Embed Size (px)
Citation preview
Estructuras Algebraicas. Teorıade Grupos
Juan M. Marquez B
11 de diciembre de 2007
2
Estructuras Algebraicas. Teorıa de GruposJuan M. Marquez B.
Introduccion.¿Podria imaginarse un edo. del arte, de la ciencia, de la tecnologia o de
la cultura tan avanzado como el que se vive sin por ejemplo... el algebra lin-eal?...imposible.
Estudiaremos la clasificacion de las estructuras algebraicas tanto como sussubestructuras asociadas (ejemplos: grupos y subgrupos, anillos e ideales,...),tambien sus morfismos (mapeos que preservan las operaciones entre las estruc-turas algebraicas) tanto como sus estructuras cocientes, con objeto de ganaruniformidad de conocimientos a la hora de estudiar con mas detalle cada una deellas.
Esto implicara que estudiaremos en forma superficial cada una de ellas, perotendremos ocacion en cada seccion incluir un cumulo mas bien modesto de topi-cos, ejemplos, ejercicios y problemas que representen un poco mas de profundidadde tales temas, y al verdadero caracter de las tecnicas del algebra moderna.
Los fundamentos de las matematicas son
Teorıa de Conjuntos
Logica Matematica
Teorıa de Categorıas
Las matematicas elementales
Indice general
1. Preliminares 51.1. Conjuntos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2. Relaciones entre conjuntos . . . . . . . . . . . . . . . . . . . . . 121.3. Mapeos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.4. Los Enteros . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231.5. Estructuras Algebraicas. . . . . . . . . . . . . . . . . . . . . . . 26
1.5.1. Operaciones Binarias. . . . . . . . . . . . . . . . . . . . 261.5.2. Estructuras Algebraicas. . . . . . . . . . . . . . . . . . . 27
1.6. Ejercicios. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2. Grupos. 292.1. Ejemplos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.2. Subgrupos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.2.1. Subgrupos Normales y Grupos Cocientes. . . . . . . . . . 372.3. Morfismos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.3.1. Teorema Fundamental de Homomorfismos. . . . . . . . . 412.4. Topicos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.4.1. Construccion de Subgrupos. . . . . . . . . . . . . . . . . 422.4.2. Grupos Simetricos. . . . . . . . . . . . . . . . . . . . . . 442.4.3. Teorema de Cayley. . . . . . . . . . . . . . . . . . . . . 472.4.4. Simplicidad de An . . . . . . . . . . . . . . . . . . . . . 482.4.5. Acciones de Grupos. . . . . . . . . . . . . . . . . . . . . 50
2.5. Teoremas sobre grupos finitos. . . . . . . . . . . . . . . . . . . . 552.5.1. Teorema de Cauchy. . . . . . . . . . . . . . . . . . . . . 552.5.2. Teoremas de Sylow. . . . . . . . . . . . . . . . . . . . . 57
2.6. Grupos Libres. . . . . . . . . . . . . . . . . . . . . . . . . . . . 602.7. Ejercicios. Comentarios. . . . . . . . . . . . . . . . . . . . . . . 612.8. Referencias. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
3

4 INDICE GENERAL
Capıtulo 1
Preliminares
Para entender de una manera clara y segura lo que se trata en todas lasmatematicas, es necesario conocer y manipular lo mejor que se pueda las tecni-cas y propiedades de los conceptos fundamentales de la teorıa de conjuntos,relaciones, mapeos (o funciones) y los numeros enteros. Los objetos principalesque se estudian en este pequeno estudio son;
Conjuntos.
Relaciones.
Mapeos.
Los Numeros Enteros.
En cada uno de estos temas trataremos las definiciones y propiedades basicasnecesarias requeridos que serviran de soporte para la toda las matematicas.
1.1. Conjuntos.
Es conveniente que se disponga de un diccionario basico de sımbolos querepresentan objetos que van a ser usados muy frecuentemente, esta lista es;
∅ ,...el conjunto vacıo.
fin de demostracion (de proposicion, lema, teorema, corolario,...)
:= define. Ejemplo, A := B se lee ”A define a B”.
5

6 CAPITULO 1. PRELIMINARES
i.e.,...id est, en otras palabras.
#A,...la cardinalidad del conjunto A.
x := 5,...x esta definida como 5.
A := {a, e, i, o, u},...A esta definido como el conjunto de las vocales mi-nusculas latinas.
U un universo dado.
N,...los numeros naturales { 0, 1, 2, 3, ...,∞ } .
Z,...los numeros enteros { −∞, ...,−1, 0, 1, ...,∞ } .
Q,...los racionales.
R,...los reales.
x ∈ N,...x pertenece a los naturales.
y /∈ Z,...y no es entero.
A ⊆ Q,...A es un subconjunto de racionales.
A ∪ B,...la union de A con B.
A ∩ B,...la interseccion de A con B.
Ac,...el complemento de A.
A \ B = {x ∈ U : x ∈ A, x /∈ B},...la diferencia entre A y B.
A 4 B = (A \ B) ∪ (B \ A),... la diferencia simetrica entre A y B.
⋃j Aj es la union de todos los Aj, que son una familia de conjuntos.
⋂j Aj es la interseccion de todos los Aj.
Estas son algunas de sus propiedades;
1. A ∪ A = A,
2. A ∩ A = A,

1.1. CONJUNTOS. 7
3. A ∪ ∅ = A,
4. A ∪ B = B ∪ A,
5. A ∩ B = B ∩ A,
6. (A ∪ B) ∩ C = (A ∩ C) ∪ (B ∩ C),
7. (A ∩ B) ∪ C = (A ∪ C) ∩ (B ∪ C),
8. (A ∪ B)c = Ac ∩ Bc,
9. (A ∩ B)c = Ac ∪ Bc,
10. A \ B = A ∩ Bc,
11. A4 B = (A ∪ B) \ (A ∩ B),
12. A4 B = B 4 A,
13. (A4 B) 4 C = A 4 (B 4 C),
14. A4 ∅ = A,
15. (A4 A) = ∅,
16. (A4 Ac) = A ∪ Ac.
Las listas anteriores representan algunos conceptos basicos que pueden serampliados en cualquier libro de matematicas elementales o mas especıficamenteen cualquiera de las Ref[8, 14, 17, 18, 24] Otro concepto elemental es el siguiente:
Definicion 1 El conjunto potencia de A, es el conjunto de todos los sub-conjuntos de A, el cual es simbolizado con ℘(A) , i.e.
℘(A) = {x|x ⊆ A}.
Por ejemplo, siA = {a, b, c},
entonces,℘(A) = {∅, {a}, {b}, {c}, {a, b}, {a, c}, {b, c},A},
es el conjunto potencia. Aquı surje la pregunta; ¿Cuanto es #℘(A)?. La respuestaesta contenida en la siguiente;
8 CAPITULO 1. PRELIMINARES
Proposicion 1 Si # A es finita, entonces #℘(A) = 2#A.
Dem:La demostracion es inductiva. Observamos que si A = φ, entonces tenemos
# A = 0 y por lo tanto # ℘(A) = 20 = 1, esto es porque ℘(A) = {∅}. Si A = {x1},entonces ℘(A) = {∅, {x1}}, ası # ℘(A) = 21 = 2. Con el ejemplo de arriba vemos
que si #(A) = 3 tendremos # ℘(A) = 23 = 8. Ası vemos que nuestra formula vale
para # A = 0, 1, 3. Suponemos ahora que la formula vale para n y que # A = n + 1.
Vamos a demostrar que se pueden construir 2n+1 elementos de ℘(A). Consideremos
B = A \ {x}, donde x ∈ A cualquiera, como B tiene n elementos, entonces por
induccion, ℘(B) tiene 2n elementos, digamos S1, S2, ..., S2n. Con estos subcojuntos
de B construimos Tj = Sj ∪ {x} subconjuntos de A.
Ahora afirmamos que los Sj y los Tj son todos los subconjuntos de A y todos son
diferentes entre si. Sea U ⊆ A, aquı hay 2 casos: x ∈ U o x /∈ U .
Si x ∈ U entonces U \ {x} ⊆ B y por tanto U \ {x} = Sk para algun k entre 1y 2n. De esta forma U = (U \ {x}) ∪ {x} = Sk ∪ {x}, i.e. U = Tk. Si x /∈ U ,
entonces U ⊆ B y por tanto U = Sl para algun l, que tambien esta entre 1 y 2n.
Ası vemos que U , o es un Tj , o es un Sj dependiendo de que x ∈ o /∈ U . Finalmente
todos los Tj son diferentes, puesto que si Ti = Th para i, h diferentes, entonces
Si \ {x} = Sh \ {x}, lo cual implicarıa que Si = Sh lo cual es imposible. Ası hemos
construido 2n + 2n = 2n(1 + 1) = 2n+1 subconjuntos diferentes de A.
Veamos como todo esto esta vinculado con los siguientes hechos algebraicos
Definicion 2 Los coeficientes binomiales estan definidos como(n
k
):=
n!
k!(n− k)!,
el cual es un numero entero siempre.
Ejemplos(
52
)= 10,
(182
)= 153,...
Observemos que los coeficientes binomiales(
2
0
),
(2
1
),
(2
2
),
respectivamente son 1, 2, 1 que son los coeficientes del binomio al cuadrado(a + b)2 = a2 + 2ab + b2 y que estos numeros coinciden con la cantidad desubconjuntos de S = {x1, x2} que son
∅,
1.1. CONJUNTOS. 9
{x1}, {x2},{x1, x2},
(1 conjunto vacıo, 2 singletons y 1 subconjunto de 2 elementos)
Tambien(
30
),(
31
),(
32
),(
33
)son los coeficientes de
(a + b)3 = a3 + 3a2b + 3ab2 + b3.
Que tambien corresponden a los subconjuntos
∅,
{x1}, {x2}, {x3},{x1, x2}, {x1, x3}, {x2, x3},
{x1, x2, x3},de {x1, x2, x3}.
Para 4 tenemos
(a + b)4 =(
40
)a4 +
(41
)a3b +
(42
)a2b2 +
(43
)ab3 +
(44
)b4.
Y∅,
{1}, {2}, {3}, {4},{1, 2}, {1, 3}, {1, 4}, {2, 3}, {2, 4}, {3, 4},
{1, 2, 3}, {1, 2, 4}, {1, 3, 4}, {2, 3, 4},{1, 2, 3, 4},
los subconjuntos de un conjunto de cuatro elementos.La formula en general toma la forma
(a + b)n =(n
0
)an +
(n
1
)an−1b + · · · +
(n
n − 1
)abn−1 +
(n
n
)bn.
O usando la notacion de sumatoria donde k varia entre 1, 2, ..., n
(a + b)n =n∑
k=0
(n
k
)an−kbk.
10 CAPITULO 1. PRELIMINARES
Finalmente si S = {1, 2, ..., n} tenemos que
#℘(S) = 2n,
= (1 + 1)n,
=
(n
0
)+
(n
1
)+ · · · +
(n
n − 1
)+
(n
n
),
formula que nos dice cuantos subconjuntos de cada tamano en S hay.Ejercicio: Pruebe que el arreglo:
(0
0
)
(1
0
) (1
1
)
(2
0
) (2
1
) (2
2
)
(3
0
) (3
1
) (3
2
) (3
3
)
(4
0
) (4
1
) (4
2
) (4
3
) (4
4
)
(5
0
) (5
1
) (5
2
) (5
3
) (5
4
) (5
5
)
· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ,
no es otra cosa que el famoso Triangulo de Pascal:
1
1 1
1 2 1
1 3 3 1
1 4 10 4 1

1.1. CONJUNTOS. 11
1 5 14 14 5 1
· · · · · · · · · · · · · · · · · · · ·,
Otro concepto importante es el de producto cartesiano;
Definicion 3 Sean A y B dos conjuntos cualquiera no vacıos. El conjunto
A× B = {(x, y) | x ∈ A, y ∈ B}
se llama el producto cartesiano de A con B. Observe que no es lo mismoA× B que B × A.
Un ejemplo; si A = {1, 2, 3} y B = {α, β}, entonces
A × B = {(1, α), (2, α), (3, α), (1, β), (2, β), (3, β)}.
No es difıcil demostrar que;
Proposicion 2 #(A× B) = #A · #B.
Definicion 4 Una particion de un conjunto de un conjunto A, es una coleccionde subconjuntos {Uj} de A tales que;
Si Ul, Um son dos de esta coleccion con l 6= m, entoncesUl ∩ Um = ∅.
⋃j Uj = A.
Los elementos de la particion se llaman componentes.
12 CAPITULO 1. PRELIMINARES
1.2. Relaciones entre conjuntos
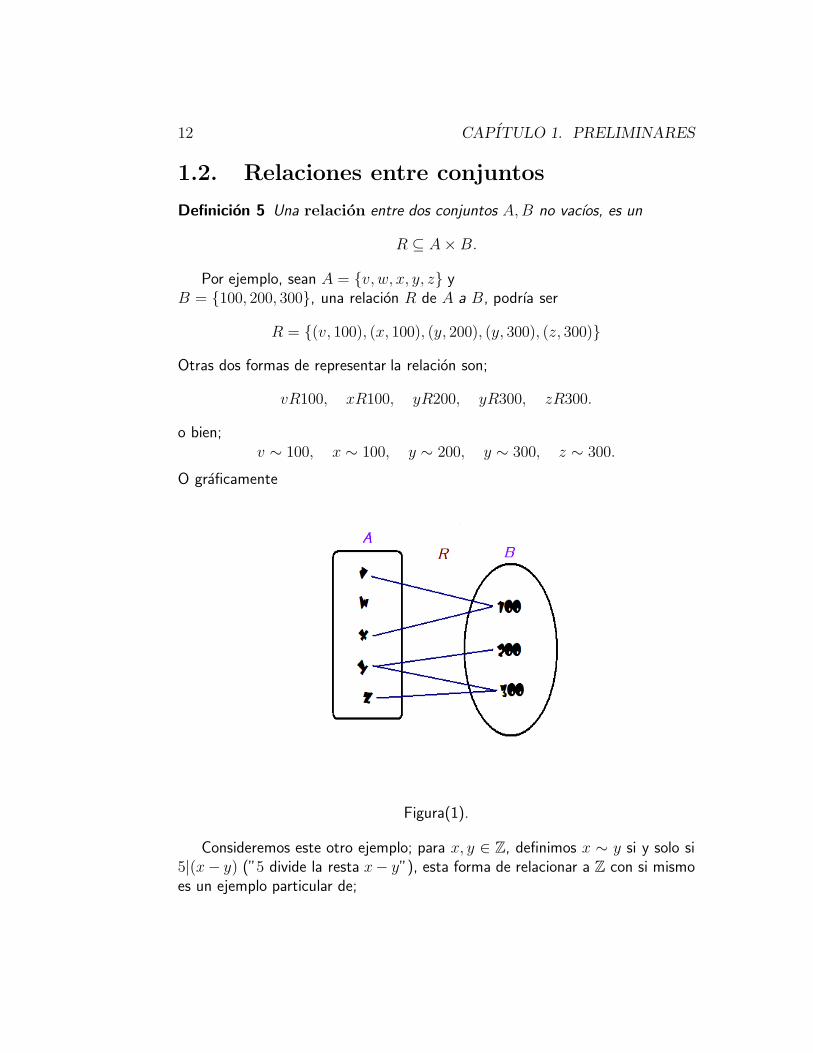
Definicion 5 Una relacion entre dos conjuntos A,B no vacıos, es un
R ⊆ A× B.
Por ejemplo, sean A = {v,w, x, y, z} yB = {100, 200, 300}, una relacion R de A a B, podrıa ser
R = {(v, 100), (x, 100), (y, 200), (y, 300), (z, 300)}
Otras dos formas de representar la relacion son;
vR100, xR100, yR200, yR300, zR300.
o bien;v ∼ 100, x ∼ 100, y ∼ 200, y ∼ 300, z ∼ 300.
O graficamente
Figura(1).
Consideremos este otro ejemplo; para x, y ∈ Z, definimos x ∼ y si y solo si5|(x− y) (”5 divide la resta x− y”), esta forma de relacionar a Z con si mismoes un ejemplo particular de;

