Embed Size (px)
Citation preview
IST - 2o Semestre de 2012/13
LEGM , LMAC , MEFT , MEBiom , MEC
EXERCÍCIOS DE ÁLGEBRA LINEAR
FICHA 1 - Método de Eliminação de Gauss
1
1 Sistemas de equações lineares
Uma equação linear nas variáveis (ou incógnitas) x1, ..., xn, é uma equação do tipo
a1x1 + ...+ anxn = d, (1.1)
onde a1, ..., an e d são números (reais ou complexos); a1, ..., an, dizem-se os coeficientes daequação e d o seu segundo membro.
Um sistema de p equações lineares (SEL) nas n variáveis (ou incógnitas)x1, ..., xn, é um conjunto de p de equações do tipo da equação (1.1):
a11x1 + ...+ a1nxn = d1a21x1 + ...+ a2nxn = d2
...ap1x1 + ...+ apnxn = dp
. (1.2)
Uma sequência numérica (s1, ..., sn) diz-se uma solução do sistema (1.2) se for solução decada uma das equações que compõem (1.2).
Dois sistemas de p equações lineares a n incógnitas são equivalentes se tiverem omesmo conjunto de soluções
Tornando implícitas as variáveis de um SEL, ele acha-se plenamente caracterizado pelamatriz
A|d =
a11 ... a1n d1a21 ... a2n d2... ... ... ...ap1 ... apn dp
.
que toma o nome de matriz aumentada do sistema (MAS). A matriz com p linhas e ncolunas (matriz p× n) sem os segundos membros das equações do sistema,
A =
a11 ... a1na21 ... a2n... ... ...ap1 ... apn
,
toma o nome de matriz dos coeficientes do sistema, ou matriz do sistema.
1Coligidos por: João Ferreira Alves, Ricardo Coutinho e José M. Ferreira.
1
1.1 Classificação dos sistemas de equações lineares
Um SEL pode ser:
• Impossível se não tiver soluções.
• Possível e determinado se possuir uma só solução.
• Possível e indeterminado se tiver infinitas soluções.
1.2 Operações elementares sobre as linhas de uma matriz
Sobre as linhas de uma matriz iremos considerar as seguintes operações:
1. Trocar linhas.
2. Multiplicar uma linha por um número diferente de zero, obtendo-se um múltiplo dessalinha.
3. Substituir uma linha pela sua soma com o múltiplo de outra linha.
Estas operações podem ser resumidamente indicadas através da seguinte notação:
Li ←→ Lj
αLi
Li + αLj
significa a operacao de trocar a linha i com a linha j.
diz-nos que estamos a multiplicar a linha Li pelo numero α = 0.
indica que estamos a substituir a linha Li pela sua soma com omultiplo αLj da linha Lj
1.3 Matriz em escada de linhas
Uma matriz diz-se em escada de linhas se tiver as seguintes características:
1. Não tem linhas nulas seguidas de linhas não nulas.
2. Chamando pivô de uma linha à primeira entrada não nula dessa linha, caso exista,cada pivô de uma linha encontra-se numa coluna à direita da coluna a que pertence opivô da linha imediatamente anterior.
Por exemplo,
1 5 0 3 −6 00 0 0 −3 0 90 0 0 0 2 −40 0 0 0 0 0
.
2
1.4 Forma reduzida de uma matriz em escada de linhas
Uma matriz em escada de linhas diz-se na forma reduzida se possuir as seguintes carac-terísticas adicionais:
• Todos os pivôs são iguais a 1.
• Cada pivô é a única entrada não nula da coluna respectiva.
Por exemplo,
1 5 0 0 0 −30 0 0 1 0 −30 0 0 0 1 −20 0 0 0 0 0
.
1.5 Variáveis dependentes e variáveis livres
Se a MAS, A|d, estiver em escada de linhas, dizemos que, com 1 ≤ i ≤ n, xi é umavariável dependente se na coluna i de A|d existir um pivô. Caso contrário diremos quexi é variável livre. Nestas condições podem ainda tirar-se as seguintes conclusões:
1. O sistema é impossível se e só se existir um pivô na última coluna de A|d.
2. O sistema é possível e determinado se e só se não existir um pivô na última coluna deA|d e não existirem variáveis livres.
3. O sistema é possível e indeterminado se e só se não existe um pivô na última colunade A|d e existirem incógnitas livres.
1.6 Método de eliminação de Gauss2 (MEG)
PASSO 1: Ordenar as variáveis e escrever a matriz aumentada do sistema A|d.
PASSO 2: Por meio de operações elementares de linhas obter uma matriz em escada delinhas.
PASSO 3: Verificar se o sistema é possível. Neste caso identificar as variáveis livres e asdependentes e:
PASSO 4: Por meio de operações elementares de linhas obter uma matriz na forma reduzidae ler a solução.
2Johann Carl Friederich Gauss, n. 30 de Abril de 1777 em Brunswick, m. em 23 de Fevereiro de 1855 emGottingen.
3
1.7 Exercícios
Exercício 1 Quais dos seguintes pares (x, y):
(0, 0) , (−1, 1) , (1,−1) e (1, 1) ,
são soluções do sistema
x+ y = 0−x− 2y = 12x+ 2y = 0
?
Exercício 2 Quais dos seguintes ternos (x, y, z):
(0, 0, 0) , (−1, 1, 0) , (1,−1, 0) , (0,−1, 1) , (−2, 0, 1) e (0,−1, 0)
são soluções do sistema x+ y + 2z = 0−x− 2y − z = 1
?
Exercício 3 Resolva os seguintes sistemas de equações lineares a duas incógnitas e inter-prete geometricamente as suas eventuais soluções :
a)x+ 2y = 1x+ 3y = 0
. b)
2x+ 3y = 14x+ 6y = 2
. c)
4x+ 5y = 112x+ 15y = 0
.
d)
x+ y = 13x− y = 2x− y = 0
. e) x+ y = 1 . f)
2x− y = 4x− y = 1x+ y = 5
.
Exercício 4 Resolva os seguintes sistemas de equações lineares a três incógnitas e procedaà interpretação geométrica das suas eventuais soluções:
a)
2x+ 2y + 3z = 1x+ 2y + z = 0x− y + z = 0
. b)
x+ 2y + 3z = 14x+ 7y + 7z = 32x+ 3y + z = 0
.
c)
x+ 2y + z = 04x+ 10y + 10z = 0x+ 3y + 4z = 0
. d)
2x+ 3y + z = 0x+ y + z = 0
.
Exercício 5 Resolva os seguintes sistemas de equações lineares
a)
2x1 + x2 + x3 + x4 = 12x1 + x2 − x3 + x4 = 3
. b)
2x+ 2y + 2z + 3w = 3x+ y + z + w = 13x+ 3y + 3z + 2w = 2
.
c)
x+ z + 2w = 02x+ 3z + 3w = 0y + 2w = 2x+ 2z + w = 0
. d)
y1 + y3 + 2y4 = 0y1 + 2y2 + y3 + y4 = 1y2 + 2y4 = 8y1 + 2y3 + y4 = 0
.
4

Exercício 6 Determine o conjunto das soluções dos seguintes sistemas:
a)
y + z = 02x+ 3w = 26x+ 3y + 3z + 4w = 63x+ 2w = 35x+ y + z + 5w = 5
. b)
3y − 2z = 02x+ 2y − 2z = 0x+ 4y − 3z = 0x− y + z = 2
.
Exercício 7 Em função dos parâmetros α e β, discuta os seguintes sistemas de equaçõeslineares:
a)
x+ 4y + 3z = 102x+ 7y − 2z = 10x+ 5y + αz = β
. b)
2x+ y + z = −6βαx+ 3y + 2z = 2β2x+ y + (α+ 1) z = 4
.
Exercício 8 Caracterize os vectores (b1, b2, b3) ∈ R3 que tornam possível o seguinte sistemade equações lineares nas incógnitas x, y e z
x+ y + 3z = b12x+ 2y − z = b24x+ 4y + 5z = b3
.
Exercício 9 Considere o sistema de equações lineares com parâmetros α e β, e incógnitasx, y e z :
2x+ 7y = 92x+ αy + βz = 12x+ 7y + z = 7
.
Determine os únicos valores de α e β para os quais o sistema é indeterminado.
Exercício 10 Obtenha uma equação linear cujo conjunto de soluções seja:
a) S = (1 + t, 1− t) : t ∈ R .
b) S = (1− t, 2s, t) : s, t ∈ R .
c) S = (3t+ 2s, t− s+ 1, 2t− s+ 2) : s, t ∈ R .
Exercício 11 Indique um sistema de equações lineares que tenha como conjunto de soluções:
a) S = (3s− 2t+ 1, s, 5t− 1, t) : s, t ∈ R .
b) S = (3t, 2t, t) : t ∈ R .
Exercício 12 Determine um polinómio p (t) = a0+a1t+a2t2 cujo gráfico passe pelos pontos
(1, 12) , (2, 15) e (3, 16) .
Exercício 13 Um mealheiro contém moedas de 1, 5 e 10 cêntimos num total de 13 moedase de 83 cêntimos. Quantas moedas de cada tipo contém o mealheiro?
Exercício 14 Quatro números inteiros são dados. Seleccionando três deles, fazendo a res-pectiva média e adicionando ao quarto obtiveram-se os seguintes valores: 29, 23, 21 e 17.Determine aqueles números.
5

Exercício 15 Um filamento de espessura negligenciável está representado na Figura 1, ondesão também indicadas as temperaturas em três nós do filamento (30o, 40o e 60o). Determinaras temperaturas dos restantes três nós, sabendo que cada uma delas é igual às médias dastemperaturas dos três nós mais próximos.
Figura 1
Exercício 16 Sejam v1, ..., vp, pontos de R3 e suponha-se que para cada j = 1, ..., p, seencontra um objecto em vj de massa mj. Em Física tais objectos são chamados de pontosde massa. A massa total do sistema é
m = m1 + ...+mp
e o ponto
v =1
m(m1v1 + ...+mpvp)
é chamado de centro de gravidade (ou centro de massa) do sistema.
a) Calcule o centro de gravidade de um sistema composto pelos pontos de massa indicadosna seguinte tabela:
Pontos Massas(5,−4, 3) 2g(4, 3,−2) 5g(−4,−3,−1) 2g(−9, 8, 6) 1g
b) Uma placa de espessura negligenciável com 3g de massa tem a forma de um triângulo devértices (0, 1, 0) , (8, 1, 0) e (2, 4, 0) . Supondo que a densidade da placa é uniforme, determineo seu centro de massa. (Este ponto coincide com o centro de massa de um sistema compostopor 1g de massa colocado em cada vértice do triângulo).
c) Como distribuiria uma massa adicional de 6g pelos três vértices da placa de modo adeslocar o centro de gravidade da placa para o ponto (2, 2, 0)?
6

2 Operações com matrizes
Uma matriz m×n é um quadro de números reais ou complexos com m filas horizontaise n filas verticais
A =
a11 a12 ... a1na21 a22 ... a2n... ... ... ...am1 am2 ... amn
.
Chamaremos linhas às filas horizontais de A e colunas às suas filas verticais. O coeficiente(ou entrada) de uma matriz A relativo à linha i e coluna j representa-se por aij ou [A]ij.
O conjunto das matrizes m × n com coeficientes reais (resp. complexos) representa-se porMm×n(R) (resp. Mm×n(C)).
2.1 Soma de matrizes e produto de uma matriz por um escalar
Dadas duas matrizes p× n
A =
a11 a12 ... a1na21 a22 ... a2n... ... ... ...ap1 ap2 ... apn
e B =
b11 b12 ... b1nb21 b22 ... b2n... ... ... ...bp1 bp2 ... bpn
pela soma de A com B entendemos a matriz, também p× n,
A+B =
a11 + b11 a12 + b12 ... a1n + b1na21 + b21 a22 + b22 ... a2n + b2n... ... ... ...
ap1 + bp1 ap2 + bp2 ... apn + bpn
.
O produto do escalar α ∈ R pela matriz A consiste na matriz
αA =
αa11 αa12 ... αa1nαa21 αa22 ... αa2n... ... ... ...αap1 αap2 ... αapn
.
• Decorrentes de propriedades bem conhecidas dos números reais, facilmente se observaa validade das propriedades seguintes onde A, B e C são matrizes n× p e α, β ∈ R:
i) A+B = B+A (comutatividade).
ii) (A+B) +C = A+ (B+C) (associatividade).
iii) α (A+B) = αA+ αB (distributividade).
iv) (α+ β)A = αA+ βA (distributividade).
v) (αβ)A = α (βA) (associatividade).
7

2.2 Produto de matrizes
Consideremos duas matrizes A e B, a primeira m× n e a segunda n× p :
A =
a11 a12 ... a1na21 a22 ... a2n... ... ... ...am1 am2 ... amn
e B =
b11 b12 ... b1pb21 b22 ... b2p... ... ... ...bn1 bn2 ... bnp
(note que o número de colunas de A é igual ao número de linhas de B). À matriz AB comm linhas, p colunas e entradas [AB]ij definidas por
[AB]ij =n
k=1
aikbkj
chamamos matriz produto de A por B.
Observemos que, como consequência da definição de produto, a coluna j da matriz AB édada pela expressão
A
b1jb2j...bnj
= b1j
a11a21...am1
+ b2j
a12a22...am2
+ · · ·+ bnj
a1na2n...amn
.
Analogamente, a linha i da matriz AB é dada por ai1 ai2 ... ain
B = ai1
b11 b12 ... b1p
+ ai2
b21 b22 ... b2p
+ · · ·
· · ·+ ain bn1 bn2 ... bnp
.
O produto de matrizes goza das propriedades a seguir indicadas.
• Seja A uma matriz m× n, B, C matrizes de tamanhos adequados e α ∈ R. Então:
i) A (BC) = A (BC) (associatividade).
ii) A (B+C) = AB+AC (distributividade).
iii) (A+B)C = AC+BC (distributividade).
iv) α (AB) = (αA)B = A (αB) (associatividade).
v) ImA = A = AIn onde
Im(matriz m×m)
=
1 0 ... 00 1 ... 0... ... ... ...0 0 ... 1
e In
(matriz n×n)=
1 0 ... 00 1 ... 0... ... ... ...0 0 ... 1
são chamadas de matrizes identidade (existência de elementos neutros).
Notemos que em geral o produto de matrizes não é comutativo.
8

2.3 Descrição matricial de um SEL
O produto de matrizes permite ainda uma descrição matricial do SEL
a11x1 + a12x2 + ...+ a1nxn = d1a21x1 + a22x2 + ...+ a2nxn = d2
...ap1x1 + ap2x2 + ...+ apnxn = dp
,
através da relaçãoAx = d,
onde
A =
a11 a12 ... a1na21 a22 ... a2n... ... ... ...ap1 ap2 ... apn
, x =
x1x2...xn
e d =
d1d2...dp
.
2.4 Transposta de uma matriz
Seja A uma matriz p × n. A matriz transposta de A é a matriz AT que se obtéma partir de A, transformando a primeira linha de A na primeira coluna de AT , a segundalinha de A na segunda coluna de AT , etc. AT é uma matriz n× p.
Esta operação de transposição de uma matriz satisfaz as propriedades a seguir estabe-lecidas.
• Seja A uma matriz p× n, B uma matriz n× k e α ∈ R. Então (ver ex. 26 b):
i)ATT
= A.
ii) (A+B)T = AT +BT .
iii) (αA)T = αAT .
iv) (AB)T = BTAT .
2.5 Exercícios
Exercício 17 Sempre que possível efectue as seguintes operações de matrizes. Justifique oscasos de impossibilidade.
a) 1 2
+
02
. b)
28
+ 2
3−5
. c) 2
1 02 1
+ 3
0 26 1
.
d)1
2
4−28
−1
3
9−36
. e)2
3
6 −69 3−3 12
+3
2
−6 4−4 82 −2
.
f)
0 8 −7 −63 1 5 4−4 6 −2 −1
−
1 −9 10−4 2 −86 7 −3
.
9
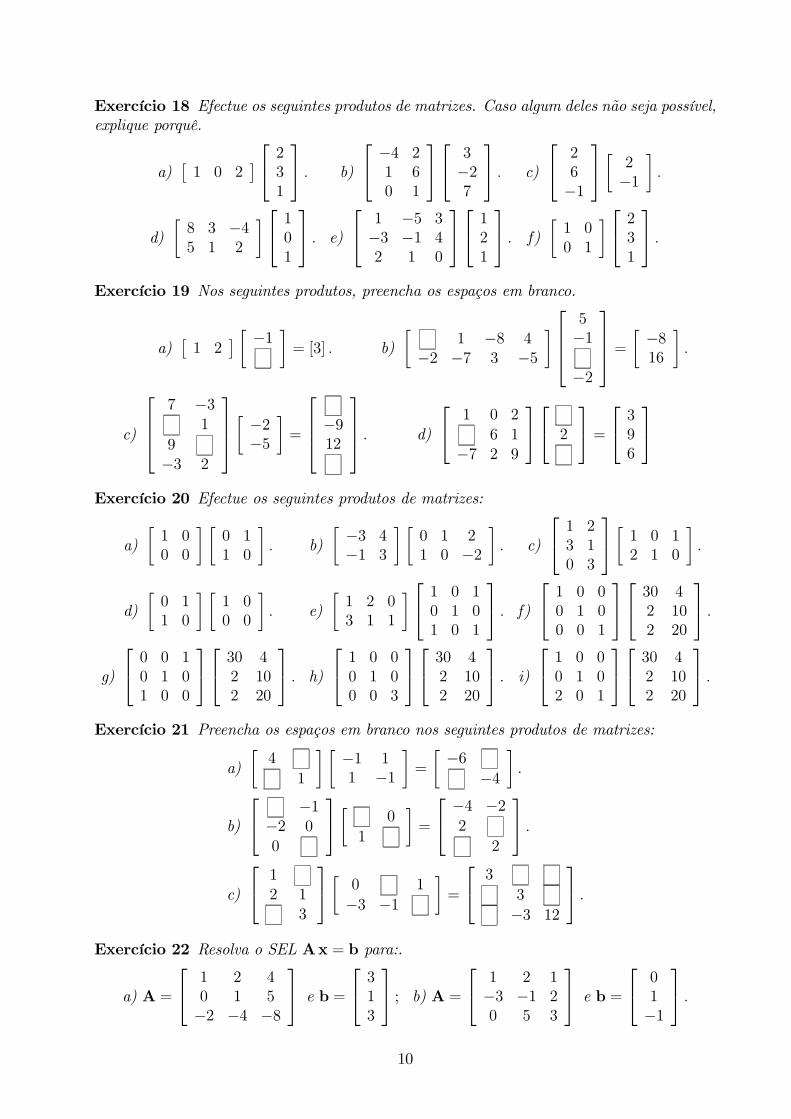
Exercício 18 Efectue os seguintes produtos de matrizes. Caso algum deles não seja possível,explique porquê.
a) 1 0 2
231
. b)
−4 21 60 1
3−27
. c)
26−1
2−1
.
d)8 3 −45 1 2
101
. e)
1 −5 3−3 −1 42 1 0
121
. f)1 00 1
231
.
Exercício 19 Nos seguintes produtos, preencha os espaços em branco.
a) 1 2
−1= [3] . b)
1 −8 4
−2 −7 3 −5
5−1
−2
=
−816
.
c)
7 −31
9−3 2
−2−5
=
−912
. d)
1 0 2
6 1−7 2 9
2
=
396
Exercício 20 Efectue os seguintes produtos de matrizes:
a)1 00 0
0 11 0
. b)
−3 4−1 3
0 1 21 0 −2
. c)
1 23 10 3
1 0 12 1 0
.
d)0 11 0
1 00 0
. e)
1 2 03 1 1
1 0 10 1 01 0 1
. f)
1 0 00 1 00 0 1
30 42 102 20
.
g)
0 0 10 1 01 0 0
30 42 102 20
. h)
1 0 00 1 00 0 3
30 42 102 20
. i)
1 0 00 1 02 0 1
30 42 102 20
.
Exercício 21 Preencha os espaços em branco nos seguintes produtos de matrizes:
a)
4
1
−1 11 −1
=
−6
−4
.
b)
−1
−2 00
0
1
=
−4 −22
2
.
c)
12 1
3
0 1
−3 −1
=
3
3
−3 12
.
Exercício 22 Resolva o SEL Ax = b para:.
a) A =
1 2 40 1 5−2 −4 −8
e b =
313
; b) A =
1 2 1−3 −1 20 5 3
e b =
01−1
.
10

Exercício 23 Com a ∈ R qualquer, seja
A =
0 aa 0
.
a) Calcule A2 e A3.
b) Mostre as seguintes relações:
A2k =
a2k 00 a2k
e A
2k+1 =
0 a2k+1
a2k+1 0
(k = 0, 1, 2, ...) .
Exercício 24 Dê um exemplo de duas matrizes A e B para as quais não são verificadas asrelações:
i) (A−B) (A+B) = A2 −B2. ii) (A+B)2 = A2 + 2AB+B2.
Exercício 25 O traço de uma matriz quadrada A = [aij]n
i,j=1 consiste na soma das entradasde A que se encontram na diagonal principal. Isto é:
trA =n
j=1
ajj .
a) Justifique que tr (A+B) = trA+ trB.
b) É uma relação do mesmo tipo verificada para a multiplicação de uma matriz por umescalar? E para o produto de matrizes?
c) Verifique para matrizes 2× 2 que tr (AB) = tr (BA) .
Exercício 26 A transposta de uma matriz A (m× n) é uma outra matriz designada porAT (n×m) em que a primeira linha de AT é a primeira coluna de A, a segunda linha de
AT é a segunda coluna de A, etc.
a) Indique as transpostas das seguintes matrizes:
A =
1 3 −1 −30 2 4 −2
, B =
2 0 −11 3 −2−3 4 50 −1 1
.
b) Justifique que: i)ATT
= A. ii) (A+B)T = AT +BT . iii) (αA)T = αAT . iv) (AB)T =BTAT .
Exercício 27 Uma matriz A (n× n) diz-se simétrica sempre que AT = A.
a) Dê exemplo de uma matriz, 3× 3, simétrica sem entradas nulas.
b) A+AT é sempre uma matriz simétrica? E AAT?
11

Exercício 28 Uma matriz quadrada,M, é dita de Markov se cada entrada da matriz estiverentre zero e um e a soma dos elementos de cada coluna for igual a 1.
a) Diga se as seguintes matrizes são de Markov:
A =
1/2 1/31/2 2/3
, B =
0, 2 0 0, 240, 25 0 0, 370, 55 1 0, 5
.
b) Analise para matrizes 2× 2, se as seguintes afirmações são verdadeiras ou falsas:
i) A soma de matrizes de Markov e uma matriz de Markov.
ii) O produto de matrizes de Markov e uma matriz de Markov.
3 Inversão de matrizes
Uma matriz A, n×n, diz-se invertível se existir uma matriz C, também n×n, tal que
AC = CA = In,
onde In é a matriz identidade n × n (elemento neutro para a multiplicação de matrizes).Nestas circunstâncias a matriz C diz-se matriz inversa de A e será representada por A−1.
• Quando existe, a inversa de uma matriz é única (ver ex. 31).
• Para o caso n = 2, se
A =
a bc d
é uma matriz tal que ad− bc = 0, então A é invertível e a sua inversa é
A−1 =
1
ad− bc
d −b−c a
.
Uma matriz que não admite inversa é chamada de matriz singular.
3.1 Propriedades das matrizes invertíveis
Sejam A e B matrizes n× n invertíveis. Então:
i) A−1 é invertível e (A−1)−1
= A (ver exercício 32 a)).
ii) AT é invertível eAT−1
= (A−1)T.
iii) Se α ∈ R\ 0 , (αA) é invertível e (αA)−1 = 1αA−1 (ver exercício 32 c)).
iv) (AB) é invertível e (AB)−1 = B−1A−1.
12

