-
Aplicacion del Filtro de Kalman para mejorar el
Tracking de jugadores de futbol
Franci Suni Lopez
Orientador: Prof Dr. Angel Mogrovejo Flores
Plan de Tesis presentado a la Facultad de Ciencias de
laEducacion como paso previo a la elaboracion de la
TesisProfesional.
UNSA - Universidad Nacional de San AgustnJulio de 2015
-
INDICE
Indice
1. Motivacion y Contexto 5
2. Definicion del Problema 6
3. Objetivos 6
3.1. Objetivo Principal . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 6
3.2. Objetivos Especficos . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 7
4. Trabajos Relacionados 7
4.1. Representacion de Objetivos . . . . . . . . . . . . . . . .
. . . . . . . . . . 7
4.1.1. Modelos con formas articuladas . . . . . . . . . . . . .
. . . . . . . 8
4.1.2. Modelos esqueleticos . . . . . . . . . . . . . . . . . .
. . . . . . . . 8
4.2. Seleccion de caractersticas . . . . . . . . . . . . . . . .
. . . . . . . . . . . 8
4.2.1. Color . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 8
4.2.2. Bordes . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 9
4.3. Filtro de Kalman . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 10
4.3.1. Algoritmo . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 10
5. Propuesta 11
6. Cronograma de Actividades 13
7. Indice Tentivo de la Tesis 13
Educacion - UNSA 2
-
INDICE DE CUADROS
Indice de cuadros
1. Cronograma de Actividades para el desarrollo de la Tesis. . .
. . . . . . . . 13
Educacion - UNSA 3
-
INDICE DE FIGURAS
Indice de figuras
1. Esquema del procedimiento basico para el tratamiento digital
de imagenes 5
2. Ejemplos de tracking y trayectorias obtenidas. (a) Tracking
mono-objetivo.(b) Tracking multi-objetivo . . . . . . . . . . . . .
. . . . . . . . . . . . . 7
3. Posibles Representaciones de un objetivo. (a) Centroide, (b)
multiples pun-tos, (c) parche rectangular, (d) parche elptico, (e)
parches en multiplespartes, (f) esqueleto, (g) puntos de control en
el contorno, (h) contornocompleto del objeto, (i) silueta del
objeto. (Figura extrada de [9]). . . . . 9
4. Distintas formas de seleccionar caractersticas de una imagen.
(a) Imagenen el espacio de color HSV. (b) Bordes extrados de la
imagen mediante eldetector de bordes de Sobel. . . . . . . . . . .
. . . . . . . . . . . . . . . . 10
5. Ciclo de funcionamiento del filtro de Kalman. La prediccion
proyecta laestimacion del estado adelante en el tiempo, mientras
que la correccionajusta la estimacion proyectada con una medida del
instante actual. . . . . 11
Educacion - UNSA 4
-
INDICE DE FIGURAS
1. Motivacion y Contexto
La Vision Computacional consiste en el estudio de los procesos
que intervienen en lavision, para entenderlos y disenar maquinas o
aplicaciones con capacidades similares. LaVision Computacional, en
un intento de reproducir el comportamiento del ser humano,define
tradicionalmente cinco fases principales (ver Figura 1):
La primera fase, que es puramente sensorial, consiste en la
Captura o Adquisicionde las imagenes digitales mediante algun tipo
de sensor. Se muestrea, discretiza yalmacena digitalmente la
imagen.
La segunda etapa consiste en el tratamiento digital de las
imagenes, con objetode facilitar las etapas posteriores. En esta
etapa de Preprocesamiento es donde,mediante filtros o
transformaciones geometricas, se eliminan partes indeseables dela
imagen o se realzan partes interesantes de la misma.
La Segmentacion consiste en dividir la escena en regiones de
atributos similares. Deesta manera podemos aislar los distintos
elementos que la componen y extraer losde interes.
El siguiente paso es Extraer las caractersticas relevantes del
objeto, de cara a cla-sificarlo adecuadamente.
Por ultimo se llega a la etapa de Reconocimiento o
Clasificacion. En ella se pretendedistinguir los objetos
segmentados, gracias al analisis de las caractersticas
extradaspreviamente para diferenciarlos.
Figura 1: Esquema del procedimiento basico para el tratamiento
digital de imagenes
Durante las dos ultimas decadas, el seguimiento de objetos en
secuencias de vdeoha recibido una especial atencion por parte de la
comunidad investigadora. Algunos desus usos mas importantes
son:
Reconocimiento basado en movimiento: identificacion humana,
deteccion automaticade objetos.
