Embed Size (px)
Citation preview
nationales Forschungszentrum in der Helmholtz-Gemeinschaft
Institut für Angewandte und Numerische Mathematik
KIT - Universität des Landes Baden-Württemberg undnationales Forschungszentrum in der Helmholtz-Gemeinschaft www.kit.edu
Finite ElementeSkript zur Vorlesung im Wintersemester 2019/2020
Christian Wieners
Version vom 6. Mai 2020
Inhaltsverzeichnis
1 PDE-Modelle 1
2 Schwache Ableitungen und Variationsformulierungen 11
3 Triangulierungen und elementare Finite-Elemente-Räume 19
4 Galerkin Verfahren 28
5 Interpolation und Approximation 41
6 Lagrange Elemente 58
7 Petrov-Galerkin Verfahren 75
8 Gemischte Finite Elemente 84
9 Discontinous Galerkin Verfahren 102

Diese Vorlesung ist eine Einführung in die numerische Verfahren zur Lösung von partiel-len Differentialgleichungen. Dabei werden insbesondere alle Diskretisierungen analysiert,die in der Vorlesung Einführung in das Wissenschaftliche Rechnen eingeführt wurden.Neben der Konstruktion der Verfahren wird im Wesentlichen die Konvergenzanalyse be-trachtet. Das Skript soll auch als Grundlage für vertiefende Vorlesungen zur numerischenBehandlung von weiteren partiellen Differentialgleichungen dienen.Der gesamte Stoff ist aus Standard-Lehrbüchern zusammengestellt; die wesentlichen Quel-len sind unten angegeben.Ich danke Herrn Hakan Demirel für die mühsame LATEX-Arbeit der ersten Version (nochaus dem Diplom-Studiengang) und Rukiye Barlak für die Überarbeitung.
Literatur
Knabner/Angermann: Numerik partieller Differentialgleichungen, Springer 2000Braess: Finite Elemente, Springer 2013Ciarlet: The finite element method for elliptic problems, Handbook of Numerical AnalysisVol II, North-Holland 1991Deuflhard/Bornemann: Numerische Mathematik III, de Gruyter 2002Brenner/Scott: The mathematical theory of finite element methods, Springer 2008Ern/Guermond: Theory and practice of finite elements, Springer 2004Ern/Di Pietro: Discontinuous Galerkin methods, Springer 2012Boffi/Brezzi/Fortin: Mixed finite element methods and applications, Springer 2013Bartels: Numerical approximation of partial differential equations, Springer 2016

1 PDE-Modelle
Ziel: Analyse von Diskretisierungs- und Lösungsmethoden für PDEs (= partial differentialequations).
Diffusion
Sei Ω ⊂ Rd (d = 1, 2, 3) ein Gebiet (offen, zusammenhängend) und beschränkt. Wirunterscheiden zwischen den Konstituierenden, also den gesuchten physikalischen Größen
u : Ω → R Konzentration von einem Stoff/Wärmemenge
σ : Ω → Rd Fluss
und den gegebenen Daten
f : Ω → R Quellen und SenkengN : ΓN → R Neumann-RanddatenuD : ΓD → R Dirichlet-Randdaten
κ : Ω → Rd×d Permeabilitätstensor,
wobei ΓN, ΓD ⊂ ∂Ω und ΓN = ∂Ω \ ΓD.Wir nehmen an, dass alle Größen hinreichend glatt sind.Das Modell mit Konstituierenden und Daten wird bestimmt durch:
1) Billanzgleichung:Für alle K ⊂ Ω (konvex und offen) gilt:∫
∂K
σ · nK da =
∫K
f dx mit nK : ∂K → Rd äußere Normale
Abbildung 1: Äußerer Normalenvektor
2) Konstitutivgleichung/Materialgesetz:
σ = κ∇u
3) Randbedingungen
u = uD auf ΓD
σ · n = gN auf ΓN
1

(1.1) LemmaSei Ω ⊂ Rd offen, und seien σ ∈ C1(Ω; Rd), f ∈ C(Ω) mit∫
∂K
σ · nK da =
∫K
f dx ∀ K ⊂ Ω konvex oder Simplices
Dann gilt:div σ = f
Beweis. Satz von Gauß:∫∂Kσ · nK da =
∫K
div σ dx
Somit gilt∫K
(div σ − f) dx = 0 ∀ K ⊂ Ω
Annahme: Es existiert (o. E.) ein x0 ∈ Ω mit (div σ−f)(x0) > 0, wobei (div σ−f) ∈ C0.Somit existiert eine offene Umgebung U ⊂ Ω mit x0 ∈ U und(div σ − f)(x0) > 0 (x ∈ U). Wir wählen K ⊂ U und x0 ∈ K und erhalten∫K
(div σ − f) dx > 0.
Insgesamt gilt also für glatte Lösungen:
− div κ∇u = f in Ωu = uD auf ΓD
κ∇u · n = gN auf ΓN
Spezialfälle
1. κ = κ0Id (isotropes Material, Modell richtungsunabhängig)
2. κ = κ1 ∈ Rd×d (homogenes Material, Modell überall gleich)
3. κ ≡ Id. Dann gilt:
div∇u =d∑j=1
∂j∂ju =d∑j=1
∂2ju = ∆u (Laplace-Operator)
Insgesamt also
−∆u = f (Poisson-Gleichung)
4. Für f = 0, heißt
∆u = 0
Laplace-Gleichung und die Lösungen heißen harmonische Funktionen.
2
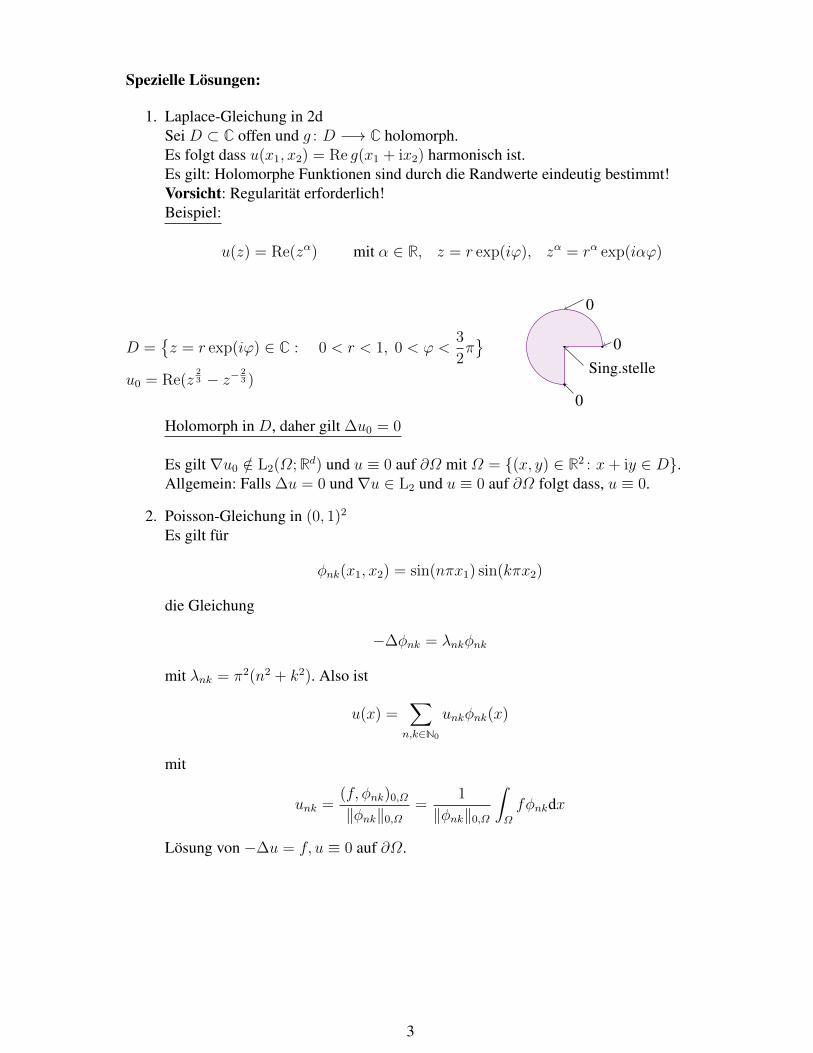
Spezielle Lösungen:
1. Laplace-Gleichung in 2dSei D ⊂ C offen und g : D −→ C holomorph.Es folgt dass u(x1, x2) = Re g(x1 + ix2) harmonisch ist.Es gilt: Holomorphe Funktionen sind durch die Randwerte eindeutig bestimmt!Vorsicht: Regularität erforderlich!Beispiel:
u(z) = Re(zα) mit α ∈ R, z = r exp(iϕ), zα = rα exp(iαϕ)
D =z = r exp(iϕ) ∈ C : 0 < r < 1, 0 < ϕ <
3
2π
u0 = Re(z23 − z−
23 )
Sing.stelle0
0
0
Holomorph in D, daher gilt ∆u0 = 0
Es gilt ∇u0 /∈ L2(Ω; Rd) und u ≡ 0 auf ∂Ω mit Ω = (x, y) ∈ R2 : x+ iy ∈ D.Allgemein: Falls ∆u = 0 und∇u ∈ L2 und u ≡ 0 auf ∂Ω folgt dass, u ≡ 0.
2. Poisson-Gleichung in (0, 1)2
Es gilt für
φnk(x1, x2) = sin(nπx1) sin(kπx2)
die Gleichung
−∆φnk = λnkφnk
mit λnk = π2(n2 + k2). Also ist
u(x) =∑n,k∈N0
unkφnk(x)
mit
unk =(f, φnk)0,Ω
‖φnk‖0,Ω
=1
‖φnk‖0,Ω
∫Ω
fφnkdx
Lösung von −∆u = f, u ≡ 0 auf ∂Ω.
3
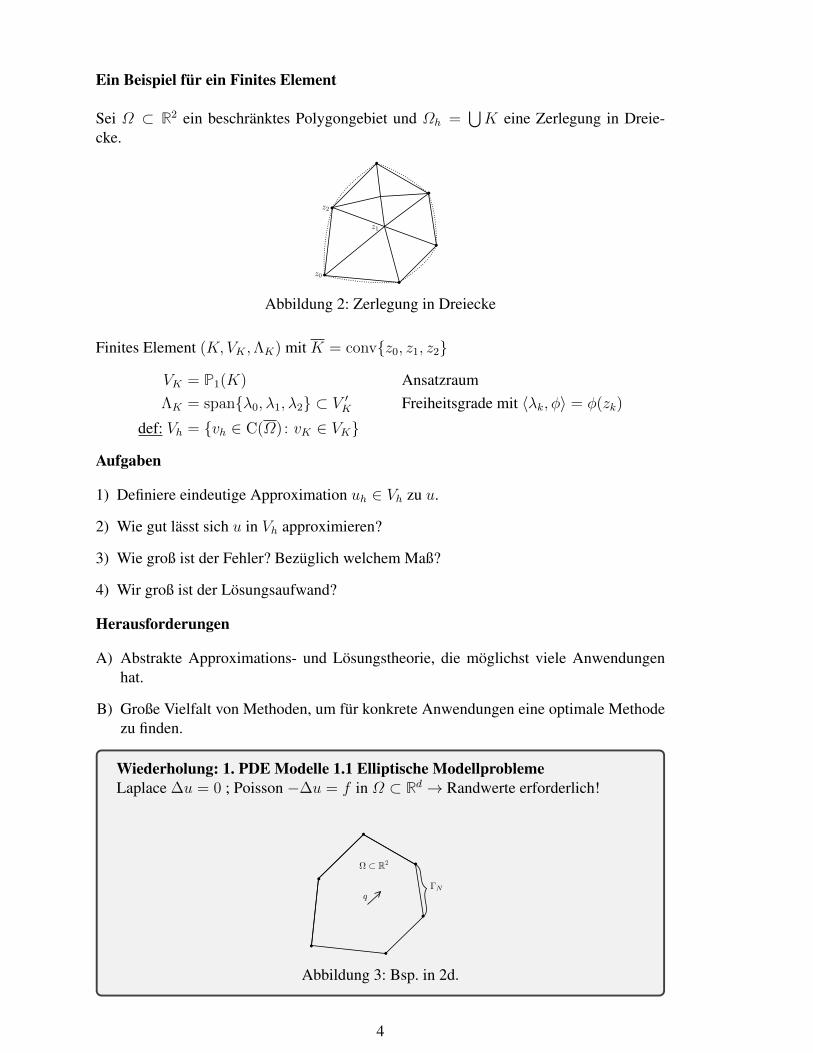
Ein Beispiel für ein Finites Element
Sei Ω ⊂ R2 ein beschränktes Polygongebiet und Ωh =⋃K eine Zerlegung in Dreie-
cke.
Abbildung 2: Zerlegung in Dreiecke
Finites Element (K,VK ,ΛK) mit K = convz0, z1, z2
VK = P1(K) AnsatzraumΛK = spanλ0, λ1, λ2 ⊂ V ′K Freiheitsgrade mit 〈λk, φ〉 = φ(zk)
def: Vh = vh ∈ C(Ω) : vK ∈ VK
Aufgaben
1) Definiere eindeutige Approximation uh ∈ Vh zu u.
2) Wie gut lässt sich u in Vh approximieren?
3) Wie groß ist der Fehler? Bezüglich welchem Maß?
4) Wir groß ist der Lösungsaufwand?
Herausforderungen
A) Abstrakte Approximations- und Lösungstheorie, die möglichst viele Anwendungenhat.
B) Große Vielfalt von Methoden, um für konkrete Anwendungen eine optimale Methodezu finden.
Wiederholung: 1. PDE Modelle 1.1 Elliptische ModellproblemeLaplace ∆u = 0 ; Poisson −∆u = f in Ω ⊂ Rd → Randwerte erforderlich!
Abbildung 3: Bsp. in 2d.
4

Konvektions-Diffusions-Reaktionsgleichung
Konfiguration:
Ω ⊂ Rd beschränktes Gebiet,∂Ω = ΓD ∪ ΓN ∪ ΓR (relativ abgeschlossen/offen)I = [0, T ] Zeitintervall
Konstituierende:
u : I × (Ω ∪ ΓD)→ R Konzentration
σ : I × (Ω ∪ ΓN ∪ ΓR)→ Rd Fluss
Parameter:
κ : I × (Ω ∪ ΓN ∪ ΓR)→ Rd×d Diffusionstensor
q : I × (Ω ∪ ΓN ∪ ΓR)→ Rd Flussvektorr : I ×Ω → R Reaktionsrateα : I × ΓR → R Randkapazität
Daten:
u0 : Ω → R AnfangswerteuD : I × ΓD → R Dirichlet-RandwertegN : I × ΓN → R Neumann-RandbedingunggR : I × ΓR → R Robin-Randbedingungf : Ω → R Quellen und Senken
Bilanzgleichung:Für K ⊂ Ω (konvex), (t1, t2) ⊂ I gilt:∫
K
(u(t2, x)− u(t1, x)) dx+
∫ t2
t1
∫∂K
σ · nk da dt =
∫ t2
t1
∫K
(ru+ f) dx
womit für glatte Lösungen ∂tu = − div σ + f + ru in Ω folgt.
Konstitutivgleichung für den Fluss:
σ = −κ∇u+ qu
Zusammen ergibt sich damit die
5

Diffusions-Konvektions-Reaktionsgleichung:
∂tu−∇κ∇u+ q · ∇u+ (∇ · q)u = ru+ f
Zusätzlich zur Differentialgleichung werden von der Lösung u folgendeRandwerte
u(t, x) = uD(t, x) für (t, x) ∈ I × ΓD
σ(t, x) · n(x) = gN(t, x) für I × ΓN
σ(t, x) · n(x) + α(t, x)u(t, x) = gR(t, x) für I × ΓR
und Anfangswerte
u(0, x) = u0(x) für x ∈ Ω
gefordert.
Spezialfälle
A) stationärer Fall (unabhängig von der Zeit t)
− div(κ∇u) + q · ∇u+ ru = f wobei r = ∇q − r
B) Wärmeleitungsgleichung (parabolisch)
∂tu−∆u = f
Allgemeine Diffusion: Richtung d1, d2 der stärksten und schwächsten Diffusion
Abbildung 4: Richtung d1, d2.
|d1| = |d2| = 1, d1 ⊥ d2
in 3d : d3 = d2 × d2
Diffusionskoeffizienten κj > 0
σ = −∑
κk(∇u · dk)dk = −κ∇u
mit κ =∑κkdkd
Tk symmetrisch positiv definit.
Nun betrachte man ϕ : Ω → Ω eine linear affine Transformation:
ϕ(x) = x0 +Bx mit B ∈ Rd×d, detB > 0 , B = Dϕ
6

Wir definierenu(x) = u(x) mit x = ϕ(x), x ∈ Ω.
Es giltDu(ϕ(x)) = Du(x)Dϕ(x) = Du(x)B.
Weiterhin gilt∇u(ϕ(x))︸ ︷︷ ︸∇u(x)
=(
Du(ϕ(x)))
= BT∇u(x)
Zusätzlich definieren wirσ(x) = σ(x) = σ(ϕ(x))
somit giltDσ(ϕ(x)) = Dσ(x)B
und
div σ(x) = Spur Dσ(x) = Spur(Dσ(x)B−1) = ∇ ·B−1σ(x)
Wir wählen für BBT = κ und erhalten somit
∇ · κ∇u(x) = ∇ ·B−T ∇u(x) = ∆u(x)
C) Transportgleichung (hyperbolisch)
∂tu+ q · ∇u = f
Für div q = 0 und f = 0 erhalten wir eine spezielle Lösung:
u(x, t) = a(|q|2t− q · x) mit a ∈ C1(R)
Nach Differentiation erhalten wir
∂tu = a′(|q|2t− q · x)|q|2
somit
∇u = −a′(|q|2t− q · x)q mit div(qu) = q · ∇u = −a′(|q|2t− q · x)|q|2
Sei γ : [0, T ]→ Ω eine Charakteristik mit γ(t) = q(γ(t)). Somit gilt
∂tu(γ(t), t) = ∇x(γ(t), t) · γ(t) + ∂tu(γ(t), t) = 0
und schließlichu(γ(t), t) = u0(γ(0)),
da u(γ(t), t) = const.
D) Reaktionsgleichung (ODE)∂tu = ru
wir erhaltenu(t, x) = exp(r(x)t)u0(x).
7

Beispiel: Finite Volumen
Mit Ωh =⋃K und VK = P0(K) gilt:∫
K
div(quK) dx =
∫∂K
q · nuK da , uK ∈ VK .
1. PDE Modelle1.1 Elliptische Modellprobleme:
Laplace ∆u = 0
1.2 Parabolisches Problem: Diffusion-Konvektion-Reaktion
∂tu− div κ∇u+ q · ∇u+ ru = f
Maxwell-Gleichungen
Konstituierende:
E : I ×Ω → R3 elektrische FeldstärkeH : I ×Ω → R3 magnetische FeldstärkeD : I ×Ω → R3 elektrische VerschiebungB : I ×Ω → R3 magnetische Induktion
Parameter:
χ : I ×Ω → R SuszeptibilitätJ : I ×Ω → R3 elektrische Stromdichteρ : I ×Ω → R LadungsdichteP : I ×Ω → R Polarisationε0 ∈ (0,∞) Permittivitätµ0 ∈ (0,∞) Permeabilität
Faraday-Gesetz: Für alle Flächen A ⊂ Ω mit stückweiße glatten Rand gilt:
∂t
∫A
B · da+
∫∂A
E · ds = 0
Ampere-Gesetz:
∂t
∫A
D · da−∫∂A
H · ds+
∫A
J · da = 0
8

Gauß-Gesetz: Für jedes Teilvolumen V ⊂ Ω (mit stetig glattem Rand) gilt:
∫∂K
D · da =
∫K
ρ dx
∫∂K
B · da = 0
(1.2) SatzWenn alle Größen hinreichend glatt sind, gilt
∂tD −∇×H = −J ∂tB +∇× E = 0
∇ ·D = ρ ∇ ·B = 0
mit
curl(u) = ∇× u =
∂2u3 − ∂3u2
∂3u1 − ∂1u3
∂1u2 − ∂2u1
= div
0 u3 −u2
−u3 0 u1
u2 −u1 0
(zeilenweise)
Beweis. Aus dem Satz von Gauß folgt∫K
div(B) dx =
∫∂K
B · n da = 0 ∀ K
gilt somit divB = 0, divD = ρ. Aus dem Satz von Stokes folgt∫A
curl(u) · da =
∫∂A
u · ds
Weiterhin gilt: ∫A
(∂tB +∇× E) da = 0 ∀A
und wir erhalten∂tB +∇× E = 0 .
(für Faraday analog)
Spezialfälle:
A) Materialgesetze im Vakuum:Mit B = µ0H, D = ε0E, J = 0, und ρ = 0 gilt
ε0∂tE −∇×H = 0 µ0∂tH −∇× E = 0
div(E) = 0 divH = 0
und somit gilt mit c = 1√ε0µ0
∂2tE =
1
ε0
∇× ∂tH
= −c2(∇(∇ · E))−∆E = c2∆E .
9

B) Zeitharmonische LösungenMit dem Ansatz E(t, x) = sin(ωt)E0(x) gilt
∂2tE = −ω2 sin(ωt)E0(x) = −c2∇×∇× E
und wir erhalten somit für E0
∇×∇× E0 −ω2
cE0 = 0 .
BeispielSei Ω = (0, 2L)3 und wnk(x, y) = sin
(nx π
L
)sin(ky π
L
).
Die Wellengleichung ist eine hyperbolische Modellgleichung.Für unk(x, y, t) = cos
(√λnkt
)wnk(x, y) gilt
∂tunk = −λnkunk = ∆unk ,
und füru =
∑(αnk cos(
√λnk t) + βnk sin(
√λnk t)wnk
)erhalten wir
∂2t u = ∆u , u(0) = u0 , ∂tu(0) = v0
mit
αnk =(u0, wnk)0,Ω
‖wnk‖0,Ω
, βnk =(v0, wnk)0,Ω
‖wnk‖0,Ω
, (f, g)0,Ω =
∫Ω
f · g dx .
10

2 Schwache Ableitungen und Variationsformulierungen
Im Folgenden sei Ω ⊂ Rd oder Ω ⊂ (0, T )× Rd.
(2.1) DefinitionSei L : C1(Ω; Rm)→ L∞(Ω; Rk) ein linearer Differentialoperator.Dann heißt L∗ : C1(Ω; Rk)→ L∞(Ω; Rm) der ”adjungierte” Differentialoperator, wenn
(Lu, v)0,Ω = (u, L∗v)0,Ω ∀u ∈ C1(Ω; Rm) , v ∈ C1c(Ω; Rk)
gilt. Dabei ist C1c(Ω; Rk) = v ∈ C1(Ω; Rk) : supp v︸ ︷︷ ︸
x∈Ω : v(x)6=0
⊂ Ω.
Insbesondere ist v = 0 auf ∂Ω.
BeispielA) Sei u ∈ C1(Ω) ∩ C0(Ω), v ∈ C1(Ω; Rd) ∩ C0(Ω; Rd). Dann gilt∫
∂Ω
uv · n da =
∫Ω
div(uv) dx =
∫Ω
(∇u · v + u div v
)dx
und für alle v ∈ C1c(Ω; Rd)
(∇u, v)0,Ω = −(u,∇ · v)0,Ω .
Daraus folgt für L = ∇L∗ = − div .
B) Mit L = div gilt L∗ = −∇.
C) Mit Lu = div(uq) gilt
L∗v = −q∇v .
D) Mit L = ∂t gilt
L∗ = −∂t .
E) Sei v, w ∈ C1(Ω; R3) ∩ C0(Ω; R3). Dann gilt∫∂Ω
(n× v)w da =
∫∂Ω
(v × w)n da =
∫Ω
div(v × w) dx
=
∫Ω
((∇× v) · w − v · (∇× w)
)dx .
Also gilt für L = curl
L∗ = curl .
(2.2) DefinitionSei L aus (2.1) und u ∈ L2(Ω; Rm). Dann heißt w ∈ L2(Ω; Rk) eine ”schwache Ableitungvon u” bezüglich L, wenn
(w, v)0,Ω = (u, L∗v)0,Ω ∀ v ∈ C1c(Ω; Rk) .
11

(2.3) SatzWenn eine schwache Ableitung w von u bzgl. L existiert, dann ist sie in L2 eindeutig undwir schreiben
w = Lu
Beweis. Seien w, w ∈ L2 schwache Ableitungen von u, dann gilt
(w − w, v)0,Ω = (u, L∗v)0,Ω − (u, L∗v)0,Ω = 0
somit ist w − w orthogonal zu C1c(Ω; Rk). Annahme: Sei ‖w − w‖0,Ω = ε > 0.
⇒ Es existiert eine Treppenfunktion χ 6= 0 mit |w − w|2 ≥ χ ≥ 0 f.ü. in Ω.⇒ Es existiert K ⊂ Ω offen mit |w − w| ≥ δ > 0 f.ü. in K, δ ∈ R.O.E. sei wj − wj ≥ δ > 0 f.ü. in K, δ ∈ R.Wähle v ∈ C1
c(Ω; Rk) mit, v 6= 0, vj ≥ 0 in K und vj = 0 in Ω \K, vi = 0 in (i 6= j)⇒ (wj − wj, v)0,Ω > 0 Widerspruch zur Annahme.
Merke:
u ∈ C1(Ω)
∫Ω
∂tuφ dx = −∫Ω
u∂tφ dx
v ∈ C1(Ω; Rd)∫Ω
∇u · v dx = −∫Ω
u div v dx
v ∈ C10(Ω)
∫Ω
div u · v dx = −∫Ω
u · ∇v dx
w ∈ C10(Ω; R3)
∫Ω
∇× v · w dx =
∫Ω
v · (∇× w) dx
(Lu, v)0,Ω = (u, L∗v)0,Ω
Es gilt
L = ∇ ⇒ L∗ = − div
L = div ⇒ L∗ = −∇L = curl ⇒ L∗ = curl
Bezeichnung
H(L,Ω) =v ∈ L2(Ω; Rm) : es existiert eine schwache Ableitung Lv ∈ L2(Ω; Rk)
L ist fortsetzbar von C(Ω; Rk) nach H(L,Ω).Weiterhin führen wir ein:
(v, w)L = (v, w)L,Ω = (v, w)0,Ω + (Lv, Lw)0,Ω
‖v‖L,Ω =√
(v, w)L =√‖v‖2
0,Ω + ‖Lv‖20,Ω
12

(2.4) SatzH(L,Ω) ist ein Hilbertraum.
Beweis. Zeige: H(L,Ω) ist vollständig. Wähle Cauchy-Folge vjj∈N ⊂ H(L,Ω) ⊂L2(Ω; Rm). Dann ist vjj∈N Cauchy-Folge in L2 mit Grenzwert v = lim
j→∞vj und wj =
Lvjj∈N Cauchy-Folge in L2 mit Grenzwert w = limj→∞
wj .
Es bleibt zu zeigen dass v ∈ H(L,Ω) und Lv = w. Die Behauptung folgt, da für alleφ ∈ C1
c(Ω; Rk) gilt:
(w, φ)0,Ω = limj→∞
(wj, φ)0,Ω
= limj→∞
(Lvj, φ)0,Ω = limj→∞
(vj, L∗φ)0,Ω = (v, L∗φ)0,Ω .
Beispiel
L = ∇ H(L,Ω) = H1(Ω) ‖v‖1,Ω =√‖v‖2
0,Ω + ‖∇v‖20,Ω
L = div H(div, Ω)
L = curl H(curl, Ω)
BemerkungL ist von C1(Ω; Rm) nach H(L,Ω) fortsetzbar und L : H(L,Ω) −→ L2(Ω; Rk) ist stetig.
Spurräume
(2.5) Definitiona) H0(L,Ω) ⊂ H(L,Ω) ist der Abschluss von C1
0(Ω; Rm) in H(L,Ω) bezüglich ‖ · ‖L,Ω.
b) H(L, ∂Ω) = H(L,Ω)/H0(L,Ω), heißt Spurraum von L,wobei ‖u‖L,∂Ω = inf u=u+H0(L,Ω) ‖u‖L,Ω.
Spurabbildung
(2.6) DefinitionSei L der Differentialoperator aus (2.1).Dann sind die Spurabbildungen
γL : C0(∂Ω; Rm)→ L∞(∂Ω; Rm)
γ∗L : C0(∂Ω; Rm)→ L∞(∂Ω; Rm)
charakterisiert durch
(Lu, v)0,Ω − (u, L∗v)0,Ω =(γL(u), γ∗L(v)
),
wobei u ∈ C1(Ω; Rm) ∩ C0(Ω; Rm) und v ∈ C1(Ω; Rk) ∩ C0(Ω; Rk).
13

BemerkungDie Wahl von γL ist nicht eindeutig (z.B. durch das Vorzeichen).Abhängig von γL ist γ∗L eindeutig bestimmt.
BeispielA) Sei m = 1, k = d∫
∂Ω
uv · n da =
∫Ω
div(uv) dx =
∫Ω
(∇u · v + u∇ · v
)dx
Für L = ∇ gilt dann γL(u) = γD(u) = u|∂Ω.Daraus folgt L∗ = − div und γ∗L(v) = γN(v) = v · n|∂ΩFür den umgekehrten Fall, also L = div und L∗ = −∇ gilt:γL(v) = (v · n)n und γ∗L(u) = un.Für das System erster Ordnung mit L
(uσ
)=( ∇·σσ+∇u
)und L∗
(vτ
)=(−∇·ττ−∇v
)gilt dann(
L
(u
σ
),
(v
τ
))0,Ω−((u
σ
), L∗(v
τ
))0,Ω
= (u, τ · n)0,∂Ω + (σ · n, v)0,∂Ω.
Also wähle z.B.
γL
(u
σ
)=
(u
(σ · n)n
)γ∗L
(v
τ
)=
(τ · nvn
).
B) Für L = ∂t und L∗ = −∂t,
(∂tu, v)0,I + (u, ∂tv)0,I =
∫ T
0
∂t(uv)dt = u(T )v(T )− u(0)v(0)
erhält man die Spurabbildungen
γL(u) =
−u(0) t = 0u(T ) t = T
γ∗L(u) =
v(0) t = 0v(T ) t = T
C) Betrachte L(vσ
)= L
(∂tv+∇·σ∂tσ+∇v
)= −L∗
(vσ
). Dann(
L
(v
σ
),
(w
τ
))0,I×∂Ω
+((v
σ
), L∗(w
τ
))0,I×∂Ω
= (v(T ), w(T ))0,∂Ω − (v(0), w(0))0,∂Ω + (σ(T ), τ(T ))0,∂Ω − (σ(0), τ(0))0,∂Ω
+ (v, τ · n)0,I×∂Ω + (σ · n,w)0,I×∂Ω
D) Für ∫∂Ω
(n× v) · wda =
∫Ω
((∇× v) · w − v · (∇× w))dx
also L = curl = L∗ sind die Spurabbildungen
γL(v) = n× vγ∗L(w) = w
14