1.2. RELACIONES ENTRE CONJUNTOS 13
Definicion 6 Una relacion binaria en A, es un
R ⊆ A × A.
Y pueden ser de varios tipos;
Reflexiva. Todo elemento de A esta relacionadocon si mismo, i.e. x ∼ x para x ∈ A.
Simetrica. Si sucede que x ∼ y, entonces y ∼ x.
Transitiva. Si tenemos que x ∼ y y y ∼ z,entonces x ∼ z.
(Lista que no es exhaustiva.)Por ejemplo la relacion x ∼ y si y solo si n|(x−y) en Z donde n es cualquier
elemento positivo de Z es un ejemplo de ser reflexiva, simetrica y transitiva. Talrelacion en Z, recibe el nombre de congruencia modulo n.
Definicion 7 La relacion que cumpla las tres propiedades anteriores, recibe elnombre de relacion de equivalencia . Un concepto asociado muy importantees el siguiente; Sea ∼ una relacion de equivalencia en A, definimos la clase deequivalencia de x ∈ A, al conjunto [x] = {y ∈ A | y ∼ x} . A x se le llamarepresentante de la clase [x].
En el ejemplo de la congruencia modulo 7 en Z, tendriamos que [0] = {multiplos de 7}, pero [2] = {x ∈ Z | x = 7k + 2, k ∈ Z}. Aquı tenemos unaproposicion muy util:
Proposicion 3 Las distintas clases de equivalencia de una relacion en A, formanuna particion de A.
Dem: Tenemos que demostrar que para cualquiera dos clases [a], [b] de equiv-alencia, o son disjuntas, o si [a] ∩ [b] 6= ∅, entonces [a] = [b]. Si sucede que[a]∩ [b] 6= ∅, existe x ∈ [a] ∩ [b], por lo cual tenemos
x ∼ a, x ∼ b. (R,1)
Ahora sea y ∈ [a], esto implica que
y ∼ a. (R,2)

14 CAPITULO 1. PRELIMINARES
Usando simetrıa en (R.1) y transitividad con (R.2), llegariamos a que
y ∼ x. (R,3)
Pero usando nuevamente transitividad con (R.1), tendremos
y ∼ b,
i.e. y ∈ [b]. Esto ultimo implica que [a] ⊆ [b]. Similarmente se demuestra que[b] ⊆ [a]. Para convencernos que
⋃
a∈A
[a] = A,
basta observar que si a ∈ A, entonces a ∈ [a] ⊆ A.
Contenida en la demostracion anterior esta la idea de la demostracion delsiguiente lema;
Lema 1 Dos clases de equivalencia cumplen [a] = [b], si y solo si a ∼ b.
Corolario 1 [a] ∩ [b] = ∅ si y solo si a, b no estan relacionados.
Definicion 8 El conjunto de todas las clases de equivalencia recibe el nombrede conjunto cociente y es simbolizado por A/ ∼, donde ∼ es la relacion deequivalencia en A.
En vista de las proposiciones anteriores, resulta que el conjunto cociente, esuna particion del conjunto A. Los representates de las clases de equivalenciadiferentes reciben el nombre de representantes principales de la particion.
Para aclarar la idea consideremos el siguiente ejemplo: A tu clase (de tuescuela) denotemosle con X, definimos en este conjunto la relacion; si c, d ∈ Xdecimos que c ∼ d si c y d tienen la misma edad. Esto define una relacion deequivalencia en X, cuyas clases de equivalencia son los jovenes que tienen lamisma edad. Si suponemos que la siguiente lista es la de tus companeros con susedades;
Juan, 19,
Pedro, 19,
1.2. RELACIONES ENTRE CONJUNTOS 15
Jose, 19,
Pacita, 20,
Maria, 20,
Walter, 23,
Susan, 23,
Dolores, 23,
Roberto, 25,
Laura, 25,
Jesus, 26.
Entonces se podrian construir las clases de equivalencia ası; [Juan]={ Juan,Pedro, Jose} , [Pacita]={ Pacita, Maria} , [Walter]={ Walter, Susan, Dolores} ,[Roberto]={ Roberto, Laura} , [Jesus]={ Jesus} . Los representantes principalesson; Juan, Pacita, Walter, Roberto y Jesus. Si las clases se representan con;Pedro, Maria, Susan, Laura y Jesus ellos serian otro posible parlamento de laparticion por edades del conjunto X.
El recıproco de la proposicion 1.3.1 tambien es cierto:
Proposicion 4 Dada una particion π = {Cj} de un conjunto A es posibledefinir una relacion de equivalencia en A, tal que las clases coinciden con loscomponentes de la particion π.
Demo: Definiendo la relacion en A como; x, y ∈ A estan relacionados si ysolo si x, y estan en el mismo componente Cj ∈ π, es facil comprobar que estodefine una relacion de equivalencia en A y que si x ∈ Cj, entonces [x] = Cj .
Proposiciones 3 y 4 integran el llamado Lema de Abstraccion.

16 CAPITULO 1. PRELIMINARES
1.3. Mapeos
El concepto de funcion, se podrıa decir, es del que apartir de el se basanmuchas de las revoluciones conceptuales del conocimiento humano. Indispensableen el moderno lenguaje no solo matematico, sino ademas cientıfico.
Definicion 9 Sean S, T dos conjuntos cualquiera no vacıos. Sea α unarelacion de S a T que satisface:
1. Para cualquier x ∈ S, existe y ∈ T tal que (x, y) ∈ α.
2. Si (x, y) ∈ α y (x, z) ∈ α, entonces y = z.
tal tipo de relacion recibe el nombre de mapeo o aplicacion. La notacion(x, y) ∈ α, es sustituida con
α(x) = y.
x se llama preimagen de y bajo α y y se llama imagen de x bajo α. Al conjuntoS se le llama dominio y a T codominio de α. Tambien es frecuente simbolizarque α es un mapeo de S a T con;
α : S → T.
Si β, α : S → T son dos mapeos decimos que α = β si para todo x ∈ S, α(x) =β(x). Otros nombres que reciben los mapeos son; funciones, transforma-ciones y tambien morfismos.
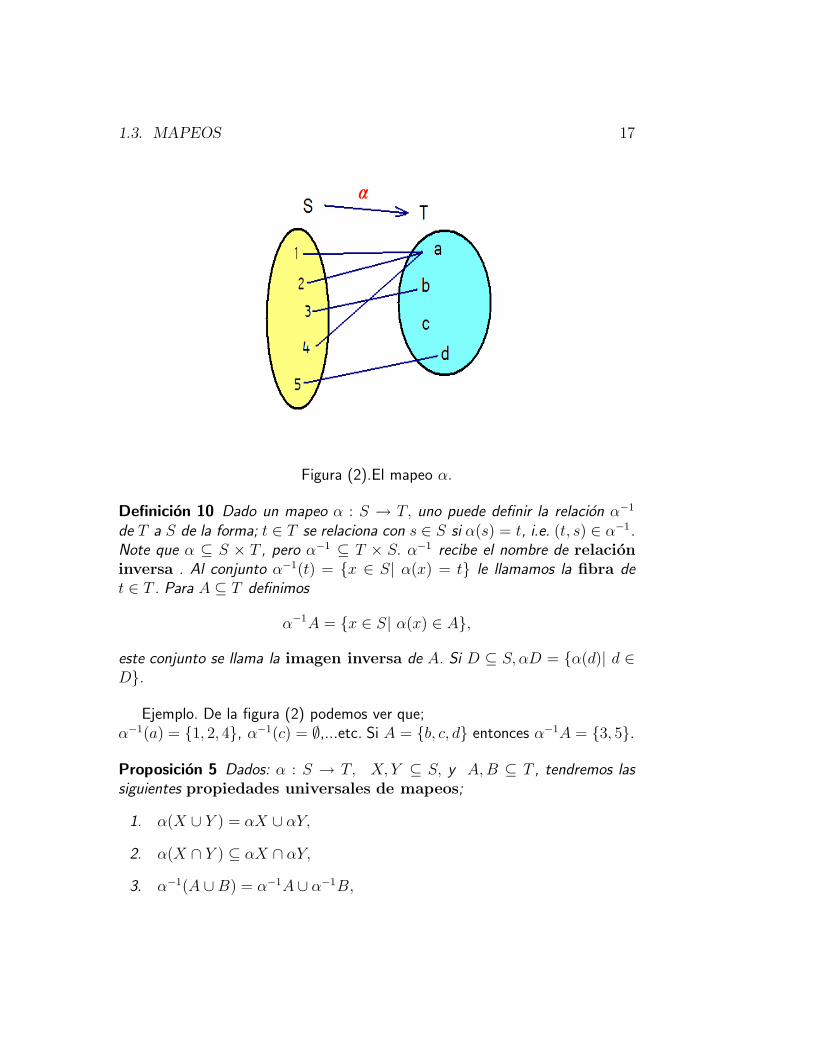
Ejemplo. Supongamos que S = {1, 2, 3, 4, 5} y que T = {a, b, c, d}, rela-cionamos estos dos conjuntos ası ;
α = {(1, a), (2, a), (3, b), (4, a), (5, d)}.
La figura (2) ilustra esta situacion. El mapeo α de arriba tambien pudo haber sidoespecificado con; α(1) = a, α(2) = a, α(3) = b, α(4) = a, α(5) = d. Notemosque a es imagen de 1, 2, 4 y b, d imagenes de 3, 5 respectivamente. 1, 2, 4 sonpreimagenes de a,...etc.
1.3. MAPEOS 17
Figura (2).El mapeo α.
Definicion 10 Dado un mapeo α : S → T, uno puede definir la relacion α−1
de T a S de la forma; t ∈ T se relaciona con s ∈ S si α(s) = t, i.e. (t, s) ∈ α−1.Note que α ⊆ S × T , pero α−1 ⊆ T × S. α−1 recibe el nombre de relacioninversa . Al conjunto α−1(t) = {x ∈ S| α(x) = t} le llamamos la fibra det ∈ T . Para A ⊆ T definimos
α−1A = {x ∈ S| α(x) ∈ A},
este conjunto se llama la imagen inversa de A. Si D ⊆ S, αD = {α(d)| d ∈D}.
Ejemplo. De la figura (2) podemos ver que;α−1(a) = {1, 2, 4}, α−1(c) = ∅,...etc. Si A = {b, c, d} entonces α−1A = {3, 5}.
Proposicion 5 Dados: α : S → T, X, Y ⊆ S, y A,B ⊆ T , tendremos lassiguientes propiedades universales de mapeos;
1. α(X ∪ Y ) = αX ∪ αY,
2. α(X ∩ Y ) ⊆ αX ∩ αY,
3. α−1(A ∪ B) = α−1A ∪ α−1B,

18 CAPITULO 1. PRELIMINARES
4. α−1(A ∩ B) = α−1A ∩ α−1B,
5. si X ⊆ Y entonces αX ⊆ αY,
6. si A ⊆ B entonces α−1A ⊆ α−1B,
7. X ⊆ α−1αX,
8. αα−1A ⊆ A,
9. Para cualquier x ∈ S, x ∈ α−1(α(x)).
Dem: Este es un buen lugar para ejercitar las definiciones recien adquiridas.
Los principales tipos de mapeos son;
Definicion 11 Sea α : S → T un mapeo. Entonces α se llama;
1. Constante.
Si α(x) = t0 para todo x ∈ S y para algun t0 ∈ T .
2. Identidad.
Si S = T y α(x) = x para todo x ∈ S. En este casosimbolizamos al mapeo con IdS.
3. Inyectivo (o Uno-a-uno).
Si x1 6= x2 entonces α(x1) 6= α(x2).
4. Sobreyectivo (o Sobre).
Todo t ∈ T tiene preimagen en S bajo α.
5. Biyectiva.
Si es inyectiva y sobreyectiva.
Ejemplos son: Si S = {x ∈ R | x ≥ 0} y T = R, entonces la formulaf(x) = x2 define un mapeo inyectivo de S → T (pero no sobreyectivo), unmapeo sobreyectivo T → S (pero no inyectivo) y un mapeo biyectivo S → S.

1.3. MAPEOS 19
Definicion 12 Sean α : S → T y β : T → U dos mapeos. Con esta situacionpodemos definir un nuevo mapeo S → U — que simbolizaremos con β ◦ α —con la siguiente formula;
β ◦ α(s) = β(α(s)).
β ◦ α recibe el nombre de la composicion de α con β.
Por ejemplo si S = R y f : S → S y g : S → S esta definidos como;f(x) = x + 1 y g(x) = x3 +
√x, entonces g ◦ f(x) = (x + 1)3 +
√x + 1.
Lema 2 La composicion de mapeos es asociativa.
Dem: Si f : S → T , g : T → U y h : U → V , podemos definir g◦f : S → Ty h ◦ g : T → V . Con todos estos es posible armar
h ◦ (g ◦ f) : S → V,
y
(h ◦ g) ◦ f : S → V.
Pero por definicion h ◦ (g ◦ f)(x) = h ◦ (g(f(x)) = h(g(f(x))), mientras que(h◦g)◦f(x) = h◦g(f(x)) = h(g(f(x))). Por lo tanto h◦(g◦f)(x) = (h◦g)◦f(x)para toda x ∈ S i.e. podemos escribir;
h ◦ (g ◦ f) = (h ◦ g) ◦ f.