3.2 Teorema da matriz inversa
Seja A uma matriz n× n. Então são equivalentes as seguintes afirmações:
(1) A é invertível.
(2) A forma reduzida de A é In.
(3) A forma reduzida de A tem n pivôs.
(4) Para qualquer d ∈ Rn, o sistema Ax = d é possível e determinado.
(5) O sistema homogéneo Ax = 0 só tem a solução nula.
(6) Existe uma matriz C (n× n) tal que CA = In.
(7) Existe uma matriz D (n× n) tal que AD = In.
3.3 Matrizes elementares
Uma matriz elementar (n× n) é uma matriz que se obtém a partir da matriz identi-dade In por meio de uma única operação elementar sobre as linhas de In.
Estas matrizes possuem as seguintes propriedades:
• Uma matriz elementar é invertível e a sua inversa é também uma matriz elementar.
• Se A é uma matriz qualquer e E uma matriz elementar, ambas n× n, EA é a matrizque se obtém a partir de A por execução da mesma operação elementar que permitiuobter E a partir da matriz identidade In.
• A forma reduzida da matrizA pode ser obtida por sucessivas multiplicações de matrizeselementares.
• A forma reduzida da matriz A será In se e só se existirem matrizes elementaresE1, ...,Ek, tais que
Ek...E1A = In.
Nestas circunstâncias A é invertível e
A−1 = Ek...E1In.
Estas relações resumem o algoritmo de Gauss-Jordan3 para a inversão de uma ma-triz: todas as operações elementares que transformem a matriz A na matriz iden-tidade In, igualmente repetidas pela mesma ordem sobre In originam a matrizA−1.
3Wilhelm Jordan, n. em 1842 em Ellwangen, m. 1899 em Hannover.
13

3.4 Exercícios
Exercício 29 Sempre que possível, calcule a inversa de cada uma das seguintes matrizes:
a)0 00 0
. b)
1 00 1
. c)
1 22 1
. d)
1 0 01 1 01 1 1
.
e)
1 −1 01 1 −10 1 1
. f)
1 0 10 1 03 3 3
. g)
1 2 3 40 1 2 30 0 1 20 0 0 1
. h)
1 0 1 00 1 0 11 0 2 11 −1 1 0
.
Exercício 30 Escreva os seguintes sistemas de equações lineares na forma matricial Ax =b e utilize, respectivamente, as alíneas e) e h) do exercício anterior para os resolver.
a)
x− y = 0x+ y − z = 1y + z = −1
. b)
x+ z = 1y + w = 1x+ 2z + w = −1x− y + z = 1
.
Exercício 31 Mostre que a inversa de uma matriz quadrada A, quando existe, é única.
Exercício 32 Sejam A e B matrizes n× n, invertíveis.
a) Será A−1 invertível?
b) Ter-se-áAk−1
= (A−1)k, (k = 1, 2, ...)?
c) Se α ∈ R, caso exista, qual é a inversa de αA? E a de A + B? Será (A+B)−1 =A−1 +B−1?
Exercício 33 Considere as matrizes;
A =
1 0 −30 1 00 0 1
, B =
0 1 01 0 00 0 1
, C =
1 0 00 2 00 0 1
, D =
1 0 00 1 00 5 1
.
Calcule a matriz ABCD e a sua inversa (ABCD)−1 .
Exercício 34 Considere as matrizes A e B, definidas pelas igualdades
A =
2 0 −3−2 0 4−2 1 2
e B =
0 0 10 1 01 0 0
.
a) Determine a matriz A−1.
b) Calcule a única matriz X que satisfaz a igualdade
B2XA
−1 = B.
14

Exercício 35 Considere as matrizes A e B, definidas pelas igualdades
A =
1 1 10 1 10 0 1
e B =
1 1 11 1 01 0 0
.
Determine uma matriz X tal que:
a) A−1X = B+ 3A−1.
b) BX = A.
Exercício 36 4Com α ∈ R seja Rα a matriz dada pela relação
Rα =
cosα − sinαsinα cosα
.
Verifique que RαRβ = Rα+β e com base nesta igualdade determine a inversa de Rα. Indiqueainda se a relação
R−1α = RT
α
é verdadeira ou falsa.
Exercício 37 Uma matriz quadrada diz-se de permutação se cada coluna e cada linha tiveruma entrada igual a 1 e as restantes entradas iguais a zero. Por exemplo, a matriz identidadeé uma matriz de permutação.
a) Dê exemplo de uma matrizA de permutação, 3×3, que seja diferente da matriz identidade.
b) Verifique que dada uma matriz qualquer B (3× 3) , a matriz AB procede a uma permu-tação das linhas de B e a matriz BA resulta de B por uma permutação das suas colunas.
c) Verifique que A é invertível, tendo como inversa a sua transposta.
Exercício 38 Seja A uma matriz quadrada tal que A3 = 0. Por exemplo
A =
0 0 01 0 00 1 0
.
Verifique que a matriz I−A é invertível com inversa dada por (I−A)−1 = I+A+A2.
Exercício 39 Uma matriz diagonal é uma matriz quadrada cujos elementos fora da diagonalprincipal são todos nulos:
A =
a11 0 ... 00 a22 ... 0... ... ... ...0 0 ... ann
.
Por exemplo, a identidade é uma matriz diagonal.
4Tenha em conta que cos (α+ β) = cosα cosβ − sinα sinβ e sin (α+ β) = sinα cosβ + cosα sinβ
15

a) Use o método de indução para mostrar que
Ak =
ak11 0 ... 00 ak22 ... 0... ... ... ...0 0 ... aknn
.
b) Mostre que se nenhum dos elementos da diagonal principal deA é zero entãoA é invertívele indique a respectiva inversa.
4 Soluções
1) Apenas (1,−1) . 2) Somente (1,−1, 0) e (−2, 0, 1)
3) a) Sistema possível e determinado: S = (3,−1); as duas rectas intersectam-se no ponto(3,−1) .
b) Sistema indeterminado com uma incógnita livre: S = (1/2− 3y/2, y) : y ∈ R ; asduas rectas são coincidentes.
c) Sistema impossível: S = ∅; as duas rectas são paralelas.
d) Sistema impossível: S = ∅; as três rectas não são concorrentes num ponto.
e) Sistema indeterminado com uma incógnita livre: S = (1− y, y) : y ∈ R ; equação deuma recta.
f) Sistema possível e determinado: S = (3, 2); as três rectas são concorrentes no ponto(3, 2).
4) a) Sistema possível e determinado: S = (−1, 0, 1); os três planos intersectam-se noponto (−1, 0, 1) .
b) Sistema impossível: S = ∅; os três planos não se intersectam num ponto.
c) Sistema indeterminado com uma incógnita livre: S = z (5,−3, 1) : z ∈ R; os trêsplanos intersectam-se segundo uma recta.
d) Sistema indeterminado com uma incógnita livre: S = z (−2, 1, 1) : z ∈ R; os doisplanos intersectam-se segundo uma recta.
5) a) Sistema indeterminado com duas incógnitas livres:
S =
1−
1
2x2 −
1
2x4, x2,−1, x4
: x2, x4 ∈ R
.
b) Sistema indeterminado com duas incógnitas livres:
S = (−y − z, y, z, 1) : y, z ∈ R .
c) Sistema indeterminado com uma incógnita livre:
S = (−3w, 2− 2w,w,w) : w ∈ R .
d) Sistema possível e determinado S = (−9, 2, 3, 3).
16

6) a) (1,−z, z, 0) : z ∈ R . b) (1, 2, 3).
7) a) Se α = 11 o sistema é possível e determinado; se α = 11 e β = 20 o sistema éindeterminado; se α = 11 e β = 20 o sistema é impossível.
b) Se α = 0 e α = 6 o sistema é possível e determinado; se α = 0 e β = −2/3 o sistema éindeterminado; se α = 0 e β = −2/3 o sistema é impossível; se α = 6 e β = −2/63 o sistemaé indeterminado; se α = 6 e β = −2/63 o sistema é impossível.
8) O sistema é possível se e só se 2b1 + b2 − b3 = 0.
9) α = 7 e β = 4.
10) a) x1 + x2 = 2. b) x1 + 0x2 + x3 = 1. c) x1 + 7x2 − 5x3 = −3.
11) a)x1 − 3x2 + 2x4 = 1x3 − 5x4 = −1
. b)x1 − 3x3 = 0x2 − 2x3 = 0
.
12) p (t) = 7 + 6t− t2.
13) 3, 4 e 6, respectivamente.
14) 3, 9, 12 e 21.
15) Nó 1: 42,5o; nó 2: 47,5o; nó 3: 40o.
16) a)1310, 910, 0. b)
103, 2, 0
. b) 3,5g pelo vértice (0, 1, 0) , 0,5g pelo vértice (8, 1, 0) e 2g
pelo vértice (2, 4, 0) .
17) a) Não é possível. Uma matriz é 1× 2 e a outra 2× 1.
b)
8−2
. c)
2 622 5
. d)
−102
. e)
−5 20 141 5
.
f) Não é possível. Uma matriz é 3× 4 e a outra 3× 3.
18) a) [4] . b) Não é possível. A primeira matriz é 3× 2 e a segunda 3× 1.
c) Não é possível. A primeira matriz é 3× 1 e a segunda 2× 1.
d)47
. e)
−6−14
.
f) Não é possível. A primeira matriz é 2× 2 e a segunda 3× 1.
19)
a) 1 2
−12
= [3] . b)
5 1 −8 4−2 −7 3 −5
5−13−2
=
−816
.
c)
7 −32 1
9 -6−3 2
−2−5
=
1−912-4
. d)
1 0 2-4 6 1−7 2 9
121
=
396
.
17

20)
a)0 10 0
. b)
4 −3 −143 −1 −8
. c)
5 2 15 1 36 3 0
. d)0 01 0
. e)
1 2 14 1 4
.
f)
30 42 102 20
. g)
2 202 1030 4
. h)
30 42 106 60
. i)
30 42 1062 28
.
21)
a)
4 -2-3 1
−1 11 −1
=
−6 64 −4
.
b)
3 −1−2 00 1
-1 0
1 2
=
−4 −22 01 2
.
c)
1 -12 10 3
0 2 1
−3 −1 4
=
3 3 -3-3 3 6-9 −3 12
.
22) a) Sistema impossível. b) Sistema possível e determinado S = (3/5,−4/5, 1) .
23) a) A2 =
a2 00 a2
, A
3 =
0 a3
a3 0
.
24) As relações não são verificadas se for AB = BA.
25) b) Para qualquer α ∈ R é tr (αA) = α (trA) . A relação tr (AB) = (trA) (trB) não éválida como se pode comprovar através do exemplo
A = B =
1 01 1
.
26) a) AT =
1 03 2−1 4−3 −2
, B
T =
2 1 −3 00 3 4 −1−1 −2 5 1
.
27) a) A =
a 1 21 b 32 3 c
. b) Sim, em ambos os casos.
28) a) A é de Markov, B não.
b) i) Falsa. Por exemplo0, 3 0, 10, 7 0, 9
+
0, 8 0, 30, 2 0, 7
=
1, 1 0, 40, 9 1, 6
.
ii) Verdadeira.
29 a) A matriz não é invertível.
18

b)1 00 1
. c)
−1/3 2/32/3 −1/3
. d)
1 0 0−1 1 00 −1 1
. e)
2/3 1/3 1/3−1/3 1/3 1/31/3 −1/3 2/3
.
f) Amatriz não é invertível. g)
1 −2 1 00 1 −2 10 0 1 −20 0 0 1
. h)
1 1 −1 11 0 0 −10 −1 1 −1−1 1 0 1
.
30) a) (0, 0,−1) ; b) (4, 0,−3, 1) .
32) a) Sim e a sua inversa é A. b) Sim. Pode usar o método de indução para o mostrar.
c) Se α = 0, (αA)−1 = 1αA−1. Para α = 0 não há invertibilidade. O mesmo pode acontecer
quando se somam duas matrizes invertíveis. Por exemplo, I e−I são invertíveis (elas própriasconstituem as suas inversas). Mas I+ (−I) = 0 não é invertível.
33) ABCD =
0 −13 −31 0 00 5 1
, (ABCD)−1 =
0 1 0
1/2 0 3/2−5/2 0 −13/2
.
34) a) A−1 =
2 3/2 02 1 11 1 0
; b) X =
−2 1 2−2 0 42 0 −3
35) a) X =
6 2 12 4 01 0 3
; b) X =
0 0 10 1 01 0 0
36) R−1α = R−α = RT
α =
cosα sinα− sinα cosα
.
37) a) A =
0 0 11 0 00 1 0
.
39) b) A−1 =
a−111 0 ... 00 a−122 ... 0... ... ... ...0 0 ... a−1nn
.
19
IST - 2o Semestre de 2012/13
LEGM, LMAC, MEFT, MEBiom, MEC
EXERCÍCIOS DE ÁLGEBRA LINEAR
FICHA 2 - Espaços Vectoriais
1
1 Combinações lineares de vectores de Rn
Por Rn entenderemos o conjunto de todas as sequências ordenadas de n números reais
x = (x1, ..., xn) ,
às quais chamaremos de vectores. Os valores reais x1, ..., xn, tomam o nome de componentesdo vector x.
Dois vectores x = (x1, ..., xn) e y = (y1, ..., yn) dizem-se iguais se as suas componenteshomólogas forem iguais. Isto é x = y⇔ x1 = y1, ..., xn = yn.
Em Rn introduzimos duas operações. Uma de soma de vectores e outra de multiplicaçãoou produto de um escalar por um vector. Para isso sejam u = (u1, ..., un) , v = (v1, ..., vn)e w = (w1, ..., wn) vectores de Rn e α, β números reais.
• Soma em Rn:u+ v = (u1 + v1, ..., un + vn) .
• Produto escalar em Rn:αu = (αu1, ..., αun) .
• Estas operações gozam das seguintes propriedades, características da estrutura algé-brica de Rn:
i) (u+ v) +w = u+ (v+w) (associatividade).
ii) u+ v = v + u (comutatividade).
iii) u+ 0 = u, onde 0 = (0, ..., 0) é o vector nulo (existência de elemento neutro).
iv) u+ (−u) = 0, onde −u = (−u1, ...,−un) (existência de elemento simétrico).
v) α (u+ v) = αu+ αv (distributividade).
vi) (α+ β)u = αu+ βu (distributividade).
vii) α (βu) = (αβ)u (associatividade).
viii) 1u = u.
1Coligidos por: João Ferreira Alves, Ricardo Coutinho e José M. Ferreira.
1

Sejam v1, v2, ..., vn, vectores de Rm. Um vector v ∈ Rm diz-se uma combinação linearde v1, v2, ..., vn, se existirem números reais x1, ..., xn, tais que
x1v1 + x2v2 + ...+ xnvn = v.
Os valores x1, x2, ..., xn, tomam o nome de coeficientes da combinação linear.
O conjunto de todas as combinações lineares de v1, v2, ..., vn, designa-se por
L (v1,v2, ...,vn) ,
e é chamado de conjunto gerado por v1,v2, ...,vn , o qual toma o nome de conjuntogerador.
Se L (v1,v2, ...,vn) = Rm, diremos que v1,v2, ...,vn é um conjunto gerador de Rm.
Em termos de componentes, v1 = (v11, v21, ..., vm1) , v2 = (v12, v22, ..., vm2) , ..., vn =(v1n, v2n, ..., vmn) formam um conjunto gerador de Rm se e só se a matriz
v11 v12 ... v1nv21 v22 ... v2n... ... ... ...vm1 vm2 ... vmn
,
pode ser transformada por operações elementares de linhas numa matriz em escada de linhascom um pivô em cada linha (i .e., sem linhas nulas).
1.1 Exercícios
Exercício 1 Considere em R2 o conjunto G = (1, 1) , (2, 2) .
a) Mostre que o vector (−5,−5) é combinação linear dos vectores de G.
b) É também o vector (1, 0) combinação linear dos vectores de G?
c) O conjunto G gera R2?
d) Determine a forma geral dos vectores (a, b) ∈ L(G).
Exercício 2 Considere em R3 o conjunto G = (1, 1, 1) , (0, 1, 1) , (1, 2, 2) .
a) Mostre que o vector (2, 3, 3) é combinação linear dos vectores de G.
b) Mostre que o vector (0, 0, 1) não é combinação linear dos vectores de G.
c) O conjunto G gera R3?
d) Determine a forma geral dos vectores (a, b, c) ∈ L(G).
Exercício 3 Indique quais dos seguintes conjuntos de vectores geram R3:
a) (1, 3, 3) , (4, 6, 4) , (−2, 0, 2) , (3, 3, 1) .
b) (1, 0, 0) , (1, 1, 0) , (1, 1, 1) .
c) (1, 4, 2) , (0, 0, 0) , (−1,−3,−1) , (0, 1, 1) .
d) (26, 47, 29) , (123, 0, 498) .
2

Exercício 4 Quais dos conjuntos indicados a seguir geram R4?
a) (1, 1, 0, 0) , (0, 0, 1, 1) , (1, 0, 0, 1) , (0, 1, 1, 0) , (0, 1, 1,−1) .
b) (1, 1, 1, 1) , (1, 1, 1, 0) , (1, 1, 0, 0) , (1, 0, 0, 0) .
c) (1, 1, 1, 1) , (1, 1, 1, 0) , (1, 1, 0, 0) , (1, 1, 0, 1) .
d) (11,−12, 1, 1) , (45, 17, 1, 20) , (21, 3, 41, 122) .
Exercício 5 Determine o único valor de a que faz com que
G = (1, 1, 1) , (1, 0, 1) , (0, 2, 0) , (3, 2, a)
não seja um conjunto gerador de R3.
Exercício 6 Considere em R3 o conjunto G = (1, 0, 1) , (0, 1, a) , (1, 1, b) , (1, 1, 1) . Qual oúnico par (a, b) ∈ R2 que faz com que G não gere R3?
Exercício 7 Considere em R4 o conjuntoG = (1, 0, 1, 0) , (0, 1, 0, 1) , (1, 1, 0, 0) , (1, 1, 1, a).Calcule o único valor de a que faz com que G não gere R4.
2 Dependência e independência linear
Os vectores de Rm, v1, v2, ..., vn, dizem-se linearmente dependentes sempre que umdeles é combinação linear dos restantes. Ou seja, os vectores v1, v2, ..., vn, são linearmentedependentes se existir j ∈ 1, ..., n tal que
vj ∈ L (v1, ...,vj−1,vj+1, ...,vn) ,
o que sucede se e só se existirem números reais c1, ..., cj−1, cj+1, ..., cn, tais que
vj = c1v1 + ...+ ci−1vj−1 + cj+1vi+1 + ...+ cnvn.
Em caso contrário diremos que os vectores v1, v2, ..., vn, são linearmente independentes.
São válidos os seguintes critérios para aferir se um conjunto de n vectores é linearmentedependente ou independente:
i) No caso n = 2, v1, v2, são vectores linearmente dependentes se e só se um deles émúltiplo do outro.
ii) Se existe j ∈ 1, ..., n tal que vj = 0, então v1, ...,vj , ...,vn, são vectores linearmentedependentes.
iii) v1, v2, ..., vn, são linearmente independentes se e só se o sistema homogéneo na formavectorial
x1v1 + x2v2 + ...+ xnvn = 0
nas variáveis x1, x2, ..., xn, só tem a solução nula.
3

Em termos de componentes, v1 = (v11, v21, ..., vm1) , v2 = (v12, v22, ..., vm2) , ..., vn =(v1n, v2n, ..., vmn) , são linearmente independentes se e só se o sistema homogéneo
v11 v12 ... v1nv21 v22 ... v2n... ... ... ...vm1 vm2 ... vmn
x1x2...xn
=
00...0
,
nas variáveis x1, x2, ..., xn, só tem a solução nula.
iv) v1 = (v11, v21, ..., vm1) , v2 = (v12, v22, ..., vm2) , ..., vn = (v1n, v2n, ..., vmn) , são linear-mente independentes se e só se a matriz
v11 v12 ... v1nv21 v22 ... v2n... ... ... ...vm1 vm2 ... vmn
pode ser transformada através de operações elementares de linhas numa matriz emescada de linhas com n pivôs.
vi) Se n > m, v1, v2, ..., vn, são vectores linearmente dependentes.
2.1 Exercícios
Exercício 8 Em cada um dos seguintes casos, mostre que os vectores indicados são linear-mente dependentes:
a) Em R3, v1 = (1, 1, 2), v2 = (2, 2, 4) .
b) Em R3, v1 = (1, 1, 1), v2 = (3, 3, 3), v3 = (0, 1, 1) .
c) Em R4, v1 = (0, 1, 0, 1), v2 = (1, 0, 1, 0), v3 = (2, 3, 2, 3) .
d) Em R4, v1 = (0, 1, 0, 1), v2 = (1, 0, 1, 0), v3 = (2, 0, 1, 3), v4 = (0, 0, 0, 0) .
Exercício 9 Em cada um dos seguintes casos, analise se vectores indicados são linearmenteindependentes:
a) Em R4, v1 = (1, 1, 0, 0) , v2 = (1, 0, 1, 0) , v3 = (0, 0, 1, 1) , v4 = (0, 1, 0, 1) .
b) Em R3, v1 = (1, 1, 2) , v2 = (1, 2, 1) , v3 = (3, 1, 1) .
Exercício 10 Quais dos seguintes conjuntos são constituídos por vectores linearmente in-dependentes?
a) (1, 1, 1) , (1, 2, 1) ⊂ R3.
b) (1, 1, 1) , (0, 1, 1) , (0, 0, 1) ⊂ R3.
c) (1, 1, 1) , (2, 2, 0) , (0, 0, 1) ⊂ R3.
d) (2, 46, 6) , (23, 2,−123) , (1, 23, 1) , (1, 10, 1) ⊂ R3.
e) (1, 0,−1, 0) , (4, 0,−3, 1) , (2, 0,−1, 1) ⊂ R4.
f) (1, 0,−1, 0) , (4, 0,−3, 1) , (2, 1,−1, 1) ⊂ R4.
g) (1, 1, 1, 1) , (1, 1, 1, 0) , (1, 1, 0, 0) , (1, 0, 0, 0) ⊂ R4.
h) (1, 23, 1, 14) , (1, 12, 1, 0) , (24,−1, 0, 0) , (11, 19, 17,−123) , (101, 119, 1, 1) ⊂ R4.
4

Exercício 11 Calcule o único valor de a que faz com que os vectores de R4
v1 = (1, 0, 0, 2) , v2 = (1, 0, 1, 0) , v3 = (2, 0, 1, a)
sejam linearmente dependentes.
3 Bases de Rn
B = v1,v2, ...,vn diz-se uma base de Rm se L (B) = Rm e se v1,v2, ...,vn foremvectores linearmente independentes.
As bases de Rm possuem as seguintes características:
• Se B = v1,v2, ...,vn é uma base de Rm então n = m. Isto é, todas as bases de Rm
possuem m vectores.
• Se v1,v2, ...,vn, são vectores linearmente independentes então B = v1,v2, ...,vn éuma base de Rn.
• Se v1,v2, ...,vn é um conjunto gerador de Rn então B = v1,v2, ...,vn é uma basede Rn.
3.1 Mudanças de base
Se B = v1,v2, ...,vn é uma base ordenada de Rn, qualquer vector x ∈ Rn pode serescrito de um único modo como combinação linear dos vectores v1,v2, ...,vn. Isto é, existemescalares únicos α1, α2, ..., αm tais que
x = α1v1 + α2v2 + ...+ αnvn.
Dizemos então que (α1, α2, ..., αn) são as coordenadas de x na base ordenada B:
[x]B
=
α1α2...αn
.
Designando por En = e1, e2, ..., en a base canónica de Rn e considerando as habituaiscoordenadas do vector x na base En,
[x]En
=
x1x2...xn
,
passamos de [x]Bpara [x]
Enatravés da multiplicação de uma matriz que representamos por
MEn←B e a que chamamos matriz de mudança de base:
[x]En
=MEn←B [x]B.
5

