Embed Size (px)
Citation preview

E S C U E L A P O L I T É C N I C A N A C I O N A L
FACULTAD DE INGENIERÍA ELÉCTRICA
"ESTUDIO DEL REGULADOR CUADRATICO GAUSSIANO
Y SU SOLUCIÓN USANDO MATLAB"
TESIS DE GRADO PREVIA A LA OBTENCIÓN DEL
TITULO DE INGENIERO KN EIxECTRONICA Y CONTROL
FABIÁN RODRIGO CASTILLO AYALA
QUITO, MA&ZO DE 1995

CERTIFICO QUE EL PRESENTE TRABAJO HA
SIDO REALIZADO EN Su TOTALIDAD POR
EL SR, FABIÁN RODRIGO CASTILLO AYALA
Be-áoya
DIRECTOR DE TESIS

AGRADECIMIENTO
Mi más sincero a/íradeclmierrfco al
Ing- Marco Barragán por sus valiosos
consejos y -tiempo dedicado a. la
dirección de esta tesis,
Ad.emás 7 a a que líos ami go s gu e
colaboraron para la. realización de
la misma

DEDICATORIA
A la memoria de mi padre, a mi madre, a
mi esposa y a mi "tierno hijo.
ÍNDICE
CAPITULO I INTRODUCCIÓN
1.1 Generalidades 1
1.2 Objetivos , , 3
1. 3 Alcance 4
1.4 Contenido 5
CAPITULO II ANÁLISIS MATEMÁTICO DE LQG
2.1 Planteamiento del Problema . . 8
2.2 Regulador Cuadrático Lineal Deterministico 10
2.2.1 Generalidades 10
2.2.2 Desarrollo Matemático ,. - - 11
2.3 Filtro de Kalma.n . . » 17
2 - 4 Teorema de Separación 24
2.5 Propiedades de Realimentación 31
CAPITULO III RESPUESTA EN FRECUENCIA
DE SISTEMAS MIMO
3.1 Ecuaciones .Fundamentales , 37

3.2 Diagramas cíe Bode de MIMO 40
3.3 Análisis de Estabilidad ....„,,.,. , _ 45
3.4 Respuesta en Frecuencia del LQG ......,-„„..., 52
CAPITULO IV APLICACIÓN DE LOS COMANDOS DEL HA.TLAB
PARA CONTROL Y CONTROL ROBUSTO
4.1 Presentación del Programa para Sistemas SISO y MIMO .. 57
4.1.1 Introducción 57
4.1.2 Herramientas utilizadas - 57
4.1.3 Ventarías cíe la Diagonaliaación de Matrices Función
de Transferencia de Sistemas Multivariables .... 58
4.1-4 Ejemplos cíe Demostración . - 59
4.1.5 Análisis para Sistemas Univariables 59
4.1.6 Contenido del Programa de demostración 63
4.2 Controlador Cuadrático Lineal . . 65
4.2.1 Introducción 65
4.2.2 Descripción de los Ejemplos 67
4.2.3 Sistemas SISO de Primer Orden ..„,.... 68
4.2.4 Sistemas SISO de Segundo Orden 84
4.2.5 Conclusiones . 102
4.3 Ganancia para el filtro de Kalman 103
4 . 3.1 Introducción 103
4.3.2 Sistemas SISO de Segundo Orden 106
4.3.3 Conclusiones - ... - 107
4.4 Análisis de los Resultados Obtenidos 109
4.4.1 Introducción 109

4.4.2 Sistemas SISO de Primer- Orden „ 109
4.4.3 Sistemas SISO de Segundo Orden 118
4.4.4 Conclxisiones - 129
4. 5 Comandos para Diagramas - , 130
4.5.1 Comandos para Sistemas SISO ...... , 130
4.5.2 Comandos para Sistemas SISO y MIMO - - 131
CAPITULO V EJEMPLOS DE APLICACIÓN, CONCLUSIONES
Y RECOMENDACIONES
5.1 E.jemplos de Aplicación 134
5.1.1 Introducción 134
5.1.2 Sistemas MIMO de Primer Orden 135
5.1.3 Sistemas MIMO de Segundo Orden 153
5.1.4 Ejemplo de una Aeronave „ . 178
5.2 Conclusiones 212
5 , 3 Recomendaciones , . , 216
BIBLIOGRAFÍA 219
ANEXOS
Manual del usuario 222
Nomenclatura Utilizada 225

CAPITULO I
I N T R O D U C C I Ó N
1.1.- GENERALIDADES.-
En la mayoría de procesos industriales, siendo éstos
relativamente complejos, se presentan factores que alteran su
comportamiento. Estos factores que pueden alterar al
sistema, se pueden producir por diferentes causas como por
ejemplo: problemas de envejecimiento de los componentes
internos, cambio en las características de funcionamiento,
perturbaciones internas, perturbaciones externas, presencia
de ruidos no deseados, etc.
Como consecuencia de estos problemas, el sistema o proceso
puede demostrar comportamiento inestable, lo que puede
provocar pérdidas considerables si el sistema es delicado y
costoso.
Entonces, se trata de enfrentar el problema desde el punto de
vista de rechazar distorsiones y minimizar los efectos que
pueden causar ruidos indeseables, es decir, tener una función
que minirnize el error y optimice el funcionamiento del
sistema; entonces se habla de un tratamiento óptimo de
sistemas utilizando la teoría estocástica, debido a que las
distorsiones y los ruidos son aleatorios.
Como se menciona, se requiere de una herramienta a fin de
rechazar distorsiones y perturbaciones no deseables para el

sistema, logrando asi estabilidad inherente en el mismo; la
herramienta empleada para tal fin puede ser la Teoría de
Control , Estocástico LQ.GR (Regulador Cuadrático Lineal
Gaussiano) o también llamado LQG.
El algoritmo computacional del LQGR se encuentra desarrollado
en el paquete Matlata para Control Robustoy el que cuenta
además con los métodos denominados Hs y H<~3 y que hacen su
análisis en el campo de la frecuencia principalmente; cabe
indicar que Hco utiliza las bases matemáticas del LQGR para
compensación_
Generalmente se tienen sistemas con varias entradas y
salidas, por lo tanto se trata de sistemas multivariables, de
tal forma que el análisis o el tratamiento matemático es
realizado por variables de estado.
Como se ha mencionado, la teoría para Control Robusto se
encuentra desarrollada dentro de un paquete computacional
denominado Robust-Control Toolbox, que forma parte del
MatlabP y es una herramienta auxiliar que permite obtener y
observar los diferentes pasos de análisis en Control Robusto.
La aplicación de este programa en plantas cuya estabilidad se
ve afectada continuamente, como es el caso por ejemplo de una
aeronave o un proyectil en el espacio, en donde las
condiciones de viento, velocidad del viento, etc. son
cambiantes e irnpredecibles, asi como las condiciones propias
del sistema que lo desequilibrans robustece la estabilidad de
estas plantas.
Ahora, el método LQGR utiliza el teorema de la Separación, lo
que facilita el análisis entre la parte deterrninística y

3
aleatoria del sistema. Sin embargo este teorema no da los
criterios para la elección adecuada de matrices de
ponderación propias del proceso de Control Robusto,
1_2_- OBJETIVOS.
El presente trabajo de tesis intenta ser básicamente un texto
de consulta y guia para el aprendizaje de Control Robusto,
por el método del Regulador Cuadrático Lineal Gaussiano
(LQGR), utili2ando el paquete Matlab.
Los objetivos a conseguir en este trabajo son:
- Desarrollar las bases matemáticas necesarias para el
análisis del método de Control Robusto denominado Regulador-
Cuadrático Lineal Gaussiano (LQGR).
- Realisar análisis multivariable de sistemas
realimentados, lo que no es exclusivo del método del LQGR,
pero es la base general para otros métodos.
- Recurrir a teoría adicional a la expuesta en la teoría
convencional de Control, para realizar el diagrama de Bode de
sistemas multivariables.
Determinar la respuesta de frecuencia del LQGR, ya que
otros métodos recurren a las bases matemáticas del LQGR y
realizan los procedimientos matemáticos en el campo de la
frecuencia.
- Realizar ejemplos de aplicación tanto para la elección
adecuada de las matrices de ponderación del proceso, como
para el análisis de estabilidad.

4
Establecer relación entre la teoría expuesta para el
LQGR y los métodos adicionales existentes, para análisis de
Control Robusto (Ha y H«0 que dispone el paquete Matlab, los
que tienen su campo de análisis en la respuesta de frecuencia
y plantean así márgenes de estabilidad multivariable en ésta,
empleando ciertas definiciones obtenidas por el LQGR. Se
debe mencionar que el análisis y respuesta de frecuencia de
los métodos Ha y B=o no es uno de los objetivos de esta tesis.
1.3.- ALCANCE.-
En el análisis del LQGR se empleará Teoría Estocástica,
Control Óptimo3 además del denominado Teorema de Separación,
lo que facilita la selección de matrices de ganancias tanto
del filtro de Raiman, como del Regulador Cuadrático Lineal
Determinístico.
Se presentará también análisis de estabilidad multivariable
de una planta; teoría de valores singulares, valores propios,
matrices de ruido y perturbaciones, matrices de la función
costo, ecuación de Riccati, respuesta de frecuencia, y
propiedades de realimentación.
Es decir., se realizará el análisis matemático para sistemas
multivariables, lo que es un aporte diferente del
convencional. Se cuenta adicionalrnente con ecuaciones que
relacionan el método del LQGR con los métodos Ha y H» por lo
tanto existe relación de sistemas multivariables y sus
respuestas de frecuencia, si bien no está dentro del alcance

5
de la tesis plantear y analizar con profundidad estas
relaciones, que sin embargo permiten visualizar varios
caminos de análisis para Control Robusto.
El lenguaje de programación en que se encuentra realizado el
pagúete de Matlab no es "amigable" al usuario, por lo que se
dificulta el intercambio de datos; por ejemplo, si se quiere
cambiar los datos de los programas de demostración, ésto no
es posible desde el paquete Matlab, sino que se requiere de
un editor de programas; sin embargo, cuando el conocimiento
del método LQ.GR es mayor, estos cambio se pueden realizar
fácilmente desde el editor, aprovechándose las demostraciones
realizadas.
Se realizarán adicionalmente ejemplos de demostración que
facilitarán el aprendizaje de dicho método.
1.4. CONTENI3X>_-
El contenido de la tesis se resume como sigue:
En el primer capítulo se presenta una breve introducción al
Control Robusto para sistemas multivariables, asi como los
objetivos, alcance y contenido del presente trabajo.
En el segundo capitulo y en el primer literal, se realiza eli
planteamiento de los problemas más comunes que se pueden
presentar en sistemas o procesos físicos, en los que se debe
realizar algún tipo de control en las variables de salida,
asi como el tipo de control robusto que se emplea para la
compensación, rechazo de perturbaciones y distorsiones.

D
En el segundo literal se analizan las bases matemáticas que
sustentan la teoría del Regulador Cuadrático Lineal
Determinístico, y además las ecuaciones que dan la solución
de éste. En el literal siguiente se presenta de manera
semejante, las ecuaciones que analizan y resuelven el Filtro
de Kalman-Bucy. A continuación y gracias al teorema de
separación, se presenta la teoría en la que se sustenta el
compensador del sistema, .por el método del Regulador
Cuadrático Lineal Gaussiano. Para finalizar este capítulo se
presentan las propiedades de realimentación, ya q.ue en
compensación se requieren sistemas en laso cerrado3 es decir
realimentados.
El tercer capítulo presenta tres literales:
En el primer literal se describen las ecuaciones
fundamentales necesarias para el análisis de sistemas
multivariables aplicando las propiedades de valores
singulares. En el segundo literal se recurre a las
ecuaciones obtenidas en el literal anterior y se las utiliza
en la graf icación de diagramas de Bode de sistemas
multivariables. En el tercer literal se analiza la
estabilidad de procesos o sistemas con varias entradas y
varias salidas (MIMO), y el análisis de estabilidad de
sistemas a una entrada y una salida (SISO) que serán una
derivación de los primeros; estos últimos sistemas pueden ser
estudiados además con la teoría convencional. Como se
mencionó entre los objetivos planteados, uno de ellos es
obtener la relación entre el método del Regulador Cuadrático
Lineal Gaussiano (LQGR) y la respuesta de frecuencia de los
métodos de control Robusto denominados Ha y H~, lo cuál se
expone en este literal. En el cuarto literal se recurre a
las ecuaciones desarrolladas en el capitulo dos, y se las
representa en forma matricial para obtener la respuesta de
frecuencia del LQ.GR? lo cuál es utilizado por los métodos
alternativos de Control Robusto (Ha y H»),
En el cuarto capitulo se presenta lo siguiente:
En el primer literal se mencionan los diferentes métodos que
dispone Matlab para Control Robusto, asi como una breve
descripción de la diagonalización de sistemas multivariables
y la utilidad de la misma. En el segundo literal se
presentan ejemplos para la elección adecuada de las matrices
de ponderación del Regulador Cuadrático Lineal
Deterministico, con el fin de obtener la ganancia del mismo.
En el tercer literal se plantean ejemplos que ayudan a
visualizar la elección adecuada de las matrices de covarianza
del error de estado estable del Filtro de Kalman, y por
consiguiente obtener la ganancia del filtro. En el cuarto
literal se presenta un análisis de los resultados obtenidos
en los dos literales anteriores. En el guinto y ultimo
literal se presentan los comandos del paquete Matlab para
Control y Control Robusto.
En el quinto capitulo se presentan varios ejemplos de
aplicación para Control Robusto, asi como las conclusiones y
recomendaciones.
Por último, en los anexos se presenta la nomenclatura
utilizada, asi como el manual del usuario para Control
Robusto.

CAPITULO II
ANÁLISIS MATEMÁTICO DE LQG.
2.1.- PLANTEAMIENTO DEL PROBLEMA.-
Para formular los problemas que se pueden presentar en un
sistema, es preciso detallar algunos de los componentes del
mismo, asi como la compensación o regulación que se puede
hacer para corregir defectos gue se pueden presentar en el
sistema.
A.— Planta física, actuadores y sensores. [2]
a.— Actuadores: Son instrumentos fisicos gue transmiten los
comandos de entrada (funciones de tiempo que pueden ser
especificados por el programador, por ejemplo comandos de
aceleraciones para un vehículo aeroespacial) dentro de las
actuales entradas de la planta. Esta tranmisión no es
exacta, es decir existe cierta incertidumbres en el actuador.
b_— Planta: Es también un instrumento fisico que traslada
las entradas de la planta, así como las distorsiones; todo
esto se incluye dentro de funciones de tiempo, de tal manera
que se pueden llamar variables de estado físico de la planta
(es decir posición, velocidad, modos de viraje). Las
variables de estado de la planta pueden ser puntos físicos

9
variables que gobiernan y complementan específicamente las
características actuales de la planta; o ser tan solo
variables matemáticas.
c.— Sensores: Los sensores son instrumentos físicos que
indican que variable física puede ser medida. En cualquier
instante la señal del sensor medida es diferente a la señal
sensada, esto indica que se incluye un error del sensor y por
lo tanto señales de incertidumbre.
B.~ Estructura del Sistema de Control-
Los objetivos del sistema de control dependen de la evolución
en el tiempo de las variables de estado físicas, esto conduce
a visualizar que se debe construir un instrumento físico, el
cual puede ser llamado el compensador; la estructura del
compensador para realimentación es ilustrada en la figura
2.1.1.
Debe ser claro que el diseño del compensador debe depender
de: a) dinámica natural del proceso físico entre la ausencia
de incertidumbre (deterministico) y la presencia de
incertidumbre (estocástico); b) el nivel de incertidumbre en
el proceso físico; y c) la certeza de una evolución
satisfactoria en el tiempo de las variables físicas de la
planta.

10
COMANDOS DE
ENTRADA PARA
PROCESO FISCO
(GENERADOS POR
EL COMPENSADOR)
COMPENSADOR
(A SER DISEÑADO)
fig. 2.1.1
SEÑALES
DE MEDIDA
DEL
SENSOR
(LLEVADAS
AL
COMPENS.)
2.2. REGULADOR CÜADRATICO LINEAL DKTERMINISXICO
2.2.1 Generalidades:
El presente trabajo está orientado a la compensación o
regulación de sistemas lineales; la razón para trabajar con
este tipo de sistemas, se debe a que es posible aplicar
diversos métodos . de análisis lineal que brindan información
sobre el comportamiento de estos sistemas lineales.
Es posible linealiaar muchos sistemas, una de las técnicas
que se puede aplicar está explicada en texto mencionado en la
referencia [4] y dice:

11
"El procedimiento de linealización de sistemas no lineales,
se basa en la expansión de la función no lineal en una serie
de Taylor alrededor del punto de operación, donde queda
únicamente el término lineal y se desprecian los términos de
orden superior de la expansión de la serie de Taylor, debido
que estos últimos son suficientemente pequeños, es decir, las
variables se desvian solamente un poco de la condición de
operación".
En lo que sigue en el desarrollo del presente trabajo, aunque
no se especifique el tipo de sistema, se sobreentenderá que
se trata de sistemas lineales.
2.2.2 Desarrollo Matemático:
Como primer paso se asume que el proceso físico opera en
ausencia de incertidumbres. Sin embargo existen
perturbaciones que pueden alterar los estados del sistema,
por lo que se hace necesaria la siguiente definición:
Vector de perturbación de estado 8x(t):
óx(t) = x(t) - xo(fc)
(2-2.1)
donde x(t) representa el estado real, xoft) es el estado
nominal. Si se asume que el estado nominal xo(t) es el
origen, entonces:
5x(t) = x(C)
(2.2.2)
esta ecuación ayuda a simplificar el análisis posterior.

12
Ahora bien, el proceso a ser controlado es descrito por la
siguiente ecuación de estado:
x(ü) =¿(t)x(t) +B(C)u(t)
(2.2.3)
ecuación que en diagrama de bloques se representa por la
figura 2.2,1.
fig. 2.2-1 Sistema descrito por variables de estado
la cuál es una descripción de variables de estado de un
sistema lineal variante o invariante en el tiempo.
Si se desea un sistema óptimo., se debe recurrir a la
denominada función costo, la que minimiza los errores de
estado del sistema y optimiza las entradas del proceso? y que
se define de acuerdo a la siguiente ecuación:
l|x(tf) j'tllx(t) - jro(fr)
(2.2.4)
donde:

13
(2.2.5)
representa la norma de la desviación del estado final, F es
•una matriz semidexinida positiva simétrica. Esta norma se
define como:
l x ( t f ) - j ro t t JOl l j - = L x ( t f ) - xo(tf)} T F l x ( t f ) - xo(tf)]
donde XT es la transpuesta conjugada de x
Como esta norma es de la desviación del estado f inal -
interesa que ésta sea cero7 entonces F debe ser- igual a cero;
por lo tanto la ecuación (2.2.4) se simplifica en:
V
|u(t)|i(t)J<ffr
_ (2.2-6)
reemplazando (2.2.2) en (2.2.6) se obtiene la siguiente
ecuación:
donde por definición
u(t)H<t)]dt
Q(t) x(t)
Í2.2.7)
(2.2.8)
u(t)
(2.2.9)
donde Q es una matriz simétrica semidexinida positiva, y R es
14
una matriz simétrica definida positiva. Reemplazando (2.2,81
y (2-2-9) en (2.2.7), se tiene:
tJ= f[xT(t) Q(t) x(t) -f uT(t) R(t) u(t)] át
o
(2,2.10}
Si se analiza la referencia [2] se puede observar que el
problema de Regulador Cuadrático Lineal Continuo se resuelve
con ayuda de la ecuación diferencial de Riccati, y mediante
la ley de control óptima, las cuales se relacionan de la
siguiente manera:
u(t) = -R"L(t) BT(t) K(t) x(t) ó
u(t] = ~G(t) x(t)
(2,2.11)
Esta ecuación define la ley de control óptima, donde K(t) es
la solución de la ecuación de Riccati, la que se muestra a
continuación:
O = K(t) + Q(t) - K(t)B(t)R~^(t)BT(t)K(t) + K(t)A(t)
(2.2.12)
Como se desea tener sistemas fisicamente realizables
(estables, controlables K entonces se requiere que éstos sean
lineales e invariantes en el tiempo, por lo tanto A, B, Q, R
deben ser constantes.
Además si se cumple que : 1 ) la planta es completamente
controlable, 2) F-03 y 3) A?B,R y Q son matrices constantes,
entonces KCt) tiende a K (una matris constante) cuando tf
tiende al infinito. Por consiguiente la derivada de K es

15
igual a cero, entonces (2-2.12) se reduce a:
O = -KA - A TK - Q + KBR~LB TK
(2.2.13)
conocida corno ecuación algébrica de Ricatti, y por lo tanto
la matriz de ganancia óptima es una constante y se expresa
como:
G = -R-IB TK
(2.2-14)
El sistema de la figura 2.2.1 con realimentación de estado se
presenta en la figura 2.2.2:
-JrwiMiv
fig. 2.2.2 Sistema de Control Óptimo en lazio cerrado
de esta figura se determina que las ecuaciones del sistema en
laso cerrado son:
x = (A - SG)x + Br
y = Cx
(2.2.15)

16
en donde para facilidad de análisis, la referencia T- es igual
a cero.
La selección adecuada de las matrices de ponderación Q y R,
requeridas para el análisis de control óptimo, se analiza en
el cuarto capitulo.
En el e,jemplo que se describe a continuación, dadas las
matrices de variables de estado, se encuentra la matriz K que
satisface la ecuación de Ricatti, y se encuentra la matriz de
ganancia (G*) del control óptimo.
Ejemplo 2-2-1.- Se tiene el sistema descrito por:
X - Ax + Bu
donde A = [1 O; O 1];
B = [2 O; O 3];
y se desea encontrar la matriz K que satisface la
ecuación de Riccati, y la matriz G de la ley de control
óptimo.
Por lo tanto se selecciona las matrices Q y R
aleatoriamente, que son simétricas y semi-definidas y
definidas positivas respectivamente;
Q = [2 0; O 33;
R = [4 0; O 11;
entonces se recurre a los comandos del MATLAB:
[G,K] = lqr(A,B,Q,R);
y se obtiene:

17
G = [1.366 0: O 2.0972]
K - [2.7321 0; O 0.6991]
2_3. EL FILTRO DE KALMAB
Es práctica común en ingeniería el uso de aproximaciones
probabilísticas para la modelación de sistemas que toman en
cuenta ciertas incertidumbres físicas. Si se supone por
ejemplo que n(t) es un proceso ramdómico que representa el
"ruido" introducido por el sensor para cualquier instante t;
entonces se podrían modelar las incertidurnbres del sensor por-
medio de la siguiente ecuación:
z(t) = s(t) + n(t]
(2.3.1)
donde para el tiempo t, z(t) es la medida del sensor actual,
s(f) es la señal actual para ser medida, y n(t) es la medida
de ruido aditivo.
La información estadística está contenida en la función
densidad de probabilidad. Además es conocido que dos
importantes parámetros estadísticos (desde el punto de vista
de ingeniería) son: 1) la media, dada por:
= J2(tl)
y 2) la covarianaa-, dada por:
t)
18
Ahora cuando se tiene un sistema estocástico dinámico lineal,
la ecuación de estado del sistema es:
x(t) =A(t)x(t) +-£?(t)u(t) + £(t)
(2,3.2)
De la ecuación (2.3.1)., se tiene la ecuación de medida
estocástica lineal:
2(t) = y(t} + 6(t)
(2.3.3)
donde y(t) está definido como:
y(t) = Qr(fc)
(2.3.4)
reemplazando (2.3.4) en (2.3.3):
Z(t) = C(t)x(t) + 0(t)
£2.3.5)
donde:
son el ruido aditivo conducido por la planta y la medición
respectivamente. Se supondrá que las incertidumbres
representadas por:
son ruido blanco, con inedia igual a cero, mutuamente
independientes, y covariansa dada por:

19
fc) ; 5 ( t ) 3 = C 6 ( t - T ) ; { = ír *0
t) ; 9 ( t) ] = 4>3 ( fc - T) ; 4> = 3:0
Por otro lado, se debe encontrar un vector
x(t)
un estimado del real x(t) el cual es "óptimo". La ecuación
del estimado óptimo, está definida en la referencia [3], y se
representa corno:
d-x(t) = A(t}x(t] + B(t)u(t) +fT(t)[z(t) -C(t)jc(fc)]dt
(2.3.6)
La solución de la ecuación planteada se encuentra en la
referencia [10] , en donde se indica que la matriz HCt) de
ganancia del filtro es obtenida como:
H(t) =
(2. 3-7)
donde Soft ) es una matriz de covarianza del error de
estimación, y la media y covarianza de esta matriz es:
- x(t)] = 0
-jc(t))U(t) -i(t))T]
La matriz de covarianza de error 2o(t) satisface la ecuación
diferencial matricial de Riccati , la q.ue se expresa como :

20
dt
- 13 o ( t) C r ( t) 4TL ( t) C( t) S o ( t)
C.JT. So(to) = I3o matriz de covarianza inicial de xo
(2.3.8)
Ahora bien. es deseable encontrar. partiendo de los
resultados obtenidos con el estimado óptimo variable en el
tiempo, ecuaciones del mismo estimador óptimo pero invariante
en el tiempo- A ello se enfoca en siguiente análisis.
Estado estable del filtro de Kalman— Buey , -
Significativos y prácticos avances se consiguen si se cumple
que :
1) El sistema es lineal e invariante en el tiempo, entonces:
A(t) ~ A = matriz constante
B(t) - B - matriz constante
C(t) ~ C = matriz constante
2) El ruido estadístico es estacionario, es decir;
£ ( t) = C = matriz constante
<(>(£;) - <(> = matriz constante
3) El tiempo inicial to para cualquier observación ha sido
considerado desde un tiempo pasado distante.
Ba,jo estas suposiciones, el estado estimado puede ser
generado por un filtro de Kalman-Bucy de estado estable, por
consiguiente la ecuación (2.3.6) es invariante en el tiempo y
se representa como:

- -at
= Áx(t) r Bu(t) -Gc(fr)]
(2.3-9)
similarmente las ecuaciones (2.3.7), y (2,3,8) serán
invariantes en el tiempo, además la matriz de ganancia H del
Filtro de Ka Imán es constante y representada por:
H = EoC1 -1
(2.3.10)
donde la matriz semidefinida positiva (por lo menos)
simétrica constante 2o, es interpretada como la matriz de
covarianza del error de estimación de estado estable,
satisfaciendo ésta la ecuación matricial algébrica de Riccati
que se muestra -a continuación:
O = ASo + UoAr + C - EoC^CEo
(2.3.11)
La representación del Filtro de Raiman en diagrama de bloques
se esquematiza en la figura 3.2.1, la que se muestra a
continuación:
3.2.1 Filtro de Kalman

22
del diagrama de bloques, se deducen las siguientes
ecuaciones:
adt
d
x = Ax + Bu -*- H(z - y)
X = (A - HC}x + Bu + Jízdt'
(2.3.12)
y = Cx-
(2.3.13)
En la ecuación (2-3-12) se puede observar que al variar el
valor de la matriz de ganancia del Filtro, varía los polos de
la matriz (A - HC), deducción que será de utilidad en el
cuarto capitulo -
A continuación se ilustra un eoemplo de la ganancia del
Filtro de Kalman recurriendo a los comandos del paquete
Matlab, del que se utiliza la función Iq.e. Esta función
define las ecuaciones de estado tal como lo muestra la
siguiente ecuación:
x = Ax + Bu + Gw
y - Cx -f Du + v
y donde el ruido del proceso y covarianzas de ruido medidos,
se encuentran definidos en el tutorial de Matlab como:
ECw] ~ E[v] = O
ECww'3 = Q
E[w'] = R
La selección adecuada de Q y R se detallará en el cuarto

rii
K.iemplo 2_3.1.~ Se -cieñe ei sis-cema descrito por:
X = Ax + Bu + <?v
y = Cx + v
donde A = fl O; Q 11; B - F2 O; O 31
C = [4 O; O 21
se desea encontrar la matriz 2o que satisface la
ecuación de Riccati, y la matriz H de la ley de control
óptimo estimado.
Se seleccionan las matrices Q y R, que sean simétricas y
semi-dez inidas y definidas positivas respectivamente
como:
Q = [2 0: O 3];
"R = [4 O: O 1];
(3=1;
se recurre a los comandos del MATLAB/:
[H,2o] = lqe(A.G,C,Q,R):
y se obtiene;
H = [1.0 O: O 2.3028.1
2o = [1.0 O; O 1.1514]

24
2.4. TEOREMA DE SEPARACIÓN
Solución del Problema de Control Estocástico LQG.
El vector de corrección de control óptimo u(t) es generado
por la ecuación:
u(fr) = -G(t)x(t)
(2.4.1)
en ésta existen dos factores que se detallan a continuación:
Especificacj,ón de G(t): La matriz de ganancia de control
Gft) es obtenida por la solución del problema cuadrático
lineal deterministico, olvidando completamente el
aspecto estocástico. El procedimiento está detallado en
la sección 2.2., asi G( t } está representada por la
siguiente ecuación:
G(t) es la matriz de ganancia de control
donde KCt } satisface la ecuación matricial diferencial
de Riccati, la que se muestra a continuación:
d K(t) = -K(t)A(t) -AT(t}K(t] - Q(t) -dt
(2.3.8}
nótese que Gít) y K(t) no dependen del análisis
estadístico, es decir no dependen de:
,<Kt) ,y z(t]

25
Especificación dedsiC'b):- El vector de estado estimado es
generado por el filtro de Kalman-Bucy- bao* o la
suposición que uí t) es deterministico, olvidando
completamente el problema de control. El desarrollo de
la teoría del vector de estado estimado fue realisado en
la sección 2.3, en el que se obtuvieron las siguientes
ecuaciones:
d-x(t) = A(t)x(t) + B(t)u(t) + ff(t) lz(t) -C(t)jc(fc)]afr
(2.4.2)
H(t) = So(t) Cr(t)4>-1(t)
H(t) es la.matriz de ganancia del filtro
en donde 2o ít } satisface la ecuación matricial
diferencial de Riccati, que se muestra a continuación:
Nótese que Hit) y Soft) son independientes de lae
matrices asignadas al problema de control Q(t) y R(tK
Interpretación, del Compensador-
De la ecuación (2. 4.2), el compensador en lazo cerrado tiene
la siguiente descripción:
d x(t) = U(t) -B(t)(?(t) - ff(t)C(t)]x(t) +H(t}z(t)dt

26
La ecuación de salida del compensador estarla dada por la
ecuación (2.4.1), descrita como:
u(t) = -G(t)x(t)
Nótese que la dinámica del compensador está resumida en la
matriz de estado dada por la ecuación:
A(t) -B(t)<?(t) -Jf(fc)C(t) =A(t)
la que para los objetivos de control (via GCt)) y el aspecto
estocástico ("vía Hit") ) , es simultáneamente importantes.
Entonces, el Teorema de Separación permite gue G(t) y H(t)
sean computadas independientemente _
Solución del Problema de Control LQG de Estado Estable,
Como se ha visto, el vector de corrección de control óptimo
u(t) es obtenido por:
u(t) = -Gx(t)
£2.4.3)
en el lado derecho de ésta ecuación existen dos factores, los
que se describen a continuación:
a) Generación de la matriz de ganancia de control G: La
matriz G es la solución para el problema de Control
Deterministico Cuadr ático Lineal de estado estable, dado
por la ecuación (2.2.14) como:

O = -R-i-B rJT
í 2 . 4 . 4 1
donde K satisface la ecuación algébrica de Riccati, la
gue se describe a continuación:
O = -KTA - AT.Sr- Q
(2.4.5)
b) Generación de :sc(t): El vector de estado óptimo es
generado por el filtro de Kalman-Bucy de estado estable,
representado en la ecuación (2.3.9) como:
d-x(t) = Ax(t) +Bu(fc) +ff[z(t) -dt'
(2.4.6)
la matriz constante H de ganancia del Filtro de Raiman
es descrita por la ecuación (2-3.10) como:
H = BoC2 -1
(2.4-7)
donde la matriz 2o satisface la ecuación algébrica de
Riccati, que se presenta a continuación:
O = A2o •*• £oAT + í - EoC^CEo
(2.4.8)
c) Estructura del Compensador: El compensador
representado por las ecuaciones (2.4.3) y (2.4.6) se
encuentra esquematizado en diagrama de bloques por la
figura 2.4.1. Para obtener una caracterización en
variables de estado del compensador, se reemplaza las
ecuaciones (2.3.13) y (2-4.3) en (2.4.6), y se obtiene

28
la siguiente ecuación:
x(t) = [A - BG - HC}x(t) + JZz(fc)a.át'
u(t) = -Gx(t)
(2.4.9)
Todas las matrices en esta ecuación son constantes, de
donde se concluye que el compensador requerido es lineal
e invariante en el tiempo.
Este compensador puede ser caracterizado por una matriz
de transferencia M(s) dada por:
Se[u(t)] = M(s)&[z(t}}
por lo tanto la matria de transferencia del compensador
Mis), tomando en cuenta la ecuación (2.4.91, es
representada como:
M(s) = -G [si - A + BG + HC] -1 H
(2.4.10)
El diagrama de bloques del sistema compensado por el
Regulador Cuadrático Lineal Gaussiano, se halla
esquematizada en la figura 2»4.1.
A partir de las ecuaciones (2.4.9) y (2.4.10), se ilustra el
ejemplo 2.4.1 con la ayuda de los comandos del Matlab para
Control Robusto, el mismo que dispone de la función Iqg, la
cual requiere la entrada de las matrices ponderadas de
control (Q y R), así como de las matrices de covarianza de
ruido medidas (w y v según la nomenclatura utilizada en el

29
Toolbok), además de la relación que pueda existir entre estas
últimas (Nf y Nc). En este paquete se define la matriz W y V
como:
W = CQ Nc; Me1*1 R]
V = [w Nf; Nf* v]
Ahora bien, la selección adecuada de las matrices Q, R, y las
covariancias de
C/ y 4>/
'se analizarán, en el cuarto capítulo.
fflXsVJrjA
A
¿ —
*
A
fig. 2-4_l Sistema de Control con "compensación" LQGR
Ejemplo 2.4-1,- Se tiene el sistema descrito por:
30
x = Ax + Su + w
y = Cx + Du + v
donde A = [1 O; O 1];
B - [2 O; O 3];
C = [4 O; O 2];
D - [O O; O O];
se desea encontrar las matrices que componen el
compensador H(s)_
Se selecciona las matrices W y V arbitrariamente. Se
utilizará la selección realizada en los ejemplos 2.2.1 y
2.3.1 para Q, R, w, y v respectivamente, asi:
Q = [2 0; O 3];
R = [4 O; O 1];
ECww'] = Q;
ECw'] = R;
entonces:
W = [2 O O O; O 3 O 0; O O 4 0; O O O 1];
V - [2000; 0 3 0 0 ; 0 0 4 0 ; 0001];
se recurre a los comandos de MATLAB/HOBUST:
[af,bf,cf,df] = lqg(A,B,C,D,W,V);
y se obtiene:
af = [-5.7321 0; O -9.8971]
bf = [1.0 0; O 2.3028]
cf - [1-3660 0; O 2.0972]
df = [O 0; O 0]

31
Donde af- bf, y cf están definidas el el paquete Matlab
para Control Robusto como:
af = A - BG - HC
bf = H
cf = G
Se ha determinado las ecuaciones que describen al
compensador; entonces el siguiente paso es encontrar
propiedades de realimentación para sistemas multivariables,
tomando en cuenta las perturbaciones y distorsiones. Las
relaciones que se encuentren podrán ser de utilidad para los
otros dos métodos de solución del problema de Control
Robusto, que presenta el paquete Matlab.
2.5. PROPIEDADES DE REALIMENTACIOW.-
En el literal 2.4 se desarrolló la matriz Mfs) función de
transferencia del compensador por el método del Regulador
Cuadrático Lineal Gaussiano, que se abreviará como LQGR.
Este compensador debe ser "acoplado" a una planta con el fin
de analizar las propiedades de realimentación del sistema
resultante en lazo cerrado. El "acople" es la conexión en
cascada entre la planta y el compensador.
Considerando el sistema de control multivariable lineal e
invariantes en el tiempo equivalente, dado por la figura
2.5.1:

N(sj representa la fundón de
transferencia del sistema
fig, 2-5.1 Sistema de Control Realimentado
las ecuaciones de la planta, del controlados y del sensor
están dadas por:
y(s) == Jtfís) [r(s) - z(s)]
z(s) = y(s) + 6
(2.5.1)
En el diagrama de bloques mostrado en la figura, se observan
las tres entradas siguientes:
r(s) ,
donde r( s) es el punto de referencia o set point, por
facilidad de análisis se desea que el estado tienda a cero,
por lo tanto r(s)=0- Las dos entradas restantes fueron
definidas en el literal 2.3.
Es de interés el análisis de distorsiones y ruido
principalmente, para ello si se analiza el anterior diagrama

de bloaues, tomando en cuenca el principio de superposición,
se tiene el diagrama de bloques de la figura 2.5,2:
fig- 2.5.2 Sistema con perturbación en planta
de la figura 2.5.2 se obtienen las siguientes ecuaciones:
yc = [r
(2.5.21
Analizando la entrada de ruido del sensor, se considera el
diagrama de bloques de la figura 2.5.3:

V'
v
fig- 2-5.3 Sistema con adición de ruido al sensor
de esta figura se desarrollan las siguientes ecuaciones:
yQ = -N(s)M(s) [y8 + 0]
}y9 - N(s)M(s)Q
ya = -[J 4-
(2.5.3^
Pero como la entrada de referencia es cero entonces, por el
teorema de superposición se tiene que la salida está dada por
la siguiente ecuación:
Análogamente se encuentra las realimentaciones de
u , u9f z, y z9
dadas por las siguientes ecuaciones:
^ = [X +
u$ = -{X + M(s)N(s)]':L
s8 = (r + N(S)M(S) r1 eUfl - -[X + M(s)N(s)]'1 M(s) 0
12.5.4)
En las ecuaciones (2.5.1).-.f2.5.4) se tiene un producto de
matrices funciones de transferencia de dos plantas en cascada
representadas por:
£3(5) - N(s) AT(s)
¿L(s) - M(s) N(s]
(2.5.5)
donde La y La. son llamadas matrices de relación de retorno
para el nodo y(s') y nodo uts) respectivamente. Las matrices:
X + L2(s)
(2.5.6)
son llamadas matrices diferencia de retorno de los mismos
nodos fy(e') y ufs)) respectivamente. Se puede además incluir
dos nuevos términos denominados diferencia de retorno
inversa:
J + L¿L(a)
I + L£L(s)
(2.5.7)
Adicionalmente, se observa que en el tutorial del programa de
Control Robusto se define a las siguientes matrices:

36
5(s) A (J +
s) 6 I{s) (X
en donde Sís) y T(s) son conocidas como sensibilidad y
sensibilidad complementaria respectivamente.
La utilidad de las ecuaciones (2.5-61 y (2.5.7) es analizada
en el literal 3.3.
El desarrollo en el dominio de la frecuencia de dichas
propiedades corresponde al método denominado H»s y su
realización como se anotó en los objetivos, cae fuera del
alcance de este trabajo de tesis.

