Embed Size (px)
Citation preview
basqueindustry.eus
FLEXIBLEROBOTICS
basqueindustry.eus

EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
Inspection/measurement robotic cell using non-destructive techniques
The cell allows the analysis for quality control and non-destructive inspection of parts. The system can be configured to perform inspection and measurement operations using various technologies including robotic arms, vision cameras, thermography, multispectral and different types of processing algorithms of the images obtained. The system consists of 2D or 3D vision systems, stereo photogrammetry, non-destructive inspection equipment (multispectral, thermography), and infrastructure to simulate different configurations and working conditions in the piece. The inspection systems are configurable
for use in various functions. The cell allows to perform different studies on a piece:
• 2D / 3D dimensional control using 2D and 3D vision techniques;
• Detection and identification of surface defects.
This cell offers the possibility of evaluating the feasibility of carrying out inspections both in-line and off-line, analyzing requirements linked to resolution, cycle times, etc. and automate solutions for both quality control and piece handling.
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• Wardrobe to establish controlled lighting conditions, conveyor belt controlled with encoder.
• Configurable 2D / 3D vision system
Gocator camera, Ranger Sick, IAI photometric stereo equipment, Pulsix Multispectral Equipment,Thermal camera
• Software for dimensional control and defect detection
• Software for inline inspection and 100% control
• Robotic arm for manipulation
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
FIELDS OF APPLICATION
Flexibility for robotic applicationsQuality control with robots
SERVICES OFFERED BY THE ASSET
Demonstration / Approaching technology
Robotic cell demonstrator for the inspection / measurement of components.
Technical feasibility analysis
Feasibility study of the limitations associated with the detection of defects specified by the client.
Proof of concept
Rapid tests of possible configurations and work cycles to assess the conception of the final inspection and measurement solution.
Training
Practical training in the application of robotics for the inspection / measurement of components.
ENTITY THAT MANAGES THE ASSET
FUNDACIÓN TEKNIKERContact Person:Loreto [email protected]
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
Zero Defect Manufacturing Cell
Flexible cell in which different technologies can be tested, all of them aimed at product inspection:
• Metrology and structural integrity (defects inspection) by means of 2D and 3D optical techniques
• Inspection by non-destructive methods (NDT) analyzing magnetic properties
• Programming, incorporation, adaptation of automations and robotics to the inspection and measurement process
This cell allows inspecting, by means of artificial vision techniques and NDT, the data of the dimensions and structural integrity of the pieces produced under a given process. It also allows the in-line inspection of the parts, ensuring the concept of zero-defects, reducing rejection and increasing productivity. This cell has the ability to test and incorporate robots and industrial automation to provide the inspection with the necessary flexibility. For this, there are 2 Fanuc robots of different sizes and capacities. Concerning to the inspection itself, telecentric optics of different sizes are available for the inspection of high precision 2D and, several laser scanners for a 3D metrology as well. Regarding the NDT, several own systems of measurement of magnetic properties are available for the detection of grinding fires and the creation
of hardness map of the product.
Due to the demands of different types of inspection, in addition to the traditional approach of traditional robotics of accurate positioning (dimensional inspection), it is also necessary to contemplate tasks where contact force control is required (inspection with non-destructive sensors requires an accurate palpation). For that, these robots have force sensors that allow seeing what efforts the robot is making during a contact between the robot and the surface. In summary, it offers companies a flexible cell with the capacity to characterize a product with 2 main objectives:
• A detailed report of the product that the client wants to characterize (metrological dimensions, defects, hardness map).
• Test and validate technologies in which the client may be interested. This cell is enough versatile to test different configurations and study the feasibility of a particular technology. This characteristic of versatility allows configuring the process with the required stations, as well as the technology to be used in each station.
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• Industrial robot Fanuc LRmate200iB with a 6-axis force/torque sensor
• Industrial robot Fanuc M10iA/12 with a 6-axis force/torque sensor
• Industrial vision: several cameras, optics (also telecentric), and 3D laser scanners
• Eddy Current portable equipment from GE Inspection Technologies – 2D Vector with different test probes
• System for measuring steel magnetic and mechanical properties and detection of grinding fires for components
FIELDS OF APPLICATION
Quality control with robots
SERVICES OFFERED BY THE ASSET
Inspection/measurement using NDT and 2D/3D optical techniques
Demonstrator/showroom, evaluate technologies, analyze technical feasibility, robotic inspection/measurement with vision techniques and NDT. Regarding optical techniques, the inspection would be: - High precision 2D and 3D metrology. - Inspection of surface defects (cracks, burrs, lack of material, etc.). Regarding NDT, the inspection would be: - Measurement of magnetic properties at different frequencies. - Measurements of magnetic induction in different levels of magnetic field H to verify that certain steels meet standards.
ENTITY THAT MANAGES THE ASSET
CEIT-IK4 Contact Person:Diego Borro Yágü[email protected]

EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
Flexible robotic cell for manipulation and collaborative work
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• Industrial robot: Mitsubishi PA10 (in 2015 it was modified to give it collaborative robot functionalities) with a 6-axis force/torque sensor
• Denso robot model VP-6242G2-S1 (clean room class)
• PLCs from several manufacturers (B&R, Beckhoff, Siemens, Rockwell)
• Industrial vision: several cameras, optics, and 3D laser scanners
• VR/AR: HTC Vive and Microsoft Hololens
The main asset is a Mitshubishi PA10 robot with the modified controller. This modification has consisted in the installation of a force sensor and the replacement of the manufacturer’s controller by a B&R-based PLC that has a G-code (open) interpreter. This fact, with the fact that the PA10 robot is an arm with 7 joints, makes it a platform where almost any scenario of robotization can be tested (position control, force/torque control, traditional robotics, collaborative robotics, emulation of machining processes using a CNC, studies of accessibility in redundant manipulators arms, etc.). However, this asset has been conceptualized to be presented, without being incompatible with the use described in the previous paragraph, as a flexible robot with which different typical operations of manipulation can be tested, such as:
bin picking / pick and place or helps the operator (in collaborative mode) to perform some task such as product assembly or tool positioning. For the collaborative mode, virtual reality or augmented reality tools can be used for human-machine interaction (operator guided, monitoring the status of the stations in real time,...). This cell has the ability to test and validate technologies in which the client may be interested since it is versatile enough to test different configurations and study the feasibility of a particular technology. This characteristic of versatility allows configuring the process with the required stations, as well as the technology to be used in each station. The cell is completed with a small portable Denso robot for layout studies, collaboration between two robots and / or collision management between mobile elements of the cell.
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
SERVICES OFFERED BY THE ASSET
Technical feasibility analysis
Demonstrator/showroom, evaluate technologies, analyze technical feasibility, technical training in collaborative robotics, conceptual design of innovative robotic solutions, automation of complex operations through robotics, applications of collaborative robotics, development of simulation applications, programming and control of robotic systems, manipulation of objects (bin-picking and “pick&place), assembly of sets, dynamic trajectory planning avoiding unforeseen obstacles.
ENTITY THAT MANAGES THE ASSET
CEIT-IK4 Contact Person:Diego Borro Yágü[email protected]
FIELDS OF APPLICATION
Flexibility for robotic applicationsAdvanced manipulation with robotsManufacture and assembly of components by robots
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
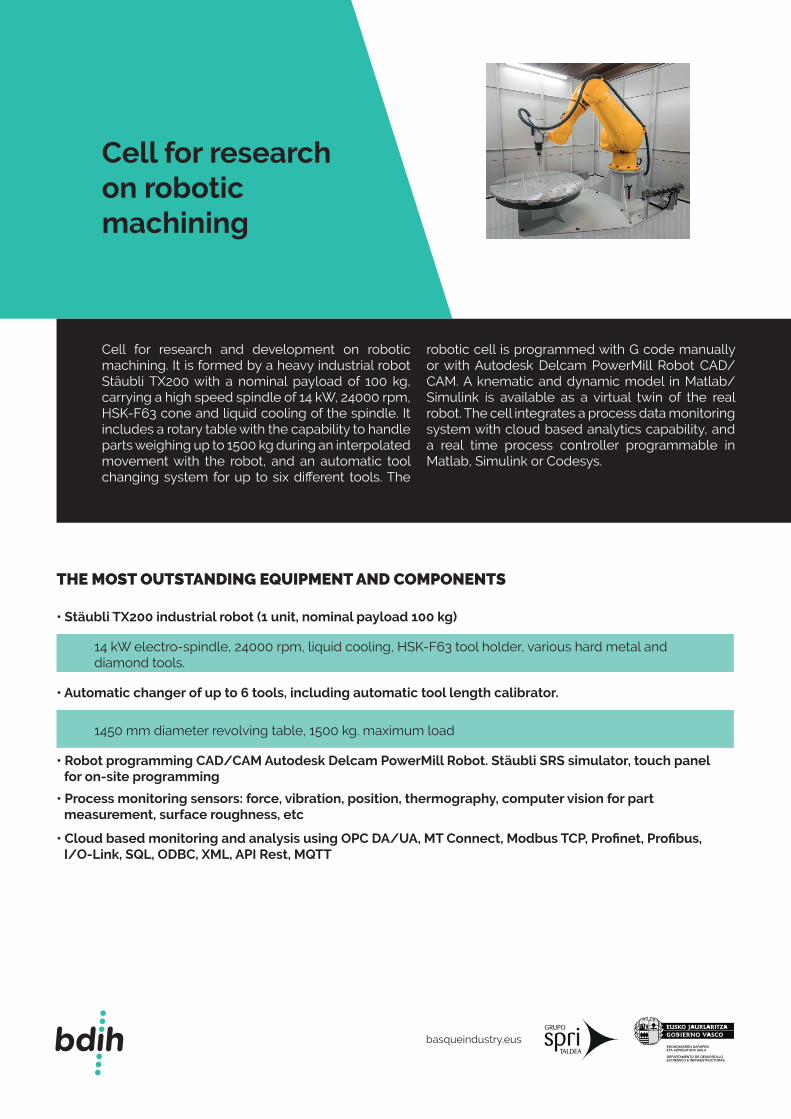
Cell for research on robotic machining
Cell for research and development on robotic machining. It is formed by a heavy industrial robot Stäubli TX200 with a nominal payload of 100 kg, carrying a high speed spindle of 14 kW, 24000 rpm, HSK-F63 cone and liquid cooling of the spindle. It includes a rotary table with the capability to handle parts weighing up to 1500 kg during an interpolated movement with the robot, and an automatic tool changing system for up to six different tools. The
robotic cell is programmed with G code manually or with Autodesk Delcam PowerMill Robot CAD/CAM. A knematic and dynamic model in Matlab/Simulink is available as a virtual twin of the real robot. The cell integrates a process data monitoring system with cloud based analytics capability, and a real time process controller programmable in Matlab, Simulink or Codesys.