Concretamente, se v1 = (v11, v21, ..., vn1) , v2 = (v12, v22, ..., vn2) , ..., vn = (v1n, v2n, ..., vnn) ,então
MEn←B =
v11 v12 ... v1nv21 v22 ... v2n... ... ... ...vn1 vn2 ... vnn
.
A passagem da base En para a base B será feita mediante a matriz
MB←En =M−1
En←B.
Dadas duas bases arbitrárias de Rn, B1 e B2 a matriz de mudança de base de B1 paraB2, MB2←B1 , pode ser obtida por intermédio da base canónica, En, através do diagrama
B1MEn←B1−→ En
MB2←B1 ↓ ւMB2←En
B2
,
a partir do qual facilmente se conclui que
MB2←B1
=MB2←EnMEn←B1 .
3.2 Exercícios
Exercício 12 Mostre que qualquer base de Rn tem n vectores.
Exercício 13 Determine quais dos seguintes conjuntos são bases de R2:
a) (1, 0) , (0, 1) .
b) (1, 1) , (0, 3) .
c) (1, 0) , (0, 3) , (2, 5) .
d) (1, 2) .
e) (1, 1) , (0, 0).
Exercício 14 Quais dos conjuntos indicados a seguir constituem bases de R3?
a) (1, 1, 1) , (1, 0, 1) , (1, 1, 0) .
b) (1, 1, 1) , (1, 0, 1) , (1, 2, 1) .
c) (3, 0, 0) , (1, 1, 0) , (2, 2, 2) , (1, 3, 5) .
d) (1, 1, 1) , (2, 2, 0) .
Exercício 15 Indique quais dos conjuntos seguintes são bases de R4:
a) (1, 0, 1, 0) , (1, 1, 0, 0) , (0, 0, 1, 0) , (2, 1,−1, 0) .
b) (1, 3, 0, 0) , (1, 1, 3, 1) , (2, 2, 3, 2) , (2, 3, 3, 2) , (2, 4, 1, 2) .
c) (2, 0, 0, 2) , (1, 1, 0, 0) , (0, 0, 2, 3) , (1, 2, 1, 2) .
d) (2, 0, 0, 2) , (1, 1, 0, 0) , (1, 2, 1, 2) .
6

Exercício 16 Seja B = v1,v2 a base de R2 constituída pelos vectores
v1 = (1, 0) e v2 = (1, 1).
a) Qual é o vector de R2 que na base B tem coordenadas (2, 2)?
b) Calcule as coordenadas do vector (3, 5) na base B.
c) Mediante uma matriz de mudança de base apropriada, calcule as coordenadas de um vector(a, b) ∈ R2 nesta base.
Exercício 17 Seja B = v1,v2,v3 a base de R3 constituída pelos vectores
v1 = (2, 0, 0), v2 = (1, 1, 0) e v3 = (1, 1, 1).
a) Qual é o vector de R3 que na base B tem coordenadas (0, 3, 5)?
b) Calcule as coordenadas do vector (2, 0, 1) na base B.
c) Mediante uma matriz de mudança de base apropriada, calcule as coordenadas de um vector(a, b, c) ∈ R3 nesta base.
Exercício 18 A é matriz de mudança de base se e só se A é invertível. Justifique.
Exercício 19 Quais das matrizes indicadas a seguir podem ser matrizes de mudança dabase canónica, E2, para uma outra base B de R2? Nos casos afirmativos indique a respectivabase B.
A =
5 00 4
. B =
2 13 1
. C =
−1 42 −8
. D =
1 −11 1
.
Exercício 20 Os vectores u = (−1, 2) e v = (2, 3) constituem uma base de R2.
a) Qual a matriz, MB1←−E2, de mudança da base canónica, E2, para B1 = u,v?
b) Se B2 = x,y for uma outra base de R2 cuja matriz de mudança da base canónica, E2,para B2 é
MB2←E2 =
−2 4−5 1
,
determine x e y.
c) Qual a matriz, MB2←−B1, de mudança da base B1 para B2?
Exercício 21 Dois vectores u e v de R2 têm nas bases B1 e B2, respectivamente, as seguintescoordenadas:
[u]B1
= (1,−1) , [u]B2
= (0, 2) , [v]B1
= (1, 2) , [v]B2
= (3, 6) .
Quais as matrizes de mudança de base: MB2←B1 e MB1←B2?
7

4 Subespaços de Rn
Um subconjunto S ⊂ Rn é dito um subespaço de Rn se satisfizer as seguintes condições:
1) x+ y ∈ S, ∀x ∈ S, ∀y ∈ S.
2) αx ∈ S, ∀x ∈ S,∀α ∈ R.
4.1 Bases e dimensão de subespaços
À semelhança do que sucede com Rn, relativamente a um qualquer subespaço S de Rn,podemos analogamente formular o conceito de base de S. Assim, B = b1, ...,bp ⊂ S diz-seuma base de S, se b1, ...,bp forem vectores linearmente independentes e L (B) = S.
Mantêm-se as seguintes características das bases de Rn:
• Todas as bases de S possuem o mesmo número de elementos. Esse número é chamadode dimensão de S e representado por dimS.
• Se dimS = p, qualquer conjunto de p vectores de S que sejam linearmente indepen-dentes constitui uma base de S.
• Se dimS = p, qualquer conjunto de p vectores de S que sejam geradores de S, constituiuma base de S.
4.2 Exemplos
1. S = 0 constitui um subespaço de Rn, chamado subespaço trivial. Adoptaremos aconvenção de que este subespaço é gerado pelo conjunto vazio. Isto é, convenciona-seque L (∅) = 0 . Assim, como o vector nulo é linearmente dependente, a única basedo subespaço nulo é o conjunto ∅ e por conseguinte, a sua dimensão é zero.
2. Se v1, v2, ..., vp, são vectores de Rn, L (v1,v2, ...,vp) é um subespaço de Rn, ditoagora subespaço gerado por v1,v2, ...,vp .
3. Se U e V são dois subespaços de Rn, o conjunto U ∩ V também é um subespaço deRn, dito subespaço intersecção de U com V. O conjunto U ∪ V pode não ser umsubespaço de Rn. Por essa razão, considera-se o conjunto
U + V = x+ y : x ∈ U e y ∈ V ,
o qual constitui um subespaço de Rn, dito subespaço soma de U com V. É ele omenor subespaço de Rn que contém U ∪ V. As dimensões destes espaços relacionam-seatravés da fórmula
dim (U + V ) + dim (U ∩ V ) = dimU + dimV.
8
4. Associados a uma matriz m× n,
A =
a11 a12 ... a1na21 a22 ... a2n... ... ... ...am1 am2 ... amn
são considerados os seguintes subespaços:
(a) Se
a1 = (a11, a21, ..., am1) , a2 = (a12, a22, ..., am2) , ..., an = (a1n, a2n, ..., amn) ,
são as colunas de A, L (a1,a2, ..., an) é um subespaço de Rm, chamado de su-bespaço das colunas da matriz A e representado por ColA. Observemos quey ∈ ColA se e só se existe x ∈ Rn tal que Ax = y.
(b) NulA = x ∈ Rn : Ax = 0 é um subespaço de Rn, designado por subespaçonulo da matriz A.
4.3 Característica e nulidade de uma matriz
Dada uma matriz A (m× n) , à dimensão do subespaço ColA chama-se característicade A, que designaremos por c (A):
c (A) = dim (ColA) .
A dimensão do espaço nulo de A toma o nome de nulidade de A e será designada porn (A):
n (A) = dim (NulA) .
Característica e nulidade satisfazem as seguinte relação fundamental:
c (A) + n (A) = n.
4.4 Teorema da matriz inversa
Estes novos conceitos permitem-nos actualizar o teorema da matriz inversa do seguintemodo:
Seja A uma matriz n× n. Então são equivalentes as seguintes afirmações:
(1) A é invertível.
(2) Para qualquer d ∈ Rn, o sistema Ax = d é possível e determinado.
(3) O sistema homogéneo Ax = 0 só tem a solução nula.
(4) ColA = Rn.
(5) NulA = 0 .
(6) c (A) = n.
(7) n (A) = 0.
9

4.5 Exercícios
Exercício 22 Represente graficamente cada um dos seguintes subconjuntos do plano, iden-tificando os que são subespaços de R2:
a) S = (x, y) ∈ R2 : x = 0 .
b) S = (x, y) ∈ R2 : x+ y = 0 .
c) S = (x, y) ∈ R2 : x+ y = 0 e x− y = 0 .
d) S = (x, y) ∈ R2 : x+ y = 1 .
e) S = (x, y) ∈ R2 : x2 + y2 = 1.
Exercício 23 Represente graficamente cada um dos seguintes subconjuntos do espaço, iden-tificando os que são subespaços de R3:
a) S = (x, y, z) ∈ R3 : x+ y + z = 0 .
b) S = (x, y, z) ∈ R3 : x+ y + z = 1 .
c) S = (x, y, z) ∈ R3 : x+ y = 0 e x− y + 2z = 0 .
d) S = (x, y, z) ∈ R3 : x+ y = 1 e x− y + 2z = 0 .
e) S = (x, y, z) ∈ R3 : x2 + y2 + z2 = 1 .
f) S = (x, y, z) ∈ R3 : xyz = 0 .
Exercício 24 Considere as matrizes
A =
1 11 1
e B =
1 3 12 0 41 −3 −3
.
a) (1, 3) ∈ ColA?
b) (1, 0, 0) ∈ ColB?
c) Qual a nulidade de A? E de B?
d) Represente geometricamente ColA.
Exercício 25 Determine a característica de cada uma das matrizes indicadas a seguir. Queconclui sobre a sua invertibilidade?
a)
2 1 31 −1 21 0 3
. b)
1 −1 23 −3 6−2 2 4
. c)
1 3 25 1 16 4 3
.
Exercício 26 Para cada uma das matrizes indicadas a seguir, determine bases para o espaçodas colunas e para o espaço nulo. Indique ainda a característica e a nulidade de cada uma
10

delas.
a) A =
1 0. b) A =
1 11 1
. c) A =
1 2 11 1 2
.
d) A =
1 12 11 2
. e) A =
1 0 01 1 01 1 1
. f) A =
1 −1 11 1 30 1 1
.
g) A =
1 4 −2 33 6 0 33 4 2 1
. h) A =
1 4 20 0 0−1 −3 −10 1 1
. i) A =
1 2 3 42 1 2 33 2 1 24 3 0 1
.
Exercício 27 Para a, b, c ∈ R\ 0 quaisquer, que valores deve assumir d para que a matriza bc d
tenha característica 1?
Exercício 28 Com h ∈ R seja
A =
1 3 −2 1−1 1 2 32 −1 −4 h
a) Para que valores de h tem A característica máxima?
b) Se h = −5 qual a nulidade de A?
Exercício 29 Seja A uma matriz 5× 5. É verdadeiro ou falso que:
a) Se NulA = 0, então Ax = b tem uma e uma só solução, qualquer que seja b ∈ R5.
b) Se dim(ColA) = 4, então Ax = b é um sistema possível, qualquer que seja b ∈ R5.
c) Se c (A) = 3, então A x = 0 é um sistema possível com 3 variáveis livres.
d) Se c (A) = 3, então cAT= 2.
e) Se c (A) = 5, então a matriz A não é invertível.
Exercício 30 Determine uma base e a dimensão de cada um dos seguintes subespaços:
a) S = (x, y) ∈ R2 : x+ y = 0 .
b) S = (x, y, z) ∈ R3 : x+ y + 2z = 0 .
c) S = (x, y, z) ∈ R3 : x+ y + z = 0 e x+ y + 2z = 0 .
d) S = (x, y, z, w) ∈ R4 : x+ y + z + w = 0 e x+ y + 2z = 0 .
e) S = L(1, 1) , (2, 1) , (1, 2) .
f) S = L(1,−1, 1) , (1, 1, 3) , (0, 1, 1) .
g) S = L(1, 4,−2, 3) , (3, 6, 0, 3) , (3, 4, 2, 1) .
11

5 Espaços e subespaços vectoriais
Um conjunto E = ∅ diz-se um espaço vectorial sobre K = R ou C, se estiver munidode duas operações, uma entre elementos deE a que chamaremos soma e outra entre elementosde E e elementos de K a que chamaremos produto escalar,
+ : u,v ∈ E → u+ v, . : α ∈ K,v ∈ E → α.v,
verificando os seguintes axiomas:
i) Associatividade da soma: (u+ v) +w = u+ (v +w) , ∀u,v,w ∈ E.
ii) Comutatividade da soma: u+ v = v + u, ∀u,v ∈ E.
iii) Existência de elemento neutro ou zero: u+ 0 = u, ∀u ∈ E.
iv) Existência de elemento simétrico : u+ (−u) = 0, ∀u ∈ E.
v) Distributividade do produto por escalares em relação à soma em E: α. (u+ v) =α.u+ α.v, ∀u,v ∈ E, ∀α ∈ K.
vi) Distributividade do produto por escalar em relação à adição em K: (α+ β) .u =α.u+ β.u, ∀u ∈ E, ∀α, β ∈ K.
vii) Associatividade entre o produto por escalar e a multiplicação emK: α. (β.u) = (αβ) .u,∀u ∈ E, ∀α, β ∈ K.
viii) A unidade de K como elemento neutro do produto por escalares: 1.u = u, ∀u ∈ E.
O primeiro exemplo de espaço vectorial (sobre R) que nos pode ocorrer é o de Rn.Podemos mesmo observar ser um espaço vectorial algo com uma estrutura algébrica idênticaà de Rn. Daí que os diversos conceitos apresentados relativamente a Rn possam analogamenteser formulados num qualquer espaço vectorial E sobre K. Muito brevemente recordamo-losseguidamente:
• Um subconjunto S ⊂ E é dito um subespaço de E se satisfizer as seguintes condições:
1) x+ y ∈ S, ∀x ∈ S, ∀y ∈ S.
2) αx ∈ S, ∀x ∈ S, ∀α ∈ K.
Nestas condições, S verifica todos os axiomas i)-viii), constituindo ele próprio um espaçovectorial sobre K e em particular 0 ∈ S.
• Dados v1, v2, ..., vn, elementos de E, v ∈ E diz-se uma combinação linear de v1, v2, ...,vn, se existirem escalares x1, ..., xn ∈ K tais que
x1v1 + x2v2 + ...+ xnvn = v.
O conjunto de todas as combinações lineares de v1, v2, ..., vn designa-se porL (v1,v2, ...,vn) e forma o subespaço de E gerado por v1,v2, ...,vn .
12

• Os elementos de E, v1, v2, ..., vn, dizem-se linearmente dependentes sempre que umdeles é combinação linear dos restantes. Em caso contrário diremos que v1, v2, ..., vn,são linearmente independentes; v1, v2, ..., vn são linearmente independentes se e só se
x1v1 + x2v2 + ...+ xnvn = 0⇔ x1 = x2 = ... = xn = 0.
• B = v1,v2, ...,vn diz-se uma base de E se L (B) = E e se v1,v2, ...,vn forem vectoreslinearmente independentes.
• Teorema de Steinitz. Dado um espaço vectorial E sobre K:
a) Se B = v1,v2, ...,vn é uma base de E, então todas as bases de E possuem nelementos; n diz-se a dimensão de E (dimE = n) .
b) Se dim = n e v1,v2, ...,vn, são vectores linearmente independentes então B =v1,v2, ...,vn é uma base de E.
c) Se dimS = n, e L (v1,v2, ...,vn) = E então B = v1,v2, ...,vn é uma base deE.
5.1 Exemplos
Vejamos alguns exemplos significativos de espaços vectoriais.
1. Cn = (z1, ..., zn) : z1, ..., zn ∈ C munido de soma e de produto escalar análogos aosdefinidos para Rn, constitui um espaço vectorial sobre R. Facilmente se verifica que
B = (1, 0, ..., 0) , ..., (0, ..., 0, 1) , (i, 0, ..., 0) , ..., (0, ..., 0, i)
é uma base de Cn enquanto espaço vectorial real. A sua dimensão será pois 2n.
2. Mas do mesmo modo Cn também constitui um espaço vectorial sobre C, tendo comobase
B = (1, 0, ..., 0) , ..., (0, ..., 0, 1) .
A sua dimensão será pois igual a n.
3. Designemos por Mm×n (R) o conjunto de todas as matrizes reais m × n. Munido dasoma de matrizes e do produto de um escalar real por uma matriz, obtemos um espaçovectorial sobre R de dimensão mn: dimMm×n (R) = mn.Por exemplo M2×2 (R) tem como base
1 00 0
,
0 10 0
,
0 01 0
,
0 00 1
e dimM2×2 (R) = 4.
4. Mm×n (C) , conjunto das matrizes complexas m×n, munido das mesmas operações desoma de matrizes e de produto de um escalar complexo por uma matriz, forma umespaço vectorial sobre C, cuja dimensão é igualmente mn.
13

5. Seja F (R) o conjunto de todas as funções reais tendo como domínio R. Consideremosa soma de duas funções f1 e f2 como sendo a função f1 + f2 dada por
(f1 + f2) (t) = f1 (t) + f2 (t) , ∀t ∈ R,
e o produto de um escalar real α por uma função f como sendo a função αf tal que
(αf) (t) = αf (t) , ∀t ∈ R.
Munido destas operações F (R) constitui um espaço vectorial sobre R. Contudo, F (R)não admite nenhuma base finita, dizendo-se por isso de um espaço de dimensãoinfinita.
6. Facilmente se observa que o conjunto dos polinómios de coeficientes reais com graunão superior a n,
Pn (R) = a0 + a1t+ ...+ antn : a0, a1, ..., an ∈ R
é um subespaço vectorial de F (R) . Ao contrário de F (R) , Pn (R) tem dimensão finita,pois
Pn = 1, t, ..., tn
constitui uma base de Pn (R), sendo portanto dimPn (R) = n+ 1.
7. Também o conjunto de todos os polinómios de coeficientes reais, independentementedo seu grau,
P (R) = a0 + a1t+ ...+ antn : n ∈ N, a0, a1, ..., an ∈ R ,
constitui um subespaço vectorial de F (R) , igualmente de dimensão infinita.
5.2 Exercícios
Exercício 31 Indique se os seguintes subconjuntos do espaço vectorial P3 (polinómios comgrau menor ou igual a 3) constituem subespaços de P3:
U = p (t) ∈ P3 : p (0) = p (1) .
V = p (t) ∈ P3 : p (−1) = p (0) = p (1) = 0 .
W =a+ bt+ ct2 + dt3 : a, b, c, d ∈ Z
.
Exercício 32 O subconjunto do espaço vectorial P2 (dos polinómios com grau ≤ 2),
U = p (t) ∈ P2 : p (0) = a ,
é um subespaço de P2 para qualquer valor de a ∈ R?
Exercício 33 Relativamente ao espaço vectorial, F, das funções f : R → R, indique quaisdos seguintes conjuntos são subespaços de F:
U = f ∈ F : f (t) + f (−t) = 0, ∀t ∈ R .
V = f ∈ F : f (t) = cos (πt) , ∀t ∈ Z .
W = f ∈ F : f (t) = sin (πt) , ∀t ∈ Z .
X = f ∈ F : f é diferenciável e f ′ (t) = f (t) , ∀t ∈ R .
14

Exercício 34 SejaMn×n (R) o espaço vectorial das matrizes reais n×n. Quais dos seguintessubconjuntos de Mn×n (R) são subespaços de Mn×n (R)?
U = A ∈Mn×n (R) : A é invertível .
V = A ∈Mn×n (R) : A não é invertível .
W = A ∈Mn×n (R) : trA = 0 .
X = A ∈Mn×n (R) : A é simétrica .
Y = A ∈Mn×n (R) : A é de Markov .
Exercício 35 Considere em P2 o conjunto de polinómios G = 1 + t, 1− t2 .
a) Mostre que o polinómio t+ t2 é combinação linear dos elementos de G.
b) Mostre que o polinómio t não é combinação linear dos elementos de G.
c) G gera P2?
d) Determine a forma geral dos polinómios p(t) ∈ L(G).
Exercício 36 Mostre que os polinómios
p1 (t) = 1 + 2t− t2, p2 (t) = 3 + t2, p3 (t) = 5 + 4t− t2, p4 (t) = −2 + 2t− t2
geram P2.
Exercício 37 Mostre que no espaço vectorial, F, das funções reais de variável real, cada umdos seguintes conjuntos é constituído por funções linearmente dependentes.
a)2, sin2(t), cos2(t)
b)cos(2t), sin2(t), cos2(t)
c) et, e−t, cosh(t) d)1, t, t2, (t+ 1)2
.
Exercício 38 Dadas n funções f1 : R→ R, f2 : R→ R, ..., fn : R→ R, do espaço vectorial,F, das funções reais de variável real, mostre que se existirem números t1, t2, ..., tn ∈ R taisque a matriz
f1 (t1) f2 (t1) ... fn (t1)f1 (t2) f2 (t2) ... fn (t2)...
......
...f1 (tn) f2 (tn) ... fn (tn)
é invertível, então f1, f2,..., fn são linearmente independentes.
Exercício 39 Aplicando o exercício anterior, mostre que os conjuntos
1, t, et
e sin(t), cos(t), t cos(t)
são constituídos por funções linearmente independentes. (Sugestão: no primeiro caso façat1 = 0, t2 = 1, t3 = −1; no segundo faça t1 = 0, t2 = π/2, t3 = π).
15

Exercício 40 Seja B = p1, p2, p3 o subconjunto de P2 constituído pelos polinómios
p1 (t) = 1 + t, p2 (t) = 1 + 2t e p3 (t) = t2.
a) Mostre que B é uma base de P2.
b) Qual é o polinómio que nesta base tem coordenadas (1, 3,−2)?
c) Determine as coordenadas do polinómio 2 + 2t− t2 na base B.
d) Mediante uma matriz de mudança de base apropriada, calcule as coordenadas de umpolinómio a+ bt+ ct2 na base B.
Exercício 41 Considere o espaço vectorial P3 e a sua base canónica P3 = 1, t, t2, t3 .
a) Mostre que B = 1 + t, 1− t− t2, t2, t3 é também uma base de P3.
b) Qual a matriz de mudança de base de P3 para B?
c) Quais as coordenadas do polinómio 1− 2t+ t3 na base B?
Exercício 42 Sejam U e V subespaços de um mesmo espaço vectorial E.
a) Mostre que intersecção U ∩ V é um subespaço de E.
b) Dê exemplos em que:
i) A união U ∪ V é um subespaço de E.
ii) A união U ∪ V não é um subespaço de E.
Exercício 43 Sejam U e V subespaços de um espaço vectorial E e considere-se o subcon-junto soma
U + Vdef= u+ v : u ∈ U e v ∈ V .
Mostre que:
a) O conjunto U ∪ V está contido no conjunto U + V.
b) A soma U + V é um subespaço de E.
c) Se W for um subespaço de E que contém U ∪ V, então W também contém U + V .
d) A soma U + V é o menor subespaço de E que contém U ∪ V.
Exercício 44 Relativamente aos subespaços de R3 descritos a seguir, determine uma basee a sua dimensão.
a) S = (x, y, z) ∈ R3 : x+ y + z = 0 ∩ (x, y, z) ∈ R3 : x+ y − 3z = 0 .
b) S = (x, y, z) ∈ R3 : x+ y + z = 0 ∩ L ((1, 1, 1) , (0, 1, 1)) .
c) S = L ((1, 0, 0) , (0, 0, 1)) ∩ L ((1, 1, 1) , (0, 1, 1)) .
d) S = L ((1, 0, 0) , (0, 0, 1)) + L ((1, 1, 1) , (0, 1, 1)) .
e) S = (x, y, z) ∈ R3 : x+ y + z = 0+ L ((1, 1, 1) , (0, 1, 1)) .
f) S = (x, y, z) ∈ R3 : x+ y + z = 0 + (x, y, z) ∈ R3 : x+ y − 3z = 0 .
16

