Embed Size (px)
Citation preview

Finite Element Analysisof Acoustic Scattering
Frank Ihlenburg
Springer





To Krystyna and Katja
Love’s not Time’s fool— William Shakespeare, Sonnett 116

This page intentionally left blank

Preface
Als uberragende Gestalt . . . tritt uns Helmholtz entgegen . . . Seineaußerordentliche Stellung in der Geschichte der Naturwissenschaf-ten beruht auf einer ungewohnlich vielseitigen, eindringenden Bega-bung, innerhalb deren die mathematische Seite eine wichtige, fur unsnaturlich in erster Linie in Betracht kommende Rolle spielt. (FelixKlein, [84, p. 223])1
Waves are interesting physical phenomena with important practical appli-cations. Physicists and engineers are interested in the reliable simulationof processes in which waves are scattered from obstacles (scattering prob-lems). This book deals with some of the mathematical issues arising in thecomputational simulation of wave propagation and fluid–structure interac-tion.The linear mathematical models for wave propagation and scattering are
well-known. Assuming time-harmonic behavior, one deals with the Helm-holtz equation ∆u + k2u = 0, where the wave number k is a physicalparameter. Our interest will be mainly in the numerical solution of exte-rior boundary value problems for the Helmholtz equation which we callHelmholtz problems for short.The Helmholtz equation belongs to the classical equations of mathema-
tical physics. The fundamental questions about existence and uniqueness
1In Helmholtz we meet an overwhelming personality. His extraordinary position inthe history of science is based on his unusually diverse and penetrating talents, amongwhich the mathematical side, which for our present purpose is of primary importance,plays an important role.

viii Preface
of solutions to Helmholtz problems were solved by the end of the 1950s; cf.,e.g., the monographs of Leis [87], Colton–Kress [39], and Sanchez Hubert–Sanchez Palencia [107]. Those results of mathematical analysis form thefundamental layer on which the numerical analysis in this book is built.The two main topics that are discussed here arise from the practical app-lication of finite element methods (FEM) to Helmholtz problems.First, FEM have been conceptually developed for the numerical discreti-
zation of problems on bounded domains. Their application to unboundeddomains involves a domain decomposition by introducing an artificial boun-dary around the obstacle. At the artificial boundary, the finite element dis-cretization can be coupled in various ways to some discrete representationof the analytical solution. We review some of the coupling approaches inChapter 3, focusing on those methods that are based on the series represen-tation of the exterior solution. In particular, we review localized Dirichlet-to-Neumann and other absorbing boundary conditions, as well as the recentperfectly matched layer method and infinite elements.Second, when using discrete methods for the solution of Helmholtz prob-
lems, one soon is confronted with the significance of the parameter k. Thewave number characterizes the oscillatory behavior of the exact solution.The larger the value of k, the stronger the oscillations. This feature has tobe resolved by the numerical model. The “rule of thumb” is to resolve awavelength by a certain fixed number of mesh points. It has been knownfrom computational experience that this rule is not sufficient to obtain re-liable results for large k. Looking at this problem from the viewpoint ofnumerical analysis, the reason for the defect can be found in the loss ofoperator stability at large wave numbers. We address this topic in Chap-ter 4, where we present new estimates that precisely characterize the errorbehavior in the range of engineering computations. We call these estimatespreasymptotic in order to distinguish them from the well-known asympto-tic error estimates for indefinite problems satisfying a Garding inequality.In particular, we accentuate the advantages of the hp-version of the FEM,as opposed to piecewise linear approximation. We also touch upon gene-ralized (stabilized) FEM and investigate a posteriori error estimation forHelmholtz problems. Our theoretical results are obtained mainly for one-dimensional model problems that display most of the essential features thatmatter in the true simulations.In the introductory Chapters 1 and 2, we set the stage for the finite ele-
ment analysis. We start with an outline of the governing equations. Whileour physical application is acoustic fluid–structure interaction, much ofthe mathematics in this book may be relevant also for numerical electro-dynamics. We therefore include a short section on Maxwell’s equations.In Chapter 2, we first (Section 2.1) review mathematical techniques forthe analytical solution of exterior Helmholtz problems. Our focus is on theseparation of variables and series representations of the solution (comple-mentary to the integral methods and representations), as needed for the

Preface ix
outline of the coupling methods in Chapter 3. The second part (Sections2.2–2.5) of Chapter 2 is a preparation of the finite element analysis inChapter 4. We first briefly review some necessary definitions and theoremsfrom functional analysis inasmuch as they are needed for the subsequentinvestigation. Then we consider the variational formulation of Helmholtzproblems and discuss variational methods.Computational results for three-dimensional scattering problems are re-
ported in Chapter 5.This text is addressed to mathematicians as well as to physicists and
computational engineers working on scattering problems. Having a mixedaudience in mind, we attempted to make the text self-contained and easilyreadable. This especially concerns Chapters 3 and 4. We hope that the illus-tration with many numerical examples makes for a better understanding ofthe theory. The material of the introductory chapters is presented in a morecompact manner for the convenience of later reference. It is assumed thatthe reader is familiar with the basic physical and mathematical conceptsof fluid–structure interaction and/or finite element analysis. References tovarious expositions of these topics are supplied.
Acknowledgments
Es ist eben viel wichtiger, in welche geistige Umgebung ein Menschhineinkommt, die ihn viel starker beeinflußt als Tatsachen und kon-kretes Wissen, das ihm geboten wird. (Felix Klein, [84, p. 249])2
Much of this book is a report of my own cognitive journey towards thereliable simulation of scattering problems with finite element methods. Myinterest in numerical acoustics began while I was working as an associate ofIvo Babuska at the University of Maryland at College Park. Many results inthis book stem from our joint work, and I have tried my best to put the spir-it of our discussions down on paper. My gratitude goes to J. Tinsley Odenand Leszek Demkowicz, of the Texas Institute for Computational and Ap-plied Mathematics (TICAM). Most of this monograph was written duringmy appointment as a TICAM Research Fellow, and TICAM’s extraordi-nary working conditions and stimulating intellectual atmosphere were anessential ingredient for its shape and content. I gratefully acknowledge thefinancial support from the Deutscher Akademischer Austauschdienst andthe Deutsche Forschungsgemeinschaft. Thanks to Professors Reißmann andRohr from my home University of Rostock, Germany, for their support ofmy grant applications. With deep gratitude I acknowledge the close co-operation with Joseph Shirron of the Naval Research Laboratory (NRL) inWashington, D.C., who made his program SONAX available to me and wasalways ready to share his broad and solid experience in numerical acoustics.
2The intellectual environment a person enters is more significant and will be of muchgreater influence than the facts and concrete knowledge that are offered him.

x Preface
He was also the first discerning reader of the manuscript. Many thanks alsoto Oliver Ernst (Freiberg/ College Park), Lothar Gaul (Stuttgart), JensMarkus Melenk (Zurich), and Guy Waryee (Brussels), who carefully readlater versions of the text. Their remarks led to a considerable improvementin content and style. Thanks to Louise Couchman (NRL) for permissionto use SONAX and to Brian Houston (NRL) for providing me with theresults of his experiments and for the numerous explanations of the detailsof his studies. Many thanks go to Achi Dosanjh, David Kramer, and Vic-toria Evarretta from the Springer-Verlag New York, for their professionalsupport in making the book. I am much obliged to Malcolm Leighton whothoroughly checked the language of the manuscript. Finally, I gladly usethis opportunity to thank my parents Ingrid and Karl Heinz Ihlenburg fortheir encouragement of my interests.
Hamburg, Germany Frank IhlenburgFebruary 1998

Contents
Preface vii
1 The Governing Equations of Time-Harmonic WavePropagation 11.1 Acoustic Waves . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Linearized Equations for Compressible Fluids . . . . 21.1.2 Wave Equation and Helmholtz Equation . . . . . . . 31.1.3 The Sommerfeld Condition . . . . . . . . . . . . . . 6
1.2 Elastic Waves . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2.1 Dynamic Equations of Elasticity . . . . . . . . . . . 81.2.2 Vector Helmholtz Equations . . . . . . . . . . . . . . 9
1.3 Acoustic/Elastic Fluid–Solid Interaction . . . . . . . . . . . 111.3.1 Physical Assumptions . . . . . . . . . . . . . . . . . 121.3.2 Governing Equations and Special Cases . . . . . . . 13
1.4 Electromagnetic Waves . . . . . . . . . . . . . . . . . . . . . 161.4.1 Electric Fields . . . . . . . . . . . . . . . . . . . . . 161.4.2 Magnetic Fields . . . . . . . . . . . . . . . . . . . . . 171.4.3 Maxwell’s Equations . . . . . . . . . . . . . . . . . . 18
1.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.6 Bibliographical Remarks . . . . . . . . . . . . . . . . . . . . 20
2 Analytical and Variational Solutions of HelmholtzProblems 212.1 Separation of Variables . . . . . . . . . . . . . . . . . . . . . 22

xii Contents
2.1.1 Cartesian Coordinates . . . . . . . . . . . . . . . . . 222.1.2 Spherical Coordinates . . . . . . . . . . . . . . . . . 242.1.3 Cylindrical Coordinates . . . . . . . . . . . . . . . . 292.1.4 Atkinson–Wilcox Expansion . . . . . . . . . . . . . . 312.1.5 Far-Field Pattern . . . . . . . . . . . . . . . . . . . . 322.1.6 Computational Aspects . . . . . . . . . . . . . . . . 32
2.2 References from Functional Analysis . . . . . . . . . . . . . 352.2.1 Norm and Scalar Product . . . . . . . . . . . . . . . 352.2.2 Hilbert Spaces . . . . . . . . . . . . . . . . . . . . . 362.2.3 Sesquilinear Forms and Linear Operators . . . . . . 382.2.4 Trace of a Function . . . . . . . . . . . . . . . . . . 39
2.3 Variational Formulation of Helmholtz Problems . . . . . . . 402.3.1 Helmholtz Problems on Bounded Domains . . . . . . 402.3.2 Helmholtz Problems on Unbounded Domains . . . . 412.3.3 Weak Formulation for Solid–Fluid Interaction . . . . 43
2.4 Well-Posedness of Variational Problems . . . . . . . . . . . 462.4.1 Positive Definite Forms . . . . . . . . . . . . . . . . 462.4.2 The inf–sup Condition . . . . . . . . . . . . . . . . . 482.4.3 Coercive Forms . . . . . . . . . . . . . . . . . . . . . 512.4.4 Regularity and Stability . . . . . . . . . . . . . . . . 53
2.5 Variational Methods . . . . . . . . . . . . . . . . . . . . . . 532.5.1 Galerkin Method and Ritz Method . . . . . . . . . . 532.5.2 Convergence Results . . . . . . . . . . . . . . . . . . 552.5.3 Conclusions for Helmholtz Problems . . . . . . . . . 57
2.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . 582.7 Bibliographical Remarks . . . . . . . . . . . . . . . . . . . . 58
3 Discretization Methods for Exterior Helmholtz Problems 613.1 Decomposition of Exterior Domains . . . . . . . . . . . . . 62
3.1.1 Introduction of an Artificial Boundary . . . . . . . . 623.1.2 Dirichlet-to-Neumann Operators . . . . . . . . . . . 633.1.3 Well-Posedness . . . . . . . . . . . . . . . . . . . . . 64
3.2 The Dirichlet-to-Neumann Operator and NumericalApplications . . . . . . . . . . . . . . . . . . . . . . . . . . . 653.2.1 The Exact DtN Operator . . . . . . . . . . . . . . . 653.2.2 Spectral Characterization of the DtN-Operator . . . 673.2.3 Truncation of the DtN Operator . . . . . . . . . . . 693.2.4 Localizations of the Truncated DtN Operator . . . . 70
3.3 Absorbing Boundary Conditions . . . . . . . . . . . . . . . 713.3.1 Recursion in the Atkinson–Wilcox Expansion . . . . 723.3.2 Localization of a Pseudodifferential Operator . . . . 743.3.3 Comparison of ABC . . . . . . . . . . . . . . . . . . 763.3.4 The PML Method . . . . . . . . . . . . . . . . . . . 78
3.4 The Finite Element Method in the Near Field . . . . . . . . 803.4.1 Finite Element Technology . . . . . . . . . . . . . . 81

Contents xiii
3.4.2 Identification of the FEM as a Galerkin Method . . 863.4.3 The h-Version and the hp-Version of the FEM . . . 87
3.5 Infinite Elements and Coupled Finite–Infinite ElementDiscretization . . . . . . . . . . . . . . . . . . . . . . . . . . 873.5.1 Infinite Elements from Radial Expansion . . . . . . 873.5.2 Variational Formulations . . . . . . . . . . . . . . . . 893.5.3 Remarks on the Analysis of the Finite–Infinite
Element Method . . . . . . . . . . . . . . . . . . . . 933.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . 973.7 Bibliographical Remarks . . . . . . . . . . . . . . . . . . . . 98
4 Finite Element Error Analysis and Control for HelmholtzProblems 1014.1 Convergence of Galerkin FEM . . . . . . . . . . . . . . . . . 102
4.1.1 Error Function and Residual . . . . . . . . . . . . . 1034.1.2 Positive Definite Problems . . . . . . . . . . . . . . . 1034.1.3 Indefinite Problems . . . . . . . . . . . . . . . . . . . 105
4.2 Model Problems for the Helmholtz Equation . . . . . . . . . 1064.2.1 Model Problem I: Uniaxial Propagation of a Plane
Wave . . . . . . . . . . . . . . . . . . . . . . . . . . 1074.2.2 Model Problem II: Propagation of Plane Waves with
Variable Direction . . . . . . . . . . . . . . . . . . . 1084.2.3 Model Problem III: Uniaxial Fluid–Solid Interaction 109
4.3 Stability Estimates for Helmholtz Problems . . . . . . . . . 1104.3.1 The inf–sup Condition . . . . . . . . . . . . . . . . . 1104.3.2 Stability Estimates for Data of Higher Regularity . . 113
4.4 Quasioptimal Convergence of FE Solutions to the HelmholtzEquation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1164.4.1 Approximation Rule and Interpolation Error . . . . 1164.4.2 An Asymptotic Error Estimate . . . . . . . . . . . . 1194.4.3 Conclusions . . . . . . . . . . . . . . . . . . . . . . . 121
4.5 Preasymptotic Error Estimates for the h-Version of the FEM 1224.5.1 Dispersion Analysis of the FE Solution . . . . . . . . 1224.5.2 The Discrete inf–sup Condition . . . . . . . . . . . . 1244.5.3 A Sharp Preasymptotic Error Estimate . . . . . . . 1254.5.4 Results of Computational Experiments . . . . . . . . 128
4.6 Pollution of FE Solutions with Large Wave Number . . . . 1324.6.1 Numerical Pollution . . . . . . . . . . . . . . . . . . 1334.6.2 The Typical Convergence Pattern of FE Solutions to
the Helmholtz Equation . . . . . . . . . . . . . . . . 1344.6.3 Influence of the Boundary Conditions . . . . . . . . 1364.6.4 Error estimation in the L2-norm . . . . . . . . . . . 1374.6.5 Results from 2-D Computations . . . . . . . . . . . . 138
4.7 Analysis of the hp FEM . . . . . . . . . . . . . . . . . . . . 1404.7.1 hp-Approximation . . . . . . . . . . . . . . . . . . . 140

xiv Contents
4.7.2 Dual Stability . . . . . . . . . . . . . . . . . . . . . . 1454.7.3 FEM Solution Procedure. Static Condensation . . . 1474.7.4 Dispersion Analysis and Phase Lag . . . . . . . . . . 1494.7.5 Discrete Stability . . . . . . . . . . . . . . . . . . . . 1514.7.6 Error Estimates . . . . . . . . . . . . . . . . . . . . . 1534.7.7 Numerical Results . . . . . . . . . . . . . . . . . . . 155
4.8 Generalized FEM for Helmholtz Problems . . . . . . . . . . 1584.8.1 Generalized FEM in One Dimension . . . . . . . . . 1584.8.2 Generalized FEM in Two Dimensions . . . . . . . . 162
4.9 The Influence of Damped Resonance in Fluid–Solid Interaction1704.9.1 Analysis and Parameter Discussion . . . . . . . . . . 1704.9.2 Numerical Evaluation . . . . . . . . . . . . . . . . . 171
4.10 A Posteriori Error Analysis . . . . . . . . . . . . . . . . . . 1744.10.1 Notation . . . . . . . . . . . . . . . . . . . . . . . . . 1744.10.2 Bounds for the Effectivity Index . . . . . . . . . . . 1754.10.3 Numerical Results . . . . . . . . . . . . . . . . . . . 179
4.11 Summary and Conclusions for Computational Application . 1854.12 Bibliographical Remarks . . . . . . . . . . . . . . . . . . . . 187
5 Computational Simulation of Elastic Scattering 1895.1 Elastic Scattering from a Sphere . . . . . . . . . . . . . . . 189
5.1.1 Implementation of a Coupled Finite–Infinite ElementMethod for Axisymmetric Problems . . . . . . . . . 189
5.1.2 Model Problem . . . . . . . . . . . . . . . . . . . . . 1915.1.3 Computational Results . . . . . . . . . . . . . . . . . 1945.1.4 Conclusions . . . . . . . . . . . . . . . . . . . . . . . 201
5.2 Elastic Scattering from a Cylinder with Spherical Endcaps . 2025.2.1 Model Parameters . . . . . . . . . . . . . . . . . . . 2025.2.2 Convergence Tests . . . . . . . . . . . . . . . . . . . 2035.2.3 Comparison with Experiments . . . . . . . . . . . . 206
5.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
References 211
Index 221

1The Governing Equations ofTime-Harmonic Wave Propagation
In this chapter, we outline some of the basic relations of linear wave physics,starting with acoustic waves, proceeding to elastic waves and fluid–solidinteraction, and finally considering the Maxwell wave equation. Thus wedeal with a scalar field (acoustics), a vector field (elastodynamics), thecoupling of these fields in fluid–solid interaction, or two coupled vector fields(electrodynamics). While each class of problems has its distinctive features,there are underlying similarities in the mathematical models, leading tosimilar numerical effects in computational implementations.We will be interested mostly in the time-harmonic case, assuming that
all waves are steady-state with circular frequency ω. We introduce here theconvention that the time variable in a time-dependent scalar field F (x, t)is separated as
F (x, t) = f(x)e−iωt , (1.0.1)
where f is a stationary function. A similar convention holds for vectorfields.
1.1 Acoustic Waves
Acoustic waves (sound) are small oscillations of pressure P (x, t) in a com-pressible ideal fluid (acoustic medium). These oscillations interact in sucha way that energy is propagated through the medium. The governing equa-tions are obtained from fundamental laws for compressible fluids.

2 1. The Governing Equations of Time-Harmonic Wave Propagation
1.1.1 Linearized Equations for Compressible FluidsConservation of Mass:
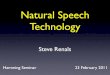
Consider the flow of fluid material with pressure P (x, t), density ρ(x, t),and particle velocity V(x, t). Let V be a volume element with boundary∂V , and let n(x), x ∈ ∂V , be the normal unit vector directed into theexterior of V , see Fig. 1.1. Then V(x, t) ·n(x) is the velocity of normal flux
V,
n(x)
n(x)
n(x)
ρ
FIGURE 1.1. A volume element with definition of normal direction.
through ∂V . The conservation of mass in a unit time interval is expressedby the relation
− ∂
∂t
∫V
ρdV =∮∂V
ρ (V · n) dS . (1.1.1)
The surface integral on the right is transformed into a volume integral usingthe Gauss theorem,
∮∂V
(ρV) · n dS =∫V
div (ρV) dV .
We thus obtain ∫V
(∂ρ
∂t+ div (ρV)
)dV = 0 ,
which leads to the continuity equation
∂ρ
∂t+ div (ρV) = 0 . (1.1.2)
Remark 1.1. The signs in (1.1.1) correspond to the decrease of mass dueto outflow (namely, in the direction of the exterior normal) of material. Asimilar relation with opposite signs on both sides is obtained for inflow ofmaterial/increase of mass.

1.1 Acoustic Waves 3
Equation of Motion:
Assume that the volume element V is subject to a hydrostatic pressureP (x, t). The total force along ∂V is then F = − ∮ PndS, where again ndenotes the outward unit normal vector along ∂V . The second Newtonianlaw F = ma now gives
−∮∂V
Pn dS =∫V
ρdVdt
dV .
The total differential in the integral on the right is linearized as dV/dt ≈∂V/∂t (see Remark 1.2 below). Further, from the Gauss theorem it followsthat − ∮
∂VPn dS = − ∫
V∇P dV , where ∇ = ·,x , ·,y , ·,z is the nabla
operator (gradient) in spatial cartesian coordinates. Thus we arrive at theequation of motion (Euler equation)
ρ∂V∂t
= −∇P . (1.1.3)
Remark 1.2. Generally, the total differential dV/dt is expanded into thenonlinear expression (cf. Landau–Lifshitz [86, p. 3])
dVdt
=∂V∂t
+ (V · ∇)V.
With the assumption of small oscillations, this relation is linearized inacoustics.
Using the time-harmonic assumption, we obtain the steady-state expres-sion of the Euler equation,
iωρv = ∇p . (1.1.4)
where we applied the separation of variables as in (1.0.1) to the scalar fieldP (x, t) and the vector field V(x, t). Introducing the vector field U(x, t) offluid particle displacements, the Euler equation is equivalently written as
ρ∂2U∂t2
= −∇P (1.1.5)
or, in stationary form,ρω2u = ∇p . (1.1.6)
1.1.2 Wave Equation and Helmholtz EquationBy definition, sound is a small perturbation (P, ρ) of a constant state(P0, ρ0) of a compressible, ideal fluid. At any field point x, the functi-ons P (x, t), ρ(x, t) represent vibrations with a small amplitude. Using the

4 1. The Governing Equations of Time-Harmonic Wave Propagation
Euler equation the velocities are also small. Assuming a linear material law,we write
P = c2ρ, (1.1.7)
where the material constant c is called the speed of sound. Then, usinglinearized versions of (1.1.2) and (1.1.3), we obtain
P,tt= c2ρ,tt= −c2ρ0 divV,t= c2 div (∇P ) ,
to arrive at the wave equation
∆P − 1c2
P,tt= 0 , (1.1.8)
where ∆ = ∇ · ∇ is the Laplacian in spatial coordinates. Throughoutthe book, we denote by f,t , f,x, etc. the partial derivatives ∂f∂t ,
∂f∂x , etc.
With the assumption of time-harmonic waves (1.0.1), we finally obtain theHelmholtz equation
∆p+ k2p = 0 , (1.1.9)
withk :=
ω
c. (1.1.10)
The physical parameter k of dimension m−1 is called the wave number.This notion will become clear in the following paragraph.
One-Dimensional Wave Equation:
Let x ∈ R. It can be easily checked that functions of the form P (x, t) =f(kx − ωt) are solutions of the one-dimensional wave equation. The valueof the function f does not change if d(kx − ωt) = 0 or, equivalently,
dx
dt=
ω
k. (1.1.11)
The expression
vph :=dx
dt(1.1.12)
is called the phase velocity of the solution f(kx− ωt). Comparing (1.1.11)with (1.1.10) we see that the phase velocity of the one-dimensional solutionf(kx − ωt) is equal to the speed of sound in the acoustic medium andhence depends on material properties only. A wave whose phase velocityis independent of k or ω is called nondispersive. The phase velocity ofdispersive waves depends on the wave number k.To illustrate the meaning of the parameter k, consider steady-state so-
lutions P (x, t) = p(x)e−iωt. The stationary part satisfies the Helmholtzequation
p′′ + k2p = 0 ,

1.1 Acoustic Waves 5
with the general solution p(x) = Aeikx +Be−ikx. The solution is periodic;i.e., p(x+ λ) = p(x) holds for all x with
λ =2πk
.
The parameter λ is called the wavelength of the stationary wave p. Thus kis the number of waves per “unit” (2π) wavelength.The corresponding time-dependent solution is
P (x, t) = Aei(kx−ωt) +Be−i(kx+ωt) . (1.1.13)
Computing the phase velocities, we see that the first term on the right-hand side of (1.1.13) represents an outgoing wave (traveling to the rightwith vph = c), whereas the second term is an incoming wave (travelingto the left with vph = −c). Further, applying at any point x = x0 theboundary condition
cP,x (x0) + P,t (x0) = 0 , (1.1.14)
we eliminate the incoming wave. Condition (1.1.14) thus acts as a nonre-flecting boundary condition (NRBC) at x0. We summarize this in Table1.1 as follows.
TABLE 1.1. Wave directions and nonreflecting boundary conditions.
Signconvention:
P (x, t) = p(x)e−iωt
Solutions: P1 = ei(kx−ωt) P2 = e−i(kx+ωt)
Wavedirection:
d(kx− ωt) = 0 d(kx+ ωt) = 0
vph = x,t= c vph = x,t= −c−→ ←−
(outgoing) (incoming)
NRBC: cP,x+P,t= 0 ↓ cP,x−P,t= 0P,t= −iωP
p,x−ikp = 0 p,x+ikp = 0
Plane Waves:
Important particular solutions of the 2-D and 3-D Helmholtz equationsare the plane waves
p(x) = ei(k·x)

6 1. The Governing Equations of Time-Harmonic Wave Propagation
φx
k
1
2xλ
FIGURE 1.2. Plane wave in 2-D.
with |k| = k. Writing (in 2-D) k = kcosφ, sinφ, we havep(x) = eik(x1 cosφ+x2 sinφ),
describing a plane wave with wave number k moving in direction φ, seeFig. 1.2. The wave front is a plane (reducing to a straight line in two di-mensions) through the point (x1, x2) with normal n = k/k = cosφ, sinφ.Along an axis x in direction k, plane waves are one-dimensional waves eikx,as in the previous example. A nonreflecting boundary condition for a planewave can thus be prescribed if its direction is known. In general, this is notpossible. Instead, one can prescribe absorbing boundary conditions (ABC)as an approximation to nonreflecting conditions.The impedance of a plane wave is constant over the wave front and equal
to the characteristic impedance
z = ρc . (1.1.15)
Indeed, impedance is defined as the ratio of the force amplitude to theparticle velocity in the normal direction. Multiplying the Euler equation(1.1.4) by the normal n = k/k and denoting vn = v · n we have iωρvn =(k/k) · ∇p = ikp, since ∇p = ikp for plane waves, and (1.1.15) follows.
1.1.3 The Sommerfeld ConditionConsidering wave propagation in free space (unbounded acoustic domain)we postulate that no waves are reflected from infinity. The mathematical ex-pression for this far-field condition is obtained from the Helmholtz integralequation as follows. Let u(r) be a solution of the homogeneous Helmholtzequation −∆u − k2u = 0 in an exterior domain Ω+ = R3 \ Ω, and letg(r, r′) = g(|r′ − r|) be the free space Green’s function (fundamental solu-tion). This function is defined everywhere in Ω+, relating an “observationpoint” r = (x1, x2, x3) to a “source point” r′ = (x′
1, x′2, x
′3). By definition,
this Green’s function satisfies the inhomogeneous Helmholtz equation
∆g(|r′ − r|) + k2g(|r′ − r|) = δ(|r′ − r|)

1.1 Acoustic Waves 7
for all r, r′ ∈ Ω+, where δ is the Dirac delta function. In three dimensions,the Green’s function is given by
g(|r′ − r|) = eik|r′−r|
4π|r′ − r| . (1.1.16)
Remark 1.3. In two dimensions, the function is
g(|r′ − r|) = iH(1)0 (k|r′ − r|)
4, (1.1.17)
where H(1)0 (x) is the cylindrical Hankel function of the first kind (see Chap-
ter 2).
Using the free space Green’s function, one can show (cf. Kress [85, p.60]) that u(r), r ∈ Ω+, satisfies the integral equation
u(r) =∫∂Ω
[u(r′)
∂
∂n′ g(r, r′)− g(r, r′)
∂
∂n′ u(r′)]dS(r′) . (1.1.18)
We truncate Ω+ at a fictitious far-field boundary in the form of a sphere SRwith large radius R that encloses Ω. The full region will then be recoveredby letting R → ∞. Thus ∂Ω+ = ∂Ω ∪ SR. We demand that∫
SR
[u(r′)
∂
∂n′ g(r, r′)− g(r, r′)
∂
∂n′ u(r′)]dS(r′)→ 0 (1.1.19)
for R → ∞. For any fixed r ∈ Ω+, we may assume that the sphere SR issufficiently large that
R = |r′ − r| ≈ |r′| ,and the normal derivatives ∂/∂n′ can be identified with ∂/∂R. Then (1.1.19)becomes ∫
SR
1R
(ik u − u
R− du
dR
)eikR
4πdS .
Hence waves are absorbed at infinity if (note that dS ∼ R2)
u = O(R−1) , ik u − du
dR= o(R−1) , R → ∞ . (1.1.20)
Here, the notation f(x) = o(g(x)), x → ∞, means that the ratio f(x)/g(x)approaches zero as x → ∞, while f(x) = O(g(x)) means that this ratiois bounded for all x. Equation (1.1.20) is known as the Sommerfeld condi-tion. We will call solutions of exterior Helmholtz problems that satisfy theSommerfeld condition radiating solutions.

8 1. The Governing Equations of Time-Harmonic Wave Propagation
Remark 1.4. Strictly speaking, the Sommerfeld condition consists of twoequations, one of which characterizes the decay and the other the directio-nal character of the stationary solution in the far field (cf. Dautray–Lions[41, p. 94] or Sanchez Hubert–Sanchez Palencia [107, p. 329]). It can beshown (Wilcox [119]; cf. also Colton–Kress [39, p. 18]) that any functionthat satisfies both the Helmholtz equation and the radiation condition (i.e.,the second equation in the Sommerfeld condition) automatically satisfiesthe decay condition. Therefore, only the radiation condition is explicitlyassumed in most references.
A similar consideration leads to the Sommerfeld condition in R2,
u = O(R−1/2), ik u − du
dR= o(R−1/2), R → ∞ . (1.1.21)
In the one-dimensional case, the condition
u′(x)− iku(x) = 0 (1.1.22)
selects the outgoing wave eikx from the set of solutionse−ikx, eikx
. Unlike
the higher-dimensional case, this condition can be imposed for finite x asa usual mixed boundary condition (also called a Robin condition).A compact way of writing the radiation condition for any dimension d is
u = O(R−(d−1)/2
), ik u − du
dR= o(R−(d−1)/2
), R → ∞ . (1.1.23)
1.2 Elastic Waves
In an elastic medium, waves propagate in the form of small oscillations ofthe stress field. The dynamic equations of elasticity are obtained from thesame basic relations of continuum mechanics as the hydrodynamic equa-tions. We review the basic relations only very briefly; a detailed introduc-tion can be found, e.g., in Bedford–Drumheller [21].
1.2.1 Dynamic Equations of ElasticityEquilibrium:
The derivatives of the stress tensor components σij and the components ofthe applied dynamic load F are in equilibrium with the components of thedynamic volume force ρsU,tt (here again U is the vector of displacements),
σij ,j +Fi = ρsUi,tt (1.2.1)
for i = 1, 2, 3. Note that the summation convention has to be applied inthe first term on the left; i.e., the sum is taken over the range of the indexj.

1.2 Elastic Waves 9
Strain-Displacement Relation:
With the assumption of small deformations, the strains are related to thedisplacements by the linearized equations
eij =12(Ui,j +Uj ,i ), i, j = 1, 2, 3 . (1.2.2)
Material Law:
The material is elastic:
σij = λellδij + 2Geij , i, j = 1, 2, 3 , (1.2.3)
withλ =
Eν
(1 + ν)(1− 2ν) , G =E
2(1 + ν),
where E and ν, respectively, denote Young’s modulus and the Poisson ratioof the solid, and the summation convention applies for the term ell.From equations (1.2.1), (1.2.2), and (1.2.3), the equation of elastodyna-
mic equilibrium is found to be
∆∗U+ F = ρsU,tt , (1.2.4)
where∆∗U = G∆U+ (λ+G)∇(∇ ·U) . (1.2.5)
Here ∆U is the vector Laplacian of U given by ∆U = ∆U1,∆U2,∆U3T ,and ∇ ·U is the divergence of the vector field U.
1.2.2 Vector Helmholtz EquationsEquation (1.2.4) can be further transformed, introducing the Helmholtzdecomposition
U = ∇Φ+∇ ×Ψ , (1.2.6)
with scalar potential Φ and vector potentialΨ. This leads to (in the absenceof volume forces)
∇ [ρsΦ,tt−(λ+ 2G)∆Φ] +∇ × [ρsΨ,tt−G∆Ψ] = 0 ,
which is satisfied if the wave equations
Φ,tt−α2∆Φ = 0 , (1.2.7)Ψ,tt−β2∆Ψ = 0 (1.2.8)
hold, where the elastic speeds of sound are defined as
α =(λ+ 2G
ρs
)1/2, β =
(G
ρs
)1/2.

10 1. The Governing Equations of Time-Harmonic Wave Propagation
For G = 0, the equation (1.2.7) reduces to the acoustic wave equation.Since λ = B − 2/3G, where B is the bulk modulus1 of the material, thespeed of sound in the acoustic medium is
c =
√B
ρ. (1.2.9)
All waves in the acoustic medium are compressional. In addition to thecompressional waves, an elastic medium also allows shear waves. For furtherdetails, see, e.g., [21].With the assumption of time-harmonic fields, the elastic wave equations
lead to the elastic Helmholtz equations
∆Φ + k2αΦ = 0 , (1.2.10)∆Ψ+ k2βΨ = 0 , (1.2.11)
with the elastic wave numbers
kα :=ω
α, kβ :=
ω
β.
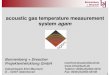
Example 1.5. (In vacuo vibrations of a spherical shell). Consider an ela-stic spherical shell freely vibrating in vacuo. We denote by t the constantthickness of the shell and by a the radius of its midsurface, see Fig. 1.3. We
y
zt
x
a
v
wu
FIGURE 1.3. Spherical shell with coordinate system and deflection components.
are interested in the eigenfrequencies of the vibrations. The characteristicequations are obtained in the following steps:
1The bulk modulus is the material constant in the hydrostatic stress-strain relations = Be, where s = σll/3 is the hydrostatic pressure and e = ell is the volume dilatation.

1.3 Acoustic/Elastic Fluid–Solid Interaction 11
1. Solve the Helmholtz equations (1.2.10), (1.2.11) for the potentials Φand Ψ.
2. Compute the displacement field u, v, w from the potentials usingdefinition (1.2.6).
3. Compute the stress fields (in terms of displacements) using (1.2.2),(1.2.3).
4. Set the stress fields to zero at the inner and outer shell boundaries toobtain a homogeneous system of equations.
5. Compute the characteristic eigenvalues from the condition that thedeterminant of the system vanishes.
For a detailed outline of this procedure, see Chang and Demkowicz [36]. Forthe full 3–D solution, the homogeneous system consists of six equations. Ifthe shell is subject to nontorsional axisymmetric motions only; i.e., v = 0and u = u(θ), w = w(θ), then the number of equations reduces to four.Chang and Demkowicz further show that for thin shells (up to t/a = 0.05)the first 25 eigenfrequencies are computed with sufficient accuracy from theKirchhoff–Love shell theory. In this theory, eigenfrequencies Ω are found asthe real solutions of the frequency equation (see also Junger–Feit [81, p.231])
Ω4 − [2(1 + ν) + λn − (β2(λn + 1) + 1)(1− ν − λn)]Ω2
+(λn − 2)(1− ν2) + β2[λ3n − 4λ2n + λn(5− ν2)− 2(1− ν2)
]= 0
with
Ω =aω
cp; λn = n(n+ 1); β =
t√12a
; cp =(
E
(1− ν2)ρ
)1/2.
This equation is quadratic in Ω; there are two different resonant frequenciesfor each mode except for the case n = 0, which permits only one positivereal solution.
1.3 Acoustic/Elastic Fluid–Solid Interaction
An acoustic wave that is incident on a rigid obstacle is totally reflected.This is called rigid scattering of sound. If the obstacle is elastic, a part ofthe incident energy is transmitted in the form of elastic vibrations. Theacoustic pressure waves act as time-varying loads, causing forced elasticvibrations. In that case, we speak of elastic scattering. Conversely, if the

12 1. The Governing Equations of Time-Harmonic Wave Propagation
acoustic medium picks up elastic vibrations of an embedded body in theform of acoustic waves, we say that sound is radiated from the body.In this section, we will obtain the equations for all these effects as special
cases of the general equations of fluid–solid interaction.
1.3.1 Physical AssumptionsWe consider elastic scattering, making the following assumptions:
Ω
Ω
+
Γ
p psinc
u
FIGURE 1.4. Fluid–solid interaction (schematic plot).
Space: Let Ω ⊂ R3 be a bounded domain of a solid (called obstacle) withboundary Γ (called wet surface), which is enclosed by the unbounded fluiddomain Ω+ = R3 \ Ω; see Fig. 1.4. It is assumed that outgoing waves areabsorbed in the far field; i.e., no waves are reflected from infinity.
Material: The fluid is supposed to be ideal, compressible, and homoge-neous with density ρf and speed of sound c. The solid obstacle is consideredas rigid or linearly elastic with density ρs. The scalar pressure field in thefluid is denoted by P (x, t). The vector field of solid displacements is denotedby U(x, t).
Time: All waves are steady-state (time-harmonic) with circular frequencyω, satisfying the separation convention (1.0.1).
Range of unknowns: The amplitudes of the oscillations both in the solidand in the fluid regions are supposed to be small.
Load: In the fluid region Ω+, an incident acoustic field Pinc(x, t) =pinc(x)e−iωt is given and/or the solid region is subject to a time-harmonicdriving force F(x, t) = f(x) exp(−iωt).
Coordinates: A cartesian coordinate system is fixed in R3 throughout allcalculations (global Lagrangian approach).The objective is to determine the stationary acoustic field of scattered
pressure p(x) for x ∈ Ω+. This solution is complex-valued. The solution ofphysical interest is then the real part of P (x, t) = p(x)e−iωt. We have
ReP = Re ((Re p+ i Im p)(cosωt − i sinωt))

1.3 Acoustic/Elastic Fluid–Solid Interaction 13
= |p|(Re p|p| cosωt+
Im p
|p| sinωt)
= |p| sin(φ+ ωt) ,
where we define
φ := arctanRe pIm p
. (1.3.1)
Hence, in the standard terminology for harmonic motion (see, e.g., Inman[77, p. 12]), the absolute value of the stationary solution is the amplitudeof the physical solution, whereas φ is its phase.
1.3.2 Governing Equations and Special CasesTransmission Conditions:
Consider an arbitrary point P ∈ Γ of the wet surface. Let n be a unit vectorin the outward normal direction and let t1, t2,n be a local orthonormalbasis at P; see Fig. 1.5. We then can formulate two conditions of staticequilibrium at the point P.
tt
TP
n2
1
Γ
FIGURE 1.5. Local orthonormal coordinate system at the point P ∈ Γ.
The pressure is in static equilibrium with the traction normal to the solidboundary:
−(p+ pinc) = Tn , (1.3.2)
where pinc is the known incident pressure.Since the fluid is supposed to be ideal, no tangential traction occurs at
the boundary:Tt1 = Tt2 = 0 . (1.3.3)
The local components of the traction vector T = Tt1 , Tt2 , TnT are re-lated by an orthonormal transform to the global cartesian componentsT = Tx, Ty, TzT . These components are computed by
Ti = σijnj ,

14 1. The Governing Equations of Time-Harmonic Wave Propagation
where nj are the cartesian components of the normal vector n. In localcoordinates, we have T = 0, 0, TnT , whence
Tn = T · n = Tini = σijninj ,
and the equilibrium conditions are equivalently written as
σijninj = −(p+ pinc) . (1.3.4)
Another equation is obtained from the compatability condition that thenormal displacements of solid and fluid are equal at the wet surface. Wemultiply the Euler equation (1.1.6) by the normal vector n and interpretthe resulting normal displacements as solid displacements. This leads to
ρfω2u · n = ∂(p+ pinc)
∂n. (1.3.5)
Using the time-harmonic velocity form (1.1.4) of the Euler equation, wecan write alternatively
−iωρfvn =∂(p+ pinc)
∂n,
relating the normal particle velocity to the normal pressure derivative.
Governing Equations:
The transmission conditions, together with the elastodynamic and theacoustic equations, form the following general system of equations for fluid–solid interaction:
∆∗u+ ρsω2u = −f in Ωs , (1.3.6)
ρfω2u · n− ∂p
∂n=
∂pinc∂n
on Γ , (1.3.7)
σij(u)ninj + p = −pinc on Γ , (1.3.8)
∆p+ k2p = 0 in Ω+ , (1.3.9)
p = O(R−(d−1)/2
),
dp
dR− ik p = o
(R−(d−1)/2
), R → ∞ , (1.3.10)
where ∆∗ in the first equation is the elasticity operator; see (1.2.5). Inequations (1.3.9), (1.3.10), k = ω/c is the wave number in the fluid.

1.3 Acoustic/Elastic Fluid–Solid Interaction 15
Special Cases:
From the general equations above, we can deduce several important specialcases:
1. u = 0Rigid scattering: (1.3.7), (1.3.9), (1.3.10).
2. Tn = 0Soft scattering: (1.3.8), (1.3.9), (1.3.10).
3. u = 0 , pinc = 0Wave propagation in free space: (1.3.9), (1.3.10).
4. pinc = 0Radiation of sound from an elastic body vibrating in fluid: all equa-tions.
5. pinc = 0 , p = 0Vibrations of an elastic body in vacuo: (1.3.6), (1.3.8).
Since the model is linear, the general case can be interpreted as a su-perposition of special cases as follows. We write the solution for elasticscattering p = pse formally as pse = pr+ ps∞, where ps∞ is the solution forrigid scattering. Since ∂ps∞/∂n = −∂pinc/∂n, the transmission condition(1.3.7) reduces to
ρfω2u · n− ∂pr
∂n= 0.
The equilibrium condition reads
Tn = pinc + ps∞ + pr.
Referring to the appropriate special cases, we see that pr can be interpretedas the pressure radiated from the elastic body.We conclude with a simple example for solid–fluid interaction.
Example 1.6. The system of one-dimensional equations
−Ed2u
dx2− ρsω
2u = f , 0 ≤ x ≤ l
u = 0 , x = 0 ,
ρfω2u − dp
dx= 0 , x = l ,
Edu
dx+ p = 0 , x = l ,
−d2p
dx2− k2p = 0 , x ≥ l ,
dp
dx− ikp = 0 , x → ∞ ,

16 1. The Governing Equations of Time-Harmonic Wave Propagation
can be physically interpreted as the forced longitudinal vibrations of a slabof length l that is coupled to an infinite fluid layer. Recall that in onedimension, the radiation condition can be prescribed at any field pointx > l. Such a condition can even be imposed directly on the slab. Indeed,the solution in the fluid is p = p0 exp(ikx), where the amplitude p0 isdetermined by the boundary and transmission conditions. Inserting thisresult into the transmission conditions at x = l, we can eliminate p0 toobtain the boundary condition
Edu
dx− iω
√ρfBu = 0 at x = l , (1.3.11)
or, equivalently,
adu
dx− iku = 0 at x = l , (1.3.12)
with the nondimensional parameter a = E/ρfc2. Thus the solution of the
coupled problem can be reduced to the solid domain; cf. Demkowicz [42].
A second example (elastic scattering from a thin spherical shell) will begiven in Chapter 2.
1.4 Electromagnetic Waves
The electromagnetic wave equations follow from Maxwell’s electrodynamicequations. Maxwell’s equations describe the interaction between two time-varying force fields: the electric field and the magnetic field. Electric fieldsare generated by charges. In conducting media, electric fields enforce cur-rents (flow of free electric charges). The interaction of currents generatesthe magnetic force field. If the magnetic field does not change in time,it does not influence the electric field. The static electric and magneticfields are coupled only implicitly via their relation to the steady current.However, any change of a magnetic field produces an electric field. Thusthe fields are directly coupled in the dynamic case. A simple transforma-tion of Maxwell’s equations shows that both the electric and the magneticfields satisfy a vector wave equation, showing that in both fields energy istransmitted in the form of waves.
1.4.1 Electric FieldsBy Coulomb’s law, the force exerted by a charge Q on a test charge q is
FQ =qQ
4πε0R2aR ,
where ε0 is a material constant (permittivity), R is the distance betweenthe charges, and aR is a unit vector pointing from Q in the direction of q.

1.4 Electromagnetic Waves 17
Generalizing to a volume distribution of charges with charge density ρV ,the force exerted on q is
F =∫V
qρV4πε0R2
aRdV ,
which leads directly to the definition of electric field intensity
E =Fq=∫V
ρV4πε0R2
aRdV .
Gauss’s law states that the total charge in a volume enclosed by a closedsurface S is equal to the surface integral of the electric flux density ε0E:∮
S
ε0E · ds =∫V
ρ dV .
Here ds := ndS is the outward differential surface vector, and ρ is thecharge per unit volume.The electric field produces a flow of free charges in a conducting medium.
By Ohm’s law, the current in a conductor is proportional to the appliedelectrical field:
J = σE ,
where σ is the conductivity of the material.Similarly to the conservation of mass in continuum mechanics, the prin-
ciple of conservation of charge states that the current passing through anyclosed surface S is equal to the decrease of charge in the volume enclosedby S: ∮
S
J · ds = − ∂
∂t
∫V
σdV .
1.4.2 Magnetic FieldsThe magnetic field intensity H characterizes the force field that is exertedby a current element on another current element in its vicinity. By Ampere’slaw, the integral of the (static) magnetic field intensity around any closedpath is equal to the total current enclosed by that path,∮
c
H · dl =∫S
J · ds .
Analogously to electric flux, the magnetic flux density B is related to thefield intensity by the material law
B = µH ,
where the material parameter µ is called the permeability. The integralof the magnetic flux over any closed surface is zero, since magnetic pointsources (that would be similar to electric charges) do not exist:∮
S
B · ds = 0 .

18 1. The Governing Equations of Time-Harmonic Wave Propagation
1.4.3 Maxwell’s EquationsTime-varying magnetic fields produce electric fields. The interaction is de-scribed by Faraday’s law,∮
c
E · dl = − ∂
∂t
∫S
B · ds ,
and the dynamic Ampere’s law reads∮c
H · dl =∫S
J · ds+∫S
∂D∂t
· ds .
Assuming linear material laws with constant material parameters, we col-lect the full system of Maxwell’s equations in integral form:∮
c
E · dl = −µ∂
∂t
∫S
H · ds ,∮S
E · ds =1ε0
∫V
ρdV ,∮c
H · dl = σ
∫S
E · ds+ ε0∂
∂t
∫S
E · ds ,∮S
H · ds = 0 ,
The corresponding differential equations
∇ ×E = −µ∂
∂tH ,
∇ ·E =ρ
ε0,
∇ ×H = σE+ ε0∂
∂tE ,
∇ ·H = 0
are obtained from the integral equalities by applying the divergence theo-rem ∮
S
F · ds =∫V
∇ · FdV
or Stokes’s theorem ∮c
F · dl =∫V
(∇ × F) · ds ,
respectively. If the electric field is free of charges (ρ ≡ 0), then the systemof Maxwell’s equations reduces to the coupled equations
∇ ×E+ µ∂
∂tH = 0 ,
∇ ×H− σE− ε0∂
∂tE = 0 ,

1.5 Summary 19
with the condition that the vector fields be divergence-free. This systemcan be transformed to the vector wave equation
∇2A = µσ∂A∂t
+ µε0∂2A∂t2
,
where A = E or H. The stationary form of the Maxwell wave equation is
∇2A+ γ2A = 0 , (1.4.1)
whereγ2 = ω2µε0 + iωµσ .
For exterior radiation and scattering problems, the Maxwell wave equationis associated with the Silver–Muller radiation condition [119]
limR→∞
R (R0 × (∇ ×A) + iγA) = 0; (1.4.2)
cf. the Sommerfeld radiation condition in the scalar case. Here R0 is aunit vector in the direction of R, and R = |R|. Solutions of the Maxwellwave equation satisfying (1.4.2) are called radiating solutions. The radiatingsolutions automatically satisfy the decay condition |A| = O
(R−1); see the
discussion on the Sommerfeld condition in Section 1.1.3.If the medium is lossless (σ = 0), then the wave number is real, and the
Maxwell wave equation transforms to the vector Helmholtz equation
∇2A+ k2A = 0 ,
withk2 = ω2µε0 .
1.5 Summary
The physical effect of wave propagation is described by the scalar waveequation (acoustics) or the vector wave equation (elastic waves) or a systemof two vector wave equations (electrodynamics). In the time-harmonic case,the wave equations transform to the corresponding Helmholtz equations.The Helmholtz equations are characterized by a physical parameter—thewave number. If no loss of energy occurs in the medium, the wave numberis real. For exterior problems, we impose the Sommerfeld condition (orthe Silver–Muller condition for Maxwell’s equations) in the far field. Thiscondition, which prevents the reflection of outgoing waves from infinity,introduces the radiation damping into the physical model. Consequently,standing waves cannot occur in exterior problems.The components of vector Helmholtz equations satisfy scalar Helmholtz
equations. Thus the investigation of scalar (acoustic) Helmholtz equationsis also relevant for the physical problems of elastic and electrodynamic wavepropagation.

20 1. The Governing Equations of Time-Harmonic Wave Propagation
1.6 Bibliographical Remarks
The material of this chapter can be found in many textbooks and mono-graphs. We have used mostly the corresponding volumes of the treatise byLandau and Lifshitz [86] as well as the textbooks by Nettel [99] and byBedford and Drumheller [21]. The monograph by Junger and Feit [81] is astandard reference for formulations and methods in acoustic scattering andfluid–solid interaction. A very precise and detailed outline of the mathe-matical models is given by Dautray and Lions [41]. For instance, we haveintroduced here the assumption of time-harmonic behavior without furtherado. This assumption has to be understood in its asymptotic meaning, asgiven in [41, p. 92, Remark 4].

2Analytical and Variational Solutions ofHelmholtz Problems
In this chapter we review essential facts concerning the analytical (“strong”)and variational (“weak”) solutions of exterior Helmholtz problems. This isin preparation for the following chapters, where we will treat the solutionof exterior Helmholtz problems with finite element methods. The finite ele-ment discretization of the exterior is carried out in a small annular domainenclosing the scatterer. The solution behavior in the exterior of that do-main must be modeled and coupled appropriately to the degrees of freedomof the finite element model. Thus information from the analytical solutionis used in the exterior region, leading to a semianalytical numerical model.In particular, one has to make sure that essential characteristics of the ma-thematical formulation, such as the radiation damping, are carried over tothe numerical approximation.As a practical matter, solutions to partial differential equations can be
found in the form of an integral representation or by separation of variables(which, in general, leads to a series representation).1 Integral representa-tions are used in the boundary integral method. For our purpose of finiteelement analysis and simulation, we will be mostly interested in the coup-ling of finite elements with various discretizations of the separated solution.Further, we review variational formulations of exterior Helmholtz problemsand discuss variational methods. In particular, we explore the conditions
1cf. Morse and Feshbach [95, pp. 493-494]: “Aside from a few cases where solutionsare guessed and then verified to be solutions, only two generally practicable methods ofsolution are known, the integral solution and the separated solution.”