CAPITULO III
RESPUESTA EN FRECUENCIA DE SISTEMAS MIMO-
3.1- ECUACIONES FUNDAMENTALES.
La teoría de Control Moderno se basa en la descripción de las
ecuaciones del sistema en términos de n ecuaciones
diferenciales de primer orden. A esto se le llama descripción
a variables de estado del sistema, entonces un sistema se
representa como se indica:
x = Ax + Bu
y = Cx
(3.1.1)
la llamada matriz de transición o función de transferencia
está definida como:
N(S) = C(3l - A}-LB
(3.1.2)
Para obtener la respuesta del sistema se puede recurrir a
diferentes métodos. En uno de éstos se obtiene el polinomio
característico de la matriz función de transferencia y se
calcula los valores propios, con éstos se obtiene la
respuesta en. el tiempo del sistema, sin embargo ésto presenta
mucha dificultad cuando se tienen matrices función de
transferencia de grandes dimensiones.
Por ello en sistemas multivariables se puede utilizar valores
singulares definidos éstos como sigue:
Definición 1.— Sea una matriz, N cuadrada n#n, los valores
singulares de la matriz N tienen la siguiente nomenclatura:
7-1, • • • ,n
y son las raices cuadradas no negativas de los valores
propios de NTW, donde W1 es la matriz transpuesta conjugada
de la matriz N.
Para determinar los valores singulares de la matriz función
de tranferencia del sistema, se debe encontrar los valores de
la matriz dada por la ecuación (3. 1.2):
N(s) = C(sl - A)-*-B
donde (si - A) -1 = „ * .. adj (si - A)II si - AÍ
(3.1.3)
en esta ecuación, se debe encontrar la transpuesta conjugada
de la matris Mis'), que tiene la siguiente nomenclatura:
(3.1.4)
entonces, se multiplica la ecuación (3.1-3) por (3.1.4) y se
obtiene la raíz cuadrada del producto resultante, el que se
muestra a continuación:
(3.1.5)
esta ecuación cumple con la definición 1, y en ésta se
observa que el cálculo de los valores singulares no requiere
resolver el polinomio característico, por lo tanto no es un
limitante el que el sistema tenga una matriz función de
transferencia de grandes dimensiones.

Para -una menor comprensión de la utilidad de los valores
singulares, es necesario presentar sus propiedades como se
indica a continuación:
(1) a(JV) =
(2) filXII
(3) & (1?) i \ ! r5<j{JV) , donde X¿ son los valoressingulares de N
(4) Si N"3- existe, a.(N) = -=
(5) Si N"1 existe, Q (N) =
FÍAT1)
1
(6)
(7)
(8) "afJSM) ¿"a(.Y)
(9) Jl(Jy) - ó(M) í s_(M + M)
(10)
Las propiedades ( 1) y ( 2 ) indican la máxima y mínima ganancia
de la matriz función de transferencia N(s), lo cual es de
utilidad en el análisis de sistemas multivariables. Cabe
anotar que el programa Matlab para Control Robusto, utiliza
las propiedades antes descritas para la construcción de
diagramas de Bode, respuestas de frecuencia de sistemas
multivariables, etc.
La utilización de algunas propiedades se visualiza en el
literal 3.2, que corresponde a la construcción de diagramas
de Bode. El paquete MATLABXROBÜST, considera a la función
slgma para el cálculo de valores singulares» La utilización

,-,e esce eomancto se encuentra ctecanaaa en ex i
siguiente - asi como en ios capit-uios cuarto y quinao
especiaimem:e.
3.2. DIAGRAMAS DE BODE DE MIMO.
En la construcción de diagramas de Bode de sistemas
muitivariables, se aplican las ecuaciones fundamentales
descritas en el literal anterior, y se realiza la traficación
de los valores singulares de la planta M.
Como se anotó, para, el cálculo de los valores singulares de
la planta Nís), se considera el comando sigma del paquete
Matlab para Control Robusto, y se utiliza en el ejemplo que
se indica a continuación, el cual describe los pasos
necesarios para la graficación del diagrama de Bode o para la
obtención de respuestas de frecuencia.
Ejemplo 3-2.1. Se tiene el sistema descrito por:
x = Ax + Bu
y = Cx + Du
donde A = [1 O; O 13;
B = [2 O; O 3];
C = [4 O; O 23;
D = CO O; O O];
se desea encontrar e]_ plano de Bode del sistema

41
mul-feivai^iable dado.
lie la ecuación (3.1.3) se obtiene que;
r~ 1
i 8
i O I
N f j w ) = |
I O
.jw - 1
De la ecuación (3.1.4) se obtiene también que;
O
-jw - 1
Por lo tanto, si se aplica la ecuación (3.1.5) se tiene:
O

¿e exhorta a comprobar al lectsor la última expresión
matricial, de acuerdo a las ecuaciones fundamentales
encontradas i ecuaciones (3.1.3), (3.1.4) y (3.1-5"))-
Realizando un barrido de la frecuencia entre limites
deseados- se puede obtener según sea el caso, el
diagrama de Bode o respuesta de frecuencia de sistemas
multivariables. Cabe anotar que en este caso se tendrán
dos curvas debido a que se trabaja con dos entradas y
dos salidas.
Utilizando la función sigma del paquete Robust de
Matlab, se obtiene los valores singulares de la planta,
los comandos utilizados son:
cíe
w=logspacef-2?4^100); % cálculo de la frecuencia
sv-sigma(A,B,C,D,l,w); % cálculo de los valores
singulares
sv=20*loglOt'sv) ;
semilogxíw,sv J %plano semilogarítmico
titlef"Plano de Bode de la planta en lazo abierto')
xlabelf'Frecuencia Rad/seg*)
ylabelí *SV - db')
grid
pause
El gráfico obtenido es el de la figura 3.2.1.
Graficaciones adicionales se realiza en los ejemplos
planteados en los capítulos cuarto y quinto.
El paquete Matlab para Control Robusto realiza el cálculo de
los valores singulares, considerando como datos las matrices
4.5
del sistema (A, B, C y Di.
Se detalla a continuación los comandos necesarios utilizados
en la graficación de diagramas de Bode:
Permite obtener los parámetros 10-& y 1013 oon los cuales se
realizará el cálculo de la frecuencia, y c es el número de
puntos a calcularse entre los parámetros dados.
El comando sigma computa la matriz sv, que contiene los
valores singulares de la matriz función de transferencia (el
programa designa a la función de transferencia como G(s)), el
argumento type, permite elegir de entre las siguientes
opciones:
1) Type = 1, G(ow)
2) Type = 2, G-i(jw)
3) Type - 3, I + G(jw)
4) Type = 4, I + Q-Mjw)
semilogx(w3 sv) :
Este comando ayuda en la graficación semilogarítmica, con los
datos de la matriz sv obtenida, y la frecuencia w calculada.
A continuación se realiza un análisis de estabilidad de
sistemas multivariables, se presentan relaciones entre el
método tratado en esta tesis (LQGR), y los otros dos métodos
de resolución (Hs y Hco) para Control Robusto, que presenta el
paquete Matlab .

'*)'•I
| e
i
1 _¿
Hi
H-
iq
-T
LO to
-T jTrr
rr~
•
\•
LL
LL
LJ
-J
IT
\•
\L
rn•r
>r- • \\
. \
U-L
1.1
J
I lIT
P-T
H
. . .
. .
.. . • \
\.
....
j, ,
.... . • •
J-LU
JU
™ "•i J
_-, \
\ 1 JT
rní'"
::: ;
:
....
'.
i ; i :
;..
...
....
.
;: :
'! :i :
\1
. . .
;\
....
.
: •
'"' •""
'[-T
rrrr
v« -.-
.
~i -
JJ.U
J-L
.L -
J
LLLLLLLL...L
UÍ
Trr
rr n
~i
; : : ;
: :
; • •
....
.. .
•
....
..
....
. .
.
....
.. .
;:::
'. :
:•
•
"p * * '_
",v ^
*-ri 'l'-
r- r
H f
-v
'- •
IJJ1LLLJ™
..
- 0T-
ap
OU.B

45
3-3, ANÁLISIS DE ESTABILIDAD
En el segundo capítulo se desarrolló la teoría en la que se
sustenta el método denominado Regulador Cuadrático Lineal
Gaussiano CLQGRK el cual hace uso de la función costo que
como se vio, está basado en minimizar el error y optimizar el
funcionamiento del sistema. Se podría suponer que bajo estos
parámetros el sistema es estable, sin embargo es necesario
demostrar esta suposición. Para ello se recurre al análisis
de estabilidad de Liapunov para sistemas lineales invariantes
en el tiempo.
Considerando el sistema lineal invariante en el tiempo dado
por la siguiente ecuación de estado del sistema:
x - Ax + Bu
(3.3.1)
entonces se debe determinar la matriz G del vector de control
óptimo, el que está dado por:
u(t) = -Gx(t)
(3.3-2)
de manera que minimice la función costo dada por la simiente
ecuación:
* í
(3.3.3)
remplazando la ecuación (3.3.2) en (3.3.3) se tiene que:

= fxT(Q + GTRG)x dt
í.3.3.4)
derivando esta ecuación y aplicando la definición del segundo
método de Liapunov (ver referencia [4]), se tiene:
XT(Q + GTRG)x = dt
(3.3.5)
si se toma en cuenta la ecuación (3.3.1), entonces resulta:
XT(Q + GTRG)x dt = -XT[(A - BG) TK + K(A - BG) ] x
(3.3.6)
comparando los dos miembros de esta ecuación se tiene que:
(A - BG) TK + K(A - BG) = -(£> + GTRG)
(3.3.7)
Por el segundo método de Liapunov, si [A - BG] es una matriz
estable (valores propios negativos), hay una matriz K
definida positiva que satisface la ecuación (3.3.7).
Para obtener la solución del problema de control óptimo
cuadrático, se recurre a una matriz he naitica o real
simétrica, definida positiva, que se puede escribir como:
(3.3-8)
reemplazando la ecuación (3.3.8) en (3.3.7), el resultado es:
(A T - G TB T) K + K(A - BG) + Q + G TTTTG = O
si en ésta ecuación se trabaja matricialtnente- se obtiene la
ecuac ion:
ATK + KA + [TG - (TT)~LBTX} * ' [TG - (TT)-*-BT£] - XBR^B^K-^- Q = O
(3 .3 .9)
Es necesario minimizar el valor de J respecto a G, por lo
•tanto es claro que el mínimo se presentará para:
en donde si se despeja G, se tiene:
G = T~L (TT) ~^B TK = R~LB TK
(3.3.10)
si esta ecuación se reemplaza en (3.3.2), el resultado es el
siguiente:
u(t) = -Gx(t) = -R-1BTKx(t}
Si se toma en cuenta el procedimiento para llegar a
determinar la ecuación (3.3.10), entonces la ecuación (3.3,9)
se reduce a la siguiente expresión;
ATK + KA - KBR-^3 TK + Q = O
(3.3.11)
Si se observan las ecuaciones (3.3.3), (3.3.10), (3.3-11) y
(2.2.10), (2.2.13), (2.2.14), es evidente que éstas son
similares , por consiguiente si se aplicó el segundo método de
Liapunov y se obtuvo similitud entre las ecuaciones
mencionadas, entonces el sistema tiene características de
estabilidad inherentes.
Sin embargo, el sistema tiene perturbaciones en la planta y

adición de ruido en el sensor, entonces se requiere de un
análisis adicional de estabilidad. Para ello se recurre a
las ecuaciones 12.4-9), (2,3.2) y (2.3.3), de las que se
deduce que el sistema en lazo cerrado satisface la siguiente
ecuación diferencial:
f * ] r A -BG i r * ] r i o i r s i_ _ =dt I x J L HC A-BG-HC J I X J + I O
(3.3.12)
Una representación alternativa del sistema en laso cerrado,
es obtenida através del uso del vector de error de estimación
de estado-, definido como se indica a continuación:
x(fc) = Jí(c) -~ .x(c)
(3.3.13)
Reemplazando la ecuación C3..3.13) en (3.3.12), se obtiene:
I y I \ \_ ' X ' = f A-8G BG 1 ' X ! f I O 1 f í 1
dt I x \ I O A-HC J I i J + I O -H J L 6 J
, _ , F A-BG BG Ise detinei P = , ,
I O A-ífC J
(3.3.14)
La respuesta dinámica del sistema de lazo cerrado dependerá
de los valores propios de la matria P, éstos se obtienen de
la siguiente ecuación;
I A-BG-3I BG \. Q A_ffC_SI¡
= det (A - BG - si} det (A - HC ~ si)
•3.3.15 'i
La ecuación C3.3.15) muestra una propiedad interesante de los
valores propios (polos) del sistema en laso cerrado- La
mitad de los valores propios pueden ser independientemente
ajustados por la matriz de ganancia del Regulador Cuadrático
Lineal Determinístico (depende solamente de las matrices de
ponderación Q y R). La otra mitad de los valores propios son
ajustados independientemente por la matriz de ganancia del
Filtro de Kalman (depende solamente de las matrices
covarianzas de ruido;.
Entonces cuando {A - BG1 y (A - HC} son matrices
estrictamente estables, el sistema de lazo cerrado
equivalente es estable.
Con este criterio se analizará en los ejemplos de
demostración, si el sistema en lazo cerrado con y sin
compensación es estable. Para conseguir este objetivo se
utiliza el comando eig del paquete MATLAB para la
determinación de los polos del sistema. Se presenta a
continuación un ejemplo del empleo de este comando:
Ejemplo 3.3.1. Se tiene el sistema descrito por:
x = Ax + Bu
y - Oc -*- Du
50
donde A - [-1 O; O -13;
B = [2 O; O 3];
C = [4 O; O 2D;
D - [O O; O O];
se desea encontrar los polos del sistema dado.
Los comandos utilizados son:
poleg ~ eig(A)
el resultado es
poleg - -1
-1
Entre los objetivos que se plantean para el análisis de
estabilidad, faltaría tan solo obtener la relación entre el
LQGR y el análisis de estabilidad en el dominio de la
frecuencia, estableciéndose fundamentos básicos de esta
relación, pero recordando que el desarrollo de esta relación
corresponde a los métodos Ha, y H«.
El objetivo de funcionamiento de sistemas SISO realimentados,
es comúnmente expresado en términos de la forma:
ps(v) ||1 + N(jw)M(jw) || V w z wo
donde ps(w) es una función escalar positiva, y wo especifica
el rango activo de frecuencia.
Esta idea básica puede ser extendida fácilmente a problemas
de sistemas multivariables (MIMO), através del uso de la
norma de la matriz del denominador del sistema en lazo

n 1
cerraao: es aecir, utilizando la primera propiedad de los
valores singulares t ver literal 3.1):
a [ (I* + N(jw)M(jw) ) -1] pequeño
o su equivalente :
Ahora se clarifica la utilización de las propiedades de
valores singulares, y teniendo como base el desarrollo de la
referencia [7], se tiene que;
Im (w)
(3.3.16)
donde lm(w) es una función escalar positiva, además:
r"\ { ítT\ ^ £ (j' r) ]
(3.3.17)
Las ecuaciones (3_3.1) y (3.3.2) representan los márgenes de
estabilidad del sistema compensado. La figura 3.3.1 ilustra
estos márgenes;

fig- 3.3.1 Márgenes de Estabilidad
Como se ha expresado., entre los objetivos de esta tesis está
el plantear las ecuaciones que relacionan el método del
Regulador Cuadrático Lineal Gaussiano (LQGR) con el método de
H= o Hs, a los que les corresponde un análisis más profundo
de la respuesta de frecuencia de los márgenes de estabilidad.
3.4. RESPUESTA EN FRECUENCIA DEL LQG.
En el literal 2-4 se desarrollaron las ecuaciones que
describen al compensador por el método del Regulador
cuadrático Lineal Gaussiano, las cuales en el dominio del
tiempo están descritas como:

-±-..xífc) = ÍA - BG - HC] -x(t) 4- & z(t)
f* 'ü(t) = -G-X(C)
(3.4.1)
Aplicando la transformada de Laplace y asumiendo que las
condiciones iniciales son cero, esta ecuación se puede
escribir en el dominio de la frecuencia como:
sX = U - BG - J-TC] X + HZ
£7 = -GX
(3.4.2)
La matriz función de transferencia M(s) del compensador se
obtiene a partir de esta ecuación:
= -G [si - A + BG + ffC] ff
Í3.4.3)
Se desea expresar la ecuación (3.4.2) en términos matriciales
como se indica a continuación, para encontrar analogía con
las expresiones matriciales utilizadas por el programa de
Control Robusto,
\-\ A - BG - HC | H
M ( s ) = j
i -G
La matriz función de transferencia del compensador utilizada
54
por el programa de Control Robusto es FísK y se expresa
como:
A - BG - HC 1 H
G ¡ O
La diferencia entre la matriz función de transferencia del
sistema dada por el programa y la que se obtiene en el
desarrollo de este trabajo, es el signo de la matris G dada
por el paquete de Control Robusto; sin embargo, este signo se
toma en cuenta en las demostraciones realizadas y se debe
incluir en la programación de cualquier diseño que se'
realice.
A partir de las ecuaciones (3.4.2) y í3.4,3K se desea
encontrar la respuesta de frecuencia de la matris función de
transferencia Mis) del compensador, para ello se recurre a un
ejemplo de demostración.
Del ejemplo 2-4.1, se tiene las matrices af, bf, cf., y df;
que representan al Regulador Cuadrático Lineal Gaussiano:
af = [-5-7321 O; O -9.8971]
bf = [1.0 0; O 2.30283
cf = [1.3660 0; O 2-0972]
df = [O O; O 0]
Donde af, bf y cf están definidas en el Toolbok de Control
Robusto por:

55
ai = A - BG - HC
bx - H
c± = G
Sn relación al procedimiento descrito en 3.2 para la
graficación de la respuesta de frecuencia del sistema, en
este caso solamente cambian las lineas de comandos, como se
indican a continuación:
sva=sigma(af,bf,cf,seros(2),l,w);
sva=20*loglOí sva);
semilogx(w,sva)
grid
pause
Entonces se obtiene el gráfico 3-4.1. El sistema es
multivariable (dos entradas-dos salidas), por lo tanto se
observan dos respuesta de frecuencia que están desacopladas
entre sí, es decir no existe interpelación entre las entradas
y salidas. La explicación de sistemas desacoplados se
analiza en la introducción del siguiente capítulo.

0
-10
-20
-30
M
-50
-60
-70
-80 10
~ -"
-. •
•*
- •
• •
""1
U.
-"m
rrrr
....
.
....
.
....
: :i¡
....
....
....
. i . .
.
....
.
1
""
íe "ap
ue
sta
e
n F
recu
en
c
~i'iT
ni
1 "T
Trn
Trr
™" n
— r
.,„
•i--
LJJJ.1
.LLI
UJ..J-.U
J.J
X!
UJ_
18 -
J 10
0
.
!>
"•
>•
>
. I .
'
";' H i
....
....
...
...
: - ;
• • • .
\ a
d
el.
1
"rrirn ''
'',
;X .. , .
. .
• •
. . .
i : ;
• . . .
.•.%
- J-
LULL
L L_
J.»
L .U
Ulil
10J-
IR
51
,Q \I
f. •> -.
? rrn ^
.LL
L 1
Tu ,\ • ••
JIl
!
03
r- \T
j
. j.i 1
ir - - - - , i g4
ro -H 4-1
u

CAPITULO IV
APLICACIÓN DE LOS COMANDOS DEL MATLAB PARA CONTROL
Y CONTROL ROBUSTO
4.1.- PRESENTACIÓN DEL PROGRAMA PARA SISTEMAS SISO Y MIMO.
4.1.1 Introducción -
Como se mencionó anteriormente.. los métodos disponibles en el
Toolbox de Control Robusto para diseño de leyes robustas de
control realimentado, son:
1. Regulador Lineal Cuadrático Gaussiano CLQGR)
2. Síntesis de Control Óptimo Ha
3. Síntesis de Control Óptimo Hco
Los métodos de Hs y H», hacen su análisis principalmente en
el campo de la frecuencia; cabe anotar que E» utiliza las
bases matemáticas del LQG para compensación.
Se debe anotar además que las leyes de realimentación
desarrolladas en el literal 2.5 de este trabado, pueden ser
utilizadas en los métodos alternativos antes indicados (Ha y
Ha*). Este es el caso de las matrices de sensibilidad y
sensibilidad complementaria anteriormente mencionadas. A
pesar de lo anotado, los ejemplos desarrollados en el
presente trabado serán enfocados hacia la solución del LQGR.
4.1-2- Herramientas utilizadas-
Las herramientas de control con las que se cuenta para el
análisis de sistemas SISO son: cálculo de polos y ceros de la

ruñe ion cíe transferencia, -Gradamiento matricial, diagramas de
Bode, diagramas de Nyquist, diagrama de Michols y respuesta
en el tiempo.
Tanto para sistemas SISO como MIMO se dispone de comandos
para el cálculo de: sistemas en cascada, sistemas
realimentados, respuesta de frecuencia. Regulador Cuadrático
Determinístico, Filtro de Kalman y Regulador Cuadrático
Lineal Gaussiano.
Las herramientas descritas para sistemas SISO y MIMO, se
utilizan en el desarrollo de los ejemplos de demostración que
se muestran en los capítulos cuarto y quinto.
4.1.3 Ventajas de la diagonalizacion de Matrices Función de
Transferencia de Sistemas Multivariables
Es deseable que en sistemas MIMO, el cambio de una de las
entradas sólo afecte a una salida, es decir que se logre una
no interacción o desacoplamiento entre las diferentes
entradas y salidas, de manera que sea posible permita
mantener independientemente las salidas en los valores
deseados.
Si se desea el desacoplamiento entre las n entradas y las n
salidas, la matriz de transferencia de lazo cerrado debe ser
diagonal (ver referencia [4])- Esto se puede conseguir con
un adecuado tratamiento matricial, procedimiento que no se
desarrolla en este traba-jo porque se aleo a de los objetivos
planteados, y porque además el paquete Matlab no cuenta con
los comandos necesarios para realizar esta tarea.

4-1.4 Ejemplos de demostración.
Los e.jemplos desarrollados en este capítulo se basan en
sistemas SISO, debido a que estos sistemas brindan facilidad
para el análisis de la elección de las diferentes matrices de
ponderación y covariansas de ruido- Con sistemas MIMO puede
existir interrelación entre las diferentes entradas y
salidas, lo cual dificulta la comprensión de la elección de
las diferentes ganancias, como se explicó anteriormente.
Por lo anotado, el análisis de ganancias del Regulador
Cuadrático Lineal Deterministico, del Filtro de Raiman, y del
Regulador Cuadrático Lineal Gaussiano, se referirá en éste
capitulo a sistemas SISO para facilitar la comprensión del
mismo-
De todas maneras, en el quinto capítulo se desarrollan
ejemplos del Regulador Cuadrático Lineal Gaussiano en
sistemas multivariables.
4-1.5- Análisis para Sistemas Ünivariables.
En el desarrollo de los ejemplos de demostración, se requiere
realizar un análisis de estabilidad de sistemas SISO, por lo
que es deseable encontrar la función de transferencia del
sistema compensado univariable en laso abierto. Para ello,
se recurre a la siguiente descripción de variables de estado
del sistema en la forma canónica controlable:
x - Ax + Budt
donde:

I ü 1 O ____ 0¡
| O O 1 ... 0|
A - | .... ¡
| O .... 1|
-ao -ai . . . -a-n.™i
— |
C = [ bo foi 1
De donde, la función de transferencia del sistema se
representa de la siguiente forma:
Ahora bien, si se recurre a la teoria de Control Moderno, que
determina que un sistema en lazo cerrado con realimentación
de estado en la forma canónica controlable 7 puede ser-
descrito como lo indica la siguiente ecuación (ver referencia
[11] ):
(4,1.1)

¿i esta ecuación se representa a variables de espado en la
forma canónica controlable, entonces las matrices de la
representación están definidas como: -
| O 1 O .... 0|
| O O 1 ... 0|
Acc =| .... |
| O .... 1|
i-(ao+go) ... I
Bcc = |...
I 1
Ccc - C bo bi ... ]
G = [go gx . . . ]
En donde G representa la matriz de ganancia del control
ópt imo.
Ahora bien, el diagrama de bloques de un sistema realimentado
através de la salida, es mostrado en la siguiente figura:

fig_ 4-1.1 Diagrama de bloques del Sistema Realimentado
En la ecuación 4.1.1 se definió a la función de transferencia
de lazo cerrado como E(s), y del diagrama de bloques de la
figura 4.1.1 se define como se indica a continuación:
,-r-f _ \ - -
+ N(s}F(s)
W(s) representa al sistemaF(s) representa al compensador
(4.1-2)
Dividiendo el numerador y denominador de la ecuación (4.1.1)
por el factor indicado a continuación, se obtiene:
E(s) -. . . +s ,n~l
Sis) =
£+ t t t+g
N(s]
14-1.3)
Si se comparan las ecuaciones (4.1.2) y (4.1.3) se deduce
que:

J-rt-1N(s)F(s) =
(4.1.4)
Esta ecuación representa la función de transferencia del
sistema compensado en lazo abierto, que, aplicada al paquete
Matlab para Control Robusto, ayuda al análisis de estabilidad
de sistemas univariables.
4.1-6 Contenido del programa de demostración.
El menú principal presenta lo siguiente:
ESTUDIO DEL REGULADOR CUADRATICO GAUSSIANO
Y SU SOLUCIÓN USANDO MATLAB
1) REGULADOR CUADRATICO LINEAL DETERMINISTICO
2) FILTRO DE KALMAN
3) REGULADOR CUADRATICO LINEAL GAUSSIANO
4) EJEMPLO DE UNA AERONAVE
0) SALIR
Los submenús se presentan como:
1) REGULADOR CUADRATICO LINEAL DETERMINISTICO
1") Sistemas SISO, Primer Orden
2) Sistemas SISO, Segundo Orden
3") Salir al menú principal
0) Salir
2) FILTRO DE KALMAN
1) Sistemas SISO, Primer Orden
2) Sistemas SISO, Segundo Orden
3") Salir al menú principal
CM Salir

64
3) REGULADOR CUADRATICO LINEAL GAÜSSIANO
1) Sistemáis SISO. Primer Orden
2) Sistemas SISO, Segundo Orden
3) Sistemas MIMO, Primer Orden
4). Sistemas MIMO, Segundo Orden
5) Salir al menú principal
0) Salir
4) EJEMPLO DE UNA AERONAVE
1) Sistema MIMO
21 Salir al menú principal
0) Salir
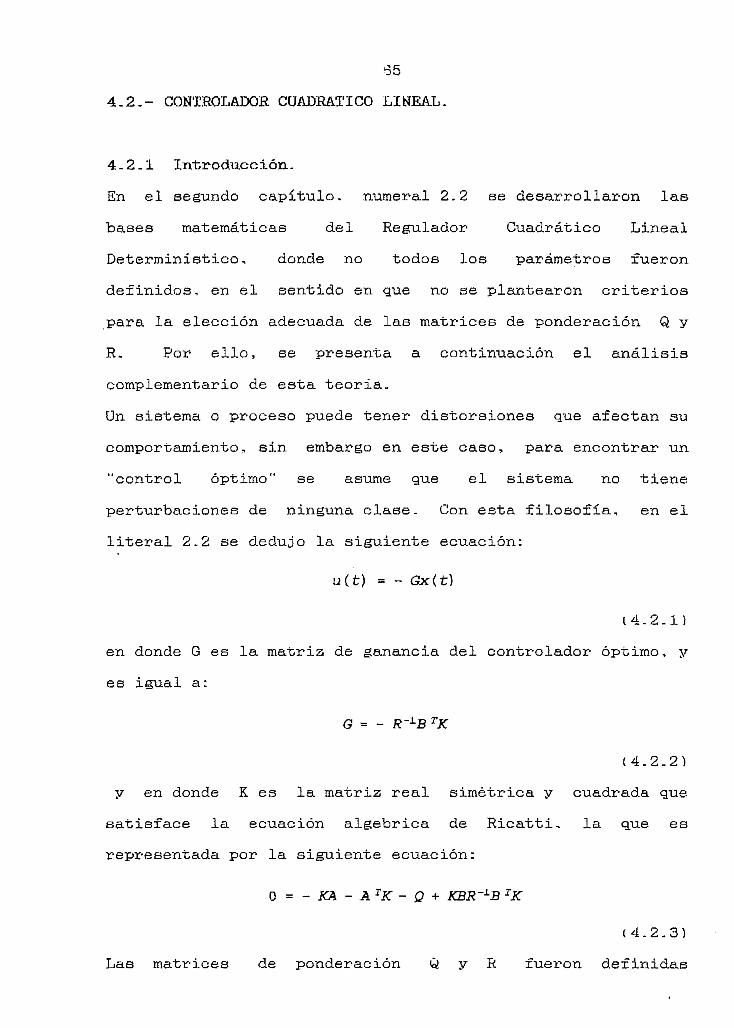
4.2,- CONTROLADQR CÜADRATICO LINEAL.
4.2.1 Introducción.
En el segundo capítulo, numeral 2.2 se desarrollaron las
bases matemáticas del Regulador Cuadrático Lineal
Determinístico, donde no todos los parámetros fueron
definidos, en el sentido en que no se plantearon criterios
para la elección adecuada de las matrices de ponderación Q y
R. Por ello, se presenta a continuación el análisis
complementario de esta teoría.
Un sistema o proceso puede tener distorsiones que afectan su
comportamiento, sin embargo en este caso, para encontrar un
"control óptimo" se asume que el sistema no tiene
perturbaciones de ninguna clase. Con esta filosofía, en el
literal 2.2 se dedujo la siguiente ecuación:
u(t) = - Gx{t)
14.2.1)
en donde G es la matriz de ganancia del controlador óptimo, y
es igual a:
G = - R~LB TK
(4.2.2}
y en donde K es la matriz real simétrica y cuadrada que
satisface la ecuación algébrica de Ricatti, la que es
representada por la siguiente ecuación:
O = - KA - ATK - Q + KBR-i-3 TK
(4.2.3)
Las matrices de ponderación Q y R fueron definidas

simétricas, semi-definida positiva, y definida positiva
respectivamente. La elección de estas matrices determina el
valor de K, y por lo tanto la ganancia del regulador óptimo,
el que está representado en el diagrama de bloques de la
figura 2.2-2 y que por facilidad se indica también en la
siguiente figura:
6-4
fig- 4-2.1 Sistema de Control Óptimo en. lazo cerrado
En este diagrama de bloques se deduce que las ecuaciones de
variables de estado del sistema óptimo en lazo cerrado son:
K = (A - 3G) x + Br
y = Cx
14.2.4)
Ahora bien, para ilustrar como se resuelve el problema de la
elección adecuada de las matrices de ponderación Q y R, se
recurre a ejemplos con sistemas SISO, y se hace uso de las
ecuaciones (4.1-4) y (4.2.4), es decir de las funciones de
transferencia para el sistema en lazo abierto y cerrado

