Embed Size (px)
Citation preview

1 / Taquímetro electrónico con medida de distancia electro-óptica.2/ La referencia "nubes de puntos" es la que comúnmente se uti-liza para denominar al conjunto de los datos espaciales de una ovarias capturas.
92[01
3/ El proceso de "registro" de una "nube de puntos" consiste endeterminar las posiciones relativas entre las diferentes capturasdel escáner para poder tener un solo conjunto de datos que permi-ta definir todo el modelo.
4/ ... edificios como el museo Gugenheim de Bilbao. los proyec-tos de Einsemann en Santiago. la nueva remodelación del merca-do de Sta. Caterina en Barcelona de E. Miralles y otros.
ESTRATEGIAS DE MODELADO FORMAL EN LA SAGRADA FAMILIAAndrés de Mesa, Joaquín Regot, M. a Amparo Núñez Andrés y Felipe Buill Pozuelo
1. IntroducciónLas técnicas de levantamiento de obrasarquitectónicas están en continuo cam-bio favorecidas por el uso de nuevosaparatos que permiten, en muy pocotiempo, conseguir una gran cantidadde información con precisiones simila-res a las determinadas con instrumen-tal topográfico de uso común como lasestaciones totales 1. Los diferentes ti-pos de aparatos se adaptan a las ca-racterísticas del levantamiento permi-tiendo trabajar a diferentes distancias,desde pocos decímetros para pequeñasesculturas o piezas arqueológicas, a cen-tenares de metros para el control mé-
trico de conjuntos monumentales,adaptándose a las precisiones reque-ridas para definir de forma óptima alobjeto según su tamaño y forma.
El sistema más utilizado para este ti-po de levantamiento está basado en lacaptura de posiciones espaciales, pun-tos en 3d, mediante la lectura de dis-tancias que producen los escáneres lá-ser de tipo terrestre aplicando barridossistemáticos. Esta técnica de barrido lá-ser, utilizando sensores terrestres, per-mite adquirir cantidades masivas depuntos con precisiones milimétricas der t rt ct r-rr c rr e r-o n,~_c: r¿iplc1~ ql1e 1!:l.~técnl-
cas habituales de levantamiento.El resultado del levantamiento con
este tipo de sensores es un conjunto dediversas "nubes de puntos" 2 que re-
cogen la geometría del objeto, que esnecesario relacionarlas entre sí me-diante referencias locales o absolutaspara obtener un conjunto posiciones3d uniforme y muy preciso.
Los sistemas gráficos informáticos,adaptados para la gestión de este tipode datos, facilitan los procesos de de-terminación y registro 3 de las "nubesde puntos", (datos de posición en tresdimensiones de los objetos). Una vezcontrolada esta etapa, estos sistemaspermiten elaborar el modelo virtual,mediante la triangulación de las posi-ciones 3d obtenidas utilizando los sis-temas de generación de mallas. A par-tir de esta primera solución formal, esposible utilizar diferentes tipos de en-tidades tridimensionales para elaborarel modelo virtual del objeto escanea-do. Se pueden aplicar de diferentes ma-neras de resolver su forma virtual, se-gún las necesidades de aquello que sequiera obtener de él, y el resultado pue-de ir desde un simple modelo 3d a co-lores, hasta un detallado análisis deprecisión del comportamiento del ma-terial de sus superficies.
El objeto de este artículo es expli-car los problemas y posibles solucio-nes que se producen en un proceso de
lev an ta m ien to arquitectónico sobretodo debido a las limitaciones que ac-tualmente tienen los programas in-formáticos, propios de estos procesos,
para generar las formas básicas de unmodelado tridimensional.
En este tipo de programas se sue-len integrar las formas geométricasmás comunes de los trabajos de inge-niería y arquitectura (como el plano,el cilindro, el cono, ... ) pero no tienenen cuenta superficies más complejasque en muchas ocasiones permitiríandeterminar formas particulares quese producen en la construcción o endiseños de arquitectura especiales. Es-te problema tiene su origen en el tipode aplicaciones a la que están desti-nados, fundamentalmente el controlde calidad en la producción o el con-trol de funcionamiento de grandesplantas industriales. Los problemasque pueden aparecer en edificios cu-yo diseño integra formas libres 4, nopermiten la aplicación inmediata deeste tipo de programas y requierensoluciones particulares para el con-trol de su modelado tridimensional.
Este trabajo muestra la metodolo-gía utilizada para obtener y modelarla superficie interna de una parte delventanal de la nave central del tem-plo de la Sagrada Familia. Este pro-ceso de ingeniería inversa permitiráoptirnizar la fabricación de nuevos
ventanales para la obra del templo dela Sagrada Familia.