22 2. Analytical and Variational Solutions of Helmholtz Problems
for well-posedness of variational problems with indefinite variational formsand discuss the convergence of variational methods in this case.
2.1 Separation of Variables
We illustrate the technique on Helmholtz problems in cartesian, spherical,and cylindrical coordinates. The solutions will be used in the semianalyticaldiscretization methods described in Chapter 3.
2.1.1 Cartesian CoordinatesConsider the Helmholtz equation ∆u+ k2u = 0 in R3. Looking for nontri-vial solutions of the form u = X(x)Y (y)Z(z), we get
X ′′Y Z +XY ′′Z +XY Z ′′ + k2XY Z = 0 ,
which we can rewrite as
−X ′′
X=
Y ′′
Y+
Z ′′
Z+ k2 .
Since the right-hand side of the latter equation does not depend on x,equality can hold only if both sides are equal to a constant, say λ. Thus wefind that the two equations
X ′′ + λX = 0 ,Y ′′
Y+
Z ′′
Z+ k2 − λ = 0
must hold simultaneously. Repeating now the argument for the secondequation, we see that functions X,Y, and Z satisfy
X ′′ + λX = 0 ,Y ′′ + νY = 0 , (2.1.1)
Z ′′ + (k2 − λ − ν)Z = 0 ,
for independent constants λ, ν. Since we are interested in propagating so-lutions, we consider only positive real values of these constants, lettingλ := α2, ν := β2 with α, β ∈ R. Then the last equation can be rewritten as
Z ′′ + γ2Z = 0 ,
withγ :=
√k2 − α2 − β2 .

2.1 Separation of Variables 23
For k2 ≥ α2 + β2, the parameter γ is also real, and we have obtainedsolutions in the form of plane waves
u(x, y, z) = ei(αx+βy+γz) ,
where the parameters α, β, γ satisfy the dispersion relation
α2 + β2 + γ2 = k2 . (2.1.2)
For α2 + β2 > k2, γ is complex, and hence the solution is decaying inthe z-direction. Such solutions are called evanescent waves. Similarly, oneobtains evanescent waves by allowing α or β to be a complex number.Consider the function
u(x, y, z) =∫ ∞
−∞
∫ ∞
−∞U(α, β)ei(αx+βy+γz)dαdβ , (2.1.3)
where α, β, γ have to satisfy the dispersion relation (2.1.2), and U(α, β) isan amplitude function such that the integral is defined. This general formof the separated solution is called a “packet” of plane waves with wavevector k = α, β, γ. Choosing γ = +
√k2 − α2 − β2 defines a wave packet
traveling to the right on the z-axis (outgoing in the z-direction), whereasthe choice γ = −
√k2 − α2 − β2 defines a wave packet traveling to the left.
Example 2.1. Wave Guide with a Square Cross-Section. In Fig. 2.1,a wave guide with a square cross-section 0 ≤ x, y ≤ π is depicted. Assumethat the pressure-release condition p = 0 is given at the walls of the waveguide. Looking for a solution of the Helmholtz equation ∆p + k2p = 0 by
0
πx
y
π
z
FIGURE 2.1. Wave guide with a square cross-section.
separation of variables, we arrive at the system (2.1.1). From the pressure-release condition, we find that the separated boundary conditions for thefirst two equations are X(0) = X(π) = 0, Y (0) = Y (π) = 0. The correspon-ding boundary value problems have eigenfunctions X = sinnx, Y = sinmy

24 2. Analytical and Variational Solutions of Helmholtz Problems
for the integer eigenvalues λ = n2, ν = m2, respectively. The solution phence can be written as
p(x, y, z) =∞∑
m,n=1
pmnZmn(z) sinnx sinmy , (2.1.4)
where the functions Zmn(z) satisfy
Z ′′mn + γ2mnZmn = 0 ,
withγmn :=
√k2 − n2 − m2 .
The elementary solutions of this equation are
Z(1)mn = eiγmnz , Z(2)mn = e−iγmnz ,
which are propagating if k2 ≥ m2 + n2. With the convention of Table 1.1,we find that the functions Z(1)mn represent waves that travel in the positivez-direction (outgoing solutions), whereas functions Z(2)mn represent incomingsolutions.
2.1.2 Spherical CoordinatesSpherical Solutions:
Consider the Neumann problem in the exterior of a sphere of radius a. Weseek a function u(r, φ, θ) satisfying
∆u+ k2u = 0 , r > a , (2.1.5)∂u
∂r= w , r = a , (2.1.6)
∂u
∂r− iku = o(r−1) , r → ∞ , (2.1.7)
where r =√
x2 + y2 + z2, θ = arctan(√
x2 + y2/z), φ = arctan(y/x) arethe spherical coordinates; see Fig. 2.2. We recall that solutions of exte-rior Helmholtz problems that satisfy the Sommerfeld condition are calledradiating solutions.The Laplacian in spherical coordinates has the form
∆u(r, θ, φ) =1r2
[∂
∂r
(r2
∂u
∂r
)+
1sin θ
∂
∂θ
(sin θ
∂u
∂θ
)+
1sin2 θ
∂2u
∂φ2
].
Looking for a solution u = f(r)g(θ)h(φ), we obtain the separated ordinarydifferential equations
d
dr
(r2
df(r)dr
)+ (k2r2 − λ)f(r) = 0 , (2.1.8)

2.1 Separation of Variables 25
θ
ϕ
x
y
z
r
FIGURE 2.2. Spherical coordinates.
sin θd
dθ
(sin θ
dg(θ)dθ
)+(λ sin2 θ − ν
)g(θ) = 0 , (2.1.9)
d2h(φ)dφ2
+ νh(φ) = 0, (2.1.10)
where λ and ν are constants. The function f is defined in the exteriorr > a, whereas the functions g, h are defined on S. Moreover, the functionf satisfies the Sommerfeld condition.Since S is a closed surface, the function h is subject to the periodi-
city condition h(0) = h(2π). Equation (2.1.10) hence admits the solutionssinmx, cosmx for ν = m2,m = 0, 1, 2, . . .Equation (2.1.9) can be transformed via t := cos θ to
(1− t2)d2g
dt2− 2tdg
dt+(λ − m2
1− t2
)g(t) = 0 .
For λ = n(n + 1), n = 0, 1, . . ., this is Legendre’s equation. The solutionsare the associated Legendre functions
gmn(θ) = Pmn (cos θ), 0 ≤ m ≤ n .
These functions are defined from the Legendre polynomials by
Pmn (t) := (1− t2)m/2dmPn(t)
dtm, (2.1.11)
where the Legendre polynomials are defined by the recurrence relation
(n+ 1)Pn+1(t) = (2n+ 1)tPn(t)− nPn−1(t) ,P1(t) = t , (2.1.12)P0(t) = 1 .
Finally, for λ = n(n+1), equation (2.1.8) is Bessel’s differential equation.For each n, this equation has the independent solutions
h(1)n (kr) = i−n−1 eikr
kr
n∑j=0
(n+
12, j
)(−2ikr)−j ,

26 2. Analytical and Variational Solutions of Helmholtz Problems
h(2)n (kr) = in+1e−ikr
kr
n∑j=0
(n+
12, j
)(2ikr)−j ,
called spherical Hankel functions [1, 10.1.16–17]. We have used the notation(n+
12, j
)=
(n+ j)!j!(n − j)!
for integer n, j ≥ 0 [1, 10.1.9]. It is easy to see that in the far field (larger) the Hankel functions depend on r as
h(1)n (kr) ∼eikr
r, h(2)n (kr) ∼
e−ikr
r,
and hence the Hankel functions of the second kind represent incomingwaves, which are eliminated by the Sommerfeld condition. In the follo-wing, we will omit the superscript where no confusion can arise, writinghn(z) for the Hankel functions of the first kind h
(1)n (z).
Collecting results, we can write the solution u as
u(r, θ, φ) =∞∑n=0
n∑m=0
hn(kr)Pmn (cos θ)(Anm cos(mφ) +Bnm sin(mφ)) .
(2.1.13)If u is a radiating solution of the Helmholtz equation in the domain exteriorto the spherical surface |x| = a, then the series (2.1.13) converges absolutelyand uniformly in every closed and bounded domain that is contained in|x| > a (cf. Colton–Kress [39, p. 33]).
Spherical Harmonics:
Using the de Moivre identity, (2.1.13) is more compactly written as
u(r, θ, φ) =∞∑n=0
hn(kr)n∑
m=−ncmnymn(θ, φ) , (2.1.14)
where cmn are complex coefficients and
ymn(θ, φ) := P |m|n (cos θ)eimφ, −n ≤ m ≤ n ,
are the spherical harmonics. From the construction outlined above, it isclear that the spherical harmonics are eigenfunctions of the Laplace opera-tor for r ≡ constant. The harmonics
y0n = Pn(cos θ)
do not depend on φ and thus represent the axisymmetric (with respect tothe z-axis) modes. Some important properties of the spherical harmonicsare listed below. For the proof, see, e.g., Colton–Kress [39, pp. 20–26].

2.1 Separation of Variables 27
(1) For each n ≥ 0, there exist exactly 2n + 1 linearly independentspherical harmonics ymn, m = −n, . . . , n.(2) The spherical harmonics are orthogonal with respect to the inner
product (u, v)0 =∫SuvdS, where S is the surface of the unit sphere. More
precisely, we have∫S
ymnym′n′dS = 0 if m = m′ or n = n′ ,
and∫S
|ymn|2dS =∫ 2π
0dφ
∫ π0
|ymn|2 sin θdθ = 4π(2n+ 1)
(n+ |m|)!(n − |m|)! =: α
2mn .
To have an orthonormal system, we redefine
Ymn :=ymnαmn
.
The orthonormalized harmonics Ymn satisfy∫S
YmnYm′n′dS = δmm′δnn′ .
(3) Each square-integrable function f(θ, φ) (i.e. the integral∫S|f |2dS exists
and is finite) can be expanded into a series of spherical polynomials
f(θ, φ) =∞∑n=0
n∑m=−n
fmnYmn(θ, φ) , (2.1.15)
where
fmn =∫S
f(θ′, φ′)Ymn(θ′, φ′)dS′ . (2.1.16)
Solution of Boundary Value Problems:
Properties (2) and (3) are effectively used to determine the unknown co-efficients cmn in (2.1.14) from the boundary condition (2.1.6). By (3), thedata can be expanded as
w(θ, φ) =∞∑n=0
n∑m=−n
wmnYmn(θ, φ) ,
leading to the equality
∂u
∂r|r=a =
∞∑n=0
kh′n(ka)
n∑m=−n
cmnYmn(θ, φ) =∞∑n=0
n∑m=−n
wmnYmn(θ, φ) .

28 2. Analytical and Variational Solutions of Helmholtz Problems
Multiplying this equation by Y mn and integrating over S, we get, by or-thogonality,
cmn =wmn
kh′n(ka)
.
Similarly, the coefficients for the exterior Dirichlet problem are
cmn =wmn
hn(ka).
Example 2.2. (Rigid Scattering from a Sphere) Assume that a planewave with amplitude P0 is incident in the z-direction on a sphere withradius a. The incident pressure is written in spherical coordinates as
pinc(r, θ) = P0eikr cos θ. (2.1.17)
The exponential function in (2.1.17) can be expanded as [1, 10.1.47]
eikr cos θ =∞∑n=0
(2n+ 1)inPn(cos θ)jn(kr) .
Here jn(z) are the spherical Bessel functions of the first kind, which canbe defined by an ascending series as [1, 10.1.2]
jn(z) =zn
1 · 3 · · · · · (2n+ 1)
(1−
12z2
1!(2n+ 3)+
( 12z2)2
2!(2n+ 3)(2n+ 5)− · · ·
).
The problem is symmetric with respect to the angular coordinate φ, andhence only coefficients wn := wn0 need be computed in the expansion for∂u/∂r. We compute the boundary data for the Neumann condition (2.1.6)as
w(θ, φ) = −dpincdr
∣∣∣∣r=a
= −kP0
∞∑n=0
(2n+ 1)inPn(cos θ)j′n(ka) .
Hence the coefficients in the data expansion are wn = −kP0(2n+1)inj′n(ka),
and we readily compute
cn0 =: cn =wn
kh′n(ka)
= −P0in(2n+ 1)
j′n(ka)
h′n(ka)
.
The scattered wave is thus
ps∞(r, θ) = −P0
∞∑n=0
in(2n+ 1)j′n(ka)
h′n(ka)
Pn(cos θ)hn(kr) . (2.1.18)

2.1 Separation of Variables 29
Example 2.3. (Elastic Scattering from a Thin Spherical Shell). Asin the case of vibrations in vacuo (Example 1.4), the stress field and dis-placement field are computed from the potentials Φ and Ψ. The stress fieldagain satisfies homogeneous boundary conditions at the interior boundary.A nonhomogeneous condition (cf. (1.3.8)) is given for the stress resultanton the wet surface. Applying separation of variables and expansion intospherical harmonics, the exact solution for the scattered pressure in termsof the Kirchhoff–Love shell theory is found to be
pr(r, θ) = P0ρfcf(kro)2
∞∑n=0
in(2n+ 1)Pn(cos θ)hn(kr)(h′n(kro))2(Zn + zn)
, (2.1.19)
where we used notations cf , ρf , respectively, for the speed of sound anddensity in the fluid, and ro for the outer radius of the shell (marking thewet surface). As before, hn are the spherical Hankel functions of the firstkind.The expression Zn is the modal mechanical impedance, defined as the
ratio of the nth pressure mode to the corresponding shell velocity mode,
Zn :=
∣∣∣∣ Ω2 − (1 + β2)(ν + λn − 1) −β2(ν + λn − 1)− (1 + ν)−λn(β2(ν + λn − 1) + (1 + ν)) Ω2 − 2(1 + ν)− β2λn(ν + λn − 1)
∣∣∣∣−iω
∣∣∣∣∣Ω2 − (1 + β2)(ν + λn − 1) 0
−λn(β2(ν + λn − 1) + (1 + ν))−a2(1− ν2)
Et
∣∣∣∣∣,
(2.1.20)where, as before, λn = n(n+ 1) and t denotes the thickness of the sphere.Further, the modal specific acoustic impedance, defined as the ratio of
pressure to normal fluid particle velocity, is
zn = iρfcfhn(kro)h′n(kro)
. (2.1.21)
The details of the solution procedure can be found, for example, inJunger–Feit [81] or in Chang and Demkowicz [37].Comparing to the case of vibrations in vacuo, we see that the modal me-
chanical impedance is zero at the eigenfrequencies of the elastic shell. Still,no resonance of the coupled system fluid–solid occurs due to the imaginaryterm zn. Thus the acoustic impedance represents the fluid damping of thecoupled system. The behavior of the system is close to resonance for smallzn. Note that zn = 0 for ρf = 0. This is the case of forced vibrations invacuo where resonance occurs at the eigenfrequencies of free vibration.
2.1.3 Cylindrical CoordinatesCertain problems of scattering from infinite cylinders can be reduced totwo-dimensional scattering from a “circle.” We then seek radiating solutions

30 2. Analytical and Variational Solutions of Helmholtz Problems
to the Helmholtz equation in polar coordinates. Separation of variablesleads to
u(r, φ) =∞∑n=0
Hn(kr)(An cos(nφ) +Bn sin(nφ)) ,
where Hn(z) =: H(1)n (z) are the cylindrical Hankel functions of the first
kind. These functions are defined as
Hn(z) = Jn(z) + iYn(z) ,
where
Jn(z) =(z2
)n ∞∑j=1
(− z2
4
)jj!(n+ j)!
are the cylindrical Bessel functions of the first kind and Yn(z) are thecylindrical Bessel functions of the second kind.2 By identifying H−n =Hn, n = 1, 2, . . ., this can formally also be written as
u(r, φ) =∞∑
n=−∞unHn(kr)einφ . (2.1.22)
For the solution of boundary value problems, the same procedure as in threedimensions applies, but the expansion into spherical harmonics is replacedby Fourier expansion around the unit circle. Hence,
un =12π
∫ 2π
0u(φ)e−inφ dφ .
Example 2.4. (Rigid Scattering of a Plane Wave). We assume anincident plane wave as in (2.1.17). Using an addition theorem [1, 9.1.44–45], we decompose
pinc(r, θ) = P0eikr cos(θ)
= 2P0∞∑n=0
′inJn(kr) cos(nθ) , (2.1.23)
where the ′ after the sum symbolizes the rule that the term correspondingto n = 0 is multiplied by the factor 1/2. The scattered pressure is thencomputed as
ps∞(r, θ) = −2P0∞∑n=0
′in
J ′n(ka)Hn(kr)
H ′n(ka)
cos(nθ) , (2.1.24)
2The definition of these functions is beyond the scope of this book. For a detailedintroduction to Bessel functions, see [29].

2.1 Separation of Variables 31
and the total pressure field on the wet surface is
p(a, θ) = pinc + ps∞ = 2P0∞∑n=0
′in(Jn(ka)− J ′
n(ka)Hn(ka)H ′n(ka)
)cos(nθ) .
2.1.4 Atkinson–Wilcox ExpansionUsing the integral representation of radiating solutions, Wilcox [119] showsthat any vector field A(r) satisfying for r = |r| > c the vector Helmholtzequation (1.4.1) and the Silver–Muller radiation condition (1.4.2) can beexpanded as a function of r in the series
A(r) =eikr
r
∞∑n=0
An(θ, φ)rn
, (2.1.25)
where r, θ, φ are the spherical coordinates of r. The series converges abso-lutely and uniformly in the parameters r, θ, φ in any region r ≥ c+ ε > c.The series is differentiable with respect to all coordinates any number oftimes, and the derivatives have the same convergence properties as theoriginal expansion.For a scalar field satisfying the Helmholtz equation and the Sommerfeld
radiation condition, it is shown that similarly
u(r) =eikr
r
∞∑n=0
un(θ, φ)rn
, (2.1.26)
with the same convergence properties as in the vector case.The expansion theorems are proven without an assumption on the decay
character of the solution. Hence the fact that
|u| = O(r−1)
asymptotically for large r follows from the theorem, which assumes onlythat u is a radiating solution (cf. the discussion in Section 1.1.3).For the two-dimensional case in polar coordinates, similar expansions
were given by Karp [82]. He proves that for each outgoing wave functionthe expansion
u(kr) = H(1)0 (kr)
∞∑n=0
fn(θ)rn
+H(1)1 (kr)
∞∑n=0
gn(θ)rn
(2.1.27)
converges absolutely and uniformly for r > a > 0. Also, this representationcan be differentiated any number of times to yield again a convergent series.

32 2. Analytical and Variational Solutions of Helmholtz Problems
2.1.5 Far-Field PatternFor large r, the Atkinson–Wilcox expansion leads to the asymptotic equa-lity
u(r) eikr
rF (θ, φ) ,
disregarding terms of order O(r2). The function F (θ, φ), which describesthe angular behavior of u at a large distance from the origin, is called thefar-field pattern of u. It can be equivalently defined as
F(rr
) u(r) r e−ikr , r → ∞ . (2.1.28)
The integral representation can be used to compute the far-field pat-tern of a radiating solution. The radius R = |r− r′| can for r r′ beapproximated as
R = r
(1 +(r′
r
)2− 2 r′
rcos(r, r′)
)1/2
r (1− r′
rcos(r, r′) ) = r − r · r′
r,
where we have neglected the square of r′/r and introduced a first order ap-proximation for the square root. Inserting this approximation into (1.1.16),we obtain
g(r, r′) 14π
eikr
rexp(−ik
r · r′
r
).
We can assume without loss of generality that r′ lies on the unit sphere S0.Hence we write r′ = n′ to obtain the asymptotic expression
g(r,n′) 14π
eikr
rexp (−ik(n · n′)) , (2.1.29)
where n = r/r. Introducing this expression into the Helmholtz integralequation (1.1.18), we arrive at the asymptotic (for large r) formula for thecomputation of the far-field pattern:
F(rr
) − 1
4π
∫S0
(ik (n · n′)u(n′) +
∂
∂n′ u(n′))
e−ik(n·n′) dS . (2.1.30)
2.1.6 Computational AspectsThe series in expansions (2.1.15) or (2.1.22), respectively, must be truncatedfor numerical evaluation. Thus, instead of the exact solution uex, one reallycomputes a truncated solution uN =
∑Nn=0 · · · . Computational experience

2.1 Separation of Variables 33
shows that there is a connection between the critical truncation parameterN (i.e., N such that some norm of the error u − uN is smaller than sometolerance ε) and the argument ka of the Hankel functions. Let us illustratethis issue with computational experiments for cylindrical scattering.
0.0 10.0 20.0 30.0 40.0
N
-0.1
0.1
0.3
0.5
0.7
0.9
Erro
r
FIGURE 2.3. Approximation of plane wave by truncated series along circle r ≡ 1.Truncation error for k = 20.
We evaluate first the series expansion of the incident signal (2.1.23).The implementation uses the routine bessjy from [100, Section 6.7]. Wecompute the exact plane wave eikx = eik(r cos θ) =: p(kr, θ) and its truncatedseries
pN :=N∑n=0
′
inJn(kr) cos(nθ) . (2.1.31)
We evaluate both functions at nres points (parameter of graphical resolu-tion), first on the interval θ ∈ [0, π] with r ≡ a = 1 (wet surface). The erroris computed in the discrete l2-norm
e(N, k) =1n
n∑j=1
|[p − pN ](krj , θj)|21/2
at n = 50 uniformly distributed control points.In Fig. 2.3, we show the error in the l2-norm as a function of N , for k =
20. We observe a dropping of the error around k = N . Similar observationscan be made if one computes the error along a radial line θ ≡ constant. InFig. 2.4, we show the error of the total solution p = pinc + ps∞. The valuesfor the “exact solution” are obtained here with truncation N = 100.

34 2. Analytical and Variational Solutions of Helmholtz Problems
0.0 10.0 20.0 30.0 40.0
N
-0.01
0.04
0.09
0.14
0.19
Err
or
FIGURE 2.4. Approximation of the total solution by a truncated series along thewet surface r ≡ 1: Truncation error as a function of N for k = 20.
The above results are representative of a number of similar experiments,from which we conclude the truncation rule
N ≈ 2k . (2.1.32)
In the following, we give a heuristic outline for the decay of Bessel func-tions Jn(x) as the index n grows for fixed x. We will see that the resultcorresponds well to numerical observations.
Analytical Outline of a Truncation Rule:
Returning to the expansion (2.1.23), we are interested in a truncation rulefor the sum (2.1.31). Since | cos(nθ)| is bounded independently of n, weseek a bound for |Jn(kr)| as a function of x = kr and n.Consider Kapteyn’s inequality (cf. Olver [103, p. 426]; we thank Markus
Melenk for suggesting this reference),
|Jn(x)| ≤(xn
)n∣∣∣∣∣∣∣∣exp(
√n2 − x2)(
1 +√1− x
n2)n∣∣∣∣∣∣∣∣. (2.1.33)
Assuming n ≥ x > 0, the roots are real, and the absolute value signs onthe right can be omitted. Using further n2 − x2 ≤ n2, we get
|Jn(x)| ≤ e
(xn
)1 +√1− x
n2
n
.

2.2 References from Functional Analysis 35
Hence, for fixed x the functions Jn(x) are small if the expression within theparantheses is smaller than 1. It is easy to see that this expression decreasesas (xn−1) decreases. Solving the inequality
e(xn
)1 +√1− x
n2< 1
for (xn−1) yields
n >e2 + 12e
x ≈ 1.543x .
Replacing x with kr, we conclude that for fixed values of kr, the contribu-tions of the Jn(kr) decay quickly with increasing n once
n > 1.6kr . (2.1.34)
2.2 References from Functional Analysis
Modern numerical methods are based on the variational or weak formu-lations of boundary value problems. The natural function spaces for weakforms of differential operators are the Sobolev spaces. If the operators arelinear, these spaces are also Hilbert spaces. We give the basic definitions inthis section.
2.2.1 Norm and Scalar ProductLet V be a complex linear space. V is called a normed space if any elementv ∈ V is uniquely mapped to a real number ‖v‖ ≥ 0 with the properties
‖v‖ = 0 ⇒ v = 0 ,‖u+ v‖ ≤ ‖u‖+ ‖v‖ , ∀u, v ∈ V , (2.2.1)
‖αv‖ = |α|‖v‖ , ∀v ∈ V, α ∈ C .
A space V is equipped with a scalar product if a map V ×V → C with theproperties
(v, v) ≥ 0 , (v, v) = 0 ⇒ v = 0 ,(αu+ v, w) = α(u,w) + (v, w) , ∀u, v, w ∈ V, α ∈ C , (2.2.2)
(u, v) = (v, u) , ∀u, v ∈ V
is defined on V . If a scalar product is defined on a linear space V , then V
is normed by the induced norm ‖ · ‖V = (·, ·)1/2V .

36 2. Analytical and Variational Solutions of Helmholtz Problems
A sequence vn ⊂ V in a normed linear space V is called a Cauchysequence if
supm,n≥k
‖vn − vm‖V → 0 for k → ∞ .
A normed linear space V is called complete if any Cauchy sequence vn ⊂V converges to an element v ∈ V ; i.e., if there exists an element v ∈ V suchthat limn→∞ ‖v − vn‖V = 0.We will frequently use the Cauchy–Schwarz inequality. Let V be a linear
space equipped with a scalar product. Then any u, v ∈ V satisfy
|(u, v)| ≤ ‖u‖‖v‖ , (2.2.3)
where ‖ · ‖ is the norm that is induced by the scalar product. Indeed,consider
0 ≤ (αu+ βv, αu+ βv)= |α|2‖u‖2 + αβ(u, v) + βα(v, u) + |β|2‖v‖2
and take
α = − (u, v)‖u‖ , β = ‖u‖ ,
assuming that u = 0 (the statement is straightforward for u = 0). Thus0 ≤ −|(u, v)|2 + ‖u‖2‖v‖2 ,
which is equivalent to (2.2.3).
2.2.2 Hilbert SpacesA linear space V is called a Hilbert space if it is equipped with a scalarproduct (·, ·)V and is complete with respect to the induced norm ‖ · ‖V .
Example 2.5. Consider the interval (0, 1) ⊂ R and define the space
L2(0, 1) := f : (0, 1)→ C,
∫ 1
0|f(x)|2dx < ∞ (2.2.4)
of square-integrable functions. For example, the function f = x lies inL2(0, 1), whereas g = x−1 does not. The operation
(f, g) :=∫ 1
0f(x)g(x)dx
defines a scalar product. In fact, L2(0, 1) is a Hilbert space3 with the norm
‖f‖ =(∫ 1
0|f(x)|2 dx
)1/2.
3Completeness is proven in the Fiszer–Riesz theorem; cf. [105, 28].

2.2 References from Functional Analysis 37
For integer m > 0, define the subspace
Hm(0, 1) :=f ∈ L2(0, 1) : ∂if ∈ L2(0, 1), i = 0, 1, . . . ,m
, (2.2.5)
where ∂if are the weak derivatives of the function f . A function f ′ = ∂fis called the weak derivative of f if∫ ∞
−∞f ′(x)ϕ(x)dx =
∫ ∞
−∞f(x)ϕ′(x)dx
for all test functions ϕ that are differentiable in the classical sense andvanish, together with all their derivatives, at ±∞. The higher derivatives∂i, i ≥ 2, are defined similarly, the derivative for i = 0 is formally identifiedwith the function f itself. One easily verifies that a scalar product on Hm
is defined by
(f, g)m =m∑i=0
∫ 1
0∂if(x)∂ig(x)dx ,
inducing the norm ‖f‖m = (f, f)1/2m . The subspaces Hm(0, 1) ⊂ L2(0, 1)are again Hilbert spaces. They are also Sobolev spaces, namely, the specialcase p = 2 of the general Sobolev spaces Wm,p. In particular, the Sobolevspace H0(0, 1) is identical with L2(0, 1).For f ∈ Hm(0, 1), we will also work with the seminorm
|f |m :=(∫ 1
0|∂mf(x)|2dx
)1/2.
Seminorms are linear maps that satisfy (2.2.1)2,3 but do not, in general,satisfy (2.2.1)1. For example, consider H1(0, 1) f ≡ 1. Then |f |1 = 0 butf = 0.
Remark 2.6. The definitions that have been given here for a one-dimen-sional interval can be generalized to domains Ω ⊂ Rn. This generalizationrequires a detailed discussion of the regularity of the domain, which dependson the smoothness of its boundary. For a rigorous and systematic treatmentof these points, we refer to Hackbusch [62, Section 6.2]. In our present ap-plications, we deal with regular domains only.4 In our review of the theory,we will frequently use the expression “sufficiently regular domain”, whichmeans that the assumptions of the fundamental trace theorem (see thereference at the end of this section) are satisfied. Convex domains withpiecewise smooth boundaries (curvilinear polygons) are an example. A do-main Ω is called convex if for any x1, x2 ∈ Ω also Ω x(t) = x1+ t(x2−x1)for all t ∈ (0, 1).
4The behavior of solutions to the Maxwell equation in domains with singularities hasbeen discussed recently in [40].

38 2. Analytical and Variational Solutions of Helmholtz Problems
2.2.3 Sesquilinear Forms and Linear OperatorsWe will write the variational (weak) formulation of a boundary value pro-blem in the form
Find u ∈ V1 :b(u, v) = f(v) , ∀v ∈ V2 ,
(2.2.6)
where ∀means “for all,” V1, V2 are normed linear spaces (called the trial andthe test space, respectively), b is a bilinear (or sesquilinear) form V1×V2 →C, and f is a linear (or antilinear) functional V2 → C. We give the precisedefinitions in the remainder of this section.The map b(·, ·) is called a bilinear form if it is linear in both arguments.
If the form b(·, ·) is linear in the first and antilinear in the second argument,namely if
b(α(u1 + u2), v) = α(b(u1, v) + b(u2, v)) ,b(u, α(v1 + v2) = α(b(u, v1) + b(u, v2)) ,
then it is called sesquilinear. The adjoint form b∗ of a sesquilinear formb : V × V → C is defined as
b∗(u, v) := b(v, u) ∀u, v ∈ V . (2.2.7)
The form b : V × V → C is called self-adjoint if b(·, ·) = b∗(·, ·).A sesquilinear form b : V1 × V2 → C is called bounded if there exists a
constant M such that
|b(u, v)| ≤ M‖u‖V1‖v‖V2
for all u, v ∈ V1 × V2.Let V1, V2 be normed linear spaces. A map A : V1 → V2 is called a linear
operator if
A(αu+ βv) = αAu+ βAv, ∀u, v ∈ V1, α, β ∈ C .
The linear operators V1 → V2 form the linear space L(V1, V2). The operatorA is bounded if there exists a real constant M such that
‖A(u)‖V2 ≤ M‖u‖V1 (2.2.8)
for all u ∈ V1. The smallest of the possible bounds is called the normof the operator A. The bounded operators form a normed linear spaceB(V1, V2) ⊂ L(V1, V2). A linear operator is bounded if and only if it iscontinuous; hence both notions can be used equivalently.In the special case that V2 is the real or complex number space, the
operators are called functionals. The set of bounded linear functionals ona normed space V forms the dual space V ′ equipped with the norm
‖f‖V ′ := sup‖u‖=1
|f(u)| = sup0=u∈V
|f(u)|‖u‖V . (2.2.9)

2.2 References from Functional Analysis 39
In our applications, we will work with the space V ∗ of antilinear functionalswith the property f(αu) = αf(u). The norm is defined as in (2.2.9). Thecomplex conjugation f → f establishes a one-to-one map V ′ ↔ V ∗. Letf ∈ V ∗, u ∈ V . The complex number f(u) can be equivalently written inthe form of the dual product 〈f, u〉V ∗×V . For example, the scalar product ina complex-valued Hilbert space is a sesquilinear form, and for any fixed u ∈V the map v → (u, v) defines an antilinear functional fu ∈ V ∗. Conversely,any functional f ∈ V ∗ can be uniquely mapped to some uf ∈ V . By theRiesz representation theorem (cf., e.g., Yosida [120, p. 90]), there exists forany Hilbert space V a one-to-one correspondence V ∗ ↔ V mapping eachfunctional f ∈ V ∗ to a uf ∈ V such that f(v) = (uf , v), v ∈ V . The Rieszmap R : f → uf is a linear operator.The dual spaces (Hm)∗ to the Sobolev spaces Hm are also denoted by
H−m. Since Hm ⊂ L2, any functional that is defined on L2 is automaticallydefined also on Hm for m ≥ 0 (and hence lies in H−m). Therefore we have
Hm(Ω) ⊂ L2(Ω) ≡ (L2(Ω))∗ ⊂ H−m(Ω) ,
where we have identified L2(Ω) ≡ (L2(Ω))∗ by the Riesz map. This relationis called a Gelfand triple (cf. Hackbusch [62, Section 6.3.3.]). One can showthat the embeddings are continuous and dense and that the inner product(·, ·)L2 is a continuous extension of the dual product 〈·, ·〉H−m×Hm [62,Section 6.3]. Therefore, in a Gelfand triple, instead of the dual pairingf(v) = 〈f, v〉H−m×Hm we can write equivalently (f, v)L2 .
2.2.4 Trace of a FunctionFor the precise treatment of boundary value problems in Hilbert spaces oneneeds the notion of the trace of a function. Let Ω be a bounded domain withboundary Γ. If a function u is continuous on the closed domain Ω = Ω ∪ Γthen the restriction u|Γ (called the trace of u on Γ) is well-defined. However,the Sobolev spaces are defined on open domains and the functions in thesespaces are, in general, not continuous. In this case, the trace of a functionis defined as a linear map from the Sobolev space on the domain Ω to aSobolev space on the boundary Γ.Considering the Sobolev space Hm(Ω), m ≥ 1, we define the trace γu of
u ∈ Hm(Ω) on Γ as a linear operator
γ : Hm(Ω)→ Hm−1/2(Γ) .
This operator is defined in such a way that γu = u|Γ for all u ∈ Hm(Ω) ∩C0(Ω). Note that m − 1/2 is not an integer. For the definition of Sobolevspaces Hs with index s ∈ R, see Hackbusch [62, Section 6.2.4]. The tracetheorem (see Hackbusch [62, Theorem 6.2.40]) states that, provided certainassumptions on the regularity of the domain Ω are satisfied, γ is a bounded

40 2. Analytical and Variational Solutions of Helmholtz Problems
operator. This is expressed by the trace inequality
‖γu‖Hm−1/2(Γ) ≤ Cγ‖u‖Hm(Ω) , (2.2.10)
where (cf. (2.2.8))
Cγ = ‖γ‖B(Hm(Ω),Hm−1/2(Γ)) .
Furthermore, the operator γ is surjective. Any w ∈ Hm−1/2(Γ) can beextended onto the domain Ω, and the extension operator (“lifting”) is alsobounded.
2.3 Variational Formulation of Helmholtz Problems
2.3.1 Helmholtz Problems on Bounded DomainsFor Helmholtz problems given on a bounded domain Ω, the natural trialand test spaces are the Sobolev spaces
H1(Ω) = v ∣∣ ‖∇v‖2 + ‖v‖2 < ∞ ,
where ‖ · ‖ is the L2-norm. As an example, consider the mixed boundaryvalue problem
−∆u − k2u = 0 in Ω ,∂νu+ βu = g on Γ ,
(2.3.1)
where β is a complex constant and ∂ν denotes the exterior normal deriva-tive. We derive a weak formulation by the method of weighted residuals.For some function u ∈ H1(Ω), we call H−1(Ω) rΩ(u) := −∆u − k2uthe domain residual and H−1/2(Γ) rΓ(u) := ∂νu + βu − g (here u isunderstood in the sense of trace) the boundary residual. Let v ∈ H1(Ω) bean arbitrary test function and w ∈ H1/2(Γ) its trace. We demand that thesum of the weighted residuals vanish:
〈rΩ(u), v〉H−1×H1 + 〈rΓ(u), w〉H−1/2×H1/2 = 0 .
Identifying the dual pairings with the L2 inner products and integratingby parts, we arrive at the variational problem:
Find u ∈ H1(Ω) :b(u, v) = (g, v)L2(Γ) , ∀v ∈ H1(Ω) , (2.3.2)
withb(u, v) =
∫Ω(∇u∇v − k2uv) dV + β
∫Γuv dS (2.3.3)
and(g, v)L2(Γ) =
∫Γgv dS . (2.3.4)

2.3 Variational Formulation of Helmholtz Problems 41
Alternatively, one can use the test function v to obtain the bilinear form
b(u, v) =∫Ω(∇u∇v − k2uv)dV + β
∫Γuv dS .
If a solution of the variational problem (2.3.2) exists, we say that the pro-blem is weakly solvable and call the solution u a variational or weak solutionof the boundary value problem (2.3.1).
2.3.2 Helmholtz Problems on Unbounded DomainsFor the exterior problem, the appropriate choice of test and trial spaces inthe weak formulation is less obvious since integration is carried out over theunbounded domain Ω+ (exterior of the scatterer Ω). Assume for simplicitythat we are computing the rigid scattering of a wave from the unit sphere.Then the normal derivative of the pressure is prescribed on the boundaryΓ = r ≡ 1, θ, φ: we seek radiating solutions p(r, θ, φ) of the Helmholtzequation satisfying a Neumann boundary condition
∂p
∂r(1, θ, φ) = g(θ, φ) .
The Sommerfeld condition is given on a sphere SR with radius R → ∞.Multiplying the Helmholtz equation in the bounded domain ΩS := 1 ≤r ≤ R, θ, φ with a test function q, we obtain as before
b(p, q) :=∫ΩS
(∇p∇q − k2pq)dV − ik
∫SR
pqdS =∫ΓgqdS .
From the Atkinson–Wilcox expansion, we expect that the solution dependsasymptotically on r as
p eikr
r:= f(r) .
Hence one naturally requires that the function f be in the trial space.However, the L2 inner product
(f, f) =∫Ω+
eikr
r
e−ikr
rdV = 4π
∫ ∞
1
1r2
r2dr
is not finite.One way to circumvent this problem is to measure the trial functions in
weighted norms. Defining the weighted inner product
(p, q)w =∫Ω+
w pq dV , w := r−2 , (2.3.5)
one easily confirms that both (f, f)w and (f,r , f,r )w exist. Accordingly, wedemand that the trial functions satisfy
‖p‖1,w := ((p, p)w + (∇p,∇p)w)1/2
< ∞ . (2.3.6)

42 2. Analytical and Variational Solutions of Helmholtz Problems
Now, if the trial functions satisfy (2.3.6), then the integrals∫pq and
∫ ∇p∇qare well defined if test functions q are such that
(q, q)w∗, (∇q,∇q)w∗ < ∞with the inner product
(p, q)w∗ :=∫Ω+
w∗pq dV , w∗ := r2 . (2.3.7)
Indeed, by the Cauchy–Schwarz inequality,∣∣∣∣∫Ω+
pq dV
∣∣∣∣ =∣∣∣∣∫Ω+(w
12 p) (w∗ 1
2 q) dV∣∣∣∣ ≤ (p, p)1/2w (q, q)1/2w∗ < ∞ .
Thus the trial and test functions, respectively, lie in the weighted Sobolevspaces
H1w(Ω
+) = u : ‖u‖1,w < ∞ , H1w∗(Ω
+) = u : ‖u‖1,w∗ < ∞ ,
where the norm ‖·‖1,w∗ is defined using the inner product (·, ·)w∗ in (2.3.6).Note that the trial and test spaces are not identical. The functions in thetrial space are of order r−1 (or lower), whereas the functions in the testspace are at most of order r−3.This property of the test functions does, however, prohibit inclusion of
the Sommerfeld condition into the variational formulation. Indeed, one ea-sily confirms that for arbitrary p ∈ H1
w(Ω+), q ∈ H1
w∗(Ω+), the integral∫
SRpqdS approaches zero as R → ∞. Hence, in the present setting, one
cannot test whether or not a trial function satisfies the Sommerfeld con-dition. However, the far-field term in the variational formulation is crucialfor well-posedness of the weak formulation (cf. Example 2.23 below). Thisobstacle is overcome by including the Sommerfeld condition into the de-finition of the trial space, thus excluding the eigenfunctions as possiblesolutions. Following Leis [87, Section 4.4], one redefines the trial space as
H1+w (Ω+) =
p : ‖p‖+1,w < ∞ , (2.3.8)
with the norm
‖p‖+1,w :=(
‖p‖21,w +∫Ω+
∣∣∣∣∂p∂r − ikp
∣∣∣∣2
dV
)1/2. (2.3.9)
Remark 2.7. The precise definition of the spaces introduced by Leis in-volves the notion of completion, which we have not introduced here. Forinstance, the space H1+
w (Ω+) is really the completion of the space H1w(Ω
+)in the norm ‖ · ‖+1,w.

2.3 Variational Formulation of Helmholtz Problems 43
With these preliminaries, weak radiating solutions of the exterior Neu-mann problem are sought from the variational problem:Find p ∈ H1+
w (Ω+) :∫Ω+(∇p · ∇q − k2 p q) dV = (g, q) , ∀q ∈ H1
w∗(Ω+) ,(2.3.10)
where (g, q) denotes the L2 inner product on the wet surface Γ. The varia-tional problem (2.3.10) is of the form (2.2.6), where V1 = Vρ and V2 = Vρ∗
are different weighted Sobolev spaces with weights ρ, ρ∗, respectively.
Remark 2.8. Due to the different weighting of test and trial functions,numerical methods based on Leis’ variational formulation lead to non-symmetric systems of algebraic equations. For the purpose of numericalcomputations, it is also possible to state on finite-dimensional spaces va-riational principles with equal weights in such a way that integration inthe corresponding variational forms is well-defined on Ω+. We will returnto this topic in the context of infinite elements in Section 3.5.
2.3.3 Weak Formulation for Solid–Fluid Interaction
Γ
Γ
Ω
i
s
FIGURE 2.5. Solid domain.
Assume that the obstacle is a solid Ωs, possibly with a traction-free interiorboundary Γi, see Fig. 2.5. To obtain a variational expression in the solid,we test equations (1.2.1) with the complex conjugate of a vector-functionv and integrate to get
−∫Ωs
(∇ · σ + ρsω2u) · vdV =
∫Ωs
f · vdV . (2.3.11)
In expanded form, the integral on the left reads
−∫Ωs
((σxx,x+σxy,y +σxz,z ) vx + (σyx,x+σyy,y +σyz,z ) vy
+ (σzx,x+σzy,y +σzz,z )vz + ρsω2 (uxvx + uy vy + uz vz)
)dV .

44 2. Analytical and Variational Solutions of Helmholtz Problems
To the components in the first part we apply the identity (with thesummation convention, cf. Section 1.2.)
(divσi)vi = div(σivi)− σi · ∇vi ,
where the components of the stress tensor are denoted by
σi = σix, σiy, σiz , i = x, y, z .
By the Gauss theorem,∫Ωs
div(σivi) =∫Γ(σivi) · n dS =
∫Γ(σi · n)vidS .
For equilibrium on Γ, the stress resultants σi · n must be equal to thecomponents of the exterior traction vector T. Inserting the results into(2.3.11) yields∫
Ωs
(σi · ∇vi − ρsω
2u · v) dV =∫ΓT · v dS +
∫Ωs
f · vdV . (2.3.12)
The scalar product T · v is invariant with respect to orthogonal transforms,and hence∫
Γ(Txvx + Ty vy + Tz vz) dS =
∫Γ(Tnvn + Tt1 vt1 + Tz vt2) dS , (2.3.13)
where n, t1, t2 is the local coordinate system shown in Fig. 1.5. From theequilibrium conditions (1.3.2) and (1.3.3), we have T · v = −(p + pinc)vn.We thus finally arrive at∫
Ωs
(σi · ∇vi − ρsω
2u · v) dV + ∫Γp(v · n)dS =
−∫Γpinc(v · n)dS +
∫Ωs
f · v dV . (2.3.14)
Similarly, multiplying the fluid equation (1.3.9) by a test function q andintegrating by parts, we obtain
0 = −∫Ω+(∆p+ k2p)qdV =
∫Ω+(∇p∇q − k2pq)dV +
∫Γ
∂p
∂nqdS ,
where we have taken into account that the exterior solid normal points intothe fluid region. Inserting the coupling condition (1.3.7) now leads to∫
Ω+(∇p∇q − k2pq) dV + ρfω
2∫Γ(u · n)qdS =
∫Γ
∂pinc∂n
qdS . (2.3.15)

2.3 Variational Formulation of Helmholtz Problems 45
Finally, equations (2.3.14) and (2.3.15) can be added up (after scaling(2.3.14) for symmetry) to give the coupled equation∫
Ω+(∇p · ∇q − k2 p q) dV
+ ρfω2(∫
Γ(u · n) q dS +
∫Γp(v · n) dS
)
+ ρfω2∫Ωs
[σi · ∇vi − ρsω
2u · v] dV= ρfω
2(−∫Γpinc(v · n) dS +
∫Ωs
f · vdV)
+∫Γ
∂pinc∂n
qdS .
(2.3.16)
We now define the Sobolev spacesH = H1(Ωs)×H1+w (Ω+),H∗ = H1(Ωs)×
H1w∗(Ω+). Then we pose the variational problem
Find U := (u, p) ∈ H :B(U ,V) = (F ,V) , ∀V := (v, q) ∈ H∗ ,
(2.3.17)
where the form B and the right-hand side are given by (2.3.16).
Example 2.9. Let us outline the weak formulation for the one-dimensionalproblem introduced in Example 1.6. Assuming that the radiation conditionis imposed at x0 > l, we have Ωs = (0, l) and Ω+ = (l, x0). Then one solvesb(u, v) = ρfω
2(f, v) with
b(u, p, v, q) = ρfω2∫ l0
(E
du
dx
dv
dx− ρsω
2uv
)dx
+ρfω2 (p(l)v(l) + u(l)q(l))
+∫ x0
l
(dp
dx
dq
dx− k2pq
)dx − ikp(x0)q(x0) ,
and
(f, v) =∫ l0
fvdx .
Equivalently, one may just solve b0(u, v) = (f, v) with
b0(u, v) =∫ l0
(E
du
dx
dv
dx− ρsω
2uv
)dx − ikρfc
2u(l)v(l) ,
imposing weakly the Robin boundary condition (1.3.12).

46 2. Analytical and Variational Solutions of Helmholtz Problems
2.4 Well-Posedness of Variational Problems
A boundary value problem is called well-posed if, for a given class of data,the solution exists, is unique, and depends continuously on the data (i.e.,if it is stable). Since the FEM is based on the variational formulation ofboundary value problems, it is of fundamental importance to know whetherthe problem is weakly solvable and if the solution is unique. Stability iscrucial for the numerical solution of a variational problem. For if a smallerror in the data can cause a large error in the solution, a numerical methodmay converge very slowly or not at all.We address these fundamental questions for the variational forms that
arise from the Helmholtz equation. These forms are, in general, not positivedefinite. Existence and uniqueness can be concluded alternatively from twogeneralizations of the positive definite case, namely, the existence theoryfor forms that satisfy an inf–sup condition or the theory for forms thatsatisfy a Garding inequality. We therefore first discuss the positive definite(V -elliptic) case and then proceed to the generalization for indefinite forms.
2.4.1 Positive Definite FormsA sesquilinear form a : V ×V → C on a Hilbert space V is called V -elliptic(positive definite) if there exists α > 0 such that
|a(u, u)| ≥ α‖u‖2Vfor all u ∈ V . Existence and uniqueness of solutions for positive definiteproblems is established by the Lax–Milgram theorem.
Theorem 2.10.(Lax–Milgram). Assume that a sesquilinear form a :V × V → C, defined on a Hilbert space V , satisfies
1. Continuity:
∃M > 0 : |a(u, v)| ≤ M‖u‖V ‖v‖V , ∀u, v ∈ V , (2.4.1)
2. V -Ellipticity:
∃α > 0 : α‖u‖2V ≤ |a(u, u)|, ∀u ∈ V , (2.4.2)
and let f be a bounded linear functional defined on V . Then there exists aunique element u0 ∈ V such that
a(v, u0) = (v, f), ∀v ∈ V . (2.4.3)
For the proof, see Yosida [120, p. 92].