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• Stäubli TX200 industrial robot (1 unit, nominal payload 100 kg)
14 kW electro-spindle, 24000 rpm, liquid cooling, HSK-F63 tool holder, various hard metal and diamond tools.
• Automatic changer of up to 6 tools, including automatic tool length calibrator.
1450 mm diameter revolving table, 1500 kg. maximum load
• Robot programming CAD/CAM Autodesk Delcam PowerMill Robot. Stäubli SRS simulator, touch panel for on-site programming
• Process monitoring sensors: force, vibration, position, thermography, computer vision for part measurement, surface roughness, etc
• Cloud based monitoring and analysis using OPC DA/UA, MT Connect, Modbus TCP, Profinet, Profibus, I/O-Link, SQL, ODBC, XML, API Rest, MQTT
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
FIELDS OF APPLICATION
Manufacture and assembly of components by robots
SERVICES OFFERED BY THE ASSET
Research in robotic machining of metal and non-metal parts
Feasibility study, tests and results analysis in the milling, drilling, recanteado and turning parts of materials such as aluminum, composite, carbon, fiberglass, polymer, resin and sand
Research in programming and simulation of robots and robotic cells
Essays, training and analysis of results in robotic CAM CAD programming and kinematic simulation and dynamics of robots in Matlab
ENTITY THAT MANAGES THE ASSET
IK4-IDEKO Contact Person:Asier Barrios [email protected]

EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
Cell for research on manufacturing and inspection of metal and composite parts
Cell for research on robotic systems for manufacturing and inspection of metal and composite parts. it has three medium size industrial robots and specifi c tools to perform manufacturing operations, such as fi nishing of metal parts (grinding, polishing, deburring), manufacturing of composite parts and non-destructive testing by ultrasonics and eddy currents. It is a fenced space for operator safety, with a 3 meter long aluminum table for the
mounting of parts and a lower tray to collect liquids used during inspection. It integrates a dust and chip suction system, and electric and pneumatic source to feed the tools. The necessary software for cell programming is available. It integrates a cloud based monitoring and analytics system, and a real time process controller programmable in Matlab, Simulink and Codesys.
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• Kuka KR16 Industrial robots
Kuka KR16 industrial robots (2 units, nominal load 16 kg, with the possibility of synchronizing move-ments between them with Kuka RoboTeam)
• Stäubli TX90L industrial robot
Stäubli TX90L industrial robot (1 unit, nominal load 6 kg, maximum 15 kg) Stäubli SRS, Kuka WorkVisual, CAD/CAM Delcam Autodesk PowerMill Robot programming software
• UT inspection and manufacturing tools
UT inspection tools: mono-element transducers and Phased Array transducers, Olympus Focus PX acquisition system. Induced currents, Olympus Omniscan NX acquisition systems.Tool for manufacturing metal parts by abrasion, radial fl exibility, pneumatic force control and pneumatic motor.
• Sensors for process monitoring
Sensors for process monitoring: force, vibration, position, thermography, dimensional artifi cial vision, surface roughness, etc.
• Monitoring and analysis in the cloud
Monitoring and analysis in the cloud with OPC DA/UA, MT Connect, Modbus TCP, Profi net, Profi bus, I/O-Link, SQL, ODBC, XML, Rest API, MQTT and programmable real-time process controller in Matlab, Simulink and Codesys.

EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
FIELDS OF APPLICATION
Advanced manipulation with robotsQuality control with robotsManufacture and assembly of components by robots
SERVICES OFFERED BY THE ASSET
Investigation in the superficial finishing of metallic pieces
Feasibility study, testing and analysis of results in the sanding, polishing, deburring and grinding of metal parts
Research in the robotization of manual manufacturing operations
Feasibility study, testing and analysis of results in the development of robotic systems replacing peo-ple in manual operations
Investigation in defect inspection through non-destructive testing
Feasibility study, tests and analysis of results in non-destructive inspection with ultrasound, induced currents and active thermography in metal parts and composites.
Research in industrial robot control techniques
Feasibility study, tests and results analysis for the development of communications with robots, between robots, and between robots and other machines.
Research in communications and connectivity with robots
Feasibility study, tests and results analysis for the development of communications with robots, between robots, and between robots and other machines.
ENTITY THAT MANAGES THE ASSET
IK4-IDEKO Contact Person:Asier Barrios [email protected]
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
Multi-use platform of Fanuc industrial robots guided by 3D computer vision
Composed by several industrial anthropomorphic 6 axes robots of different sizes and specifications, as well as by different industrial computer vision cameras that can be mounted in the different
robots. For each application the most appropriate combination of robot / s camera / s would be selected.
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• Anthropomorphic robot Fanuc M710iC/50
Anthropomorphic robot Fanuc M710iC/50 Anthropomorphic robot Fanuc M-900iA-400L Anthropomorphic robot Fanuc ArcMate 100iC Anthropomorphic robot Fanuc R2000iB/210F
• Joint tracking system: Servorobot Powerbox + PowerCam
Joint tracking system: Servorobot Powerbox + PowerCam
• Welding equipment: Kempi Kemparc 450
Welding equipment: Kempi Kemparc 450
• Roboguide V8.3075 (RevJ): simulation and offline programming SW for fanuc robots.
Roboguide V8.3075 (RevJ): simulation and offline programming SW for fanuc robots.
• Different 3D computer vision equipment based on structured light technology
Different 3D computer vision equipment based on structured light technology
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
FIELDS OF APPLICATION
Advanced manipulation with robotsQuality control with robotsFlexibility for robotic applicationsManufacture and assembly of components by robots
SERVICES OFFERED BY THE ASSET
Robotic advanced handling
Pick and place handling
Flexibility for robotic applications
Flexibility for robotic applications
Quality control with robots
Dimensional control, integrity control, part damage detection with robots and 3D computer vision.
Parts manufacturing and assembly with robots
Robots accuracy improvement. Drilling, riveting, sealant application, additive manufacturing, screwing, deburring, components assembly.
Technological-economic advice
Analysis of needs. SoA. Technological analysis. Feasibility evaluation. Proof of concept.
Design, prototyping and validation
Conceptual design, simulation, architecture of the solution, safety analysis. Prototyping, programming and experimental validation. Technology transfer
Training
Demonstration. Workshops (<1 day). Training (>1 day)
ENTITY THAT MANAGES THE ASSET
FUNDACIÓN TECNALIA RESEARCH & INNOVATION Contact Person:Karmele Florentino [email protected]
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
Integration of Inspection systems in robotic solutions
Inside dynamic manufacturing systems, robotic inspection systems allow the automatized superficial inspection of pieces, reducing inspection times and increasing production. What is more, the automatization of the inspection provides inspections of higher quality and eliminates the possible subjectivity arising in manual inspections like dye testing and magnetic particle testing.
The automated inspection cell is aimed to the application of active thermography. It has a Kuka KR30HA that has the possibility of changing the elements of the head. A laser or an inductor can be put together with different thermographic cameras. There are two low power lasers of 808 nm and 1064 nm respectively. It also has a 3KW induction generator, which depending on the surface to be inspected can give very good results. The inspection trajectories are defined using the CAD-CAM Tebis. Moreover, all the processing and the algorithms related to automatic detection are externally programmed using python. The cell can be provided with the TIC infrastructure needed to communicate and receive information with logical platforms based on Big Data Concepts
and Flexible Manufacturing. In particular the following elements can be integrated:
(i) The following IoT communication protocols: OPC-UA, MQTT y AMPQ.
(ii) Interchange of information with other machines using industrial communication protocols (Profibus, Profinet) or even M2M if a middleware is installed with that purpose (based on Apache Camel for example). This transforms the inspection cell in a really interesting asset since it can be integrated in MES systems in flexible manufacturing lines with the aim of optimizing the cicles and the available resources.
(iii) Directly with databases (SQL and ODBC).
