Embed Size (px)
Citation preview
Institut National des Sciences Appliquées de Strasbourg
Mémoire de soutenance de Diplôme d’Ingénieur INSA
Spécialité TOPOGRAPHIE
Évaluation des mesures de fils tendus par
photogrammétrie en vue de l’automatisation
des mesures d’écartométrie pour l’accélérateur
de particules LHC au CERN.
Annexes
Présenté en Septembre 2016 par Camille Vendeuvre
Réalisé au sein de l’entreprise :
CERN
385 route de Meyrin
CH-1211 Genève 23, Suisse
Correcteur :
Pierre Grussenmeyer
Directeur de PFE :
Dirk Mergelkuhl
Ingénieur métrologie des expériences

INSA Strasbourg - CERN
Sommaire des annexes
1 Les États qui contribuent au CERN ......................................................................... 1
2 Photogrammétrie convergente ................................................................................ 2
2.1 Équations de colinéarité ................................................................................... 2
2.2 Orientation interne ........................................................................................... 4
2.2.1 Les paramètres de prise de vue ................................................................ 4
2.2.2 Paramètres de distorsions ........................................................................ 5
2.3 Orientation externe .......................................................................................... 6
2.4 Orientation absolue .......................................................................................... 6
2.4.1 Mise à l’échelle ......................................................................................... 7
2.4.2 Transformation des coordonnées ............................................................. 7
3 Rapport de métrologie des cibles inclinées ............................................................. 8
4 Rapport de métrologie des barres d’échelle ............................................................ 9
5 Rapport de métrologie du banc de tests ................................................................ 12
6 Calcul de ligne ...................................................................................................... 20
6.1 Rappels sur les moindres carrés .................................................................... 20
6.2 Calculs des paramètres de la ligne ................................................................ 21
6.3 Calcul des valeurs initiales ............................................................................. 21
6.4 Remplissage de la matrice jacobienne A ....................................................... 22
6.5 Remplissage de la matrice des écarts K ........................................................ 23
6.6 Programmation .............................................................................................. 23
6.7 Résultats du calcul de lignes .......................................................................... 23
7 Détection et élimination des erreurs dans le calcul d’une ligne.............................. 24
7.1 Pondérations à l’aide des données d’AICON ................................................. 25
7.1.1 Pondération par les rayons ..................................................................... 25
7.1.2 Pondération par les précisions ................................................................ 25
7.2 Estimateurs Robustes .................................................................................... 26
7.3 Élimination par les erreurs normées ............................................................... 26
7.4 Comparatif des différentes méthodes ............................................................ 28
8 Photos en couleurs ............................................................................................... 29
8.1 Comment sont faites les photos couleur (matrice de bayer) ........................... 29
8.2 Évaluation de l’apport des photos couleur ...................................................... 29
8.3 Couleur du fil.................................................................................................. 32
9 Calcul de flèche du fil ............................................................................................ 33
10 ISO : sensibilité ISO de l’appareil .......................................................................... 33
11 Importance du point de source .............................................................................. 34
12 Mesure Visio (microscope) .................................................................................... 35
INSA Strasbourg - CERN
12.1 Mesures des caractéristiques au microscope ................................................. 35
12.2 Vérification des fils ......................................................................................... 36
12.2.1 Diamètre et régularité du fil. .................................................................... 36
12.2.2 Défauts sur le fil ...................................................................................... 37
12.3 Vérification de la qualité des cibles. ............................................................... 38
12.4 Centrage d’un point dans une cible pour mesure théodolite ........................... 41
13 Mesures de fils à plomb ........................................................................................ 42
13.1 Fils à plombs.................................................................................................. 42
13.2 Disposition des cibles et barres d’échelle ....................................................... 43
13.3 Tests de précision sur fils à plomb ................................................................. 44
13.3.1 Précision sur la détermination des fils et sur leur parallélisme ................ 45
13.3.2 Bilan relatif aux mesures de fil à plomb ................................................... 48
14 Guide de programmation d’un calcul de fil tendu par photogrammétrie ................. 49
14.1 Prérequis ....................................................................................................... 49
14.2 Application de l’opérateur « edge » ................................................................ 49
14.3 Application des corrections aux points mesurés. ............................................ 50
14.4 Détection approximative ................................................................................ 51
14.5 Tri des points ................................................................................................. 52
14.6 Calcul du centre du fil .................................................................................... 52
14.7 Projection vers l’espace objet ........................................................................ 53
14.8 Calcul de la ligne moyenne ............................................................................ 53
Table des figures .......................................................................................................... 54
Table des tableaux ....................................................................................................... 55
Table des formules ....................................................................................................... 55

INSA Strasbourg - CERN
Camille VENDEUVRE 1
1 Les États qui contribuent au CERN
Source : (CERN 2016)1
Actuellement, les États membres sont : l’Allemagne, l'Autriche, la Belgique, la Bulgarie,
le Danemark, l'Espagne, la Finlande, la France, la Grèce, la Hongrie, Israël, l'Italie, la
Norvège, les Pays-Bas, la Pologne, le Portugal, la République slovaque, la République
tchèque, la Roumanie, le Royaume-Uni, la Suède et la Suisse. La Serbie et Chypre sont États
membres associés en phase préalable à l’adhésion. La Turquie et le Pakistan sont États
membres associés.
Figure 1 : Les états membre du CERN (source : CERN)
1 CERN, 2016. États membres. Available at: http://home.cern/fr/about/member-states Consulté le 31 août 2016.
INSA Strasbourg - CERN
2 Camille VENDEUVRE
2 Photogrammétrie convergente
Ce chapitre présente les bases de la photogrammétrie. Les mesures de précision
nécessitent une connaissance approfondie de l’ensemble des paramètres, de la prise de vue
au calcul. La première partie passe en revue les aspects mathématiques de la
photogrammétrie et la seconde un certain nombre d’aspects pratiques.
La photogrammétrie convergente ou photogrammétrie terrestre regroupe les méthodes
de mesure utilisant des photographies prises autour d’un même objet.
Elle s’oppose à la photogrammétrie stéréoscopique ou aérienne qui est la mesure sur des
photographies prises le plus souvent d’un avion. Ces photos sont prises en bandes et
orientées dans la même direction. Ces deux méthodes utilisent cependant la même base
mathématique : les équations de colinéarité. Il est possible de réaliser des prises de vue
stéréoscopiques d’objets terrestres et les prises de vue convergentes se répandent en
photogrammétrie aérienne
2.1 Équations de colinéarité
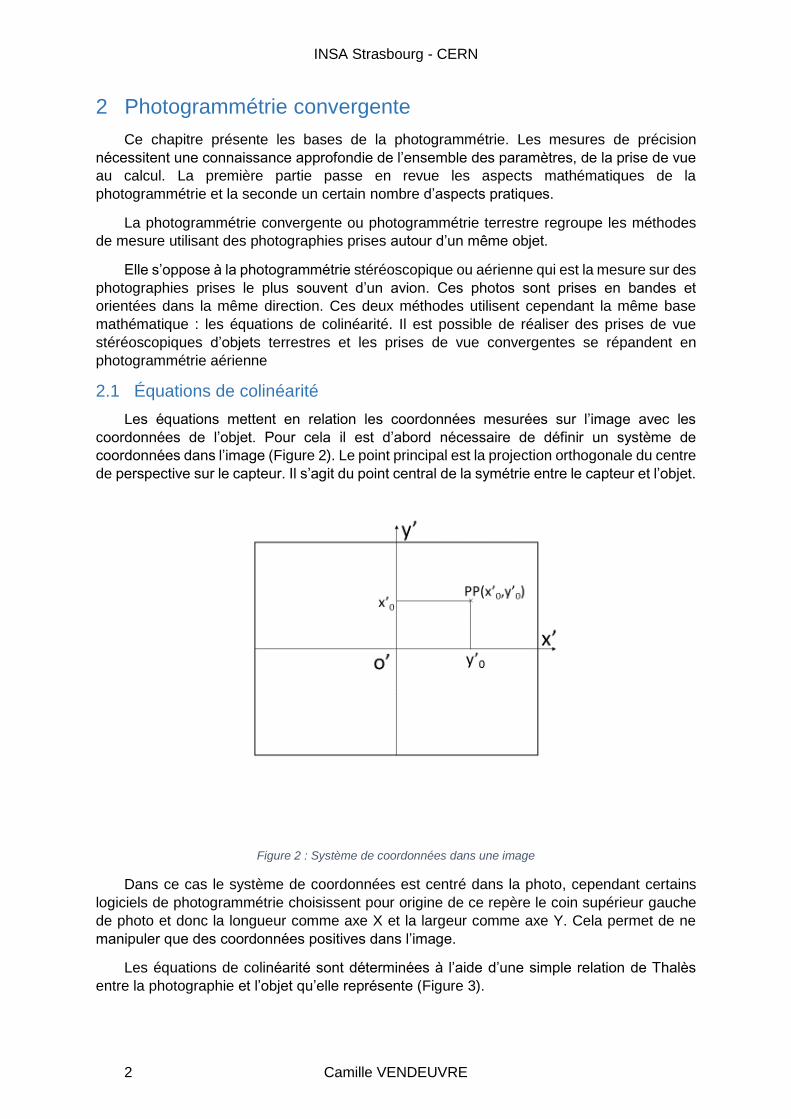
Les équations mettent en relation les coordonnées mesurées sur l’image avec les
coordonnées de l’objet. Pour cela il est d’abord nécessaire de définir un système de
coordonnées dans l’image (Figure 2). Le point principal est la projection orthogonale du centre
de perspective sur le capteur. Il s’agit du point central de la symétrie entre le capteur et l’objet.
Figure 2 : Système de coordonnées dans une image
Dans ce cas le système de coordonnées est centré dans la photo, cependant certains
logiciels de photogrammétrie choisissent pour origine de ce repère le coin supérieur gauche
de photo et donc la longueur comme axe X et la largeur comme axe Y. Cela permet de ne
manipuler que des coordonnées positives dans l’image.
Les équations de colinéarité sont déterminées à l’aide d’une simple relation de Thalès
entre la photographie et l’objet qu’elle représente (Figure 3).

INSA Strasbourg - CERN
Camille VENDEUVRE 3
Figure 3 : Relation géométrique pour la détermination des équations de colinéarité
Le point P a pour coordonnées images (x’, y’), (X’, Y’, Z’) dans le repère de prise de vue
et (X, Y, Z) dans le repère global. L’équation de colinéarité permet d’exprimer les coordonnées
images en fonction de la distance principale (c), de la hauteur de prise de vue (H), des
coordonnées images (x0’, y0’) du point principal et du centre de perspective de la prise de vue
(X0’, Y0’, Z0’).
𝐻
𝑐=𝑋′𝑝 − 𝑋′0𝑥′𝑝 − 𝑥′0
𝑥′𝑝 − 𝑥′0𝑐
=𝑋′𝑝 − 𝑋′0
𝐻 𝑒𝑡 𝐻 = 𝑍′0 − 𝑍′𝑝
𝑥′𝑝 = 𝑥′0 − 𝑐𝑋′𝑝 − 𝑋′0𝑍′𝑝 − 𝑍′0
Formule 1 : Équation de colinéarité dans le Plan OXZ
Cette relation s’applique dans le plan OXZ de la prise de de vue. Une relation identique
s’applique dans le plan OYZ.
𝑦′𝑝 = 𝑦′0 − 𝑐𝑌′𝑝 − 𝑌′0
𝑍′𝑝 − 𝑍′0
Formule 2 : Équation de colinéarité dans le Plan OYZ
Ces équations de colinéarité sont exprimées dans un repère propre à la prise de vue et il
est nécessaire de les replacer dans un repère général à l’aide d’une matrice de rotation. Le
contenu de la matrice rotation est détaillé par la suite (Cf. § 2.3).

INSA Strasbourg - CERN
4 Camille VENDEUVRE
(𝑋 − 𝑋0𝑌 − 𝑌0𝑍 − 𝑍0
) = (𝑅11 𝑅12 𝑅13𝑅21 𝑅22 𝑅23𝑅31 𝑅32 𝑅33
)(
𝑋′ − 𝑋′0𝑌′ − 𝑌′0𝑍′ − 𝑍′0
)
Formule 3 : Rotation du repère de prise de vue vers le repère global
L’introduction de cette rotation pour se placer dans le repère global conduit à la forme
généralisée des équations de colinéarité (Formule 4).
{
𝑥′ = 𝑥′0 − 𝑓
𝑅11(𝑋 − 𝑋0) + 𝑅21(𝑌 − 𝑌0) + 𝑅31(𝑍 − 𝑍0)
𝑅13(𝑋 − 𝑋0) + 𝑅23(𝑌 − 𝑌0) + 𝑅33(𝑍 − 𝑍0)+ 𝑑𝑥
𝑦′ = 𝑥′0 − 𝑓𝑅12(𝑋 − 𝑋0) + 𝑅22(𝑌 − 𝑌0) + 𝑅32(𝑍 − 𝑍0)
𝑅13(𝑋 − 𝑋0) + 𝑅23(𝑌 − 𝑌0) + 𝑅33(𝑍 − 𝑍0)+ 𝑑𝑦
Formule 4 : Équations de colinéarité objet vers image
Il est aussi possible d’exprimer les coordonnées objet en fonction des coordonnées
images.
{
X = 𝑋0 + (𝑍𝑝 − 𝑍0)
𝑅11(𝑥′ − 𝑥′0) + 𝑅12(𝑦′ − 𝑦′0) − 𝑅13(𝑓)
𝑅31(𝑥′ − 𝑥′0) + 𝑅32(𝑦′ − 𝑦′0) + 𝑅33(𝑓)
Y = 𝑌0 + (𝑍𝑝 − 𝑍0)𝑅21(𝑥
′ − 𝑥′0) + 𝑅22(𝑦′ − 𝑦′0) − 𝑅23(𝑓)
𝑅31(𝑥′ − 𝑥′0) + 𝑅32(𝑦′ − 𝑦′0) + 𝑅33(𝑓)
Formule 5 : Équations de colinéarité image vers objet
Ces relations sont à la base de la photogrammétrie et traduisent l’alignement entre le
point objet P, le centre de perspective O et le point image p’. Pour un seul point sur une photo
il existe 3 inconnues (X, Y, Z) pour la position du point dans le repère objet et seulement deux
équations pour les coordonnées pixel du point. Il est donc nécessaire de connaître la position
d’un point sur plusieurs photos pour calculer sa position dans l’espace. Ces points sont
appelés points homologues.
2.2 Orientation interne
L’orientation interne consiste en un calcul par ajustement de compensation par les
moindres carrées des paramètres de la caméra. Les paramètres de prise de vue peuvent
changer entre chaque série de photos et il est nécessaire de fixer cette géométrie pour un
même projet. Un simple changement de mise au point modifie la distance principale et donc
l’orientation interne. Une fois chaque photo associée aux paramètres de prise de vue, il est
possible d’utiliser plusieurs caméras et donc plusieurs prises de vue dans un même projet.
Ces paramètres peuvent être séparés en deux classes : les paramètres géométriques et
les paramètres de distorsion.
2.2.1 Les paramètres de prise de vue
Ces paramètres correspondent à la géométrie de la caméra au moment de la prise de
vue. Il s’agit du calcul de la distance principale ainsi que de la position du point principal. Il est
aussi nécessaire de définir un système de coordonnées ; dans le cas d’une photo numérique
ce sont les pixels eux-mêmes qui servent de système de coordonnées.

INSA Strasbourg - CERN
Camille VENDEUVRE 5
2.2.2 Paramètres de distorsions
L’utilisation de multiples lentilles dans l’objectif introduit nécessairement des erreurs, qui
sont dues à des défauts d’alignement des axes optiques des lentilles ou même des défauts
dans la fabrication du verre. La correction de ces défauts est absolument nécessaire dans le
cadre des mesures de précision. Les écarts peuvent atteindre plusieurs dizaines de pixels et
les précisions requises pour l’étude sont bien inférieures au pixel.
Des valeurs calculées en laboratoire sont fournies par les constructeurs afin de connaître
des valeurs initiales pour démarrer le calcul en bloc.
Les distorsions sont classées en trois groupes : radiale, tangentielle et du capteur. La
correction finale s’exprime de la manière suivante:
𝑑𝑥 = 𝑑𝑥𝑟𝑎𝑑 + 𝑑𝑥𝑡𝑎𝑛 + 𝑑𝑥𝑑𝑒𝑓
𝑑𝑦 = 𝑑𝑦𝑟𝑎𝑑 + 𝑑𝑦𝑡𝑎𝑛 + 𝑑𝑦𝑑𝑒𝑓
Formule 6 : Correction des coordonnées pixels d'un point
Les distorsions radiales correspondent aux défauts mécaniques dans l’optique. Il s’agit
donc de défauts symétriques par rapport au point principal. Ces défauts sont exprimés de la
manière suivante par Brown2. Dans la plupart des cas le calcul ne dépasse pas le troisième
terme même si il est possible d’en calculer plus, les termes supplémentaires sont
négligeables.
𝑑𝑟′𝑟𝑎𝑑 = 𝐾1𝑟3 + 𝐾2𝑟
5 + 𝐾3𝑟7
Formule 7 : Correction radiale dans le cas « unbalanced »
Une seconde manière d’exprimer ces distorsions permet de décorréler les paramètres de
distorsion de la distance principale. Cela revient à une rotation de la courbe autour de l’origine.
Les distorsions repassent donc par 0 pour une distance égale à r0. Ce modèle est aussi appelé
modèle « balanced ».
𝑑𝑟′𝑟𝑎𝑑 = 𝐴1(𝑟3 − 𝑟0
2𝑟) + 𝐴2(𝑟5 − 𝑟0
4𝑟) + 𝐴3(𝑟7 − 𝑟0
6𝑟)
Formule 8 : Correction radiale dans le cas « balanced »
Avec 𝑑𝑟𝑟𝑎𝑑 la correction radiale, r le rayon (𝑟 = 𝑥2 + 𝑦2), 𝐴1, 𝐴2, 𝐴3 les coefficients du
polynôme et 𝑟0le second passage par 0 de la courbe de distorsion. Ce second passage par 0
est souvent situé au 2/3 du capteur.
Pour passer de la formule radiale aux corrections selon les axes, il suffit d’appliquer les
formules suivantes définies à l’aide du théorème de Thalès :
𝑑𝑥′𝑟𝑎𝑑 = 𝑥′ ∗𝑑𝑟′𝑟𝑎𝑑𝑟′
𝑑𝑦′𝑟𝑎𝑑 = 𝑦′ ∗𝑑𝑟′𝑟𝑎𝑑𝑟′
Formule 9 : Projection des déformations radiales sur les axes
2 BROWN, D. C. 1966: Decentering distortion of lenses. Photogrammetric Engeneering pp. 444 - 462.
INSA Strasbourg - CERN
6 Camille VENDEUVRE
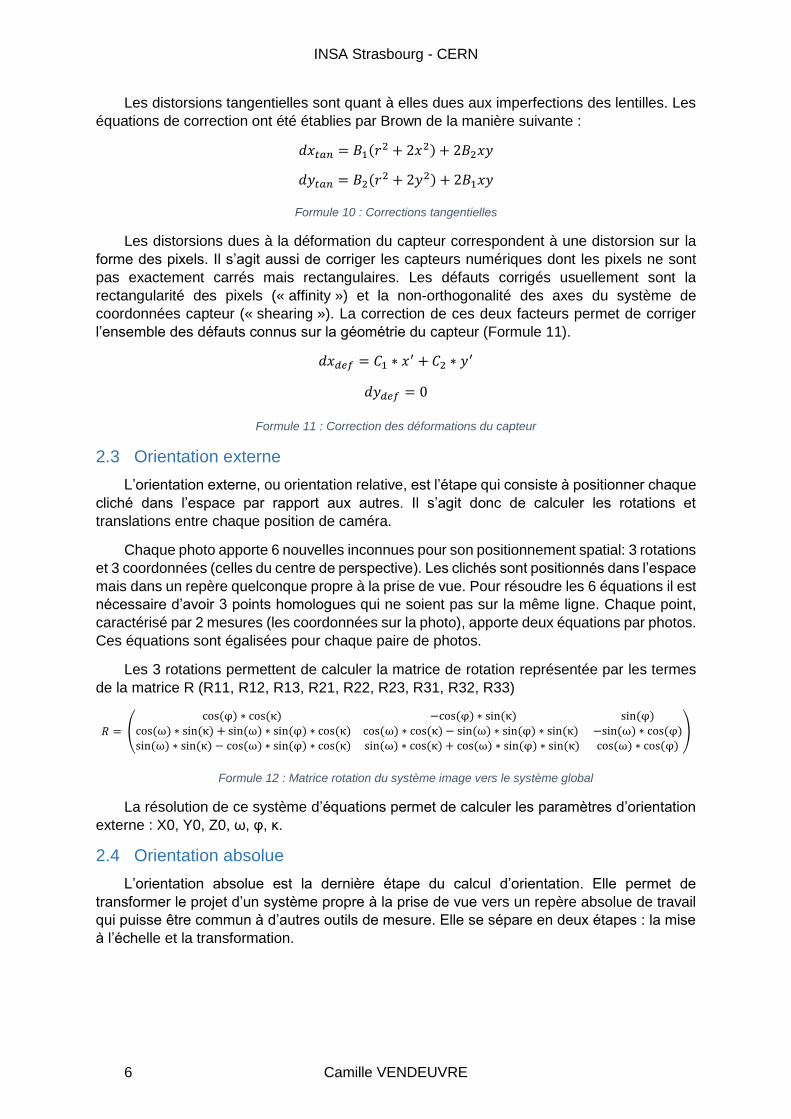
Les distorsions tangentielles sont quant à elles dues aux imperfections des lentilles. Les
équations de correction ont été établies par Brown de la manière suivante :
𝑑𝑥𝑡𝑎𝑛 = 𝐵1(𝑟2 + 2𝑥2) + 2𝐵2𝑥𝑦
𝑑𝑦𝑡𝑎𝑛 = 𝐵2(𝑟2 + 2𝑦2) + 2𝐵1𝑥𝑦
Formule 10 : Corrections tangentielles
Les distorsions dues à la déformation du capteur correspondent à une distorsion sur la
forme des pixels. Il s’agit aussi de corriger les capteurs numériques dont les pixels ne sont
pas exactement carrés mais rectangulaires. Les défauts corrigés usuellement sont la
rectangularité des pixels (« affinity ») et la non-orthogonalité des axes du système de
coordonnées capteur (« shearing »). La correction de ces deux facteurs permet de corriger
l’ensemble des défauts connus sur la géométrie du capteur (Formule 11).
𝑑𝑥𝑑𝑒𝑓 = 𝐶1 ∗ 𝑥′ + 𝐶2 ∗ 𝑦
′
𝑑𝑦𝑑𝑒𝑓 = 0
Formule 11 : Correction des déformations du capteur
2.3 Orientation externe
L’orientation externe, ou orientation relative, est l’étape qui consiste à positionner chaque
cliché dans l’espace par rapport aux autres. Il s’agit donc de calculer les rotations et
translations entre chaque position de caméra.
Chaque photo apporte 6 nouvelles inconnues pour son positionnement spatial: 3 rotations
et 3 coordonnées (celles du centre de perspective). Les clichés sont positionnés dans l’espace
mais dans un repère quelconque propre à la prise de vue. Pour résoudre les 6 équations il est
nécessaire d’avoir 3 points homologues qui ne soient pas sur la même ligne. Chaque point,
caractérisé par 2 mesures (les coordonnées sur la photo), apporte deux équations par photos.
Ces équations sont égalisées pour chaque paire de photos.
Les 3 rotations permettent de calculer la matrice de rotation représentée par les termes
de la matrice R (R11, R12, R13, R21, R22, R23, R31, R32, R33)
𝑅 = (
cos(φ) ∗ cos(κ) −cos(φ) ∗ sin(κ) sin(φ)
cos(ω) ∗ sin(κ) + sin(ω) ∗ sin(φ) ∗ cos(κ) cos(ω) ∗ cos(κ) − sin(ω) ∗ sin(φ) ∗ sin(κ) −sin(ω) ∗ cos(φ)sin(ω) ∗ sin(κ) − cos(ω) ∗ sin(φ) ∗ cos(κ) sin(ω) ∗ cos(κ) + cos(ω) ∗ sin(φ) ∗ sin(κ) cos(ω) ∗ cos(φ)
)
Formule 12 : Matrice rotation du système image vers le système global
La résolution de ce système d’équations permet de calculer les paramètres d’orientation
externe : X0, Y0, Z0, ω, φ, κ.
2.4 Orientation absolue
L’orientation absolue est la dernière étape du calcul d’orientation. Elle permet de
transformer le projet d’un système propre à la prise de vue vers un repère absolue de travail
qui puisse être commun à d’autres outils de mesure. Elle se sépare en deux étapes : la mise
à l’échelle et la transformation.
INSA Strasbourg - CERN
Camille VENDEUVRE 7
2.4.1 Mise à l’échelle
La photogrammétrie et les géométries de prise de vue sont libres de toute échelle. Le
théorème de Thalès, fondement des équations de colinéarité, est lui-même un facteur
d’échelle. Il est donc nécessaire de fixer une distance sous risque d’avoir un système libre.
Pour appliquer un facteur d’échelle au projet, il est nécessaire d’avoir introduit dans la
prise de vue un objet dont la taille est connue. Dans le cas des mesures effectuées, il s’agit
de barres d’échelle en carbone mais il peut aussi s’agir d’une mire, d’une simple règle ou d’un
objet quelconque dont on connaît la taille. Il faut trouver sur ces objets deux points dont la
distance spatiale est connue.
L’objet dont les dimensions sont connues est mesuré en 3D à l’aide de points homologues
sur des photos. Cela implique que l’objet doit être visible sur au moins deux photos. Une fois
les points mesurés en 3D il suffit d’appliquer un facteur d’échelle à tout le projet afin que ces
points soient séparés par la distance réelle.
