Embed Size (px)
Citation preview
基盤ロボット技術活用型 オープンイノベーション促進プロジェクト
インテリジェントホームオートメーションシステム アーキテクチャ設計書
文書管理情報
[ 文書情報 ]
文書番号 PX022D-SP-010
版数 3.0
発行日 2011.3.29
発行元 株式会社セック 開発本部 第四開発部
プロジェクト番号 PX022
プロジェクト名称 基盤通信モジュール RT ミドルウェア研究開発
配付先 なし
[ 確認欄 ]
作成者 株式会社セック 開発本部 第四開発部 豊田光弘
審査者 株式会社セック 開発本部 第四開発部 中本啓之
承認者 株式会社セック 開発本部 第四開発部 長瀬雅之
Copyright© 2011 Systems Engineering Consultants Co., Ltd. All Rights Reserved.
インテリジェントホームオートメーションシステム アーキテクチャ設計書
-i-
改版履歴
版数 改版日 改版内容 備考
1.0 2010.4.30 新規作成 なし
2.0 版数合わせ
3.0 2011.3.29 ハードウェアのスペックを最新の情報に反映
インテリジェントホームオートメーションシステム アーキテクチャ設計書
-ii-
目次
改版履歴........................................................................................................................ I
目次.............................................................................................................................. II
1 総則........................................................................................................................ 1
1.1. 目的 ...........................................................................................................................1 1.2. 関連文書....................................................................................................................2
2 アーキテクチャ設計 ................................................................................................ 3