Moreover, there is a wide knowledge and equipment in UltraSounds applied as an inspection technique.
In what refers to normatives, the cell has Class 1 isolation for the use of laser systems. It hasn’t any problems regarding environment or energetic efficiency.
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• 8 axis robotic system
Kuka KR30HA (6 axes, high precisión and a máximum load of 30 Kg) together with a working table with 2 aditional axes (rotation and pitch).
Thermographic cameras: Flir X6541sc (cooled and with a máximum framerate of 4000 Hz) and a Flir A655sc (microbolometric and with a maximum framerate of 50 Hz)
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
FIELDS OF APPLICATION
Quality control with robots
• Lasers
Frankfurt Laser of 808 nm (50 W) and a Collimated laser of 1064 nm (10 W)
• itVis induction generator
itVis induction generator (3 kW) and adapted inductors for the inspection of components using active thermography (with the possibility to create new ones).
• Software
Thermographic and monitoring software with the capability of storing process data as well as thermographic data for a posterior processing. Tebis CAD-CAM software for the definition and optimization of the inspection trajectories.
SERVICES OFFERED BY THE ASSET
Advanced Materials Inspection
Automatization of the inspection of composites in manufacturing processes and in the inspection of advanced materials employed in joining processes.
Inspection in flexible manufacturing systems
Inspection in flexible manufacturing systems Consideration of inspection systems in: (i) Flexible manufacturing production and intelligent manufacturing. (ii) Production data handling in management software. (iii) Monitoring systems integrated in the production system with the aim of achieving unitary traceability.
Prototyping of Inspection Systems
Validation tests of real robotic inspection systems with the aim of getting information of the limiting parameters: sensibility, cycle time, etc. Prototyting and test under industrial conditions using new inspection technologies.
Collaboration and Coworking
Get industrial companies closer to the opportunities derived from the robotic technologies in what refers to inspection and quality control. New business oportunities. Collaboration with interntational networks known for their excellence.
Training
Training of technicians and operators on the new robot based industrial inspection systems.
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
ENTITY THAT MANAGES THE ASSET
IK4-LORTEK Contact Person:Eider [email protected]
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
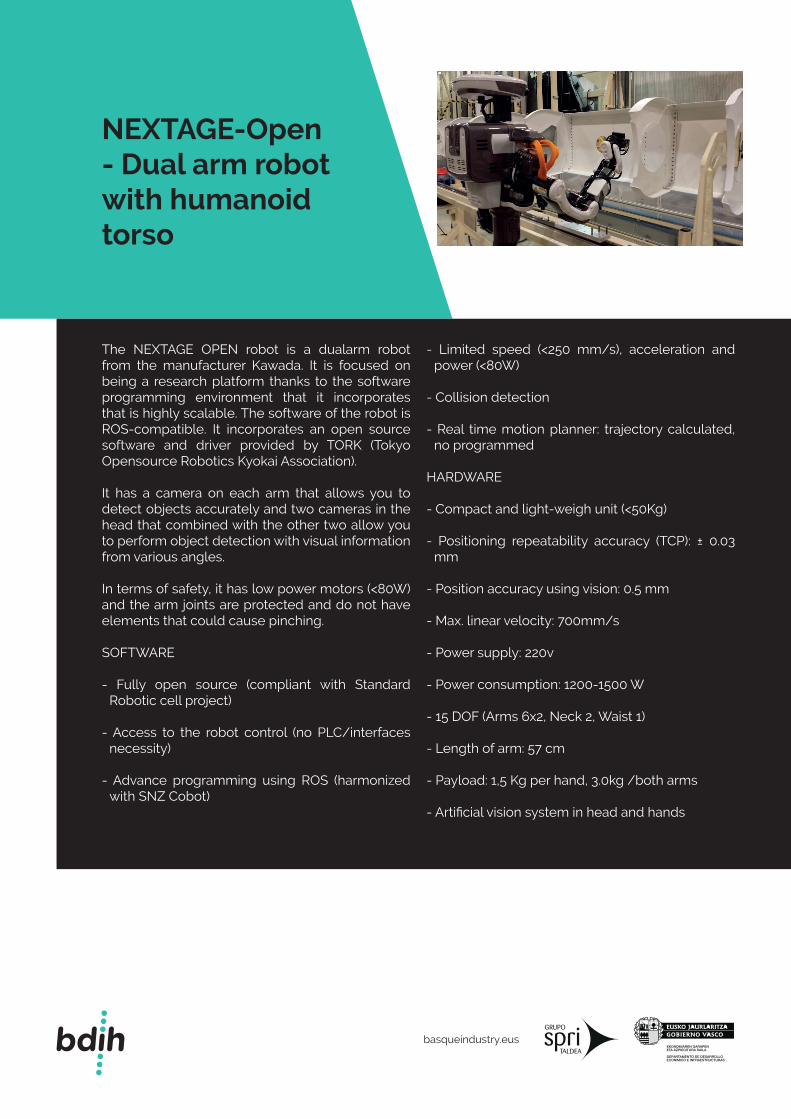
NEXTAGE-Open - Dual arm robot with humanoid torso
The NEXTAGE OPEN robot is a dualarm robot from the manufacturer Kawada. It is focused on being a research platform thanks to the software programming environment that it incorporates that is highly scalable. The software of the robot is ROS-compatible. It incorporates an open source software and driver provided by TORK (Tokyo Opensource Robotics Kyokai Association).
It has a camera on each arm that allows you to detect objects accurately and two cameras in the head that combined with the other two allow you to perform object detection with visual information from various angles.
In terms of safety, it has low power motors (<80W) and the arm joints are protected and do not have elements that could cause pinching.
SOFTWARE
- Fully open source (compliant with Standard Robotic cell project)
- Access to the robot control (no PLC/interfaces necessity)
- Advance programming using ROS (harmonized with SNZ Cobot)
- Limited speed (<250 mm/s), acceleration and power (<80W)
- Collision detection
- Real time motion planner: trajectory calculated, no programmed
HARDWARE
- Compact and light-weigh unit (<50Kg)
- Positioning repeatability accuracy (TCP): ± 0.03 mm
- Position accuracy using vision: 0.5 mm
- Max. linear velocity: 700mm/s
- Power supply: 220v
- Power consumption: 1200-1500 W
- 15 DOF (Arms 6x2, Neck 2, Waist 1)
- Length of arm: 57 cm
- Payload: 1,5 Kg per hand, 3.0kg /both arms
- Artificial vision system in head and hands
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• Head Kawada product
- 2 dof Pan Tilt - 1x Stereovision by USB2 camera
• Torso Kawada product
- 2x 6dof arms with embedded Electronics (drivers – CAN com) - 1x Torso rotation
• Robot Pedestal
-QNX low level PC -Application control PC: Linux Ubuntu +ROS
• 2x Stereovision by USB3 Color camera
2x Stereovision by USB3 Color camera
• Grippers
Electric gripper (serial com + power) Pneumatic gripper 2 Deburring end-effectors using pneumatics Schunk pneumatic tool changer
FIELDS OF APPLICATION
Flexibility for robotic applicationsAdvanced manipulation with robotsQuality control with robotsManufacture and assembly of components by robots
SERVICES OFFERED BY THE ASSET
Advanced manipulation with robots
Handling pick in place, in Picking or Kitting type
Flexibility for robotic applications
Automatic generation of trajectories without collision Automatic or easy programming of robotic cells Detection and location of parts based on Vision for robot guidance. Dual-arm coordinated motion Te-leoperation of robots
Quality control with robots
Parts dimensional control with robots and 3D vision parts integrity control and defects detection using robots and 3D vision
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
ENTITY THAT MANAGES THE ASSET
FUNDACIÓN TECNALIA RESEARCH & INNOVATION Contact Person:Karmele Florentino [email protected]
Manufacture and assembly of components by robots
Accuracy improvement of robots Riveting with robots Assembly of components with robots Screwed with a robot Deburring with robots
General services offered by the node agent
1. Technological-economic advice 2. Design, prototyping and validation 3. Training and awareness

EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
VULCANO: Mobile dual-arm robot (2 UR10) with autonomous omnidirectional navigation, 3D vision guidance and force control
The dual-arm robot was developed to count with a flexible robotic solution with potential to being used in a large range of automation use cases requested by the European companies. VULCANO is composed by: two UR10 arms, torso
with lift and turn, autonomous navigation system with omnidirectional wheels, vision systems in the torso and grippers. The complete functionality of this asset is on a ROS framework developed by Tecnalia.
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• 2 UR10 arms
• Mobile platform with omnidirectional wheels.
• Vision systems
FIELDS OF APPLICATION
Advanced manipulation with robotsQuality control with robotsManufacture and assembly of components by robotsInternal logistics with mobile robotsFlexibility for robotic applications
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
SERVICES OFFERED BY THE ASSET
Parts manipulation and transportation in large workspaces
Advanced parts manipulation with robots. The manipulated parts (20 Kg payload) can be transported in indoor industrial workshops. The 15 DoF of the robot are available for part manipulation.
Bin Picking or Kitting applications
Advanced parts manipulation with robots. Combined 3D vision techniques with location, detection, segmentation and matching are integrated in the robot manipulation to enhance complex bin picking applications. With the implementation of this capability, the kitting can be implemented by using the own robot table or an additional support.