Cette étape est une étape critique de la mesure. Afin d’améliorer la précision, il est
nécessaire que ces points soient calculés à partir d’un maximum de photos pour réduire
l’erreur de pointé, mais aussi que la taille de l’objet soit connue avec une précision adaptée
au besoin. Il est aussi possible d’introduire plusieurs objets de taille connue pour réduire
l’erreur et contrôler la mise à l’échelle. Il est conseillé d’éviter une mise à l’échelle trop petite
par rapport à l’objet auquel cas une extrapolation aura lieu.
L’introduction d’une erreur systématique à ce moment dans le calcul aura un impact
important, particulièrement pour le calcul des distances dans tout le projet.
2.4.2 Transformation des coordonnées
Les coordonnées peuvent être rapportées après mise à l’échelle dans un repère absolu.
Il s’agit d’une transformation à 6 degrés de liberté (3 rotations et 3 translations). Afin de bloquer
ces 6 degrés de liberté il est nécessaire de connaître 3 points. Le premier point bloque les 3
translations, le second point laisse libre une rotation autour de l’axe formé par les deux
premiers points et le troisième point sert à bloquer cette dernière rotation. Il n’est
techniquement pas nécessaire de connaître les neuf coordonnées mais seulement 6 pour
définir le système par un point (bloquer les translations) une direction (deux coordonnées) et
une dernière coordonnée pour bloquer la dernière rotation autour de la direction donnée.
La transformation requiert donc un minimum de 3 points non alignés mais l’ajout d’autres
points garantira un contrôle de la transformation et le calcul de précisions à l’aide du calcul en
bloc.
INSA Strasbourg - CERN
8 Camille VENDEUVRE
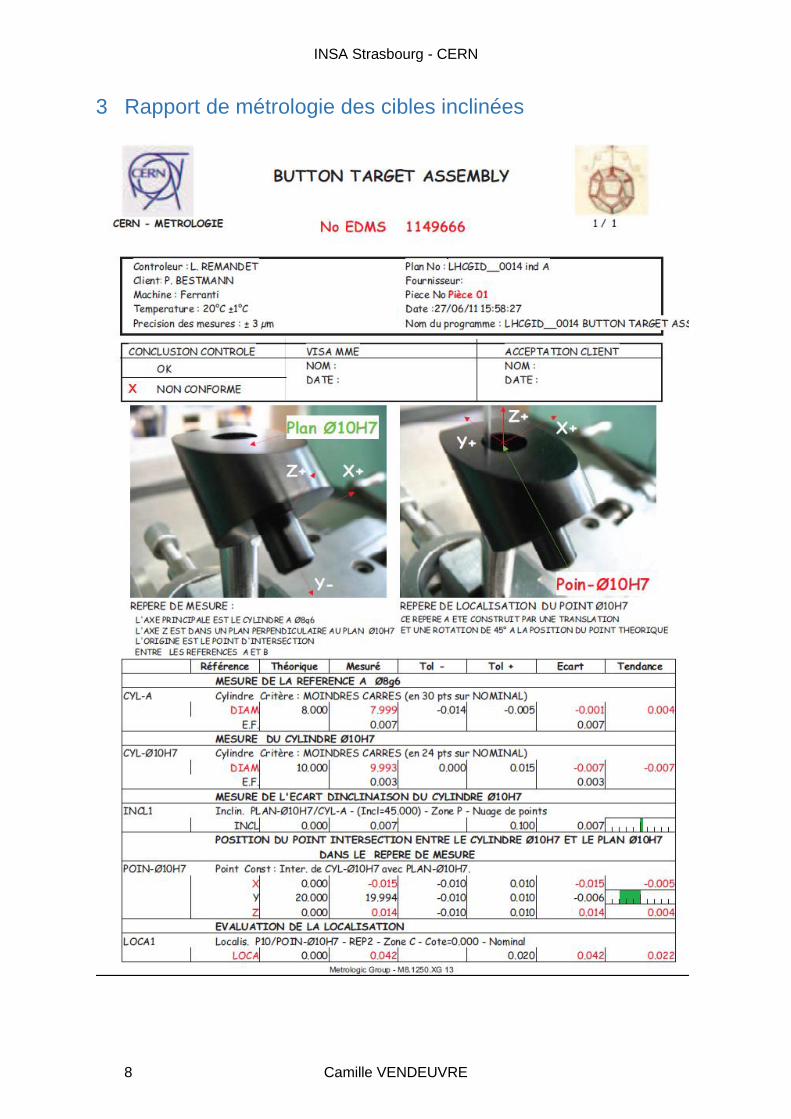
3 Rapport de métrologie des cibles inclinées
INSA Strasbourg - CERN
Camille VENDEUVRE 9
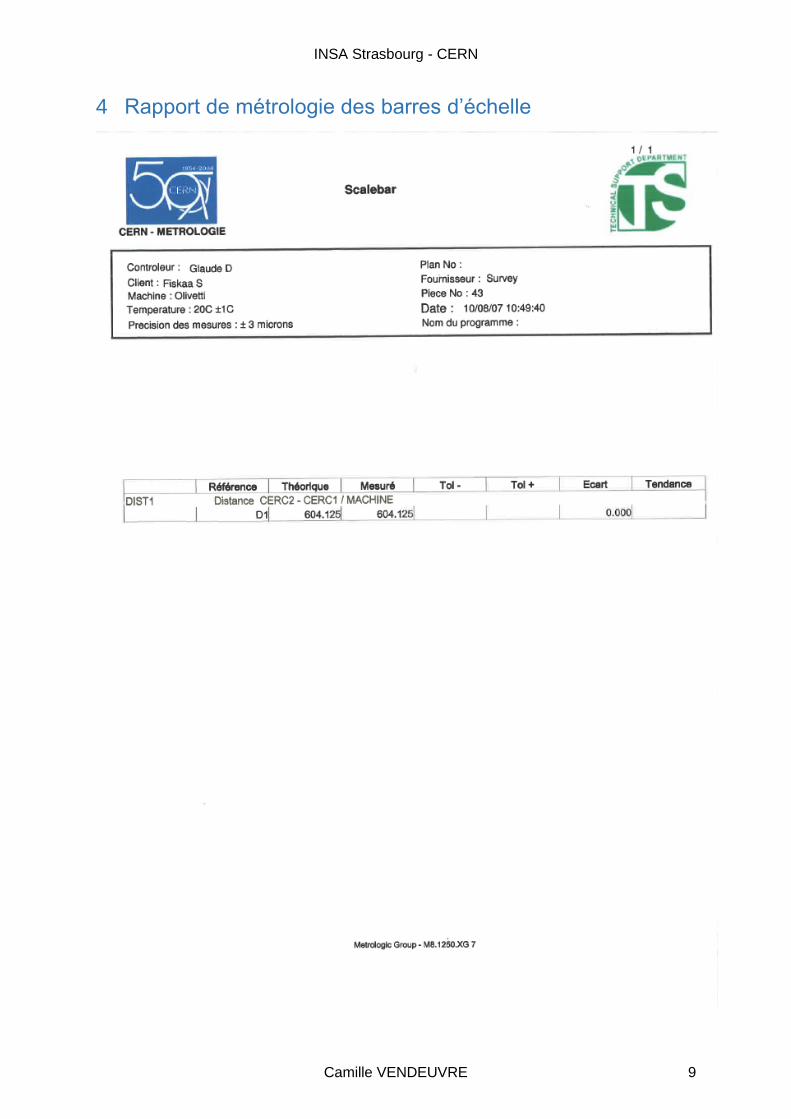
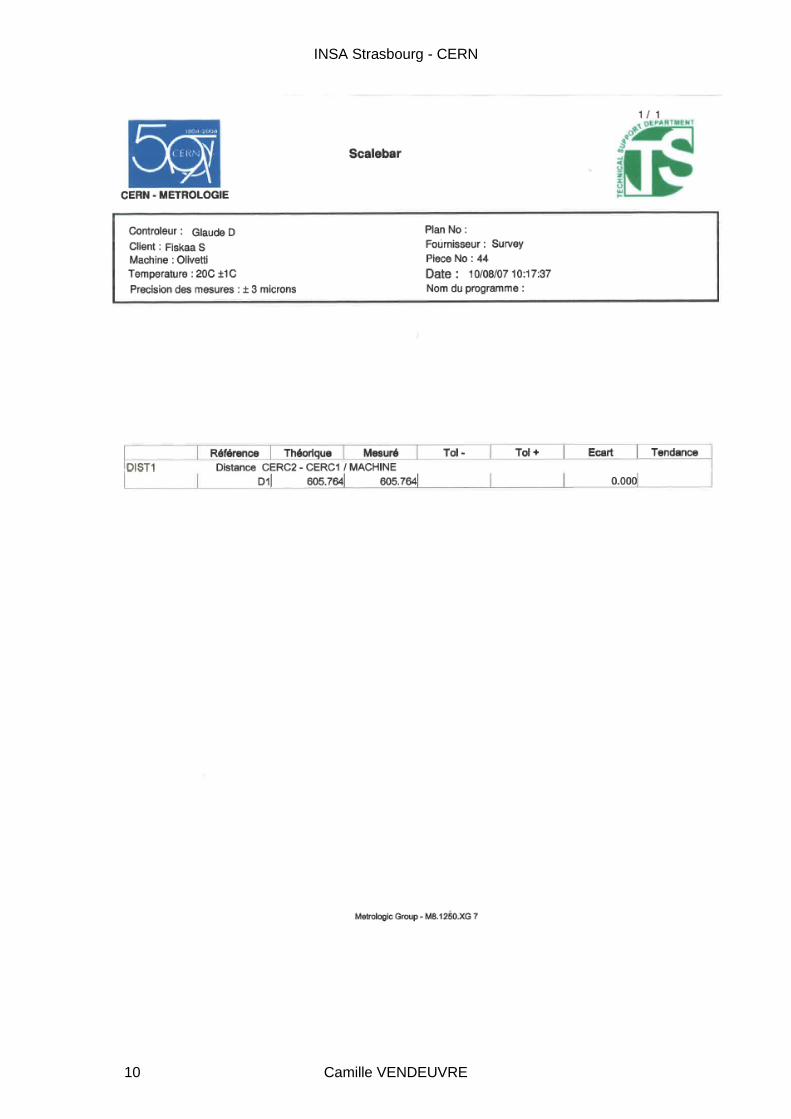
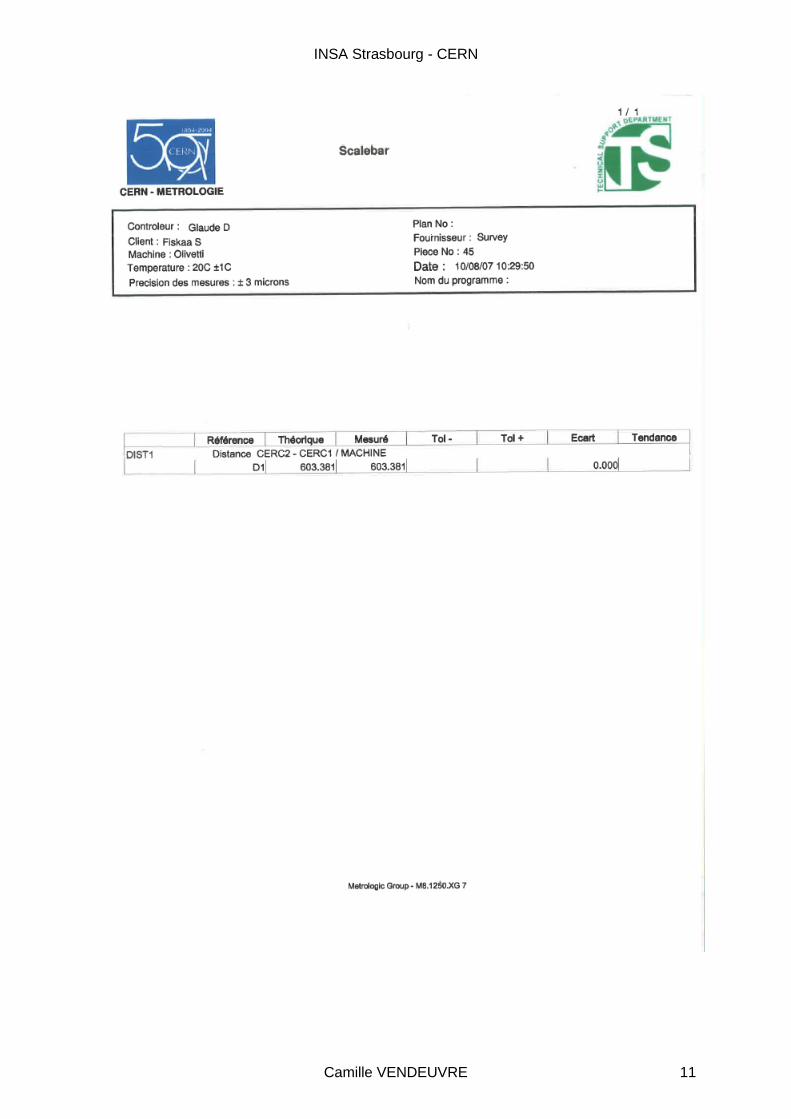
4 Rapport de métrologie des barres d’échelle
INSA Strasbourg - CERN
10 Camille VENDEUVRE
INSA Strasbourg - CERN
Camille VENDEUVRE 11

INSA Strasbourg - CERN
12 Camille VENDEUVRE
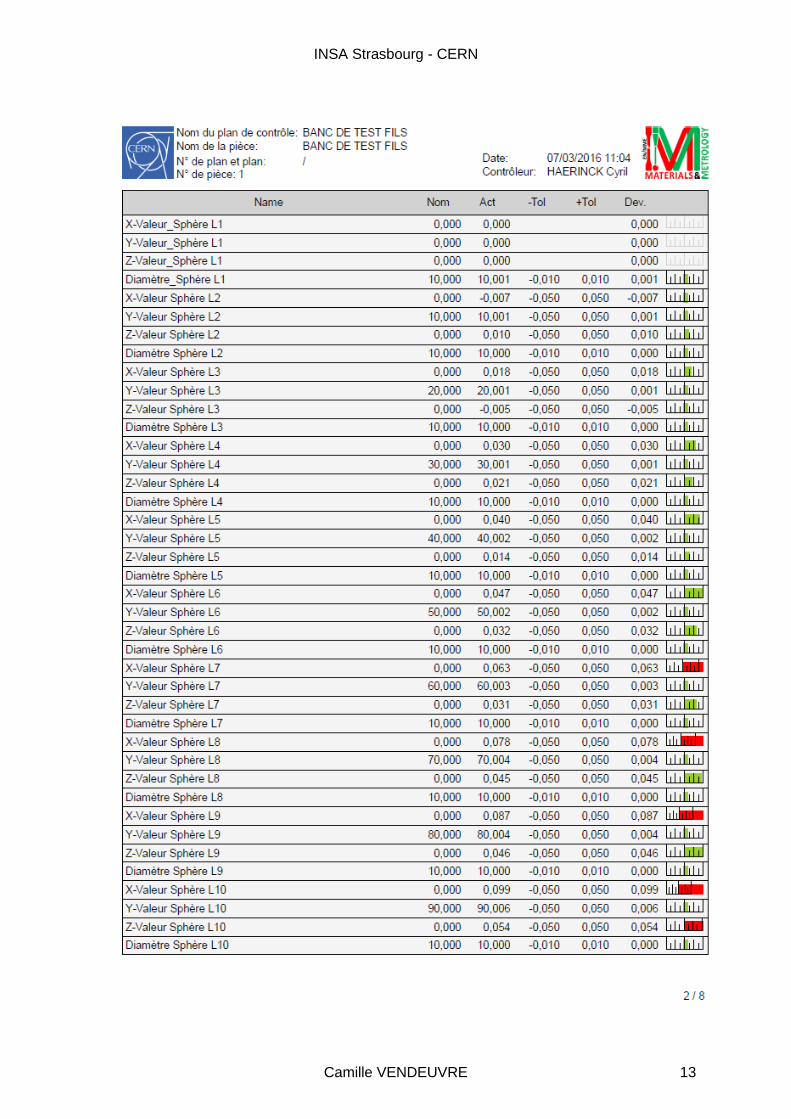
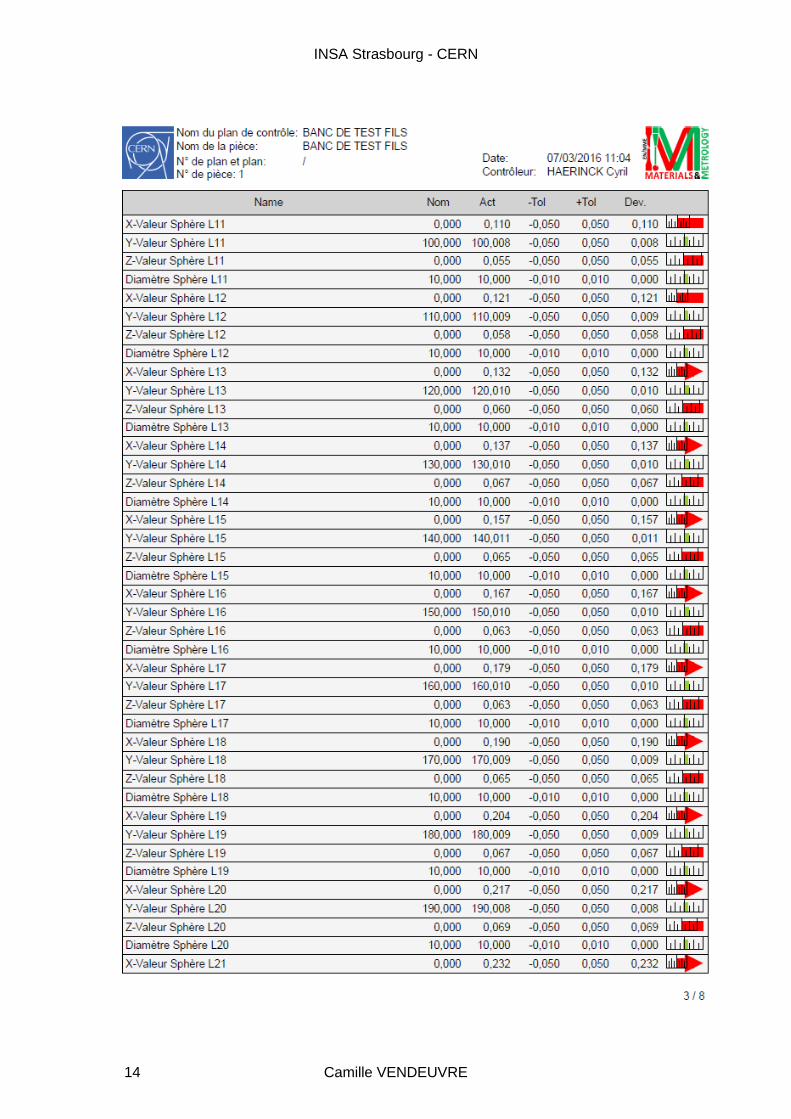
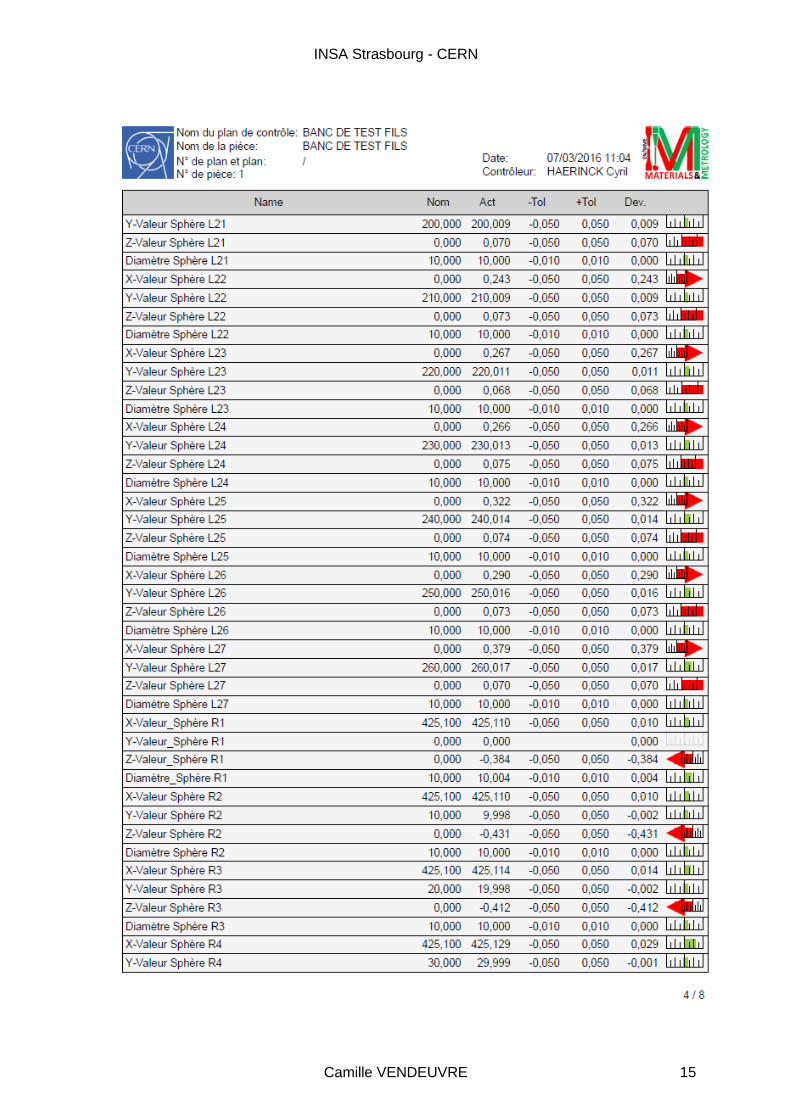
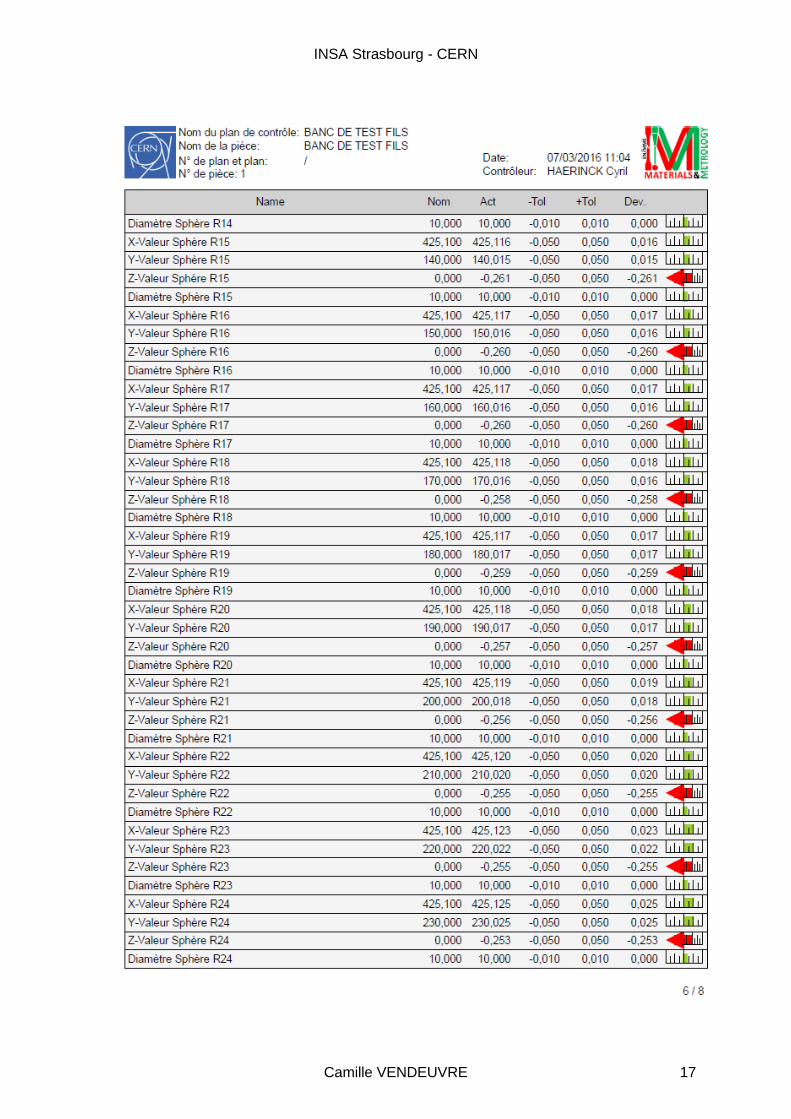
5 Rapport de métrologie du banc de tests
INSA Strasbourg - CERN
Camille VENDEUVRE 13
INSA Strasbourg - CERN
14 Camille VENDEUVRE
INSA Strasbourg - CERN
Camille VENDEUVRE 15

INSA Strasbourg - CERN
16 Camille VENDEUVRE
INSA Strasbourg - CERN
Camille VENDEUVRE 17
INSA Strasbourg - CERN
18 Camille VENDEUVRE
INSA Strasbourg - CERN
Camille VENDEUVRE 19

INSA Strasbourg - CERN
20 Camille VENDEUVRE
6 Calcul de ligne
Le calcul de la ligne moyenne est une étape critique du projet. En effet la modélisation de
la ligne à partir des mesures réalisées sur le logiciel contraint la précision des résultats. AICON
ne fournit pas directement une équation de droite car l’algorithme fonctionne aussi pour des
lignes courbes. Le logiciel calcule des points au centre du fil espacés d’une distance définie
par l’utilisateur (Cf. rapport 3.5.5).
Pour calculer la ligne la plus probable, la méthode des moindres carrés est utilisée. Cette
méthode s’adapte bien à la problématique car un grand nombre de mesures sont disponibles
sur un seul fil afin de déterminer sa droite moyenne.
6.1 Rappels sur les moindres carrés
La méthode des moindres carrés est une méthode de calcul de compensation permettant
d’obtenir le meilleur résultat pour un jeu de données comportant une redondance. Cette
méthode s’appuie sur l’hypothèse que les erreurs seront réparties selon une loi normale dite
distribution Gaussienne.
