Embed Size (px)
Citation preview

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 1/48
Sistema de Amarração
• As Linhas de ancoragem têm a funçãoestrutural de fornecer forças derestauração para manter em posição os
sistemas flutuantes tais como plataformassemi-submersíveis ou navios. Paraoferecer a força de restauração necessáriasão dispostas em catenária (ancoragem
convencional) ou utilizadas como linhasretesadas (taut-leg) ou tendões.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 2/48
Sistemas de Amarração
• Ancoragem em Catenária
• As linhas são presas no fundo do mar por
âncoras de resistência horizontal;• Possui um raio de ancoragem razoavelmentegrande e o próprio atrito do trecho de linhaencostado no fundo contribui com a força derestauração;
• A principal desvantagem é o congestionamento
de linhas de unidades próximas, interferindodiretamente no posicionamento das mesmas,
juntamente com os equipamentos submarinos.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 3/48
Sistemas de Amarração
• Ancoragem em Taut-Leg
• É constituída por linhas retesadas com umângulo de topo de aproximadamente 45 com avertical;
• Menor projeção horizontal com mesma ordem degrandeza da lâmina d’água;
• Proporciona maior rigidez ao sistema, sendo opasseio da embarcação limitado a offsetsmenores;
• As âncoras utilizadas precisam resistir a altascargas verticais;• São fixas nas extremidades inferiores por meio
de estacas de sucção e VLA (âncoras comresistência vertical).

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 4/48
Sistema de Amarração
• O raio de ancoragem no sistema taut leg éduas a três vezes menor que o raio deancoragem do sistema catenária e o passeio(offset) é da ordem de 3% da lâmina d’água,sendo cerca de três vezes menor que nosistema em catenária.
• O sistema de ancoragem para unidade deperfuração atende a critérios menos rigorososque o sistema de uma UEP. As unidadespermanentes ancoradas são projetadas para
uma condição ambiental cinco vezes maior doque o tempo de real utilização (condiçãoambiental centenária para vinte anos deoperação).

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 5/48
Sistemas de Amarração

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 6/48
Tipos de Fundações

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 7/48
Sistemas de Amarração
• Ancoragem Vertical (Tendões)
• Este tipo de ancoragem baseia-se na utilizaçãode tendões verticais que precisam estar sempre
tracionados devido ao excesso de empuxoproveniente da parte submersa da embarcação;• Os tendões podem ser de cabo de aço ou
material sintético, proporcionando alta rigidezno plano vertical e baixa rigidez no planohorizontal;
• A força de restauração no plano horizontal éfornecida pela componente horizontal da forçade tração nos tendões;
• Este tipo de ancoragem é usado principalmenteem plataformas TLP (Tension Leg Platform ), mastambém pode ser adotado por bóias, monobóias,
entre outras.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 8/48
Sistemas de Amarração
Ancoragem Vertical _TLP

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 9/48
Sistemas de Amarração
• A âncora é o elemento responsável pela fixação doponto de ancoragem onde é presa a linha deancoragem para manter estacionária a unidadeflutuante.
• Na ancoragem tradicional, em catenária, âncoradeve resistir apenas às cargas horizontais onde omais comum é a utilização de âncoras de arrasteque são fáceis de instalar, porém necessitam deum grande trecho de linha apoiado no fundo paragarantir exatamente que não sofrerão cargasverticais.
• Na ancoragem taut-leg a âncora deverá suportar cargas verticais de grande magnitude.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 10/48
Âncora Convencional (DEA – Drag Embedment Anchor)
• É o modelo tradicional, usado duranteanos na indústria offshore. Sãocravadas através do arraste no solomarinho, sem penetração profunda (5
a 15 m abaixo da superfície).• Em princípio, as cargas que chegamna âncora devem ser horizontais,implicando numa grande distânciaentre o TDP na condição neutra e aâncora.
• São de fácil remoção quandopuxadas na vertical ou no sentidocontrário ao da cravação.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 11/48
Sistemas de Amarração
• Tipos de ponto fixo para ancoragem tipo
Taut-leg:
- Âncora para carga vertical (VLA)- Estaca Torpedo
- Estaca de Sucção
- Estaca escavada e cimentada