El proceso se desarrolla en cuatropasos: captura de datos espaciales, se-

Fig.l. Ventanal objeto de estudio.
lección y filtrado de estos datos, ajus-tes de la forma de la superficie y re-presentación gráfica tridimensional.
2. Objetivo del trabajoEl modernismo es una de las corrien-tes arquitectónicas más importante enCataluña en el siglo xx, y AntonioGaudí su principal representante. Unode los trabajos más singulares de estearquitecto es el templo de la SagradaFamilia actualmente en construcción,donde aparece el tema de nuestro es-tudio, el interior de un ventanal de la
nave principal del lado que corres-ponde a la Fachada de la Pasión.
Este ventanal está compuesto porelementos prefabricados de piedra ar-tificial que componen las diferentespiezas de las superficies que lo con-forman. Las formas geométricas quese utilizaron al definir su forma fueronsuperficies cuadráticas y superficiesplanas cuya composición alcanza unasdimensiones de 12 metros de anchopor 16 metros de altura (figura 1).
La finalidad del trabajo efectuadofue conseguir un modelo virtual com-pleto similar al de la ventana real cons-
truida. Para ello se propusieron dos ca-minos de actuación. Un primer cami-no de tipo geométrico basado en la de-terminación de secciones planas de lasuperficie aprovechando las "nubes depuntos" tridimensionales. Este proce-dimiento terminaba de definir la for-ma final de la superficie, obteniendolíneas rectas de la superficie a partir deestas secciones planas aplicando unjuego proycctivo basado en la regla ge-neral de las superficies regladas.
Un segundo camino de tipo mate-mático permitió establecer las super-ficies que componen el conjunto a par-
..•,.Q
c:
CD(")-c-::o(")
'"93
EG1

94[Gl
tir de la utilización de las ecuacionesgenerales de las superficies cuadráticasajustadas por mínimos cuadrados. Unavez clasificadas estas superficies gene-rales se obtuvo su geometría, posicióny tipo de superficie (hiperboloide, pa-raboloide ... ) y con ello los parámetrosnecesarios para su generación virtual.
En ambos casos el proceso se com-pleto con el estudio de las meto dolo-gías para la elaboración de las super-ficies tridimensionales a partir de losparámetros que las definen. El desa-rrollo de este trabajo se llevo a caboaplicando un sistema de control para-métrico único para todas las superfi-cies del ventanal, para poder que con-trolar el comportamiento de cada parterespecto al conjunto, lo que permitiórealizar un análisis completo del obje-to de estudio y a su vez determinar unmodelo ideal partiendo de la toma dedatos del modelo real.
3. Captura de datosEn el caso estudiado se utilizaron dostipos de sistemas topográficos para lacaptura de datos espaciales. El pri-mero de ellos responde a un tipo detrabajo discreto con identificación dedetalles por parte del operador, el cualcaptura los puntos significativos y derelleno, empleando las estaciones to-tales de medida con láser Leica 705,y Topcon GPT 7000. En el segundocaso la toma se realiza de forma au-tomática capturando de forma ma-siva una "nube de puntos", donde eloperador únicamente selecciona laventana de captura y la resolución es-pacial, no produciéndose una selec-ción de puntos en función de la cali-dad y representatividad de los
mismos, en este caso se emplearon lossensores láser escáner Cyrax 2500 yRiegl LMS-Z420i.
La distancia de trabajo en ambos ca-so fue de aproximadamente 45 metrosya que tanto las estaciones, topográfi-cas como los láser escáneres, se situa-ron frente al ventanal, en una platafor-ma estable en el balcón situado al otrolado de la nave, de este modo se evita-ba tener visuales cuya inclinación pro-dujera un error superior al estimado enprincipio como tolerable en la deter-minación de cada uno de los puntos.
En el primero de los casos (radia-ción topográfica) únicamente se rea-lizó una captura discreta de la infor-mación espacial, definiendo los
Fig. 2. Toma de datos topografía.
bordes, los cambios de pendiente, ypuntos en cada superficie para tenersuficiente redundancia, para poderajustar correctamente cada cuádri-ea de forma independiente. Debido ala falta de visibilidad, por los ele-mentos situados en planos anterioresque ocultan parte del ventanal, el nú-mero de puntos capturados no es ex-cesivamente elevado en alguno de loselementos (de algunas decenas depuntos) (figura 2).