La principale difficulté de la méthode est de gérer la non-linéarité des équations
d’observation. Pour cela un développement de Taylor au premier degré permet de linéariser
les équations et de faciliter la résolution. Il est aussi nécessaire de calculer des valeurs
approchées pour éviter que le programme ne trouve des extrema locaux qui ne représentent
pas la meilleure solution.
Les étapes clés pour la résolution du problème sont présentées succinctement.
- Établissement des équations d’erreur primitive. Avec 𝐿𝑖 la valeur approchée et 𝑙𝑖 la
mesure.
𝑣𝑖 = 𝐿𝑖 − 𝑙𝑖
Formule 13 : Équation d'erreur primitive
- Établissement des équations d’erreur transformée. Avec 𝐹(𝑥, 𝑦, 𝑧)
𝑣𝑖 =𝜕𝐹
𝜕𝑥∗ 𝑑𝑥 +
𝜕𝐹
𝜕𝑦∗ 𝑑𝑦 +
𝜕𝐹
𝜕𝑧∗ 𝑑𝑧 + 𝐹(𝑥0, 𝑦0, 𝑧0)
Formule 14 : Équation d'erreur transformée
- Passage à la forme matricielle :
𝐴 =
(
𝜕𝐹
𝜕𝑥(𝑥1, 𝑦1, 𝑧1)
𝜕𝐹
𝜕𝑦(𝑥1, 𝑦1, 𝑧1)
𝜕𝐹
𝜕𝑧(𝑥1, 𝑦1, 𝑧1)
⋮ ⋮ ⋮𝜕𝐹
𝜕𝑥(𝑥𝑛, 𝑦𝑛, 𝑧𝑛)
𝜕𝐹
𝜕𝑦(𝑥𝑛, 𝑦𝑛, 𝑧𝑛)
𝜕𝐹
𝜕𝑧(𝑥𝑛, 𝑦𝑛, 𝑧𝑛))
𝑃 = (𝑃1 0 00 ⋱ 00 0 𝑃𝑛
)𝑘 = (−𝑘1 = 𝐹(𝑥1, 𝑦1, 𝑧1)
⋮−𝑘𝑛 = 𝐹(𝑥n, 𝑦n, 𝑧𝑛)
)
Formule 15 : Forme matricielle du système d'équations
Les formules de résolution du système matriciel (Formule 15) sont exposées en Formule
16.

INSA Strasbourg - CERN
Camille VENDEUVRE 21
𝑁 = 𝐴𝑡 ∗ 𝑃 ∗ 𝐴
𝑁𝑘 = 𝐴𝑡 ∗ 𝑃 ∗ 𝑘
𝑑𝑥 = 𝑁−1 ∗ 𝑁𝑘
Formule 16 : Résolution du système d'équations
Il est ensuite possible de calculer les précisions associées par transmission d’erreurs
quadratique (Formule 17). La matrice v est la matrice des résidus, Cxx matrice de covariance
des inconnues, Cll matrice de covariance des observations, Qxx matrice des cofacteurs des
inconnues et Qll matrice des cofacteurs des observations.
𝑣 = 𝑎 ∗ 𝑑𝑥 − 𝑘
𝑚𝑞02 =
𝑣𝑡 ∗ 𝑃 ∗ 𝑣
(𝑛 − 𝑞)
𝐶𝑥𝑥 = 𝑚𝑞02 ∗ 𝑄𝑥𝑥 = 𝑚𝑞0
2 ∗ 𝑁−1
𝐶𝑙𝑙 = 𝑚𝑞02 ∗ 𝑄𝑙𝑙 = 𝑚𝑞0
2 ∗ (𝐴 ∗ 𝑄𝑥𝑥 ∗ 𝐴𝑡)
Formule 17 : Calcul et transmission d'erreurs quadratique
Une fois la correction dx calculée, les valeurs initiales sont corrigées. Ces valeurs sont
ensuite utilisées comme valeurs approchées de la première itération. Le calcul est itéré
jusqu’à l’obtention de corrections négligeables.
6.2 Calculs des paramètres de la ligne
Dans ce cas, une régression linéaire orthogonale est choisie car elle représente mieux la
droite moyenne qu’une régression selon un seul des axes. Deux régressions linéaires sont
donc réalisées selon deux plans perpendiculaires contenant la direction principale du fil.
L’ensemble des travaux d’alignement du CERN sont décomposés en une composante radiale
(plane) et une composante d’élévation.
La distance d’un point P à une droite d est définie par la Formule 18. La droite d est
représentée par son coefficient directeur a et son ordonnée à l’origine b. Le point P par ses
coordonnées Px et Py. La valeur absolue permet d’obtenir toujours une distance positive entre
le point et la droite. Dans le cas étudié, elle n’est pas nécessaire, la fonction à minimiser étant
la somme des écarts au carré. Il n’y a donc pas d’influence si l’écart s’avère positif ou négatif.
𝐷 = | 𝑎 ∗ 𝑥 − 𝑦 + 𝑏 |
√1 + 𝑎²=√(𝑎 ∗ 𝑥 − 𝑦 + 𝑏)2
√1 + 𝑎²
Formule 18 : Distance entre un point et une droite
Dans ce cas, la mesure correspond à la distance orthogonale entre le point et la droite.
La mesure est donc égale à la fonction à minimiser (Formule 19).
𝑣𝑖 = 𝐿𝑖
Formule 19 : Équation d'erreur primitive pour une régression linéaire
6.3 Calcul des valeurs initiales
Pour calculer les valeurs initiales, 2 points suffisent à définir l’équation de la droite
(Formule 20). Dans les conditions de tests et des mesures, les points extrêmes peuvent être

INSA Strasbourg - CERN
22 Camille VENDEUVRE
entachés d’erreurs. Deux points à 1/3 et 2/3 de la ligne sont donc choisis. À l’aide de ces deux
points, les paramètres a et b sont calculés.
𝑎0 = 𝑌2 − 𝑌1𝑋2 − 𝑋1
𝑏0 = 𝑌1 − 𝑎0 ∗ 𝑋1
Formule 20 : Calcul des paramètres initiaux
6.4 Remplissage de la matrice jacobienne A
L’étape suivante consiste à calculer les différentes dérivées 𝜕𝐷
𝜕𝑎 (Formule 21) et
𝜕𝐷
𝜕𝑏
(Formule 22).
𝜕𝐷
𝜕𝑎=
1
1 + 𝑎2∗ (1
2∗(2𝑎𝑥2 − 2𝑥𝑦 + 2𝑏𝑥)
√(𝑎𝑥 − 𝑦 + 𝑏)2∗ √1 + 𝑎2 −√(𝑎𝑥 − 𝑦 + 𝑏)2 ∗
1
2∗
2𝑎
√1 + 𝑎2)
𝜕𝐷
𝜕𝑎=
1
1 + 𝑎2∗ (
𝑥(𝑎𝑥 − 𝑦 + 𝑏)
√(𝑎𝑥 − 𝑦 + 𝑏)2∗ √1 + 𝑎2 −
𝑎√(𝑎𝑥 − 𝑦 + 𝑏)2
√1 + 𝑎2)
𝜕𝐷
𝜕𝑎= (
𝑥(𝑎𝑥 − 𝑦 + 𝑏)
√(𝑎𝑥 − 𝑦 + 𝑏)2∗
1
√1 + 𝑎2−𝑎√(𝑎𝑥 − 𝑦 + 𝑏)2
(1 + 𝑎2)3/2)
𝜕𝐷
𝜕𝑎= 𝑥 ∗ 𝑠𝑖𝑔𝑛(𝑎𝑥 − 𝑦 + 𝑏)
√1 + 𝑎2−𝑎 ∗ |𝑎𝑥 − 𝑦 + 𝑏|
(1 + 𝑎2)3/2
Formule 21 : Calcul de 𝜕𝐷
𝜕𝑎
𝜕𝐷
𝜕𝑏=1
2∗(2𝑎𝑥 − 2𝑦 + 2𝑏)
√(𝑎𝑥 − 𝑦 + 𝑏)2 ∗
1
√1 + 𝑎2
𝜕𝐷
𝜕𝑏=
(𝑎𝑥 − 𝑦 + 𝑏)
√(𝑎𝑥 − 𝑦 + 𝑏)2 ∗
1
√1 + 𝑎2
𝜕𝐷
𝜕𝑏=𝑠𝑖𝑔𝑛(𝑎𝑥 − 𝑦 + 𝑏)
√1 + 𝑎2
Formule 22 : Calcul de 𝜕𝐷
𝜕𝑏
Les coefficients de la matrice jacobienne A (Formule 23) correspondent aux valeurs des
dérivées estimées en (a, b, Xi et Yi)
𝐴𝑖,1 = 𝑋𝑖 ∗ 𝑠𝑖𝑔𝑛(𝑎𝑋𝑖 − 𝑌𝑖 + 𝑏)
√1 + 𝑎2−𝑎 ∗ |𝑎𝑋𝑖 − 𝑌𝑖 + 𝑏|
(1 + 𝑎2)3/2
𝐴𝑖,2 = 𝑠𝑖𝑔𝑛(𝑎𝑋𝑖 − 𝑌𝑖 + 𝑏)
√1 + 𝑎2
Formule 23 : Calcul des coefficients de la matrice jacobienne
INSA Strasbourg - CERN
Camille VENDEUVRE 23
6.5 Remplissage de la matrice des écarts K
Les ki correspondent à l’opposé de la distance entre le point et la droite modélisée
(Formule 24).
𝑘𝑖 = − | 𝑎 ∗ 𝑋𝑖 − 𝑌𝑖 + 𝑏 |
√1 + 𝑎²
Formule 24 : Calcul des écarts ki
6.6 Programmation
La programmation a été réalisée sous Matlab ce qui permet une mise en œuvre rapide
du programme. Dans le cadre d’un calcul en bloc, les matrices constituent la principale
difficulté de programmation. L’écriture d’un programme permet un meilleur contrôle des
calculs et des résultats. Cela permet, en automatisant un maximum de tâches, de faciliter les
analyses lors des différents tests.
6.7 Résultats du calcul de lignes
Le calcul de ligne s’avère très rapide pour le calcul des différents fils d’un même projet et
pour le calcul des distances. Les résultats sur la détermination des paramètres semblent
particulièrement optimistes.
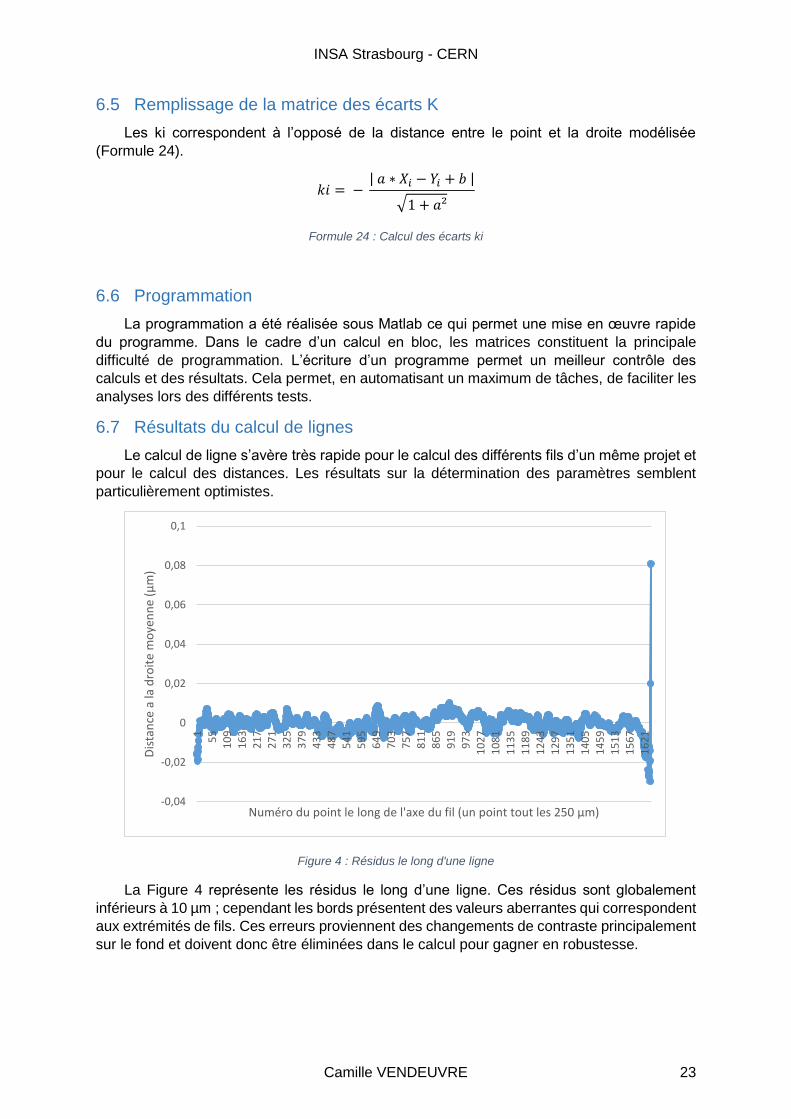
Figure 4 : Résidus le long d'une ligne
La Figure 4 représente les résidus le long d’une ligne. Ces résidus sont globalement
inférieurs à 10 µm ; cependant les bords présentent des valeurs aberrantes qui correspondent
aux extrémités de fils. Ces erreurs proviennent des changements de contraste principalement
sur le fond et doivent donc être éliminées dans le calcul pour gagner en robustesse.
-0,04
-0,02
0
0,02
0,04
0,06
0,08
0,1
15
51
09
16
32
17
27
13
25
37
94
33
48
75
41
59
56
49
70
37
57
81
18
65
91
99
73
10
27
10
81
11
35
11
89
12
43
12
97
13
51
14
05
14
59
15
13
15
67
16
21
Dis
tan
ce a
la d
roit
e m
oye
nn
e (µ
m)
Numéro du point le long de l'axe du fil (un point tout les 250 µm)
INSA Strasbourg - CERN
24 Camille VENDEUVRE
7 Détection et élimination des erreurs dans le calcul d’une ligne
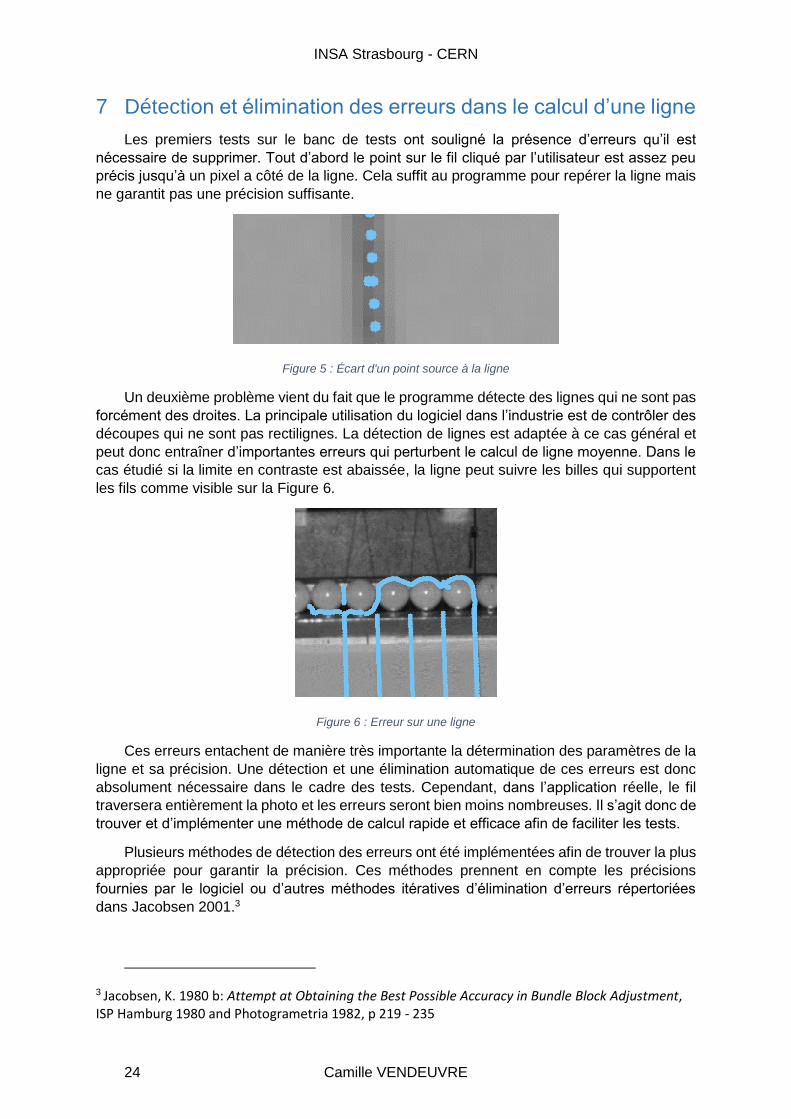
Les premiers tests sur le banc de tests ont souligné la présence d’erreurs qu’il est
nécessaire de supprimer. Tout d’abord le point sur le fil cliqué par l’utilisateur est assez peu
précis jusqu’à un pixel a côté de la ligne. Cela suffit au programme pour repérer la ligne mais
ne garantit pas une précision suffisante.
Figure 5 : Écart d'un point source à la ligne
Un deuxième problème vient du fait que le programme détecte des lignes qui ne sont pas
forcément des droites. La principale utilisation du logiciel dans l’industrie est de contrôler des
découpes qui ne sont pas rectilignes. La détection de lignes est adaptée à ce cas général et
peut donc entraîner d’importantes erreurs qui perturbent le calcul de ligne moyenne. Dans le
cas étudié si la limite en contraste est abaissée, la ligne peut suivre les billes qui supportent
les fils comme visible sur la Figure 6.
Figure 6 : Erreur sur une ligne
Ces erreurs entachent de manière très importante la détermination des paramètres de la
ligne et sa précision. Une détection et une élimination automatique de ces erreurs est donc
absolument nécessaire dans le cadre des tests. Cependant, dans l’application réelle, le fil
traversera entièrement la photo et les erreurs seront bien moins nombreuses. Il s’agit donc de
trouver et d’implémenter une méthode de calcul rapide et efficace afin de faciliter les tests.
Plusieurs méthodes de détection des erreurs ont été implémentées afin de trouver la plus
appropriée pour garantir la précision. Ces méthodes prennent en compte les précisions
fournies par le logiciel ou d’autres méthodes itératives d’élimination d’erreurs répertoriées
dans Jacobsen 2001.3
3 Jacobsen, K. 1980 b: Attempt at Obtaining the Best Possible Accuracy in Bundle Block Adjustment, ISP Hamburg 1980 and Photogrametria 1982, p 219 - 235
INSA Strasbourg - CERN
Camille VENDEUVRE 25
Pour comparer toutes ces méthodes une ligne présentant des points faux (Figure 6) a été
choisie. Cette ligne a ensuite été nettoyée manuellement de ses points faux et une ligne
moyenne a été calculée à partir du programme de base sans pondération. Ce résultat de
référence sera ensuite comparé au résultat de chaque méthode.
7.1 Pondérations à l’aide des données d’AICON
La pondération est le moyen le plus facile d’éliminer des erreurs. En attribuant un poids
faible voire nul aux observations fausses, on les exclut automatiquement du calcul de
compensation car le produit P*v*v associé à cette observation est faible voire nul.
AICON fournit plusieurs informations associées aux coordonnées des points. Il s’agit des
« emq » sur chaque coordonnée ainsi qu’une information « Rays » par points. Sans savoir
quels calculs amènent ces informations, car AICON n’est pas un logiciel libre, il apparait que
les meilleurs points situés au milieu des lignes ont des « emq » plus faibles et un nombre de
rayons plus élevé.
7.1.1 Pondération par les rayons
Cette méthode de pondération s’avère la plus facile à mettre en œuvre. Il suffit de donner
un poids équivalent au nombre de rayons pour chaque point sur la ligne.
Les résultats de cette méthode ne sont pas convaincants. Les écarts sont encore trop
importants. Cela est dû au fait que les points faux n’ont que la moitié de rayons des points
pertinents et leur poids résultant est donc seulement inférieur de moitié.
7.1.2 Pondération par les précisions
Même si la méthode de calcul des précisions utilisée par AICON n’est pas connue, ces
précisions semblent cohérentes avec la qualité du point, tout du moins sur les points
aberrants. Ce sont donc les emq qui sont choisies pour pondérer les observations (Formule
25).
Dans un premier temps une transmission d’emq entre les coordonnées est utilisée ainsi
que la distance point-droite à l’aide de la jacobienne précédemment calculée (Formule 23). Il
est ensuite nécessaire de choisir l’unité de poids. Pour cela la première observation est prise
comme observation de poids P=1. Les autres poids sont calculés à l’aide de la formule
suivante.
𝑃𝑖 =𝑚𝑞0
2 ∗ 𝑃0𝑚𝑞𝑖
2
Formule 25 : Calcul des poids
Les résultats de cette méthode ne sont pas concluants. Le problème vient du fait que des
points sont associés à une emq nulle, en particulier le pointé initial de l’utilisateur, mais aussi
les derniers points de chaque côté du fil. Et une emq nulle est elle-même associée à un poids
infini ce qui empêche le programme de fonctionner. Cette expérience met en lumière les
problèmes de redondance pour les points faux.

INSA Strasbourg - CERN
26 Camille VENDEUVRE
7.2 Estimateurs Robustes
Des méthodes d’estimation robustes sont présentées dans Jacobsen 2001. Deux
formules différentes ont été implémentées et testées.
La première méthode appelé méthode danoise (Formule 26) consiste à réduire le poids
des observations dont le résidu est plus important que σ0. Plus le résidu sera important plus
le poids sera faible car exp(-u) est une fonction décroissante.
𝑃 = 𝑒−𝑅𝐸𝐴∗(
𝑟𝑠𝑖𝑔𝑚𝑎0
)𝑅𝐸𝐶
Avec REA=0,05 et REC=4,4 puis 3,0 pour la dernière itération.
Formule 26 : Poids pour une compensation robuste
Cette méthode donne de très bon résultats, proches des valeurs de référence à environ
un µm. Cependant la méthode manque de stabilité. Pour éliminer assez de points faux il faut
itérer au moins une dizaine de fois contrairement à ce qui est indiqué dans Jacobsen 2001
qui conseille 2 à 4 itérations. L’augmentation du nombre d’itérations réduit très fortement le
nombre de points même sur des lignes qui sont justes. Les résultats sont meilleurs mais cela
est seulement dû au faible nombre de points restant pour calculer la droite.
La seconde méthode a déjà été implémentée dans le programme BLUH4. Il s’agit d’un
programme pour le calcul en bloc dans le cadre de la photogrammétrie. Une méthode itérative
d’élimination des erreurs y est utilisée (Formule 27). La formule distingue 2 cas : si l’écart est
inférieur à 2 σ0 le poids vaut 1. Si l’écart est supérieur à 2σ0 le poids est de plus en plus petit
à mesure que l’écart est important.
𝑉 < 2 ∗ 𝑠𝑖𝑔𝑚𝑎0 ⇒ 𝑃 = 1
𝑉 > 2 ∗ 𝑠𝑖𝑔𝑚𝑎0 ⇒ 𝑃 =𝑠𝑖𝑔𝑚𝑎0 ∗ 𝑠𝑖𝑔𝑚𝑎0 ∗ 4
𝑉 ∗ 𝑉
Formule 27 : Poids dans le programme BLUH
Cette méthode n’apporte pas de résultats suffisamment bons au vu du nombre de points
faux sur certaines lignes. Dans le cas étudié, il y a plus de 200 points faux ce qui représente
10 % des points de la ligne. Ces points doivent être tout simplement éliminés. Le problème
est que les points faux se voient associer des poids en fonction de leur écart à σ0. Les points
qui se trouvent sur d’autres fils ou autour des billes se voient donc associer des poids
négligeables (10-7).Mais les points faux situés sur le même fil derrière la bille ne présentent
pas assez d’écart pour avoir des poids négligeables. Ces points ont des poids de 0,3 à 0,5
alors qu’ils devraient aussi être éliminés du calcul.
La méthode du programme BLUH permet cependant d’avoir des résultats très proches
de la valeur de référence (exacts) sans pour autant garantir la précision.
7.3 Élimination par les erreurs normées
La dernière méthode implémentée est l’élimination systématique des erreurs plus
grandes que 2,58 σ0. Ce seuil correspond à 1% des mesures en dehors de ±2,58 σ0. Dans
les conditions de mesures, il a été estimé qu’une fois les erreurs éliminées 1% des mesures
4 BLUH : Bundle block adjustment Leibniz University Hannover
INSA Strasbourg - CERN
Camille VENDEUVRE 27
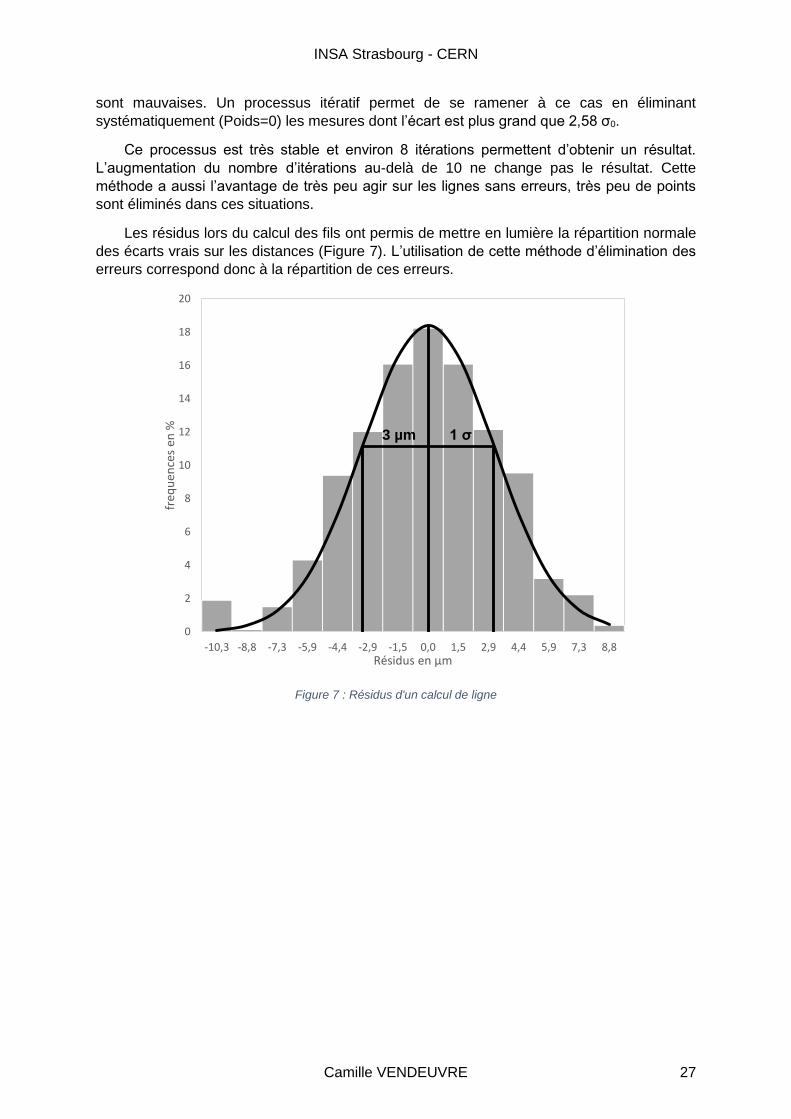
sont mauvaises. Un processus itératif permet de se ramener à ce cas en éliminant
systématiquement (Poids=0) les mesures dont l’écart est plus grand que 2,58 σ0.
