Embed Size (px)
Citation preview
Title—Forming Computer Teachers - Development and Use of
ROBOKIT.
Abstract—In this paper, we describe the current rules for
teacher training in Brazil and the importance to prepare them to
work with educational robotics. There are not many robotic kits
manufacture in Brazil, therefore the ROBOKIT was developed to
help in the training of teacher’s and to motivate the national
production of robotic kits.
Index Terms— Teacher training in Brazil, undergraduation in
teaching of computing, educational robotics, ROBOKIT.
I. INTRODUÇÃO
ensino diretivo raramente oportuniza ao estudante atuar no planejamento e construção de objetos que utilizem
tecnologia. Porém, as atividades de criação são encontradas em quase todos os campos da atividade funcional humana. Existe, portanto, uma necessidade de introduzir no Ensino Fundamental o conteúdo da automação e dos robôs, possibilitando novas metodologias pouco exploradas ou desconhecidas pelos professores desse nível de ensino.
A ênfase atual é dada a formas de aprendizagem multidisciplinares, inter-relacionadas e voltadas ao desenvolvimento de competências tecnológicas e comunicacionais exigidas pela sociedade. Assim, torna-se imprescindível a criação de equipamentos e softwares para a efetivação de práticas inovadoras no cotidiano escolar, que utilizem bases teóricas consistentes, para que os professores possam efetivamente acompanhar o desenvolvimento dos alunos nos momentos em que interagem com tais equipamentos. Baseado na realidade apresentada e buscando
M. E. J. K. Cruz, UNISC – Universidade de Santa Cruz do Sul,
Departamento de Informática, Av. Independência, 2293, CEP 96815-900 Santa Cruz do Sul - RS – Brazil, Fone/Fax: 55 (51) 3717-7393 (e-mail: [email protected]).
W. Haetinger, UNISC – Universidade de Santa Cruz do Sul, Departamento de Informática, Av. Independência, 2293, CEP 96815-900 Santa Cruz do Sul - RS – Brazil, Fone/Fax: 55 (51) 3717-7393, (e-mail:[email protected]).
F. Horn, Imply Tecnologia Eletrônica. Rua 28 de setembro, 1713. CEP 96810-530 Santa Cruz do Sul - RS – Brazil. Fone: 55 (51) 2106 8000, Fax: 55 (51)3715-5858 (e-mail: [email protected]).
DOI (Digital Object Identifier) Pendiente.
produzir um equipamento para contribuir com o Ensino Fundamental e o fomento ao pensamento operacional dos estudantes, este artigo apresenta considerações sobre a formação de futuros professores e o desenvolvimento de um kit de robótica educativa operado por programação. O kit foi idealizado por alunos e professores do Curso Licenciatura em Computação da Universidade de Santa Cruz do Sul – UNISC em parceria com empresa.
O ROBOKIT visa suprir a lacuna existente na produção de equipamentos para o trabalho com robótica educativa no Brasil, uma vez que existem poucos fabricantes nacionais destes produtos. Um diferencial contundente do ROBOKIT é a possibilidade de trabalho com materiais alternativos, enquanto os kits importados oferecem peças prontas para encaixe e montagem de modelos pré-elaborados disponíveis em manuais sequenciais.
O projeto ROBOKIT corrobora a teoria de Berto e Nakano [1], uma vez que foi originado em uma pesquisa acadêmica e atualmente vem sendo comercializado.
Neste ínterim, o presente artigo é organizado da seguinte forma: a seção II descreve o projeto pedagógico do curso Licenciatura em Computação, no qual o ROBOKIT foi idealizado e é utilizado; na seção III é descrito o ROBOKIT, sua funcionalidade e aplicação; na seção IV são apresentadas as metodologias de utilização do produto; e na seção V são feitas as considerações finais.
II. FORMAÇÃO DE PROFESSORES NO BRASIL PARA O TRABALHO COM TECNOLOGIA DA COMPUTAÇÃO
O curso Licenciatura em Computação da Universidade de Santa Cruz do Sul, Rio Grande do Sul, Brasil, prima pela formação dos alunos, futuros docentes, assegurando a qualidade e o cumprimento de todos os aspectos necessários à formação ética e comprometida com mudanças educacionais significativas. A legislação vigente no Brasil para a formação de professores, através da Lei de Diretrizes e Bases da Educação Nacional, estabelece normas no Art. 621. O projeto pedagógico do curso Licenciatura em Computação atende
1 A formação de docentes para atuar na educação básica far-se-á em nível
superior, em curso de licenciatura, de graduação plena, em universidades e institutos superiores de educação, admitida, como formação mínima para o exercício do magistério na educação infantil e nas quatro primeiras séries do ensino fundamental, a oferecida em nível médio, na modalidade Normal [2].