En el segundo caso tenemos "nubesde puntos" que será necesario unir pa-ra tener el modelo global del ventanalen el caso de trabajar con el modelode la casa Cyrax puesto que el sensorRiegl permitía obtener en un solo ba-rrido toda la superficie de la ventana.Al igual que en el caso de topografíaclásica alguno de los elementos quedórepresentado por un número de pun-tos poco elevado debido a la imposi-bilidad de medir la superficie al estaroculta por otros elementos (sin em-bargo, en general, el número de pun-tos es muy superior) (figura 3).
Otro de los trabajos realizados encampo, y necesario para poder rela-cionar las "nubes de puntos" tomadasmediante estación total y escáner lá-ser, fue la toma de puntos de controlque permitieran realizar la transfor-mación entre los sistemas de coorde-nadas a los que estaban referenciadosuno y otro trabajo. En este caso y pa-ra tal fin se dispusieron puntos de con-trol materializados por dianas planasy cilindros de alta reflectividad, de losque se disponían coordenadas en el sis-tema establecido por topografía, eje xen la dirección de la nave, eje z verti-cal y eje Y ortogonal a ambos y al ven-tanal (figura 4). A partir del conoci-

i I Consiste en una transformación de coordenadas que considera.n cambio de escala, un veetor de traslación entre los dos siste-nas y los tres giros entre las temas de coordenadas, De esta íorna se pueden pasar las coordenadas tomadas en un sistema localle una "nube de puntos" a otro sistema coordenada con sólo co-ioesr las coordenadas de tres puntos en los dos sistemas, En el:aso topográfico el factor de escala es obligatoriamente la unidad.
Fig, 3. Toma de datos scanner.
miento de las coordenadas en dichosistema y las correspondientes a la "nu-be de puntos" obtenida por láser es-cáner se calcularon los parámetros detransformación tridimensional de se-mejanza 5 que nos permitía llevar la"nube de puntos" (referenciada a unsistema arbitrario) al sistema ante-riormente descrito.
Tanto en el caso topográfico clási-co como en la captura de datos por ba-rrido láser la posición de los puntoscapturados está afectada por los erro-res producidos en la medida de ángu-los y distancia, siendo este último el demayor magnitud para la distancia detrabajo en nuestro caso. Para amboscasos la magnitud del error en distan-cia está entorno a 5mm.
4. Filtrado de los datosPara un mejor tratamiento y compa-ración de los resultados obtenidos porambos métodos se dividió el ventanalen diferentes superficies con las que setrabajó de forma independiente.
En el caso topográfico este trabajoera cómodo al tener definidas las su-perficies y sus contornos, cambios dependiente, ... con un identificador paracada punto. Lo cual es totalmente im-posible con la utilización del láser es-cáner por lo que se hace necesario untrabajo de depuración y tratamiento dela "nube de puntos" inicial mucho máslaborioso y costoso. La manipulaciónde esta gran cantidad de datos es unode los problemas que plantea este tipode sistemas de medida, que será nece-
'"X"C..•el)
'"o=
..Q
e
951(";1
bl
Fig. 4. Ejes de coordenadas,
sario resolver en un futuro próximo siqueremos que el trabajo con sensoresde captura masiva sea realmente efec-tivo. Además, se ha de tener en cuentaque cualquier error en la depuración,dejando puntos que no pertenezcan auna superficie, nos conducirá al ajustede una superficie errónea, ya que al tra-bajar en la mayoría de los casos con unaresolución muy alta se encontrarán es-tos puntos en gran cantidad, dificul-tando su localización incluso mediantela utilización de filtros estadísticos co-mo veremos en el siguiente epígrafe.
Otro factor a considerar es la co-
rrección de errores ocasionado por di-ferentes factores que afectan a la señalcomo son el material de la superficie re-flectante, color de la misma, rugosidad, ...

96
tG1que en casos especiales pueden presen-tar valores muy importantes (Schulz T.et al., 2004) (Núñez A. et al., 2005).
Por tanto, será muy importante es-tablecer la metodología necesaria pa-ra separar las diferentes superficies,puesto que en caso contrario, podemosobtener superficies erróneas al ser muydifícil la detección de los puntos equí-vocos al encontrarse en gran cantidad.
5. Ajustes de superficiesLa posibilidad de la determinación desuperficies regladas alabeadas a partirde los datos requiere de un conoci-miento a fondo de la geometría y lamatemática analítica utilizada por losprogramas de CAD.