Ce processus est très stable et environ 8 itérations permettent d’obtenir un résultat.
L’augmentation du nombre d’itérations au-delà de 10 ne change pas le résultat. Cette
méthode a aussi l’avantage de très peu agir sur les lignes sans erreurs, très peu de points
sont éliminés dans ces situations.
Les résidus lors du calcul des fils ont permis de mettre en lumière la répartition normale
des écarts vrais sur les distances (Figure 7). L’utilisation de cette méthode d’élimination des
erreurs correspond donc à la répartition de ces erreurs.
Figure 7 : Résidus d'un calcul de ligne
0
2
4
6
8
10
12
14
16
18
20
-10,3 -8,8 -7,3 -5,9 -4,4 -2,9 -1,5 0,0 1,5 2,9 4,4 5,9 7,3 8,8
freq
uen
ces
en %
Résidus en µm
3 µm 1 σ
INSA Strasbourg - CERN
28 Camille VENDEUVRE
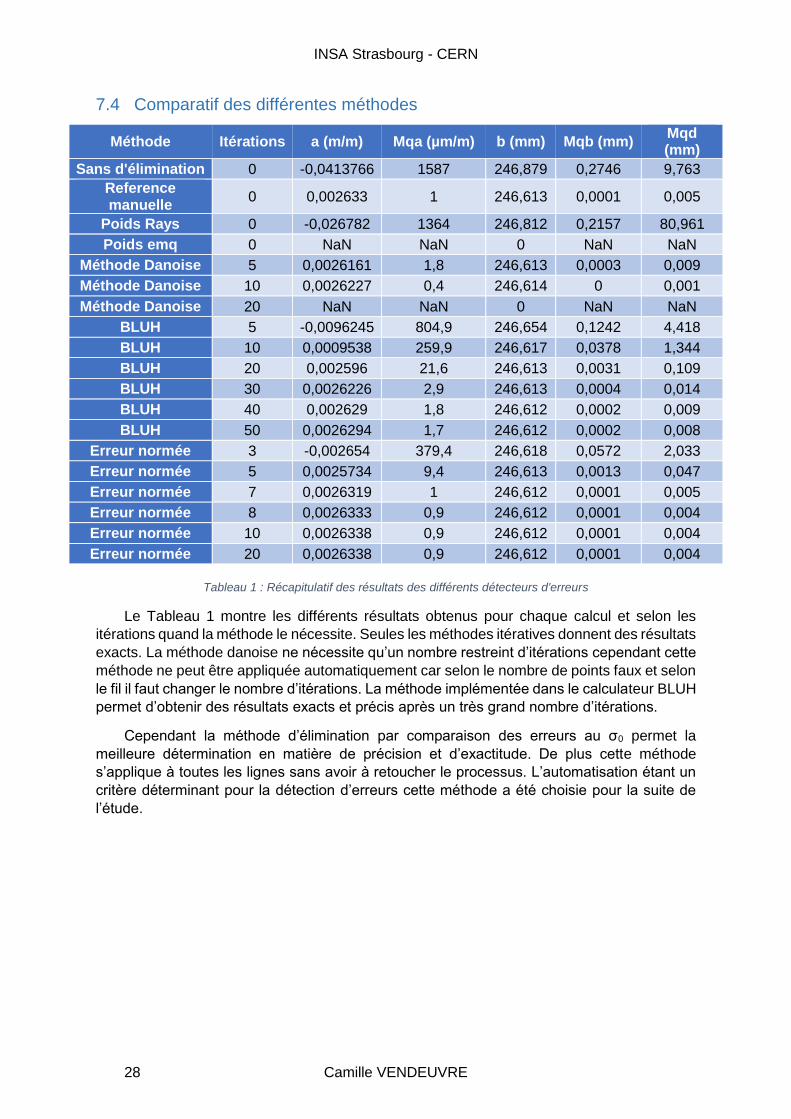
7.4 Comparatif des différentes méthodes
Méthode Itérations a (m/m) Mqa (µm/m) b (mm) Mqb (mm) Mqd (mm)
Sans d'élimination 0 -0,0413766 1587 246,879 0,2746 9,763
Reference manuelle
0 0,002633 1 246,613 0,0001 0,005
Poids Rays 0 -0,026782 1364 246,812 0,2157 80,961
Poids emq 0 NaN NaN 0 NaN NaN
Méthode Danoise 5 0,0026161 1,8 246,613 0,0003 0,009
Méthode Danoise 10 0,0026227 0,4 246,614 0 0,001
Méthode Danoise 20 NaN NaN 0 NaN NaN
BLUH 5 -0,0096245 804,9 246,654 0,1242 4,418
BLUH 10 0,0009538 259,9 246,617 0,0378 1,344
BLUH 20 0,002596 21,6 246,613 0,0031 0,109
BLUH 30 0,0026226 2,9 246,613 0,0004 0,014
BLUH 40 0,002629 1,8 246,612 0,0002 0,009
BLUH 50 0,0026294 1,7 246,612 0,0002 0,008
Erreur normée 3 -0,002654 379,4 246,618 0,0572 2,033
Erreur normée 5 0,0025734 9,4 246,613 0,0013 0,047
Erreur normée 7 0,0026319 1 246,612 0,0001 0,005
Erreur normée 8 0,0026333 0,9 246,612 0,0001 0,004
Erreur normée 10 0,0026338 0,9 246,612 0,0001 0,004
Erreur normée 20 0,0026338 0,9 246,612 0,0001 0,004
Tableau 1 : Récapitulatif des résultats des différents détecteurs d'erreurs
Le Tableau 1 montre les différents résultats obtenus pour chaque calcul et selon les
itérations quand la méthode le nécessite. Seules les méthodes itératives donnent des résultats
exacts. La méthode danoise ne nécessite qu’un nombre restreint d’itérations cependant cette
méthode ne peut être appliquée automatiquement car selon le nombre de points faux et selon
le fil il faut changer le nombre d’itérations. La méthode implémentée dans le calculateur BLUH
permet d’obtenir des résultats exacts et précis après un très grand nombre d’itérations.
Cependant la méthode d’élimination par comparaison des erreurs au σ0 permet la
meilleure détermination en matière de précision et d’exactitude. De plus cette méthode
s’applique à toutes les lignes sans avoir à retoucher le processus. L’automatisation étant un
critère déterminant pour la détection d’erreurs cette méthode a été choisie pour la suite de
l’étude.
INSA Strasbourg - CERN
Camille VENDEUVRE 29
8 Photos en couleurs
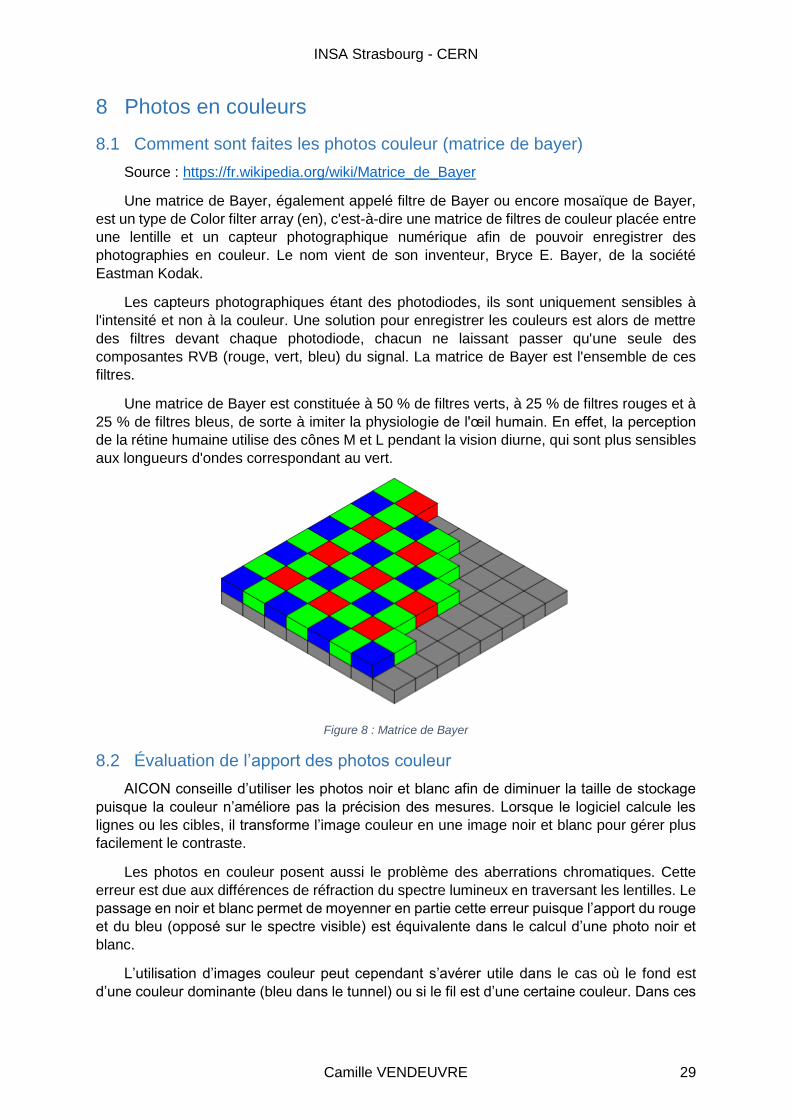
8.1 Comment sont faites les photos couleur (matrice de bayer)
Source : https://fr.wikipedia.org/wiki/Matrice_de_Bayer
Une matrice de Bayer, également appelé filtre de Bayer ou encore mosaïque de Bayer,
est un type de Color filter array (en), c'est-à-dire une matrice de filtres de couleur placée entre
une lentille et un capteur photographique numérique afin de pouvoir enregistrer des
photographies en couleur. Le nom vient de son inventeur, Bryce E. Bayer, de la société
Eastman Kodak.
Les capteurs photographiques étant des photodiodes, ils sont uniquement sensibles à
l'intensité et non à la couleur. Une solution pour enregistrer les couleurs est alors de mettre
des filtres devant chaque photodiode, chacun ne laissant passer qu'une seule des
composantes RVB (rouge, vert, bleu) du signal. La matrice de Bayer est l'ensemble de ces
filtres.
Une matrice de Bayer est constituée à 50 % de filtres verts, à 25 % de filtres rouges et à
25 % de filtres bleus, de sorte à imiter la physiologie de l'œil humain. En effet, la perception
de la rétine humaine utilise des cônes M et L pendant la vision diurne, qui sont plus sensibles
aux longueurs d'ondes correspondant au vert.
Figure 8 : Matrice de Bayer
8.2 Évaluation de l’apport des photos couleur
AICON conseille d’utiliser les photos noir et blanc afin de diminuer la taille de stockage
puisque la couleur n’améliore pas la précision des mesures. Lorsque le logiciel calcule les
lignes ou les cibles, il transforme l’image couleur en une image noir et blanc pour gérer plus
facilement le contraste.
Les photos en couleur posent aussi le problème des aberrations chromatiques. Cette
erreur est due aux différences de réfraction du spectre lumineux en traversant les lentilles. Le
passage en noir et blanc permet de moyenner en partie cette erreur puisque l’apport du rouge
et du bleu (opposé sur le spectre visible) est équivalente dans le calcul d’une photo noir et
blanc.
L’utilisation d’images couleur peut cependant s’avérer utile dans le cas où le fond est
d’une couleur dominante (bleu dans le tunnel) ou si le fil est d’une certaine couleur. Dans ces
INSA Strasbourg - CERN
30 Camille VENDEUVRE
cas, l’utilisation des photos couleur peuvent permettre d’augmenter le contraste dans une
certaine composante colorimétrique.
Pour ce test, une série de 16 photos en couleurs a été décomposée en 4 séries. Une
série pour chaque composante rouge / vert / bleu ainsi qu’une série en noir et blanc calculée
avec la fonction RGB2gray de Matlab (I=0,2989x R + 0,5870x G + 0,1140xB). Des projets ont
ensuite été calculés pour chaque série.
Pour chacun de ces projets la précision de détermination des cibles a d’abord été
calculée. Il s’agit de photos identiques et les configurations ne changent donc pas. Les seules
différences sont dues au changement de colorimétrie. Les résultats sont ensuite comparés
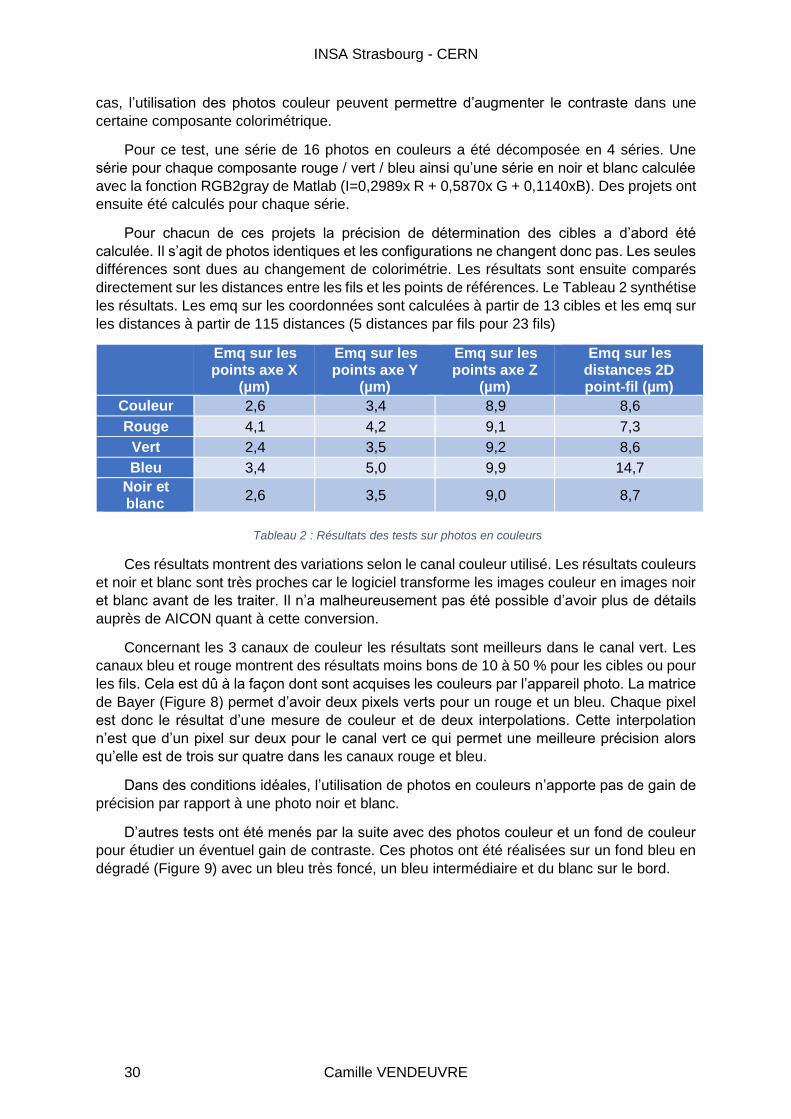
directement sur les distances entre les fils et les points de références. Le Tableau 2 synthétise
les résultats. Les emq sur les coordonnées sont calculées à partir de 13 cibles et les emq sur
les distances à partir de 115 distances (5 distances par fils pour 23 fils)
Emq sur les points axe X
(µm)
Emq sur les points axe Y
(µm)
Emq sur les points axe Z
(µm)
Emq sur les distances 2D point-fil (µm)
Couleur 2,6 3,4 8,9 8,6
Rouge 4,1 4,2 9,1 7,3
Vert 2,4 3,5 9,2 8,6
Bleu 3,4 5,0 9,9 14,7
Noir et blanc
2,6 3,5 9,0 8,7
Tableau 2 : Résultats des tests sur photos en couleurs
Ces résultats montrent des variations selon le canal couleur utilisé. Les résultats couleurs
et noir et blanc sont très proches car le logiciel transforme les images couleur en images noir
et blanc avant de les traiter. Il n’a malheureusement pas été possible d’avoir plus de détails
auprès de AICON quant à cette conversion.
Concernant les 3 canaux de couleur les résultats sont meilleurs dans le canal vert. Les
canaux bleu et rouge montrent des résultats moins bons de 10 à 50 % pour les cibles ou pour
les fils. Cela est dû à la façon dont sont acquises les couleurs par l’appareil photo. La matrice
de Bayer (Figure 8) permet d’avoir deux pixels verts pour un rouge et un bleu. Chaque pixel
est donc le résultat d’une mesure de couleur et de deux interpolations. Cette interpolation
n’est que d’un pixel sur deux pour le canal vert ce qui permet une meilleure précision alors
qu’elle est de trois sur quatre dans les canaux rouge et bleu.
Dans des conditions idéales, l’utilisation de photos en couleurs n’apporte pas de gain de
précision par rapport à une photo noir et blanc.
D’autres tests ont été menés par la suite avec des photos couleur et un fond de couleur
pour étudier un éventuel gain de contraste. Ces photos ont été réalisées sur un fond bleu en
dégradé (Figure 9) avec un bleu très foncé, un bleu intermédiaire et du blanc sur le bord.
INSA Strasbourg - CERN
Camille VENDEUVRE 31
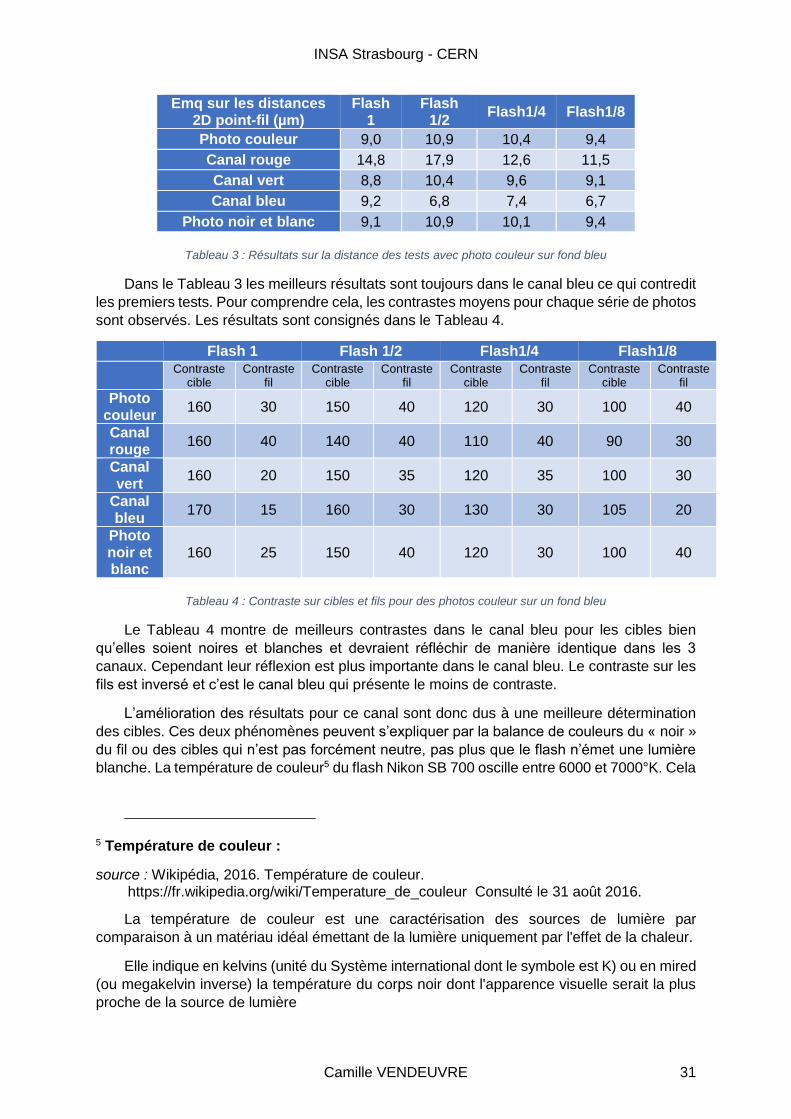
Emq sur les distances 2D point-fil (µm)
Flash 1
Flash 1/2
Flash1/4 Flash1/8
Photo couleur 9,0 10,9 10,4 9,4
Canal rouge 14,8 17,9 12,6 11,5
Canal vert 8,8 10,4 9,6 9,1
Canal bleu 9,2 6,8 7,4 6,7
Photo noir et blanc 9,1 10,9 10,1 9,4
Tableau 3 : Résultats sur la distance des tests avec photo couleur sur fond bleu
Dans le Tableau 3 les meilleurs résultats sont toujours dans le canal bleu ce qui contredit
les premiers tests. Pour comprendre cela, les contrastes moyens pour chaque série de photos
sont observés. Les résultats sont consignés dans le Tableau 4.
Flash 1 Flash 1/2 Flash1/4 Flash1/8
Contraste
cible Contraste
fil Contraste
cible Contraste
fil Contraste
cible Contraste
fil Contraste
cible Contraste
fil
Photo couleur
160 30 150 40 120 30 100 40
Canal rouge
160 40 140 40 110 40 90 30
Canal vert
160 20 150 35 120 35 100 30
Canal bleu
170 15 160 30 130 30 105 20
Photo noir et blanc
160 25 150 40 120 30 100 40
Tableau 4 : Contraste sur cibles et fils pour des photos couleur sur un fond bleu
Le Tableau 4 montre de meilleurs contrastes dans le canal bleu pour les cibles bien
qu’elles soient noires et blanches et devraient réfléchir de manière identique dans les 3
canaux. Cependant leur réflexion est plus importante dans le canal bleu. Le contraste sur les
fils est inversé et c’est le canal bleu qui présente le moins de contraste.
L’amélioration des résultats pour ce canal sont donc dus à une meilleure détermination
des cibles. Ces deux phénomènes peuvent s’expliquer par la balance de couleurs du « noir »
du fil ou des cibles qui n’est pas forcément neutre, pas plus que le flash n’émet une lumière
blanche. La température de couleur5 du flash Nikon SB 700 oscille entre 6000 et 7000°K. Cela
5 Température de couleur :
source : Wikipédia, 2016. Température de couleur. https://fr.wikipedia.org/wiki/Temperature_de_couleur Consulté le 31 août 2016.
La température de couleur est une caractérisation des sources de lumière par
comparaison à un matériau idéal émettant de la lumière uniquement par l'effet de la chaleur.
Elle indique en kelvins (unité du Système international dont le symbole est K) ou en mired
(ou megakelvin inverse) la température du corps noir dont l'apparence visuelle serait la plus
proche de la source de lumière
INSA Strasbourg - CERN
32 Camille VENDEUVRE
correspond à une lumière légèrement bleutée ce qui explique le meilleur contraste dans ce
canal.
Les résultats couleurs et valeurs de gris sont semblables ce qui confirme la transformation
des canaux couleurs vers un canal unique en valeur de gris lors des calculs même si la
méthode de correction n’est pas connue. Ces mêmes résultats se présentent comme
composés des autres résultats et moyennent d’une certaine façon les différents canaux.
Les projets avec les meilleurs contrastes et des valeurs de flash élevées permettent
d’utiliser un grand nombre de cibles, même sur des positions de caméra inclinées.
L’augmentation du nombre de cibles permet une meilleure orientation externe et garantit de
meilleurs résultats lors des mesures sur fils.
L’utilisation de photos couleur ne convient pas à cause du manque d’uniformité des
couleurs en arrière-plan dans le tunnel. Sur les 27 km du tunnel, on trouve différentes qualités
de peinture, mate ou brillante, et la teinte varie du bleu au gris. De plus les photos ne seront
pas forcement choisies pour avoir l’aimant en arrière-plan. Dans ce cas-là les photos en noir
et blanc restent bien plus faciles d’utilisation.
Pour d’autres applications plus contraignantes, il est possible d’utiliser les photos couleur
même s’il sera préférable de se ramener à des conditions plus aisées en ajoutant des feuilles
blanches par exemple pour augmenter le contraste avec le fond.
8.3 Couleur du fil
L’utilisation de fils de couleur couplée à des photos couleur peut permettre de créer des
contrastes plus importants lors de mesures dans des conditions réelles. En effet dans la
plupart des cas, les mesures ont lieu devant les cryostats qui sont bleus. Des fils rouges sur
un fond bleu dans le canal correspondant aux couleurs bleues peuvent permettre d’obtenir de
meilleurs résultats.