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 12/48
Âncoras de Carga Vetical (VLA – Vertical Load Anchor)
• São cravadas através do arraste no solo marinho.• Estas âncoras podem ter a forma parecida comuma arraia ou de uma enxada, devido ao formatopenetram em torno de 25 a 20 metros no solomarinho, aumentando a resistência à carga
vertical.• São mais caras do que as convencionais, por
haver menos concorrência no mercado. Tem sidodifícil a remoção após instalada, o que contraindica para uso em MODU, ou projetos de curtaduração.
• Os procedimentos de arraste podem impedir seuposicionamento correto, principalmente em áreascongestionadas por muitas plataformas, além de
necessitarem de embarcações de alto custo paraauxiliar o processo de instalação.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 13/48
Estacas de Sucção
• Estacas de sucção são utilizadas emsistemas em que as linhas são mantidastensionadas, como por exemplo, em semi-submersíveis taut-leg e TLPs.
•É uma estaca com forma de um cilindrooco, medindo 12 a 15 m de altura, por cerca de 5 m de diâmetro, com umaextremidade fechada e outra aberta.
• As estacas de sucção são inicialmente
posicionadas por gravidade e depois umsistema de bombas retira toda a água dedentro da estaca, cravando-a através deum diferencial de pressão.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 14/48
Âncoras
Estacas

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 15/48
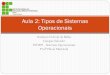
Estaca Torpedo
• Estaca cilíndrica sólida com ponta cônica fechada queé cravada no solo por gravidade após lançamento dealtura calculada.
• Em geral seu comprimento é cerca de 10 vezes odiâmetro.
• A presença das aletas proporciona maior área decontato da estaca com o solo aumentando aresistência, tanto lateral quanto axial.
• Inicialmente, foram aplicadas para ancoragem delinhas flexíveis. Posteriormente começou a ser adotada na ancoragem de MODUs, Semi Submersíveisde Produção e FPSOs possibilitando sua instalação emáguas com profundidades superiores a 2000m.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 16/48
Estaca Torpedo

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 17/48
Lançamento de Estaca Torpedo

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 18/48
Estacas Torpedo Vantagens:
• Permite que cargas horizontais e verticaispossam ser aplicadas.
• É a melhor alternativa para plataforma semi-submersíveis e unidades FPSOs em águas
profundas e em locais congestionados.• O custo de instalação desta estacaapresenta baixa sensibilidade ao aumentoda lâmina d’água, viabilizando
economicamente a sua aplicação em águasprofundas.
• Necessita-se somente de um rebocador pararealizar o transporte e lançamento.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 19/48
Estacas Torpedo
Dimensões Típicas:
• Ancoragem de MODUs
Diâmetro externo = 30” (760 mm) Comprimento = 12 m
• Ancoragem de Sistemas Flutuantes de Produção
Diâmetro externo = 42” (1070 mm) Comprimento = 15 m

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 20/48
Estacas Perfuradas e Cimentadas (Grouted Pile)
• Estaca que simula a primeirafase de perfuração de um poço.
• Tem uma tecnologia bemconsolidada e confiável, mas,geralmente não é utilizada pelo
alto custo da unidade deperfuração

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 21/48
Componentes das Linhas de ancoragem
• Amarras – São as correntes usadas na ancoragemde embarcações, em geral fabricadas com açocarbono ou de baixa liga. As principaiscaracterísticas são elevada vida útil e granderesistência à abrasão, o que as torna ideais parauso nos trechos de entrada da linha de ancoragem
na unidade (superfície do mar) e em contato com osolo marinho.O peso linear elevado é propriedade muitoimportante para o trecho apoiado no solo quando osistema de ancoragem é em catenária.Emcompensação, as amarras, pelo seu alto peso
linear e custo elevado, não são indicadas para otrecho intermediário, entre o fundo do mar e 100 mde profundidade, próximo a entrada da UEP.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 22/48
Componentes das Linhas de ancoragem

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 23/48
Componentes das Linhas de ancoragem
• Cabos de Aço
Os cabos de aço são mais resistentes aomanuseio do que os cabos de poliéster,têm diâmetro menor para a mesma cargamáxima, são menos sensíveis a danos deabrasão, podendo tocar no solo marinhodurante a instalação.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 24/48
Componentes das Linhas de ancoragem
• Alguns dos tipos de cabos utilizados:
• No caso de unidades flutuantes para explotação de
petróleo e projetadas para permanecer no local por um período maior que 5 anos, o cabo de açonormalmente usado e recomendado é o Spiral Strand devido à sua maior resistência à fadiga e acorrosão.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 25/48
Componentes das Linhas de ancoragem • Cabos de Poliéster
São mais leves, porém com um diâmetro maior,
para a mesma carga mínima de ruptura (MBL-Minimum Breaking Load) e possuem característicaselásticas que viabilizam a instalação de sistemasde ancoragem taut leg (menor raio de ancoragem).São mais caros que os cabos de aço e mais baratos
que as amarras. São muito sensíveis à abrasão e acontaminação por toque no fundo do mar (ingressos de grão de areia).

