Embed Size (px)
Citation preview
Chaos, Solitons and Fractals 40 (2009) 848–861
www.elsevier.com/locate/chaos
Frequency-domain and time-domain methods for feedbacknonlinear systems and applications to chaos control
Zhisheng Duan *, Jinzhi Wang, Ying Yang, Lin Huang
State Key Laboratory for Turbulence and Complex Systems and Department of Mechanics and Engineering Science, Peking University,
Beijing 100871, PR China
Accepted 20 August 2007
Abstract
This paper surveys frequency-domain and time-domain methods for feedback nonlinear systems and their possibleapplications to chaos control, coupled systems and complex dynamical networks. The absolute stability of Lur’e sys-tems with single equilibrium and global properties of a class of pendulum-like systems with multi-equilibria are dis-cussed. Time-domain and frequency-domain criteria for the convergence of solutions are presented. Some latestresults on analysis and control of nonlinear systems with multiple equilibria and applications to chaos control arereviewed. Finally, new chaotic oscillating phenomena are shown in a pendulum-like system and a new nonlinear systemwith an attraction/repulsion function.� 2007 Elsevier Ltd. All rights reserved.
1. Introduction
The absolute stability of Lur’e systems which are composed of a linear system and a feedback nonlinear loop hasbeen extensively studied for several decades and different criteria have been established, see [1–6] and references therein.The frequency-domain condition based on transfer functions for Lur’e systems is popular in engineering since it can beeffectively tested. An important concept in control theory related to such a method is the notion of positive realnesswhich has many applications to passivity analysis and control [7,8], quadratic optimal control [9], and adaptive systemtheory [10]. On the other hand, the time-domain method based on Lyapunov functions is effective in computation andcontroller design [4,11,12] because of the development of linear matrix inequality (LMI) theory [13,14]. And the remark-able Kalman–Yakubovich–Popov (KYP) lemma [4,5,15] established the equivalence between frequency-domain condi-tions (e.g., circle and Popov criteria) and time-domain conditions (LMIs) for absolute stability of Lur’e systems. Thislemma has been known as one of the most important results in systems and control theory. A generalized KYP lemmaand its applications to filtering problems in communications with restrictions on frequency ranges were given in [16]. Atthe beginning study of Lur’e systems, the stability conditions were applicable to single-input and single-output (SISO)systems. Later on, they were generalized to multi-input and multi-output (MIMO) systems, e.g., the Popov criterionwas extended to multiple sector restricted Lur’e systems in [17] and it was shown that the diagonal parameter matrixin Popov multiplier does not need to be positive. And more exact criteria were established for absolute stability with
0960-0779/$ - see front matter � 2007 Elsevier Ltd. All rights reserved.doi:10.1016/j.chaos.2007.08.034
* Corresponding author. Tel./fax: +86 10 62765037.E-mail address: [email protected] (Z. Duan).

Z. Duan et al. / Chaos, Solitons and Fractals 40 (2009) 848–861 849
sector and slope conditions, see [18,19] and references therein. The boundedness without absolute stability for a specialclass of Lur’e systems was studied in [20]. The study of absolute stability is of fundamental importance in many prob-lems of control and electrical circuits, e.g., Lur’e systems play important roles in neural networks [21–23] and synchro-nization theory [24–26]. In the latter case, Chua’s circuit [27,28] which is representable in Lur’e form, is often employedin the synchronization schemes.
All the results on absolute stability are generally restricted to systems with the unique equilibrium. Meanwhile engi-neers often have to deal with systems with multiple equilibria. In feedback nonlinear systems, different nonlinear func-tions correspond to different equilibrium set. In this way, new types of stability problems appear and the canonicalLyapunov methods for global stability cannot be used to deal with such problems. Lyapunov and Popov tools wereextended to cover such kinds of stability problems in [29–31]. Some global properties such as dichotomy (convergenceof bounded solutions), Lagrange stability (boundedness of all solutions), gradient-like behavior (convergence of allsolutions), etc., were presented and the corresponding frequency-domain criteria were established for a class ofmulti-equilibrium systems which were called pendulum-like systems in [29]. Applications to phase-locked loops, syn-chronous machines and Chua’s circuits were also given. Recently, controller design guaranteeing dichotomy andLagrange stability for pendulum-like systems was studied in [32–34]. Robustness analysis and control were studiedin [35,36]. The nonexistence of bounded oscillating solutions or periodic solutions in cylindrical space was studied in[37,38]. The diversity of system dynamics was analyzed in [39] for Lur’e systems and pendulum-like systems. Othermethods for analysis, control and applications of nonlinear systems have also been well developed, e.g., see [40,41]for asymptotic methods of strongly nonlinear systems [42,43] for differential geometry methods [44] for output regula-tion of nonlinear systems and its applications. This paper focuses on feedback nonlinear systems and attempts to dis-cuss time-domain and frequency-domain methods in a unified framework, as well as their applications to chaos control.
The study of chaos has attracted a lot of researchers since Lorenz presented a simple three dimensional chaotic sys-tem, see [28,45–50] and references therein. So far, two large classes of chaotic systems were extensively studied. One iswith nonlinearity of the product of variables, such as Lorenz system and Rossler system [46], the other is with singlevariable nonlinear functions such as Chua’s circuits with piece-wise-linear (PWL) nonlinearity and smooth Chua’sequations with cubic nonlinearity [28] which can be viewed as Lur’e systems. Chaotic systems are typically associatedwith multiple equilibrium behavior. Many methods for chaos analysis and control have been established [28,46,47]. Thevarious literature references show that the study of chaos is a universal problem. In the study of chaos, it is generallyhard to obtain analytical criteria for the existence of chaotic attractors. Based on the harmonic balance principle, apractical approach for predicting chaotic dynamics in nonlinear systems was presented in [48]. This method is practi-cally applicable, but not completely exact. Therefore, it is interesting to know the nonexistence of chaotic attractors.Based on the property of dichotomy [29], the nonexistence of chaotic attractors and limit cycles in feedback nonlinearsystems was studied in [29,51–53]. Different from the chaos control method based on the dynamics near the equilibrium,the control method based on the property of dichotomy is a global method under which all bounded solutions are con-vergent. And the study of dichotomy is an important aspect in view of the existence and nonexistence of complex behav-ior in dynamical systems [54].
