Embed Size (px)
Citation preview

ESCUELA POLITÉCNICA DEL EJÉRCITO
CARRERA DE INGENIERÍA GEOGRÁFICA Y
DEL MEDIO AMBIENTE
PROYECTO DE GRADO PARA LA OBTENCIÓN DEL TÍTULO DE INGENIERÍA
TRANSFORMACIÓN DE COORDENADAS PLANAS ENTRE LOS SISTEMAS GEODÉSICOS PSAD56 Y SIRGAS MEDIANTE UNA
RED NEURONAL ARTIFICIAL
REALIZADO POR:
ROMERO CHASIPANTA RICARDO VINICIO
SANGOLQUÍ – ECUADOR
FEBRERO - 2013

CERTIFICACIÓN
Certificamos que el presente proyecto de grado fue realizado en su totalidad por el Sr.
Romero Chasipanta Ricardo Vinicio y cumple con los requisitos teóricos, técnicos,
metodológicos, científicos y legales establecidos por la ESPE como documento previo a la
obtención del título de Ingeniero Geógrafo y del Medio Ambiente.
Sangolquí, 06 de febrero de 2013.
__________________ __________________
Dr. Alfonso Tierra PhD Ing. Marco Luna MSc
DIRECTOR CODIRECTOR

RESUMEN
El presente documento presenta la aplicación de la metodología de redes neuronales
artificiales en la transformación de coordenadas planas (Este, Norte) desde un sistema
geodésico local a un sistema global que sea compatible con escalas catastrales mayores a
1: 5000, aplicado a un sector del Distrito Metropolitano de Quito. Debido a que el Ecuador
cuenta con parámetros de transformación oficiales compatibles con escalas menores a
1:25000, es necesario desarrollar otra metodología que permita mejorar los niveles de
precisión.
El tipo de red neuronal artificial que se utilizó fue una red unidireccional, multicapa
con el algoritmo de retropropagación y el método de optimización Levenberg – Marquardt.
Los resultados que se obtuvieron con la red neuronal fueron comparados con un cálculo
similar realizado con parámetros de transformación usando los mismos datos, teniendo
como resultado que la mejor opción es utilizar la metodología de redes neuronales
artificiales para transformar coordenadas con precisiones compatibles hasta escalas
menores a 1: 2500

ABSTRACT
This document presents the application of the Artificial Neural Networks
methodology to transform projected coordinates (east, north) from a local geodesic system
to a global system like SIRGAS that is compatible with cadastral scales greater than
1: 5000; it was executed within Metropolitan District of Quito. Due to Ecuador has official
transformation parameters which are compatible with scales lesser than 1:25000, is
necessary to develop other methodology whose allow to improve the precision.
The type of artificial neural network used was a multilayer feed forward network
with retro propagation algorithm and the optimization of Levenberg – Marquardt. The
outcomes obtained in this document were compared between with a similar compute made
up with transformation parameters, using the same dates. In conclusion the best option was
the methodology of artificial neural network, transforming coordinates within the precision
to scales lesser than 1:25000.

DEDICATORIA
Este proyecto está dedicado a:
Mi familia que ha sido un ejemplo de unidad y esfuerzo,
los mismos que me han ayudado a cumplir mis metas y desafíos
en especial a mis padres que a pesar de todo siempre me han apoyado en momentos de
decisión que han sido cruciales en mi vida.
Mis mejores amigos que en cada encuentro han afianzado mis ideales y principios
permitiendo ser más humano y mejor profesional.

AGRADECIMIENTOS
A Dios por ser el pilar de mi voluntad y dueño de mis actos.
A mi familia por enseñarme los valores y principios de los que me siento orgulloso.
A mis profesores que impartieron además de su cátedra, lecciones de vida y de trabajo.
A mis compañeros Andrea Viteri y Christian Pilapanta que juntos logramos hacer un grupo
no solo de profesionales que buscan superarse día a día sino de amigos.
A Yoly que siempre me demostró su apoyo en confianza en mi.
A mi director y codirector de tesis por ser guías en el cumplimiento de los objetivos de este
proyecto y por incentivar la investigación desde temprana edad.

PRÓLOGO
Es de gran importancia mantener un sistema único de referencia de coordenadas, a fin de
que la cartografía que represente los detalles mínimos del terreno sean fácilmente
georrefenciados en campo y de esta manera el usuario pueda integrar nueva información
cartográfica a la existente. El problema se presenta cuando se cuenta con diferentes
sistemas de coordenadas y más aún si entre estos sistemas se presentan locales y globales
que necesariamente necesitan ser transformados para empatar la información.
En este marco se encuentra la presente investigación que contiene una metodología nueva
como es el caso de redes neuronales artificiales aplicado a resolver este problema
estrictamente geodésico, la cual será la base para determinar si logra mejor las precisiones
en el cálculo de las coordenadas con la finalidad que sea capaz de ser utilizado en la
cartografía catastral, la misma que es el insumo principal en la planificación para el
desarrollo de un territorio.
Además se puede evaluar esta metodología con respecto a las técnicas anteriormente
empleadas como es el caso de parámetros de transformación calculados con mínimos
cuadrados, esto permitirá tener una idea que la calidad y validez de ambos métodos para
que el lector tenga la capacidad de discernir su decisión por cual metodología optar para
resolver este complejo problema.

ÍNDICE DE CONTENIDO.
Pág.
CAPÍTULO 1. ASPECTOS GENERALES.
1.1. INTRODUCCIÓN 1
1.2. ANTECEDENTES 2
1.3. DESCRIPCIÓN DEL PROBLEMA 3
1.4. JUSTIFICACIÓN 4
1.5. DESCRIPCIÓN DEL ÁREA DE ESTUDIO 5
1.6. OBJETIVO GENERAL 5
1.7. OBJETIVOS ESPECÍFICOS 5
1.8. METAS 6
CAPÍTULO 2. MARCO TEÓRICO
2.1. SISTEMAS DE REFERENCIA TOPOCÉNTRICOS 7
2.1.1. PROVISIONAL SOUTH AMERICA DATUM 7
2.2. SISTEMAS DE REFERENCIA GEOCÉNTRICOS 8
2.2.1. SISTEMA DE REFERENCIA GEOCÉNTRICO PARA LASAMÉRICAS 8
2.3. SISTEMAS DE PROYECCIÓN CARTOGRÁFICA 9
2.3.1. SISTEMA UNIVERSAL TRANSVERSA DE MERCATOR (UTM) 10
2.3.2. TRANSVERSA MERCATOR DE QUITO (TMQ) 11
2.4. TRANSFORMACIONES ENTRE SISTEMAS DE REFERENCIAGEODÉSICOS 11
2.4.1. TRANSFORMACIÓN TRIDIMENSIONAL. MÉTODO DE HELMERT 12
2.4.2. TRANSFORMACIÓN BIDIMENSIONAL CONFORME 14
2.5. AJUSTE DE MÍNIMOS CUADRADOS 16

2.6. REDES NEURONALES ARTIFICIALES 18
2.6.1. NEURONA BIOLÓGICA 19
2.6.2. FUNDAMENTOS BIOLÓGICOS 19
2.6.3. SEMEJANZAS ENTRE NEURONAS BIOLÓGICAS Y NEURONAS ARTIFICIALES 20
2.6.4. ELEMENTOS BÁSICOS DE UNA RED NEURONAL ARTIFICIAL 21
2.6.5. PROCESOS DE APRENDIZAJE DE UNA RNA 23
2.6.6. TIPOS DE APRENDIZAJE 25
2.6.7. FUNCIONES DE ACTIVACIÓN O DE TRANSFERENCIA 26
2.6.8. ARQUITECTURA DE REDES NEURONALES ARTIFICIALES 26
2.7. REDES NEURONALES ARTIFICIALES MULTICAPA (RNAM) 28
2.7.1. ALGORITMO DE RETROPROPAGACIÓN (APRENDIZAJE VISTOCOMO GRADIENTE DESCENDIENTE) 30
2.7.2. MÉTODO DE OPTIMIZACIÓN DE LEVENBERG – MARQUARDT 36
2.8. ENTRENAMIENTO DE UNA RED NEURONAL ARTIFICIAL MULTICAPA 37
CAPÍTULO 3. METODOLOGÍA
3.1. AJUSTE CON EL MÉTODO DE MÍNIMOS CUADRADOS 41
3.2. SELECCIÓN DE PUNTOS PARA EL ENTRENAMIENTO DE LA REDNEURONAL ARTIFICIAL 43
3.3. PRE-PROCESAMIENTO Y POST-PROCESAMIENTO ESTADÍSTICODE LOS DATOS 44
3.4. SELECCIÓN DE LA ARQUITECTURA DE LA RNA 45
3.5. ENTRENAMIENTO DE LA RED NEURONAL ARTIFICIAL 46
3.6. MAPA DE DISTORSIONES 50
CAPÍTULO 4. DISCUSIÓN DE LOS RESULTADOS
4.1. ANÁLISIS DE LOS RESULTADOS OBTENIDOS CON EL AJUSTE DE MÍNIMOS CUADRADOS 51

4.2. ANÁLISIS DE LOS RESULTADOS OBTENIDOS CON UNA REDNEURONAL ARTIFICIAL 53
4.3. COMPARACIÓN ENTRE LOS RESULTADOS OBTENIDOS CON PARÁMETROS DE TRANSFORMACIÓN Y UNA R.N.A.M. 59
CAPÍTULO 5. CONCLUSIONES Y RECOMENDACIONES
5.1. CONCLUSIONES 61
5.2. RECOMENDACIONES 62
ANEXOS
ANEXO 1. EJERCICIO DE INICIACIÓN DE REDES NEURONALES ARTIFICIALES.
ANEXO 2. COORDENADAS DE LOS PUNTOS QUE SERÁN PRESENTADOS A LA RNA PARA EL ENTRENAMIENTO, DIVIDIDOS EN DATOS DE ENTRENAMIENTO, VALIDACIÓN Y COMPROBACIÓN.
ANEXO 3. PROGRAMA DISEÑADO EN MATLAB CAPAZ DE TRANSFORMAR COORDENADAS PLANAS DESDE UN SISTEMA LOCAL A UNO GLOBAL.
ANEXO 4. MAPA DE DISTORSIONES
ANEXO 5. RESULTADOS DE LA TRANSFORMACIÓN BIDIMENSIONAL USANDO PARÁMETROS DE TRANSFORMACIÓN.
ANEXO 6. RESULTADOS DE LA TRANSFORMACIÓN DE COORDENADAS CON UNA RED NEURONAL ARTIFICIAL MULTICAPA.
REFERENCIAS BIBLIOGRÁFICAS

ÍNDICE DE TABLAS.
Tabla. 1.1. Coordenadas del área de estudio.
Tabla. 2.1. Clasificación de los sistemas de proyección cartográfica.
Tabla. 2.2. Parámetros proyección TMQ.
Tabla. 3.1. Coordenadas de los puntos utilizados para calcular los parámetros de
transformación por el método de mínimos cuadrados.
Tabla. 3.2. Valores de los parámetros para detener el entrenamiento de la RNA.
Tabla. 4.1. Parámetros de transformación calculados con mínimos cuadrados.
Tabla. 4.2. Resultados obtenidos en la transformación de coordenadas utilizando parámetros de transformación.
Tabla. 4.3. Resultados obtenidos en la transformación de coordenadas utilizando una RNAM.
Tabla. 4.4. Cuadro resumen de los resultados obtenidos con Parámetros de Transformación y una Red Neuronal Artificial.

ÍNDICE DE FIGURAS.
Figura. 2.1. Diferencia entre un sistema topocéntrico y geocéntrico
Figura. 2.2. Transformación de Helmert
Figura. 2.3. Transformación bidimensional de Helmert
Figura. 2.4. Proceso de sinapsis de una neurona biológica
Figura. 2.5. Semejanza entre una neurona biológica y una neurona artificial
Figura. 2.6. Modelo de una neurona artificial
Figura. 2.7. Generalización por Aprendizaje (a), Sobreaprendizaje (b)
Figura. 2.8. Funciones de activación más empleadas
Figura. 2.9. Arquitecturas comunes de redes neronales artificiales
Figura. 2.10. Funciones de transferencia más usadas en una red multicapa
Figura. 2.11. Funcionamiento lógico del algoritmo de retropropagación
Figura. 2.12. Cálculo de la señal de error de una red neuronal multicapa
Figura. 2.13. Paso de la función de error en una función sigmoidal
Figura. 2.14. Superficie de error en un mínimo local o global
Figura. 2.15. Evolución de las curvas de error para los 3 subconjuntos de datos que se presentan en el entrenamiento de la RNA.
Figura. 3.1. Puntos seleccionados para el ajuste de mínimos cuadrados observados tanto en la cartografía de PSAD56 como en SIRGAS00
Figura. 3.2. Distribución de los puntos seleccionados para el entrenamiento y aprendizaje de la RNA
Figura. 3.3. Topología de la RNA usada en el presente trabajo
Figura. 3.4. Proceso para desarrollar la metodología del entrenamiento de la RNA en latransformación de coordenadas
Figura. 4.1. Determinación de zonas con eventos extremos de distorsión en la zona de
estudio utilizando el ajuste con mínimos cuadrados

Figura. 4.2. Distorsiones generadas en la posición de los 60 datos utilizando parámetros de transformación
Figura. 4.3. Ajuste de los datos de las coordenadas en la simulación de la RNAM
Figura. 4.4. Ajuste de los datos de las coordenadas después del entrenamiento de la RNAM
Figura. 4.5. Diferencia (m) de los valores en coordenadas Este para los 60 puntos observados
Figura. 4.6. Diferencia (m) de los valores en coordenadas Norte para los 60 puntos observados
Figura. 4.7. Diferencias (m) de la posición de los 60 datos en estudio

GLOSARIO
ALTURA ELIPSOIDAL: altura medida desde el punto sobre la superficie terrestre hasta la superficie elipsoidal formando una normal con esta última.
ALTURA ORTOMÉTRICA: altura que se mide desde un punto sobre la superficie terrestres siguiendo la línea de la plomada hasta la superficie del geoide. Esta altura no representa una línea recta debido a las fuerzas de gravedad y centrífuga de la Tierra que actúan sobre ella.
APRENDIZAJE: etapa de la red en donde ha aprendido a generalizar los patronesde los datos de entrada, siendo de capaz de otorgar respuestas con rendimientos similares a pesar de cambiar los datos de entrada.
COOTAD: Código Orgánico de Ordenamiento Territorial, Autonomía y Descentralización.
DATUM: origen de coordenadas de sistemas topocéntricos, que es determinado por sus coordenadas referidas a un elipsoide de referencia, además del desvío de la vertical en el punto.
DISTORSIONES: discrepancias, diferencias, variaciones entre la magnitud, dirección y sentido del resultado deseado y el resultado calculado.
ELIPSOIDE DE REFERENCIA: figura ideal o matemática de la Tierra conformada por parámetros observados sobre la superficie o el exterior.
ENTRENAMIENTO: proceso iterativo de aprendizaje de una red neuronal artificial, en el cual se busca obtener un rendimiento eficiente de la red, en términos de tiempo, error y predicción.
EXTRAPOLACIÓN: predicción de valores que se suponen tendrán un comportamiento similar al de un fenómeno en particular que sigue sus propias reglas, el cual se encuentra fuera del límite de espacio o tiempo.
FUNCIÓN DE ACTIVACIÓN: función matemática continua, creciente y monótona que se encarga de activar o desactivar la señal que será enviada a las neuronas posteriores.
GENERALIZACIÓN: capacidad de las redes neuronales artificiales de predecir patrones extremos que se pueden presentar en los datos.
GEOIDE: superficie compleja que se asemeja a la superficie del nivel medio de los mares en calma, en función de del modelo geopotencial.

