Embed Size (px)
Citation preview

ENIM Projet de fin d’étude
- 1 -
Sommaire
Chapitre I. Introduction aux jets libres_______________________________________________ 4
I.1 Jets libres ________________________________________________________________ 5 I.1.1 Structure aérodynamique d’un jet libre turbulent _______________________________ 5 I.1.2 Objectifs de la manipulation des jets _________________________________________ 7
I.2 Le bruit d’un écoulement____________________________________________________ 7 I.2.1 Formulation analytique ___________________________________________________ 7 I.2.2 Méthodologie de manipulation en vue de réduire le bruit ________________________ 10
I.3 Conclusion ______________________________________________________________ 11 Chapitre II Technique de contrôle des jets___________________________________________ 12
II.1 Objectif ________________________________________________________________ 13 II.2 Différentes techniques de contrôle d’écoulement de type jet _______________________ 13
II.2.1 Contrôle passif _______________________________________________________ 13 II.2.2 Le contrôle actif ______________________________________________________ 13
II.2.2.1 Exemples d’actionneurs______________________________________________ 14 II.3 Conclusion ______________________________________________________________ 16
Chapitre III Etude expérimentale et moyens de caractérisation ___________________________ 17 III.1 Contexte Général _________________________________________________________ 18 III.2 Présentation du dispositif expérimental________________________________________ 19
III.2.1 Equipement de base et adaptation ________________________________________ 19 III.2.2 Alimentation des actionneurs____________________________________________ 22
III.3 Méthodes de caractérisation_________________________________________________ 23 III.3.1 Simulation numérique _________________________________________________ 23
III.4 Techniques de mesure _____________________________________________________ 23 III.4.1 Mesure ponctuelle par tube de Pitot_______________________________________ 23 III.4.2 Vélocimétrie par image de particule ______________________________________ 24
III.4.2.1 Principe ________________________________________________________ 24 III.4.2.2 Encensement ____________________________________________________ 25 III.4.2.3 Création de plan lumineux__________________________________________ 25 III.4.2.4 Acquisition d’image_______________________________________________ 26 III.4.2.5 Traitement des images _____________________________________________ 26 III.4.2.6 Post-traitement ___________________________________________________ 27 - Critère 1Γ _______________________________________________________________ 28
- Critère 2Γ _______________________________________________________________ 28 III.4.3 Choix de la zone de mesure par PIV ______________________________________ 29
III.5 Conclusion ______________________________________________________________ 29 Chapitre IV Résultats et interprétations______________________________________________ 30
IV.1 Caractérisation de l’écoulement sans contrôle___________________________________ 31 IV.2 Effet du contrôle _________________________________________________________ 33
IV.2.1 Quantité de mouvement injecté __________________________________________ 33 IV.2.2 Effet du contrôle sur le champ moyen _____________________________________ 34 IV.2.3 Effet du contrôle sur la carte des fluctuations _______________________________ 36
IV.3 Conclusion ______________________________________________________________ 37

ENIM Projet de fin d’étude
- 2 -
Table des figures
Figure I-1: Visualisation d’un jet axisymétrique subsonique (Re=104, Van Dyke1) ..............................5 Figure I-2 : Structure aérodynamique d’un jet libre (Goldstein2, 1976)..................................................6 Figure I-3: Profils dans la couche de cisaillement (Goldstein2, 1976). ...................................................6 Figure I-4 : Notation utilisée pour le développement de Lighthill3 (1952) .............................................8 Figure I-5 : Illustration schématique du bruit produit par les jets turbulents (D’après Lazure5, 1997) .10 Figure I-6 : Structures tourbillonnaires d’un jet libre ............................................................................10 Figure II-1 : Contrôle du jet par deux tubes actionneurs, d’après Davis12 (1982).................................14 Figure II-2:Actionneur fluidique, d’après Viets18 (1975) ......................................................................16 Figure III-1 : Dispositif de la LMFA Figure III-2 : Dispositif réalisé ......................18 Figure III-3 : Intensité turbulente longitudinale dans le jet entre 1.5D et 3D; jet seul (gauche) et jet contrôlé (droite) .....................................................................................................................................19 Figure III-4 Schéma de la soufflerie Figure III-5 : Diffuseur horizontale..........19 Figure III-6 : Dessin d’ensemble de la réduction...................................................................................20 Figure III-7 : actionneur longitudinal ....................................................................................................20 Figure III-8 : actionneur transversal ......................................................................................................20 Figure III-9 : actionneur incliné............................................................................................................21 Figure III-10 : Vue globale du dispositif d’adaptation couplé à l’actionneur longitudinal ...................21 Figure III-11 : Vue globale du dispositif d’adaptation couplé à l’actionneur transversal .....................21 Figure III-12 : Vue globale du dispositif d’adaptation couplé à l’actionneur incliné............................22 Figure III-13 : Dispositif d’alimentation des actionneurs......................................................................22 Figure III-14 : Diviseur de débit ............................................................................................................22 Figure III-15 : Distribution du champs de vitesse obtenu par fluent V=39.2 m/s .................................23 Figure III-16 : Schéma du principe de la PIV M .Ben Chiekh19............................................................24 Figure III-17 : Diffusion de la lumière par une particule M. Ben Chiekh19 ..........................................25 Figure III-18 : Courbe de la formation des tourbillons..........................................................................29 Figure IV-1 : Profil de la vitesse du jet sur efférentes section pour Uj =30 ms-1...................................31 Figure IV-2 : Courbe de la variation de la vitesse en fonction de Y pour une section X=0,5 D...........32 Figure IV-3 : Identification des tourbillons par le critère 2Γ ................................................................32 Figure IV-4 Champ de la vitesse moyenne dans le cas sans contrôle ...................................................33 Figure IV-5 : Cartographies des champs moyens de la vitesse (en m/s) ...............................................34 Figure IV-6 : Courbe des variations de la vitesse moyenne pour les même section et vitesse d’injection (uj=25 ms-1) pour des déférents contrôles ..............................................................................................35
Figure IV-7 : Caractérisation des fluctuations des vitesses 2u sous l’effet du contrôle ........................37

ENIM Projet de fin d’étude
- 3 -
Introduction Générale
Les écoulements de fluides de type jet, rencontrés dans la nature ou dans les machines
inventées par l'homme, sont instationnaires. Ces écoulements sont généralement turbulents et souvent
couplés à d'autres phénomènes physiques tels que les échanges de chaleur ou de matière. Ils peuvent
être manipulés afin d'améliorer les performances d’un quelconque système: augmenter le mélange en
sortie d’un injecteur ou d’un brûleur (en combustion ou en aéronautique), diminuer l’émission
d’oxyde d’azote ou encore la pollution sonore, on parle ainsi de contrôle des écoulements.
Des actions de recherche ont été menées visant l’étude de différentes méthodes de contrôle des
jets. Le souci était de chercher une méthode efficace qui convient le mieux pour la réalisation des
objectifs visés. Parmi les moyens de contrôle qui ont prouvé leurs efficacités, on cite le contrôle par
des actionneurs fluidiques. Des nombreux travaux réalisés sur ce type de contrôle, ont été consacrés à
la compréhension ou à l’optimisation de ce type de contrôle. Les études expérimentales et
numériques, se sont attachées essentiellement à l’identification et à la compréhension du mécanisme
du contrôle.
Ce travail s’inscrit dans le cadre d’un Projet de Fin d’Etude à l’Ecole Nationale d’Ingénieur de
Monastir. Il consiste à caractériser l’écoulement en l’absence et sous l’effet de l’actionneur de
contrôle à fin de mieux comprendre le mécanisme du contrôle.
Dans le premier chapitre, nous présentons brièvement un état de connaissance des jets libres et
des problèmes liés à ce type d’écoulement en mettant plus l’accent sur le bruit que génèrent les
structures des couches de cisaillement. Les principes de quelques techniques de contrôle des jets sont
présentés dans le second chapitre. Le troisième chapitre traite la description des dispositifs
expérimentaux employés au cours de ce travail ainsi que la principale technique de caractérisation
aérodynamique utilisée dans ce travail en l’occurrence de la vélocimétrie par image de particules en
précisant les principaux outils de post-traitement employés. Le dernier chapitre sera consacré aux
résultats des expériences réalisées sur le jet libre et à l'interprétation de ces résultats.