Se plantean dos vías de ajuste desuperficies a los puntos. La primera,eminentemente gráfica, requiere de ladeterminación de curvas en la super-ficie. La segunda se obtiene a partirdel análisis matemático y la determi-nación de las ecuaciones pararnétri-cas de la superficie.
6.1. Proceso GeométricoCon la base de datos obtenida me-diante la captura y el filtrado de pun-tos de! ventanal, como primera alter-nativa, se estudió la manera de definirlas diferentes superficies del conjuntoa través de un procedimiento geomé-trico. Para restringir e! campo de ac-tuación se dieron dos premisas: las su-perficies deberían ser regladas y desegundo grado. A partir de estas doscondiciones, como primer paso, se rea-lizó la selección de un grupo puntos deuna de las superficies de! conjunto conla intención de determinar tres curvas
6/ Los aparatos láser escáner para mediciones tridimensionaleshacen una lectura ordenada de todas las posiciones espacialesque miden, puesto que los cabezal es del aparato giran en torno ados ejes perpenciculares entre sí, por lo tanto el resultado ofreceuna matriz de puntos espaciales configurada por filas y por colum-nas. Como consecuencia, todos los puntos que corresponden auna fila o a una columna se encuentran sobre un mismo plano, unplano que siempre pasa por 01 centro de giro del rayo láser.7/ El método general de determinación y clasificación de las su-perficies regladas alabeadas permite aplicar la proyección a unplano de dos curvas de la superficie desde un punto de la mismapara establecer líneas rectas contenidas en la superficie.
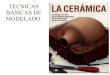
Fig. 5. Obtención de curvas planas y generatrices.
planas que deberían pertenecer a la fa-milia de las cónicas.
El método empleado para la selec-ción de los puntos de una curva planade la superficie, se realizó separandoaquellos puntos del proceso de escane-ado que corresponden al barrido de unpaso del láser escáner 6. Mediante la in-terpolación de los puntos seleccionadosse trazó el arco de una curva de segun-do grado. Para definir los elementos quedeterminan a este tipo de curva, (cen-tro ejes, vértices ... ), fue necesario apli-car la simetría afín. De esta manera,se pudieron trazar tangentes y perpen-diculares a la curva [Sánchez Gallego,1997], indispensables para obtener sutrazado completo.
La determinación de las generatricesrectas que pertenecen a superficies ala-beadas de segundo grado, se resolviómediante la proyección de una de suscurvas, (obtenida con el procedimien-
to que se ha expuesto), sobre e! planoque contiene a otra curva cualquiera dela misma superficie. Para realizar estaproyección, se utilizó como centro deproyección un punto que también per-teneciese a la superficie. De esta mane-ra, uniendo el punto de proyección cone! punto de intersección entre la curvaproyectada y una de las curvas de la su-perficie se pudo determinar una gene-ratriz recta de la superficie [IzquierdoAsensi, 1992] 7. Repitiendo este proce-dimiento tres veces, se pudieron obte-ner tres generatrices rectas de la super-ficie. Estas tres generatrices permitierondeterminar e! parale!epípedo asintóti-co de una superficie reglada de segun-do grado, cuyo centro, en cualquiera delos C::ISO<: corresponde al centro de es-te tipo de superficies (figura 5).
El proceso de obtención de este pa-ralelepípedo se realizó por medio de laintersección de seis planos obtenidos por

Fig 6. Determinación del cono asintótico y el eje dela superficie.Fig. 7. Generación del hiperboloide elíptico.