Formação de Licenciados em Computação no Brasil - Desenvolvimento e Utilização do
ROBOKIT
Marcia Elena Jochims Kniphoff da Cruz, Werner Haetinger, Fabiano Horn
O
206 IEEE-RITA Vol. 4, Núm. 3, Ago. 2009
ISSN 1932-8540 © IEEE
efetivamente todos os aspectos legislados: do total deste componente, 1800 horas são dedicadas às atividades de ensino/aprendizagem e as demais 200 horas para outras formas de atividades de enriquecimento didático, curricular, científico e cultural. Estas 2000 horas de trabalho para execução de atividades científico-acadêmicas somadas às 400 horas da prática como componente curricular e às 400 horas de estágio curricular supervisionado são o campo da duração formativa em cujo terreno se planta a organização do projeto pedagógico planejado para um total mínimo de 2800 horas. A formação é realizada em 4 anos, sendo que a lei dita que não pode ser realizada em tempo inferior a 3 anos para todos os cursos de licenciatura, inclusive o curso normal superior. Em resumo, estabelece: 1) 400 (quatrocentas) horas de prática como componente
curricular, vivenciadas ao longo do curso; 2) 400 (quatrocentas) horas de estágio curricular
supervisionado a partir do início da segunda metade do curso;
3) 1800 (mil e oitocentas) horas de aulas para os conteúdos curriculares de natureza científico-cultural;
4) 200 (duzentas) horas para outras formas de atividades acadêmico-científico-culturais.
O curso também segue as diretrizes da Sociedade Brasileira de Computação (SBC) [3] a qual estabelece que as competências específicas e de docência das áreas de computação e de educação devem nortear o currículo, a avaliação, a organização institucional e a gestão pedagógica de maneira coerente e integrada na formação e na sua prática. A SBC, dentre outras indicações, sugere um currículo multidisciplinar. Incentiva a preparação de profissionais para tratar as áreas de computação e de educação, desenvolvendo competências para o uso educacional efetivo das ferramentas computacionais de maneira integrada a problemas em outros domínios de conhecimentos. Alguns princípios formativos são essenciais: modelagem, especificação, desenvolvimento, implantação e manutenção de soluções computacionais para abordagem de problemas em contextos educacionais e de educação corporativa, bem como, o uso e seleção de software e hardware adequados às demandas das escolas, instituições de ensino e organizações em geral.
Nesse sentido, o curso Licenciatura em Computação da Universidade de Santa Cruz do Sul (UNISC) sente-se comprometido com a prescrição da lei e com o fomento para a inserção da tecnologia na Educação Básica. Para dar conta destas, possui disciplinas denominadas Práticas Articuladoras em Computação e Estágio Supervisionado em Computação e horas práticas em diversas disciplinas.
O curso incentiva e evidencia a importância da programação na educação em várias disciplinas componentes do currículo regular, abordando aspectos práticos e teóricos, essenciais à formação dos futuros docentes. Especificamente as disciplinas de Programação I, Programação II e Linguagens de Programação para a Educação trabalham a programação para a aprendizagem do aluno do referido curso e para a aplicação na Educação Básica.
A partir do primeiro semestre de 2005, na disciplina Linguagem de Programação para a Educação, foi estudada a importância da programação para crianças e adolescentes em idade de escolarização. A disciplina permitiu o estudo sobre a importância da programação para o desenvolvimento cognitivo, afetivo e social dos alunos e suas possibilidades na escola. Durante a disciplina percebeu-se a carência na produção brasileira de equipamentos para o trabalho com robótica educativa, sendo que os equipamentos mais utilizados pelas escolas consultadas através de páginas de Internet eram importados.
Inicialmente, foi observado que as escolas que possuíam equipamentos para o trabalho com robótica educativa constituíam o grupo da rede particular de ensino, empregando valores financeiros significativos para a aquisição de kits. Na maioria dos casos, os kits eram compostos por motores, LED e peças de encaixe para montagem de estruturas previamente descritas em manuais.
Durante a disciplina de Linguagens de Programação para a Educação, foi iniciada a proposta de parceria com uma empresa da área de desenvolvimento tecnológico para a implementação de um kit que utilizasse materiais alternativos e para que os alunos da Licenciatura em Computação tivessem este diferencial na formação docente. Da parceria estabelecida surgiu o ROBOKIT.
III. O ROBOKIT
O ROBOKIT consiste em um objeto de aprendizagem composto por uma caixa multicontroladora, programável, dotada de microcontrolador, memória, teclado, display e alto-falante, que permite conectar simultaneamente diversos motores, lâmpadas, LED’s e relés. O produto foi desenvolvido de forma colaborativa entre os alunos e professores do curso de Licenciatura em Computação-UNISC, que orientaram as funcionalidades, elaboraram o manual e uma vídeo-aula. A fabricação ficou a cargo da empresa Imply Tecnologia Eletrônica, que acolheu a proposta.
O ROBOKIT permite elaborar atividades e momentos em sala de aula em que se propicia a ação do aluno frente a um problema, na formulação de conceitos e ideias processuais. O potencial pedagógico do ROBOKIT está na possibilidade de programação pelo aluno que o utiliza. A programação é desenvolvida conforme objetivos estabelecidos pelo grupo de alunos envolvidos no projeto. Preferencialmente é incentivada a elaboração de jogos pedagógicos que envolvam conteúdos estudados, elaborados na íntegra pelos alunos, sob orientação do professor. Tais projetos permitem aos alunos participação em todas as fases do jogo, da ideia a ser abordada, às regras que devem ser seguidas, além dos materiais alternativos com os quais o jogo será construído. Inúmeras habilidades são trabalhadas enquanto o projeto é desenvolvido. Cabe, assim ao professor estar presente para orientar o raciocínio dos alunos em certa direção através de materiais (conhecimento da criança, imagens mentais, esquemas motores) e instrumentos lógicos (estrutura de raciocínio, hábitos intelectuais) [12], auxiliando no ambiente promotor de aprendizagem. As crianças produzem pequenos inventos mecânicos, maquetes e
JOCHIMS, HAETINGER Y HORN: FORMAÇÃO DE LICENCIADOS EM COMPUTAÇÃO NO BRASIL... 207
ISSN 1932-8540 © IEEE

protótipos de movimentação autônoma que são construídos com materiais alternativos de baixo custo. Estas máquinas, sempre criadas com um aspecto pedagógico, têm a sua ação e animação levada a efeito através da programação no ROBOKIT.
