige Rolle spielt, ist die Latenz. Sie kann folgendermaßen beschrieben werden: Der Benutzer tätigt eine Aktion. Dies wird vom VR-System detektiert und verarbeitet. Schließlich wird das Er-gebnis an den Benutzer zurückgegeben und dargestellt. Die Zeit, die zwi-schen Auslösung der Aktion und der Darstellung liegt ist die Latenz. Jede Komponente, die Teil der eben beschriebenen Abarbeitungssequenz ist, be-sitzt ihre eigene Latenzzeit, die sie an die Latenz der Sequenz weitergibt.
Die Latenz sollte so gering wie möglich sein. Der ideale, aber unrealistische Wert ist Null. Eine hohe Latenz trägt zur Unge-nauigkeit der Simulation bei. Durch die Verzögerung werden dem Benutzer „veraltete“ Darstellungen präsentiert, die
insbesondere dann nicht mehr aktuell und damit fehlerhaft sein können, wenn er in der Zwischenzeit Aktionen durchgeführt hat. Einige Anhalts-punkte zur Wahrnehmbarkeit von Latenzen sind durch Tabelle 3 gegeben.
2.2 Perzeptuelle Integration I Bisher sind die Aspekte der virtuellen Realität einzeln betrachtet worden: Verschiedene Arten der menschlichen Wahrnehmung sind beschrieben und das Kriterium der Echtzeitfähigkeit erläutert worden. Die Schwierigkeit beim Entwurf von VR-Anwendungen besteht in der Integration, d.h. in der gleichzeitigen Betrachtung und Berücksichtigung aller dieser Aspekte. Letztendlich ist ein Kompromiss zu finden, welcher die durch die Applika-tion gegebenen Anforderungen bezüglich der Performanz weitestgehend erfüllt und dabei dem Benutzer eine hinreichend vollständige Darstellung bietet, so dass er sich immersiv in die virtuelle Umgebung einbezogen fühlt. Dieser Zusammenhang wird in dieser Arbeit als perzeptuelle Integration bezeichnet.
Latenz Wahrnehmbar ab, VR: 100 ms Toleranzschwelle für VR: 300 ms Wahrnehmbar ab, AR: 30 ms
Tabelle 3: Wahrnehmung von Latenz, nach [Wlo95]
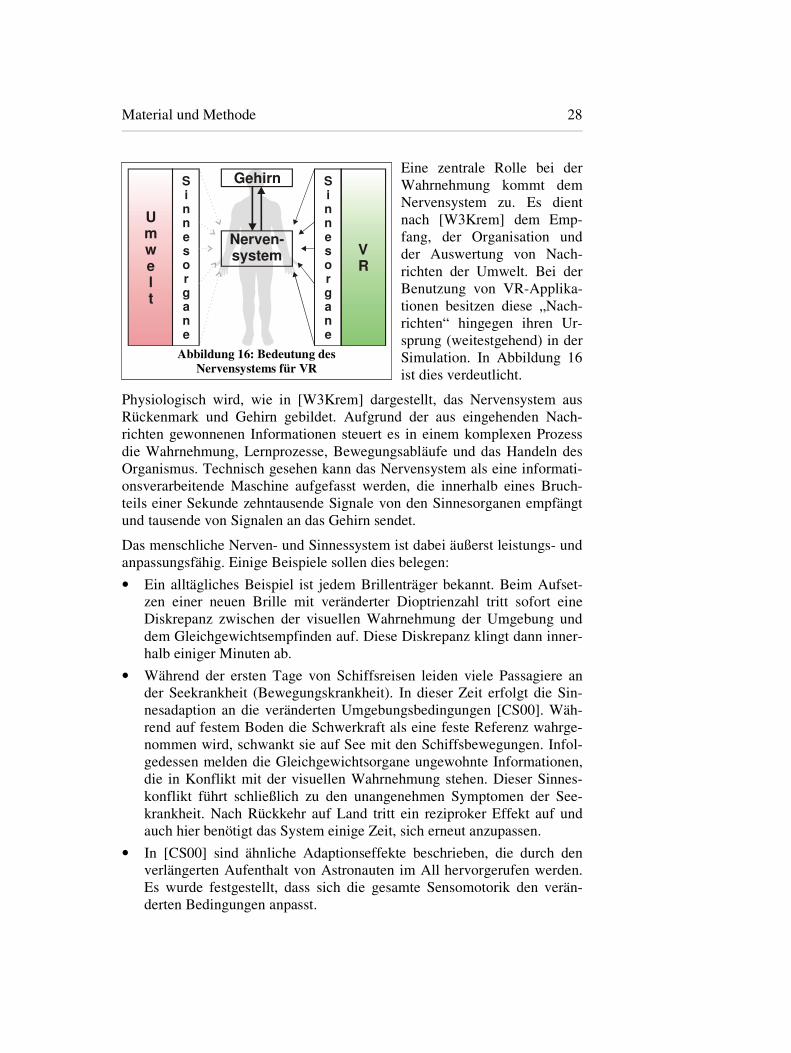
Material und Methode 28
Eine zentrale Rolle bei der Wahrnehmung kommt dem Nervensystem zu. Es dient nach [W3Krem] dem Emp-fang, der Organisation und der Auswertung von Nach-richten der Umwelt. Bei der Benutzung von VR-Applika-tionen besitzen diese „Nach-richten“ hingegen ihren Ur-sprung (weitestgehend) in der Simulation. In Abbildung 16 ist dies verdeutlicht.
Physiologisch wird, wie in [W3Krem] dargestellt, das Nervensystem aus Rückenmark und Gehirn gebildet. Aufgrund der aus eingehenden Nach-richten gewonnenen Informationen steuert es in einem komplexen Prozess die Wahrnehmung, Lernprozesse, Bewegungsabläufe und das Handeln des Organismus. Technisch gesehen kann das Nervensystem als eine informati-onsverarbeitende Maschine aufgefasst werden, die innerhalb eines Bruch-teils einer Sekunde zehntausende Signale von den Sinnesorganen empfängt und tausende von Signalen an das Gehirn sendet.
Das menschliche Nerven- und Sinnessystem ist dabei äußerst leistungs- und anpassungsfähig. Einige Beispiele sollen dies belegen: • Ein alltägliches Beispiel ist jedem Brillenträger bekannt. Beim Aufset-
zen einer neuen Brille mit veränderter Dioptrienzahl tritt sofort eine Diskrepanz zwischen der visuellen Wahrnehmung der Umgebung und dem Gleichgewichtsempfinden auf. Diese Diskrepanz klingt dann inner-halb einiger Minuten ab.
• Während der ersten Tage von Schiffsreisen leiden viele Passagiere an der Seekrankheit (Bewegungskrankheit). In dieser Zeit erfolgt die Sin-nesadaption an die veränderten Umgebungsbedingungen [CS00]. Wäh-rend auf festem Boden die Schwerkraft als eine feste Referenz wahrge-nommen wird, schwankt sie auf See mit den Schiffsbewegungen. Infol-gedessen melden die Gleichgewichtsorgane ungewohnte Informationen, die in Konflikt mit der visuellen Wahrnehmung stehen. Dieser Sinnes-konflikt führt schließlich zu den unangenehmen Symptomen der See-krankheit. Nach Rückkehr auf Land tritt ein reziproker Effekt auf und auch hier benötigt das System einige Zeit, sich erneut anzupassen.
• In [CS00] sind ähnliche Adaptionseffekte beschrieben, die durch den verlängerten Aufenthalt von Astronauten im All hervorgerufen werden. Es wurde festgestellt, dass sich die gesamte Sensomotorik den verän-derten Bedingungen anpasst.
Gehirn
Nerven-system
Sinnesorgane
Sinnesorgane
Umwelt
VR
Abbildung 16: Bedeutung des Nervensystems für VR
Material und Methode 29
Es stellt sich nun zwangsläufig die Frage, ob ähnliche Phänomene auch für VR-Simulationen zutreffen können. Ein Beispiel dazu: Von Piloten der US Air Force ist das sog. Post-Simulator-Syndrom bekannt. Nach der intensiven Benutzung von hoch-immersiven Flugsimulatoren können sie sich nicht mehr wie gewohnt orientieren. Ihnen ist daher auch nach derartigen Trai-ningseinheiten, für mindestens 24 Stunden, das Fliegen untersagt [KF90].
In der Tat ist die Erforschung dieser Fragestellung das Thema vieler Arbei-ten. So wird einerseits die Adaptionsfähigkeit der Sinnesorgane auf spe-zielle Gegebenheiten in VR-Applikationen untersucht, z.B. in [DM96, BR98] oder [GW98]. Diese Gegebenheiten stellen dabei typischerweise eine Diskrepanz zur üblichen Art der Wahrnehmung dar. Andere Arbeiten (z.B. [KF90, Kol96] oder [Pot98]) beschäftigen sich hingegen allgemein mit dem Phänomen der Simulatorkrankheit (simulator sickness) in virtuellen Umge-bungen.
Eine Resümee aus diesen Arbeiten: Durch die Leistungs- und Adaptionsfä-higkeit des menschlichen Wahrnehmungsapparates und der darin enthalte-nen Redundanz können gewisse Unvollkommenheiten einer VR-Simulation ausgeglichen werden. Es findet eine Adaption statt. Wird ein Proband über lange Zeit der Simulation ausgesetzt, so kann der Adaptionsvorgang – in Analogie zur Seekrankheit – zu Symptomen der Simulatorkrankheit führen. Dabei können nach [Kol96] bis zu 40 Kriterien gefunden werden, die einen Einfluss darauf besitzen. Sie lassen sich in die folgenden drei Kategorien einteilen:
• Simulation: Alle technischen Aspekte der Simulation können einen Einfluss besitzen.
• Aufgabe: Die durch die Simulation modellierte Aufgabe ist relevant. • Individuum: Das Auftreten von Symptomen der Simulatorkrankheit
hängt ebenfalls stark vom jeweiligen Benutzer ab. Sehr starke und klar bemerkbare Unvollkommenheiten tragen hingegen zur generellen Ablehnung einer VR-Simulation bei.
2.3 Komponenten eines VR-Systems Nach der Erarbeitung der wesentlichen Charakteristiken von Virtual Reality werden nun aktuelle Hard- und Softwarekomponenten vorgestellt, die der-zeit auf diesem Gebiet zum Einsatz kommen. In diesem Abschnitt wird zu-nächst eine Kurzübersicht dazu gegeben. Ab dem folgenden Abschnitt 2.4 werden dann die Komponenten im Detail vorgestellt, die für diese Arbeit besonders berücksichtigt werden müssen. Allgemeine Übersichten zu Kom-ponenten von VR-Systemen sind auch zu finden in [GS90, Bis92, HL93, IDA96, BBB97] oder [JTAP00].
Material und Methode 30
Nach [BBB97] bestehen die technischen Komponenten der virtuellen Reali-tät zunächst aus Hard- und Softwaresystemen, die sich weiter in Sensoren, Effektoren und deren Koppelung gruppieren lassen.
Folgende Hardware ist zu nennen: • Displays zur Darstellung der virtuellen Umgebung: grafische Displays
zur visuellen Präsentation, akustische, haptische, vestibuläre, olfaktori-sche, usw. Displays.
• Positionierungs- und Orientierungssysteme, um den Benutzer und andere, beliebige Objekte zu lokalisieren.
• Interaktions- und Manipulationssysteme zum Handeln in der virtuellen Umgebung: Hierfür werden z.B. Zeigegeräte oder taktile Geräte einge-setzt. Oft werden auch Datenhandschuhe, 3D-Joy-sticks und Spaceballs verwendet. Sprachsteuerung ist ebenfalls in diesem Zusammenhang zu nennen.
Ein Interaktionsgerät, dessen Einsatz sich bei der VOLKSWAGEN AG bewährt hat, ist die in Abbildung 17 dargestellte Spacemouse. Es ist das typische Gerät für den Operator, bzw. Administrator einer VR-Anwen-dung.
• Berechnungssysteme zur Erzeugung der virtuel-len Umgebung: Computerhardware. Effiziente Hardware kann wesentlich zu einer hohen Sys-temperformance beitragen.
Bei VOLKSWAGEN stehen für Anwendungen aus dem Bereich der virtuellen Realität Grafik-rechner zur Verfügung, wie sie die nebenstehende Abbildung 18 zeigt [Zimm00]. Die Systeme sind typischerweise mit mehreren Prozessoren (z.B. R10000), mehreren Gigabyte Hauptspeicher und mehreren Grafik-Pipes ausgestattet.
• Netzwerke zur Koppelung der einzelnen Subsysteme und zur Kommunikation mit anderen VR-Systemen (z.B. für Verteilte VR).
Folgende Softwaretechniken werden zur Verarbeitung der Benutzereinga-ben und zur Präsentation der virtuellen Welten eingesetzt: • Modellierung: Aus dem geometrischen Modell der virtuellen Umge-
bung werden die Daten einzelner Objekte abgeleitet und durch Farb- und Oberflächendaten angereichert. Die funktionale Modellierung legt die Freiheitsgrade der Objekte und deren Verhalten fest.
Abbildung 17: Space-mouse [W3DLR]
Abbildung 18: Grafik-rechner ONYX
[W3SGI]
Material und Methode 31
• Die Kontrolle der Simulation erfolgt durch ständige Berechnung der Objektkonfiguration auf der Grundlage einer Datenbasis, in der die Ob-jekte enthalten sind. Außerdem erfolgt sie in den Interaktionen des Be-nutzers sowie der Verhaltensparameter autonomer Objekte.
• Kommunikation ist zur Koordinierung von Input und Output und zur Kontrolle der Simulation erforderlich.
• Rendering ist die Transformation des parametrischen Datenmodells in diskrete Bilder und Klänge. Lokale Modelle bestimmen die Oberflä-cheneigenschaften einzelner Objekte, globale Modelle berechnen die wechselseitige Abhängigkeit von Beleuchtungen und Reflexionen. Zur Erhöhung der Performance können z.B. unterschiedliche Detaillierungs-grade (levels of detail, LOD) realisiert werden. Entsprechende Techni-ken sind z.B. in [FDFH90] oder [Fel92] erläutert.
Bei der nun folgenden Vorstellung von Komponenten aus dem VR-Bereich wird ein einheitliches Schema benutzt, das eine spätere Auswahl erleichtert. Es werden stets Kriterien genannt die, in Abhängigkeit von einer gegebenen Aufgabe, zur Bewertung herangezogen werden können. Einige Bewertungs-kriterien sind dabei für alle Komponenten gleichermaßen anwendbar. Der Autor fasst diese allgemeinen Kriterien zur besseren Übersicht im Vorfeld zusammen.
• Systemergonomie: Der Anwendungskontext dieser Arbeit liegt im Be-reich der Fahrzeugergonomie. Um mit dem Ergonomie-Mock-Up pro-bandengestützt zu relevanten Aussagen zu kommen, dürfen den Benut-zern keine (nur geringe) Restriktionen auferlegt werden. Eine ideale Systemkomponente erfüllt ihren technischen Zweck, bleibt darüber hin-aus aber für einen Benutzer unsichtbar und stört ihn nicht. Von vielen VR-Komponenten wird diese Anforderung heute nicht erfüllt [Zimm00]. Bereits ein futuristisches Aussehen eines Systems kann Scheu und Ab-lehnung bei Anwendern hervorrufen, die keine Erfahrung mit Virtual Reality besitzen.
• Gesundheitliche Aspekte: Selbstverständlich müssen Gesundheitsrisi-ken beachtet und ausgeschlossen werden. Für herkömmliche Computer-technik existieren oft Normen dazu. Die große Bandbreite an unter-schiedlicher Technik erschwert dieses für den VR-Bereich.
• Integrierbarkeit: Jede einzelne Systemkomponente soll sich möglichst einfach in ein VR-System einbetten lassen. Standardisierte Schnittstellen erleichtern den Vorgang der Integration.
• Administrierbarkeit: Der Aufwand für Wartung, Administration und Inbetriebnahme soll gering sein. Eine Komponente soll sich innerhalb kurzer Zeit für eine bestimmte Aufgabe konfigurieren lassen.
Material und Methode 32
• Verfügbarkeit: Kommerzielle Verfügbarkeit kann eine wichtige Rolle spielen. An vielen Forschungs- und Entwicklungseinrichtungen werden hingegen prototypische Systemkomponenten für den VR-Bereich kon-struiert, die (derzeit) kaum für die Allgemeinheit verfügbar sind.
• Kosten: Zur Beurteilung der nachfolgend dargestellten Komponenten werden diesbezüglich drei Preiskategorien verwendet: niedrig (Preis < 10000 €), mittel (Preis von 10.000 bis 50.000 €) und hoch (Preis > 50.000 €).
2.4 Grafikdisplays Die Aufgabe von Grafikdisplays (da in diesem Abschnitt nur solche von Interesse sind, werden sie hier auch oft nur Displays genannt) für den VR-Bereich ist es, zunächst dem Benutzer eine Sicht auf die virtuelle Umgebung zu ermöglichen. Dies erfolgt typischerweise im Zusammenspiel mit einem Tracking- und einem VR-System. Das Trackingsystem erfasst die aktuellen Blickparameter des Benutzers, die ein VR-System in eine entsprechende Ansicht auf die modellierte Szenengeometrie umrechnet. Das Ergebnis wird schließlich im Display angezeigt.
In Ergänzung zu Leistungsmerkmalen herkömmlicher Computermonitore, dazu gehören z.B. Einstellmöglichkeiten für Farbe, Kontrast, Helligkeit und Bildwiederholfrequenz, besitzen Displays für den VR-Bereich oft noch eine Vielzahl zusätzlicher Eigenschaften:
• Immersionsgrad: Gerade Grafikdisplays üben großen Einfluss auf den Immersionsgrad eines Nutzers aus. Einige erlauben keine Sicht auf die reale Umgebung (z.B. Datenhelme), schließen den Benutzer komplett in die Simulation ein und ermöglichen so einen hohen Grad an Immersion. Andere Displays bieten hingegen nur einen geringen Immersionsgrad.
• Sehfeld (field of view, FOV): Das darstellbare FOV des Displays soll sich an der Charakteristik des menschlichen Sehfeldes orientieren (vgl. Abschnitt 2.1.2.1 auf Seite 18).
• Auflösung: Im Zusammenhang mit dem Sehfeld ist die Auflösung eines Displays wichtig. Sie soll so hoch sein, dass über das gesamte FOV auch kleine Details noch gut abgebildet werden und vom Benutzer erkennbar sind. Die Darstellung muss dabei verzerrungsfrei sein. Die Eigenschaft, dass das menschliche Auge nur in einem kleinen Bereich um die Seh-achse scharf sieht, kann ausgenutzt werden.
• Arbeitsvolumen: Ein großes Arbeitsvolumen, in dem sich der Benutzer möglichst frei bewegen kann, ist für viele Anwendungen erforderlich und muss auch vom Display unterstützt werden.
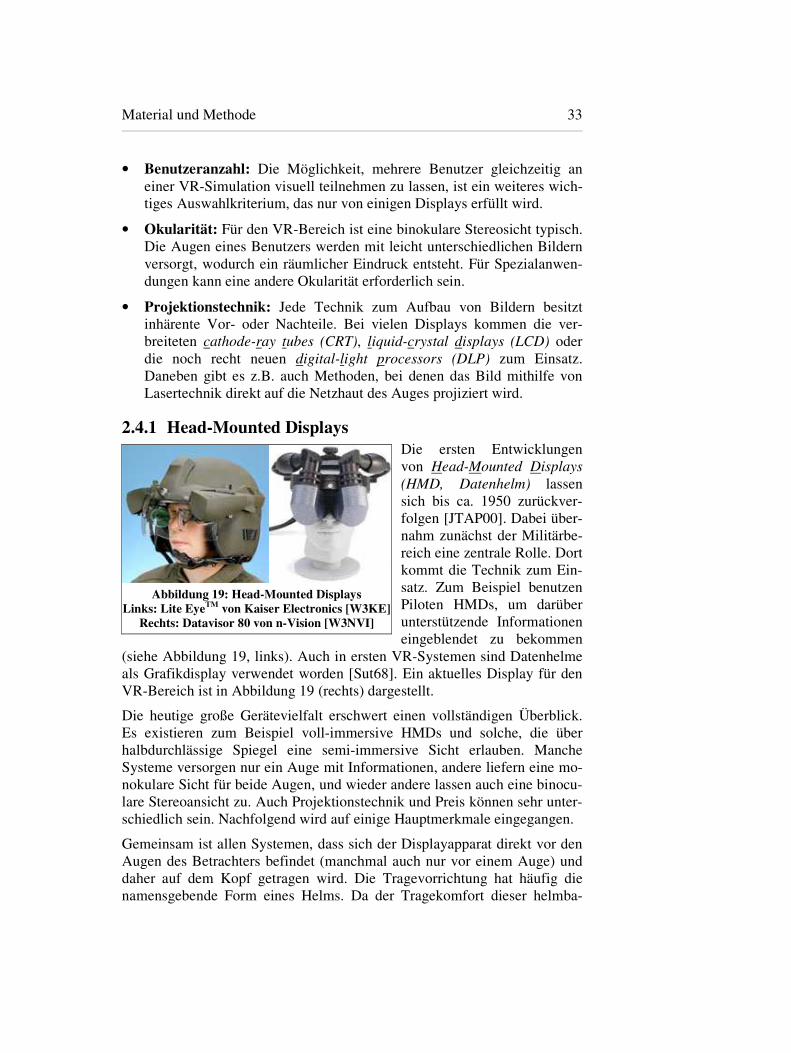
Material und Methode 33
• Benutzeranzahl: Die Möglichkeit, mehrere Benutzer gleichzeitig an einer VR-Simulation visuell teilnehmen zu lassen, ist ein weiteres wich-tiges Auswahlkriterium, das nur von einigen Displays erfüllt wird.
• Okularität: Für den VR-Bereich ist eine binokulare Stereosicht typisch. Die Augen eines Benutzers werden mit leicht unterschiedlichen Bildern versorgt, wodurch ein räumlicher Eindruck entsteht. Für Spezialanwen-dungen kann eine andere Okularität erforderlich sein.
• Projektionstechnik: Jede Technik zum Aufbau von Bildern besitzt inhärente Vor- oder Nachteile. Bei vielen Displays kommen die ver-breiteten cathode-ray tubes (CRT), liquid-crystal displays (LCD) oder die noch recht neuen digital-light processors (DLP) zum Einsatz. Daneben gibt es z.B. auch Methoden, bei denen das Bild mithilfe von Lasertechnik direkt auf die Netzhaut des Auges projiziert wird.
2.4.1 Head-Mounted Displays Die ersten Entwicklungen von Head-Mounted Displays (HMD, Datenhelm) lassen sich bis ca. 1950 zurückver-folgen [JTAP00]. Dabei über-nahm zunächst der Militärbe-reich eine zentrale Rolle. Dort kommt die Technik zum Ein-satz. Zum Beispiel benutzen Piloten HMDs, um darüber unterstützende Informationen eingeblendet zu bekommen
(siehe Abbildung 19, links). Auch in ersten VR-Systemen sind Datenhelme als Grafikdisplay verwendet worden [Sut68]. Ein aktuelles Display für den VR-Bereich ist in Abbildung 19 (rechts) dargestellt.
Die heutige große Gerätevielfalt erschwert einen vollständigen Überblick. Es existieren zum Beispiel voll-immersive HMDs und solche, die über halbdurchlässige Spiegel eine semi-immersive Sicht erlauben. Manche Systeme versorgen nur ein Auge mit Informationen, andere liefern eine mo-nokulare Sicht für beide Augen, und wieder andere lassen auch eine binocu-lare Stereoansicht zu. Auch Projektionstechnik und Preis können sehr unter-schiedlich sein. Nachfolgend wird auf einige Hauptmerkmale eingegangen.
Gemeinsam ist allen Systemen, dass sich der Displayapparat direkt vor den Augen des Betrachters befindet (manchmal auch nur vor einem Auge) und daher auf dem Kopf getragen wird. Die Tragevorrichtung hat häufig die namensgebende Form eines Helms. Da der Tragekomfort dieser helmba-
Abbildung 19: Head-Mounted Displays Links: Lite EyeTM von Kaiser Electronics [W3KE]
Rechts: Datavisor 80 von n-Vision [W3NVI]
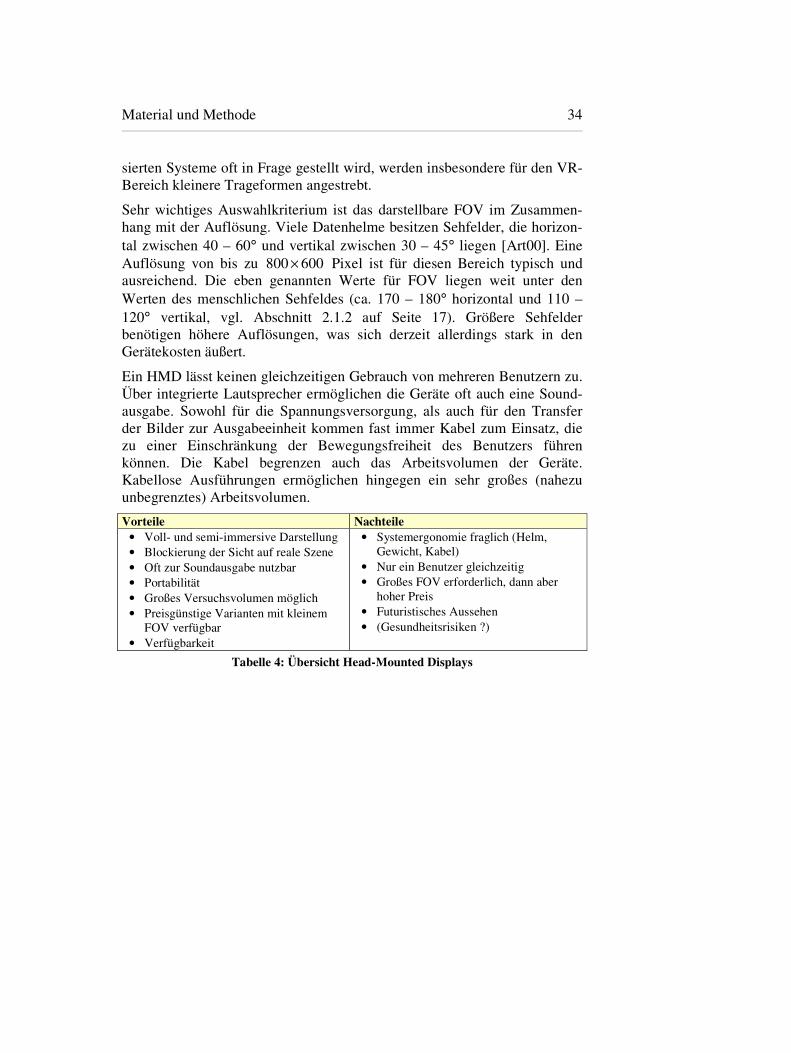
Material und Methode 34
sierten Systeme oft in Frage gestellt wird, werden insbesondere für den VR-Bereich kleinere Trageformen angestrebt.
Sehr wichtiges Auswahlkriterium ist das darstellbare FOV im Zusammen-hang mit der Auflösung. Viele Datenhelme besitzen Sehfelder, die horizon-tal zwischen 40 – 60° und vertikal zwischen 30 – 45° liegen [Art00]. Eine Auflösung von bis zu 600800 × Pixel ist für diesen Bereich typisch und ausreichend. Die eben genannten Werte für FOV liegen weit unter den Werten des menschlichen Sehfeldes (ca. 170 – 180° horizontal und 110 – 120° vertikal, vgl. Abschnitt 2.1.2 auf Seite 17). Größere Sehfelder benötigen höhere Auflösungen, was sich derzeit allerdings stark in den Gerätekosten äußert.
Ein HMD lässt keinen gleichzeitigen Gebrauch von mehreren Benutzern zu. Über integrierte Lautsprecher ermöglichen die Geräte oft auch eine Sound-ausgabe. Sowohl für die Spannungsversorgung, als auch für den Transfer der Bilder zur Ausgabeeinheit kommen fast immer Kabel zum Einsatz, die zu einer Einschränkung der Bewegungsfreiheit des Benutzers führen können. Die Kabel begrenzen auch das Arbeitsvolumen der Geräte. Kabellose Ausführungen ermöglichen hingegen ein sehr großes (nahezu unbegrenztes) Arbeitsvolumen.
Vorteile Nachteile • Voll- und semi-immersive Darstellung • Blockierung der Sicht auf reale Szene • Oft zur Soundausgabe nutzbar • Portabilität • Großes Versuchsvolumen möglich • Preisgünstige Varianten mit kleinem
FOV verfügbar • Verfügbarkeit
• Systemergonomie fraglich (Helm, Gewicht, Kabel)
• Nur ein Benutzer gleichzeitig • Großes FOV erforderlich, dann aber
hoher Preis • Futuristisches Aussehen • (Gesundheitsrisiken ?)
Tabelle 4: Übersicht Head-Mounted Displays
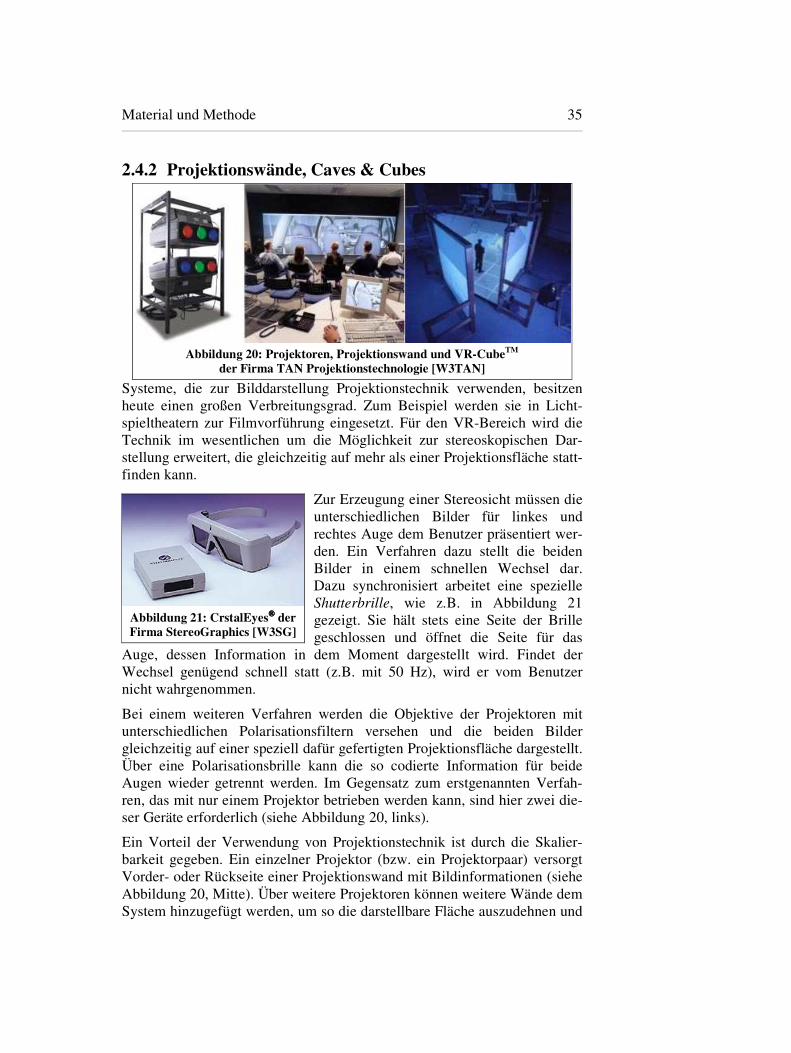
Material und Methode 35
2.4.2 Projektionswände, Caves & Cubes
Abbildung 20: Projektoren, Projektionswand und VR-CubeTM der Firma TAN Projektionstechnologie [W3TAN]
Systeme, die zur Bilddarstellung Projektionstechnik verwenden, besitzen heute einen großen Verbreitungsgrad. Zum Beispiel werden sie in Licht-spieltheatern zur Filmvorführung eingesetzt. Für den VR-Bereich wird die Technik im wesentlichen um die Möglichkeit zur stereoskopischen Dar-stellung erweitert, die gleichzeitig auf mehr als einer Projektionsfläche statt-finden kann.
Zur Erzeugung einer Stereosicht müssen die unterschiedlichen Bilder für linkes und rechtes Auge dem Benutzer präsentiert wer-den. Ein Verfahren dazu stellt die beiden Bilder in einem schnellen Wechsel dar. Dazu synchronisiert arbeitet eine spezielle Shutterbrille, wie z.B. in Abbildung 21 gezeigt. Sie hält stets eine Seite der Brille geschlossen und öffnet die Seite für das
Auge, dessen Information in dem Moment dargestellt wird. Findet der Wechsel genügend schnell statt (z.B. mit 50 Hz), wird er vom Benutzer nicht wahrgenommen.
Bei einem weiteren Verfahren werden die Objektive der Projektoren mit unterschiedlichen Polarisationsfiltern versehen und die beiden Bilder gleichzeitig auf einer speziell dafür gefertigten Projektionsfläche dargestellt. Über eine Polarisationsbrille kann die so codierte Information für beide Augen wieder getrennt werden. Im Gegensatz zum erstgenannten Verfah-ren, das mit nur einem Projektor betrieben werden kann, sind hier zwei die-ser Geräte erforderlich (siehe Abbildung 20, links).
Ein Vorteil der Verwendung von Projektionstechnik ist durch die Skalier-barkeit gegeben. Ein einzelner Projektor (bzw. ein Projektorpaar) versorgt Vorder- oder Rückseite einer Projektionswand mit Bildinformationen (siehe Abbildung 20, Mitte). Über weitere Projektoren können weitere Wände dem System hinzugefügt werden, um so die darstellbare Fläche auszudehnen und
Abbildung 21: CrstalEyes der Firma StereoGraphics [W3SG]
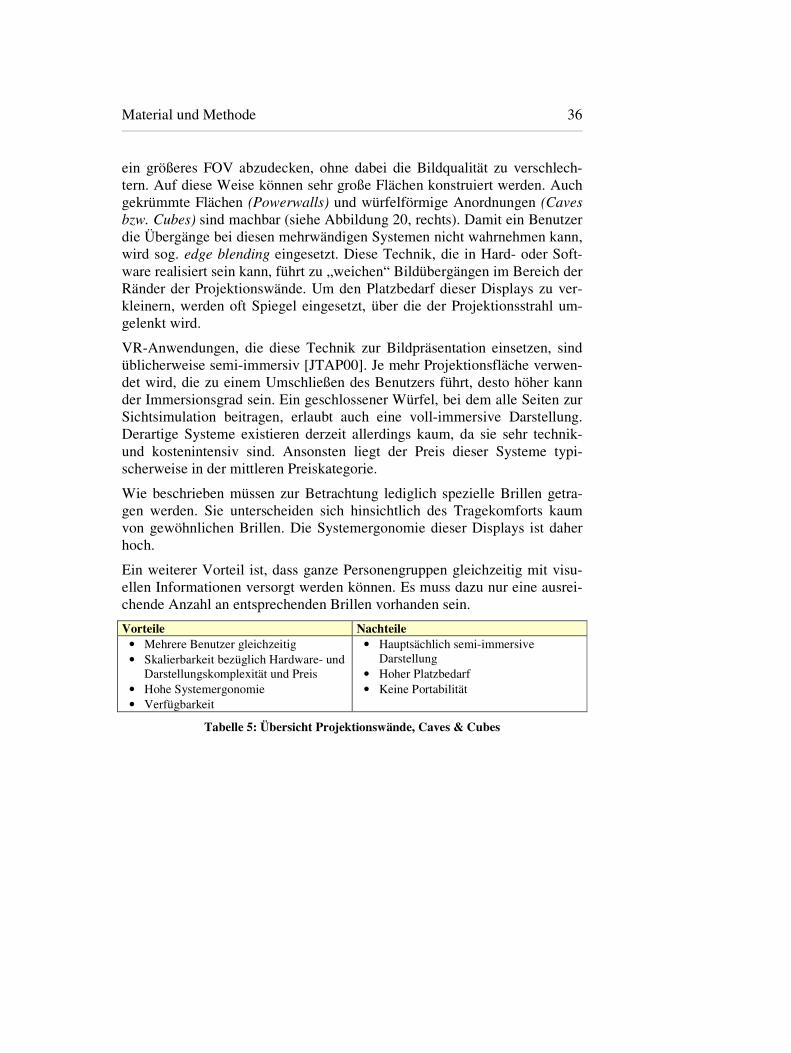
Material und Methode 36
ein größeres FOV abzudecken, ohne dabei die Bildqualität zu verschlech-tern. Auf diese Weise können sehr große Flächen konstruiert werden. Auch gekrümmte Flächen (Powerwalls) und würfelförmige Anordnungen (Caves bzw. Cubes) sind machbar (siehe Abbildung 20, rechts). Damit ein Benutzer die Übergänge bei diesen mehrwändigen Systemen nicht wahrnehmen kann, wird sog. edge blending eingesetzt. Diese Technik, die in Hard- oder Soft-ware realisiert sein kann, führt zu „weichen“ Bildübergängen im Bereich der Ränder der Projektionswände. Um den Platzbedarf dieser Displays zu ver-kleinern, werden oft Spiegel eingesetzt, über die der Projektionsstrahl um-gelenkt wird.
VR-Anwendungen, die diese Technik zur Bildpräsentation einsetzen, sind üblicherweise semi-immersiv [JTAP00]. Je mehr Projektionsfläche verwen-det wird, die zu einem Umschließen des Benutzers führt, desto höher kann der Immersionsgrad sein. Ein geschlossener Würfel, bei dem alle Seiten zur Sichtsimulation beitragen, erlaubt auch eine voll-immersive Darstellung. Derartige Systeme existieren derzeit allerdings kaum, da sie sehr technik- und kostenintensiv sind. Ansonsten liegt der Preis dieser Systeme typi-scherweise in der mittleren Preiskategorie.
Wie beschrieben müssen zur Betrachtung lediglich spezielle Brillen getra-gen werden. Sie unterscheiden sich hinsichtlich des Tragekomforts kaum von gewöhnlichen Brillen. Die Systemergonomie dieser Displays ist daher hoch.
Ein weiterer Vorteil ist, dass ganze Personengruppen gleichzeitig mit visu-ellen Informationen versorgt werden können. Es muss dazu nur eine ausrei-chende Anzahl an entsprechenden Brillen vorhanden sein.
Vorteile Nachteile • Mehrere Benutzer gleichzeitig • Skalierbarkeit bezüglich Hardware- und
Darstellungskomplexität und Preis • Hohe Systemergonomie • Verfügbarkeit
• Hauptsächlich semi-immersive Darstellung
• Hoher Platzbedarf • Keine Portabilität
Tabelle 5: Übersicht Projektionswände, Caves & Cubes

Material und Methode 37
2.4.3 Immersive Desktopsysteme und Vision Domes Der Einsatz von immer-siven Desktopsystemen ist immer dann erfolg-versprechend, wenn die gegebene Aufgabe typi-scherweise an einem Tisch ausgeführt wird (siehe Abbildung 22, links). Dies ist z.B. für viele Anwendungen aus
den Bereichen Städteplanung, Medizin oder CAD-Konstruktion zutreffend. Es können kleine Gruppen von bis zu vier Personen mit Sichtinformationen versorgt werden [JTAP00], wobei die Berechnung der Sicht i.a. nur für ei-nen Blickpunkt erfolgt. Je weiter die Betrachter sich von diesem Punkt entfernen, desto verzerrter wird ihr dargestelltes Bild. Es existieren aber auch Verfahren, die es ermöglichen, mehrere Benutzer gleichzeitig mit kor-rekten Ansichten zu versorgen (siehe [ABFH97]).
Wie bei der im vorherigen Abschnitt vorgestellten Projektionstechnik wer-den auch hier die Bilder mithilfe von Projektoren dargestellt. Zur Ansicht kommen die oben genannten Brillen zum Einsatz. Immersive Desktopsys-teme liegen in der mittleren Preiskategorie.
Da die in dieser Arbeit gegebene Aufgabe nicht an einem Tisch ausgeführt wird, werden immersive Desktopsysteme nicht weiter betrachtet.
Der Aufbau eines Vision Domes (siehe Abbildung 22, rechts) ähnelt dem eines Planetariums. Ein hochauflösendes Projektionssystem ist für die Dar-stellung auf der hemisphärischen Fläche zuständig. Damit die Anzeige korrekt ist, muss eine Anpassung der Bilder an die Form der Projektionsflä-che erfolgen. Theoretisch ist ein derartiges Display in der Lage die gesamte Halbkugel mit Bildinformationen zu versorgen, was allerdings sehr hohe Anforderungen an die Auflösung stellt.
Ein Vision Dome kann von einer ganzen Personengruppe genutzt werden. Die Benutzer müssen wiederum die oben genannten Brillen tragen.
Hauptsächlich der aufwendige Aufbau eines Systems, aber auch die hohe Auflösung, die das Display aufweisen muss, tragen zu den hohen Kosten bei.
Es ist für diese Arbeit nur von geringer Priorität, mehrere Benutzer gleich-zeitig an der VR-Simulation teilhaben zu lassen. Die Gewährleistung dieser Funktionalität steht in keiner Relation zum hohen Kostenaufwand eines die-ser Systeme. Daher werden auch Vision Domes von der weiteren Betrach-tung ausgeschlossen.
Abbildung 22: Responsive Workbench [W3ABFH] und Vision DomeTM [JTAP00]
Material und Methode 38
2.5 Audiodisplays Obwohl die Wahrnehmung von akustischen Ereignissen im alltäglichen Le-ben eine wichtige Rolle spielt, wird eine entsprechende Berücksichtigung in vielen VR-Simulationen heute vernachlässigt. Es wird primär die visuelle Wahrnehmung der Benutzer angesprochen [IDA96, SL00, Beg00, W3Gär01]. Dabei besitzen Grafikdisplays einige bedeutende Nachteile: Die Menge an darstellbaren Informationen wird durch den physikalisch zur Verfügung stehenden Platz begrenzt. Dies ist insbesondere bei tragbaren Displays wichtig. Zur Wahrnehmung der Informationen muss der Benutzer seine Aufmerksamkeit direkt auf das Grafikdisplay richten. Diese Nachteile können durch eine stärkere Berücksichtigung der Audiokomponente einer Applikation kompensiert werden.
Nach Bullinger, Bauer und Braun lassen sich Soundeffekte in VR-Applika-tionen für vier Zwecke einsetzen [BBB97]:
• Interaktion: Sound wird als Ein- und Ausgabe eingesetzt werden. Sprachein- und Sprachausgabe ist z.B. hier zu nennen.
• Sonifizierung: (Numerische) Daten werden als Sound dargestellt wer-den. Eine akustische Darstellung kann auch eine Unterstützung einer grafischen Präsentation sein [MR95].
• Lokalisierung: Objekte der virtuellen Umgebung werden mit einem Sound verknüpft werden und sind so einfacher zu detektieren.
• Navigation: Über Soundereignisse werden dem Benutzer in der virtuel-len Welt Orientierungshilfen zur Verfügung gestellt werden.
Zur Soundaufnahme kommen Mikrofone zum Einsatz. Viele Parameter der aufgenommenen Signale, wie z.B. Amplitude, Frequenz und Phase können über Synthesizer variiert werden. Zur Soundausgabe werden Lautsprecher verwendet. Sie werden entweder in die Umgebung des Benutzers platziert oder sind in Kopfhörern integriert. Positionsunabhängige und positionsab-hängige Audiosysteme werden unterschieden.
Die einfachste Form positionsunabhängiger Audioausgabe ist monauraler Sound. Unabhängig von der Anzahl der zur Aufnahme der Soundquelle verwendeter Mikrofone wird stets das gleiche Signal aufgenommen und wiedergegeben.
Zur Aufnahme von Stereosound kommen mindestens zwei Mikrofone zum Einsatz, die räumlich voneinander getrennt sind. Dadurch werden unter-schiedliche Signale aufgenommen und bei der Wiedergabe an den Benutzer zurückgegeben. Stereosound wird von Hörern oft so empfunden, als ob sich die Soundquellen direkt im Inneren des Kopfes befinden. Deren Position
Material und Methode 39
kann dabei einem Punkt auf der Strecke zugeordnet werden, die sich vom linken bis zum rechten Ohr erstreckt.
Sowohl monauraler Sound als auch Stereosound sind besonders zur Wie-dergabe von akustischen Ereignissen geeignet, die von ihrer Charakteristik eine globale Bedeutung für die Applikation besitzen. Es kann z.B. auf Er-eignisse hingewiesen werden, die außerhalb des Sichtbereichs des Anwen-ders liegen. Auch für Sprachausgabe sind diese Arten der Soundwiedergabe geeignet.
Positionsabhängige Soundausgabe wird durch eine Anpassung auf die bin-aurale Hörfähigkeit des Menschen erreicht. Dadurch wird es einem Hörer ermöglicht, einer Soundquelle eine Position zuzuordnen, die sich auch au-ßerhalb des Kopfes befinden kann. Zur Aufnahme des Sounds werden zwei Mikrophone verwendet, die sich an den Ohrpositionen einer Dummypuppe befinden. Der aufgenommene Sound wird mit dem Originalsound vergli-chen. Die Differenzen werden zur Berechnung der HRTF (head-related transfer function) benutzt. Die HRTF ist eine lineare Funktion, die unter Berücksichtigung der Charakteristiken des binauralen Hörens (vgl. Ab-schnitt 2.1.2.2, Seite 21) die Position einer Soundquelle wiedergibt. Sie wird zum Entwurf von FIR-Filtern (finite impulse response) benutzt. Jede Posi-tion benötigt pro Ohr ein Filter. Um einen Sound einer bestimmten Stelle der virtuellen Umgebung zuzuordnen, muss das korrespondierende Paar an FIR-Filtern auf das auszugebende Audiosignal angewendet werden. Es ist so möglich die Objekte einer Simulation lokal mit Soundereignissen zu ver-binden.
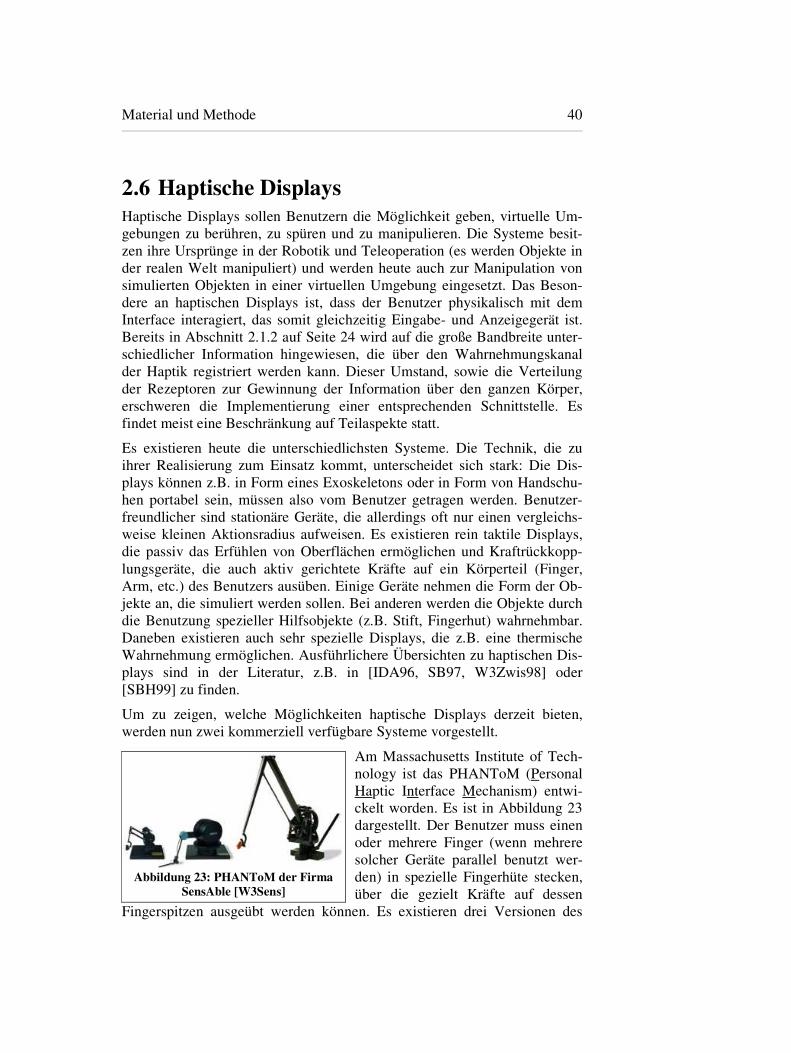
Material und Methode 40
2.6 Haptische Displays Haptische Displays sollen Benutzern die Möglichkeit geben, virtuelle Um-gebungen zu berühren, zu spüren und zu manipulieren. Die Systeme besit-zen ihre Ursprünge in der Robotik und Teleoperation (es werden Objekte in der realen Welt manipuliert) und werden heute auch zur Manipulation von simulierten Objekten in einer virtuellen Umgebung eingesetzt. Das Beson-dere an haptischen Displays ist, dass der Benutzer physikalisch mit dem Interface interagiert, das somit gleichzeitig Eingabe- und Anzeigegerät ist. Bereits in Abschnitt 2.1.2 auf Seite 24 wird auf die große Bandbreite unter-schiedlicher Information hingewiesen, die über den Wahrnehmungskanal der Haptik registriert werden kann. Dieser Umstand, sowie die Verteilung der Rezeptoren zur Gewinnung der Information über den ganzen Körper, erschweren die Implementierung einer entsprechenden Schnittstelle. Es findet meist eine Beschränkung auf Teilaspekte statt.
Es existieren heute die unterschiedlichsten Systeme. Die Technik, die zu ihrer Realisierung zum Einsatz kommt, unterscheidet sich stark: Die Dis-plays können z.B. in Form eines Exoskeletons oder in Form von Handschu-hen portabel sein, müssen also vom Benutzer getragen werden. Benutzer-freundlicher sind stationäre Geräte, die allerdings oft nur einen vergleichs-weise kleinen Aktionsradius aufweisen. Es existieren rein taktile Displays, die passiv das Erfühlen von Oberflächen ermöglichen und Kraftrückkopp-lungsgeräte, die auch aktiv gerichtete Kräfte auf ein Körperteil (Finger, Arm, etc.) des Benutzers ausüben. Einige Geräte nehmen die Form der Ob-jekte an, die simuliert werden sollen. Bei anderen werden die Objekte durch die Benutzung spezieller Hilfsobjekte (z.B. Stift, Fingerhut) wahrnehmbar. Daneben existieren auch sehr spezielle Displays, die z.B. eine thermische Wahrnehmung ermöglichen. Ausführlichere Übersichten zu haptischen Dis-plays sind in der Literatur, z.B. in [IDA96, SB97, W3Zwis98] oder [SBH99] zu finden.
Um zu zeigen, welche Möglichkeiten haptische Displays derzeit bieten, werden nun zwei kommerziell verfügbare Systeme vorgestellt.
Am Massachusetts Institute of Tech-nology ist das PHANToM (Personal Haptic Interface Mechanism) entwi-ckelt worden. Es ist in Abbildung 23 dargestellt. Der Benutzer muss einen oder mehrere Finger (wenn mehrere solcher Geräte parallel benutzt wer-den) in spezielle Fingerhüte stecken, über die gezielt Kräfte auf dessen
Fingerspitzen ausgeübt werden können. Es existieren drei Versionen des
Abbildung 23: PHANToM der Firma SensAble [W3Sens]

Material und Methode 41
Gerätes, die dem Benutzer einen unterschiedlich großen Bewegungsradius erlauben (Handgelenk, Ellenbogen oder Schulter als den Radius bestim-mend). Außerdem existiert eine Version, die auch Bewegungen des Benut-zers registrieren und somit dessen Hand und Fingerposition verfolgen kann. Der Preis der Geräte liegt in der mittleren Preiskategorie. Eine Pro-grammbibliothek gewährleistet eine vielseitige Verwendbarkeit des Gerätes.
Die Firma Immersion Corporation [W3IC] vertreibt das Gerät CyberForceTM. Es ist in Abbildung 24 gezeigt. Das stationäre Desk-top-Gerät misst die Position und Orientie-rung der Benutzerhand und generiert Kräfte im Bereich von 6,6 – 8,8 N, die translato-risch (dreidimensional) auf Hand und Arm des Benutzers ausgeübt werden können. Der Aktionsradius ist auf 19,5″ beschränkt. In Verbindung mit weiteren Produkten der Firma kann die Funktionalität erweitert werden. Mit dem Datenhandschuh Cy-berGlove® lassen sich auch die Krümmun-
gen der einzelnen Finger bestimmen. Über das Exoskeleton CyberGraspTM, das die Hand des Benutzers umgibt, können weiterhin Kräfte auf jeden Fin-ger der Hand ausgeübt werden.
In [IDA96], [Tsai96] und [SBH99] sind Mängel derzeitiger haptischer Systeme aufgeführt. Einige sind nachfolgend aufgeführt:
• Es lassen sich nicht einmal für sehr einfache Umgebungen überzeugende Simulationen realisieren, beispielsweise bereitet die Darstellung virtu-eller Wände große Probleme. Komplexere Umgebungen sind durch be-stehende haptische Systeme erst recht nicht überzeugend darstellbar.
• In [Tsai96] wird auf Instabilitäten hingewiesen, die sich in einer mechanischen Unruhe des virtuellen Systems äußern, wenn eigentlich statische Objekte simuliert werden.
• Probleme ergeben sich vor allem durch Grenzen der mechanischen Dar-stellung, die elektromechanische Integration, Computerhardware und Software sowie die eingesetzten Simulationsalgorithmen.
• Es existieren keine Systeme, die das gesamte Spektrum der haptischen Wahrnehmung abdecken. Es werden stets nur (einfache) Teilaspekte re-alisiert.
Abbildung 24: CyberForceTM der Firma Immersion Corp. [W3IC]

Material und Methode 42
2.7 Tracking In VR-Anwendungen werden Trackingsysteme eingesetzt, um Bewegungen eines Benutzers oder allgemeiner von beliebigen Objekten zu erfassen1. Diese Informationen werden an das Grafiksystem weitergereicht, das da-durch in der Lage ist, eine digitale Repräsentation des Benutzers, bzw. der getrackten Objekte in die virtuelle Umgebung zu integrieren. Idealerweise ermitteln Trackingsysteme mindestens 6 Freiheitsgrade (Degrees Of Free-dom, DOF) für ein Objekt im 3D-Raum. Durch ein Tupel, bestehend aus drei translatorischen und drei rotatorischen Werten, ist jedes Objekt bzgl. räumlicher Positionierung und Ausrichtung eindeutig festgelegt. Werden weniger Freiheitsgrade vom Trackingsystem ermittelt, besteht im allgemei-nen keine Eindeutigkeit, was für einige Aufgaben aber durchaus akzeptabel und ausreichend sein kann.
Trackingverfahren besitzen viele Gemeinsamkeiten mit Verfahren aus dem Bereich Motion Capture. Motion Capture wird z.B. in der Film- und Com-puterspielindustrie eingesetzt, um die Bewegungen eines realen Darstellers auf einen virtuellen Charakter zu übertragen. Die Bewegungsabläufe des virtuellen Charakters erhalten auf diese Weise ein natürlicheres Erschei-nungsbild. Der wesentliche Unterschied zu diesem Bereich ist, dass beim Motion Capture zwischen Aufnahme der Bewegungen und Übertragung der Ergebnisse auf den virtuellen Charakter beliebig viel Zeit vergehen darf, die z.B. zur Verbesserung der Qualität der aufgenommenen Daten genutzt wer-den kann. Diese Zeit steht in einem VR-System i.a. nicht zur Verfügung. Die Ergebnisse müssen sofort an den Benutzer weitergegeben werden. Nur so kann für ihn der Eindruck einer „flüssigen“ Simulation entstehen.
Die „klassische“ Aufgabe eines Trackingsystems in einer immersiven VR-Anwendung ist die Erfassung der Position und Orientierung vom Kopf des Benutzers (auch HMD-, Head- oder Kopftracking genannt). Aus diesen Pa-rametern kann ein VR-System die Benutzersicht auf die Szene ermitteln, die im Grafikdisplay angezeigt wird. Wegen der hohen Dominanz des visuellen Sinns (vgl. Abschnitt 2.1.2.1 auf Seite 18) besitzen Fehler, die beim Kopftracking entstehen, besonders starke, negative Auswirkungen auf die gesamte VR-Simulation.
Trackingsysteme können anhand der folgenden Kriterien bewertet und ver-glichen werden (siehe z.B. auch [MAB92] oder [Bha93]):
• Genauigkeit: Die gegebene Aufgabe impliziert die zu erzielende Genauigkeit. Durch äußere Einflüsse (Interferenz), sowie Verdeckungen der zu erfassenden Objekte sollen sich keine negativen Auswirkungen bemerkbar machen. Dies gilt für den gesamten Zeitraum der Datenerfas-
1 Nachfolgend werden die zu erfassenden Objekte oft auch Targets genannt. Es werden dabei 3D-Targets und 6D-Targets unterschieden.

