-
Estabilidad de los sistemas realimentados y su compensación
-
Estabilidad de un sistema mecánico
Estable Indiferente Inestable
-
Amplificador de audio de potencia
Señal de entrada sinusoidal
Medición con señal de entrada sinusoidal
-
Respuesta con pobre compensación
ENTRADA
SALIDA
-
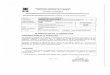
Respuesta en frecuencia insuficientemente compensadoMedición con
señal de entrada sinusoidal desde 1Hz a 1GHz (por simulación)
30dB─
0dB─
Frecuencia
17dBGanancia
-
Respuesta en frecuencia sub compensado
30dB─
0dB─
Frecuencia
6dB
Medición con señal de entrada sinusoidal desde 1Hz a 1GHz (por
simulación)
Ganancia
-
Respuesta en frecuencia compensado
30dB─
0dB─
Frecuencia
Medición con señal de entrada sinusoidal desde 1Hz a 1GHz (por
simulación)
Ganancia
-
Amplificador de audio de potencia
Señal de entrada cuadrada
Medición con señal de entrada cuadrada
-
Señal de entrada cuadrada (escalón)
-
Respuesta al escalón
-
Respuesta al escalón pobremente compensado
-
Respuesta al escalón sub compensado
-
Respuesta al escalón aceptablemente compensado
-
Respuesta al escalón compensado
-
Respuesta al escalón sobre compensado
-
Circuitos de compensación del amplificador
-
Efecto de polos y ceros en la respuesta en frecuencia
a
a
(del amplificador sin realimentar)
-
Respuesta del amplificador con un polo
a
aaa
Realimentándolo, siempre resulta estable
-
a
a
Realimentándolo resulta estable, pudiendo presentar
respuestastransitorias oscilatorias, sobrepicos en la amplitud y no
planicidad enla respuesta en frecuencia
Respuesta del amplificador con dos polos
-
Realimentándolo puede ser estable o inestable, pudiendo
presentarrespuestas con oscilaciones transitorias, sobrepicos en
amplitud y noplanicidad en la respuesta en frecuencia.
Respuesta del amplificador con tres polos
-
Inestabilidad de un sistema realimentado
f(s)a1(s)aA
+=
XAY =
f
a(s)
∞=+−→ fsa1
sa1fsa
lim)()(
)(
-
• Una pequeña señal de frecuencia ω1 excita la entrada
• Llega a la salida con la fase invertida• Regresa al sumador de
entrada resultando
en una señal error de mayor amplitud que la de entrada
• Llega a la salida con mayor amplitud, y así sucesivamente
Ante una excitación que contenga lafrecuencia ω1 (como el ruido
térmico en elsumador + ) se genera una señal de salidaoscilante de
amplitud creciente
Sistema inestable
La amplitud de la oscilación quedará limitada por la fuente de
alimentación u otro mecanismo desaturación del circuito
ω1
ω1
a(s)
f
Proceso de crecimiento de la amplitud de salida
-
El sistema será inestable si existe s = jω1 tal que:
( ) 11 −=ωjaf
( ) 11 =ωjaf ( ) º1801 −=∠ ωjaf
En forma equivalente:
( ) 0jωaflog 1 =
y
O también:
( ) º1801 −=∠ ωjafy
Criterio de Barkhausen
-
El término a(s)f se conoce como ganancia de lazo y suele
denominarse T(s)
a(s) f = ganancia de lazo = T(s)
f
Medición de la ganancia de lazo
a(s)
-
Se puede calcular o medir con el siguiente esquema:
a(s)
f
vPRUEBA
SALV ( )SAL
PRUEBA
V-a s f =v
-
Circuito para simular la ganancia de lazo T(s)
Circuito bien compensado
Ganancia
Fase
Abriendo el lazo e
inyectando señal de prueba
Midiendo
-
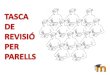
−180°
60dB− Ganancia de Lazo
Fase de la ganancia de lazo
Frecuencia
0dB
Amplitud y fase de la ganancia de lazo T(s)Ver que |T| llega a
0dB antes que la fase alcance -180°
Y que la fase llega a -180° cuando |T| < 0dB