ENIM Projet de fin d’étude
- 4 -
Chapitre I. Introduction aux jets libres

ENIM Projet de fin d’étude
- 5 -
I.1 Jets libres
Un jet libre est un écoulement de fluide issu d’une tuyère et qui se mélange avec le fluide
ambiant (Figure I-1). Il constitue le cas le plus simple de turbulence libre. L’écoulement est
caractérisé par la vitesse d’éjection du jet Uj dans le plan de sortie de la tuyère de diamètre Dj. Le
fluide éjecté est à température ambiante.
Différentes grandeurs sans dimension permettent de caractériser le jet :
• Le nombre de Mach
0c
UM j= (où c0 est la vitesse du son dans le fluide ambiant),
• Le nombre de Reynolds Re j jU D
ν=
• Le nombre de Strouhal . j
tj
f DS
U=
Figure I-1: Visualisation d’un jet axisymétrique subsonique (Re=104, Van Dyke1)
I.1.1 Structure aérodynamique d’un jet libre turbul ent
Lorsque le jet quitte la tuyère, il se forme une couche de mélange annulaire entre le jet et
l’environnement extérieur. Cette couche s’étend sur environ 4Dj et son épaisseur croît de manière
linéaire avec la distance axiale (environ 0.2X). Elle entoure une zone appelée « cône potentiel »,
dans lequel la vitesse est par définition supérieure à 99% de la vitesse du jet et où l’écoulement
est irrotationnel (la vitesse dérive d’un potentiel) (Figure I-2).

ENIM Projet de fin d’étude
- 6 -
Cette couche s’étend sur :
4 à 5
0.99j
jet j
X D
U U
≤
>
Figure I-2 : Structure aérodynamique d’un jet libre (Goldstein2, 1976).
En s’éloignant davantage de cette zone de fort cisaillement, le jet traverse une « zone de
transition » qui s’étend sur
4 <X 8j jD D≤
Puis atteint la « zone de turbulence développée » à partir d’environ 8Dj. Dans la couche de
cisaillement, max( ' ) rmsu est quasiment constant et égale à 0.16 Uj jusqu’à la région de transition
puis décroît en 1/X² dans la zone de turbulence développée. Les profils de vitesse moyenne et
d’intensité de turbulence sont représentés sur Figure I-3.
Figure I-3: Profils dans la couche de cisaillement (Goldstein2, 1976).
La région de mélange comporte des tourbillons qui ont tendance à être étirés suivant l’axe
longitudinal X. Dans la couche de mélange, les variations des longueurs de corrélation (échelle
caractéristique des tourbillons) varient quasi linéairement suivant :
=0.1
= 0.05X
Y
l X
l Y

ENIM Projet de fin d’étude
- 7 -
La vitesse de convection sur l’axe de la couche de mélange est de l’ordre de
0.62 cU U j=
I.1.2 Objectifs de la manipulation des jets
Les jets sont manipulés afin d'améliorer les performances du système où ils sont impliqués.
Dans le domaine de la combustion, les jets rencontrés dans les brûleurs sont manipulés dans le but
d’augmenter le mélange à la sortie de l’injecteur du brûleur. Ceci pour s’étendre vers des applications
aéronautiques. Le jet donne plus d’homogénéité au mélange carburant+comburant et permet de
diminuer les émissions polluantes. La bibliographie offre énormément de documentation sur ce
domaine ainsi que la méthodologie à suivre pour réaliser cet objectif. Brièvement, on cherche à
favoriser la turbulence par génération de vortex ou introduction d’éléments de transition ou autre
techniques. Le lecteur peut se référer à Gad-El-Hak21 et al.
D’un autre côté, la pollution sonore représente un domaine d’actualité en terme de manipulation
ou encore contrôle des jets en vue de réduire le bruit des jets. Le problème est d’actualité et connaît un
intérêt croissant (Rapport Nasa25 2003,…). Dans ce qui suit nous donnerons un aperçu sur la notion du
bruit d’un jet et les différentes sources qui en produisent.
I.2 Le bruit d’un écoulement
Pour mieux comprendre la notion du bruit d’un jet, une présentation analytique s’avère
nécessaire. En se basant sur les équations de la mécanique des fluides de base, on peut obtenir les
expressions des quantités responsables de la production du bruit et accéder au phénomène physique
associé à chacune de ces quantités.
I.2.1 Formulation analytique
En écrivant l’équation de la conservation de la masse :
( )0i
i
u
t x
ρρ ∂∂ + =∂ ∂
Et l’équation de Navier-Stokes :
( ) ( )i j iji
j i j
u uu p
t x x x
ρ τρ ∂ ∂∂ ∂+ = − +∂ ∂ ∂ ∂
Ou, pour un fluide Newtonien, le tenseur des contraintes visqueuses ijτ s’écrit :
2
3ji k
ij ijj i k
uu u
x x xτ µ µ δ
∂∂ ∂= + − ∂ ∂ ∂

ENIM Projet de fin d’étude
- 8 -
La différence de la dérivée par rapport au temps de la première équation et de la divergence de
la seconde donne :
( ) ( ) ( )i j iji i
i i j i i j
u uu u p
t t x x t x x x x
ρ τρ ρρ ∂ ∂∂ ∂ ∂ ∂ ∂ ∂ ∂ + − + = − ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
D’où :
( ) ( )22 2
2
i j
ij iji j i j
u up
t x x x x
ρρ δ τ∂∂ ∂− = −
∂ ∂ ∂ ∂ ∂
L’introduction de la vitesse de référence c0 (vitesse du son) et du tenseur Tij permet d’obtenir
l’équation de Lighthill3 :
22 2202
ij
i j i j
Tc
t x x x x
ρ ρ ∂∂ ∂− =∂ ∂ ∂ ∂ ∂
I-1
Avec :
0
020 ρ
γpc = (où γ est le classique rapport des chaleurs spécifiques ).
( ) ijjiij cpuuT τρρ −−+= 20 est le tenseur de Lighthill3
D’après Goldstein2 (1976) dans le terme sourceijT , on peut distinguer successivement les trois
processus de bruit suivants :
• L’instationnarité des forces convectives non linéaires (contraintes de Reynolds).
• Le bruit d’entropie lié aux échanges turbulents de chaleur.
• Les fluctuations du tenseur des contraintes visqueuses.
Le terme source contient non seulement la production du son par la turbulence, mais
aussi les interactions entre l’écoulement aérodynamique et les ondes acoustiques. Cette
équation d’onde inhomogène a aussi la particularité d’être exacte car elle ne contient aucune
hypothèse et provient directement de la dynamique des fluides. En pratique, le tenseur de Lighthill3 se
réduit à :
ij i jT u uρ≈
Figure I-4 : Notation utilisée pour le développement de Lighthill 3 (1952)