Apart from the study of systems modelling a single agent, coupled systems and large-scale systems composing ofmany subsystems have also been extensively studied, e.g., see linear and nonlinear interconnected systems [52,55,56],complex dynamical behaviors in coupled Chua’s circuits [57], bifurcation and chaos in a string-beam coupled system[58], the synchronization problem in coupled neurons and multi-Lorenz systems [59,60], time-delayed coupled nonlinearoscillators [61], and the large-scale system theory [62–65], respectively. Generally, complex phenomenon appears in cou-pled systems or large-scale systems with interconnections of subsystems, e.g., sometimes some subsystem must be unsta-ble in order to stabilize the whole system [65–67]. It is important to design stabilizing controllers with the existence oflocal instability. The sense of instability was discussed in [68]. The local instability with stability as a whole also appearsin dynamical networks [67]. Complex dynamical networks have attracted increasing attention from physicists, biolo-gists, social scientists and control scientists in recent years, see [69–76] and references therein. From another point ofview, a complex dynamical network can be considered as a large-scale system with special interconnections amongits dynamical nodes. Without requiring interchange of information among different nodes, the decentralized controllerdesign methodology in large-scale system theory is obviously non-effective, thereby leaving an interesting research prob-lem to the field of complex dynamical networks. And the notions of ‘small-world’, ‘scale free’, ‘power-law’, etc. in com-plex networks will in turn provide new opportunities to the traditional large-scale system theory. It is also an interestingtopic to extend miscellaneous results on feedback nonlinear systems to the currently popular complex dynamicalnetworks.
This paper is devoted to introducing stability analysis and control results for feedback nonlinear systems in a unifiedfrequency-domain and time-domain framework. Section 2 is a review of absolute stability for Lur’e systems. Section 3introduces some global properties for a class of nonlinear systems with multiple equilibria. Section 4 introduces the
850 Z. Duan et al. / Chaos, Solitons and Fractals 40 (2009) 848–861
latest results on robustness analysis and control of pendulum-like systems. The application of the property of dichot-omy to chaotic system control is also introduced. And two examples are given to show some new chaotic oscillatingphenomena. The last section concludes the paper.
Throughout this paper, the superscript T means transpose for real matrices and the superscript H means conjugatetranspose for complex matrices. Re stands for the symmetric part of the given matrix, e.g., given a complex matrix Y,RefY g ¼ 1
2ðY þ Y HÞ.
2. Absolute stability of Lur’e systems
Given a Lur’e system:
_x ¼ Axþ Bf ðyÞy ¼ Cx
�ð1Þ
where x = (x1, . . . ,xn)T is the state, y = (y1, . . . ,ym)T is the output and f(y) = (f1(y1), . . . , fm(ym))T is the nonlinear func-tion vector with sector condition:
0 6fiðyiÞ
yi
6 ci; f ið0Þ ¼ 0; i ¼ 1; . . . ;m: ð2Þ
For simplicity, we only consider the sector condition as above. For a general sector, it can be transformed into the sec-tor above by a simple loop transformation [5,6].
Let C = diag(c1, . . . ,cm). By the method in [17], we have the following result.
Lemma 1. System (1) is absolutely stable for all f satisfying (2), if A is stable and there exist a diagonal matrix M and a
symmetrical matrix P such that the following LMI holds:
PAþ ATP PBþ ATCTM þ CTC
BTP þMCAþ CC MCBþ BTCTM � 2I
" #< 0: ð3Þ
By the canonical KYP lemma [15], linear matrix inequality (3) can be converted to a frequency-domain inequality.
Lemma 2. System (1) is absolutely stable for all f satisfying (2), if A is stable and there exists a diagonal matrix M such
that
RefjwMCðjwI � AÞ�1Bþ CCðjwI � AÞ�1B� Ig < 0; 8w 2 R: ð4Þ
In fact, inequality (4) is the canonical Popov criterion for MIMO Lur’e systems [17], see [5,6,29] for circle criterion.Since the transfer function shows the intrinsic characteristics of control systems, the frequency-domain inequality isoften preferred by engineers. However, the LMI (3) is very popular for computation due to the powerful toolbox[13,14]. Lur’e systems have been extensively studied and they have played important roles in chaos synchronization[26]. The canonical Chua’s circuit and smooth Chua’s equations can be written in Lur’e form. Along with the develop-ment of complex networks, it is an interesting topic to study complex dynamical networks of Lur’e nodes.
In what follows, we introduce a class of feedback nonlinear systems with infinite number of equilibria.
3. Global properties of pendulum-like systems
The following feedback nonlinear system was studied in [29] by extending the Lyapunov method. Such systems havebeen used widely in electric circuits, mechanical systems and phase synchronizations [29–31].
dydt ¼ Ay þ BuðxÞ;dxdt ¼ Cy þ RuðxÞ;
(ð5Þ
where A 2 Rn·n, B 2 Rn·m, C 2 Rm·n, R 2 Rm·m, u(x) = (u1(x1), . . . ,um(xm))T. By viewing _x as the output of the system,the transfer function from u(x) to _x is
KðsÞ ¼ CðsI � AÞ�1Bþ R:

Z. Duan et al. / Chaos, Solitons and Fractals 40 (2009) 848–861 851
Generally, the following assumptions for the system above are made:
Assumption 1. (A,B) is controllable, (A,C) is observable, A and K(0) are nonsingular.
Assumption 2. ui: R! R is Di-periodic, satisfies the local Lipschitz continuous condition and possesses a finite numberof zeroes on [0, Di), i = 1, . . . ,m.
In order to analyze the characteristic of system (5), we define a set E as
E ¼ fd ¼ ð0; . . . ; 0; k1D1; . . . ; kmDmÞTjki 2 Zg:
Rewriting (5) as
_g ¼ f ðt; gÞ; ð6Þ
where g = (yTxT)T and f: R+ · Rn+m! Rn+m is continuous and locally Lipschitz continuous in the second argument, bythe periodicity of ui, system (6) satisfies
f ðt; gþ dÞ ¼ f ðt; gÞ; t P 0; d 2 E:
This characteristic is just like the pendulum characteristic of mathematical pendulum equation, so (5) is called a pen-dulum-like system in [29]. And because of the periodicity of ui, system (5) is a typical nonlinear system with infiniteisolated equilibria. The equilibrium set of (5) can be analyzed simply as follows. Any equilibrium (yeq,xeq) of (5) satisfies
Ayeq ¼ �BuðxeqÞ; Cyeq ¼ �RuðxeqÞ:
By the nonsingularity of A, one can get
ð�CA�1Bþ RÞuðxeqÞ ¼ 0:
Since K(0) = R � CA�1B is nonsingular (Assumption 1), we have u(xeq) = 0, and so yeq = 0. Therefore, the equilibriumset K of (5) is
K ¼ fðyeq; xeqÞjyeq ¼ 0;uðxeqÞ ¼ 0g:
Definition 1. System (5) is called to be gradient-like, if every solution converges to a certain equilibrium.
Definition 2. System (5) is called to be dichotomous, if every bounded solution converges to a certain equilibrium.
Definition 3. System (5) is called to be Lagrange stable, if every solution is bounded.Let
vi ¼Z Di
0
uiðrÞdr
�Z Di
0
juiðrÞjdr; v ¼ diagðv1; . . . ; vmÞ: ð7Þ
The following frequency-domain condition for gradient-like behavior of (5) was given in [29].
Lemma 3. Suppose A is Hurwitz stable. Under Assumptions 1 and 2, if there exist real diagonal matrices j, d, � with � > 0,
d > 0 such that the following conditions hold:
(i) Re{jK(iw)} + KH(iw)�K(iw) + d < 0, "w 2 R,
(ii) 4d� > (jv)2, then system (5) is gradient-like.
