Embed Size (px)
Citation preview
はじめてのおつかい 1 号(改)
for つくばチャレンジ 2009
台車制御モジュール
ハードウェア設計書
Version 0.8
2009 年 4 月 19 日
冨山 隆志
2
変更履歴
Ver. 日付 主な内容 備考
0.0 2009/03/30 初版作成開始
0.8 2009/04/19 実装を除いて暫定リリース
3
目次
1. CART CONTROL MODULE 概要...................................................................... 5
1.1. CART CONTROL MODULE とは ............................................................................. 5
1.2. 本仕様書の適用範囲 ........................................................................................... 5
1.3. 関連資料 ............................................................................................................ 5
2. 仕様 ................................................................................................................. 6
2.1. 基本仕様 ............................................................................................................ 6
2.2. 電気的仕様 ......................................................................................................... 6
2.3. インタフェース仕様 ........................................................................................... 6
ホスト通信 I/F(USB-mini B Receptacle) ................................................................ 6
バッテリコネクタ(CN1~4) ..................................................................................... 7
DC モータ(CN5) ......................................................................................................... 7
ロータリーエンコーダ(CN6) ....................................................................................... 7
温度センサ(CN7).................................................................................................... 7
LRF 用 12V 電源(CN8) .......................................................................................... 7
クーリングファン用 12V 電源(CN9) ....................................................................... 8
RC 受信機(CN10) ................................................................................................... 8
RC サーボモータ(CN11) ........................................................................................ 8
3. CART CONTROL MODULE のアーキテクチャ ................................................. 9
3.1. CART CONTROL MODULE の機能ブロック構成 .................................................... 9
3.2. RC 受信機のデコード方式.................................................................................. 9
3.3. RC サーボモータの位置決め制御 ..................................................................... 10
4. 回路の詳細 ..................................................................................................... 11
4.1. CPU ................................................................................................................ 11
CPU のアドレスマップ(モード3:シングルチップモード) .................................... 11
通常動作(シングルチップモード).......................................................................... 11
オンボード書き換え(ブートモード) ...................................................................... 12
4.2. リセット回路 ................................................................................................... 13
4.3. USB-UART 変換モジュール ............................................................................ 13
マニュアル走行モードスイッチ................................................................................. 14
4.4. 電源部 .............................................................................................................. 14
制御用 5V 電源回路 ................................................................................................... 14
12V 電源回路 ............................................................................................................ 15
6V および 21.6V 電源回路......................................................................................... 15
4
4.5. DC モータ制御部 ............................................................................................. 16
モータドライバ IC .................................................................................................... 17
モータの制御方法 ..................................................................................................... 18