ENIM Projet de fin d’étude
- 9 -
Une équation linéaire inhomogène peut être résolue à l’aide de la fonction de Green du
problème. Cette fonction est la solution de l’équation pour laquelle l’inhomogénéité est concentrée
en un point, aussi bien par rapport au temps que dans l’espace : la fonction de Green traduit donc la
réponse linéaire du système à une impulsion acoustique (dans un milieu au repos). La fonction de
Green en champ libre s’écrit :
( )0 0
1( , | , )
4G x t y t r c
rτ δ τ
π= − −r r
La quantité( )0t r c− représente le temps de retard, c’est-à-dire le temps à partir duquel
l’observateur en ( ),x tr
a ressenti l’émission sonore produite par une source placée enyr
. G0 ne
dépend que de la distance r et non pas de la position de la source ou bien celle de l’observateur.
Compte tenu de l’expression de G0, la solution de l’équation d’onde en espace libre s’écrit :
( ) ( )20
20
,' ,
4ij
i j V
T y t r cx t dy
x x c rρ
π−∂=
∂ ∂ ∫r
r r
Cette équation indique finalement qu’une source placée au point yr
et émettant au temps
( )0t r c− est perçue au temps t au point d’observationxr
. Dans le cas particulier du champ lointain,
les fluctuations de la pression acoustique sont déterminées à partir de la relation :
20' 'p c ρ≈
On peut donc, connaissant le champ aérodynamique d’un écoulement, déterminer son
rayonnement acoustique par le calcul d’une intégrale sur un volume englobant toutes les sources
acoustiques. Cette équation constitue la base pour évaluer le bruit rayonné par un petit volume de
turbulence.
Par ailleurs, pour compléter l'équation de Lighthill, qui avait été établie en espace libre,
Williams4, F et al., (1969) a reprit le même raisonnement en tenant compte de la présence de parois
solides et de variations du débit. Si Q représente le débit de masse introduit par unité de volume,
l'équation de continuité devient :
( )i
i
uQ
t x
ρρ ∂∂ + =∂ ∂
Alors que l’équation de Navier Stokes, en notant fi la ième composante de la force extérieure
par unité de volume, devient :
( ) ( )i j ijii
j i j
u uu pf
t x x x
ρ τρ ∂ ∂∂ ∂+ = − +∂ ∂ ∂ ∂

ENIM Projet de fin d’étude
- 10 -
De sorte que la propagation gouvernant la propagation des ondes sonores s’écrit alors :
22 2202
iji
i j i i j
TfQc
t x x t x x x
ρ ρ ∂∂∂ ∂ ∂− = − +∂ ∂ ∂ ∂ ∂ ∂ ∂
Avec des sources de types monopolaire, dipolaire et quadripolaire :
Figure I-5 : Illustration schématique du bruit produit par les jets turbulents (D’après Lazure5, 1997)
I.2.2 Méthodologie de manipulation en vue de réduir e le bruit
Le bruit d’un écoulement turbulent libre est caractérisé par des sources acoustiques de type
quadripôle. La nature des sources acoustiques présentes dans un jet libre subsonique peut être mise en
évidence par leurs fréquences d’émission.
Les hautes fréquences proviennent de structures tourbillonnaires de petites tailles, de
vitesse de convection élevées : ces sources sont donc situées près de la sortie de la buse. Les
sources sonores basses fréquences s’étendent depuis la zone de mélange jusqu’au début de la
zone de turbulence développée (Figure I-6) où la vitesse est moins élevée. Les grosses structures
sont plus énergétiques, leur volume source est plus important, elles sont donc prépondérantes dans le
bruit rayonné par le jet.
Figure I-6 : Structures tourbillonnaires d’un jet libre

ENIM Projet de fin d’étude
- 11 -
I.3 Conclusion
Dans ce chapitre, une introduction aux jets libres et l’intérêt de leur manipulation ont été
présentés. Les objectifs de la manipulation ou du contrôle des jets sont essentiellement l’augmentation
du mélange et la réduction du bruit. La méthodologie à suivre pour chaque cas est différente voir
opposée à l’autre. La favorisation de la turbulence et la génération des structures tourbillonnaires dans
l’écoulement participent à l’augmentation des coefficients d’échanges et l’amélioration du mélange.
Au contraire, la re–laminarisation de l’écoulement et l’atténuation de l’effet des structures
tourbillonnaires de la zone de cisaillement conduit à la diminution du bruit.
Dans le chapitre suivant nous présenterons quelques techniques possibles de manipulation ou
contrôle des écoulements de type jet.

ENIM Projet de fin d’étude
- 12 -
Chapitre II Technique de contrôle des jets

ENIM Projet de fin d’étude
- 13 -
II.1 Objectif
L’objectif du contrôle d’un écoulement de type jet diffère suivant l’application industrielle
attenante. On peut ainsi contrôler un jet pour améliorer le mélange en sortie d’un injecteur ou d’un
brûleur (en combustion ou en aéronautique), mais aussi pour le faire battre, le diriger, diminuer
l’émission, d’oxyde d’azote ou bien encore la pollution sonore.
Nous allons ici essentiellement porter notre intérêt sur les différentes techniques de contrôle du
mélange d’un jet avec le fluide ambiant, ce qui constitue l’effet le plus souvent recherché, quelque soit
le contexte. En effet l’amélioration du mélange permet d’atténuer le bruit de jet.
II.2 Différentes techniques de contrôle d’écoulemen t de type jet
Il existe deux grandes catégories dans le contrôle d’écoulements en général et dans celui des
jets en particulier : le contrôle passif et le contrôle actif. Le contrôle passif consiste à affecter la
dynamique de l’écoulement en modifiant la géométrie de l’injecteur et/ou de la zone d’injection du
jet, alors que le contrôle actif repose sur un apport extérieur d’énergie.
II.2.1 Contrôle passif
Comme nous l’avons déjà mentionné, la modification des géométries peut conférer à
l’écoulement une toute autre structure, tel que
• Les jets non circulaires : souvent utilisé pour l’optimisation du rendement de la combustion
et la limitation l’émission des polluant (Gutmark et Grinstein in Faivre7 2003). On distingue
deux catégories dans ce type de contrôle :
o Les jets à rapports d’aspect important (les jets ellipsoïdaux et rectangulaires).
o Les jets anguleux tel que les jets carrés ou aussi rectangulaires.
• Les générateurs de vorticité axiale : cette technique consiste à garder une géométrie d’un jet
circulaire tout en ajoutant des petits obstacles en sorties. Ce qui va créer de la vorticité axiale
et ainsi améliorer le mélange en interagissant avec la couche de mélange (Bradbury et Kadhem
in Faivre7 2003).
II.2.2 Le contrôle actif
Le contrôle actif consiste en un apport d’énergie externe à travers des actionneurs,
généralement pilotés électriquement, dans le but de modifier une ou plusieurs caractéristiques de
l’écoulement.
Le contrôle actif est dit "en boucle fermée" s’il existe un capteur (capteur de température, de
pression...) transmettant à tout instant un signal à l’organe commandant le dispositif de contrôle.

ENIM Projet de fin d’étude
- 14 -
Après traitement de ce signal, il est possible de décider s’il est nécessaire ou non de mettre en
fonctionnement (ou d’arrêter) le système de contrôle. Si cette branche de rétroaction est inexistante
dans le dispositif de contrôle, celui-ci est sera dit "en boucle ouverte" (Stone8 et al. 2003).
II.2.2.1 Exemples d’actionneurs
• Les haut-parleurs sont très souvent utilisés en contrôle actif, notamment dans le contrôle actif
des instabilités de combustion (Vermeulen9 et al. Lang10 et al.). Il s’agit, historiquement, de
l’un des premiers types d’actionneurs utilisés. Le principe de fonctionnement repose sur le fait
qu’un haut-parleur peut générer une onde acoustique qui vient perturber localement les
champs de vitesse et de pression de l’écoulement, permettant ainsi de contrôler les instabilités.
Un intérêt particulier quant à son utilisation est que l’onde acoustique créée se propage
facilement dans le dispositif : on peut placer le haut-parleur assez loin de zones délicates, telle
une chambre de combustion.
• Les volets (”flaps”) Suzuki11 et al. ont élaboré un "injecteur intelligent", équipé de 18 volets
équirepartis autour de la section de sortie de l’injecteur. Ces volets sont commandés
électromagnétiquement et offrent une gamme de modes de fonctionnement très étendue. En
effet, ils peuvent être actionnés en phase, en alternance (une moitié des volets s’ouvre tandis
que l’autre se ferme) ou bien encore un à un. (si les volets ne sont pas mobiles ils peuvent se
classer dans les techniques de contrôle passif)
• Les tubes actionneurs Davis12 a conçu un moyen de contrôler activement un jet à l’aide de
deux petits jets disposés au même endroit que les palettes de Bradbury13 et al. Ces deux jets de
contrôle imposent en continu au jet principal des flux de quantité de mouvement transversaux
avec lesquels il entre en compétition (Figure II-1). Davis montre que l’influence des jets de
contrôle dépend de leur vitesse débitante.
Figure II-1 : Contrôle du jet par deux tubes actionneurs, d’après Davis12 (1982)