respectivamenre.
Antes de desarrollar los e.jemplos- es necesario recordar la
dimensión de las matrices de variables de estado del sistema,
con el propósito de dimensionar correctamente las matrices de
ponderación; el caso genenral es indicado a continuación:
X = A K + S uB*l n*n n*l n*o
= jf[xr Q x + u T R u ]dtf. 1*U Q.*-XL Jl*l 1 *p jp**p jp*l
Para sistemas univariables hay una sola entrada, entonces
esta ecuación se define como se indica a continuación:
= A x + B un.*n n*l n*l 1*1
[ x r í ? x + uT R u }dtl*n n«j3 zi*l 1*1 1*1 1*1
4.2-2 Descripción de los Ejemplos.
Los pasos seguidos en el desarrollo de los e.jemplos de
aplicación para sistemas SISO de primer y segundo orden son:
1) Cuadro de las características del sistema sin regulación
(polos de lazo cerrado, respuestas en frecuencia y en el
tiempo) (cuadro 1 o 41.
2) Cuadro de las combinaciones de las matrices de
ponderación CQ y R)-, con el fin de observar los cambios que
se producen en las respuestas en el tiempo del sistema
compensado (ubicación de los polos de laao cerrado del
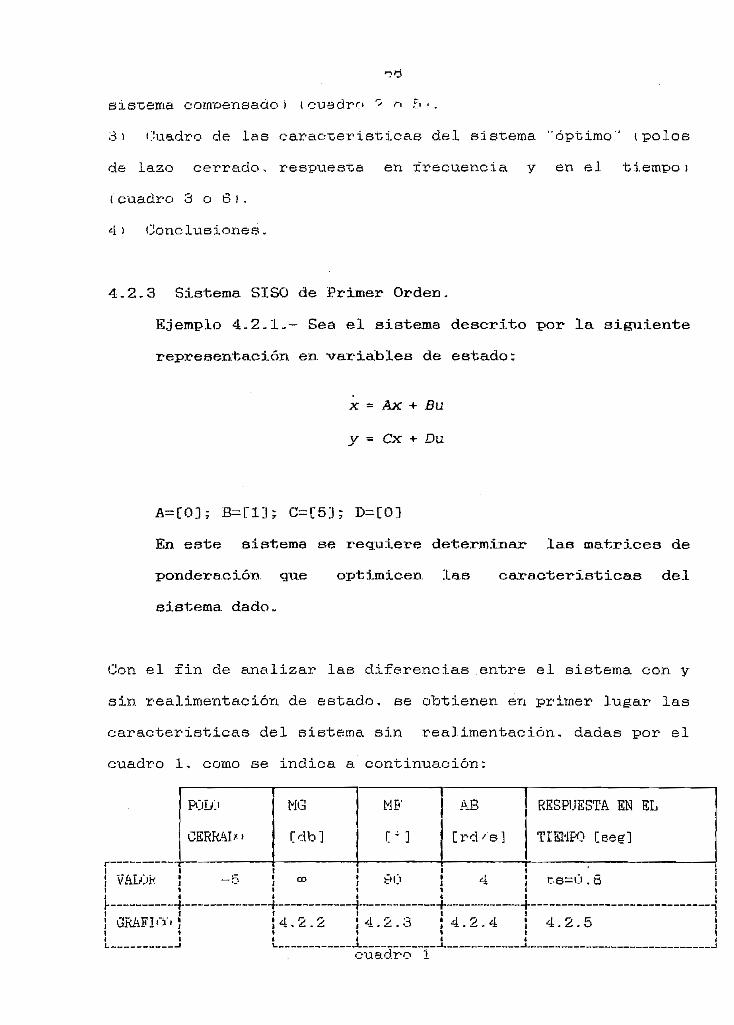
sistema compensado ) í cuadro v o 5 f ,
3) Cuadro de las características del sistema "óptimo" (polos
de laso cerrado, respuesta en frecuencia y en el tiempo í
í cuadro 3 o 6 i .
4 ) Conclusiones.
4.2.3 Sistema SISO de Primer Orden,
Ejemplo 4-2-1.- Sea el sistema descrito por la siguiente
representación en variables de estado:
x = Ax + Bu
y - Cx + Du
A=C03; B=fl3; C=[5;i; D
En este sistema se requiere determinar las matrices de
ponderación, que optimicen, las características del
sistema dado»
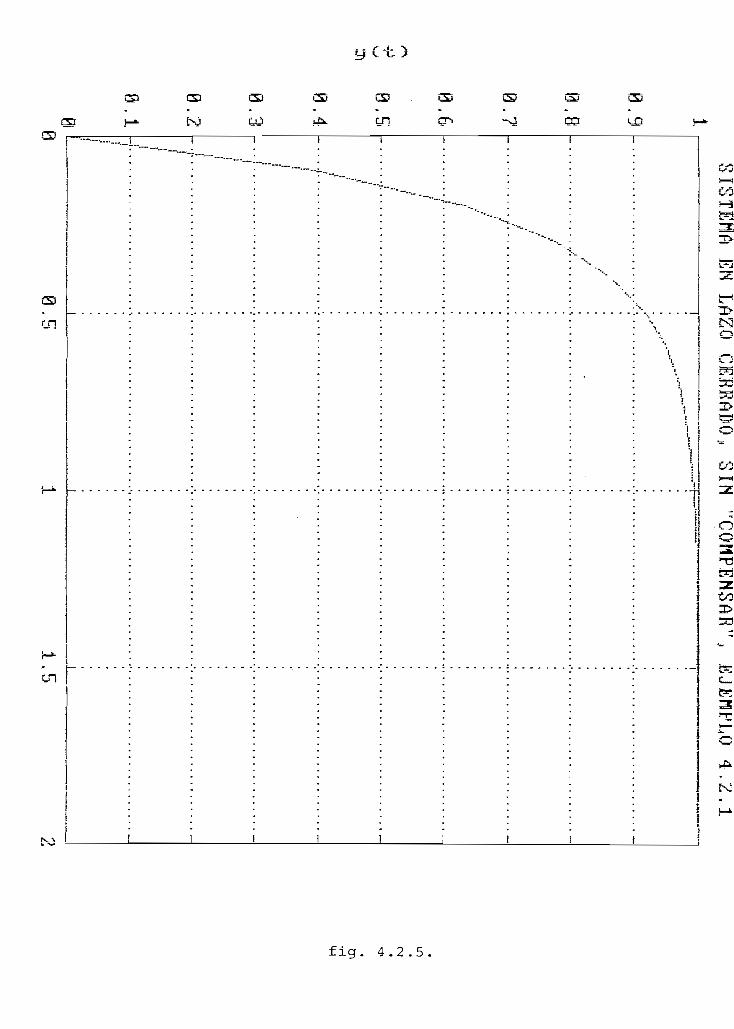
Con el fin de analizar las diferencias entre el sistema con y
sin realimentación de estado, se obtienen en primer lugar las
características del sistema sin realimentación, dadas por el
cuadro 1, como se indica a continuación:
POLO
CERRAI*)
HG
Cdb]
MB' AB
[rd's]
RESPUESTA M EL
TIEMPO [seg]
1 1 , _.
i -f. —
y i.1
4,2 ,2 ¡4.2.3icuadro í
4
4.2.4
ts=ü.o
:-j . j . |
4.2.5
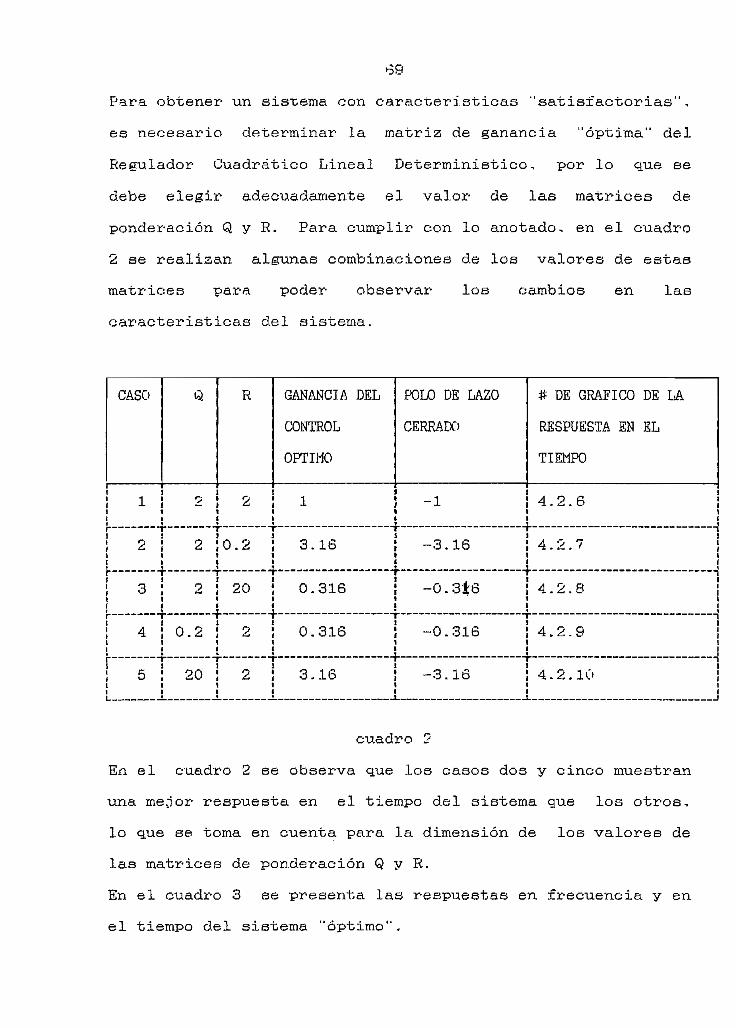
Para obtener un sis-cema con características "satisfactorias",
es necesario determinar la matriz de ganancia "óptima" del
Regulador üuadrático Lineal Determinastico, por lo que se
debe elegir adecuadamente el valor de las matrices de
ponderación Q y R. Para cumplir con lo anotado, en el cuadro
2 se realizan algunas combinaciones de los valores de estas
matrices para poder observar los cambios en las
características del sistema.
CASO
1
r ~ 1
2
L-— -----| 1
3
r 14
, — |
5i __
Q
<P
i ]2
í 12
r i
0.2
r — i20
R
2
i — ~ ~i0.2
i 120
H _ _ .-i
2
r "i
9¿j
GANANCIA DEL
CONTROL
ÓPTIMO
1
3.16r _ - . _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ ^
0.316
n0.316
3.16____— ™___ _—_.._.-™_j
POLO DE LAZO
CERRADO
— 1
H_ : ,
-3.16
h..........................................
-0.3$6
r~~ ~ i-0.316
"i-3.16
i____ __ ___ _
# DE GRÁFICO DE LA
RESPUESTA EN EL
TIEMPO
4.2 .6
1 _ _ _._ _j4 .2 .7
............ „„_.í
4 .2 .8
4.2.9
r 14.2.10
L
cuadro 2
En el cuadro 2 se observa que los casos dos y cinco muestran
una mecior respuesta en el tiempo del sistema que los otros,
lo que se toma en cuenta para la dimensión de los valores de
las matrices de ponderación Q y R.
En el cuadro 3 se presenta las respuestas en frecuencia y en
el tiempo del sistema "óptimo".

70
PW-
CERRA!*!'
MG
Cdb]
HF
C ; ]
AB
[rd's]
RESPUESTA EN EL
TIEMPO fseg]
VA.i-.Oh
GRAFIO i
-22.36
r ~
co
4.2.11
90.r n
4.2.12
12
h _ _
4,2.13
¡ ts=ü1i. j.Í 4.2.ii
.2
14
cuadro 3
Loe valores de Q y R, como la ganancia del control óptimo que
determinaron los resultados del cuadro 3, son mostrados a
continuación:
O - [101
R = [0.02]
G = [22.36]

RESP
UEST
A DE
MA
GNIT
UD DE
L SI
STEM
A SI
N "C
OMPE
NSAR
", EJ
EMPL
O 4,
2.1
DO 50 40 30 20 J0 0
-10
-20
-30 •18
! r_
rT_
rrrn
.j
|_..
f_T_
]_1_
)-I.
T
r (._
T
"X
V,
*••
^_„
V,
. . , .
*-»
'• ;
. ',
. . !
.....
. ....
..
..
.
,-LLJJJ
.
*
. :.
. .
V L...
, -.-.
. , *
"V-
: : *
. .
*!--
. i i
•*
.,
...
'".
. . .
.....
..
..
.
L.J
JJJ.J
. ±
10°
\„
mT
íT""
....
....
....
! .
. .
• •
:
, ,
. .
.
Í ;
;
! i
, . ;;;
;X
' ' '
-..-
I »
•«
-(
,_
-
*.v\L
1_ .
..L»,L
»
10
J
,„
-.. LJ
•
Llt lí
(N (N -H m

•RES
PUES
TA
DE
FASE
D
EL S
ISTE
MA
SIN
"CO
MPE
NSA
RA
EJEM
PLO
4.2
.1
•98
™" ¿
1
"" !
•"••-i
U-.
r i
1 1 r
....
.
,',.
..
i i .
,
.... ur1
_....n
1 1
i
....
'.
.....
1 •
' ' *
'.','.
'.'.
10a
i
r rr
n
, — !_,
;_;_;.
,.;
.....
i i
i jij
10*
1
r .
........ ~i
rr r— 1- 1
T I
ro CN tu -H m
Z

3 1_es. o
cev-0£_n
tXJes en
fSte
t_fc^ _C^Ji
, 1'
SD
j V
'—t^t-fc*
LU
; . . : .
L
rLr
i:::::::::::rr~
.--•"'".-•"""
^•-•i..--•
"
.--"""
j-~~'~
..-""'
.--'"
'
..f
.-*"
.--""'
CO
3>
i»w
• *• J
~* t5*. ...::..:.. .q oí Y***L j
i •—1 ->.
1í ,-s
! ^i ^<Ȓ>0
_JÍ ^^'J' OO
_J^ l_J
r t TVi ií
:__! c/i
3
-
- t-s
_1 hl.1I ^ J
i ^^"1 r/2
H"| £
! rTí
l /~5i
• • ~l >ü
fig. 4 . 2 . 4
Hi
H-
M Ln
i:3
"
i .E.,
...—*
."^.•-
tbr
—,
Z'B
£'0
F0
9'
u:; r's
oíaw
ara
' JIUS
HMMO
OU N
IS '
oaym
o oz
ya w
a

zI
[fias]}.
T0
'0
S'T
Hi
H-
Zir,
NJ
CTi
S'Z e S'E
W
OSMO o
ayaa
ao o
zuí
wayw
aisi
sS
'fr

S'T
S'0
O
MÍ
H-
N)
cz o
syo
osui
wa
n
Z'0
9'0
8'0
Z'T
9'T
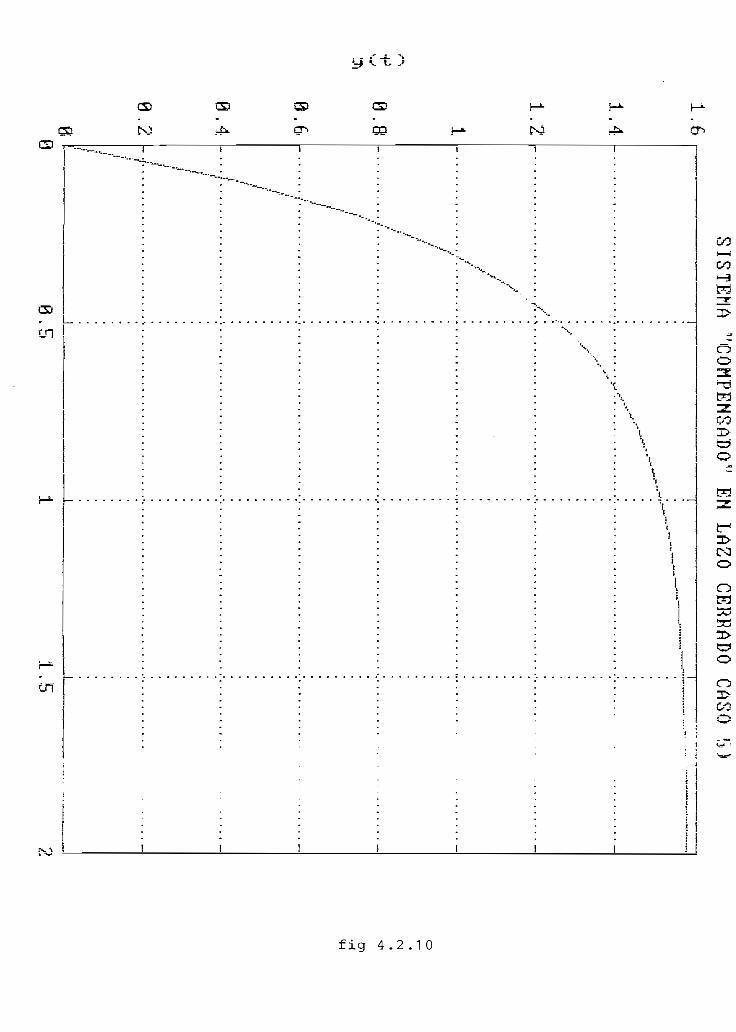
/•s

SIST
EMA
"COMPENSADO"
EN LA
ZO CERRADO
CASO
3)
r*\
4 3 2
co CN tn -H m
81 l¿ 0
0.
1-5
2
t [s
eg
]

8 7 5
SISTEMA
"COMPENSADO"
EN LA
ZO CERRADO
CASO 4)
CT
i
C\
31Cn •H
3 2 1.
e.1
.52
(•*•
tts
eg
]
SIST
EMA
'"CO
MPEN
SADO
" EN LA
ZO CE
RRAD
O CA
SO1. 1.4
1.2
8.8
0.6
0,4
0.2
B0.
11.5
tN
2
t

DIAG
RAMA DE
MA
GNIT
UD DE
L SI
STEM
A "C
OMPE
NSAD
O",
EJEM
PLO
4.2.1
36 20 -II
J-> J
•21
\
i r r
"
..
,
. ,
•V
-.1
. .
. . v.
\ ;
; ; ;
'X.
.....
.....
..
..
.
..
..
.
Í J J
'*
1
_
•-..
rrrn
....
.
• •
' V
.
"\
"V.
^
.
. .
.
L 1.
.I J_
LL
._
... ..
~ i
' r
i i í
i T-
" r
i
x
....
.... . . .
. . .
: ' i
• • •
. . .
'•V
...
•"•
....
. .
. .
....
! IL
L
2
IB"1
10°
10
"•-
1 J
1
1
N.
.
;•• "•r x
rr i 1
T" _ „
T^ L 8;
ÍN Cn -H
u (rad/seg)
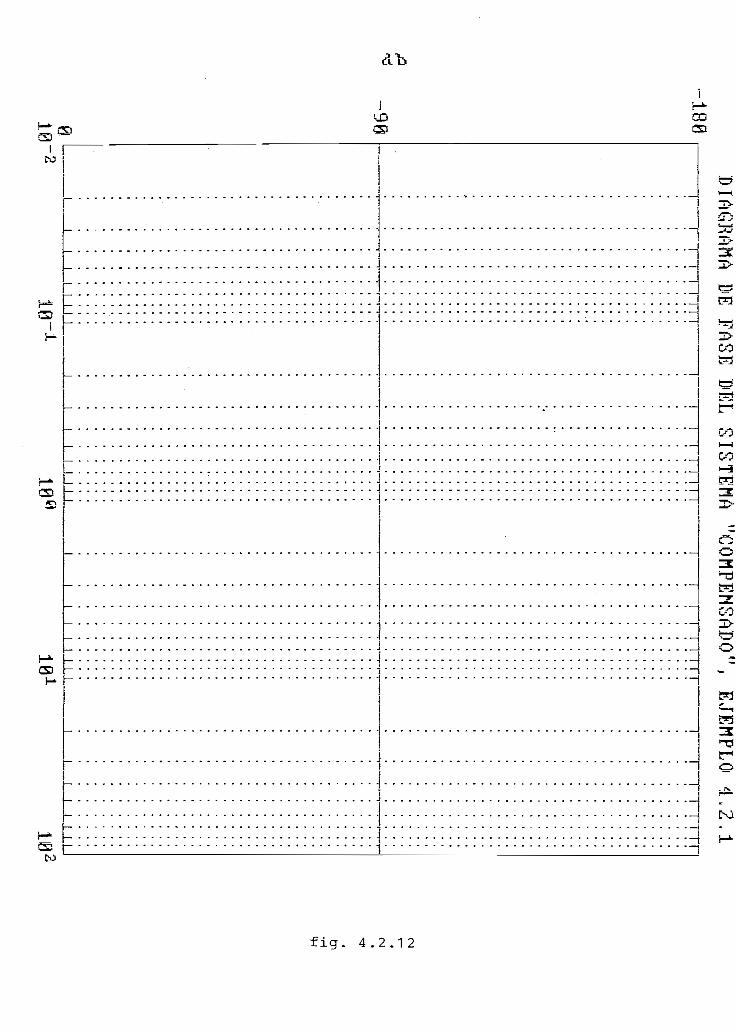
DIAGRAMA
BE FA
SE BE
L SISTEMA
"COMPENSADO",
EJEM
PLO
4.2.1
180U 8 e le
— O
L
• — ™t
•"-•
rrrr
r T
i
....
.
; ;
; ; ;
. . .
. . .
....
.
• .....
..
..
.
10"
1
-
I I
I IT
I
, .
..
..
. .
..
..
• •
• • •
•
. .
..
..
'
í 1
1 . U
1
1
r r
i 1 1
i
....
.
....
.
....
.
. i i
. .
i
• '
• •
• •
' : , . . • • • • •
1 i
I I 1
.1
10
0
10
1
i J—
,•— • i
- 11i
CN ÍN tJl
-H m
2
w (rad/seq)
"

RESP
UEST
A DE
FR
ECUE
NCIA (AB),
SIST
EMA
"COM
PENS
ADO"
, EJ
EHPL
O 4.2.1
JL¿
M 14 16 18 26 22 24 26 9 P
¿O 10
\ ¿r~l
L-
rn n
....
.
....
.
!
. .
' :
i -
.
. U
.U
.J.,
i — i
•••r
riTi
i r"
i
....
...
..
. i .
i
....
.
....
.
. . t
. .
. .
. .
. .
1 !
I...1
.I. 1
1
-.-..,
i 1 1
1 i
. ..
..— .
* * ""'?
• -,'.\,
• • • . • • • • • , . , , • • ; •
X
. . .
• | . • • • • • . ; , , * • •
: • • • . - . • * . • • •.
. .
..
..
.
10"1
18
0
LJJ U
.J
\
v \1
r~ \jr' \,
r \jrr • í _1 1T - - - .- L.
0;
ro CM
w írad/seg)
(•>
" r*

SIST
EMA
"COM
PENS
ADO"
EN
LAZO
CE
BRAD
O CA
SO "O
PTIH
O")
1
fl
flu
. u
/"S
W
'
04
R
?U
.
£» R oE
~ '
' •
f j i i 1 1 i i 1 j i
i f i i 1 1 0
1U_U
U~
U—
.>..-.«»
**, «,1, »
„. -„
-, ,t«.U
-..—
... -
5 J_
.
. . ,_
M ._,„
—-.
i u
-|-.
m...ij.4.n
i ...É
l- r
l. —
.-...,.._.—
111.-
-11I
L_
, ..
..J
L 1. 5
2
Cn •H U-t
h
t[s

4.2.4 Sistema SISO de Segundo urden.
Ejemplo 4.2,2,- Se tiene el sistema descrito por
x = Áx + Bu
y - Cx + Du
A=f-2 O: 1 03; B=ri; 03; C=CO 53; D=[G3
Se requiere determinar las matrices de ponderación
optimicen las características del sistema dado.
Al igual que en el e.jemplo anterior se presentan las
características del sistema sin compensación (cuadro 4), esto
es, polos del sistema en laso cerrado, respuesta de
frecuencia y en el tiempo,
VALOR
1 — — -]i GRAFIO:»L i
PUL/.»
CERRAK'
-1+2.1
-1-SiL Ir n
MG
Cdh]
Cu
I _Jr 1
4.2.15U™ __-,____l
HF
[°1
45
L Jr _j
4,2.16i _.___ _— __
AB
[rd/s]
2
4.2.17
L — _— — —J
RESPUESTA EN EL
TIEMPO Ceeg]
ts=3. 7
4,2,18L ._ _)
cuaaro 4
Para encontrar la matriz de ganancia del Regulador Cuadrático
Lineal Deterministico, es preciso dimensionar las matrices de
ponderación tQ y R), para ello se recurre a combinaciones de
los valores de estas matrices tal corno se muestra en el
ex;adro 5.
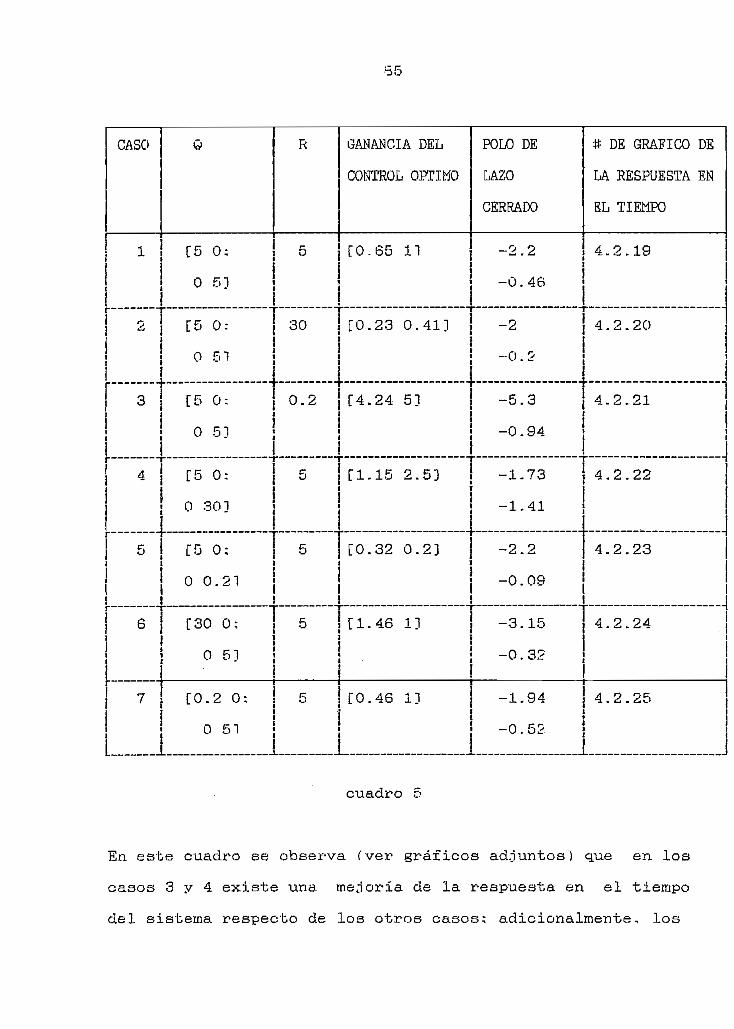
CASO Q
1 [5 C
| 0 E! i
2 [5 C
I 0 £
1 1j
3 ! [5 C
í í n r¡ 0 í:
i — 14 j [5 C
¡ 0 3C
5 ; [5 C
| | 0 0 .1 !r | _
6 | [30
¡ > ní !
7 | [0.2
! •
R GANANCIA DEL
CONTROL ÓPTIMO
í; 5 j [0.65 11
Í ii 1 * 1- 1 1i !r j j
í: j 30 ! [0.23 0.411i í-, I i
1 ' '' i 1i 1 ,—— ——^.—_—_— -^.__— —— ——-——_— í: 0.2 j [4.24 5]
i ii 1
3 ¡ !! i_ i j j
> : 1 5 [ [1.15 2.5]i i
o ! !• ! .J -J _: - _J
; | 5 j [0.32 0.2]
21 1 í¿ i t
í 11 " t" " i
0: i 5 Í [1.46 1]i *í í
rr n ' 'b 1 ^ *-*• - i i
| j1 1
0; ! 5 ! [0.46 11í 1r- . f i
¡ 5 1 ' »"-' 1 1
! 1 j
POLO DE
LAZO
CERRADO
-2.2
-0.46
[ :~
9~2
-0.2
-5 3— u . o
-0.94j. |
-1.73
-1 41X . M-L
-2.2
-0.09
-3.15
-0.32
-1-94
-0.52
# DE GRÁFICO DE
LA RESPUESTA EN
EL TIEMPO
4.2.19
°~ ~" :
: 4.2.20
4-2.21
r ~ I4.2.22
i
4.2.23
4.2.24
i
4.2.25
cuadro 5
En este cuadro se observa ("ver gráficos adjuntos) que en los
casos 3 y 4 existe una mejoría de la respuesta en el tiempo
del sistema respecto de los otros casos; adicionalmente, los

polos de lazo cerrado tienden a ale.jarse del e.je imaginario.
De los resultados obtenidos en el cuadro 5, se determinan
parámetros para dimensionar los valores de las matrices Q y
R, de tal manera que el sistema mejora considerablemente sus
características, esto es, menor sobreimpulso y mayor
velocidad de respuesta, tal como se indica en el cuadro 6.
_
VALOR
— — — — — -^GRÁFICO
L _— __— .J
POtD
CERRADO
»21
-131 _ _ _|r ~
MG
Cdb]
CD
L Jr n
4.2.26i
MF
[°]
72
._ _ _,r n
4.2.27
L— ,™™—_ ™™
AB
[rd/s]
10.5
4.2.28L _ _ _
RESPUESTA m EL
TIEMPO [seg]
ts=0 . 5
4.2.29 I;1L _ _ J
cuadro 6
Los valores de Q y R, asi como la ganancia del control óptimo
que determinan los resultados del cuadro número seis, son
mostrados a continuación:
Q = [6 0; O 721]
R - [0.01]
G = [32 268-5]

RES
PUES
TA
DE
MA
GN
ITU
D D
EL
SIST
EMA
SIN
"CO
MPE
NSA
R",
EJ
EMPL
O 4
.2.2
6 0
[—'i
r T"
irm
1—
TT~r
TTTn
r—
i—rr
rrm
i r
™r
rm
ni
TTTT
ITT
20 -
80
•126
1-I-
I
I I
I 1.1
.1 J
L.I
....
I I.
I.I.
I I
10"
1
10
0
J_
CN Di
-H
181
102
:1.0
3
u C
rad/
seg*
)
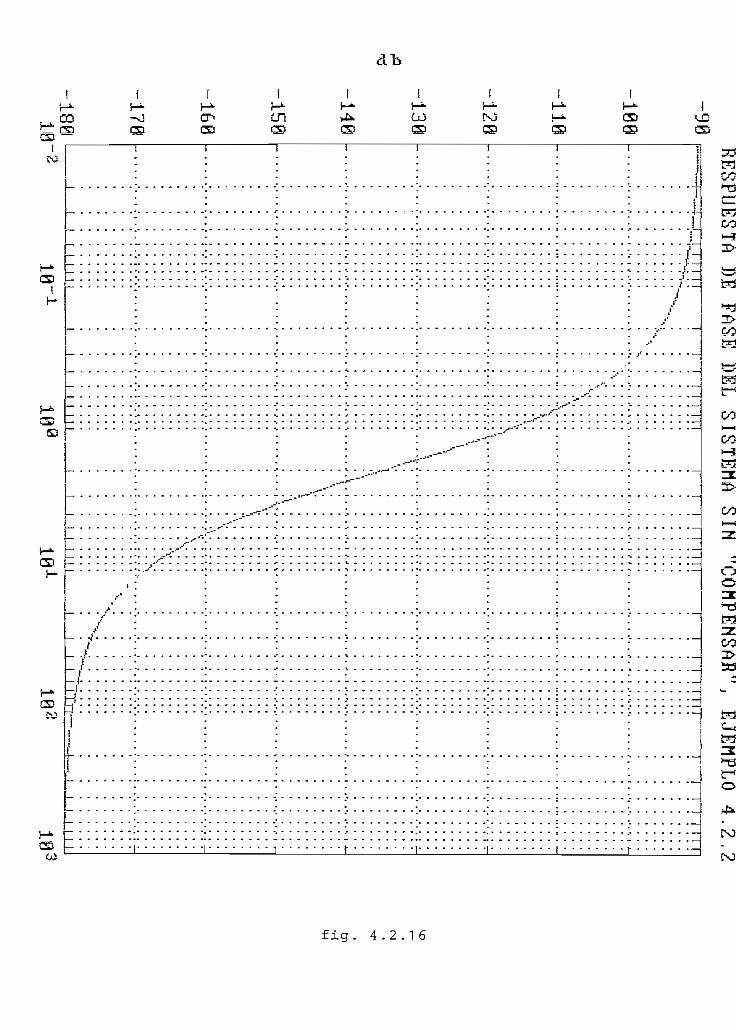
RESP
UEST
A DE
FA
SE DE
L SISTEMA
SIN
"COM
PENS
AR",
EJ
EMPL
O 4.2,2
-90
-100
-
110
120
-
130
-
-140
-
150
-
160
-
170
•180
•"-•
**—
-•—
— **
M*t
.•••
4UJT
....
.
....
.
....
.
_ p
L_
! 1
!. .. .
"TT
TT
TT
I
i. •(> "•-•
L_l
..!
(> \ i. ¡ í 'i
... .....
•i \ R"^
- 1 tt^
.1, iJ
.A
, 1 J
,,. • \J
TT
T1
\., • L
X
LU 1
!
"x
1 1
\
T~
t
i l
iTíT
i-r—
— u—
,..
81
10
2
_-J
1 • _L
J
IT o- - i. - 11 _e:
en •H
w Crad/seg)

RESP
UEST
A DE
FR
ECUE
NCIA (AB),
SIST
EMA
SIN
"COM
PENS
AR",
EJ
EMPL
O 4.2,?
¿.o 8
-2B
-48
-60
1001
120 10
_~ —
-TT
TT
TI
.....
.....
.....
1
.
1....
" i i
rn
i "
«r-
i
1 1
1 1
1 1 1
1 1
1 !
•
1-1•v
*-:
10-1
.LL If
•
^«.
jQ
N
L_
^ „
\
!'!
"v'l
LLJ 1
TI
H
V
\
\ i
i i '•
....
..
. . ¡ • • : . • -.. • | . • • . . - •
• •
i i
- , • • : • : • . u • . * ' ' . • • • 1
\
\
L
\1
10
2
\'
!
V
, .
. .
n r u-
\ *~ •
J
LJJ
JJL
1
r- CN -H 4-1
u (rad/seg)

SIST
EMA
EN LA
ZO CERRADO
SIN
"COM
PENS
AR",
EJ
EMPL
O 4.2.2
i 4
1.2
-
0.8
8.6
0.4 .2
o
co (N tn -H m
tCseg]

W
4.5 4 3
2. 2
~L
i» iJi
0.5
SIST
EMA
"CO
MPE
NSA
DO
" EN
LA
ZO
CERR
AD
O CA
SO
.1)
(N •H m
e L=
¿:0
3_i_ 4
t L
'seg
]

S
Hi
H-
to K)
O
z T~
0
T
S..-1
3 ¿ 8os
yo o
avHu
ao o
zwi
wa
(loay
sNa<
iMOD
(l yw
aisi
s

SIST
EMA
'"CO
MPEN
SADO
" EN
LA
ZO CERRADO,
CASO 3)
J.
R
Qu
. _7
0P . O
R
7o , i
R
f\ . u
R
^u .
u1
04
R
TiU . J
'
R 7
u .
¿»
01 . J. 8
f
i
y
„...
./
V i 1r
...
/*
I-1'
/'
_._
L 5j-
^. -
- ~
} «
7v
~~
- -•
-"
.1
S
CN (N tn -H
t [
Sífí
fí

-
-.¿ . b
SIST
EMA
"COM
PENS
ADO"
EN LA
ZO CE
RRAD
O CA
SO 4)
~r
2;
1,5 1
8.5
(N CN (N tn •H 4H
23
-L 45
t [s
eg
]

9 8 7 -
5 4 3 2 1.
SIST
EMA
"COM
PENS
ADO"
EN
LA
ZO CE
RRAD
O CA
SO 5)
82
(N -H
t

rs 31
2.5 2
1.
& !-=¿
8
SIST
EMA
"COM
PENS
ADO"
EN
LA
ZO CERRADO
CASO 6)
(N fN
t[seg]

CJ
SIST
EMA
"COM
PENS
ADO"
EN
LA
ZO CERRADO
CASO 7)
w
u-)
CN
fN
1
tn •H
02
-i_ 4
t Lseg]

DIAG
RAMA DE
MAGNITUD
DEL
SISTEMA
"COM
PENS
ADO"
, EJ
EMPL
O 4,2.2
uu
86
60
48
20 0
20
-40 18
— ?
"~«._
1_
. _
--,
!
"TT
T'm
•-,"*-,
.. *\v^
"•V
*-..„
'-.
. .....
* '
1 1
1 1
1 1
•x, *'
^-
,
11
*v
•
"\-i
10o
\J
rn-r
r¡""
- -
%. _jL
LJJ 1
•'-..
'"•-
1 I
_ '*'*•.
i -.
a1
1 !
1 1
I 1 !
^J
i
U
"•s.
í.ll
X I. ...
!
ir~ x
r
•-,
. . i.
i i
102!
ITT j~ t—
J-L
1.0
CN ÍN tn -H 4-1
u Crad/seg)
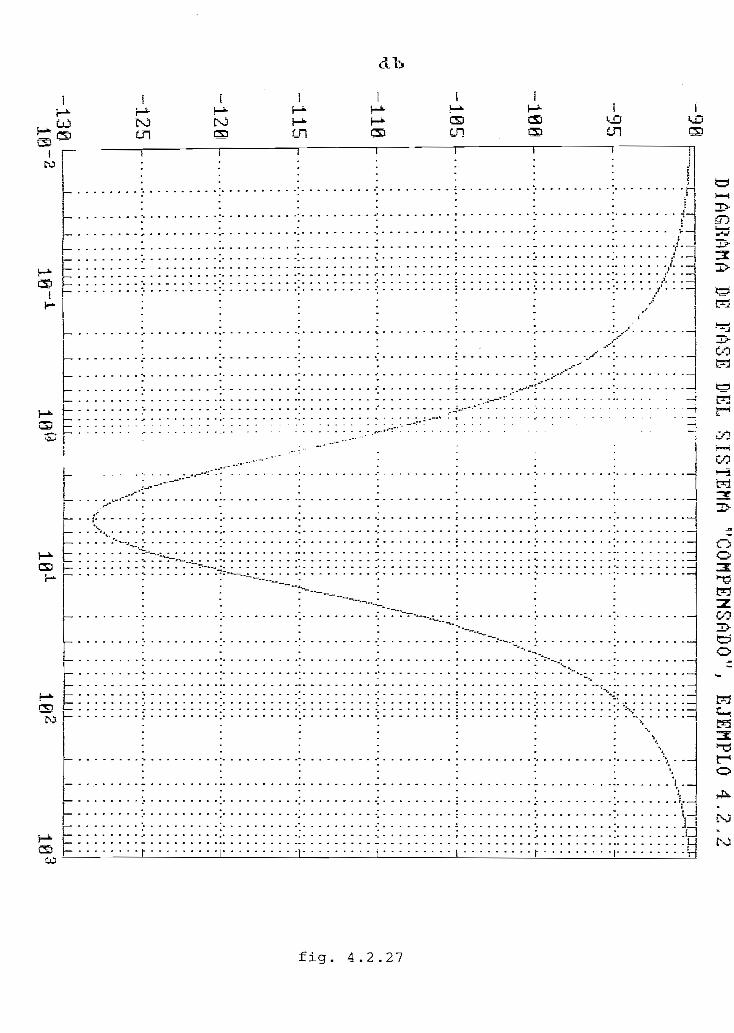
(/Ja
s/pi
sa:
Hí
H-
NJ
M -J
TT
_r - ™ -, Ü
T
•~E0
T Te
:Cu
[i
III
MI
i i
• . • | ; • • • j • • • • • • ; - • ,-•
/
LJJ
•i? c
unar
a '1 J o
t
/ r f
i f
í l'
* rl
• '
• •
/
1 .T rr
i i •
" fr
oa:ys
Had:w
ooiíh
r™ \_ w
i.
i
1 J
<ia>
00T
T
-8T
" ni n
i i i
"¡ • •
!. . • • •
••
V '
- 1.
•
III
Io
'í e
1* n
, & i
í>
:
. .
. .
(
' . :( • .j i'L_ I
1_ a\ r
n i i
....
. .
....
. .
•-
....
. .
....
. .
....
.
, \,
: :>'
r--L^
syj
aa w
wyi
i
U:
i
iIZ:
e-
a
0T e e T
SZT-
0ZT
ST
T-
0TT
S0T
-
00T
36

RESP
UEST
A DE
FRECUENCIA
<AB)
, SISTEMA
"COMPENSADO",
EJEM
PLO
4.2.2
fi
OL
Í
-40
-60
-70
-80
-90
100
110 10
— , —
r~•"
I'l'
l IT
'E
—.__
,
•
. ..
...
i i
i i i
... rr
~2
lar1
ir
„...
,0 ~
..
—
1 11 1 "X
\
'•t '
1B1
rTTT
T
\
• • • , . . . . .
. . .
V
' • 1. 1
' \\
.
.
' : '
. . .
, . .
, . .
. . ,
. . .
! . 1
! . '.
1 ,.i
.1 I.U ie
. • • • • . É í
\ • • • • • . • • j_ .
t \.
'•i f.
1 *.
1 \ 1
-
\
i
)2
18
:
co (N CN tJl -H
w C
rad
/se
g)

/"s
SIST
EMA
"COH
PENS
ADO"
EN
LAZO
CERRADO,
CASO
"ÓPTIMO")
8.9 e.8
8.7
0.6
8.4
0.2
j.
2 3
t [s
eg-l
l
4
CTi
CN CN Cn •H .