A. Como surgiu o ROBOKIT
O ROBOKIT surgiu a partir de uma pesquisa realizada na disciplina Linguagens de Programação para a Educação, do curso Licenciatura em Computação que, a partir dos resultados, objetivou desenvolver um kit de robótica para aplicação no Ensino Fundamental e para a formação de professores, primando por materiais alternativos e de baixo custo, e ainda desenvolver oficinas e acompanhar a aprendizagem dos alunos participantes, através do Método Clínico Piagetiano [4, 12]. A pesquisa teve seu encaminhamento considerando que a programação é uma atividade necessária em qualquer idade, portanto, sua abordagem formal na escola é indispensável. A proposta do kit foi apresentada à empresa Imply Tecnologia Eletrônica para que o produzisse, conforme orientações dos alunos e professores do curso. Todos os encaminhamentos foram dados em parceria efetiva, sendo que a empresa implementava e os alunos e professores testavam e elaboravam uma listagem de sugestões para retornar à empresa para novas melhorias no kit.
O ROBOKIT foi submetido a vários testes realizados pelos alunos até ser considerado ideal para utilização em escolas de Ensino Fundamental, conforme ilustrado na Figura 1. Várias modificações no software foram realizadas tornando a linguagem acessível e de fácil compreensão para crianças em fase de escolarização. O display da caixa multicontroladora do ROBOKIT apresenta os resultados da programação com texto que incentiva a criação a pensar sobre a ação que se deseja executar. O resultado imediato (feedback) permite que a criança observe se seu comando está sendo executado conforme desejado ou se necessita adequação. A criança, ao programar o ROBOKIT assume uma posição de comando e controle, tornando-se autora de uma sequência de instruções para animar seu invento, maquete ou jogo pedagógico.
Local da Figura 1
O Método Clínico [4], segundo Piaget [12] é desenvolvido através de um conjunto de perguntas e experimentos utilizados para descobrir os aspectos do funcionamento e da estruturação da mente da criança, enquanto ela organiza os objetos sobre os quais age, para analisar como ela desenvolve as relações. Este método é um aliado fundamental para o trabalho pedagógico, consistindo em conversar livremente com os alunos sobre determinado assunto, acompanhando os desvios do seu pensamento para reconduzi-lo ao tema, através de questionamentos ou contra argumentações, sem dar a resposta ao aluno. Conforme as respostas dadas pela criança ou adolescente entrevistado é possível classificar a estruturação do seu pensamento, sendo que a maioria dos entrevistados apresentou contextos de esforço e interesse em direção à reflexão. Poucas crianças entrevistadas apresentam contextos mentais de fabulação ou brincadeira, nos quais as respostas são desconexas ao assunto proposto pelo professor entrevistador. Um exemplo retrata o quanto as crianças se envolvem e apreciam programar o ROBOKIT. O exemplo é de uma criança de 8 anos que trabalhava com o ROBOKIT pela segunda vez:
Entrevista realizada ao aluno A: O que este robô faz? – Liga
e faz música. Com que ele se parece? – Com uma calculadora. – O que é preciso fazer para que ele funcione? – Comandar
ele. Outros robôs também são comandados para funcionar ou eles sabem o que fazer sozinhos? – !ão sabem. Todos
precisam ser comandados por uma pessoa e eles também
podem estragar e alguém arruma de novo. Assim, é fundamental oportunizar aos alunos essa
experiência, através de uma linguagem acessível que incentive o desenvolvimento da capacidade de formular problemas e de lançar respostas para solucioná-los, incentivando a introdução ao pensamento científico e à programação.
Borges et al [5] implementaram um ambiente didático para operação remota de robô manipulador, apresentando as características do ambiente e a testagem durante o desenvolvimento. Miranda, Sampaio e Borges [6] desenvolveram um ambiente de programação visual para o kit de robótica educacional RoboFácil. Cruz et al [7] apresentam a importância da preparação de professores para o trabalho com robótica e programação no Ensino Fundamental e a validação do ROBOKIT realizado com alunos de quinta e sexta série de escola e alunos da graduação. Da mesma forma Haetinger [8] desenvolveu uma interface controladora de motores através de um computador de mesa. Estes motores eram adaptados a inventos diversos criados por alunos de graduação.
Diante dos resultados da pesquisa e dos dados agregados para as proposições futuras, considera-se que o produto desenvolvido, o ROBOKIT, atingiu plenamente os objetivos, tendo ao final de 2007 sua utilização aplicada a treze escolas diferentes da região de Santa Cruz do Sul – RS e a diversos grupos de estudo da universidade.