Material und Methode 43
sung. Die Ergebniswerte wiederholter Messungen unter gleichen Ver-suchsbedingungen sollen gleich sein (Wiederholgenauigkeit) und keine Drift aufweisen. Die Auflösung des Systems soll so hoch sein, dass auch kleine Änderungen der zu erfassenden Objekte detektiert werden kön-nen. Die Anwendung des Trackingverfahrens selbst soll hingegen keine negativen Effekte hervorrufen, die sich z.B. störend durch ein „Zittern“ (Jitter) der Ergebniswerte bemerkbar machen.
• Echtzeitfähigkeit: Da ein Trackingsystem oft „Basisdaten“ generiert, die von anderen Systemkomponenten benutzt werden müssen, machen sich Fehler beim Tracking besonders stark bemerkbar, da sie sich in den benutzenden Komponenten „fortpflanzen“. Die sehr wichtige Erzeugung der Benutzersicht ist in diesem Zusammenhang zu nennen. Eine geringe Wiederholrate kann zu den in Abschnitt 2.1.3 auf Seite 26 erwähnten Aliasingeffekten führen. Eine hohe Latenz trägt hingegen zur Ungenau-igkeit der Simulation bei.
• Skalierbarkeit: Viele Anwendungen erfordern, dass mehrere Targets gleichzeitig getrackt werden müssen. Das Erfassungssystem sollte dies unterstützen. Es sollten aus dieser Anforderung keine negativen Auswir-kungen auf andere Leistungsmerkmale entstehen. Oft wirkt sich aber die Erhöhung der Targetanzahl negativ auf die Geschwindigkeit oder Ge-nauigkeit eines Systems aus. Auch das gesamte Arbeitsvolumen, das durch die gegebene Applikation bestimmt wird, muss vom Tracking-system erfassbar sein. Idealerweise ist der trackbare Bereich eines Sys-tems für unterschiedliche Anforderungen skalierbar.
Es existieren im VR-Bereich bereits viele, zum Teil sehr unterschiedliche Trackingsysteme, wobei jedes bestimmte Vor- aber auch Nachteile besitzt. Ein ideales, universelles System, das gemäß der genannten Bewertungskri-terien nur positive Eigenschaften aufweist, existiert derzeit nicht (siehe auch [Auer00]). Tracking besitzt daher ein enormes Entwicklungs- und Erfor-schungspotential und ist im VR- und AR-Bereich eins der am häufigsten diskutierten Themen. Eine Folgerung daraus ist, dass ein Trackingsystem immer in Abhängigkeit von einer gegebenen Anwendung ausgewählt wer-den muss. Nur so können möglichst viele Anforderungen erfüllt werden, die durch die Applikation gegebenen sind. Um die für diese Arbeit zu treffende Systemauswahl zu erleichtern, wird hier zunächst eine Klassifizierung heute verfügbarer Trackingsysteme vorgenommen. Der häufigste Ansatz dazu, der in der Literatur zu finden ist (siehe z.B. [App91, MAB92, Bha93, Kal94, FZMC96]) und der auch hier verwendet wird, benutzt dazu die Technologie, die den Systemen zugrunde liegt. Ein alternativer Ansatz ist z.B. in [Mul94] zu finden. Hier werden Trackingsysteme in die drei Klassen Outside-in, Inside-out und Inside-in eingeteilt. Diese Klassifizierung bezieht sich auf die Anordnung der Signalgeber und Signalempfänger:

Material und Methode 44
• Outside-in: Signalgeber befinden sich auf dem Objekt, das erfasst werden soll. Empfänger sind an bekannten Stellen im Versuchsvo-lumen. Als Signalgeber kann bei dieser Methode auch das zu tra-ckende Objekt selbst dienen.
• Inside-out: Signalempfänger befinden sich auf dem Objekt, das er-fasst werden soll. Natürliche oder manuell installierte Signalgeber sind an bekannten Stellen im Versuchsvolumen.
• Inside-in: Sowohl Signalgeber und Empfänger befinden sich auf dem zu trackenden Objekt.
2.7.1 Mechanisches Tracking Das erste Trackingsystem, das im VR-Bereich zum Einsatz gekommen ist, war ein mechanisches System. Der VR-Pionier Ivan E. Sutherland hat es 1968 zur Erfassung von HMD-Be-wegungen benutzt [Sut68]. Es ist bereits in der Lage gewesen, sechs Freiheits-grade zu ermitteln. Die Technologie ist zu diesem
Zeitpunkt auch erfolgreich in anderen Disziplinen eingesetzt worden, wie z.B. der Robotik, Anthropologie und Medizin [MAB92].
Oft ist bei diesen Systemen das Objekt, das verfolgt werden soll (z.B. ein HMD, ein Monitor oder eine Kamera), physikalisch mit einem Referenz-punkt verbunden. Diese Verbindung kann, wie in Abbildung 25 dargestellt, aus einem beweglichen Arm bestehen. Die translatorischen und rotatori-schen Bewegungen des Objektes werden auf den Arm übertragen und dort gemessen. Dazu können z.B. Potentiometer oder Winkelmesser eingesetzt werden. Aus den gemessenen Werten berechnet schließlich eine Auswerte-einheit die verschiedenen Freiheitsgrade des Objektes.
Mechanische Trackingsysteme, die für den Einsatz im VR-Bereich konzi-piert sind, fallen in die mittlere Preiskategorie. Geräte, die für spezielle Aufgaben entwickelt werden, können hingegen sehr teuer sein. In der Automobilindustrie werden derartige Systeme z.B. zur dreidimensionalen Vermessung von Fahrzeugteilen eingesetzt. Die entsprechenden Geräte sind in der Lage, Objektpunkte mit einer maximalen Ungenauigkeit von wenigen �m zu erfassen. Sie sind für einen allgemeinen Einsatz im VR-Bereich ungeeignet, können aber z.B. als Referenzgeräte bzgl. Genauigkeit für andere Systeme benutzt werden.
Abbildung 25: BOOM (Binocular Omni-Orientation Monitor) der Firma Fakespace Inc. [W3Fak]

Material und Methode 45
Über die oben erwähnte physikalische Verbindung ist es möglich, Impulse zurück an das zu erfassende Objekt zu senden, die z.B. zur Erzeugung eines haptischen Feedbacks für den Benutzer verwendet werden können.
In Tabelle 6 sind die Vor- und Nachteile der Technologie zusammengefasst:
Vorteile Nachteile • Hohe Genauigkeit, keine Drift • Hohe Wiederholrate, geringe Latenz • Robust gegenüber Störeinflüssen • Geeignet für haptische Feedback-
Mechanismen • Wohlbekannte Technologie, z.B. aus
dem Bereich der Telerobotik
• Geringe Systemergonomie • Die Bewegungsfreiheit des Benutzers
und das Arbeitsvolumen wird durch die Mechanik begrenzt
• Keine Skalierbarkeit • Oft können nur wenige Objekte
gleichzeitig erfasst werden
Tabelle 6: Übersicht mechanisches Tracking
2.7.2 Akustisches Tracking Beim akustischen Tracking emittiert eine Sendeeinheit ein Signal mit einer Frequenz, die typischerweise im Ultraschall-bereich liegt (oberhalb 20 kHz) und damit vom mensch-lichen Gehör nicht wahrge-nommen werden kann. Da die
Ausbreitungsgeschwindigkeit des akustischen Signals a pri-ori bekannt ist, kann eine
Empfangseinheit (ein spezielles Mikrophon) bei Signaldetektion die Entfer-nung zum Sender bestimmen.
Beim Einsatz von drei Sende- oder Empfangseinheiten kann über Trian-gulation die 3D-Position bestimmt werden. Für 6-DOF sind sowohl drei Sende- als auch drei Empfangseinheiten nötig. Mit weiteren redundanten Sendern oder Empfängern kann die Ausfallsicherheit des Systems erhöht werden. Dies ist wichtig, da viele Einflüsse negativ auf die Messgenauigkeit einwirken. So spielt z.B. (akustische) Verdeckung eine Rolle, aber auch Schwankungen der Temperatur, des Luftdrucks und der Luftfeuchtigkeit besitzen diesbezüglich einen Einfluss.
Prinzipiell können akustische Trackingsysteme so konfiguriert werden, dass die Sendeeinheiten auf den zu verfolgenden Objekten haften und die Emp-fangseinheiten stationär sind (Outside-In-Konfiguration). Auch die genau umgekehrte Inside-Out-Konfiguration ist möglich.
Zwei unterschiedliche Methoden kommen beim akustischen Tracking zum Einsatz, die in der Literatur die Namen Time of Flight (TOF) und Phase
Abbildung 26: 3D Mouse und Headtracker der Firma Logitech [W3Log]
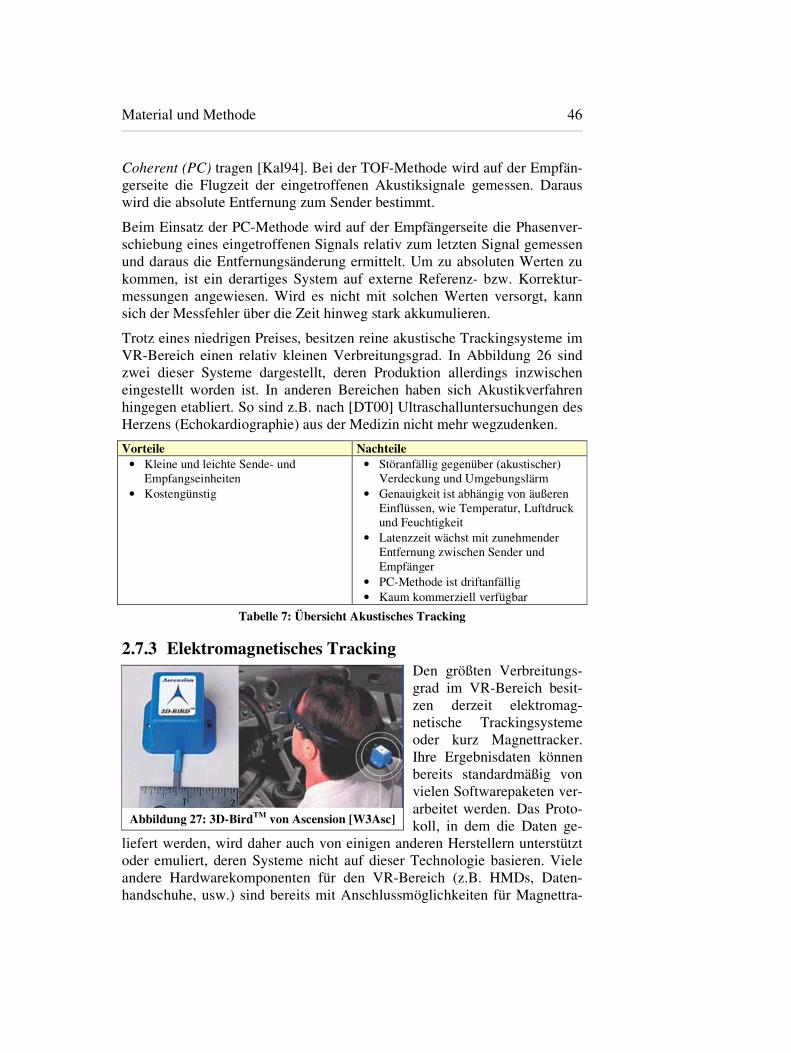
Material und Methode 46
Coherent (PC) tragen [Kal94]. Bei der TOF-Methode wird auf der Empfän-gerseite die Flugzeit der eingetroffenen Akustiksignale gemessen. Daraus wird die absolute Entfernung zum Sender bestimmt.
Beim Einsatz der PC-Methode wird auf der Empfängerseite die Phasenver-schiebung eines eingetroffenen Signals relativ zum letzten Signal gemessen und daraus die Entfernungsänderung ermittelt. Um zu absoluten Werten zu kommen, ist ein derartiges System auf externe Referenz- bzw. Korrektur-messungen angewiesen. Wird es nicht mit solchen Werten versorgt, kann sich der Messfehler über die Zeit hinweg stark akkumulieren.
Trotz eines niedrigen Preises, besitzen reine akustische Trackingsysteme im VR-Bereich einen relativ kleinen Verbreitungsgrad. In Abbildung 26 sind zwei dieser Systeme dargestellt, deren Produktion allerdings inzwischen eingestellt worden ist. In anderen Bereichen haben sich Akustikverfahren hingegen etabliert. So sind z.B. nach [DT00] Ultraschalluntersuchungen des Herzens (Echokardiographie) aus der Medizin nicht mehr wegzudenken.
Vorteile Nachteile • Kleine und leichte Sende- und
Empfangseinheiten • Kostengünstig
• Störanfällig gegenüber (akustischer) Verdeckung und Umgebungslärm
• Genauigkeit ist abhängig von äußeren Einflüssen, wie Temperatur, Luftdruck und Feuchtigkeit
• Latenzzeit wächst mit zunehmender Entfernung zwischen Sender und Empfänger
• PC-Methode ist driftanfällig • Kaum kommerziell verfügbar
Tabelle 7: Übersicht Akustisches Tracking
2.7.3 Elektromagnetisches Tracking Den größten Verbreitungs-grad im VR-Bereich besit-zen derzeit elektromag-netische Trackingsysteme oder kurz Magnettracker. Ihre Ergebnisdaten können bereits standardmäßig von vielen Softwarepaketen ver-arbeitet werden. Das Proto-koll, in dem die Daten ge-
liefert werden, wird daher auch von einigen anderen Herstellern unterstützt oder emuliert, deren Systeme nicht auf dieser Technologie basieren. Viele andere Hardwarekomponenten für den VR-Bereich (z.B. HMDs, Daten-handschuhe, usw.) sind bereits mit Anschlussmöglichkeiten für Magnettra-
Abbildung 27: 3D-BirdTM von Ascension [W3Asc]
Material und Methode 47
cker ausgestattet. Der niedrige Preis dieser Systeme trägt ebenfalls zu deren Verbreitung bei.
Magnettracker bestehen aus einer Sende- und einer Empfangseinheit pro Objekt, das getrackt werden soll. Die physikalischen Aufbauten von Sender und Empfänger ähneln sich und bestehen im wesentlichen aus drei Spulen, die orthogonal zueinander angebracht sind. Der Sender wird an einer bekannten Position im Versuchsvolumen angebracht. Empfangseinheiten haften auf den zu trackenden Objekten (Inside-Out-Verfahren).
Während der Verfolgung eines Objektes fließt nacheinander Strom durch die Spulen des Senders. Dadurch entstehen Magnetfelder, die in den drei Empfängerspulen Ströme induzieren, deren Stärke gemessen wird. Eine ermittelte Stromstärke lässt einen Rückschluss auf die Entfernung zum Sender zu. Neun Werte werden bei einem kompletten Messzyklus ermittelt. Eine Auswerteeinheit kann daraus 6-DOF bestimmen.
Der größte Nachteil dieser Technologie ist die Anfälligkeit gegenüber Stö-rungen des Magnetfeldes. Sind im Versuchsvolumen z.B. Metalle, Moni-tore, Stromquellen oder Stromleitungen vorhanden, machen sich Störungen bemerkbar, die sich negativ auf die Messgenauigkeit auswirken.
Magnettracker unterteilen sich in Systeme, deren Magnetfeld durch Wech-selstrom (AC) oder getakteten Gleichstrom (DC) erzeugt wird. Bei den DC-Systemen wird versucht, die Störanfälligkeit gegenüber Metallen zu ver-ringern. Dies bestätigt sich in den Untersuchungen, die in [NMFP98] be-schrieben sind. Hier wird der Einfluss verschiedener Störfaktoren auf AC- und DC-Systeme untersucht. Es ist herausgefunden worden, dass sich Störeffekte durch Metalle bei DC-Trackern weniger auswirken. Allerdings sind AC-Systeme weniger anfällig gegenüber Störungen, die durch Strom-quellen und Stromleitungen entstehen.
Daneben existieren für Magnettracker auch Softwareverfahren, über die Störeffekte verringert werden können [Zac97a].
Vorteile Nachteile • Unterstützung bereits in vielen Soft-
und Hardwareprodukten vorhanden • Empfänger sind relativ klein und leicht
(siehe Abbildung 27) • Kostengünstig • Verfahren zur Verbesserung der
Datenqualität vorhanden • Verfügbarkeit
• Genauigkeit wird von Störungen des Magnetfeldes beeinflusst
• Genauigkeit verringert sich mit zunehmender Entfernung vom Sender (Zentrum des Magnetfeldes)
• Geschwindigkeit verringert sich mit Anzahl der zu trackenden Objekte
• Bei Geräten der unteren Preisklasse ist meist eine Verkabelung erforderlich
• Geringe Skalierbarkeit
Tabelle 8: Übersicht elektromagnetisches Tracking

Material und Methode 48
2.7.4 Optisches Tracking Grundlage optischer Tra-ckingsysteme sind photo-grammetrische Verfahren mit einer Stereoanalyse der Bilddaten von zwei oder mehr Kameras (siehe Abbildung 28). Die Ver-wendung der Stereoana-lyse zur Rekonstruktion von Objektoberflächen im dreidimensionalen Raum ist u.a. auch aus der Pho-
togrammetrik, Mustererkennung und Robotik bekannt. Im Gegensatz zu Anwendungen aus diesen Bereichen ist es für Virtual Reality nicht unbe-dingt notwendig, die gesamte Objektoberfläche zu rekonstruieren. Es rei-chen einige markante Punkte aus, dafür spielt die Geschwindigkeit der Datenerfassung eine wesentlich wichtigere Rolle. Verfahren zur 3D-Rekon-struktion bei Verwendung von Kameras sind z.B. in [Koch97, Qua98] oder [Smo98] beschrieben.
Es ist zunächst eine Unterteilung in passive und aktive Verfahren möglich. Bei den passiven Verfahren wird keinerlei Zusatzinformation auf den zu verfolgenden Objekten angebracht, was speziell beim Personentracking eine hohe Systemergonomie zur Folge hat. Es wird entweder die komplette Sze-nengeometrie rekonstruiert oder nur eine Teilmenge daraus. Die Erfassung der gesamten Szenengeometrie ist ein komplexer und rechenintensiver Vorgang. Um die für den VR-Bereich notwendigen Wiederholraten zu er-reichen, findet daher meist eine Beschränkung auf Teilinformationen aus der Szene statt. Dabei ist es dann oft notwendig, vorab in einem „Lernpro-zess“ das System mit Informationen über die zu verfolgenden Objekte zu versorgen (modellbasiertes Tracking). In dem Artikel [Chan99] ist ein derartiges Verfahren zur Extraktion von Lippenkonturen beschrieben und in [BHH96] eins zur Detektion von Hand- und Kopfmodellen. Ein Vorteil die-ser passiven Verfahren ist, dass als Ergebnis direkt 3D-Geometrien der zu verfolgenden Objekte vorliegen und diese nicht auf einem anderen Weg erzeugt werden müssen. Derartige passive, optische Verfahren werden z.B. im Medizinbereich bei der berührungslosen Vermessung von Personen mit Brandverletzungen eingesetzt. Die Ergebnisdaten können u.a. zur Herstel-lung von Spezial- oder Modekleidung genutzt werden. Im VR-Bereich sind diese Verfahren wenig verbreitet. Es existieren auch kaum kommerzielle Produkte.
Bei den aktiven Verfahren werden für eine robuste und schnellen Detektion die zu verfolgenden Objekte mit speziellen Zusatzinformationen, soge-
Abbildung 28: Kamera der Firma Vicon [W3Vic] und ein zur Ganganalyse eingesetztes optisches System der
Firma Motion Analysis Corporation [W3MAC]

Material und Methode 49
nannten Markern, ausgestattet (markerbasierte Verfahren). Aus den er-zeugten Bildern der einzelnen Kameras werden nur die zweidimensionalen Markerpositionen extrahiert. Durch eine Korrespondenzanalyse über die ge-gebenen Bilder einer Konstellation an Kameras und anschließender Trian-gulation können 3-DOF ermittelt werden. Feste Konstellationen mehrerer Marker – sog. Rigid Bodies – erlauben auch die Ermittlung von 6-DOF.
Es existieren aktive und passive Marker. Aktive Marker (siehe Abbildung 29, links oben) erleich-tern die Korrespondenzanalyse. Sie können z.B. aus einer Diode beste-hen. Beim Einsatz mehrerer Marker werden die Dioden zeitversetzt geschaltet. In den aufgenommenen Bildern der Kameras ist so stets nur ein Marker sichtbar. Um diese ein-fache und robuste Möglichkeit zu nutzen, ist allerdings zusätzlicher Hardwareaufwand nötig. So müs-sen die Marker über eine Kontroll-einheit gesteuert und mit Strom versorgt werden und sind dazu
meist mit dieser über ein Kabel verbunden.
Bei Systemen, die passive Marker verwenden (siehe Abbildung 29, links unten) ist keine Verkabelung nötig. Die Korrespondenz kann rein rechne-risch oder über codierte Marker hergestellt werden. Oft werden spezielle, re-flektierende Materialien bei der Herstellung der Marker eingesetzt, was deren Detektion in den Kamerabildern erleichtert. Während der Messung werden sie von einer zusätzlichen Lichtquelle angestrahlt. Hierfür werden z.B. IR-Blitzlichtlampen verwendet, die mit der jeweiligen Kamera syn-chronisiert sind.
Die kommerziell verfügbaren, markerbasierten Trackingsysteme funktionie-ren überwiegend nach dem Outside-in-Prinzip. Am Department of Compu-ter Science der University of North Carolina ist hingegen ein System entwi-ckelt worden, das nach dem Inside-out-Prinzip arbeitet. Hier sind sechs mi-niaturisierte Kameras auf dem HMD des Benutzers angebracht. An der De-cke des Versuchsraumes ist ein festes Raster an Targets installiert, das von den Kameras erfasst wird. Aus den tatsächlich erfassten Targets der einzel-nen Kameras kann die Kopfposition des Benutzers in 6-DOF bestimmt wer-den. Im Gegensatz zu den Outside-in-Systemen, die zur Vergrößerung des Versuchsvolumens mehr Kameras benötigen, kann hier kostengünstig ein-fach das Raster der Targets vergrößert werden. Die Entwicklungsgeschichte des Systems ist in dem Artikel [WBVBK01] dokumentiert.
Abbildung 29: Personentracking mit Markern.
Oben links: Aktivmarker. Unten links: Passive 3D-Marker.
Material und Methode 50
Eine Spezialform optischer Trackingsystem sind Au-gen- oder Eyetracker (siehe Abbildung 30). Sie sind speziell zur Bestimmung der Blickrichtung der Au-gen einsetzbar. Zum Beispiel wird bei der sog. Kor-nea-Reflex-Methode das Auge mit schwachem, nicht wahrnehmbaren Infrarotlicht beleuchtet und dabei der Pupillenmittelpunkt als auch der Reflexpunkt auf der Hornhaut mit einer Infrarot-Messkamera festgestellt. Aus den beiden detektierten Punkten lässt sich die Blickrichtung ermitteln. Die für das Augentracking erforderliche Hardware lässt sich oft in einen HMD integrieren.
Kommerzielle optische Trackingsysteme besitzen derzeit einem hohen Preis. Da sie aber oft eine hohe Genauigkeit und Wiederholrate aufweisen und gleichzeitig die Erfassung mehrerer Targets erlauben, beginnen sie sich trotzdem immer stärker zu verbreiten. Es ist daher vorhersehbar, dass der Preis zukünftig „erschwinglicher“ wird. Verdeckung stellt das größte Prob-lem für die Systeme dar. Die optische Erfassung bedingt, dass für verdeckte Targets keine Informationen geliefert werden können.
Vorteile Nachteile • Hohe Genauigkeit, keine Drift • Hohe Geschwindigkeit • Großes Versuchsvolumen möglich • 3D-Marker sind klein und leicht • Viele Marker gleichzeitig meßbar • Es existieren viele Spezialformen
optischer Verfahren (Mustererkennung, Augentracking)
• Keine Messwerte bei Verdeckung • Bei einigen Systemen sind die Marker
verkabelt • 6D-Marker können groß und unhandlich
sein • Relativ aufwendige Inbetriebnahme • Hoher Preis
Tabelle 9: Übersicht optisches Tracking
2.7.5 Inertiales Tracking Inertiale Systeme wer-den seit Jahren zur Na-vigation in der Raum-fahrt, bei U-Booten, Flugzeugen und Raketen eingesetzt [W3SDID]. Durch den Einsatz mo-derner Mikroelektronik, die den Platzbedarf der
benötigten Hardware immer kleiner werden lässt, ist der Einsatz inertialer Systeme heute ebenfalls in anderen Bereichen möglich. Dies gilt auch für den VR-Bereich. In Abbildung 31 sind zwei kommerzielle Systeme der Firma Intersense [W3Int] zu sehen.
Abbildung 30: Augentracker von
SensoMotoric Instruments [W3SMI]
Abbildung 31: Inertiale Tracker IS-300 und InterTrax der Firma Intersense [W3Int]
Material und Methode 51
Im Gegensatz zu anderen Trackingtechnologien, die oft aus einer Konstel-lation von Signalgebern und davon getrennten Empfängern bestehen, ver-schmelzen bei inertialen Systemen diese beiden Einheiten miteinander. Sen-soren sitzen direkt auf den zu verfolgenden Objekten. Die translatorischen und rotatorischen Impulse der Objekte dienen als Signale (Inside-in-Konfi-guration). Durch diese enge Kopplung ist die Technologie unanfällig ge-genüber Problemen durch Verdeckung. Können die erzeugten Daten kabel-los von den Sensoren zur Auswerteeinheit transferiert werden, so besitzt sie weiterhin das Potential, beliebig große Versuchsvolumen erfassen zu kön-nen.
Ein inertiales System zur Erfassung von 6-DOF besteht typischerweise aus zwei Arten inertialer Sensoren [Ver96]: Aus den Ergebniswerten drei orthogonal zueinander angebrachter Beschleunigungsmesser lässt sich durch zweifache Integration die Raumposition eines Objektes ermitteln. Die Ori-entierung ergibt sich über einfache Integration der Ergebniswerte von drei orthogonalen Gyroskopen, die als Ergebnisse Änderungen der Objektorien-tierung liefern. Beide Sensorarten liefern direkt am Ausgang relative Daten, und erst die Integration über die Zeit ermöglicht daraus die Berechnung ab-soluter Werte. Aus diesem Grund ist oft eine Drift bei den Ergebniswerten inertialer Systeme feststellbar.
Vorteile Nachteile • Keine synthetischen Signalgeber
erforderlich • Beliebig große Versuchsvolumen
möglich • Kein Verdeckungsproblem • Objektanzahl theoretisch unbegrenzt
• Drift • Genauigkeit ist abhängig von äußeren
Einflüssen wie Temperatur und Vibrationen
• Kleine Änderungen oft schwer zu entdecken
Tabelle 10: Übersicht inertiales Tracking
2.7.6 Hybrides Tracking Beim hybriden Trackingansatz werden ver-schiedene Systeme miteinander kombiniert, um die spezifischen Mängel einzelner Technologien auszugleichen und Vorteile gegenseitig zu ergänzen. Es handelt sich in diesem Sinne also um keine echte, eigene Technologie. Redundan-zen, die durch die Kombination im Gesamtsys-tem entstehen können, können zum Beispiel zur Erhöhung der Stabilität und Ausfallsicherheit des Trackingverfahrens ausgenutzt werden.
Derzeit gibt es kaum kommerzielle Produkte auf diesem Gebiet. Eine Aus-nahme ist das in Abbildung 32 dargestellte System der Firma Intersense [W3Int]. Hier werden ein inertiales und ein akustisches System miteinander
Abbildung 32: IS600 Mark2 der Firma Intersense [W3Int]
Material und Methode 52
kombiniert. Um die für das inertiale Subsystem typische Drift auszuglei-chen, liefert das akustische Subsystem in regelmäßigen Intervallen absolute Positionsmessungen. Eine Auswerteeinheit kombiniert die Werte der Sub-systeme und gibt sie von dort an das Zielsystem weiter. Das System liegt in der mittleren Preiskategorie.
In Forschungseinrichtungen existieren einige prototypische Systeme. An der Technischen Universität Graz ist ein System entwickelt worden, das aus der Kombination eines elektromagnetischen und eines optischen Verfahrens besteht [Auer00]. In [SHCG96] ist ein ähnliches System beschrieben, das am Department of Computer Science der University of North Carolina ent-wickelt worden ist. In [YNA99] ist hingegen ein System beschrieben, das aus der Kombination eines inertialen und optischen Subsystems besteht.
Vorteile Nachteile • Kombination der Vorteile einzelner
Technologien • Höhere Robustheit, durch Ausnutzung
von Redundanzen
• Kaum kommerziell verfügbar • Systemkomplexität steigt bzgl. Hard-
und Software • Systemergonomie kann durch
Verwendung mehrerer Subsysteme sinken
Tabelle 11: Übersicht hybrides Tracking
2.8 Datenhandschuhe Als eine Spezialform von Trackingsystemen können Datenhandschuhe betrachtet werden. Über mechanische, elektrische oder fiberopti-sche Verfahren werden die Krümmungen und Sprei-zungen der einzelnen Finger bestimmt. Die dadurch
ermittelten Ergebniswerte können z.B. für Gestenerkennung oder zur Steue-rung eines digitalen Handmodells in einer VR-Umgebung benutzt werden.
Daneben ist es möglich, dem Benutzer über den Handschuh ein haptisches Feedback zu geben (siehe Abschnitt 2.6 auf Seite 40). Dazu ist auf dem Handschuh meist eine mechanische Vorrichtung (Exoskeleton) erforderlich, wie dies in Abbildung 33 (rechts) gezeigt ist.
Abbildung 33: CyberGlove® und CyberGraspTM der Firma Immersion Corporation [W3IC]
Material und Methode 53
2.9 3D-Menschmodelle Die Entwicklung von 3D-Mensch-modellen setzt parallel zur Eta-blierung von CAD-Systemen ein [SPB99] und kann bis zum Anfang der 70er Jahre zurückverfolgt wer-den [BPW99].
Als 3D-Menschmodell wird die dreidimensionale Repräsentierung des menschlichen Körpers im Computer durch ein Gittermodell mit Haut, Skelett und beweglichen
Gelenken aufgefasst. Das Modell soll dabei menschliche Maße (Anthropo-metrie), Haltungen, Bewegungen und Empfinden (z.B. Komfortempfinden) simulieren. In [BPW99] und [Tha96] werden ausführlich Methoden be-schrieben, die für diese Zwecke verwendbar sind.
3D-Menschmodelle werden heute z.B. für Aufgaben bei der Crashsimula-tion in der Automobil- und Flugzeugindustrie, der ergonomischen Arbeits-platzauslegung, der Bewegungsanalyse in der Medizin und im Unterhal-tungsbereich eingesetzt. Die enorme Vielzahl an Einsatzmöglichkeiten hat bislang auch zur Implementierung vieler unterschiedlicher Modelle geführt, die zueinander inkompatibel sind. Um dem entgegenzuwirken, existieren erste Bestrebungen, Normierungen auf diesem Gebiet zu erzielen [W3HA01].
Auch im VR-Bereich kommen 3D-Menschmodelle zum Einsatz. Sie lassen sich in die beiden Klassen autonome Charaktere und Avatare einteilen [SHS98]. Autonome Charaktere dienen hauptsächlich der „Bevölkerung“ virtueller Welten. Eine virtuelle Szene, aufwendig und detailreich model-liert, wirkt ohne Leute, die sich in der Szene bewegen, nicht komplett [Tha96]. Avatare bilden hingegen den Nutzer auf die virtuelle Welt ab. Bei manchen Anwendungen wird der komplette Körper des Benutzers darge-stellt, bei anderen findet eine Beschränkung auf bestimmte Körperteile statt, z.B. auf die Hände. Während bei autonomen Charakteren algorithmischer Aufwand betrieben werden muss, um ihr Verhalten festzulegen, wird das von Avataren vom Benutzer „diktiert“.
Für diese Arbeit sind nur Avatare von Interesse. Über einen Avatar soll der Benutzer des Ergonomie-Mock-Ups seinen eigenen Körper in der virtuellen Umgebung visuell wahrnehmen können. Nachfolgend sind einige Auswahl-kriterien für Menschmodelle aufgeführt, wobei speziell Avatare berücksich-tigt werden:
Abbildung 34: Virtuelle Menschen [Tha96]

Material und Methode 54
• Kontrolle: Der Bewegungsablauf des Menschmodells muss in Abhän-gigkeit der Bewegungen des Benutzers steuerbar sein. Zu diesem Zweck können z.B. Trackingsysteme zum Einsatz kommen, die den Bewe-gungsablauf des Nutzers erfassen und auf das Modell übertragen.
• Skalierbarkeit: Eine freie Skalierbarkeit des Menschmodells ist erstre-benswert. Beispielsweise kann über 3D-Messmethoden (z.B. Laserlicht-schnittverfahren oder Photogrammetrie, siehe [Geu94]) ein exaktes Ab-bild einer Versuchsperson im Computer erzeugt werden, aus dem dann ein 3D-Menschmodell abgeleitet werden kann.
• Performanz: Der Prozess der Erzeugung des Manikins soll sich so parametrieren lassen, dass die für eine Anwendung erforderliche Per-formanz erreicht werden kann. Insbesondere die Anzahl der zur Model-lierung verwendeten Grafikprimitive spielt eine wichtige Rolle.
2.10 Virtuelle Fahrsimulationen Fahr- und Flugsimulato-ren gehören mit zu den ältesten Anwendungen im VR-Bereich [BBB97]. Sie bieten gerade Anfängern die Möglichkeit, den Um-gang mit Fahrzeugen ge-fahrlos zu erlernen. Insbe-sondere kann ihre Verhal-tensweise für Notsituatio-nen geschult werden. Die-ses ist in der Realität nur
schwer möglich. Es lässt sich deutlich ein Transfer des in Simulationen er-lernten Wissens auf reale Situationen nachweisen [BBB97]. Nachfolgend werden nur noch Fahrsimulatoren betrachtet.
Einige Applikationen involvieren den Benutzer in die Fahrsimulation, in-dem sie lediglich seine visuelle Wahrnehmung berücksichtigen. Das Auto-cockpit oder allgemeiner die Simulatorkabine, in der sich der Benutzer be-findet, ist unbeweglich. Projektionswände oder ein HMD werden dabei typi-scherweise als Grafikdisplay benutzt. Technisch aufwendiger sind Systeme, die zusätzlich eine Erregung des vestibulären Wahrnehmungsapparates ermöglichen. In Abbildung 35 sind Bewegungsplattformen dargestellt, die dieses leisten. Wird auf einer solchen Plattform die Simulatorkabine instal-liert, können simulationsgesteuert Bewegungen auf die Kabine übertragen werden. Für den Benutzer können so z.B. rotatorische Bewegungen des Autos und Unebenheiten einer virtuellen Straße vestibulär fühlbar gemacht
Abbildung 35: Bewegungsplattformen Links: Bewegungsplattform FUNRIDE der Firma
simtec [W3Sim] Rechts: Bewegliche Simulatorkabine der Firma STN
Atlas Elektronik GmbH [W3STN]
Material und Methode 55
werden. Der translatorische Aktionsradius der Systeme ist hingegen stark durch ihre Mechanik begrenzt. In vielen Arbeiten zum Thema Fahrsimula-tion, z.B. in [Kem99, HJZ99, MT00] oder [HJZ00], wird auf die Wichtig-keit der vestibulären Wahrnehmung bei virtuellen Fahrsimulationen hinge-wiesen.
Zur Realisierung einer Fahrsimulation können außerdem folgende Kom-ponenten zum Einsatz kommen [Ols95, KEPRW95, TAHD96]:
• Fahrzeugmodell: Die Modellierung des Fahrzeuginnenraums – der un-mittelbaren Umgebung des Probanden – ist von großer Bedeutung. Wenn das Fahrzeug während der Simulation verlassen werden kann, bzw. wenn auch eine entsprechende Szenenansicht von „außen“ unter-stützt wird, muss auch das Äußere des Fahrzeugs – die Karosserie – mo-delliert sein.
• Szenerie: Die Fahrsimulation findet i.a. in einem Ausschnitt einer virtuellen Welt statt, die einen realen oder fiktiven Ursprung besitzen kann und ebenfalls modelliert werden muss.
• Bedienelemente: Üblicherweise sind während einer Fahrsimulation Elemente, wie z.B. Lenkrad, Pedalerie und Betätigungsknöpfe zu benut-zen. Einige davon können rein virtuell sein. Die Detektion der Betäti-gung kann in diesem Fall über eine Kollisionserkennung erfolgen [Zac94, Zac02]. Für reale Bedienelemente kann hingegen spezielle Sen-sorik zum Einsatz kommen [Bull99]. Die damit erfassten Spannungs-werte werden auf entsprechende digitale Wertebereiche abgebildet.
• Fahrdynamik: Eine Fahrdynamiksoftware kann zur Berechnung des aktuellen Fahrzeugzustands verwendet werden. Als Parameter dienen die ermittelten Werte der Bedienelemente, sowie die Fahrzeugposition in der virtuellen Welt. In die Berechnung können weiterhin z.B. die Dy-namik des Fahrzeugaufbaus, das Achsverhalten oder das verwendete Reifenmodell einfließen [MST98].
• Feedback-Komponenten: Visuell wird die Fahrsimulation vom Benut-zer auf dem Grafikdisplay wahrgenommen. Das aktuelle Lenkmoment des Fahrzeugs kann über eine Kraftrückkopplung spürbar gemacht wer-den. Über eine Bewegungsplattform ist vestibuläre Wahrnehmung mög-lich. Motoren- und Reifengeräusche sowie das Geräusch des Fahrtwin-des können ein akustisches Feedback liefern. Durch die Unterstützung möglichst vieler dieser Wahrnehmungskanäle kann der Realitätsgefühl der Simulation erhöht werden.
• Straßenverkehr: Andere Verkehrsteilnehmer, die sich autonom durch die Szene bewegen, tragen zur Verringerung der Monotonie der Simula-tion bei. Außerdem können sie zur Provokation bestimmter Ereignisse genutzt werden, wie z.B. zur Herbeiführung von Gefahrensituationen.
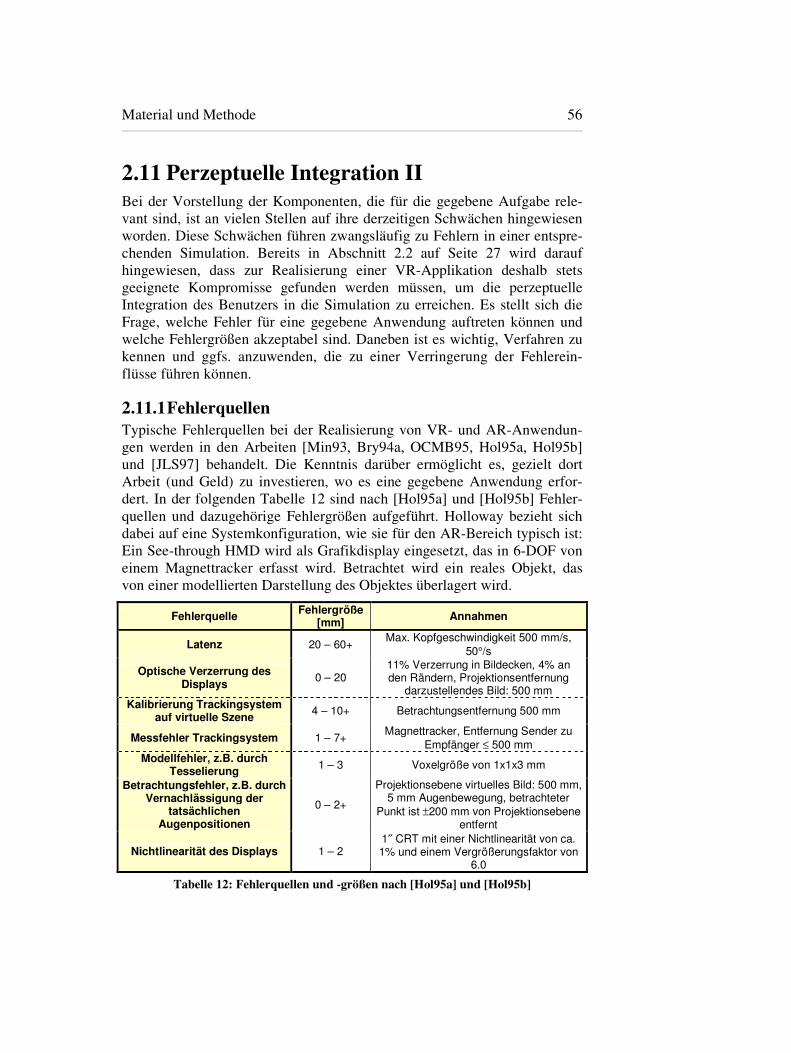
Material und Methode 56
2.11 Perzeptuelle Integration II Bei der Vorstellung der Komponenten, die für die gegebene Aufgabe rele-vant sind, ist an vielen Stellen auf ihre derzeitigen Schwächen hingewiesen worden. Diese Schwächen führen zwangsläufig zu Fehlern in einer entspre-chenden Simulation. Bereits in Abschnitt 2.2 auf Seite 27 wird darauf hingewiesen, dass zur Realisierung einer VR-Applikation deshalb stets geeignete Kompromisse gefunden werden müssen, um die perzeptuelle Integration des Benutzers in die Simulation zu erreichen. Es stellt sich die Frage, welche Fehler für eine gegebene Anwendung auftreten können und welche Fehlergrößen akzeptabel sind. Daneben ist es wichtig, Verfahren zu kennen und ggfs. anzuwenden, die zu einer Verringerung der Fehlerein-flüsse führen können.
2.11.1 Fehlerquellen Typische Fehlerquellen bei der Realisierung von VR- und AR-Anwendun-gen werden in den Arbeiten [Min93, Bry94a, OCMB95, Hol95a, Hol95b] und [JLS97] behandelt. Die Kenntnis darüber ermöglicht es, gezielt dort Arbeit (und Geld) zu investieren, wo es eine gegebene Anwendung erfor-dert. In der folgenden Tabelle 12 sind nach [Hol95a] und [Hol95b] Fehler-quellen und dazugehörige Fehlergrößen aufgeführt. Holloway bezieht sich dabei auf eine Systemkonfiguration, wie sie für den AR-Bereich typisch ist: Ein See-through HMD wird als Grafikdisplay eingesetzt, das in 6-DOF von einem Magnettracker erfasst wird. Betrachtet wird ein reales Objekt, das von einer modellierten Darstellung des Objektes überlagert wird.
Fehlerquelle Fehlergröße [mm] Annahmen
Latenz 20 – 60+ Max. Kopfgeschwindigkeit 500 mm/s,
50°/s
Optische Verzerrung des Displays 0 – 20
11% Verzerrung in Bildecken, 4% an den Rändern, Projektionsentfernung
darzustellendes Bild: 500 mm Kalibrierung Trackingsystem
auf virtuelle Szene 4 – 10+ Betrachtungsentfernung 500 mm
Messfehler Trackingsystem 1 – 7+ Magnettracker, Entfernung Sender zu Empfänger ≤ 500 mm
Modellfehler, z.B. durch Tesselierung 1 – 3 Voxelgröße von 1x1x3 mm
Betrachtungsfehler, z.B. durch Vernachlässigung der
tatsächlichen Augenpositionen
0 – 2+
Projektionsebene virtuelles Bild: 500 mm, 5 mm Augenbewegung, betrachteter
Punkt ist ±200 mm von Projektionsebene entfernt
Nichtlinearität des Displays 1 – 2 1″ CRT mit einer Nichtlinearität von ca. 1% und einem Vergrößerungsfaktor von
6.0
Tabelle 12: Fehlerquellen und -größen nach [Hol95a] und [Hol95b]
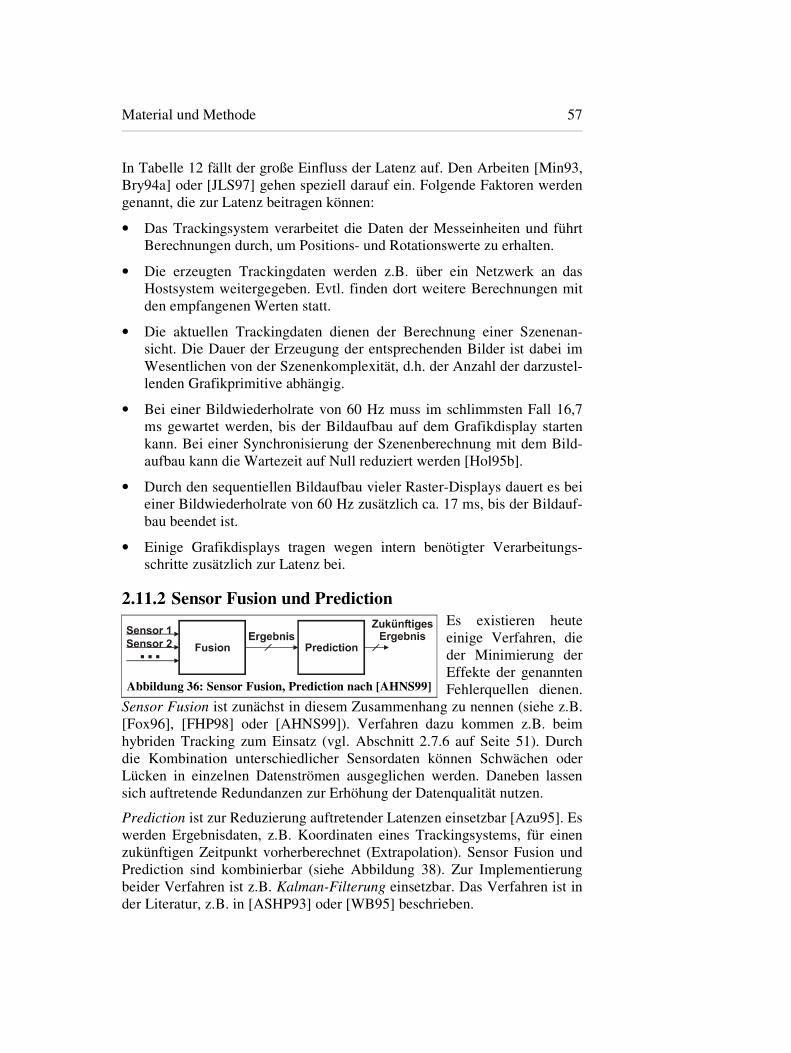
Material und Methode 57
In Tabelle 12 fällt der große Einfluss der Latenz auf. Den Arbeiten [Min93, Bry94a] oder [JLS97] gehen speziell darauf ein. Folgende Faktoren werden genannt, die zur Latenz beitragen können:
• Das Trackingsystem verarbeitet die Daten der Messeinheiten und führt Berechnungen durch, um Positions- und Rotationswerte zu erhalten.
• Die erzeugten Trackingdaten werden z.B. über ein Netzwerk an das Hostsystem weitergegeben. Evtl. finden dort weitere Berechnungen mit den empfangenen Werten statt.
• Die aktuellen Trackingdaten dienen der Berechnung einer Szenenan-sicht. Die Dauer der Erzeugung der entsprechenden Bilder ist dabei im Wesentlichen von der Szenenkomplexität, d.h. der Anzahl der darzustel-lenden Grafikprimitive abhängig.
• Bei einer Bildwiederholrate von 60 Hz muss im schlimmsten Fall 16,7 ms gewartet werden, bis der Bildaufbau auf dem Grafikdisplay starten kann. Bei einer Synchronisierung der Szenenberechnung mit dem Bild-aufbau kann die Wartezeit auf Null reduziert werden [Hol95b].
• Durch den sequentiellen Bildaufbau vieler Raster-Displays dauert es bei einer Bildwiederholrate von 60 Hz zusätzlich ca. 17 ms, bis der Bildauf-bau beendet ist.
• Einige Grafikdisplays tragen wegen intern benötigter Verarbeitungs-schritte zusätzlich zur Latenz bei.
2.11.2 Sensor Fusion und Prediction Es existieren heute einige Verfahren, die der Minimierung der Effekte der genannten Fehlerquellen dienen.
Sensor Fusion ist zunächst in diesem Zusammenhang zu nennen (siehe z.B. [Fox96], [FHP98] oder [AHNS99]). Verfahren dazu kommen z.B. beim hybriden Tracking zum Einsatz (vgl. Abschnitt 2.7.6 auf Seite 51). Durch die Kombination unterschiedlicher Sensordaten können Schwächen oder Lücken in einzelnen Datenströmen ausgeglichen werden. Daneben lassen sich auftretende Redundanzen zur Erhöhung der Datenqualität nutzen.
Prediction ist zur Reduzierung auftretender Latenzen einsetzbar [Azu95]. Es werden Ergebnisdaten, z.B. Koordinaten eines Trackingsystems, für einen zukünftigen Zeitpunkt vorherberechnet (Extrapolation). Sensor Fusion und Prediction sind kombinierbar (siehe Abbildung 38). Zur Implementierung beider Verfahren ist z.B. Kalman-Filterung einsetzbar. Das Verfahren ist in der Literatur, z.B. in [ASHP93] oder [WB95] beschrieben.
Abbildung 36: Sensor Fusion, Prediction nach [AHNS99]
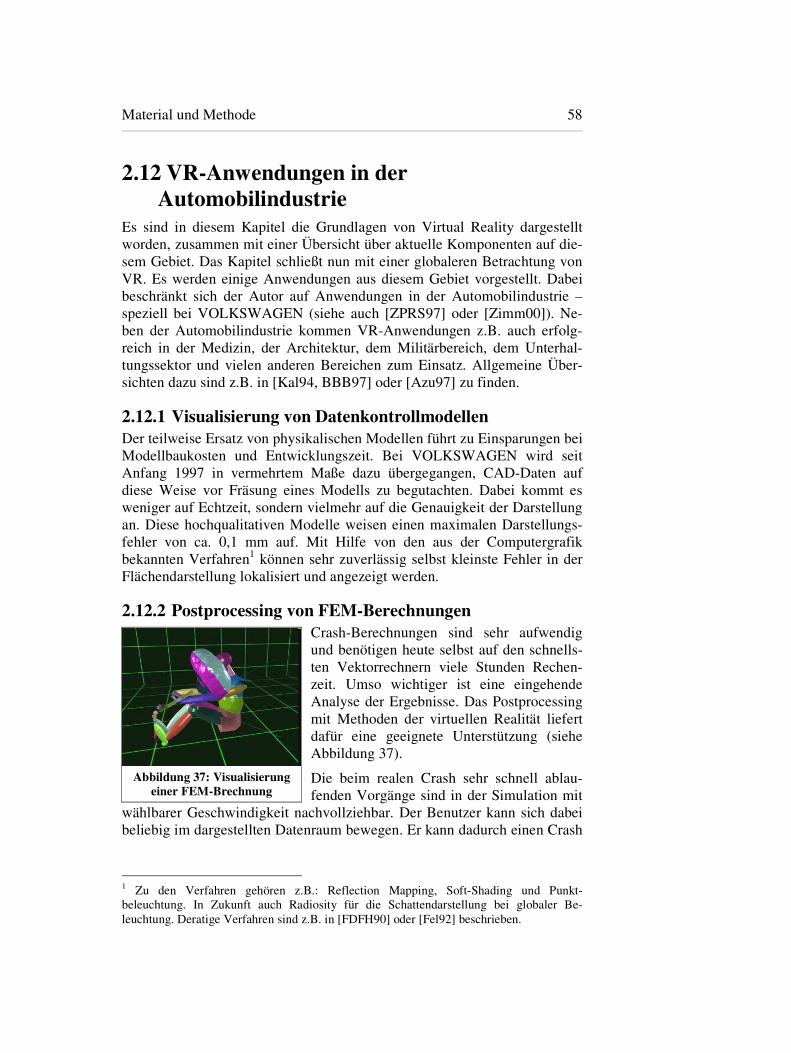
Material und Methode 58
2.12 VR-Anwendungen in der Automobilindustrie
Es sind in diesem Kapitel die Grundlagen von Virtual Reality dargestellt worden, zusammen mit einer Übersicht über aktuelle Komponenten auf die-sem Gebiet. Das Kapitel schließt nun mit einer globaleren Betrachtung von VR. Es werden einige Anwendungen aus diesem Gebiet vorgestellt. Dabei beschränkt sich der Autor auf Anwendungen in der Automobilindustrie – speziell bei VOLKSWAGEN (siehe auch [ZPRS97] oder [Zimm00]). Ne-ben der Automobilindustrie kommen VR-Anwendungen z.B. auch erfolg-reich in der Medizin, der Architektur, dem Militärbereich, dem Unterhal-tungssektor und vielen anderen Bereichen zum Einsatz. Allgemeine Über-sichten dazu sind z.B. in [Kal94, BBB97] oder [Azu97] zu finden.
2.12.1 Visualisierung von Datenkontrollmodellen Der teilweise Ersatz von physikalischen Modellen führt zu Einsparungen bei Modellbaukosten und Entwicklungszeit. Bei VOLKSWAGEN wird seit Anfang 1997 in vermehrtem Maße dazu übergegangen, CAD-Daten auf diese Weise vor Fräsung eines Modells zu begutachten. Dabei kommt es weniger auf Echtzeit, sondern vielmehr auf die Genauigkeit der Darstellung an. Diese hochqualitativen Modelle weisen einen maximalen Darstellungs-fehler von ca. 0,1 mm auf. Mit Hilfe von den aus der Computergrafik bekannten Verfahren1 können sehr zuverlässig selbst kleinste Fehler in der Flächendarstellung lokalisiert und angezeigt werden.
2.12.2 Postprocessing von FEM-Berechnungen Crash-Berechnungen sind sehr aufwendig und benötigen heute selbst auf den schnells-ten Vektorrechnern viele Stunden Rechen-zeit. Umso wichtiger ist eine eingehende Analyse der Ergebnisse. Das Postprocessing mit Methoden der virtuellen Realität liefert dafür eine geeignete Unterstützung (siehe Abbildung 37).
Die beim realen Crash sehr schnell ablau-fenden Vorgänge sind in der Simulation mit
wählbarer Geschwindigkeit nachvollziehbar. Der Benutzer kann sich dabei beliebig im dargestellten Datenraum bewegen. Er kann dadurch einen Crash
1 Zu den Verfahren gehören z.B.: Reflection Mapping, Soft-Shading und Punkt-beleuchtung. In Zukunft auch Radiosity für die Schattendarstellung bei globaler Be-leuchtung. Deratige Verfahren sind z.B. in [FDFH90] oder [Fel92] beschrieben.
Abbildung 37: Visualisierung einer FEM-Brechnung

