Embed Size (px)
Citation preview
Atlas Copco ROC Series F MkII Descripción del sistema
Confidencial, sólo uso interno preparado por Francisco Jara 2
Introducción
Abreviaciones RAS Rod Adding System Sistema de Adición de Barras RCS Rig Control System Sistema de Control Equipo RHS Rod Handling System Sistema de manejo de Barras ECM Engine Control Module Módulo de control motor EMS Engine Monitoring System Sistema de monitoreo del motor CCU CAN Control Unit Unidad de control de CAN HEC Hole / Engine Control Control de perforación y motor DPCI Damper Pressure Controlled Impact Control impacto por pres. de amortiguador RPCF Rotation Pressure Controlled Feed Control avance por pres. de rotación ECL Electrically Controlled Lubrication Control de lubricación electrónico ECG Electrically Controlled Greasing Control de engrase electrónico DCT Dust Collector Colector de polvo DTH Down The Hole Martillo de fondo TH Top Hammer Martillo en la cabeza CR COPROD Coprod PWM Pulse With Modulation Pulso modulado PTO Power Take Out Toma fuerza
Tipos de Señal PMI: Digital input Entrada digital PMAI: Analogue input Entrada análoga PMO: Digital output Salida digital
¡Error! No se encuentra el origen de la referencia.
Confidencial, sólo uso interno preparado por Francisco Jara 3
Sistema Hidráulico, general
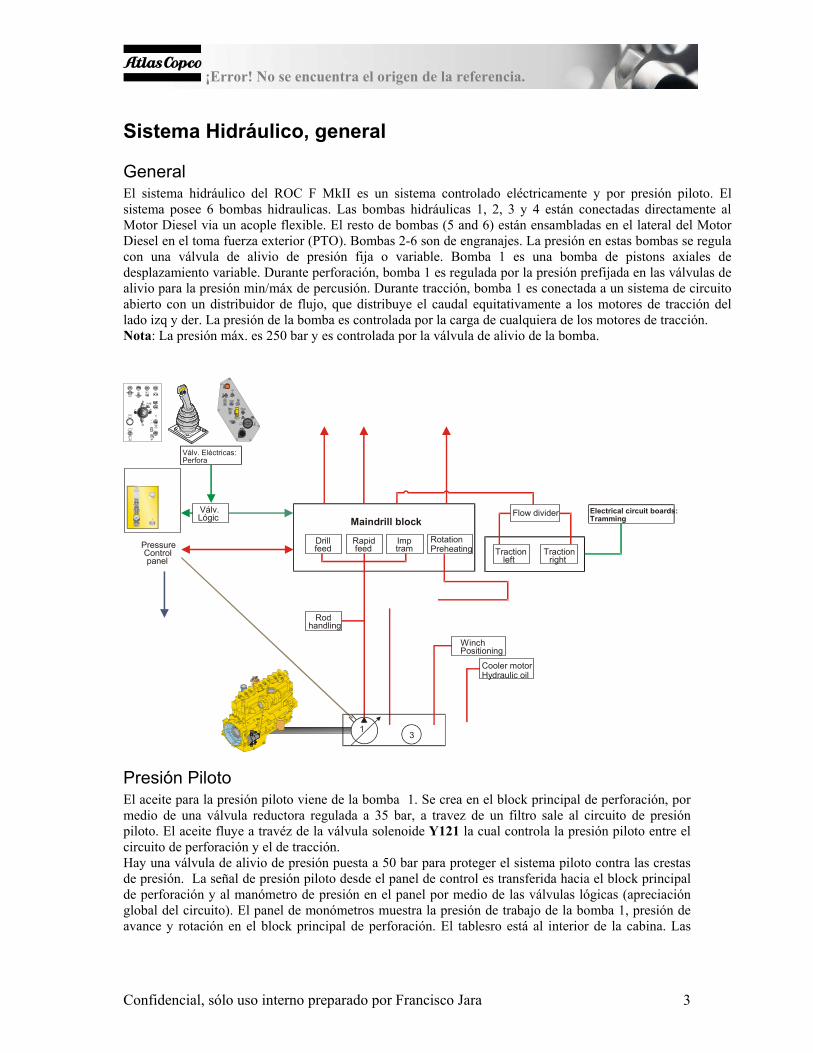
General El sistema hidráulico del ROC F MkII es un sistema controlado eléctricamente y por presión piloto. El sistema posee 6 bombas hidraulicas. Las bombas hidráulicas 1, 2, 3 y 4 están conectadas directamente al Motor Diesel via un acople flexible. El resto de bombas (5 and 6) están ensambladas en el lateral del Motor Diesel en el toma fuerza exterior (PTO). Bombas 2-6 son de engranajes. La presión en estas bombas se regula con una válvula de alivio de presión fija o variable. Bomba 1 es una bomba de pistons axiales de desplazamiento variable. Durante perforación, bomba 1 es regulada por la presión prefijada en las válvulas de alivio para la presión min/máx de percusión. Durante tracción, bomba 1 es conectada a un sistema de circuito abierto con un distribuidor de flujo, que distribuye el caudal equitativamente a los motores de tracción del lado izq y der. La presión de la bomba es controlada por la carga de cualquiera de los motores de tracción. Nota: La presión máx. es 250 bar y es controlada por la válvula de alivio de la bomba.