温度センサ ................................................................................................................ 18
4.6. ロータリーエンコーダ ..................................................................................... 19
4.7. RC サーボモータ I/F ........................................................................................ 19
4.8. RC 受信機 I/F .................................................................................................. 19
5. 実装 ............................................................................................................... 20
5.1. 回路図 .............................................................................................................. 20
5.2. レイアウト ....................................................................................................... 20
5.3. 配線図 .............................................................................................................. 20
5.4. 部品リスト ....................................................................................................... 20
APPENDIX A 巡航速度における電流の見積もり ..................................................... 21
モータが発生すべきトルク ....................................................................................... 21
巡航速度における車輪の回転数................................................................................. 22
モータに流れる電流 .................................................................................................. 23
APPENDIX B 登坂時における電流の見積もり .......................................................... 24
5
1. Cart Control module 概要
1.1. Cart Control module とは
Cart Control module は、2009 年度のつくばチャレンジ用ロボットカートの制御モ
ジュールである。冨山は 2008 年度に引き続き、2009 年度もつくばチャレンジに参加
することを目指し、2008 年度のロボットカートの制御モジュールを大幅に見直して
2009 年度版の制御モジュールを開発する。新しい制御モジュールでは 2008 年度の反
省に基づき、電源回路まわりの信頼性向上と電力効率向上、モータドライバ IC の変更、
CPU の変更、基板サイズの縮小を図る。
1.2. 本仕様書の適用範囲
本仕様書は、2009 年度のつくばチャレンジ用ロボットカートの制御モジュール仕様
および回路の動作について説明する。
1.3. 関連資料
はじめてのおつかい1号(改)for Tsukuba challenge 2009 開発構想書
はじめてのおつかい1号(改)for Tsukuba challenge 2009 概念設計
6
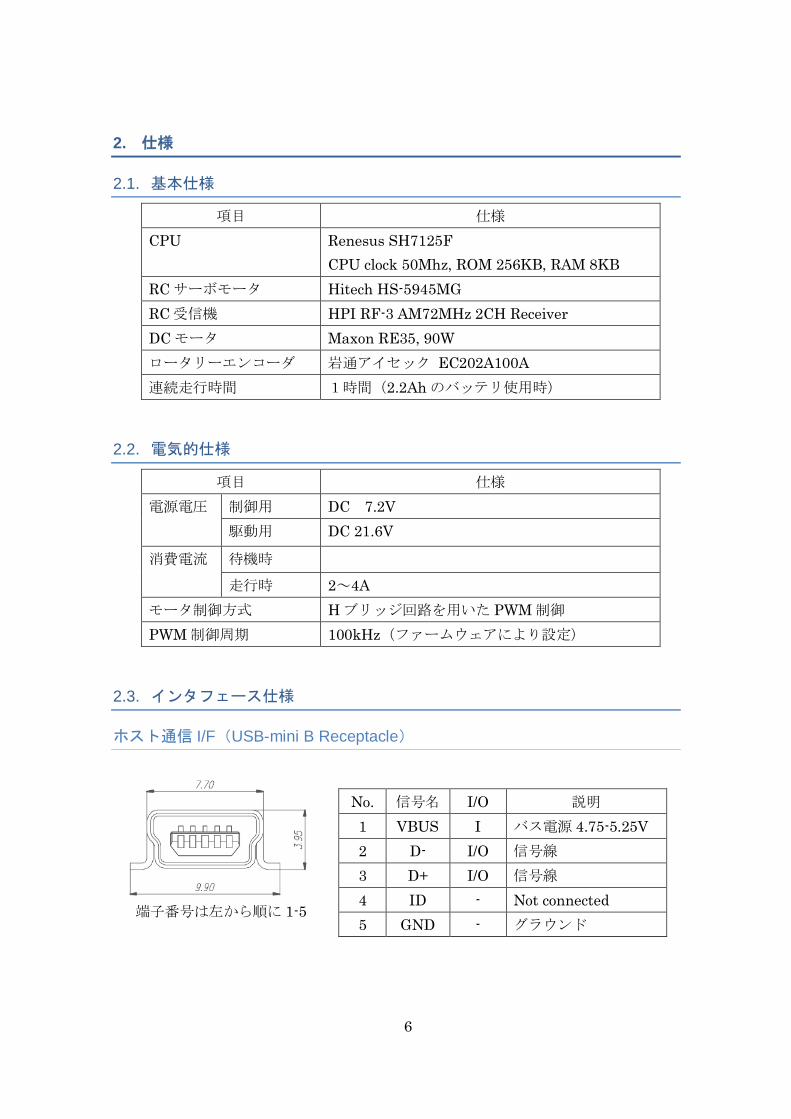
2. 仕様
2.1. 基本仕様
項目 仕様
CPU Renesus SH7125F
CPU clock 50Mhz, ROM 256KB, RAM 8KB
RC サーボモータ Hitech HS-5945MG
RC 受信機 HPI RF-3 AM72MHz 2CH Receiver
DC モータ Maxon RE35, 90W
ロータリーエンコーダ 岩通アイセック EC202A100A
連続走行時間 1時間(2.2Ah のバッテリ使用時)
2.2. 電気的仕様
項目 仕様
電源電圧
制御用 DC 7.2V
駆動用 DC 21.6V
消費電流 待機時
走行時 2~4A
モータ制御方式 H ブリッジ回路を用いた PWM 制御
PWM 制御周期 100kHz(ファームウェアにより設定)
2.3. インタフェース仕様
ホスト通信 I/F(USB-mini B Receptacle)
端子番号は左から順に 1-5
No. 信号名 I/O 説明
1 VBUS I バス電源 4.75-5.25V
2 D- I/O 信号線
3 D+ I/O 信号線
4 ID - Not connected
5 GND - グラウンド
7
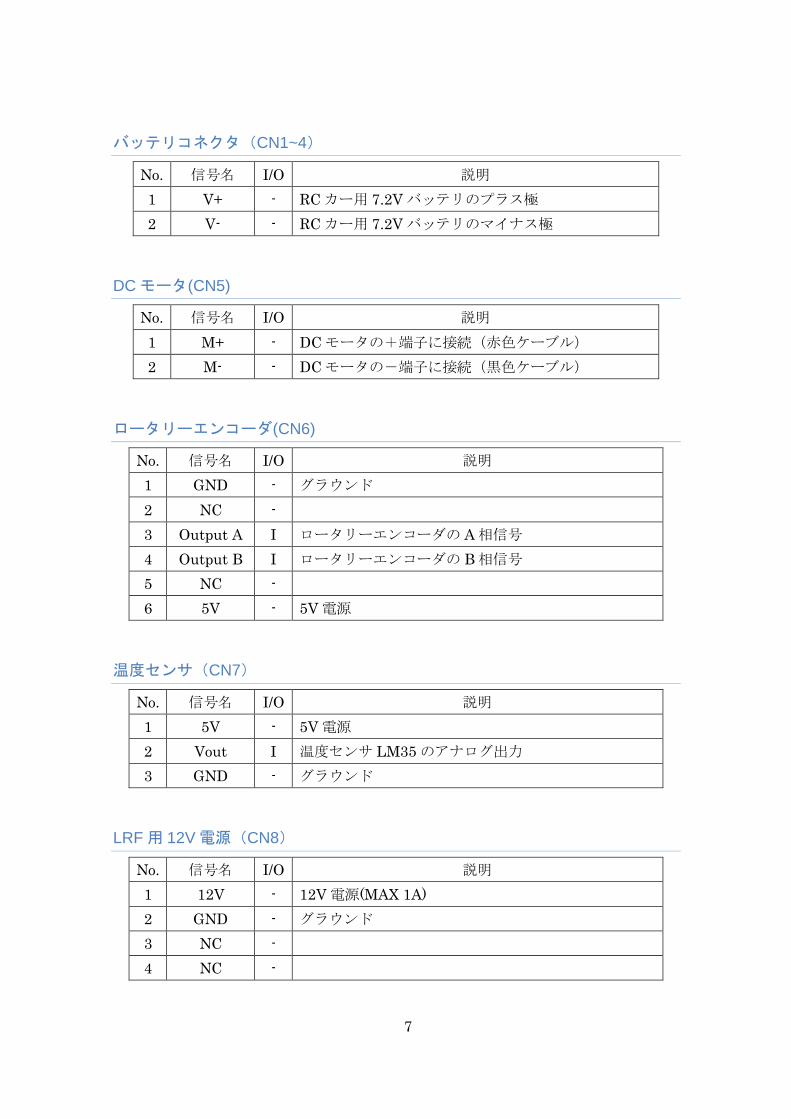
バッテリコネクタ(CN1~4)
No. 信号名 I/O 説明
1 V+ - RC カー用 7.2V バッテリのプラス極
2 V- - RC カー用 7.2V バッテリのマイナス極
DC モータ(CN5)
No. 信号名 I/O 説明
1 M+ - DC モータの+端子に接続(赤色ケーブル)
2 M- - DC モータの-端子に接続(黒色ケーブル)
ロータリーエンコーダ(CN6)
No. 信号名 I/O 説明
1 GND - グラウンド
2 NC -
3 Output A I ロータリーエンコーダの A 相信号
4 Output B I ロータリーエンコーダの B 相信号
5 NC -
6 5V - 5V 電源
温度センサ(CN7)
No. 信号名 I/O 説明
1 5V - 5V 電源
2 Vout I 温度センサ LM35 のアナログ出力
3 GND - グラウンド
LRF 用 12V 電源(CN8)
No. 信号名 I/O 説明
1 12V - 12V 電源(MAX 1A)
2 GND - グラウンド
3 NC -
4 NC -
8
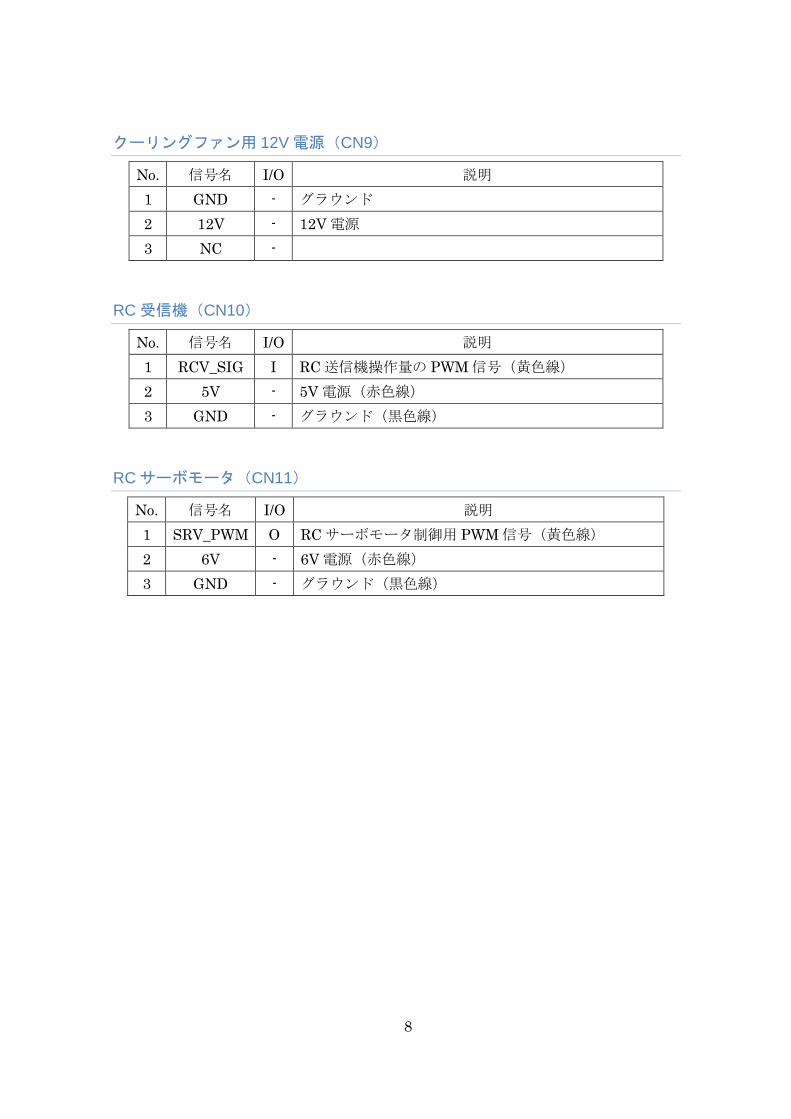
クーリングファン用 12V 電源(CN9)
No. 信号名 I/O 説明
1 GND - グラウンド
2 12V - 12V 電源
3 NC -
RC 受信機(CN10)
No. 信号名 I/O 説明
1 RCV_SIG I RC 送信機操作量の PWM 信号(黄色線)
2 5V - 5V 電源(赤色線)
3 GND - グラウンド(黒色線)
RC サーボモータ(CN11)
No. 信号名 I/O 説明
1 SRV_PWM O RC サーボモータ制御用 PWM 信号(黄色線)
2 6V - 6V 電源(赤色線)
3 GND - グラウンド(黒色線)
9
3. Cart Control module のアーキテクチャ
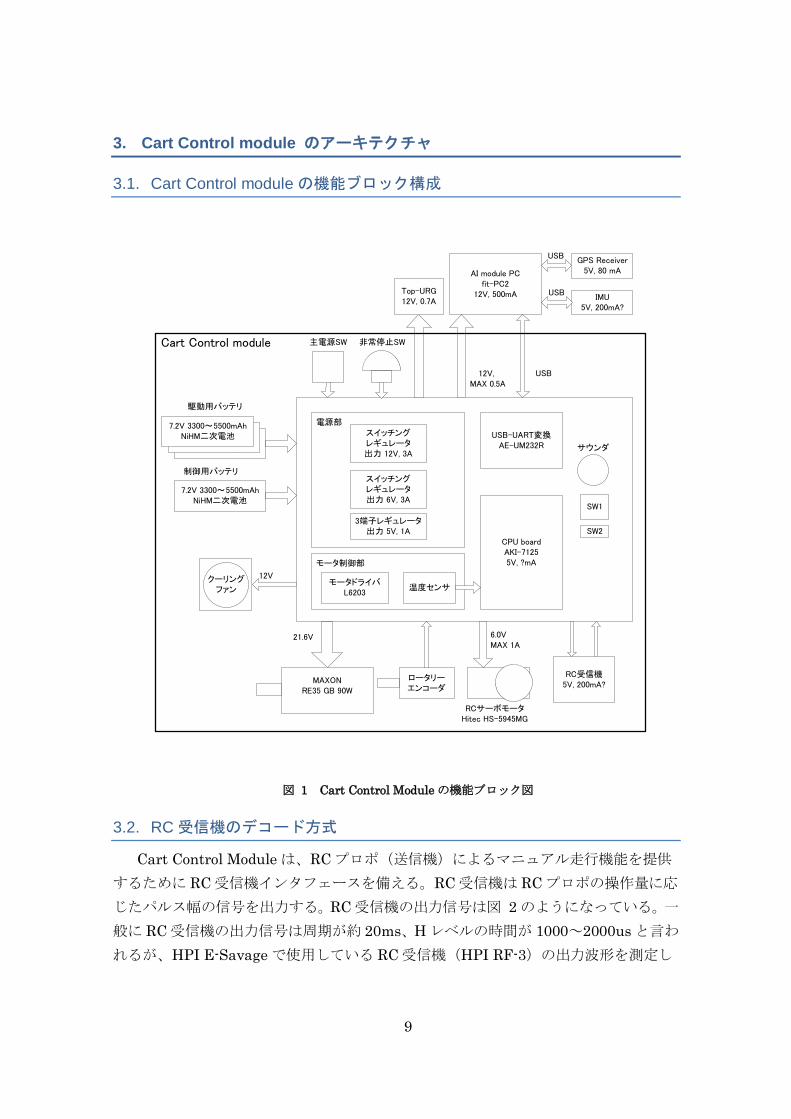
3.1. Cart Control module の機能ブロック構成
CPU boardAKI-71255V, ?mA
電源部
モータ制御部
非常停止SW
7.2V 3300 5500mAhNiHM二次電池
7.2V 3300 5500mAhNiHM二次電池
7.2V 3300 5500mAhNiHM二次電池
7.2V 3300 5500mAhNiHM二次電池
主電源SW
クーリングファン
12V
RCサーボモータHitec HS-5945MG
6.0VMAX 1A
USB-UART変換AE-UM232R
MAXONRE35 GB 90W
AI module PCfit-PC2
12V, 500mA
ロータリーエンコーダ
サウンダ
21.6V
12V, MAX 0.5A
USB
Top-URG12V, 0.7A
スイッチングレギュレータ出力 12V, 3A
スイッチングレギュレータ出力 6V, 3A
温度センサモータドライバ
L6203
SW2
SW1
3端子レギュレータ出力 5V, 1A
GPS Receiver5V, 80 mA
USB
Cart Control module
RC受信機5V, 200mA?
IMU5V, 200mA?