GRADIENTE DESCENDIENTE: gradiente opuesto a la función de error de la red, el cual se encarga de seguir el mismo sentido y dirección del vector error con la finalidad de encontrar el mínimo error posible.
GRS80: Geodetic Reference System 1980.
ITRF: International Terrestrial Reference Frame.
ITRS: International Terrestrial Reference System.
MARCO GEODÉSICO: Materialización del sistema geodésico en puntos con coordenadas de precisión y exactitud, realizadas en campañas de mediación.
NIMA: National Imagery Mapping Agency.
ONDULACIÓN GEOIDAL: diferencia de altura existente entre la superficie elipsoidal y el geoide.
PARÁMETROS DE TRANSFORMACIÓN: variables calculadas que se utilizan para compatibilizar dos sistemas de referencia de coordenadas que son diferentes en posición, orientación o tamaño.
PESOS SINÁPTICOS: valores numéricos que determinan el potencial de las señales provenientes de las neuronas de entrada y ocultas.
PRECISIÓN: proximidad de las mediciones entre sí, con respecto a un valor de referencia.
PSAD56: Provisional South America Datum 1956.
RETROPROPAGACIÓN, ALGORTIMO DE: algoritmo de aprendizaje muy común en redes neuronales artificiales multicapa, el cual calcula el error de la red actualizando los pesos sinápticos hasta que estos se ajuste de tal manera que brinden una respuesta cercana a la deseada.
SIRGAS: Sistema de Referencia Geocéntrico para las Américas.
SOBREAPRENDIZAJE: etapa en que la red neuronal artificial memoriza los patrones de entrada y pierde la capacidad de generalizar ante otros eventos externos, tal es así que al presentar diferentes conjuntos de entrada, las respuestas serán similares.
TEST: comprobación del aprendizaje de la red neuronal artificial, que por lo general se presenta a la red un conjunto de datos que siguen una distribución aleatoria para determinar si el entrenamiento ha sido eficiente.
TMQ: Transversa de Mercator Quito, es una proyección cartográfica que se aplica solamente en el Distrito Metropolitano de Quito, la misma que es una modificación de la UTM.

UMBRAL: límite inferior y/o superior que determina la amplitud de la señal antes de ingresar a la función de activación.
UTM: Universal Transversa de Mercator, proyección cartográfica.
VEMOS: Modelo de Velocidades para Suramérica y el Caribe.
WGS84: World Geodetic System 1984.

CAPÍTULO 1
ASPECTOS GENERALES
1.1. INTRODUCCIÓN
Entre las primeras interrogantes de la humanidad desde ya varias épocas es conocer
con certeza ¿dónde estamos?, esta duda ha hecho que varios pensadores propongan varias
teorías sobre la figura de la Tierra y leyes que la gobiernan. Aunque en la actualidad se
conoce la verdadera forma del planeta y se siguen planteando teorías y leyes que
demuestran los fenómenos naturales que rigen la dinámica de la Tierra, aún se discute la
misma pregunta para conocer con exactitud nuestra ubicación sobre la superficie.
En el transcurso de la historia muchos investigadores e interesados se dedicaron a
responder esta interrogante con la adopción de sistemas de coordenadas referidas a
elipsoides de revolución que representaban la forma matemática de la Tierra y con su
origen de coordenadas materializado sobre la superficie, lo cual dio la oportunidad de
representar en planos, cartas o mapas los detalles de la corteza terrestre, pero esta
metodología de posicionamiento es considerada local o regional, es decir, cada país
adoptaba un sistema de referencia propio que se acople mejor a sus condiciones
geográficas.
Actualmente, con el desarrollo de la tecnología de posicionamiento satelital se puede
obtener la posición de un punto en la Tierra con cierto nivel de confianza, referenciada a
un sistema de coordenadas global, con lo cual se pueden desarrollar trabajos, proyectos,
investigaciones georreferenciadas a un sistema de coordenadas único. En este punto fue
preciso determinar metodologías que permitan migrar las coordenadas de los sistemas de
referencia clásicos a los actuales, manteniendo los niveles de precisión acorde a las
necesidades y especificaciones técnicas de la cartografía de cada país.

CAPÍTULO 1. ASPECTOS GENERALES 2____________________________________________________
2
1.2. ANTECEDENTES
La transformación de coordenadas de puntos que se encuentran en diferentes
sistemas geodésicos se lo realiza a partir del surgimiento de los nuevos métodos de
posicionamiento satelital, por lo que es importante que se defina y se estandarice un
sistema único de referencia para la cartografía, es así que a partir de la utilización del
sistema WGS84 (World Geodetic System 1984), en Ecuador se hizo necesario transformar
la antigua cartografía que se encontraba referenciada en PSAD56 (Provisional South
American Datum). Por tal motivo la NIMA (National Imagery and Mapping Agency)
consideró para esta transformación 11 puntos de control en el Ecuador continental para
calcular parámetros de transformación que consistieron en 3 traslaciones, dando errores de
metros en algunas zonas del país, por lo que solamente era compatible para escalas
pequeñas.
Además es importante conocer que el Ecuador cuenta con parámetros de
transformación oficiales entre los sistemas PSAD56 y WGS84 los cuales son compatibles
con escalas menores a 1: 25 0001, estos parámetros de transformación aplica 3 traslaciones,
3 rotaciones y 1 diferencial de escala, por lo cual indican que son aplicables a sistemas de
coordenadas cartesianas, es decir coordenadas (X, Y, Z) de un punto, si bien es cierto
representa una ayuda para transformar la cartografía nacional, estos parámetros no son
aplicables a escalas de mayor detalle. Posteriormente, se realizó investigaciones en este
tema empleando el modelo de velocidades de placas tectónicas VEMOS (Velocity Model
for SIRGAS) mejorando las precisiones de la transformación entre estos sistemas hasta
escalas compatibles a 1: 15 000 y menores2. Cabe recordar que estos resultados son
aplicables solamente para coordenadas cartesianas y los puntos que se emplearon para el
cálculo estaban distribuidos en todo el territorio continental.
Por otro lado, la determinación de parámetros de transformación empleando otras
metodologías como las transformaciones bidimensionales con coordenadas planas (Este -
Norte) resulta útil para obtener soluciones a este tema, en donde se calculan 4 parámetros
1Leiva, C., “ Determinación de parámetros de transformación entre los Sistemas PSAD56 y WGS84 para el país”, 2003
2Santacruz, A., “Transformación entre el sistema PSAD56 y los marcos de referencia ITRF utilizando modelos de Helmert y velocida-
des de placas tectónicas VEMOS”, 2010.

CAPÍTULO 1. ASPECTOS GENERALES 3____________________________________________________
3que consideran: 2 traslaciones, 1 rotación y 1 factor de escala. Se debe tener en cuenta que
esta técnica puede generar errores sistemáticos, además que su entorno de validez es para
áreas de extensión pequeña lo cual no permite un extrapolación de resultados, pero al no
dar resultado ninguna otra técnica de transformación ya sea por la poca disponibilidad y
calidad de los datos, se recurre a esta metodología3, que generalmente ha sido usado en
áreas como la fotogrametría.
Siguiendo los lineamientos del párrafo anterior, se realizaron cálculos para
determinar nuevos parámetros de transformación utilizando coordenadas planas
proyectadas (Este - Norte) que sean compatibles con escalas de detalle catastral sea para
zonas rurales así como también para zonas urbanas. El cálculo se realizó con la técnica de
ajuste de mínimos cuadrados dando como resultado 4 parámetros de transformación que al
calcular las coordenadas, éstas lograron ser compatibles con escalas menores a 1: 5 000,
por lo tanto son aplicables solamente para zonas rurales4.
En el Ecuador la aplicación de redes neuronales artificiales en geodesia ha sido poco
estudiada y desarrollada, a pesar de ello se demostró que al aplicar una red neuronal
artificial utilizando coordenadas cartesianas (X, Y, Z) se puede transformar del sistema
PSAD56 al SIRGAS (Sistema de Referencia Geocéntrico para las Américas) en escalas 1:
5000 y menores5. Pero esta metodología no se ha usado aplicando coordenadas planas.
1.3. DESCRIPCIÓN DEL PROBLEMA
En el país existen municipios o niveles de gobierno que cuentan con cartografía
catastral referenciada en PSAD56 mientras que los proyectos actuales de posicionamiento
satelital por GPS (Global Positioning System) están referenciados al datum geodésico
WGS84, el cual es compatible con el ITRF2000 (International Terrestrial Reference Frame
2000), dado que no existen diferencias significativas desde el punto de vista cartográfico6.
Por lo que los parámetros de transformación oficiales para Ecuador entre estos sistemas no
se acoplan a estas escalas catastrales que necesitan los niveles de gobierno.
3Pérez, R., “Parámetros de transformación entre el Sistemas SIRGAS95 y los sistemas locales CDM y ROU-USAMS (Yacaré)”, 2002.
4Romero, R. & Tierra, A., “Parámetros de transformación entre sistemas de referencia proyectados UTM-PSAD56 Y SIRGAS00 para
escalas catastrales”, 2012.5
Tierra, A., “Transformación entre los sistemas geodésicos PSAD56 y SIRGAS usando una Red Neuronal Artificial”, 2009.6 Tierra, A., “Estado actual del cambio para el Sistema de Referencia Geocéntrico SIRGAS95 en el Ecuador”, 2007.

CAPÍTULO 1. ASPECTOS GENERALES 4____________________________________________________
4Por otro lado, la información que se necesita para transformar sistemas geodésicos de
referencia y que además sean compatibles con escalas catastrales es muy limitada, por el
hecho de que se necesita una cantidad necesaria de puntos de control de precisión en el
territorio de estudio con coordenadas observadas en ambos sistemas. Esta limitante de in-
formación induce a usar en el cálculo la observación de puntos de las esquinas de los pre-
dios en lugar de puntos de control geodésicos.
Además cabe mencionar que a nivel mundial y regional con el desarrollo del posi-
cionamiento satelital, va aumentando el número de usuarios de la tecnología GPS7 con
nuevas aplicaciones como proyectos de infraestructura rural y urbana, delimitación de tie-
rras, gestión del riesgo y ordenamiento territorial entre las más empleadas en planificación.
1.4. JUSTIFICACIÓN
Realizar nuevamente proyectos para el levantamiento del catastro de un municipio
referenciado en SIRGAS para tener actualizada la base de información catastral implica
una fuerte inversión económica, además de requerir el personal con la capacidad técnica
indicada para realizar estos proyectos y, hardware y software entre el equipo tecnológico
necesario.
Por otra parte, desde la publicación y vigencia del COOTAD (Código Orgánico de
Ordenamiento Territorial, Autonomía y Descentralización), los niveles de gobierno des-
centralizados deben administrar y actualizar su sistema de información catastral, según el
artículo 139 de este código, esto servirá para diseñar programas y proyectos dirigidos a un
correcto ordenamiento territorial además de mitigar rezagos sociales del sector8, por lo
tanto esto obliga a los municipios a cumplir con los requerimientos establecidos por la ley.
Por lo antes señalado es importante establecer una metodología que permita trans-
formar la cartografía catastral de sistemas clásicos a modernos con los niveles de precisión
7Tierra, A.,” Evaluación del EGM08 y EGM06 en el Ecuador a partir de datos GPS y nivelación geométrica”, 2009.
8González, G., “Cartografía catastral y planeación urbana y regional”, Revista de Información y Análisis, num 18, México 2002.

CAPÍTULO 1. ASPECTOS GENERALES 5____________________________________________________
5requeridos, y además de ello que sea de forma eficiente para poder aprovechar las ventajas
y oportunidades que ofrece la navegación satelital por GPS9.
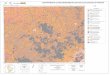
1.5. DESCRIPCIÓN DEL ÁREA DE ESTUDIO
El área de estudio seleccionada comprende una extensión de aproximadamente 212
hectáreas que corresponden a 12 hojas catastrales escala 1:1000 con la siguiente referencia
geográfica:
País: Ecuador
Provincia: Pichincha
Cantón: DM Quito
Las coordenadas locales en las cuales se encuentra el área de estudio están
georreferenciadas en la proyección TMQ (Transversa Modificada para Quito), las mismas
que están representadas en la tabla 1.1.
Tabla. 1.1. Coordenadas del área de estudio
TMQ – PSAD56 TMQ – SIRGAS00
ESTE (m) NORTE (m) ESTE (m) NORTE (m)
501500 9982000 501263.3 9981632.5
502700 9982000 502463.3 998163.5
502700 9982800 502463.3 9982432.5
501500 9982800 501263.3 9982432.5
1.6. OBJETIVO GENERAL
Determinar una metodología que permita transformar entre sistemas de referencia
proyectados, utilizando una red neuronal artificial multicapa que facilite la migración de
información optimizando recursos económicos y tiempo.
9Tierra, A. et al, “Using an artificial neural network to improve the transformation of coordinates between classical geodetic reference
frames”, 2007

CAPÍTULO 1. ASPECTOS GENERALES 6____________________________________________________
61.7. OBJETIVOS ESPECÍFICOS
Observar coordenadas de puntos homólogos de las hojas catastrales en los sistemas
TMQ-PSAD56 y TMQ-SIRGAS.
Determinar la mejor arquitectura de la RNA mediante un entrenamiento supervisado
y validación del aprendizaje.
Transformar puntos de entrenamiento, validación y comprobación para determinar el
error entre los valores transformados y observados a fin de conocer la capacidad de
generalización y aprendizaje de la red.
Comprobar los resultados obtenidos con la RNA con una transformación bidimen-
sional conforme.
1.8. METAS
Determinar tres conjuntos de datos: de entrenamiento, validación y comprobación de
la RNA.
Un programa diseñado en MATLAB que transforme las coordenadas planas de un
sistema geodésicos clásico a uno geocéntrico.
Mapa de distorsiones de las coordenadas Este – Norte calculadas vs las observadas.