4-¿.b Conclusiones.
Oo n oase en los e/iempios presentíaos, y otros que no se
incluyen, se pueae concluir que en la elección de los valores
de las matrices de ponderación Q y R se deben tomar en cuenta
varios parámetros, es por ello que los valores de éstas no
son únicos. Por ejemplo el procedimiento de la linealización
de sistemas no lineales toma en cuenta dicha elección- Este
procedimiento se describió en el capítulo dos, pero no se
desarrolla en este traba.jo.
Gomo se mencionó, la elección de las matrices de ponderación
no es única para cualquier sistema-, y ésta dependerá de
cuales parámetros son de mayor importancia; por ejemplo, si
se requiere que el sistema responda rápidamente, entonces se
debería dar a Q un valor alto.
En resumen, en. la elección de las matrices Q y R son
determinantes aquellos parámetros que requerimos que se
cumplan con la "mayor precisión posible", através de un
procedimiento de tentativa y error.
Por último, en el proceso de análisis matemático se tomó por
facilidad la referencia igual a cero, sin embargo ésta se
puede variar de forma que el sistema tenga un valor deseado
de salida.

103
4.3.- GANANCIA PARA EL FILTRO DE KALMAN.
4.3-1 Introducción -
En la elección de la matriz de ganancia del Filtro de Kalman,
es necesario recurrir a la teoría desarrollada en el segundo
capítulo., en donde se determinaron relaciones matemáticas que
se recuerdan a continuación:
-5Lx(fr) =Ax(t) + Bu(t) + ffíz(t) - Cx(t)]dt
£4.3.1)
En esta ecuación, H es la matriz de ganancia del filtro, y es
definida por la siguiente ecuación:
H =
(4.3.2)
en donde la matriz semi-def inida positiva simétrica constante
2o es interpretada como matriz de covarianza del error dei
estimación de estado estable, y satisface la ecuación
matricial algébrica de Ricatti-, la que se expresa como:
O = Alio
(4.3.3)
En esta ecuación es necesario dimensionar las matrices de
covarianaa de ruido, las cuales son representadas por:
C y 4>
(4.3.4)
Por lo tanto H dependerá de los valores asignados a esta
expresión. Ahora bien, se han definido las matrices que
determinan el valor de la ganancia del Filtro, las mismas que

requieren criterios auieíonaies para ser seleccionadas. Para
eJLÍO se recurre al diagrama de bloques del Filtro de Kalman,
que es representado por la figura 4-3.1,
xft)
!H
fig. 4.3-1 Filtro de Kalman
Del diagrama de bloques de la figura se puede deducir la
ecuación (4.3.5 j que es similar a la ecuación (2.3.12)
deducida en la sección El Filtro de Kalman dado en el segundo
capitulo. Del diagrama de bloques se tiene:
*** *~ ~= Ax + Bu + K(z - y]
at
ddt
x = (A - HC)x + Bu + Hz
-4.3.5)
en donde se puede observar que al variar- el valor de la
matriz de ganancia del Filtro H, varia la ubicación de los
polos de la matriz de lazo cerrado (A - HC). Cabe recordar
que la ubicación de los polos del sistema en lazo cerrado,
determina, la rapidez de respuesta de éste, asi corno la
dimensión del ancho de banda-
lu5
Adicionalmente, si existe un incremento en la matriz
covarianza de ruido de la planta (ver ecuación 4.3.3") ,
entonces la matriz de covarianza del error incrementa su
valor (ver ecuación 4.3.2) y, por consiguiente el valor de la
matriz de ganancia del Filtro H es también mayor, sin embargo
este incremento en la matriz de covarianza de la planta
significa que la perturbación en la misma tiene mayor
"potencia" y por lo tanto causa mayor "oscilación" en el
estado actual x(t); el Filtro debe estimar estas oscilaciones
en x(t), y esto requiere un alto ancho de banda.
Ahora bien, si los polos del Filtro (A - HC) en el plano
complejo son ubicados lejos del eje imaginario, entonces el
Filtro tiene un ancho de banda considerable, sin embargo esto
significa que el ruido que pasará al sensor es mayor, y este
es el precio que se tiene que pagar.
Tomando en cuenta lo anotado, a continuación se describen
ejemplos en la selección de las matrices de covarianza de
ruido, y por lo tanto de la matriz de ganancia del Filtro,
asi como la ubicación de los polos del Filtro.
Como se anotó en el literal 2.3, el paquete de Control
Robusto para Matlab, establece que las ecuaciones de estado
del sistema están dadas por:
x = Ax + Bu + Gw
y = Cx 4- Du + v
En donde la matriz G es un módulo de ruido, y para una mejor
comprensión de la elección de las matrices de covariansa de
ruiao. esca toma e i valor unic-ario, Estas matrices son
especificadas por el paquete como se muestra a continuación;
E[W] = R
Para el cálculo de las matrices H y 2o el Matlab dispone del
siguiente comando :
[H,2o] - lqefA,G,C,Q,R)
Para determinar " los parámetros Q y R, se recurre a una planta
SISO.
4.3.2 Sistema SISO de Segundo Orden,
Eoemplo 4.3.1,— Se tiene el sistema descrito por:
x = Ax + Bu + Gw
y = Cx + £>u + v
A=[~2 O; 1 03; B=[l; O]; C=fO 5]; D=[0]
se requiere determinan- la ganancia "óptima" del filtro
de Kalman 7 mediante la elección de las matrices de
covar lanza.
Para obsevar las variaciones en la ubicación de los polos del
Filtro debido a cambios en los valores de las matrices de
covarianaa de ruido, se plantea el cuadro 7-

1 i i7
íCASO & ? GANANCIA DEL
; FILTRO
; ' KAIMAN
1 Í [1 0: 0 1 ] | 1 ¡ [0.1 ! - «1 í í 1
• ir | - | _!2 1 [10; 0 11 ¡ 20 j [0.
i i !I t t -^ •1 1 1
r— — -|— - T f" "3 j [1 0: 0 203 { 1 \0
i i * ^i. . . i i"T « I r
4 1 [20 0: 0 1] j 5 ] [2i f i» ! i• i •*•! JL 4. ^ 1r T ^ T
DE
17:
POLOS DEL
FILTRO DE
KÁLMAN
-2.3
03] i -4.871i
02: ] -1,85
24] j -1.35i
.05: í -2,01
.47] j -22.4
i.17; ] -4.41+2.2J
.37] ¡ -4.41-2.2.1
5 ) [81 0: 0 I t O.OÓ | [23.3; ) -12.7+1.5,17 14 1
í i 4» í ^~I !
5 i i i *
i
i
Jn
:
'
!i
,!]
'
,
:
. 66] | -12.7-l.5j3 ,t
cuadro 7
4.3.3 Conclusiones -
Con base al e.jemplo presentado, y otros que no se incluyen,
se puede concluir que en la selección de los valores de las
matrices de covarianaa de ruido, deben tomarse en cuenta
varios parámetros.
Por ejemplo, un incremento en la matriz covarianza de ruido
de la planta causa en el filtro un mayor ancho de banda del
mismo. La interpretación del ancho de banda del filtro es
útil y como ya se expresó, un incremento de esta covariansa
hace que el ruido blanco de la planta tenga mayor "potencia"

108
y por consiguiente causa mayor "oscilación" en el estado
actual xit). El filtro debe estimar- estas oscilaciones en
x(t), y esto requiere un alto ancho de banda. Por supuesto,
un ancho de banda alto deja pasar mayor ruido al sensor,
desgraciadamente esto es una deventaja, pero se puede llegar
a un equilibrio entre estos parámetros.
Por consiguiente, la elección de las diferentes partes de las
matrices covarianzas de ruido debe ser interpretada como un
camino de control del ancho de banda del filtro.
En realidad, actualmente no hay técnicas generales
disponibles que pueden ser aplicadas con confianza cuando se
tiene que seleccionar las matrices de covarianza de ruido.
Sin embargo, la intuición física, sentido común, y
simulaciones representan efectivas herramientas que tienen
que ser usadas para obtener buenos diseños.
Se puede concluir que la selección de los valores de Q y R en
cualquier sistema no es única, ya que dependerá de cuales
parámetros son de mayor peso en el diseño a realizarse.
4.4.- ANÁLISIS DE LOS RESULTADOS OBTENIDOS.
4.4-1 Introducción.
Sn los literales 4-2 y 4.3, se realizaron los respectivos
análisis para el Regulador Cuadrático Lineal Determinístico y
el Filtro de Kalman. Se determinaron además, algunos
criterios para la selección de los valores de las matrices de
ponderación y covarianzas de ruido respectivamente; sin
embargo, es necesario determinar los valores de estas
matrices en un conjunto general. Para ello se recurre al
Regulador Cuadrático Lineal Gaussiano.
De las ecuaciones 2.4.9 y 2.4.10, es necesario encontrar las
matrices de ganancia óptima y ganancia del Filtro de Kalman,
para ello se recurre al comando Iqg, el que requiere para su
ejecución de la selección de las siguentes matrices:
W = [Q Nc; Nc* R]
V - [w Nf; Nf* v]
en donde Nc y Nf representan las correlaciones entre las
matrices de ponderación (Q y R) y matrices de covarianza de
ruido (w y v) respectivamente, y que para nuestros fines
serán iguales a cero.
4-4.2 Sistema SISO de Primer Orden
Ejemplo 4.4-1.— Se tiene el sistema descrito por:
x = Ax -f Bu + w
y = Cx + Du + v

A=CO]; B=fll; C=r51? T)=roi
Se 'requiere determinar las ganancias "óptimas" del
Regulador Cuadrático Lineal Gaussiano,
SI ejemplo planteado es similar al e.jemplo 4.2.1, por lo que
para observar las características del sistema sin compensar-
se recurre al cuadro 1. Medíante combinaciones de los
valores de las matrices de "ponderación" W y V, se constituye
el cuadro 8, con el fin de observar los diferentes cambios en
las caracteristcas del sistema.
CASO
1
11
_J[
2.1 i
31
11
4
5
i
W
n 0:
0 1]I 1r ~
f i o :
0 13, ,— -.
[1 Ü:
0 11
[1 0:
0 20]
[20 0:
0 13
v"
' no:9.
0 111i 1
! n o:0 203
, \0 0:
0 11
[1 0:
0 11[ „
[1 0:1
0 13
GANANCIA
DEL L0GK
H=rn
G=mir ™
H-[0.2:¿1
G-[ll\,.....
H = [ 4 . 4 7 j'
G=ni
H=ri]G = f ü . 2 2 J
H = r i 3G-[4.471
POLO DE
[ASO
CERRADO
-1
-oi__ _ j
— i
-1.1*i H.......
.*~ J.
-22.4
Ü ri"~j. ¿¿
—5
-4.47
-5
tf DE GRAF.
DE LA RESP.
EN EL TIEMPO
4 ,4 .1!i
I ji4 . 4 . 2
;i
4 .4 .3
¡
4.4.4
r J, —
4 .4 .5
cuadro 8

111
En el cuadro 8 se puede observar que en los casos 3 y 5 se
presentan meoores características del sistema en comparación
a los otros, es por ello que para la elección "satisfactoria"
de las matrices W y V se toman en cuenta los casos anotados.
En el cuadro 9 se muestran los valores asignados a las
matrices de "ponderación" W y V, de tal forma que el sistema
mejora las características dinámicas respecto al sistema sin
compensar.
W
[10 0:
0 0.0153
V
[10 0;
0 0.15]
GANANCIAS
DEL LQGR
H=[8.161
G=[25.8]L J
POLO DE
LAZO
CERRADO
-25.8
-40.8
ít DE GRAF.
DE LA RESP.
EN EL TIEÜP
4.4 .6i1i
cuadro 9
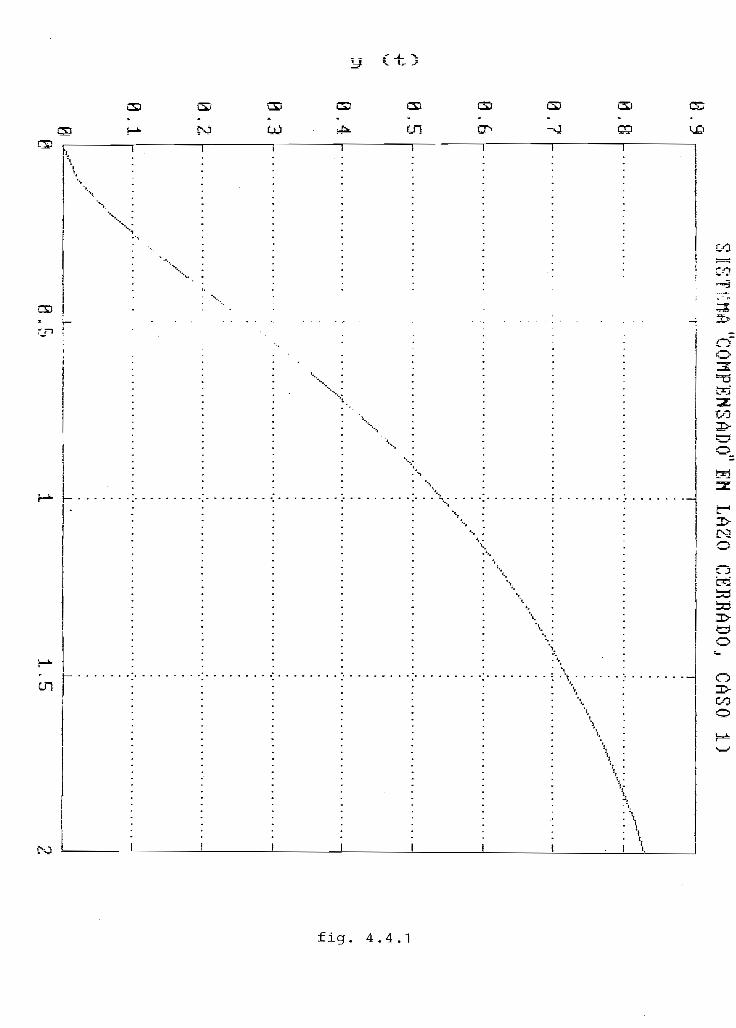
c
t
esrr)
í— i
W ^
5
^
. fc
en
ce v-
FI\-
%-
—
c c
-*• f.
2 C
ó t
S C
O -l
'"••'.^
2 C
^ C
1
'->._
'\ C
n ci
s
\
3 C
PI,
\.
\» C
s3 C
'
V
\f
i\
S C
O <s.
'
*l
\
D
C-O
1f~¿O
s3:co
g
1ir1
CN3/•~^
O^* ^
ib
tí
O
coo
"""
fig. 4 . 4 . 1

SIST
EMA
"COM
PENS
ADO"
EN
LAZO
CE
RRA
DO
, CA
SO
2)8
.7
0.6
0 U1
•
0.4
CN
8.3
•H M-t
8.2
0. e e
0.5
11.5
2
t ts
eg
]

SIST
EMA
"COM
PENS
ADO"
EN
LAZO
CE
RRA
DO
, CA
SO
3)0
,9
0 8
u
* **
f
0,7
-
0.6
0-5
ro
8,4
Cn -H
0.3
0.2
0.1
00
1.5
2
t [s
eg
l

oír
8,3
0.25 0
.2
0.1
5
B.l
8.85
e
SIST
EMA
"COM
PENS
ADO"
EN
LAZO
CE
RRA
DO
, CA
SO
4)
L
0.
c:
~r 1.1
.52
Cn •H
r*i
t [s
eg
]
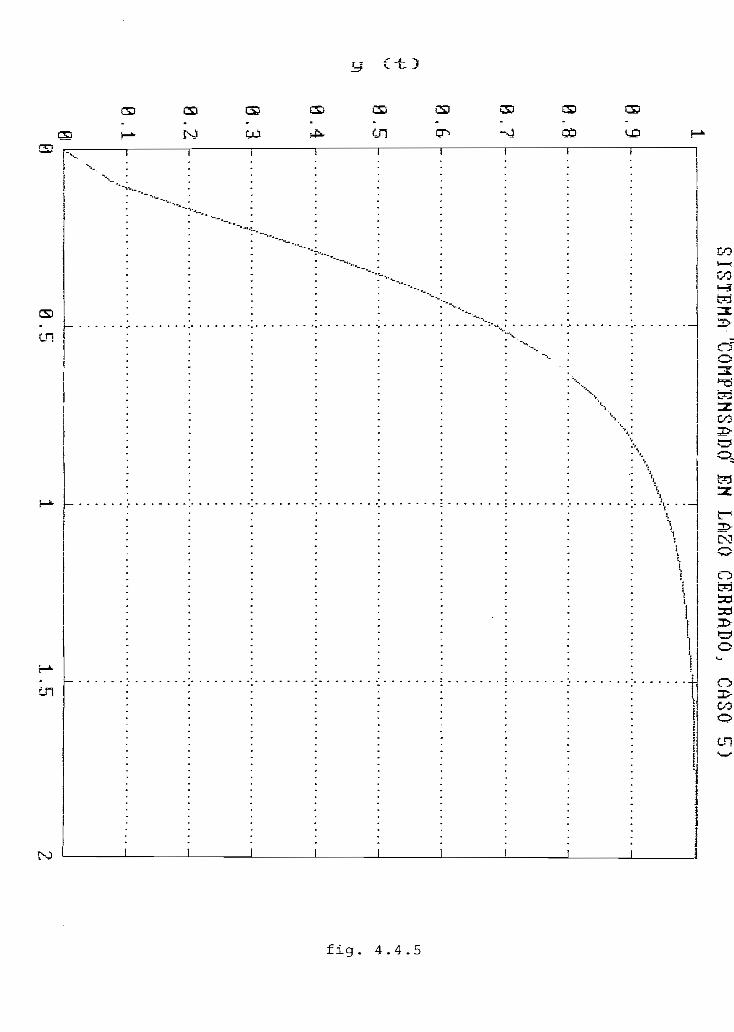
C2D
CU
CD
tnC5D
CT>
¡3co
T"
esen
00
en
r^
^s~~r~
i
fig. 4 . 4 . 5
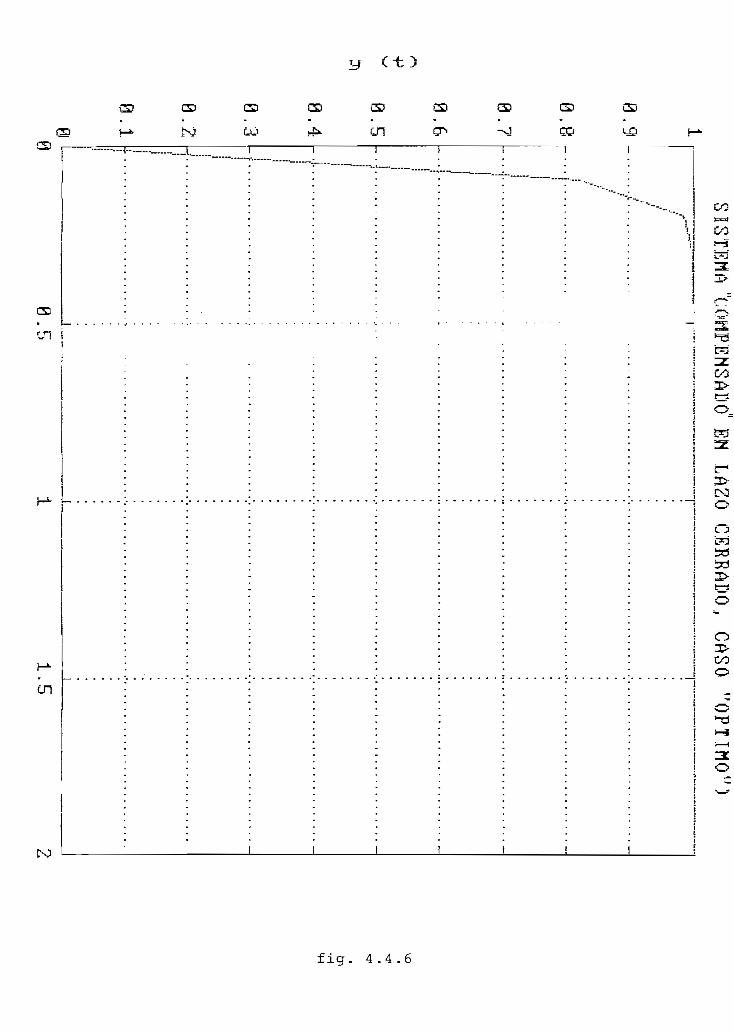
CB4H
CD
CT-
~~T~
cu
ce LO
CE
1
cu
en
CSJ
fc=3
oO
o3>coo
fig. 4 . 4 . 6

118
•4-4-3 Sistema SISO de Segundo Orden
Ejemplo 4-4.2.- Se tiene el sistema descrito por
x = Ax + Bu + w
y = Cx + Du + v
A=[-2 O; 1 03; B=[l; O]; C=[0 53; D
Se requiere determinar las matrices de ganancia del
Regulador Cuadr ático Lineal Gaussiano-
El sistema descrito por el e.j emplo 4-4-2 es similar al
ejemplo 4-2.2, por lo tanto para observar las características
del sistema sin realimentar se recurre al cuadro 4.
Adicionalmente se realizan, combinaciones de los valores de
las matrices cíe "ponderación" W y V, las que son mostradas en
el cuadro 10, en éste se observan los diferentes cambios en
las características del sistema.
cA
S
0
;
:. ,
: -1i!
1
1 l
W
[ 1 0 0 :
0 1 0 -u i u.
0 0 13
L J
V
[1 0 0;L
0 1 0:
0 0 13
__ _ __— — -,__-__„_
GANANCIA DEL
LQGR
H-[0.17:u
1.03]
G=[0.65 13
L™™™™-.—™..— ,—_—_.— J
POLOS DE
LAZO
CERRAIX)
-0.46
-2.19
-2.29
-4.87
tt DE GRAF,
DE LA RESP.
EN EL
TIEMPO
4.4.7i,1
¡
¡
j
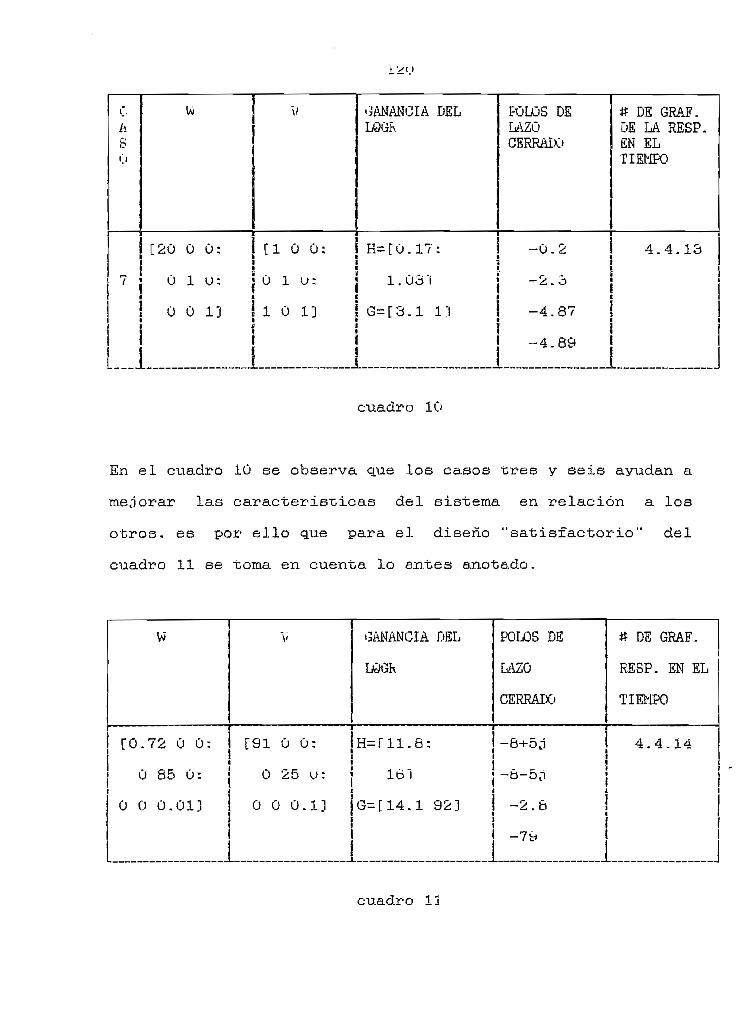
f
hBñ
7
!
W
[20 0 0:
0 1 u:
0 0 1 ]1
L_
V
[1 0 0;
0 1 u:
1 0 1 ]
L_ „__ „
GANANCIA DELLQGK
H=[0.17:^
1.03*1
G=[3.1 1]
L
POLOS DELAZOCERRADO
-0-2
f~ s ,-*¿.o
-4,87
-4.89
# DE GRAF.DE LA RESP.EN ELTIEMPO
4.4.13
i:
cuadro 10
En el cuadro 10 se observa que los casos tres y seis ayudan a
mejorar las características del sistema en relación a los
otros, es por ello que para el diseño "satisfactorio" del
cuadro 11 se toma en cuenta lo arrbes anotado.
w \> GANANCIA DEL
LQGK
POLOS DE
LAZO
CERRADO
# DE GRAF.
RESP. EN EL
TIEMPO
*-•• 1 " ' •" i --• • r- —[0.72 0 0; Í [91 0 0: JH=r i l . 8 : ¡-6+5,1 1 4.4.14
! j j ;0 85 0: | 0 25 0: i 161 ! -ó-oó j
t 1
0 0 0.01] ! 0 0 0.1]i
i _ _ JI
¡G-C14.1 92]i
i
ij -2.6
hii
_ i _
!
cuadro 11

DI
0,9
0.S .4
0.
0.2
0.1
.
SIST
EMA
"COM
PENS
ADO"
EN
LAZO
CE
RRA
DO
, CA
SO
i)
1_L
5
r- tn
t

SIST
EMA
"COM
PENS
ADO" EN
LAZO CE
RRAD
O, CA
SO 2)
u .
y
0Q . o
fl
7o . i
BE
L. u
^*\l
! CJ
i -iJ
1
Q'T
i -r, O
H
?U
,
¿4,
R
1U
.
J..
íl
.-"-'*
*
/
/
.-
/'
/
,,v*"
/
^"
O2
3
t
CO tn •H

0.9
SIST
EMA
"COM
PENS
ADO"
EN
LAZO
C
ERR
AD
O,
CASO
3)
~r
~r
0,8
0.7
W "Ti
0.
0.
Cn •H m
0.3
0.2 0
01
_L 2
_i_ 3
5
t ts
eg
]

0 0.8
0.7
0.4
0.3 0,2: .1
SIST
EMA
"COM
PENS
ADO"
EN
LAZO
CE
RRAD
O.,
CASO
4)
0
_J_ 2
tn -H
t

6,4
0,.-v
r~
.3
5
0.
^0
.2 .15
8.1
e. e
s e
SÍST
EÍ1A
"CO
MPE
NSAD
O" E
N LA
ZO
CER
RA
DO
, CA
SO
5)
2
T~ 3
5
tn •H
t
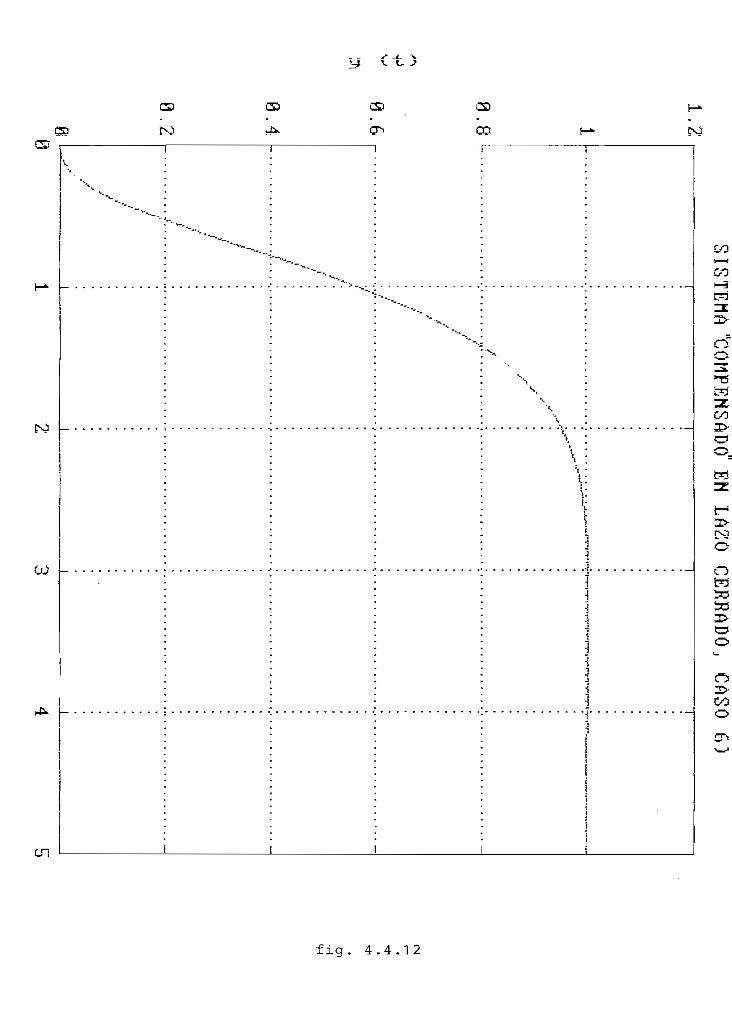
1.2
8.8
-
31
8,4 -
8.2
-
SIST
EMA
"COM
PENS
ADO" E
N LA
ZO C
ERRA
DO., C
ASO &)
1 .1
I /
r
i'
/'
,í
OJ -H 4-1
O2
3
t
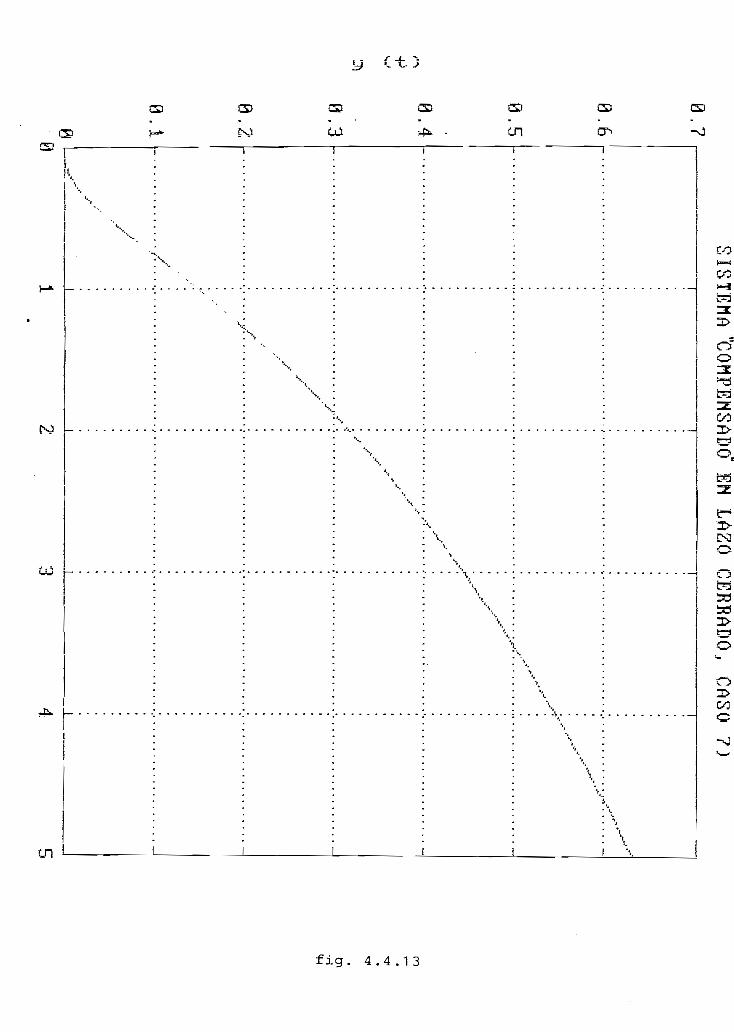
0.7
SIST
EMA "COMPENSADO" EN
LAZO
CER
RADO
, CA
SO
0.6
e.s
0.4
PO
LTi
0.3
0.2
0.1 e
2
t Lseg]

i]z
Iy
.1—
.
*'
0
8'0
..i .
i,os
vo
ron

129
4.4.4 Conclusiones.
Al analizar las características de los sistemas sin
regulación, se observa que éstos mejoran la respuesta
dinámica asi como la estabilidad ya que los polos de lazo
cerrado de los sistemas equivalentes (sistema y el LQGR)
están ubicados a la izquierda del plano complejo, entonces se
obtienen sistemas robustos.
Para la elección de las matrices de ponderación y covarianzas
de ruido se tomaron en cuenta los desarrollos realizados en
las secciones 4.2 y 4.3, esto debido al teorema de separación
desarrollado en el segundo capitulo.
Cabe anotar que la elección de estas matrices no es única, es
decir, no es la misma para cualquier sistema, sino que
dependerá de los parámetros que el sistema requiera con mayor
"precisión". Existen parámetros adicionales tales como la
linealización de sistemas no lineales, y que deben ser
tomados en cuenta si el caso lo requiere, pero que no fueron
analizados en este trabajo ya que salen fuera de los
objetivos planteados.
Los ejemplos planteados servirán para el análisis de los
ejemplos de aplicación de sistemas multivariables
desarrollados en el siguiente capitulo, y ayudan a la
comprensión de éstos si los sistemas MIMO son desacoplados.