O produto foi planejado para atender as necessidades do Ensino Fundamental, que carece de materiais para o trabalho com programação e acionamento de motores, LED’s e sons. Os kits de robótica existentes são importados e apresentam custo elevado, inviabilizando a aquisição destes materiais para
Fig. 1. Alunos da Licenciatura em Computação UNISC testando o ROBOKIT.
208 IEEE-RITA Vol. 4, Núm. 3, Ago. 2009
ISSN 1932-8540 © IEEE
a grande maioria das escolas. Em geral, a rede particular de ensino tem maior acesso a kits importados. Algumas escolas municipais conseguem estabelecer contratos com importadoras de kits.
Considerando a necessidade da introdução à programação e ao manuseio de materiais relacionados à robótica no Ensino Fundamental e observando o crescente consumo de produtos importados pelas escolas, considerou-se que o desenvolvimento de um kit nacional era favorável ao mercado e uma oportunidade de ampliar a aproximação universidade-empresa como exemplo de cadeia produtiva.
Para regular os aspectos relacionados à propriedade intelectual e à exploração comercial do produto, foi estabelecido um contrato de parceria entre o curso Licenciatura em Computação - UNISC e a empresa Imply Tecnologia Eletrônica, objetivando a execução conjunta do kit.
B. Descrição técnica do ROBOKIT
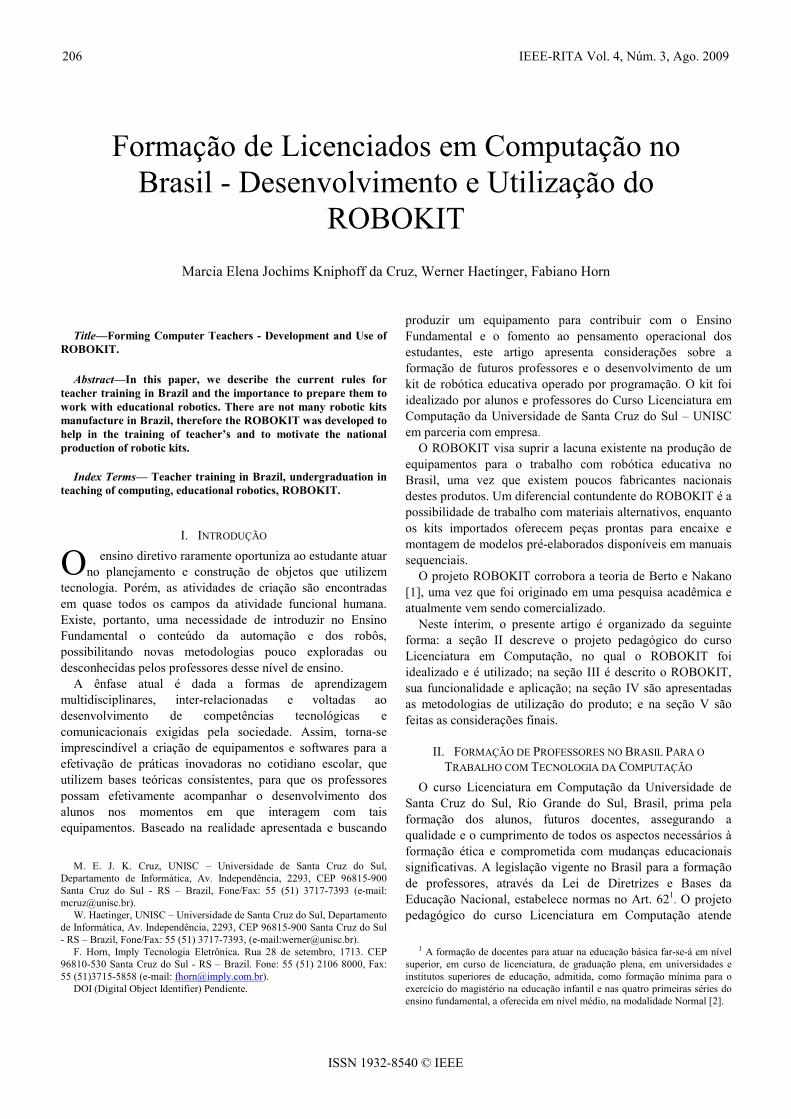
A estrutura do ROBOKIT foi planejada para ser o mais econômica possível, representando uma relação viável entre custo-benefício ao usuário. Na Figura 2 apresenta-se o diagrama de blocos com as principais funcionalidades do ROBOKIT.
Local da Figura 2 Foi utilizado um microcontrolador [9] Microchip, modelo
PIC16F873A-I/P. Este componente centraliza e executa todas as atividades do ROBOKIT.
Internamente há dois tipos de memória que são mantidas mesmo na falta de energia: - uma do tipo flash, residente diretamente dentro do microcontrolador e armazena os programas de controle e gerenciamento intrínsecos do ROBOKIT. - a outra é do tipo Erasable Programmable Read-Only Memory (EEPROM com barramento I2C) que grava e recupera os programas feitos pelos alunos. Esta memória é externa ao microcontrolador, sendo conectada a ele com apenas 2 I/O’s e possui capacidade para 32.768 bytes, o que permite gravar e recuperar até 64 programas feitos pelos alunos. Esta memória
de programas é tratada como uma fila, permitindo inserir e remover comandos sempre no final.