20 CAPITULO 1. PRELIMINARES
Lema 3 Composicion de biyecciones es biyeccion.
Dem: Sean f : S → T y g : T → U dos biyecciones. Primero vamos ademostrar que g ◦ f : S → U es inyectiva. Si s1 6= s2 entonces f(s1) 6= f(s2)porque f es inyectiva, asi g(f(s1)) 6= g(f(s2)) i.e. g ◦ f(s1) 6= g ◦ f(s2), por lotanto g ◦ f es inyectiva. Para la sobreyectividad sea u ∈ U arbitrario, como g essobre, existe t ∈ T con g(t) = u. Pero para esta t ∈ T existe s ∈ S con f(s) = t,porque f es sobre. Ası que u = g(t) = g(f(s)) = g ◦ f(s) i.e. u tiene preimagenen S bajo g ◦ f . Aquı estamos viendo que g ◦ f tambien es sobreyectiva.
Lema 4 Si f : S → T es una biyeccion, entonces f−1 : T → S es una biyeccion.Ademas f−1 ◦ f = IdS y f ◦ f−1 = IdT .
Dem: Primero debemos comprobar que la relacion
f−1
es un mapeo. Tenemos que la fibra para todo t ∈ T satisface #f−1(t) = 1,entoces definimos;
f−1(t) = s, donde; f(s) = t,
esta formula satisface las dos condiciones para ser una aplicacion T → S. Sise usa la propiedad universal s ∈ f−1(f(s)) entonces estamos indicando ques = f−1f((s)) i.e. s = f−1 ◦ f(s). Como esto vale para cualquier s ∈ S en-tonces f−1 ◦ f = IdS. Para f ◦ f−1 = IdT , usamos la propiedad universalff−1A ⊆ A, la cual, en este caso (f biyectiva) es f ◦ f−1A ⊆ A. Si hacemosA = {t} obtenemos f ◦ f−1(t) = t. Como esto ultimo vale para todo t ∈ T ,la conclusion es f ◦ f−1 = IdT . Para la inyectividad de f−1; sean t1, t2 ∈ Tcon t1 6= t2, tendremos f−1(t1) 6= f−1(t2) pues ambas fibras son disjuntas y novacıas. Que toda fibra es no vacıa implica la sobreyectividad de f−1.
Un ejemplo muy importante de los conceptos previos, es el caso que S = Ty #S < ∞.
Proposicion 6 Sea #S = n, entonces el conjunto Sn de todas las biyeccionesS → S, tiene #Sn = n!.

1.3. MAPEOS 21
Dem: Inductiva. Si S tiene un elemento hay solo una biyeccion. Si S tienedos elementos tenemos solo dos biyecciones. Vemos que la proposicion vale paran = 1, 2. Ahora supongamos validez para n = k y que
S = {x1, x2, ..., xk+1}.
Vamos a construir (k + 1)! biyecciones S → S. Primero hacemos;
x1 → x1. (M,1).
Ası tenemos k elementos libres en S. Entonces por induccion habra k! biyeccionesdiferentes las cuales satiscen (M.1). Ahora hacemos;
x1 → x2. (M,2).
Nuevamente tenemos k elementos libres en S, los cuales, por induccion puedenser aplicados en otras k! biyecciones S → S. Que son diferentes a las anteri-ores queda garantizado por (M.1) y (M.2). Siguiendo este proceso acabaremosobteniendo;
k! + · · · + k!︸ ︷︷ ︸k + 1-veces
= (k + 1)k! = (k + 1)!.
Ejemlpo. Sea S = {1, 2, 3}. Con la notacion:
(1 2 32 3 1
)
indicamos la aplicacion con el esquema
De esta forma las 6 biyecciones de S3 son:
22 CAPITULO 1. PRELIMINARES
(1 2 31 2 3
),
(1 2 31 3 2
),
(1 2 32 1 3
)
(1 2 32 3 1
),
(1 2 33 1 2
),
(1 2 32 3 1
)
Otros conceptos son:
Definicion 13 Si f : S → T y A ⊆ S, definimos un mapeo A → T en terminosde f , simbolizado y definido con
f |A(x) = f(x), x ∈ A.
1.4. LOS ENTEROS 23
f |A se llama la restriccion de f sobre A. Ademas si g : A → T donde A ⊆ Sy si tenemos un f : S → T tal que si f |A = g, entonces decimos que f es unaextension de g
1.4. Los Enteros
Los conceptos basicos de la aritmetica utilizados muy frecuentemente incluyenel de numero primo, maximo comun divisor (MCD), ası como el algoritmo de ladivision, que pasamos a revisar.
Definicion 14 Los numeros primos en Z son;
±2,±3,±5,±7,±11,±13,±17, ...
¿Que es lo que los caracteriza? Siempre que un primo se factoriza un factor es 1o −1.
Recordemos que en Z, a|b si b = ma i.e. si b es un multiplo de a. Noteque b > a. De esta forma tenemos las siguientes propiedades muy faciles dedemostrar.
Proposicion 7 Con a, b, c,m ∈ Z;
1. Si a|b y a|c, entonces a|(b + c) y a|(b− c).
2. Si a|b y b|c, entonces a|c.
3. Si a|b, entonces a|mb.
24 CAPITULO 1. PRELIMINARES
Definicion 15 El maximo comun divisor de a, b ∈ Z, es d = (a, b) quesatisface:
1. d|a y d|b,
2. Si c|a y c|b, entonces c|d.
Teorema 1 Para cualquiera a, b ∈ Z, siempre existen t, r ∈ Z unicos tales que,
a = bt + r, donde, 0 ≤ r < |b|.
Dem: Demostraremos el caso cuando b > 0. Consideremos el conjunto Sab ={x ∈ Z | x = a− bs ≥ 0, s ∈ Z} el que vemos, esta acotado por abajo. Siendoası, debemos tener algun r el cual es el mınimo entero positivo en Sab. Ahoracomo r ∈ Sab, entonces existe t ∈ Sab con lo que nos da;
r = a − bt. (Z1)
Vamos a demostrar que 0 ≤ r < b. Que r ≥ 0 es obvio. Supongamos que r > b.Entonces r− b > 0. Pero usando ecuacion (Z1), tendriamos r− b = a− bt− b =a − (t + 1)b. Ademas r − b < r. Todo esto nos dice que r − b ∈ Sab, lo cualcontradice la eleccion de r. No queda otra que r < b.
Para la unicidad suponga que existen r′, t′ ∈ Z tales que a = bt′ + r′ con0 ≤ r′ < b. Entonces restando las dos representaciones de a vemos que r− r′ =(t− t′)b es decir r− r′ es multiplo de b pero −b < r − r′ < b entonce t− t′ = 0es decir t = t′ que a su vez implica r = r′
La proposicion anterior se llama el algoritmo de la division . Con todolo anterior formulamos:
Proposicion 8 El maximo comun divisor d = (a, b) de cualquiera dos a, b ∈ Zexiste y satisface;
d = aλ + bµ, donde, λ, µ ∈ Z.
Dem: Consideremos el conjunto,
Tab = {x ∈ Z | x = am + bn ≥ 0, m, n ∈ Z}.
Sea d = mınimo entero positivo en Tab. Aplicando el algoritmo de la division dosveces;
a = dt1 + r1, donde, 0 ≤ r1 < d. (Z,2)

1.4. LOS ENTEROS 25
b = dt2 + r2, donde, 0 ≤ r2 < d. (Z,3)
Ademas como d ∈ Tab, existen λ, µ ∈ Z, tales que d = aλ + bµ. Sustituyendoeste en ecuaciones (Z.2) y (Z.3), tendremos;
r1 = a− (aλ + bµ)t1 = a(1 − λt1) + b(−µt1),
r2 = b − (aλ + bµ)t2 = a(−λt2) + b(1 − µt2).
i.e., r1, r2 ∈ Tab. Ahora si r1, r2 6= 0, d no serıa el mınimo entero positivo en Tab
lo cual no es cierto. Entonces r1, r2 = 0. Por lo tanto, a = dt1 y b = dt2, i.e.,d|a y d|b. Finalmente si c|a y c|b, entonces c|(aλ + bµ), es decir; c|d.
Definicion 16 Decimos que a, b ∈ Z son primos relativos , si el MCD es,
(a, b) = 1.
Lema 5 Sea p primo. Si q|pn, entoncesq = 1, p, p2, ..., pn.
Dem: Inductiva. Si q|p entonces q = 1, p, ası que por definicion vale laproposicion con n = 1. Para n = 2, tenemos q|p2. Ası (p, q) = 1 o bien p (estoes porque los divisores de p son 1 y p).
Si (p, q) = 1 entonces 1 = ps+qt. Entonces p = p2s+pqt. Pero q|p2 implica
p2 = mq. (1)
Llegamos a que p = mqs + pqt = (ms + pt)q, i.e. q|p y por eso q = 1, p.
Ahora si (q, p) = p, tenemos p|q, entonces q = np. Sustituyendo esto enecuacion (1) de arriba, nos da p2 = mnp. Cancelamos una p y obtenemosp = mn i.e. m|p. Por lo tanto m = 1, p. Sustituyendo estos valores de m enecuacion (1), obtenemos respectivamente q = p2, p. Con esto concluimos lavalidez de la proposicion con n = 2.
El ultimo paso inductivo es ahora claro.

26 CAPITULO 1. PRELIMINARES
1.5. Estructuras Algebraicas.
1.5.1. Operaciones Binarias.
Definicion 17 Cualquier mapeo S × S → S recibe el nombre de operacionbinaria en S.
Definicion 18 Sea ρ : S × S → S mapeo, entonces el par (S, ρ) recibe elnombre de estructura algebraica con una operacion binaria.
Es posible tener estructuras algebraicas con dos o mas operaciones bina-rias. Ahoera bien, las operaciones binarias pueden tener alguna de las siguientespropiedades:
Definicion 19 Sea (S, ρ) una estructura algebraica. Si ρ satisface ∀ a, b, c ∈ S,tenemos;
ρ(ρ(a, b), c) = ρ(a, ρ(b, c)),
entonces decimos que ρ es asociativa.
Definicion 20 Sea (S, ρ) es una estructura algebraica.Si ∃ e ∈ S talque
∀ a ∈ S,
ρ(a, e) = ρ(e, a) = a,
entonces decimos que e es un elemento neutro de ρ
Definicion 21 Sea (S, ρ) es una estructura algebraica con elemento neutro ydonde ρ satisface que
∀ a ∈ S,∃ b ∈ S,
los cuales cumplen;ρ(a, b) = ρ(b, a) = e,
entonces decimos que ρ tiene la propiedad de inversos y que b es el inverso dea. Simbolizaremos con a−1 al inverso de a.
Definicion 22 Sea (S, ρ) una estructura algebraica donde ρ satisface que
∀ a, b ∈ S,
ρ(a, b) = ρ(b, a)
entonces decimos que ρ es conmutativa .
1.5. ESTRUCTURAS ALGEBRAICAS. 27
1.5.2. Estructuras Algebraicas.
Las estructuras algebraicas con una operacion binaria son:
Definicion 23 Un Semigrupo S es una estructura algebraica (S, ρ) donde ρes asociativa.
Definicion 24 Un Monoide M es una estructura algebraica (M,ρ) donde ρes asociativa y tiene neutro.
Definicion 25 Un Grupo G es una estructura algebraica (G, ρ) donde ρ esasociativa, tiene neutro y tiene inversos.
Definicion 26 Un Grupo Abeliano G es un grupo (G, ρ) donde ρ es con-mutativa.
Y las estructuras algebraicas con dos operacion binaria son:
Definicion 27 Un Anillo R es uan estructura algebraica (R,+, ·) donde(1) (R,+) es una grupo abeliano,(2) (R, ·) es asociativa y(3) se da la distributividad izquierda y derecha i.e. a · (b + c) = a · b + a · c y(b + c) · a = b · a + c · a, para cualquiera a, b, c ∈ R.
Definicion 28 Un Anillo Conmutativo R es un anillo (R,+, ·) donde laoperacion · es conmutativa.
Definicion 29 Un Campo F es una anillo (F,+, ·) donde (F \ {0}, ·) es otrogrupo abeliano.
Hay estructuras algebraicas de una operacion binaria el la cual actua (acciona)otra como un anillo o un campo. Un modulo es un grupo abeliano donde actua unanillo y un espacio vectorial es donde actua un campo. Los axiomas que cumplenambos son
a(v + w) = av + aw
(a + b)v = av + bv
a(bv) = (ab)v
1v = v

28 CAPITULO 1. PRELIMINARES
1.6. Ejercicios.
1. Demuestre que ϕ : N × N → N, definida como
ϕ(n,m) = m + (n + m)(m + n + 1)/2,
es una biyeccion. Observe que
ϕ(0, 0) = 0,
ϕ(1, 0) = 1,
ϕ(0, 1) = 2,
ϕ(2, 0) = 3,
ϕ(1, 1) = 4, ...
2. Sea p ∈ Z primo. Supongamos que p|ab, entonces p|a o p|b.
3. Teorema Fundamental de la Aritmetica. Si a = π1π2 · · · πn = ρ1ρ2 · · · ρm
son descomposiciones de a ∈ Z \ {1,−1} en factores primos, entoncesn = m y cada πi = ±ρj.
4. Mas ejercicios pueden (y deberıan) ser buscados en las referencias.
Capıtulo 2
Grupos.
La definicion de grupo ya fue establecida en la seccion anterior, y ahoraveremos sus ejemplos elementales y ademas de sus propiedades basicas.
2.1. Ejemplos.
Los siguientes ejemplos representan una coleccion de grupos elementales quesirven para ilustrar muchos de los conceptos abstractos que encontraremos masadelante. Es importante que en cada ejemplo se verifique el cumplimiento de losaxiomas, ası como la conmutatividad o no.
Ejemplo 1 (Z,+). Enteros con la suma.
Ejemplo 2 (Q,+). Racionales con la suma.
Ejemplo 3 (R,+). Reales con la suma.
Ejemplo 4 (C,+). Complejos con la suma.
Ejemplo 5 (Q \ {0}, ·). Racionales sin el cero con la multiplicacion.
Ejemplo 6 (R \ {0}, ·). Reales sin el cero con la multiplicacion.
Ejemplo 7 (C \ {0}, ·). Complejos sin el cero con la multiplicacion.
29