Rapidfeed
RotationPreheating
Drillfeed
Imptram
Maindrill blockVálv. Lógic
Rodhandling
WinchPositioning
Cooler motorHydraulic oil
3
Electrical circuit boards: Tramming
Válv. Eléctricas: Perfora
Tractionleft
Traction right
Flow divider
1
Pressure Control panel
a b
d c e
Presión Piloto El aceite para la presión piloto viene de la bomba 1. Se crea en el block principal de perforación, por medio de una válvula reductora regulada a 35 bar, a travez de un filtro sale al circuito de presión piloto. El aceite fluye a travéz de la válvula solenoide Y121 la cual controla la presión piloto entre el circuito de perforación y el de tracción. Hay una válvula de alivio de presión puesta a 50 bar para proteger el sistema piloto contra las crestas de presión. La señal de presión piloto desde el panel de control es transferida hacia el block principal de perforación y al manómetro de presión en el panel por medio de las válvulas lógicas (apreciación global del circuito). El panel de monómetros muestra la presión de trabajo de la bomba 1, presión de avance y rotación en el block principal de perforación. El tablesro está al interior de la cabina. Las
Sistema Hidráulico, general
Confidencial sólo uso Interno. [email protected] 4
palancas de tracción están situadas cerca del asiento del operador y controlan proporcionalmente la tracción.
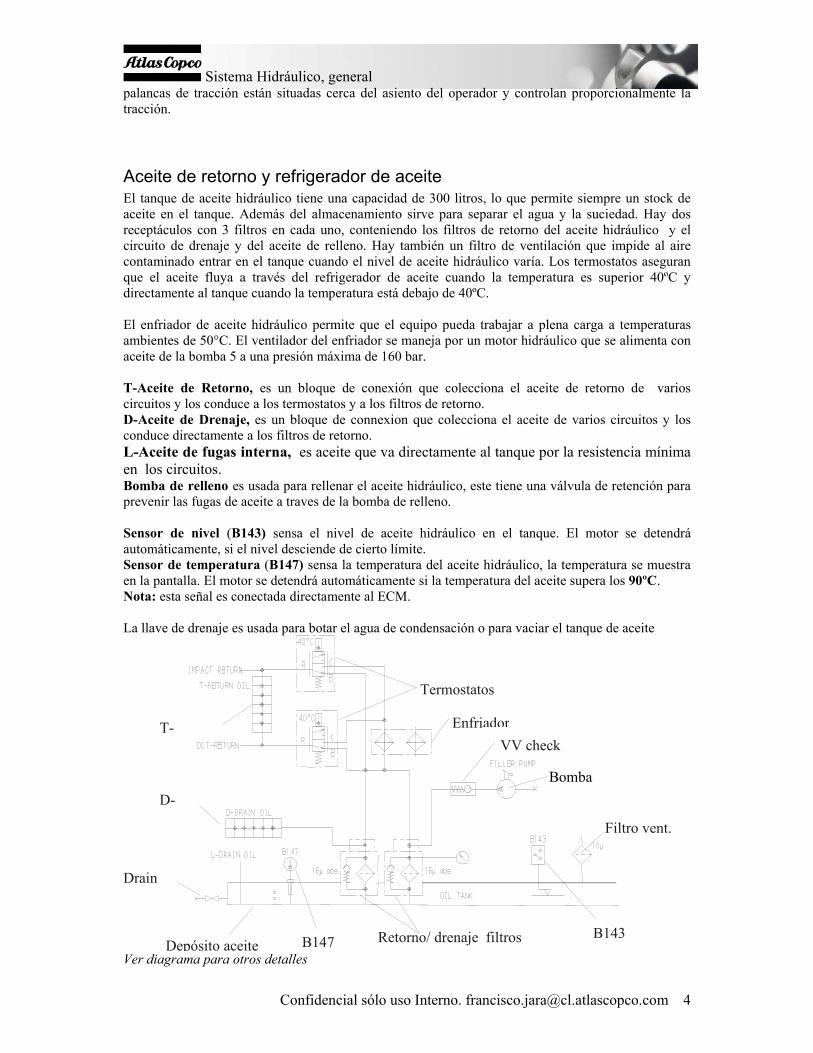
Aceite de retorno y refrigerador de aceite El tanque de aceite hidráulico tiene una capacidad de 300 litros, lo que permite siempre un stock de aceite en el tanque. Además del almacenamiento sirve para separar el agua y la suciedad. Hay dos receptáculos con 3 filtros en cada uno, conteniendo los filtros de retorno del aceite hidráulico y el circuito de drenaje y del aceite de relleno. Hay también un filtro de ventilación que impide al aire contaminado entrar en el tanque cuando el nivel de aceite hidráulico varía. Los termostatos aseguran que el aceite fluya a través del refrigerador de aceite cuando la temperatura es superior 40ºC y directamente al tanque cuando la temperatura está debajo de 40ºC. El enfriador de aceite hidráulico permite que el equipo pueda trabajar a plena carga a temperaturas ambientes de 50°C. El ventilador del enfriador se maneja por un motor hidráulico que se alimenta con aceite de la bomba 5 a una presión máxima de 160 bar. T-Aceite de Retorno, es un bloque de conexión que colecciona el aceite de retorno de varios circuitos y los conduce a los termostatos y a los filtros de retorno. D-Aceite de Drenaje, es un bloque de connexion que colecciona el aceite de varios circuitos y los conduce directamente a los filtros de retorno. L-Aceite de fugas interna, es aceite que va directamente al tanque por la resistencia mínima en los circuitos. Bomba de relleno es usada para rellenar el aceite hidráulico, este tiene una válvula de retención para prevenir las fugas de aceite a traves de la bomba de relleno. Sensor de nivel (B143) sensa el nivel de aceite hidráulico en el tanque. El motor se detendrá automáticamente, si el nivel desciende de cierto límite. Sensor de temperatura (B147) sensa la temperatura del aceite hidráulico, la temperatura se muestra en la pantalla. El motor se detendrá automáticamente si la temperatura del aceite supera los 90ºC. Nota: esta señal es conectada directamente al ECM. La llave de drenaje es usada para botar el agua de condensación o para vaciar el tanque de aceite
Bomba
B143
Filtro vent.