Bemerkung1) Die Spurabbildung ist stetig fortsetzbar:
γL : H(L,Ω) −→ H(L, ∂Ω).
Das folgt aus der Tatsache, dass
γL(H0(L,Ω)) = 0
γL(u+ u0) = γ(u)
für u0 ∈ H0(L,Ω).
2) Für L = ∇ und u ∈ H1(Ω) gilt u|∂Ω ∈ L2(∂Ω).Aber: Im Allgemeinen ist σ · n /∈ L2(∂Ω) für σ ∈ H(div, Ω)
Lösungskonzepte
Am Beispiel der Poissongleichung L(uσ
)=( ∇σσ+∇u
)=(f0
)mit u = uD auf dem Dirichlet-
Rand ΓD = ∂Ω werden wir jetzt drei wesentliche Lösungskonzepte verdeutlichen.
a) Klassische Lösung:(uσ
)∈ C1(Ω; R1+d) ∩ C0(Ω; R1+d) und f ∈ C0(Ω)
Es gilt also für das Problem
−∇ · σ = f
σ +∇u = 0 ,
dass −∆u = f lösbar ist mit u ∈ C2(Ω) ∩ C0(Ω).
b) Starke Lösung:Hier ist
(uσ
)∈ H(L,Ω), f ∈ L2 und uD ∈ H1(Ω) eine Fortsetzung der Randwerte.
−∇ · σ = f in L2(Ω)
σ +∇u = 0 ,
Daraus folgt u ∈ H1(Ω) und σ ∈ H(div) und u− uD ∈ H10(Ω).
c) Schwache Lösung:(uσ
)∈ L2(Ω; R1+d).((uσ
), L∗(v
τ
))0,Ω
=(L
(u
σ
),
(v
τ
))0,Ω−(γL
(u
σ
), γ∗L
(v
τ
))0,Ω
= (f, v)0,Ω−(uD, τ ·n)0,Ω
für alle (v, τ) ∈ C1(Ω; R1+d) ∩ C0(Ω; R1+d) mit v = 0 auf ∂Ω. Also gilt für allev ∈ C1(Ω)
(σ,−∇v)0,Ω = (f, v)0,Ω,
und(u,−∇ · τ)0,Ω + (σ, τ)0,Ω = −(uD, τ · n)0,∂Ω
für alle τ ∈ C1(Ω; Rd) ∩ C0(Ω; Rd).
⇒ (u,−∇ · τ)0,Ω = −(σ, τ)0,Ω ∀τ ∈ C1c(Ω; Rd)
⇒ u ∈ H1(Ω), σ = −∇u ∈ L2(Ω; Rd)
⇒ (∇u,∇v)0,Ω = (f, v)0,Ω ∀v ∈ H10(Ω) .
15

Systeme erster Ordnung Es sei:
L : C1(Ω; Rm)→ C1(Ω; Rm) linearer DifferentialoperatorγL = (γj,L)j=1,...m : C0(∂Ω; Rm)→ C0(∂Ω; Rm) Spurabbildung
Γj ⊂ ∂Ω für j = 1, ...m
(2.7) Definitiona) u ∈ C1(Ω; Rm) ∩ C0(Ω; Rm) heißt klassische Lösung, wenn für j = 1, ...,m, f ∈
C(Ω; Rm) und gj ∈ C0(Γj) gilt
Lu = f auf Ωγj,Lu = gj auf Γj .
b) u ∈ H(L,Ω) heißt starke Lösung, wenn für j = 1, ...,m, f ∈ L2(Ω; Rm) und gj ∈L2(Γj) gilt
Lu = f auf Ωγj,Lu = gj auf Γj .
c) u ∈ L2(Ω; Rm) heißt schwache Lösung wenn
(u, L∗φ)0,Ω = (f, φ)0,Ω − (γL(u), γ∗L(φ))0,∂Ω
für alle φ ∈ V∗ := v ∈ C1(Ω; Rm) ∩ C0(Ω; Rm) : γ∗j,L(v) = 0 auf ∂Ω ⊂ Γj .
BeispielKonvektions-Reaktions-Diffusionsgleichung
L
(u
σ
)=
(∂tu+∇ · σ + q · ∇u+ ru
κ−1σ +∇u
)=
(f
0
)u = uD auf ΓD
L∗(v
τ
)=
(−∂tv −∇ · τ −∇(q · v) + rv
κ−1τ −∇v
)−σ · n = gN auf ΓN .
Daraus folgt
(u,−∂tv −∇ · τ +∇(qv) + rv)0,I×Ω + (σ, κ−1τ −∇v)0,I×Ω
= (f, v)0,I×Ω − (u(0), v(0))0,Ω − (uD, τ · n)0,I×ΓD + (gN, v)0,I×ΓN ,
das bedeutet τ · n = 0 auf ΓN und v = 0 auf ΓD, v(T ) = 0 in Ω. Daraus folgt
(u,−∇ · τ)0,I×Ω + (σ, κ−1τ)0,I×Ω = 0
für alle τ ∈ C1c(Ω; Rd). Insgesamt gilt u ∈ H1(Ω) mit ∇u + κ−1σ = 0 ⇒ σ = −κ∇u.
Falls ∂tu(t) ∈ L2(Ω) gilt
(∂tu(t), v)0,Ω = (κ∇u,∇v)0,Ω + (q · ∇u, v)0,Ω + (r, u)0,Ω = (f, v)0,Ω + (gN, v)0,ΓN .
16

(2.8) LemmaSei (u, σ) ∈ L2(Ω; R1+d) eine schwache Lösung der stationären KDR-Gleichung. Danngilt u ∈ H1(Ω) und
(κ∇u,∇v)0,Ω + (q · ∇u+ ru, v)0,Ω = (f, v)0,Ω + (gN, v)0,Γ ,
für alle v ∈ H1(Ω) mit v = 0 auf ΓD = ∂Ω \ ΓN.
Beweis mit Satz von Gauß.
(2.9) LemmaEs sei E,H ∈ H(curl;Ω) Lösungen von
∇× E + ωH = 0
∇×H − ωE = f
wobei ω ∈ C unf f ∈ L2(Ω; R3).Dann gilt für alle ψ ∈ H0(curl;Ω)∫
Ω
(∇× E · ∇ × ψ − ω2Eψ)dx =
∫Ω
ωf · ψdx.
Beweis. Es gilt ∫Ω
(∇×H) · ψdx =
∫Ω
H · ∇ × ψdx
für alle ψ ∈ C1c(Ω; R3). Daraus folgt∫
Ω
∇× E · ∇ × ψ dx = −∫Ω
ωH · ∇ × ψ dx
= −∫Ω
ω∇×H · ψ dx = −∫Ω
(ω2E + f) · ψ dx .
VariationsformulierungenSei im weiteren V = v ∈ H(L,Ω) : γj(v) = 0 auf Γj und W = L2(Ω; Rm).Systeme erster Ordnung:
a) Least squares (kleinste Quadrate)
u ∈ V :1
2‖Lu− f‖2
0,Ω = min!
⇒ (Lu− f, Lv)0,Ω = 0 ∀v ∈ V⇒ (Lu,w)0,Ω = (f, w)0,Ω ∀w ∈ W
b) LL∗-Methodez ∈ V ∗ = z ∈ H(L∗, Ω) : γ∗j (z) = 0 auf ∂Ω Γj
1
2‖L∗z‖2
0,Ω − (f, z)0,Ω = min!
⇒ (L∗z, L∗v)0,Ω = (f, v)0,Ω ∀v ∈ V⇒ (u, L∗v)0,Ω = (f, v)0,Ω ∀w ∈ W
17

Systeme zweiter Ordnung:
a) u ∈ H10(Ω): ∫
Ω
κ∇u · ∇v dx =
∫Ω
fv dx ∀v ∈ H10(Ω)
b) E ∈ H0(curl, Ω):∫Ω
∇× E · ∇ × ψ dx =
∫Ω
fψ dx ∀ψ ∈ H0(curl, Ω).
Gemischte Formulierung: σ ∈ H0(div, Ω) und u ∈ L2(Ω) :∫Ω
∇ · σv dx =
∫Ω
fv dx∫Ω
σ · τ dx−∫Ω
u∇ · τ dx =
∫∂Ω
uDτ · n da .
Ausblick:
Allgemeine Variationsformulierung:
V Hilbertrauma : V × V → R Bilinearform
` ∈ V ′ Linearform, z.B. 〈`, φ〉 =
∫Ω
fφ dx
u ∈ V : a(u, φ) = 〈`, φ〉 ∀φ ∈ V
Finite-Elemente: Definiere Vh ⊂ V
Galerkin-Verfahren:
uh ∈ Vh : a(uh, φh) = 〈`, φh〉 ∀φh ∈ Vh .
18

3 Triangulierungen und elementare Finite-Elemente-Räume
(3.1) Definitiona) Ein offener Simplex K ⊂ Rd hat die Form K = convVK mit
VK = zK,0, zK,1, . . . , zK,d ⊂ Rd
mit |K| > 0. Wir wählen o.E. für zK,j positive Orientierung, so dass für die MatrixBK = (zK,1 − zK,0| . . . |zK,d − zK,0) ∈ Rd×d gilt: detBK > 0.
b) Eine zulässige Triangulierung K = Kh von einem beschränkten Polygon / Polyeder-gebiet Ω ⊂ Rd ist eine Zerlegung Ωh =
⋃K∈Kh
K mit ∂Ωh = Ω \ Ωh =⋃
K∈Kh∂K
undconv(VK ∩ VK′) = conv K ∩ conv K ′ = convVK ∩ VK′
d.h. ∂K ∩ ∂K ′ ist leer, ein Eckpunkt, eine Kante oder eine Fläche K 6= K ′.
Abbildung 5: Triangulierung
Bezeichnung:
Vh =⋃
K∈Kh
Vk ⊂ Ω Gesamtmenge aller Eckpunkte (= vertex)
FK =d⋃j=0
int(convVK\zK,j)︸ ︷︷ ︸FK,j
Flächen
EK =⋃j 6=m
int(convzK,j, . . . , zK,m)︸ ︷︷ ︸Ek,j,m
Kanten
Fh =⋃
K∈Kh
FK , VF = F ∩ Vh , Eh =⋃
K∈Kh
EK , VE = E ∩ Vh
19

P(Ωh) = ΠKP(K) Polynome in K (unstetig)Pq(Ωh) = ΠKPq(K) Polynom vom Grad ≤ q
P(Ωh; Rd) = ΠKP(K; Rd)
hK = diamK , h = maxK∈Kh
hK , hF = diamF , hE = diamE .
Für F ∈ FK ∩Ω ist KF ∈ K mit F ∈ FKF , eindeutig bestimmt und es ist
nK = −nKF .
Abbildung 6: Triangulierung
Für u ∈ P(Ωh) und ψ ∈ C1c(Ω; Rd) gilt:
•∫Ω
(u∇ · ψ +∇u · ψ
)dx
p.I.=∑K
∫K
div(uψ) dx =∑K
∫∂K
(uKψ)︸ ︷︷ ︸(uKnK)·ψ
·nK da
Abbildung 7: Triangulierung
Für vh ∈ P(Ωh; Rd) und φ ∈ C1c(Ω) gilt:∫
Ω
(vh · ∇φ+ (∇ · vh)φ
)dx =
∑K
∫∂K
(vK · nK)φ da .
Dabei bezeichnet vK die stetige Fortsetzung von vh|K nach K.Für wh ∈ P(Ωh; R3) und η ∈ C1
c(Ω; R3) gilt:∫Ω
((∇× wh) · η − wh · (∇× η)
)dx =
∑K
∫∂K
(wK × η) · nK da .
20
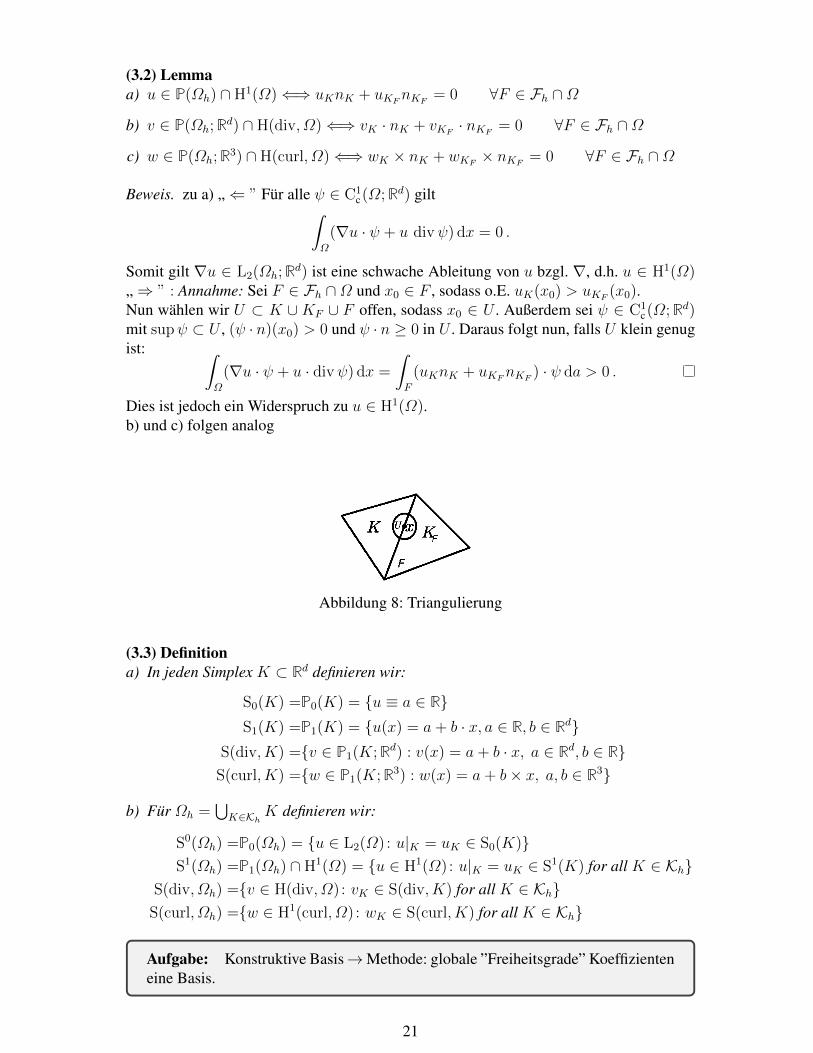
(3.2) Lemmaa) u ∈ P(Ωh) ∩ H1(Ω)⇐⇒ uKnK + uKFnKF = 0 ∀F ∈ Fh ∩Ω
b) v ∈ P(Ωh; Rd) ∩ H(div, Ω)⇐⇒ vK · nK + vKF · nKF = 0 ∀F ∈ Fh ∩Ω
c) w ∈ P(Ωh; R3) ∩ H(curl, Ω)⇐⇒ wK × nK + wKF × nKF = 0 ∀F ∈ Fh ∩Ω
Beweis. zu a) „⇐ ” Für alle ψ ∈ C1c(Ω; Rd) gilt∫
Ω
(∇u · ψ + u divψ) dx = 0 .
Somit gilt ∇u ∈ L2(Ωh; Rd) ist eine schwache Ableitung von u bzgl. ∇, d.h. u ∈ H1(Ω)„⇒ ” : Annahme: Sei F ∈ Fh ∩Ω und x0 ∈ F , sodass o.E. uK(x0) > uKF (x0).Nun wählen wir U ⊂ K ∪KF ∪ F offen, sodass x0 ∈ U . Außerdem sei ψ ∈ C1
c(Ω; Rd)mit supψ ⊂ U , (ψ · n)(x0) > 0 und ψ · n ≥ 0 in U . Daraus folgt nun, falls U klein genugist: ∫
Ω
(∇u · ψ + u · divψ) dx =
∫F
(uKnK + uKFnKF ) · ψ da > 0 .
Dies ist jedoch ein Widerspruch zu u ∈ H1(Ω).b) und c) folgen analog
Abbildung 8: Triangulierung
(3.3) Definitiona) In jeden Simplex K ⊂ Rd definieren wir:
S0(K) =P0(K) = u ≡ a ∈ RS1(K) =P1(K) = u(x) = a+ b · x, a ∈ R, b ∈ Rd
S(div, K) =v ∈ P1(K; Rd) : v(x) = a+ b · x, a ∈ Rd, b ∈ RS(curl, K) =w ∈ P1(K; R3) : w(x) = a+ b× x, a, b ∈ R3
b) Für Ωh =⋃K∈Kh K definieren wir:
S0(Ωh) =P0(Ωh) = u ∈ L2(Ω) : u|K = uK ∈ S0(K)S1(Ωh) =P1(Ωh) ∩ H1(Ω) = u ∈ H1(Ω) : u|K = uK ∈ S1(K) for all K ∈ Kh
S(div, Ωh) =v ∈ H(div, Ω) : vK ∈ S(div, K) for all K ∈ KhS(curl, Ωh) =w ∈ H1(curl, Ω) : wK ∈ S(curl, K) for all K ∈ Kh
Aufgabe: Konstruktive Basis→Methode: globale ”Freiheitsgrade” Koeffizienteneine Basis.
21

(3.4) DefinitionEin Finites Element ist ein Tripel (K,VK ,ΛK) mit:
K ⊂ Rd ZelleVK ⊂ L2(K; Rm) Vektorraum mit NK = dimVK <∞ΛK = spanλ′K,1, . . . , λ′K,NK ⊂ V ′K Freiheitsgrade.
sodass, jedes vK ∈ VK eindeutig durch 〈λ′k,j, vK〉 ∈ R (j = 1, . . . , NK) bestimmt ist,d.h. falls 〈λK,j, vK〉 = 0 gilt, gilt auch vK = 0.
Wähle zu jedem F ∈ Fh eine Orientierung für die Normale nF , und zu E ∈ Eh mitE = conv(zi, zj) Richtung des Kantenvektors τE = 1
|zj−zi|
(zj − zi
).
Beispiel
u ∈ S0(K) : 〈η′K , u〉 =1
|K|
∫K
u dx
u ∈ S1(K) : 〈λ′z, u〉 = u(z), z ∈ VK
v ∈ S(div, K) : 〈ψ′F , v〉 =1
|F |
∫F
v · nF da F ∈ FK
w ∈ S(curl, K) : 〈φ′E, w〉 =1
|E|
∫E
w · τE ds E ∈ EK
(3.5) LemmaDie Freiheitsgrade in K lassen sich nach Ωh fortsetzen:
a) η′K ist Freiheitsgrad in S0(Ωh).
b) S1(Ωh) ⊂ C(Ω) und u ∈ S1(Ωh) ist durch 〈λ′z, u〉 = u(z) mit (z ∈ Vh) bestimmt.
c) v ∈ S(div, Ωh) ist durch 〈ψ′F , v〉 = 1|F |
∫Fv · nF da bestimmt (F ∈ Fh).
d) w ∈ S(curl, Ωh) ist durch 〈φ′E, w〉 = 1|E|
∫Ew · τE ds bestimmt (E ∈ Eh).
Beweis. zu b): Zu zeigen ist, dass für ein z ∈ Vh und ein u ∈ S1(Ωh) gilt:
〈λ′z, uK〉 = 〈λ′z, uK′〉 ,
für alle K,K ′ ∈ K und z ∈ Vk ∩ VK′ .Betrachte nun folgende Fälle
22

1) Wenn K ′ = KF mit F ∈ FF folgt die Behauptung direkt aus (3.2) a)
2) Wenn K = K0, K1, ..., Km = K ′ mit FKj−1∩ FKj 6= ∅. Dann gilt:
〈λz, uK0〉 = 〈λ′z, uKj〉 = u(z)
ist wohldefiniert für j = 1, ...,m.
Abbildung 9: Triangulierung
Sind H(div, Ω)-Funktionen stetig? - Nein!
zu c): 1) Für F ∈ FK ∩ FKF (K 6= KF ) folgt aus (3.2) b), dass auf F
v·nK+v·nKF = v·nF (nK ·nF )+v·nF (nKF ·nF ) = v·nF (nK ·nF )−v·nF (nK ·nF ) = 0
Daraus folgt〈ψ′F , vK〉 = 〈ψ′F , vK′〉
2) Für FK ∩ FK′ 6= ∅ folgt 〈ψ′F , vK〉 = 0.
zu d): Zu zeigen: Falls E ∈ EK ∩ EK′ gilt für w ∈ S(curl, Ωh):
〈φ′E, wK〉 = 〈φ′E, wK′〉
1) Es existiert ein F ∈ FK ∩ FK′ und E ∈ EF . Dann folgt aus (3.2) c) auf F
wK × nK + wKF × nKF = 0.
Also ist w × nF stetig in K ∪KF ∪ F . Da τE · nF = 0 (senkrecht) folgt
wK · τE = wKF · τE .
2) Wähle K = K0, ..., Km = K ′ mit Fj ∈ FKj−1∩ FKj und E ∈ EFj . Dann gilt
für j = 1, ...,m〈φE, wKj−1
〉 = 〈φE, wKj〉
23

Konstruktion einer Basis Ziel ist es nun eine Basis dual zu den DoFs (degrees offreedom) zu bestimmen.D.h. Bestimme zu λ′1, . . . , λ
′N ∈ Λh, N = dimVh, eine Basis λ1, . . . , λN ∈ Vh mit
〈λ′j, λn〉 = δjn =
1, j = n
0, j 6= n.
Daraus folgt:
vh(x) =N∑n=1
〈λ′n, v〉λn(x) .
Zu K = convz0 = 0, z1 = e1, . . . , zd = ed (Referenzsimplex) undK = convzK,0, ..., zK,d definieren wir eine Funktion ϕK : K −→ K mit
ϕK(x) = zK,0 +BK x
wobeiBK =
(zK,1 − zK,0| . . . |zK,d − zK,0
)∈ Rd×d
(3.6) Satz (Basisfunktionen)a) (ηK)K∈Kh ist Basis von S0(Ωh) mit ηK(x) =
1, x ∈ K0, sonst.
Es gilt für die L2 Projektion
Π0hu =
∑K
〈η′K , u〉ηK ∈ S0(Ω) .
Außerdem gilt dim S0(Ωh) = |Kh|.
b) Definiere die baryzentrischen Koordinaten λ0(x) = 1− x1 − · · · − xd und λj(x) = xjfür j = 1, ..., d.
(λz)z∈Vh ist eine Basis von S1(Ωh) mit
λz(x) =
λj(x) mit x = ϕK(x), z = ϕK(zj), x ∈ K0 für x /∈ K
Es gilt dann
λz(y) =
1 für z = y
0 für y ∈ Vh\z(Hütchenfunktion)
und somit für u ∈ C0(Ω) und die Lagrange-Interpolation
Π1hu =
∑u(z)λz ∈ S1(Ωh) .
24

c) (ψF )F∈Fh ist eine Basis von S(div, Ωh) für x ∈ K, F ∈ FK . Für ψj(x) = 1
|Fj |(x− zj)
gilt
ψFj(x) =nK · nFj|Fj|
(x− zK,j)
Abbildung 10: Triangulierung
Somit haben wirΠdivh v =
∑〈ψ′F , v〉ψF ∈ S(div, Ωh)
für v ∈ H1(Ω; Rd).
d) (φE)E∈Eh ist eine Basis von S(curl, Ωh) mit
φE(x) = λz(x)∇λy(x)− λy(x)∇λz(x) für E = convz, y
Es giltΠcurlh w =
∑E∈Eh
〈φ′E, w〉φE ∈ S(curl, Ωh)
für w ∈ C1(Ω; R3).
(3.7) SatzFür alle uh ∈ S0(Ωh) und ε > 0 existiert uε ∈ C1
c(Ω) mit ‖uh − uε‖0,Ω ≤ ε.
Beweis: Zu Ωh := ∪K∈KhK und δ ∈ (0, 1) definieren wir
Kδ = x =d∑j=0
θjzK,j : θj ≥ 0,d∑j=0
θj < 1− δ
mit Ωδ =⋃K∈Kh Kδ, Ωh =
⋃δ>0Ω
δ
Abbildung 11: Triangulierung
25

Weiterhin sei
χδ(r) = max1− r
δ, 02
χδ(x) =(∫
Rdχd(|y|) dy
)−1χj(|x|),
die Dirac-Folge in Rd. Nun definiere
uδ(x) =
∫Ω2δ
χδ(x− y)uh(y) dy,
Daraus folgt nun, dass suppuδ ⊂ Ωδ ⊂ Ω.
Abbildung 12: Triangulierung
Da uh ∈ S0(Ωh) ist gilt
uδ(x) = uh(x) für x ∈ Ω3δ
und somit ist uδ ∈ C10(Ω). Es gilt
|uh(x)− uδ(x)| ≤ ‖u‖∞,Ω
und somit‖uh − uδ‖0,Ω ≤ ‖u‖∞,Ω|Ω\Ω3δ| < ε
für δ beliebig klein. Wir haben gezeigt, dass uδ unsere Treppenfunktion u beliebig gutapproximiert!
26

Bemerkunga) Für uh ∈ S1(Ωh) gilt
uh ∈ H10(Ω)⇐⇒ uh(z) = 0 ∀z ∈ Vh ∩ ∂Ω
b) Für vh ∈ S(div, Ωh) gilt
vh ∈ S(div, Ωh) ∩ H0(div, Ω)⇐⇒ vh · nF = 0 ∀F ∈ Fh ∩ ∂Ω
c) Für wh ∈ S(curl, Ωh) gilt
wh ∈ H0(curl, Ω)⇐⇒ wh·τE = 0 ∀E ∈ Eh∩∂Ω)⇐⇒ wh×nF = 0 ∀F ∈ Fh∩∂Ω
Exakte Sequenzen
A)
R→ C∞(Ω)∇−→ C∞(Ω; R3)
∇×−−→ C∞(Ω; R3)∇·−→ C∞(Ω)→ 0
u ≡ const⇒ ∇u = 0
w = ∇u⇒ ∇× w =
∂2∂3 − ∂3∂2
∂3∂1 − ∂1∂3
∂1∂2 − ∂2∂1
u = 0
v = ∇× w ⇒ ∇ · v = ∂1(∂2w3 − ∂3w2) + ∂2(∂3w1 − ∂1w3) + ∂3(∂1w2 − ∂2w1) = 0
B)
R→ H1(Ω)∇−→ H(curl, Ω)
∇×−−→ H(div, Ω)∇·−→ L2(Ω)→ 0
Aus u ∈ H1(Ω) folgt, dass ein w ∈ L2(Ω; R3) existiert.Also gilt für alle φ = ∇× ψ ∈ C1
0(Ω)∫Ω
w · φ dx =
∫Ω
u · ∇ · φ dx.
Für alle ψ ∈ C1c(Ω; R3) gilt∫
Ω
w · (∇× ψ) dx =
∫Ω
u · ∇ · (∇× ψ) dx = 0 .
Daraus folgt w ∈ H(curl, Ω) und ∇× w = 0.Aus w ∈ H(curl, Ω) folgt, dass ein v ∈ L2(Ω; R3) existiert mit∫
Ω
v · ψ dx =
∫Ω
w · ∇ × ψ dx ∀ψ = ∇φ ∈ C10(Ω; R3)
⇒∫Ω
v · ∇φ dx = 0 ∀φ ∈ C1c(Ω) .
Daraus folgt v ∈ H(div, Ω) und∇ · v = 0.
C)
R→ S1(Ωh)︸ ︷︷ ︸3uh
∇−→ S(curl︸︷︷︸3∇uh
, Ωh︸︷︷︸3wh
)∇×−−→ S( div︸︷︷︸
3∇×wh
, Ωh︸︷︷︸3vh
)∇·−→ S0(Ωh)︸ ︷︷ ︸
3∇vh
→ 0
27

4 Galerkin VerfahrenBeispielSei (u, σ) ∈ H1(Ω) ∩ H(div, Ω) mit σ = −∇u und div σ = f ∈ L2(Ω) und u|∂Ω = 0.Dann gilt −∆u = f und man sieht dass
−∫Ω
σ · ∇φ dx =
∫Ω
fφ dx ∀φ ∈ H10(Ω) ,
also ∫Ω
∇u · ∇φ dx︸ ︷︷ ︸a(u,φ)
=
∫Ω
fφ dx︸ ︷︷ ︸〈`,φ〉
∀φ ∈ H10(Ω)
gilt.Wir suchen u ∈ H1
0(Ω) mit a(u, φ) = 〈`, φ〉 ∀φ ∈ H10(Ω).
Galerkin - Approximation
uh ∈ Vh = S1(Ωh) ∩ H10(Ω) mit a(uh, φh) = 〈`, φh〉 ∀φh ∈ Vh.
Für die Galerkin-Approximation wird vorausgesetzt, dass die Lösung u existiert, vgl. (4.3).
(4.1) Lemma (Cea’s Lemma)Sei V ein Hilbertraum, a : V × V → R eine stetige Bilinearform und ` : V → R einestetige Linearform, d.h. ` ∈ V ′, mit
‖a‖V×V = supv,w 6=0
|a(v, w)|‖v‖V ‖w‖V
<∞
‖`‖V ′ = supv 6=0
|〈`, v〉|‖v‖V
<∞ .
Seien folgende Bedingungen erfüllt:
a) Stetigkeit: a und ` sind stetig, d.h. es existieren Ca, C` > 0 mit
|a(v, w)| ≤ Ca‖v‖V ‖w‖V ∀v, w ∈ V|〈`, v〉| ≤ C`‖v‖V .
b) Elliptizität: a(·, ·) ist elliptisch, d.h. es existiert ca > 0 mit:
a(v, v) ≥ ca‖v‖2V ∀v ∈ V
Dann existiert eine eindeutige Galerkin-Approximation uh ∈ Vh, und für die Lösungenu ∈ V, uh ∈ Vh von
a(u, v) =〈`, v〉 ∀v ∈ Va(uh, vh) =〈`, vh〉 ∀vh ∈ Vh
gilt:
28

1) Stabilität: Die Lösung ist eindeutig und beschränkt durch
‖u‖V ≤1
ca‖`‖V ′ , ‖uh‖V ≤
1
ca‖`‖V ′ .
2) Galerkin-Orthogonalität
a(u− uh, vh) = 0 ∀vh ∈ Vh
3) A-priori Fehlerabschätzung
‖u− uh‖V ≤Caca
infvh∈Vh
‖u− vh‖V
Bemerkung: Es gilt Ca ≥ ‖a‖V×V und C` ≥ ‖`‖V ′ .
Beweis. Zu 1): Seien u, u ∈ V und für alle v ∈ V sei
a(u, v) = 〈`, v〉a(u, v) = 〈`, v〉 .
Daraus folgt0 = a(u− u, u− u) ≤ ca‖u− u‖2
V .
Daraus folgt u = u. Weiter gilt
ca‖u‖2V ≤ a(u, u) = 〈`, u〉 ≤ ‖`‖V ′‖u‖V .
Folglich gilt dann
‖u‖V ≤‖`‖V ′ca
.
2) folgt sofort aus a(uh, vh) = 〈`, vh〉.Zu 3): Es gilt für alle vh ∈ Vh
ca‖u− uh‖2V ≤a(u− uh, u− uh)
2)= a(u− uh, u)
2)= a(u− uh, u− vh)
≤Ca‖u− uh‖V ‖u− vh‖V .
29