ENIM Projet de fin d’étude
- 15 -
Il distingue deux régimes de fonctionnement principaux.
• Pour des faibles vitesses des jets de contrôle, il n’y a pas pénétration dans le jet
principal, qui est seulement légèrement distordu. Cependant, ceci conduit à une
réduction des vitesses locales de l’ordre de 30% et le mélange dans les zones
de cisaillement est nettement amélioré. La réduction de la vitesse du jet
principal est fonction du carré de la vitesse des jets impactant et du cube
(approximativement) de leur diamètre.
• Pour des vitesses élevées dans les tubes actionneurs, le cône potentiel du jet
principal est atteint, ce qui introduit de profondes distorsions et le jet perd alors
sa forme circulaire, rendant ainsi le contrôle délicat. Il semble donc, pour Davis,
que le régime le plus efficace pour actionner un jet avec des jets transversaux
soit un régime de faible vitesse dans de petits injecteurs.
Lardeau14 et al. ont réalisé des simulations numériques directes d’une configuration
très voisine de celle de Davis12 n’étudiant entre autres l’effet de l’inclinaison des tubes
actionneurs par rapport à l’axe principal de l’écoulement. Il ressort de cette étude que le fait
d’orienter les tubes de sorte à induire du SWIRL s’avère préjudiciable pour la qualité du
contrôle, aussi bien en termes de décroissance de vitesse axiale que d’intensité turbulente.
Denis15 et al. ont établi que le nombre optimal de jets de contrôle n’était pas deux
comme le laissait entendre Davis12 mais quatre. La configuration est celle d’un jet en présence
de co-flow dans un milieu confiné. Selon les essais, entre deux et six jets rectangulaires
transversaux viennent impacter le jet principal. Il a ainsi pu être établi quelle était l’orientation
optimale des actionneurs pour le contrôle, le paramètre de comparaison étant la surface de
mélange : les actionneurs doivent être placés de manière à venir tangenter le jet principal, une
diagonale de la section de sortie des actionneurs devant être alignée avec le plan de la section
de sortie du jet principal. Ceci a pour effet de créer de la vorticité longitudinale, venant
directement interagir avec les structures cohérentes de la couche de mélange du jet. Toutefois,
les auteurs notent que la distance d’action des jets est faible : la couche de mélange du jet
reprend une évolution naturelle à faible distance de la sortie du jet. Il peut alors être envisagé
d’actionner à nouveau le jet un peu plus en aval dans l’écoulement. On notera également que
les tubes actionneurs peuvent être utilisés dans des régimes totalement différents. Ainsi,
comme relaté ci-dessus, un des objectifs du contrôle actif est souvent de ne nécessiter qu’un
apport très faible en énergie, d’où l’intérêt, par exemple, d’utiliser des tubes actionneurs de
petites tailles et à des régimes de vitesses faibles.

ENIM Projet de fin d’étude
- 16 -
• Les jets synthétiques : une membrane oscille à des fréquences proches de celle de sa
résonance dans une cavité (Amitay16 et al.). Ces oscillations sont commandées par des piézo-
électriques atteignant des fréquences de l’ordre de 1200 Hz. Le jet est appelé synthétique car il
ne nécessite aucune source de fluide (débit moyen nul). Plusieurs configurations permettent
d’actionner le jet principal de manière radiale ou axiale. Les auteurs affirment qu’à l’aide de ce
dispositif il est possible d’interagir simultanément sur les structures cohérentes et sur les
micro-structures de la couche de cisaillement. Ceci a en outre pour effet de supprimer
l’instabilité naturelle de Kelvin-Helmholtz de la couche de cisaillement du jet. De ce fait, le
transfert d’énergie des grosses structures vers les plus petites s’en voit amélioré.
• Les actionneurs fluidiques : La fluidique est une technologie fondée sur les propriétés
d’attachement, de décollement et de déviation des jets de fluide en présence de parois fixes.
Elle repose sur le fait qu’un jet s’écoulant dans une tuyère divergente symétrique est attiré
tantôt par une paroi tantôt par l’autre. De plus, le moindre gradient de pression traversant le jet
peut le faire aller d’une plaque vers l’autre. La fluidique a alors été utilisée pour le contrôle
actif des jets. Viets17 a élaboré une série d’injecteurs utilisant ce principe, tel celui de la Figure
II-2. L’intérêt principal de ce type d’actionneur est qu’il ne comporte pas de parties mobiles.
Ce procédé est notamment pleinement investigué dans le cadre du contrôle de la poussée des
engins aéronautiques et spatiaux réalisé en plaçant une surface incurvée en sortie d’injecteur
(Mason18 et al.)
Figure II-2:Actionneur fluidique, d’après Viets 18 (1975)
II.3 Conclusion
Dans ce chapitre, une introduction à la notion du contrôle ainsi que les éléments
bibliographiques sur les différents systèmes de contrôles et leurs effets ont été élaborés. Cette étude
bibliographique montre que le contrôle agit favorablement selon l’objectif fixé si les différentes
précautions physiques et techniques se trouvent réunies.

ENIM Projet de fin d’étude
- 17 -
Chapitre III Etude expérimentale et moyens de
caractérisation