CAPÍTULO 2
MARCO TEÓRICO
2.1. SISTEMAS DE REFERENCIA TOPOCÉNTRICOS
Los sistemas de referencia topocéntricos o locales son definidos por un elipsoide de
referencia y un datum (origen) que mejor se acople a las condiciones geográficas de una
región o país (dependiendo de la extensión), es decir, el punto origen se precisa en la
superficie terrestre y a partir de este se materializan los vértices de una red geodésica
utilizando métodos clásicos de triangulación. Es importante conocer que la definición del
datum es el punto donde coincide la normal elipsoidal con la vertical del lugar, además
estos sistemas solamente soportan el marco de referencia geodésico horizontal, lo que
significa que únicamente se puede calcular coordenadas geodésicas (latitud, longitud) o
proyectadas (Este-Norte), por consiguiente el sistema de referencia vertical es definido
independientemente de las densificaciones de red por medio de campañas de nivelación
desde una cota inicial, que generalmente se lo hace desde un mareógrafo.
La desventaja de estos sistemas locales es que cada país o región realiza la
materialización de su red acorde con los parámetros del elipsoide y datum elegidos, lo cual
provoca incompatibilidad entre otras redes adyacentes, especialmente en las zonas
fronterizas.
2.1.1.PROVISIONAL SOUTH AMERICA DATUM 1956 (PSAD56)
Este sistema de referencia topocéntrico fue adoptado como sistema oficial por varios
países en Suramérica en el año de 1956, y como su nombre lo indica (Provisional) fue
implementado para dar soluciones emergentes de la época, el cual está conformado por los
siguientes parámetros:
Elipsoide de referencia: Internacional de Hayford.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 8
Datum: La Canoa. Venezuela.
Desviación de la vertical: !"#$%&'()(*!"(-0.15”
2.2. SISTEMAS DE REFERENCIA GEOCÉNTRICOS
Los sistemas de referencia geocéntricos quedan definidos por un sistema de ejes
cartesianos ortogonales (X, Y, Z) que tiene como datum el centro de masas de la Tierra, el
eje Z sigue la dirección del polo, el eje X descansa en el plano ecuatorial y el eje Y es
ortogonal a los anteriores, por lo tanto es un sistema tridimensional de alcance mundial9.
2.2.1.SISTEMA DE REFERENCIA GEOCÉNTRICO PARA LAS AMÉRICAS
(SIRGAS)
La definición del sistema SIRGAS fue basada en las convenciones establecidas por
el Sistema Internacional de Referencia Terrestre (ITRS por sus siglas en inglés), el cual se
materializa en el Marco Internacional de Referencia Terrestre (ITRF por sus siglas en
inglés) y utiliza el elipsoide GRS80 (Geodetic Reference System 1980) como referencia
para coordenadas geodésicas. La primera realización de SIRGAS, se hizo coincidir con la
materialización del ITRF94 época 1995.4 con un total de 58 estaciones observadas en
simultáneo con el apoyo de los países de Sudamérica, quedando establecido el sistema
SIRGAS95. A partir de este, se realizaron nuevas observaciones en el año 2000 con 184
estaciones correspondientes al ITRF2000 y época 2000.4, la cual se la denominó
SIRGAS00, y finalmente la última realización de SIRGAS es la red que opera de forma
continua con 250 estaciones, la misma que se denomina SIRGAS-CON10.
El sistema SIRGAS soporta las nuevas tecnologías de posicionamiento satelital
dando la oportunidad de georreferenciar los levantamientos, mediciones y ajustes en un
sistema homogéneo y de mayor cobertura. Además es preciso señalar que la evolución de
la exactitud del geocentro entre WGS84 e ITRF alcanzó una diferencia mínima en el año
2000, por lo cual para fines cartográficos esta diferencia es despreciable para coordenadas
obtenidas en WGS84 e ITRF200011.
9 Pallejá, E., Comité Nacional de la Unión geodésica y Geofísica Internacional, “Sistemas Geodésicos”, 1999.10 Página web Oficial de SIRGAS, www.sirgas.org, Fecha de ingreso, enero 2013.11 Tierra, A., “Estado actual del cambio para el Sistema de Referencia Geocéntrico SIRGAS95 en el Ecuador”, 2007.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 9
En la figura 2.1, se ilustra los sistemas antes mencionados PSAD56 y SIRGAS, en
donde se observa la diferencia entre un sistema topocéntrico y geocéntrico, además de la
heterogeneidad de ambos sistemas en cuanto se refiere a paralelismo y escalamiento.
Figura. 2.1. Diferencia entre un sistema topocéntrico y geocéntrico
Fuente: UNLP - Facultad de Ciencias Astronómicas y Geofísicas, 2012
2.3. SISTEMAS DE PROYECCIÓN CARTOGRÁFICA
Los sistemas de proyección sirven para representar en un plano la Tierra o parte de
ella, manteniendo una relación biunívoca entre las coordenadas de la superficie que será
proyectada y las coordenadas del elipsoide al que está referida dicha superficie12, esta
relación se la puede expresar de la siguiente manera:
x= f1 !"#$%
2.1.y= f2 !"#$%
Donde (x, y) representan las coordenadas planas deducidas a partir de las
coordenadas elipsoidales !" $% utilizando la función matemática especificada por cada
sistema de proyección, obviamente estos sistemas de proyección generan distorsiones en
las distancias y ángulos durante la transformación por lo cual se busca que el modelo
matemático mantenga las mínimas discrepancias entre distancia y ángulos en la región de
12
Molina, L., “Validación de modelos de transformación bidimensional para compatibilizar bases cartográficas escala 1:10000”, Curitiba, 2007.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 10
validez de la proyección13. Entre los tipos de sistemas de proyección se puede citar los que
se detallan en la tabla 2.1.
Tabla. 2.1. Clasificación de los sistemas de proyección cartográfica
A. En función de la superficie sobre la que
se proyecta
- Proyección cilíndrica
- Proyección cónica
- Proyección Azimutal
B. En función de la superficie sobre la que
se proyecta con respecto al eje de la Tierra
- Proyección normal
- Proyección transversa
- Proyección oblicua
- Proyección polar
- Proyección ecuatorial
C. En función de las deformaciones
- Proyección conforme
- Proyección equivalente
- Proyección equiárea
- Proyección equidistante
- Proyección afiláctica
D. En función de la posición del centro de
proyección
- Proyección gnomónica
- Proyección estereográfica
- Proyección escenográfica
- Proyección ortográfica
E. En función de la orientación del punto
de vista
- Proyección polar
- Proyección meridiana
- Proyección cenital
- Proyección azimutal
Fuente: IGM Ecuador, 2005
2.3.1.SISTEMA UNIVERSAL TRANSVERSAL DE MERCATOR (U.T.M.)
Es una proyección conforme usada en casi todo el mundo, el cual utiliza un cilindro
transversal que está tangente con la línea ecuatorial y se lo hace coincidir con un meridiano
central en donde se forma un sistema de coordenadas planas con el origen situado en la 13 Pallejá, E., “Sistemas Geodésicos de Referencia”, 1ra edición, Comité Nacional de la Unión Geodésica y Geofísica Internacional, 1999.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 11
intersección entre el ecuador y el meridiano central seleccionado. Algunas consideraciones
de este sistema se enlistan a continuación.
Es un cilindro secante entre las latitudes 80° N – 80° S, esto debido a que se generan
distorsiones conforme se aumenta la latitud.
Está dividido en 60 zonas de 6° de longitud cada una.
El meridiano central es la semisuma de los meridianos de las fronteras.
La numeración inicia en el meridiano 180° Este a partir del meridiano de Greenwich.
El origen en el hemisferio norte tiene coordenadas Este-Norte (500 000; 0) m.
El origen en el hemisferio sur tiene coordenadas Este-Norte (500000; 10 000000) m.
Elipsoide de referencia es adoptado por cada región o país.
2.3.2.TRANSVERSA MERCATOR DE QUITO (T.M.Q.)
Es una modificación de la proyección transversa de Mercator, en donde se modifica
el meridiano central y el factor de escala, además que solamente es aplicable para el
Distrito Metropolitano de Quito, lugar donde se aplica la metodología en estudio. Los
parámetros de la proyección TMQ se encuentran en la tabla 2.2.
Tabla. 2.2. Parámetros proyección TMQ.
Meridiano central 78° 30’ 00”
Origen de latitudes 0° 0’ 0”
Factor de escala 1.0004584
Falso Este 500 000 metros
Falso Norte 10 000000 metros
Zona 17 Sur modificada (w77° - w80°)
Fuente: Distrito Metropolitano de Quito, 2007.
2.4. TRANSFORMACIONES ENTRE SISTEMAS DE REFERENCIA
GEODÉSICOS
Existen varios métodos convencionales para transformar las coordenadas de un
sistema a otro, entre las más conocidas se tiene, por ecuaciones de regresión múltiple y
parámetros de transformación. La elección de cualquiera de estas alternativas para

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 12
transformar las coordenadas de un sistema a otro debe actualizar el marco geodésico
mejorando la consistencia de la red y minimizando las distorsiones acumuladas en el
tiempo, con el objetivo de evitar la obsolescencia de la antigua red para comparar y
estandarizar los resultados14.
2.4.1.TRANSFORMACIÓN TRIDIMENSIONAL. MÉTODO DE HELMERT
Esta transformación es válida entre sistemas que cuentan con coordenadas
cartesianas o geocéntricas (X, Y, Z) y los parámetros son calculados a partir de puntos
comunes observados en ambos sistemas, en donde la calidad de los parámetros de
transformación encontrados puede depender del entorno de validez y la calidad de los
puntos de control15.
El modelo matemático para la metodología de Helmert toma en consideración 7
parámetros de transformación: 3 traslaciones, 3 rotaciones y un diferencial de escala:
[ !] = (1 + ") # [$%] # [ &] + ['] 2.2.
Donde:
[XG] y [XT], son las matrices que contienen las coordenadas cartesianas de los puntos
comunes de los sistemas geocéntricos y topocéntricos, respectivamente.
[Rx] y [T], son las matrices de rotación y traslación, respectivamente.
&: es el diferencial de escala.
Para la obtención de las coordenadas (X, Y, Z,) de un punto de un sistema
topocéntrico como es el caso de PSAD56, es necesario conocer la altura elipsoidal que es
calculada mediante la ondulación geoidal y la altura ortométrica, para lo cual se realiza el
siguiente cálculo:
h=H+ n 2.3.
14 INEGI, El cambio de Marco de Referencia Terrestre Internacional (ITRF) en México, Abril, 2011.15 Instituto Geográfico Agustín Codazzi, Parámetros oficiales de transformación para migrar a MAGNA-SIRGAS la información existentes en Datum BOGOTÁ, 2004.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 13
Donde:
h= altura elipsoidal
H=altura ortométrica
n= ondulación geoidal
En el caso de Ecuador, al no contar con un geoide de precisión se pueden calcular las
coordenadas cartesianas obviando la altura elipsoidal o tomando valores arbitrarios,
teniendo en cuenta que la diferencia o error en la posición es afectada en el orden
decimétrico por la variación de valores de la altura elipsoidal16.
Los requerimientos necesarios para esta metodología es emplear por lo menos 3
puntos comunes entre ambos sistemas para obtener un sistema de 9 ecuaciones con 7
incógnitas. En la figura 2.2 se observa como actúa los 7 parámetros en la transformación
de Helmert.
Figura. 2.2. Transformación de Helmert
Fuente: Instituto Geográfico Agustín Codazzi, 2004
16 Escalona, P., & Iturra, S., “Análisis de la metodología de transformación de PSAD56 a SIRGAS en el catastro minero de la zona de Til-Til”, 2006.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 14
Según (Rodriguez et al, 1997)17, algunos problemas que se sucitan en esta
transformación es cuando la calidad de los puntos de control del sistema clásico son
deficientes, generando 2 tipos de errores fundamentales:
El primero definido por el comportamiento estadístico aleatorio que se puede
solventar empleando mayor cantidad de puntos de control.
El segundo es la propagación sistemática de errores, por el hecho que no son
suficientes los 7 parámetros de transformación.
2.4.2.TRANSFORMACIÓN BIDIMENSIONAL CONFORME
La transformación bidimensional conforme es una derivación del método de Helmert
y como es evidente en su nombre, es empleada para coordenadas planas, en este caso
(Este-Norte) en donde se calculan 4 parámetros de transformación: 2 traslaciones, 1
rotación y 1 factor de escala, además es imprescindible conocer al menos 3 puntos
comunes en ambos sistemas. Lo destacado de esta transformación es que no varía la
verdadera forma de la superficie después de la transformación18. En la siguiente ecuación
se observan las ecuaciones de condición para la transformación conforme bidimensional.
Es=a Ep+b Np+TE
2.4.
Ns=a Np-b Ep+TN
Donde:
(ES,NS) y (EP, NP), son las coordenadas proyectadas Este-Norte del sistema SIRGAS
y PSAD56, respectivamente.
a y b, son parámetros para calcular el factor de escala y el ángulo de rotación, como
se aprecia en la ecuación 2.5.
17 Rodríguez, R., Brunini, C. & Olondriz, J., “El problema de la determinación de parámetros de transformación”, Universidad Nacional de la Plata, 1997.18 Pérez, J., “Apuntes de Fotogrametría II”, Mérida, 2001.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 15
k = !"#$%& !a2+b2
2.5.
'(%)%&%*+,
Donde:
k = factor de escala-%.,/.0/,12%,%3,4'54%16/%1576468.5,/%16%69.,/,% :$.
!= ángulo de rotación
En la figura 2.3. se ilustra la transformación bidimensional conforme entre 2
sistemas, para calcular las coordenadas de un punto.
Figura. 2.3. Transformación bidimensional de Helmert
Fuente: Pérez J., 2001
Esta metodología considerada, genera fuertes errores sistemáticos, y su entorno de
validez es para cubrir áreas pequeñas además que los parámetros obtenidos son
exclusivamente para ese sector, impidiendo su extrapolación, por lo que se requiere de una
zonificación de parámetros de transformación, es decir, cada sector o zona de estudio
tengan su propios parámetros 19, si se desea extender a mayores superficies de territorio. A
pesar de estas limitantes, se demostró que empleando esta transformación bidimensional se
pueden alcanzar buenos resultados para transformar la cartografía de escalas menores a
1:500020.
19 Pérez, R., “Parámetros de transformación entre el Sistemas SIRGAS95 y los sistemas locales CDM y ROU-USAMS ”, 2002, pág. 5-6.20 Romero R. & Tierra A., “Parámetros de Transformación entre Sistemas de Referencia Proyectados UTM-PSAD56 y UTM-SIRGAS00 para escalas catastrales: Caso Distrito Metropolitano de Quito”,2012.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 16
2.5. AJUSTE DE MÍNIMOS CUADRADOS
El ajuste de mínimos cuadrados se fundamenta en que se asume que el valor más
probable de una variable es el valor que hace la suma de los cuadrados de los residuos sea
mínima, para lo cual se debe minimizar la siguiente función.
" = #$% # 2.6.
Donde se aprecia claramente que la función ;$% 69% 6/% 34210.'2% <,'45.5,/% 16% /29%
vectores residuales del ajuste (V), multiplicados por la matriz de pesos (P). Uno de los
métodos empleados en este ajuste es el de las observaciones ajustadas (La) en función de
las variables ajustadas F(Xa), más conocido como el método paramétrico, que se
fundamenta en la formulación de ecuaciones de condición21, como se indica en la ecuación
2.7.
La = F(Xa) 2.7.
En donde es necesario calcular las variables ajustadas (Xa) mediante la suma de los
valores aproximados de los parámetros desconocidos (Xo) y los parámetros calculados (X),
de la siguiente forma:
Xa=Xo+X 2.8.
De esta manera se calcula el vector de las observaciones ajustadas, aplicando el
método de mínimos cuadrados
La=Lb + V 2.9.
Donde,
Lb= vector de observaciones realizadas
V= vector de valores residuales
21 Passos, G., “Formación Continua en Georreferenciación aplicada al catastro rural”, 2005.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 17
Los valores de Xo son estimaciones que se pueden hacer por métodos gráficos o
datos preliminares que se posea, mientras que los valores del vector X se calculan a partir
del modelo de linealización de observaciones indirectas del modelo matemático de
mínimos cuadrados que se presenta a continuación.
Al reemplazar 2.7 en 2.9, se tiene:
F(Xa) = Lb + V 2.10.
De esta manera se obtiene:
F(Xa) = Lb + V = F(Xo + X) = F(Xo) + #=
#>,|Xo&X 2.11.
De 2.11 se entiende que
F(Xo) = Lo 2.12.
#=
#>,|Xo&X = AX 2.13.
Donde,
Lo = vector de las observaciones aproximadas de los parámetros aproximados Xo.
A= matriz de las derivadas parciales de las ecuaciones de condición o también
conocido como Jacobiano.
Por lo tanto se puede expresar 2.11 de la siguiente manera:
Lb + V = Lo + AX 2.14.
Obteniendo el modelo linealizado de las observaciones del método paramétrico
AX - L = V 2.15.
Donde,
L= Diferencia entre las observaciones realizadas de las observaciones aproximadas