2.1. ハードウェア構成 .....................................................................................................3 2.2. ソフトウェア構成 .....................................................................................................5 2.3. データフロー.............................................................................................................8 2.4. コンポーネント構成..................................................................................................9
2.4.1. RTC 構成 ...........................................................................................................9 2.4.2. 複合コンポーネント ........................................................................................11 2.4.3. Bridge RTC .....................................................................................................12
3 付録...................................................................................................................... 13
3.1. 用語一覧..................................................................................................................13
インテリジェントホームオートメーションシステム アーキテクチャ設計書
-1-
1 総則 1.1. 目的
独立行政法人新エネルギー・産業技術総合開発機構では、ロボットの基盤技術の標準化、
及び活用事例の創出を目的とし、「基盤ロボット技術活用型オープンイノベーション促進
プロジェクト」を実施している。このプロジェクトでは、ロボット技術の応用アプリケ
ーションとして住宅といった建築内におけるインテリジェントな環境分散型ロボットシ
ステムのビジネス展開を目指し、ホームネットワークシステムを開発する。そして、こ
のホームネットワークシステムにおいて、建築物内に分散させた RT 要素部品を連携動作
させることで、建物の品質管理及び利便性が向上することを実証する。
このプロジェクトのテーマの 1 つに、「基盤通信モジュールおよび開発ツールの開発」