Material und Methode 59
auch an Stellen „miterleben“, die sonst nur schwer zugänglich sind, z.B. im Inneren einer Tür.
2.12.3 Virtuelle Produkt Klinik Die Produkt Klinik ist ein häufig benutztes Werkzeug der Marktforschung, um Kundenwünsche und Akzeptanz für ein neues Fahrzeugmodell mög-lichst lange vor der Markteinführung zu erfragen und zu testen. Produkt Kliniken sind zum Teil sehr aufwendig und kostenintensiv. Es müssen nicht nur große Hallen angemietet werden, auch der Transport von Fahrzeugen, speziell Prototypen, ist teuer und problematisch wegen der erforderlichen Geheimhaltung.
Zusammen mit der VOLKSWAGEN-Marktforschung wurde 1996 der erste Versuch einer virtuellen Klinik durchgeführt, parallel zur zeitgleich stattfin-denden realen Klinik. Damals handelte es sich um ein bereits im Markt be-findliches Fahrzeug, den VW-Sharan. Die Ergebnisse dieser ersten virtuel-len Klinik, die mit Hilfe einer Repräsentativ-Befragung von 100 Personen stattfand, waren sehr ermutigend, so dass im Jahr 2000 erstmalig auch eine Befragung zu einem noch nicht vorgestellten Modell durchgeführt wurde.
Die Übereinstimmungen zwischen realer und virtueller Klinik sind zum größten Teil fast deckungsgleich und liegen innerhalb der natürlichen Streu-ung [Zimm00].
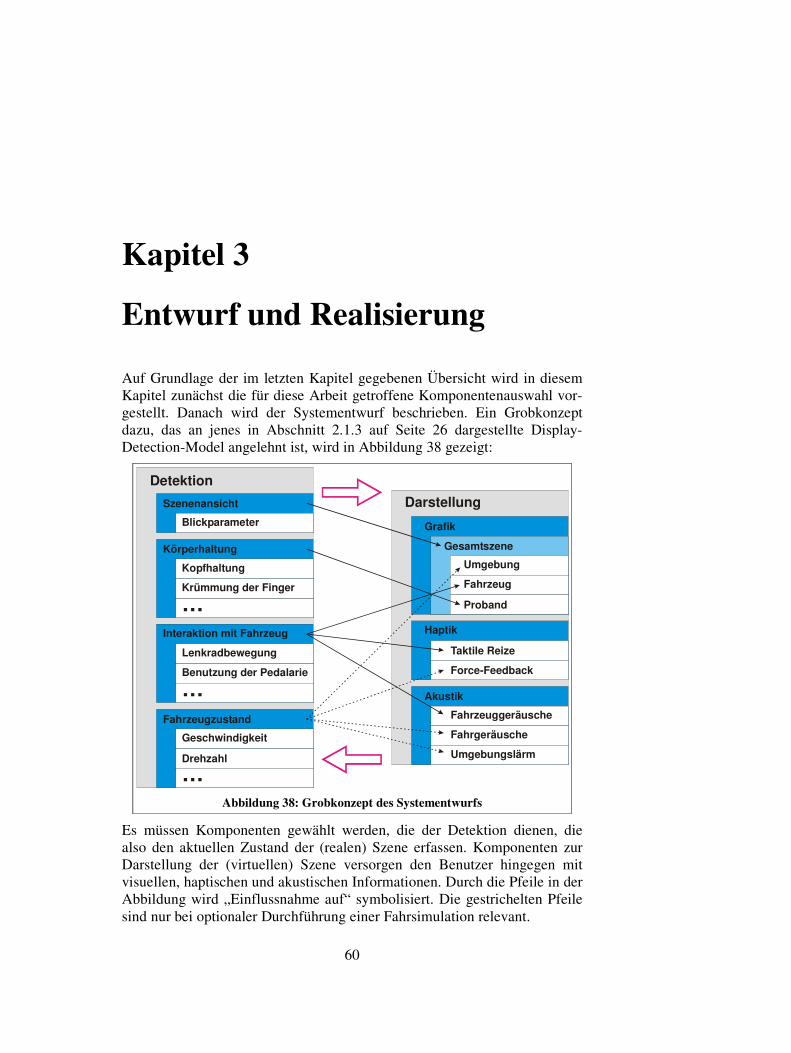
60
3 Entwurf und Realisierung
Kapitel 3
Entwurf und Realisierung
Auf Grundlage der im letzten Kapitel gegebenen Übersicht wird in diesem Kapitel zunächst die für diese Arbeit getroffene Komponentenauswahl vor-gestellt. Danach wird der Systementwurf beschrieben. Ein Grobkonzept dazu, das an jenes in Abschnitt 2.1.3 auf Seite 26 dargestellte Display-Detection-Model angelehnt ist, wird in Abbildung 38 gezeigt:
Grafik
Haptik
Akustik
Darstellung
Gesamtszene
Umgebung
Fahrzeug
Proband
Taktile Reize
Force-Feedback
Fahrzeuggeräusche
Umgebungslärm
Fahrgeräusche
…
Interaktion mit Fahrzeug
Körperhaltung
Szenenansicht
Detektion
Lenkradbewegung
Benutzung der Pedalarie
Kopfhaltung
Krümmung der Finger
…
Fahrzeugzustand
Geschwindigkeit
Drehzahl
…
Blickparameter
Abbildung 38: Grobkonzept des Systementwurfs
Es müssen Komponenten gewählt werden, die der Detektion dienen, die also den aktuellen Zustand der (realen) Szene erfassen. Komponenten zur Darstellung der (virtuellen) Szene versorgen den Benutzer hingegen mit visuellen, haptischen und akustischen Informationen. Durch die Pfeile in der Abbildung wird „Einflussnahme auf“ symbolisiert. Die gestrichelten Pfeile sind nur bei optionaler Durchführung einer Fahrsimulation relevant.
Entwurf und Realisierung 61
Der Systementwurf, d.h. die Kopplung der Komponenten des Ergonomie-Mock-Ups setzt sich aus folgenden drei Entwürfen zusammen:
• Der Kommunikationsentwurf realisiert die systemnahe Kopplung der Komponenten, so dass Datenaustausch unter ihnen möglich ist.
• Geometrie-, Sound- und Haptikentwurf definieren Modelle einer virtuellen Szene. Die entstandenen Modelle stellen Diskretisierungen einer entsprechenden realen Szene dar.
• Der Interaktionsentwurf erlaubt eine Kopplung der Komponenten auf logischer Ebene. Die Detektion von Ereignissen wird mit Aktio-nen verknüpft, die zu einer Aktualisierung der Darstellung führen.
Für alle drei Entwurfsebenen werden Konzepte entwickelt, die realisiert und getestet werden. Durch das so gegebene Schichtenmodell sind zukünftige Änderungen einfach realisierbar. Es können mehr und leistungsfähigere Komponenten dem Ergonomie-Mock-Up hinzugefügt werden.
3.1 Komponentenauswahl Nachfolgend werden die für diese Arbeit ausgewählten Komponenten vor-gestellt. Zu berücksichtigen ist, dass sich die VR-Technik stets verändert und weiterentwickelt [Bry94b, ZPRS97]. So können schon bald leistungs-fähigere Komponenten existieren, die dann anstelle der hier ausgewählten verwendet werden können.
An einigen Stellen findet, meist aus Kostengründen, eine Beschränkung auf Kernkomponenten und -funktionalitäten statt. Da optisches Tracking derzeit vergleichsweise teuer ist, kommen zunächst z.B. nur drei Kameras zum Ein-satz (vgl. Abschnitt 3.1.4, ab Seite 69). Bedingt durch die Kameraanzahl beschränkt sich die Messdatenerfassung auf den Oberkörperbereich eines Probanden. Sowohl für den Fußraumbereich als auch für die Erfassung von Ein- und Ausstiegsuntersuchungen sind zusätzliche Kameras erforderlich.
3.1.1 Haptisches Display (Sitzkiste) Das letzte Kapitel hat im Abschnitt 2.6 auf Seite 41 auf die Schwächen derzeitiger haptischer Displaytechnik hingewiesen. Bereits sehr einfache Simulationen, wie z.B. die Darstellung virtueller Wände, erweisen sich als problematisch. Die Simulation eines kompletten Fahrzeuginnenraums ist um ein Vielfaches komplexer. Es ist dem Autor kein System bekannt, das dazu auch nur annähernd in der Lage ist. Auch die Vision von Sutherland („... A chair displayed in such a room would be good enough to sit in. …”) bleibt mit der heute zur Verfügung stehenden Technik unerfüllt.
Aus diesem Grund ist es daher für diese Arbeit unerlässlich, reale Kompo-nenten in die Umgebung des Benutzers zu platzieren, die dieser zur elemen-

Entwurf und Realisierung 62
taren Benutzung benötigt (z.B. Sitz, Lenkrad, Fußhebelwerk) und die für den jeweiligen durchzuführenden Versuch erforderlich sind (z.B. Bedien-elemente, Schalter). Die Gesamtheit dieser Komponenten und der Aufbau, der zu deren Aufnahme erforderlich ist, wird in Anlehnung an die üblichen Sitzkisten, die im Automobilbereich verwendet werden, ebenfalls als Sitzkiste oder Mock-Up bezeichnet. Die Sitzkisten, die im Rahmen dieser Arbeit zum Einsatz kommen, sind in Abbildung 39 dargestellt:
Abbildung 39: Sitzkisten und Sitzkistenmodelle
Links: Modell einer einfachen (Holz-)Sitzkiste, die zu Testzwecken verwendet wurde. Mitte: Sitzkiste für den VOLKSWAGEN Passat.
Rechts: Sitzkiste für den VOLKSWAGEN Transporter.
Zunächst ist es wichtig, von einer realen Sitzkiste auch ein Modell zur Ver-fügung zu haben, das exakt die Geometrie des Mock-Ups wiedergibt. Da-durch lässt sich die Kalibrierung von realer und virtueller Szene einfach überprüfen (vgl. Abschnitt 3.1.4.1 ab Seite 74). Während der Erprobungs-phase hat sich die Verwendung einer sehr einfachen Sitzkiste, die z.B. aus Holz gefertigt sein kann, als zweckmäßig erwiesen. Die dort getesteten Ver-fahren werden dann auf die Sitzkiste übertragen, die in Abbildung 39 (Mitte) gezeigt ist. Es handelt sich dabei um ein „Überbleibsel“ eines Fahrsimulators, der bei VOLKSWAGEN bereits 1972 zum Einsatz gekom-men ist [Bull99]. Das Modell der Sitzkiste wird über photogrammetrische Messverfahren erzeugt. Im Rahmen der Studienarbeit [Krebs01] findet schließlich die Portierung des Ergonomie-Mock-Ups auf die Sitzkiste statt, die in Abbildung 39 (rechts) dargestellt ist.
Die beiden zuletzt genannten Sitzkisten sind statisch, d.h. ihr Aufbau und das dazugehörige Modell sind nur für einen speziellen Automobiltyp (VW
Entwurf und Realisierung 63
Passat, bzw. VW Transporter) ausgelegt. Eine Art von Sitzkisten, die diese Einschränkung nicht besitzt, wird im folgenden Kapitel in Abschnitt 6.2.1 ab Seite 121 vorgestellt.
In eine Sitzkiste können die für ein Automobil typischen Bedienelemente eingebaut und mit Sensorik ausgestattet werden, die der Erfassung der Be-nutzerinteraktion mit dem Fahrzeug dient. Aus diesen Informationen ist ei-nerseits eine grafische Darstellung der Bedienelemente ableitbar, die den aktuellen Zustand der realen Bedienelemente wiedergibt (Beispiel: Lenkrad dreht sich in der Simulation entsprechend zur Bewegung des realen Lenk-rads). Andererseits sind die Informationen zur Durchführung einer Fahrsi-mulation verwendbar (siehe Abschnitt 3.1.5 ab Seite 77). Speziell bei einer Fahrsimulation kann über die Sitzkiste eine Kraftrückkopplung an den Be-nutzer erfolgen. So nimmt er z.B. das Lenkmoment oder Unebenheiten der Straße wahr.
Die hier getroffene Auswahl des haptischen Displays ist von zentraler Be-deutung für das Ergonomie-Mock-Up. Insbesondere beeinflusst es die Aus-wahl anderer Komponenten, die im Folgenden vorgestellt werden.
3.1.2 Grafik- und Audiodisplay Eine Sitzkiste für VR-Anwendungen weist einen vereinfachten physikalischen Aufbau auf, der nur wenig mit dem Aussehen eines realen Automobils gemeinsam hat (vgl. Abbildung 39) und deshalb vom Benutzer während eines Versuchs auch nicht visuell wahrgenommen werden soll. Stattdessen soll der Nutzer den vollständigen Innenraum des entsprechenden Fahrzeugs sehen, das in der Simulation dargestellt wird. Das einzige Gra-
fikdisplay, das diese Forderung erfüllen kann, ist ein HMD. Es kann kom-plett die Sicht auf die reale Szene blockieren. Projektionswände, Caves, Cubes, Desktopsysteme und auch Vision Domes bieten diese Möglichkeit nicht. Ein HMD ist daher das Grafikdisplay, das für die gegebene Aufgabe am besten geeignet ist.
Neben dem eben genannten Hauptgrund, der maßgeblich zur Auswahl eines Datenhelms als Grafikdisplay beigetragen hat, gibt es verschiedene andere Vorteile von HMDs (vgl. Tabelle 4 auf Seite 34), die für die gegebene Auf-gabe relevant sind: Die Portabilität ermöglicht die Durchführung von Ein- und Ausstiegsuntersuchungen. Viele kommerzielle Systeme lassen sich gleichzeitig als Audiodisplay benutzen. Durch die Blockierung der Sicht auf die reale Szene wird ein voll-immersive Darstellung erreicht, wie sie sonst nur wenige Grafikdisplays bieten (z.B. geschlossene Projektionswürfel oder
Abbildung 40: Datavisor 10Xi der Firma n-Vision [W3NVI]
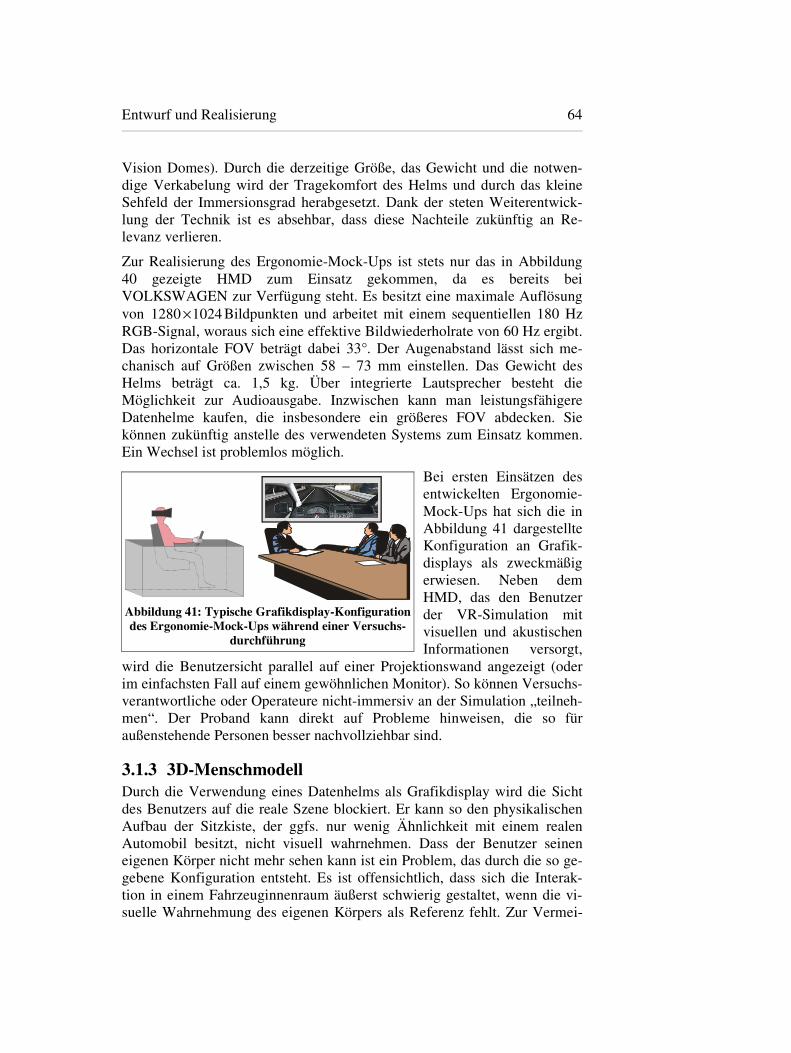
Entwurf und Realisierung 64
Vision Domes). Durch die derzeitige Größe, das Gewicht und die notwen-dige Verkabelung wird der Tragekomfort des Helms und durch das kleine Sehfeld der Immersionsgrad herabgesetzt. Dank der steten Weiterentwick-lung der Technik ist es absehbar, dass diese Nachteile zukünftig an Re-levanz verlieren.
Zur Realisierung des Ergonomie-Mock-Ups ist stets nur das in Abbildung 40 gezeigte HMD zum Einsatz gekommen, da es bereits bei VOLKSWAGEN zur Verfügung steht. Es besitzt eine maximale Auflösung von 10241280 × Bildpunkten und arbeitet mit einem sequentiellen 180 Hz RGB-Signal, woraus sich eine effektive Bildwiederholrate von 60 Hz ergibt. Das horizontale FOV beträgt dabei 33°. Der Augenabstand lässt sich me-chanisch auf Größen zwischen 58 – 73 mm einstellen. Das Gewicht des Helms beträgt ca. 1,5 kg. Über integrierte Lautsprecher besteht die Möglichkeit zur Audioausgabe. Inzwischen kann man leistungsfähigere Datenhelme kaufen, die insbesondere ein größeres FOV abdecken. Sie können zukünftig anstelle des verwendeten Systems zum Einsatz kommen. Ein Wechsel ist problemlos möglich.
Bei ersten Einsätzen des entwickelten Ergonomie-Mock-Ups hat sich die in Abbildung 41 dargestellte Konfiguration an Grafik-displays als zweckmäßig erwiesen. Neben dem HMD, das den Benutzer der VR-Simulation mit visuellen und akustischen Informationen versorgt,
wird die Benutzersicht parallel auf einer Projektionswand angezeigt (oder im einfachsten Fall auf einem gewöhnlichen Monitor). So können Versuchs-verantwortliche oder Operateure nicht-immersiv an der Simulation „teilneh-men“. Der Proband kann direkt auf Probleme hinweisen, die so für außenstehende Personen besser nachvollziehbar sind.
3.1.3 3D-Menschmodell Durch die Verwendung eines Datenhelms als Grafikdisplay wird die Sicht des Benutzers auf die reale Szene blockiert. Er kann so den physikalischen Aufbau der Sitzkiste, der ggfs. nur wenig Ähnlichkeit mit einem realen Automobil besitzt, nicht visuell wahrnehmen. Dass der Benutzer seinen eigenen Körper nicht mehr sehen kann ist ein Problem, das durch die so ge-gebene Konfiguration entsteht. Es ist offensichtlich, dass sich die Interak-tion in einem Fahrzeuginnenraum äußerst schwierig gestaltet, wenn die vi-suelle Wahrnehmung des eigenen Körpers als Referenz fehlt. Zur Vermei-
Abbildung 41: Typische Grafikdisplay-Konfiguration des Ergonomie-Mock-Ups während einer Versuchs-
durchführung
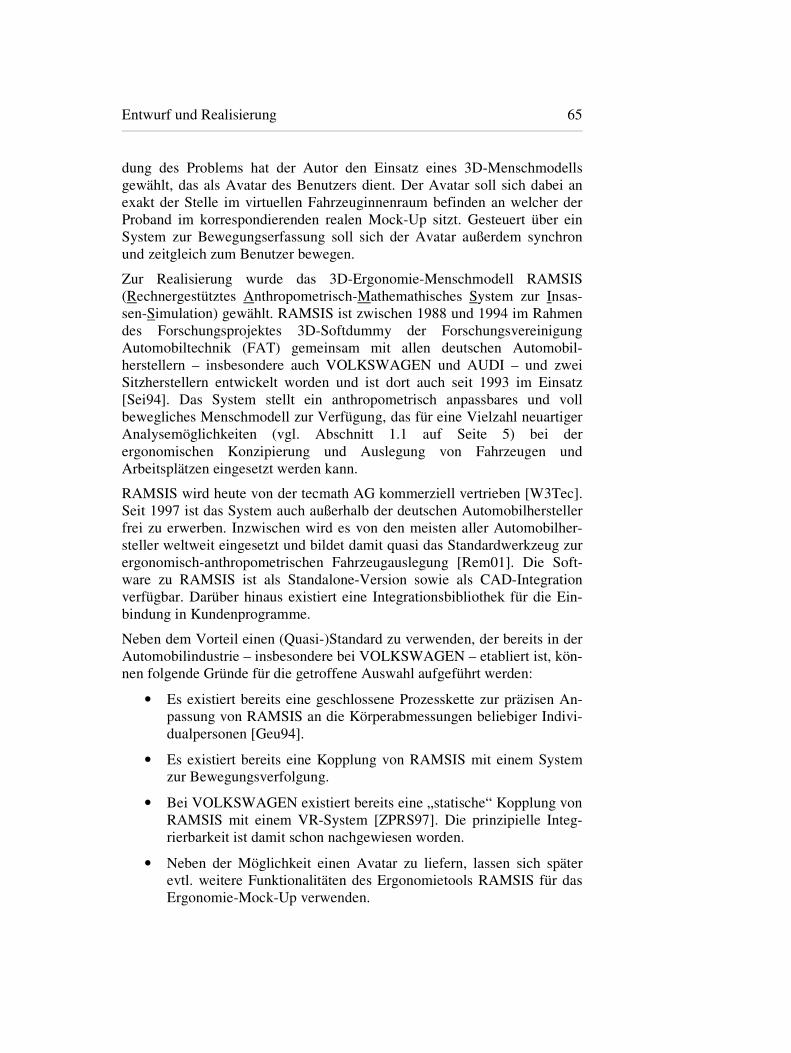
Entwurf und Realisierung 65
dung des Problems hat der Autor den Einsatz eines 3D-Menschmodells gewählt, das als Avatar des Benutzers dient. Der Avatar soll sich dabei an exakt der Stelle im virtuellen Fahrzeuginnenraum befinden an welcher der Proband im korrespondierenden realen Mock-Up sitzt. Gesteuert über ein System zur Bewegungserfassung soll sich der Avatar außerdem synchron und zeitgleich zum Benutzer bewegen.
Zur Realisierung wurde das 3D-Ergonomie-Menschmodell RAMSIS (Rechnergestütztes Anthropometrisch-Mathemathisches System zur Insas-sen-Simulation) gewählt. RAMSIS ist zwischen 1988 und 1994 im Rahmen des Forschungsprojektes 3D-Softdummy der Forschungsvereinigung Automobiltechnik (FAT) gemeinsam mit allen deutschen Automobil-herstellern – insbesondere auch VOLKSWAGEN und AUDI – und zwei Sitzherstellern entwickelt worden und ist dort auch seit 1993 im Einsatz [Sei94]. Das System stellt ein anthropometrisch anpassbares und voll bewegliches Menschmodell zur Verfügung, das für eine Vielzahl neuartiger Analysemöglichkeiten (vgl. Abschnitt 1.1 auf Seite 5) bei der ergonomischen Konzipierung und Auslegung von Fahrzeugen und Arbeitsplätzen eingesetzt werden kann.
RAMSIS wird heute von der tecmath AG kommerziell vertrieben [W3Tec]. Seit 1997 ist das System auch außerhalb der deutschen Automobilhersteller frei zu erwerben. Inzwischen wird es von den meisten aller Automobilher-steller weltweit eingesetzt und bildet damit quasi das Standardwerkzeug zur ergonomisch-anthropometrischen Fahrzeugauslegung [Rem01]. Die Soft-ware zu RAMSIS ist als Standalone-Version sowie als CAD-Integration verfügbar. Darüber hinaus existiert eine Integrationsbibliothek für die Ein-bindung in Kundenprogramme.
Neben dem Vorteil einen (Quasi-)Standard zu verwenden, der bereits in der Automobilindustrie – insbesondere bei VOLKSWAGEN – etabliert ist, kön-nen folgende Gründe für die getroffene Auswahl aufgeführt werden:
• Es existiert bereits eine geschlossene Prozesskette zur präzisen An-passung von RAMSIS an die Körperabmessungen beliebiger Indivi-dualpersonen [Geu94].
• Es existiert bereits eine Kopplung von RAMSIS mit einem System zur Bewegungsverfolgung.
• Bei VOLKSWAGEN existiert bereits eine „statische“ Kopplung von RAMSIS mit einem VR-System [ZPRS97]. Die prinzipielle Integ-rierbarkeit ist damit schon nachgewiesen worden.
• Neben der Möglichkeit einen Avatar zu liefern, lassen sich später evtl. weitere Funktionalitäten des Ergonomietools RAMSIS für das Ergonomie-Mock-Up verwenden.
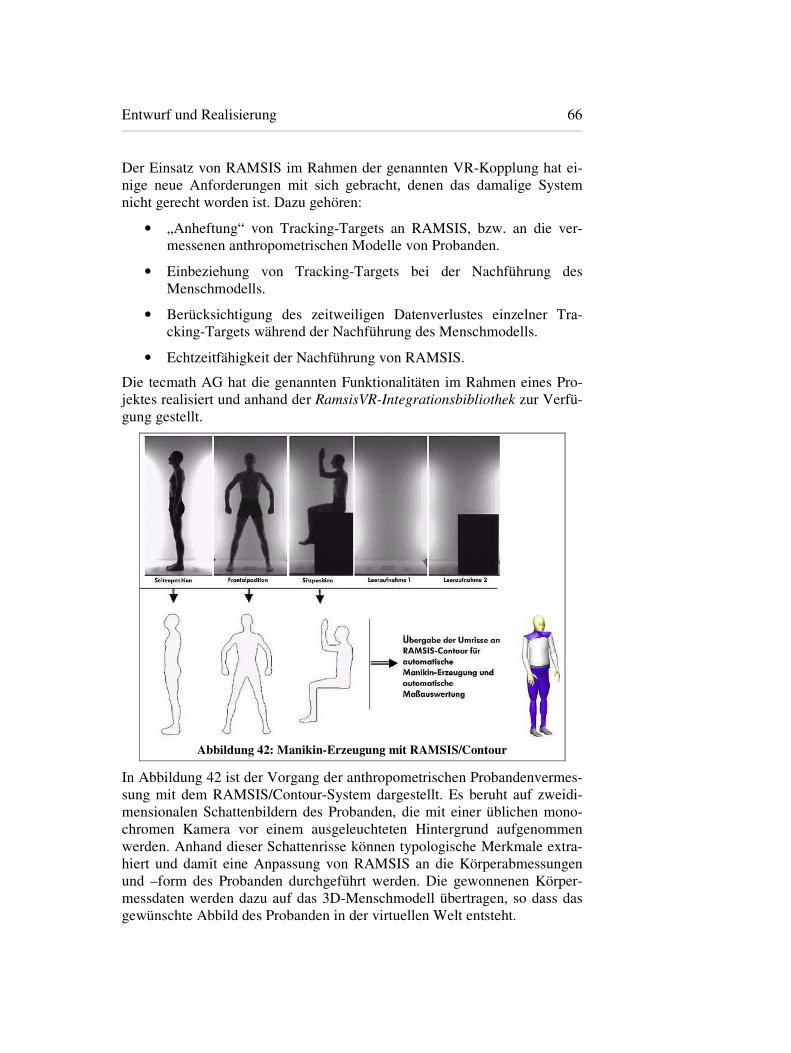
Entwurf und Realisierung 66
Der Einsatz von RAMSIS im Rahmen der genannten VR-Kopplung hat ei-nige neue Anforderungen mit sich gebracht, denen das damalige System nicht gerecht worden ist. Dazu gehören:
• „Anheftung“ von Tracking-Targets an RAMSIS, bzw. an die ver-messenen anthropometrischen Modelle von Probanden.
• Einbeziehung von Tracking-Targets bei der Nachführung des Menschmodells.
• Berücksichtigung des zeitweiligen Datenverlustes einzelner Tra-cking-Targets während der Nachführung des Menschmodells.
• Echtzeitfähigkeit der Nachführung von RAMSIS.
Die tecmath AG hat die genannten Funktionalitäten im Rahmen eines Pro-jektes realisiert und anhand der RamsisVR-Integrationsbibliothek zur Verfü-gung gestellt.
Abbildung 42: Manikin-Erzeugung mit RAMSIS/Contour
In Abbildung 42 ist der Vorgang der anthropometrischen Probandenvermes-sung mit dem RAMSIS/Contour-System dargestellt. Es beruht auf zweidi-mensionalen Schattenbildern des Probanden, die mit einer üblichen mono-chromen Kamera vor einem ausgeleuchteten Hintergrund aufgenommen werden. Anhand dieser Schattenrisse können typologische Merkmale extra-hiert und damit eine Anpassung von RAMSIS an die Körperabmessungen und –form des Probanden durchgeführt werden. Die gewonnenen Körper-messdaten werden dazu auf das 3D-Menschmodell übertragen, so dass das gewünschte Abbild des Probanden in der virtuellen Welt entsteht.
Entwurf und Realisierung 67
Der beschriebene Vorgang nimmt für eine einzelne Person, inklusive aller Vor- und Nachbereitungen (dazu gehören z.B.: Einweisung der Versuchs-person, Datenauswertung, Modellberechnung, etc.), ungefähr eine halbe Stunde in Anspruch. Es handelt sich um einen halbautomatischen Prozess. An einigen Stellen müssen dem System von einem Operator Hilfestellungen gegeben werden. Der maximale Messfehler des Systems liegt nach eigenen Erfahrungen bei ca. 1,5 cm. Inzwischen existieren aber auch Alternativen zum dargestellten Verfahren, die eine wesentlich höhere Genauigkeit erreichen (vgl. Abschnitt 4.3.3 auf Seite 120).
Durch den eben beschriebenen Vorgang wird ein individuelles 3D-Menschmodell in der virtu-ellen Umgebung zur Verfügung gestellt. Nachfolgend geht es darum, das Menschmodell mit einem Trackingsystem zu kop-peln. Der Kopplungsmechanis-mus soll dabei nicht speziell auf ein bestimmtes System ausgelegt, sondern möglichst universell realisiert werden. Dadurch lassen sich später z.B. verschiedene Systeme zur Bewegungserfas-
sung einsetzen. RAMSIS stellt zur Realisierung der Kopplung sog. Refe-renzpunkte zur Verfügung. Es handelt sich dabei um Positionen auf dem 3D-Menschmodell, auf die durch einen Marker Bezug genommen werden kann. Die Marker werden dabei später durch reale Targets eines Tracking-systems dargestellt. Mögliche Referenzpunkte und Markertypen sind in Tabelle 13 gezeigt. Neben den dort aufgeführten Referenzpunkten stellt RAMSIS 32 weitere bereit, die der Bewegung der Finger dienen.
Eine zentrale Bedeutung besitzt der Referenzpunkt PELVIS_MID1. Er legt den Ursprung des 3D-Menschmodells fest. PELVIS_MID soll daher stets mit einem 6D-Marker „verknüpft“ werden, um das Modell korrekt in der virtuellen Umgebung zu platzieren (z.B. auf dem Fahrersitz eines Autos). Nicht jeder mögliche Referenzpunkt muss mit einem Marker ausgestattet und bewegt werden. Bleibt ein Punkt unberücksichtigt, so wird unter Einbe-ziehung der Kinematik des menschlichen Körpers das 3D-Modell trotzdem an den entsprechenden Stellen bewegt. Es hat sich als praktikabel erwiesen, neben dem Becken auch an den „Körperenden“ (Kopf, Füße, Hände) 6D-Marker zu verwenden, also möglichst viele Freiheitsgrade vom Tracking-system bestimmen zu lassen. An den übrigen Körperstellen sind weniger
1 Beckenmitte
Referenzpunkt HAND_RIGHT HAND_LEFT
ELBOW_RIGHT ELBOW_LEFT
HEAD CHEST
BELLY_BUTTON KNEE_RIGHT KNEE_LEFT
FOOT_RIGHT FOOT_LEFT
PELVIS_RIGHT PELVIS_LEFT PELVIS_MID
Markertyp MARKER_3D
MARKER_6D_VECTOR MARKER_6D_ANGLE
ANGLE
Tabelle 13: Referenzpunkte und Markertypendes 3D-Menschmodells RAMSIS

Entwurf und Realisierung 68
Freiheitsgrade ausreichend, oder es kann sogar auf die interne Bestimmung der Freiheitsgrade über das Menschmodell zurückgegriffen werden. Werden sehr viele Referenzpunkte über das Trackingsystem bestimmt, wirkt sich dies einerseits mindernd auf die Systemperformanz aus. Andererseits lassen sich dann oft „Überbestimmtheitseffekte“ der intern verwendeten Algo-rithmen feststellen, die sich z.B. in einem „Zittern“ des dargestellten Mo-dells äußern.
Die individuellen 3D-Modelle der Pro-banden setzen sich aus etwa 3000 Drei-ecken zusammen. Zur Konstruktion der Dreiecke werden ca. 1200 3D-Punkte verwendet. Jeder Berechnungszyklus von RAMSIS kann zu einer Änderung der Punktkoordinaten führen, wodurch der Effekt von Bewegung entsteht. Für ein gegebenes Modell gewährleistet das Ver-fahren, dass die Anzahl an Dreiecken und Punkten über den gesamten Berechnungs-zeitraum konstant bleibt. Zur Integration von RAMSIS in ein VR-System müssen dort einmalig entsprechende Datenstruk-turen für Dreiecke, Punkte, Materialien
und Farben angelegt werden. Zur Laufzeit brauchen dann „nur“ noch bei Feststellung einer Bewegung die Punktkoordinaten aktualisiert werden. Ein Ergebnis der Anwendung des genannten Verfahrens ist in Abbildung 43 gezeigt.
Wie bereits erwähnt ist die Performanz hauptsächlich von der Anzahl ver-wendeter Referenzpunkte abhängig. Wird z.B. probeweise nur der Becken-marker PELVIS_MID eingesetzt, so ist die erreichbare Wiederholrate grö-ßer als 100 Hz. Für typische Konfigurationen (s.o.) ergeben sich Wiederhol-raten von über 25 Hz. Die Werte gelten für die Berechnung des Menschmo-dells, die Integration in das Zielsystem ist dabei (noch) nicht berücksichtigt.
Zum Abschluss des Abschnitts wird das Ergebnis eines Experimentes be-schrieben, mit dem noch einmal die Notwendigkeit der Verwendung eines Menschmodells betont wird. Fünf Probanden werden im fertigen Ergono-mie-Mock-Up mit der Durchführung einer Greifaufgabe konfrontiert. Das zu ergreifende Zielobjekt ist ihnen vorher nicht bekannt. Es wird „zufällig“ während der Simulation erzeugt. Die Zeit, die von der Darstellung des virtu-ellen Zielobjektes bis zum Erreichen durch den Probanden vergeht, wird gemessen. Den Versuchspersonen werden auf diese Weise mehrere Zielob-jekte präsentiert. Für die eine Hälfte der Zielobjekte steht das RAMSIS-Menschmodell als grafische Referenz während der Simulation zur Verfü-gung, bei der anderen Hälfte wird darauf verzichtet. Zusätzlich wird der
Abbildung 43: 3D-Menschmodell RAMSIS integriert in Sitzkiste
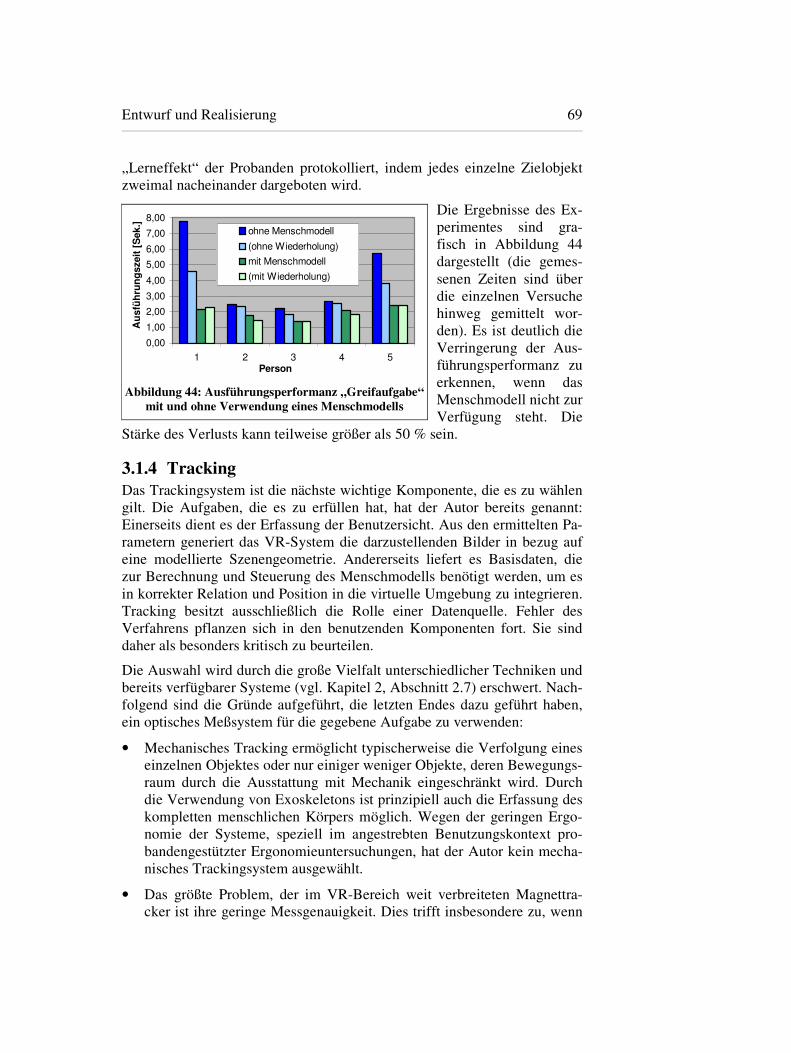
Entwurf und Realisierung 69
„Lerneffekt“ der Probanden protokolliert, indem jedes einzelne Zielobjekt zweimal nacheinander dargeboten wird.
Die Ergebnisse des Ex-perimentes sind gra-fisch in Abbildung 44 dargestellt (die gemes-senen Zeiten sind über die einzelnen Versuche hinweg gemittelt wor-den). Es ist deutlich die Verringerung der Aus-führungsperformanz zu erkennen, wenn das Menschmodell nicht zur Verfügung steht. Die
Stärke des Verlusts kann teilweise größer als 50 % sein.
3.1.4 Tracking Das Trackingsystem ist die nächste wichtige Komponente, die es zu wählen gilt. Die Aufgaben, die es zu erfüllen hat, hat der Autor bereits genannt: Einerseits dient es der Erfassung der Benutzersicht. Aus den ermittelten Pa-rametern generiert das VR-System die darzustellenden Bilder in bezug auf eine modellierte Szenengeometrie. Andererseits liefert es Basisdaten, die zur Berechnung und Steuerung des Menschmodells benötigt werden, um es in korrekter Relation und Position in die virtuelle Umgebung zu integrieren. Tracking besitzt ausschließlich die Rolle einer Datenquelle. Fehler des Verfahrens pflanzen sich in den benutzenden Komponenten fort. Sie sind daher als besonders kritisch zu beurteilen.
Die Auswahl wird durch die große Vielfalt unterschiedlicher Techniken und bereits verfügbarer Systeme (vgl. Kapitel 2, Abschnitt 2.7) erschwert. Nach-folgend sind die Gründe aufgeführt, die letzten Endes dazu geführt haben, ein optisches Meßsystem für die gegebene Aufgabe zu verwenden:
• Mechanisches Tracking ermöglicht typischerweise die Verfolgung eines einzelnen Objektes oder nur einiger weniger Objekte, deren Bewegungs-raum durch die Ausstattung mit Mechanik eingeschränkt wird. Durch die Verwendung von Exoskeletons ist prinzipiell auch die Erfassung des kompletten menschlichen Körpers möglich. Wegen der geringen Ergo-nomie der Systeme, speziell im angestrebten Benutzungskontext pro-bandengestützter Ergonomieuntersuchungen, hat der Autor kein mecha-nisches Trackingsystem ausgewählt.
• Das größte Problem, der im VR-Bereich weit verbreiteten Magnettra-cker ist ihre geringe Messgenauigkeit. Dies trifft insbesondere zu, wenn
0,00
1,00
2,00
3,00
4,00
5,00
6,00
7,00
8,00
1 2 3 4 5Person
Aus
führ
ungs
zeit
[Sek
.]
ohne Menschmodell
(ohne Wiederholung)mit Menschmodell(mit Wiederholung)
Abbildung 44: Ausführungsperformanz „Greifaufgabe“
mit und ohne Verwendung eines Menschmodells
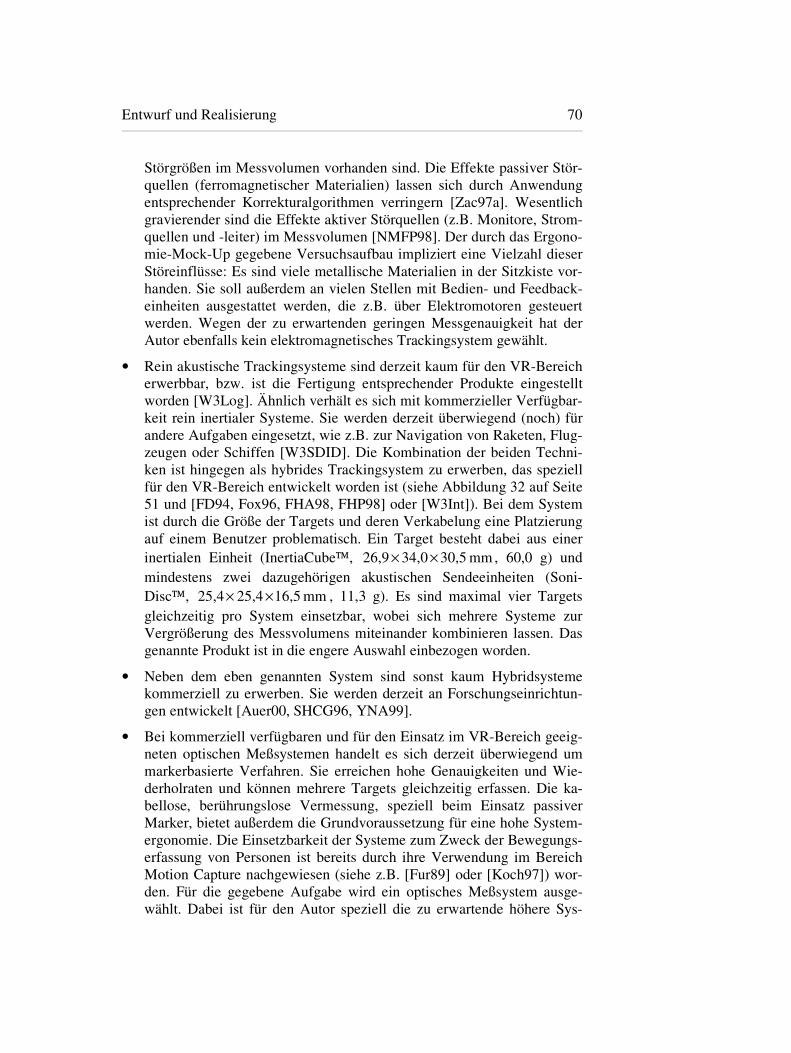
Entwurf und Realisierung 70
Störgrößen im Messvolumen vorhanden sind. Die Effekte passiver Stör-quellen (ferromagnetischer Materialien) lassen sich durch Anwendung entsprechender Korrekturalgorithmen verringern [Zac97a]. Wesentlich gravierender sind die Effekte aktiver Störquellen (z.B. Monitore, Strom-quellen und -leiter) im Messvolumen [NMFP98]. Der durch das Ergono-mie-Mock-Up gegebene Versuchsaufbau impliziert eine Vielzahl dieser Störeinflüsse: Es sind viele metallische Materialien in der Sitzkiste vor-handen. Sie soll außerdem an vielen Stellen mit Bedien- und Feedback-einheiten ausgestattet werden, die z.B. über Elektromotoren gesteuert werden. Wegen der zu erwartenden geringen Messgenauigkeit hat der Autor ebenfalls kein elektromagnetisches Trackingsystem gewählt.
• Rein akustische Trackingsysteme sind derzeit kaum für den VR-Bereich erwerbbar, bzw. ist die Fertigung entsprechender Produkte eingestellt worden [W3Log]. Ähnlich verhält es sich mit kommerzieller Verfügbar-keit rein inertialer Systeme. Sie werden derzeit überwiegend (noch) für andere Aufgaben eingesetzt, wie z.B. zur Navigation von Raketen, Flug-zeugen oder Schiffen [W3SDID]. Die Kombination der beiden Techni-ken ist hingegen als hybrides Trackingsystem zu erwerben, das speziell für den VR-Bereich entwickelt worden ist (siehe Abbildung 32 auf Seite 51 und [FD94, Fox96, FHA98, FHP98] oder [W3Int]). Bei dem System ist durch die Größe der Targets und deren Verkabelung eine Platzierung auf einem Benutzer problematisch. Ein Target besteht dabei aus einer inertialen Einheit (InertiaCube, mm 30,534,026,9 ×× , 60,0 g) und mindestens zwei dazugehörigen akustischen Sendeeinheiten (Soni-Disc, mm 16,525,4 25,4 ×× , 11,3 g). Es sind maximal vier Targets gleichzeitig pro System einsetzbar, wobei sich mehrere Systeme zur Vergrößerung des Messvolumens miteinander kombinieren lassen. Das genannte Produkt ist in die engere Auswahl einbezogen worden.
• Neben dem eben genannten System sind sonst kaum Hybridsysteme kommerziell zu erwerben. Sie werden derzeit an Forschungseinrichtun-gen entwickelt [Auer00, SHCG96, YNA99].
• Bei kommerziell verfügbaren und für den Einsatz im VR-Bereich geeig-neten optischen Meßsystemen handelt es sich derzeit überwiegend um markerbasierte Verfahren. Sie erreichen hohe Genauigkeiten und Wie-derholraten und können mehrere Targets gleichzeitig erfassen. Die ka-bellose, berührungslose Vermessung, speziell beim Einsatz passiver Marker, bietet außerdem die Grundvoraussetzung für eine hohe System-ergonomie. Die Einsetzbarkeit der Systeme zum Zweck der Bewegungs-erfassung von Personen ist bereits durch ihre Verwendung im Bereich Motion Capture nachgewiesen (siehe z.B. [Fur89] oder [Koch97]) wor-den. Für die gegebene Aufgabe wird ein optisches Meßsystem ausge-wählt. Dabei ist für den Autor speziell die zu erwartende höhere Sys-