−
0°-
-
−180°
60dB− Ganancia de Lazo
Fase de la ganancia de lazo
Frecuencia
Frecuencias de cruce
Frecuencia de cruce de la fase
Frecuencia de cruce de la ganancia
0dB
La condición para la oscilación de un sistema realimentado es( )
º1801 −≤∠ ωja( ) 11 ≥ωjaf ∧
−
0°-
-
−180°
60dB− Ganancia de Lazo
Fase de la ganancia de lazo
Frecuencia
Margen de fase y Margen de ganancia
Margen de fase
Margen de ganancia
0dB
La condición para la oscilación de un sistema realimentado es( )
º1801 −≤∠ ωja( ) 11 ≥ωjaf ∧
−
0°-
-
Margen de fase de 90° :
Margen de fase de 45° :
0f
Respuesta en frecuencia del amplificador
-
( )
1
0
ps1
asa−
=
( )( )01
0
T1ps1
AsA
+−
=
( )ωjA
0A
0a
( )01 T1p +1p
0T ( )ωjT
ωlog
[ ]dB
0A
0a
( )ωja
( )ωja
( )ωjA
f1
T1aA
0
00 ≅+=
faT 00 =
Comportamiento de un sistema realimentado con 1 polo
10 pa≅
OAlogalogf1logalogfalogTlog −≅−==
( )fsa1
sasA)()(
+=
-
Ejemplo de margen de fase con 1 polo
( ) ( ) ( ) ( ) 0101010101010 log20log201log20log20log20log20
AjafjafjajT −≅−== ωωωω
( ) [ ]dBja ω
0A
0a
-
Ejemplo de margen de fase en sistemas de más de 1 polo:
( ) =ωjT10log20
( ) == fja ω10log20
( ) ≅−= fja 1log20log20 1010 ω
( ) 01010 log20log20 Aja −≅ ω
-
Respuesta de sistemas realimentados con dos polosSe tiene un
sistema con margen de fase = 45° en la frecuencia decruce de la
ganancia de lazo ωO
( ) º135−= ejT Oω
La fase de T a esa frecuencia será
( ) ( ) 1O OT j a j fω ω= =
La ganancia del sistema es ( ) ( )( )ωωωjT
jajA O +=
1
Reemplazando por
( ) º135−=∠ OjT ω
( ) ( )º1351 −+= ejajA OOωω
( ) ( ) ( )j
jaj
jajA OOO 7,03,07,07,01 −=
−−=
ωωω ( ) ( )f
jajA OO
3,176,0
==ω
ω
y operando se tiene ⇒
⇒ y tomando módulo
Análogamente para un margen de fase de 60° es ( )f
jA O1
=ω
( )f
jA O7,0
=ωY para un margen de fase de 90° es
Con lo que será
O
O
-
Ganancia relativa en función de la frecuencia relativa para
distintos márgenes de fase
0AAlog20
0ff
-
Estabilidad de un sistema de tres polos según la magnitud de la
realimentación “f “
ESTABLE INESTABLEINESTABLE CRÍTICO
f pequeño f grandef intermedio
0 ≤ f ≤ 1 para el circuito del ejemplo, con realimentación serie
paralelo
-
Compensación por polo dominante
• Creando un polo nuevo en baja frecuencia demanera de llevar la
frecuencia de cruce (gananciade lazo=0dB) a la frecuencia del
primer polooriginal y lograr un margen de fase de 45°
• Desplazando del primer polo hacia las bajasfrecuencias de
manera de llevar la frecuencia decruce de la ganancia (T=1) a la
frecuencia delsegundo polo y lograr un margen de fase de 45°
-
Ejemplo: creando nuevo polo
T=0dB
-
Ejemplo: desplazando polo
T=0dB
-
Creación del polo dominante
• Una forma es agregar capacidad en algunaparte del circuito, o
aumentar algunacapacidad existente, pero esto requierecapacitores
grandes
• Otra forma es agregar capacitores pequeñosusando la técnica de
multiplicación de Miller,lo que a su vez permite partir polos, o
seacorrer el polo inferior hacia abajo y el superiorhacia
arriba
-
Caso típico en un amplificador• Agregando un capacitor:
RCPD
1= RiRR //1= πrrRi b +=
C resulta muy grande, aproximadamente 1000 pF
-
• Multiplicando por Miller:
El efecto Miller es una realimentación local en la segunda
etapa
-
• Esquematizando:
( )CgmRC LM += 1• Se aplica Miller:
• Con lo que desplaza el primer polo hacia las bajas frecuencias
con capacitores de pequeño valor, típicamente < 100 pF.