2.4 Well-Posedness of Variational Problems 47
Remark 2.11. Note that now f is associated with a linear functional (·, f).Equivalently (just take the conjugate on both sides of (2.4.3)), one can statethat the dual problem
a∗(u, v) = (f, v)
has a unique solution. The problem a(u, v) = (f, v) has a unique solutionfor all antilinear functionals f ∈ V ∗.
The ellipticity condition (2.4.2) implies immediately that the solution u0is bounded by the data f , measured in the norm of the dual space V ∗.Indeed,
‖f‖V ∗ = sup0=v∈V
|f(v)|‖v‖V = sup
0=v∈V
|a(u0, v)|‖v‖V ≥ |a(u0, u0)|
‖u0‖V ≥ α‖u0‖V ,
and hence
‖u0‖V ≤ 1α‖f‖V ∗ . (2.4.4)
Further, letting v = u in the continuity condition, we get
α‖u‖2V ≤ |a(u, u)| ≤ M‖u‖2V ∀u ∈ V . (2.4.5)
Thus the energy norm|||u||| := (|a(u, u)|)1/2 (2.4.6)
induced by the V -elliptic form a(·, ·) is equivalent to the norm ‖ · ‖V .
Remark 2.12. If the form a is self-adjoint, then a(u, u) is real, and theabsolute values in (2.4.2) and (2.4.5) can be omitted.
Example 2.13. (Poisson equation). Let Ω be a bounded convex domainwith a piecewise smooth boundary Γ and consider the Poisson equationwith Dirichlet boundary conditions
∆u = f on Ω ,
u = 0 on Γ ,
where f is a complex-valued function. The corresponding sesquilinear form
a(u, v) =∫Ω
∇u∇vdV
is defined on the Hilbert subspace V = H10 (Ω) ⊂ H1(Ω) containing all H1-
functions that vanish on Γ. For these functions, one can show the Poincareinequality
‖u‖ ≤ C‖∇u‖ , (2.4.7)

48 2. Analytical and Variational Solutions of Helmholtz Problems
where C is a positive constant and ‖ · ‖ denotes the L2-norm. V -ellipticitythen easily follows with
a(u, u) ≥ 11 + C2
‖u‖21 ,
where ‖u‖1 is the norm of the Sobolev space H1(Ω).
Example 2.14. (Elasticity). Let Ω be as in the previous example andconsider the bilinear form, cf. (2.3.12),
a(u,v) =∫Ωσi · ∇vidV .
Introducing the material law (1.2.3) in the general form
σij = Eijklekl
and using the strain–displacement relations (1.2.2), we can write equiva-lently
a(u,v) =∫ΩEijkleij(u)ekl(v)dV =
∫ΩEijkl
∂ui∂xj
∂vkxl
dV .
The form a(·, ·) is V -elliptic on the subspace V ⊂ [H1(Ω)]d of all functions
satisfying a Dirichlet condition on a nonempty part ΓD ⊂ Γ,
V =u ∈ [H1(Ω)
]d, u = 0 onΓD ⊂ Γ
.
The proof of the corresponding relation
|a(u,u)| ≥ α‖u‖2H1(Ω) ∀u ∈ V,
for some α > 0, is based on the Korn inequality∫Ωeij(u)eij(u)dV +
∫ΩuiuidV ≥ γ‖u‖2H1(Ω) ,
with γ > 0. For details see, e.g., Sanchez Hubert–Sanchez Palencia [107].
2.4.2 The inf–sup ConditionGenerally, the Helmholtz problem for large k is indefinite. Consider, as anexample, the one-dimensional case with Dirichlet conditions. For u, v ∈H10 (0, 1), the form
b(u, v) =∫ 1
0
(u′v′ − k2uv
)dx (2.4.8)

2.4 Well-Posedness of Variational Problems 49
is H10 -elliptic only if k is smaller than the minimal positive eigenvalue of
the Laplace equation with Dirichlet boundary conditions, i.e., if k < π.The following generalization of the Lax–Milgram theorem was shown by
Babuska [7, p. 112].
Theorem 2.15. (Babuska). Assume that a sesquilinear form b : V1×V2 →C on Hilbert spaces V1, V2 satisfies
1. Continuity:
∃M > 0 : |b(u, v)| ≤ M‖u‖V1‖v‖V2 , ∀u ∈ V1, v ∈ V2 ,(2.4.9)
2. inf–sup Condition:
∃β > 0 : β ≤ sup0=v∈V2
|b(u, v)|‖u‖V1‖v‖V2
, ∀0 = u ∈ V1 , (2.4.10)
3. “Transposed” inf–sup Condition:
sup0=u∈V1
|b(u, v)| > 0, ∀0 = v ∈ V2 , (2.4.11)
and let f : V2 → C be an antilinear bounded functional defined on V2. Thenthere exists a unique element u0 ∈ V1 such that
b(u0, v) = f(v), ∀v ∈ V2 .
The solution u0 satisfies the bound
‖u0‖V1 ≤ 1β‖f‖V ∗
2. (2.4.12)
Remark 2.16. Condition (2.4.10) is also called the Babuska–Brezzi con-dition. It is fundamental for a large class of indefinite problems, especiallysaddle-point problems, arising in mixed or hybrid FEM; see, e.g., Braess[30], Carey and Oden [33]. The real number
β = inf0=u∈V1
sup0=v∈V2
|b(u, v)|‖u‖‖v‖
is called the inf–sup constant.
Remark 2.17. The Babuska theorem covers the case V1 = V2 and doesnot assume definiteness. If V1 = V2, we can compare the inf–sup constantβ to the ellipticity constant α of the Lax–Milgram theorem by writing
α = infu∈V
|a(u, u)|‖u‖2 . (2.4.13)

50 2. Analytical and Variational Solutions of Helmholtz Problems
Obviously, since α is computed by taking the infimum also over the secondargument, whereas for β the supremum is taken over this argument, wehave always α ≤ β. This is also seen from
α‖u‖ ≤ |a(u, u)|‖u‖ ≤ sup
v∈V|a(u, v)|
‖v‖ , ∀u .
Since this holds for all u ∈ V , we have
α ≤ infu∈V
supv∈V
|b(u, v)|‖u‖‖v‖ = β .
In particular, it can occur that α = 0 but still β > 0, i.e., a form maybe not elliptic but satisfy the inf–sup condition. In fact, we will show inChapter 4 that the Helmholtz variational forms of one-dimensional modelproblems satisfy the inf–sup condition with β = Ck−1 > 0.
Remark 2.18. Both α and β depend on the norm of the space V . Forinstance, considering a V -elliptic sesquilinear form a(·, ·), trivially α = 1in the energy norm |||u||| = √a(u, u). Also, β = 1 in this norm. Indeed,applying the Cauchy–Schwarz inequality, we have
|a(u, v)| ≤√
|a(u, u))|√
|(a(v, v)| ,whence
sup0=v∈V
|a(u, v)||||v||| ≤ |||u||| .
Since equality holds for v = u, the supremum is exactly |||u|||. Thus
β = infu∈V
|||u||||||u||| = 1 .
Remark 2.19. As already mentioned, the question of existence and uni-queness is always related to certain function spaces. In (conforming) FEM,the solution is sought on a finite-dimensional subspace Vh ⊂ V . Let usnote here an important difference between definite and indefinite forms:The ellipticity property carries over from V to Vh, whereas the inf–sup pro-perty does not. Indeed, the infimum in condition (2.4.13) cannot decreaseif it is taken on a subspace, whereas the supremum involved in the inf–supconstant, in general, decreases on a subspace. Consequently, the inf–supcondition may not be satisfied on the subspace.
Remark 2.20. Similar to the Lax–Milgram theorem, the Babuska theo-rem implies stability, and hence well-posedness. Conversely, requiring stabledependence
‖u‖V1 ≤ C‖f‖V ∗2
(2.4.14)

2.4 Well-Posedness of Variational Problems 51
leads in a natural way to the inf–sup condition as follows. Assume thatfor some fixed f ∈ V ∗
2 we have obtained a solution u0 = 0. Then, by thedefinition of the dual norm, (2.4.14) can be written as
1C=: β ≤ ‖f‖V ∗
2
‖u0‖V1
= sup0=v∈V2
|f(v)|‖u0‖V1‖v‖V2
= sup0=v∈V2
|a(u0, v)|‖u0‖V1‖v‖V2
.
This leads directly to the inf–sup condition if we now require that (2.4.14),and hence the above inequality, hold for all possible data f ∈ V ∗
2 (or, equi-valently, for all u ∈ V1).
2.4.3 Coercive FormsLet Ω be a bounded domain and consider the Hilbert space V = H1(Ω). Asesquilinear form b : V × V → C is called V -coercive if it satisfies for allu ∈ V the Garding inequality∣∣∣ b(u, u) + C‖u‖2L2(Ω)
∣∣∣ ≥ α‖u‖2H1(Ω) (2.4.15)
with positive constants C,α.
Remark 2.21. We specify here the general definition of V -coercivity fora Gelfand triple V ⊂ H ⊂ V ′ (see Hackbusch [62, Section 6.5.13]) to thespecial case H1(Ω) ⊂ L2(Ω) ⊂ H−1(Ω).
Remark 2.22.We can interpret (2.4.15) as a V -ellipticity property of theform a(u, v) := b(u, v) + C(u, v)L2(Ω).
Consider the general variational problem (2.2.6) with V1 = V2 = H1(Ω)and assume that the sesquilinear form b(u, v) is H1-coercive. For a suf-ficiently regular domain5 Ω, the embedding H1(Ω) ⊂ L2(Ω) is compact.Then it can be shown (cf. Hackbusch [62, Theorem 6.5.15]) that the pro-blem satisfies the Fredholm alternative: either equation (2.2.6) has a so-lution u ∈ H1(Ω) for all f or there exists a nontrivial solution of thehomogeneous problem (with f ≡ 0). Hence the existence of the solutionfollows if we can show uniqueness. We illustrate this in the following ex-ample of a one-dimensional Helmholtz problem.
Example 2.23. Let Ω = (0, 1) and let f ∈ L2(0, 1) be given. Consider theboundary value problem6
−u′′ − k2u = f on Ω = (0, 1) ,
5see Remark 2.6.6to be precise, this problem is well-defined in the classical sense for functions f ∈
C0[0, 1], u ∈ C2(0, 1) ∩ C0[0, 1].

52 2. Analytical and Variational Solutions of Helmholtz Problems
u(0) = 0 , (2.4.16)u′(1)− iα(k)u(1) = 0 ,
with some R α(k) > 0. The corresponding sesquilinear form is
b(u, v) =∫ 1
0
(u′v′ − k2uv
)dx − iαu(1)v(1) . (2.4.17)
The test and trial spaces are V1 = V2 = H1(0(0, 1), where
H1(0(0, 1) :=
u ∈ H1(0, 1); u(0) = 0
(2.4.18)
is the subspace of all functions that satisfy the Dirichlet condition u(0) = 0.Obviously, the real part of the Helmholtz variational form (2.4.17) with
v = u satisfies the Garding inequality (with C = k2). To show the unique-ness of the solution, suppose that there are two solutions u1, u2. Then theirdifference w = u1 − u2 satisfies the homogeneous equality b(w, v) = 0 forall v. Taking v = w, we get∫
(|w′|2 − k2|w|2) = iα|w(1)|2.
The left-hand side of this equation is real, and the right-hand side is ima-ginary. Hence for α = 0, equality can hold only if w(1) = 0. Then, by(2.4.16)3 also7 w′(1) = 0, and we are given a homogeneous initial valueproblem that has the unique solution w ≡ 0. Hence u1 = u2, showing uni-queness. Existence then follows from the Fredholm alternative.
Note that the nonvanishing imaginary boundary term was essential forthe proof of uniqueness. In the case that α = 0, the problem (2.4.17) reducesto the equation for forced vibrations of a slab. The homogeneous equationthen has nontrivial solutions (the eigenmodes) for k = π/2 + nπ. At thesefrequencies, the inhomogeneous problem is no longer uniquely solvable.Similarly, in two and three dimensions, interior problems for the Helm-
holtz equation generally have eigenvalues at which there is no unique so-lution. However, the interior problem has, in general, a unique solution ifthe vibrations are damped. Since damping is proportional to the velocity,the wave number in that case is complex.Exterior (Dirichlet or Neumann) problems with a radiation condition are
uniquely solvable for all real wave numbers k; cf. Sanchez Hubert–SanchezPalencia [107, Chapter VIII, Sections 3–4].
7Here we assume that the variational formulation and the original boundary valueproblem are equivalent, i.e., u has a second derivative in the weak sense. This is true forf ∈ L2(0, 1). A more general argument for f ∈ H−1(0, 1) is given in [72].

2.5 Variational Methods 53
2.4.4 Regularity and StabilityWe have seen (cf. (2.4.12) that stable dependence of the solution on thedata follows, in general, from the inf–sup condition. Consider again the one-dimensional model problem (2.4.16) and assume for simplicity that α = k.We can show (cf. Theorem 4.1.) that β = O(k−1). Thus the problem tofind u ∈ V such that b(u, v) = (f, v), v ∈ V , has a unique solution u thatsatisfies the stability estimate (cf. (2.4.12))
‖u‖H1 ≤ Ck ‖f‖H−1 . (2.4.19)
The dual space in this case is the space of distributions H−1(0, 1). However,the data f may lie in the space of square-integrable functions L2(0, 1) orbe even smoother. Hence the stability estimates are closely related to theregularity of the solution. The question is, if a boundary value problem isweakly solvable, in what space is the solution contained. In the context ofSobolev spaces Hs(Ω), we seek maxs : u ∈ Hs(Ω). The answer dependsnot only on the data and the properties of the differential operator, butalso on the regularity of the domain Ω. Here, we consider only the case thatΩ is a convex domain8. Then the following proposition holds.
Proposition 2.24. Let Ω ∈ Rn, n = 2, 3, be a convex domain and assumethat u is a solution of the variational problem
Find u ∈ H1
0 (Ω) :∫Ω(∇u∇v − k2uv) dV = (f, v) , ∀v ∈ H1
0 (Ω) .
Then u ∈ H2(Ω) ∩ H10 (Ω) if f ∈ L2(Ω).
Since the differential operator of the Helmholtz equation has constant co-efficients, and the corresponding sesquilinear form is H1
0 (Ω)-coercive, thisproposition is a corollary from a well-known regularity theorem; cf. Hack-busch [62, Theorem 9.1.22].
2.5 Variational Methods
2.5.1 Galerkin Method and Ritz MethodLet V1, V2 be Hilbert spaces. Consider the general variational problem(2.2.6) with a sesquilinear form b : V1×V2 → C and an antilinear functionalf ∈ V ∗
2 , and assume that there exists a unique solution u ∈ V1. We seek an
8cf. Remark 2.6.

54 2. Analytical and Variational Solutions of Helmholtz Problems
approximate solution uN of the form
uN =N∑j=1
ujφj ,
where the φj are linearly independent elements of the space V1, and uj areunknown complex coefficients. The linear span of the basis functions φjforms the finite-dimensional subspace V N1 ⊂ V1. In general, the space V1is infinite-dimensional, and V N1 is a proper subspace. Similarly, we definea test space V N2 ⊂ V2 as the linear span of basis functions ψi ∈ V2 fori = 1, . . . , N .A function uN ∈ V N1 is called the Galerkin solution of the variational
problem (2.2.6) if it satisfies the variational equality for all test functionsv ∈ V N2 . Equivalently, one requires that the variational equality hold foreach of the basis functions of the test space V N2 ,
b(uN , ψi) = (f, ψi) , i = 1, . . . , N . (2.5.1)
The coefficients uj are thus determined from the linear system of equations
Au = f , (2.5.2)
where
[A]ij = b(φj , ψi), [f ]i = (f, ψi), i, j = 1, . . . , N . (2.5.3)
This general case of the Galerkin method, where V N1 = V N2 , is also calledthe Petrov–Galerkin method. If V N1 = V N2 , one speaks of the Bubnov–Galerkin method.A similar system of equations is obtained from the Ritz method. Let V
be a Hilbert space and consider the variational equality
a(u, v) = (f, v) , ∀v ∈ V , (2.5.4)
for a V -elliptic self-adjoint form a : V × V → C. By the Lax–Milgramtheorem, the form a can be uniquely associated with a self-adjoint positivedefinite operator A : V → V such that
a(u, v) = (Au, v)V
for all v ∈ V , where (·, ·)V denotes the scalar product on the Hilbert spaceV . Let V N ⊂ V be a finite-dimensional subspace. With the Ritz method,one seeks the function uN ∈ V N ⊂ V that minimizes the energy functional
J(u) := (Au, u)− 2(f, u)in V N .

2.5 Variational Methods 55
The Ritz method is a special case of the Galerkin method. Indeed, sinceuN is minimizing,
(AuN , uN )− 2(f, uN ) ≤ (A(uN + τv), uN + τv)− 2(f, uN + τv)= (AuN , uN )− 2(f, uN ) + 2τ [ (AuN , v)− (f, v) ]+ τ2(Av, v)
must hold for arbitrary v ∈ V N and τ ∈ R, and hence the term in thesquare brackets must vanish. Replacing again (AuN , v) = a(uN , v), weobtain (2.5.4).
2.5.2 Convergence ResultsConvergence of the Ritz method is assured if the basis functions φj arecomplete in V with respect to the energy norm |||u||| := |a(u, u)|1/2. Thesystem φj∞
1 is called complete if for any function u ∈ V and arbitrarilysmall ε > 0 one can find a number N and coefficients αj such that
|||u −N∑j=1
ajφj ||| ≤ ε .
This condition is satisfied if the system φj∞1 represents the union of the
basis functions of an infinite sequence
V 1 ⊂ V 2 ⊂ · · · ⊂ V N ⊂ · · · ⊂ V (2.5.5)
of finite-dimensional subspaces with the property
infv∈V N
|||u − v||| → 0 for N → ∞ , ∀u ∈ V . (2.5.6)
For fixed N , the infimum in (2.5.6) is called the error of best approximation(of an element u ∈ V by elements v ∈ V N ) in the energy norm. If the forma is V -elliptic, the Ritz solution uN ∈ V N is the best approximation (inthe energy norm) of the exact solution u ∈ V .Indeed, a(u, v) = a(uN , v) = (f, v) holds for all v ∈ V N . Thus the error
u − uN is orthogonal to V N : a(u − uN , v) = 0, v ∈ V N . Hence
|||u − uN |||2 = a(u − uN , u − uN ) = a(u − uN , u − v) ≤ |||u − uN ||||||u − v|||
for all v ∈ V N (we applied the Cauchy–Schwarz inequality in the laststep). Canceling the error norm on both sides, we have proved the claim.Therefore, the rate of convergence of the Ritz method on the subspaces(2.5.5) is completely determined by the convergence rate in (2.5.6).We recall that the property of V -ellipticity carries over to the subspaces
in (2.5.5). Furthermore, the energy norm is equivalent to the norm of thespace V . Thus an error estimate in the norm ‖ · ‖V follows directly from

56 2. Analytical and Variational Solutions of Helmholtz Problems
the equivalence relation (2.4.5). We have shown the following proposition.
Theorem 2.25. Let a : V ×V → C be a V -elliptic continuous sesquilinearform. For some f ∈ V ∗, let u ∈ V be the exact solution and let uN ∈ V N ⊂V be the Ritz solution of the variational equality (2.5.4). Then
‖u − uN‖V ≤ M
αinfv∈V N
‖u − v‖V , (2.5.7)
where α,M are the ellipticity and continuity constants of the form a, re-spectively.
This theorem is known under the name Cea’s lemma. As a direct corol-lary, we see that condition (2.5.6) is sufficient for convergence of the Ritzsolutions on the sequence of subspaces V N .In the general case of an indefinite form, problem (2.2.6) is uniquely sol-
vable if the continuous form b(·, ·) satisfies the “discrete” inf–sup condition
∃βN > 0 : βN ≤ sup0=v∈V N
2
|b(u, v)|‖u‖V1‖v‖V2
, ∀0 = u ∈ V N1 , (2.5.8)
and the discrete transposed condition
supu∈V N
1
|b(u, v)| > 0, ∀0 = v ∈ V N2 . (2.5.9)
Note that the discrete inf–sup condition does not follow from the “conti-nuous condition” (2.4.10) on V1× V2. Hence, in general, (2.5.8) has also tobe proven separately if the continuous condition (2.4.10) is known to hold.Let us estimate the error u−uN . Trivially, for any v ∈ V N1 , ‖u−uN‖V1 ≤
‖u−v‖V1+‖uN−v‖V1 holds by the triangle inequality. We apply the discreteinf–sup condition to the second term on the right:
‖u − uN‖V1 ≤ ‖u − v‖V1 +1βN
sup0=w∈V N
2
|b(uN − v, w)|‖w‖V2
≤ ‖u − v‖V1 +1βN
sup0=w∈V N
2
|b(u − v, w)|‖w‖V2
.
The second line is obtained from the first by adding and subtracting u inb(uN−v, w) and using the orthogonality relation b(u−uN , w) = 0, w ∈ V N2 .Applying the continuity condition |b(u − v, w)| ≤ M‖u − v‖V1‖w‖V2 andtaking the infimum over v ∈ V N1 , we have shown the following theorem; cf.Babuska [7, Chapter 6].
Theorem 2.26. Let V1, V2 be Hilbert spaces. Consider a sesquilinear formb : V1 × V2 → C that satisfies the assumptions of Theorem 2.15 as well

2.5 Variational Methods 57
as (2.5.8) and (2.5.9). Let u ∈ V1 and uN ∈ V N1 ⊂ V1 be the exact andapproximate solutions, respectively, of the variational problem (2.2.6). Thenthe error u − uN satisfies
‖u − uN‖V1 ≤(1 +
M
βN
)infv∈V N
1
‖u − v‖V1 . (2.5.10)
With the notations introduced in (2.5.5) and (2.5.6) we can also formu-late a sufficient condition of convergence for the Bubnov-Galerkin methodfor H1-coercive forms. We consider the problem (2.2.6) with V1 = V2 =H1(Ω). Then the following theorem holds.
Theorem 2.27. Let Ω be a bounded domain and let b(·, ·) be a V -coercivesesquilinear form on V = H1(Ω), i.e., b satisfies the Garding inequality(2.4.15). Consider a sequence of subspaces satisfiying (2.5.5) and (2.5.6).
There exists a number N0 such that the variational problem (2.2.6) hasunique solutions uN ∈ V N for all N ≥ N0 and ‖uN −u‖1 → 0 as N → ∞.
The proof can be found in Hackbusch [62, Section 8.2.2]. Comparing thestatement of the theorem to the convergence statement for Ritz solutions,we may predict a different convergence behavior as follows. Ritz solutions(of positive definite problems) will typically begin to converge from thestart (with N = 1), whereas Galerkin solutions for indefinite but coerciveforms may behave erratically for small N and start to display a convergencepattern only if the number of degrees of freedom in the discrete model haspassed the critical number N0.
2.5.3 Conclusions for Helmholtz ProblemsWe consider the Helmholtz variational form on a bounded domain Ω,
B(u, v) =∫Ω(∇u∇v − k2uv)dV ,
neglecting the boundary terms in the present discussion. The form B is,in general, not H1-elliptic, and hence the Ritz method cannot be applied.However, B(u, v) is H1-coercive. Therefore Galerkin methods can be em-ployed for the numerical solution.Finite element methods are Galerkin methods with piecewise polyno-
mials as trial and test functions. Thus the result of Theorem 2.27 can beused to establish the asymptotic convergence of finite element solutions toHelmholtz problems. In applied computations with large wave number k,the crucial point is the relation between the wave number and the criticaldimension N0 of the finite element subspaces. We will return to this topicin Chapter 4.

58 2. Analytical and Variational Solutions of Helmholtz Problems
2.6 Summary
Radiating solutions of the Helmholtz equation can be written in the formof an infinite series (obtained by separation of variables) or as an integralrepresentation (using the free space Green’s function). One can say thatthe Green’s function “maps” the analytical information from the exterior(in particular, the far-field behavior) onto the wet surface. The integral re-presentation is more general than the series representation, since it can bewritten for an arbitrary boundary. It forms the analytical basis for boun-dary element methods. In connection with FEM, we will construct absor-bing boundary conditions or infinite elements that are based on the seriesrepresentation of the exact solution. The FEM is applied to the variationalformulation of the governing equations. We outline this formulation andreview the theory on existence and uniqueness of solutions to variationalproblems, as well as the theory of variational numerical methods. The ses-quilinear forms for Helmholtz problems are, in general, indefinite, but theysatisfy a Garding inequality.
2.7 Bibliographical Remarks
The method of separation of variables is described in textbooks on solutionmethods for PDE. The peculiar part in the application of this method tothe Helmholtz equation is the proof that the separation constant λ mustbe of the form λ = n(n + 1) with integer n. This is often given just as afact. A rigorous justification can be found, e.g., in the treatise of Morseand Feshbach [95, Chapters 5,10].On the topic of integral solution representations, as well as on methods
for integral equations, see Colton and Kress [39]. The book on integralequations of Kress [85], in particular, Chapters 1–4, is also recommendedfor further reading on the topics of functional analysis that have been onlybriefly introduced in this chapter. A broader introduction to functionalanalysis with an emphasis on applications is given in the recent book byOden and Demkowicz [102]. For an introduction to the variational formu-lation of PDE and corresponding solution methods, see, e.g., Michlin [94]or Hackbusch [62]. The first volume of the treatise by Dautray and Lions[41] is an encyclopedic reference on the mathematical modeling of appliedproblems that lead to the wave and the Helmholtz equations. The methodsof solution and many fundamental theoretical results are also covered. Theessential results of the mathematical analysis of the wave and Helmholtzequations in exterior domains, especially in the nonclassical weak formu-lation, are reviewed by Leis [87]. A compact outline of the mathematicaltheory for exterior Helmholtz problems, including a spectral analysis ofthe Laplace operator in exterior domains and the investigation of scatte-

2.7 Bibliographical Remarks 59
ring frequencies, is given by Sanchez Hubert and Sanchez Palencia [107,Chapter VIII]. Roughly speaking, the scattering frequencies are resonantfrequencies of Helmholtz problems with radiation damping. Resonance canoccur only if Im k < 0 [107, p. 348]. We do not elaborate here on this issuesince we assumed that k ∈ R.

This page intentionally left blank

3Discretization Methods for ExteriorHelmholtz Problems
The finite element method (FEM) is a well-established method for the nu-merical solution of boundary value problems on bounded domains. Theapplication of this method on unbounded exterior domains usually invol-ves a decomposition of the exterior. In scattering problems, the obstacle isenclosed by an artificial boundary. The FEM is used for discretization ofthe bounded domain between the obstacle and the artificial boundary. Onthe artificial boundary, one can prescribe absorbing boundary conditions(ABC) that incorporate (exactly or approximately) the far-field behaviorinto the finite element model. In this chapter, we review some popularABC, namely, the truncated Dirichlet-to-Neumann (DtN) map after Fengand Keller–Givoli, the recursion in the Atkinson–Wilcox expansion afterBayliss et al., the localization of a pseudodifferential operator by Pade ap-proximation of its dispersion relation after Enquist and Majda, and therecent perfectly matched layer approach after Berenger. We start with theoutline of the domain decomposition approach and the spherical DtN ope-rator, which exactly maps a radiating exterior solution to the radial deri-vative of its trace on a coupling sphere (Sections 3.1 and 3.2, respectively).The various ABC are reviewed in Section 3.3. In Section 3.4, we describethe finite element discretization of the near field. The discretization of thefar field with infinite elements after Burnett and Demkowicz–Gerdes is in-vestigated in Section 3.5.

62 3. Discretization Methods for Exterior Helmholtz Problems
3.1 Decomposition of Exterior Domains
A first natural domain decomposition for the coupled fluid–structure pro-blem is suggested by the presence of two media. The elastic structure isdiscretized with finite elements. Let us assume for convenience that theelastic response is given as a Neumann boundary condition for the exteriorproblem. We will now describe a decomposition of the exterior into a nearfield and a far field by the introduction of an artificial boundary enclosingthe obstacle.
3.1.1 Introduction of an Artificial Boundary
Ω
Γ Γ
Ω
a
Ω
a+
a
FIGURE 3.1. Scatterer and artificial boundary.
As before, let Ω ⊂ R3 be a sufficiently regular domain1 and denote byΩ+ := R3 \Ω the exterior. Consider the Neumann boundary value problem
−∆u − k2u = 0 in Ω+ ,
∂nu = g on Γ := ∂Ω , (3.1.1)∂u
∂R− iku = o(R−1), R → ∞ ,
where ∂n denotes the derivative in exterior normal direction on Γ. A na-tural way of discretizing this exterior problem is to introduce boundaryelements on Γ. These boundary elements are generally based on an inte-gral representation of the exact solution in the exterior.2 If the free spaceGreen’s function is used in the kernels, the method of boundary elements(BEM) is theoretically applicable for an arbitrary shape of the obstacle.The Sommerfeld condition is automatically satisfied. It is, in general, notnecessary to introduce an artificial boundary Γa ⊂ Ω+ along which finiteelements are coupled with boundary elements. Still, a decomposition as de-picted in Fig. 3.1 is also an option here (for example, it could be motivated
1cf. Remark 2.6.2Some authors also refer to Dirichlet-to-Neumann maps with non-singular kernels as
BEM.

3.1 Decomposition of Exterior Domains 63
by a complicated shape of the wet surface Γ); cf. Hsiao [69]. The BEM forHelmholtz equations is well-researched, and results are available in severalmonographs. Here we focus on different methods of numerical far-field re-solution that are based on the solution by separation of variables. Thesemethods require the introduction of an artificial boundary that is definedon coordinate lines. For instance, in cartesian coordinates the boundary Γais a rectangle given by equations x = ±a, y = ±b, whereas Γa is a sphericalsurface in spherical coordinates.
3.1.2 Dirichlet-to-Neumann OperatorsAssuming that the obstacle Ω is enclosed by a smooth artificial boundaryΓa ⊂ Ω+, let Ωa denote the annular domain between Γ and Γa, and let Ω+adenote the reduced exterior domain; cf. Fig. 3.1. Problem (3.1.1) is thenequivalently replaced by the coupled problem (cf. Johnson and Nedelec[78])
−∆u− − k2u− = 0 in Ωa ,∂νu− = g on Γ ,
u− = u+ on Γa ,∂νu− = ∂νu+ on Γa , (3.1.2)
−∆u+ − k2u+ = 0 in Ω+a ,
∂u+∂R
− iku+ = o(R−1), R → ∞ .
Suppose u− = u+ is given on Γa and we can solve analytically the exteriorDirichlet problem for u+ in Ω+a . Having u+, we can compute ∂νu+ on Γa.Thus we have constructed a mapping
G : u+|Γa → ∂νu+|Γa . (3.1.3)
Since all the problems are linear, G is a linear operator G : H1/2(Γa) →H−1/2(Γa). This operator is called the Dirichlet-to-Neumann (DtN) ope-rator. By (3.1.2)3,4, the operator G equivalently maps u−|Γa → ∂νu−|Γa
.
Remark 3.1. One can use both the integral or the series representationof the exact solution for the construction of the DtN operator. In the firstcase, the operator is also known as the Poincare–Steklov operator. We willfocus on the second case and consider only DtN operators from the seriesrepresentation.
Using the DtN operator (3.1.3), the coupled problem (3.1.2) is equiva-lently replaced by the reduced problem
−∆u − k2u = 0 on Ωa ,

64 3. Discretization Methods for Exterior Helmholtz Problems
∂νu = g on Γ , (3.1.4)∂νu = Gu on Γa .
Since we are now solving a problem on the bounded domain Ωa, the questionof well-posedness arises naturally.
3.1.3 Well-PosednessLet us establish a sufficient condition for well-posedness of the reducedboundary value problem (3.1.4). We consider the weak formulation
Find u ∈ H1(Ωa) :b(u, v) := B(u, v)− 〈Gu, v〉Γa = 〈g, v〉Γ , ∀v ∈ H1(Ωa) ,
(3.1.5)with
B(u, v) =∫Ωa
(∇u∇v − k2uv)dV
and (we again identify the dual pairings with the L2 inner products)
〈Gu, v〉Γa =∫Γa
Guv dS
and〈g, v〉Γ =
∫Γgv dS .
From here on, we omit the subscripts in the notation of the dual pairings.We assume that the form b(·, ·) satisfies a Garding inequality, hence exi-stence of a solution to (3.1.5) follows from uniqueness of the adjoint pro-blem. The following proposition was shown by Grote and Keller [58].
Theorem 3.2. A solution of (3.1.5) is unique if
Im 〈Gu, u〉 < 0 (or > 0) (3.1.6)
holds for all u ∈ H1/2(Γa), u = 0.
Indeed, let u be a solution of (3.1.5) with g ≡ 0. Then b(u, u) = B(u, u)−〈Gu, u〉 = 0. Note that B(u, u) is real; hence Im b(u, u) = Im 〈Gu, u〉 = 0.By (3.1.6), u vanishes on Γa. Then also3 ∂νu ≡ 0 on Γ. We continue functionu by zero into the exterior to get a function u ≡ 0 that is “locally H2”;i.e., u ∈ H2(D) for each closed and bounded subdomain D ⊂ Ω+a . Fromthe regularity theory for the Helmholtz operator (cf. Proposition 2.24 andHackbusch [62, Chapter 9]) it follows that u is analytic. Then we can apply
3This follows strongly just from (3.1.4)3, but it can also be shown weakly.

3.2 The Dirichlet-to-Neumann Operator and Numerical Applications 65
the analytic continuation principle to find 0 ≡ u ≡ u in Ωa. This provesthe theorem.For the numerical solution, the operator G must be replaced by a trun-
cated DtN operator GN and, instead of (3.1.4), one solves
−∆uN − k2uN = 0 on Ωa ,∂νu
N = g on Γ , (3.1.7)∂νu
N = GNuN on Γa .
In general, uN = u is some approximation of u. To establish well-posedness,one uses Theorem 3.2, replacing the exact operator G with the approximateoperator GN .Problem (3.1.7) can be solved by the finite element method (FEM) in
the standard way. If uNh denotes the finite element solution of (3.1.7), wehave, by the triangle inequality
‖u − uNh ‖ ≤ ‖u − uN‖+ ‖uN − uNh ‖ . (3.1.8)
In general, both errors occur, but (3.1.8) allows us to analyze the con-vergence of the FEM and the error of the DtN operator separately. Theanalysis of the finite element error will be the topic of Chapter 4. In the pre-sent chapter, we review various methods for the discretization of exteriorHelmholtz problems in Ω+a
3.2 The Dirichlet-to-Neumann Operator andNumerical Applications
We assume in the following that the coupling surface Γa is a sphere ofradius r = a. Though a spherical domain may not be the best choice inapplications (e.g., the scattering from elongated obstacles), we prefer thissimple case for the presentation of the principal ideas.
3.2.1 The Exact DtN OperatorThe general construction principle for a DtN operator was described inSection 3.1. Suppose that the Dirichlet datum u− is given on the sphere.We expand u− into spherical harmonics (cf. Section 2.1.2) as
u−(θ, φ) = a2∞∑n=0
n∑m=−n
umnYmn(θ, φ)
withumn =
∫S0
u(a, θ′, φ′)Ymn(θ′, φ′) dS′ ,

66 3. Discretization Methods for Exterior Helmholtz Problems
where S0 is the unit sphere. The radiating solution u+ = u is given onΩ+a by (2.1.14). In our present case, the constants cmn are found from theDirichlet condition to be
cmn =umn
hn(ka).
Thus
u(r, θ, φ) =∞∑n=0
hn(kr)hn(ka)
n∑m=−n
umnYmn(θ, φ) . (3.2.1)
Differentiating in the radial direction and setting r = a finally leads to
Gu(θ, φ) := −∂u
∂r(a, θ, φ)
= −∞∑n=0
kh′n(ka)
hn(ka)
n∑m=−n
umnYmn(θ, φ) . (3.2.2)
Here the negative sign is taken since the outward normal of the exteriorregion Ω+a points in the negative radial direction. A more compact notationfor (3.2.2) is
Gu =∞∑n=0
αnun ,
where
αn = −kh′n(ka)
hn(ka)(3.2.3)
and
un(θ, φ) =n∑
m=−numnYmn(θ, φ) .
By the orthogonality of the spherical harmonics,
〈Gu, u〉 =∞∑n=0
αn
n∑m=−n
|umn|2
for u ∈ L2(Γa). We will characterize the spectral properties of operator Gin the next paragraph.The DtN operator defines an exact nonreflecting condition on the artifi-
cial boundary; i.e., there are no spurious reflections introduced at Γa. Thenear field of the original exterior problem can be then exactly computedfrom the reduced problem (3.1.4). The operator G is nonlocal since oneintegrates over the whole surface to compute the coefficients umn. Thusthe coupling matrix is dense, similar to the FEM–BEM coupling.In cylindrical coordinates, one obtains by a similar procedure the DtN-
condition
−∂u
∂r(a, θ, φ) = − 1
2π
∞∑n=−∞
kH ′n(ka)
Hn(ka)einφ
∫ 2π
0u(a, φ′)e−inφ′
dφ′ . (3.2.4)

3.2 The Dirichlet-to-Neumann Operator and Numerical Applications 67
3.2.2 Spectral Characterization of the DtN-OperatorThe following proposition is shown in [45].
Lemma 3.3. Let αn, n = 0, 1, 2, . . ., be the complex sequence defined in(3.2.3). Then, for all n,
Imαn < 0; Imαn → −0 as n → ∞ (3.2.5)
andmax(
1a,n+ 1
a− k) ≤ Reαn ≤ n+ 1
a+ k . (3.2.6)
That is, the imaginary parts of all the αn are negative whereas the realparts are bounded from below and asymptotically behave like (n+ 1)a−1.
Let us first show (3.2.5). The spherical Hankel function of the first kindcan be written as a complex sum of Bessel functions and Weber functions,cf. [1, 10.1.1]. Thus
αn := −kj′n(ka) + iy′
n(ka)jn(ka) + iyn(ka)
Hence, with ka := x,
Imαn = − k
j2n + y2n
∣∣∣∣ j′n(x) y′
n(x)jn(x) yn(x)
∣∣∣∣ .By [1, 10.1.6], the Wronskian is x−2, hence
Imαn = − k
|hn(x)|2x2 .
This shows that Imαn < 0 for all n. Now we replace the modulus of theHankel functions, using [1, 10.1.27],
|hn(x)|2 = x−2Sn(x) , (3.2.7)
with
Sn(x) =n∑k=0
(2n − k)![2(n − k)]!k![(n − k)!]2
(2x)2k−2n . (3.2.8)
We first note that x2 in the expression for Imα cancels with that in (3.2.7).Further, rewriting the members of the sum above as
snk =(2n − k)!
n!· [2(n − k)]!(n − k)!
· n!k!(n − k)!
(2x)2k−2n
we immediately see that
snk ≥(
nk
)(2x)2k−2n

68 3. Discretization Methods for Exterior Helmholtz Problems
for all n, k. Hence
Sn ≥n∑k=0
(nk
)1k(
1(2x)2
)n−k=(1 +
1(2x)2
)n
and therefore the imaginary part vanishes asymptotically.Now turn to the investigation of the real part
Reαn = −kj′n(x)jn(x) + y′
n(x)yn(x)|hn(x)|2 . (3.2.9)
By direct computation,
Reα0 =1a.
For n ≥ 1, we replace j′n and y′
n, using the relation [1, 10.1.21],
f ′n = fn−1 − n+ 1
xfn ,
which holds for f = j or f = y, to get
k−1Reαn =n+ 1x
− rn(x) (3.2.10)
with
rn(x) :=jn−1(x)jn(x) + yn−1(x)yn(x)
|hn(x)|2 .
We claim that |rn| < 1. Indeed, using the expressions for the modulus andphase of the Bessel functions [1, 10.1.26], we can write
rn(x) =π2xMn− 1
2(x)Mn+ 1
2(x)(cos θn− 1
2cos θn+ 1
2+ sin θn− 1
2sin θn+ 1
2)
π2xM
2n+ 1
2(x)
,
where Mn+1/2(x) =√2x/π |hn(x)|. Hence
r2n(x) ≤|h2n−1(x)|2|h2n(x)|2
=Sn−1(x)Sn(x)
,
where we used again (3.2.7). With the index transformations l = n− 1− kand l = n − k, respectively, we get
Sn−1(x) =n−1∑l=0
(n − 1 + l)!(2l)!(n − 1− l)!(l!)2
(2x)−2l ,
Sn(x) =n∑l=0
(n+ l)!(2l)!(n − l)!(l!)2
(2x)−2l .

3.2 The Dirichlet-to-Neumann Operator and Numerical Applications 69
We write the second sum in the form
Sn(x) =n−1∑l=0
aln+ l
n − l(2x)−2l + sn(2x)−2n ,
where al are the coefficients of Sn−1(x). Now it is easy to see that
Sn(x) ≥ Sn−1(x) + sn(2x)−2n .
It follows that |rn(x)| ≤ 1 as claimed. Then it follows from (3.2.10) that
n+ 1x
− 1 ≤ k−1Reαn ≤ n+ 1x
+ 1 . (3.2.11)
To complete the proof of (3.2.6), observe that (3.2.9) is equivalently writtenas
Reαn = −k(|hn(x)|2)′2|hn(x)|2 =
|hn(x)|′|hn(x)| .
Inserting |hn(x)| = x−1√Sn(x) we get
Reαn = k1− x
S′n(x)
2Sn(x)
x.
By direct computation, it is easily checked that −xS′n(x)/Sn(x) ≥ 0. Re-
placing x = ka above and in (3.2.11), the lower bound of (3.2.5) readilyfollows. The lemma is proved.
3.2.3 Truncation of the DtN OperatorSince the exact DtN operator involves an infinite series, the computationhas to be truncated in practice, replacing G with
GN =N∑n=0
αnun . (3.2.12)
Now, the problem is well-posed only for the lower-order spherical har-monics. Indeed, GNun = 0 if n > N . Hence GNf = 0 for any function fthat is expanded into higher-order harmonics only. Then the ABC (3.1.4)reduces to the Neumann condition ∂νf = 0. The Neumann eigenvalue pro-blem for the Laplace operator on a bounded domain has real eigenvalues(cf. [87, Sections 2.4, 4.1]), and hence there exist, in general, wave numbersk for which the reduced problem (3.1.4) is not uniquely solvable.This problem is circumvented if one uses the modified truncated DtN
operator (Grote and Keller [58])
G∗ = (GN − BN ) +B , (3.2.13)

70 3. Discretization Methods for Exterior Helmholtz Problems
where B is any computationally efficient DtN operator with the property(3.1.6), and (GN − BN ) is the truncation of G − B to the first N + 1modes. For example, one can simply take the so-called Sommerfeld opera-tor B = ik. Grote and Keller [58] prove that the modified DtN conditionrenders well-posed problems for all u ∈ H1(Ωa). They also show in nume-rical experiments that the error ‖u − uN‖ (in maximum norm on Ωa) issmall also for N ' ka. For the truncated DtN condition (3.2.12), Harariand Hughes [66] had proposed the rule
N ≥ ka ,
based on numerical experiments.
3.2.4 Localizations of the Truncated DtN OperatorWe review the approach for the two-dimensional case from Feng [54]. Thekey is to replace the eigenvalues of the DtN operator (3.2.4) by the asymp-totic expansion (for large a)
kH ′n(ka)
Hn(ka) ik
∞∑m=0
(i
2ka
)mcm(n2) . (3.2.14)
The coefficients cm are defined recursively. The first four coefficients are oflow order in n2:
c0 = c1 = 1, c2 = 2(1− n2
2), c3 = −4(1− n2
4) .
Inserting into (3.2.4) and interchanging the order of summation, we get
∂u
∂n(a, φ) ik
∞∑n=0
(i
2ka
)n ∞∑m=−∞
cn(m2)umeimφ .
Now the sum over m can be interpreted as the action of the differentialoperator
cn
(− ∂2
∂φ2
)
on the function u =∑m umeimφ. Then, by truncating the DtN operator
to N terms, we obtain a local ABC,
GN = ik
N∑n=0
(i
2ka
)ncn
(− ∂2
∂φ2
). (3.2.15)
The first four operators contain only lower derivatives (up to the second)with respect to φ. Since the coefficients cn are written in even powers of

3.3 Absorbing Boundary Conditions 71
∂/∂φ only, the resulting ABC are symmetric in φ. By its construction,this DtN operator reproduces any solution that can be written as a linearcombination of the first N Fourier modes on the circle S under the condi-tion that a is sufficiently large (since the asymptotic expansion in r is used).
Remark 3.4. The expansion (3.2.14) is obtained from the expansion (cf.[1, 9.2.7-10])
H(1)n (x) =
√2πx
ei(x−( 12+ 14 )π)
∞∑m=0
(i
2x
)m(n,m)
where (n,m) is an even polynomial of n.
Givoli and Keller [60] propose an idea that is similar to Feng’s, exceptthat the DtN condition is constructed in such a way that the first N Fouriermodes are matched exactly by the numerical solution. This is achieved byfirst truncating the exact DtN condition and then expanding the finite suminto powers ofm2. To find the expansion, we require that the N+1 complexnumbers
λn = −kH ′n(ka)
Hn(ka), n = 0, 1, . . . , N ,
be written as a linear combination of the form
zn =N∑m=0
cmn2m .
Now the unknown complex coefficients cm can be computed from the linearsystem
00 02 04 · · · 0N
10 12 14 · · · 1N...
N0 N2 N4 · · · NN
c0c1...
cN
=
λ0λ1...
λN
.
The solutions for N = 0, 1 are trivially c0 = λ0, c1 = λ1 − λ0.
3.3 Absorbing Boundary Conditions
We are interested in absorbing boundary conditions (ABC) that are pre-scribed on Γ to replace the Sommerfeld condition. We distinguish betweenglobal (integral) and local (differential) ABC. Assuming that some dis-cretization of the boundary is given and a set of nodal points Xn := xjn1defined on Γa, we call an operator global if at any point of interest x ∈ Xn

72 3. Discretization Methods for Exterior Helmholtz Problems
Local
a
supp G
x0
Γ
Nonlocal
Γa
supp G x0
FIGURE 3.2. Local and nonlocal boundary operators.
it acts over all nodal points from Xn; see Fig. 3.2. On the other hand, forsome x0 ∈ Xn a local operator on u(x) acts only on a subset of M nodalpoints adjacent to x0 wherem is a fixed number that does not depend on n.We already discussed integral ABC with regular kernels obtained by trun-cation of the exact DtN map, as well as their localizations. In this section,we review some other popular local ABC. All local operators are differentialoperators, which are in practice implemented as difference operators.
3.3.1 Recursion in the Atkinson–Wilcox ExpansionWe start from the time-dependent case. Assume that P (x, t), x ∈ Ω+, is asolution of the scaled wave equation
∆P − ∂2P
∂t2= 0 (3.3.1)
in the exterior domain Ω+. We define an approximate solution PN by im-posing the condition
BNPN = 0 (3.3.2)
on the coupling surface Γa, where the linear operators BN are defined asfollows.
B1 = L+1r, B2 =
(L+
3r
)(L+
1r
),
...
BN =(L+
2N − 1r
)BN−1 , (3.3.3)
with
L =(
∂
∂t+
∂
∂r
).
By the Atkinson–Wilcox expansion (2.1.26),
P (r, θ, φ, t) =eik(r−t)
r
∞∑n=0
pn(θ, φ)rn
(3.3.4)

3.3 Absorbing Boundary Conditions 73
holds in the exterior of any sphere enclosing the obstacle. It is easy to showby inductive argument that
BNP =∞∑n=1
aNnPn
rn+N, N = 1, 2, . . . , (3.3.5)
where Pn := eik(r−t)pn−1 and
aNn = (−1)N (n − 1)(n − 2) · · · (n − N) . (3.3.6)
Thus operatorBN annihilates (“absorbs”) the firstN terms of the Atkinson–Wilcox expansion of any propagating wave given in the form (3.3.4), andwe have the residual condition
BNP = O(r−(2N+1)
).
We can obtain time-harmonic variants of the operators BN by replacingeach time differentiation with the operator −ik in the frequency domain.The corresponding time-harmonic solution is denoted by pN . From (3.3.5),(3.3.6), and (3.3.2) we see that any radiating solution p satisfies the residualrelation
BN (pN − p) = BNp =∞∑
n=N+1
aNnpn
rn+N.
This residual relation shows, in particular, that the ABC will be more exactthe larger the radius of the artificial boundary.In cylindrical coordinates, similar considerations lead to the operator
BNp =∞∑n=1
aNnpn
rn+N− 12, N = 1, 2, . . . (3.3.7)
with aNn as in (3.3.6). This formula is developed from the expansion
p =
√2
πkrei(kr−
π2 )
∞∑j=0
fj(φ)rj
,
which in turn follows from (2.1.27), using [1, 9.2.3].A DtN operator GN is defined from BN by setting
GN := −BN +∂
∂n. (3.3.8)
In practice, one usually employs only the first two approximate conditions.We consider here the spherical conditions for the case of axial symmetry(no dependence on φ) [20]. From
B1 =∂
∂r− ik +
1r,
B2 =∂2
∂r2+(4r
− 2ik)+(2r
− 4ik)1r
− k2

74 3. Discretization Methods for Exterior Helmholtz Problems
we obtain, using the Bessel equation (2.1.8) to eliminate ∂2/∂r2,
G1 = ik − 1r, (3.3.9)
G2 = ik − 1r+
∂
∂θ
(sin θ
∂
∂θ
)
2r2(1r
− ik
)sin θ
. (3.3.10)
3.3.2 Localization of a Pseudodifferential OperatorWe first consider cartesian coordinates in R2. Let the solution be given inthe form of a wave packet (cf. (2.1.3)),
p(x, y) =∫ ∞
−∞p(α)ei(αx+βy)dα ,
with the dispersion relation
α = k√1− σ2, σ =
β
k, (3.3.11)
characterizing an outgoing solution. We seek an ABC at the boundary x =constant in two dimensions. If we could transform the dispersion relationexactly into an ABC then all wave packets would pass the boundary withoutreflection. However, this is not possible if we look for a DtN condition in theform of a local differential operator. Since (3.3.11) is a nonrational expres-sion, it represents a pseudodifferential rather than a differential operator.4
To obtain local operators, we approximate the nonrational relation by ra-tional functions. Then we deduce the approximate DtN conditions fromthose differential operators that are the preimages of the approximate Fou-rier symbols. Enquist and Majda [52] show that the Pade approximations5
lead to stable and well-posed formulations. In Table 3.1, we list the Padeapproximations with residual orders (in σ), the corresponding differentialoperators for N = 0, 1, 2, and the resulting DtN operators for the scaledwave equation (3.3.1). As an example, let us outline the operator for N = 1:
p,x= iαp ik
(1− σ2
2
)p =
(ik +
i(iβ)2
2k
)p =
(ik +
i
2k∂2
∂y2
)p .
4Here it suffices to say that the Fourier symbol of a differential operator is always apolynomial. Conversely, only polynomials can be symbols of differential operators. Thetheory of pseudodifferential operators allows for more general Fourier symbols and isthus applicable also to integral operators.
5We review the basic ideas of Pade approximation in the appendix to this chapter.

3.3 Absorbing Boundary Conditions 75
TABLE 3.1. Pade approximations and differential operators at x = 0.
Order N Approximation Residual Boundary operator
0 1 O(σ2) ik
1 1− 12σ2 O(σ4) ik +
i
2k∂2
∂y2
21− 3
4σ2
1− 14σ2
O(σ6) ik +3i4k
∂2
∂y2− 14k3
∂2
∂x∂y2
We see that the first two Pade expansions are just the Taylor expansions.The approximation for N = 2 is the ratio of quadratic polynomials. ForN ≥ 3, the expansions involve higher-order polynomials and consequentlylead to higher-order differential operators.Enquist and Majda also develop boundary conditions in polar coordina-
tes; cf. Section 3.3.3.Unlike the previous approaches, Enquist and Majda do not attempt mo-
dal annihilation. The quality of the ABC is assessed from the amplitudereduction in the reflected modes. A plane wave Pinc hitting the boundaryx = 0 at angle θ produces a spurious reflection Pref ; see Fig. 3.3. Consi-dering again the scaled wave equation (3.3.1), we write the incoming waveas
Pinc = eik(x cos θ+y sin θ−t) .
ThenPref = R0e
ik(−x cos θ+y sin θ−t) .
θx
y
p
pref
inc
FIGURE 3.3. Reflection of a plane wave at an artificial boundary x = 0.

76 3. Discretization Methods for Exterior Helmholtz Problems
The reflection coefficient R0 is computed from the zero-order boundarycondition (pinc + pref),x−ik(pinc + pref) = 0 at x = 0 as
R0 =cos θ − 1cos θ + 1
. (3.3.12)
Hence any plane wave incident in the normal direction is completely ab-sorbed, whereas spurious reflections occur for θ = 0. One can show [52]that
|RN | =∣∣∣∣cos θ − 1cos θ + 1
∣∣∣∣(N+1)
holds for the higher-order approximations. The amplitude of the spuriousreflections decreases with the order N .
3.3.3 Comparison of ABCIn Table 3.2 we list the different two-dimensional DtN operators in polarcoordinates, supposing that the artificial surface is a sphere of radius a.
TABLE 3.2. DtN conditions in polar coordinates. The abbreviations in the firstcolumn stand, respectively, for “Bayliss–Gunzburger–Turkel”, “Enquist–Majda”,and “Feng”.
DtN conditions GN
Authors N = 0 N = 1 N = 2
BGT − ik − 12a
−2k2 − 3ika+
34a2 +
1a2
∂2
∂θ2
2(ik − 1
a
)
EM − ik − 12a
ik − 12a+
12k2a2
(ik +
1a
)∂2
∂θ2
F ik ik − 12a
ik − 12a− i
8ka2 −i
2ka2
∂2
∂θ2
Remark 3.5. The Sommerfeld operator ik is formally obtained for theapproximation order N = 0 only by the approach of Feng.
The corresponding expressions from the Givoli–Keller approach are
kH ′o(ka)
Ho(ka), k
[H ′o(ka)
Ho(ka)−(H ′1(ka)
H1(ka)− H ′
o(ka)Ho(ka)
)∂2
∂θ2
],

3.3 Absorbing Boundary Conditions 77
for N = 1 or N = 2, respectively (the expression for N = 3 involves thefourth derivative in θ). We observe:
1. All conditions are essentially equal for N = 1.6 The condition (3.1.6)for well-posedness is satisfied.
2. For N = 2, the expressions differ. However, all conditions, exceptthose of Enquist and Majda, are based on the annihilation of thefirst three modes in the exterior expansion. Hence one expects similarapproximation errors if the radius of the artificial sphere is sufficientlylarge (recall that Feng uses an expansion that is exactly annihilatingonly asymptotically). The same applies to the satisfaction of condition(3.1.6). For sufficiently large radius a, all conditions are dominatedby the positive definite Sommerfeld operator ik.
3. Feng’s as well as Enquist’s and Majda’s conditions always lead tosymmetric (in θ) DtN operators whereas the Bayliss–Gunzburger–Turkel approach does not. In our evaluation, this is visible for N = 2.
4. The wave number enters the higher-order operators with inverse power.Thus the improvement in accuracy by higher N is expected to de-crease with growing k.
The various ABC have been compared in numerical experiments by Shirron[110]. The accuracy of the conditions is assessed by defining and solving“canonical problems” for rigid scattering from the unit circle; see Fig. 3.4.
a=1λ
P ΓΓa
FIGURE 3.4. Cylindrical scatterer and artificial boundary.
Shirron isolates modal information by assuming that the cylinder is sub-ject to a signal consisting of the nth mode only (this is the nth canonicalproblem). Then the scattered signal also consists of that mode only. Thefirst 30 canonical problems are solved by FEM in the annular domain, im-posing the various ABC with orders N = 0, 1, 2. The approximation error
6A simple calculation shows that
kH′
0(ka)H0(ka)
ik − 12a
for large ka.