Entwurf und Realisierung 71
temergonomie im Vergleich zum o.g. inertialen System ausschlagge-bend.
• Das größte Problem optischer Datenerfassung ist Verdeckung. Das Problem kann kostenintensiv durch die Verwendung von redundanten Erfassungseinheiten (Kameras) (teil-)kompensiert werden. Gerade aber die durch die gegebene Aufgabe bestehende Kombinationsmöglichkeit des Trackingverfahrens mit einem Menschmodell kann ebenfalls zur Er-höhung der Ausfallsicherheit des Messverfahrens beitragen. Tritt wäh-rend der Datenerfassung Verdeckung auf, kann auf die internen Berech-nungsverfahren zur Bewegung des Menschmodells zurückgegriffen werden. Bei der Implementierung der RamsisVR-Integrationsbibliothek sind entsprechende Algorithmen berücksichtigt worden.
• Ein zweiter Nachteil ist der derzeitig hohe Preis optischer Systeme. Allerdings beginnt sich dieser Nachteil allmählich, durch die immer größer werdende Anzahl an Anwendungen (nicht nur im VR-Bereich), zu relativieren.
Komponenten des gewählten Produktes werden in Abbildung 45 gezeigt. Zunächst kommt das ProReflex-System der Firma Qualisys AB zum Ein-satz. Die Firma A.R.T. GmbH vertreibt und betreut das Sys-tem in Deutschland und entwi-ckelt es für spezielle Anforde-rungen weiter, die z.B. aus dem VR-Bereich stammen können.
So sind beispielsweise die in Abbildung 45 gezeigten 6D-Targets von A.R.T. gefertigt worden. Die Firma vertreibt heute eine eigene Weiterent-wicklung des ProReflex-Systems mit dem Namen ARTtrack1 [W3Art], die auch bereits bei VOLKSWAGEN zum Einsatz kommt. Die nachfolgen-den Ausführungen gelten hingegen speziell für das ProReflex-System.
Die Kameras bestehen aus einer kompakten Einheit, die vom Hersteller als Motion Capture Unit (MCU) bezeichnet wird. In ihr befinden sich neben einem hochauflösenden Aufnahmesystem (CCD-Sensoren1 mit 458658× Pixeln), das eine Aufnahmefrequenz von bis zu 240 Hz ermöglicht (es sind auch MCUs mit einer Frequenz von bis zu 1000 Hz lieferbar), ein integ-rierter IR-Blitz, sowie ein großer Teil der Bildsignalverarbeitung und –ana-lyse. Gemessen werden passive Marker, das sind kleine Kugeln (∅ z.B. 10
1 CCD = charge coupled device. Digitale Sensoreinheit zur Erfassung und Speicherung von Bildinformationen.
Abbildung 45: Optisches Meßsystem der Firma Qualisys [W3Qua], bzw. A.R.T. [W3Art]
Links: Kamera, Rechts: 6D-Targets
Entwurf und Realisierung 72
mm), deren Oberfläche aus einem reflektierenden Material gefertigt ist. Während der Messung werden sie von den IR-Blitzen der Kameras ange-strahlt, was deren robuste, störunanfällige Detektion in den erfassten Bildern ermöglicht. Jede Kamera liefert an ihrem Ausgang bereits zweidimensionale Bildspeicherkoordinaten detektierter, möglicher Marker.
Aus den Daten der einzelnen Kameras berechnet ein PC-Host die endgülti-gen Ergebnisse. Dazu wird im Wesentlichen eine Korrespondenzanalyse und eine Punktverfolgung mit anschließender Triangulation durchgeführt [Koch97]. Für 3-DOF sind mindestens zwei Messkameras erforderlich und ein einzelner Marker (3D-Target) ist ausreichend. Bis zu 32 Kameras kön-nen in einem System integriert werden. Für die gegebene Aufgabe werden zunächst drei Kameras verwendet. Sollen 6-DOF ermittelt werden, können dazu mehrere Marker zu einem Rigid Body (6D-Target) zusammengefasst werden. Das System erlaubt dem Benutzer die flexible Definition von Rigid Bodys (s.u.).
Eine sehr wichtige Anforderung an die Ergebnisse des Trackingverfahrens ist Markierbarkeit. Über den Zeitraum der Messung müssen sich Ergebnis-daten eindeutig identifizieren und einem realen Target zuordnen lassen. Es darf insbesondere zu keinen Vertauschungen kommen. Dem logischen Kon-strukt „Kopftarget“ dürfen z.B. stets nur die Daten der Kopferfassung über das entsprechende reale Target zugeordnet werden und nicht plötzlich Da-ten, die beispielsweise von der Erfassung einer Benutzerhand stammen. Derartige Vertauschungen würden, z.B. bei der Berechnung des Mensch-modells, unvorhersehbare Effekte auslösen. Das verwendete System kann diese Eindeutigkeit nur für 6D-Targets gewährleisten. Für 3D-Targets ist ein eigenes Markierungsverfahren implementiert worden.
Die absolute 3D-Messgenauigkeit des Systems liegt nach Herstellerangaben in einem Versuchsvolumen von 1 m3 bei ±0,2 mm. Es lassen sich maximal 150 3D-Targets verwenden, die mit einer Messfrequenz von 60 Hz erfasst werden können. Die Maximalzahl der 6D-Targets ist auf vier begrenzt. Beim Einsatz von 6D-Targets erreicht das System eine Messfrequenz von 50 Hz. Die Kameras müssen auf ein bestimmtes Versuchsvolumen (externe Kalibrierung) und auf eine bestimmte Messentfernung (interne oder Kame-rakalibrierung) angepasst werden. Als Ergebnis der Kamerakalibrierung werden die Kamerakonstante1, die Lage des Hauptpunktes2, sowie Parame-ter zur Beschreibung der Objektivverzeichnung bestimmt [GS97]. Der
1 Die Kamerakonstante ist der senkrechte Abstand zwischen dem Projektionszentrum und der Bildebene [GS97]. 2 Koordinaten hx und hy des Projektionszentrums im Bildkoordinatensystem. Da der Ur-sprung des Bildkoordinatensystems konstruktionsbedingt annähernd mit dem Hauptpunkt übereinstimmen soll, sind die Werte hx und hy annähernd gleich Null [GS97].
Entwurf und Realisierung 73
Hersteller führt beim erworbenen System die Kamerakalibrierung durch. Hingegen führt der Benutzer die externe Kalibrierung durch. Das Ergebnis der externen Kalibrierung sind Kamerastandpunkte: Lage (X0, Y0, Z0) und Ausrichtung (Richtung, Neigung, Kantung) jeder Kamera. Die maximale Messentfernung beträgt 75 m. Die minimale Markergröße für eine Messent-fernung von 2 m ist mit einem Durchmesser von 3 mm angegeben. Die Software zur Datenauswertung der Kameras läuft auf einem PC unter dem Betriebssystem Windows. Die Ergebnisdaten können per UDP (siehe Abschnitt 3.2) an einen zu wählenden Empfänger geschickt werden. Weitere Einzelheiten und technische Details zum verwendeten System sind in [W3Art, W3Qua] oder [Koch97] zu finden.
Die Kameras sind so zu justie-ren, dass das Versuchsvolumen möglichst verdeckungsfrei ein-zusehen ist. Außerdem sollen sich ihre Erfassungsbereiche möglichst weit überschneiden (siehe Abbildung 46). Um dies zu gewährleisten, ist es zweck-mäßig die Grenzen des Ver-suchsvolumens mit Kontroll-markern auszustatten. Die Tra-ckingsoftware kann die Kame-rabilder anzeigen, anhand derer
die genannten Forderungen überprüft werden können.
Der Einsatz optischer Trackingsysteme ist besonders dann zweckmäßig, wenn während der Erfassung kaum Probleme durch Verdeckungen zu er-warten sind. Diese Forderung wird vom Sitzkistenaufbau des Ergonomie-Mock-Ups besonders für die Erfassung des Kopf- und Oberkörperbereichs erfüllt. Problematischer gestaltet sich hingegen die Erfassung des Fußraums. Bedingt durch den Sitzkistenaufbau sind hier Verdeckungen vorhersehbar. Dies gilt besonders, wenn nur drei Kameras zur Erfassung des kompletten Versuchsvolumens zur Verfügung stehen. Hier kann eine Erhöhung der Kamerazahl Abhilfe schaffen. Der Rahmen dieser Arbeit beschränkt sich auf die Erfassung des Oberkörperbereichs von Probanden.
Die Erfassung von Fingerkrümmungen über das optische System ist hinge-gen nicht angebracht. Durch die begrenzte Anzahl zur Verfügung stehender, eindeutiger Targets wird dies besonders deutlich. Über Datenhandschuhe kann diese spezielle Aufgabe wesentlich robuster und zweckmäßiger ausge-führt werden. Aus diesem Grund ist die Verwendung von zwei Datenhand-schuhen (vgl. Abschnitt 2.8 auf Seite 52) eingeplant worden. In Abhängig-keit der Ergebniswerte der Handschuhe können die Finger des Menschmo-dells bewegt werden.
= 3D
2D 2D
Kamera1 Kamera2
+
Abbildung 46: Einsatz von Kameras zur Erfas-sung des Messvolumens „Sitzkiste“ (links) und
Messprinzip nach [Qua98] (rechts)
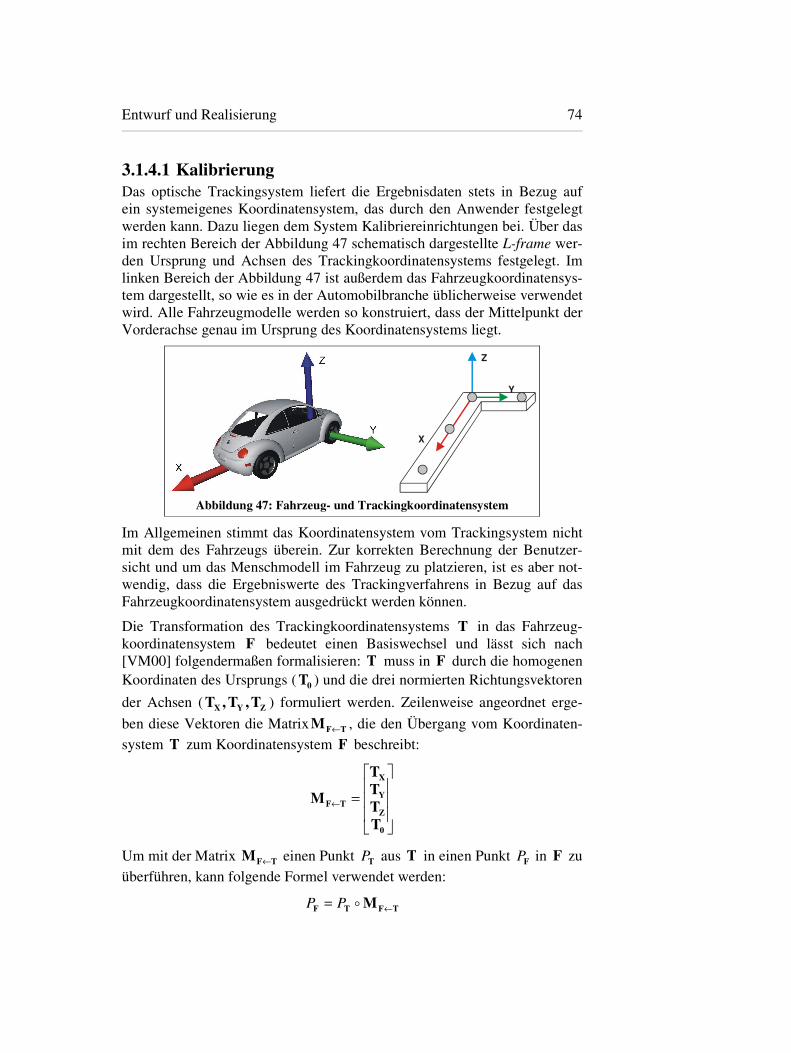
Entwurf und Realisierung 74
3.1.4.1 Kalibrierung Das optische Trackingsystem liefert die Ergebnisdaten stets in Bezug auf ein systemeigenes Koordinatensystem, das durch den Anwender festgelegt werden kann. Dazu liegen dem System Kalibriereinrichtungen bei. Über das im rechten Bereich der Abbildung 47 schematisch dargestellte L-frame wer-den Ursprung und Achsen des Trackingkoordinatensystems festgelegt. Im linken Bereich der Abbildung 47 ist außerdem das Fahrzeugkoordinatensys-tem dargestellt, so wie es in der Automobilbranche üblicherweise verwendet wird. Alle Fahrzeugmodelle werden so konstruiert, dass der Mittelpunkt der Vorderachse genau im Ursprung des Koordinatensystems liegt.
Y
Z
X
Abbildung 47: Fahrzeug- und Trackingkoordinatensystem
Im Allgemeinen stimmt das Koordinatensystem vom Trackingsystem nicht mit dem des Fahrzeugs überein. Zur korrekten Berechnung der Benutzer-sicht und um das Menschmodell im Fahrzeug zu platzieren, ist es aber not-wendig, dass die Ergebniswerte des Trackingverfahrens in Bezug auf das Fahrzeugkoordinatensystem ausgedrückt werden können.
Die Transformation des Trackingkoordinatensystems T in das Fahrzeug-koordinatensystem F bedeutet einen Basiswechsel und lässt sich nach [VM00] folgendermaßen formalisieren: T muss in F durch die homogenen Koordinaten des Ursprungs ( 0T ) und die drei normierten Richtungsvektoren der Achsen ( ZYX T,T,T ) formuliert werden. Zeilenweise angeordnet erge-ben diese Vektoren die Matrix TFM ← , die den Übergang vom Koordinaten-system T zum Koordinatensystem F beschreibt:
���
�
�
���
�
�
=←
0
Z
Y
X
TF
TTTT
M
Um mit der Matrix TFM ← einen Punkt TP aus T in einen Punkt FP in F zu überführen, kann folgende Formel verwendet werden:
TFTF M ←= �PP
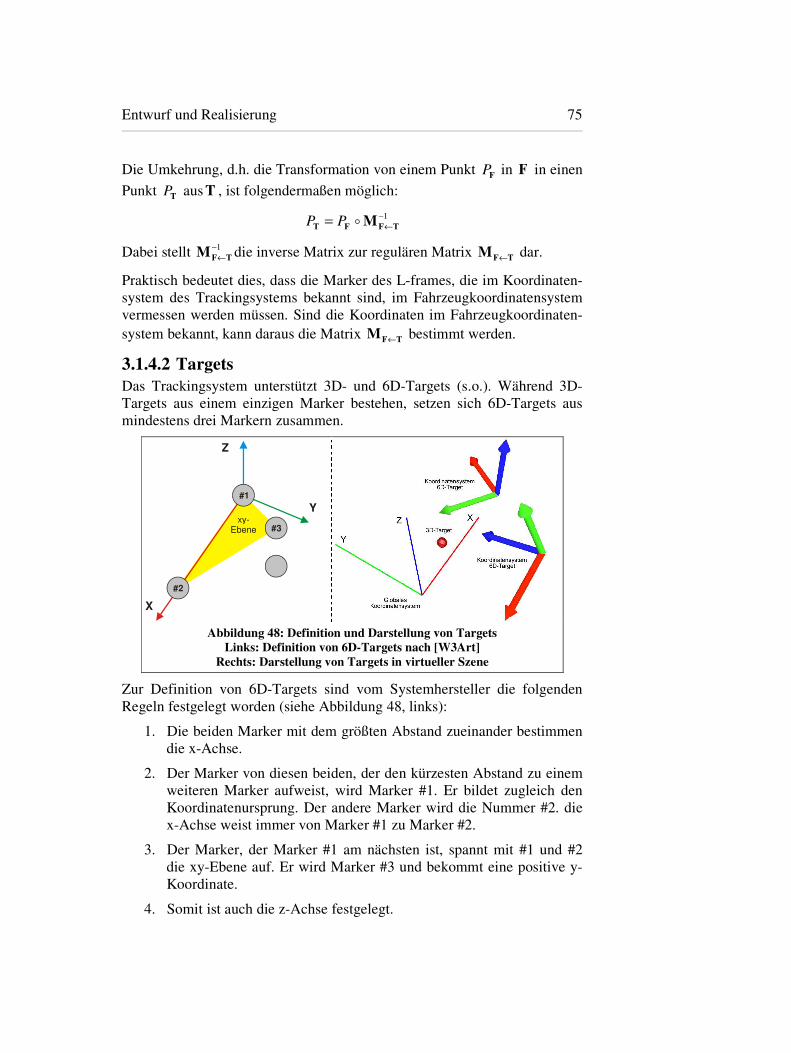
Entwurf und Realisierung 75
Die Umkehrung, d.h. die Transformation von einem Punkt FP in F in einen Punkt TP aus T , ist folgendermaßen möglich:
1−←= TFFT M�PP
Dabei stellt 1−←TFM die inverse Matrix zur regulären Matrix TFM ← dar.
Praktisch bedeutet dies, dass die Marker des L-frames, die im Koordinaten-system des Trackingsystems bekannt sind, im Fahrzeugkoordinatensystem vermessen werden müssen. Sind die Koordinaten im Fahrzeugkoordinaten-system bekannt, kann daraus die Matrix TFM ← bestimmt werden.
3.1.4.2 Targets Das Trackingsystem unterstützt 3D- und 6D-Targets (s.o.). Während 3D-Targets aus einem einzigen Marker bestehen, setzen sich 6D-Targets aus mindestens drei Markern zusammen.
Y
Z
X
#1
#2
#3xy-
Ebene
Abbildung 48: Definition und Darstellung von Targets
Links: Definition von 6D-Targets nach [W3Art] Rechts: Darstellung von Targets in virtueller Szene
Zur Definition von 6D-Targets sind vom Systemhersteller die folgenden Regeln festgelegt worden (siehe Abbildung 48, links):
1. Die beiden Marker mit dem größten Abstand zueinander bestimmen die x-Achse.
2. Der Marker von diesen beiden, der den kürzesten Abstand zu einem weiteren Marker aufweist, wird Marker #1. Er bildet zugleich den Koordinatenursprung. Der andere Marker wird die Nummer #2. die x-Achse weist immer von Marker #1 zu Marker #2.
3. Der Marker, der Marker #1 am nächsten ist, spannt mit #1 und #2 die xy-Ebene auf. Er wird Marker #3 und bekommt eine positive y-Koordinate.
4. Somit ist auch die z-Achse festgelegt.
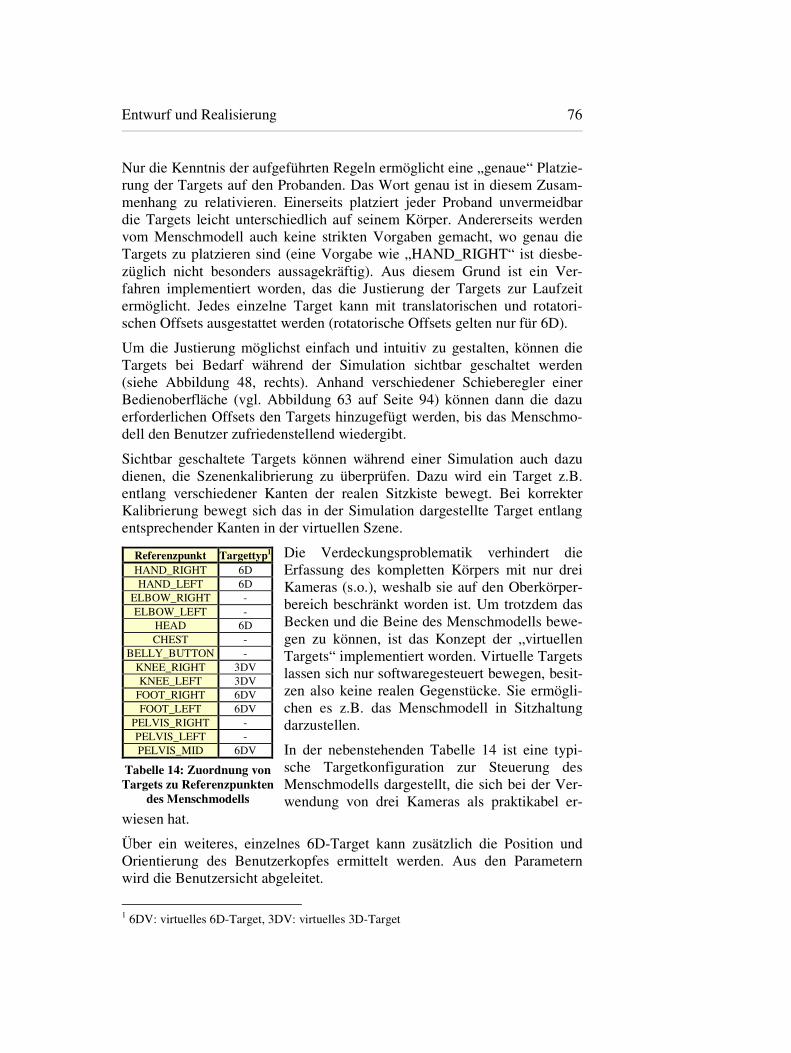
Entwurf und Realisierung 76
Nur die Kenntnis der aufgeführten Regeln ermöglicht eine „genaue“ Platzie-rung der Targets auf den Probanden. Das Wort genau ist in diesem Zusam-menhang zu relativieren. Einerseits platziert jeder Proband unvermeidbar die Targets leicht unterschiedlich auf seinem Körper. Andererseits werden vom Menschmodell auch keine strikten Vorgaben gemacht, wo genau die Targets zu platzieren sind (eine Vorgabe wie „HAND_RIGHT“ ist diesbe-züglich nicht besonders aussagekräftig). Aus diesem Grund ist ein Ver-fahren implementiert worden, das die Justierung der Targets zur Laufzeit ermöglicht. Jedes einzelne Target kann mit translatorischen und rotatori-schen Offsets ausgestattet werden (rotatorische Offsets gelten nur für 6D).
Um die Justierung möglichst einfach und intuitiv zu gestalten, können die Targets bei Bedarf während der Simulation sichtbar geschaltet werden (siehe Abbildung 48, rechts). Anhand verschiedener Schieberegler einer Bedienoberfläche (vgl. Abbildung 63 auf Seite 94) können dann die dazu erforderlichen Offsets den Targets hinzugefügt werden, bis das Menschmo-dell den Benutzer zufriedenstellend wiedergibt.
Sichtbar geschaltete Targets können während einer Simulation auch dazu dienen, die Szenenkalibrierung zu überprüfen. Dazu wird ein Target z.B. entlang verschiedener Kanten der realen Sitzkiste bewegt. Bei korrekter Kalibrierung bewegt sich das in der Simulation dargestellte Target entlang entsprechender Kanten in der virtuellen Szene.
Die Verdeckungsproblematik verhindert die Erfassung des kompletten Körpers mit nur drei Kameras (s.o.), weshalb sie auf den Oberkörper-bereich beschränkt worden ist. Um trotzdem das Becken und die Beine des Menschmodells bewe-gen zu können, ist das Konzept der „virtuellen Targets“ implementiert worden. Virtuelle Targets lassen sich nur softwaregesteuert bewegen, besit-zen also keine realen Gegenstücke. Sie ermögli-chen es z.B. das Menschmodell in Sitzhaltung darzustellen.
In der nebenstehenden Tabelle 14 ist eine typi-sche Targetkonfiguration zur Steuerung des Menschmodells dargestellt, die sich bei der Ver-wendung von drei Kameras als praktikabel er-
wiesen hat.
Über ein weiteres, einzelnes 6D-Target kann zusätzlich die Position und Orientierung des Benutzerkopfes ermittelt werden. Aus den Parametern wird die Benutzersicht abgeleitet.
1 6DV: virtuelles 6D-Target, 3DV: virtuelles 3D-Target
Referenzpunkt Targettyp1
HAND_RIGHT 6D HAND_LEFT 6D
ELBOW_RIGHT - ELBOW_LEFT -
HEAD 6D CHEST -
BELLY_BUTTON - KNEE_RIGHT 3DV KNEE_LEFT 3DV
FOOT_RIGHT 6DV FOOT_LEFT 6DV
PELVIS_RIGHT - PELVIS_LEFT - PELVIS_MID 6DV
Tabelle 14: Zuordnung von Targets zu Referenzpunkten
des Menschmodells
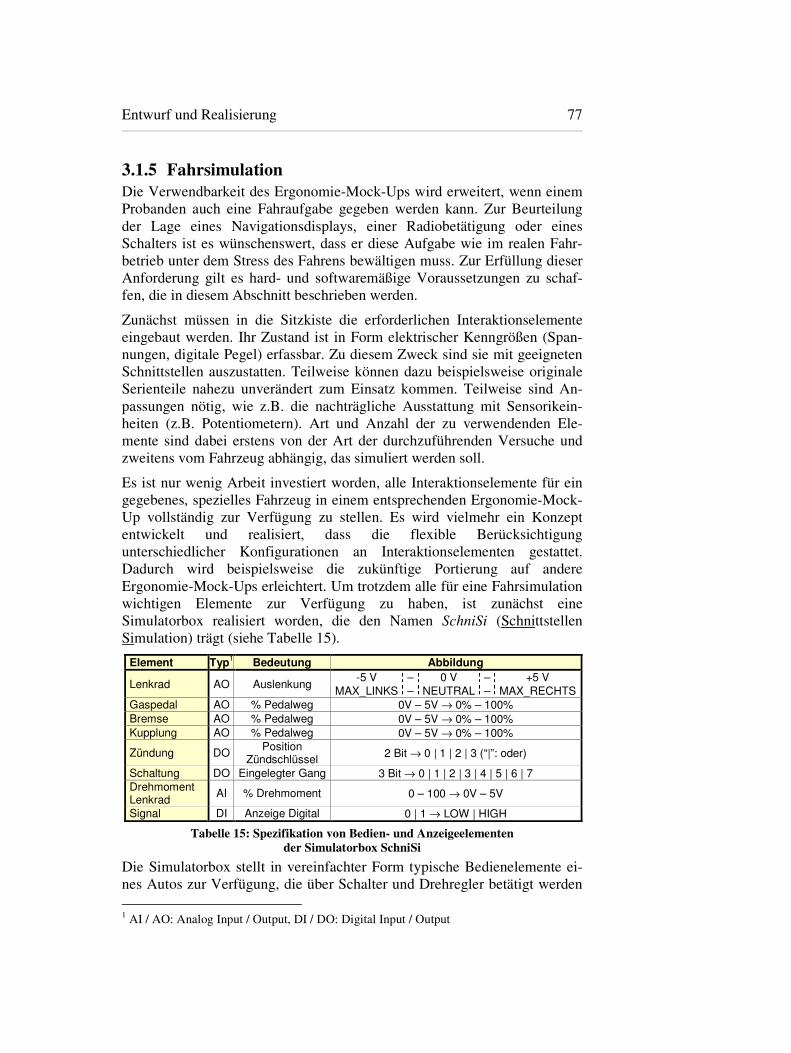
Entwurf und Realisierung 77
3.1.5 Fahrsimulation Die Verwendbarkeit des Ergonomie-Mock-Ups wird erweitert, wenn einem Probanden auch eine Fahraufgabe gegeben werden kann. Zur Beurteilung der Lage eines Navigationsdisplays, einer Radiobetätigung oder eines Schalters ist es wünschenswert, dass er diese Aufgabe wie im realen Fahr-betrieb unter dem Stress des Fahrens bewältigen muss. Zur Erfüllung dieser Anforderung gilt es hard- und softwaremäßige Voraussetzungen zu schaf-fen, die in diesem Abschnitt beschrieben werden.
Zunächst müssen in die Sitzkiste die erforderlichen Interaktionselemente eingebaut werden. Ihr Zustand ist in Form elektrischer Kenngrößen (Span-nungen, digitale Pegel) erfassbar. Zu diesem Zweck sind sie mit geeigneten Schnittstellen auszustatten. Teilweise können dazu beispielsweise originale Serienteile nahezu unverändert zum Einsatz kommen. Teilweise sind An-passungen nötig, wie z.B. die nachträgliche Ausstattung mit Sensorikein-heiten (z.B. Potentiometern). Art und Anzahl der zu verwendenden Ele-mente sind dabei erstens von der Art der durchzuführenden Versuche und zweitens vom Fahrzeug abhängig, das simuliert werden soll.
Es ist nur wenig Arbeit investiert worden, alle Interaktionselemente für ein gegebenes, spezielles Fahrzeug in einem entsprechenden Ergonomie-Mock-Up vollständig zur Verfügung zu stellen. Es wird vielmehr ein Konzept entwickelt und realisiert, dass die flexible Berücksichtigung unterschiedlicher Konfigurationen an Interaktionselementen gestattet. Dadurch wird beispielsweise die zukünftige Portierung auf andere Ergonomie-Mock-Ups erleichtert. Um trotzdem alle für eine Fahrsimulation wichtigen Elemente zur Verfügung zu haben, ist zunächst eine Simulatorbox realisiert worden, die den Namen SchniSi (Schnittstellen Simulation) trägt (siehe Tabelle 15).
Element Typ1 Bedeutung Abbildung
Lenkrad AO Auslenkung -5 V – 0 V – +5 V MAX_LINKS – NEUTRAL – MAX_RECHTS
Gaspedal AO % Pedalweg 0V – 5V → 0% – 100% Bremse AO % Pedalweg 0V – 5V → 0% – 100% Kupplung AO % Pedalweg 0V – 5V → 0% – 100%
Zündung DO Position Zündschlüssel 2 Bit → 0 | 1 | 2 | 3 (“|”: oder)
Schaltung DO Eingelegter Gang 3 Bit → 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 Drehmoment Lenkrad AI % Drehmoment 0 – 100 → 0V – 5V
Signal DI Anzeige Digital 0 | 1 → LOW | HIGH
Tabelle 15: Spezifikation von Bedien- und Anzeigeelementen der Simulatorbox SchniSi
Die Simulatorbox stellt in vereinfachter Form typische Bedienelemente ei-nes Autos zur Verfügung, die über Schalter und Drehregler betätigt werden 1 AI / AO: Analog Input / Output, DI / DO: Digital Input / Output

Entwurf und Realisierung 78
können. Daneben sind auch zwei Elemente vorhanden, die der Anzeige von Werten dienen, die an die Box gesendet werden können. Neben der Unter-teilung in Bedien- und Anzeigeelemente können diese weiterhin anhand der Signaltypen untergliedert werden. Es handelt sich entweder um analoge (z.B. Lenkrad, Pedalerie) oder digitale (z.B. Schaltung, Schalter) Signale.
Als nächstes gilt es ein System zur Datenerfassung und -aus-wertung zu wählen, das eine Kopplung mit den Interakti-onselementen einer Sitzkiste herstellt. Die Kopplung soll natürlich unabhängig davon sein, ob sie zu realen Kompo-nenten hergestellt wird (siehe Abbildung 49) oder zu sol-chen, die über die Simulator-box nur „virtuell“ zur Verfü-gung stehen. Die Datenerfas-sungskarte1 PCI-MIO16E-4 der Firma National Instruments [W3NI] ist zu dem Zweck aus-
gewählt worden. Bei dem PC-Einsteckmodul handelt es sich um eine 12-Bit Multifunktionskarte. In Abhängigkeit vom gewählten Messmodus können 8 oder 16 analoge Eingabekanäle betrieben werden. Sie unterstützt zwei ana-loge Ausgänge und 8 digitale Leitungen, die bidirektional arbeiteten können. Zur Erhöhung der Messkanalanzahl sind bei Bedarf mehrere DAQ-Karten parallel einsetzbar. Für einen einzelnen analogen Messkanal kann die Geschwindigkeit der Datenerfassung auf bis zu 500 kS/s konfiguriert werden. Die Ungenauigkeit einer Messung beträgt nach Herstellerangaben, in Abhängigkeit vom zu erfassenden Spannungsbereich – maximal ca. 5 mV. Die Karte wird über ein geschirmtes Kabel mit einer Anschluss-Box (Bezeichnung: BNC-2090, gleicher Hersteller wie oben) verbunden. Sie dient als Anschlusselement für die Signalquellen und -senken.
Im Rahmen der Diplomarbeit [Bull99] ist eine Software entwickelt worden, die mithilfe des gewählten Meßsystems eine Kopplung mit den Interaktions-elementen einer Sitzkiste herstellt. Für jedes einzelne zu erfassende Signal ist während einer Konfigurationsphase dessen Definitions- und Wertebe-reich anzugeben. Während des Messvorgangs werden die ermittelten Ergeb-nisdaten zur weiteren Verwendung an einen zu spezifizierenden Empfänger geschickt. Daneben werden auch Datenpakete empfangen, deren Inhalt nach 1 Die Karte wird vom Hersteller auch DAQ-Karte genannt. DAQ steht für Data Acquisition (engl. Datenerfassung). Der hauptsächliche Zweck der Karte ist Datenerfassung. Sie er-möglicht aber auch die Datenausgabe und andere Spezialfunktionen.
Anschluss-Box
Datenerfassungund -auswertung
DAQ-Karte
Lenkwinkel
Lenkmoment
Blinklicht
Gang
AO
DO
AI
DI
Abbildung 49: Datenerfassung und –auswertung von Interaktionselementen einer Sitzkiste
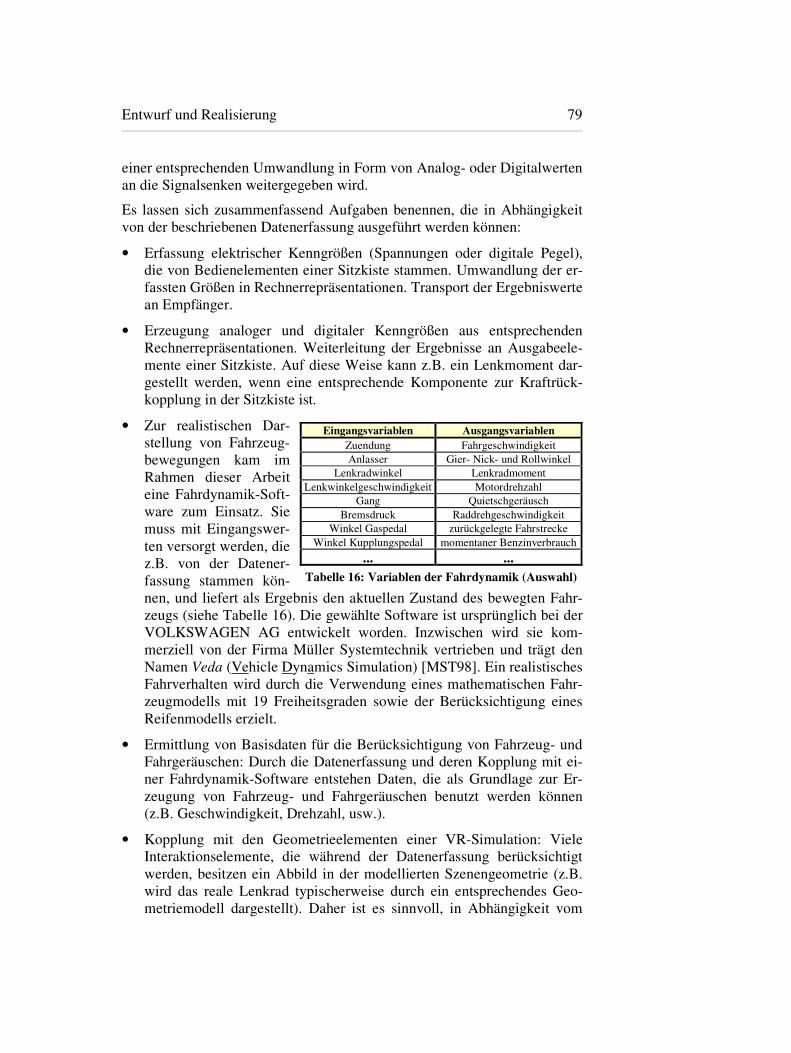
Entwurf und Realisierung 79
einer entsprechenden Umwandlung in Form von Analog- oder Digitalwerten an die Signalsenken weitergegeben wird.
Es lassen sich zusammenfassend Aufgaben benennen, die in Abhängigkeit von der beschriebenen Datenerfassung ausgeführt werden können:
• Erfassung elektrischer Kenngrößen (Spannungen oder digitale Pegel), die von Bedienelementen einer Sitzkiste stammen. Umwandlung der er-fassten Größen in Rechnerrepräsentationen. Transport der Ergebniswerte an Empfänger.
• Erzeugung analoger und digitaler Kenngrößen aus entsprechenden Rechnerrepräsentationen. Weiterleitung der Ergebnisse an Ausgabeele-mente einer Sitzkiste. Auf diese Weise kann z.B. ein Lenkmoment dar-gestellt werden, wenn eine entsprechende Komponente zur Kraftrück-kopplung in der Sitzkiste ist.
• Zur realistischen Dar-stellung von Fahrzeug-bewegungen kam im Rahmen dieser Arbeit eine Fahrdynamik-Soft-ware zum Einsatz. Sie muss mit Eingangswer-ten versorgt werden, die z.B. von der Datener-fassung stammen kön-nen, und liefert als Ergebnis den aktuellen Zustand des bewegten Fahr-zeugs (siehe Tabelle 16). Die gewählte Software ist ursprünglich bei der VOLKSWAGEN AG entwickelt worden. Inzwischen wird sie kom-merziell von der Firma Müller Systemtechnik vertrieben und trägt den Namen Veda (Vehicle Dynamics Simulation) [MST98]. Ein realistisches Fahrverhalten wird durch die Verwendung eines mathematischen Fahr-zeugmodells mit 19 Freiheitsgraden sowie der Berücksichtigung eines Reifenmodells erzielt.
• Ermittlung von Basisdaten für die Berücksichtigung von Fahrzeug- und Fahrgeräuschen: Durch die Datenerfassung und deren Kopplung mit ei-ner Fahrdynamik-Software entstehen Daten, die als Grundlage zur Er-zeugung von Fahrzeug- und Fahrgeräuschen benutzt werden können (z.B. Geschwindigkeit, Drehzahl, usw.).
• Kopplung mit den Geometrieelementen einer VR-Simulation: Viele Interaktionselemente, die während der Datenerfassung berücksichtigt werden, besitzen ein Abbild in der modellierten Szenengeometrie (z.B. wird das reale Lenkrad typischerweise durch ein entsprechendes Geo-metriemodell dargestellt). Daher ist es sinnvoll, in Abhängigkeit vom
Eingangsvariablen Ausgangsvariablen Zuendung Fahrgeschwindigkeit Anlasser Gier- Nick- und Rollwinkel
Lenkradwinkel Lenkradmoment Lenkwinkelgeschwindigkeit Motordrehzahl
Gang Quietschgeräusch Bremsdruck Raddrehgeschwindigkeit
Winkel Gaspedal zurückgelegte Fahrstrecke Winkel Kupplungspedal momentaner Benzinverbrauch
... ... Tabelle 16: Variablen der Fahrdynamik (Auswahl)