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 26/48
Sistemas de Amarração
• Tipos de Sistemas de Ancoragem:
• Spread Mooring
• Dicas (Differentiated AnchoringSystem)
• Single Point Mooring

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 27/48
Spread Mooring • É um sistema de amarração onde a embarcação fica
posicionada através da conexão a vários pontos fixos,espalhados (spread) mais ou menos igualmente ao redor daUEP.
• É o tipo usado para unidades flutuantes de casco tiporedondo, como as SS, Spar, etc; onde os esforços resultantesdo ambiente não variam muito com o ângulo de incidência dos
agentes ambientais sobre o casco.• Em regiões onde as condições ambientais possuem direçõespreferenciais bem definidas, pode ser usado também emunidades tipo navio. Nesse caso, a unidade será posicionadacom eixo longitudinal paralelo à direção da condiçãoambiental mais severa, pois não se alinhará com a resultanteambiental.
• Para unidades tipo navio, os principais tipos de SpreadMooring são:Quadro de Ancoragem – as linhas de ancoragem sãodiretamente conectadas à unidade.Quadro de bóias – as linhas de ancoragem são conectadas abóias e a unidade amarrada às bóias com cabos sintéticos(normalmente Nylon).

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 28/48
Sistema Dicas (Differentiated Compliance Anchoring System
• É uma variação do Spred Mooring, desenvolvidopara UEPs tipo navio, onde as linhas de ancoragemligadas à proa possuem complacência diferentedas ligadas à popa da UEP, permitindo um certoalinhamento com as condições ambientais.
• Foi desenvolvido inteiramente por técnicos daPetrobras.
• Pode ser projetado para embarcações de qualquer porte.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 29/48
Amarração em um único Ponto Single Point Mooring (SPM)
• É um sistema de amarração usado emUnidades tipo navio em que a embarcaçãofica conectada a apenas um único ponto. È
utilizado em regiões onde as condiçõesambientais mudam constantemente, poispermite que a Unidade se alinhe com aresultante dos esforços ambientais,minimizando as forças sobre o casco,reduzindo as cargas no sistema deancoragem.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 30/48
Monobóia (CALM Buoy – Catenary Anchor leg Mooring Buoy)
É um corpo flutuante ancorado por linhas emcatenária que permite uma embarcação, a elaamarrada por meio de cabos, gire em qualquer
direção, em função da resultante ambiental .Podem ser utilizados em LDA que variam de 20 ma 830 m. São utilizadas na Bacia de Campos hámais de 20 anos.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 31/48
CALM (Catenary Anchor Leg Moorings )

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 32/48
Monobóia com Yoke (CALM-yoke System)
• Consiste de uma monobóia conectada àembarcação por meio de um braço rígido(yoke) articulado no casco. A articulaçãorígida elimina movimentos horizontais entea bóia e o navio.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 33/48
SALM (Single Anchor Leg Mooring)
• O sistema SALM emprega um sistema deriser vertical que tem uma amplacapacidade de flutuação próximo asuperfície com uma forquilha de
acoplamento rígida.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 34/48
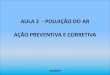
Sistema de Amarração com Turret
No sistema de amarração com turret todas as linhasde ancoragem e risers são presas no turret que fazparte da estrutura a ser ancorada. O turret permiteque a embarcação gire em torno das linhas. Ele podeser montado externo ou internamente a embarcação.
É um sistema composto por um corpo centralcilíndrico, ancorado no fundo do mar, conectado aocasco de uma embarcação através de rolamentos euniões rotativas (Swivel),

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 35/48
Sistema de Amarração com Turret

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 36/48
Sistema de Amarração com Turret
• O princípio de ancoragem de unidadesflutuantes por turret foi, primeiramente,utilizado em embarcações de perfuração. Aextensão desse princípio para a área deprodução veio a ocorrer no final dos anos
70, através da empresa Maritime Tentech,utilizando-se o conceito de turret internotipo “drag-chain”. O primeiro FPSO comturret interno desenvolvido para condiçõesde mar adversas, ainda com tecnologiaTentech, foi construído no Japão eentregue em 1986. Foi o FPSO Petrojarl 1,que provou que os equipamentos deprocesso poderiam operar com sucessonum FPSO do tipo “navio”, operando nascondições de mar encontradas no Mar do
Norte.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 37/48
Recomendações Existentes para o Projeto de Linhas de Ancoragem
• O passeio máximo que a estrutura pode apresentar éestabecido principalmente para evitar danos nosrisers e evitar uma possível ruptura.Offset admissível do navio Condição %LDAIntacta 10Linha Rompida 15
• Tração MáximaPara o projeto de sistemas de ancoragem existem
normas de projeto (ABS, DNV, API) comrecomendações de fatores de segurança.Tmax=MBL/FSTmax – Tração MáximaMBL – Valor mínimo da carga de ruptura do material
FS – Fator de segurança