Retorno/ drenaje filtros
Termostatos
EnfriadorT-
D-
Depósito aceite
VV check
B147
Drain
Ver diagrama para otros detalles
Sistema Hidráulico, general
Confidencial sólo uso Interno. [email protected] 5
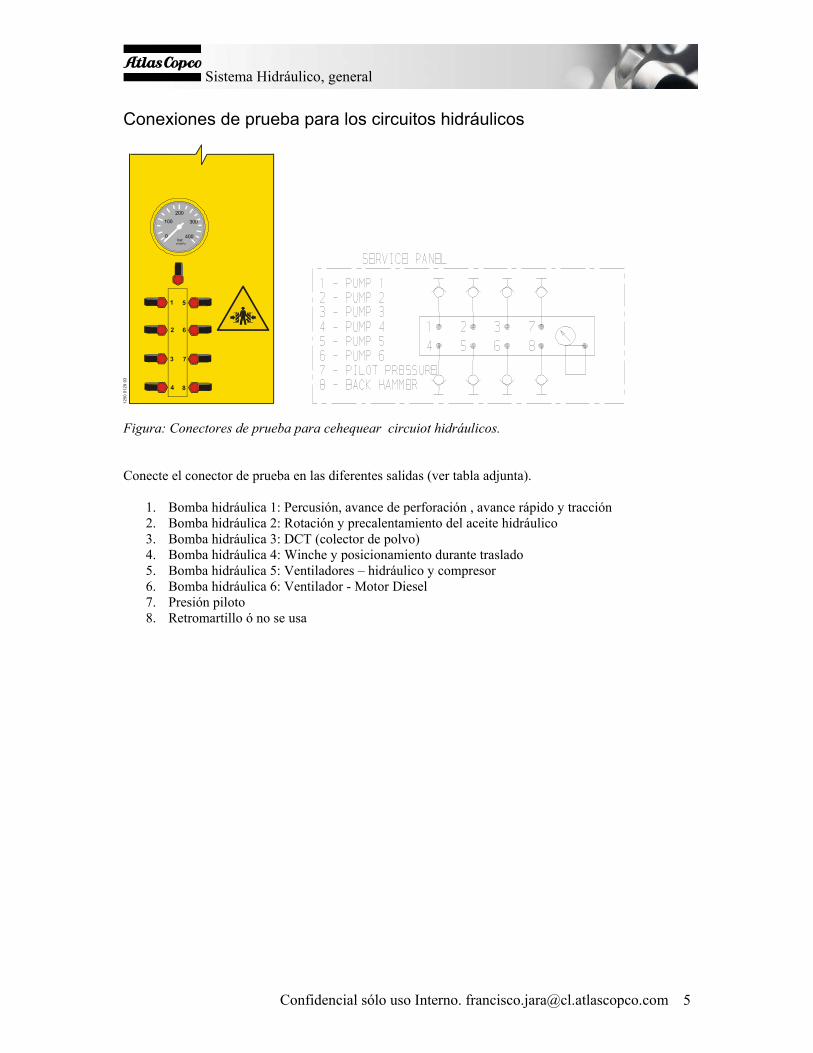
Conexiones de prueba para los circuitos hidráulicos
1250
012
9 93
Figura: Conectores de prueba para cehequear circuiot hidráulicos. Conecte el conector de prueba en las diferentes salidas (ver tabla adjunta).