Entwurf und Realisierung 80
ermittelten Zustand des realen Elements einen entsprechenden Zustand auf das betroffene Geometriemodell zu übertragen (z.B. kann sich da-durch das Geometriemodell des Lenkrads synchron zum realen Lenkrad bewegen).
Wird ein gegebenes Interaktionselement digital über n Bitleitungen er-fasst, so erfordert das im Rahmen dieser Arbeit implementierte Switch-Verfahren, dass maximal n2 verschiedene Geometriemodelle des Ele-ments zur Verfügung stehen. Für jedes mögliche Bitmuster kann ein ei-genes Modell gewählt werden. Es sind aber auch Mehrfach- und Nicht-belegungen möglich. Aus den Modellen wird während der Simulation ständig, in Abhängigkeit vom ermittelten Bitmuster, eins ausgewählt, das dargestellt wird. Alle anderen Modelle bleiben „unsichtbar“.
Bei einem analogen Interaktionselement findet hingegen – typischer-weise in Bezug auf eine gegebene Achse – eine Rotation oder Transla-tion statt. Nachfolgend ist ein Verfahren beschrieben, das die Rotation eines Geometriemodells um eine gegebene Achse ermöglicht. Das Prin-zip, das verwendet wird, lautet: Überführe durch Translation und Rotati-onen die Drehachse auf eine der drei Hauptachsen; rotiere um den gege-benen Winkel und führe anschließend die inversen Rechenschritte aus (siehe auch [FDFH90] und [Fel92]).
Aufgabe: Eine Rotationsachse sei eindeutig durch die beiden Punkte ),,( 1111 zyxP = und ),,( 2222 zyxP = definiert. Ein beliebiges Geomet-
rieobjekt soll um den gegebenen Winkel δ um diese Achse gedreht werden.
1. Translation der Rotations-achse in den Ursprung des Koordinatensystems: Zur Aufstellung einer entspre-chenden Translationsmatrix T kann jeder Punkt der durch 1P und 2P definierten Geraden benutzt werden. Hier wird willkürlich 1P ausgewählt. Die resultie-rende Matrix lautet:
���
�
�
���
�
�
−−−=
1010000100001
111 zyx
T
2P
1P
du
b
12
12),,(PPPP
cba−−==u
x
y
z),,0( cb=u 22 cbd +=
dc=)cos(α
db=)sin(α
Abbildung 50: Rotation um Drehachse I
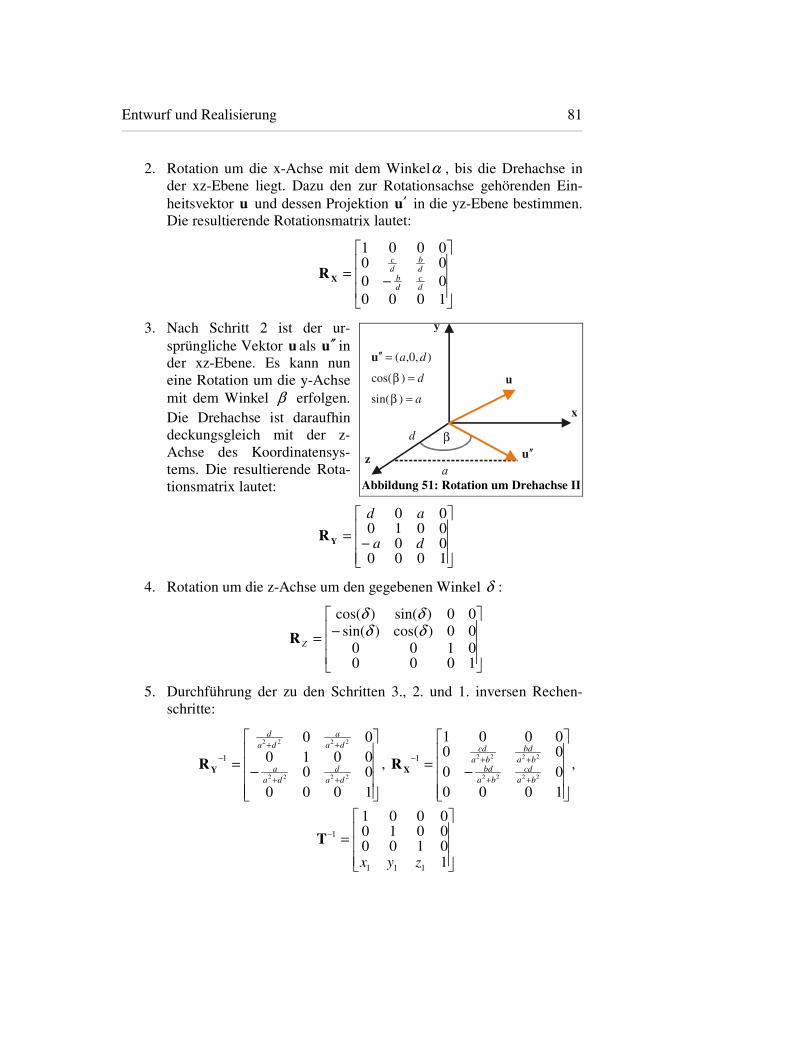
Entwurf und Realisierung 81
2. Rotation um die x-Achse mit dem Winkelα , bis die Drehachse in der xz-Ebene liegt. Dazu den zur Rotationsachse gehörenden Ein-heitsvektor u und dessen Projektion u′ in die yz-Ebene bestimmen. Die resultierende Rotationsmatrix lautet:
���
�
�
���
�
�
−=
100000000001
dc
db
db
dc
XR
3. Nach Schritt 2 ist der ur-sprüngliche Vektor u als u ′′ in der xz-Ebene. Es kann nun eine Rotation um die y-Achse mit dem Winkel β erfolgen. Die Drehachse ist daraufhin deckungsgleich mit der z-Achse des Koordinatensys-tems. Die resultierende Rota-tionsmatrix lautet:
���
�
�
���
�
�
−=100000001000
da
ad
YR
4. Rotation um die z-Achse um den gegebenen Winkel δ :
���
�
�
���
�
�−=
1000010000)cos()sin(00)sin()cos(
δδδδ
ZR
5. Durchführung der zu den Schritten 3., 2. und 1. inversen Rechen-schritte:
����
�
�
����
�
�
−=++
++−
100000001000
2222
2222
1
dad
daa
daa
dad
YR ,
����
�
�
����
�
�
−=++
++−
100000000001
2222
22221
bacd
babd
babd
bacd
XR ,
���
�
�
���
�
�
=−
1010000100001
111
1
zyx
T
),0,( da=u
a=)sin(β
d=)cos(β
u
x
y
z
βd
Abbildung 51: Rotation um Drehachse II
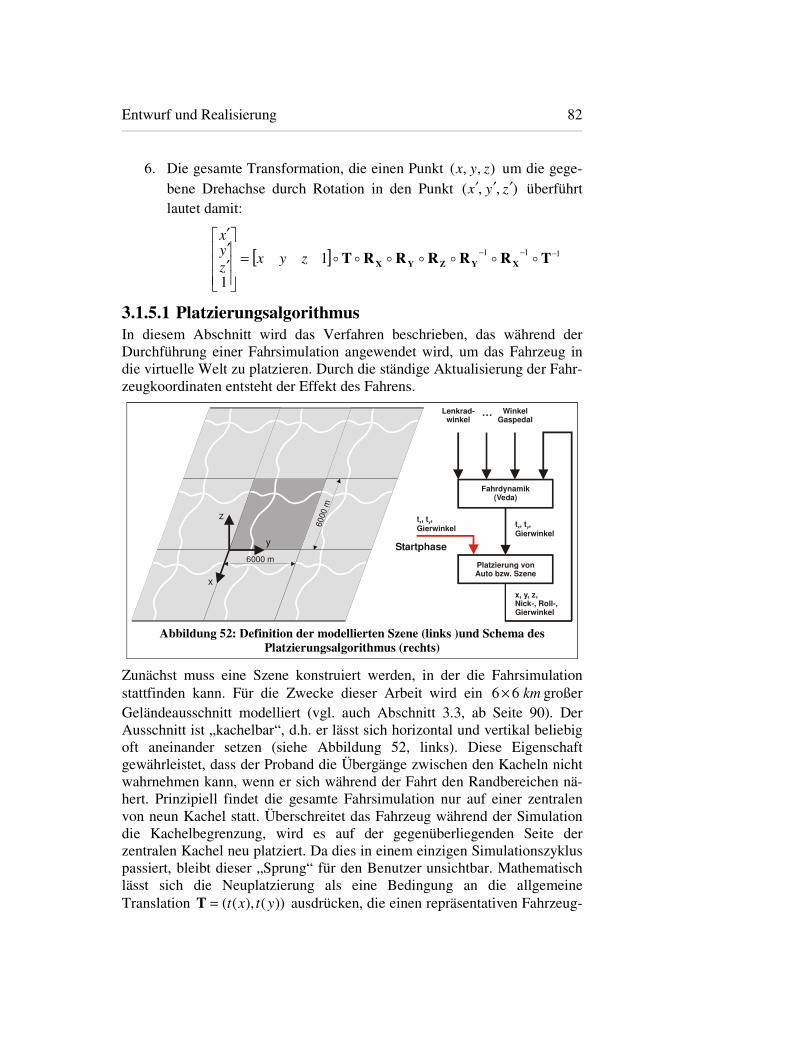
Entwurf und Realisierung 82
6. Die gesamte Transformation, die einen Punkt ),,( zyx um die gege-bene Drehachse durch Rotation in den Punkt ),,( zyx ′′′ überführt lautet damit:
[ ] 1111
1
−−−=���
�
�
���
�
�
′′′
TRRRRRT XYZYX �������zyxzyx
3.1.5.1 Platzierungsalgorithmus In diesem Abschnitt wird das Verfahren beschrieben, das während der Durchführung einer Fahrsimulation angewendet wird, um das Fahrzeug in die virtuelle Welt zu platzieren. Durch die ständige Aktualisierung der Fahr-zeugkoordinaten entsteht der Effekt des Fahrens.
x
y
z
6000
m
6000 mPlatzierung vonAuto bzw. Szene
Fahrdynamik(Veda)
Lenkrad-winkel
… WinkelGaspedal
t , t ,Gierwinkel
x y
x, y, z,Nick-, Roll-,Gierwinkel
t , t ,Gierwinkel
x y
Startphase
Abbildung 52: Definition der modellierten Szene (links )und Schema des Platzierungsalgorithmus (rechts)
Zunächst muss eine Szene konstruiert werden, in der die Fahrsimulation stattfinden kann. Für die Zwecke dieser Arbeit wird ein km66 × großer Geländeausschnitt modelliert (vgl. auch Abschnitt 3.3, ab Seite 90). Der Ausschnitt ist „kachelbar“, d.h. er lässt sich horizontal und vertikal beliebig oft aneinander setzen (siehe Abbildung 52, links). Diese Eigenschaft gewährleistet, dass der Proband die Übergänge zwischen den Kacheln nicht wahrnehmen kann, wenn er sich während der Fahrt den Randbereichen nä-hert. Prinzipiell findet die gesamte Fahrsimulation nur auf einer zentralen von neun Kachel statt. Überschreitet das Fahrzeug während der Simulation die Kachelbegrenzung, wird es auf der gegenüberliegenden Seite der zentralen Kachel neu platziert. Da dies in einem einzigen Simulationszyklus passiert, bleibt dieser „Sprung“ für den Benutzer unsichtbar. Mathematisch lässt sich die Neuplatzierung als eine Bedingung an die allgemeine Translation ))(),(( ytxt=T ausdrücken, die einen repräsentativen Fahrzeug-
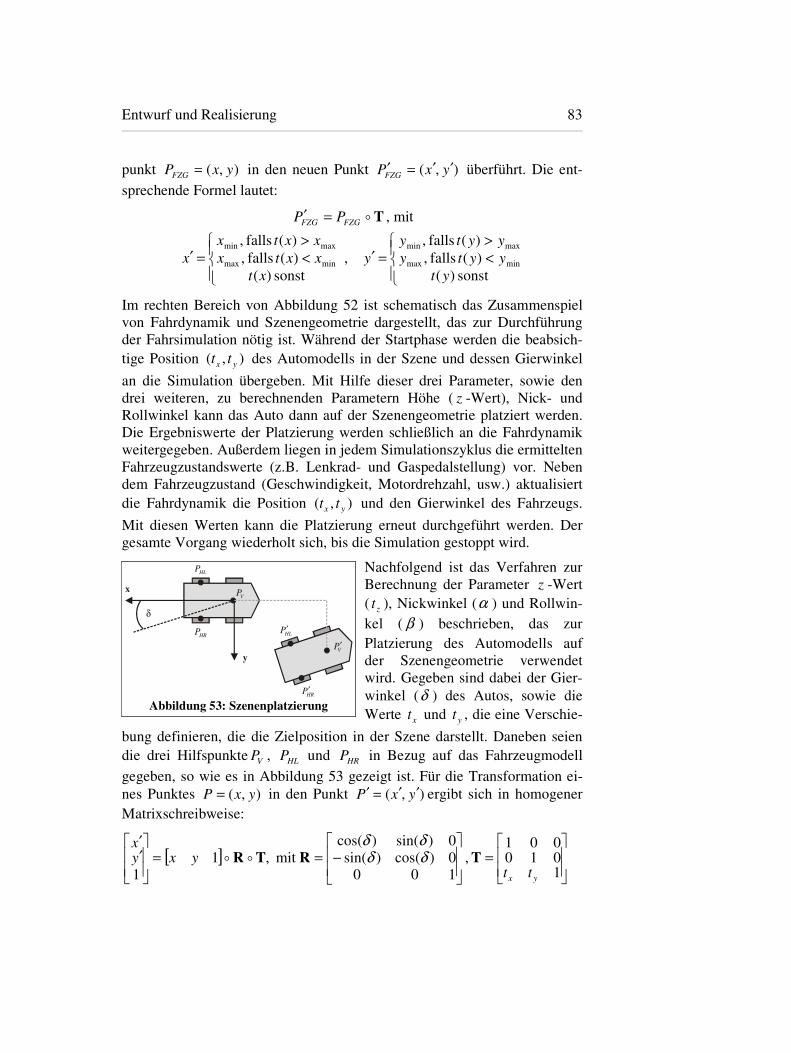
Entwurf und Realisierung 83
punkt ),( yxPFZG = in den neuen Punkt ),( yxPFZG ′′=′ überführt. Die ent-sprechende Formel lautet:
T�FZGFZG PP =′ , mit
��
�
<>
=′��
�
<>
=′sonst )(
)( falls ,)( falls ,
,sonst )(
)( falls ,)( falls ,
minmax
maxmin
minmax
maxmin
ytyytyyyty
yxt
xxtxxxtx
x
Im rechten Bereich von Abbildung 52 ist schematisch das Zusammenspiel von Fahrdynamik und Szenengeometrie dargestellt, das zur Durchführung der Fahrsimulation nötig ist. Während der Startphase werden die beabsich-tige Position ),( yx tt des Automodells in der Szene und dessen Gierwinkel an die Simulation übergeben. Mit Hilfe dieser drei Parameter, sowie den drei weiteren, zu berechnenden Parametern Höhe ( z -Wert), Nick- und Rollwinkel kann das Auto dann auf der Szenengeometrie platziert werden. Die Ergebniswerte der Platzierung werden schließlich an die Fahrdynamik weitergegeben. Außerdem liegen in jedem Simulationszyklus die ermittelten Fahrzeugzustandswerte (z.B. Lenkrad- und Gaspedalstellung) vor. Neben dem Fahrzeugzustand (Geschwindigkeit, Motordrehzahl, usw.) aktualisiert die Fahrdynamik die Position ),( yx tt und den Gierwinkel des Fahrzeugs. Mit diesen Werten kann die Platzierung erneut durchgeführt werden. Der gesamte Vorgang wiederholt sich, bis die Simulation gestoppt wird.
Nachfolgend ist das Verfahren zur Berechnung der Parameter z -Wert ( zt ), Nickwinkel (α ) und Rollwin-kel ( β ) beschrieben, das zur Platzierung des Automodells auf der Szenengeometrie verwendet wird. Gegeben sind dabei der Gier-winkel (δ ) des Autos, sowie die Werte xt und yt , die eine Verschie-
bung definieren, die die Zielposition in der Szene darstellt. Daneben seien die drei Hilfspunkte VP , HLP und HRP in Bezug auf das Fahrzeugmodell gegeben, so wie es in Abbildung 53 gezeigt ist. Für die Transformation ei-nes Punktes ),( yxP = in den Punkt ),( yxP ′′=′ ergibt sich in homogener Matrixschreibweise:
[ ]��
�
�
��
�
�=
��
�
�
��
�
�−==
��
�
�
��
�
�′′
1010001
, 1000)cos()sin(0)sin()cos(
mit ,11 yx tt
yxyx
TRTR δδδδ
��
x
y
VP
HLP
HRP
δ
VP′HLP′
HRP′
Abbildung 53: Szenenplatzierung
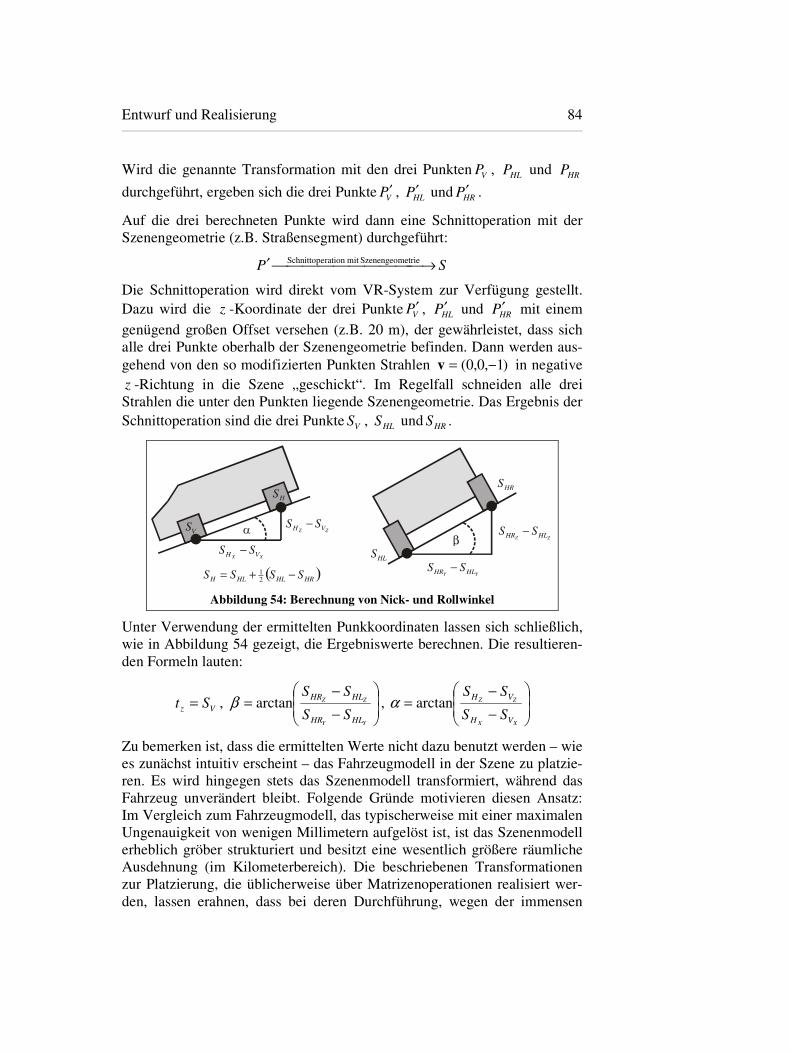
Entwurf und Realisierung 84
Wird die genannte Transformation mit den drei Punkten VP , HLP und HRP durchgeführt, ergeben sich die drei Punkte VP′ , HLP′ und HRP′ .
Auf die drei berechneten Punkte wird dann eine Schnittoperation mit der Szenengeometrie (z.B. Straßensegment) durchgeführt:
SP →′ etrieSzenengeommit ration Schnittope
Die Schnittoperation wird direkt vom VR-System zur Verfügung gestellt. Dazu wird die z -Koordinate der drei Punkte VP′ , HLP′ und HRP′ mit einem genügend großen Offset versehen (z.B. 20 m), der gewährleistet, dass sich alle drei Punkte oberhalb der Szenengeometrie befinden. Dann werden aus-gehend von den so modifizierten Punkten Strahlen )1,0,0( −=v in negative z -Richtung in die Szene „geschickt“. Im Regelfall schneiden alle drei Strahlen die unter den Punkten liegende Szenengeometrie. Das Ergebnis der Schnittoperation sind die drei Punkte VS , HLS und HRS .
βHLS
HRS
ZZ HLHR SS −
YY HLHR SS −
VS
HS
XX VH SS −
ZZ VH SS −
HRHLHLH SSSS −+= 21
Abbildung 54: Berechnung von Nick- und Rollwinkel
Unter Verwendung der ermittelten Punkkoordinaten lassen sich schließlich, wie in Abbildung 54 gezeigt, die Ergebniswerte berechnen. Die resultieren-den Formeln lauten:
Vz St = , ��
�
��
�
�
−−
=YY
ZZ
HLHR
HLHR
SS
SSarctanβ ,
��
�
��
�
�
−−
=XX
ZZ
VH
VH
SS
SSarctanα
Zu bemerken ist, dass die ermittelten Werte nicht dazu benutzt werden – wie es zunächst intuitiv erscheint – das Fahrzeugmodell in der Szene zu platzie-ren. Es wird hingegen stets das Szenenmodell transformiert, während das Fahrzeug unverändert bleibt. Folgende Gründe motivieren diesen Ansatz: Im Vergleich zum Fahrzeugmodell, das typischerweise mit einer maximalen Ungenauigkeit von wenigen Millimetern aufgelöst ist, ist das Szenenmodell erheblich gröber strukturiert und besitzt eine wesentlich größere räumliche Ausdehnung (im Kilometerbereich). Die beschriebenen Transformationen zur Platzierung, die üblicherweise über Matrizenoperationen realisiert wer-den, lassen erahnen, dass bei deren Durchführung, wegen der immensen

Entwurf und Realisierung 85
Größenunterschiede zwischen Fahrzeug- und Szenenmodell, Rechenunge-nauigkeiten entstehen können. Da die primäre Versuchsumgebung eines Probanden durch das Fahrzeugmodell gegeben ist, gilt es hier Ungenauig-keiten zu vermeiden. Ungenauigkeiten bei der Transformation der Szene sind im Vergleich dazu weniger relevant. Da die Geometriekomplexität des Fahrzeugmodells die des Szenenmodells typischerweise um ein vielfaches übertrifft, ist durch den beschriebenen Ansatz außerdem eine höhere Per-formanz erzielbar.
Aus Sicht des Benutzers besteht zwischen den beiden Verfahren kein Unter-schied. Bei der Implementierung muss lediglich darauf geachtet werden, dass alle Translationen und Rotationen stets „umgekehrt“ durchgeführt wer-den müssen. Zum Beispiel bedeutet dies, dass eine Vorwärtsbewegung des Autos 1−= xx einer Rückwärtsbewegung der Szene 1+= xx entspricht. Rotationen um einen Winkel ω sind in Rotationen um den Winkel ω− zu ändern.
Zusammengefasst ergibt sich die folgende Transformation, die einen Punkt der Szene ),,( zyxPSZENE = in den neuen Punkt ),,( zyxPSZENE ′′′=′ überführt:
[ ] )()()(),,(1
1
δαβ −−−−−−=���
�
�
���
�
�
′′′
ZYXtxtytxzyxzyx
RRRT ����
T ist dabei eine Translationsmatrix und ZYX RRR und ,, sind Rotations-matrizen um jeweiligen Achsen des Koordinatensystems (siehe z.B. [FDFH90, S. 213-217] oder [Fel92, S. 243-246]).
3.2 Kommunikationsentwurf Zwischen den ausgewählten Einzelkomponenten des Ergonomie-Mock-Ups bestehen zunächst keine Beziehungen. Es handelte sich um „eigenständige“ Systeme. Die Aufgabe des Kommunikationsentwurfs ist es, einen elementa-ren Datenaustausch zwischen den Systemen und damit die Kommunikation untereinander zu ermöglichen. Folgende Anforderungen sind dabei für die gegebene Aufgabe zu berücksichtigen:
• Die Einzelkomponenten sind in einem heterogenen Computernetzwerk verteilt. So laufen Tracking- und DAQ-Komponenten auf einem PC un-ter dem Betriebssystem WindowsNT, die Komponenten Menschmodell, Fahrdynamik und VR-System hingegen auf einer Workstation unter IRIX. Die Einzelrechner sind über ein Local Area Network (LAN) mit-einander verbunden.
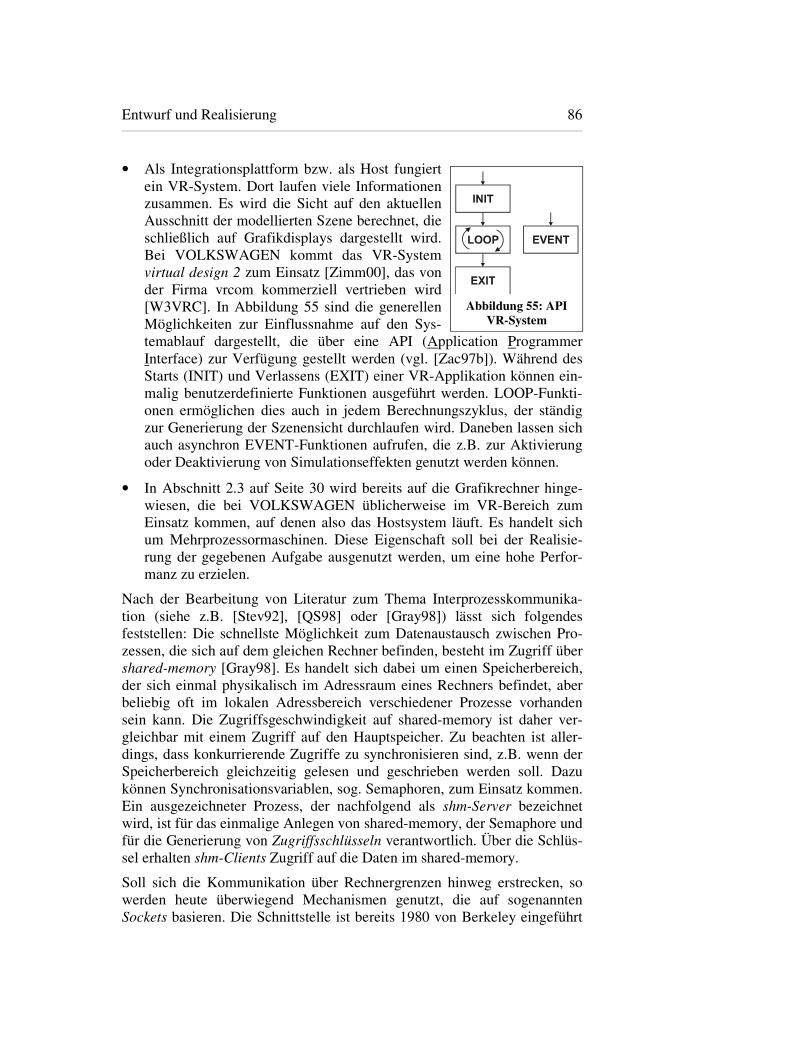
Entwurf und Realisierung 86
• Als Integrationsplattform bzw. als Host fungiert ein VR-System. Dort laufen viele Informationen zusammen. Es wird die Sicht auf den aktuellen Ausschnitt der modellierten Szene berechnet, die schließlich auf Grafikdisplays dargestellt wird. Bei VOLKSWAGEN kommt das VR-System virtual design 2 zum Einsatz [Zimm00], das von der Firma vrcom kommerziell vertrieben wird [W3VRC]. In Abbildung 55 sind die generellen Möglichkeiten zur Einflussnahme auf den Sys-temablauf dargestellt, die über eine API (Application Programmer Interface) zur Verfügung gestellt werden (vgl. [Zac97b]). Während des Starts (INIT) und Verlassens (EXIT) einer VR-Applikation können ein-malig benutzerdefinierte Funktionen ausgeführt werden. LOOP-Funkti-onen ermöglichen dies auch in jedem Berechnungszyklus, der ständig zur Generierung der Szenensicht durchlaufen wird. Daneben lassen sich auch asynchron EVENT-Funktionen aufrufen, die z.B. zur Aktivierung oder Deaktivierung von Simulationseffekten genutzt werden können.
• In Abschnitt 2.3 auf Seite 30 wird bereits auf die Grafikrechner hinge-wiesen, die bei VOLKSWAGEN üblicherweise im VR-Bereich zum Einsatz kommen, auf denen also das Hostsystem läuft. Es handelt sich um Mehrprozessormaschinen. Diese Eigenschaft soll bei der Realisie-rung der gegebenen Aufgabe ausgenutzt werden, um eine hohe Perfor-manz zu erzielen.
Nach der Bearbeitung von Literatur zum Thema Interprozesskommunika-tion (siehe z.B. [Stev92], [QS98] oder [Gray98]) lässt sich folgendes feststellen: Die schnellste Möglichkeit zum Datenaustausch zwischen Pro-zessen, die sich auf dem gleichen Rechner befinden, besteht im Zugriff über shared-memory [Gray98]. Es handelt sich dabei um einen Speicherbereich, der sich einmal physikalisch im Adressraum eines Rechners befindet, aber beliebig oft im lokalen Adressbereich verschiedener Prozesse vorhanden sein kann. Die Zugriffsgeschwindigkeit auf shared-memory ist daher ver-gleichbar mit einem Zugriff auf den Hauptspeicher. Zu beachten ist aller-dings, dass konkurrierende Zugriffe zu synchronisieren sind, z.B. wenn der Speicherbereich gleichzeitig gelesen und geschrieben werden soll. Dazu können Synchronisationsvariablen, sog. Semaphoren, zum Einsatz kommen. Ein ausgezeichneter Prozess, der nachfolgend als shm-Server bezeichnet wird, ist für das einmalige Anlegen von shared-memory, der Semaphore und für die Generierung von Zugriffsschlüsseln verantwortlich. Über die Schlüs-sel erhalten shm-Clients Zugriff auf die Daten im shared-memory.
Soll sich die Kommunikation über Rechnergrenzen hinweg erstrecken, so werden heute überwiegend Mechanismen genutzt, die auf sogenannten Sockets basieren. Die Schnittstelle ist bereits 1980 von Berkeley eingeführt
Abbildung 55: API VR-System
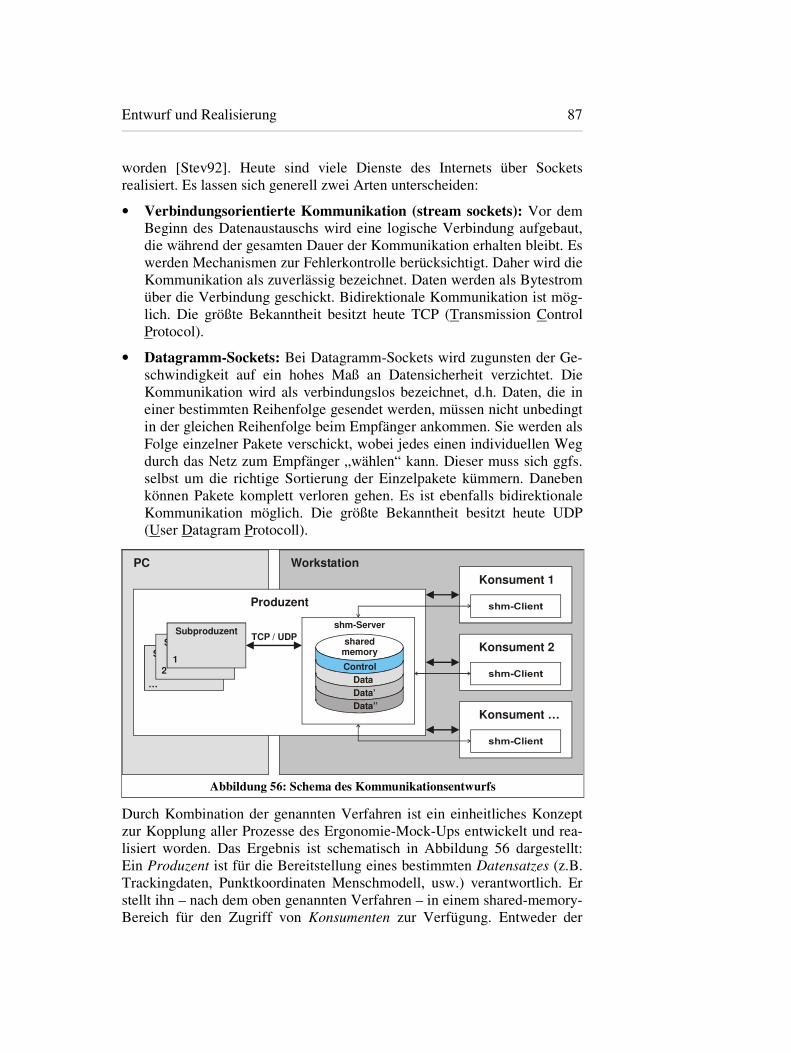
Entwurf und Realisierung 87
worden [Stev92]. Heute sind viele Dienste des Internets über Sockets realisiert. Es lassen sich generell zwei Arten unterscheiden:
• Verbindungsorientierte Kommunikation (stream sockets): Vor dem Beginn des Datenaustauschs wird eine logische Verbindung aufgebaut, die während der gesamten Dauer der Kommunikation erhalten bleibt. Es werden Mechanismen zur Fehlerkontrolle berücksichtigt. Daher wird die Kommunikation als zuverlässig bezeichnet. Daten werden als Bytestrom über die Verbindung geschickt. Bidirektionale Kommunikation ist mög-lich. Die größte Bekanntheit besitzt heute TCP (Transmission Control Protocol).
• Datagramm-Sockets: Bei Datagramm-Sockets wird zugunsten der Ge-schwindigkeit auf ein hohes Maß an Datensicherheit verzichtet. Die Kommunikation wird als verbindungslos bezeichnet, d.h. Daten, die in einer bestimmten Reihenfolge gesendet werden, müssen nicht unbedingt in der gleichen Reihenfolge beim Empfänger ankommen. Sie werden als Folge einzelner Pakete verschickt, wobei jedes einen individuellen Weg durch das Netz zum Empfänger „wählen“ kann. Dieser muss sich ggfs. selbst um die richtige Sortierung der Einzelpakete kümmern. Daneben können Pakete komplett verloren gehen. Es ist ebenfalls bidirektionale Kommunikation möglich. Die größte Bekanntheit besitzt heute UDP (User Datagram Protocoll).
Durch Kombination der genannten Verfahren ist ein einheitliches Konzept zur Kopplung aller Prozesse des Ergonomie-Mock-Ups entwickelt und rea-lisiert worden. Das Ergebnis ist schematisch in Abbildung 56 dargestellt: Ein Produzent ist für die Bereitstellung eines bestimmten Datensatzes (z.B. Trackingdaten, Punktkoordinaten Menschmodell, usw.) verantwortlich. Er stellt ihn – nach dem oben genannten Verfahren – in einem shared-memory-Bereich für den Zugriff von Konsumenten zur Verfügung. Entweder der
ControlDataData’Data’’
sharedmemory
shm-Server
SubproduzentSubproduzent
Subproduzent
12
…
Produzent
TCP / UDP
Konsument 1
Konsument 2
Konsument …
PC Workstation
Abbildung 56: Schema des Kommunikationsentwurfs
Entwurf und Realisierung 88
Produzent generiert den Datensatz selbst (z.B. Prozess zur Berechnung des Menschmodells) oder er greift dazu auf Subproduzenten zurück. Tracking-daten werden z.B. gemäß Abschnitt 3.1.4 auf Seite 69 durch das „Zusam-menspiel“ von zwei Programmen (= Subproduzenten) erzeugt und dann per TCP (oder UDP) an den Produzenten weitergereicht. Die Berücksichtigung von Komponenten über Rechnergrenzen hinweg ist damit gewährleistet.
Der Produzent ist shm-Server, also für die Erzeugung des shared-memory-Bereichs verantwortlich. Er verwaltet dort stets drei Exemplare des entspre-chenden Datensatzes (Data, Data′, Data″), um Wartezeiten beim Zugriff möglichst zu vermeiden. Die dadurch entstehende Redundanz ist akzep-tabel. Jedes Exemplar ist mit einem logischen Alter und einem Attributwert versehen, der den aktuellen Zugriffsstatus anzeigt (UNUSED, READ, WRITE). Diese Statusinformationen sind ebenfalls im shared-memory-Be-reich „Control“ abgelegt. Der Zugriff auf die Statusinformationen wird über eine Semaphore geregelt, so dass keine Zugriffskonflikte entstehen können.
Bei der Neueinstellung eines Datensatzes überschreibt der dafür zuständige Produzent das älteste Exemplar mit dem Status „UNUSED“. Das Über-schreiben signalisiert er durch Setzen von „WRITE“ als Statuswert. Nach Beendigung der Neueinstellung erhält das aktualisierte Exemplar den Status „UNUSED“ und wird außerdem als jüngstes Exemplar markiert.
Konsumenten müssen zunächst einmalig über den Schlüssel eines Produ-zenten die Zugriffsberechtigung auf seine Daten im shared-memory-Bereich erhalten. Danach kann der Zugriff auf den aktuellen Datensatz erfolgen. Dazu wählt der Konsument das Exemplar mit dem jüngsten Alter, dessen Status „UNUSED“ ist. Den Zugriff signalisiert er durch Setzen von „READ“. Das erhaltene Exemplar kopiert er in einen lokalen Speicherbe-reich, setzt den Zugriffsstatus sofort wieder auf „UNUSED“ und kann dann den Datensatz verarbeiten, der im lokalen Speicherbereich vorliegt. Der Konsument „blockiert“ ein Exemplar so nur für eine sehr kurze Zeit.
Es handelt sich bei den genannten Verfahren um einen asynchronen Kopp-lungsmechanismus, dessen Schlichtheit einen hohen Datendurchsatz ge-währleistet. Der Produzent kann mit maximaler Geschwindigkeit Daten erzeugen, die der Konsument wiederum mit seiner maximalen Geschwin-digkeit verarbeiten kann. Wartezeiten werden vermieden. Besitzen beide Komponenten stark unterschiedliche Wiederholraten, kann es vorkommen, dass entweder der Produzent viele Datensätze erzeugt, die gar nicht benutzt werden oder aber, dass der Konsument sehr oft nacheinander den gleichen Datensatz verarbeitet (falls dies nicht speziell überprüft und vermieden wird). Für die gegebene Aufgabe sind diese Eigenschaften unkritisch.
Das Verfahren ist sehr flexibel. So kann z.B. der Konsument eines Daten-satzes gleichzeitig der Produzent eines anderen Datensatzes sein. Die Art
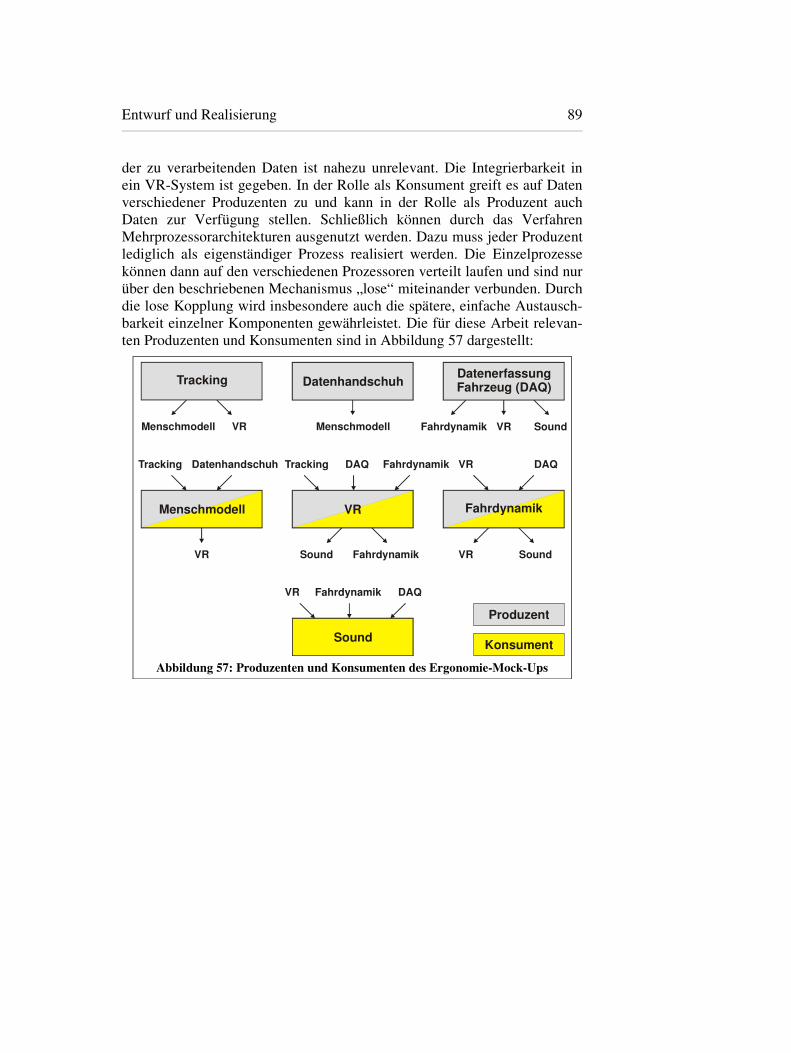
Entwurf und Realisierung 89
der zu verarbeitenden Daten ist nahezu unrelevant. Die Integrierbarkeit in ein VR-System ist gegeben. In der Rolle als Konsument greift es auf Daten verschiedener Produzenten zu und kann in der Rolle als Produzent auch Daten zur Verfügung stellen. Schließlich können durch das Verfahren Mehrprozessorarchitekturen ausgenutzt werden. Dazu muss jeder Produzent lediglich als eigenständiger Prozess realisiert werden. Die Einzelprozesse können dann auf den verschiedenen Prozessoren verteilt laufen und sind nur über den beschriebenen Mechanismus „lose“ miteinander verbunden. Durch die lose Kopplung wird insbesondere auch die spätere, einfache Austausch-barkeit einzelner Komponenten gewährleistet. Die für diese Arbeit relevan-ten Produzenten und Konsumenten sind in Abbildung 57 dargestellt:
Datenhandschuh
VR Fahrdynamik
Tracking
Menschmodell
Menschmodell VR Fahrdynamik VRMenschmodell
VR VR SoundFahrdynamik
Sound
VR Fahrdynamik
DatenerfassungFahrzeug (DAQ)
DAQ
Tracking Datenhandschuh Tracking DAQ Fahrdynamik
Sound
VR DAQ
Sound
Produzent
Konsument
Abbildung 57: Produzenten und Konsumenten des Ergonomie-Mock-Ups
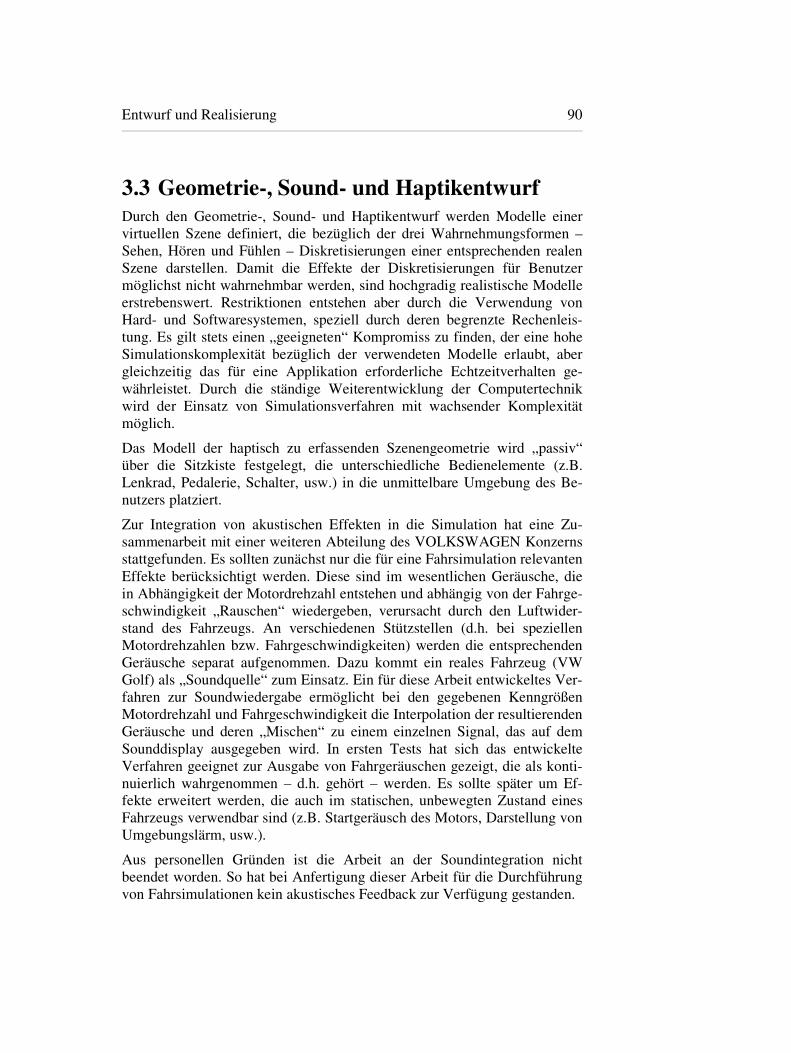
Entwurf und Realisierung 90
3.3 Geometrie-, Sound- und Haptikentwurf Durch den Geometrie-, Sound- und Haptikentwurf werden Modelle einer virtuellen Szene definiert, die bezüglich der drei Wahrnehmungsformen – Sehen, Hören und Fühlen – Diskretisierungen einer entsprechenden realen Szene darstellen. Damit die Effekte der Diskretisierungen für Benutzer möglichst nicht wahrnehmbar werden, sind hochgradig realistische Modelle erstrebenswert. Restriktionen entstehen aber durch die Verwendung von Hard- und Softwaresystemen, speziell durch deren begrenzte Rechenleis-tung. Es gilt stets einen „geeigneten“ Kompromiss zu finden, der eine hohe Simulationskomplexität bezüglich der verwendeten Modelle erlaubt, aber gleichzeitig das für eine Applikation erforderliche Echtzeitverhalten ge-währleistet. Durch die ständige Weiterentwicklung der Computertechnik wird der Einsatz von Simulationsverfahren mit wachsender Komplexität möglich.
Das Modell der haptisch zu erfassenden Szenengeometrie wird „passiv“ über die Sitzkiste festgelegt, die unterschiedliche Bedienelemente (z.B. Lenkrad, Pedalerie, Schalter, usw.) in die unmittelbare Umgebung des Be-nutzers platziert.
Zur Integration von akustischen Effekten in die Simulation hat eine Zu-sammenarbeit mit einer weiteren Abteilung des VOLKSWAGEN Konzerns stattgefunden. Es sollten zunächst nur die für eine Fahrsimulation relevanten Effekte berücksichtigt werden. Diese sind im wesentlichen Geräusche, die in Abhängigkeit der Motordrehzahl entstehen und abhängig von der Fahrge-schwindigkeit „Rauschen“ wiedergeben, verursacht durch den Luftwider-stand des Fahrzeugs. An verschiedenen Stützstellen (d.h. bei speziellen Motordrehzahlen bzw. Fahrgeschwindigkeiten) werden die entsprechenden Geräusche separat aufgenommen. Dazu kommt ein reales Fahrzeug (VW Golf) als „Soundquelle“ zum Einsatz. Ein für diese Arbeit entwickeltes Ver-fahren zur Soundwiedergabe ermöglicht bei den gegebenen Kenngrößen Motordrehzahl und Fahrgeschwindigkeit die Interpolation der resultierenden Geräusche und deren „Mischen“ zu einem einzelnen Signal, das auf dem Sounddisplay ausgegeben wird. In ersten Tests hat sich das entwickelte Verfahren geeignet zur Ausgabe von Fahrgeräuschen gezeigt, die als konti-nuierlich wahrgenommen – d.h. gehört – werden. Es sollte später um Ef-fekte erweitert werden, die auch im statischen, unbewegten Zustand eines Fahrzeugs verwendbar sind (z.B. Startgeräusch des Motors, Darstellung von Umgebungslärm, usw.).
Aus personellen Gründen ist die Arbeit an der Soundintegration nicht beendet worden. So hat bei Anfertigung dieser Arbeit für die Durchführung von Fahrsimulationen kein akustisches Feedback zur Verfügung gestanden.
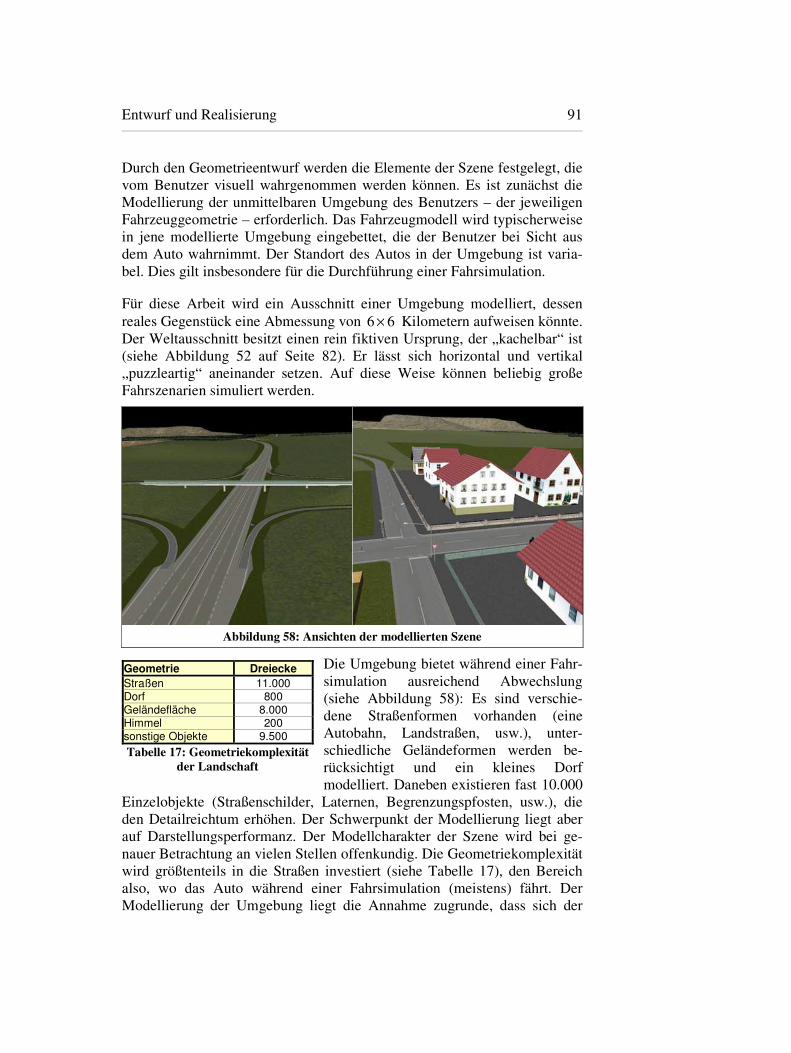
Entwurf und Realisierung 91
Durch den Geometrieentwurf werden die Elemente der Szene festgelegt, die vom Benutzer visuell wahrgenommen werden können. Es ist zunächst die Modellierung der unmittelbaren Umgebung des Benutzers – der jeweiligen Fahrzeuggeometrie – erforderlich. Das Fahrzeugmodell wird typischerweise in jene modellierte Umgebung eingebettet, die der Benutzer bei Sicht aus dem Auto wahrnimmt. Der Standort des Autos in der Umgebung ist varia-bel. Dies gilt insbesondere für die Durchführung einer Fahrsimulation.
Für diese Arbeit wird ein Ausschnitt einer Umgebung modelliert, dessen reales Gegenstück eine Abmessung von 66 × Kilometern aufweisen könnte. Der Weltausschnitt besitzt einen rein fiktiven Ursprung, der „kachelbar“ ist (siehe Abbildung 52 auf Seite 82). Er lässt sich horizontal und vertikal „puzzleartig“ aneinander setzen. Auf diese Weise können beliebig große Fahrszenarien simuliert werden.
Abbildung 58: Ansichten der modellierten Szene
Die Umgebung bietet während einer Fahr-simulation ausreichend Abwechslung (siehe Abbildung 58): Es sind verschie-dene Straßenformen vorhanden (eine Autobahn, Landstraßen, usw.), unter-schiedliche Geländeformen werden be-rücksichtigt und ein kleines Dorf modelliert. Daneben existieren fast 10.000
Einzelobjekte (Straßenschilder, Laternen, Begrenzungspfosten, usw.), die den Detailreichtum erhöhen. Der Schwerpunkt der Modellierung liegt aber auf Darstellungsperformanz. Der Modellcharakter der Szene wird bei ge-nauer Betrachtung an vielen Stellen offenkundig. Die Geometriekomplexität wird größtenteils in die Straßen investiert (siehe Tabelle 17), den Bereich also, wo das Auto während einer Fahrsimulation (meistens) fährt. Der Modellierung der Umgebung liegt die Annahme zugrunde, dass sich der
Tabelle 17: Geometriekomplexität der Landschaft
Geometrie Dreiecke Straßen 11.000 Dorf 800 Geländefläche 8.000 Himmel 200 sonstige Objekte 9.500
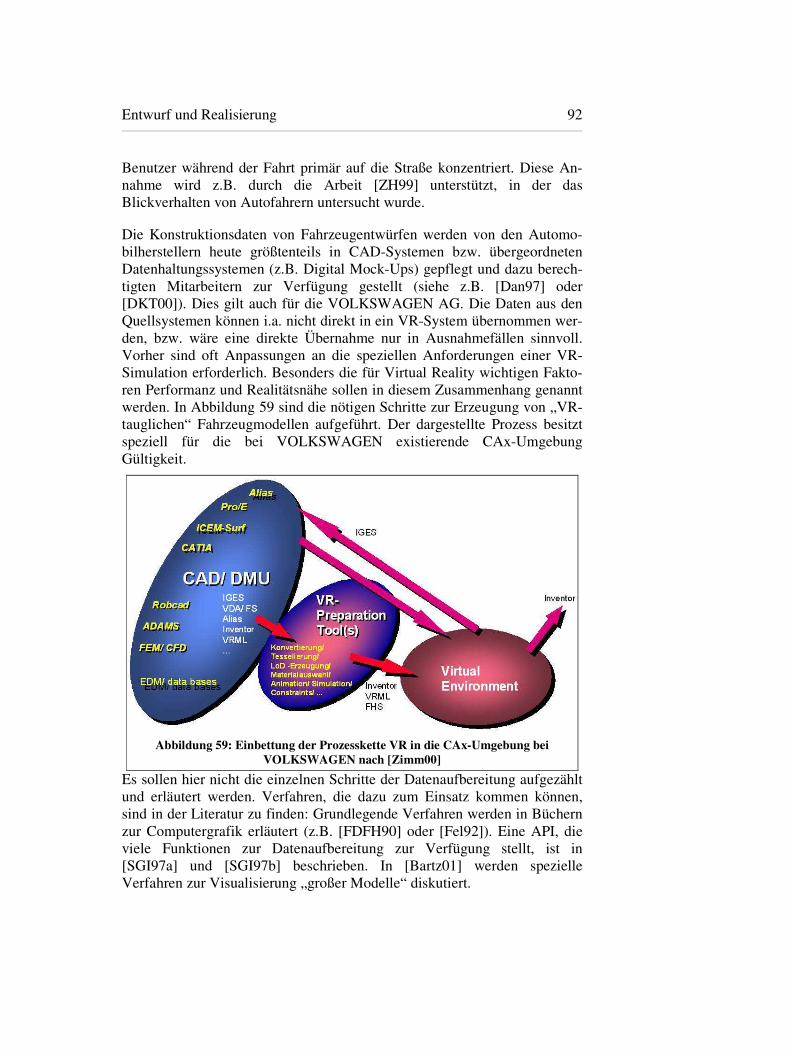
Entwurf und Realisierung 92
Benutzer während der Fahrt primär auf die Straße konzentriert. Diese An-nahme wird z.B. durch die Arbeit [ZH99] unterstützt, in der das Blickverhalten von Autofahrern untersucht wurde.
Die Konstruktionsdaten von Fahrzeugentwürfen werden von den Automo-bilherstellern heute größtenteils in CAD-Systemen bzw. übergeordneten Datenhaltungssystemen (z.B. Digital Mock-Ups) gepflegt und dazu berech-tigten Mitarbeitern zur Verfügung gestellt (siehe z.B. [Dan97] oder [DKT00]). Dies gilt auch für die VOLKSWAGEN AG. Die Daten aus den Quellsystemen können i.a. nicht direkt in ein VR-System übernommen wer-den, bzw. wäre eine direkte Übernahme nur in Ausnahmefällen sinnvoll. Vorher sind oft Anpassungen an die speziellen Anforderungen einer VR-Simulation erforderlich. Besonders die für Virtual Reality wichtigen Fakto-ren Performanz und Realitätsnähe sollen in diesem Zusammenhang genannt werden. In Abbildung 59 sind die nötigen Schritte zur Erzeugung von „VR-tauglichen“ Fahrzeugmodellen aufgeführt. Der dargestellte Prozess besitzt speziell für die bei VOLKSWAGEN existierende CAx-Umgebung Gültigkeit.
Abbildung 59: Einbettung der Prozesskette VR in die CAx-Umgebung bei VOLKSWAGEN nach [Zimm00]
Es sollen hier nicht die einzelnen Schritte der Datenaufbereitung aufgezählt und erläutert werden. Verfahren, die dazu zum Einsatz kommen können, sind in der Literatur zu finden: Grundlegende Verfahren werden in Büchern zur Computergrafik erläutert (z.B. [FDFH90] oder [Fel92]). Eine API, die viele Funktionen zur Datenaufbereitung zur Verfügung stellt, ist in [SGI97a] und [SGI97b] beschrieben. In [Bartz01] werden spezielle Verfahren zur Visualisierung „großer Modelle“ diskutiert.

