Embed Size (px)
Citation preview

UNIVERSIDADE FEDERAL DA BAHIA
INSTITUTO DE GEOCIÊNCIAS
CURSO DE GRADUAÇÃO EM GEOFÍSICA
GEO213 � TRABALHO DE GRADUAÇÃO
ESTUDO AVALIATIVO DA MODELAGEMNUMÉRICA DE TEMPOS DE TRÂNSITOATRAVÉS DO TRAÇAMENTO DE RAIOS
SÍSMICOS
RODRIGO DE SANTANA SANTOS
SALVADOR � BAHIA
AGOSTO � 2014
Estudo Avaliativo da Modelagem Numérica de Tempos de Trânsito através do
Traçamento de Raios Sísmicos
por
Rodrigo De Santana Santos
Orientador: Prof. Dr. Wilson Mouzer Figueiró
GEO213 � TRABALHO DE GRADUAÇÃO
Departamento de Geofísica
do
Instituto de Geociências
da
Universidade Federal da Bahia
Comissão Examinadora
Dr. Wilson Mouzer Figueiró - Orientador
Dr. Paulo Eduardo Miranda Cunha
Dr. Helcio Moreira Perin
Data da aprovação: 25/08/2014

�Se os fatos não se encaixam na teoria, modi�que os fatos�
Albert Einstein
�Toda a doutrina social que visa des-
truir a família é má, e para mais ina-
plicável. Quando se decompõe uma
sociedade, o que se acha como resí-
duo �nal não é o indivíduo mas sim
a família�
Victor Hugo

Dedico este trabalho à minha querida mãe e
aos meus irmãos que são a razão da minha
existência.
iii

RESUMO
O presente trabalho tem como ideia central avaliar a modelagem numérica dos tempos de
trânsito de ondas sísmicas, que se propagam em modelos de campos de velocidades com-
pressionais e isotrópicos, onde tais modelos possuem semelhança com situações geradas pela
natureza. A modelagem é executada por meio do traçamento de raios das ondas sísmicas.
Muitas abordagens podem ser usadas na modelagem de traçamento de raios, porém neste
trabalho adotou-se a resolução das equações do raio. Para a resolução das equações do raio,
geralmente usa-se procedimentos numéricos que possuem caráter aproximativo, envolvem
erros neste procedimento. Como este tipo de abordagem tem sido amplamente utilizado
em trabalhos cientí�cos, a proposta aqui é veri�car qual o grau de aproximação usado pela
metodologia numérica. Para tal avaliação são feitos testes por procedimentos distintos. O
primeiro teste avaliativo é feito por meio da comparação entre os resultados gerados pela
resolução numérica das equações e resultados gerados pela resolução analítica. A outra ma-
neira de avaliação é por meio da veri�cação da equação eiconal, que por ter atualização
numérica possui erros, e assim feito para cada posição do raio, pode-se gerar campos de
erros, que podem ser devidamente interpretados junto com os demais dados. Por se tratar
de um trabalho avaliativo, foram executados o máximo possível de testes, e para isso usou-se
uma grande quantidade de modelos, a �m de elevar o grau de con�abilidade das conclusões.
i

ABSTRACT
The central idea of this work is to evaluate the numerical modeling of the transit times of
seismic waves, which propagate in isotropic, compressinal velocity �eld models, where such
models have similarities with situations created by nature. Such modeling is performed by
means of ray tracing of seismic waves transmitted in these models. Many approaches can
be used in ray tracing modeling, but in this work this is done by solving the ray equations.
For solving the ray equations numerical procedures are usually carried out, and since the
method is inherently approximate, errors tend to accumulate during the procedure. As this
type of approach has been widely used in scienti�c studies in this branch, the proposal here
is investigate how precise the numerical approximate are. For such, assessment test with
di�erent procedures are done. The �rst evaluation test is done by comparing the results
generated by numerically solving the equations and results generated by solving the some
equations analytically. The other way of evaluation is by checking the eikonal equation,
which also has numerical errors, and we can generate �elds of errors that can be properly
interpreted along with other data. Because it is an evaluative study, tests were executed in
many models, in order to in�ate the degree of reliability of the �ndings.
ii

ÍNDICE
RESUMO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . i
ABSTRACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ii
ÍNDICE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
ÍNDICE DE TABELAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
ÍNDICE DE FIGURAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vi
INTRODUÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
CAPÍTULO 1 Fundamentos Téoricos Gerais . . . . . . . . . . . . . . . . 3
1.1 Equação eiconal e sistema de equações do traçamento de raio . . . . 5
CAPÍTULO 2 Traçamento do Raios e Cálculos de Tempos de Trânsito . 8
2.1 Traçamento numérico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1.1 Cálculo do tempo de trânsito numéricos . . . . . . . . . . . . . 10
2.2 Traçamento analítico e cálculo dos tempos analíticos . . . . . . . . . 11
2.3 Erros cometidos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.4 Condições iniciais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4.1 Relação entre ∆τ , ∆T e ∆S . . . . . . . . . . . . . . . . . . . . . . 15
CAPÍTULO 3 RESULTADOS E DISCUSSÕES . . . . . . . . . . . . . . 16
3.1 A modelagem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1.1 Modelo do meio homogêneo (M1) . . . . . . . . . . . . . . . . . 17
3.1.2 Modelo de camadas plano verticais (M2) . . . . . . . . . . . . . 23
3.1.3 Modelo de camadas plano horizontais (M3) . . . . . . . . . . . 29
3.1.4 Modelo de camadas planas inclinadas (M4) . . . . . . . . . . . 35
3.1.5 Modelo de camadas planas verticais (M5) . . . . . . . . . . . . 41
3.1.6 Modelo de camadas plano horizontais (M6) . . . . . . . . . . . 46
3.1.7 Modelo da anticlinal antiforme (M7) . . . . . . . . . . . . . . . 52
3.1.8 Modelo da anticlinal sinforme (M8) . . . . . . . . . . . . . . . . 58
3.1.9 Modelo de sinclinal antinforme (M9) . . . . . . . . . . . . . . . 64
3.1.10 Modelo da intrusão granítica (M10) . . . . . . . . . . . . . . . . 70
iii

CAPÍTULO 4 Discussão e Conclusões . . . . . . . . . . . . . . . . . . . . 77
Agradecimentos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
APÊNDICE A Fluxograma do algortimo . . . . . . . . . . . . . . . . . . . 80
APÊNDICE B Resolução Analítica das equações do Raio . . . . . . . . . 81
B.1 Os modelos M1, M2, M3 e M4 . . . . . . . . . . . . . . . . . . . . . . . . . . 81
B.2 Os Modelos M5, M6, M7 e M8 . . . . . . . . . . . . . . . . . . . . . . . . . . 82
B.3 O Modelo M9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
B.4 O modelo M10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Referências . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
ANEXO I Equação Eiconal . . . . . . . . . . . . . . . . . . . . . . . . 91
iv

ÍNDICE DE TABELAS
3.1 Densidades e velocidades de propagação de ondas longitudinais e transversais
de alguns materiais e rochas. . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
v

ÍNDICE DE FIGURAS
2.1 Esquematização de raios que partem da fonte com condições iniciais, em um
plano y = 0. Esses raios são traçados com métodos numérico (~χN) e analítico
(~χA), respectivamente. A diferença nos percursos deles se dá pelo fato do raio
numérico ter caráter aproximativo. . . . . . . . . . . . . . . . . . . . . . . . 15
3.1 Modelo M1: campo de velocidades homogêneo e isotrópico dado em km/s. . 18
3.2 Traçamento de raios no modeloM1, quando a fonte é colocada na posição S0 =
2, 0 km. Em: (a) traçamento exato, (b) traçado numérico para o parâmetro τ ,
(c) traçado numérico para o parâmetro T e (d) traçamento numérico para o
parâmetro S. Os grá�cos (e), (f) e (g) exibem as distâncias entre as posições
das chegadas às bordas do modelo dos raios exatos e dos numéricos, em função
do ângulo de saída, traçados, respectivamente, com os parâmetros τ , T e S. . 20
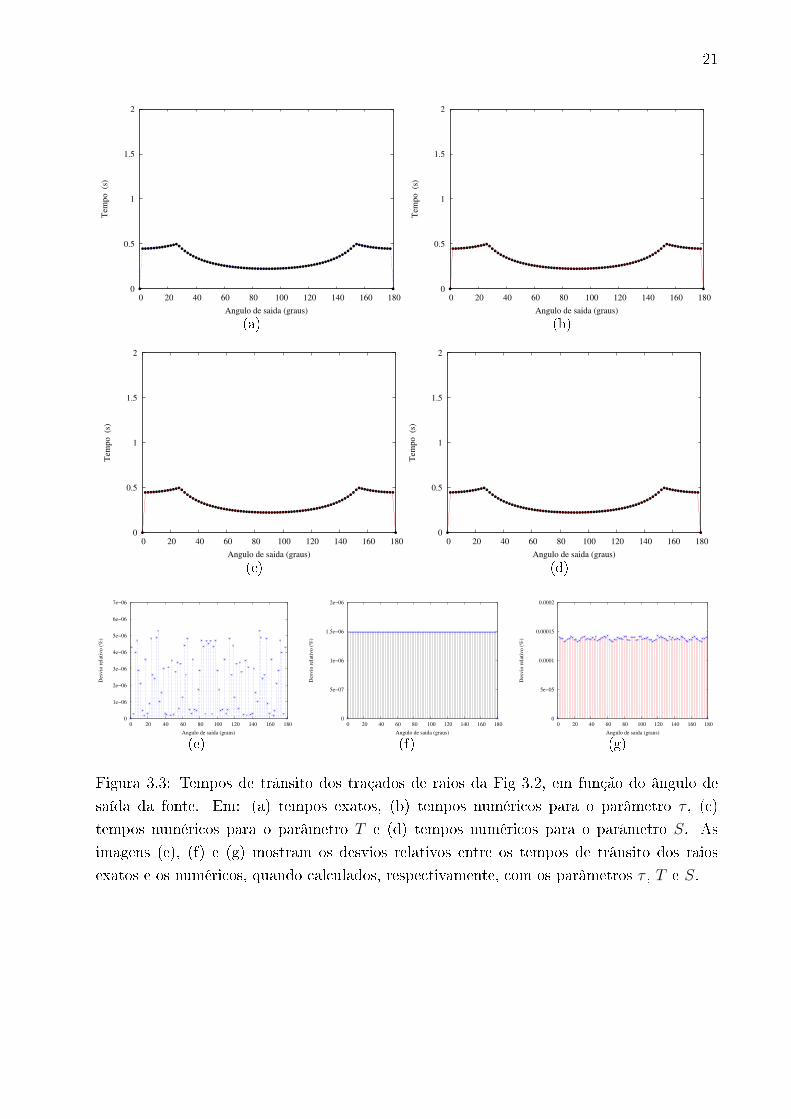
3.3 Tempos de trânsito dos traçados de raios da Fig 3.2, em função do ângulo de
saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o parâme-
tro τ , (c) tempos numéricos para o parâmetro T e (d) tempos numéricos para
o parâmetro S. As imagens (e), (f) e (g) mostram os desvios relativos entre
os tempos de trânsito dos raios exatos e os numéricos, quando calculados,
respectivamente, com os parâmetros τ , T e S. . . . . . . . . . . . . . . . . . 21
3.4 Campos de erros dos módulos da vagarosidade dados pela Eq. (2.16), referen-
tes ao modelo M1 para os parâmetros τ , T e S. . . . . . . . . . . . . . . . . . 22
3.5 ModeloM2: campo de velocidades heterogêneo e isotrópico de camadas planas
paralelas verticais dado em km/s . . . . . . . . . . . . . . . . . . . . . . . . 23
3.6 Traçamento de raios no modeloM2, quando a fonte é colocada na posição S0 =
2, 0 km. Em: (a) traçamento exato, (b) traçado numérico para o parâmetro
τ , (c) traçado numérico para o parâmetro T e (d) traçamento numérico para o
parâmetro S. As imagens (e), (f) e (g) exibem as distâncias entre as posições
das chegadas dos raios exatos e numéricos em função do ângulo de saída,
traçados, respectivamente, para os parâmetros τ , T e S. . . . . . . . . . . . . 26
3.7 Tempos de trânsito dos traçados de raios da Fig 3.6, em função do ângulo de
saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o parâme-
tro τ , (c) tempos numéricos para o parâmetro T e (d) tempos numéricos para
o parâmetro S. As imagens (e), (f) e (g) mostram os desvios relativos entre
os tempos de trânsito dos raios exatos e os numéricos, quando calculados,
respectivamente, com os parâmetros τ , T e S. . . . . . . . . . . . . . . . . . 27
vi

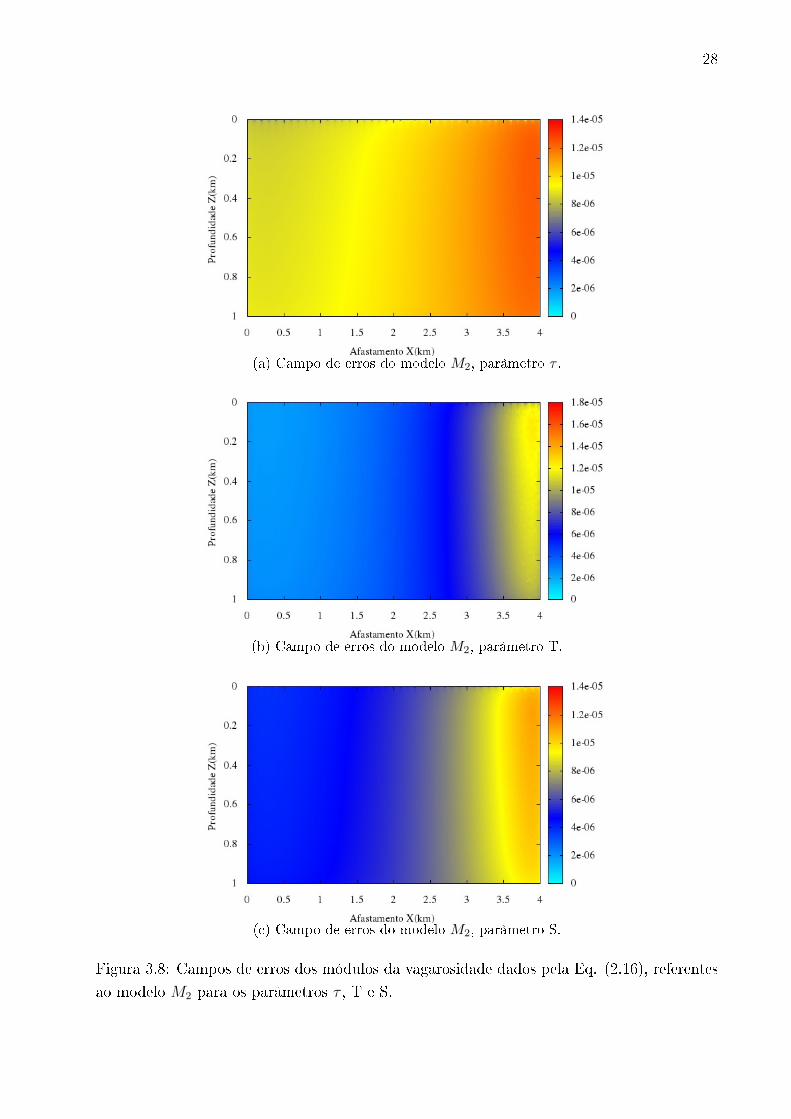
3.8 Campos de erros dos módulos da vagarosidade dados pela Eq. (2.16), referen-
tes ao modelo M2 para os parâmetros τ , T e S. . . . . . . . . . . . . . . . . . 28
3.9 Modelo M3: campo de velocidades de camadas planas paralelas horizontais
dado em km/s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
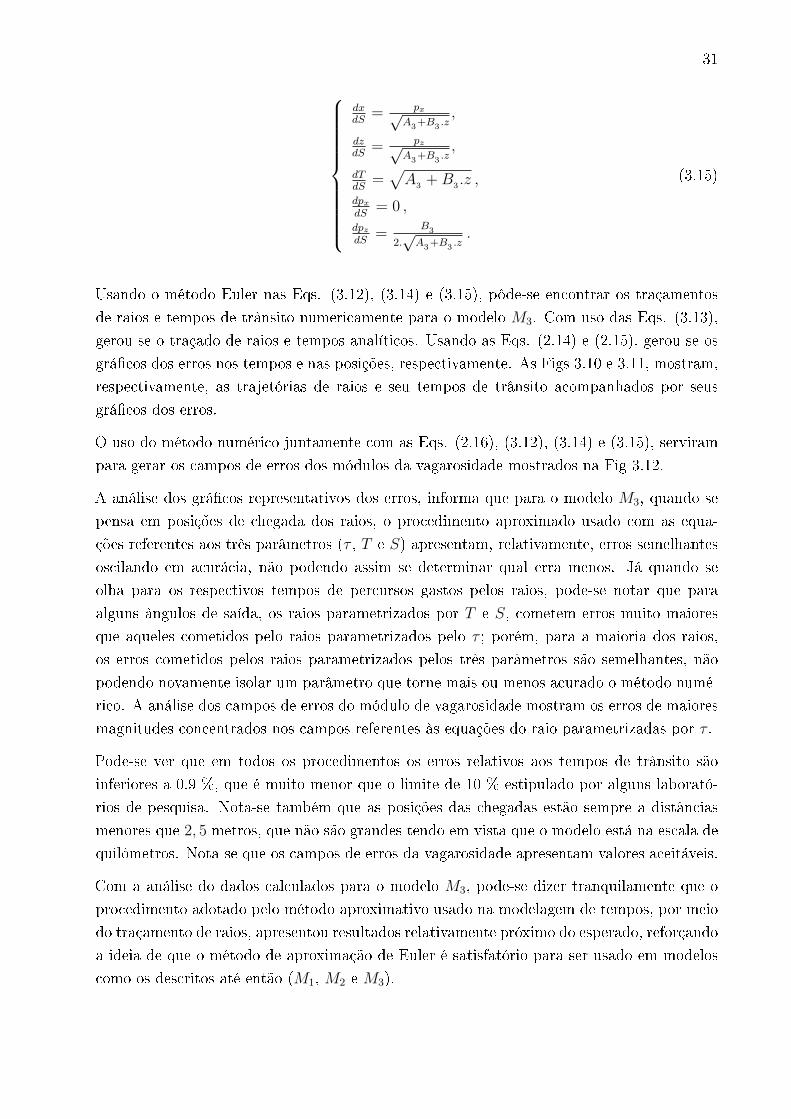
3.10 Traçamento de raios no modeloM3, quando a fonte é colocada na posição S0 =
2, 0 km. Em: (a) traçamento exato, (b) traçado numérico para o parâmetro
τ , (c) traçado numérico para o parâmetro T e (d) traçamento numérico para o
parâmetro S. As imagens (e), (f) e (g) exibem as distâncias entre as posições
das chegadas dos raios exatos e os numéricos em função do ângulo de saída,
traçados, respectivamente, segundo os parâmetros τ , T e S. . . . . . . . . . . 32
3.11 Tempos de trânsito dos traçados de raios da Fig. 3.10, em função do ângulo
de saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o pa-
râmetro τ , (c) tempos numéricos para o parâmetro T e (d) tempos numéricos
para o parâmetro S. As imagens (e), (f) e (g) mostram os desvios relativos en-
tre os tempos de trânsito dos raios exatos e os numéricos, quando calculados,
respectivamente, com os parâmetros τ , T e S. . . . . . . . . . . . . . . . . . 33
3.12 Campos de erros dos módulos da vagarosidade dados pela Eq. (2.16) referentes
ao modelo M3 para os parâmetros τ , T e S; respectivamente. . . . . . . . . . 34
3.13 Modelo M4: campo de velocidades de camadas inclinadas, dado em km/s. . 35
3.14 Traçamento de raios no modeloM4, quando a fonte é colocada na posição S0 =
1, 0 km. Em: (a) traçamento exato, (b) traçado numérico para o parâmetro
τ , (c) traçado numérico para o parâmetro T e (d) traçamento numérico para o
parâmetro S. As imagens (e), (f) e (g) exibem as distâncias entre as posições
das chegadas dos raios exatos e numéricos em função do ângulo de saída,
traçados, respectivamente, com os parâmetros τ , T e S. . . . . . . . . . . . . 38
3.15 Tempos de trânsito dos traçados de raios da Fig 3.14, em função do ângulo
de saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o pa-
râmetro τ , (c) tempos numéricos para o parâmetro T e (d) tempos numéricos
para o parâmetro S. As imagens (e), (f) e (g) mostram os desvios relativos
entre os tempos de trânsito dos raios exatos e numéricos, quando calculados,
respectivamente, com os parâmetros τ , T e S. . . . . . . . . . . . . . . . . . 39
3.16 Campos de erros dos módulos da vagarosidade dados pela Eq. (2.16), referen-
tes ao modelo M4, para os parâmetros τ , T e S. . . . . . . . . . . . . . . . . 40
3.17 Modelo M5: campo de velocidades de camadas planas verticais. . . . . . . . 41
vii

3.18 Traçamento de raios no modeloM5, quando a fonte é colocada na posição S0 =
2, 0 km. Em: (a) traçamento exato, (b) traçado numérico para o parâmetro
τ , (c) traçado numérico para o parâmetro T e (d) traçamento numérico para o
parâmetro S. As imagens (e), (f) e (g) exibem as distâncias entre as posições
das chegadas dos raios exatos e dos numéricos em função do ângulo de saída,
traçados, respectivamente, com os parâmetros τ , T e S. . . . . . . . . . . . . 43
3.19 Tempos de trânsito dos traçados de raios da Fig. 3.18, em função do ângulo
de saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o pa-
râmetro τ , (c) tempos numéricos para o parâmetro T e (d) tempos numéricos
para o parâmetro S. As imagens (e), (f) e (g) mostram os desvios relativos
entre os tempos de trânsito dos raios exatos e numéricos, quando calculados,
respectivamente, com os parâmetros τ , T e S. . . . . . . . . . . . . . . . . . 44
3.20 Campos de erros dos módulos da vagarosidade, dados pela Eq. (2.16), refe-
rentes ao modelo M5, para os parâmetros τ , T e S. . . . . . . . . . . . . . . 45
3.21 Modelo M6: campo de velocidades de camadas plano horizontais, dado em
km/s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.22 Traçamento de raios, no modelo M6, quando a fonte é colocada na posição
S0 = 3, 0 km. Em: (a) traçamento exato, (b) traçado numérico para o parâ-
metro τ , (c) traçado numérico para o parâmetro T e (d) traçamento numérico
para o parâmetro S. Os grá�cos (e), (f) e (g) exibem as distâncias entre as
posições das chegadas dos raios exatos e os numéricos em função do ângulo
de saída, traçados, respectivamente, com τ , T e S. . . . . . . . . . . . . . . . 49
3.23 Tempos de trânsito dos traçados de raios da Fig 3.22 em função do ângulo de
saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o parâme-
tro τ , (c) tempos numéricos para o parâmetro T e (d) tempos numéricos para
o parâmetro S. As imagens (e), (f) e (g) mostram os desvios relativos entre
os tempos de trânsito dos raios exatos e os numéricos, quando calculados,
respectivamente, com respeito aos parâmetros τ , T e S. . . . . . . . . . . . . 50
3.24 Campos de erros dos módulos da vagarosidade, gerados pela Eq. (2.16), refe-
rentes a M6, para os parâmetros τ , T e S. . . . . . . . . . . . . . . . . . . . 51
3.25 Modelo M7: campo de velocidade da anticlinal antiforme. . . . . . . . . . . . 52
3.26 Traçamento de raios, no modelo M7, quando a fonte é colocada na posição
S0 = 3, 0 km. Em: (a) traçamento exato, (b) traçado numérico para o parâ-
metro τ , (c) traçado numérico para o parâmetro T e (d) traçamento numérico
para o parâmetro S. Os grá�cos (e), (f) e (g) exibem as distâncias entre as
posições das chegadas dos raios exatos e numéricos em função do ângulo de
saída, traçados, respectivamente, com os parâmetros τ , T e S. . . . . . . . . 55
viii