Exercício 45 Considere os seguintes subespaços U e V de R3 e determine uma base dosubespaço soma U + V e uma base do subespaço intersecção U ∩ V .
a) U = (0, 0, 0) e V = (0, 0, 0) .
b) U = (0, 0, 0) e V = L(1, 1, 1)..
c) U = L(1, 0, 0) e V = L(0, 1, 0).
d) U = L(1, 0, 0) e V = L(1, 0, 0).
e) U = L(1, 0, 0) e V = L(0, 1, 0) , (0, 0, 1).
f) U = L(1, 0, 0) e V = L(0, 1, 0) , (1, 1, 0).
Exercício 46 Considere os seguintes subespaços U e V de R4 e determine uma base dosubespaço soma U + V e uma base do subespaço intersecção U ∩ V .
a) U = L(0, 1,−1, 1) , (1, 0, 1, 0) , (1, 1, 0, 1) e V = L(0, 1, 0, 0) , (1, 0, 0, 0) , (1, 1, 0, 0).
b) U = L(0, 1,−1, 1) , (1, 0, 1, 0) , (1, 1, 0, 1) e V = L(0, 1, 0, 0) , (1, 0, 0, 0) , (1, 2,−1, 1).
c) U = L(1, 0, 0, 0) , (0, 1, 0, 0) , (1, 1, 0, 1) e V = L(1, 1, 1, 0) , (1, 1,−1, 0) , (0, 0, 0, 1).
d) U = L(1, 1, 0, 0) , (0, 1, 1, 0) , (0, 0, 1, 1) e V = L(1, 0,−1, 0) , (0, 1, 0,−1) , (1, 1, 1, 1).
e) U = L(1, 1, 0, 0) , (0, 1, 1, 0) , (0, 0, 1, 1) e V = L(1, 0,−1, 0) , (0, 1, 0,−1).
f) U = L(1, 1, 0, 0) , (0, 1, 1, 0) , (0, 0, 1, 1) e V = L(1, 0,−1, 1) , (0, 1, 0,−2).
g) U = L(1, 1, 0, 0) , (1, 1, 1, 1) , (0, 0, 1, 1) e V = L(1, 0, 1, 0) , (2, 1, 2, 1).
Exercício 47 Determine uma base para cada um dos seguintes subespaços de P3:
a) S = p(t) ∈ P3 : p(0) = 0 .
b) S = p(t) ∈ P3 : p(1) = 0 .
c) S = p(t) ∈ P3 : p(1) = p (0) .
Exercício 48 Considere o espaço vectorial Mm×n (R) ,das matrizes reais m× n.
a) Mostre que S =A ∈M2×3 (R) :
1 1
A = 0
é um subespaço de M2×3 (R) . Determine
uma base deste subespaço.
b) Mostre que o conjunto S =A ∈M2×2 (R) : A = AT
(das matrizes que são simétricas)
é um subespaço de M2×2 (R) e determine uma sua base.
c) Mostre que o conjunto S = A = [aij ] ∈ M3×3 (R) : aij = 0 se i+ j é par é um subespaçode M3×3 (R) . Encontre uma base para este subespaço.
Exercício 49 No espaço vectorial C2 (R) das funções reais de variável real que são duasvezes diferenciáveis, considere o subconjunto
S =f ∈ C2 (R) : f ′′ − 2f ′ + f = 0
.
a) Mostre que S é um subespaço de C2 (R) .
b) Mostre que o conjunto et, tet é uma base de S. (Sugestão: mostre que se f ∈ S, entãof(t)e−t é um polinómio com grau 1).
c) Tendo em conta a alínea anterior mostre que, dados a e b ∈ R, existe uma e uma sófunção f ∈ S tal que f(0) = a e f ′(0) = b.
17

6 Soluções
1) b) Não. c) Não. d) L (G) = (a, b) ∈ R2 : a = b .
2) c) G não gera R3. d) L(G) = (a, b, c) ∈ R3 : b = c.
3) a) Não. b) Sim c) Não. d) Não.
4) a) Sim. b) Sim. c) Não. d) Não.
5) a = 3.
6) (a, b) = (0, 1).
7) a = 1.
9) a) L.D. b) L. I.
10)a) L. I. b) L. I. c) L.D. d) L.D. e) L.D. f) L. I. g) L. I. h) L.D.
11) a = 2.
13) a) Sim. b) Sim. c) Não. d) Não. e) Não.
14) a) É base de R3. b) Não é base de R3. c) Não é base de R3. d) Não é base de R3.
15) a) Não é base de R4. b) Não é base de R4. c) É base de R4. d) Não é base de R4.
16) a) (4, 2) . b) (−2, 5) . c) (a− b, b).
17) a) (8, 8, 5) . b) (1,−1, 1). c)1
2a− 1
2b, b− c, c
.
19)A, B = (1/5, 0) , (0, 1/4) .B, B = (−1, 3) , (1,−2) .D, B = (1/2,−1/2) , (1/2, 1/2) .
C não é matriz de mudança de base.
20) a) MB1←E2 =
−3/7 2/72/7 1/7
.
b) x = (1/18, 5/18) , y = (−2/9,−1/9) .
c) MB2←B1 =
10 87 −7
.
21) MB2←B1 =
1 1
10/3 4/3
eMB1←B2 =
−2/3 1/25/3 −1/2
.
22) a) É subespaço de R2. b) É subespaço de R2. c) É subespaço de R2.
d) Não é subespaço de R2. e) Não é subespaço de R2.
23) a) É subespaço de R3. b) Não é subespaço de R3. c) É subespaço de R3.
d) Não é subespaço de R3. e) Não é subespaço de R3. f) Não é subespaço de R3.
24) a) Não. b) Sim. c) 1 e 0. d) Recta y = x.
25) a) 3; invertível. b) 2; não invertível. c) 2; não invertível.
26) a) 1 é base de ColA, c (A) = 1, (0, 1) é base de NulA, n (A) = 1.
b) (1, 1) é base de ColA, c (A) = 1, (−1, 1) é base de NulA, n (A) = 1.
c) (1, 1) , (2, 1) é base de ColA, c (A) = 2, (−3, 1, 1) é base de NulA, n (A) = 1.
18
d) (1, 2, 1) , (1, 1, 2) é base de ColA =, c (A) = 2,
∅ é base de NulA, n (A) = 0.
e) (1, 1, 1) , (0, 1, 1) , (0, 0, 1) é base de ColA, c (A) = 3,
∅ é base de NulA, n (A) = 0.
f) (1, 1, 0) , (−1, 1, 1) é base de ColA =, c (A) = 2,
(−2,−1, 1) é base de NulA, n (A) = 1.
g) (1, 3, 3) , (4, 6, 4) é base de ColA =, c (A) = 2,
(−2, 1, 1, 0) , (1,−1, 0, 1) é base de NulA, n (A) = 2.
h) (1, 0,−1, 0) , (4, 0,−3, 1) é base de ColA, c (A) = 2,
(2,−1, 1) é base de NulA, n (A) = 1.
i) (1, 2, 3, 4) , (2, 1, 2, 3) , (3, 2, 1, 0) é base de ColA, c (A) = 3,
(−1, 0,−5, 4) é base de NulA =, n (A) = 1.
27) d = bc/a.
28) a) h = −5. b) n (A) = 2.
29) a) V. b) F. c) F. d) F. e) F.
30) a) (−1, 1) é uma base de S, dimS = 1.
b) (−1, 1, 0) , (−2, 0, 1) é uma base de S, dimS = 2.
c) (−1, 1, 0) é uma base de S, dimS = 1.
d) (−1, 1, 0, 0) , (−1,−1, 1, 1) é uma base de S, dimS = 2.
e) (1, 1) , (1, 2) é uma base de S, dimS = 2.
f) (1,−1, 1) , (1, 1, 3) é uma base de S, dimS = 2.
g) (1, 4,−2, 3) , (3, 6, 0, 3) é uma base de S, dimS = 2.
31) U e V são subespaços de P3. W não.
32) U é subespaço de P3 se e só se a = 0.
33) U, W e X são subespaços de F. V não.
34) W e X são subespaços de Mn×n (R) . U, V e Y não.
35) c) G não gera P2. d) L(G) = b− c+ bt+ ct2 : b, c ∈ R .
40) b) 4 + 7t− 2t2; c) (2, 0,−1) ; d) (2a− b, b− a, c) .
41) b)MP3→B =
1/2 1/2 0 01/2 −1/2 0 01/2 −1/2 1 00 0 0 1
.
c) (−1/2, 3/2, 3/2, 1) .
19
44) a) (−1, 1, 0) é uma base de S, dimS = 1.
b) (−2, 1, 1) é uma base de S, dimS = 1.
c) (1, 0, 0) é uma base de S, dimS = 1.
d) (1, 0, 0) , (0, 0, 1) , (1, 1, 1) é uma base de S, dim(S) = 3.
e) (1, 1, 1) , (0, 1, 1) , (−1, 1, 0) é uma base de S, dimS = 3.
f) (−1, 1, 0) , (−1, 0, 1) , (3, 0, 1) é uma base de S, dimS = 3.
45) a) A base de U ∩ V e de U + V é o conjunto vazio.
b) A base de U ∩ V é o conjunto vazio. Uma base de U + V é (1, 1, 1).
c) A base de U ∩ V é o conjunto vazio. Uma base de U + V é (1, 0, 0) , (0, 1, 0).
d) Uma base de U ∩ V e de U + V é (1, 0, 0).
e) A base de U ∩ V é o conjunto vazio. Uma base de U +V é (1, 0, 0) , (0, 1, 0) , (0, 0, 1).
f) A base de U ∩ V é (1, 0, 0). Uma base de U + V é (1, 0, 0) , (0, 1, 0).
46) a) A base de U ∩ V é o conjunto vazio.
Uma base de U + V é (0, 1,−1, 1) , (1, 0, 1, 0) , (0, 1, 0, 0) , (1, 0, 0, 0).
b) Uma base de U ∩ V é (0,−1, 1,−1) .
Uma base de U + V é (0, 1,−1, 1) , (1, 0, 1, 0) , (0, 1, 0, 0) , (1, 0, 0, 0).
c) Uma base de U ∩ V é (1, 1, 0, 0) , (0, 0, 0, 1).
Uma base de U + V é (1, 0, 0, 0) , (0, 1, 0, 0) , (1, 1, 0, 1) , (1, 1, 1, 0).
d) Uma base de U ∩ V é (1, 0,−1, 0) , (0, 1, 0,−1) , (1, 1, 1, 1) = U = V .
Uma base de U + V é (1, 1, 0, 0) , (0, 1, 1, 0) , (0, 0, 1, 1).
e) Uma base de U ∩ V é (1, 0,−1, 0) , (0, 1, 0,−1).
Uma base de U + V é (1, 1, 0, 0) , (0, 1, 1, 0) , (0, 0, 1, 1).
f) Uma base de U ∩ V é (1, 1,−1,−1).
Uma base de U + V é (1, 1, 0, 0) , (0, 1, 1, 0) , (0, 0, 1, 1) , (1, 0,−1, 1).
g) Uma base de U ∩ V é (1, 1, 1, 1).
Uma base de U + V é (1, 1, 0, 0) , (1, 1, 1, 1) , (1, 0, 1, 0).
47) a) t, t2, t3 é uma base de S. b) t− 1, t2 − 1, t3 − 1 é uma base de S.
c) 1, t2 − t, t3 − t é uma base de S.
48) a)
1 0 0−1 0 0
,
0 1 00 −1 0
,
0 0 10 0 −1
.
b)
1 00 0
,
0 00 1
,
0 11 0
.
c)
0 0 01 0 00 0 0
,
0 1 00 0 00 0 0
,
0 0 00 0 00 1 0
,
0 0 00 0 10 0 0
.
20

IST - 2o Semestre de 2012/13
LEGM, LMAC, MEFT, MEBiom, MEC
EXERCÍCIOS DE ÁLGEBRA LINEAR
FICHA 3 - Transformações Lineares
1
1 Linearidade
Transformações lineares são funções
T : E1 → E2
entre dois espaços vectoriais E1 e E2 (sobre R ou C) com as seguintes características:
i) T (u+ v) = T (u) + T (v), ∀u,v ∈ E1.
ii) T (αu) = αT (u), ∀u ∈ E1, ∀α ∈ K.
A partir destes axiomas pode facilmente mostrar-se que as transformações lineares go-zam das seguintes propriedades:
• T (αu+ βv) = αT (u) + βT (v), ∀u,v ∈ E1, ∀α, β ∈ K.
• T (−u) = −T (u).
• T (0) = 0.
Um exemplo de transformação linear pode ser obtido através da operação de derivaçãode funções, dadas as suas propriedades no que concerne à soma e ao produto de funções. Seconsiderarmos o espaço P de todos os polinómios, a função D : P→ P tal que
Dp (t) = p′ (t) ,
ou mais concretamente
Dant
n + ... + a2t2 + a1t + a0
= nant
n−1 + (n− 1) an−1tn−2 + ... + 2a2t + a1,
constitui uma transformação linear entre P e ele próprio.
1Coligidos por: João Ferreira Alves, Ricardo Coutinho e José M. Ferreira.
1

1.1 Algumas transformações lineares de R2 em R2
Outro exemplo de transformação linear
T : Rn → Rm
é-nos dado pelo produto de uma matriz A, m× n, por um vector coluna x ∈ Rn:T (x) = Ax.
Entre elas constam as seguintes transformações lineares de R2 em R2 (ver exercícios 8 e 11da secção seguinte).
1. MUDANÇA DE ESCALA:
Sr (x, y) = (rx, ry) =
r 00 r
xy
.
(ampliação se r > 1, redução se r < 1).
2. ROTAÇÃO EM TORNO DA ORIGEM DE AMPLITUDE θ:
Rθ (x, y) = (x cos θ − y sin θ, x sin θ + y cos θ) =
cos θ − sin θsin θ cos θ
xy
.
3. REFLEXÃO RELATIVAMENTE ÀS RECTAS y = ±x:
R (x, y) = (±y,±x) =
0 ±1±1 0
xy
.
4. REFLEXÃO RELATIVA AO EIXO DOS xx:
Rx (x, y) = (x,−y) =
1 00 −1
xy
.
5. REFLEXÃO RELATIVA AO EIXO DOS yy:
Ry (x, y) = (−x, y) =
−1 00 1
xy
.
6. REFLEXÃO RELATIVA À ORIGEM:
R0 (x, y) = (−x,−y) =
−1 00 −1
xy
.
7. PROJECÇÃO SOBRE O EIXO DOS xx:
Px (x, y) = (x, 0) =
1 00 0
xy
.
8. PROJECÇÃO SOBRE O EIXO DOS yy:
Py (x, y) = (0, y) =
0 00 1
xy
.
2

1.2 Exercícios
Exercício 1 T : R4 → R2 é uma transformação linear tal que
T (u1) = (1,−1) , T (u2) = (1, 2) , T (u3) = (−3,−1) .
a) Calculei) T (u1 − 2u2) . ii) T (3u1 − u2) . iii) T (u1 − u2 + 4u3) .
b) Determine α e β tais que T (αu1 + β u3) = (0,−8) .
Exercício 2 Quais das seguintes transformações são lineares?
a) T (x1, x2) = (x1, x2) .
b) T (x1, x2) = (x1 + 1, x2) .
c) T (x1, x2) = (2x21 + x1x2, x1) .
d) T (x1, x2, x3) = (2x1 + x2, x1 + 2x2, x1 + 2x2 + x3) .
e) T (x1, x2, x3) = (x1 + 3, x1 + 2x2 + x3, x2 − 4x3) .
f) T (x1, x2, x3, x4) = (2x1 + x2 − x3 + x4, x1 + x2 − 3x3) .
Exercício 3 Com k,m ∈ R, sejam Tk e Tm as transformações de R3 em R2 dadas, respec-tivamente, por:
Tk (x, y, z) = (x− y − z, x + y + z) + (k, k) ,
Tm (x, y, z) =xm − ym − zm, ym−1z
.
Para que valores de k e m são Tk e Tm transformações lineares?
Exercício 4 A transformação T : P → P, entre o espaço de todos os polinómios P e elepróprio, é dada por
T (p (t)) = tp (t) .
a) Calcule T (5 + 4t + 3t2 + 2t3) .
b) Mostre que T é uma transformação linear.
Exercício 5 Seja P1 (R) = a0 + a1t : a0, a1 ∈ R o espaço dos polinómios de grau nãosuperior a 1. A transformação T : P1 (R) → P1 (R) , entre P1 (R) e ele próprio, é dada por
T (a0 + a1t) = b0 + b1t
em que b0b1
=
1 −1−1 1
a0a1
.
a) Calcule T (1 + 2t) .
b) Determine a0 e a1 tais que T (a0 + a1t) = 1− t. E tais que T (a0 + a1t) = 1− 2t?
c) Mostre que T é uma transformação linear.
3

Exercício 6 Sejam v1, ..., vp, vectores de Rn e T : Rn → Rm uma transformação linear.Mostre que se T (v1) , ..., T (vp) são linearmente independentes então o mesmo sucede av1, ..., vp.
Exercício 7 Seja T : R2 → R a transformação linear definida por T (x, y) = x − y. DadoE ⊂ R, por T−1 (E) entende-se o subconjunto de R2,
T−1 (E) =
(x, y) ∈ R2 : T (x, y) ∈ E.
Determine e represente geometricamente:
a) T−1 (3) . b) T−1 (0) . c) T−1 ([−1, 1]) .
Exercício 8 Seja ∆ ⊂ R2 o triângulo de vértices (1, 1) , (1,−1) e (2, 0) e Cρ ⊂ R2 acircunferência de centro na origem e raio ρ > 0. Relativamente às transformações linearesT : R2 → R2 descritas a seguir, determine:
i) T (∆) . ii) T (Cρ) .
a) Reflexão relativamente ao eixo dos xx.
b) Reflexão relativamente ao eixo dos yy.
c) Reflexão relativa à recta y = x.
d) Reflexão relativa à recta y = −x.e) Mudança de escala de razão r > 0.
Exercício 9 A transformação linear T : R2 → R2 dada por
T (x, y) =x
2,y
3
.
Determine T (E) , onde E designa a elipse de equação
x2
4+y2
9= 1.
Exercício 10 Com θ ∈ R, a transformação linear Rθ : R2 → R2 dada por
Rθ(x, y) = (x cos θ − y sin θ, x sin θ + y cos θ) ,
diz-se uma rotação de amplitude θ.
a) Calcule os vectores Rπ/2 (1, 0) , Rπ/2 (0, 1) , Rπ/2 (1, 1) , Rπ/3 (1, 1) . Interprete os resulta-dos geometricamente.
b) Quais das seguintes matrizes representam rotações? Em caso afirmativo indique a respec-tiva amplitude.
i)
0 −11 0
. ii)
0 1−1 0
. iii)
−√
2/2 −√
2/2√2/2 −
√2/2
.
iv)
−√
3/2 1/2
−1/2 −√
3/2
. v)
−1/2
√3/2√
3/2 −1/2
.
4

c) A composição de duas rotações, Rθ2 Rθ1 , é uma rotação? Em caso afirmativo, qual asua amplitude?
d) Mostre que para qualquer θ ∈ R, Rθ admite inversa. Determine-a.
e) Se Cρ ⊂ R2 for a circunferência de centro na origem e raio ρ > 0, mostre que Rθ (Cρ) =Cρ, para qualquer θ ∈ R.f) Seja ra a recta de R2 cuja equação analítica é y = ax (a = 0) . Qual a equação analíticada recta Rπ/2 (ra)?
Exercício 11 Seja ∆ ⊂ R3, o triângulo de vértices (1, 0, 1) , (−1, 1, 0) e (0, 0, 2) . Relativa-mente às transformações lineares T : R3 → R3 descritas a seguir, determine T (∆) .
a) Reflexão com relação ao plano xOz.
b) Reflexão com relação ao plano yOz.
c) Rotação em torno do eixos dos zz de amplitude π/2.
2 Representação matricial de transformações lineares
Se T : E1 → E2 for uma transformação linear entre E1 e E2, e estes forem espaçosvectoriais de dimensão finita, então T admite uma representação matricial no sentido quepassamos a descrever.
Sejam B1 = u1, ...,un uma base de E1 (dimE1 = n) e B2 = v1, ...,vm uma base deE2 (dimE2 = m) . Então com x ∈ E1 temos
x = x1u1 + ... + xnun
eT (x) = x1T (u1) + ... + xnT (un) .
Como tal, as coordenadas de [T (x)]B2de T (x) na base B2 relacionam-se com as coordenadas
[x]B1de x na base B1 através de uma matriz [T ]
B2B1(m× n):
[T (x)]B2
= [T ]B2B1
[x]B1,
em que as colunas de [T ]B2B1
são as coordenadas na base B2, [T (u1)]B2 , ..., [T (un)]B2, de
T (u1) , ..., T (un) .
No caso de ser E1 = Rn e E2 = Rm, ou seja, quando T : Rn → Rm é uma transformaçãolinear entre Rn e Rm, os vectores x e T (x) confundem-se com as suas coordenadas nascorrespondentes bases canónicas, En e Em. Assim, em tal caso
T (x) = [T ] x
em que as colunas da matriz [T ] são as coordenadas na base Em dos vectores T (u1) , ..., T (un) .
5

2.1 Composição de transformações lineares
ComE1, E2 eE3 espaços vectoriais sobreK (R ou C) sejam T1 : E1 → E2 e T2 : E2 → E3duas transformações lineares. Então facilmente se observa que a composição de T2 com T1,
(T2 T1) (x) = T2 (T1 (x))
é uma transformação linear entre os espaços E1 e E3.
Se E1, E2 e E3 forem espaços de dimensão finita tais que
dimE1 = n , dimE2 = m e dimE3 = ℓ ,
de bases, respectivamente, B1, B2 e B3, T1 admite uma representação matricial através deuma matriz [T1]B2B1 , m×n, e T2 uma representação matricial por uma matriz [T2]B3B2 , ℓ×m.Como tal, T2 T1 terá como representação matricial a matriz [T2]B3B2 [T1]B2B1 (ℓ× n) . Naverdade,
[(T2 T1) (x)]B3
= [T2 (T1 (x))]B3
= [T2]B3B2 [T1 (x)]B2
= [T2]B3B2 [T1]B2B1 [x]B1.
2.2 Representação matricial e mudanças de base
Se D1 e D2 forem outras bases, respectivamente, de E1 e E2 a transformação linearT : E1 → E2 terá uma representação matricial diferente, dada agora por uma outra matriz[T ]
D2D1, igualmente m× n.
As matrizes [T ]B2B1
e [T ]D2D1
relacionam-se de acordo com o diagrama
[x]B1
[T ]B2B1−→ [T (x)]
B2
MB1←D1 ↑ ↓ MD2←B2
[x]D1
−→[T ]
D2D1
[T (x)]D2
onde MB1←D1 é a matriz de mudança de base D1 para a base B1 e MD2←B2 é a matriz demudança de base de B2 para D2. Ou seja,
[T ]D2D1
= MD2←B2 [T ]B2B1
MB1←D1
2.3 Exercícios
Exercício 12 Considere R2 munido da base B = v1,v2 , onde v1 = (1, 2) , v2 = (2, 1) .Represente matricialmente na base B as seguintes transformações lineares T : R2 → R2
definidas pelas seguintes relações:
a) T (1, 2) = (2, 1) e T (2, 1) = (1, 2).
b) T (1, 2) = (3, 3) e T (2, 1) = (6, 6).
c) T (v1) = v1 + v2 e T (v2) = 3v1 − 7v2.
d) T (v1 + v2) = 5v1 + v2 e T (v1 − v2) = 3v1 − 7v2.
6