AGV design and customization
Advanced parts manipulation with robots. Mobile platform elements like navigation systems, charge and safety elements were. In this line, it has the know-how of designing customized platforms according with different use cases conditions.
Automatic trajectory generation to avoid collisions.
Advanced parts manipulation with robots. Safety robot systems include strategies to avoid and prevent collisions. Different techniques can be implemented to reach this objective: from detecting the collision and stop the robot, to dynamically calculate the trajectory free of collisions during the execution time.
Easy programming of robotic cells
Flexibility in robotic applications. This tool facilitates the robot programming by not robot experts by using the information of the robot workspace and the involved parts in the manipulation.
Vision-based parts detection and localization for robot guiding
Flexibility in robotic applications. Experience in several techniques and configurations of artificial vision systems (stereo vision, structured light, laser scanning, tags detection, 2D and 3D detection and matching… ) is available to been applied according the parts requirements and robot working conditions.
Force/Compliance based robot guiding
Flexibility in robotic applications. Force and torque (3 to 6 axes) should be measured and controlled depending on the use case to be automated. Located on the end-effector, these sensors allow the compliance guiding of the robot.
Teleoperation of robots
Flexibility in robotic applications. This asset can be used in master-slave control configuration. This means this robot can be used in remote sites on in environments dangerous for humans. Different control strategies can be implemented from remote visualization to include force feedback by using haptic devices.
Dual-arm coordinated motion
Flexibility in robotic applications. Dual arm manipulation is mandatory in task that requires synchronized or cooperative operation as performed by humans. This capacity allows to increase the weight and size of the parts manipulated.
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
Parts dimensional control with robots and 3D vision systems
Quality control with robots. In machining and manufacturing processes is fundamental to ensure que final result of the part. Artificial vision systems allow the automatic measurement of the part by using 3D matching strategies. In some cases, the manipulation of the part is mandatory, in order to access to all the part sides, then the use of a manipulator is justified.
Quality control with robots and 3D vision systems
Quality control with robots. Different parameters can be defined as quality control parameters, be-ing possible to include detection by using vision systems or programming test to be executed by the robot. The data obtained from these test is analyzed in the ROS framework developed by Tecnalia. Additionally, in some cases, the manipulation of the part is mandatory, in order to access to all the part sides, then the use of a manipulator is justified.
Robotic drilling
Manufacturing and assembly performed by robots. The automation of the drilling operation implies to deal with: manipulation of the tool and involved parts, quality control of the hole, clamping force to avoid dust in the parts interface, guide holes and part-references identification, improvements in the process and data analysis. All those are included in Tecnalia Know-how.
Robotic riveting
Manufacturing and assembly performed by robots. The automation of the riveting operation implies to deal with: manipulation of the tool and involved parts, (blind and hi-lite/hi-lok rivets), quality control of the performed riveting, guide hole accurate location and data analysis of the overall process.
Sealant application with robots
Manufacturing and assembly performed by robots. The automation of the sealant applications de-pends on the specific process (sealant interface, parts with sealant, buttons or sealant cords…), then the robotic operation will manage the specific requirements for the operation with: manipulation of the tool and involved parts (sealant, gripper end-effector…), references in the part and data analysis of the complete operation including the final result of the sealant applied.
Robotic components manipulation and assembly
Manufacturing and assembly performed by robots. Automatic assembly can be used in a large range of processes, being needed to analyze each case to define the complexity of the automation itself. In some cases the automation is a solved problem, but in other cases, it is needed to develop an innova-tive solution.
Robotic screwing and tightening
Manufacturing and assembly performed by robots. The tightening of threaded parts requires of flexible robotic devices and control strategies, being in some cases necessary to include force Feedback. It is also included the screwing application, including the parts manipulation and the quality control of the operation.
Robotic deburring
Manufacturing and assembly performed by robots. The automation of the deburring process includes the manipulation of the tools and parts involved in the process, the burr detection (by using artificial vision systems), quality control of the final result and the data analysis of all the signals in process.
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
Accuracy improvement of robots.
Manufacturing and assembly performed by robots. A tuned control system increases the robotic system performance, being possible to include in the close loop additional data to compensate disturbances in the system (such as vision systems to correct deformations or to include compensations, as well as implement visual servoing strategies).
ENTITY THAT MANAGES THE ASSET
FUNDACIÓN TECNALIA RESEARCH & INNOVATION Contact Person:Karmele Florentino [email protected]
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
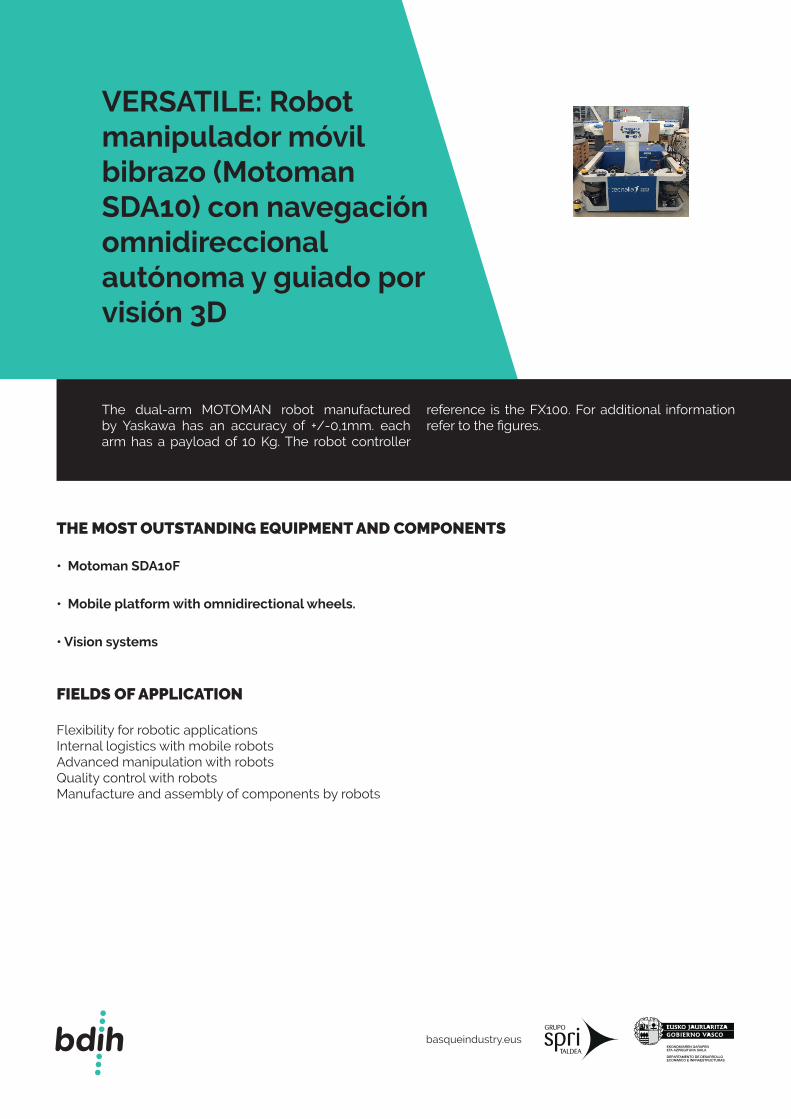
VERSATILE: Robot manipulador móvil bibrazo (Motoman SDA10) con navegación omnidireccional autónoma y guiado por visión 3D
The dual-arm MOTOMAN robot manufactured by Yaskawa has an accuracy of +/-0,1mm. each arm has a payload of 10 Kg. The robot controller
reference is the FX100. For additional information refer to the figures.
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• Motoman SDA10F
• Mobile platform with omnidirectional wheels.
• Vision systems
FIELDS OF APPLICATION
Flexibility for robotic applicationsInternal logistics with mobile robotsAdvanced manipulation with robotsQuality control with robotsManufacture and assembly of components by robots
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
SERVICES OFFERED BY THE ASSET
Parts manipulation and transportation in large workspaces.
Advanced parts manipulation with robots. The manipulated parts (20 Kg payload) can be transported in indoor industrial workshops. The 15 DoF of the robot are available for part manipulation.
Bin Picking or Kitting applications
Advanced parts manipulation with robots. Combined 3D vision techniques with location, detection, segmentation and matching are integrated in the robot manipulation to enhance complex bin picking applications. With the implementation of this capability, the kitting can be implemented by using the own robot table or an additional support.
AGV design and customization
Advanced parts manipulation with robots. The mobile platform payload is 1,5 tons. Mobile platform elements like navigation systems, charge and safety elements . In this line, Tecnalia has the know-how of designing customized platforms according with different use cases conditions.
Automatic trajectory generation to avoid collisions.
Advanced parts manipulation with robots. Safety robot systems include strategies to avoid and prevent collisions. Different techniques can be implemented to reach this objective: from detecting the collision and stop the robot, to dynamically calculate the trajectory free of collisions during the execution time.
Easy programming of robotic cells
Flexibility in robotic applications. This tool facilitates the robot programming by not robot experts by using the information of the robot workspace and the involved parts in the manipulation.
Vision-based parts detection and localization for robot guiding
Flexibility in robotic applications. Experience in several techniques and configurations of artificial vision systems (stereo vision, structured light, laser scanning, tags detection, 2D and 3D detection and matching… ) is available to been applied according the parts requirements and robot working conditions
Dual-arm coordinated motion
Flexibility in robotic applications. Dual arm manipulation is mandatory in task that requires synchronized or cooperative operation as performed by humans. This capacity allows to increase the weight and size of the parts manipulated.