In this paper, the gradient-like behavior means that every solution is convergent to a certain equilibrium. Since sys-tem (5) has multiple equilibria, the global convergence does not mean every equilibrium is Lyapunov stable. In fact, itcan be shown that in the case of global convergence of system (5) there exists at least one equilibrium that is not Lyapu-nov asymptotically stable [30]. This shows the complexity of dynamical behaviors in pendulum-like systems.
For convenience of computation by LMI toolbox, we can also convert the conditions of Lemma 3 to LMIs by KYPlemma [52].

852 Z. Duan et al. / Chaos, Solitons and Fractals 40 (2009) 848–861
Lemma 4. Under Assumption 1, the condition (i) of Lemma 3 is equivalent to the existence of a symmetrical matrix P such
that
N þ PAþ ATP PB
BTP 0
" #< 0;� �
where N ¼ CT�C 12CTjþ CT�R
12jC þ RT�C dþ RT�Rþ 1
2ðjRþ RTjÞ :
And by Schur complement, the condition (ii) of Lemma 3 is equivalent to
2d jv
jv 2�
� �> 0:
Obviously, the matrix inequalities in Lemma 4 are linear in variables P, j, � and d, so they can be solved easily byLMI toolbox.
More exact conditions are given for the gradient-like behavior of pendulum-like systems when the nonlinear func-tion u satisfies the bounded derivative condition [29]. And the conditions in Lemmas 3 or 4 for global convergence arecomparatively strong. In some practical systems, we often care about the nonexistence of bounded oscillating solutions.In this case, the convergence of bounded solutions is a useful property. Similarly to the method in Lemma 3, the fol-lowing condition for dichotomy was given in [29].
Lemma 5. Under Assumptions 1 and 2, if there exist real diagonal matrices j = diag(j1, . . . ,jm), � = diag(�1, . . . ,�m) with
� > 0 such that the following inequality holds:
RefjKðiwÞg þ KHðiwÞ�KðiwÞ 6 0; 8w 2 R; ð8Þ
then (5) is dichotomous.
Similarly to Lemma 4, we can also convert the condition (8) into an LMI. In addition, Lagrange stability conditionfor SISO pendulum-like system was presented in [29]. Comparing the absolute stability conditions in Section 2 with theconditions for global properties of pendulum-like systems in this section, we can see some relations between two typesof feedback nonlinear systems. The canonical Lyapunov and Popov tools were extended to nonlinear systems with infi-nite equilibria and new results were established for global properties [29]. In fact, such types of feedback nonlinear sys-tems can be similarly studied in the above frequency-domain and time-domain methods.
4. Latest results
Analysis and control of nonlinear systems with multiple equilibria and applications to chaos control have receivedan increasing interest. This section focuses mainly on the development of feedback nonlinear systems in China.
4.1. Analysis and control of pendulum-like system
In system (5), ui only depends on xi. In practical systems, the nonlinear functions ui may depend on xj, j 5 i. As aspecial case, we consider the following system:
dydt ¼ Ay þ BuðzÞ;dxdt ¼ Cy þ RuðzÞ;
(ð9Þ
where A, B, C and R are given as in (5), u(z) = (u1(z1), . . . ,um(zm))T, z1 = a11x1 + � � � + a1mxm, . . . ,zm = am1x1 + � � � + ammxm. We denote the m · m matrix (aij) by M, so z = Mx. Then u(z) can also be denoted byu(Mx). Obviously, the transfer function from u(z) to _x is
KðsÞ ¼ CðsI � AÞ�1Bþ R:
In what follows, we consider the global convergence of system (9), where the interconnection matrix M will play animportant role. First we analyze the equilibria of (9). Obviously, any equilibrium (yeq,xeq) of (9) satisfies
Ayeq ¼ �BuðzeqÞ; Cyeq ¼ �RuðzeqÞ;
where zeq = Mxeq. Consequently, we have

Z. Duan et al. / Chaos, Solitons and Fractals 40 (2009) 848–861 853
ðR� CA�1BÞuðzeqÞ ¼ 0:
By the assumption that K(0) is nonsingular, we can get u(zeq) = 0, i.e., ui(zieq) = 0, i = 1, . . . ,m. And it follows thatyeq = 0 by the nonsingularity of A. If M is nonsingular, xeq = M�1zeq. By the periodicity condition of ui, the numberof equilibrium of system (9) is infinite and its equilibrium set is
K ¼ fðyeq; xeqÞjyeq ¼ 0; xeq ¼ M�1zeq;uðzeqÞ ¼ 0g:
Alternatively, system (9) can be written as
dydt ¼ Ay þ BuðzÞ;dzdt ¼ MCy þMRuðzÞ;
(ð10Þ
where A, B, C, R and M are given as in (9). Obviously, the transfer function from u(z) to _z is MK(s). About the globalconvergence of systems (9) and (10), we have the following statement.
Conclusion 1. If M is nonsingular, then system (9) is gradient-like if, and only if, system (10) is gradient-like.Mathematically, system (9) is simple and its global convergence can be studied by system (10). However, it is
interesting in the viewpoint of input and output information coupling of systems. Combining Lemma 3 and Conclusion1, one can get the following result [52].
Conclusion 2. Suppose A is Hurwitz stable. Under Assumptions 1 and 2, if there exist real diagonal matrices j, d, � with� > 0, d > 0 such that
RefjMKðiwÞg þ KHðiwÞMT�MKðiwÞ þ d < 0; 8w 2 R
and the condition (ii) of Lemma 3 holds, then system (9) is gradient-like.
Given the coupled matrix M, we can analyze the gradient-like behavior of system (9) by testing the conditions ofConclusion 2. In addition, we can also design such a coupled matrix such that (9) is gradient-like. For the design prob-lem, first we rewrite Conclusion 2 to reduce a matrix variable [52].
Lemma 6. Suppose A is Hurwitz stable. Under the Assumptions 1 and 2, if there exist a matrix M and diagonal matrices
� > 0, d > 0 such that
RefMKðiwÞg þ KHðiwÞMT�MKðiwÞ þ d < 0; 8w 2 R; ð11Þ
and
4d� > ðvÞ2; ð12Þ
then for this M, the corresponding system (9) is gradient-like.
In order to design M by the canonical LMI method, we can convert (11) to an LMI similarly to that in Lemma 4.
Lemma 7. The frequency-domain inequality (11) in Lemma 6 holds if and only if there is a symmetrical matrix P such
that
PAþ ATP PBþ 12CTMT CTMT
BTP þ 12MC dþ 1
2ðMRþ RTMTÞ RTMT
MC MR ���1
264
375 < 0:
Based on this lemma, the coupling matrix M can be designed easily by the popular LMI method. We can also studythe property of dichotomy similarly, see [52] for details. The coupled matrix studied above is something like the inputtransformation in control theory. In [52], it is also proved that there exists a multiplier matrix such that a transfer func-tion is strictly positive real if and only if two stable matrices have a common Lyapunov matrix.
