Embed Size (px)
Citation preview
Fondamenti di automatica – prof. S. Chiaverini
1
Relazione di
Fondamenti di automatica
Prof. Stefano Chiaverini
Corso di laurea di ingegneria delle telecomunicazioni
II anno – III quadrimestre
A.A. 2001/2002
Elaborato D
Studente relatore:
Antonio Formato
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis

Antonio Formato
2
Indice
Pag.
• Considerazioni generali sul sistema in esame......................................................................3 • Calcolo di C(s) e H per il controllo in retroazione………………………………………...4 • Errore a regime…………………………………………………………………………...…5 • Analisi delle proprietà di stabilità………………………………………………………….7 Criterio di Routh……………………………………………………………………………..7
Criterio di Nyquist…………………………………………………………………………...9 • Correzione della risposta armonica………….......……………………………………….13 • Valutazione tramite legami globali della risposta del sistema ………………………….19 • Verifica nel dominio del tempo della correttezza dell’ analisi svolta…..………………22 • Riferimenti bibliografici…………………….…………………………………………….24
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis

Fondamenti di automatica – prof. S. Chiaverini
3
-Considerazioni generali sul sistema in esame Si consideri per l’impianto P il seguente modello implicito ingresso – uscita lineare e stazionario:
( ) )(5.1)(15)(25)(10 2
2
3
3
tudt
tdudt
tdydt
tyddt
tyd+=++ .
Questo sistema è un sistema LTI (detto lineare stazionario o lineare tempo invariante) di ordine n, con una variabile di ingresso e una di uscita; la risposta y(t) è determinata da un legame espresso da un’equazione differenziale di ordine n=3. A partire da queste informazioni si possono dedurre alcune osservazioni: in primo luogo è soddisfatta la condizione mn ≥ la quale indica che il sistema è causale e quindi fisicamente realizzabile; più precisamente n>m quindi si può dire che la risposta è continua. Per ricavare la soluzione dell’equazione differenziale che modella l’impianto è conveniente procedere con il metodo della trasformata di Laplace che consente una più agevole soluzione. Questo tipo di trasformazione funzionale stabilisce una corrispondenza biunivoca tra funzioni del tempo e funzioni immagine in modo da rendere più semplice la soluzione in quanto consente di convertire un problema costituito da equazioni differenziali in un problema di equazioni algebriche.
Il primo passo da svolgere è ricavare la funzione di trasferimento )()()( sU
sYsP = .
Operando la trasformazione di Laplace si ottiene:
)(5.1)(15)(25)(10)( 23 sUsUssYssYssYs ⋅+⋅⋅=⋅⋅+⋅⋅+⋅
2)5(5.115
)()()(
++
==sss
sUsYsP
Pu y
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis

Antonio Formato
4
-Calcolo di C(s) e H per il controllo in retroazione
Schema di controllo in retroazione
C(s) e H devono essere ricavate in modo da soddisfare le seguenti specifiche progettuali:
6)(2)(
)(6)()(2)(
,3
33
=⇒⋅=⋅=⇒⋅=
∞−
−−
A
d
ettrttyttr
δδδ
sistema a ciclo chiuso sia astatico nei confronti dell’ingresso non manipolabile )()( 1 ttd −= δ . C(s) indica l’azione di controllo devoluta al controllore, H caratterizza l’azione svolta dai componenti sul ramo di retroazione. Con r(t) si indica l’ ingresso di riferimento, sapendo che l’ uscita desiderata viene fornita in ingresso ad un sistema di controllo tramite un segnale ad essa proporzionale dd Kytr =)( , si impone la condizione
3)(2)(6
)(2)(6)()(3
333 =
⋅⋅
=⇒⋅⋅=⋅⇒⋅=−
−−− t
tKtKttrKty dddd δ
δδδ
Si faccia l’ ipotesi di una retroazione puramente algebrica (anche se ciò richiederebbe l’ uso di un trasduttore ideale) in modo da sfruttare la relazione
dKH 1= .
311
==dK
H .
C(s) P(s)
R Y
D
H
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis

Fondamenti di automatica – prof. S. Chiaverini
5
-Errore a regime Si consideri un riferimento in forma di segnale canonico di ordine (K+1)
)()( )1(0 tRtr k+−= δ
e se ne consideri anche la Laplace-trasformata
10)( += Ks
RsR
Particolarizzando queste due espressioni per il problema in esame si ottiene:
2)(2)( 03 =⇒= − Rttr δ
332)](2[)( stLsR == −δ
)(1 t−δ )(2 t−δ )(3 t−δ
h=1 pd
d
KKRK+
02
∞ ∞
h=2 0 v
d
KRK 0
2
∞
h=3 0 0 a
d
KRK 0
2
Tabella: Errore a regime per 2,2 ≤≤ kh .
Secondo la tabella dell’ errore a regime, considerando )(2)( 3 ttr −= δ si ricava che per ottenere un errore finito deve essere h=3, ovvero la funzione di trasferimento deve avere due poli nell’ origine. Dato che un polo nell’ origine è già presente in P(s), lo si deve aggiungere in C(s) che assume in
questo modo la forma: s
KsC c=)( .
Con riferimento alla tabella si evince che, nel caso h=2 e )(2)( 3 ttr −= δ , si ottiene:
a
d
KRKe 0
2
=∞
Il guadagno G0 è indicato per diversi valori h:
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis

Antonio Formato
6
=
⋅=
=
=
⋅→
→
→
)(limlimlim
2
)(
)(
0
0
0
0
sGss
a
sv
sp
K
sGsK
sGK
G
sostituendo si ottiene:
32362
02
=⇒⋅
=⇒=∞ aaa
d KKK
RKe
quindi
)(2
0lim sGsK
sa ⋅=
→
con )()()( sPsCsG ⋅= funzione di trasferimento del ramo di azione diretta
503255.1
3)5(5.1153)()( 2
2
0
2
0limlim =⇒=⇒=
++
⋅⇒=⋅⋅→→
ccc
ssK
Ksss
sK
ssPsCs
22
22
)5(375750)()()(
)5(75750)()()(
50)(
++
=⋅=
++
=⋅=
=
ssssHsGsF
ssssPsCsG
ssC
La richiesta di astatismo nei confronti di un ingresso non manipolabile di tipo a gradino impone la presenza di un polo nell’ origine nella funzione di trasferimento di catena diretta a monte dell’ applicazione del disturbo. Infatti quando )()( 10 tDtd −= δ si ha K=0, il sistema a ciclo chiuso risulta astatico se e solo se è presente in C(s) almeno un polo nell’ origine. Da queste considerazioni si
evince che la struttura minima della funzione C(s) deve essere s
KsC c=)( , essendo in questo caso
ssC 50)( = si può certamente affermare che la specifica riguardante l’ astatismo è soddisfatta.
Applicando il teorema del valor finale al limite:
Essendo h1=1, K=0, D0=1, H=1/3, il limite è uguale a zero perché risulta soddisfatta la condizione h1>K.
0)(0.20.1
00,2
0
1
limlim =⋅⋅+
⋅⋅−= +
−
→∞→ HGGsDGs
te hh
kh
sD
t
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis

Fondamenti di automatica – prof. S. Chiaverini
7
-Analisi delle proprietà di stabilità - Criterio di Routh Per il sistema a ciclo chiuso ottenuto si analizzano le proprietà di stabilità al variare del guadagno Kc determinando l’ intervallo si valori che ne assicurano la stabilità asintotica. La funzione di trasferimento in retroazione è:
)5.115()5(3)5.115(3
)5(3)5.115(
1
)5(5.115
)(1)()( 22
22
2
++++
=
++
+
++
=+
=sKss
sK
sssK
sss
sK
sFsGsW
c
c
c
c
L’ equazione caratteristica è:
5.115753035.115)2510(3 23422cccc KsKsssKsKsss ++++=++++
Essendo il polinomio caratteristico una equazione algebrica a coefficienti reali è possibile applicare il criterio di Routh. Il primo passo da svolgere è la costruzione della tabella di Routh a partire dall’ equazione caratteristica.