3.27 Tempos de trânsito dos traçados de raios da Fig 3.26, em função do ângulo de
saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o parâme-
tro τ , (c) tempos numéricos para o parâmetro T e (d) tempos numéricos para
o parâmetro S. As imagens (e), (f) e (g) mostram os desvios relativos entre
os tempos de trânsito dos raios exatos e os numéricos, quando calculados,
respectivamente, com os parâmetros τ , T e S. . . . . . . . . . . . . . . . . . 56
3.28 Campos de erros dos módulos da vagarosidade, dados pela Eq. (2.16), refe-
rentes ao modelo M7 para os parâmetros do raio τ , T e S. . . . . . . . . . . 57
3.29 Modelo M8: campo de velocidades da anticlinal sinforme. . . . . . . . . . . . 58
3.30 Traçamento de raios no modeloM8, quando a fonte é colocada na posição S0 =
2, 0 km. Em: (a) traçamento exato, (b) traçado numérico para o parâmetro
τ , (c) traçado numérico para o parâmetro T e (d) traçamento numérico para o
parâmetro S. Os grá�cos (e), (f) e (g) exibem as distâncias entre as posições
das chegadas dos raios exatos e os numéricos em função do ângulo de saída,
traçados, respectivamente, com os parâmetros τ , T e S. . . . . . . . . . . . . 61
3.31 Tempos de trânsito dos traçados de raios da Fig 3.30, em função do ângulo de
saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o parâme-
tro τ , (c) tempos numéricos para o parâmetro T e (d) tempos numéricos para
o parâmetro S. Os grá�cos (e), (f) e (g) mostram os desvios relativos entre
os tempos de trânsito dos raios exatos e os numéricos, quando calculados,
respectivamente, com os parâmetros τ , T e S. . . . . . . . . . . . . . . . . . 62
3.32 Campos de erros dos módulos da vagarosidade, calculados pela Eq. (2.16),
referentes ao modelo M8, para os parâmetros τ , T e S. . . . . . . . . . . . . 63
3.33 Modelo M9: campo de velocidade da sinclinal antinforme. . . . . . . . . . . . 64
3.34 Traçamento de raios no modeloM9, quando a fonte é colocada na posição S0 =
1, 0 km. Em: (a) traçamento exato, (b) traçado numérico para o parâmetro
τ , (c) traçado numérico para o parâmetro T e (d) traçamento numérico para o
parâmetro S. Os grá�cos (e), (f) e (g) exibem as distâncias entre as posições
das chegadas dos raios exatos e numéricos em função do ângulo de saída,
traçados, respectivamente, com os parâmetros τ , T e S. . . . . . . . . . . . . 67
3.35 Tempos de trânsito dos traçados de raios da Fig 3.34, em função do ângulo de
saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o parâme-
tro τ , (c) tempos numéricos para o parâmetro T e (d) tempos numéricos para
o parâmetro S. Os grá�cos (e), (f) e (g) mostram os desvios relativos entre
os tempos de trânsito dos raios exatos e os numéricos, quando calculados,
respectivamente, com os parâmetros τ , T e S. . . . . . . . . . . . . . . . . . 68
3.36 Campos de erros dos módulos da vagarosidade, dados pela Eq. (2.16) referen-
tes ao modelo M9 para os parâmetros τ , T e S. . . . . . . . . . . . . . . . . 69
3.37 Modelo M10: campo de velocidades da intrusão granítica . . . . . . . . . . . 70
ix

3.38 Traçamento de raios no modelo M10, quando a fonte é colocada na posição
S0 = 2, 5 km. Em: (a) traçamento exato, (b) traçado numérico para o parâ-
metro τ , (c) traçado numérico para o parâmetro T e (d) traçamento numérico
para o parâmetro S. Os grá�cos (e), (f) e (g) exibem as distâncias entre as
posições das chegadas dos raios exatos e os numéricos em função do ângulo
de saída, traçados, respectivamente, com os parâmetros τ , T e S. . . . . . . 73
3.39 Tempos de trânsito dos traçados de raios da Fig 3.38, em função do ângulo de
saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o parâme-
tro τ , (c) tempos numéricos para o parâmetro T e (d) tempos numéricos para
o parâmetro S. Os grá�cos (e), (f) e (g) mostram os desvios relativos entre
os tempos de trânsito dos raios exatos e os numéricos, quando calculados,
respectivamente, com os parâmetros τ , T e S. . . . . . . . . . . . . . . . . . 74
3.40 Campos de erros dos módulos da vagarosidade, dados pela Eq. (2.16) referen-
tes ao modelo M10 para os parâmetros τ , T e S. . . . . . . . . . . . . . . . . 75
A.1 Fluxograma mostra a estrutura do algoritmo que foi usado na modelagem de
traçamento de raios. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
x

INTRODUÇÃO
Modelagens sismológicas por traçamento de raios sísmicos são ferramentas amplamente uti-
lizadas na indústria de petróleo e em laboratórios de pesquisas. Tal método é usado para
construção de imagens da sub-superfície que são usadas na exploração de hidrocarbonetos.
A modelagem dá uma noção de como cada parâmetro in�uencia nos dados. Além disso, a
modelagem fornece dados calculados para diferentes modelos. Tais dados são de grande uti-
lidade em procedimentos de inversão, pois eles podem ser comparados com os dados obtidos
em campo, e deste modo, nos dar uma medida do grau da diferença entre o modelo consi-
derado na modelagem e o real, que, na grande maioria dos casos, é inacessível à observação
de maneira direta.
Ao longo do trajeto dos raios sísmicos é possível calcular os tempos de trânsito das ondas
compressionais, e assim esses tempos são usados em trabalhos de inversão sísmica, sendo
estes de grande préstimo na tomogra�a sísmica. Estas modelagens são feitas sobre campos
de velocidades sísmicas que são provenientes de modelos geológicos e que podem ser para-
metrizados por funções matemáticas. Quando se aplica a função do campo de velocidade
no conjunto de equações do raio, tais equações se tornam um sistema de EDO's (equações
diferenciais ordinárias), e nos trabalhos de traçamento são resolvidas utilizando-se métodos
numéricos que, por possuir caráter aproximativo, faz com que surjam questionamentos con-
cernentes à acurácia apresentada por seus resultados. Portanto, faz-se necessário avaliar tais
métodos, com respeito à sua con�abilidade, buscando-se fornecer resposta para a pergunta:
qual é o grau de aproximação obtido por métodos numéricos de traçamento de raios sísmicos
normalmente utilizados em trabalhos de modelagem de sísmica?
No presente trabalho será examinado a con�abilidade do método numérico para resolução
de equações diferenciais ordinárias, conhecido como metódo de Euler (ou Runge-Kutta de
primeira ordem), que é amplamente utilizados em trabalhos cientí�cos de traçamento de
raios. A resposta ao questionamento levantado é dada por meio da interpretação de resul-
tados obtidos com dois procedimentos diferentes. No primeiro caso é feito uma comparação
entre resultados obtidos com a resolução analítica das equações do raio e aqueles encontra-
dos por meio de método aproximativo. Para tal avaliação são obtidos tempos de trânsito
através do traçamento de raios em modelos de campos bidimensionais e isotrópicos de ve-
locidades sísmicas de ondas compressionais parametrizados por funções de duas variáveis.
Tais modelagens são feitas de duas maneiras: uma fornece resultados aproximados (que são
encontrados por meio de uso do método de Euler), e a outra fornece solução exata (através
da resolução analítica das equações do raio). Tendo ambos os resultados, pode-se calcular
1

2
a discrepância entre o esperado e o aproximado. O segundo procedimento que servirá como
base para responder a questão formulada é feito por meio da veri�cação da equação eiconal
que deve ser satisfeita ao longo da trajetória do raio em todos os seus nós.
Quando o modelo do campo de velocidades é uma função com alto teor de complexidade, não
é possível encontrar solução analítica das equações do raio, e assim o traçamento de forma
exata não pode ser realizado. Por esta razão, o trabalho �cou restrito apenas aos campos
que admitem solução analítica.
CAPÍTULO 1
Fundamentos Téoricos Gerais
Dois conceitos importantes quando se fala em propagação de ondas de sísmicas de corpo que
se propagam em camadas e blocos geológicos, são seus tempos de trânsito e as trajetórias de
seus raios. Desta maneira, muitos procedimentos computacionais têm sido propostos para
encontrar tais tempos e percursos de raios. O método a ser empregado para esses cálculos,
são dependentes de alguns fatores, tais como:
• Dimensão do modelo (1D, 2D, 3D),
• A representação computaçional,
• A complexidade do modelo,
• A con�guração do arranjo de aquisição,
• A acurácia exigida no procedimento,
• A e�ciência numérica exigida,
• O tipo de evento medido (onda refratada, primeiras chegadas, onda direta, onda trans-
mitida e etc),
• O tipo de dado calculado (tempos de trânsito, amplitudes, atenuações e etc), e
• O propósito prático para os resultados.
Com relação aos tempos de trânsito das ondas sísmicas, existem duas distinções básicas
quanto à forma que são medidos. Estes podem ser o tempo medido para as primeiras chegadas
(que no caso, a medição é relacionada ao tempo gasto entre a detonação e a primeira quebra
observada no traço sísmico), ou podem ser o tempo de viagem individual elementar de uma
dada onda, que podem ser, por exemplo, ondas: re�etidas, transmitidas, refratadas e etc.
Assim para diferentes eventos se obtêm tempos de trânsito distintos. No desenvolvimento
deste trabalho, focou-se em um único evento, que foi o da onda transmitida, isto é, todos os
procedimentos aqui desenvolvidos foram para este tipo de evento.
3

4
O tempo de trânsito da onda sísmica, é o tempo que um ponto da frente de onda gasta para
percorrer um caminho que liga a fonte ao receptor. Esta trajetória é comumente conhecida
como raio, logo quando se fala em tempo de trânsito deve-se chamar a atenção para o
traçamento de raios, pois este é um pré-requisito básico para o desenvolvimento da teoria do
tempo de trânsito. Por esta razão, e por ser um dos focos deste trabalho, esta teoria será
agora desenvolvida.
Existem duas famílias de métodos básicos para traçamento de raio, sendo que a primeira
é conhecida como �boundary-value ray tracing�. Este tipo ocorre quando a direção do raio
não é conhecida em qualquer de seus pontos. Neste caso, porém, as posições da fonte e do
receptor são conhecidas. Esta família também é conhecia como �Bending Methods� (Método
do Encurvamento). A outra ocorre quando a direção do raio e a posição são conhecidas
em algum ponto entre a saída e a chegada do raio (geralmente tal ponto é a posição da
fonte), estas informações compõem um sistema de condições iniciais, e o traçamento pode
ser realizado por algum método. O traçamento feito desta maneira recebe o nome de �initial-
value ray tracing�, e tal família recebe o nome de �Shooting Methods� (Métodos do Tiro). As
próximas linhas são usadas para mostrar de forma simples os quatro principais procedimentos
de resolução para se fazer o traçamento segundo métodos do tiro. Dois desses métodos, são
usados neste trabalho, e por esta razão se voltará a falar sobre eles de maneira mais completa.
1. O primeiro método envolve solução numérica do sistema de equações de traçamento
de raios, e complementada com a lei de Snell nos pontos de contato com interfaces
estruturais. O tempo de trânsito é obtido automaticamente com o traçamento do raio.
A solução numérica pode ser obtida por meio de vários métodos, como, por exemplo:
o de Runge-Kutta, o preditor-corretor de hamming, ou o de Euler.
2. No segundo, a solução é conseguida por meio da resolução analítica do sistema de
equações do raios. Soluções analíticas só podem ser encontradas para alguns tipos
de modelos de campos de velocidade que se permitam encontrar analiticamente das
equações paramétricas do raio, como, por exemplo, aqueles modelos, cuja a expressão
matemática é escrita como sendo o inverso da raiz quadrada de um polinômio.
3. No terceiro, supõem-se a existência de uma solução semi-analítica. Isto ocorre quando
o modelo como um todo não pode ser resolvido analiticamente, mas frações do mo-
delo, separadas por curvas estruturais, como camadas ou bloco, podem ser resolvidas
analiticamente. Dessa forma, o raio é obtido pela composição de uma série de raios
elementares em cada unidade de bloco ou camada.
4. O último método aqui citado, é aquele aplicado apenas em modelos unidimensionais.
O cálculo é feito por meio de integrais padrões do raio (Cerveny, 2005).

5
1.1 Equação eiconal e sistema de equações do traçamento de raio
Raios desempenham um papel fundamental em vários ramos da física. Por este motivo, não
é surpreendente que muitas abordagens diferentes possam ser usadas para de�nir a obtenção
de sistemas de traçamentos de raios. A abordagem mais geral para derivação do sistemas de
traçamentos de raio é baseada na solução da equação da onda de alta frequência assintótica
elastodinâmica, o que resulta na equação eiconal (||∇T ||22
= 1/V 2). A derivação desta
equação é mostrada no Anexo I. Para fazer o traçamento serão usados modelos de meios
isotrópicos com variações suaves, e nesses casos se aplicam a equação eiconal (Popov, 2002),
que em coordenadas cartesianas assume a forma mostrada na Eq. (1.1):
ρiρi =1
V (xi)2 , ρi =
∂T
∂xi, i = 1, 2 e 3; (1.1)
onde T = T (xi) é o tempo que uma dada frente de onda gasta para ir da fonte a uma posição
xi, que é chamado de tempo de trânsito, ρi são os componentes do vetor vagarosidade ~ρ =
∇T que representam a direção do raio em cada posição ~χ = (x1, x2, x3) da trajetória do raio
(pois são tangentes ao raio neste pontos), V (xi) representa a velocidades da onda primaria
V = α variando com xi. A Eq. (1.1) pode ser representada por meio do hamiltoniano H,e este pode ser apresentado de várias maneira diferentes, como por exemplo: H(xi, ρi) =(ρiρi−V
−2), H(xi, ρi) =
((ρiρi)
1/2 −V −1), ou H(xi, ρi) = 1
2(V
2.ρiρi− 1), de tal maneira que
deve satisfazer a Eq. (1.2):
H(xi, ρi) = 0. (1.2)
A Eq. (1.2) é desenvolvida em termos de alguma especi�cação ou característica, e ela será
usada para o desenvolvimento do sistema de equações do raio. No caso em questão a caracte-
rística é a trajetória no espaço 3D: xi = xi(u) (u é algum parâmetro ao longo da trajetória),
ao longo da qual H(xi, ρi) = 0 é satisfeita. A curva característica é uma solução do chamado
sistema característico de equações diferenciais ordinárias de primeira ordem. A derivação
detalhada do sistema característico pode ser encontrada em muitos livros e monogra�as, em
particular (Bleistein, 1984) oferece um tratamento muito detalhado. O sistema característico
da equação diferencial parcial não-linear, dado pela Eq. (1.2), é apresentado na Eq. (1.3):dxidu
= ∂H∂ρi
,
dρidu
= − ∂H∂xi
, i = 1, 2, 3.
dtdu
= ρk∂H∂ρk
.
(1.3)
A solução desse sistema de equações resulta em xi = xi(u), com ~χ(u) = (x1(u), x2(u), x3(u)),
6
sendo ~χ(u) o vetor posição dos pontos da trajetória, e nos componentes com vetor vagaro-
sidade ρi = ρi(u), que é tangente ao raio nos pontos ~χ(u) e fornece a direção do raio em
tais pontos, que é dado por ~ρ(u) = (ρ1(u), ρ2(u), ρ3(u)). A variável u é um parâmero da
trajetória, e não pode ser escolhida arbitrariamente, pois esta é dependente da forma especí-
�ca da função H escolhida na Eq. (1.2). O incrementar du ao longo da curva característica
está relacionada com o aumento do tempo de viagem dt, conforme visto na última equação
do sistema (1.3). Uma vez que os raios foram de�nidos como as curvas características da
equação eiconal (1.2), o sistema (1.3) pode ser usado para determinar a trajetória do raio e
o tempo de viagem ao longo dela. Assim esse sistema recebe o nome de sistema de equações
do raio ou sistema de traçamento do raio. A Eq. (1.2) assume várias formas, e pode ser
mostrada de uma forma mais geral tal como na Eq. (1.4), onde o valor n está identi�cado
com o parâmetro característico u (Cerveny, 2005):
H(xi, ρi) = n−1
((ρiρi)
n/2 − 1
V (xi)n
). (1.4)
No caso de n = 0 deve-se usar o limite na Eq. (1.4) fazendo n tender para zero (n → 0), e
aplicar a regra de L'Hospital, assim chegar-se-á a uma nova versão para esta equação, como
é mostrado pela Eq. (1.5):
H(xi, ρi) =1
2ln(ρiρi) + ln(V (xi)). (1.5)
Substituindo-se as Eqs. (1.4) ou (1.5) na Eq. (1.3), chegar-se-á no sistema (1.6):{dxidu
= (ρkρk)n−22 .ρi ,
dρidu
= n−1.∂V
−n
∂xi, dT
du= V
−n; i = 1, 2, 3. (1.6)
Como o raio foi de�nido como curva característica da Eq. (1.2), o sistema (1.6) é a represen-
tação das equações de traçamento do raio, e podem ser escritas para diferentes valores de n
e, consequentemente, diferentes parâmetos de raio u. Neste trabalho usou-se três parâmetros
de raio diferentes, e para isso foram feitos n = 0, n = 1 e n = 2. Para n = 0 se obtêm dTdu
= 1
e com isso pode-se notar que u = T , ou seja, o parâmetro da trajetória é o próprio tempo
de trânsito ao longo do raio, e o sistema de equações a ser resolvido neste caso é mostrado
na Eq. (1.7):{dxidT
= (ρkρk)−1.ρi,
dρidT
= −∂(ln(V )
)∂xi
, dTdT
= 1; i = 1, 2, 3. (1.7)
Se for feito n = 1, então dTdu
= V−1
e com isso pode-se notar que u = S, ou seja, o parâmetro
da trajetória é o comprimento do arco ao longo do raio, e o sistema (1.3) �ca:

7
{dxidS
= (ρkρk)−1/2
.ρi ,dρidS
= ∂∂xi
(1V
), dT
dS= 1
V; i = 1, 2, 3. (1.8)
Se n = 2, é obtido o sistema de equações do raio dado por Eq. (1.9), que também será usado
para fazer o traçamento do raio:{dxidτ
= ρi ,dρidτ
= 12∂∂xi
(1
V 2
), dT
dτ= 1
V 2 ; i = 1, 2, 3. (1.9)
Na Eq. (1.9) o parâmetro do raio τ é chamado de variável natural ao longo do raio, este não
possui signi�cado físico, e possui dimensão de comprimento ao quadrado dividido por tempo
(L2/T ), e é relacionado com o tempo pela Eq. (1.10):
τ =
∫ T
0
V2
dT, (1.10)
onde T é o tempo de trânsito ao longo da trajetoria que liga os pontos ~χ(0) à ~χ(τ). As
Eqs. (1.7), (1.8) e (1.9) compõem a fundamentação matemática para o traçamento de raios
usados neste trabalho, e o próximo capítulo irá abordar dois métodos de resolvê-las, quando
conhecidas as condições iniciais: "initial-value ray tracing" (Cerveny, 2005).

CAPÍTULO 2
Traçamento do Raios e Cálculos de Tempos de
Trânsito
Soluções rápidas e simples dos sistemas (1.7), (1.8) e (1.9) são baseadas em resolução analítica
dessas equações, e maneiras de se realizar tais soluções são facilmente encontradas em: Svec
et al., 2010 e Hairer et al., 1991. No entanto, é muito difícil, para a maioria dos modelos,
descrever a distribuição de velocidades em todo o campo por funções que tenham solução
analítica dessas equações, e por esta razão a maioria dos trabalhos nos meios cientifíco e
acadêmico, que usam traçado de raios, são baseados em soluções numéricas.
2.1 Traçamento numérico
As equações do raio são EDO's, e procedimentos numéricos para resolver estes tipos de
equações são bem explorados em literaturas como: (Butcher, 1987), (Gear e Gear, 1971),
(Butcher, 2008) e (Shampine, 1994). Cada método numérico possui uma precisão diferente,
que depende de sua estrutura, e muitos desses são usados em programas computacionais e em
alguns pacotes de sub-rotinas. Para realizar este tipo de traçamento numérico, é necessário
primeiro selecionar a propriedade do raio, ou seja, o parâmetro u desejado, e, então, deve-se
selecionar um valor para o passo (incremento no parâmetro do raio, ∆u). A acurácia do
procedimento numérico vai depender também do valor do incremento ∆u.
O método escolhido para fazer o traçamento numérico foi o de Euler, e a escolha se deu pelo
fato de que foram encontrados muitos trabalhos de traçamento que fazem uso deste método,
como por exemplo: (Santos, 2008), (Figueiró et al., 2005), (Teles e Figueiró, 2009), (Pereira,
2010), (dos Santos e Figueiró, 2006a), (dos Santos e Figueiró, 2006b), (Mendes, 2009) e
(de Souza e Figueiró, 2004). O método de Euler é o correspondente ao método de Taylor
truncado na primeira derivada, e pode ser visto também como o método de Runge-Kutta de
segunda ordem. No desenvolvimento em Taylor tem-se: ~χ(u0 + ∆u) ≈ ~χ(u0) + d~χ(u0)du
.∆u+ d2~χ(u0)du2
.∆u2
2!+ d3~χ(u0)
du3.∆u
3
3!+ · · ·+ dn~χ(u0)
dun.∆u
n
n!,
~ρ(u0 + ∆u) ≈ ~ρ(u0) + d~ρ(u0)du
.∆u+ d2~ρ(u0)du2
.∆u2
2!+ d3~ρ(u0)
du3.∆u
3
3!+ · · ·+ dn~ρ(u0)
dun.∆u
n
n!
(2.1)
8

9
que no método de Euler se torna: ~χ(u0 + ∆u) ≈ ~χ(u0) + d~χ(u0)du
.∆u ,
~ρ(u0 + ∆u) ≈ ~ρ(u0) + d~ρ(u0)du
.∆u,(2.2)
onde u0 representa o valor do parâmetro do raio na posição de partida, onde são conhecidas
as condições inciais (~χ(u0) e ~ρ(u0)). A partir da Eq (1.9), pode-se notar que dxi/dτ = ρi
e dρi/dτ = 12∂(V
−2(~χ(τ))
)/∂xi, com i = 1, 2, 3; então pode-se escrever d~χ(τ)/dτ = ~ρ(τ),
d~ρ(τ)/dτ = 12∇(V
−2(~χ(τ)
)). Analogamente, é feito com as Eqs. (1.7) e (1.8) e se obtêm
d~χ(T )/dT = (ρkρk)−1.~ρ(T ), d~ρ(T )/dT = −∇
(ln(V (~χ(T ))
))e d~χ(S)/dS = (ρkρk)
−1/2.~ρ(S),
d~ρ(S)/dS = ∇(V −1
(~χ(S)
)), por �m quando for inserido esses resultados na Eq. (2.2), res-
pectivamente, obtêm-se as Eqs. (2.3), (2.4) e (2.5): ~χ(τ0 + ∆τ) ≈ ~χ(τ0) + ~ρ(τ0).∆τ ,
~ρ(τ0 + ∆τ) ≈ ~ρ(τ0) + 12∇(V
−2(~χ(τ0)
)).∆τ ,
(2.3)
~χ(T0 + ∆T ) ≈ ~χ(T0) + (ρkρk)−1.~ρ(T0).∆T ,
~ρ(T0 + ∆T ) ≈ ~ρ(T0)−∇(ln(V (~χ(T0))
)).∆T ,
(2.4)
~χ(S0 + ∆S) ≈ ~χ(S0) + (ρkρk)−1/2
.~ρ(S0).∆S ,
~ρ(S0 + ∆S) ≈ ~ρ(S0) +∇(V
−1(~χ(S0)
)).∆S.
(2.5)
Desta forma é possível traçar todo o raio pelo processo interativo, ou seja, partindo-se de
uma posição inicial com as condições iniciais conhecidas para u0 e, então, vai se fazendo o
procedimento descrito acima para se encontrar as novas posições e direções do raio, até que
se atinge um dos limites do modelo. Se for desenvolvido este método, para, por exemplo,
as equações do raio referentes ao parâmetro de raio τ , o processo é o seguinte: parte-se da
posição ~χ(τ0) com ~ρ(τ0) conhecido e, então, o primeiro passo a ser dado consiste em encontrar
a nova posição ~χ(τ0 + ∆τ) e a nova direção do raio ~ρ(τ0 + ∆τ) utilizando-se a Eq.(2.3).
Com isto, pode-se determinar ~χ(τ0 + 2.∆τ) e ~ρ(τ0 + 2.∆τ) através da Eq. (2.6) e, de modo
iterativo, determinar ~χ(τ0 +N.∆τ) e ~ρ(τ0 +N.∆τ) por meio da Eq. (2.7): ~χ(τ0 + 2.∆τ) ≈ ~χ(τ0 + ∆τ) + ~ρ(τ0 + ∆τ).∆τ ,
~ρ(τ0 + 2.∆τ) ≈ ~ρ(τ0 + ∆τ) + 125(V
−2(~χ(τ0 + ∆τ)
)).∆τ ,
(2.6)
...