Teleoperation of robots
Flexibility in robotic applications. This asset can be used in master-slave control configuration. This means this robot can be used in remote sites on in environments dangerous for humans. Different control strategies can be implemented from remote visualization to include force feedback by using haptic devices.
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
Parts dimensional control with robots and 3D vision systems
Quality control with robots. In machining and manufacturing processes is fundamental to ensure que final result of the part. Artificial vision systems allow the automatic measurement of the part by using 3D matching strategies. In some cases, the manipulation of the part is mandatory, in order to access to all the part sides, then the use of a manipulator is justified.
Quality control with robots and 3D vision systems
Quality control with robots. Different parameters can be defined as quality control parameters, be-ing possible to include detection by using vision systems or programming test to be executed by the robot. The data obtained from these test is analyzed in the ROS framework developed by Tecnalia. Additionally, in some cases, the manipulation of the part is mandatory, in order to access to all the part sides, then the use of a manipulator is justified.
Accuracy improvement of robots
Manufacturing and assembly performed by robots. A tuned control system increases the robotic sys-tem performance, being possible to include in the close loop additional data to compensate distur-bances in the system (such as vision systems to correct deformations or to include compensations, as well as implement visual servoing strategies).
Robotic drilling
Manufacturing and assembly performed by robots. The automation of the drilling operation implies to deal with: manipulation of the tool and involved parts, quality control of the hole, clamping force to avoid dust in the parts interface, guide holes and part-references identification, improvements in the process and data analysis. All those are included in Tecnalia Know-how.
Robotic riveting
Manufacturing and assembly performed by robots. The automation of the riveting operation implies to deal with: manipulation of the tool and involved parts, (blind and hi-lite/hi-lok rivets), quality control of the performed riveting, guide hole accurate location and data analysis of the overall process.
Robotic components manipulation and assembly.
Manufacturing and assembly performed by robots. Automatic assembly can be used in a large range of processes, being needed to analyze each case to define the complexity of the automation itself. In some cases the automation is a solved problem, but in other cases, it is needed to develop an innova-tive solution.
ENTITY THAT MANAGES THE ASSET
IK4-IDEKO Contact Person:Asier Barrios [email protected]
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
MUGIRO: Customizable omnidirectional mobile robot with autonomous navigation and teleoperation
Multipurpose mobile platform integrated by different modules, omnidirectional and with autonomous navigation.
Equipped with 4 adjustable motorized wheels that provide omnidirectional movement capacity, plus an additional axis that allows orienting the upper platform. Robot oriented as a test platform
for different robotic technologies (autonomous navigation, mobile manipulation, security, human-robot interaction, etc.). It has a large upper cover enabled to mount additional sensors and actuators. It has a high performance internal PC for the control and integration of additional components. Control system based on ROS.
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• Laser de seguridad SICK S3000
• Security system (relay, laser, bumpers and remote emergency stop)
• High performance internal PC
• Omnidirectional motor wheels
FIELDS OF APPLICATION
Internal Logistics with mobile robotsFlexibility for robotic applications
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
SERVICES OFFERED BY THE ASSET
Internal logistics with mobile robots
Customization of autonomous mobile robot / AGV
Flexibility for robotic applications
Teleoperation of robots
General services offered by the node agent
1. Technological-economic advice 2. Design, prototyping and validation 3. Training and awareness
ENTITY THAT MANAGES THE ASSET
FUNDACIÓN TECNALIA RESEARCH & INNOVATION Contact Person:Karmele Florentino [email protected]
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
Collaborative robotic platform composed by the KukaLWR4, UR5, haptic devices and 3D workspace monitoring
Collaborative robot KUKA light weight 4(LWR4)
The Kuka LWR was the first collaborative robot, it counts with compliance control thanks to the force sensors integrated in all the robot joints. This control strategy allows to move by hand the robot, being used to program robot trajectories by not robot experts. This robot was the predecessor of the Kuka iiwa. The robot arm payload is 7 Kg.Universal robot UR5
Universal Robots became very popular thanks to their value for money relation. Additionally, the
programming interface is friendly (if compared with industrial robots). The force sensor located in its last joint allows limited force control strategies.Haptic devices
Haptic devices (or robots) allows the feedback of force signals from remote or virtual environments. In teleoperation is possible to apply different master-slave control configuration depending on the use case requirements. Three different devices are available in this asset: Phantom Omni with 6 DoF, Novint Falcon with 3 DoF and the Force dimension Omega 7 with 7 DoF.
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• KUKA light weight 4 robot (LWR4) – collaborative robot
• Universal robot UR5
• Phantom Omni
• Force dimension Omega 7
• Novint Falcon
FIELDS OF APPLICATION
Quality control with robotsAdvanced manipulation with robotsFlexibility for robotic applications Manufacture and assembly of components by robots
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
SERVICES OFFERED BY THE ASSET
Bin Picking or Kitting applications
Advanced parts manipulation with robots. Combined 3D vision techniques with location, detection, segmentation and matching are integrated in the robot manipulation to enhance complex bin picking applications. With the implementation of this capability, the kitting can be implemented by using the own robot table or an additional support.
Collaborative Human-robot interaction with 3D workspace monitoring
Advanced parts manipulation with robots. Collaborative workspace implies force signals in all robot joints (or in the robot surface) and the workspace monitoring by redundant systems (vision, laser and electro-mechanic devices) Friendly programming, ergonomic and dynamic trajectory are also included tool that improve the functionality of the collaborative cell.
Automatic trajectory generation to avoid collisions
Advanced parts manipulation with robots. Safety robot systems include strategies to avoid and prevent collisions. Different techniques can be implemented to reach this objective: from detecting the collision and stop the robot, to dynamically calculate the trajectory free of collisions during the execution time.
Easy programming of robotic cells
Flexibility in robotic applications. This tool facilitates the robot programming by not robot experts by using the information of the robot workspace and the involved parts in the manipulation.
Vision-based parts detection and localization for robot guiding
Flexibility in robotic applications. Experience in several techniques and configurations of artificial vision systems (stereo vision, structured light, laser scanning, tags detection, 2D and 3D detection and matching… ) is available to been applied according the parts requirements and robot working conditions.
Force/Compliance based robot guiding
Flexibility in robotic applications. Force and torque (3 to 6 axes) should be measured and controlled depending on the use case to be automated. Located on the end-effector, these sensors allow the compliance guiding of the robot.
Teleoperation of robots
Flexibility in robotic applications. This asset can be used in master-slave control configuration. This means this robot can be used in remote sites on in environments dangerous for humans. Different control strategies can be implemented from remote visualization to include force feedback by using haptic devices.
Parts dimensional control with robots and 3D vision systems
Quality control with robots. In machining and manufacturing processes is fundamental to ensure que final result of the part. Artificial vision systems allow the automatic measurement of the part by using 3D matching strategies. In some cases, the manipulation of the part is mandatory, in order to access to all the part sides, then the use of a manipulator is justified.
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
Quality control with robots and 3D vision systems
Quality control with robots. Different parameters can be defined as quality control parameters, being possible to include detection by using vision systems or programming test to be executed by the robot. The data obtained from these test is analyzed in the ROS framework developed by Tecnalia. Additionally, in some cases, the manipulation of the part is mandatory, in order to access to all the part sides, then the use of a manipulator is justified.
Robotic drilling
Manufacturing and assembly performed by robots. The automation of the drilling operation implies to deal with: manipulation of the tool and involved parts, quality control of the hole, clamping force to avoid dust in the parts interface, guide holes and part-references identification, improvements in the process and data analysis. All those are included in Tecnalia Know-how.
Sealant application with robots
Manufacturing and assembly performed by robots. The automation of the sealant applications depends on the specific process (sealant interface, parts with sealant, buttons or sealant cords…), then the robotic operation will manage the specific requirements for the operation with: manipulation of the tool and involved parts (sealant, gripper end-effector…), references in the part and data analysis of the complete operation including the final result of the sealant applied.
Robotic components manipulation and assembly
Manufacturing and assembly performed by robots. Automatic assembly can be used in a large range of processes, being needed to analyze each case to define the complexity of the automation itself. In some cases the automation is a solved problem, but in other cases, it is needed to develop an innovative solution.
Robotic screwing and tightening
Manufacturing and assembly performed by robots. The tightening of threaded parts requires of flexible robotic devices and control strategies, being in some cases necessary to include force Feedback. It is also included the screwing application, including the parts manipulation and the quality control of the operation.
Robotic deburring
Manufacturing and assembly performed by robots. The automation of the deburring process includes the manipulation of the tools and parts involved in the process, the burr detection (by using artificial vision systems), quality control of the final result and the data analysis of all the signals in process.
ENTITY THAT MANAGES THE ASSET
FUNDACIÓN TECNALIA RESEARCH & INNOVATION Contact Person:Karmele Florentino [email protected]
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
Automatic programming software library for flexible robotic cells
With the easy programming software developed by Tecnalia, different types of robots could be programmed (UR, Yaskawa, Nextstage, Kuka LWR ...). Currently there are two alternatives developed: easy programming with CAD information and a GUI with basic robot skills.