Entwurf und Realisierung 93
In Abbildung 60 ist das Ergebnis einer Datenaufbereitung dargestellt. Das entsprechende Modell kommt auch bei dem Probandenversuch zum Einsatz, der in Abschnitt 4.2 ab Seite 101 beschrieben ist. Es ermöglicht eine Bildwiederholrate von ca. 30 fps.
Abbildung 60: VOLKSWAGEN Sharan bestehend aus ca. 60.000 Polygonen für
Innen- und Außenmodell, integriert in Straßenszene
Neben dem Geometriemodell für Fahrzeug und Umgebung existiert zu-sätzlich die Geometrie des Menschmodells (ca. 3000 Dreiecke, siehe Ab-schnitt 3.1.3 ab Seite 64). Sie muss nicht explizit modelliert werden, son-dern wird durch Anwendung des entsprechenden Berechnungsverfahrens implizit zur Laufzeit erzeugt.
3.4 Interaktionsentwurf Über den Interaktionsent-wurf wird eine Schnitt-stelle bereitgestellt, über die auf logischer Ebene ein Datenfluss und damit eine Verbindung zwischen den bisher vorgestellten Kom-ponenten und Funktiona-litäten herstellt werden kann. In Analogie zu ei-
nem Schichtenmodell stellen dazu, wie in Abbildung 61 gezeigt, untere Schichten den darüber liegenden Schichten ihre Daten zur Verfügung. Auf der untersten Komponentenschicht befinden sich zunächst die einzelnen Systeme, die für diese Arbeit ausgewählt worden sind. Sie arbeiten unab-hängig voneinander, verteilt in einem heterogenen Computernetzwerk. Eine Kommunikationsschicht überträgt ihre Daten über Rechnergrenzen hinweg auf den Simulationshost und stellt sie dort zum Zugriff bereit. In einer Mo-dellierungsschicht sind die Modelle einer virtuellen Umgebung bezüglich Geometrie, Sound und Haptik abgelegt. Teilweise greift die Schicht implizit auf die Komponentenschicht zu (z.B. wird über die Komponente „Sitzkiste“
Komponentenschicht
Tracking Menschmodell DAQ
Kommunikations-schicht
ModellierungsschichtUmgebung
Interaktionsschicht
Abbildung 61: Schichtmodell „Ergonomie-Mock-Up“
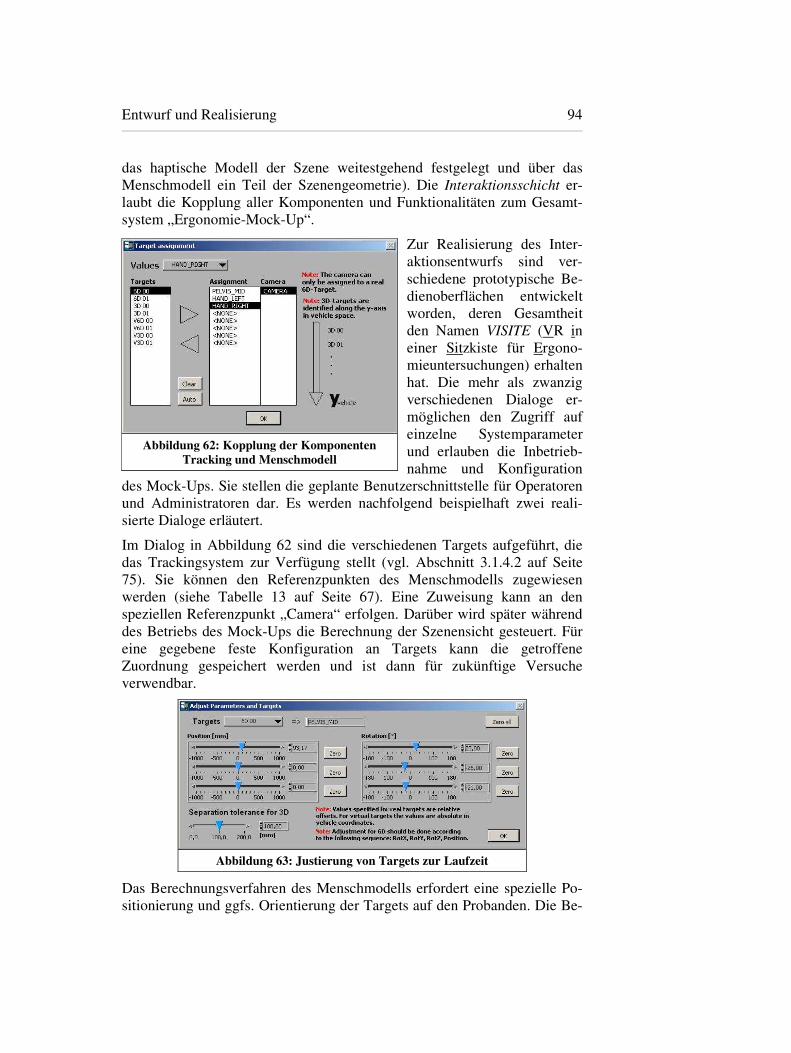
Entwurf und Realisierung 94
das haptische Modell der Szene weitestgehend festgelegt und über das Menschmodell ein Teil der Szenengeometrie). Die Interaktionsschicht er-laubt die Kopplung aller Komponenten und Funktionalitäten zum Gesamt-system „Ergonomie-Mock-Up“.
Zur Realisierung des Inter-aktionsentwurfs sind ver-schiedene prototypische Be-dienoberflächen entwickelt worden, deren Gesamtheit den Namen VISITE (VR in einer Sitzkiste für Ergono-mieuntersuchungen) erhalten hat. Die mehr als zwanzig verschiedenen Dialoge er-möglichen den Zugriff auf einzelne Systemparameter und erlauben die Inbetrieb-nahme und Konfiguration
des Mock-Ups. Sie stellen die geplante Benutzerschnittstelle für Operatoren und Administratoren dar. Es werden nachfolgend beispielhaft zwei reali-sierte Dialoge erläutert.
Im Dialog in Abbildung 62 sind die verschiedenen Targets aufgeführt, die das Trackingsystem zur Verfügung stellt (vgl. Abschnitt 3.1.4.2 auf Seite 75). Sie können den Referenzpunkten des Menschmodells zugewiesen werden (siehe Tabelle 13 auf Seite 67). Eine Zuweisung kann an den speziellen Referenzpunkt „Camera“ erfolgen. Darüber wird später während des Betriebs des Mock-Ups die Berechnung der Szenensicht gesteuert. Für eine gegebene feste Konfiguration an Targets kann die getroffene Zuordnung gespeichert werden und ist dann für zukünftige Versuche verwendbar.
Abbildung 63: Justierung von Targets zur Laufzeit
Das Berechnungsverfahren des Menschmodells erfordert eine spezielle Po-sitionierung und ggfs. Orientierung der Targets auf den Probanden. Die Be-
Abbildung 62: Kopplung der Komponenten Tracking und Menschmodell

Entwurf und Realisierung 95
rücksichtigung dieser Forderung wird über eine manuelle Kalibrierprozedur ermöglicht, deren entsprechender Dialog in Abbildung 63 gezeigt ist. Nach-dem ein Benutzer mit Targets ausgestattet worden ist, kann jedes einzelne während der Simulation, über das in Abschnitt 3.1.4.2 beschriebene Verfahren, so eingestellt werden, bis der Proband möglichst gut durch das 3D-Menschmodell dargestellt wird. Die Qualität dieser Kalibrierung wird derzeit rein visuell von einem Operator beurteilt. Während des Vorgangs muss der Proband möglichst bewegungslos in einer „Standardhaltung“ im Mock-Up sitzen, die dem Operator die Überprüfung der Übereinstimmung aus mehreren Ansichten erlaubt. Für diese visuelle Kontrolle ist die Dar-stellung der Szenengeometrie auf einem zusätzlichen Grafikdisplay erfor-derlich.
Neben den genannten, stehen einem Benutzer im Interaktionsentwurf z.B. auch die folgenden Funktionalitäten zur Verfügung:
• Kalibrierung der Szene auf das Fahrzeugkoordinatensystem.
• Kopplung der Datenerfassungskomponente DAQ mit der Szenen-geometrie (z.B. Lenkradgeometrie dreht sich in Abhängigkeit eines bestimmten Messwertes).
• Kopplung von DAQ und Fahrdynamik.
• Kopplung von Fahrdynamik und Szenengeometrie.
96
4 Ergebnisvalidierung
Kapitel 4
Ergebnisvalidierung
Während und nach der Realisierungsphase werden kritische Systempara-meter überprüft. Die Einsatzfähigkeit im anvisierten Versuchskontext des entstandenen Ergonomie-Mock-Ups wird in einem ersten Probandenversuch exemplarisch getestet. Dieses Kapitel stellt die Ergebnisse dazu zusammen.
4.1 Validierung der Echtzeitfähigkeit Für hoch-immersive VR-Anwendungen kann besonders deren Echtzeitver-halten als kritisch beurteilt werden (siehe Abschnitt 2.1.3 auf Seite 26). Die Ergebnisse der Überprüfungen sind in diesem Abschnitt zusammengefasst.
Vorteilhaft bezüglich des Echtzeitverhaltens ist zunächst die Wahl der Komponente „Sitzkiste“. Sie ermöglicht überwiegend passiv über ihre Ge-ometrie den Benutzern die taktile Wahrnehmung des simulierten Fahrzeug-innenraums. Es sind keine aktiven Berechnungsverfahren notwendig, die einen Teil der zur Verfügung stehenden Rechenleistung verbrauchen könn-ten.
Das optische Trackingsystem besitzt die Funktion einer Datenquelle. Es liefert weiteren Komponenten Basisdaten. Speziell das echtzeitkritische Verfahren zur Berechnung der Szenensicht ist diesbezüglich zu nennen. Gerade optische Systeme besitzen im Vergleich zu anderen Trackingsyste-men oft überlegene Echtzeitcharakteristiken – ein Kriterium, das maßgeb-lich mit zur Auswahl eines optischen Verfahrens beigetragen hat (siehe Ab-schnitt 3.1.4 ab Seite 69).
Die durch den Kommunikationsentwurf realisierte lose Kopplung der Kom-ponenten des Ergonomie-Mock-Ups ermöglicht eine einfache Verteilung der Rechenlast auf verschiedene Prozessoren und trägt daher ebenfalls zu einer hohen Performanz bei.
Die beiden Zeitfaktoren Wiederholrate und Latenz werden im Abschnitt 2.1.3 im Zusammenhang mit der Echtzeitfähigkeit einer Applikation aufge-führt. Die für VR-Anwendungen wichtige Bildwiederholrate kann relativ
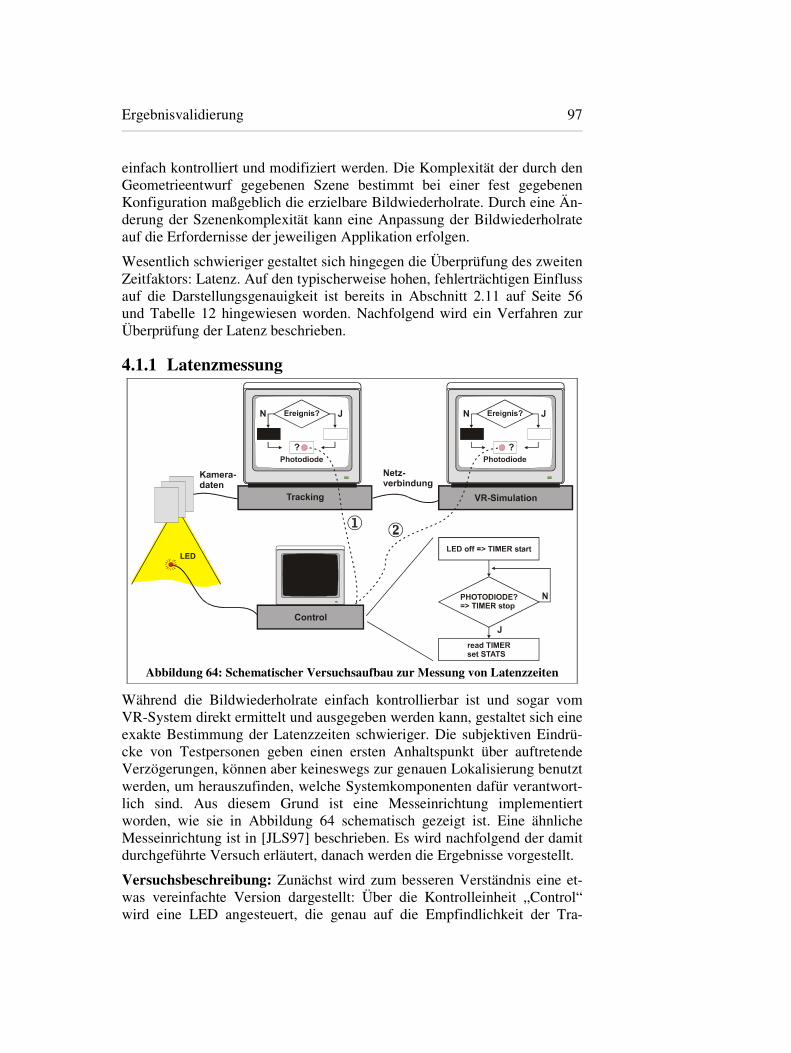
Ergebnisvalidierung 97
einfach kontrolliert und modifiziert werden. Die Komplexität der durch den Geometrieentwurf gegebenen Szene bestimmt bei einer fest gegebenen Konfiguration maßgeblich die erzielbare Bildwiederholrate. Durch eine Än-derung der Szenenkomplexität kann eine Anpassung der Bildwiederholrate auf die Erfordernisse der jeweiligen Applikation erfolgen.
Wesentlich schwieriger gestaltet sich hingegen die Überprüfung des zweiten Zeitfaktors: Latenz. Auf den typischerweise hohen, fehlerträchtigen Einfluss auf die Darstellungsgenauigkeit ist bereits in Abschnitt 2.11 auf Seite 56 und Tabelle 12 hingewiesen worden. Nachfolgend wird ein Verfahren zur Überprüfung der Latenz beschrieben.
4.1.1 Latenzmessung
Abbildung 64: Schematischer Versuchsaufbau zur Messung von Latenzzeiten
Während die Bildwiederholrate einfach kontrollierbar ist und sogar vom VR-System direkt ermittelt und ausgegeben werden kann, gestaltet sich eine exakte Bestimmung der Latenzzeiten schwieriger. Die subjektiven Eindrü-cke von Testpersonen geben einen ersten Anhaltspunkt über auftretende Verzögerungen, können aber keineswegs zur genauen Lokalisierung benutzt werden, um herauszufinden, welche Systemkomponenten dafür verantwort-lich sind. Aus diesem Grund ist eine Messeinrichtung implementiert worden, wie sie in Abbildung 64 schematisch gezeigt ist. Eine ähnliche Messeinrichtung ist in [JLS97] beschrieben. Es wird nachfolgend der damit durchgeführte Versuch erläutert, danach werden die Ergebnisse vorgestellt.
Versuchsbeschreibung: Zunächst wird zum besseren Verständnis eine et-was vereinfachte Version dargestellt: Über die Kontrolleinheit „Control“ wird eine LED angesteuert, die genau auf die Empfindlichkeit der Tra-
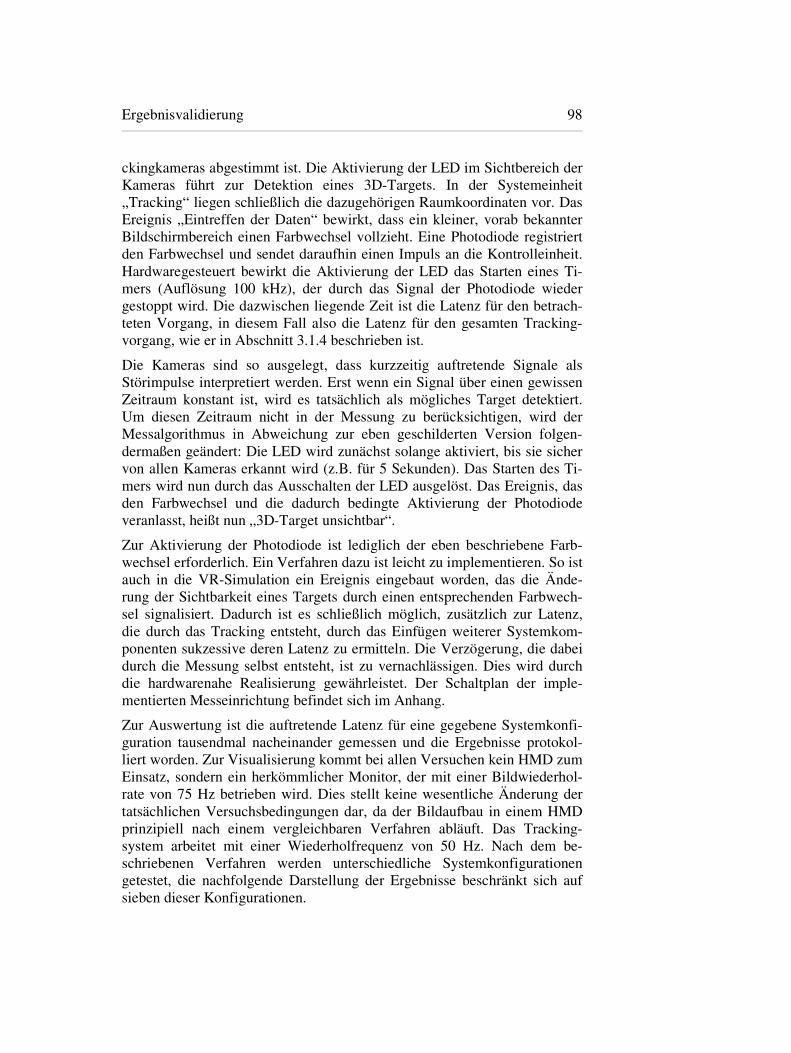
Ergebnisvalidierung 98
ckingkameras abgestimmt ist. Die Aktivierung der LED im Sichtbereich der Kameras führt zur Detektion eines 3D-Targets. In der Systemeinheit „Tracking“ liegen schließlich die dazugehörigen Raumkoordinaten vor. Das Ereignis „Eintreffen der Daten“ bewirkt, dass ein kleiner, vorab bekannter Bildschirmbereich einen Farbwechsel vollzieht. Eine Photodiode registriert den Farbwechsel und sendet daraufhin einen Impuls an die Kontrolleinheit. Hardwaregesteuert bewirkt die Aktivierung der LED das Starten eines Ti-mers (Auflösung 100 kHz), der durch das Signal der Photodiode wieder gestoppt wird. Die dazwischen liegende Zeit ist die Latenz für den betrach-teten Vorgang, in diesem Fall also die Latenz für den gesamten Tracking-vorgang, wie er in Abschnitt 3.1.4 beschrieben ist.
Die Kameras sind so ausgelegt, dass kurzzeitig auftretende Signale als Störimpulse interpretiert werden. Erst wenn ein Signal über einen gewissen Zeitraum konstant ist, wird es tatsächlich als mögliches Target detektiert. Um diesen Zeitraum nicht in der Messung zu berücksichtigen, wird der Messalgorithmus in Abweichung zur eben geschilderten Version folgen-dermaßen geändert: Die LED wird zunächst solange aktiviert, bis sie sicher von allen Kameras erkannt wird (z.B. für 5 Sekunden). Das Starten des Ti-mers wird nun durch das Ausschalten der LED ausgelöst. Das Ereignis, das den Farbwechsel und die dadurch bedingte Aktivierung der Photodiode veranlasst, heißt nun „3D-Target unsichtbar“.
Zur Aktivierung der Photodiode ist lediglich der eben beschriebene Farb-wechsel erforderlich. Ein Verfahren dazu ist leicht zu implementieren. So ist auch in die VR-Simulation ein Ereignis eingebaut worden, das die Ände-rung der Sichtbarkeit eines Targets durch einen entsprechenden Farbwech-sel signalisiert. Dadurch ist es schließlich möglich, zusätzlich zur Latenz, die durch das Tracking entsteht, durch das Einfügen weiterer Systemkom-ponenten sukzessive deren Latenz zu ermitteln. Die Verzögerung, die dabei durch die Messung selbst entsteht, ist zu vernachlässigen. Dies wird durch die hardwarenahe Realisierung gewährleistet. Der Schaltplan der imple-mentierten Messeinrichtung befindet sich im Anhang.
Zur Auswertung ist die auftretende Latenz für eine gegebene Systemkonfi-guration tausendmal nacheinander gemessen und die Ergebnisse protokol-liert worden. Zur Visualisierung kommt bei allen Versuchen kein HMD zum Einsatz, sondern ein herkömmlicher Monitor, der mit einer Bildwiederhol-rate von 75 Hz betrieben wird. Dies stellt keine wesentliche Änderung der tatsächlichen Versuchsbedingungen dar, da der Bildaufbau in einem HMD prinzipiell nach einem vergleichbaren Verfahren abläuft. Das Tracking-system arbeitet mit einer Wiederholfrequenz von 50 Hz. Nach dem be-schriebenen Verfahren werden unterschiedliche Systemkonfigurationen getestet, die nachfolgende Darstellung der Ergebnisse beschränkt sich auf sieben dieser Konfigurationen.
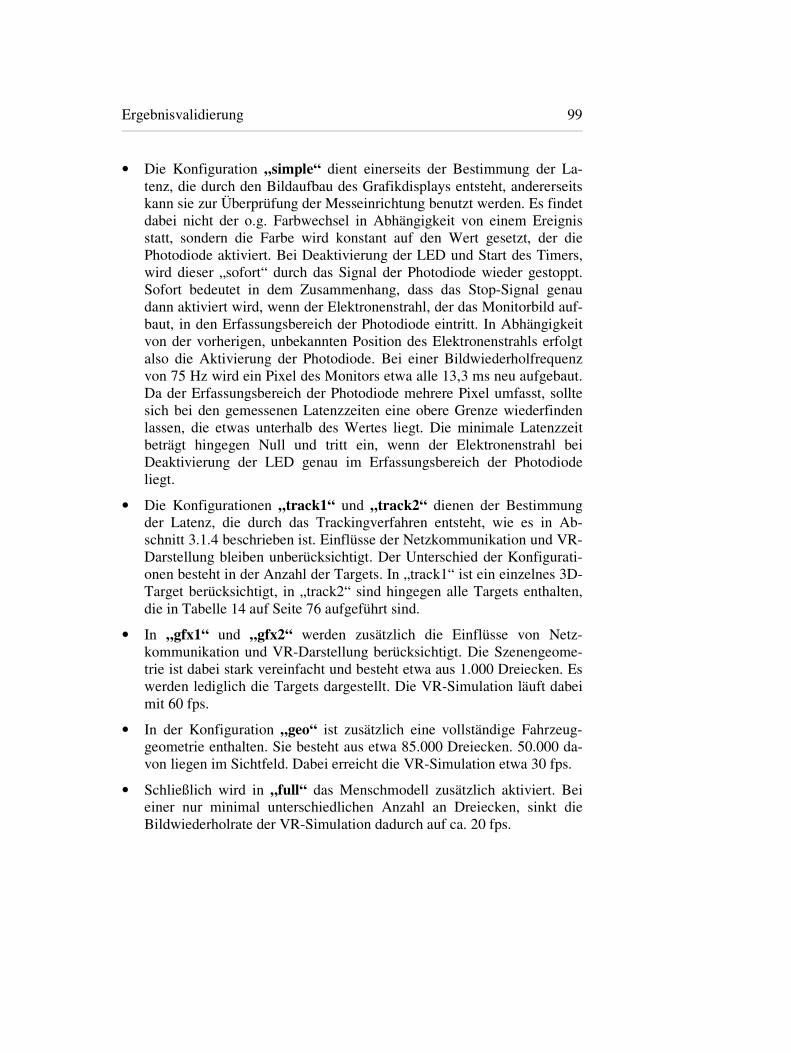
Ergebnisvalidierung 99
• Die Konfiguration „simple“ dient einerseits der Bestimmung der La-tenz, die durch den Bildaufbau des Grafikdisplays entsteht, andererseits kann sie zur Überprüfung der Messeinrichtung benutzt werden. Es findet dabei nicht der o.g. Farbwechsel in Abhängigkeit von einem Ereignis statt, sondern die Farbe wird konstant auf den Wert gesetzt, der die Photodiode aktiviert. Bei Deaktivierung der LED und Start des Timers, wird dieser „sofort“ durch das Signal der Photodiode wieder gestoppt. Sofort bedeutet in dem Zusammenhang, dass das Stop-Signal genau dann aktiviert wird, wenn der Elektronenstrahl, der das Monitorbild auf-baut, in den Erfassungsbereich der Photodiode eintritt. In Abhängigkeit von der vorherigen, unbekannten Position des Elektronenstrahls erfolgt also die Aktivierung der Photodiode. Bei einer Bildwiederholfrequenz von 75 Hz wird ein Pixel des Monitors etwa alle 13,3 ms neu aufgebaut. Da der Erfassungsbereich der Photodiode mehrere Pixel umfasst, sollte sich bei den gemessenen Latenzzeiten eine obere Grenze wiederfinden lassen, die etwas unterhalb des Wertes liegt. Die minimale Latenzzeit beträgt hingegen Null und tritt ein, wenn der Elektronenstrahl bei Deaktivierung der LED genau im Erfassungsbereich der Photodiode liegt.
• Die Konfigurationen „track1“ und „track2“ dienen der Bestimmung der Latenz, die durch das Trackingverfahren entsteht, wie es in Ab-schnitt 3.1.4 beschrieben ist. Einflüsse der Netzkommunikation und VR-Darstellung bleiben unberücksichtigt. Der Unterschied der Konfigurati-onen besteht in der Anzahl der Targets. In „track1“ ist ein einzelnes 3D-Target berücksichtigt, in „track2“ sind hingegen alle Targets enthalten, die in Tabelle 14 auf Seite 76 aufgeführt sind.
• In „gfx1“ und „gfx2“ werden zusätzlich die Einflüsse von Netz-kommunikation und VR-Darstellung berücksichtigt. Die Szenengeome-trie ist dabei stark vereinfacht und besteht etwa aus 1.000 Dreiecken. Es werden lediglich die Targets dargestellt. Die VR-Simulation läuft dabei mit 60 fps.
• In der Konfiguration „geo“ ist zusätzlich eine vollständige Fahrzeug-geometrie enthalten. Sie besteht aus etwa 85.000 Dreiecken. 50.000 da-von liegen im Sichtfeld. Dabei erreicht die VR-Simulation etwa 30 fps.
• Schließlich wird in „full“ das Menschmodell zusätzlich aktiviert. Bei einer nur minimal unterschiedlichen Anzahl an Dreiecken, sinkt die Bildwiederholrate der VR-Simulation dadurch auf ca. 20 fps.
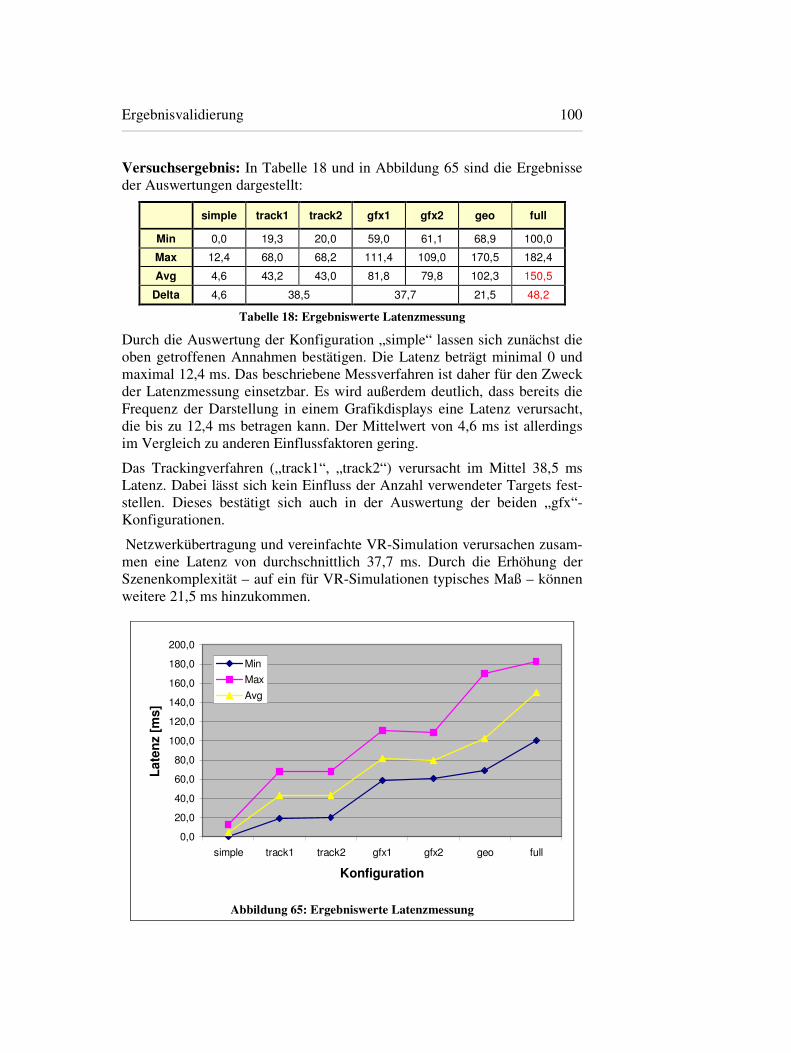
Ergebnisvalidierung 100
Versuchsergebnis: In Tabelle 18 und in Abbildung 65 sind die Ergebnisse der Auswertungen dargestellt:
simple track1 track2 gfx1 gfx2 geo full
Min 0,0 19,3 20,0 59,0 61,1 68,9 100,0
Max 12,4 68,0 68,2 111,4 109,0 170,5 182,4
Avg 4,6 43,2 43,0 81,8 79,8 102,3 150,5
Delta 4,6 38,5 37,7 21,5 48,2
Tabelle 18: Ergebniswerte Latenzmessung
Durch die Auswertung der Konfiguration „simple“ lassen sich zunächst die oben getroffenen Annahmen bestätigen. Die Latenz beträgt minimal 0 und maximal 12,4 ms. Das beschriebene Messverfahren ist daher für den Zweck der Latenzmessung einsetzbar. Es wird außerdem deutlich, dass bereits die Frequenz der Darstellung in einem Grafikdisplays eine Latenz verursacht, die bis zu 12,4 ms betragen kann. Der Mittelwert von 4,6 ms ist allerdings im Vergleich zu anderen Einflussfaktoren gering.
Das Trackingverfahren („track1“, „track2“) verursacht im Mittel 38,5 ms Latenz. Dabei lässt sich kein Einfluss der Anzahl verwendeter Targets fest-stellen. Dieses bestätigt sich auch in der Auswertung der beiden „gfx“-Konfigurationen.
Netzwerkübertragung und vereinfachte VR-Simulation verursachen zusam-men eine Latenz von durchschnittlich 37,7 ms. Durch die Erhöhung der Szenenkomplexität – auf ein für VR-Simulationen typisches Maß – können weitere 21,5 ms hinzukommen.
0,0
20,0
40,0
60,0
80,0
100,0
120,0
140,0
160,0
180,0
200,0
simple track1 track2 gfx1 gfx2 geo full
Konfiguration
Late
nz [m
s]
MinMaxAvg
Abbildung 65: Ergebniswerte Latenzmessung
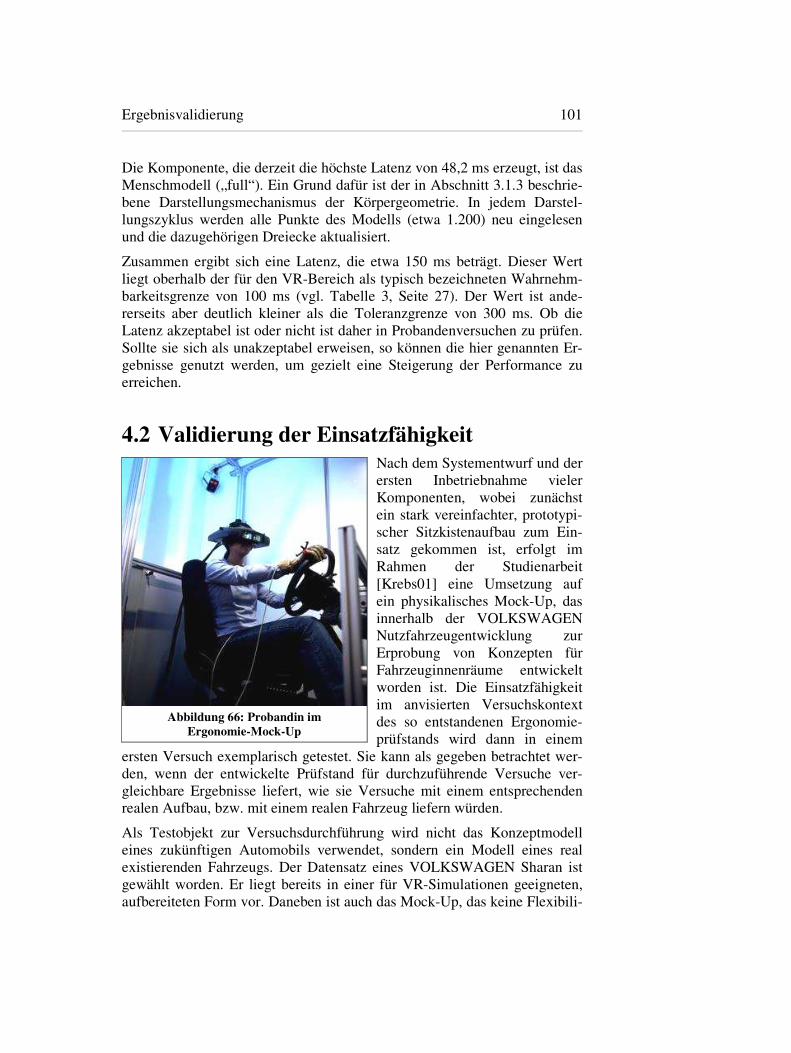
Ergebnisvalidierung 101
Die Komponente, die derzeit die höchste Latenz von 48,2 ms erzeugt, ist das Menschmodell („full“). Ein Grund dafür ist der in Abschnitt 3.1.3 beschrie-bene Darstellungsmechanismus der Körpergeometrie. In jedem Darstel-lungszyklus werden alle Punkte des Modells (etwa 1.200) neu eingelesen und die dazugehörigen Dreiecke aktualisiert.
Zusammen ergibt sich eine Latenz, die etwa 150 ms beträgt. Dieser Wert liegt oberhalb der für den VR-Bereich als typisch bezeichneten Wahrnehm-barkeitsgrenze von 100 ms (vgl. Tabelle 3, Seite 27). Der Wert ist ande-rerseits aber deutlich kleiner als die Toleranzgrenze von 300 ms. Ob die Latenz akzeptabel ist oder nicht ist daher in Probandenversuchen zu prüfen. Sollte sie sich als unakzeptabel erweisen, so können die hier genannten Er-gebnisse genutzt werden, um gezielt eine Steigerung der Performance zu erreichen.
4.2 Validierung der Einsatzfähigkeit Nach dem Systementwurf und der ersten Inbetriebnahme vieler Komponenten, wobei zunächst ein stark vereinfachter, prototypi-scher Sitzkistenaufbau zum Ein-satz gekommen ist, erfolgt im Rahmen der Studienarbeit [Krebs01] eine Umsetzung auf ein physikalisches Mock-Up, das innerhalb der VOLKSWAGEN Nutzfahrzeugentwicklung zur Erprobung von Konzepten für Fahrzeuginnenräume entwickelt worden ist. Die Einsatzfähigkeit im anvisierten Versuchskontext des so entstandenen Ergonomie-prüfstands wird dann in einem
ersten Versuch exemplarisch getestet. Sie kann als gegeben betrachtet wer-den, wenn der entwickelte Prüfstand für durchzuführende Versuche ver-gleichbare Ergebnisse liefert, wie sie Versuche mit einem entsprechenden realen Aufbau, bzw. mit einem realen Fahrzeug liefern würden.
Als Testobjekt zur Versuchsdurchführung wird nicht das Konzeptmodell eines zukünftigen Automobils verwendet, sondern ein Modell eines real existierenden Fahrzeugs. Der Datensatz eines VOLKSWAGEN Sharan ist gewählt worden. Er liegt bereits in einer für VR-Simulationen geeigneten, aufbereiteten Form vor. Daneben ist auch das Mock-Up, das keine Flexibili-
Abbildung 66: Probandin im Ergonomie-Mock-Up

Ergebnisvalidierung 102
tät im Sinne einer variablen Sitzkiste besitzt, an das Modell anzupassen. Ein dem Datensatz entsprechender, realer Sharan ist ebenfalls vorhanden. Das Fahrzeugmodell wird in eine fiktive Landschaftsszene eingebettet. Die Si-mulation erreicht dabei eine Bildwiederholrate von ca. 30 fps. Auf die Durchführung einer Fahrsimulation und die Berücksichtigung von Finger-bewegungen, bei der Darstellung des Menschmodells, muss verzichtet wer-den. Die entsprechenden Komponenten stehen zum Zeitpunkt der Versuchs-durchführung nicht zur Verfügung.
Eine Gruppe bestehend aus 15 Versuchspersonen wird dann ausgewählt, um den Innenraum des virtuellen Modells mit dem im realen Fahrzeug zu ver-gleichen und hinsichtlich der Übereinstimmung charakteristischer Punkte zu beurteilen. Bei der Auswahl der Personen wurde darauf geachtet, ein mög-lichst breites Perzentilspektrum und unterschiedliche anthropometrische Eigenschaften abzudecken. Die Gruppe setzt sich aus 2 weiblichen und 13 männlichen Personen zusammen. Es sind Körpergrößen von 1,53m bis 1,98m vertreten. Im Vorfeld hat, wie in Abschnitt 3.1.3 auf Seite 66 beschrieben, eine anthropometrische Vermessung stattgefunden, so dass jede Person während der Simulation durch ein entsprechend angepasstes Menschmodell dargestellt werden kann.
Allgemeine Innenraumgröße Breite der A-Säulen Kopffreiheit Breite der B-Säulen
Höhe der Gürtellinie Greifentfernung zum Radio Sichtfeld nach vorn Greifentfernung zur Dachkonsole
Sitzhöhe gegenüber der Fahrbahn Abstand zur linken Türverkleidung Lenkradposition Greifentfernung zum Lichtschalter
Sicht auf das Kombiinstrument Neigung der Windschutzscheibe
Greifentfernung zum Lautsprecher vorne links in der Instrumententafel
Tabelle 19: Vergleichskriterien virtuelles / reales Interieur
Zu Beginn der Versuchsdurchführung bekommt die jeweilige Person zu-nächst die Gelegenheit, sich mit der virtuellen Umgebung vertraut zu machen. Im Anschluss daran soll sie sich die in Tabelle 19 aufgeführten 15 Kriterien des virtuellen Innenraums möglichst gut einzuprägen. In Abbildung 67 sind einige Momentaufnahmen der Versuchsdurchführung aus der Sicht der Probanden dargestellt. Ein Betreuer führt dann die jewei-lige Person zum realen Sharan und fordert sie dort auf, eine Bewertung der Übereinstimmung bezüglich der 15 Kriterien vorzunehmen, die als „gar nicht“, „gering“, „mittel“ oder „sehr hoch“ eingestuft werden können. Daneben war es auch möglich, „kein Urteil“ abzugeben.
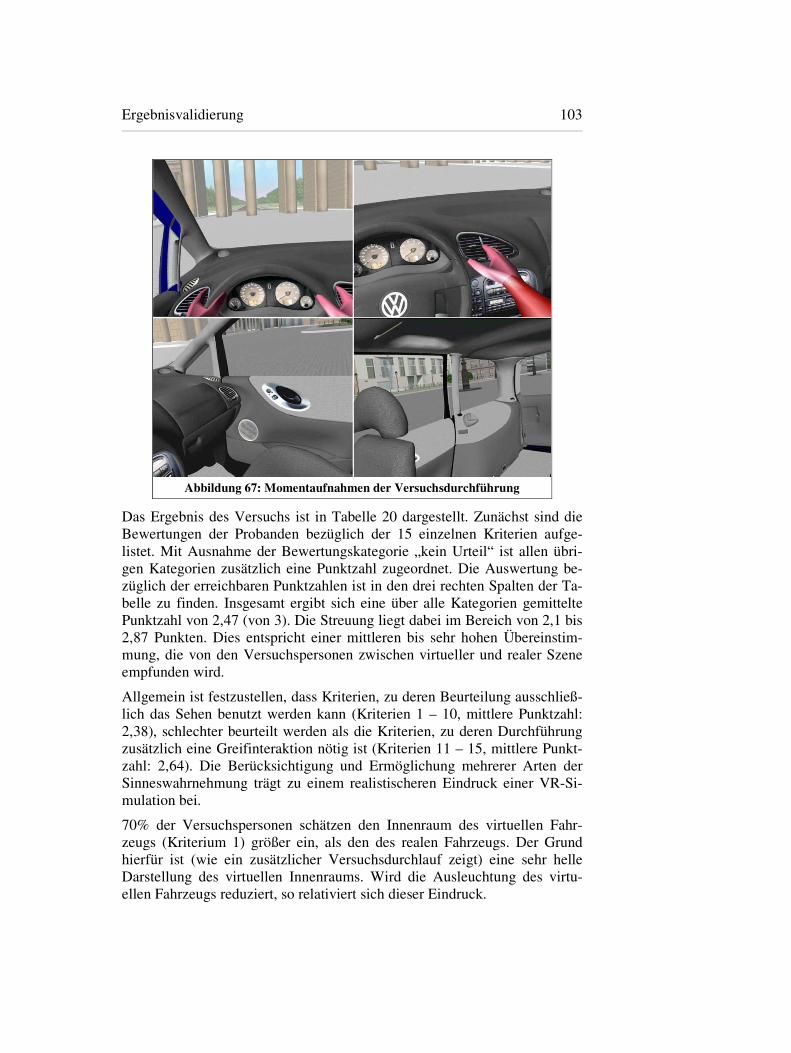
Ergebnisvalidierung 103
Abbildung 67: Momentaufnahmen der Versuchsdurchführung
Das Ergebnis des Versuchs ist in Tabelle 20 dargestellt. Zunächst sind die Bewertungen der Probanden bezüglich der 15 einzelnen Kriterien aufge-listet. Mit Ausnahme der Bewertungskategorie „kein Urteil“ ist allen übri-gen Kategorien zusätzlich eine Punktzahl zugeordnet. Die Auswertung be-züglich der erreichbaren Punktzahlen ist in den drei rechten Spalten der Ta-belle zu finden. Insgesamt ergibt sich eine über alle Kategorien gemittelte Punktzahl von 2,47 (von 3). Die Streuung liegt dabei im Bereich von 2,1 bis 2,87 Punkten. Dies entspricht einer mittleren bis sehr hohen Übereinstim-mung, die von den Versuchspersonen zwischen virtueller und realer Szene empfunden wird.
Allgemein ist festzustellen, dass Kriterien, zu deren Beurteilung ausschließ-lich das Sehen benutzt werden kann (Kriterien 1 – 10, mittlere Punktzahl: 2,38), schlechter beurteilt werden als die Kriterien, zu deren Durchführung zusätzlich eine Greifinteraktion nötig ist (Kriterien 11 – 15, mittlere Punkt-zahl: 2,64). Die Berücksichtigung und Ermöglichung mehrerer Arten der Sinneswahrnehmung trägt zu einem realistischeren Eindruck einer VR-Si-mulation bei.
70% der Versuchspersonen schätzen den Innenraum des virtuellen Fahr-zeugs (Kriterium 1) größer ein, als den des realen Fahrzeugs. Der Grund hierfür ist (wie ein zusätzlicher Versuchsdurchlauf zeigt) eine sehr helle Darstellung des virtuellen Innenraums. Wird die Ausleuchtung des virtu-ellen Fahrzeugs reduziert, so relativiert sich dieser Eindruck.
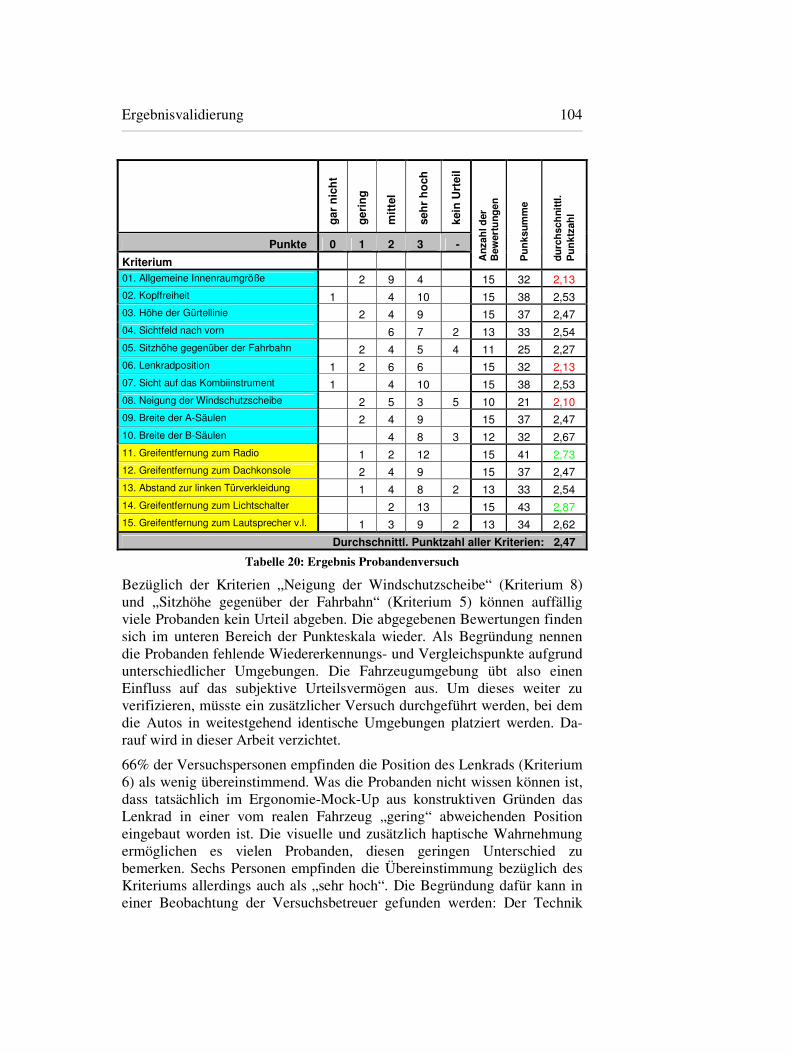
Ergebnisvalidierung 104
gar
nich
t
geri
ng
mitt
el
sehr
hoc
h
kein
Urt
eil
Punkte 0 1 2 3 -
Kriterium Anz
ahl d
er
Bew
ertu
ngen
Pun
ksum
me
durc
hsch
nitt
l. P
unkt
zahl
01. Allgemeine Innenraumgröße 2 9 4 15 32 2,13 02. Kopffreiheit 1 4 10 15 38 2,53 03. Höhe der Gürtellinie 2 4 9 15 37 2,47 04. Sichtfeld nach vorn 6 7 2 13 33 2,54 05. Sitzhöhe gegenüber der Fahrbahn 2 4 5 4 11 25 2,27 06. Lenkradposition 1 2 6 6 15 32 2,13 07. Sicht auf das Kombiinstrument 1 4 10 15 38 2,53 08. Neigung der Windschutzscheibe 2 5 3 5 10 21 2,10 09. Breite der A-Säulen 2 4 9 15 37 2,47 10. Breite der B-Säulen 4 8 3 12 32 2,67 11. Greifentfernung zum Radio 1 2 12 15 41 2,73 12. Greifentfernung zum Dachkonsole 2 4 9 15 37 2,47 13. Abstand zur linken Türverkleidung 1 4 8 2 13 33 2,54 14. Greifentfernung zum Lichtschalter 2 13 15 43 2,87 15. Greifentfernung zum Lautsprecher v.l. 1 3 9 2 13 34 2,62
Durchschnittl. Punktzahl aller Kriterien: 2,47
Tabelle 20: Ergebnis Probandenversuch
Bezüglich der Kriterien „Neigung der Windschutzscheibe“ (Kriterium 8) und „Sitzhöhe gegenüber der Fahrbahn“ (Kriterium 5) können auffällig viele Probanden kein Urteil abgeben. Die abgegebenen Bewertungen finden sich im unteren Bereich der Punkteskala wieder. Als Begründung nennen die Probanden fehlende Wiedererkennungs- und Vergleichspunkte aufgrund unterschiedlicher Umgebungen. Die Fahrzeugumgebung übt also einen Einfluss auf das subjektive Urteilsvermögen aus. Um dieses weiter zu verifizieren, müsste ein zusätzlicher Versuch durchgeführt werden, bei dem die Autos in weitestgehend identische Umgebungen platziert werden. Da-rauf wird in dieser Arbeit verzichtet.
66% der Versuchspersonen empfinden die Position des Lenkrads (Kriterium 6) als wenig übereinstimmend. Was die Probanden nicht wissen können ist, dass tatsächlich im Ergonomie-Mock-Up aus konstruktiven Gründen das Lenkrad in einer vom realen Fahrzeug „gering“ abweichenden Position eingebaut worden ist. Die visuelle und zusätzlich haptische Wahrnehmung ermöglichen es vielen Probanden, diesen geringen Unterschied zu bemerken. Sechs Personen empfinden die Übereinstimmung bezüglich des Kriteriums allerdings auch als „sehr hoch“. Die Begründung dafür kann in einer Beobachtung der Versuchsbetreuer gefunden werden: Der Technik

Ergebnisvalidierung 105
gegenüber sehr aufgeschlossene Personen sind von der virtuellen Darstellung des Modells auffallend beeindruckt und weisen die Tendenz auf, pauschal die Übereinstimmung der einzelnen Punkte als „sehr hoch“ zu beurteilen. Zur Vermeidung derartiger pauschaler Überbewertungen gibt der Autor für die zukünftige Durchführung ähnlicher Versuche folgende Empfehlung: Es müssen bewusst auch Kriterien zur Bewertung angeboten werden, die sich im realen und virtuellen Modell unterscheiden. Werden die Probanden im Vorfeld darauf hingewiesen, müssen sie ihre Entscheidungen sorgfältiger prüfen. Ein virtuelles Modell soll sich nicht nur dadurch auszeichnen, das reale Modell möglichst gut wiederzugeben, sondern es muss auch auf Unterschiede klar erkennbar hinweisen.
Eine Abhängigkeit der Bewertungen von bestimmten anthropometrischen Eigenschaften ist nicht festgestellt worden. Weitere Testergebnisse sind in [Krebs01] dargestellt.