10
~χ(τ0 +N.∆τ) ≈ ~χ(τ0 + (N − 1)∆τ) + ~ρ(τ0 + (N − 1)∆τ).∆τ ,
~ρ(τ0 +N.∆τ) ≈ ~ρ(τ0 + (N − 1)∆τ) + 12∇(V
−2(~χ(τ0 + (N − 1)∆τ)
)).∆τ ,
(2.7)
com N sendo um número natural que representa a quantidade de passos dados desde a fonte
até o registro. O processo descrito acima pode, analogamente, ser demonstrado nos casos dos
outros parâmetros característicos T e S. A equação geral do procedimento descrito acima é
mostrada na Eq. (2.8): ~χ(uj + ∆u) ≈ ~χ(uj) +d~χ(uj)
du.∆u ,
~ρ(uj + ∆u) ≈ ~ρ(uj) +d~ρ(uj)
du.∆u, onde uj+1 = uj + ∆u e j ε {0, 1, 2, . . . }.
(2.8)
Como este trabalho se baseia no traçamento por meio do "initial-value ray tracing", o raio
é traçado partindo-se da fonte e, nesse caso, no início j = 0 e assim T0 = 0, que equivale a
τ0 = 0, e S0 = 0, daí, então, a cada nova interação ocorre uma atualização do parâmetro do
raio com a soma de ∆τ , ∆s ou ∆T , e assim, o raio chega ao �nal do percurso perfazendo τ ,
T e S totais, tal como dado pelas Eqs. (2.9):
τ =N−1∑j=1
∆τ, S =M−1∑j=1
∆s e T =K−1∑j=1
∆T . (2.9)
Como se pode notar, desta maneira é fácil montar um algoritmo computacional re�nado, que
faça o traçamento do raio, e assim o tempo de trânsito pode ser calculado automaticamente.
O �uxograma de como foram construídos os algoritmos dos traçamentos exatos e numéricos
são mostrados no Apêndice A deste trabalho.
2.1.1 Cálculo do tempo de trânsito numéricos
A fonte que origina as ondas sísmicas �ca posicionada na superfície do terreno, e dá origem a
uma frente de onda, que, sendo o meio isotrópico, é uma superfície que tem os raios sísmicos
a ela perpendiculares. Como os modelos adotados são contínuos e variam de forma suave,
as mudanças de direção dos raios devem ocorrer de forma suave, isto é os raios têm suas
trajetórias encurvadas suavemente ao longo do meio. Porém, quando se divide o raio em
pedaços pequenos, estes são, aproximadamente, segmentos de reta, e o traçamento é feito
levando em conta esse fato. Ou seja, o raio é aproximado por uma linha poligonal, onde os
nós são os pontos ~χ(u), e o comprimento de cada segmento é função do incremento ∆u do
raio e da velocidade que a onda possui no ponto. O procedimento para o cálculo dos tempos
trânsito numéricos, depende do parâmetro de raio escolhido. No caso do parâmetro do raio
ser o T , o cálculo do tempo de trânsito total é obtido diretamente pelo somatório de todos os
∆T ao longo do raio. Já no caso de ser τ , deve-se calcular os tempos gastos pela onda para

11
percorrer cada segmento ao longo da poligonal, ou seja, o tempo para percorrer a distância
entre dois nós sequentes da poligonal, e isto é feito com a Eq. (2.10):
tτj (~χj, ~χj+1) =‖ ~χj+1 − ~χj ‖2
V (~χj), (2.10)
onde ~χj e ~χj+1 são os nós da poligonal, e V (~χj) é a velocidade que a onda tem ao passar
pelo ponto ~χj e ‖ . ‖2 é a norma euclidiana. Por �m, no caso do parâmetro do raio ser o
comprimento de arco S, o cálculo do tempo de trânsito para cada nó da poligonal é obtido
diretamente pela razão entre o módulo passo, que neste caso é o próprio deslocamento ∆S,
e a velocidade, tal como:
tSi
(~χi, ~χi+1) =∆S
V (~χi). (2.11)
Nos três casos, o tempo total é obtido com a soma dos tempos calculados entre todos os nós
da poligonal que formam o raio. Assim a Eq. (2.12) sintetiza esses cálculos:
Tτ =N−1∑j=1
tτj , TS
=M−1∑j=1
tsj e TT
=K−1∑j=1
∆t (2.12)
onde Tτ é o tempo total calculado ao longo do raio quando o parâmetro do raio é τ , TTo
tempo para quando o parâmetro é o próprio tempo, e TSé o tempo quando o comprimento
de arco é o parâmetro considerado do raio. Os índices K, M e N nas Eqs. (2.9) e (2.12), são
os números de nós das poligonais, e possuem diferentes valores, pois, não necessariamente
as poligonais relacionadas a cada raio (que partem com as mesmas condições iniciais, para
os diferentes parâmetro de raio) terão o mesmo número de nós, e isto se dá pelo fato dos
comprimentos dos segmentos das poligonais serem distintos.
2.2 Traçamento analítico e cálculo dos tempos analíticos
Para alguns tipos de modelos nos quais as equações que parametrizam seus campos de ve-
locidades apresentam um grau de complexidade não tão alto, o sistema de equações do raio
pode ser resolvido analiticamente. A complexidade do sistema de equações a ser resolvido
para cada modelo, vai depender do parâmetro do raio adotado, assim como, também, da ge-
ometria do modelo. Neste trabalho, os modelos usados estão restritos àqueles que permitem
a resolução analítica das equações do raio para algum dos três parâmetros de raio usado (τ ,
S e T ). Isto é, cada um dos 10 modelos considerados usados tem como pré-requisitos básico
permitir a resolução analítica das equações do raio. No geral, estruturas reais não podem ser
exatamente descritas por funções de campo de velocidades que possibilitem soluções analí-
ticas das equações do raio, porém a relevância deste tipo de método se dá por dois motivos.
Primeiro, porque em muitos modelos a distribuição de velocidades pode ser individualizada

12
em blocos e camadas separadamente, podendo ser descritas por funções relativamente sim-
ples, e que permitem a resolução analítica do sistema de traçamento de raios. E o segundo,
que motivou usar este tipo de solução nesta pesquisa, é o fato de que soluções analíticas
são importantes para descrever com exatidão o comportamento dos raios que obedecem ao
sistema (1.6), e assim podem ser usadas a �m de avaliar a acurácia de métodos adotados em
abordagens numéricas.
Para encontrar a solução analítica de algum dos três sistemas (1.9), (1.7) ou (1.8), é
usado algum método de resolução direta de EDO's, e assim encontra-se as equações da posi-
ção ~χ(τ) = (x1(τ), x2(τ), x3(τ)), ~χ(T ) = (x1(T ), x2(T ), x3(T )) ou ~χ(S) = (x1(S), x2(S), x3(S))
e os tempos de trânsito T (τ), T (T ) e T (S). Como este tipo de solução é dita exata, neste
trabalho será resolvido analiticamente para cada modelo apenas num dos sistemas, e este
resultado, dito exato, pode ser usado na avaliação da abordagem numérica de todos os pa-
râmetros característicos. Após devidamente resolvido, as soluções analíticas terão a forma
mostrada na Eq. (2.13)x1(u) = C11.f1(u) + C12.f2(u) + C13.f3(u) + · · ·+ C1n.fn(u) ,
x2(u) = C21.g1(u) + C22.g2(u) + C23.g3(u) + · · ·+ C2n.gn(u) ,
x3(u) = C31.h1(u) + C32.h2(u) + C33.h3(u) + · · ·+ C3n.hn(u) ,
T (u) = d1.w1(u) + d2.w2(u) + d3.w3(u) + · · ·+ dn.wn(u) ,
(2.13)
onde fi , gi , hi e wi são funções de u, e Cijk e di são constantes a serem determinadas com
auxílio de condições iniciais.
2.3 Erros cometidos
É sabido que num processo numérico acumulam-se erros durante sua execução, e quanti�car
esses erros é uma maneira de avaliação da acurácia de tal procedimento. Muitos testes podem
ser usados para avaliar esses erros, porém neste trabalho isso será feito de três maneiras
diferentes, gerando dados passíveis de interpretação.
A geração dos campos de raios e tempos de trânsito numéricos é executada fazendo-se partir
da fonte noventa raios, com diferença angular constante entre raios sucessivos. São usados tal
quantidade de raios pois desta maneira maior parte dos pontos dos modelos sofrem visitação
de raios, e assim o modelo é melhor imageado. Como os trajetos dos raios e tempos de trânsito
são feitos com ambas as abordagens, numérica e analítica, e como os dados calculados de
forma analítica são ditos exatos, pode-se comparar tais dados. Como se vê na Fig. 2.1, os
raios numérico e analítico chegam em posições diferentes, e muito provavelmente possuem
tempos de trânsito diferentes, apesar de terem partido da fonte com o mesmo ângulo de
saída. Desta forma surgem duas maneiras de avaliação o método, isto é calcula-se, por

13
meio da Eq. (2.14), os desvio relativo entre os tempos obtidos pelas abordagens numérica
e analítica. E calcula-se, também, por meio da Eq. (2.15), as distâncias entre as posições
de chegadas dos raios numérico e analíticos. Os desvios relativos dos tempos são calculados
em porcentagem, já as distâncias absolutas entre as posições de chegadas são calculadas em
quilômetros. Tantos erros nos tempos como nas posições, são individualizados por meio das
posições e direções de saída na fonte. Como de cada fonte partem muitos raios, a direção de
saída acaba sendo o único elemento capaz de distinguir os diferentes raios oriundos de uma
mesma fonte. Assim, geram-se grá�cos de erros nos tempos e nas posições de chegadas, em
função da direção de saída da fonte. Isto é,
Dt(θ) =
∣∣∣∣∣TA(θ)− TN
(θ)
TA
(θ)
∣∣∣∣∣ · 100%, (2.14)
onde TA
(θ) é o tempo calculado de maneira analítica, TN
(θ) o numérico e Dt(θ) representa
o desvio relativo entre esses tempos de trânsito, todos relativos a um mesmo ângulo θ de
partida do raio fonte. A diferença em termos de pontos de chegada é dada por:
Dr(θ) =‖ ~χA
(θ)− ~χN
(θ) ‖, (2.15)
onde ~χA
(θ) é a posição de chegada do raio analítico, ~χN
(θ) a do raio numérico, e Dr(θ) a
separação entre essas chegadas em quilômetros (km). A terceira e última forma de avaliação
diz respeito a Eq. (1.2), H(xi, ρi) = 0, que teoricamente deve ser satisfeita ao longo de todos
os pontos do traçado dos raios. Como a atualização da posição, e do vetor vagarosidade, que
representa a direção de percurso neste ponto, ocorre de maneira numérica, existirá um erro,
δ(xi, ρi), quanti�cado pela Eq. (2.16), que é associado a cada posição do modelo visitada
pelo raio, e que é a diferença entre o que foi calculado ρiρi e o valor que era esperado 1/V2.
δ(xi, ρi) = |ρiρi − V−2|. (2.16)
Como esses erros são calculados em cada posição do modelo no qual o raio passa, então pode-
se criar um campo de erros com relação ao vetor vagarosidade referente. Assim, para cada
modelo pode-se gerar um campo de erros para cada família de raios obtida considerando-se
diferentes parâmetros de raio. Com o intuito de gerar campos de erro com o máximo possível
de dados de posições no modelo, coloca-se a fonte de ondas em vinte posições na superfície.
Todos os testes discutidos acima são feitos para as equações do raio considerando-se cada
um dos parâmetros de raio citados, e isto é feito com o objetivo de saber-se qual deles torna
o traçamento de raios numérico mais acurado na modelagem de tempos de trânsito.
2.4 Condições iniciais
Sabe-se que cada raio e tempo de trânsito ao longo desse raio é totalmente especi�cado
quando se conhece condições de contorno, como as posições de saída e de chegada dos raios,

14
ou as condições iniciais do raio (direção e posição de saída). Até o momento foi mostrado
como executar o traçamento de raios quando são conhecidas condicões iniciais. Isto é, deve-se
ter conhecimento das coordenadas de ponto de partida, as componentes do vetor vagarosidade
e o tempo de trânsito neste ponto, ou seja, na fonte:
xi = xi0, ρi = ρ
i0, T = T0 . (2.17)
A quantidade ρi0determina a direção inicial do raio na fonte, que deve satisfazer a Eq. (2.18)
ρi0ρi0
=1
V2
0
, onde V0 = V (xi0
). (2.18)
Em todo o desenvolvimento teórico feito até aqui, foi usada a notação ~χ = (x1, x2, x3) e
~ρ = (ρ1, ρ2, ρ3), no caso 3D, para representar os vetores posição e vagarosidade. Porém,
a partir daqui, para tornar mais didáticos os resultados, tal notação, muitas vezes, será
substituída por ~χ = (x, y, z) e ~ρ = (px, py, pz). Outro ponto que também deve ser chamado
atenção é que, com o intuito de facilitar os cálculos, estudou-se apenas os raios coplanares,
ou seja, raios que percorre seus trajetos unicamente no plano x2 = 0, isto é y = 0, e assim a
modelagem será feita em duas dimensões, com os vetores vagarosidade e posição tendo dois
componentes cada, ou seja, ~χ = (x1, x3) e ~ρ = (ρ1, ρ3) ou ~χ = (x, z) e ~ρ = (px, pz).
As componentes pi0do vetor vagarosidade que deve satisfazer a Eq. (2.18), pode ser encon-
trada por meio dos ângulos θ que o vetor ~ρ faz com a horizontal, como pode ser visto na
Fig. 2.1, e assim se escreve os componentes pi0em função destes ângulos. Na posição inicial
~χ = (S0 , 0) os raios possuem a direção:
px0 =1
V0
cos(θ) , pz0 =1
V0
sin(θ), (2.19)
com 0 ≤ θ ≤ π. O vetor vagarosidade é tangente à trajetória como é mostrado na Fig 2.1,
e os seus componentes são as projeções deste vetor nos eixos ~ox e ~oy do plano cartesiano,
assim pode-se montar o relacionamento entre ~ρ0
= (px0 , pz0) e o ângulo de saída θ. Como:
‖ ~ρ0‖=√p2
x0+ p2
z0= V (S0 , 0)
−1
,
então, pode ser notado que na fonte :{px0 = V (S0 , 0)
−1 · cos(θ),
pz0 = V (S0 , 0)−1 · sin(θ).
Assim, o sistema de condições iniciais �ca completo, como é mostrado na Eq. (2.20) e poderá
ser usado na individualização dos raios a serem estudados:

15
SSSSw?
-px0
pz0
~χN ~χA
~ρ0
θ
So> -x
?z
(0,0)
Figura 2.1: Esquematização de raios que partem da fonte com condições iniciais, em um
plano y = 0. Esses raios são traçados com métodos numérico (~χN) e analítico (~χ
A), res-
pectivamente. A diferença nos percursos deles se dá pelo fato do raio numérico ter caráter
aproximativo.
x(0) = S0 ,
z(0) = 0,
px0 = V (S0 , 0)−1 · cos(θ),
pz0 = V (S0 , 0)−1 · sin(θ).
(2.20)
2.4.1 Relação entre ∆τ , ∆T e ∆S
A �m de estabelecer resultados passiveis de comparação, deve-se montar um relacionamento
entre os módulos dos passos, assim calcula-se os valores ∆τ e ∆S, em função do campo de
velocidades do modelo, e em função de um ∆T �xo, como mostrado na Eq. (2.21).
∆τ =V max2 + V min2
2.∆T e ∆S =
V max+ V min
2.∆T, (2.21)
onde V max e V min representam, respectivamente, as velocidades máximas e minimas pre-
sentes no modelo.

CAPÍTULO 3
RESULTADOS E DISCUSSÕES
Este capítulo tem por objetivo apresentar os resultados obtidos com a pesquisa executada.
Como já mencionado o traçado dos raios foi feito para três situações de parâmetros de raio,
e por esta razão este capítulo deve ser rami�cado em três grandes blocos correspondentes a
cada um deles. Em todas as situações o traçamento é feito pelo método exato e aproximado, a
�m de obter ferramentas de discusões quanto à acurácia numérica obtida por cada parâmetro
do raio: τ , T e S. Quando obtido de forma analítica, o resultado é considerado como exato.
Desta maneira, independe do parâmetro usado terá a mesma resposta no traçamento dos raios
e nos tempos de percurso. Valendo-se desta a�rmativa, pode-se escolher, para cada modelo,
o parâmetro do raio que faça o sistema (1.6) mais facilmente resolvível de forma analítica, e
fazê-lo dispensa a resolução dos demais. Em cada modelo, foi escolhida uma posição ~χ(S0, 0)
na superfície do campo de velocidades, onde a fonte foi detonada, e os raios originados. Estes
foram prolongados até atingirem os limites do modelo, momento no qual obtêm-se a posição
da chegada do raio, assim como calcula-se o tempo de trânsito da propagação ondulatória
da fonte até o ponto de chegada do raio. O valor do passo ∆T = 0, 000325, foi mantido �xo
para todos os modelos, com ∆τ e ∆S sendo calculados pela Eq. (2.21).
3.1 A modelagem
Neste trabalho usou-se modelos de campos bidimensionais e isotrópicos de velocidades sís-
micas de ondas compressionais parametrizados por funções de duas variáveis, com as veloci-
dades dadas em quilômetros por segundo (km/s). A escolha dos modelos foi feita levando-se
em consideração duas restrições básicas: A primeira é a de que o modelo escolhido deva
ter semelhança com alguma situação geológica presente na natureza, para que o traçamento
sirva de base para possíveis comparações com medidas de campo, e para isso as velocidades
das ondas devem estar limitadas as valores tipicamente encontrados em rochas e materiais
conhecidos. A Tabela 3.1 mostra velocidades de ondas compressionais (P, primárias) e ci-
salhantes (S, secundárias), para alguns materiais e rochas conhecidas, e por esta razão as
velocidades em todos os modelos terão valores atribuídos na faixa de 1, 0 a 8, 0 km/s. A
segunda restrição diz respeito à complexidade da função usada para descrever modelos, pois
tal equação deverá permitir a resolução analítica do sistema de equações do raio para um
16

17
dos três parâmetros. Por se tratar de um trabalho avaliativo por meio de testes experi-
Tipo de Material Onda P (m/s) Onda S (m/s) Densidade (g/cm3)
Solos 300 - 700 100 - 300 1,7 - 2,4
Areia seca 300 - 1200 100 - 500 1,5 - 1,7
Areia saturada 1500 - 2000 400 - 600 1,9 - 2,1
Argila saturada 1100 - 2500 200 - 800 2,0 - 2,4
Arenito saturado 2000 - 3500 800 - 1800 2,1 - 2,4
Calcário 3500 - 6000 2000 - 3300 2,4 - 2,7
Sal 4500 - 5500 2500 - 3100 2,1 - 2,3
Granito 4500 - 6000 2500 - 3300 2,5 - 2,7
Basalto 5000 - 6000 2800 - 3400 2,7 - 3,1
Gnaisse 4400 - 5200 2700 - 3200 2,5 - 2,7
Água 1450 - 1500 ����� 1
Gelo 3400 - 3800 1700 - 1900 0,9
Óleo 1200 - 1250 ����� 0,6 - 0,9Tabela 3.1: Densidades e velocidades de propagação de ondas longitudinais e transversais de
alguns materiais e rochas.
mentais, a redundância de testes se faz necessária, ou seja, quanto maior for o número de
experimentos realizados, maior será a con�abilidade dos resultados �nais do estudo. Assim
sabendo, buscou-se o maior número possível de situações que possibilitem a realização de
experimentos, e, então, foram selecionados dez modelos que atendam ambas as restrições
colocadas acima, de tal forma que se testou exaustivamente a abordagem numérica em cada
uma das situações, e o resultado de tais testes podem ser abordados neste capítulo.
3.1.1 Modelo do meio homogêneo (M1)
O modelo escolhido para representar M1 é o mais simples possível, ele retrata a situação
geológica de um meio homogêneo e isotrópico, ou seja, não sofre variação nas suas proprie-
dades petrofísicas, em nenhuma das direções, e a velocidade das ondas sísmicas é constante
ao longo de toda a sua extensão. O campo de velocidades que representa o modelo M1 visto
na Fig. 3.1 é gerado por meio da Eq. (3.1):
V1(x, z) =1√A1
, (3.1)
onde A1 = 0, 05 s2/km2, a velocidade é constante e igual a V1 = 4, 472 km/s.

18
Modelo M1
0 0.5 1 1.5 2 2.5 3 3.5 4
X - Afastamento (km)
0
0.2
0.4
0.6
0.8
1
Z -
Pro
fundid
ade (
km
)
4.42
4.43
4.44
4.45
4.46
4.47
4.48
4.49
4.5
4.51
4.52
Figura 3.1: Modelo M1: campo de velocidades homogêneo e isotrópico dado em km/s.
Traçamento de raios em M1 com τ como parâmetro do raio
Quando se aplica a Eq. (3.1) no sistema referente ao parâmetro τ dado pela Eq. (1.9), será
encontrado o sistema de EDO's do raio, para o modelo M1 quando o parâmetro do raio é τ ,
como mostrado na Eq. (3.2):
dxdτ
= px ,d2xdτ2
= 0 ,
dzdτ
= pz ,d2zdτ2
= 0 ,
dTdτ
= A1 ,dpxdτ
= 0 ,dpzdτ
= 0.
(3.2)
O sistema (3.2) quando resolvido de forma analítica, com o auxílio das condições inicias,
resulta nas equações parâmetricas do raio como é mostrado na Eq. (3.3), e tais equações são
usadas para execução do traçado exato e cálculo de tempo de trânsito:
x(τ) =
√A1 . cos(θ).τ + S0 ,
z(τ) =√A1 . sin(θ).τ ,
T (τ) = A1 .τ
(3.3)
com S0 = 2, 0 km.

19
Traçamento em M1 com o tempo T como parâmetro do raio
Para se obter o sistema de equações do raio para o modeloM1 com o tempo T como parâmetro
do raio, aplica-se a Eq. (3.1) no sistema (1.7), o que resulta na Eq. (3.4). Tal sistema de
equações é usado para fazer o traçamento quando o parâmetro do raio é o tempo de trânsito
T .
dxdT
= pxA1,
dzdT
= pzA1,
dTdT
= 1 ,dpxdT
= 0 ,dpzdT
= 0.
(3.4)
Traçamento em M1 com o comprimento de arco S como parâmetro do raio
Por �m busca-se o sistema de equações do raio com o comprimento de arco S como parâmetro
do raio. Para tanto, aplica-se a Eq (3.1) no sistema de equações (1.8), resultando na Eq.
(3.5):
dxdS
= px√A1
,
dzdS
= pz√A1
,
dTdS
=√A1 ,
dpxdS
= 0 ,dpzdS
= 0.
(3.5)
Aplicando o método numérico de Euler nas Eqs. (3.2), (3.4) e (3.5), pôde-se gerar as traje-
tórias dos raios e tempos de trânsito numéricos para o modelo M1, para cada um dos três
parâmetros de raio. A Eq. (3.3) permite o traçado de raios e o cálculo de tempos de trânsito
analítico. As trajetórias dos raios são mostradas na Fig. 3.2 junto com os erros nas posições.
Os respectivos tempos de trânsitos são mostrados na Fig. 3.3 junto com os desvios relativos
aos tempos ocorridos entre os procedimentos aproximados e os exatos para τ , T e S. As Figs.
3.4 (a), (b) e (c) mostram os campos de erros da vagarosidade, referentes aos procedimentos
numéricos realizados com as Eqs. (3.2), (3.4) e (3.5); respectivamente, dados pela Eq.(2.16).
Conforme pode ser observado nas imagens, a comparação entre os resultados para os três
parâmetros de raios, aquele que apresenta maiores erros com respeito ao traçamento dos
raios no modeloM1, são aqueles feitos quando o parâmetro do raio é o comprimento do arco.
No caso dos tempos de trânsito o parâmetro que acarreta os piores resultados também é o
comprimento de arco. Não se pode distinguir qual campo de erros é o mais acurado, pois

20
eles apresentam certa homogeneidade quando comparados.
(a) (b)
(c) (d)
0
2e-08
4e-08
6e-08
8e-08
1e-07
1.2e-07
0 20 40 60 80 100 120 140 160 180
Dis
tanci
a (K
m)
Angulo de saida (graus)
(e)
0
5e-09
1e-08
1.5e-08
2e-08
2.5e-08
3e-08
3.5e-08
4e-08
0 20 40 60 80 100 120 140 160 180
Dis
tanci
a (K
m)
Angulo de saida (graus)
(f)
0
5e-07
1e-06
1.5e-06
2e-06
2.5e-06
3e-06
3.5e-06
4e-06
0 20 40 60 80 100 120 140 160 180
Dis
tanci
a (K
m)
Angulo de saida (graus)
(g)
Figura 3.2: Traçamento de raios no modelo M1, quando a fonte é colocada na posição
S0 = 2, 0 km. Em: (a) traçamento exato, (b) traçado numérico para o parâmetro τ , (c)
traçado numérico para o parâmetro T e (d) traçamento numérico para o parâmetro S. Os
grá�cos (e), (f) e (g) exibem as distâncias entre as posições das chegadas às bordas do modelo
dos raios exatos e dos numéricos, em função do ângulo de saída, traçados, respectivamente,
com os parâmetros τ , T e S.
21
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(a)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(b)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(c)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(d)
0
1e−06
2e−06
3e−06
4e−06
5e−06
6e−06
7e−06
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(e)
0
5e−07
1e−06
1.5e−06
2e−06
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(f)
0
5e−05
0.0001
0.00015
0.0002
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(g)
Figura 3.3: Tempos de trânsito dos traçados de raios da Fig 3.2, em função do ângulo de
saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o parâmetro τ , (c)
tempos numéricos para o parâmetro T e (d) tempos numéricos para o parâmetro S. As
imagens (e), (f) e (g) mostram os desvios relativos entre os tempos de trânsito dos raios
exatos e os numéricos, quando calculados, respectivamente, com os parâmetros τ , T e S.

