Embed Size (px)
DESCRIPTION
spdm
Citation preview

Fakulta strojní
Katedra konstruování strojů
Semestrální práce z předmětu
KKS/SPDM1 Téma:
Určení velikosti potřebné energie pro
pohyb elektromobilu
Autor:
Pavel Florian

Úvod Tento semestrální projekt se zabývá studií pohonného systému elektromobilu se
zaměřením na stanovení kapacity akumulátorů pro zajištění určitého dojezdu. Za tímto
účelem bylo vytvořeno několik matematických modelů v prostředí MATLAB/Simulink.
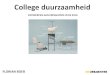
New European Driving Cycle K zjištění referenčního zátěžného stavu, ze kterého se při návrhu kapacity vychází, byl
použit jízdní cyklus NEDC (Obr. 1). Hodnoty rychlosti se uplatňují při výpočtu síly
aerodynamického odporu, která je dána vztahem:
,
kde je hustota vzduchu, součinitel odporu, čelní plocha a rychlost vozidla.
Obrázek 1 – Průběh rychlosti NEDC
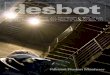
K zahrnutí vlivu setrvačné síly je nutné znát průběh zrychlení během jízdního cyklu.
Zrychlení získáme časovou derivací rychlosti (Obr. 2). Průběh zrychlení je nutné upravit.
Záporné hodnoty při deceleraci znamenají, že se elektromotor chová jako generátor a dobíjí
baterii. V tomto případě ovšem neuvažujeme regenerativní brzdění, a proto všechny záporné
hodnoty položíme rovno nule. Výsledný průběh je znázorněn na Obr. 2. Setrvačná síla se pak
stanoví jednoduše jako součin rychlosti a hmotnosti. Posledním uvažovaným silovým
účinkem je valivý odpor pneumatik.
Obrázek 2 - Modifikovaný průběh zrychlení NEDC
0 100 200 300 400 500 600-10
0
10
20
30
40
50
60
70
80Target speed
Time (sec)
spdm8/10-15 mode : 10-15 Mode Cycle

Regulační smyčka Základním principem, který zde byl využit, aby se model choval požadovaným
způsobem, je princip zpětnovazebního řízení. Roli regulátoru plnil PID regulátor a největším
problémem bylo správně stanovit jednotlivé konstanty. To se v případě některých modelů
zcela nepodařilo, a tak chování nebylo úplně přesné, ale především rychlost samotného
výpočtu vyvážila tento nedostatek.
Obrázek 3 - Regulační smyčka
Varianty matematických modelů První varianta modelu (Obr. 4) byla nejkvalitnější z hlediska způsobu řízení. Byla zde
využita PWM modulace a diskrétní PID regulátor. Tento přístup byl ovšem nejnáročnější
z hlediska požadovaných znalostí i výpočetního času, což se vzhledem k velkému počtu iterací
projevilo jako zásadní nedostatek.
Obrázek 4 - První varianta s PMW modulací
V druhé variantě (Obr. 5) byl použit jiný blok elektromotoru s integrovaným PID
regulátorem. Tato varianta byla nejlepší z hlediska přesnosti regulace, ale neumožňovala
zapojení baterie a výpočetní čas byl stále příliš dlouhý.

Obrázek 5 - Varianta 2
Poslední evoluce (Obr. 6) se vyznačuje jednodušším modelem elektromotoru, jehož
parametry byly získány z katalogu Siemens (Obr. 7), a řízením pomocí přímé regulace napětí.
Tento způsob řízení sice není tak přesný a neodpovídá původně dohodnutým požadavkům,
ale zásadní výhoda tkví v rychlosti výpočtu. Celý jízdní cyklus (660 s) lze nasimulovat během
necelé vteřiny, což je řádově 1000 krát méně než předchozí varianty.
Princip řízení spočívá v tom, že do PID regulátoru vstupuje požadovaná rychlost jako
referenční signál a výstupem akčního členu je určeno napětí na elektromotoru. Dále je
snímán signál proudu v elektromotoru, kterým se zatěžuje baterie. Proces vybíjení baterie
tedy není řešen v hlavní smyčce, ale probíhá paralelně.
Obrázek 6 - Varianta 3

Obrázek 7 - Parametry bloku elektromotoru
Na následujícím obrázku je znázorněna charakteristika baterie. Jednotlivé parametry
byly přizpůsobeny tak, aby odpovídaly bateriím značky Sinopoly.
Obrázek 8 - Charakteristika baterie
Hlavní výsledky jsou graficky shrnuty na následující stránce (Obr. 9). Z grafů plyne, že
během jednoho cyklu ujede vozidlo přibližně 3820 m, přičemž stav nabití baterie (SOC) klesne
na 87%. S ohledem na charakteristiku baterie lze konstatovat, že kapacita 100 Ah v tomto
případě dostačuje na dojezd přibližně 23 km. Pokud bychom chtěli překonat 100 km,
budeme potřebovat baterii více než 4 krát větší. Na Obrázku 10 je skutečný průběh rychlosti,
který se poměrně odlišuje od průběhu z Obrázku 1. Absolutní hodnoty rychlosti jsou však až
do určitého momentu téměř shodné. Při výpočtu bylo provedeno několik zjednodušení, mj.
působení konstantního valivého odporu bez ohledu na to, jestli vozidlo stojí, či jede. Tímto lze
vysvětlit překmitávání rychlosti do záporných hodnot. Na Obr. 11 je znázorněn průběh
výkonu elektromotoru během jízdního cyklu, který ve špičkách dosahuje 40 kW, což je
„rozumná“ hodnota sloužící jako kontrola správnosti řešení.

Obrázek 9 - Průběh některých sledovaných veličin
Obrázek 10 - Skutečný průběh rychlosti
Obrázek 11 - Průběh výkonu elektromotoru

Závěr V rámci tohoto semestrálního byl simulován pohonný systém elektromobilu se
zaměřením na dojezd. K řešení bylo využito prostředí MATLAB/Simulink. Bylo zjištěno, že
pokud uvažujeme 500kg elektromobil, budeme potřebovat baterie o kapacitě více než 400 Ah
k dojezdu 100 km. Původně navržení systém řízení pomocí PWM modulace byl zjednodušen.
Největším problémem, který vnáší nejistoty do výsledků, při řešení podobných úloh je to, že
potřebujeme znát velké množství rozličných parametrů, které se často nenacházejí v odborné
literatuře. V tomto případě se jedná především o parametry elektromotoru, které mohou
značně ovlivnit výsledek.