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 18
Desde 2.15 se puede aplicar el principio de mínimos cuadrados, representada en 2.16
para calcular matricialmente el valor del vector X, dando como resultado que,
X = (AT P A)-1(AT P L) 2.16.
Al terminar el ajuste se procede a calcular la varianza a posteriori que es un
estimador de la calidad del ajuste, para lo cual se puede calcular en función de los residuos
como se aprecia a continuación
'()=VT?@?A
n-u2.17.
Donde,
n= número de ecuaciones de condición
u= número de parámetros
Finalmente se calcula la matriz de varianza-covarianza de las observaciones
ajustadas para conocer las precisiones de las mismas, de la siguiente manera:
* Xa = B(2?+AT?@?C,-12.18.
2.6. REDES NEURONALES ARTIFICIALES
Las redes neuronales artificiales (RNA), aparecen como solución a la representación
del conocimiento en el campo de la Inteligencia Artificial (IA), que era típicamente
representado por redes y reglas semánticas o modelos probabilísticos, pero fueron
apareciendo problemas más complejos que no podían expresar el conocimiento tan
explícitamente, ni procesarlo, ni tampoco empleando razonamiento lógico. Es así que se
decide emplear unidades computacionales procesadoras de información en forma paralela e
interconectadas entre sí, similiar a las neuronas biológicas, de esta manera se implementó
las redes neuronales artificiales22.
22 Salao, J., “Estudio de las técnicas de Inteligencia Artificial mediante el apoyo de un software educativo”, 2009.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 19
2.6.1.NEURONA BIOLÓGICA
La neurona biológica recibe señales por medio de la sinápsis que se origina en las
dendritas o membrana celular las cuales son emisoras de la señal proveniente de otra
neurona, si la señal recibida es lo suficientemente fuerte es capaz de activar la neurona y
emitir un flujo de información a través del axón que enviará a otra neurona siguiendo el
mismo proceso explicado. En la figura 2.4 se ilustra este proceso.
Figura. 2.4. Proceso de sinapsis de una neurona biológica
Fuente: Gershenson C, 2003.
2.6.2.FUNDAMENTOS BIOLÓGICOS
Una red neuronal artificial intenta simular las estructuras biológicas del sistema
nervioso, tomando en cuenta que el cerebro es un superprocesador complejo, no lineal y
paralelo con alrededor de 1011 neuronas y 10 veces más de conexiones 1012, las cuales
tienen la capacidad de:
Recuperar la información y realizar las tareas que anteriormente lo hacían neuronas
muertas, es decir, se autorecuperan.
Construir sus propias reglas de aprendizaje a través de la experiencia (conocimiento
adquirido).

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 20
Realizar cálculos muy complejos en paralelo como la visión que es un proceso
cerebral realizado en muy corto tiempo.
Son responsables de la memoria o inteligencia que no es mas que el acceso al
conocimiento.
2.6.3.SEMEJANZAS ENTRE NEURONAS BIOLÓGICAS Y NEURONAS
ARTIFICIALES
La semejanza está determinada en las entradas (sinapsis) que son multiplicadas por
pesos (fuerza de las señales sinápticas) y calculadas por una función de sumatoria que
determina la activación de la neurona. Finalmente otra función matemática (señal que viaja
por el axón) calcula la señal de salida de la neurona hacia otra neurona interconectada que
recibirá la señal y de esta forma se da origen a una nueva sinapsis. En la figura 2.5 se
observa esta semenjanza entre neuronas biológicas y artificiales, donde se aprecia
claramente que las entradas (E) de la neurona artificial cumplen con la función de las
dendritas de una neurona biológica, mientras que el cuerpo celular de la neurona
.24469328168%,%/,%90<,'245,%16%/,9%68'4,1,9% D$%E%/,%708.5F8%16%,.'5G,.5F8% 7 ?$$-%758,/<68'6%
la señal de salida de la neurona artificial corresponde al impulso de activación que viaja a
través del axón para realizar la sinápsis con otra neurona.
Figura. 2.5. Semejanza entre una neurona biológica y una neurona artificial

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 21
Es preciso señalar también que estas semejanzas están basadas en algunas funciones
cerebrales tales como23:
Se auto organiza de manera que crea su propia representación de la información.
Tolera fallos, como se explicó anteriormente es capaz de suplir actividades de
neuronas dañadas.
Tiene la capacidad de generalizar.
Los procesos de aprendizaje de la RNA derivan en conocimiento adquirido cuando la
red es estimulada por el ambiente que la rodea.
Las dendritas son las portadoras del conocimiento adquirido (memoria) en los
procesos de aprendizaje.
2.6.4.ELEMENTOS BÁSICOS DE UNA RED NEURONAL ARTIFICIAL
Al igual que en el cerebro humano, la neurona es el elemento principal de una red
neuronal artificial, de igual manera el elemento fundamental de una red neuronal artificial
es la neurona artifical, por lo tanto, para ejemplificar su funcionamiento, se presenta en la
figura 2.6 una neurona artificial, en donde se observa que la suma de las n entradas (xj) de
la neurona i, multiplicada por los pesos sinápticos (wij), genera la entrada ponderada total
o potencial postsináptico de la neurona i. La función de los pesos sinápticos es medir la
fuerza de interconexión entre las neuronas enlazadas, posterior a esto se observa que la
sumatoria de las señales del potencial postsináptico más el umbral ("i) deben pasar por una
función de activación o de transferencia (f(?)), obteniendo la señal de salida (yi) de la red
neuronal.
23 Daza, S., Redes neuronales, http://www.monografias.com/trabajos12/redneur/redneur.shtml, 2008-10, 2012-10

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 22
Figura. 2.6. Modelo de una neurona artificial
Fuente: Nacelle A., 2009
El funcionamiento de la neurona (i), ilustrada en la figura anterior y explicada
anteriormente, también se puede expresar como modelo matemático de la siguiente forma.
yi=f+* wij?xj -Hi, 2.19.
Finalmente se puede resumir que la estructura interna general de una RNA queda
conformada por los siguientes elementos:
El conjunto de capas donde se puede encontrar la capa de neuronas de entradas que
se le presenta a la red para iniciar con el entrenamiento, la capa de neuronas ocultas
que reciben la información de capas anteriores y la envían a la capa de salida.
Los pesos sinápticos que son aleatorios y se ajustan en función de los algoritmos de
aprendizaje.
Un elemento externo de cada una de las entradas de la red que cumple la función de
aumentar o disminuir el valor de la señal ponderada o postsináptica, la cual se
denomina umbral.
El sumador lineal que es el encargado de enviar las señales postsinápticas más el
umbral a la función de activación de la red.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 23
La función de activación o de transferencia que por lo general es determinista y en la
mayoría de los casos es creciente y contínua; mas adelante se verá un apartado sobre
funciones de activación.
La señal que origina la función de activación es la respuesta de la red que se
transmitirá al exterior.
Es preciso indicar aspectos prácticos para lectores que desean familiarzarse con redes
neuronales artificiales que ven la necesidad de comprender su funcionamiento, por tal
motivo en el anexo 1 se encuentra un ejercicio práctico que trata principalmente sobre las
variaciones aleatorias de los pesos sinápticos y la función de los umbrales, ejercicios como
este, que sirven de iniciación en el conocimiento de redes neuronales se lo puede encontrar
a mayor detalle en (Gershenson, C., 200324).
2.6.5.PROCESOS DE APRENDIZAJE DE UNA RNA
El aprendizaje de una red neuronal artificial no es mas que la solución de un
problema mediante un proceso en el cual los parámetros libres (pesos sinápticos) de la red
se adaptan a las modificaciones que ocurren en la estructura interna de la red y en el
ambiente que la estimula, a este proceso se lo denomina como algoritmo de aprendizaje.
Con esto se puede decir que una red neuronal con el tiempo puede aprender las
propiedades del ambiente con la que interactúa y las características de los datos que se le
presentan.
El objetivo del aprendizaje es mejorar el rendimiento de la red en función de la señal
de error que se origina en la salida de la red, esto se hace en función del ajuste de los pesos
hasta lograr que se estabilicen. La estabilización es cuando la red almacena en sus
conexiones la información o dicho de otra manera se guarda en la memoria, tal como se
mecionó en el apartado 2.6.3. Es importante recordar que una de las particularidades de las
redes neuronales es la capacidad de generalizar, es decir, que proporciona respuestas
similares con diferentes conjuntos de entrada de manera que se la pueda emplear en
cualquier circunstancia, pero si la red memoriza los patrones de entrada que se utilizó en
24 Gershenson, C., “Artificial Neural Networks for beginners”, 2003.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 24
un principio (entrenamiento) y los emplea para dar una respuesta a pesar de cambiar los
valores de entrada, se dice que la red tiene un sobreaprendizaje y pierde la capacidad de
generalizar25, en la figura 2.7 se puede observar como se produce el aprendizaje y
sobreaprendizaje de una red. Para ayudar a mitigar el efecto del sobreaprendizaje se
necesitan 3 conjuntos de datos de entrada y salida, los cuales se distribuyen de la siguiente
manera:
Datos de entrenamiento que son usados en la fase inicial del aprendizaje, en donde se
le presenta a la red las entradas y las salidas esperadas.
Datos de validación , los cuales se le presenta a la red con los eventos más extremos
(valores máximo y mínimos) para mejorar la capacidad de generalización de la red,
de esta manera se intenta garantizar un buen entrenamiento26.
Datos de test los cuales deben estar valores aleatorios sin ningún sesgo en especial
que representen el problema en cuestión.
Figura. 2.7. Generalización por Aprendizaje (a), Sobreaprendizaje (b)
25 Chacón, A., “Predicción de ondulaciones geoidales a través de una red neuronal artificial en un área del Distrito Metropolitano de Quito”, 2010.20 Najah, A., El-Sahfie, A., Karim, O. & El-I,J756%KL-M%C33/5.,'528%27%,4'5N.5,/%8604al networks for water quality prediction”, 2012.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 25
2.6.6.TIPOS DE APRENDIZAJE
Según Nacelle A.,27 se puede diferenciar los procesos de aprendizaje en función de la
modificación de la estructura interna de la red y de los cambios iterativos de las conexiones
sinápticas como se demuestra a continuación:
APRENDIZAJE SUPERVISADO
El aprendizaje supervisado se da cuando se le presenta a la red un conjunto de datos
de entrada que serán usados para calcular una respuesta al problema presentado, esta
respuesta es comparada con un conjunto similar de datos de salida y, la diferencia que se
obtenga entre la respuesta de la red y la respuesta deseada se constituye en la función de
error, es en este punto donde interviene un agente externo de la red (supervisor) que se
encarga de determinar las modificaciones de los pesos sinápticos hasta minimizar el error.
APRENDIZAJE NO SUPERVISADO O AUTOORGANIZADO
En este aprendizaje no es necesaria la presencia de un agente externo para ayudar a
la red a mejorar su rendimiento, la misma red mediante el algoritmo de aprendizaje
seleccionado ajusta los pesos de las capas de entrada y ocultas, de manera que, solamente
se le presenta a la red un conjunto de datos de entrada y no de salida deseada para la
comparación. Este tipo de aprendizaje es utilizado en redes neuronales que tendrán el
objetivo de relacionar, clasificar o reconocer patrones que se encuentran implícitamente en
los datos de entrada.
APRENDIZAJE HÍBRIDO
Se da este apendizaje cuando la red presenta las características de los aprendizajes
antes señalados, pero en diferentes capas de la red neuronal.
APRENDIZAJE REFORZADO
A diferencia del apendizaje híbrido, este toma funcionalidades del aprendizaje
supervisado y no supervisado para mejorar la respuesta, en el caso del supervisado lo que
27 Nacelle, A., “Redes Neuronales Artificiales”, 2009