USB
駆動用バッテリ
制御用バッテリ
図 1 Cart Control Module の機能ブロック図
3.2. RC 受信機のデコード方式
Cart Control Module は、RC プロポ(送信機)によるマニュアル走行機能を提供
するために RC 受信機インタフェースを備える。RC 受信機は RC プロポの操作量に応
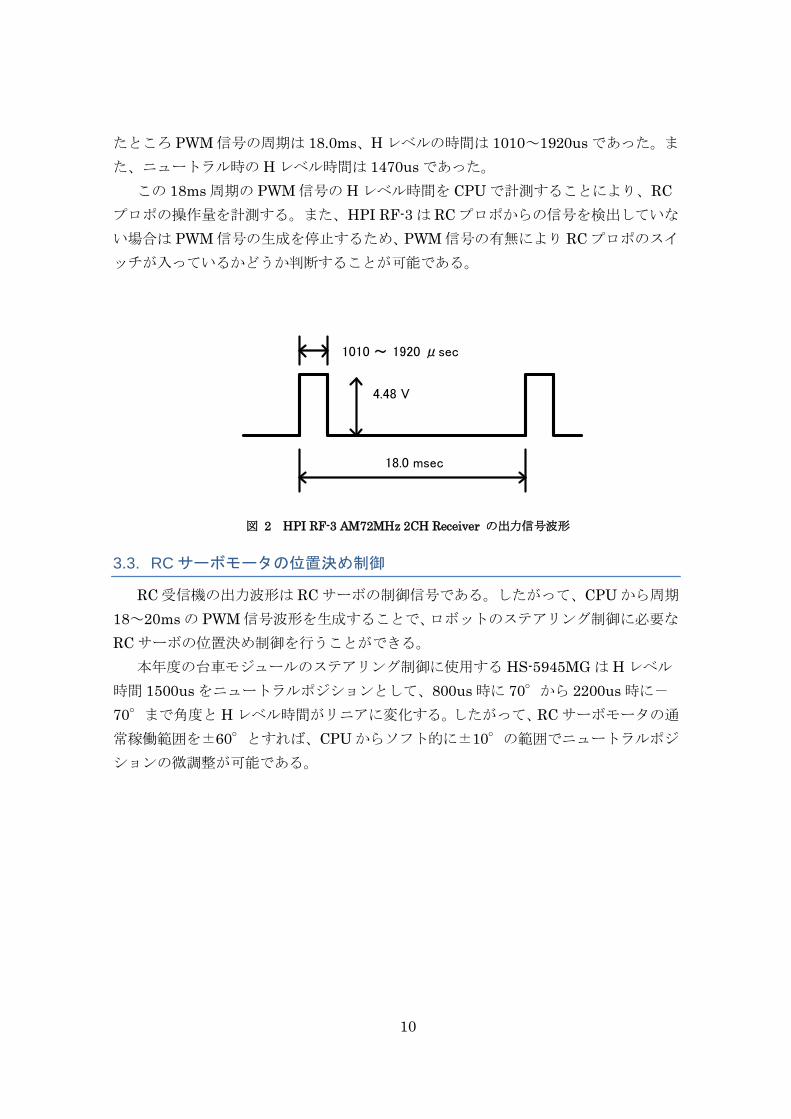
じたパルス幅の信号を出力する。RC 受信機の出力信号は図 2 のようになっている。一
般に RC 受信機の出力信号は周期が約 20ms、H レベルの時間が 1000~2000us と言わ
れるが、HPI E-Savage で使用している RC 受信機(HPI RF-3)の出力波形を測定し
10
たところ PWM 信号の周期は 18.0ms、H レベルの時間は 1010~1920us であった。ま
た、ニュートラル時の H レベル時間は 1470us であった。
この 18ms 周期の PWM 信号の H レベル時間を CPU で計測することにより、RC
プロポの操作量を計測する。また、HPI RF-3 は RC プロポからの信号を検出していな
い場合は PWM 信号の生成を停止するため、PWM 信号の有無により RC プロポのスイ
ッチが入っているかどうか判断することが可能である。
18.0 msec
1010 1920 μsec
4.48 V
図 2 HPI RF-3 AM72MHz 2CH Receiver の出力信号波形
3.3. RC サーボモータの位置決め制御
RC 受信機の出力波形は RC サーボの制御信号である。したがって、CPU から周期
18~20ms の PWM 信号波形を生成することで、ロボットのステアリング制御に必要な
RC サーボの位置決め制御を行うことができる。
本年度の台車モジュールのステアリング制御に使用する HS-5945MG は H レベル
時間 1500us をニュートラルポジションとして、800us 時に 70°から 2200us 時に-
70°まで角度と H レベル時間がリニアに変化する。したがって、RC サーボモータの通
常稼働範囲を±60°とすれば、CPU からソフト的に±10°の範囲でニュートラルポジ
ションの微調整が可能である。
11
4. 回路の詳細
4.1. CPU
Cart Control Module の制御用 CPU ボードには、AKI-7125 を使用する。AKI-7125
はルネサステクノロジの 32bit RIRC タイプ CPU である SH7125F を搭載している。
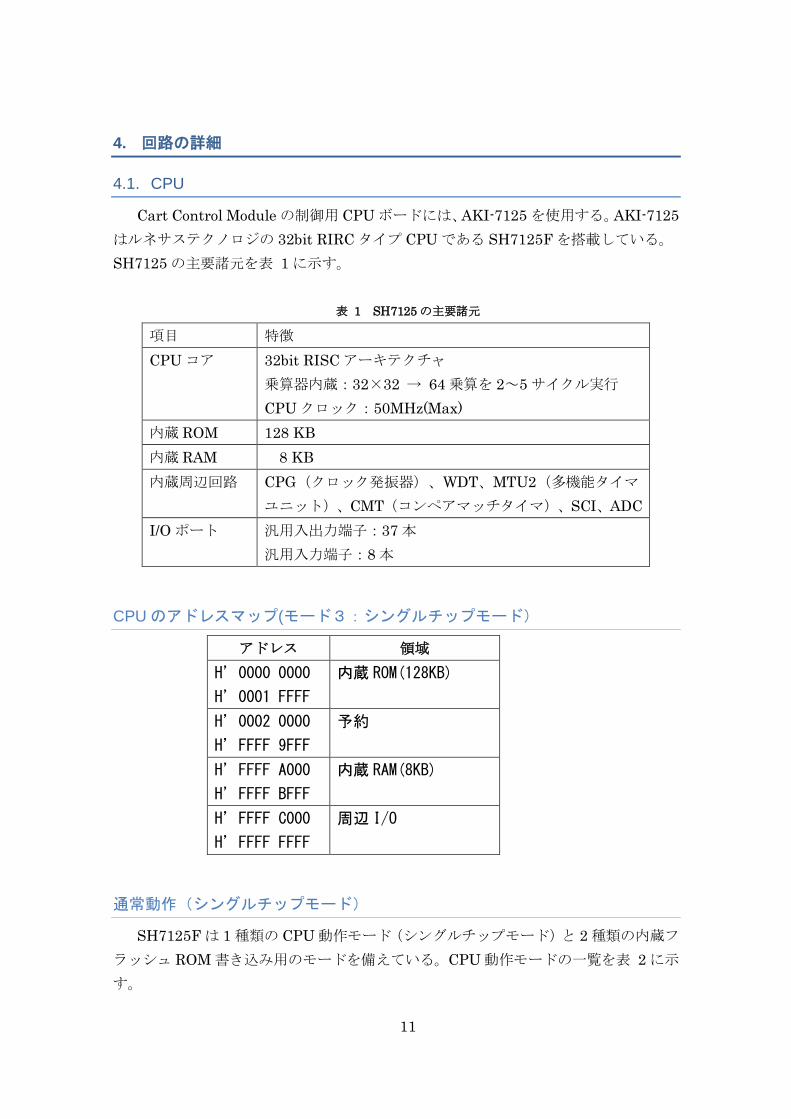
SH7125 の主要諸元を表 1 に示す。
表 1 SH7125 の主要諸元
項目 特徴
CPU コア 32bit RISC アーキテクチャ
乗算器内蔵:32×32 → 64 乗算を 2~5 サイクル実行
CPU クロック:50MHz(Max)
内蔵 ROM 128 KB
内蔵 RAM 8 KB
内蔵周辺回路 CPG(クロック発振器)、WDT、MTU2(多機能タイマ
ユニット)、CMT(コンペアマッチタイマ)、SCI、ADC
I/O ポート 汎用入出力端子:37 本
汎用入力端子:8 本
CPU のアドレスマップ(モード3:シングルチップモード)
アドレス 領域
H’0000 0000
H’0001 FFFF
内蔵 ROM(128KB)
H’0002 0000
H’FFFF 9FFF
予約
H’FFFF A000
H’FFFF BFFF
内蔵 RAM(8KB)
H’FFFF C000
H’FFFF FFFF
周辺 I/O
通常動作(シングルチップモード)
SH7125F は 1 種類の CPU 動作モード(シングルチップモード)と 2 種類の内蔵フ