1. Bomba hidráulica 1: Percusión, avance de perforación , avance rápido y tracción 2. Bomba hidráulica 2: Rotación y precalentamiento del aceite hidráulico 3. Bomba hidráulica 3: DCT (colector de polvo) 4. Bomba hidráulica 4: Winche y posicionamiento durante traslado 5. Bomba hidráulica 5: Ventiladores – hidráulico y compresor 6. Bomba hidráulica 6: Ventilador - Motor Diesel 7. Presión piloto 8. Retromartillo ó no se usa
Sistema eléctrico, general
Confidencial, sólo uso interno preparado por Francisco Jara 6
Sistema eléctrico, general
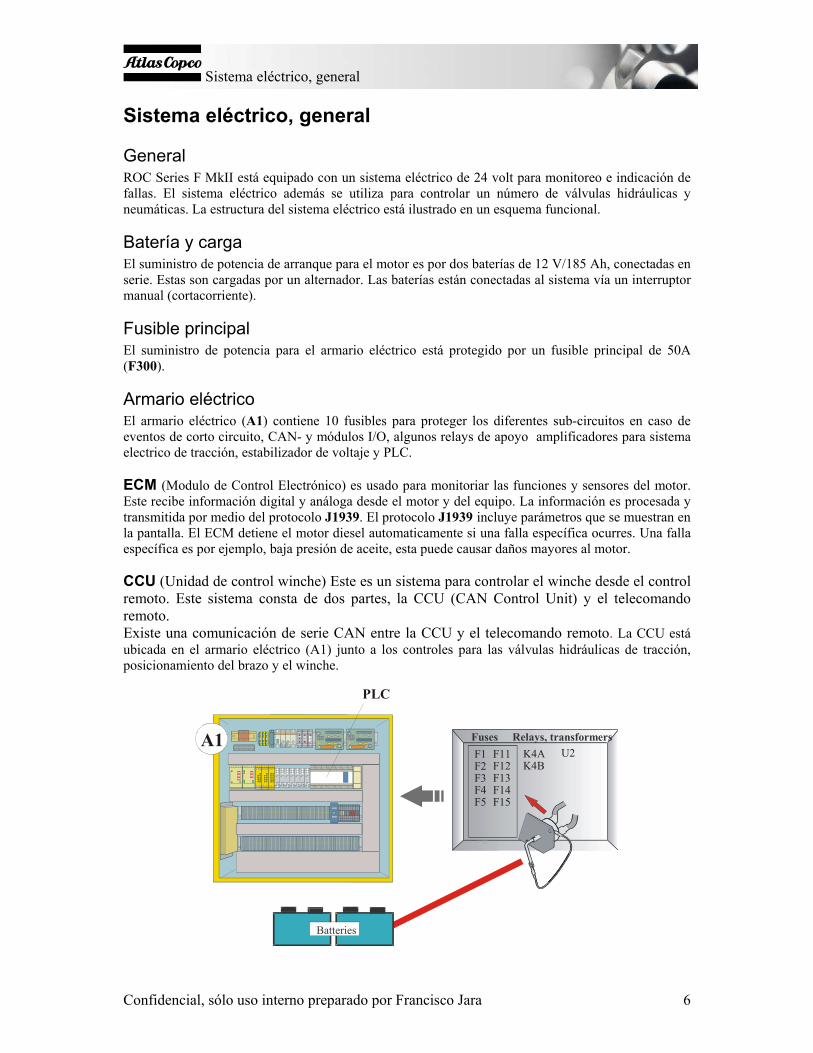
General ROC Series F MkII está equipado con un sistema eléctrico de 24 volt para monitoreo e indicación de fallas. El sistema eléctrico además se utiliza para controlar un número de válvulas hidráulicas y neumáticas. La estructura del sistema eléctrico está ilustrado en un esquema funcional.
Batería y carga El suministro de potencia de arranque para el motor es por dos baterías de 12 V/185 Ah, conectadas en serie. Estas son cargadas por un alternador. Las baterías están conectadas al sistema vía un interruptor manual (cortacorriente).
Fusible principal El suministro de potencia para el armario eléctrico está protegido por un fusible principal de 50A (F300).
Armario eléctrico El armario eléctrico (A1) contiene 10 fusibles para proteger los diferentes sub-circuitos en caso de eventos de corto circuito, CAN- y módulos I/O, algunos relays de apoyo amplificadores para sistema electrico de tracción, estabilizador de voltaje y PLC. ECM (Modulo de Control Electrónico) es usado para monitoriar las funciones y sensores del motor. Este recibe información digital y análoga desde el motor y del equipo. La información es procesada y transmitida por medio del protocolo J1939. El protocolo J1939 incluye parámetros que se muestran en la pantalla. El ECM detiene el motor diesel automaticamente si una falla específica ocurres. Una falla específica es por ejemplo, baja presión de aceite, esta puede causar daños mayores al motor. CCU (Unidad de control winche) Este es un sistema para controlar el winche desde el control remoto. Este sistema consta de dos partes, la CCU (CAN Control Unit) y el telecomando remoto. Existe una comunicación de serie CAN entre la CCU y el telecomando remoto. La CCU está ubicada en el armario eléctrico (A1) junto a los controles para las válvulas hidráulicas de tracción, posicionamiento del brazo y el winche.