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 26
hace es indicar si el rendimiento global de la red está actuando bien o no, así el supervisor
envía un señal de aprobación o negación y, en el caso del aprendizaje no supervisado,
ajusta los pesos en función de probalidades y no se basa en respuestas deseadas.
2.6.7.FUNCIONES DE ACTIVACIÓN O DE TRANSFERENCIA
Como se mencionó anteriormente, la función de activación es monótona, continua,
creciente y en la mayoría de los casos es derivable en todos sus puntos. Es la encargada de
limitar la amplitud de la señal proveniente de las capas precedentes de la red neuronal, la
misma que se encarga de activar o desactivar la señal que se emitirá a capas posteriores de
la red, a esto se denomina el estado de activación.
En definitiva, el estado de activación es un valor numérico asociado a la neurona que
dependiendo de la función puede variar su rango entre [-1,1] y [0,1]. Entre las funciones de
activación comunmente empleadas (ver figura 2.8.) se tiene:
Figura. 2.8. Funciones de activación más empleadas
Fuente: Nacelle A., 2009
2.6.8.ARQUITECTURA DE REDES NEURONALES ARTIFICIALES
La clasificación de las redes neuronales en función de su arquitectura se basa en el
número de capas que contenga la red, por ejemplo:

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 27
Redes monocapa: es la forma más fundamental de representar una red neuronal
artificial, debido a que contiene en su estructura una sola capa, es decir, las neuronas
de la capa de entrada que se conectan completa y directamente con la capa de salida.
Redes Multicapa: La característica principal de estas redes es la presencia de una o
más capas ocultas que procesan la información recibida por la capa de entrada que
está en constante interacción con el entorno, este tipo de red puede estar total o
parcialmete conectada.
Redes recurrentes: Las conexiones de este tipo de redes pueden ser entre neuronas
de la misma capa, de diferentes capas o con la misma neurona , por lo que es
empleada para el estudio de sistemas no lineales. Para una mejor ilustración, en la
figura 2.9 se encuentran ejemplos de arquitecturas de redes neuronales artificiales.
Figura. 2.9. Arquitecturas comunes de redes neronales artificiales
Fuente: Nacelle A. (2009)
Otro aspecto importante al elegir la arquitectura de la red, es conocer el tipo de
conexión que tendrán las capas, con esto se quiere decir que el sentido de transmisión de la
señal será determinante para elegir el algoritmo de aprendizaje, mantener las propiedades
de generalización y adaptación a los cambios tanto internos como externos de la red. En
este contexto se puede mencionar los siguientes tipos:
Redes unidireccionales (feedforward): como su nombre lo indica, la señal transita
a través de la red en una sola dirección (izquierda-derecha) y las conexiones son

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 28
únicamente desde la capa de entrada hacia la capa de salida, pasando por las capas
ocultas.
Redes retroalimentadas (feedback): Tienen la particularidad que el tránsito de la
señal a lo largo de la red se puede dar desde la capa de entrada hacia la capa de salida
o visceversa, y las conexiones se dan en cualquier sentido.
2.7. REDES NEURONALES ARTIFICIALES MULTICAPA (RNAM)
Las redes neuronales multicapa son redes unidireccionales, supervisadas,
conformadas por una o más capas ocultas que usan el algoritmo de retroprogación como
gradiente descendiente (o sus modificaciones) como proceso de aprendizaje,
frecuentemente empleadas como aproximadoras universales de funciones28, y
recientemente relacionadas con problemas de reconocimientos de patrones, predicciones y
comparaciones enfocadas en el modelamiento de problemas complejos no lineales en
ciencias de la tierra29, por tal razón se ha empleado esta arquitectura para el presente
trabajo.
Por lo general, se aplica una función de activación sigmoidal con sus diferentes
variaciones (logística y tangente hiperbólica) en las capas ocultas y una función lineal en la
capa de salida, la función sigmoidal tiene su razón de ser en que la red debe aprender las
relaciones no lineales existentes entre los conjuntos de entradas y salidas, mientras que la
función lineal se interpreta como función de regresión entre las entradas y salidas, por lo
que la señal que ingresa a la función de activación lineal es la misma señal que se emite al
ambiente, como lo ilustra la figura 2.10.
28 Hernández, N., “Redes de Neuronas Artificiales en Oceanografía”, 2004.29 Rezeai, K., et al., “Feed Forward Neural Network and Interpolation Function Models to Predict the Soil and Subsurface Sediments Distribution in Bam, Iran”, 2009.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 29
Figura. 2.10. Funciones de transferencia más usadas en una red neuronal artificial multicapa
En la anterior figura se observa claramente que en la capa oculta se utiliza la función
de transferencia sigmoidal tangente hiperbólica, esta función es utilizada con frecuencia en
redes neuronales artificiales, aunque actualmente no existen demasiadas investigaciones
enfocadas a la correcta selección de una función de activación, se puede mencionar las
razones por la cual esta función es considerada constantemente, haciendo resonancia del
apartado 2.6.7 de este capítulo.
La función sigmoidal tangente hiperbólica es una función continua real,
estrictamente creciente y acotada que cumple con la siguiente condición:
Sea S una función sigmoidea continua cuyos elementos son funciones reales tales que,
f(x) - #$!%&'($!%)!*+*$!,-.,/!01s límites 2343!'+5. son:
lim/01 2(3) =4lim/051 2(3) = 6
con 7 > 6
Donde,
f(x) = función sigmoidal tangente hiperbólica
O29%G,/2469%16%)&%!%E%P&%-1

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 30
Así mismo, esta función es considerada en esta técnica porque es diferenciable en
todos sus puntos y además el valor de la primera derivada de la función (pendiente) tiene
valor positivo lo cual facilita seguir el camino sobre la superficie del error30, como se verá
posteriormente.
Finalmente el criterio determinante para utilizar funciones sigmoideas, en este caso
tangente hiperbólica, es por el hecho que presenta buenos rendimientos aplicados en
funciones no lineales usando desde 5 neuronas en la capa oculta hasta 13 neuronas31.
2.7.1.ALGORITMO DE RETROPROPAGACIÓN (APRENDIZAJE VISTO COMO
GRADIENTE DESCENDIENTE)
El algoritmo de retropropagión mejora el rendimiento de la red en función de la
corrección de la señal de error usando el método del gradiente descendiente, este algoritmo
hace que los pesos sinápticos adopten valores aleatorios al paso de la señal de activación
dirigida hacia adelante, proveniente de la estimulación de las neuronas de entrada hasta
obtener la señal de salida, en este punto se compara con la respuesta deseada para conocer
el error (diferencia) y, finalmente la señal de propagación del error es enviada hacia atrás
para ajustar los pesos hasta alcanzar un error mínimo (ver figura 2.11.), el proceso es
iterativo y en cada iteración se actualizan los pesos y las conexiones sinápticas hasta que la
red neuronal aprenda el entrenamiento. Este algoritmo desarrollado por Rumelhart, Hinton
& Williams en 1986 es ampliamente utilizado en las redes multicapa debido a su
simplicidad y aplicabilidad.
30 Chandra, P., “Sigmoidal Function Classes for Feedforward 64789:83;!</143;!</7=-4>0?, 2003.31 Llano, L. & et al, “Comparación del desempeño de funciones de activación en redes feedforward para aproximar funciones de datos con y sin ruido”, 2007.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 31
Figura. 2.11. Funcionamiento lógico del algoritmo de retropropagación
Fuente: Haykin S, 2005
La notación que se empleará en este tema, será definida por una red neuronal con
neuronas de entrada (i), neuronas ocultas (j) y, neuronas de salida (k), además de los
siguientes parámetros:
Las neuronas serán representadas por el símbolo x.
Las iteraciones o las veces que la señal de activación pasa por la red, es denominada
como n.
La señal de error proveniente de la neurona j en la n iteración es ej(n).
La respuesta deseada de la neurona j es dj(n).
La señal de salida de una neurona definida por el símbolo y.
Los pesos sinápticos que conecta la neurona de entrada con la neurona oculta wji(n),
donde el primer subíndice indica la neurona a la que se envía la señal y el segundo
subíndice representa la neurona de donde proviene la señal.
El umbral aplicado a las neuronas ocultas denominado por bj, en donde su efecto
sináptico es wj0 = bj.
El campo local inducido o lo que es igual a la suma de la señal ponderada con el
umbral antes de ser aplicada la función de transferencia es vj(n).
La función de activación será f(·).

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 32
La señal de activación ponderada que se origina desde la capa de entrada de la RNAM
viene dada por la ecuación 2.20.
89(n)= * xi·wji(n) 2.20.
La ecuación 2.20 viene condicionada por el umbral que actúa como reguladora de la
señal de activación originando el campo local inducido, que viene dado por:
vj(n)=uj(n)+bj 2.21.
vj(n)= * wji·yi 2.22.
Esta función del campo local inducido es la que ingresará a la función de
transferencia para determinar la activación de la neurona, en este caso, la primera función
que interviene es una sigmoidal tangente hiperbólica, como lo indican la ecuación 2.23.
2( ) = :;<= >?9(<)@ =A5BCDE(F)
AGBCDE(F) 2.23.
La ecuación 2.23, también se puede interpretar como el campo local inducido por
una función de transferencia de la siguiente forma:
H9 = 2 >?9(<)@ 2.24.
La expresión 2.24, es la señal de salida de la capa oculta, la cual será la entrada para
la capa de salida. Como se mencionó anteriormente, la segunda función de transferencia
que se encuentra en la capa de salida es una función lineal, lo cual indica que la misma
señal que ingresa, es la que se emite al entorno como respuesta, por lo tanto se puede decir
lo siguiente:
2I( ) = 29( ) = 2( ) 2.25.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 33
Por lo tanto,
HI(<) = H9(<) 2.26.
En este caso el error de la señal de salida de la neurona j de la ecuación 2.26 en la
época n, es comparada con la respuesta que se esperaba, obteniendo el error de la neurona
de salida,
J9(<) = K9(<) L H9(<) 2.27.
El error de la capa de salida de la red es la semi-suma de los errores al cuadrado de
las neuronas de salidas en la época de iteración n,
M(<) =A) *+J9(<),)
2.28.
Para comprender mejor la función del error de salida de la red neuronal, se puede
observar la figura 2.12 con una ilustración de una RNA multicapa.
Figura. 2.12. Cálculo de la señal de error de una red neuronal multicapa
Fuente: Rojas R, 1996.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 34
Una vez que se ha calculado la ecuación 2.28, la función del algoritmo de
retropropagación es conocer la dependencia de la función de error con respecto a las
entradas, salidas y pesos de la red, para lo cual se ajustan los pesos con el método del
gradiente descendiente32, por lo que es necesario conocer el gradiente del error:
NO = P QR
QSTU+
QRQSVU
+QR
QSWU+ X +
QRQSEU
Y 2.29.
La actualización de los pesos se la realiza con la siguiente ecuación:
Z[9\ = L] Q^(_)
QSEU2.30
La expresión anterior puede ser interpretada como el ajuste de los pesos sinápticos
que es igual al producto de una constante de aprendizaje (@) y el gradiente del error
anterior calculado por la red. El ajuste dependerá de la constante @ y de cuanto afecta los
valores de los pesos al error, es decir, si los pesos influyen demasiado en el error, entonces
el ajuste será más largo que si no influyera en gran cantidad. La alternativa para conocer lo
antes expuesto y resolver la ecuación 2.30, es aplicando la regla de la cadena, la cual
premite determinar el aporte de cada uno de los parámetros a la función de error.
Q^(_)
QSEU=
Q^(_)
QBE QBE
Q`E Q`E
QaE QaE
QSEU2.31.
De las ecuaciones 2.28, 2.27, 2.24 y 2.22 se deriva respectivamente lo siguiente
Q^(_)
QBE= J9(<) 2.32.
QBEQ`E
= L1 2.33.
Q`EQaE
= 2b >?9(<)@ 2.34.
32 Gershenson, C., “Artificial Neural Network for beginners”, 2003.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 35
QaEQSEU
= H\(<) 2.35.
Reemplazando 2.32, 2.33, 2.34 y 2.35 en 2.31, se obtiene:
Q^(_)
QSEU= LJ9(<) 2b >?9(<)@ H\(<) 2.36
Como se aprecia en la ecuación 2.36, la derivada parcial del error con respecto a los
pesos sinápticos aporta el signo negativo o el sentido opuesto al gradiente del error de la
ecuación 2.29, de ahí el nombre de gradiente descendiente.
Para entender mejor el proceso de corrección del error en una función sigmoidal se
aprecia en la figura 2.13, que se quiere seguir la dirección del gradiente para encontrar el
mínimo de esta función para lo cual es importante que no existan regiones donde la
función de error sea completamente plana, por lo tanto, como la función sigmoidal siempre
tendrá derivadas positivas, la pendiente de la función proporciona una función de descenso
que se puede seguir33.
Figura. 2.13. Paso de la función de error en una función sigmoidal
Fuente: R. Rojas, 1993
33 Rojas, R., “Neural Network. A systematic Introduction”,1996.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 36
El problema que se presenta en el algoritmo de retropropagación en el momento de
encontrar el camino adecuado del gradiente de error, es cuando este se encuentra en una
superficie de mínimo local, esto ocurre porque el método de optimización que se emplea
sigue las pendientes más pronunciadas, por lo tanto no se asegura que la función tendrá
convergencia en óptimos globales34, como se aprecia en la figura 2.14, obviamente que no
se puede asegurar si el error se encuentra en una superficie de mínimo local o global, pero
una vez que la red converge en un mínimo (local o global), se detiene el aprendizaje35.
Figura. 2.14. Superficie de error en un mínimo local o global
Fuente: Chacón, 2010.
2.7.2. MÉTODO DE OPTIMIZACIÓN DE LEVENBERG- MARQUARDT
El algoritmo de aprendizaje de retropropagación en ocasiones puede ser lento e ineficiente
por el hecho de que emplea la información de la primera derivada o el gradiente para
encontrar el error, lo cual no garantiza que sea un mínimo global, por esta razón se han
realizado variaciones de este algoritmo de aprendizaje para acelerar el proceso de
entrenamiento y a su vez dar mayor confianza en ubicar el error en un mínimo global, para
lo cual se emplean los criterios de segundas derivadas (matriz hesiana)36, por lo tanto este
método es considerado en la búsqueda del gradiente descendiente para el entrenamiento de
la red como una proceso de optimización numérica, el cual fue desarrollado por Levenberg
34 Hernández, N., “Redes de Neuronas Artificiales en Oceanografía”, 2004. 35 Chacón, A., “Predicción de ondulaciones geoidales a través de una red neuronal artificial en un área del Distrito Metropolitano de Quito”, 2010 36 Hwang, J., “Regression Modeling in Back-Propagation and Proyection Pursuit Learning”, 1994.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 37
(1944) y Marquardt (1963), el mismo que consiste en la actualización de parámetros en n
iteraciones, como se demuestra en la ecuación 2.37.
[9\(<) = +[9\(<) L 1, L cd+[9\(<) L 1, + ](<)ef5Ag[9\(<) Ec.2.37
Como se observa en la expresión anterior, para aplicar el algoritmo es necesario
resolver la matriz inversa de cd+[9\(<) L 1, + ](<)ef5A, la misma que se puede expresar
como la matriz Hessiana Q$%de la función total de error:
Hh >wji(n)@ = * PiE(n)
iwjiY PiE(n)
iwjiY
T
Ec.2.38
Para mayor información de los métodos de inversión de la aproximación de la matriz
hessiana (ecuación 28) se puede encontrar en (Dreyfus, G., 2004)37.
2.8. ENTRENAMIENTO DE UNA RED NEURONAL ARTIFICIAL
MULTICAPA
Para el proceso de entrenamiento de una red neuronal, es importante recalcar lo que
se mencionó en el apartado 2.6.5., el mismo que hace referencia a la necesidad de tener tres
subconjuntos de datos que se van a presentar a la red neuronal, que tendrán que estar
distribuidos en datos de entrenamiento, de validación y de test y, dependiendo de la regla
de aprendizaje se contará con ejemplos de entrada y de salida.
Una vez que se cuenten con los subconjuntos de datos, es importante elegir la
topología de la red, el algoritmo de aprendizaje y la función que evaluará el desempeño de
la red para evitar problemas de generalización, sobreaprendizaje o mínimos locales, en este
caso se proponen los parámetros que serán utilizados para determinar en que punto se debe
terminar el aprendizaje y de esta manera garantizar un aprendizaje eficiente y eficaz.
37 Dreyfus, G., “Neural Networks. Methodology and Applications”, pág. 193-194, 2004