The easy programming with CAD information is based on extracting information from the parts and the work space of the robot to program different operations (assemblies, pick & place, drilling, riveting, deburring, application of material, etc). In this way, the programmer only uses a CAD
environment (CATIA) to indicate the operations to the robot and that information is sent to the software developed by Tecnalia (based on ROS) to configure the robot. This programming method also requires a simulation phase to verify that everything is running correctly.
The easy programming using a GUI of skills has a different conception, in this option the programmer must be familiar with the operations he wants to do and build through pre-programmed blocks the application he wants to execute. This option allows you to interact directly with the robot.
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• Easy programming by extracting information from CAD (CAD programming)
• Easy programming through a graphical interface of skills (GUI based on robot skills) 2017
FIELDS OF APPLICATION
Advanced manipulation with robotsQuality control with robotsFlexibility for robotic applicationsManufacture and assembly of components by robots
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
SERVICES OFFERED BY THE ASSET
Advanced manipulation with robots
Handling pick in place, in Picking or Kitting type
Flexibility for robotic applications
Human-Robot Interaction, safe environment monitoring and collaborative robotics Automatic generation of trajectories without collision Automatic or easy programming of robotic cells Vision-based parts detection and localization for robot guiding Force/Compliance based robot guiding
Quality control with robots
Parts dimensional control with robots and 3D vision Parts integrity control and defects detection using robots and 3D vision
Manufacture and assembly of components by robots
Accuracy improvement of robots Machining with robots Drilling with robots Riveting with robots Sealant application with robots Assembly of components with robots Screwed with a robot Deburring with robots
General services offered by the node agent
1. Technological-economic advice 2. Design, prototyping and validation 3. Training and awareness
ENTITY THAT MANAGES THE ASSET
FUNDACIÓN TECNALIA RESEARCH & INNOVATION Contact Person:Karmele Florentino [email protected]
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
3D vision system for parts reconstruction, valid for defect detection applications and for location and grasping of parts with fl exible robots
The asset is composed by both hardware and software.
Regarding the hardware, the asset is composed by distinct industrial 3D vision acquisition devices. The diff erent acquisition systems provide diff erent characteristics in terms of acquisition speed, accuracy, area to inspect, portability and so on, which makes it possible to adapt to the requirements of the application.
For defect detection, the software is designed to capture information about the environment of the robot, and send to it the coordinates necessary to grasp a certain object. There is a calibration phase between the 3D vision system, the robot and the gripper. The calibration phase is highly optimized so that minimal manual work is required. The vision software detects a known or unknown object and sends a correction to the robot system so that it can reach the object in an effi cient way. The grasping
system optimizes the grasping position according to the gripper used and the geometry of the part to be grasped. CAD models of the parts can be used as models for the object detection.
For applications of location and grasping of parts with fl exible robots, the software is designed to capture information about the environment of the robot, and send to it the coordinates necessary to grasp a certain object. There is a calibration phase between the 3D vision system, the robot and the gripper. The calibration phase is highly optimized so that minimal manual work is required. The vision software detects a known or unknown object and sends a correction to the robot system so that it can reach the object in an effi cient way. The grasping system optimizes the grasping position according to the gripper used and the geometry of the part to be grasped. CAD models of the parts can be used as models for the object detection.
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• Industrial stereovision system ENSENSO
• Structured light scanner David
• Halcon vision software libraries
• Custom-made stereovision system based on industrial uEye cameras and a texture projector
• In-house developed libraries for calibration, registration, object detection, matching,defect detection, etc
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
FIELDS OF APPLICATION
Advanced manipulation with robotsQuality control with robotsManufacture and assembly of components by robotsFlexibility for robotic applications
SERVICES OFFERED BY THE ASSET
Advanced manipulation using robots
Flexibility for robotized applications
Vision-based parts detection and localization for robot guiding
Manufacturing and assembly of components using robots
Assembly of components using robots Additive manufacturing using robots Screwing of components using robots
Quality inspection with robots
Dimensional inspection of parts with robots and 3D vision. Integrity control of parts and defect detection using robots and 3D vision.
General services offered by the node agent
1. Technological-economic advice 2. Design, prototyping and validation 3. Training and awareness
ENTITY THAT MANAGES THE ASSET
FUNDACIÓN TECNALIA RESEARCH & INNOVATION Contact Person:Karmele Florentino [email protected]

EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
Robotics and Autonomous Systems Laboratory at the University of the Basque Country (UPV/EHU)
The laboratory of robotics and autonomous systems has the capabilities to allow experimentation in robotics, data analysis, statistics, machine learning and computer vision. A range of different sensors (cameras, lasers, kinects, thermal sensors, ultrasounds, …) might be employed for
achieving a variety of goals (people detection, objects recognition, safe navigation,…) Logical assets (software libraries and applications) are also available to develop natural language based person-machine interaction methods. Gesture based communication is also available.
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• Roobts: pepper, nao, B21, Pioneer,...
Different mobile robots to perform experiments, learning and so on; all of them working under ROS
FIELDS OF APPLICATION
Internal logistics with mobile robotsAdvanced manipulation with robotsQuality control with robotsManufacture and assembly of components by robotsFlexibility for robotic applications
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
SERVICES OFFERED BY THE ASSET
Object Recognition
With the available sensors (cameras, lasers,…) decide if in the acquired data there is an object of interest (a given part, a tool,…)
People Detection
With the available sensors (cameras, lasers, …) decide if in the acquired data there is a person
Gesture Interface
To establish a person-machine interaction (gestural and spoken) by means of vision techniques, natural language processing, etc.
Speech based Communication
Make use of natural language processing tools to generate coherent sentences
Prognosis and diagnosis systems
Analizar los datos de distintos sensores para predecir el comportamiento de un activo industrial (desgaste de piezas, fallos en motores,...)
ENTITY THAT MANAGES THE ASSET
UPV/EHU Contact Person:Basilio Sierra [email protected]

EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
Control and autonomous navigation library for mobile robots (mapping, navigation and fleet management)
Autonomous navigation software for AGV.
Flexible navigation systems for AGV (Automatic Guided Vehicle or automatic guided vehicle). Solutions based on SLAM and laser guidance that provide greater flexibility than traditional systems
based on infrastructure (philogy, magnetic stripe, reflectors). They allow the deployment without major changes in the work environment and the configuration and simple and even dynamic reconfiguration of trajectories.
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• Roobts: pepper, nao, B21, Pioneer,...
Different mobile robots to perform experiments, learning and so on; all of them working under ROS
FIELDS OF APPLICATION
Internal logistics with mobile robots
SERVICES OFFERED BY THE ASSET
Internal logistics with mobile robots
Customization of autonomous mobile robot/AGV Autonomous navigation based on 2D slam Autonomous navigation based on 3D slam
ENTITY THAT MANAGES THE ASSET
FUNDACIÓN TECNALIA RESEARCH & INNOVATION Contact Person:Karmele Florentino [email protected]
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
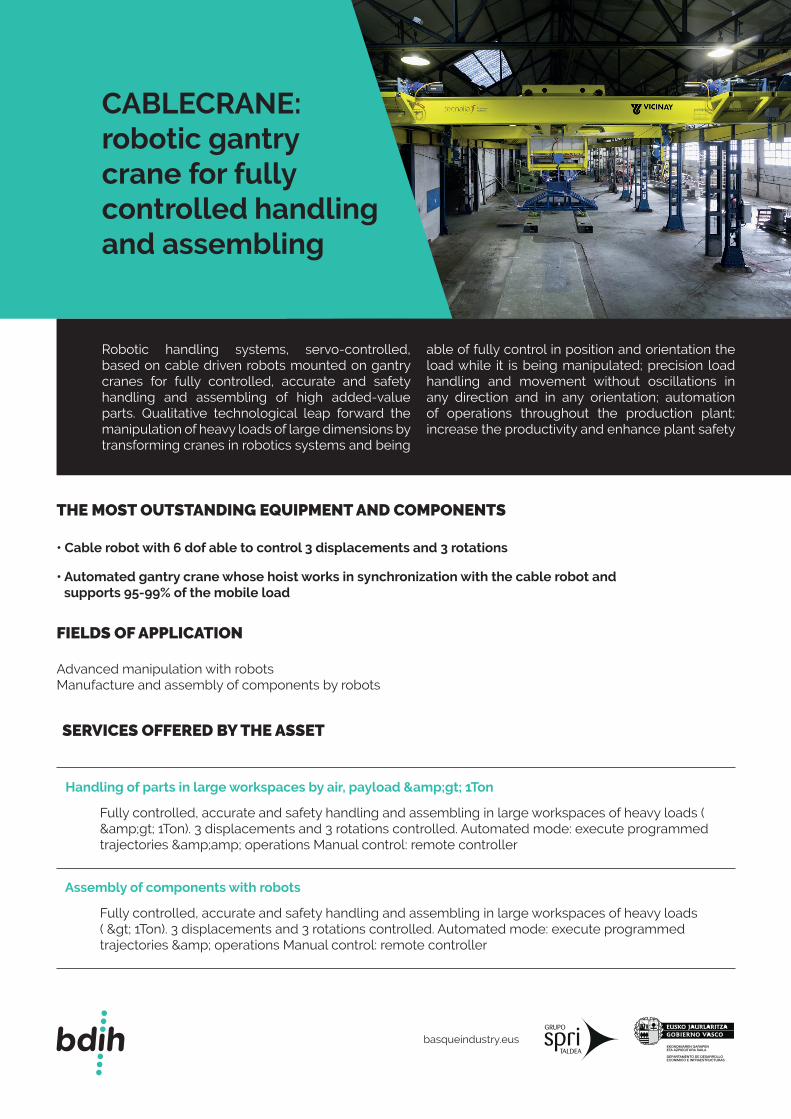
CABLECRANE: robotic gantry crane for fully controlled handling and assembling
Robotic handling systems, servo-controlled, based on cable driven robots mounted on gantry cranes for fully controlled, accurate and safety handling and assembling of high added-value parts. Qualitative technological leap forward the manipulation of heavy loads of large dimensions by transforming cranes in robotics systems and being
able of fully control in position and orientation the load while it is being manipulated; precision load handling and movement without oscillations in any direction and in any orientation; automation of operations throughout the production plant; increase the productivity and enhance plant safety
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• Cable robot with 6 dof able to control 3 displacements and 3 rotations
• Automated gantry crane whose hoist works in synchronization with the cable robot and supports 95-99% of the mobile load
FIELDS OF APPLICATION
Advanced manipulation with robotsManufacture and assembly of components by robots
SERVICES OFFERED BY THE ASSET
Handling of parts in large workspaces by air, payload &gt; 1Ton
Fully controlled, accurate and safety handling and assembling in large workspaces of heavy loads ( &gt; 1Ton). 3 displacements and 3 rotations controlled. Automated mode: execute programmed trajectories &amp; operations Manual control: remote controller
Assembly of components with robots
Fully controlled, accurate and safety handling and assembling in large workspaces of heavy loads ( > 1Ton). 3 displacements and 3 rotations controlled. Automated mode: execute programmed trajectories & operations Manual control: remote controller

EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
ENTITY THAT MANAGES THE ASSET
FUNDACIÓN TECNALIA RESEARCH & INNOVATION Contact Person:Karmele Florentino [email protected]

EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
COGIRO: Cable driven robot mounted on a fixed frame
Robotic handling systems, servo-controlled, based on cable driven robots mounted on fixed structures for fully controlled, accurate and safety handling and assembling of high added-value parts. Qualitative technological leap forward the manipulation of heavy loads of large dimensions
being able of fully control in position and orientation the load while it is being manipulated; precision load handling and movement without oscillations in any direction and in any orientation; automation of operations throughout the production plant; increase the productivity and enhance plant safety.