4 3 75 1.5Kc
3 30 15Kc 2 b1 b2 1 c1 0 a0
c
c
K
K
b2375
30753
1530
1 −==
cc K
Kb 5.1
305.13030
2 ==
c
ccc
KKK
bK
bb
c3150
)452160(1530
1
21
1 −−
==
cKa 5.10 =
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis
Antonio Formato
8
Sostituendo i valori ottenuti nella tabella: 4 3 75 1.5Kc
3 30 15Kc 2 75-Kc3/2 1.5Kc
1 c
cc
KKK
3150)452160(
−−
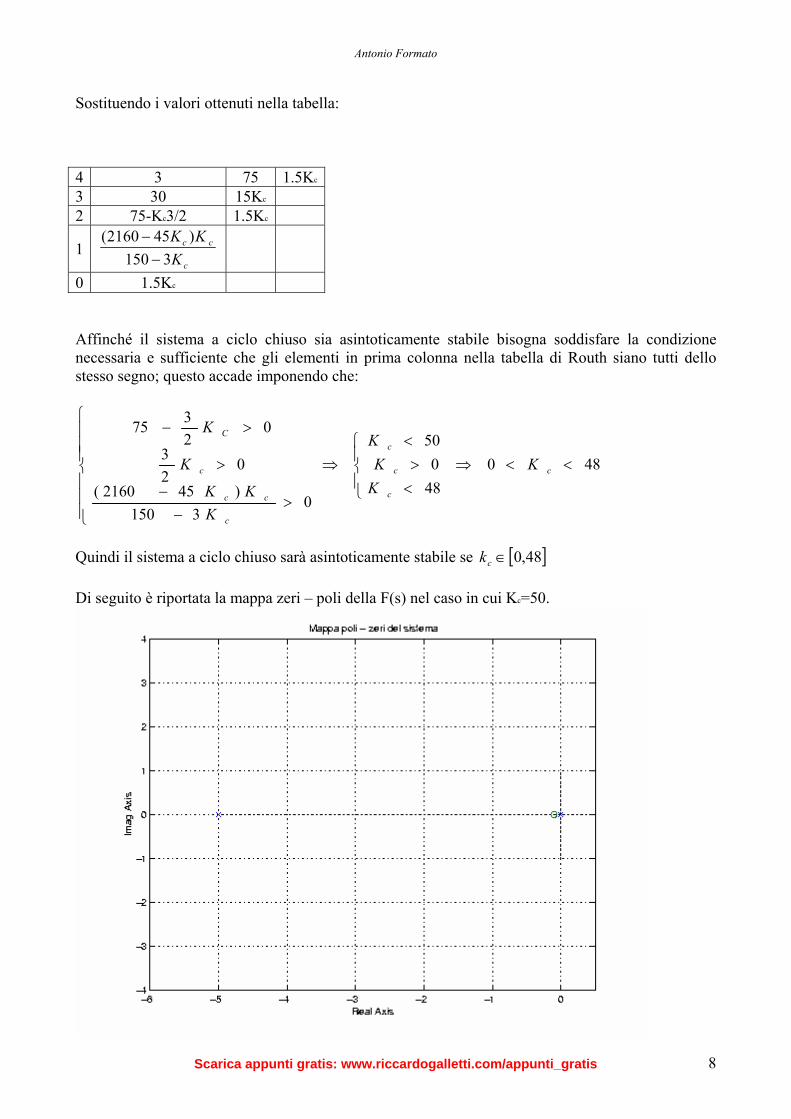
0 1.5Kc Affinché il sistema a ciclo chiuso sia asintoticamente stabile bisogna soddisfare la condizione necessaria e sufficiente che gli elementi in prima colonna nella tabella di Routh siano tutti dello stesso segno; questo accade imponendo che:
<<⇒
<><
⇒
>−
−
>
>−
480480
50
03150
)452160(
023
02375
c
c
c
c
c
cc
c
C
KKK
K
KKK
K
K
Quindi il sistema a ciclo chiuso sarà asintoticamente stabile se ][ 48,0∈ck Di seguito è riportata la mappa zeri – poli della F(s) nel caso in cui Kc=50.
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis
Fondamenti di automatica – prof. S. Chiaverini
9
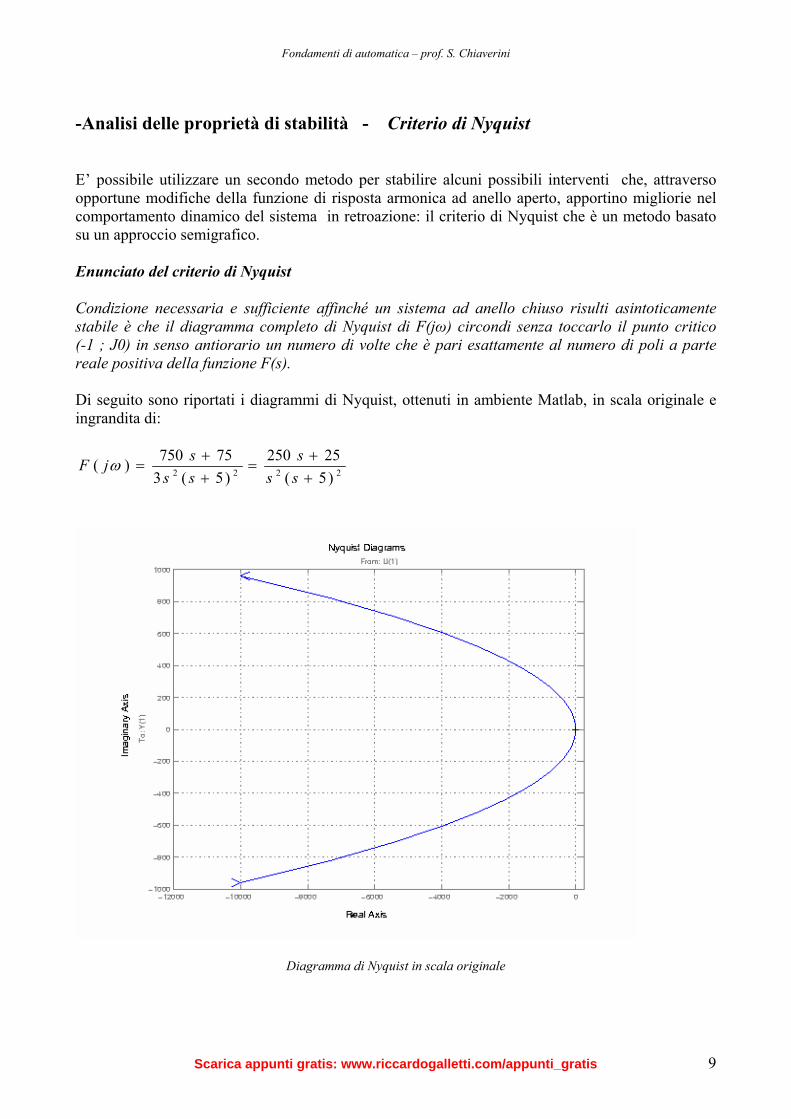
-Analisi delle proprietà di stabilità - Criterio di Nyquist E’ possibile utilizzare un secondo metodo per stabilire alcuni possibili interventi che, attraverso opportune modifiche della funzione di risposta armonica ad anello aperto, apportino migliorie nel comportamento dinamico del sistema in retroazione: il criterio di Nyquist che è un metodo basato su un approccio semigrafico. Enunciato del criterio di Nyquist Condizione necessaria e sufficiente affinché un sistema ad anello chiuso risulti asintoticamente stabile è che il diagramma completo di Nyquist di F(jω) circondi