がある。基盤通信モジュールは、RT システム上のネットワークへ接続する際にデバイス
と RT ミドルウェアとのアダプタの役割を果たし、これにより既存のデバイスを利用して
容易に RT システムが構築可能になる。この基盤通信モジュールの開発に関するサブテー
マとして「RTC-Liteフレームワークに基づく基盤通信モジュールRTミドルウェアの開発」
がある。このテーマでは、OpenRTM-aist と相互運用可能であり、基盤通信モジュール上
で動作可能な RT ミドルウェアの開発を行なう。
プロジェクトの別のテーマとして、「RT 要素部品群による RT システムの開発・検証」
がある。このテーマでは、基盤通信モジュールと既存のセンサ、及びアクチュエータな
どの要素部品を接続することにより、これまで煩雑な作業であった要素部品のネットワ
ーク接続や RT システムへの参加を可能とする「RT要素部品」の開発を行なう。この開
発に関するサブテーマとして「プラグアンドプレイ機能を実現する統合ミドルウェアの
開発」があり、このテーマでは、OpenRTM-aist とアプリケーションの中間に位置し、RT
システムに対してプラグアンドプレイ機能や、RT システムのステータス監視などの機能
を提供する統合ミドルウェアの開発を行なう。
本書では、今回開発するホームネットワークシステムのアーキテクチャ設計について記
述する。
インテリジェントホームオートメーションシステム アーキテクチャ設計書
-2-
1.2. 関連文書
本書に関連する文書を表 1-1 に示す。
表 1-1 関連文書一覧
No 文書番号 文書名
(1) - 「基盤ロボット技術活用型オープンイノベーション促進プロジェク
ト」に係る委託業務実施計画書

インテリジェントホームオートメーションシステム アーキテクチャ設計書
-3-
2 アーキテクチャ設計 2.1. ハードウェア構成
ホームネットワークシステムのハードウェア構成を図 2-1 に示す。ホームネットワーク
システムは、ホームコントローラ、RT 要素部品管理モジュール、基盤通信モジュール、
小型通信ドライバモジュール、及び各種デバイスによって構成される。
ホームコントローラは1軒の住宅内に 1 台程度配置するもので、タッチパネルを有した
高性能な組み込み型 MPU である。住宅内の全ての設備を統合しており、ユーザとのイン
タフェースやインターネット上のデータセンターとの通信などを行なう。住宅内に配置
される全ての設備機器の全てをホームコントローラで管理することが難しいため、複数
の設備機器を統合する機器として、RT 要素備品管理モジュールを配置する。RT 要素部品
管理モジュールは部屋毎もしくはブレーカー毎に配置される。基盤通信モジュールは端
末のセンサやアクチュエータを制御するものであり、窓や屋外センサなどの設備機器ご
とに配置される。小型通信ドライバモジュールもデバイスを制御するものであり、住宅
内に大量に配置される。
図 2-1 ハードウェア構成
アクチュエータ 人感 センサ
温度 センサ
湿度 センサ
照明 接触 センサ
ホームコントローラ
RT 要素部品 管理モジュール
基盤通信 モジュール
(エンドデバイス)