ラッシュ ROM 書き込み用のモードを備えている。CPU 動作モードの一覧を表 2 に示
す。
12
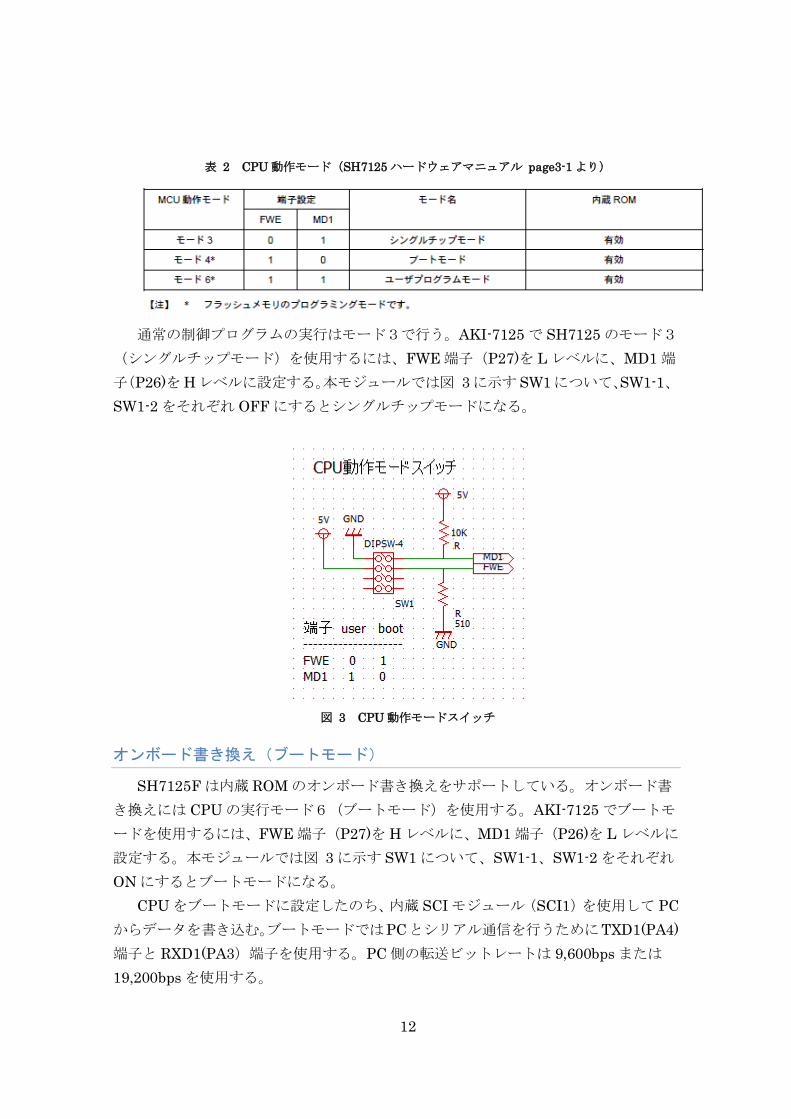
表 2 CPU 動作モード(SH7125 ハードウェアマニュアル page3-1 より)
通常の制御プログラムの実行はモード3で行う。AKI-7125 で SH7125 のモード3
(シングルチップモード)を使用するには、FWE 端子(P27)を L レベルに、MD1 端
子(P26)を Hレベルに設定する。本モジュールでは図 3 に示す SW1について、SW1-1、
SW1-2 をそれぞれ OFF にするとシングルチップモードになる。
図 3 CPU 動作モードスイッチ
オンボード書き換え(ブートモード)
SH7125F は内蔵 ROM のオンボード書き換えをサポートしている。オンボード書
き換えには CPU の実行モード6(ブートモード)を使用する。AKI-7125 でブートモ
ードを使用するには、FWE 端子(P27)を H レベルに、MD1 端子(P26)を L レベルに
設定する。本モジュールでは図 3 に示す SW1 について、SW1-1、SW1-2 をそれぞれ
ON にするとブートモードになる。
CPU をブートモードに設定したのち、内蔵 SCI モジュール(SCI1)を使用して PC
からデータを書き込む。ブートモードではPCとシリアル通信を行うためにTXD1(PA4)
端子と RXD1(PA3)端子を使用する。PC 側の転送ビットレートは 9,600bps または
19,200bps を使用する。
13
4.2. リセット回路
AKI-7125 には CPU に対するリセット回路が搭載されていないため、RES 端子に
対して RC 延滞回路(積分回路)によるリセット回路を接続する。リセットに要する時
間 Tresは SH7125 ハードウェアマニュアルよりパワーON 発信安定時間が 10ms であ
るから、Tres=10ms とする。
本モジュールでは、この Tresを確保するためにリセット IC である PST600 を使用
する。PST600 では、延滞時間 T が
T = CL × RL × lnVcc
Vcc − Vspcu + 0.2 + 0.04
で与えられる。ここで CL=10uF, RL=1kΩ, CPU のリセット閾値 Vscpu=4.5V とする
と延滞時間 T は
T = 10 × 1 × ln5
5 − 4.5 + 0.2 + 0.04 ≅ 19.7 [ms]
となり、Tresの 2 倍程度のリセット時間を確保できる。このリセット回路により作
りだされる active low のリセット信号は CPU だけでなく USB-UART 変換モジュール
も一緒にリセットする。本モジュールの USB-UART 変換モジュールが使用している
FT232RL は内部にリセットジェネレータを持っているため、USB-UART 変換モジュ
ールについてはリセット時間を考慮する必要はない。
4.3. USB-UART 変換モジュール
AI module(PC)と CPU 間で通信を行うために、USB-UART 変換モジュールと
して AE-UM323R を使用する。本モジュールでは AE-UM323R の 5V 電源を制御回路
から供給する。USB の VBUS からではなく AE-UM323R の外部から電源を供給する
ことになるので、ジャンパーピンの設定は次の表に従う。
J1 1-2 オープン
2-3 ショート
J2 オープン
PC 側で使用する AE-UM323R のデバイスドライバは FTDI 社のウェブサイト
(http://www.ftdichip.com/)で提供されており、ロイヤリティフリーで使用できる。
使用可能な通信速度は 300~460Kbps である。
14
マニュアル走行モードスイッチ