mx
"C"'1(J:>
'"=
8 / La obtención dol cono asintótico permite obtener una secciónperpendicular al eje, lelipse). La excentricidad de la elipse resulta-do de esta sección define el factor de afinidad entre el hiperboloi-de de revolución, y el de garganta elíptica.9! El hecho de poder disponer de un cuadrilátero alabeadu de unparaboloide hiperbóliro conlleva el conocimiento de la orientaciónde sus planos directores y por consiquiente la dirección de su eje.Definir la posición dol vértice y de sus oarábolas principales es defácil determinación,
1»,
(?w
w"".cc:-<Iln...•o'
("J
ti)
la combinación de tres de las generatri-ces rectas, pertenecientes a la superficie,tomadas de dos en dos, El centro del pa-ralelepípedo obtenido permitió definirel centro de la superficie reglada ya queson coincidentes, El tipo de superficie sedeterminó mediante el trazado de lasperpendiculares desde el centro de la su-perficie a las generatrices utilizadas pa-ra obtener el prisma, Si estas perpendi-culares son coplanares entre sí, lasuperficie es de revolución, y por tantoel eje de la superficie es la normal al pla-no de dichas perpendiculares, En casocontrario, el hiperboloide es elíptico, yla obtención de su eje se realiza mediantesu cono asintótico 8 (figura 6),
El procedimiento geométrico em-pleado para la obtención de superfi-cies regladas, que corresponden a hi-perboloides de una hoja, es extensiblea la generación de paraboloides hi-perbólicos. En este caso, la obtencióndel paralelepípedo asintótico median-te tres generatrices de la superficie, per-mite definir directamente un cuadrilá-tero alabeado perteneciente a este tipode superficie, lo que es suficiente paradefinirla tridimensionalmente medianteprogramas de diseño asistido 9,
A partir de estos datos obtenidos ge-ométricamente, se pueden establecerlos parámetros necesarios para gene-rar este tipo de superficies mediantelos diversos procedimientos de mode-lado tridimensional con los que dis-ponen los programas de modelado vir-tual [Regot, Mesa, 2005c],
En este caso, basta aplicar una afi-nidad, entre cualquier sección elípticadel hiperboloide y la circunferencia quetiene por diámetro su eje mayor, Si es-te proceso de transformación incluyeuna de las generatrices, la determinación
97

98[01
de un hiperboloide de revolución es in-mediata. En cambio, aplicando el mis-mo factor de afinidad sobre esta figura,pero en sentido inverso, se obtiene el hi-perboloide elíptico que contiene las doscurvas iniciales, las tres generatrices quehan generado el prisma asintótico y la"nube de puntos" con la que se ha ini-ciado el proceso. De esta manera, se pue-de establecer los diferentes cuerpos quecomponen el conjunto arquitectónicodel ventanal (figura 7).
6.2. Proceso analíticoSe procede a la determinación de pun-tos pertenecientes a cada superficie me-diante los modos de selección de enti-dades que ofrecen los programas degestión de "nubes de puntos". En es-te proceso la dificultad de establecerlos puntos de cada superficie dependede la calidad y de las características delaparato de captura, ofreciendo venta-jas aquellos aparatos que permiten es-tablecer características y propiedadesno relacionadas directamente con lageometría de la superficie como la re-flectividad, el color etc.
Después de la separación de lospuntos en diferentes superficies se tra-taron éstas de forma independiente, demodo que no era necesario considerarlos condicionan tes geométricos exis-tentes entre ellas. Únicamente nos cen-tramos en el hecho de que cada uno delos puntos pertenecía a la superficiecorrespondiente y por tanto para ca-da uno de ellos se podía plantear unaexpresión del tipo (1) que correGpon-de a la ecuación general de las super-ficies cuadráticas, en la que tendremoscomo incógnitas los parámetros A, B,C, D, E, F, G, H, 1.
10/ entendemos como incertidumbre la cesviacíón típica asocia-da al valor estimado, y como región de incertidumbre al área encuyo interior se encuentra el valor estimado con una cierta proba-bilidad, que en el caso de estar trabajando con errores estándarsería del 68%.
Ax2 + Bt + CZ2 + Dxy + Exz + Fyz + Gx + Hy + Iz = -1
Por tanto y para poder determinarcada superficie necesitaremos conocerestos 9 parámetros, siendo necesariodisponer para su estimación de al me-nos 9 puntos en cada una de ellas, dis-tribuidos homogéneamente; con el in-conveniente de que no tendremos unaestimación del error asociado a tal de-terminación. Este problema se ve sub-sanado por el hecho de disponer de unacantidad de puntos, y por tanto de ecua-ciones, superior al estrictamente nece-sario. De esta forma para cada una delas superficies se podrá resolver el sis-tema de ecuaciones mediante un ajustemínimo cuadrático por el método deobservaciones indirectas, método queadapta una superficie de forma que lasumatoria de los residuos al cuadradosea mínima. La ventaja de este métodoes que junto con el valor de los pará-metros que definen cada una de las su-perficies nos dará una estimación de laincertidumbre 10 de los mismos, así co-mo la desviación de cada uno de lospuntos a la superficie ajustada.
6.2.1. AnálisisLas soluciones obtenidas en el ajusteson sometidas a una serie de test esta-dísticos que nos permiten determinarla bondad de las mismas y detectar losposibles puntos afectados por un erroren la propia observación o no perte-necientes a la superficie. Para ello seanalizó la fiabilidad interna y exter-na (parérnetros de hom.0seneid"d), re-dundancias, test W-Baarda y el míni-mo error detectable, fijándose losparárnetros de nivel de fiabilidad y po-tencia del test en a=O.l % y ~=80%
(1)
respectivamente (Chueca et al., 1999)(Wolf P.R. et al., 1997).