Educacion - UNSA 5
-
INDICE DE FIGURAS
Supervision o vigilancia automatica: monitorear una escena para
detectar activida-des sospechosas o eventos no deseados.
Indexado de video: anotacion automatica de parametros y
recuperacion de vdeosen bases de datos multimedia [2].
Interaccion ordenador-humano: reconocimiento de gestos,
seguimiento de los ojos,etc.
Monitorizacion del trafico: obtencion de estadsticas del trafico
en tiempo real paradirigirlo adecuadamente.
Navegacion de vehculos: capacidades de planificacion de rutas
basada en vdeo yevitacion de obstaculos
Todas ellas requieren un algoritmo de tracking robusto para
funcionar de manera optima.Para poder ser aplicado en sistemas de
vision, el algoritmo debe ser capaz de controlaroclusiones
parciales y totales, cambios de escala del objeto, cambios de
iluminacion dela escena, movimientos erraticos, medidas ruidosas...
Ademas, para algunas aplicacionescomo supervision o interaccion,
los trackers deben proporcionar seguimientos fiables a lolargo de
enormes secuencias de vdeo, en tiempo real y a altas frecuencias de
refresco.Estas restricciones requieren de una aplicacion estable y
computacionalmente eficiente.
2. Definicion del Problema
Un problema clasico en vision computacional es el seguimiento de
objetos en secuen-cias de imagenes(video), denominado comunmente
tracking. Su resolucion consta de tresetapas clave: deteccion de
los objetos de interes, seguimiento de dichos objetos de un fra-me
al siguiente y, por ultimo, analisis del movimiento que permite
reconocer algun patronde comportamiento(ver Figura 2). Un asunto
crucial en tracking visual es la adaptaciondel algoritmo general a
la aplicacion de seguimiento particular. El principal problema
esque, habitualmente, existen multitud de parametros que deben ser
fijados, y en muchasocasiones no esta claro como deben ser
establecidos para cada problema en particular.
3. Objetivos
3.1. Objetivo Principal
El objetivo fundamental de este proyecto consiste en implementar
el Filtro de Kal-man al Tracking(seguimiento) de jugadores de
futbol en video, evaluando los resultadosque se obtienen en la
aplicacion bajo diferentes condiciones experimentales.
Educacion - UNSA 6
-
INDICE DE FIGURAS
Figura 2: Ejemplos de tracking y trayectorias obtenidas. (a)
Tracking mono-objetivo. (b)Tracking multi-objetivo
3.2. Objetivos Especficos
Incorporar Filtro de Kalman a los algoritmos de tracking.
Reducir el numero de falsos positivos detectados.
Corregir errores en la oclusion de jugadores.
4. Trabajos Relacionados
En el contexto del seguimiento de objetivos, se puede definir un
objetivo u objetocomo cualquier region de la imagen que sea de
interes para un analisis posterior. Por ejem-plo, un barco en el
mar, vehculos en la carretera, aviones en el aire o gente
caminandopor la calle son conjuntos de objetivos que podran ser
importantes para hacer segui-miento en un dominio especfico.
Habitualmente, los sistemas de tracking se componende cuatro
etapas: representacion del objetivo, extraccion de caractersticas,
deteccion delobjetivo en la escena y seguimiento del objetivo
(trayectoria seguida). Estas etapas estanestrechamente vinculadas,
ya que la tecnica escogida para la representacion del
objetivocondiciona en gran parte su deteccion y posterior
seguimiento. En los siguientes subapar-tados se estudiaran las
tecnicas comunmente utilizadas para resolver cada una de las
fasesmencionadas.
4.1. Representacion de Objetivos
Los objetivos pueden ser representados por su forma y
apariencia. En esta seccionse describiran inicialmente las
representaciones de la forma de los objetos comunmente
Educacion - UNSA 7
-
INDICE DE FIGURAS
utilizadas en el tracking para, despues, estudiar
representaciones mas complejas que unenforma y apariencia.
4.1.1. Modelos con formas articuladas
Los objetos articulados estan compuestos de diversas partes
unidas entre s a travesde uniones. Por ejemplo, el cuerpo humano es
un objetivo articulado con cabeza, torso,brazos, piernas, manos y
pies unidos mediante articulaciones. La relacion entre las
partesesta gobernada por un modelo de movimiento cinematico, por
ejemplo, angulo de union,etc. Para representar un objeto
articulado, se pueden modelar las partes que lo constituyenusando
cilindros o elipses (Figura 3(e)).