30 CAPITULO 2. GRUPOS.
Ejemplo 8 (S3, ◦). Las biyecciones de {1, 2, 3} en si mismo, con la composicionde mapeos. De esta forma las 6 biyecciones de S3 son:
Id =
(1 2 31 2 3
), α1 =
(1 2 31 3 2
),
α2 =
(1 2 33 2 1
), α3 =
(1 2 32 1 3
),
β1 =
(1 2 32 3 1
), β2 =
(1 2 33 1 2
)
La tabla de Cayley que se obtiene de todas la operaciones entre estos elementoses
◦ Id α1 α2 α3 β1 β2
Id Id α1 α2 α3 β1 β2
α1 α1 Id β1 β2 α2 α3
α2 α2 β2 Id β1 α3 α1
α3 α3 β1 β2 Id α1 α2
β1 β1 α3 α1 α2 β2 Idβ2 β2 α2 α3 α1 Id β1
2.1. EJEMPLOS. 31
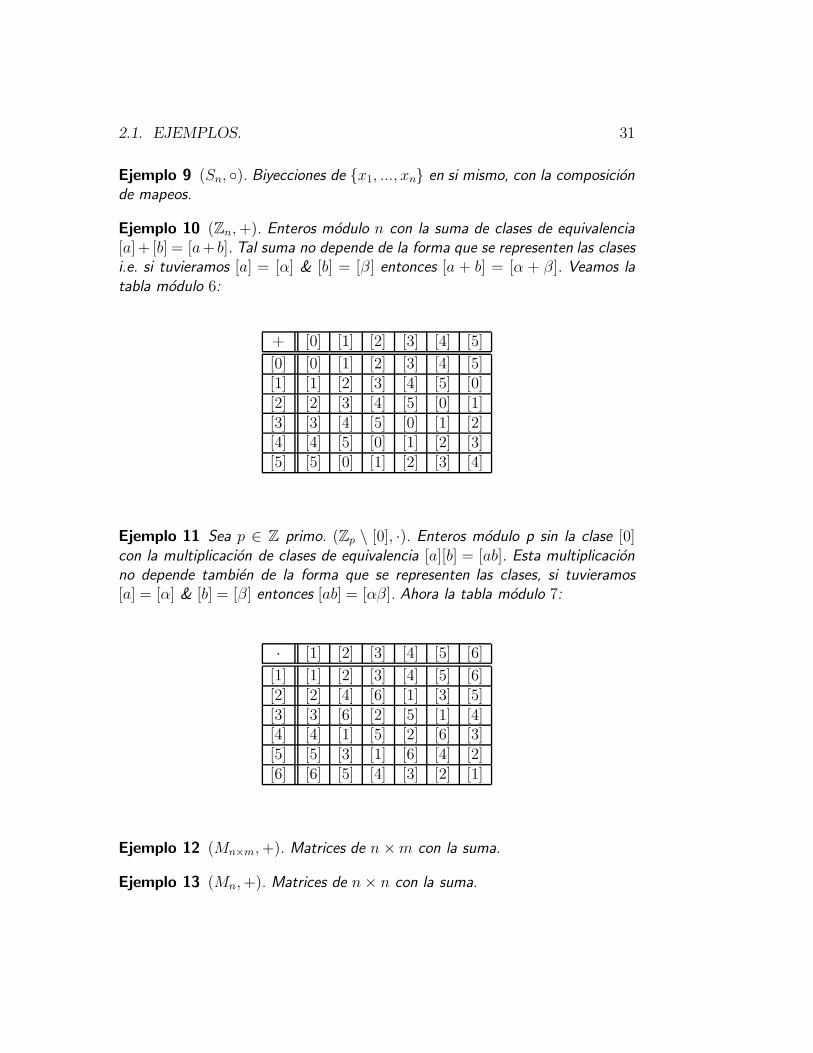
Ejemplo 9 (Sn, ◦). Biyecciones de {x1, ..., xn} en si mismo, con la composicionde mapeos.
Ejemplo 10 (Zn,+). Enteros modulo n con la suma de clases de equivalencia[a]+ [b] = [a+ b]. Tal suma no depende de la forma que se representen las clasesi.e. si tuvieramos [a] = [α] & [b] = [β] entonces [a + b] = [α + β]. Veamos latabla modulo 6:
+ [0] [1] [2] [3] [4] [5]
[0] [0] [1] [2] [3] [4] [5][1] [1] [2] [3] [4] [5] [0][2] [2] [3] [4] [5] [0] [1][3] [3] [4] [5] [0] [1] [2][4] [4] [5] [0] [1] [2] [3][5] [5] [0] [1] [2] [3] [4]
Ejemplo 11 Sea p ∈ Z primo. (Zp \ [0], ·). Enteros modulo p sin la clase [0]con la multiplicacion de clases de equivalencia [a][b] = [ab]. Esta multiplicacionno depende tambien de la forma que se representen las clases, si tuvieramos[a] = [α] & [b] = [β] entonces [ab] = [αβ]. Ahora la tabla modulo 7:
· [1] [2] [3] [4] [5] [6]
[1] [1] [2] [3] [4] [5] [6][2] [2] [4] [6] [1] [3] [5][3] [3] [6] [2] [5] [1] [4][4] [4] [1] [5] [2] [6] [3][5] [5] [3] [1] [6] [4] [2][6] [6] [5] [4] [3] [2] [1]
Ejemplo 12 (Mn×m,+). Matrices de n ×m con la suma.
Ejemplo 13 (Mn,+). Matrices de n × n con la suma.

32 CAPITULO 2. GRUPOS.
Ejemplo 14 (GL(n), ·). Matrices de Mn con determinante 6= 0 y la multipli-cacion.
Ejemplo 15 (SL(n), ·). Matrices de Mn con determinante = 1 y la multipli-cacion.
Convencion. De aquı en adelante cuando se hable de un grupo arbitrario,en vez de escribir la operacion ρ(x, y) de x, y ∈ G simplemente escribimos
xy,
(yuxtaposicion de x & y indican la operacion entre ellos.)
Definicion 30 Tambien se llama orden del grupo al numero
|G| := #G.
Proposicion 9 El elemento neutro de un grupo es unico.
Dem: Sea e ∈ G el neutro .oficial”. Sea e′ ∈ G que tambien satisface que paracualquier x ∈ G, e′x = xe′ = x. Ası e = ee′ = e′.
Proposicion 10 El elemento inverso en un grupo es unico.
Dem: Sea x−1 ∈ G el inverso de x ∈ G. Sea y ∈ G tal que xy = yx = e.Entonces y = ye = y(xx−1) = (yx)x−1 = ex−1 = x−1.
Proposicion 11 En cualquier grupo tenemos las siguientes propiedades.
1. Si x, y ∈ G entonces (xy)−1 = y−1x−1.
2. xnxm = xn+m.
3. x−n = (x−1)n = (xn)−1.
4. x0 = e.
5. (xn)m = xnm.

2.2. SUBGRUPOS. 33
6. Si ax = ay, entonces x = y. Llamada Ley de Cancelacion por la Izquierda.
7. Si xa = ya, entonces x = y. Ley de Cancelacion por la Derecha.
Dem: 1. Observe quexy(y−1x−1) = x(yy−1)x−1 = xex−1 = e entonces y−1x−1 es el inverso de xy.2. xnxm = (x · · ·x)︸ ︷︷ ︸
n-veces
(x · · ·x)︸ ︷︷ ︸m-veces
= x · · · x︸ ︷︷ ︸n + m-veces
= xn+m.
3. (x−1 · · ·x−1)︸ ︷︷ ︸n-veces
= (x · · ·x︸ ︷︷ ︸n-veces
)−1.
4. x0 = xn−n = xnx−n = (x · · ·x)(x−1 · · · x−1) = e · · · e = e.5. Ejercicio.6.& 7. Tambien.
La operacion de un grupo G puede hacerse manifiesta actuando tambien entresubconjuntos A,B ⊆ G. Ası AB = {xy | x ∈ A, y ∈ B} y A−1 = {x−1 | x ∈A}.
Por ejemplo en (S3, ◦) si A = {α1, α2} & B = {α1, β2} entonces
A ◦ B = {α1 ◦ α1, α2 ◦ α1, α1 ◦ β2, α2 ◦ β2},= {Id, β2, α3, α1}.
2.2. Subgrupos.
Pasamos a estudiar las subestructuras, propiedades y construcciones adicio-nales
Ejemplos y Propiedades basicas.
Definicion 31 Un subconjunto H ⊆ G de un grupo G se llama subgrupo deG, si H es un grupo con la misma operacion de G. Simbolicamente escribimos
H < G.
Ejemplo 16 (Z,+) < (R,+)
Ejemplo 17 (2) = {multiplos de 2} < (Z,+)
Mas general:

34 CAPITULO 2. GRUPOS.
Ejemplo 18 (k) = {multiplos de k} < (Z,+)
Ejemplo 19 {1,−1, i,−i} < (C \ {0}, ·).
Ejemplo 20 En S3 las biyecciones;
Id =
(1 2 31 2 3
), β1 =
(1 2 32 3 1
),
β2 =
(1 2 33 1 2
).
Sea G un grupo. Ya que cualquier subconjunto de un grupo no siempre esun subgrupo, el siguiente importante criterio servira para decidir si ciertoH ⊆ G, es un subgrupo:
Lema 6 H < G ⇐⇒ ∀ x, y ∈ H tenemos xy−1 ∈ H.
Dem: Si H < G & si x, y ∈ H entonces xy ∈ H ası como x−1, y−1 ∈ H.Tambien xy−1 ∈ H.
Conversamente. Si para x, y ∈ H tenemos xy−1 ∈ H, verificaremos que Hes un subgrupo de G. Asociatividad de la operacion en H ya hay, puesto queH ⊆ G. Haciendo y = x en la hipotesis tendremos xx−1 ∈ H i.e. e ∈ H. Ahorasi e, x ∈ H entonces ex−1 ∈ H i.e. x−1 ∈ H. Finalmente si x, y ∈ H implicax, y−1 ∈ H, entonces por hipotesis otra vez x(y−1)−1 ∈ H, i.e. xy ∈ H.
Como ejemplos de su uso demostraremos que:
Proposicion 12 Si H,K < G entonces H∩K < G. Mas generalmente si {Hj}es una coleccion de subgrupos de G, entonces
⋂j Hj < G.
Dem: Primero, si x, y ∈ H∩K entonces x, y ∈ H & x, y ∈ K. Como H,K < Gentonces xy−1 ∈ H & xy−1 ∈ K, ası xy−1 ∈ H ∩ K, i.e. (por Lema 1)H ∩ K < G.Para
⋂j Hj < G es similar
Para ilustrar todo lo anterior sean (2), (3) los multiplos de 2 y de 3 enZ. Ambos son subgrupos. Porque si x, y ∈ (2) entonces1 x = 2m & y = 2n=⇒ x− y = 2m − 2n = 2(m − n) ∈ (2). Ademas (2) ∩ (3) = (6).
1aquı la notacion abstracta xy−1 toma la forma x−y ya que el inverso de y ∈ Z es −y.
2.2. SUBGRUPOS. 35
Definicion 32 Sean a ∈ G, H < G. El conjunto aH = {ax | x ∈ H} se llamaclase lateral izquierda de a. Similarmente Ha es la clase lateral derecha.
Ejemplo 21 En Z tomamos el subgrupo (8). Entonces la clase lateral izquierdade 1 es 1 + (8) = {1 + 8k | k ∈ Z}.
Ejemplo 22 En S3 y con el subgrupoN = {Id, β1, β2} y con α1 ∈ S3 tenemos α1 ◦N = {α1 ◦ Id, α1 ◦β1, α1 ◦β2}& N ◦ α1 = {Id ◦ α1, β1 ◦ α1, β2 ◦ α1} observamos que α1 ◦ N = N ◦ α1,pero esto no es una generalidad. Lo veremos con el H = {Id, α1} < S3. Sicalculamos β1 ◦ H y H ◦ β1 tendremos β1 ◦ H 6= H ◦ β1.
¿Cuando dos clases laterales son iguales?
Lema 7 Ha = Hb ⇐⇒ ab−1 ∈ H.Similarmente aH = bH ⇐⇒ a−1b ∈ H.
dem: (⇒) para la primera parte. Operando con b−1 tenemos Hab−1 = H,ası eab−1 ∈ H.(⇐). Supongamos que ab−1 = h0 ∈ H entonces a = h0b. Sea x ∈ Ha, en-tonces x = h1a = h1h0b ∈ Hb ası Ha ⊆ Hb. Ahora si y ∈ Hb entoncesy = h2b = h2h
−10 h0b = h2h
−10 a ∈ Ha, por esto Ha ⊇ Hb.
Similarmente para la segunda parte del Lema
Denotemos con G/H el conjunto de todas la clases laterales Ha llamadotambien conjunto cociente
Teorema 2 G/H es una particion de G donde cada componente tiene la mismacardinalidad.
Dem: Si Ha ∩ Hb 6= ∅ entonces ∃ c ∈ Ha ∩ Hb. Esto implica que c = h1a &c = h2b. Si x ∈ Ha entonces x = h3a = h3h
−11 h1a = h3h
−11 c = h3h
−11 h2b es
decir x ∈ Hb, por lo tanto Ha ⊆ Hb. Similarmente Ha ⊇ Hb. Todo lo anteriornos dice que clases laterales con elementos comunes son la misma, por lo cualdos clases Ha,Hb son disjuntas si no tienen elementos comunes.
Por otro lado x ∈ Hx ⊆ ⋃a Ha nos indica que G =
⋃a Ha.