106
5 Diskussion
Kapitel 5
Diskussion
Dieses Kapitel behandelt die Diskussion der Ergebnisse dieser Arbeit. Es werden Vor- und Nachteile, sowie derzeitige Schwächen der gewählten Re-alisierung genannt. Außerdem vergleicht der Autor die erzielten Ergebnisse mit den Ergebnissen anderer Arbeiten.
Zur Diskussion einzelner Ergebnisse wird auch noch einmal der im vorigen Kapitel in Abschnitt 4.2 ab Seite 101 beschriebene Probandenversuch herangezogen. Während der Versuchsdurchführung sind die Probanden von den Betreuern ermuntert worden Kritik zu äußern. In der folgenden Enume-ration sind ihre Bemerkungen festgehalten, so dass in der anschließenden Diskussion darauf Bezug genommen werden kann.
1. Die Finger des Menschmodells sind nicht beweglich. Dieses wird von vier Testteilnehmern als störend empfunden.
2. Die taktile Rückmeldung beim Erreichen virtueller Geometrien ist nicht vorhanden, aber besonders notwendig für einen realistischen Eindruck.
3. Zeitverzug zwischen Aktionen der Versuchsperson und der visuellen Rückkopplung.
4. Sehr kleines Sichtfeld im HMD.
5. Durch eine helle Ausleuchtung des virtuellen Modellinnenraumes wird dieser größer als der Innenraum des realen Fahrzeugs empfunden.
6. Greifbewegungen sind wichtig für eine Entfernungs- und Größenbeur-teilung.
7. Die nicht den Bewegungen der Versuchsperson folgenden Beine des Menschmodells werden bemerkt, jedoch nicht als störend empfunden.
Diskussion 107
5.1 Haptisches Display (Sitzkiste) Der Ansatz zur Bereitstellung haptischer Wahrnehmung in der virtuellen Umgebung, der in dieser Arbeit gewählt worden ist, ist mit dem von Schie-fele vergleichbar. Schiefele entwickelt in [Schi00] das Konzept der Luft-fahrt-Sitzkiste zur Realisierung einer virtuellen Cockpit- und Flugsimula-tion. Die Nutzbarkeit ist in verschiedenen Versuchen nachgewiesen worden. Der Autor beobachtet allerdings, dass rein virtuelle Bedienkomponenten, für die über die Sitzkiste kein taktiles Feedback zur Verfügung gestellt wird, große Probleme bei Benutzern verursachen. Sie können rein visuell nur schwer den Vollzug einer (Schalt-)Interaktion feststellen. Eine ähnliche Beobachtung macht auch Begault [Beg00, S. 160]. Er stellt fest, dass sich die Benutzerakzeptanz durch ein zusätzliches akustisches Feedback erhöhen lässt (s.u.). Dazu kann z.B. die Betätigung eines virtuellen Schalters mit einem entsprechenden Klicklaut verbunden werden.
Allgemeiner wird die Methode virtuelle Umgebungen mit physikalischen Elementen „anzureichern“ in [Ins01] und [Lok02] erforscht. Insko spricht in diesem Zusammenhang von passiver Haptik. Er tätigt speziell die folgenden zwei Feststellungen:
• Durch passive Haptik lässt sich ein höherer Immersionsgrad erzielen: Während einer VR-Simulation werden 60 Personen damit konfrontiert, am Rand eines virtuellen Abgrunds zu stehen. Die Probanden können den Rand des Abgrunds zunächst nur über einen HMD visuell wahrneh-men. In einer zweiten Versuchsreihe stehen sie außerdem auf einer rea-len Erhöhung, über die der Rand zusätzlich betont wird. Die Probanden erleben den Abgrund während der Durchführung der zweiten Versuchs-reihe wesentlich realistischer. Dies bestätigt sich einerseits in den Be-richten der Probanden. Andererseits können auch stärkere Änderungen ihrer Herzfrequenz und Hautleitfähigkeit gemessen werden, als bei je-nem Versuch, der ohne Verwendung passiver Haptik durchgeführt wor-den ist.
• Durch passive Haptik lässt sich die Ausführungsperformanz für be-stimmte Aufgaben steigern: In einer zweiten Studie testet Insko die Per-formanz von Testpersonen bei der Durchführung einer Navigationsauf-gabe. Die Probanden müssen sich dabei mit verbundenen Augen durch ein Labyrinth bewegen. Über ein HMD wird ihnen während einer Lern-phase das Labyrinth in einer virtuellen Umgebung präsentiert. Der einen Hälfte der Probanden wird die VR-Simulation lediglich visuell darge-boten und Kollisionen mit den virtuellen Wänden akustisch signalisiert. Der anderen Hälfte steht zusätzlich ein vereinfachtes, reales Modell des Labyrinths zur Verfügung. Insko stellt fest, dass von den Personen, die während der Lernphase das Haptikmodell benutzen konnten, später die Navigationsaufgabe schneller ausgeführt worden ist.
Diskussion 108
Aus den genannten Ergebnissen folgere ich: Der Sitzkistenaufbau des Ergo-nomie-Mock-Ups kann im Vergleich zum Aufbau eines echten Fahrzeugin-nenraums in vereinfachter Form stattfinden, es sollten aber möglichst kom-plett alle Elemente darin enthalten sein, mit denen ein Benutzer interagieren kann. Rein virtuelle Bedienelemente sind nach Möglichkeit zu vermeiden.
Es ist in dem Zusammenhang auch zu beachten, dass durch die Verwendung rein virtueller Bedienelemente erhöhte Anforderungen an eine VR-Simula-tion entstehen. Die Betätigung dieser Elemente muss z.B. über eine Kolli-sionserkennung feststellgestellt werden [Zac94, Zac02]. Beispielsweise kann eine Kollision von Zeigefinger- und Schaltergeometrie einen entsprechenden virtuellen Schalter aktivieren. Durch die Verwendung vieler solcher Kollisionsobjekte lässt sich die Ausführungsgeschwindigkeit einer Applikation merkbar negativ beeinflussen.
Der Forderung nach einem möglichst vollständigen Sitzkistenaufbau stehen die folgenden Punkte gegenüber:
• In sehr frühen Phasen einer Fahrzeugentwicklung ist ein vollständi-ger Aufbau i.a. nicht möglich.
• Durch einen sehr komplexen und vollständigen Aufbau geht die Flexibilität verloren, die durch die Verwendung virtueller Methoden erzielt werden sollte.
• Ein vollständiger Aufbau ist zeit- und kostenintensiv. Es entstehen die Nachteile, die es durch den Einsatz des Ergonomie-Mock-Ups zu vermeiden gilt.
• Speziell die Verwendung eines optischen Trackingsystems wird er-schwert, wenn der Sitzkistenaufbau sehr komplex ist und viele Ver-deckungen auftreten können.
Für einen Sitzkistenaufbau ist daher stets ein geeigneter Kompromiss zu finden. Zunächst ist es naheliegend, die ständig zu benutzenden Kompo-nenten (Lenkrad, Pedalerie, Schaltung, usw.) in den Aufbau zu integrieren. Auch die für die Durchführung der jeweiligen Ergonomieanalyse erforderli-chen Komponenten sind diesbezüglich wichtig. Der Einsatz weiterer Komponenten ist dagegen von Fall zu Fall zu entscheiden.
In Abschnitt 6.2.1 ab Seite 121 wird ein System vorgestellt, das ebenfalls den Innenraum eines Fahrzeugs wiedergibt und gleichzeitig eine hohe Fle-xibilität und Vollständigkeit zur Verfügung stellen kann.
Durch Punkt 2 der o.g. Enumeration wird bestätigt, dass passive Haptik sehr wichtig ist, um einen Fahrzeuginnenraum möglichst realistisch wahrnehmen zu können. Durch die „Anreicherung“ der virtuellen Umgebung mit realen Komponenten, ist das Ergonomie-Mock-Up dem Bereich Augmented Virtu-ality zuzuordnen (vgl. Abschnitt 2.1.1 auf Seite 17).
Diskussion 109
5.2 Grafik- und Audiodisplay Beim Entwurf des Ergonomie-Mock-Ups und der Auswahl von Kompo-nenten zur Realisierung steht das Kriterium Benutzerfreundlichkeit im Mit-telpunkt. Es soll kein Prüfstand aufgebaut werden, der alle technischen An-forderungen ideal erfüllt, aber auf die Ablehnung der späteren Benutzer stößt. Diese Forderung nach hoher Systemergonomie wird derzeit am we-nigsten von der Komponente zur Grafikausgabe – dem HMD – erfüllt. Als Gründe dafür können Größe, Gewicht, Verkabelung, kleines Sehfeld und ein futuristisches Aussehen aufgeführt werden.
Aus den in Abschnitt 3.1.2 auf Seite 63 genann-ten Gründen wird für die speziellen Anforde-rungen dieser Arbeit trotzdem ein HMD zum Zweck der Grafikausgabe gewählt. Dabei ist stets nur das dort beschriebene Modell einge-setzt worden. Inzwischen gibt es leis-tungsfähigere Varianten, und auch zukünftig ist mit weiteren Verbesserungen zu rechnen. Ein Beispiel einer relativ neuen Entwicklung mit höherem Tragekomfort ist in Abbildung 68
dargestellt [W3MVIS]. Da das HMD lediglich der Grafik- und Soundausgabe dient und keine anderen Aufgaben erfüllt, kann es zukünftig nahezu beliebig durch andere Modelle ersetzt werden, die die gleichen Funktionen (besser) erfüllen. Es ist daher ratsam, die technische Weiterentwicklung der Geräte zu beobachten.
Die Ergonomie von HMD-Systemen ist Thema vieler Arbeiten. Nachfol-gend werden einige aufgeführt:
Referenzwerte für FOV-Größen von Datenhelmen stellen die Werte des menschlichen Sehfeldes dar (ca. 170 – 180° horizontal und 110 – 120° vertikal, vgl. Abschnitt 2.1.2 auf Seite 17). Arthur untersucht in [Art00] die Auswirkungen unterschiedlicher FOV-Größen auf die Ausführungsperfor-manz von Benutzern, bei der Durchführung verschiedener Aufgaben. Das Ergebnis zeigt, dass im Vergleich zu einem horizontalen Sehfeld von 176° ein kleines FOV von 48° zu einem Verlust an Performanz führt, der zwi-schen 24 – 31% liegen kann. Ein mittelgroßes FOV von 112° bedingt Ein-bußen zwischen 12 – 23%. Bei einer gegebenen, festen FOV-Größe ist da-bei die Stärke des Verlusts von der jeweiligen Aufgabe abhängig. Aufgaben mit hoher Dynamik, bei denen der Benutzer seinen ganzen Körper und nicht nur den Kopf bewegen muss, führen zu den höchsten Performanzeinbußen.
Punkt 4 der obigen Enumeration verdeutlicht, dass die Effekte, die durch ein kleines Sehfeld entstehen, auch von den Benutzern des Ergonomie-Mock-Ups bemerkbar sind.
Abbildung 68: RetinaDisplay von microvision [W3MVIS]

Diskussion 110
Neveu, Blackmon und Stark zeigen verschiedenen Testpersonen einen ca. zweistündigen Film in einem HMD [NBS98]. Vor und nach der Betrachtung werden verschiedene Sehparameter, insbesondere die Latenz der Akkom-modation, gemessen und protokolliert. Zur Kontrolle wird den Personen der Film auch auf einem herkömmlichen Fernsehgerät gezeigt und ebenfalls der Einfluss auf die Sehparameter notiert. Im Vergleich zur Fernsehbetrachtung ist bei Benutzung des HMDs nur ein geringer Anstieg an Latenz festbestell-bar. Die Stärke des Anstiegs steht dabei in Relation zum Alter der Ver-suchspersonen.
Bauer, Deisinger und Riedel lassen in der Arbeit [BDR96] zwölf Testper-sonen bei der Benutzung eines HMDs eine ca. einstündige Sequenz an ver-schiedenen Aufgaben abarbeiten. Davor und danach wird die Konzentrati-onsfähigkeit der Probanden kontrolliert. Durch die Benutzung des HMDs ist keine signifikante Beeinflussung festgestellt worden.
5.3 Tracking Aus den in Abschnitt 3.1.4 ab Seite 69 aufgeführten Gründen ist für die Zwecke dieser Arbeit ein optisches Trackingsystem ausgewählt worden. Es hat sich herausgestellt, dass sich damit der Oberkörperbereich von Proban-den robust erfassen lässt. Dies gilt für den Einsatz von drei Messkameras und für die durch die Sitzkisten definierten Versuchsvolumen. Alle Sitzkis-ten, die bisher im Rahmen dieser Arbeit zum Einsatz gekommen sind (vgl. Abbildung 39 auf Seite 62), besitzen einen speziellen „offenen“ Aufbau, der größtenteils die verdeckungsfreie Erfassung der Targets ermöglicht. Speziell die besonders wichtige Erfassung des Kopftargets ist durch diese Bauweise gewährleistet.
Die Erfassung von Ein- und Ausstiegsuntersuchungen und die des komplet-ten Körpers sind hingegen mit der gegebenen Kameraanzahl nicht zweckmäßig durchführbar. Für eine derartige Erfassung ist keine geeignete Systemkonfiguration gefunden worden. Verdeckungen rufen Störeffekte hervor, die deutlich in einer VR-Simulation wahrnehmbar sind. Die eben genannten Zwecke erfordern daher die Erhöhung der Kamerazahl.
Die bisherigen Testpersonen fühlen sich durch das Anbringen von Targets nicht gestört (zumindest hat sich keine Person diesbezüglich geäußert, siehe obige Enumeration). Allerdings ist die derzeitige Beschränkung auf vier gleichzeitig erfassbare 6D-Targets kritisch. Dies gilt insbesondere, wenn zukünftig der komplette Körper erfasst werden soll. Das in dieser Arbeit verwendete System besitzt allerdings bereits ein Nachfolgesystem, das diese Einschränkung nicht mehr besitzt [W3Art].
Das optische Trackingsystem erfasst die Position und Orientierung vom Kopf des Benutzers. Aus den ermittelten Koordinaten werden Blickpara-
Diskussion 111
meter abgeleitet, aus denen schließlich die Sicht auf die virtuelle Szene be-rechnet wird. Es handelt sich dabei lediglich um eine Näherung an die tat-sächlichen Blickparameter eines Probanden. Holloway beschreibt in [Hol95a, S. 61] Fehlerquellen, die bei dem genannten Modell zur Näherung der Benutzersicht einen Einfluss besitzen:
• Kalibrierfehler: Die erforderliche Transformation, um die ermittel-ten Kopfkoordinaten in Augenkoordinaten umzurechnen, wird in ei-ner Kalibrierprozedur bestimmt. Da nach [Hol95a] kein Verfahren dazu perfekt ist, entstehen durch die Umrechnung Fehler.
• Vernachlässigung der Augenbewegung: Wird kein System zum Augentracking verwendet, entstehen durch die Bewegungen der Au-gen Fehler. Selbst wenn ein solches System verwendet wird, bleibt durch technisch bedingte Unvollkommenheiten der Erfassung ein Restfehler bestehen.
• Bewegungen des HMDs (z.B. Verrutschen): Jeder Benutzer trägt das Head-Mounted Display leicht unterschiedlich auf dem Kopf und auch während eines Versuchs kann es verrutschen. Die Betrach-tungspunkte ändern sich dadurch relativ zu den dargestellten Bildern im HMD. Durch diese Änderungen entstehen Fehler.
Um den Fehler zu verringern, der durch die Realisierung des genannten „Blickmodells“ entsteht, kann beispielsweise Augentracking zum Einsatz kommen. Dazu ist die Beschaffung einer Hardwarekomponente erforderlich, wie sie in Abschnitt 2.7.4 auf Seite 48 beschrieben ist. Es ist allerdings abzuwägen, ob der zusätzliche Hardwareaufwand zu Gunsten einer höheren Genauigkeit gerechtfertigt ist. Holloway weist in [Hol95a] und [Hol95b] darauf hin, dass bei einer exakten Kalibrierung der Sichtparameter der entstehende Fehler durch Vernachlässigung der Augenrotation im Vergleich zu anderen Fehlerquellen (z.B. Latenz, vgl. Tabelle 12 auf Seite 56) gering ist. Eine exakte Kalibrierung bedeutet in diesem Zusammenhang die individuelle Berücksichtigung des Augenabstands. Die Projektionszentren der darzustellenden Bilder müssen so berechnet werden, dass sie genau in den Mittelpunkten der Augen liegen.
Neben der Kalibrierung der Sichtparameter müssen vor jeder Versuchs-durchführung auch alle Targets kalibriert werden, über die das Menschmo-dell gesteuert wird. Dies ist erforderlich, da jeder Proband die Targets auf leicht unterschiedliche Weise anlegt. Wird die Kalibrierung vernachlässigt, ist während der VR-Simulation keine genaue Steuerung des Menschmodells möglich.
Ein Ansatz zur Realisierung der Kalibrierung berücksichtigt die Targets während der anthropometrischen Vermessung. So kann während dieser Vermessung die Position der Targets auf dem Körper der Probanden mit
Diskussion 112
Methoden der digitalen Bildverarbeitung bestimmt werden. Voraussetzung ist, dass die Probanden die Targets bereits während der anthropometrischen Vermessung tragen und dass die Versuchsdurchführung unmittelbar im Anschluss daran stattfindet (um ein „Verrutschen“ der Targets zu vermei-den). Dieser Ansatz bietet einen hohen Automatisierungsgrad bei der Kali-brierung, bindet aber Ergonomieanalysen zeitlich (und räumlich) an die Durchführung der anthropometrischen Vermessungen. Der Ansatz ist daher nicht realisiert worden.
Der Autor hat hingegen das in Abschnitt 3.1.4.2 auf Seite 75 beschriebene Verfahren implementiert, das eine Justierung der Targets zur Laufzeit er-möglicht. Die anthropometrische Vermessungen und die Ergonomieanaly-sen sind unabhängig voneinander ausführbar. Der Nachteil der gewählten Realisierung besteht im manuellen Aufwand, der für die Kalibrierung erfor-derlich ist.
Für die Erfassung von Fingerbewegungen ist der Einsatz von zwei Daten-handschuhen geplant (siehe Abschnitt 2.8 auf Seite 52). Die Verwendbarkeit kabelloser Datenhandschuhe ist zu prüfen. Eine „Verkabelung der Hände“ kann als sehr störend empfunden werden [Zimm00]. Die Kopplung der beiden Erfassungseinheiten mit dem Menschmodell ist bisher im Rahmen dieser Arbeit nicht durchgeführt worden.
5.4 3D-Menschmodell Der Integration eines Menschmodells in die VR-Simulation kommt in dieser Arbeit eine zentrale Bedeutung zu. Es ist offensichtlich, dass sich die Inter-aktion in einem Fahrzeuginnenraum äußerst schwierig gestaltet, wenn die visuelle Wahrnehmung des eigenen Körpers als Referenz fehlt (vgl. Ab-schnitt 3.1.3 auf Seite 69). In anderen Arbeiten ist oft eine Beschränkung auf Teilaspekte vorzufinden. In [Bei94] und [Schi00] werden beispielsweise nur die Hände eines Benutzers berücksichtigt. Für diese Arbeit würde das bedeuten, dass der Anwender während der Benutzung des Ergonomie-Mock-Ups z.B. auf den Fahrersitz herabblicken kann und dort nicht seinen Unterkörper, sondern einen leeren Sitz sieht. Diese unnatürliche Art der visuellen Wahrnehmung des eigenen Körpers gilt es nach den Erkenntnissen des Autors durch den Einsatz eines Menschmodells zu vermeiden.
Die für diese Arbeit zur Verfügung stehende Ausbaustufe des optischen Trackingsystems (s.o.) beschränkt die Nachführung des Menschmodells auf den Oberkörperbereich inklusive Arme und Hände. Diese Einschränkung ist von Probanden bemerkbar, wie es Punkt 7 der obigen Enumeration verdeut-licht.
Wesentlich gravierender und störender äußern sich aber Effekte, die durch die Nichtberücksichtigung der Fingerbewegungen entstehen (siehe Punkte 1

Diskussion 113
und 6 der Enumeration). Da die Kopplung von Datenhandschuhen mit dem Menschmodell bisher nicht durchgeführt worden ist (s.o.), werden die Fin-ger des Menschmodells unbeweglich, stets ausgestreckt dargestellt. Dies ist besonders bei Interaktionen im virtuellen Fahrzeuginnenraum störend. Möchte ein Proband z.B. einen Drehknopf am Radio bedienen, so nimmt er visuell, während er eine entsprechende Drehbewegung durchführt, seine Handgeometrie im ausgestreckten Zustand wahr. Er sieht sie in dem Fall zum großen Teil in das Radio „eintauchen“. Fingertracking sollte aus den genannten Gründen schnell berücksichtigt und die Kopplung mit dem Menschmodell realisiert werden.
5.5 Fahrsimulation Fahrsimulationen mit dem Ergonomie-Mock-Up setzen den Einbau entspre-chender Sensorikkomponenten in die zu verwendende Sitzkiste voraus. Über die Sensorik ist der aktuelle Zustand der Interaktionselemente (Lenk-rad, Pedalerie, Schaltung, usw.) erfassbar. Der Einbau aller dazu erforderli-chen Sensorikkomponenten in eine Sitzkiste ist aufwendig. Teilweise wer-den die originalen Serienteile genutzt. Sonst muss über Spezialkonstruktio-nen eine alternative Erfassung ermöglicht werden.
Eine Tendenz, die sich innerhalb der Automobilindustrie abzeichnet, kann zukünftig dazu benutzt werden, diesen Vorgang der Ausstattung einer Sitz-kiste mit Sensorikkomponenten zu vereinfachen. Reißenweber beschreibt diese Tendenz folgendermaßen [Rei98, S. 189]: „Bei Kraftfahrzeugen ist in den letzten Jahren ein deutlicher Trend hin zu immer stärkerem Einsatz von Steuerungs- und Regelungstechnik zu beobachten. Es gibt Motor- und Ge-triebesteuerungen, Antiblockiersystem (ABS), Antischlupfregelung (ASR) und mehrere Funktionen umfassende Fahrdynamikregelungen. Zwischen diesen Komponenten ist ein reger Datenaustausch unter Echtzeitbedingun-gen notwendig. Deshalb hat die in diesem Bereich sehr aktive Robert Bosch GmbH ein für diese Aufgaben optimales Bussystem, das Controller Area Network (CAN) entwickelt. CAN ist über den Fahrzeugbereich hinaus auch in industriellen Anwendungen längst verbreitet.“
Zukünftig kommt wie beschrieben in Automobilen immer häufiger Steue-rungs- und Regelungstechnik zum Einsatz. Immer mehr Fahrzeugkompo-nenten werden standardmäßig mit einem CAN-Bus ausgestattet. Ihr Zustand ist dann direkt über das CAN-Protokoll erfassbar. Es ist daher dann ggfs. nicht mehr erforderlich, spezielle Sensorikkomponenten für die Messdaten-erfassung zu konstruieren.
Die Messdatenerfassung liefert Basisdaten für eine Fahrsimulation. Die Fahrsimulation ist wie in Abschnitt 3.1.5 ab Seite 77 beschrieben realisiert worden. Sie wird dem Benutzer derzeit rein visuell präsentiert (ggfs. akus-

Diskussion 114
tisch, wenn entsprechende Audiokomponenten zur Verfügung stehen). Auf die Einbeziehung des vestibulären Systems ist bisher verzichtet worden. Die Problematik, die damit verbunden ist, wird nachfolgend erläutert.
Mourant und Thattacherry untersuchen in [MT00], ob Symptome der Simulatorkrankheit auftreten können, wenn bei einer virtuellen Fahrsimula-tion die vestibuläre Wahrnehmung unberücksichtigt bleibt. Insgesamt 30 Personen (15 Männer, 15 Frauen) im Alter zwischen 18 und 36 Jahren neh-men an dem Test teil. Durch simulierte Fahrten auf einer Autobahn, einer Landstraße und durch eine Stadt untersuchen die Autoren auch die Einflüsse verschiedener Fahrumgebungen. Bei den Probanden sind nach der Ver-suchsdurchführung Symptome der Simulatorkrankheit feststellbar. Dabei treten stärkere Effekte bei Frauen als bei Männern auf. Durch die höheren Fahrgeschwindigkeiten auf der Autobahn und der Landstraße sind dort im Vergleich zur „langsamen“ Stadtfahrt ebenfalls stärkere Effekte feststellbar.
Harris, Jenkin und Zikovitz beschreiben in den Arbeiten [HJZ99] und [HJZ00] ein Experiment zur Erarbeitung von Zusammenhängen zwischen visueller und vestibulärer Wahrnehmung. Eine Testperson wird dabei mit translatorischer Vorwärtsbewegung konfrontiert. Sie befindet sich auf einem Kart1, das in einem tunnelartigen Gangsystem von einem Operator vorwärts bewegt werden kann. Die Sicht der Person auf die reale Umgebung ist über ein HMD blockiert, so dass die Bewegung nur vestibulär wahrnehmbar ist. Im Datenhelm kann der Person die gleiche Bewegung auch rein visuell ge-zeigt werden, ohne dabei das Kart zu bewegen. Zusätzlich sind auch Misch-formen möglich, die eine gleichzeitige, gewichtete Stimulierung beider Wahrnehmungskanäle ermöglichen. Die Aufgabe der Versuchspersonen be-steht darin, während der Fahrt eine Stelle zu markieren, die ihnen vorher entweder visuell oder vestibulär „gezeigt“ worden ist2. Die tatsächlich zurückgelegten Strecken zum Zeitpunkt der Markierung werden festgehal-ten. Es ergeben sich zwei Werte: Einer für die real mit dem Kart zurückge-legte Strecke und einer für die Strecke, die im HMD dargestellt worden ist. Aus den Werten wird die Stärke der Einflussnahme der beiden Wahrneh-mungskanäle für das Ereignis der translatorischen Vorwärtsbewegung be-stimmt. Als wichtiges Ergebnis ist herausgefunden worden, dass bei einer Vernachlässigung der vestibulären Wahrnehmung die visuelle Simulation überbetont werden muss. Je stärker die Vernachlässigung ist, desto stärker muss die Gewichtung der visuellen Fahrsimulation sein. Bei totaler Ver-nachlässigung der vestibulären Wahrnehmung muss z.B. den Probanden eine etwa vierfach längere Fahrtstrecke visuell präsentiert werden, damit sie die zuvor gezeigte Fahrstrecke als „durchfahren“ wahrnehmen. Dieses gilt 1 Als Kart wird hier ein einfacher „fahrbarer Untersatz“ verstanden, der mithilfe einer Schnur mit konstanter Geschwindigkeit vorwärts bewegt werden kann. 2 Vestibulär zeigen bedeutet in dem Zusammenhang, dass die Testperson auf dem Kart sitzend die entsprechende Strecke gezogen wird.
Diskussion 115
speziell für das genannte einfache Experiment (Fahrt durch monotone Tun-nelszene).
Die Berücksichtigung vestibulärer Wahrnehmung im Ergonomie-Mock-Up ist zu einem späteren Zeitpunkt möglich. Die dazu erforderlichen Daten werden bereits jetzt von der Fahrdynamik zur Verfügung gestellt. Die nöti-gen Hardwarekomponenten sind in Abschnitt 2.10 auf Seite 54 vorgestellt worden.
Im Vergleich zur aufwendigen Berücksichtigung vestibulärer Wahrneh-mung, stellt die Integration einer Kraftrückkopplung eine kostengünstige und einfache Möglichkeit dar, den Realitätsgrad einer Fahrsimulation zu erhöhen. Über das Lenkrad können Kräfte an den Benutzer zurückgegeben werden, die z.B. zur Darstellung des Lenkmoments oder von Straßenun-ebenheiten nutzbar sind. Entsprechende Systemkomponenten haben sich heute bereits in vielen Computerspielen etabliert.
Weiterhin ist die Simulation von Straßenverkehr geplant. Es sollen andere Verkehrsteilnehmer, insbesondere Autofahrer dargestellt werden, die sich nach der Vorgabe einfacher Regeln weitestgehend autonom über das Stra-ßennetz fortbewegen. Eine entsprechende Diplomarbeit ist zum Zeitpunkt der Erstellung dieser Arbeit noch nicht fertiggestellt worden.
5.6 Geometrie-, Audio- und Haptikentwurf Der in dieser Arbeit verwendete Ansatz zur Bereitstellung haptischer Wahr-nehmung für den Benutzer (vgl. Abschnitt 3.1.1 auf Seite 61) stellt nur sehr geringe Ansprüche an das Simulationssystem. Das Modell der haptisch zu erfassenden Szenengeometrie wird „passiv“ über die Sitzkiste festgelegt, die unterschiedliche Bedienelemente1 in die unmittelbare Umgebung des Benut-zers platziert. Es sind fast keine „aktiven“ Berechnungsverfahren nötig (z.B. haptisches Rendering2 [SBH99, SBMS95] und Kollisionserkennung [Zac94, Zac02]). Nur wenn während einer Fahrsimulation eine Kraftrückkopplung über das Lenkrad der Sitzkiste erfolgen soll, ist die Berücksichtigung eines Kraftmoments erforderlich, das dann für den Benutzer spürbar wird. Die Fahrdynamiksoftware liefert den dafür notwendigen Wert (siehe Tabelle 16 auf Seite 79). Auf die Kopplung des Wertes mit einer entsprechenden Dar-stellungskomponente ist bisher verzichtet worden.
Die Berücksichtigung von akustischen Ereignissen wird heute in vielen VR-Simulationen vernachlässigt [IDA96, SL00, Beg00, W3Gär01]. In dieser
1 Zum Beispiel Lenkrad, Pedalerie, Schalter. 2 Definition Haptisches Rendering nach [SBH99]: „Haptische Beschreibung und Darstel-lung von Vorgängen in und von Interaktionen mit virtuellen Umgebungen, d.h. Modellie-rung und Applizierung von taktilen (den Tastsinn betreffenden) und kinästhetischen / propriozeptiven (den „Kraftsinn“ betreffenden) Ereignissen und Reizen.“
Diskussion 116
Arbeit sollten zunächst Fahrzeug- und Fahrgeräusche berücksichtigt wer-den. Alle dazu erforderlichen Daten (z.B. Geschwindigkeit, Drehzahl, usw.) werden berechnet und stehen zur Verfügung. Aus den in Abschnitt 3.3 auf Seite 90 genannten Gründen ist die Arbeit an dieser Soundintegration nicht beendet worden. Die Integration weiterer akustischer Effekte in die Simula-tion (z.B. Geräusche von Fremdfahrzeugen, Umgebungslärm, usw.) bleibt derzeit ebenfalls unberücksichtigt. Nachfolgend wird auf Problematiken hingewiesen, die durch die Vernachlässigung akustischer Ereignisse in Si-mulationen entstehen können.
Begault weist auf die große Wichtigkeit akustischer Information bei der Implementierung von Benutzerschnittstellen hin. Er untersucht in [Beg00] die Einsetzbarkeit von Computer-Touchscreens für die Realisierung von „Checks“, die Piloten vor dem Start eines Flugzeugs durchzuführen haben. Die verschiedenen Punkte der Checkliste sind dabei über virtuelle Schalter auf dem Touchscreen grafisch dargestellt. Die Bedienung bereitet den Pilo-ten enorme Schwierigkeiten. Sie können nur schwer die Durchführung ihrer Schaltaktion wiedererkennen. Erst als die Betätigung der Elemente des Touchscreens mit einem entsprechenden akustischen Ereignis verbunden worden ist, hat dies zu einer Steigerung der Benutzerakzeptanz geführt.
Davis, Scott et al. untersuchen in [DSP99], welche Effekte durch die Berücksichtigung von Sound in einer VR-Applikation entstehen können. Sie haben herausgefunden, dass ambienter Sound das Gefühl der Immersion bei Probanden erhöht. Die Qualität der grafischen Darstellung wird als hoch-wertiger empfunden. Außerdem können sich viele Probanden besser an Objekte und deren Position in der virtuellen Umgebung erinnern, als dies bei einer vergleichbaren VR-Simulation ohne Sound der Fall ist.
Diese Arbeit modelliert eine Szene, wie dies in Abschnitt 3.3 ab Seite 90 beschrieben ist. Dabei ist großer Wert auf Darstellungsperformanz gelegt worden. An vielen Stellen wird dies durch eine sehr einfache Modellierung ersichtlich. Die Szene lässt sich zukünftig aber beliebig verändern, verbes-sern und erweitern.
Bei der Erstellung der Szene sind außerdem an vielen Stellen die speziellen Anforderungen der Ergonomieanalyse unberücksichtigt geblieben. In die-sem Zusammenhang ist z.B. die Integration typischer Ampelszenen in die Szene wünschenswert. Auch hier sollte nachgebessert werden.
Beier stellt in der Arbeit [Bei94] fest, dass eindrucksvolle VR-Simulationen oft auf einer sehr arbeits- und zeitintensiven Datenaufbereitung beruhen und dass der dazu nötige Aufwand oft unterschätzt wird. Die Aussage ist sicher auch heute (2003) noch gültig. Durch die ständige Weiterentwicklung von Werkzeugen, die auf dem Gebiet zum Einsatz kommen, werden aber immer schnellere Aufbereitungen mit qualitativ hochwertigeren Ergebnissen mög-lich. Datenaufbereitung ist bei VOLKSWAGEN gegenwärtig ein halbauto-
Diskussion 117
matischer Prozess. Die vom Benutzer erforderlichen Schritte sind innerhalb kurzer Zeit erlernbar (z.B. werden bei VW zweitägige Kurse dazu angebo-ten). Nach eigener Erfahrung ist die Datenaufbereitung eines kompletten Fahrzeugmodells von einem geübten Benutzer in ungefähr einer Woche durchführbar.
Die Schwierigkeit für die gegebene Aufgabe besteht darin, die Modellaufbe-reitung so durchzuführen, dass eine möglichst hohe Bildwiederholrate vor-liegt und gleichzeitig die Fahrzeugmodelle gerade noch den Anforderungen der jeweiligen Ergonomieuntersuchung genügen. In der Literatur (z.B. in [Kem99] oder [W3GKN]) sind Richtwerte von 30 bis 60 fps für die Bildwiederholrate genannt, die zur Durchführung von Fahrsimulationen erreicht werden sollten. Dies ist bei der Aufbereitung der Szenen- und Fahr-zeuggeometrie zu beachten.
Wichtig ist auch die Berücksichtigung spezieller Parameter, wie z.B. der Szenenbeleuchtung bei der Modellierung der virtuellen Umgebung. Dies wird durch Punkt 5 der obigen Enumeration verdeutlicht. Durch eine starke Beleuchtung empfinden 70% der Versuchspersonen den Innenraum des virtuellen Fahrzeugs größer als den des realen Fahrzeugs. In einem zusätzli-chen Versuchsdurchlauf, bei dem das Modell mit reduzierter Beleuchtung dargestellt worden ist, ist dieser Eindruck relativiert worden.
118
6 Zusammenfassung und Ausblick
Kapitel 6
Zusammenfassung und Ausblick
In diesem Kapitel sind die wichtigsten Ergebnisse dieser Arbeit zusammen-gefasst. Danach folgt ein Ausblick auf naheliegende Ansätze, die den Be-nutzungskontext des Ergonomie-Mock-Ups erweitern.
6.1 Zusammenfassung Obwohl Virtual Reality seit etlichen Jahren im akademischen Bereich er-forscht wird, gibt es nach [Zac00] bis heute nur wenige Anwendungen im produktiven Einsatz. Nach [Bry94b] hat sich der erwartete Erfolg von An-wendungen aus dem VR-Bereich, mit einigen wenigen Ausnahmen, nicht eingestellt. Bryson macht dafür das Fehlen allgemeiner Entwurfsmethodi-ken verantwortlich, die zur Realisierung überzeugender VR-Applikationen einsetzbar sind. Speziell die Erzeugung hoch-immersiver Szenarien gestaltet sich schwierig. Hier kommt der konsistenten, ganzheitlichen Berücksichti-gung mehrerer Wahrnehmungskanäle der Benutzer eine zentrale Bedeutung zu. Bullinger et al. resümieren in diesem Zusammenhang [BBB97, S. 1734], dass die Faktoren zur Erzeugung von Immersion bis heute nur teilweise bekannt sind. Eine der größten Herausforderungen im VR-Bereich liegt im Verständnis dieser Faktoren, die der Generierung von immersiven, compu-tererzeugten Umgebungen dienen, die der Benutzer als real empfinden kann.
Die zentrale Aufgabe dieser Arbeit ist es, die Verwendbarkeit von VR-Me-thoden für den Nutzungskontext der Fahrzeugergonomie zu überprüfen (vgl. Abschnitt 1.3). Dazu ist exemplarisch ein Ergonomie-Mock-Up entworfen, realisiert und auf Einsetzbarkeit getestet worden. Das Ergonomie-Mock-Up stellt ein hoch-immersives Szenario dar. Idealerweise soll sich ein Benutzer in dieser virtuellen Umgebung wie in einer entsprechenden realen Umge-bung verhalten.
Diese Arbeit erläutert zunächst die Grundlagen von Virtual Reality. Dabei liegt ein Schwerpunkt auf der Betrachtung der menschlichen Wahrnehmung (siehe Abschnitt 2.1.2). Die Leistungsmerkmale der menschlichen Wahr-nehmung definieren implizit ein Anforderungsprofil an die Realisierung
Zusammenfassung und Ausblick 119
einer VR-Applikation. Es zeigt sich, dass die Leistungsfähigkeit der menschlichen Wahrnehmung mit heutigen Computersystemen kaum zu er-reichen ist. Daher müssen bei der Realisierung von VR-Applikationen oft Kompromisse getroffen werden.
Die Vorstellung aktueller Komponenten (siehe Abschnitte 2.4 bis 2.10), die bei der Realisierung der gegebenen Aufgabenstellung zum Einsatz kommen können, bildet die Grundlage für eine spätere Auswahl. Vor- und Nachteile der einzelnen Komponenten werden genannt. Dabei findet keine Beschrän-kung auf technische Merkmale statt, sondern auch ergonomische Aspekte treten in den Mittelpunkt. Eine ideale Systemkomponente erfüllt ihren technischen Zweck, bleibt darüber hinaus aber für einen Benutzer unsicht-bar und stört ihn nicht. Von vielen VR-Komponenten wird diese Anforde-rung heute nicht erfüllt [Zimm00].
Folgende Hauptkomponenten sind für das Ergonomie-Mock-Up ausgewählt worden:
• (VR-)Sitzkiste (siehe Abschnitt 3.1.1)
• Head-Mounted Display (siehe Abschnitt 3.1.2)
• 3D-Menschmodell (siehe Abschnitt 3.1.3)
• Optisches Trackingsystem (siehe Abschnitt 3.1.4)
• Komponenten für eine (optionale) Fahrsimulation (siehe Abschnitt 3.1.5)
Ein grundsätzliches Problem in virtuellen Umgebungen ist die fehlende haptische Wahrnehmung der Umgebung [Ins01, Lok02]. Zur Reduzierung des Problems wird das Konzept der (VR-)Sitzkiste entworfen und realisiert. Probanden nehmen durch die Sitzkiste den Fahrzeuginnenraum wesentlich realistischer wahr. Rein virtuelle Elemente bereiten ihnen hingegen Prob-leme (siehe Abschnitt 4.2, ab Seite 101).
Das Tracking von Kopf- und Handpositionen in VR-Umgebungen geschieht heute überwiegend durch elektromagnetisch arbeitende Systeme. Diese haben in realen Arbeitsumfeldern einen signifikanten Fehler [Zac00]. Aus diesem Grund kommt in dieser Arbeit ein optisches Trackingsystem zum Einsatz (Messgenauigkeit liegt bei ca. ±0,2 mm). Es werden verschiedene Algorithmen entwickelt, um die Ergebnisdaten des Trackingsystems in eine VR-Umgebung zu integrieren (siehe Abschnitt 3.1.4).
Über einen Avatar ist es dem Benutzer des Ergonomie-Mock-Ups möglich, den eigenen Körper in der virtuellen Umgebung visuell wahrzunehmen (siehe Abschnitt 3.1.3). Bei dem Avatar handelt es sich um ein komplettes 3D-Menschmodell, das in Echtzeit (ca. 25 Hz), gesteuert durch das
Zusammenfassung und Ausblick 120
Trackingsystem, bewegt wird. Das Menschmodell wird in einem Kalibrierprozess an den aktuellen Benutzer angepasst.
Neben rein statischen Ergonomieuntersuchungen, kann mit dem Ergonomie-Mock-Up eine Fahrsimulation durchgeführt werden. Dazu sind verschie-dene Algorithmen entwickelt worden, um das simulierte Fahrzeug in einer modellierten Welt zu bewegen (siehe Abschnitt 3.1.5 und [Feu02]).
Der in dieser Arbeit vorgestellte Systementwurf gliedert sich in drei Ebenen (siehe Abschnitte 3.2 bis 3.4): Der Kommunikationsentwurf erlaubt einen Datenaustausch unter den Einzelkomponenten. Geometrie-, Sound- und Haptikentwurf definieren Modelle einer virtuellen Szene bezüglich der ent-sprechenden Wahrnehmungsformen. Der Interaktionsentwurf verknüpft die Komponenten auf logischer Ebene miteinander. Das dadurch entstandene Schichtmodell ermöglicht den Austausch von Funktionalitäten einer Schicht, ohne dass davon die höheren Schichten betroffen sind und geändert werden müssen.
Für hoch-immersive VR-Anwendungen kann besonders deren Echtzeitver-halten als kritisch beurteilt werden. Während die Bildwiederholrate einer VR-Applikation einfach kontrolliert und modifiziert werden kann, gestalten sich genaue Aussagen zur Latenz schwieriger. In dieser Arbeit wird eine Messapparatur zur Latenzbestimmung entworfen und realisiert (siehe Ab-schnitt 4.1). Die damit ermittelte Latenz liegt, bei einer für Ergonomieuntersuchungen typischen Modellkonfiguration, bei 150 ms. Da die auftretenden Verzögerungen, speziell bei schnellen Bewegungen, auch von den Probanden wahrgenommen werden, muss die Latenz zukünftig minimiert werden.
Nachdem für die Zwecke dieser Arbeit zunächst ein stark vereinfachter, prototypischer Sitzkistenaufbau zum Einsatz kommt (siehe Abbildung 39 (Mitte) auf Seite 62), erfolgt im Rahmen der Studienarbeit [Krebs01] eine Umsetzung des Ergonomie-Mock-Ups auf eine Sitzkiste, die innerhalb der VOLKSWAGEN Nutzfahrzeugentwicklung zur Erprobung von Konzepten für Fahrzeuginnenräume entwickelt worden ist. Der damit durchgeführte Probandenversuch weist eine hohe Korrelation zwischen den Versuchser-gebnissen auf, die einerseits anhand des Ergonomie-Mock-Ups, andererseits anhand eines entsprechenden realen Fahrzeugs ermittelt worden sind (vgl. Abschnitt 4.2 ab Seite 101).
Aus diesem Grund hat man sich bei VOLKSWAGEN und Audi inzwischen dazu entschieden, das Ergonomie-Mock-Up weiter auszubauen. Es soll zukünftig ein noch leistungsfähigeres optisches Trackingsystem zum Ein-satz kommen, das mehr als drei Kameras beinhaltet. Außerdem sollen mehr Sensorikkomponenten in die Sitzkiste eingebaut werden. Es ist geplant, die noch ausstehenden Funktionalitäten im Rahmen von Forschungs- und Entwicklungsarbeiten zu realisieren.
Zusammenfassung und Ausblick 121
6.2 Nutzungskontexte Neben verschiedenen Erweiterungen, die sich auf den unmittelbaren Ausbau des Ergonomie-Mock-Ups beziehen, lässt sich der Nutzungskontext zu-künftig noch darüber hinaus erweitern. Einige Ansatz hierfür werden ab-schließend vorgestellt.
6.2.1 Variabler Ergonomieprüfstand Beim Entwurf und der Realisierung des hier vorgestellten Ergonomieprüf-stands wird von Anfang an auf Flexibilität geachtet. Es soll kein Mock-Up entstehen, das nur die speziellen Gegebenheiten eines einzelnen Fahrzeug-entwurfs wiedergibt, sondern die gesamte Hardware und Algorithmik ist so auszulegen, dass sie auf ein breites Fahrzeugspektrum applizierbar ist. Als Beleg dafür, dass dieses Ziel erreichbar gewesen ist, kann [Krebs01] aufge-führt werden. Im Rahmen einer Studienarbeit erfolgt die Portierung aller Systemkomponenten auf einen weiteren Sitzkistenaufbau (s.o.). Bei einer Portierung sind im Wesentlichen die folgenden drei Schritte durchzuführen:
1. Hardware-Design: Das Ergonomie-Mock-Up muss an die jeweiligen Gegebenheiten angepasst werden, die durch das darzustellende Fahrzeug und das physikalische Mock-Up bestimmt werden. In diesem Zusammenhang sind z.B. die folgenden Punkte zu nennen: Das optische Trackingsystem ist so zu positionieren, dass alle Messkameras verde-ckungsfrei das Versuchsvolumen „sehen“. Über eine einmalig durchzu-führende Kalibrierprozedur wird das Trackingsystem zur Datenerfas-sung im Koordinatensystem des Fahrzeugs vorbereitet (vgl. Abschnitt 3.1.4.1 ab Seite 74). Fahrzeugspezifische Bedienelemente können dem Mock-Up hinzugefügt werden, die mit Schnittstellen zur Datenerfassung ausgestattet werden müssen (siehe Abschnitt 3.1.5 ab Seite 77).
2. Geometrie-Design: Für das darzustellende Fahrzeug ist eine Datenauf-bereitung durchzuführen. Der entsprechende Vorgang ist in Abschnitt 3.3 ab Seite 90 beschrieben.
3. Interaktions-Design: Die einzelnen Systemkomponenten müssen miteinander verknüpft werden (vgl. Abschnitt 3.4 ab Seite 93). So kön-nen Betätigungen von Bedienelementen im Fahrzeug zu veränderten vi-suellen, akustischen oder auch vestibulären Darstellungen führen. Daneben ist über Ergebnisdaten des Trackingsystems das Menschmodell steuerbar. Die entsprechenden Verknüpfungen müssen dafür festgelegt werden.
Nach [Krebs01] ist der Aufwand für eine derartige Portierung nicht unerheblich. Durch einen variablen Sitzkistenaufbau lässt sich der Aufwand zukünftig reduzieren. Hempel und Hajne beschäftigen sich in [W3HH97]

Zusammenfassung und Ausblick 122
und Braun in [Braun99] mit einer derartigen variablen Auslegung von Sitz-kisten. Die Anpassung des Ergonomie-Mock-Ups auf einen neuen Fahrzeu-ginnenraum kann dadurch größtenteils auf das Geometrie-Design reduziert werden (Punkt 2 der obigen Enumeration). Die beiden übrigen Kriterien müssen bei einem variablen Aufbau hingegen nicht oder nur geringfügig geändert werden.
Die Firma Prefix [W3Pre01] bietet dies-bezüglich das Programmable Vehicle Mo-del (PVM) an (siehe Abbildung 69). So-wohl das Interieur als auch die Karosserie lassen sich im PVM auf beliebige Ent-würfe eines Automobils konfigurieren. Beliebig viele solcher Konfigurationen sind per Software speicherbar, zwischen denen ein Operator während einer Ver-suchsdurchführung wählen und wechseln kann. Das PVM passt sich innerhalb von
Sekunden an eine gewählte Variante an.
Die große Variabilität eines PVM wirkt sich auf das äußere Erscheinungs-bild aus. So können konstruktionsbedingt Lücken oder Kanten deutlich sichtbar werden, die in dem darzustellenden Entwurf nicht zu finden sind. Durch die Kombination von Ergonomie-Mock-Up und PVM kann dieser Nachteil vermieden werden. Das Ergonomie-Mock-Up ermöglicht eine hochwertige visuelle Darstellung und verbirgt damit die Schwachstellen des PVM. Andererseits ist über das PVM ein sehr realistisches haptisches Feed-back möglich, da es sehr genau (nach [W3Pre01] beträgt die Genauigkeit ± ½ Millimeter) an die Gegebenheiten eines Fahrzeuginnenraums angepasst werden kann. Die VOLKSWAGEN AG erwägt derzeit die Beschaffung eines dieser Systeme.
6.2.2 Direkte Kopplung mit CAD-Systemen Das modulare Konzept des Ergonomie-Mock-Ups (vgl. Abschnitt 3.2 auf Seite 89) ermöglicht, dass sich viele Systemkomponenten einzeln, losgelöst vom Prüfstand in einem ganz anderen Anwendungskontext benutzen lassen. So kommt z.B. zur Visualisierung der Komponente Menschmodell ein VR-System zum Einsatz, wodurch eine besonders performante Darstellung ge-währleistet werden soll. Genauso gut könnte aber auch jedes andere System, das die Möglichkeit zur Darstellung von Dreiecksnetzen besitzt, diese Auf-gabe übernehmen. Es muss nur ein entsprechender Zugriffsmechanismus auf die Ergebnisdaten der Menschmodellberechnung implementiert werden.
Eine sehr naheliegende Idee ist die Integration von Komponenten des Ergo-nomie-Mock-Ups in CAD-Systeme, die in der Automobilindustrie großflä-
Abbildung 69: Programmable Vehicle Model [W3Pre01]
Zusammenfassung und Ausblick 123
chig zum Einsatz kommen [Dan97]. Die maßstabsgetreue, visuelle Darstel-lung unter Einbeziehung einer Benutzersicht oder auch die Darstellung eines bewegten Menschen in Relation zur Konstruktion stellen Möglichkeiten dar, die in einem CAD-System derzeit typischerweise nicht zur Verfügung stehen. Der große Vorteil dabei wäre, dass auch Personen, die nicht mit den speziellen Anforderungen einer VR-Simulation vertraut sind, einen Teil der Funktionalität des Ergonomie-Mock-Ups für ihre Zwecke nutzen könnten. Aspekte der virtuellen Realität, wie Immersion, multisensorische Reize und Echtzeitfähigkeit würden dabei nur eine untergeordnete Rolle spielen.
6.2.3 Aufbau von Ergonomiebewertungsteams Unabhängig von der hier vorlie-genden Arbeit wird derzeit ein sog. Ergonomiebewertungsteam inner-halb des VOLKSWAGEN Kon-zerns aufgebaut. Alle Teammit-glieder werden anthropometrisch vermessen (siehe Tabelle 21). Aus den Messdaten werden RAMSIS-
Manikins erstellt. Damit können dann Haltungs- und Bewegungsanalysen unter Berücksichtigung individueller Merkmale der Versuchspersonen durchgeführt werden. Das Ergonomiebewertungsteam besteht zurzeit aus ca. 80 Personen, angestrebt sind bis zu 200 Personen. Bei der Zusammen-setzung der Gruppe wird darauf geachtet, dass insbesondere Grenzperzentile (in diesem Zusammenhang wird von Sitzriesen und Sitzzwergen gespro-chen) und Personen mit ausgeprägten anthropometrischen Eigenschaften in ihr enthalten sind.
Die anthropometrische Vermessung einer einzelnen Person nimmt nach dem in 3.1.3 auf Seite 66 beschriebenen Verfahren, inklusive aller Vor- und Nachbereitungen (dazu gehören z.B.: Einweisung der Versuchsperson, Datenauswertung, ...), ungefähr zwanzig Minuten in Anspruch. Daraus wird ersichtlich, dass durch die Vermessung einer repräsentativen Gruppe an Versuchspersonen ein nicht unerheblicher Zeit- und Arbeitsaufwand ent-steht.
Soll das im Rahmen dieser Arbeit entwickelte Ergonomie-Mock-Up für Probandenversuche zum Einsatz kommen, so ist vor der Versuchsdurchfüh-rung ebenfalls eine anthropometrische Vermessung der Probanden erforder-lich. Die Vermessung trägt zur Genauigkeit der Darstellung des Menschmo-dells in der virtuellen Umgebung bei. Über das Menschmodell nimmt der Proband seinen eigenen Körper während der Simulation visuell wahr. So kann für ihn ein höherer Grad an Immersion entstehen, als dies bei einem entsprechenden Versuch ohne ein angepasstes Menschmodell der Fall wäre.
Körpermaße Maßwert (mm) Perzentil Koerperhoehe 1802.63 49.3 Stammlaenge 946.18 51.8 Kopfhoehe 226.02 51.9 Kopfbreite 157.01 51.3
... ... ...
Tabelle 21: Körpermaße eines Mannes, 50. Perzentil (Beispiel)

Zusammenfassung und Ausblick 124
Bei der Auswahl eines Menschmodells für die Zwecke dieser Arbeit (vgl. Abschnitt 3.1.3, ab Seite 64) wird darauf geachtet, eins zu nehmen, das bereits in die Prozesskette der ergonomischen Fahrzeuggestaltung im VOLKSWAGEN Konzern integriert worden ist. Ein solches Ergonomie-Menschmodell steht mit RAMSIS zur Verfügung [Rem01]. Die Vorteile, die aus der Verwendung des etablierten Werkzeugs entstehen, liegen auf der Hand: Zur Durchführung von Probandenversuchen müssen keine aufwendigen, anthropometrischen Vermessungen neu durchgeführt werden. Es stehen dazu die Mitglieder des Ergonomiebewertungsteams zur Verfügung. Sie sind bereits vermessen worden und ihre RAMSIS-Manikins liegen ebenfalls vor. Beim Einsatz des Ergonomie-Mock-Ups können hier also vorhandene Ressourcen genutzt werden. Es entsteht kein zusätzlicher Arbeits-, Zeit- und Kostenaufwand. In diesem Zusammenhang ist anzumerken, dass zur Durchführung des exemplarischen Pro-bandenversuchs, der in Kapitel 4.2 beschrieben ist, bereits das Ergono-miebewertungsteam zum Einsatz gekommen ist1.
Die Technik, die zur an-thropometrischen Ver-messung zum Einsatz kommt, entwickelt sich weiter: So steht für die Mitglieder des Ergono-
miebewertungsteams neben dem bisher be-schriebenen Verfahren auch ein weitaus leis-tungsfähigeres Meß-system zur Verfügung. Es handelt sich um den
in Abbildung 70 dargestellten 3D-Bodyscanner. Die Messeinrichtung ist in der Lage, in nur 20 Sekunden einen Menschen oder beliebige Objekte mit einer Auflösung von 1 bis 2 Millimetern berührungslos zu erfassen [W3Vit]. Dabei werden direkt dreidimensionale Modelle erzeugt, die sich aus bis zu 2 Mio. Punkten zusammensetzen können. Optional kann das System sogar Farben erfassen und den erzeugten Modellen zuordnen (siehe Abbildung 70, rechts). Eine Kopplung des Systems mit dem Ergonomietool RAMSIS ist ebenfalls bereits vorhanden, d.h. es können die gleichen Ergonomieanalysen wie bisher durchgeführt werden, jetzt zusätzlich auf der Grundlage einer qualitativ hochwertigeren Datenbasis. Neben den Vorteilen, die der Einsatz des Meßsystems bringt, sei hier nicht verschwiegen, dass ein hoher Hard-ware- und Kostenaufwand entsteht.
1 Allen Versuchsteilnehmern sei an dieser Stelle noch einmal gedankt.
Abbildung 70: Der 3D-Bodyscanner vitus [W3Vit] Links: Person während der Vermessung
Rechts: Ergebnis mit und ohne Farbmapping
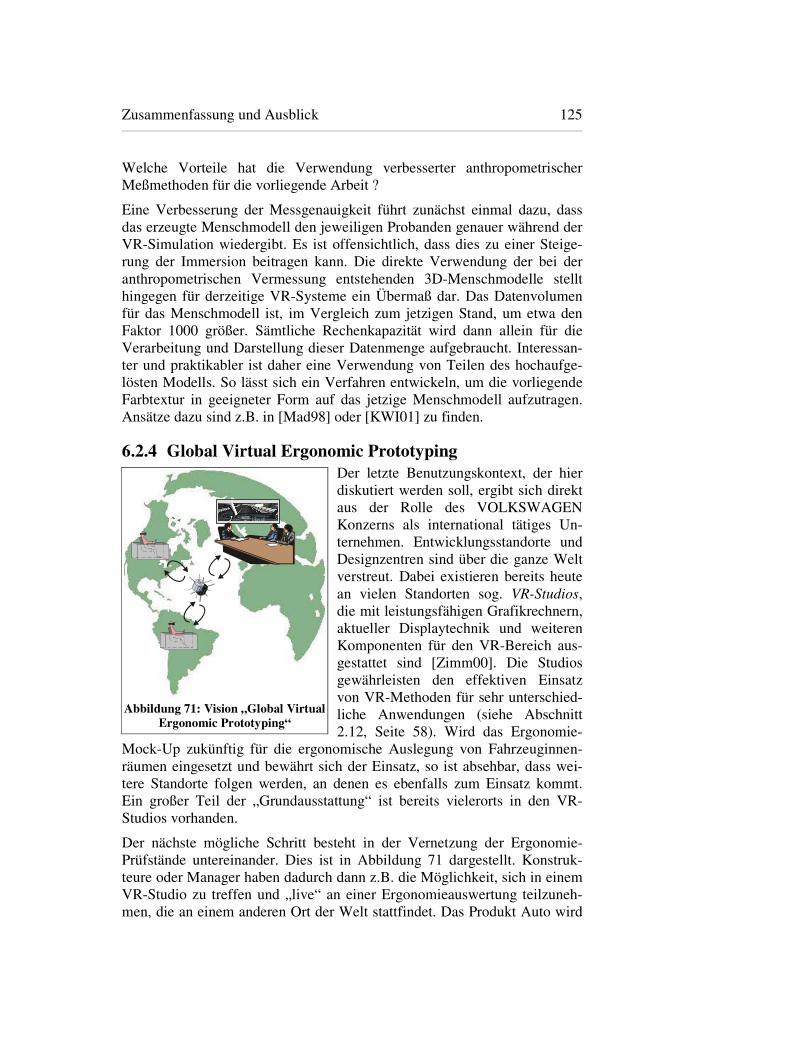
Zusammenfassung und Ausblick 125
Welche Vorteile hat die Verwendung verbesserter anthropometrischer Meßmethoden für die vorliegende Arbeit ?
Eine Verbesserung der Messgenauigkeit führt zunächst einmal dazu, dass das erzeugte Menschmodell den jeweiligen Probanden genauer während der VR-Simulation wiedergibt. Es ist offensichtlich, dass dies zu einer Steige-rung der Immersion beitragen kann. Die direkte Verwendung der bei der anthropometrischen Vermessung entstehenden 3D-Menschmodelle stellt hingegen für derzeitige VR-Systeme ein Übermaß dar. Das Datenvolumen für das Menschmodell ist, im Vergleich zum jetzigen Stand, um etwa den Faktor 1000 größer. Sämtliche Rechenkapazität wird dann allein für die Verarbeitung und Darstellung dieser Datenmenge aufgebraucht. Interessan-ter und praktikabler ist daher eine Verwendung von Teilen des hochaufge-lösten Modells. So lässt sich ein Verfahren entwickeln, um die vorliegende Farbtextur in geeigneter Form auf das jetzige Menschmodell aufzutragen. Ansätze dazu sind z.B. in [Mad98] oder [KWI01] zu finden.
6.2.4 Global Virtual Ergonomic Prototyping Der letzte Benutzungskontext, der hier diskutiert werden soll, ergibt sich direkt aus der Rolle des VOLKSWAGEN Konzerns als international tätiges Un-ternehmen. Entwicklungsstandorte und Designzentren sind über die ganze Welt verstreut. Dabei existieren bereits heute an vielen Standorten sog. VR-Studios, die mit leistungsfähigen Grafikrechnern, aktueller Displaytechnik und weiteren Komponenten für den VR-Bereich aus-gestattet sind [Zimm00]. Die Studios gewährleisten den effektiven Einsatz von VR-Methoden für sehr unterschied-liche Anwendungen (siehe Abschnitt 2.12, Seite 58). Wird das Ergonomie-
Mock-Up zukünftig für die ergonomische Auslegung von Fahrzeuginnen-räumen eingesetzt und bewährt sich der Einsatz, so ist absehbar, dass wei-tere Standorte folgen werden, an denen es ebenfalls zum Einsatz kommt. Ein großer Teil der „Grundausstattung“ ist bereits vielerorts in den VR-Studios vorhanden.
Der nächste mögliche Schritt besteht in der Vernetzung der Ergonomie-Prüfstände untereinander. Dies ist in Abbildung 71 dargestellt. Konstruk-teure oder Manager haben dadurch dann z.B. die Möglichkeit, sich in einem VR-Studio zu treffen und „live“ an einer Ergonomieauswertung teilzuneh-men, die an einem anderen Ort der Welt stattfindet. Das Produkt Auto wird
Abbildung 71: Vision „Global Virtual
Ergonomic Prototyping“