From lemmas above, we can see the effects of nonlinear input and output coupling. The effects of linear intercon-nections were studied in [56]. Apart from the static coupling matrix discussed above, we can also design dynamical cou-pling guaranteeing dichotomy or gradient-like behavior for system (5). Take _x as the input of the designed controller,one can get the following controlled pendulum-like system:

854 Z. Duan et al. / Chaos, Solitons and Fractals 40 (2009) 848–861
dydt ¼ Ay þ BuðuÞ;dxdt ¼ Cy þ RuðuÞ;dxkdt ¼ Akxk þ Bk _x;
dudt ¼ Ckxk þ Dk _x;
8>>>><>>>>:
ð13Þ
Tidy up the system above as
dxcldt ¼ Aclxcl þ BcluðuÞ;
dudt ¼ Cclxcl þ DcluðuÞ
;
(ð14Þ
where
xcl ¼y
xk
� �; Acl ¼
A 0
BkC Ak
� �; Bcl ¼
B
BkR
� �; Ccl ¼ ðDkC Ck Þ; Dcl ¼ DkR:
Apparently, the closed-loop transfer function from u(u) to _u is Gcl(s) = Ccl(sI � Acl)�1Bcl + Dcl = G(s)K(s), where
G(s) = Ck(sI � Ak)�1Bk + Dk. The controller designed above can also be viewed as a dynamic coupling, see [32] for de-tails of designing such a controller. The nonlinear feedback system (14) is shown in Fig. 1.
In addition to the gradient-like behavior and dichotomy, the nonexistence of periodic solutions of the second kindwas studied in [37,38].
Assumption 3. The derivative of u(r) is Lipschitz continuous and there exist numbers l1j, l2j, j 2 m such that
l1j 6dujðrÞ
dr6 l2j; 8r 2 R ð15Þ
Denote
l1 ¼ diagðl11; . . . ; l1mÞ; l2 ¼ diagðl21; . . . ; l2mÞ
with the numbers l1j and l2j from (15).
Definition 4. The solution (y(t), x(t)) of (9) is called the cycle of the second kind if there exist a number T 5 0 and inte-gers jk, k 2 m such that
yðt þ T Þ ¼ yðtÞ; xkðt þ T Þ ¼ xkðtÞ þ jkD
The following result establishes LMI conditions for nonexistence of cycles of the second kind in system (9) [38].
Lemma 8. Under Assumptions 1–3, if there exist x0 P 0, P = PT and diagonal matrices � > 0, d > 0, s P 0, j such that
the following linear matrix inequalities hold:
2� mj
jm 2d
� �> 0; ð16aÞ
P1 þ ATP þ PA P2 þ PB
PT2 þ BTP P3 þP4
" #< 0; ð16bÞ
KTð0ÞMTð�þ sÞMKð0Þ �RefjMKð0Þg þ d 6 0; ð16cÞ
where
Fig. 1. nonlinear feedback system.

Z. Duan et al. / Chaos, Solitons and Fractals 40 (2009) 848–861 855
P1 ¼ CTMTð�þ sÞMC;
P2 ¼1
2½CTMTjþ slATCTMT� þ CTMTð�þ sÞMR;
P3 ¼ dþ 2RefslMCBþ jMRg þ 2RTMTð�þ sÞMR;
P4 ¼ l�11 sl�1
2 x20;
l ¼ l�11 � l�1
2 ;
then system (9) has no cycles of the second kind with the frequency x > x0. If x0 = 0, the system has no cycles of the second
kind.
From the above result, an LMI-based approach on designing the coupled matrix M to ensure the absence of cyclesof the second kind in system (9) was proposed in [38].
Lemma 9. If there exist P = PT and diagonal matrices s > 0, d > 0 such that
4d > sm2; ð17aÞ
PAþ ATP PB
BTP d� s=4
" #< 0; ð17bÞ
CT
RT
" #?PAþ ATP PB
BTP d
" #CT
RT
" #?T
< 0; ð17cÞ
then there exists a coupled matrix M such that the corresponding system (9) has no cycles of the second kind.
The method of the input and output coupling studied above was applied to coupled Chua’s circuits in [51]. Control-ler design guaranteeing dichotomy and Lagrange stability were studied in [33,34]. Robustness analysis and control ofpendulum-like systems were studied in [35,36]. It is also interesting to study large-scale systems or complex dynamicalnetworks composed of multiple pendulum-like systems such as phase-locked loops.
4.2. Application to chaos control
Dichotomy is one of the most important properties of nonlinear systems with multiple equilibria. For such kind ofsystems the existence of limit cycles or strange attractors is impossible. Obviously, if a system does not have the prop-erty of dichotomy, it is significant to design a controller such that the closed-loop system possesses this property.
Consider nonlinear control system:
_x ¼ Axþ buðrÞ þ b1u;
_r ¼ cxþ quðrÞ;ð18Þ
where A 2 Rn·n is a constant real matrix, b 2 Rn, b1 2 Rn and cT 2 Rn are real vectors and q is a number. x 2 Rn, r 2 R
and u is control variable. A method of designing a state feedback control law u = Kx such that the following closed-loop nonlinear system
_x ¼ ðAþ b1KÞxþ buðrÞ;_r ¼ cxþ quðrÞ;
ð19Þ
is dichotomous was proposed in [53].
Lemma 10. Suppose that there exist numbers g, e > 0, s P 0 and matrices Q = QT and Y such that
AQþ QAT þ b1Y þ Y Tb1 QJ � 12r2Y TbT
1 cT þ b QcT
JTQ� 12r2cb1Y þ bT q2r1 � r2cbþ gq 0
cQ 0 � 1r1
264
375 6 0; ð20Þ
where r1 = e � sl1l2, r2 = s(l1 + l2) and J ¼ g2cT þ qr1cT � 1
2r2ATcT, then there exists a feedback matrix K = YQ�1. Fur-
thermore, if the following conditions hold:
(i) (A + b1K, b) is controllable and (A + b1K, c) is observable,
(ii) u(r) has a finite number of isolated zeros, or Q > 0, then the closed-loop nonlinear system (19) is dichotomous.

856 Z. Duan et al. / Chaos, Solitons and Fractals 40 (2009) 848–861
It is shown in [53] that a group of attractors from Chua’s circuit are well controlled by using Lemma 10In what follows, we consider a modified canonical Chua’s circuit [77] described by four coupled first-order differen-
tial equations:
C1
dv1
dt¼ i1 � gðv1Þ;
C2dv2
dt¼ �G1v2 � i1 � i2;
L1di1
dt¼ v2 � v1 � Ri1;
L2di2
dt¼ v2;
ð21Þ
where v1 and v2 are the voltages across the capacitors C1 and C2, i1 and i2 denote the currents through the induc-tances L1 and L2, respectively. R is a resistor, and g(v1) is the current through the nonlinear resistor which can beexpressed as
gðv1Þ ¼ Gbv1 þ1
2ðGa � GbÞ½jv1 þ Bpj � jv1 � Bpj�: ð22Þ
In fact, Chua’s circuits can be viewed as special cases of Lure’s systems. In order to control chaos and hyperchaos,we inject an external current signal iu in the circuit which is shown in Fig. 2.