4.1.2. Modelos esqueleticos
El esqueleto de cualquier objeto puede ser extrado aplicando la
transformacion MAT(Medial Axis Transformation) a la silueta del
objeto [4]. Este modelo se usa comunmenteen el reconocimiento de
objetos [5]. La representacion basada en esqueleto puede
utilizarsepara modelar tanto objetos rgidos como articulados
(Figura 3(f)).
4.2. Seleccion de caractersticas
Seleccionar las caractersticas correctas juega un papel crtico
en tracking. En gene-ral, la propiedad mas deseable de una
caracterstica visual es su singularidad, de formaque los objetos
puedan ser facilmente discriminados en el espacio de
caractersticas. Laseleccion de caractersticas esta estrechamente
relacionada con la representacion de losobjetos. Por ejemplo, el
color es usado como una caracterstica por las
representacionesbasadas en histograma mientras que, para las
basadas en contornos, se suelen utilizar losbordes del objeto. En
general, la mayora de algoritmos de tracking usan una combina-cion
de estas caractersticas. Los detalles de las caractersticas
visuales mas comunes secomentan a continuacion.
4.2.1. Color
El color aparente de un objeto es influenciado principalmente
por dos factores f-sicos, 1) la distribucion espectral de potencia
de la iluminacion y 2) las propiedades dereflectancia de la
superficie del objeto. En procesamiento de imagenes, el espacio de
colorRGB (rojo, verde, azul) es comunmente usado para representar
el color. Sin embargo, elespacio RGB no es un espacio de color
perceptualmente uniforme, es decir que las diferen-cias entre
colores en el espacio RGB no se corresponden con las diferencias
entre colorespercibidas por el ser humano [6]. Adicionalmente, las
dimensiones RGB estan altamente
Educacion - UNSA 8
-
INDICE DE FIGURAS
Figura 3: Posibles Representaciones de un objetivo. (a)
Centroide, (b) multiples puntos,(c) parche rectangular, (d) parche
elptico, (e) parches en multiples partes, (f) esqueleto,(g) puntos
de control en el contorno, (h) contorno completo del objeto, (i)
silueta delobjeto. (Figura extrada de [9]).
correladas. Por el contrario, L*u*v y L*a*b son espacios de
color perceptualmente unifor-mes, mientras que HSV (Hue,
Saturation, Value) es aproximadamente uniforme (Figura4(a)). Sin
embargo, estos espacios de color son sensibles al ruido. En
resumen, aun no seha dicho la ultima palabra sobre que espacio de
color es mas eficiente, por lo que se usanuna gran variedad de
ellos en tracking.
4.2.2. Bordes
Los lmites de un objeto usualmente generan cambios bruscos en la
intensidad dela imagen. La deteccion de bordes es usada para
identificar estos cambios (Figura 4(b)).Una propiedad importante de
los bordes es que son menos sensibles a los cambios deiluminacion
en comparacion con las caractersticas de color. Los algoritmos que
hacentracking tomando como referencia el lmite de los objetos
normalmente usan bordes comocaracterstica representativa. Gracias a
su simplicidad y precision, la aproximacion a ladeteccion de bordes
mas popular es el detector de bordes de Canny [7]. Una evaluacionde
los algoritmos de deteccion de bordes puede ser consultada en
[8].
Educacion - UNSA 9
-
INDICE DE FIGURAS
Figura 4: Distintas formas de seleccionar caractersticas de una
imagen. (a) Imagen en elespacio de color HSV. (b) Bordes extrados
de la imagen mediante el detector de bordesde Sobel.
4.3. Filtro de Kalman
El filtro de Kalman consiste en un conjunto de ecuaciones
matematicas que proveenuna solucion recursiva optima al problema de
filtrado lineal de datos discretos, medianteel metodo de mnimos
cuadrados. Se trata de una solucion optima en el sentido de
queminimiza la covarianza estimada del error. La meta de esta
solucion consiste en calcularun estimador lineal, insesgado y
optimo, del estado de un sistema en t con base en lainformacion
disponible en t-1, y actualizar, con la informacion adicional
disponible ent, dichas estimaciones [9]. El filtro se desempena
suponiendo que el sistema puede serdescrito a traves de un modelo
estocastico lineal, en donde el estado tiene una
distribucionGaussiana. El filtro de Kalman es el principal
algoritmo para estimar sistemas dinamicosrepresentados en la forma
de espacio de estados. En esta representacion el sistema esdescrito
por un conjunto de variables denominadas de estado. El estado
contiene toda lainformacion relativa al sistema en un cierto
instante de tiempo. Esta informacion debepermitir la inferencia del
comportamiento pasado del sistema, con el objetivo de predecirsu
comportamiento futuro [10]. Lo que hace al filtro tan interesante
es precisamente suhabilidad para predecir el estado de un sistema
en el pasado, presente y futuro, aun cuandola naturaleza precisa
del sistema modelado es desconocida. En la practica, las
variablesde estado individuales de un sistema dinamico no pueden
ser exactamente determinadaspor una medicion directa. Dado lo
anterior, su medicion se realiza por medio de procesosestocasticos
que involucran algun grado de incertidumbre en la medicion.