(4.2) SatzSei Ωh =
⋃K ⊂ Ω Triangulierung in Simplices mit Γ =
⋃F∈Fh∩Γ F ⊂ ∂Ω.
Dann existieren CΓ , CF > 0 und es gilt für u ∈ H1(Ω)
a) u|Γ ∈ L2(Γ )
b) ‖u‖0,Γ ≤ CΓ‖u‖1,Ω
c) ‖u‖0,Ω ≤ CF(‖u‖0,Γ + ‖∇u‖0,Ω) (Poincaré-Friedrichs)
0
0
1
1
2
2 3
3
4 5
4
1
2
3
Abbildung 13: Triangulierung
Anwendung: V = v ∈ H1(Ω) : v|Γ = 0 mit v|Γ = vΓ .Dann gilt
‖v‖0,Ω ≤ CF‖∇v‖0,Ω ∀v ∈ V
und somit
‖v‖21,Ω = ‖v‖2
0,Ω + ‖∇v‖20,Ω ≤ (C2
F + 1)‖∇v‖20,Ω
Für a(v, w) =∫Ω∇v · ∇w dx gilt:
a(v, v) = ‖∇v‖20,Ω ≥ (C2
F + 1)−1‖v‖21,Ω
Wobei (C2F + 1)−1 = ca. Also ist a elliptisch.
Beweis. Zu F ∈ FK mit F = conv(VK\zF) und zF ∈ VK definiere ψF (x) = x − zFund somit divψF ≡ d, dann gilt:
ψF · nF ≡ CF konstant
und
ψF ′ · nF ′ = 0 für F ′ 6= F .
Zu b): Wir erhalten für F ∈ FK ∩ Γ
‖u‖20,Γ =
∑F∈Fh∩Γ
1
CF
∫F
u2ψF · nF da =∑K
∑F∈Fk∩Γ
1
CF
∫∂K
u2ψF · nK da .
30

Setzt man divψF ≡ d und∫∂K
u2ψF · nK da =
∫K
div(u2ψF ) dx =
∫K
(2u∇u · ψF + du2
)dx
gilt∑K
∑F∈FK∩Γ
1
CF
∫∂K
u2ψF · nK da ≤(
max1
CF
)(2‖u‖0,Ω‖∇u‖0,Ω‖ψF‖∞ + d‖u‖2
0,Ω
)≤ C2
Γ‖u‖21,Ω .
Wir haben hier ausgenutzt, dass ‖ψF‖∞ ≤ hK und die Konstante C2Γ ist dann gegeben mit
C2Γ = max 1
CF(h2
K + d).Das bedeutet insbesondere, dass die Abschätzung abhängig ist von unserer (groben) Tri-angulierung.Für c) zerlege Ωh = Ω0
h ∪Ω1h ∪ · · · ∪ΩK
h mit
Ωjh =
⋃K∈Kj
K
K0 = K ∈ K : FK ∩ Γ 6= ∅Kj = K ∈ K\Kj−1 : FK ∩ ∂Ωj−1
h 6= ∅ .
Wie bereits in Teilaufgabe b) benutzen wir hier, dass∫K
div(u2ψF ) dx =
∫K
u2 divψF dx+
∫K
2u∇u · ψF dx .
Zusammen mit dem Satz von Gauß folgt nun
1
d‖u‖2
0,K =
∫K
u2 divψF dx =
∫∂K
u2ψF · nK da+
∫K
2u∇u · ψF dx
≤ CF‖u‖20,F + 2‖u‖0,K‖∇u‖0,K‖ψF‖∞
≤ 1
2d‖u‖2
0,Ω + 2d‖∇u‖20,Ωh
2k
⇒ 1
2d‖u‖2
0,K ≤ cF‖u‖20,F + 2dh2
k‖∇u‖20,K
⇒ ‖u‖0,Ω0 ≤ C1
(‖u‖0,Γ + ‖∇u‖2
0,Ω0
)mit C1 = 2dmaxCF, 2dhk
mit a) ‖u‖0,∂Ω0∩∂Ω1 ≤ C2
(‖u‖0,Ω0 + ‖∇u‖0,Ω0
)≤ C1C2‖u‖0,Γ + (C1 + C2)‖∇u‖0,Ω0
analog ‖u‖0,∂Ω1 ≤ C3
(‖u‖0,∂Ω0∩∂Ω1 + ‖∇u‖0,Ω1
)≤ C4
(‖u‖0,Γ + ‖∇u‖0,Ω0∪Ω1
)induktiv ‖u‖0,Ω ≤ C
(‖u‖0,Γ + ‖∇u‖0,Ω0∪···∪ΩR
).
(4.3) SatzSei V ein Hilbertraum, Vhh∈H, 0 ∈ H und Vh ⊂ V, H ⊂ (0, h0) eine Familie vonendlich-dimensionalen Teilräumen, Vh ⊂ Vh′ für h′ < h und V0 =
⋃Vh der Abschluss in
31

V bzgl. ‖.‖V . Weiterhin sei J : V → R gleichmäßig konvex, d.h. es existiert ein cJ > 0 mit
J((1− λ)v + λw) ≤ (1− λ)J(v) + λJ(w)− cJ2λ(1− λ)‖v − w‖2
V
∀λ ∈ (0, 1), v, w ∈ V0
Sei J nach unten beschränkt in V0, d.h.
J(v) ≥ C ∈ R ∀v ∈ V0
Dann gilt: Es existiert ein eindeutiges Minimum u ∈ V0 in J mit
J(v) ≤ J(u) ∀v ∈ V0 .
Abbildung 14: Triangulierung
Beweis. Wähle Minimalfolge uhh∈H mit limh→0
J(uh) = infv∈V0 J(v) Dies ist möglich, da
J stetig ist und Vh ⊂ V0 dicht ist.
Dann gilt für die Minimalfolge mit λ = 12:
cJ8‖vh − vh′‖2
V ≤1
2J(vh) +
1
2J(vh′)− J
(1
2vh +
1
2vh′)
mit h′, h ∈ H
≤ 1
2J(vh) +
1
2J(vh′)− inf
v∈V0J(v)
Für alle ε > 0 existiert hε ∈ H mit
J(uh) ≤ inf J +ε
2, h < hε .
Somit gilt
cJ8‖uh − uh′‖2
V ≤ ε ∀ h, h′ < hε ,
d.h. uhh∈H ist eine Cauchyfolge in V0 und es existiert u ∈ V0 mit limh→0
u. Für J stetig gilt
J(u) = limh→0
J(uh) = inf J ,
und da J strikt konvex ist, gilt dass u das eindeutige Minimum ist.
32

Anwendung Definiere J(v) = 12a(v, v)− 〈`, v〉. Zeige: J(u) = min! ist eindeutig defi-
niert in V .
1) J(·) stetig: |J(v)− J(w)| ≤ Ca + C`.
2)
J(v) ≥ 1
2Ca‖v‖2
1,Ω − C`‖v‖1,Ω ≥ −1
2
C2`
Ca.
3) Zeige J(·) ist gleichmäßig konvex, d.h. es existiert cJ > 0 mit
J((1− λ)v + λw) ≤ (1− λ)J(v) + λJ(w)− cJλ(1− λ)
2‖v − w‖2
V
und es gilt
2(J((1− λ)v + λw)− (1− λ)J(v)− λJ(w))
= a(v + λ(w − v), v + λ(w − v))− (1− λ)a(v, v)− λa(w,w)
= (λ2 − λ)a(v − w, v − w) ≤ −λ(1− λ)Ca‖v − w‖21,Ω .
(4.4) SatzSei Ωh =
⋃K, Ω = Ωh ∪ ∂Ωh, ein beschränktes Polygon-/Polyedergebiet.
a) Dann existiert Ω ⊂ Rd offen mit Ω ⊂ Ω und C > 0 sodass, zu u ∈ H1(Ω) eineFortsetzung u ∈ H1
0(Ω) mit
‖u‖1,Ω ≤ C‖u‖1,Ω.
b) C1(Ω) ist dicht in H1(Ω)
c) u|∂Ω ∈ L2(Ω) für u ∈ H1(Ω) und H10(Ω) = u ∈ H1(Ω) : u|∂Ω = 0
d) Sei (Kh)h∈H zulässige Triangulierungen mit 0 ∈ H. Dann gilt:
H1(Ω) =⋃h∈H
S1(Ωh)
H1Γ (Ω) = v ∈ H1(Ω) : v|Γ = 0 =
⋃h∈H
vh ∈ S1(Ωh) : vh(z) = 0 für z ∈ Vh ∩ Γ
33

Abbildung 15: Triangulierung
Beweis. Zu a): Zu z ∈ Vh ∩ ∂Ω wähle nz = 1|Fz |∑
F∈F∩Γ nF die Normalenrichtung mit
Fz = F ∈ Fh : z ∈ VF .
Definiere für hz ∈ (0, h) klein genug
z = z + hznz /∈ Ω
zF =1
d
∑z∈VF
z
zE =1
2
∑z∈VE
z
Sei
Vh = V ∪ z : z ∈ Vk ∩ ∂Ω∪ zF : F ∈ Fh ∩ ∂Ω∪ zE : E ∈ Eh ∩ ∂Ω
und konstruiere K ⊃ K mit Vh =⋃K∈KVK und Ωh =
⋃K∈K
K. Zu F ∈ Fh ∩ ∂Ω wähle
K ∈ K mit F ∈ FK und KF ∈ K\K wobei hier F ∈ FKF .Definiere nun
λF =∑z∈VF
λz ∈ S1(Ωh) .
34

Zu u ∈ H1(Ω) definiere:
u(x) = −λF (x)u(x) ,
wobei x = ϕKF (x) die Spiegelung von x = ϕK(x) ist. Es folgt, dass
u ∈ H1(K ∪ F ∪KF )
ist. Somit gilt
‖u‖1,KF = ‖λu‖21,K ≤ ‖λu‖2
0,K + ‖∇λu+ λ∇u‖20,K
≤ ‖u‖20,K +
2
h‖u‖2
0,K + 2‖∇u‖20,K
≤ C‖u‖21,K
Nun wähle F ′ ∈ FKF \F und spiegle u von KF auf KF ′ bis u auf Ω fortgesetzt ist.Daraus folgt nun induktiv, dass
‖u‖1,Ω ≤ C‖u‖1,Ω
und per Konstruktion ist u(x) = 0 für x ∈ ∂Ω.Zu b):
Abbildung 16: Triangulierung
Wähle zu δ > 0 eine Dirac-Folge χδ mit ∫Rdχδ(x) dx = 1
χδ(x) = cδ max1− |x|δ2, 02 mit cδ > 0 .
Also ist χδ ∈ C1(Rd). Weiter ist
limδ→0
(χδ ∗ v)(x) = limδ→0
∫Rdχδ(x− y)v(y) dy
für v ∈ C0(Rd) und χδ ∗ v ∈ C1(Rd). Zu u ∈ H1(Ω) wählen wir nun u ∈ H1(Ω) ausAufgabenteil a) und definieren
uδ = χδ ∗ u ∈ C1(Ω) ⊃ C1(Ω) .
35

35
35
Abbildung 17: Triangulierung
Zu ε > 0 wählen wir uε ∈ C0(Ω) mit ‖u − uε‖0,Ω < ε. Da uε gleichmäßig stetig ist inΩ ⊂ Ω gilt
‖χδ ∗ uε − uε‖0,Ω → 0
für δ → 0. Das heißt wir können folgende Abschätzung treffen.
‖uδ − u‖0,Ω = ‖uδ − u‖0,Ω
= ‖uδ − χδ ∗ uε + χδ ∗ uε − uε + uε − u‖0,Ω
≤ ‖χδ ∗ (u− uε‖0,Ω + ‖χδ ∗ uε − uε‖0,Ω + ‖uε − u‖0,Ω → 0
für ε, δ → 0.Analog folgt für (∂jχ) ∗ u = ∂juδ ∈ C0(Ω) ⊃ C0(Ω): Zu ε > 0 wähle uε,j ∈ C0(Ω) mit‖∂ju− uε,j‖ < ε :
‖∂juδ − ∂ju‖0,Ω → 0 .
Zusammen folgt also
limδ→0‖uδ − u‖1,Ω = 0 .
Zu c): Anwendung auf Spuren:Aus (4.2) folgt für alle u ∈ C1(Ω) folgende Abschätzung
‖u‖0,∂Ω = CF‖u‖1,Ω
Hierbei können wir verwenden, dass u = u|∂Ω = γD(u), d.h. γD : C1(Ω)→ L2(∂Ω)ist stetig fortsetzbar mit γD(u) = lim
δ→0γD(uδ).
Da uδ eine Cauchy-Folge in H1(Ω) ist γD(uδ) eine Cauchy-Folge in L2(∂Ω).Für u ∈ H1
0(Ω) existiert (uδ)δ>0 ∈ C1c(Ω) mit ‖u− uδ‖1,Ω → 0 und es gilt dann
γD(u) = limδ→0
γD(uδ) = 0 .
Zu d): Zu u ∈ H1(Ω) wähle uδ ∈ C1(Ω) mit ‖u− uδ‖1,Ω ≤ ε.Dann wähle zu h ∈ H die Interpolation uh,δ = Π1uδ, d.h. uh,δ(z) = uδ(z) für alle z ∈ Vh.Da 0 ∈ H folgt
limh→0‖uh,δ − uδ‖∞ = 0.
36

WiederholungSei a : V × V → R, ` : v → R stetig und a(v, v) ≥ Ca‖v‖2
V
J(v) =1
2a(v, v) = 〈`, v〉
gleichmäßig konvex von unten beschränkt in V0 ⊂ V .Es existiert eine eindeutige Lösung mit
u ∈ V : a(u, v) = 〈`, v〉 ∀v ∈ V0
Beispiel
a(v, w) =
∫Ω
∇v · ∇w dx 〈`, v〉 =
∫Ω
fv dx
mit V = H1(Ω) und V0 =⋃h∈H S1(Ωh) ⊂ V
(4.5) LemmaSei ϕK : K → K linear affin mit BK = DϕK , JK = detBK > 0 und x→ x = ϕK(x).
Weiterhin sei u ∈ H1(K) und u = u ϕk, dann gilt:
a) ‖u‖0,K ≤ J− 1
2K ‖u‖0,K
b) ‖∇u‖0,K ≤ |BK |︸︷︷︸Spektralnorm
J− 1
2K ‖∇u‖0,K mit |BK | = supz 6=0
|BKz||z|
Beweis. Zu a): ∫K
|u|2 dx =
∫K
|u ϕK |2J−1K (JK dx) = J−1
K
∫K
|u|2 dx
Zu b): Es gilt D(u ϕK) = Du · DϕK und somit
∇u = (Du)T = BTK∇u .
Es folgt ∫K
|∇u|2 dx =
∫K
|BTK∇u ϕK |2J−1
K JK dx = J−1K JK
∫K
|F T∇u|2 dx
≤ J−1| BTK︸︷︷︸
BK
|∫K
|∇u|2 dx .
37
Anwendung:Zu u ∈ H1(Ω) wähle Fortsetzung u ∈ H1
0(Rd) und definiere uδ = κδ u, d.h. uF (x) =∫Rd κδ(x− y)u(y) dy somit
uδ = uδ|Ω ∈ C10(Rd), lim
δ→0‖u− uδ‖1,Rd = 0
Somit ist C1(Ω) dicht in H1(Ω).
Diffusions-Konvektion-Reaktion:
σ = −κ∇u+ qu ∈ H1(div, Ω) , u ∈ H(Ω)
div σ + ru = f in Ω∂Ω = ΓD ∪ ΓN ∪ ΓR mit u = 0 auf ΓD : u ∈ H1
ΓD(Ω)
−κ∇u · n = gN auf ΓN
κ∇n+ αu = gR auf ΓR
Sei φ ∈ H1ΓD
(Ω) dann gilt∫Ω
(f − ru)φ dx =
∫Ω
div(σ)φ dx =
∫Ω
div(−κ∇u)φ dx︸ ︷︷ ︸∫Ω κ∇u·∇φdx−
∫∂Ω κ∇u·nφ dx
+
∫Ω
div(qu)︸ ︷︷ ︸q·∇u+div q·u
φ dx
= −∫ΓN
gNφ da+
∫ΓR
(αu+ gR)φ da
Somit erhalten wir∫Ω
(κ∇u · ∇φ+ q∇uφ+ (div q − r)uφ dx+
∫ΓR
α · nφ da
=
∫Ω
fφ dx+
∫ΓN
gNφ da+
∫ΓR
gRφ da
Definiere:
a(u, φ) =
∫Ω
(κ∇u · ∇φ+ q · ∇nφ+ (div q − r)uφ) dx+
∫ΓR
αuφ da
〈l, φ〉 =
∫Ω
fφ dx+
∫ΓN
gNφ da+
∫ΓR
gRφ da
(4.6) LemmaSei Ω ⊂ Rd.
a) Für κ ∈ L∞(Ω; Rd×d), q ∈ L∞(Ω; Rd), r ∈ L∞(Ω) und α ∈ L∞(ΓR) ist
a(v, w) =
∫Ω
(κ∇v · ∇w + q · ∇vw + rvw) dx+
∫ΓR
αvw da
stetig in H1(Ω), d.h. es existiert Ca > 0 mit
|a(v, w)| ≤ Ca‖v‖1,Ω‖w‖1,Ω .
38

b) Für f ∈ L2(Ω), gN ∈ L2(ΓN), gR ∈ L2(ΓR) ist
〈`, v〉 =
∫Ω
fv dx+
∫ΓN
gNv da+
∫ΓR
gRv da
stetig in H1(Ω), d.h. es existiert C` > 0 mit
|〈`, φ〉| ≤ C`‖φ‖1,Ω .
c) Sei κ symmetrisch mit κy · y ≥ κ0|y|2, κ0 > 0, und sei
r − 1
2div q ≥ 0, α ≥ 0, q · n ≥ 0 auf ΓN ∪ ΓR .
Wenn eine der folgenden Bedingungen erfüllt ist,
i) |ΓD|d−1 > 0
ii) q · n+ α ≥ α0 > 0 auf Γ ⊂ ΓR, r|d−1| > 0
iii) r − 12
div q ≥ r0 > 0 auf ω ⊂ Ω, ω offen
iv) q · n ≥ q0 > 0 auf Γ ⊂ ΓN, |Γ |d−1| > 0,
dann ist a(·, ·) elliptisch.
Beweis. Zu a): Es gilt
|a(v, w)| ≤ ‖κ‖∞‖∇v‖0,Ω‖∇w‖0,Ω
+ ‖q‖∞‖∇v‖0,Ω‖w‖1,Ω
+ ‖r‖∞‖v‖1,Ω‖w‖1,Ω
+ ‖α‖∞,ΓR‖v‖0,ΓR‖w‖0,ΓR
≤(‖κ‖∞ + ‖q‖∞ + ‖r‖∞ + C2
ΓR‖α‖∞
)‖v‖1,Ω‖w‖1,Ω
Zu b):|〈`, φ〉| ≤
(‖f‖0,Ω + CΓN‖gN‖0,ΓN + CΓR‖gR‖0,ΓR
)‖φ‖1,Ω
Beweis. Zu c): Es gilt
a(v, v) =
∫Ω
(κ∇v · ∇v + q · ∇vv︸ ︷︷ ︸12
∫Ω(div(v2q)−(div q)v2) dx
+(div q − v)v2) dx+
∫ΓR
αv2 da
≥∫Ω
κ0‖∇v‖2 dx+1
2
∫∂Ω
q · nv2 da+
∫Ω
(1
2div q − v)v2 dx+
∫ΓR
αv2 da
≥ κ0‖∇v‖20,Ω +
1
2
∫ΓN
q · nv2 da︸ ︷︷ ︸≥0
+
∫ΓR
1
2(q · n+ α)v2 da︸ ︷︷ ︸
≥0
+
∫Ω
(1
2div q − r)︸ ︷︷ ︸≥0
v2 dx
Zu (i): Es gilt ‖v‖0,Ω und somit
‖v‖0,Ω ≤ CF‖∇v‖0,Ω ≤1 + CF
κ0
a(v, v)
39

somit ist ca = κ0C2
F +1.
Zu (ii): Es gilt
‖v‖20,Ω ≤ C2
F
(‖v2‖ΓR + ‖∇‖2
)≤(C2
F
α0
+1
κ0
)a(v, v)
Die letzte Abschätzung folgt aus der Youngschen Ungleichung. Da
‖v‖0,Ω ≤1
κ0
a(v, v) ,
folgt ca =(C2
Fα0
+ 2κ0
)−1.Zu (iii): Aus
‖v‖0,Ω ≤ Cω‖∇v‖0,Ω
folgt ca =(Cωr0
+ 2κ0
)−1.
Zu (iv): Hier gilt ca =(CFq0
+ 2κ0
)−1.
(4.7) LemmaSei a : V × V → R bilinear, stetig und elliptisch (mit Ca > ca > 0) und ` : V → R linearund stetig (d.h. ` ∈ V ′).Dann existiert eine eindeutige Lösung u ∈ V von
a(u, v) = 〈`, v〉 v ∈ V .
Beweis. Setze u0 = 0 und zu τ > 0 bestimme vk ∈ V für k = 1, 2, . . . mit
(vk, v)V = 〈`, v〉 − a(uk−1, v) ∀v ∈ VSetze uk = uk+1 + τvk. Dann ist Jk(v) = 1
2‖v‖2
V − 〈`k, v〉 = min!.Aus (4.3) folgt das ein eindeutiges Minimum vk existiert.Zeige: Falls τ < 2 ca
Caist, dann konvergiert (uk)k∈N gegen die Lösung u ∈ V .
Wir definieren die Operatoren:
A : V → V ′ mit 〈Av,w〉 = a(v, w)
AV : V → V ′ mit 〈AV v, w〉 = (v, w)V
wobei der zweite Operator der Riesz-Operator genannt wird. Es gilt
AV vk = `− Auk−1
und
uk+1 = uk + τvk = uk − A−1V (`− Auk)
= (id−τA−1V A)︸ ︷︷ ︸
M
uk − A−1V ` .
Wenn ‖M‖V < 1 dann konvergiert (uk). Es gilt
‖M‖V = supv∈V \0
‖Mv‖V‖v‖V
= supv,w∈V \0
(Mv,w)V‖v‖V ‖w‖V
und
(Mv,w)V = 〈AVMv,w〉 = 〈(AV − τA)v, w〉 = (w,w)V − τa(v, w) .
40

5 Interpolation und Approximation
Sei K = convz0, z1, . . . , zd eine Zelle mit Eckpunkten zj , sei K = convz0, z1, . . . , zddas Referenzelement, und ϕK(x) = BK x+ z0,K linear affin mit BK = DϕK(x).
Bezeichnungen: JK = detBK > 0, hK = diamK, h = maxhK
(5.1) DefinitionEine Familie von Zerlegungen Kh∈H heißt
a) quasi-uniform, falls c > 0 existiert mit hK ≥ ch ∀K ∈ Kh ∀h ∈ H
b) regulär, falls C > 0 existiert mit |B−1K | ≤ Ch−1
K ∀K ∈ Kh ∀h ∈ H
(5.2) SatzSei ρK = maxdiamU : U = Ur(z) ⊂ K größter Durchmesser eines Kreises / Kugelin K. Dann gilt: Falls c > 0 existiert mit ρK ≥ chK dann ist Kh regulär.
Beweis. Sei y ∈ Rd mit |y| ≤ ρK =⇒ dann existiert x1, x2 ∈ K mity = x2 − x1 = ϕK(x2)− ϕK(x1) mit x2, x1 ∈ K. Es gilt
|B−1K | = sup
|y|<ρK
1
ρK|B−1
K y|
≤ 1
ρKsup
x1,x2∈K|B−1
K (x2 − x1)|
≤ 1
ρKsup
x1,x2∈K|x2 − x1| ≤ hK .
Insgesamt sagt dieses Resultat, dass das Verhältnis vom Innen- und Außendurchmessernicht degenerieren darf.
Abbildung 18: Triangulierung
41
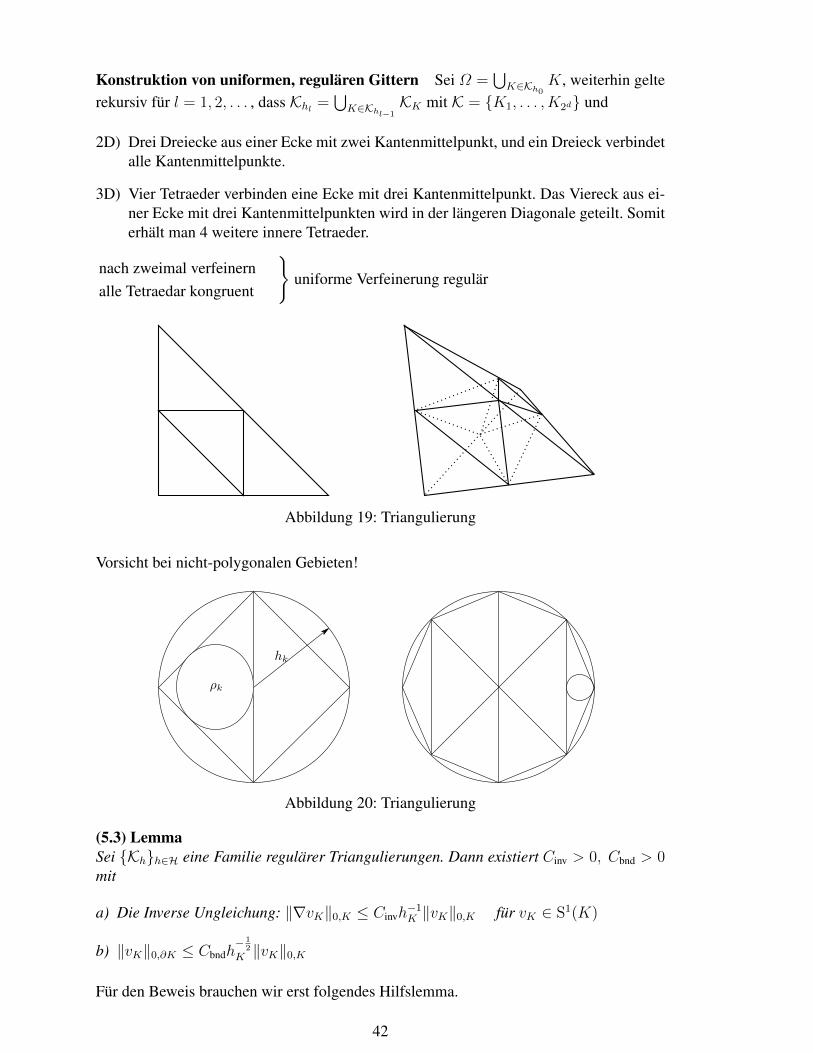
Konstruktion von uniformen, regulären Gittern Sei Ω =⋃K∈Kh0
K, weiterhin gelterekursiv für l = 1, 2, . . . , dass Khl =
⋃K∈Khl−1
KK mit K = K1, . . . , K2d und
2D) Drei Dreiecke aus einer Ecke mit zwei Kantenmittelpunkt, und ein Dreieck verbindetalle Kantenmittelpunkte.
3D) Vier Tetraeder verbinden eine Ecke mit drei Kantenmittelpunkt. Das Viereck aus ei-ner Ecke mit drei Kantenmittelpunkten wird in der längeren Diagonale geteilt. Somiterhält man 4 weitere innere Tetraeder.
nach zweimal verfeinernalle Tetraedar kongruent
uniforme Verfeinerung regulär
Abbildung 19: Triangulierung
Vorsicht bei nicht-polygonalen Gebieten!
Abbildung 20: Triangulierung
(5.3) LemmaSei Khh∈H eine Familie regulärer Triangulierungen. Dann existiert Cinv > 0, Cbnd > 0mit
a) Die Inverse Ungleichung: ‖∇vK‖0,K ≤ Cinvh−1K ‖vK‖0,K für vK ∈ S1(K)
b) ‖vK‖0,∂K ≤ Cbndh− 1
2K ‖vK‖0,K
Für den Beweis brauchen wir erst folgendes Hilfslemma.
42
(5.4) LemmaSei u ∈ H1(K) und u = u ϕK ∈ H1(K). Dann gilt:
a) ‖u‖0,K ≤ J− 1
2K ‖u‖0,K
b) ‖∇u‖0,K ≤ |BK |J− 1
2K ‖∇u‖0,K
Beweis. zu a) Es folgt aus dem Transformationssatz:∫K
|u|2dx =
∫K
|u ϕK |2J−1K JKdx =
∫ϕK(K)
|u|2J−1K dx = J−1
K ‖u‖20,K .
zu b)
(∇u(x))> = D(u ϕK)(x) = Du(x)DϕK(x) = Du(x)BK ,
Es gilt also ∇u(x) = B>K∇u(x).Das bedeutet wiederum∇u(x) = B−>K ∇u(x).Aus der Kettenregel und dem Transformationssatz folgt nun
‖∇u‖20,K
=
∫K
|∇u|2dx =
∫K
|B−>K ∇u(ϕK(x))|2J−1K JKdx
=
∫K
|B−>K ∇u(x)|2J−1K dx ≤ |B2
K |J−1K ‖∇u‖
21,K .
Beweis zu Lem. 5.3:
Beweis. Sei K Referenzsimplex: Für v ∈ S1(K) sei
Cinv = supv 6=0
‖∇v‖0,K
‖v‖0,K
= max‖v‖0,K≤1
‖∇v‖0,K
Cbnd = maxv 6=0
‖v‖0,∂K
‖v‖0,K
Sei v = v ϕK und∇v(x) = B−>K ∇v(x).Zu a)
‖∇v‖20,K =
∫K
|B−>K ∇v(ϕ−1K (x))|2 dx =
∫K
|B−>K ∇v(x)|2JKdx
≤ |B−1K |
2JK‖∇v‖20,K≤ Cinv|B−1
K |2JK‖v‖2
0,K
(5.4)
≤ Cinv|B−1K |
2‖v‖20,K
(5.2)
≤ Ch−1K .
Schließlich gilt also
‖∇v‖0,K ≤ Cinvh−1K ‖v‖0,K .
Zu b)
‖v‖20,∂K ≤ Chd−1
K ‖v‖20,∂K
≤ CCbndhd−1K ‖v‖
20,K ≤ CCbndh
d−1K J
12K‖v‖
20,K .
43