本モジュールでは、RC プロポによるマニュアル走行モードをサポートするために
マニュアル走行モード切り替え用スイッチとしてトグルスイッチ SW2 を設ける。SW2
が OFF(解放)の場合、CPU の PA0 端子がプルアップされて H レベルになり、SW2
が ON(短絡)の場合、CPU の PA0 端子が L レベルになる。ハード的には信号レベル
を切り替えるのみであり、実際の走行モード切り替えは CPU のファームウェアで行う。
4.4. 電源部
電源部では 12V, 6V, 5V の三種類の電圧で電源を提供する。また、モータ駆動用の
21.6V に対する ON/OFF を管理する。各電圧の用途と最大電流を次表に示す。
表 3 電源の最大電流見積もり
電圧 最大電流
見積もり
用途
12 V 0.7 A Top-URG
0.5 A AI module
0.1 A クーリングファン
6 V 1.0 A RC サーボモータ
5 V 0.5 A USB-UART 変換モジュール
0.2 A RC 受信機
0.1 A CPU ボード
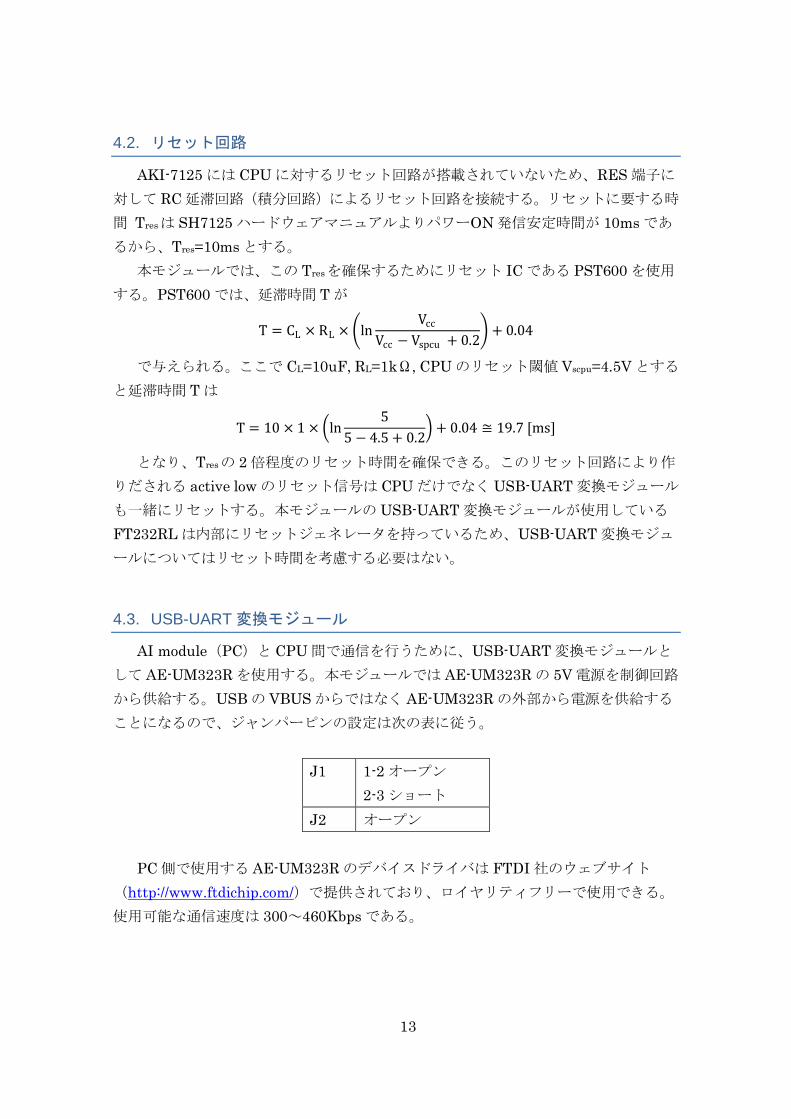
制御用 5V 電源回路
5V 電源については流れる電流が少ないことから、低損失3端子レギュレータ
LM2940 を用いて RC 用バッテリの 7.2V から 5V を作る。図 4 に 5V 系電源の回路図
を示す。レギュレータの手前にあるスイッチが本モジュールの主電源スイッチとなる。
図 4 5V 電源回路
15
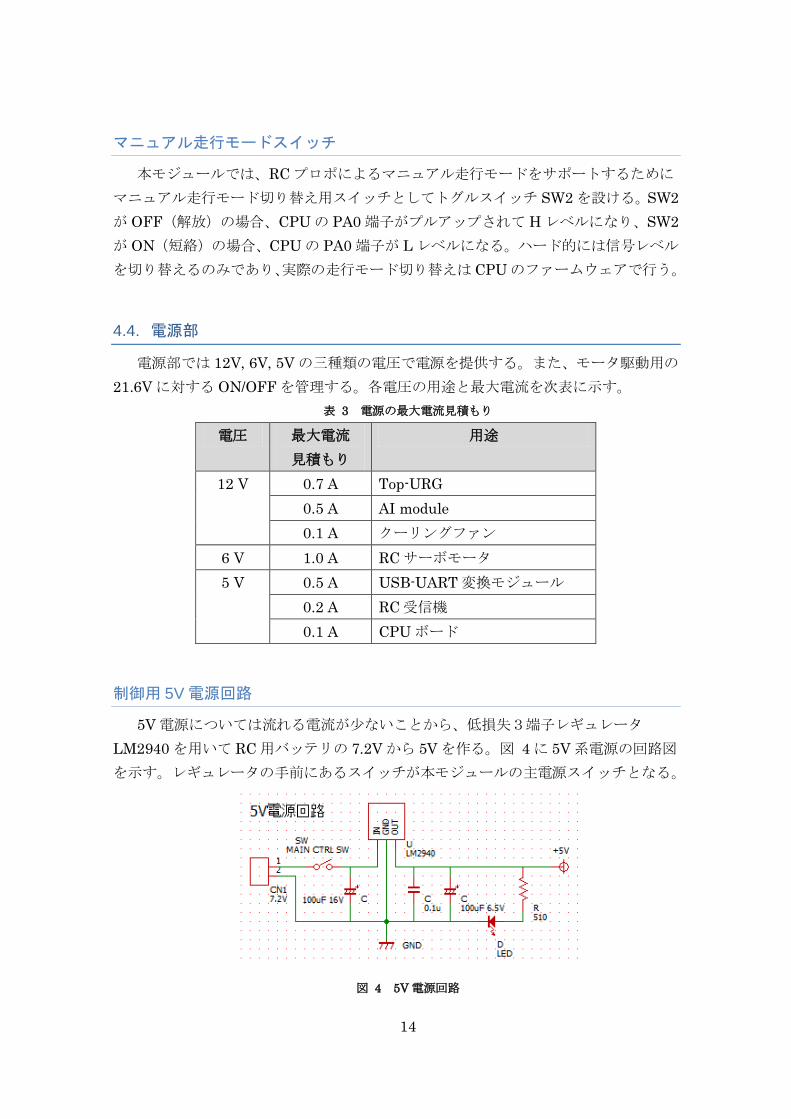
12V 電源回路
12V 系電源の回路図を図 5 に示す。12V 電源を確保するために、スイッチングレギ
ュレータ HRD12003E を使用する。HRD12003E が Vo=12V を出力するためには入力
電圧 Vin が Vo + 2.5V 以上必要である。そこで RC 用の 7.2V バッテリを 3 本直列に
繋いで 21.6V を確保する。また、5V 系電源の主電源スイッチ SW1 が OFF のときに
12V 系の電源も OFF になるよう、フォト MOS リレー AQZ102 を使用してスイッチン
グレギュレータに対する電源入力を ON/OFF する。
CPU から 7.2V を 3 本直列したバッテリの電圧監視を行えるよう、21.6V の電圧を
1/10 に分圧して CPU の AN0 端子に入力する。
図 5 12V 電源回路
6V および 21.6V 電源回路
6V 電源については最大電流が 1A 程度と大きく、3 端子レギュレータを使用すると
発熱が大きくなってしまう。そこで、スイッチングレギュレータ HRD123003E を用い
て 21.6V から 6V を作る。HRD123003E を用いて 6V を作るために必要な抵抗値は次
式で計算する。
R1 =Rx ∙ Ry (Vo − Vs)
Rx ∙ Vs − Ry Vo − Vs
ここでデータシートより Vs=2.5V, Rx =6.2kΩ, Ry=1.63kΩと希望出力電圧 Vo=6V
を代入すると、
16
R1 =6200 × 1630 × (6 − 2.5)
6200 × 2.5 − 1630 × (6 − 2.5)≅ 3611
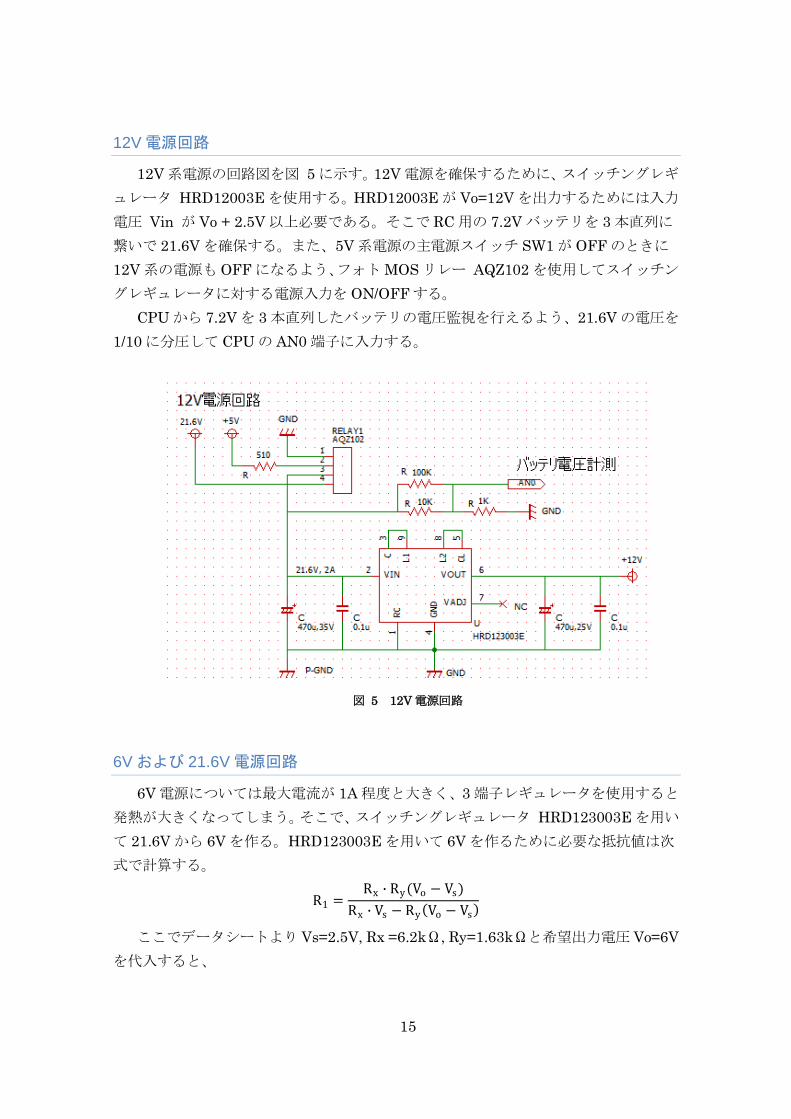
となる。したがって、HRD123003E の出力を 6V にするには、図 6 のように Vout
端子と Vadj 端子の間に 36KΩの抵抗を入れればよい。
図 6 6V および 21.6V 電源回路
DCモータに電力を供給する 21.6V系については図 6 の回路図に示すように非常停
止スイッチ(EMERGNCY SW)を配置した。これにより、非常停止スイッチが押され
ると RC サーボモータの電源になる 6V だけでなく、DC モータを駆動する 21.6V 系の