36 CAPITULO 2. GRUPOS.
Finalmente definiendo Ha → Hb como ha 7→ hb veremos que ella (la apli-cacion) es una biyeccion
Observamos que tambien es posible tener aH ↔ bH con ah 7→ bh, al igualque Ha ↔ bH con ha 7→ bh. Por lo tanto ∀ Ha, aH ;Ha ↔ H, aH ↔ H.
Supongamos que |G| < ∞ & H < G.Entonces #(G/H) < ∞. Supongamos que G/H = {Ha1, Ha2, ...,Hat}. Ası
G = Ha1 ∪ · · · ∪ Hat,
=t⋃
j=1
Haj,
porque Hai ∩ Hak = ∅ (si i 6= k) entonces |G| =∑t
j=1 #Haj. Pero #Haj =|H| =⇒
|G| =t∑
j=1
|H|,
= t|H|.
Ası hemos demostrado el
Teorema 3 (Lagrange). Si G es de orden finito y H < G, entonces |H| divide|G|.
El numero #(G/H) recibe el nombre de ındice del subgrupo N en G, y sesimboliza con [G : H].Ejemplo. Si H = {Id, α1} < S3 tendremos S3/H = {H, H ◦ β1, H ◦ β2} ={{Id, α1}, {β1, α2}, {β2, α3}} entonces [S3 : H] = 3.
Hemos de notar que aunque |G|, |H| ≥ ∞ podemos tener [G : H] < ∞como lo nuestra el ejemplo Z/(3) = {0 + (3), 1 + (3), 2 + (3)} donde tenemos[Z : (3)] = 3. Mas generalmente tendremos [Z : (k)] = k.
2.2. SUBGRUPOS. 37
2.2.1. Subgrupos Normales y Grupos Cocientes.
Definicion 33 Un subgrupo N < G se llama normal, si ∀ a ∈ G, aN = Na.Simbolicamente
N / G.
Trabajando con el N = {Id, β1, β2} < S3 veremos que N /S3. Tambien encualquier grupo abeliano tendremos automaticamente igualdad de clase laterales(izquierdas con derechas), dando como resultado que todos los subgrupos deellos sean normales.
Equivalentemente
Proposicion 13 Sea N < G, entonces N / G ⇐⇒ ∀ g ∈ G,∀ n ∈ N tenemosque gng−1 ∈ N .
Dem: Si gN = Ng entoncesgNg−1 = Ngg−1 = Ne = N , esto nos dice que cada producto gng−1 cumplegng−1 ∈ N . Conversamente, si gNg−1 ⊆ N, ∀ g ∈ G entonces g−1Ng ⊆N tambien. Operando con g y su inverso, g(g−1Ng)g−1 ⊆ gNg−1 ⊆ N , i.e.N ⊆ gNg−1, obteniendose N = gNg−1. Finalmente Ng = (gNg−1)g implicaNg = gN
Con un subgrupo N < G podemos construir un grupo con el conjunto G/N .
Definicion 34 La operacion
NaNb = Nab, (∗)
hace que el cociente G/N sea un grupo. Tal grupo recibe el nombre de GrupoCociente.
Que la construccion NaNb = Nab define una operacion binaria en G/N quedaverificado como sigue:
Clausura. La operacion (∗) anterior esta bien definida. Debemos demostrarque (∗) efectivamente define un mapeo G/N × G/N → G/N pues aquı es deque la operacion NO DEPENDE de la manera que se representen las clases, esdecir, si Na = Nc & Nb = Nd ⇒ NaNb = NcNd:Na = Nc & Nb = Nd implican (por lema 7 ) ac−1, bd−1 ∈ N entonces

38 CAPITULO 2. GRUPOS.
a = n1c, b = n2d, ası ab = n1cn2d = n1cn2c−1cd = n1n3cd donde cn2c
−1 =n3 ∈ N . Entonces ab = n1n3cd implica ab(cd)−1 = n1n3 ∈ N , lo cual implica(por lema 7 otra vez) que Nab = Ncd, i.e. NaNb = NcNd.
Asociatividad. Na(NbNc) = (NaNb)Nc se da porque a(bc)[(ab)c]−1 =e ∈ N .
Neutro. Basta observar NaNe = Nae = Na = Nea = NeNa es decirNe = N es la clase ”elemento neutro”en G/N .
Inversos. Observe que NaNa−1 = Na−1Na = Ne, es decir2 (Na)−1 =Na−1
Para el ejemplo N = {Id, β1, β2} < /S3 tenemos la tabla
◦ N N ◦ α1
N N N ◦ α1
N ◦ α1 N ◦ α1 N
Por otro lado para (4)Z tenemos
+ 0 + (4) 1 + (4) 2 + (4) 3 + (4)
0 + (4) 0 + (4) 1 + (4) 2 + (4) 3 + (4)1 + (4) 1 + (4) 2 + (4) 3 + (4) 0 + (4)2 + (4) 2 + (4) 3 + (4) 0 + (4) 1 + (4)3 + (4) 3 + (4) 0 + (4) 1 + (4) 2 + (4)
2.3. Morfismos.
Un mapeo h : G → G′ entre dos grupos se llama homomorfismo si∀ a, b ∈ G se cumple
h(ab) = h(a)h(b),
es decir, la imagen de un producto es igual al producto de imagenes.
Ejemplo 23 Si definimos h : (R,+) → (R \ {0}, ·) como h(x) = ex (mapeoexponencial) es un homomorfismo porque h(x + y) = ex+y = exey = h(x)h(y).
2aquı tambien coincide con la definicion de inverso de conjunto

2.3. MORFISMOS. 39
Ejemplo 24 Tambien si se define h : (R\{0}, ·) → (R,+) como h(x) = logb(x)(logaritmos base b) ⇒ tendremos que h(xy) = logb(xy) = logb(x) + logb(y) =h(x) + h(y).
Ejemplo 25 Sea η : G → G/N definido como η(x) = Nx. Ası η(xy) = Nxy =NxNy = η(x)η(y) esto es, η es un homomorfismo. Mas aun η es sobreyectivaporque Nz ∈ G/N tiene como preimagen a z ∈ G. Tal homomorfismo recibe elnombre de homomorfismo natural.
Ejemplo 26 Sea a ∈ G. Sea Ia : G → G definido como Ia(x) = axa−1. Los Ia
se llaman automorfismos internos porque;HMF: Ia(xy) = axya−1 = axa−1aya−1 = Ia(x)Ia(y).IY: Ia(x) = Ia(y) entonces axa−1 = aya−1 entonces x = y.SY: Dado u ∈ G entonces Ia(x) = u tiene solucion con x = a−1ua.
Ejemplo 27 Otro mas. Sea A = [aij] una matriz de m × n, con ella podemosdefinir un mapeo Rn → Rm como
v1...vn
7→
a11 · · · a1n...
. . ....
am1 · · · amn
v1...
vn
.
Si simbolizamos esta ultima relacion como v 7→ Av veremos que si ademasw 7→ Aw entonces v + w 7→ A(v + w) = Av + Aw.
Los homomorfismos reciben nombres especiales en caso que satisfagan al-gunas condiciones adicionales. Un epimorfismo (EMF) es un homomorfismoque es sobreyectivo. Un monomorfismo (MMF) es un homomorfismo inyecti-vo. Un endomorfismo (DMF) es un homomorfismo de un grupo en el mismo.Un isomorfismo (IMF) es un homomorfismo biyectivo. Y finalmente un auto-morfismo (AMF) es un endomorfismo biyectivo.Si hay un isomorfismo entre dos grupos G, G escribimos
G ≈ G,
y leemos ”G es isomorfo a G”.
Para los homomorfismos se tienen las siguientes propiedades.
40 CAPITULO 2. GRUPOS.
Teorema 4 Sea h : G → G′ un homomorfismo. Sean e ∈ G, e′ ∈ G′ los neutrosde cada grupo & x ∈ G. Entonces
h(e) = e′.
h(x−1) = (h(x))−1.
Dem: Primero. h(e) = h(ee) = h(e)h(e) entonces h(e) = h(e)h(e), cancelandoh(e) de ambos lados llegaremos a h(e) = e′.
Segundo.
h(x−1) = h(x−1)e′,
= h(x−1)h(x)(h(x))−1,
= h(x−1x)(h(x))−1,
= e′(h(x))−1,
= (h(x))−1.
Teorema 5 Si H < G y ϕ : G → G′ un homomorfismo, entonces ϕH < G′.
Demostracion: Usando el Lema 1. Si x, y ∈ ϕH entonces existen correspondi-entes preimagenes de s, t en H, ası ϕ(s) = x & ϕ(t) = y. Pero st−1 ∈ Hporque H < G. Entonces ϕ(st−1) = ϕ(s)(ϕ(t))−1 = xy−1, es decir, xy−1 tienepreimagen en H. Por lo tanto xy−1 ∈ ϕH
Teorema 6 Si L < G′ y ϕ : G → G′ un homomorfismo, entonces ϕ−1L < G.
2.3. MORFISMOS. 41
Dem: Ejercicio
El Kernel o nucleo de un homomorfismo ϕ : G → G′ es el conjunto kerϕ =ϕ−1(e′). Para el ejemplo η : G → G/N definido como η(x) = Nx tenemoskerη = N .
Para este conjunto se cumple
Teorema 7 Si ϕ : G → G′ un homomorfismo, entonces kerϕ / G′.
Dem: Si x, y ∈ kerϕ entonces ϕ(xy−1) = ϕ(x)(ϕ(y))−1 = e′e′ = e′ i.e. xy−1 ∈kerϕ, esto demuestra que kerϕ < G′. Para la normalidad sea x ∈ kerϕ &g ∈ G, entonces ϕ(gxg−1) = ϕ(g)ϕ(x)ϕ(g−1) = ϕ(g)ϕ(g−1) = ϕ(e) = e′, esdecir gxg−1 ∈ kerϕ
2.3.1. Teorema Fundamental de Homomorfismos.
Teorema 8 (Fundamental de Homomorfismos.) Sea α : G → G unepimorfismo. Entonces G es isomorfo a G/ ker α.
Dem: Abreviamos con K = kerα. Vamos a definir ϕ : G/ kerα → G comoϕ(Kx) = α(x). ϕ esta bien definida: Pues si Kx = Ky entonces xy−1 ∈ K.Ası α(xy−1) = e, entonces α(x) = α(y) i.e. ϕ(Kx) = ϕ(Ky). ϕ es un homomor-fismo: ϕ(KxKy) = ϕ(Kxy) = α(xy) = α(x)α(y) = ϕ(Kx)ϕ(Ky). ϕ es inyec-tiva: Si ϕ(Kx) = ϕ(Ky) entonces α(x) = α(y). ⇒ α(xy−1) = e ⇒ Kx = Ky.Finalmente ϕ es sobreyectiva: Ya que si t ∈ G & α es sobreyectiva, entoncesexiste u ∈ G talque α(u) = t. Por lo tanto ϕ(Ku) = α(u) = t.
Ejemplo. Sea µ : Z → Zn definido como µ(x) = [x]. µ es un homomorfismocuyo kernel es (n), entonces Zn ≈ Z/(n).
Otro; sea F un campo3. Para el mapeo δ : GL(n,F ) → F ∗ definido comoδ(A) = det(A). Si 1 es el neutro en F ∗ entonces ker δ = SL(n,F ) y
GL(n,F )/SL(n,F ) ≈ F ∗.
3Un campo es una estructura algebraica con dos operaciones binarias (F, +, ·) donde(F, +) es un grupo abeliano, y si 0 es el neutro de + entonces (F ∗ = F \ {0}, ·) tambienes un grupo abeliano. Ademas de que se da la ley distributiva a · (b + c) = a · b + a · c
42 CAPITULO 2. GRUPOS.
Como aplicacion del teorema fundamental de homomorfismos (TFHMFs) de-mostramos el
Teorema 9 (Fermat) Sea G un grupo finito. Si a ∈ G entonces a|G| = e.
Dem: Consideremos el subgrupo 〈a〉 < G & el mapeo ∂ : Z → 〈a〉 definidocomo ∂(n) = an. Es facil ver que ∂ es un HMF. Ademas que ∂ es SY, porque lapreimagen de am ∈ 〈a〉 es m ∈ Z. Entonces por el TFHMFs tenemos
Z/ ker ∂ ≈ 〈a〉.
Ahora el ker∂ < Z, esto implica que ∃ k ∈ Z talque (k) = ker∂ porque Z escıclico. Pero sabemos que Z/(k) ≈ Zk. Por lo tanto
Zk ≈ 〈a〉.
Ası k divide |G| por el teorema de Lagrange. Tenemos pues |G| = ck para algunc ∈ Z. Ademas, ya que k ∈ (k), entonces ∂(k) = e, i.e. ak = e. Finalmentea|G| = ack = (ak)c = e.
Ejemplo 28 En el grupo multiplicativoZ∗
p = {[1], ..., [p−1]} (con p primo) tenemos |Z∗p| = p−1, entoces para cualquier
clase tenemos [a]p−1 = [1], que en terminos de congruencias4 resulta en ap−1 ≡ 1mod p. Por ejemplo verifique con calculadora que 36 ≡ 1 mod 7, 1416 ≡ 1 mod17, 3030 ≡ 1 mod 31...¿facil?
2.4. Topicos.
2.4.1. Construccion de Subgrupos.
Una manera muy general de construir subgrupos en G es elegir S ⊆ G yarmar el alfabeto S ∪ S−1. Con el integramos el conjunto
〈S〉 = {x ∈ G | x = σ1σ2 · · ·σn, donde σk ∈ S ∪ S−1}.
Los objetos x = σ1σ2 · · · σn se llaman palabras en el alfabeto S ∪ S−1.
4recuerde que si n|(a − b) entonces a ≡ b mod n, lo que nos indica que [a] = [b].

2.4. TOPICOS. 43
Proposicion 14 〈S〉 es un subgrupo de G, decimos que S genera a tal sub-grupo.
Dem: Si x = σ1 · · ·σn & y = τ1 · · · τm son dos palabras en el alfabeto S ∪ S−1
entoncesxy−1 = σ1 · · ·σn(τ1 · · · τm)−1 = σ1 · · ·σnτ
−1m · · · τ−1
1 tambien, Ası por lema 6〈S〉 < G.
Otros son
Definicion 35 Sean a ∈ G, A ⊆ G. Definimos Z(a) = {x ∈ G | ax = xa} &Z(A) = {x ∈ G | ax = xa, ∀a ∈ A}, estas construcciones se llaman centra-lizadores. Ademas N(A) = {x ∈ G | xA = Ax} se llama normalizador deA.
El centro de un grupo es Z = Z(G), que no debe ser confundido con Z.
Que estas construcciones son subgrupos es un buen ejercicio, usando el lema 6.
Otros conceptos son:
[a, b] := aba−1b−1 conmutador que tiene las propiedades
[a, e] = e.
[a, a] = e.
[a, b]−1 = [b, a].
g[a, b]g−1 = [gag−1, gbg−1]
El conjunto de todos los conmutadores genera un subrupo normal (buen ejercicio)[G,G] de G. Ası 〈[a, b] | a, b ∈ G〉 = [G,G]. El cociente G/[G,G] se llama laabelianizacion de G.