ENIM Projet de fin d’étude
- 18 -
Le contexte de ce travail ainsi que le dispositif expérimental réalisé sont exposés dans la
première partie de ce chapitre. Les techniques de caractérisation aérodynamique feront l’objet de la
deuxième partie de ce chapitre.
III.1 Contexte Général
L’idée de base de ce travail est de visualiser l’effet d’un contrôle fluidique sur un écoulement de
type jet. Nous nous sommes inspirés des travaux réalisés actuellement par l’équipe de « Mécanique
des fluides actives » du LMFA23 de Lyon. Nous avons adopté le même principe du contrôle utilisé par
cette équipe. Il est basé sur le principe de micro-jets continus au nombre de 18 injecteurs
régulièrement espacés dans la direction azimutale. Cependant, au lieu d’appliquer ces micro-jets après
la sortie du jet de sorte qu’ils viennent impacter le jet principale (Figure III-1), nous avons choisis
d’appliquer ces micro-jets au niveau de la sortie du jet ce qui nous offre la possibilité de choisir
plusieurs configurations de contrôle de façon non intrusive (Figure III-2).
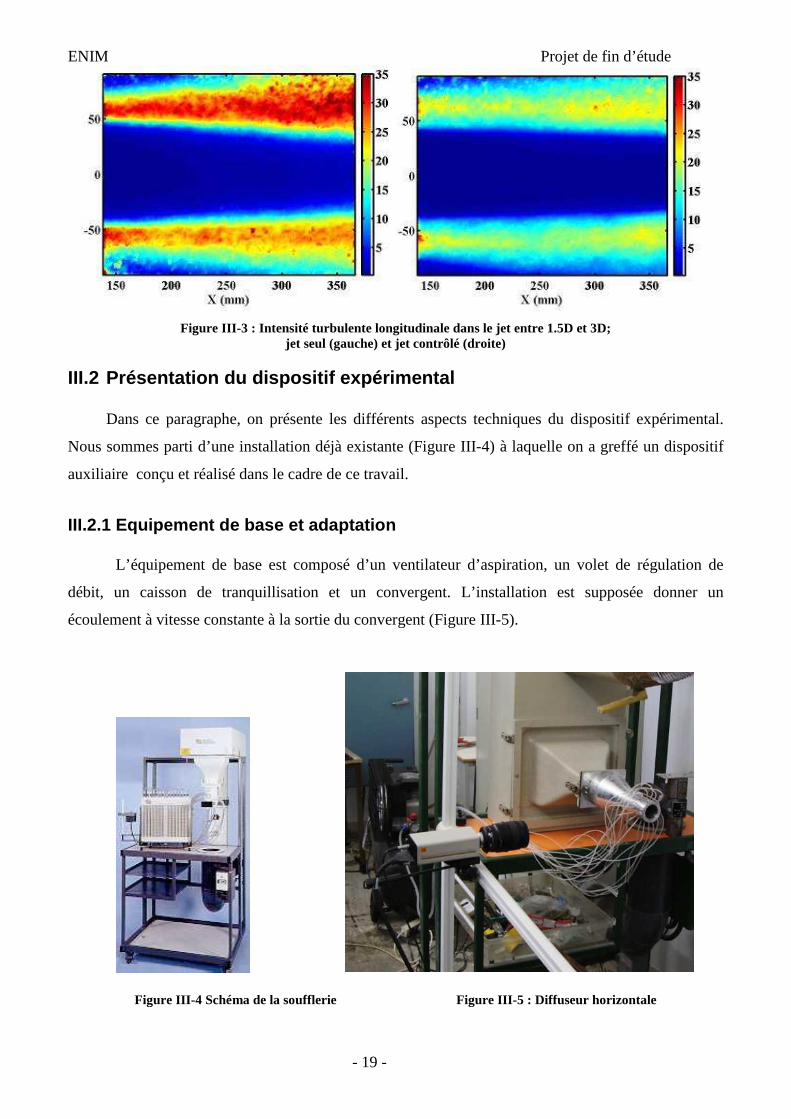
La dite équipe a pu déterminer les mécanismes d'interaction entre les jets secondaires et la
couche de mélange du jet principal et les effets de ces mécanismes sur les grandeurs caractéristiques
de la turbulence dans la couche de mélange. Un optimum au sens de la réduction du maximum de ces
grandeurs turbulentes a pu être isolé en fonction du débit dans les injecteurs secondaires, et de l’angle
d'injection. Le contrôle agit favorablement dans le sens de la réduction de l’intensité de la turbulence
et par conséquent réduit le bruit. Une diminution de 5 dB sur le spectre du bruit rayonné par le jet
étudié a été annoncée par les chercheurs de cette équipe.
Figure III-1 : Dispositif de la LMFA Figure III-2 : Dispositif réalisé
ENIM Projet de fin d’étude
- 19 -
Figure III-3 : Intensité turbulente longitudinale dans le jet entre 1.5D et 3D;
jet seul (gauche) et jet contrôlé (droite)
III.2 Présentation du dispositif expérimental
Dans ce paragraphe, on présente les différents aspects techniques du dispositif expérimental.
Nous sommes parti d’une installation déjà existante (Figure III-4) à laquelle on a greffé un dispositif
auxiliaire conçu et réalisé dans le cadre de ce travail.
III.2.1 Equipement de base et adaptation
L’équipement de base est composé d’un ventilateur d’aspiration, un volet de régulation de
débit, un caisson de tranquillisation et un convergent. L’installation est supposée donner un
écoulement à vitesse constante à la sortie du convergent (Figure III-5).
Figure III-4 Schéma de la soufflerie Figure III-5 : Diffuseur horizontale

ENIM Projet de fin d’étude
- 20 -
La section de la soufflerie de base étant rectangulaire (100x50). Nous étions obligés de
l’adapter en introduisant une pièce intermédiaire (Figure III-6) afin d’obtenir une section circulaire de
diamètre 40 mm. Cette adaptation a limité l’étendu du choix du diamètre de la buse. La pièce
intermédiaire a été conçue et réalisé dans le cadre de ce travail. En avant projet, des simulations
numériques sous l’environnement Fluent ont été réalisées pour s’assurer de la fiabilité des résultats.
Figure III-6 : Dessin d’ensemble de la réduction
La pièce d’adaptation a été taraudé à l’extrémité, ce qui a permis le montage de trois
actionneurs différents représentant chacun une configuration de contrôle possible par rapport la
direction du jet principal: contrôle longitudinal (angle de 0°), transversale (angle de 90°) et incliné
(angle de 45°) (Figure III-7, Figure III-8 et Figure III-9).
Figure III-7 : actionneur longitudinal
Figure III-8 : actionneur transversal

ENIM Projet de fin d’étude
- 21 -
Figure III-9 : actionneur incliné
Les différentes vues d’ensembles des actionneurs montés sur la pièce d’adaptation sont
données sur les figures (Figure III-10, Figure III-11 et Figure III-12.
Figure III-10 : Vue globale du dispositif d’adaptation
couplé à l’actionneur longitudinal
Figure III-11 : Vue globale du dispositif d’adaptation
couplé à l’actionneur transversal

ENIM Projet de fin d’étude
- 22 -
Figure III-12 : Vue globale du dispositif d’adaptation couplé à l’actionneur incliné
III.2.2 Alimentation des actionneurs
A fin d’avoir le même débit pour les 18 injecteurs, nous avons utilisé une seule source
d’alimentation en l’occurrence d’un réservoir d’air comprimé à pression réglable. La vitesse des
micro-jets de contrôle dépendra la pression amont dans le réservoir. Un étalonnage dans ce sens a été
réalisé. Un dispositif de réparation du débit provenant du réservoir d’air comprimé en 18 dérivations a
été conçu et réalisé. L’équirépartition du débit provenant de la source sur les différentes dérivations a
été vérifiée.
Figure III-13 : Dispositif d’alimentation des actionneurs
Figure III-14 : Diviseur de débit

ENIM Projet de fin d’étude
- 23 -
III.3 Méthodes de caractérisation
III.3.1 Simulation numérique
A fin de nous assurer que la réduction (le passage d’une section rectangulaire à une section
circulaire) n’affecte pas l’écoulement à la sortie dispositif du soufflage, nous avons fait appel à un
logiciel de simulation Fluent.
Ce logiciel nous a permis d’avoir cette figure :
Figure III-15 : Distribution du champs de vitesse obtenu par fluent V=39.2 m/s
III.4 Techniques de mesure
Deux techniques de mesures ont été employées dans ce travail : mesure de vitesse moyenne et
ponctuelle par tube de Pitot et mesure de la vitesse instantanée dans un plan par vélocimétrie par
images de particules.
III.4.1 Mesure ponctuelle par tube de Pitot
La sonde est formée par un tube coudé, la portion rectiligne possédant une ouverture au
sommet (nez) de diamètre entre 0.3 à 0.5 le diamètre intérieure de la hampe est maintenue parallèle au
courant, la hampe est distante de l’extrémité de la portion rectiligne de L>10d, elle sert de canalisation
au manomètre.

ENIM Projet de fin d’étude
- 24 -
Cette méthode utilise le fait qu’une sonde plongée dans une veine de fluide uniforme, il existe une
ligne de courant qui se sépare au nez de la sonde pour la contourner, ce point intitulé point d’arrêt
possède la particularité d’avoir une vitesse nulle. Ce qui permet d’avoir :
ρ)(2 pp
U i −=
Avec pi est la pression d’arrêt.
III.4.2 Vélocimétrie par image de particule
Apparue dans les années 1980, la Vélocimétrie par Images de Particules (PIV) a fait l’objet
d’un développement considérable. Cette technique est actuellement en pleine expansion et fait l’objet
du plus grand nombre de travaux actuellement.
La possibilité qu’offre la PIV de décrire un plan de l’écoulement ouvre un champ nouveau
d’investigations et fait de la PIV est la technique vélocimétrique actuellement la plus prometteuse.
La PIV correspond à une mesure directe de la vitesse de l’écoulement par l’intermédiaire de la
relation.
t
xV
∆∆=
III.4.2.1 Principe
La PIV utilise une partie des principes de ADL. La visualisation de l’écoulement est réalisée
par l’intermédiaire de l’introduction de particules au sein du fluide. Ces particules soumises à un
rayonnement lumineux vont réémettre: par diffusion une lumière qui peut être détecté par une caméra
numériques.
Figure III-16 : Schéma du principe de la PIV M .Ben Chiekh19