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 38
Con respecto a la arquitectura de las redes neuronales multicapa, el número de capas
ocultas dependerá de la complejidad del problema que se desea resolver, por lo general se
emplea una sola capa oculta y lo que varía es el número de neuronas ocultas, aunque este
último parámetro es definido individualmente y a criterio del autor, debido a que no
existen suficientes investigaciones sobre la relación entre el número de neuronas ocultas y
la calidad del entrenamiento, solamente existen algunas indicaciones realizadas por
diferentes autores38, en este sentido el número de capas y neuronas ocultas dependerán de
la complejidad del problema y de los datos que se tengan a disposición.
Es recomendable realizar un tratamiento estadístico previo a los datos de entrada y
salida de manera que estén todos dentro de un mismo rango y los valores similares, en el
caso de esta investigación se hizo una normalización de los datos, es decir, que los datos
sigan una tendencia normal con media cero y desviación estándar de uno.
En lo que se refiere al algoritmo de aprendizaje, se puede emplear el de
retropropagación con las diferentes variaciones de los métodos de optimización, lo cual
ayudará a la red a converger más rápido, de la misma forma es importante que antes de
empezar con cualquier entrenamiento, los pesos sinápticos sean inicializados en cero para
que al paso de la señal de activación puedan tomar valores arbitrarios.
Finalmente, se comprueba si el entrenamiento de la red ha dado buenos resultados,
para lo cual se emplea el subconjunto de datos de validación para intentar garantizar que la
red aprenda patrones extremos y adquiera conocimiento de una complejidad mayor sobre
los datos, para que los datos del subconjunto de test demuestren el verdadero error de la
red para los 3 subconjuntos como se aprecia en la figura 2.15, donde se observa claramente
en la componente vertical como al inicio del entrenamiento se calcula un error alto y
conforme va ajustando los pesos sinápticos, el error va disminuyendo hasta alcanzar el
error meta propuesta a la red, así como también el mejor punto de convergencia de la red
en una determinada época de iteración.
38 Para profundizar a mayor detalle las acotaciones sobre capas y neuronas ocultas se puede observar las siguientes referencias: Huang, S.C. & Huang, Y. F., “Bounds on the number of the hidden neurons in multilayer perceptrons”, 1991.
Kung, S. Y. & Hwang, J. N., “An algebraic projection analysis for optimal hidden units size and learning rate in backpropagation algorithm”, 1988.

CAPÍTULO 2. MARCO TEÓRICO_______________________________________________________ 39
Figura. 2.15. Evolución de las curvas de error para los 3 subconjuntos de datos que se presentan en el
entrenamiento de la RNA.

CAPÍTULO 3
METODOLOGÍA
Antes de describir la metodología empleada en este estudio, es preciso recalcar la
situación actual de los gobiernos municipales u otras dependencias de gestión territorial
que puede aplicar esta metodología en la transformación de coordenadas, la misma que se
ha planteado en esta investigación como un escenario próximo a la realidad, en otras
palabras se pretende tener lo insumos mínimos que debe contar el usuario para poder
desarrollar con normalidad esta técnica, entre estos insumos se puede mencionar los
siguientes:
Cartografía catastral de la zona de trabajo georreferenciada en un sistema
topocéntrico y geocéntrico, la misma que servirá para obtener las coordenadas de los
puntos de control, de generalización y de comprobación observados en las esquinas
de los lotes o puntos que sean fácilmente identificados en la cartografía de ambos
sistemas los cuales se le presentará a la red para su posterior cálculo; este proceso se
lo puede realizar con un sistema de información geográfica. Este tipo de observación
de los puntos se realizó de este modo por el hecho que no existe en todo el territorio
nacional los suficientes puntos de control geodésicos o de densificaciones de red
georreferenciados en PSAD56 y si los existiera no cuentan con la debida
documentación que garantice la exactitud y precisión del punto, por lo tanto, la
incertidumbre de la observación del punto en el S.I.G. está estrictamente ligada al
acierto de operario.
Acotando al apartado anterior, se debe tener en cuenta que las coordenadas que se
obtendrán en la observación son planas, es decir, son coordenadas que vienen de un
cálculo en función de las coordenadas originales, esto es, en el caso de PSAD56 se
!" #"$% !% &!'()'% *+% ,,'*+-!*!.% /012342% 5)+-('!.% 6#+% +-% +"% !.,% *+% 789:/7%

CAPÍTULO 3. METODOLOGÍA_____________________________________________________ 41
provienen de coordenadas A(X,Y,Z), por lo tanto la transformación que se realiza
debe ser entre coordenadas proyectadas (Este-Norte).
En caso de no contar con el catastro en formato digital y solamente se cuente con los
planos análogos o físicos, es aconsejable acudir a escáner de alta resolución para que
no distorsionen la figura real de las hojas catastrales con el fin de conservar las
especificaciones técnicas con las que fueron elaboradas, así como también favorecerá
en mantener los niveles de precisión en el proceso de digitalización de lotes, predios
y detalles del catastro físico inmobiliario.
Finalmente, para lograr la transformación es necesario contar con el paquete
informático donde se ejecutará el programa de transformación con la técnica de redes
neuronales artificiales, y que se ajuste a las necesidades de los diferentes usuarios, en
este caso se empleó el software MATLAB.
3.1 AJUSTE DE OBSERVACIONES CON EL MÉTODO DE MÍNIMOS
CUADRADOS
El procedimiento previo que se recomienda realizar para seleccionar los puntos que
se presentarán en el entrenamiento de la red, es precisamente el ajuste de mínimos
cuadrados con el método paramétrico, para lo cual se utilizará el condicionamiento
propuesto en la ecuación 2.4, la misma que servirá para calcular los parámetros de
transformación que serán aplicados para conocer la consistencia del ajuste, esto se realizará
sin variar la verdadera forma de la cartografía original, lo cual es una ventaja muy
importante en catastros debido a que los cálculos de impuestos prediales, delimitación de
propiedades y solución de conflictos de tierras en general, no tendrán variaciones
significantes.
Los requerimientos para resolver el ajuste con esta metodología es determinar por lo
menos tres puntos de control para establecer un sistema de 6 ecuaciones y 4 incógnitas
dando mejor confianza en los grados de libertad para el ajuste. En este estudio se
emplearon cuatro puntos que se ubican en los extremos del área total de estudio cubriendo

CAPÍTULO 3. METODOLOGÍA_____________________________________________________ 42
con la condición que todo el territorio entre en el ajuste, como se puede ver en la figura
3.1.
Figura. 3.1. Puntos seleccionados para el ajuste de mínimos cuadrados observados tanto en la
cartografía de PSAD56 como en SIRGAS00
Las coordenadas de los puntos que se observan en la figura anterior, también están
detalladas en la siguiente tabla.
Tabla. 3.1. Coordenadas de los puntos utilizados para calcular los parámetros de transformación por
el método de mínimos cuadrados.
Coordenadas TMQ-PSAD56 Coordenadas TMQ-SIRGAS00
ESTE(m) NORTE(m) ESTE(m) NORTE(m)
501500 9982800 501263.33950 9982432.49230
503900 9982800 503663.31390 9982432.49430
503900 9981600 503663.30840 9981232.50100
501500 9981600 501263.33400 9981232.49880
Con los parámetros de transformación que se obtienen como resultado del ajuste, se
procede a transformar espacialmente la cartografía digital, para lograr esto se recurrió al

CAPÍTULO 3. METODOLOGÍA_____________________________________________________ 43
módulo de transformación espacial que se puede encontrar en sistemas de información
geográfica como gvSIG, SAGA GIS, Kosmo, entre otros, los mismos que ayudan al
operario a visualizar la cartografía catastral transformada con los niveles de precisión que
otorgan los parámetros de transformación, los mismos que son presentados y analizados en
el apartado 4.1 del presente documento.
3.2 SELECCIÓN DE PUNTOS PARA EL ENTRENAMIENTO DE LA RED
NEURONAL ARTIFICIAL
Como se explicó en el capítulo anterior, los puntos que se deben tomar en
consideración para el entrenamiento de la red deben estar clasificados en 3 subconjuntos,
tanto para las entradas como para las salidas, los cuales fueron observados en la cartografía
catastral digital del Distrito Metropolitano de Quito en el sector de Iñaquito referenciado
en PSAD56 y SIRGAS0039, con una extensión de territorio aproximada de 212 hectáreas,
la cantidad de puntos observados en el SIG fueron un total de 60 puntos distribuidos en los
tres subconjuntos, los mismos que están distribuidos en la zona de estudio como se observa
en la figura 3.2.
Figura. 3.2. Distribución de los puntos seleccionados para el entrenamiento y aprendizaje de la RNA
39 La información a la que se hace alusión fue proporcionada por la Dirección Metropolitana de Catastro del D.M. de Quito, 2011.

CAPÍTULO 3. METODOLOGÍA_____________________________________________________ 44
El criterio que se empleó en la selección de los puntos de entrenamiento o de control
que se emplearon en la fase de entrenamiento de la RNA multicapa es básicamente utilizar
puntos fácilmente identificables en ambos sistemas, además que cubran la totalidad del
territorio y que su distribución siga una tendencia sinusoidal, en este caso se observaron las
coordenadas de 20 puntos, las mismas que se encuentran adscritas en el anexo 2.
Para determinar los puntos de validación en este estudio, se realizó el ajuste de
mínimos cuadrados con el método paramétrico, en donde fue necesario utilizar las
coordenadas los puntos de que se presentaron en la tabla 3.1 que cubrían la totalidad de la
superficie, de esta manera se calcularon los parámetros de transformación que al ser
utilizados en el SIG para la transformación espacial, sirvieron para conocer las zonas
donde se evidenciaban eventos extremos de las coordenadas, por lo tanto fueron puntos
que se observaron en zonas donde las diferencias entre los valores calculados y observados
fueron mínimas o casi insignificantes y también donde se presentaron mayores
distorsiones, las coordenadas de estos puntos también están agregadas en el anexo 2.
Finalmente los puntos test o de comprobación no siguen una regla o especificación
técnica en particular, simplemente se recomienda que sean puntos distribuidos
aleatoriamente en todo el territorio y que no estén considerados en los anteriores
subconjuntos de datos. Según (Najah, A. et al, 2012) el subconjunto de datos de
comprobación podría estar comprendido aproximadamente entre el 10-40% del total de los
datos que serán presentados a la red40, es así que se observaron 20 puntos en la zona de
Iñaquito y sus coordenadas, al igual que los puntos anteriores, también están en el anexo 2.
Con todo esto se puede dar un enfoque general para un buen entrenamiento de la red.
3.3. PRE-PROCESAMIENTO Y POST-PROCESAMIENTO ESTADÍSTICO DE
LOS DATOS
Este paso se realizó para mejorar el rendimiento de la RNA normando los datos para
estar en un rango determinado de valores, por citar un ejemplo, si los valores en las
neuronas de entrada son muy grandes, entonces los valores de los pesos sinápticos y del
umbral serán demasiados pequeños para evitar que el campo inducido que ingresa a la
40 Najah, A., El-Sahfie, A., Karim, O. & El-Sahfie H., “Application of Artificial Neural Network for water quality prediction”, 2012.