電源も電源供給を停止する。また、非常停止スイッチが押された状態を CPU から検出
するための信号線(MPWR_ON)を設けた。フォトモスリレーAQZ102 はピーク負荷
電流が 9.0A なので、モータの突入電流(始動電流)17.6A をカバーできるよう AQZ102
を 2 個並列に用いる。
4.5. DC モータ制御部
平地を巡航速度で走行した場合に流れる電流、斜度 10°を登坂した場合に流れる電
流、突入電流(=始動電流)は Appendix A, B よりそれぞれ 2A、4A、17.6A であるか
ら、モータ駆動系は瞬間最大電流を 20A として設計する。DC モータ制御部の回路図を
図 7 に示す。
17
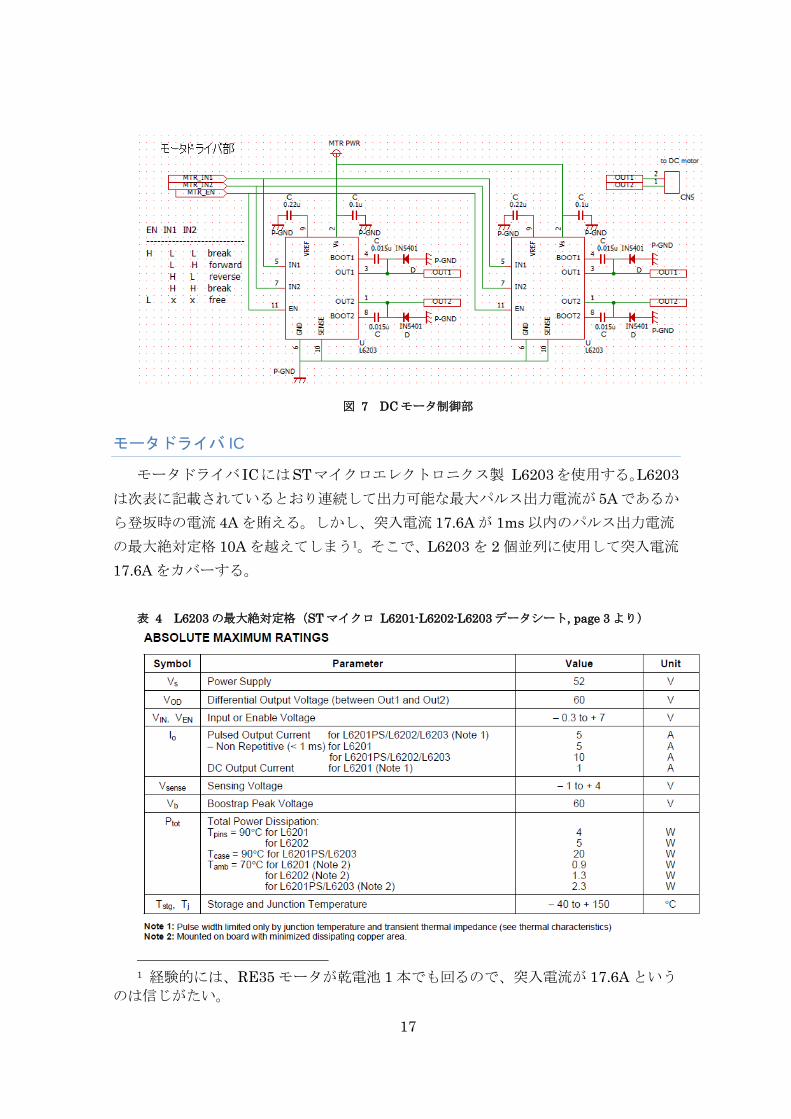
図 7 DC モータ制御部
モータドライバ IC
モータドライバ ICにはSTマイクロエレクトロニクス製 L6203を使用する。L6203
は次表に記載されているとおり連続して出力可能な最大パルス出力電流が 5Aであるか
ら登坂時の電流 4A を賄える。しかし、突入電流 17.6A が 1ms 以内のパルス出力電流
の最大絶対定格 10A を越えてしまう1。そこで、L6203 を 2 個並列に使用して突入電流
17.6A をカバーする。
表 4 L6203 の最大絶対定格(ST マイクロ L6201-L6202-L6203 データシート, page 3 より)
1 経験的には、RE35 モータが乾電池 1 本でも回るので、突入電流が 17.6A という
のは信じがたい。
18
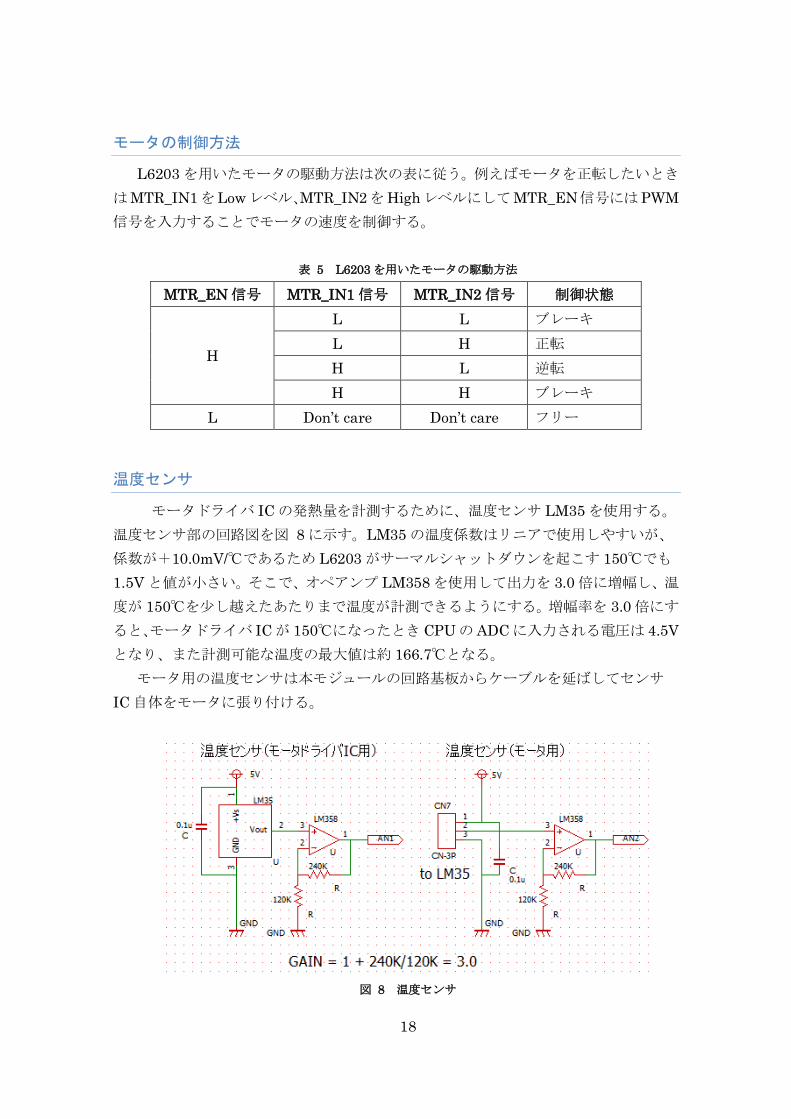
モータの制御方法
L6203 を用いたモータの駆動方法は次の表に従う。例えばモータを正転したいとき
はMTR_IN1をLowレベル、MTR_IN2をHighレベルにしてMTR_EN信号にはPWM
信号を入力することでモータの速度を制御する。
表 5 L6203 を用いたモータの駆動方法
MTR_EN 信号 MTR_IN1 信号 MTR_IN2 信号 制御状態
H
L L ブレーキ
L H 正転
H L 逆転
H H ブレーキ
L Don’t care Don’t care フリー
温度センサ
モータドライバ IC の発熱量を計測するために、温度センサ LM35 を使用する。
温度センサ部の回路図を図 8 に示す。LM35 の温度係数はリニアで使用しやすいが、
係数が+10.0mV/℃であるため L6203 がサーマルシャットダウンを起こす 150℃でも
1.5V と値が小さい。そこで、オペアンプ LM358 を使用して出力を 3.0 倍に増幅し、温
度が 150℃を少し越えたあたりまで温度が計測できるようにする。増幅率を 3.0 倍にす
ると、モータドライバ IC が 150℃になったとき CPU の ADC に入力される電圧は 4.5V
となり、また計測可能な温度の最大値は約 166.7℃となる。
モータ用の温度センサは本モジュールの回路基板からケーブルを延ばしてセンサ
IC 自体をモータに張り付ける。
図 8 温度センサ
19
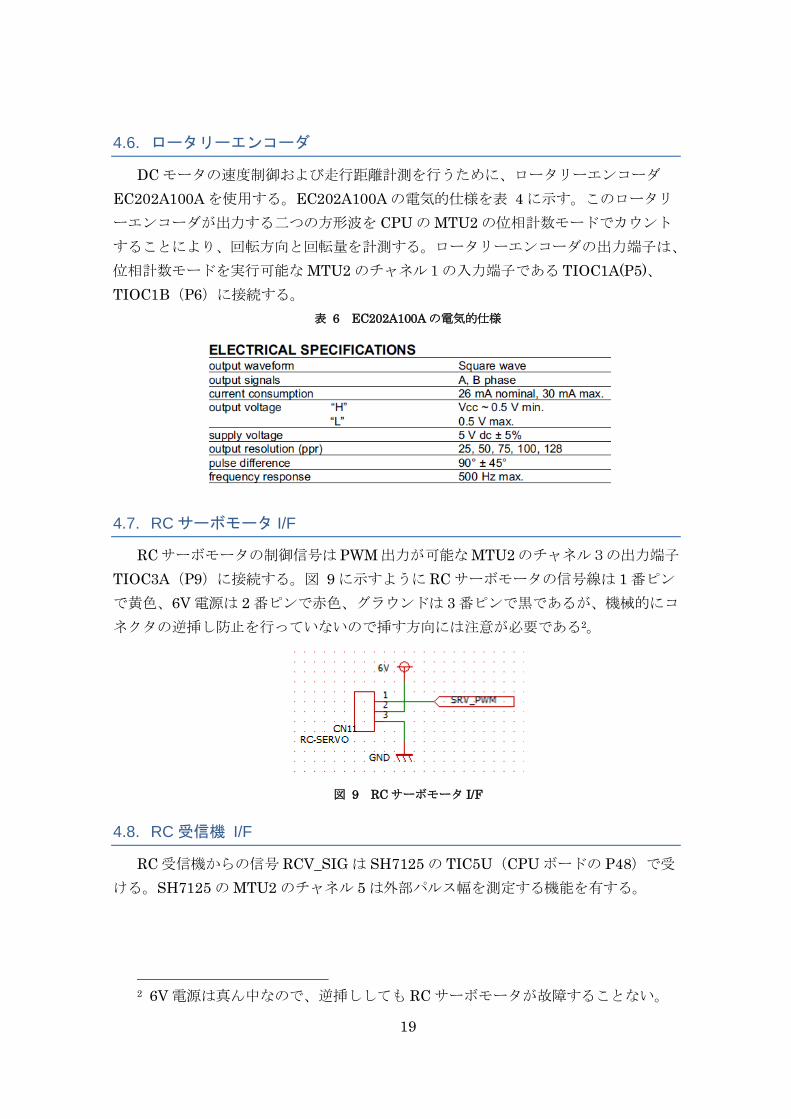
4.6. ロータリーエンコーダ
DC モータの速度制御および走行距離計測を行うために、ロータリーエンコーダ
EC202A100A を使用する。EC202A100A の電気的仕様を表 4 に示す。このロータリ
ーエンコーダが出力する二つの方形波を CPU の MTU2 の位相計数モードでカウント
することにより、回転方向と回転量を計測する。ロータリーエンコーダの出力端子は、
位相計数モードを実行可能な MTU2 のチャネル1の入力端子である TIOC1A(P5)、
TIOC1B(P6)に接続する。