小型通信ドライバ モジュール
基盤通信 モジュール (PLC/CAN)
基盤通信 モジュール
(PLC/ZigBee)
インターネット データセンター
※凡例 Ethernet 高速 PLC CAN ZigBee GPIO

インテリジェントホームオートメーションシステム アーキテクチャ設計書
-4-
図 2-1 に示したハードウェアの詳細を表 2-1 に示す。
表 2-1 ハードウェア詳細
名称 仕様 備考
ホームコントローラ 汎用 PC 並み OS :Windows RTM :OpenRTM.NET
RT 要素部品管理モジュール CPU :AM1808(375MHz) ROM :2GB RAM :256MB
OS :Linux RTM :OpenRTM-aist
基盤通信モジュール (PLC/CAN 版)
CPU :SH7214(100MHz) ROM :1MB RAM :128KB I/F :CAN
OS :TOPPERS / ASP RTM :RTC-Lite Manager + miniRTCs
基盤通信モジュール (PLC/ZigBee 版)
CPU :SH7214(100MHz) ROM :1MB RAM :128KB I/F :ZigBee
OS :TOPPERS / ASP RTM :RTC-Lite Manager + microRTCs
小型通信ドライバモジュール CPU :Cortex(72MHz) Flash :256KB RAM :64KB
OS :なし RTM :miniRTCs
基通信通信モジュール (エンドデバイス)
CPU :CC2530(16MHz) ROM :256KB RAM :8KB
OS :なし RTM :microRTCs
センサ/アクチュエータ
図 2-1 に示した通信プロトコルの通信帯域について表 2-2 に示す。
表 2-2 通信帯域
名称 通信帯域 備考
Ethernet 数 Mbps 以上
高速 PLC 数 Mbps 以上
CAN 1Mbps
ZigBee 250Kbps

インテリジェントホームオートメーションシステム アーキテクチャ設計書
-5-
2.2. ソフトウェア構成
ホームネットワークシステムのソフトウェア構成を図 2-2 に示す。本システムはモジュ
ールの構成に応じて、RTC-Liteをベースとした高速制御用RTC-Lite、低速制御用RTC-Lite、
及び OpenRTM-aist をベースとした統合ミドルウェアの 2 種類の RT ミドルウェアから構
成される。
高速制御用 RTC-Lite、及び低速制御用 RTC-Lite は、省資源なマイコンでも動作するよ
う機能を制限し、軽量な実装となっている。この RT ミドルウェアは、基盤通信モジュー
ル、及び小型通信モジュール上で動作し、通信プロトコルとして CAN と ZibBee を対象
としている。
統合ミドルウェアは、基盤通信モジュールの統合機能や、アプリケーションを構築する
ための機能を有する。この統合ミドルウェアは、RT 要素部品管理モジュール上で動作す
る。
図 2-2 ソフトウェア構成
基盤通信モジュール
デバイスRTC
ZigBee
低速制御用RTC-Lite
小型通信ドライバモジュール
デバイスRTC