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• COGIRO
Cable driven robot with 6 dof (3 displacements and 3 rotations controlled), dimensions 15 m x 11 m x 6 m height. Load capacity 500 kg. Rotations X e Y de +/- 40º; ratotaton Z: 100º (-70º; + 35º)
FIELDS OF APPLICATION
Advanced manipulation with robotsManufacture and assembly of components by robots
SERVICES OFFERED BY THE ASSET
Handling of parts in large workspaces by air, payload < 1Ton
Fully controlled, accurate and safety handling and assembling in large workspaces of heavy loads ( <1Ton). 3 displacements and 3 rotations controlled. Automated mode: execute programmed trajectories & operations Manual control: remote controller
High speed PickAndPlace
High speed PickAndPlace of heavy loads < 1 Tn

EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
ENTITY THAT MANAGES THE ASSET
FUNDACIÓN TECNALIA RESEARCH & INNOVATION Contact Person:Karmele Florentino [email protected]
Additive manufacturing with robots
3D printing of large parts using cable driven robots
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
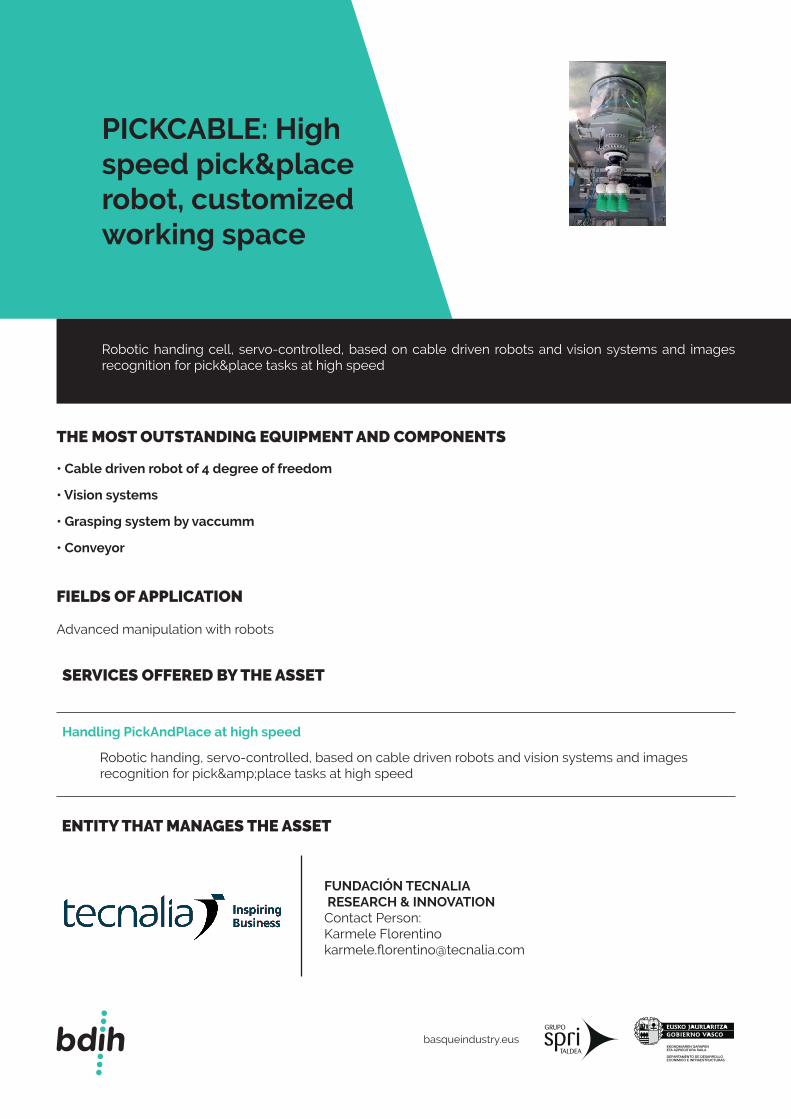
PICKCABLE: High speed pick&place robot, customized working space
Robotic handing cell, servo-controlled, based on cable driven robots and vision systems and images recognition for pick&place tasks at high speed
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• Cable driven robot of 4 degree of freedom
• Vision systems
• Grasping system by vaccumm
• Conveyor
FIELDS OF APPLICATION
Advanced manipulation with robots
SERVICES OFFERED BY THE ASSET
Handling PickAndPlace at high speed
Robotic handing, servo-controlled, based on cable driven robots and vision systems and images recognition for pick&place tasks at high speed
ENTITY THAT MANAGES THE ASSET
FUNDACIÓN TECNALIA RESEARCH & INNOVATION Contact Person:Karmele Florentino [email protected]
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
Robotic system for flexible manipulation of objects and tools
The cell allows to build up solutions to automate operations of manipulation of pieces, or manipulation of tool on piece. The robotic system can be configured to perform operations of: pick and place of objects, or positioning of tool on object in both conventional and collaborative modes. The robotic system is formed by a robot manipulator of 6/7 degrees of freedom, equipped with three systems of vision:
1) external systems of 3D vision,
2) stereovision system in eye-in hand configuration and several tool systems for interchangeable grasping (suction and clamp)
3) force sensor.
The vision systems are configurable for use in two functions:
4) the detection and identification of the position of the pieces on the surface or in the container,
5) area monitoring to avoid collisions in case of operation in collaborative mode.
This cell offers the possibility of evaluating the feasibility and raise the automation of operations related to: bin-picking; operations on piece that require positioning of tool such as screwing / deburring; continuous tool control on surface for polishing operations, inspection. The cell allows analyzing requirements linked to cycle times, variability in positioning, security in collaborative mode, etc.
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• Collaborative manipulator robots
Sensitive manipulator robot of 7 degrees of freedom Kuka iiwa, collaborative manipulator robot 6 degrees of freedom UR-10.
• 3D vision systems and stereovision
3D vision systems (Ruler Sick, Ensenso, Asus, Kinect), stereovision system composed of IDS cameras.
• RobotIQ force sensor.
• Suction Grippers and Shunk Clamp.
• Software modules for detection of objects, area monitoring and trajectories.
Software modules: (1) 3D pose detection of objects, (2) area monitoring and (3) manipulation to define / execute trajectories.
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
FIELDS OF APPLICATION
Advanced manipulation with robotsFlexibility for robotic applicationsManufacture and assembly of components by robots
SERVICES OFFERED BY THE ASSET
Demonstration / Approaching technology
Demonstrator of collaborative and flexible robotics applied to the manipulation of objects.
Technical feasibility analysis
Feasibility study of the limitations associated with the detection or positioning of objects specified by the customer in handling operations.
Proof of concept
Rapid tests of possible configurations and work cycles to assess the conception of the final solution in manipulation of components.
Training
Practical training in the application of collaborative and flexible robotics in the manipulation of components.