CAPÍTULO 3. METODOLOGÍA_____________________________________________________ 45
función de transferencia se sature, si esto sucede en el inicio del entrenamiento de la red,
los gradientes serán demasiados pequeños dando como consecuencia un entrenamiento
lento41.
En este estudio se empleó la normalización de los datos con media igual a cero y con
desviación estándar de uno en ambos conjuntos de datos, tanto de entrada y de salida
deseada, de esta manera se asegura que la respuesta de la RNA también esté comprendida
en un rango normalizado. Posteriormente se desnormaliza la salida calculada por la red
para calcular las diferencias en unidades de origen.
3.4. SELECCIÓN DE LA ARQUITECTURA DE LA R.N.A.
La arquitectura de la red que se empleó en este problema de transformación de
coordenadas, fue una red neuronal multicapa con una capa oculta y su posterior capa de
salida, mientras que la topología empleada para la conexión de las neuronas fue de flujo
unidireccional con el algoritmo de aprendizaje supervisado de retropropagación empleando
la optimización numérica de Levenberg-Marquardt, siguiendo los criterios, fórmulas y
consideraciones que se explicaron en el capítulo anterior.
En la figura 3.3 se observa la topología empleada en este trabajo donde se aprecia
que la capa de entrada se encuentra compuesta por 2 vectores de entrada correspondientes
a las coordenadas Este y Norte del sistema PSAD56 de cada punto, las mismas que fueron
procesadas en la capa oculta con 6 neuronas artificiales donde será aplicada la función de
activación sigmoidea tangente hiperbólica y, la respuesta de la señal de activación de esta
capa oculta pasará por una función de transferencia lineal que originará como respuesta
dos salidas, las cuales serán precisamente las coordenadas Este y Norte de los mismos
puntos pero ya calculados en el sistema SIRGAS00; es aquí donde se presentan los datos
de salida deseados para que la red calcule el error y, mediante el algoritmo de
retropropagación ajuste todos los parámetros libres de la red hasta que la respuesta de la
red se aproxime en el error mínimo y por consiguiente conocer si el aprendizaje es exitoso.
41 Hudson, M., et al, “Neural Network Toolbox, Guía de usuario”, 2012.

CAPÍTULO 3. METODOLOGÍA_____________________________________________________ 46
Figura. 3.3. Topología de la RNA usada en el presente trabajo.
3.5. ENTRENAMIENTO DE LA RED NEURONAL ARTIFICIAL
El entrenamiento de la red neuronal artificial debe asegurar que las discrepancias
entre los valores de salida de la RNA y los valores deseados sean lo mínimo posible, en
este caso y para la presente investigación, la diferencia en la posición sea menor a 1.5
metros para que de esta manera sea compatible con escalas mayores a 1:5 000.
Es precisamente en este apartado en el cual se aplica el entrenamiento de la RNA con
el algoritmo de aprendizaje y su optimización numérica, para lo cual fue necesario diseñar
el programa en el software de MATLAB que sea flexible para cambiar datos o parámetros
de entrenamiento, además que cumpla con las condiciones de eficiencia del rendimiento y
buen aprendizaje. La metodología del entrenamiento de la RNA que se ilustra en la figura
3.4, es un proceso de selección de constantes ensayos y modificaciones de número de
neuronas ocultas, períodos de iteración, error meta que se desea alcanzar, tiempo de
entrenamiento, entre otros, hasta encontrar una arquitectura de red y estructura del
programa que más se acerque a cumplir con el objetivo principal.

CAPÍTULO 3. METODOLOGÍA_____________________________________________________ 47
Figura. 3.4. Proceso para desarrollar la metodología del entrenamiento de la RNA en la
transformación de coordenadas.
Se puede observar que los conjuntos de entrada y de salida deseada se realizan fuera
del programa de MATLAB, se puede valer de un sistema de información geográfica libre o
comercial. Los conjuntos de datos que se emplearon en el entrenamiento se detallan en el
anexo 2.

CAPÍTULO 3. METODOLOGÍA_____________________________________________________ 48
En el diseño del programa de la transformación se utilizó la herramienta de redes
neuronales artificiales (Neural Network Toolbox), donde se pudo configurar los parámetros
de entrenamiento de la red, por ejemplo:
El pre-procesamiento estadístico de los datos para la normalización con media cero y
varianza 1 se utilizó la función ‘mapstd’ que crea dos repositorios, el primero que
contiene los datos normalizados y el segundo comprende con la configuración del
proceso de normalización que permite retomar los valores originales de los datos. En
este mismo proceso es conveniente indicar que al final del entrenamiento es
necesario conocer los resultados del aprendizaje con los valores y unidades
originales, para lo cual se emplea la función ‘reverse’, la misma que se basa del
segundo repositorio creado en el pre-procesamiento para generar la salida con las
coordenadas Este-Norte.
El siguiente paso es crear la RNA, para lo cual se emplea la función ‘net’ que
requiere conocer la topología y el algoritmo de entrenamiento, en este caso se
empleó la función ‘newff 42’ la cual al ser activada, implícita y automáticamente se
configura para que utilice el algoritmo de retropropagación con la optimización de
Levenberg – Marquardt, adicional a esto se suma que por defecto la red está
compuesta por una capa de neuronas ocultas y una capa de salida.
Esta función necesita conocer principalmente, el conjunto de entrada y de salida,
además del número de neuronas ocultas.
Cabe recalcar que los conjuntos de entrada y salida están conjuntamente los datos de
entrenamiento, validación y test, pero para que la RNA pueda diferenciarlos se
emplea la función ‘divideind’, que tiene la capacidad de dividir el conjunto de datos
en bloques, es así que el primer bloque de 20 datos serán destinados al
entrenamiento, mientras que el siguiente bloque de 20 datos serán para ayudar a la
generalización de la red y finalmente el tercer bloque de 20 datos servirán para
comprobar el aprendizaje de la red.
42 New Feed Forward network = red unidireccional

CAPÍTULO 3. METODOLOGÍA_____________________________________________________ 49
Previo al proceso de entrenamiento de la red, es recomendable modificar los
parámetros del entrenamiento para determinar hasta que punto se puede detener el
aprendizaje, por tal razón se tomaron en cuenta los valores que se detallan en la tabla
3.2.
Tabla. 3.2. Valores de los parámetros para detener el entrenamiento de la RNA
Función Descripción Valor
net.trainParam.epochsNúmero máximo de épocas de iteración
del entrenamiento500
net.trainParam.goal Rendimiento que se desea alcanzar 1E-7
net.trainParam.show Número de épocas que serán
desplegadas20
net.trainParam.timeMáximo tiempo de entrenamiento en
segundoinf
Nota: Los parámetros restantes se mantienen con los valores que se generan por defecto,
estos pueden ser revisados en las guías de usuario de MATLAB.
El siguiente paso es la inicialización de los pesos sinápticos con valores cercanos a
cero para que al paso de la señal de activación tomen valores aleatorios, para este
caso se empleó la función ‘init’.
Luego de esto se puede iniciar el entrenamiento de la red con la función ‘train’, la
cual pide como requisitos presentar la red que se creó (unidireccional), las entradas y
las salidas deseadas y se detendrá cuando se cumpla alguno de los parámetros
especificados en la tabla 3.2. Para determinar si la red ha respondido correctamente,
se puede simular la red con la función ‘sim’. Esta función también se puede emplear
antes de iniciar con el entrenamiento cuando se le presentan los conjuntos de entrada
y salida, para que la red intente simular los resultados.
Finalmente se recomienda ilustrar con los gráficos del entrenamiento los procesos de
rendimiento y simulación para un mejor análisis de revisión del entrenamiento.

CAPÍTULO 3. METODOLOGÍA_____________________________________________________ 50
Para mejor conocimiento de este proceso de diseño del programa de transformación
de coordenadas, se puede recurrir al anexo 3 de este trabajo, donde se encuentra detallado
los pasos de programación con su respectiva justificación.
3.6. MAPA DE DISTORSIONES
Este mapa de distorsiones sirve para conocer las zonas del área de estudio donde se
evidenciaron diferencias significativas después del cálculo de transformar las coordenadas,
además para determinar el porcentaje de datos que cumplen con los requerimientos del
objetivo principal (diferencia menor a 1.5m) con lo cual se consigue determinar la
fiabilidad de la metodología.
El insumo determinante para obtener las diferencia de los datos son las gráficas de
error que se obtiene para cada una de las coordenadas, es decir, tanto para las diferencias
en las coordenadas Este como en las de Norte, y finalmente se calcula el error en posición
con lo cual se obtienen las magnitudes del error de cada punto. La ilustración del mapa de
distorsiones de la transformación de coordenadas con la RNA se aprecia en el anexo 4.

CAPÍTULO 4
DISCUSIÓN DE LOS RESULTADOS
4.1. ANÁLISIS DE LOS RESULTADOS OBTENIDOS EN EL AJUSTE CON
MÍNIMOS CUADRADOS
Como se explicó en el capítulo anterior, el procedimiento previo al entrenamiento de
la red neuronal artificial, es el ajuste con el método paramétrico de mínimos cuadrados
para el cálculo de parámetros de transformación y de esta manera establecer las zonas de
menor y mayor distorsión. El resultado en este paso son cuatro parámetros de
transformación que se detallan en la tabla 4.1.
Tabla. 4.1. Parámetros de transformación calculados con mínimos cuadrados
Parámetro Valor
Traslación Este -234 m
Traslación Norte -271.23 m
Ángulo de Rotación 2.17 E-7 rad
Diferencial de escala -9.63 E -6
Con estos valores se transformó espacialmente la zona de estudio con la ayuda del
software gvSIG, en su módulo “Sextante” en la opción “Transformar” donde se
evidenciaron con distorsiones pequeñas que no sobrepasaban los 0.30 metros de diferencia,
así como también las zonas con grandes distorsiones que sobrepasan los niveles de
precisión requeridos, es decir, eran mayores a 1.5 metros de diferencia. Para ilustrar de
mejor manera estas zonas que representan eventos extremos en cuanto se refiere a
diferencia, se presenta la figura 4.1 en donde se observa en tono verde la zona con
distorsiones pequeñas, en tono rojo la zona con mayores distorsiones y finalmente el resto
del territorio que fluctúan diferencia entre 0.30 y 1.5 metros.

CAPÍTULO 4. DISCUSIÓN DE LOS RESULTADOS 52______________________________________________________
Figura. 4.1. Determinación de zonas con eventos extremos de distorsión en la zona de estudio
utilizando el ajuste con mínimos cuadrados
Con los valores de los parámetros de transformación se procedió a calcular las
coordenadas en el sistema SIRGAS utilizando los puntos observados que se detallan en el
anexo 2, a fin de poder comparar los mismos resultados con los calculados por la RNA, los
valores obtenidos en la precisión de la posición empleando parámetros de transformación
se detallan en la tabla 4.2.
Tabla. 4.2. Resultados obtenidos en la transformación de coordenadas utilizando parámetros de transformación
VARIABLE VALOR
Media aritmética 0.845 m.
Desviación estándar 1.335 m.
Error mínimo 0.004 m.
Error máximo 3.301 m.
Número de datos con valores superiores o iguales a 1.5 m 17
Porcentaje válido de los datos 71.67%
Coeficiente de variación 1.54

CAPÍTULO 4. DISCUSIÓN DE LOS RESULTADOS 53______________________________________________________
Nota: Si se desea verificar los valores de la tabla 4.2 se puede revisar el anexo 5 que
contiene los resultados de las diferencias entre las coordenadas SIRGAS calculadas y
observadas.
Como se pudo observar en la tabla 4.2, los resultados obtenidos utilizando
parámetros de transformación se evidencia una cantidad considerable de datos que
sobrepasan el umbral de 1.5 m, por lo que genera en más sectores de la zona de estudio
distorsiones grandes, en la figura 4.2 se observa como los parámetros de transformación
originan fuertes picos de distorsión, así como también valles pronunciados con diferencias
despreciables, es decir, no existe una homogeneidad en los valores.
Figura. 4.2. Distorsiones generadas en la posición de los 60 datos utilizando parámetros de
transformación
4.2. ANÁLISIS DE LOS RESULTADOS OBTENIDOS CON UNA RED
NEURONAL ARTIFICIAL MULTICAPA
Posteriormente se realizó el cálculo de las coordenadas con la metodología de
RNAM, para lo cual, se procedió a presentar los datos a la red para que esta sea capaz de
0
0.5
1
1.5
2
2.5
3
3.5
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49 51 53 55 57 59
Diferencias en la posición (m)

CAPÍTULO 4. DISCUSIÓN DE LOS RESULTADOS 54______________________________________________________
simular los valores de salida como paso previo al entrenamiento, en donde se produjo el
ajuste que se aprecia en la figura 4.3.
Figura. 4.3. Ajuste de los datos de las coordenadas en la simulación de la RNAM
De la figura anterior se observa en el eje horizontal las coordenadas normalizadas en
PSAD56, mientras que en el eje vertical se observa las coordenadas normalizadas en
SIRGAS00. La secuencia de datos en color rojo muestra la respuesta deseada de la red y
como debería ser el ajuste de los datos, mientras que por otro lado, los datos que se
encuentran dispersos en el área del gráfico son la simulación de la red apenas son
presentados los datos a la red.
Posteriormente se realizó el entrenamiento de la RNAM con los parámetros de
entrenamiento que se expusieron en la tabla 3.1 del capítulo anterior, en donde se observó
que el proceso de entrenamiento ajustó los datos calculados a los esperados con