O visor é constituído por um LCD (Liquid Crystal Display) com 2 linhas e 16 caracteres dotado de backlight. O teclado constitui a interface de entrada de dados e programas e foi desenvolvido especialmente para o ROBOKIT em função do layout, das teclas e da arte. O ROBOKIT pode operar através de uma fonte externa ou através da sua bateria interna, do tipo recarregável 12 V DC. Esta bateria lhe confere maior mobilidade e uma autonomia média de 2 horas.
O motor de passo pode ser programado para girar para a direita ou para a esquerda, além de poder variar o intervalo de tempo entre cada passo em milissegundos. Este tipo de motor é muito preciso em seus movimentos, permitindo executar movimentos com ângulos muito pequenos. O motor de corrente contínua pode ter o valor da sua velocidade controlada dentro de uma ampla faixa de valores através de PWM (Pulse Width Modulation), que já vem implementado em hardware. Cada um dos LED’s pode ter especificado o seu tempo de acionamento em segundos. As notas musicais foram implementadas diretamente no microcontrolador.
O teclado funciona de forma multiplexada, através de uma varredura feita pelo microcontrolador. A varredura retorna códigos ASCII para cada tecla. Estes códigos são associados a comandos que correspondem ao nome das teclas na capa de policarbonato.
Internamente as micro-instruções são organizadas em um formato onde a primeira posição corresponde ao tipo de comando (motor de passo, motor contínuo, LED’s, SOM, etc) e as demais posições são os parâmetros modificáveis conforme a instrução (sentido de rotação, número de passos, velocidade). Este formato é transparente ao aluno e o seu emprego dispensa a criação de uma linguagem específica para o estudante fazer a programação do ROBOKIT. Para programar, ele digita uma seqüência de teclas na ordem desejada.
A programação do ROBOKIT é feita através do teclado e os comandos são visualizados no LCD, proporcionando um feedback imediato ao aluno. Os comandos de repetição foram incluídos para permitir executar os blocos de programas por várias vezes.
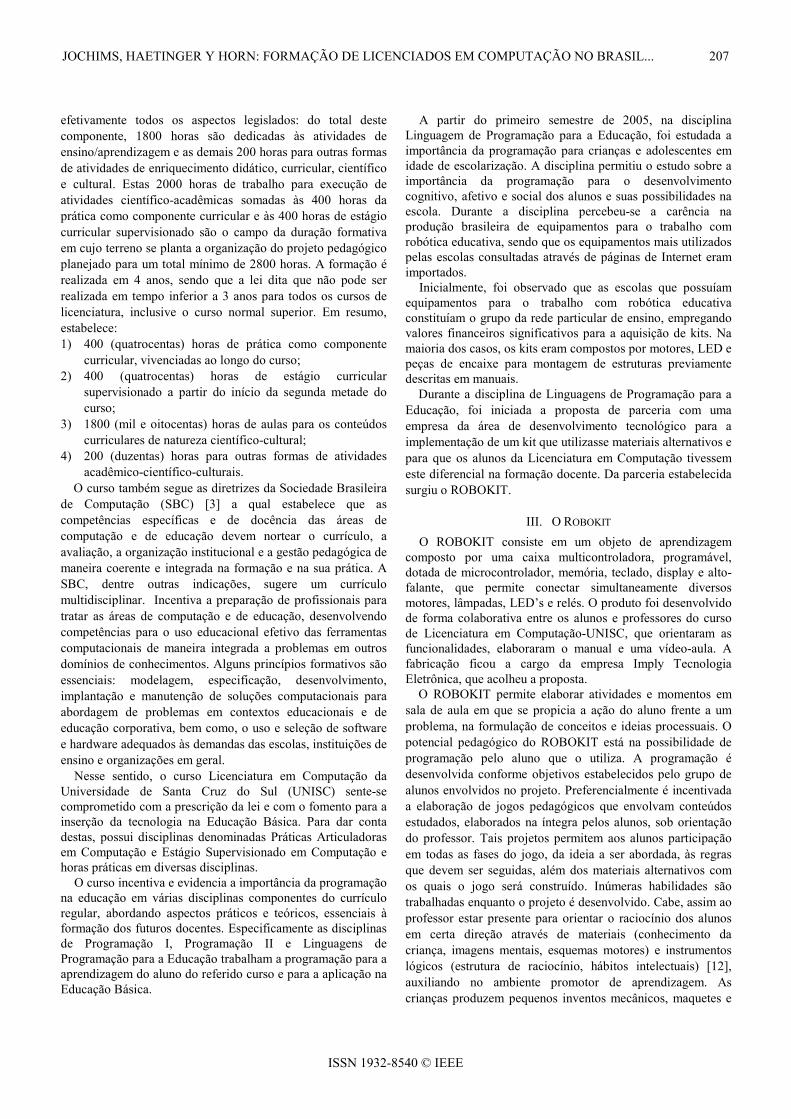
Vários layouts foram criados para o ROBOKIT, sendo que foi escolhido o mais ergonômico, apresentado na Figura 3.
Local da Figura 3
Fig. 2. Diagrama de blocos do ROBOKIT .
Fig. 3. Layout do ROBOKIT .