130
4.5 COMANDOS PARA DIAGRAMAS.
Los comandos que se pueden utilizar para la desarrollo del
Regulador Cuadrático Lineal Deterministico, Filtro de Raiman
y Regulador Cuadrático Lineal Gaussiano, son los que se
indican a continuación;
4-5.1 Comandos para Sistemas SISO.
Los comandos utilizados en el desarrollo de los ejemploa de
demostración de sistemas SISO son:
[a,b,c,d]=t£2ss(n*uun,den) :
Permite obtener los valores de las matrices de estado a7 b, c
y d a partir de las expresiones del numerador y denominador
de la función de transferencia.
Cnum,den]=ss2tf (a,b,c,d,l)
Permite obtener los valores del numerador y denominador (num
y den) de la función de tranferencia del sistema a partir de
las matrices de estado.
•b=a:b:c
Define el parámetro t para la respuesta en el tiempo, tomando
como márgenes los valores a y c, el intervalo de análisis es
el parámetro b.
y=step(a,b,c,d7l,t)
Permiten obtener los valores de la respuesta en el tiempo a
partir de las matrices de estado del sistema a, b, c, y d, o
de la función de transferencia.

í mag, phase j =bode (xmm, den;, v* i
realizan el cálculo de los calores del diagrama de Bode de
modulo ituag), y fase iphaseí. Aquí a, b, c y d { HUID , den) son
las matrices del sistema (matrices de la ¿unción de
transferencia), y w es el rango de frecuencia.
[re 7im]=nyquist(a,b,c,d,l?w)
Nyquist calcula la respuesta de frecuencia del diagrama de
bíyquist de sistemas continuos en el tiempo, y en donde a, b,
c y d, representan las matrices de estado del sistema, w
representa el rango de frecuencia.
4.5.2 Comandos para Sistemas SISO y MIMO.
Los comandos que a continuación se detallan son de utilidad,
tanto para sistemas SISO como MIMO:
polo=eig(a)
Ayuda al cálculo de los polos del sistema determinados por la
matriz a
w= logspace(—a,b,c)
Realiza el cálculo de la frecuencia entre los parámetros 10~a
y 1013, y c es el número de puntos a calcularse entre los
parámetros dados.
semilogxíw., sv)
Ayuda en la graficación semilogaritmica del eje x (w), y toma
los valores de la matriz sv para la graficación del ev1e y .
av= s i gma(a,b,c,d,type,w)
Sigma computa la matriz sv que contiene los valores
singulares de la matriz función de transferencia; type da la
posibilidad de elegir entre las siguientes opciones:

1 ) Type - 1 . Gi .iw »
2 ) Type =• 2. G-^-Í .*jw »
3 ) Type = 3. 1 + Gí Jw »
4) Type = 4, I + G-M.jwi
CA,B,C,D]=series(al,bl,cl,dl,a2,b2,c2,d2)
Series calcula las matrices equivalentes de dos sistemas en
cascada dadas por al? bl, c!7 di y a23 b27 c27 d2.
[A,B,C,D]=feedbk(a,b,c,d,type)
Feedbk calcula las matrices equivalentes A7 B, C y Dy del
sistema representado por las matrices a, b, c y d que es
realimentado con. las siguientes opciones:
1) type - 1, lazo directo I; lazo realimentado ía,b,c,d)
2) type = 2, lazo directo (a,bsc,d); lazo realimentado I
3) type = 3, lazo directo fal,bl,cl,dl ) ; lazo
realimentado ( a2 , b2 , c , 2 , d2 )
4) type = 4, realimentación de estado completa -F
5) type = 5, realimentación -H;
Realiza el cálculo de la ganancia óptima G y de la matriz £
que satisface la ecuación algébrica de Ricatti, a partir de
las matrices de ponderación Q y R y de las matrices de estado
a y b.
CH,K]=l<ae(a,g,c,Q,R)
Realiza el cálculo de la matriz de ganancia del Filtro H, y
de la matriz K que satisface la ecuación algébrica de
Ricatti, a partir de las matrices de covarianza de ruido Q y
R y matrices de estado a y c. El parámetro g es tomado como
módulo de distorsión.

133
Cag,bg,cg,dg]=lqg(a,b,e,d,W,V)
Realiza el cálculo de las matrices ag, bg, cg, dg del
Regulador- Cuadr-ático Lineal Gaussiano a partir de las
matrices de ponderación W y V y de las matrices de estado del
sistema a, b, c, d- Las matrices del LQGR son definidas
como :
ag = a - He - bG
bg = H
cg = G
donde H es la matriz de ganancia del Filtro, y G es la matriz
de ganancia del Regulador Óptimo.
Cac,bc,cc,dc]=reg(a,b»c,d,k9l)
Realiza el cálculo de las matrices ac, be, ce, de del
Regulador Cuadrático Lineal Gaussiano a partir de las
matrices de ganancia k y 1 (control óptimo y filtro de Raiman
respectivamente) y de las matrices de estado del sistema a,
b7 c7 d- Las matrices del LQGR son definidas como:
ac = a — le - bk
bg = 1
cg = k
donde 1 es la matriz de ganancia del Filtro, y k es la matriz
de ganancia del Regulador Óptimo.

CAPITULO V
EJEMPLOS DE APLICACIÓN, CONCLUSIONES
Y RECOMENDACIONES
5.1.- EJEMPLOS DE APLICACIÓN.
5,1-1 Introducción.
En el segundo capítulo se desarrollaron las bases matemáticas
para el análisis de sistemas por el método del Regulador
Cuadrático Lineal Gaussiano; adicionalmente, en el tercer
capítulo se presentaron las bases para el análisis y
graficación de sistemas multivariables, asi como un estudio
de estabilidad. Finalmente en el cuarto capítulo se
realizaron ejemplos de demostración de la teoría dada, pero
con la ayuda de sistemas univariables; esto, con el fin de
que los ejemplos desarrollados proporcionen criterios para la
elección de las matrices de ponderación y de covarianaas de
ruido, Entonces, se llega al último capítulo con las
herramientas y comandos necesarios para el análisis de los
valores adecuados de las ganancias de las matrices de
"ponderación" de sistemas multivariables.
A continuación se presentan ejemplos de aplicación del
programa Matlab para Control Robusto de sistemas
multivariables por el método del Regulador Cuadrático Lineal
Gaussiano (LQGR). Adicionalmente, se incluyen las
Í35
respectivas conclusiones y recomendaciones.
Cabe recordar que el paquete Hatlab cuenta con el comando Iqg
para la elección de las matrices de ganancia óptima y
ganancia del Filtro de Raiman, el que requiere para su
ejecución de la selección, de las siguientes matrices de
"ponderación":
W = CQ Nc; Me* R]
V = [w Nf; NfT v]
donde Nc y Nf representa la correlación entre las matrices Q,
R y w, v respectivamente, y que, para el desarrollo de los
ejemplos de aplicación son iguales a cero.
5.1_2 Sistemas MIMO de Primer Orden
Ejemplo 5.1.1-— Sea el sistema descrito por la siguiente
representación en variables de estado
x = Ax + Bu + w
y = Cx + Du + v
A=CO O; 00]; B=[l O; O 1]; C=C2 O; O 5]; D=[0 O; O O]
Se reguiere determinar las matrices de "ponderación" W y
V que optimicen las características del sistema dado:
Con el fin de analizar las diferencias entre las
características del sistema con realimentación de estado y
sin ésta, se presentan en primer lugar algunas
características del sistema sin regular, tal como se muestra
en el siguiente cuadro:

136
i ni¡ Gráficoij1 1
Valor
DIAGRAMA DE
BODE
ñ 1 1O . J. .. X
L _
RESPUESTA DE
FRECUENCIA
pi 1 *>•j . j. . i ¡
POLOS DE LAZO
CERRADO
i
¡
" ¡
cuadro 12
En el siguiente cuadro se muestran algunas combinaciones de
los valores de las matrices de "ponderación", para analizar-
los cambios que se producen en las características del
sistema:
eA
S
0
í i1 - « -i
r 1
• 2; *•\
: [ 1 0 0 0 ;
0 1 0 0 ;,i
0 0 1 0 ;
0 0 0 1 ]r j
f l 0 0 0;1
0 1 0 0 ;
0 0 1 0 ;
0 0 0 1 ]
V
[ 1 0 0 0 ;
0 1 0 0 ;
0 0 1 0 ;
0 0 0 1 ]i j
[ 1 0 0 0 ;
0 1 0 0 :
0 0 1 0 ;
0 0 0 20]L _
GANANCIAS DEL
LQGR
H=[l 0;
0 1]
G=[l 0;
0 1]j._ „ _ _ _ |
H=[l 0;
0 0.2]
G=[l 0;
0 1]L _ _ _J
POLO DE
LAZO
CERRADO
-1 *
\2) •-•
•-1 *
-5Lr n
— 1 *
-2.
-1 *
-1.12__„„____._„„„__,„
tt DE GRAF.
RESP. DE
BRSC.
5.1.3
:1
1!i
i
n
5.1.4
i
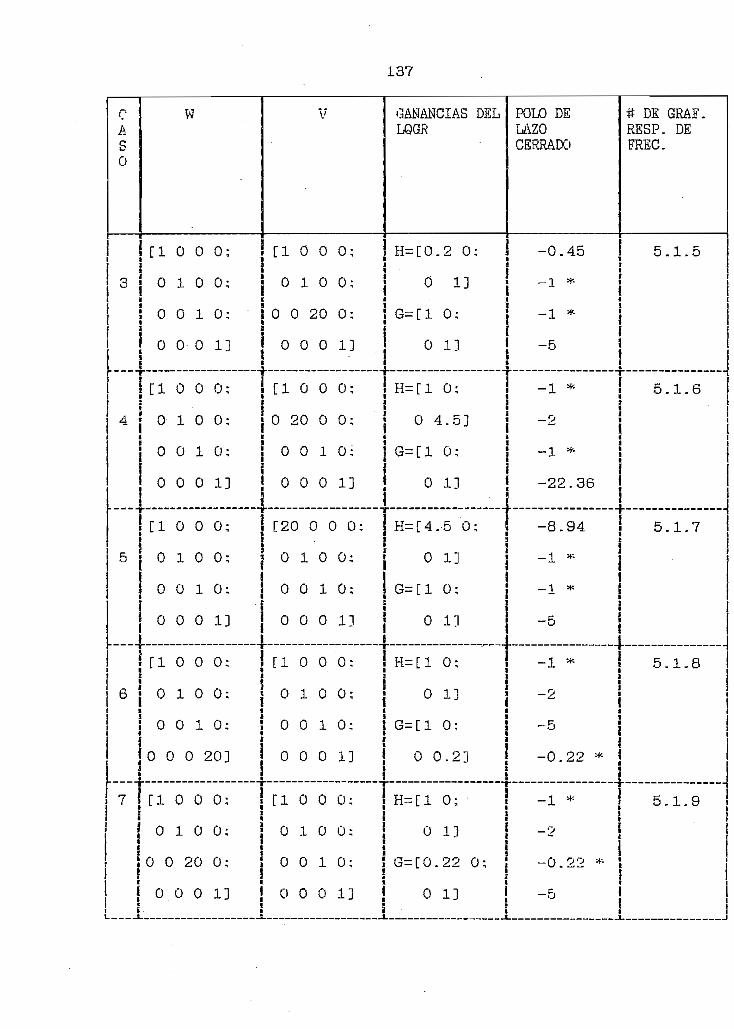
137
c wAS0
! [ 1 0 0 0 ;i i uí
j 3 j 0 1 0 0 ;i i
V GANANCILQGR
[ 1 0 0 0 ; H=[0.2í
0 1 0 0 ; j 0i
j 0 0 1 0; j 0 0 20 0; j G=[l 0jj 0 0 0 1 ]
í
^S DEL POLO DE # DE GRAF.L¿\20 RSSP. DECERRADO FREC.
0 — n A t*i ^ 1 R, ™^j _ ^O 1 O - JL - «_)I i
1] -1 * |
i
; -1 * j\] 0 1 ] -5 í
. . _ ! ! 1• ~i T[ 1 0 0 0 ; j [ 1 0 0 0 ; j H= [ 1 0
r i a
1 4 0 1 0 0 ; | 0 20 0 0; j 0 4 .i 1 i
0 0 1 0 ; j 0 0 1 0; G=[l 0
0 0 0 1 ] 0 0 0 1 ] 0 1I
i *•----f— •—---—--—-— --"K— -—-———- — ~~ — " |f— -------
[ 1 0 0 0 ; 1 [20 0 0 0; j H=[4.-5! |
i 5 0 1 0 0 ; i 0 1 0 0; ¡ 0 1I I if *
0 0 1 0 :
0 0 0 1 ]. I -Tr
[ 1 0 0 0 ;i¡
0 0 1 0 ; I G=[l ÜE1
0 0 0 1 ] | 0 111
[ 1 0 0 0; i H=[l 0i;6 0 1 0 0 ; « 0 1 0 0 ; 0 1i: 1ii
0 0 1 0 ; ! 0 0 1 0 ; j G=[l 0! i '0 0 0 2 0 3 0 0 0 1] ¡ 0 0 .
i 1 1_ 1 ! _ _ !
T ~r T^
7 1 [ 1 0 0 0 ; I [ 1 0 0 0 ; j H= [ 1 0í \1 0 1 0 0 ; iti i
0 1 0 0 ; 0 1i«
0 0 20 0; ! 0 0 1 0; S G^[0.2J 1
1 1 i ij 0 0 0 1] ¡ 0 0 0 1 ] ¡ 0 11 1 3« . ., » , , , , . i
i
t
1 ' '
: -1 * S 5.1.6
5] -* !J " i
i1_1 * *1 J. t11
] j -22.36._„....... — j........ — _„___.
¡ -8.94 í 5.1.79 I* 1
-1» 1i i
i -i * S}3 -5 (
L. _ _L J1 I
| -1 * ! 5.1.8* it í¡ r 1j * —¿, *i it tI i
— R '-0 ¡
I
2] -0.22 * |¡ i. *a (
; ¡ -1 * 5.1,9í i
3 í -2 i
2 0 ; -0,22 * 1i i
] * -5 íJ » i; !_,____„__ JL_ —__™____t. 1
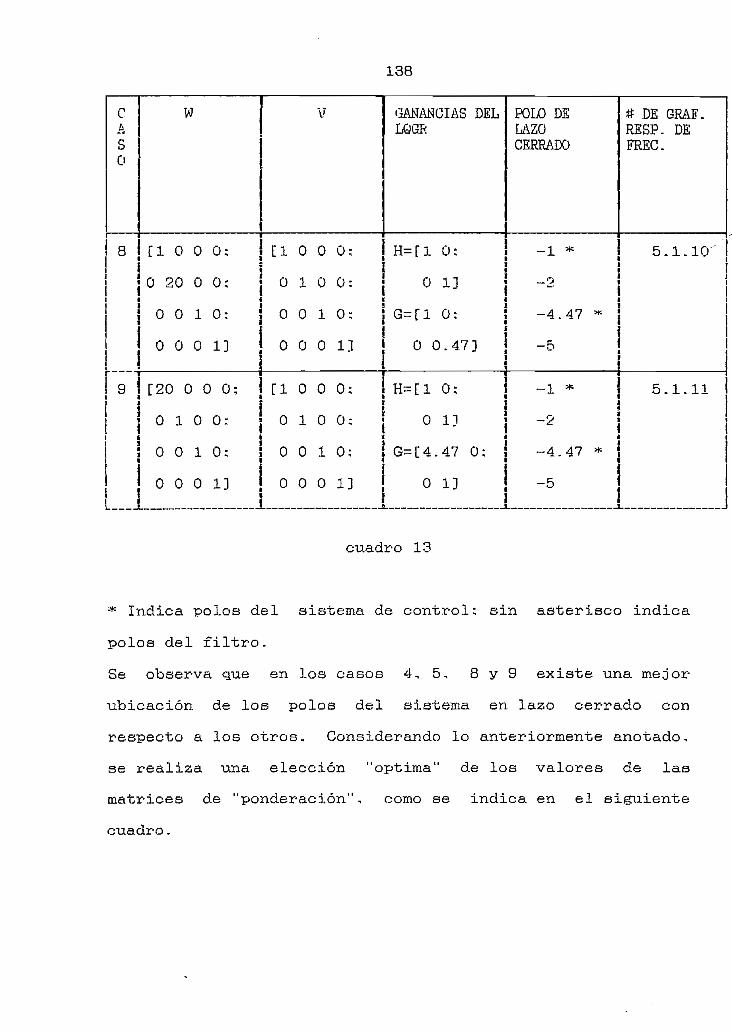
138
cAS0
Po
i:
;
r9
1
1
w
[ 1 0 0 0 :u
0 20 0 0;
0 0 1 0 :
0 0 0 1 ]
[ 2 0 0 0 0 ;
0 1 0 0 :
0 0 1 0 :
0 0 0 1 ]
V
[ 1 0 0 0 ;
0 1 0 0 :
0 0 1 0 ;
0 0 0 1 ]
[ 1 0 0 0 ;•
0 1 0 0 ;
0 0 1 0 ;
0 0 0 1 ]L
«GANANCIAS DELLQGR
H=[l 0;•
0 13'
G=[l 0;
0 0.47]
H=[l 0:
0 1]
G=[4.47 0;
0 1]L— . — _ — _— — __—__
POLO DELAZOCERRADO
-1 *
-o
-4.47 *
-r>
-1 *
-2
-4.47 *
-51 _ _]
# DE GRAF.RSSP. DEFREC.
5.1.10''
!iiiiiii
5.1.11i 1
:i
„__—______
cuadro 13
* Indica polos del sistema de control; sin asterisco indica
polos del filtro.
Se observa qne en los casos 4, 5, 8 y 9 existe una mejor
ubicación de los polos del sistema en lazo cerrado con
respecto a los otros- Considerando lo anteriormente anotado,
se realiza una elección "óptima" de los valores de las
matrices de "ponderación", como se indica en el siguiente
cuadro,

139
w
[20 0 0 0;
0 30 0 0:
0 0 0.1 0;•0 0 0 0.1]
L ___—-_
V
[ 2 0 0 0 0 ;
0 30 0 0;
0 0 0.1 0;
0 0 0 0.1]L
GANANCIAS DEL
LQGR
H=ri4.1 0;
0 17.3]
G=ri4.1 0:
0 17.3]
POLO DE
LAZO
CERRADO
-28.3
-14.1 *
-86.6
-17.3 *
tt DE
GRAF.
BODE
5.1.
12j.¿
.
#
RESP
FREC
5.
*• •13
cuadro 14
* Indica polos del sistema de control: sin asterisco indica
polos del filtro.

hh H-
ln
B" TT -
-„ _ -i. - i i
n • ir > inn „, 'V
1el T
•
• •
"v
' '1_ : • • • : • , • : • . • • •3T rm . .
.. .
,. .
,. .
.. .
.i i
''!
'•
'"H. *
• • •
. , .
• : :
• \ . .
i.
. , ; : :
. , .
. . .
. . .
• • •
, . .
n *-,
LLU
LLL.—
,
""V
i .— 1
~'-v
TÍ
i 11
'"v"v
31 ~n .."1 ,..
••,
"
LU
J_U
~\
1
v_
\(
n
** •.„
"x _1
3T
T_T
T .L
-^"v
.
-.
^
1
•••
"'•t ^
10 T
nT
TT
T" I
. .
. .
, .
X,.
. ' -^
"*•„ •
~"~f
• •
• •
•"""
,
LLJJ
._LJ
._.^ i
1
z ,
.01 0Z
-
8e*
8Í-
cuna
ra
f(1ay
swí[(
iwoo
0 NI
S MW
ÜISI
S ia
a sa
os a
a

RES
PUES
TA
DE
FREC
UEN
CIA
C
AB
) SIN
"C
OM
PEN
SAR
",
EJEM
PLO
5.1
.10
"~~n
~nw"T
^TT
T¡T
w^T
'^^
1—r~
rTTT
Trr
1—rT
TTTT
I
10
•28
-3B
-40 -se
l I
..I J
-LJJJJ
2 10-1
J L.
I.
. 1JL
LL
U
i 1
L-L
LL
LL
L-
10
1
J
L—LJ
.J.J
.U_
(N ui
LJ^
UJ-
L
10
3
u

RESP
UEST
A n
FR
ECUE
NCIA
(A
B)>
SIST
EMA
"COM
PENS
ADO"
, CA
SO 1)
u
-28
-48
-68
-88
100
120 10
-2
.....
L__
1 í •
i Vi
ríV
' '
f ~"~
1
L»
-
L.J
OJ-
LLL
i
i,__
16"1
:;;;~J
v' 1
i « "T '-
-.
J *•*
•»
....
V
-••, •-
1 1 1 1
10°
1
ÍT
"
\
i. '.,
91
r1'"11 \
r rr
n . .
L__J
\-
• • , , •
. . .
•
S' •\
\
• , * • ;
LJ.J
1 -.I 1
\, ''•
\J
!L,
,.. \• LJ
.... . L_
ÍT •
\ -LL JTT T
-*
•""
_
J_L
.0:
ro m •H M-t
i»:

.RES
PUES
TA
DE
FREC
UEN
CIA
(A
B),
SI
STEM
A "C
OM
PEN
SAD
O",
CASO
2)
u
-20
-40
-60
100
120 10
1 r-
.. i
.. f
YT
'i
[-,-•
- •-' -
f—^-^.^
Ull II
I I
1
U»
U,
....
....
....
.
.....
: : :
: :
LJLJ_U
_U
__J- —
L—
le"1
iI
•T
"..
:
10
0
\
"• L™
\''
"!'!
V%,
.
II H
X
\
'. ;'v ':
"JJ1S
r~L~
í i.
rTT
lTIT
"
'-.
i • . • • • ; • • • • • •
'*! ' 1.
' • '• . ; • '• .
• •
LJ-J
• • . • • • • • • • - , >v¡ • *"i , • . •
. • • , . • • • • • , : \ "..
''•
. • . . .
X
.'" '"•-
LU
.1LL
L
LJ
10
a
• 'S
i s1 ! s* •.•TT v
-
"•
18
:
U") tn -H
u C
rad
/seg
-) *

RESP
UEST
A DE
FR
ECUE
NCIA (AB),
SISTEMA
"COM
PENS
ADO"
, CA
SO 3)
irt
o
-20
-40
-60
-80
100
126
140 18
«1 L__
L_
' 1" M
! 1
* '
.....
..
..
... ....
....
....
1 -I
L 1
" "'
IJS ft
tv'."
*'~"
— P
-4--U
4.1
1
**-.,
•-
J
'""*<
•
IB'1
10
®
--,
• "T
i -." *
-LU
JO
.]
1
10
1
....
r1"• •*
"TT1 • •
. . .
.
| : • ; • : í • '
• • • • * ;
1T
\.
i 1
1
11
\^
"T
I IT
T
V"
32
_U
T-
- •r-
1 L
10
:
m LO
w (rad/seg)
Jr«

RESP
UEST
A DE
FREC
UENC
IA (AB),
SIST
EHA
"COM
PENS
ADO"
, CA
SO 4
o
-26
-46
-66
-86
-106 -126 10
; ¡
"¡T
ii r
....
....
....
....
i " •
' '
. . .
1 L.-J..
, ¡
1.1
-2
.,.u .6-i
T~nr-
s
L_L.L
LU it
*" ~v"*
--^
J ,0
"x 1
'^ 1 1, _
•- _
1 1
LLJ 1
""-.
1 ^
'-,
l
m
•
\
. . , i • ; • •
-j * i, • , •
'' ;-, • • . • • 1
\
1 • • ' - • ^ • ' • y
v>
• ; ••..
. : . n
jt «%
\1
102
' -j
i \1 1 j_ Ji \ s LL
.0:
-H m
Crad/seg)

60 80 108
12fl
RESPUESTA
DE FRECUENCIA
(AB),
SIST
EMA
"COMPENSADO",
CASO 5)
T,....,p ...p
^:
^^^
p
_jl
~[
]|
I TI
"~
11
rTT
TT
Tl
' I
1 1
ITTTT
J
J—
LJ-L
LU
J
10"1
-LJ-J
-LU
JJ
l LJ-U
-LLÜ
J
LO
JLJJJJJ,
IB*3
10
1
J
L__L
_LLL
LL
LT) tjl -H m
w Cr
ad/s
ecy)

G5 CBCOS ca
t-oc^ CD
FSi U
K
QD
L
. _í
*n
XwCD
!
"u
"-4
fig. 5.1
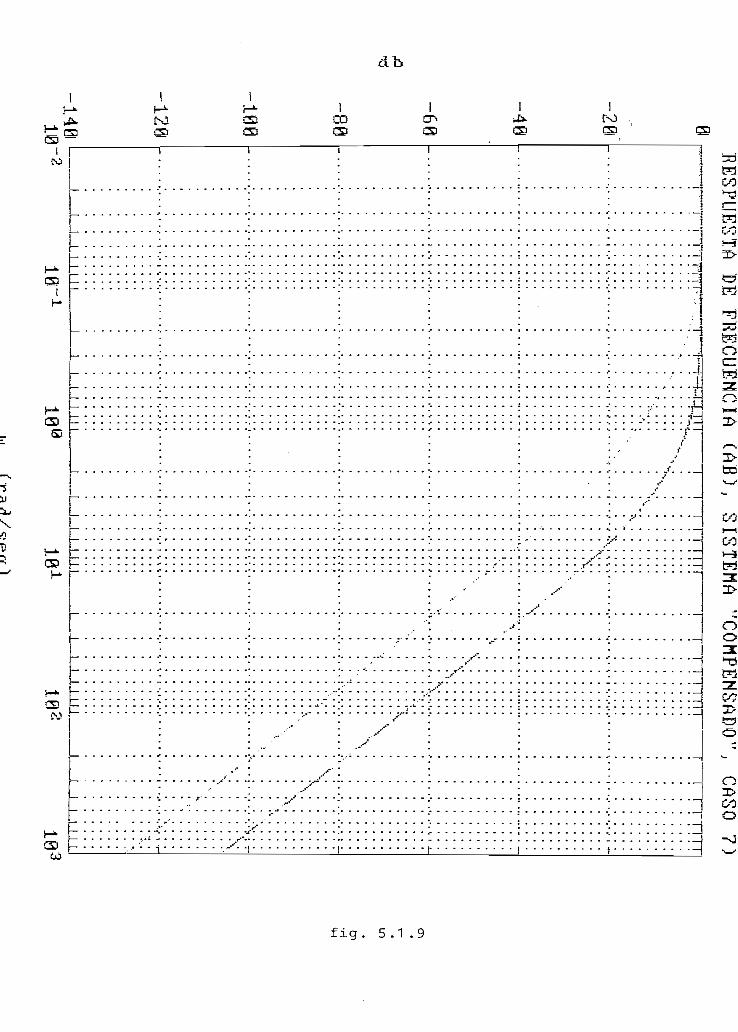
RESP
UEST
A DE
FR
ECUE
NCIA (AB),
SIST
EMA
"COM
PENS
ADO"
, CA
SO 7)
u
-28
"
-48
-68
-88
100
128
140 ie
— O
""""""
L_
""rTT
^rr"
....
.
l U
!i
10"1
r-—
-r— .
L»L."•
¡-Ljj i
U-
_.
LJ
*•-•„
-
i
**v ,,
'"*-
1 1^- „
L
' ! !
LJJ 1
TT -
\.\ • ,,
31
r~"
"•
f \."
iTn
\ •
\l
] .
..._....
J
10
2
1
'-1 LJ
^ -J
1 V.
-U
rrr ~ - „ "• j.j_ ie:
w(rad/seg)
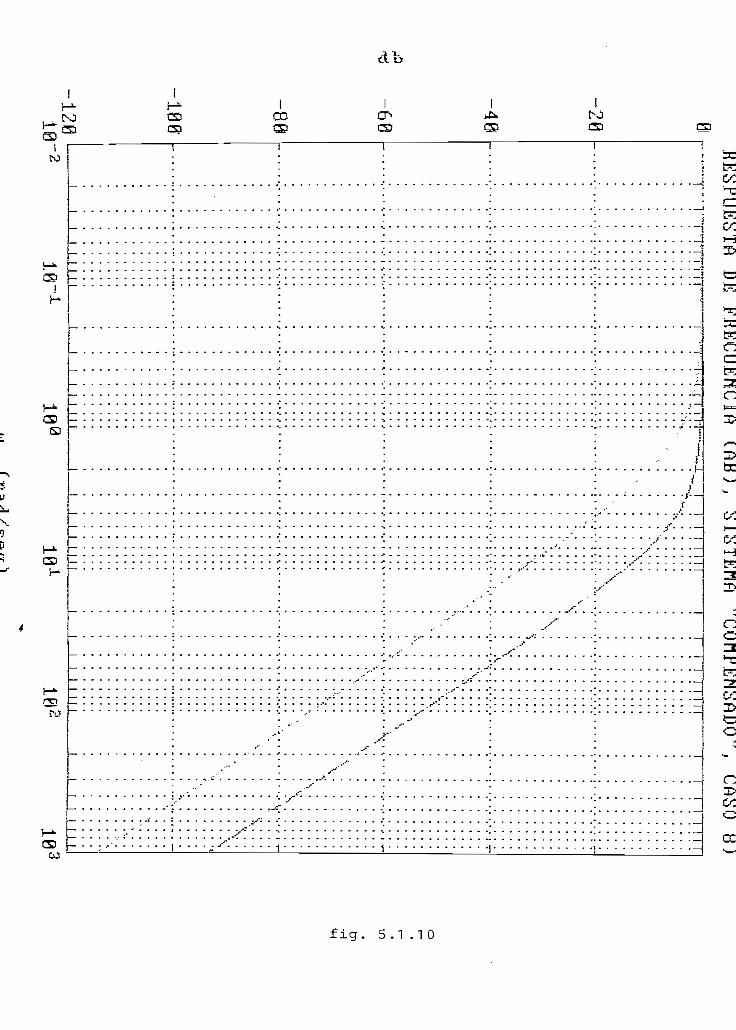
RESP
UEST
A DE
FR
ECUE
NCIA (AB),
SIST
EMA
"COM
PENS
ADO"
, CA
SO 8)
2 60
180
• i"<TT
rrr '
!_..
1 E
1 1
ww
-
..--f
lTT
F--I..Í
r'•*
2 ir
1
10°
L_'
1 |l
TI
LJ U
•. J
• V • '- LLJ. 1
II
. \.
I-I-
1 1
1 II
II 1
T í
I
\•
\•
• *
'• - ' '• '• .
\
• • ^ • :-
• . • : | 1 1
1
'''- •
Jl
31
IB2
1\J
^ _J
1 1
1 -
_LL
J 1
ÍT
o tn -H m
, — o3
w

bfi
RESP
UEST
A BE
FR
ECUE
NCIA
(AB)., SI
STEM
A "C
OMPE
NSAD
O",
CASO 9)
n*"^
~ T
TT
TT
TT
WW
Ff"
Tw
t^
I \n
1
I TI
I' I "
111
T-TT
TTTT
126
—•
-LU
..I.
I 11
.J
L__
LL
.LL
JJ-L
_LL
110
1
LT)
w Cr
ad/s
eg*)

e
Hi
H-
vQ Ul
Bl
TT
ÍL
1 T \ JJ
- _
-" ^
m LJ
-,.
r
-.
n TI
•
"
....
~"I
--•
i LÍ
ÍLÍJ
"I --
L-.„
,
• 1
Tt 11
V
"' ""•
- i.n ~n ' ^
1n~
.
i
v_
"' X
nrrn
~T""
i — r
rrrn
T™
T —
i.
.
, •.,,
•v.
••-
'•
II
....
. .
....
. .
. , , .
. .
.....
,
..... .
....
. .
.....
.
'i1 i
' ".
1-
LLU
JJ_J
J
U1.L
LL1-,L-1
-._.._
.11J.1
J,.Í™
• ».
• •
,_
L
. .
~
01 08 09 82 0 09 Qfl
C-J
rÍLo
üysN
3dwo
Oo
tfuai
sis
iao:
auc
a aa

RESP
UEST
A DE
FR
ECUE
NCIA (AB),
SIST
EMA
"COM
PENS
ADO"
, CA
SO "Ó
PTIM
O")
-20
-
-se
-
-40
-50
i-,„..,.,
..
1
" T
ÍTT
..
..
.
..
..
.
"••"
••""
•
LL
LL
LI..
.
....
í***
" 1,
''Ti
'
.1 ,.
1 JW
'•"-i
rtU
"T
~X
"*.
\ \
' > . , ''
' , '
' '
, .
. ,
'
'
'
'
||
' ' '
I," \ ••
•
¡ ' ' ' ' '
1 "
^
\
, ' ' ' '
\.
'-
II
..
I. L
1 1
I II
I 1
-..
\,
I
\
*! i
1
!"!'" T~
- '' T-
1 1
n 10 tn •H
•2
10-1
10
0
1B1
IB2
10
3
w C
rad
/se
g)

153
5-1.3 Sistemas MIMO de Seseando Orden
Ejemplo 5.1.2 Sea el sistema descrito por la siguiente
representación en variables de estado:
x ~ Ax + Bu + v
y = Cx + Du + v
A=[-2 000; 1 O O O; O O -2 O; O O 1 01;
B-Cl O; O O; O 1; O O]; C=[0 5 O O; O O O 2];
D-[0 O? O O]
Se requiere determinar las matrices de "ponderación" W y
V7 gue optimicen las características d.el sistema dado:
Con el fin de analizar las diferencias entre las
características del sistema con regulación y sin ésta, a
continuación se presentan algunas características del sistema
sin regular, como se indica a continuación:
DIAGRAMA DE
BODE
5.1,14.
RESPUESTA DE
FRECUENCIA
5.1,15
1POLOS DE LAZO
CERRADO
~HValor
2+3
cuadro 15

154
En el siguiente cuadro se muestran algunas combinaciones de
los valores de las matrices de "ponderación", para analizar-
los cambios que se producen en las características del
sistema:
r
A
S
0
i1
1 1
2
i
1ii
:
Í i
w
1 0 0 0 0 0 ;
0 1 0 0 0 0 :
' O 0 1 0 0 0;
0 0 0 1 0 0 ;
0 0 0 0 1 0 ;
0 0 0 0 0 1 ;
r~ — 1
... . .
0 1 0 0 0 0 ;
0 0 1 0 0 0 :
0 0 0 1 0 0 ;
0 0 0 0 1 0 ;
0 0 0 0 0 1 :
V
1 0 0 0 0 0 ;• -0 1 0 0 0 0 :
0 0 1 0 0 0 ;
0 0 0 1 0 0;
0 0 0 0 1 0 ;
0 0 0 0 0 1 ;
r j1 0 0 0 0 0 ;
0 1 0 0 0 0 ;
0 0 1 0 0 0 ;-
0 0 0 1 0 0 ;
0 0 0 0 1 0 :
0 0 0 0 0 20;
GANANCIAS DEL
LQGR
H=[0.2 0;•
10 ;
0 0.1;
0 1.1]
G=[0.7 0 0 0 :
0 0 - 6 1 ]
. jr iH=[0.2 0;
1 0:
0 0.01;
0 0.24]
G-[0.7 Oí 0 0;
0 0 0.65 1]
L ,
POLO DE G
LAZO R
CERRADO A
F
'. -4.9 5, »-0.5 * j .
i-0.5 * ¡1
i•-2 1 * 1
|£j . .L . .
11
-2.29 Í l
-2.21 * J 61
-2+0. o.j Í|
-2-0.5,1 ¡1Í.I1 1
-4.9 ¡5ti
-2.4 Li
-2.2 * j ltt
-0.5 j . |i ¡
-2.2 * ¡1i¡
-0-5 * [7i
-0 * i—u . o
-2 *ii, * ..