Exercício 13 Considere uma transformação linear T : R2 → R3 tal que
T (1, 3) = (1, 1, 1) e T (5, 7) = (2, 2, 3)
Determine uma base B2 = v1,v2 de R2 e uma base B3 = w1,w2,w3 de R3 de formaque a representação matricial de T nestas bases B2, B3 seja
1 20 10 0
.
Exercício 14 Considerem-se as aplicações lineares S : R3 → R2 e T : R2 → R3 definidaspor S (x, y, z) = (3x + y + 4z, x + z) e T (x, y) = (x− 4y, 2x− 5y, 3x− 6y). Determine arepresentação matricial de S T e de T S nas bases canónicas de R3 e R2, respectivamente.
Exercício 15 Considere R2 munido da base B = v1,v2 , onde v1 = (0, 2) , v2 = (2, 0) .Represente matricialmente na base B as seguintes transformações lineares T : R2 → R2:
a) T é definida por T (x1, x2) = (2x1 + x2, x1 + 2x2) .
b) T é representada na base canónica de R2 pela matriza bc d
.
Exercício 16 B = v1,v2 constitui uma base de R2, onde v1 = (1, 1) , v2 = (1, 2) .
a) Qual a representação matricial da transformação linear T : R2 → R2 na base B, se nabase canónica de R2 ela for representada pela matriz
2 11 2
?
b) Supondo que T é representada na base B pela matriz
3 21 2
,
determine a expressão analítica para T (x1, x2) .
Exercício 17 Com v1 = (0, 2, 0) , v2 = (0, 0, 2) e v3 = (2, 0, 0) , B = v1,v2,v3 forma umabase de R3. Determine as representações matriciais na base B das seguintes transformaçõeslineares T : R3 → R3:
a) T é dada analiticamente por T (x1, x2, x3) = (x1 + x2, x1 + x3, x3 + x2) .
b) Relativamente à base canónica de R3, T é representada pela matriz
a b cd e fg h i
.
7

Exercício 18 Considere a base de R3, B = v1,v2,v3 , onde v1 = (1, 0, 0) , v2 = (1, 1, 0)e v3 = (1, 1, 1) .
a) Sabendo que T : R3 → R3 é uma transformação linear que na base canónica de R3 érepresentada pela matriz
1 1 01 0 10 1 1
,
determine a sua representação matricial na base B.b) Supondo que na base B, uma transformação linear T é representada matricialmente pelamatriz
1 2 11 0 00 1 2
,
determine analiticamente T (x1, x2, x3) .
Exercício 19 T : R3 → R2 é a transformação linear dada por
T (x1, x2, x3) = (2x1 + x2, x3 + 3x2) .
Por que matrizes é representada T relativamente à base B1 = u1,u2,u3 de R3 e B2 =v1,v2 de R2 nos casos em que:
a) u1 = (1, 0, 0), u2 = (0, 1, 0) , u3 = (0, 0, 1) , v1 = (1, 0) , v2 = (0, 1) .
b) u1 = (0, 2, 0), u2 = (0, 0, 2) , u3 = (2, 0, 0) , v1 = (1, 0) , v2 = (0, 1) .
c) u1 = (1, 0, 0) , u2 = (1, 1, 0) , u3 = (1, 1, 1) , v1 = (1, 1) , v2 = (1, 2) .
d) u1 = (1, 0, 0) , u2 = (0, 1, 0) , u3 = (0, 0, 1) , v1 = (1, 1) , v2 = (1, 2) .
Exercício 20 Considerem-se as bases B2 = w1,w2 de R2 e B3 = v1,v2,v3 de R3, onde
v1 = (1,−1, 0) , v2 = (−1, 1, 1) e v3 = (1, 0,−1) .
Sejam S : R3 → R2 e T : R2 → R3 aplicações lineares tais que
S (v1) = w1 +w2, S (v2) = w1 −w2, S (v3) = w1,
T (w1) = v1 + v2 e T (w2) = v2 + v3.
determine a expressão analítica para T S (x, y, z).
Exercício 21 Seja T : P2 → P2 definida por T (p (t)) = tp′ (t). Determine a matriz querepresenta T na base P2 = 1, t, t2.
Exercício 22 Seja T : P2 → P4 definida por T (p (t)) = p (t2)+p (2) t3. Determine a matrizque representa T nas bases P2 = 1, t, t2, P4 = 1, t, t2, t3, t4.
Exercício 23 Seja T : P2 → R3 definida por T (p (t)) = (p (−1) , p (0) , p (1)). Determine amatriz que representa T nas bases canónicas P2, E3.
8

Exercício 24 T : P2 → P3 é uma transformação linear tal que
T (1) = 1 + t, T (t) = 1 + 2t, Tt2
= t− t3.
a) Que polinómio é T (1− 2t + 3t2)?
b) Represente matricialmente T com respeito às bases canónicas de P2 e de P3.
c) Represente matricialmente T relativamente às bases B = 1, 1 + t, 1 + t + t2 de P2 eD = 1, 1 + t, 1 + t2, 1 + t3 de P3.
Exercício 25 Seja F : M2×2 (R) →M2×2 (R) dada por
F (A) = A+AT .
a) F é uma transformação linear. Justifique.
b) Por que matriz é representada F relativamente à base canónica de M2×2 (R) ,
1 00 0
,
0 10 0
,
0 01 0
,
0 00 1
.
Exercício 26 Seja
A =
a bc d
uma matriz arbitrária do espaço vectorial M2×2 (R) das matrizes reais 2 × 2. Quais dasseguintes transformações de M2×2 (R) em R, são lineares?
T1 (A) = a + d. T2 (A) = ab− cd. T3 (A) = a + b + c + d. T4 (A) = abcd.
Nos casos afirmativos indique a respectiva representação matricial relativamente à base canó-nica de M2×2 (R) .
Exercício 27 Considere as transformações D : P3 → P2 e P : P2 → P3 definidas por:
Dp (t) = p′ (t) , Pp (t) =
t
0
p (s) ds,
em que p designa um polinómio de P3.
a) Ambas são transformações lineares. Justifique.
b) Determine as matrizes que representam D e P relativamente às bases canónicas 1, t, t2de P2 e 1, t, t2, t3 de P3.
c) D e P são transformações inversas?
9

3 Núcleo e contradomínio de uma transformação linear
Relativamente a uma qualquer transformação linear T : E1 → E2 entre dois espaçosvectoriais E1 e E2, facilmente se verifica que o contradomínio de T ou conjunto imagem
ImT = y ∈ E2 : y = T (x) , x ∈ E1
constitui um subespaço de E2. Sempre que ImT = E2 diremos que T é uma transformaçãolinear sobrejectiva ou uma sobrejecção de E1 em E2.
A invertibilidade de T fica então apenas dependente de ser uma transformação injec-tiva, ou seja de satisfazer a propriedade
x1 = x2 ⇒ T (x1) = T (x2)
(ou de modo equivalente a implicação T (x1) = T (x2) ⇒ x1 = x2). Na verdade, se T forinjectiva então podemos considerar a transformação inversa
T−1 : ImT → E1,
ou seja a transformação que satisfaz as relações
T−1 T
(x) = x, ∀x ∈ E1,
T T−1
(y) = y, ∀y ∈ ImT.
Nestas circunstâncias, pode facilmente verificar-se que T−1 é igualmente uma transformaçãolinear entre ImT e E1. Quando T for simultaneamente injectiva e sobrejectiva diremos queT é bijectiva ou uma bijecção entre E1 e E2.
Para aferirmos da injectividade da transformação T, um outro espaço assume um papelrelevante: o chamado de núcleo de T definido por
NucT = x ∈ E1 : T (x) = 0 ,
que facilmente se observa constituir um subespaço de E1. Na verdade, pode mostrar-se queT é injectiva se e só se for válida a seguinte equivalência
T (x) = 0⇔ x = 0,
facto que é equivalente a afirmar que NucT = 0 .Podemos pois estabelecer que as seguintes afirmações são equivalentes:
• T : E1 → ImT é invertível.
• T é injectiva.
• NucT = 0 .
10

3.1 Núcleo e contradomínio de uma transformação linear entreespaços de dimensão finita
No caso em que os espaços E1 e E2 são de dimensão finita há a registar algumas particu-laridades específicas. Na verdade, tomando uma base B1 de E1, uma base B2 de E2 e a matriz[T ]
B2B1que, relativamente a estas bases, representa a transformação linear T : E1 → E2,
atendendo a que[T (x)]
B2= [T ]
B2B1[x]
B1,
podemos concluir que
NucT =x ∈ E1 : [x]
B1∈ Nul [T ]
B2B1
.
Do mesmo modo,ImT =
y ∈ E2 : [y]
B2∈ Col [T ]
B2B1
.
Assim, recordando a nulidade, n (A) , e a característica, c (A) , de uma matriz A, temos
dim (NucT ) = dimNul [T ]
B2B1
= n
[T ]
B2B1
dim (ImT ) = dimCol [T ]
B2B1
= c
[T ]
B2B1
edim (NucT ) + dim (ImT ) = dimE1.
Se dim (E1) = dim (E2), podemos ainda afirmar que T é uma transformação invertível(ou bijectiva) se e só se a matriz [T ]
B2B1for invertível. Nestas condições, relativamente às
bases B1 e B2, a matriz que representa a transformação inversa, T−1, é a matriz inversa damatriz que representa T :
T−1B1B2
= [T ]−1
B2B1.
3.2 Exercícios
Exercício 28 Determine bases para o núcleo e para o contradomínio (ou espaço imagem)de cada uma das seguintes transformações lineares:
a) T (x1, x2) = (2x1 + x2, 2x1 + x2) .
b) T (x1, x2) = (x1 + x2, x1 − x2) .
c) T (x1, x2, x3) = (x1 + x2 + x3, 2x1 + 2x2 + 2x3, x2 − x3) .
d) T (x1, x2, x3) = (x1 + 2x2 − x3, 2x1 + 4x2 − 2x3,−x1 − 2x2 + x3) .
e) T (x1, x2, x3) = (x1 − x3, x1 + 2x3, x2 + 3x3) .
f) T (x1, x2, x3) = (x1 − x3, x2 + x3) .
g) T (x1, x2) = (2x1 + x2, 4x1 + 2x2, 0) .
Exercício 29 A transformação linear T : R2 → R2, na base constituída pelos vectoresv1 = (1, 1), v2 = (1,−1) é representada pela matriz
3 32 2
.
Determine bases para o núcleo e para o espaço imagem de T e indique a dimensão dessessubespaços.
11

Exercício 30 Na base formada pelos vectores
v1 = (−1, 1, 1), v2 = (1,−1, 1), v3 = (1, 1,−1),
a transformação linear T : R3 → R3 é representada pela matriz
−2 0 11 1 0−1 1 1
.
Determine bases dos subespaços NucT e ImT.
Exercício 31 A transformação linear T : P2 → P1, relativamente às bases canónicas destesespaços, é representada pela matriz
2 1 −3−6 −3 9
.
a) Que polinómio é T (1 + 2t + t2)?
b) Determine bases do núcleo e do contradomínio de T.
Exercício 32 T : P1 → P2 é uma transformação linear que nas bases canónicas de P1 e P2é representada pela matriz
1 11 −11 0
.
a) Caso exista, qual o polinómio p (t) de P1 tal que T (p (t)) = 1− t?
b) Determine bases do núcleo e do contradomínio de T.
Exercício 33 Seja T : Rn → Rm uma transformação linear e A a matriz que representa
T nas bases canónicas de Rn e Rm. Justificando as suas respostas, indique se as seguintesafirmações são verdadeiras ou falsas2.
a) dim (NucT ) = n (A) .
b) T é injectiva se e só se n (A) = 0.
c) T é injectiva se e só se a característica de A coincide com o número de colunas de A.
d) A dimensão da imagem de T coincide com a característica de A.
e) T é sobrejectiva se e só se a característica de A coincide com o número de linhas de A.
Exercício 34 Seja T : R3 → R2 a transformação linear definida por
T (x1, x2, x3) = (x1 + x2, x1 + x2 − x3) .
a) Calcule a matriz que representa T nas bases canónicas de R3 e R2.
2Recorde que n(A) designa a nulidade da matriz A.
12

b) Determine uma base para o núcleo de T. A transformação T é injectiva?
c) Determine uma base para o contradomínio de T. T é sobrejectiva?
d) Resolva a equação T (x1, x2, x3) = (1, 1).
e) Existe algum vector (a, b) ∈ R2 para o qual a equação T (x1, x2, x3) = (a, b) é impossível?
f) Existe algum vector (a, b) ∈ R2 para o qual a equação T (x1, x2, x3) = (a, b) é possível edeterminada?
Exercício 35 Considere a transformação linear que na base canónica de R3 é representadapela matriz
1 2 22 1 40 0 2
.
a) Determine uma base para o núcleo de T. T é injectiva?
b) Indique uma base para a imagem de T. T é sobrejectiva?
c) Resolva a equação T (x1, x2, x3) = (3, 3, 0).
d) Existe algum vector (a, b, c) ∈ R3 para o qual a equação T (x1, x2, x3) = (a, b, c) é impossí-vel?
e) Existe algum vector (a, b, c) ∈ R3 para o qual a equação T (x1, x2, x3) = (a, b, c) é indeter-minada?
Exercício 36 Na base de R2 formada por v1 = (1, 1), v2 = (1, 0), a transformação linearT : R2 → R2 é representada pela matriz
2 41 2
.
a) Encontre uma base de NucT. T é injectiva?
b) Indique uma base de ImT. T é sobrejectiva?
c) Resolva a equação T (x1, x2) = (3, 2).
d) Existe algum vector (a, b) ∈ R2 para o qual a equação T (x1, x2) = (a, b) é impossível?
e) Existe algum vector (a, b) ∈ R2 para o qual a equação T (x1, x2) = (a, b) é possível edeterminada?
Exercício 37 Seja T : R3 → R3 a transformação linear que na base constituída pelosvectores v1 = (1, 1, 1), v2 = (1, 1, 0), v3 = (1, 0, 0) é representada por
1 2 22 4 40 0 2
.
a) Determine uma base para o núcleo de T. T é injectiva?
b) Indique uma base para a imagem de T. T é sobrejectiva?
c) Mostre que equação T (x1, x2, x3) = (2, 4, 0) não tem soluções.
d) Existe algum vector (a, b, c) ∈ R3 para o qual a equação T (x1, x2, x3) = (a, b, c) é indeter-minada.
13

Exercício 38 T é a transformação linear dada por
T (x1, x2) = (x1 + x2, x1 + 2x2) .
a) Qual a matriz que representa T na base canónica?
b) Mostre que T é bijectiva e calcule T−1(y1, y2).
c) Resolva a equação linear T (x1, x2) = (1, 1).
Exercício 39 A matriz
1 0 00 1 00 0 −1
representa a transformação linear T na base de R3 constituída pelos vectores
v1 = (1, 1, 1), v2 = (1, 1, 0), v3 = (1, 0, 0).
a) Mostre que T é bijectiva e calcule T−1(y1, y2, y3).
b) Resolva a equação linear T (x1, x2, x3) = (1, 2, 1).
Exercício 40 Relativamente à base canónica de P2, a transformação linear T : P2 → P2,tem a representação matricial
1 1 11 2 −40 0 1
.
Mostre que T é bijectiva e calcule T−1(1 + t + 2t2).
Exercício 41 Seja I : Pn → R a transformação dada por
I (p) =
1
0
p (t) dt (p (t) ∈ Pn) .
a) I é uma transformação linear. Justifique.
b) Qual a matriz que na base canónica 1, t, ..., tn de Pn representa I?
c) Determine o núcleo de I? Qual a sua dimensão?
d) É I uma bijecção entre Pn e R?
Exercício 42 Designe-se por S o subespaço das matrizes simétricas 2× 2, i.e.
S =A ∈M2×2 (R) : A = AT
.
Considere-se T : S → S a transformação linear definida por
T (A) = AB+BA, onde B =
0 11 0
.
a) Determine uma base para S e indique a matriz que, nessa base, representa T.
b) Calcule uma base do NucT e justifique que T não é injectiva nem sobrejectiva.
c) Resolva em S, a equação T (A) = B.
14

4 Soluções
1) a) i) (−1,−5) . ii) (2,−5) . iii) (−12,−7) . b) α = 6, β = 2.
2) São lineares as transformações das alíneas a), d) e f).
3) k = 0 e m = 1.
4) a) 5t + 4t2 + 3t3 + 2t4.
5) a) t− 1. b) a0 = a1 + 1. Não existe.
7) a) Recta y = x − 3. b) Recta y = x. c) Região do plano entre as rectas y = x − 1 ey = x + 1.
8) a) i) T (∆) = ∆; ii) T (Cρ) = Cρ.
b) i) Triângulo de vértices (−1, 1) , (−1,−1) e (−2, 0) ; ii) T (Cρ) = Cρ.
c) i) Triângulo de vértices (1, 1) , (−1, 1) e (0, 2) ; ii) T (Cρ) = Cρ.
d) i) Triângulo de vértices (−1,−1) , (1,−1) e (−2, 0) ; ii) T (Cρ) = Cρ.
e) i) Triângulo de vértices (r, r) , (r,−r) e (2r, 0) ; ii) T (Cρ) = Crρ.
9) T (E) é a circunferência de centro na origem e raio 1.
10) a) (0, 1) , (−1, 0) , (−1, 1) e
1−√
3/2,1 +
√3/2.
b) i) θ = π/2 + 2kπ. ii) θ = −π/2 + 2kπ. iii) θ = 3π/4 + 2kπ. iv) θ = −5π/6 + 2kπ. v)Não.
c) Sim; θ1 + θ2. d) R−θ. f) y = −x/a.11) a) Triângulo de vértices (1, 0, 1) , (−1,−1, 0) e (0, 0, 2) .
b) Triângulo de vértices (−1, 0, 1) , (1, 1, 0) e (0, 0, 2) .
c) Triângulo de vértices (0, 1, 1) , (−1,−1, 0) e (0, 0, 2) .
12) a)
0 11 0
. b)
1 21 2
c)
1 31 −7
d)
4 1−3 4
.
13) Por exemplo v1 = (1, 3) , v2 = (5, 7) , w1 = (1, 1, 1) , w2 = (0, 0, 1) , w3 = (1, 0, 0) .
14) [S T ] =
17 −414 −10
, [T S] =
−1 1 01 2 33 3 6
15) a)
2 11 2
. b)
d cb a
.
16) a)
3 30 1
. b) T (x1, x2) = (4x1, 4x1 + x2) .
17) a)
0 1 11 1 01 0 1
. b
e f dh i gb c a
.
15

18) a)
0 1 01 0 00 1 2
. b) T (x1, x2, x3) = (2x1 + x2, x1 + x3, x2 + x3).
19) a)
2 1 00 3 1
. b)
2 0 46 2 0
. c)
4 3 2−2 0 1
. d)
4 −1 −1−2 2 1
.
20) T S (x, y, z) = (0,−y, 3x + 2y + 2z)
21)
0 0 00 1 00 0 2
22)
1 0 00 0 00 1 01 2 40 0 1
23)
1 −1 11 0 01 1 1
24) a) −3t3 − 1. b)
1 1 01 2 10 0 00 0 −1
. c)
0 −1 −11 3 40 0 00 0 −1
.
25) b)
2 0 0 00 1 1 00 1 1 00 0 0 2
26) T1 e T3 são lineares; T2 e T4 não. T1 é representada pela matriz
1 0 0 1e T3 é
representada pela matriz
1 1 1 1.
27) b) D é representada por
0 1 0 00 0 2 00 0 0 3
e P por
0 0 01 0 00 1/2 00 0 1/3
. c) Não.
28) a) (1,−2) é base de NucT e (1, 1) é base de ImT.
b) ∅ é base de NucT ; (1, 1) , (1,−1) é base de ImT.
c) (−2, 1, 1) é base de NucT ; (1, 2, 0) , (1, 2, 1) é base de ImT.
d) (−2, 1, 0), (1, 0, 1) é base de NucT ; (1, 2,−1) é base de ImT.
e) ∅ é base de NucT ; (1, 1, 0) , (0, 0, 1) , (−1, 2, 3) é base de ImT.
f) (1,−1, 1) é base de NucT ; (1, 0) , (0, 1) é base de ImT.
g)
(−12, 1)é base de NucT ; (2, 4, 0) é base de ImT.
29) (0, 1) é base de NucT e (5, 1) é base de ImT. dim NucT = dim ImT = 1.
30) (0, 2,−1) é base de NucT e (2,−4, 0) , (2, 0, 0) é base de ImT.
31) a) 1− 3t. b) 1− 2t, 3 + 2t2 é base de NucT, 2− 6t é base de ImT.
32 a) p (t) = t. b) ∅ é base de NucT, 1 + t + t2, 1− t é base de ImT.
33) Todas as afirmações são verdadeiras.
16

34) a)
1 1 01 1 −1
.
b) (−1, 1, 0) é base de NucT. A transformação T não é injectiva pois dim NucT = 0.
c) (1, 1) , (0,−1) é base de ImT. A transformação T é sobrejectiva pois dim ImT = 2 =dimR2.
d) O conjunto das soluções é (1, 0, 0)+ NucT = (1, 0, 0) + x2 (−1, 1, 0) : x2 ∈ R .e) Não, porque T é sobrejectiva.
f) Não, porque T não injectiva.
35) a) ∅ é base do NucT . T é injectiva.
b) (1, 2, 0) , (2, 1, 0) , (2, 4, 2) é base de ImT. T é sobrejectiva.
c) A única solução da equação é (1, 1, 0).
d) e e) Como T é bijectiva a equação T (x1, x2, x3) = (a, b, c) é possível e determinada paraqualquer (a, b, c) ∈ R3.36) a) (1, 2) é base de NucT, logo T não é injectiva.
b) (3, 2) é uma base de ImT , pelo que T não é sobrejectiva.
c) O conjunto das soluções é (0,−1)+ NucT.
d) Sim. Por exemplo, T (x1, x2) = (1, 0) é impossível.
e) Não.
37) a) (1, 1, 2) é base de NucT, logo T não é injectiva.
b) (8, 6, 2) , (−2, 0, 0) é uma base de ImT, pelo que T não é sobrejectiva.
d) Sim.
38) a)
1 11 2
. b) T−1 (y1, y2) = (2y1 − y2,−y1 + y2) .
c) Como T é bijectiva, a única solução da equação é o vector T−1(1, 1) = (1, 0) .
39) a) T−1(y1, y2, y3) = (−y1 + 2y2, y2, y3) . b) A única solução da equação é (3, 2, 1) .
40) T−1 (1 + t + 2t2) = 2t2 + 10t− 11.
41) b)
1 1/2 ... 1/ (n + 1).
c) NucI =a0 + a1t + ... + ant
n : a0 + a12
+ ... + ann+1
= 0, dim NucI = n. d) Não.
42) a) Na base
1 00 0
,
0 00 1
,
0 11 0
,
a matriz que representa T é
0 0 20 0 21 1 0
.
b) −1 00 1
é base de NucT. c) O conjunto das soluções é
1− a 0
0 a
: a ∈ R
.
17
IST - 2o Semestre de 2012/13
LEGM, LMAC, MEFT, MEBiom, MEC
EXERCÍCIOS DE ÁLGEBRA LINEAR
FICHA 4 - Determinantes. Vectores e valores próprios
1
1 Determinantes
Pode-se definir detA, o determinante de uma matriz A ∈ Mn×n (K), como o valor dafunção de Mn×n (K) em K que satisfaz as seguintes propriedades:
i) Se In é a matriz identidade, então det In = 1.
ii) Se a matriz A′
se obtém da matriz A multiplicando uma das suas linhas por α, entãodetA
′
= α detA
iii) detA não se altera se uma linha for substituída pela sua soma com outra linha.
Partindo destas propriedades axiomáticas é possível mostrar que a função A → detAtambém tem que satisfazer as seguintes:
iii’) detA não se altera se uma linha for substituída pela sua soma com o múltiplo de outralinha.
iv) Se a matriz A′
se obtém da matriz A permutando duas das suas linhas, então detA′
=− detA
Com base nas propriedades acima descritas é possível calcular qualquer determinante atravésdo método de eliminação de Gauss. Por exemplo:
1Coligidos por: João Ferreira Alves, Ricardo Coutinho e José M. Ferreira.
1

det
2 2 23 3 82 5 3
= det
2 2 20 0 50 3 1
por iii′)
= −det
2 2 20 3 10 0 5
por iv)
= −2× 3× 5× det
1 1 10 1 1/30 0 1
por ii)
= −30 det
1 0 00 1 00 0 1
por iii′)
= −30 por i)
1.1 Propriedades dos determinantes
Representando a matriz A através das suas linhas:
A =
a11 a12 ... a1na21 a22 ... a2n... ... ... ...an1 an2 ... ann
=
a′1
a′2
...a′n
,
podemos descrever a linearidade do determinante em função das suas linhas nas seguintesduas primeiras propriedades.
1. det
a′1
...a′i + a...a′n
= det
a′1
...a′i
...a′n
+ det
a′1
...a
...a′n
.
2. det
a′1
...αa′i...a′n
= α det
a′1
...a′i
...a′n
(∀α) .
3. detAT = detA.
4. O determinante muda de sinal por permutação entre pares de linhas (ou de colunas).
5. detA não se altera se uma linha (ou coluna) for substituída pela sua soma com omúltiplo de outra linha (respectivamente coluna).
2