(5.5) FolgerungSei Vh = S1(Ωh) ∩ H1
Γ (Ω) = spanλ1, . . . , λN, a : Vh × Vh → R stetig, elliptisch in
H1(Ω) und A =(a(λn, λk)
)n,k∈ RN×N
Dann gilt cond2(A) ≤ C(minhk)−2(
maxhkmin ρk
)d(= O(h−2)) falls Kh quasi-uniform.
Beweis. Sei a(·, ·) symmetrisch, v =(v(z)
)z∈Vh
und |v|2 =∑|v(z)|2 mit v ∈ S1
h(Ω).
Auf K gilt:
c‖v‖0,K ≤ |v|2 =
∑z∈VK
|v(z)|2 ≤ C‖v‖20,K
mit 0 < c < C
somit gilt
cJ−1K ‖v‖
20,K ≤ |v|2K ≤ CJ−1
K ‖v‖20,K
bzw.
ch−dK ‖v‖20,K ≤ |v|2K ≤ Cρ−dK ‖v‖
20,K
Es gilt
Av · v = a(v, v) ≥ ca‖v‖21,Ω ≥ ca‖v‖2
0,Ω ≥ cmin ρdK |v|2
Av · v = a(v, v) ≤ Ca‖v‖21,Ω ≤ CaC
2inv
∑K
h−2K ‖v‖
20,K ≤ CaCinvC maxh−2+d
k |v|2
und somit
cond2(A) ≤ C(minhK)−2(maxhK
min ρK
)d.
AnwendungSei A =
(a(λz, λy)
)z,y∈Vh\ΓD
mit |ΓD|d−1 > 0 und a(v, φ) =∫∇v · ∇φ dx,
dann gilt cond2(A) ≤ Ch2 auf uniformen Triangulierungen.
Beweis.
ca‖v‖20 ≤ ‖∇v‖2
0 = a(v, v) ≤ C2invh
−2‖v‖20
Es gilt (minhK)−2 ≤ Ch−2 auf uniformen Triangulierungen.
Sei v =(v(z)
)z∈Vh\ΓD
∈ RNn , Nn = |Vh\ΓD|, v = (v(zj)z∈V (Normäquivalenz).
In K gilt
α‖v‖0,K ≤ |v|2K≤ β‖v‖0,K
weiterhin gilt für v = v ρ1
α2h−d‖v‖20,K ≤ ‖v‖2
0,K≤ β2h−d‖v‖2
0,K
44

zusammenfassend
cααh−d‖v‖2
0
und erhalten die Abschätzung
cαβh−d
|v| ≤ Av · v ≤ C2invh
−2 1
αh−d|v|2 .
Für vh = Π0hv erhalten wir vh(x) = vK (x ∈ K) mit vK = 1
|K|
∫Kv dx. Es gilt:
‖ v − Π0hv︸ ︷︷ ︸
v−vK
‖0,K ≤ CP,K‖∇v‖0,K
In K gilt:
‖v − vK‖0,K ≤ CP‖∇v‖0,K
Für v = v ρK gilt
‖v − vK‖0,K ≤ J− 1
2K ‖v − vK‖0,K ≤ CPJ
− 12
K ‖∇v‖0,K
≤ CJ− 1
2K |BK |J
12K‖∇v‖0,K ≤ ChK‖∇v‖0,K .
Die Galerkin-Projektion:
Zu u ∈ V definieren wir die Galerkin-Projektion Ghu = uh ∈ Vh, also
a(Ghu, vh) = a(u, vh) ∀vh ∈ Vh .
wobei
〈`U , v〉 = a(u, v) stetig mit ‖`U‖V ′ ≤ Ca‖u‖V
Beispiel
a) V = H1Γ (Ω) Vh = S1(Ωh) ∩ V a(u, v) =
∫∇u · ∇v dx
b) V = L2(Ω) Vh = S0(Ωh) a(u, v) =
∫uv dx
mit (Π0hu, 1)0,K = (u, 1)0,K =
∫Ku dx = uk|K|
(5.6) LemmaSei a(·, ·) stetig, elliptisch und symmetrisch in V . Dann ist a(·, ·) auch ein Skalarproduktin V und die Galerkin-Projektion ist Orthogonal-Projektion, d.h.
a(Ghv − v,Ghw) = 0 und a(Ghv,Ghv) ≤ a(v, v) ∀v, w ∈ V .
45

Beweis.Definiere |||v||| =
√a(v, v) Energienorm mit Skalarprodukt a(·, ·) und
ca‖v‖2V ≤ |||v|||2 ≤ Ca‖v‖2
V . Es gilt für vh = Ghv
a(Ghu,Ghv) = a(u,Ghv)
und somit gilt
|||Ghv|||2 = a(Ghu,Ghu) = a(u,Ghu) ≤ |||u||| |||Ghu||| .
(5.7) SatzSei Π0
hv =∑
K∈K〈η′K , v〉ηK ∈ S0(Ω), mit
ηK(x) =
1, x ∈ K0, sonst
und
〈η′K , v〉 =1
|K|
∫K
v dx
die L2-Projektion von L2(Ω)→ S0(Ωh).Dann gilt
a) ‖v − Π0hv‖0,Ω ≤ Ch‖∇v‖0,Ω ∀v ∈ H1(Ω)
b) limh→0
Π0hv = v für Khh∈H, 0 ∈ H
Vor dem Beweis führen wir den Satz von Poincaré ein.
(5.8) SatzFür v ∈ H1(ω) und ω ⊂ Ω offen definieren wir vω =
∫ωv dx. Dann gilt die Poincaré
Abschätzung mit CP > 0
‖v − vω‖0,Ω ≤ CP‖∇u‖0,Ω
Anwendung:
V = H1(Ω)/R ∼= u ∈ H1(Ω) :
∫Ω
u dx = 0 ,
mit a(v, w) =∫Ω∇v · ∇w dx. Dann gilt
‖v‖20,Ω + ‖∇v‖2
0,Ω = ‖v − vΩ‖20,Ω + ‖∇(v − vΩ)‖2
0,Ω ≤ (C2P + 1) ‖∇v‖2
0,Ω︸ ︷︷ ︸a(v,v)
mit ca = 1C2
P +1gilt:
a(v, v) ≥ ca‖v‖2V
46

Beweis.
i) O.E ist v ∈ C1(Ω), Ω konvex und R = diam(Ω)
Es gilt: |v(x)− vω| ≤ (diamω)d
d|ω|
∫ω|x− y|1−d|∇v(y)| dy. Sei
χω(x) =
1, x ∈ ω0, sonst.
Dann gilt∫ω
v(y) dy =
∫Rdχωv(y) dy =
∫|ω|=1
∫ ∞0
χω(x+ ru)v(x+ ru)rd−1 dr da
Weiterhin gilt:
v(x)− vω =1
|ω|
∫|u|=1
∫ ∞0
(v(x)− v(x+ ru)
)χω(x+ ru)rd−1 dr da
Da
v(x)− v(x+ ru) = −∫ r
0
∂sv(x+ su) ds = −∫ r
0
∇v(x+ su) · u ds
gilt, können für den Betrag folgende Abschätzung treffen:
|v(x)− vω| ≤1
|ω|
∫|u|=1
∫ R
0
rd−1 dr︸ ︷︷ ︸Rd
d
∫ R
0
|∇v(x+ su)|χω(x+ su)s1−dsd−1 ds da
≤ Rd
d|ω|
∫ω
|∇v(y)||x− y|1−d dy .
Es folgt
‖v − vω‖20,ω ≤ C
∫ω
( ∫ω
|∇v(y)||x− y|1−d dy)2
dx
C.S.≤ C
∫ω
( ∫ω
|∇v(y)|2|x− y|1−d dy)( ∫
ω
|x− y|1−d dy)
dx
≤ C
∫ω
|∇v(y)|2( ∫
ω
|x− y|1−d dx)
dy( ∫
ω
|x− y|1−d dy)≤ C‖∇v‖2
0,ω .
Die letzte Abschätzung gilt da
|x− y|1−d =
∫|u|
∫ R
0
|ru|1−drd−1 dr da ≤ R|∂ω|d−1 .
ii) Approximiere v ∈ H1(Ω) durch vε ∈ C1(Ω) mit ‖v − vε‖1,ω < ε.
47

Zum Beweis von (5.7).
Beweis.
1. zu a): Wähle in (5.8) ω = K Dann folgt aus
‖v − vK‖0,K ≤ C‖∇v‖0,K
für alle v ∈ H1(K), dass
‖u− uK‖0,K = J12K‖u− uK‖0,K ≤ C|BK |‖∇v‖0,K .
Das heißt
‖v − Π0hv‖2
0,Ω =∑‖v − vK‖2
0,K ≤ Ch‖∇v‖1,Ω .
2. zu b): Wir wissen, dass ∀ε > 0 ein vε ∈ C10(Ω) existiert mit ‖v − vε‖0,Ω ≤ ε und es
existiert h ∈ H mit
‖vε − Π0hvε‖0,Ω ≤ Ch‖∇vε‖0,Ω < ε .
Es gilt für wh ∈ S0(Ωh), dass
(v − Π0hv, wh)0,Ω =
∑K
(v − vK , wK)0,K = 0
Insgesamt folgt also
‖v − Π0hv‖0,Ω = ‖v − vε − Π0
h(v − vε) + vε + Π0hvε‖0,Ω
≤ ‖v − vε‖0,Ω + ‖Π0h(v − vε)‖0,Ω + ‖vε − Π0
hvε‖0,Ω ≤ 3ε .
Clément-InterpolationWir definieren ΠCl
h : L2(Ω)→ S1(Ωh) mit ΠClh v =
∑z∈Vh vωzλz.
Seien weiterhin ωz = suppλz ⊂ Ω.
Abbildung 21: Triangulierung
48

(5.9) SatzFür reguläre Triangulierungen mit ωK =
⋃z∈VK ωz gilt:
a) ‖v − ΠClh v‖0,K ≤ ChK‖∇v‖0,ωK v ∈ H1(ωK)
b) ‖v − ΠClh v‖0,F ≤ Ch
12K‖∇v‖0,ωK F ∈ FK
c) ‖∇ΠClh v‖0,Ω ≤ C‖∇v‖0,Ω
Beweis. zu a) Es gilt für (5.8) mit ω = ωz
‖v − vωz‖0,ωz ≤ Chk‖∇v‖0,ωz
Dann gilt
‖v − ΠClh v‖0,K ≤ ‖v −
∑vωzλz‖0,K = ‖
∑(v − vωz)λz‖0,K
≤∑z∈VK
‖λz‖∞︸ ︷︷ ︸≤1
‖v − vωz‖0,ωz ≤ ChK‖∇v‖0,ωK
zu b) Mit F ⊂ ∂K gilt, dass ‖v‖0,F ≤ C2F
(‖v‖0,K + ‖∇v‖0,K
).
Dann gilt mit v ϕK = v
‖v‖20,F ≤ Chd−1
K ‖v‖20,F
≤ C2FCh
d−1K
(‖v‖2
0,K︸ ︷︷ ︸=J−1
K ‖v‖0,K
+ ‖∇v‖0,K︸ ︷︷ ︸=J−1
K |BK |‖∇v‖0,K
)2
≤ Chd−1K
(h−dK ‖v‖
20,K + h2−d
K ‖∇v‖20,K
)dann gilt also
‖v‖20,F ≤ C
(h−1K ‖v‖
20,K + hK‖∇v‖2
0,K
).
Somit erhalten wir dann
‖∇(v − Π0hv)‖0,K ≤ ‖∇
∑z∈Vh
(v − vωz)λz‖0,K ≤ ‖∑z∈Vh
∇vλz + (v − vωz) +∇λz‖0,K
≤∑z∈Vz
‖λz‖ ‖∇v‖0,K + ‖v − vωz‖0,ωz ‖∇λz‖∞︸ ︷︷ ︸h−1K
≤ C‖∇v‖0,ωz
und dann folgt insgesamt
‖v − ΠClh v‖2
0,F ≤ C(h−1K ‖v − ΠCl
h v‖20,K + hK‖∇(v − ΠCl
h v)‖20,K
)≤ ChK‖∇v‖2
0,ωK
zu c) Wir zerlegen die 1
1 =∑z∈Vh
λz
0 =∑z∈Vh
∇λz
49

Daraus folgt
∇ΠClh v(x) =
∑z∈Vh
vωz∇λz(x) =∑z∈Vh
(vωz − v(x))∇λz(x).
Dann gilt
‖∇ΠClh v‖2
0,Ω =
∫Ω
∑z∈Vh
(vωz − v)∇λz · ∇ΠClh v dx
≤∑z∈Vh
‖vωz − v‖0,ωz‖∇λz‖∞‖∇ΠClh v‖0,ωz
≤ C∑K∈Kh
hK‖v‖1,ωzh−1K ‖∇ΠCl
h v‖0,Ω .
Daraus folgt dann insgesamt
‖∇ΠClh v‖0,Ω ≤ C‖∇v‖0,Ω .
AnwendungΠClh konvergiert gegen die Einbettung E : H1(Ω) −→ L2(Ω), v 7→ u d.h.
limh→0‖Eu− ΠCl
h v‖0,Ω = 0
(5.10) DefinitionSeien V,W Banachräume. Dann heißt eine stetige Abbildung E : V → W ”kompakt”,wenn jede beschränkte Folge vnn∈N ⊂ V eine konvergente Teilfolge Evnn∈N ⊂ Wexistiert. Dabei ist N ⊂ N, |N | =∞.
(5.11) SatzSei Ehh∈H eine Folge von Abbildungen Eh : V −→ W mit
1. limh→0‖E − Eh‖L(V,W ) = 0 mit ‖E‖L(V,W ) = supv 6=0
‖Ev‖W‖v‖V
2. dimEh(V ) <∞.
Dann ist E kompakt.
Beweis. (vgl. Arzelà-Ascoli)Sei vnn∈N ⊂ V beschränkt, d.h. ‖vn‖V < C, n ∈ N. Sei hkk∈N ⊂ H mit hk → 0für k →∞, dann gilt für alle hk, dass ‖Ehkvn‖w ≤ ‖Ehk‖L(V,W )‖vn‖N beschränkt ist undspanEhkvn <∞.Das bedeutet es existiert eine konvergente Teilfolge Ehkvnn∈Nk für N1 ⊂ N,Nk ⊂Nk−1 und
limn∈Nk
Ehkvn = wk ∀wk ∈ W
50

Das bedeutet jetzt:rekursiv: Wähle eine konvergente Teilfolge Ehkvnn∈Nk mit Nk = nkl : l ∈ N ⊂Nk−1.Definiere eine Diagonalfolge N = nkk : k ∈ N zu beliebigem ε > 0 existiert einN0 > 0 mit
‖E − Ehk‖ < ε k > N0
‖Ehkvkk − wk‖w < ε k > N0
es gilt für k > l > N0
‖Evnkk − Evll‖v ≤ ‖(E − Ehk)vnkk + (E − Ehk)vnll+ Ehkvnkk − wk + wk − Ehkvnll‖v ≤ 4ε .
Es folgt also dass Evnkk eine Cauchy-Folge ist.
A posterori Fehlerschranke Betrachte
a(v, w) =
∫Ω
∇v · ∇w dx
〈`, v〉 =
∫Ω
f · v dx+
∫ΓN
gNv da
und mit V = H1ΓD
(Ω), Vh = S1(Ωh) ∩ V gelte
u ∈ V : a(u, v) = 〈`, v〉 ∀v ∈ Vu ∈ Vh : a(uh, vh) = 〈`, vh〉 ∀vh ∈ Vh .
(5.12) LemmaSei Kh regulär. Dann gilt
‖u− uh‖1,Ω ≤ C
( ∑K∈Kh
h2K‖∆uK + f‖2
0,K
+∑
F∈Fh\∂Ω
hF‖[∇uh · n]F‖20,F +
∑F∈Fh∩ΓN
hF‖∇uh · n− gN‖20,F
)
mit [∇u · n]F = ∇uk · nk +∇uKF · nKF auf F ∈ FK ∩ FKF
Beweis. Duales Problem (Standardtrick): Sei u∗ ∈ H1Γ (Ω) = V die Lösung von
a(u∗, φ) = a(u− uh, v) ∀v ∈ V
somit gilt
ca‖u∗‖21,Ω ≤ a(u− uh, u∗) ≤ Ca‖u− uh‖1,Ω‖u∗‖1,Ω
somit erhalten wir
‖u∗‖21,Ω ≤
Caca‖u− uh‖2
1,Ω .
51

Weiterhin gilt
ca‖u− uh‖21,Ω ≤ a(u− uh, u− uh)
= a(u− uh, u− ΠClh u)
= a(u− uh, v)
= 〈`, v〉 − a(uh, v)
≤∑K
∫K
(fu−∇u∇v
)dx+
∫∂K∩ΓN
gNv da
=∑K
[ ∫K
(f + ∆v
)v dx−
∫∂K
∇ · uhnv da+
∫∂K∩ΓN
gNv da]
=∑K
∫K
(f + ∆u
)v dx−
∑F∈Fh∩Ω
∫F
[∆u · n
]v da+
∑F∈Kh∩ΓN
∫F
(gN −∇u · n
)v da
≤∑K
‖f + ∆u‖0,K‖v‖0,K︸ ︷︷ ︸≤ChK‖∇v‖0,ωK
+∑
F∈Fh∩Ω
‖[∇u · n
]‖0,F‖v‖0,F︸ ︷︷ ︸
≤C√hF ‖∇w‖0,ωK
+∑
F∈Fh∩ΓN
‖∇u · n− gN‖0,F‖v‖0,F
≤ C
√∑K
h2K‖F + ∆u‖2
0,K +
√∑K
‖∇w‖2 +
√ ∑F∈Kh∩Ω
hF‖[∇u · h
]‖2
0,F
+
√∑K
‖∇w‖20,ωF
+
√ ∑F∈BK∩ΓN
hF‖∇u · n− gN‖20,F
Die stetige Einbettung H2(Ω) ⊂ C0(Ω) (d ≤ 3)
(5.13) SatzSei d ≤ 3. Dann gilt H2(Ω) ⊂ C0(Ω) und es existiert ein C0 > 0 mit ‖v‖∞ < C0‖u‖2,Ω.
Beweis. i) Definiere Q : H1(K)→ P1(K)
v 7→ Qv(x) =1
|K|
∫K
(v(y) +∇v(y)(x− y)
)dx
und Rv = v −Qv.Sei o.E. v ∈ C2(K), zu x, y ∈ K definieren wir
ρ(t) = v((1− t)y + tx) z = 1− ty + tx
und somit
ρ′(t) = ∇v(z)(x− y)
ρ′′(t) = (x− y)TD2v(z)(x− y)
weiterhin gilt
v(x) = ρ(1) = ρ(0) + ρ′(0) +
∫ 1
0
ρ′′(1− t)t dt
= v(y) +∇v(y)(x− y) +
∫ 1
0
t(x− y)D2 v(z)︸︷︷︸ty+(1−t)x ⇒z−y=t(y−x)
(x− y) dt
52

bzw.
v(x) = Qv(x) +Rv(x)
mit Rv(x) =1
|K|
∫K
∫ 1
0
t(x− y)D2v((1− t)y + tx︸ ︷︷ ︸z
)(x− y) dt dy
wir definieren
θx
(yt
)=
(ty + (1− t)x
t
)=
(zt
)und
Dθxy
(yt
)=
(t id y − x0 t
)⇒ det θxy = td .
Rv(x) =1
|K|
∫K
∫ 1
0
(x− z)D2v(z)(x− z)t−1tdt−d dt dy
=1
K
∫ ∫θx(K×(0,1))︸ ︷︷ ︸∫ 10
∫K(x,t)
(x− z)D2v(z)(x− z)t−1−d dt dz
mit(zt
)∈ θx(K × (0, 1)) gilt
z ∈ K(x, t) := ty + (1− t)x : y ∈ K
und somit
Rv(x) =
∫K
k(y, z)(x− z)TD2v(z)(x− z) dz
k(x, z) =1
|K|
∫ 1
0
t−1−d1K(x,t)(t) dt
mit k(x, z) =
1, z ∈ K(x, t)⇒ z = (1− t)y + tx
0, sonst
|k(x, z)| ≤ 1
|K|
∫ 1
|x−z|hK
t−1−d dt ≤ 1
|K|1
d
( |x− z|hK
−d)≤ 1
d
(hKρK
)d|x− z|−d
ii) Für k(x, z) = |x− z|2 und d ≤ 3 gilt∫K
∣∣∣|k(x, z)| |x− z|2∣∣∣2 dz ≤ C
∫K
∣∣∣ |x− z|−d |x− z|2∣∣∣2 dz
≤ C
∫K
∫ hK
0
(γ−d+2)2γd−1 dr dϕ <∞ für d ≤ 3
53

iii)
‖Rv‖∞ ≤ C‖D2v‖0,K für d ≤ 3
|Rv(x)| ≤∫K
|k(x, z)|x− z|2| |D2v(z)| dz ≤ CK‖D2v‖0,K
iv)
‖v‖∞,Ω︸ ︷︷ ︸Rv+Qv
≤ C‖v‖2,Ω für d ≤ 3
‖Qv‖∞ = supx∈K
∫K
v(y) +∇v(y)(x− y) dx
≤√|K|‖v‖0,K + ‖∇v‖0,K
√hK |K| .
A priori Fehlerabschätzung
(5.14) DefinitionHm(Ω) =
v ∈ Hm−1(Ω) : ∂jv = Hm−1(Ω), j = 1, . . . , d
für m > 1,
‖u‖m,Ω =√‖u‖2
0,Ω +∑d
j=1 ‖∂ju‖2m−1,Ω, und |u|m,Ω.
Im Fallm = 2: ‖u‖22,Ω = ‖u‖0,Ω+‖∇u‖2
0,Ω+‖D2u‖20,Ω |u|2 = ‖D2u‖0,Ω (Seminorm)
Anwendung: Lagrange-Interpolation Π1h : C(Ω)→ S1(Ωh),
h→∑v(z)hz ist für u ∈ H2(Ω) wohldefiniert.
(5.15) Satz (Bramble-Hilbert Lemma (nur für Referenzdreiecke))Es existiert ein c > 0 mit ‖v − Π1
Kv‖1,K ≤ C|v|2,K v ∈ H2(K)
Beweis. Definiere: |||φ||| = |φ|2,Ω +∑
z∈VK|φ(z)|2,Ω ≤ (1 + C0(d+ 1))‖φ‖2,K
Beh.: Es existiert ein C > 0 : ‖φ‖2,K ≤ C|||φ|||. Ann.: Ein C > 0 existiert nicht. Somitexistiert (φn)n∈N mit ‖φ‖2,K = 1, |||φn||| < 1
n. Also existiert eine konvergente Teilfolge
φnn∈N mit N ⊂ N und |N | =∞. Und somit existiert ein φ ∈ H1(Ω) mitlimn∈N‖φ− φn‖1,Ω = 0.
Weiterhin existiert ∀ε > 0 ein N0 >1ε
mit ‖φm − φk‖1,K < ε n, k > N0 n, k ∈ N
‖φn − φk‖20,K
= ‖φn − φk‖21,K
+ |φn − φk|2,K < 4ε2 .
D.h. φn ist eine Cauchy Folge in H2, wodurch auch
limn∈N‖φn − φ‖2,K = 0
gilt. Also ‖φ‖2,K = 1, |φ|2 = 0, und φ(z) = 0. Wodurch φ ∈ P1(k) liegt und somit
φ =∑z∈Vk
φ(z)λd = 0 . `
54

BemerkungAllgemein gilt das Bramble-Hilbert-Lemma:
Qhv = v − Π1hv = 0 ∀v ∈ Pk(Ω)
Das heißt es existiert C > 0 mit ‖v −Qhv‖k,Ω ≤ C|v|k+1.
(5.16) SatzSei Khh∈H regulär. Dann existiert Cm > 0 mit ‖v − Π1
hv‖m ≤ Cmh2−m|D2v|0,Ω,
v ∈ H2(Ω), h ∈ H, m = 0, 1.
Beweis.
‖v − Π1h‖2
0,Ω =∑K
‖v − Π1hv‖2
0,K =∑K
JK‖v − Π1Kv‖2
0,K
≤ C∑K
JK |D2v|20,K︸ ︷︷ ︸∫
K |D2v|2JK dx=∫K |D2v|2ϕK dx≤
∫K |BK |4|D2v|2 dx
≤ C∑
h4K |D2v|0,K
≤ Ch4|D2v|22,Ω|v − Π1
h|21,Ω = ‖∇(v − Π1Kv)‖2
0,Ω =∑‖∇(v − Π1
Kv)‖20,K
≤∑
JK |B−1K |
2‖∇(v − Π1Kv)‖2
0,K≤ C
∑|B−1
K |2|BK |4︸ ︷︷ ︸≤Ch2
‖D2v‖20,K .
Anwendung auf den FE-Fehler Falls die Lösung u ∈ H2(Ω) glatt genug. Dann gilt
‖u− uh‖1,Ω ≤Caca
infvh∈S1(Ωh)
‖u− vh‖1,Ω
≤ Caca‖u− Π1
hu‖1,Ω|u|
(5.17) SatzNach Galerkin: Falls u ∈ H2(Ω) glatt genug, dann ist
‖u− uh‖1,Ω ≤Caca
infvh∈Vh
‖u− vh‖1,Ω
≤ Caca‖u− Π1
hu‖1,Ω ≤ Ch|u|2,Ω .
Sei zusätzlich für alle f ∈ L2(Ω) die Lösung wf ∈ V von
a(φ,w) = (f, φ)0,Ω
erfüllt wf ∈ H2(Ω) mit ‖wf‖ ≤ C‖f‖0,Ω. Dann gilt
‖v − uh‖0,Ω < Ch2|v|2,Ω
Beweis. Zu f = u− uh definiere w = wf ∈ V mit a(φ,w) = (u− un, φ)0,Ω. Dann gilt
Ca‖w‖21,Ω ≤ a(w,w) ≤ ‖u− un‖0,Ω‖w‖1,Ω
55

bzw.
‖w‖1,Ω ≤1
Ca‖u− un‖1,Ω
und somit
‖u− uh‖20,Ω = a(u− uh, w) = a(u− uh, w − Π1
h(w))
≤ Ca‖u− uh‖1,Ω‖w − Π1hw‖ ≤ Ch|u|2,Ωh|w|2,Ω ≤ Ch2|u|2‖u− uh‖0,Ω
(Dualitätstrick von Nietsche bei voller Regularität).
Richtungsableitung Seien v ∈ Cm(K), z ∈ Rd ∂zv(x) = limδ→0
1δ(v(x + δz) − v(x)),
dann gilt
∂zv(x) =Dv(x)[z] = ∇v(x) · z∂zDv(x)[y] =D2v(x)[y, z] = yTD2v(x)z
Dmv(x)[z1, . . . , zm] =∂zmDm−1v(x)[z1, . . . , zm−1]
und seien
v = v ϕK BKDϕK x = ϕK(x)
somit gilt
∂zv(x) =Dv(x)DϕK(x)z = Dv(x)[BKz]
Dmv(x)[z1, . . . , zm] =Dmv(x)[BKz1, . . . BKzm]
somit erhalten wir
|Dmv(x)| = sup|z1|=···=|zm|=1
|Dmv(x)[z1, . . . , zm]|
dann gilt
|Dmv(x)| ≤ |BK |m|Dmv(x)|
(5.18) Definitiona) Eine elliptische DGL heißt H2-regulär, wenn die Lösung u ∈ V ⊂ H1(Ω) von
a(u, v) = (f, v)0,Ω in H2 ist und C > 0 existiert, sodass für alle f ∈ L2(Ω) gilt
‖D2u‖0,Ω ≤ C‖f‖0,Ω
b) Ein Gebiet heißt H2-regulär, wenn a) für a(v, w) =∫Ω∇v · ∇w dx in H1
0(Ω) gilt.
(5.19) SatzSei die DGL H2-regulär. Dann existiert C > 0 mit
‖u− uh, v‖0,Ω ≤ Ch2‖D2u‖0,Ω ≤ Ch2‖f‖0,Ω.
56
Beweis. Zu u, uh definiere u∗ ∈ H1ΓD
mit a(u∗, v) = (u−uh, v)0,Ω für alle v ∈ H1ΓD
. Dannfolgt laut Voraussetzung, dass u∗ ∈ H2(Ω) und ‖D2u∗‖0,Ω ≤ C‖u−uh‖0,Ω. Das bedeutetdann,
‖u− uh‖20,Ω = a(u∗, u− uh) = a(u∗ − Π1
hu∗, u− uh)
≤ Ca‖u∗ − Π1hu∗‖1,Ω‖u− uh‖1,Ω
≤ CaCh‖D2u∗‖0,ΩCh‖D2u‖0,Ω ≤ C‖u− uh‖0,Ω .
57

6 Lagrange Elemente
(6.1) DefinitionSeiZK ⊂ K eine Menge von Interpolationspunkten und VK ⊂ C(K) ein Finite-Elemente-Raum. Dann heißt ZK unisolvent in VK , wenn jedes v ∈ VK eindeutig durch (v(z))z∈ZKbestimmt ist, d.h. zu jedem g ∈ C(K) genau ein v ∈ VK existiert mit vK(z) = g(z) füralle z ∈ ZK .
S1(K) = VK , ZK = VK
Abbildung 22: Abbildung
unisolvent in P2(R2) = 1, x1, x2, x1x2, x21, x
22
Abbildung 23: Abbildung
ZK = jeweils zwei Knotenpunkte pro Kante (ohne Eckpunkte):ZK nicht unisolvent in P2(K): es existiert ein quadratisches Polynom
v ∈ P2(R2) mit v(z) = 0 ∀z ∈ ZK
Abbildung 24: Abbildung(ohne Eckpunkte)
(6.2) Satz (Simplex)Sei k ∈ N und K = convz0, . . . , zd.Dann ist ZK =
∑dj=0 µjzj :
∑dj=0 µj = 1, µj ∈ 1
kN0
unisolvent in
Pk(K) = spanxα = xα1
1 · · · · · xαdd : α ∈ Nd
0 ,∑d
j=0 αj ≤ k.
58