CAN
高速制御用RTC-Lite
ホームコントローラ
OpenRTM.NET
CORBA
RTシステムサービス
ホームアプリケーション
アプリRTC
基盤通信モジュール
CAN Socket
アプリRTC
高速制御用RTC-Lite
RTC-Lite Manager
基盤通信モジュール
Socket
アプリRTC
ZigBee
低速制御用RTC-Lite
RTC-Lite Manager
RT要素部品管理モジュール
Socket CORBA
OpenRTM-aist
統合ミドルウェア
アプリRTC Bridge RTC
インテリジェントホームオートメーションシステム アーキテクチャ設計書
-6-
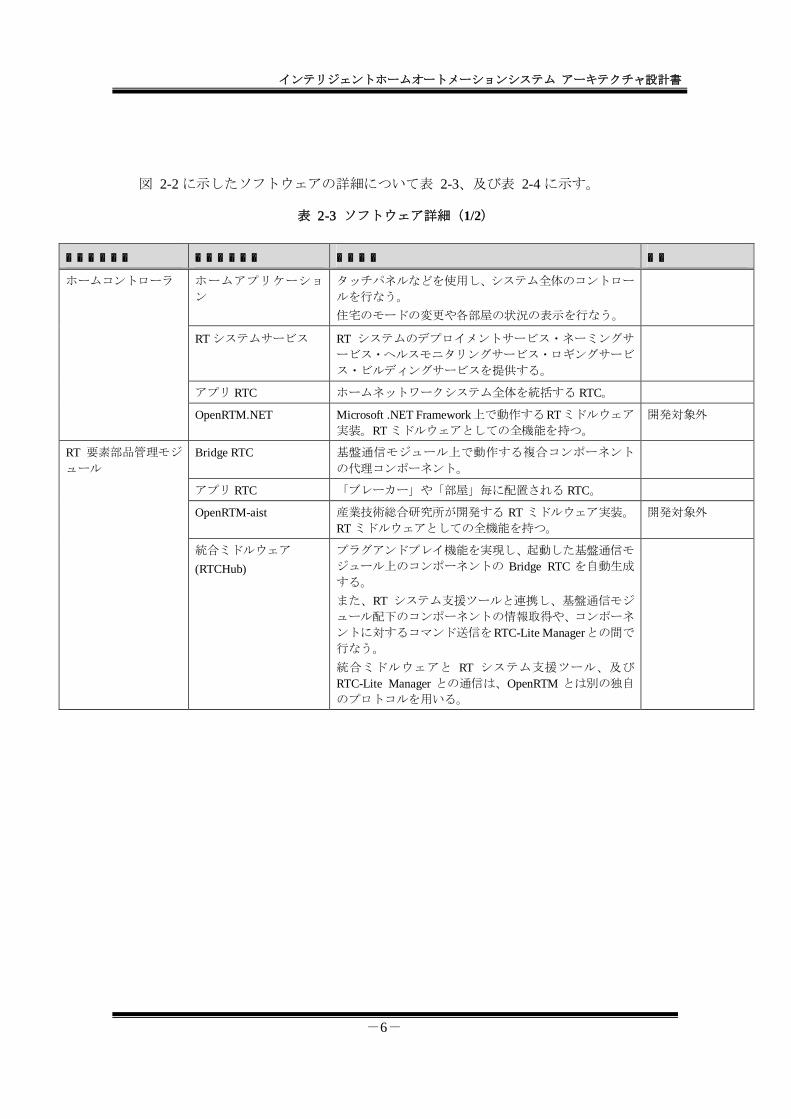
図 2-2 に示したソフトウェアの詳細について表 2-3、及び表 2-4 に示す。
表 2-3 ソフトウェア詳細(1/2)
ハードウェア ソフトウェア 処理内容 備考
ホームアプリケーショ
ン タッチパネルなどを使用し、システム全体のコントロー
ルを行なう。 住宅のモードの変更や各部屋の状況の表示を行なう。
RT システムサービス RT システムのデプロイメントサービス・ネーミングサ
ービス・ヘルスモニタリングサービス・ロギングサービ
ス・ビルディングサービスを提供する。
アプリ RTC ホームネットワークシステム全体を統括する RTC。
ホームコントローラ
OpenRTM.NET Microsoft .NET Framework上で動作するRTミドルウェア
実装。RT ミドルウェアとしての全機能を持つ。 開発対象外
Bridge RTC 基盤通信モジュール上で動作する複合コンポーネント
の代理コンポーネント。
アプリ RTC 「ブレーカー」や「部屋」毎に配置される RTC。
OpenRTM-aist 産業技術総合研究所が開発する RT ミドルウェア実装。
RT ミドルウェアとしての全機能を持つ。 開発対象外
RT 要素部品管理モジ
ュール
統合ミドルウェア (RTCHub)
プラグアンドプレイ機能を実現し、起動した基盤通信モ
ジュール上のコンポーネントの Bridge RTC を自動生成
する。 また、RT システム支援ツールと連携し、基盤通信モジ
ュール配下のコンポーネントの情報取得や、コンポーネ
ントに対するコマンド送信をRTC-Lite Managerとの間で
行なう。 統合ミドルウェアと RT システム支援ツール、及び
RTC-Lite Manager との通信は、OpenRTM とは別の独自
のプロトコルを用いる。
インテリジェントホームオートメーションシステム アーキテクチャ設計書
-7-
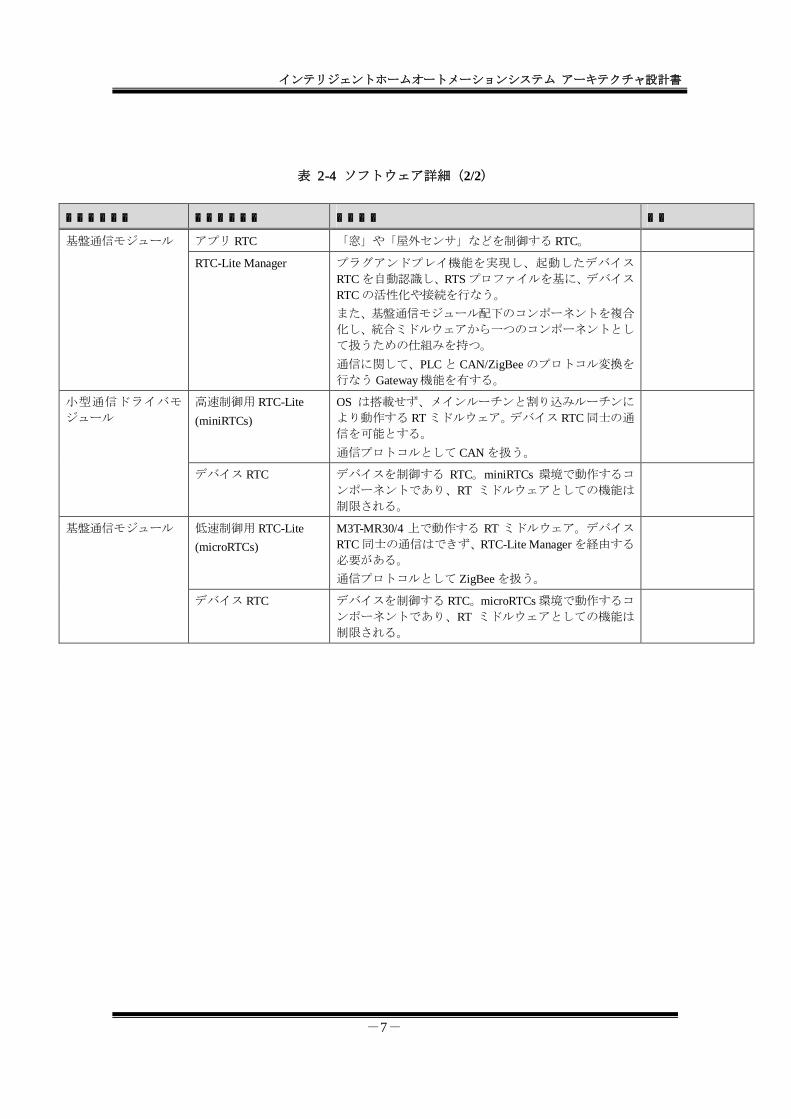
表 2-4 ソフトウェア詳細(2/2)
ハードウェア ソフトウェア 処理内容 備考
アプリ RTC 「窓」や「屋外センサ」などを制御する RTC。 基盤通信モジュール
RTC-Lite Manager プラグアンドプレイ機能を実現し、起動したデバイス
RTC を自動認識し、RTS プロファイルを基に、デバイス
RTC の活性化や接続を行なう。 また、基盤通信モジュール配下のコンポーネントを複合