6. Se
A =
a11 a12 a13 · · · a1n0 a22 a23 · · · a2n0 0 a33 · · · a3n...
.... . .
...0 0 0 · · · ann
é uma matriz triangular superior (ou triangular inferior) então
detA = a11a22...ann.
7. Se A tiver duas linhas (ou duas colunas) iguais então detA = 0.
8. detA = 0, se A tiver uma linha (ou coluna) nula.
9. As linhas (ou colunas) de A são linearmente dependentes se e só se detA = 0.
10. A é invertível se e só se detA = 0. Nestas circunstâncias
detA−1 =1
detA.
11. det (AB) = (detA) (detB) .
1.2 Outros métodos para o cálculo de determinantes
Existem outros métodos directos para calcular determinantes de uma matriz n× n
A =
a11 a12 ... a1na21 a22 ... a2n... ... ... ...an1 an2 ... ann
.
• Regra de Laplace2: Para qualquer i = 1, 2, ..., n,
detA =n
j=1
(−1)i+j aij detAij =n
j=1
aijcij
= ai1 detAi1 − ai2 detAi2 + ai3 detAi3 − ...+ (−1)i+n ain detAin
= ai1ci1 + ai2ci2 + ai3ci3 + ...+ aincin
Para qualquer j = 1, 2, ..., n,
detA =n
i=1
(−1)i+j aij detAij =n
i=1
aijcij
= a1j detA1j − a2j detA2j + a3j detA3j − ...+ (−1)n+j anj detAnj
= a1jc1j + a2jc2j + a3jc3j + ...+ anjcnj
onde Aij é a matriz que se obtem de A por supressão da linha i e da coluna j. Ovalor cij = (−1)i+j detAij é chamado de cofactor (i, j) da matriz A.
2Pierre Simon Laplace, n. Beaumont-en-Ange (Normandia) França, a 23 de Março de 1749, m. Paris, a5 de Março de 1827.
3

• Expansão permutacional: Designemos por P o conjunto de todas as permutaçõesσ = (σ1, ..., σn) de 1, 2, ..., n . Obtemos,
detA =
σ∈P
ǫσa1σ1a2σ2 ...anσn =
σ∈P
ǫσaσ11aσ22...aσnn,
onde ǫσ é o sinal da permutação σ (i. e. ǫσ = (−1)iσ , onde iσ designa o número totalde inversões de σ; dada uma permutação σ dizemos que ocorre uma inversão sempreque i < j e σi > σj).
1.3 Determinantes de matrizes 2× 2 e 3× 3Para o caso de uma matriz 2× 2,
A =
a11 a12a21 a22
detA = a11a22 − a12a21.
Uma utilização importante deste determinante prende-se com o cálculo de áreas deparalelogramos P do plano gerados por dois vectores v1 = (a, b) e v2 = (c, d) de R2:
area de P =
deta bc d
= |ad− bc| .
Relativamente a uma matriz 3× 3,
A =
a11 a12 a13a21 a22 a23a31 a32 a33
,
podemos estabelecer que
detA = a11a22a33 + a12a23a31 + a13a21a32 − a11a23a32 − a12a21a33 − a13a22a31,dando origem à chamada regra de Sarrus3
a11 + a12 + a13 a11 a12 a13 − a11 − a12 − a13ց ց ց ւ ւ ւ
a21 a22 a23 a21 a22 a23 a21 a22 a23ց ց ց ւ ւ ւ
a31 a32 a33 a31 a32 a33 a31 a32 a33
Estes determinantes permitem a obtenção do cálculo de volumes de paralelepípedos, P,gerados por três vectores v1 = (x1, y1, z1) , v2 = (x2, y2, z2) e v3 = (x3, y3, z3) de R3:
volume de P =
det
x1 y1 z1x2 y2 z2x3 y3 z3
= |x1y2z3 + x3y1z2 + x2y3z1 − x1y3z2 − x2y1z3 − x3y2z1| .3Pierre Frédéric Sarrus, n. Saint Affrique (Midi-Pyrenées) França, a 10 de Março de 1798, m. Estrasburgo,
França, a 20 de Novembro de 1861.
4

1.4 Matriz dos cofactores
Considerando os cofactores
cij = (−1)i+j detAij
chama-se matriz dos cofactores de A à matriz
cofA = [cij]i,j=1,...n
=
c11 c12 ... c1nc21 c22 ... c2n... ... ... ...cn1 cn2 ... cnn
.
A matriz cofA satisfaz a seguinte relação com a matriz A ∈ Mn×n (K), n 2:
A (cofA)T = (detA) In.
Desta igualdade resulta que se A é invertível então
A−1 =
1
detA(cofA)T .
1.5 Regra de Cramer4
Seja Ax = d um sistema de n equações a n incógnitas tal que detA = 0. Então osistema possui uma única solução cujas componentes são dadas por
x1 =detA1
detA, x2 =
detA2
detA, ..., xn =
detAn
detA,
onde com j = 1, 2, ..., n, Aj é a matriz que se obtém de A substituindo a coluna j de A pelovector coluna d.
1.6 Exercícios
Exercício 1 Use eliminação de Gauss para calcular os determinantes das seguintes matri-zes:
a)
1 21 1
. b)
1 11 1
. c)
3 −1 40 1 −20 5 0
.
d)
1 0 01 1 01 1 1
. e)
3 0 00 1 −20 5 0
. f)
1 −1 11 1 30 1 1
.
4Gabriel Cramer, n. a 31 Julho de 1704 em Geneva, m. a 4 de Janeiro de 1752 em Bagnols-sur-Cèze(França) .
5
Exercício 2 Use eliminação de Gauss para calcular os determinantes das seguintes matri-zes. Aproveite o resultado para indicar as que são invertíveis.
a)
1 12 22 310 3 11 160 0 1 100 0 0 1
. b)
1 2 4 31 1 3 30 3 0 00 2 2 2
. c)
1 0 0 31 1 0 30 3 1 10 2 2 2
.
d)
1 0 0 20 1 2 30 2 1 23 3 0 1
. e)
1 0 0 31 1 0 30 0 1 1−5 2 2 2
. f)
1 1 0 0 01 4 0 6 01 1 0 3 00 3 1 1 30 0 0 2 5
.
Exercício 3 Sabendo que
det
a b cd e fg h i
= 5,
calcule:
a) det
d e fg h ia b c
. b) det
−a −b −c2d 2e 2f−g −h −i
.
c) det
a+ d b+ e c+ fd e fg h i
. d) det
a b c
d− 3a e− 3b f − 3c2g 2h 2i
.
Exercício 4 Sabendo que os valores reais γ e δ são tais que:
det
1 2 γδ 1 11 γ + δ 2
= 1,
determine
det
1 2 γδ δγ + δ2 2δδγ γ γ
.
Exercício 5 Mostre que
det
λ 1 1 1 1 1λ λ+ 1 2 2 2 2λ λ+ 1 λ+ 2 3 3 3λ λ+ 1 λ+ 2 λ+ 3 4 4λ λ+ 1 λ+ 2 λ+ 3 λ+ 4 5λ λ+ 1 λ+ 2 λ+ 3 λ+ 4 λ+ 5
= λ6.
6

Exercício 6 Calcule o determinante da matriz n× n
B =
λ λ λ ... λ1 λ+ 1 1 ... 11 1 λ+ 1 ... 1...
......
......
1 1 1 1 λ+ 1
.
Exercício 7 Mostre que
det
1 1 1λ1 λ2 λ3λ21 λ22 λ23
= (λ3 − λ2)(λ3 − λ1)(λ2 − λ1).
Exercício 8 Utilize sucessivamente a regra de Laplace para calcular os determinantes dasmatrizes indicadas a seguir.
a)
1 0 31 3 10 0 −3
. b)
1 1 02 3 11 6 0
. c)
1 1 12 3 15 6 −3
.
d)
1 2 4 31 1 3 30 3 0 00 2 2 2
. e)
1 0 0 31 1 0 30 0 1 1−5 2 2 2
. f)
1 1 0 0 01 4 0 6 01 1 0 3 00 3 1 1 30 0 0 2 5
.
Exercício 9 Uma matriz cujas entradas são 0 ou 1 tem determinante igual a 0, 1 ou−1.Verdadeiro ou falso?
Exercício 10 Através da regra de Sarrus calcule os determinantes das seguintes matrizes:
a)
1 0 31 3 10 0 −3
. b)
1 1 02 3 11 6 0
. c)
1 1 12 3 15 6 −3
.
Exercício 11 Calcule as áreas dos paralelogramos cujos vértices são:
a) (0, 0) , (−1, 3) , (4,−5) e (3,−2) .b) (−1, 0) , (0, 5) , (1,−4) e (2, 1) .c) (0,−2) , (6,−1) , (−3, 1) e (3, 2) .
Exercício 12 Calcule os volumes dos paralelepípedos gerados pelos vectores u, v e w onde:
a) u = (1, 0,−2) , v = (1, 2, 4) e w = (7, 1, 0) .b) u = (1, 4, 0) , v = (−2,−5, 2) e w = (−1, 2− 1) .
7

Exercício 13 Calcule os determinantes das matrizes
A =
1 0 10 1 53 0 1
e B =
2 2 20 2 21 1 2
.
E ainda: a) det(3A). b) det(A3B2). c) det(A−1
BT ). d) det(A4
B−2).
Exercício 14 i) Para as matrizes indicadas a seguir verifique a validade da fórmula:
A (CofA)T = (detA) I,
onde CofA designa a matriz dos cofactores.
a)
0 1 22 4 11 2 0
. b)
1 1 02 0 11 2 2
. c)
1 0 01 3 01 1 1
d)
1 4 52 5 43 6 3
.
ii) Caso seja possível, determine a matriz inversa de cada uma destas matrizes.
Exercício 15 Use a regra de Cramer para resolver os sistemas de equações lineares:
a)
y + 2z = 12x+ 4y + z = 0x+ 2y = 1
. b)
x+ y = 12x+ z = 1x+ 2y + 2z = −1
.
Exercício 16 Sejam f1, f2 e f3 funções do espaço vectorial C2 (R) , das funções reais de de
variável real que são duas vezes diferenciáveis. Mostre que se existe t0 ∈ R de modo que odeterminante5
det
f1 (t0) f2 (t0) f3 (t0)f ′1 (t0) f ′2 (t0) f ′3 (t0)f ′′1 (t0) f ′′2 (t0) f ′′3 (t0)
= 0,
então f1, f2 e f3 são linearmente independentes.
Exercício 17 Aplicando o exercício anterior, mostre que 1,e−t, t e−t é constituído porfunções linearmente independentes.
5Este determinante é conhecido pelo nome de wronskiano das funções f1, f2 e f3. Esta condição deindependência linear é devida a Josef-Maria Hoëné Wronski (n. Wolsztyn, Polónia, 23 de Agosto de 1778;m. Neilly-sur-Seine, França, em 8 de Agosto de 1853).
8

2 Vectores e valores próprios de transformações linea-
res
Dada uma transformação linear T : E → E do espaço vectorial E nele próprio, se comv ∈ E\ 0 e λ escalar se tem
T (v) = λv,
diremos que v é um vector próprio de T e λ um seu valor próprio.
Designando por I : E → E a transformação linear identidade, ou seja a transformaçãotal que I (x) = x, qualquer que seja x ∈ E, temos que
T (v) = λv⇔ (T − λI) (v) = 0.
Assim, se λ é um valor próprio de T, então v será um vector próprio de T associado a λ see só se
v ∈ Nuc (T − λI) \ 0 .Como tal, podemos afirmar que λ é um valor próprio de T se e só se Nuc (T − λI) = 0 ,sendo qualquer elemento não nulo de Nuc (T − λI) um vector próprio de T associado a λ.
O subespaço de E, Nuc (T − λI) , é chamado de subespaço próprio associado a λ,que representaremos por E (λ):
E (λ) = Nuc (T − λI) .
2.1 Vectores e valores próprios de matrizes
Analogamente, podem definir-se os conceitos de valor próprio e vector próprio de umamatriz A (n× n) . Nesse sentido, um vector v = 0 e um escalar λ são, respectivamente, umvector próprio de A e um valor próprio de A, se
Av = λv.
O conjunto dos valores próprios de A é designado por espectro da matriz A e repre-sentado por σ (A) . Ao contrário do que sucede para uma transformação linear qualquer,para uma matriz podemos obter uma caracterização dos seus valores próprios. Na verdade,atendendo a que
Av = λv⇔ (A− λI)v = 0,se v é um vector próprio associado ao valor próprio λ, podemos afirmar que v é uma soluçãonão nula do sistema homogéneo (A− λI)x = 0, e portanto concluir que
λ ∈ σ (A)⇔ det (A− λI) = 0.
Facilmente se verifica que det (A− λI) é um polinómio em λ de grau n, chamado de po-linómio característico de A. Logo o conjunto dos valores próprios de uma matriz A éanaliticamente identificado pelas raízes de um polinómio:
σ (A) = λ : det (A− λI) = 0 .
9

O conjunto dos vectores próprios associados a um mesmo valor próprio de A, é consti-tuído por todos os vectores não nulos que são solução do sistema homogéneo (A− λI)x = 0,ou seja Nul (A− λI) \ 0 . O subespaço Nul (A− λI) é também designado por espaço pró-prio associado ao valor próprio λ e igualmente representado por E (λ) .
2.2 Vectores e valores próprios de transformações lineares em es-paços de dimensão finita
Seja agora T : E → E uma transformação linear em que o espaço E é de dimensãofinita. Considerando a matriz [T ]
Bque representa T, relativamente a uma dada base B de
E, de[T (v)]
B= [T ]
B[v]
B,
podemos concluir que a relaçãoT (v) = λv
é equivalente a[T ]
B[v]
B= λ [v]
B.
Deste modo, λ é um valor próprio de T se e só se λ ∈ σ (A) . O espaço próprio associado aum valor próprio λ, pode também ser caracterizado através da matriz [T ]
B:
E (λ) = Nuc (T − λI) = v ∈ E : [v]B∈ Nul ([T ]
B− λI) .
No caso de ser E = Rn ou Cn como há uma identificação entre vectores e coordenadasna base canónica temos que
E (λ) = Nuc (T − λI) = Nul ([T ]E− λI) ,
onde [T ]Eé a representação matricial de T na base canónica de Rn ou Cn.
2.3 Diagonalização de matrizes
Uma matriz D (n× n) diz-se uma matriz diagonal se forem nulos todos os elementosde D que estão fora da diagonal principal:
D =
d1 0 0 ... 00 d2 0 ... 00 0 d3 ... 0... ... ... ... ...0 0 0 ... dn
.
Por exemplo, a matriz identidade é uma matriz diagonal.
Uma matrizA (n× n) é dita diagonalizável se for semelhante a uma matriz diagonalD. Ou seja, se existir uma matriz invertível, S, dita matriz de semelhança, tal que
A = SDS−1.
10

• Teorema da diagonalização. Uma matriz A (n× n) é diagonalizável se e só seadmitir n vectores próprios, v1,v2, ...,vn, linearmente independentes.A matriz de semelhança, S, terá como colunas as coordenadas dos vectores própriosv1,v2, ...,vn :
S = [v1 v2...vn] .
A matriz diagonal
D =
λ1 0 0 ... 00 λ2 0 ... 00 0 λ3 ... 0... ... ... ... ...0 0 0 ... λn
será formada de maneira que λj é um valor próprio associado a vj , para j = 1, ..., n.
• Corolário. Se A tiver n valores próprios distintos, então A é diagonalizável.
Com E um espaço de dimensão finita (dimE = n) seja T : E → E uma transformaçãolinear representada por uma matriz [T ] diagonalizável. Nestas condições, aos n vectorespróprios de [T ] linearmente independentes, associamos n vectores próprios de T tambémlinearmente independentes que desse modo constituirão uma base B do espaço E. A matrizdiagonal D = [T ]
Bsemelhante a [T ] será a representação de T relativamente à base B.
2.4 Exercícios
Exercício 18 Seja T : R2 → R2 a transformação linear definida por
T (x1, x2) = (x1 + 2x2, 2x1 + x2)
e considere os vectores v1 = (2, 1), v2 = (−1, 1), v3 = (2, 3) e v4 = (4, 4). Identifique os quesão vectores próprios de T. Nos casos afirmativos, indique os respectivos valores próprios deT.
Exercício 19 Considere a transformação linear definida por
T (x1, x2, x3) = (0, x2 + 3x3, 3x2 + x3) .
Dentre os vectores v1 = (2, 1, 1), v2 = (0,−1, 1), v3 = (1, 0, 0), v4 = (−1, 1, 3) e v5 =(0, 3, 3), quais são vectores próprios de T? E que valores próprios de T que lhes estão asso-ciados?
Exercício 20 T é a transformação linear definida por:
T (x1, x2, x3) = (x1 + 2x2 + 2x3, 2x1 + x2 + 2x3, 2x1 + 2x2 + x3) .
Verifique se alguns dos vectores v1 = (2, 1, 1), v2 = (1, 1, 1), v3 = (−2, 0, 2), v4 = (−1, 1, 3)e v5 = (−1, 1, 0) são vectores próprios de T. A que valores próprios de T estão associados?
11

Exercício 21 Seja T : R2 → R2 a transformação linear definida por
T (x1, x2) = (x1 + x2, x1 + x2) .
Mostre que os vectores v1 = (1,−1) e v2 = (1, 1) determinam uma base de R2 constituídapor vectores próprios de T. Nesta base, determine a representação matricial de T.
Exercício 22 T : R3 → R3 é a transformação linear dada por:
T (x1, x2, x3) = (x2, x2, x2) .
Justifique que os vectores v1 = (1, 0, 0), v2 = (1, 1, 1) e v3 = (0, 0, 1) determinam uma basede R3 constituída por vectores próprios de T . Qual a representação matricial de T nestabase?
Exercício 23 T é a transformação linear definida por T (x1, x2) = (x1 + 2x2, 3x2) .
a) Indique o polinómio característico da matriz que representa T.
b) Calcule os valores próprios e os subespaços próprios de T que lhes estão associados.
c) Determine uma base de R2 constituída por vectores próprios de T. Qual a representaçãomatricial de T nesta base?
Exercício 24 Seja T : R2 → R2 a transformação linear que na base canónica de R2 érepresentada pela matriz
A =
2 33 2
.
a) Especifique σ (A) .
b) Calcule os subespaços próprios de T.
c) Determine uma matriz de mudança de base S e uma matriz diagonal D tais que
D = S−1AS.
Exercício 25 Na base canónica de R2 a transformação linear T é representada pela matriz
A =
2 10 2
.
a) Determine σ (A) .
b) Calcule os subespaços próprios de T.
c) Mostre que não existe uma base de R2 constituída por vectores próprios de T.
Exercício 26 Seja T : R3 → R3 a transformação linear definida por
T (x1, x2, x3) = (x2 + x3, 2x2 + x3, x2 + 2x3) .
a) Indique o polinómio característico da matriz que representa T.
12

b) Calcule os valores próprios e os subespaços próprios de T.
c) Determine uma base de R3 constituída por vectores próprios de T . Qual é a representaçãomatricial de T nesta base?
d) Designando por A a matriz que representa T na base canónica de R3, determine umamatriz S e uma matriz diagonal D tais que D = S−1AS.
Exercício 27 T : R3 → R3 é a transformação linear dada por
T (x1, x2, x3) = (3x1, 2x2 + x3, 2x3) .
a) Qual o polinómio característico da matriz que representa T?
b) Calcule os valores próprios e os subespaços próprios de T.
c) Mostre que não existe uma base de R3 constituída por vectores próprios de T.
Exercício 28 Seja T : R3 → R3 a transformação linear que na base canónica de R3 érepresentada pela matriz
A =
9 0 03 7 −13 −2 8
.
a) Determine σ (A) .
b) Calcule os subespaços próprios de T.
c) Determine uma matriz S e uma matriz diagonal D tais que D = S−1AS.
Exercício 29 T : P1 → P1 é uma transformação linear que na base canónica de P1, 1, t ,é representada pela matriz
A =
−1 −32 4
.
a) Determine σ (A) .
b) Calcule os subespaços próprios de T.
c) Indique uma base de P2 tal que a representação matricial de T nessa base seja diagonal.
Exercício 30 Considere a transformação linear T : P2 → P2 dada por
T (p (t)) = p′ (t) + p (t) .
a) Relativamente à base canónica de P2, 1, t, t2 , que matriz representa T?b) Qual o polinómio característico da matriz que representa T?
c) Calcule os valores próprios e os subespaços próprios de T.
d) Pode T ser representada por uma matriz diagonal? Justifique.
13

Exercício 31 Duas matrizes quadradas A e B dizem-se semelhantes se existe uma matrizS invertível tal que B = S−1AS. Mostre que:
a) Qualquer matriz quadrada é semelhante a ela própria (A é semelhante a A).
b) Se A e B são semelhantes, então também B e A são semelhantes.
c) Se A e B são semelhantes e se B e C são semelhantes, então A e C são semelhantes.
d) Se A e B são semelhantes e A é diagonalizável, então B é diagonalizável.
e) Se A e B são semelhantes, então têm o mesmo polinómio característico.
3 Valores próprios complexos
Mesmo queA seja uma matriz real (n× n) ,A pode admitir valores próprios complexos.Nestas condições, se λ ∈ C é um valor próprio de A então um vector próprio v que lhe estejaassociado será necessariamente um vector de Cn: v = (v1, ..., vn) , com v1, ..., vn ∈ C. Numacircunstância destas é possível então concluir que λ, o complexo conjugado de λ, é igualmenteum valor próprio de A e que o chamado vector conjugado de v,
v = (v1, ..., vn) ,
é vector próprio de A associado a λ.
3.1 Exercícios
Exercício 32 Resolva as seguintes equações na variável complexa z.
a) z4 − 1 = 0. b) z3 + 8 = 0. c) z4 + 1 = 0. d) z (z − 3)2 + 16z = 0.
Exercício 33 Seja T : C2 → C2 a transformação linear definida por T (z1, z2) = (−z2, z1) .a) Calcule o polinómio da matriz que representa T.
b) Quais os valores próprios e os subespaços próprios de T?
c) Determine uma base de C2 constituída por vectores próprios de T. Qual é a representaçãomatricial de T nesta base?
Exercício 34 T : C2 → C2 é a transformação linear que na base canónica de C2 é repre-sentada pela matriz
A =
0 2−2 0
.
a) Indique o polinómio característico de A.
b) Calcule os valores próprios e os subespaços próprios de T.
c) Determine uma matriz de mudança de base S e uma matriz diagonal D tais que D =S−1AS.
14