78 3. Discretization Methods for Exterior Helmholtz Problems
is measured at a point P on the wet surface, and the artificial surface Γa isa circle located at the distance λ from Γ. The computations are done forwave numbers k = 1, 5, 10, 20. From the numerical data in [110], we drawhere two conclusions for N = 2.First, the Bayliss–Gunzburger–Turkel conditions are the most accurate
ones, especially for the lower modes. In Shirron’s computations, the ar-tificial boundary is very close to the scatterer, i.e., not in an asymptoticrange of the radius. Recall that Feng’s condition is based on the asymptoticexpansion with respect to the radius.
TABLE 3.3. Comparison of relative errors in the first- (BGT1) and second-order(BGT2) ABC after Bayliss–Gunzburger–Turkel for different k. The first columnshows the ratio of the errors.
k BGT1/BGT2 BGT21 177 3e-055 22 4.3e-0310 8 2.1e-0220 4 7.3e-02
Second, the maximal error for each k occurs for n ≈ k [110, p. 27]. Whilethe error grows with k, the improvement in N = 2 compared to N = 1decreases; see Table 3.3 (data from [110, pp. 28–30]). Consequently, sincethe maximal error for larger k is contributed by higher modes, the advan-tage of the Bayliss–Gunzburger–Turkel condition with respect to Feng’sand Enquist’s and Majda’s conditions becomes insignificant in that case.Resuming our evaluation, we note that the ABC discussed here are qua-
litatively equivalent. The differences are negligible except for small radiusand low wave number. Thus the choice of the “best” ABC can be based onpractical considerations, such as symmetry of the resulting DtN operatoror the order of the derivatives involved.
3.3.4 The PML MethodA new method for the construction of ABC has been recently proposed byBerenger [22, 23]. The idea is to introduce an exterior layer at the artificialboundary in such a way that all plane waves are totally absorbed. Thismeans that no reflection occurs for an arbitrary angle of incidence, and thetransmitted wave vanishes at infinity, whence the name perfectly matchedlayer (PML) method. In practice, the computation is truncated at somefinite distance within the layer. But the resulting artificial reflections aresmall, due to the exponential decay.The idea originated from electromagnetic compuations. Here we out-
line the method for the acoustic equations in R2. We consider the artificialboundary x = 0 in cartesian coordinates, assuming that the standard acou-

3.3 Absorbing Boundary Conditions 79
stic equations hold in the domain Ω− = x ≤ 0 and the infinite layer isΩ+ = x ≥ 0.We start from the linearized continuity equation (1.1.2)
∂ρ
∂t+ ρ0divV = 0 ,
which we rewrite as a system
∂ρx∂t
= −ρ0Vx,x ,∂ρy∂t
= −ρ0Vy,y
ρx + ρy = ρ .
Here ρx, ρy are just formal variables with no physical meaning. We furtherrecall the linearized Euler equation (1.1.3), which we write componentwisein the form
∂Vx∂t
= − 1ρ0
∂P
∂x,
∂Vy∂t
= − 1ρ0
∂P
∂y.
Finally, the pressure and density are coupled by the material law
P = c2ρ .
In the PML Ω+, we reformulate those equations that contain a derivativeorthogonal to the boundary (here, the x-direction). In these equations weadd an absorption term. For our example, the modified equations read
∂ρx∂t
+ σ(x)ρx = −ρ0Vx,x ,∂Vx∂t
+ σ(x)Vx = − 1ρ0
∂P
∂x.
The homogeneous solutions of these equations are of the formA exp(−σ(x)t),and hence we require σ(x) ≥ 0 for x ≥ 0 to assure decay. Further, we requirethat σ ≡ 0 for x ≤ 0 and that σ(x) ∈ C1(R).We are ready to deduce the modified time-harmonic equation for p. Re-
placing the time-derivatives with −iω, we obtain
ρx = − ρ0σ − iω
vx,x=1
σ − iω
∂
∂x
(1
σ − iω
∂p
∂x
)
ρy = − 1ω2
∂2p
∂y2.
Writing the material law in the form c−2p = ρx + ρy and inserting therelations above, we finally arrive at
iω
σ − iω
∂
∂x
(iω
σ − iω
∂p
∂x
)+
∂2p
∂y2+ k2p = 0 . (3.3.13)
For x ≤ 0, we have σ = 0 and (3.3.13) reduces to the Helmholtz equation.

80 3. Discretization Methods for Exterior Helmholtz Problems
Let now x ≥ 0. Looking at the first term in (3.3.13), it is natural tointroduce a new coordinate x′ such that
∂x′
∂x=
iω
σ − iω.
With the transformation
x′ = x+i
ω
∫ x0
σ(ξ) dξ , (3.3.14)
we thus formally recover the Helmholtz equation in the (x′, y) coordinatesystem. We can write normalized solutions of this equation in the form ofa wave packet
p(x′, y) =∫ ∞
−∞ei(αx
′+βy)dα , α2 + β2 = k2 .
Then, for an arbitrarily fixed α = kx, we have
eikxx′= eikxx exp
(−kx
∫ x0
σ(ξ)ω
dξ
),
and hence the wave is decaying in the positive x-direction (recall that σ >0). No spurious reflection occurs at x = 0, since there is no jump in thematerial properties between the acoustic medium and the PML.Consider now the practical case that the layer is truncated by a Dirichlet
condition at x = δ > 0. Then reflection occurs. Writing, respectively, pinc =ei(kxx
′+kyy) , pref = Rei(−kxx′+kyy) for the incoming and reflected waves
and setting pinc + pref = 0 at x = δ, we see that the the amplitude of thereflected wave is
R = − exp(2ikx
∫ δ01 +
iσ(ξ)ω
dξ
). (3.3.15)
Remark 3.6. The introduction of the damping factor σ has no physicalsignificance. It is a mathematical transformation which in effect is an ana-lytical continuation of the elementary solutions into the complex plane; cf.Collino and Monk [38].
3.4 The Finite Element Method in the Near Field
We consider the reduced boundary value problem (3.1.4) and review themain steps of its solution with finite element methods. We consider hereonly the case of a p-uniform regular mesh. Adjacent elements either sharea vertex or a common edge (there are no “hanging nodes”), and the poly-nomial degree is constant throughout the mesh. The finite element methodis applied to the weak formulation (3.1.5). We assume that g and G aresuch that the problem is well posed.

3.4 The Finite Element Method in the Near Field 81
3.4.1 Finite Element TechnologyThe numerical solution of (3.1.5) by the FEM involves the following steps(we consider a two-dimensional domain for simplicity).
(1) Triangulation of the Domain:
Domain Ωa is divided into quadrilaterals and/or triangles τi (with straightor curvilinear boundaries) — the finite elements. The set of all elements iscalled the triangulation
T = τi, i = 1, . . . , N .
We assume the ideal case that
Ωa =N⋃i=1
τi ;
that is, the finite elements are an exact partition of Ωa. Then∫Ωa
(∇u∇v − k2uv) dV =N∑i=1
bi(u, v) ,
wherebi(u, v) =
∫τi(∇u∇v − k2uv) dV
is the restriction of the form b(u, v) to the element τi.Prescribing some measure function that maps each element to its size hi
(for example, one can take the radius of the inscribed circle for straight-lined triangles), one defines the mesh size
h = maxi
hi
of the triangulation T .
(2) Mapping from Master Elements:
Each of the elements τi is mapped from master elements by a transform
(x, y) = Q(ξ, η) , (3.4.1)
where ξ, η are defined either on a master square (e.g., −1 ≤ ξ, η ≤ 1) or ona master triangle (e.g., 0 ≤ ξ ≤ 1, 0 ≤ η ≤ ξ); see Fig. 3.5. For example, astraight-lined quadrilateral is mapped from the square master element bythe linear map
x =14(X1(1− ξ)(1− η) +X2(1 + ξ)(1− η)
+ X3(1 + ξ)(1 + η) +X4(1− ξ)(1 + η)) ,
y =14(Y1(1− ξ)(1− η) + Y2(1 + ξ)(1− η)
+ Y3(1 + ξ)(1 + η) + Y4(1− ξ)(1 + η)) ,

82 3. Discretization Methods for Exterior Helmholtz Problems
where (Xi, Yi) are the coordinates of the element corners in the global x, ycoordinate system. In general, the map Q is nonlinear.
ξ
x
y
ξ
Q Qη
η
FIGURE 3.5. Triangulation of domain Ω and mapping from master elements.
The local forms bi are computed on the master elements A as
bi =∫A
(J−1∇ξηu(Q(ξ, η))
)T (J−1∇ξη v(Q(ξ, η))
)detJ dξdη
−k2∫A
u(Q(ξ, η))v(Q(ξ, η)) detJ dξdη ,
where the gradients are computed in local coordinates (ξ, η), and J is theJacobian matrix
J =
[∂x∂ξ
∂x∂η
∂y∂ξ
∂y∂η
].
The design of the mesh has to be such that J−1 exists for each element.
(3) Approximation:
The trial functions u and test functions v are approximated in local coor-dinates ξ, η by the linear combination
uh(ξ, η) =n(p)∑i=1
aiNi(ξ, η) , (3.4.2)
where the ai are unknown complex coefficients and Ni are polynomials ofmaximal degree p. Each of the coefficients ai corresponds to a degree of free-dom (DOF) of the element τi. The functions Ni are called shape functions.In a quadrilateral element, the first four DOF are identified with the nodalvalues of the unknown function uh at the corners of the element. The firstfour shape functions N1, . . . , N4 are the bilinear (nodal) shape functions14 (1±ξ)(1±η). In the hierarchical concept of hp-approximation, we further

3.4 The Finite Element Method in the Near Field 83
2(p-1)1 1
1 1
2(p-1)
(p-2)(p-3)/2
2(p-1)
2(p-1)
FIGURE 3.6. Degrees of freedom in square element with hierarchical basis: ,nodal DOF; , edge DOF; © – internal DOF.
have 4(p − 1) edge modes and (p − 2)(p − 3)/2 internal modes (“bubblefunctions”); see Fig. 3.6. Here, p is the maximal degree of the polynomialshape functions. Edge modes arise for p ≥ 2, and internal modes ariseonly for p ≥ 4. The mapping Q transforms the elemental shape functionsinto element-level basis functions for approximation in global coordinates.The quality of the FE approximation depends on the mesh design (i.e.,the size and shape of the elements), the degree of approximation inside theelements, and also on the choice of the transform Q.The local shape functions form the linear polynomial spaces Sp() or
Sp((), respectively. For the square master elements, the space Sp() con-sists of all polynomials that can be written as a linear combination ofmonomials ξiηj , 0 ≤ i, j ≤ p, i+ j ≤ p, plus the monomial ξη for p = 1 orthe monomials ξpη, ξηp for p > 1, respectively. As an example, see below
ξ4
1
1
2
2
4 3
3
η
FIGURE 3.7. Square master element.
the hierarchical shape functions (cf. Szabo and Babuska [112, Chapter 6])

84 3. Discretization Methods for Exterior Helmholtz Problems
for a square master element with node and edge numbering as depicted inFig. 3.7.
1. Nodal modes:
N1(ξ, η) =14(1− ξ)(1− η) ,
N2(ξ, η) =14(1 + ξ)(1− η) ,
N3(ξ, η) =14(1 + ξ)(1 + η) ,
N4(ξ, η) =14(1− ξ)(1 + η) .
2. Edge modes: The edge modes associated with edge 1 are
N(1)i =
12(1− η)φi(ξ), i = 2, . . . , p ,
with
φi(ξ) =
√2i − 12
∫ ξ−1
Pi−1(t)dt , (3.4.3)
where Pi−1(t) are the Legendre polynomials given in (2.1.12). Simi-larly, the edge modes on edge 2 are
N(2)i =
12(1 + ξ)φi(η), i = 2, . . . , p ,
etc.
3. Internal modes: If p ≥ 4, then there are (p− 2)(p− 3) internal modes
N(0)1 (ξ, η) = φ2(ξ)φ2(η) ,
N(0)2 (ξ, η) = φ3(ξ)φ2(η) ,
N(0)3 (ξ, η) = φ2(ξ)φ3(η),
...
Remark 3.7. It is possible to choose other polynomials than those definedin (3.4.3). For fixed degree of approximation p, the choice of the polynomialshape functions does not influence the quality of approximation. Differentshape functions just form different bases of the same space Sp, which de-termines the degree of local approximation. The elemental shape functionscan thus be chosen by practical aspects of the FEM technology such asgeometrical approximation of the domain, method of mesh refinement andenrichment, efficient coding and data storage. For instance, the new basisin a p-enrichment step is an extension of the previous basis if hierarchical

3.4 The Finite Element Method in the Near Field 85
shape functions are used; otherwise, a whole new basis has to be intro-duced if p is changed locally. Considerations of the optimal choice of basisfunctions for the FEM can be found in [10]. A performance analysis of dif-ferent hierarchical square elements of order p in the example of the Laplaceequation with h-uniform mesh is given in [9]. The choice of basis functionsinfluences the conditioning of the global stiffness matrix. This aspect is ofparticular importance for very large problems where iterative solvers withpreconditioning are used; cf. Babuska et al. [8]. A performance analysisof different hierarchical square elements of order p in the example of theLaplace equation with h-uniform mesh is given in [9].
(4) Computation of Local Stiffness and Mass Matrices:
On each element, the local form bi(u, v) is computed, where u, v are writtenon the master element as
∑j ajNj ,
∑i biNi, respectively. Carrying out the
integrations (in general, by Gaussian quadrature), one obtains the localmatrix
Aloc = Kloc − k2Mloc ,
with
[Kloc]ij =∫A
(J−1∇Nj(ξ, η)
)T (J−1∇Ni(ξ, η)
)detJ dξdη ,
[Mloc]ij =∫A
Nj(ξ, η)Ni(ξ, η) detJ dξdη .
(5) Assembly of Global Matrices:
On the global level, we look for an approximate solution uh(x, y) that iscontinuous across element junctions. Thus the DOF associated with thenodal and edge modes on neighboring elements have to be identified; seeFig. 3.8. The global stiffness matrix is obtained by summing up the contri-
FIGURE 3.8. Identification of modes in assembly.
butions of local stiffness matrices for all elements that contain the vertexor edge under consideration. The internal modes are not connected across

86 3. Discretization Methods for Exterior Helmholtz Problems
element edges and can be eliminated prior to the assembly by static con-densation. After assembly, we obtain the linear system
Au = g , (3.4.4)
where the system matrixA = K− k2M (3.4.5)
is a linear combination of the stiffness matrix K and the mass matrix M,and the vector g has been assembled from the discretization of the right-hand side. Provided that the bubble modes have been condensed, the vectoru contains all DOF associated with the nodal and edge modes of the globalmesh.
3.4.2 Identification of the FEM as a Galerkin MethodIn the assembly procedure, one effectively constructs continuous basis func-tions Φl(x, y) over patches Pl =
⋃τj of adjacent elements. In Fig. 3.9a) we
show the nodal basis function on a patch consisting of four quadrilaterals.Similarly, one obtains p − 1 edge basis functions on patches consisting oftwo adjacent elements; see Fig. 3.9b). Finally, the internal modes lead toglobal basis functions that are supported on one element only.
(a) Nodal basis function (b) Edge basis function
FIGURE 3.9. Global basis functions.
Since all basis functions vanish at the patch boundaries, they can becontinuously extended by zero onto the whole domain. The trial functionuh is then written as the linear combination
uh(x, y) =Nglob∑l=1
ulΦl(x, y) ,
with unknown coefficients ul. The global basis functions Φl(x, y) reduce onevery element τi to polynomials Φ
(i)l (ξ(x, y), η(x, y)) in local coordinates.
The linear span of these basis functions forms the finite-dimensional spaceSph(Ωa). By definition, S
ph(Ωa) is a subspace of the space H1(Ωa) in which
we seek the exact solution; hence the FEM is conforming.

3.5 Infinite Elements and Coupled Finite–Infinite Element Discretization 87
The finite element solution is found from the variational problem:Find uh ∈ Sph(Ωa) :
b(uh, v) = 〈g, v〉Γ , ∀v ∈ Sph(Ωa) .(3.4.6)
Equivalently, the testing is performed succesively with all the basis functi-ons Φl, l = 1 . . . Nglob.
3.4.3 The h-Version and the hp-Version of the FEMThe FEM is a numerical method for the solution of boundary value pro-blems. We suppose that a unique solution exists and demand that the nu-merical solution converges to the exact solution. In practice, convergenceis either achieved by refining the mesh, letting the mesh size h approachzero asymptotically, or by increasing the degree of polynomial approxima-tion p on a fixed mesh. The first procedure is called h-refinement, whereasthe second procedure is called p-enrichment. Correspondingly, one speaksof the h-version and the p-version of the FEM. If convergence is achie-ved by a combination of h-refinement and p-enrichment, one speaks of thehp-version; see Szabo and Babuska [112].We will investigate the convergence of the FEM for Helmholtz problems.
In this context, we will use the name h-version to refer to the standard pro-cedure of h-refinement with piecewise linear basis functions. If also higher-order polynomials are used in the approximation, we will speak of the hp-version. In our applied computations, we will concurrently use h-refinementand p-enrichment to achieve convergence.
3.5 Infinite Elements and Coupled Finite–InfiniteElement Discretization
In Sections 3.2 and 3.3, we reviewed some numerical approaches in whichthe exterior domain Ω+a outside the artificial boundary Γa was truncated.Alternatively, one can partition Ω+a into so-called infinite elements. In thissection, we review the infinite elements based on the radial expansion ofWilcox (cf. Section 2.1.4) after Burnett [32].We first define infinite elements for the exterior of the unit sphere and
then consider different variational formulations that lead to Petrov–Galerkinor Bubnov–Galerkin methods.
3.5.1 Infinite Elements from Radial ExpansionConsider the domain decomposition of the exterior as described in Sec-tion 3.1. Assume that the annular subdomain Ωa is partitioned into finite

88 3. Discretization Methods for Exterior Helmholtz Problems
elements and a subspace Sph(Ωa) ⊂ H1(Ωa), based on conforming finiteelements, is defined. This naturally induces a finite element partition anda finite element space Sph(Γa) on the artificial boundary Γa. Assume fur-ther that the finite elements are coupled to infinite elements that form apartition of the exterior domain Ω+a , as sketched in Fig. 3.10.
ξ
x
y
ξ
Q Qη
η
ξ
η
FIGURE 3.10. Partition of the exterior into finite and infinite elements.
In the general case, one assumes that Γa is described by a system ofcoordinates in such a way that the normal at any point of Γa is tangentialto a coordinate line which goes out from Γa to infinity. One can imagineeach infinite element bounded by those coordinate lines. Infinite elementsbased on prolate or oblate spheroids have been described by Burnett [32].These infinite elements are of practical value if one computes the scatteringof waves from elongated or flat obstacles, since they allow to fit the obstacleclosely, keeping the finite element region small. If the artificial surface is asphere, we use spherical coordinates and the coordinate lines are the radiallines.In the following, we outline the basic ideas of the infinite element dis-
cretization for the most simple case that Γa is the surface of the unit sphere.The infinite element is a semianalytical construction that reduces to a finiteelement on the coupling surface. In addition, a finite number of analytical“shape functions” is defined in the radial direction. Thus the IE shapefunctions are obtained as a tensor product of the FE shape functions andthe radial functions. That means, it is assumed that separation of variablescan be applied in the exterior of the artificial boundary.We seek a numerical solution uNh that in Ω+a = r > 1 can be written
in the form
uNh (r, θ, φ) = UN (r)uh(θ, φ) , uh ∈ Sph(Γa) , (3.5.1)
with
UN (r) =N∑j=1
ajϕj(r) ,

3.5 Infinite Elements and Coupled Finite–Infinite Element Discretization 89
where the radial “shape functions” are the first N members of the radialexpansion (2.1.26),
ϕj(r) =eikr
rj, j = 1, . . . , N , (3.5.2)
and the aj are unknown complex coefficients; see also Fig. 3.11.
eikr
r,eikr
r2 , . . .
FIGURE 3.11. Infinite element.
The only nodes of the infinite elements are the FE corner nodes on thecoupling surface. Similar to the edge and bubble modes in the hierarchicalfinite element approximation (see, e.g., Szabo and Babuska [112]), the radialdegrees of freedom aj need not be associated with physical locations.
3.5.2 Variational FormulationsA Petrov–Galerkin Formulation:
Let us first consider the variational formulation (2.3.10) with the weightedSobolev spaces after Leis [87], as introduced in Section 2.3.2. The trial func-tions uNh defined in (3.5.1) lie in the space H1+
w (Ω+a ). Indeed, the functionsalways satisfy the Sommerfeld condition by the choice of the radial basisfunctions, and it can be easily checked that ‖uNh ‖1,w < ∞. Hence the trialspace
V1 :=u ; u|Ωa ∈ Sph(Ωa) andu|Ω+
a∈ SpNh,w(Ω
+a )
, (3.5.3)
where SpNh,w(Ω+a ) denotes the linear span of the trial functions (3.5.1), is
a finite-dimensional subspace of the space H1+w (Ω+). Each function in the
trial space reduces on Γa to a finite element function uh ∈ Sph(Γa), whereasin radial direction it lies in the linear span of the shape functions (3.5.2).

90 3. Discretization Methods for Exterior Helmholtz Problems
The test functions v have to be defined in such a way that the test spaceV2 is a subspace of the weighted Sobolev space H1
w∗(Ω+). This condition issatisfied if v = O(r−3), r → ∞. Defining the radial basis functions
ψj(r) =eikr
rj, j = 3, . . . , N + 2 , (3.5.4)
we can write the test functions in the form
v = vNh (r, θ, φ) = VN (r)vh(θ, φ) , (3.5.5)
with vh ∈ Sph(Γa) and
VN (r) =N∑j=1
bjψj(r) .
The test space for the coupled finite–infinite element method is thus
V2 :=v ∈ H1
w∗(Ω+a ) ; v|Ωa ∈ Sph(Ωa) , v|Ω+
a∈ SpNh,w∗(Ω
+a )
.
where SpNh,w∗(Ω+a ) ⊂ H1+w∗ (Ω+a ) is the linear span of (3.5.5). Hence the trial
and test functions of the coupled finite–infinite element discretization arecontinuous functions on Ω+ = Ωa∪Ω+a that reduce to piecewise polynomialfunctions on Ωa and to semianalytical infinite element functions on Ω+a .With these notations, the variational problem is posed as
Find uNh ∈ V1 :B(uNh , v) = 〈g, v〉Γ, ∀v ∈ V2 ,
(3.5.6)
whereB(u, v) =
∫Ω+(∇u∇v − k2uv) dV . (3.5.7)
Separation of variables under the integral:
Let us write the test and trial functions in the form
u = U(r)Φ(θ, φ) , v = V (r)Ψ(θ, φ) .
Then
B(u, v) =∫ ∞
1r2dr
∫S0
[∇(ΦU)∇(ΨV )− k2UV ΦΨ] dS ,
where S0 denotes the surface of the unit sphere, and dS = sin θ dφ dθ.Writing out the gradient in spherical coordinates as
∇ =∂
∂rer +
1r∇S , with ∇S = ∂
∂θeθ +
1sin θ
∂
∂φeφ ,

3.5 Infinite Elements and Coupled Finite–Infinite Element Discretization 91
we arrive at the separated form
B(u, v) =∫ ∞
1r2(U,r V ,r −k2UV
)dr
∫S0
ΦΨ dS
+∫ ∞
1UV dr
∫S0
∇SΦ∇SΨ dS . (3.5.8)
Bubnov–Galerkin Formulations:
Let us now consider variational formulations where the trial and test spacesare identical. This is possible if the spaces are finite-dimensional and theintegration in the exterior is understood in the sense of the Cauchy principalvalue. We disregard the FE region Ωa, considering only the infinite elementdiscretization of Ω+a here. The infinite elements are defined as in Section3.5.1, but now we seek the discrete solution uNh from the variational problem
Find uNh ∈ V1 :bc(uNh , v) = 〈g, v〉Γ, ∀v ∈ V1 ,
(3.5.9)
where V1 is the space defined in (3.5.3), and the variational form is
bc(u, v) := limR→∞
(∫ΩR
(∇u∇v − k2uv) dV − ik
∫SR
uv dS
). (3.5.10)
Here, as before, SR denotes the surface of a large sphere with radius R thatis concentric with Γa, whereas ΩR is the annual domain between the Γaand SR. Unlike the form B(u, v) in (3.5.7), the sesquilinear form bc(u, v)contains a surface integral in the far field. As previously mentioned, thisintegral always vanishes in the limit R → ∞ for test functions that areO(r−3) and, therefore, it is not included in (3.5.7).The following verification of the integration in (3.5.10) is given after
Gerdes [55]. We rewrite the trial and test functions in the form
u =exp(ikr)
rmfm , v =
exp(ikr)rn
fn , (3.5.11)
where the coefficients fm and fn are functions of the angular coordinates,and the summation convention applies over the range 1, . . . , N of the in-dices. Substituting (3.5.11) into the sesquilinear form (3.5.10) and takinginto account (3.5.8), we obtain
bc(u, v) = limR→∞
∫ R1
r2
[∂
∂r
(exp(ikr)
rm
)∂
∂r
(exp(ikr)
rn
)
− k2
rm+n
]dr
∫S0
fmfn dS
+∫ R1
dr
rm+n
∫S0
∇Sfm∇S fn dS − ikR2
Rm+n
∫S0
fmfn dS
,

92 3. Discretization Methods for Exterior Helmholtz Problems
where we have used the trivial relation(exp(ikr)
rm
)(exp(ikr)
rn
)=
1rm+n
.
Carrrying out the differentiation in r and cancelling powers of r leads to
bc(u, v) = limR→∞
∫ R1
[k2
rm+n−2 +ik(m − n)rm+n−1 +
nm
rn+m
− k2
rm+n−2
]dr
∫S0
fmfn dS
+∫ R1
1rm+n
dr
∫S0
∇Sfm∇S fn dS − ik
∫S0
R2
Rm+nfmfn dS
.
The integration above is well-defined since the terms k2/rm+n−2 (which aresingular for m + n ≤ 3) cancel, and the term ik(m − n)/rm+n−1 vanishesfor m = n = 1. For the remaining terms, the integrals in radial directionexist and can be easily computed. The surface integral is evaluated to be
limR→∞
1Rm+n−2
∫S0
fmfn dS =
0, n+m > 2∫S0
|f1|2 dS n = m = 1 .
It is also possible to formulate a variational problem, using a bilinearform instead of the sesquilinear form bc. We define the variational form buc(“unconjugated”) in the same way as bc (“conjugated”), but without thecomplex conjugation of the test functions:
buc(u, v) := limR→∞
(∫ΩR
(∇u∇v − k2uv) dV − ik
∫SR
uv dS
). (3.5.12)
The corresponding variational problem is obtained by replacing bc with bucin (3.5.9).Let us verify the integration in this case. Writing out the trial and test
functions, we now obtain
buc(u, v) = limR→∞
Imn
∫ R1
r2[∂
∂r
(exp(ikr)
rn
)∂
∂r
(exp(ikr)
rm
)
− k2exp(2ikr)
rm+n
]dr
+ Jmn
∫ R1
exp(2ikr)rm+n
dr − ikexp(2ikR)Rm+n−2 Imn
,

3.5 Infinite Elements and Coupled Finite–Infinite Element Discretization 93
where we have denoted the surface integrals as
Imn :=∫S0
fmfn dS , Jmn :=∫S0
∇Sfm∇Sfn dS .
Carrying out the differentiation in r and cancelling powers of r, we nowobtain
buc(u, v) = limR→∞
Imn
∫ R1
exp(2ikr)rm+n
[−2(kr)2 − i(n+m)kr + nm]dr
+ Jmn
∫ R1
exp(2ikr)rm+n
dr − ikexp(2ikR)Rm+n−2 Imn
.
The integrals of the form∫ R1
exp(2ikr)rj
dr, j ≥ 1
can be computed, using the sine and cosine integrals [1, Chapter 5]. Fordetails, we refer to Burnett [32].It remains to consider the limit (for m = n = 1)
L := limR→∞
(∫ R1
−2k2 exp(2ikr)dr − ik exp(2ikR)
)∫S0
f21 dS .
Performing the integration in radial direction, we observe that the R-dependent terms within the parantheses cancel and the limit is simply
L = −ik exp(2ik)∫S0
f21 dS .
3.5.3 Remarks on the Analysis of the Finite–Infinite ElementMethod
The numerical analysis of the infinite element discretizations is a matterof ongoing research. Computational tests on various model problems havebeen reported by Shirron [110] and Gerdes [55]. Let us collect some ob-servations here. For brevity, we will refer to the different formulations asPG, BGC, and BGU (Petrov–Galerkin, Bubnov–Galerkin conjugated, andBubnov–Galerkin unconjugated, respectively).In practice, one is not necessarily interested in computing the far-field
results directly from the discrete model. Rather, one may use the coupledfinite–infinite element discretization to obtain an approximate solution ofthe near field problem in Ωa only. In the second step, one then computesthe far-field pattern from the Helmholtz integral equation (1.1.18), using

94 3. Discretization Methods for Exterior Helmholtz Problems
the numerical solution on a “collection surface” in the near field. If suchan approach is taken, the discretization with infinite elements is effectivelyused for “mapping” numerically the far-field behavior onto the near field.This interpretation reminds us of the numerical DtN operators discussed inSection 3.2. Let us identify the DtN operator GN that corresponds to thecoupled finite–infinite element discretization. Consider the coupled equa-tions (3.1.2). Assume, for the sake of argument, that we know the Dirichletdatum u+. Then we can solve the exterior Dirichlet problem (3.1.2)3,5,6with an “infinite element method” based on the Petrov–Galerkin formula-tion (3.5.6). Taking the normal derivative of the solution on the artificialsurface Γa, we have constructed an approximate DtN operator GN .We now give a more precise definition of the DtN operators G and
GN . Let us write the exterior Dirichlet problem (3.1.2)3,5,6 equivalently asBu+ = u, where u ∈ H1/2(Γa) is the trace of u on Γa, and B : H1+
w (Ωa)→H1/2(Γa) is a linear operator. This problem is uniquely solvable (cf., e.g.,Leis [87, Section 4.4]); i.e., the operator B has a bounded inverse operatorB−1 : H1/2(Γa) → H1+
w (Ωa) such that u = B−1u. Identifying u with itstrace γu ∈ H1/2(Γa) and interpreting the normal derivative as a linearoperator ∂ν : H1/2(Γa)→ H−1/2(Γa), we finally see that G = ∂ν γ B−1.Similarly, we write the Galerkin formulation of (3.1.2)3,5,6 as BNuN = u
where BN : V N1 ⊂ H1+w (Ω+a ) → H1/2(Γa) is the linear operator associated
with the restriction to the finite-dimensional subspace. Assuming that thisproblem is also well-posed, we follow the existence of a bounded inverseB−1N : H1/2(Γa) → H1+
w (Ω+a ). Concluding similarly as above, we find thatGN = ∂ν γ B−1
N .Let us now deduce a sufficient condition for convergence of uN → u,
where uN , u are, respectively, the solutions of (3.1.4) or (3.1.7). With thedefinitions of G,GN as above, we seek the exact solution u from
Find u ∈ H1(Ωa) :b(u, v) = B(u, v) + (Gu, v) = (g, v) , ∀v ∈ H1(Ωa) ,
(3.5.13)
whereas the approximate solution uN is obtained fromFind uN ∈ H1(Ωa) :
bN (uN , v) = B(uN , v) + (GNuN , v) = (g, v) , ∀v ∈ H1(Ωa) .(3.5.14)
We see that bN (uN , v) = b(u, v) holds for all v ∈ H1(Ωa). The followingtheorem is shown in [45].
Theorem 3.8. Suppose that the variational problem (3.1.4) or, equiva-lently, (3.5.13), has a unique solution u ∈ H1(Ωa) with the trace u ∈Hα(Γa), α ≥ 1/2. Assume further that the discrete problem(3.1.7) satisfiesthe inf–sup condition with βN > 0, and let uN be the solution of (3.5.14).Then the error u − uN is bounded as
‖u − uN‖1 ≤ C(α,Γa, u)β−1N ‖G − GN‖L(Hα,H−1/2) .

3.5 Infinite Elements and Coupled Finite–Infinite Element Discretization 95
Hence uN converges to u if
β−1N ‖G − GN‖L(Hα,H−1/2) → 0 , N → ∞ .
For the proof, observe that
|bN (u − uN , v)| = |bN (u, v)− b(u, v) + b(u, v)− bN (uN , v)|= |b(u, v)− bN (u, v)|= |〈(G − GN )u, v〉| , ∀v ∈ H1(Ωa) .
Then, by the discrete inf–sup condition,
βN‖u − uN‖1 ≤ sup0=v∈H1(Ωa)
|bN (u − uN , v)|‖v‖1
= sup0=v∈H1(Ωa)
|〈(G − GN )u, v〉|‖v‖1
≤ Cγ‖G − GN‖L(Hα,H−1/2)‖u‖Hα(Γa) ,
where Cγ is the trace constant. Hence
‖u − uN‖1 ≤ Cγβ−1N ‖G − GN‖L(Hα,H−1/2) ‖u‖Hα(Γa) ,
yielding the statement with C = Cγ ‖u‖Hα(Γa).
Remark 3.9. In essence, Theorem 3.8 states a specialization of the well-known fact that convergence follows from stability and approximability.Here, stability is shown if β−1
N < ∞; whereas approximability is measuredin the distance ‖G−GN‖. Note that we use the space Hα instead of H1/2.As usual, the speed of convergence depends on the regularity of the solu-tion. At this point, we require just the minimal regularity α = 1/2, whichis naturally satisfied, since u ∈ H1.
The theorem holds for any shape of the artificial boundary. If Γa is asphere, we expand the trial and test functions into spherical harmonics. Ashas been shown for the exact DtN operator in Section 3.2, we then findcomplex numbers αNn , n = 1, 2, . . ., such that
〈GNu, u〉 =∞∑n=0
αNn
n∑m=−n
|umn|2, u ∈ H1/2(Γa) . (3.5.15)
The αNn can be determined numerically by solving modal problems. Thefollowing lemma is related to the approximability of the exact solution onthe coupling surface.

96 3. Discretization Methods for Exterior Helmholtz Problems
Lemma 3.10. Let αNn , αn, respectively, be the coefficients in the sphericalexpansions (3.5.15) and (3.2.2), (3.2.3). Then for integer N ≥ 1
αNn = αn, n = 0, 1, . . . , N (3.5.16)
holds.
To show (3.5.16), we recall (cf. Section 2.1.2) that the exact solution uof the exterior Dirichlet problem with boundary data u is
u(r, θ, φ) =∞∑n=0
hn(kr)hn(ka)
un(θ, φ) ,
with
un =n∑
m=−numnYmn .
It is well-known (cf. [1, 10.1.16]) that the Hankel functions hn(kr) can beexpressed as a finite sum of n functions ϕj(r) from the infinite elementapproximation (3.5.2). Hence selecting the Dirichlet data in such a waythat umn ≡ 0 for n > N , the exact solution lies in the trial space of theGalerkin method for the computation of the discrete eigenvalues. Therefore,the exact solution, and hence the exact eigenvalues of the DtN operator,are reproduced for all spherical modes with n ≤ N .Using the lemma, one can show that the approximation error ‖G−GN‖
decays exponentially as N is increased [45]. Recall that convergence de-pends on approximability and stability, as expressed in the error estimate(2.5.10). Approximability is quantified by the infχ∈V N
1‖u − χ‖V1 ; i.e., it
depends only on the choice of the trial space V1. Now, all three methodsuse the same finite-dimensional trial space V1 ⊂ H1+
w (Ω+a ). Thus all formu-lations have the same approximability in the exterior Sobolev norm. Theapproximation error decays exponentially (the typical behavior for spectralapproximation). Differences in the convergence behavior must then resultfrom different stability properties. A measure for the stability is given bythe discrete inf–sup constant βN , as discussed in Chapter 2 (see Theorem2.26). The three forms used for PG, BGC, and BGU, respectively, obviouslysatisfy the same continuity condition. Thus the specific convergence beha-vior of each formulation is determined by its inf–sup constant only.Shirron [110] computes the constants βBGCN and βBGUN for a model pro-
blem. His results suggest that the BGC constants approach zero with alge-braic rate,
βBGCN = O(N−2) ,
whereas the BGU constants decay exponentially. We therefore expect thatthe BGC converges everywhere in the exterior, since the exponential rateof approximability is asymptotically stronger than the algebraic rate of the

3.6 Summary 97
stability loss. On the other hand, the BGU formulation does not, in general,converge in the exterior.Things look different if we restrict ourselves to convergence on the ar-
tificial boundary only. Shirron [110] and Gerdes [55] measure the error inmaximum norm
‖e‖∞ = maxx∈Γa
|u(x)− uG(x)| ,
where uG is the Galerkin solution. Shirron considers a sequence of modalequations that is deduced from the cylindrical scattering problem. Gerdescomputes the solutions for rigid scattering from the unit sphere. Both au-thors observe that all three formulations converge in the maximum normon Γa. Moreover, the BGU formulation converges much more quickly thanBGC and PG. For illustration, see results from Gerdes [55] in Table 3.4.
TABLE 3.4. Relative error ‖u−uphN‖∞/‖u‖∞ on Γa, in percent, for the PG, BGC,
and BGU formulation. Comparison of results with N = 1, 3, 6 radial functionsand angular approximation p = 4 or p = 5.
p=4 p=5N=1 N=3 N=6 N=1 N=3 N=6
PG 100 87.64 27.43 100 84.0 9.2BGC 100 100 31.96 100 100 14.7BGU 80.26 33.23 29.08 58.63 14.04 9.07
3.6 Summary
We have described different approaches to the finite-element analysis of ex-terior problems. The decomposition of the exterior domain into a near field(inside an artificial surface enclosing the obstacle) and a far field is commonto all the approaches. The bounded near-field domain is partitioned intofinite elements, whereas the far field is either partitioned into infinite ele-ments, or it is truncated by applying absorbing boundary conditions to thenear-field problem. We have reviewed a number of those conditions, wri-ting them in the form of approximate Dirichlet-to-Neumann conditions. Wethen show that the infinite-element discretization can also be interpretedas an approximate Dirichlet-to-Neumann condition. All the far-field appro-ximations treated in this chapter are related to the series representation ofthe exact solution, as discussed in Chapter 2.

98 3. Discretization Methods for Exterior Helmholtz Problems
3.7 Bibliographical Remarks
Absorbing boundary conditions, in the context of the solution of the waveequation by FEM, were first proposed by Enquist and Majda [52]. The workon the other ABC and the DtN conditions originates in the early 1980s.The article by Feng [54] is somewhat hard to locate. It also seems to containsome misprints in the final formulae, which we have corrected here. Thepioneering work on infinite elements is due to Bettess and Zienkiewicz [24],see also the monograph [25] of Bettess. A detailed overview of numericalmethods for exterior problems is given in Givoli’s monograph [60].Our present review of approximation methods for the far field of the
exterior solution does not attempt to be complete. For example, we discusshere only approaches that are based on the series representation of theexact solution. This concerns, in particular, the infinite elements, where weelaborate only on the spectral approximation based on radial expansion.The original paper by Burnett [32] contains a detailed discussion of otherformulations. Burnett uses a bilinear form in his coupled finite–infinite-element formulation. The mathematical formulation in weighted Sobolevspaces was first introduced by Demkowicz and Gerdes [46]. It is closelyrelated to the “wave-envelope” formulation by Astley et al. [4].The finite-element method is treated in a large number of textbooks. Our
outline mostly follows Szabo and Babuska [112].
Appendix: Pade Approximation
We seek an approximation of a smooth function f(x) by rational polynomials.First the function f(x) is replaced by a power series expansion L(x), e.g., itsTaylor series. As an example, we consider f(x) = (1 + x)1/2. Then we have
f(x) = 1 +x
2− x2
8+3x3
48+O(x4) := L(x) .
Now we look for a rational function
rmn(x) =pm(x)qn(x)
,
where pm, qn are polynomials of order m,n, respectively, such that the functionpm approximates the product Lqn with order O(xm+n+1). Let pm(x) = ao +a1x + · · · + amx
m, qn(x) = b0 + b1x + · · · + bnxn, and L(x) = cjx
j . Then thefunction rmn has the required property if the equations
c0b0 = a0 ,
c1b0 + c0b1 = a1 ,
...
cmb0 + cm−1b1 + · · ·+ c0bm = am ,
and
cm+1b0 + cmb1 + · · · cm−n+1bn = 0 ,

3.7 Bibliographical Remarks 99
...
cm+nb0 + cm+n−1b1 + · · ·+ cmbn = 0
are satisfied. Functions rmn are called the Pade approximations of L(x) (or f(x)).The table
roo ro1 ro2 . . .r1o r11 r12 . . .r2o r21 r22 . . ....
......
. . .
is called the Pade table of L. As an example, we compute r11 for f(x) as givenabove. The systems of equations are
c2b0 + c1b1 = 0 ,
c0b0 = a0 ,
c1b0 + c0b1 = a1 ,
with c0 = 1, c1 = 1/2, c2 = −1/8. Setting b0 = 1, we get b1 = 1/4, a0 = 1, anda1 = 3/4, which gives
r11 =1 + 3x
4
1 + x4
.
This rational function approximates f(x) with order O(x3). For further informa-tion, see Jones and Thron [80].

This page intentionally left blank

4Finite Element Error Analysis andControl for Helmholtz Problems
This chapter is devoted to the finite element analysis of Helmholtz pro-blems on bounded domains. Speaking of “Finite Element Analysis,” weelaborate on the computational analysis with the FEM as well as on thenumerical analysis of the FEM. We will use the abbreviation “FE” for“finite element,” as in “FE mesh,” “FE solution” etc.We assume throughout that we are solving a well-posed problem, one,
for example, that results from domain decomposition of an exterior domainΩ+ = Ωa ∪ Ω+a as described in Section 3.1. In particular, we are interestedin the FE solution of the variational problem (3.1.5) in the bounded near-field domain Ωa. The FE discretization of Ωa has been described in Section3.4. Solving (3.1.5) on the finite-dimensional subspace Vh ∈ H1(Ωa), weget the FE solution uh ∈ Vh. In general, uh = u, and we wish to estimatethe error function e = u − uh. We distinguish two cases:
• First, a priori error estimation. The error function is estimated in asuitable functional norm without quantitative input from the computedsolution. The estimates are based on the approximation propertiesof the subspace where the numerical solution is sought and on thestability properties of the differential operator or variational form.The estimates are generally global; i.e., the error function is estimatedin an integral norm computed over the whole solution domain.
• Second, a posteriori error estimation. The error function is estimatedemploying the computed solution of the discrete model as data for theestimates. In practice, the estimates are usually part of an adaptivemesh refinement methodology. For mesh refinement, one needs local

102 4. Finite Element Error Analysis and Control for Helmholtz Problems
information on the error. A posteriori error estimation should there-fore be given in a norm that is defined on a single element or on apatch of adjacent elements.
Since the FEM is a Galerkin method, the first natural step of error ana-lysis is to specify the convergence results from Section 2.5 for the presentcase. This will be our starting point. We give the basic definitions and re-view the well-known FE convergence theory for positive definite forms. Wethen turn to the convergence of the FEM for indefinite forms. In particular,we will discuss the specializations of Theorems 2.26 (inf–sup condition) and2.27 (asymptotic convergence for coercive forms) for Helmholtz problems.Both theorems yield error estimates for the FE solution. However, the up-per bound from the inf–sup condition is too crude if the wave number k islarge, whereas the asymptotic estimate from the Garding inequality holdson very fine meshes only (again, if k is large).The main purpose of this chapter is therefore the proof of so-called pre-
asymptotic estimates. We will show convergence theorems that hold onmeshes with the restriction kh < 1, which is a standard assumption in en-gineering practice. The new error bounds contain a pollution term that isrelated to the loss of stability with large wave numbers. We will give a pre-cise description of this effect. The question arises of whether it is possibleto reduce the pollution effect. We first show that FEM with higher-orderpolynomial approximation (the hp version of the FEM) work well towardsthis goal. Then we review the so-called stabilized FEM, which attempt tocorrect the loss of stability in the Helmholtz operator. Finally, we analyzethe problem of a posteriori error estimation and draw conclusions for prac-tical computations. Most of the theorems in this chapter are given withtheir proofs. Only in cases where proofs seemed too lengthy or technical,we refer the reader to the literature for details.
4.1 Convergence of Galerkin FEM
The FEM is a Galerkin method with piecewise polynomial trial and testfunctions. Hence the general theory of the Galerkin method applies, whilethe specific ingredients are the approximation properties of the FE sub-spaces. The size of the Galerkin subspaces VN is inversely proportional tothe mesh size h of the FE mesh and proportional to the degree of polyno-mial approximation p. FE error estimates are therefore generally given asa function of these two numerical parameters.

4.1 Convergence of Galerkin FEM 103
4.1.1 Error Function and ResidualLet V be a Hilbert space, and let a sesquilinear form b : V × V → C begiven. Consider the abstract variational problem
Find u ∈ V :b(u, v) = f(v) , ∀v ∈ V ,
(4.1.1)
where f ∈ V ∗ is an antilinear functional. With the FEM, we solve insteadFind uh ∈ Vh :
b(uh, v) = f(v) , ∀v ∈ Vh ,(4.1.2)
where Vh ⊂ V is a proper subspace (conforming FEM). Assume that thesolutions u, uh exist. We call
e = u − uh (4.1.3)
the error function. Since Vh ⊂ V , we have the standard orthogonalitycondition
b(e, v) = 0, ∀v ∈ Vh . (4.1.4)
The FE solution uh does not, in general, satisfy the original problem (4.1.1),and we define the residual r ∈ V ∗ by
r(v) := f(v)− b(uh, v), v ∈ V . (4.1.5)
Replacing above f(v) = b(u, v), we see that the error function satisfies theresidual equation
b(e, v) = r(v), ∀v ∈ V . (4.1.6)
If the form b satisfies the assumptions of the Lax–Milgram theorem (or theinf–sup condition), we immediately get the error estimate
‖e‖V ≤ C‖r‖V ∗ ,
where C is a stability constant. This type of residual estimate is usuallyapplied a posteriori, i.e., after uh has been computed.
4.1.2 Positive Definite ProblemsWe first consider a sesquilinear form a(u, v) : V ×V → C that satisfies theassumptions of the Lax–Milgram theorem (Theorem 2.10). Then solutionsu, uh of (4.1.1) exist, and the error u−uh satisfies the error estimate (Cea’sLemma, cf. Theorem 2.25)
‖u − uh‖V ≤ M
αinfv∈Vh
‖u − v‖V , (4.1.7)
where α,M are, respectively, the ellipticity and the continuity constant.This error estimate allows us to identify the two factors influencing theconvergence behavior of any FEM:

104 4. Finite Element Error Analysis and Control for Helmholtz Problems
• The infimum characterizes the approximability of the exact solutionin the subspace that is spanned by the FE shape functions. If theinfimum is reached on an element uba ∈ Vh, then this element isthe best approximation of u in the subspace Vh (in the norm of the“full space” V ). Geometrically speaking, ‖u − uba‖V is the minimaldistance between u and Vh. Therefore, uba is also frequently called theVh-projection of u; see Fig. 4.1. The error of the best approximation,
V
V
u
fe
uu
h
feba
e
e
ba
FIGURE 4.1. Best approximation of a function.
u−uba, is therefore V -orthogonal to all functions from the subspace,
(u − uba, v)V = 0, ∀v ∈ Vh , (4.1.8)
where (·, ·)V is the scalar product of the space V . Thus uba can besimply computed from the variational problem
Find uba ∈ Vh :(uba, v)V = (u, v)V , ∀v ∈ V ,
(4.1.9)
provided that the exact solution is known.
• The factor Mα−1 characterizes the stability of the problem. In po-sitive definite problems, the stability constant is generally not large,and thus approximability is the major factor influencing convergence.
Resuming, we can verbally express Cea’s lemma by the “equality”
Convergence = Approximability + Stability.
In general, even if the approximation error is small, stability problems maylead to poor convergence.The approximability by the FE shape functions can be related to the well-
known error of interpolation of a given function (here the exact solution)

4.1 Convergence of Galerkin FEM 105
by piecewise polynomials of degree p. Let m = p+ 1 and let Ipu be a pth-order interpolant of u (for example, the continuous, piecewise polynomial,of degree p, Lagrangian interpolant within each element), and let h be theFE mesh size. Then the estimate (cf. Brenner–Scott [31, p. 104])
‖u − Ipu‖Hs(Ω) ≤ Chm−s‖u‖Hm(Ω), 0 ≤ s ≤ m (4.1.10)
holds. It is supposed that the domain Ω and function u are such that thenorm on the right-hand side is well-defined. By definition, the error of bestapproximation is smaller than or equal to the interpolation error; hencethe estimate (4.1.10) applies also for the best approximation. The constantC depends, in general, on m,n as well as on the shape of the elements (ascharacterized by its “chunkiness parameter” [31, p. 97]) and on the normof the local–global mapping.
4.1.3 Indefinite ProblemsDiscrete inf–sup Condition:
Unlike the coercivity condition, the inf–sup condition, if proven for the“full space” V , does not automatically hold on the FE subspace Vh. Let asesquilinear form b : V1×V2 → C on Hilbert spaces V1, V2 be given. Assumethat the conditions of the Babuska theorem (Theorem 2.15) are satisfied onV1×V2, and let W1 ⊂ V1,W2 ⊂ V2 be proper subspaces. If form b satisfies,in addition,
(1) the discrete inf–sup condition
∃βh > 0 : βh ≤ sup0=v∈W2
|b(u, v)|‖u‖‖v‖ , ∀0 = u ∈ W1 , (4.1.11)
(2) the transposed condition
sup0=u∈W1
|b(u, v)| > 0, ∀0 = v ∈ W2 , (4.1.12)
then there exists a unique element uh ∈ W1 such that
b(uh, v) = f(v), ∀v ∈ W2 .
As a corollary (cf. Theorem 2.26), we find that the error u − uh can beestimated as
‖u − uh‖V1 ≤(1 +
M
βh
)infv∈W1
‖u − v‖V1 . (4.1.13)

106 4. Finite Element Error Analysis and Control for Helmholtz Problems
Coercive Problems:
We consider a sesquilinear form b(·, ·) on H1(Ω), where Ω is a boundeddomain and assume that b satisfies the Garding inequality (2.4.15) as wellas the continuity condition |b(u, v)| ≤ M‖u‖H1(Ω)‖v‖H1(Ω). Assume fur-ther that the continuous problem (4.1.1) is uniquely solvable, and let u bethe exact solution. As before, we denote by Vh the finite-dimensional FEsubspaces.Let uh ∈ Vh denote the FE solutions on a sequence of meshes with
decreasing mesh size h (as obtained from successive mesh refinements).On such a sequence, the assumptions of Theorem 2.27 apply. It follows1
that there exists a “threshold” value h0 such that the discrete variationalproblem (4.1.2) has a unique solution uh for all h < h0, and the error u−uhsatisfies the estimate
‖u − uh‖V ≤ C infv∈Vh
‖u − v‖V , ∀h < h0 , (4.1.14)
where C is a constant not depending on h. Estimates of the form (4.1.14)are called quasioptimal.
Remark 4.1. Observe that the error estimates for the indefinite forms areformally similar to the positive definite case. However, the stability con-stants in (4.1.7) and (4.1.13) are different (cf. the corresponding discussionin Section 2.5; see Remark 2.17 in particular). Estimate (4.1.14) states thatthe error of the coercive problem behaves asymptotically (practically spea-king, on sufficiently fine meshes) as in the positive definite case. However,we will see that the “asymptotic” meshes for Helmholtz forms do not, ingeneral, lie in the range of engineering applications.
4.2 Model Problems for the Helmholtz Equation
We will use three model problems for time-harmonic wave propagation,each featuring essential properties of the general three-dimensional prob-lem of elastic scattering. First, we consider the propagation of a plane wavein a homogeneous exterior domain. The problem is one-dimensional, andhence the unbounded domain can be truncated by imposing the Sommerfeldcondition at finite distance. This problem will be used to exemplify theproblem of FEM approximation at high wave numbers. In particular, wewill show preasymptotic a priori error estimates and discuss the pollutioneffect.
1The corresponding theorem on convergence of the Galerkin FEM for coercive pro-blems was proven by Schatz [108]. We reproduce this proof in its specialization to theHelmholtz equation in Section 4.4.2.