Beispiele:
k = 1 : S1(K) = spanλ0, ..., λd
k = 2 : ZK = z0, z1, z2, z12, z01, z02 mit Ecken zj und Kantenmittelpunkten zkj in 2d,allgemein:
ZK = z1, ..., zd ∪ zjk =1
2(zj + zk) : 0 ≤ j ≤ k ≤ d
VK = spanλj(2λj − 1) : j = 0, ..., d
∪λjλk : 0 ≤ j ≤ k ≤ d
.
Daraus folgt
(λj(2λj − 1))(zk) = δjk
(λj(2λj − 1))(zjk) = 0
(4λjλk)(zlm) = δjkδlm
(λjλk)(zm) = 0
k = 3 : d = 2 Basis von P3(K)
φj(x) =1
2λj(x)(3λj(x)− 1)(3λj(x)− 2)
φjk(x) =9
2λj(x)λk(x)(3λj(x)− 1)
φ012(x) = 27λ0(x)λ1(x)λ2(x) Element-Bubble
Abbildung 25: Abbildung
Allgemein:
Konstruiere v0 ∈ Pk mit v0(x) = g(x) x ∈ ZK mit x2 = 0
Konstruiere w ∈ Pk−1 mit w(x) =1
x2
(g(x)− v0(x1)) x ∈ ZK mit x2 > 0
Definiere: v(x) = v0(x1) + x2w(x)⇒ v ∈ Pk(R2)
Abbildung 26: Abbildung
Beweis.
1. Zeige dim Pk = |ZK |.Es genügt zu zeigen, dass jede Interpolationsaufgabe lösbar ist.
2. Induktion über d
d = 1: tl =l
k, l = 0, . . . , k , Ll(x1) =
K∏l=0,l 6=k
x1 − tltk − tl
⇒ v(x1) =K∑l=0
g(tl)Ll(x1)
Sei die Behauptung für d = 1 gezeigt.
59

3. Induktion über kd > 1, k = 1 : v(x) =
∑dj=0 v(zj)λj(x)
k → k + 1Es gilt F = x ∈ K : λ0(x) = 0und g ∈ C(K). Dann existiert nach Induktions-voraussetzung ein vF ∈ Pk(F ) mit
vF (z) = g(z) ∀z ∈ Zk ∩ F
Es existiert w ∈ Pk−1(K) : w(z) = 1λ0(z)
(g(z)− vF (z)
)für alle z ∈ ZK\F .
Definiere
v(x) = vF (d∑j=0
λj(x)) + λ0(x)w(x) .
Dann gilt für alle v ∈ Pk(K) und z ∈ F ∩ Z
v(z) = vF (d∑j=0
λj(x)) = g(z)
und für z ∈ Z\F
v(z) = vF (z) + λ0(z)g(z)− vF (z)
λ0(z)= g(z) .
Vierecke / Quader:
Abbildung 27: Triangulierung
(6.3) Satz (Vierecke,Quader)Sei K = [0, 1]d der Einheitsquader und Qk =
Pk ⊗ Pk d = 2
Pk ⊗ Pk ⊗ Pk d = 3
Dann sind die Punkte ZK = 1k∈ Zd ∩ K unisolvent in Qk.
60

Beweis. Seien L0, ..., Lk die Lagrange-Polynome zu tj = jk
für j = 0, ..., k, d.h.
Lj =k∏
m=0
t− tmtj − tm
für m 6= j .
Zu g ∈ C(K) und d = 3 definiere
v(x) =k∑
m1=0
k∑m2=0
k∑m3=0
g(tm1 , tm2 , tm3
)Lm1(t)Lm2(t)Lm3(t)
Das bedeutet v ∈ Q3.
Serendepity-Element
Abbildung 28: d = 2, k = 2
Das Serendepity-Element auf K = (0, 1)d und ZK = VK ∪ EK ist definiert durch
φ00(x) = (1− x1)(1− x2)(1− 2x1 − 2x2)
φ02(x) = −x1(1− x2)(1− 2x1 + 2x2)
φ21(x) = −x1x2(1 + 2x1 − 2x2)
φ10(x) = 4x1(1− x1)(1− x2)
(6.4) Definitiona) (K,VK ,ΛK) heißt Lagrange-Element, wenn VK ⊂ C(K) und wenn die Freiheits-
grade ΛK Punktauswertungen an ZK sind (mit ZK unisolvent in VK)
b) Eine Familie (K,VK ,ΛK), K ∈ Kh, h ∈ H heißt ”affin”, wenn ein Referenzele-ment (K, V , Λ) existiert, so dass für alle K eine Abbildung ϕK : K → K mit:
a) ϕK diffeomorph und orientierungserhaltend d.h. bijektiv ist.Also ist DϕK regulär und JK = det DϕK > 0.
b) VK = v ϕ−1K : v ∈ V
c) ΛK = λ′ ∈ V ′K : 〈λ′, v〉 = 〈λ′, v ϕK〉 für ein λ′ ∈ Λ
c) Wenn ϕK linear ist, dann ist die Familie ”linear affin”.
61

BemerkungFür affine Lagrange-Elemente gilt :
VK = v ∈ C(K) : v ϕK ∈ V Vh = v ∈ C(Ω) : v|K ∈ VK .
(6.5) LemmaSei Ωh =
⋃K eine Zerlegung in Simplices und seien Sk(Ωh) = C(Ω) ∩ Pk(Ωh) =
C(Ω)∩∏
Pk(K) die Lagrange-Elemente vom Grad k auf Simplizes und Ikh die Lagrange-Interpolation. Dann gilt für reguläre Triangulierungen: Es existiert ein Cm > 0 mit
‖v − Ikhv‖m ≤ Cmhk+1−m‖Dk+1v‖0,Ω m = 0, . . . , k
dabei ist Dmv definiert durch
Dv(x)[z] = ∇v(x) · z ,
Dmv(x)[z1, . . . , zm] = ∇(
Dm−1v(x)[z1, . . . , zm−1])· zm .
Beweis.
a) Bramble-Hilbert-Lemma in K
b) Skalierung: Dmv(x)[z1, . . . , zm] = Dmv(x)[BKz1, . . . , BKzm]
(6.6) Lemma (Bramble-Hilbert)Sei (K,VK ,ΛK) ein Lagrange-Element, und sei IK : C(K) → VK die Interpolation mitIKv(x) =
∑z∈ZK v(z)λz(x). Weiterhin sei IK exakt für Pk(K) für k ≥ 1 d.h.
IKv = v v ∈ Pk(K)
Dann existiert ein C > 0 mit
‖v − IKv‖k+1,K ≤ C‖Dk+1v‖0,K
Anwendungen des Bramble-Hilbert-Lemmas Anwendung auf a : V × V → R stetigelliptisch in V = H1
ΓD(Ω), Vh = Sk(Ωh) ∩ V .
Sei u ∈ V Lösung von a(u, v) = 〈`, v〉 für alle v ∈ V .
a) Sei u ∈ Hk+1(Ω). Dann gilt
‖u− uh‖1,Ω ≤ Chk|u|k+1,Ω
b) Sei das Problem zusätzlich H2-regulär, dann gilt für
‖u− uh‖0,Ω ≤ Chk+1|u|k+1,Ω .
Denn
‖u− uh‖20,Ω = a(u∗ − Π1
hu∗, u− uh)
≤ Ch|u∗|2,Ωhk|u|k+1,Ω
62

Isoparametrische Elemente
(6.7) DefinitionEin Gebiet Ω ⊂ Rd heißt Lipschitz-Gebiet, wenn ∂Ω lokal Lipschitz-parametrisierbar ist,d.h. ∀z ∈ ∂Ω existiert ein U ∈ Rd, ψz : U → Rd, z ∈ ψ(U), ψ(U+) = ψ(U) ∩ Ω mitU+ = x ∈ Rd : x1 ≥ 0 und ein γ > 0
|ψz(x)− ψ(y)| ≤ γ|x− y| ∀x, y ∈ U .
Beispiel: Polygongebiete sind Lipschitz-Gebiete
Abbildung 29: d = 2, k = 2
Abbildung 30: d = 2, k = 2, kein Lipschitz-Gebiet
Anwendung:
Abbildung 31: d = 2, k = 2
(6.8) DefinitionEin Element (K,VK ,ΛK) einer affinen Familie heißt ”isoparametrisch”, wenn ϕK ∈ V d
gilt.
63

Beispiel
K = [0, 1]2, K = convz00, z01, z10, z11
z00 =
(00
), z10 =
(10
), z01 =
(01
), z11 =
(11
)
Abbildung 32: d = 2, k = 2
ϕK(x) = (1− x1)(1− x2)z00
+ x1(1− x2)z10
+ x1x2z11
+ (1− x1)x2z01 ∈ K für x ∈ K
BK(x) =[(1− x1)(z10 − z00) + x2(z11 − z01)
∣∣∣(1− x1)(z01 − z00) + x1(z11 − z10)]∈ R2×2
Dann gilt:
a) ϕK linear affin, wenn K Parallelogramm ist, d.h. z11 = z10 + z01 − z00
b) JK = detBK > 0⇔ det(z11 − z00|z01 − z00) > 0
Warnung:
1) VK = v ϕ−1K : v ∈ V 6⊂ P2(K) für allgemeine Vierecke K.
2) Falls das Viereck fast ein Dreieck ist, gilt |B−1K | → ∞.
(6.9) LemmaFür isoparametrische Lagrange-Elemente gilt:
ϕK(x) =∑z∈ZK
λz(x)z
mit
λz(y) =
1, z = y y, z ∈ Z0, sonst
d.h. ϕK ist durch die Bilder ZK der Referenzknoten Z und die Basisfunktionen in Kbestimmt.
64

Anwendung Sei ψF : F → ∂Ω eine glatte Parametrisierung, d.h.F = ψF (x) : x ∈ F von F ⊂ ∂Ω, F ∈ FK .Blending-Funktion:
ϕK(x) = (1− λ(x))ψF( d∑j=1
λj(x)zj)
+ λ0(x)z0 ,
wobei λj die Lagrange-Basisfunktionen zu zj sind und F = x ∈ K : λ0(x) = 0 =convz1, . . . , zd.
Babuška-Paradox Für festes h und k → ∞ und Interpolation von ψF an äquidistantenPunkten⇒ Keine FE-Konvergenz mit isoparametrischen Elementen!
Konsistenzfehler Sei a(·, ·) elliptisch, stetig in V ⊂ H1(Ω), ` ∈ V ′.Sei jetzt Vh ⊂ V und ah, `h Approximationen von a un `, z.B durch Kubator oder Rand-approximation.
u ∈ V : a(u, v) = 〈`, v〉 ∀v ∈ V ⊂ H1(Ω)
uh ∈ V : ah(uh, vh) = 〈`h, vh〉 ∀vh ∈ Vh ⊂ V
(6.10) Lemma (von Strang)Sei
|a(v, w)| ≤ Ca‖v‖V ‖w‖V ∀v, w ∈ V
und
ah(vh, vh) ≥ ca‖vh‖2V ∀vh ∈ Vh
Dann existiert ein C > 0 mit
‖u− uh‖V ≤ C infvh∈Vh
(‖u− vh‖V + sup
‖wh‖V =1
|a(vh, wh)− ah(vh, wh)|)
+ C sup‖zh‖V =1
|〈`− `h, zh〉|
Beweis. Es gilt vh ∈ Vh\uh und somit
ca‖uh − vh‖V ≤ ah(uh − vh, uh − vh)= a(u− vh, uh − vh) + a(vh, uh − vh)− a(u, uh − vh)
+ ah(uh, uh − vh)− ah(vh, uh − vh)= a(u− vh, uh − vh) + a(vh, uh − vh)− ah(vh, uh − vh) + 〈`h, uh − vh〉− 〈`, uh − vh〉
≤ Ca‖u− vh‖V ‖uh − vh‖V +|a(vh, uh − vh)− ah(vh, uh − vh)|
‖uh − vh‖V‖uh − vh‖V
+|〈`h − `, uh − vh〉|‖uh − vh‖V
‖uh − vh‖V
65

Wir erhalten dann
ca‖uh − vh‖V ≤ Ca‖u− vh‖V + sup‖wh‖V =1
|a(vh, wh)− ah(vh, wh)|+ sup‖zh‖V =1
|〈`− `h, zh〉|
und schließlich gilt
‖u− uh‖V ≤ ‖u− vh‖V + ‖uh − vh‖V ≤(
1 +Caca
)‖u− vh‖V + sup . . .
AnwendungKubatur
∫K
g(x) dx ≈∑ξ∈ΞK
ωξg(ξ) = JK∑ξ∈Ξ
ωξg( ξ)
a(v, w) =
∫Ω
κ(x)∇v(x) · ∇w(x) dx
wobei κ symmetrisch, positiv definit und κ0 > 0 kleinster Eigenwert in Ω ist.Es gilt
〈`, v〉 =
∫Ω
f(x)v(x) dx
mit JK = detBK , ΞK Quadraturpunkte, ωξ ∈ R Quadraturgewichte. Dann
ah(vh, wh) =∑K
∑ξ∈ΞK
ωξκ(ξ)∇v(ξ)∇wh(ξ), 〈`h, vh〉 =∑K
∑ξ∈ΞK
ωξf(ξ)vh(ξ)
wobei der Quadraturfehler gegeben ist durch:
EK(g) =
∫K
g(x) dx−∑ξ∈ΞK
ωξg(ξ)
BeispielA) Sei K Simplex, k = 1, ΞK = zK, 1
d+1
∑dj=0 zK,j und ωξ = |K| Mittelpunkt. Seien
weiterVh = S1(Ωh) ∩ H1
0(Ω), f ∈ C(Ω) ∩ H1(Ω), κ ∈W1,∞(Ω), d.h. ∇κ ∈ L∞(Ω; Rd).Dann gilt:
〈`h − `, vh〉 =∑K
f(zK)vh(zK)|K| −∫K
fvh dx
=∑K
∫K
(f(zK)− f(x)
)vh dx
≤∑K
hK‖∇f‖0,K‖vh‖0,K
≤ hK‖∇f‖0,Ω‖vh‖0,Ω .
66

Dies gilt da∫K
(f(zK)− f(x)
)dx =
∫K
∫ |x−zK |0
∇f(zK + s(x− zK)) · (x− zK) ds .
Dann gilt schließlich
ah(vh, wh)− a(vh, wh) =∑K
|K|κ(zK)∇vh(zK) · ∇wh(zK)−∫K
κ(x)∇vh∇wh dx
=
∫K
|κ(zK)− κ(x)||∇vh||∇wh| dx
≤ h‖∇κ‖∞‖vh‖1,Ω‖wh‖1,Ω .
B) Sei K = [0, 1]d dann gilt:
∫ 1
0
φ(x) dx ≈ 1
2
(φ(α) + φ(1− α)
)mit wξ = 1
4und
α =3−√
3
6für d = 2 Ξ =
(αα
),
(1− αα
),
(α
1− α
),
(1− α1− α
)
Warnung: für d = 3 und dim Q2 = dim P2 ⊗ P2 ⊗ P2 = 9 und |ΞK | = 9,aber: ah(vh, wh) singulär in S2(Ωh)!
C) Sei K = conv(0
0
),
(10
),
(01
).
Es gilt∫g(x) dx =
∫ 1
0
∫ 1−x1
0
g(x1, x2) dx2 dx1 =
∫ 1
0
∫ 1
0
g(x1, t(1− x1))(1− x1) dt dx1
und somit gilt
Ξ =( ξ1
(1− ξ1)α
),
(ξ2
(1− ξ2)α
),
(ξ1
(1− ξ2)(1− α)
)(ξ2
(1− ξ1)(1− α)
)
Gauß-Quadratur zum Gewicht (1− t)
∫ 1
0
f(x)w(x) dx = w1f(ξ1) + w2f(ξ2) + . . .︸︷︷︸Quadraturfehler
67

(6.11) LemmaFür die Quadratur
∫Kg dx ≈
∑ξ∈Ξ wξg(ξ) in K mit w > 0 gelte für ein k ∈ N
1. V ⊂ Pk(K)
2. Ξ unisolvent in Pk−1 oder die Quadratur ist in P2k−2 exakt.
Dann gilt für die Approximation ah(·, ·) von
a(v, w) =
∫Ω
κ(x)∇v(x) · ∇w(x) dx
(κ positiv definit) durch Quadratur für linear affine Elemente:Es existiert ca > 0 mit
ah(vh, vh) ≥ ca|vh|21 vh ∈ Vh
Beweis. 1.Fall: Ξ unisolvent in P2k−2
Dann gilt für v ∈ V ∑ξ∈Ξ
ωξ|∇v|2 = 0
bzw.
⇒|∇v(ξ)| = 0 ∀ξ ∈ Ξ
⇒∇v(ξ) = 0 ∀ξ ∈ Ξ
⇒v∈Pl(K)
∇v(ξ) = 0 ∀ξ ∈ Ξ
dann gilt
v →( ∑ξ∈ΞK
wξ|∇v(ξ)|2) 1
2Norm in ∇V ⊂ Pk−1(K; Rd)
Normäquivalenz: Es existiert ein c0 > 0 mit∑wξ|∇v|2 ≥ c‖∇v‖2
0,K
2.Fall: Sei (Ξ, ω) exakt in P2k−2(K), dann gilt∑wξ|∇v(ξ)|2 = ‖∇v‖2
0,Kmit c = 1
und somit erhalten wir∑ξ∈ΞK
wξ(κ∇v · ∇v)(ξ) ≥ κ0
∑ξ∈ΞK
ωξ|B−>K ∇v(ξ)|2JK = κ0‖∇v‖20,K .
Die Behauptung folgt dann durch Aufsummieren über K.
68

(6.12) SatzSei VK = Pk(K), Vh = Pk(Ωh) ∩ H1
Γ (Ω) für k ≥ 1 und die Quadratur sei exakt fürv ∈ P2k−2(K).Weiterhin sei ∂ακ ∈ L∞(Ω)d×d für |α| ≤ k und f ∈ Hk(Ω) ∩ C(Ω). Dann gilt:
a)
|a(vh, wh)− ah(vh, wh)| ≤ Chk‖κ‖∞,k,Ω‖vh‖k,Ω‖wh‖1,Ω vh, wh ∈ Vh
mit ‖κ‖∞,k,Ω = maxl=0,...,k ‖Dlκ‖∞,Ω
b) ∣∣∣ ∫Ω
fvh dx− 〈`h, vh〉∣∣∣ ≤ Chk‖f‖k,Ω‖vh‖1Ω
Anwendung Falls u ∈ Hk+1(Ω) gilt
‖u− uh‖1,Ω ≤C(‖u− Πk
hu‖1,Ω + sup‖wh‖1=1
|a(Πkhu,wh)− ah(Πk
hwh, vh))
+ sup‖zh‖1=1
|〈`− `h, zh〉|
≤ Chk|u|k+1,Ω + hk‖κ‖∞,Ω‖Πhu‖0,Ω + hk‖f‖k,Ω = O(hk)
Beweis. zu a) Definiere EK(g) =∫Kg(x) dx−
∑ξ∈ΞK
wξg(ξ).Dann gilt
EK(g) = JKE(g)
mit
g = g ϕK = κpq = ψq
p = ∇vh ϕKq = ∇wh ϕK .
Eingesetzt ergibt, dass
|E(g)| ≤ C‖g‖∞ ≤ C‖ψq‖∞ ≤ C‖ψ‖∞‖q‖∞ .
Da V endlich-dimensional ist, können wir aufgrund der Normäquivalenz folgende Ab-schätzung treffen:
‖q‖∞ ≤ C‖q‖0,K .
Variante des Bramble-Hilbert-Lemmas:
E(Πk−1ψq) = 0⇒ |E(ξ)| ≤ C‖Dkψ‖∞‖∇wh‖0,K ,
wobei Πk−1ψ ∈ Pk−1 und q ∈ Pk−1 ist.Dann
‖Dψ‖∞,K = ‖Dk(κp)‖∞,K ≤k∑l=0
‖Dlκ‖∞,K‖Dk−lp‖∞,K
≤ Ck∑l=1
‖Dlκ‖∞,K‖Dk−lp‖0,K .
69

Dann folgt insgesamt mit |BK | ≤ h
EK(κ∇vh · ∇wh) ≤ CJk
k∑l=1
‖Dlκ‖∞,K‖Dk−lp‖0,K‖q‖0,K
≤ CJk
k∑l=1
|BK |l‖Dlκ‖∞,K |BK |k−lJ− 1
2K ‖D
k−lp‖0,KJ− 1
2K ‖q‖0,K
≤ Chk‖κ‖∞,k,K‖vh‖k,K‖wh‖1,K .
Zu b) Sei g = fvh und v = vh ϕK . Dann gilt folgende Abschätzung
E(f v) = E(fΠ1v) + E(f(v − Π1v)
B.H.
≤ C‖f − Πk−1f‖0,K‖Π1v‖0,K + ‖f − Πk−2f‖0,K‖v − Π1v‖0,K
≤ C‖Dkf‖0,K‖v‖0,K‖Dk−1f‖0,K‖v − Π1v‖0,K .
Insgesamt folgt dann
|EK(fvh) ≤ |C(hk‖f‖k,K‖v‖0,K + hk−1‖f‖k,Kh‖vh‖1,K
).
Nichtkonforme Elemente
Crouzeix-Raviart Seien Ωh =⋃K Simplizes und
V nch =
vh ∈ P1(Ωh) :
∫F
[vh]F da = 0 ∀F ∈ Fh
mit [vh]F = vKF − vK , F = FKF ∩ FK ∩Ω und [vK ]F = vK |F für F ∈ F ∩ ∂Ω.Es gilt V nc
h 6⊂ H10(Ω), aber für vh ∈ V nc
h mit vK = vh|K gilt
vh(zF ) = 0 für zF ∈ ∂ΩvK(zF ) = vKF (zF ) für F ∈ F ∩Ω .
Basis: Sei λz Basis in S1(Ωh) ⊂ H1(Ω). Dann gilt
λz(x) = 1− 1
(y − z) · nF(x− z) · nF z ∈ VK \ VF , y ∈ VF .
Das heißt λz(z) = 1 und λz(y) = 0 für alle y ∈ VF . Es gilt dann
λF (x) = d(1
d− λz(x)
)mit λF (zF ) = 1 und λF (zF ′) = 0 für F ′ ∈ FK\F. Es folgt also
Πnch v =
∑F∈F
〈λ′F , v〉λF =∑F∈F
1
|F |
∫F
v daλF
mit V nch = spannλF : F ∈ F ∩Ω.
70

Vorsicht: ZK = zF : F ∈ FK ist unisolvent für Simplizes aber nicht unisolvent inQ1(K) = P1 ⊗ P1, z.B. vh(x1, x2) = (x1 − 1
2)(x2 − 1
2) 6= 0, K = (1, 0)2.
Es gilt mit ‖v‖21,Ωh
=∑
K ‖v‖21,K , dass
‖Πnch v‖1,Ωh ≤ C‖v‖1,Ω
‖v − Πnch v‖0,Ω ≤ Ch2‖v‖2,Ω ∀v ∈ H2(Ω)
Poisson-Problem Betrachte das Poisson-Problem
−∆u = f in Ωu = 0 auf ∂Ω .
Für Ω konvex gilt für die Lösung u ∈ H10(Ω) von
a(u, v) = (f, v)0,Ω ∀v ∈ H10(Ω)
folgende Abschätzung für C > 0 und f ∈ L2(Ω)
‖u‖2,Ω ≤ C‖f‖0,Ω .
Die nichtkonforme Approximation sieht dann folgendermaßen aus: Es gilt für uh ∈ V nch
ah(uh, vh) = (f, vh)0,Ω ∀vh ∈ V nch
ah(vh, wh) =∑K
∫K
∇vh · ∇wh dx .
Dann folgt Konsistenz, also
ah(v, w) = a(v, w) ∀v, w ∈ H1(Ω) .
(6.13) LemmaEs existiert ein αh > 0 mit
ah(vh, vh) ≥ αh‖vh‖21,Ωh
∀vh ∈ V nch .
Beweis. Es gilt
|ah(vh, vh)| = 0
wir können folgern, dass
∇vh ≡ 0 in K ⊂ Ωh
gilt. Und somit auch
vh = const in K ⊂ Ωh
d.h vh = 0 auf allen K mit ZK ∩Ω 6= ∅. Induktiv erhalten wir
vh = 0 in Ω
Die Behauptung folgt aus Normäquivalenz und dimVh <∞.
71

(6.14) Lemma (2.Strang-Lemma)Sei αh > 0 mit
ah(v, v) ≥ αh‖v‖21,Ωh
∀v ∈ V nch + H1
0(Ω) .
Dann gilt
‖u− uh‖1,Ωh ≤ C infvh∈V nc
h
‖u− vh‖1,Ωh + C supwh∈V nc
h
|ah(uh, wh)− (f, wh)0,Ω|‖wh‖1,Ωh
.
Beweis. Für alle vh ∈ V nch gilt
αa‖uh − vh‖21,Ωh≤ ah(uh − vh, uh − vh)= ah(u− vh, uh − v) + (f, uh − vh)− ah(u, uh − vh)≤ ‖u− vh‖1,Ωh‖uh − vh‖1,Ωh
+|ah(uh, uh − vh)− (f, uh − vh)|
‖uh − vh‖1,Ωh
‖uh − vh‖1,Ωh .
(6.15) SatzSei u ∈ H2 und Ω konvex. Dann gilt
‖u− uh‖1,Ωh ≤ Ch‖u‖2,Ω .
Beweis. Sei Ω konvex.
i) Zu w ∈ L2(Ω) definiere φ ∈ H10(Ω) mit
(∇φ,∇ψ)0,Ω = (w,ψ)0,Ω .
Aus der Konvexität von Ω folgt dann −∆φ = w und
‖φ‖2,Ω ≤ C‖w‖0,Ω .
Definiere weiter p = −∇φ für p ∈ H1(Ω,Rd). Es folgt dann∇ · p = w und
‖p‖1,Ω ≤ C‖w‖0,Ω .
ii) Sei v ∈ H1(Ω) mit vF = 1|F |
∫Fv da.
Behauptung:
‖v − vF‖0,F ≤ C√h‖∇v‖0,K
Dies gilt da für vK ∈ P1(K) mit 1|F |
∫FvK da = vF und v = v ϕK , vK = vK ϕK
gilt mit dem Bramble-Hilbert-Lemma
‖v − vF‖0,F = ‖v − vK‖0,F =
√|F ||F |‖v − vK‖0,F
≤ C
√|F ||F |‖v − vK‖1,K
≤ C
√|F ||F |‖BK‖∞,K
√|K||K|‖∇(v − vK)‖0,K
≤ C√h‖∇(v − vK)‖0,K .
72

iii) Es existiert C0 > 0 für h < h0 mit
ah(v, v) ≥ C0‖v‖21,Ω ∀v ∈ V nc
h + H10(Ω) .
Wir verwenden
‖v‖0,Ω = supw∈L2(Ω)
(v, w)0,Ω
‖w‖0,Ω
.
Es gilt
(v, w)0,Ωi)= (v,∇p)0,Ω =
∑K
−∫K
∇v · p dx+
∫∂K
vp · n da .
Wir können nun mit pF = 1|F |
∫Fp da folgende Abschätzung treffen∫
F
vp · n da =
∫F
v(p− pF ) · n da
=
∫F
(v − vF )(p− pF ) · n da ≤ ‖v − vF‖0,F‖p− pF‖0,F
≤ C√h‖∇v‖0,K
√h‖∇p‖0,K .
Insgesamt gilt also
(v, w)0,Ω ≤ ‖∇v‖0,Ωh‖p‖0,Ω + Ch‖∇v‖0,Ωh‖∇p‖0,Ωh
≤ (1 + Ch0)‖∇v‖0,Ωh‖w‖0,Ω
und damit
‖v‖0,Ω = supw∈L2(Ω)
(v, w)0,Ω
‖w‖0,Ω
≤(
1 + Ch0
)‖∇v‖0,Ωh .
Es folgt also
‖v‖21,Ωh≤ ‖v‖0,Ωh + ‖∇v‖0,Ωh ≤
(1 + (1 + Ch0)2
)ah(v, v) .
iv) Für u ∈ H2(Ω) ∩ H10(Ω), −∆u = f und wh ∈ V nc
h gilt
supwh 6=0
|ah(u,wh)− (f, wh)|‖wh‖1,Ωh
≤ hC‖u‖2,Ω .
Dies gilt da
ah(u,wh)− (f, wh) =∑K
∫K
(∇u · ∇wh − fwh) dx
=∑K
∫K
(−∆uwh − fwh) dx+
∫∂K
∇u · nwh da
=∑K
∑F⊂∂K
∫F
∇u · n(wh − wF ) da
=∑K
∑F
∫F
(∇u− (∇u)F ) · n(wh − wF ) da
≤∑K
∑F
‖∇u− (∇u)F‖0,F‖wh − wF‖0,F
≤ Ch‖∇(∇u)‖0,Ωh‖∇w‖0,Ωh ≤ Ch‖u‖2,Ωh‖wh‖1,Ωh
mit wF = 1|F |
∫Fwh da.
73

Alternative FormulierungBestimme vh ∈ P1(Ωh) mit
Jh(vh) =1
2‖∇vh‖2
0,Ωh− (vh, f)0,Ω = min s.t.∫
F
[vh]F da = 0 ∀F ∈ F .
Bestimme Sattelpunkt von
ψ(vh, λh) = Jh(vh) + ([vh], λh)∂Ω
=1
2〈Ahvh, vh〉+ (f, vh)0,Ω + 〈Bhλh, vh〉
mit 〈Bhλh, vh〉 =∑
F
∫F
[vh]FλF da, λF = λh|F .Also löse das lineare Sattelpunkt-System
Ahuh +Bhλh = fh
B′huh = 0
und damit das symmetrisch positiv definite Schur-Komplement-System(B′hA
−1h Bh
)Ah = B′hA
−1h fh .
74

7 Petrov-Galerkin Verfahren
Seien U, V Hilberträume und b : U × V → R eine Bilinearform, ` ∈ V ′.
Fragen:
1. Unter welchen Bedingungen existiert eine eindeutige Lösung mit
u ∈ U : b(u, v) = 〈`, v〉 ∀v ∈ V ?
2. Unter welchen Bedingungen an
Uh × Vh ⊂ U × V (h ∈ H)
existiert die eindeutige Approximation uh ∈ Uh von
b(uh, vh) = 〈`, vh〉 ∀vh ∈ Vh?
3. Unter welchen Bedingungen konvergiert uh → u(mit Abschätzung abhängig von h)?
BeispielA) U = V , b(·, ·) stetig, elliptisch,
⋃h∈H Vh = V ⇒ Galerkin.
B) Streamline-Diffusion: U = V = H1ΓD
(Ω),
b(u, v) =
∫Ω
(κ∇u · ∇v + q · ∇u · v
)dx
bδ(uh, vh) = b(uh, vh) +∑K
δK(q · ∇uh, q∇vh)0,K
〈`δ, vh〉 = 〈`, vh〉+∑K
δK〈`, q · ∇vh〉K
Das entspricht
Vh =vh ∈ L2(Ωh) : es ex. uh ∈ Uh = S1(Ωh) mit vh|K = uh + q · ∇uh
.
C) Vertex-Centered Finite Volumes U = V = H1ΓD
, Ωh Simplices.
Uh = S1(Ωh) ∩ H1ΓD, Vh = Π
z∈VzP0(ωz)
b(u, v) =
∫Ω
∇u · ∇v dx , bh(uh, vh) =∑z∈V
vz
∫ωz
∇uh · nωz da
Abbildung 33: d = 2, k = 2
75