ENIM Projet de fin d’étude
- 25 -
La mise en œuvre de la technique de mesure repose sur quatre étapes :
• L’ensemencement de l'écoulement.
• La création d'un plan lumineux.
• L’acquisition d'images.
• Le post-traitement des données.
III.4.2.2 Encensement
D’après la description du principe général, on constate que l’on ne mesure pas directement la
vitesse du fluide mais celle des particules du traceur, comme en vélocimétrie Doppler. Il est donc
nécessaire de prendre une précaution essentielle quant au choix de ces particules. Elles devront suivre
le plus parfaitement possible l’écoulement sous peine de ne plus mesurer la vitesse du fluide, mais
celle de la phase dispersée.
Figure III-17 : Diffusion de la lumière par une particule M. Ben Chiekh19
III.4.2.3 Création de plan lumineux
Pour créer le plan lumineux, on utilise généralement un montage optique à base de lentilles
cylindriques, de prismes ou de miroirs. Il est aussi possible d’utiliser une fibre optique qui facilite
sensiblement l’utilisation, en permettant de positionner aisément le plan laser dans l’écoulement
étudié. La source de la lumière est un laser pulsé qui fournit des illuminations de courte durée mais de
puissance importante :
Wns
mjP 610
15
15 ≈≈

ENIM Projet de fin d’étude
- 26 -
III.4.2.4 Acquisition d’image
La prise d’images est essentiellement assurée par des caméras numériques CCD (Charged
Coupled Device).
Les camera CCD utilisent des colonnes de pixels associées à des colonnes de registres de
stockage temporaires adjacents à chaque colonne de pixels, chaque image inclut m x n pixels ou
cellules sensibles à la lumière, de nombre égal au nombre de cellules de stockage qui ne seront jamais
exposées à la lumière. La première pulsation laser est synchronisée pour illuminer la première image,
qui sera transférée ensuite depuis les cellules sensibles aux registres de stockage immédiatement après
la pulsation laser. La seconde pulsation illumine ensuite la deuxième image. Les cellules de stockage
contiennent à cet instant la première image. Le transfert d’une image sur le registre est effectué en
moins d’une microseconde. Les deux images sont ensuite transférées séquentiellement à la sortie de la
caméra pour acquisition et traitement par le processeur de traitement.
La facilité accrue de la saisie d’images et la rapidité de plus en plus grande des logiciels de
traitement invite les chercheurs à acquérir un nombre de plus en plus grand d’images. Il est fréquent
que des mesures soient effectuées sur plusieurs milliers d’images, voire plusieurs dizaines de milliers.
II résulte de cette situation que malgré les capacités considérables de stockage des ordinateurs actuels,
il devient de plus en plus difficile de gérer ces énormes quantités de données. De plus, la résolution de
plus en plus élevée des caméras entraîne une augmentation significative de la taille des fichiers
images.
III.4.2.5 Traitement des images
Après numérisation, les images doivent être traitées afin d’en déduire le champ des vitesses.
Pour cela, on se base sur l’inter corrélation adaptive qui n’est qu’une amélioration de
l’intercorrélation. Les images numérisées sont initialement divisées en un grand nombre de fenêtres
ou zones d’interrogation. Les zones d’interrogation ont des dimensions qui sont en puissance de 2, du
fait des transformées de Fourier qui sont à effectuer. On cherche ensuite à remonter au déplacement
moyen des particules dans chacune des zones entre les deux acquisitions successives, le résultat final
étant donc un champ de vitesses.
L’algorithme de base de l’intercorrélation consiste à deviser la paire d’images issues des
mesures PIV en des zone dite d’interrogation (notées ZI) de taille N x N pixels, a fin de déterminer le
déplacement à réaliser à l’intérieur de chaque zone de l’image 1 pour obtenir le maximum de
correspondance avec la zone correspondante sur l’image 2.

ENIM Projet de fin d’étude
- 27 -
Numériquement cela revient à numériser chaque image en lui associant deux fonction f et g
décrivant l’intensité de lumière dans chacune
Le problème se réduit donc à déterminer la fonction de transfert image s(m,n) qui permet
d’obtenir en présence d’un bruit d(m,n), la fonction de sortie g(m,n) à partir d’une fonction d’entrée
f(m,n), toute deux connues sur la zone d’interrogation correspondante repérer par le couple (m,n) sur
chacune des deux images.
En utilisant la théorie statique de l’intercorrélation spatiale sous sa forme discrète appliquer
aux fonctions représentatives des images échantillonnées.
La corrélation adaptative utilise le résultat du champs de vitesse/déplacement issue de
l’intercorrélation est utilisé pour faire une approximation de la déformation d’image. La même
interrogation est encore exécutée par intercorrélation, mais les fenêtres d’image de particule sont
choisies de telle la manière que la correspondance d’image soit augmentée.
Le champ issu de cette opération n’est qu’une mesure résiduelle du champ de déplacement par
rapport au champ prédicteur.
III.4.2.5.1 Validation par la hauteur des pics de corrélation
Le principe consiste à comparer la hauteur des deux plus hauts pics détectés dans le plan de
corrélation par le processeur. En intercorrélation, le plus haut pic est considéré comme le signal et les
autres sont assimilés au bruit. Pour que le vecteur soit validé, le rapport pic seconddu hauteur
picpremier du hauteur doit
être supérieur à une va leur limite imposer par l’utilisateur.
III.4.2.5.2 Validation par la gamme de vitesse Cette méthode permet d’éliminer le vecteur non inclus dans un intervalle de vitesse
physiquement acceptable. Cela permet d’éliminer notamment le vecteur vitesse présentant une
intensité aberrante par rapport à la nature de l’écoulement. Il est donc nécessaire de connaître la
gamme de vitesse mesurée dans l’expérience.
III.4.2.6 Post-traitement
Le post-traitement des mesures est réalisé par des outils conventionnels (moyenne,
fluctuations,…) appuyées par des critères d’identification de structures cohérentes en l’occurrence du
critère 2Γ . Ce critère a été développé par Graftieaux20 et al pour les écoulements 2D. Il permet
déterminer l’emplacement du centre tourbillonnaire et la limite d’un tourbillon en considérant
uniquement la topologie de champ de vitesse et non son intensité comme c’est le cas des autres

ENIM Projet de fin d’étude
- 28 -
critères (vorticité, critère Lamda2,…). Le lecteur peut se referer à la reference pour plus amples
informations Kaouthar24, 2004
Pour expliquer la formulation du critère 2Γ , il faut impérativement passer par le critère de base 1Γ
- Critère 1Γ La fonction scalaire adimensionnelle normalisée 11 1− < Γ < est définie en un point fixe du
domaine considéré :
( )1
1
.M
zM SM
PM UP u dS
S PM U∈
∧Γ = ∫uuuur uuur
uur
uuuur uuur
S : l’air qui entoure le point P
M : un point quelconque de S
zuuur
: Vecteur normale au plan de mesure
Cette fonction procure un moyen pour quantifier la topologie des lignes des courant de
l’écoulement à la proximité du point P ainsi que le signe de rotation du tourbillon.
1Γ n’est pas un invariant Galiléen (c'est-à-dire dépendant de la valeur moyenne locale du
champ vecteur de vitesse.
Généralement, au pré du centre de tourbillons 1Γ atteint une valeur très proche de 1
- Critère 2Γ Le critère 2Γ , dérive du critère précèdent en tenant compte de la convection locale du
tourbillon. La fonction 2Γ est définie par
( ) ( )1
1
.
M P
zM SM
PM U UP u dS
S PM U∈
∧ −Γ = ∫
uuuur uuur uuur
uur
uuuur uuur
1P
S
U UdSS
= ∫uuur
: La vitesse locale de convection.
On note que contrairement à1Γ , 2Γ est un invariant Galiléen. De plus les développeurs de ce
critère ont pu déterminer un seuil de validation pour considérer que le résultat représente une frontière
de tourbillon tel que π2
2 >Γ
Au voisinage du centre de tourbillons 2Γ atteint une valeur très proche de 1

ENIM Projet de fin d’étude
- 29 -
III.4.3 Choix de la zone de mesure par PIV Le choix de la zone de mesure par PIV s’est basé essentiellement sur des études antérieures
(Schram21, C, et al., 2003) qui ont montré que les tourbillons commencent à apparaître à partir de
X=0.5D (Figure III-18)
Figure III-18 : Courbe de la formation des tourbillons
obtenue par critère de vorticité avec Uj=5ms-1
III.5 Conclusion
Dans ce chapitre, nous avons mis ce travail dans son contexte. On a présenté le dispositif
expérimental obtenu suite à l’adaptation d’une installation déjà existante. Les techniques de mesures
de la vitesse ont été introduites en consacrant une grande partie à la technique PIV très performante
dans ce genre d’étude.