JOCHIMS, HAETINGER Y HORN: FORMAÇÃO DE LICENCIADOS EM COMPUTAÇÃO NO BRASIL... 209
ISSN 1932-8540 © IEEE
C. Manuais e Vídeo-aula
O texto do manual, com 23 páginas, foi elaborado pelos professores alunos do curso de Licenciatura em Computação da UNISC, contando com a orientação e a revisão de professores. Adotou-se o formato livreto pela economia e mobilidade. A capa, Figura 4, foi feita com papel do tipo couchet e todas as páginas internas são coloridas. Também acompanha o produto uma carta de mesa que resume os principais comandos e funcionalidades do ROBOKIT. O manual é considerado um caderno pedagógico com texto dirigido aos pais e professores. O teor dos textos do manual enfatizam a importância da programação, da criação com materiais alternativos e a possibilidade de relacionar inventos, jogos pedagógicos e maquetes a conhecimentos que as crianças já possuem. Estas características são o diferencial na comparação com demais kits que apresentam a montagem de inventos passo a passo com peças pré-moldadas.
Além de descrever os componentes do ROBOKIT, seus
conectores, ligações e operação, o manual também apresenta sugestões de projetos e jogos educativos, tais como: Montagem de Maquetes, Elaboração de Inventos, Telas Artísticas e Criativas, Datas Comemorativas, Aprenda Futebol Brincando, Jogo do Raciocínio, Jogo das Formas Geométricas, Jogo Ritmos Musicais, Montando o Mapa do Brasil, Bingo da Multiplicação, Alfabeto das Cores, Trilha das Cores.
A vídeo-aula, que é distribuída em CD, apresenta explicações teórico-pedagógicas, exemplos de inventos e jogos pedagógicos, visando à formação docente para o trabalho na escola. O funcionamento do ROBOKIT é apresentado passo a passo.
IV. METODOLOGIAS DESENVOLVIDAS
A atividade de criação dos alunos das escolas de Ensino Fundamental inicia na elaboração dos seus inventos que são montados pela integração de materiais alternativos, que podem ser os mais diversos, incluindo: cartolina, madeira, metal, plástico, rodas, correias, eixos, engrenagens, motores, LED’s, entre outros. Estes elementos são conectados ao ROBOKIT e após é realizada a sua programação. Os diferentes tipos de motores que podem ser ligados permitem que os inventos adquiram movimento e ação.
Para ativar o seu invento, o iniciante digita instruções no ROBOKIT, criando um programa que segue uma lógica estabelecida no projeto. A capacidade interativa proporcionada pelo ROBOKIT torna a atividade mais atrativa e interessante para o aprendiz, favorecendo, assim, o processo de ensino-aprendizagem.
O professor orientador procura conduzir as atividades práticas incentivando montagens com caráter lúdico e envolvendo tópicos relativos ao conteúdo desenvolvido em aula, d’ABREU [10]. A interação com os demais colegas também é evidenciada pela troca constante de ideias e necessidade de tomada de decisões grupais.
Foram analisados os resultados de aprendizagem de 22 crianças entre 6 e 12 anos. Foram aplicados questionários às crianças sobre a concepção de robótica e assuntos adjacentes, solicitando que traçassem um paralelo entre programar no ROBOKIT e programar grandes robôs ou robôs sofisticados apresentados na TV.
Para exemplificar apresenta-se parte das respostas dadas por três alunos de 8 anos, nas quais a resposta final indica a formação da sua estrutura de pensamento:
Aluno B Entrevistador: - Para o ROBOKIT funcionar o que é preciso
fazer? Resposta do aluno: - Programar ele. Entrevistador: - Como? Resposta do aluno: - Apertando nos botões. Entrevistador: - E se ele estragar? Resposta do aluno: - Alguém arruma. Entrevistador: - E os robôs da TV? Alguém necessita
programar estes robôs? Resposta do aluno: - Não eles sabem tudo sozinhos. Aluno C Resposta do aluno: - Não precisa ser programado eles são
robôs inteligentes, mas se estragar alguém precisa arrumar. Aluno D Resposta do aluno: - Qualquer robô precisa ser programado
para funcionar. A análise das respostas permite concluir o nível de
pensamento no qual se encontra cada aluno. É possível, classificar, através das respostas como o aluno está estruturando seu pensamento, se consegue estabelecer relações entre a programação do ROBOKIT e um outro robô mais sofisticado, mas fora do seu alcance físico. Nas respostas é
Fig. 4. Manual do ROBOKIT.
210 IEEE-RITA Vol. 4, Núm. 3, Ago. 2009
ISSN 1932-8540 © IEEE
possível identificar que o aluno B ainda possui a fabulação em seu pensamento, mas se direciona para o desencadeamento de um pensamento mais elaborado. O aluno C já se encontra em nível mais avançado e o D já está na crença espontânea, segundo a metodologia clínica de Piaget.
Segundo Piaget [11], o conhecimento construído está incorporado aos esquemas mentais que são colocados para funcionar diante de situações problemas ou desafios. Esse processo ocorre mediante a tomada de consciência, que é entendida como uma construção que decorre das relações do sujeito com o objeto, sendo a mesma vista como uma conceituação, isto é, uma passagem da assimilação prática para a assimilação por meio de conceitos.