Fuses Relays, transformers F1F2F3F4F5 F15
F11F12F13F14
K4AK4B
Batteries
U2
PLC
A1
Sistema eléctrico, general
Confidencial sólo uso Interno. [email protected] 7
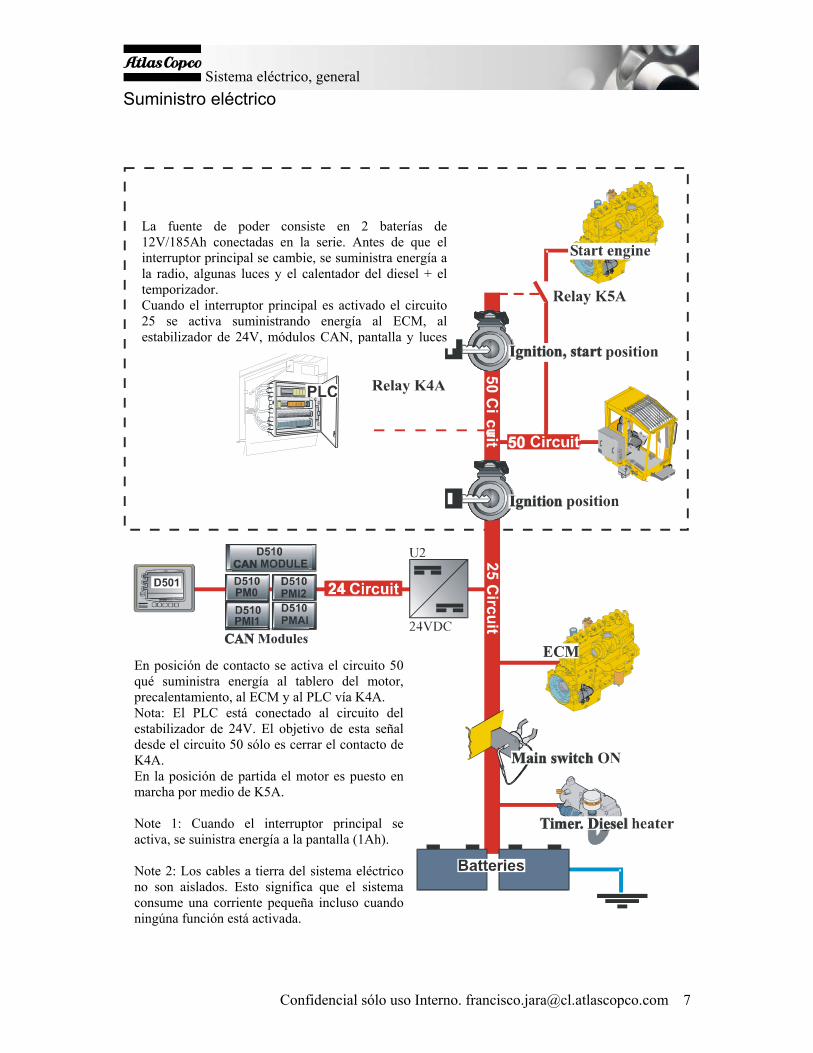
Suministro eléctrico
En posición de contacto se activa el circuito 50 qué suministra energía al tablero del motor, precalentamiento, al ECM y al PLC vía K4A. Nota: El PLC está conectado al circuito del estabilizador de 24V. El objetivo de esta señal desde el circuito 50 sólo es cerrar el contacto de K4A. En la posición de partida el motor es puesto en marcha por medio de K5A. Note 1: Cuando el interruptor principal se activa, se suinistra energía a la pantalla (1Ah). Note 2: Los cables a tierra del sistema eléctrico no son aislados. Esto significa que el sistema consume una corriente pequeña incluso cuando ningúna función está activada.
La fuente de poder consiste en 2 baterías de 12V/185Ah conectadas en la serie. Antes de que el interruptor principal se cambie, se suministra energía a la radio, algunas luces y el calentador del diesel + el temporizador. Cuando el interruptor principal es activado el circuito 25 se activa suministrando energía al ECM, al estabilizador de 24V, módulos CAN, pantalla y luces
Comunicación
Confidencial sólo uso Interno. [email protected] 8
Comunicación
Sistema HEC (Hole/Engine Control) La pantalla muestra datos del motor, información de ángulos/pozo y estado de sensores, interruptores, etc. El sistema consiste de pantalla, ECM (Modulo control motores Cat), D510 módulos CAN, PMAI (Módulo entrada análoga), PMI1 and PMI2 (Modulo entrada digital), PMO (Módulo salida digital), D170 sensor brazo, D171 sensor de inclinación, D172 unidad electronica, tapones finales, estabilizador 24V y un transformador interno de 10V.
Pantalla: La pantalla esta conectada al ECM usando la serial de comunicación J1939. El ECM recibe información desde sensors análogos e interruptores digitales desde el motor y equipo. La información es procesada y transmitida por el protocolo J1939. El protocolo de J1939 incluye parámetros que se muestran en la pantalla. La pantalla principal D501 recibe del protocolo de J1939 y traduce esto a CAN que se muestra entonces en la pantalla.
Angulos/medición de profundidad: Comunicación CAN conecta el sensor del brazo D170, junto al sensor de ángulo de la viga D171 y la unidad electrónica D172 para la pantalla. El registrador de profundidad B172 genera los pulsos (0-24V) qué se procesan en el módulo D172. Un tapón final se conecta a D172, dando fin a la red. La pantalla también tiene un tapón final instalado para determinar el inicio de la red. Sensor/interruptor que supervisa el sistema: El sistema puede presentar interruptores y estado de sensores en la pantalla. Los sensors análogos son conectados vía el CAN bus al módulo PMAI y los conmutadores diitales (ON/OFF) están conectados vía los módulos PMI1 y PMI2. El módulo PMAI procesa solo las señales analoguas entre (0-10000 mV) y PMI1 / PMI2 sólo señales digitales entre (0/24 V). Algunos sensors del motor CAT están también conectados al sistema de monitores vía J1939/CAN. Suministro de energía: El sistema es suministrado con 24 V DC estabilizados para asegurar la máxima estabilidad. Los sensores análogos son suministrados con 10 V DC desde el convertidor 10 V DC. El rango de voltaje para las señales análogas para el módulo PMAI es 0-10000 mV.