44 CAPITULO 2. GRUPOS.
2.4.2. Grupos Simetricos.
Sabemos que Sn el conjunto de las n! biyecciones o permutaciones deun conjunto con n elementos forman un grupo. Si α ∈ Sn entonces podemosrepresentarla mediante el esquema
α =
(1 2 · · · n
α(1) α(2) · · · α(n)
).
Pero hay otra forma de representar a las permutaciones. Por ejemplo, si
α =
(1 2 3 43 2 4 3
).
entonces escribiremos
α = (134),
esta notacion llamada ciclo indica lo mismo que la previa con la convencion deque los elementos que estan fijos (α(2) = 2) no se escriben. La notacion (134)indica que 1 7→ 3, 3 7→ 4 & 4 7→ 1 como 2 no aparece, 2 7→ 2. Observe que(134) = (413) = (341).
Otros ejemplos. Si
β =
(1 2 3 4 5 65 4 1 3 6 2
).
entonces β = (156243).Si
γ =
(1 2 3 4 5 62 1 3 6 4 5
).
entonces γ = (12)(465). Aquı vemos que γ consiste de dos ciclos. Sera que(12) & (465) sean factores de γ? La respuesta es si, como es facil comprobarlohaciendo los calculos con la otra notacion
γ =
(1 2 3 4 5 62 1 3 4 5 6
)(1 2 3 4 5 61 2 3 6 4 5
).
Observe adicionalmente que cambiando el orden de la operacion anterior nocambia el resultado
γ =
(1 2 3 4 5 61 2 3 6 4 5
)(1 2 3 4 5 62 1 3 4 5 6
),

2.4. TOPICOS. 45
entonces γ = (465)(12). Esto ilustra una propiedad basica de los ciclos... Sioperamos con ciclos disjuntos, podemos conmutar los factores....
Ciclos de longitud 2 se llaman transposiciones. Obseve que si τ = (ab)entonces τ ◦ τ = Id.
Escribamos aquı todos los elementos de S3 \ Id en terminos de ciclos
α1 = (23), α2 = (13),
α3 = (12), β1 = (123), β2 = (321).
Ahora observemos lo siguiente
(123) = (13)(12)
que corresponde a la factorizacion
β1 = α2 ◦ α3.
Pero tambien tenemos(312) = (32)(31)
&(231) = (21)(23)
que corresponde a las factorizaciones
β1 = α1 ◦ α2,
= α3 ◦ α1.
Es decir tenemos un metodo para convertir cualquier ciclo en transposiciones.Otro ejemplo, si
γ = (13567),
= (17)(16)(15)(13).
Llamaremos paridad de una permutacion α al sımbolo (−1)α que es 1 obien −1 dependiendo de que si α consiste en par o bien impar cantidad detransposiciones. Por ejemplo para la permutacion γ de arriba tenemos (−1)γ = 1.Tambien (−1)(2356189) = 1 porque (2356189) = (29)(28)(21)(26)(25)(23).
Es relativamente facil demostrar que
46 CAPITULO 2. GRUPOS.
Proposicion 15 (−1)α◦β = (−1)α(−1)β
Dem: Cuando hacemos la descomposicion del producto α ◦β en transposiciones;α ◦ β = τ1 ◦ · · · τt ◦ σ1 ◦ · · · ◦ σs veremos que el numero de ellas seguira siendopar (o impar) en el caso que haya cancelaciones entre los factores τt ◦ σ1.
Para aclarar el enunciado anterior, considere el ejemplo
(1342)(391) = (12)(14)(13)(31)(39),
= (12)(14)(39),
vemos ası que la paridad no cambia si usamos cualquiera de las 2 ultimas repre-sentaciones de esta permutacion.
Proposicion 16 Si α = (a1a2 · · · an) es un ciclo de longitud n entoncesα−1 = (anan−1 · · · a1) = (a1an · · · a2)
Dem: Observando que
α = (a1an) · · · (a1a3)(a1a2)
entonces al operar con
(a1an · · · a2) = (a1a2)(a1a3) · · · (a1an)
tenemos
(a1an) · · · (a1a3)(a1a2)(a1a2)(a1a3) · · · (a1an)
obteniendose cancelacion de todos los factores.
Para el inverso de α = γ1 ◦ · · ·◦γn con γi ciclos no necesariamente disjuntos,usariamos la ley (γ1γ2)
−1 = γ2−1γ1
−1.
Teorema 10 Todas las permutaciones pares forma un subgrupo normal An deSn. Ademas |An| = |Sn|/2.

2.4. TOPICOS. 47
Dem: Sea An = {α1, ..., αk} todas las permutaciones pares. Si αi, αj ∈ An en-tonces ellas pueden descomponerse en un numero par de transposiciones, digamosαi = T1 ◦ · · · ◦ T2n & αj = S1 ◦ · · · ◦ S2m. Entonces el producto
αi ◦ (αj)−1 = T1 ◦ · · · ◦ T2n ◦ (S1 ◦ · · · ◦ S2m)−1,
= T1 ◦ · · · ◦ T2n ◦ S−12m ◦ · · · ◦ S−1
1 ,
en esta ultima relacion vemos que hay par transposiciones, si llegara ha habercancelaciones, iriamos quitando transposiciones de dos en dos, lo cual no cambiala paridad del producto αi◦α−1
j . Por lo tanto αi◦α−1j ∈ An, de lo que se concluye
que An < Sn. Para la normalidad sea αi ∈ An y γ ∈ Sn. El producto γ ◦αi ◦γ−1
tendremos una cantidad par de transposiciones por que las que aportan γ y γ−1
suman dos veces el mismo numero, dando (−1)γ◦αi◦γ−1= 1 ⇒ γ◦αi◦γ−1 ∈ An,
i.e An < Sn.
Finalmente si T ∈ Sn es una sencilla transposicion, la clase lateral T ◦ An
tiene la misma cardinalidad de An. Sea δ ∈ Sn cualquier otra permutacion. Siδ /∈ An entonces δ es impar. Ası T ◦ δ ∈ An digamos T ◦ δ = αr, entoncesT ◦ T ◦ δ = T ◦ αr, i.e δ = T ◦ αr ∈ T ◦ An. Con todo lo anterior tenemos queAn∪T ◦An = Sn. Pero ademas An∩T ◦An = ∅. Por lo tanto #(An∪T ◦An) =#Sn i.e. 2#An = #Sn.
2.4.3. Teorema de Cayley.
Ahora vamos a demostrar el Teorema de Cayley. Definimos los mapeos λa :G → G con la formula λa(x) = ax Sea B = {λa} que forma un grupo de biyec-ciones (permutaciones de G) con la composicion de mapeos: λa(x) = λa(y)implica ax = ay entonces x = y nos da la inyectividad. Para la sobreyectividadλa(x) = b tiene solucion para x eligiendole como x = a−1b. λa ◦ λb(x) = λab(x)nos da la clausura. Asociatividad automatica. Nuetro λe. E inversos con λ−1
a =λa−1.
Ahora definimos Λ : G → B como Λ(g) = λg. Afirmamos que Λ es un IMF:
Λ(g1g2) = λg1g2,
= λg1 ◦ λg2 ,
= Λ(g1) ◦ Λ(g2).

48 CAPITULO 2. GRUPOS.
que nos dice que Λ es un HMF. Tambien es IY porque si Λ(g) = Λ(h) entoncesλg = λh, siendo esto ultimo igualdad de mapeos, i.e., λg(x) = λh(x), ∀ x ∈ Gası gx = hx, ∀x ∈ G, entonces g = h con la eleccion x = e. Finalmentetenemos SY pues si λc ∈ B vemos que la preimagen es c ∈ G i.e. Λ(c) = λc.Todo lo anterior se resume en el
Teorema 11 (Cayley). Todo grupo es isomorfo a un grupo de permutaciones.
2.4.4. Simplicidad de An
.Para demostrar que An es un grupo simple para n > 4, empecemos con
Lema 8 Sean θ, (a1 a2 am) dos permutaciones entoncesθ · (a1 am) · θ−1 = (θa1 θam)
Dem: Sea x ∈ {1, ..., n} y hacemos bi = θai. Entonces tenemos
θ · (a1 am)x =
{θx si x /∈ {a1, ..., am}bi+1 si x = ai
Y por otro lado:
(b1 bm) · θx =
{θx si x /∈ {b1, ..., bm}bi+1 si θx = bi
Pero considerando que x /∈ {a1, ..., am} si y solo si θx /∈ {b1, ..., bm}, las dosdefiniciones de arriba son identicas i.e. θ ·(a1 am) = (b1 bm) ·θ, de dondededucimos el resultado.
Un triciclo es un ciclo de longuitd 3, como (123).
Lema 9 Cualquier permutacion par se puede factorizar en triciclos.
Dem: Sea α = π1π2 · · · π2m para un numero par de transposiciones πsomething.Pero para cualquier pareja de transposiciones tenemos:
Cuando son disjuntas
πkπl = (ab)(cd) = (ab)(bc)(cb)(cd) = (abc)(bcd) ∈ An;

2.4. TOPICOS. 49
o cuando tienen interseccion no trivial:
πsπt = (ab)(bc) = (bca) ∈ An.
Ası que α = T1 · · ·Tr.Esa proposicion nos dice que An = 〈{los triciclos}〉. Ademas tenemos que
Lema 10 Si H < An y (abc) ∈ H para algun triciclo, entonces H = An.
Dem: Sean (abc) ∈ H y (xyz) y otro triciclo cualquiera. En Sn podemos armarla permutacion
θ =
(a b cx y z
)y calculamos θ · (abc) · θ−1 = (xyz), es decir cualquier triciclo
esta en H y por lo tanto H = An.
Lema 11 Si H < An y (ab)(cd) ∈ H para un par de transposiciones disjuntas,entonces H = An tambien.
Dem: Sea α = (ab)(cd) ∈ H, con n > 4 existe e ∈ {1, ..., n} \ {a, b, c, d} con elcual construimos (abe) y entonces
θ · α · θ−1 = (abe)(ab)(cd)(eba) = (eb)(cd) ∈ H.
pero tambien
α−1 · θ · α · θ−1 = (dc)(ba)(cd)(eba) = (abe) ∈ H.
Es decir H tiene al menos un triciclo y ası H = An.Los ordenes de A2 y A3 son 1 y 3. el primero es un grupo trivial y el segundo
tiene orden primo, por lo que, en base al teorema de Lagrange, no tiene subgruposno triviales. A4 tiene un subgrupo normal no trivial: {Id, (12)(34), (13)(24), (14)(23)}que lo hace no simple.
Ahora demostremos que
Teorema 12 An es simple para n > 4
Dem: Sea H normal en An diferente de 〈{Id}〉. Entonces hay en H unelemento α 6= Id.
Factoricemos disjuntamente α = α1 · · ·αk, y el teorema quedara demostradoconsiderando los siguientes 4 casos

50 CAPITULO 2. GRUPOS.
CASO 1: Supongamos que α1 = (a1 a2 am) tiene longitud m > 3.Sea σ = (a1 a2 a3) y observamos que σ ·αi = αi ·σ para cada i = 2, ..., k y queσ ∈ An. Entonces σ · α · σ−1 · α−1 = (a1 a2 a4) que esta en H y por el lema 3anterior tenemos H = An.
CASO 2: Supongamos que α1 = (a1 a2 a3) y α2 = (a4 a5 a6).Esta vez hacemos σ = (a2 a3 a4) y entonces σ ·α · σ−1 ·α−1 = (a1 a4 a2 a3 a5)que esta en H y por el caso 1 anterior tenemos H = An.
CASO 3: Supongamos que α1 = (a1 a2 a3) y que α2, ..., αk son transposi-ciones.Aquı, tenemos que α2 = (a1 a2 a3) que esta en H y por el lema 3 anteriortambien tenemos H = An.
CASO 4: Todas las αi son transposiciones.Hay un numero par de transposiciones y elijiendo σ = (a2 a3 a4) tendremos queσ ·α ·σ−1 ·α−1 = (a1 a4)(a2 a3) que esta en H y por el lema 4 anterior tenemosH = An.
2.4.5. Acciones de Grupos.
En esta breve seccion nos topamos con conceptos sencillos y pero abstrac-tos que no solo sirven como soporte tecnico para la teorıa de grupos finitos.Los conceptos como el de estabilizador (o subgrupo isotropico) y el deorbita que sencillos pero poderosos, permiten descomponer algun conjunto Xen forma sistematica para su analisis cuando esta bajo la influencia de un grupo Gdado. La ecuacion de clase obtenida puede dar mucha informacion del grupomismo cuando este actua sobre si mismo.
Empezamos con la
Definicion 36 Sean G un grupo y X un conjunto non-vacuo. Sea ϕ : G×X →X que satisface las siguientes condiciones
1. ϕ(e, x) = x,
2. ϕ(g1, ϕ(g2, x)) = ϕ(g1g2, x),
esto para ∀ g1, g2 ∈ G & ∀ x ∈ X. y decimos que ϕ es una accion de G en X.

2.4. TOPICOS. 51
Convencionalmente tendremos el siguiente cambio de notacion
ϕ(g, x) = g • x.
y ası las condiciones de arriba, toman la forma
1. e • x = x,
2. g1 • (g2 • x) = g1g2 • x.
Ejemplo 29 Si definimos la accion de G sobre si mismo como g • x = gxg−1,entonces se cumple las dos condiciones de la definicion 1:e • x = exe−1 = x,g1 • (g2 • x) = g1 • (g2xg−1
2 ) = g1g2x(g1g2)−1 = g1g2 • x.
Otro
Ejemplo 30 Definimos la(
cos θ − sin θsin θ cos θ
)•(
xy
)=
(x cos θ − y sin θx sin θ + y cos θ
).
Esto forma una accion de las matrices con la multiplicacion sobre conjunto deparejas (
xy
)∈ R2.
Tal accion es una caracterizacion de las rotaciones en el plano.
Uno mas.
Ejemplo 31 Sean P,Q < G. Definimos el mapeo P × G/Q → G/Q comop • Qa = Qpap−1. No es difıcil de verificar que esto define una accion.
Consideremos ahora los siguientes conceptos.
Definicion 37 Sea G que actua sobre X. Sea x0 ∈ X. El estabilizador dex0 ∈ X es el subconjunto
St(x0) = {g ∈ G | g • x0 = x0},

52 CAPITULO 2. GRUPOS.
es decir, en el estabilizador estan los elementos del grupo que cuando actuansobre x0, no le afectan. Ademas afirmamos que
Teorema 13 St(x0) < G.
Dem: Sean g1, g2 ∈ St(x0). Entonces g1•x0 = x0 y g2•x0 = x0. Pero g−12 •(g2•
x0) = g−12 • x0 de lo que se sigue x0 = g−1
2 • x0 lo que permite g1g−12 • x0 = x0.
Ası g1g−12 ∈ St(x0) lo cual implica que St(x0) < G.
Teorema 14 Supongamos que g • x = y, entonces gSt(x)g−1 = St(y).
Dem: Si g•x = y entonces g−1•y = x. Sea u ∈ gSt(x)g−1, entonces u = gsg−1
para algun s ∈ St(x) con el cual s • x = x. Ahora
u • y = gsg−1 • y,
= g • (s • (g−1 • y)),
= g • (s • x),
= g • x,
= y.
Es decir u ∈ St(y). Por lo tanto gSt(x)g−1 ⊆ St(y). La otra parte es similar.
Ahora consideremos la siguiente:
Definicion 38 Sea Orb(x0) = {x ∈ X | g • x0 = x,∃ g ∈ G}. Tal conjunto sellama la orbita de x0
En Orb(x0) tenemos a los elementos de X que se obtienen apartir de x0 bajo laaccion de G.
Ası nos encontramos con el importante
Lema 12 El mapeo Orb(x0) → G/St(x0) definido con la asignacion g • x0 7→gSt(x0) es una biyeccion.
2.4. TOPICOS. 53
Dem: Llamemos φ a tal asignacion, i.e. φ(g • x0) = gSt(x0). Para la so-breyectividad; si hSt(x0) ∈ G/St(x0) entonces u = h • x0 ∈ Orb(x0) cumpleφ(u) = hSt(x0). Para la inyectividad, supongamos que a = ga • x0, b = gb • x0
y φ(a) = φ(b). Entonces gaSt(x0) = gbSt(x0), esto ultimo es si y solo sig−1
a gb ∈ St(x0). Por lo tanto g−1a gb • x0 = x0 y ası gb • x0 = ga • x0, es
decir a = b.
Ahora afirmamos que la relacion binaria en X definida por
”x ∼ y, si ∃ g ∈ G, que satisface g • x = y”,
es una relacion de equivalencia y que la clase de equivalencia de x0 coincide conOrb(x0), porque:(Reflexividad). x ∼ x ya que e • x = x.(Simetrıa). Si g • x = y entonces g−1 • y = x.(Transitividad). Si g1 • x = y y g2 • y = z entonces g1g2 • x = z.Tambien, si x ∈ [x0] entonces ∃ g ∈ G tal que g • x0 = x es decir x ∈ Orb(x0).Ası [x0] ⊆ Orb(x0). Similarmente [x0] ⊇ Orb(x0).
Resumiendo:
Lema 13 El conjunto de todas las orbitas de la accion de G en X es unaparticion de X. De esta manera
X =⋃
j
Orb(xj).
Los {xj} reciben el nombre de representantes orbitales de la particion or-bital.
Ecuacion de Clase.
Si #X < ∞ (y bajo la observacion anterior), tenedremos
#X =n∑
j=1
#Orb(xj),
llamada Formula de Descomposicion Orbital.