Para exemplificar, um dos inventos consistiu em um jogo composto por cartolina, caixa de sapato e cartas de papel. Na cartolina foi desenhada uma trilha com casas numeradas. As cartas, também numeradas, continham problemas relativos ao conteúdo de Geometria Plana e indicações para acerto ou erro. A caixa de sapato foi encapada com papel numerado e no centro suportava o motor de passo com um ponteiro ligado ao seu eixo. Através da programação, o ROBOKIT fazia o controle do giro do motor, apontando o número de casas a serem percorridas sobre a trilha. A última casa alcançada indicava a carta a ser retirada pelo jogador. Mediante resolução do problema, o jogador poderia avançar ou recuar. O planejamento, o estabelecimento de regras e o desenvolvimento do jogo, apresentado na Figura 5, ficou a cargo dos alunos com a orientação do professor.
Outro exemplo da praticidade e ergonomia do ROBOKIT é
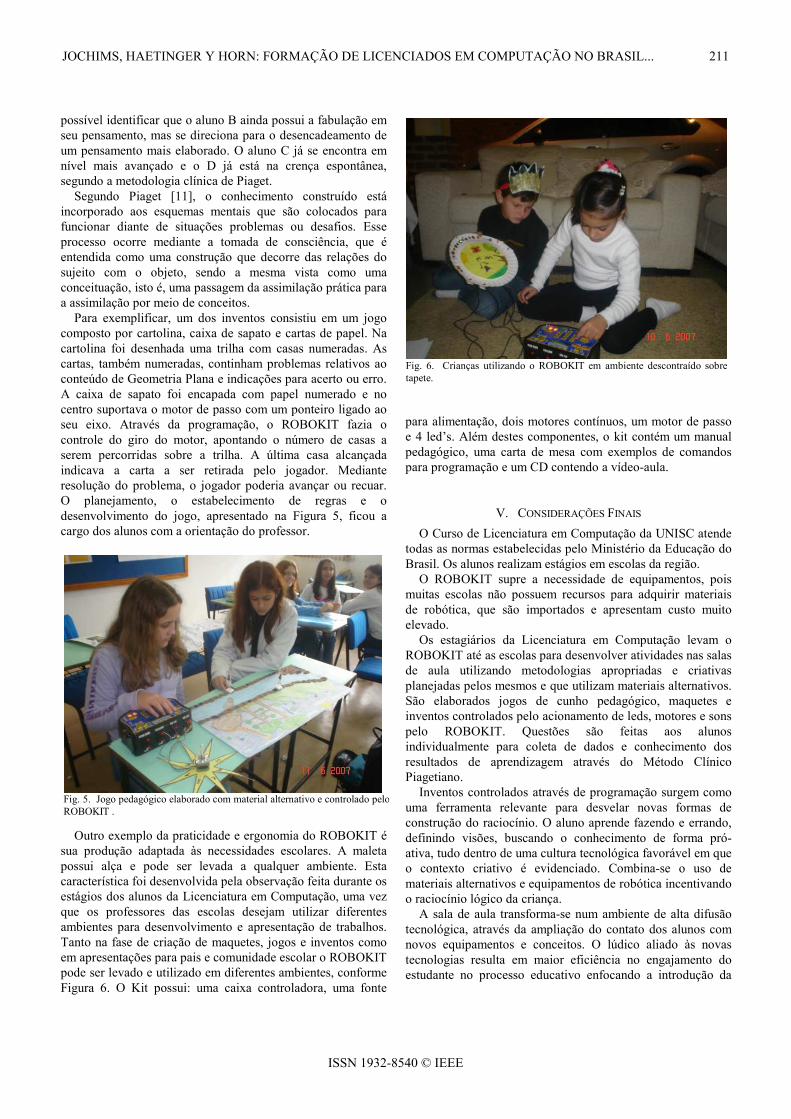
sua produção adaptada às necessidades escolares. A maleta possui alça e pode ser levada a qualquer ambiente. Esta característica foi desenvolvida pela observação feita durante os estágios dos alunos da Licenciatura em Computação, uma vez que os professores das escolas desejam utilizar diferentes ambientes para desenvolvimento e apresentação de trabalhos. Tanto na fase de criação de maquetes, jogos e inventos como em apresentações para pais e comunidade escolar o ROBOKIT pode ser levado e utilizado em diferentes ambientes, conforme Figura 6. O Kit possui: uma caixa controladora, uma fonte
para alimentação, dois motores contínuos, um motor de passo e 4 led’s. Além destes componentes, o kit contém um manual pedagógico, uma carta de mesa com exemplos de comandos para programação e um CD contendo a vídeo-aula.
V. CONSIDERAÇÕES FINAIS
O Curso de Licenciatura em Computação da UNISC atende todas as normas estabelecidas pelo Ministério da Educação do Brasil. Os alunos realizam estágios em escolas da região.
O ROBOKIT supre a necessidade de equipamentos, pois muitas escolas não possuem recursos para adquirir materiais de robótica, que são importados e apresentam custo muito elevado.
Os estagiários da Licenciatura em Computação levam o ROBOKIT até as escolas para desenvolver atividades nas salas de aula utilizando metodologias apropriadas e criativas planejadas pelos mesmos e que utilizam materiais alternativos. São elaborados jogos de cunho pedagógico, maquetes e inventos controlados pelo acionamento de leds, motores e sons pelo ROBOKIT. Questões são feitas aos alunos individualmente para coleta de dados e conhecimento dos resultados de aprendizagem através do Método Clínico Piagetiano.