Las observaciones que no superan es-tos test son eliminadas y se recalcula lasolución. Aproximadamente entre el 1%yel 5% de los puntos tuvieron que sereliminados de cada una de las superfi-cies, en el caso de emplear observacio-nes topográficas. Esto supone la bús-queda y eliminación de 1a 3 puntos.
Esta "depuración" se ve dificultada,y en ocasiones de imposible solución,en el caso de emplear sensores láser es-cáner puesto que dejar una pequeña zo-na que no pertenezca a la superficie acalcular supone introducir hasta cente-nares de puntos erróneos, lo que no per-mite su localización de forma eficiente,ya que estos puntos se encuentran con-centrados en una zona que modificala geometría de la superficie.
Tras conseguir una solución adecua-da se procedió a la clasificación de lassiete superficies que se había separadocomo cuádricas, que son las zonas querodean los tres óculos superiores y laparte superior de las cuatro ventanasinferiores. Aunque en principio los fal-dones y jambas de las mismas pudierandar la impresión de corresponder a su-perficies cuádricas se comprobó que nose cumplía la ecuación general para lospuntos de las mismas.
Es necesario indicar la dificultad enla determinación de las ventanas in-feriores puesto que se disponía de par-tid" de un 40% de la superficie totalvisible en ese lateral, lo que se vio dis-minuido por estar parte de la super-ficie oculta por las columnas en el ca-so de las ventanas extremas.

Fig. 8. Proceso de la obtención del modelo analíticoy los parámetros de la superficie.
6.2.2. Clasificación de las superficiesUna vez obtenidos los coeficientes de laecuación general procedemos a su cla-sificación mediante la cual obtenemos:
I Tipo de superficie
I Magnitud de los semiejes
I Coordenadas del centro
I Rotaciones para los tres ejes 'ID, <1>, K
Para las magnitudes de los ejes po-demos indicar que los valores obteni-dos para las superficies 2, 3, 4, 5, 6,Y 7, que en principio debían ser la mis-ma, son coincidentes en el orden delcentímetro. El parámetro que mayorvariación experimenta es la orienta-ción de la superficie en función del nú-mero de puntos y la distribución de losmismos, que puede ser debido a losdesplazamientos que sufren las piezasprefabricadas en su colocación.
Posteriormente la ecuación generalde los hiperboloides de una hoja setransforma en su expresión pararné-trica para su representación gráfica.
6.2.3. Resultados obtenidosLas superficies calculadas después de laeliminación de los puntos erróneos, enel caso topográfico, son clasificadas deforma correcta para todos los casos, re-sultando superficies cuádricas del tipo
hiperboloide, los valores analíticos quedefinen su forma se encuentran con di-ferencias menores de 5mm, y los girosse determinan dentro de márgenes acep-tables (<1°). El número de puntos con-siderados para poder determinar co-rrectamente las superficies pequeñas esde cerca de 30 puntos, repartidos ho-mogéneamente por todo el elementoconsiderado, representando este en oca-siones un valor en porcentaje inferiora125% del total de la superficie.
En el caso del barrido con láser es-cáner se consiguen resultados simila-res (no mejores por ampliar el gradode libertad de forma importante), pe-ro se hace más difícil el proceso de lim-pieza y depuración de puntos erróne-os (figura 8).
7. El modelo tridimensional dela superficie de la ventanaEn comparación con el proceso ela-borado a partir de geometría tridi-mensional, el estudio de la forma del
o1»
<Doo-==o1»
99
EG1
ventanal realizado mediante el análi-sis matemático de las "nubes de Pun-tos", dio un resultado mucho más pre-ciso y versátil para controlar lassuperficies que lo componen.
Por esta razón, la generación tridi-mensional del ventanal del templo dela Sagrada Familia, (estudiado me-diante ecuaciones matemáticas obte-nidas del análisis de diversas "nubesde puntos"), se ha desarrollado en dospartes. En la primera parte, se esta-blecieron los criterios necesarios pa-ra transformar las ecuaciones mate-máticas en superficies modeladastridimensionalmente que formen par-te de la estructura de un único con-junto. Para llevar a cabo este primercometido, fue necesario crear un rigu-roso sistema paramétrco que permi-tiese modificar la posición, el tamañoy la orientación de cada una de las su-perficies que componen el ventanal, deforma interactiva y en relación con elresto del conjunto. La segunda partede este trabajo, se dedicó a concretar

100
tQ1
\ -
la forma definitiva del ventanal, ini-cialmente construido mediante una"infraestructura" paramétrica mate-mática y un conjunto de superficies de-finidas a través de su forma geométri-ea pura. Como consecuencia, en estaetapa fue necesario realizar una seriede operaciones tridimensionales deproyección, intersección y recorte, pa-ra transformar las superficies básicasen la forma definitiva del ventanal.