155
oAs0
3
w
1 0 0 0 0 0 ;
0 1 0 0 0 0 :
V
1 0 0 0 0 0 ;
0 1 0 0 0 0 :
GANANCIAS DELLQGR
H=[0.2 0;
0.2 0;
POLO DELAZOCERRADO
-0.5 *!
-0.5 *
GRAF
5
•
1ai
3 J Otj ot!
i °il oí
1°IfiI5iS
i
11
4 J Oi
j o3
1»1
¡0it1°9tI
U
1
0
0
0
0
0
1
0
0
0
0
u
0
1
0
0
0
0
0
10
0
0
u
0
0
1
0
0
0
0
0
1
0
0
u
0
0
0
1
0
0
0
0
0
10
u;
0:
0;
0;
0;
1;
0:
0;
0:
0:
0;
1:
l ^ti
1°i
l oí1i °I
1°s
1°1iiJ1jij
l l£a
0i
i °i1°1
j o111°i»s
U
1
0
0
0
0
0
1
0
0
0
0
u
0
10
0
0
0
0
10
0
0
u
0
0
1
0
0
0
0
0
20
0
0
u
0
0
0
20
0
0
0
0
0
10
u;
0:
0;
0;
0;
1;
0:
0;
0:
0;
0;
1:
iitíi
!tiijiií1111¡
I1
i11I
ii
iti
•i
rl— L U
0
0
0
G=[0
0
H=[0
1
0
0
G=[0
0
. ¿
.2
0.
1.
.7
0
.17
0:
0.
4.
.7
0
u ; -u . o ^ oS 1i t
0 ; j -0 . 5 * j .i i
12; ] -1.35 ¡1: ii !
13 j -1.9 j .i i
1 0 0 : { -2.2 * !lí 1 1
f i0.65 03 j -2.2 * |8
I i> 3
5 -2+0.5o Sí ' '* 1 1! -2-0.5J 1i |_
0; ] -4.9 5í 1( 1 <
j -2 . 3 1i i
05: j -0.5 * j li *
473 | -2.21 * | .
1 0 0 ; | -8 . 9 j 1I í1 I I
0.7 13 | -0.5 * «9i Ii i! -2.2 * !
.1.i

156
ASO
w V GANANCIAS DELLQGR
POLO DELAZOCERRADO
GRAF
5 ! 1 O O O O O: | 1
J O 1 O O O 0: J Oi t
¡O O 1 O O O: ¡Oi a
J O O O 1 O O; J O
1 O O O O 1 Ox J O3 í
J O O O O O 1; J O
S4-i
0 0 0 0 0 :
1 0 0 0 0 :
O 20 O O 0:
0 0 1 0 0 :
0 0 0 1 0 :
0 0 0 0 1 :
i H=[0.17 0:
¡ 1 0:
-4.9
j -O . 5 * i .
I O 1.7:
j O 1.6]
¡ G=[0.7 1 O 0:i
| O O 0.7 1]
2.3
2.2 *
1- 2
—*? O
4- 4
-2.6+2J
-2.6-2J
1 0 0 0 0 0 : S 1 0 0 0 0 O :• ig i
J O 1 O O O O; ¡O 20 0 0 0 0 :I í
J 0 0 1 0 0 0 : ¡ 0 0 1 0 0 0 :i iJ O O O 1 O O: ¡ O O O 1 O O:
5
I
H-C0.05 O:
4.47 0:
0 0.12:
O 1.1]
ÍO O O O 1 0: - ¡ O
1 10 0 0 0 0 1 : J O
! 1I \ i1 \1 O: ¡ G= [0 .7 1 O 0:
I0 0 0 0 1 : 1 0 0 0.7 1]
-22.4
-0.5 * j .
-2 j l!
-2.^ * •«_i i .
-0.5 * i 2S
-2.2 * 1 1
-2+0.5j !
-2-0. 5d

157
C W VAs0
i
7 j 1 0 0 0 0 0: 20 0 0 0 0 0:1 S
J 0 1 0 0 0 0 ; J 0 1 0 0 0 0 :I «
| 0 0 1 0 0 0 ; ¡ 0 0 1 0 0 0 :• 1
J 0 0 0 1 0 0 : ¡ 0 0 0 1 0 0 :f It t1 0 0 0 0 1 0 : J O O O O I O ;f I2 ai •J 0 0 0 0 0 1 ; J 0 0 0 0 0 1 :1 1
i !! 19 1
i t1 1. 1 | jr T — *
8 j 1 0 0 0 0 0 : ¡ 1 0 0 0 0 0 ;5 i1 50 1 0 0 0 0 : ¡ 0 1 0 0 0 0 :
i iJ 0 0 1 0 0 0 ; ¡ 0 0 1 0 0 0 ;I B
GANANCIAS DELLQGR
H=[2.2 0:
1.4 0:
0 0.12;
0 1.1]
G~[0.7 1 0 0;
0 0 0.7 1]
L
H=[0.2 0;
1 0:
0 0.12;
POLO DELAZOCERRADO
-0.5 *
-0.5 *
-2.2 *
-4 . 4+2.1-
-4.4-2J
-2+0. 5 ¿i
-2-0. 5J
-4.9
-0,5 *
-2.3
GRAF
5•
i ii
* ii2 1
11
9 i" i1
j
'•• I;
5
i

158
cASC»
9
W V GANANCIASLQGR
i
1 0 0 0 0 0 : ] 1 0 0 0 0 0; H=[0.2
0 1 0 0 0 0 : 1 0 1 0 0 0 0 : i 10 :i i
0 0 1 0 0 0 : ¡ 0 0 1 0 0 0 : j 0 0 .: B •J 0 0 0 1 0 0 : J O O O I O O : ¡ 0 1 .
0 0 0 0 20 0: 0 0 0 0 1 0 : ¡ G=1 ! I
¡ 0 0 0 0 0 1 : J O 0 0 0 0 1; [0.120¡ ii s o o o .• 1 ii i :
i 1 !
iÍ
.
i 1
1 DEL POLO DE GLAZO RCERRADO A
B1
0: -4.9 5i i1 -o.ii * 1 .1 1
12 : j -2 * | 1i '
1] -2.3
-0.5 * 23 :
. 2 0 0 : i -2.2 * 4
! ^7 1 ] ! -2+0. 5 j j
! 1
j -2-0.5:1 j1 I
1 I 1 1
1 0 0 0 0 0 : j 1 0 0 0 0 0; j H=[0.2 0; | -4.9 J 5i at i
0 0 1 0 0 0 0 : j 0 1 0 0 0 0: j 1 0:
0 0 1 0 0 0 : ¡ 0 0 1 0 0 0 : ] 0 0 .i r iI i i¡0 0 0 20 0 0: j 0 0 0 1 0 0: j 0 1.1 t S
J O 0 0 0 1 0: ¡ 0 0 0 0 1 0 : j G=[0.7
1 31 ¡-0.5 * j .
12: j -2.3 j l; tJ !
11 -2.2 *1 1i i1 0 0 : j -2+J * J 2
t s
;0 0 0 0 0 1: ¡ 0 0 0 0 0 1 ; j 0 0 1.7 4.5] ] -2-J * J5I S 1 I !t i t
! 1 1a a BI i I1 B I
1 1 1S Í Í
t a ' i! 3
-2-0. 5 j\ \ Í
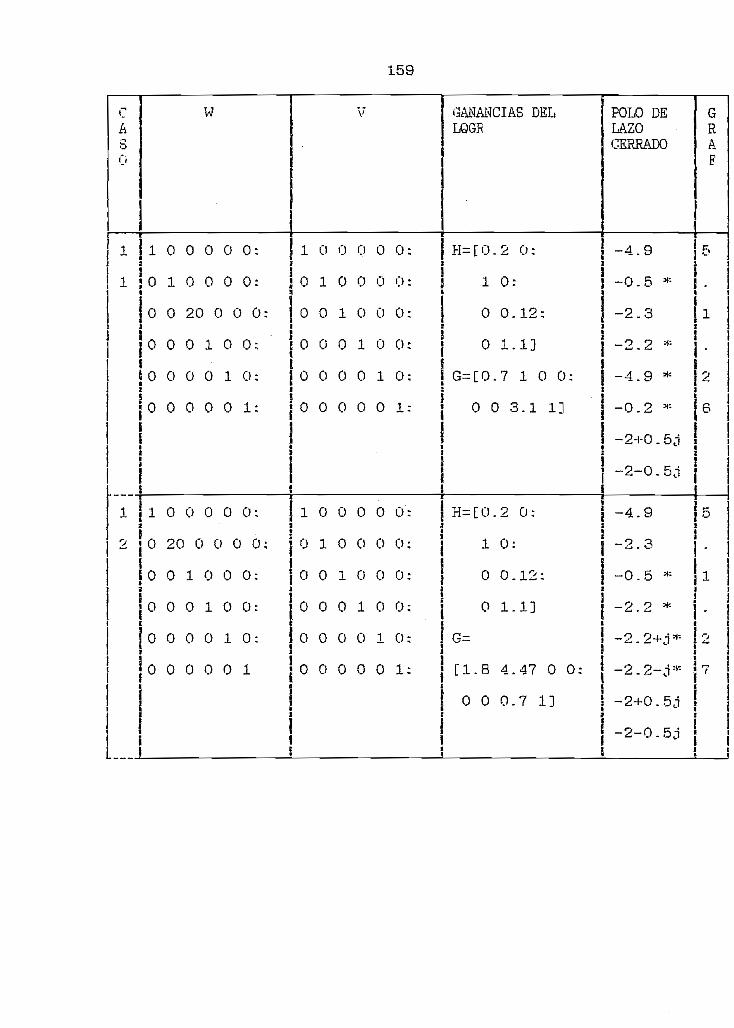
159
t_A3fi
W GANANCIAS DELLQGR
POLO DELAZOCERRADO
GRAF
j 1 j 1 O O O O O:' a
1 j O 1 O O O O:i
j O O 20 O O 0:
¡ 0 0 0 1 0 0 ;IJ O O O O 1 O:zJ O O O O O 1:
5
1 O O 0 0 0 :i
| O 1 O O O O:
1 O O 1 O O O:
0 0 0 1 0 0 :
0 0 0 0 1 0 :
0 0 0 0 0 1 :
H=[0.2 O;
j 1 O:*
j O 0.12;E
¡ O 1.1]f¡ G-C0.7 1 O 0:¡1 O O 3.1 1]
-4.9 ñi
•0.5 * ¡ .
-2.3 ¡1J
-*? 2 * !í-> - ¿J j .
-4.9 * J 2i
-0.2
! -2+0-5t1 i: e
-2-0.5,1i
1 j 1 O O O O O:5
2 J O 20 O O O O:
0 0 1 0 0 0 :
0 0 0 1 0 0 :
0 0 0 0 1 0
0 0 0 0 0 1
¡ 1 0 0 0 0 0 :*j O 1 O O O O;
¡ 0 0 1 0 0 O :
[ O O O 1 O O:
I O O O O 1 O:3
¡ 0 0 0 0 0 1 ;
H=[0.2 0;
1 O:
O 0.12;
O 1.13
G=
-4.9
-2.3
-0.5 *
-2.2 *i il o Ii
[1.8 4.47 O O; -2.2-d* 7
i !i f1 1i ii 1i ei *
i i i j
f 0 0 0.7 1] j -2+0 .5a j jf a z ii 2 1 1S 5 -2-0 5-i *i j - J - O C J j ,i t i ií » K |
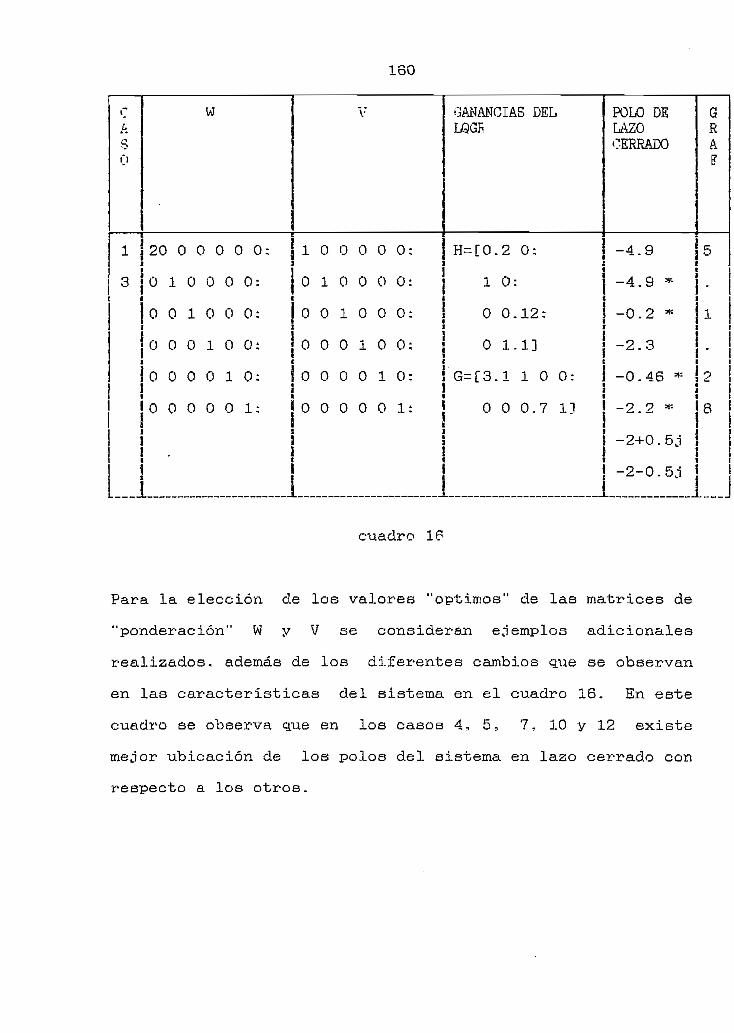
160
f*
A30
i ]j
:i
,
,
i:.i:
W
20 0 0 0 0 0:
0 1 0 0 0 0 :•
0 0 1 0 0 0 :.
0 0 0 1 0 0 :
0 0 0 0 1 0 :
0 0 0 0 0 1 :
.
V
1 0 0 0 0 0 :
0 1 0 0 0 0 :
0 0 1 0 0 0 ;
0 0 0 1 0 0 ;
0 0 0 0 1 0 :
0 0 0 0 0 1 :
GANANCIAS DELLQGR
H=[0.2 0;
10 :
0 0.12;
0 1.1]
G=[3.1 1 0 0 :
0 0 0.7 11
L „,
POLO DELAZOCERRADO
-4.9
-4.9 *:
-0.2 *•
-2 3"
:
! -0.46 *:
-9 9 *.
-2+0.53;
-2-0. 5 j
GRA
?
5
1
'
, 2
8
•
cuadro 16
Para la elección de los valores "óptimos" de las matrices de
"ponderación" W y V se consideran ejemplos adicionales
realizados, además de los diferentes cambios que se observan
en las características del sistema en el cuadro 16- En este
cuadro se observa que en los casos 4, 5, 7, 10 y 12 existe
mejor ubicación de los polos del sistema en laao cerrado con
respecto a los otros.

161
w
[ 1 0 0 0 0 0 :
0 81 0 0 0 .0:
0 0 1 0 0 0 :
1 0 0 0 81 0 0;
0 0 0 0 0.01 0:
0 0 0 0 0 0.01}
._ _-.™__._ — _ — — — -i
V
[391 0 0 0 0 0 :
0 0.0001 0 0 0
0:
0 0 395 0 0 0 :
0 0 0 0.0001 0
O r
0 0 0 0 0.0001
0 : .
0 0 0 0 0
0.0001]
.1AHANCIA
DEL LQGR
H-
[6154 0:
49.6 0:
0 6128:
0 78.3]
G*=
[14,9 0:
90 0:
0 14.8:
0 90]
[_
POLO DE
LAZO
CERRADO
-125+125.1
-125-125,1
-79+79,1
-79-79,1
J
-8-4d *
-8+4.1 *
-8-4d *
L
G
R
A
F
5
.
1Í
ii.!
* í" i
9 •
ijcuadro 17
* Indica polos del sistema de control; sin asterisco indica
polos del filtro.

3Cl
rv
QC
1
j— *S5
1i .. j.
M-
S
5—
H*
•J CE C
r~.
n
—\z :::::::
-
ru.U
—
— ...... .f— . . . . .,j .
s cs c
>
- '•X
_.,-"'"
D CB C
-i
r- -Hs c
, '*X*
//'
í. .....
s». ^D C
1
X
-
VÍ
s c
,í
/'
s'.•*
Cs^ >4O CS C
i .-i
;
* ' í
/t*
• ••ri
-< '
/ ; /; £
*
/ -7
.•'
|
;
.•
;
•
*
,
:
•
;
:•-
i. ra c
r" ¡
i!
11
—
1
:::::::::=!
-
_H
fig. 5.1 .14

TÍ
RESP
UEST
A DE
FRECUENCIA
CAB)
, SI
STEM
A SI
N "C
OMPE
NSAR
", EJ
EMPL
O 5.
1-n n
_
^ ,„„___
.
„ „
-.....„
_—
_
e
28 40
-12 10
le™1
™1__I_UJ.J.L1
l LJ_LJJJJ.L-
181
-J_1JJJ.UJ
10a
-LJ.JJ
103
ID m
[rad/seg]

-20
-
•40
-60
-86
•II 12
8
140
160
188
RES
PUES
TA
DE
FREC
UEN
CIA
C
AB
), SI
STEM
A "C
OM
PEN
SAD
O11
, CA
SO
1)- r
^T^r
TTTT
iT^^
"^T^
~[~i
7rTT
Tn
r—rn
~rrr
m
1—nr
Tnr
rnT
[—
-r r-
rnT
T]
UL
L-L
UL
-
10
1
J 1.
. 1 1
-LL
UJ
LO -H 4-)
ui C
rad
/seg
")
•-*•

RESP
UEST
A DE
FR
ECUE
HCIA (AB),
SIST
EMA
"COM
PENS
ADO"
, CA
SO 2)
u
-20
-60
-80
100
120
140
160
200 10
oL
''"".
1
r r rn
i''"*™
^"***
. . .
! !
• , ..
...
* •
• • *
*
. ..
...
LJ
.LIL
LL-
-
10-i
^•£^
r
1
r"~
1 —
-L L_1-
1 1
L
* \- LL If
1 " '"
""'^
)B ~
""
(
•% 1
1 1
«LL
.U 1
TT
\.
ii
\ 1
% -
, •.
. ,
• ; : V .'1 '•• / . • . : • :
M • . • • : [ ; • • ,1 : -,. • • | 1 :
. . .
. . .
L I.
1 I
I 1
a1
10
.
'•
• • 1 2
-.
"•.
L
1 v LJ ^
Ji ¡ _u
1 1 1" j~ v .L.
LJJ_ ie
:
m tn •H
w Crad/seg)

8
-20
IB e
120
168
188 10
EES
•" 'iPU
ESTA
D
E FR
iJL
.L
• n r
r r
- •..
...
. .
. ..
..
....
.
....
.
uí£r
~
EC —77
1
L-
UE
HC
IA
(AI
-- u.^ L_
1-1
-r.
1 1
n, [ — t V
< t
r~3] ~i
t!3T "T! ,EM
A '
ir
•-. ',
LL 1
J!
'CC
I
>H r~ X
p: rENSí
rnT • • • • . \ • • '-. •'•-.
91
i,_ •-_ LL IE
w,
CASO
:I
'
-,_ . %-, \
í2 ~
~ . t.
1 !
1
\
\•
1
-
3) TT
I - - j_ - í_
LU
X 10:
co m tn •H H-t
u (r
ad
/se
g)

RESP
UEST
A DE
FRE
CUEN
CIA
(AB),
SIST
EMA
"COM
PENS
ADO"
, CA
SO 4)
u
-20
-40
-60
100
120
160
180 10
~2
1
• •
•;
;
.....
......
. .....
10"1
i'V
.
i _ _
j-.
\.
18*
i
•N- LL
1
II • JJ.
,0
-. ,' •
\- \m '.
\
_ -'\
t . '
i • • • : • •
in • •
• •
'• '.
'• '•
- • '•
\ ;
*•
•
_LU
JJ 1E
.. . , -. "i . X
"•: \—
J
si, ,'- _J
-J
1 \
1
, I J_ 11 ] - -V-.
JJ_ J:
LT) Cn •H
w(•j

RES
PUES
TA
BE!
FR
ECU
ENC
IA
(AB
),
SIST
EMA
"CO
MPE
NSA
DO
", CA
SO
5)
-40
88
•108
-120
•140 16
e
188
""••""
2
"'"'
L_~
... •
|-,.^
-j.-
í ,
.:. ,
.
' - .....
• , , .....
. .....
....
.... [
. I
] I
.........
,',""
IB"1
Q '!
!"'!
L_L.L
UJ
If
1 *^v.
1 ,0
•s
*••
1 1 L.
J
....
• \
['!
":,
JJ 1
rr , \ u.
\.
"TT
Tn
"•í
* • • ; : • . \ ; • • . i , • • •
...i.
I01
;
* . • • , | : • • • • • . -U LE
• • . | ; • , • ; • \
• ; . . • • • J
J
,2
"•i
V
r"rn
nT|
\jv _j
\
-
\ 1_LL
o CN Ul
•H m
w (r
ad
/se
g)

RESPUESTA
DE FRECUENCIA
(AB)., SISTEMA
"COM
PENS
ADO1',
CA
SO 6)
28 -86
-
108
128
168
-
10
' 'r.
„ .-p.(
( .p
p,,
,.-.,
.....
. .....
. .....
. .....
L_LU
..I
I.l
._
Jr\
t
... .
.^
^...
|..|
} m
f.
f ( rr
j (
] j
_.(
1
1^
l 1
i
"•'••
v
.1 ..
.....
10B
1
-, l_
\
V -. LLL
J 1
s
• u
\ \.
•-. '•
...rr
rm
V,
\ •
•.
V . •
: :,; .
: : : :
....
....
....
....
....
; ü ;
a1
10a
•i \ s . LJ
S '•• «J
"T . ••• .
«u
ITT ¿_
JJ-
18
:
(N LO •H 4-1
u C.rad/seg)
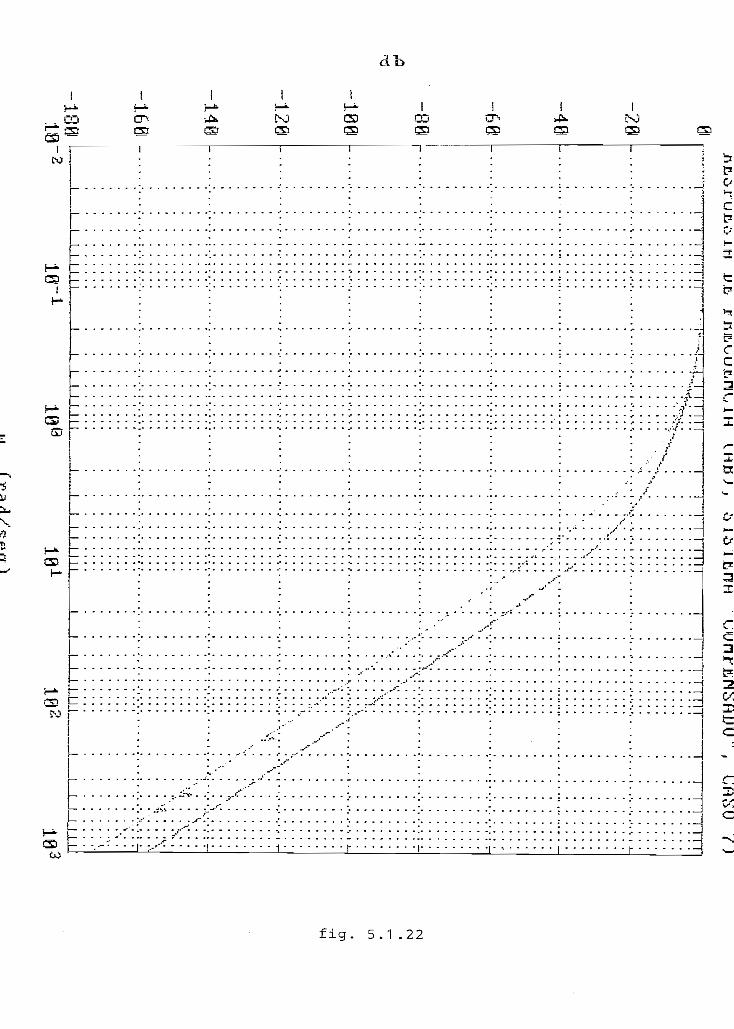
RESP
UEST
A BE
FR
ECUE
NCIA (AB),
SIST
EMA
"COM
PENS
ADO"
, CA
SO 7)
nri
-20
-
bo -
-88
-
-180
-
•128
-
•140
-
160
188
-- 1.
.,~-
! ...
..
~" l
' •
ri i
r
• . • •
.....
• • • • • . •
. , .
.....
LJ-L
LLLLl
rrrni
"'""--.
i —r™ '.
" rrn
\ •\
'•, '.
••V
'
'\'
FT
T
'•
I. ,1
... L
LLU
-L
1 1
J...
LI LU
Í L,,
..1
1.,
,.
, • •-
• • • , *
• • ••-, : • . :
. . , '•!T
• • '. • . '- • 'k,
:/
• , \ •
T • • • • • • * : \
i.
• '.
• V
;
"
• • ' 1
,.
1 ^\_
1
'•
•
"••
""' .
| 1 T
T _ 4— '\,
J
! ,,
I [
,1
1 1
1
ÍN CM -H
l(5e
IB
1IB
2
w (r
ad
/se
g)
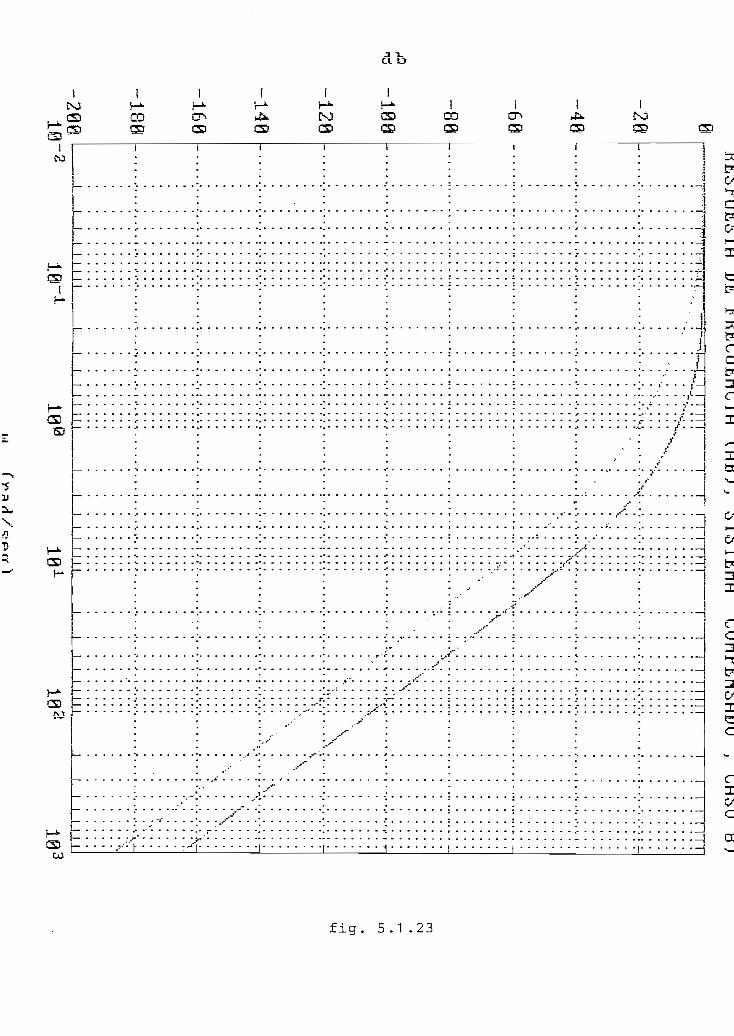
RES
PUES
TA
DE
.FRE
CUEN
CIA
(AB
),
SIST
EMA
"CO
MPE
NSA
DO
",
CASO
8)
u
-20
-48
108
128
140
160
20
8 10
<"•*
"*•*
•=«'
oL-
' '
"TT
--I l-
í [.
-¿
—j—
-™.
L_
. .
! ", ,
.
• . ..
...
, ..
...
! '.
''.'
.'
, ..
...
• •
• •
• •
L_LI
. 1
11 1
......
_
—U
tI il i
'*•-
''s-
1 l :
\
!!"
""
\
\
j gi
~¿
10®
10
^"
-.
rrir
i
* *
• •
: '
. .
• •
'• '•
. -
'• •
\ ; •
'S•
•,
• •
'- c-
. .
- . • .,. . • \•
'
' '-.
\ '•-.
• , : .
L.
JJX
\.
v
1
'i •.\
i
1 1 s
JLL
10
m CN m tn -H m
3
w C
rad/
seg"
)

0
-28
-40
-60
100
128
140
160
•180 18
:RES P
U i-*
?
Ei
"" 1™
ÍTA
D.E
FP
EC
UE
h
'""¡
'"I
'!• í
L
í *"
*"T
™*"
"lv~
1
......
. .....
. .....
. .....
. ....
. .....
.. J
1
| |
1 1
....
._.
1™
1CK
TT
T".
L-L
*— .,
LU ií
1 (A
I
"--^
'-
,0™"i),
si:
.v \_
„
• L
3T m \J 1
EMA
"CO
MP
EN
SA
DO
",
CA
!! , 1 .. \•
'--.
9-L
'v • ' • \
1
'i _rTT
TT
lT
'"• „
•-. --
U
• X LL1 11
• • . s
JJ_
1
32
i \
_jS r .:
0 i \
9)
rnri
.. j. J
- - -
J_L
.0:
CN
-H m
w