化し、統合ミドルウェアから一つのコンポーネントとし
て扱うための仕組みを持つ。 通信に関して、PLC と CAN/ZigBee のプロトコル変換を
行なう Gateway機能を有する。
高速制御用 RTC-Lite (miniRTCs)
OS は搭載せず、メインルーチンと割り込みルーチンに
より動作する RT ミドルウェア。デバイス RTC 同士の通
信を可能とする。 通信プロトコルとして CAN を扱う。
小型通信ドライバモ
ジュール
デバイス RTC デバイスを制御する RTC。miniRTCs 環境で動作するコ
ンポーネントであり、RT ミドルウェアとしての機能は
制限される。
低速制御用 RTC-Lite (microRTCs)
M3T-MR30/4 上で動作する RT ミドルウェア。デバイス
RTC 同士の通信はできず、RTC-Lite Manager を経由する
必要がある。 通信プロトコルとして ZigBee を扱う。
基盤通信モジュール
デバイス RTC デバイスを制御する RTC。microRTCs 環境で動作するコ
ンポーネントであり、RT ミドルウェアとしての機能は
制限される。
インテリジェントホームオートメーションシステム アーキテクチャ設計書
-8-
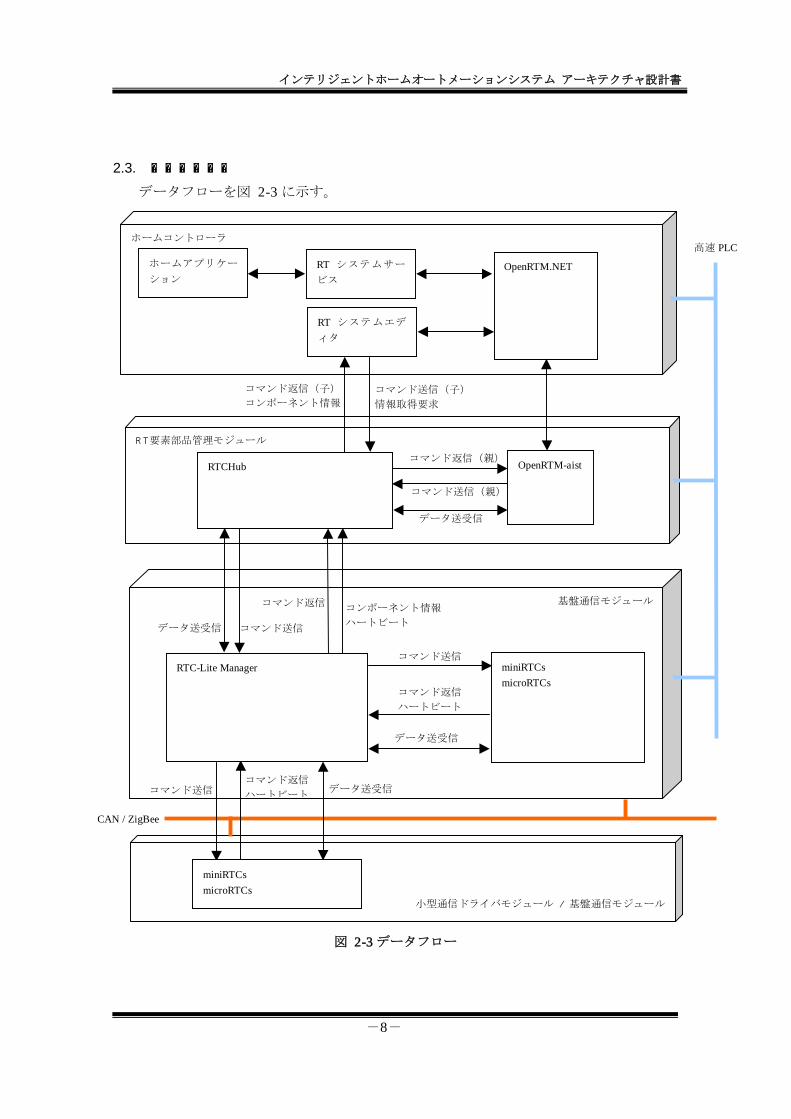
2.3. データフロー
データフローを図 2-3 に示す。
図 2-3 データフロー
基盤通信モジュール
小型通信ドライバモジュール / 基盤通信モジュール
RT要素部品管理モジュール
miniRTCs microRTCs
データ送受信
コマンド送信 コマンド返信 ハートビート データ送受信
データ送受信
miniRTCs microRTCs
RTCHub OpenRTM-aist
コンポーネント情報 ハートビート
CAN / ZigBee
コマンド返信 ハートビート
コマンド送信
ホームコントローラ 高速 PLC
RT システムサー
ビス OpenRTM.NET
コマンド返信
コマンド送信
ホームアプリケー
ション
RT システムエデ
ィタ
コマンド送信(子) 情報取得要求
コマンド返信(子) コンポーネント情報
コマンド返信(親)
コマンド送信(親)
データ送受信
RTC-Lite Manager
インテリジェントホームオートメーションシステム アーキテクチャ設計書
-9-
2.4. コンポーネント構成
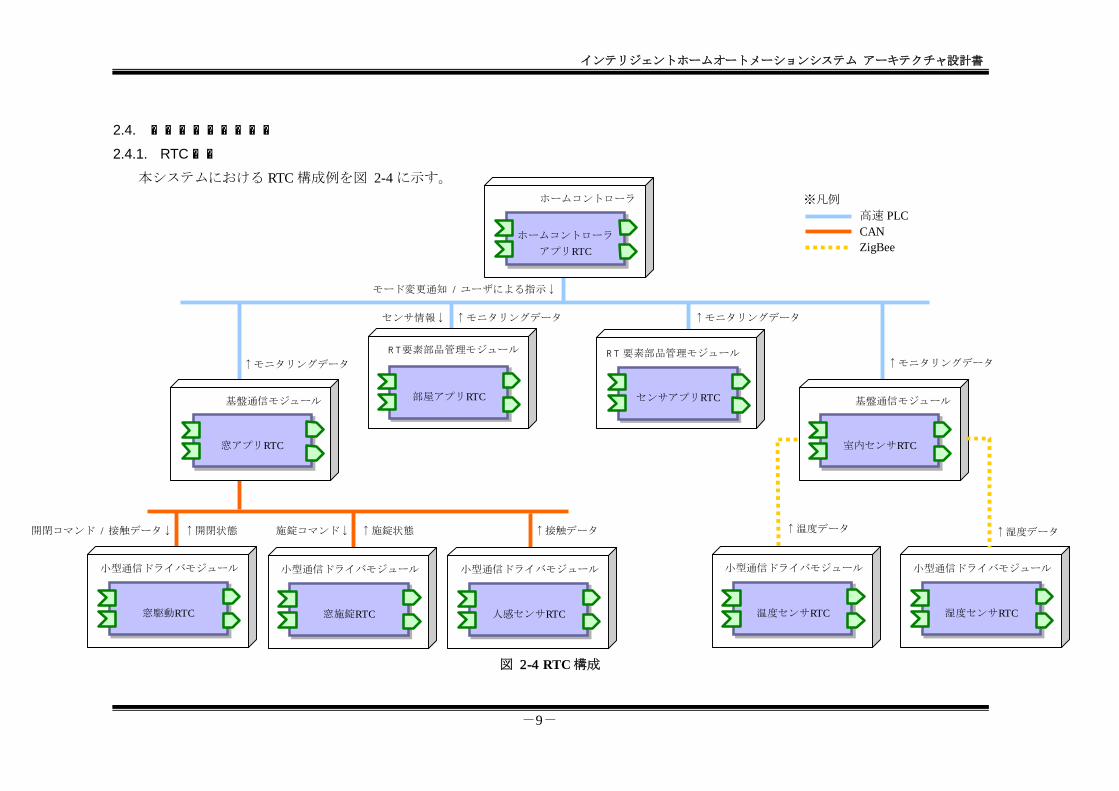
2.4.1. RTC構成
本システムにおける RTC 構成例を図 2-4 に示す。
図 2-4 RTC 構成
ホームコントローラ
ホームコントローラ アプリRTC
小型通信ドライバモジュール
人感センサRTC
小型通信ドライバモジュール
窓施錠RTC
小型通信ドライバモジュール
窓駆動RTC
小型通信ドライバモジュール
温度センサRTC
小型通信ドライバモジュール
湿度センサRTC
RT要素部品管理モジュール
基盤通信モジュール 基盤通信モジュール
RT 要素部品管理モジュール
室内センサRTC
※凡例 高速 PLC CAN ZigBee