22
(a) Campo de erros do modelo M1, parâmetro τ .
(b) Campo de erros do modelo M1, parâmetro T.
(c) Campo de erros do modelo M1, parâmetro S.
Figura 3.4: Campos de erros dos módulos da vagarosidade dados pela Eq. (2.16), referentes
ao modelo M1 para os parâmetros τ , T e S.

23
De maneira geral os resultados numéricos apresentados por todos os três parâmetros de
raio no modelo M1 se mostraram bem satisfatórios, visto que os erros entre as posições das
chegadas apresentadas para este modelo em todas as situações se mostraram inferiores a
4 × 10−2 metros, sendo que a escala usada nos modelos é da ordem de quilômetros. No
caso dos tempos de trânsito os resultados para essas situações também se mostraram de boa
qualidade visto que os desvios relativos entre os tempos, se mostraram inferiores a 2.10−4
%,
isto é, muito inferiores a 10% que é o limite de erro que se permite em muitos laboratórios
de pesquisa. Os campos de erros apresenta-se com valores muito pequenos. Obviamente, o
fato do modelo em questão ser o mais simples possível in�uencia nos excelentes resultados,
porém, com respeito ao modelo M1, pode-se dizer que o método de aproximação de Euler
pode ser usado com boa segurança.
3.1.2 Modelo de camadas plano verticais (M2)
Modelo M2
0 0.5 1 1.5 2 2.5 3 3.5 4
X - Afastamento (km)
0
0.2
0.4
0.6
0.8
1
Z -
Pro
fundid
ade (
km
)
2.5
3
3.5
4
4.5
5
5.5
Figura 3.5: Modelo M2: campo de velocidades heterogêneo e isotrópico de camadas planas
paralelas verticais dado em km/s
O modelo M2 tem como principal característica, variações, unicamente lateral, de suas pro-
priedades petrofísicas. Este tipo de meio pode, por exemplo, ser gerado quando um conjunto
de camadas plano paralelas passam por uma sucessão de esforços, ocorrendo como resposta
dobramentos de suas camadas, a ponto de tornar tais camadas, em certas regiões, verticali-
zadas. Após isso ocorre erosão, a ponto do conjunto de camadas que estavam horizontais se
tornaram totalmente verticais. Este tipo de ambiente ocorre geralmente em locais próximos

24
a limites de placas convergentes, onde existe grande concentração de stress causando tais
deformações. A Fig. 3.5 mostra a representação do modelo M2, com os valores de suas
velocidades variando de 2, 5 km/s até 5, 5 km/s, e a Eq. (3.6) parametriza este campo:
V2(x, z) =1√
A2 +B2 .x, (3.6)
onde A2 = 0, 15 s2/km2 e B2 = −0, 0287 s2/km3.
Traçamento de raio em M2 com τ como parâmetro do raio
Aplica-se a Eq. (3.6), que é referente ao campo de velocidades do modelo M2, no sistema
(1.9), gerando-se então o sistema de EDO's de raios parametrizado por τ :
dxdτ
= px ,d2xdτ2
=B2
2,
dzdτ
= pz ,d2zdτ2
= 0 ,
dTdτ
= A2 +B2 .x ,dpxdτ
=B2
2,
dpzdτ
= 0 .
(3.7)
Resolvendo-se a Eq. (3.7), de maneira analítica, e com uso das condições iniciais, chegou-se
nas equações paramétricas da posição, e também na equação analítica do tempo de trânsito
dos raios como mostrado na Eq. (3.8):x(τ) =
√A2 +B2 .S0 . cos(θ).τ +
B2
4.τ 2 + S0 ,
z(τ) =√A2 +B2 .S0 .sen(θ).τ ,
T (τ) = B2 .
√A2+B2 .S0 . cos(θ).τ2
2+
B22
12.τ 3 + (A2 +B2 .S0).τ ,
(3.8)
onde S0 = 2, 0 km. O sistema das Eq. (3.8) serve como base para fazer os traçamentos
de raios exatos bem como calcular os respectivos tempos de trânsitos exatos, úteis como
referência para avaliação da acurácia numérica do método de Euler.
Traçamento de raio em M2 com tempo T como parâmetro de raio
Usando-se a Eq. (3.6) no sistema (1.7), chega-se ao sistema de EDO's (3.9), que é chamado
de sistema de equações do raio parametrizado pelo tempo de trânsito T , para o caso do
modelo M2:

25
dxdT
= pxA2+B2 .x
,
dzdT
= pzA2+B2 .x
,
dTdT
= 1 ,dpxdT
=B2
2.(A2+B2 .x),
dpxdT
= 0.
(3.9)
Traçamento em M2 com S como parâmetro de raio
O sistema de equações do raio, para o parâmetro comprimento de arco, é encontrado apli-
cando a Eq. (3.6) no sistema (1.8), o que resulta na Eq. (3.10):
dxdS
= px√A2+B2 .x
,
dzdS
= pz√A2+B2 .x
,
dTdS
=√A+B2.x ,
dpxdS
=B2
2.√A2+B2 .x
,
dpzdS
= 0.
(3.10)
Os traçados dos raios e tempos de trânsito numéricos, são obtidos quando se aplica o método
de Euler nas Eqs. (3.7), (3.9) e (3.10). A solução analítica na Eq. (3.8), serve para a obtenção
do traçado e dos tempos exatos. Assim, são obtidas as trajetórias dos raios como mostrados
na Fig. 3.6 e os respectivos tempos de trânsito mostrados na Fig. 3.7. Nessas imagens
também são mostrados os erros nas posições e desvios nos tempos. Os campos de erros da
vagarosidade referentes as Eqs. (3.7), (3.9) e (3.10) são mostrados nas Figs. 3.8 (a), (b) e
(c).
Ao se comparar os grá�cos de erros nas posições de chegadas, para os diferentes parâmetros
de raio, pode-se notar que não há um que se isole em maior acuracidade, tendo os erros
gerados para o parâmetro τ ligeira vantagem com relação aos demais. Quando se analisa os
grá�cos de erros nos tempos, pode-se ver que, aqueles gerados pelas equações referentes ao
parâmetros S são ligeiramente menos acurados. A análise dos campos de erros da Fig 3.8,
mostra uma grande semelhança entre esses campos.
No geral pode-se notar que os resultados calculados com a abordagem numérica para o
modelo M2, apresentam erros mais elevados quando comparados com o modelo M1, porém
em nenhuma das situações os erros obtiveram valores extremamente elevados comparados
às dimensões do modelo, e assim pode-se quali�car o método de Euler como um método
satisfatório, quando utilizado na modelagem numérica de traçamento de raios para modelos
semelhantes ao modelo M2.

26
(a) (b)
(c) (d)
0
0.0005
0.001
0.0015
0.002
0.0025
0 20 40 60 80 100 120 140 160 180
Dis
tan
cia
(Km
)
Angulo de saida (graus)
(e)
0
0.0005
0.001
0.0015
0.002
0.0025
0 20 40 60 80 100 120 140 160 180
Dis
tan
cia
(Km
)
Angulo de saida (graus)
(f)
0
0.0005
0.001
0.0015
0.002
0.0025
0 20 40 60 80 100 120 140 160 180
Dis
tan
cia
(Km
)
Angulo de saida (graus)
(g)
Figura 3.6: Traçamento de raios no modelo M2, quando a fonte é colocada na posição
S0 = 2, 0 km. Em: (a) traçamento exato, (b) traçado numérico para o parâmetro τ , (c)
traçado numérico para o parâmetro T e (d) traçamento numérico para o parâmetro S. As
imagens (e), (f) e (g) exibem as distâncias entre as posições das chegadas dos raios exatos e
numéricos em função do ângulo de saída, traçados, respectivamente, para os parâmetros τ ,
T e S.

27
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(a)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(b)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(c)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(d)
0
0.0005
0.001
0.0015
0.002
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(e)
0
0.05
0.1
0.15
0.2
0.25
0.3
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(f)
0
0.02
0.04
0.06
0.08
0.1
0.12
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(g)
Figura 3.7: Tempos de trânsito dos traçados de raios da Fig 3.6, em função do ângulo de
saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o parâmetro τ , (c) tempos
numéricos para o parâmetro T e (d) tempos numéricos para o parâmetro S. As imagens (e),
(f) e (g) mostram os desvios relativos entre os tempos de trânsito dos raios exatos e os
numéricos, quando calculados, respectivamente, com os parâmetros τ , T e S.
28
(a) Campo de erros do modelo M2, parâmetro τ .
(b) Campo de erros do modelo M2, parâmetro T.
(c) Campo de erros do modelo M2, parâmetro S.
Figura 3.8: Campos de erros dos módulos da vagarosidade dados pela Eq. (2.16), referentes
ao modelo M2 para os parâmetros τ , T e S.

29
3.1.3 Modelo de camadas plano horizontais (M3)
O terceiro modelo, que é mostrado na Fig. 3.9, retrata um meio geológico isotrópico composto
por um conjunto de camadas planas e horizontais que possuem velocidades variando de 3, 0
a 6, 0 km/s. As variações ocorrem de forma contínua e suave, não sendo possível estabelecer
os limites verticais entre as camadas. Este tipo de meio pode, por exemplo, ocorrer em
ambientes deposicionais de calmaria, geralmente marinho ou lacustre, nos quais a deposição
ocorre por decantação. Neste caso, a estrati�cação é do tipo plano paralela como mostra a
imagem do campo. A Eq. (3.11) é usada para descrever matematicamente como varia as
velocidades das ondas sísmicas compressionais em M3:
V3(x, z) =1√
A3 +B3 .z, (3.11)
onde A3 = 0, 10 s2/km2 e B3 = −0, 07 s2/km3.
Modelo M3
0 0.5 1 1.5 2 2.5 3 3.5 4
X - Afastamento (km)
0
0.2
0.4
0.6
0.8
1
Z -
Pro
fundid
ade (
km
)
3
3.5
4
4.5
5
5.5
6
Figura 3.9: ModeloM3: campo de velocidades de camadas planas paralelas horizontais dado
em km/s.
Traçamento de raios em M3 com τ como parâmetro do raio
No caso de M3, usa-se a Eq. (3.11) na Eq. (1.9) e chega-se ao sistema de EDO's do raio
parametrizado por τ tal como mostrado na Eq. (3.12):

30
dxdτ
= px,d2xdτ2
= 0 ,
dzdτ
= pz,d2zdτ2
=B3
2,
dTdτ
= A3 +B3 .z ,dpxdτ
= 0 ,dpzdτ
=B3
2.
(3.12)
Com a resolução analítica da Eq. (3.12) e auxílio das condições iniciais, encontra-se as
equações paramétricas da posição do raio e tempo de trânsito em função do parâmetro do
raio τ como mostrado na Eq. (3.13):x(τ) =
√A3 . cos(θ).τ + S0 ,
z(τ) =√A3 .sin(θ).τ +
B3
4.τ 2 ,
T (τ) =B3 .√A3 . sin(θ).τ2
2+
B23
12.τ 3 + A3 .τ ,
(3.13)
com S0 = 2, 0 km.
Traçamento de raios em M3 com o tempo como parâmetro do raio
No caso do modelo M3, quando se usa a função geradora do campo de velocidades, isto é
a Eq. (3.11), no sistema (1.7), encontra-se as EDO's (3.14), que são as equações do raio
parametrizado pelo tempo de trânsito:
dxdT
= pxA3+B3 .z
,
dzdT
= pzA3+B3 .z
,
dTdT
= 1 ,dpxdT
= 0 ,dpzdT
=B3
2(A3+B3 .z).
(3.14)
traçamento de raios em M3 com S como parâmetro de raio
Ainda com respeito ao modelo M3, semelhantemente ao feito nos casos dos parâmetros τ
e T , usa-se a Eq. (3.11) no sistema de Eqs. (1.8) que gera o sistema de EDO's do raio
parametrizado pelo comprimento de arco S, tal como mostrado na Eq. (3.15):
31
dxdS
= px√A3+B3 .z
,
dzdS
= pz√A3+B3 .z
,
dTdS
=√A3 +B3 .z ,
dpxdS
= 0 ,dpzdS
=B3
2.√A3+B3 .z
.
(3.15)
Usando o método Euler nas Eqs. (3.12), (3.14) e (3.15), pôde-se encontrar os traçamentos
de raios e tempos de trânsito numericamente para o modelo M3. Com uso das Eqs. (3.13),
gerou-se o traçado de raios e tempos analíticos. Usando as Eqs. (2.14) e (2.15), gerou-se os
grá�cos dos erros nos tempos e nas posições, respectivamente. As Figs 3.10 e 3.11, mostram,
respectivamente, as trajetórias de raios e seu tempos de trânsito acompanhados por seus
grá�cos dos erros.
O uso do método numérico juntamente com as Eqs. (2.16), (3.12), (3.14) e (3.15), serviram
para gerar os campos de erros dos módulos da vagarosidade mostrados na Fig 3.12.
A análise dos grá�cos representativos dos erros, informa que para o modelo M3, quando se
pensa em posições de chegada dos raios, o procedimento aproximado usado com as equa-
ções referentes aos três parâmetros (τ , T e S) apresentam, relativamente, erros semelhantes
oscilando em acurácia, não podendo assim se determinar qual erra menos. Já quando se
olha para os respectivos tempos de percursos gastos pelos raios, pode-se notar que para
alguns ângulos de saída, os raios parametrizados por T e S, cometem erros muito maiores
que aqueles cometidos pelo raios parametrizados pelo τ ; porém, para a maioria dos raios,
os erros cometidos pelos raios parametrizados pelos três parâmetros são semelhantes, não
podendo novamente isolar um parâmetro que torne mais ou menos acurado o método numé-
rico. A análise dos campos de erros do módulo de vagarosidade mostram os erros de maiores
magnitudes concentrados nos campos referentes às equações do raio parametrizadas por τ .
Pode-se ver que em todos os procedimentos os erros relativos aos tempos de trânsito são
inferiores a 0.9 %, que é muito menor que o limite de 10 % estipulado por alguns laborató-
rios de pesquisa. Nota-se também que as posições das chegadas estão sempre a distâncias
menores que 2, 5 metros, que não são grandes tendo em vista que o modelo está na escala de
quilômetros. Nota-se que os campos de erros da vagarosidade apresentam valores aceitáveis.
Com a análise do dados calculados para o modelo M3, pode-se dizer tranquilamente que o
procedimento adotado pelo método aproximativo usado na modelagem de tempos, por meio
do traçamento de raios, apresentou resultados relativamente próximo do esperado, reforçando
a ideia de que o método de aproximação de Euler é satisfatório para ser usado em modelos
como os descritos até então (M1, M2 e M3).
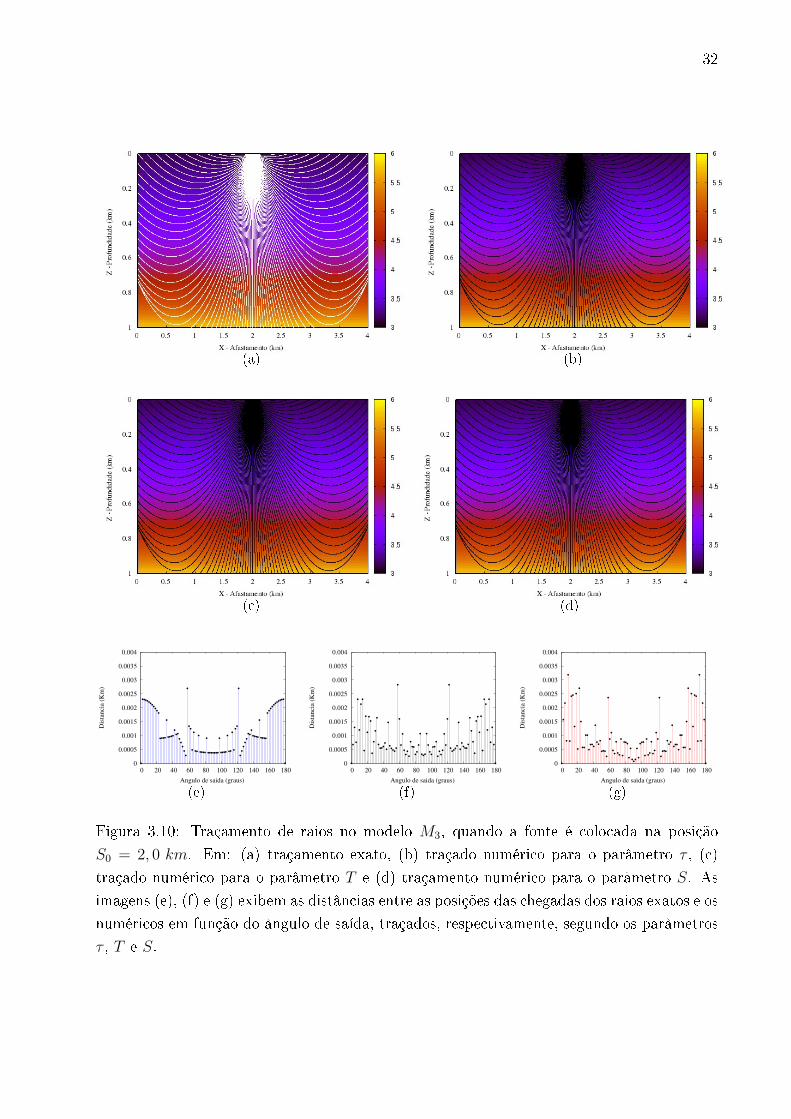
32
(a) (b)
(c) (d)
0
0.0005
0.001
0.0015
0.002
0.0025
0.003
0.0035
0.004
0 20 40 60 80 100 120 140 160 180
Dis
tan
cia
(Km
)
Angulo de saida (graus)
(e)
0
0.0005
0.001
0.0015
0.002
0.0025
0.003
0.0035
0.004
0 20 40 60 80 100 120 140 160 180
Dis
tan
cia
(Km
)
Angulo de saida (graus)
(f)
0
0.0005
0.001
0.0015
0.002
0.0025
0.003
0.0035
0.004
0 20 40 60 80 100 120 140 160 180
Dis
tan
cia
(Km
)
Angulo de saida (graus)
(g)
Figura 3.10: Traçamento de raios no modelo M3, quando a fonte é colocada na posição
S0 = 2, 0 km. Em: (a) traçamento exato, (b) traçado numérico para o parâmetro τ , (c)
traçado numérico para o parâmetro T e (d) traçamento numérico para o parâmetro S. As
imagens (e), (f) e (g) exibem as distâncias entre as posições das chegadas dos raios exatos e os
numéricos em função do ângulo de saída, traçados, respectivamente, segundo os parâmetros
τ , T e S.

33
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(a)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(b)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(c)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(d)
0
0.05
0.1
0.15
0.2
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(e)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(f)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(g)
Figura 3.11: Tempos de trânsito dos traçados de raios da Fig. 3.10, em função do ângulo
de saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o parâmetro τ , (c)
tempos numéricos para o parâmetro T e (d) tempos numéricos para o parâmetro S. As
imagens (e), (f) e (g) mostram os desvios relativos entre os tempos de trânsito dos raios
exatos e os numéricos, quando calculados, respectivamente, com os parâmetros τ , T e S.
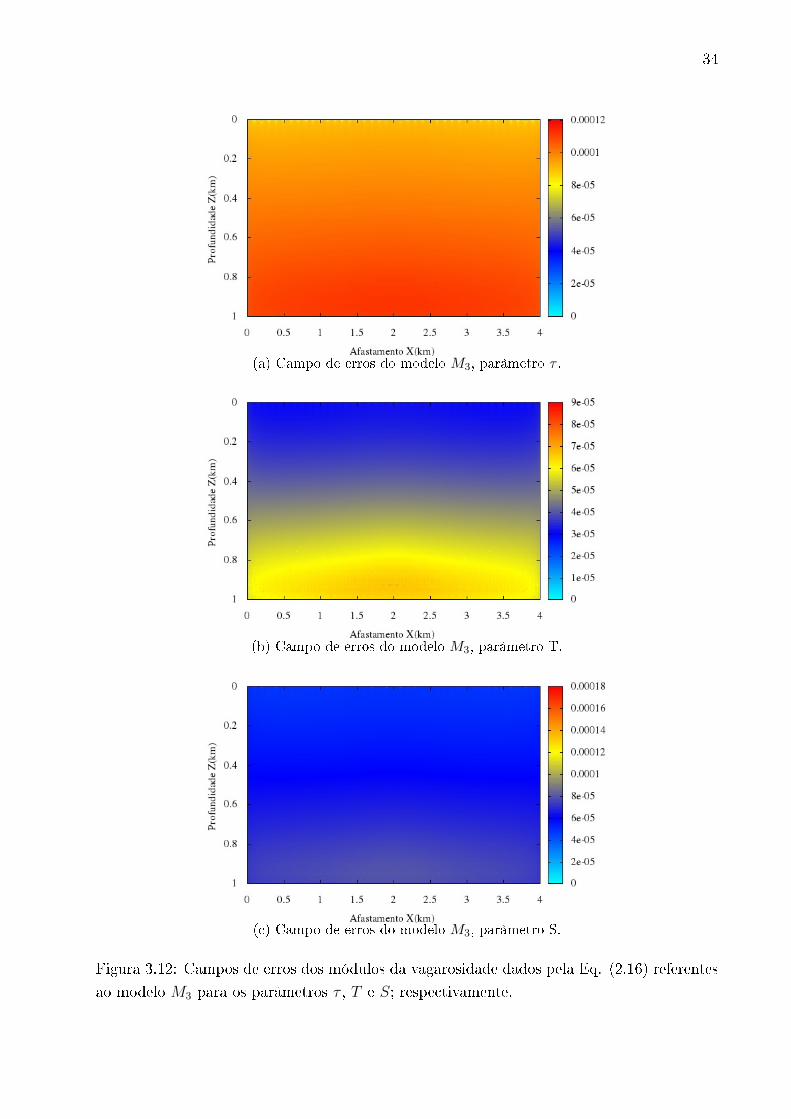
34
(a) Campo de erros do modelo M3, parâmetro τ .
(b) Campo de erros do modelo M3, parâmetro T.
(c) Campo de erros do modelo M3, parâmetro S.
Figura 3.12: Campos de erros dos módulos da vagarosidade dados pela Eq. (2.16) referentes
ao modelo M3 para os parâmetros τ , T e S; respectivamente.
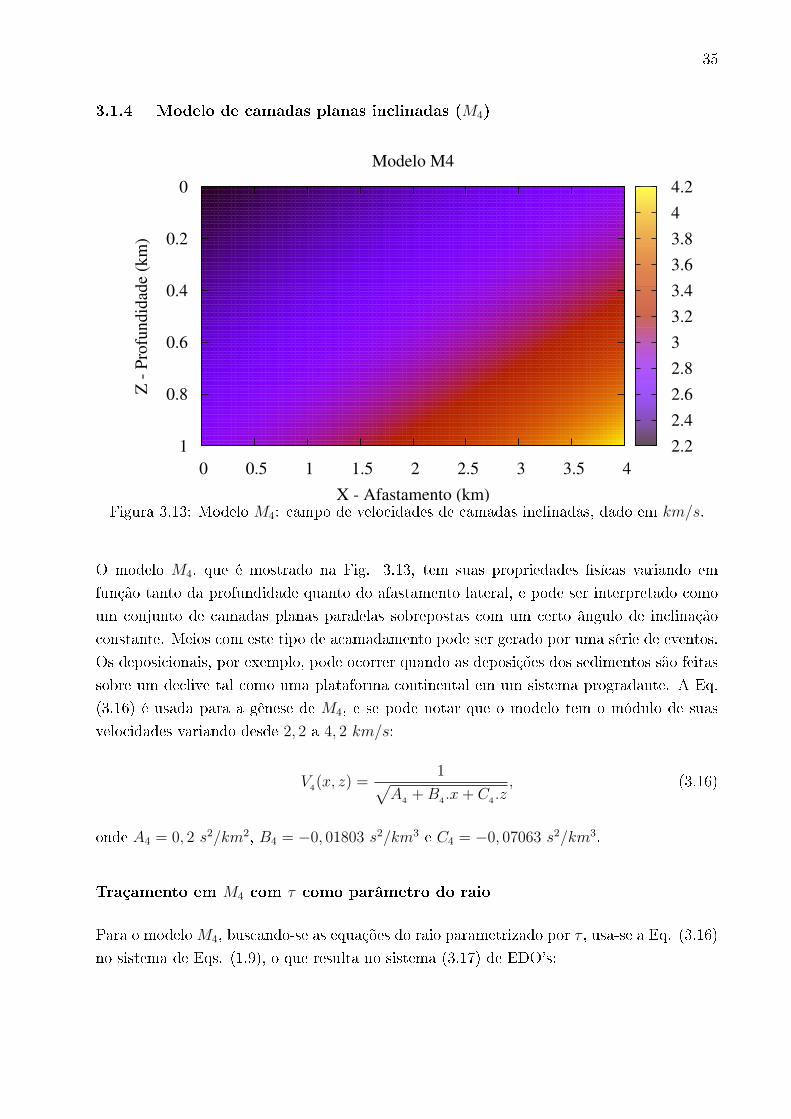
35
3.1.4 Modelo de camadas planas inclinadas (M4)
Modelo M4
0 0.5 1 1.5 2 2.5 3 3.5 4
X - Afastamento (km)
0
0.2
0.4
0.6
0.8
1
Z -
Pro
fundid
ade (
km
)
2.2
2.4
2.6
2.8
3
3.2
3.4
3.6
3.8
4
4.2
Figura 3.13: Modelo M4: campo de velocidades de camadas inclinadas, dado em km/s.
O modelo M4, que é mostrado na Fig. 3.13, tem suas propriedades �sícas variando em
função tanto da profundidade quanto do afastamento lateral, e pode ser interpretado como
um conjunto de camadas planas paralelas sobrepostas com um certo ângulo de inclinação
constante. Meios com este tipo de acamadamento pode ser gerado por uma série de eventos.
Os deposicionais, por exemplo, pode ocorrer quando as deposições dos sedimentos são feitas
sobre um declive tal como uma plataforma continental em um sistema progradante. A Eq.
(3.16) é usada para a gênese de M4, e se pode notar que o modelo tem o módulo de suas
velocidades variando desde 2, 2 a 4, 2 km/s:
V4(x, z) =1√
A4 +B4 .x+ C4 .z, (3.16)
onde A4 = 0, 2 s2/km2, B4 = −0, 01803 s2/km3 e C4 = −0, 07063 s2/km3.
Traçamento em M4 com τ como parâmetro do raio
Para o modeloM4, buscando-se as equações do raio parametrizado por τ , usa-se a Eq. (3.16)
no sistema de Eqs. (1.9), o que resulta no sistema (3.17) de EDO's:

36
dxdτ
= px,d2xdτ2
=B4
2,
dzdτ
= pz,d2zdτ2
=C4
2,
dTdτ
= A4 +B4 .x+ C4 .z ,dpxdτ
=B4
2,
dpzdτ
=C4
2.
(3.17)
Com uso de métodos de resolução analítica, encontrou-se uma solução para o sistema (3.17)
que teve como resultado as equações paramétricas da posição e tempos de trânsito dos raios,
como mostrado na Eq. (3.18):
x(τ) =
B4 .τ2
4+√A4 +B4 .S0 . cos(θ).τ + S0 ,
z(τ) =C4 .τ
2
4+√A4 +B4 .S0 .sen(θ).τ ,
T (τ) =(B2
4+C2
4).τ3
12+
(B4 .√A4+B4 .S0 . cos(θ)+C4
√A4+B4 .S0 .sen(θ))
2.τ 2 + (A4 +B4 .S0).τ ,
(3.18)
com S0 = 2, 0 km.
Traçamento em M4 com o tempo T como parâmetro do raio
Para o modelo M4, usando-se a Eq. (3.16) no sistema (1.7) e fazendo-se algumas manipula-
ções, chega-se ao sistema de EDO's (3.19) das equações do raio parametrizado pelo tempo
T :
dxdT
= pxA4+B4 .x+C4 .z
,
dzdT
= pzA4+B4 .x+C4 .z
,
dTdT
= 1dpxdT
=B4
2.(A4+B4 .x+C4 .z),
dpzdT
=C4
2.(A4+B4 .x+C4 .z).
(3.19)
Traçamento de raios em M4 com S como parâmetro de raio
Ainda para o modelo M4, com o uso da Eq. (3.16) no sistema (1.8), encontra-se as equações
do raio parametrizadas pelo comprimento de arco S tal como pode ser visto na Eq. (3.20).
As Eq. (3.17), (3.19) e (3.20) são as chamadas equações do raio, para o modelo M4, com os
parâmetros de raio τ , T e S, respectivamente. Quando se usa o método de Euler descrito
na seção (1.2.1), juntamente com as condições iniciais estipuladas em tais equações, pode-se
obter os campos de raios, bem como os seus respectivos tempos de trânsito numéricos:

37
dxdS
= px√(A4+B4 .x+C4 .z)
,
dzdS
= pz√(A4+B4 .x+C4 .z)
,
dTdS
=√A4 +B4 .x+ C4 .z ,
dpxdS
=B4
2.√
(A4+B4 .x+C4 .z),
dpzdS
=C4
2.√
(A4+B4 .x+C4 .z).
(3.20)
A Eq. (3.18) é usada para gerar as trajetórias dos raios e os tempos de trânsito analíticos,
e estes são usados como referencial para avaliação da acurácia do método numérico. O uso
do método de Euler nas Eqs. (3.17), (3.19) e (3.20), juntamente com as Eqs. (2.14) e (2.15),
resultam nos grá�cos dos erros nos tempos e nas posições de chegada dos raios. Esses erros
são mostrados com as trajetórias dos raios e os tempos nas Figs. 3.14 e 3.15. Ao usar o
método de Euler nas mesmas equações com a Eq. (2.16), pôde-se gerar os campos de erros
dos módulos da vagarosidade, referente aos traçamentos de raios gerados com os parâmetros
τ , T e S. Os campos de erros são mostrados na Fig. 3.16.
Ao comparar os grá�cos dos erros nas posições referentes às trajetórias de raios (para traçados
com os parâmetros τ , T e S) pode-se notar uma pequena superioridade em acurácia para
alguns raios parametrizados por τ , porém esse padrão não se repete sempre, ou seja, alguns
raios são menos (ou equivalentemente) acurados, quando comparados aos resultados relativos
aos outros parâmetros. A comparação entre os três grá�cos de desvio relativos dos tempos de
trânsito mostrados na Fig. 3.15, mostra que, para a maioria dos raios, os tempos de trânsito
calculados pelo método numérico, para as equações parametrizadas com S, apresentam mais
proximidade com os calculados pelo método analítico, pois apresentam erros de menores
magnitudes. Porém, novamente isso não acontece para todos os raios, pois para alguns deles
os tempos calculados, com parâmetro S, são muito maiores que para os outros parâmetros.
De tal maneira que: para o modelo M4 não se pode decidir, entre os aqui citados, um
parâmetro de raios que torne o traçamento (ou os tempos de trânsito) melhor do que os
demais. Os três campos de erros vagarosidade mostrados na Fig. 3.16, apresentam um
padrão muito semelhantes, porém as magnitudes do erros para o parâmetro T , apresenta-se
levemente superior.
No geral, para qualquer dos grá�cos de erros analisados e, para qualquer dos parâmetros
de raios usados, a abordagem numérica apresentou-se como um método satisfatório, pois
os dados calculados numericamente apresentou resultados próximos do esperado, isto é, os
erros apresentados possuem valores de ordem de grandeza muito menores que os dados cal-
culados. Podendo-se, assim, novamente dizer que o método de Euler é um método numérico
satisfatório quando usado na modelagem de tempos trânsito obtidos por traçamento de raios
em modelos semelhantes a M4.

38
(a) (b)
(c) (d)
0
0.0005
0.001
0.0015
0.002
0 20 40 60 80 100 120 140 160 180
Dis
tan
cia
(Km
)
Angulo de saida (graus)
(e)
0
0.0005
0.001
0.0015
0.002
0 20 40 60 80 100 120 140 160 180
Dis
tan
cia
(Km
)
Angulo de saida (graus)
(f)
0
0.0005
0.001
0.0015
0.002
0 20 40 60 80 100 120 140 160 180
Dis
tan
cia
(Km
)
Angulo de saida (graus)
(g)
Figura 3.14: Traçamento de raios no modelo M4, quando a fonte é colocada na posição
S0 = 1, 0 km. Em: (a) traçamento exato, (b) traçado numérico para o parâmetro τ , (c)
traçado numérico para o parâmetro T e (d) traçamento numérico para o parâmetro S. As
imagens (e), (f) e (g) exibem as distâncias entre as posições das chegadas dos raios exatos e
numéricos em função do ângulo de saída, traçados, respectivamente, com os parâmetros τ ,
T e S.

39
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(a)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(b)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(c)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(d)
0
0.05
0.1
0.15
0.2
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(e)
0
0.05
0.1
0.15
0.2
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(f)
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(g)
Figura 3.15: Tempos de trânsito dos traçados de raios da Fig 3.14, em função do ângulo
de saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o parâmetro τ , (c)
tempos numéricos para o parâmetro T e (d) tempos numéricos para o parâmetro S. As
imagens (e), (f) e (g) mostram os desvios relativos entre os tempos de trânsito dos raios
exatos e numéricos, quando calculados, respectivamente, com os parâmetros τ , T e S.

40
(a) Campo de erros do modelo M4, parâmetro τ .
(b) Campo de erros do modelo M4, parâmetro T .
(c) Campo de erros do modelo M4, parâmetro S.
Figura 3.16: Campos de erros dos módulos da vagarosidade dados pela Eq. (2.16), referentes
ao modelo M4, para os parâmetros τ , T e S.

41
3.1.5 Modelo de camadas planas verticais (M5)
Modelo M5
0 0.5 1 1.5 2 2.5 3 3.5 4
X - Afastamento (km)
0
0.2
0.4
0.6
0.8
1
Z -
Pro
fundid
ade (
km
)
2.2
2.4
2.6
2.8
3
3.2
3.4
3.6
3.8
4
Figura 3.17: Modelo M5: campo de velocidades de camadas planas verticais.
O modelo M5 representa um meio de camadas plano paralelas verticais que é semelhante ao
modelo M3, diferindo no fato de ter variações no campo de velocidades de maneira menos
suave, e também de ser parametrizado por uma expressão matemática mais complexa. A
Eq. (3.21), usada para gerar o modelo M5, tem termo de segundo grau dentro da raiz:
V5(x, z) =1√
A5 +B5 .x2, (3.21)
onde A5 = 0, 06815 s2/km2 e B5 = 0, 00801 s2/km4. A Fig. 3.17 mostra o modelo M5, com
velocidades variando desde 2, 2 a 4, 0 km/s.
Traçamento em M5 com τ como parâmetro do raio
dxdτ
= px,d2xdτ2
= B5 .x ,
dzdτ
= pz,d2zdτ2
= 0 ,
dTdτ
= A5 +B5 .x2 ,
dpxdτ
= B5 .x ,dpzdτ
= 0 .
(3.22)
A Eq. (3.22) representa o sistema de equações do raios parametrizadas pelo parâmetro
τ , para o modelo M5, que é encontrado pela substituição da Eq. (3.21) no sistema (1.9).

42
Quando se resolve a Eq. (3.22) de maneira analítica, com o auxílio das condições iniciais,
o resultado são as equações paramétricas da posição do raio, e do seu respectivo tempo de
trânsito, como visto em (3.23):
x(τ) = K51 .e√B5 .τ −K52 .e
−√B5 .τ ,
z(τ) =√A5 +B5 .S
2
0. sen(θ).τ ,
T (τ) = (A5 + 2.B5 .K51 .K52).τ +B5 .K
2
51.e
2.√B5 .τ
2.√B5
− B5 .K2
52.e−2.
√B5 .τ
2.√B5
+B5 .(K
2
52−K2
51)
2.√B5
,
K51 = 12.(S0 +
√A5+B5 .S
20
B5. cos θ) ,
K52 = 12.(S0 −
√A5+B5 .S
20
B5. cos θ),
(3.23)
onde S0 = 2, 0 km.
Traçamento em M5 com o tempo como parâmetro do raio
Usando a Eq. (3.21) no sistema (1.7), chega-se ao sistema de EDO's do raio parametrizado
por T tal como mostrado na Eq. (3.24):
dxdT
= pxA5+B5 .x
2 ,
dzdT
= pzA5+B5 .x
2 ,
dTdT
= 1 ,dpxdT
=B5 .x
(A5+B5 .x2),
dpzdT
= 0.
(3.24)
Traçamento em M5 com o comprimento de arco como parâmetro do raio
Para encontrar as equações do raio parametrizadas como parâmetro S, substitui-se a Eq.
(3.21) no sistema (1.8), o que resulta no sistema de EDO's dado pela Eq. (3.25):
dxdS
= px√A5+B5 .x
2,
dzdS
= pz√A5+B5 .x
2,
dTdS
=√A5 +B5 .x
2 ,dpxdS
=B5 .x√
A5+B5 .x2,
dpzdS
= 0.
(3.25)

43
Usando o método numérico, desenvolvido neste trabalho, nas Eqs. (3.22), (3.24) e (3.25),
encontrou-se as trajetórias dos raios e tempos de trânsito numéricos para o respectivos pa-
râmetros τ , T e S. Com a Eq. (3.23) gerou-se as trajetórias e tempos de trânsito dos raios
analíticos.
(a) (b)
(c) (d)
0
0.0002
0.0004
0.0006
0.0008
0.001
0.0012
0.0014
0 20 40 60 80 100 120 140 160 180
Dis
tanci
a (K
m)
Angulo de saida (graus)
(e)
0
0.0002
0.0004
0.0006
0.0008
0.001
0.0012
0.0014
0 20 40 60 80 100 120 140 160 180
Dis
tanci
a (K
m)
Angulo de saida (graus)
(f)
0
0.0002
0.0004
0.0006
0.0008
0.001
0.0012
0.0014
0 20 40 60 80 100 120 140 160 180
Dis
tanci
a (K
m)
Angulo de saida (graus)
(g)
Figura 3.18: Traçamento de raios no modelo M5, quando a fonte é colocada na posição
S0 = 2, 0 km. Em: (a) traçamento exato, (b) traçado numérico para o parâmetro τ , (c)
traçado numérico para o parâmetro T e (d) traçamento numérico para o parâmetro S. As
imagens (e), (f) e (g) exibem as distâncias entre as posições das chegadas dos raios exatos e
dos numéricos em função do ângulo de saída, traçados, respectivamente, com os parâmetros
τ , T e S.

44
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(a)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(b)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(c)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(d)
0
0.05
0.1
0.15
0.2
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(e)
0
0.05
0.1
0.15
0.2
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(f)
0
0.02
0.04
0.06
0.08
0.1
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(g)
Figura 3.19: Tempos de trânsito dos traçados de raios da Fig. 3.18, em função do ângulo
de saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o parâmetro τ , (c)
tempos numéricos para o parâmetro T e (d) tempos numéricos para o parâmetro S. As
imagens (e), (f) e (g) mostram os desvios relativos entre os tempos de trânsito dos raios
exatos e numéricos, quando calculados, respectivamente, com os parâmetros τ , T e S.
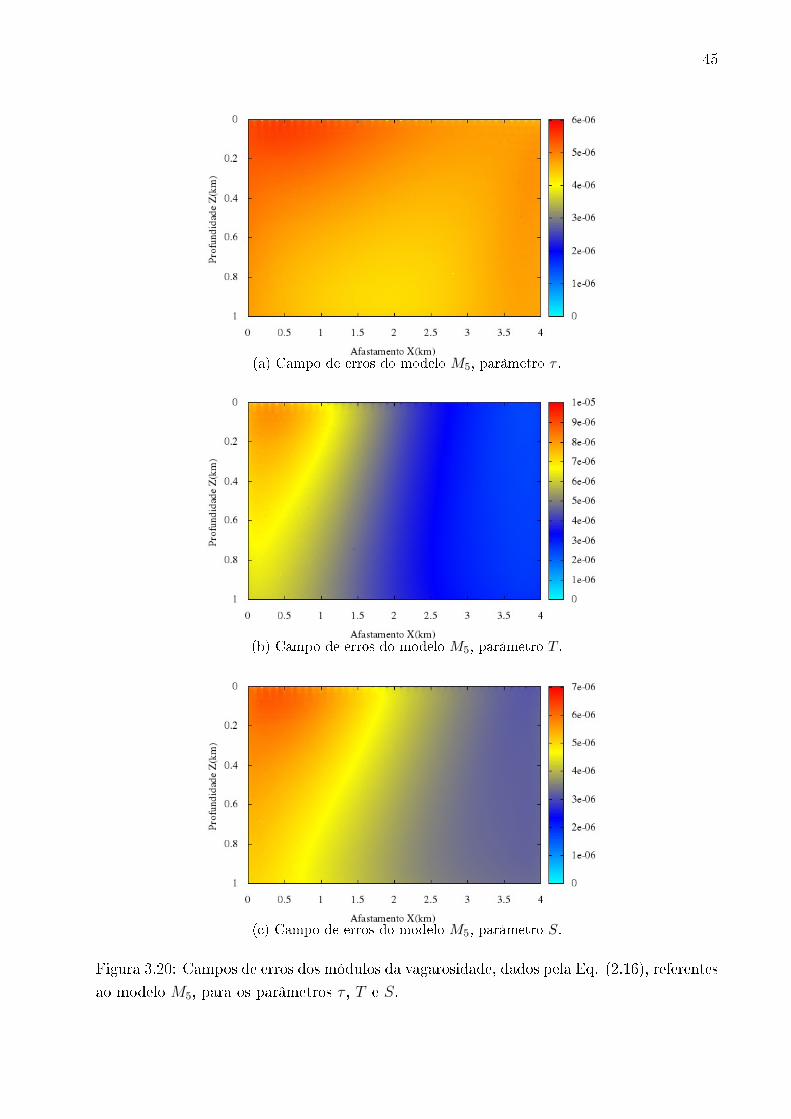
45
(a) Campo de erros do modelo M5, parâmetro τ .
(b) Campo de erros do modelo M5, parâmetro T .
(c) Campo de erros do modelo M5, parâmetro S.
Figura 3.20: Campos de erros dos módulos da vagarosidade, dados pela Eq. (2.16), referentes
ao modelo M5, para os parâmetros τ , T e S.

46
A avaliação dos erros cometidos nos resultados numéricos em relação aos analíticos, foram
calculados por meio das Eqs. (2.14) e (2.15). As trajetórias dos raios, juntamente com os
grá�cos dos erros nas posições de chegada são mostrados na Fig. 3.18. Já a Fig. 3.19, mostra
os respectivos tempos de trânsito e os grá�cos dos desvios relativos entre tempos numéricos
e exatos. Com o uso do método de Euler nas Eqs. (3.22), (3.24) e (3.25), em conjunto com
a Eq. (2.16), calculou-se os campos de erros da vagarosidade, referente aos traçamentos de
raios gerados para os parâmetros τ , T e S. Os campos de erros são mostrados na Fig. 3.20.
Quando se compara os grá�cos dos erros para os três parâmetros de raio, aquele cujo os
resultados apresentam erros ligeiramente menores nas posições de chegada é o parâmetro τ .
Já com relação ao tempo de trânsito, o parâmetro que torna o método mais acurado é o
comprimento de arco, porém essas diferenças de acurácia são bem sutis. O mesmo acontece
com os campos de erros da vagarosidade, de tal forma que tal comparação feita para o
modelo M5, para cada um dos parâmetros do raio, novamente não possibilita identi�car um
parâmetro que seja superior aos demais.
Como se pode notar nos grá�cos dos erros (tanto nas posições quanto nos tempos), que estes
assumem pequenas magnitudes quando comparados às ordens de grandezas dos dados. O
mesmo se diz dos campos de erros dos módulos da vagarosidade. Pode-se, então, novamente
quali�car que (por ter tido sucesso na modelagem de tempos de trânsito, por seu uso do
traçamento de raios no modelo M5) o método de Euler apresentou-se de modo satisfatório,
quando usado em modelos semelhantes aos aqui considerados.
3.1.6 Modelo de camadas plano horizontais (M6)
O modelo M6 sugere um meio geológico composto por um conjunto de camadas planas e
horizontais que tem sua gênese semelhante ao modelo M3. A grande diferença entre esses
dois modelos está nas equações que são usadas para a geração do campo de velocidades,
pois em M6 aparece um termo de graus dois dentro da raiz, coisa ausente em M3. Uma
outra distinção entre esses modelos está na variação de velocidades mais suaves em M3
relativamente a M6, já que no segundo caso a variação vertical está elevada ao quadrado.
O modelo M6 tem velocidades que variam de 3, 0 a 6, 0 km/s, essas variações ocorrem de
forma contínua, como pode ser notado na Fig. 3.21. A expressão usada para gerar M6 é
dada pela Eq. (3.26):
V6(x, z) =1√
A6 +B6 .z2, (3.26)
onde A6 = 0, 20 s2/km2 e B6 = −0, 135 s2/km4.

47
Modelo M6
0 0.5 1 1.5 2 2.5 3 3.5 4
X - Afastamento (km)
0
0.2
0.4
0.6
0.8
1
Z -
Pro
fundid
ade (
km
)
2.2
2.4
2.6
2.8
3
3.2
3.4
3.6
3.8
4
Figura 3.21: Modelo M6: campo de velocidades de camadas plano horizontais, dado em
km/s.
Traçamento em M6 com τ como parâmetro do raio
Usando a Eq. (3.26) no sistema (1.9), encontra-se-a o sistema de EDO's do raio parametri-
zado por τ , como é mostrado na Eq. (3.27):
dxdτ
= px ,d2xdτ2
= 0 ,
dzdτ
= pz ,d2zdτ2
= B6 .z ,
dTdτ
= A6 +B6 .z2 ,
dpxdτ
= 0 ,dpzdτ
= B6 .z .
(3.27)
Resolvendo-se a Eq. (3.27) de maneira analítica e com uso das condições iniciais, encontra-se
as equações paramétricas da trajetória do raio e a equação de seus tempos de trânsito, como
é mostrado na Eq. (3.28):x(τ) =
√A6 . cos(θ).τ + S0 ,
z(τ) =√
A6
|B6 |sen(θ).sen(
√|B6|.τ) ,
T (τ) = A6 .τ +B6 .A6
2.|B6 |.√|B6 |
.sen2(θ).(√|B6|.τ −
sen(2.√|B6 |.τ)
2
),
(3.28)
com S0 = 3, 0 km.

48
Traçamento em M6 com o tempo como parâmetro do raio
Para encontrar o sistema de equações do raio parametrizadas por T , aplica-se a Eq. (3.26)
no sistema (1.7), gerando o sistema de EDO's do raio (3.29):
dxdT
= pxA6+B6 .z
2 ,
dzdT
= pzA6+B6 .z
2 ,
dTdT
= 1 ,dpxdT
= 0 ,dpxdT
=B6 .z
A6+B6 .z2 .
(3.29)
Traçamento em M6 com comprimento de arco como parâmetro do raio
Usando a Eq. (3.26) no sistema (1.8), gera-se as equações do raio para o parametrizadas
pelo S mostrada na Eq. (3.30).
dxdS
= px√A6+B6 .z
2,
dzdS
= pz√A6+B6 .z
2,
dTdS
=√A6 +B6 .z
2
dpxdS
= 0,dpzdS
=B6 .z√
A6+B6 .z2.
(3.30)
O método de Euler, aplicado nas Eqs. (3.27), (3.29) e (3.30), gerou os traçamentos de raios
e os seus tempos de trânsito para os parâmetros τ , T e S. Usou-se a Eq. (3.28) para gerar
os traçados de raios e tempos de trânsito de maneira analítica. Com intuito de avaliar a
acurácia dos dados numéricos, foram usadas as Eqs. (2.14) e (2.15), que relacionam os dados
numéricos com os analíticos, quanti�cando as diferenças entre eles. Resolvendo-se as Eqs.
(3.27), (3.29) e (3.30) por meio do método numérico em conjunto com a Eq. (2.16), obteve-se
os campos de erros dos módulos da vagarosidade.
Analisando a Fig. 3.22, pode-se ver os trajetos dos raios numéricos e analíticos, e também os
grá�cos dos erros nas posições de chegadas deles. Comparando os grá�cos dos erros gerados
para cada parâmetro (τ , T e S), pode-se notar grande semelhança entre eles, sendo de certa
forma impossível, discernir sobre qual campos de raios numérico é mais acurado em relação
aos demais. A Fig. 3.23, traz os tempos de trânsito dos raios mostrados na Fig. 3.22, e
também os desvios relativos entre os tempos calculados de maneiras analítica e numérica.
Nota-se grande semelhança entre os desvios dos tempos quando se compara os grá�cos para
τ , T e S.