4.3.1. Algoritmo
El filtro de Kalman estima el estado utilizando un control de
retroalimentacion:estima el estado en un instante de tiempo
determinado y entonces obtiene la retroali-mentacion por medio de
los datos observados. Desde este punto de vista las ecuaciones
Educacion - UNSA 10
-
INDICE DE FIGURAS
que se utilizan para derivar el filtro de Kalman se pueden
dividir en dos grupos: las queactualizan el estado en el tiempo o
ecuaciones de prediccion y las que actualizan el estadoa partir de
los datos observados o ecuaciones de actualizacion. Las del primer
grupo sonresponsables de proyectar la estimacion del estado y de la
covarianza del error al momentot tomando como referencia el estado
en el momento t-1. El segundo grupo de ecuacionesson responsables
de la retroalimentacion, es decir, incorporan nueva informacion
dentro dela estimacion a priori anterior con lo cual se llega a una
estimacion (a posteriori) mejoradadel estado. Las ecuaciones que
actualizan el tiempo pueden ser vistas como ecuacionesde
prediccion, mientras que las ecuaciones que incorporan nueva
informacion pueden con-siderarse como ecuaciones de correccion.
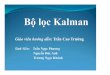
Efectivamente, el algoritmo de estimacion finalpuede definirse como
un algoritmo de prediccion-correccion: se pronostica el nuevo
estadoy su incertidumbre a partir de la informacion disponible, y
se corrige la prediccion con lanueva medida, minimizando
estadsticamente el error. Este ciclo se muestra en la Figura5.
Figura 5: Ciclo de funcionamiento del filtro de Kalman. La
prediccion proyecta la esti-macion del estado adelante en el
tiempo, mientras que la correccion ajusta la estimacionproyectada
con una medida del instante actual.
5. Propuesta
Una vez descrito el filtro de Kalman, se puede presentar la
solucion que se utilizaraen este estudio, as como las mejoras
propuestas con el fin de comparar y evaluar los resul-tados
obtenidos. La solucion implementada esta basada en el algoritmo SIR
(SequentialImportance Resampling) propuesta en [3]. Este algoritmo
mejora el rendimiento del filtrode Kalman a traves de una etapa de
remuestreo que previene la degeneracion de los pesos.
Educacion - UNSA 11
-
INDICE DE FIGURAS
La solucion empleada en el problema particular del seguimiento
de objetivos utiliza:
Un vector de estados que incluye la posicion del objetivo, sus
dimensiones (repre-sentando al mismo como un rectangulo), su
velocidad y la variacion temporal de susdimensiones.
Descriptores de objeto basados en histograma RGB.
La similitud de Bhattacharyya para calcular la f.d.p. de las
observaciones.
Una f.d.p. del estado (funcion de importancia) independiente de
las observaciones.
Un remuestreo mediante la tecnica ?Stochastic Universal
Sampling?.
Un ruido gaussiano con desviacion tpica prefijada.
El filtro de Kalman cuenta con multitud de parametros que deben
ser definidosadecuadamente para que el rendimiento sea optimo,
tanto en terminos de calidad de laestimacion como de carga
computacional necesaria. En este captulo se describiran losmas
importantes y la influencia que tienen en el tracking. Tambien
expondremos diversasmodificaciones que se aplicaran al sistema
basico con el objetivo de mejorar su rendimiento:
Probar diversas tecnicas de remuestreo de los pesos, con el fin
de restar importanciaa partculas debiles.
Emplear otro espacio de color, HSV, en la creacion del
histograma.
Analizar si otras medidas de similitud pueden mejorar los
resultados: comparacionde histogramas frente a similitudes entre
matrices de covarianza.