RESP
UEST
A DE
FR
ECUE
NCIA (AB), SI
STEM
A "C
OMPE
NSAD
O1',
CA
SO 10
)u
-20
-40
-60
-80
100
120
140
160 IB
'"fI
L_
"*T
TT
i i
....
....
....
.....
....
....
.....
U.L
LLLL
18
•T
-tW
lt
rr i~
J-
LL
LL 1E
r-[-.._ ~
"
U ,B
1
V
1_-.
'• L
1 1
' LU 1
11
% . '. .\• \
1 \,
.
1 1 1 1
1 1
•. '-
• • : • • • . 1 • • • \ -- 1 : • • • i
V • •
. •.,
\
L.I.
.1
31
ie
1 , \ i
1 1
lili
\•
-
',
' ,
J.
J.
L.J
.J
U_L
J_
LO CN
LO •H M-l
w C
rad
/seg
f)
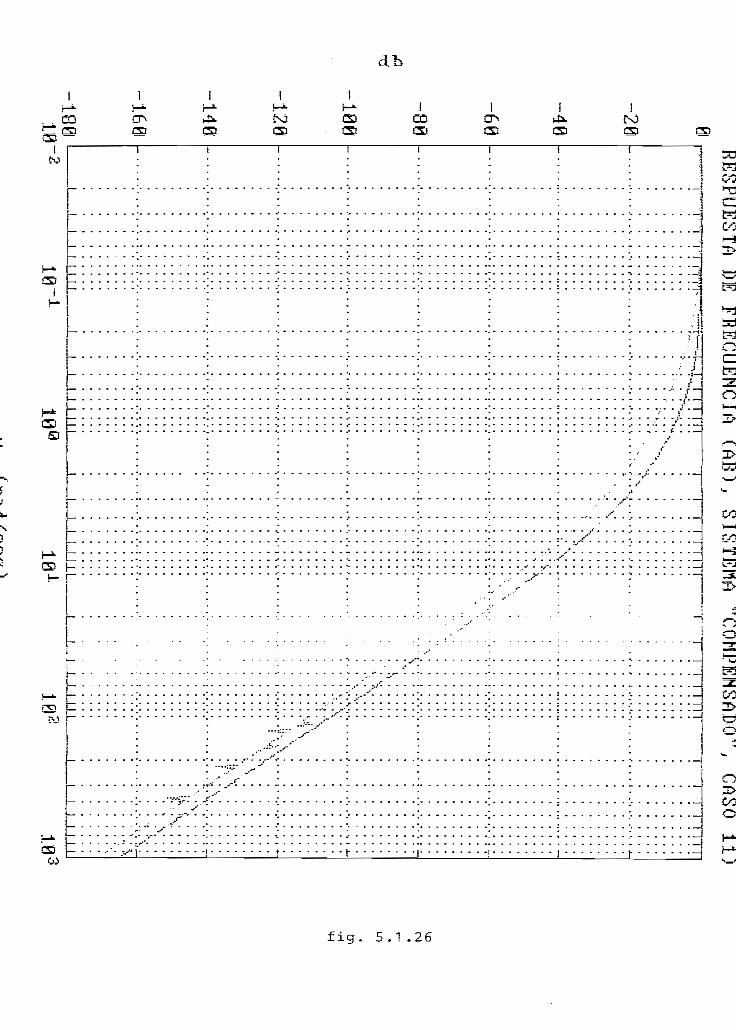
RESP
UEST
A DE
FR
ECUE
NCIA
CA
B),
SIST
EMA
"COM
PENS
ADO"
, CA
SO 11
)
-100
120
140
160
180 10
L_
«-*.
~ 1 "^
^^"^
'.'^"
•f
.....
.....
i m
i10-1
1
~"T3rr
T ifn
.
i .
,0
r~ , \_Trr
rn
i \ %
\
r ;
rnr
. . .
. . .
: : :
. . .
. , . ii; .
. ..
. ..
, .
•). , , '. v . . .
. . .
. . .
. . .
. . .
. . .
. . .
. . .
. . .
..
..
T • • * • • • * . • • \\
ÍL
., \
'••
•';
""•
• . ' • . •
,.
r~ •-. 1r \-~n ^
TT r-
.
-LLJJJJ
J
L, J.
..1-L
LLLL
1
LJ_JU
JJJ_
1B
1
10
2
1B:
ÍN tn •H m
w (rad/seg)
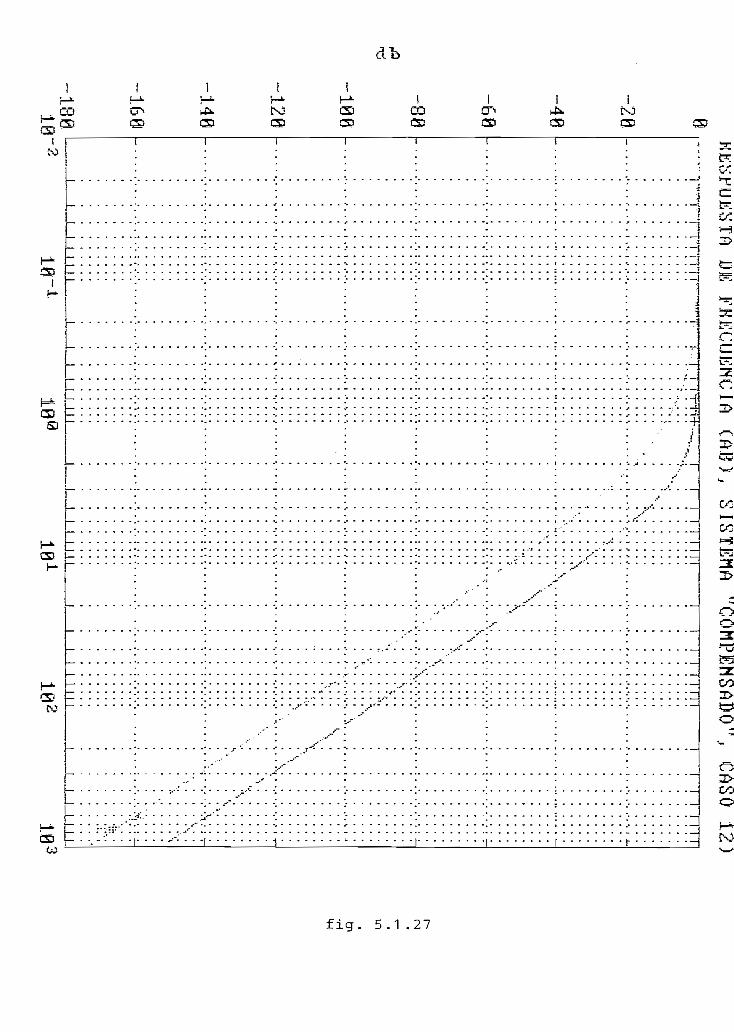
RESP
UEST
A BE
FE
ECUE
NCIA
ÍA.B), SI
STEM
A "C
OMPE
NSAD
O".,
CA
SO 12
)u
-28
-48
-68
-88
168
128
148
166
180 10
-2
""""
1
.,,_. "
r' r'¡
i f r
" ""H
rWTi
. ..
...
V....
L_L_1_LLLLI
J
L_
Ifl'1
_ L-i. .
-;.
-
LJJ
JLU
IB0
' \
1
_
-.. L
| 1
- '•- LU 1
-.\
'••
.1.1
,
s. -._
\
111r •
, \
, '* •,
. ,.
. , . • l
i V •- 1II • ti
'-. ' •,.
•\
' • ' • , ' LJ
a1
i02
"•.
\
L
''f- LJ
nnrn
r
,, • ,j
i „LJ
. J
- j- r-
J_L
.0
CN m Cn •H
w (r
ad
/se
g)
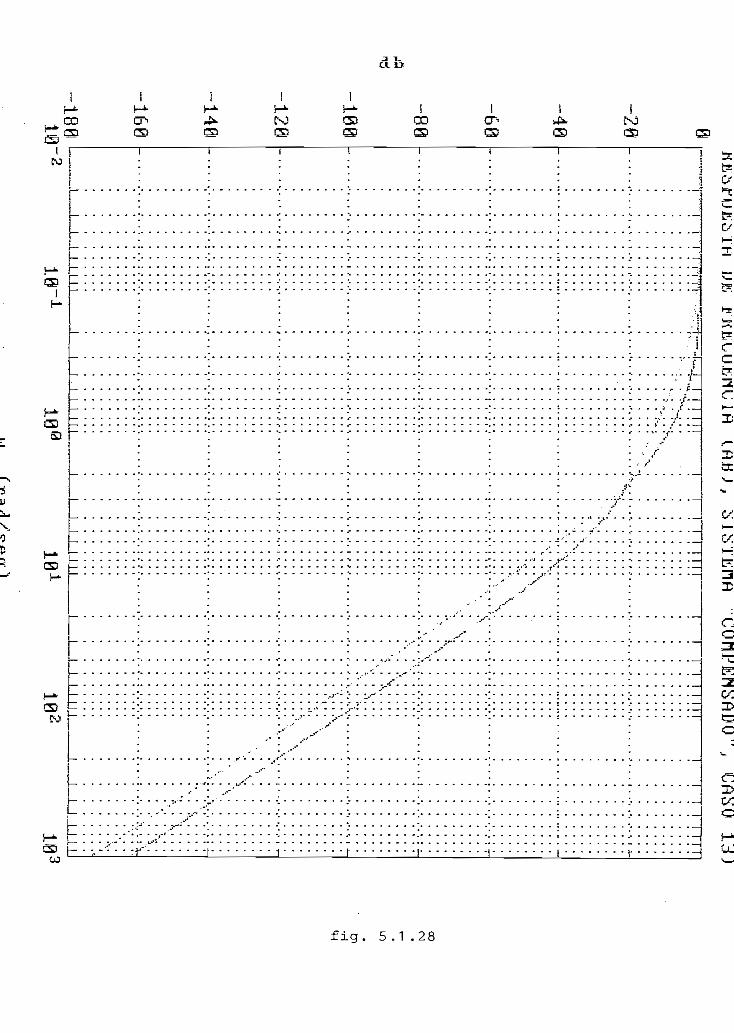
•Jfl
0
-20
-40
-60
-80
-100
-120
-140
-160
-180 18
RES]
PUES
TA
DE
FREC
UEN
CIA
ÍA
B...
.
..
..
.
.....
..
..
.
..
..
.
..
..
.
..
..
.
7
."."
—I
-2
lfl-l
-.,_
,•• -
.
1
•-.„
^1
1
..t
Mil
r L_
S 1 — ^ l_
I "" \.S r .. L
.TI Tf * _.i i:m
"C
QM
PEN
TT -
\
±L_
_.
\1
\_
SA ÍTT
•
i
• • • •.(
DO
1',
C"i ^ : \.
...
.
i ~.\ir" ••, •
IB2
ÍO
13["
TT
TT
7
J—
• ., U. J
i. T-
J_L .8
)
co OJ un
' tn -H m
3
u (r
ad
/se
g)
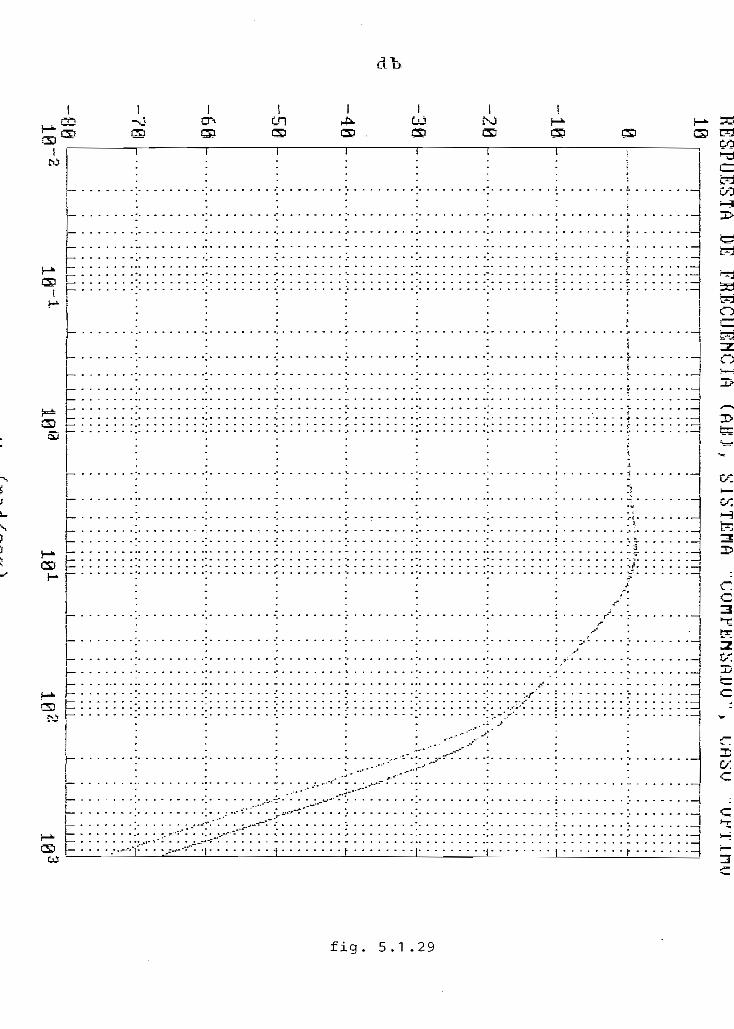
RESP
UEST
A DE
FR
ECUE
NCIA
'COM
PENS
ADO"
, CA
SO "Ó
PTIM
OJL
O 8
20 38 48 se 88 10
i i" n
i n
r r
f\L
i i
rr
. . ,
, . ,.
. ,
• •
•
• •
• • •
1
10 0
L_
L
T!
LJJ 1
TI
*X
01
u
V
I
...
\_
rTT
TT
TT
L_
\J \-
. ; '
•, •. 'i
•• \. ',
LU
J
10
1 2
V :.
\. r-
'rrr • •t -,
Tí A. T v" "'
10
01 CN
'*>u
(rad/seg)
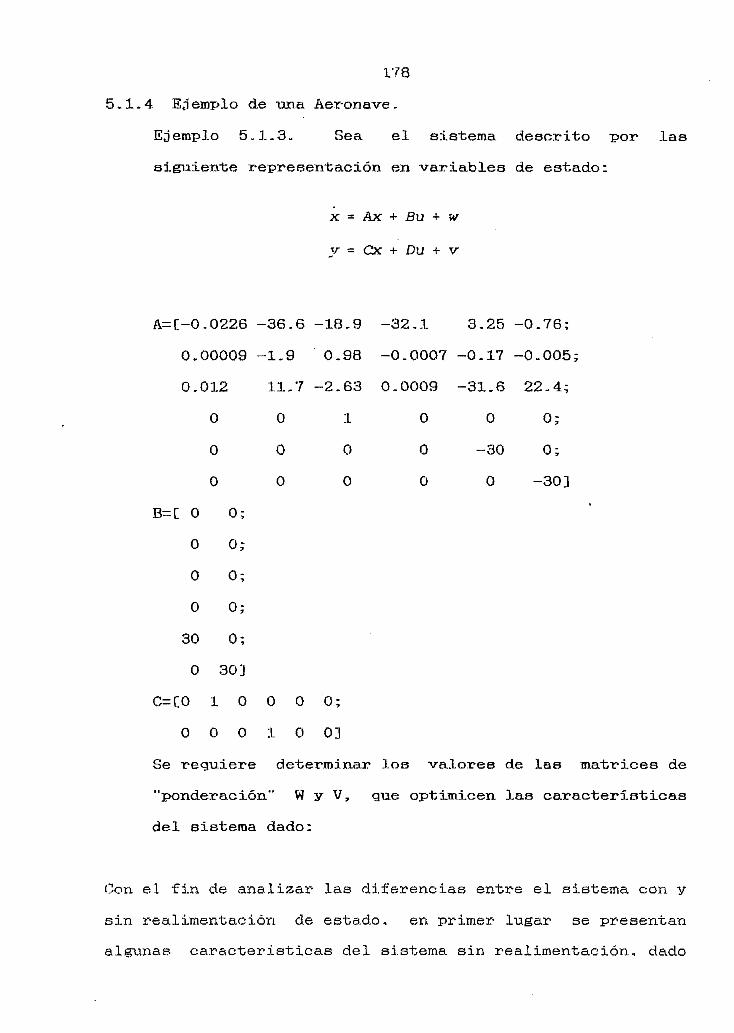
0
0
0
1
0
0
0
0
0
0
-30
0
0;
0;
»30 ]
178
5.1.4 Ejemplo de -una Aeronave.
Ejemplo 5.1.3. Sea el sistema descrito por las
siguiente representación en variables de estado:
x = Ax + Bu + w
y - Cx + Du + v
A=[-0.0226 -36.6 -18-9 -32,1 3.25 -0.76;
0.00009 -1-9 0.98 -0.0007 -0.17 -0.005;
0,012 11.7 -2.63 0.0009 -31.6 22-4;
O
O
O
B=[ O O;
O O;
O O;
O O;
30 O;
O 30]
C=CO 1 O O O O;
0 0 0 1 0 0 ]
Se requiere determinar los valores de las matrices de
"ponderación" W y V, que optimicen las características
del sistema dado:
Con el fin de analizar las diferencias entre el sistema con y
sin realimentación de estado, en primer lugar se presentan
algunas características del sistema sin realimentación, dado

Gráfico
DIAGRAMA DE
BODE
5.1. 30
RESPUESTA DE
FRECUENCIA
5.1.3 '.'
POLOS DE LAZO
CERRAPO
cuadro
1. 45-*-1. 3-i
1.45-1.8-
En el eete cuadro se puede observar que no todos los polos
del sistema en lazo cerrado se encuentran en el. semiplano
izquierdo del plano complejo, por lo que se está tratando con
un sistema de fase no mínima.. Todos los ejemplos de
demostración anteriormente realisados en este trabajo- han
sido de fase mí-nima- es decir los polos y ceros de los
sistemas se encontraban ubicados en el semiplano izquierdo
del plano complejo, y se ha observado los cambios que se
producen en las características del sistema en presencia de
los cambios en los valores de las diferentes matrices.
Ahora bien, a continuación se realizan combinaciones de los
diferentes valores de las matrices de "ponderación" W y V,
con el fin de observar el comportamiento del sistema ante

• 80
«e-ros cambios. Debido a ia dimensión de las matrices de
"ponderación", se mantiene a la matriz W constante, tal como
se indica a continuación:
| 1 0 0 0 0 0 0 0
| 0 1 0 0 0 0 0 0
I o o i o o o o o
w - j o o o i o o o oI o o o o i o o oI o o o o o i o oI o o o o o o i o
I o o o o o o o i
v se varían los valores de la matriz V, como se indica en el
siguiente cuadro :

•mu*»
***
O o o o o o o 'O o 03 I o 'O
o
oO
0
D
0
O
O
o
oO
l-
1
^
o
•"->
Q o o 1 —
1
1 I
o
to Oí
03
1-f
MO
i—
*. '.O
C
OTJ
'"-«
•1
J.
•j)
to
O
O
O
O
M
O
O
O
O
O
I-*
O
O
O
0
0
M
O
0
O
O
o
•-*
o
o
o
o
oM
O
O
O
O
O
O
0
0
0
0
0
0
0
o
o
o
o
o
o
*-*••"
^ O
O
*""
*' O
* '"*
"2
K I!
o co
-<
i to
to
• •
• -*
3o
o
to
.k.
o
o
c-1
0}
tt^
l~*
CO
Oí
Oí
-.Tí
Oí
• f
•»
-i
.»
I i
1 1
1 I
IIO
J3
O
'"J
l ^
I-
1
H4
rjp
D
-1
0•f
'0
"•
0)
'JJI-*
.C^
I
h
1 1
t 1
•CO
tO
D
O
í IO
03
'33
l_j.
t>
' '
03
:-J
- ' J
-•O
-I
•'O
i-1
• O
í
M
O
O
O
O
O
M
O
O
O
O
M
O
."
l"~l
!~1
l~i
l~S
l"
O
O
l-1
O
O
O
O
M
O
O
O
O
M
O
O
O
O
O
o
o
o
o
o
oC
1 'O
*-
j CZ
* '^Z
' d'
K !i
O
O
M
CO
h*
1 to
o
o
to
c^
to
co'—
> "
C
Ji
tú
CD
• O
3ro
C
O
MO
íO
) 03
IO
CD
-<1
'Ji
Oí
o>
1 I
1 I
I !
tO
tO
-JO
Oí
Oí
.oí
cji
o
• ••
to1
+ ..
-Jl—
i, [_
i1
1 i
1ilO
'"O
10
O
O
'-0•:j-
-:j-
0
• •
CO
tO
CO
H-
* •
'"Ji
-i
rj
t-
-, '-1
f— I
Jj
-"i
'3"C
l t* S O l-í co o t?d r*
•
• ~j
"G
3
O^d
C
"1^d
O
ü
O E~*
p> ÍSl
o
•13
rt>
¡TI
¿75
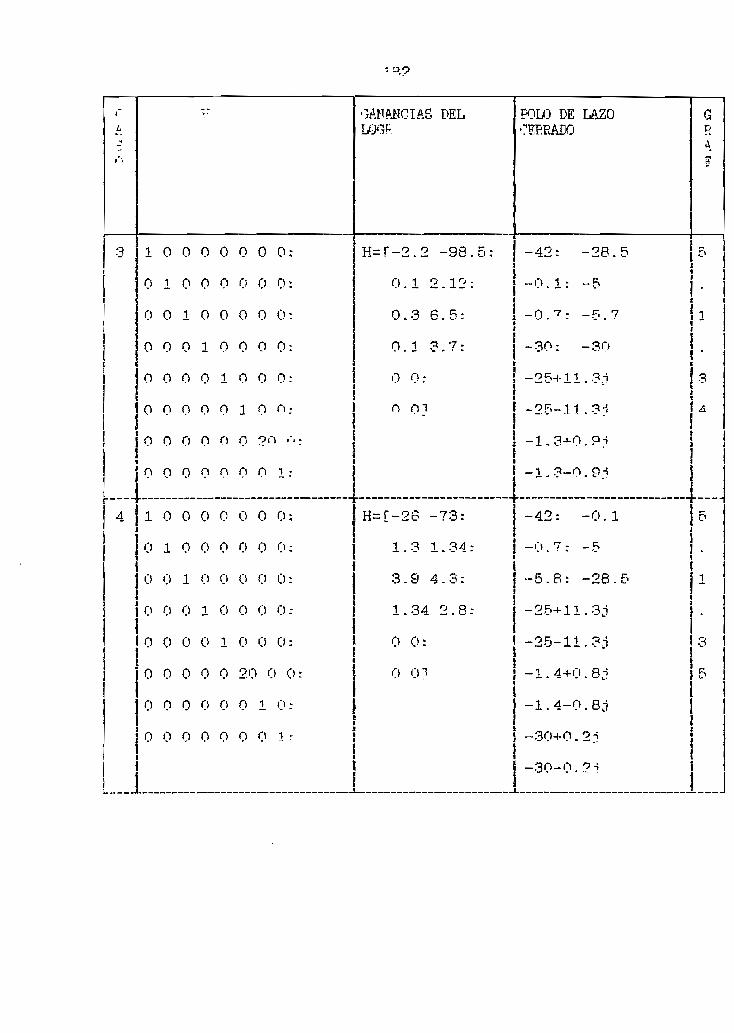
(fc*
<•
ta
J
O
O
O
O
O
O
O
H1
O
O
O
O
O
O
i-1
O
O
O
O
O
O
l-1
O
O
O
O
O
O
M
O
O
O
O
O
O
I-1
O
O
O
O
O
O
(0
O
O
O
O
O
Oí
-1
O
O
O
O
O
•-
o
~
e
o
o
o
o K IIO
O
H
* C
u H
* ! ÍO
O
O
CO
CD
''¿1
O>
tu*.
M
1to
-
• -a
0)
ü>
O)
O)
"
ib.
' ™
1 I
1 I
1 t
1 1
1O
J C
u t-
1
M
tO
IO
Oí
O
(NO
O
•
Oí
Oí
• IO
1 -
h.
Cv
.t
v 1
f
0)
-10
O
1 Hh
H
- M
fO
(O
II
IJ.
'.J
- 00
03
«*
j5 Ü
5 ÍO
O
í O
c_j.
0.
o.
cj.
QO
1-1
Oí
rjl
f¿
• i-i
.
oí
0
O
O
0
O
0
0
0
0
0
o
o
o
o
oO
O
O
O
M
0
0
0
\^
O
o
o
*-*
o
oO
.'0
O
O
O
¡-1
O
O
O
o
o
oO
O
(-
1 ^ fc
1 1
t 1
tí-ji
Oí
O••j
3 O
5
1 *
1 f
M
I-O
Z>
t-
1
i-1
1rO
'Q
''J
-j5
-J5
':j.
-j.
vj.
•:_
!. o
N
'J5
O5
O
O
t-1
O
i-»
O
I-*
O
0
O
0
O
o
o
oo
o
oo
o
oo
o
o ffi IIO
O
1 to
en
101
01
M
CO10
03 ai
1 !
1O
O
.N [O
<l
)-*
-f
I 1
1oí
ai
10 03 O
í
i-*
. oí
:...„*
--, • r;
II I1™1
hH c* r
íti tr
1M
O
o c
* o
i ;t-
'."
CI
C^

183
»~*
£
S
r-
1 6
n
6
17
1 0 0 0 0 0 0 0;
0 1 0 0 0 0 0 0:
0 0 1 0 0 0 0 0 :
0 0 0 1 0 0 0 0 :
0 0 0 0 20 0 0 0:
0 0 0 0 0 1 0 0 :
0 0 0 0 0 0 1 0:
0 0 0 0 0 0 0 1 :
r - — - -j
1 0 0 0 0 0 0 0 ;
0 1 0 0 0 0 0 0:.
0 0 1 0 0 0 0 0:
OMANCIAS DELLOGE
H=[-2B -76:
1.4 1.4:
4.2 4.6:
1,4 2-9:
-0.01 -0.01::
0 0]
.1r n1
: H=[-45.5 -45:
^ «2 1 :
! 5.7 3-:
POLO DE LAZOCERRADO
-42; -28.5
r- -- 5 : - 0 . 1
-0.7: -5.6
-30: -30
-25+11. 3dv
-25-11.3.J*
-l.56-fO.9a
-l.56-0.9j_
r
-42; -28.5
-0.14:-0.7
-1.2: -5.8
GRAt?
P,
ii • ;:
11
•
3
•
6,
i
1
5•
!
I * iP11Pil o1IIP* Oi i '-'i1 n1°s
0
0
0
0
0
0
1
0
0
0
0
0
0
20
0
0
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0:
0 0:
0:
0:
0:
1 r
1jii1jJí1i*is1
1
5.
1
0
0
7 3í
5:
0:
01
] -1.2:iii ~ P, -! °-!! -30:ií
-25+11j! -25-11iiií
-5.8 1 ji¡ ;
-4.4 j . ¡
3jj
. 3.1 J 7i
- 3.1 Íi ;i1 :1! ii

tb4
f
Ai0
7
ii — "i8
1
0
0
0
0
o0
0
10
0
0.
!oi•! o1i10!0
0
1
0
0
0
0
0
0
0
20
0
0
0
0
0
0
0
0
20
0
0
0
0
0
0
0
1
0
0
0
0
0
V
0
0
0
1
0
0
0
0
0
0
n
10
0
0
0
0
0
0
0
1
0
0
0
0
0
o
0
1
0
0
o
0
0
0
0
0
1
0
0
0
0
o
0
0
1
O
0
0
0
0
0
0
0
1
0
0
0
o
0
0
0
1
0
0:
0 :
0:
0:
0:
0:
0:
1 =
0:
0:
0:
0:
0:
0:
0:
1:
GANANCIAS DELLQGF
H=[-27.4 -75:
1.4 1.4:
4.1 4.5;
1.4 2.85:
0 0:
0 0]
H=[-43 -67:
4.1 1.3:
7 4.3:•' ' 1.24 2.8:1
! 0 0:!¡! 0 03!11!i1[!,1
POLO DE LAZOOERRADO
-42: -28.5
-5: -0.1
-5.7: -0.7
-30: -30
-25+11.3.1
-25-11.3.J
-1.54-0.9.1"
-1.5-0.9.11
-42: -28.5
-5: -0.05
-0.7: -7.1
-30: -301
, -25+11.3.1i:
I -25-11.33¡!i; -2.l-Hl.7o1i-2. 1-1. 7,1
GRA?
5•
ii
i3
8::
:_
51
•:
1I
:
\.
31
,
i911
!i ;

185
rAsr»
9
V
1
0
0¡
1°i
0S0
l oSt
0
0
1
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
10
0
0
0
0
0
0
0
1
0
0:
0:
0:
GANANCIAS DELLQGfc
POLO BE LAZOCERRADO
GRA
H=f-24 -69.5: j -42: -28.5 J 5j ]
1.31.3; ¡ -5: -0.1 i . :í 1 1
3.5 3.8; I -5.7: -0.7 1 !!
0: ] 1.25 2.7: j -30: -30 j . ¡i j j
0: ! 0 0: ! -25+11.3,1 i 4 ¡1 !i i «
0: ! 0 0] ¡ -25-11.30 J O3 t 1
0* 'U - r -1.3+0.8.1 !I I* i i
1: j j -l.3-0.8a jJ 1 !
cuadro 20
La matriz de ganancia G del control óptimo- es constante para
todos los casos e igual a:
G = | 0.85 -3.2 -1.55 -2.5 1.3 -0.57
1-0.5 2 1 l.S -0.57 0.8
Ahora bien, si se mantiene la matriz V en un valor constante
e ieual ar

186
V -
1 0 0 0 0 0 0 0 J
0 1 0 0 0 0 0 0 ]
0 0 1 0 0 0 0 0 |
0 0 0 1 0 0 0 0 |
0 0 0 0 1 0 0 0 ¡
0 0 0 0 0 1 0 0 |
0 0 0 0 0 0 1 0 |
0 0 0 0 0 0 0 1 ]
v se varían los valores de la matriz W, como se muestra en el
siguiente cuadro:
p
A
?
0
10
W GANANCIAS DELi
1 0 0 0 0 0 0 0:
0 1 0 0 0 0 0 0 :
0 0 1 0 0 0 0 0:
0 0 0 1 0 0 0 0 :
LQGR
POLO DE LAZO
CERRADO
- - - t • -¡G*= Í -36; -5
G
R
A
B1
5í 51 3
[0.98 -0.03: j -5.7; -5.7 j .t i
-3.9 0.15; 1 -0.1: -0.7 1* ii it 1 !
-1.9 0.1: j -30 -30 . ;
í 1 I I
Í 0 0 0 0 1 0 0 0 : ! -3 0.12: í -20+10. Yo ¡4 !S \ 1 it i t t ií 0 0 0 0 0 1 0 0 :i«
1.5-0.04; j -20-10.7,1 | 1i I
¡ t e i 3i 5 0 0 0 0 0 0 1 0: 1-0.9 0.06] í -1.3+0. 84 j !i S í !: t i i i1O O O O O O O 20: i ! -1.3-0.84.1 i i
1...J

187
rA5r.
i' i;
1
W
1 0 0 0 0 0 0 0 :
0 1 0 0 0 0 0 0 :
0 0 1 0 0 0 0 0 :
0 0 0 1 0 0 0 0 :
'"¿ANAHCIAS DELLQG*
[0.01 -0.9:
POLO DE LAZOCERRADO
-40: -30
-0.1; -5
GRAt?
5•
•i i |-0.4 4.3: | -0.7: -5.7 ! 1 !1 s :i i i-0.2 2: -30: -30 í .
í I I
J O 0 0 0 1 0 0 0: [ -0.3 3.2:1 S £
-15+10, 2j ¡4S
t J i l
0 0 0 0 0 1 0 0 : ] 0.18-1.5:í *Í í
-15-10,2o J 2ii i
0 0 0 0 0 0 20 0: í -0.07 1.2] ! -1.3+0.9J 51 í ! !! ¡ S i !
I j O O O O O O O l : ¡ j -1.3-0.9J j
i i•í
2 0
0
0
0
0
0
o
0
1
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
20
0
0
0
0
0
0
0
1
0
0:
0:
0:
0:
0:
0 0;
0;
i:
¡ r.
PT- 5(jT" ¡ss[1 -0.3: j
i-3.8 1: !
*s1-1.85 0.52; |
i-2.9 0.8; • í
!i1.5 -0.3: j
!
-0.3 3.7] !Í
<í
i itL . 1
-137:
-0-7:
-5.7;
-30:
-1.3+0
-1.3-0
-20+10
-20-10
-0.1 J59
J-5 j .
i i-35.3 ¡1 1• i1 ;t i-30 j .
t
.8J ] 43i
.Sj J 31
, oo í11
.5,1 ¡i

•88
rAo
i •
í
i
1
4
t!i
w
1 0 0 0 0 0 0 0 ;
0 1 0 0 0 0 0 0 :
0 0 1 0 0 0 0 0 :
„ ~ „ ~
0 0 0 0 20 000;
0 0 0 0 0 1 0 0 :
0 0 0 0 0 0 1 0 :
0 0 0 0 0 0 0 1 :
1 0 0 0 0 0 0 0 :
0 1 0 0 0 0 0 0 :
0 0 1 0 0 0 0 0 :•0 0 0 20 0 0 0 0:
0 0 0 0 1 0 0 0 :
0 0 0 0 0 1 0 0 :
0 0 0 0 0 0 1 0 :
0 0 0 0 0 0 0 1 :1
GANANCIAS DELLQGfc
[-0.6 -0.8;
-2.3 3.8:
-1.1 1.8:
-1.7 2.9:
3.8 -0.4:
-0.4 1.1]c
L _ nn
0T-
[0.9 -0.5:
-3.4 1.9:•i-1.6 1:
!1 -2.5 2.2;
1.3-0.6;
-0.6 0.81iii
\O DE LAZO
CERRADO
-137: -40
-5: -0.1
-0.7: -5.9
-30: -30
-15+9. 9,1
-15-9.9,1
-1.3+0.8,1
-1.3-0.8,1
-42: -29.5
-0.1; -0.7
-5.7; -5i¡
- -30: -30i; -26+11.8,1
, -26-11.80
! -1.3+0.8,1::
! -1.3-0.8,1[
GRA
5
1
*
4
4
'i
5
1
'
4
5¡i
! ..
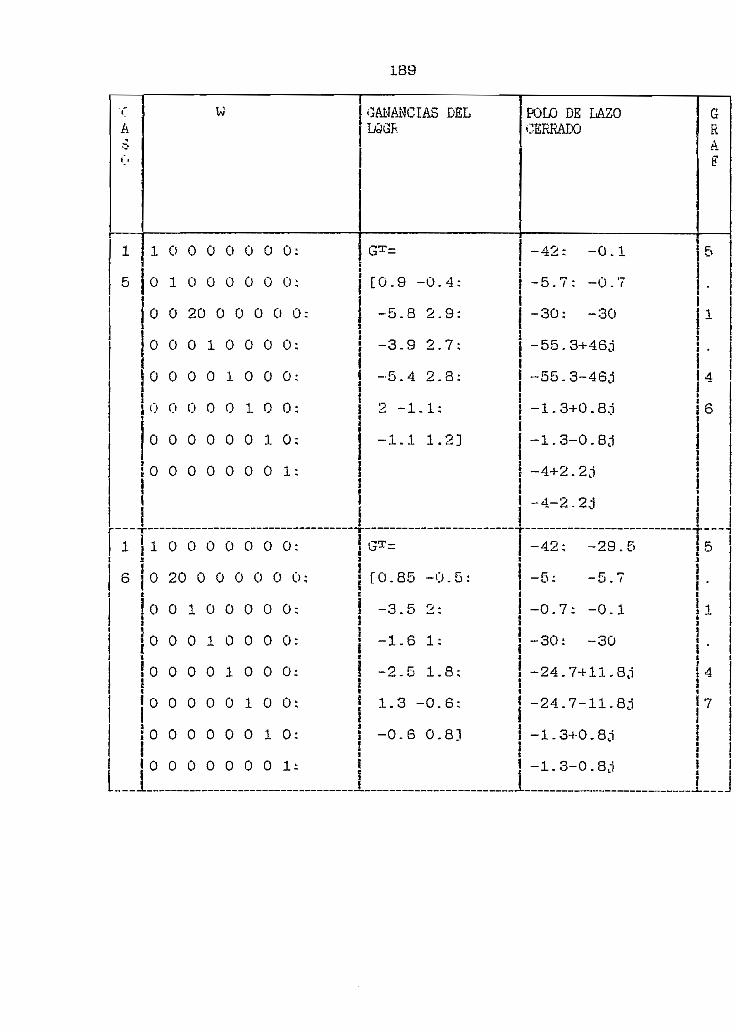
139
T
A
'-'
5
r 1
i
6
1
0
0
0
00
0
0
I — -,1[,00
!,0
,1
00
o
0
10
0
0
0
0
0
0
20
0
0
0
0
0
0
0
0
20
0
0
0
0
0
0
0
10
0
0
0
0
w
0
0
0
10
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
10
0
0
0
0
0
0
1
0
0
0
0
0
0
10
0
0
0
0
0
0
0
10
0
0
0
0
0
0
10
0;
0;
0 0:
0;
0;
0:
0;
1:
— !
0:
0 0;
0;
0 =
0;
0:
0:
1 =
GANANCIAS DEL POLO DE LA5LQGR CERRADO
GT= -42; -0i
[0.9 -0.4: j -5.7: -0i
-5.8 2.9: -30: -3
-3.9 2.7; -55.3-4-46íí
-5.4 2.8: j -55.3-46
2-1.1; i -1.3+0.8ii
-1.1 1.23 -1.3-0.8¡í -4+2.2,1
Íi| -4-2.2.1j
r. _ g
GT= 1 -42; -2it
[0.85 -0.5: -5: -5i
-3.5 2; ! »0.7: -0ii-1.6 1: 1 -30: -3
ii-2.5 1.8: ! -24.7+11
1i1.3 -0.6: Í -24.7-11
ii-0.6 0.81 -1.3+0.8
¡i¡ -1.3-0.8
L 1 _
:o GRA
.1 5
. 7
0 j l¡ij i .
i.11
j 1 6
-1 i¡ii¡iI 1i i1 !a i1 1
9.5 j 5it
.7 ,.I
.1 í l11
1 -I
- 8,1 j 4¡i
- 8á ] 7
j \i
¿ 1 \ i
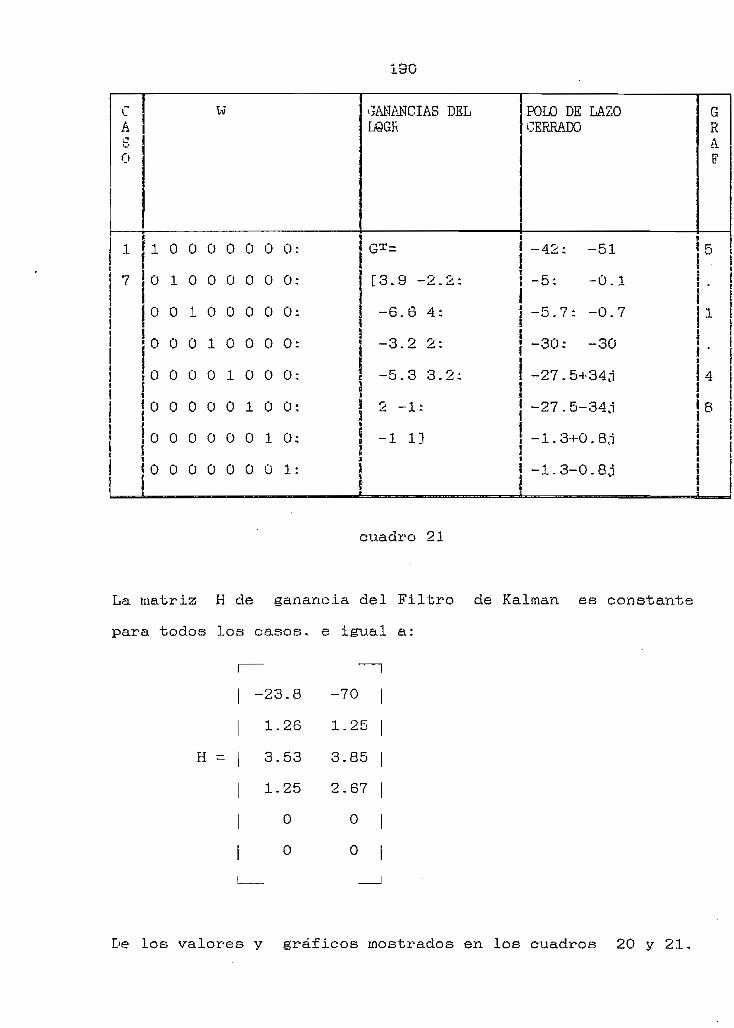
190
cAo•_*
0
1
7
w
1 0
0 1
0 0
0 0i
! l o oi0 0
0 0ít0 0
I
0
0
10
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
10
0
0
0
0
0
0
0
10
0:
0:
0:
GMMCIAS DELLQGR
POLO DE LAZOCERRADO
iG^=. í — 4*>
!' [ • 3 9 _•> 9 * » —5 •
í-6.6 4; ] -5.
1 i0: -3.2 2: j -30
i *0: 1 -5.3 3.2: i -27
1 \ i0: j - 2 -1: j -27
£ !0; } -1 1] í -1.
t
j t1: 1 j -1.
S ic :
GRAF
; -51 J 5
-0.1 j .
7: -0.7 j l5
: -30 j .i
.5+34,1 Í 4I ¡i 1
.5-34t1 ¡8 ¡i ii
3+0 .8.1 !íi
3-0 . 8 j ja
cuadro 21
La matriz H de ganancia del Filtro de Kalrnan es constante
para todos los casos, e igual a:
H =
23.8
1,26
3,53
1.25
0
0
-70
1.25
3.85
2.67
0
0
De los valores y gráficos mostrados en los cuadros 20 y 21,

asi como otras comomaciones realizadas pero que no se
incluyen en este numeral-. se infiere que no es posible
reguiar completamente la ubicación de los polos del sistema
"compensado1 , esto se • debe a que el sistema no es
desacoplado, es por ello que oiiando se varía el valor de un
elemento en las matrices de "ponderación", el sistema cambia
"varias" características. Por lo tanto se requerirá de un
' pr-ecompensador", que diagonalice la matriz función de
transferencia del sistema en laso cerrado, con el fin de
poder desacoplar las diferentes entradas y salidas, tarea
esta que no es objeto de este trabajo.
Cabe anotar-, que el sistema "compensado" en laso cerrado para
todos los cambios realizados, es estable, pero sin poder
llegar a conseguirse características "totalmente
satisfactorias".
Ahora bien, el método del Regulador Cuadrático Lineal
Gaussiano es empleado por el método denominado Recobro de
Transferencia de Laso ('LTR"), para el análisis de plantas de
fase no mínima y mínima, en sistemas SISO y en algunos
sistemas MIMO. Este análisis se puede realisar por medio de
tres opciones íref. [12]), las que se presentan a
continuación, y cuya descripción y análisis no está dentro
del alcance de este trabajo de tesis:
- Evadir el problema
- Trabajar con el problema
- Obtener un R2 óptimo
Adicionalmente, el análisis de sistemas de fase mínima y no

192
mínima puede ser realizado por otros métodos alternativos
para el análisis de Control Robusto incluidos dentro del
Matlab.