表 6 EC202A100A の電気的仕様
4.7. RC サーボモータ I/F
RCサーボモータの制御信号は PWM出力が可能な MTU2 のチャネル3の出力端子
TIOC3A(P9)に接続する。図 9 に示すように RC サーボモータの信号線は 1 番ピン
で黄色、6V 電源は 2 番ピンで赤色、グラウンドは 3 番ピンで黒であるが、機械的にコ
ネクタの逆挿し防止を行っていないので挿す方向には注意が必要である2。
図 9 RC サーボモータ I/F
4.8. RC 受信機 I/F
RC 受信機からの信号 RCV_SIG は SH7125 の TIC5U(CPU ボードの P48)で受
ける。SH7125 の MTU2 のチャネル 5 は外部パルス幅を測定する機能を有する。
2 6V 電源は真ん中なので、逆挿ししても RC サーボモータが故障することない。
20
5. 実装
5.1. 回路図
5.2. レイアウト
5.3. 配線図
5.4. 部品リスト
21
Appendix A 巡航速度における電流の見積もり
大まかな道筋としては、巡航速度で走行中に車輪が発生すべきトルクと回転数を求
め、この二つと減速比、電源電圧、最大電流等の情報を Maxon のモータ選定プログラ
ムに入力してモータに流れる電流を算出する。
モータが発生すべきトルク
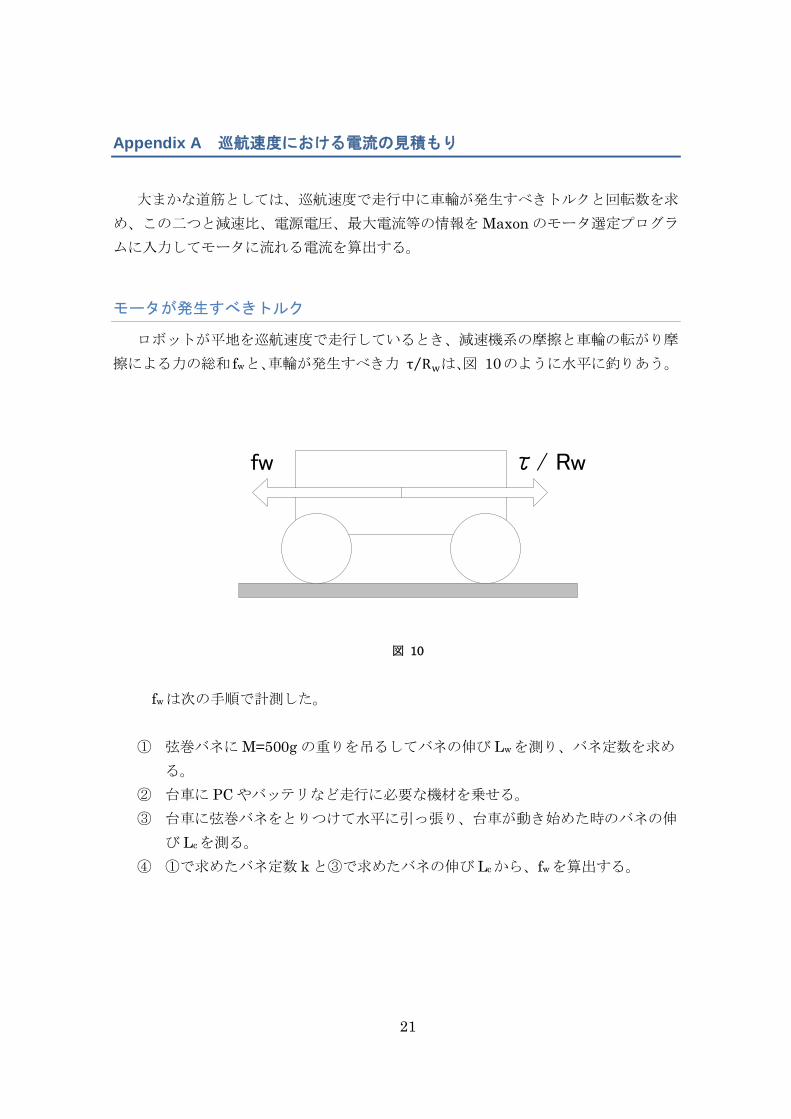
ロボットが平地を巡航速度で走行しているとき、減速機系の摩擦と車輪の転がり摩
擦による力の総和 fwと、車輪が発生すべき力 τ Rw は、図 10のように水平に釣りあう。
fw τ/ Rw
図 10
fwは次の手順で計測した。
① 弦巻バネに M=500g の重りを吊るしてバネの伸び Lwを測り、バネ定数を求め
る。
② 台車に PC やバッテリなど走行に必要な機材を乗せる。
③ 台車に弦巻バネをとりつけて水平に引っ張り、台車が動き始めた時のバネの伸
び Lcを測る。
④ ①で求めたバネ定数 k と③で求めたバネの伸び Lcから、fwを算出する。
22
弦巻バネに M=500g の重りをつるすとバネの伸びは 2cm であった。したがってバ
ネ定数 k は重力加速度 g=9.8[m/s/s]として、
k =Mg
Lw=
0.5 × 9.8
0.02= 245 [N m ]
であることが分かる。続いて、台車に取り付けたバネを水平に引っ張ると、ばねの
伸びが 4cm のところで台車が動き始めた。したがってバネ定数 k を用いて fwを求める
と、
fw = k × Lc = 245 × 0.04 = 9.8 [N]
と求まる。その結果、車輪が発生すべきトルクτは、
τ = Rw fw = 0.065 × 9.8 = 0.637 [Nm]
と求まる。
巡航速度における車輪の回転数
車輪が発生すべきトルクに続いて、巡航速度における車輪の回転数を求める。走行
速度 v と車輪半径 Rw、車輪の角速度ωの関係は次式のとおりである。
v = Rwω
この式をωについて解くと、
ω =v
Rw
ここで、走行速度が v=4.0[km/h] = 4000÷60[m/分]のとき、車輪の角速度ω[rad/
分]は、
ω =4000 ÷ 60
0.065= 1025.6 rad 分
さらに、rad/分で表現された角速度を rpm に換算すると、巡航速度における車輪の
回転数は
ω =1025.6
2π= 163.2 [rpm]
と求まる。
23
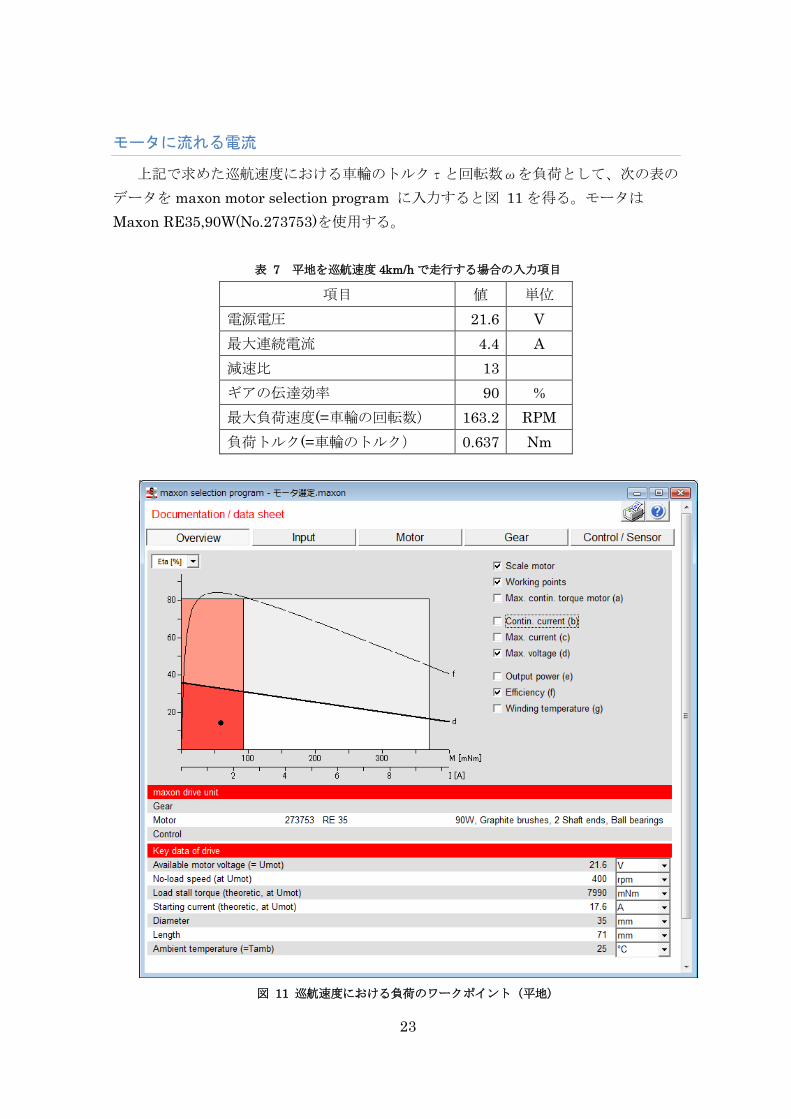
モータに流れる電流
上記で求めた巡航速度における車輪のトルクτと回転数ωを負荷として、次の表の
データを maxon motor selection program に入力すると図 11 を得る。モータは
Maxon RE35,90W(No.273753)を使用する。