ENTITY THAT MANAGES THE ASSET
FUNDACIÓN TEKNIKERContact Person:Loreto [email protected]
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
Robotic system for flexible assembly of components
The cell allows to propose operations to automate the assembly of parts. The robotic system can be configured to perform component assembly operations in both conventional and collaborative modes. The robotic system is composed by a bi-manipulator robot of 13 degrees of freedom, equipped with vision systems, a force sensor, a tool exchanger with different tools and an area monitoring system for work in collaborative mode. The system has two main components:
1) the assembly where the sensors (force, vision) are configured for use in detecting the position of the pieces on the surface and control the trajectory
of the arms in insertion operations during the montage;
2) safety area monitoring for the detection of elements that enter the working area of the robot reducing or speeding up or stopping its operation.
This cell offers the possibility of evaluating the feasibility and propose the automation of operations related to assembly of components, insertion, coupling, screwing,. The cell allows the analysis of requirements linked to cycle times, variability in positioning, security in collaborative mode, etc.
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• Robot bi-manipulator of 13 degrees of freedom COMAU.
• Pilz vision system + lasers for Sick security.
• Vision system "eye in hand IDS"
• Tool exchanger.
• Software modules: (1) Area monitoring and (2) object detection and assembly operations with insertion.
FIELDS OF APPLICATION
Advanced manipulation with robotsFlexibility for robotic applicationsManufacture and assembly of components by robots
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
SERVICES OFFERED BY THE ASSET
Demonstration / Approaching technology
Demonstrator of collaborative and flexible robotics applied to the assembly of components.
Technical feasibility analysis
Feasibility study of the limitations associated with the detection or positioning of objects specified by the client.
Proof of concept
Rapid tests of possible configurations and work cycles to assess the design of the final robotic assembly solution.
Training
ctical training in the application of collaborative and flexible robotics in the assembly of components.
ENTITY THAT MANAGES THE ASSET
FUNDACIÓN TEKNIKERContact Person:Loreto [email protected]

EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
Multi-sensor flexible robot cell for geometry and surface 3D inspection
This flexible robotic inspection cell offers the possibility of dimensional measurements and surface inspections or the combination of both on matt and bright volumetric parts. The approximate volume of the piece is 50 mm x 50 mm x 100 mm. Depending on the technology it can reach 50 mm x
50 mm x 200 mm. It has a human machine interface that facilitates the programming of inspection requirements, allowing SMEs to have a feasibility study of 3D and 2D inspection technologies in a short time. The technology used in this cell is suitable for use in production lines.
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• Human machine interface (HMI)
With the HMI we define the inspection requirements and it controls the inspection posts available in the cell. In addition, it facilitates the inclusion of new features.
• Robot (Stäubli TX 60)
It is responsible for picking the pieces and placing them in front of the inspection posts.
• Deflectometry
This equipment is in charge of carrying out the superficial inspection of bright parts, being able to identify surface defects smaller than 20um (Z).
• Post Photometric Stereo (Trevista Surface)
This equipment is in charge of carrying out the superficial inspection of matt pieces. It allows a 3D inspection at speeds of up to 200 pieces per minute.
• 3D laser scanner
This equipment is in charge of carrying out the dimensional measurement of parts, mainly mates. It reaches measurements with an accuracy of 35um.

EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
FIELDS OF APPLICATION
Flexibility for robotic applicationsQuality control with robots
SERVICES OFFERED BY THE ASSET
Demonstration
Robotic cell demonstrator for the inspection / measurement of parts
Technical feasibility analysis
Feasibility study of the limitations associated with the detection of defects specifi ed by the client
Proof of concept
Rapid tests of possible confi gurations and work cycles to assess the conception of the fi nal inspection and measurement solution
Training
Vocational Training, Degrees / Master of Engineering, Industrial Doctorates, Training of Professionals
ENTITY THAT MANAGES THE ASSET
Mondragón Goi Eskola Politeknikoa JMA SCoopContact Person:Nestor Arana [email protected]
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
Real time image analysis software library
Viulib inspection is part of Viulib®, a real time image processing library owned by Vicomtech.
Viulib® SDK brings a big amount of computer vision related techniques and algorithms together, that together turn into an efficient and flexible tool to deal with market-requested solutions based on image analysis. Viulib inspection is focused on industrial needs related with superficial quality inspection of components or with control processes using 2D computer vision techniques. Viulib inspection requires hardware to obtain images or data.
Vicomtech has for this purpose some computer vision test bed and a robot equipped with different image and illumination acquisition equipment that fulfil different inspection services.
Apart from the inspection module inspection, Viulib® also has image processing capacities oriented towards human-computer interaction, such as movement identification or face detection and recognition
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• High speed and Dynamic range matrix and line cameras
Line and area sensor based cameras with high spatial resolution and high sensitivity for component surface inspection and dimensional analysis.
• Photometric image reconstruction system
System for component surface reconstruction based on photometric-stereo technology.
• Robot kolaboratiboak
Collaborative Robots with 6 degrees of freedom kuka lwr 4+ Universal Robot UR10
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
FIELDS OF APPLICATION
Advanced manipulation with robotsQuality control with robotsInternal logistics with mobile robotsFlexibility for robotic applications
SERVICES OFFERED BY THE ASSET
Superfi cial inspection
Service focused on inspection or superfi cial quality of components, based on stereo photometric techniques. It can be oriented towards in-line inspection mechanisms or on-board robots. The camera or the stereo photometric system is integrated on a robot, which moves and points at the component to fully inspect it or certain parts of it.
Active security on collaborative robotic schemes
The Viulib® SDK has high-level capacities for continuous monitoring of people in diff erent scenarios. This feature can be very relevant on collaborative robotic scenarios, where there is close interaction between workers and robots. The application of computer vision techniques using Viulib® can provide additional security services and avoid possible accidents.
Human-Robot interaction
The Viulib® library has high level capacities for facial identifi cation or gesture recognition. This is a very important feature on the implementation of services oriented to collaborative robotic schemes, where fl exible solutions of interaction and communication between workers and robots are requested.
ENTITY THAT MANAGES THE ASSET
VICOMTECHContact Person:Iñigo [email protected]

EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
Cartesian robot for scanning and Zero-Defect manufacturing with M3 software
Vulkan is a Cartesian robot for measuring, scanning and digitizing parts. Innovalia, thus contributes to enhance the ZDM concept and ensure quality control in manufacturing and production.
In the current manufacturing processes, the quality control systems are carried out once the piece is fi nished. In this way, it is not possible to make corrections of possible deviations during the production process, causing the rejection of the part if it does not comply with some of the established tolerances and requirements.
With the integration of the Vulkan asset in the manufacturing process, the piece is monitored and there are more precise and current references of its production cycle. In this way, the process control is increased and the reprocessing of the parts is reduced.
Thanks to the Vulkan, an optimum level of quality is guaranteed by inspecting the production and performing a dimensional control of the parts with the robot and 3D scanning.
It is a horizontal arm machine with a high rigidity structure.
M3 Software
High performance software for the capture and analysis of point clouds. M3 solves the complex process of scanning and managing point clouds in an agile, powerful and simple way.
Geometry extraction systems
The data processing operation, acquired through the scanning system, includes the importation of point clouds, reduction of noise in the captured data and the reduction of the number of points. These tasks are performed using a range of predefi ned fi lters. This process also allows combining multiple sets of scanned data. The results of their processing are clouds of combined points, clean and in a suitable format.
THE MOST OUTSTANDING EQUIPMENT AND COMPONENTS
• Vulkan Gage
Cartesian robot with solid architecture in stabilized steel with horizontal arm
• Head with contact tip
The touch-trigger makes contact with the object to be measured by moving the mechanismand taking the measurement from the generated signal.
EKONOMIAREN GARAPENETA AZPIEGITURA SAILA
DEPARTAMENTO DE DESARROLLOECONîMICO E INFRAESTRUCTURAS
basqueindustry.eus
SERVICES OFFERED BY THE ASSET
Measurement and quality control with robot
With the Vulkan can be carried out various solutions related to surface scanning, reverse engineering, measurement of high precision surface characteristics, measurement of high precision geometric characteristics and measurement of deformable parts.
Point cloud analysis
Innovalia also develops high performance software for the capture and analysis of point clouds. Among its advantages it stands out that it is compatible with various 3D measuring devices, it is multisensor (same workfl ow for optical and contact measurement) and it is very easy to use (it starts to work in a few minutes).
Analysis of results
Thanks to the Innovalia M3 Software, the deviations of the manufactured component can be analysed in great detail with respect to the original design thanks to the study of the acquired point cloud. Through M3 Analytics, which is a SPC software for the analysis and improvement of production, a statistical analysis of the metrological information and the process data presented in reports is carried out to know the production status.
Training
On-site courses for practical training in dimensional control solutions in hybrid technology and subsequent analysis of results.
• OptiScan optical sensor
Scanning laser sensor that allows to obtain high precision 3D digitalisations for reverse engineering applications, virtual metrology, automated inspection and robot guidance.
• M3 software
High performance software for the capture and analysis of point clouds.
• M3 server
The M3 database uses the standard VPX (Virtual Part Exchange) that allows the information to be stored, shared and fi ltered with great effi ciency, connecting the database directly with the scanning system and the software.
ENTITY THAT MANAGES THE ASSET
ASOCIACIÓN DE EMPRESASTECNOLÓGICAS INNOVALIAContact Person:Alicia González [email protected]