D) Least-Squares
U = H10(Ω)× H(div, Ω) V = L2(Ω)× L2(Ω; Rd)
und
−∆p = f ⇒ −∇q = f
q = ∇p .
b((p, q), (φ, ψ)) = (−∇ · q, φ)0,Ω + (q −∇p, ψ)0,Ω
〈`, (φ, ψ)〉 = (f, φ)0,Ω .
E) Parabolische Raum-Zeit-VerfahrenU = H1(0, T ; L2(Ω)) ∩ L2(0, T ; H1(Ω))V = L2(0, T ; H1(Ω))
b(u, v) =
∫ T
0
((∂tu, v)0,Ω − (∇u,∇v)0,Ω
)dt
F) Gemischte Finite-Elemente/Sattelpunktprobleme −→ in Kapitel 8
Frage 1:
(7.1) SatzVoraussetzungen:
a) Es existiert ein Cb > 0 mit
|b(u, v)| < Cb‖u‖U‖v‖V ∀u ∈ U, v ∈ V .
b) Es existiert ein β > 0 mit
infu∈U\0
supv∈V \0
b(u, v)
‖v‖V ‖u‖U≥ β ∀u ∈ U .
c) Zu jedem v ∈ V \0 existiert ein u ∈ U mit b(u, v) 6= 0.
Dann ist 1) eindeutig lösbar und ‖u‖U ≤ 1β‖`‖V ′ .
Bemerkung
1) b)⇔ supv∈V \0b(u,v)‖v‖V
≥ β‖u‖U ∀u ∈ U .
2) Falls b(·, ·) elliptisch mit U = V folgt
b(v, v) ≥ α‖v‖2V ⇒ α = β .
76

BeispielSei U = V und b(u, v) ≥ α‖u‖2
U dann gilt
sup‖v‖=1
b(u, v) ≥ b(u, v)
‖u‖U≥ α‖u‖U .
Beweis. Definiere B ∈ L(U, V ′) den linearen Operator B : U → V ′ mit
〈Bu, v〉 = b(u, v) u ∈ U, v ∈ V.
Zu zeigen ist, dass unter den Bedingungen a)-c), B ein Isomorphismus ist.
i.) Die Stetigkeit folgt aus a) da
‖B‖L(U,V ′) = supu∈U\0
‖Bu‖V ′‖u‖U
= supu∈U\0
supv∈V \0
〈Bu, v〉‖u‖U‖v‖V
≤ Cb .
ii.) B injektiv: Sei u1, u2 ∈ U mit Bu1 = Bu2 gilt
0 = 〈B(u1 − u2), v〉 = sup‖v‖=1
b(u1 − u2, v) ≥ β‖u1 − u2‖
also ist u1 = u2, d.h. B ist injektiv.
iii.) Es existiert B−1 : B(U)→ U mit
β‖u‖U ≤ sup‖v‖V =1
〈Bu, v〉 = ‖Bu‖V ′
somit
‖B−1`‖U ≤1
β‖`‖V ′ mit ` = Bu ∈ B(U)
also
‖B−1‖L(B(U),U) ≤1
β
Zeige: B(U) = B(U) ist abgeschlossen. Sei ` ∈ B(U), d.h. es existiert
(un)n∈N ⊂ U : limn→∞
‖Bun − `‖V = 0
Es gilt
(Bun − `)− (Buk − `) = B(un − uk)
ist Cauchy-Folge. Weiterhin gilt
‖B(un − uk)‖V ′ = sup‖v‖V =1
〈B(un − uk), v〉‖v‖V︸ ︷︷ ︸
b(un−uk,v)
≥ β‖un − uk‖
77
Somit ist (un)n∈N eine Cauchy-Folge und es existiert ein u ∈ U mit limk→∞‖u− uk‖k = 0.
Wir erhalten
‖Bu− `‖V ′ = sup‖v‖V =1
b(u, v)− 〈l, v〉
a.)= sup‖v‖V =1
(limn→∞
b(u, v)− 〈l, v〉)
= 0
Zeige: B(U) = B(U) = V surjektivAnnahme: Es existiert ein ` ∈ V ′ mit ` /∈ B(U) abgeschlossen und konvex. Nach demTrennungssatz existiert ein γ ∈ R, v0 ∈ V mit
〈`, v0〉︸ ︷︷ ︸6=0
< γ ≤ 〈 Bu︸︷︷︸0=〈B′v0,u〉
, v0〉 ∀u ∈ U
D.h.
v0 ∈ Kern(B′)c.)= 0 .
Dies ist ein Widerspruch.
BemerkungDa B′ surjektiv ist, gilt dass das Schurkomplement elliptisch ist. D.h. für A ∈ L(V, V ′)definiert ducrh 〈Av,w〉 = (v, w)V für alle v, w ∈ V . Dann ist A symmetrisch positivdefinit,
‖A‖L(V,V ′) = ‖A−1‖L(V ′,V ) = 1
und
b(u, v) = 〈`, v〉 ∀v ∈ V⇔ 〈Bu, v〉 = 〈`, v〉 ∀v ∈ V⇔ Bu = `
somit folgt
A−1Bu = A−1`
bzw.
B′A−1Bu︸ ︷︷ ︸=S∈L(U,U ′)
= B′A−1`
mit B′ : V → U ′ gilt
〈B′v, w〉 = b(u, v) .
78
Behauptung:
sup‖v‖V =1
b(u, v) =√〈Su, v〉
Definiere das Lagrange-Funktional
Φ(u, v, λ) = b(u, v) + λ(‖v‖2V − 1) = 〈Bu, v〉+ λ(〈Au, v〉 − 1)
Kritische Stelle:
Bu+ λ2Av = 0
somit
v = − 1
2λA−1B
weiterhin gilt
1 = ‖v‖2V = 〈Av, v〉 =
1
4λ2〈Bu,A−1Bu〉 = 〈B′A−1Bu, u〉 = 〈Su, u〉
Es gilt
β‖u‖U ≤ supv∈V \0
b(u, v)
‖v‖V= sup
φ∈U
b(u,A−1)
‖AB−1φ‖V
≤ supφ∈U
〈Su, φ〉β‖φ‖U
≤ 1
β‖Su‖U ′ .
Wiederholung Für B ∈ L(U, V ′) mit b(u, v) = 〈Bu, v〉V ′×V ist äquivalent.
a) B′ ∈ L(V, U ′) surjektiv
b) B injektiv und B(U) = B(U)
c) Es existiert ein β > 0 mit ‖Bu‖V ′ ≥ β‖U ∀u ∈ U
d) Es existiert ein β > 0 mit infu∈U supv∈V〈Bu,v〉‖u‖U‖v‖V
≥ β
(7.2) LemmaSei B ∈ L(U, V ′) injektiv , und es existiert ein β > 0 mit
supu∈U\0
b(u, v)
‖u‖U≥ β‖v‖V ∀v ∈ V .
Dann gilt auch
supv∈V \0
b(u, v)
‖v‖V≥ β‖u‖U = ‖Bu‖V ′ = ‖A−1Bu‖V ∀u ∈ U ,
mit b(u, v) = ‖B′v‖U ′ = ‖R−1B′v‖U ′ und A ∈ L(V, V ′) 〈Av,w〉 = (v, w)
79
Beweis. Sei R ∈ L(U,U ′), 〈Ru, u〉 = (u, u)U und ‖R‖U = ‖R−1‖U = 1 dann gilt
β‖v‖V ≤ supu∈U\0
〈B′v, u〉√〈Ru, u〉
=√〈BR−1B′v, v〉 .
Das heißt für alle u ∈ U\0 ist Bu 6= 0 und es existiert v ∈ V mit 〈Bu, v〉 6= 0.Dies bedeutet wiederum, dass es für alle u ∈ U\0 ein v ∈ V mit b(u, v) 6= 0.Aus der Bijektivität von B′ ∈ L(V, U ′), dass B ∈ L(U, V ′) und BR−1B′ ∈ L(V, V ′) dass
(BR−1B′(BR−1B′)−1 − id)B = 0 .
Da B injektiv ist gilt:
B′(BR−1B′)−1B = R
und somit1
βsupv∈V
b(u, v)
‖v‖V≥ sup
v∈V
b(u, v)√〈BR−1B′v, v〉
=√〈B′(BR−1B′)−1Bu, u〉 =
√〈(Ru, u〉 = ‖u‖U .
(7.3) SatzSeien Uh × Vh ⊂ U × V (h ∈ H) mit
supvh∈Vh\0
b(uh, vh)
‖vh‖V≥ βh‖uh‖U ∀uh ∈ Uh
mit βh > 0 unabhängig von h ∈ H. Dann gilt
‖u− uh‖U ≤Cbβh
infφh∈Uh
‖u− φh‖U
für uh ∈ Uh mit
b(uh, vh) = 〈`, vh〉 ∀vh ∈ Vhund
‖uh‖ ≤1
βh‖`‖V .
BemerkungFalls βh ≥ β0 > 0 für alle h ∈ H folgt Konvergenz.
Beweis.
‖u− uh‖U ≤ ‖u− φh‖U + ‖φh − uh‖U ≤ ‖u− φh‖U +1
βhsupvh∈Vh
b(φh − uh, vh)‖vh‖V
= ‖u− φh‖U +1
βhsupvh∈Vh
b(φh − u, vh)‖vh‖V︸ ︷︷ ︸
≤C‖φh−u‖U
≤ (1 +C
βh)‖φh − u‖U
mit
b(φh − uh, vh) = b(φh, vh)− 〈`, vh〉 = b(φh, vh)− b(u, vh)= b(φh − u, vh) ≤ C‖φh − u‖U‖vh‖V .
80

(7.4) SatzSei P ∈ L(U,U) Idempotent, d.h. P 2 = P mit P 6= id, P 6= 0. Dann gilt
‖P‖U = ‖ id−P‖U ≤ 1 + ‖P‖U .
Bemerkung‖P‖U ≥ 1 und ‖P‖U = 1⇔ Orthogonalprojektion
Beweis. Sei u ∈ U mit ‖u‖U = 1 und u0 = Pu, u1 = (id−P )u dann gilt
‖u‖2U = ‖u0 + u1‖2
U = ‖u0‖2U + ‖u1‖2
U + 2(u0, u1)U = 1
Zeige: ‖Pu‖U ≤ ‖ id−P‖U
1.) Fall: u0 = 0 dann gilt
‖Pu‖U = ‖u0‖U = 0 ≤ ‖ id−P‖U
2.) Fall: u = u0 und u1 = 0 dann gilt
‖Pu‖U = ‖u0‖U = ‖u‖U = 1 ≤ ‖ id−P‖U
3.) Fall: Wir definieren u0 = ‖u1‖U‖u0‖U
u0, u1 = ‖u0‖U‖u1‖U
u1 und u = u0 + u1 dann gilt
‖u‖2U = ‖u0‖2
U + ‖u1‖2 + 2(u0, u1)U
= ‖u1‖2U + ‖u0‖2
U + 2(u0, u1)U
= ‖u‖U = 1
und somit
‖Pu‖U = ‖u0‖U = ‖u1‖U = ‖(id−P )u‖U ≤ ‖ id−P‖U‖u‖U ≤ ‖ id−P‖U .
Analog lässt sich ‖(id−P )u‖U ≤ ‖P‖U zeigen.
Alternativer Beweis zu (7.3)Wir definieren die Einbettung
Eh,U : Uh → U Eh,V : Vh → V
und
Bh ∈ L(uh, v′h) 〈Bhuh, vh〉 = b(uh, vh) .
d.h
Bh = E ′h,VBhEh,V ⇒ u = B−1h E ′h,V ` = B−1
h E ′h,VBu
und damit
81
‖u− uh‖U = ‖u− Eh,UB−1h E ′h,vBu‖U
= ‖(idh−Eh,UB−1h E ′h,VB)(u− φh)‖
≤ ‖ idh−Eh,UB−1h E ′h,VB︸ ︷︷ ︸
Idempotent
‖L(U,U)‖u− φh‖U
≤ ‖Eh,UB−1h E ′h,VB‖L(U,U)‖u− φh‖U
≤ ‖Eh,U‖︸ ︷︷ ︸=1
‖B−1h ‖︸ ︷︷ ︸
= 1βh
‖E ′h,V ‖︸ ︷︷ ︸=1
‖B‖︸︷︷︸≤Cb
‖u− φh‖U
≤ Cbβh‖u− φh‖U
Fortin-Kriterium
(7.5) SatzSei b : U × V → R stetig und inf-sup-stabil und zu Uh × Vh ⊂ U × Vh existiert eineProjektion Πh ∈ L(V, Vh) mit
b(uh,Πhv − v) = 0 ∀uh ∈ Uh .
Dann gilt
supvh∈Vh\0
b(uh, vh)
‖vh‖V≥ β
‖Πh‖L(V,Vh)
‖u‖U .
Bemerkung1) Falls ‖Πhv‖V ≤ C‖v‖V mit einem C unabhängig von h, folgt dass β0 = β
C.
2) Wenn b in Uh × Vh inf-sup-stabil ist, dann existiert ein Fortin-Operator wie im Satz.
Beweis. Für uh ∈ Uh gilt
β‖uh‖U ≤ supv∈V \0
b(uh, v)
‖v‖V= sup
v∈V \0
b(uh,Πhv)
‖v‖V
≤ supΠhv 6=0
1
‖Πh‖Vb(uh,Πhv)
‖Πhv‖V=
1
‖Πh‖Vsupvh 6=0
b(uh, vh)
‖vh‖V.
”Optimale” TesträumeEs sei
Bh ∈ L(Uh, V′h) mit 〈Bhuh, vh〉 = b(uh, vh) injektiv
V opth = A−1
h Bh(Uh) ⊂ Vh Ah ∈ L(Vh, V′h) mit 〈Ahvh, φh〉 = a(vh, φh)
V-elliptischdimUh ≤ dimVh
(7.6) DefinitionDer Raum
V optH = A−1
h Bh(Uh) ⊂ Vh
heißt optimaler Testraum.
82

PropositionEs sind äquivalent:
a) uh ∈ Uh löst
b(uh, φh) = 〈`h, φh〉 ∀φh ∈ V opth
b) uh = (B′hA−1h B)−1B′hA
−1h `h
c) (uh, vh) ∈ Uh × Vh löst
a(vh, φh)+b(uh, φh) = 〈`h, φh〉 ∀φh ∈ Vhb(ψh, vh) = 0 ∀ψh ∈ Uh .
Beweis.
(c)
Ahvh +Bhuh = `h
B′hvh = 0
somit gilt
vh = A−1h (`h −Bhuh)
bzw.
⇒ 0 = B′hA−1h (`h −Bhuh)
⇒ B′hA−1h Bhuh = B′hA
−1h `h (b)
⇒ 〈B′hA−1h Bhuh, φh〉 = 〈B′hA−1
h `h, φh〉 ∀φh⇒ 〈Bhuh, A
−1h Bhφh︸ ︷︷ ︸∈V opt
h
〉 = 〈`h, A−1h Bhφh︸ ︷︷ ︸∈V opt
h
〉 (a) .
83

8 Gemischte Finite Elemente
Wir betrachten gemischte Finite Elemente (= mixed finite elements).
(8.1) DefinitionSeien V,W Hilberträume und
a : V × V → R
b : V ×W → R
Bilinearformen und
` = (`V , `W ) ∈ V ′ ×W ′
eine Linearform. Dann ist für (u, λ) ∈ V ×W
a(u, v) + b(v, λ) =〈`V , v〉b(u,w) =〈`W , w〉
für alle v ∈ V,w ∈ W ein ”Sattelpunktproblem”.Für gemischte FE: Vh ×Wh ⊂ V ×W und es gilt für (uh, λh) ∈ Vh ×Wh,
a(uh, vh) + b(vh, λh) =〈`V , vh〉b(uh, wh) =〈`W , wh〉
für alle (vh, wh) ∈ Vh ×Wh.
Beispiel
A) ”Optimale” TesträumeSei b inf-sup-stabil in Uh × Vh.Dann gilt für Bh ∈ L(Uh, V
′h) mit 〈Bhuh, vh〉 = b(uh, vh):
Bh ist injektiv (dann ist B′h auch surjektiv)⇔ dimVh = dimUh.Lösungsalgorithmus: Wähle a : V × V → R elliptisch, symmetrisch und definiereAh ∈ L(Vh, V
′h) mit 〈Ahvh, φh〉 = a(vh, φh) für alle vhφh,∈ Vh und
V opth = A−1
h Bh(Uh). Dann ist dimV opth = dimUh.
Sei (uh, vh) Lösung des Sattelpunktproblems
a(vh, φh) + b(uh, φh) =〈`, φh〉 ∀φh ∈ Vhb(ψh, vh) =0 ∀ψh ∈ Uh .
Dann giltb(uh, vh) = 〈`, vh〉 ∀vh ∈ V opt
h .
Beweis.
Ahvh +Bhuh = `h B′hvh = 0
⇒ vh = A−1h (`h −Bhuh)⇒ B′hA
−1h (`h −Bhuh) = 0
⇒ B′hA−1h Bhuh = B′hA
−1h `h
⇒ 〈Bhuh, A−1h Bhφh〉 = 〈`h, A−1
h B−1h φh〉 ∀φh ∈ Uh
⇒ b(uh, vh) = 〈`h, vh〉 vh ∈ V opth .
84

BemerkungB′hA
−1h Bh ist das ”Schur-Komplement”.
B) Poisson-Gleichung
−∆u = f in Ω
mit u = uD auf ∂Ω und σ = ∇u gilt:
0 =
∫Ω
(σ −∇u) · ψ dx =
∫Ω
σ · ψ dx−∫Ω
∇u · ψ dx
=
∫Ω
σ · ψ dx+
∫Ω
u divψ dx−∫∂Ω
uDψ · n da
0 =
∫Ω
(div σ + f
)φ dx ∀ψ, φ .
Somit lautet das Problem: bestimme (σ, u) mit∫Ω
σ · ψ︸︷︷︸a(σ,ψ)
dx+
∫Ω
u divψ︸ ︷︷ ︸b(ψ,u)
dx =
∫∂Ω
uDψ · n da ,
∫Ω
div σ · φ︸ ︷︷ ︸b(σ,φ)
dx =
∫Ω
fφ dx ∀ψ, φ .
C) Gebietszerlegung Ω = Ω1 ∪ Γ ∪Ω2 mit Ω = Ω1 ∪Ω2 und Γ = ∂Ω1 ∩ ∂Ω2. Es gilt:
Abbildung 34: d = 2 k = 2
−∆u = f in Ω1 ∪Ω2
u = 0 auf ∂Ω
und
u1 = u|Ω1 und u2 = u|Ω2
Aus
−∆u = f in Ω ⇐⇒ u1 = u2 und ∇u1 · n1 = ∇u2 · n1 auf Γ
folgt mit [u]Γ = (u2 − u1)Γ∫Γ
[u]Γ · ψ da = 0 ∀ψ ∈ L2(Γ ) .
85
Also gilt mit
∇u1 · n1 = −∇u2 · n2︸︷︷︸−n1
= 0
und φ|∂Ω = 0, dass∫Ω
fφ dx = −∫Ω1
∆u1φ dx−∫Ω2
∆u2φ dx
=
∫Ω1∪Ω2
∇u · ∇φ dx−∫∂Ω1
∇u1 · n1φ1 da−∫Ω2
∇u2 · n2φ2 da
= −∫Γ
µ[φ]Γ da
Bestimme (u1, u2, µ) mit∫Ω1
∇u1 · ∇φ1 dx
∫Ω2
∇u2 · ∇φ2 dx−∫Γ
µ[φ] da =
∫Ω1
fφ1 dx+
∫Ω2
fφ2 dx∫Γ
[u] · ψ da = 0
D) Stokes-Gleichung
v : Ω → R3 Geschwindigkeitp : Ω → R Druck
−∆v +∇p = f in Ωdiv v = 0 in Ω
v = 0 auf ∂Ω
=⇒∫Ω
fφ dx =
∫Ω
(−∆v +∇p
)φ dx =
∫Ω
∇v · ∇φ︸ ︷︷ ︸a(v,φ)
dx−∫Ω
p div φ dx ∀φ ∈ H10(Ω)
0 =
∫Ω
div v · ψ︸ ︷︷ ︸b(v,ψ)
dx ∀ψ ∈ L2(Ω)
86

(8.2) LemmaSei a(·, ·) symmetrisch und a(v, v) ≥ 0. Dann ist äquivalent:
a) (u, λ) ∈ V ×W löst das Sattelpunktproblem aus (8.1).
b) (u, λ) ∈ V ×W ist Sattelpunkt des Lagrange-Funktionals,
F (v, w) =1
2a(v, v) + b(v, w)− 〈`, (v, w)〉
d.h.
F (u,w) ≤ F (u, λ) ≤ F (v, λ) ∀(v, w) ∈ V ×W .
Bemerkungu ∈ V minimiert
J(v) =1
2a(v, v)− 〈`V , v〉 unter der Nebenbedingung b(v, w) = 〈`W , w〉 ∀w ∈ W .
Beweis. Es gilt, dass
F (u, λ+ w) ≤ F (u, λ) ∀w ∈ W
äquivalent ist zu
b(u,w) = 〈`W , w〉 w ∈ W .
Daraus folgt
F (u, λ) ≤ J(u)
und
F (u, λ) ≤ F (u+ δv) ∀v ∈ V, δ > 0 .
und erhalten somit
0 ≤ δa(u, v) +δ2
2a(v, v)− δ〈`V , v〉+ δb(v, λ) .
”a)⇒ b)”
0 ≤ δ2
2a(v, v) ⇒
δ=1F (u, λ) ≤ F (u+ v, λ) .
”b)⇒ a)”
δ(a(u, v) + b(v, λ)− 〈`V , v〉 ≥ −
δ2
2a(v, v) .
Daraus folgt δ ≥ − δ2
2a(v, v)→ 0 für δ → 0. Also folgt Gleichheit durch
a(u, v) + b(v, λ) ≥ 〈`V , v〉 ∀v ∈ V .
87

(8.3) SatzSei v0 ∈ V mit b(v0, w) = 〈`W , w〉 für alle w ∈ W mit
V0 = v ∈ V : b(v, w) = 0 ∀w ∈ W = kerB
W0 = w ∈ W : b(v, w) = 0 ∀v ∈ V = kerB′ .
a.) Sei a(·, ·) stetig, symmetrisch und elliptisch in V0, d.h. es existiert α > 0 mit
a(v, v) ≥ α‖v‖2V ∀v ∈ V0 .
Dann existiert genau ein Minimum u ∈ v0 + V0 von J(·), d.h.
J(u) ≤ J(v0 + v) ∀v ∈ V0 .
b.) Sei W0 = 0 und b(·, ·) stetig und inf-sup-stabil, d.h. es existiert ein β > 0 mit
supv 6=0
b(v, w)
‖v‖V≥ β‖w‖W ∀w ∈ W, v ∈ V .
Dann existiert genau ein λ ∈ W , so dass (u, λ) Lösung von (8.1) ist.
Beweis. zu a.) v0 +V0 ist linear affin und abgeschlossen. Das heißt v0 +V0 ist konvex undabgeschlossen. Weiter ist J(·) gleichmäßig konvex in v0 +V0. Daraus folgt sofort, dass einMinimum u ∈ v0 + V0 existiert.Alternativ: Löse u0 ∈ V0 also
a(u0, v) = 〈`V , v〉 − a(v0, v) v ∈ V0 .
Dann folgt mit u = v0 + u0, dass a(u, v) = 〈`, v〉.Nun gilt für alle v ∈ V0
J(u) ≤ J(v0 + v) = J(u) +1
2a(u0 − v, u0 − v) .
zu b.) Nach Satz (7.1) existiert ein eindeutiges λ ∈ W mit
b(v, λ) = 〈`V , v〉 − a(u, v) ∀v ∈ V .
Stabilität: A-priori Schranken
a(u, v) + b(v, λ) =〈`V , v〉b(u,w) =〈`W , w〉
Dann ist
β‖λ‖W ≤ supv 6=0
b(v, λ)
‖v‖V
≤ supv 6=0
1
‖v‖V(− a(u, v) + 〈`V , v〉
)≤ Ca‖u‖V ‖`V ‖V ′ .
88

Außerdem b(v0, w) = 〈`W , w〉 und v0 − u ∈ V0. Verwende:
α‖u− v0‖V ≤ a(u− v0, u− v0) = 〈`V , u− v0〉 − b(u− v0, λ)− a(v0, u− v0)
≤ ‖`V ‖V ′‖u− v0‖V + Ca‖v0‖V ‖u− v0‖V .
Dann gilt
‖u‖V = ‖u− v0 + v0‖V ≤ ‖v0‖V + ‖u− v0‖V
≤(
1 +Caα
)‖v0‖V +
1
α‖`V ‖V ′ .
BemerkungDefiniere W = W/W0=W>
0 mit
b : V × W → R
b(v, w) = b(v, w +W0),
und der Norm
‖w‖W = infw+W0=w
‖w‖W
‖w‖W = supv 6=0
b(v, w)
‖v‖V,
und mit w ∈ W folgt β = 1. Es folgt, dass b inf-sup-stabil ist. Außerdem existiert einLagrange-Parameter λ ∈ V .
Anwendungen
A) Sei V = H(div, Ω),W = L2(Ω) und
a(v, ψ) =
∫Ω
v · ψ dx
b(v, w) =
∫Ω
div vw dx
a(·, ·) ist nicht elliptisch in V !Aber a(·, ·) ist elliptisch in V0 mit α = 1
V0 = v ∈ V :
∫Ω
div vw dx = 0 ∀w ∈ W
= v ∈ H(div, Ω) : div v = 0 .
Es gilt
a(v, v) = ‖v‖20,Ω + ‖ div v‖2
0,Ω = ‖v‖2H(div,Ω) ∀v ∈ V0 .
Zu u ∈ L2(Ω) bestimme wu ∈ H10(Ω) mit der Eigenschaft∫
Ω
∇wu∇φ dx =
∫Ω
uφ dx ∀φ ∈ H10(Ω) .
89

Setze vh = −∇wu dann gilt
div vh = −∆wu = u .
Weiter folgt nun
‖vh‖20,Ω = ‖∇wu‖2
0,Ω ≤ (1 + C2P)−1‖wu‖1,Ω
≤ (1 + C2P)−1‖u‖0,Ω ,
und
‖vh‖2V = ‖vh‖2
0,Ω + ‖∇ · vh‖20,Ω ≤ (1 + C2
P)−1‖u‖20,Ω
Insgesamt gilt also
‖u‖0,Ω = ‖∇ · vh‖0,Ω =b(vh, u)0
‖u‖0,Ω
≤ 1
(1 + C2P)−
12
b(vh, u)
‖vh‖V≤√
1 + C2P sup
v 6=0
b(v, u)
‖φ‖V.
Also ist b(·, ·) inf-sup stabil in H(div, Ω)× L2(Ω).
B) Definiere V = v ∈ H1(Ω1 ∪Ω2) : u|∂Ω = 0. Und
a(v, v) = ‖∇v‖20,Ω1∪Ω2
≥(
1 + C2F
)−1(‖v‖2
1,Ω1+ ‖v‖2
1,Ω2
)mit
‖u‖0,Ωj ≤ CF
(‖∇v‖0,Ωj + ‖v‖0,∂Ω∩∂Ωj
).
Außerdem sei
V = [v] ∈ L2(Γ ) : v ∈ V ‖v‖V = inf
γ(v)=V‖v‖V
d.h. γ : V → L2(Γ ) mit v 7−→ [v] = v2 − v1.
Definiere noch V = γ(V )=V/ ker γ und W = V ⊃ L2(Γ ) (V =V/V0). Dann gilt
‖w‖W : = supv 6=0
〈w, γ(v)〉‖v‖V
und damit β0 = 1. Für µ ∈ W ∩ L2(Ω) gilt
b(v, µ) = 〈µ, γ(v)〉 =
∫Γ
µ[v] da .
90

Vorsicht W 6= L2(Ω), d.h.
V = H1200(Γ ) ⊂ H
12 (Γ )
W = H− 1
200 (Γ ) ⊃ H−
12 (Γ )
C) Betrachten wir das Problem∫Ω
div v dx =
∫∂Ω
v · n da = 0
für v ∈ H10(Ω; Rd).
Es gilt also
b(v, p) =
∫Ω
div vp dx = 0
für p ≡ const . Wähle W = p ∈ L2(Ω) :∫Ωp dx = 0=L2(Ω/R).
Jetzt benutzen wir einen Satz aus der Analysis.
BemerkungEs existiert C > 0 (abhängig von Ω), so dass zu jedem p ∈ W ein vp ∈ V existiert mitdiv vp = p und
‖vp‖1,Ω ≤ C‖p‖0,Ω
Für unser Problem bedeutet das:
‖p‖0,Ω =(div vp, p)0,Ω
‖p‖0,Ω
≤ Cb(vp, p)
‖vp‖1,Ω
≤ C supφ∈V \0
b(φ, p)
‖v‖1,Ω
.
Das heißt b(·, ·) ist inf-sup-stabil in V × L2(Ω)/R mit β = 1C
.
(8.4) SatzSei Vh ×Wh ⊂ V ×W und für αh, βh > 0 gelte
a(vh, vh) ≥ αh‖vh‖2V ∀vh ∈ V0,h = vh ∈ Vh : b(vh, wh) = 0 ∀wh ∈ Wh︸ ︷︷ ︸
*V0
und
supvh∈Vh\0
b(vh, wh)
‖vh‖V≥ βh‖wh‖W ,
W0,h = wh ∈ Wh : b(vh, wh) = 0 ∀vh ∈ Vh = 0 .
Dann existiert eine eindeutige Lösung (uh, λh) ∈ Vh ×Wh von
a(uh, vh) + b(vh, λh) = 〈`V , vh〉 ∀vh ∈ Vhb(uh, wh) = 〈`W , wh〉 ∀wh ∈ Wh .
BemerkungSei Vh = Vh/V0,h und Bh ∈ L(Vh,W
′h). Dann folgt W ′
h=Vh=Wh.
91