Inventos controlados através de programação surgem como uma ferramenta relevante para desvelar novas formas de construção do raciocínio. O aluno aprende fazendo e errando, definindo visões, buscando o conhecimento de forma pró-ativa, tudo dentro de uma cultura tecnológica favorável em que o contexto criativo é evidenciado. Combina-se o uso de materiais alternativos e equipamentos de robótica incentivando o raciocínio lógico da criança.
A sala de aula transforma-se num ambiente de alta difusão tecnológica, através da ampliação do contato dos alunos com novos equipamentos e conceitos. O lúdico aliado às novas tecnologias resulta em maior eficiência no engajamento do estudante no processo educativo enfocando a introdução da
Fig. 5. Jogo pedagógico elaborado com material alternativo e controlado pelo ROBOKIT .
Fig. 6. Crianças utilizando o ROBOKIT em ambiente descontraído sobre tapete.
JOCHIMS, HAETINGER Y HORN: FORMAÇÃO DE LICENCIADOS EM COMPUTAÇÃO NO BRASIL... 211
ISSN 1932-8540 © IEEE
programação no Ensino Fundamental, que pela legislação brasileira é composto de nove anos.
Como proposição futura pretende-se desenvolver um ambiente de controle do ROBOKIT pela Internet e por celular, objeto de pesquisa em andamento no ano de 2008 e 2009, além do acoplamento de sensores para novas aplicações.
AGRADECIMENTOS
Agradecemos aos alunos e professores participantes do projeto, à UNISC – Universidade de Santa Cruz do Sul pelo apoio logístico e financeiro dado a esta pesquisa e à empresa Imply Tecnologia Eletrônica pela fabricação e comercialização do ROBOKIT.
REFERÊNCIAS
[1] BERTO, Rosa M. V. S. e NAKANO, Davi Noboru. 2000 A produção científica nos anais do encontro nacional de engenharia de produção: um levantamento de métodos e tipos de pesquisa. Escola Politécnica da Universidade de São Paulo Departamento de Engenharia de Produção. Anais ENEGEP, São Paulo.
[2] Brasil. PARECER CNE/CP 28/2001. Despacho do Ministro em 17/1/2002, publicado no Diário Oficial da União de 18/1/2002, Seção 1, p. 31.
[3] SBC – Sociedade Brasileira de Computação. 2002 Currículo de Referência para Cursos de Licenciatura em Computação. CR-LC/2002 - Versão homologada em Assembleia da SBC em julho de 2002.
[4] DELVAL, Juan. 2002 Introdução à prática do método clínico: descobrindo o pensamento das crianças. Porto Alegre: Artmed.
[5] BORGES, Emanuel N. 2006 Ambiente didático para operação remota de robô manipulador. In: XXVI ENEGEP - Fortaleza, CE, Brasil: ENEGEP 2006 ABEPRO 1 (EESC/USP).
[6] MIRANDA, Leonardo C, SAMPAIO, Fábio F. e BORGES, José A. 2007 ProgrameFácil: Ambiente de Programação Visual para o kit Robótica Educacional RoboFácil. Anais do XVIII Simpósio Brasileiro de Informática na Educação, São Paulo.
[7] CRUZ, Marcia K. et al. 2007 Formação Docente para Trabalho com Robótica Educativa. Anais do XVIII Simpósio Brasileiro de Informática na Educação, São Paulo.
[8] HAETINGER, Werner. 2004 Construção de robôs para ensinar os conceitos de programação orientada a objetos. In: 6º SIMPOSIO INTERNACIONAL DE INFORMATICA EDUCATIVA - SIIE 2004. Caceres: Universidad de Extremadura.
[9] PEREIRA, Fábio. 2003 Microcontroladores PIC: Programação em C. 6°. ed. São Paulo: Érica.
[10] d’ABREU, João Vilhete Viegas. 1996 Desenvolvimento de Projetos em Parceria Professor-Aluno na Oficina de Robótica Pedagógica. Anais do VII Congresso Internacional Logo. Porto Alegre, RS, novembro, 1995 e Anais do III Congresso Iberoamericano de Informática. Barranquilla, Colômbia, julho.
[11] PIAGET, Jean. 1997 A Tomada de Consciência. São Paulo: Melhoramentos Universidade de São Paulo.
[12] __________. 2005 A Representação do Mundo na Criança: com concurso de onze colaboradores. Aparecida, São Paulo: Idéias & Letras.
Marcia Elena Jochims Kniphoff da Cruz é licenciada em Matemática e Biologia e mestre em Educação pela Universidade Federal do Rio Grande do Sul (Brasil). É professora do Departamento de Informática e atual Coordenadora da Licenciatura em Computação, da Universidade de Santa Cruz do Sul. Suas linhas de pesquisa são Robótica e Informática Educativa.
Werner Haetinger é licenciado em Física e mestre em Ciência da Computação pela Universidade Federal do Rio Grande do Sul (Brasil). É professor assistente do Departamento de Informática da Universidade de Santa Cruz do Sul. Suas linhas de pesquisa são Robótica e Informática Educativa.
Fabiano Horn é Técnico em Automação Industrial e atualmente é Diretor de Tecnologia da empresa IMPLY Tecnologia Eletrônica (Brasil), na qual dirige a gestão de projetos nas áreas de hardware, firmware e software.
212 IEEE-RITA Vol. 4, Núm. 3, Ago. 2009
ISSN 1932-8540 © IEEE





