ENIM Projet de fin d’étude
- 30 -
Chapitre IV Résultats et interprétations

ENIM Projet de fin d’étude
- 31 -
Dans ce chapitre, nous présentons les premiers résultats obtenus dans le cadre de cette étude. On
commence par présenter l’effet du contrôle sur le champ moyen de vitesse. Les interprétations sur
l’effet du contrôle seront appuyées par les cartographies des énergies de fluctuations.
IV.1 Caractérisation de l’écoulement sans contrôle
Afin de vérifier que l’écoulement est de type jet, nous avons pris des mesures de la
vitesse à l’aide du tube du Pitot monté sur un système de déplacement pouvant avoir des
précisions de l’ordre de 1 mm. Des mesures prises au niveau de différentes sections
orthogonales à l’axe du jet ont permis d’avoir le profil suivant :
Profil du développement du jet à Uj=30 ms -1 et D=40 mm
y = -0,2729x + 1
-4
-3
-2
-1
0
1
2
3
4
0 2 4 6 8 10 12
X/D
Y/D
X=0,5D
X=D
X=2D
X=4D
X=7D
X=8D
X=10D
Série10
Linéaire (Cone-)
Figure IV-1 : Profil de la vitesse du jet sur efférentes section pour Uj =30 ms-1
Lorsque le jet quitte la tuyère, il se forme une couche de mélange annulaire entre le jet et
l’environnement extérieur. Cette couche s’étend sur environ 3.67 Dj et son épaisseur croît de manière
linéaire avec la distance axiale (environ 0.27 X). Elle entoure la zone appelée « cône potentiel ».
En s’éloignant davantage de cette zone, le jet se développe puis atteint la « zone de turbulence
développée ». On retrouve quasiment les résultats déjà mentionnés dans I.1.1.
Par la suite, nous avons maintenue la section constante, et nous avons tracé le profil de la vitesse
pour différentes valeurs de la vitesse d’éjection du jet Uj.

ENIM Projet de fin d’étude
- 32 -
Courbe de la variation de la vitesse en fonction de Y pour une section X=0,5 D
0,00
0,20
0,40
0,60
0,80
1,00
1,20
-0,8 -0,7 -0,6 -0,5 -0,4 -0,3 -0,2 -0,1 0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8
Y/D
U/U
j
Uj=30,5ms-1
Uj=14,9ms-1
Uj=21ms-1
Numérique
Figure IV-2 : Courbe de la variation de la vitesse en fonction de Y pour une section X=0,5 D
La figure IV.2 permet de vérifier d’avantage qu’il s’agit bien d’un comportement jet, nous
remarquons d’abord que les quatre courbes adimensionnées (pour différentes vitesse d’éjection Uj et à
la même section X=0.5D) se correspondent, de plus la courbe en bleu correspond au résultat de la
simulation numérique déjà mentionnée.
La PIV permet de visualiser les champs instantanés de vitesse et caractériser les structures qui se
développent dans la zone de cisaillement du jet. La Figure IV-3donne un exemple sur ces champs
instantanés combinés à des cartes de critères de détection des structures tourbillonnaires.
Figure IV-3 : Identification des tourbillons par le critèr e 2Γ
Le champ moyen de l’écoulement sans contrôle est donné par la Figure IV-4 . Le comportement
de type jet est bien vérifié à partir de ce champ moyen

ENIM Projet de fin d’étude
- 33 -
X/D
Y/D
1 1.2 1.4 1.6 1.8 20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Figure IV-4 Champ de la vitesse moyenne dans le cas sans contrôle
IV.2 Effet du contrôle
IV.2.1 Quantité de mouvement injecté
Pour les micro-jets on a choisie de traiter deux cas test en faisant varier la pression dans le
réservoir d’air comprimé, Des valeurs de 4 à 6 bars au niveaux du réservoir donnant des vitesses de
micro jets d’environ 25 à 35 ms-1.
La vitesse de l’écoulement principale étant de 5 ms-1, ce qui donne un coefficient d’injection de
quantité de mouvement de l’ordre de :
%5,4045,020
118
5
25
40
218
4
418 2
2
2
2
2
≈≈
==⇒== °
°
µρπ
ρπ
µ
jj
jj
soufflage
UD
ud
JetM
M
Et de %25,0=jµ par injecteur
Les valeurs obtenues sont relativement faibles.

ENIM Projet de fin d’étude
- 34 -
IV.2.2 Effet du contrôle sur le champ moyen
Des modifications très importantes ont été observées sur le champ moyen de vitesse suite à
l’application du contrôle. Comparé au cas sans contrôle (Figure IV-5 -a)), le champ moyen obtenu
avec contrôle longitudinal (Figure IV-5 -b)) a subi de grand élargissement suite à l’injection de la
quantité de mouvement dans la zone de cisaillement ou l’intensité de la vitesse est faible et par
conséquent le coefficient d’injection de la quantité de mouvement local très élevée. Toute la zone de
cisaillement se trouve déplacée vers le haut et la vitesse moyenne dans le jet voit sa taille diminuer.
a) b)
c) d)
Figure IV-5 : Cartographies des champs moyens de la vitesse (en m/s)
a) Sans contrôle b) Contrôle longitudinale à uj=25ms-1
c) Contrôle incliné à uj=25ms-1 d) Contrôle transversal à uj=25ms-1

ENIM Projet de fin d’étude
- 35 -
Il est clair que le coefficient de quantité de mouvement est très élevé tout ce passe comme si un
deuxième jet vient confiner le jet principal. La solution est de réduire au maximum la vitesse
d’injection au niveau des micros jets, choses très difficiles à réaliser avec les moyens qu’on dispose,
car il est délicat de garder la pression constante à ce niveau.
Un système de tampon de détente doit être inséré entre le réservoir d’air comprimé pour lui faire
subir une détente avant qu’il soit utilisé pour alimenter l’actionneur.
L’effet obtenu avec les deux autres actionneurs est totalement différent. Sous l’effet du contrôle
transversale et incliné, c’est l’intérieur du jet qui va subir des modifications, le comportement jet se
perd. La zone de cisaillement reste pratiquement intacte.
-0,5
0
0,5
1
1,5
2
2,5
3
3,5
4
0 0,2 0,4 0,6 0,8 1 1,2
Y/D
U/U
j
Sans contrôle
Contrôle incliné
Contrôle vertical
Contrôle longitudinal
Figure IV-6 : Courbe des variations de la vitesse moyenne pour les même section et vitesse d’injection (uj=25 ms-1) pour des déférents contrôles
La courbe confirme les constations sur les champs moyen, le contrôle longitudinale provoque
une survitesse dans la couche de cisaillement initiale, en injectant de la quantité de mouvement, la
zone de cisaillement de taille initiale d’environ 0,4 Dj se trouve réduite à 0,15 Dj d’environ.
Le contrôle transversale n’affecte pas de façon significative le profil de vitesse, ceci est du à
l’injection à l’intérieur de l’écoulement. Le contrôle incliné, provoque une sur vitesse à l’intérieur de
la structure de l’écoulement sans modifier la taille de la zone de cisaillement.
On observe une contraction de la section débitante. Les applications de ce cas ne sont pas
envisageables.