↓1p⇒
-
• El segundo polo (a la salida de la segunda etapa) también se
desplaza debido a la reducción de la impedancia de salida RO :
2
2
1 TO T
RR+
=1
12
.CC
CCCCTOTAL ++=
• Resultando:
TOTALOCRp 12 −=
2p 1p
222
1CR
p −=11
11CR
p −=CRgmR
p21
11
−=( )12212 CCCCCgmCp
++−=
σ
ωj
• O bien calculado resolviendo el circuito:
• Gráficamente:( )12212 CCCCC
gmCp++
−=
-
Compensación por adelanto de fase
• Consiste en agregar un cero en el realimentador demanera de
compensar un polo del amplificador
• Un caso típico es un realimentador con un polo y uncero, en un
amplificador con 3 polos
( ) ( ) ( )
+
+
+
+
+
==
321
0
1111
1
PPPP
Z
jjjj
jTjfjajT
ωω
ωω
ωω
ωω
ωω
ωωω
-
Un amplificador tiene una ganancia en baja frecuencia de 32000
yuna función transferencia con tres polos reales negativos
demagnitudes 1KHz, 0,5MHz y 100 MHz.
a) Dibujar el diagrama de módulo y fase de la función
transferencia.b) Determinar el margen de fase en caso de utilizarse
el
amplificador en un sistema realimentado con ganancia detensión
de 50dB
c) Determinar el ancho de banda del sistema del punto bd)
Compensar por polo dominante para utilizar el amplificador
realimentado con ganancia unitaria (0dB) y un margen de fasede
45° asumiendo que los polos originales no resultan alterados.
e) Compensar el amplificador realimentado para una ganancia
de20dB y un margen de fase de 45°, desplazando el polo inferior
yasumiendo que los polos superiores no resultan alterados.
Ejercicio 1:
-
Un amplificador de tensión se encuentra correctamentecompensado
con margen de fase de 45º para una ganancia de 0dBcon ancho de
banda de 1MHz y distorsión armónica de 0,005%.Se requiere modificar
el amplificador para emplearlo en unpreamplificador de audio con
una ganancia de 40dB.
a) ¿Con que margen de fase operará el preamplificador luego de
lamodificación de la ganancia del amplificador?
b) ¿Se cumplirá con la calidad requerida en dicha
aplicación,justificar?
c) Si fuera posible modificar la compensación del
amplificador,¿cómo se haría tal modificación?
Ejercicio 2:
Estabilidad de los sistemas realimentados y su
compensaciónEstabilidad de un sistema mecánicoAmplificador de audio
de potenciaRespuesta con pobre compensaciónRespuesta en frecuencia
insuficientemente compensadoRespuesta en frecuencia sub
compensadoRespuesta en frecuencia compensadoAmplificador de audio
de potenciaSeñal de entrada cuadrada (escalón)Respuesta al
escalónRespuesta al escalón pobremente compensadoRespuesta al
escalón sub compensadoRespuesta al escalón aceptablemente
compensadoRespuesta al escalón compensadoRespuesta al escalón sobre
compensadoCircuitos de compensación del amplificadorEfecto de polos
y ceros en la respuesta en frecuenciaRespuesta del amplificador con
un poloRespuesta del amplificador con dos polosRespuesta del
amplificador con tres polosInestabilidad de un sistema
realimentadoAnte una excitación que contenga la frecuencia ω1 (como
el ruido térmico en el sumador + ) se genera una señal de salida
oscilante de amplitud crecienteCriterio de BarkhausenEl término
a(s)f se conoce como ganancia de lazo y suele denominarse T(s)Se
puede calcular o medir con el siguiente esquema:Circuito para
simular la ganancia de lazo T(s)Amplitud y fase de la ganancia de
lazo T(s)La condición para la oscilación de un sistema realimentado
esLa condición para la oscilación de un sistema realimentado
esNúmero de diapositiva 30Número de diapositiva 31Número de
diapositiva 32Número de diapositiva 33Respuesta de sistemas
realimentados con dos polosNúmero de diapositiva 35Estabilidad de
un sistema de tres polos según la magnitud de la realimentación “f
“ Compensación por polo dominanteNúmero de diapositiva 38Número de
diapositiva 39Creación del polo dominanteCaso típico en un
amplificadorNúmero de diapositiva 42Número de diapositiva 43Número
de diapositiva 44Número de diapositiva 45Número de diapositiva
46Número de diapositiva 47