senza toccarlo il punto critico (-1 ; J0) in senso antiorario un numero di volte che è pari esattamente al numero di poli a parte reale positiva della funzione F(s). Di seguito sono riportati i diagrammi di Nyquist, ottenuti in ambiente Matlab, in scala originale e ingrandita di:
2222 )5(25250
)5(375750)(
++
=++
=sss
sssjF ω
Diagramma di Nyquist in scala originale
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis
Antonio Formato
10
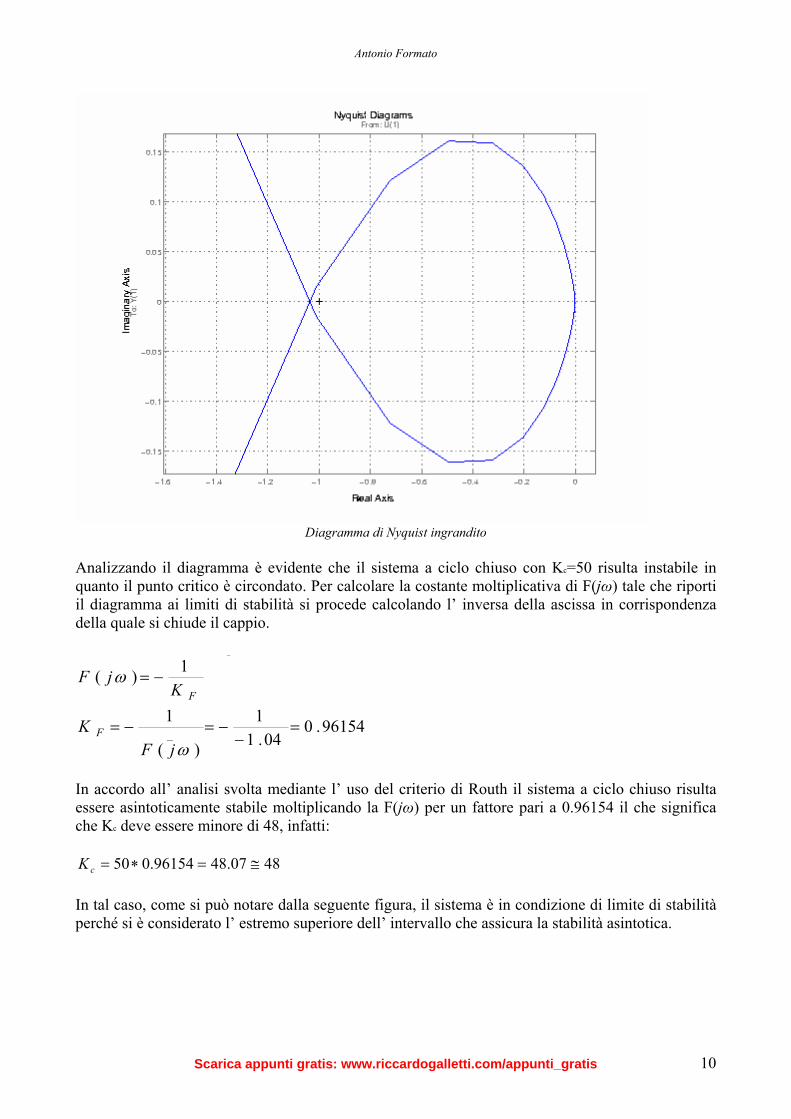
Diagramma di Nyquist ingrandito
Analizzando il diagramma è evidente che il sistema a ciclo chiuso con Kc=50 risulta instabile in quanto il punto critico è circondato. Per calcolare la costante moltiplicativa di F(jω) tale che riporti il diagramma ai limiti di stabilità si procede calcolando l’ inversa della ascissa in corrispondenza della quale si chiude il cappio.
96154.004.1
1
)(
1
1)(
_ =−
−=−=
−=−
ω
ω
jFK
KjF
F
F
In accordo all’ analisi svolta mediante l’ uso del criterio di Routh il sistema a ciclo chiuso risulta essere asintoticamente stabile moltiplicando la F(jω) per un fattore pari a 0.96154 il che significa che Kc deve essere minore di 48, infatti:
4807.4896154.050 ≅=∗=cK
In tal caso, come si può notare dalla seguente figura, il sistema è in condizione di limite di stabilità perché si è considerato l’ estremo superiore dell’ intervallo che assicura la stabilità asintotica.
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis
Fondamenti di automatica – prof. S. Chiaverini
11
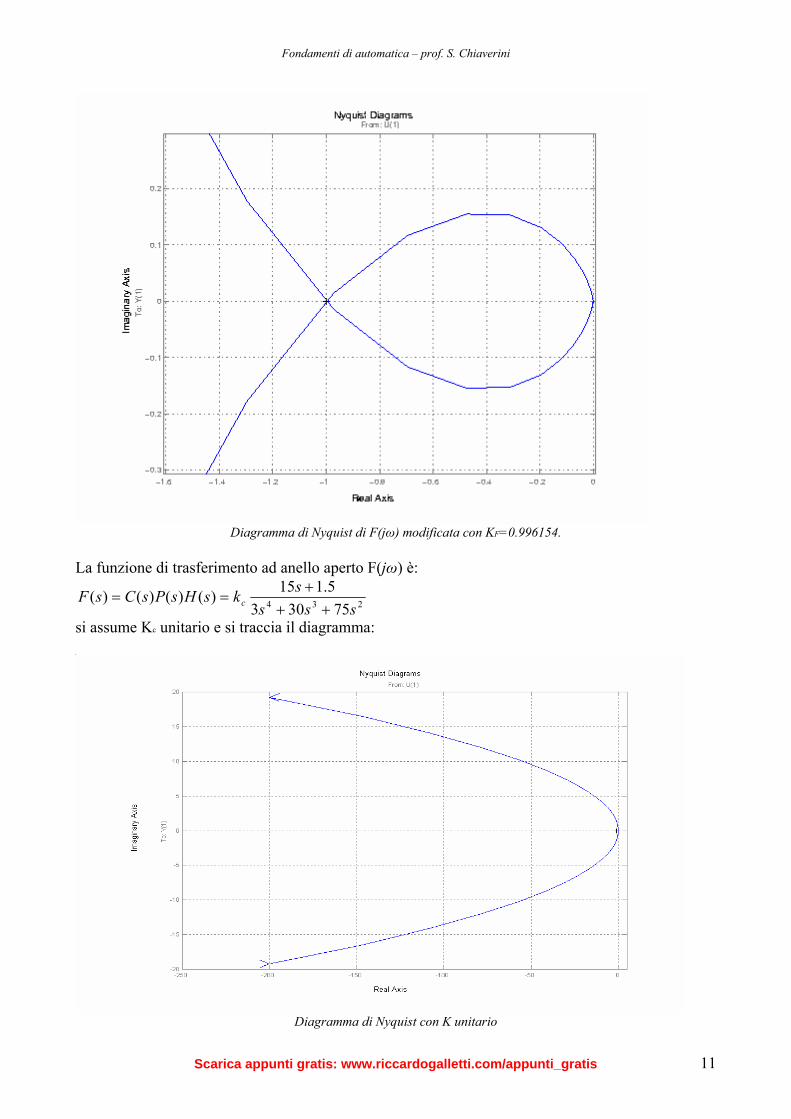
Diagramma di Nyquist di F(jω) modificata con KF=0.996154.