Exercício 35 Seja T : C3 → C3 a transformação linear definida por
T (z1, z2, z3) = (z1 + z2 − z3, z2, z1 − z2 + z3) .
a) Calcule o polinómio característico da matriz que representa T.
b) Determine os valores próprios e os subespaços próprios de T.
c) Determine uma base de C3 constituída por vectores próprios de T. Qual é a representaçãomatricial de T nesta base?
d) Designando por A a matriz que representa T na base canónica de C3, determine umamatriz de mudança de base S e uma matriz diagonal D tais que D = S−1AS.
Exercício 36 Considere as matrizes:
A =
1 10 2
, B =
−1 2−4 5
e C =
10 −424 −10
.
Mostre que todas são diagonalizáveis e calcule An, Bn e Cn, para n ∈ N.
Exercício 37 Considere as matrizes:
A =
1 1−1 1
e B =
2 1−4 2
.
Mostre que as matrizes A e B (não sendo diagonalizáveis enquanto matrizes reais) sãodiagonalizáveis enquanto matrizes complexas. Calcule An e Bn, para n ∈ N.
Exercício 38 A matriz
A =
a −bb a
com a, b ∈ R, b = 0, tem valores próprios complexos λ = a ± ib. Mostre que transformaçãolinear que A representa consiste na composição de uma rotação seguida de uma mudança deescala. Ou seja, que
A =
ρ 00 ρ
cos θ − sin θsin θ cos θ
.
Exercício 39 Com base no exercício anterior calcule An, onde
A =
1 −11 1
.
Particularize para o cálculo de A10 e A12.
15

4 Aplicação à resolução de algumas equações diferen-
ciais
Exercício 40 Seja T : P2 → P2 a transformação linear definida por
T (p(t)) = p′(t)− 2p(t).
a) Qual a matriz que representa T na base canónica 1, t, t2 de P2?b) Mostre que T é bijectiva e calcule a matriz que representa T−1 na mesma base. Justifiqueque, para qualquer polinómio q(t) ∈ P2,
T−1(q(t)) = −12q(t)− 1
4q′(t)− 1
8q′′(t).
c) Resolva em P2 a equação diferencial p′(t)− 2p(t) = 1 + t+ t2.
Exercício 41 Seja T : P2 → P2 a transformação linear definida por
T (p(t)) = t2p′′(t)− 2p(t).
a) Que matriz representa T na base canónica 1, t, t2 de P2?b) Determine uma base do NucT e conclua que T não é injectiva nem sobrejectiva.
c) Resolva em P2 a equação diferencial t2p′′(t)− 2p(t) = 1.
Exercício 42 No espaço vectorial C2 (R) das funções reais de variável real duas vezes dife-renciáveis, considere a transformação linear T : C2 (R)→ C2 (R) definida por
T (f) = f ′′ − 2f ′ + f.
a) Indique uma base de NucT (ver Exercício 49 da Ficha 2).
b) Sabendo que f(t) ≡ 1 é uma solução da equação linear T (f) = 1, calcule a única soluçãoda mesma equação que verifica f(0) = f ′ (0) = 0.
Exercício 43 Considere o sistema de equações diferenciais linearesx′1(t)x′2(t)
= A
x1(t)x2(t)
, com A =
2 11 2
.
Decida quais dos seguintes pares de funções são soluções deste sistema: (−et,et), (e3t, e3t),(et, e3t).
Exercício 44 Considere uma matrizA ∈M2×2 (R) e designe por SA o conjunto das soluçõesdo sistema
x′1(t)x′2(t)
= A
x1(t)x2(t)
.
a) Mostre que SA com as operações usuais de adição e multiplicação por escalar tem estruturade espaço linear.
16

b) Mostre que se D =
λ1 00 λ2
, então os pares de funções (eλ1t, 0) e (0, eλ2t) constituem
uma base para SD, e portanto
SD =c1eλ1t, c2eλ2t
: c1, c2 ∈ R
.
Sugestão: mostre que se (x1(t), x2(t)) ∈ SD , então x1(t)e−λ1t e x2(t)e−λ2t são funçõesconstantes.
c) Mostre que se J =
λ 10 λ
, então os pares de funções (eλt, 0) e (teλt, eλt) constituem
uma base para SJ , e portanto
SJ =c1eλt + c2teλt, c2eλt
: c1, c2 ∈ R
.
Sugestão: mostre que se (x1(t), x2(t)) ∈ SJ então x2(t)e−λt é uma função constante ex1(t)e−λt é um polinómio com grau 1.
d) Mostre que se S é uma matriz de mudança de base e B = S−1AS, então tem-se:
SA =S
y1(t)y2(t)
: (y1(t), y2(t)) ∈ SB
.
Exercício 45 Considere a matriz
A =
2 11 2
.
a) Mostre que A é diagonalizável, identificando uma matriz diagonal D e uma matriz demudança de base S tais que A = SDS−1.
b) Resolva o sistema de equações diferenciais
x′1(t) = 2x1(t) + x2 (t)x′2(t) = x1(t) + 2x2 (t)
Exercício 46 Considere a matriz
A =
2 1−2 5
.
a) Mostre que A é diagonalizável, identificando uma matriz diagonal D e uma matriz demudança de base S tais que A = SDS−1.
b) Calcule a única solução do problema de valores iniciais
x′1(t) = 2x1(t) + x2 (t)x′2(t) = −2x1(t) + 5x2 (t)
, x1(0) = 1, x2(0) = −1.
17

5 Soluções
1) a) −1. b) 0. c) 30. d) 1. e) 30. f) 0. 2) a) 3. b) 6. c) 0. d) 18. e) 15. f) −453) a) 5. b) 10. c) 5. d) 10. 4) −δγ.6) λn, onde n é o número de linhas (e de colunas da matriz).
8)a) −9; b) −5; c) −7; d) 6; e) 15; f) −45.
9) Falso; det
1 0 11 1 00 1 1
= 2.
10) a) −9. b) −5. c) −7. 11) a) 7. b) 14. c) 21. 12) a) 22. b) 15.
13) detA = −2, detB = 4. a) −54. b) −128. c) −2. d) 1.
14) a) CofA =
−2 1 04 −2 1−7 4 −2
, detA = 1 e A−1 =
−2 4 −71 −2 40 1 −2
.
b) CofA =
−2 −3 4−2 2 −11 −1 −2
, detA = −5 e A−1 =
2/5 2/5 −1/53/5 −2/5 1/5−4/5 1/5 2/5
.
c) CofA =
3 −1 −20 1 −10 0 3
, detA = 3 e A−1 =
1 0 0
−1/3 1/3 0−2/3 −1/3 1
.
d) CofA =
−9 6 −318 −12 6−9 6 −3
,detA = 0 e A não é invertível.
15) a) (−9, 5,−2) . b) (1, 0,−1) .18) v1 e v3 não são vectores próprios de T ; v2 é vector próprio de T associado ao valorpróprio −1, v4 é vector próprio de T associado ao valor próprio 3.19) v2, v3 e v5 são vectores próprios de T ; −2, 0 e 4 são os respectivos valores próprios.20) v2 é vector próprio de T associado ao valor próprio 5, v3 e v5 são vectores própriosassociados ao valor próprio −1.
21)0 00 2
. 22)
0 0 00 1 00 0 0
.
23) a) P (λ) = (λ− 1) (λ− 3) .b) 1 e 3 são os valores próprios de T. Os subespaços próprios de T são:
E (1) = L(1, 0) e E (3) = L(1, 1) .
c)1 00 3
.
18

24) a) σ (A) = −1, 5 b) E (−1) = L(−1, 1) e E (5) = L(1, 1) . c) D =−1 00 5
e S =−1 11 1
.
25 a) σ (A) = 2 . b) E (2) = L(1, 0) . c) dimE (2) = 1 = dimR2 = 2.26) a) P (λ) = λ (3− λ) (λ− 1) .b) 0, 1 e 3 são os valores próprios de T. Os subespaços próprios são:
E (0) = L(1, 0, 0) , E (1) = L(0,−1, 1) e E (3) = L(2, 3, 3) .c) (1, 0, 0) , (0,−1, 1) , (2, 3, 3) .
d) D =
0 0 00 1 00 0 3
e S =
1 0 20 −1 30 1 3
.
27) a) P (λ) = (3− λ) (λ− 2)2 .b) 2 e 3 são os valores próprios de T. Os subespaços próprios são:
E (2) = L(0, 1, 0) e E (3) = L(1, 0, 0) .c) Não existe uma base de R3 formada por vectores próprios de T porque
dimE (2) + dimE (3) = 2 = dim R3.
28) a) σ (A) = 6, 9 .b) E (6) = L(0, 1, 1) e E (9) = L(2, 3, 0) , (1, 0, 3) .
c) S =
0 2 11 3 01 0 3
e D =
6 0 00 9 00 0 9
.
29) a) σ (A) = 1, 2 .b) E (1) = L (t− 3/2) , E (2) = L (t− 1) .
c) T é representada por D =1 00 2
na base t− 3/2, t− 1 .
30) a) A =
1 1 00 1 20 0 1
. b) (1− λ)3 .
c) 1 é valor próprio de T. E (1) = L1 .d) Não: dimE (1) = 1 = 3 = dimP2.
32) a) z = ±1 e z = ±i. b) z = 1± i√3 e z = −2.
c) z =√2± i
√2/2 e z =
−√2± i
√2/2. d) z = 0 e z = 3± 4i.
33) a) P (z) = z2 + 1. b) ±i são os valores próprios de T ;E (i) = L(i, 1) eE (−i) = L(−i, 1) .
19

c) (i, 1) , (−i, 1) é base de C2; D =i 00 −i
.
34) a) P (z) = z2 + 4. b) ±2i são os valores próprios de T ; E (2i) = L(−i, 1) eE (−2i) = L(i, 1) .
c) (i, 1) , (−i, 1) é base de C2; D =−2i 00 2i
, S =
i −i1 1
.
35) a) P (z) = (1− z)(1− z)2 + 1
. b) 1 e 1± i são os valores próprios de T ;
E (1) = L(1, 1, 1) , E (1 + i) = L(i, 0, 1) e E (1− i) = L(−i, 0, 1) .
c) (1, 1, 1) , (i, 0, 1) , (−i, 0, 1) é base de C2; D =
1 0 00 1 + i 00 0 1− i
.
d) S =
1 i −i1 0 01 1 1
e D.
36 An =
1 2n − 10 2n
, Bn =
2− 3n 3n − 12− 2 (3n) 2 (3n)− 1
e
Cn =
3 (2n)− 2 (−2)n (−2)n − (2n)6 (2n)− 6 (−2)n 3 (−2)n − 2 (2n)
.
37) An =√2ncos(nπ/4) sin(nπ/4)− sin(nπ/4) cos(nπ/4)
e Bn =
√8ncos(πn/4) 1
2sin(πn/4)
−2 sin(πn/4) cos(πn/4)
.
39) An =
2n/2 cos (nπ/4) −2n/2 sin (nπ/4)2n/2 sin (nπ/4) 2n/2 cos (nπ/4)
. A10 =
0 −3232 0
; A12 =
−64 00 64
.
40) a)
−2 1 00 −2 20 0 −2
. b)
−1/2 −1/4 −1/40 −1/2 −1/20 0 −1/2
. c) −1− t− t2/2.
41) a)
−2 0 00 −2 00 0 0
. b) t2 é base de NucT. c) p (t) = −1/2 + a t2, com a ∈ R.
42) a) et, tet . b) f (t) = tet − et + 1.
43) Sim, sim, não.
45) a) D =1 00 3
e S =
−1 11 1
; b) SA = (−c1et + c2e3t, c1et + c2e3t) : c1, c2 ∈ R
46) a) S =1 11 2
e D =
3 00 4
; b) (3e3t − 2e4t, 3e3t − 4e4t)
20

IST - 2o Semestre de 2012/13
LEGM, LMAC, MEFT, MEBiom, MEC
EXERCÍCIOS DE ÁLGEBRA LINEAR
FICHA 5 - Ortogonalidade
1
1 Produto interno e ortogonalidade
Dados u,v ∈ Rn, u = (u1, ..., un) ,v = (v1, ..., vn) define-se o produto interno (usual)de u por v, como sendo o valor real
u · v = u1v1 + ...+ unvn.
Também se usa a notação u,v com o mesmo significado de u ·v. Considerando os vectorescoluna
u =
u1...un
, v =
v1...vn
,
o produto interno pode descrever-se em termos de um produto matricial:
u · v = uTv.
O produto interno possui as seguintes propriedades:
i) u · v = v · u (comutatividade).
ii) u · (v+w) = u · v + u ·w (distributividade).
iii) u · (αv) = α (u · v) , ∀α ∈ R.
iv) u · u 0 e u · u = 0 se e só se u = 0.
À custa do produto interno definimos a norma de um vector u ∈ Rn, u , através darelação
u = (u · u)1/2 =u21 + ...+ u2n.
No caso de R3 (e R2) o valor real não negativo u , coincide com a habitual noção docomprimento do vector u. Tem-se ainda que com u,v ∈ R3 (e R2)
u · v = u v cos θ,
1Coligidos por: João Ferreira Alves, Ricardo Coutinho e José M. Ferreira.
1

onde θ ∈ [0, π] é o (menor) ângulo entre u e v. A distância entre u e v é definida pelo valoru− v .
São válidas as seguintes propriedades da norma:
i) u 0 e u = 0 se e só se u = 0.
ii) αu = |α| u , ∀α ∈ R.
iii) |u · v| u v (desigualdade de Cauchy2-Schwarz3).
iv) u+ v u+ v (desigualdade triangular).
1.1 Vectores e subespaços ortogonais
Dois vectores u,v ∈ Rn são ditos ortogonais (u ⊥ v) se u · v = 0.
Dois subespaços U e V de Rn dizem-se ortogonais se
u · v = 0, ∀u ∈ U, ∀v ∈ V.
Dois vectores u e v são ortogonais se e só se u+ v2 = u2 + v2 (Teorema dePitágoras).
Dado um subespaço U de Rn, toma o nome de complemento ortogonal de U, oconjunto
U⊥ = w ∈ Rn : w · u = 0, ∀u ∈ U .A respeito deste conceito são válidas as seguintes afirmações:
• U⊥ é um subespaço de Rn.
• U e U⊥ são subespaços ortogonais.
• U ∩ U⊥ = 0 .
• dimU + dimU⊥ = n.
• U + U⊥ = Rn
•U⊥⊥ = U.
• L (u1, ...,up)⊥ = w ∈ Rn : w · u1 = 0, ...,w · up = 0 .
• Dada uma matriz real, S, n× p então:
i) (ColS)⊥ = NulST . ii) (NulS)⊥ = ColST .
2Augustin Louis Cauchy, n. em Paris, França, a 21 de Agosto de 1789, m. em Sceaux, França, a 23 deMaio de 1857.
3Herman Amandus Schwarz, n. em Hermsdorf, Polónia, a 25 de Janeiro de 1843, m. em Berlim, Alema-nha, a 30 de Novembro de 1921.
2

1.2 Exercícios
Exercício 1 Para os casos a seguir indicados calcule u · v e cos θ (θ = ∡ (u,v)) .
a) u = (−1, 1, 0) , v = (0, 0, 1) .
b) u = (1, 2,−1) , v = (3, 1, 0) .
c) u = (−2,−1, 1) , v = (3, 1,−2 ) .
Exercício 2 Os vectores u = (3,−2, 1) e v = (1,−3, 5) constituem os lados dum triângulorectângulo? Qual a área do triângulo?
Exercício 3 Mostre que
u · v =u+ v2 − u− v2
4
Exercício 4 Prove a identidade do paralelogramo:
u− v2 + u+ v2 = 2 u2 + 2 v2 .
Exercício 5 Determine uma base do complemento ortogonal do subespaço U de R3 quando:
a) U = L(1, 1, 1) , (1, 0, 1) .
b) U = L(1, 0, 2) .
c) U = (x, y, z) ∈ R3 : x+ y − z = 0 .
d) U = (x, y, z) ∈ R3 : x+ z = 0, y + z = 0 .
Exercício 6 Encontre uma base do complemento ortogonal do subespaço U de R4 nos se-guintes casos:
a) U = L(1, 0, 1, 1) .
b) U = (x, y, z, w) ∈ R4 : x+ 2y + z + 2w = 0, x+ 2y − z = 0 .
c) U = L(1, 0, 1, 1), (1, 0, 1, 0) .
d) U = L(1, 0, 1, 1), (1, 0, 1, 0), (1, 2, 2, 0) .
e) U = (x, y, z, w) ∈ R4 : x− y + z − w = 0, 2y − z = 0, x+ y − w = 0 .
f) U = L(1, 0, 1, 1), (1, 0, 1, 0), (1, 0,−1, 0), (0, 1, 0, 0) .
g) U = (x, y, z, w) ∈ R4 : x− y + z − w = 0, 2y − z = 0, z − w = 0, z + w = 0 .
3

2 Bases ortogonais
U = u1, ...,up ⊂ Rn diz-se um conjunto ortogonal de Rn se os vectores de U foremortogonais dois a dois. Isto é, se
uj · uk = 0, ∀j = k.
Se além disso, se tiveruj = 1, ∀j,
diremos que U é um conjunto ortonormado.
Relativamente a estes conjuntos é possível obter as seguintes conclusões:
• São linearmente independentes os vectores de qualquer conjunto ortogonal que nãocontenha o vector nulo.
• Qualquer conjunto ortogonal de n vectores diferentes do vector nulo é uma base de Rn.
2.1 Projecção ortogonal sobre um vector
Dados u,v ∈ Rn, chama-se projecção ortogonal de v sobre u, ao vector
Proju v =v · uu · uu.
Tem-se que o vector w = v − Projuv é tal que w ⊥ Proj
uv e que
min v − u′ : u′ ∈ L (u) = distância de v a L (u) = w = v − Projuv .
2.2 Método de ortogonalização de Gram-Schmidt
As projecções ortogonais sobre um vector permitem-nos formular um algoritmo que, apartir de uma qualquer base B = u1, ...,up de um dado subespaço U de Rn, nos dê umabase ortogonal de U , Ω = v1, ...,vp , onde:
v1 = u1
v2 = u2 − Projv1 u2
v3 = u3 − Projv1u3 − Proj
v2u3
.................
vp = up − Projv1 up − Projv2 up − ...− Projvp−1 up
Este algoritmo toma o nome de método de ortogonalização de Gram4-Schmidt5.
4Jorgen Pederson Gram, n. em Nurstrup, Dinamarca, a 27 de Junho de 1850, m. em Copenhaga,Dinamarca, a 29 de Abril de 1916.
5Erhard Schmidt, n. em Tartu, Estónia, a 13 de Janeiro de 1876, m. em Berlim, Alemanha, a 6 deDezembro de 1959.
4

A partir deste método podemos generalizar o noção de projecção de um vector sobre umsubespaço U de Rn. Se Ω = u1, ...,up for uma base ortogonal de U, com v ∈ Rn chama-seprojecção ortogonal de v sobre U ao vector
ProjU v = Proju1v + ...+ Proj
upv.
Tem-se que o vector v − ProjU v = ProjU⊥ v é ortogonal a U e que
distância de v a U = min v − u : u ∈ U = v − ProjU v = ProjU⊥ v .
Em particular, a projecção de v sobre um vector u é tal que
Proju v = ProjL(u) v.
2.3 Matrizes ortogonais
Uma matriz A, real e n× n, diz-se uma matriz ortogonal se for invertível e se a suamatriz inversa coincidir com a sua transposta, ou seja se
AAT = AT A = I.
A este propósito são equivalentes as seguintes afirmações:
• A é ortogonal.
• As colunas de A formam um conjunto ortonormado.
• (Ax) · (Ay) = x · y, ∀x,y ∈ Rn.
• Ax = x , ∀x ∈ Rn.
2.4 Matrizes ortogonalmente diagonalizáveis
Uma matriz A, real e n × n, diz-se uma matriz ortogonalmente diagonalizável sefor semelhante a uma matriz diagonal, D, cuja matriz de semelhança, S, seja ortogonal. Istoé, se
A = SDS−1
com S−1 = ST .
Facilmente se verifica que uma matriz ortogonalmente diagonalizável, A é necessaria-mente uma matriz simétrica, ou seja, AT = A. O inverso também sucede como se estabeleceno seguinte teorema:
Teorema espectral das matrizes simétricas. Seja A uma matriz real, n×n e simétrica.Então:
• σ (A) ⊂ R.
• Os espaços próprios de A são ortogonais.
• A é ortogonalmente diagonalizável.
5

2.5 Exercícios
Exercício 7 Dos casos seguintes indique aqueles em que Ω = u1,u2,u3 é uma base orto-gonal de R3. Nos casos afirmativos transforme Ω numa base ortonormada.
a) u1 = (−1, 4,−3) , u2 = (5, 2, 1) , u3 = (3,−4,−7) .b) u1 = (1,−2, 1) , u2 = (0, 1, 2) , u3 = (−5,−2, 1) .c) u1 = (2,−5,−3) , u2 = (0, 0, 0) , u3 = (4,−2, 6) .
Exercício 8 Seja U = (x, y, z) ∈ R3 : x− y − z = 0, x+ y + z = 0 .a) Determine a projecção ortogonal de (3, 0,−1) sobre U.
b) Qual a distância de (3, 0,−1) a U?
Exercício 9 Seja U um subespaço de Rn e b1,b2, ..,bp uma base ortogonal de U. Verifiqueque para qualquer x ∈ U é válida a seguinte igualdade:
x = Projb1
(x) + Projb2
(x) + ...+ Projbp
(x)
Exercício 10 Verifique que os vectores b1 = (1, 1, 0), b2 = (1,−1,−1), b3 = (1,−1, 2)formam uma base ortogonal de R3 e determine as coordenadas do vector v = (3, 2, 1) nestabase.
Exercício 11 Com u = 0, vector de R3, considere a recta L = L (u) . Para cada x ∈ R3designe por x∗ a reflexão de x relativamente a L.
a) Justifique quex∗ = 2 ProjL (x)− x.
b) Justifique que transformação T : R3 → R3 dada por T (x) = x∗ é linear.
c) Para u = (1, 0, 1) , qual a matriz que representa T?
Exercício 12 Considere o produto interno usual em R4 e os seguintes dois vectores ortogo-nais e normalizados:
u1 =
2
3,2
3,1
3, 0
e u2 =
2
3,−23, 0,
1
3
Considere ainda v = (1, 0, 0, 0). Determine um vector u3 de modo que u1, u2 e u3 formemuma base ortonormada do subespaço L (u1,u2,v).
Exercício 13 Em R3, com o produto interno usual, considere o subespaço
U = L (1, 1, 1) , (1, 0, 0) .
a) Calcule a projecção ortogonal de (1, 0, 1) sobre U .
b) Qual é a distância de (1, 0, 1) a U?
6

Exercício 14 Em R3, com o produto interno usual, considere o subespaço
U =(x, y, z) ∈ R3 : x− y = 0
.
a) Calcule a projecção ortogonal de (1, 0, 0) sobre U .
b) Qual é a distância de (1, 0, 0) a U?
Exercício 15 Considere o subespaço U = L(1, 1, 1, 1) , (1, 0, 1, 0) de R4.
a) Obtenha uma base ortonormada para U.
b) Determine a projecção ortogonal de (0, 1, 0, 2) sobre U.
c) Qual a distância de (0, 1, 0, 2) a U?
Exercício 16 Considere o subespaço U = (x, y, z, w) ∈ R4 : x− y + z − w = 0 como su-bespaço do espaço euclidiano usual R4.
a) Determine uma base de U⊥ que seja ortonormada.
b) Qual a projecção ortogonal de (1, 0, 1, 0) sobre U?
c) Calcule a distância de (1, 0, 1, 0) a U?
Exercício 17 Seja U = (x, y, z, w) ∈ R4 : x− y + z = 0, y − z + w = 0 .a) Obtenha uma base ortonormada de U.
b) Determine a projecção ortogonal de (0, 0, 1, 0) sobre U.
c) Indique a distância de (0, 0, 1, 0) a U.
Exercício 18 a) Verifique que
A =
cos θ − sin θsin θ cos θ
é uma matriz ortogonal.
b) Qual a inversa de
B =
12
−√32
√32
12
?
Exercício 19 Determine a e b de modo que
A =
13
23
23
23
a b
23
b a
seja uma matriz ortogonal.
Exercício 20 Sejam A,B ∈ Mn×n (R) duas matrizes ortogonais. Verifique se AB ou A+Bsão também ortogonais.
7