54 CAPITULO 2. GRUPOS.
Pero usando el lema 12 vamos a llegar a
#X =n∑
j=1
[G : St(xj)],
puesto que #(G/H) = [G : H].
Vamos ahora a considerar el caso particular de la accion de G sobre G mismobajo la conjugacion, i.e. g • x = gxg−1 donde g, x ∈ G.En este caso para los estabilizadores tenemos St(a) = Z(a) porque
gag−1 = a ⇐⇒ g ∈ Z(a),
y las orbitas Orb(a) son las clases de conjugacion.Obteniendose la Ecuacion de Clase
|G| =n∑
j=1
[G : Z(xj)].
Pero para elementos centrales c ∈ Z tenemos Orb(c) = {c} solamente. Entoncesen la ecuacion de clase anterior habra un sumando (= 1) por cada elementocentral, por lo tanto
|G| = |Z|+m∑
xj /∈Z
[G : Z(xj)], ECC
donde m = n − |Z|.
Como una aplicacion de los resultados anteriores tenemos
Teorema 15 Si |G| = pk con p primo, entonces |Z| > 1.
Dem: De la ecuacion de clase ECC tenemos
|Z| = pk −m∑
xj /∈Z
[G : Z(xj)],
= pk − pk/|Z(x1)| − · · · − pk/|Z(xr)|,
⇒|Z| = pk − pk−c1 − · · · − pk−cr , (1)
2.5. TEOREMAS SOBRE GRUPOS FINITOS. 55
donde se esta usando el hecho que [G : Z(a)] = pk/|Z(a)| y que los divisores depk son 1, p, p2, ..., pk, ası hemos supuesto que |Z(xi)| = pci . Como los xi /∈ Zentonces ci < k, pudiendose factizar cuando menos una p en la relacion (1) dearriba. Entonces |Z| = p(pk−1 − pk−c1−1 − · · · − pk−cr−1), por tanto |Z| > 1.
Tambien
Teorema 16 Si |G| = p2 con p primo, entonces G es abeliano.
Dem: Como |Z| divide a p2 entonces |Z| = 1, p o p2. Por el teoremaanterior |Z| > 1. Y si |Z| = p2 entonces G = Z lo cual implica que G esabeliano.
Para el caso que |Z| = p, consideramos el grupo cociente G/Z cuyo orden esprecisamente |G/Z| = |G|/|Z| = p por lo que es cıclico: para ver esto claramenteelegimos X ∈ G/Z \ {eZ} y si o(X) = r entonces r|p, por lo que r = 1o r = p, como X no es la clase lateral trivial eZ pues r = p lo que implica que〈X〉 = G/Z.
Supongamos que X = gZ. Vamos a demostrar que G es abeliano.Eligiendo a a, b ∈ G obtenemos aZ = Xn = gnZ tanto como bZ = Xm =
gmZ de donde se deduce que a = gnz1 y b = gmz2 para dos elementos centralesz1, z2 y ası
ab = gnz1gmz2 = gngmz1z2 = gn+mz1z2 = gm+nz2z1 = gmz2g
nz1 = ba
por lo que G es abeliano
2.5. Teoremas sobre grupos finitos.
En este capıtulo estudiaremos a los grupos finitos dando las demostracionesde algunos teoremas clasicos como el de Cauchy y los de Sylow.
2.5.1. Teorema de Cauchy.
Para la demostracion de el teorema de Cauchy vamos a necesitar los siguientesresultados. Recordando que la definicion o(a) = mınimo r ∈ N tal que ar = e(observe que o(e) = 1), tenemos:
56 CAPITULO 2. GRUPOS.
Lema 14 Si en G \ e tenemos ap = e para algun primo, entonces o(a) = p
Dem: Supongamos que o(a) = q. Aplicando el algoritmo de la division;
p = qs + t, donde; 0 ≤ t < q.
Entonces e = ap = aqs+t = (aq)sat = esat = at, resumiendo at = e, pero comoo(a) = q, concluimos que t = 0, i.e. q | p, esto implica que q = 1 o q = p. Laprimera opcion implicarıa que a = e.
Ahora tenemos el
Teorema 17 (Cauchy) . Si p es un primo y G es un grupo abeliano para elcual |G| = mp, entonces existe a ∈ G tal que ap = e.
La demostracion de la proposicion es inductiva: Suponemos que la proposicionvale para todo grupo abeliano A cuyo orden |A| < |G|. Sea b ∈ G \ e y sear = o(b). Aquı tenemos dos casos; 1) p | r, y 2) p 6 | r.
Si 1), entonces r = lp y definiendo a = bl, vemos que ap = blp = br = e,entonces (por el lema anterior) o(a) = p.
Si 2), consideremos el subgrupo 〈b〉 = {b, b2, ..., br−1, br = e}. Ahora
|G/〈b〉| = |G|/r = q.
Afirmamos que p | q. Como p 6 | r, entonces ellos son primos relativos y existens, t ∈ Z con los que 1 = ps + rt. Ası q = psq + rtq = psq + t|G| = p(sq + mt),por lo tanto p | q, i.e. p | |G/〈b〉|. Ya que |G/〈b〉| < |G|, entonces es validala hipotesis inductiva, ası existe X ∈ G/〈b〉 con p = o(X). Ahora, como X esuna clase lateral, tiene un representante c ∈ G digamos, con el, X = c〈b〉. Seau = o(c), entonces Xu = (c〈b〉)u = cu〈b〉 = e〈b〉. Ahora aplicando el algoritmode la division; u = pw + v, donde 0 ≤ v < p, entonces e〈b〉 = Xu = Xpw+v =(Xp)wXv = Xv i.e. Xv = e〈b〉, pero o(X) = p y 0 ≤ v < p, entonces v = 0,es decir, u = pw. Finalmente definiendo a = cw vemos que ap = cpw = cu = e,ası por el lema o(a) = p.
2.5. TEOREMAS SOBRE GRUPOS FINITOS. 57
2.5.2. Teoremas de Sylow.
El teorema de Lagrange dice que el orden de un subgrupo divide el orden delgrupo que lo contiene. Uno se puede preguntar cuando es valido lo recıproco,es decir, si d | |G| entonces ¿existe un subgrupo de orden d? la respuesta es nosiempre y depende de quien es d. Los teoremas de Sylow dan informacion acercade esta situacion.
Teorema 18 (Sylow I) . Si p es un primo y G es un grupo para el cual pn | |G|,entonces existe H < G tal que |H| = pn.
Dem: La demostracion de este teorema es inductiva, sobre |G| y sobre n. Sea Zel centro de G y supongamos que el teorema vale ∀ grupos Γ tales que |Γ| < |G|.Veamos para n=1. Si p | |G| hacemos |G| = mp. Ahora consideramos 2 casos:
p | |Z|
p 6 | |Z|
En primera instancia, usando el Teorema de Cauchy (Z es abeliano) existe c ∈ Zque cumple o(c) = p. Si H = 〈c〉, entonces H < Z < G y |H| = p. Ahora sip 6 | |Z|, entonces usando la ecuacion de clase
p 6 | (|G| −∑
aj /∈Z
[G : Z(aj)]).
Esto ultimo implica que existe a /∈ Z tal que p 6 | [G : Z(a)]. Ası el maximocomun divisor (p, [G : Z(a)]) = 1 (i.e. son coprimos). Entonces existen µ, ν ∈ Zcon la propiedad 1 = pµ + [G : Z(a)]ν. Luego |Z(a)| = pµ|Z(a)| + |G|ν.Ademas |Z(a) = pµ|Z(a)|+ mpν. Por lo tanto p||Z(a)|. Como a /∈ Z entonces|Z(a)| < |G| por lo cual es valida una de las hipotesis inductivas. Ası existira H <Z(a) < G con |H| = p. Con todo lo anterior demostramos la validez del teoremacuando n = 1.
Ahora suponemos que el teorema vale para k digamos, i.e. si pk | |G| entonceshay H < G con |H| = pk y suponemos que vale para todo grupo cuyo orden esmenor que en orden de |G|.
Sea que pk+1||G|, y consideraremos otra vez los 2 casos: cuando p divide |Z|y cuando p no divide |Z|.
Si p||Z| entonces existira c ∈ Z con o(c) = p. No es difıcil verificar que 〈c〉 <G y ası podemos considerar a G/〈c〉 como grupo. Como |G/〈c〉| < |G| entonces

58 CAPITULO 2. GRUPOS.
vale la hipotesis inductiva, siendo que existe H < G/〈c〉 con |H| = pk. Considereahora el epimorfismo natural η : G → G/〈c〉 definido como η(x) = x〈c〉. SeaH = η−1H. Observamos ademas que el kerη = 〈c〉. Ası por el teorema funda-mental de homomorfismos tenemos H ≈ H/〈c〉, dando |H| = p|H | = pk+1.
En el caso de que p 6 ||Z|, tendremos tambien que pk+1 6 ||Z| y entoncespk+1 6 |(|G| − ∑
aj /∈Z[G : Z(aj)]), lo cual implica que existe a /∈ Z tal que
pk+1 6 | [G : Z(a)], lo cual nos da (pk+1, [G : Z(a)]) = 1 que a su vez nosda la existencia µ, ν ∈ Z con la propiedad 1 = pk+1µ + [G : Z(a)]ν, pero sipk+1||G| entonces |G| = mpk+1 y ası deducimos que |Z(a)| = pk+1(µ|Z(a)| +mν) i.e. pk+1||Z(a)|, siendo valida la hipotesis inductiva nuevamente (sobre |G|)dandonos un H < Z(a) < G con |H| = pk+1.
Ahora consideremos los siguientes conceptos
Definicion 39 Un p-subgrupo H de G es aquel que |H| = pn para algun nentero positivo. Y un p-subgrupo de Sylow H de G cumple |H| = pn peropn+1 6 | |G|. Abreviamos p-S para los primeros y p-SS para los segundos.
Con ellos formulamos y demostramos el
Teorema 19 (Sylow II) . Cualquiera dos p-SS son conjugados en G, en otraspalabras, si Q,R ∈ p-SS ⇒ ∃ a ∈ G, aQa−1 = R.
Dem: Dejemos que Q actue en G/R como
q • aR := qaR. ∗
efectivamente esto es una accion.Sean |G| = mpα y |Q| = pα (entonces |R| = pα porque ambos son p-SS y
pα+1 6 | |G|), ası p 6 | m.La accion ∗ de arriba da origen a la ecuacion de clase
#(G/R) =∑
ajR
#Orb(ajR),
que se convierte en
m =∑
ajR
#Orb(ajR). ∗∗

2.5. TEOREMAS SOBRE GRUPOS FINITOS. 59
Pero Orb(ajR) ↔ Q/St(ajR) entonces #Orb(ajR) = pα/|St(ajR)| = pα−cj
que sustituido en ∗∗ nos da
m = pα−c1 + · · · + pα−ck , ∗ ∗ ∗
digamos. Ahora, como p 6 | m entonces en ∗ ∗ ∗ existe un ci que cumple ci = α,esto implica que |St(aiR)| = pα y por tanto Orb(aiR) = {aiR} solamente. Enotras palabras Q entero estabiliza a la clase lateral aiR, i.e. ∀ q ∈ Q tenemosq • aiR = qaiR = aiR. Ası a−1
i qaiR = R si y solo si a−1i qai ∈ R para todo
q ∈ Q, es decir a−1i Qai ⊆ R. Finalmente como a−1
i Qai, R tienen la mismacardinalidad entonces a−1
i Qai = R.
Y ahora
Teorema 20 (Sylow III) . Si = es el conjunto de los p-SS de G entonces#= ≡ 1 mod p. Ademas #= | |G|.
Dem: Hacemos que P ∈ = actue en = mismo por conjugacion:
x • T := x−1Tx.
Sabemos que #= ≡ #=P mod p pues |P | = pn (recuerde el ejercicio 5 delcapıtulo de Acciones).
Calculemos =P . Si U ∈ =P entonces x−1Ux = U para todo x ∈ P . Estonos indica que P < N(U) (normalizador de U). Tambien tenemos trivialmenteU < N(U). Ası llegamos a que P,U son p-SS en N(U) y por lo tanto P,Uson conjugados en N(U), es decir, existe z ∈ N(U) tal que zUz−1 = P , perocomo U < |N(U) entonces zUz−1 = U , con lo que concluimos U = P . Es decir=P = {P} nomas.Entonces #= ≡ 1 mod p.
Para concluir la demostracion, haremos que G actue en = tambien por con-jugacion, es decir
g • R := gRg−1,
donde g ∈ G y R ∈ =. Pero por Sylow II solo tenemos una orbita i.e. Orb(R) ==, dando la ecuacion de clase
#= = #Orb(R) = [G : St(R)] = |G|/|St(R), |
es decir,#= | |G|.