49
(a) (b)
(c) (d)
0
0.0005
0.001
0.0015
0.002
0.0025
0.003
0 20 40 60 80 100 120 140 160 180
Dis
tanci
a (K
m)
Angulo de saida (graus)
(e)
0
0.0005
0.001
0.0015
0.002
0.0025
0.003
0.0035
0 20 40 60 80 100 120 140 160 180
Dis
tanci
a (K
m)
Angulo de saida (graus)
(f)
0
0.0005
0.001
0.0015
0.002
0.0025
0.003
0 20 40 60 80 100 120 140 160 180
Dis
tanci
a (K
m)
Angulo de saida (graus)
(g)
Figura 3.22: Traçamento de raios, no modelo M6, quando a fonte é colocada na posição
S0 = 3, 0 km. Em: (a) traçamento exato, (b) traçado numérico para o parâmetro τ , (c)
traçado numérico para o parâmetro T e (d) traçamento numérico para o parâmetro S. Os
grá�cos (e), (f) e (g) exibem as distâncias entre as posições das chegadas dos raios exatos e
os numéricos em função do ângulo de saída, traçados, respectivamente, com τ , T e S.
A comparação dos campos de erros da vagarosidade da Fig. 3.24, mostra que para o parâ-
metro comprimento de arco S, o campo de erros apresenta, na média, menores magnitudes,
porém é algo muito sutil, podendo-se notar que a acurácia apresentada pelo método numérico
aplicada a M6, para os três parâmetros de raio, não difere muito entre eles.

50
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(a)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(b)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(c)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(d)
0
0.05
0.1
0.15
0.2
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(e)
0
0.05
0.1
0.15
0.2
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(f)
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(g)
Figura 3.23: Tempos de trânsito dos traçados de raios da Fig 3.22 em função do ângulo
de saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o parâmetro τ , (c)
tempos numéricos para o parâmetro T e (d) tempos numéricos para o parâmetro S. As
imagens (e), (f) e (g) mostram os desvios relativos entre os tempos de trânsito dos raios
exatos e os numéricos, quando calculados, respectivamente, com respeito aos parâmetros τ ,
T e S.

51
(a) Campo de erros do modelo M6, parâmetro τ .
(b) Campo de erros do modelo M6, parâmetro T .
(c) Campo de erros do modelo M6, parâmetro S.
Figura 3.24: Campos de erros dos módulos da vagarosidade, gerados pela Eq. (2.16), refe-
rentes a M6, para os parâmetros τ , T e S.

52
Com a observação das Figs. 3.22, 3.23 e 3.24, pode-se ver que os grá�cos e campos de erros,
apresentam magnitudes relativamente pequenas quando comparadas com as dimensões do
modelo, de tal maneira que, mesmo cometendo-se tais erros, o método pode ser usado sem
grande perdas aproximativas. Sendo assim, pode-se avaliar como satisfatório, o método
numérico de Euler, quando usado na modelagem de tempos de trânsito através de traçamento
de raios (para modelos semelhantes a M6) usando como parâmetro de raio τ , T ou S.
3.1.7 Modelo da anticlinal antiforme (M7)
Modelo M7
0 0.5 1 1.5 2 2.5 3 3.5 4
X - Afastamento (km)
0
0.2
0.4
0.6
0.8
1
Z -
Pro
fundid
ade (
km
)
2
2.5
3
3.5
4
4.5
Figura 3.25: Modelo M7: campo de velocidade da anticlinal antiforme.
O modelo M7, mostrado na Fig. 3.25, pode ser entendido como a fração de uma das estru-
turas geológicas mais procuradas pelos pro�ssionais de exploração de hidrocarboneto, que
é a anticlinal antiforme. Isto porque, quando sob condições adequadas de sincronismo com
a geração e migração de hidrocarbonetos, ela pode ser um excelente reservatório do tipo
armadilha. Este tipo de estrutura se forma em ambientes submetidos a esforços compressi-
onais, podendo ser explicado por meio da teoria da tectônica de placas. O modelo M7 tem
o campo de velocidades variando de 2, 2 a 4, 2 km/s. A Eq. (3.31) é usada para o campo
de velocidades do modelo M7 e este modelo é considerado como um meio isotrópico. Além
disso, a variação de velocidades ocorre de maneira continua e suave:
V7(x, z) =1√
A7 +B7 .x2 + C7 .z
, (3.31)
onde as constantes valem: A7 = 0, 13 s2/km2, B7 = 0, 0055 s2/km4 e C7 = −0, 079 s2/km3.

53
Traçamento em M7 com τ como parâmetro do raio
Para se obter as equações do raio, parametrizado por τ , usa-se a Eq. (3.31) no sistema (1.9),
que resulta nas EDO's do raio dadas pela Eq. (3.32):
dxdτ
= pxd2xdτ2
= B7.x ,
dzdτ
= pzd2zdτ2
= C7
2,
dTdτ
= A7 +B7 .x2 + C7 .z ,
dpxdτ
= B7 .x ,dpzdτ
=C7
2.
(3.32)
A solução analítica do sistema (3.32) resultou nas equações paramétricas do raio e na equação
de seu tempo de trânsito dadas pela Eq. (3.33):
x(τ) = 12.K71 .e
√B7 .τ + 1
2.K72 .e
−√B7 .τ ,
z(τ) =C7 .τ
2
4+√A7 +B7 .S
2
0 . sen(θ).τ ,
T (τ) = A7 .τ +B7 .
(K2
71.e2.√B7 .τ
2.√B7
+ 2.K71 .K72 .τ −K2
72.e−2.
√B7 .τ
2.√B7
)+
+C2
7.τ3
12+
C7.K73 .τ2
2+B7 .
(K2
72−K2
71
2.√B7
),
K71 =
(S0 +
√A7+B7 .S
20
B7. cos(θ)
),
K72 =
(S0 −
√A7+B7 .S
20
B7. cos(θ)
).
(3.33)
com S0 = 3, 0 km.
Traçamento em M7 com o tempo com parâmetro do raio
Usando a Eq. (3.31) no sistema de Eqs. (1.7), encontra-se o sistema de equações do raio
dado pela Eq. (3.34), correspondente ao parâmero de raio T :
dxdT
= pxA7+B7 .x
2+C7 .z,
dzdT
= pzA7+B7 .x
2+C7 .z,
dTdT
= 1 ,dpxdT
=B7 .x
A7+B7 .x2+C7 .z
,
dpzdT
=C7
2.(A7+B7 .x2+C7 .z)
.
(3.34)

54
Traçamento em M7 com comprimento do arco como parâmetro do raio
Para as EDO's do raio parametrizadas pelo comprimento do arco S, usa-se a Eq. (3.31) no
sistema (1.8), gerando as Eq. (3.35):
dxdS
= px√A7+B7 .x
2+C7 .z,
dzdS
= pz√(A7+B7 .x
2+C7 .z,
dTdS
=√A7 +B7 .x
2 + C7 .z ,dpxdS
=B7 .x√
A7+B7 .x2+C7 .z
,
dpzdS
=C7
2.√A7+B7 .x
2+C7 .z.
(3.35)
Usando o método de Euler nas Eqs. (3.32), (3.34) e (3.35), gerou-se as trajetórias dos raios
e os tempos de trânsito aproximados, para os respectivos parâmetros de raio τ , T e S. Já a
Eq. (3.33) foi usada para gerar as trajetórias e tempos de trânsito exatos. As Eqs. (2.15)
e (2.14) foram usadas nas comparações dos dados numéricos e analíticos, gerando assim os
erros nas posições e desvios nos tempos de percurso. Esses erros e desvios são mostrados
em grá�cos juntamente com os trajetos e tempos de trânsito dos raios nas Figs. 3.26 e 3.27.
Usando a Eq. (2.16) em conjunto com o método de Euler nas Eqs. (3.32), (3.34) e (3.35),
pôde-se encontrar os campos de erros da vagarosidade, referentes aos parâmetros τ , T e S.
Tais campos são mostrados na Fig. 3.28.
A observação das imagens permite fazer uma avaliação da acurácia do método para cada
parâmetro e assim estipular qual torna o método numérico mais próximo do procedimento
exato. Porém, assim como nos modelos anteriores, quando se compara a acurácia do método
numérico, pode-se notar uma semelhança muito grande entre os diferentes parâmetros. O
mesmo acontece com os grá�cos dos erros nos tempos e nos campos da vagarosidades de tal
forma que se torna impossível isolar um parâmetros que seja superior aos demais.
Todos os erros cometidos pelos procedimentos numéricos na geração dos dados, para qualquer
um dos parâmetros de raios, possuem dimensões muito pequenas relativamente aos dados
calculados, de maneira que novamente se pode dizer que o método de Euler é satisfatório na
modelagem numérica de tempos de trânsito para modelos similares a M7.

55
(a) (b)
(c) (d)
0
0.0005
0.001
0.0015
0.002
0.0025
0.003
0 20 40 60 80 100 120 140 160 180
Dis
tanci
a (K
m)
Angulo de saida (graus)
(e)
0
0.0005
0.001
0.0015
0.002
0.0025
0.003
0 20 40 60 80 100 120 140 160 180
Dis
tanci
a (K
m)
Angulo de saida (graus)
(f)
0
0.0005
0.001
0.0015
0.002
0.0025
0.003
0 20 40 60 80 100 120 140 160 180
Dis
tanci
a (K
m)
Angulo de saida (graus)
(g)
Figura 3.26: Traçamento de raios, no modelo M7, quando a fonte é colocada na posição
S0 = 3, 0 km. Em: (a) traçamento exato, (b) traçado numérico para o parâmetro τ , (c)
traçado numérico para o parâmetro T e (d) traçamento numérico para o parâmetro S. Os
grá�cos (e), (f) e (g) exibem as distâncias entre as posições das chegadas dos raios exatos e
numéricos em função do ângulo de saída, traçados, respectivamente, com os parâmetros τ ,
T e S.

56
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(a)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(b)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(c)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(d)
0
0.05
0.1
0.15
0.2
0.25
0.3
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(e)
0
0.05
0.1
0.15
0.2
0.25
0.3
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(f)
0
0.1
0.2
0.3
0.4
0.5
0.6
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(g)
Figura 3.27: Tempos de trânsito dos traçados de raios da Fig 3.26, em função do ângulo
de saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o parâmetro τ , (c)
tempos numéricos para o parâmetro T e (d) tempos numéricos para o parâmetro S. As
imagens (e), (f) e (g) mostram os desvios relativos entre os tempos de trânsito dos raios
exatos e os numéricos, quando calculados, respectivamente, com os parâmetros τ , T e S.

57
(a) Campo de erros do modelo M7, parâmetro τ .
(b) Campo de erros do modelo M7, parâmetro T .
(c) Campo de erros do modelo M7, parâmetro S.
Figura 3.28: Campos de erros dos módulos da vagarosidade, dados pela Eq. (2.16), referentes
ao modelo M7 para os parâmetros do raio τ , T e S.
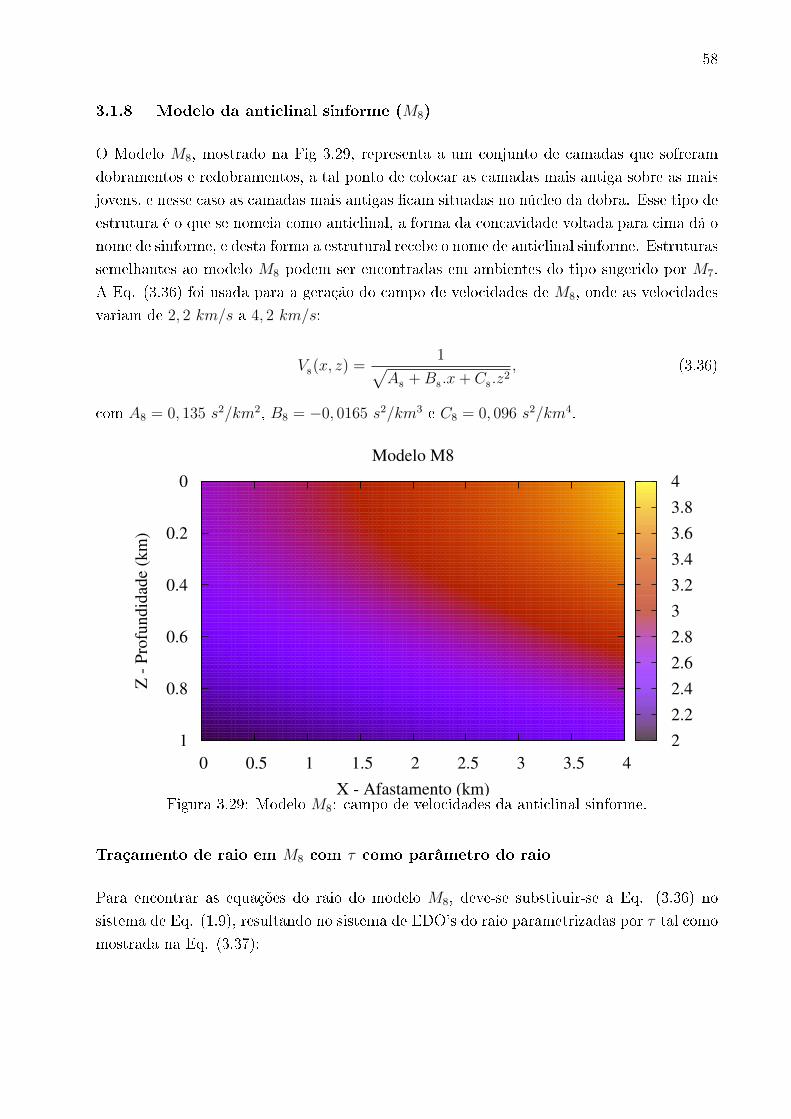
58
3.1.8 Modelo da anticlinal sinforme (M8)
O Modelo M8, mostrado na Fig 3.29, representa a um conjunto de camadas que sofreram
dobramentos e redobramentos, a tal ponto de colocar as camadas mais antiga sobre as mais
jovens, e nesse caso as camadas mais antigas �cam situadas no núcleo da dobra. Esse tipo de
estrutura é o que se nomeia como anticlinal, a forma da concavidade voltada para cima dá o
nome de sinforme, e desta forma a estrutural recebe o nome de anticlinal sinforme. Estruturas
semelhantes ao modelo M8 podem ser encontradas em ambientes do tipo sugerido por M7.
A Eq. (3.36) foi usada para a geração do campo de velocidades de M8, onde as velocidades
variam de 2, 2 km/s a 4, 2 km/s:
V8(x, z) =1√
A8 +B8 .x+ C8 .z2, (3.36)
com A8 = 0, 135 s2/km2, B8 = −0, 0165 s2/km3 e C8 = 0, 096 s2/km4.
Modelo M8
0 0.5 1 1.5 2 2.5 3 3.5 4
X - Afastamento (km)
0
0.2
0.4
0.6
0.8
1
Z -
Pro
fundid
ade (
km
)
2
2.2
2.4
2.6
2.8
3
3.2
3.4
3.6
3.8
4
Figura 3.29: Modelo M8: campo de velocidades da anticlinal sinforme.
Traçamento de raio em M8 com τ como parâmetro do raio
Para encontrar as equações do raio do modelo M8, deve-se substituir-se a Eq. (3.36) no
sistema de Eq. (1.9), resultando no sistema de EDO's do raio parametrizadas por τ tal como
mostrada na Eq. (3.37):

59
dxdτ
= px,d2xdτ2
=B8
2,
dzdτ
= pz,d2zdτ2
= C8 .z ,
dTdτ
= A8 +B8 .x+ C8 .z2 ,
dpxdτ
=B8
2,
dpzdτ
= C8 .z .
(3.37)
Resolvendo-se analiticamente o sistema (3.37), com a ajuda das condições iniciais, pode-se
encontrar as equações paramétricas da posição e dos tempos de trânsito dados pela Eq.
(3.38):
x(τ) =B8 .τ
2
4+√A8 +B8 .S0 . cos(θ).τ + S0 ,
z(τ) =
(√A8+B8 .S0
4.C8. sin(θ)
)(e√C8 .τ − e−
√C8 .τ
),
T (τ) = (A8
+B8.S0).τ +
B2
8 .τ3
12+B8 .
√A8+B8 .S0
2. cos(θ).τ 2+
+
((A8+B8 .S0 ). sin2 θ
4
).
(e2.√C8 .τ− e
−2.√C8 .τ
2.√C8
− 2.τ
),
(3.38)
com S0 = 2, 0 km.
Traçamento em M8 com o tempo como parâmetro de raio
A inserção da Eq. (3.36) no sistema de Eqs. (1.7), gerou-se o sistema de equações do raio,
parametrizado pelo parâmetro T , para o modelo M8, como pode ser visto na Eq. (3.39):
dxdT
= pxA8+B8.x+C8.z2
,
dzdT
= pzA8+B8.x+C8.z2
,
dTdT
= 1 ,dpxdT
= B8
2.(A8+B8.x+C8.z2),
dpzdT
= C8.zA8+B8.x+C8.z2
.
(3.39)
Traçamento de raio em M8, com S como parâmetro do raio
Substituindo a Eq. (3.36) no sistema (1.8), encontra-se como resultado a Eq. (3.40), que é
o sistema de EDO's do raio, parametrizado pelo comprimento de arco S:

60
dxdS
= px√A8+B8.x+C8.z2
,
dzdS
= pz√A8+B8.x+C8.z2
,
dTdS
=√A8 +B8 .x+ C8 .z
2 ,dpxdS
= B8
2.√A8+B8.x+C8.z2
,
dpzdS
= C8.z√A8+B8.x+C8.z2
.
(3.40)
Usando-se o método numérico de Euler nas Eqs. (3.37), (3.39) e (3.40), pôde-se encontrar
as trajetórias dos raios e tempos de trânsitos numéricos, para cada um dos parâmetros de
raios τ , T e S, respectivamente. A Eq. (3.38) serviu como base para geração dos trajetos de
raios e tempos de trânsito analíticos.
A critério de comparação quantitativa, usou-se as Eqs. (2.15) e (2.14), para calcular os erros
entre os dados analíticos e os numéricos. As Fig. 3.30 e 3.31, exibem os resultados dos traça-
dos de raios, numéricos e analítico, e os tempos de trânsito. Nessas �guras ainda é possível
se ver os grá�cos dos erros nas posições de chegada dos raios e nos tempos de trânsito.
Usando a Eq. (2.16), e o método de Euler nas Eqs. (3.37), (3.39) e (3.40), pôde-se gerar os
campos de erros dos módulos da vagarosidade, para cada traçado de raio com os parâmetros
τ , T e S. Esses campos de erros são mostrados na Fig. 3.32.
Por meio dos grá�cos dos erros nas posições, mostrados na Fig. 3.30, pode-se perceber que
as trajetórias numéricas dos raios apresentam grande semelhanças quando comparados entre
si, pois os erros para raios, que possuem mesmas condições iniciais, são bem pequenos. Ao
comparar os erros nos tempos de trânsito, mostrados na Fig. 3.31, pode-se notar uma grande
proximidade entre os valores dos erros, porém os tempos calculados com as equações para-
metrizadas por S apresentam-se um pouco mais acurados que os demais, já que apresentam
erros menores. Na comparação entre os campos de erros da vagarosidade mostrados na Fig.
3.32, pode-se perceber grande semelhança no padrão de erros entre eles, porém o campo de
erros para o parâmetro S apresenta uma leve vantagem sobre os demais, por possuir, em
alguns pontos do modelo, erros de menores magnitudes.
Com essa discussão, pode-se perceber que a modelagem de tempos de trânsito no modeloM8,
apresentou-se levemente mais vantajosa quando as equações do raios foram parametrizadas
com o parâmetro S.
No geral, para qualquer um dos parâmetros de raios, os erros apresentados com a abordagem
numérica são sempre de ordem de grandeza muito menores que os dados calculados. Assim
pode-se dizer que a modelagem de tempos de trânsito com uso de traçamento de raios numé-
rico apresentou excelentes resultados, e, então, classi�car o método de Euler como e�ciente
neste tipo de modelagem para modelos semelhantes ao M8.

61
(a) (b)
(c) (d)
0
0.0002
0.0004
0.0006
0.0008
0.001
0.0012
0.0014
0 20 40 60 80 100 120 140 160 180
Dis
tanci
a (K
m)
Angulo de saida (graus)
(e)
0
0.0005
0.001
0.0015
0.002
0 20 40 60 80 100 120 140 160 180
Dis
tanci
a (K
m)
Angulo de saida (graus)
(f)
0
0.0005
0.001
0.0015
0.002
0 20 40 60 80 100 120 140 160 180
Dis
tanci
a (K
m)
Angulo de saida (graus)
(g)
Figura 3.30: Traçamento de raios no modelo M8, quando a fonte é colocada na posição
S0 = 2, 0 km. Em: (a) traçamento exato, (b) traçado numérico para o parâmetro τ , (c)
traçado numérico para o parâmetro T e (d) traçamento numérico para o parâmetro S. Os
grá�cos (e), (f) e (g) exibem as distâncias entre as posições das chegadas dos raios exatos e
os numéricos em função do ângulo de saída, traçados, respectivamente, com os parâmetros
τ , T e S.