By transformations of variables [53], the system injected control signal can be written in the following form:
dx1
ds¼ a1ðx3 � f ðx1ÞÞ;
dx2
ds¼ �a2x2 � x3 � x4 þ u;
dx3
ds¼ b1ðx2 � x1 � x3Þ;
dx4
ds¼ b2x2;
ð23Þ
where u is the injected control. The nonlinear function f(x1) is defined as
f ðx1Þ ¼ bx1 þ1
2ða� bÞ½jxþ 1j � jx� 1j�: ð24Þ
Let
a1 ¼ 2:1428; a2 ¼ �0:1285; b1 ¼ 0:0393; b2 ¼ 0:001532; a ¼ �0:0299; b ¼ 1:995:
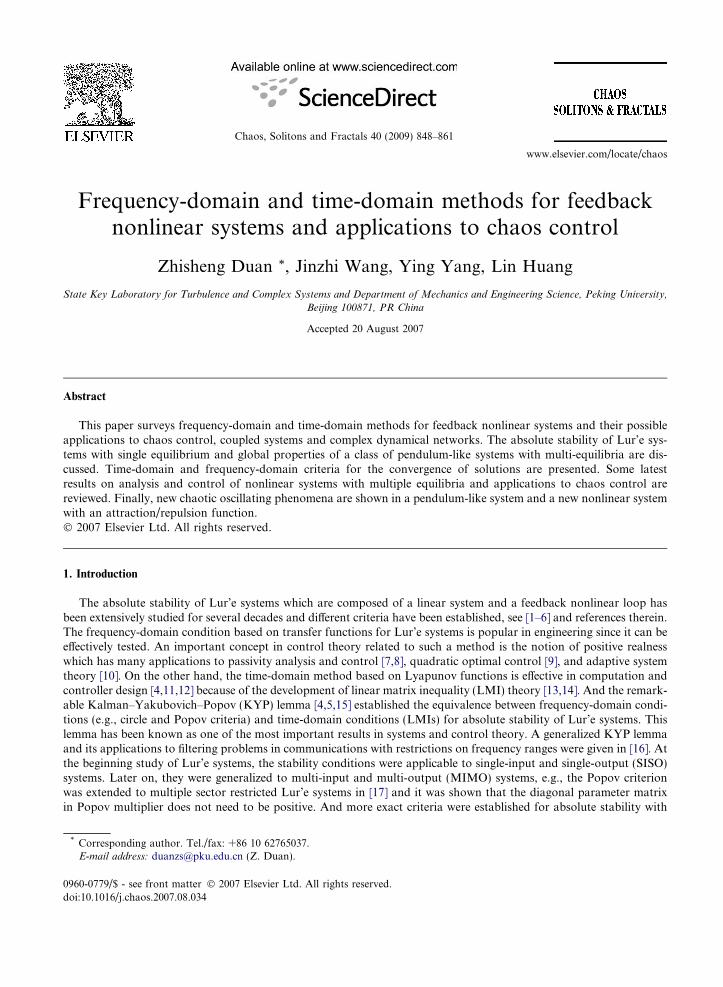
When there is no control, i.e., u = 0, the hyperchaotic attractors of modified Chua’s circuit (23) in x2-x1 and x1-x3
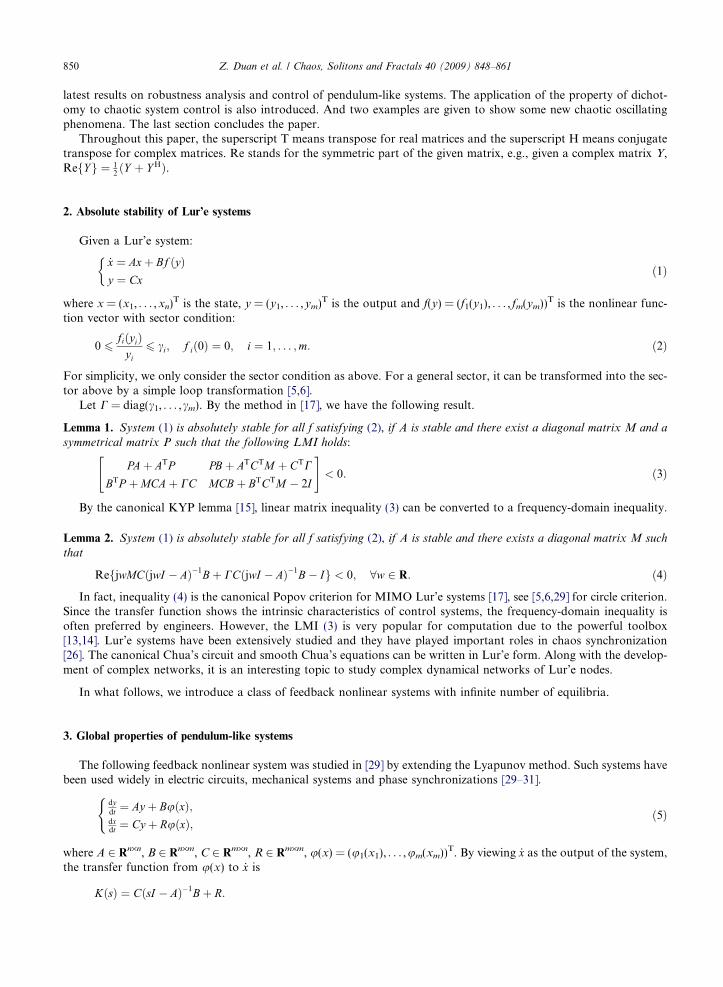
planes are shown in Fig. 3. The states of system (23) with control u = Kx are shown in Fig. 4, whereK = 1.0e + 005[�2.4148, �0.0007, �1.6281, �0.0000] is obtained by Lemma 10. It is obvious that hyperchaotic oscil-lations of the system disappear.
Fig. 2. Modified canonical Chua’s circuit injected control signal iu.
—4 —3 —2 —1 0 1 2 3 4—1.5
—1
—0.5
0
0.5
1
1.5
x2
x1
—1.5 —1 —0.5 0 0.5 1 1.5—0.8
—0.6
—0.4
—0.2
0
0.2
0.4
0.6
0.8
x1
x3
a b
Fig. 3. (a) Hyperchaotic attractor of modified Chua’s equation (23) with u = 0 in x2 � x1 plane; (b) Hyperchaotic attractor of modifiedChua’s equation (23) with u = 0 in x1 � x3 plane.
0 0.5 1 1.5—35
—30
—25
—20
—15
—10
—5
0
5
10
t
x1, x
2
0 1 2 3 4 5 6 7 8 9 10—0.025
—0.02
—0.015
—0.01
—0.005
0
0.005
0.01
0.015
t
x3, x
4
a b
Fig. 4. (a) The states x1(t) and x2(t) of modified equation (23) injected control u = Kx. (b) The states x3(t) and x4(t) of modified Chua’sequation (23) injected control u = Kx.