表 7 平地を巡航速度 4km/h で走行する場合の入力項目
項目 値 単位
電源電圧 21.6 V
最大連続電流 4.4 A
減速比 13
ギアの伝達効率 90 %
最大負荷速度(=車輪の回転数) 163.2 RPM
負荷トルク(=車輪のトルク) 0.637 Nm
図 11 巡航速度における負荷のワークポイント(平地)
24
図 11 を見ると、黒丸で示された負荷のワークポイントがモータの推奨連続運転
領域に入っており、モータに流れる電流はおよそ 1.5A 前後であることが分かる。水平
な路面であっても実際には凹凸があるので、その分 30%程度のマージンをみて、水平
な路面を巡航速度 4km/h で走行するときに必要な電流は 2A と見積もることにする。
Appendix B 登坂時における電流の見積もり
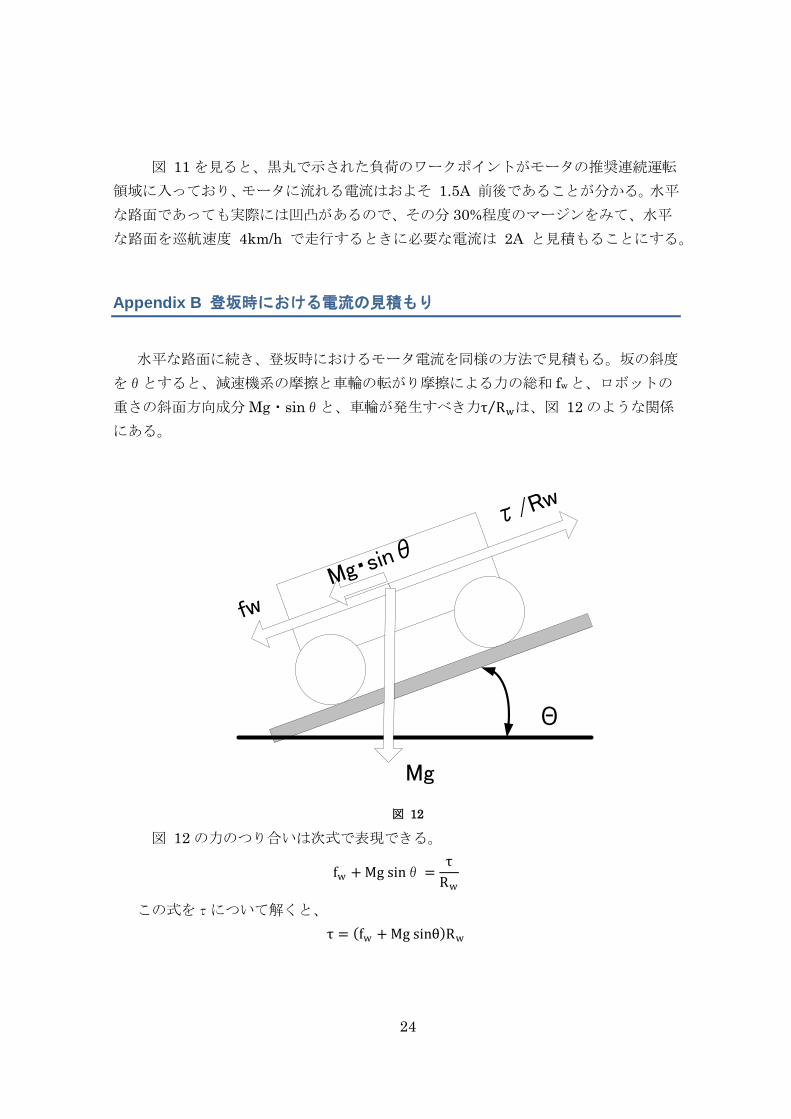
水平な路面に続き、登坂時におけるモータ電流を同様の方法で見積もる。坂の斜度
をθとすると、減速機系の摩擦と車輪の転がり摩擦による力の総和 fwと、ロボットの
重さの斜面方向成分 Mg・sinθと、車輪が発生すべき力τ Rw は、図 12 のような関係
にある。
fw
τ/Rw
Θ
Mg
Mg・sinθ
図 12
図 12 の力のつり合いは次式で表現できる。
fw + Mg sinθ =τ
Rw
この式をτについて解くと、
τ = fw + Mg sinθ Rw
25
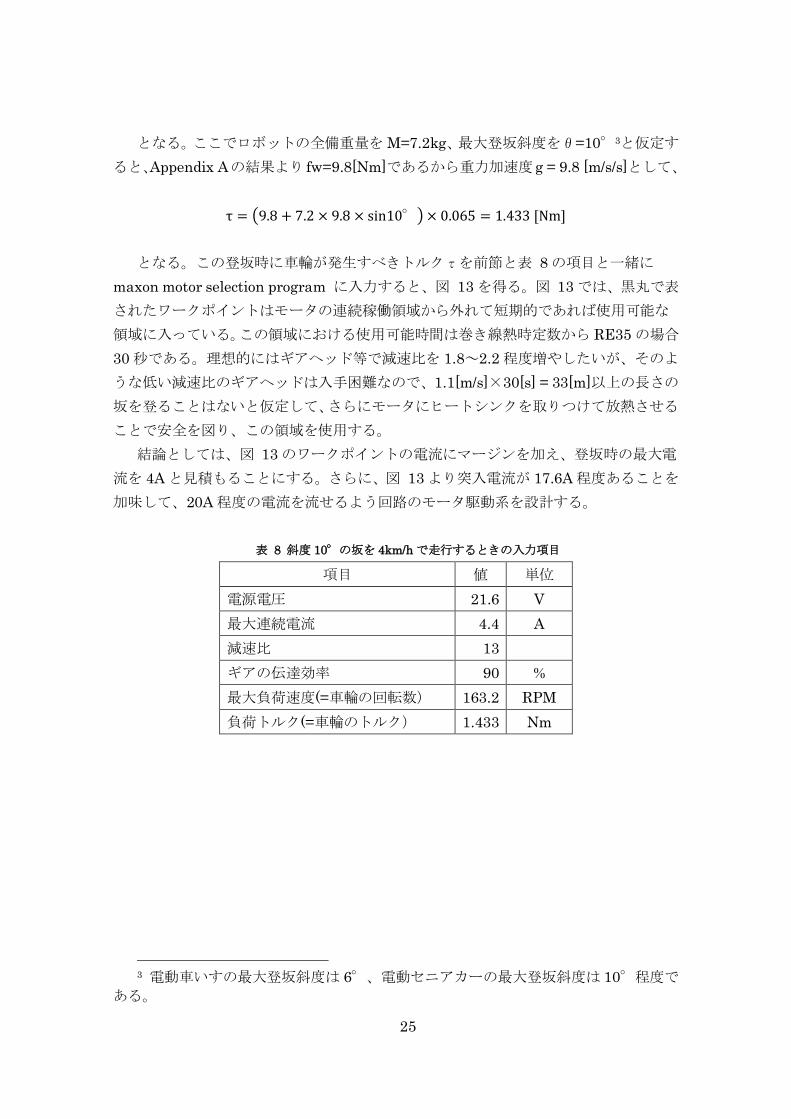
となる。ここでロボットの全備重量を M=7.2kg、最大登坂斜度をθ=10°3と仮定す
ると、Appendix Aの結果より fw=9.8[Nm]であるから重力加速度g = 9.8 [m/s/s]として、
τ = 9.8 + 7.2 × 9.8 × sin10° × 0.065 = 1.433 [Nm]
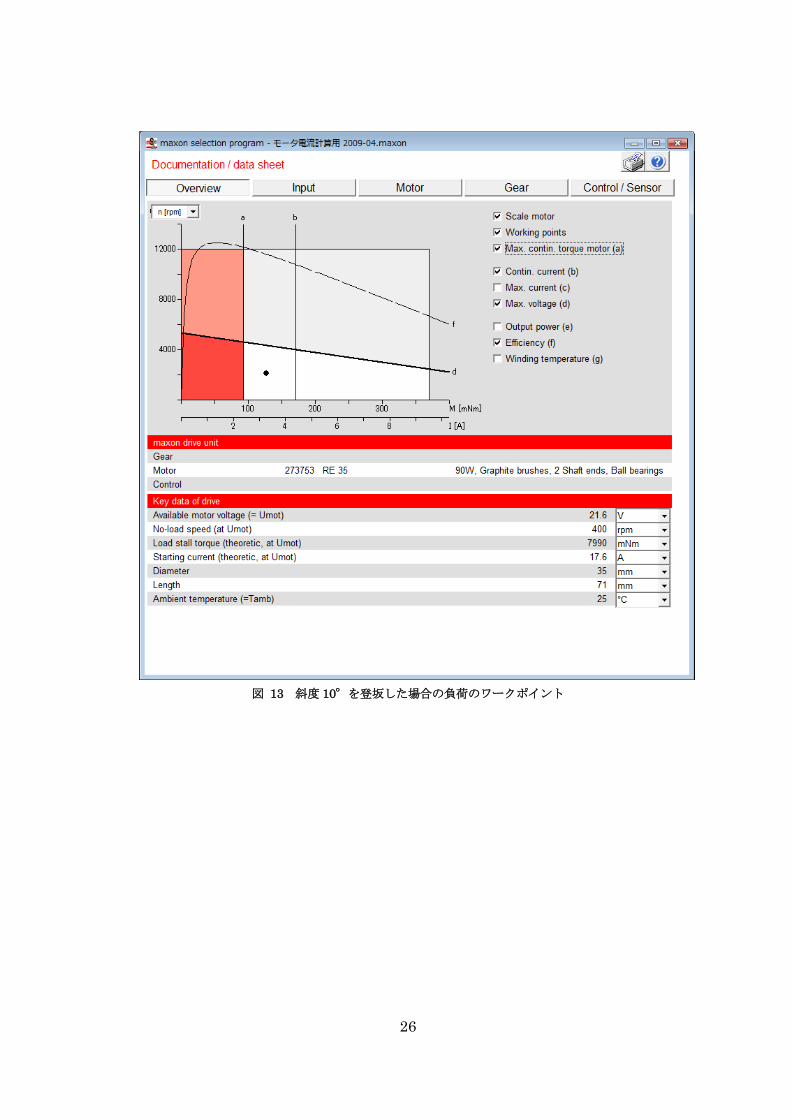
となる。この登坂時に車輪が発生すべきトルクτを前節と表 8 の項目と一緒に
maxon motor selection program に入力すると、図 13 を得る。図 13 では、黒丸で表
されたワークポイントはモータの連続稼働領域から外れて短期的であれば使用可能な
領域に入っている。この領域における使用可能時間は巻き線熱時定数から RE35 の場合
30 秒である。理想的にはギアヘッド等で減速比を 1.8~2.2 程度増やしたいが、そのよ
うな低い減速比のギアヘッドは入手困難なので、1.1[m/s]×30[s] = 33[m]以上の長さの
坂を登ることはないと仮定して、さらにモータにヒートシンクを取りつけて放熱させる
ことで安全を図り、この領域を使用する。
結論としては、図 13 のワークポイントの電流にマージンを加え、登坂時の最大電
流を 4A と見積もることにする。さらに、図 13 より突入電流が 17.6A 程度あることを
加味して、20A 程度の電流を流せるよう回路のモータ駆動系を設計する。
表 8 斜度 10°の坂を 4km/h で走行するときの入力項目
項目 値 単位
電源電圧 21.6 V
最大連続電流 4.4 A
減速比 13
ギアの伝達効率 90 %
最大負荷速度(=車輪の回転数) 163.2 RPM
負荷トルク(=車輪のトルク) 1.433 Nm
3 電動車いすの最大登坂斜度は 6°、電動セニアカーの最大登坂斜度は 10°程度で
ある。
26
図 13 斜度 10°を登坂した場合の負荷のワークポイント

















![グラウンド・コンディション² $ª& &t ± í ² 8Õ ]](https://img.pdfslide.tips/doc/110x75/61031521eabadb1bec0e2b0d/ffffffff-t-8-.jpg)