Comunicación
Confidencial sólo uso Interno. [email protected] 9
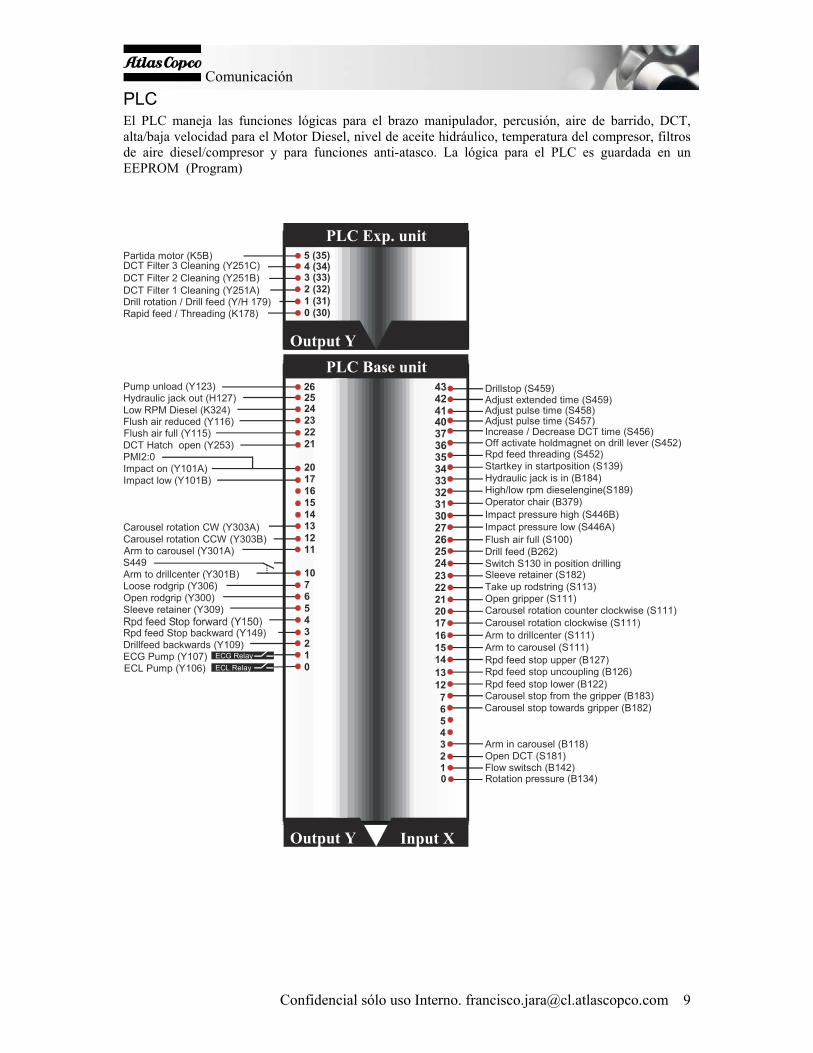
PLC El PLC maneja las funciones lógicas para el brazo manipulador, percusión, aire de barrido, DCT, alta/baja velocidad para el Motor Diesel, nivel de aceite hidráulico, temperatura del compresor, filtros de aire diesel/compresor y para funciones anti-atasco. La lógica para el PLC es guardada en un EEPROM (Program)
Output Y Input X
Pump unload (Y123) Hydraulic jack out (H127) Low RPM Diesel (K324) Flush air reduced (Y116) Flush air full (Y115) DCT Hatch open (Y253) PMI2:0 Impact on (Y101A) Impact low (Y101B)
Carousel rotation CW (Y303A) Carousel rotation CCW (Y303B) Arm to carousel (Y301A) S449 Arm to drillcenter (Y301B) Loose rodgrip (Y306) Open rodgrip (Y300) Sleeve retainer (Y309) Rpd feed Stop backward (Y149) Drillfeed backwards (Y109)ECG Pump (Y107) ECL Pump (Y106)
26 25 24 23 22 21 20 17 16 15 14 13 12 11 10 7 6 5 4 3 2 1 0 ECL Relay
ECG Relay
212017161514131276543210
Open gripper (S111) Carousel rotation counter clockwise (S111)Carousel rotation clockwise (S111) Arm to drillcenter (S111)
Rpd feed stop upper (B127) Rpd feed stop uncoupling (B126) Rpd feed stop lower (B122) Carousel stop from the gripper (B183)Carousel stop towards gripper (B182)
Arm in carousel (B118) Open DCT (S181)Flow switsch (B142) Rotation pressure (B134)
PLC Base unit
Arm to carousel (S111)
22 Take up rodstring (S113) 23 Sleeve retainer (S182)
Switch S130 in position drilling Drill feed (B262)Flush air full (S100) Impact pressure low (S446A) Impact pressure high (S446B) Operator chair (B379) High/low rpm dieselengine(S189) Hydraulic jack is in (B184) Startkey in startposition (S139) Rpd feed threading (S452) Off activate holdmagnet on drill lever (S452)Increase / Decrease DCT time (S456) Adjust pulse time (S457) Adjust pulse time (S458) Adjust extended time (S459) Drillstop (S459)