DIAG
RAMA
J)
E BO
DE,
SIST
EMA
SIN
"COM
PENS
AR",
EJ
EMPL
O 5.1.3
TtU R u
-AR
DU
-ñR
O \
J
1 R
R-L
"J
U
1 ?
Rl
¿r U
1 4
R.1. "
U te~
5
IB
r ~
~
- 4
i e ~
3 1.0
_..-"
"'
"2
30-i
10
\
10
\,
\
1
10
_
\•
\
1
O ro 10 Cn -H

RESP
UEST
A DE
FR
ECUE
NCIA
(AB),
SIST
EMA
SIM
"COM
PENS
AR",
EJ
EMPL
O 5.1.
flo
-4R
TtU
-RR
(J U
-14R
,L x ti'
~5
10"4
10
[ 1 ~3
10
-..-"••~"~"
"
j -2
10"-
1-
10
..., .
_
0
10
\
'i,
i \.
L ^ ~
J
1
10
r
i
'. \
2 10:
U")
w
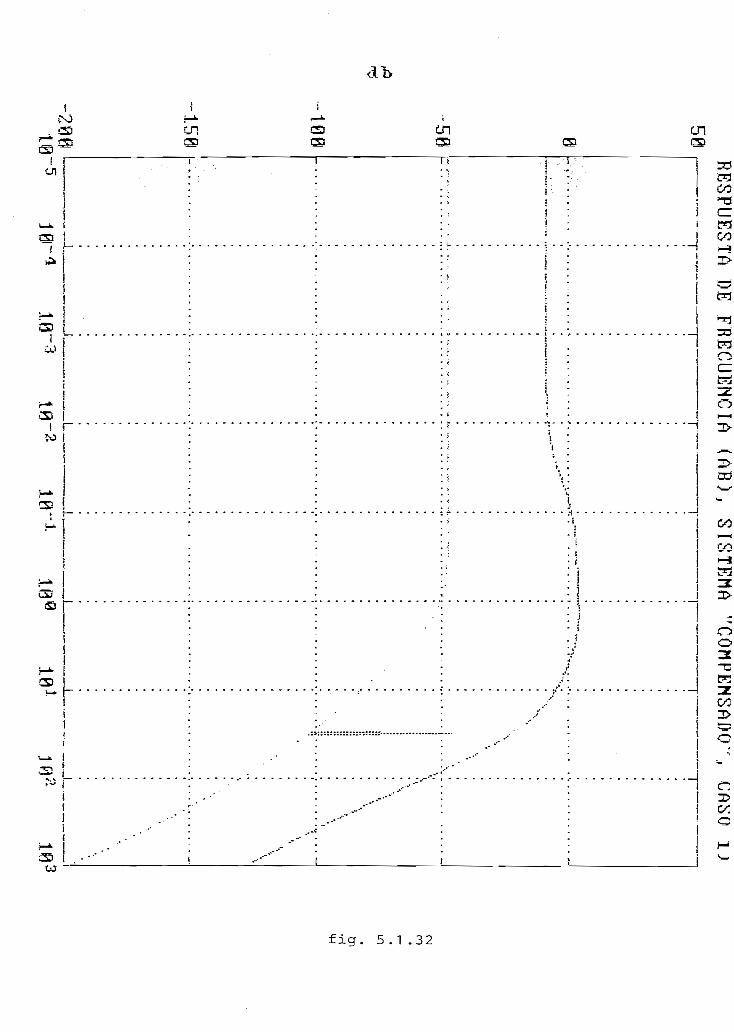
RESP
UEST
A DE
FR
ECUE
NCIA
<A
B),
SIST
EMA
"COM
PENS
ADO"
, CA
SO 1)
DO
-1 f
ófll
L u
U
-7H
Wf-j
. "J
O 10
~5
10
""""
~"
~4
10
""
I ~3
10
__..~
..
"'**
~2
10
. L "3-
10
*'"'*•
-v
._
8
10
_
-x
'•',
| 3 JR
-.. -. 1
(N ro LO -H MH

O»
N.íflC5
i-i-l
í— -i^3
en
U-k.
'
I-1'
ce
to
be
í-*ss
i-k-H-
U-k.
ÍS
9 c
{ - - • • • -
1
9 C
". .---"
D C& Cf i
i
i Í
: t
• i
!
> iii
¡ ií , í. .i it í
I; I
; í
£
ií '; "
i
i."I
i \
i
*
i
/
& 2
• • • • - • — i
i
1!
\
iV.i
\
../ 1f
:— 1
!
. . . . . . '
.1
:
:
00
co
fig. 5.1 .33

RESPUESTA J)
E FRECUENCIA
IftB
), Sl
STEH
fi "C
OnFE
NSfi
JÍO"
, CflSÜ
~d)
1
1 ...
"••'-
.-•«
•" *
*"*
-._.
,.,
.,L-
-..
. ...
._
....
\
'--.
L
f •"
"
\o
LO tn -H
10
10-4
10
10-
100
101
102
103
w [rad/seg]

RESPUESTA
DE FRECUENCIA
(AB), SI
STEH
ft "CQIli'EriSflJJU", ÜH
SU <u
*¿ y |
j
_ . _
1
.
|__i
^
0
188
—r
u10"4
1810
10
18»
18-
__L-
n^
1
ro tn •H
w trad/seg]

RESP
UEST
A ])E
FRECUENCIA
CAB)
, SISTEMA
"COMPENSADO",
CASO 5)
-50
~_L
10-
10"
IB'2
100
j_.
181
IB2
10
ro LT)
-H m
w ír
ad/s
eg.1

RESP
UEST
A BE
FR
ECUE
NCIA (AB),
SIST
EMA
"COM
PENS
ADO"
, CA
SO 6)
co
-)U r
T
~
I r~
~
~T
l~
—p
—
-j.
8 IB'
10-
18L
18-
18"1
18
° 18
1
J85Í
183
ro
u [rad/seg3
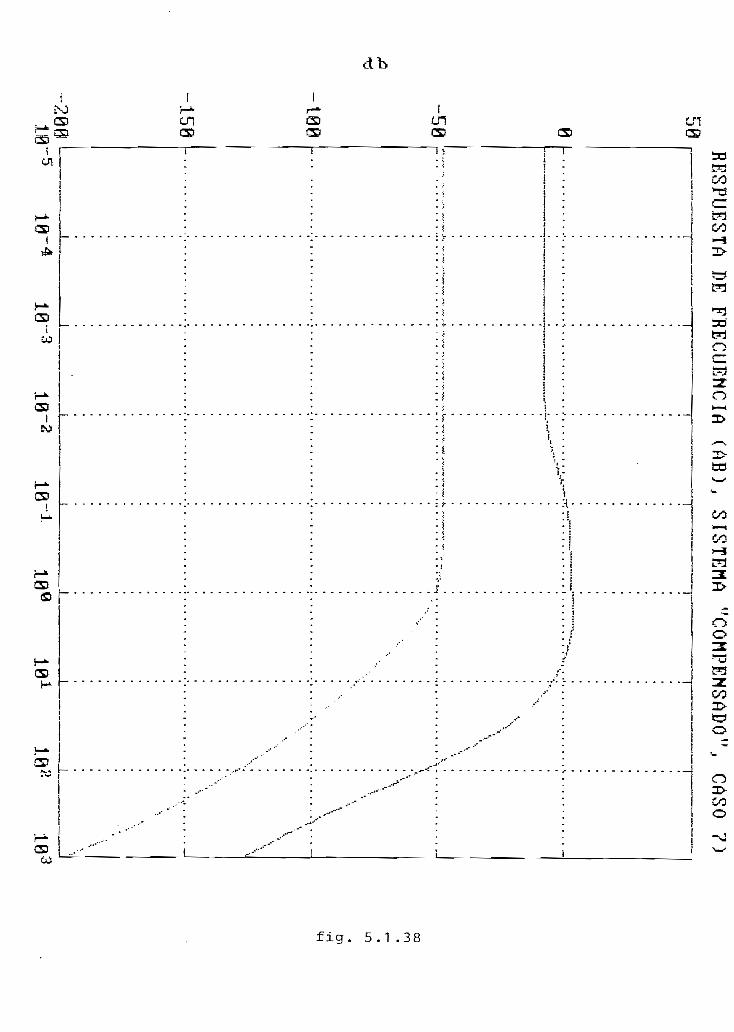
RESP
UEST
A DE
FRE
CUEN
CIA
(AB),
SIST
EMA
"COM
PENS
ADO"
, CA
SO 7)
0
50 10-&
10-4
10-j
10
~r
__j
i i
i10"J
10°
101
10a
103
co m •H HH
^
ui [rad/seg]
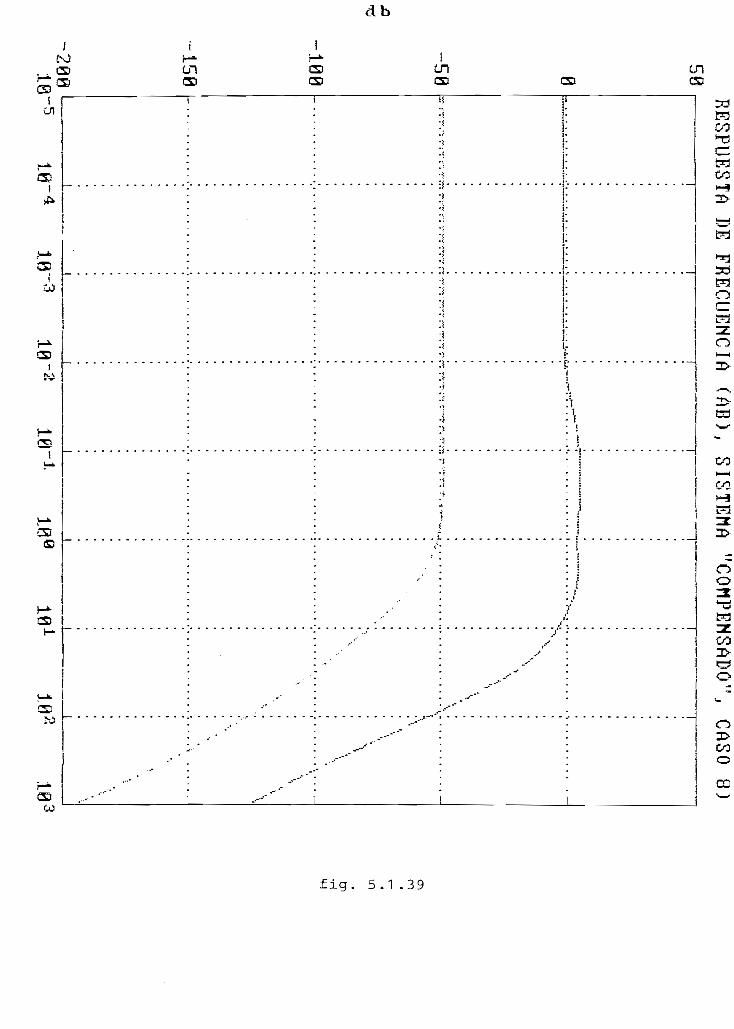
RESP
UEST
A DE
FRECUENCIA
(AB), SISTEMA
"COMPENSADO"., CA
SO 8)
58 0
100
10e
CTv
ro tn •H m
10
110
2
u^
Cra
d/s
eg]
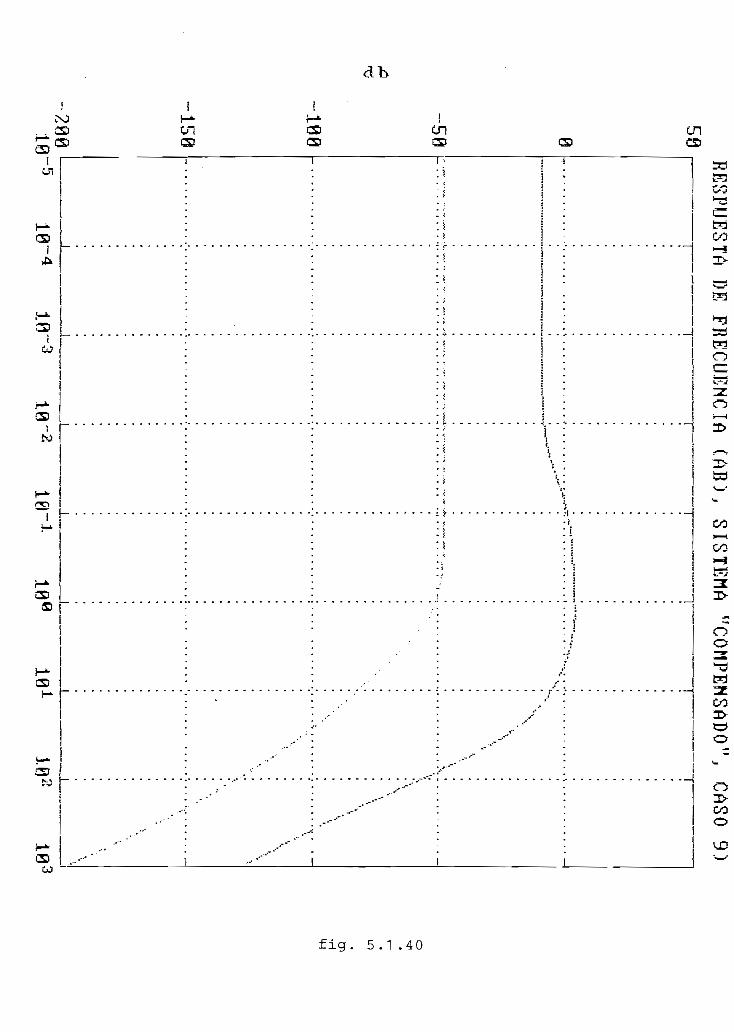
RESP
UEST
A DE
FRE
CUEN
CIA
(AB),
SIST
EMA
"COM
PENS
ADO"
, CA
SO 9)
b O
i ~
\
:*
i —
r
:~
"i
i —
y
-50
18
0
-20
0
Cn •H m
10'
10-3
10
10-
10
e10
110
;10
w [r
ad
/se
cr]
'•'I

RESP
UEST
A DE
FRECUENCIA
CAB)
, SISTEMA
"COM
PENS
ADO"
, CA
SO 10
)CQ
_„
,
.^u r
~- -j—
-j
j j
-j
-p
0 18ie-4
10
10-
1.0
100
101
18a
m Cn •H m
103
w

RESP
UEST
A DE
FR
ECUE
NCIA (AB),
SIST
EMA
"COM
PENS
ADO"
, CA
SO 11
)CQ
.
e
188 -
18'
10'
i10-3
10--
10a
181
1.0:
.10;
CN •H M-l
w Oad/segl

I50 0
-50
100
150
20
0
250 10
RE
SPU
EST
A D
E F
RE
CU
EN
CIA
(A
B),
SI
STE
MA
"CO
MPE
NSA
DO
",
CA
SO
12)
~5
10
, — „_
.
—
- ••
-i
i ,
~4
10
_
. „-
L ~3
.1.0
r
-r
_- "—
-
- -
1 ~2
IB
• -
.,, .. .._
.
. i
-•j- 10
:-5 .
0
10
!
"l
'
: * '
' í.
1
10
'.
N
\
'•i
"t
"•
ro U1 tn -H 4H
2
10
3
w tr
ad
/se
g]

RESP
UEST
A DE
FR
ECUE
NCIA (AB),
SIST
EMA
"COM
PENS
ADO"
, CA
SO 13
)__
__r
í
0
100
•150
-200
rT
rT
J
Cn •H m
-510
10-J
.10
110
3
w [r
ad/s
-eg
.1

RESP
UEST
A DE
FRECUENCIA
(AB), SI
STEh
A "COMPENSADO",
CASO 14)
ou
~cn
DO
1 flfl
JL
UU
1
RJL
.OU
?flfl
¿.un 18
— ~5
10
~4
10i ~
3
10
--""*""
"2
10
L |
-1
10
"*
L
, ,
0
10
-..
\ '-.
1
10
-.
\i
'"•
a
10'
LO tn -H
w Erad/sea]

RESP
UEST
A DE
FR
ECUE
NCIA (AB), SI
STEM
A "C
OMPE
NSAD
O",
CASO 15)
-CO
jJt
J
1 f
lfl
l O
U
288 18
~
1 0
1 "4
18
-,-»!*
1 "^
18
"
».•"" *""
^2
10
"J
10
--.
é
18
"
X\
\i
'-•
1
10
' \
*1
?- T
íw

RESP
UEST
A DE
FR
ECUE
NCIA
(AB),
SIST
EMA
"COM
PENS
ADO"
, CA
SO 16
)
0
00
-25B
T-
I—- *-i o
J i
1_j
-.8
~
_L_
10
10
' J-
18 e
L_
10J
103Í
ie3
r- 10 tn •H m
'•Ju
Erad/sea]
"
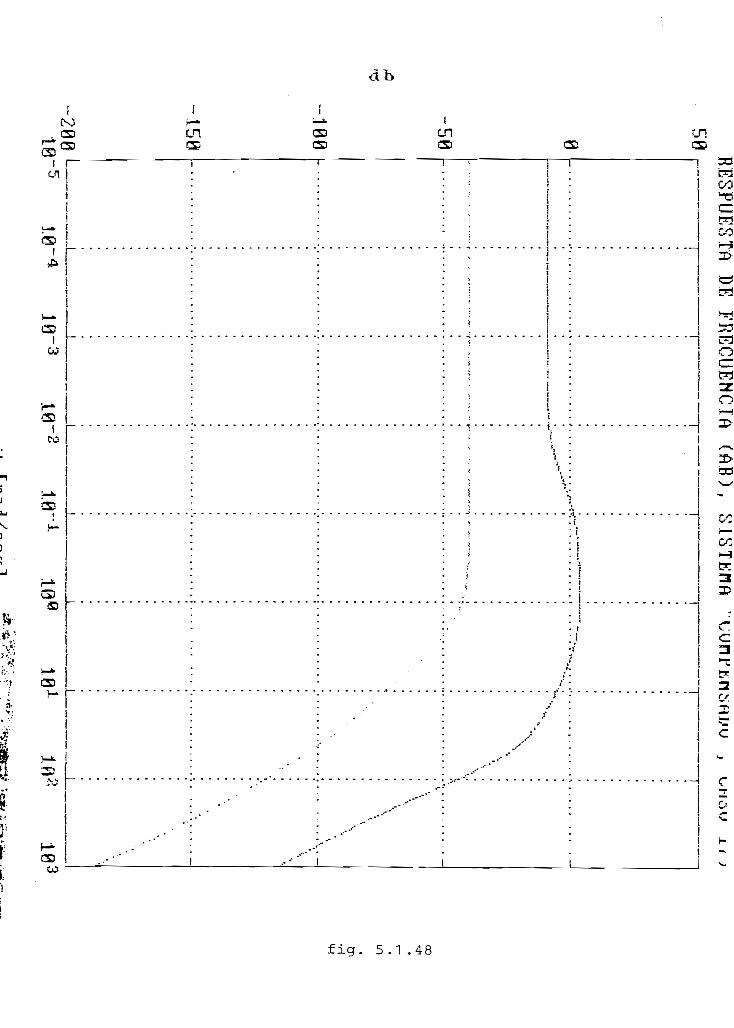
RESP
UEST
A DE
FRECUENCIA
(AB),
SISTEMA
"COM
PENS
ADO"
, CA
SO 17
)au H o
-C
Ootl
1 fif
i.1
O O
l^fl
J. V
-ftJ
200 10
~5
1.9
i — —
-í"~
" "¡
, .
"3
10
~2 10
-J-
100
10
1
•\
1
IR
r
\
_ __
co LT) * tn •H m
3
l>ad
/sec
f,l
••J

212
•5.2.- CONCLUSIONES.-
La teoría desarrollada muestra que si un sistema no tiene
perturbaciones, entonces se puede aplicar el método del
Regulador Cuadrático Lineal Determinístico. Por el
contrario, si el sistema presenta perturbaciones, es posible
rechazar estas distorsiones con la ayuda del análisis
estocástico- Es posible realizar el análisis de forma
separada, tanto para el Regulador Cuadrático Lineal
Determinístico como para el Filtro de Kalman, usando el
Teorema de Separación.
- Se establecieron relaciones entre la teoría expuesta para
el Regulador Cuadrático Lineal Gaussiano fLQGR) y los métodos
adicionales existentes, para análisis de Control Robusto (Ha
y Hco) de que dispone el paquete Matlab, los cuales tienen su
campo de análisis en la respuesta de frecuencia y plantean
J1"/ así márgenes de estabilidad multivariable en ésta, empleando
' ciertas definiciones obtenidas por el LQGR-
Los métodos de Ha y H», hacen su análisis principalmente en
el campo de la frecuencia; cabe anotar que H» xitiliza las
" bases matemáticas del LQG.
: - En el cuarto capitulo se desarrollaron ejemplos de
demostración de sistemas SISO, y de donde se puede concluir
que para el Regulador Cuadrático Lineal Determinístico, los
valores de las matrices de ponderación Q y R deben ser-
seleccionados de acuerdo a los requerimientos "óptimos" del

213
sistema, que se deseen. Por e.jemplo, si se requiere que el
sistema responda rápidamente, entonces se debería asignar a Q
un valor alto. Es decir, se deben encontrar valores acordes
con las necesidades a cumplirse en el sistema.
Adicionalmente, la elección de los valores de las matrices de
ponderación debe tomar en consideración procesos de
linealización de sistemas no lineales, si éste fuera el caso.
Se puede concluir que la elección de los valores de las
matrices de ponderación Q y R para cualquier sistema, no es
única.
En el cuarto capitulo se establecieron además, criterios
para la selección de los valores de las matrices de
covarianza de ruido, las que definen el valor de la ganancia
del Filtro de Raiman. Para la elección de esta ganancia, se
debe tomar en cuenta que el Filtro debe responder lo más
rápidamente posible, ya que asi estimará con "eficiencia" el
estado del sistema; esto se puede lograr dando a la matriz de
covarianza de perturbación del sistema un valor alto, con lo
que se logra que el Filtro posea un mayor ancho de banda.
Sin embargo, esto implica que el ruido que el Filtro "deja"
pasar al sensor sea mayor, es por ello que se debe lograr un
equilibrio entre los diferentes parámetros. Por lo tanto, se
concluye que la selección de los valores de las matrices de
covarianza de ruido que determinan la ganancia del Filtro en
cualquier sistema, no es única.
- En el cuarto capítulo, considerando los criterios dados

215
regulación pero no de forma satisfactoria. En este caso, es
necesario recurrir a técnicas adicionales, las que basan su
análisis en el LQGR.
El empleo del método del Regulador Cuadratico Lineal
Gaussiano, permite obtener estabilidad en sistemas
"apar antemente" inestables., regulando con ciertas
limitaciones la ubicación de los polos del sistema en lazo
cerrado, como es el caso del ejemplo 5,1,3.
- En los ejemplos 4.2.1, 4.2,2, 4.3.1, 4.3.2, 4.4.1, 4.4.2,
5.1-1 y 5,1.2 se plantearon sistemas desacoplados, con el fin
de facilitar la comprensión en la elección de los valores de
las diferentes matrices (ponderación y/o covarianzas de
ruido} . Sin embargo, cuando no se tienen sistemas--
desacoplados ., la elección de dichas matrices se dificulta
considerablemente, y el procedimiento para determinar los
valores de éstas es similar al empleado, es decir de ensayo y
error.
Existen restricciones en cuanto a la selección de los
valores de las diferentes matrices, ya que del desarrollo
matemático realizado se determinó que éstas deben ser reales,
simétricas y definidas o semi-definidas positivas según sea
el caso.
- Este trabajo ha cumplido con los objetivos propuestos,
esto es el estudio del Regulador Cuadrática Lineal Gaussiano,
asi como ia determinación de los criterios para la elección
cié los valores de las matrices de ponderación y covarianzas
de ruido, que determinan los valores de las ganancias del
Regulador Cuadrático Lineal Deterministico y Filtro de Kalman
respectivamente, asi como el establecimiento de las
relaciones existentes entre el LQGR y los métodos
alternativos para Control Robusto que dispone el paquete
Matlab.
5.3.- RECOMENDACIONES.-
- Se recomienda el presente traba.jo de tesis como un texto
de consulta y guia para el aprendizaje de Control Robusto,
por el método del Regulador Cuadrático Lineal Gaussiano
(LQGR), utilizando el paquete Matlab.
Si bien es cierto el método del LQGR no es exclusivo del
Matlab para Control Robusto, éste es la base general para
otros métodos, por ejemplo se debe determinar la respuesta de
frecuencia del LQGR, ya que otros métodos recurren a las
bases matemáticas del LQGR y realizan los procedimientos
matemáticos en el campo de la frecuencia.
- Se recomienda considerar los criterios expuestos en la
elección de los valores de las diferentes matrices
I ponderación y/o covariansas de ruido), si se desea realizar
diseños utilizando el LQGR, y asi poder utilizar los ejemplos
de demostración realizados. El lenguaje de programación en

217
lenguaje de programación en que se encuentra desarrollado el
paquete Matlab no es "amigable" al usuario, por lo que se
dificulta el intercambio de datos. Por ejemplo., si se
requiere cambiar los datos de los programas de demostración,
ésto no se puede realizar desde el paquete Matlab, sino que
es necesario recurrir a un, editor de programas; sin embargo,
cuando el conocimiento del método LQGR es mayor, estos
cambios se pueden realizar fácilmente desde el editor,
aprovechando las demostraciones realizadas en este trabado -
- Se recomienda en el análisis de sistemas rnultivariables,
diagonalizar la matriz función de transferencia del sistema
en laso cerrado, ya que es deseable en sistemas MIMO que el
cambio de una de las entradas de referencia solo afecte a una
salida, es decir, lograr una no interacción o desacoplamiento
que permita mantener las salidas en valores deseados.
- Es recomendable la aplicación del método del Regulador
Cuadrática Lineal Gaussiano en sistemas de fase mínima. Para
sistemas de fase no mínima a pesar de que no se logra
características "satisfactorias", pero el sistema mejora la
"estabilidad", y es recomendable conocer el método del LQGE
que es la base para otros métodos alternativos de análisis de
estos sistemas.


BIBLIOGRAFÍA--
[1] KIRK Donald, "Optimal Control Theory", Prentice-Hall
Inc. California 1970.
[2] ATHANS Michael, "The Role and use of the Stocbastic
Linear- Quadratic-Gaussian Problem in Control System
Desigs", IEEE, Diciembre 1971.
[33 CELLERI Marcelo, "Control Estocástico Discreto 2da
parte". Tesis de Grado, Escuela Politécnica Nacional
Facultad de Ingeniería Eléctrica, 1987.
[4] OGATA Katsuhiko., "Ingerieria de Control Moderna",
University of Minnesota, Segunda Edición, México 1993.
[5] DISTEFANO-STUBBERUD-WILLIAMS., "Retroalimentación y
Sistemas de Control", Segunda Edición, Colombia 1992.
[6] SAFONOV-LAUB-HARTMAM- "Feedback Prcperties of
Multivariable Systems: The Role and Use of the Return
Difference Matrix"„ IEEE, Febrero 1981.

i"7l DOYLE-STEIN, "Multivariable Feedback Design; Ooncepts
for a Classical/Modern Synthesis", IEEE, Febrero 1981,
f81 AGAMENMOMI-DESAGUES-ROMAGMOLL. "Diseño de Controladores
Multivariables Robustos", P.N.I.E.
[9] LEHTOMAKI-SANDELL-ATHANS, "Robust Result in Linear-
Quadratic Gaussian Based Multivariable Control Designs",
IEEE, Febrero 1981.
[10] ASTROM Karl, "Introduction to Stochastic Control
Theory", University of Southern California, 1970.
[11] Apuntes de Control Moderno, Escuela Politécnica
Nacional- 1993.
[12] STEIN-ATHAMS, "The LQG/LTR Procedure for Multivariable
Feedback Control Design". IEEE, Febrero 1987.

X O en

MANUAL DE ÜSÜ.ABIO
Para la realización de los ejemplos de demostración, fueron
utilizados los siguientes archivos:
PRUDEMO.M Archivo para el ingreso a los ejemplos de
demostración.
PRUEBA1,M Archivo para el ingreso a. los ejemplos de
demostración por el método del Regulador
Cuadrática Lineal Deterministico.
PRUEB111,M Es el archivo para el desarrollo de ejemplos
del Regulador Cuadrático Lineal Deterministico
con la ayuda de sistemas SISO de primer orden.
PRUEB112.M Es el archivo para el desarrollo del Regulador
Cuadrático Lineal Deterministico con la ayuda
de sistemas SISO de segundo orden.
PRUEBA2.H Archivo para el ingreso a los ejemplos del
Filtro de Kalman.
PRUEB211-M Es el archivo para el desarrollo de ejemplos
del Filtro de Kalman con la ayuda de sistemas
SISO de primer orden.
PRUEB212-M Es el archivo para, el desarrollo de ejemplos
del B'iltro de Kalman con la ayxida de sistemas
SISO de segundo orden.
PRUEBAS.M Archivo para el ingreso a los ejemplos de
demostración por- el método del Regu.le.dor

223
PRÜEB311.M
PRUEB312.M
PRUEB411..M
PRUEB412.M
PRUEB512.M
Cuaclrático Lineal Gaussiano,
Es el archivo para el desarrollo de ejemplos
del Regulador* Cuadrática Lineal Gaussiano con
la ayuda de sistemas SISO de primer orden.
Es el archivo para el desarrollo de ejemplos
del Regulador Cuadrático Lineal Gaussiano con
la ayuda de sistemas SISO de segundo orden.
Es el archivo para el desarrollo de ejemplos
del Regulador Cuadrático Lineal Gaussiano con
la ayuda de sistemas MIMO de primer orden.
Es el archivo para el desarrollo de ejemplos
del Regulador Cuadrático Lineal Gaussiano con
la, ayuda de sistemas MIMO de segundo orden.
Es el archivo para el desarrollo del ejemplo
de una Aeronave por el método del Regulador
Cuadrático Lineal Gaussiano,
Si bien, el lenguaje de programación en que se encuentra el
paquete Matlab no es "amigable" al usuario, por lo que se
dificulta el intercambio de dato»s; sin embargo, si el lector
desea realizar ejemplos por el procedimiento de tentativa y
error, puede aprovechar los ejercicios realizados.
Mediante un editor de programas es posible realizar cambios
en los archivos de los ejemplos de aplicación, e ingresar
sistemas diferentes a los planteados, de tai forma que la
programación para los cálculos por los diferentes "métodos"
(Regulador Cuadrático Lineal Deterministico, Filtro de Kalman
'224
o Regulador Ouaclrático Lineal Gaussiano), asi como para la
graficaoión, puede ser aprovechada.
Para la simulación, luego de los cambios que se puedan
realizar, es necesario correr los ejemplos de aplicación
dentro del Matlab.
Dependerá de que se desea simular, para la elección de los
archivos indicados anteriormente.
Para realizar la impresión de los gráficos con ayuda de la
techa Priixfc Screen, es necesario cargar el archivo
gra.phics«co.m del sistema operativo.
NOMENCLATURA UTILIZADA
x(t) Vector de estado del sistema.
•u(t) Vector de control.
y(t) Vector de Salida.
A., B, C y D Matrices de variables de estado,
H Matriz de ganancia del filtro de Raiman.
G Matriz de ganancia del .Regulador Cuadrática Lineal
Deterrninistico. A pesar, de que el tutorial del
Matlab para Control Robusto lo utiliza de
diferentes formas, que han sido en cada caso
anotadas,
z Señal del. sensor con adición de ruido.
So Matriz de covarianza del Error.
K Matriz que satisface la ecuación de Ricatti.
Q y R Matrices de ponderación.
Nc y Nf Matrices de correlación entre Q, R y w, v
respectivamente.
r Entrada de referencia,
J Función costo.
T Matriz, de ayuda para análisis de estabilidad.
I Matriz identidad.
Hz y H~> Nomenclatura de los métodos alternativos para
control Robusto que dispone el paquete Matlab.





