↑施錠状態 ↑開閉状態 ↑接触データ 開閉コマンド / 接触データ↓ 施錠コマンド↓ ↑温度データ ↑湿度データ
↑モニタリングデータ ↑モニタリングデータ
↑モニタリングデータ ↑モニタリングデータ
モード変更通知 / ユーザによる指示↓
センサ情報↓
窓アプリRTC
部屋アプリRTC センサアプリRTC
インテリジェントホームオートメーションシステム アーキテクチャ設計書
-10-
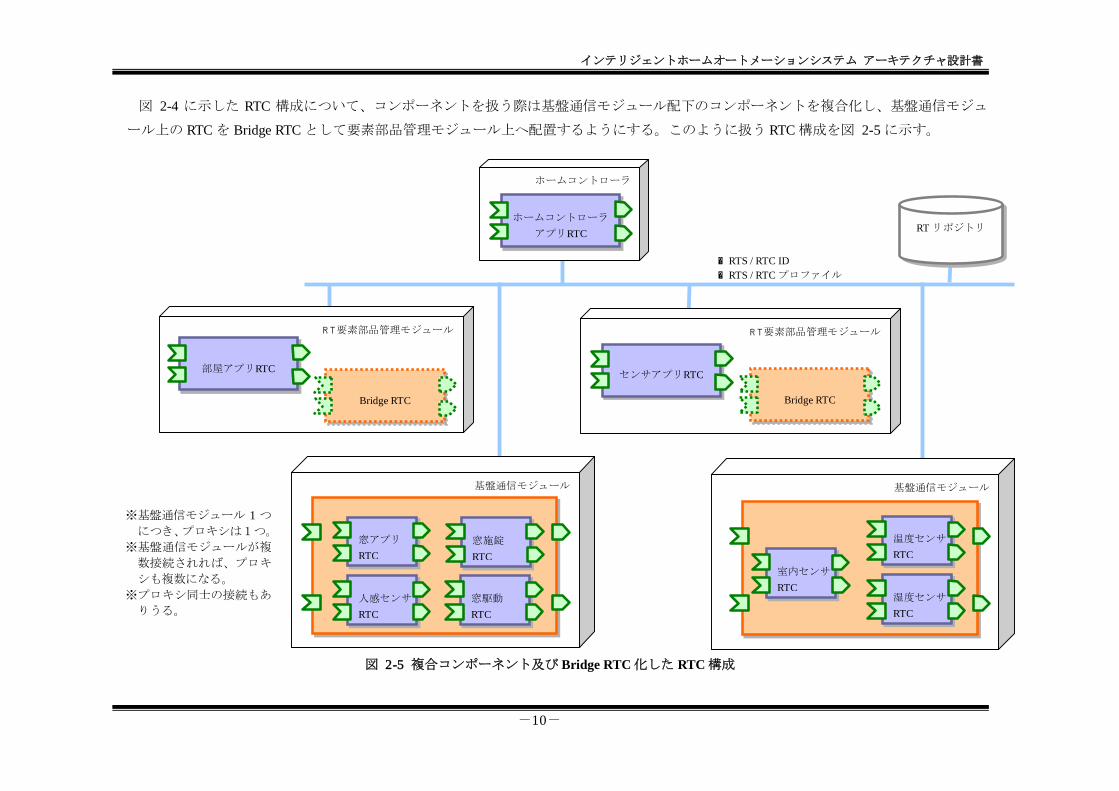
図 2-4 に示した RTC 構成について、コンポーネントを扱う際は基盤通信モジュール配下のコンポーネントを複合化し、基盤通信モジュ
ール上の RTC を Bridge RTC として要素部品管理モジュール上へ配置するようにする。このように扱う RTC 構成を図 2-5 に示す。
図 2-5 複合コンポーネント及び Bridge RTC 化した RTC 構成
ホームコントローラ
ホームコントローラ アプリRTC
RT要素部品管理モジュール
Bridge RTC
部屋アプリRTC
RT要素部品管理モジュール
Bridge RTC
センサアプリRTC
RT リポジトリ
→RTS / RTC ID ←RTS / RTC プロファイル
※基盤通信モジュール 1 つ
につき、プロキシは1つ。
※基盤通信モジュールが複
数接続されれば、プロキ
シも複数になる。 ※プロキシ同士の接続もあ
りうる。
基盤通信モジュール
温度センサ RTC
湿度センサ RTC
室内センサ RTC
基盤通信モジュール
窓駆動 RTC
窓施錠 RTC
人感センサ RTC
窓アプリ RTC

インテリジェントホームオートメーションシステム アーキテクチャ設計書
-11-
2.4.2. 複合コンポーネント
基盤通信モジュール上にて、以下の状況を勘案し、基盤通信モジュール以下の複数のコ
ンポーネントをあたかも 1 つのコンポーネントであるかのように見せることとした。
下位の系は下位の系として閉じた状態にしたい。
末端のデバイスコンポーネントをプロキシコンポーネントとして見せるためには、
プロキシのプロキシを生成する必要があり、処理が複雑になる。
しかし、RTC の開発中においては、複合コンポーネント内の子コンポーネントを操作す
る必要がある。そのため、子コンポーネントの状態や接続状況を RTSystemEditor にて表
示できる必要がある†。
複合コンポーネントの仕様について以下に示す。
(1) コンポーネントの起動
RTS プロファイルにて、<isRequire/>と設定されているコンポーネントが全て起動
した時点で、「起動」として扱う。
(2) コンポーネントの状態遷移コマンド受信
複合コンポーネントに対して状態遷移コマンドが送信された際は、全ての子コンポ
ーネントに対してコマンドを送信する。
(3) 異常ケース
① コンポーネントの状態が不一致
Active/Inactive が混在している際は、Active として RTSystemEditor へ通知す
る。Error のコンポーネントが 1 つでもあれば、Error として扱う。
② コンポーネントがエラー状態に遷移
子コンポーネントが Error 状態に遷移した場合、RESET コマンドの自動発行