3 Formas quadráticas
Uma forma quadrática é uma função Q : Rn → R cuja expressão analítica do seguintetipo:
Q (x1, ..., xn) =
i.j=1
aijxixj,
onde aij ∈ R, i, j = 1, ..., n.
Com
x =
x1...xn
qualquer forma quadrática pode assumir a forma
Q (x1, ..., xn) = xTAx,
com A matriz real, n× n e simétrica. Por exemplo, a forma quadrática Q : R2 → R,
Q (x1, x2) = 2x21 − 3x1x2 + 4x22
= [x1 x2]
2 −3/2
−3/2 4
x1x2
.
3.1 Classificação das formas quadráticas
Pondo x = (x1, ..., xn) , uma forma quadrática Q (x) e as matrizes simétricas que lheestão associadas são classificadas em:
1. Definidas positivas se Q (x) > 0, ∀x ∈ Rn\ 0 .
2. Definidas negativas se Q (x) < 0, ∀x ∈ Rn\ 0 .
3. Semidefinidas positivas se Q (x) 0, ∀x ∈ Rn.
4. Semidefinidas negativas se Q (x) 0, ∀x ∈ Rn.
5. Indefinidas se Q (x) tomar valores positivos e negativos.
3.2 Formas quadráticas e valores próprios
A partir da relaçãoQ (x1, ..., xn) = x
TAx,
com A matriz real, n× n e simétrica, como A é ortogonalmente diagonalizável temos que
xTAx = xTSDST x
em que D é uma matriz diagonal, n × n, e S uma matriz ortogonal também n × n. ComyT =
y1 ... yn
, fazendo então
y = STx
8

temos quexTAx = yTDy.
Isto significa que através da mudança de variável x = Sy, a forma quadrática Q pode serdescrita, na nova variável, através da expressão
Q (y1, ..., yn) = yTDy = λ1y
21 + ...+ λny
2n,
onde λ1, ..., λn, são os números reais que constituem o espectro de A, ou seja os seus valorespróprios.
Este facto permite-nos então concluir:
1. Q é uma forma definida positiva se e só se todos os valores próprios de A são positivos.
2. Q é uma forma definida negativa se e só se todos os valores próprios deA são negativos.
3. Q é uma forma semidefinida positiva se e só se todos os valores próprios de A são nãonegativos.
4. Q é uma forma semidefinida negativa se e só se todos os valores próprios de A são nãopositivos.
5. Q é uma forma indefinida se e só se A tiver valores próprios positivos e negativos.
3.3 Exercícios
Exercício 21 Classifique as seguintes matrizes simétricas.
a)
1 11 1
. b)
2 11 2
. c)
−3 11 −2
.
d)
3 22 0
. e)
1 2 02 1 00 0 3
. f)
2 0 10 −2 01 0 2
.
Exercício 22 Com base no exercício anterior classifique as seguintes formas quadráticas.
a) Q(x1, x2) = x21 + x22 + 2x1x2.
b) Q(x1, x2) = 2x21 + 2x22 + 2x1x2.
c) Q(x1, x2) = −3x21 + 2x2x1 − 2x22.
d) Q(x1, x2) = 3x21 + 4x2x1.
e) Q(x1, x2, x3) = x21 + x22 + 3x23 + 4x2x1.
f) Q(x1, x2, x3) = 2x21 − 2x22 + 2x23 + 2x3x1.
Exercício 23 Para cada uma das formas quadráticas do exercício anterior, à excepção dac), proceda a uma mudança de variável x = Sy, indicando a respectiva matriz S, de modo aobter Q sem termos com produtos cruzados.
9

4 Produto interno em espaços vectoriais gerais
Dado um espaço vectorial V sobre R, um produto interno definido em V é uma aplicação., . : V × V → R que satisfaz as seguintes propriedades válidas para quaisquer u,v,w ∈ Ve α, β ∈ R:
i) u,v = v,u (simetria).
ii) (αu+ βv) ,w = α u,w+ β v,w (linearidade).
iii) u,u 0 e u,u = 0 se e só se u = 0 (positividade).
Dado um espaço vectorial V sobre C, um produto interno definido em V é uma aplicação., . : V × V → C que satisfaz as seguintes propriedades válidas para quaisquer u,v,w ∈ Ve α, β ∈ C:
i) u,v = v,u (simetria hermiteana).
ii) (αu+ βv) ,w = α u,w+ β v,w (linearidade).
iii) u,u 0 e u,u = 0 se e só se u = 0 (positividade).
Note-se que u, (αv + βw) = α u,v+ β u,w
À custa dum produto interno ., . definido em V definimos a correspondente normade um vector u ∈ V, u , através da relação
u =u,u.
São válidas as seguintes propriedades da norma:
i) u 0 e u = 0 se e só se u = 0.
ii) αu = |α| u , ∀α ∈ K.
iii) |u · v| u v (desigualdade de Cauchy6-Schwarz7).
iv) u+ v u+ v (desigualdade triangular).6Augustin Louis Cauchy, n. em Paris, França, a 21 de Agosto de 1789, m. em Sceaux, França, a 23 de
Maio de 1857.7Herman Amandus Schwarz, n. em Hermsdorf, Polónia, a 25 de Janeiro de 1843, m. em Berlim, Alema-
nha, a 30 de Novembro de 1921.
10

Dois vectores u,v ∈ V são ditos ortogonais (u ⊥ v) se u,v = 0.
Se dois vectores u e v são ortogonais, então u+ v2 = u2 + v2 (Teorema dePitágoras).
Define-se o ângulo θ entre dois vectores u,v do espaço vectorial V sobre R munidodo produto interno ., . de forma a que seja válida a fórmula
u,v = u v cos θ, ou seja θ = arccosu,vu v .
Dois subespaços U e W de V dizem-se ortogonais se
u,v = 0, ∀u ∈ U, ∀v ∈W.
Dado um subespaço U de V, toma o nome de complemento ortogonal de U, o subes-paço de V definido por
U⊥ = w ∈ V : u,w = 0, ∀u ∈ U .
4.1 Projecções em subespaços de dimensão finita
U = u1, ...,up ⊂ V , diz-se um conjunto ortogonal do espaço vectorial V munidode um produto interno ., . se os vectores de U forem ortogonais dois a dois. Isto é, se
uj ,uk = 0, ∀j = k.
Se além disso, se tiveruj = 1, ∀j,
diremos que U é um conjunto ortonormado.
Dados u,v ∈ V, chama-se projecção ortogonal de v sobre u, ao vector
Projuv =
v,uu,uu.
Tem-se que o vector w = v − Projuv é tal que w ⊥ Proj
uv e que
min v − u′ : u′ ∈ L (u) = distância de v a L (u) = w = v − Projuv .
O método de ortogonalização de Gram-Schmidt mantém a mesma forma e per-mite a partir de uma qualquer base B = u1, ...,up de um dado subespaço U (de dimensãofinita) de V obter uma base ortogonal Ω = v1, ...,vp de U :
v1 = u1
v2 = u2 − Projv1 u2
v3 = u3 − Projv1u3 − Proj
v2u3
.................
vp = up − Projv1 up − Projv2 up − ...− Projvp−1 up
11

Dado U um subespaço de V de dimensão finita e u1,u2, ..,up uma base ortogonal deU , então para qualquer u ∈ U é válida a seguinte igualdade:
u = Proju1
(u) + Proju2
(u) + ...+ Projup
(u)
Se Ω = u1, ...,up for uma base ortogonal de U, com v ∈ V chama-se projecçãoortogonal de v sobre U ao vector
ProjU v = Proju1v + ...+ Proj
upv.
Tem-se que o vector v − ProjU v é ortogonal a U e que
distância de v a U = min v− u : u ∈ U = v − ProjU v .
Em particular, a projecção de v sobre um vector u é tal que Projuv = ProjL(u) v.
4.2 Produtos internos em espaços de dimensão finita
A espaço vectorial de dimensão finita V munido de um produto interno ., . dá-se onome de espaço euclidiano.
Dada uma base B = u1, ...,un do espaço vectorial V sobre R (resp. sobre C) a cadaproduto interno ., . corresponde uma matrizM simétrica (resp. hermítica i.e. MT =M )e definida positiva que o representa: se [v]B = xT = [x1, ..., xn] e [w]B = yT = [y1, ..., yn] sãoas coordenadas de v e w ∈ V na base B, então
v,w = xTMy (resp. v,w = xTMy),
ondeM = [ui,uj]1i,jn
4.3 Exercícios
Exercício 24 Identifique as aplicações ., . : R2×R2 → R que definem em R2 um produtointerno:
a) (x1, x2) , (y1, y2) = x1y1 + x2y2
b) (x1, x2) , (y1, y2) = x1y1 + x1y2 + x2y2
c) (x1, x2) , (y1, y2) = −2x1y1 + 3x2y2
d) (x1, x2) , (y1, y2) = 3x1y1 + 2x2y1 + 2x1y2 + 3x2y2
Exercício 25 Identifique as aplicações ., . : R3×R3 → R que definem um produto internoem R
3:
a) (x1, x2, x3) , (y1, y2, y3) = x1y1 + x2y2 + x3y3
b) (x1, x2, x3) , (y1, y2, y3) = x1y1 + 2x1y2 + x2y2 + 3x1y3 + x2y3 + x3y3
c) (x1, x2, x3) , (y1, y2, y3) = 2x1y1 + x2y1 + x1y2 + 2x2y2 + 2x3y3
12

Exercício 26 Considere em R2 o produto interno definido por
x,y = x1y1 − x2y1 − x1y2 + 2x2y2.
a) Calcule x, para um qualquer vector x = (x1, x2) ∈ R2;b) Calcule o ângulo determinado pelos vectores (1, 0) e (1, 1);
c) Conclua pelas alíneas anteriores que os vectores v1 = (1, 0) e v2 = (1, 1) constituem umabase ortonormada de R2. Calcule as componentes de um vector x = (x1, x2) ∈ R2 em relaçãoa esta base.
Exercício 27 Considere em R3 o produto interno definido por
x,y = x1y1 + 4x2y2 + 2x3y2 + 2x2y3 + 5x3y3.
a) Calcule x, para um qualquer vector x = (x1, x2, x3) ∈ R3;b) Considere os vectores v1 = (1, 0, 0), v2 = (0, 1/2, 0) e v3 = (0,−1/4, 1/2). Calcule osângulos determinados pelos vectores: v1e v2; v1 e v3; v2 e v3.
c) Conclua pelas alíneas anteriores que v1,v2,v3 é uma base ortonormada de R3. Calculeas componentes de um vector x = (x1, x2, x3) ∈ R3 em relação a esta base.
Exercício 28 Considere em P2 o produto interno definido por:
p (t) , q (t) = p(−1)q(−1) + p(0)q(0) + p(1)q(1).
a) Calcule p (t) para um qualquer polinómio p (t) ∈ P2.b) Mostre que os polinómios
p1(t) = 1− t2, p2(t) =1
2t+
1
2t2 e p3(t) = −
1
2t+
1
2t2
constituem uma base ortonormada de P2. Calcule as componentes do polinómio p (t) = 1nesta base.
Exercício 29 Considere em P2 o produto interno definido por:
p (t) , q (t) = p (0) q (0) + p′ (0) q′ (0) + p′ (1) q′ (1) .
a) Calcule p (t) para um qualquer polinómio p (t) ∈ P2.b) Calcule o ângulo determinado pelos polinómios p(t) = 1 e q(t) = 2 + t2.
Exercício 30 Considere o espaço linear P2 com o seguinte produto interno:
p (t) , q (t) = p(−1)q(−1) + p(0)q(0) + p(1)q(1).
Considere ainda o subespaço de P2
U = p(t) ∈ P2 : p(0) = 0 .
a) Calcule a projecção ortogonal do polinómio 1 + t sobre U .
b) Qual é a distância de 1 + t a U?
13

5 Geometria dos k-planos
Num espaço euclidiano V , um k-plano é um conjunto da forma
Pk = p0+ U,
onde p0 ∈ V e U é um subespaço de V com dimU = k.
Um 0-plano é um ponto, um 1-plano é uma recta e um 2-plano é um plano. Se dimV = n,então um n-plano é o próprio espaço V e não existem k-planos com k > n.
Se Pk = p0+U e p1 ∈ Pk, então Pk também admite a representação Pk = p1+U .
Sejam p0, p1, ...,pk ∈ V , k + 1 pontos distintos do espaço euclidiano V , então existe omenor k′-plano que passa nesses pontos definido por
Pk′ = p0+ Lp1 − p0, ...,pk − p0
e se p1 − p0, ...,pk − p0 é linearmente independente k′ = k.
5.1 Representações paramétricas e cartesianas de k-planos
Se Pk = p0+ Lu1, ...,uk, então p ∈ Pk é equivalente a
p = p0 + x1u1 + · · ·+ xkuk, com x1, ..., xk escalares,
que constituem equações paramétricas do k-plano Pk.Se w1, ..., wn−k é uma base de U⊥ então p ∈ Pk = p0+ U se e só se
p− p0,wj = 0, para j = 1, ..., n− k,
que constituem equações cartesianas do k-plano Pk.
5.2 Distância entre k-planos
Seja Pk = p0+ U um k-plano e Qs = q0 +W um s-plano de um espaço euclidiano V ,a distância entre estes conjuntos é dada por
min p− q : p ∈ Pk, q ∈ Qs =Proj(U+W )⊥ (p0 − q0)
.
Em particular a distância de um ponto q ∈ V a Pk = p0+ U é dada por
min p− q : p ∈ Pk = ProjU⊥ (p0 − q) .
Note-se que por definição Proj0 v = 0.
14

5.3 Exercícios
Exercício 31 Para cada uma das rectas de R3, calcule um ponto p e um subespaço S taisque r = p+ S :
a) r é a recta de R3 que passa pelos pontos (1, 1, 1) e (1, 0, 1) ;
b) r é a recta de R3 que passa pelo ponto (1, 0, 2) e tem a direcção do vector (1, 1, 0) ;
c) r é a recta de R3 que passa pelo ponto (1, 3,−1) e é ortogonal aos vectores (1, 2, 1) e(1, 0, 1).
Exercício 32 Determine uma equação cartesiana para cada uma das rectas do exercícioanterior.
Exercício 33 Para cada um dos planos de R3, calcule um ponto p e um subespaço S taisque α = p+ S :
a) α é o plano de R3 que passa pelos pontos (1, 1, 1) , (1, 0, 1) e (1, 0, 0) .
b) α é o plano de R3 que passa pelo ponto (1, 0, 2) e é paralelo ao plano que passa pelospontos (0, 0, 0), (1, 1, 0) e (1,−1, 0) .c) α é o plano de R3 que passa pelo ponto (1, 3,−1) e é ortogonal ao vector (1, 0,−2).
Exercício 34 Determine uma equação cartesiana para cada um dos planos do exercícioanterior.
Exercício 35 Seja r1 a recta de R3 que passa pelos pontos (1, 1, 1) e (1, 0, 1), e r2 a rectade R3 que passa pelos pontos (2, 5, 1) e (0, 5, 1). Determine a intersecção destas rectas.
Exercício 36 Seja r a recta de R3 que passa pelos pontos (2,−1, 3) e (4,−5, 5), e α o planode R3 que passa pelos pontos (1, 0, 0), (2, 1, 1) e (1, 1, 2) . Determine a intersecção da rectar com o plano α.
Exercício 37 Seja β o plano R3 que passa pelo ponto (0, 1, 0) e é ortogonal ao vector (1, 1, 1).Determine uma equação cartesiana para a intersecção do plano β com o plano α do exercícioanterior.
Exercício 38 Considere a recta r = (x, y, z) ∈ R3 : 2x− y = 1 e 3x− z = 2 .
a) Escreva esta recta na forma p+ S, onde p ∈ R3 e S é um subespaço de R3.
b) Calcule a distância entre o ponto (5, 6, 7) e a recta r.
Exercício 39 Considere o plano α de R3 que passa pelos pontos (1, 0, 0), (1, 1, 0) e (2, 0,−5).a) Escreva a equação cartesiana do plano α.
b) Calcule a distância entre o ponto (1, 6, 7) e o plano α.
15

Exercício 40 Mostre que se r1 e r2 são rectas não paralelas de R3, então existe um únicopar de planos paralelos α1 e α2 tais que r1 ⊂ α1 e r2 ⊂ α2.
Exercício 41 Considere a recta r1 ⊂ R3 que passa pelos pontos (1, 0, 0) e (2,−4, 3), e arecta r2 definida por
r2 =(x, y, z) ∈ R3 : x = 0 e y = 1
.
a) Escreva estas rectas na forma p+ S, onde p ∈ R3 e S é um subespaço de R3.
b) Calcule a distância entre r1 e r2.
Exercício 42 Seja z ∈ R e considere-se em R3 a recta r que passa nos pontos (1, 0, 0) e(0, 1, 0) e o plano α que passa nos pontos (0, 0, 1), (1, 0, 2) e (0, 1, z).
a) Escreva r e α na forma p+ S, onde p ∈ R3 e S é um subespaço de R3.
b) Determine z tal que a distância de r a α não seja nula.
c) Para esse valor de z calcule a distância de r a α.
Exercício 43 Calcule a distância entre os seguintes 2-planos de R4:
P = (0, 0, 1, 1)+L(1, 1, 1, 1) , (1, 2, 0, 0) e Q = (0, 1, 3, 0)+L(1, 1, 0, 0) , (0, 0, 1, 1) .
Exercício 44 Calcule w ∈ R tal que a distância entre os seguintes 2-planos de R4 é nãonula e determine-a para esse valor de w.
P = L(1, 1, 1, 1) , (1, 2, 1, 1) e Q = (1, 1, 1, 0)+ L(1, 1, 2, 1) , (3, 4, 5, w) .
Exercício 45 Mostre que a distância de um ponto (x0, y0, z0) a um plano de R3 com equaçãocartesiana ax+ by + cz = d é
|ax0 + by0 + cz0 − d|√a2 + b2 + c2
.
Exercício 46 Sejam r1 e r2 duas rectas não paralelas de R3, e (a, b, c) ∈ R3 um vector
ortogonal a r1 e r2. Mostre que se (x1, y1, z1) é um ponto de r1 e (x2, y2, z2) é um ponto der2, então a distância de r1 a r2 é dada por
|a (x2 − x1) + b (y2 − y1) + c (z2 − z1)|√a2 + b2 + c2
.
16
6 Soluções
1) a) u · v = 0, cos θ = 0. b) u · v = 5, cos θ =√15/6. c) u · v = −9, cos θ = −3
√21/14.
2) Sim. Area = 7√6/2.
5) a) (−1, 0, 1) . b) (0, 1, 0) , (−2, 0, 1) . c) (1, 1,−1) . d) (1, 0, 1) , (0, 1, 1) .6) a) (0, 1, 0, 0) , (−1, 0, 1, 0) , (−1, 0, 0, 1) . b) (1, 2, 1, 2) , (1, 2,−1, 0) .c) (0, 1, 0, 0) , (−1, 0, 1, 0) . d) (2, 1,−2, 0) . e) (1,−1, 1,−1) , (0, 2,−1, 0) . f) Conjuntovazio (porque U⊥ = (0, 0, 0, 0)). g) (1, 0, 0, 0) , (0, 1, 0, 0) , (0, 0, 1, 0) , (0, 0, 0, 1) (porqueU⊥ = R4).
7) a) Ω não é conjunto ortogonal. b) Ω é uma base ortogonal de R3. A respectiva baseortonormada é
1/√6,−2/
√6, 1/
√6,0, 1/
√5, 2/
√5,−5/
√30,−2/
√30, 1/
√30
.c) Ωé um conjunto ortogonal, mas não constitui uma base.
8) a) (0, 1/2,−1/2) . b)√38/2.
10) (5/2, 0, 1/2) .
11) c) A matriz que representa T é0 0 10 −1 01 0 0
.
12) u3 = (1/3, 0,−2/3,−2/3)13) a)
1, 1
2, 12
; b)
√22.
14) a) (1/2, 1/2, 0); b)√22.
15) a) (1/2, 1/2, 1/2, 1/2) , (1/2,−1/2, 1/2,−1/2) . b) (0, 3/2, 0, 3/2). c)√2/2.
16) a) (1/2,−1/2, 1/2,−1/2) . b) (1/2, 1/2, 1/2, 1/2). c) 1.17) a)
0,√2/2,
√2/2, 0
,−√10/5,−
√10/10,
√10/10,
√10/5
.
b) (−1/5, 2/5, 3/5, 1/5). c)√10/5.
18) b) BT =
1
2
√3
2
−√3
2
1
2
.
19) a = −2/3 e b = 1/3 ou a = 1/3 e b = −2/3.20) AB é ortogonal, A+B pode não ser.
21) a) Os valores próprios da matriz são 0 e 2, logo é semidefinida positiva.
b) Os valores próprios da matriz são 1 e 3, logo é definida positiva.
c) Os valores próprios da matriz são−12
√5− 5
2e 12
√5− 5
2(ambos negativos), logo é definida
negativa.
d) Os valores próprios da matriz são −1 e 4, logo é indefinida.e) Os valores próprios da matriz são −1 e 3, logo é indefinida.f) Os valores próprios da matriz são −2, 1 e 3, logo é indefinida.
22) a) Semidefinida positiva. b) Definida positiva. c) Definida negativa. d) Indefinida.
e) Indefinida. f) Indefinida.
17

23) a) Q(y1, y2) = 2y22, S =−1/
√2 1/
√2
1/√2 1/
√2
.
b) Q(y1, y2) = y21 + 3y22, S =−1/
√2 1/
√2
1/√2 1/
√2
.
d) Q(y1, y2) = 4y21 − y22, S =2/√5 1/
√5
1/√5 −2/
√5
.
e) Q(y1, y2, y3) = 3y21 + 3y22 − y23, S =
1/√2 0 −1/
√2
1/√2 0 1/
√2
0 1 0
.
f) Q(y1, y2, y3) = −2y21 + y22 + 3y23, S =
0 −1/
√2 1/
√2
1 0 00 1/
√2 1/
√2
.
24) a) Define um produto interno; b) Não define um produto interno; c) Não define umproduto interno; d) Define um produto interno.
25) a) Define um produto interno; b) Não define um produto interno; c) Define um produtointerno.
26) a) (x1, x2) =x21 − 2x1x2 + 2x22; b) α = π
2; c) (x1 − x2, x2).
27) a) (x1, x2, x3) =x21 + 4x22 + 5x23 + 4x2x3; b) α = β = γ = π
2; c) (x1, 2x2 + x3, 2x3).
28) a) p (t) =p(−1)2 + p(0)2 + p(1)2; c) (1, 1, 1).
29) a) p (t) =p (0)2 + p′ (0)2 + p′ (1)2; b) α = π
4.
30) a) t+ t2; b) 1.
31) a) p = (1, 1, 1) e S = L (0, 1, 0); b) p = (1, 0, 2) e S = L (1, 1, 0); c) p = (1, 3,−1) eS = L (1, 0,−1).
32) a)
x = 1z = 1
; b)−x+ y = −1z = 2
; c)
y = 3x+ z = 0
.
33) a) p = (1, 1, 1) e S = L (0, 1, 0) , (0, 1, 1); b) p = (1, 0, 2) e S = L (1, 1, 0) , (1,−1, 0);c) p = (1, 3,−1) e S = L (2, 0, 1) , (0, 1, 0).34) a) x = 1; b) z = 2; c) −x+ 2z = −3.35) r1 ∩ r2 = (1, 5, 1).36) r ∩ α = (1, 1, 2) .
37)
x+ y + z = 1x− 2y + z = 1
.
38) a) r = (1, 1, 1)+ L(1, 2, 3); b) d ((5, 6, 7) , r) = 37
√21.
39) a) 5x+ z = 5; b) d ((1, 6, 7) , α) = 726
√26.
41) a) r1 = (1, 0, 0)+L(1,−4, 3) e r2 = (0, 1, 0)+L(0, 0, 1); b) d (r1, r2) = 317
√17.
42) a) r = (1, 0, 0)+ L(−1, 1, 0) e α = (0, 0, 1)+ L(1, 0, 1) , (0, 1, z − 1) ; b) z = 2
;c) d (r, α) = 2√33
43) d (P,Q) = 32
√2
44) Para w = 3 vem d (P ,Q) =√22
18




