La funzione di trasferimento ad anello aperto F(jω) è:
234 753035.115)()()()(
ssssksHsPsCsF c +++
==
si assume Kc unitario e si traccia il diagramma:
Diagramma di Nyquist con K unitario
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis

Antonio Formato
12
Si applica un ingrandimento della figura per visualizzare al meglio la zona di interesse:
E’ evidente dalla figura che il punto critico non è circondato quindi il sistema è stabile. Dal grafico si ricava la coordinata del cappio e si ricava
( )[ ]
480208.01
0208,0Re
≅=
=
cK
sF
Questo risultato è un ulteriore conferma della correttezza dell’ analisi di stabilità del sistema; si può quindi affermare che, essendo il valore di Kc limitato, il sistema si trova in condizione di stabilità condizionata.
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis
Fondamenti di automatica – prof. S. Chiaverini
13
-Correzione della risposta armonica Si richiede di modificare la risposta armonica del sistema in modo da soddisfare la seguente specifica:
F(jω) : °= 40ϕm e s
radt 1=ω
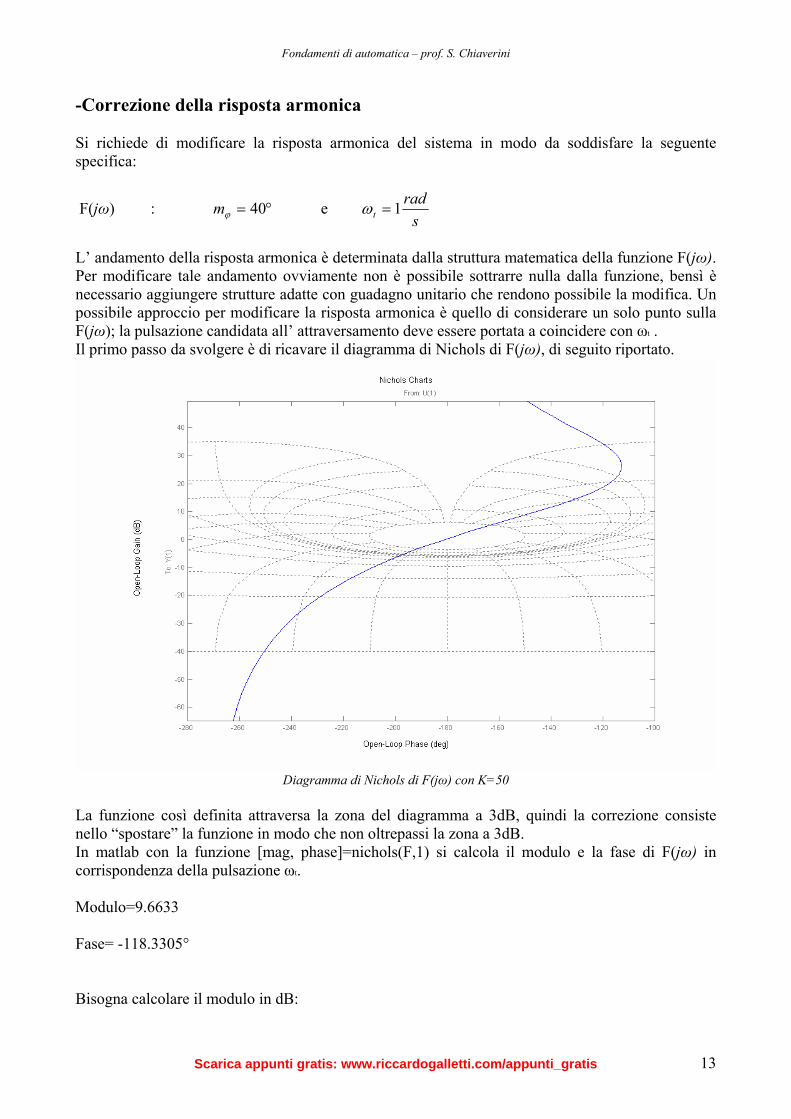
L’ andamento della risposta armonica è determinata dalla struttura matematica della funzione F(jω). Per modificare tale andamento ovviamente non è possibile sottrarre nulla dalla funzione, bensì è necessario aggiungere strutture adatte con guadagno unitario che rendono possibile la modifica. Un possibile approccio per modificare la risposta armonica è quello di considerare un solo punto sulla F(jω); la pulsazione candidata all’ attraversamento deve essere portata a coincidere con ωt . Il primo passo da svolgere è di ricavare il diagramma di Nichols di F(jω), di seguito riportato.
Diagramma di Nichols di F(jω) con K=50
La funzione così definita attraversa la zona del diagramma a 3dB, quindi la correzione consiste nello “spostare” la funzione in modo che non oltrepassi la zona a 3dB. In matlab con la funzione [mag, phase]=nichols(F,1) si calcola il modulo e la fase di F(jω) in corrispondenza della pulsazione ωt. Modulo=9.6633 Fase= -118.3305° Bisogna calcolare il modulo in dB:
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis

Antonio Formato
14
dBdBModulo 7025.196633.9log20 == Per soddisfare la specifica si deve applicare un’ opportuna rete ritardatrice - attenuatrice che ha una funzione di trasferimento pari a
sssG
τατ++
=1
1)(
Bisogna solo ricavare i parametri caratterizzanti questo sistema che sono α e τ tenendo in considerazione che
om 226695.213305.1184018040 −≅−=++−=⇒°= ϕϕ quindi si deve attenuare di 19.07dB e ritardare di 22° la risposta armonica del sistema. I parametri della rete correttrice si ricavano per via grafica dalla carta di Nichols andando a leggere le coordinate individuate dal vettore individuato sulla carta che attenua e ritarda secondo i valori richiesti:
2222111111
=⇒=
=⇒=
τωτ
αα
E’ possibile ricavare α e τ anche per via analitica attraverso le seguenti relazioni:
( ) 0943.0111
3.2311
1034.010
22
2
207025.19
=−+=
=⋅−−
=
==−
Mtg
tgMtgM
M
ϕωτ
α
ϕϕ
ωτ
Sostituendo i valori ottenuti è possibile ricavare la funzione di trasferimento G(s) della rete correttrice:
ss
s
ssG
22121
22111221
)(++
=+
+=
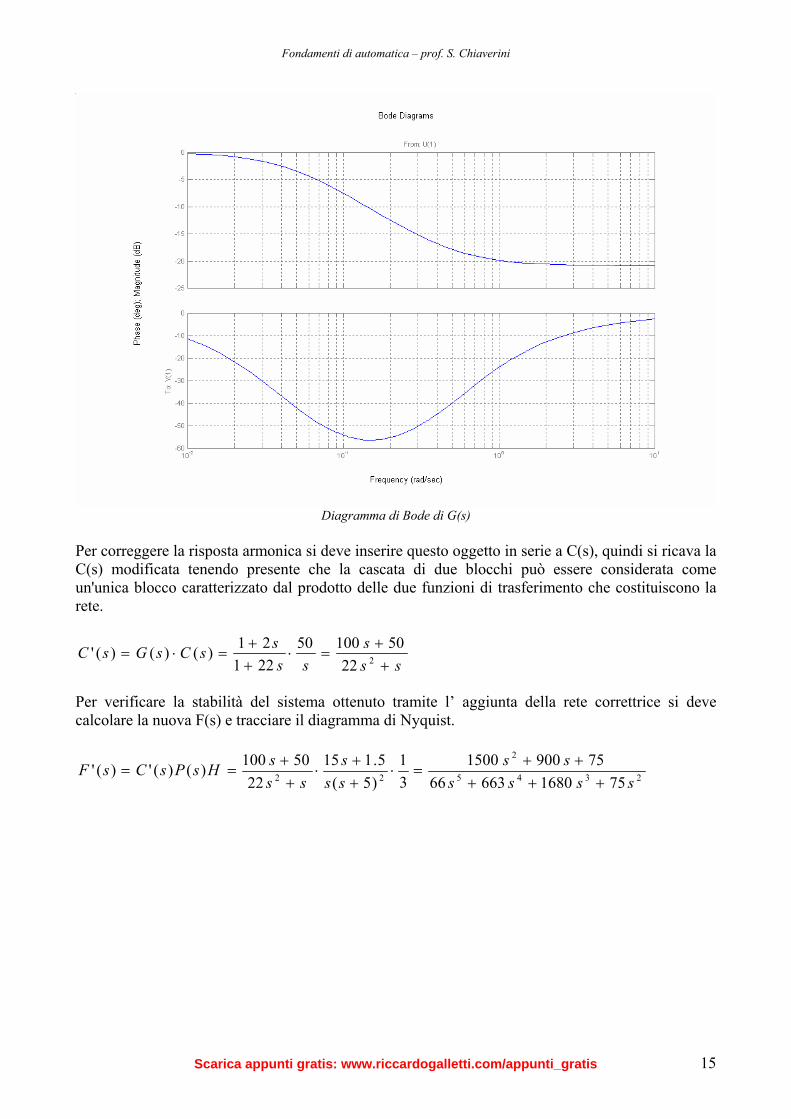
Dal diagramma di Bode di G(s), riportato di seguito, si evince che alle basse frequenze la rete correttrice non cambia sensibilmente il guadagno e la fase; all’ aumentare della frequenza la rete produce un’ attenuazione e un ritardo ben evidenti nel diagramma che consente di modificare la risposta armonica del sistema in analisi.
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis
Fondamenti di automatica – prof. S. Chiaverini
15
Diagramma di Bode di G(s)
Per correggere la risposta armonica si deve inserire questo oggetto in serie a C(s), quindi si ricava la C(s) modificata tenendo presente che la cascata di due blocchi può essere considerata come un'unica blocco caratterizzato dal prodotto delle due funzioni di trasferimento che costituiscono la rete.
sss
ssssCsGsC
++
=⋅++
=⋅= 2225010050
22121)()()('
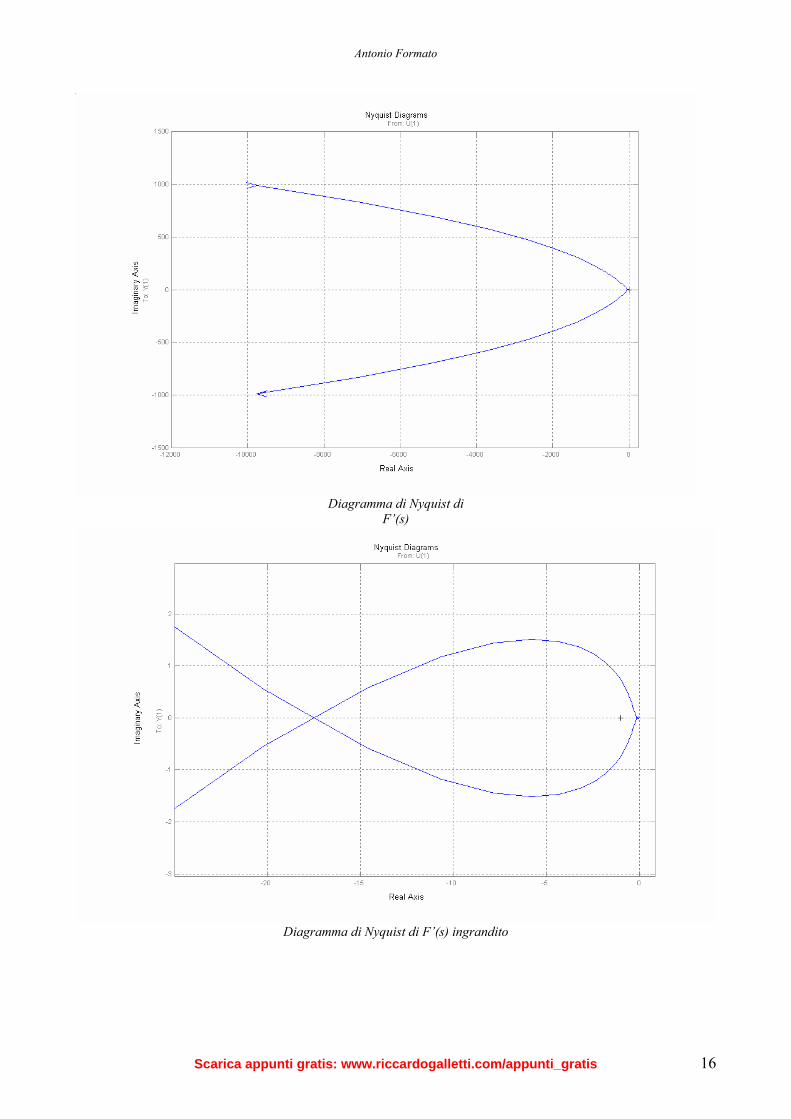
Per verificare la stabilità del sistema ottenuto tramite l’ aggiunta della rete correttrice si deve calcolare la nuova F(s) e tracciare il diagramma di Nyquist.