Implementar adaptatividad en la desviacion tpica del ruido
gaussiano sobre el es-tado.
Comprobar si otros vectores de estados pueden dar lugar a una
solucion mejor.
Educacion - UNSA 12
-
INDICE DE FIGURAS
6. Cronograma de Actividades
Cuadro 1: Cronograma de Actividades para el desarrollo de la
Tesis.Actividad Inicio Aprox. Fin Aprox.
Elaboracion del Proyecto de Tesis 25-jul-15
30-jul-15Presentacion y Aprobacion del Proyecto 01-ago-15
08-ago-15
Redaccion de la Parte Teorica de la Tesis 09-ago-15
09-set-15Implementacion de las tecnicas a ser usadas 10-set-15
25-oct-15
Realizacion de las pruebas y escritura de resultados 26-oct-15
26-nov-15Presentacion del Borrador de Tesis 27-nov-15 04-dic-15
Correcion de observaciones al Borrador de Tesis 05-dic-15
12-dic-15Presentacion de la Version Final de la Tesis 22-dic-15
24-dic-15
Sustentacion de la Tesis 26-dic-15 28-dic-15
7. Indice Tentivo de la Tesis
La memoria de este proyecto esta organizada en 6 captulos. A
continuacion sepresenta una breve descripcion de cada uno:
Captulo 1: Marco teorico en el que se desarrolla el proyecto,
motivacion y objetivosa alcanzar.
Captulo 2: Breve analisis de las tecnicas y tecnologas
comunmente empleadas enel seguimiento de objetos.
Captulo 3: Descripcion del filtro de Kalman y las tecnicas
asociadas: metodo deMonte Carlo y filtro de particulas. Desarrollo
del algoritmo.
Captulo 4: Desarrollo de la solucion propuesta. Descripcion de
las funcionalidadesimplementadas tanto en la version basica como en
sus extensiones.
Captulo 5: Aplicacion del sistema implementado al seguimiento de
jugadores ba-jo diferentes condiciones: oclusiones, movimiento de
camara y multiples jugadores.Analisis de la importancia de los
parametros libres. Comparacion de las diferen-tes extensiones.
Descripcion y analisis de las medidas y resultados obtenidos de
laspruebas.
Captulo 6: Extraccion de conclusiones en base a los resultados
obtenidos. Limita-ciones y debilidades de la aplicacion. Analisis
de la continuidad del proyecto a travesde posibles mejoras y
desarrollos futuros.
Educacion - UNSA 13
-
REFERENCIAS
Referencias
[1] Landeau Rebeca Elaboracion de trabajos de investigacion 1 l
Ed. Editorial Alfa Vene-zuela. (2002)
[2] MPEG REQUIREMENTS GROUP. ISO/MPEG N4676, MPEG-7
Applications,v11.0, N. Day, ed., MPEG Requirements Group.
(2002)
[3] BAGDANOV, A., DINI, F., DEL BIMBO, A. AND NUNZIATI, W.
Improving therobustness of particle-filter based visual trackers
using online parameter adaptation.IEEE International Conference on
Advanced Video and Signal based Surveillance(AVSS). (2007)
[4] BALLARD, D., AND BROWN, C. Computer Vision, Cap. 8.
Prentice-Hall. (1982)
[5] ALI, A. AND AGGARWAL, J. p. Segmentation and recognition of
continuous humanactivity. IEEE Workshop on Detection and
Recognition of Events in Video, (2001)
[6] PASCHOS, G. Perceptually uniform color spaces for color
texture analysis: an empi-rical evaluation. IEEE Transactions on
Image Processing 10(6), p. 932-937. (2001)
[7] CANNY, J. F. A computational approach to edge detection.
IEEE Trans. PatternAnalysis and Machine Intelligence, 8 (6), p.
679-698. (1986)
[8] SHIN, M. C., GOLDGOF, D. B., BOWYER, K. W., AND NIKIFOROU,
S. Compa-rison of edge detection algorithms using a structure from
motion task. IEEE Transac-tions on Systems, Man, and Cybernetics,
Part B 31(4), p. 589-601. (2001)
[9] WELCH, G. AND BISHOP, G. An introduction to the Kalman
Filter. Cap. 4, p.19-24. Department of Computer Science, University
of North Carolina at Chapel Hill(2001)
[10] ROESSER, R. P. A discrete state-space model for linear
image processing. IEEETransactions on Automatic Control AC-20, p.
1-10. (1975)
Educacion - UNSA 14