4.2 Model Problems for the Helmholtz Equation 107
The second problem is a two-dimensional Helmholtz equation on a square.Here we will address the dependence of error estimation on the directionof the waves.The third problem is again one-dimensional, describing the propagation
of a plane wave in an inhomogeneous medium. This will allow us to high-light typical numerical effects in the solution of fluid–structure interactionproblems.
4.2.1 Model Problem I: Uniaxial Propagation of a PlaneWave
λ
x
FIGURE 4.2. Uniaxial propagation of plane wave.
The propagation of a time-harmonic plane wave along the x-axis (Fig. 4.2)leads to the boundary value problem that we already introduced in (2.4.16),
−u′′ − k2u = f on Ω = (0, 1) ,u(0) = 0 , (4.2.1)
u′(1)− iku(1) = 0 ,
with the corresponding variational formulationFind u ∈ H1
(0(Ω) :b(u, v) = (f, v), ∀v ∈ H1
(0(Ω) ,(4.2.2)
where
b(u, v) =∫ 1
0u′v′ − k2
∫ 1
0uv − iku(1)v(1) , (4.2.3)
(f, v) =∫ 1
0f(x)v(x)dx ,
and H1(0(Ω) has been defined in (2.4.18) as the subspace of all H
1-functionsthat satisfy the Dirichlet condition u(0) = 0. For datum f ∈ L2(0, 1), thesolution of the boundary value problem (4.2.1) can be written in the form
u(x) =∫ 1
0G(x, s)f(s) ds , (4.2.4)

108 4. Finite Element Error Analysis and Control for Helmholtz Problems
using the Green’s function
G(x, s) =1k
sin(kx) eiks 0 ≤ x ≤ s ,
sin(ks) eikx s ≤ x ≤ 1 .(4.2.5)
For the numerical solution with finite element methods, let a set of nodes
Xh := xi; 0 = x0 < x1 < x2 < . . . < xN = 1 (4.2.6)
be given on Ω = (0, 1). We call Xh the FE mesh and
h = max1≤i≤N
(xi − xi−1) (4.2.7)
the mesh size. The intervals τi = (xi−1, xi) are called finite elements. Themesh is called uniform if all elements have the same size h = N−1.
4.2.2 Model Problem II: Propagation of Plane Waves withVariable Direction
θ
y
x
h
(a) FE mesh (b) Plane wave in direc-tion θ
FIGURE 4.3. Model Problem II: Domain, FE mesh, and exact solution
We solve the Helmholtz equation in two dimensions on the square Ω =(0, 1) × (0, 1). Figure 4.3a shows the domain and a partition into finiteelements with uniform mesh size h. The problem is formulated as
−∆u − k2u = 0 in Ω ,
with boundary conditions
iku+∂u
∂n= g on Γ = ∂Ω ,

4.2 Model Problems for the Helmholtz Equation 109
where the function g is chosen such that the exact solution is a plane wave
uex = eik·x
propagating in direction θ; i.e., k = kcos θ, sin θ. The corresponding va-riational formulation is
Find u ∈ H1(Ω) :b(u, v) = (g, v), ∀v ∈ H1(Ω) , (4.2.8)
where
b(u, v) =∫Ω
(∇u∇v − k2uv)dxdy + ik
∫Γuv ds , (4.2.9)
and (g, v) =∫Γ gv ds.
4.2.3 Model Problem III: Uniaxial Fluid–Solid Interaction
Ω Ω Ωp,q u,v p,q
~ ~
0 x x L2x
1 1 2 3
FIGURE 4.4. Fluid-solid interaction model.
The plot of Fig. 4.4 shows a simple case of one-dimensional acoustoelasticfluid–solid interaction. The “fluid” regions Ω1,Ω3 have material propertiesρf (density) and cf (speed of sound in fluid). The “solid” region Ω2 hasproperties E (Young’s modulus) and ρs, cs (density, speed of sound in solid).The domain of computation is Ω = Ω1 ∪Ω2 ∪Ω3, where Ω1 = (0, x1), Ω2 =(x1, x2), and Ω3 = (x2, L), 0 < x1 < x2 < L. The general physical relationsgiven in Chapter 1 are here specialized to the system of Helmholtz equations
p,xx+k2p = −g1 in Ω1 , (4.2.10)au,xx+nk2u = −f in Ω2 , (4.2.11)
p,xx+k2p = −g2 in Ω3 , (4.2.12)
with the boundary conditions
p,x (0) + ikp(0) = 0 , (4.2.13)p,x (L)− ikp(L) = 0 , (4.2.14)
and the transmission conditions
p,x (x1)− k2u(x1) = 0 , (4.2.15)p(x1) + au,x (x1) = 0 , (4.2.16)
p,x (x2)− k2u(x2) = 0 , (4.2.17)p(x2) + au,x (x2) = 0 , (4.2.18)

110 4. Finite Element Error Analysis and Control for Helmholtz Problems
with the notations n = ρf/ρs and a = E/B, where B is the bulk modulusof the fluid; cf. (1.2.9). The real parameter k = ω/cf , where ω is a given fre-quency, is the wave number in the fluid. The pressures are nondimensional(scaled by the bulk modulus).The variational formulation is given on the (test and trial) space V =
H1(Ω1) × H1(Ω2) × H1(Ω3), where H1(Ωi) are the usual Sobolev spaceson the subdomains. Let the trial functions be denoted by U = (p, u, p) andconsider the variational form
b(U ,V) = −ikp(0)q(0) +∫Ω1
p,x q,x dx − k2∫Ω1
pqdx
−k2u(x1)q(x1)− k2p(x1)v(x1)
+k2(∫
Ω2
au,x v,x dx − nk2∫Ω2
uvdx
)(4.2.19)
+k2p(x2)v(x2) + k2u(x2)¯q(x2)
+∫Ω3
p,x ¯q,x dx − k2∫Ω3
p¯qdx − ikp(L)¯q(L),
with trial functions V = (q, v, q). Defining the L2-type inner product onspace V by the weighted sum
(U ,V)0 = (p, q) + k2(u, v) + (p, q) , (4.2.20)
we seek the solution U that satisfiesFind U ∈ V :
b(U ,V) = (F ,V)0, ∀V ∈ V ,(4.2.21)
with F = (g1, f, g2).
4.3 Stability Estimates for Helmholtz Problems
Throughout this section, we consider Model Problem I.
4.3.1 The inf–sup ConditionLet us show that the inf–sup constant for the one-dimensional model pro-blem is of order O(k−1).
Theorem 4.2. Let V = H1(0(0, 1), and let b : V ×V → C be the sesquilinear
form defined in (4.2.3). Then the inf-sup constant
β = inf0=u∈V
sup0=v∈V
|b(u, v)||u|1|v|1

4.3 Stability Estimates for Helmholtz Problems 111
satisfiesC1k
≤ β ≤ C2k
(4.3.1)
for constants C1, C2 not depending on k.
Let us first prove the left inequality of (4.3.1). We will show that for anygiven u ∈ V there exists an element vu ∈ V such that
|b(u, vu)| ≥ C
k|u|1 |vu|1 . (4.3.2)
Let u ∈ V be given. Define vu := u+ z, where z is a solution of the adjointvariational problem
b(w, z) = k2(w, u), ∀w ∈ V . (4.3.3)
Furthermore, since u ∈ H1(0, 1) ⊂ L2(0, 1), the function z is also a solutionof the corresponding adjoint boundary value problem2 with datum k2u; cf.the discussion of regularity in Section 2.5. Hence
z = k2∫ 1
0G(x, s)u(s) ds ,
with the Green’s function G(x, s) from (4.2.5). Then
|b(u, vu)| ≥ Re b(u, vu)= Re (b(u, u) + b(u, z))= Re
(b(u, u) + b(u, z) + k2(u, u)− k2(u, u)
)= Re b(u, u) + k2‖u‖2 = |u|21.
Now, if we show that
|u|1 ≥ C
k|vu|1, (4.3.4)
we have proved (4.3.2) and the lower bound in (4.3.1) follows. To obtain(4.3.4), we integrate by parts the Green’s function representation of z,
z(x) = k2(H(x, 1)u(1)−
∫ 1
0H(x, s)u′(s)ds
),
where
H(x, s) :=∫ s0
G(x, t)dt.
2The adjoint problem to (4.2.1) is obtained by changing the sign in the Sommerfeldcondition.

112 4. Finite Element Error Analysis and Control for Helmholtz Problems
Differentiating this equation and taking absolute values, we get by thetriangle inequality
|z′(x)| ≤ k2(|H,x (x, 1)||u(1)|+
∫ 1
0|H,x (x, s)u′(s)|ds
)≤ k2 (|H,x (x, 1)|+ ‖H,x ‖) |u|1 .
By direct computation |H,x (x, 1)| ≤ k−1, ‖H,x ‖ ≤ k−1, and hence
|z|1 ≤ 2k|u|1 .Consequently,
|vu|1 ≤ |u|1 + |z|1 ≤ (1 + 2k)|u|1 ,which proves (4.3.4) for sufficiently large k.To prove the upper bound of (4.3.1), it is sufficient to find an element
z0(x) ∈ V that satisfies
|b(z0, v)||z0|1 ≤ C
k|v|1, ∀v ∈ V .
Consider the functionz0(x) = ϕ(x)
sin kxk
,
where ϕ ∈ C∞(0, 1) is chosen in such a way that it does not depend on kand
z0(0) = z0(1) = z′0(0) = z′
0(1) = 0 (4.3.5)
holds. We further require that |z0|1 ≥ α for some α > 0 not depending onk (take, for example, ϕ(x) = x(x − 1)2). Then it is easy to see that
b(z0, v) = −∫ 1
0(z′′0 (x) + k2z0(x))v(x)dx
holds for all v ∈ V . Defining
u(x) :=∫ x0
(z′′0 (s) + k2z0(s)
)ds , (4.3.6)
one easily derives the bound
|b(z0, v)| =∣∣∣∣u(1)v(1)−
∫ 1
0u(x)v′(x) dx
∣∣∣∣ ≤ (|u(1)|+ ‖u‖)|v|1.
On the other hand, integrating by parts in (4.3.6) and using the definitionof z0, we see that the terms in the right-hand side above can be estimatedas follows:
|u(1)| ≤ 1k‖ϕ′′‖∞

4.3 Stability Estimates for Helmholtz Problems 113
and‖u‖ ≤ 1
k(‖ϕ′′‖∞ + 2‖ϕ′‖∞) .
Hence there exists a constant C1 such that
(|u(1)|+ ‖u‖) ≤ C1k
holds. Collecting results, we can write
|b(z0, v)||z0|1 ≤ 1
α|b(z0, v)| ≤ C
k|v|1, ∀v ∈ V
with C = α−1C1, where α is by definition the lower bound of |z0|1. Thiscompletes the proof of (4.3.1).
Now (2.4.12) immediately gives the following.
Corollary 4.3. Let V = H1(0(0, 1) and u ∈ V be the solution of (4.2.2) for
data f ∈ V ∗ = H−1(0, 1). Then
‖u‖H1 ≤ Ck‖f‖H−1 . (4.3.7)
We remark that a similar result on the inf–sup constant holds on theFE subspaces on uniform meshes with mesh size h, i.e., we can show thatthe discrete inf–sup condition (4.1.11) holds with βh = O(k−1); see (4.5.7)below.
4.3.2 Stability Estimates for Data of Higher RegularityFrom the general regularity theory it follows that the variational problem(4.2.2) yields solutions u ∈ Hs+1(0, 1) for data f ∈ Hs−1(0, 1). In the casethat s = 0, the corresponding stability estimate (4.3.7) has been obtainedas a corollary from the Babuska theorem. For our analysis of the h-versionand the hp-version of the FEM, we will also need stability estimates fordata f ∈ Hs(0, 1), s ≥ 0. We first treat the case s = 0.
Theorem 4.4. Let u ∈ H1(0(0, 1) be the variational solution of (2.4.16). If
the data f ∈ L2(0, 1), then the solution u lies in the Sobolev space H2(Ω),and the stability estimates
‖u‖ ≤ 1k‖f‖ , (4.3.8)
|u|1 ≤ ‖f‖ , (4.3.9)|u|2 ≤ (1 + k)‖f‖ (4.3.10)

114 4. Finite Element Error Analysis and Control for Helmholtz Problems
hold.
Indeed, applying the Cauchy–Schwarz inequality to the integral repre-sentation
u(x) =∫ 1
0G(x, s)f(s) ds ,
with G(x, s) from (4.2.5), we get
|u(x)| ≤∫ 1
0|G(x, s)| |f(s)| ds ≤ 1
k
∫ 1
0|f(s)| ds ,
for all x ∈ (0, 1). The expression on the right can be written as the L2-innerproduct (1, |f |), hence
|u(x)| ≤ ‖f‖ ,
again by the Cauchy–Schwarz inequality. Then (4.3.8) follows if one squaresboth sides of the inequality and integrates over (0, 1).The second bound (4.3.9) is obtained similarly if one first takes the de-
rivative in x on both sides of the integral representation. This operation iswell-defined since G,x (x, s) ∈ L2(0, 1).Regarding (4.3.10), we first remark that u ∈ H2(0, 1) by Proposition
2.24. Hence u′′ = f − k2u holds, and (4.3.10) follows from the triangleinequality and (4.3.8).
Remark 4.5. Similar stability estimates have been shown for Helmholtzproblems on convex domains Ω ∈ R2 by Melenk [91].
Remark 4.6. It is easy to show that the seminorm | · |1 = ‖u′‖ is a normon H1
(0(0, 1). Indeed, with u(0) = 0 we have u(x) =∫ x0 u′(t)dt, and then,
by the Cauchy–Schwarz inequality,
|u(x)| ≤(∫ x
012dt
)1/2(∫ 1
0|u′(t)|2dt
)1/2,
whence
‖u‖2 =∫ 1
0|u(x)|2dx ≤
∫ 1
0x dx |u|21 =
12|u|21 .
We have proven a Poincare inequality for u ∈ H1(0(0, 1). Hence on H1
(0(0, 1),the seminorm | · |1 is equivalent to the norm ‖u‖1; cf. Example 2.13.
The stability estimate of Theorem 4.4 can be generalized for s ≥ 0. Itfollows from the regularity theory (cf. Hackbusch [62, Theorem 9.1.16.])that data f ∈ Hs−1(0, 1) is mapped to a solution u ∈ Hs+1(0, 1). Thematter of interest here is the power to which the wave number k enters the

4.3 Stability Estimates for Helmholtz Problems 115
stability constant.
Theorem 4.7. Let f be the data and u the solution of (4.2.2). Assume,for l > 1, that f(x) ∈ H l−1(0, 1). Then u ∈ H l+1(0, 1), and
|u|l+1 ≤ Cs(l)kl−1‖f‖l−1 (4.3.11)
holds for a constant Cs(l) ≤ Dl, where D does not depend on k and l.
We give the proof for l = 2, showing |u|3 ≤ Ck‖f‖1. The solution u iswritten as
u(x) =∫ 1
0G(x, s)f(s)ds , (4.3.12)
with the Green’s function G(x, s) from (4.2.5). By partial integration,
u(x) = [H(x, s)f(s)]s=1s=0 −∫ 1
0H(x, s)f ′(s)ds (4.3.13)
where
H(x, s) :=∫
G(x, s)ds = − 1k2
i sin(kx)eiks + 1, 0 ≤ x ≤ s,
cos(ks)eikx, s ≤ x ≤ 1 .(4.3.14)
For any fixed s (or x, respectively), H(x, s) is an H2-function of x (ors, respectively). In the boundary points, H(x, 0) and H(x, 1) are smooth(C∞) functions. We now estimate
|u(x)| ≤ |H(x, 0)||f(0)|+ |H(x, 1)||f(1)|+ supx,s
|H(x, s)|‖f ′‖ .
From (4.3.14) we have directly
∀x, s : |H(x, s)| ≤ 2k2
.
It is easy to show that
∀s : |f(s)| ≤√2‖f‖1 ,
whence‖u‖ ≤ 2
k2
(1 + 2
√2)‖f‖1 . (4.3.15)
Next we want to estimate the derivatives of u. Differentiating in (4.3.13),we obtain
u′(x) = [H,x (x, s)f(s)]s=1s=0 −
∫ 1
0H,x (x, s)f ′(s)ds , (4.3.16)

116 4. Finite Element Error Analysis and Control for Helmholtz Problems
which leads directly to
|u|1 ≤ 1k
(1 + 2
√2)‖f‖1. (4.3.17)
Similarly, since H(x, ·) ∈ H2(Ω), we obtain, differentiating in (4.3.16),
|u|2 ≤(1 + 2
√2)‖f‖1. (4.3.18)
Finally, since u ∈ H3(Ω), the differential equation u′′′+k2u′ = f ′ holds (inthe weak sense). Hence
|u|23 ≤ k4|u|21 + 2k2|u|1|f |1 + |f |21 ,
and with (4.3.17) we obtain
|u|23 ≤ D2k2‖f‖21 + 2Dk‖f‖21 + ‖f‖21 ,
or, equivalently,|u|3 ≤ C k ‖f‖1 , (4.3.19)
which proves the statement for l = 2. The argument for the higher deriva-tives is similar; see [73] for details.
4.4 Quasioptimal Convergence of FE Solutions tothe Helmholtz Equation
Throughout this section, we consider Model Problem I of Section 4.2.1.We denote by Sh(0, 1) ⊂ H1
(0(0, 1) the space of continuous piecewise linearfunctions (with the nodal values in the points of the mesh Xh), satisfyingthe Dirichlet condition at x = 0.
4.4.1 Approximation Rule and Interpolation ErrorThe functions sin(kx) and cos(kx) are elementary solutions of the Helm-holtz equation in one dimension. These solutions are periodic with wave-length λ = 2π/k. It is intuitively clear that a “rule of thumb”
nres =λ
h≈ constant (4.4.1)
should be applied in the design of the mesh for given k. The number nresis called the resolution of the mesh – see Fig. 4.5. The choice nres = 10 isusually recommended in practice. This rule leads to reliable results if weinterpolate an oscillatory function u.

4.4 Quasioptimal Convergence of FE Solutions to the Helmholtz Equation 117
λ
Oscillatory Function
Piecewise Linear Interpolant
h
FIGURE 4.5. Resolution of a wave with nres = 8.
Indeed, the interpolation error satisfies the following well-known estima-tes (see, e.g., Strang and Fix [111, p. 45]):
Lemma 4.8. Let u ∈ H2(0, 1), and let uI ∈ Sh(0, 1) be the piecewise linearinterpolant of u on a mesh with mesh size h. Then
‖u − uI‖ ≤(h
π
)2|u|2 ,
|u − uI |1 ≤(h
π
)|u|2 , (4.4.2)
‖u − uI‖ ≤(h
π
)|u − uI |1 .
Now, assuming that u and u′ do not vanish identically, we can divideon both sides of the first two estimates of (4.4.2) by the norms ‖u‖ and|u|1, respectively, to obtain estimates for the relative error. In our one-dimensional model, the solution u is a linear combination of the elementarysolutions sin(kx), cos(kx), and we therefore can find constants such that
|u|2‖u‖ ≤ C1k
2,|u|2|u|1 ≤ C2k . (4.4.3)
Hence the relative errors of interpolation of an oscillatory solution u satisfy
‖u − uI‖‖u‖ ≤ C1h
2k2 , (4.4.4)
|u − uI |1|u|1 ≤ Chk . (4.4.5)
Since kh = nres/(2π), we conclude that the resolution rule (4.4.1) controlsthe interpolation error.

118 4. Finite Element Error Analysis and Control for Helmholtz Problems
It is easy to see that in one dimension (we show it below for u ∈ H1(0, 1))the nodal interpolant uI is the best approximation of a given function u inthe H1-seminorm; i.e.
|u − uI |1 = infv∈Sh(0,1)
|u − v|1 (4.4.6)
holds. Indeed, the best approximation satisfies
0 = ((u − uba)′, v′) =∫ 1
0(u − uba)′v′, ∀v ∈ Sh(0, 1) .
Then, splitting the integral and integrating by parts, we have
0 =N∑i=1
∫ xi
xi−1
(u − uba)′v′
=N∑i=1
[(u − uba) v′]xi
xi−1−∫ xi
xi−1
(u − uba)v′′, ∀v ∈ Vh .
The second member on the right vanishes since v′′ ≡ 0 in the elementinteriors. Hence the first member must also be zero for all v ∈ Vh, whichcan be true only if u = uba in all nodal points. Thus (4.4.6) holds.
0.0 0.2 0.4 0.6 0.8 1.0-0.030
-0.020
-0.010
0.000
0.010
Finite element solution for hk=0.6k=10, h=1/17
Real partImaginary part
x
(a) k = 10
0.50 0.60 0.70 0.80 0.90 1.00x
-0.00030
-0.00020
-0.00010
0.00000
0.00010
Finite element solution for hk=0.6k=100, h=1/167
Real partImaginary part
(b) k = 100
FIGURE 4.6. Finite element solution for different wave numbers.
We thus have shown that the error of the best approximation is con-trolled by the “rule of thumb” (4.4.1). On the other hand, it is knownfrom computations that the FE error grows with the wave number also onmeshes where the rule of thumb is satisfied. In Fig. 4.6, we show the pie-cewise linear finite element solution of Model Problem I for two differentwave numbers, k = 10 and k = 100. Both solutions are computed with

4.4 Quasioptimal Convergence of FE Solutions to the Helmholtz Equation 119
nres = 10. The graphs of both FE solutions look fine in the “eyeball norm”:both are oscillatory as expected. However, the error (in H1-seminorm) ofthe first solution is 21%, while the error of the solution for k = 100 is largerthan 100%. This example illustrates the problem with the application ofthe quasioptimal estimate (4.1.14) from the general convergence theory forGalerkin methods. The error of best approximation is the same for bothwave numbers (18%), but the FE solution for k = 100 cannot be considereda reliable approximation of the exact solution.Resuming the discussion of this section, we can say that the estimates
(4.4.2) determine the size of the optimal error in the solution space ofthe h-version of the FEM. This optimal error is bounded independentlyof the wave number k if one applies the rule (4.4.1) for the mesh size h.However, the optimal order of the error is not, in general, achieved in FEcomputations.We will now show that the condition k2h ' 1 is sufficient for quasiopti-
mality of the FE error.
4.4.2 An Asymptotic Error EstimateThe Helmholtz variational form (4.2.3) is H1
(0-coercive. Hence we can spe-cify the quasioptimal estimate (4.1.14) for Model Problem I. We considerhere the case of piecewise linear approximation. The corresponding FE sub-space is denoted by Sh(0, 1).
Theorem 4.9. Let f ∈ L2(0, 1), and let u ∈ V =: H2(0, 1)∩H1(0(0, 1), uh ∈
Vh =: Sh(0, 1) be, respectively, the exact and the finite element solutionsof (4.2.2) . Assume that h and k are such that the denominators of theconstants in the following estimates are positive. Then
|u − uh|1 ≤ Cs infv∈Vh
|u − v|1 (4.4.7)
holds with the stability constant
Cs :=2(1 +(hk2π
)2) 12
( 12 − 6C21k2h2(1 + k)2
) 12, (4.4.8)
whereC1 :=
2(1− 2(1 + k)k2h2
π2 )π.
To prove the statement, let z ∈ H1(0(0, 1) be such that
b(v, z) = (v, e), ∀v ∈ H1(0(0, 1) ,

120 4. Finite Element Error Analysis and Control for Helmholtz Problems
where we denote, as usual, e := u−uh. In particular, b(e, z) = (e, e). Then,for all w ∈ Vh,
‖e‖2 = (e, e) = b(e, z − w)
=∫
e′ (z − w)′ − k2∫
e (z − w)− ike(1) (z(1)− w(1))
≤ ‖ (z − w)′‖ ‖e′‖+ k2‖z − w‖ ‖e‖+ k|z(1)− w(1)||e(1)| ,where we use the orthogonality b(e, w) = 0, and the third line follows fromthe second by the Cauchy–Schwarz inequality. To estimate the last termabove, we use the inequality |v(1)| ≤ √
2‖v‖ 12 ‖v′‖ 1
2 , which leads to
k|z(1)− w(1)||e(1)| ≤ 2k‖ (z − w)′‖ 12 ‖e′‖ 1
2 ‖z − w‖ 12 ‖e‖ 1
2
≤ k2‖z − w‖ ‖e‖+ ‖ (z − w)′‖ ‖e′‖ , (4.4.9)
where we have also applied the trivial inequality 2ab ≤ a2 + b2. Hence
‖e‖2 ≤ 2(‖ (z − w)′‖ ‖e′‖+ k2‖z − w‖ ‖e‖)
holds for all w ∈ Vh. Choosing w = zI ∈ Vh (the piecewise linear interpolantof z) and recalling that z by definition is the solution to the variationalproblem with datum e (“Nitsche trick”), we can apply the approximationproperties of Lemma 4.2 and the stability conditions from Theorem 4.4, toobtain
‖e‖2 ≤ (‖ (z − zI)′‖ ‖e′‖+ k2‖z − zI‖ ‖e‖)≤ 2
((1 + k)
h
π‖e′‖ ‖e‖+ k2
h2
π2(1 + k) ‖e‖2
).
Dividing both sides of the inequality by the common factor ‖e‖, we see that‖e‖ ≤ C1 (1 + k)h ‖e′‖ (4.4.10)
holds withC1 :=
2(1− 2(1 + k)k2h2
π2 )π
under the assumption that k, h are such that the denominator of C1 ispositive.Let us now derive an estimate for |e|1. By the definition of the error func-
tion, the trivial identity b(e, e) = b(e, u−uh) holds. Using the orthogonalityproperty of the error, we can replace uh above with an arbitrary functionfrom the subspace: b(e, e) = b(e, u− v) ∀v ∈ Vh. Writing out this equation,we have∫ 1
0e′e′ − k2
∫ 1
0ee − ik|e(1)|2 =
∫ 1
0e′(u − v)′ − k2
∫ 1
0e(u − v)− ike(1)(u(1)− v(1)) ,

4.4 Quasioptimal Convergence of FE Solutions to the Helmholtz Equation 121
and therefore
‖e′‖2 ≤ k2‖e‖2 + k|e(1)|2 + ‖e′‖ ‖(u − v)′‖+ k2‖e‖ ‖u − v‖+ k|e(1)| |u(1)− v(1)|
≤ k2‖e‖2 + 2k‖e′‖ ‖e‖+ 2‖e′‖ ‖(u − v)′‖+ 2k2‖e‖ ‖u − v‖ ,
where the terms at x = 1 have been estimated as in (4.4.9). We now usethe so-called ε-inequality
2ab ≤ ε2a2 +b2
ε2, ε = 0 ,
to get the estimates
2k ‖e′‖ ‖e‖ ≤ 14
‖e′‖2 + 4k2‖e‖2 ,
2 ‖e′‖ ‖(u − v)′‖ ≤ 14
‖e′‖2 + 4‖(u − v)′‖2 ,2k2 ‖e‖ ‖u − v‖ ≤ k2 ‖e‖2 + k2‖u − v‖2.
Introducing these estimates into the previous inequality leads to
‖e′‖2 ≤ 6k2‖e‖2 + 12‖e′‖2 + 4‖(u − v)′‖2 + k2‖u − v‖2 ,
which holds for all v ∈ Vh. Now we choose v = uI . Then, using (4.4.10)and the approximation properties (4.4.2) we finally obtain
12‖e′‖2 ≤ 6k2C21 (1 + k)2h2‖e′‖2 + 4|u − uI |21 + k2
(h
π
)2|u − uI |21 ,
and the statement of the theorem readily follows, completing the proof.
4.4.3 ConclusionsThe constant Cs in (4.4.8) does not depend on h, k if h is small enoughthat k2h ' 1. Thus (4.4.7) holds only under the condition that
h ' 1k2
,
by which we have specified the size of the threshold value h0 (cf. Section4.1.3) for the Helmholtz equation. Moreover, one can show (cf. Demkowicz[42], see also Ihlenburg and Babuska [74]) that Cs = 1 asymptotically:
|u − uh|1 → infv∈Vh
|u − v|1, h → 0 .

122 4. Finite Element Error Analysis and Control for Helmholtz Problems
Practically speaking, the estimate (4.4.7) predicts that the convergenceof the FE error on very fine meshes is similar to that of the interpolationerror (and thus is controlled by the “rule of thumb”). However, for largek, meshes of size h = O(k−2) are not used in practice. It is impossible todetermine from the asymptotic order of convergence the size of the actualerror on a mesh with h = O(k−1).Further, in practice one is interested in a rule that keeps the error below
some tolerance level. However, a mesh design by hk2 ≤ α would lead to adecreasing error for increasing k. Indeed,
e1 =|u − uh|1
|u|1 ≤ Cs|u|1 infv∈Vh
|u − v|1 ≤ CsCh|u|2|u|1 ≤ Chk ≤ C
α
k.
Hence, asymptotically (which means here: on meshes with k2h < α) theFE errors tend towards 0 as k is increased. However, it is only required thatthe error be bounded for all k.Finally, we remark that Theorem 4.9 can be proven also for the hp-version
of the FEM; i.e., for Vh = Sph(0, 1), see Ihlenburg and Babuska [73].
4.5 Preasymptotic Error Estimates for theh-Version of the FEM
We have seen that the asymptotic error estimate does not, in general, cha-racterize the error behavior (of FE solutions to the Helmholtz equation) inthe range of engineering computations. In this section, we show estimatesthat hold under the assumption kh < 1. We will find that the error ofGalerkin–FE solutions to Helmholtz problems always contains a so-calledpollution term that depends on the wave number. While this term is negli-gible for low wave numbers or on extremely refined meshes, it does have amajor influence for large wave numbers with standard mesh resolution.
4.5.1 Dispersion Analysis of the FE SolutionWe set out in search of new error estimates that hold under the assumptionkh < 1. We start from a spectral analysis of the stiffness matrix for ModelProblem I. On a uniform mesh, this matrix can be written as
K =
2S(kh) R(kh)R(kh) 2S(kh) R(kh)
. . .R(kh) 2S(kh) R(kh)
R(kh) S(kh)− ikh
, (4.5.1)

4.5 Preasymptotic Error Estimates for the h-Version of the FEM 123
with
R(kh) = −1− (kh)2
6, S(kh) = 1− (kh)2
3.
Except for the first and last lines, each line of this tridiagonal matrix cor-responds to the homogeneous difference equation
R(kh)(u(xi − h) + u(xi + h)) + 2S(kh)u(xi) = 0 . (4.5.2)
We seek a solution of this equation in the form
y(xh) = eikxh , xh ∈ Xh,
with unknown “discrete wave number” k. Then (4.5.2) transforms into thealgebraic equation
R(kh)λj−1 + 2S(kh)λj +R(kh)λj+1 = 0 ,
whereλ = eikh .
The solutions of this equation,
λ1,2 = −S(kh)R(kh)
±√
S2(kh)R2(kh)
− 1 ,
are
(i) complex if∣∣∣∣S(kh)R(kh)
∣∣∣∣ < 1 ,
(ii) real if∣∣∣∣S(kh)R(kh)
∣∣∣∣ ≥ 1 .
From the definition of λ we see that k is either real (in case (i)) or pure com-plex (case (ii)). Thus case (i) describes a propagating wave, whereas case (ii)describes an evanescent wave. Solving the inequality |S(kh)/R(kh)| < 1,we see that the propagating case corresponds to the bound
h ≤√12k
. (4.5.3)
Assuming that this inequality is satisfied, we can compute the discrete wavenumber in terms of kh, setting
cos(kh) = −S(kh)R(kh)
(4.5.4)
to obtain
k =1harccos
(−S(kh)
R(kh)
). (4.5.5)

124 4. Finite Element Error Analysis and Control for Helmholtz Problems
Writing the Taylor expansion of the right-hand side, we find that
k = k − k3h2
24+O(k5h4). (4.5.6)
Three conclusions can be made at this point:(1) The discrete solutions are dispersive; i.e., their phase velocity depends
on the frequency ω (recall from the discussion in Section 1.1.2. that theexact solution is nondispersive).(2) The (piecewise linear) FE solution is a propagating wave, provided
that the minimal resolution condition (4.5.3) is satisfied. Since√12 ≈ π,
this condition means that a wavelength should be resolved by more thantwo elements.(3) If the discrete solution is a propagating wave, then the phase velocity
of this “numerical wave” differs from that of the exact wave. In our case,the phase difference is characterized by (4.5.6).
4.5.2 The Discrete inf–sup ConditionWe consider again Model Problem I. The discrete inf–sup constant is of thesame order O(k−1) as the continuous constant (cf. (4.3.1)).
Theorem 4.10. Let Vh = Sh(0, 1) ⊂ H1(0(0, 1), and let b : Vh × Vh → C be
the sesquilinear form defined in (4.2.3). Then the inf-sup constant
βh = inf0=u∈Vh
sup0=v∈Vh
|b(u, v)||u|1|v|1
satisfiesC1k
≤ βh ≤ C2k
(4.5.7)
for constants C1, C2 not depending on k or h.
The proof is similar to that of the continuous case, using techniques fromthe theory of finite difference methods. We refer to [72] for details.Inserting βh = O(k−1) into the error estimate (4.1.13) and recalling that
the continuity constant M = O(k2), we obtain the bound
|u − uh|1 ≤ C(1 + k3)h |u|2 , (4.5.8)
with some constant C independent of h, k. Dividing by |u|1, we concludethat the relative error is bounded as
e :=|u − uh|1
|u|1 ≤ C(1 + k3)kh . (4.5.9)
Here, we have assumed again that the solution is oscillatory in the sense of(4.4.3); i.e., an extra power of k is introduced in each differentiation. The

4.5 Preasymptotic Error Estimates for the h-Version of the FEM 125
bound in estimate (4.5.9) consists of two terms. The first term is of orderhk, representing the interpolation error (cf. (4.4.5)). However, for k 1,the error bound is dominated by the second term of order O(k4h). Thisterm estimates the numerical pollution in the error. We will discuss thisissue in more detail in Section 4.6.Computational experiments show that though the estimate (4.5.9) is too
pessimistic (with respect to the power to which the wave number k entersthe pollution term), it does reflect the nature of the error for Helmholtzproblems. Let us explain at this point why this estimate may well be toopessimistic: In (4.5.9) we have used the stability constant Mβ−1
h , which isobtained as the ratio of the continuity constant and the inf–sup constant.Both these constants are independently valid for any function in the spacesH1(0(Ω) or Sh(0, 1), respectively.Consider, for example, the linear function u = x ∈ H1
(0(Ω). The norm ofthis function is
|u|1 =(∫ 1
0|u′|2 dx
)1/2= 1 .
On the other hand, we have
|b(x, x)| =∣∣∣∣∫ 1
0dx − k2
∫ 1
0x2dx − ik
∣∣∣∣ =√9 + 3 k2 + k4
3= O(k2) .
This shows that the continuity constant is, in general, no better than O(k2).However, for error estimation we are not interested in a bound that holdsfor all members of the Sobolev space H1
(0(Ω) at the same time. For instance,the linear function of the example above is not a solution of the boundaryvalue problem (4.2.1). Quite to the contrary, the terms (u′, v′) − k2(u, v)cancel for the solutions of this problem. Thus we can expect finer errorestimates from employing solution-specific stability constants such as thosederived in Theorem 4.4.
4.5.3 A Sharp Preasymptotic Error EstimateUsing the discrete wave number, we can construct a discrete Green’s func-tion (cf., e.g., Samarski [106])
Gh(x, s) =1
h sin kh
sin kx
(A sin ks+ cos ks
), x ≤ s ,
sin ks(A sin kx+ cos kx) , s ≤ x ≤ 1 ,(4.5.10)
where
A =(kh)2 sin k cos k + i
√12√12− (kh)2
12− (kh)2 cos2 k .

126 4. Finite Element Error Analysis and Control for Helmholtz Problems
Obviously, |A| is bounded independently of k if kh ≤ α <√12. Employing
the discrete Green’s function, the solution is now written as
uh(xi) =n∑j=1
Gh(xi, sj)rh(sj) , (4.5.11)
where the discrete right-hand side is computed in the standard way as thescalar product of the data f and the nodal shape functions:
rh(sj) = h
∫ 1
0f(s)φj(s) ds .
Remark 4.11. Relating (4.5.11) to the FE solution procedure, we see that
[ [Gh(xi, sj), j = 1, . . . , n], i = 1, . . . , n]
is precisely the inverse of the stiffness matrix K.
Using the discrete Green’s function, we can show the following estimate(“discrete” stability).
Lemma 4.12. Let Vh := Sh(0, 1) be the space of piecewise linear functionson a uniform partition of Ω = (0, 1) with mesh size h, and let uh ∈ Vh be theFE solution to the variational problem (4.2.2) for given data f ∈ L2(0, 1).Then, if hk ≤ 1, there exists a constant C not depending on h and k suchthat
|uh|1 ≤ C‖f‖ (4.5.12)
holds.
The proof of this lemma employs some techniques from the finite diffe-rence theory. Details can be found in [72].Observe that (4.5.12) holds under the condition hk < 1. We will call
bounds with this constraint “preasymptotic”, distinguishing the resultsfrom the asymptotic case k2h ' 1. Recall that the meshes designed bythe “rule of thumb” are in the preasymptotic range.We are ready to derive an error estimate for the FE error u − uh. We
start from the trivial inequality
|u − uh|1 ≤ |u − uI |1 + |uI − uh|1 ,where uI denotes again the piecewise linear nodal interpolant of u. Let usshow that z := uh − uI is the solution of the variational problem
b(z, v) = k2(u − uI , v), ∀v ∈ Vh . (4.5.13)
Indeed, adding and subtracting the exact solution, we get
b(z, v) = −b(u − uh, v) + b(u − uI , v) = b(u − uI , v)

4.5 Preasymptotic Error Estimates for the h-Version of the FEM 127
by the b-orthogonality of u − uh. The right-hand side is
b(u − uI , v) =∫ 1
0(u − uI)′v′ − k2
∫ 1
0(u − uI)v − ik(u(1)− uI(1))v(1)
The boundary term on the right is zero since u = uI at all nodes (inparticular, at the node x = 1). Further, the first integral on the right alsovanishes. To see this, one simply integrates by parts, integrating the firstand differentiating the second member of the inner product. The term v′′
is zero in all element interiors, since v is piecewise linear. The jump termsat the nodes vanish, since uI is the interpolant.Applying now the stability bound (4.5.12) to (4.5.13) and inserting the
result into the first inequality, we have
|u − uh|1 ≤ |u − uI |1 + C k2‖u − uI‖≤ (1 + Ck2h) |u − uI |1 ,
where the second line follows from the first by the approximation properties(4.4.2). Taking into account that the interpolant uI is the best approxima-tion of u in the H1-seminorm, we have shown the following theorem.
Theorem 4.13. Let f ∈ L2(0, 1) and let u ∈ V , uh ∈ Vh be the exactand FE solutions, respectively, of (4.2.2), where the spaces are defined asin Theorem 4.9. Then, if hk < 1, the error satisfies
|u − uh|1 ≤ (1 + C k2h)infv∈Vh
|u − v|1 , (4.5.14)
where C is a constant not depending on k, h.
Remark 4.14. Note that the asymptotic result (4.4.7) directly followsfrom (4.5.14) if k2h ' 1. Thus Theorem 4.13 is a generalization (for thespecial case of Model Problem I) of the well-known asymptotic theory.
Let us conclude by deriving the preasymptotic bound for the relativeerror. Introducing the approximation properties of the interpolant and as-suming oscillatory behavior of the solution (i.e., |u|2/|u|1 = O(k)), we findthat e1 satisfies
e1 ≤ C1hk + C2k3h2 , hk < 1. (4.5.15)
The second term in (4.5.15) is significantly smaller (for large k) than theterm C2k
4h in the corollary of the inf–sup condition; cf. (4.5.9).We will now show with computational results that the estimate (4.5.14)
is sharp. Considering the relative error in H1-norm, it turns out that theupper bound in (4.5.15) cannot be further improved: a pollution term ofthe size O(k3h2) is indeed seen in numerical experiments.

128 4. Finite Element Error Analysis and Control for Helmholtz Problems
0.0 2.0 4.0 6.0
kh
−2.0
−1.0
0.0
1.0
2.0
cos(kh)− S(kh)/R(kh): " discrete cosine"
FIGURE 4.7. Discrete and exact cosine.
4.5.4 Results of Computational ExperimentsWe consider Model Problem I with datum f = 1. The FE meshes Xh areuniform with mesh size h = N−1.
Discrete Wave Number and Phase Lag:
We first illustrate the dispersion relation (4.5.6). In Fig. 4.7, we show the“discrete cosine” cos kh, computed from (4.5.4), compared to the exactcos kh. The FE solution is evanescent if kh >
√12. The cutoff value kh =√
12 is marked in the plot with a fat dot. For normalized discrete wavenumbers below the cutoff value, the finite element solution is a propagatingwave with a dispersive discrete wave number. We consider only this case inthe following.The phase lag of the FE solution with respect to the exact solution, as
quantified in (4.5.6), is illustrated in Fig. 4.8.
Error of the Best Approximation:
The best approximation of the exact solution u in the H1-seminorm | · |1 isthe nodal interpolant uI ; cf. (4.4.6). The convergence of the interpolationerror is shown for different wave numbers in Fig. 4.9. The log-log plotshows the predicted convergence rate of N−1. The error stays at 100%on coarse meshes and starts to decrease at a certain mesh size, which wecall the critical number of degrees of freedom (DOF) for approximability.More precisely, for any fixed k and f the critical number of DOF is theminimal number N(k, f) for which, first, e1(n, k) < 1 and, second, e1(n, k)is monotone decreasing with respect to n for n > N(k, f).The critical number of DOF for approximability is determined by the rule
that the mesh size for interpolation by piecewise linear functions should besmaller than one-half of the wavelength of the exact solution, i.e. hk < π.

4.5 Preasymptotic Error Estimates for the h-Version of the FEM 129
0 0.2 0.4 0.6 0.8 1
x
-0.02
-0.01
0
0.01
0.02
Imag
inar
y P
arts
0 0.2 0.4 0.6 0.8 1
x
0
0.005
0.01
0.015
0.02
Rea
l Par
ts
FIGURE 4.8. Phase lag of the finite element solution: exact and finite elementsolution for k = N = 10.
1 10 100 1000
Number of Elements
0.02
0.05
0.1
0.2
0.5
1
Rel
ativ
e E
rror
hk=0.2
n(10) n(40) n(100) n(400)
FIGURE 4.9. Relative error of best approximation in the H1-seminorm, wavenumbers (from left to right) k = 10, 40, 100, 400.

130 4. Finite Element Error Analysis and Control for Helmholtz Problems
10 100 1000
Number of Elements
0.01
0.05
0.1
0.5
1R
elat
ive
Err
or
hk=0.5
hk=0.2
hk=0.1
hk=0.05
k=3 k=10 k=50
k=100
FIGURE 4.10. Relative error of the FE solution in the H1-seminorm fork = 3, 10, 50, 100. The horizontal lines connect points with hk =constant.
The critical point N0, computed from
N0 =[k
π
](4.5.16)
is plotted for different k. The positions of these points approximately coin-cide with the beginning of convergence on all curves. The figure also showsthat the error of the best approximation is controlled by the magnitude hk.For illustration, the points hk = 0.2 are connected in the convergence cur-ves for the different k. The connecting line neither increases nor decreasessignificantly with the change of k. Applying the “rule of thumb” λ/h ≈ 10thus guarantees a constant (with respect to k) error of about 17%.
TABLE 4.1. Resolution needed to maintain a relative error of 10% in theH1-seminorm.
k 100 200 300 400 600 800 1000n 38 57 63 82 94 107 120
Finite Element Error:
The relative error of the finite element solution for different k is plotted inFig. 4.10. Unlike the error of the best approximation, the FE error is notcontrolled by the magnitude of hk. We see that the lines hk=constant inFig. 4.10 increase with k. In Table 4.1 we display the resolution needed tomaintain an error of 10% for increasing k. Clearly, the rule kh =constantis not sufficient to control the FE error. We observe a pollution effect atlarge wave numbers.

4.5 Preasymptotic Error Estimates for the h-Version of the FEM 131
10 100 1000 10000 100000
Number of Elements
0.001
0.01
0.1
1
Rel
ativ
e E
rror
k=10
k=50
k=100k=200
k^2*h=1
k^2*h=10
FIGURE 4.11. Relative error of the FE solution compared with the best approxi-mation (BA) in the H1-seminorm. For each k, the lower lines show the BA error.Points with k2h=constant on the BA or FE lines, respectively, are connected.
10 100 1000 10000 100000
Number of Elements
0.001
0.01
0.1
1
Rel
ativ
e E
rror
k=10
k=50
k=100
FIGURE 4.12. Relative error of the FE solution compared to the best approxi-mation in the H1-seminorm: stability constant C(k) in the preasymptotic range(kh=constant).

132 4. Finite Element Error Analysis and Control for Helmholtz Problems
In Figures 4.11 and 4.12 we illustrate the error behavior, respectively, inthe asymptotic and in the preasymptotic range. The plots show the relativeFE error |u− uh|1/|u|1 and BA (best approximation) error |u− uba|1/|u|1for different wave numbers k. Points with k2h=constant on the FE and BAerror lines, respectively, are connected in Fig. 4.11. Along the line corre-sponding to k2h = 10, we observe a constant (with respect to k) distancebetween the FE and BA error lines. Since we have plotted in the log-log-scale, this corresponds to a constant ratio Cs = |u − uh|1/|u − uba|1 asestablished in the quasioptimal estimate (4.4.7) of Theorem 4.9. This showsthat an assumption on k2h seems to be necessary for asymptotic conver-gence. For k2h = 1 the distance is indistinguishable within the resolution ofthe plot, corresponding to the fact that Cs → 1 as h → 0; cf. Section 4.4.3.We also observe that the error decreases along the lines k2h=constant.On the other hand, the stability constant Cs grows with k in the preasymp-
totic range kh=constant, as shown in Fig. 4.12. The ratio |u−uh|1/|u−uba|1now behaves as predicted by the estimate (4.5.14) of Theorem 4.13.
4.6 Pollution of FE Solutions with Large WaveNumber
The error estimate (4.5.15) establishes a bound of order O(k3h2) for therelative error of the FE solution to Model Problem I. Computations showthat this upper bound is reached for large k; see Fig. 4.13.
0 200 400 600 800 1000
Wave Number k
0
0.05
0.1
0.15
0.2
0.25
Rel
ati
ve E
rro
r
FIGURE 4.13. Relative error of the FE solution in the H1-seminorm as functionof wave number k with constraint k3h2 = 1.
In this context, we speak of numerical pollution in the FE error: viewingthe error of interpolation as the “natural” error that is inherent to anyapproximation, we interpret the second term in (4.5.15) as a “pollution” ofthis natural error. We will give a precise definition in the following. We also

4.6 Pollution of FE Solutions with Large Wave Number 133
address the influence of boundary conditions on the convergence behaviorand discuss error estimation in the L2-norm.
4.6.1 Numerical PollutionDefinition: Consider a Helmholtz problem with wave number k on a nor-med space V . Let u = 0 ∈ V and uh ∈ Vh ⊂ V , respectively, be the exactand the finite element solution, and assume that an estimate of the form
e =‖u − uh‖V
‖u‖V ≤ C(k) infv∈Vh
‖u − v‖V‖u‖V (4.6.1)
holds. Then, if C can be written in the form
C(k) = C1 + C2kβ(hk)γ , (4.6.2)
where β > 0, γ ≥ 0, and C1, C2 are independent of h and k, then thefinite element solution is said to be polluted, and the term C2k
β(hk)γ iscalled pollution term.
Remark 4.15. Generally, one speaks of pollution if the error consists oftwo parts, one that is locally determined and another that is of nonlocalnature. For instance, in FE computations for elasticity problems, pollutionoccurs in regions away from a singularity (corner, crack, point load) if anerror from insufficient resolution at the singularity spreads into the domainof computation, superposing the local interpolation error also in areas thatare distant from the singularity.
Comparing (4.5.15) with (4.5.6), we see that the pollution term for theerror in Helmholtz problems has the size of the phase lag. Indeed, in theproof of the error estimate, the pollution term results from the evaluationof ‖uh − uI‖, where obviously, uI is in phase with the exact solution. Thephase lag is a global effect that builds up over the whole domain of computa-tion. This shows the similarity between the notions of pollution in positivedefinite and indefinite problems. The difference is that the pollution in ourcase cannot be related to an insufficient resolution of a local singularity butis caused by the dispersive character of the discrete wave number, which isa global property. This topic will be further discussed in the section on aposteriori error estimation.The pollution term also determines the critical number of DOF for the
finite element error, as Fig. 4.14 shows. The position of the critical points, asmarked over the abscissa of the plot, has been computed from the formula
N0 =√
k3/24 . (4.6.3)
This formula can be obtained by heuristic argument from a simple estimateof the amplitude error at the end of the interval [72].