2345
2
22 75168066366759001500
31
)5(5.115
2250100)()(')('
ssssss
sss
sssHsPsCsF
+++++
=⋅++
⋅++
==
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis
Antonio Formato
16
Diagramma di Nyquist di
F’(s)
Diagramma di Nyquist di F’(s) ingrandito
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis
Fondamenti di automatica – prof. S. Chiaverini
17
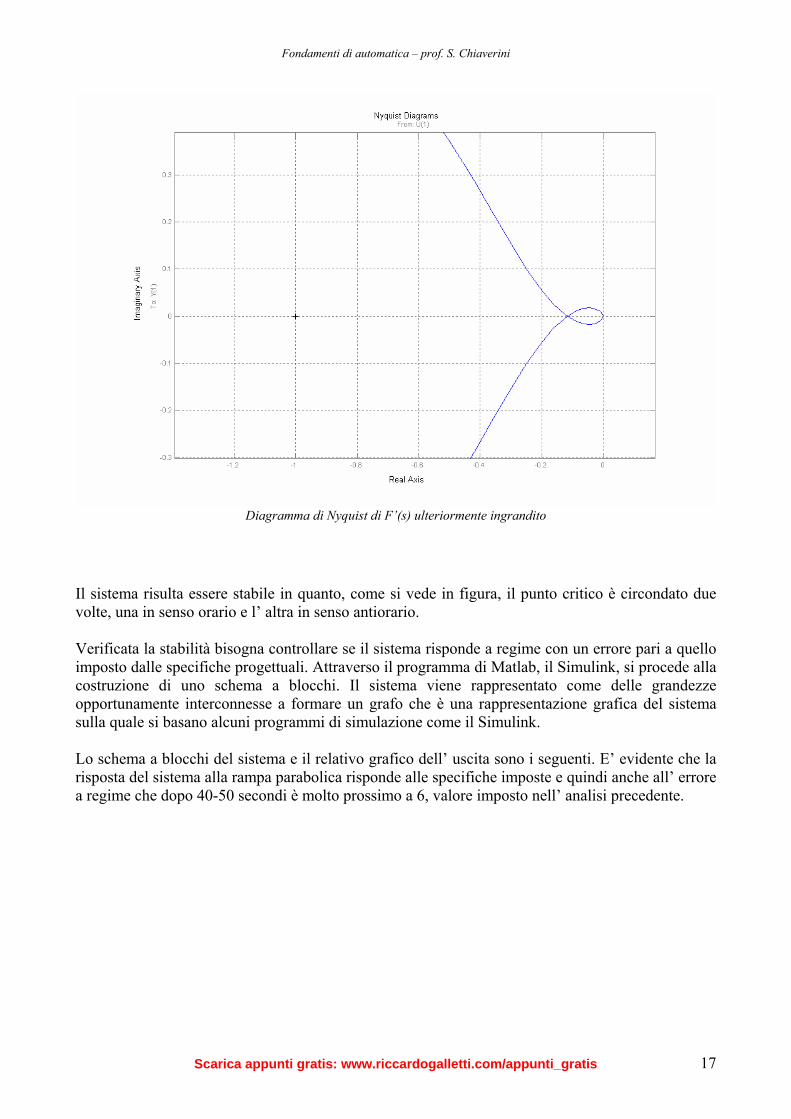
Diagramma di Nyquist di F’(s) ulteriormente ingrandito
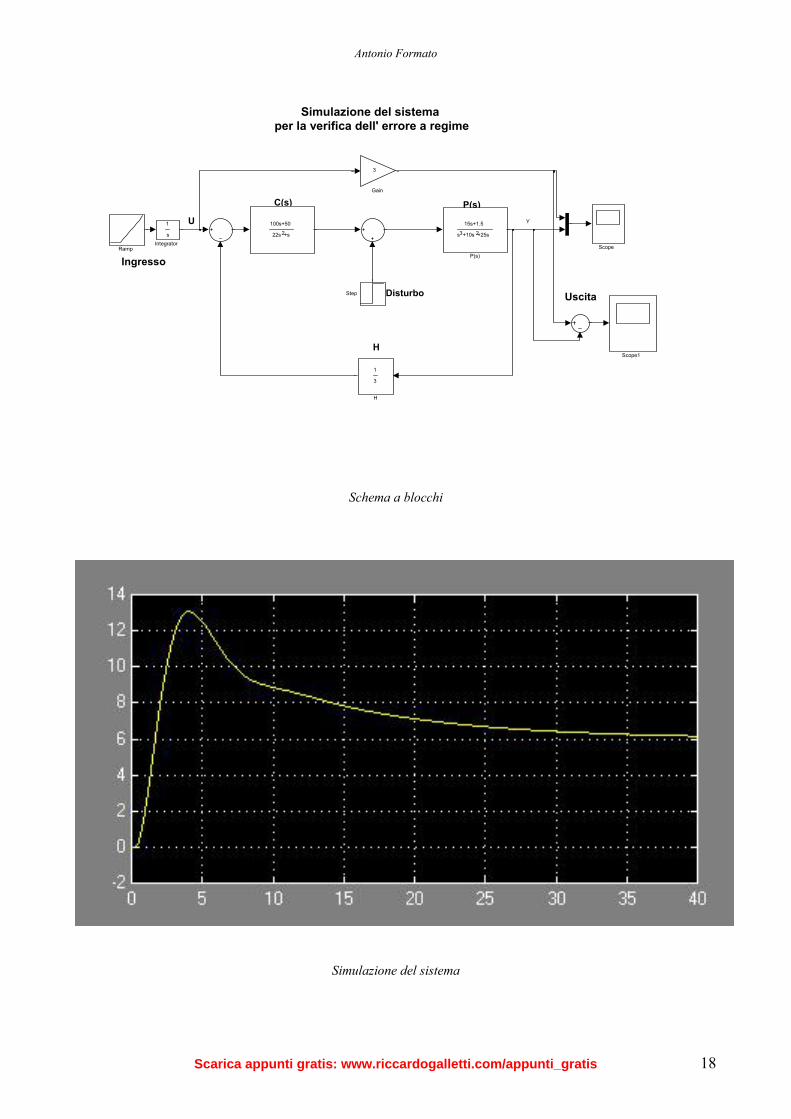
Il sistema risulta essere stabile in quanto, come si vede in figura, il punto critico è circondato due volte, una in senso orario e l’ altra in senso antiorario. Verificata la stabilità bisogna controllare se il sistema risponde a regime con un errore pari a quello imposto dalle specifiche progettuali. Attraverso il programma di Matlab, il Simulink, si procede alla costruzione di uno schema a blocchi. Il sistema viene rappresentato come delle grandezze opportunamente interconnesse a formare un grafo che è una rappresentazione grafica del sistema sulla quale si basano alcuni programmi di simulazione come il Simulink. Lo schema a blocchi del sistema e il relativo grafico dell’ uscita sono i seguenti. E’ evidente che la risposta del sistema alla rampa parabolica risponde alle specifiche imposte e quindi anche all’ errore a regime che dopo 40-50 secondi è molto prossimo a 6, valore imposto nell’ analisi precedente.