Output Y
5 (35)4 (34)3 (33)2 (32)1 (31)0 (30)
PLC Exp. unit Partida motor (K5B)
Rapid feed / Threading (K178) Drill rotation / Drill feed (Y/H 179) DCT Filter 1 Cleaning (Y251A) DCT Filter 2 Cleaning (Y251B) DCT Filter 3 Cleaning (Y251C)
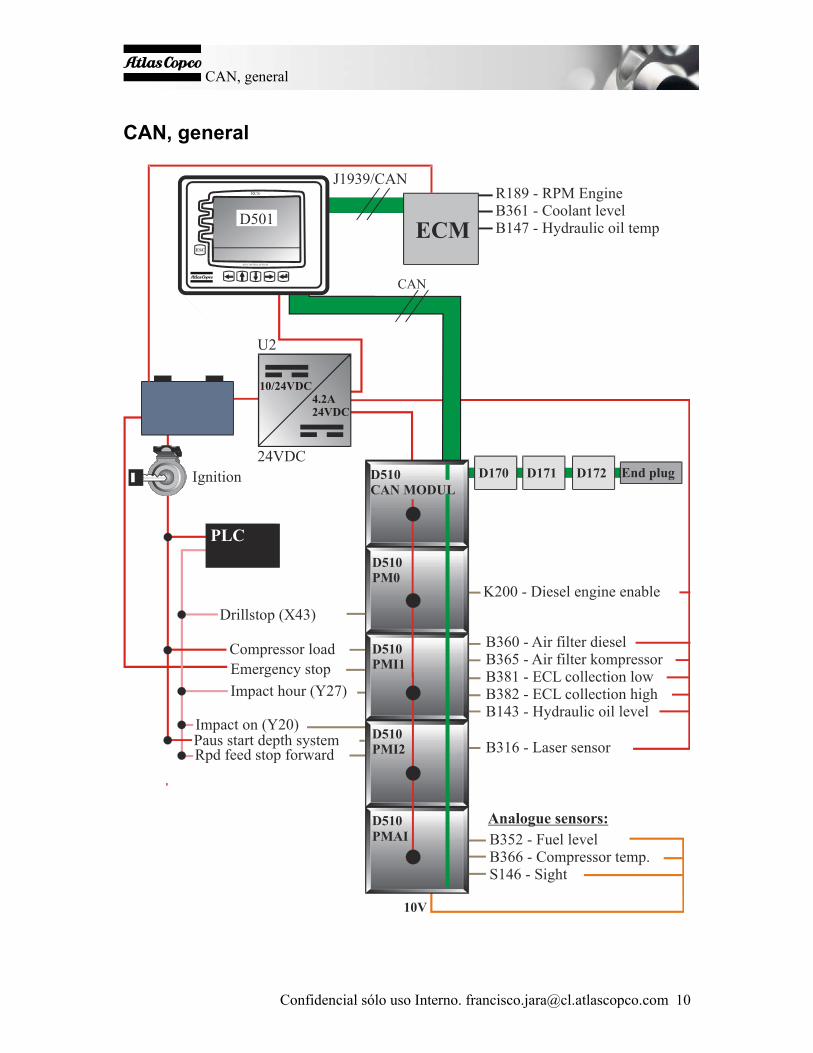
CAN, general
Confidencial sólo uso Interno. [email protected] 10
CAN, general
D510PM0
D510PMI1
D510PMI2
D510PMAI B352 - Fuel level
B366 - Compressor temp.S146 - Sight
B316 - Laser sensor
B360 - Air filter dieselB365 - Air filter kompressorB381 - ECL collection lowB382 - ECL collection highB143 - Hydraulic oil level
K200 - Diesel engine enable
D170
Compressor load
Paus start depth systemRpd feed stop forward
24VDC
U2
ECM
R189 - RPM EngineB361 - Coolant levelB147 - Hydraulic oil temp
End plugD510CAN MODUL
D171
J1939/CAN
CAN
RIG CONTROL SYSTEM
RCS
ESC
Emergency stop
PLC
Drillstop (X43)
Impact hour (Y27)
D172
10V
Impact on (Y20)
Ignition
4.2A24VDC
10/24VDC
D501
Analogue sensors:
Confidencial sólo uso Interno. [email protected] 11
Pantalla (D501) La pantalla es el computador principal en el sistema. Todos los datos CAN son manejados por la pantalla mostrados garfica o digitalmente. El programa para el sistema se guarda en la pantalla y el programa es descargado desde PC a una tarjeta memoria vía puerto USB (instrucciones por separado) ___________________________________________________________________________
Modulo CAN El modulo CAN recibe datos desde la entrada de los módulos (PMAI, PMI, PMI2) vía un retorno interno de datos. La información es traducida por el protocolo CAN en el módulo CAN. LEDs:
Cuando la comunicación CAN entre el módulo CAN y la pantalla principal está OK, los LED TX/RX destellan.
Cuando el dato interior está OK, el (E-data) LED brilla verde. Cuando el suministro de energía está OK, el (power) LED brilla verde.