134 4. Finite Element Error Analysis and Control for Helmholtz Problems
10 100 1000 10000
Number of Elements
0.01
0.1
1R
elat
ive
Err
or
N(10) N(40) N(100) N(400) N(1000)
FIGURE 4.14. Relative error of the FE solution in H1-seminorm and criticalnumber of DOF.
Remark 4.16. The size of the critical number of DOF may be important,for instance, for the application of multilevel methods to the Helmholtzequation, if the coarse-grid solutions still have to be able to approximatethe exact solution. Our experiments show that the coarsest grid shouldthen be found from some constraint on k3h2.
4.6.2 The Typical Convergence Pattern of FE Solutions tothe Helmholtz Equation
We have concluded from the preasymptotic estimate (4.5.14) that a cons-traint k2h < c is sufficient for optimal convergence
‖u − uh‖1 ≤ C‖u − uI‖1 ,
with a constant C not depending on k, h. The plot in Fig. 4.11 has shown(cf. the corresponding remarks in Section 4.5.4) that this constraint alsoseems to be necessary.We are now in a position to describe precisely the FE error behavior
throughout the region of convergence. In Fig. 4.15, the finite element errorand the interpolation error are plotted for k = 100. We distinguish fourintervals on the abscissa, where the number of elements N is shown:
(1) N ≤ no: The point
n0 =k
π≈ 32
is the “limit of resolution” (two elements per wavelength, hk = π).To the left of n0, the error of the best approximation is 100%.

4.6 Pollution of FE Solutions with Large Wave Number 135
10 100 1000 10000 100000
Number of Elements
0.001
0.01
0.1
1
Rel
ativ
e E
rror
↑n0
↑N0
↑Ns
FIGURE 4.15. Convergence of relative errors of FE solution (continuous line)and best approximation (dashed line) for k = 100.
(2) n0 < N ≤ N0: The point
N0 =√
k3/24 ≈ 200
is the minimal meshsize for which the FE error is (and stays, if themesh is refined) below 100%. In this interval, the error of the bestapproximation goes down at the rate −1 as h decreases, whereas theerror of the finite element solution oscillates with amplitudes of morethan 100%. The finite element solution is well-defined, but it doesnot approximate the exact solution. The pollution term in the errorestimate (4.5.15) is dominant in this region. For the “rule of thumb”λ/n = 10 (read at N = 5k/π ≈ 160 in Fig. 4.15), the minimal erroris ≈ 15%, whereas the finite element error still exceeds 100%.
(3) N0 < N ≤ Ns: To the right of N = Ns, the influence of the pollutionterm in the FE error is negligible. The point N = Ns marks thebeginning of asymptotic convergence; hence
Ns =1ck2,
where, theoretically, c is a small constant. Numerical experience showsthat c need not be small, but a constraint on k2h is needed to ensurequasi-optimality in the H1-norm. To the left of Ns, the convergencebehavior of the finite element solution is still governed by the pollu-tion term. Note that the prevalence of this term leads to a superopti-mal rate of convergence: one observes a decay N−2 compared withN−1 for the best approximation.
(4) n > Ns: The condition for quasi-optimal convergence of the finiteelement solution is satisfied, independent of k.

136 4. Finite Element Error Analysis and Control for Helmholtz Problems
0.0001
0.001
0.01
0.1
1
10
10 100 1000 10000 100000
Rel
ativ
e E
rror
Number of Elements
BA, k=10BA, k=100BA, k=400FE, k=10
FE, k=100FE, k=400
FIGURE 4.16. Errors of finite element solution (FE) and best approximation(BA) for Sommerfeld boundary conditions.
The third region is generally the region of practical interest. The finiteelement error is sufficiently small, while the mesh is still reasonably coarse.In particular, the FE error lies within this region if one constrains themagnitude of k3h2; cf. estimate (4.5.15). With a constraint of this form,reliability of the finite element solution is assured for all k.We remark that similar behavior of the errors has been observed in com-
putations for a one-dimensional example with highly irregular mesh; cf.Babuska and Sauter [17].
4.6.3 Influence of the Boundary ConditionsIn order to test the influence of different boundary conditions on the beha-vior of the FE solution, we impose a Sommerfeld condition instead of theDirichlet condition at x = 0. We then get the modified variational equality
b∗(u, v) = (u′, v′)− k2(u, v)− ik〈u, v〉 = (f, v), (4.6.4)
with〈u, v〉 = u(0)v(0) + u(1)v(1) .
No Dirichlet condition is imposed, and hence the solution is sought inV = H1(Ω). In this space, the H1-seminorm is not a norm. Instead we use
‖u‖∗ =(‖u′‖2 + k2|u(0)|2)1/2 ,
which is equivalent to the H1-norm. The convergence behavior of the fi-nite element solution and the best approximation is shown in Fig. 4.16 fordifferent wave numbers. The convergence behavior is similar to that in thecase of the Dirichlet condition. Further details can be found in Ihlenburgand Babuska [74].

4.6 Pollution of FE Solutions with Large Wave Number 137
0 100 200 300 400 500
Wave Number k
0.02
0.04
0.06
0.08
0.1R
elat
ive
Err
or
FIGURE 4.17. Relative error of the FE solution in the l2-norm for constantresolution with kh = 0.2.
4.6.4 Error estimation in the L2-normSo far, estimates have been given in the H1-norm. This norm measuresboth the function and its derivative, as opposed to the L2-norm, whichmeasures only the function itself.An estimate for the error in the L2-norm is obtained in the same way as
for the H1-norm. Assuming again that hk < 1, one can show3 the discretestability bound
‖uh − uI‖ ≤ Ck‖u − uI‖with C independent of h, k. Thus
‖u − uh‖ ≤ (1 + k)‖u − uI‖ .
Inserting on the right-hand side the interpolation estimate from (4.4.2), wearrive at
‖u − uh‖ ≤ (1 + Ck)(h
π
)2|u|2 . (4.6.5)
For an oscillatory solution, |u|2/‖u‖ = O(k2), and hence we can estimatethe relative error of an oscillatory solution as
e0 :=‖u − uh‖
‖u‖ ≤ Ck(kh)2 , (4.6.6)
where C is a constant that does not depend on k, h.The estimate (4.6.6) states that the L2-errors are dispersive also in the
asymptotic range. That is, on meshes designed by the “rule of thumb,” the
3Recall that z = uh − uI solves the Helmholtz problem with the right-hand sidek2(u − uI), and compare the continuous stability bound (4.3.9).

138 4. Finite Element Error Analysis and Control for Helmholtz Problems
10 100 1000 10000 100000
Number of Elements
0.0001
0.001
0.01
0.1
1R
elat
ive
Err
or
FIGURE 4.18. Relative errors of the FE solution in the H1-norm and in thel2-norm for k = 10 and k = 100.
error grows linearly with k also for small h. This is confirmed in numericalexperiments. We consider again the FE solution of Model Problem I. InFig. 4.17, we show the growth of the relative error in the l2 vector normon meshes with resolution n = 10π. In Fig. 4.18, the convergence of therelative error in the H1-seminorm is compared to the relative error in thediscrete l2-norm. The errors for k = 10 (left two lines) and k = 100 areplotted. In each case, the lower lines in the plot correspond to the error inthe l2-norm, whereas the upper lines are the results in the H1-norm.The figure illustrates the typical convergence behavior for H1-coercive
forms. If the perturbation term is large, it governs the error behavior inthe preasymptotic range (in both the H1- and L2-norms). However, whilethe positive definite term determines the asymptotic behavior in the H1-norm, this effect is not observed if the error is measured in the norm of theperturbation (L2-norm).
4.6.5 Results from 2-D ComputationsNow consider Model Problem II. The square domain Ω = (0, 1) × (0, 1)is partitioned into regular square elements. Bilinear shape functions areused for approximation. In the present example, boundary conditions arechosen such that the exact solution is a plane wave with the wave vectork = kcos θ, sin θ for θ = π/8. The FE solutions were obtained withdiscretizations ranging from 16× 16 to 1024× 1024 elements.In Fig. 4.19 the relative errors in the H1-seminorm for k = 10, k = 50,
and k = 100 are plotted. We observe that the error behavior is completelysimilar to the one-dimensional case; cf. Fig. 4.15. In Fig. 4.20, the errorsof the finite element solution and best approximation in the H1-norm and

4.6 Pollution of FE Solutions with Large Wave Number 139
0.01
0.1
1
2 4 8 16 32 64 128 256 512 1024
Rel
ativ
e E
rror
Number of Elements
FE, k = 10BA, k = 10FE, k = 50BA, k = 50
FE, k = 100BA, k = 100
FIGURE 4.19. Relative errors in the H1-norm for the 2-D Helmholtz problem:finite element solution (FE) vs. best approximation (BA) for k = 10, k = 50 andk = 100.
0.0001
0.001
0.01
0.1
1
2 4 8 16 32 64 128 256 512 1024
Rel
ativ
e E
rror
Number of Elements
FE, H1FE, L2BA, H1BA, L2
FIGURE 4.20. Relative errors for the 2-D Helmholtz problem: finite elementsolution (FE) vs. best approximation (BA) in the L2-norm and the H1-seminormfor k = 50.

140 4. Finite Element Error Analysis and Control for Helmholtz Problems
the L2-norm, respectively, are shown for k = 50. Again, the results aresimilar to those shown in Fig. 4.18. Similar results of computations in threedimensions are discussed in Gerdes and Ihlenburg [57].
4.7 Analysis of the hp FEM
We have seen that the relative error of the standard (h-version) GalerkinFEM can be written in the form (cf. (4.5.15))
e1 = O(θ + kθ2), θ < 1 , (4.7.1)
with θ = kh. The second term in this estimate characterizes numerical pol-lution, due to the phase difference between the exact and FE solutions. Inthis section we will investigate FE approximations with polynomial shapefunctions of degree p ≥ 2. It will become evident that formula (4.7.1) canbe generalized to higher-order polynomial approximations, except that now
θ :=(kh
p
)p. (4.7.2)
Towards this goal, we outline the specifics of hp-approximation and describein detail the FE solution procedure, including static condensation. Thisleads to the investigation of the phase lag by dispersion analysis. Finally,the preasymptotic error estimate (4.7.1), with θ from (4.7.2), is obtained.The material for this section is taken mostly from Ihlenburg and Babuska[73].The analysis of the problem has some new ingredients compared to the h-
version. First of all, we need information on the approximation of functionsby higher-order polynomials. The error of approximation (measured in theH1-norm) of the function u with polynomials of order p can be bounded, ingeneral, by an expression of the form hp|u|p+1. To make use of this property,the derivatives of higher order should exist (in the weak sense). Hence wehave to address the question of regularity. For Helmholtz problems, we needto know how the wave number k enters the stability estimates for functionsof higher regularity. Also, it is possible to bound the error of approximationin negative norms (up to 1− p).After studying these two issues — approximability and stability in higher-
order norms — we turn to the actual error analysis. As for the h-version,the key lemma addresses discrete stability. We describe the process of staticcondensation that is used to separate local analysis from global analysis.In particular, the error analysis in negative norms is of local character.
4.7.1 hp-ApproximationWe consider again Model Problem I with uniform meshesXh of mesh size h.Hence by the hp-version we here mean h-convergence (i.e., error reduction

4.7 Analysis of the hp FEM 141
by global mesh refinement) with shape functions of degree p. The masterelement in the one-dimensional case is the interval I = (−1, 1). The poly-nomials in Sp(I) are written as linear combinations of the nodal shapefunctions
N1(ξ) =1− ξ
2, N2(ξ) =
1 + ξ
2; −1 ≤ ξ ≤ 1 ,
and (if p > 1) the internal shape functions
Nl(ξ) = φl−1(ξ) ; l = 3, 4, . . . , p+ 1 ,
where the φl have been defined in (3.4.3). We denote by Sph(τi) the setof shape functions on the element τi = (xi−1, xi), where x = Q(ξ) isthe standard linear map I → τi. The global space of hp-approximation isSph(Ω) ⊂ H1(Ω). The approximation properties of the h-version (cf. (4.4.2))can then be generalized. To write the corresponding theorem, we define an-tiderivatives of a function as follows. As usual, f (m), m ≥ 0 denotes themth derivative of a function f . Generalizing this for negative integers, wecall any function F such that
∂mF = f
an mth antiderivative of f and write
F = f (−m) .
The definition is specified for the interval (0, 1) as follows. Let f ∈ L2(0, 1),then
f (−1)(x) := −∫ 1
x
f(t)dt ,
and similarly,
f (−m−1)(x) := −∫ 1
x
f (−m)(t)dt .
Lemma 4.17. Let l, p be integers with 1 ≤ l ≤ p and let u ∈ H l+1(0, 1).There exists an s ∈ Vh = Sph(0, 1) such that
∀xi ∈ Xh : s(m)(xi) = u(m)(xi) , m = −p+ 1, . . . , 0 , (4.7.3)
and
‖(u − s)(m)‖ ≤ Ca(l)Ca(−m)(
h
2p
)l−m+1|u|l+1 , m = −p+ 1, . . . , 1 ,
(4.7.4)hold, where Ca satisfies:
1. Ca(−1) = 1 (formal definition),
2. Ca(0) = 1,

142 4. Finite Element Error Analysis and Control for Helmholtz Problems
3. Ca decreases for 0 ≤ l ≤ √p,
4. Ca increases for l >√p and
Ca(p) = max1≤l≤p
Ca(l) =(e2
)p(πp)−1/4 . (4.7.5)
The proof is based on Babuska et al. [14], where the cases l = 0, 1 aretreated. Let τi be a finite element and let I = (−1, 1). A function u′(ξ) ∈H l(I) ⊂ L2(I) can be expanded as
u′(ξ) =∞∑i=0
aiPi(ξ) ,
where Pi(ξ) are the Legendre polynomials of order i and equality is under-stood in the L2 sense. Setting
s′(ξ) :=p−1∑i=0
aiPi(ξ)
and defining the integrals (i = 0, 1, 2, . . .)
u(−i)(ξ) = u(−i)(1)−∫ 1
ξ
u(−i+1)(τ)dτ , (4.7.6)
s(−i)(ξ) = u(−i)(1)−∫ 1
ξ
s(−i+1)(τ)dτ , (4.7.7)
we now prove that (4.7.3) holds. First, let i = 0. Then from (4.7.6), (4.7.7)we have trivially u(1) = s(1). Further, by definition,
u(−1) = u(1)−∫ 1
−1u′(τ)dτ = u(1)−
∞∑j=0
aj
∫ 1
−1Pj(τ)dτ = u(1)− 2a0
= u(1)−∫ 1
−1s′(t)dt = s(−1)
by (4.7.7). Now we integrate u′(ξ). Using
Pi(τ) = (P ′i−1(τ)− P ′
i+1(τ))/(2i+ 1) ,
we obtain
u(ξ) = u(1) + a0(P1(ξ)− P0(ξ)) +∞∑i=1
aiPi+1(ξ)− Pi−1(ξ)
2i+ 1.

4.7 Analysis of the hp FEM 143
Integrating once more (we write U := u(−1)),
U(−1) = U(1)−∫ 1
−1u(τ)dτ = U(1)− 2u(1) + 2a0 + 2a13 .
Obviously, the same result is obtained from the integration of the polyno-mial s(ξ), since only the coefficient of P0 influences the result of integrationover the whole interval I. Using a similar argument we conclude that in-tegration of the polynomial s on the one hand and the function u on theother hand leads to the same result exactly p − 1 times. Indeed, by repla-cing repeatedly Pi(τ) = (P ′
i−1(τ)−P ′i+1(τ))/(2i+1), we see that with the
ith succesive integration of u(ξ) or s(ξ) the coefficient ai enters the set ofcoefficients multiplying P0. Since the norms of u(i) and s(i) depend only onthe coefficient of P0, both norms are equal until P0 is multiplied by ap−1;i.e., in general, u(−p+1)(ξ) = s(−p+1)(ξ) and u(−p)(ξ) = s(−p)(ξ). Thus no-dal exactness, (4.7.3), is proved on an arbitrary element and hence it holdsglobally.Let us now prepare the proof of estimate (4.7.4). With the above defini-
tions, the error of approximation is
e′(ξ) := u′(ξ)− s′(ξ) =∞∑i=p
aiPi(ξ) ,
and from the orthogonality property of the Legendre polynomials we have
‖e′‖2 =∞∑i=p
22i+ 1
a2i . (4.7.8)
It can be proven (see Babuska et al. [14], Chapter 3) that s′ is the bestL2-approximation to u′ on I and the estimate
‖u′ − s′‖ ≤ Ca(l)pl
|u|l+1 (4.7.9)
holds for 0 ≤ l ≤ p, where the constant Ca has the properties 2–4 of thestatement. Integrating the error e′, we get
e(ξ) =∫ 1
ξ
(u′(t)− s′(t)) dt
=∞∑i=p
ai
∫ 1
ξ
Pi(t)dt = −∞∑i=p
ai2i+ 1
(Pi+1(ξ)− Pi−1(ξ)) .
After reordering, this is equivalently written as
e(ξ) =∞∑
i=p+1
biPi(ξ) +ap
2p+ 1Pp−1(ξ) +
ap+12p+ 3
Pp(ξ)

144 4. Finite Element Error Analysis and Control for Helmholtz Problems
withbi =
ai+12i+ 3
− ai−12i − 1 ,
and the norm is
‖e‖2 =∞∑
i=p+1
22i+ 1
b2i +a2p
(2p+ 1)22
2p − 1 +a2p+1
(2p+ 3)22
2p+ 1. (4.7.10)
We apply the relation (a − b)2 ≤ 2a2 + 2b2 to obtain (for i ≥ p+ 1)
b2i ≤ 2a2i−1(2i − 1)2 +
2a2i+1(2i+ 3)2
,
and thus∞∑
i=p+1
b2i2
2i+ 1≤ 12p2
∞∑i=p
a2i2
2i+ 1+
12p2
∞∑i=p+2
a2i2
2i+ 1
holds. Now taking into account the second and third member in the right-hand side of (4.7.10), we get
‖e‖2 ≤ 1p2
∞∑i=p
a2i2
2i+ 1,
and hence‖e‖ ≤ 1
p‖e′‖ . (4.7.11)
From (4.7.9) it then follows that
‖e‖ ≤ Ca(l)pl+1
|u|l+1 (4.7.12)
holds for 1 < l ≤ p.We conclude the local analysis by showing an orthogonality property for
e. Since s′ is the L2-projection of u′ on Sp−1(I),∫ 1
−1(u′(ξ)− s′(ξ))ξmdξ = 0 (4.7.13)
holds for m = 0, 1, . . . , p − 1. We claim that e(ξ) =∫ 1ξ(u′(t) − s′(t))dt is
orthogonal to Sp−2(I).Indeed, for m ≥ 0 we compute∫ 1
−1e(ξ)ξmdξ =
∫ 1
−1(∫ 1
ξ
(u′(t)− s′(t))dt)ξmdξ
=∫ 1
−1((u′(t)− s′(t))
∫ t−1
ξmdξ)dt
=1
m+ 1
∫ 1
−1(u′(t)− s′(t))(tm+1 + 1)dt ,

4.7 Analysis of the hp FEM 145
which together with (4.7.13) proves that e is orthogonal to Sp−2(I). By theback-transform I → τi and summation over the elements we derive (4.7.4)for the H1- and L2-norms; i.e., the cases m = 1, 0 in (4.7.4).It remains to prove (4.7.4) for dual norms. We apply a standard argument
(cf. Schatz [109]). By definition, for m ≥ 1,
‖e‖−m = supv∈Hm
(0
(e, v)|v|m .
Let Pmv ∈ Smh (Ω) be the L2-projection of v ∈ Hm(0 on Smh (Ω). Then by
orthogonality (4.7.13)
‖e‖−m = supv∈Hm
(0
(e, v − Pm−1v)|v|m
holds for 1 ≤ m ≤ p − 1. Applying the Cauchy–Schwarz inequality and(4.7.12), we conclude for 1 ≤ l ≤ p and 1 ≤ m ≤ p − 1 the estimate
‖e‖−m ≤ Ca(l)(
h
2p
)l+1|u|l+1 Ca(m)
(h
2p
)m |v|m|v|m
≤ C(l,m)(
h
2p
)l+m+1|u|l+1 ,
whereC(l,m) = Ca(l)Ca(m) ≤
(e2
)2p(πp)−1/2.
This completes the proof of the lemma.
Remark 4.18.We have shown that there exists an interpolant s such thatp − 1 antiderivatives of s interpolate the corresponding antiderivatives ofu. These interpolants then satisfy the standard interpolation error bounds.The present proof is given for approximation in one dimension. The er-
ror bounds in the negative norms (i.e., for the antiderivatives) are similarlyobtained in two and three dimensions; see, e.g., Schatz [109].
4.7.2 Dual StabilityBesides the stability estimate (4.3.11), we will need yet another stabilityresult, bounding lower norms of the solution by the corresponding normsof the data.
Lemma 4.19. Let Ω = (0, 1), and let f ∈ L2(Ω) be a “bubble” function withthe property f (−i)(0) = f (−i)(1) = 0 for i = 1, . . . ,m. Then the solution

146 4. Finite Element Error Analysis and Control for Helmholtz Problems
u ∈ H1(0(Ω) of (4.2.2) with datum f satisfies
|u|1 ≤ C1km‖f (−m)‖+ C2‖f (−1)‖ , (4.7.14)
with C1, C2 independent of k.
Remark 4.20. The assumption on the data means that m integrals of fvanish at x = 0 (note that all integrals vanish at the endpoint by definition).Without this assumption we can prove only that
|u|1 ≤ C k ‖f (−1)‖ ;
cf. (2.4.19). In general, |u|1 cannot be bounded by a term C‖f (−1)‖ inde-pendently of k.
We give the proof for m = 2. The idea is to introduce a smoother kernelinto the Green’s function representation of u(x). We define
K(x, s) := G(x, s)− H(x, s) ,
where H(x, s) is the Green’s function for the auxiliary Dirichlet problemFind u ∈ H1
0 (Ω) :
B1(w, v) =∫ 1
0w′v′ + k2
∫ 1
0wv = (f, v), ∀v ∈ H1
0 (Ω) .
(4.7.15)Note that B1 is a positive definite bilinear form. Hence
Hxx(x, s)− k2H(x, s) = −δs(x) , (4.7.16)Gxx(x, s) + k2G(x, s) = −δs(x) , (4.7.17)
holds weakly. It follows that
Kxx = −k2(G+H) .
Then, however, since G,H ∈ H1(Ω) (as functions of x for any fixed s), wehave K ∈ H3(Ω). We write
u(x) =∫ 1
0K(x, s)f(s)ds+
∫ 1
0H(x, s)f(s)ds := u1(x) + u2(x) . (4.7.18)
The point is that K is a smooth kernel and H is the kernel for a V -ellipticproblem. This problem has an inf–sup constant β = 1 in the energy norm(cf. Remark 2.18), and from the Lax-Milgram theorem it follows that
|u2|1 ≤ |||u2||| ≤ ‖f (−1)‖ .

4.7 Analysis of the hp FEM 147
To estimate u1, we integrate by parts to get
u′1(x) =
∫ 1
0Kx(x, s)f(s)ds =
∫ 1
0Kxss(x, s)f (−2)(s)ds,
(the boundary terms vanish due to the specific assumption on f). Thus, bythe Cauchy–Schwarz inequality,
|u′1(x)| ≤ ‖Kxss‖‖f (−2)‖.
From the definition of the function K and the symmetry of the Green’sfunctions, it follows that Kxss = −k2(G+H)x, and thus
‖Kxss‖ ≤ k2 (‖Gx‖+ ‖Hx‖) .It is straightforward to show that ‖Gx‖ and ‖Hx‖ are bounded indepen-dently of k, and we finally arrive at
|u′1(x)| ≤ C k2‖f (−2)‖ .
Together with the estimate of u2, this proves the case m = 2.For m = 1, the statement follows from the inf–sup condition. For m ≥ 3,
the proof proceeds as for m = 2; see [73].
4.7.3 FEM Solution Procedure. Static CondensationIn the following, we describe in detail the solution of the boundary valueproblem (4.2.1) by the hp-version of the FEM.
Step 1. Local Approximation and Static Condensation:
On any element τj , the trial function u and the test function v are writ-
ten as scalar products of shape functionsN j1 , N
j2 , . . . , N
jp+1
and the
vectors of unknown coefficients aj =aj1, a
j2, . . . , a
jp+1
Tand bj =
bj1, bj2, . . . , b
jp+1
T, respectively. We assume a local numbering in which
subscripts 1, 2 correspond to the nodal modes, while subscripts j ≥ 3 corre-spond to the bubble modes. Thus aj1 = u(xj−1) := uj−1, a
j2 = u(xj) := uj ,
and bj1 = vj−1, bj2 = vj . The variational problem reduces locally (i.e., on
interior elements τj) to
bjT [Bj ]aj = bjT rj , (4.7.19)
where the elements of the (p+ 1)× (p+ 1) square matrix [Bj ] are
blm =∫τj
N jl (x)
′N jm(x)
′dx − k2
∫τj
N jl (x)N
jm(x)dx − ikN j
l (1)Njm(1) ,
(4.7.20)

148 4. Finite Element Error Analysis and Control for Helmholtz Problems
and the right-hand side is
rjl =∫τj
f(x)N jl (x)) dx .
Now, decomposing
[Bj ] =
[Bj11
] [Bj12
][Bj21
] [Bj22
] , (4.7.21)
where[Bj11
]is the left upper 2×2 submatrix of [Bj ], and assuming for the
moment that[Bj22
]is nonsingular, we define
[CBj ] =[Bj11
]−[Bj12
] [Bj22
]−1 [Bj21
]. (4.7.22)
Then, by local variation of bj3, . . . , bjp+1T , we find
vj−1 vj[CBj
] uj−1uj
= vj−1 vj
rj−1rj
, (4.7.23)
where
rj−1rj
=
rj1rj2
−[Bj12
] [Bj22
]−1
rj3...
rjp+1
. (4.7.24)
On a uniform mesh, the local matrices [CBj ] are identical on all elementsand can be written in the form
[CB] =[
Sp(kh) Tp(kh)Tp(kh) Sp(kh)
], (4.7.25)
where Sp and Tp are rational polynomial functions.
Step 2. Global Assembling and Solution for uh:
Enforcing continuity of the test functions at the nodal points of Xh leadsto the usual set of linear equations
Kpuph = rp .
The condensed stiffness matrix Kp is an n × n tridiagonal matrix
Kp =
2Sp(kh) Tp(kh)Tp(kh) 2Sp(kh) Tp(kh)
. . .Tp(kh) 2Sp(kh) Tp(kh)
Tp(kh) Sp(kh)− ikh
(4.7.26)

4.7 Analysis of the hp FEM 149
which is formally similar to the stiffness matrix of the h version. The vectoron the right-hand side is
rp =
r1...
rj−1 + rj...rn
. (4.7.27)
Step 3. Local “Decondensation:”
The equation
[Bj22
]
aj3...
ajp+1
=
rj3...
rjp+1
−
[Bj21
]uj−1uj
(4.7.28)
can be inverted, provided that[Bj22
]is regular, to determine locally the
bubble modes of the finite element solution. Adding together the localmodes and the bubble modes, the finite element solution is obtained, com-pleting the procedure.
Remark 4.21. The matrix [B22] is singular at the discrete eigenvalues ofthe condensation, determined by the eigenvalue problem
w′′ + λ2w = 0 , w(0) = w(1) = 0 .
The exact solutions are λ = π, 2π, . . . The discrete eigenvalues are obtainedif the problem is solved over the subspace of all “bubble” polynomialsof order ≤ p. In one dimension, there exist p − 1 “bubble” polynomials(p = 2, 3, . . .), and hence the eigenvalue problem has p − 1 solutions. Welist the computed and exact eigenvalues for p = 2, . . . , 6 in Table 4.2. Ob-viously the rule hk ≤ π excludes a breakdown of condensation.
4.7.4 Dispersion Analysis and Phase LagThe homogeneous solutions of the interior difference equations
Tp(kh)uh(xi−1) + 2Sp(kh)uh(xi) + Tp(kh)uh(xi+1) = 0
are, similar to (4.5.2),
yh1 = exp(ikxh), yh2 = exp(−ikxh) ,

150 4. Finite Element Error Analysis and Control for Helmholtz Problems
TABLE 4.2. Singular values λh of the local stiffness matrix and exact eigenvalues(lower row) of the associated eigenvalue-problem for p = 2, . . . , 6.
p / i 1 2 3 4 52 3.16228 - - - -3 3.16228 6.48074 - - -4 3.14612 6.48074 10.1060 - -5 3.14612 6.28503 10.1060 14.1597 -6 3.14159 6.28503 9.44318 14.1597 18.7338
i ∗ π 3.14159 6.28319 9.42478 12.5664 15.7080
where the parameter k is determined as a function of k, h, and p by
cos(kh) = −Sp(kh)Tp(kh)
. (4.7.29)
In Fig. 4.21, we plot the discrete cosine cos(kh), computed from (4.7.29),for p = 1, . . . , 6. The plot for p = 1 is identical with the plot of Fig. 4.7.Recall that the discrete wave number k is complex, and hence the numericalsolution is evanescent, if | cos(kh)| = |Sp(kh)/Tp(kh)| > 1. The magnitudeof the cutoff frequency grows with the increase of approximation order p.However, the discrete wave number is complex on small intervals (see, forexample, kh ≈ 7 for p = 3) also before it reaches the cutoff frequency. Theonly way to avoid this situation completely is to keep the resolution belowthe first cutoff frequency kh =
√12.
We now show a bound for the phase difference between the exact andFE solutions for the hp-version.
Theorem 4.22. Let p ≥ 1 and denote by k the discrete wave numberdefined in (4.7.29). Then, if hk < 1,
|k − k| ≤ k C
(Ca(p)2
)2(hk
2p
)2p(4.7.30)
where k is the exact wave number, Ca is the approximation constant from(4.7.4), and C does not depend on k, h, or p.
The proof can be found in [73]. The key idea is to use analytic shapefunctions for the represention of the exact solution. These functions t1, t2are found from the local boundary value problems
t′′ + k2t = 0 on τj , (4.7.31)
with inhomogeneous local Dirichlet data
t1(xj−1) = 1, t1(xj) = 0 , (4.7.32)

4.7 Analysis of the hp FEM 151
0 2 4 6 8 10 12 14
Normalized Frequency K
-2
-1
0
1
2
- S(
K)/
T(K
)
0 10 20 30 40
Normalized Frequency K
-2
-1
0
1
2
3
- S(
K)/
T(K
)
p = 1
p = 2
p = 3
p = 4
p = 5
p = 6
FIGURE 4.21. Cosine of the normalized discrete wave number vs. normalizedfrequency K.
ort2(xj−1) = 0, t2(xj) = 1 , (4.7.33)
respectively. Having computed t1, t2, the homogeneous solution of the Helm-holtz equation can be written on each inner element τj ⊂ Ω as
u(x) = u1t1(x) + u2t2(x) , (4.7.34)
where u1 := u(xj−1), u2 := u(xj) are the nodal values of u on Xh. Thephase difference is then estimated by comparing the analytic with the finiteelement shape functions.
4.7.5 Discrete StabilityNow we have collected almost all prerequisites to showing the error esti-mates. The last step is to prove discrete stability estimates. It is easy to

152 4. Finite Element Error Analysis and Control for Helmholtz Problems
show the following.
Lemma 4.23. Let uh ∈ Sph(0, 1) be the finite element solution to the va-riational problem (4.2.2) with datum f ∈ L2(Ω). Assume that hk ≤ α < π.Then
‖u′h‖ ≤ C‖f‖ (4.7.35)
holds with a constant C independent of h,k, and p.
This is just the same statement as for p = 1, see Lemma 4.12. The proofcan be found in [73].We proceed to the assessment of dual discrete stability. Here we consider
only data that vanishes at all points of the finite element grid. We showedin Lemma 4.17 that there exist approximating functions such that theerror has this property. Hence, for integer l ≥ 0, we define a subspaceF l0(Ω) ⊂ L2(Ω) by
F l0(Ω) =f ∈ L2(Ω)
∣∣∣ f (−i) |Xh= 0 for i = 1, . . . , l
(4.7.36)
with F 00 (Ω) := L2(Ω). For this data, one can locally bound the componentsof the condensed right-hand side in (4.7.24).
Lemma 4.24. Consider the variational problem (4.2.2) on Sph(Ω) with dataf ∈ F p−10 (Ω). Let τj be an arbitrary finite element and let rj−1, rjT bethe condensed right-hand side vector given by (4.7.24). Assume further thatthe mesh size h is sufficiently small so that hk ≤ α < π. Then
|rj | ≤ Cd(p,m)h1/2km‖f (−m)‖∆i (4.7.37)
holds for even m = 0, 2, . . . ≤ p − 1 with
Cd(p, 0) = 1
and
Cd(p,m) = C1 + C2αp−m 2(m−1)/2 (p+ 1)!(p+ 1)
((p − m+ 1)!)2, m ≥ 2 ,
where C1, C2 do not depend on h, k, or p.
The proof is rather technical; the details can be found in [73]. We canprove this statement also for odd m with the additional assumption thathk is bounded from below, i.e., 0 < β ≤ hk.We are ready to formulate the dual stability theorem on the finite-
dimensional (discrete) level.

4.7 Analysis of the hp FEM 153
Lemma 4.25. Let uh ∈ Sph(0, 1) be the FE solution to (4.2.2) with datumf ∈ Fm0 (Ω). Assume that 0 < kh ≤ α < π. Then
|uh|1 ≤ Cd(p,m)km‖f (−m)‖+ C1‖f (−1)‖ , (4.7.38)
where Cd is the constant from (4.7.37) and C1 does not depend on h, k, or p.
The proof follows the argument for the continuous case; see Lemma 4.19.For details, we refer again to [73].
4.7.6 Error EstimatesWe formulate two theorems. The first error estimate is similar to the h-version estimate (4.5.14).
Theorem 4.26. For 1 ≤ l ≤ p let u ∈ H1(0(0, 1) ∩ H l+1(0, 1) and uh ∈
Sph(0, 1) be the solution and the FE solution to the variational problem(4.2.2), respectively. Assume that hk ≤ α < π. Then the error e := u − uhsatisfies the bound
|e|1 ≤ Ca(l)(1 + C1k
(kh
2p
))(h
2p
)l|u|l+1 , (4.7.39)
where C1 does not depend on h, k, or p, and Ca(l) is the constant in theapproximation property (4.7.4).
The proof proceeds as for p = 1, using the interpolant s from Lemma 4.17.We write e = u − s + z and observe that z := s − uh solves (4.2.2) withdata f = k2(u − s). Thus |e|1 ≤ Ck2‖u − s‖+ |u − s|1, and the statementfollows with the approximation property (4.7.4). This proves (4.7.39).But (4.7.4) admits error bounds also with respect to dual norms of the
data k2(u− s) ∈ F p−10 (Ω). Using also the corresponding dual stability pro-perties from Lemma 4.25, we directly arrive at the following result.
Theorem 4.27. Let 1 ≤ l ≤ p and 0 ≤ m ≤ p, m even, with p ≥ 2. Let u ∈H1(0(0, 1) ∩ H(l+1)(0, 1) be the solution to the variational problem (4.2.2)
with data f ∈ H(l−1)(0, 1), and let uh ∈ Sph(0, 1) be the finite elementsolution to this problem. Assume further that the mesh size h is such thathk ≤ α < π. Then
|e|1 ≤ Ca(l)
[1 + C1
(kh
2p
)2+ kCd(p,m)Ca(m)
(kh
2p
)m+1](h
2p
)l|u|l+1(4.7.40)
holds with C1 independent on k, h, and p.

154 4. Finite Element Error Analysis and Control for Helmholtz Problems
The order m is related to the specific approximation properties of theinterpolant s, allowing the estimation of p + 1 antiderivatives in the dualnorm. As usual in the hp-version, the error is bounded by higher-orderderivatives of the exact solution.Assuming again oscillatory behavior with |u|l+1/|u|1 = O(kl) and taking
l = p, we can estimate the relative error after (4.7.40) as
e1 ≤ C1
(hk
2p
)p+ C2 k
(hk
2p
)2p. (4.7.41)
The first term in this estimate is the approximation error, while the secondterm represents numerical pollution. As for the h-version, this term is ofthe same order as the phase lag. We conclude that the pollution effect forp ≥ 2 is significantly reduced if the mesh is fine enough such that
θ =kh
2p< 1 .
Since this expression is taken to the power 2p in the pollution term, thewave number k must be rather large to render a significant pollution effect.
Remark 4.28. The order of convergence depends on the regularity of thesolution. A function over a one-dimensional domain Ω ⊂ R has regularityl + 1 if its weak derivatives ∂ju, j ≤ l + 1 exist in Ω. For solutions u ofexterior Helmholtz problems, the Wilcox expansion theorem states that uis analytic, i.e., of infinite regularity. In that case, the order of convergenceis always p after estimate (4.7.41). However, there are applications such asdiffraction from binary gratings (cf. Elschner and Schmidt [51]), where onemaximally has regularity 2. Solving such problems with hp FEM, one canexpect only the convergence rate 1 in the energy norm. On the other hand,since the pollution error is estimated using negative norms, the estimatefor l ≤ p is still
e1 ≤ C1
(hk
2p
)l+ c2 k
(hk
2p
)l+p.
Hence, the application of p-version elements always leads to a reduction ofthe pollution error. Relative to the approximation error, this reduction iseven more significant for low regularity.
Remark 4.29. Setting
θ =(hk
p
)p,
we can rewrite (4.7.41) as
e1 ≤ C1θ + C2θ2 .

4.7 Analysis of the hp FEM 155
10 100 1000
Number of Elements
0.00001
0.0001
0.001
0.01
0.1
1
Rel
ati
ve E
rro
r e = 0.1
p=1
p=2
p=3
p=4
p=5p=6
FIGURE 4.22. Relative error of the finite element solution versus best approxi-mation error for k = 30π and p = 1, 2, . . . , 6.
Thus the estimate is similar for all p, including the standard h-version withp = 1; cf. (4.5.15). As a practical matter, we conclude that the error will,in general, be the same for any p if θ is kept constant (i.e., if higher appro-ximation is applied on coarser mesh).
4.7.7 Numerical ResultsWe illustrate our analysis with some results from computational experi-ments. The following computations were carried out on Model Problem Iwith data f = 1 in (4.2.2). In Fig. 4.22, we plot the error of the best appro-ximation and the FE error in the H1-norm for k = 30π and p = 1, . . . , 6.We observe the theoretically predicted asymptotic convergence rates hp andthe reduction of the pollution effect for hk < 2p. We also see that roughlythe same pollution (look at the distance between the BA and the FE errorcurves along the horizontal mark e = 0.1) occurs for constant ratio θ asdefined in the remark above.
Remark 4.30. The “bumps” in the error lines in Fig. 4.22 are an artifactof the one-dimensional model. For h such that kh = lπ, l = 1, 2, . . . , welocally approximate only one of the functions sinx or cosx, respectively.From the Taylor expansions of these functions it is easy to understand the“even–odd” effect in the approximation with polynomials of order p.

156 4. Finite Element Error Analysis and Control for Helmholtz Problems
10 100 1000 10000
Number of Elements
0.001
0.01
0.1
1
Rel
ativ
e E
rror
100 1000 10000
Degrees of Freedom
0.001
0.01
0.1
1
Rel
ativ
e E
rror
p = 1
p = 2
p = 3p = 6
FIGURE 4.23. Error of the finite element solution as a function of the numberof nodal points N (upper plot) and as a function of the number of DOF (lowerplot) for k = 100 and p = 1, . . . , 6.

4.7 Analysis of the hp FEM 157
TABLE 4.3. Number of elements to achieve accuracy (relative error inH1-seminorm) of ε. Parameters: k = 30π, p = 1, . . . , 6; n: number of elements;DOF=n ∗ p: degrees of freedom; nmd: computational cost measured in numbersof multiplications and divisions.
p 1 2 3 4 5 6 ε
efe 0.49795 0.51962 0.5470 0.5582 0.5851 0.7208n 211 48 25 16 12 10
DOF 211 96 75 64 60 60 0.5nmd 1051 284 321 508 824 1296efe 0.099947 0.09956 0.09683 0.0911 0.0829 0.09833n 491 76 35 22 16 12
DOF 491 152 105 88 80 72 0.1nmd 2451 452 451 700 1100 1556efe 0.01000 0.0.01055 0.01013 0.01000 0.01026 0.00983n 2813 180 64 35 23 17
DOF 2813 360 192 140 115 102 0.01nmd 14061 1076 828 1116 1583 2206
The theoretical analysis and the numerical tests show that the qualityand reliablity of the FE solution grow with p. In computational practice,this (theoretically unbounded) growth is inhibited by the decrease in nu-merical stability due to ill conditioning of the stiffness matrix for higherp. We thus conclude this section by a short discussion of computationalefficiency of the FEM implementation for different p. Consider first theplots in Fig. 4.23, where the relative error of the FE solution is plotted,respectively, against the number of mesh points and the number of DOF.Increasing p, one significantly reduces the number of elements needed to
stay within some preset tolerance. The same is true if accuracy is relatedto the number of DOF, though the gain for p ≥ 4 becomes less signifi-cant. A comparison of numerical effort is made by the count of the numberof multiplications and divisions (nmd). In the given one-dimensional case,condensation involves computing the inverse of a (p − 1)× (p − 1) matrix,which requires (p− 1)3 operations [5, p. 515]. Generally (on a non-uniformmesh) this has to be performed on each element. The solution of the re-sulting tridiagonal system then requires 5n − 4 operations [5, p. 528]. Theoverall number of multiplications and divisions is thus
nmd = 5n − 4 + n(p − 1)3.
In Table 4.3, we tabulate the nmd needed to achieve a relative error of thefinite element solution in H1-seminorm of 0.1%, 0.5%, or 0.01%, respec-tively. We observe a significant payoff in computational effort in passingfrom p = 1 to p = 2 or p = 3. As usual in the hp-method, the optimalrelation between h and p depends on the required accuracy; generally, thehigher the accuracy the bigger the payoff by higher-order elements.

158 4. Finite Element Error Analysis and Control for Helmholtz Problems
4.8 Generalized FEM for Helmholtz Problems
The pollution effect at high wave numbers is inherent in the standardGalerkin FEM solutions for Helmholtz problems. As previously, we speakof a nondimensional wave number that models a high frequency or a largecomputational domain. As both cases frequently occur in practical appli-cations, the question arises of how to reduce the pollution effect.Our analysis has shown that the pollution in the FEM error is due to
the deterioration of stability. This is a specific property of the Helmholtzvariational form. Accordingly, one may attempt a reduction of pollution bya modification of the Helmholtz operator in such a way that the modifiedoperator has better stability properties. This approach is called stabiliza-tion. On the other hand, the practical interest is not stabilization per sebut error control, i.e., convergence. Recalling the conclusions from Cea’slemma, convergence can also be improved by raising the order of approxi-mation. In the hp-version of the FEM, higher-order polynomials are usedas shape functions. The next step is to use analytic functions for appro-ximation. These functions should incorporate knowledge on the operator(e.g., be partial solutions) to have a priori good approximation properties.Methodically, such an approach can be viewed as a limiting case p → ∞ ofthe hp-version of the FEM.In this section, we review stabilized methods and methods with speci-
fic approximation properties. The approaches are investigated analyticallyand in numerical experiments on Model Problems I, II. The idea of sta-bilization by Galerkin–least-squares FEM after Harari and Hughes [63] isexplained on the one-dimensional example. We also consider a so-calledquasi-stabilized method that gives in one dimension the same nodal valuesas a FEM with analytic shape functions. All of these methods eliminatethe pollution effect for Model Problem I.This elimination is not possible using any generalized FEM in two dimen-
sions. Here, the stabilizing effect of the GLS–FEM is sensitive to the direc-tion of the exact solution. The error can be significantly reduced in certain“preferred” directions, but the stabilized approach, in general, has littleeffect if the exact solution does not have dominant components in one ofthese directions. As an alternative, we review the quasi-stabilized FEM(QSFEM) after Babuska and Sauter [11, 17]. In this method, the error isnowhere completely eliminated. Rather, the pollution error is minimizedfor all possible directional components of the exact solution.
4.8.1 Generalized FEM in One DimensionTo present the idea of the generalized FEM, we first consider Model Pro-blem I with uniform mesh Xh.

4.8 Generalized FEM for Helmholtz Problems 159
Stabilization:
The Helmholtz variational form is indefinite due to the term −k2(u, v). Inthe Galerkin–least-squares (GLS) method proposed by Harari and Hughes[63], the variational form is modified to
bGLS(u, v) = b(u, v) + τ (Lu,Lv)Ω, u, v ∈ Vh , (4.8.1)
and the right-hand side is
fGLS(v) = f(v) + τ (f,Lv)Ω. (4.8.2)
Here, L is the Helmholtz differential operator, τ is a parameter yet to bedetermined, and (·, ·)Ω is the reduced L2 inner product, where integrationis carried out only on the element interiors (i.e., the singularities at inter-element boundaries are suppressed in the reduced inner product).The goal is to make, by appropriate choice of the parameter τ , the form
bGLS “unconditionally stable” and thus to “circumvent the Babuska–Brezzicondition,” i.e., to avoid the stability problems of the form b as quantifiedby the inf–sup condition.The optimal τ is found from discrete dispersion analysis. A typical stencil
of the standard FEM stiffness matrix in one dimension is (cf. (4.5.1))
(2αG + 1)uj−1 + 2(4αG − 1)uj + (2αG + 1)uj+1 , (4.8.3)
with αG = (kh)2/12. The GLS matrix is similarly defined, but with αGreplaced by
αGLS = αG(1− τk2) . (4.8.4)
The discrete wave number of the FE solution is determined by (4.5.4),which we here write in the form
cos kh =1− 4αG1 + 2αG
.
Thus we seek τ such that
cos kh =1− 4αGLS1 + 2αGLS
,
i.e., the GLS solution has the exact wave number. Solving this equation forαGLS and equating the result to αG(1− τk2), we find
τ =1k2
(1− 6
k2h21− cos kh2 + cos kh
). (4.8.5)
It is shown in numerical experiments on Model Problem I that this choiceof τ leads indeed to solutions with no phase lag [63]. Thus the error in theGLS method is an interpolation error that is free of pollution.

160 4. Finite Element Error Analysis and Control for Helmholtz Problems
A generalized FEM with the same property on nonuniform meshes isdeveloped in Babuska and Sauter [17]. In this quasi-stabilized FEM (QS-FEM), the nodal values of the approximate solution uh are computed fromthe algebraic system
Gstabuh = Qstab(f) , (4.8.6)
where uh is the vector of nodal values of the function uh on Xh, the FEstiffness matrix Gstab is the tridiagonal matrix defined by
Gij =k2h
2 tan kh2
sin k(xi+1 − xi−1)sin k(xi+1 − xi) sin k(xi − xi−1)
if i = j ,
− 1sin k|xi − xj | if |i − j| = 1 ,
0 otherwise ,(4.8.7)
and the mapping Qstab is defined by
(Qstabf
)i=
h
2 tan kh2
i+1∑m=i
tan k(xm−xm−1)2
xm − xm−1
∫ xm
xm−1f(x)dx
xm − xm−1. (4.8.8)
In [17], it is proven that the solution uh obtained from (4.8.6) is nodallyexact for piecewise constant data and that it is pollution-free for any dataf ∈ H1(Ω).
Approximation with Analytic Shape Functions:
The nodal values of the QSFEM are equivalently obtained from a GalerkinFEM with analytic shape functions. Consider the nodal functions Φi of theform
Φi =
t(i)1 on ∆i ,
t(i−1)2 on ∆i−1 ,
0 otherwise,
(4.8.9)
where the shape functions t1, t2 are computed from the local boundaryvalue problems (4.7.31) and (4.7.32) or (4.7.33), respectively. On the masterelement ξ ∈ (−1, 1), the shape functions are explicitly
t1(ξ) = − sinKξ
2 sinK+cosKξ
2 cosK, (4.8.10)
t2(ξ) =sinKξ
2 sinK+cosKξ
2 cosK, (4.8.11)
with K = kh/2; see Fig. 4.24.

4.8 Generalized FEM for Helmholtz Problems 161
−1.0 −0.5 0.0 0.5 1.0
ξ
−3.0
−2.0
−1.0
0.0
1.0
2.0
3.0
tFunction t_1Function t_2
FIGURE 4.24. Analytic shape functions on master element.
The trial functions for the Galerkin FEM are written in the standardway as a linear combination of nodal functions
uh(x) =N∑i=1
uiΦi(x) , (4.8.12)
where ui are the unknown nodal values of the function uh. Then the matrixcoefficient Gii−1 is
Gii−1 =2
xi − xi−1
∫ 1
−1t′1(ξ)t
′2(ξ)dξ − xi − xi−1
2k2∫ 1
−1t1(ξ)t2(ξ)dξ
= − k
sin k(xi − xi−1).
Similarly,
Gii =2
xi − xi−1
∫ 1
−1(t′2)
2 − xi − xi−12
k2∫ 1
−1(t2)2
+2
xi+1 − xi
∫ 1
−1(t′1)
2 − xi+1 − xi2
k2∫ 1
−1(t1)2
=k sin k(xi+1 − xi−1)
sin k(xi − xi−1) sin k(xi+1 − xi).
The expression on the right-hand side is exact for piecewise constant func-tions. In this case, we integrate:
2xi − xi−1
∫ 1
−1ft1 +
2xi+1 − xi
∫ 1
−1ft2
=2k
(tan k(xi − xi−1)
xi − xi−1
∫ xi
xi−1f
xi − xi−1+tan k(xi+1 − xi)
xi+1 − xi
∫ xi+1
xif
xi+1 − xi
).

162 4. Finite Element Error Analysis and Control for Helmholtz Problems
Equations (4.8.7), (4.8.8) are then obtained if we multiply by a scalingfactor. For a general right-hand side, the integration over the elements isequivalent to local averaging of the data. Since (4.8.12) represents in factthe exact solution of (4.2.1), it is clear that the generalized FEM (which useslinear shape functions but has nodal values from analytic shape functions)is exact at the nodal points. Since the homogeneous generalized FEM hasno phase lag, it can be shown [17] that no pollution occurs in the error forall right-hand sides f ∈ H1(Ω).
Conclusions from the 1-D example:
In the one-dimensional case, it is possible to eliminate the phase lag of theFE solution and, accordingly, the pollution term in the error. The salientfeature of the Galerkin–least-squares FEM and the quasi-stabilized FEMis high nodal approximation and elimination of the phase lag rather thanstabilization of the underlying variational form. For small values of kh, theGLS parameter τ is negative and thus does not stabilize the Helmholtzvariational form. Indeed, expanding (4.8.5) for small kh leads to
τ = −h2
12+O(k2h4);
see also Fig. 4.25.
0.0 1.0 2.0 3.0 4.0kh
−0.6
−0.4
−0.2
0.0
0.2
0.4
τ
FIGURE 4.25. The function τ(kh) for k = 100.
4.8.2 Generalized FEM in Two DimensionsUnlike the one-dimensional model case, Helmholtz problems in higher-dimensional applications possess an infinite number of linearly independentparticular solutions. For instance, all plane waves u(x, y) = exp(ik ·x) with|k| = k are solutions of (u + k2u = 0 in Rn, n ≥ 2. We now investigatehow this essential difference influences the performance of the generalizedFEM.