Z. Duan et al. / Chaos, Solitons and Fractals 40 (2009) 848–861 857
4.3. New kinds of chaotic oscillating systems
Example 1. Consider the system in the form of (5) with the following data
A ¼�0:4 3
�1 �0:5
� �; B ¼
1 0
�1:4 1
� �; C ¼
2 �1
0 1
� �; R ¼
a 1:2
�2 1
� �; ð25Þ
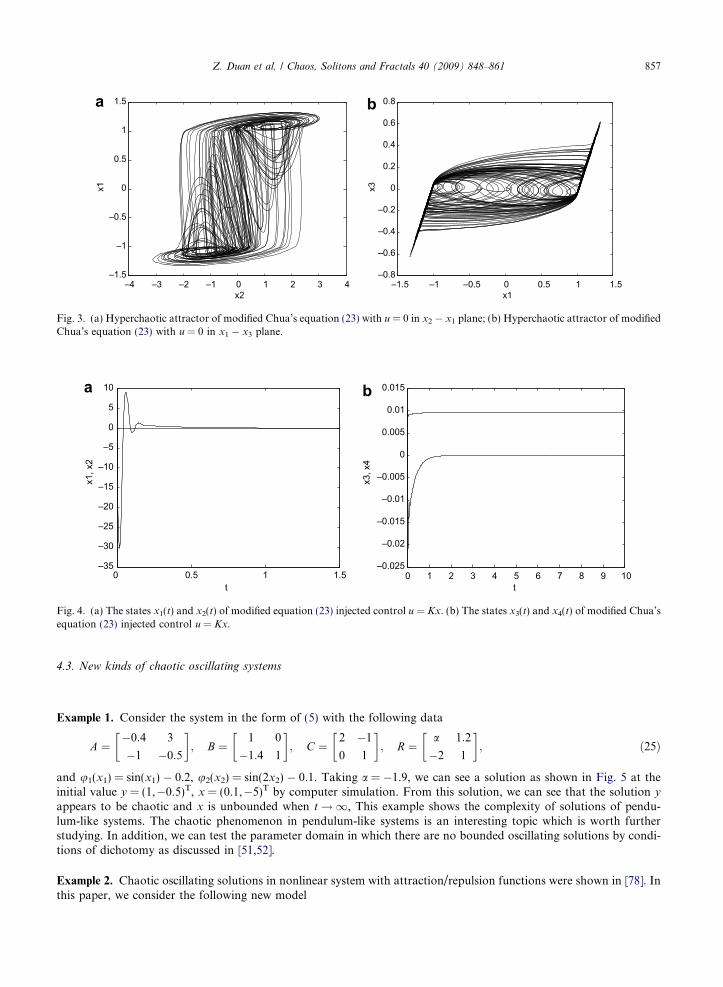
and u1(x1) = sin(x1) � 0.2, u2(x2) = sin(2x2) � 0.1. Taking a = �1.9, we can see a solution as shown in Fig. 5 at theinitial value y = (1,�0.5)T, x = (0.1,�5)T by computer simulation. From this solution, we can see that the solution y
appears to be chaotic and x is unbounded when t!1, This example shows the complexity of solutions of pendu-lum-like systems. The chaotic phenomenon in pendulum-like systems is an interesting topic which is worth furtherstudying. In addition, we can test the parameter domain in which there are no bounded oscillating solutions by condi-tions of dichotomy as discussed in [51,52].
Example 2. Chaotic oscillating solutions in nonlinear system with attraction/repulsion functions were shown in [78]. Inthis paper, we consider the following new model
0 50 100 150 200 250 300—10
—8
—6
—4
—2
0
2
4
6
8
10
—6 —4 —2 0 2 4 6
—6—4—2
02
46
—10
—5
0
5
10
a b
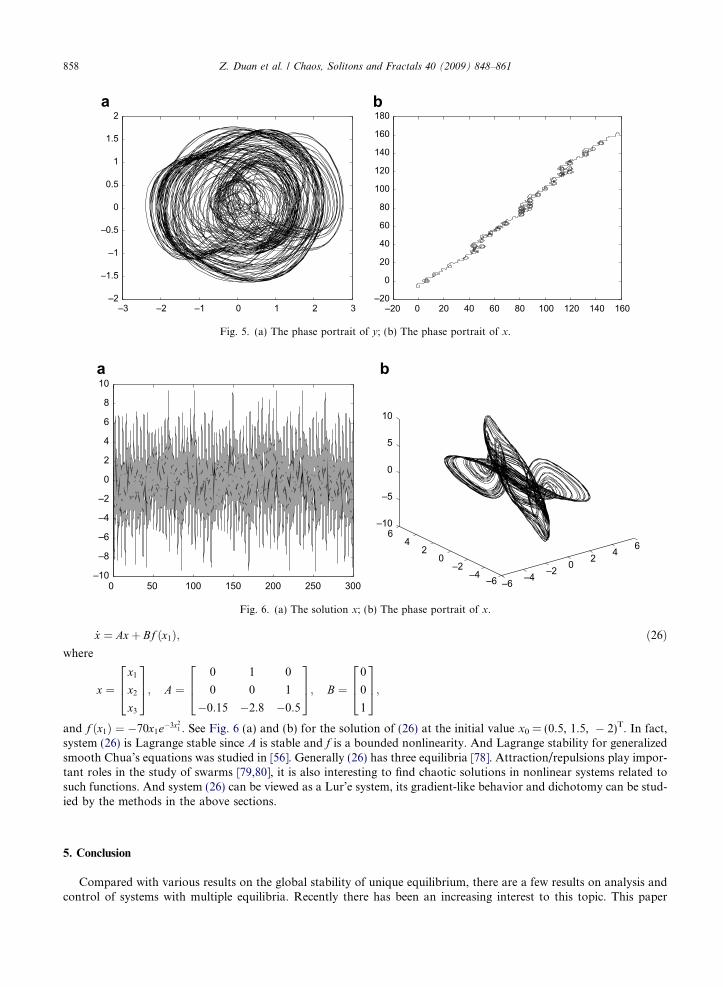
Fig. 6. (a) The solution x; (b) The phase portrait of x.
—3 —2 —1 0 1 2 3—2
—1.5
—1
—0.5
0
0.5
1
1.5
2
—20 0 20 40 60 80 100 120 140 160—20
0
20
40
60
80
100
120
140
160
180a b
Fig. 5. (a) The phase portrait of y; (b) The phase portrait of x.