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis
Antonio Formato
18
Schema a blocchi
Simulazione del sistema
Simulazione del sistema per la verifica dell' errore a regime
C(s) P(s)
H
Disturbo
Ingresso
YU
Uscita Step
Scope1
Scope Ramp 15s+1.5
s +10s +25s3 2
P(s)
1 s
Integrator
1
3
H
3
Gain
100s+50 22s +s 2
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis
Fondamenti di automatica – prof. S. Chiaverini
19
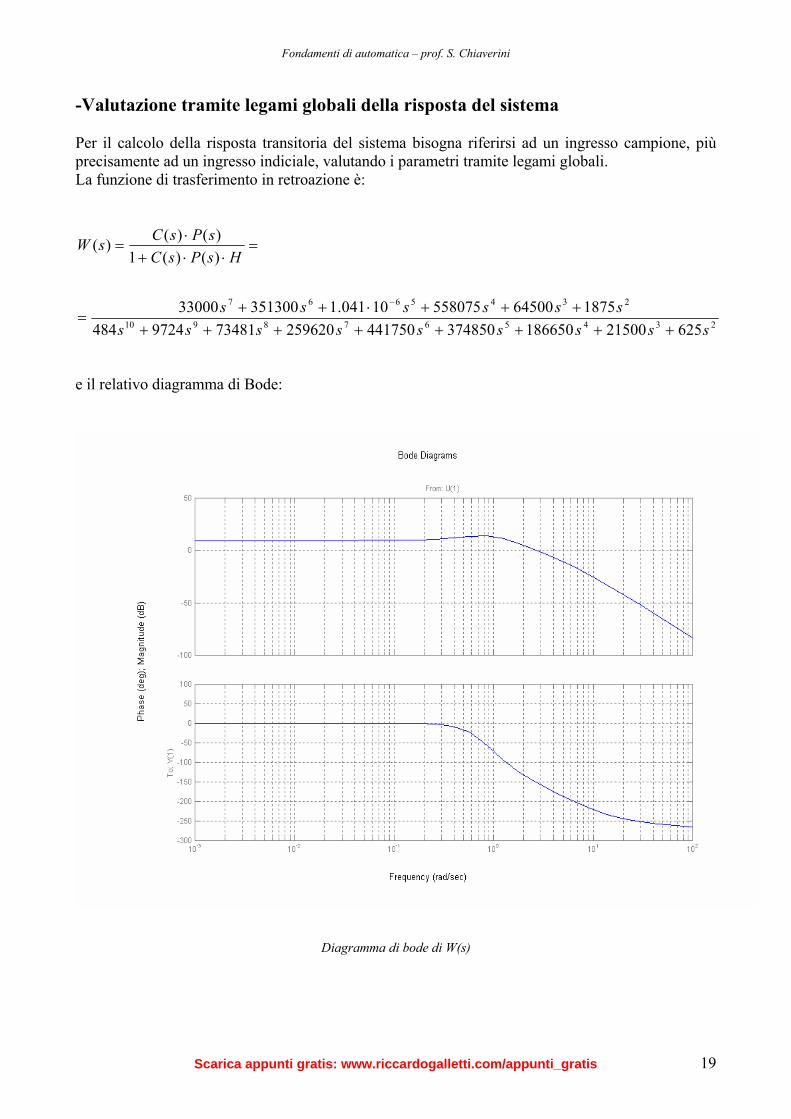
-Valutazione tramite legami globali della risposta del sistema Per il calcolo della risposta transitoria del sistema bisogna riferirsi ad un ingresso campione, più precisamente ad un ingresso indiciale, valutando i parametri tramite legami globali. La funzione di trasferimento in retroazione è:
2345678910
2345667
6252150018665037485044175025962073481972448418756450055807510041.135130033000
)()(1)()()(
sssssssssssssss
HsPsCsPsCsW
+++++++++++⋅++
=
=⋅⋅+
⋅=
−
e il relativo diagramma di Bode:
Diagramma di bode di W(s)
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis
Antonio Formato
20
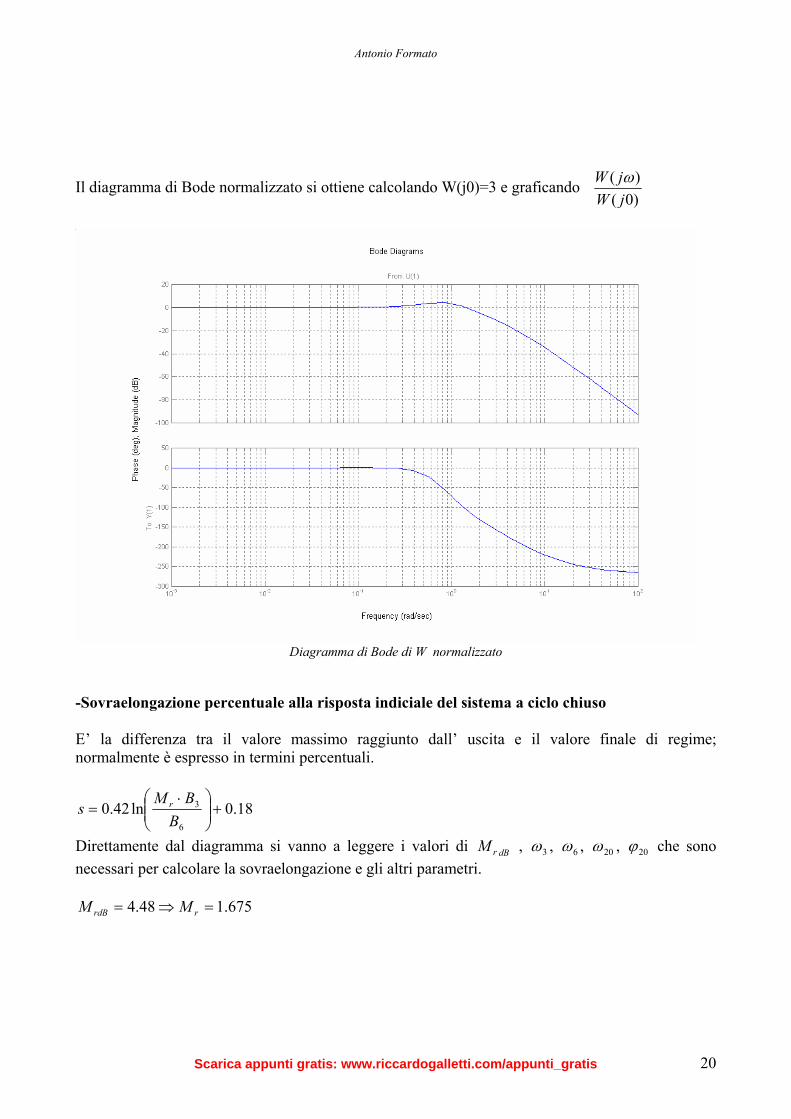
Il diagramma di Bode normalizzato si ottiene calcolando W(j0)=3 e graficando )0()(
jWjW ω
Diagramma di Bode di W normalizzato
-Sovraelongazione percentuale alla risposta indiciale del sistema a ciclo chiuso E’ la differenza tra il valore massimo raggiunto dall’ uscita e il valore finale di regime; normalmente è espresso in termini percentuali.
18.0ln42.06
3 +
⋅=
BBM
s r
Direttamente dal diagramma si vanno a leggere i valori di dBrM , 3ω , 6ω , 20ω , 20ϕ che sono necessari per calcolare la sovraelongazione e gli altri parametri.
675.148.4 =⇒= rrdB MM
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis

Fondamenti di automatica – prof. S. Chiaverini
21
°−=
===⇒=
===⇒=
===⇒=
186
7926.02
98.42
98.4
3469.02
18.22
18.2
2833.0278.1
278.1
20
202020
666
333
ϕππ
ωω
ππω
ω
ππω
ω
Bs
rad
Bs
rad
Bs
rad
Sostituendo i valori nella formula precedente si ricava la sovraelongazione:
3116.018.03469.0
2833.0675.1ln42.018.0ln42.06
3 =+
⋅
=+
⋅=
BBM
s r
-Tempo di salita alla risposta indiciale del sistema a ciclo chiuso E’ l’ intervallo di tempo definito dalle intersezioni della tangente al tempo all’ emivalore con l’ asse delle ascisse e il valore di regime.
sB
tr 29.13469.0
45.045.0
6
===
-Tempo di assestamento alla risposta indiciale del sistema a ciclo chiuso E’ il tempo occorrente affinché l’ uscita rimanga entro il 5± % del valore finale.
sB
BMB
t ra 36.74.0
3469.02833.0675.116.2
3469.014.016.21
6
3
6%5, =
−
⋅=
−=
-Tempo all’ emivalore alla risposta indiciale del sistema a ciclo chiuso E’ il tempo in cui la risposta raggiunge metà del valore di regime.
sB
te 07.13469.0
186002.0002.0
6
20 =⋅
=⋅
=ϕ
-Periodo di prima oscillazione alla risposta indiciale del sistema a ciclo chiuso E’ la misura del periodo della prima oscillazione della risposta indiciale.