4.8 Generalized FEM for Helmholtz Problems 163
Galerkin–Least-Squares FEM:
We consider the numerical solution of Model Problem II with bilinear FEMon a uniform square mesh. The shape functions are the nodal modes
N1(ξ, η) = φ1(ξ)φ1(η), . . . , N4(ξ, η) = φ2(ξ)φ2(η) .
Inserting the bilinear approximation into the GLS variational equality
b(uh, vh) + τ(Luh,Lvh) = 0
on a uniform interior element patch as shown in Fig. 4.26 leads to thediscrete equation
i+1∑k=i−1
j+1∑l=j−1
(Sijkl − k2(1− τk2)Mijkl
)uh(xk, yl) = 0 ,
where Sijkl, ,Mijkl are the coefficients of the assembled stiffness and massmatrix, respectively. Thus, at every interior point of the mesh, the FEM
h
h
i+1
i
i-1
j-1 j j+1
FIGURE 4.26. Patch in uniform 2-D mesh.
equations can be represented by the 9-point difference star
Ainterior =
A2 A1 A2
A1 A0 A1A2 A1 A2
. (4.8.13)
Assuming now a solution in the form of a plane wave with (known) directionθ and (unknown) discrete wave number k = k(θ),
uh(x, y) = eik(x cos θ+y sin θ) ,
we get the dispersion relation
A0 + 2A1(cos ξ1 + cos ξ2) + 4A2(cos ξ1 cos ξ2) = 0 , (4.8.14)
withξ1 := kh cos θ , ξ2 := kh sin θ .

164 4. Finite Element Error Analysis and Control for Helmholtz Problems
For the Galerkin method with exact integration, we have the standardcoefficients of the stiffness and mass matrix
A0 =83
− 4αG , A1 = −13
− αG4
, A2 = −13
− αG ,
where now αG :=(kh)2
9. The same coefficients are obtained for the GLS–
FEM, with αG replaced by αGLS = αG(1− τk2). Inserting this stencil intothe dispersion relation (4.8.14), the optimal value of τ(θ, k, h) is computedby setting k = k, i.e., replacing ξ1, ξ2 by
ξ1 = kh cos θ , ξ2 = kh sin θ ,
to obtain
τ =1k2
(1− 64− cos ξ1 − cos ξ2 − 2 cos ξ1 cos ξ2
(2 + cos ξ1)(2 + cos ξ2)k2h2
). (4.8.15)
Inserting this value of τ into the GLS variational equality, we get an FEsolution that has no phase lag if the exact solution is a plane wave indirection θ.
Example 4.31. Assuming θ = 0 we get with cos ξ1 = cos kh, cos ξ2 = 1,the 1-D dispersion relation (cf. (4.8.5))
τ =1k2
(1− 6
k2h21− cos kh2 + cos kh
).
However, a general signal consists of plane waves going in an infinitenumber of directions. Even if there are directionally prevalent componentsin this decomposition, they are not necessarily known a priori. It is notclear if the GLS leads to improved approximation of a wave that is notdominant in the preferred direction. In fact, numerical tests (cf. Thompsonand Pinsky [114, Fig. 12]; see also the paragraph on numerical results be-low) show that the GLS–FEM has the same error as the standard GalerkinFEM if the direction of the exact solution is different from the directionchosen for the factor τ .
Minimization of Pollution in the Quasi-Stabilized FEM:
The discretization of the Helmholtz equation by the Galerkin or the Galerkin–least-squares FEM renders on a uniform square mesh the uniform differ-ence stencils (4.8.13) with dispersion relation (4.8.14). On the other hand,the exact dispersion relation of a plane wave u = exp(ξ1x + ξ2y) , ξ1 =kh cos θ , ξ2 = kh sin θ , is the circle
ξ21 + ξ22 − k2h2 = 0 .

4.8 Generalized FEM for Helmholtz Problems 165
The phase lag, and thus the pollution of the discrete solution, is determinedby the distance between the curves described by the exact and the discretedispersion relations. The maximal distance of the curves is
d(k, h, kh) = max0≤θ≤2π
∥∥∥∥(
ξ1(θ)ξ2(θ)
)−(
ξ1(θ)ξ2(θ)
)∥∥∥∥in vector norm, where ξ1(θ), ξ2(θ) are the roots of the dispersion relation(4.8.14). Recalling the definitions of ξi and ξi, we see that
d = maxθ
|k(θ)− k|h . (4.8.16)
Since k is computed from the dispersion relation (4.8.14) as a functionof A0, A1, A2, we may ask for the minimal distance d over all possiblecoefficients of the stencil (4.8.13). The coefficients are linearly dependentthrough the dispersion relation; hence we effectively have two degrees offreedom for a modification of the stencil. Assuming that the phase lag, asin the one-dimensional case, can be expanded as a series with odd powersof kh,
(k − k)h = c1(kh)3 + c2(kh)5 + c3(kh)7 + · · · ,where the ci depend on A0, A1, A2 via k, one can choose A0, A1, A2 suchthat c1 = c2 = 0, whence
kopt − k = k7h6 +O(k9h8
). (4.8.17)
Example 4.32. The stencil
Ainterioropt =3∑
m=0
(kh)mAinteriorm
has the optimal property (4.8.17) if
Ainterior0 =
−1
5 − 45 − 1
5− 45 4 − 4
5− 15 − 4
5 − 15
, Ainterior1 = − 1
250
17 58 1758 0 5817 58 17
,
Ainterior2 =−150000
801 2549 8012549 0 2549801 2549 801
,
Ainterior3 =−1
4.5× 107
152626 473849 152626473849 0 473849152626 473849 152626
.
A rigorous outline of (4.8.17) can be found in Babuska et al. [17, 11]. Thereit is also shown that for any 9-point difference stencil, one can find some

166 4. Finite Element Error Analysis and Control for Helmholtz Problems
exact solution of the Helmholtz equation such that its approximation onthe stencil is polluted. Hence, in two dimensions, there is no generalizedFEM (GFEM) with piecewise linear shape functions that is pollution-freefor all possible loads. On the other hand, it is possible to construct stencilswith minimal pollution error. The phase lag of the discrete solutions fromthese stencils is of order k7h6.
Remark 4.33. In the GLS–FEM, the modified discrete operator stemsfrom a modified (“stabilized”) variational form. This form is subsequentlydiscretized by the standard FEM approach, i.e., the modifications are in-troduced on the functional level. The modifications of the discrete operatorin the QSFEM are imposed on the algebraic level directly into the stiffnessmatrix. Thus the QSFEM is rather a finite difference than a finite elementmethod. On the other hand, the conclusions from the analysis apply to anygeneralized FEM that leads to nine-point difference stencils. The idea hasrecently been generalized to rectilinear stencils (Elschner and Schmidt [51]).
Numerical Results:
Let us first illustrate the dispersion relation (4.8.14). We plot this relationfor kh = 2.5, with the coefficients computed by the Galerkin method, thestabilized method after Pinsky and Thompson, and the quasi-stabilizedmethod. The results are shown in Fig. 4.27, all in comparison to the ex-act dispersion curve (3.3.11).4 We see that the quasi-stabilized relation isvirtually identical with the exact relation, whereas the distance d(θ) of thestabilized curve is zero for some θ but is large for others. The distancebetween the Galerkin curve and the exact curve is large everywhere.Second, we have solved Model Problem II with the methods discussed
above. The boundary conditions of the computational example have beenformulated in such a way that the exact solution is u = exp(ik · x).Let us compare the standard Galerkin FEM with the stabilized methods.
In Fig. 4.28, we show the difference of the FE and BA errors |e|1 − |eba|1for mesh sizes h(k) such that kh = 1.5 (i.e., on coarse grids with roughlyfour elements per wavelength). We consider wave vectors k = k(cos θ, sin θ)with
k = 30, 100, 150, θ = 0,π
16,π
8,3π16
,π
4,3π8
,π
2.
For each of these combinations (k, θ), the numerical solution is computedwith Galerkin FEM, GLS–FEM, and the QSFEM. The preferred directionof the GLS–FEM is θ0 = π
8 . Again, the directional sensitivity of the GLS-FEM is evident. While the numerical error is very small if the exact solutionis dominant in the preferred direction, the error is not much reduced (with
4Thanks to Stefan Sauter for the graphics routine that plots the 2-D dispersion curves.

4.8 Generalized FEM for Helmholtz Problems 167
(a) Galerkin (b) Stabilized
(c) Q-stabilized
FIGURE 4.27. Dispersion curves for k = 100.
respect to the standard Galerkin FEM) if the exact solution differs fromthe preferred direction. On the other hand, the error reduction by QSFEMis directionally independent.
Analytic Approximation and Partition of Unity Method:
In one dimension, any solution of the homogeneous Helmholtz equation canbe written as a linear combination of the functions exp(ikx), exp(−ikx). So-lutions of Helmholtz problems on two-dimensional bounded domains canbe approximated with arbitrarily small error using plane waves. More pre-cisely, the set
W =exp(ik(x cos
2πmn
+ y sin2πmn)),m = 0, 1, . . . , n− 1
, n = 1, 2, . . .
(4.8.18)
is dense in the H1-norm on a bounded domain Ω (cf. Melenk [91, p.127],Herrera [68]).Thus analytic shape functions can be constructed on a rectilinear mesh as
tensor products of the one-dimensional functions ti(kxx)tj(kyy), i, j = 1, 2.

168 4. Finite Element Error Analysis and Control for Helmholtz Problems
0
0.1
0.2
0.3
0.4
0.5
1
0 Pi/16 Pi/8 3Pi/16 Pi/4 3Pi/8 Pi/2
Err
or(G
FE
M)
- E
rror
(BA
)
Wave Direction
Galerkin-FEM, k=30Galerkin-FEM, k=100Galerkin-FEM k=150
GLS-FEM, k=30GLS-FEM, k=100GLS-FEM k=150
QSFEM, k=30QSFEM, k=100QSFEM k=150
FIGURE 4.28. Dependency of the H1-error on the wave direction θ for kh = 1.5and k = 30, 100, 150.
Directional enrichment can be achieved by superposing several productswith k2x + k2y = k2. However, like the GLS–FEM and QSFEM, this ap-proach lacks generality, since it is restricted to regular rectilinear grids.This restriction results from the fact that the analytic functions are usedboth for approximation and as shape functions on the FEM mesh, i.e.,the functions have to satisfy the usual local boundary conditions on theelements.This restriction is removed in a new generalized FEM, the partition of
unity FEM (PUM) proposed by Melenk and Babuska [91, 92]. The concep-tual idea of this new method makes it possible to incorporate analyticalknowledge of the exact solution on a general mesh or even using a mesh-freeapproach of discretization. The key idea is to employ analytic functions forapproximation without imposing any mesh-dependent boundary conditi-ons directly on these functions. Rather, the shape functions are obtainedby multiplying the approximating functions with patch functions that havecompact support and globally form a partition of unity on the domain Ω.Thus a typical PUM basis function is written as
Φi(x, y) = ϕi(x, y)vi(x, y) , (4.8.19)
where the ϕi(x, y)Ni=1 form a partition of unity on Ω,
N∑i=1
ϕi(x, y) ≡ 1 on Ω , (4.8.20)

4.8 Generalized FEM for Helmholtz Problems 169
and
vi(x, y) =m(i)∑j=1
v(j)i (x, y) (4.8.21)
are the analytic approximating functions. For the Helmholtz equation, thesefunctions can be chosen from (4.8.18).An partition of unity is given, for example, by the piecewise linear basis
functions (“hat functions”) on any FE partition of Ω. In Fig. 4.29, a typicallocal approximation space of the PUM on a patch ωj is depicted. Thepatch function ϕi is obtained from the piecewise linear shape functions. Theapproximating function vi is a superposition of plane waves from W , beingdirected in angles θ1, . . . , θ4. In a finite element context, one expects that
4
ΩΓ
ω
ϕθ
θ θθ
j
BV3
1 2
FIGURE 4.29. PUM basis function and approximation by plane waves.
by incorporation of functions from a local spaceW into the FEM trial spacethe quality of approximation is increased significantly. This is confirmed byMelenk and Babuska [92], who prove the approximation estimate
‖uH − um‖ ≤ C(Ω, k, s)(ln2mm
)s‖uH‖s.
Here, m is the number of basis functions from W that are used in (4.8.21).The approximated function uH is any homogeneous solution of the Helm-holtz equation on Ω ⊂ R2. While this is the same convergence rate as forthe p-version, the increase from m to m + 1 adds only one DOF, whereasan ever increasing number of DOF is added if advancing by degree in thep-version with polynomial approximation. Also the algebraic rate of con-vergence is theoretically unlimited if the exact solution is analytic, henceone expects exponential convergence with respect to m. Indeed, the firstnumerical tests of the PUM for the Helmholtz equation show high con-vergence rates. The tests are performed on Model Problem II. Table 4.4(taken from [91, p. 148]) shows the potential advantage in efficiency com-

170 4. Finite Element Error Analysis and Control for Helmholtz Problems
pared to the FEM (h version) and QSFEM. In the table, N is the numberof subdivisions of the sides of the square domain (N = Nx = Ny).
TABLE 4.4. DOF necessary in different methods to stay below the indicatedtolerance for the relative error in H1-norm, with wave number k = 32.
ε 15% 7% 1%FEM 9400 26000a 800, 000a
QSFEM 4096 16384 80, 000a
PUM, N = 1 88 88 104PUM, N = 8 468 810 810
aestimated
4.9 The Influence of Damped Resonance inFluid–Solid Interaction
In this section, we discuss some numerical aspects of Model Problem III,which describes fluid–solid interaction. The coupled problem of acousticfluid–solid interaction is well-defined for all frequencies ω. Due to the ra-diation damping, the system does not have eigensolutions in the form ofstanding waves. The vibrations of the elastic structure are damped by theacoustic medium. The magnitude of the damping coefficient depends on theratio of the fluid and solid material constants. If the fluid has small density,the system behaves almost as the elastic solid, vibrating in vacuo. Thus aloss of stability is expected near the interior (i.e., of the elastic obstacle)eigenfrequencies.
4.9.1 Analysis and Parameter DiscussionWith respect to the wave number k, the coupled problem has generallythe same stability properties as the uncoupled problem. For a load F thatis a square-integrable function, there exists a unique solution U of thevariational problem (4.2.21). The solution is twice weakly differentiableand depends on the load as (Babuska et al. [90])
‖U ,xx ‖0 ≤ Cs(1 + k)‖F‖0 , (4.9.1)
where ‖ · ‖0 is the L2-norm that is induced by the inner product (4.2.20).Analyzing the convergence of the FE solution leads to the asymptotic
error estimate
‖U − Uh‖1,V ≤ Copt infΦ∈Sh
‖U − Φ‖1,V , (4.9.2)

4.9 The Influence of Damped Resonance in Fluid–Solid Interaction 171
1e-07
1e-06
1e-05
1e-04
0.001
0.01
30 60 120 240 480 960
Rel
ativ
e E
rror
Number of Elements
BAFE
FIGURE 4.30. Relative error of best approximation (BA) and FE solution inH1-norm as a function of the number of elements for k = 10 and p = 2. The FEerror is marked by .
where Sh is the subspace of FEM approximation. Here, the H1-norm isdefined as
‖U‖1,V =((U ′,U ′)2 + k2(U ,U)2)1/2 . (4.9.3)
The estimate holds with Copt independent of k, h, provided that k2h ' 1.Thus both the exact and the discrete problems are well-posed. The ana-
lysis is based on the Garding inequality, and hence does not provide pre-asymptotic estimates. The stability constants depend on the coupling pa-rameters a and n, as defined in Section 4.2.3. These coupling parameterscharacterize the ratio of the solid and fluid material constants. For waterand steel, typical values are
E = 210× 109N/m2, cf = 1.5× 103m/s, cs = 5.1× 103m/s,ρf = 1.0× 103kg/m3, ρs = 7.8× 103kg/m3.
4.9.2 Numerical EvaluationIn our numerical experiments for the coupled problem we pursue two objec-tives: first, to investigate the preasymptotic error behavior of the coupledproblem; second, to address the sensitivity of the coupled problem to thematerial properties of the media. Consider Model Problem III on a domainΩ = ∪Ωi with Ω1 = (0, 3), Ω2 = (3, 6), Ω3 = (6, 9). In the left fluid region,a source is present in the form of a step-function
g1(x) =1 , x ∈ [1, 2],0 , otherwise ,
and no load is given in the solid or in the right fluid region: f = g2 = 0.The material parameters for steel and water are assumed.

172 4. Finite Element Error Analysis and Control for Helmholtz Problems
1e-06
1e-05
0.0001
0.001
0.01
0.1
1
30 60 120 240 480 960
Rel
ativ
e E
rror
Number of Elements
BAFE
FIGURE 4.31. Relative error of best approximation (BA) and FE solution inH1-norm as a function of the number of elements for k = 500 and p = 5. The FEerror is marked by .
The nondimensional problem is discretized using an hp-version of theFEM on uniform meshes with 30, 60, 120, . . . , 960 elements in the wholefluid–solid region. The error of the FEM solution is again compared withthe error of the best approximation.Representative results for the FE and BA errors are shown in Fig. 4.31.
Generally, higher p have to be chosen for higher k in order to get errorsbelow 100%.We see that the coupled problem generally shows the same numerical
effects as the uncoupled one.The more interesting feature of the coupled problem is its sensitivity
to the ratio of the material properties fluid–solid. This is investigated inthe following experiments. We now consider an infinite coupled domainΩ = Ω1 × Ω2, where the solid is given on Ω1 = (0, 1) and the fluid onΩ2 = (1,∞). A Dirichlet boundary condition u(0) = 0 is assumed, andno load is given in the fluid, g2(x) = 0. This is the problem of forcedvibrations of a Dirichlet-fixed rod interacting with a fluid at x = 1. Viaa DtN condition at x = 1, this problem can be reduced to the boundaryvalue problem (cf. Example 1.6)
−u′′ − κk2u = f in (0, 1) ,u(0) = 0 , (4.9.4)
u′(1)− ikαu(1) = 0 ,
where κ = (cf/cs)2 and α = ρfc2f /ρsc
2s . For α → 0 the problem is ill
conditioned at the eigenvalues√κ k =
(π2+mπ
), m = 1, 2, . . . .

4.9 The Influence of Damped Resonance in Fluid–Solid Interaction 173
0.001
0.01
0.1
1
10
1000 10000
Rel
ativ
e E
rror
Number of Elements
ρ = 1ρ = 0.1
ρ = 0.01ρ = 0.001
ρ = 0.0001ρ = 1000
FIGURE 4.32. Relative error in the H1-seminorm for kκ1/2 = 10.5π and differentvalues of ρf .
0.001
0.01
0.1
1
10
10 100 1000 10000
Rel
ativ
e E
rror
Number of Elements
BA, m=10BA, m=10.5
FE, m=10FE, m=10.5
FIGURE 4.33. Relative errors for best approximation (BA) and FE solution,computed in the H1-seminorm: comparison of kκ1/2 = 10.5π (exact eigenvalue)to kκ1/2 = 10π (between eigenvalues).

174 4. Finite Element Error Analysis and Control for Helmholtz Problems
Figure 4.32 shows the error of the FE solution (with data f = 1, piecewiselinear approximation) near the critical values for
√κk.
The relative error in the H1-seminorm is plotted for different values of a(we formally let a → 0 by ρf → 0). The solution converges almost optimallyfor ρf = 1000. This corresponds to the propagation of a wave through ahomogeneous medium as considered in Model Problem I. No significantpollution is observed on [0, 1], since the wave number is small. However,the pollution effect grows considerably as a → 0.To simulate in the same plot the FEM convergence between eigenvalues,
consider the line for ρ = 103. For large a−1, the Robin boundary conditiontends to the Dirichlet condition. This boundary value problem has exacteigenvalues at mπ, m = 1, 2, . . ., and hence the assumed value of m = 10.5lies between two eigenvalues. This solution converges almost optimally.This effect is also illustrated in Fig. 4.33. Again we compute with the
material constants for steel and water. We see the significant increase ofthe pollution effect when the wave number is moved toward an interioreigenfrequency (from 10π to 10.5π). The mesh must be very fine in orderto achieve a reliable resolution of the dynamic instability.Resuming the experiments, we conclude that unlike the uncoupled pro-
blem, the FE solution of the coupled problem may be considerably pollutedalso for small k. The pollution occurs close to eigenvalues of the interiorproblem. In the general case, these eigenvalues are not known a priori. Thereliability of the solution deteriorates close to the interior frequencies, inparticular, if the damping by the acoustic medium is small.
4.10 A Posteriori Error Analysis
The goal of a posteriori error analysis is twofold (cf. Verfurth [116, p. 1]):first, one needs to identify (and resolve adaptively) local concentrationsof the errors due to singularities. Second, the a posteriori error estima-tor should give a reliable indication of the global quality of the computedsolution. Here, we focus on the second aspect. We analyze the residualestimator after Babuska and Miller [16]. In computational experiments, wealso investigate the averaging method after Zienkiewicz and Zhu [122]. Thequestion is how the indefiniteness of the variational form and the resultingpollution in the FE solution influence the efficiency of a posteriori errorestimation. The investigation is carried out on Model Problem I.
4.10.1 NotationLet uh ∈ Vh be the FE solution of (4.2.2). Here, we consider only the h-version of the FEM; hence Vh =: Sh(0, 1) ⊂ H(0(0, 1) denotes the space ofpiecewise linear functions that are defined on the unit interval and satisfy

4.10 A Posteriori Error Analysis 175
a Dirichlet condition at x = 0. The function
ri :=(f +
d2uhdx2
+ k2uh
)∣∣∣∣τi
(4.10.1)
is called the interior residual in the element τi. We define the elementresidual indicator function ei ∈ H1
0 (τi) as the solution of the variationalproblem:
Find ei ∈ H10 (τi) :
bi(ei, v) = (ri, v)i ∀ v ∈ H10 (τi) ,
(4.10.2)
where H10 (τi) denotes the subspace of H1-functions that vanish on the
element boundaries,
bi(ei, v) =∫τi
(deidx
dv
dx− k2eiv
)dx
is the reduction of the Helmholtz variational form to the element τi, and(·, ·)i denotes the local L2 inner product. The element error indicators aregiven by
ηi := |ei|1,i =(∫
τi
∣∣∣∣deidx
∣∣∣∣2
dx
)1/2. (4.10.3)
Finally, we define the global estimator of the H1-norm of the FE error |e|1,Ωas
E :=(N∑i=1
η2i
)1/2. (4.10.4)
The efficiency of this estimator is measured by the global effectivity index
κ :=E
|e|1,Ω . (4.10.5)
Remark 4.34. The error estimators based on the solution of local Dirich-let problems are equivalent (cf. Verfurth [116, Section 1.3]) to the originalresidual estimators of Babuska and Miller [16].
4.10.2 Bounds for the Effectivity IndexTheorem 4.35. Assume kh < π. Then
1(1 +
k2h
π
)(1 +(kh
π
)2) ≤ κ ≤1 + C(1 + k)
k2h2
π(1−(kh
π
)2) (4.10.6)

176 4. Finite Element Error Analysis and Control for Helmholtz Problems
holds withC =
2(1− 2(1 + k)
k2h2
π2
)π
, (4.10.7)
provided that k, h are such that C is positive.
The proof of the theorem is based on the observation that the localindicators measure an interpolation error, while on the other hand, weknow that the FE solution uh ∈ Vh is also shifted with respect to the exactsolution. This shift is a global effect of dispersion (which again is relatedto the global effect of operator instability) and thus cannot be indicatedlocally.To quantify these observations, we define a function u ∈ H(0(0, 1) in such
a way that the FE solution is the H1-projection of u. Then there will beno phase difference between u and uh. Let the function u be defined as thesolution of the variational problem
Find u ∈ H1(0(0, 1) :
(u′, v′) = (f, v) + k2(uh, v) + 〈uh, v〉, ∀v ∈ H1(0(0, 1) ,
(4.10.8)where we define
〈uh, v〉 := ikuh(1)v(1) .
We will call u the shifted solution. By definition, the FE solution of ModelProblem I is the projection of u in the H1-seminorm. Since we solve a one-dimensional problem, the projection uh is in fact the nodal interpolant ofu (cf. Section 4.4.1). An illustration of the definition is given in Fig. 4.34,where we plot the exact, the shifted, and the finite element solutions.Now we are ready to formulate two lemmas that lead directly to the
proof of the theorem.
Lemma 4.36. Let u, u, uh be the exact, the shifted, and the finite elementsolutions of (4.2.2), respectively. Let e = u − uh, e = u − uh. Then
(1 + C(1 + k)
k2h2
π
)−1|e|1 ≤ |e|1 ≤
(1 +
k2h
π
)|e|1 (4.10.9)
holds with C from (4.10.7), provided that h, k are such that C is positive.
For the proof we observe that the exact solution satisfies
(u′, v′) = (f, v) + k2(u, v) + 〈u, v〉 ∀ v ∈ V .
Subtracting (4.10.8), we have
(µ′, v′) = k2(e, v) + 〈e, v〉 ∀ v ∈ V ,

4.10 A Posteriori Error Analysis 177
0.725 0.735 0.745 0.755 0.765 0.775x
-2.5e-4
-2.0e-4
-1.5e-4
-1.0e-4
-5.0e-5
0.0e+0
Rea
l Par
ts
Exact solutionShifted solutionFE solution
FIGURE 4.34. Real part of the exact, finite element, and shifted solutions fork = 100 on a mesh with resolution λ/h ≈ 13.
where we define µ := u− u ∈ H1(0(0, 1). Adding −k2((u− u), v)−〈u− u, v〉
to both sides, we find that µ is the solution of the problemFind µ ∈ H1
(0(0, 1) :b(µ, v) = k2(e, v) ∀v ∈ H1
(0(0, 1) .(4.10.10)
(Note that e(1) = 0 because uh is the nodal interpolant of u.) Thus µ canbe written as
µ(x) = k2∫ 1
0G(x, s)e(s) ds ,
where G is the Green’s function given in (4.2.5). Differentiating in x andapplying the Cauchy–Schwarz inequality, we see that
|µ|1 ≤ k2‖G,x ‖‖e‖ .
Using the approximation property (4.4.2)3, we have
|µ|1 ≤ k2h
π|e|1 .
Then, writing e = u − uh = µ − e, the upper bound of (4.10.9) follows bythe triangle inequality.For the lower bound, we write the variational equality of (4.10.8) as
(e′ − e′, v′) = k2(e, v) + 〈e, v〉 .

178 4. Finite Element Error Analysis and Control for Helmholtz Problems
Choosing v = −e, we get
|e|21 = (e′, e′)− k2(e, e) ≤ |e|1|e|1 + k2‖e‖‖e‖by the Cauchy–Schwarz inequality. In the proof of the asymptotic errorestimate (4.4.7) it is shown that
‖e‖ ≤ C(1 + k)h|e|1 (4.10.11)
holds with C from (4.10.7). Hence
|e|21 ≤ |e|1|e|1 + k2C(1 + k)h|e|1h
π|e|1 ,
where we have also used the interpolation estimate (4.4.2). Dividing nowboth sides of the estimate by |e|1, we obtain the lower bound, proving thelemma.
Remark 4.37. The assumptions on k, h in the lower bound are quiterestrictive. In many cases, instead of (4.10.11), the simpler relation
|e|1 ≤ |e|1 (4.10.12)
holds, since e is an interpolation error (of the shifted solution), whereas e ispolluted. The lower bound (which is the numerator in the upper bound ofthe theorem) holds then with the constant 1. We observed this behavior, inparticular, in the numerical evaluation. However, (4.10.12) is not generallytrue. A counterexample is given in Babuska et al. [12].
Lemma 4.38. Assume kh < π. Then(1 +
k2h2
π2
)−1|e|1,i ≤ |ei|1,i ≤
(1− k2h2
π2
)−1|e|1,i . (4.10.13)
For the proof, let us fix an arbitrary interior element τi and use in (4.10.8)a test function v ∈ H1
0 (τi) that is extended by zero outside of τi. We get
(e′, v′)i = (f + k2uh, v)i = (ri, v) ,
where the latter equality follows from the definition of the interior residual(note that u′′
h = 0 in the element interiors). Now from the definition of theresidual indicator function (4.10.2) we have
bi(ei, v) = (e′, v′)i . (4.10.14)
Taking again v = ei, we obtain
(e′, e′i)i = |ei|21,i − k2‖ei‖2i ,

4.10 A Posteriori Error Analysis 179
and hence
|ei|21,i = (e′, e′i)i + k2‖ei‖2i ≤ |e|1,i|ei|1,i +
k2h2
π2|ei|21,i ,
where we have used the interpolation estimate (4.4.2). Reordering anddividing by |ei|1,i, we get(
1− k2h2
π2
)|ei|1,i ≤ |e|1,i ,
and the upper bound of the statement readily follows.To prove the lower bound, we take v = e in (4.10.14):
|e|21,i = bi(ei, e)
=∣∣(e′i, e
′)i − k2 (ei, e)i∣∣ ≤ |(e′
i, e′)i|+ k2 |(ei, e)i|
≤ |ei|1,i|e|1,i + k2‖ei‖i ‖e‖i ≤(1 +
k2h2
π2
)|ei|1,i |e|1,i .
Canceling |e|1,i on both sides, we obtain the lower bound for |ei|1,i, andthe statement is shown.
Remark 4.39. The lemma indicates what the local indicators really mea-sure, namely, the difference between the shifted solution and the FE so-lution (rather than the difference between the exact and the FE soluti-ons). Indeed, we may assume that kh ' 1 in practice, and hence the localeffectivity index of the indicator with respect to the error function e is closeto 1 on each element. On the other hand, considering the upper bound inLemma 4.37 we see that the global error of the FE solution may be signi-ficantly larger than the error with respect to the shifted solution (k2h 1for large k on meshes with kh = constant). Using Lemma 4.38 we can iden-tify the error of the shifted solution with the local indicator.
The estimate (4.10.6) of Theorem 4.35 is a direct consequence of theestimates (4.10.9) and (4.10.13). We state two conclusions. First, the errorestimator is asymptotically exact; i.e., the effectivity index tends to 1 ash → 0. Second, the lower bound in (4.10.6) indicates that the error may besignificantly underestimated if k2h is not small.We now illustrate these conclusions in numerical experiments.
4.10.3 Numerical ResultsIn Fig. 4.35, we plot the error function e, the error with respect to theshifted solution e, and the local residual indicator function e for f ≡ 1,k = 100, and h = 1/300. We see that the indicator e closely measures the

180 4. Finite Element Error Analysis and Control for Helmholtz Problems
0.72 0.73 0.74 0.75 0.76 0.77 0.78-0.004
-0.002
0.000
0.002
0.0040.72 0.73 0.74 0.75 0.76 0.77 0.78
-2.5e-5-2.0e-5-1.5e-5-1.0e-5-0.5e-50.0e+00.5e-51.0e-51.5e-52.0e-52.5e-5
FIGURE 4.35. Real parts of exact error e(x) (thick solid line), error with respectto the shifted solution e(x) (thick dashed), and the residual error indicator func-tion e(x) (thin solid). The derivates are shown in the lower plot, where also the(Z–Z)-estimator is plotted (dotted). Dashed vertical lines indicate nodes.
TABLE 4.5. Quality of the residual estimator: comparison of exact and estimatederrors, magnitudes in percentage of H1-norm of exact solution.
hk k Estimated, % Exact, %10 16.73 19.58100 29.29 128.58
0.6 200 25.38 199.71500 17.43 133.8510 8.50 8.95100 10.10 28.88
0.3 200 11.27 66.40500 7.29 123.1810 2.79 2.81100 2.92 3.99
0.1 200 2.98 7.10500 2.93 18.09

4.10 A Posteriori Error Analysis 181
50 100 150 200
Wave Number k
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
2.0G
loba
l Eff
ecti
vity
Ind
ex
FIGURE 4.36. Numerical evaluation of bounds for the effectivity index. The solidline shows the measured index as a function of the wave number, the dashed linesshow the predicted upper and lower bounds, respectively.
10 100 1000 10000 100000
Number of Elements
1
0.1
0.01
0.001
Rel
ativ
e E
rror
Estimated, k=100Exact, k=100Estimated, k=400Exact, k = 400
FIGURE 4.37. Convergence h→ 0 of exact and estimated error for k = 100 andk = 400.

182 4. Finite Element Error Analysis and Control for Helmholtz Problems
error e but does not reflect the true behavior of the FE error. The amplitudeof the error is significantly underestimated by the local indicators.The following computations further illustrate the bounds in (4.10.6). To
show that the lower bound indeed reflects the behavior of the effectivityindex for meshes with kh =constant, we plot in Fig. 4.36 the numericallycomputed effectivity index for kh = 0.6. This magnitude of kh correspondsto the “rule of thumb” to use 10 elements per wavelength. We compare theeffectivity index of the FE computation (continuous line) to the theoreticalupper and lower bound (dashed lines) in (4.10.6). Clearly, the lower boundof (4.10.6) reflects the actual behavior of the computed effectivity index.We now evaluate the estimator E using linear elements. For this parti-
cular case, the second derivatives of uh vanish in all element interiors, andhence the residuals ri are given by ri = (f+k2uh)|τi . The element residualproblems (4.10.2) were solved using quadratic approximations for trial andtest functions ei and v.
In Fig. 4.37, we plot the exact relative error|e|1,I|u|1,I
and the estimated
relative errorE
|u|1,Ifor k = 100 and k = 400. Again we see that on coarse
meshes the estimator E underestimates the error |e|1,I . Note that for k =400 the true error is 100% at a mesh size where the estimator predicts anerror of only 10%. Additional numbers are given in Table 4.5 for mesheswith hk = 0.6, 0.3, and 0.1. Recall that hk = 0.6 corresponds to the “ruleof thumb” (4.4.1), whereas hk = 0.3, hk = 0.1 are overrefined meshes. Notethat the estimators predict errors of a constant order of magnitude for allwave numbers. Comparing this observation with the a priori investigation(in particular, Fig. 4.9 and corresponding remarks), and also comparingFig. 4.37 with Figures 4.11 and 4.12 from Section 4.5., we see that theestimator shows the typical convergence behavior of a best approximation— yet another illustration of the fact that the residual estimator measuresthe interpolation error.To show that this behavior is typical for local error indicators in general,
the computations were carried out also for the estimator EZZ based on theso-called ZZ element error indicators, as defined in Zienkiewicz and Zhu[122] by
ηZZi :=(∫
τi
∣∣∣σZZi (x)− duhdx(x)∣∣∣2dx)
12
, (4.10.15)
where
σZZi (x) =x − xi−1xi − xi−1
sZZi +xi − x
xi − xi−1sZZi−1, x ∈ τi , (4.10.16)
with
sZZi =12duhdx
(xi)+12duhdx
(xi+1
), xi =
(xi−1 + xi2
),

4.10 A Posteriori Error Analysis 183
100 1000 10000 100000
Number of Elements
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
Glo
bal E
ffec
tivi
ty I
ndex
k=100k=400k=1000
Minimum effectivity indices : 0.215 for k = 100 0.058 for k = 400 0.060 for k = 1000
FIGURE 4.38. Convergence of the global effectivity index for the residualestimator.
100 1000 10000 100000
Number of Elements
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
Glo
bal E
ffec
tivi
ty I
ndex
k = 100k = 400k = 1000
Minimum effectivity indices : 0.222 for k = 100 0.059 for k = 400 0.067 for k = 1000
FIGURE 4.39. Convergence of the global effectivity index for ZZ estimator.

184 4. Finite Element Error Analysis and Control for Helmholtz Problems
0 20 40 60 80 100 120 140 160 180 200
Wave Number k
0.0
0.2
0.4
0.6
0.8
1.0
Glo
bal E
ffec
tivi
ty I
ndex
k^2h=10
k^2h=5
k^2h=2
FIGURE 4.40. Global effectivity index on sequences of meshes withk2h =constant. The effectivity indices have been computed from the residualestimator.
for each interior node i, 1 ≤ i ≤ N − 1. The estimator and effectivityindices are computed as in (4.10.4), (4.10.5).In Figures 4.38 and 4.39, we plot the effectivity indices κ from the resi-
dual and ZZ methods, respectively, as functions of the number of elementsfor different k. We observe that in both cases the indices converge mono-tonically to 1 as h → 0. Thus, for sufficiently fine meshes, E is an efficientestimator of |e|1,Ω. However, the asymptotic behavior of the estimator doesnot reflect the quality of engineering computations, where it is a commonpractice to employ meshes with a specified number of elements per wave-length. The plots show again how the true FE error is underestimated onmeshes that correspond to the “rule of thumb” kh=constant.The ZZ estimator and the residual estimator behave similarly, differing
only on very coarse grids, where the residual estimator overestimates theerror, while the ZZ estimator underestimates the error.Finally, we expect from (4.10.6) that the global estimator E is efficient
if the size of k2h is restricted (as k grows), whereas it is unbounded if themeshes are designed by the “rule of thumb” (4.4.1). This is confirmed inFigures 4.40 and 4.41. The plots show how the effectivity index dependson k if the meshes for the FE computation satisfy constraints on k2h andkh, respectively. Obviously, the estimators are efficient and reliable for allk if hk2 = β. On the other hand, the quality of the estimators deterioratesif kh = constant.

4.11 Summary and Conclusions for Computational Application 185
0 20 40 60 80 100 120 140 160 180 200
Wave Number k
0.0
0.2
0.4
0.6
0.8
1.0
Glo
bal E
ffec
tivi
ty I
ndex
hk=0.5
k^2h = 2
FIGURE 4.41. Variation of the global effectivity index with wave number. Theupper line shows the effectivity indices on a sequence of fine meshes for whichk2h = 2. The lower line shows the deterioration of the effectivity index on mesheswith kh = 0.5. The effectivity indeces have been computed from the the ZZestimator.
4.11 Summary and Conclusions for ComputationalApplication
The application of discrete methods to Helmholtz problems generally re-quires the resolution of different scales. For exterior problems, the FEM isapplied in the near field. The far-field behavior has to be mapped onto thenear field in such a way that the reduced problem is well-posed and thetruncation error is controlled.The FE model in the near field resolves the size of the computational
domain, as well as the wavelength of the incident signal. These scales maydiffer in order of magnitude, leading to a large nondimensional wave numberin a scaled model. The solutions are then highly oscillatory (rough). Thevariational operator is indefinite, and the stability of the model deteriorateswith large wave number.In the case of elastic scattering, the wave propagates through an inho-
mogeneous medium. Here, the numerical model suffers additional stabilityproblems at the (discrete) eigenfrequencies of the interior problem.We have investigated the reliability of finite element methods for large
wave number. From our numerical results, the term “large wave number”

186 4. Finite Element Error Analysis and Control for Helmholtz Problems
for the homogeneous case can be quantified roughly by the relation
L
λ≈ 10 ,
that is, the computational domain is ten times larger than the length ofthe incident wave. In our discussion, a wave number k means the nondi-mensional number
k = 2πL
λ.
Our investigation leads to the following conclusions.
Error Control for the h-Version of the FEM:
There is a principal difference between asymptotic and preasymptotic er-ror behavior. The asymptotic estimates do not hold in the typical rangeof engineering computations. On meshes with kh =constant, the FE errorhas a pollution term the size of which corresponds to the phase error ofthe numerical solution. The pollution term, and thus the error, is unboun-ded for large wave numbers on meshes designed by the “rule of thumb”kh =constant.For piecewise linear approximation, the error can be controlled by a rule
k3h2=constant. That is, the number of elements computed from the “ruleof thumb” should be augmented by
√k, yielding a resolution
λ
h≈ 6
√k . (4.11.1)
This relation also controls the error in the L2-norm. Computational expe-riments show that these rules, which are concluded from a priori error ana-lysis, lead to reliable FE solutions. This has been confirmed in experimentson the original one-dimensional model problems, as well as in benchmarkcomputations for higher-dimensional applications.Regarding a posteriori error estimation, one cannot, in general, rely on
the standard local estimators and indicators to control the error in the FEsolution of Helmholtz problems. These errors effectively estimate a quasi-interpolating numerical solution and do not take into account the phaseerror. The true error is underestimated if the wave number is large.
Convergence Speedup:
Raising the order of approximation p leads to significant speedup of the hconvergence, both in the interpolation and the pollution error. Taking intoaccount the computational cost, a selection of p = 2, 3, or 4 has been foundoptimal in the one-dimensional model problem. The scale of the mesh forthe hp version is
θ =(hk
p
)p,

4.12 Bibliographical Remarks 187
meaning that reliable results can also be expected on coarse meshes. It ispossible to create specialized FEM, incorporating analytical informationabout the Helmholtz operator into the trial space. We have discussed thequasistabilized FEM and the partition of unity FEM.
Error Norm:
Most of the estimates are given in the H1-norm (energy norm). Usuallythe interest in acoustic computations is in the primary variable (pressurep) rather than its derivative. Still, the H1-norm is relevant for exteriorproblems if one is interested in the far-field response. In many FE approa-ches, this response is computed analytically from the Helmholtz boundaryintegral equation using the FE data on some “collecting surface” within Ωa.Since this integral equation involves both p and its normal derivative, theH1-norm is appropriate for error control in the near field. The situation isdifferent for interior problems. Here, the L2-norm may be more appropriatefor error control. The numerical analysis of the convergence behavior anda posteriori error control in the L2-norm is a matter of ongoing research.
Error control for Fluid–Solid Interaction Problems:
For elastic scattering, the numerical error is significantly polluted also forsmall wave numbers if the corresponding frequency ω is close to an eigen-frequency of the interior problem. Efficient error control in the vicinity ofeigenfrequencies is an open problem.
Finite Element Modeling of Exterior Problems:
Since the pollution of the finite element error depends on both the frequencyand the size of the computational domain, it is favorable to keep this domainas small as possible. This means that the artificial surface should be closeto the obstacle.
4.12 Bibliographical Remarks
Numerous textbooks are available for an introduction to the FEM, for in-stance Akin [2], Bathe [18], or Hughes [71]. Since we placed special emphasison the hp-version, we mostly follow the book by Szabo and Babuska [112].The foundations of the FEM for elliptic partial differential equations canbe found in a number of textbooks such as Breass [30], Brenner–Scott [31],Carey–Oden [33], or Schatz [109]. The classical monograph by Ciarlet [34]has been reedited in [35].Regarding indefinite forms, the fundamental inf–sup condition was proven
by Babuska in 1973 [7]. Schatz published his results on forms satisfying aGarding inequality in 1974 [108]. The results are covered in Hackbusch’stextbook [62]; see also Braess [30]. The application to Helmholtz forms is

188 4. Finite Element Error Analysis and Control for Helmholtz Problems
more recent; see Aziz, Kellog and Stephens [6] and Douglas et al. [50]. Ourproof of the asymptotic quasioptimality of the FE error is based on [50].Several papers have been devoted to the dispersion analysis of the dis-
crete Helmholtz operators; cf. Harari and Hughes [63, 64], Thompson andPinsky [113, 114]. The preasymptotic estimates in this chapter were firstpublished in joint papers with Babuska [72, 73, 74]. Our elaborations onnumerical pollution are closely related to Wahlbin’s article [117]. Compare,for example, our estimates of the pollution term for higher p to the followingfrom [117, p. 377].
“If a function is appreciably smaller in a negative norm thanin, say, the L2 norm, this is frequently due to oscillations. Asan example, the reader may contemplate the functions vn(x) =sin(nx) . . . .”
Since the pollution in the discrete oscillatory solutions of the Helmholtzequation is caused by a global (namely, in the Helmholtz differential ope-rator) rather than a local (geometric) singularity, our error estimates areglobal, too. Other than that, our main estimates (4.7.39) and (4.7.40) aresimilar to Wahlbin’s “basic local estimates” [117, Theorems 9.1, 9.2].On the generalized FEM for Helmholtz problems, see Babuska and Sauter
[17]; the idea of the QSFEM is outlined in Babuska et al. [11]. The partitionof unity FEM was first proposed in the PhD thesis of Melenk [91] and hassince been developed in a series of papers by Melenk and Babuska [92, 93].This method can also be viewed and implemented as a meshless method;see Babuska and Melenk [15].The material of Section 4.10 is taken from our joint work with Babuska,
Strouboulis and Gangeraj [12].

5Computational Simulation of ElasticScattering
We use the finite–infinite element program SONAX1 for the computationalsimulation of elastic scattering. We first perform computational experi-ments with an elastic sphere where the exact solution is known and thenproceed to the simulation of physical experiments for an elongated cylin-drical shell embedded in water.
5.1 Elastic Scattering from a Sphere
5.1.1 Implementation of a Coupled Finite–Infinite ElementMethod for Axisymmetric Problems
The computer program SONAX computes the numerical solution for elasticscattering from rotationally symmetric obstacles by a Fourier finite–infiniteelement (FE–IE) method. It is especially geared towards the approximationof elongated scatterers, since the artificial boundary is, in general, a prolatespheroid. This allows the user to keep the FE region small, reducing thecomputational effort and the numerical pollution at large kL (here L is theprincipal length of the finite element domain around the obstacle).The obstacle is modeled in cylindrical coordinates (r, φ, z); see Fig. 5.1.
With the assumption of rotational symmetry, all structural and acoustic
1The program SONAX was created by Dr. Joseph Shirron at the Naval ResearchLaboratory, in Washington, D.C.

190 5. Computational Simulation of Elastic Scattering
θφr
P
θ
θP
0
s
z
1
0
FIGURE 5.1. Rotationally symmetric obstacle insonified by a plane wave.
unknowns of the full three-dimensional model can be expanded in a Fou-rier series in the azimuthal angle φ. Then the degrees of freedom for thenumerical model are introduced in the two-dimensional cross-section of thethree-dimensional model. If the load is also symmetric, only the zeroth com-ponent of the expansion need be computed. The assumption of rotationalsymmetry is made only for the structure.If the load is nonsymmetric, then the boundary data g(r, z, φ) is decom-
posed as
g(r, z, φ) =∞∑
n=−∞gn(r, z)einφ .
A finite number of problems with rotationally symmetric loads gn(r, z) aresolved, and the three-dimensional solution p is obtained as the superposi-tion of the solutions pneinφ.The load can be given as a combination of plane waves in arbitrary
directions or as a combination of point sources (spherical waves). The sourcepoint P0 is the far-field point determined by the polar angle θ0. The loadis given by user input in the form of a sweep over a frequency range k =k0, . . . , k1 in steps of size ∆k. For each frequency in the sweep, the scatteredpressure ps can be computed at arbitrary far-field points Ps. We thus define,for some given far-field point Ps, a frequency response function (FRF)
F (k) := ps(Ps, k) .
The program SONAX features the possibilities of monostatic and bista-tic frequency sweeps. In monostatic scattering, the locations of the sourceand receiver are fixed. If the source and receiver are at the same location(θ0 = θs), the monostatic sweep returns the backscattered field. In bistaticscattering, the source is fixed at θ0, but there are many receivers at variouslocations θs(i), i = 1, 2, . . . .The far-field response is computed in several steps: First, we solve the
FE–IE problem to obtain the numerical solution pNh ≈ p in the near field.

5.1 Elastic Scattering from a Sphere 191
We then compute the normal derivative ∂νpNh on the wet surface. Finally,
the integral
p(r) ≈∫Γ
[pNh (r
′)∂νg(r, r′)− ∂νpNh (r
′)g(r, r′)]dS′ (5.1.1)
is computed. Since Ps is a far-field point, we use the asymptotic expression(2.1.29) for the free-space Green’s function.The finite elements in the three-dimensional elastic and fluid media are
based on the hierarchical Legendre-type shape functions (cf. Babuska–Szabo [112]). The far-field behavior is resolved by infinite elements usingthe unconjugated Bubnov–Galerkin formulation (3.5.12). The test and trialspaces are identical, both being based on (3.5.2). The resulting system ma-trix is symmetric. In general, the artificial surface is a prolate spheroid,given in a bipolar coordinate system. On this surface, the infinite elementsare constructed by the same principle as described for the sphere in Sec-tion 3.5. For details, see Burnett [32].
5.1.2 Model ProblemWe analyze scattering from an elastic sphere. The exact solution for thisproblem is given in Section 2.1. It has been found to be in good agreementwith experimental results; cf. Junger and Feit [81, pp. 352–356].This model is chosen as a benchmark for SONAX. In particular, we are
interested in the convergence behavior of the FE–IEM with respect to thenumerical parameters h, p (finite elements), and N (infinite elements). Weconsider three different spheres, S05, S15, and S25, with uniform thicknessest = 0.05m, t = 0.1m, t = 0.25m, respectively. All spheres have the samemidsurface radius a = 5m. The material parameters for all spheres aregiven in Table 5.1.
TABLE 5.1. Material parameters.
E = 2.07E + 11P Young’s modulusρs = 7669 kg/m3 solid densityρf = 1000 kg/m3 fluid densityν = 0.3 Poisson’s ratiocf = 1524m/s fluid speed of sound
A plane wave of unit amplitude is incident on the shells, and the far-fieldpattern of the backscattered pressure is computed.In Fig. 5.2, we show the exact frequency response function for the three
shells, i.e., the absolute value of the far-field pattern in the backscattereddirection. We observe that no resonance peaks are formed at the higher

192 5. Computational Simulation of Elastic Scattering
0.0 0.5 1.0 1.5 2.0Wave Number k
0.0
10.0
20.0
30.0
|F(k
)|
t=0.15m (S15)t=0.05m (S05)t=0.25m (S25)
FIGURE 5.2. Far-field pattern of backscattered pressure for elastic sphericalshells S05, S15, S25.
TABLE 5.2. Wave numbers corresponding to eigenfrequencies of free vibration.
1 2 3 4 5 5 7 80.501 0.596 0.639 0.669 0.701 0.741 0.794 0.862
eigenmodes for the shells S05 and S15, whereas they are still visible for the“thick” shell S25. For S05, only the first four eigenmodes are visible in theFRF plot, whereas the first six peaks can be distinguished for S15. Theeigenfrequencies for the free vibrations of the shell in vacuum are the zerosof the mechanical impedance; cf. the denominator in (2.1.20). We list thewave numbers corresponding to the first eight frequencies in Table 5.2.The in-fluid damped eigenvalues are shifted to the left from their po-
sitions in free vibration. The shift is rather significant since the acousticimpedance zn is complex with a nonvanishing real part; cf. the denominatorin (2.1.19). For illustration, see in Fig. 5.3 the damped solution (with ρs, ρfas in Table 5.1) compared to the weak damping ρf = 1.0 kg/m3. In the FRFfor the weakly damped case, the peaks occur precisely at the eigenvaluesin Table 5.2.We now turn to the evaluation of the numerical discretizations. The
computational experiments with the FE–IE model are performed for theshell S15 only. We are interested in wave numbers k = 0.25, . . . , 2m−1,which correspond to the nondimensional frequency range ka = 1.25, . . . , 10.