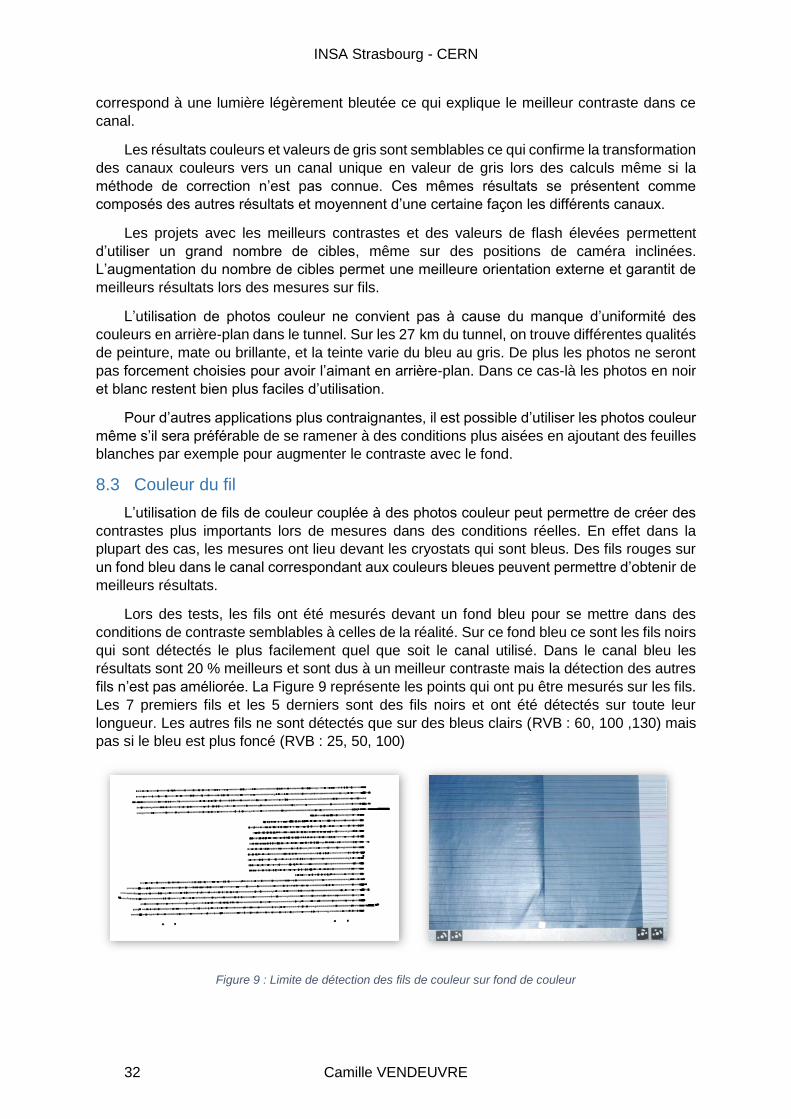
Lors des tests, les fils ont été mesurés devant un fond bleu pour se mettre dans des
conditions de contraste semblables à celles de la réalité. Sur ce fond bleu ce sont les fils noirs
qui sont détectés le plus facilement quel que soit le canal utilisé. Dans le canal bleu les
résultats sont 20 % meilleurs et sont dus à un meilleur contraste mais la détection des autres
fils n’est pas améliorée. La Figure 9 représente les points qui ont pu être mesurés sur les fils.
Les 7 premiers fils et les 5 derniers sont des fils noirs et ont été détectés sur toute leur
longueur. Les autres fils ne sont détectés que sur des bleus clairs (RVB : 60, 100 ,130) mais
pas si le bleu est plus foncé (RVB : 25, 50, 100)
Figure 9 : Limite de détection des fils de couleur sur fond de couleur
INSA Strasbourg - CERN
Camille VENDEUVRE 33
Les fils de couleur n’offrent jamais de meilleurs résultats quel que soit le canal utilisé. Le
fil noir garantit la détection la plus facile quelle que soit la couleur de fond. Les fils noirs
présentent en effet un contraste maximal dans chaque canal ce qui permet de garantir une
bonne détection sur tout le spectre de prise de vue.
9 Calcul de flèche du fil
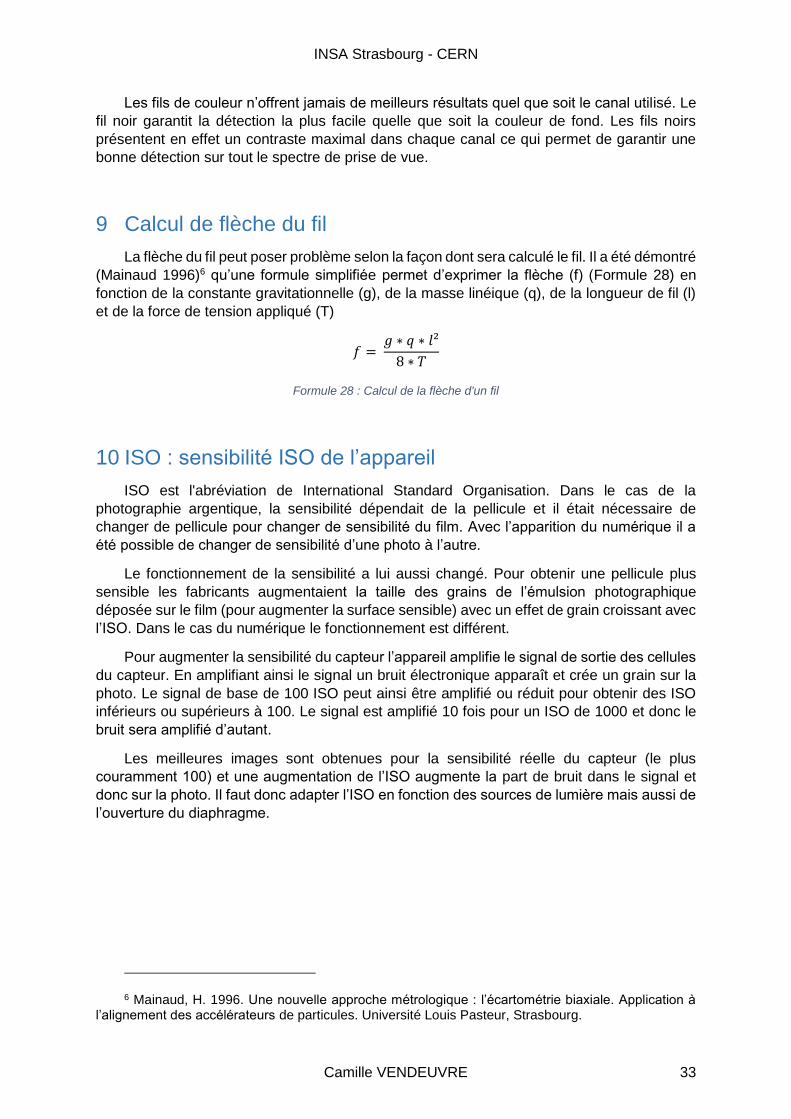
La flèche du fil peut poser problème selon la façon dont sera calculé le fil. Il a été démontré
(Mainaud 1996)6 qu’une formule simplifiée permet d’exprimer la flèche (f) (Formule 28) en
fonction de la constante gravitationnelle (g), de la masse linéique (q), de la longueur de fil (l)
et de la force de tension appliqué (T)
𝑓 = 𝑔 ∗ 𝑞 ∗ 𝑙²
8 ∗ 𝑇
Formule 28 : Calcul de la flèche d'un fil
10 ISO : sensibilité ISO de l’appareil
ISO est l'abréviation de International Standard Organisation. Dans le cas de la
photographie argentique, la sensibilité dépendait de la pellicule et il était nécessaire de
changer de pellicule pour changer de sensibilité du film. Avec l’apparition du numérique il a
été possible de changer de sensibilité d’une photo à l’autre.
Le fonctionnement de la sensibilité a lui aussi changé. Pour obtenir une pellicule plus
sensible les fabricants augmentaient la taille des grains de l’émulsion photographique
déposée sur le film (pour augmenter la surface sensible) avec un effet de grain croissant avec
l’ISO. Dans le cas du numérique le fonctionnement est différent.
Pour augmenter la sensibilité du capteur l’appareil amplifie le signal de sortie des cellules
du capteur. En amplifiant ainsi le signal un bruit électronique apparaît et crée un grain sur la
photo. Le signal de base de 100 ISO peut ainsi être amplifié ou réduit pour obtenir des ISO
inférieurs ou supérieurs à 100. Le signal est amplifié 10 fois pour un ISO de 1000 et donc le
bruit sera amplifié d’autant.
Les meilleures images sont obtenues pour la sensibilité réelle du capteur (le plus
couramment 100) et une augmentation de l’ISO augmente la part de bruit dans le signal et
donc sur la photo. Il faut donc adapter l’ISO en fonction des sources de lumière mais aussi de
l’ouverture du diaphragme.
6 Mainaud, H. 1996. Une nouvelle approche métrologique : l’écartométrie biaxiale. Application à l’alignement des accélérateurs de particules. Université Louis Pasteur, Strasbourg.
INSA Strasbourg - CERN
34 Camille VENDEUVRE
11 Importance du point de source
Chaque calcul de ligne est basé sur un algorithme dont seules les grandes lignes sont
connues.
La première étape consiste à saisir un point homologue sur deux photos. Cette
intervention manuelle implique donc une part d’aléatoire car le point ainsi mesuré n’est pas
exactement au milieu de la ligne. Ce point est donc connu en 3D car il est présent sur deux
photos. Il est ensuite projeté dans les autres photos et les lignes épipolaires définissent la
direction des profils qui seront mesurés sur le fil.
Il est nécessaire de savoir comment cette intervention de l’utilisateur influence le résultat
et comment la faciliter pour éviter toute perte de temps.
Tout d’abord les deux photos doivent être sélectionnées de façon à avoir le meilleur angle
d’intersection sur le point mesuré. Pour cela, la base entre les photos doit être perpendiculaire
au fil. Cela garantit que, malgré l’erreur de pointé, la distance entre le point 3D et le centre du
fil soit assez faible pour que le programme puisse calculer des profils dans les autres photos.
Si les photos sont prises dans un cas normal il faut choisir les photos avec la plus grande
base (B) car selon la Formule 29, la valeur de la précision diminue en fonction de la base et
augmente en fonction de l’erreur de pointé (σpx), les valeurs de profondeur (Z) et de la distance
principale (c) étant semblables sur toutes les photos.
𝜎𝑧 = 𝑍
𝐵∗𝑍
𝑐 𝜎𝑝𝑥
Formule 29 : Précision en profondeur dans le cas normal
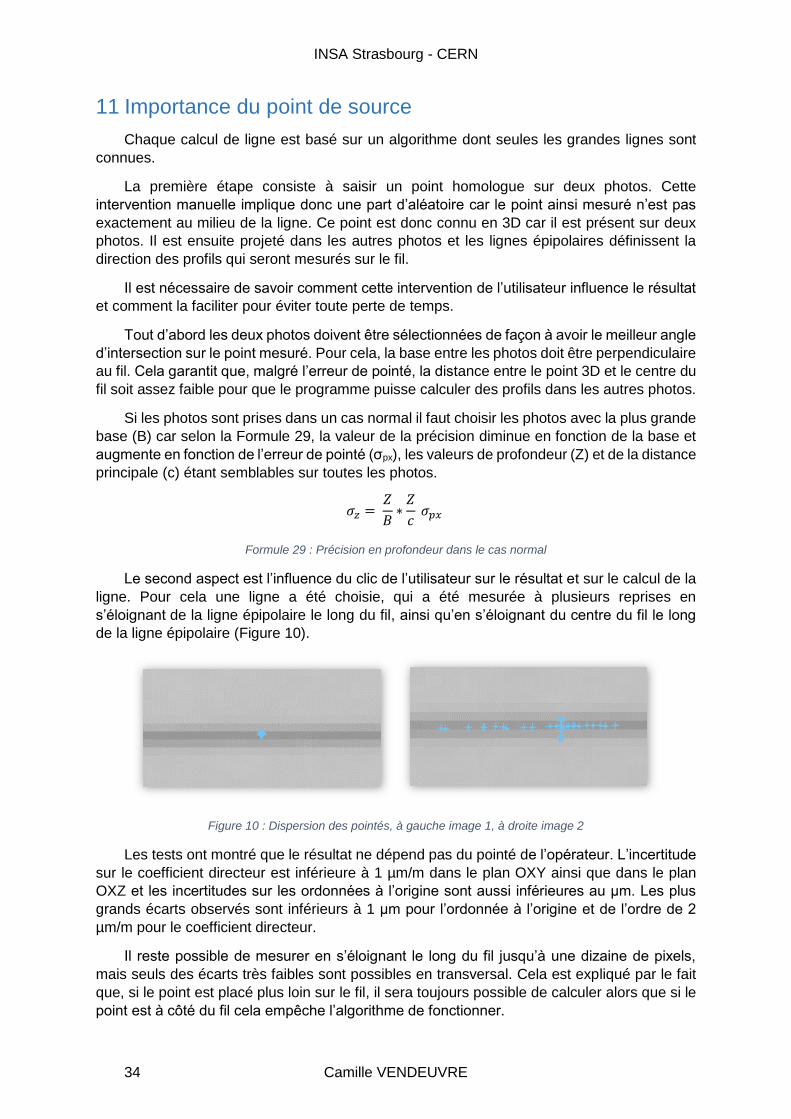
Le second aspect est l’influence du clic de l’utilisateur sur le résultat et sur le calcul de la
ligne. Pour cela une ligne a été choisie, qui a été mesurée à plusieurs reprises en
s’éloignant de la ligne épipolaire le long du fil, ainsi qu’en s’éloignant du centre du fil le long
de la ligne épipolaire (Figure 10).
Figure 10 : Dispersion des pointés, à gauche image 1, à droite image 2
Les tests ont montré que le résultat ne dépend pas du pointé de l’opérateur. L’incertitude
sur le coefficient directeur est inférieure à 1 µm/m dans le plan OXY ainsi que dans le plan
OXZ et les incertitudes sur les ordonnées à l’origine sont aussi inférieures au µm. Les plus
grands écarts observés sont inférieurs à 1 µm pour l’ordonnée à l’origine et de l’ordre de 2
µm/m pour le coefficient directeur.
Il reste possible de mesurer en s’éloignant le long du fil jusqu’à une dizaine de pixels,
mais seuls des écarts très faibles sont possibles en transversal. Cela est expliqué par le fait
que, si le point est placé plus loin sur le fil, il sera toujours possible de calculer alors que si le
point est à côté du fil cela empêche l’algorithme de fonctionner.
INSA Strasbourg - CERN
Camille VENDEUVRE 35
12 Mesure Visio (microscope)
12.1 Mesures des caractéristiques au microscope
La machine Tesa Visio 300 est une MMT utilisée par le service Survey pour les mesures
microscopiques. Cette machine est composée d’un microscope optique associé à une règle
optique. La seconde partie est une table micrométrique. L’association de ces deux
composantes permet des mesures planimétriques d’une précision annoncée de 1 µm. L’axe
vertical n’est pas motorisé et il n’y a donc pas d’autofocus. La détermination est faite par mise
au point manuelle ce qui induit une perte de précision en hauteur par rapport à la précision
théorique.
La précision théorique est de 3+10*L[mm]/1000 µm dans le plan OXY et de
3+2*L[mm]/1000 µm selon la verticale. La plage de mesure est de 300 mm par 200 mm dans
le plan et de 150 mm selon la verticale. Le grossissement de 20x à 130x permet tout de même
une vérification des caractéristiques des différents fils et de vérifier les cibles qui sont
imprimées au CERN.
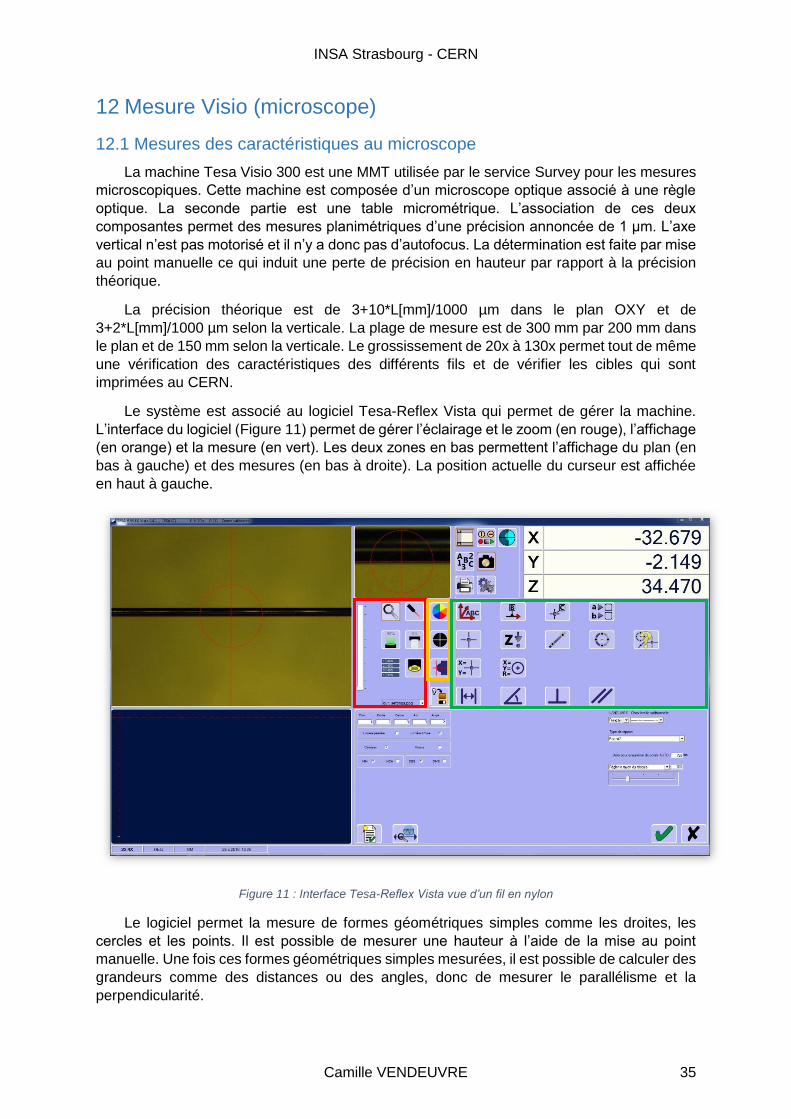
Le système est associé au logiciel Tesa-Reflex Vista qui permet de gérer la machine.
L’interface du logiciel (Figure 11) permet de gérer l’éclairage et le zoom (en rouge), l’affichage
(en orange) et la mesure (en vert). Les deux zones en bas permettent l’affichage du plan (en
bas à gauche) et des mesures (en bas à droite). La position actuelle du curseur est affichée
en haut à gauche.
Figure 11 : Interface Tesa-Reflex Vista vue d’un fil en nylon
Le logiciel permet la mesure de formes géométriques simples comme les droites, les
cercles et les points. Il est possible de mesurer une hauteur à l’aide de la mise au point
manuelle. Une fois ces formes géométriques simples mesurées, il est possible de calculer des
grandeurs comme des distances ou des angles, donc de mesurer le parallélisme et la
perpendicularité.
INSA Strasbourg - CERN
36 Camille VENDEUVRE
12.2 Vérification des fils
Les caractéristiques des fils (diamètre et régularité) sont essentielles lors de la mesure.
Le diamètre des fils a été contrôlé de manière préalable avec un pied à coulisse. Ce contrôle
assure que les résultats exposés dans le rapport au § 4.4 soient valables. La mesure sur Visio
permet de vérifier les caractéristiques de manière plus fine. De plus la régularité des bords du
fil peut influencer le résultat.
12.2.1 Diamètre et régularité du fil.
Après le choix du fil en nylon de 300 µm, noir, ses caractéristiques géométriques ont été
vérifiées. Le logiciel permet de calculer la régularité le long du fil ainsi que son diamètre.
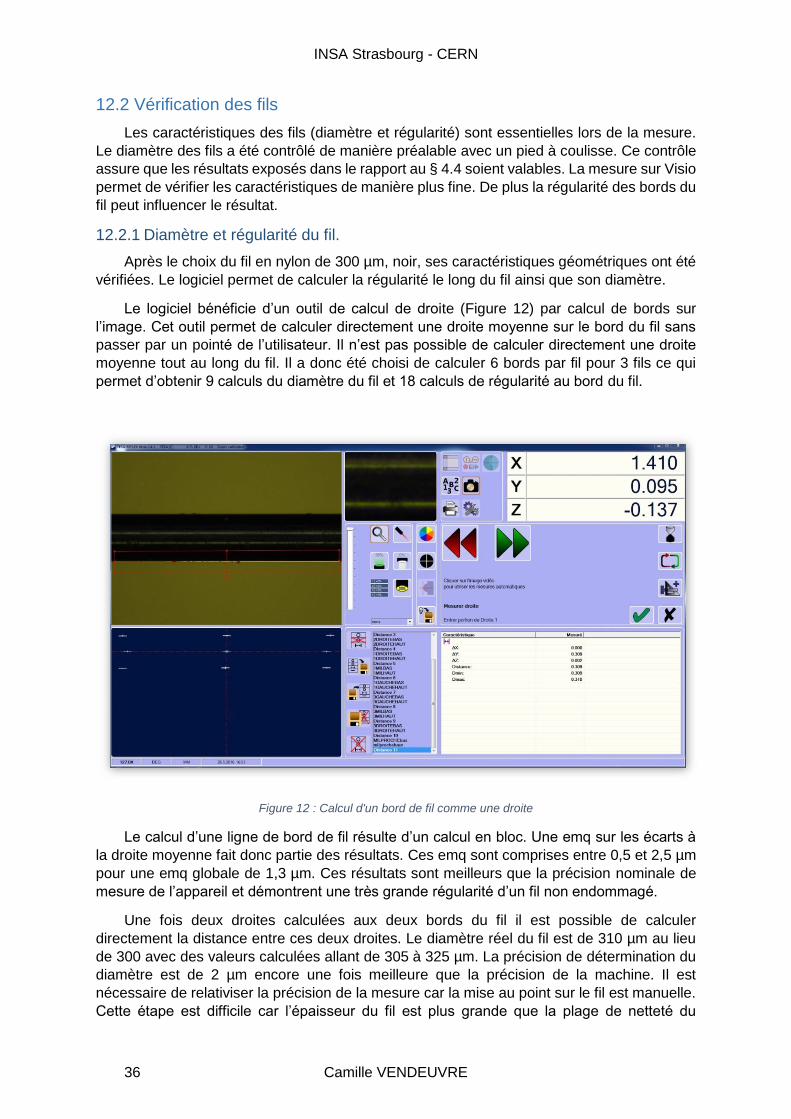
Le logiciel bénéficie d’un outil de calcul de droite (Figure 12) par calcul de bords sur
l’image. Cet outil permet de calculer directement une droite moyenne sur le bord du fil sans
passer par un pointé de l’utilisateur. Il n’est pas possible de calculer directement une droite
moyenne tout au long du fil. Il a donc été choisi de calculer 6 bords par fil pour 3 fils ce qui
permet d’obtenir 9 calculs du diamètre du fil et 18 calculs de régularité au bord du fil.
Figure 12 : Calcul d'un bord de fil comme une droite
Le calcul d’une ligne de bord de fil résulte d’un calcul en bloc. Une emq sur les écarts à
la droite moyenne fait donc partie des résultats. Ces emq sont comprises entre 0,5 et 2,5 µm
pour une emq globale de 1,3 µm. Ces résultats sont meilleurs que la précision nominale de
mesure de l’appareil et démontrent une très grande régularité d’un fil non endommagé.
Une fois deux droites calculées aux deux bords du fil il est possible de calculer
directement la distance entre ces deux droites. Le diamètre réel du fil est de 310 µm au lieu
de 300 avec des valeurs calculées allant de 305 à 325 µm. La précision de détermination du
diamètre est de 2 µm encore une fois meilleure que la précision de la machine. Il est
nécessaire de relativiser la précision de la mesure car la mise au point sur le fil est manuelle.
Cette étape est difficile car l’épaisseur du fil est plus grande que la plage de netteté du
INSA Strasbourg - CERN
Camille VENDEUVRE 37
microscope. La mise au point doit donc être faite sur les bords du fil et non sur le dessus. Si
un léger flou persiste après la mise au point il en résultera un effet d’élargissement du fil.
L’utilisation de cette machine est aussi l’occasion de mesurer d’autres sortes de fils. Le
fil vectran (Figure 13) qui sera testé par la suite ainsi qu’un fil tressé (Figure 14).
Figure 13 : Vue au microscope d'un fil en vectran (⌀ 0,5 mm)
Figure 14 : Vue au microscope d'un fil tressé (⌀ 0,4 mm)
Les précisions de détermination des bords sont d’environ 5 µm pour le fil en vectran et 7
µm pour le fil tressé. Les différents brins du fil tressé sont nettement visibles à l’aide d’un fort
zoom et les bords ne sont pas de vraies droites sur ce fil. Les changements de colorimétrie
sont aussi très importants et pourraient être source d’erreur dans des calculs d’analyse
d’images. Le vectran est quant à lui plus homogène au niveau des bords du fil mais aussi au
niveau de la colorimétrie.