60 CAPITULO 2. GRUPOS.
2.6. Grupos Libres.
El objetivo principal de este capitulo es alcanzar el teorema fundamental delos grupos libres (Schreier).
Sea X = {x1, x2, ...} y sea X−1 = {x−11 , x−1
2 , ...} otros objetos que satisfacenlas relaciones
xix−1i = x−1
i xi = 1
donde llamaremos a 1 la palabra vacıa y cumple la propiedad
xj1 = 1xj = xj.
El conjunto X ∪ X−1 recibe el nombre de alfabeto. Una palabra es unayuxtaposicion de letras del alfabeto.
Por ejemplo si X = {x1, x2, x3} entonces algunas palabras son
f = x1x2x3,
g = x1x−11 x3x2x
−11 ,
h = x3x3x3x−11 x−1
2 .
Las palabras g de arriba y x3x2x−11 no son iguales, pero se dice que se obtuvo
una de otra mediante una cancelacion.
Dos palabras son adyacentes si difieren por una cancelacion. Dos palabrasson equivalentes si difieren por una cantidad finita de cancelaciones.
De esta manera se define una relacion de equivalencia entre las distintaspalabras generadas por X.
Denotemos con F (X) el conjunto de las diferentes clases de equivalencia.Ahora sean [w1], [w2] dos clases cualquiera en F (X), entonces definiendo
[w1][w2] := [w1w2],
obtenemos una operacion bien definida en F (X), que le convierte en grupo. Talgrupo es llamado grupo libre generado por X.
El teorema de Schreier, se los debo.

2.7. EJERCICIOS. COMENTARIOS. 61
2.7. Ejercicios. Comentarios.
Grupos.
1. Determine cual de las siguientes estructuras algebraicas es grupo e indique los axiomasque se cumplen.
Z con ρ(x, y) = x − y.
S = {x ∈ Q|x tiene denominador impar} con la suma.
R3 con ρ(V, W ) = V × W (producto cruz).
En ℘(S) = {A ⊆ S} con ρ(A, B) = (A − B) ∪ (B − A).
2. El conjunto de matrices
A =
1 a b0 1 c0 0 1
donde a, b, c ∈ R con la multiplicacion, es un grupo. ¿Como es el inverso?
3. Si G es un grupo en el cual ∀ x ∈ G; x2 = e, entonces xy = yx.
4. Dar 3 ejemplos donde a, b ∈ G, (ab)−1 6= a−1b−1.
5. Pruebe que si para a, b ∈ G sucede a−1b2a = ba =⇒ b = a.
6. Pruebe que si a2 = e & a−1b2a = b3 =⇒ b5 = e.
7. Pruebe que si a5 = e & a−1ba = b2 =⇒ b31 = e.
8. Pruebe que si a−1b2a = b3 & b−1a2b = a3 =⇒ a = b = e.
9. Sea G un grupo talque 3 6 | |G| & (ab)3 = a3b3 =⇒ a = b.
10. Para a, b ∈ R definimos Tab : R → R como Tab(x) = ax + b con a 6= 0. Pruebe que elconjunto S = {Tab} es un grupo con la composicion de mapeos.
11. Supongamos que aba−1 = bm =⇒ ∀ r ∈ N, arba−r = bmr
. Indicacion: Use induccion.Primero intente para r = 2 y recuerde que (bm)m = bmm = bm2
.
12. Supongamos que para a, b ∈ G existe k ∈ N tal que
(ab)k = akbk,
(ab)k+1 = ak+1bk+1,
(ab)k+2 = ak+2bk+2.
Entonces ab = ba.Indicacion: (ab)k+1 = (ab)kab = akbkab = ak+1bk+1 = akabkb, entonces; akbkab =akabkb implica (¿porque?) bka = abk...
13. ¿Porque (℘(S),∪), (℘(S),∩) no son grupos?

62 CAPITULO 2. GRUPOS.
14. Demuetre que las matrices de la forma[cos θ − sin θsin θ cos θ
], forman un grupo con la multiplicacion usual.
15. El conjunto de matrices
E =
1 0 00 1 00 0 1
, A1 =
1 0 00 0 10 1 0
,
A2 =
0 0 10 1 01 0 0
, A3 =
0 1 01 0 00 0 1
,
B1 =
0 0 11 0 00 1 0
, B2 =
0 1 00 0 11 0 0
.
Definen un grupo. Hacer la tabla.
16. Las funciones continuas en un intervalo [a, b] con la suma de funciones definida como(f +g)(x) = f(x)+g(x), tambien es un grupo. Tal conjunto se simboliza con Co[a, b].
17. Las matrices de la forma [a −bb a
]
con a, b ∈ R con la suma. Tambien las mismas matrices sin la
[0 00 0
]con la multi-
plicacion. Son grupos.
18. Si v, w ∈ Rn con v + w = (v1 + w1, ..., vn + wn). Rn con esta operacion es un grupo.
19. El conjunto de todas las soluciones de la ecuacion diferencial y′ = y donde y = y(x),con la suma (y1 + y2)(x) = y1(x) + y2(x).
20. Un grupo G se llama cıclico si existe un elemento g ∈ G con el cual podemos ”generar.a
todos los elementos de G. I.e. si x ∈ G entonces x = an, donde n es un entero.¿Son (Z, +), (Zn, +), (Zp, ·), (R, +), (Rn, +), (S3, ◦) cıclicos?¿Cuales son los respectivos generadores?¿Son unicos?
Subgrupos.
1. Si H < G ⇒ HH ⊆ H & H−1 ⊆ H.
2. Sea {Hj} una coleccion de subgrupos en G que cumple; k 6= l entonces Hk ⊆ Hl oHl ⊆ Hk. Con esa condicion
⋃j Hj < G.
3. Sea H < G. Si definimos ”a ∼ b si y solo si ab−1 ∈ H”, pruebe que esto es una relacionde equivalencia en G. Pruebe que [a] = Ha.
4. Si H < G & N / G entonces H ∩N < |H.

2.7. EJERCICIOS. COMENTARIOS. 63
5. Si H < G & N / G entonces HN / G & HN = NH.
6. Sea G un grupo. Sea Ξ el conjunto de todos los subgrupos de G. Si H, K ∈ Ξ definimosH ∼ K si y solo si existe a ∈ G talque H = aKa−1. Muestre que esto define unarelacion de equivalencia en Ξ.
7. Demuetre que las matrices de la forma(cos θ − sin θsin θ cos θ
),
son un subgrupo de SL2(R).
8. Sea G un grupo cıclico (i.e. existe a ∈ G tal que 〈a〉 = G). Demostrar que si H < G,entonces H tambien es cıclico. Indicacion: Tomar la potencia ak con k mınimo enteropositivo que cumple ak ∈ H & aplicar algoritmo de la division con otra potencia al ∈ H.Ası podra demostrar que 〈ak〉 = H.
9. Con H < G demuestre que si HaHb = Hab y aHbH = abH, ∀a, b ∈ G entoncesH / G.
10. Demuestre que SL(n) / GL(n).
11. Si [G : N ] = 2 entonces N / G.
12. Demuestre que Z / G.
13. Demuestre que [G, G] / G.
14. G/N es abeliano ⇔ [G, G] ⊆ N .
15. H / N (H). Si K / G tal que H ⊆ K entonces N (H) < K.
Morfismos.
1. G = R \ {0} es un grupo con la multiplicacion usual. Definiendo ϕ : G → G comoϕ(x) = x2. Es ϕ un HMF? Es con la definicion ϕ(x) = 2x? Calcule los kerneles.
2. Sea G un grupo y K / G. Definimos para a ∈ G fijo ηa : G → G/K como ηa(x) =Kaxa−1. Es ηa un epimorfismo?
3. Definamos un mapeo deS3 = {Id, α1, α2, α3, β1, β2} a el conjunto de matrices
E =
1 0 00 1 00 0 1
, A1 =
1 0 00 0 10 1 0
,
A2 =
0 0 10 1 01 0 0
, A3 =
0 1 01 0 00 0 1
,
B1 =
0 0 11 0 00 1 0
, B2 =
0 1 00 0 11 0 0
.

64 CAPITULO 2. GRUPOS.
AsıId 7→ E, α1 7→ A1, α2 7→ A2,
α3 7→ A3, β1 7→ B1, β2 7→ B2.
Define esto un isomorfismo? Indicacion: Vea las tablas de Cayley de ambos grupos...
Grupos de Permutaciones.
1. ¿Cual es el orden del ciclo (12467119)? ¿Cual es el orden de la permutacion (457823)(169)?
2. Generalice el ejercicio anterior. Es decir, diga cual es el orden de una permutacionα = γ1 ◦ · · · ◦ γr donde los γi son ciclos de longitud λi.
3. Usando el Teorema de Cayley demuestre que A3 ≈ Z3.
4. Encuentre dos diferentes subgrupos de S6 isomorfos a S3.
5. Considere el siguiente subgrupo de S4
H = { Id, (12)(34), (13)(24), (14)(23),
(123), (132), (234), (432), (134),
(431), (124), (421) }.
Demuestre que es y que tiene subgrupos de orden 2, 3 y 4, pero no de orden 6.
Acciones de Grupos en conjuntos.
1. Dar otros 3 ejemplos de accion de grupos en conjuntos.
2. Considerando la accion por conjugacion de S3 sobre si mismo, calcule todas las orbitaso clases de conjugacion.
3. Verifique la validez del lema 12 con el ejercicio anterior.
4. Observe el cumplimiento de la ecuacion de clase ECC con el ejemplo anterior.
5. Definamos XG = {x ∈ X | g • x = x, ∀ g ∈ G} tales elementos de X se llamanpuntos fijos de la accion. Demuestre que si |G| = pn y X es finito, entonces
#X ≡ #XG mod p.
2.8. Referencias.
1. Alegre Gil, C. et al. Algebra Lineal. Curso Teorico-Practico. UniversidadPolitecnica de Valencia. 1995.
2. Anton, H. Introduccion al Algebra Lineal. Lim-usa. 1976.
2.8. REFERENCIAS. 65
3. Baumslag, N et al. Theory and Problems of Group Theory. Schaum’sOutline Series, McGraw-Hill. 1968.
4. Birkhoff, G.,Bartee, T.C. Modern Applied Algebra. McGraw-Hill. 1970
5. Carlson, D. Recent developments in the teaching of linear algebra inthe US. Apotaciones Matematicas, Serie Comunicaciones 14. SociedadMatematica Mexicana. 1994.
6. Friedberg, S.H. et. al. Algebra Lineal. Publicaciones Cultural. Mexico.1982.
7. Jacobson, N. Basic Algebra I. W.H. Freeman & Co. 1974.
8. Kostrikin, A.I. Introduccion al Algebra. MIR. 1983.
9. Hall, M. Teorıa de los Grupos. Trillas. 1969
10. Hardley, G. Algebra Lineal. Bilingua. Fondo Educativo Interamericano.1969.
11. Herstein, I.A. Algebra Moderna. Trillas. 1978.
12. Herstein,I.N, Winter, D.J. Algebra Lineal y Teoria de Matrices. GrupoEditorial Iberoamerica. 1989.
13. Hoffman, K. Kunze, R. Algebra lineal. Prentice-Hall Internacional. 1973.
14. Kurosch, A.G. Curso de algebra superior. MIR. 1977.
15. Lang, S. Linear Algebra. Addison-Wesley. 1966.
16. Lang, S. Algebra. 3rd Ed. Addison-Wesley. 1993.
17. Lipschutz, S. Matematicas Finitas. Schaum, McGraw-Hill. 1966.
18. Lipschutz, S. Teorıa de Conjuntos y Temas Afines. McGraw-Hill. 1970.
19. Maltsev, A.I. Fundamentos del Algebra Lineal. Mir. 1972.
20. Marquez, J.M. Preliminares. Notas del Depto de Mat. del CUCEI. U deG. 1993.
66 CAPITULO 2. GRUPOS.
21. Marquez, J.M. Teoria de Grupos. Notas del Depto de Mat. del CUCEI. Ude G. 1994.
22. Noble, B. Daniel, J.W. Algebra Lineal Aplicada. Prentice-Hall Hispanoa-mericana. 1989.
23. Strang, G. Algebra Lineal y sus Aplicaciones. Addison-Wesley Iberoamer-icana. 1986.
24. Vance, E.P. Introduccion a la Matematica Moderna. Fondo Educ.Interamericano.1978.
25. Vargas, J.A. Algebra Abstracta. Limusa. 1986.
26. Voevodin, V.V. Algebra Lineal. Mir. 1970.
Indice alfabetico
(−1)α, 45(S, ρ), 26
(a + b)n =∑n
k=0
(nk
)an−kbk, 10
A4 B, 6G/H, 35G ≈ G, 39Ha, 35N / G, 37Orb(x0), 52St(x0), 51β ◦ α, 19〈S〉, 43℘(A), 7p-subgrupo, 58p-subgrupo de Sylow, 58C, 6N, 6Q, 6R, 6orbita, 50
An , 46
abelianizacion, 43alfabeto, 42algoritmo de la division, 24anillo, 27anillo conmutativo, 27aplicacion, 16automorfismo, 39
biyectiva o biyeccion, 18
campo, 27, 41centralizador, 43centro, 43ciclo, 44clase de equivalencia, 13clase lateral derecha e izquierda, 35clases de conjugacion, 54clases de equivalencia, 31clases laterales iguales, 35coeficientes binomiales, 8componentes de una particion, 11composicion de mapeos, 19congruencia modulo n, 13conjunto cociente, 14, 35conjunto potencia, 7conmutador, 43criterio para subgrupos, 34
determinante, 32
Ecuacion de Clase, 54elemento neutro, 26endomorfismo, 39enteros modulo n, 31epimorfismo, 39estabilizador, 50, 51estructura algebraica, 26extension, 23
formula de descomposicion orbital, 53
67
68 INDICE ALFABETICO
Fermat, 42fibra, 17funcion, 16
genera, 43grupo, 27grupo S3, 30grupo abeliano, 27grupo cociente, 37grupos, 29
HMF, 39homomorfismo, 38homomorfismo natural, 39
imagen, 16imagen inversa, 17inverso, 26inyectivo, 18isomorfismo, 39isomorfo, 39IY, 39
kernel, 41
Lema de Abstraccion, 15
maximo comun divisor, 24mapeo, 16mapeo constante, 18mapeo identidad, 18matrices, 31monoide, 27monomorfismo, 39morfismos, 16
normalizador, 43
operacion binaria, 26orbita, 52
orden del grupo, 32
palabras, 42paridad, 45parlamento, 15particion, 11permutaciones, 44preimagen, 16primos, 23primos relativos, 25producto cartesiano, 11propiedad asociativa, 26propiedad conmutativa, 26propiedad de inversos, 26propiedades universales de mapeos,
17
relacion binaria, 13relacion de equivalencia, 13relacion entre conjuntos, 12relacion inversa, 17representante de clase, 13representantes orbitales, 53restriccion, 23
semigrupo, 27Simplicidad de An, 48sobreyectivo, 18subgrupo, 33subgrupo isotropico, 50subgrupo normal, 37SY, 39
tabla de Cayley, 30teorema de Cauchy, 55Teorema de Cayley, 47Teorema de Lagrange, 36teoremas de Sylow, 56

INDICE ALFABETICO 69
Terorema Fundamental de Homomor-fismos, 41
tipos de mapeos, 18transformaciones, 16transposiciones, 45
uno a uno, 18





