858 Z. Duan et al. / Chaos, Solitons and Fractals 40 (2009) 848–861
_x ¼ Axþ Bf ðx1Þ; ð26Þ
wherex ¼x1
x2
x3
264
375; A ¼
0 1 0
0 0 1
�0:15 �2:8 �0:5
264
375; B ¼
0
0
1
264375;
and f ðx1Þ ¼ �70x1e�3x21 : See Fig. 6 (a) and (b) for the solution of (26) at the initial value x0 = (0.5, 1.5, � 2)T. In fact,
system (26) is Lagrange stable since A is stable and f is a bounded nonlinearity. And Lagrange stability for generalizedsmooth Chua’s equations was studied in [56]. Generally (26) has three equilibria [78]. Attraction/repulsions play impor-tant roles in the study of swarms [79,80], it is also interesting to find chaotic solutions in nonlinear systems related tosuch functions. And system (26) can be viewed as a Lur’e system, its gradient-like behavior and dichotomy can be stud-ied by the methods in the above sections.
5. Conclusion
Compared with various results on the global stability of unique equilibrium, there are a few results on analysis andcontrol of systems with multiple equilibria. Recently there has been an increasing interest to this topic. This paper
Z. Duan et al. / Chaos, Solitons and Fractals 40 (2009) 848–861 859
introduces some latest results on analysis and control of a class of pendulum-like systems with multiple equilibria.Together with Lur’e system, we have discussed global properties of feedback nonlinear systems in a unified fre-quency-domain and time-domain framework. Applications to chaos control based on the property of dichotomy havealso been presented. Finally, we have introduced two new chaotic oscillating systems. Some further analysis and controlof such kinds of chaotic systems are worth studying. Along with the development of complex dynamical networks, it isinteresting to extend miscellaneous results on feedback nonlinear systems to dynamical networks. Further research isneeded to network systems with Lur’e nodes such as Chua’s circuit or pendulum-like nodes such as phase-locked loop.
Acknowledgements
This work is supported by the National Science Foundation of China under grants 60674093, 60334030, 10472001.
References
[1] Lur’e AI, Postnikov VN. On the theory of stability of control systems. Prikladnaya Matematika Mehkhanika 1944;8(3):246–8.[2] Popov VM. Hyperstability of automatic control systems. New York: Springer-Verlag; 1973.[3] Kalman RE. Lyapunov functions for the problem of Lur’e in automatic control. Proc Natl Acad Sci, USA 1963;49(2):201–5.[4] Yakubovich VA. Solution of certain matrix inequalities in the stability theory of nonlinear control systems. Soviet Math Dokl
1962;3:620–3.[5] Khalil HK. Nonlinear systems. 2nd ed. NJ: Prentice-Hall; 1996.[6] Huang L. Fundamental theory on robustness and stability. Beijing: Science Press; 2003 [in Chinese].[7] Desoer CA, Vidyasagar M. Feedback systems: input–output properties. San Diego: Academic Press; 1975.[8] Lozano R, Brogliato B, Egeland O, Maschke BG. Dissipative systems analysis and control: theory and applications. London:
Springer-Verlag; 2000.[9] Anderson BDO, Moore JB. Linear optimal control. New York: Prentice-Hall; 1970.
[10] Landau YD. Adaptive control: the model reference approach. New York: Marcel Dekker; 1979.[11] Arcak M, Larsen M, Kokotovic P. Circle and Popov criteria as tools for nonlinear feedback design. Automatica 2003;39:643–50.[12] de Oliveira MC, Geromel JC, Hsu L. A new absolute stability test for systems with state-dependent perturbations. Int J Robust
Nonlinear Control 2002;12:1209–26.[13] Boyd S, Elghaoui L, Feron E, Balakrishnan V. Linear matrix inequalities in system and control theory. Philadelphia, PA: SIAM;
1994.[14] Gahinet P, Nemirovski A, Laub AJ. LMI control toolbox. Natick, MA: The MathWorks Inc.; 1995.[15] Rantzer A. On the Kalman–Yakubovich–Popov lemma. Syst Control Lett 1996;28:7–10.[16] Iwasaki T, Hara S. Generalized KYP lemma: unified frequency domain inequalities with design applications. IEEE Trans
Automat Control 2005;50(1):41–59.[17] Park P. A revisited Popov criterion for nonlinear Lur’e systems with sector-restrictions. Int J Control 1997;68(3):461–9.[18] Park P. Stability criteria of sector and slope restricted Lur’e systems. IEEE Trans Automat Control 2002;47(2):308–13.[19] Suykens JAK, Vandewalle J, de Moor B. An absolute stability criterion for the Lur’e problem with sector and slope restricted
nonlinearities. IEEE Trans Circuits Syst – I 1998;45(9):1007–9.[20] Arcak M, Larsen M, Kokotovic P. Boundedness without absolute stability in systems with stiffening nonlinearities. Eur J Control
2002;8:243–50.[21] Guzelis C, Chua LO. Stability analysis of generalized cellular neural networks. Int J Circuit Theory Appl 1993;21:1–33.[22] Kaszkurewicz E, Bhaya A. On a class of global stable neural circuits. IEEE Trans Circuits Syst – I 1994;41(2):171–4.[23] Liao XX. Theory and application of stability for dynamical systems. Beijing: Press of National Defense and Industry; 2000 [in
Chinese].[24] Curra PF, Chua LO. Absolute stability theory and synchronization problem. Int J Bifurcat Chaos 1997;7:1375–83.[25] Wu CW, Chua LO. A unified framework for synchronization and control of dynamical systems. Int J Bifurcat Chaos
1994;4:979–89.[26] Wu CW. Synchronization in coupled chaotic circuits and systems. Singapore: World Scientific; 2002.[27] Chua LO. Chua’s circuit: 10 years later. Int J Ciruit Theor Appl 1994;22:279–306.[28] Madan R. Chua’s circuit: a paradigm for chaos. Singapore: World Scientific; 1993.[29] Leonov GA, Ponomarenko AV, Smirnova VB. Frequency-domain method for nonlinear analysis: theory and applications.
Singapore: World Scientific; 1996.[30] Leonov GA, Burkin IM, Shepeljavyi AL. Frequency methods in oscillation theory. Dordrecht: Kluwer Academic Publishers;
1992.[31] Leonov GA, Reitmann V, Smirnova VB. Non-local methods for pendulum-like feedback systems. Leipzig: Teubner; 1992.[32] Duan ZS, Huang L, Wang L. Multiplier design for extended strict positive realness and its applications. Int J Control
2004;77(17):1493–502.
860 Z. Duan et al. / Chaos, Solitons and Fractals 40 (2009) 848–861
[33] Wang JZ, Huang L, Duan ZS. Design of controller for a class of pendulum-like system guaranteeing dichotomy. Automatica2004;40(6):1011–6.
[34] Wang JZ, Duan ZS, Huang L. Control of a class of pendulum-like systems with Lagrange stability. Automatica2006;42(1):145–50.
[35] Yang Y, Fu R, Huang L. Robust analysis and synthesis for a class of uncertain nonlinear systems with multiple equilibria. SystControl Lett 2004;53(2):89–105.
[36] Wang JZ, Duan ZS, Huang L. Robust gradient-like property and controller design for uncertain pendulum-like systems. J DynControl Syst 2006;12(2):229–46.