Zusammenfassung und Ausblick 126
dadurch besser und schneller als bisher an die Bedürfnisse der Weltbevölke-rung im Hinblick auf eine ergonomische Fahrzeuggestaltung anpassbar.
Zur Realisierung des eben beschriebenen Ansatzes können dann Methoden der Verteilten VR zum Einsatz kommen (siehe z.B. [Bro98]).
127
Literaturverzeichnis [AB94] R.T. Azuma, G. Bishop (1994): Improving Static and
Dynamic Registration in an Optical See-through HMD. Proceedings of SIGGRAPH ‘94.
[ABFH97] M. Agrawala, A.C. Beers, B. Fröhlich, P. Hanrahan, et al. (1997): The Two-User Responsive Workbench: Support for Collaboration through Individual Views of a Shared Space. Proceedings of SIGGRAPH ‘97.
[AHNS99] R.T. Azuma, B. Hoff, H. Neely III, R. Sarfaty (1999): A Motion-Stabilized Outdoor Augmented Reality System. Proceedings of IEEE Virtual Reality ’99, pp. 252 - 259.
[AJ96] B.D. Adelstein, E.R. Johnston (1996): Dynamic Response of Electromagnetic Spatial Displacement Trackers. Presence, Vol. 5, No. 3, pp. 302-318.
[AL96] N.v. Ackern, M. Lindenberg (1996): Seminar: Ausgewählte Probleme der Wahrnehmungsphysiologie – Räumliches Hören. Universität Mannheim, Seminararbeiten 1996.
[App91] H.L. Applewhite (1991): Position Tracking in Virtual Reality. In S.K.Helsel: Proceedings of the Second Annual Virtual Reality Conference and Exhibition.
[Art00] K.W. Arthur (2000): Effects of Field of View on Performance with Head-Mounted Displays. Dissertation, University of North Carolina at Chapel Hill, Department of Computer Science (TR00-019).
[Asc94] Ascension Technology Corporation (1994): Flock of BirdsTM – Six Degrees-Of-Freedom Measurement Device, POB 527, Burlington, VT 05402, Technical Description.
[ASHP93] A. Azarbayejani, T. Starner, B. Horowitz, A. Pentland (1993): Visually Controlled Graphics. IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 15, No. 6.
[Auer00] T. Auer (2000): Hybrid Tracking for Augmented Reality. Dissertation an der Technischen Universität Graz.
Literaturverzeichnis 128
[Azu93] R.T. Azuma (1993): Tracking Requirements for Augmented Reality. Communications of the ACM, 7(36), pp. 50-51.
[Azu95] R.T. Azuma (1995): Predictive Tracking for Augmented Reality. Dissertation, University of North Carolina at Chapel Hill, Department of Computer Science (TR95-007).
[Azu97] R.T. Azuma (1997): A Survey of Augmented Reality. Presence: Teleoperators and Virtual Environments, Vol. 6, No. 4, pp. 355-385.
[Bach99] M. Bach (1999): Räumlich durchs Auge: Wie kommt die greifbare Welt in den Kopf? c’t-Computermagazin, 07/99, S.158.
[Baj93] M.A. Bajura (1993): Camera Calibration for Video See-Through Head-Mounted Display. University of North Carolina at Chapel Hill, Department of Computer Science.
[Baj97] M.A. Bajura (1997): Merging Real and Virtual Environments with Video See-Through Head-Mounted Displays. Dissertation, University of North Carolina at Chapel Hill, Department of Computer Science (TR98-036).
[Bartz01] D.M. Barts (2001): Large Model Visualization: Techniques and Applications, Dissertation der Fakultät für Informatik der Eberhard-Karls-Universität Tübingen.
[BBB97] H.-J. Bullinger, W. Bauer, M. Braun, (1997): Virtual Environments. In G. Salvendy: Handbook of human factors and ergonomics, 2nd ed., pp. 1725-1759. New York et al., Wiley.
[BBB99] H.-J. Bullinger, R. Breining, W. Bauer (1999): Virtual Prototyping – State of the Art in Product Design, In Proceedings of the 26th International Conference on Computers & Industrial Engineering, pp. 103-107.
[BDR96] W. Bauer, J. Deisinger, O. Riedel (1996): Ergonomic Issues of Virtual Reality Systems: Head-Mounted Displays. Virtual Reality World 1996, Conference documentation, Hudak Druck München.
Literaturverzeichnis 129
[Beg00] D.R. Begault (2000): 3-D Sound for Virtual Reality and Multimedia, National Aeronautics and Space Administration (NASA), Ames Research Center.
[Bei94] K.-P. Beier (1994): Virtual Reality in Automotive Design and Manufacturing. Proceedings, Convergence '94, International Congress on Transportation Electronics.
[Bei00] K.-P. Beier (2000): Web-Based Virtual Reality in Design and Manufacturing Applications. 1st International European Conference on Computer Applications and Information Technology in the Maritime Industries.
[Bel95] C. Belz (1995): Neue Interaktionsparadigmen für die Interaktion in stereoskopischen Videobildern unter Verwendung von Augmented Reality Methoden. Diplom-arbeit an der Technischen Universität Darmstadt.
[BFMZ94] G. Bishop, H. Fuchs, L. Millan, E.J.S. Zagier (1994): Frameless Rendering: Double Buffering Considered Harmful. Proceedings of SIGGRAPH ’94.
[BGG98] C. Baur, D. Guzzoni, O. Georg (1998): VIRGY: A Virtual Reality and Force Feedback Based Endoscopic Surgery Simulator. In Medicine Meets Virtual Reality, J.D. Westwwod, H.M. Hoffmann, D. Stredney and S.J. Weghorst (Eds.), IOS Press and Ohmsha.
[Bha93] D.K. Bhatnagar (1993): Position trackers for Head-Mounted Display systems: a survey. University of North Carolina at Chapel Hill, Department of Computer Science (TR93-010).
[BHH96] R. Bowden, T. Heap, C. Hart (1996): Virtual Data Gloves: Interacting with Virtual Environments through Computer Vision. In Proc. 3rd UK VR-Sig Conference, DeMontfort University.
[Bis92] G. Bishop (1992): Research Directions in Virtual Environments. Report of an NSF Invitational Workshop.
[BMS98] R. Bowden, T.A. Mitchell, M. Sarhadi (1998): Recon-structing 3D Pose and Motion from a Single Camera View. In Proc. British Machine Vision Conference, J.N. Carter, M.S. Nixon Eds, Uni of Southampton, Vol. 2.
Literaturverzeichnis 130
[BN95] M. Bajura, U. Neumann (1995): Dynamic Registration Correction in Augmented-Reality Systems. In IEEE Virtual Reality Annual International Symposium (VRAIS).
[BO99] A. Balk, Dr. H. Oehlschlaeger (1999): Konzeptentwicklung bei Volkswagen Nutzfahrzeuge: Organisation, Prozesse und Methoden, VDI-Berichte Nr. 1504, S. 25-50.
[Boh99] G. Bohmann (1999): Virtual Reality – Sinnvolle Anwendung oder technische Spielerei ?
[BPW99] N.I. Badler, C.B. Phillips, B.L. Webber (1999): Simulating Humans: Computer Graphics, Animation, and Control. Department of Computer and Information Science, University of Pennsylvania, Oxford University Press.
[BR98] F.A. Biocca, J.P. Rolland (1998): Virtual Eyes Can Rearrange Your Body: Adaption to Visual Displacement in See-Through, Head-Mounted Displays. Presence Vol. 7, No. 3, pp. 262 – 277.
[Braun99] M. Braun (1999): Entwicklung eines variablen Ergonomie-Prüfstandes mit CAD-Anbindung und Validierung einer Arbeitsmethodik. Dissertation an der Technischen Universität München, Lehrstuhl für Ergonomie. In Fortschritt-Berichte VDI, Verkehrstechnik / Fahrzeugtechnik, Reihe 12, Nr. 374.
[Bro98] W. Broll (1998): Ein objektorientiertes Interaktionsmodell zur Unterstützung verteilter virtueller Umgebungen. GMD Research Series No. 11 / 98.
[Bry94a] S. Bryson (1994): Effects of Lag and Frame Rate on Various Tracking Tasks. In Proceedings of the SPIE – The International Society for Optical Engineering, Vol. 1915 of Stereoscopic Displays and Applications IV, pp. 155 – 166.
[Bry94b] S. Bryson (1994): Approaches to the Successful Design and Implementation of VR Applications. Proceedings of SIGGRAPH ’94.
[Bull99] F. Bullmann (1999): Applikationen der Sensorik zur Kopplung von Fahrdynamik-Simulationssoftware mit einer Ergonomie-Sitzkiste. Diplomarbeit an der Fachhochschule Braunschweig/Wolfenbüttel, Fachbereich Produktions- und Verfahrenstechnik.
Literaturverzeichnis 131
[BZSS95] W. Barfield, D. Zeltzer, T. Sheridan, M. Slater (1995): Presence and performance within virtual environments. In W. Barfield & T. A. Furness (eds.), Virtual environments and advanced interface design, pp. 473-513. New York: Oxford University Press.
[Chan99] M.T. Chan (1999): Automatic Lip Model Extraction for Constrained Contour-Based Tracking. In Proceedings IEEE International Conference on Image Processing, Vol. 2, pp. 848-851.
[Chu92] M.-W. Chu (1992): Polhemus Coordinates and Polhemus-Puma Conversion. The University of Rochester, Computer Science Department (TR 427).
[Clar95] A.H. Clarke (1995): Neuere Aspekte des vestibulo-okulären Reflexes. Europ Arch ORL (Suppl.1995/I)117-153, Labor für experimentelle Gleichgewichtsforschung, HNO Klinik, Universitätsklinikum Benjamin Franklin, Berlin.
[CS00] A.H. Clarke, H. Scherer (2000): Das Gleichgewichtssystem und die räumliche Orientierung. Klausurtagung zum Thema Schwerkraft und Leben: Perspektiven biowissenschaftlicher Weltraumforschung in Deutschland.
[CSD93] C. Cruz-Neira, D. J. Sandin, T. A. DeFanti (1993): Surround-Screen Projection-Based Virtual Reality: The Design and Implementation of the CAVE. SIGGRAPH ’93.
[Dan97] C.W. Dankwort (1997): Process Chain in Automotive Industry - Present Day Demands versus Long Term Open CAD/CAM Strategies. In Tagungsband zum Congres SIA: „La CAO et maquettage numerique en developpement automobile et aeronautique“.
[DKT00] G. Döllner, P. Kellner, O. Tegel (2000): Digital Mock-Up and Rapid Prototyping in Automotive Product Development. Transactions on the SDPS, Vol. 4, No 1, pp. 55-66.
[DM95] N.I. Durlach, A.S. Mavor (eds., 1995): Virtual Reality – Scientific and Technological Challenges. National Research Council, National Academy Press.
Literaturverzeichnis 132
[DM96] D. Drasic, P. Milgram (1996): Perceptual Issues in Augmented Reality. SPIE Volume 2653: Stereoscopic Displays and Virtual Reality Systems III.
[DMZ95] S. Dyer, J. Martin, J. Zulauf (1995): Motion Capture White Paper.
[DSP99] E.T. Davis, K. Scott, J. Pair, L.F. Hodges, J.Oliverio (1999): Can Audio Enhance Visual Perception and Performance in a Virtual Environment? Georgia Institute of Technology.
[DT00] J. Dormeier, M. Teistler: Medizinische Transparenz durch Virtualisierung. In Virtualisierung und Virtualität – Neue Technologien für die Medizinische Informatik. Technische Universität Braunschweig, Medizinische Informatik Spezial 2000.
[DWS99] H.Q. Dinh, N. Walker, C. Song, A. Kobayashi, L. F. Hodges (1999): Evaluating the Importance of Multi-sensory Input on Memory and the Sense of Presence in Virtual Environments. In Proceedings of the IEEE Virtual Reality.
[EAB99] S.R. Ellis, B.D. Adelstein, S. Baumeler, G.J. Jense, R.H. Jacoby (1999): Sensor Spatial Distortion, Visual Latency, and Update Rate Effects on 3D Tracking in Virtual Environments. In Proceedings of the IEEE Virtual Reality.
[EM97] S.R. Ellis, B.M. Menges (1997): Judgments of the Distance to Nearby Virtual Objects: Interaction of Viewing Conditions and Accommodative Demand. Presence, Vol. 6, No. 4, pp. 452 – 460.
[ET98] S. Emura, S. Tachi (1998): Multisensor Integrated Prediction for Virtual Reality. Presence, Vol. 7, No. 4, pp. 410-422.
[FD94] E. Foxlin, N. Durlach (1994): An Inertial Head-Orientation Tracker with Automatic Drift Compensation for Use with HMD’s. Proceedings of the VRST ’94 Conference.
[Fel92] W.D. Fellner (1992): Computergrafik. 2. Auflage, BI Wissenschaftsverlag.
[Feu02] D. Feustel (2002): Implementierung einer Fahrsimulation in eine virtuelle Sitzkiste. Diplomarbeit an der Fachhochschule Braunschweig/Wolfenbüttel, Institut für Fahrzeugbau.
Literaturverzeichnis 133
[FHA98] E. Foxlin, M. Harrington, Y. Altshuler (1998): Miniature 6-DOF inertial system for tracking HMDs. Aerosense ‘98.
[FHP98] E. Foxlin, M. Harrington, G. Pfeifer (1998): ConstellationTM: A Wide-Range Wireless Motion-Tracking System for Augmented Reality and Virtual Set Applications. Proceedings of SIGGRAPH ‘98.
[FJS97] E.H. Furnée, A. Jobbágy, J.C. Sabel, H.L. J.v. Veenendaal, F. Martin, D.C.W.G. Andriessen (1997): Marker-referred movement measurement with grey-scale coordinate extraction for high-resolution real-time 3D at 100 Hz. In A.D.D.R. Snyder, T. Etoh, C.B. Johnson, J.S. Walton, Proceedings of the SPIE Symposium on Ultrahigh- and High-Speed Photography and Image-based Motion Measurement.
[Fox96] E. Foxlin (1996): Inertial Head-Tracker Sensor Fusion by a Complementary Separate-Bias Kalman Filter. Proceedings of the IEEE 1996 Virtual Reality Annual International Symposium.
[FDFH90] J.D. Foley, A.v. Dam, S.K. Feiner, J.F. Hughes (1990): Computer Graphics – Principles and Practice. Addison-Wesley, 2nd Edition.
[Fur89] E.H. Furnée (1989): TV / Computer Motion Analysis Systems – The First Two Decades. PhD thesis, Delft University of Technologie.
[FZMC96] W. Frey, M. Zyda, R. McGhee, B. Cockayne (1996): Off-the-Shelf, Real-Time, Human Body Motion Capture for Synthetic Environments. Computer Science Department, Naval Postgraduate School, USA.
[Geu94] H. Geuß (1994): Entwicklung eines anthropometrischen Meßverfahrens für das CAD-Menschmodell RAMSIS. Dissertation am Lehrstuhl für Ergonomie der Technischen Universität München.
[GH97] J.L. Gabbard, D. Hix (1997): A Taxonomy of Usability Characteristics in Virtual Environments. Deliverable to Office of Naval Research, Grant No. N00014-96-1-0385.
[Gol97] E.B. Goldstein (1997): Wahrnehmungspsychologie. Heidelberg.
Literaturverzeichnis 134
[Gray98] J.S. Gray (1998): Interprocess Communications in UNIX – The Nooks & Crannies. 2nd Edition, Prentice Hall.
[GS90] M. Green, C. Shaw (1990): The Data Paper: Living in the Virtual World. In Proceedings of Graphics Interface '90, pp. 123-130, Halifax, Nova Scotia, Canadian Human-Computer Communications Society.
[GS97] R. Godding, G. Suilmann (1997): Vorstudie zur 3D-Bewegungsanalyse bei Unfallversuchen, Rollei Fototechnic GmbH, Braunschweig, erstellt im Auftrag der Mercedes Benz AG und der Volkswagen AG.
[GW98] J. Groen, P.J. Werkhoven (1996): Visumotor Adaption to Virtual Hand Position in Interactive Virtual Environments. Presence, Vol. 7, No. 5, pp. 429-446.
[HBS98] U. Häfner, R. Breining, A. Simon (1998): Virtual Reality für CAD und FEM: Heutiger Stand, Tendenzen und Beispiele. 16. CAD-FEM Users’ Meeting.
[Hen97] A. Hennig (1997): Die andere Wirklichkeit: Virtual Reality – Konzepte, Standards, Lösungen. Addison-Wesley.
[HJZ99] L.R. Harris, M. Jenkin, D.C. Zikovitz (1999): Vestibular cues and virtual environments: choosing the magnitude of the vestibular cue. In Proceedings of the IEEE Virtual Reality.
[HJZ00] L.R. Harris, M. Jenkin, D.C. Zikovitz (2000): Visual and non-visual cues in the perception of linear self motion. Springer-Verlag.
[HL93] R.L. Holloway, A. Lastra (1993): Virtual Environments: A Survey of the Technology. University of North Carolina at Chapel Hill, Department of Computer Science (TR93-033).
[Hol95a] R.L. Holloway (1995): Registration Errors in Augmented Reality Systems. Dissertation, University of North Carolina at Chapel Hill, Department of Computer Science (TR95-016).
[Hol95b] R.L. Holloway (1995): Registration Error Analysis for Augmented Reality. Presence, Vol. 6, No. 4.
Literaturverzeichnis 135
[IDA96] C. Youngblut, R.E. Johnson, S.H. Nash, R.A. Wienclaw, C.A. Will (1996): Review of Virtual Environment Interface Technology. Institute for Defense Analyses Paper P-3186. URL: http://www.hitl.washington.edu/scivw/IDA
[Ins01] B.E. Insko (2001): Passive Haptics Significantly Enhances Virtual Environments. Dissertation, University of North Carolina at Chapel Hill, Department of Computer Science (TR01-017).
[Int98] Intersense Inc. (1998): IS-600 Mk2 Precision Motion Tracker – User Manual Version 1.1.
[JLS97] M.C. Jacobs, M.A. Livingston, A. State (1997): Managing Latency in Complex Augmented Reality Systems. University of North Carolina at Chapel Hill. Proceedings of 1997 Symposium on Interactive 3D Graphics.
[JMC93] A.L. Janin, D. W. Mitzell, T.P. Caudell (1993): Calibration of Head-Mounted Displays for Augmented Reality Applications.
[JTAP00] JTAP305 (2000): Final Report. Advanced VR Research Centre, Loughborough University.
[Kal94] R.S. Kalawsky (1994): The Science of Virtual Reality and Virtual Environments. Addison-Wesley.
[Kem99] A. Kemeny (1999): Simulation and Perception. Renault, Direction de la Recherche – Research Division; Technocentre Renault.
[KEPRW95] J. Kuhl, D. Evans, Y. Papelis, R. Romano, G.S. Watson (1995): The Iowa Driving Simulator: An Immersive Research Environment. IEEE Computer 28, 7, pp. 35-41.
[KF90] R.S. Kennedy, J.E. Fowlkes (1990): What does it mean when we say that simulator sickness is polygenic and polysymptomatic. In E.G. Monroe (Hrsg.): Proceedings of the 1990 Image V Conference. Phoenix: Image Society.
[Koch97] M. Koch (2000): Motion Capture Systeme – technologische Grundlagen und Vergleich anhand der Systemparameter. Diplomarbeit im Fachbereich Photoingenieurwesen an der Fachhochschule Köln.
Literaturverzeichnis 136
[Kol96] E.M. Kolasinski (1996): Prediction of Simulator Sickness in a Virtual Environment. Dissertation, University of Central Florida.
[Krebs01] J. Krebs (2001): Konzeptionelle Entwicklung und Aufbau eines virtuellen Ergonomieprüfstands. Studienarbeit an der Technischen Universität Braunschweig.
[Kri93] R. Krist (1993): Modellierung des Sitzkomforts – Eine experimentelle Studie. Inaugural-Dissertation an der Katholischen Universität Eichstätt.
[KWI01] R. Kurazume, M.D. Wheeler, K. Ikeuchi (2001): Mapping textures on 3D geometric model using reflectance image. Workshop for Data Fusion at IEEE Int. Conf. on Robotics and Automation.
[LM95] O.H. Levine, R.R. Mourant (1995): A Driving Simulator Based on Virtual Environments Technology. Presented at the Transportation Research Board Annual Meeting.
[Lok02] B.C.L. Lok (2002): Interacting With Real Objects Significantly Enhances Connitive Virtual Environment Taks. Dissertation, University of North Carolina at Chapel Hill (TR02-021).
[MAB92] K. Meyer, H.L. Applewhite, F.A. Biocca (1992): A Survey of Position Trackers. Presence, Vol. 1, No. 2, pp. 173-200.
[Mad98] S. Mader (1997): Automatisches Texture-Handling für ein interaktives bildgestütztes 3D-Rekonstruktionssystem. Di-plomarbeit, Universität Leipzig, Institut für Informatik.
[MB99] M.R. Mine, G. Bishop (1999): Just-In-Time Pixels. University of North Carolina at Chapel Hill, Department of Computer Science (NC 27599-3175).
[MBT96] T. Molet, R. Boulic, D. Thalman (1996): A Real Time Anatomical Converter for Human Motion Capture. Published in Proc. 7h Eurographics Int. Workshop on Animation and Simulation, Springer-Verlag.
[MDG95] P. Milgram, D. Drasic, J.J. Grodski, A. Restogi, S. Zhai, C. Zhou (1995): Merging Real and Virtual Worlds. Proceedings of IMAGINA ’95.
Literaturverzeichnis 137
[Mee01] M.J. Meehan (2001): Physiological Reaction as an Objective Measure of Presence in Virtual Environments. Dissertation, University of North Carolina at Chapel Hill (TR01-018).
[MG96] F. Madritsch, M. Gervautz (1996): CCD-Camera Based Optical Beacon Tracking for Virtual and Augmented Reality. Graz University of Technology. In EUROGRAPHICS 96.
[Min93] M.R. Mine (1993): Characterization of End-To-End Delays in Head-Mounted Display Systems. University of North Carolina at Chapel Hill, Department of Computer Science.
[MJ94] P. Min, H. Jense (1994): Interactive Stereoscopy Optimization for Head-Mounted Displays.
[MR95] T.M. Madhyastha, D.A. Reed (1995): Data Sonification: Do You See What I Hear? IEEE Software, Vol. 12, No. 2, pp. 45-56.
[MST98] Müller Systemtechnik (1998): „MST Veda Vehicle Dynamics Simulation”; Benutzerhandbuch.
[MT00] R.R. Mourant, T.R. Thattacherry (2000): Simulator Sickness in a Virtual Environments Driving Simulator. In Proceedings of the IEA 2000/HFES 2000 Congress.
[Mul94] A. Mulder (1994): Human movement tracking technology. Simon Fraser University, School of Kinesiology, TR94-1.
[NBS98] C. Neveu, T. Blackmon, L. Stark (1998): Evaluation of the Effects of a Head-mounted Display on Ocular Accommodation. Presence Vol. 7, No. 3.
[NMFP98] M.A. Nixon, B.C. McCallum, W.R. Fright, N.B. Price (1998): The Effects of Metals and Interfering Fields on Electromagnetic Trackers. Presence, Vol. 7, No 2, pp. 204-218.
[OCMB95] M. Olano, J. Cohen, M. Mine, G. Bishop (1995): Combatting Rendering Latency. Proceedings of the 1995 Symposium on Interactive 3D Graphics, pp. 19-24.
Literaturverzeichnis 138
[Ols95] E.C.B. Olsen (1995): The Evolution of a Virtual Reality Driving Simulator: From Law Enforcement Training to Research and Assessment. In Proceedings of the Third Annual International Conference: Virtual Reality and Persons with Disabilities.
[PLK98] J. Psotka, S.A. Lewis, D. King (1998): Effects of Field of View on Judgments of Self-Location: Distortions in Distance Estimations Even When the Image Geometry Exactly Fits the Field of View. Presence, Vol. 7, No. 4, pp. 352-369.
[Pot98] M. Potel (1998): Motion Sick in Cyberspace. Wildcrest Associates, IEEE.
[Pret00] D.P. Pretschner (2000): Medizinische Informatik – virtuelle Medizin auf dem Vormarsch. In Virtualisierung und Virtualität – Neue Technologien für die Medizinische Informatik, Technische Universität Braunschweig, Medi-zinische Informatik Spezial 2000.
[QS98] B. Quinn, D. Shute (1996): Windows Sockets Network Programming. Addison-Wesley Publishing Company.
[Qua98] Qualisys (1998): Marinetrak – User’s Manual v0.1 rev. 981012. Qualisys AB, Sweden.
[Rab98] R. Rabätje (1998): Virtuelle Montageuntersuchungen. In Moderne Methoden zur Montageplanung; Seminarberichte 1998.
[RD96] O. Riedel, J. Deisinger (1995): Displays für Virtual Reality. In Proceedings of the 10. Electronic Displays 95, pp. 81-92.
[Rei98] B. Reißenweber (1998): Feldbussysteme. Oldenbourg Verlag.
[Rem01] W. Remlinger (2001): Using RAMSIS in automotive conception and design at Audi. Vortrag auf dem RAMSIS-Anwendertreffen der Tecmath AG 2001 (RAMSIS USER CONFERENCE).
[Rie97] O.H. Riedel (1997): 3D-Echtzeit-Rendering unter Berück-sichtigung der Anatomie und Physiologie des menschliches Auges. Dissertation an der Universität Stuttgart, Fakultät Konstruktions- und Fertigungstechnik.
Literaturverzeichnis 139
[RL97] A. Rößler, R. Lippmann (1997): Virtuelle Menschmodelle in der Produktentwicklung. In Spektrum der Wissenschaft, Ausgabe 9/1997.
[SB97] M.A. Srinivasan, C. Basdogan (1997): Haptics in Virtual Environments: Taxonomy, Research Status, and Challenges. Comput. & Graphics, Vol. 21, No. 4, pp. 393-404.
[SB99] H. Scharm, R. Breining (1999): How Automotive Industry uses Immersive Projection Technology. In H.-J. Bullinger, O. Riedel (Editors): Forschung und Praxis T52: Proceedings of the 3rd International Immersive Projection Technology Workshop. New York, u.a.: Springer-Verlag, pp. 133-144.
[SBH99] M.A. Srinivasan, C. Basdogan, C.-H. Ho (1999): Haptic Interactions in the Real and Virtual World. In Design, Specification and Verfication of Interactive Systems ’99, Eds: D. Duke, A. Puerta, Springer-Verlag.
[SBMS95] K. Salisbury, D. Brock, T. Massie, N. Swarup, C. Zillies (1995): Haptic Rendering: Programming Touch Interaction with Virtual Objects. Symposium on Interactive 3D Graphics, Monterey, USA.
[Schi00] J. Schiefele (2000): Realization and Evaluation of Virtual Cockpit Simulation and Virtual Flight Simulation. Dissertation an der Technischen Universität Darmstadt.
[Schm95] R. Schmid (1995): Industrielle Bildverarbeitung: Vom visuellen Empfinden zur Problemlösung. Vieweg Verlag.
[Schr99] K. Schrader (1999): Kopplung virtueller Räume mit einer Ergonomie-Sitzkiste. Automotive Circle International, Bad Nauheim.
[Sei94] A. Seidl (1994): Das Menschmodell RAMSIS – Analyse, Synthese und Simulation dreidimensionaler Körperhaltungen des Menschen. Dissertation am Lehrstuhl für Ergonomie der Technischen Universität München.
[SGI97a] Silicon Graphics Inc. (1997): Cosmo 3D C++ Programmer’s Guide.
Literaturverzeichnis 140
[SGI97b] Silicon Graphics Inc. (1997): OpenGL Optimizer Programmer’s Guide: An Open API for Large-Model Visualization.
[SHCG96] A. State, G. Hirota, D.T. Chen, W.F. Garret, M.A. Livingston (1996): Superior Augmented Reality Registration by Integrating Landmark Tracking and Magnetic Tracking. Proceedings of ACM SIGGRAPH ’96.
[SHS98] S.K. Semwai, R. Hightower, S. Stansfield (1998): Mapping Algorithms for Real-Time Control of an Avatar Using Eight Sensors. Presence, Vol. 7, No. 1.
[SKDO99] J. Schiefele, W. Kubbat, K.-U. Dörr, M. Olbert (1999): Stereoscopic Projection Screens and Virtual Cockpit Simulation for Pilot Training. Immersive Projection Technologies (IPT) 99, pp. 212-222.
[SL00] R.D. Shilling, T. Letowski (2000): Development of Virtual Auditory Interfaces. RTO HFM Workshop on “What is Essential for Virtual Reality Systems to Meet Military Human Performance Goals ?”, Hague, Netherlands.
[SML98] W. Schroeder, K. Martin, B. Lorensen (1998): The Visualization Toolkit – An Object-Oriented Approach to 3D Graphics. 2nd Edition, Prentice Hall PTR.
[Smo98] R. Smolorz (1998): Verfolgung der 3D-Dummybewegung in Crashversuchen durch Auswertung monokularer Bildfolgen. Diplomarbeit an der Universität Hannover.
[SPB99] T. Seitz, E. Pfeiffer, H. Bubb (1999): 3-D-Menschmo-dellierung in Schwerelosigkeit. In Tagungsband zur DGLR-Jahrestagung, Berlin, #DGLR-JT1999-125.
[Spies94] S. Spies (1994): Management von Automobilentwicklungen – Umsetzung bereichsübergreifender Integration. Dissertation der Hochschule St. Gallen für Wirtschafts-, Rechts- und Sozialwissenschaften. Dissertation Nr. 1561.
[SRM02] K. Schrader, W. Remlinger, M. Meier (2002): Mixed Reality with RAMSIS. VDI/SAE, Digital Human Modeling Conference 2002.
Literaturverzeichnis 141
[SSKM01] M.J. Schuemie, P.v.d. Straaten, Me. Krijn, C.A.P.G. v. d. Mast (2001): Research on Presence in VR: a Survey. Journal of Cyberpsychology and Behavior; Delft.
[Stev92] W.R. Stevens (1992): Programmieren von UNIX-Netzen – Grundlagen, Programmierung, Anwendung. Carl Hanser Verlag München.
[Sut65] I.E. Sutherland (1965): The Ultimate Display. Proceedings of IFIP Congress, pp. 506-508.
[Sut68] I.E. Sutherland (1968): A Head-Mounted Three Dimensional Display. Fall Joint Computer Conference, pp. 757-764.
[Sym00] M. Symietz (2000): Echtzeitbasierte Generierung und Verlegung von Leitungsobjekten in einem digitalen Fahrzeugmodell mit einem Virtual-Reality-System. Dissertation an der Universität Bielefeld.
[TAHD96] P. Tinker, R. Azuma, C. Hein, M. Daily (1996): Driving Simulation for Crash Avoidance Warning Evaluation. Proceedings of 29th ISATA Dedicated Conference on Simulation, Diagnosis and Virtual Reality in the Automotive Industry, pp. 367-374.
[TBHH00] H. Thoms, B. Bischof, S. Heymann, K. Hildebrand (2000): Tiefenwahrnehmung. Bauhaus-Universität Weimar, Studien-gang Mediensysteme.
[Tha96] D. Thalman (1996): The Complexity of Simulating Virtual Humans. Supercomputing Review, EPFL-SCR No. 8.
[Tsai96] J.-C. Tsai (1996): Toward guaranteed stability in the haptic display of virtual environments. Dissertation, Northwestern University.
[UK95] M. Uenohara, T. Kanade (1995): Vision-Based Object Registration for Real-Time Image Overlay. In Proceedings CVRMED ’95, pp. 14-22.
[US95] M. Usoh, M. Slater (1995): An exploration of immersive virtual environments. Endeavour 19, pp. 34 - 38.
Literaturverzeichnis 142
[Ver96] C. Verplaetse (1996): Inertial proprioceptive devices: Self-motion-sensing toys and tools. IBM Systems Journal, Volume 35, NOS 3&4.
[VM00] O. Vornberger, O. Müller (2000): Computergrafik, Vorle-sungsskript, Fachbereich Mathematik/Informatik, Universität Osnabrück.
[WB95] G. Welch, G. Bishop (1995): An Introduction to the Kalman Filter. University of North Carolina at Chapel Hill, Department of Computer Science (TR041).
[WB96] G. Welch, G. Bishop (1996): One-Step-at-aTime Tracking. University of North Carolina at Chapel Hill, Department of Computer Science.
[WBVBK01] G. Welch, G. Bishop, L. Vicci, S. Brumback, K. Keller (2001): High-Performance Wide-Area Optical Tracking – The HiBall Tracking System. Presence: Teleoperators and Virtual Environments.
[WCBTR95] R.T. Whitaker, C. Crampton, D.E. Breen, M. Tuceryan, E. Rose (1995): Object Calibration for Augmented Reality. Proceedings of Eurographics ’95, Maastricht, NL.
[Wel96] G.F. Welch (1996): SCAAT: Incremental Tracking with Incomplete Information. University of North Carolina at Chapel Hill, Department of Computer Science (TR96-061).
[Wlo93] M.M. Wloka (1993): Dissertation Proposal: Time-Critical Graphics. Brown University, Department of Computer Sciencs (CS-93-50).
[Wlo95] M.M. Wloka (1995): Lag in Multiprocessor Virtual Reality. In Presence: Teleoperators and Virtual Environments, pp. 50-63.
[WS98] B.G. Witmer, M.J. Singer (1998): Measuring Presence in Virtual Environments: A Presence Questionnaire. Presence, Vol. 7, No. 3, pp. 225-240.
[WTH96] G. Walker, D. Traill, M. Hinds, A. Coe, M. Polaine (1996): VisionDome: a collaborative virtual environment. British Telecommunications Engineering, Vol. 16.
Literaturverzeichnis 143
[YNA99] S. You, U. Neumann, R. Azuma (1999): Hybrid Inertial and Vision Tracking for Augmented Reality Registration. In Proceedings of the IEEE VR ’99, pp. 260-267.
[Zac94] G. Zachmann (1994): Exact and fast Collision Detection. Diplomarbeit an der Technischen Universität Darmstadt.
[Zac97a] G. Zachmann (1997): Distortion correction of magnetic fields for position tracking. Technical report, Fraunhofer Institute for Computer Graphics (IGD).
[Zac97b] G. Zachmann (1997): WALK – Version δ. Fraunhofer Institute for Computer Graphics (IGD).
[Zac00] G. Zachmann (2000): Virtual Reality in Assembly Simulation – Collision Detection, Simulation Algorithms, and Interaction Techniques. PhD thesis, Darmstadt University of Technology. Fraunhofer IRB Verlag.
[Zac02] G. Zachmann (2002): Minimal Hierarchical Collision Detection. ACM Symposium on Virtual Reality Software and Technology (VRST).
[ZH99] D.C. Zikovitz, L.R. Harris (1999): Head tilt during driving. Ergonomics, Vol. 42, No. 5, pp. 740 – 746.
[Zimm00] P. Zimmermann (2000): Virtual Reality (VR) – Forschung und Anwendung bei VOLKSWAGEN. In Virtualisierung und Virtualität – Neue Technologien für die Medizinische Informatik. Technische Universität Braunschweig, Medizinische Informatik Spezial 2000.
[ZPRS97] P. Zimmermann, F. Purschke, R. Rabätje, M. Schulze, A. Starke, M. Symietz (1997): Virtual Reality (VR) – New Methods of Improving and Accelerating Vehicle Development. Proceedings of the 5th International Conference Florence ATA.
[ZM93] S. Zhai, P. Milgram (1993): Human Performance Evaluation of Manipulation Schemes in Virtual Environments. Proceedings of IEEE Virtual Reality Annual Symposium (VRAIS).
144
Informationen aus dem World Wide Web Der Autor hat alle Verweise am 24.01.2002 auf Korrektheit und Verfügbar-keit überprüft.
[W3ABFH] M. Agrawala, A. Beers, B. Fröhlich, P. Hanrahan: Responsive Workbench. Stanford University Computer Graphics Laboratory URL: http://graphics.stanford.edu/projects/RWB
[W3Art] A.R.T. – advanced realtime tracking GmbH, Gewerbestraße 17, D-82211 Herrsching, Germany URL: http://www.ar-tracking.com
[W3Asc] Ascension Technology Corporation, P.O. Box 527, Burlington, VT, 05402 USA URL: http://www.ascension-tech.com
[W3DLR] Deutsches Zentrum für Luft- und Raumfahrt e.V. (DLR) Linder Höhe, D-51147 Köln-Porz URL: http://www.dlr.de/DLR-Homepage
[W3End95] M. Enderle (1995): Farbensehen beim Menschen. Ruhr Universität Bochum, Multimedia Seminar. URL: http://www.tp4.ruhr-uni-bochum.de/MultiMedia/Seminar.html
[W3Fak] Fakespace Labs, Inc., 241 Polaris Ave.; Mountain View, CA, 94043 USA URL: http://www.fakespacelabs.com
[W3Gär01] D. Gärdenfors (2001): Auditory Interfaces – A Design Platform. URL: http://www.designsounds.net
[W3GKN] M. Grein, A. Kaußner, H. Noltemeier: Visualisierung in der Fahrsimulation. URL: http://www-info1.informatik.uni-wuerzburg.de/de/publikationen/rz.htm
Informationen aus dem World Wide Web 145
[W3HA01] Humanoid Animation Working Group (2001): H | Anim 2001. Web3D Consortium Incorporated. URL: http://www.h-anim.org/Specifications/H-Anim2001
[W3HH97] P. Hempel, A. Hajne (1997): Verstellbare Sitzkiste. Hochschule für angewandte Wissenschaften Hamburg, Fachbereich Fahrzeugtechnik und Flugzeugbau URL: http://www.fh-hamburg.de/f/personal/projekte/sitzkiste/sitzkiste.html
[W3Hof] P. Hoffmann: Bau und Funktion des Ohres. Med on net AG; Gewerbestraße 12; 84427 St. Wolfgang; Germany. URL: http://www.gesundheitspilot.de
[W3IC] Immersion Corporation, 801 Fox Lane, San Jose, California 95131 USA URL: http://www.immersion.com
[W3IGH] Informationszentrum für gutes Hören Zugerstrasse 79, 6314 Unterägeri, Switzerland. URL: http://www.akustika.ch
[W3Inf] infoquelle – Gesundheit data solution Steude Beulker BbR, Schönefelder Straße 72-74; 12355 Berlin, Germany URL: http://www.infoquelle.de
[W3Int] InterSense 73 Second Avenue; Burlington, MA 01803, USA URL: http://www.isense.com
[W3Kai] P.K. Kaiser: The Joy of Visual Perception – A Web Book. York University, 4700 Keele Street, Toronto, Ontario, Canada. URL: http://www.yorku.ca/eye
[W3KE] Kaiser Electronics – A Rockwell Collins Company 2701 Orchard Parkway – MS-91, San Jose, CA 95134, USA URL: http://www.kaiserelectronics.com
[W3Kol96] J. Kolozs (1996): Position Trackers for Virtual Reality. University of Utah URL: http://www.cs.utah.edu/~cs6360/Kolozs/trackers.html
Informationen aus dem World Wide Web 146
[W3Krem] M. Kremer: Audite ! – Akustik – Gehör – Psychoakustik. Bergische Universität Gesamthochschule Wuppertal, Labor für digitale Signalverarbeitung, Fuhlrottstraße 10, 42097 Wuppertal. URL: http://www.dasp.uni-wuppertal.de/audite
[W3Log] Logitech GmbH Streiflacher Straße 7, D-82110 Germering, Germany URL: http://www.logitech.com/cf/index.cfm
[W3LOI] Stadt Wien: Lärm Online Informationssystem. URL: http://www.rosinak.co.at/lois/node.jsp
[W3MAC] Motion Analysis Corporation, 3617 Westwind Blvd., Santa Rosa, California 95403, USA URL: http://www.motionanalysis.com
[W3MVIS] Microvision, Inc. 19910 North Creek Parkway; Bothwell, WA 98011-3008, USA. URL: http://www.mvis.com
[W3ND] NetDoctor.de: Gleichegewichtsprüfung. http://www.netdoktor.de
[W3NDI] NDI – Northern Digital Inc., 103 Randall Dr., Waterloo, Ontario, Canada URL: http://www.ndigital.com
[W3NI] National Instruments Corporation 6504 Bridge Point Parkway, Austin, TX 78730-5039 URL: http://www.natinst.com
[W3NVI] n-Vision, Inc., 7915 Jones Branch Drive, McLean, VA 22102, USA URL: http://www.nvis.com
[W3Pol] Polhemus Incorporated – A Rockwell Collins Company, 40 Hercules Drive, Colchester, VT 05446, USA URL: http://www.polhemus.com/home.htm
[W3Pre01] PREFIX Corporation (2001): PVM – Programable Vehicle Model. 1300 W. Hamlin Rd., Rochester Hills, MI 48309, USA, Product specification. URL: http://www.prefix.com
Informationen aus dem World Wide Web 147
[W3Pro] G. Prokopakis: Haptics. Naval Postgraduate School, Department of Computer Science. URL: http://www.cs.nps.navy.mil/people/faculty/capps/4473/projects/prokopak/full.html
[W3Qua] Qualisys AB Esperantoplatsen 7-9; S-41116 Gothenburg; Sweden URL: http://www.qualisys.com
[W3Roc01] U. Rockmann (2001): Sinnesphysiologie. Carl von Ossietzky Universität, Oldenburg, Institut für Sportwissenschaften. URL: http://www.uni-oldenburg.de/sport/bww/Lehre/Sinne/sinne.html
[W3SDID] Systron Donner Inertial Division, 2700 Systron Drive, Concord, CA 94518-1399; USA URL: http://www.systron.com
[W3Sens] SensAble Technologies, Inc. 15 Constitution Way, Wobum, MA 01801, USA URL: http://www.sensable.com
[W3SG] StereoGraphics Corporation 2171 E. Francisco Blvd.; San Rafael, CA 94901; USA URL: http://www.stereographics.com
[W3SGI] Silicon Graphics Inc. (SGI) 1600 Amphitheatre Pkwy.; Mountain View, CA 94043; USA URL: http://www.sgi.com
[W3Shn93] B. Shneiderman (1993): EVE – The Encyclopedia of Virtual Environments. Produced by the students of Dr. Ben Shneiderman's CMSC 828S Virtual Reality and Telepresence Course. URL: http://www.hitl.washington.edu/projects/knowledge_base/virtual-worlds/EVE
[W3Sim] simtec simulation technology GmbH Hermann-Blenk-Str. 34, D-38108 Braunschweig, Germany URL: http://www.simtec-gmbh.de
[W3SMI] SensoMotoric Instruments GmbH Warthestraße 21, D-14513 Teltow / Berlin, Germany URL: http://www.smi.de/home/home.htm
Informationen aus dem World Wide Web 148
[W3STN] STN Atlas Elektronik GmbH Sebaldsbrücker Heerstraße 235, 28305 Bremen, Germany URL: http://www.atlas.de/sae/Hauptframe.htm
[W3TAN] TAN Projektionstechnologie GmbH & Co. KG Tiefenbroicher Weg 35 / A2; D-40472 Düsseldorf, Germany URL: http://www.tan.de
[W3Tec] tecmath AG – Human Solutions, Sauerwiesen 2; D-67661 Kaiserslautern URL: http://www.hs.tecmath.de
[W3Vic] Vicon Motion Systems Inc., 9 Spectrum Pointe Lake Forest CA 92630 USA URL: http://www.vicon.com
[W3Vit] Vitronic Dr.-Ing. Stein Bildverarbeitungssysteme GmbH Hasengartenstraße 14a, 65189 Wiesbaden URL: http://www.vitus.de
[W3VRC] vrcom – Gesellschaft für immersive Visualisierungslösungen mbH, Donnersbergring 20; D-64295 Darmstadt, Germany URL: http://www.vrcom.de
[W3Zwis98] R. Zwisler (1998): Virtuelle Realität und die Rolle von Haptik. Institut für Psychologie; Universität Regensburg. URL: http://www.zwisler.de/scripts/haptics/haptics.html
149
Lebenslauf
Name: Kai Schrader
Geburtstag, Geburtsort: 06.05.1968 in Celle
Familienstand: verheiratet, ein Kind
Eltern: Fritz Schrader, verstorben am 30.08.1973 Erika Schrader, geb. Oschlies, Hausfrau
Schulausbildung: 1974-1978 Grundschule Westercelle 1978-1988 Gymnasium Ernestinum Celle - Abitur
Wehrdienst: Zeitsoldat, stellvertretender Zugführer, 1988-1990 Reserveoffizier
Studium: Informatik an der Technischen Universität Braunschweig 1990-1996 Studienschwerpunkte: Datenbanksysteme, Betriebssysteme und Rechnerverbund, Enzwurf integrierter Schaltungen Anwendungsfach: Mathematik 2.10.1995-29.3.1996 Diplomarbeit bei der VOLKSWAGEN AG Wolfsburg 30.10.1996 Abschluss: Diplom in Informatik
Beruflicher Werdegang: 1996-1997 Systemanalytiker bei der LINEAS GmbH in Braunschweig 1997-1999 Doktorandentätigkeit im Virtual Reality Labor der VOLKSWAGEN AG Wolfsburg seit 1.6.1999 Systemanalytiker bei der VOLKSWAGEN AG Wolfsburg
Sprachkenntnisse: gute Englischkenntnisse, Latein
Führerschein: Klasse 3
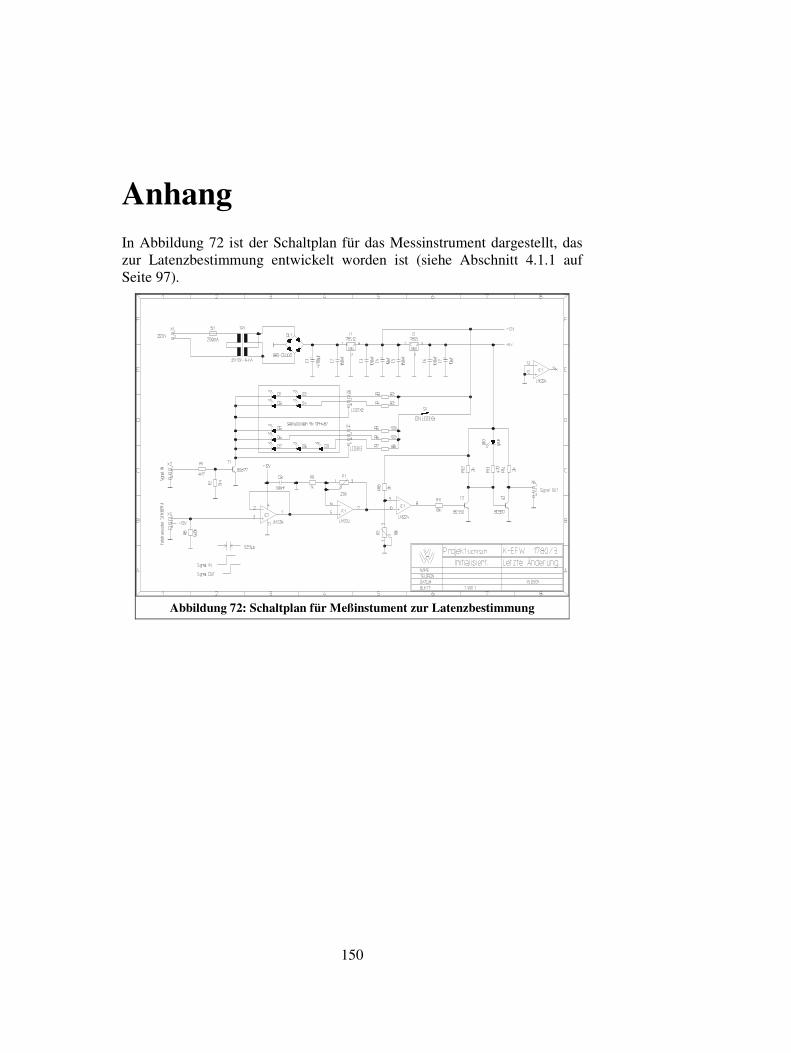
150
Anhang In Abbildung 72 ist der Schaltplan für das Messinstrument dargestellt, das zur Latenzbestimmung entwickelt worden ist (siehe Abschnitt 4.1.1 auf Seite 97).
Abbildung 72: Schaltplan für Meßinstument zur Latenzbestimmung












![Bor Saen [mock]](https://img.pdfslide.tips/doc/110x75/568bdbe31a28ab2034b02ff5/bor-saen-mock.jpg)