Sin embargo, el objetivo de esta par-te del trabajo no sólo fue representar tri-dimensionalmente las superficies que de-finen las ecuaciones matemáticascalculadas previamente, sino utilizar lasposiciones y las intersecciones entre lasprincipales superficies del ventanal, co-mo sistema de control de la precisióndel proceso de cálculo realizado sobrelas "nubes de puntos" para obtener losparámetros de la ecuación que definea cada superficie.
A partir de esta idea, se estableció unarigurosa "infraestructura" pararnétrica
de control mediante una tabla de cál-culo que contenía los parárnetros nece-sarios para controlar 7 hiperboloideselípticos (figura 9). Para poder trabajara partir de un modelo formal único, ca-paz de abarcar los diferentes paráme-tros calculados en las ecuaciones paraeste tipo de superficies; cada uno de loshiperboloides fue definido a partir deun modelo genérico: el hiperboloide derevolución clásico. Todas las ecuacio-nes de los hiperboloides del ventanalque se calcularon dieron como resul-tado figuras elípticas, como consecuen-cia su forma geométrica se definió co-mo la transformación para métrica afín<.leun hipcrboloidc de revolución 11.
La adaptación de cada uno de ellosa la forma del ventanal, se llevo a ca-bo transformando los parámetros ma-temáticos de su ecuación en elementos
geométricos de control. Con estas con-diciones, la superficie de cada uno delos 7 hiperboloides fue definida para-métricamente mediante: el centro y eleje de la superficie, el eje mayor y eleje menor de la garganta y un puntode paso de la superficie. Para llevar acabo un control del tamaño, la posi-ción y la orientación de cada superfi-cie de forma interactiva, fue necesariocrear una extensa tabla con los 5 pa-rámetros para cada uno de los 7 hi-perboloides elípticos tal como se handescrito. Mediante esta tabla, se con-siguió modificar la forma, rectificar laposición y la orientación de cada unode los siete hiperboloides, aplicandoun control numérico muy preciso, queno sólo era independiente para cadauno de ellos, sino que también era in-dependiente para cada uno de los ele-mentos geométricos y la posición es-pacial que define a la superficie. De

Fig. 9. Generación de superficies mediante un sis-tema paramétrico.Fig. 10. Modelado de jambas y antepechos de laparte inferior del ventanal.Fig. 11. Recorte de los bordes de las superficiesbásicas.Fig. 12. Superficies finales del modelo tridimensio-nal del ventanal de la Sagrada Familia.
esta manera, los cómputos de cálculopara definir los parámetros de las ecua-ciones que determinan a cada hiper-boloide, realizados a partir de las "nu-bes de puntos", podían verificarsegráfica y numéricamente con muchaprecisión en cada momento y de for-ma constante.
El control tridimensional de las su-perficies de la parte inferior del ven-tanal, no se pudo llevar a cabo me-diante una rigurosa parametrización,como la realizada en su parte superior.Las superficies de la parte inferior nocorresponden a superficies cuadráticassimples con una definición geométri-ca conocida, capaz de ser definida me-diante ecuaciones matemáticas. Por es-ta razón, su tratamiento formal sedesarrolló mediante superficies deaproximación tipo "Patch". Con estetipo de superficies se realizaron los pri-meros ensayos de formalización paralos cuatro vanos inferiores del venta-nal. Su aplicación a las superficies ho-rizontales mas bajas de todo el ven-tanal, nos permitió detectar, que en estecaso se podía utilizar como solucióndefinitiva un hiperboloide elíptico coneje mayor horizontal. La definición dela ecuación de este tipo de superficie,se realizo mediante el análisis mate-mático de la "nube de puntos" co-rrespondiente, asignando al sistema decálculo una condición adicional: el re-sultado debería corresponder a la su-perficie de un hiperboloide elíptico. Deesta manera, se consiguió una aproxi-mación muy ajustada entre la superfi-cie resultante y la "nube de puntos"que la define (fig.lO)_ Las jambas ver-ticales de la parte inferior del ventanalse resolvieron con superficies de "ba-rrido" que se apoyan en dos guías
11/ Aunque la definición geométrica de afinidad entre un hiper-boloide de revolución y uno elíptico pueda parecer compleja. la re-lación entre estas dos figuras no viene a ser otra cosa que el es-coloco de una de una de estas dos figuras. en relación a la otra,según una sola dirección, Es evidente que, en este caso, la direc-ción de afinidad o escalado unidireccional, la define el eje mayorde la elipse principal del hiperboloide elíptico.12/ La idea de proyectar las Irneasdel perímetro de recorte sobrela superficie, fue para resolver las pequeñas imprecisiones entrelos vértices del perímetro de recorte, definidos topográficamente yla superficie del hiperboloide definida matemáticamente.