CAPÍTULO 4. DISCUSIÓN DE LOS RESULTADOS 55______________________________________________________
discrepancias mucho menores a las presentadas en el figura anterior, por lo tanto en la
figura 4.4 se observa el ajuste de las coordenada calculadas a las observadas.
Figura. 4.4. Ajuste de los datos de las coordenadas después del entrenamiento de la RNAM
En la figura 4.4, se observa cómo los valores de las coordenadas calculadas,
representadas con la secuencia de datos en color azul, se ajusta a los datos de salida
esperados representados por la secuencia de datos de color rojo, dando un pronóstico
favorable y alentador al cálculo de las diferencias entre coordenadas calculadas y
observadas, obviamente estos resultados se verán después que pasen el proceso de
desnormalización.
Una vez que se han cumplido todos los pasos del proceso de entrenamiento, se
procede a la desnormalización de los resultados como se expuso anteriormente, en donde
se conoce los valores calculados por la red pero con las unidades y valores de interés, en
donde se procede a verificar las diferencias resultantes entre las coordenadas Este y Norte.
En la figura 4.5 y 4.6 se observa estas diferencias en unidades métricas tanto para las

CAPÍTULO 4. DISCUSIÓN DE LOS RESULTADOS 56______________________________________________________
coordenadas en Este como para las coordenadas en Norte, respectivamente. En el eje
vertical están representadas las diferencias en metros, mientras que en el eje horizontal
están los datos que se utilizaron para el entrenamiento, validación y test.
Figura. 4.5. Diferencia (m) de los valores en coordenadas Este para los 60 puntos observados
Se puede apreciar en la figura anterior que los valores fluctúan entre los picos de
-2.43 m y 1.73 m con una desviación estándar de 0.77 m, en donde solamente 5 datos
quedan fueran del rango establecido de precisión que es menor a una diferencia de 1.5m, a
pesar de que existen picos y valles en los valores, estos no sobrepasan la precisión que se
espera. Para complementar la información presentada, también se expone la siguiente
figura con la información de las coordenadas en norte.
2.50
2.00
1.50
1.00
0.50
0.00
0.50
1.00
1.50
2.00
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49 51 53 55 57 59
Dif
ere
nci
a (
m)
Diferencias en las coordenadas Este

CAPÍTULO 4. DISCUSIÓN DE LOS RESULTADOS 57______________________________________________________
Figura. 4.6. Diferencia (m) de los valores en coordenadas Norte para los 60 puntos observados
En la figura 4.6 se aprecia como las diferencias en las coordenadas Norte varían
desde los picos -1.05 m hasta 1.59 m, con una desviación estándar de 0.55 m, en donde
sobresale solamente un dato que queda fuera del rango permitido de precisión. Con los
valores de las diferencias en las coordenadas este y norte se procede a calcular el error total
en la posición horizontal, el cual determinará la calidad de la metodología, para lo cual se
presenta en la tabla 4.3 las estadísticas generales de los resultados finales de las diferencias
en la posición horizontal.
Tabla 4.3. Resultados obtenidos en la transformación de coordenadas utilizando una RNAM
CARACTERÍSTICA VALOR
Media aritmética 0.750 m.
Desviación estándar 0.585 m.
Error mínimo 0.050 m.
Error máximo 2.915 m.
Número de datos con valores superiores o iguales a 1.5 m 8
Porcentaje válido de los datos 86.67%
Coeficiente de variación 0.78
1.5
1.0
0.5
0.0
0.5
1.0
1.5
2.0
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49 51 53 55 57 59Dif
ere
nci
a (
m)
Diferencias en las coordenadas Norte

CAPÍTULO 4. DISCUSIÓN DE LOS RESULTADOS 58______________________________________________________
Nota: Si se desea revisar los datos que resultaron del cálculo de la red neuronal
artificial y sus cálculos para obtener los valores de la tabla 4.3 se puede recurrir al anexo 6
como fuente de verificación.
Como se observa en los valores anteriores, el error promedio en la posición si cumple
con los niveles de precisión requeridos para escalas mayores a 1:5 000, incluso con la
desviación estándar, este valor no sobrepasa el valor de 1.5 m, además se observa que los
valores que superiores a 1.5 m solamente representa el 14% de los datos aproximadamente,
es decir, la metodología es aplicable en la mayoría del territorio. En la figura 4.7 se
evidencia lo antes citado.
Figura. 4.7. Diferencias (m) de la posición de los 60 datos en estudio
De la figura anterior se exponen las diferencias en metros en el eje vertical mientras
que los datos se presentan en el eje horizontal, además se aprecia mayor homogeneidad
entre los resultados obtenidos los cuales se encuentran representados en el mapa de
distorsiones que se encuentra en el anexo 4. Además se puede complementar que los datos
de entrenamiento (1 al 20) no sobrepasan el valor de 1.5 m. Mientras que los datos de
validación (21 al 40) que contienen los valores con características extremas, presentan 5
0.0
1.5
3.0
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49 51 53 55 57 59
Diferencias en la Posición (m)

CAPÍTULO 4. DISCUSIÓN DE LOS RESULTADOS 59______________________________________________________
valores que no se ajustan al nivel de precisión y, finalmente los datos test (41 al 60)
presentan 3 datos que sobrepasan el valor de 1.5 m. además que aquí se encuentra el dato
con diferencia máxima que es de 2.915m.
4.3. COMPARACIÓN ENTRE LOS RESULTADOS OBTENIDOS CON
PARÁMETROS DE TRANSFORMACIÓN Y UNA RNAM
En este apartado se pretende comparar ambas metodologías para demostrar la
fiabilidad y efectividad de las técnicas empleadas, a fin de dar un enfoque técnico a la
solución de transformación de coordenadas, para tener un sustento práctico en la decisión
de optar por un método estadístico convencional como es el ajuste de mínimos cuadrados o
una técnica no convencional de predicción de resultados como es las redes neuronales
artificiales.
En resumen se puede decir que la metodología de redes neuronales artificiales puede
reducir las diferencias en la posición de manera más eficiente que los parámetros de
transformación, la tabla 4.4 representa una compilación de los resultados obtenidos con
ambas técnicas.
Tabla. 4.4. Cuadro resumen de los resultados obtenidos con Parámetros de Transformación y una Red
Neuronal Artificial
Variable
Resultados obtenidos
con parámetros de
transformación
Resultados
obtenidos con
una RNAM
Valor Valor
Media aritmética 0.845 m 0.750 m
Desviación estándar 1.335 m 0.585 m
Error mínimo 0.004 m 0.050 m
Error máximo 3.301 m 2.915 m
Amplitud entre el valor mínimo y máximo 3.297 m 2.865 m
Número de datos con valores superiores o
iguales a 1.5 m17 8
Porcentaje válido de los datos 71.67% 86.67%

CAPÍTULO 4. DISCUSIÓN DE LOS RESULTADOS 60______________________________________________________
Coeficiente de variación 1.54 0.78
Se aprecia claramente que los resultados producidos por la red neuronal artificial
mejoran los valores obtenidos por los parámetros de transformación, favoreciendo esta
metodología para aplicar en la transformación de coordenadas la misma que tiene mayor
porcentaje de aplicabilidad (86.67%) en el territorio en estudio y con menor rango entre las
discrepancias mayores y menores (2.865 m), permitiendo que sea compatible con escalas
mayores a 1:5 000 con mejor homogeneidad en los valores calculados, y así siendo
aplicable a cartografía catastral rural y ciertos proyectos del catastro urbano que requiera
precisión promedio de 0.75 m.

CAPÍTULO 5
CONCLUSIONES Y RECOMENDACIONES
5.1. CONCLUSIONES
La transformación de coordenadas planas o proyectadas (Este, Norte) ha dado
mejores resultados que los presentados en los antecedentes de la transformación
empleando coordenadas cartesianas (X, Y, Z).
El uso de la técnica de redes neuronales artificiales, en este caso una red multicapa y
unidireccional, empleada en la transformación de coordenadas planas para migrar la
cartografía de un sistema topocéntrico a uno geocéntrico, resultó compatible con
escalas menores a 1: 2500, las mismas que servirán para proyectos de catastros que
requieran precisiones decimétricas.
En el cálculo de parámetros transformación con el ajuste de mínimos cuadrados que
permitan transformar coordenadas planas desde un sistema local a un sistema global,
dio como resultado que son compatibles con escalas mayores a 1:5000, pero se debe
tomar en consideración que genera errores sistemáticos que se evidencian en el rango
de amplitud entre el mínimo y máximo valor, además que hay discontinuidades en
los resultados como se pudieron observar en la figura 4.2.
En la comparación entre el cálculo de coordenadas con parámetros de transformación
y redes neuronales artificiales, se evidenció que el mejor resultado en cuanto se
refiere a precisión, homogeneidad de resultados, porcentaje de validación y rango de
amplitud entre la distorsión mínima y máxima, se obtiene justamente con la segunda
opción que son redes neuronales artificiales.

CAPÍTULO 5. CONCLUSIONES Y RECOMENDACIONES 62______________________________________________________
5.2. RECOMENDACIONES
Queda abierta la posibilidad de emplear otro tipo de redes neuronales artificiales,
como por ejemplo redes recurrentes, además de variar los algoritmos de aprendizaje
y optimización numérica en el entrenamiento de la red, a fin de lograr mejores
precisiones en los resultados.
La transformación que emplea parámetros de trasformación la cual se la puede
realizar matemáticamente así como también espacialmente con la ayuda de un
Sistema de Información Geográfica (en este caso gvSIG con la opción del Sextante)
y así poder visualizar la cartografía digital transformada para trabajar sobre ella,
pero, la transformación que se realiza con redes neuronales artificiales aún no ha
desarrollado un comando o programa que permita visualizar la transformación de
manera espacial, aunque gracias al progreso de softwares libres se puede crear una
línea de sentencia que solvente esta necesidad de transformar espacialmente los
resultados obtenidos con una red neuronal artificial.

REFERENCIAS BIBLIOGRÁFICAS.
Chacón, Alexandra, “Predicción de ondulaciones geoidales a través de una red neuronal artificial en un área del Distrito Metropolitano de Quito”, 2010.
Chandra, Pravin, “Sigmoidal Function Classes for Feedforward !"#$%#&'( Neural Networks”, 2003.
Daza, S., Redes neuronales,http://www.monografias.com/trabajos12/redneur/redneur.shtml, 2008-10, 2012-10.
Distrito Metropolitano de Quito, Ordenanza Metropolitana N° 0225, 2007.
Dreyfus, G., “Neural Networks. Methodology and Applications”, pág. 193-194, 2004.
Escalona, Pamela, & Iturra, Sonia, “Análisis de la metodología de transformación de PSAD56 a SIRGAS en el catastro minero de la zona de Til-Til”, 2006.
Gershenson Carlos, “Artificial Neural Networks for beginners”, 2003.
Gonzáles, Giraldo, “Cartografía catastral y planeación urbana y regional”, Revista de Información y Análisis, num 18, México 2002.
Haykin. S., “Neural Networks a comprehensive foundation”, 2da edición, 2005.
Hernández, Nuria, “Redes de Neuronas Artificiales en Oceanografía”, 2004.
Hudson, M., et al, “Neural Network Toolbox, Guía de usuario de Matlab”, 2012.
Hwang, J., “Regression Modeling in Back-Propagation and Proyection Pursuit Learning”, 1994.
INEGI, El cambio de Marco de Referencia Terrestre Internacional (ITRF) en México, Abril, 2011.
Instituto Geográfico Agustín Codazzi, Parámetros oficiales de transformación para migrar a MAGNA-SIRGAS la información existentes en Datum BOGOTÁ, 2004.

Instituto Geográfico Militar – Ecuador, Atlas Universal y del Ecuador Tomo 1, 2005.
Leiva, César, “ Determinación de parámetros de transformación entre los Sistemas PSAD56 y WGS84 para el país”, 2003.
Llano, Luis, et al, “Comparación del desempeño de funciones de activación en redes feedforward para aproximar funciones de datos con y sin ruido”, 2007.
Molina, Leonardo, “Validación de modelos de transformación bidimensional para compatibilizar bases cartográficas escala 1:10000”, Curitiba, 2007.
Nacelle Andrés, “Redes Neuronales Artificiales”, 2009.
Najah, A., El-Sahfie, A., Karim, O. & El-Sahfie H., “Application of Artificial Neural Network for water quality prediction”, 2012.
Pallejá, Ezequiel, “Sistemas Geodésicos de Referencia”, 1ra edición, Comité Nacional de la Unión Geodésica y Geofísica Internacional, 1999.
Passos, Geraldo, “Formación Continua en Georreferenciación aplicada al catastro rural”, 2005.
Pérez, Juan, “Apuntes de Fotogrametría II”, Mérida, 2001.
Pérez, Roberto, “Parámetros de transformación entre el Sistemas SIRGAS95 y los sistemas locales CDM y ROU-USAMS (Yacaré)”, 2002.
Rezeai, K., et al., “Feed Forward Neural Network and Interpolation Function Models to Predict the Soil and Subsurface Sediments Distribution in Bam, Iran”, 2009.
Rodríguez, Ruben, Brunini, Claudio & Olondriz, Javier, “El problema de la determinación de parámetros de transformación”, Universidad Nacional de la Plata, 1997.
Rojas, Raúl, “Neural Network. A systematic Introduction”, 1996.
Romero, Ricardo & Tierra, Alfonso, “Parámetros de transformación entre sistemas de referencia proyectados UTM-PSAD56 Y SIRGAS00 para escalas catastrales”, 2012.

Salao, José, “Estudio de las técnicas de Inteligencia Artificial mediante el apoyo de un software educativo”, 2009.
Santacruz, Andrea, “Transformación entre el sistema PSAD56 y los marcos de referencia ITRF utilizando modelos de Helmert y velocidades de placas tectónicas VEMOS”, 2010.
SIRGAS, Página web Oficial de SIRGAS, www.sirgas.org, Fecha de ingreso, enero 2013.
Tierra, Alfonso, “Estado actual del cambio para el Sistema de Referencia Geocéntrico SIRGAS95 en el Ecuador”, 2007.
Tierra, Alfonso, “Transformación entre los sistemas geodésicos PSAD56 y SIRGAS usando una Red Neuronal Artificial”, 2009.
Tierra, Alfonso,” Evaluación del EGM08 y EGM06 en el Ecuador a partir de datos GPS y nivelación geométrica”, 2009.
Universidad Nacional de La Plata - Facultad de Ciencias Astronómicas y Geofísicas, 2012.