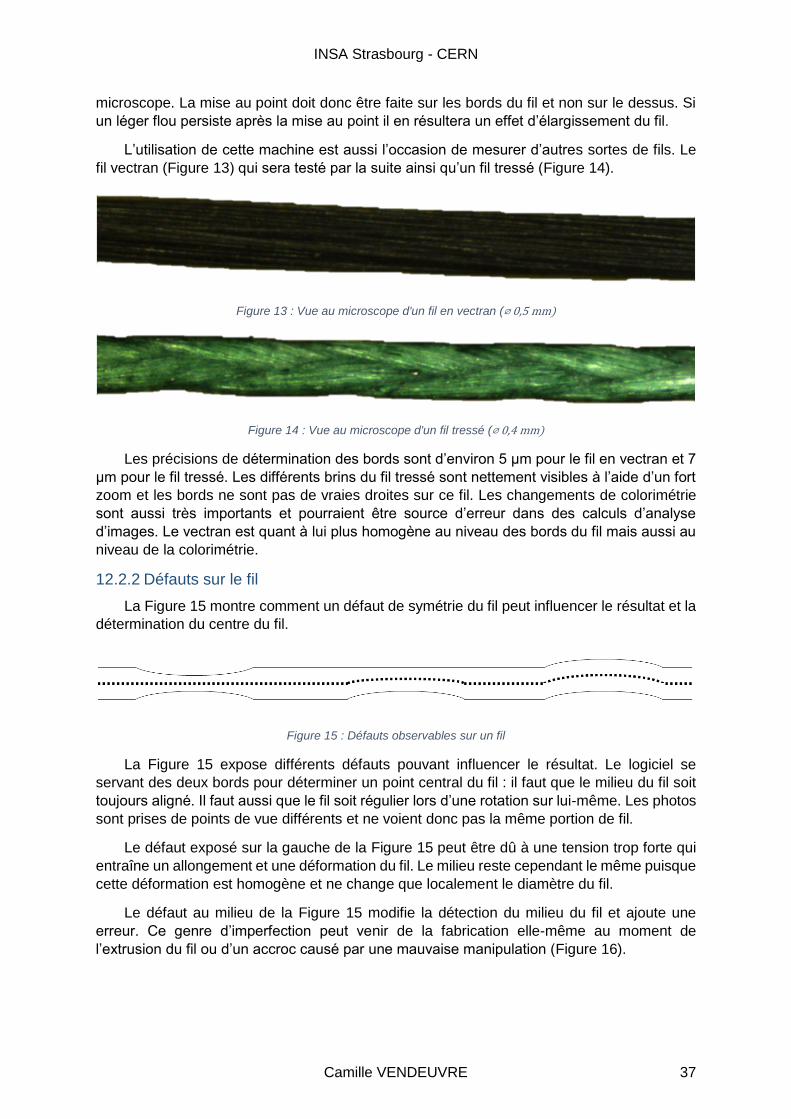
12.2.2 Défauts sur le fil
La Figure 15 montre comment un défaut de symétrie du fil peut influencer le résultat et la
détermination du centre du fil.
Figure 15 : Défauts observables sur un fil
La Figure 15 expose différents défauts pouvant influencer le résultat. Le logiciel se
servant des deux bords pour déterminer un point central du fil : il faut que le milieu du fil soit
toujours aligné. Il faut aussi que le fil soit régulier lors d’une rotation sur lui-même. Les photos
sont prises de points de vue différents et ne voient donc pas la même portion de fil.
Le défaut exposé sur la gauche de la Figure 15 peut être dû à une tension trop forte qui
entraîne un allongement et une déformation du fil. Le milieu reste cependant le même puisque
cette déformation est homogène et ne change que localement le diamètre du fil.
Le défaut au milieu de la Figure 15 modifie la détection du milieu du fil et ajoute une
erreur. Ce genre d’imperfection peut venir de la fabrication elle-même au moment de
l’extrusion du fil ou d’un accroc causé par une mauvaise manipulation (Figure 16).
INSA Strasbourg - CERN
38 Camille VENDEUVRE
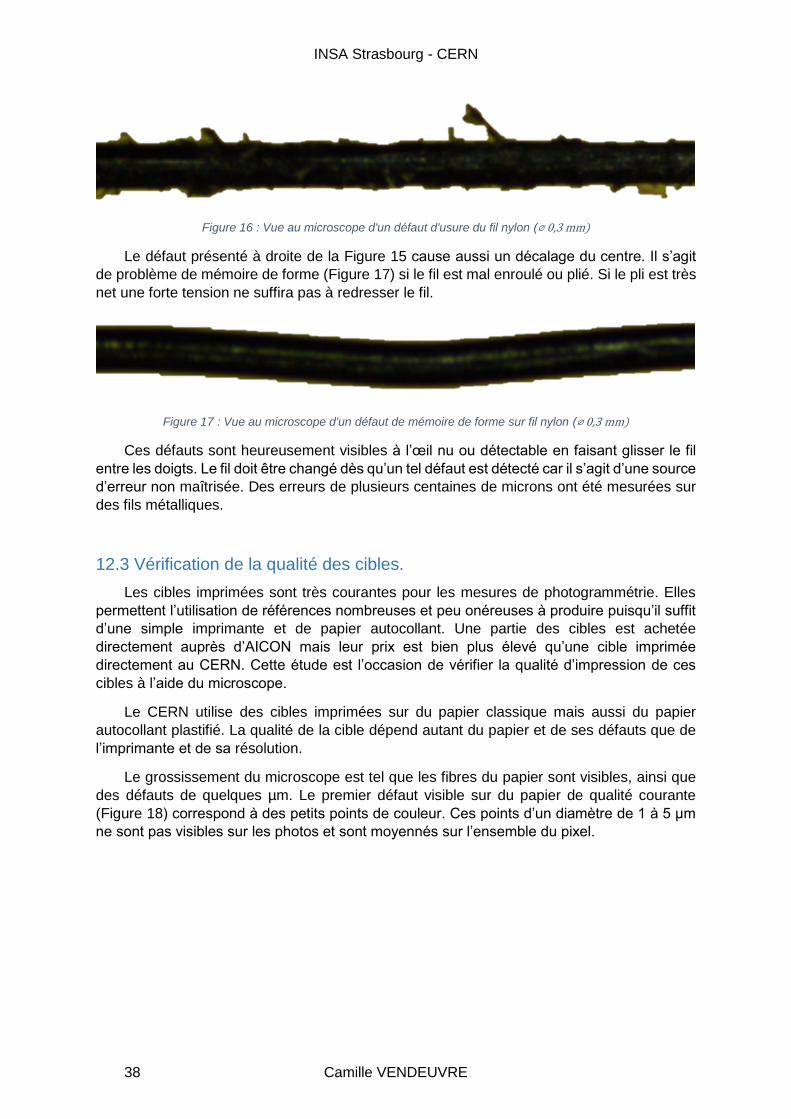
Figure 16 : Vue au microscope d'un défaut d'usure du fil nylon (⌀ 0,3 mm)
Le défaut présenté à droite de la Figure 15 cause aussi un décalage du centre. Il s’agit
de problème de mémoire de forme (Figure 17) si le fil est mal enroulé ou plié. Si le pli est très
net une forte tension ne suffira pas à redresser le fil.
Figure 17 : Vue au microscope d'un défaut de mémoire de forme sur fil nylon (⌀ 0,3 mm)
Ces défauts sont heureusement visibles à l’œil nu ou détectable en faisant glisser le fil
entre les doigts. Le fil doit être changé dès qu’un tel défaut est détecté car il s’agit d’une source
d’erreur non maîtrisée. Des erreurs de plusieurs centaines de microns ont été mesurées sur
des fils métalliques.
12.3 Vérification de la qualité des cibles.
Les cibles imprimées sont très courantes pour les mesures de photogrammétrie. Elles
permettent l’utilisation de références nombreuses et peu onéreuses à produire puisqu’il suffit
d’une simple imprimante et de papier autocollant. Une partie des cibles est achetée
directement auprès d’AICON mais leur prix est bien plus élevé qu’une cible imprimée
directement au CERN. Cette étude est l’occasion de vérifier la qualité d’impression de ces
cibles à l’aide du microscope.
Le CERN utilise des cibles imprimées sur du papier classique mais aussi du papier
autocollant plastifié. La qualité de la cible dépend autant du papier et de ses défauts que de
l’imprimante et de sa résolution.
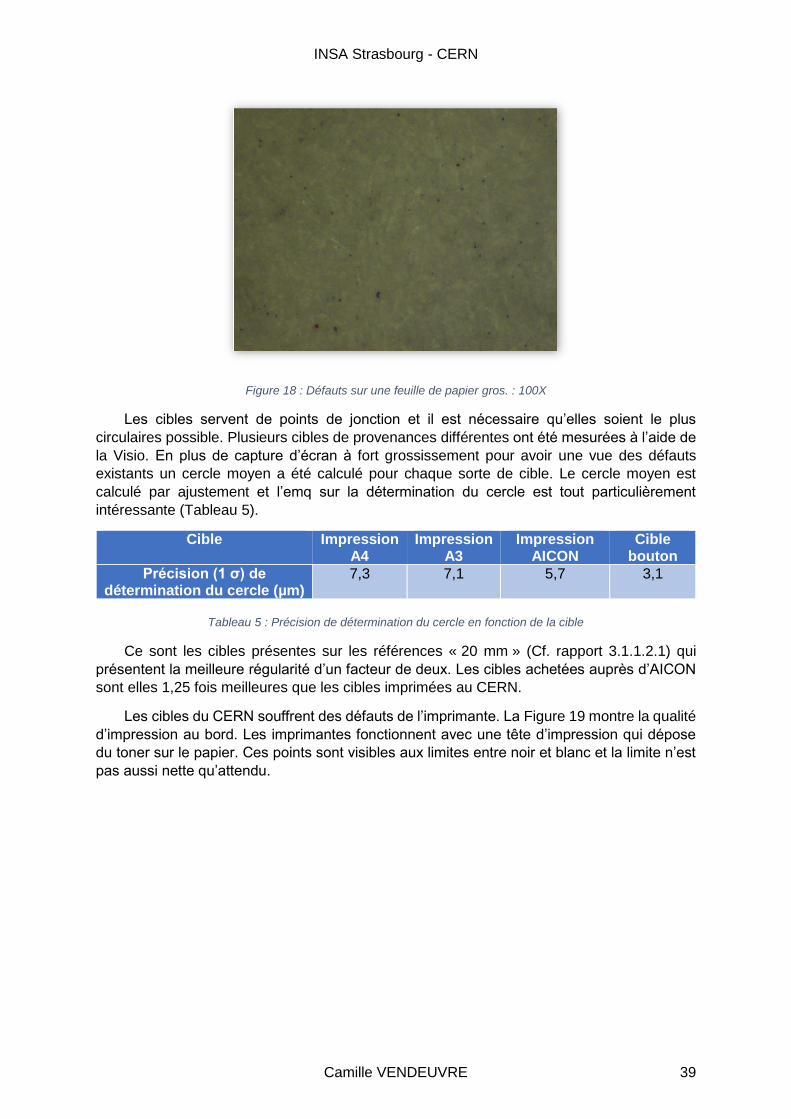
Le grossissement du microscope est tel que les fibres du papier sont visibles, ainsi que
des défauts de quelques µm. Le premier défaut visible sur du papier de qualité courante
(Figure 18) correspond à des petits points de couleur. Ces points d’un diamètre de 1 à 5 µm
ne sont pas visibles sur les photos et sont moyennés sur l’ensemble du pixel.
INSA Strasbourg - CERN
Camille VENDEUVRE 39
Figure 18 : Défauts sur une feuille de papier gros. : 100X
Les cibles servent de points de jonction et il est nécessaire qu’elles soient le plus
circulaires possible. Plusieurs cibles de provenances différentes ont été mesurées à l’aide de
la Visio. En plus de capture d’écran à fort grossissement pour avoir une vue des défauts
existants un cercle moyen a été calculé pour chaque sorte de cible. Le cercle moyen est
calculé par ajustement et l’emq sur la détermination du cercle est tout particulièrement
intéressante (Tableau 5).
Cible Impression A4
Impression A3
Impression AICON
Cible bouton
Précision (1 σ) de détermination du cercle (µm)
7,3 7,1 5,7 3,1
Tableau 5 : Précision de détermination du cercle en fonction de la cible
Ce sont les cibles présentes sur les références « 20 mm » (Cf. rapport 3.1.1.2.1) qui
présentent la meilleure régularité d’un facteur de deux. Les cibles achetées auprès d’AICON
sont elles 1,25 fois meilleures que les cibles imprimées au CERN.
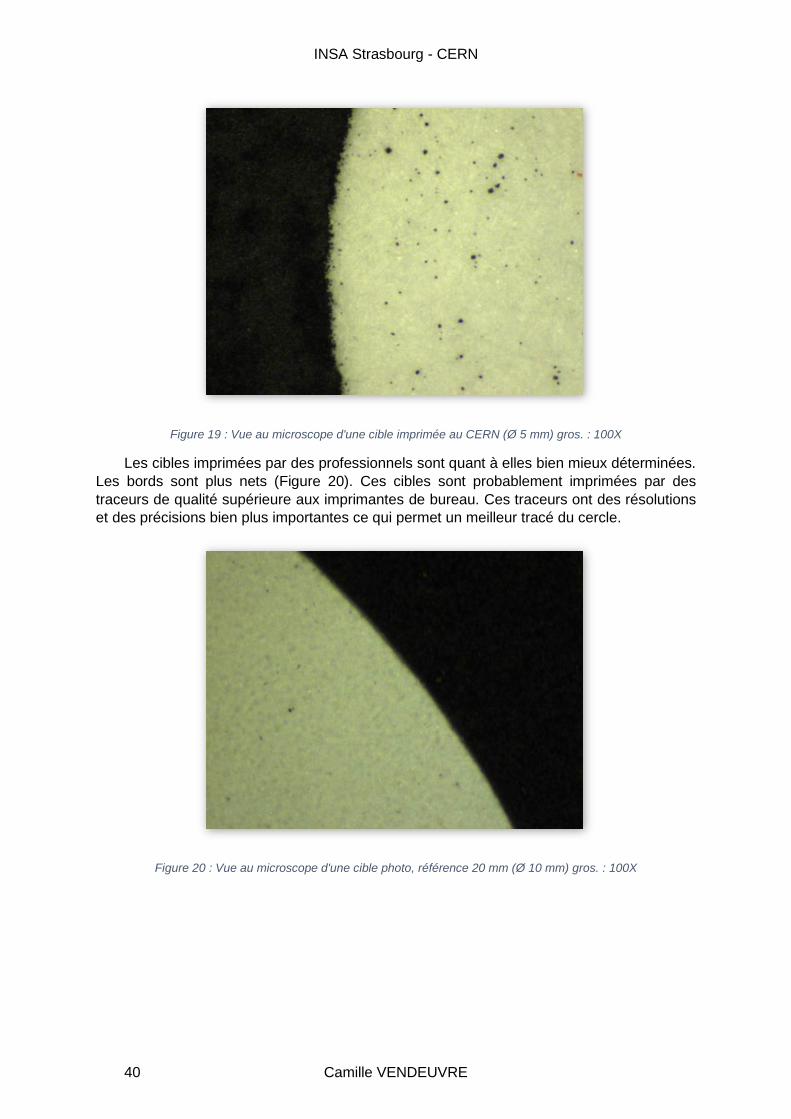
Les cibles du CERN souffrent des défauts de l’imprimante. La Figure 19 montre la qualité
d’impression au bord. Les imprimantes fonctionnent avec une tête d’impression qui dépose
du toner sur le papier. Ces points sont visibles aux limites entre noir et blanc et la limite n’est
pas aussi nette qu’attendu.
INSA Strasbourg - CERN
40 Camille VENDEUVRE
Figure 19 : Vue au microscope d'une cible imprimée au CERN (Ø 5 mm) gros. : 100X
Les cibles imprimées par des professionnels sont quant à elles bien mieux déterminées.
Les bords sont plus nets (Figure 20). Ces cibles sont probablement imprimées par des
traceurs de qualité supérieure aux imprimantes de bureau. Ces traceurs ont des résolutions
et des précisions bien plus importantes ce qui permet un meilleur tracé du cercle.
Figure 20 : Vue au microscope d'une cible photo, référence 20 mm (Ø 10 mm) gros. : 100X
INSA Strasbourg - CERN
Camille VENDEUVRE 41
12.4 Centrage d’un point dans une cible pour mesure théodolite
Lors des mesures sur la maquette (Cf. rapport 4.4) des cibles spéciales sont utilisées
pour permettre une mesure par tachéométrie et par photogrammétrie. Ces cibles sont dotées
d’un point au centre du cercle qui sert de cible pour la tachéométrie. La précision du centrage
de ce point influence directement la compatibilité des deux mesures.
Les cibles sont créées à l’aide du logiciel CodeMaker d’AICON puis imprimées sur les
imprimantes du service. La machine Visio permet de contrôler le centrage du point dans la
cible mais aussi la qualité d’impression des cercles de la cible et du point.
La mesure de ces cibles a permis de révéler une erreur de centrage supérieur à 20 µm
dans le sens de balayage de la tête d’impression. L’erreur de centrage dans la longueur est
quant à elle moins importante. Cette erreur n’est cependant pas régulière et certaines cibles
sont parfaites quand d’autres présentent de défauts importants (jusqu’à 40 µm).
D’autres cibles ont été imprimées par l’imprimerie du CERN qui possède une imprimante
professionnelle Canon Océ VarioPrint 6160. Ces cibles présentent des meilleurs résultats sur
le centrage des points (Tableau 6).
Cibles Précision (1 σ) de détermination du
cercle (µm)
Précision (1 σ) de détermination
du point (µm)
Précision (1 σ) de centrage en X (µm)
Précision (1 σ) de centrage en Y (µm)
Impression bureau 7,7 5,5 8,1 22,0
Impression professionnelle
16,0 3,2 4,7 5,6
Tableau 6 : Précision de détermination de cercles et centrage d'un point dans une cible
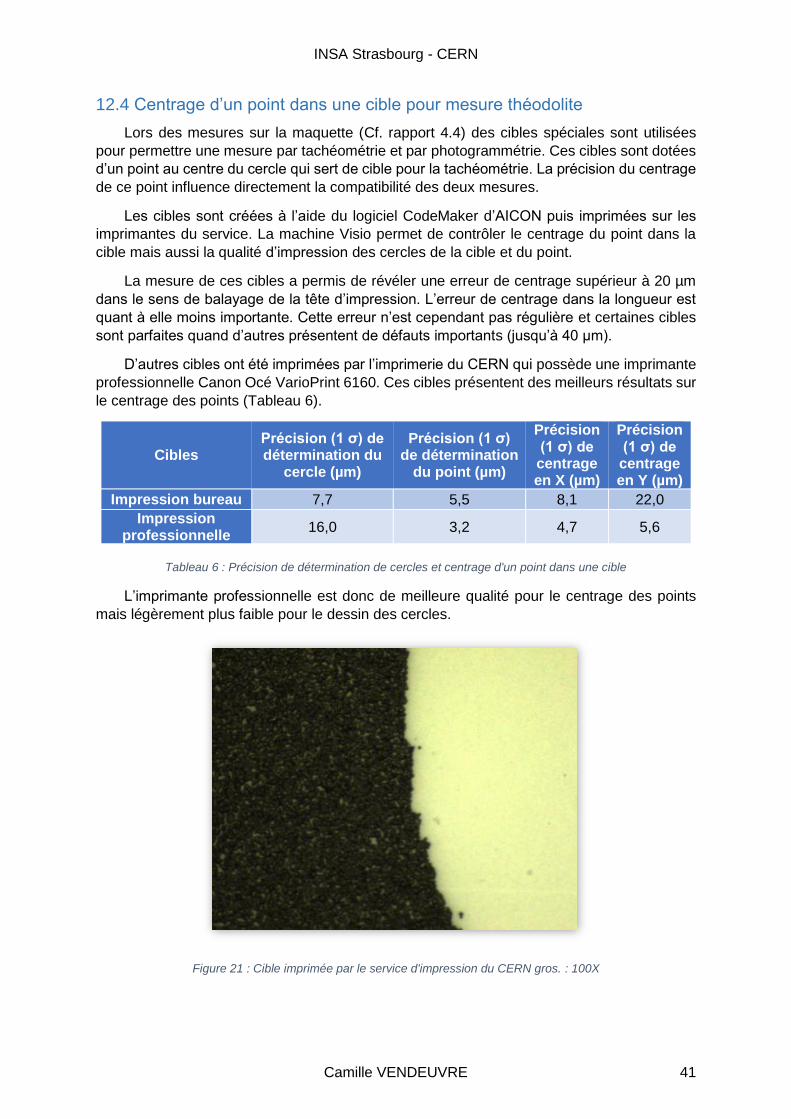
L’imprimante professionnelle est donc de meilleure qualité pour le centrage des points
mais légèrement plus faible pour le dessin des cercles.
Figure 21 : Cible imprimée par le service d'impression du CERN gros. : 100X
INSA Strasbourg - CERN
42 Camille VENDEUVRE
La Figure 21 permet de voir le point d’encre de l’imprimante (10 µm) qui est bien plus petit
que la définition de l’impression. Le cercle est en effet constitué d’une succession de lignes
droites.
La perte de précision sur la détermination du cercle est compensée par une manipulation
bien plus facile des cibles dont l’encre est mieux fixée et dont la qualité reste la même au
cours du temps. Les cibles provenant d’imprimantes laser de bureau ont tendance à s’altérer
quand on les manipule.
13 Mesures de fils à plomb
Les tests se sont déroulés à la base géodésique du CERN. Cela permet de bénéficier
d’un environnement contrôlé (température, courant d’air).
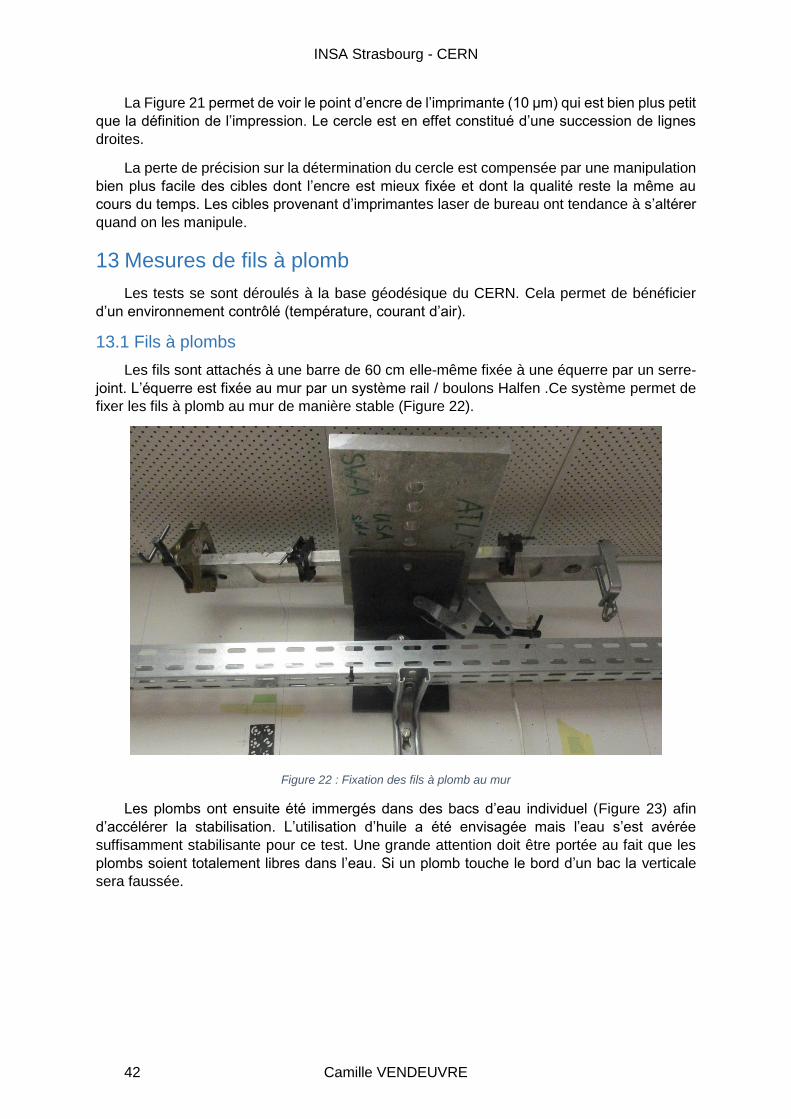
13.1 Fils à plombs
Les fils sont attachés à une barre de 60 cm elle-même fixée à une équerre par un serre-
joint. L’équerre est fixée au mur par un système rail / boulons Halfen .Ce système permet de
fixer les fils à plomb au mur de manière stable (Figure 22).
Figure 22 : Fixation des fils à plomb au mur
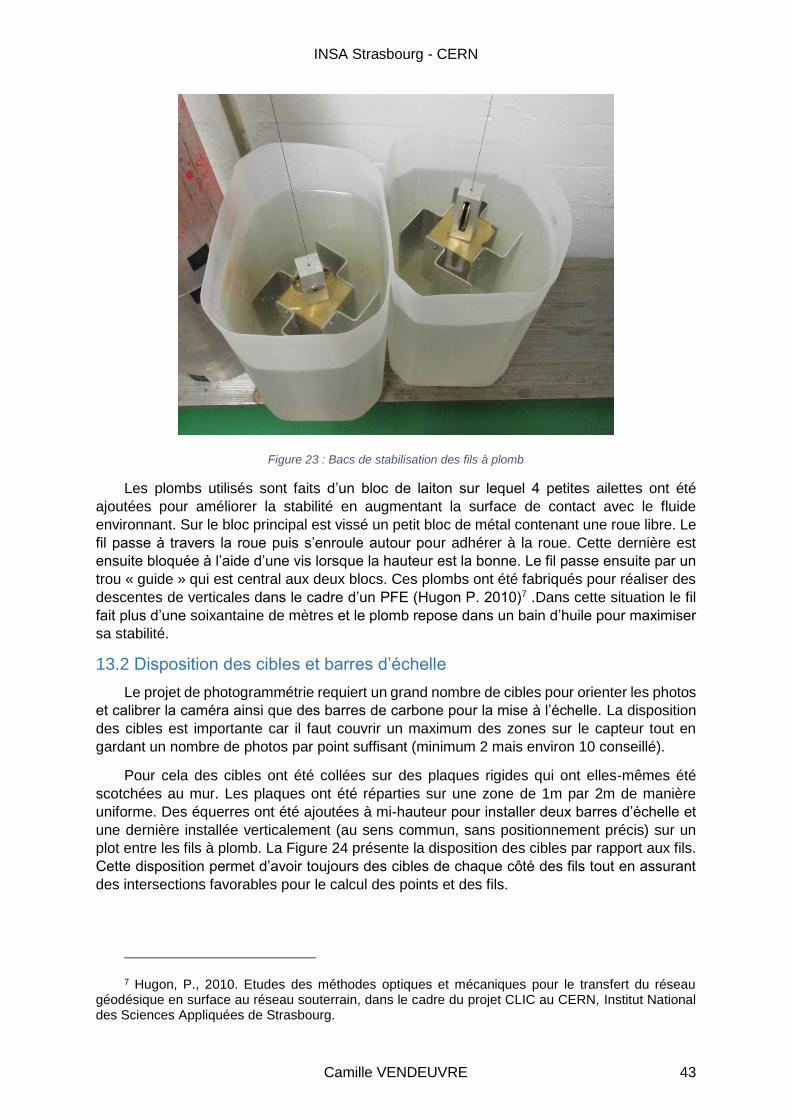
Les plombs ont ensuite été immergés dans des bacs d’eau individuel (Figure 23) afin
d’accélérer la stabilisation. L’utilisation d’huile a été envisagée mais l’eau s’est avérée
suffisamment stabilisante pour ce test. Une grande attention doit être portée au fait que les
plombs soient totalement libres dans l’eau. Si un plomb touche le bord d’un bac la verticale
sera faussée.