"verticales", y que tienen como gene-ratriz la sección horizontal que pasapor el centro de cada uno de los hi-perboloides más bajos del ventanal.
La forma definitiva del ventanal seha desarrollado en una segunda parte,íntegramente dedicada a recortar y co-nectar entre sí las diferentes superfi-cies básicas definidas previamente enla estructura paramétrica. Para reali-zar este proceso, fue necesario esta-blecer tridimensionalmente todas lasgeneratrices rectas que configuran elperímetro definitivo de cada uno delos 7 hiperboloides. Sin duda alguna,esta parte fue una de las más comple-jas dentro del proceso de modelado tri-dimensional del ventanal. La forma"estrellada" del perímetro definido porlíneas rectas que recorta a cada uno delos siete hiperboloides elípticos, obli-gó, en cada caso, a proyectar los vér-tices de la "estrella" perimetral sobrela superficie del hiperboloide en di-rección de su normal 12. Sin embargo,para obtener una superficie alabeadarecortada con precisión mediante lí-neas rectas, fue necesario proyectar porsegunda vez estos mismos vértices so-bre el plano de la garganta del hiper-boloide (fig. 11). Como consecuencia,la posición tridimensional exacta decada una de las líneas de recorte sobrela superficie del hiperboloide, quedódefinida mediante la posición de su pri-mera proyección y los extremos de lastangentes trazadas desde su segundaproyección a la elipse de la garganta13. Todos los espacios residuales entrelos hiperboloides recortados del ven-tanal, corresponden a superficies pla-nas simples y por lo tanto son muy sen-cillas de definir, puesto que se trata deplanos con perímetro triangular que
CDX
-es
IQ..•al'-I:\l..•
-=1:-."n-o'=n1»
unen los vacíos producidos por los re-cortes rectilíneo s de los hiperboloides(fig. 12). Con esta última operación,se dio por concluido el trabajo de mo-delar tridimensionalmente la forma de-finitiva de un ventanal del templo dela Sagrada Familia, estudiado a partirde diversas "nubes de puntos", defi-nido mediante varias ecuaciones ma-temáticas, controlado espacialmentede forma para métrica, y formalizadoen tres dimensiones a través de una ge-ometría de superficies tipo NURBS[Regot, Mesa, 2004].
101
Ee1
Referencias
- CHUECAM. BERNÉJL., HERRÁEZJ (19991: Microgeodesia yredes locales. Ed. Paraninfo.
- IZOUlERDOASENSIF. (19921: Ejercicios de Geometría Des-criptiva I (sistema díérírico). Ed. Dossat Madrid 1992
- NÚÑEZA, BUILLF., MÚÑoz F., (2005al: Comportamiento deun sensor láser escáner. Proceedings 6" Semana de Ge-omática. Barcelona 2005.
- NÚÑEZA., BUILLF. (2005b): Determination 01 ruled surta-ces from clouds points Procedings 7th conference 011 Op-tical 3-D measurement techniques.Viena 2005.
- REGOTJ, MESAA, (2005cl From analytic equations to gra-phic modeling delinition 01 ruled surfaces. Procedings 7thconlerence on Optical3-D measurement techniques.Vie-na 2005.
- REGOTJ., MESAA, (2004) Metodologías para la genera-ción y análisis de superficies tridimensionales en la res-titución virtual de la arquitectura. Proceedings 1st Con-gres Virtual city anf Territori. Barcelona September 2004.
- SÁNCHEZGALLEGOJ A (19971 Geometría Descriptiva. Sis-temas de proyección cilíndrica. Edicions UPC Barcelo-na, 1997.
- WOLf P.R.,GHllANIC.D. (19971 "Adjustment computations.Statistics and least squares in surveying and SIG" JohnWilwy ancl sons, INC. 1997
http://wmatemeis.uva.es/-matpag/CO NTEN IOOS/Cua-driras/rnarcu cuadrkas.htmhttp://mathworld.wolfram.com/OuadraticSurface.lltml