5.1 Elastic Scattering from a Sphere 193
0.20 0.30 0.40 0.50 0.60 0.70
Wave Number k
0.0
5.0
10.0
15.0
|F(k
)|
Elastic scattering from spherical shellExact solution with different densities of fluid
ρ = 1000ρ = 1
FIGURE 5.3. Scattering from elastic shell with different densities of acousticmedium.
0
1
2
3
4
5
6
-6 -4 -2 0 2 4 6
FIGURE 5.4. Spherical shell with mesh a32-r2-R600.
Relating the wavenumber to the size of the computational domain, we getthe nondimensional wave number K = kaπ = 0.8, . . . , 32.In Fig. 5.4, we show a typical mesh for the finite element discretization
of the model (after reduction to two dimensions by Fourier expansion inthe azimuthal angle φ). The thin-walled elastic medium is partitioned intoone layer of finite elements. The shell is enclosed in a spherical artificialboundary of radius Ra. We choose a uniform angular discretization andintroduce a number of element layers in the radial direction. In the plot, weshow the mesh for the shell S15 with 32 elements in the angular directionand 2 element layers in the fluid. The artificial boundary is located atRa = 6m. For this mesh, the mesh sizes in the angular and radial directions,

194 5. Computational Simulation of Elastic Scattering
respectively, are
hθ =πa
32= 0.491m, hr =
R − a+ t/22
= 0.4625m ,
and hence the magnitude of kh varies between 0.1 and 1. That is, forthe largest k the mesh stays below the minimal resolution kh = π/2 forpiecewise linear approximation. The recommended mesh size by the ruleλ/h = 10 corresponds to a magnitude kh = π/5 ≈ 0.62. For the meshas shown, this resolution is matched for k = 1.28m−1, i.e., roughly in themiddle of the frequency sweep. Convergence studies are carried out on aseries of meshes shown in Table 5.3.
TABLE 5.3. Meshes for convergence tests.
· · a16-r2-R600 · ·a32-r2-R525 a32-r2-R550 a32-r2-R600 a32-r4-R600 a32-r8-R600
· · a64-r2-R600 · ·
In the table, a and r denote the angular and radial partitions, respec-tively, and R is the radius of the artificial boundary. On these meshes, wewill test the effect of polynomial enrichment as well as angular and ra-dial h-refinement. The mesh a32-r2-R600 is the pivot mesh. The meshesfor angular refinement are given in the vertical sequence of the meshes inTable 5.3, while the meshes for radial refinement are given to the right ofthe pivot. Finally, we will use the meshes a32-r2-R525 and a32-r2-R550 totest the sensitivity of the FE–IE coupling to the size of the FE domain andthe number of DOF in the infinite elements.
5.1.3 Computational ResultsPolynomial Enrichment:
In the following, we adopt the notation of p- or q-convergence, respectively,for the solution behavior with respect to polynomial enrichment in the solid(degree p) or in the fluid (degree q). We first consider pq-convergence onthe coarse mesh a16-r1-R600 (16 elements in the angular and one in theradial direction). In Fig. 5.5 we show q-convergence with piecewise linearelements in the shell. Due to the underresolution in the shell, the modelconverges to the wrong solution. For p = 2 the shell is sufficiently wellresolved; see Fig. 5.6. Still the fluid is underresolved for q = 1, causing ashift in the lower damped eigenfrequencies and a deviation from the exactsolution for higher wave numbers. The same effect is observed for p = 3and p = 4; we show here p = 4 in Fig. 5.7. Clearly, the minimal degree ofapproximation on the coarse mesh is p = q = 2, that is, quadratics both inthe shell and in the fluid. This conclusion is also supported by the plots of

5.1 Elastic Scattering from a Sphere 195
0.0 0.5 1.0 1.5 2.0k
0.0
10.0
20.0
30.0
40.0
50.0
|F(k
)|
Far−field pattern of backscattered pressureElastic spherical shell, t=0.15m,a=5m, mesh a16r1R600, pq−convergence
ExactFEM, p=1, q=1FEM, p=1, q=2FEM, p=1, q=3
FIGURE 5.5. q-Convergence on coarse mesh with p = 1.
0.0 0.5 1.0 1.5 2.0k
0.0
10.0
20.0
30.0
|F(k
)|
Far−field pattern of backscattered pressureElastic spherical shell, t=0.15m,a=5m, mesh a16r1R600, pq−convergence
Exact FEM, p=2, q=1FEM, p=2, q=2FEM, p=2, q=3
FIGURE 5.6. q-Convergence on coarse mesh with p = 2.

196 5. Computational Simulation of Elastic Scattering
0.0 0.5 1.0 1.5 2.0k
0.0
10.0
20.0
30.0
|F(k
)|
Far−field pattern of backscattered pressure
Elastic spherical shell, t=0.15m,a=5m, mesh a16r1R600, pq−convergence
Exact FEM, p=4, q=1FEM, p=4, q=2FEM, p=4, q=3
FIGURE 5.7. q-Convergence on coarse mesh with p = 4.
p-convergence with fixed q. In Fig. 5.8, we plot the curves with p = 1, 2, 3for q = 2. We get very good agreement if p = 2 or p = 3. For p = 3 andq = 2, the FEM model also resolves the higher eigenfrequencies (5th and6th), provided the step size of the frequency sweep is chosen sufficientlysmall, as shown in the detail of Fig. 5.9.Let us relate these observations for the FRF to the error analysis in
Chapter 4. For the one-dimensional model problem, the relative error in theH1-norm at K = 10 is about 20% for the best approximation, compared to25% for the finite element solution. Thus there is no significant pollutionfor wave number, but the relative error in the H1-norm is large due toinsufficient mesh refinement.2 The nondimensional wave number K = 10corresponds to k = 0.6m−1 in the plot of the frequency response. Hence,for q = 1, the fluid part is computed with considerable error, contributingto the shift in the higher eigenvalues. On the other hand, the estimate ofthe relative error for quadratic approximation in the fluid is of order(
kh
4
)2≈ 2%
(pollution is negligible). Correspondingly, we see very good agreement inthe frequency response curves for higher approximation.
2Note that both p and its first derivative are used to compute the far-field responseby (5.1.1), hence the H1-norm is the appropriate error norm for far-field computations.

5.1 Elastic Scattering from a Sphere 197
0.0 0.5 1.0 1.5 2.0k
0.0
10.0
20.0
30.0
|F(k
)|
Far−field pattern of backscattered pressureElastic spherical shell, t=0.15m,a=5m, mesh a16r1R600, pq−convergence
Exact FEM, p=1, q=2FEM, p=2, q=2FEM, p=3, q=2
FIGURE 5.8. p-Convergence on coarse mesh with q = 2.
0.40 0.50 0.60k
0.0
5.0
10.0
15.0
|F(k
)|
Far−field pattern of backscattered pressure
Elastic spherical shell, t=0.15m,a=5m, mesh a16r1R600, pq−convergence
Exact FEM, p=3, q=1FEM, p=3, q=2
FIGURE 5.9. q-Convergence on coarse mesh with p = 3; details for higher eigen-frequencies.

198 5. Computational Simulation of Elastic Scattering
0.0 0.5 1.0 1.5 2.0k
0.0
5.0
10.0
15.0
20.0
25.0
30.0
|F(k
)|
Far−field pattern of backscattered pressureElastic spherical shell, t=0.15m, a=5m, mesh a32−r2−N2−R600
Exact p=2,q=1p=2,q=2p=1,q=3
FIGURE 5.10. pq-Convergence on mesh with 32 angular and 2 radial (fluid)elements.
0.40 0.50 0.60k
0.0
5.0
10.0
15.0
|F(k
)|
Far−field pattern of backscattered pressureElastic spherical shell, t=0.15m, a=5m, mesh a32-r2-N2-R600
Exact FEM, p=3, q=1
FIGURE 5.11. q-Convergence on mesh a32r2, p = 3, q = 1, 2; details for highereigenfrequencies.

5.1 Elastic Scattering from a Sphere 199
0.0 0.5 1.0 1.5 2.0k
0.0
10.0
20.0
30.0
|F(k
)|
Far−field pattern of backscattered pressureElastic spherical shell, t=0.15m, a=5m, radial convergence, p=q=1
Exact a32−r2a32−r4a32−r8
FIGURE 5.12. Radial convergence on mesh with 32 angular elements, p = q = 1.
Mesh Refinement:
In Fig. 5.10 we show results from the finer mesh with 32 angular elementsand 2 radial fluid elements. A pq-convergence study leads to similar con-clusions as far as the solid resolution is concerned. Also for this mesh, theapplication of piecewise linear elements in the solid implies q-convergenceto the wrong solution. On the other hand, with p = 2 we now see goodagreement in the higher eigenmodes also for q = 1, indicating the effect ofh-convergence in the fluid. This is shown in detail in Fig. 5.11.In Fig. 5.12, we show the FRF on radially refined meshes with p = q = 1.
Again we observe convergence to the wrong solution. The radial refinementin the fluid is, obviously, no remedy for the insufficient resolution of theshell.Angular refinement, which is performed simultaneously in the shell and
in the fluid, improves the quality of the numerical FRF. On a mesh with64 angular linear elements, we achieve about the same agreement with theexact FRF as on the mesh with 16 elements and quadratic elements in theshell; cf. Fig. 5.13. However, also on the finest mesh we observe small peaksin the numerical solution. Taking quadratic elements in the shell and linearelements in the fluid, angular refinement from 16 to 32 elements yields verygood agreement (not shown here).

200 5. Computational Simulation of Elastic Scattering
0.0 0.5 1.0 1.5 2.0k
0.0
10.0
20.0
30.0
|F(k
)|
Far−field pattern of backscattered pressure
Elastic spherical shell, t=0.15m,a=5m, angular converge, p=q=1
Exact a16r2a32r2a64r2
FIGURE 5.13. Angular convergence on mesh with 2 radial (fluid) elements,p = q = 1.
0.0 0.5 1.0 1.5 2.0k
0.0
10.0
20.0
30.0
|F(k
)|
Far−field pattern of backscattered pressureElastic spherical shell, t=0.15m, a=5m, angular convergence
Exact a16,p=2,q=1a32,p=2,q=1
FIGURE 5.14. Angular convergence on mesh with 2 radial (fluid) elements,p = 2, q = 1.

5.1 Elastic Scattering from a Sphere 201
0.0 0.2 0.4 0.6 0.8 1.0k
0.0
10.0
20.0
|F(k
)|
Far−field pattern of backscattered pressureElastic spherical shell, t=0.15m, a=5m, mesh a32r2*n*R*, p=2, q=1
Exact solutionR=525,n=2R=550,n=2R=600,n=2R=600,n=1
FIGURE 5.15. Influence of far-field resolution.
Resolution of the Far Field:
Finally, we consider the influence of far-field resolution. In Fig. 5.15, weplot results with Ra < 600 (i.e., the artificial boundary is moved closer tothe obstacle). For the same number of DOF in the infinite elements, theagreement between the FRF curves does not visibly deteriorate as the sizeof the FE region is decreased. Even reducing the number of exterior DOFto the minimal N = 1 does not cause major disagreement with the exactresponse. Only a slight perturbation of the FRF is observed at the fourtheigenvalue.
5.1.4 ConclusionsThe quality of the computed frequency response is more sensitive to thenumerical resolution of the solid than the numerical resolution of the fluid.Though the positions of the frequency peaks are influenced both by themechanical and by the acoustic impedance, underrefinement in the solidcauses a larger error in the position of the frequency peaks than under-resolution in the fluid.The approximation of the far-field behavior with infinite elements in-
fluences the quality of the numerical FRF less significantly. In particular,the size of the computational domain may be rather small, and for thewave numbers considered, only a small number of radial shape functions isneeded.

202 5. Computational Simulation of Elastic Scattering
0.30 0.35 0.40 0.45 0.50 0.55 0.60 0.65k
0.0
5.0
10.0
15.0
20.0
|F(k
)|
Far−field pattern of backscattered pressureElastic spherical shell, t=0.15m, a=5m, mesh a32−r2, p=2, q=1
Exact solutionR=525,n=2R=550,n=2R=600,n=2R=600,n=1
FIGURE 5.16. Influence of far-field resolution, detailed plot.
5.2 Elastic Scattering from a Cylinder withSpherical Endcaps
5.2.1 Model ParametersWe consider a hemispherically capped cylinder, called mock shell; see Fig. 5.17.
l=
rout =4.686m t cyl =0.0406mcap=0.1143mt
68m
FIGURE 5.17. Cylindrical shell with spherical endcaps.
The outer radius of the shell is 4.6863 m, the length of the circularcylinder is 67.9958 m, the cylinder thickness is 0.04064 m, and the endcapthickness is 0.1143 m. The material parameters are given in Table 5.4.We will use two different meshes; see Fig. 5.18. The size of the coarse
mesh is H = 1.25 m in both directions, and the size of the fine mesh ish = H/2. We will typically compute a frequency sweep of ka = 2.5, . . . , 20,which corresponds to
λ
H= 10, . . . , 1;
λ
h= 20, . . . , 2.

5.2 Elastic Scattering from a Cylinder with Spherical Endcaps 203
TABLE 5.4. Material parameters of capped shell.
E = 2.0E + 11P Young’s modulusρs = 7908.5 kg/m3 solid densityρf = 1000 kg/m3 fluid densityν = 0.29 Poisson’s ratiocf = 1482m/s fluid speed of sound
(a) Coarse mesh H
(b) Fine mesh h
FIGURE 5.18. Mock shell in fluid; coarse and fine mesh for computations.
That is, the coarse mesh is for all wave numbers of the sweep below therecommended resolution for piecewise linear approximation. The fine meshhas the recommended resolution of 10 in the middle of the sweep. It is forall k finer than the minimal resolution n = 2.To get an estimate of the pollution effect, we have to consider a nondi-
mensional wave number that reflects the size of the computational domain.In this elongated structure with L a, the nondimensional wave num-ber is K = kL, where L = 90 m measures the long principal axis of thespheroid. The frequency sweep is then K = 45, . . . , 450; hence we have toexpect significant pollution of the numerical results at the higher end ofthe sweep.
5.2.2 Convergence TestsWe first perform convergence tests to establish confidence in the compu-tational simulation. In Fig. 5.19, we illustrate the pq-convergence on thecoarse mesh for k = 1, . . . , 3. On the abscissa we show the magnitude of

204 5. Computational Simulation of Elastic Scattering
4.0 6.0 8.0 10.0 12.0 14.0ka
−20.0
0.0
20.0
40.0
60.0
|F(k
)|
Mock shell, backscattered elastic responsep−q−N convergence on coarse mesh
p2−q2−N2p3−q3−N2p4−q3−N2p4−q4−N3p4−q4−N4p4−q5−N3
FIGURE 5.19. Far-field pattern of backscattered pressure for the mock shell.pqN-Convergence on coarse mesh.
0.0 5.0 10.0 15.0ka
−20.0
0.0
20.0
|F(k
)|
Mock shell, backscattered elastic responsep−q−N convergence on coarse and fine mesh
H−p4−q4−N3H−p4−q4−N4h−p3−q2−N2h−p4−q2−N2
FIGURE 5.20. Far-field pattern of backscattered pressure for the mock shell.pq-Convergence on coarse and fine mesh.

5.2 Elastic Scattering from a Cylinder with Spherical Endcaps 205
0.0 5.0 10.0 15.0 20.0 25.0ka
−20.0
0.0
20.0
|F(k
)|
Mock shell, backscattered elastic responsepq convergence on fine mesh
p3−q2−N2p4−q2−N2
FIGURE 5.21. Far-field pattern of backscattered pressure for the mock shell.pq-Convergence on fine mesh.
ka, whereas the far-field pattern of the scattered pressure is measured onthe vertical axis (see Remark 5.1 below for the scaling of the data and theunit of measurement). A coarse step size ∆k has been taken in the fre-quency sweep. The legend shows the values for the numerical parametersp, q (polynomial degrees in the solid and fluid mesh, respectively), and N(number of radial shape functions in the infinite elements).For p, q ≤ 3, convergence is observed only in the range k = 1, . . . , 2. At
the higher end of the sweep, good mutual agreement is found only betweenthe curves with higher polynomial resolution. We thus assume that theselatter results are convergent. This assumption is validated in the next plot,Fig. 5.20, where we compare the results on the coarse mesh with data com-puted on the fine mesh. Except for the peaks3 at ka = 12 in the p3-q2-N2line and at ka = 13 in the p4-q2-N2 line, the results on the fine mesh are ingood mutual agreement. Both curves are closely fitted by the coarse meshdata up to ka ≈ 13. We thus have enough confidence to recompute the finemesh data with a fine resolution of the frequency sweep. For the curvesas shown in Fig. 5.21, the sweep was k = 0.5 : 0.005 : 4.29, consisting of759 separate FE–IE computations. In our implementation of SONAX onRISC workstations, this sweep took up 52 minutes of CPU time for thecase p3-q2-N2 on the fine mesh. This time can, of course, be significantly
3Up to now we have no explanation for these peaks.

206 5. Computational Simulation of Elastic Scattering
reduced by using a frequency-adaptive approach, where a coarse mesh withlow pq is used at the beginning of the sweep, and the numerical resolutionis increased in several steps during the sweep.
Remark 5.1. The frequency response is given as the target strength, whichis precisely defined as TS = 20 log10 |F (k)|, where the far-field pattern inthe computation of F (k) has been scaled to 1 meter. The appropriate unitfor the TS is decibel (dB). In the plots, we write |F (k)| for brevity.
5.2.3 Comparison with Experiments
(Source)
Shell
Line Array
Receiver
FIGURE 5.22. Setup of experiments.
Experimental studies on the scattering from the mock shell were carriedout by Dr. Brian Houston at the Naval Research Laboratory. The setup ofthe experiments is sketched in Fig. 5.22. The test model is a shell that hasbeen precisely fabricated with ratio 1:50 of the original model. The expe-rimental results are scaled back to the true scale, where the computationswith the FE-IE model are performed. The shell is embedded in a large tankcontaining water. A plane wave is simulated by a line array of point sources.The response is measured by a receiver. The source is fixed. Both the recei-ver and the shell can be rotated independently. To measure backscattereddata, the receiver is aligned with the source (monostatic measurements).The center of the shell is located at a distance l = 3 m from the center ofthe line array. The reproducibility of the experimental data has been care-fully checked by repeated measurements. The curves that will be shownhere are the averaged representations of a series of measurements.In Fig. 5.23, we show the comparison between the experiment and the
simulation for the backscattered elastic response at bow incidence. The shellis positioned such that its long axis is perpendicular to the line array. The

5.2 Elastic Scattering from a Cylinder with Spherical Endcaps 207
0.0 5.0 10.0 15.0 20.0ka
−10.0
10.0
|F(k
)|
Mock shell, backscattered elastic responseComparison of experiment and simulation
h−p4−q4−N2h−p4−q3−N2Experiment
FIGURE 5.23. Far-field pattern of backscattered pressure for the mock shell.Comparison of high-resolution simulation and experiment. Plane wave insonifi-cation.
10.0 12.0 14.0 16.0 18.0 20.0ka
−10.0
−5.0
0.0
5.0
10.0
15.0
20.0
F(k)
Mock shell, backscattered elastic responseComparison of experiment and simulation
h−p4−q4−N2h−p4−q3−N2Experiment
FIGURE 5.24. Far-field pattern of backscattered pressure for the mock shell.Detail at the higher end of the frequency sweep.

208 5. Computational Simulation of Elastic Scattering
simulation very well reflects the k-dependent pattern of the experiment,but the agreement in the amplitude is not satisfactory. The oscillations atthe high end of the sweep are better reproduced with degree q = 4; see alsothe detailed plot in Fig. 5.24.
3m
1.36m 3m
FIGURE 5.25. Situation for end-on insonification.
Still the amplitudes are not in good agreement. Obviously, this is not dueto the lack of convergence in the simulation. Reconsidering the experimentalsetup, we were led to the hypothesis that the shell, at bow incidence of thewave, responds to a point source rather than a plane wave (see a sketchof the situation in Fig. 5.25). Hence the computations were repeated witha point source as load input. The results are shown in Fig. 5.26. We nowobserve a very good agreement between computational and experimentaldata throughout the range of the frequency sweep.In a final numerical experiment (here the load is again a plane wave), we
investigate the sensitivity of the numerical model with respect to coarse-ning of the grid. Recall that the numerical parameters of the high-fidelitycomputations had been determined, based both on our a priori studies oferror behavior and on the convergence tests described above. The minimalresolution for high confidence of the simulation had been established to bep = 4, q = 3, and N = 2 (on the fine mesh of size h), and this was validatedby comparison with the experimental data.In Fig. 5.27, we compare the experimental data with the results from
computations with smaller numerical resolution. Lowering the polynomialdegree on the fine mesh, we compute a sweep that becomes blurred andunstructured at ka ≈ 13. On the coarse mesh with the same polynomialdegree of approximation, the computational sweep is in good agreementonly up to ka ≈ 9 (except for an unexplained peak at ka ≈ 5.6). This isbetter than expected, taking into account the pollution effect, which shouldbe significant on the coarse mesh. We assume that we are dealing with theeffect of smoothening of the near-field data, which takes place when thefar-field data are computed from the integral representation of the exteriorsolution.

5.2 Elastic Scattering from a Cylinder with Spherical Endcaps 209
0.0 5.0 10.0 15.0 20.0ka
−20.0
0.0
20.0
|F(k
)|
Mock shell, backscattered elastic responseSimulation of point source
Experimenth−p4−q3−N2
FIGURE 5.26. Far-field pattern of backscattered pressure for the mock shell.Point source insonification.
0.0 5.0 10.0 15.0 20.0ka
−40.0
−20.0
0.0
20.0
40.0
|F(k
)|
Mock shell, backscattered elastic responseComparison of experiment and fine/coarse mesh FEM
H−p3−q2h−p3−q2Experiment
FIGURE 5.27. Far-field pattern of backscattered pressure for mock shell. Com-parison of simulation on fine and coarse mesh with experiment. Plane wave inso-nification.

210 5. Computational Simulation of Elastic Scattering
5.3 Summary
We report on our experience from computational simulations of elastic scat-tering using finite and infinite elements. The computations were performedwith the hp FE–IE program SONAX, written by Dr. Joseph Shirron, NavalResearch Laboratory, Washington D.C.The testing is carried out in several steps. First, we analyze an obstacle
for which the exact solution can be found analytically. The main purposeis to establish confidence in the method and the implementation and totest the influence of the computational parameters on the accuracy of thediscrete solution. We then turn to the application, where the exact solutionis not known. Here, we test hp-convergence of the discrete solution. Thesetests are carried out, based on the study of the error behavior in Chapter 4.After a sufficient resolution has been found, the results for this model arecompared to experimental data. The measured and computed frequencyresponse functions are found to be in good agreement.The implementation shows that the FEM can be used as an effective and
convenient numerical tool for the computational analysis of acoustic fluid–structure interaction. The high efficiency is due partly to the applicationof the Fourier FEM with the corresponding dimensional reduction (at theexpense of a restriction to axially symmetric objects). In the present com-putations, we considered symmetric (with respect to angle φ) loads only.In related tests, we also obtained good agreement for angular incidence,performing computations at φ = 45 and φ = 70. In this case, we needto superimpose several Fourier modes. To the best of our knowledge, ananalysis of the Fourier FEM for the Helmholtz equation is still lacking. Forthe Laplace equation, see Heinrich [67].Regarding the numerical parameters, we make the following observations:
first, the coupled model is more sensitive to insufficient numerical resolutionof the structure, compared to the resolution in the fluid (here we mean onlythe resolution of the near field that is discretized by FEM). Second, thedegree of approximation in the far-field part of the fluid (discretized byinfinite elements) has only little influence on the accuracy of the far-fieldresponse. We recall that this response is computed analytically, using theHelmholtz integral equation, from the near-field FE data. In the exampleconsidered, even several successive reductions of the FE domain did notsignificantly influence the final result. Third, results obtained by polynomialenrichment on a coarse mesh were generally of higher quality than resultsof the h-version with approximation p = 1. This especially concerns thediscretization of the shell.

References
[1] M. Abramovitz and I.A. Stegun, Handbook of Mathematical Func-tions, National Bureau of Standards, 1964.
[2] J.E. Akin, Finite Elements for Analysis and Design, Academic Press,London, 1994.
[3] H.W. Alt, Lineare Funktionalanalysis, 2. Auflage, Springer-Verlag,Berlin, 1992.
[4] R.J. Astley, G.J. Macaulay, J.-P. Coyette, and L. Cremers, Three-dimensional wave-envelope elements of variable order for acousticradiation and scattering. Part I. Formulation in the frequency do-main, J. Acoust. Soc. Am. 103 (1) 1998, 49-63.
[5] K.E. Atkinson, An Introduction to Numerical Analysis, second edi-tion, J. Wiley, 1989.
[6] A.K. Aziz, R.B. Kellogg, and A.B. Stephens, A two-point boundaryvalue problem with a rapidly oscillating solution, Numer. Math. 53,107–121 (1988).
[7] I. Babuska and A.K. Aziz, The mathematical foundations of the finiteelement method. In: A.K. Aziz (ed.), The mathematical foundationsof the finite element method with applications to partial differentialequations, Academic Press, New York, 1972, 5–359.

212 References
[8] I. Babuska, A. Craig, J. Mandel, and J. Pitkaranta, Efficient precon-ditioning for the p-version finite element method in two dimensions,SIAM J. Numer. Anal. 28 (1991), 3, 624–661.
[9] I. Babuska and H. Elman, Performance of the hp-version of the FEMwith various elements, Int. J. Numer. Meth. Eng., 36, 2503–2523(1993).
[10] I. Babuska, M. Griebel, and J. Pitkaranta, The problem of selectingthe shape functions for a p-type finite element, Int. J. Numer. Meth.Eng., 28, 1891–1908 (1989).
[11] I. Babuska, F. Ihlenburg, E. Paik, and S. Sauter, A generalized finiteelement method for solving the Helmholtz equation in two dimensionswith minimal pollution; Comp. Methods Appl. Mech. Eng., 128 (1995)325–359.
[12] I. Babuska, F. Ihlenburg, T. Strouboulis, and S. Gangaraj, A poste-riori error estimation for FEM solutions of Helmholtz’s equation —Part I: the quality of local indicators and estimators, Int. J. Numer.Meth. Eng. 40, 3443–3462, 1997.
[13] I. Babuska, F. Ihlenburg, T. Strouboulis, and S. Gangaraj, A poste-riori error estimation for FEM solutions of Helmholtz’s equation —part II: estimation of the pollution error, Int. J. Numer. Meth. Eng.40, 3883–3900, 1997.
[14] I. Babuska, I.N. Katz and B.S. Szabo, Finite element analysis in onedimension, Lecture Notes (unpublished), 1985.
[15] I. Babuska and J.M. Melenk, The partition of unity method, Int. J.Numer. Meth. Eng., 40, 727–758, 1997.
[16] I. Babuska and A. Miller, A Feedback Finite Element Method withA-posteriori Error Estimation — Part 1: The Finite Element Me-thod and Some Basic Properties of the A Posteriori Error Estimator,Comp. Methods Appl. Mech. Eng., 61, 1–40, 1987.
[17] I. Babuska and S. Sauter, Is the pollution effect of the FEM avoidablefor the Helmholtz equation considering high wave numbers, SIAM J.Numer. Anal. 34 (6), 2392–2423, 1997.
[18] K.J. Bathe, Finite Element Procedures in Engineering Analysis,Prentice Hall, Englewood Cliffs, 1982.
[19] A. Bayliss, C. Goldstein, and E. Turkel, On accuracy conditions forthe numerical computation of waves, J. Comp. Physics 59 (1985),396–404.

References 213
[20] A. Bayliss, M. Gunzburger, and E. Turkel, Boundary conditions forthe numerical solution of elliptic equations in exterior regions, SIAMJ. Appl. Math., Vol. 42, 2 (1982) 430–451.
[21] A. Bedford and D.S. Drumheller, Elastic Wave Propagation, J. Wiley1994.
[22] J. Berenger, A perfectly matched layer for the absorption of electro-magnetic waves, J. Comput. Physics 114 (1994), 185–200.
[23] J. Berenger, Perfectly matched layer for the FDTD solution of wave-structure interaction problems, IEEE Trans. Antennas Propagat. 44(1996), 110–117.
[24] P. Bettess and O.C. Zienkiewicz, Diffraction and refraction of surfacewaves using finite and infinite elements, Int. J. Numer. Methods Eng.,11, 1271–1296 (1977).
[25] P. Bettess, Infinite Elements, Penshaw Press, Cleadon 1992.
[26] Ph. Bouillard, J.-F. Allard, and G. Warzee, Accuracy control foracoustic finite element analysis, ACUSTICA 1, 1996, p. S156.
[27] Ph. Bouillard, J.-F. Allard, and G. Warzee, Superconvergent patchrecovery technique for the finite element method in acoustics, Comm.Numer. Methods Eng., 12, 581–594 (1996).
[28] Ph. Bouillard and F. Ihlenburg, Error control for finite element solu-tions of Helmholtz equation. In: Proceedings, 15th IMACS WorldCongress 1997 on Scientific Computation, Modelling and AppliedMathematics.
[29] F. Bowman, Introduction to Bessel Functions, Dover N.Y. 1958.
[30] D. Braess, Finite Elemente, 2. Auflage, Springer Verlag Berlin 1997;English edition: Finite Elements: Theory, Fast Solvers and Applica-tions in Solid Mechanics, Cambridge University Press, Cambridge,1997.
[31] S.C. Brenner and L.R. Scott, The Mathematical Theory of FiniteElement Methods, Springer-Verlag, New York, 1994.
[32] D. Burnett, A 3-D acoustic infinite element based on a generalizedmultipole expansion, J. Acoust. Soc. Am. 96 (1994), 5, 2798–2816.
[33] G.F. Carey and J.T. Oden, Finite Elements : A Second Course, Vol-ume II, Prentice-Hall, 1983.
[34] P.G. Ciarlet, The Finite Element Method for Elliptic Equations,North Holland, Amsterdam, 1978.

214 References
[35] P.G. Ciarlet and J.L. Lions (eds.), Handbook of Numerical Analysis,Vol. II, North Holland, Amsterdam, 1991.
[36] Y.-C. Chang and L. Demkowicz, Vibrations of a spherical shell. Com-parison of 3D elasticity and Kirchhoff shell theory results, Comp.Assist. Mech. Eng. Sci., 187–206 (1995).
[37] Y.-C. Chang and L. Demkowicz, Scattering of a spherical shell. Com-parison of 3D elasticity and Kirchhoff shell theory results, Comp.Assist. Mech. Eng. Sci., 207–229 (1995).
[38] F. Collino and P. Monk, The perfectly matched layer in curvilinearcoordinates, to appear in SIAM J. Sci. Comp.
[39] D. Colton and R. Kress, Inverse Acoustic and Electromagnetic Scat-tering Theory, Springer-Verlag Berlin, Heidelberg, New York, 1992.
[40] M. Costabel, M. Dauge: Singularites des equations de Maxwell dansun polyedre. C. R. Acad. Sci. Paris Serie I 324, 1997, 1005–1010.
[41] R. Dautray, and L. Lions, Mathematical Analysis and Numerical Me-thods for Science and Technology, Vol. 1, Springer-Verlag, Berlin,1990.
[42] L. Demkowicz, Asymptotic convergence in Finite and Boundary ele-ment methods — Part 1: Theoretical results, Comput. Math. Appli.Vol. 27, No. 12, 69–84.
[43] L. Demkowicz, Asymptotic convergence in Finite and Boundary ele-ment methods — Part 2: The LBB constant for Rigid and elasticscattering problems, Comput. Math. Appli. Vol. 27, No. 12, 69–84,Vol. 28, 6, 93–109 (1994).
[44] L. Demkowicz, W. Rachowicz, K. Banas, and J. Kucwaj, 2D adaptivepackage (2DhpAP), Technical Report, Cracow, April 1992.
[45] L. Demkowicz and F. Ihlenburg, Analysis of a Coupled Finite–InfiniteElement Method for Exterior Helmholtz Problems, TICAM TechnicalReport, 11-96.
[46] L. Demkowicz and K. Gerdes, Convergence of the infinite elementmethods for the Helmholtz equation, TICAM-Report 6/96, to appearin Numer. Math..
[47] L. Demkowicz, A. Karafiat, and J.T. Oden, Solution of elastic scatte-ring problems in linear acoustics using hp boundary element method,Comp. Methods Appl. Mech. Eng. 101 (1992) 251–282.

References 215
[48] L. Demkowicz and J.T. Oden, Recent Progress on application of hp-adaptive BE/FE methods to elastic scattering, Int. J. Numer. Meth.Eng., 37, 2893–2910 (1994).
[49] L. Demkowicz and J.T. Oden, Application of hp-adaptive BE/FEmethods to elastic scattering, TICAM Report 94–15, 1994.
[50] J. Douglas Jr., J.E. Santos, D. Sheen, L. Schreyer, Frequency domaintreatment of one-dimensional scalar waves, Mathematical Models andMethods in Applied Sciences, Vol. 3, (1993) 171–194.
[51] J. Elschner and G. Schmidt, Diffraction in periodic structures andoptimal design of binary gratings I. Direct problems and gradientformulas, to appear in Math. Methods Appl. Sci.
[52] B. Enquist and A. Majda, Absorbing boundary conditions for thenumerical simulation of waves, Math. Comp. 31, No. 139, 629–651(1977).
[53] B. Enquist and A. Majda, Radiation boundary conditions for acousticand elastic wave calculations, Comm. Pure Appl. Math., Vol. 32, 313–357, 1979.
[54] Feng Kang, Finite element method and natural boundary reduction,Proceedings of the International Congress of Mathematicians, War-saw, 1983, 1439–1453.
[55] K. Gerdes, The conjugated vs. the unconjugated infinite elementmethod for the Helmholtz equation in exterior domains, ResearchReport 96–11, Seminar Angewandte Mathematik, ETH Zurich, toappear in Comp. Methods Appl. Mech. Eng.
[56] K. Gerdes and L. Demkowicz, Solutions of 3D-Laplace and Helm-holtz equations in exterior domains using hp infinite elements, Comp.Methods Appl. Mech. Eng. 137 (1996) 239–273.
[57] K. Gerdes and F. Ihlenburg, The pollution effect in FE solutionsof the 3D Helmholtz equation with large wavenumber, to appear inComp. Methods Appl. Mech. Eng.
[58] M.J. Grote and J.B. Keller, On nonreflecting boundary conditions,J. Comp. Physics 122 (1995), 231–243.
[59] D. Givoli, Non-reflecting boundary conditions, J. Comp. Physics 94(1991), 1–29.
[60] D. Givoli, Numerical Methods for Problems in Infinite Domains, El-sevier, Amsterdam, 1992.

216 References
[61] D. Givoli, and J.B. Keller, Special finite elements for use with high-order boundary conditions, Comp. Methods Appl. Mech. Eng. 119(1994), 199–213.
[62] W. Hackbusch, Theorie und Numerik elliptischer Differentialglei-chungen, Teubner Verlag 1996; English edition: Elliptic Partial Diffe-rential Equations, Theory and Numerical Treatment, Springer-VerlagBerlin, Heidelberg, New York, 1992.
[63] I. Harari and T.J.R. Hughes, Finite element method for the Helm-holtz equation in an exterior domain: model problems, Comp. Me-thods Appl. Mech. Eng. 87 (1991), 59–96.
[64] I. Harari and T.J.R. Hughes, A cost comparison of boundary elementand finite element methods for problems of time-harmonic acoustics,Comp. Methods Appl. Mech. Eng. 97 (1992), 77–102.
[65] I. Harari and T.J.R. Hughes, Galerkin/least squares finite elementmethods for the reduced wave equation with non-reflecting boundaryconditions in unbounded domains, Comp. Methods Appl. Mech. Eng.98 (1992) 411–454.
[66] I. Harari and T.J.R. Hughes, Analysis of continuous formulationsunderlying the computation of time-harmonic acoustics in exteriordomains, Comp. Methods Appl. Mech. Eng.., 97, 103–124 (1992).
[67] B. Heinrich, The Fourier FEM for Poisson’s equation in axisymmetricdomains with edges, SIAM J. Numer. Anal., 33, 1885–1911, 1996.
[68] I. Herrera, Boundary Methods: An Algebraic Theory, Pitman, Boston,1984.
[69] G.C. Hsiao, The coupling of boundary element and finite elementmethods, ZAMM 70 (1990) 6, T493–T503.
[70] G.C. Hsiao and R.E.Kleinmann, Error analysis in numerical solutionof acoustic integral equations, Int. J. Numer. Meth. Eng., 37, 2921–2933.
[71] T. J. R. Hughes, The Finite Element Method, Prentice Hall, Engle-wood Cliffs, 1987.
[72] F. Ihlenburg and I. Babuska, Finite element solution to the Helmholtzequation with high wave numbers, Comput. Math. Appli., Vol. 30, No.9, 9–37, 1995.
[73] F. Ihlenburg and I. Babuska, Finite element solution to the Helmholtzequation with high wave numbers - Part II: the h-p-version of theFEM, SIAM J. Numer. Anal., Vol. 34, , No. 1, 315–358, 1997.

References 217
[74] F. Ihlenburg and I. Babuska, Dispersion analysis and error estimationof Galerkin finite element methods for the numerical computation ofwaves, Int. J. Numer. Meth. Eng., 38 (1995) 3745–3774.
[75] F. Ihlenburg and Ch. Makridakis, Error estimates of Galerkin FEMfor a system of coupled Helmholtz equations in one dimension. In:W. Hackbusch and G. Wittum (eds.), Numerical treatment of coupledsystems, Vieweg, 1995, 96–105.
[76] F. Ihlenburg and J. Shirron,. Numerical and analytical resolution ofdifferent scales for efficient high fidelity simulation of acoustic scatte-ring problems. To appear in Proccedings of Kieler GAMM Symposium1997, Vieweg, 1998
[77] D.J. Inman, Engineering Vibration, Prentice Hall, Englewood Cliffs,1996.
[78] C. Johnson and J.C. Nedelec, On the coupling of boundary integraland finite element methods, Math. Comp. 35, 152, 1063–1079, 1980.
[79] F. John, Partial Differential Equations, Fourth ed., Springer NewYork, 1982.
[80] W.B. Jones, W.J. Thron, Continued Fractions, Analytic Theory andApplications, Addison-Wesley, Reading, Mass., 1980.
[81] M.C. Junger and D. Feit, Sound, Structures and Their Interaction,2nd ed., MIT Press, Cambridge MA, 1986.
[82] A. Karp, A convergent far field expansion for two-dimensional radia-tion functions, Comm. Pure Appl. Math. 14, 427 (1961).
[83] J.B. Keller and D. Givoli, Exact non-reflecting boundary conditions,J. Comp. Physics 82 (1989) 172–192.
[84] F. Klein, Vorlesungen uber die Entwicklung der Mathematik im 19.Jahrhundert, Teil 1, R. Courant and O. Neugebauer (eds.), Springer-Verlag, Berlin, 1926.
[85] R. Kress, Integral Equations, Springer-Verlag Berlin, Heidelberg, NewYork, 1990.
[86] L.D. Landau and E.M. Lifshitz, Fluid Mechanics, Pergamon Press,Oxford, 1987.
[87] R. Leis, Initial Boundary Value Problems in Mathematical Physics,J. Wiley & Teubner Verlag, Stuttgart, 1986.

218 References
[88] J. Mackerle, Finite element and boundary element techniques in acou-stics — a bibliography (1990–92), Finite Elem. Anal. Design, 15(1994), 263–272.
[89] M. Malhotra, Iterative solution methods for large-scale finite elementmodels in structural acoustics, SUDAM report No. 92-2 (Ph.D. dis-sertation), Div. of Applied Mechanics, Stanford University, 1996.
[90] Ch. Makridakis, F. Ihlenburg, and I. Babuska, Analysis and finite ele-ment methods for a fluid–solid interaction problem in one dimension,Math. Methods and Models in Appl. Sciences, Vol. 6, No. 8 (1996),1119–1141.
[91] J.M. Melenk, On Generalized Finite Element Methods, Ph.D. thesis,University of Maryland at College Park, 1995.
[92] J.M. Melenk and I. Babuska, The partition of unity method: basictheory and applications, Comp. Methods Appl. Mech. Eng., 139, 289–314, 1996.
[93] J.M. Melenk and I. Babuska, Approximation with harmonic andgeneralized harmonic polynomials in the partition of unity method,Comp. Assist. Mech. Eng. Sci., Vol. 4, 607–632, 1997.
[94] S.G. Michlin and K.L. Smolickij, Approximate Methods for Solutionof Differential an Integral Equations, Elsevier, 1967.
[95] P.M. Morse, H. Feshbach, Methods of Theoretical Physics, McGraw–Hill Book Comp. New York, 1953.
[96] C. Muller, Foundations of the Mathematical Theory of Electromagne-tic Waves, Springer Verlag, 1969.
[97] A. Nachman, A brief perspective on computational electromagnetics,J. Comp. Physics 126, 237–239 (1996).
[98] J. Necas, Les methodes directes en theorie des equations elliptiques,Prague, Academia, 1967.
[99] S. Nettel, Wave Physics, Oscillations- Solitons-Chaos, second ed.,Springer-Verlag, 1995.
[100] W.H. Press, S.A. Teukolsky, W.T. Vetterling, and B.P. Flannery,Numerical Recipes in FORTRAN, second edition, Cambridge Univer-sity Press, 1992.
[101] H. J.P. Morand and R. Ohayon, Fluid–Structure Interaction, J. Wiley,New York, 1995.

References 219
[102] J. T. Oden and L.F. Demkowicz, Applied Functional Analysis, CRCPress, 1996.
[103] F.W.J. Olver, Asymptotics and Special Functions, Academic Press,1974.
[104] S.P. Parker (ed.), Acoustics Source Book, McGraw–Hill 1987.
[105] F. Riesz and B. Sz.-Nagy, Functional Analysis, Dover Publications,New York, 1990.
[106] A.A. Samarskii, Introduction to the theory of difference schemes,[Russian], Moscow, Nauka edition, 1971.
[107] J. Sanchez Hubert and E. Sanchez Palencia, Vibration and Couplingof Continuous Systems. Asymptotic Methods, Springer Verlag, Berlin,Heidelberg, 1989.
[108] A. Schatz, An observation concerning Ritz–Galerkin methods withindefinite bilinear forms, Math. Comp. 28 (1974), 959–962.
[109] A.H. Schatz, An analysis of the finite element method for secondorder elliptic boundary value problems. In: A.H. Schatz, V.T. Thomeeand W.L. Wendland, Mathematical Theory of Finite and BoundaryElement Methods, Birkhauser-Verlag, Basel, 1990.
[110] J. Shirron, Numerical Solution of Exterior Helmholtz Problems UsingFinite and Infinite Elements, Ph.D. thesis, College Park, MD, 1995.
[111] G. Strang and G.J. Fix, An Analysis of the Finite Element Method,Prentice Hall, Englewood Cliffs, NJ, 1973.
[112] B.S. Szabo and I. Babuska, Finite Element Analysis, J. Wiley, 1991.
[113] L.L. Thompson and P.M. Pinsky, Complex wavenumber Fourier ana-lysis of the p-version finite element method, Comp. Mech., 13 (1994),255 –275.
[114] L.L. Thompson and P.M. Pinsky, A Galerkin Least Squares FiniteElement Method for the Two-Dimensional Helmholtz Equation, Int.J. Numer. Meth. Eng., 38 (1995), 371–397.
[115] V.V. Varadan, A. Lakhtakia, and V.K. Varadan, Field Representa-tions and Introduction to Scattering, Vol. 1, North Holland 1991.
[116] R. Verfurth, A Review of aposteriori Error Estimation and AdaptiveMesh Refinement Techniques, J. Wiley and Teubner-Verlag, 1996.
[117] L.B. Wahlbin, Local behavior in finite element methods. In: P.G.Ciarlet and J.L. Lions, eds., Handbook of Numerical Analysis, Vol.II, Elsevier, 353–522.

220 References
[118] W.L. Wendland, On asymptotic error estimates for the combinedBEM and FEM. In: Stein, E., Wendland, W. (eds.) Finite elementand boundary element techniques from mathematical and engineeringpoint of view, CISM Lecture Notes 301, Springer-Verlag 1988, 273–333.
[119] C. H. Wilcox, An expansion theorem for electromagnetic fields,Comm. Pure Appl. Math. 9, 115–134 (1956).
[120] K. Yosida, Functional Analysis, Springer-Verlag, Berlin, 1980.
[121] E. Zeidler (ed.) Teubner Taschenbuch der Mathematik, Teubner Ver-lag, Leipzig, 1996.
[122] O.C. Zienkiewicz and J.Z. Zhu, The superconvergent patch recoveryand a posteriori error estimates. Part 2: Error estimates and adapti-vity, Int. J. Numer. Meth. Eng., 33, 1365–1382 (1992).

Index
Absorbing boundary condition i,6, 61, 71–78
Adjoint sesquilinear form 38Ampere’s law 17–18Amplitude 13Antilinear functional 38Approximability 95, 104Artificial boundary i, 61–63, 87,
95, 193–194, 201Atkinson–Wilcox expansion 31–32,
41, 61, 72
Babuska theorem 49, 113Babuska–Brezzi condition 49, 159Babuska–Miller estimator 174–175Bessel’s equation 25, 74Bessel function
cylindrical 30, 34spherical 28, 67–68
Best approximation 55, 94, 104,118, 127, 172
Bilinear form 38
Cauchy principal value 91Cauchy–Schwarz inequality 36, 42,
50, 55, 120, 145, 147, 177
Cauchy sequence 36Cea’s lemma 56, 103, 158Coercive form 51–52, 57, 102, 106Compatability condition 14Complete basis 55Complete space 36Convergence 36, 55
asymptotic 135exponential 169FEM 102–106
hp-version 154Galerkin method 57Helmholtz problems 57
infinite elements 95–97
Conservationof mass 17of charge 17
Coulomb’s law 16Cutoff frequency 128, 150
Dirac delta function 7Dirichlet-to-Neumann condition i,
61, 63–71, 94Feng 70

222 Index
Givoli–Keller 71Grote–Keller 69
Dual space 38
Effectivity index 175, 182Elasticity operator 14Error estimation
a priori 101, 106a posteriori 101–103interpolation 105, 116–118Galerkin method 56–57Galerkin FEM 105–106quasioptimal 106, 116–120preasymptotic 122–132Ritz method 56
Error indicator 175Euler equation 3, 14, 79
Faraday’s law 18Far field 6, 26Far-field pattern 32, 93, 191, 203Finite difference methods 124, 166Finite element method (FEM) i,
21, 61, 80–87conforming 86Galerkin–Least–Squares 158–
159, 162–164generalized 158–170, 188h-version 87, 113hp-version 87, 113, 122, 158,
172Quasi-stabilized 158, 160, 162,
164–166Fluid-structure interaction i, ii, 12,
15, 29, 43, 62, 107, 109,170–173
Fredholm alternative 51Fourier expansion 30, 190, 193
Galerkin method 54, 86, 96, 102Garding inequality ii, 46, 51, 57 –
58, 64, 102, 106, 172Gauß
law 17theorem 2, 3, 44
Gelfand triple 39, 51Gradient 3Green’s function 58, 62, 67, 108,
111, 146, 177–178, 191discrete 125
Hankel functionspherical 26, 29–30, 67. 96cylindrical 33
Helmholtzequation i, 4, 6, 8–11, 19, 30–
31, 41, 52, 79–80, 107–109, 121, 166, 169
integral 6–7, 32, 93decomposition 9problem i
Hilbert space 35–36Hm(Ω) 37H1(0(0, 1) 52
Impedance 6, 29Incident pressure 13, 33Infinite elements 43, 61, 87–97,Inf–sup condition 48–50, 94–95,
102, 105, 110, 127, 187discrete 56, 124Helmholtz problems 110, 124
Jacobian matrix 82
Kapteyn’s inequality 34Karp expansion 31Korn inequality 48
Laplace operator (Laplacian) 4,9, 26, 69
spherical coordinates 24Lax–Milgram theorem 46, 50, 103,
146Legendre
equation 25function 25polynomial 25, 84, 142–143
L2(Ω) 36Linear functional 38Linear operator 38

Index 223
Mass matrix 85–86Master element 81Maxwell’s equations 16, 18Maxwell wave equation 19
Nabla operator 3Norm 35
of operator 38of functional 38energy 47, 50, 55weighted 41
Normed space 35Nonreflecting boundary condition
56
Obstacle i, 12, 189Ohm’s law 17Oscillatory solution 117, 127, 137,
154, 188
Pade approximation 74–75, 98–99Partition of unity method 168–
170Perfectly matched layer 61, 78–80Phase 13
velocity 45, 124lag (difference) 124, 128, 133,
140, 154, 159, 165–66, 176hp-FEM 149–151
Poincare inequality 47, 114Polar coordinates 30–31Pollution effect 102, 106, 124, 130,
132–133, 135, 140, 158,165, 174, 186–188
Potential 9, 11, 29Pressure
incident 12–13, 28scattered 12, 191, 203, 206–
209Projection 104, 176
Radiating solution 7, 24, 26, 29,341, 41, 43, 51, 58, 61
Radiation condition 8Radiation of sound 12, 15
Regularity 39Residual 103, 175, 178
weighted 40Resonance 29Riesz map 39Ritz method 54Robin boundary condition 8, 45
Scalar product 35Shape function 83–84, 141
analytic 150, 160Scattering
elastic 11–12, 29, 106, 185,189–210
monostatic 190rigid 11, 25, 28, 30, 41, 97soft 15
Seminorm 37Separation of variables 3, 21, 29–
30, 90Sesquilinear form 38Shell 10–11, 191, 206Silver–Muller condition 19, 31Sobolev space 35
weighted 43, 89Sommerfeld condition 7–8, 19, 24–
26, 31, 41–42, 62, 71, 106,136
Speed of sound 4, 9Spherical coordinates 24, 28, 31,
90Spherical harmonics 26–27, 29, 65–
66, 95Stability
infinite elements 96finite elements 104, 113–116,
132, 151–153Stabilization 158Static condensation 86, 140, 147–
148Stiffness matrix 85–86Stokes theorem 18Strain 8–9Stress 8, 11, 29, 44Summation convention 8–9, 44

224 Index
Test function 40–42, 95Time-harmonic assumption 1, 3–
4, 10, 12, 20Trace 31, 40
theorem 37inequality 40, 89–90
Transmission condition 13Trial function 41–42, 89–90, 95
Variational formelliptic (positiv definite) 46coercive 51
Variational method 21Vibrations 10, 15–16, 29
Waveacoustic 1dispersive 4, 124equation 4, 9–10elastic 1, 8electromagnetic 1, 16evanescent 23, 123, 128, 130incoming 5number i–ii, 4, 10, 14, 19, 185–
186discrete 125–126, 128, 159
plane 5, 23, 28, 30, 33, 107–108, 167, 169, 206
packet 23guide 23outgoing 5, 8, 12reflected 75–76, 80
Wavelength 5, 124Weak formulation 35Wet surface 12–13, 29, 43
Zienkiewicz–Zhu estimator 174, 182
![Isoscalar !! scattering and the σ/f0(500) resonance · Finite vs. infinite volume spectrum. s=E2 cm Im[s] Re[s] second Riemann sheet Infinite volume narrow resonance broad resonance](https://img.pdfslide.tips/doc/110x75/5b7b84147f8b9aa74b8cb1ad/isoscalar-scattering-and-the-f0500-resonance-finite-vs-innite-volume.jpg)