[37] Yang Y, Duan ZS, Huang L. Nonexistence of periodic solutions in a class of dynamical systems with cylindrical phase space. Int JBifurcat Chaos 2005;15(4):1423–31.
[38] Yang Y, Duan ZS, Huang L. Design of nonlinear interconnections guaranteeing the absence of periodic solutions. Syst ControlLett 2006;55:338–46.
[39] Huang L, Yang Y, Geng ZY, Wang JZ, Duan ZS. Analysis and control of diversity of system dynamic properties: On the post-absolute stability. Control Theory Appl 2004;21(6):966–74 [in Chinese].
[40] He JH. Some asymptotic methods for strongly nonlinear equations. Int J Modern Phys B 2006;20(10):1141–99.[41] He JH. Application of homotopy perturbation method to nonlinear wave equations. Chaos, Solitons & Fractals
2005;26(3):695–700.[42] Isidori A. Nonlinear control systems. 3rd ed. New York: Springer; 1995.[43] Hong YG, Cheng DZ. Analysis and control of nonlinear systems. Beijing: Science Press; 2005 [in Chinese].[44] Huang J. Nonlinear output regulation: theory and applications. Philadelphia: SIAM; 2004.[45] Lorenz EN. Deterministic nonperiodic flows. J Atmos Sci 1963;20:130–41.[46] Chen GR, Lu JH. Analysis, control and synchronization of the class of Lorenz systems. Beijing: Science Press; 2003 [in Chinese].[47] Chen GR, Dong X. From chaos to order: methodologies, perspectives and applications. Singapore: World Scientific; 1998.[48] Genesio A, Tesi A. Harmonic balance methods for the analysis of chaotic dynamics in nonlinear systems. Automatica
1992;28(3):531–48.[49] Roy D, Musielak ZE. Generalized Lorenz models and their routes to chaos. I. Energy-conserving vertical mode truncations.
Chaos, Solitons & Fractals 2007;32(3):1038–52.[50] Li Gh, Zhou SP. Anti-synchronization in different chaotic systems. Chaos, Solitons & Fractals 2007;32(2):516–20.[51] Duan ZS, Wang JZ, Huang L. Frequency-domain method for the property of dichotomy of modified Chua’s equations. Int J
Bifurcat Chaos 2005;15(8):2485–505.[52] Duan ZS, Wang JZ, Huang L. Input and output coupled nonlinear systems. IEEE Trans Circuits Syst – I: regular papers
2005;52(3):567–75.[53] Wang JZ, Duan ZS, Huang L. Dichotomy of nonlinear systems: application to chaos control of nonlinear electronic circuit. Phys
Lett A 2006;351:143–52.[54] Chua LO. CNN: a paradigm for complexity. World Scientific Series on Nonlinear Science, Series A, vol. 31; 1998.[55] Duan ZS, Huang L, Wang L, Wang JZ. Some applications of small gain theorem to interconnected systems. Syst Control Lett
2004;52(3-4):263–73.[56] Duan ZS, Wang JZ, Huang L. A generalization of smooth Chua’s equations under Lagrange stability. Int J Bifurcat Chaos
2007;17(9):1–13.[57] Cincotti S, Stefano SD. Complex dynamical behaviours in two non-linearly coupled circuits. Chaos, Solitons & Fractals
2004;21:633–41.[58] Zhang W, Cao DX. Studies on bifurcation and chaos of a string-beam coupled system with two degrees-of-freedom. Nonlinear
Dyn 2006;45(1–2):131–47.[59] Wang QY, Lu QS, Chen GR, Guo DH. Chaos synchronization of coupled neurons with gap junctions. Phys Lett A
2006;356(1):17–25.[60] Lu JA, Han XP, Li YT, Yu MH. Adaptive coupled synchronization among multi-Lorenz systems family. Chaos, Solitons &
Fractals 2007;31(4):866–78.[61] Wang ZH, Hu HY. An energy analysis of nonlinear oscillators with time-delayed coupling. Int J Bifurcat Chaos
2006;16(8):2275–92.[62] Ugrinovskii VA, Petersen IR, Savkin AV, et al. Decentralized state-feedback stabilization and robust control of uncertain large-
scale systems with integrally constrained interconnections. Syst Control Lett 2000;40(2):107–19.[63] Yang GH, Zhang SY. Decentralized control of a class of large-scale systems with symmetrically interconnected subsystems. IEEE
Trans Automat Control 1996;41(5):710–3.[64] Siljak DD. Large-scale dynamic systems. New York: North-Holland; 1978.[65] Siljak DD. Decentralized control of complex systems. New York: Academic Press; 1991.[66] Duan ZS, Wang JZ, Huang L. Special decentralized control problems and effectiveness of parameter-dependent Lyapunov
function method. In: Proceedings of American Control Conference 2005; Portland, OR, p. 1697–702.[67] Duan ZS, Wang JZ, Huang L. Special decentralized control problems in discrete-time interconnected systems composed of two
subsystems. Syst Control Lett 2007;56(3):206–14.[68] Ashwin P, Timme M. When instability makes sense. Nature 2005;436:36–7.[69] Watts DJ, Strogatz SH. Collective dynamics of ‘small-world’ networks. Nature 1998;393(6684):440–2.
Z. Duan et al. / Chaos, Solitons and Fractals 40 (2009) 848–861 861
[70] Barabasi AL, Albert R. Emergence of scaling in random networks. Science 1999;286(5439):509–12.[71] Wang XF. Complex networks: topology, dynamics, and synchronization. Int J Bifurcat Chaos 2002;5(12):885–916.[72] Li X, Wang XF, Chen GR. Pinning a complex dynamical network to its equilibrium. IEEE Trans Circuits Syst – I
2004;51(10):2074–85.[73] Li Y, Fang JQ, Liu Q, Liang Y. Small world properties generated by a new algorithm under same degree of all nodes. Commun
Theor Phys 2006;45(5):950–4.[74] Bu SL, Zhang YW, Wang BH. Synchronizing complex networks by an adaptive adjustment mechanism. Chin Phys Lett
2006;23(11):909–12.[75] Wang XF, Li X, Chen GR. Complex networks: theory and its applications. Beijing: Press of Tsinghua University; 2006 [in
Chinese].[76] Guo L, Xu XM. Complex networks. Shanghai: Press of Science, Technology and Education; 2006 [in Chinese].[77] Thamilmaran K, Lakshmanan M. Hyperchaos in a modified canonical Chua’s circuit. Int J Bifurcat Chaos 2004;14(1):221–43.[78] Duan ZS, Wang JZ, Huang L. Attraction/repulsion functions in a new class of chaotic systems. Phys Lett A 2005;335(2–
):139–49.[79] Gazi V, Passino KM. Stability analysis of swarms. IEEE Trans AC 2003;48(4):692–7.[80] Gazi V, Passino KM. Stability analysis of social foraging swarms. IEEE Trans Syst, Man Cybernet: Part B 2004;34(1):539–57.





