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 38/48
Condição Máxima de Projeto
• A condição máxima de projeto é definida como umacombinação de vento, onda e corrente para a qualo sistema de ancoragem é projetado. É a condiçãoextrema que o sistema deve suportar sem danos.
• Critérios de Projeto:
Ancoragem Permanente a)Vento – 100 anos (Período de Retorno)
Onda – 100 anos
Corrente - 10 anos
b)corrente – 100 anos (Período de Retorno)Onda – 100 anos
Vento - 10 anos
Ancoragem Provisórias (5 anos)
a)Operações longe de outras estruturas – 1 ano
b) Operações próximas a outras estruturas – 10 anos

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 39/48
Metodologia de Análise
• Análise DesacopladaEfetua-se as análises dos movimentos do casco.Nesta análise as linhas são representadas por ummodelo simplificado composto por coeficientes
escalares de massa, rigidez, amortecimento ecarregamento, que são introduzidos na equação demovimento do flutuante.
• A segunda etapa do procedimento desacoplado,associada ao projeto das linhas consiste emefetuar análises de modelos de Elementos Finitosda linha, sob a aplicação, no topo, dos movimentosda unidade flutuante calculados na 1ª etapa, bemcomo dos carregamentos de onda e correnteza aolongo da linha.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 40/48
Análise Desacoplada

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 41/48
Sistema de Posicionamento Dinâmico (DP)
• Defini-se posicionamento dinâmico comoum sistema que controla automaticamentea posição e o aproamento de umaembarcação por meio de propulsão ativa.
• As unidades DP podem ser constituídas denavios ou plataformas semi-submersíveis.Quando estas unidades operam muitopróximas a outras unidades ancoradas,
pode ser necessária a utilização deâncoras de segurança, para o caso desofrerem alguma falha na geração deenergia para os propulsores.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 42/48
Sistema de Posicionamento Dinâmico (DP)
• É grande a diversidade de atividadesdesempenhadas por navios equipados com PD.
- Perfuração
- Suporte e Mergulho
- Lançamento de linhas e umbilicais
- Instalação/Remoção de EquipamentosSubmarinos
- Offloading de Plataformas
- Pesquisa Oceanográfica

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 43/48
Sistema de Posicionamento Dinâmico (DP)
Vantagens:
• Durante uma operação de offloading onavio é completamente autopropelido, e
portanto, não há necessidade derebocadores.
• Navios com PD possuem altamanobrabilidade.
• Resposta mais rápida a mudanças nascondições ambientais.
• Custo do Sistema é invariável com aprofundidade.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 44/48
Sistema de Posicionamento Dinâmico (DP)
Desvantagens:
• Custo alto de instalação e operação.
• Maior possibilidade de falha.
• Requer mais pessoas a bordo para
manutenção e operação.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 45/48
Sistema de Posicionamento Dinâmico (DP)
• A característica fundamental dos SPDs é aintegração de um grande número de sub-sistemas operando conjuntamente.Os sub-sistemas principais de um SPD são:• Sub-sistema de Potência
• Sub-sistema de Atuação
• Sub-sistema de sensoriamento• Sub-sistema de Controle

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 46/48
Sistema de Posicionamento Dinâmico (DP)
• Sub-Sistema de PotênciaÈ responsável por fornecer energia aospropulsores, a alguns sensores e aos
elementos de controle.
• Sub-sistema de AtuaçãoÉ responsável por fornecer as forças
necessárias para o posicionamento daembarcação. È composto pelos diversostipos de propulsores e pelos sistemas decontrole associados a cada um deles.
Sistema de Posicionamento

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 47/48
Sistema de Posicionamento Dinâmico (DP)
• Sub-Sistema de Sensoriamento
È composto pelos equipamentos (sensores)responsáveis por fornecer as informaçõesnecessárias para que o controlador posicione aembarcação de forma desejada.
Os sensores de posição medem a posição de umponto da embarcação no plano horizontal. Astecnologias empregadas são: sistemas delocalização por satélite (GPS), sistemashidroacústicos, radares por microondas, dentreoutros.O aproamento é medido por girocompassos;
Sensores responsáveis pela medição das condiçõesambientais. A medição do vento (velocidade edireção) é feita pelos anemômetros.O controlador utiliza suas informações para estimar as forças de
baixa frequência devidas ao vento econtrabalanceá-las diretamente pelos propulsores.

5/17/2018 Erikagravina-Aula2 Inst Prod - slidepdf.com
http://slidepdf.com/reader/full/erikagravina-aula2-inst-prod 48/48
Sistema de Posicionamento Dinâmico (DP)
• Sub-Sistema de SensoriamentoÈ composto pelos computadores. O
computador é dotado de placas decomunicação responsáveis pela leitura dasinformações dos diversos sensores e pelocomando sobre os sistemas de controledos propulsores. Toda a inteligência dosSPDs está contida no programa
computacional executado neste sub-sistema, que realiza a lógica de controleresponsável pelo posicionamento daembarcação.