ENIM Projet de fin d’étude
- 36 -
En guise de conclusion pour cette partie, la manipulation des jets, toutes en gardant leur
comportement par une injection dans zone de cisaillement ou le jet secondaire crée vient confiner le
jet principal.
On estime que la vitesse du jet secondaire crée doit être de même intensité que celle du jet
principal. La réalisation pratique de cette configuration demande beaucoup de précautions.
IV.2.3 Effet du contrôle sur la carte des fluctuati ons
La figure illustre les cartographies des énergies de fluctuations u2 pour les différentes
configurations : sans contrôle (a), contrôle longitudinal (b), transversal (c) et incliné (d). Comparé au
cas sans contrôle, la cartographie des énergies des fluctuations du contrôle longitudinal présente une
nette modification pas au niveau structure mais plutôt en terme d’intensité. Le maximum d’intensité
des fluctuations dans la zone de cisaillement a été multiplié par 16. Le contrôle provoque
l’intensification des énergies de fluctuations ce qui améliore le mélange dans cette zone. Quant aux
deux autres cas de contrôle, c’est l’intensification des valeurs des fluctuations à l’intérieur du jet
principale qui se manifeste. Le contrôle transversale fait passer l’intensité maximale à l’intérieur de
l’écoulement de 0.4 (m/s)² à 5 (m/s)². L’effet du contrôle incliné est plus intense que celui du contrôle
transversal car il possède une composante transversale. Ces constations confirment les conclusions
tirées à partir du champ moyens. Le contrôle longitudinal permet d’atteindre des résultats probants si
l’objectif fixé était l’amélioration du mélange. Si par contre, on souhaite réduire le bruit, on est amené
à trouver une solution pour avoir des vitesses de micro-jets très basses. Une conclusion qui reste à
confirmer par voie expérimentale et demande la résolution du problème d’alimentation déjà exposé.

ENIM Projet de fin d’étude
- 37 -
a) b)
c) d)
Figure IV-7 : Caractérisation des fluctuations des vitesses 2u sous l’effet du contrôle a) Sans contrôle
b) Contrôle longitudinale à uj=25ms-1 c) Contrôle incliné à uj=25ms-1
d) Contrôle transversal à uj=25ms-1
IV.3 Conclusion
Les séries des premières mesures effectuées dans le cadre de ce projet ont permis de voir
l’influence des différentes configurations de contrôle sur l’écoulement de type jet. La
configuration de contrôle par micro-jets longitudinaux s’avère plus probante en terme
d’action sur la zone de cisaillement. Avec les vitesses d’injection qu’on dispose, un effet
d’amélioration du mélange a été obtenu. Pour l’effet contraire nécessaire pour la réduction
de bruit d’autres précautions sont indispensables.
ENIM Projet de fin d’étude
- 38 -
Conclusion Générale

ENIM Projet de fin d’étude
- 39 -
L’idée de base de ce travail de visualiser l’effet d’un contrôle fluidique sur un écoulement de
type jet circulaire. Le contrôle est basé sur le principe de micro-jets continus au nombre de 18
injecteurs régulièrement espacés dans la direction azimutale appliqués au niveau de la sortie du jet.
Trois configurations de contrôle non intrusive ont été étudié à savoir : contrôle longitudinal, contrôle
transversal et contrôle incliné à 90° par rapport à la direction de l’écoulement.
Il ressort de cette étude :
- Le contrôle modifie la structure de base de l’écoulement ;
- Le contrôle longitudinal modifie que la zone de cisaillement en provoquant de
l’agitation dans cette zone ce qui induit une nette intensification de l’énergie de
fluctuation. Cette intensification peut être bénéfique pour les problèmes de mélange
- Les deux autres types de contrôle modifient la structure intérieure de l’écoulement et
provoquent l’augmentation de l’énergie des fluctuations dans cet endroit ;
- Si l’objectif fixé était le réduction du bruit, une nette réduction de la vitesse des
actionneurs est indispensable ce qui demande plus d’effort au niveau conception et
réalisation du dispositif expérimental. Ceci, constituera une perspective logique de ce
travail.

ENIM Projet de fin d’étude
- 40 -
Références Bibliographiques
1. Van Dyke, M., 1988, An album of fluid motion. Parabolic Press, Fourth printing.
2. Goldstein, M.E., 1976, Aeroacoustics. McGraw-Hill International Book Company
3. Lighthill, M.J., 1952, On sound generated aerodynamically: I. General theory. Proc. Roy.
Soc., A (211), 564-587.
4. Ffowcs Williams, J.E., Hawkings, D.L, 1965, Noise of highly turbulent jets at low exhaust
speeds. AIAA J., 3, pp. 791-793.
5. Lazure, H., 1997, Relation entre la structure aérodynamique d'écoulements turbulents
incompressibles et le bruit émis, Thèse Université de Poitiers.
6. Andersson, N., 2003, A Study of Mach 0.75 Jets and Their Radiated Sound Using Large-
Eddy Simulation, Division of Thermo and Fluid Dynamics, Chalmers University Of
Technology, Göteborg, Sweden.
7. Faivre, V., 2003, Etude expérimentale et numérique du contrôle actif des jets dans des
chambre de combustion, Thèse Institut National Polytechnique de Toulouse
8. Stone, C. et Menon, S., 2003, Open-loop control of combustion instabilities in a model gas
turbine combustor, J. Turbulence, 3.
9. Vermeulen, P. J., Odgers, J. & Ramesh, V., 1982, Acoustic control of dilution-air mixing in
a gas turbine combustor, Journal of Engineering and Power, 104, 844-852.
10. Lang, W., Poinsot, T. et Candel, S., 1987, Active control of combustion instability,
Combustion and Flame, 70, 281-289.
11. Suzuki, H., Kasagi, N. et Suzuki, Y., 1999, Active control of an axisymmetric jet with an
intelligent nozzle, 1st int. Symposium on Turbulent Shear Flow.
12. Davis, M. R., 1982, Variable control of jet decay, AIAA Journal, 20, 606-609.
13. Bradbury, L. J. S. & Khadem, A. H., 1975, The distortion of jets by tabs”, J. Fluid Mech.,
70, 801-813.
14. Lardeau, S., Lamballais, E. et Bonnet, J. P., 2002, Direct numerical simulation of a jet
controlled by fluid injection, Journal of Turbulence, 3.
15. Denis, S., Delville, J., Garem, J. H. et Bonnet, J. P., 1999, Contrôle de l’expansion d’un jet
rond par des jets impactants, 14ème Congrès Français de Mécanique Toulouse, Référence
848 1-6.

ENIM Projet de fin d’étude
- 41 -
16. Amitay, M. et Glezer, A., 1999, Aerodynamic flow control of a thick airfoil using synthetic
jet actuators, Proceedings of the 3rd ASME/JSME Joint Fluids Engineering Conference San
Francisco, California, FEDSM-6922.
17. Viets, H., 1975, Flip-Flop jet nozzle, AIAA Journal, 13, 1375-1379.
18. Mason, M. S. et Crowther, W. J., 2002, Fluidic thrust vectoring of low observable aircraft,
CEAS Aerospace Aerodynamic Research Conference Cambridge, UK.
19. Ben Cheikh, M., 2004, Contrôle d’écoulement par jet synthétique analyse à partir des
mesures de vélocimétrie par image de particule, Thèse Ecole National d’Ingénieur de
Monastir.
20. Grafitieaux, L., Michard, M. et Grosjean, N, 2002, Combining PIV, POD and vortex
identification algorithme for the staudy of unstady turbulent swirling flows.
21. Schram, C. et Anthoine, J., 2003, Journées Mesures de vitesse particulaire acoustique par
laser, Angers, France
22. Gad-El-Hak, M., Pollard, A. et Bonnet, J.P,1998,Flow control : Fundamentals and
Practices, Springer
23. http://acoustique.ec-lyon.fr
24. Ismail, K., 2004, Critères d’indentification des structures cohérentes, Mastère à l’Ecole
National d’Ingénieur de Monastir.





