はしない。
†子コンポーネントの操作は、あくまで開発中にのみ必要となるものであり、運用中に子コンポーネントに
対して直接の操作は必要ない。
インテリジェントホームオートメーションシステム アーキテクチャ設計書
-12-
2.4.3. Bridge RTC
統合ミドルウェアは、以下の理由によりコンポーネント毎にプロキシを生成する方式を
採用しないこととした。
デバイスコンポーネント毎にプロキシコンポーネントを生成した場合、デバイスコ
ンポーネントが増えると要素部品管理モジュールの処理負荷が増える。
低速 PLC のネットワークトラフィックが増大する。
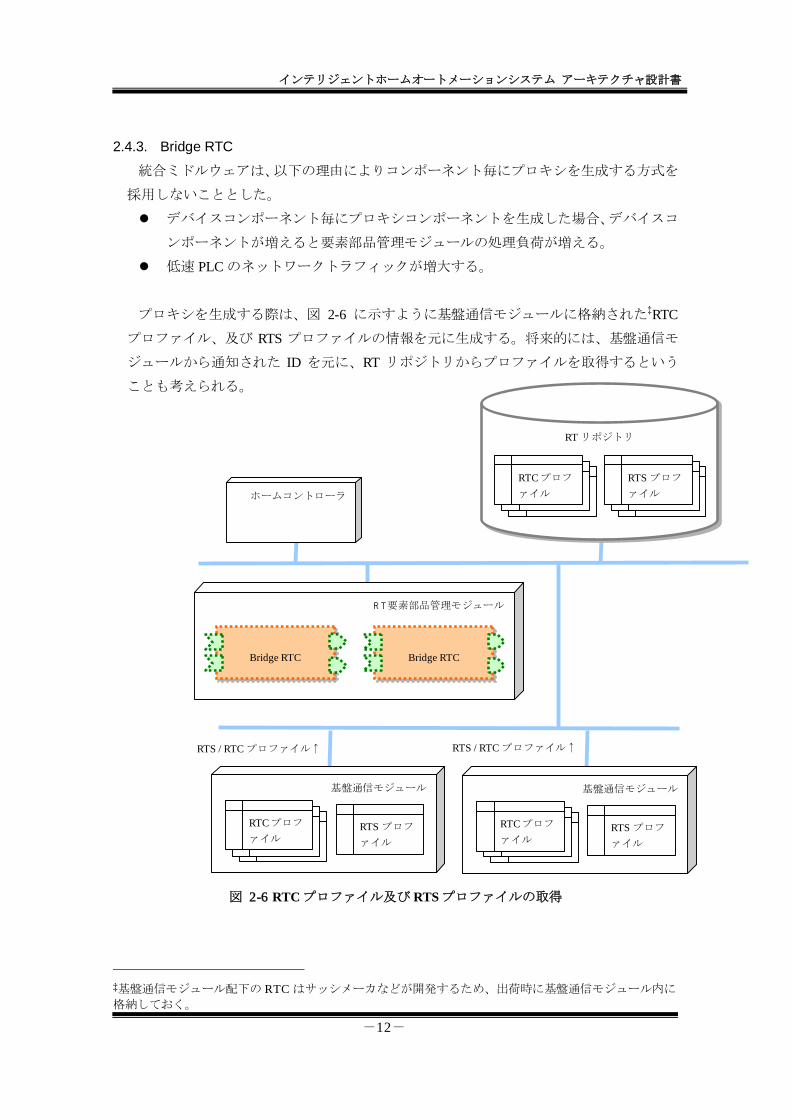
プロキシを生成する際は、図 2-6 に示すように基盤通信モジュールに格納された‡RTC
プロファイル、及び RTS プロファイルの情報を元に生成する。将来的には、基盤通信モ
ジュールから通知された ID を元に、RT リポジトリからプロファイルを取得するという
ことも考えられる。
図 2-6 RTC プロファイル及び RTS プロファイルの取得
‡基盤通信モジュール配下の RTC はサッシメーカなどが開発するため、出荷時に基盤通信モジュール内に
格納しておく。
ホームコントローラ
RT リポジトリ
RTS / RTC プロファイル↑
RTS プロフ
ァイル RTCプロフ
ァイル
基盤通信モジュール
RTS プロフ
ァイル RTCプロフ
ァイル
RTS / RTC プロファイル↑
基盤通信モジュール
RTS プロフ
ァイル RTCプロフ
ァイル
RT要素部品管理モジュール
Bridge RTC Bridge RTC
インテリジェントホームオートメーションシステム アーキテクチャ設計書
-13-
3 付録 3.1. 用語一覧
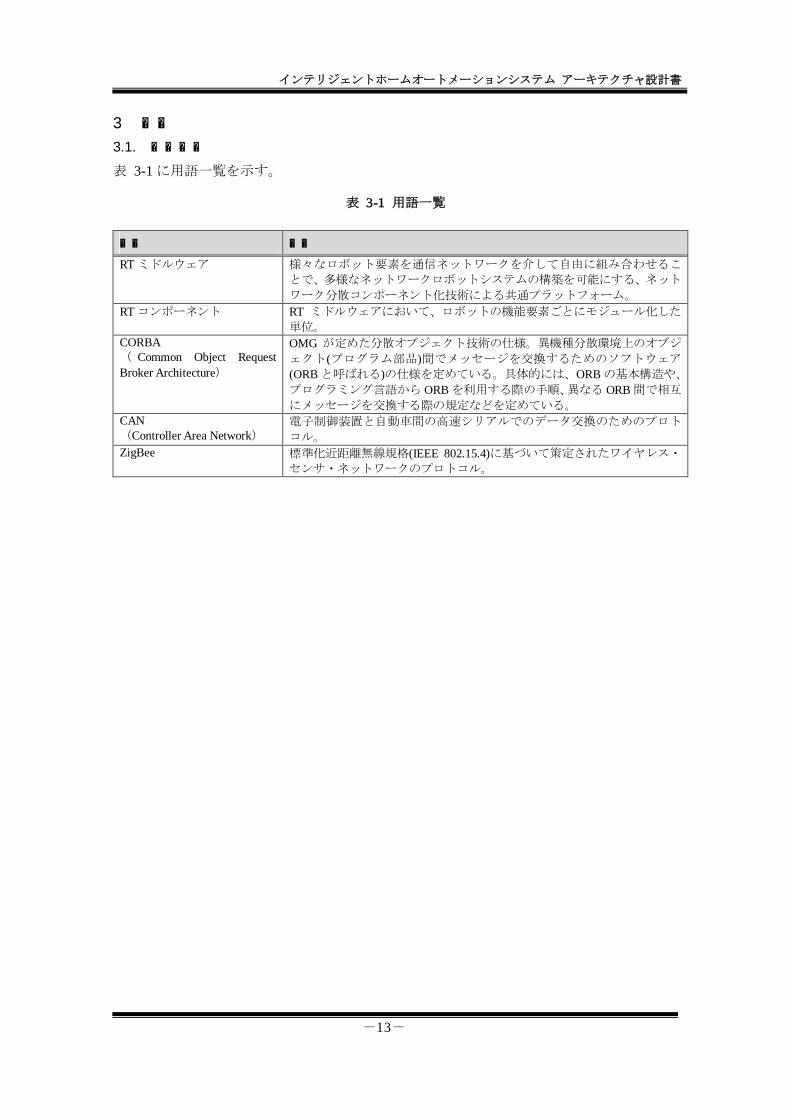
表 3-1 に用語一覧を示す。
表 3-1 用語一覧
用語 解説
RT ミドルウェア 様々なロボット要素を通信ネットワークを介して自由に組み合わせるこ
とで、多様なネットワークロボットシステムの構築を可能にする、ネット
ワーク分散コンポーネント化技術による共通プラットフォーム。 RT コンポーネント RT ミドルウェアにおいて、ロボットの機能要素ごとにモジュール化した
単位。 CORBA ( Common Object Request Broker Architecture)
OMG が定めた分散オブジェクト技術の仕様。異機種分散環境上のオブジ
ェクト(プログラム部品)間でメッセージを交換するためのソフトウェア
(ORB と呼ばれる)の仕様を定めている。具体的には、ORB の基本構造や、
プログラミング言語から ORB を利用する際の手順、異なる ORB 間で相互
にメッセージを交換する際の規定などを定めている。 CAN (Controller Area Network)
電子制御装置と自動車間の高速シリアルでのデータ交換のためのプロト
コル。 ZigBee 標準化近距離無線規格(IEEE 802.15.4)に基づいて策定されたワイヤレス・
センサ・ネットワークのプロトコル。