'22.1B
T =
22.02
4.12
4.1 ===⇒=ππ
ωω I
II Bs
rad
sB
T 54.522.022.1
'22.1
===
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis
Antonio Formato
22
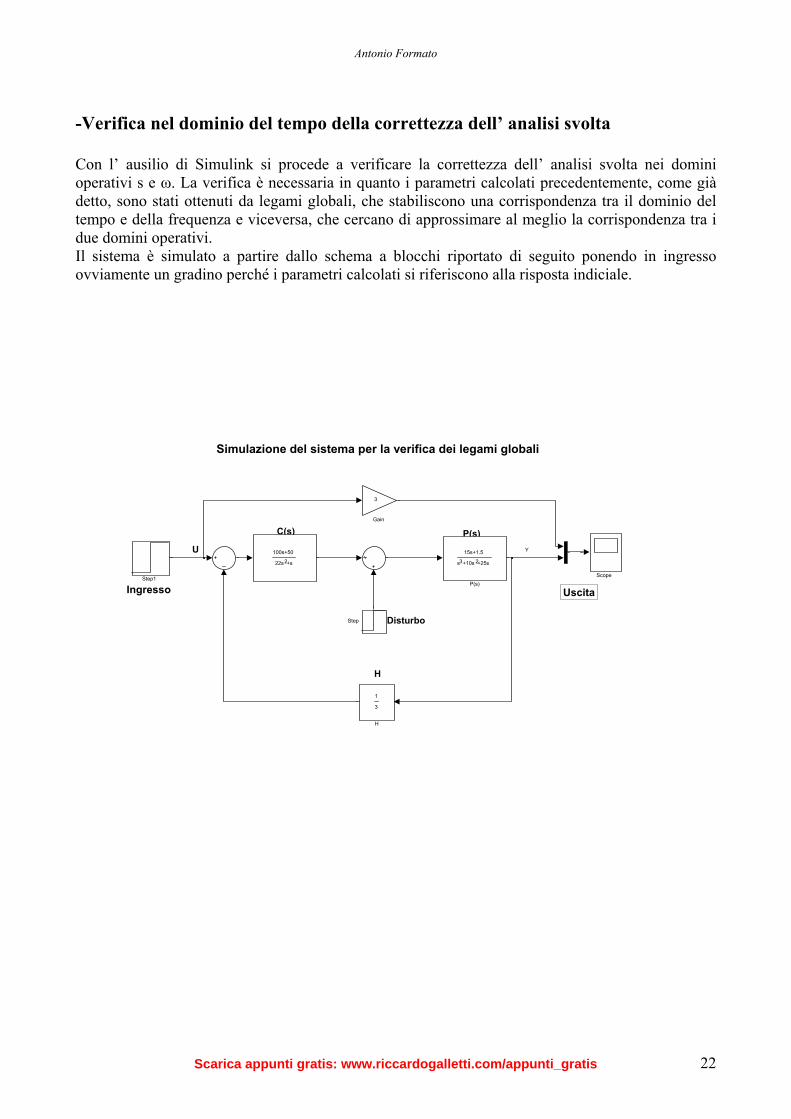
-Verifica nel dominio del tempo della correttezza dell’ analisi svolta Con l’ ausilio di Simulink si procede a verificare la correttezza dell’ analisi svolta nei domini operativi s e ω. La verifica è necessaria in quanto i parametri calcolati precedentemente, come già detto, sono stati ottenuti da legami globali, che stabiliscono una corrispondenza tra il dominio del tempo e della frequenza e viceversa, che cercano di approssimare al meglio la corrispondenza tra i due domini operativi. Il sistema è simulato a partire dallo schema a blocchi riportato di seguito ponendo in ingresso ovviamente un gradino perché i parametri calcolati si riferiscono alla risposta indiciale.
Simulazione del sistema per la verifica dei legami globali
C(s) P(s)
H
Disturbo
Ingresso
YU
Uscita Step1
Step
Scope 15s+1.5
s +10s +25s3 2
P(s)
1
3
H
3
Gain
100s+50 22s +s 2
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis
Fondamenti di automatica – prof. S. Chiaverini
23
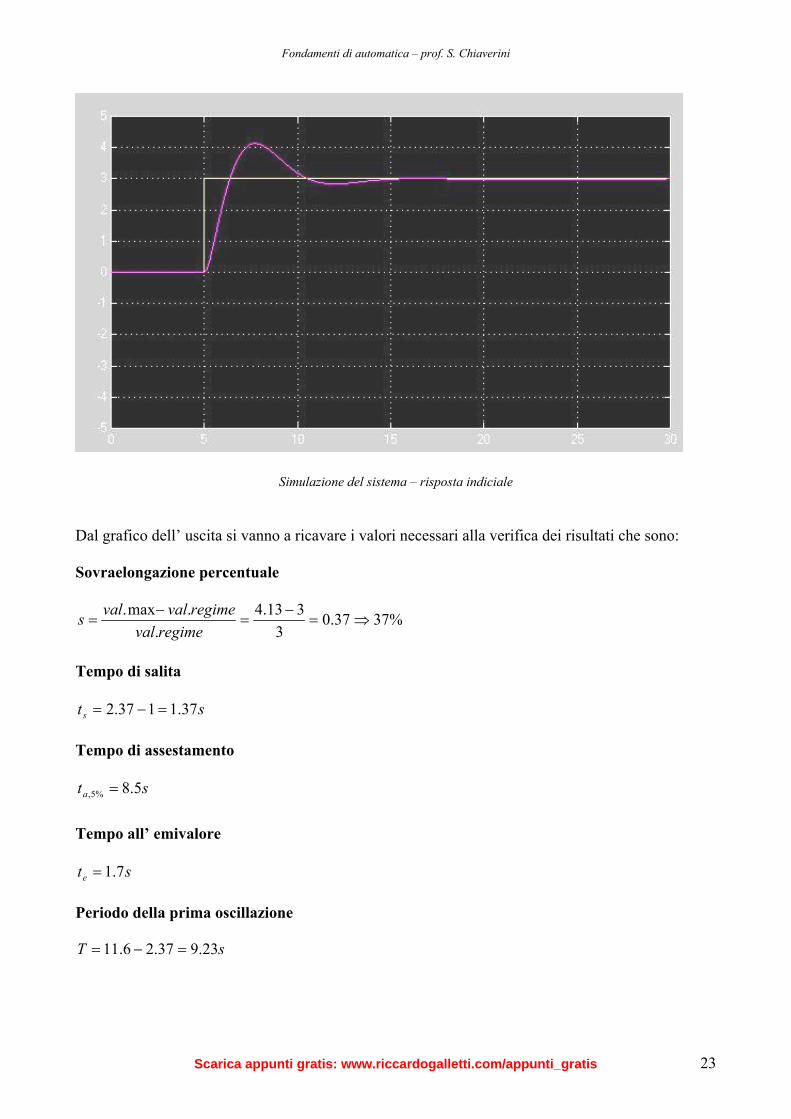
Simulazione del sistema – risposta indiciale Dal grafico dell’ uscita si vanno a ricavare i valori necessari alla verifica dei risultati che sono: Sovraelongazione percentuale
%3737.03
313.4.
.max.⇒=
−=
−=
regimevalregimevalvals
Tempo di salita
sts 37.1137.2 =−= Tempo di assestamento
sta 5.8%5, =
Tempo all’ emivalore
ste 7.1= Periodo della prima oscillazione
sT 23.937.26.11 =−=
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis

Antonio Formato
24
Riferimenti bibliografici
-Appunti dalle Lezioni di Automatica A.A. 2001/2002-Stefano Chiaverini -Controlli Automatici- Giovanni Marro, quarta edizione Zanichelli -Manuale di elettronica e Telecomunicazioni-G. Biondo, E. Sacchi, quarta edizione, cap. 6 -Appunti personali del corso
Scarica appunti gratis: www.riccardogalletti.com/appunti_gratis