INSA Strasbourg - CERN
Camille VENDEUVRE 43
Figure 23 : Bacs de stabilisation des fils à plomb
Les plombs utilisés sont faits d’un bloc de laiton sur lequel 4 petites ailettes ont été
ajoutées pour améliorer la stabilité en augmentant la surface de contact avec le fluide
environnant. Sur le bloc principal est vissé un petit bloc de métal contenant une roue libre. Le
fil passe à travers la roue puis s’enroule autour pour adhérer à la roue. Cette dernière est
ensuite bloquée à l’aide d’une vis lorsque la hauteur est la bonne. Le fil passe ensuite par un
trou « guide » qui est central aux deux blocs. Ces plombs ont été fabriqués pour réaliser des
descentes de verticales dans le cadre d’un PFE (Hugon P. 2010)7 .Dans cette situation le fil
fait plus d’une soixantaine de mètres et le plomb repose dans un bain d’huile pour maximiser
sa stabilité.
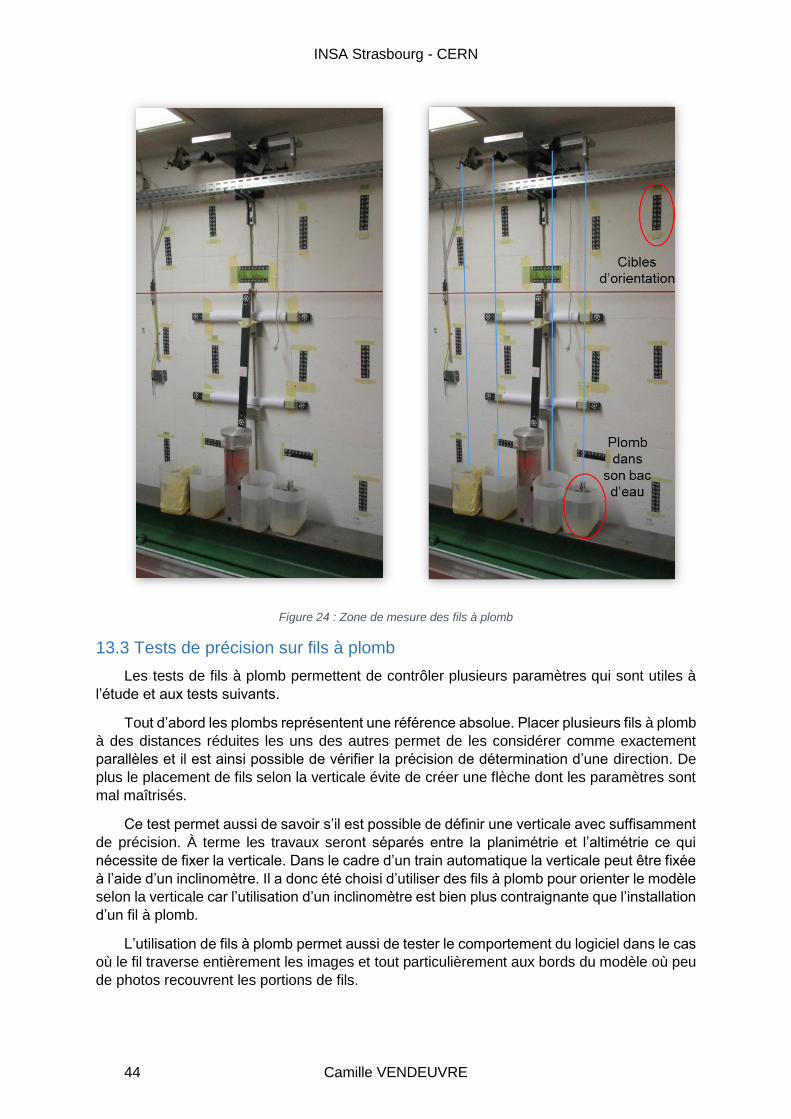
13.2 Disposition des cibles et barres d’échelle
Le projet de photogrammétrie requiert un grand nombre de cibles pour orienter les photos
et calibrer la caméra ainsi que des barres de carbone pour la mise à l’échelle. La disposition
des cibles est importante car il faut couvrir un maximum des zones sur le capteur tout en
gardant un nombre de photos par point suffisant (minimum 2 mais environ 10 conseillé).
Pour cela des cibles ont été collées sur des plaques rigides qui ont elles-mêmes été
scotchées au mur. Les plaques ont été réparties sur une zone de 1m par 2m de manière
uniforme. Des équerres ont été ajoutées à mi-hauteur pour installer deux barres d’échelle et
une dernière installée verticalement (au sens commun, sans positionnement précis) sur un
plot entre les fils à plomb. La Figure 24 présente la disposition des cibles par rapport aux fils.
Cette disposition permet d’avoir toujours des cibles de chaque côté des fils tout en assurant
des intersections favorables pour le calcul des points et des fils.
7 Hugon, P., 2010. Etudes des méthodes optiques et mécaniques pour le transfert du réseau géodésique en surface au réseau souterrain, dans le cadre du projet CLIC au CERN, Institut National des Sciences Appliquées de Strasbourg.
INSA Strasbourg - CERN
44 Camille VENDEUVRE
Figure 24 : Zone de mesure des fils à plomb
13.3 Tests de précision sur fils à plomb
Les tests de fils à plomb permettent de contrôler plusieurs paramètres qui sont utiles à
l’étude et aux tests suivants.
Tout d’abord les plombs représentent une référence absolue. Placer plusieurs fils à plomb
à des distances réduites les uns des autres permet de les considérer comme exactement
parallèles et il est ainsi possible de vérifier la précision de détermination d’une direction. De
plus le placement de fils selon la verticale évite de créer une flèche dont les paramètres sont
mal maîtrisés.
Ce test permet aussi de savoir s’il est possible de définir une verticale avec suffisamment
de précision. À terme les travaux seront séparés entre la planimétrie et l’altimétrie ce qui
nécessite de fixer la verticale. Dans le cadre d’un train automatique la verticale peut être fixée
à l’aide d’un inclinomètre. Il a donc été choisi d’utiliser des fils à plomb pour orienter le modèle
selon la verticale car l’utilisation d’un inclinomètre est bien plus contraignante que l’installation
d’un fil à plomb.
L’utilisation de fils à plomb permet aussi de tester le comportement du logiciel dans le cas
où le fil traverse entièrement les images et tout particulièrement aux bords du modèle où peu
de photos recouvrent les portions de fils.
INSA Strasbourg - CERN
Camille VENDEUVRE 45
Ce test permet enfin de faire des mesures en s’éloignant du fil sans prendre de risque sur
la proximité des ombres. Des mesures jusqu’à 2 m des fils peuvent être réalisées, ce qui est
semblable aux conditions limites dans le tunnel.
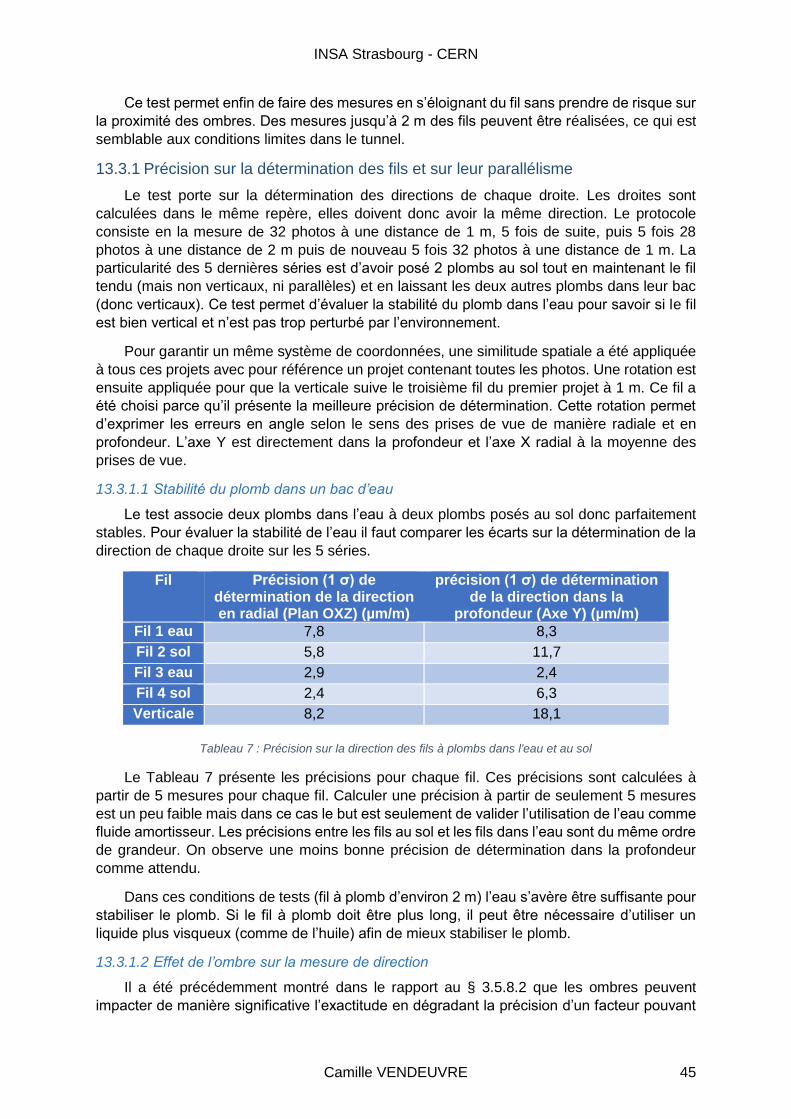
13.3.1 Précision sur la détermination des fils et sur leur parallélisme
Le test porte sur la détermination des directions de chaque droite. Les droites sont
calculées dans le même repère, elles doivent donc avoir la même direction. Le protocole
consiste en la mesure de 32 photos à une distance de 1 m, 5 fois de suite, puis 5 fois 28
photos à une distance de 2 m puis de nouveau 5 fois 32 photos à une distance de 1 m. La
particularité des 5 dernières séries est d’avoir posé 2 plombs au sol tout en maintenant le fil
tendu (mais non verticaux, ni parallèles) et en laissant les deux autres plombs dans leur bac
(donc verticaux). Ce test permet d’évaluer la stabilité du plomb dans l’eau pour savoir si le fil
est bien vertical et n’est pas trop perturbé par l’environnement.
Pour garantir un même système de coordonnées, une similitude spatiale a été appliquée
à tous ces projets avec pour référence un projet contenant toutes les photos. Une rotation est
ensuite appliquée pour que la verticale suive le troisième fil du premier projet à 1 m. Ce fil a
été choisi parce qu’il présente la meilleure précision de détermination. Cette rotation permet
d’exprimer les erreurs en angle selon le sens des prises de vue de manière radiale et en
profondeur. L’axe Y est directement dans la profondeur et l’axe X radial à la moyenne des
prises de vue.
13.3.1.1 Stabilité du plomb dans un bac d’eau
Le test associe deux plombs dans l’eau à deux plombs posés au sol donc parfaitement
stables. Pour évaluer la stabilité de l’eau il faut comparer les écarts sur la détermination de la
direction de chaque droite sur les 5 séries.
Fil Précision (1 σ) de détermination de la direction en radial (Plan OXZ) (µm/m)
précision (1 σ) de détermination de la direction dans la
profondeur (Axe Y) (µm/m)
Fil 1 eau 7,8 8,3
Fil 2 sol 5,8 11,7
Fil 3 eau 2,9 2,4
Fil 4 sol 2,4 6,3
Verticale 8,2 18,1
Tableau 7 : Précision sur la direction des fils à plombs dans l'eau et au sol
Le Tableau 7 présente les précisions pour chaque fil. Ces précisions sont calculées à
partir de 5 mesures pour chaque fil. Calculer une précision à partir de seulement 5 mesures
est un peu faible mais dans ce cas le but est seulement de valider l’utilisation de l’eau comme
fluide amortisseur. Les précisions entre les fils au sol et les fils dans l’eau sont du même ordre
de grandeur. On observe une moins bonne précision de détermination dans la profondeur
comme attendu.
Dans ces conditions de tests (fil à plomb d’environ 2 m) l’eau s’avère être suffisante pour
stabiliser le plomb. Si le fil à plomb doit être plus long, il peut être nécessaire d’utiliser un
liquide plus visqueux (comme de l’huile) afin de mieux stabiliser le plomb.
13.3.1.2 Effet de l’ombre sur la mesure de direction
Il a été précédemment montré dans le rapport au § 3.5.8.2 que les ombres peuvent
impacter de manière significative l’exactitude en dégradant la précision d’un facteur pouvant
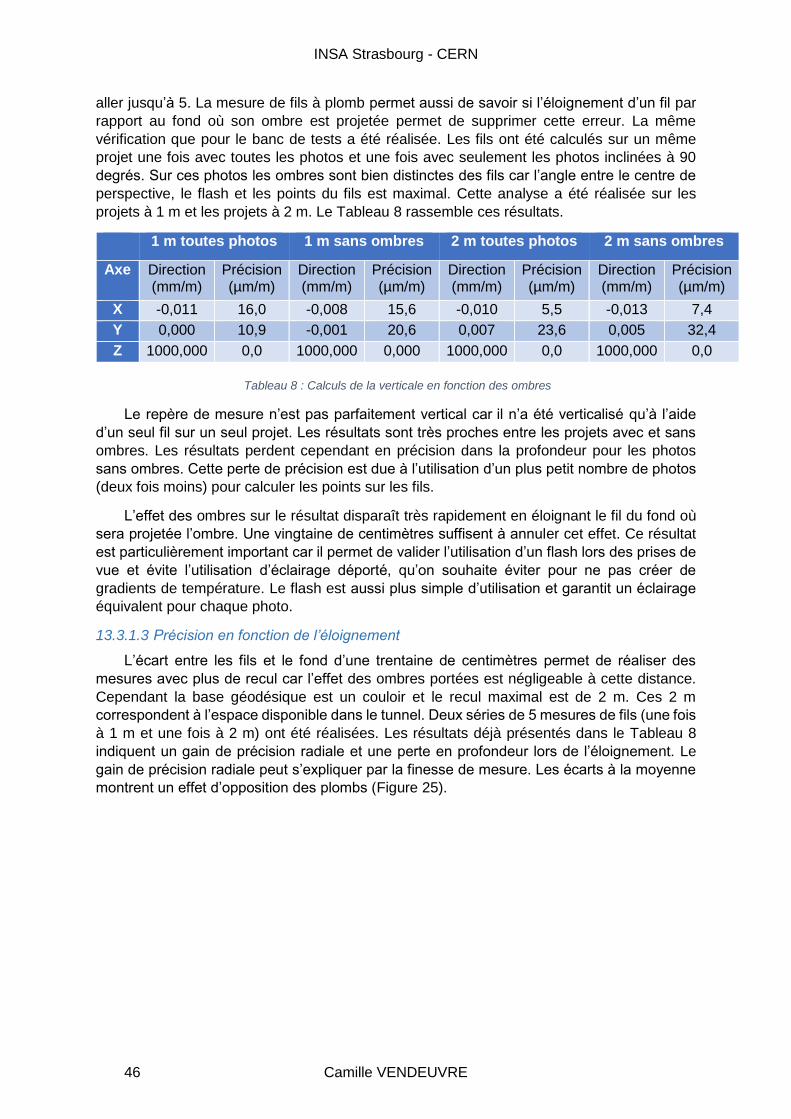
INSA Strasbourg - CERN
46 Camille VENDEUVRE
aller jusqu’à 5. La mesure de fils à plomb permet aussi de savoir si l’éloignement d’un fil par
rapport au fond où son ombre est projetée permet de supprimer cette erreur. La même
vérification que pour le banc de tests a été réalisée. Les fils ont été calculés sur un même
projet une fois avec toutes les photos et une fois avec seulement les photos inclinées à 90
degrés. Sur ces photos les ombres sont bien distinctes des fils car l’angle entre le centre de
perspective, le flash et les points du fils est maximal. Cette analyse a été réalisée sur les
projets à 1 m et les projets à 2 m. Le Tableau 8 rassemble ces résultats.
1 m toutes photos 1 m sans ombres 2 m toutes photos 2 m sans ombres
Axe Direction (mm/m)
Précision (µm/m)
Direction (mm/m)
Précision (µm/m)
Direction (mm/m)
Précision (µm/m)
Direction (mm/m)
Précision (µm/m)
X -0,011 16,0 -0,008 15,6 -0,010 5,5 -0,013 7,4
Y 0,000 10,9 -0,001 20,6 0,007 23,6 0,005 32,4
Z 1000,000 0,0 1000,000 0,000 1000,000 0,0 1000,000 0,0
Tableau 8 : Calculs de la verticale en fonction des ombres
Le repère de mesure n’est pas parfaitement vertical car il n’a été verticalisé qu’à l’aide
d’un seul fil sur un seul projet. Les résultats sont très proches entre les projets avec et sans
ombres. Les résultats perdent cependant en précision dans la profondeur pour les photos
sans ombres. Cette perte de précision est due à l’utilisation d’un plus petit nombre de photos
(deux fois moins) pour calculer les points sur les fils.
L’effet des ombres sur le résultat disparaît très rapidement en éloignant le fil du fond où
sera projetée l’ombre. Une vingtaine de centimètres suffisent à annuler cet effet. Ce résultat
est particulièrement important car il permet de valider l’utilisation d’un flash lors des prises de
vue et évite l’utilisation d’éclairage déporté, qu’on souhaite éviter pour ne pas créer de
gradients de température. Le flash est aussi plus simple d’utilisation et garantit un éclairage
équivalent pour chaque photo.
13.3.1.3 Précision en fonction de l’éloignement
L’écart entre les fils et le fond d’une trentaine de centimètres permet de réaliser des
mesures avec plus de recul car l’effet des ombres portées est négligeable à cette distance.
Cependant la base géodésique est un couloir et le recul maximal est de 2 m. Ces 2 m
correspondent à l’espace disponible dans le tunnel. Deux séries de 5 mesures de fils (une fois
à 1 m et une fois à 2 m) ont été réalisées. Les résultats déjà présentés dans le Tableau 8
indiquent un gain de précision radiale et une perte en profondeur lors de l’éloignement. Le
gain de précision radiale peut s’expliquer par la finesse de mesure. Les écarts à la moyenne
montrent un effet d’opposition des plombs (Figure 25).
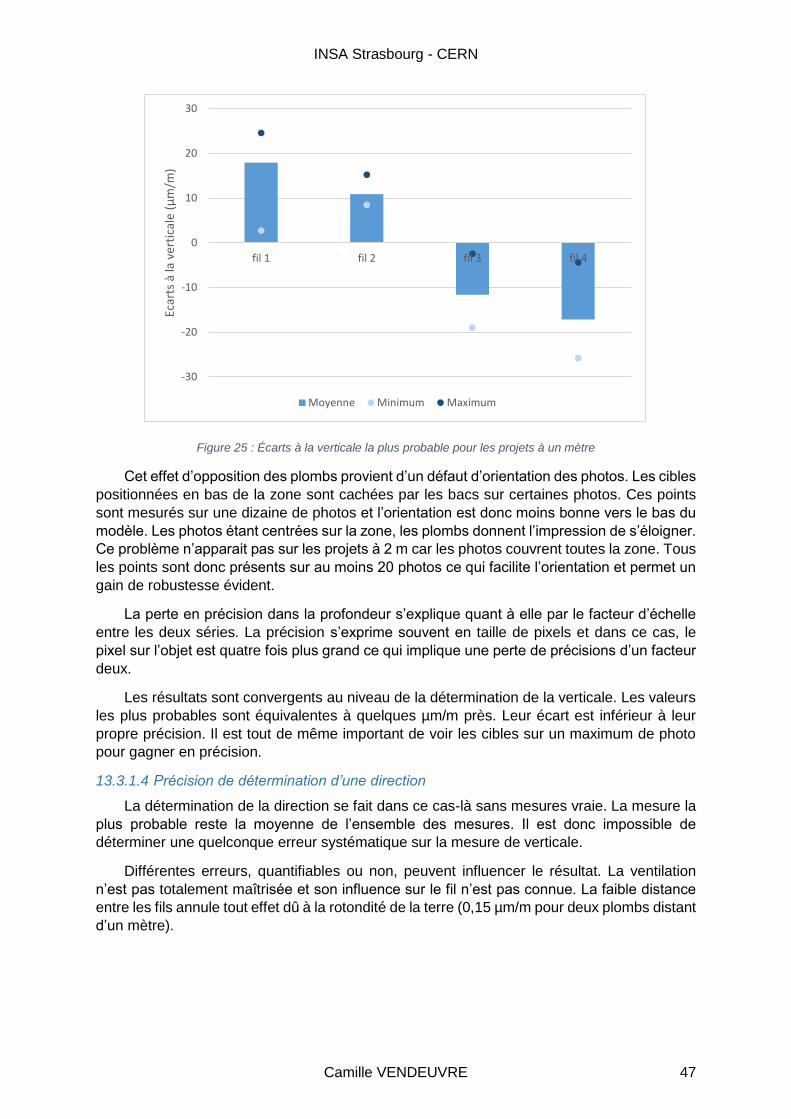
INSA Strasbourg - CERN
Camille VENDEUVRE 47
Figure 25 : Écarts à la verticale la plus probable pour les projets à un mètre
Cet effet d’opposition des plombs provient d’un défaut d’orientation des photos. Les cibles
positionnées en bas de la zone sont cachées par les bacs sur certaines photos. Ces points
sont mesurés sur une dizaine de photos et l’orientation est donc moins bonne vers le bas du
modèle. Les photos étant centrées sur la zone, les plombs donnent l’impression de s’éloigner.
Ce problème n’apparait pas sur les projets à 2 m car les photos couvrent toutes la zone. Tous
les points sont donc présents sur au moins 20 photos ce qui facilite l’orientation et permet un
gain de robustesse évident.
La perte en précision dans la profondeur s’explique quant à elle par le facteur d’échelle
entre les deux séries. La précision s’exprime souvent en taille de pixels et dans ce cas, le
pixel sur l’objet est quatre fois plus grand ce qui implique une perte de précisions d’un facteur
deux.
Les résultats sont convergents au niveau de la détermination de la verticale. Les valeurs
les plus probables sont équivalentes à quelques µm/m près. Leur écart est inférieur à leur
propre précision. Il est tout de même important de voir les cibles sur un maximum de photo
pour gagner en précision.
13.3.1.4 Précision de détermination d’une direction
La détermination de la direction se fait dans ce cas-là sans mesures vraie. La mesure la
plus probable reste la moyenne de l’ensemble des mesures. Il est donc impossible de
déterminer une quelconque erreur systématique sur la mesure de verticale.
Différentes erreurs, quantifiables ou non, peuvent influencer le résultat. La ventilation
n’est pas totalement maîtrisée et son influence sur le fil n’est pas connue. La faible distance
entre les fils annule tout effet dû à la rotondité de la terre (0,15 µm/m pour deux plombs distant
d’un mètre).
-30
-20
-10
0
10
20
30
fil 1 fil 2 fil 3 fil 4
Ecar
ts à
la v
erti
cale
(µ
m/m
)
Moyenne Minimum Maximum
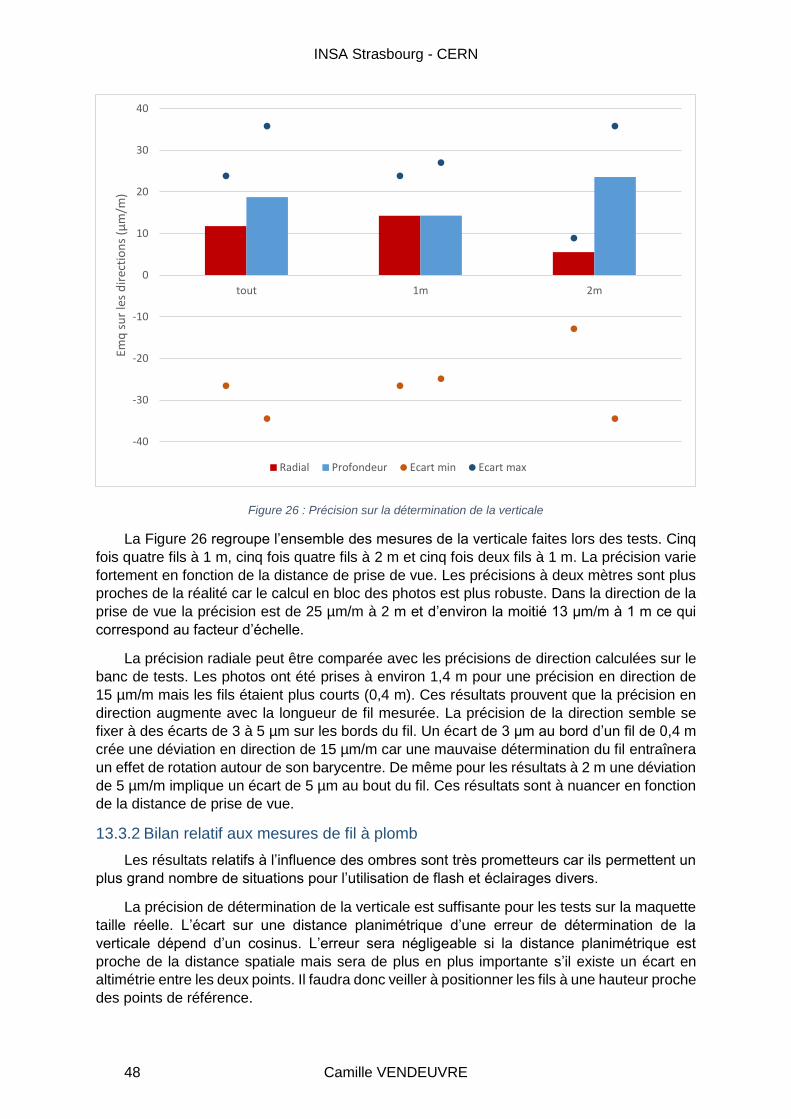
INSA Strasbourg - CERN
48 Camille VENDEUVRE
Figure 26 : Précision sur la détermination de la verticale
La Figure 26 regroupe l’ensemble des mesures de la verticale faites lors des tests. Cinq
fois quatre fils à 1 m, cinq fois quatre fils à 2 m et cinq fois deux fils à 1 m. La précision varie
fortement en fonction de la distance de prise de vue. Les précisions à deux mètres sont plus
proches de la réalité car le calcul en bloc des photos est plus robuste. Dans la direction de la
prise de vue la précision est de 25 µm/m à 2 m et d’environ la moitié 13 µm/m à 1 m ce qui
correspond au facteur d’échelle.