62
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(a)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(b)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(c)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(d)
0
0.05
0.1
0.15
0.2
0.25
0.3
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(e)
0
0.05
0.1
0.15
0.2
0.25
0.3
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(f)
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(g)
Figura 3.31: Tempos de trânsito dos traçados de raios da Fig 3.30, em função do ângulo
de saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o parâmetro τ , (c)
tempos numéricos para o parâmetro T e (d) tempos numéricos para o parâmetro S. Os
grá�cos (e), (f) e (g) mostram os desvios relativos entre os tempos de trânsito dos raios
exatos e os numéricos, quando calculados, respectivamente, com os parâmetros τ , T e S.
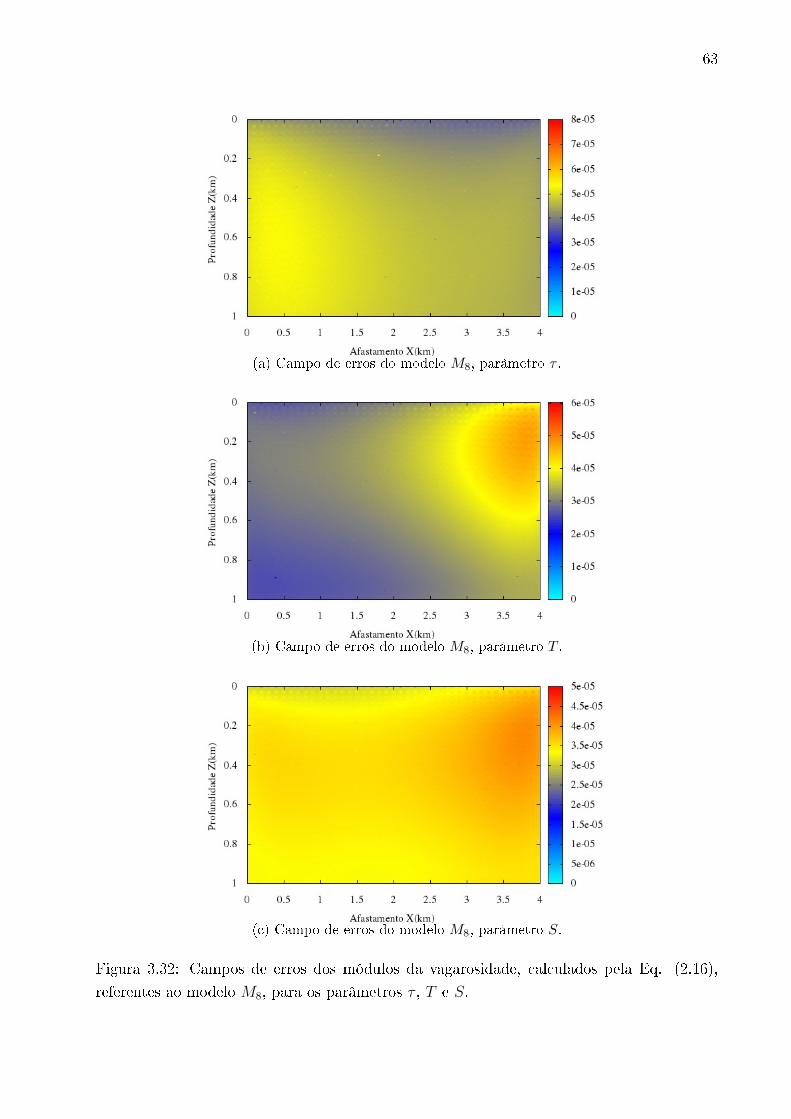
63
(a) Campo de erros do modelo M8, parâmetro τ .
(b) Campo de erros do modelo M8, parâmetro T .
(c) Campo de erros do modelo M8, parâmetro S.
Figura 3.32: Campos de erros dos módulos da vagarosidade, calculados pela Eq. (2.16),
referentes ao modelo M8, para os parâmetros τ , T e S.
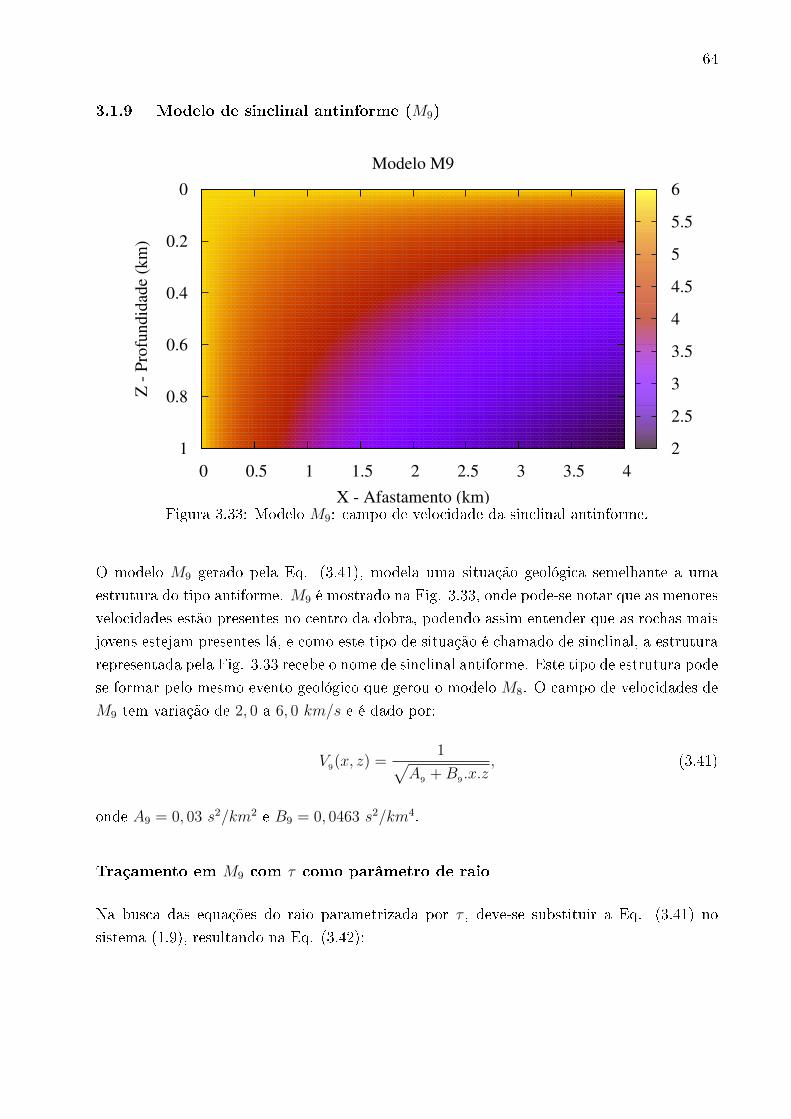
64
3.1.9 Modelo de sinclinal antinforme (M9)
Modelo M9
0 0.5 1 1.5 2 2.5 3 3.5 4
X - Afastamento (km)
0
0.2
0.4
0.6
0.8
1
Z -
Pro
fundid
ade (
km
)
2
2.5
3
3.5
4
4.5
5
5.5
6
Figura 3.33: Modelo M9: campo de velocidade da sinclinal antinforme.
O modelo M9 gerado pela Eq. (3.41), modela uma situação geológica semelhante a uma
estrutura do tipo antiforme. M9 é mostrado na Fig. 3.33, onde pode-se notar que as menores
velocidades estão presentes no centro da dobra, podendo assim entender que as rochas mais
jovens estejam presentes lá, e como este tipo de situação é chamado de sinclinal, a estrutura
representada pela Fig. 3.33 recebe o nome de sinclinal antiforme. Este tipo de estrutura pode
se formar pelo mesmo evento geológico que gerou o modelo M8. O campo de velocidades de
M9 tem variação de 2, 0 a 6, 0 km/s e é dado por:
V9(x, z) =1√
A9 +B9 .x.z, (3.41)
onde A9 = 0, 03 s2/km2 e B9 = 0, 0463 s2/km4.
Traçamento em M9 com τ como parâmetro de raio
Na busca das equações do raio parametrizada por τ , deve-se substituir a Eq. (3.41) no
sistema (1.9), resultando na Eq. (3.42):

65
dxdτ
= px,d2xdτ2
=B9
2.z ,
dzdτ
= pz,d2zdτ2
=B9
2.x ,
dTdτ
= A9 +B9 .x.z ,dpxdτ
=B9
2.z ,
dpzdτ
=B9
2.x .
(3.42)
Resolvendo analiticamente a Eq. (3.42), encontrou-se as equações paramétricas da posição
e a equação dos tempos de trânsito, como mostrado na Eq. (3.43):
x(τ) = K91 .e
√B92 .τ
+ K92 .e−
√B92 .τ
+ K93 . cos(√
B9
2.τ) + K94 .sen(
√B9
2.τ),
z(τ) = K95 .e
√B92 .τ
+ K96 .e−
√B92 .τ
+ K97 . cos(√
B9
2.τ) + K98 .sen(
√B9
2.τ),
T =
[A9 + B9 .
(K91 .K96 + K92 .K95 +
(K93 .K97 + K94 .K98
2
))].τ +
+B9 .(K93 .K97−K94 .K98
2.√
2.B9
).sen(
√2.B9 .τ) +B9 .
(K93 .K98+K94 .K97√
2.B9
).sen2
(√B9
2.τ)
+
+ B9 .(K91 .K95√
2.B9
).e√
2.B9 .τ − B9 .(K92 .K96√
2.B9
).e
−√
2.B9 .τ + B9 .(K92 .K96−K91 .K95√
2.B9
)com
K94 = 12.[√
2.A9
B9.(
cos(θ)− sen(θ))], K91 = 1
4.[S0 +
√2.A9
B9.(
cos(θ) + sen(θ))],
K98 = 12.[√
2.A9
B9.(
sen(θ)− cos(θ))], K92 = 1
4.[S0 −
√2.A9
B9.(
cos(θ) + sen(θ))],
K95 = 14.[S0 +
√2.A9
B9.(sen(θ) + cos(θ)
)], K93 = 1
2.S0 , K97 = −1
2.S0 ,
K96 = 14.[S0 −
√2.A9
B9.(sen(θ) + cos(θ)
)].
(3.43)
onde S0 = 1, 0 km.
Traçamento em M9 com tempo como parâmetro do raio
Substituindo a Eq. (3.41) no sistema de Eqs. (1.7), encontra-se as EDO's do raio parame-
trizadas por T , como mostrado na Eq. (3.44):
dxdT
= pxA9+B9 .x.z
,
dzdT
= pzA9+B9 .x.z
,
dTdT
= 1 ,dpxdT
=B9 .z
2.(A9+B9 .x.z),
dpzdT
=B9 .x
2.(A9+B9 .x.z).
(3.44)

66
Traçamento em M9 com S como Parâmetro de Raio
Por �m, usa-se a Eq. (3.41) no sistema (1.8), o que resulta no sistema de equações do raio
referente ao parâmetro S dado pela Eq.(3.45):
dxdS
= px√A9+B9 .x.z
,
dzdS
= pz√A9+B9 .x.z
,
dTdS
=√A9 +B9 .x.z ,
dpxdS
=B9 .z
2.√A9+B9 .x.z
,
dpzdS
=B9 .x
2.√A9+B9 .x.z
.
(3.45)
Usando o método de Euler nas Eqs. (3.42), (3.44) e (3.45), pôde-se gerar os campos de raios
e tempos de trânsito numéricos referentes aos parâmetros τ , T e S, respectivamente. A Eq.
(3.43) serviu como base para a geração dos traçamentos de raios e seus tempos de trânsito
analíticos. Para fazer a comparação entre os resultados numéricos usou-se as Eqs. (2.15) e
(2.14), o que possibilitou a geração dos erros nas posições e erros nos tempos.
Com uso do método numérico de Euler em conjunto com as Eqs. (2.16), (3.42), (3.44) e
(3.45), gerou-se os campos de erros da vagarosidade para as trajetórias de raios referentes
aos parâmetros τ , T e S, respectivamente.
Comparando os grá�cos de erros, assim como os campos de erros da vagarosidade, pode-
se notar uma forte equivalência em relação à acurácia da abordagem numérica, para cada
um dos parâmetros de raio, sendo difícil estipular aquele que torna a abordagem numérica,
relativamente, mais acurada.
A função matemática usada para representar o modelo M9 é regida pelo inverso da raiz
quadrada de um polinômio, assim como todos os outros modelos usados anteriormente,
porém o tipo de polinômio aqui usado é de grau dois com termos cruzados. Funções que são
descritas por estes tipos de polinômios apresentam alta instabilidade, assim por este motivo
já era de se esperar que o procedimento numérico feito no modelo M9 apresentasse erros
relativamente maiores que os apresentados nas situações anteriores como pode ser notado
nos grá�cos dos erros mostrados nas Figs. 3.35 e 3.34, bem como nos campos de erros das
Fig. 3.36.
Mesmo com os erros apresentados nesta seção sendo relativamente maiores que em algumas
das situações anteriores, estes resultados são de boa qualidade, pois quando se leva em conta
o fato da alta instabilidade do modelo e o fato de que os erros são de dimensões bem menores
àquelas do modelo, tais erros estão abaixo do limite esperado.

67
(a) (b)
(c) (d)
0
0.0005
0.001
0.0015
0.002
0.0025
0.003
0 20 40 60 80 100 120 140 160 180
Dis
tanci
a (K
m)
Angulo de saida (graus)
(e)
0
0.0005
0.001
0.0015
0.002
0.0025
0.003
0 20 40 60 80 100 120 140 160 180
Dis
tanci
a (K
m)
Angulo de saida (graus)
(f)
0
0.0005
0.001
0.0015
0.002
0.0025
0.003
0 20 40 60 80 100 120 140 160 180
Dis
tanci
a (K
m)
Angulo de saida (graus)
(g)
Figura 3.34: Traçamento de raios no modelo M9, quando a fonte é colocada na posição
S0 = 1, 0 km. Em: (a) traçamento exato, (b) traçado numérico para o parâmetro τ , (c)
traçado numérico para o parâmetro T e (d) traçamento numérico para o parâmetro S. Os
grá�cos (e), (f) e (g) exibem as distâncias entre as posições das chegadas dos raios exatos e
numéricos em função do ângulo de saída, traçados, respectivamente, com os parâmetros τ ,
T e S.

68
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(a)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(b)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(c)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(d)
0
0.05
0.1
0.15
0.2
0.25
0.3
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(e)
0
0.05
0.1
0.15
0.2
0.25
0.3
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(f)
0
0.05
0.1
0.15
0.2
0.25
0.3
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(g)
Figura 3.35: Tempos de trânsito dos traçados de raios da Fig 3.34, em função do ângulo
de saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o parâmetro τ , (c)
tempos numéricos para o parâmetro T e (d) tempos numéricos para o parâmetro S. Os
grá�cos (e), (f) e (g) mostram os desvios relativos entre os tempos de trânsito dos raios
exatos e os numéricos, quando calculados, respectivamente, com os parâmetros τ , T e S.

69
(a) Campo de erros do modelo M9, parâmetro τ .
(b) Campo de erros do modelo M9, parâmetro T .
(c) Campo de erros do modelo M9, parâmetro S.
Figura 3.36: Campos de erros dos módulos da vagarosidade, dados pela Eq. (2.16) referentes
ao modelo M9 para os parâmetros τ , T e S.

70
3.1.10 Modelo da intrusão granítica (M10)
Modelo M10
0 0.5 1 1.5 2 2.5 3 3.5 4
X - Afastamento (km)
0
0.2
0.4
0.6
0.8
1
Z -
Pro
fundid
ade (
km
)
1
2
3
4
5
6
7
8
Figura 3.37: Modelo M10: campo de velocidades da intrusão granítica
O último modelo que será submetido aos testes, é o modeloM10, que tem a Eq. (3.46), como
função geradora. Ela é semelhante a todas as outras, ou seja, trata-se da raiz quadrada de
um polinômio, porém a Eq. (3.46), apresenta uma complexidade muito maior que as demais,
e assim o modelo M10, é em termos matemáticos, o mais complexo de todos os aqui apresen-
tados. Em termos geológicos, M10 tenta retratar uma situação em que um meio homogêneo
recebe uma intrusão anômala, que pode ser por exemplo magma. Este magma enquanto
quente agiu mudando as propriedades preofísicas das rochas de sua vizinhança, gerando o
que se chama de metamor�smo de contato, que após esfriar e solidi�car-se apresentou a
estrutura tal como mostra a Fig. 3.37. Desta forma as variação de velocidades no entorno
desse corpo ocorrem de forma suave e contínua. Este tipo de situação acontece quando a
ação de correntes de convecção transportam o magma mantélico, até regiões da crosta, em
uma velocidade relativamente alta a ponto de não haver tempo deste magma solidi�car no
caminho que a trouxe até a posição atual. A expressão matemática de M10 é, então, dada
por:
V10(x, z) =1√
A10 +B10 .x2 + C10 .z
2 + F10 .x+G10 .z, (3.46)
comA10 = 0, 753 s2/km2, B10 = 0, 0983 s2/km4, C10 = 0, 764 s2/km4, F10 = −0, 4575 s2/km3
e G10 = −0, 786 s2/km3.

71
Traçamento em M10 com τ como parâmetro do raio
Como feito em todos os modelos anteriores, aplica-se a equação do campo de velocidades
na Eq. (1.9), gerando o sistema de EDO's do raio parametrizada por τ , mostrado na Eq.
(3.47):
dxdτ
= px ,d2xdτ2
= B10 .x+F10
2,
dzdτ
= pz ,d2zdτ2
= C10 .z +G10
2,
dTdτ
= A10 +B10 .x2 + C10 .z
2 + F10 .x+G10 .z ,dpxdτ
= B10 .x+F10
2,
dpzdτ
= C10 .z +G10
2.
(3.47)
Resolvendo o sistema de Eq. (3.47) de maneira analítica, e usando as condições iniciais,
encontrou-se a Eq. (3.48), que representa as equações paramétricas da posição do raio, e dos
seus tempos de trânsito, para o modelo M10:
x(τ) = K11 .e√B10 .τ +K12 .e
−√B10 .τ − F10
2.B10,
z(τ) = K13 .e√C10 .τ +K14 .e
−√C10 .τ − G10
2.C10,
T (τ) = (A10 −F 210
4.B10+ 2.B10 .K11 .K12 −
G210
4.C10+ 2.C10 .K13 .K14).τ + K15 +
+B10 .K
211.e
2.√B10 .τ
2.√B10
− B10 .K212.e
−2.√B10 .τ
2.√B10
+C10 .K
213.e
2.√C10 .τ
2.√C10
− C10 .K214.e
−2.√C10 .τ
2.√C10
,
K15 =
(B10 .K
212−B10 .K
211
2.√B10
+C10 .K
214−C10 .K
213
2.√C10
),
K11 = 12.
(F10
2.B10+ S0 +
√A10+B10 .S
20+F10 .S0
B10. cos(θ)
),
K13 = 12.
(G10
2.C10+
√A10+B10 .S
20+F10 .S0
C10.sen(θ)
),
K12 = 12.
(F10
2.B10+ S0 −
√A10+B10 .S
20+F10 .S0
B10. cos(θ)
),
K14 = 12.
(G10
2.C10−√
A10+B10 .S20+F10 .S0
C10.sen(θ)
)
(3.48)
com S0 = 3, 0 km.
Traçamento em M10 com parâmetro tempo
Aplicando a Eq. (3.46) no sistema (1.7), pôde-se encontrar as equações do raio parametri-
zadas por T conforme a Eq. (3.49):

72
dxdT
= pxA10+B10 .x
2+C10 .z2+F10 .x+G10 .z
,
dzdT
= pzA10+B10 .x
2+C10 .z2+F10 .x+G10 .z
,
dTdT
= 1 ,dpxdT
=2.B10 .x+F10
2.(A10+B10 .x2+C10 .z
2+F10 .x+G10 .z),
dpzdT
=2.C10 .z+G10
2.(A10+B10 .x2+C10 .z
2+F10 .x+G10 .z).
(3.49)
Traçamento em M10 com comprimento do arco como parâmetro de raio
Por �m, para encontrar as equações do raio referentes ao parâmetro S, substitui-se a Eq.
(3.46) no sistema (1.8), gerando assim a Eq. (3.50):
dxdS
= px√A10+B10 .x
2+C10 .z2+F10 .x+G10 .z
,
dzdS
= pz√A10+B10 .x
2+C10 .z2+F10 .x+G10 .z
,
dTdS
=√A10 +B10 .x
2 + C10 .z2 + F10 .x+G10 .z ,
dpxdS
=2.B10 .x+F10
2.√A10+B10 .x
2+C10 .z2+F10 .x+G10 .z
,
dpzdS
=2.C10 .z+G10
2.√A10+B10 .x
2+C10 .z2+F10 .x+G10 .z
.
(3.50)
Usando o método numérico nas Eqs. (3.47), (3.49) e (3.50), gerou-se os traçamentos de raios
e os seus tempos de trânsito de maneira aproximada. Com o uso da Eq. (3.48) gerou-se as
trajetórias dos raios e os tempos de trânsito analítico. Com as Eqs. (2.15) e (2.14) pôde-se
comparar os resultados analíticos com os numéricos, gerando assim erros nos tempos e nas
posições de registro dos raios. Os grá�cos dos erros nas posições são mostrados na Fig. 3.38,
já os tempos de trânsito e seus erros são exibidos na Fig. 3.39.
Com o uso do método de Euler juntamente com as Eqs. (2.16), (3.47), (3.49) e (3.50), pôde-
se gerar os campo de erros da vagarosidade, referentes ao modelo M10, que são mostrados na
Fig. 3.40. Quando se compara os raios gerados pelas equações do raio para cada parâmetro
de raio, pode-se notar grande semelhança nos valores dos erros. A comparação dos erros nos
tempos de trânsito, para as equações do raio com τ , T e S, mostra valores com magnitudes
próximos, porém pode-se notar que o padrão de erros nos tempos quando calculados pelas
equações parametrizadas por τ , são diferentes dos com T e S.
Os campos de erros da vagarosidade mostrados na Fig. 3.40, exibem um padrão de erros
semelhante para os parâmetro T e S, porém grande distinção para o parâmetro τ . Nas regiões
onde os campos de erros para os parâmetros T e S, exibem menores erros, são justamente as
regiões em que o campo de erros para o parâmetro τ , exibe os maiores erros. Este fato pode
ser explicado levando-se em conta que, diferentemente de T e S, o parâmetro τ não possui
sentido físico.

73
(a) (b)
(c) (d)
0
0.002
0.004
0.006
0.008
0.01
0.012
0 20 40 60 80 100 120 140 160 180
Dis
tan
cia
(Km
)
Angulo de saida (graus)
(e)
0
0.002
0.004
0.006
0.008
0.01
0.012
0 20 40 60 80 100 120 140 160 180
Dis
tan
cia
(Km
)
Angulo de saida (graus)
(f)
0
0.002
0.004
0.006
0.008
0.01
0.012
0 20 40 60 80 100 120 140 160 180
Dis
tan
cia
(Km
)
Angulo de saida (graus)
(g)
Figura 3.38: Traçamento de raios no modelo M10, quando a fonte é colocada na posição
S0 = 2, 5 km. Em: (a) traçamento exato, (b) traçado numérico para o parâmetro τ , (c)
traçado numérico para o parâmetro T e (d) traçamento numérico para o parâmetro S. Os
grá�cos (e), (f) e (g) exibem as distâncias entre as posições das chegadas dos raios exatos e
os numéricos em função do ângulo de saída, traçados, respectivamente, com os parâmetros
τ , T e S.

74
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(a)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(b)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(c)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Tem
po (s
)
Angulo de saida (graus)
(d)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(e)
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(f)
0
2
4
6
8
10
12
14
0 20 40 60 80 100 120 140 160 180
Des
vio
rel
ativ
o (
%)
Angulo de saida (graus)
(g)
Figura 3.39: Tempos de trânsito dos traçados de raios da Fig 3.38, em função do ângulo
de saída da fonte. Em: (a) tempos exatos, (b) tempos numéricos para o parâmetro τ , (c)
tempos numéricos para o parâmetro T e (d) tempos numéricos para o parâmetro S. Os
grá�cos (e), (f) e (g) mostram os desvios relativos entre os tempos de trânsito dos raios
exatos e os numéricos, quando calculados, respectivamente, com os parâmetros τ , T e S.

75
(a) Campo de erros do modelo M10, parâmetro τ .
(b) Campo de erros do modeloM10, parâmetro T .
(c) Campo de erros do modelo M10, parâmetro S.
Figura 3.40: Campos de erros dos módulos da vagarosidade, dados pela Eq. (2.16) referentes
ao modelo M10 para os parâmetros τ , T e S.

76
Naturalmente por ser o modelo que apresenta maior complexidade em relação aos outros
apresentados, o modelo M10 tem os seus erros de maiores magnitude que os que o antece-
deram, entretanto mesmo com valores maiores, ainda assim esses erros não são grande o
su�ciente a tal ponto de comprometer os dados numéricos. De tal maneira que novamente
pode-se classi�car como bom o método de Euler quando usado para tal modelagem.
Sistematicamente, todos os modelos de campo de velocidades usados neste trabalho, tinha
como equação geradora uma função do tipo a o inverso da raiz quadrada de um polinômio,
isto pois quando esse tipo de função é usada no sistema de equações do raio para o parâmetro
τ , o resultado é um sistemas de EDO's de possíveis de resolução analítica, de tal forma que
para todas as situações foi possível gerar dados analíticos, para comparação e avaliação da
acurácia dos dados numéricos.

CAPÍTULO 4
Discussão e Conclusões
Em muitas situações do processamento de dados sísmicos, é feito uso de traçamento de raios
como ferramenta de investigação do campo de velocidades, e tal traçado é feito por métodos
de aproximação. Este trabalho teve como �nalidade avaliar a acurácia da abordagem numé-
rica do traçamento de raios na modelagem sísmica de tempo de trânsito, e estabelecer um
parâmetro que tornasse tal modelagem o mais acurada possivel.
Exaustivamente foram feito testes no método numérico de Euler no traçado de raios sísmico,
para diversas situações de modelos de campos de velocidades. Em todas as situações foram
obtidos erros com o uso do método numérico, como era de se esperar, visto que se trata de
uma aproximação. Os erros dependem: da complexidade do campo de velocidades usado, do
parâmetro de raio das equações, do módulo do passo e da dimensões dos modelos. Assim,
a variação de cada um desses fatores, afetaria de maneira diferente a acurácia do traçado,
como foi notado no desenrolar do trabalho.
Em algumas situações houve grande difernça entre os padrões de erros da abordagem nu-
mérica para os diferentes parâmetros de raio, sendo que para os parâmetros T e S o padrão
era um, enquanto que para τ o padrão era outro. Isto pode ser explicado por dois fatores:
primeiro pelo fato de que o parâmetro τ não possui signi�cância física, enquanto que os
outros dois têm. Segundo pois o relacionamento estabelecido entre os parâmetros por meio
das Eqs. (2.21) é feito por meio de media da velocidade, e não em cada ponto onde ocorre
atualização do raio e mudança da velocidade. Na maioria das situações quando se comparou
a acurácia do método numérico, aplicado nas equações do raios parametrizada de diferentes
modos, pode-se notar valores muito próximos entre eles, de forma que pôde-se concluir, a
esse respeito, que a acurácia do método numérico depende muito menos do parâmetro de
raio do que se imaginava, e acredita-se que se o relacionamento entre os parâmetros fosse
feito de outra maneira, o resultado apresentado por eles seria igual.
Como visto, o método foi testado exaustivamente em dez modelos ao todo, isto pois se trata
de um trabalho avaliativo, e neste tipo de trabalho a redundância de resultados é necessária.
Como pôde-se ver em todos os modelos testados, a abordagem numérica mostrou-se muito
satisfatória, pois tanto nos grá�cos de erros, como nos campos de erros da vagarosidade,
com exceção dos modelos M9 e M10, onde os erros apresentados foram um pouco maiores,
77

78
porém aceitáveis, a dimensão dos erros foram sempre muito menores que as dimensões dos
dados e dos modelos. Com base neste estudo, pode-se concluir respondendo ao questiona-
mento feito, de que o método numérico de Euler pode ser usado na modelagem numérica de
tempos de trânsito sísmico, obtidos por meio do traçamento de raios, com um alto grau de
con�abilidade, pois apresenta alta acurácia, não comprometendo os dados calculados. Ou
seja, o método de Euler, é um bom método para ser usado em tal modelagem.