(8.5) FolgerungSei αh ≥ α0 > 0 und βh ≥ β0 > 0 für alle h ∈ H, V0,h ⊂ V0.Dann gilt für (vh, wh) ∈ Vh ×Wh
‖(u, λ)− (uh, λh)‖V×W ≤ C inf ‖(u, λ)− (vh, λh)‖V×W
mit C abhängig von Ca, Cb, α0, β0.
Wiederholung:
− div κ∇u = f in Ωu = uD auf ∂Ω
Dann folgt mit σ = κ∇u∫Ω
κ−1σ · τ dx+
∫Ω
div τu dx =
∫∂Ω
uDτ · n da∫Ω
div σv dx = −∫Ω
fv dx .
Definiere V = H(div, Ω), W = L2(Ω) und dann
a(σ, τ) =
∫Ω
κ−1σ · τ dx
b(τ, v) =
∫Ω
div τv dx
und falls τ · n ∈ L2(∂Ω)
〈`V , τ〉 =
∫∂Ω
uDτ · n da
〈`W , w〉 = −∫Ω
uDfw dx .
Sei κ ∈ L∞(Ω) mit 0 ≤ κ0 ≤ κ(x) ≤ κ1 f.ü. in Ω. Dann gilt Beschränktheit in L2, also
a(σ, τ) ≤ κ1‖σ‖0,Ω‖τ‖0,Ω.
Sei jetzt weiter
V0 = τ ∈ H(div, Ω) : b(τ, v) = 0 ∀v ∈ W= τ ∈ H(div, Ω) : div τ = 0 .
Dann folgt
κ0‖τ‖2V ≤ a(τ, τ) ≤ κ1‖τ‖2
V ∀τ ∈ V0
Es gilt dann folgende Abschätzung
supτ∈V
b(τ, v)
‖τ‖V≥ 1√
C2P + 1
‖v‖W ∀v ∈ W .
Falls `V ∈ V ′ und f ∈ L2(Ω) ist folgt, dass eine Lösung (σ, u) ∈ V ×W existiert.
92

Diskretisierung
Vh = S(div, Ωh) ⊂ P1(Ωh; Rd) ∩ H(div, Ω) ⊂ V
Wh = P0(Ωh) ⊂ W .
Aus τh ∈ Vh folgt dann div τh ∈ Wh. Sei
Vh,0 = τh ∈ Vh : b(τh, wh) = 0 ∀wh ∈ Wh= τh ∈ Vh : div τh = 0 .
Es gilt dann, dass
a(τh, τh) ≥ κ0‖τh‖2V
elliptisch ist in Vh,0.
(8.6) LemmaEs existiert ein β0 > 0 und h0 > 0 mit
supτh∈S(div,Ωh)
∫Ω
div τhwh dx
‖τh‖H(div,Ω)
≥ β0‖wh‖0,Ω ∀wh ∈ P0(Ωh), h < h0 .
Beweis. Sei τh = Πdivh τ ∈ S(div, Ωh) definiert durch∫
F
τ · n da =
∫F
τh · n da ∀F ∈ Fh .
D.h. τh =∑
F1|F |
( ∫Fτ · n da
)ψF . Dies ist wohldefiniert für τ ∈ H1(Ω; Rd), aber nicht
für τ ∈ H(div, Ω).Sei nun weiterhin wh = Π0
hw ∈ S0(Ωh) die L2-Projektion definiert durch
wh|K =
∫K
w dx ∀K ∈ Kh .
Daraus folgt ∫Ω
whwh dx =
∫Ω
(Π0hw)vh dx =
∫Ω
wvh dx ∀vh ∈ S0(Ω) .
i) Das Diagramm
V ∩ H1(Ω; Rd)div
//
Πdivh
L2(Ω)
Π0h
Vh
div // Qh
ist kommutativ, d.h.Π0h div τ dx = div Πdiv
h τ,
denn für alle wh ∈ Wh und wh|K = 1|K|
∫Kw dx gilt∫
Ω
wh(div τ − div Πdivh τ) dx =
∑K
wh|K∫K
div(τ − Πdivh τ) dx
=∑K
wh|K∫∂K
(τ · n− Πdivh τ · n) da = 0.
Daraus folgt
0 = Π0h(div τ − div Π0
hτ) = Π0h div τ − div Πdiv
h τ .
93

ii) Zeige
‖Πdivh τ‖V ≤ C
(‖τ‖V + h‖∇τ‖0,Ω
).
Es folgt aus i), dass
‖ div Πdivh τ‖0,Ω = ‖Π0
h div τ‖0,Ω ≤ ‖ div τ‖0,Ω
und
‖Πdivh τ‖2
0,Ω = ‖∑F
1
|F |
(∫F
τ · n da)ψF‖2
0,Ω
≤ 2∑K
∑F
‖ψF‖2∞|K|
1
|F |2
∣∣∣∣∫F
τ · n da
∣∣∣∣2 ≤ Ch‖τ · n‖20,F
≤ |F |‖τ · n‖20,F .
Nun können wir abschätzen
‖τ · n‖20,F ≤
∫F
|τ |2ψF · n da =
∫K
div(|τ |2ψF ) dx
≤∫K
(|τ |2 divψF + 2∇ττ · ψF
)dx
≤ ‖τ‖20,K + 2‖∇τ‖0,K‖τ‖0,K
≤ h‖∇τ‖20,K + h−1‖τ‖2
0,K .
Insgesamt folgt dann∑F
‖τ · n‖20,F ≤ C
(h−1‖τ‖0,Ω + h‖∇τ‖0,Ω
)und
‖Πdivh τ‖2
0,Ω ≤ C(‖τ‖2
0,Ω + h2‖∇τ‖20,Ω
).
iii) Sei b(·, ·) inf-sup-stabil in V ×W , d.h. zu wh ∈ Wh ⊂ W existiert ein τ ∈ V mit‖τ‖V = 1 und b(τ, wh) ≥ β‖wh‖0,Ω.Wähle τε ∈ C1(Ω; Rd) mit ‖τ − τε‖V ≤ h und ‖τε − Π1
hτε‖1,Ω ≤ Ch.Dann gilt
‖∇τε‖0,Ω ≤ C‖∇Π1hτε‖0,Ω ≤ Ch−1‖Π1
hτε‖0,Ω ≤ Ch−1 .
Weiter folgt
b(τ, wh) = b(τε, wh) + b(τε − τ, wh)≤ b(τε, wh) + h‖wh‖0,Ω
≤ b(Πdivh τε, wh) + h‖wh‖0,Ω
und aus ii) folgt
‖Πdivh τε‖V ≤ C
(‖τε‖V + h‖∇τε‖V
)≤ C0 .
94

Insgesamt folgt
supτh∈Vh
b(τh, wh)
‖τ‖V≥ b(Πdiv
h τε, wh)
‖Πdivh τε‖V
≥ 1
C0
(b(τ, wh)− h‖wh‖0,Ω
)≥ 1
C0
(β − h)‖wh‖0,Ω ,
für h0 = β2
und β0 = β2.
Sei (u, λ) ∈ V ×W Lösung von
a(u, v) + b(λ, v) = 〈`V , v〉 ∀v ∈ Vb(u,w) = 〈`W , w〉 ∀w ∈ W .
(8.7) SatzSei Vh ⊂ V , Wh ⊂ W und
V0,h = vh ∈ Vh : b(vh, µh) = 0 ∀µh ∈ WhVh(`W ) = vh ∈ Vh : b(vh, µh) = 〈`W , µh〉 ∀µh ∈ WhW0,h = wh ∈ Wh : b(vh, wh) = 0 ∀vh ∈ Vh .
Es gelte
a) a(vh, vh) ≥ αh‖vh‖2V für alle vh ∈ V0,h
b) Vh(`W ) 6= ∅
c)
supvh∈Vh
b(vh, wh)
‖vh‖V≥ βh‖wh‖W/W0,h
∀wh ∈ Wh, βh > 0 ,
wobei ‖wh‖W/W0,h= infw0,h∈W0,h
‖wh + w0,h‖W .
Dann existiert eine eindeutige Lösung (uh, λh) ∈ Vh ×Wh/W0,h von
a(uh, vh) + b(λh, vh) = 〈`V , vh〉 ∀vh ∈ Vhb(uh, wh) = 〈`W , wh〉 ∀wh ∈ Wh .
und es existiert ein C > 0 mit
‖u− uh‖V + ‖λ− λh‖W/W0,h≤ C inf
(vh,wh)∈Vh×Wh
(‖u− vh‖V + ‖λ− wh‖W/W0,h
).
Beweis. i) Mit a) folgt: Zu uh ∈ Vh(`W ) existiert u0,h ∈ V0,h mit
a(u0,h, v0,h) = 〈`V , v0,h〉 − a(uh, v0,h) ∀v0,h ∈ V0,h .
Definiere uh = uh + u0,h. Dann gilt
a(uh, vh) + b(vh, λh) = 〈`V , vh〉 ∀vh ∈ V0,h .
Mit c) folgt, dass ein λh ∈ W0,h existiert mit
b(vh, λh) = 〈`V , vh〉 − a(uh, vh) ∀vh ∈ Vh .
(Das heißt die zugehörigen Matrizen sind invertierbar.)
95
ii) Es gilt
supwh∈Wh\0
b(vh, wh)
‖wh‖W≥ β inf
v0,h∈V0,h‖vh + v0,h‖V .
Um das zu zeigen, wählen wir zu vh ∈ Vh ein vh ∈ Vh + V0,h mit
‖vh‖V = infv0,h∈V0,h
‖vh + v0,h‖V
und wh ∈ Wh mit
b(zh, wh) = (vh, zh)V ∀zh ∈ Vh ,
welches nach c) existiert. Jetzt folgt
β0‖wh‖W ≤ supzh∈Vh\0
b(zh, wh)
‖zh‖V= sup
zh∈Vh\0
b(vh, zh)
‖zh‖V≤ ‖vh‖V
und
supwh∈Wh\0
b(vh, wh)
‖wh‖W≥ b(vh, wh)
‖wh‖W=‖vh‖2
V
‖wh‖W≤ β0‖vh‖V .
iii) Es gilt
infvh∈Vh(`W )
‖u− vh‖V ≤(
1 +Cbβ
)infvh∈Vh
‖u− vh‖V .
Denn aus b) folgt dass ein vh ∈ Vh(`W ) und
b(vh, wh) = 〈`W , wh〉 = b(u,wh) ∀wh ∈ Wh .
Für vh ∈ Vh beliebig löst rh = vh − vh ∈ Vh das Problem
b(rh, wh) = b(u− vh, wh) ∀wh ∈ Wh .
Zu rh bestimme v0,h ∈ V0,h mit ‖rh + v0,h‖V = ‖rh‖V/V0,h . Aus c) und ii) folgt dann
βh‖rh + v0,h‖V ≤ supwh∈Wh\0
b(u− vh, wh)‖wh‖W
≤ Cb‖u− vh‖V
und
‖u− (vh + v0,h)‖V ≤ ‖u− vh‖V + ‖u− (vh − v0,h − vh)‖V
≤(
1 +Cbβ
)‖u− vh‖V .
iv) Zeige:
‖u− uh‖V ≤(
1− Caαh
)inf
vh∈Vh(`W )‖u− vh‖V +
Cbαh
infwh∈Wh
‖λ− wh‖W
96

Es gilt für alle vh ∈ Vh(`W ), dass uh − vh ∈ V0,h und
αh‖uh − vh‖2V ≤ a(uh − vh, uh − vh) ,
d.h.
αh‖uh − vh‖V ≤ supvh∈V0,h\0
a(uh − vh, vh)‖vh‖V
≤ Ca‖u− uh‖V + Cb‖λ− λh‖W .
Diese Abschätzung folgt aus
a(uh − vh, vh) = a(uh − u, vh) + a(u− vh, vh)= −b(vh, λh) + b(vh, λ) + a(u− vh, vh)≤(Cb‖wh − λ‖W + Ca‖u− vh‖V
)‖vh‖ .
Insgesamt folgt also
‖u− uh‖V ≤ ‖u− vh‖V + ‖uh − vh‖V
≤ 1
αh
(Cb‖wh − λ‖W + Ca‖u− vh‖V
).
v) Zeige
‖λ− λh‖W/W0,h≤(
1− Cbβ0
)inf
wh∈Wh
‖λ− wh‖W +Caβ0
‖u− uh‖V .
Es gilt für alle vh ∈ Vh, dass b(vh, λ− λh) = a(u− uh, vh), d.h.
b(vh, wh − λh) = a(u− uh, vh) + b(vh, λ− wh) .
Es folgt
β0‖wh − λh‖W/W0,h≤ sup
vh∈Vh\0
b(vh, wh − λh)‖vh‖V
≤ Ca‖u− uh‖V + Cb‖λ− wh‖W
und
‖wh − λh‖W/W0,h≤ ‖λ− wh‖W/W0,h
+ ‖wh − λh‖W/W0,h
≤ 1
β0
(Ca‖u− uh‖V + Cb‖λ− wh‖W
).
Berechnung von β0 als Eigenwertproblem Sei Wh = W0,h und
〈Bhvh, wh〉 = b(vh, wh)
〈RVh vh, vh〉 = (vh, vh)V
〈RWh wh, wh〉 = (wh, wh)W .
Behauptung:
supvh 6=0
b(vh, wh)
‖vh‖V=√〈Shwh, wh〉 , Sh = B′h(R
Vh )−1B′h .
97

Beweis. ”≥”
supvh 6=0
〈B′hwh, vh√〈RV
h vh, vh〉≥ 〈B′hwh, (RV
h )−1B′hwh√〈B′hwh, (RV
h )−1B′hwh〉=√〈Shwh, wh〉 .
”≤”
〈B′hwh, vh‖vh‖V
=((RV
h )−1B′hwh, vh)
‖vh‖V≤ ‖(RV
h )−1B′hwh‖V =√〈Shwh, wh〉 .
Seien (qh,j, µh,j) ∈ Wh × R Eigenpaare von Shqh,j = µh,jRWh qh,j .
Dann folgt µh,j und mit β0 = min√µh,j gilt√
〈Shwh, wh〉 ≥ β0‖wh‖W .
Das Stokes-System
−∆v +∇p = f, in Ωdiv v = 0
v = 0 auf ∂Ω
Weiter sei v ∈ V = H10(Ω; Rd), p ∈ W = L2,0(Ω) = q ∈ L2(Ω) :
∫Ωq dx = 0
und für
a(v, w) + b(p, w) =(f, w)0,Ω ∀w ∈ Vb(v, q) =0 ∀q ∈ W
gilt
supw∈H1
0(Ω;Rd)
b(w, q)
‖w|1,Ω≥ β‖q‖0,Ω ∀q ∈ W .
Außerdem sei
a(v, w) =
∫Ω
∇v∇w dx
b(v, q) =
∫Ω
divwq dx .
Taylor-Hood-Element Sei Ωh =⋃K mit K Simplex.
Weiter sei Vh = (P2(Ωh) ∩ H10(Ω))d und
Wh = S1(Ωh) ∩W = qh ∈ P1(Ωh) ∩ H1(Ω) :∫Ωqh dx = 0.
98

(8.8) LemmaFür alle Simplizes K ∈ K sei maximal eine Seite F ∈ FK ∩ ∂Ω auf dem Rand. Dannexistiert β0 > 0 mit
supvh∈Vh
b(vh, wh)
‖vh‖1,Ω
≥ β0‖wh‖0,Ω ∀wh ∈ Wh .
Beweis. Wir definieren
‖wh‖1,h =(∑
K
h2K‖∇wh‖2
0,K
)1/2
i) Zeige: Es existiert β1 > 0 mit
supvh∈Vh
b(vh, wh)
‖vh‖1,Ω
≥ β1‖wh‖1,Ω .
Wir definieren zu wh ∈ Wh ein vh ∈ Vh mit
vh(z) = 0, ∀z ∈ Vh ∪ zE : E ∈ E ∩ ∂Ωvh(zE) = −(∇wh · tE)tE ∀E ∈ E ∩Ω
mit zE = 12(z1 + z2), E = convz1, z2, tE = z2 − z1 und z1, z2 = VE . Dann gilt:
‖∇vh‖∞ = h2‖∇wh‖∞‖∑
E∈EK\∂Ω
vh(zE)∇λzE‖20,K
≤ ‖vh‖2∞
∑E
‖∇λzE‖20,K ≤ (h2‖∇wh‖∞)2Ch−2|K| ≤ Ch2‖∇wh‖2
0,K
Das bedeutet ‖∇vh‖0,Ω ≤ C‖wh‖1,h und
‖vh‖1,h ≤√
1 + C2P‖∇vh‖0,Ω ≤
√1 + C2
P‖wh‖1,h .
In 3d gilt für φK ∈ P2(K)∫K
φK dx = |K|(1
5
∑E∈εK
φ(zE)− 1
20
∑z∈VK
φ(z))
und damit
b(vh, wh) =
∫Ω
div vhwh dx−∫Ω
vh · ∇wh dx
= −∑K
|K|15
∑E∈EK\∂Ω
vK(zE) · ∇wh,K−|∇wh·tE |2
≥ c∑K
|K|∑
E∈EK\∂Ω
|∇wh|2h2
= c∑K
h2‖∇wh‖20,K‖
= c‖∇wh‖21,h ≥ c‖wh‖1,h‖v‖1,Ω .
99

ii) Es gilt
‖v − ΠClh v‖0,Ω ≤ C1h‖∇v‖0,Ω
‖ΠClh v‖1,Ω ≤ C2‖v‖1,Ω .
Dann folgt
supvh∈Vh
b(vh, wh)
‖vh‖1,Ω
= supv∈V
b(ΠClh vh, wh)
‖Πhvh‖1,Ω
≥ 1
C2
supv∈V
b(v, wh) + b(ΠClh v − v, wh)
‖v‖1,Ω
≥ β
C2
‖w‖0,Ω − supv∈V
1
‖v‖1,Ω
∑K
h−1K ‖Π
Clh v − v‖0,KhK‖∇wh‖0,Ω
≥ β
C2
‖w‖0,Ω − C3‖w‖1,h
mit C3 = (1 + C2P)−
12C1. Es gilt also
(1 +C3
β1
) supvh 6=0
b(vh, wh)
‖vh‖1,Ω
≥ β‖wh‖0,Ω
somit erhalten wir β0 = βC−12 (1 + C3
β1)−1
Schließlich:
‖v − vh‖1,Ω + ‖p− ph‖0,Ω ≤ ch2(‖v‖3,Ω + ‖p‖2,Ω
),
falls v, p glatt genug.
Das Mini-ElementDefiniere zu S1(K) = spanλz : z ∈ VK eine Bubble-Funktion bK(x) = Πz∈VKλz(x)und wähle
Vh =(S1(Ωh) ∩ H1
0(Ω))d
+ bKej : j = 1, . . . , d
Wh = wh ∈ S1(Ωh) :
∫Ω
wh dx = 0
(8.9) LemmaDas Mini-Element ist inf-sup-stabil.
Beweis. Ansatz für einen Fortin-OperatorDefiniere die Interpolation
Πhv = ΠClh v +
∑K
d∑j=1
γK,jejbK
mit∑
z∈Vh∩Ω
(1
| suppλz |
∫suppλz
v dx)λz. Bestimme γK,j so, dass∫
K
(Πhv − v) dx = 0 .
100
Das ist äquivalent zu ∫K
(v − ΠClh v) dx =
d∑j=1
γK,jej
∫K
bK dx
und
γK,j =1∫
KbK dx
∫K
(vj − ΠClh vj) dx ,
somit gilt∫Ω
div vwh dx = −∫Ω
v · ∇wh dx = −∫Ω
ΠClh v · ∇wh dx =
∫Ω
div ΠClh vwh dx ,
d.h. b(v − Πhv, wh) = 0 für alle v ∈ V,wh ∈ Wh.Es gilt
‖Πhv‖1,Ω ≤ ‖ΠClh v‖1,Ω +
∑K
∑j
|γK,j|‖bK‖1,K ≤ C‖v‖1,Ω .
da ‖bK‖1,K ≤ Ch−1√|K| und
|γK,j| ≤C
|K|‖1‖0,K‖v − ΠCl
h v‖0,K ≤√|K||K|
h‖v‖1,Ω .
Es folgt das Πh ein Fortin-Operator ist und die inf-sup-Stabilität ist gezeigt.
101

9 Discontinous Galerkin Verfahren
DG für die Poisson-Gleichung
Sei Ω konvex und ∂Ω = ΓD ∪ ΓN. Betrachte die Poisson-Gleichung
−∆u = f in Ωu = uD auf ΓD 6= ∅
∇u · n = gN auf ΓN = ∂Ω\ΓD .
Sei nun vh ∈ P(Ωh), u ∈ H2(Ω) und∇u · nF ∈ L2(F ). Dann gilt∫Ω
fvh dx = −∫Ω
∆uvh dx =∑K
∫K
∇uK · ∇vK dx−∫∂K
∇uK · nKvK da
=∑K
∫K
∇uK · ∇vK dx−∑
F∈F∩Ω
∫F
∇u · nvKF da−∫∂Ω
∇u · nvK da
mit uK = u|K und vK ∈ P(K) die stetige Fortsetzung von v|K nach K. Dabei definierenwir
σF =
12(σK + σKF ), F ∈ FK ∩ FKF ⊂ (∂K ∩ ∂KF ∩Ω)σ, F ∈ F ∩ ∂Ω
[[v]]F =
vKnK + vKFnKF , F ∈ FK ∩ΩvKnK , F ∈ FK ∩ ∂Ω
SIP – Symmetric Inner Penalty Zu γ > 0 und vh, φh ∈ P(Ωh) definiere
ah(vh, φh) =∑K
∫K
∇vh · ∇φh dx−∑
F∈F\ΓN
∫F
(∇vhF [[φh]]F + [[vh]]F∇φhF
)da
+∑
F∈F\ΓN
γ
hF
∫F
[[vh]]F [[φh]]F da ,
〈`h, φh〉 =
∫Ω
fφh dx+
∫ΓN
gNφh da
−∑K
∑F∈FK∩ΓD
∫F
uD∇φKnK da+∑K
∑F∈FK∩ΓD
γ
hF
∫F
uDφK da .
BemerkungFür v, φ ∈ H2(Ω) ∩ H1
0(Ω) gilt
ah(v, φ) =
∫Ω
∇v · ∇φ dx .
(9.1) Lemma (Elliptizität = Stabilität)Sei Vh ⊂ P(Ωh), dimVh <∞ und Ctr > 0 mit
‖∇vh · nK‖20,∂K ≤ Ctr
1
hK‖∇vh‖2
0,K
102

für alle vh ∈ Vh und γ > Ctr. Dann gilt
ah(vh, vh) ≥ Cγ‖vh‖21, 1
2,Ωh
für alle vh ∈ Vh und Cγ > 0 und
‖vh‖21, 1
2,Ωh
= ‖∇vh‖20,Ωh
+∑
F∈F\ΓN
1
hF‖[[vh]]F‖2
0,F .
Beweis. Es gilt
ah(vh, vh) =∑K
∫K
|∇vK |2 dx− 2∑
F∈F\ΓN
∫F
∇vhF [[vh]]F da+∑
F∈F\ΓN
γ
hF
∫F
[[vh]]2F da
≥∑K
‖∇vK‖20,K − 2
∑F∈F\ΓN
‖∇vhF · nF‖0,F‖[[vh]]F‖0,F +∑
F∈F\ΓN
γ
hF‖[[vh]]F‖2
0,F
≥∑K
‖∇vK‖20,K −
∑F∈F\ΓN
hFα‖∇vhF · nF‖2
0,F +∑
F∈F\ΓN
γ − αhF‖[[vh]]F‖2
0,F
≥∑K
(1− Ctr
α
)‖∇vK‖2
0,K + (γ − α)∑
F∈F\ΓN
1
hF‖[[vh]]F‖2
0,F
≥ Cγ‖vh‖21, 1
2,Ωh
,
mit Cγ = 1− Ctr
α= γ − α > 0.
In der ersten Abschätzung haben wir verwendet, dass 2ab ≤ hFαa2+ α
hFb2 und weiter haben
verwendet, dass∑F∈F\ΓN
hF‖∇vhF · nF‖20,F ≤
∑K
hK‖∇vK · nK‖20,∂K ≤ Ctr‖∇vK‖2
0,K .
Bemerkung‖vh‖1, 1
2,Ωh
ist eine Norm in Vh, denn
1. Aus ‖vh‖1, 12,Ωh
= 0 folgt
∇vK = 0 ∀K[[∇vh]]F = 0 ∀F ∈ F\ΓN
2. vK = const und vK = vKF und vK = [[vK ]]F für F ⊂ ΓD
3. vh = const, ΓD 6= 0, d.h. vh ≡ 0.
Folgerung: a(·, ·) ist positiv definit in Vh. Das bedeutet es existiert eine eindeutige Lösunguh ∈ Vh mit
ah(uh, vh) = 〈`h, vh〉 ∀vh ∈ Vh .
(9.2) Lemma (Konsistenz)Es gilt für die Lösung
ah(u− uh, φh) = 0 ∀φh ∈ Vh .
103

Beweis.
ah(uh, φh) = 〈`h, φh〉 =(−∆u, φh
)0,Ωh−
∑F∈F∩ΓD
∫F
u∇φh · n da
+∑
F∈F∩ΓD
γ
hF
∫F
uφh da+∑
F∈F∩ΓN
∫F
∇u · nφh da
=∑K
(∫K
∇u · ∇φh dx−∑
F∈FK\ΓN
∫F
∇u · nKφh da)
−∑
F∈F\ΓN
∫F
[[u]]F∇φhF da+∑
F∈F\ΓN
γ
hF
∫F
[[u]]F [[φh]]F da
= ah(u, φh) ,
denn für u ∈ H2(Ω)∩H10(Ω) gilt [[u]]F = 0, ∇uF · nK = 0 für F ∈ Fh ∩Ω und u = 0
auf ΓD, d.h.∑K
∫∂K\ΓN
∇u · nKφK da =∑
F∈F\ΓN
∫F
(∇uF [[φh]]F + [[u]]F∇φhF
)da .
(9.3) Lemma (Stetigkeit)Es gilt für vh ∈ Vh + H2(Ω) und φh ∈ Vh, dass
ah(vh, φh) ≤ C‖vh‖1, 32,Ωh‖φh‖1, 1
2,Ωh
,
mit
‖vh‖21, 3
2,Ωh
= ‖vh‖21, 1
2,Ωh
+∑
F∈F\ΓN
hF‖∇vh · nF‖20,F .
Beweis. Es gilt
ah(vh, φh) ≤∑K
‖∇vh‖0,K‖∇φh‖0,K
+∑
F∈F\ΓN
(h− 1
2F ‖∇vhF · nF‖0,Fh
12F‖[[φh]]F‖0,F
+ h− 1
2F ‖[[vh]]F‖0,Fh
12F‖∇φhF · nF‖0,F
)+ γ
∑F∈F\ΓN
h− 1
2F ‖[[vh]]F‖0,Fh
12F‖[[φh]]F‖0,F
≤(∑
K
‖∇vh‖20,K
) 12
+(∑
K
‖∇φh‖20,K
) 12
+ (1 + γ)( ∑F∈F\ΓN
h−1F
(‖[vh]‖2
0,F + ‖[φh]‖20,F
)) 12
+( ∑F∈F\ΓN
hF‖∇vh · n‖20,F
) 12 +
( ∑F∈F\ΓN
hF‖∇φh · n‖20,F
) 12
≤ 2(1 + γ)‖vh‖1, 32,Ωh‖φh‖1, 1
2,Ωh
.
104