La précision radiale peut être comparée avec les précisions de direction calculées sur le
banc de tests. Les photos ont été prises à environ 1,4 m pour une précision en direction de
15 µm/m mais les fils étaient plus courts (0,4 m). Ces résultats prouvent que la précision en
direction augmente avec la longueur de fil mesurée. La précision de la direction semble se
fixer à des écarts de 3 à 5 µm sur les bords du fil. Un écart de 3 µm au bord d’un fil de 0,4 m
crée une déviation en direction de 15 µm/m car une mauvaise détermination du fil entraînera
un effet de rotation autour de son barycentre. De même pour les résultats à 2 m une déviation
de 5 µm/m implique un écart de 5 µm au bout du fil. Ces résultats sont à nuancer en fonction
de la distance de prise de vue.
13.3.2 Bilan relatif aux mesures de fil à plomb
Les résultats relatifs à l’influence des ombres sont très prometteurs car ils permettent un
plus grand nombre de situations pour l’utilisation de flash et éclairages divers.
La précision de détermination de la verticale est suffisante pour les tests sur la maquette
taille réelle. L’écart sur une distance planimétrique d’une erreur de détermination de la
verticale dépend d’un cosinus. L’erreur sera négligeable si la distance planimétrique est
proche de la distance spatiale mais sera de plus en plus importante s’il existe un écart en
altimétrie entre les deux points. Il faudra donc veiller à positionner les fils à une hauteur proche
des points de référence.
-40
-30
-20
-10
0
10
20
30
40
tout 1m 2m
Emq
su
r le
s d
irec
tio
ns
(µm
/m)
Radial Profondeur Ecart min Ecart max
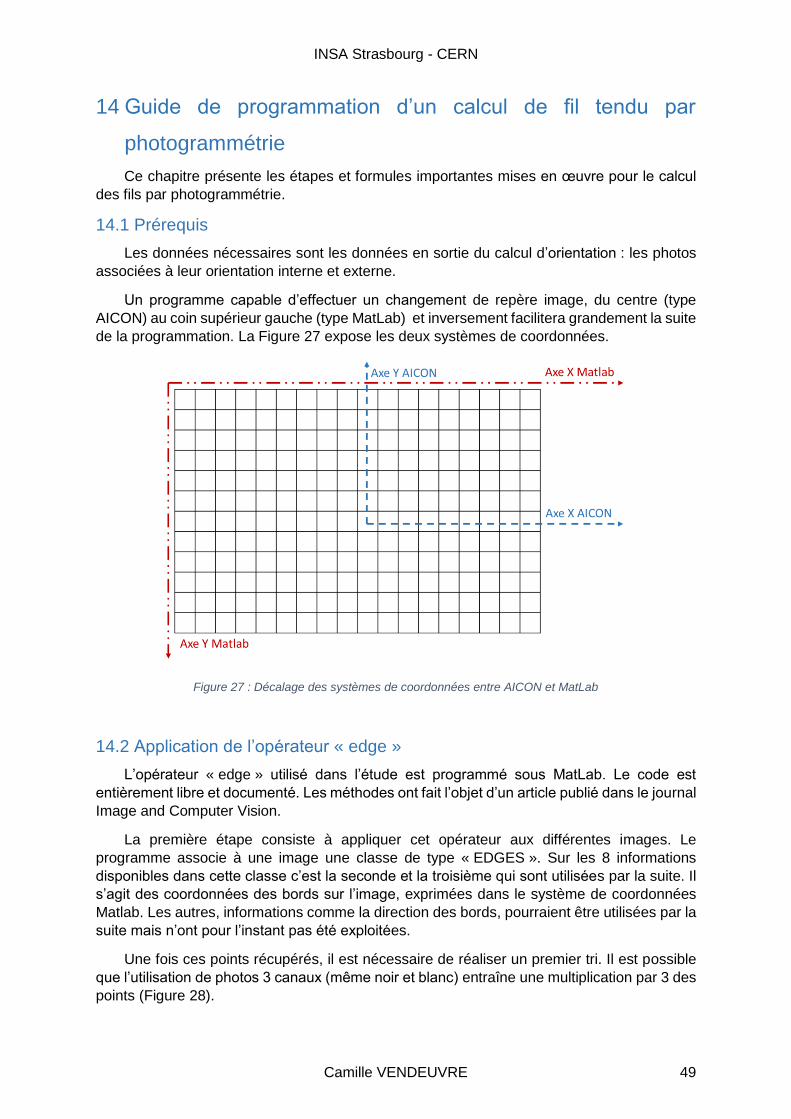
INSA Strasbourg - CERN
Camille VENDEUVRE 49
14 Guide de programmation d’un calcul de fil tendu par
photogrammétrie
Ce chapitre présente les étapes et formules importantes mises en œuvre pour le calcul
des fils par photogrammétrie.
14.1 Prérequis
Les données nécessaires sont les données en sortie du calcul d’orientation : les photos
associées à leur orientation interne et externe.
Un programme capable d’effectuer un changement de repère image, du centre (type
AICON) au coin supérieur gauche (type MatLab) et inversement facilitera grandement la suite
de la programmation. La Figure 27 expose les deux systèmes de coordonnées.
Figure 27 : Décalage des systèmes de coordonnées entre AICON et MatLab
14.2 Application de l’opérateur « edge »
L’opérateur « edge » utilisé dans l’étude est programmé sous MatLab. Le code est
entièrement libre et documenté. Les méthodes ont fait l’objet d’un article publié dans le journal
Image and Computer Vision.
La première étape consiste à appliquer cet opérateur aux différentes images. Le
programme associe à une image une classe de type « EDGES ». Sur les 8 informations
disponibles dans cette classe c’est la seconde et la troisième qui sont utilisées par la suite. Il
s’agit des coordonnées des bords sur l’image, exprimées dans le système de coordonnées
Matlab. Les autres, informations comme la direction des bords, pourraient être utilisées par la
suite mais n’ont pour l’instant pas été exploitées.
Une fois ces points récupérés, il est nécessaire de réaliser un premier tri. Il est possible
que l’utilisation de photos 3 canaux (même noir et blanc) entraîne une multiplication par 3 des
points (Figure 28).

INSA Strasbourg - CERN
50 Camille VENDEUVRE
Figure 28 : Résultat d'une détection de points sur un fil (reste de la photo masqué)
Ces points sont seulement séparés par une constante égale à la largeur de la photo en
pixels. Une manière simple de trier les points est de ne conserver que les points dont
l’abscisse est inférieure à la largeur du capteur.
14.3 Application des corrections aux points mesurés.
Ces points sont mesurés sur des photos brutes. Il est donc nécessaire de les corriger des
distorsions de l’image. Le modèle de déformation calculé par AICON suit les Formule 30. Ces
paramètres sont décrits de manière plus détaillée au § 2.2.2.
Les corrections doivent être appliquées sur les coordonnées exprimées dans un repère
ayant pour origine le point principal. Orienté axe X vers la droite et axe Y vers le haut de la
photo.
𝑑𝑟′𝑟𝑎𝑑 = 𝐴1(𝑟3 − 𝑟0
2𝑟) + 𝐴2(𝑟5 − 𝑟0
4𝑟) + 𝐴1(𝑟7 − 𝑟0
6𝑟)
𝑑𝑥′𝑟𝑎𝑑 = 𝑥′ ∗𝑑𝑟′𝑟𝑎𝑑𝑟′
𝑑𝑦′𝑟𝑎𝑑 = 𝑦′ ∗𝑑𝑟′𝑟𝑎𝑑𝑟′
𝑑𝑥𝑡𝑎𝑛 = 𝐵1(𝑟2 + 2𝑥2) + 2𝐵2𝑥𝑦
𝑑𝑦𝑡𝑎𝑛 = 𝐵2(𝑟2 + 2𝑦2) + 2𝐵1𝑥𝑦
𝑑𝑥 = 𝑑𝑥𝑟𝑎𝑑 + 𝑑𝑥𝑡𝑎𝑛 + 𝑑𝑥𝑑𝑒𝑓
𝑑𝑦 = 𝑑𝑦𝑟𝑎𝑑 + 𝑑𝑦𝑡𝑎𝑛 + 𝑑𝑦𝑑𝑒𝑓
Formule 30 : Calcul des distorsions conformément au logiciel AICON
Ces corrections sont valables directement dans les équations de colinéarité exprimant les
coordonnées images en fonction des coordonnées objet. Cette situation étant inverse, les
corrections doivent être appliquées de manière itérative.
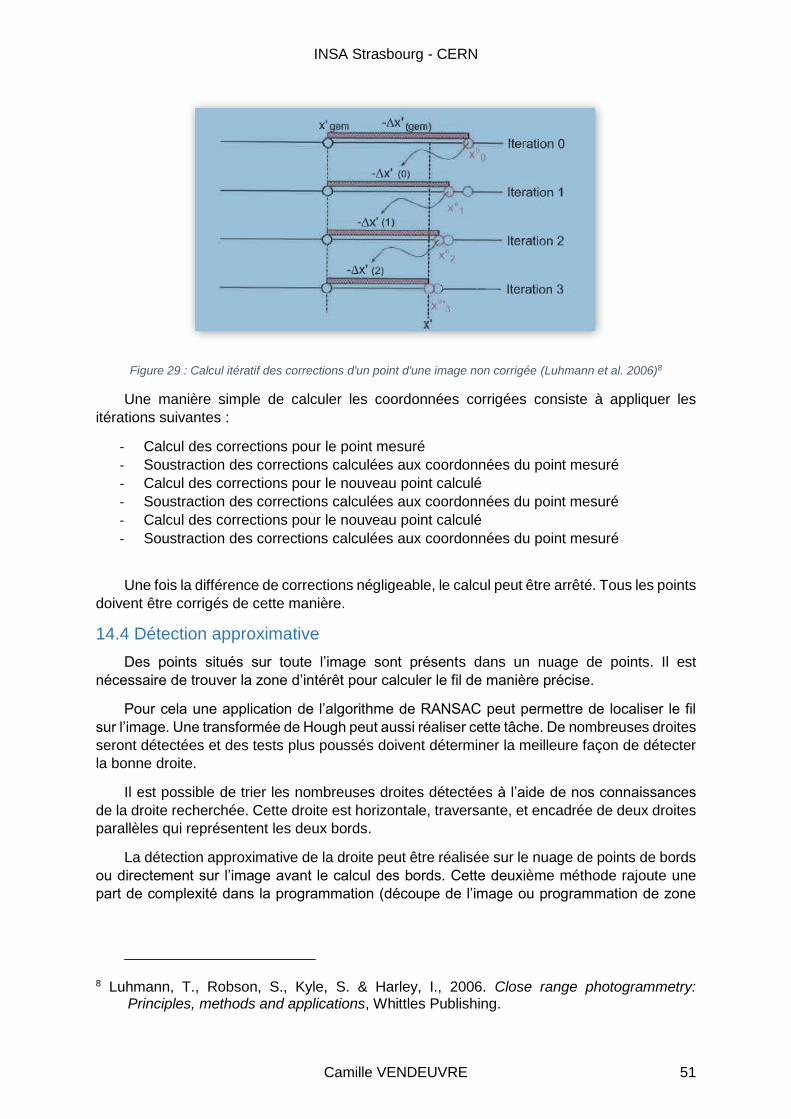
INSA Strasbourg - CERN
Camille VENDEUVRE 51
Figure 29 : Calcul itératif des corrections d'un point d'une image non corrigée (Luhmann et al. 2006)8
Une manière simple de calculer les coordonnées corrigées consiste à appliquer les
itérations suivantes :
- Calcul des corrections pour le point mesuré
- Soustraction des corrections calculées aux coordonnées du point mesuré
- Calcul des corrections pour le nouveau point calculé
- Soustraction des corrections calculées aux coordonnées du point mesuré
- Calcul des corrections pour le nouveau point calculé
- Soustraction des corrections calculées aux coordonnées du point mesuré
Une fois la différence de corrections négligeable, le calcul peut être arrêté. Tous les points
doivent être corrigés de cette manière.
14.4 Détection approximative
Des points situés sur toute l’image sont présents dans un nuage de points. Il est
nécessaire de trouver la zone d’intérêt pour calculer le fil de manière précise.
Pour cela une application de l’algorithme de RANSAC peut permettre de localiser le fil
sur l’image. Une transformée de Hough peut aussi réaliser cette tâche. De nombreuses droites
seront détectées et des tests plus poussés doivent déterminer la meilleure façon de détecter
la bonne droite.
Il est possible de trier les nombreuses droites détectées à l’aide de nos connaissances
de la droite recherchée. Cette droite est horizontale, traversante, et encadrée de deux droites
parallèles qui représentent les deux bords.
La détection approximative de la droite peut être réalisée sur le nuage de points de bords
ou directement sur l’image avant le calcul des bords. Cette deuxième méthode rajoute une
part de complexité dans la programmation (découpe de l’image ou programmation de zone
8 Luhmann, T., Robson, S., Kyle, S. & Harley, I., 2006. Close range photogrammetry: Principles, methods and applications, Whittles Publishing.
INSA Strasbourg - CERN
52 Camille VENDEUVRE
d’intérêt pour le détecteur de bords) mais peut réduire le temps de calcul puisque l’étape la
plus longue est l’application du détecteur de bord.
14.5 Tri des points
A ce stade le nuage de points de bords et une position approximative de la droite sont
connus. Un tri des points appartenant réellement au fil doit être réalisé.
Le tri avec une zone tampon autour de la droite est la méthode la plus facile. Il s’agit de
trier les points selon leur distance orthogonale à la droite (Formule 31). Cette formule est
valable pour une droite d’équation a*x+b=y.
𝐷 = |𝑎 ∗ 𝑥 + 𝑏 − 𝑦|
√1 + 𝑎²
Formule 31 : Calcul de distance orthogonale d'un point à une droite en 2D
Il est donc nécessaire de choisir un seuil pour le tri des points. Ce seuil dépend de la taille
du fil sur le capteur et donc de la taille réelle du fil, de la distance principale, de la distance au
fil et de la résolution du capteur. Il faut aussi prendre en compte la qualité de l’image et les
perturbations autour de la mesure. Pour un fil noir sur un fond blanc, aucun autre point de
bords ne sera déterminé ailleurs que sur le fil alors que, si l’image est bruitée de nombreuses
erreurs viendront perturber la mesure.
Pour déterminer le seuil, une méthode empirique consiste à appliquer le détecteur de
bords sur une photo en condition normale et de regarder à combien de pixels du centre du fil
se trouvent les bords de fil et d’ajouter 2 à 3 pixels de marge. Cette marge peut être nécessaire
en cas de mauvaise détermination de la droite par la détection approximative (Cf. § 14.4).
14.6 Calcul du centre du fil
Le calcul du centre du fil passe par une régression linéaire. La méthode développée au §
6 permet de calculer une régression linéaire orthogonale.
Une ligne moyenne peut être calculée directement sur les points conservés lors de l’étape
précédente. Cette droite moyenne est assez proche du centre du fil mais le calcul peut être
encore affiné.
Il est possible de calculer deux droites pour représenter les deux bords du fil. Pour cela
un nouveau tri doit être effectué. En enlevant la valeur absolue de la Formule 31 il est possible
de trier les points dont la distance à la ligne est positive de ceux dont la distance est négative.
Ces deux groupes de points représentent les points d’un côté et de l’autre de la ligne.
Une fois les deux bords identifiés, une droite est calculée pour chaque bord. Puis le calcul
de la bissectrice permet de connaître l’équation du fil sur l’image.
Il existe deux bissectrices qui peuvent être calculées avec la Formule 32.

INSA Strasbourg - CERN
Camille VENDEUVRE 53
𝑎 = ( 𝑎2 ∗ √(1 + 𝑎1²) − 𝑎1 ∗ √(1 + 𝑎2²) ) / ( √(1 + 𝑎1²) − √(1 + 𝑎2²) )
𝑏 = ( 𝑏2 ∗ √(1 + 𝑎1²) − 𝑏1 ∗ √(1 + 𝑎2²) ) / ( √(1 + 𝑎1²) − √(1 + 𝑎2²) )
𝑎 = ( 𝑎2 ∗ √(1 + 𝑎1²) + 𝑎1 ∗ √(1 + 𝑎2²) ) / ( √(1 + 𝑎1²) + √(1 + 𝑎2²) )
𝑏 = ( 𝑏2 ∗ √(1 + 𝑎1²) + 𝑏1 ∗ √(1 + 𝑎2²) ) / ( √(1 + 𝑎1²) + √(1 + 𝑎2²) )
Formule 32 : Calcul des bissectrices de deux droites
Pour déterminer la bonne il suffit de prendre un point de chaque bissectrice puis de
calculer la distance signée du point aux deux droites. Si la distance est de signe opposé il
s’agit de la bonne bissectrice.
14.7 Projection vers l’espace objet
Les droites sont connues dans l’espace image et il faut ensuite les calculer dans l’espace
objet pour combiner les différentes images.
Une première méthode consiste à appliquer directement les paramètres de translation et
de rotation à l’image par son centre de perspective.
Une méthode simple consiste à choisir deux points sur la droite image (de préférence aux
extrémités du fil sur l’image) et de les projeter à l’aide des équations de colinéarité (Formule
5) en choisissant une élévation arbitraire.
14.8 Calcul de la ligne moyenne
Pour chaque photo le centre de perspective ainsi que deux points projetés du fil sont
connus ce qui forme un plan par photo. Les plans se coupent en une ligne qui représente le
fil. L’intersection de plans doit se faire par ajustement. Une documentation complète des
équations et informations nécessaires pour le calcul de cette droite est disponible sur internet.
La méthode consiste à calculer d’abord un point de la ligne. Ce point est le point le plus
proche de tous les plans. La distance orthogonale (Formule 33) d’un point (x, y, z) à un plan
peut servir d’observation à minimiser dans le cas d’un calcul de moindres carrés. Le plan
d’équation a*x+b*y+c*z+d=0 a pour normale le vecteur (a, b, c).
𝐷 = |𝑎 ∗ 𝑥 + 𝑏 ∗ 𝑦 + 𝑐 ∗ 𝑧 + 𝑑|
√𝑎2 + 𝑏2 + 𝑐²
Formule 33 : Distance orthogonale d'un point à un plan
Il s’agit ensuite de calculer la direction du fil. Cette direction doit être la plus
perpendiculaire possible aux vecteurs normaux des plans. Il faut donc réduire au plus le
produit scalaire de la direction de la ligne recherchée et des normales des différents plans
(Formule 34).
𝐷 = √𝑎 ∗ 𝑉𝑥 + 𝑏 ∗ 𝑉𝑦 + 𝑐 ∗ 𝑉𝑧
Formule 34 : Projeté du vecteur normal au plan sur le vecteur directeur de la droite
Une fois la droite calculée dans l’espace il est possible de calculer la distance entre cette
droite et le point de référence.
INSA Strasbourg - CERN
54 Camille VENDEUVRE
Table des figures
Figure 1 : Les états membre du CERN (source : CERN) ....................................................... 1 Figure 2 : Système de coordonnées dans une image............................................................ 2 Figure 3 : Relation géométrique pour la détermination des équations de colinéarité ............. 3 Figure 4 : Résidus le long d'une ligne.................................................................................. 23 Figure 5 : Écart d'un point source à la ligne......................................................................... 24 Figure 6 : Erreur sur une ligne ............................................................................................. 24 Figure 7 : Résidus d'un calcul de ligne ................................................................................ 27 Figure 8 : Matrice de Bayer ................................................................................................. 29 Figure 9 : Limite de détection des fils de couleur sur fond de couleur ................................. 32 Figure 10 : Dispersion des pointés, à gauche image 1, à droite image 2 ............................. 34 Figure 11 : Interface Tesa-Reflex Vista vue d’un fil en nylon ............................................... 35 Figure 12 : Calcul d'un bord de fil comme une droite ........................................................... 36 Figure 13 : Vue au microscope d'un fil en vectran (⌀ 0,5 mm) ............................................. 37
Figure 14 : Vue au microscope d'un fil tressé (⌀ 0,4 mm) .................................................... 37 Figure 15 : Défauts observables sur un fil ........................................................................... 37 Figure 16 : Vue au microscope d'un défaut d'usure du fil nylon (⌀ 0,3 mm) ......................... 38
Figure 17 : Vue au microscope d'un défaut de mémoire de forme sur fil nylon (⌀ 0,3 mm) .. 38
Figure 18 : Défauts sur une feuille de papier gros. : 100X ................................................... 39 Figure 19 : Vue au microscope d'une cible imprimée au CERN (Ø 5 mm) gros. : 100X ...... 40 Figure 20 : Vue au microscope d'une cible photo, référence 20 mm (Ø 10 mm) gros. : 100X
........................................................................................................................................... 40 Figure 21 : Cible imprimée par le service d'impression du CERN gros. : 100X .................... 41 Figure 22 : Fixation des fils à plomb au mur ........................................................................ 42 Figure 23 : Bacs de stabilisation des fils à plomb ................................................................ 43 Figure 24 : Zone de mesure des fils à plomb ...................................................................... 44 Figure 25 : Écarts à la verticale la plus probable pour les projets à un mètre ...................... 47 Figure 26 : Précision sur la détermination de la verticale .................................................... 48 Figure 27 : Décalage des systèmes de coordonnées entre AICON et MatLab .................... 49 Figure 28 : Résultat d'une détection de points sur un fil (reste de la photo masqué) ........... 50 Figure 29 : Calcul itératif des corrections d'un point d'une image non corrigée (Luhmann et al.
2006) .................................................................................................................................. 51
INSA Strasbourg - CERN
Camille VENDEUVRE 55
Table des tableaux
Tableau 1 : Récapitulatif des résultats des différents détecteurs d'erreurs .......................... 28 Tableau 2 : Résultats des tests sur photos en couleurs ...................................................... 30 Tableau 3 : Résultats sur la distance des tests avec photo couleur sur fond bleu ............... 31 Tableau 4 : Contraste sur cibles et fils pour des photos couleur sur un fond bleu ............... 31 Tableau 5 : Précision de détermination du cercle en fonction de la cible ............................. 39 Tableau 6 : Précision de détermination de cercles et centrage d'un point dans une cible.... 41 Tableau 7 : Précision sur la direction des fils à plombs dans l'eau et au sol ........................ 45 Tableau 8 : Calculs de la verticale en fonction des ombres ................................................. 46
Table des formules
Formule 1 : Équation de colinéarité dans le Plan OXZ .......................................................... 3 Formule 2 : Équation de colinéarité dans le Plan OYZ .......................................................... 3 Formule 3 : Rotation du repère de prise de vue vers le repère global ................................... 4 Formule 4 : Équations de colinéarité objet vers image .......................................................... 4 Formule 5 : Équations de colinéarité image vers objet .......................................................... 4 Formule 6 : Correction des coordonnées pixels d'un point .................................................... 5 Formule 7 : Correction radiale dans le cas « unbalanced » ................................................... 5 Formule 8 : Correction radiale dans le cas « balanced » ....................................................... 5 Formule 9 : Projection des déformations radiales sur les axes .............................................. 5 Formule 10 : Corrections tangentielles .................................................................................. 6 Formule 11 : Correction des déformations du capteur ........................................................... 6 Formule 12 : Matrice rotation du système image vers le système global ............................... 6 Formule 13 : Équation d'erreur primitive .............................................................................. 20 Formule 14 : Équation d'erreur transformée ........................................................................ 20 Formule 15 : Forme matricielle du système d'équations ...................................................... 20 Formule 16 : Résolution du système d'équations ................................................................ 21 Formule 17 : Calcul et transmission d'erreurs quadratique .................................................. 21 Formule 18 : Distance entre un point et une droite .............................................................. 21 Formule 19 : Équation d'erreur primitive pour une régression linéaire ................................. 21 Formule 20 : Calcul des paramètres initiaux ....................................................................... 22
Formule 21 : Calcul de 𝜕𝐷𝜕𝑎 ............................................................................................... 22
Formule 22 : Calcul de 𝜕𝐷𝜕𝑏 ............................................................................................... 22 Formule 23 : Calcul des coefficients de la matrice jacobienne ............................................ 22 Formule 24 : Calcul des écarts ki ........................................................................................ 23 Formule 25 : Calcul des poids ............................................................................................. 25 Formule 26 : Poids pour une compensation robuste ........................................................... 26 Formule 27 : Poids dans le programme BLUH .................................................................... 26 Formule 28 : Calcul de la flèche d'un fil ............................................................................... 33 Formule 29 : Précision en profondeur dans le cas normal ................................................... 34 Formule 30 : Calcul des distorsions conformément au logiciel AICON ................................ 50 Formule 31 : Calcul de distance orthogonale d'un point à une droite en 2D ........................ 52 Formule 32 : Calcul des bissectrices de deux droites .......................................................... 53 Formule 33 : Distance orthogonale d'un point à un plan ...................................................... 53 Formule 34 : Projeté du vecteur normal au plan sur le vecteur directeur de la droite .......... 53