Agradecimentos
Primeiramente agradeço a Jeová Deus, por ter me dado toda proteção e sabedoria para
conduzir a vida e alcançar meus objetivos.
Agradeço à minha mãe Jailma Santana pelo amor e apoio dado durante toda a minha
vida, pela paciência que tem e por ser a mãe e pessoa que ela é.
Agradeço aos meu irmãos, Reginaldo, Reigilande e Márcia Santana por comporem a
melhor família que se pode ter e pelo apoio dado durante os anos de graduação.
Agradeço aos amigos que �z durante os anos que passei nas graduações de Física e
Geofísica, em especial todos os alunos da turma 2011, pela amizade e companheirismo.
Agradeço aos meus amigos da família Carvalho: Robsom, Reinaldo e Roberto pelos
conselhos e amizade leal.
Agradeço a todos os meus amigos, colegas e familiares, por terem feito parte da minha
formação como pessoa.
A todos os professores que �zeram parte da minha formação acadêmica, pelo compro-
metimento e competência.
Agradeço ao corpo de professores pesquisadores, Holz, Reinan, Porsani, Botelho e Sato
pelo apoio nas diversas situações e carinho.
Agradecimento especial ao meu professor orientador Wilson Figueiró, pela orientação
perfeita, pela paciência e carinho.
À ANP pela oportunidade de trabalho nesta pesquisa e pelo suporte �nanceiro com
bolsa de estudo, e suporte na participação em eventos cientí�cos.
79

APÊNDICE A
Fluxograma do algortimo
Figura A.1: Fluxograma mostra a estrutura do algoritmo que foi usado na modelagem de
traçamento de raios.
80

APÊNDICE B
Resolução Analítica das equações do Raio
Para cada modelo usou-se as equações paramétricas do raio e tempo de transito que são
encontradas por meio da resolução analítica das equações do raio. Isto foi feito com o �m
de encontrar dados exatos, passiveis de comparação com dados calculados pela abordagem
numérica. Este apêndice foi reservado para a demostração das resoluções analíticas das
equações do raio para cada um do dez modelos usados.
B.1 Os modelos M1, M2, M3 e M4
Aqui se mostra como foi feito a resolução analítica das equações do raio para os modelosM1,
M2, M3 e M4. O primeiro sistema tratado é (3.7), que se refere ao modelo M2. Como visto
abaixo em (B.1), deve-se resolver as EDO's:
d2xdτ2
=B2
2,
d2zdτ2
= 0 ,
dTdτ
= A2 +B2 .x .
(B.1)
O método usado é o de separação de variáveis e integração direta, isto é:∫x
d2x =
∫τ
(B2
2
)dτ 2 ,
∫z
d2z = 0 ,
∫T
dT =
∫τ
(A2 +B2 .x)dτ
integrando-se independentemente duas vezes cada termo das expressões de x e z se encontra:
x(τ) =B2
4.τ 2 +K21 .τ +K22 , z(τ) = K23 .τ +K24
substituindo a expressões de x e z encontradas, na equação do tempo vêm:∫T
dT =
∫τ
(A2 +
B22
4.τ 2 +B2 .K21 .τ +B2 .K22
)dτ
e por �m integra-se cada termo da equação do tempo independentemente, o que resulta em:
T =B2
2
12.τ 3 +
B2 .K21
2.τ 2 + (A2 +B2 .K22).τ +K25 .
81

82
desta forma as expressões analíticas do traçamento de raios para o modelo M2 �cam estabe-
lecida como sendo: x(τ) =
B2
4.τ 2 +K21 .τ +K22 ,
z(τ) = K23 .τ +K24 ,
T =B2
2
12.τ 3 +
B2 .K21
2.τ 2 + (A2 +B2 .K22).τ +K25 .
(B.2)
e as constantes Kijsão encontrada por meio das condições iniciais. As equações (3.12),
(3.12) e (3.17), referente aos modelosM1 ,M3 eM4 são resolvidas analiticamente de maneira
semelhante ao feito para a (3.7), referente ao modelo M2.
B.2 Os Modelos M5, M6, M7 e M8
Será mostrado como resolver analiticamente a Eq. (B.3) que se refere a Eq. (3.22) referente
ao modelo M5, sendo que a Eq. (3.27) referente ao modelo M6 é resolvida de maneira
semelhante: d2xdτ2
= B5 .x ,
d2zdτ2
= 0 ,
dTdτ
= A5 +B5 .x2.
(B.3)
Uma equação diferencial linear de segunda ordem é dita homogênea se ela pode ser escrita
como y′′+a(u)y′+ b(u)y = 0, com isso (B.3) é visto como EDO homogênea. Se y1(u) e y2(u)
são as soluções LI (linearmente independentes) de uma EDO homogênea, então é valido o
principio da superposição em que yg(u) = c1.y1(u) + c2.y2(u) também é solução da EDO,
onde yg(u) é chamada de solução geral da EDO, c1 e c2 são constantes a determinar:
d2z
dτ 2= 0 ,
pode ser resolvida da mesma forma como foi feito no caso anterior (B.1), já a equação:
d2x
dτ 2= B5 .x ,
é uma equação diferencial linear de segunda ordem dita homogênea e sua solução é do tipo
x(τ) = eλτ , isto pois B5 ≥ 0. Se for substituído esta solução na EDO acima encontra-se:
λ2.x = B5 .x, λ2 = B5 .
A equação acima é chamada de polinômio característico, e a sua solução dará a solução geral
da EDO. Assim encontra-se λ = ±√B5 , e com isso a solução geral da EDO será :

83
x(τ) = K51 .e√B5 .τ +K52 .e
−√B5 .τ .
Substituindo esta equação na EDO do tempo vêm:∫T
dT =
∫τ
(A5 +B5 .(K
2
51.e2.√B5 .τ + 2.K51 .K52 +K
2
52.e−2.√B5 .τ )
)dτ .
Integrando independentemente ambos os lados encontra-se a expressão analítica do tempo
de trânsito e assim �ca de�nido o sistema de equações paramétricas do raio:x(τ) = K51 .e
√B5 .τ +K52 .e
−√B5 .τ ,
z(τ) = K53 .τ +K54 ,
T (τ) = (A5 + 2.B5 .K51 .K52).τ +B5 .K
2
51.e
2.√B5 .τ
2.√B5
− B5 .K2
52.e−2.
√B5 .τ
2.√B5
+K55 .
(B.4)
O sistema de equações (3.27) referentes ao modelo M6 é mostrado em (B.5), tem forma
padrão semelhante a (B.3), porém a solução da EDO homogênea assume formato diferente,
e isto porque B6 < 0. d2xdτ2
= 0 ,
d2zdτ2
= B6 .z ,
dTdτ
= A6 +B6 .z2 .
(B.5)
A equação d2xdτ2
= 0 , é resolvida de maneira semelhante como foi feito nas outras equações
deste formato, porém como B6 < 0 a EDO homogênea assume a seguinte forma:
d2z
dτ 2= B6 .z,
d2z
dτ 2= −|B6|.z
onde |B6| é o modulo de B6 . A solução deste tipo de equação é do tipo z(τ) = eλ.τ . Se
substituir esta solução na EDO acima vêm:
λ2.z = −|B6|.z λ = ±i√|B6|,
que é o chamada polinômio característico, e assim como a solução do polinômio carac-
terístico é complexa pode se escrever a solução da EDO como z(τ) = eλ.τ + e−λ.τ , ou seja,
z(τ) = c1. cos(√|B6|.τ) + c2. sin(
√|B6 |.τ) + c3. cos(
√|B6|.τ)− c4. sin(
√|B6|.τ) , e após com-
binar os termos desta equação encontra-se:
z(τ) = K61 . cos(√|B6|.τ) +K62 . sin(
√|B6|.τ)
Por �m para se encontrar a equação do tempo deve-se substituir a expressão z(τ) na EDO
do tempo, o que resulta em:

84
∫T
dT =
∫τ
(A6 +B6 .K
261. cos
2
(√|B6|.τ) + 2.B6 .K61 .K62 . sin(
√|B6|.τ). cos(
√|B6|.τ) +
+B6 .K262. sin
2
(√|B6|.τ))
)dτ ,
após integrar ambos os lados independentemente vêm:
T (τ) =B6 .K
262
2.√|B6 |
.
(√|B6|.τ −
sin(2.√|B6|.τ)
2
)+
2.B6 .K61 .K62 . sin2
(√|B6|.τ)√
|B6|
+B6 .K
261
2.√|B6|
.
(√|B6|.τ +
sin(2.√|B6|.τ)
2
)+ A6 .τ +K65 .
Assim as equações paramétricas da posição e tempo para M6 são dadas por:
x(τ) = K63 .τ +K64 ,
z(τ) = K61 . cos(√|B6|.τ) +K62 . sin(
√|B6|.τ) ,
T (τ) =B6 .K
262
2.√|B6 |
.
(√|B6|.τ −
sin(2.√|B6 |.τ)
2
)+
2.B6 .K61 .K62 . sin2(√|B6 |.τ)√
|B6 |+
+B6 .K
261
2.√|B6 |
.
(√|B6|.τ +
sin(2.√|B6 |.τ)
2
)+ A6 .τ +K65 .
(B.6)
A resolução analítica das equações referentes aos modelos M7 e M8 podem ser facilmente
encontrada como combinações das resoluções dos modelos anteriores.
B.3 O Modelo M9
O sistema de equações que deve ser resolvido analiticamente neste caso são as equações (3.42)
que são mostradas na Eq. (B.7):
d2xdτ2
=B9
2.z ,
d2zdτ2
=B9
2.x ,
dTdτ
= A9 +B9 .z.x .
(B.7)
Inicialmente deriva-se duas vezes a primeira e segunda equação deste sistema em função de
τ , a�m de transformar tais equações em função de uma única variável, assim o sistema se
torna: d4xdτ4
=B
2
9
4.x ,
d4zdτ4
=B
2
9
4.z ,
dTdτ
= A9 +B9 .z.x .
(B.8)

85
Como pode-se observar em (B.8), as primeira e segunda equações se tornaram EDO's linear
homogênea de quarta ordem, e suas soluções são do tipo x(τ) = eλ1.τ para x e z(τ) = eλ2.τ
para z, assim após substituir nas equações acima, pode-se notar que λ1 = λ2 = λ, e o
polinômio característico para ambas as equações (para x e z), são:
λ4 =B9
4e assim λ
R= ±
√B9
2e λc = ±i
√B9
2
Como pode-se notar o polinômio característico possui quatro soluções sendo duas reais (λR)
e duas complexas (λc), assim se escreve λR
= ±iΛ com Λε<, pode-se vê que as soluções deEDO para x e para z serão respectivamente x(τ) = eλR .τ + e−λR .τ + eiΛ.τ + e−iΛ.τ para x e
z(τ) = eλR .τ + e−λR .τ + eiΛ.τ + e−iΛ.τ . Essas soluções podem ser vistas como combinações das
soluções das EDO's (B.3) e (B.5), então usando o mesmo raciocínio, as equações de x e z
têm como solução:
x(τ) = K91 .e
√B92 .τ
+K92 .e−
√B92 .τ
+K93 . cos(√B9
2.τ)
+K94 . sin(√B9
2.τ),
z(τ) = K95 .e
√B92 .τ
+K96 .e−
√B92 .τ
+K97 . cos(√B9
2.τ)
+K98 . sin(√B9
2.τ).
Para cacular a equação do tempo deve-se substituir as expressões de x e z na EDO do tempo:dTdτ
= A9 +B9 .(K91 .e
√B92 .τ
+K92 .e−
√B92 .τ
+K93 . cos(√B9
2.τ)
+K94 . sin(√B9
2.τ)).×(
K95 .e
√B92 .τ
+K96 .e−
√B92 .τ
+K97 . cos(√B9
2.τ)
+K98 . sin(√B9
2.τ))
Após fazer todos os produtos a equação se torna:
∫TdT =
∫τ
(A9 + B9 .
(K91 .K95 .e
√2.B9 .τ + K91 .K96 + K91 .K97 . cos
(√B9
2.τ).e
√B92 .τ
+
K94 .K95 . sin(√B9
2.τ).e
√B92 .τ
+ K91 .K98 . sin(√B9
2.τ).e
√B92 .τ
+ K98 .K94 . sin2(√
B9
2.τ) +
K92 .K97 . cos(√B9
2.τ).e
−
√B92 .τ
+ K92 .K96 .e−√
2.B9 .τ + K92 .K98 . sin(√B9
2.τ).e
−
√B92 .τ
+
K93 .K95 . cos(√B9
2.τ).e
√B92 .τ
+ K93 .K96 . cos(√B9
2.τ).e
−
√B92 .τ
+ K93 .K97 . cos2(√B9
2.τ)
+ K92 .K95 + K94 .K96 . sin(√B9
2.τ).e
−
√B92 .τ
+ K94 .K97 . sin(√B9
2.τ). cos(
√B9
2.τ) +
K93 .K98 . cos(√B9
2.τ). sin
(√B9
2.τ)))
dτ.

86
A integração em ambos os lados da expressão acima resulta na equação paramétrica do
tempo de trânsito:
T = (A9 + K91 .K96 + K92 .K95).τ + B9 .[(
K93 .K98 + K94 .K97√2.B9
). sin2
(√B9
2.τ)
+
K94 .K98
2.τ +
(K91 .K97 + K93 .K95√
2.B9
).e
√B92 .τ
.(
cos(√B9
2.τ)
+ sin(√B9
2.τ))
+
K93 .K97
2.τ +
(K92 .K97 + K93 .K96√
2.B9
).e
−
√B92 .τ
.(
sin(√B9
2.τ)− cos
(√B9
2.τ))
−(K92 .K96√
2.B9
).e
−√
2.B9 .τ +(K94 .K95 + K91 .K98√
2.B9
).e
√B92 .τ
.(
sin(√B9
2.τ)− cos
(√B9
2.τ))
+(K91 .K95√
2.B9
).e√
2.B9 .τ −(K92 .K98 + K94 .K96√
2.B9
).e
−
√B92 .τ
.(
sin(√B9
2.τ)
+ cos(√B9
2.τ))
+(K93 .K97 − K94 .K98
2.√
2.B9
.)
sin(√
2.B9 .τ)]
+ K99 .
Assim pode-se então escrever as equações paramétricas do raio e tempo de trânsito como
sendo:
x(τ) = K91 .e√B9 .τ + K92 .e
−√B5 .τ + K93 . cos(
√|B6|.τ) + K94 . sin(
√|B6|.τ) ,
z(τ) = K95 .e√B5 .τ + K96 .e
−√B5 .τ + K97 . cos(
√|B6|.τ) + K98 . sin(
√|B6|.τ) ,
T = (A9 + K91 .K96 + K92 .K95).τ + B9 .[(
K93 .K98 + K94 .K97√2.B9
). sin2
(√B9
2.τ)
+
K94 .K98
2.τ +
(K91 .K97 + K93 .K95√
2.B9
).e
√B92 .τ
.(
cos(√B9
2.τ)
+ sin(√B9
2.τ))
+
K93 .K97
2.τ +
(K92 .K97 + K93 .K96√
2.B9
).e
−
√B92 .τ
.(
sin(√B9
2.τ)− cos
(√B9
2.τ))
−(K92 .K96√
2.B9
).e
−√
2.B9 .τ +(K94 .K95 + K91 .K98√
2.B9
).e
√B92 .τ
.(
sin(√B9
2.τ)− cos
(√B9
2.τ))
+(K91 .K95√
2.B9
).e√
2.B9 .τ −(K92 .K98 + K94 .K96√
2.B9
).e
−
√B92 .τ
.(
sin(√B9
2.τ)
+ cos(√B9
2.τ))
+(K93 .K97 − K94 .K98
2.√
2.B9
.)
sin(√
2.B9 .τ)]
+ K99 .
(B.9)
B.4 O modelo M10
Para encontrar as equações paramétricas do raio, deve-se resolver as equação (3.47) que são
mostradas aqui em (B.10):
d2xdτ2
= B10 .x+F10
2,
d2zdτ2
= C10 .z +G10
2,
dTdτ
= A10 +B10 .x2 + C10 .z
2 + F10 .x+G10 .z .
(B.10)

87
Todas as equações resolvidas até então foram do tipo yn + a1yn−1 + · · ·+ any = 0 que são as
chamadas equações diferenciais linear homogênea e suas soluções são mostradas como uma
solução geral. No sistema (B.10) existem equações do tipo y′′+a1y′+any = f(u), que são as
chamadas equações diferenciais lineares não homogêneas, e suas soluções são mostradas como
uma soma entre a solução geral (yg) da sua homogênea associada (isto é quando f(u) = 0)
e uma solução particular (yp), ou seja Y = yg + yp. Já foi mostrado nos modelos M5 e M6
como deve-se encontrar a solução geral para o tipo de homogênea associada visto em (B.10),
e assim:
xg(τ) = K11 .e√B10 .τ +K12 .e
−√B10 .τ
,
zg(τ) = K13 .e√C10 .τ +K14 .e
−√C10 .τ
.
Deve-se encontrar então a solução particular, e para isso será usado o método dos coe�cientes
a determinar que diz que:
Se f(u) = Pn(u).eα.u então a solução particular da EDO linear não homogênea é dada:
yp(u) = uM .Qn(u).eα.u ,
onde M é a multiplicidade de α como raiz αn+a1α+a2 = 0, Qn(u) é uma função polinomial
de grau n cujos coe�cientes devem ser determinados (Svec M., et. al, 2010). Nas equações
vista em (B.10) pode-se notar que f(u) = Cte e assim f(u) = Pn(u).eα.u com Pn(u) = Cte
e α = 0, e com isso a solução será do tipo:
yp(u) = uM .Cte
olhando as EDO's de x e de z pode-se ver que :
para x : αnx −B10 .αx − F10/2 = 0, para z : αnz − C10 .αz −G10/2 = 0
isto é, em ambas as situações M = 0 pois α = 0 não é raiz da equação, então por �m a
solução particular para x e z são dadas por.
ypx(τ) = Ctex , ypz(τ) = Ctez
Por �m deve-se determinar os coe�cientes Ctex e Ctex, e para isso basta usar as soluções
particulares nas EDO's, assim vêm:
0 = Ctex.B10 + F10/2 , 0 = Ctez.C10 +G10/2 ,
assim as soluções para x e z �cam determinadas como sendo:
x(τ) = K11 .e√B10 .τ +K12 .e
−√B10 .τ − F10
2.B10
,

88
z(τ) = K13 .e√C10 .τ +K14 .e
−√C10 .τ − G10
2.C10
.
Com x e z determinados, pode-se substituir na equação do tempo para poder encontrar a
equação paramétrica do tempo. Assim a EDO do tempo �ca:
dT =
[C10 .
(K13 .e
√C10 .τ +K14 .e
−√C10 .τ − G10
2.C10
)2
+F10 .
(K11 .e
√B10 .τ+K12 .e
−√B10 .τ− F10
2.B10
)+
B10 .
(K11 .e
√B10 .τ +K12 .e
−√B10 .τ − F10
2.B10
)2
+G10 .
(K13 .e
√C10 .τ+K14 .e
−√C10 .τ− G10
2.C10
)+A10
]dτ
Para resolver esta equação basta integrar ambos os lados independentemente. A integração
de tal equação será omitida pelo fato de todos os tipos de integrais envolvidas na expressão,
já terem sido resolvida em algum momento nas equações dos modelos anteriores. Assim o
sistema de equações paramétricas do raio �ca :
x(τ) = K11 .e√B10 .τ + K12 .e
−√B10 .τ − F10
2.B10,
z(τ) = K13 .e√C10 .τ + K14 .e
−√C10 .τ − G10
2.C10,
T (τ) = (A10 −F 210
4.B10+ 2.B10 .K11 .K12 −
G210
4.C10+ 2.C10 .K13 .K14).τ + K15 +
B10 .K211.e
2.√B10 .τ
2.√B10
− B10 .K212.e
−2.√B10 .τ
2.√B10
+C10 .K
213.e
2.√C10 .τ
2.√C10
− C10 .K214.e
−2.√C10 .τ
2.√C10
.

Referências
Bleistein, N. (1984) Mathematical Methods for Wave Phenomena, Academic Press.
Butcher, J. C. (1987) The Numerical Analysis of Ordinary Di�erential Equations: Runge-
Kutta and General Linear Methods, Wiley-Interscience.
Butcher, J. C. (2008) Numerical Methods for Ordinary Di�erential Equations, John Wiley
& Sons.
Cerveny, V. (2005) Seismic Ray Theory, Cambridge University Press.
Figueiró, W. M.; Oliveira, S. P. e Novaes, F. C. (2005) Traveltime data pro�les obtained using
seismic ray tracing methods for the continental slope model parameterized by polynomi-
als, 9th International Congress of the Brazilian Geophysical Society. Expanded Abstract,
Salvador, BA, Brasil.
Gear, C. W. e Gear, C. W. (1971) Numerical Initial Value Problems In Ordinary Di�erential
Equations, vol. 59, Prentice-Hall Englewood Cli�s, NJ.
Hairer, E.; Nørsett, S. P. e Wanner, G. (1991) Solving Ordinary Di�erential Equations, vol. 2,
Springer.
Mendes, F. C. (2009) Modelagem Sísmica de Curvas de Tempos de Trânsito usando Traça-
mento de Raios em Campos de Velocidades Parametrizados por Polinômios, Trabalho de
Graduação em Geofísica, Universidade Federal da Bahia, Salvador, BA, Brasil.
Pereira, T. F. (2010) Estudo Comparativo emModelagem Sísmica entre Traçamento de Raios
e Propagação de Ondas, Trabalho de Graduação em Geofísica, Universidade Federal da
Bahia, Salvador, BA, Brasil.
Popov, M. (2002) Ray Theory and Gaussian Beam Method for Geophysicists: Edufba,
Salvador-Bahia.
Santos, M. A. B. (2008) Modelagem Sismologica de Curvas de Tempos de Trânsito com
Parametrização por Série Trigonometrica do Campo Global de Velocidades, Trabalho de
Graduação em Geofísica, Universidade Federal da Bahia, Salvador, BA, Brasil.
dos Santos, R. H. M. e Figueiró, W. M. (2006a) Modelagem acústica bidimensional usando
diferentes parametrizações de campos de velocidades, Revista Brasileira de Geofísica,
24(1):103�105.
dos Santos, V. G. B. e Figueiró, W. M. (2006b) Inversão sísmica tomográ�ca usando traçado
analítico de raios, II Simpósio Brasileiro de Geofísica. Resumos Expandidos, Natal, RN,
Brasil.
89

90
Shampine, L. F. (1994) Numerical Solution of Ordinary Di�erential Equations, vol. 4, CRC
Press.
de Souza, A. E. C. M. e Figueiró, W. M. (2004) Campos de tempos de trânsito obtidos por
traçamento de raios sísmicos em campos de velocidades com parametrização polinomial,
I Simpósio Brasileiro de Geofísica. Resumos Expandidos, São Paulo, SP, Brasil.
Svec M., Menezes M. C. & de Menezes, M. B. (2010) Tópicos : Séries e Equações Diferenciais,
Edufba, Salvador, Ba, Brasil.
Teles, M. R. L. e Figueiró, W. M. (2009) Modelagem sísmica de tempos de trânsito de re�exão
em interface parabólica, 11th International Congress of the Brazilian Geophysical Society.
Expanded Abstract, BA, Brasil.

ANEXO I
Equação Eiconal
Esse anexo trata da demonstração da equação eiconal (1.1) usada no desenvolvimento
das equações do traçamento de raios. Inicialmente deve-se partir da equação da onda, onde
temos :
∇2ψ − 1
υ2.∂2ψ
∂t2= 0. (I.1)
Onde deve-se supor que a solução dessa equação de onda assume a seguinte forma:
ψ(~x, t) = A(~x).e−2.π.f.i.[t−T (~x)] (I.2)
onde as funções A(~x) e T (~x) são funções desconhecidas descrevendo amplitude e tempo de
trânsito da onda, que varia com função da posição. Sabendo-se que o Laplaciano da (I.2) é
dado por:
∇2ψ = 2.π.f.e−2.π.f.i.[t−T (~x)]
[(− 2.π.f.A.|~∇T |2 +
∆A
2.π.f
)+ i.(2.~∇.~∇A) + A∆T
](I.3)
e sabendo que a segunda derivada parcial de (I.2) com relação ao tempo é dado por :
∂2ψ(~x, t)
dt2= −4.π2.f 2.A(~x).e−2.π.f.i.[t−T (~x)] (I.4)
Usando as Eqs. (I.3) e (I.4) na equação da onda (I.1), pode-se extrair a Eq. (I.5).
[~∇T ]2 − ∇2A
4.π.f 2.A− 1
υ2= 0 (I.5)
A Eq. (I.5), é extraída, levando-se em conta que o resultado das substituições em (I.3) gera
uma equação complexa, e para que uma equação complexa seja nula é necessário que a sua
parte real e sua parte imaginaria sejam ambos nulas. Estes resultados são exatos, contudo, é
esperado que o segundo termo da equação (I.5) seja desprezível quando as frequências forem
relativamente altas. Quando este termo estiver descartado, o resultado é a Eq. (I.6), que se
chama equação eiconal .
[~∇T ]2 − 1
υ2= 0 (I.6)
91





