Nota: Si el CAN TX/RX LED está desconectado, el tapón final está dañado. ___________________________________________________________________________
PMO module El módulo PMO maneja las salidas digitales (24 V). El modulo tiene 8 canales (0-7). Nosotros sólo usamos 2 canales, canal 0 donde controlamos el relay K200 para arranque de motor y canal 1 para parada automática de perforación. Canales 2-7 no son usados. LEDs:
Cuando el dato interno es OK, el LED para esa función, enciende. Los canales con salida de datosestán conectados a un LED luminozao cuando la salida es alta
(24 V) ___________________________________________________________________________
PMI1 module El módulo PMI1 maneja las señales digitales de entrada (24 V). Las señales digitales de entrada son información básica para manejar las funciones, tales como arranque de motor. Las señales tambien generan información que se muestra en pantalla utilizando iconos. Entradas:
PMI1:0 No se usa PMI1:1 Ingresa dato desde B360, filtros de aire motor PMI1:2 Ingresa dato desde B365, filtros de compresor PMI1:3 Ingresa dato desde S180, Compresor activado PMI1:4 Ingresa dato desde B381, ECL colector baja (opción) PMI1:5 Ingresa dato desde B382, ECL colector alta (opción) PMI1:6 Ingresa dato desde B143 nivel aceite hidco. PMI1:7 Ingresa dato desde S132ABC, parada de emergencia
LEDs:
Los canales de los datos de entrada están conectados con los LED que se encienden cuando las señales de los datos de entrada son altas (24V).
When the internal data is OK, the LED for this funcion lights.

Confidencial sólo uso Interno. [email protected] 12
___________________________________________________________________________
Módulo PMI2 El módulo PMI2 tiene las mismas especificaciones de hardware como el módulo PMI1. Las señales digitales de entrada proporcionan la información básica que es evaluada en la pantalla principal para poder mostrar la correcta información de profundidad de pozo. Algunas señales tambien generan información que sethat is shown on the display. Entradas:
PMI2:0 Ingresa datos desde PLC Salida Y20, percusión activada. PMI2:1 Ingresa datos desde B128, Pausa/inicio sistema de medicion de pozo PMI2:2 Ingresa datos desde B122, parada avance rápido adelante PMI2:3 Ingresa datos desde B126, parada avance rapido atras desacople PMI2:4 Ingresa datos desde B316, sensor laser PMI2:5 PMI2:6
__________________________________________________________________________________
Módulo PMAI El módulo PMAI maneja señales análogas de entrada, excepto canal 3 donde es una señal digital de 10 V. Las señales tienen un rango entre 0-10000 mV. Entradas:
PMAI:0 Ingresa datos desde B352, sensor de combustible PMAI:1 Tierra PMAI:2 Ingresa datos desde B366, sensor temperatura de compresor PMAI:3 Tierra PMAI:4 Ingresa datos desde S146, dispositivo de puntería PMAI:5 Tierra
Nota: Cuando la señal análoga desde B366 es >9700 mV o < 150 mV en pantalla se muestra un circuito abierto.
Lineas para señales analoguas :
PMAI:0 Ingresa datos desde B352 sensor de combustible. ~10000mV cuando estanque está lleno y 0mV cuando está vacío
PMAI:2 Ingresa datos desde B366 -sensor de temperatura compresor≈6000-4000mV cuando la temperatura ambiente está ≈ +20-23ºC. valor de linea guía: 360mV ≈ 115ºC.
LEDs: Los canales de entrada (0-4) tienen LEDs. La intensidad de los LEDS varia con la intensidad de la señal.
Confidencial sólo uso Interno. [email protected] 13
CAN Hay varios tipos de módulos de control (Móduñlo CAN, ECM, panatlla, etc.). Común para todos ellos es que cada uno contiene un procesador por separado. Los módulos se comunican entre cada uno de ellos por medio del CAN bus. El CAN bus utiliza comunicación en serie. Cada parte del dato se envía a la vez por medio del bus hasta que todos han sido transmitidos. Esto es un método simple sólo requiere de un conductor y Tierra. ___________________________________________________________________________
Convertidor 10 V Los sensores análogos son suministrados con 10 V. esta es suministrada internamente por el convertidor de 10 V. ___________________________________________________________________________
Estabilizador 24 V DC El generador es la fuente de energía para el sistema eléctrico cuando el motor está funcionando. El generador genera entre 24-28 V dependiendo de la velocidad del motor. Ciertos módulos de control especiales requieren una C.C. estabilizada a 24 V para trabajar correctamente. El estabilizador provee a estos módulos 24V C.C.estable. El estabilizador se puede calibrar con el potenciómetro U2 (entre el terminal U2/4 y U2/14 en el estabilizador) LED: El LED brilla cuando el estabilizador provee energía. __________________________________________________________________________________
J1939/CAN J1939/CAN es un protocolote comunicación CAN usado por el ECM. El protocolo incluye información para ser mostrada en pantalla. __________________________________________________________________________________
ECM Módulo de control CAT que controla el funcionamiento del motor durante la operación. __________________________________________________________________________________
Módulos D170/D171 Sensores de ángulo basados en CAN que se comunican a la pantalla vía el módulo CAN.
Módulo D172 Módulo CAN que traduce las señales del sensor de pulso (registro de profundidad B172) en señales para CAN. __________________________________________________________________________________
Tapón final Al inicio y al final de la red CAN hay instalados tapones finales.Un tapón final consiste en una resistencia de (120Ω) la cuál termina el cable de la manera correcta de modo que la señal "no despida de nuevo al sistema”. __________________________________________________________________________________





