(9.4) Satz (Konvergenz)a) Es gilt
‖u− uh‖1, 12,Ωh≤ C inf
φh∈V‖u− φh‖1, 3
2,Ωh
.
b) Falls u ∈ Hm+1(Ω) mit m ≥ 1 dann gilt
‖u− uh‖1, 12,Ωh≤ Chm‖u‖m+1,Ω .
c) Falls Ω konvex, so gilt
‖u− uh‖0,Ω ≤ Chm+1‖u‖m+1,Ω .
Beweis. zu a)
‖u− uh‖1, 12,Ωh≤ ‖u− φh‖1, 1
2,Ωh
+ ‖uh − φh‖1, 12,Ωh
und
‖u− φh‖1, 12,Ωh
(10.1)
≤ 1
Cγ
ah(uh − φh, uh − φh)‖uh − φh‖1, 1
2,Ωh
(10.2)=
1
Cγ
ah(u− φh, uh − φh)‖uh − φh‖1, 1
2,Ωh
(10.3)
≤ 1
CγC‖uh − φh‖1, 3
2,Ωh
für φh 6= uh.zu b)Es gilt
‖u− ΠmKu‖1,K ≤ ChmK‖Dm+1u‖0,K ,
‖u− ΠmKu‖0,F ≤ Ch
12K‖∇(u− Πm
Ku)‖0,K ≤ Chm+ 1
2K ‖Dm+1u‖0,K
und
‖∇(u− ΠmKu) · nF‖0,F ≤ Ch
12K‖D
2(u− ΠmKu)‖0,K .
Also folgt
‖u− Πmh u‖1, 1
2,Ωh≤ Chm‖Dm+1u‖0,Ω .
zu c) Duales Problem: w ∈ H1(Ω) mit w = 0 auf ΓD und
a(w, v) = (∇w,∇v)0,Ω = (u− uh, v)0,Ω
für alle v ∈ H1(Ω) mit v = 0 auf ΓD.Falls w ∈ H2(Ω) mit ‖w‖2,Ω ≤ C‖u− uh‖0,Ω folgt
‖u− uh‖20,Ω = a(w, u− uh) = ah(w, u− uh) = ah(w − Π1
hw, u− uh)≤ C‖w − Π1
hw‖1, 32,Ωh‖u− uh‖1, 1
2,Ωh
≤ Chm+1‖Dm+1u‖0,Ω .
105
Das ”hp-Dilemma” Die Datenstruktur in Pk(Ωh) ist zwar einfacher als inSk(Ωh) = Πk(Ωh) ∩ H1(Ω), aber:
1. Es gibt mehr Freiheitsgrade
2. Ctr abhängig von k.
Betrachte σ = ∇u mit
‖σ · n‖0,∂K ≤ Ctrh‖σ‖0,K ∀σ ∈ Pk−1(K; Rd) .
Es folgt σ · n = σ(0) = 1.In 2d: Es existiert σk ∈ Pk−1(K; Rd) mit ‖σk · n‖0,∂K ≥ k2C‖σk‖0,K .Es folgt Ctr = O(k2) und damit γ = O(k2). Das heißt der Penalty γ wächst mit k.
Konvergenz mit minimaler Regularität Sei Vh = Pk(Ωh). Wir definieren für F ∈ FKrF : L2(F )→ Pk−1(Ωh; Rd) mit∫
Ω
rF (ϕ) · σh dx =
∫F
σh · nFϕ da ∀σh ∈ Pk−1(Ωh; Rd)
und Rh : H1(Ωh)→ Pk−1(Ωh; Rd) mit Rh(v) =∑
F rF ([v]).
BemerkungEs ist
‖rF ([ϕ])‖0,K ≤ Ctr
∑F∈Fk
h12F‖[ϕ]‖0,F .
Wir definieren Gh : H1(Ωh)→ L2(Ωh; Rd) mit Gh(v) = ∇v −Rh(v).
BemerkungEs ist
‖Gh(v)‖0,Ω ≤ C‖v‖1, 12,Ω ,
und es gilt ∫Ω
rF ([vh]) · ∇wh dx =
∫F
∇wh · [vh] da .
Daraus folgt∫Ω
Gh(vh) · ∇wh dx =
∫Ω
∇vh · ∇wh dx+∑F
∫F
∇wh · [vh] da .
Daraus folgt
ah(vh, wh) =
∫Ω
Gh(vh) ·Gh(wh) dx+∑
F∈F\ΓN
γ
hF
∫F
[vh][wh] da−∫Ω
Rh(vh) ·Rh(wh) dx .
Es folgt Elliptizität für γ > Ctr.Es gilt
106
a) ah(·, ·) ist wohldefiniert für H1(Ωh).
b) ah ist asymptotisch konsistent, d.h. aus vh → v und wh → w in H1(Ωh) für h → 0folgt
ah(vh, wh)→ a(v, w) für h→ 0 .
c) uh → u konvergiert in H1(Ωh), aber ohne Rate, denn
[[uh]]F → 0 für h→ 0
Gh(uh)→ ∇u in L2(Ω; Rd) (Schwache Konvergenz)uh → u in L2(Ω) (Starke Konvergenz) .
Bemerkungah und Upwind Flux approximieren
− div κ∇u+ q · ∇u+ ru = f .
Konvektions-Reaktions-Gleichung
Zu q : Ω → Rd, r : Ω → R, f : Ω → R und uin : Γin → R auf Γin = x ∈ ∂Ω : q · n < 0,bestimme
u : Ω → R mit
q · ∇u+ ru = f inΩu = uin auf Γin
Abbildung 35: d = 2 k = 2
Dazu definieren wir
Lu = q · ∇u+ ru
den Differentialoperator erster Ordnung und
b(u, v) = (Lu, v)0,Ω =
∫Ω
(q · ∇u+ ru)v dx
eine Bilinearform b : U × V → R mit V = L(U) ⊂ L2(Ω) und
U = H(L,Ω) = v ∈ L2(Ω) : Lv ∈ L2(Ω)= v ∈ L2(Ω) : es existiert w ∈ L2(Ω) mit (w, φ)0,Ω = (v, L∗φ)0,Ω ∀φ ∈ C1
c(Ω)
107

ein Hilbertraum mit ‖u‖U = (‖u‖20,Ω + ‖Lu‖2
0,Ω)1/2. Dabei ist L∗w = − div(qw) + rw.Es folgt
(L∗w, φ)0,Ω =
∫Ω
(− div(qw)φ+ rwφ) dx
= −∫∂Ω
n · qwφ da+
∫Ω
(wq · ∇φ+ rwφ) dx
= (w,Lφ)0,Ω ∀w, φ ∈ C1c(Ω) .
Weiter definieren wir
U(uin) = u ∈ H(L,Ω) : u− uin ∈ U0, uin ∈ H(L,Ω)
U0 = u ∈ H(L,Ω) : (Lu, φ)0,Ω − (u, L∗φ)0,Ω = 0 ∀ϕ ∈ U∗U∗ = ϕ ∈ C1(Ω), ϕ = 0 auf ∂Ω\Γin .
Ist nun w ∈ U0 hinreichend glatt, gilt
(Lu, φ)0,Ω − (u, L∗φ)0,Ω =
∫∂Ω
q · nuφ da
=
∫Γin
q · nuφ da ∀φ ∈ U∗ .
Daraus folgt
(u, L∗v)0,Ω = (f, v)0,Ω − (uinq · n, v)0,Γin ∀v ∈ U∗
〈Bu, v〉 = b(u, v) B ∈ L(U, V ′),∀u ∈ U, v ∈ V .
(9.5) LemmaSei q ∈ L∞(Ω; Rd) mit div q ∈ L∞(Ω), r ∈ L∞(Ω).Es existiere ein r0 > 0 mit r − 1
2div q ≥ r0 > 0 fast überall in Ω.
Dann existiert CL > 0 mit
‖u‖0,Ω ≤ CL‖Lu‖0,Ω ∀u ∈ U0 .
Beweis.
r0
∫Ω
u2 dx ≤∫Ω
(r − 1
2div q
)u2 dx =
∫Ω
(ru2 +
1
2q · ∇(u2)
)dx− 1
2
∫Ω
div(u2q) dx
≤∫Ω
Luu dx ≤ ‖Lu‖0,Ω‖u‖0,Ω
denn
−1
2
∫Ω
div(u2q) dx = −∫∂Ω
q · nu2 da
= −∫∂Ω\Γin
q · nu2 da ∀u ∈ U0 mit u2q ∈ H(div, q) .
Insgesamt folgt
‖u‖0,Ω ≤1
r0
‖Lu‖0,Ω .
108

(9.6) LemmaEs gilt
supv∈V \0
b(u, v)
‖v‖0,Ω
≥ β‖u‖U ∀u ∈ U0
und β = (1 + C2L)−1/2.
Beweis. Es gilt für u ∈ U0
‖u‖2U = ‖u‖2
0,Ω + ‖Lu‖20,Ω ≤ (C2
L + 1)‖Lu‖20,Ω .
Mit v = Lu gilt dann
supv∈V \0
b(u, v)
‖v‖0,Ω
≥‖Lu‖2
0,Ω
‖Lu‖0,Ω
≥ 1√C2L + 1
‖u‖U
(9.7) FolgerungV = L(U) ⊂ L2(Ω) ist abgeschlossen und damit ein Hilbertraum.
Beweis. Wähle vnn∈N ⊂ U mit limn→∞
Lvn = f . Dann gilt
‖vn − vl‖0,Ω ≤ CL‖Lvn − Lvl‖0,Ω → 0 n, l→∞ .
Das heißt vn ist eine Cauchy-Folge in U0 und es existiert ein v ∈ U mit limn→∞
vn = v.Aus der Stetigkeit von L folgt, dann das
Lv = limn→∞
Lvn = f .
Galerkin-Ansatz Sei Vh = Uh = Pk(Ωh) ⊂ L2(Ω) mit k ∈ N0. Wählen wir k = 0dann erhalten wir Finite Volumen und Discontinous Galerkin für k ≥ 1.Für vh ∈ Vh gilt
b(u, vn) = (ru, vn)0,Ωh +∑K
(q · ∇u, vn)0,K
= (ru, vn)0,Ωh +∑K
(−u, div(qvn))0,K +
∫∂K
uq · nKvK da
= (u, rvn − div(qvn))0,Ωh +∑K
∑F∈FK
∫F
ψ(u) · nKvK da
mit dem Fluss ψ(u) = uq. Für den numerischen Fluss gilt (upwind):
ψ∗K,F (uh) =
uKq q · nK ≥ 0 AusflussuKF q q · nK < 0 F ⊂ Ωuinq q · nK < 0 F ⊂ Γin.
Abbildung 36: Abbildung
109
Wir setzen voraus, dass Γin =⋃F⊂Γin
F , F ∈ FKF und F = ∂K ∩ ∂KF . Es gilt weiterhin
bh(uh, vh) = (uh, rvn − div(qvn))0,Ωh +∑K
∑F⊂∂K
∫F
ψ∗K,F (uh) · nKvK da
= (q · ∇uh + ruh, vn)0,Ωh +∑K
∑F⊂∂K
∫F
(B∗K,F (uh)− ψ(uk)
)· nKvK da ,
mit
ψ∗(un)− ψ(uh) =
[uh]K,F q q · nk < 0
0 sonst
wobei hier
[uh]K,F = uKF − uK[uh]K,F = −uh für F ∈ F ∩ Γin .
Es folgt (ψ∗K,F (uh)− ψ(uh)
)· nK =
1
2
(q · nK − |q · nK |
)[uh]
und damit
bh(uh, vh) = (Luh, vh)0,Ωh +∑K
∑F
∫F
q · nK [uh]K,Fvh da
〈`h, vh〉 = (f, vh)0,Ω −∫Γin
uinq · nvh da .
Schließlich definieren wir
‖uh‖q,∂hΩ =∑
F∈F∩Ω
∫F
|q · n| |[uh]F | da =∑
F∈F∩∂Ω
∫F
|q · n|u2h da .
(9.8) Satz (Stabilität)Es gilt
bh(vh, vh) ≥ r0‖vh‖20,Ω + ‖vh‖2
q,∂Ωh∀vh ∈ Vh .
Beweis. Es gilt
bh(vh, vh) =∑K
(LvK , vK)0,K +
∫∂K\Γin
q · nK [vh]K,FvK da−∫Γin
q · n|vh|2 da
=
∫Ω
(r − 1
2div q)|vh|2 dx+
1
2
∫Ω
div(qv2h) da
+∑K
∑F∈FK\Γin
1
2
∫F
(q · nK − |q · nK |)[vh]K,FvK da+
∫Γin
|q · n|v2h da
≥ r0‖vh‖20,Ω +
1
2
∫∂Ω
|q · n||vh|2 da+∑
F∈F∩Ω
1
2
∫F
|q · nF |[vh]2 da .
110

Dies gilt da für F ∈ F ∩Ω gilt
q · nKv2K + q · nKF v2
KF+
1
2(q · nK − |q · nK |2)(vKF − vK)vK
+1
2(q · nKF − |q · nKF |)(vK − vKF )vKF
= q · nK(v2K − v2
KF+ vKF vK − v2
K − vKF vK + v2KF
)
− 1
2|q · nK |(vKF vK − v2
K + vKvKF − v2KF
)
= −1
2|q · nK ||[vh]K,F |2 .
Es gilt
1
2q · nv2
h + |q · n|v2h =
1
2|q · n|v2
h F ∈ F ∩ Γin
1
2q · nv2
h =1
2|q · n|v2
h F ∈ F ∩ ∂Ω\Γin .
(9.9) Lemma (Konsistenz)Sei u ∈ H1(Ω). Dann gilt für die Lösung
bh(u− uh, vh) = 0 ∀vh ∈ Vh (Galerkin-Orthogonalität.)
Beweis. Aus u ∈ H1(Ω) folgt, dass
[u]F = 0 F ∈ F ∩Ω[u]F = uin F ∈ F ∩ Γin .
Damit gilt
bh(u, vh) = (Lu, vh)0,Ω +∑K
∑F∈FK∩Ω
∫F
q · nK [u]vh da−∫Γin
q · nuv da
= (f, vh)0,Ω −∫Γin
q · nuinvh da = 〈`h, vh〉 = bh(uh, vh)
Definiere:
‖vh‖21,q,Ωh
= ‖vh‖20,Ω + ‖vh‖q,∂Ωh +
∑K
hk‖q · ∇vh‖20,K .
(9.10) Satz (Stabilität)Sei ‖q − Π0
hq‖∞ ≤ Cqh1/2. Dann existiert ein β0 > 0 mit
supφh∈Vh
bh(vh, φh)
‖φh‖1,q,Ωh
≥ β0‖vh‖1,q,Ωh ∀vh ∈ Vh .
Beweis. Für k = 0 folgt die Behauptung sofort aus (9.9).
111

i) Für wK ∈ Pk(K) gelten die inversen Ungleichungen∫∂K
|q · nK |w2K da ≤ C1h
−1K ‖wK‖
20,K ,
und
‖∇wK‖0,K ≤ C2h−1‖wK‖0,K ,
mit C1, C2 > 0 abhängig von k, q und der Gitterqualität.
ii) Zu vh ∈ Vh definiere
wK = Π0Kq · ∇vK ∈ Pk(K) = VK
dann gilt√∫∂K
|q · nK |w2K da ≤
√C1h
−1/2K ‖wK‖0,K
≤√C1h
−1/2K
(‖q · ∇vK‖0,K + Cq‖∇vK‖0,K
),
da
‖wK‖0,K = ‖Π0Kq · ∇vK‖0,Ω
≤ ‖q · ∇vK‖0,K + ‖(q − Π0Kq) · ∇vk‖0,K ≤ Cqh
12‖∇vK‖0,K .
iii) Definiere wh =∑
K hkwk. Dann folgt aus i) sofort
‖wh‖0,Ω ≤ ‖q‖∞C2‖vh‖0,Ω .
Zu zeigen
1
2
∑K
hK‖q · ∇vK‖20,K ≤ bh(vh, wh) + Cbh(vh, vh) .
Es gilt∑K
hK‖q · ∇vK‖20,K = (q · ∇vh, wh)0,Ωh +
∑K
hK(q · ∇vh, (q − Π0hq) · ∇vh)0,K
und
hK(q · ∇vK , (q − Π0Kq) · ∇vK)0,K ≤
hK4‖q · ∇vh‖2
0,K + hK‖q − Π0hq‖2
∞‖∇v‖20,K︸ ︷︷ ︸
≤C‖vK‖20,K
.
Es folgt
3
4
∑K
hK‖q · ∇vK‖20,K = (q · ∇vh, wh)0,Ωh + C‖vh‖2
0Ω
112

Aus
(q · ∇vh, wh)0,Ωh = bh(vh, wh)− (rvh, wh)0,Ω
−∑K
∫∂K\Γin
[vh]qK · nwh da−∫Γin
q · nvhwh da
folgt
3
4
∑K
hK‖q · ∇vK‖20,K ≤ bh(vh, wh) + ‖r‖∞‖vh‖0,Ω‖wh‖0,Ω
+ ‖vh‖q,Ω‖wh‖0,∂hΩ + C‖vh‖20,Ω
≤ bh(vh, wh) + C‖vh‖20,Ω + C‖vh‖2
q,Ωh
+1
4
∑K
hK‖q · ∇vK‖20,K .
Dies gilt da
‖r‖∞‖vh‖0,Ω‖wh‖0,Ω ≤ C2‖r‖∞‖q‖∞‖vh‖20,Ω
und
‖wh‖0,∂K ≤ C1h− 1
2‖wK‖0,K = C1h12‖Π0
Kq · ∇vh‖0,K
≤ C1h12
(‖q · ∇vh‖0,K + ‖q − Π0
K‖∞‖∇vh‖0,K
)≤ C1h
12‖q · ∇vh‖0,K + C3‖vh‖0,K .
Es folgt
‖wh‖20,∂K ≤ 2C2
1h‖q · ∇vh‖20,K + 2C2
3‖vh‖20,K
und damit
‖vh‖q,∂hΩ‖wh‖0,∂Ω ≤ 2C21‖vh‖2
q,∂Ω +1
8C21
‖wh‖20,∂Ωh
≤ 2C21‖vh‖2
q,∂Ωh+
1
4
∑K
hK‖q · ∇vh‖20,K +
1
4C2
3‖vh‖20,Ω .
iv) Es folgt aus ii) und iii)
‖wh‖21,q,Ωh
= ‖wh‖20,Ω + ‖wh‖2
q,∂Ωh+∑K
hK‖q · ∇vh‖20,Ω
≤ ‖q‖∞C2‖vh‖20,Ω + ‖q‖∞‖wh‖0,∂Ωh + ‖q‖∞C2
1‖vh‖20,Ω
≤ C‖vh‖21,q,Ωh
.
v) Es folgt
‖vh‖21,q,Ωh
= ‖vh‖20,Ω + ‖vh‖2
0,∂Ωh+∑K
hK‖q · ∇vK‖20,K
≤ C4bh(vh, vh) + b(vh, wh) + C‖vh‖20,Ω + C‖vh‖2
0,Ω
= bh(vh, vh) mit vh = wh + C4 + 1 + C + C︸ ︷︷ ︸C5
vh .
113
Es folgt
supφh 6=0
b(vh, φh)
‖φh‖1,q,Ωh
≥ b(vh, vh)
‖vh‖1,q,Ωh
≥ ‖vh‖1,q,Ωh
‖vh‖1,q,Ωh
≥ β0‖vh‖1,q,Ωh
mit β0 = 1C5+C4
.
Definiere
‖v‖232,q,Ωh
= ‖v‖21,q,Ωh
+∑K
(h−1K ‖v‖
20,K + ‖v‖2
0,∂K
)(9.11) Lemma (Stetigkeit)Für v ∈ V + Vh, wh ∈ Vh gilt
bh(v, wh) ≤ C‖v‖ 32,q,Ωh‖wh‖1,q,Ωh .
Beweis. Es gilt
bh(v, wh) = (rv, wh)0,Ω +∑K
(v, div(q)wh + q · ∇wh)0,K
+∑K
∑F∈FK\Γin
∫F
ψ∗K,F (v) · nKwh da−∫Γin
q · nvwh da
≤ C‖v‖0,Ω‖wh‖0,Ω +(∑
K
h−1K ‖v‖
20,K
)2(∑
K
hK‖q · ∇wh‖20,K
) 12
+(∑
K
‖v‖20,∂K
) 12‖wh‖q,∂Ωh
≤ ‖v‖ 32,q,Ωh‖wh‖1,q,Ωh .
(9.12) Satz (Konvergenz)Sei u Lösung von Lu = f , u = uin auf Γin mit u glatt genug.
a) Es gilt
‖u− uh‖1,q,Ωh ≤ C infvh∈Vh
‖u− vh‖ 32,q,Ωh
.
b) Falls u ∈ Hm+1(Ω), (m ≤ k), dann gilt
‖u− uh‖1,q,Ωh ≤ Chm+1/2‖u‖m+1,Ω .
Beweis. zu a)
‖u− uh‖1,q,Ωh ≤ ‖u− vh‖1,q,Ωh + ‖uh − vh‖1,q,Ωh
≤ ‖u− v‖1,q,Ωh +1
β0
supφh∈Vh
bh(vh − u,wh)‖wh‖1,q,Ωh
≤(
1 +C
β0
)‖u− vh‖ 3
2,q,Ωh
.
114

zu b)Seien ‖vh‖ = Π0
hu (k = 0) oder vh = Πmh u (k > 1), dann gilt
‖u− vh‖ ≤ Chm+1‖Dm+1u‖0,Ω
also ∑K
hK‖q · ∇(u− vh)‖20,K ≤ hCh2m‖Dm+1u‖2
0,Ω
‖u− vh‖q,∂Ωh ≤ Ch−12‖u− vh‖0,Ωh ≤ Chm+ 1
2‖u‖m+1∑K
h−1K ‖u− vh‖
20,K ≤ h−1Ch2(m+1)‖Dm+1u‖2
0,Ω .
Transportgleichung
Zu q : Ω → Rd, Γin = x ∈ ∂Ω : q · n < 0 und
f : (0, T )×Ω → R
uin : (0, T )× Γin → R
u0 : Ω → R
bestimme u : [0, T ]× Ω → R mit
∂tu+ q · ∇u = f, in Q = (0, T )×Ωu(t, x) = uin(t, x) (t, x) ∈ (t, x)× Γin
u(0, x) = u0(x) x ∈ Ω .
Starke Lösung (strong solutions)Sei Lv = ∂v + q · ∇v. Definiere
H(L,Q) = v ∈ L2(Q) : Lv ∈ L2(Q)= v ∈ L2(Q) : w ∈ L2(Q) existiert mit(w, φ)0,Q = (v, L∗φ) ∀φ ∈ C1
c(Q)
mit L∗w = −∂tw − div(qw). Dies gilt da
(Lv,w)0,Q − (v, L∗w)0,Q = (∂tv, w)0,Q + (q · ∇v, w)0,Q + (v, div qw)0,Q
=
∫ T
0
∂t(v(t), w(t))0,Ω dt+
∫ T
0
∫Ω
div(vwq) dx dt = 0
für v, w ∈ C10(Q). Definiere weiter
U0 = v ∈ C1(Ω) : v(0) = 0, v(t, x) = 0 für (t, x) ∈ [0, T ]× Γin ,
mit U0 = Abschluss von U0 in H(L,Q) bzgl. ‖v‖L,Q =(‖v‖2
0,Q + ‖Lv‖20,Q
) 12 .
(9.13) LemmaEs existiert CL > 0 mit ‖v‖0,Q ≤ CL‖Lv‖0,Q für alle v ∈ U0.
115

Beweis. Es gilt für v ∈ U0
‖v‖20,Q =
∫ T
0
(‖v(t)‖2
0,Ω − ‖v(0)‖20,Ω
)dt =
∫ T
0
∫ t
0
∂t‖v(s)‖20,Ω ds dt
= 2
∫ T
0
∫ t
0
(∂tv(s), v(s))0,Ω ds dt
≤ 2
∫ T
0
∫ t
0
((∂tv(s), v(s))0,Ω +
∫∂Ω\Γin
q · nv(s)2 da
)ds dt .
O.E. sei div q = 0 und da∫∂Ω\Γin
q · nv(s)2 da =
∫∂Ω
q · nv(s)2 da =
∫Ω
div qv2 dx = 2
∫Ω
vq · ∇v dx
gilt, folgt insgesamt
2
∫ T
0
∫ t
0
((∂tv(s), v(s))0,Ω +
∫∂Ω\Γin
q · nv(s)2 da)
ds dt
= 2
∫ T
0
∫ t
0
(∂tv(s) + q · ∇v(s), v(s))0,Ω ds dt
≤ 2
∫ T
0
∫ t
0
‖Lv(s)‖0,Ω‖v(s)‖0,Ω ds ≤ 2T︸︷︷︸CL
‖Lv‖0,Ω‖v‖0,Q .
(9.14) SatzL : U0 → L2(Q) ist unter unseren Voraussetzungen surjektiv.
Beweis. Sei f ∈ L2(Q). Zu ε > 0 existiert N , sodass ‖f − fN‖0,Q < ε, mit
fnN = fN(t) =1
MtN
∫ tN ,n
tN ,n−1
f(t) dt
mit t ∈ (tN,n−1, tN,n) und MtN = TN
, tN,n = nMtN .Wir müssen zeigen, dass ein uN ∈ U0 existiert mit LuN = fN .Definiere u0
N = uN(0) = 0 und unN ∈ H0(LN , Ω) = v ∈ L2(Ω) : LN ∈ L2(Ω) mitLNv = 1
MtNv + q∇v.
O.E. sei 1MtN− 1
2div q ≥ 0. Dann folgt
1
MtN(u1
N − un−1N ) + q∇unN = fnN ⇔ (LNu
nN , v)0,Ω = (f − 1
MtNun−1N , v)0,Ω ∀v ∈ L2(Ω)
Aus (9.7) folgt dann, dass eine Lösung existiert.Definiere uN ∈ H(L,Q) als linearen Spline von u0
N , u1N , . . . , u
NN . Daraus folgt
limN→∞
‖LuN − f‖0,Ω = 0.
116

(9.15) SatzSei f ∈ L2(Q). Dann existiert eine eindeutige Lösung u ∈ U0 von Lu = f und es gilt mitβ = 1√
1+C2L
und
(Lu, v)0,Q = (f, v)0,Q,
supv 6=0
(Lu, v)0,Q
‖v‖0,Q
≥ β‖u‖U ,
‖u‖U ≤1
β‖f‖0,Q .
Beweis. Aus (9.14) folgt das eine Lösung u existiert und die Eindeutigkeit folgt aus (9.13).Zu u wähle v = Lu. Dann gilt
supv 6=0
(Lu, v)0,Q
‖v‖0,Q
≥ (Lu, Lu)0,Q
‖Lu‖0,Q
= ‖Lu‖0,Q ≥
√‖u‖2
0,Q + ‖Lu‖20,Q
1 + C2L
.
Daraus folgt insgesamt
‖u‖U ≤1
βsupv 6=0
(Lu, v)0,Q
‖u‖0,Q
=1
βsupv 6=0
(f, v)0,Q
‖u‖0,Q
= ‖f‖0,Q .
Schwache Lösungen Sei u ∈ H(L,Q), v ∈ U∗0 . Dann gilt
(f, v)0,Q = (Lu, v)0,Q
= (u, L∗v)0,Q + (u(T ), v(T ))0,Ω − (u(0), v(0))0,Ω +
∫(0,T )×∂Ω
uvq · n da .
u ∈ L2(Ω) heißt schwache Lösung wenn
(u, L∗v)0,Q = (f, v)0,Q + (u0, v(0))0,Ω −∫
(0,T )×Γin
uinvq · n da =: 〈`, v〉 ∀v ∈ U∗0 .
(9.16) SatzSei
|〈`, v〉| ≤ C`‖v‖U∗ ∀v ∈ U∗0 .
Dann existiert eine eindeutige Lösung u ∈ L2(Ω) mit
(u, L∗v)0,Q = 〈`, v〉 ∀v ∈ U∗0
und es gilt
supφ∈U∗0
(u, L∗φ)
‖φ‖U∗≥ β‖u‖0,Q .
Das bedeutet
‖u‖0,Q ≤1
β‖`‖U ′ =
1
βsupφ∈U∗0
〈`, φ〉‖φ‖U∗
.
117

Beweis. b∗(u, v) = (u, L∗v)0,Q ist inf-sup-stabil in L2(Ω) × U∗0 und L∗ ist injektiv. Zu-sammen mit der Dualität aus Kapitel 7 folgt die Behauptung.
BemerkungSei
J(v) =1
2‖L∗v‖2
0,Q − 〈`, v〉
≥ β2
2‖v‖2
U∗ −2
β‖`‖U ′
β
2‖v‖U∗
≥ β2
4‖v‖2
U∗ −1
β2‖`‖2
U ′
Das heißt es existiert ein eindeutiges Minimum u∗ von J(·), also u = L∗u∗.Formal: Löse LL∗u∗ = `. Und mit u = L∗u∗ folgt Lu = `.
Das Riemann-Problem Sei Ω = Rd, x0 = Ω, n ∈ S1 und q ∈ Rd. Weiter sei
u0(x) =
uL, x ∈ ΩL = x ∈ Ω : (x− x0) · n < 0uR, x ∈ ΩR = x ∈ Ω : (x− x0) · n > 0.
BeispielSei q ≡ 1, d = 1 und n = 1 mit ∂tu+ ∂xu = 0.Dann ist
u(t, x) =
uL, (t, x) ∈ QL =
(tx
): (x− x0) · n < tq · n
uR, (t, x) ∈ QR = (tx
): (x− x0) · n > tq · n
schwache Lösung von, d.h. für alle v ∈ C1c(R× Rd) gilt
(u, L∗v)0,Q = −uL∫QL
(∂tv + div(qv)) dx− uR∫QR
(∂tv + div(qv)) dx
= (u0, v(0))0,Ω − uL∫ T
0
∫∂QL
(−q · nn
)·(v
qv
)da dt
− uR∫ T
0
∫∂QR
(q · n−n
)·(v
qv
)da dt
= (u0, v(0))0,Ω .
Der Upwind-Flux ist die Lösung des Riemann-Problems, d.h. ψ(u) = qu und
ψ∗(u) =
uLq, q · n > 0uRq, q · n < 0.
Sei uh ∈ P(Ωh) und F ∈ FK ∩ FKF . Setze uL = uK und uR = uKF . Dann folgt
ψ∗(uh) =
uKq, q · nK ≥ 0uKF q, q · nK < 0 F ∩Ωuinq, q · nK < 0 F ∩ ∂Ω.
118

Zu N ∈ N Zeitschritten definiere Qh =N⋃n=1
⋃K
(tn−1, tn) × K. Weiter sei Wh = Pk(Ωh)
und
Vh =N⋃n=1
⋃K
P0 ⊗ Pk(K) ⊂ L2(Q)
Uh = vh ∈ C([0, T ];Wh) ∩⋃R
P1 ⊗ Pk(K) : vh(0) = 0 .
Es folgt dass dimVh = dimUh und ∂tUh = Vh.Definiere Lh = ∂t + Ah mit
(Ahvh, wh)0,Ωh = (qh · ∇vh, wh)0,Ωh − (qh · nvh, wh)0,Γin +∑K
∑F∈F in
K∩Ω
(qh · nF [vh]K,F , wh)0,F
und F inK = F ∈ FK : qh · nK < 0.
Implizite MittelpunktsregelSei u0
h = Πhu0, Mt = TN
der Zeitschritt und fN = Πhf ∈ Vh mit
1
Mt(unh − un−1
h ) +1
2Ah(u
nh + un−1
h ) = fnh .
Definiere linearen Spline
uh(t, x) =N∑n=1
φn(t)unh(x)
mit φn(t) = max0, 1− |t−tn|Mt . Es folgt für t ∈ (tn−1, tn), dass ∂tuh(t) = 1Mt(u
nh − un−1
h )und dass
(Ahuh, vh)0,Qh =N∑n=1
1
2(Ah(u
nh + un−1
h ), vh)0,Ωh .
Das heißt, uh ∈ Uh löst (für u0 = 0)
bh(uh, vh) = (f, vh)0,Q + (uin, vh)(0,T )×Γin ∀vh ∈ Vh .
Konsistenz:
(Ahv, w)0,Ω = (qh · ∇v, w)0,Ω = (Av,w)0,Ω ∀v, w ∈ Wh ∩ H1(Ω) .
(9.17) SatzEs gilt
supvh∈Vh\0
bh(uh, vh)
‖vh‖0,Q
≥ β‖uh‖Uh
‖u− uh‖Uh ≤ C infvh∈Uh
‖u− vh‖Uh
bzgl.
‖v‖2Uh
= ‖v‖20,Q + ‖ΠhLhv‖0,Q v ∈ U + Uh
mit Lhv = Lv für v ∈ U .
119
Beweis. Sei Πh : Uh → Vh die L2-Projektion, d.h.
(Πhw, vh)0,Q = (w, vh)0,Q w ∈ L2(Q)
Zeige:
‖vh‖0,Q ≤ 2T‖ΠhLhvh‖0,Q ∀vh ∈ Uh .
Es gilt
‖vh‖20,Q =
∫ T
0
(‖vh(t)‖2
0,Ω − ‖vh(0)‖20,Ω
)dt = 2
∫ T
0
∫ t
0
(∂tvh(s), vh(s))0,Ω ds dt
= 2
∫ T
0
(T − t)(∂tvh(t), vh(t))0,Ω dt = 2(∂tvh, (T − t)vh)0,Q
≤ 2(∂tvh, (T − t)Πhvh)0,Q .
Dies folgt aus
(∂tvh, (T − t)(vh − Πhvh))0,Q =N∑n=1
1
Mt(vnh − vn−1
h , (T − t)(φn − φn−1)(vnh − vn−1h ))0,Ω
=N∑n=1
1
Mt
∫ tn−1
tn
(T − t)tn + tn−1 − 2t
Mtdt‖vnh − vn−1
h ‖20,Ω > 0 .
Es folgt dann
(ΠhAhvh, (T − t)Πhvh)0,Q =N∑n=1
1
4
∫ tn
tn−1
(T − t) dt(Ah(vn−1h + vnh), vn−1
h + vnh)0,Ω
und damit schließlich
‖vh‖20,Q ≤ 2(∂tvh + ΠhAh︸ ︷︷ ︸
ΠhLhvh
vh, (T − t)Πhvh)0,Q ≤ 2T‖ΠhLhvh‖0,Q‖vh‖0,Q .
Insgesamt ergibt sich
‖vh‖0,Q ≤ CL︸︷︷︸2T
‖ΠhLhvh‖0,Q
und
supwh∈Vh\0
bh(vh, wh)
‖wh‖0,Q
≥ (Lhvh,ΠhLhvh)0,Q
‖ΠhLhvh‖0,Q
= ‖ΠhLhvh‖0,Q ≥ β‖vh‖Uh .
120





























